Embed Size (px)
Citation preview

Ausgleichungsrechnung II
Gerhard Navratil
Mit Beitragen von Martin Staudinger
Institute for GeoinformationTechnical University Vienna
Gußhausstraße 27-291040 Vienna, Austria
Stand: 12. Dezember 2006

ii

Inhaltsverzeichnis
1 Einleitung 1
2 Methode der kleinsten Quadrate 2 52.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Stochastisches Modell a priori - Gewichtsmatrix . . . . . . . . . . 62.3 Ausgleichungsverfahren . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.1 Funktionales Modell . . . . . . . . . . . . . . . . . . . . . 72.3.2 Allgemeine Auflosung . . . . . . . . . . . . . . . . . . . . 92.3.3 Ausgleichung vermittelnder Beobachtungen . . . . . . . . 112.3.4 Ausgleichung bedingter Beobachtungen . . . . . . . . . . 152.3.5 Ausgleichung vermittelnder Beobachtungen mit Bedingungs-
gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3.6 Ausgleichung bedingter Beobachtungen mit Unbekannten 18
2.4 Stochastisches Modell a posteriori . . . . . . . . . . . . . . . . . . 182.4.1 Kofaktorfortpflanzungsgesetz . . . . . . . . . . . . . . . . 182.4.2 Kofaktoren a posteriori . . . . . . . . . . . . . . . . . . . 192.4.3 Varianz der Gewichtseinheit a posteriori . . . . . . . . . . 222.4.4 Varianzen, Kovarianzen und Standardabweichungen der
ausgeglichenen Großen und ihrer Funktionen . . . . . . . 22
3 Datumsproblematik 253.1 Das mathematische Problem . . . . . . . . . . . . . . . . . . . . 27
3.1.1 Direkte Losung . . . . . . . . . . . . . . . . . . . . . . . . 293.1.2 Pragmatische Losung . . . . . . . . . . . . . . . . . . . . 313.1.3 Geometrische Interpretation . . . . . . . . . . . . . . . . . 333.1.4 Datumsfreies Konzept und Zusatzparameter . . . . . . . . 35
3.2 Standardverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . 393.2.1 Zwangsfreie Ausgleichung . . . . . . . . . . . . . . . . . . 393.2.2 Freie Ausgleichung . . . . . . . . . . . . . . . . . . . . . . 403.2.3 Gezwangte Ausgleichung . . . . . . . . . . . . . . . . . . . 43
3.3 Datumswechsel uber die S-Transformation . . . . . . . . . . . . . 443.4 Abschließende Bemerkungen . . . . . . . . . . . . . . . . . . . . . 47
3.4.1 Weiche Lagerung . . . . . . . . . . . . . . . . . . . . . . . 473.4.2 Netze der Landesvermessung . . . . . . . . . . . . . . . . 49
iii

iv INHALTSVERZEICHNIS
4 Qualitat von Netzen 514.1 Was ist Qualitat? . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.2 Beurteilung der Genauigkeit . . . . . . . . . . . . . . . . . . . . . 52
4.2.1 Lokale Genauigkeitskriterien . . . . . . . . . . . . . . . . 544.2.2 Globale Genauigkeitsmaße . . . . . . . . . . . . . . . . . . 60
4.3 Beurteilung der Zuverlassigkeit . . . . . . . . . . . . . . . . . . . 644.3.1 Standardisierte Verbesserung . . . . . . . . . . . . . . . . 664.3.2 Redundanzanteil . . . . . . . . . . . . . . . . . . . . . . . 664.3.3 Innere Zuverlassigkeit . . . . . . . . . . . . . . . . . . . . 714.3.4 Außere Zuverlassigkeit . . . . . . . . . . . . . . . . . . . . 724.3.5 Alternative . . . . . . . . . . . . . . . . . . . . . . . . . . 724.3.6 Optimierung . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.4 Beispiel Streckennetz . . . . . . . . . . . . . . . . . . . . . . . . . 734.4.1 Zwangsfreie Ausgleichung . . . . . . . . . . . . . . . . . . 734.4.2 Gezwangte Ausgleichung . . . . . . . . . . . . . . . . . . . 774.4.3 Gesamtspurminimierung . . . . . . . . . . . . . . . . . . . 784.4.4 Teilspurminimierung . . . . . . . . . . . . . . . . . . . . . 79
4.5 Abschließende Bemerkungen . . . . . . . . . . . . . . . . . . . . . 80
5 Bestimmung von Naherungskoordinaten 835.1 Iterative Ausgleichung . . . . . . . . . . . . . . . . . . . . . . . . 845.2 Herkommliche Ansatze . . . . . . . . . . . . . . . . . . . . . . . . 85
5.2.1 Hohennetze . . . . . . . . . . . . . . . . . . . . . . . . . . 855.2.2 Lagenetze . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.3 Direkter Ansatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 865.3.1 Schritt 1: Ubertragung der Orientierungsunbekannten . . 875.3.2 Schritt 2: Ausgleichung der Koordinatendifferenzen . . . . 885.3.3 Schritt 3: Bestimmung von Naherungskoordinaten fur die
ubrigen Punkte . . . . . . . . . . . . . . . . . . . . . . . . 885.4 Strategie fur 3D-Netze . . . . . . . . . . . . . . . . . . . . . . . . 88
6 Robuste Schatzung 916.1 Einfuhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 926.2 Grundlagen der Parameterschatzung . . . . . . . . . . . . . . . . 97
6.2.1 Schatzfunktion . . . . . . . . . . . . . . . . . . . . . . . . 976.2.2 Einflussfunktion . . . . . . . . . . . . . . . . . . . . . . . 996.2.3 Verlustfunktion . . . . . . . . . . . . . . . . . . . . . . . . 100
6.3 Modellansatze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1016.3.1 Stochastisches Modell . . . . . . . . . . . . . . . . . . . . 1016.3.2 Herleitung der Schatzfunktion . . . . . . . . . . . . . . . . 1026.3.3 M-Schatzer . . . . . . . . . . . . . . . . . . . . . . . . . . 1046.3.4 L-Schatzer . . . . . . . . . . . . . . . . . . . . . . . . . . . 1056.3.5 Ls-Norm-Schatzer . . . . . . . . . . . . . . . . . . . . . . 106
6.4 Eigenschaften robuster Schatzverfahren . . . . . . . . . . . . . . 1086.4.1 Hebelbeobachtungen . . . . . . . . . . . . . . . . . . . . . 1096.4.2 Bruchpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.5 Weitere Schatztypen . . . . . . . . . . . . . . . . . . . . . . . . . 114

