Embed Size (px)
Citation preview
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-1
1. Bewegungsgleichung
1.1 Das Newtonsche Grundgesetz
1.2 Dynamisches Gleichgewicht
1.3 Geführte Bewegung
1.4 Massenpunktsysteme
1.5 Schwerpunktsatz
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-2
1.1 Das Newtonsche Grundgesetz
● Die Erfahrung zeigt:
– Wenn die Kräfte, die an einem Massenpunkt angreifen, nicht im Gleichgewicht sind, ändert sich seine Geschwin-digkeit.
– Beschleunigung und Kraft haben die gleiche Richtung.
– Der Betrag der Beschleunigung ist proportional zum Betrag der Kraft.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-3
1.1 Das Newtonsche Grundgesetz
● 2. Newtonsches Gesetz:
– Zwischen der am Massenpunkt angreifenden Kraft F und seiner Beschleunigung a besteht der Zusammenhang
– Die Proportionalitätskonstante m wird als träge Masse be-zeichnet.
– Ein Massenpunkt ist ein geometrischer Punkt, dem eine träge Masse zugeordnet ist.
F=m a
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-4
∑ F x=ma x , ∑ F y=ma y , ∑ F z=maz
1.1 Das Newtonsche Grundgesetz
● Bewegungsgleichungen:
– Wenn am Körper mehrere Kräfte angreifen, so ist die Resul-tierende zu bilden:
– In einem kartesischen Koordinatensystem gilt:
– Diese Gleichungen werden als Bewegungsgleichungen be-zeichnet.
∑ F=m a
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-5
1.1 Das Newtonsche Grundgesetz
– Aus den Bewegungsgleichungen lässt sich die Bewegung des Massenpunkts bestimmen, wenn die Kräfte und die An-fangsbedingungen gegeben sind.
– Wenn die Bewegung gegeben ist, so lassen sich aus den Bewegungsgleichungen die benötigten Kräfte ermitteln.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-6
1.1 Das Newtonsche Grundgesetz
● Inertialsystem:
– Das Newtonsche Grundgesetz gilt nicht in beliebigen Be-zugssystemen.
– Ein Bezugssystem, in dem das Grundgesetz gilt, wird als Inertialsystem bezeichnet.
– Bei technischen Anwendungen kann die Erde in der Regel als Inertialsystem angesehen werden.
– Jedes Bezugssystem, das sich geradlinig mit konstanter Geschwindigkeit relativ zu einem Inertialsystem bewegt, ist ebenfalls ein Inertialsystem.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-7
1.1 Das Newtonsche Grundgesetz
● Lösungsweg:
– Freischneiden des betrachteten Systems
– Einführen eines geeigneten Koordinatensystems
– Aufstellen der Bewegungsgleichungen:● Kraft- , Geschwindigkeits- und Beschleunigungskomponenten
sind positiv, wenn die zugehörigen Vektoren in Richtung posi-tiver Koordinatenachsen zeigen.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-8
1.1 Das Newtonsche Grundgesetz
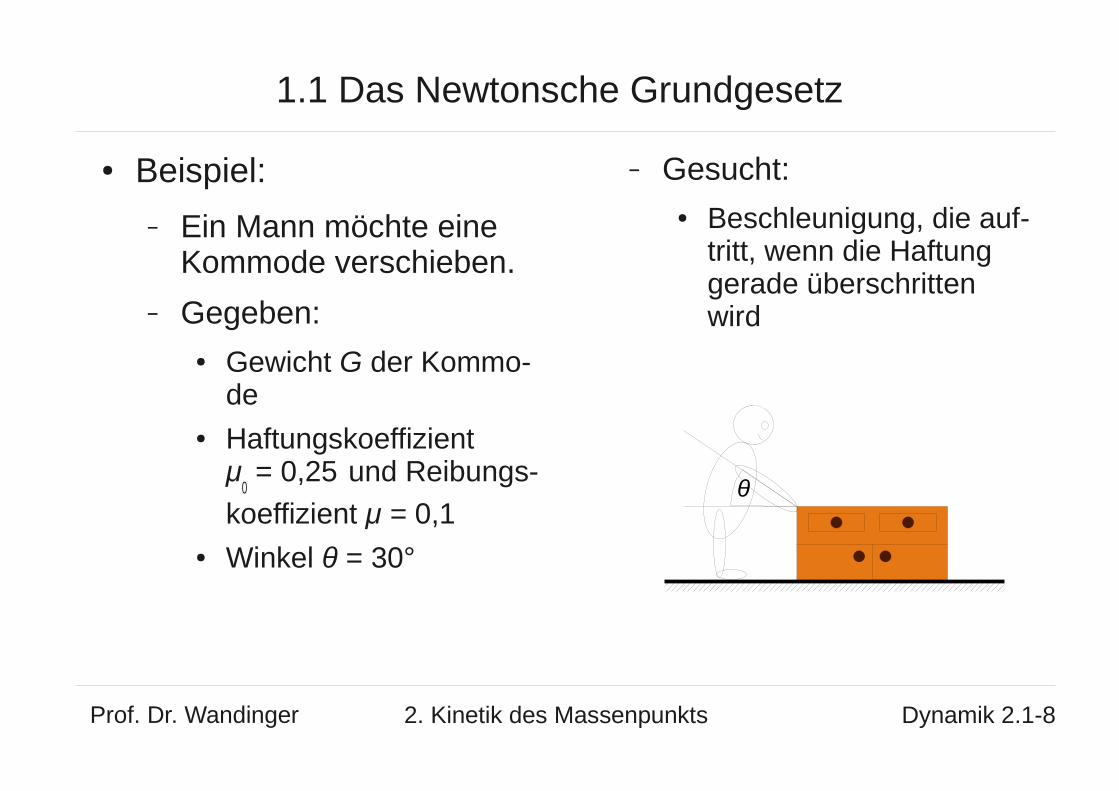
● Beispiel:
– Ein Mann möchte eine Kommode verschieben.
– Gegeben:● Gewicht G der Kommo-
de● Haftungskoeffizient
μ0 = 0,25
und Reibungs-
koeffizient μ = 0,1● Winkel θ = 30°
– Gesucht:● Beschleunigung, die auf-
tritt, wenn die Haftung gerade überschritten wird
θ
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-9
1.1 Das Newtonsche Grundgesetz
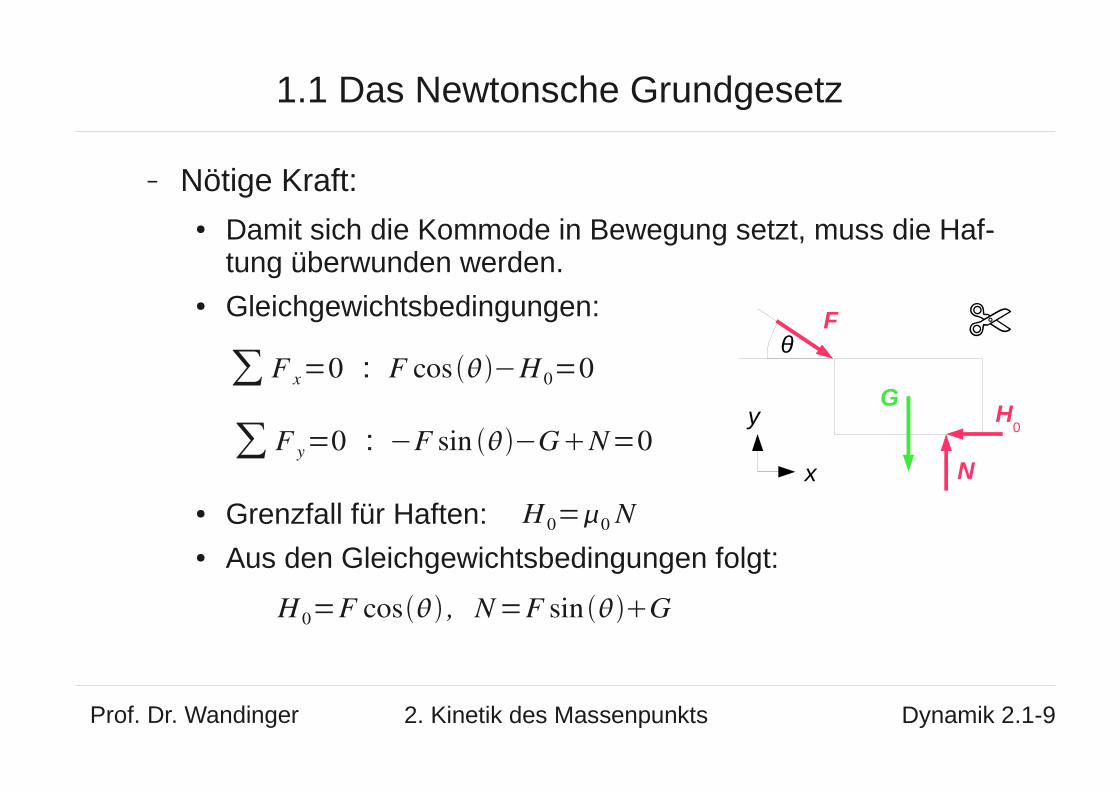
– Nötige Kraft:● Damit sich die Kommode in Bewegung setzt, muss die Haf-
tung überwunden werden.● Gleichgewichtsbedingungen:
● Grenzfall für Haften:● Aus den Gleichgewichtsbedingungen folgt:
θF
GH
0
Nx
y
✄∑ F x=0 : F cos −H 0=0
∑ F y=0 : −F sin −GN=0
H 0=0 N
H 0=F cos , N=F sin G
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-10
1.1 Das Newtonsche Grundgesetz
● Einsetzen in die Haftbedingung ergibt:
● Daraus folgt für die Kraft:
– Gleiten:● Wird die Kraft F auch nur geringfügig überschritten, tritt Glei-
ten auf. Statt der Haftungskraft wirkt die kleinere Gleitrei-bungskraft.
