Embed Size (px)
Citation preview
Kennwertermittlung für die FEM-Simulation
Hauptfach-, Spezialisierungsfach- und APMB-Versuch
1 Einleitung
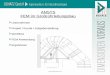
Bild 1.1: FEM-Simulation eines uniaxialen Zugstabs
Kunststoffe werden seit vielen Jahren als Konstruktions- und Funktionswerkstoffe eingesetzt. Ein spe-
zieller Vertreter der Funktionswerkstoffe sind Elastomere. Elastomere weisen bei Raumtemperatur
gummielastische Eigenschaften auf. Diese Eigenschaften hängen allerdings stark von Umgebungs-
und Einsatzbedingungen ab. Für die Abschätzung des gesamten Bauteilverhaltens sind umfangreiche
Kenntnisse über das mechanische Verhalten der Elastomere unter Belastung notwendig. Dies ist das
Ziel der mechanischen Werkstoffprüfung.
Um das mechanische Verhalten von Kunststoffen zu beschreiben werden entsprechende Material-
modelle benötigt. Diese enthalten Modellparameter, die über Experimente bestimmt werden müssen
(Optimierungsproblem). Die beispielsweise aus einem einachsigen Zugversuch ermittelten Modell-
parameter werden häufig zur Berechnung komplexer dreidimensionaler Geometrien herangezogen.
Meist liegt im Bauteil allerdings ein dreiachsiger Spannungszustand vor. Deshalb empfiehlt es sich,
auch andere Spannungs- bzw. Dehnungszustände in die Kennwertermittlung einzubeziehen.
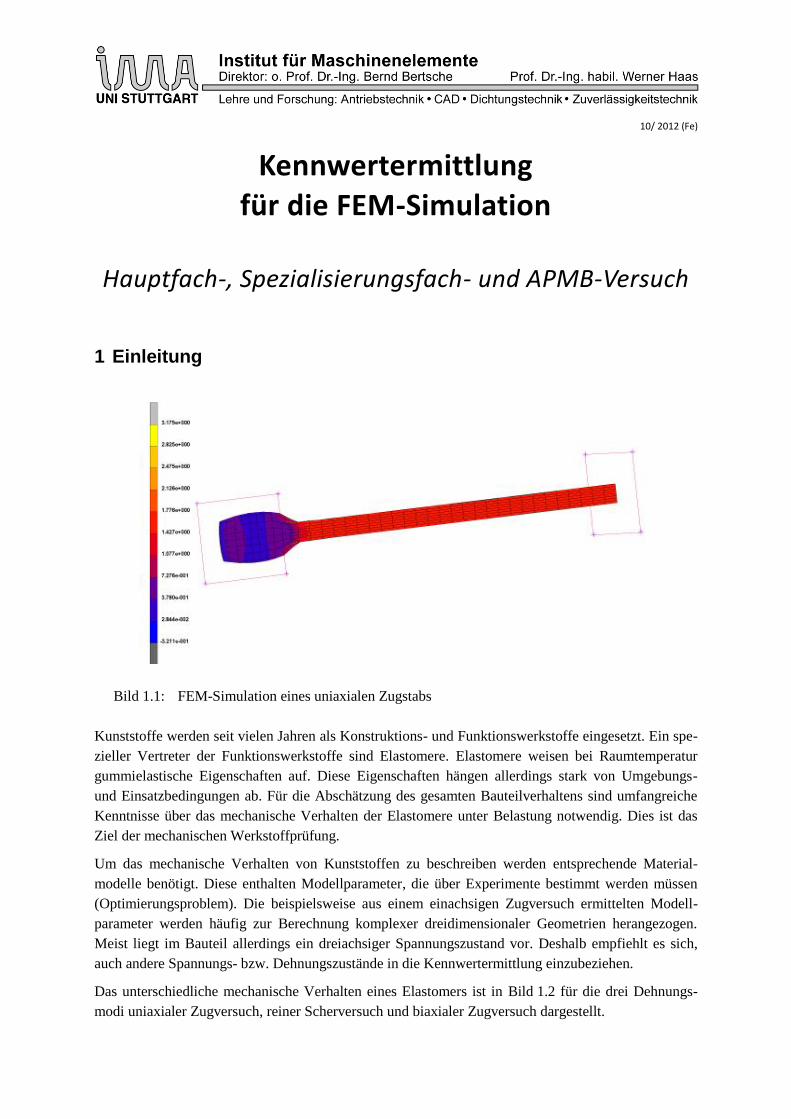
Das unterschiedliche mechanische Verhalten eines Elastomers ist in Bild 1.2 für die drei Dehnungs-
modi uniaxialer Zugversuch, reiner Scherversuch und biaxialer Zugversuch dargestellt.
10/ 2012 (Fe)
2
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Bild 1.2: Verschiedene Dehnungsmodi
In diesem Praktikumsversuch geht es um die mechanische Werkstoffprüfung von Elastomeren und
deren Beschreibung zur Anwendung in der FEM-Simulation (Finite-Elemente-Methode).
An einer Zugprüfmaschine werden verschiedene Prüfungen durchgeführt. Über die gewonnenen
Messdaten werden die Modellparameter für verschiedene Materialmodelle bestimmt. Diese werden im
Anschluss zur FEM-Simulation eines Zugstabs weiterverwendet.
2 Mechanisches Verhalten von Kunststoffen
Metallische Werkstoffe haben den großen Vorteil, dass sich deren Eigenschaften bei Raumtemperatur
nicht signifikant ändern. Bei Kunststoffen ist dies in den meisten Fällen nicht der Fall. Das
mechanische Verhalten von Kunststoffen hängt stark von den Umgebungsbedingungen ab. Die
wichtigsten Abhängigkeiten sind die Temperatur, Zeit und Schädigungseffekte. Diese werden im
Folgenden kurz vorgestellt.
2.1 Chemischer Aufbau von Elastomeren
Das mechanische Verhalten von Kunststoffen wird maßgeblich durch deren chemischen Aufbau, d.h.
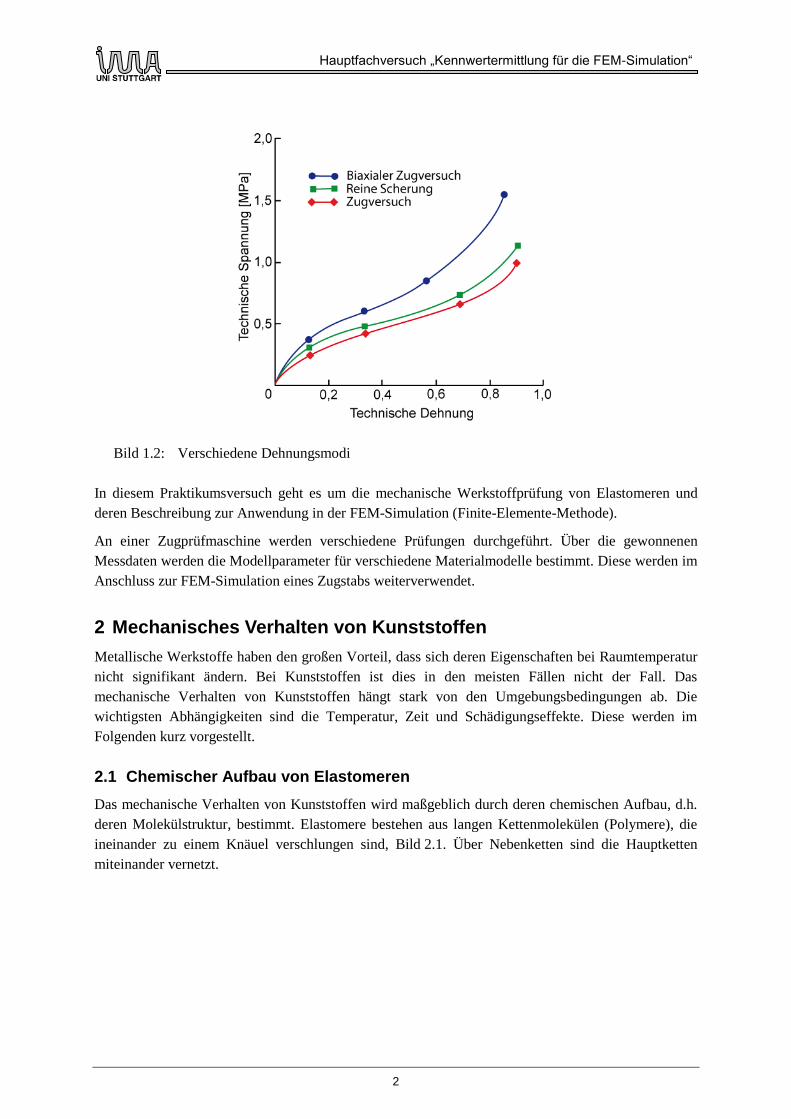
deren Molekülstruktur, bestimmt. Elastomere bestehen aus langen Kettenmolekülen (Polymere), die
ineinander zu einem Knäuel verschlungen sind, Bild 2.1. Über Nebenketten sind die Hauptketten
miteinander vernetzt.