INHALTSVERZEICHNIS v
7 Zufallsprozesse 1157.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1157.2 Stochastische Prozesse . . . . . . . . . . . . . . . . . . . . . . . . 116
7.2.1 Parameter stochastischer Prozesse . . . . . . . . . . . . . 1177.2.2 Weitere wichtige Eigenschaften . . . . . . . . . . . . . . . 119
7.3 Empirische Schatzung stochastischer Prozesse . . . . . . . . . . . 1217.3.1 Statistische Schatzwerte eines allgemeinen stochastischen
Prozesses . . . . . . . . . . . . . . . . . . . . . . . . . . . 1217.3.2 Statistische Schatzwerte eines ergodischen stochastischen
Prozesses . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
8 Deformationsanalyse 1238.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1238.2 Strenge Deformationsanalyse bei 2 Epochen . . . . . . . . . . . . 125
8.2.1 Teilaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . 1258.2.2 Globaler Kongruenztest . . . . . . . . . . . . . . . . . . . 1268.2.3 Lokalisierung signifikant verschobener Einzelpunkte . . . . 131
8.3 Deformationsanalyse bei mehreren Epochen . . . . . . . . . . . . 1328.4 Deformationsanalyse mit Hilfe robuster Schatzverfahren . . . . . 133
9 Transformationen 1359.1 Modelle der Koordinatentransformation . . . . . . . . . . . . . . 136
9.1.1 Helmert-Transformation . . . . . . . . . . . . . . . . . . . 1369.1.2 Affin-Transformation . . . . . . . . . . . . . . . . . . . . . 1389.1.3 Polynomiale Transformation . . . . . . . . . . . . . . . . . 1399.1.4 Dreidimensionale Helmert-Transformation . . . . . . . . . 1399.1.5 Weitere dreidimensionale Transformationen . . . . . . . . 142
9.2 Anwendung von Transformationsmodellen . . . . . . . . . . . . . 1429.2.1 Bestimmung der Parameter fur die Helmert-Transformation1439.2.2 Bestimmung der Parameter fur die dreidimensionale Helmert-
Transformation . . . . . . . . . . . . . . . . . . . . . . . . 1469.2.3 Bestimmung der Parameter fur die dreidimensionale Affine-
Transformation . . . . . . . . . . . . . . . . . . . . . . . . 1479.2.4 Verwendung von Transformationen am Beispiel der Trans-
formation von GPS-Datensatzen . . . . . . . . . . . . . . 1479.3 Robuste Transformation . . . . . . . . . . . . . . . . . . . . . . . 148
9.3.1 L1-Schatzung . . . . . . . . . . . . . . . . . . . . . . . . . 1499.3.2 LMS-Schatzung . . . . . . . . . . . . . . . . . . . . . . . . 150
9.4 Nachbarschaftstreue Anpassung . . . . . . . . . . . . . . . . . . . 1519.4.1 Maschenweise Affin-Transformation . . . . . . . . . . . . . 1519.4.2 Abstandsgewichte . . . . . . . . . . . . . . . . . . . . . . 1529.4.3 Multiquadratische Interpolation . . . . . . . . . . . . . . . 153
10 Interpolation 15510.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15510.2 Geometrische Interpolationsverfahren . . . . . . . . . . . . . . . . 157
10.2.1 Polynominterpolation . . . . . . . . . . . . . . . . . . . . 15810.2.2 Spline-Interpolation . . . . . . . . . . . . . . . . . . . . . 15810.2.3 Inverse Distance Weighted Methode . . . . . . . . . . . . 166
10.3 Statistische Interpolationsverfahren . . . . . . . . . . . . . . . . . 167

vi INHALTSVERZEICHNIS
10.3.1 Interpolation nach der Methode der kleinsten Quadrate . 16810.3.2 Kovarianzfunktionen . . . . . . . . . . . . . . . . . . . . . 16910.3.3 Multiquadratische Interpolation . . . . . . . . . . . . . . . 170
11 Regression und Kollokation 17111.1 Regression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
11.1.1 Lineare Regression . . . . . . . . . . . . . . . . . . . . . . 17311.1.2 Multiple und nichtlineare Regression . . . . . . . . . . . . 17511.1.3 Kovarianzfunktion . . . . . . . . . . . . . . . . . . . . . . 176
11.2 Kollokation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17711.2.1 Kollokationsansatz . . . . . . . . . . . . . . . . . . . . . . 17811.2.2 Schatzung der Zielfunktion . . . . . . . . . . . . . . . . . 17911.2.3 Zusammenfassung der Bezeichnungen . . . . . . . . . . . 18211.2.4 Anwendung . . . . . . . . . . . . . . . . . . . . . . . . . . 18211.2.5 Beispiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
12 Geostatistik 18712.1 Einfuhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18712.2 Statistische Grundbegriffe . . . . . . . . . . . . . . . . . . . . . . 189
12.2.1 Momente einer Verteilung . . . . . . . . . . . . . . . . . . 18912.2.2 Median, interquartiler Bereich und Quantile . . . . . . . . 189
12.3 Geostatistische Begriffe . . . . . . . . . . . . . . . . . . . . . . . 19012.3.1 Regionalisierte Zufallsvariable . . . . . . . . . . . . . . . . 19012.3.2 Stationaritat . . . . . . . . . . . . . . . . . . . . . . . . . 191
12.4 Variogramm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19212.4.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . 19212.4.2 Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . 19312.4.3 Theoretische Variogramme . . . . . . . . . . . . . . . . . 19412.4.4 Anisotrope Variogramme . . . . . . . . . . . . . . . . . . 19612.4.5 Kovariogramm und Korrelogramm . . . . . . . . . . . . . 196
12.5 Explorative Datenanalyse (EDA) . . . . . . . . . . . . . . . . . . 19712.5.1 Visualisierung der Daten . . . . . . . . . . . . . . . . . . . 19712.5.2 Komplexere Methoden der Analyse . . . . . . . . . . . . . 200
12.6 Pradiktion und Kriging . . . . . . . . . . . . . . . . . . . . . . . 20112.6.1 Pradiktor . . . . . . . . . . . . . . . . . . . . . . . . . . . 20312.6.2 Gewohnliches Krigen (Ordinary Kriging) . . . . . . . . . 20412.6.3 Universal Kriging . . . . . . . . . . . . . . . . . . . . . . . 206
Literaturverzeichnis 209
Stichwortverzeichnis 220

Kapitel 1
Einleitung
Wie in der Lehrveranstaltung Ausgleichungsrechnung I (ab sofort: A1) gese-hen, beschaftigt sich die Ausgleichungsrechnung mit der Losung uberbestimm-ter Gleichungssysteme. In A1 haben wir eine allgemein anerkannte Methode, dieMethode der kleinsten Quadrate, kennen gelernt. Ausgehend von statistischenUberlegungen (statistische Beschreibung von Daten, Wahrscheinlichkeitsvertei-lungen und Zufallsvektoren) haben wir eine Moglichkeit gesucht, uberbestimmteProbleme zu losen. Dabei sind wir auf eine Extremwertaufgabe mit Nebenbe-dingungen gestoßen, fur die wir einige in der Vermessung wichtige Spezialfallebesprochen haben. Bereits 1977 hat jedoch Reißmann gesagt, dass ”sich der In-halt des Fach- und Lehrgebietes Ausgleichungsrechnung wahrend der letzten 20Jahre betrachtlich erweitert hat. Viel Neues war aufzunehmen, aber uberflussigesAltes kaum abzuwerfen“ (Reißmann, 1977). Als Beispiele zahlt Reißmann unteranderem Matrizenschreibweise, korrelierte Beobachtungen und Kollokation auf.Einiges von dem, was Reißmann als Neuerung aufgezahlt hat, haben wir bereitsin A1 behandelt, so zum Beispiel haben wir durchgehend die Matrizenschreib-weise verwendet. Es haben sich jedoch in den letzten Jahrzehnten wieder einigeneue Entwicklungen ergeben, die wir berucksichtigen mussen. Wir werden so-mit in A2 ganzlich andere Schwerpunkte setzen als in A1. Es soll nicht mehr diereine Losung der Extremwertaufgabe im Vordergrund stehen. Vielmehr wollenwir mehr Informationen uber die Qualitat von Beobachtungen und Ergebnis-sen herauslesen als bisher. Zusatzlich werden wir Spezialfalle betrachten, die furdie Praxis von Bedeutung sind (Pelzer, 1985). Wir werden dabei hauptsachlichfolgende Schwerpunkte setzen:
• Spezielle Aspekte geodatischer Netze: Bei der Berechnung geodatischerNetze stehen wir vor einigen Problemen, fur die ganz spezielle Algorith-men und Methoden entwickelt wurden. Eines unserer Probleme ist dieLagerung unserer Netze sowie der Ubergang zwischen verschiedenen Vari-anten der Lagerung. Desweiteren benotigen wir Angaben uber die Qualitatund Zuverlassigkeit unserer Ergebnisse. Schließlich ist es auch notwendig,Naherungskoordinaten automatisiert zu ermitteln. Das ist jedoch nichtimmer so einfach wie bei den Beispielen aus A1. Wir werden daher kurzeinige Moglichkeiten fur die Bestimmung von Naherungskoordinaten be-sprechen.
• Robuste Schatzung: Neben der Methode der kleinsten Quadrate gibt es
1