F cos =0 F sin G
F cos −0sin =0G F=0G
cos−0sin
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-11
1.1 Das Newtonsche Grundgesetz
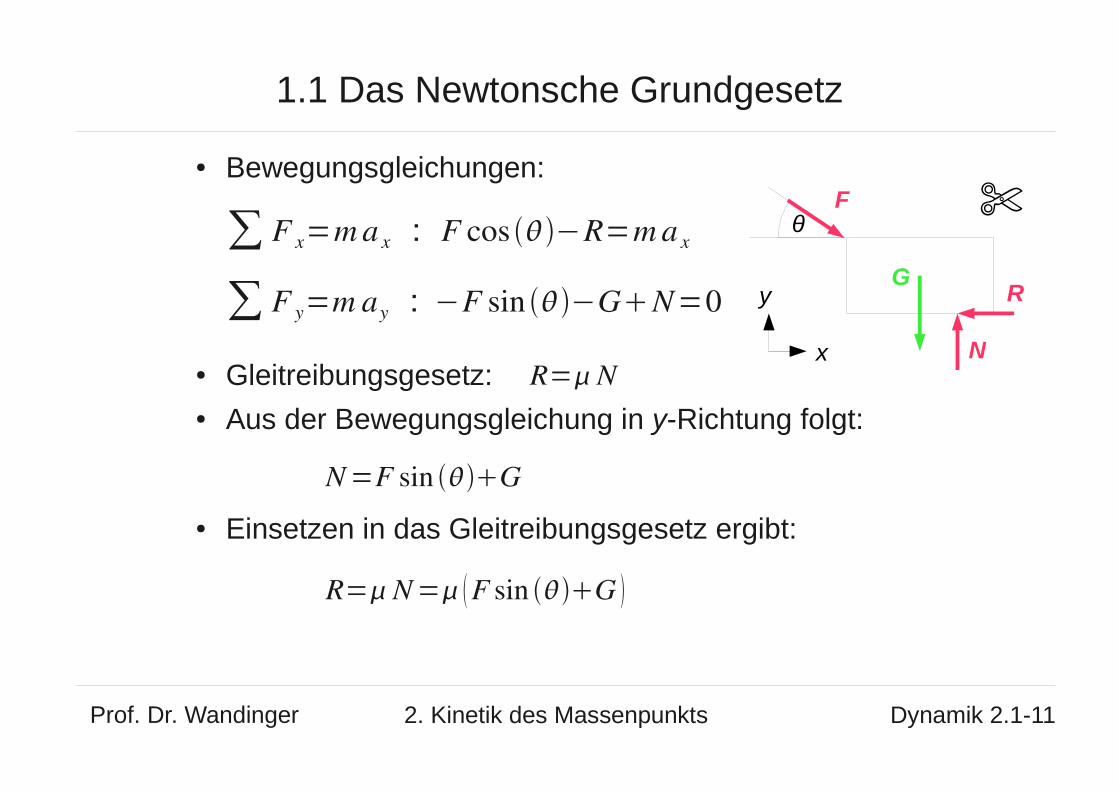
● Bewegungsgleichungen:
● Gleitreibungsgesetz:● Aus der Bewegungsgleichung in y-Richtung folgt:
● Einsetzen in das Gleitreibungsgesetz ergibt:
θF
GR
Nx
y
✄∑ F x=ma x : F cos −R=ma x
∑ F y=m ay : −F sin −GN=0
R=N
N=F sin G
R=N= F sin G
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-12
1.1 Das Newtonsche Grundgesetz
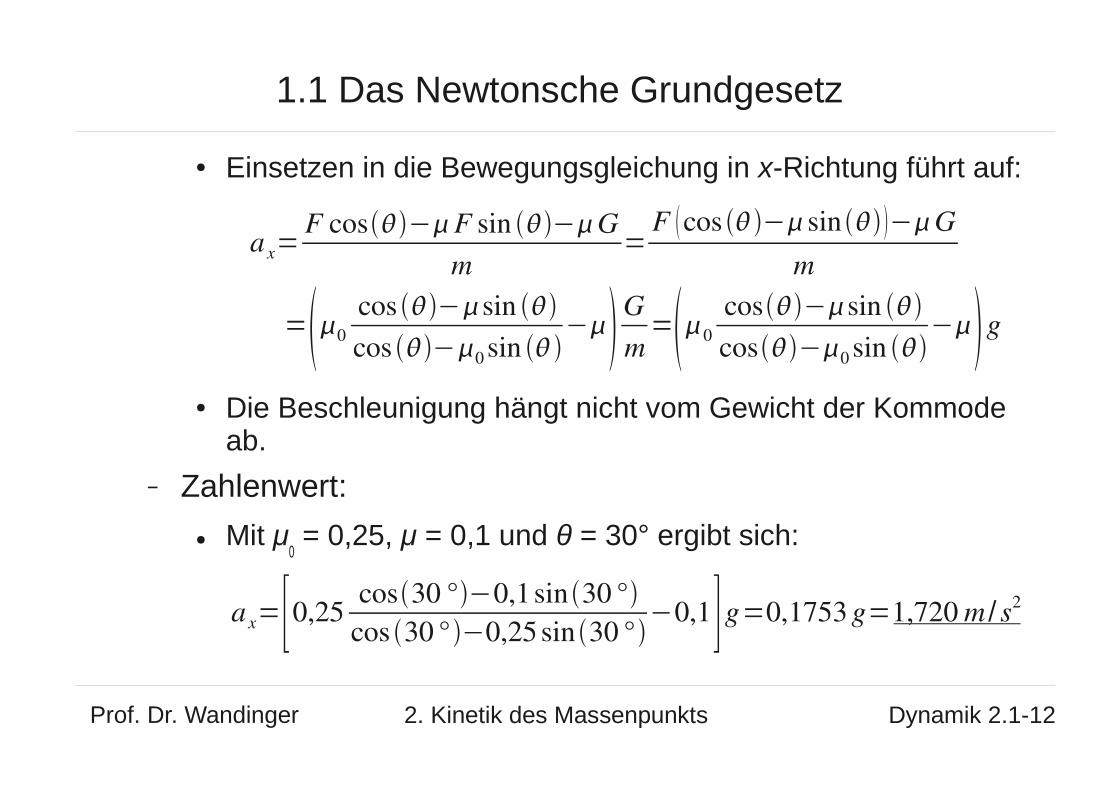
● Einsetzen in die Bewegungsgleichung in x-Richtung führt auf:
● Die Beschleunigung hängt nicht vom Gewicht der Kommode ab.
– Zahlenwert:
● Mit μ0 = 0,25, μ = 0,1 und θ = 30° ergibt sich:
ax=F cos−F sin −G
m=
F cos −sin −Gm
=0cos −sin cos −0sin
−Gm=0cos−sin cos−0sin
−g
ax=[0,25 cos30 °−0,1sin30 °cos 30° −0,25sin30 °
−0,1]g=0,1753g=1,720 m / s2
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-13
1.2 Dynamisches Gleichgewicht
● Die d'Alembertsche Trägheitskraft:
– Das Newtonsche Grundgesetz kann auch in der Form
geschrieben werden.
– Die Kraft
wird als d'Alembertsche Trägheitskraft bezeichnet.
– Die d'Alembertsche Trägheitskraft ist eine Scheinkraft, die entgegensetzt zur Beschleunigung gerichtet ist.
F−m a=0
FT=−m a
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-14
1.2 Dynamisches Gleichgewicht
● Dynamisches Gleichgewicht:
– Durch das Einführen der Trägheitskraft lässt sich das New-tonsche Grundgesetz formal auf eine Gleichgewichtsbedin-gung zurückführen:
– Dieses Gleichgewicht wird als dynamisches Gleichgewicht bezeichnet.
– Später wird gezeigt:● Bei einem starren Körper greift die d'Alembertsche Trägheits-
kraft im Schwerpunkt an.● Wenn sich der Körper dreht, können zusätzliche Momente
auftreten.
FFT=0
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-15
1.2 Dynamisches Gleichgewicht
● Vorgehen:
– Der zu untersuchende Körper wird freigeschnitten.
– Neben den äußeren Kräften werden zusätzlich die d'Alem-bertschen Trägheitskräfte eingetragen.
– Die Bewegungsgleichungen folgen dann wie in der Statik aus der Bedingung, dass die Summe der Kräfte und Mo-mente null sein muss.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-16
1.2 Dynamisches Gleichgewicht
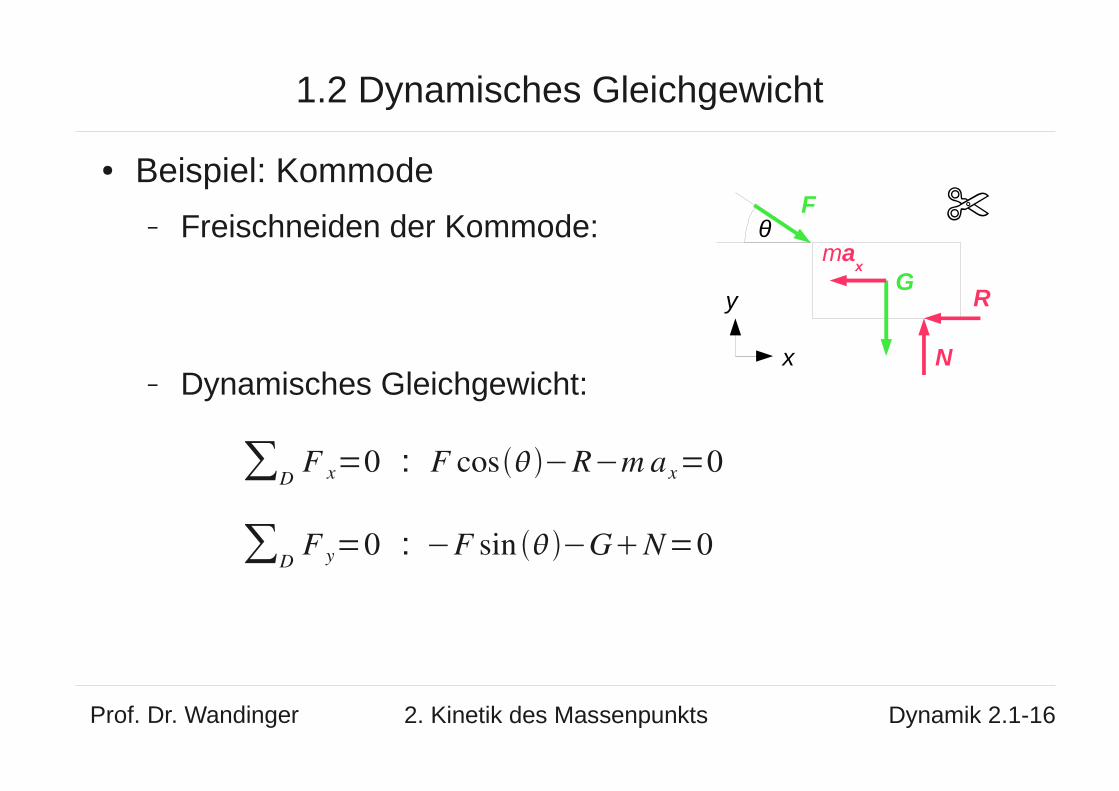
● Beispiel: Kommode
– Freischneiden der Kommode:
– Dynamisches Gleichgewicht:
θF
GR
Nx
y
max
✄
∑DF x=0 : F cos−R−m ax=0
∑DF y=0 : −F sin −GN=0
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-17
1.3 Geführte Bewegung
● Bei einer geführten Bewegung wird der Massenpunkt ge-zwungen, sich auf einer vorgegebenen Fläche oder Kurve zu bewegen.