3
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Bild 2.1: Molekülstruktur von Elastomeren
2.2 Temperaturabhängigkeit
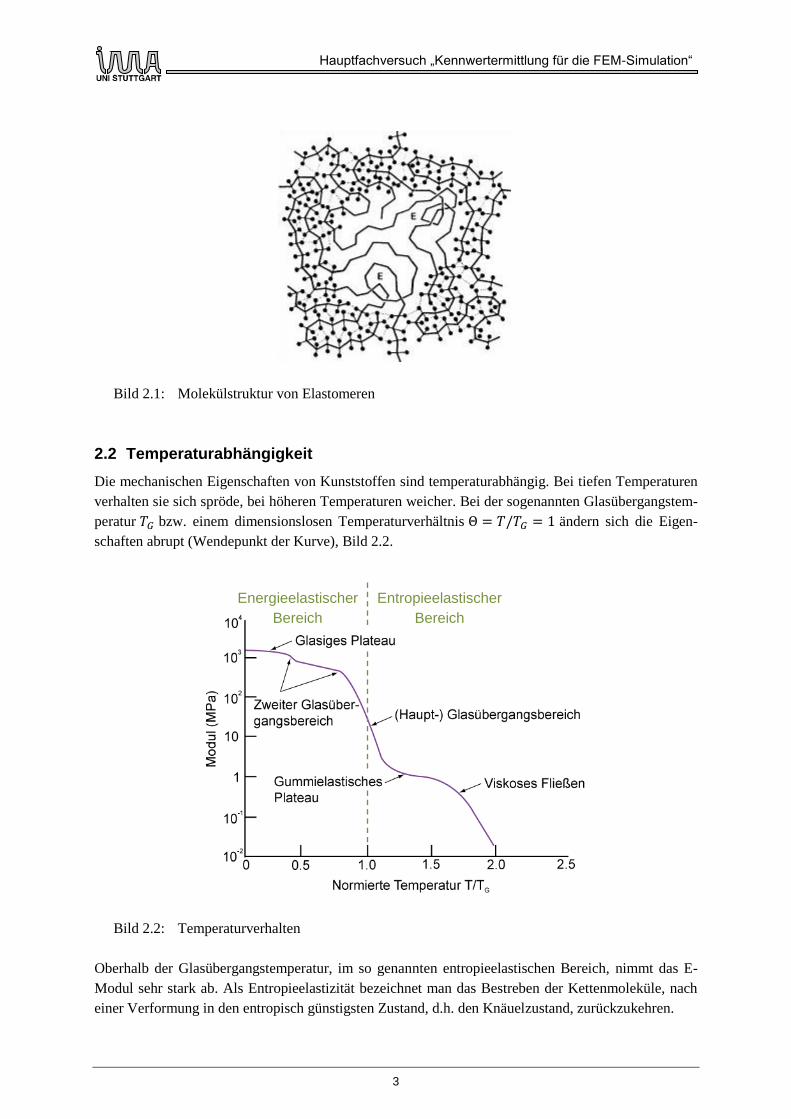
Die mechanischen Eigenschaften von Kunststoffen sind temperaturabhängig. Bei tiefen Temperaturen
verhalten sie sich spröde, bei höheren Temperaturen weicher. Bei der sogenannten Glasübergangstem-
peratur bzw. einem dimensionslosen Temperaturverhältnis ändern sich die Eigen-
schaften abrupt (Wendepunkt der Kurve), Bild 2.2.
Bild 2.2: Temperaturverhalten
Oberhalb der Glasübergangstemperatur, im so genannten entropieelastischen Bereich, nimmt das E-
Modul sehr stark ab. Als Entropieelastizität bezeichnet man das Bestreben der Kettenmoleküle, nach
einer Verformung in den entropisch günstigsten Zustand, d.h. den Knäuelzustand, zurückzukehren.
Entropieelastischer
Bereich
Energieelastischer
Bereich
4
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Unterhalb der Glasübergangstemperatur, im so genannten energieelastischen Bereich verhalten sich
Kunststoffe deutlich steifer. In diesem Bereich sind die Bewegungen der Kettenmoleküle eingefroren.
Auf äußere Belastung reagiert der Kunststoff lediglich mit interatomaren und intermolekularen Ab-
standsänderungen.
Je nach Einsatzgebiet wählt man einen Kunststoff mit entsprechender Glasübergangstemperatur aus.
Konstruktionswerkstoffe wie Polyamid ( = 80 °C) für den Automobilbau werden in der Regel unter-
halb der Glasübergangstemperatur eingesetzt, während Elastomere ( = - 40 °C) oberhalb der Glas-
übergangstemperatur eingesetzt werden.
2.3 Zeitabhängigkeit (Viskoelastizität)
Die zeitlichen Effekte basieren wie auch die Temperaturabhängigkeit auf der molekularen Struktur des
Kunststoffs.
Belastungsgeschwindigkeit
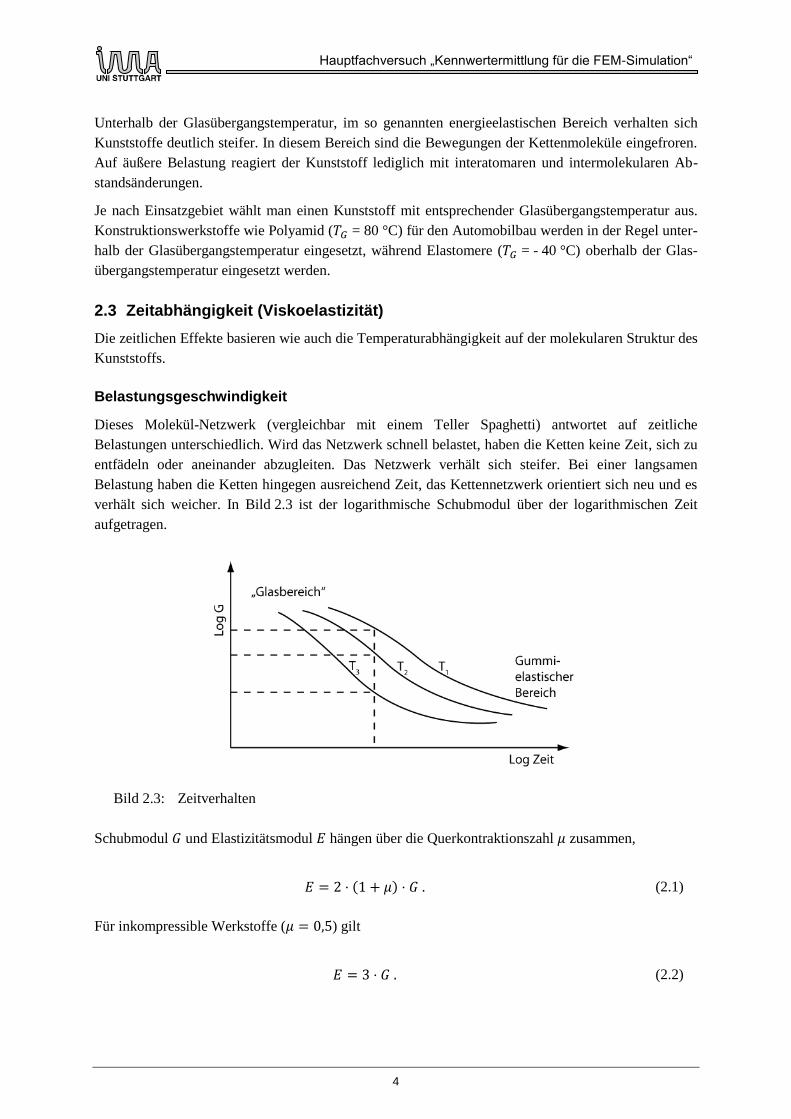
Dieses Molekül-Netzwerk (vergleichbar mit einem Teller Spaghetti) antwortet auf zeitliche
Belastungen unterschiedlich. Wird das Netzwerk schnell belastet, haben die Ketten keine Zeit, sich zu
entfädeln oder aneinander abzugleiten. Das Netzwerk verhält sich steifer. Bei einer langsamen
Belastung haben die Ketten hingegen ausreichend Zeit, das Kettennetzwerk orientiert sich neu und es
verhält sich weicher. In Bild 2.3 ist der logarithmische Schubmodul über der logarithmischen Zeit
aufgetragen.