2 KAPITEL 1. EINLEITUNG
auch noch andere Verfahren, um uberbestimmte Gleichungssysteme zulosen. Eine in der Praxis sehr wichtige Gruppe von Schatzmethoden sinddie robusten Schatzer, die ein großes Problem der Ausgleichung nach klein-sten Quadraten umgehen. Voraussetzung fur Methode der kleinsten Qua-drate war, dass die Beobachtungen normalverteilt sind. Bei Vorhandenseingrober Fehler ist das nicht mehr gegeben und die Methode schlagt fehl,wobei auch die Suche nach den groben Fehlern nicht unterstutzt wird.Robuste Schatzverfahren liefern auch bei Ausgangsdaten mit groben Feh-lern noch korrekte Ergebnisse. Solche Verfahren sind in vielen Bereichender Geodasie nutzlich. Vor allem bei automationsgestutzten Auswertun-gen, bei denen man die Messdaten nicht mehr manuell auf Plausibilitatuberprufen kann, sind robuste Methoden wichtig. Beispiele dafur sind diePhotogrammetrie (Bundelblockausgleich), die Bestimmung von Parame-tern fur Transformationen sowie die Bearbeitung von großen Netze (z.B.der Landesvermessung.
• Anwendung von Ausgleichungsverfahren: Die in A1 besprochenen Ausglei-chungsverfahren konnen nicht nur fur geodatische Netze verwendet wer-den sondern sind allgemein anwendbar. Wir werden zwei Beispiele kennenlernen, die auch in der geodatischen Praxis vielfach vorkommen: Deforma-tionsanalyse und die Bestimmung von Transformationsparametern.
• Interpolation: Interpolation ist ein sehr breites Feld. Bisher wurden haupt-sachlich einfache Verfahren verwendet (i.A. lineare Interpolation). Jetztwollen wir uns komplexere Verfahren ansehen, die das Problem jeweilsnach bestimmten Gesichtspunkten optimieren. Wir werden uns dabei so-wohl zweidimensionale, als auch dreidimensionale Falle ansehen. Ebensowerden wir zwischen den Fallen unterscheiden, in denen die Interpola-tionsfunktion durch die Stutzstellen verlauft (z.B. Spline-Interpolation)und solche, in denen sie das nicht tut (z.B. Interpolation nach kleinstenQuadraten).
Wie aus der Liste ersichtlich werden wir uns im Unterschied zur Vorlesung A1weniger mit Grundlagen, als vielmehr mit weiterfuhrenden Problemen und derAnwendung der Grundlagen beschaftigen. In A1 haben wir einen Satz Werkzeu-ge kennen gelernt, zu denen jetzt noch einige weitere Werkzeuge hinzukommen.Wichtiger als das Erlernen von neuen Methoden ist jedoch das Wissen, wannman welche Methode anwenden sollte. In dieser Vorlesung werden wir exempla-risch an einigen Beispielen versuchen, die Methoden gegeneinander abzuwagen.
Als Grundlage fur viele Ausfuhrungen wurde das Buch ”Ausgleichungsrech-nung - Eine Einfuhrung fur Studierende und Praktiker des Vermessungs- undGeoinformationswesens“ von Wolfgang Niemeier (2002) verwendet. Weitere In-formationen konnen aber auch in vielen anderen Buchern gefunden werden. Imfolgenden findet sich eine kleine Auswahl von Buchern, die jeweils bestimmteAspekte der hier behandelten Probleme beinhalten1:
• Willem Baarda, A Testing Procedure for Use in Geodetic Networks(1968): Qualitatskriterien
1Die Bucher sind in alphabetischer Reihenfolge der Autoren angefuhrt. Es handelt sichdabei keineswegs um eine Reihung nach Wichtigkeit oder Gute.

3
• Noel Cressie, Statistics for Spatial Data (1991), John Wiley & Sons Inc.:Statistik, Geostatistik
• Shanlong Kuang, Geodetic Network Analysis and Optimal Design (1996),Ann Arbor Press: Grobfehlersuche, Qualitatskriterien fur geodatische Net-ze, Deformationsanalyse
• Wolfgang Niemeier, Ausgleichungsrechnung (2002), de Gruyter: Me-thode der kleinsten Quadrate, robuste Schatzung, Datumsproblematik,Qualitatsangaben, Transformationen, Regression, Kollokation, Kalman-Filterung
• Hans Pelzer et al., Geodatische Netze in Landes- und Ingenieurgeodasie(1985), Vermessungswesen bei Konrad Wittwer: Deformationsanalyse, Zu-fallsprozesse, Qualitat von Netzen
• Kornelius Peters, Problematik von Toleranzen bei Ingenieur- sowie Be-sitzgrenzvermessungen (1974), Sonderheft 29 der Osterreichischen Zeit-schrift fur Vermessungswesen und Photogrammetrie: Zuverlassigkeitstheo-rie
• Gunter Reißmann, Die Ausgleichungsrechnung (1976), VEB Verlag furBauwesen: Fehlerrechnung, Methode der kleinsten Quadrate, Korrelatio-nen, statistische Prufverfahren
• Hans Rudolf Schwarz, Numerische Mathematik (1986), Teubner Stutt-gart: Interpolation, Funktionsapproximation, Methode der kleinsten Qua-drate
• Dietrich Stoyan, Stochastik f.Ingenieure u.Naturwissenschaftler (1993),Akademieverlag Berlin: Zufallsgroßen und Verteilungen, statistische Tests,Korrelationen, Zuverlassigkeitstheorie, Zeitreihen, Geostatistik
• Fridolin Wicki, Robuste Schatzverfahren fur die Parameterschatzung ingeodatischen Netzen (1999), Mitteilungen des Institutes fur Geodasie undPhotogrammetrie ETH Zurich: Robuste Schatzverfahren, Methode derkleinsten Quadrate
• Helmut Wolf, Ausgleichungsrechnung nach der Methode der kleinstenQuadrate (1968), Dummlerbuch 7820 / Ferd. Dummler’s Verlag, Bonn.

4 KAPITEL 1. EINLEITUNG

Kapitel 2
Methode der kleinstenQuadrate 2
2.1 Einleitung
Die Methode der kleinsten Quadrate haben wir bereits in A1 kennen gelernt. Indiesem Kapitel wird das Wichtigste daraus noch einmal wiederholt.
In der Praxis des Vermessungswesens konnen bei der Datenerfassung oft diegemessenen Großen nicht unmittelbar verwendet werden, sondern nur darausabgeleitete Großen. Es gibt dabei einen funktionalen Zusammenhang zwischenden tatsachlich beobachteten Großen (den ”Beobachtungen“) und den eigentlichinteressierenden, aber unbekannten Großen (den ”Unbekannten“). Zusatzlichgehen wir im Allgemeinen von redundanten1 Beobachtungen aus. Wir nehmenalso an, dass wir mehr Beobachtungen durchgefuhrt haben, als zur Bestimmungder Unbekannten notwendig. Das ermoglicht uns
• zuverlassige Ergebnisse zu erhalten (wir konnen unsere Beobachtungenkontrollieren),
• plausible2 Werte fur die Unbekannten anzugeben (wir verwenden dazuwahrscheinlichkeitstheoretische Verfahren) und
• Aussagen uber die Qualitat der Ergebnisse zu tatigen (wir konnen ein Maßfur die Prazision von Messgroßen und Unbekannten angeben)3
Es sind im Prinzip unterschiedliche Moglichkeiten des ”Ausgleichens“ red-undanter Messungen denkbar. Aus historischen Grunden, aber auch weil siemathematisch fundiert und einfach zu berechnen ist, hat sich die ”Methode derkleinsten Quadrate“ durchgesetzt. Alle Messmethoden lassen sich relativ ein-fach modellieren, egal ob moderne GPS-Verfahren oder Messungen mit einemStahlmaßband. Ein weiterer Vorteil ist, dass die Methode sowohl vor den eigent-lichem Messungen (”a priori“4) einsetzbar, als auch nach den Messungen (”a
1vom lat. redundare:”im Uberfluss vorhanden sein“
2vom lat. plausibilis: eigentlich”Beifall verdienend“; hier im Sinne von
”die Wahrschein-
lichkeit soll moglichst gross sein, dass der erhaltene Wert nahe am wahren Wert liegt.“3Qualitat und Zuverlassigkeit werden wir im Detail in Kapitel 4 behandeln.4vom lat. prior, Komparativ zu prae: vor(aus).
5