● Dadurch wird die Zahl der Freiheitsgrade des Massen-punktes eingeschränkt.
● Die Zahl der Freiheitsgrade ist gleich der Zahl der Koordi-naten, die notwendig sind, um die Lage des Massenpunk-tes eindeutig zu beschreiben.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-18
1.3 Geführte Bewegung
Pξ
η
P
s
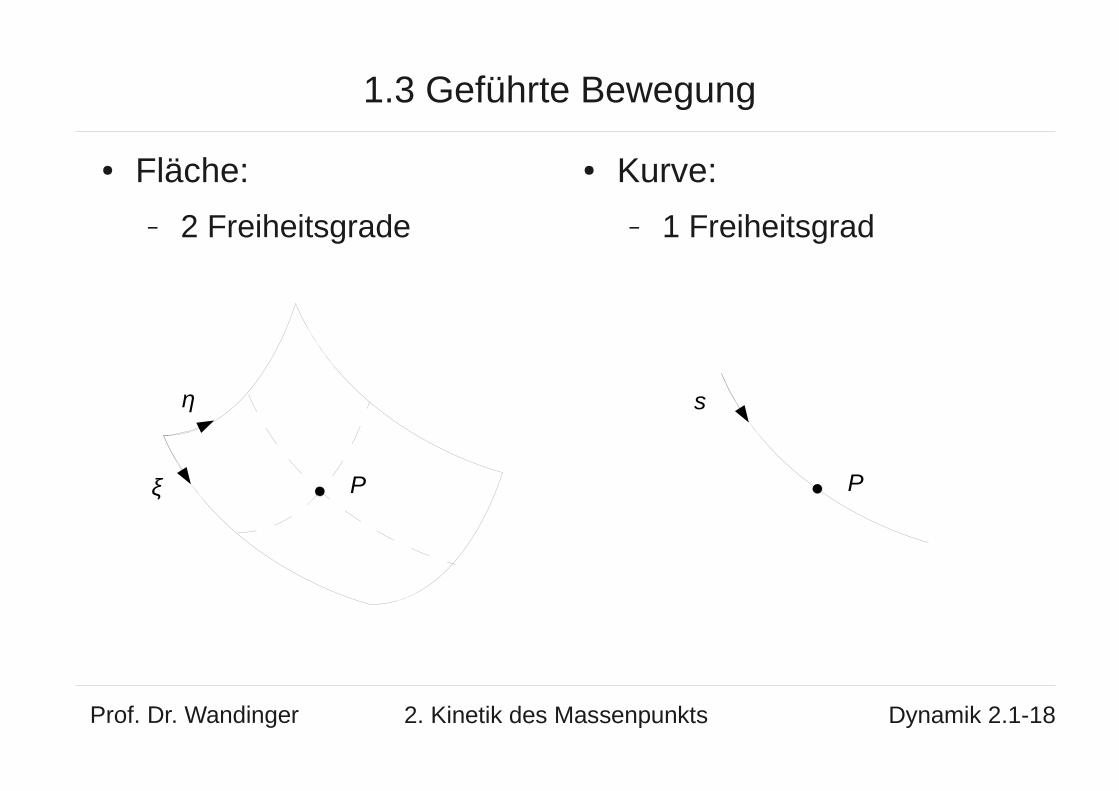
● Fläche:
– 2 Freiheitsgrade
● Kurve:
– 1 Freiheitsgrad
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-19
1.3 Geführte Bewegung
● Neben den eingeprägten Kräften treten Zwangskräfte auf, die die geforderte Bindung an die Fläche oder Kurve be-wirken.
● Die Zwangskräfte stehen senkrecht auf der Fläche oder Kurve.
● Die Zwangskräfte werden auch als Führungskräfte be-zeichnet.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-20
1.3 Geführte Bewegung
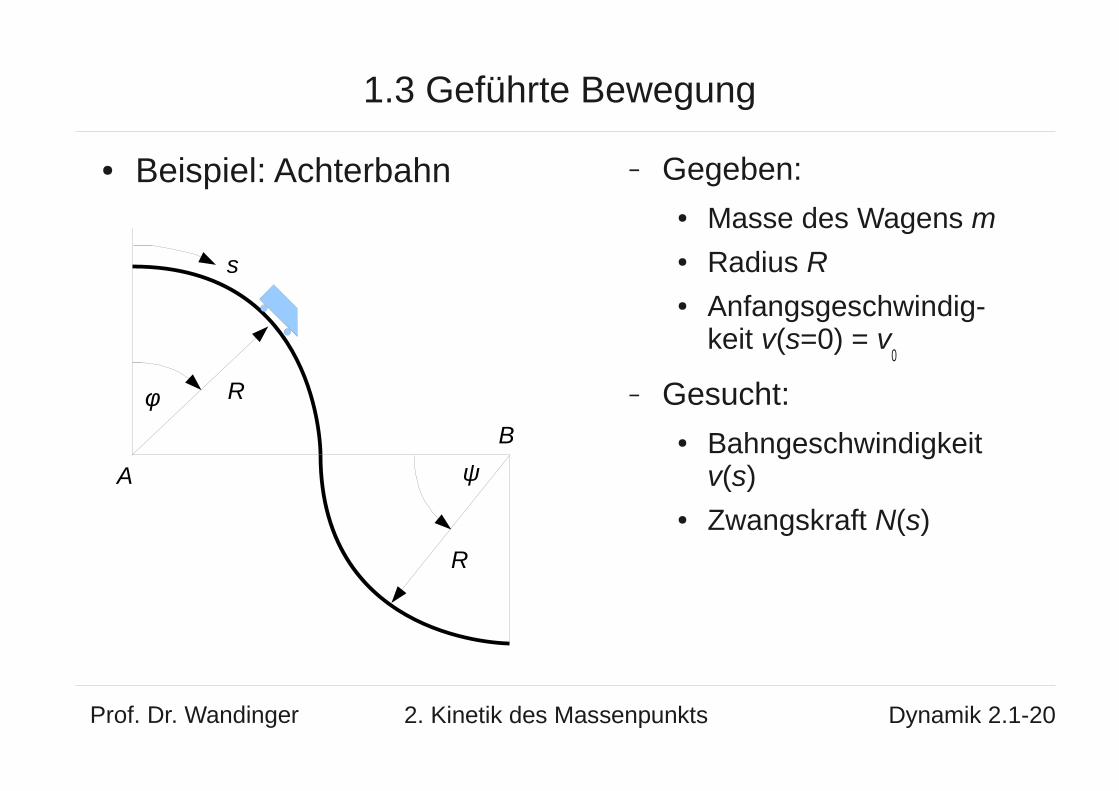
● Beispiel: Achterbahn
R
R
s
A
B
φ
ψ
– Gegeben:● Masse des Wagens m● Radius R● Anfangsgeschwindig-
keit v(s=0) = v0
– Gesucht:● Bahngeschwindigkeit
v(s)● Zwangskraft N(s)
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-21
1.3 Geführte Bewegung
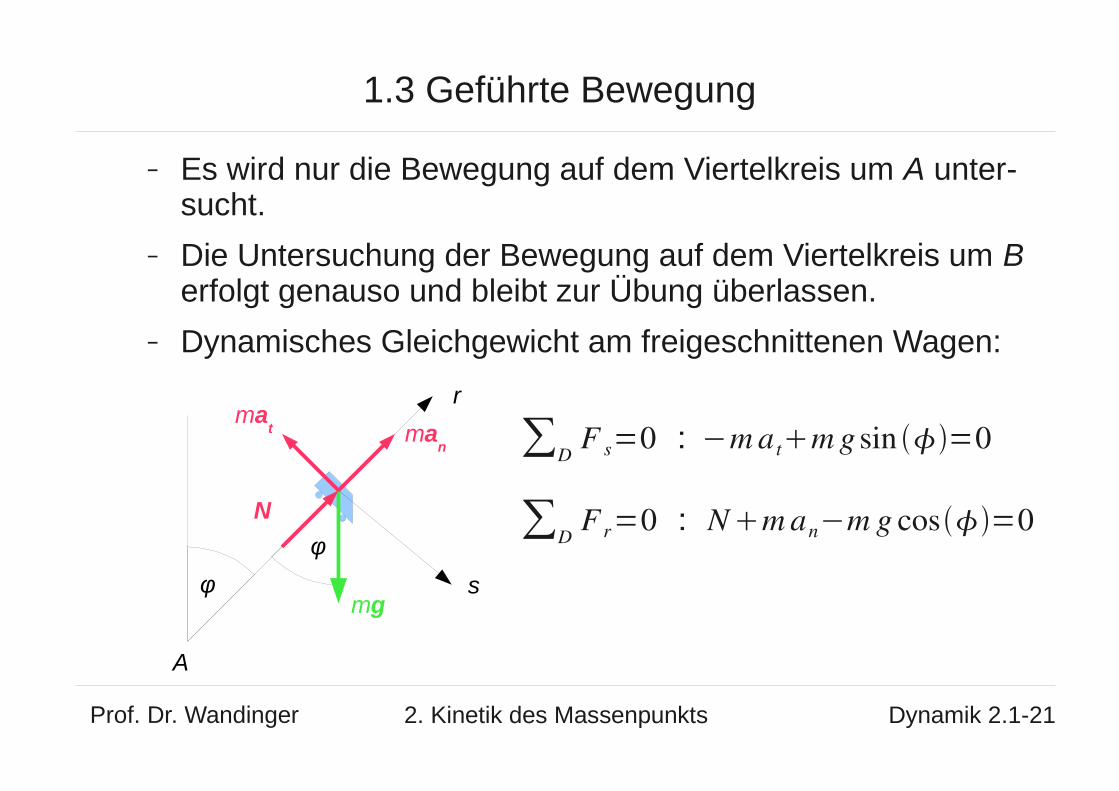
– Es wird nur die Bewegung auf dem Viertelkreis um A unter-sucht.
– Die Untersuchung der Bewegung auf dem Viertelkreis um B erfolgt genauso und bleibt zur Übung überlassen.