Bild 2.3: Zeitverhalten
Schubmodul und Elastizitätsmodul hängen über die Querkontraktionszahl zusammen,
(2.1)
Für inkompressible Werkstoffe ( ) gilt
(2.2)
5
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
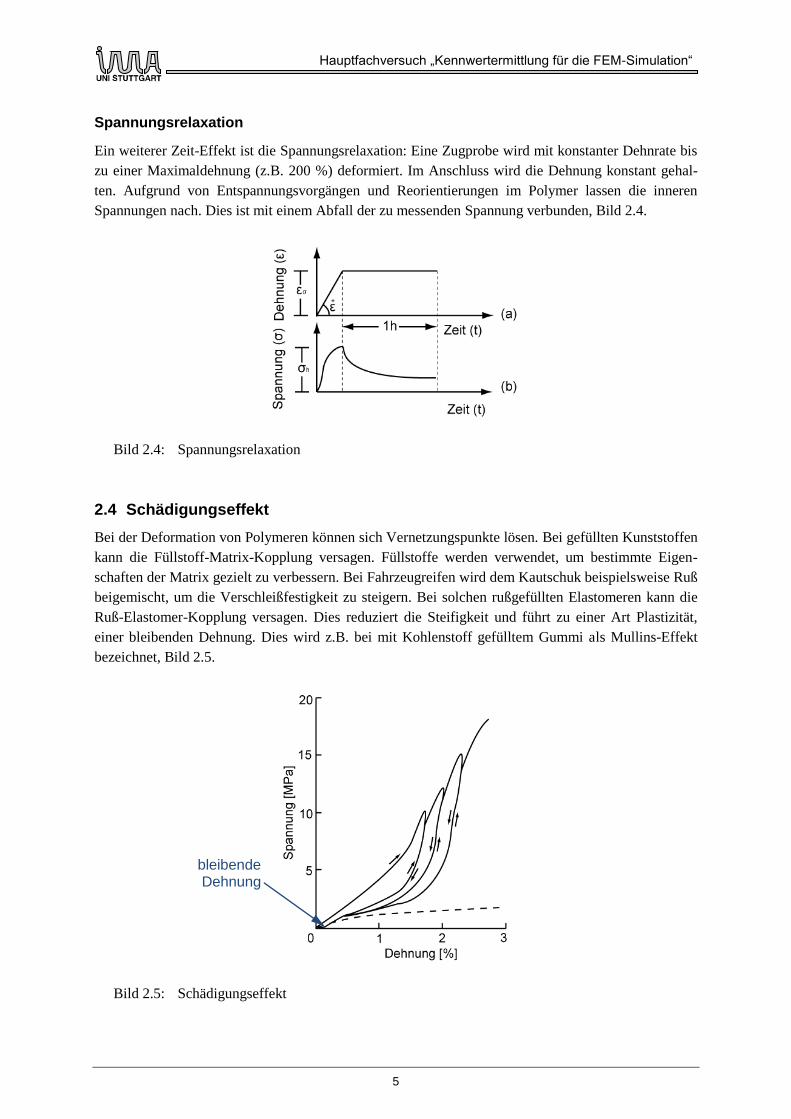
Spannungsrelaxation
Ein weiterer Zeit-Effekt ist die Spannungsrelaxation: Eine Zugprobe wird mit konstanter Dehnrate bis
zu einer Maximaldehnung (z.B. 200 %) deformiert. Im Anschluss wird die Dehnung konstant gehal-
ten. Aufgrund von Entspannungsvorgängen und Reorientierungen im Polymer lassen die inneren
Spannungen nach. Dies ist mit einem Abfall der zu messenden Spannung verbunden, Bild 2.4.
Bild 2.4: Spannungsrelaxation
2.4 Schädigungseffekt
Bei der Deformation von Polymeren können sich Vernetzungspunkte lösen. Bei gefüllten Kunststoffen
kann die Füllstoff-Matrix-Kopplung versagen. Füllstoffe werden verwendet, um bestimmte Eigen-
schaften der Matrix gezielt zu verbessern. Bei Fahrzeugreifen wird dem Kautschuk beispielsweise Ruß
beigemischt, um die Verschleißfestigkeit zu steigern. Bei solchen rußgefüllten Elastomeren kann die
Ruß-Elastomer-Kopplung versagen. Dies reduziert die Steifigkeit und führt zu einer Art Plastizität,
einer bleibenden Dehnung. Dies wird z.B. bei mit Kohlenstoff gefülltem Gummi als Mullins-Effekt
bezeichnet, Bild 2.5.
Bild 2.5: Schädigungseffekt
bleibende Dehnung
6
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Für die Werkstoffprüfung bedeutet dies, dass die ersten Belastungszyklen eines Zugversuchs nicht
verwertbar sind, weil sich das Werkstoffverhalten bei jedem Zyklus ändert und nur einmal auftritt. Der
Probenkörper muss vor der eigentlichen Messung konditioniert, d.h. mehrmals (Empfehlung dreimal
[1], [2]) bis zur maximal im Bauteil auftretenden Dehnung (besser noch etwas darüber hinaus) be- und
entlastet werden.
3 Materialmodelle
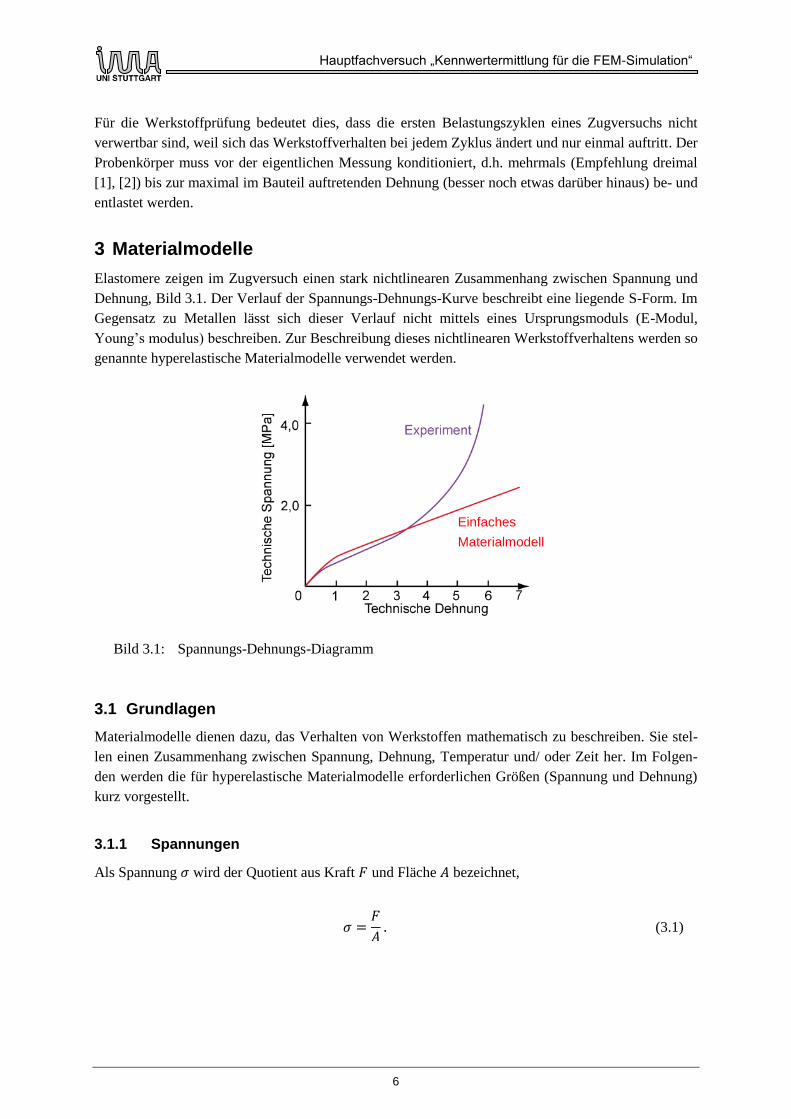
Elastomere zeigen im Zugversuch einen stark nichtlinearen Zusammenhang zwischen Spannung und
Dehnung, Bild 3.1. Der Verlauf der Spannungs-Dehnungs-Kurve beschreibt eine liegende S-Form. Im
Gegensatz zu Metallen lässt sich dieser Verlauf nicht mittels eines Ursprungsmoduls (E-Modul,
Young’s modulus) beschreiben. Zur Beschreibung dieses nichtlinearen Werkstoffverhaltens werden so
genannte hyperelastische Materialmodelle verwendet werden.
Bild 3.1: Spannungs-Dehnungs-Diagramm
3.1 Grundlagen
Materialmodelle dienen dazu, das Verhalten von Werkstoffen mathematisch zu beschreiben. Sie stel-
len einen Zusammenhang zwischen Spannung, Dehnung, Temperatur und/ oder Zeit her. Im Folgen-
den werden die für hyperelastische Materialmodelle erforderlichen Größen (Spannung und Dehnung)
kurz vorgestellt.