6 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
posteriori“5) bei der Auswertung der Beobachtungen und der Absicherung derErgebnisse durch statistische Tests. Zudem ermoglicht der wahrscheinlichkeits-theoretische Hintergrund die Berucksichtigung von Varianzen der Messgroßenund von Korrelationen zwischen den Messgroßen.
Wir erinnern uns an die Grundforderung der Methode der kleinsten Qua-drate aus A1: Gesucht sind jene Verbesserungen vi der Beobachtungen, fur diegilt:
n∑
i=1
piv2i → min (2.1)
bzw. in Matrizenschreibweise
vT Pv → min . (2.2)
Die Elemente der Matrix P (die pi) stellen Gewichte dar6. Wir wollen also beider Bildung der Quadratsumme die einzelnen Verbesserungen unterschiedlichgewichten. Diese Gewichtung soll umgekehrt proportional zu den Varianzen derzugehorigen Beobachtungen erfolgen. Somit haben genaue Messungen (solchemit geringerer Varianz) einen großeren Einfluss auf das Ergebnis als ungenaueMessungen.
Die Extremwertaufgabe (2.2) lost man bekanntlich durch Null-Setzen derersten Ableitung der Funktion vT Pv. Dazu mussen wir aber zunachst noch dieMatrix P und den Vektor v naher betrachten.
2.2 Stochastisches Modell a priori - Gewichts-matrix
In A1 wurde die Kovarianzmatrix eines Zufallsvektors definiert. Diese Matrixbeschreibt die stochastischen Eigenschaften der Elemente des Zufallsvektors unddie Zusammenhange zwischen den einzelnen Elementen. Der Beobachtungsvek-tor L ist ein solcher Zufallsvektor und besitzt daher eine Kovarianzmatrix. In derHauptdiagonalen der Kovarianzmatrix stehen die Varianzen der einzelnen Beob-achtungen. Die Elemente außerhalb der Hauptdiagonalen sind mit den Wertender entsprechenden Kovarianzen besetzt bzw. Null, wenn die Beobachtungenstochastisch unabhangig sind.
ΣLL =
σ21 σ12 . . . σ1n
σ21 σ22 . . . σ2n
......
. . ....
σn1 σn2 . . . σ2n
(2.3)
Die Gewichtung der Verbesserungen in (2.2) soll nun umgekehrt proportional zuVarianzen und Kovarianzen erfolgen. Oft sind jedoch nur relative Genauigkeits-angaben zu den Beobachtungen bekannt. Das kann beispielsweise die Herstel-lerangabe bezuglich der Genauigkeit eines Distanzmessgerates sein. Wir wahlendaher eine ”Bezugsvarianz“, zu der wir alle anderen Varianzen und Kovarianzenins Verhaltnis setzen wollen. Wir nennen diese Bezugsvarianz die Varianz der
5vom lat. posterior = der spatere, folgende; Komparativ zu posterus: nachfolgend.6Daher auch die Abkurzung p, vom lat. pendus: das Gewicht.

2.3. AUSGLEICHUNGSVERFAHREN 7
Gewichtseinheit oder den Varianzfaktor σ20 . Sie legt fest, welcher Beobachtung
wir das Gewicht Eins geben, namlich jener Beobachtung mit der Varianz σ20 .
Das konnen tatsachlich vorhandene Beobachtungen sein, in den meisten Fallenwerden wir aber eine fiktive Beobachtung verwenden, die wir nur als Rechen-große einfuhren. Theoretisch ist es vollkommen egal, welchen Wert σ2
0 hat, dadieser Wert nur das Bezugsniveau definiert. Es ist jedoch sinnvoll, die Varianzder Gewichtseinheit so zu wahlen, dass in der Hauptdiagonalen extreme Wertevermieden werden. Solche Werte fuhren namlich zu ebenso extremen Wertenbei der spateren Auflosung des Gleichungssystems und verursachen oft (wegender limitierten Auflosung der Zahlen im Computer) Ungenauigkeiten bei derBerechnung.
Wir setzen alle Varianzen und Kovarianzen in Proportion zur Varianz derGewichtseinheit und erhalten die Kofaktormatrix Q:
QLL =1σ2
0
ΣLL. (2.4)
Die Elemente der Kofaktormatrix QLL werden als Kofaktoren, Gewichtskoeffi-zienten oder Gewichtsreziproke bezeichnet.
Um eine Gewichtung umgekehrt proportional zu den Varianzen (bzw. Kofak-toren) vorzunehmen ist noch die Bildung von Reziprokwerten notwendig, wasin der Matrizenrechnung durch eine Inversion der Matrix geschieht:
P = Q−1LL. (2.5)
Die Festlegung der Varianzen und Kovarianzen des Beobachtungsvektors ge-schieht bereits vor dem empirischen Bestimmen von Realisierungen des Beob-achtungsvektors. Wir sprechen daher auch von den ”a priori-Varianzen“ undder ”Varianz der Gewichtseinheit a priori“ bzw. vom ”stochastischen Modell apriori“. Dieses Modell enthalt ausschließlich theoretische Großen. Die Korrekt-heit dieser Annahmen muss also noch uberpruft werden.
An dieser Stelle sei darauf hingewiesen, dass das stochastische Modell auchaufwandiger gestaltet werden kann. Bei der gemeinsamen Ausgleichung unter-schiedlicher Beobachtungsgruppen (z.B. Richtungen und Stecken) wird manch-mal auch anstelle einer gemeinsamen Varianz der Gewichtseinheit fur jede Be-obachtungsgruppe j eine eigene Varianz der Gewichtseinheit σ2
0j eingefuhrt. Diegenaue Vorgangsweise bei einer solchen Aufspaltung findet man in der Fachli-teratur und wird als Varianzkomponentenschatzung bezeichnet (z.B. Forstner,1979b; Grafarend et al., 1980; Grimm-Pitzinger und Hanke, 1986; Koch, 1978;Niemeier, 2002).
2.3 Ausgleichungsverfahren
2.3.1 Funktionales Modell
Wir gehen davon aus, dass wir n Beobachtungen durchgefuhrt haben und ausdiesen Beobachtungen u unbekannte Großen ermitteln wollen. Die Beobachtun-gen L1, L2, ..., Ln sind Realisierungen der Zufallsgroßen. Sie bilden den Beob-achtungsvektor L. Der Beobachtungsvektor ist eine Naherung fur den wahrenWert L. Der wahre Wert ist nicht direkt feststellbar, aber wir konnen mit Hil-fe der Methode der kleinsten Quadrate einen Schatzwert dafur angeben: den