– Dynamisches Gleichgewicht am freigeschnittenen Wagen:
A
φ
φ
mg
N
man
mat
s
r
∑DF s=0 : −ma tmg sin =0
∑DF r=0 : Nman−m g cos=0
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-22
1.3 Geführte Bewegung
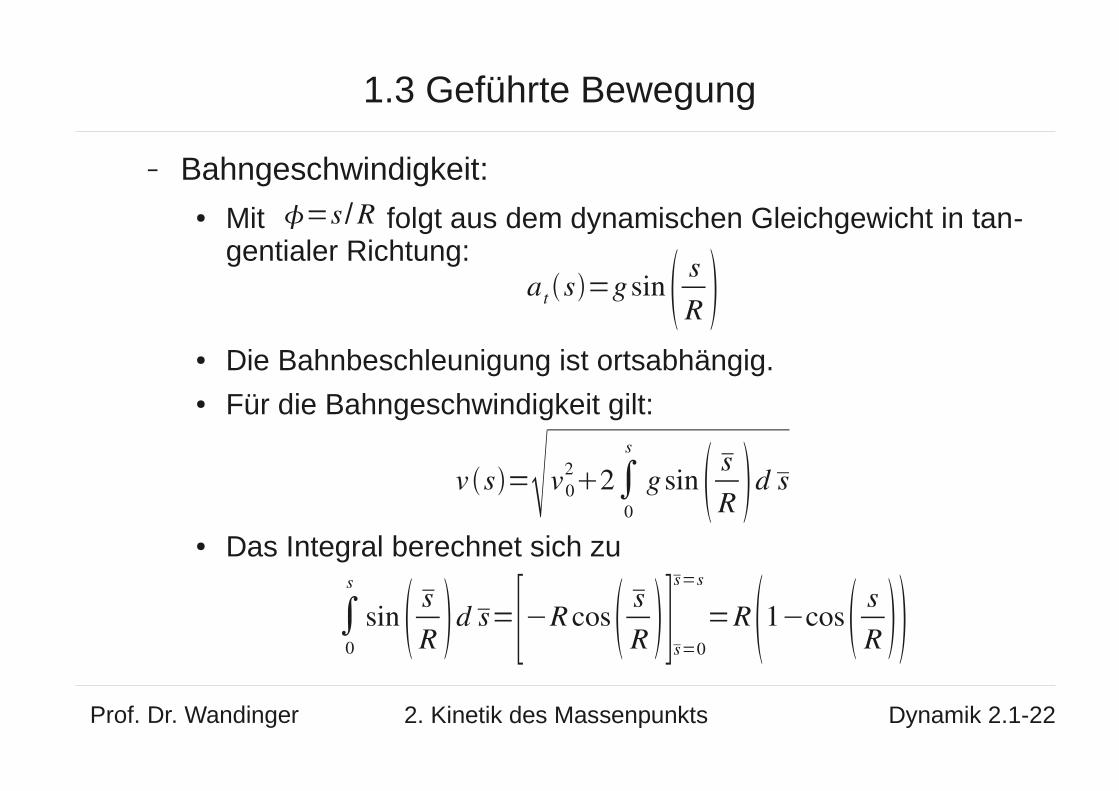
– Bahngeschwindigkeit:● Mit folgt aus dem dynamischen Gleichgewicht in tan-
gentialer Richtung:
● Die Bahnbeschleunigung ist ortsabhängig.● Für die Bahngeschwindigkeit gilt:
● Das Integral berechnet sich zu
=s /R
at s=gsin sR
v s=v022∫
0
s
gsin sR d s
∫0
s
sin sR d s=[−Rcos sR ]s=0
s=s
=R 1−cos sR
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-23
1.3 Geführte Bewegung
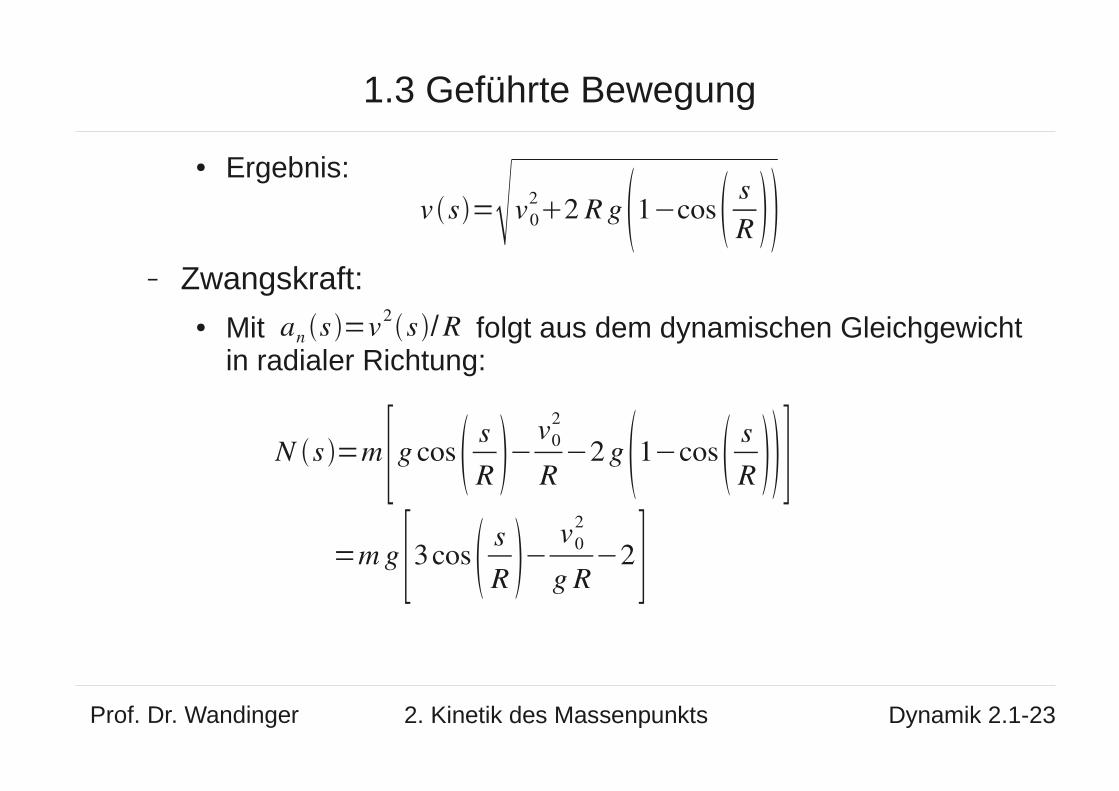
● Ergebnis:
– Zwangskraft:● Mit folgt aus dem dynamischen Gleichgewicht
in radialer Richtung:
v s=v022 Rg 1−cos s
R an s=v2
s/R
N s=m [g cos sR − v0
2
R−2g 1−cos s
R ]=mg [3cos s
R − v02
g R−2]
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-24
1.3 Geführte Bewegung
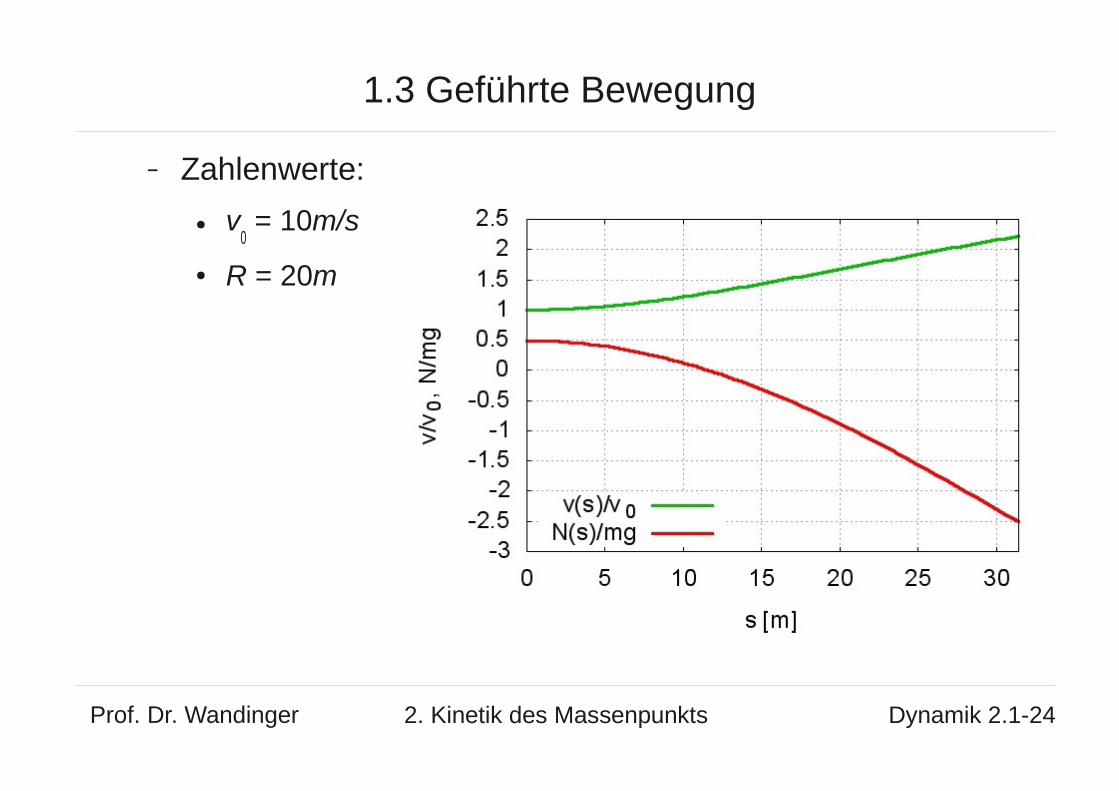
– Zahlenwerte:
● v0 = 10m/s
● R = 20m
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-25
1.4 Massenpunktsysteme
● Ein Massenpunktsystem besteht aus einer endlichen Zahl von Punktmassen, die untereinander in Verbindung ste-hen.
● Kinematische Bindungen sind geometrische Beziehungen zwischen den Koordinaten der Massenpunkte.
● Physikalische Bindungen beschreiben Zusammenhänge zwischen den Abständen der Massenpunkte und den Kräften.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-26
1.4 Massenpunktsysteme
● Vorgehen:
– Wahl der Freiheitsgrade
– Freischneiden der einzelnen Massenpunkte:● Die Bindungskräfte treten als zusätzliche unbekannte Kräfte
auf.