3.1.1 Spannungen
Als Spannung wird der Quotient aus Kraft und Fläche bezeichnet,
(3.1)
Einfaches
Materialmodell

7
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Spannungstensor
Die Spannung ist wie die Kraft eine vektorielle Größe. Zur Beschreibung des Spannungszustandes an
einem bestimmten Punkt im Bauteil dient der Spannungstensor ,
(3.2)
Der Spannungstensor besteht aus Schubspannungen ( ) und Normalspannungen ( ).
Aufgrund des Momentengleichgewichts am infinitesimalen Würfelelement ist der Spannungstensor
symmetrisch ( ).
Unterschied zwischen technischer und wahrer Spannung
Bei der technischen Spannung wird als Fläche die Ursprungsfläche herangezogen. Zur Bestim-
mung der wahren Spannung wird dagegen die tatsachliche Fläche verwendet. Beim uniaxialen
Zugversuch wird dadurch z.B. die Querschnittsverkleinerung infolge Querkontraktion berücksichtigt,
(3.3)
3.1.2 Dehnungen
Jeder Körper reagiert auf angreifende äußere Kräfte mit einer Verformung. Wie die Spannung ist auch
die Verformung eine vektorielle Größe, die durch den Verformungstensor beschrieben wird,
(3.4)
Der Dehnungstensor besteht aus Dehnungen ( ), die durch Normalspannungen hervorgerufen
werden, und Gleitungen ( ), die durch Schubspannungen verursacht werden.
Unterschied zwischen technischer und wahrer Dehnung
Wie bei der Spannung, wird auch bei der Dehnung zwischen technischer und wahrer Dehnung
unterschieden. Die technische Dehnung ist definiert als die Längenänderung eines Körpers
bezogen auf die Ursprungslänge ,
(3.5)

8
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Bei der wahren Dehnung wird die Längenänderung des Körpers auf die aktuelle Länge bezogen,
(3.6)
Im Bereich kleiner Dehnungen sind technische und wahre Dehnung ungefähr gleich,
(3.7)
3.1.3 Streckung
Die Streckung (auch Verstreckgrad genannt) beschreibt das Verhältnis aus Endlänge und Ur-
sprungslänge ,
(3.8)
Die drei Streckungen in Richtung der Hauptachsen werden zur Definition des Cauchy-Green-Tensors
herangezogen. Dieser Tensor wird in FEM-Programmen zur Beschreibung großer Deformationen
verwendet,
(3.9)
Der Cauchy-Green-Tensor kann durch seine drei Invarianten , und charakterisiert werden.
Diese sind unabhängig von der Wahl des Koordinatensystems, d.h. sie verändern sich bei Transforma-
tion (Drehung) des Koordinatensystems nicht.
Die erste Invariante beschreibt die Längenänderung der Raumdiagonalen des Würfelelements,
(3.10)
Die zweite Invariante drückt die Oberflächenänderung des Würfelelements aus,
(3.11)
Die dritte Invariante beschreibt die Volumenänderung des Würfelelements,
(3.12)

9
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Für inkompressible Werkstoffe gilt
(3.13)
Die Invarianten des Cauchy-Green-Tensors werden zur Formulierung von hyperelastischen Material-
modellen verwendet.
3.2 Beanspruchungszustände
Zur Gewinnung von Materialkennwerten werden bei der mechanischen Materialprüfung von Elasto-
meren verschiedene Untersuchungen mit unterschiedlichen Deformationszuständen (Deformations-
modi) durchgeführt. Im Folgenden werden die drei wichtigsten Deformationsmodi vorgestellt.
3.2.1 Uniaxialer Versuch
Beim Zugversuch, wie er auch bei der Prüfung metallischer Werkstoffe verwendet wird, stellt sich ein
einachsiger Spannungszustand im Messbereich des Probenkörpers ein, Bild 3.2.
Bild 3.2: Uniaxialer Zugversuch
Der Spannungstensor ergibt sich im Messbereich zu
(3.14)
Der zugehörige Deformationstensor lautet
(3.15)
Ausgangs-
geometrie
deformierte
Geometrie
10
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
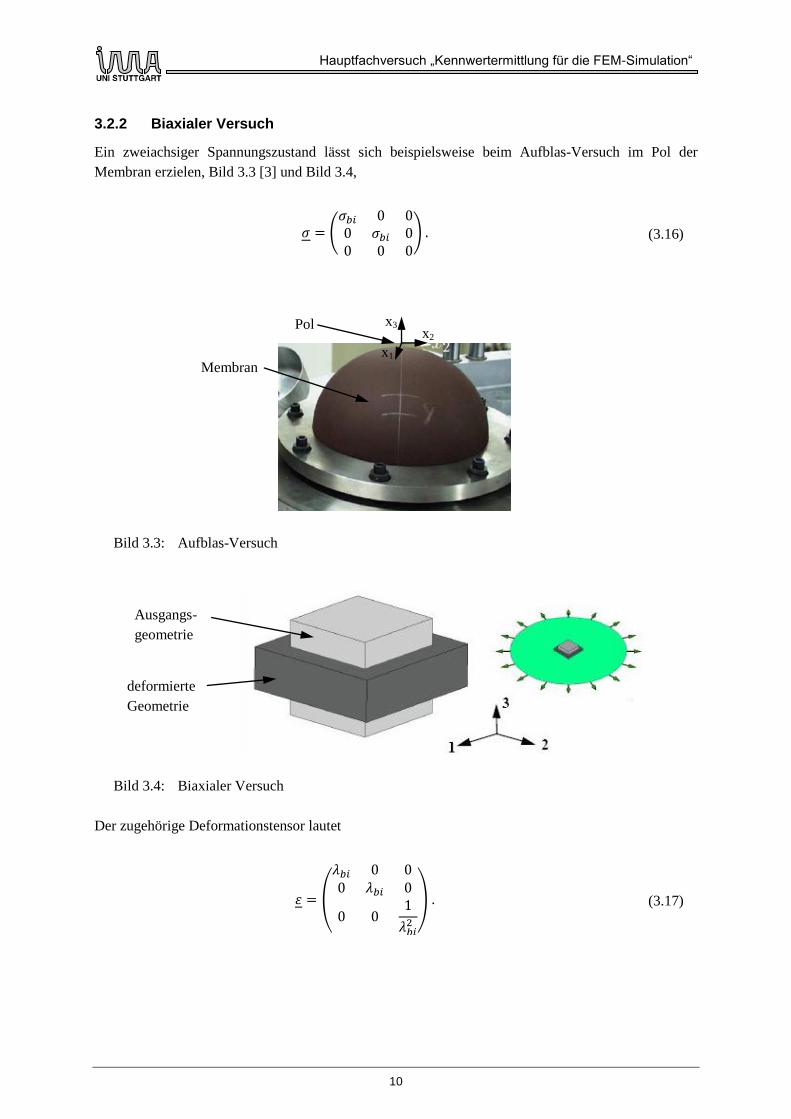
3.2.2 Biaxialer Versuch
Ein zweiachsiger Spannungszustand lässt sich beispielsweise beim Aufblas-Versuch im Pol der
Membran erzielen, Bild 3.3 [3] und Bild 3.4,
(3.16)
Bild 3.3: Aufblas-Versuch
Bild 3.4: Biaxialer Versuch
Der zugehörige Deformationstensor lautet
(3.17)
Ausgangs-
geometrie
deformierte
Geometrie
Membran
Pol x3
x1
x2
11
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
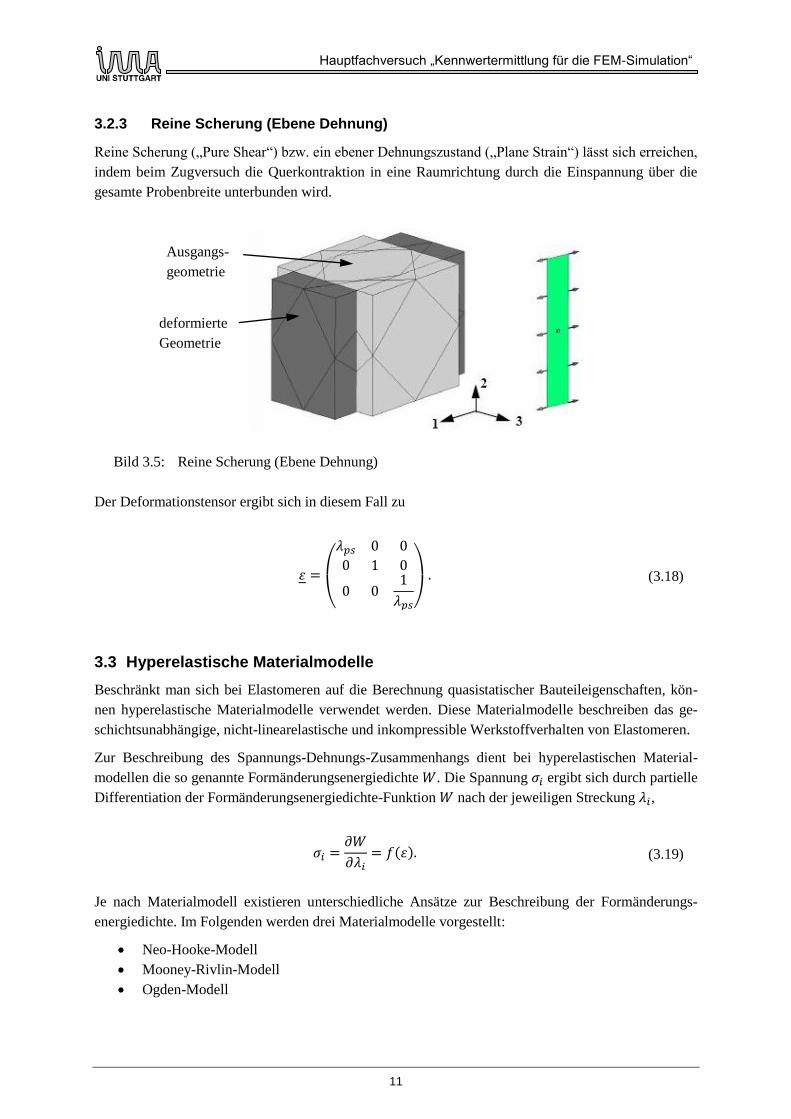
3.2.3 Reine Scherung (Ebene Dehnung)
Reine Scherung („Pure Shear“) bzw. ein ebener Dehnungszustand („Plane Strain“) lässt sich erreichen,
indem beim Zugversuch die Querkontraktion in eine Raumrichtung durch die Einspannung über die
gesamte Probenbreite unterbunden wird.