8 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
ausgeglichenen Beobachtungsvektor L. Er enthalt die - im Sinne der Wahr-scheinlichkeitsrechnung - plausibelsten Werte der Beobachtungen. Man erhaltden ausgeglichenen Beobachtungsvektor, indem man zum Beobachtungsvektorden Vektor der Verbesserungen addiert:
L = L + v. (2.6)
Die unbekannten Großen X1, X2, ..., Xu werden im Parametervektor X zusam-mengefasst. Auch X ist ein Zufallsvektor und hat daher einen wahren Wert X.Mit Hilfe der Methode der kleinsten Quadrate ermitteln wir fur den Parame-tervektor einen Schatzwert, den ausgeglichenen Parametervektor X. Sehr oftkennen wir bereits naherungsweise Werte7 fur die unbekannten Großen. Diesefassen wir im genaherten Parametervektor X0 zusammen. Ausgeglichener undgenaherter Parametervektor unterscheiden sich um den gekurzten Parameter-vektor x:
X = X0 + x. (2.7)
Die wahren Werte des Beobachtungsvektors und des Parametervektors stehenin einem funktionalen Zusammenhang:
ϕ(L, X) = o. (2.8)
Wir gehen davon aus, dass sich r solche Beziehungen formulieren lassen, derVektor ϕ also r Funktionen enthalt.
Eine weitere Annahme bei der Bestimmung der plausibelsten Werte der Pa-rameter ist, dass auch die ausgeglichenen Großen (2.8) erfullen, also
ϕ(L, X) = o (2.9)
gilt. Gleichung (2.9) heißt auch funktionales Modell der Ausgleichung.Vor dem weiteren Vorgehen legen wir noch drei Großen fest, auf die wir
spater zuruckgreifen werden. Der Beobachtungsvektor L und der genaherte Pa-rametervektor X0 werden das Gleichungssystem (2.8) nicht exakt erfullen, son-dern einen gewissen Widerspruch hervorrufen. Dieser wird im Widerspruchsvek-tor zusammengefasst:
ϕ(L,X0) = w. (2.10)
Außerdem kann man sich fragen, welche Werte L annehmen musste, damit dasGleichungssystem (2.10) keinen Widerspruch aufweist (also die ursprunglichenBedingungen (2.8) erfullt sind). Wir nennen diesen Vektor den genaherten Be-obachtungsvektor L0 wenn gilt:
ϕ(L0,X0) = o. (2.11)
Beobachtungsvektor und genaherter Beobachtungsvektor unterscheiden sich umden gekurzten Beobachtungsvektor l:
L = L0 + l. (2.12)
7Eine Naherung konnen wir beispielsweise durch Losen der Aufgabe ohne uberschussigeBeobachtungen oder durch eine grafische Losung der Aufgabe in einer maßstablichen Skizzeerhalten.

2.3. AUSGLEICHUNGSVERFAHREN 9
In der praktischen Rechnung wird man umgekehrt den gekurzten aus dem ge-messenen und dem genaherten Beobachtungsvektor bestimmen (”gemessen mi-nus gerechnet“):
l = L− L0. (2.13)
Die Funktionen ϕ1 bis ϕr konnen Funktionen beliebigen Typs sein. Wir gehenaber davon aus, dass die Elemente des gekurzten Parametervektors x relativklein gegenuber den Elementen des genaherten Parametervektors X0 sind. Das-selbe nehmen wir fur die Elemente des Verbesserungsvektors v gegenuber denElementen des Beobachtungsvektors L an. Wir werden daher das ursprunglichefunktionale Modell (2.9) mit Hilfe einer Taylorentwicklung in ein linearisier-tes funktionales Modell uberfuhren indem wir die Entwicklung nach der erstenAbleitung abbrechen:
ϕ(L, X) = ϕ(L,X0)++ ∂ϕ
∂X1(X1 −X01) + . . . + ∂ϕ
∂Xu(Xu −X0u)+
+ ∂ϕ
∂L1(L1 − L1) + . . . + ∂ϕ
∂Ln(Ln − Ln)
. (2.14)
Wir fassen nun alle partiellen Ableitungen in jeweils einer Matrix zusammen(”Jakobi-Matrix“), und zwar jene nach den Unbekannten X1 bis Xu in derModellmatrix (auch: Designmatrix ) A und jene nach den Beobachtungen L1
bis Ln in der Matrix B. Bei numerischer Rechnung konnen dabei die Wertefur die Differentialquotienten in A und B sowohl durch analytisches aber auchdurch numerisches Differenzieren bestimmt werden.
A =
(∂ϕ1
∂X1
) (∂ϕ1
∂X2
). . .
(∂ϕ1
∂Xu
)(
∂ϕ2
∂X1
) (∂ϕ2
∂X2
). . .
(∂ϕ2
∂Xu
)
......
. . ....(
∂ϕr
∂X1
) (∂ϕr
∂X2
). . .
(∂ϕr
∂Xu
)
(2.15)
B =
(∂ϕ1
∂L1
) (∂ϕ1
∂L2
). . .
(∂ϕ1
∂Ln
)(
∂ϕ2
∂L1
) (∂ϕ2
∂L2
). . .
(∂ϕ2
∂Ln
)
......
. . ....(
∂ϕr
∂L1
) (∂ϕr
∂L2
). . .
(∂ϕr
∂Ln
)
(2.16)
Mit diesen Bezeichnungen und unter Anwendung der Gleichungen (2.6), (2.7)und (2.10) konnen wir (2.9) jetzt schreiben als
Ax + Bv + w = o. (2.17)
2.3.2 Allgemeine Auflosung
Die Minimalitatsforderung (2.2), von der wir ausgegangen sind, wurde im letz-ten Abschnitt noch durch die Bedingung (2.17) erganzt. Aus mathematischerSicht haben wir es also mit einer ”Extremwertaufgabe mit Nebenbedingungen“zu tun. Ein geeignetes Losungsverfahren dafur ist die Multiplikatormethode vonLagrange. Ublicherweise werden die dabei verwendeten Lagrange’schen Multi-plikatoren mit λ bezeichnet; aus historischen und formalen Grunden werden

10 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
wir anstelle dessen Multiplikatoren in der Form 2k verwenden. Im geodatischenSprachgebrauch werden sie auch als Korrelaten bezeichnet. A, B und w re-prasentieren r Funktionen, wir brauchen somit auch r Korrelaten. Diese fassenwir im Korrelatenvektor zusammen:
k =
k1
k2
...kr
. (2.18)
Die zu minimierende Funktion hat somit die endgultige Form
F (v,x) = vT Pv− 2kT (Ax + Bv + w). (2.19)
Nun mussen wir die partiellen Ableitungen dieser Funktion bilden und gleichNull setzen. Formal gehen wir dabei genauso vor wie bei ”normalen“ Ableitun-gen, d.h. es gelten beim Ableiten von Matrizen und Vektoren ebenfalls Summen-und Produktregel etc.
∂F
∂v= 2vT P− 2kT B = oT
Pv−BT k = o
Pv = BT k,
v = P−1BT k, (2.20)
∂F
∂x= −2kT A = oT ,
AT k = o. (2.21)
Wir konnen nun zunachst (2.20) in die Nebenbedingung (2.17) einsetzen unddann gemeinsam mit (2.21) das folgende Gleichungssystem aufstellen:
(BP−1BT A
AT 0
)(kx
)=
( −wo
). (2.22)
Dieses Gleichungssystem ist (wenn regular) durch Inversion direkt auflosbar:(
kx
)=
(BP−1BT A
AT 0
)−1 ( −wo
). (2.23)
Wir erhalten eine Losung fur x und k und nach Einsetzen von k in (2.20) auchfur v. Dies ist der Allgemeinfall der Ausgleichungsrechnung , auch Ausgleichun-gen bedingter Beobachtungen mit Unbekannten genannt. In den meisten Fallenwerden wir es aber mit Anwendungen zu tun haben, in denen die Funktion (2.8)einfacher aufgebaut ist als im Allgemeinfall. Wir unterscheiden folgende Falle:
1. Im Gleichungssystem (2.8) treten r = n Gleichungen auf bei denen in jederGleichung nur jeweils eine Beobachtung Li vorkommt. Dieser Fall heißtAusgleichung vermittelnder Beobachtungen.
2. In (2.8) treten keine unbekannten Parameter X auf. Es gibt aber r Glei-chungen, die den funktionalen Zusammenhang zwischen den Beobachtun-gen beschreiben. Dies ist eine Ausgleichung bedingter Beobachtungen.