– Aufstellen des dynamischen Gleichgewichts für jeden Mas-senpunkt
– Berücksichtigung der Bindungsgleichungen
– Auflösen der Gleichungen nach den gesuchten Größen
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-27
1.4 Massenpunktsysteme
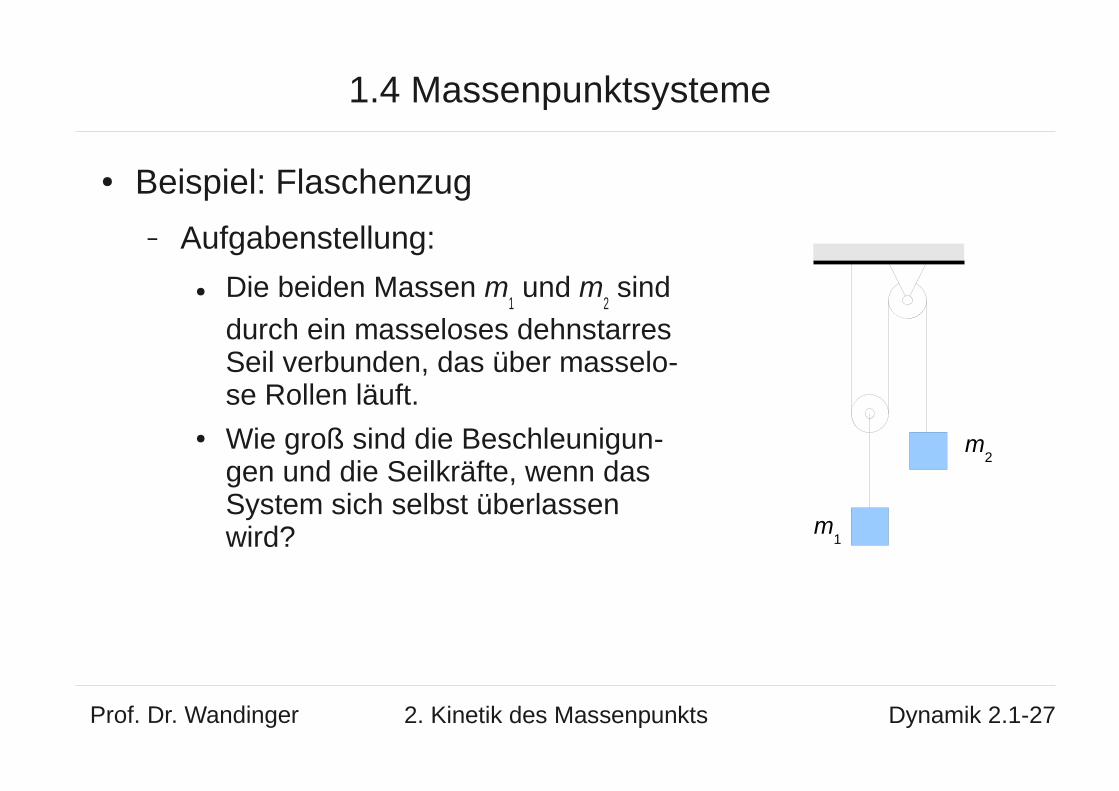
● Beispiel: Flaschenzug
– Aufgabenstellung:
● Die beiden Massen m1 und m
2 sind
durch ein masseloses dehnstarres Seil verbunden, das über masselo-se Rollen läuft.
● Wie groß sind die Beschleunigun-gen und die Seilkräfte, wenn das System sich selbst überlassen wird? m
1
m2
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-28
1.4 Massenpunktsysteme
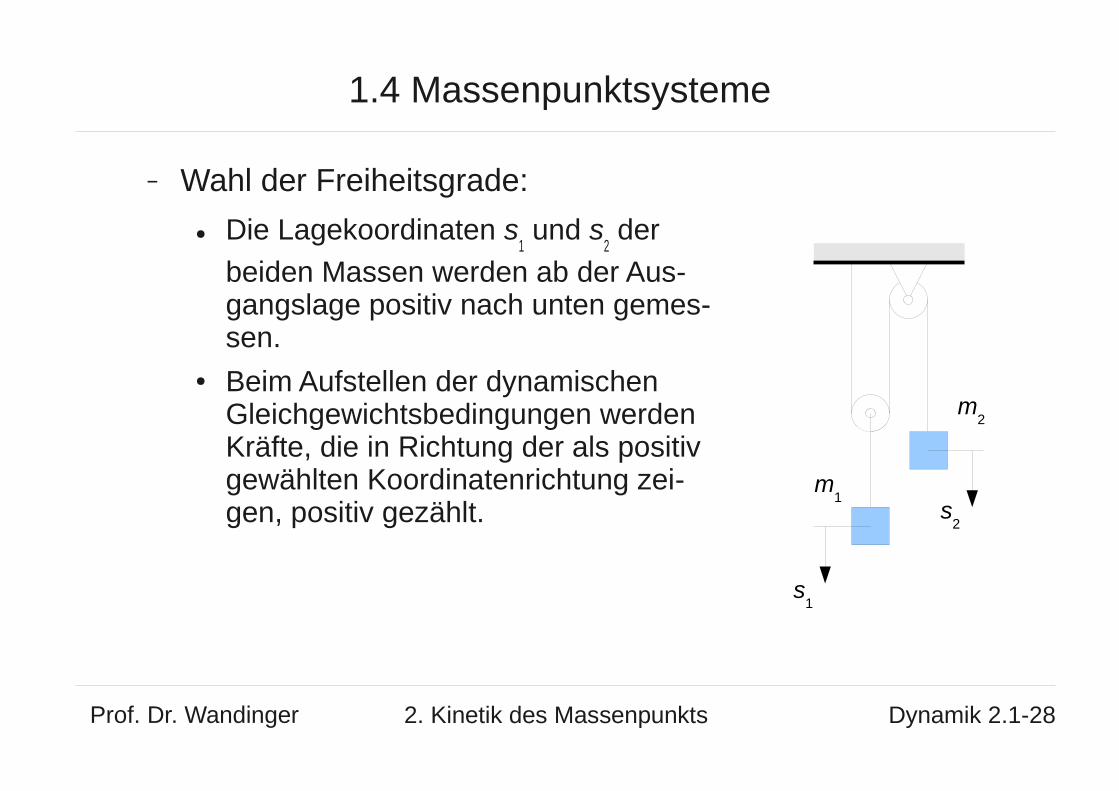
– Wahl der Freiheitsgrade:
● Die Lagekoordinaten s1 und s
2 der
beiden Massen werden ab der Aus-gangslage positiv nach unten gemes-sen.
● Beim Aufstellen der dynamischen Gleichgewichtsbedingungen werden Kräfte, die in Richtung der als positiv gewählten Koordinatenrichtung zei-gen, positiv gezählt.
m1
m2
s1
s2
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-29
1.4 Massenpunktsysteme
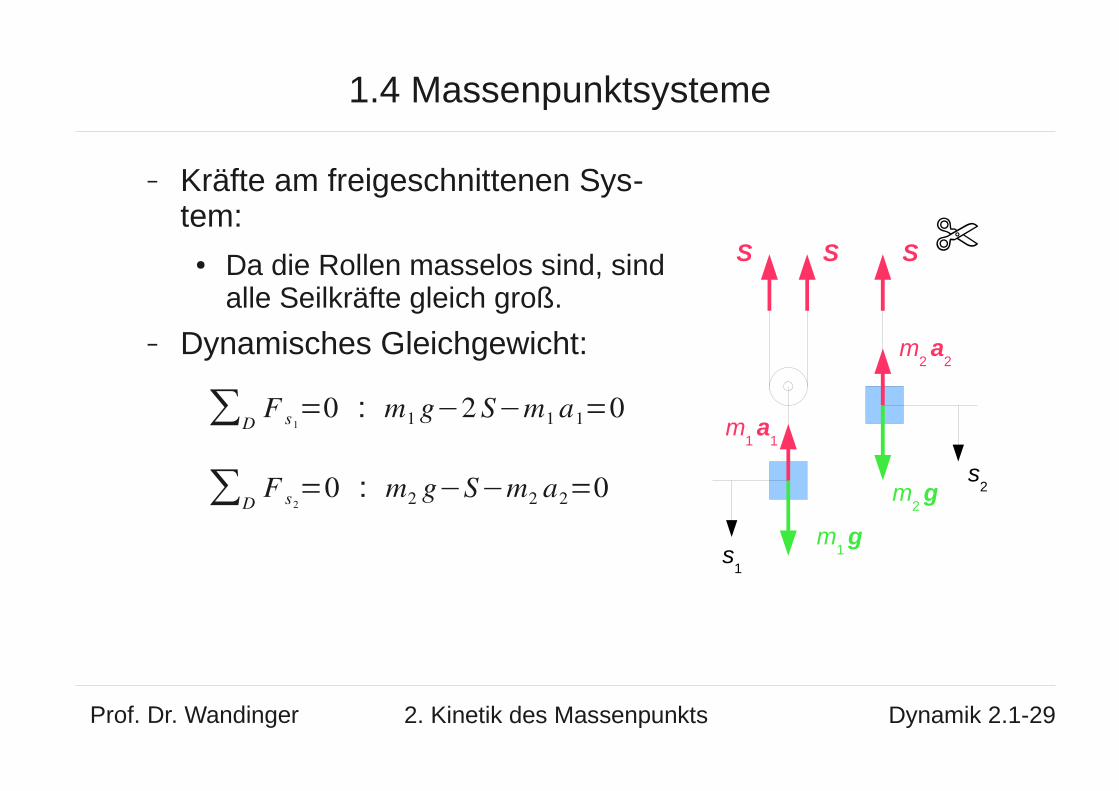
– Kräfte am freigeschnittenen Sys-tem:
● Da die Rollen masselos sind, sind alle Seilkräfte gleich groß.
– Dynamisches Gleichgewicht:
m1 g
m2 g
S
s1
s2
SS
m1 a
1
m2 a
2
✄
∑DF s1
=0 : m1g−2S−m1a1=0
∑DF s2
=0 : m2 g−S−m2 a2=0
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-30
1.4 Massenpunktsysteme
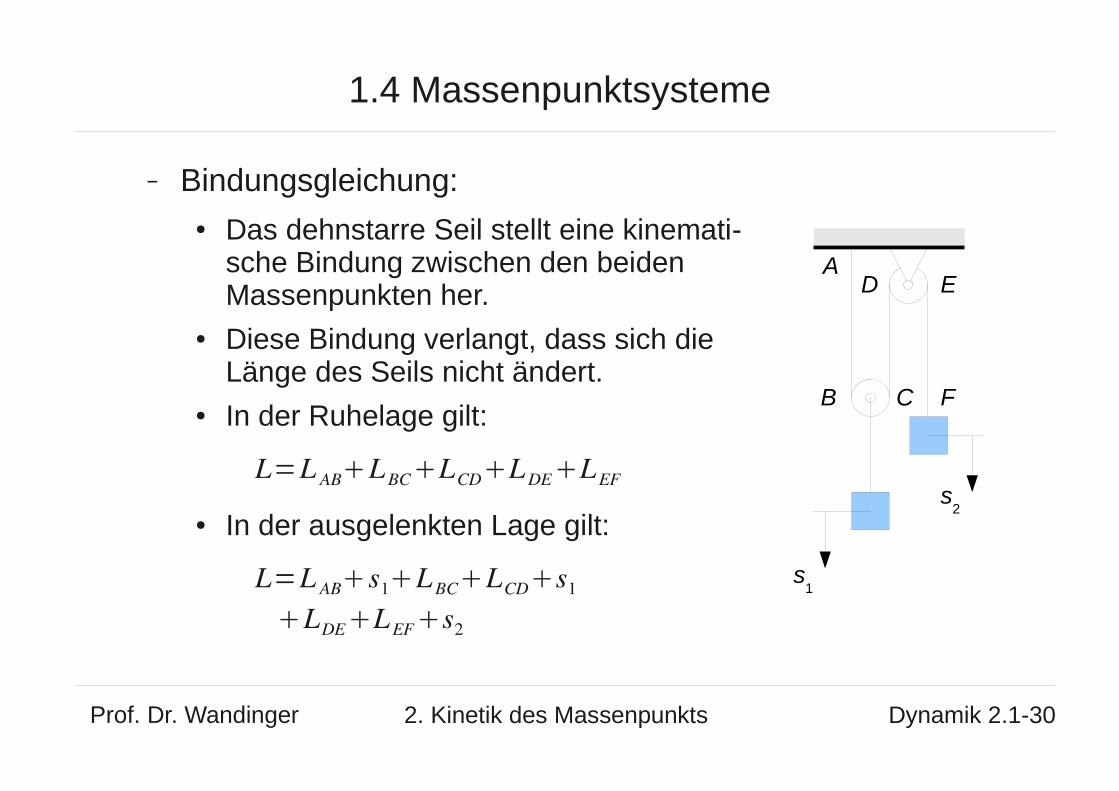
– Bindungsgleichung:● Das dehnstarre Seil stellt eine kinemati-
sche Bindung zwischen den beiden Massenpunkten her.