Bild 3.5: Reine Scherung (Ebene Dehnung)
Der Deformationstensor ergibt sich in diesem Fall zu
(3.18)
3.3 Hyperelastische Materialmodelle
Beschränkt man sich bei Elastomeren auf die Berechnung quasistatischer Bauteileigenschaften, kön-
nen hyperelastische Materialmodelle verwendet werden. Diese Materialmodelle beschreiben das ge-
schichtsunabhängige, nicht-linearelastische und inkompressible Werkstoffverhalten von Elastomeren.
Zur Beschreibung des Spannungs-Dehnungs-Zusammenhangs dient bei hyperelastischen Material-
modellen die so genannte Formänderungsenergiedichte . Die Spannung ergibt sich durch partielle
Differentiation der Formänderungsenergiedichte-Funktion nach der jeweiligen Streckung ,
(3.19)
Je nach Materialmodell existieren unterschiedliche Ansätze zur Beschreibung der Formänderungs-
energiedichte. Im Folgenden werden drei Materialmodelle vorgestellt:
Neo-Hooke-Modell
Mooney-Rivlin-Modell
Ogden-Modell
Ausgangs-
geometrie
deformierte
Geometrie

12
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
3.3.1 Neo-Hooke-Modell
Das Neo-Hooke-Modell ist das einfachste hyperelastische Materialmodell. Die Formänderungs-
energiedichte wird dabei als Funktion der ersten Invarianten des Cauchy-Green-Tensors und einem
konstanten Materialparameter angenommen,
(3.20)
Die Anpassung des einzigen Parameters erfolgt beim Neo-Hooke-Modell anhand des uniaxialen
Zugversuchs. Alternativ lässt sich der Neo-Hooke-Paramater näherungsweise aus dem E-Modul
oder über den Schubmodul aus der Shore-A-Härte bestimmen,
(3.21)
(3.22)
Der Schubmodul kann aus der Shore-A-Härte abgeschätzt werden [1],
(3.23)
(3.24)
3.3.2 Mooney-Rivlin-Modell
Das Mooney-Rivlin-Modell kann als eine Erweiterung des Neo-Hooke-Modells aufgefasst werden.
Neben der Abhängigkeit von der ersten Invarianten des Cauchy-Green-Tensors ist die Form-
änderungsenergiedichte nun auch eine Funktion der zweiten Invarianten ,
(3.25)
Mit der Inkompressibilitätsbedingung, Gleichung (3.13), lautet das Mooney-Rivlin-Modell
(3.26)
Zur Verbesserung der numerischen Konvergenz nimmt MSC.Marc/Mentat eine (sehr kleine) Kom-
pressibilität an [4]. Diese berechnet sich zu
(3.27)

13
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
3.3.3 Ogden-Modell
Die in MSC.Marc/Mentat implementierte Form des Ogden-Modells ermöglicht eine Anwendung auf
kompressible Elastomere. Bei dieser Formulierung wird die Formänderungsenergiedichte als Funktion
der Hauptstreckungen des Cauchy-Green-Tensors dargestellt [4],
(3.28)
Dabei sind und Materialkonstanten und der Ordnungsgrad (üblich bzw. ). Das
Kompressionsmodul wird oft nur abgeschätzt, da volumetrische Tests sehr aufwändig sind. Ist kein
Kompressionsmodul bekannt, kann dies mit folgender Gleichung abgeschätzt werden,
(3.29)
3.3.4 Beispiel
Zur Verdeutlichung des Zusammenhangs zwischen Spannung und Dehnung soll dieser am Beispiel
des uniaxialen Zugversuchs mit Hilfe des Neo-Hooke-Modells hergeleitet werden [5].
Mit den drei Hauptstreckungen des einachsigen Spannungszustands
(3.30)
lautet die Formänderungsenergiedichte-Funktion beim Neo-Hooke-Modell
(3.31)
Die Spannung ergibt sich nach Gleichung (3.19) durch Ableiten der Formänderungsenergiedichte-
Funktion nach der Streckung ,
(3.32)
Damit lautet der Zusammenhang zwischen Spannung und technischer Dehnung
(3.33)
14
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
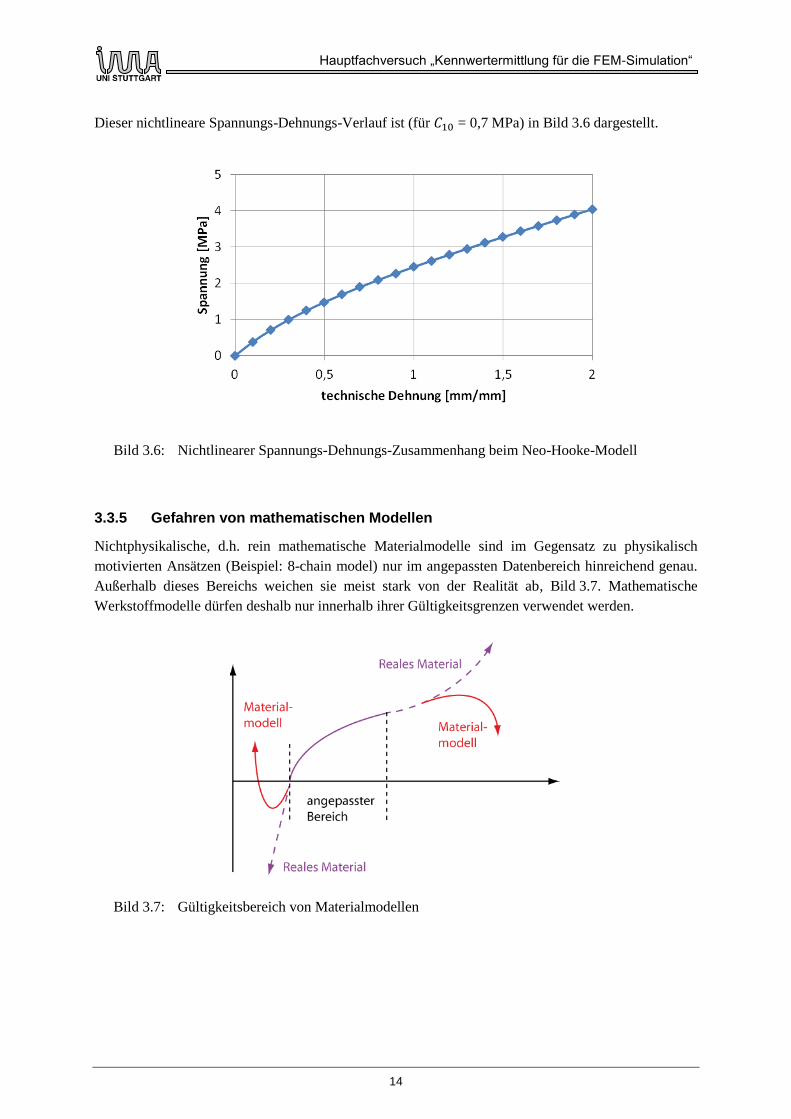
Dieser nichtlineare Spannungs-Dehnungs-Verlauf ist (für = 0,7 MPa) in Bild 3.6 dargestellt.