2.3. AUSGLEICHUNGSVERFAHREN 11
3. In n Gleichungen tritt jeweils nur eine Beobachtung auf (wie im Fall derAusgleichung vermittelnder Beobachtungen), in den verbleibenden (r−n)Gleichungen hingegen kommen nur unbekannte Parameter (und keine Be-obachtungen) vor. Dies ist eine Ausgleichung vermittelnder Beobachtungenmit Bedingungsgleichungen. Zu beachten ist dabei, dass es sich ausschließ-lich um Bedingungen zwischen den Unbekannten und nicht um Bedingun-gen zwischen den Beobachtungen oder Bedingungen zwischen Beobach-tungen und Unbekannten handelt.
Im Folgenden werden wir uns diese drei Verfahren naher ansehen.
2.3.3 Ausgleichung vermittelnder Beobachtungen
Bei der Ausgleichung vermittelnder Beobachtungen kommt im Gleichungssy-stem (2.8) pro Gleichung nur jeweils genau eine Beobachtung Li vor. Somitkann jede Gleichung explizit nach Li aufgelost werden. Fur die ausgeglichenenGroßen kann daher (2.9) umgeformt werden zu
ϕ(X)− L = o (2.24)
bzw.L = ϕ(X). (2.25)
L enthalt n Messgroßen und der Funktionsvektor ϕ enthalt r = n Funktionen.Dabei hat jede Funktion u Parameter, also genau so viele wie Unbekannte imSystem vorkommen. Die Große
nfv = n− u (2.26)
gibt die Anzahl der Freiheitsgrade (auch: Redundanz ) an, bzw. die Anzahl der
”uberschussigen“ Beobachtungen. Eine Ausgleichungsaufgabe liegt vor, wenngilt nfv > 0 (Uberbestimmung). Bei nfv = 0 ist das System eindeutig bestimmt(”n Gleichungen in u = n Unbekannten“). Bei nfv < 0 ist das System unterbe-stimmt und nur unvollstandig losbar.
Einsetzen von (2.6) in (2.25) ergibt
L + v =
ϕ1(X)ϕ2(X)
...ϕn(X)
. (2.27)
Nun fuhren wir eine Taylorentwicklung durch und erhalten eine ModellmatrixA wie in (2.15). Die Matrix B hingegen vereinfacht sich zur negativen Einheits-matrix:
B = −I. (2.28)
Desweiteren konnen wir (2.10) vereinfachen zu
ϕ(X0) = L + w (2.29)
und (2.11) zuϕ(X0) = L0. (2.30)

12 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
Daraus folgtL0 = L + w (2.31)
bzw. zusammen mit (2.12)w = −l. (2.32)
Gleichung (2.17) kann somit geschrieben werden als
Ax− Iv− l = o
bzw.v = Ax− l. (2.33)
Gleichung (2.33) wird auch die Verbesserungsgleichung des Ausgleichungspro-blems genannt.
Bevor wir die Extremwertaufgabe (2.2) losen konnen, mussen wir noch dieGewichtsmatrix P bestimmen. Die Anwendung des Varianzfortpflanzungsgeset-zes auf (2.12) ergibt fur die Kovarianzmatrix des verkurzten Beobachtungsvek-tors l
Σll = ΣLL (2.34)
und somit gilt auch fur die Kofaktormatrizen
Qll = QLL. (2.35)
Damit kann die Gewichtsmatrix P ubernommen werden.Zur Losung der Extremwertaufgabe (2.2) konnen wir (2.23) vereinfachen zu
(kx
)=
(P−1 AAT 0
)−1 (lo
), (2.36)
wofur wir eine explizite Auflosung nach x angeben konnen8:
x = (AT PA)−1AT Pl. (2.37)
Diese Gleichung heißt auch die Normalgleichung des Ausgleichungsproblems unddie Matrix
N = AT PA (2.38)
ist die Normalgleichungsmatrix . (2.37) kann dann auch geschrieben werden als
x = N−1AT Pl. (2.39)
Die Verbesserungen v erhalt man durch direktes Einsetzen von x in (2.33) bzw.wenn wir (2.39) in (2.33) einsetzen aus
v = (AN−1AT P− I)l. (2.40)
Die ausgeglichenen Beobachtungen L ergeben sich durch direktes Einsetzen vonv in (2.6) bzw. durch Einsetzen von (2.12) und (2.40) in (2.6):
L = L0 + (I + AN−1AT P− I)l = L0 + AN−1AT Pl. (2.41)
8Zum Ergebnis (2.37) kommt man auch, indem man (2.33) sofort in die Extremwertaufgabe(2.2) einsetzt und die erste Ableitung der sich daraus ergebenden Funktion gleich Null setzt.

2.3. AUSGLEICHUNGSVERFAHREN 13
Hauptprobe
Die Methode der kleinsten Quadrate in der von uns angewandten Form gehtdavon aus, dass die Elemente in x ”relativ klein“ gegenuber den Elementenin X0 sind. Nur unter dieser Voraussetzung ist das Abbrechen der Taylorent-wicklung nach dem linearen Glied erlaubt. Leider ist diese Voraussetzung nichtimmer erfullt bzw. nicht immer moglich (weil die Naherungswerte nicht so ge-nau bestimmt werden konnen). Im Anschluss an die Ausgleichung ist daher eineUberprufung der angenommenen Voraussetzung notig, die so genannte Haupt-probe des Ausgleichungsproblems.
Die Hauptprobe fur eine Ausgleichung vermittelnder Beobachtungen bestehtaus der Prufung, ob die ausgeglichenen Großen L und X das ursprungliche, (i.A.nichtlineare) funktionale Modell (2.27) genugend genau erfullen. Genugend ge-nau bedeutet dabei, dass sich die Differenzen in dem Rahmen bewegen, der vonder Rechengenauigkeit vorgegeben wird. War unser ursprungliches funktiona-les Modell bereits linear, so musste keine Linearisierung erfolgen. Demzufolgekann kein Linearisierungsfehler auftreten. Trotzdem ist jedoch eine abschließen-de Probe notwendig, da sich auch Rechenfehler eingeschlichen haben konnen.Die Hauptprobe ist dazu geeignet.
Geht die Hauptprobe nicht auf, kann dies drei Ursachen haben:
1. Die Naherungswerte waren nicht gut genug, sodass das Linearisieren un-zulassig war und die Taylorreihe zu fruh abgebrochen wurde (entfallt beilinearen funktionalen Modellen).
2. Beim Aufstellen des funktionalen Modells ist ein Fehler passiert.
3. Im Zuge der Rechnung ist ein Rechenfehler aufgetreten.
Bei Verwendung getesteter Rechenprogramme ist es eher unwahrscheinlich, dasstatsachlich ein Rechenfehler passiert ist. Es ist allerdings moglich, dass aufGrund ungunstiger numerischer Eigenschaften der Normalgleichungsmatrix dieInversion zu falschen Ergebnissen gefuhrt hat9.
Fehler beim Aufstellen der Matrizen des funktionalen Modells konnen beider praktischen Rechnung leicht passieren. Einerseits kann man sich beim Ab-leiten selbst irren, andererseits konnen Rechenfehler auftreten. Insbesondere istauf die richtige Verwendung der Vorzeichen sowie auf das Zusammenpassen derEinheiten zu achten. Jedes Element der aufzustellenden Matrizen hat im All-gemeinen nicht nur einen Zahlenwert, sondern auch eine physikalische Einheit.Besonders bei funktionalen Modellen, in denen sowohl Langen (Distanzen, Ko-ordinatendifferenzen) als auch Winkel und Richtungen vorkommen, sind hierfehleranfallig. Gegebenenfalls sind Winkel und Richtungen ins Bogenmaß um-zurechnen. Das Zusammenpassen der physikalischen Einheiten betrifft ubrigensauch das stochastische Modell. Letzteres wird allerdings durch die Hauptprobenicht uberpruft.
Beim Aufspuren eventueller Fehler des funktionalen Modells sind jene Ele-mente der Matrizen ”heiße“ Kandidaten, die mit den Gleichungen des funktio-nalen Modells korrespondieren. Geht zum Beispiel die 3. Gleichung der Haupt-probe nicht auf, so ist die Wahrscheinlichkeit groß, dass die 3. Zeile der MatrixA oder das 3. Element des Vektors l fehlerhaft sind.
9Vergleiche hierzu die Kommentare bezuglich der Varianz der Gewichtseinheit auf Seite 7