● Diese Bindung verlangt, dass sich die Länge des Seils nicht ändert.
● In der Ruhelage gilt:
● In der ausgelenkten Lage gilt:
s1
s2
A
B C
D E
F
L=L ABLBCLCDLDELEF
L=L ABs1LBCLCDs1
LDELEFs2
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-31
1.4 Massenpunktsysteme
● Daraus folgt:● Für die Beschleunigungen gilt:
– Mit den beiden dynamischen Gleichgewichtsbedingungen und der kinematischen Bindung stehen drei Gleichungen zur Verfügung, um die drei Unbekannten zu bestimmen.
– Auflösen nach den gesuchten Größen:● Wird vom dynamischen Gleichgewicht für Masse 1 zweimal
das dynamische Gleichgewicht für Masse 2 abgezogen, so folgt:
● Berücksichtigung der Bindungsgleichung führt auf
2 s1s2=0a2=s̈2=−2 s̈1=−2a1
m1−2 m2 g=m1a1−2m2a2
m1−2m2 g=m14m2 a1
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-32
1.4 Massenpunktsysteme
– Ergebnis:● Beschleunigungen:
● Für m1 = 2m
2 ist das System im Gleichgewicht.
● Die Seilkraft kann aus dem dynamischen Gleichgewicht für Masse 2 bestimmt werden:
– Durch die kinematische Bindung wird die Anzahl der Frei-heitsgrade von 2 Freiheitsgraden auf einen Freiheitsgrad reduziert.
S=m2 g−a2 =m2
m14m2−4 m22m1
m14m2
g=3m1m2
m14 m2
g
a1=m1−2 m2
m14m2
g , a2=22 m2−m1
m14m2
g
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-33
1.4 Massenpunktsysteme
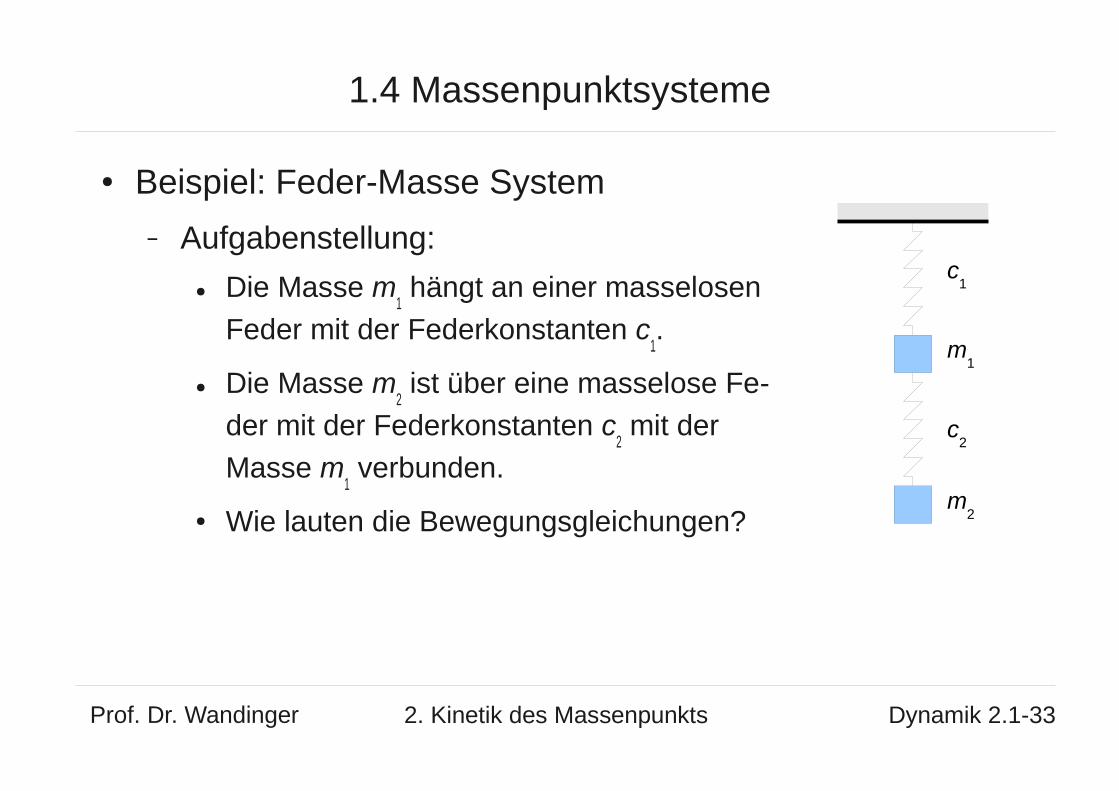
● Beispiel: Feder-Masse System
– Aufgabenstellung:
● Die Masse m1 hängt an einer masselosen
Feder mit der Federkonstanten c1.
● Die Masse m2 ist über eine masselose Fe-
der mit der Federkonstanten c2 mit der
Masse m1 verbunden.
● Wie lauten die Bewegungsgleichungen?
m1
m2
c1
c2
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-34
1.4 Massenpunktsysteme
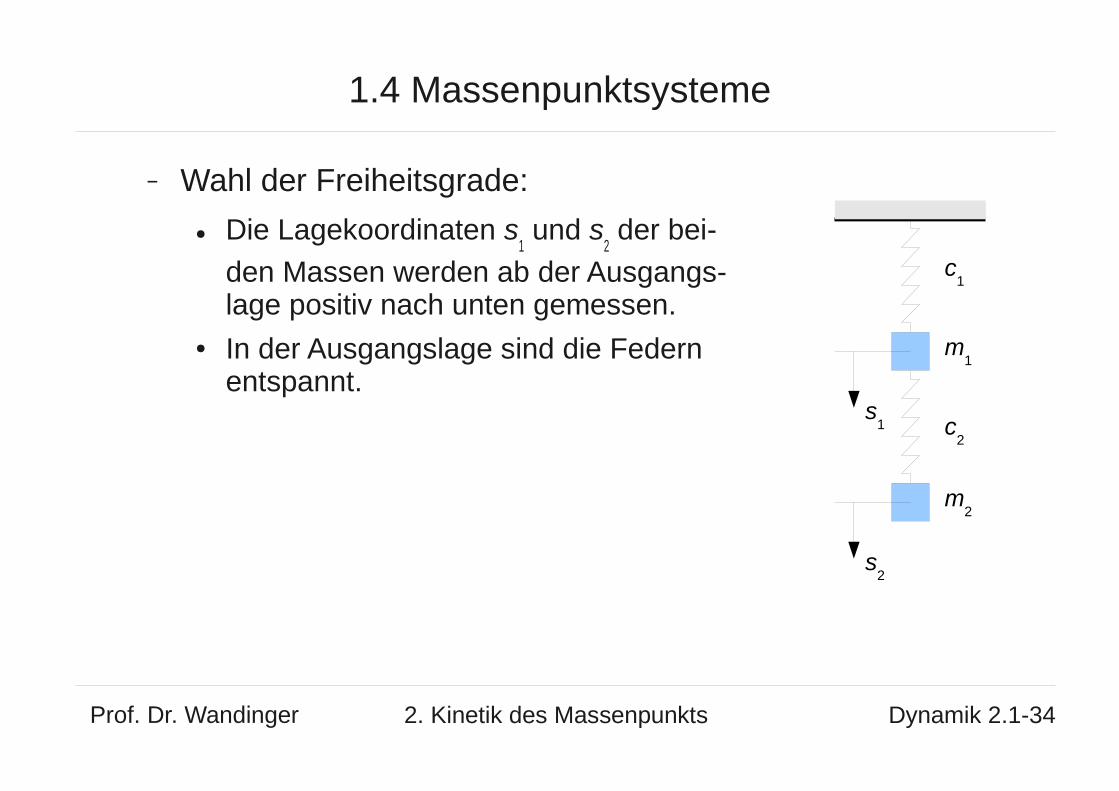
– Wahl der Freiheitsgrade:
● Die Lagekoordinaten s1 und s
2 der bei-
den Massen werden ab der Ausgangs-lage positiv nach unten gemessen.