Bild 3.6: Nichtlinearer Spannungs-Dehnungs-Zusammenhang beim Neo-Hooke-Modell
3.3.5 Gefahren von mathematischen Modellen
Nichtphysikalische, d.h. rein mathematische Materialmodelle sind im Gegensatz zu physikalisch
motivierten Ansätzen (Beispiel: 8-chain model) nur im angepassten Datenbereich hinreichend genau.
Außerhalb dieses Bereichs weichen sie meist stark von der Realität ab, Bild 3.7. Mathematische
Werkstoffmodelle dürfen deshalb nur innerhalb ihrer Gültigkeitsgrenzen verwendet werden.
Bild 3.7: Gültigkeitsbereich von Materialmodellen
15
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
4 Werkstoffprüfung
Im Rahmen des Praktikumsversuchs werden zwei Werkstoffprüfungen durchgeführt:
Härtemessung mittels Durometer
Aufzeichnung einer Spannungs-Dehnungs-Kurve mittels Zugprüfmaschine
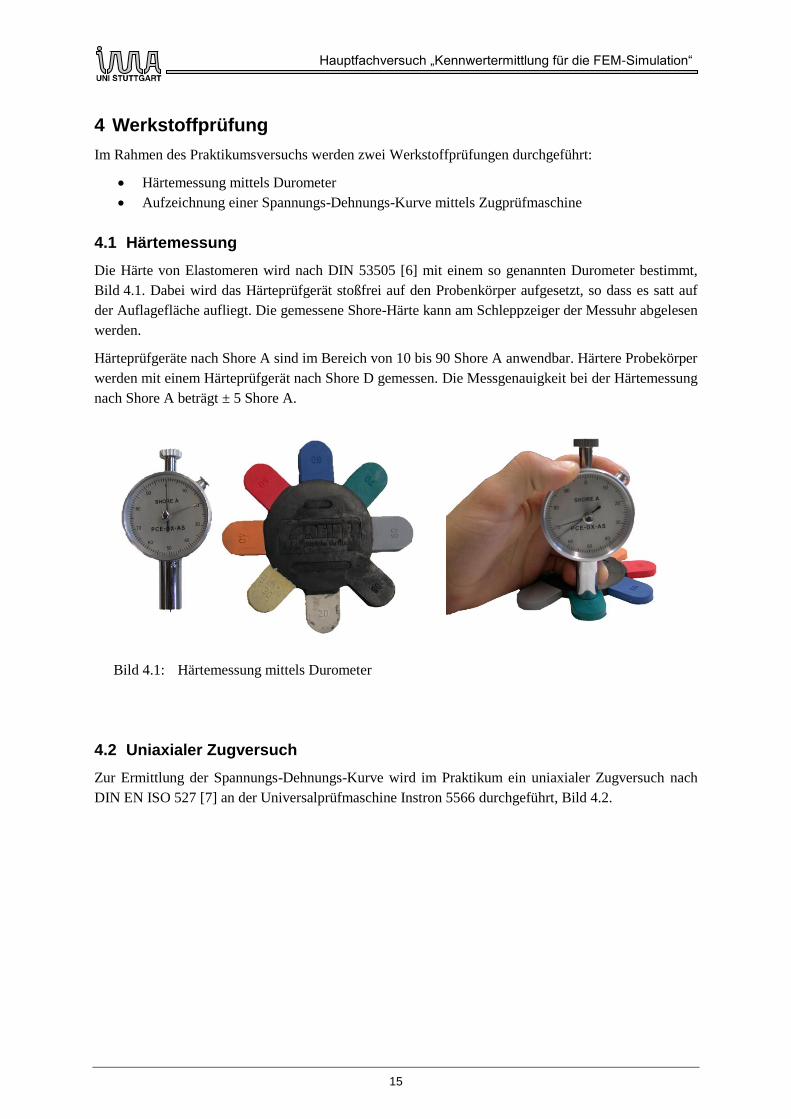
4.1 Härtemessung
Die Härte von Elastomeren wird nach DIN 53505 [6] mit einem so genannten Durometer bestimmt,
Bild 4.1. Dabei wird das Härteprüfgerät stoßfrei auf den Probenkörper aufgesetzt, so dass es satt auf
der Auflagefläche aufliegt. Die gemessene Shore-Härte kann am Schleppzeiger der Messuhr abgelesen
werden.
Härteprüfgeräte nach Shore A sind im Bereich von 10 bis 90 Shore A anwendbar. Härtere Probekörper
werden mit einem Härteprüfgerät nach Shore D gemessen. Die Messgenauigkeit bei der Härtemessung
nach Shore A beträgt ± 5 Shore A.
Bild 4.1: Härtemessung mittels Durometer
4.2 Uniaxialer Zugversuch
Zur Ermittlung der Spannungs-Dehnungs-Kurve wird im Praktikum ein uniaxialer Zugversuch nach
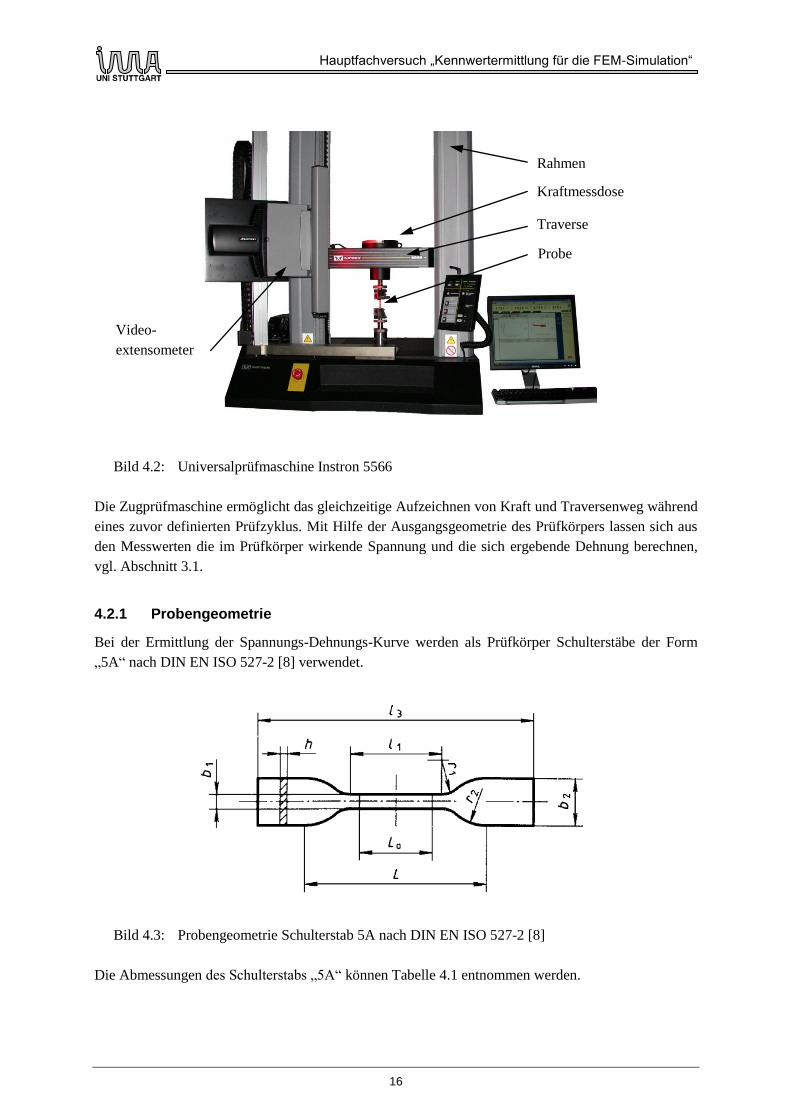
DIN EN ISO 527 [7] an der Universalprüfmaschine Instron 5566 durchgeführt, Bild 4.2.
16
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Bild 4.2: Universalprüfmaschine Instron 5566
Die Zugprüfmaschine ermöglicht das gleichzeitige Aufzeichnen von Kraft und Traversenweg während
eines zuvor definierten Prüfzyklus. Mit Hilfe der Ausgangsgeometrie des Prüfkörpers lassen sich aus
den Messwerten die im Prüfkörper wirkende Spannung und die sich ergebende Dehnung berechnen,
vgl. Abschnitt 3.1.
4.2.1 Probengeometrie
Bei der Ermittlung der Spannungs-Dehnungs-Kurve werden als Prüfkörper Schulterstäbe der Form
„5A“ nach DIN EN ISO 527-2 [8] verwendet.
Bild 4.3: Probengeometrie Schulterstab 5A nach DIN EN ISO 527-2 [8]
Die Abmessungen des Schulterstabs „5A“ können Tabelle 4.1 entnommen werden.