14 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
Iterative Ausgleichung
Ist das Ergebnis der Hauptprobe nicht zufrieden stellend, so ist die Ausgleichungiterativ zu wiederholen. Man rechnet zunachst eine Ausgleichung durch. DasErgebnis dieser Ausgleichung wird als Naherungslosung wieder in eine Ausglei-chung eingefuhrt. Der Beobachtungsvektor L und seine Kovarianzmatrix ΣLL
bleiben dabei erhalten. Die Designmatrix A und gekurzte Beobachtungsvektorl hingegen andern sich und sind daher neu aufzustellen.
Die Iteration wird nun solange durchgefuhrt, bis die Hauptprobe genugendgenau erfullt ist. In Einzelfallen kann es jedoch auch vorkommen, dass die Itera-tion nicht konvergiert. Dann muss man mit vollkommen neu ermittelten Nahe-rungswerten von vorne beginnen.
Lineare Verbesserungsgleichungen
Die Ausgleichung vermittelnder Beobachtungen wird noch einfacher, wenn dieVerbesserungsgleichungen bereits in ihrer ursprunglichen Form linear sind. Diestritt zum Beispiel bei der Beobachtung von Koordinatendifferenzen (GPS-Vektorenoder Hohenunterschieden mittels Nivellement) auf. Dann sind die Koeffizientender A-Matrix besonders einfach zu finden. Vor allem aber kann der oben be-schriebene Linearisierungsfehler nicht passieren, da keine Linearisierung mehrerforderlich ist. Es sind auch keine Naherungswerte fur die Unbekannten not-wendig.
Ausgleichung direkter Beobachtungen
Eine nochmalige Vereinfachung tritt auf, wenn wir die Unbekannten nicht in-direkt ”vermittels“ der Beobachtung anderer Messgroßen bestimmen, sonderndirekt die Unbekannten selbst beobachten. Damit treten in der Matrix A anden entsprechenden Stellen nur 1 auf.
Ein Spezialfall einer solchen Ausgleichung direkter Beobachtungen ist, wennes sich uberhaupt nur um eine unbekannte Große handelt, die mehrfach beob-achtet wurde. (2.37) vereinfacht sich dann zu
x =aT PlaT Pa
(2.42)
mit
a =
11...1
.
Bei Annahme der Einheitsmatrix als Gewichtsmatrix P liefert (2.42) die Formelfur das einfache arithmetische Mittel der direkt beobachteten Große. Ist dieGewichtsmatrix P hingegen eine Diagonalmatrix mit mindestens einem Elementungleich Eins, so ergibt sich aus (2.42) das gewogene arithmetische Mittel. Inallen anderen Fallen steht (2.42) fur das allgemeine arithmetische Mittel.

2.3. AUSGLEICHUNGSVERFAHREN 15
2.3.4 Ausgleichung bedingter Beobachtungen
Bei einer Ausgleichung bedingter Beobachtungen geht es nicht darum, unbekann-te Parameter Xj zu bestimmen. Es sollen lediglich die unbekannten Verbesse-rungen v und daraus ausgeglichene Beobachtungen L abgeschatzt werden. Esgibt r Gleichungen, die den funktionalen Zusammenhang der (wahren) Beob-achtungen untereinander beschreiben. Dieser Zusammenhang soll auch von denausgeglichenen Beobachtungen erfullt werden. Oft sind die Bedingungen geome-trischer Natur (z.B. die Winkelsumme in Polygonen). Fur die Geodasie typischeBedingungen haben wir in A1 kennen gelernt.
Zunachst einmal stellt sich die Frage, wie viele solcher Gleichungen uber-haupt aufzustellen sind. Ist n0 die Anzahl der zur eindeutigen Losung des funk-tionalen Modells (2.45) notwendigen Beobachtungen, so ist die Anzahl der auf-zustellenden Bedingungen fur n durchgefuhrte Beobachtungen gleich
r = n− no. (2.43)
Ist r = n, so liegt keine Ausgleichungsaufgabe vor. Fur r > n haben wir zu vieleBedingungen, die sich im Allgemeinen gar nicht gleichzeitig erfullen lassen. BeideFalle sind ohne praktischen Wert.
Fur r < n hat man n Verbesserungsgleichungen und r Bedingungsgleichun-gen bei n ”Unbekannten“ im Gleichungssystem (namlich die n verbesserten Be-obachtungen). Daraus folgt: r Beobachtungen sind uberschussig und damit istdie Anzahl der Freiheitsgrade der Ausgleichung bedingter Beobachtungen gleich
nfb= r = n− n0. (2.44)
Da es keinen Parametervektor X gibt, wird die Matrix A zur Nullmatrix. (2.9)vereinfacht sich zu
ϕ(L) = o. (2.45)
Den Widerspruchsvektor w erhalt man durch Einsetzen der Beobachtungen indie Bedingungsgleichungen
ϕ(L) = w. (2.46)
Die Gleichung (2.17) vereinfacht sich zu
Bv + w = o (2.47)
und das Gleichungssystem (2.23) zu
k = −(BP−1BT )−1w. (2.48)
Dies konnen wir nun unmittelbar in (2.20) einsetzen:
v = −P−1BT (BP−1BT )−1w. (2.49)
In (2.48) und (2.49) konnen wir wieder eine Normalgleichungsmatrix der beding-ten Ausgleichung herausheben:
NB = BP−1BT . (2.50)

16 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
Hauptprobe
Auch bei der Ausgleichung bedingter Beobachtungen gibt es eine Hauptprobe.Die ausgeglichenen Beobachtungen mussen die Gleichung (2.45), also die auf-gestellten Bedingungen, erfullen. Ist die Hauptprobe nicht erfullt, sind ahnlicheSchritte durchzufuhren wie bei der vermittelnden Ausgleichung beschrieben.
2.3.5 Ausgleichung vermittelnder Beobachtungen mit Be-dingungsgleichungen
Das einfache Modell einer Ausgleichung vermittelnder Beobachtungen kann nochum zusatzliche Bedingungsgleichungen zwischen den Unbekannten erganzt wer-den. Ein Beispiel ware die Forderung, dass Punkte auf einer Geraden oder eineranderen mathematisch definierten Figur liegen (Grundstucksgrenzen im Kata-ster) oder dass bestimmte geometrische Bedingungen der Unbekannten eingehal-ten werden (Parallelitat, Orthogonalitat, vorgegebener Abstand zweier Punkteetc.). Es gibt drei Moglichkeiten, solche Probleme zu losen:
• Unbekannte konnen mit Hilfe der Bedingungen eliminiert werden.
• Eine strenge Losung der Extremwertaufgabe (Minimierung von vT Pv un-ter den zusatzlichen (Neben-)Bedingungen) ist moglich.
• Die Bedingungen konnen als fiktiver Beobachtungen mit sehr hoher Ge-wichtung eingefuhrt werden.
Die erste Methode wurden in A1 kurz angerissen und ist einfach durchzufuhren.Sie ist allerdings von geringerer praktischer Bedeutung, da sie nur schwer auto-matisierbar ist. Deswegen behandeln wir sie hier nicht noch einmal. Wir werdenuns auf die wichtigeren Methoden strenge Losung und Einfuhrung von fiktivenBeobachtungen beschranken. Die Einfuhrung fiktiver Beobachtungen ist vor al-lem deshalb wichtig, da sie die Angabe von Bedingungen auch bei solchen Pro-grammen erlaubt, bei denen Bedingungsgleichungen eigentlich nicht vorgesehensind.
Strenge Losung
Bei einer Ausgleichung vermittelnder Beobachtungen mit Bedingungsgleichun-gen zwischen den Unbekannten gehen wir zunachst aus von n Beobachtungen,die zur Bestimmung der u Unbekannten durchgefuhrt wurden. Zusatzlich sollenzwischen den Unbekannten noch nb = (r−n) Bedingungen vorgegeben sein. DieAnzahl der Freiheitsgrade betragt somit
nfvb= n− u + nb = r − u. (2.51)
Eine Ausgleichungsaufgabe liegt genau dann vor, wenn nfvb> 0, d.h. wenn
r > u odern + nb > u. (2.52)
Die Summe aus Anzahl der Beobachtungen und Anzahl der Bedingungsglei-chungen muss also großer als die Anzahl der Unbekannten sein. Das funktionaleModell der vermittelnden Ausgleichung mit Bedingungen setzt sich zusammenaus
L = ϕ(X) (2.53)