● In der Ausgangslage sind die Federn entspannt.
m1
m2
c1
c2
s2
s1
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-35
1.4 Massenpunktsysteme
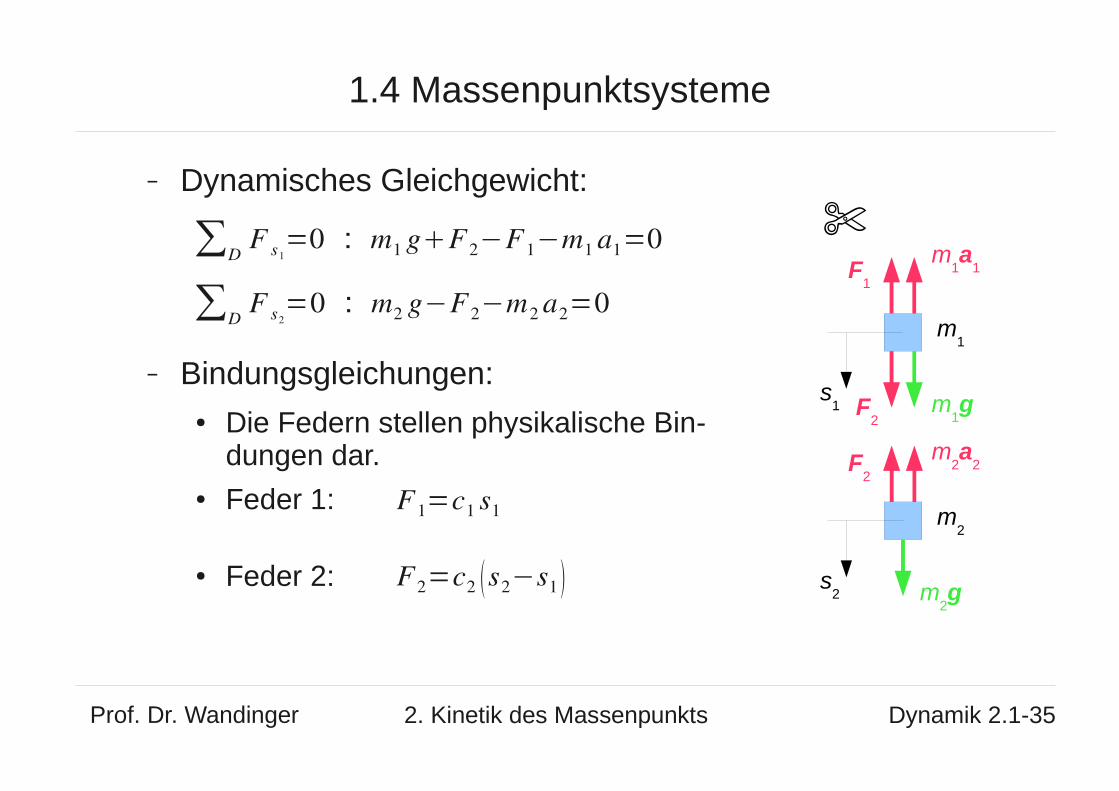
– Dynamisches Gleichgewicht:
– Bindungsgleichungen:● Die Federn stellen physikalische Bin-
dungen dar.● Feder 1:
● Feder 2:
m1
m2
s2
s1
F1
F2
F2
m1g
m2g
m1a
1
m2a
2
✄∑DF s1
=0 : m1 gF2−F1−m1a1=0
∑DF s2
=0 : m2 g−F2−m2a2=0
F1=c1 s1
F2=c2 s2−s1
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-36
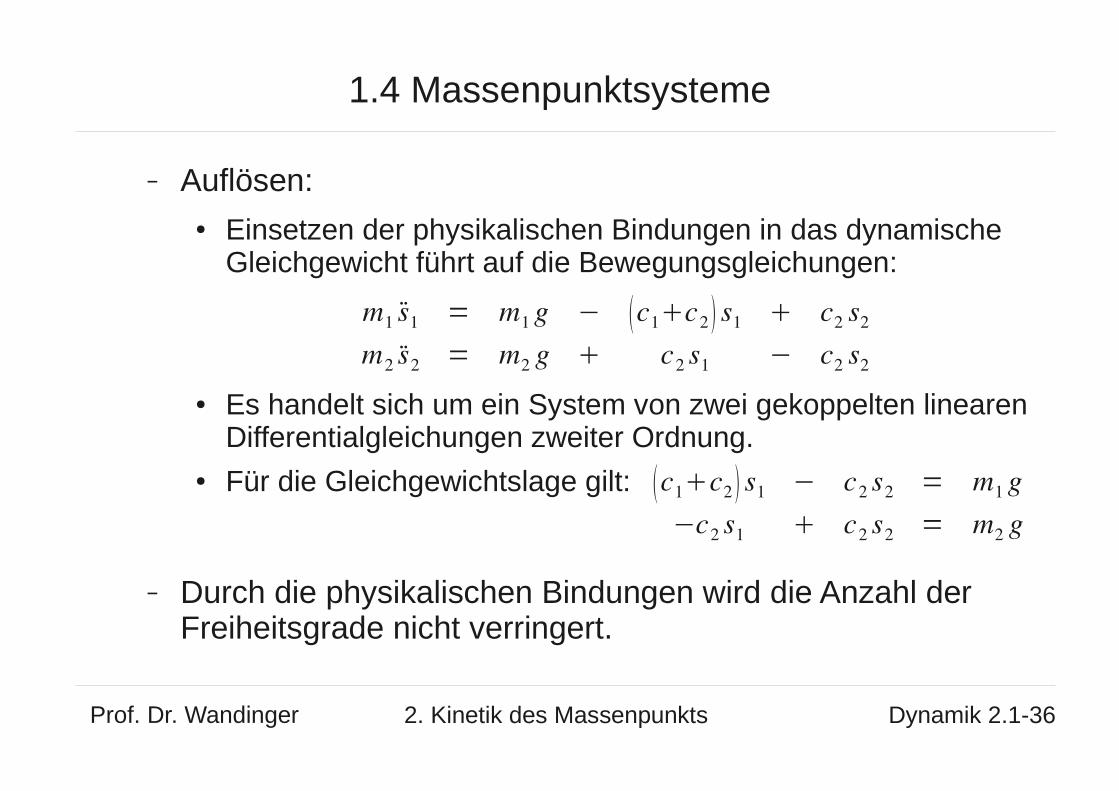
1.4 Massenpunktsysteme
– Auflösen:● Einsetzen der physikalischen Bindungen in das dynamische
Gleichgewicht führt auf die Bewegungsgleichungen:
● Es handelt sich um ein System von zwei gekoppelten linearen Differentialgleichungen zweiter Ordnung.
● Für die Gleichgewichtslage gilt:
– Durch die physikalischen Bindungen wird die Anzahl der Freiheitsgrade nicht verringert.
m1 s̈1 = m1g − c1c2 s1 c2 s2
m2 s̈2 = m2 g c2 s1 − c2 s2
c1c2 s1 − c2 s2 = m1 g−c2 s1 c2 s2 = m2 g
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-37
1.5 Schwerpunktsatz
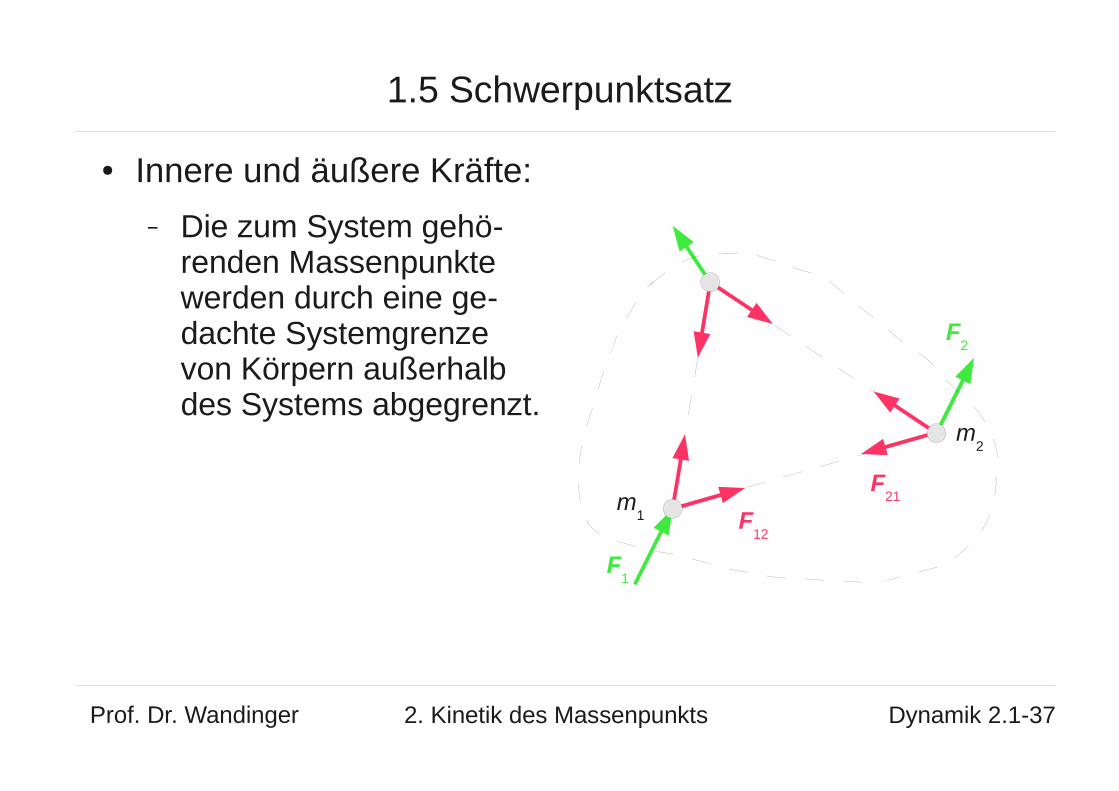
● Innere und äußere Kräfte:
– Die zum System gehö-renden Massenpunkte werden durch eine ge-dachte Systemgrenze von Körpern außerhalb des Systems abgegrenzt.
F1
F2
F12
F21m
1
m2
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-38
1.5 Schwerpunktsatz
– Äußere Kräfte:● Äußere Kräfte haben ihre Ursache außerhalb des Systems:
– Eingeprägte Kräfte: Gewichtskraft– Lagerkräfte– Zwangskräfte
● Die aus den auf die Masse mit Index i wirkenden äußeren Kräften resultierende Kraft wird mit F
i bezeichnet.
– Innere Kräfte:● Innere Kräfte werden durch kinematische oder physikalische
Bindungen verursacht.● Sie werden durch Freischneiden sichtbar gemacht.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-39
1.5 Schwerpunktsatz
● Die innere Kraft, die der Massenpunkt j auf den Massenpunkt i ausübt, wird mit F
ij bezeichnet.
● Wegen Actio = Reactio sind Fij und F
ji entgegengesetzt gleich
groß:
● Bewegungsgleichungen für die Massenpunkte:
– Für jeden Massenpunkt i gilt:
– Die Summe erstreckt sich über alle inneren Kräfte, die am Massenpunkt i angreifen.
F ijF ji=0
mi r̈ i=F i∑j
F ij
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-40
1.5 Schwerpunktsatz
– Summation über alle Massenpunkte ergibt:
– Die Summe der äußeren Kräfte ergibt die resultierende äu-ßere Kraft:
– In der doppelten Summe über die inneren Kräfte gibt es zu jedem Summand F
ij den entsprechenden Summanden F
ji.
– Daher verschwindet die Summe über die inneren Kräfte, so dass gilt:
∑i
mi r̈ i=∑i
F i∑i∑
jF ij
∑i
F i=F
∑i
mi r̈ i=F
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-41
1.5 Schwerpunktsatz
● Schwerpunkt:
– Der Ortsvektor rS des Schwerpunktes ist definiert durch
– Dabei ist die gesamte Masse des Systems.
– Aus der Definition des Schwerpunktes folgt
– Zweimaliges Ableiten nach der Zeit führt auf
rS=1m∑i
m i r i
m=∑i
mi
m rS=∑i
mi r i
m r̈S=∑i
mi r̈ i
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-42
1.5 Schwerpunktsatz
● Damit ist gezeigt:
– Die Art der Bindungen spielt dabei keine Rolle:● starre Bindungen● Federn● Gravitationskräfte zwischen den Massenpunkten
m r̈S=F
Der Schwerpunkt eines Systems von Massenpunkten bewegt sich so, als ob die gesamte Masse in ihm vereinigt wäre und alle äußeren Kräfte an ihm angriffen.