Kraftmessdose
Rahmen
Probe
Video-
extensometer
Traverse
17
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
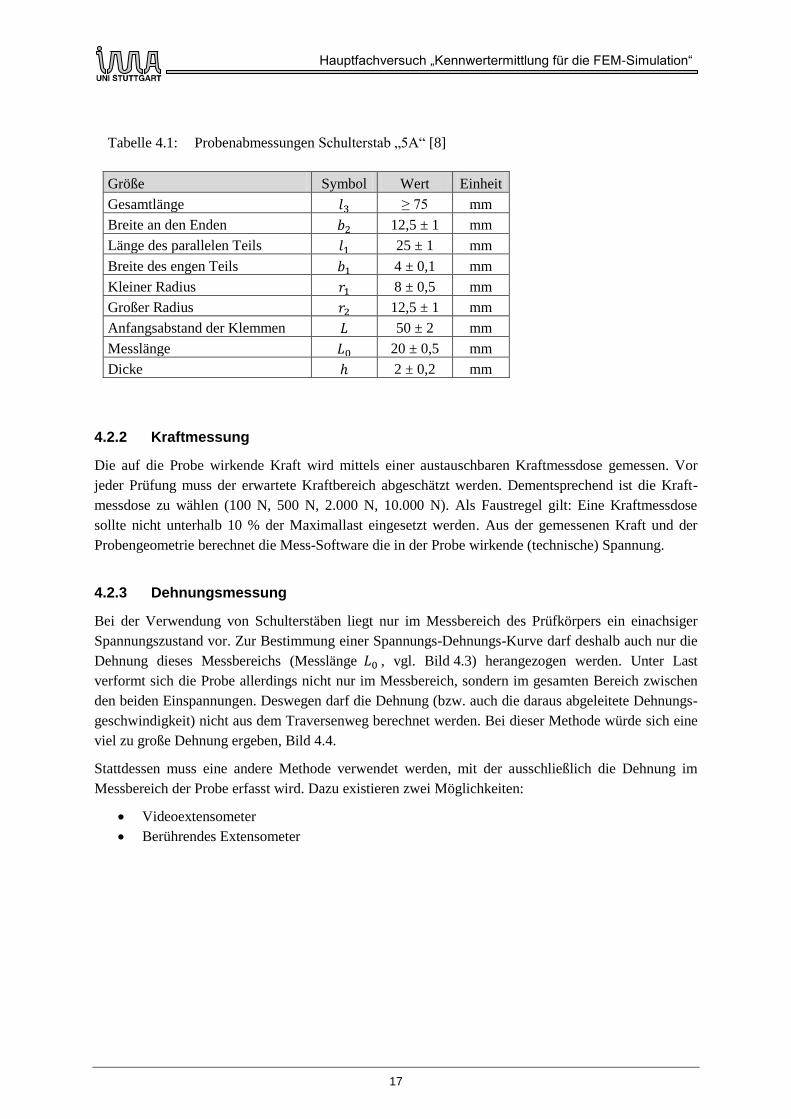
Tabelle 4.1: Probenabmessungen Schulterstab „5A“ [8]
Größe Symbol Wert Einheit
Gesamtlänge ≥ 75 mm
Breite an den Enden 12,5 ± 1 mm
Länge des parallelen Teils 25 ± 1 mm
Breite des engen Teils 4 ± 0,1 mm
Kleiner Radius 8 ± 0,5 mm
Großer Radius 12,5 ± 1 mm
Anfangsabstand der Klemmen 50 ± 2 mm
Messlänge 20 ± 0,5 mm
Dicke 2 ± 0,2 mm
4.2.2 Kraftmessung
Die auf die Probe wirkende Kraft wird mittels einer austauschbaren Kraftmessdose gemessen. Vor
jeder Prüfung muss der erwartete Kraftbereich abgeschätzt werden. Dementsprechend ist die Kraft-
messdose zu wählen (100 N, 500 N, 2.000 N, 10.000 N). Als Faustregel gilt: Eine Kraftmessdose
sollte nicht unterhalb 10 % der Maximallast eingesetzt werden. Aus der gemessenen Kraft und der
Probengeometrie berechnet die Mess-Software die in der Probe wirkende (technische) Spannung.
4.2.3 Dehnungsmessung
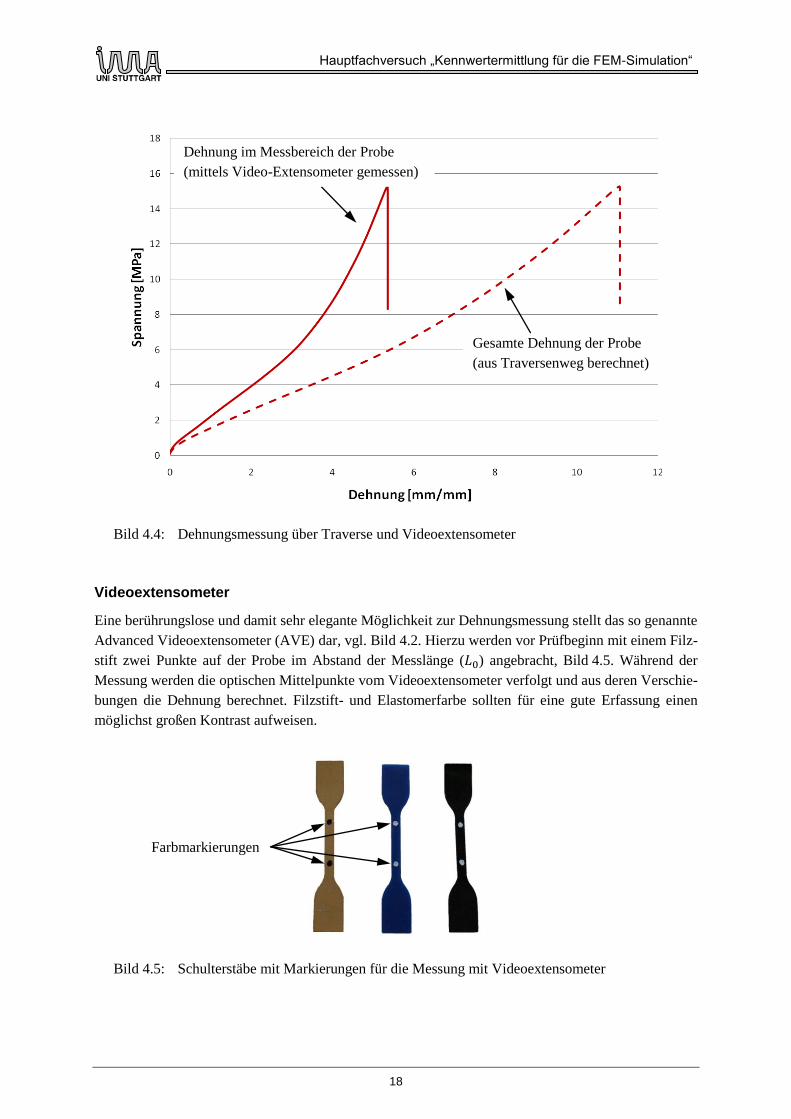
Bei der Verwendung von Schulterstäben liegt nur im Messbereich des Prüfkörpers ein einachsiger
Spannungszustand vor. Zur Bestimmung einer Spannungs-Dehnungs-Kurve darf deshalb auch nur die
Dehnung dieses Messbereichs (Messlänge , vgl. Bild 4.3) herangezogen werden. Unter Last
verformt sich die Probe allerdings nicht nur im Messbereich, sondern im gesamten Bereich zwischen
den beiden Einspannungen. Deswegen darf die Dehnung (bzw. auch die daraus abgeleitete Dehnungs-
geschwindigkeit) nicht aus dem Traversenweg berechnet werden. Bei dieser Methode würde sich eine
viel zu große Dehnung ergeben, Bild 4.4.
Stattdessen muss eine andere Methode verwendet werden, mit der ausschließlich die Dehnung im
Messbereich der Probe erfasst wird. Dazu existieren zwei Möglichkeiten:
Videoextensometer
Berührendes Extensometer
18
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
Bild 4.4: Dehnungsmessung über Traverse und Videoextensometer
Videoextensometer
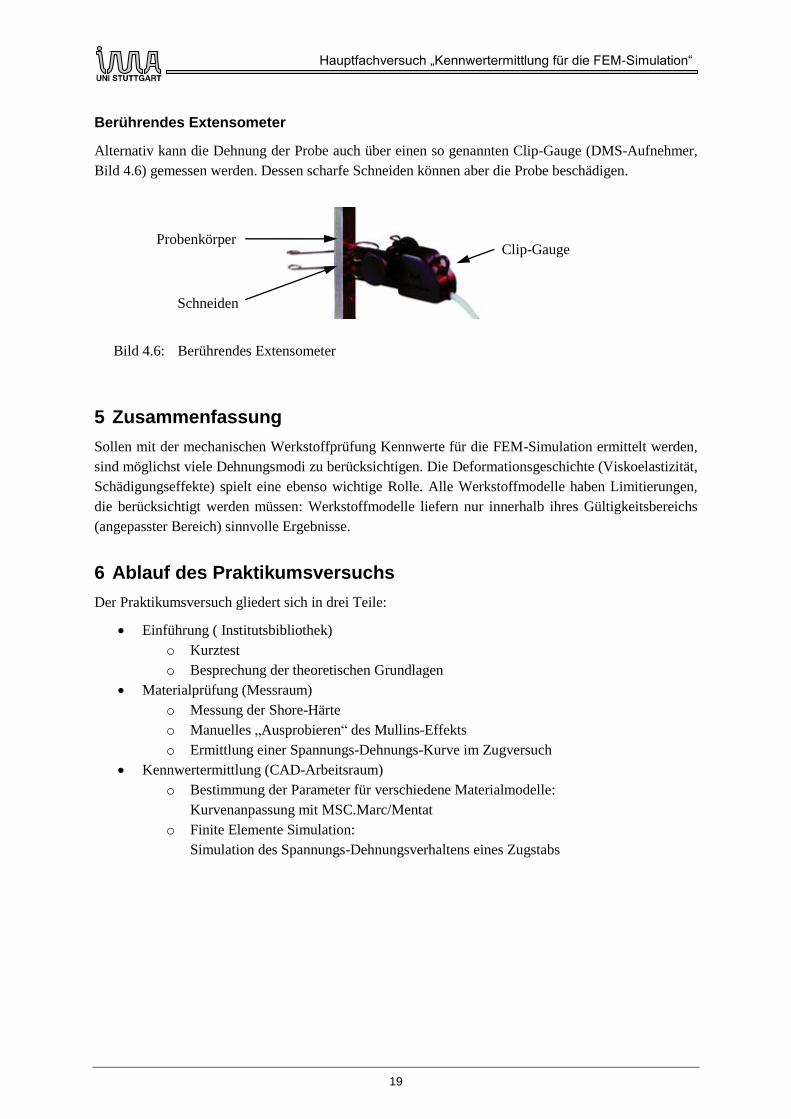
Eine berührungslose und damit sehr elegante Möglichkeit zur Dehnungsmessung stellt das so genannte
Advanced Videoextensometer (AVE) dar, vgl. Bild 4.2. Hierzu werden vor Prüfbeginn mit einem Filz-
stift zwei Punkte auf der Probe im Abstand der Messlänge ( ) angebracht, Bild 4.5. Während der
Messung werden die optischen Mittelpunkte vom Videoextensometer verfolgt und aus deren Verschie-
bungen die Dehnung berechnet. Filzstift- und Elastomerfarbe sollten für eine gute Erfassung einen
möglichst großen Kontrast aufweisen.
Bild 4.5: Schulterstäbe mit Markierungen für die Messung mit Videoextensometer
Farbmarkierungen
Gesamte Dehnung der Probe
(aus Traversenweg berechnet)
Dehnung im Messbereich der Probe
(mittels Video-Extensometer gemessen)
19
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
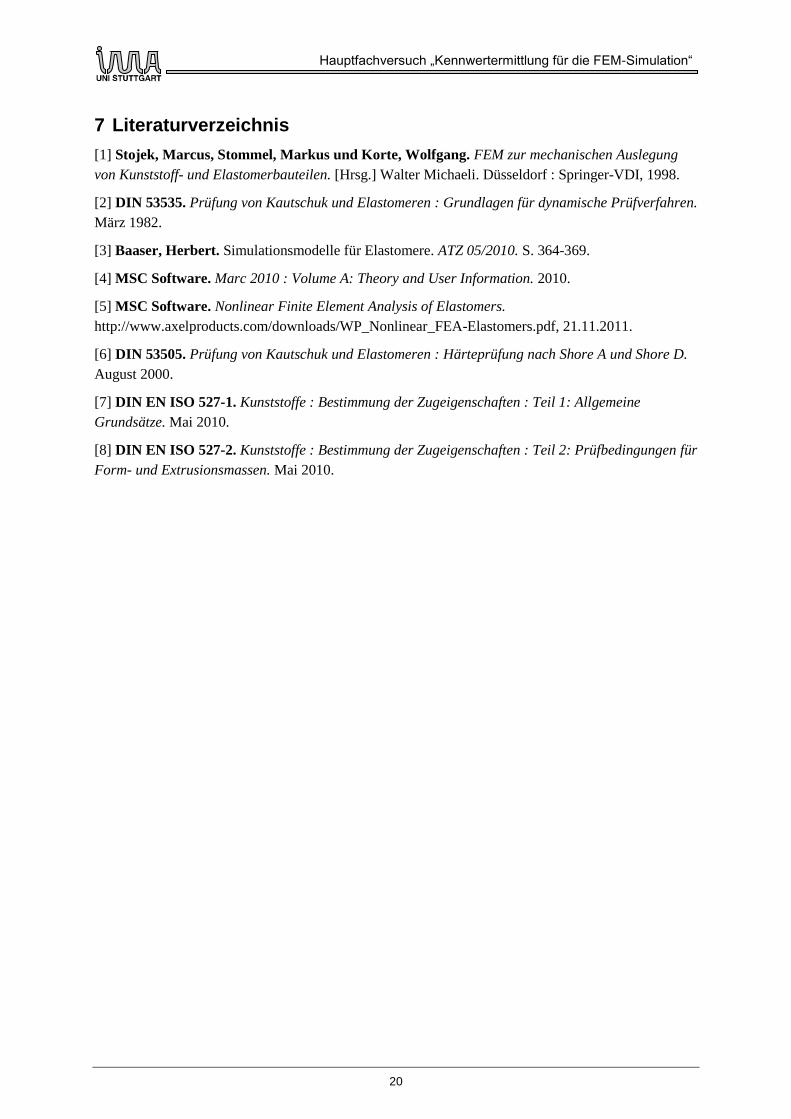
Berührendes Extensometer
Alternativ kann die Dehnung der Probe auch über einen so genannten Clip-Gauge (DMS-Aufnehmer,
Bild 4.6) gemessen werden. Dessen scharfe Schneiden können aber die Probe beschädigen.
Bild 4.6: Berührendes Extensometer
5 Zusammenfassung
Sollen mit der mechanischen Werkstoffprüfung Kennwerte für die FEM-Simulation ermittelt werden,
sind möglichst viele Dehnungsmodi zu berücksichtigen. Die Deformationsgeschichte (Viskoelastizität,
Schädigungseffekte) spielt eine ebenso wichtige Rolle. Alle Werkstoffmodelle haben Limitierungen,
die berücksichtigt werden müssen: Werkstoffmodelle liefern nur innerhalb ihres Gültigkeitsbereichs
(angepasster Bereich) sinnvolle Ergebnisse.
6 Ablauf des Praktikumsversuchs
Der Praktikumsversuch gliedert sich in drei Teile:
Einführung ( Institutsbibliothek)
o Kurztest
o Besprechung der theoretischen Grundlagen
Materialprüfung (Messraum)
o Messung der Shore-Härte
o Manuelles „Ausprobieren“ des Mullins-Effekts
o Ermittlung einer Spannungs-Dehnungs-Kurve im Zugversuch
Kennwertermittlung (CAD-Arbeitsraum)
o Bestimmung der Parameter für verschiedene Materialmodelle:
Kurvenanpassung mit MSC.Marc/Mentat
o Finite Elemente Simulation:
Simulation des Spannungs-Dehnungsverhaltens eines Zugstabs
Probenkörper
Schneiden
Clip-Gauge
20
Hauptfachversuch „Kennwertermittlung für die FEM-Simulation“
7 Literaturverzeichnis
[1] Stojek, Marcus, Stommel, Markus und Korte, Wolfgang. FEM zur mechanischen Auslegung
von Kunststoff- und Elastomerbauteilen. [Hrsg.] Walter Michaeli. Düsseldorf : Springer-VDI, 1998.
[2] DIN 53535. Prüfung von Kautschuk und Elastomeren : Grundlagen für dynamische Prüfverfahren.
März 1982.
[3] Baaser, Herbert. Simulationsmodelle für Elastomere. ATZ 05/2010. S. 364-369.
[4] MSC Software. Marc 2010 : Volume A: Theory and User Information. 2010.
[5] MSC Software. Nonlinear Finite Element Analysis of Elastomers.
http://www.axelproducts.com/downloads/WP_Nonlinear_FEA-Elastomers.pdf, 21.11.2011.
[6] DIN 53505. Prüfung von Kautschuk und Elastomeren : Härteprüfung nach Shore A und Shore D.
August 2000.
[7] DIN EN ISO 527-1. Kunststoffe : Bestimmung der Zugeigenschaften : Teil 1: Allgemeine
Grundsätze. Mai 2010.
[8] DIN EN ISO 527-2. Kunststoffe : Bestimmung der Zugeigenschaften : Teil 2: Prüfbedingungen für
Form- und Extrusionsmassen. Mai 2010.