Der Schwerpunkt eines Systems von Massenpunkten bewegt sich so, als ob die gesamte Masse in ihm vereinigt wäre und alle äußeren Kräfte an ihm angriffen.
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-43
1.5 Schwerpunktsatz
● Dynamisches Gleichgewicht:
– Mit lautet der Schwerpunktsatz:
– Die d'Alembertsche Trägheitskraft eines Systems von Mas-senpunkten wird mit der Beschleunigung des Schwerpunkts berechnet.
– Sie wird im Freischnitt am Schwerpunkt eingetragen.
– Später wird gezeigt: Wenn sich das System von Massen-punkten dreht, kann zusätzlich ein d'Alembertsches Träg-heitsmoment um den Schwerpunkt auftreten.
FT=−m aS FFT=0
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-44
1.5 Schwerpunktsatz
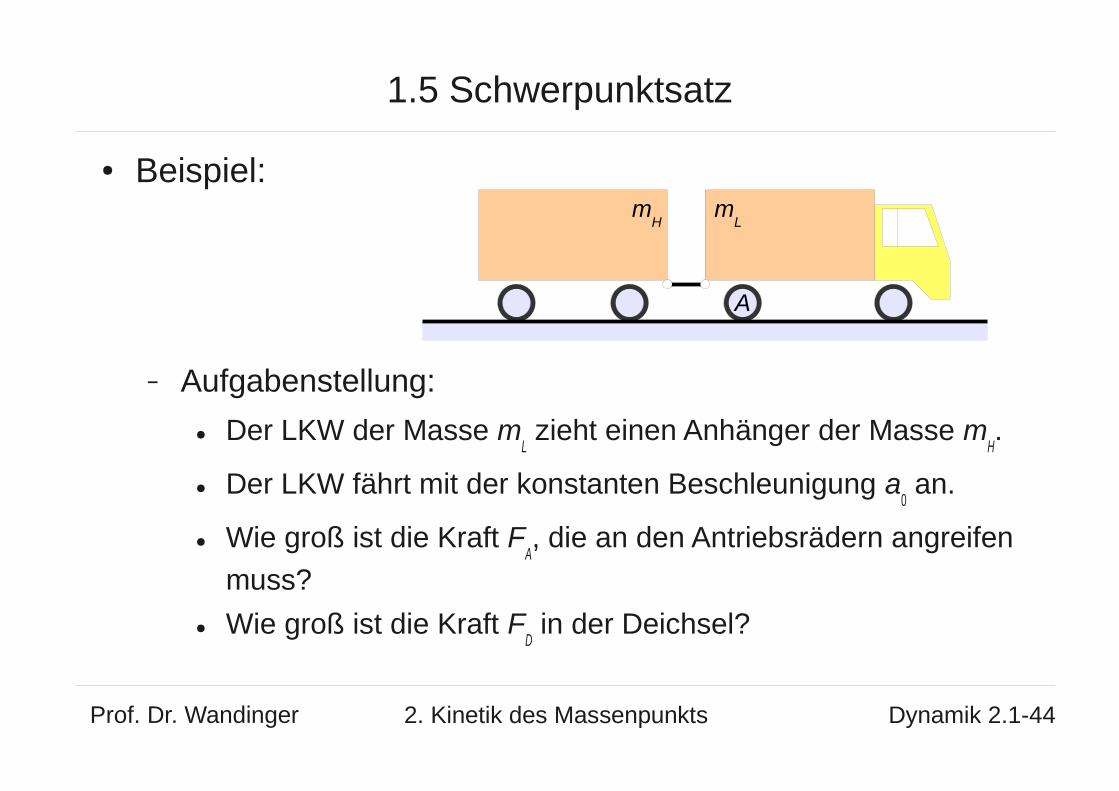
● Beispiel:
– Aufgabenstellung:
● Der LKW der Masse mL zieht einen Anhänger der Masse m
H.
● Der LKW fährt mit der konstanten Beschleunigung a0 an.
● Wie groß ist die Kraft FA, die an den Antriebsrädern angreifen
muss?
● Wie groß ist die Kraft FD in der Deichsel?
A
mH
mL
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-45
1.5 Schwerpunktsatz
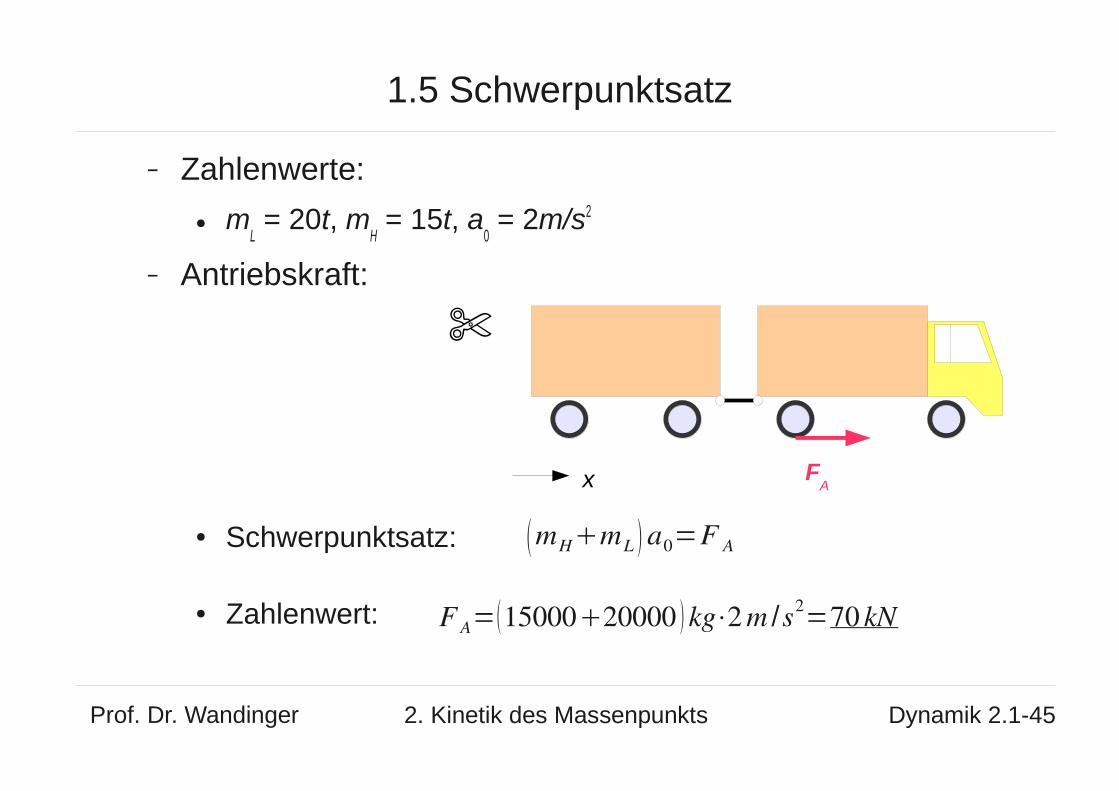
– Zahlenwerte:
● mL = 20t, m
H = 15t, a
0 = 2m/s2
– Antriebskraft:
● Schwerpunktsatz:
● Zahlenwert:
x FA
✄
mHmL a0=F A
FA=1500020000 kg⋅2m /s2=70 kN
Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.1-46
1.5 Schwerpunktsatz
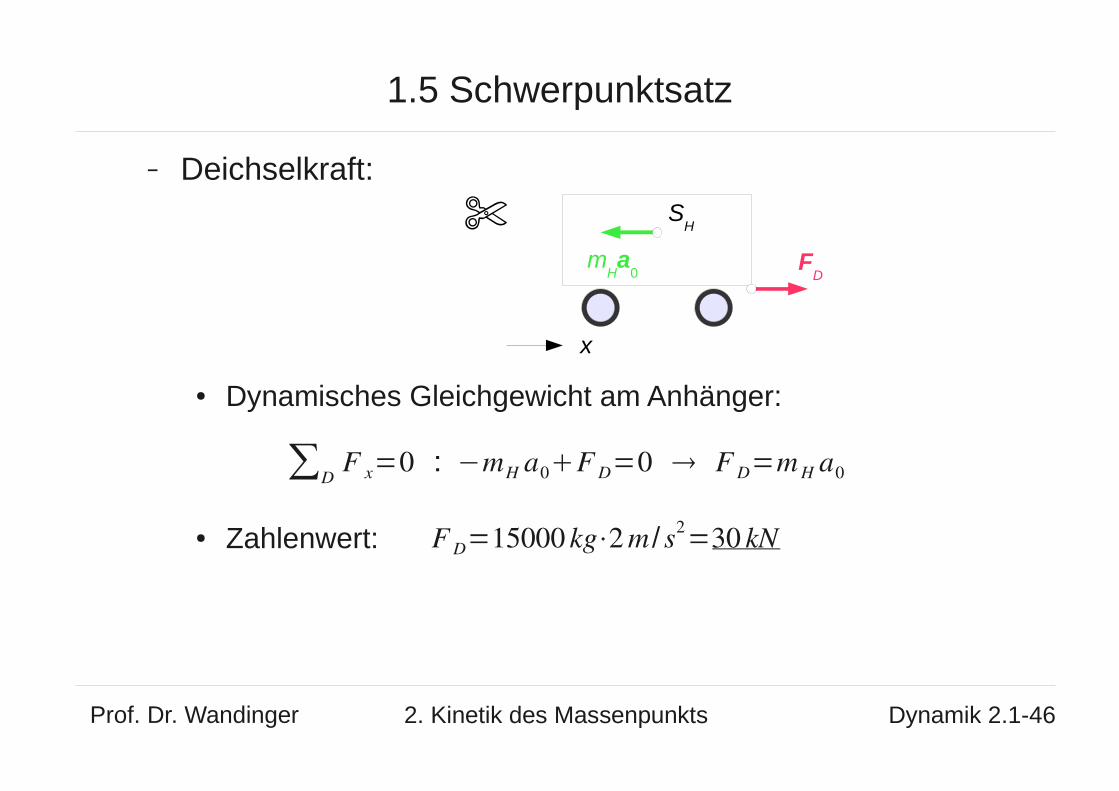
– Deichselkraft:
● Dynamisches Gleichgewicht am Anhänger:
● Zahlenwert:
SH
mHa
0 FD
x
✄
∑DF x=0 : −mH a0FD=0 FD=mH a0
FD=15000 kg⋅2m / s2=30 kN


