2.3. AUSGLEICHUNGSVERFAHREN 17
undϕ(X) = o. (2.54)
Das zu losende Gleichungssystem konnen wir nun getrennt - jeweils mit einer ei-genen Modellmatrix - betrachten: Einerseits gibt es n Verbesserungsgleichungenwie in (2.33)
v = A1x− l, (2.55)
andererseits haben wir nb Bedingungen zwischen den u Unbekannten, womit in(2.17) noch die Bedingungsgleichung
A2x + w = o (2.56)
verbleibt. Es gibt keine Bedingungen zwischen den Beobachtungen, daher istin (2.17) B eine Nullmatrix. Zur Minimierung der Verbesserungsquadratsummewenden wir wieder die Methode von Lagrange an und erhalten
(AT
1 PA1 AT2
A2 0
)(x−k
)=
(AT
1 Pl−w
). (2.57)
Dieses System konnen wir sofort auflosen nach(
x−k
)=
(AT
1 PA1 AT2
A2 0
)−1 (AT
1 Pl−w
). (2.58)
Hauptprobe
Als Hauptprobe mussen nach der ”Ausgleichung vermittelnder Beobachtungenmit Bedingungsgleichungen zwischen den Unbekannten“ die ausgeglichenen Be-obachtungen und ausgeglichenen Unbekannten in das nichtlinearisierte funktio-nale Modell eingesetzt werden. Es mussen sowohl die ursprunglichen Verbes-serungsgleichungen (2.53) als auch die ursprunglichen Bedingungsgleichungen(2.54) genugend genau erfullt sein.
Umwandeln der Bedingungen in fiktive Beobachtungen
Bei der strengen Losung haben wir die zusatzlichen Bedingungen tatsachlichals Bedingungsgleichungen (2.54) in die Ausgleichung eingefuhrt. Wir konnendiese Bedingungen aber auch als ”fiktive“ Beobachtungen auffassen, die demfunktionalen Modell (2.53) angefugt werden. Ein exakt einzuhaltender Abstandzweier Punkte konnte beispielsweise als Streckenbeobachtung einfließen. Um dreiPunkte auf einer Geraden liegen zu lassen, mussen zwei Richtungsbeobachtun-gen mit gleichem Wert eingefugt werden - je eine Beobachtung vom ersten derdrei Punkte zu den beiden ubrigen. Diese Beobachtungen erhalten im stocha-stischen Modell geringe Varianzen, sodass sie dann in die Ausgleichung mitentsprechend hohen Gewichten einfließen (die Gewichte sind ja umgekehrt pro-portional zu den Varianzen). Nach Perovic sollten die Varianzen diese fiktivenBeobachtungen mindestens um 3 Zehnerpotenzen besser sein als die Varianzender ubrigen Beobachtungen um gute Ergebnisse zu liefern (Perovic, 2005, S.194-195)
Im verkurzten Beobachtungsvektor l des funktionalen Modells stehen anden entsprechenden Stellen nur Nullen (da keine tatsachlichen Beobachtungengemacht wurden, ist die Differenz ”gemessen minus gerechnet“ gleich Null).

18 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
2.3.6 Ausgleichung bedingter Beobachtungen mit Unbe-kannten
Eine Ausgleichung bedingter Beobachtungen mit Unbekannten liegt vor, wennwir die funktionalen Zusammenhange zwischen den Unbekannten und Beobach-tungen weder in der Form (2.25) (vermittelnde Ausgleichung), noch in der Form(2.45) (bedingte Ausgleichung) oder im System (2.53)-(2.54) (vermittelnde Aus-gleichung mit Bedingungen) darstellen konnen. Es ist dies also der bereits amAnfang dieses Abschnitts dargestellte Allgemeinfall der Ausgleichungsrechnung.Von diesem haben wir das funktionale Modell und seine Auflosung bereits her-geleitet und in (2.17) und (2.23) angegeben.
Ahnlich wie bei einer Ausgleichung bedingter Beobachtungen mussen wirvor dem Aufstellen des funktionalen Modells uberlegen, wie viele Gleichungenwir haben bzw. wie groß die Anzahl der Freiheitsgrade ist. Bezeichnet n0 dieAnzahl der zur eindeutigen Losung notwendigen Beobachtungen, so ergibt sichdie Anzahl der Freiheitsgrade zu
nfa = n− n0. (2.59)
Dazu kommen aber jetzt noch u Unbekannte, sodass die Gesamtanzahl deraufzustellenden Gleichungen gleich
r = (n− n0) + u = nfa + u (2.60)
ist. Diese r Bedingungsgleichungen werden nach den Unbekannten (A-Matrix)und Beobachtungen (B-Matrix) partiell abgeleitet. Um die Elemente des Wi-derspruchsvektors w zu bestimmen, werden Naherungswerte der Unbekanntenund Beobachtungen in die nichtlinearisierten r Gleichungen eingesetzt - siehe(2.10).
Hauptprobe
Zur Hauptprobe sind nach erfolgter Ausgleichung die ausgeglichenen Unbekann-ten und verbesserten Beobachtungen in das nichtlinearisierte funktionale Modelleinzusetzen. Die Gleichung (2.9) muss hinreichend genau erfullt sein. Andernfallsist zu uberprufen, ob eventuell irgendwo ein Rechen- oder Modellfehler vorliegtbzw. ob die Naherungswerte fur die Unbekannten zu ”schlecht“ waren, sodassdas Linearisieren eigentlich unzulassig war. In diesem Fall ist die Ausgleichungzu wiederholen, wobei als neue Naherungswerte die Werte des eben erhaltenenAusgleichungsdurchgangs zu verwenden sind.
2.4 Stochastisches Modell a posteriori
Zur Gewichtung der einzelnen Gleichungen haben wir a priori ein stochastischesModell eingefuhrt. Wir untersuchen nun, wie dieses stochastische Modell im Fallder Ausgleichung vermittelnder Beobachtungen und bedingter Beobachtungena posteriori aussieht.
2.4.1 Kofaktorfortpflanzungsgesetz
Wir sind im stochastischen Modell a priori zwar von der Kovarianzmatrix derBeobachtungen ausgegangen, haben letztendlich aber zur Gewichtung die Ko-

2.4. STOCHASTISCHES MODELL A POSTERIORI 19
faktormatrix Q verwendet. Im allgemeinen Kovarianzfortpflanzungsgesetz (sieheA1) konnen wir auf beiden Seiten mit 1
σ20
multiplizieren und erhalten
1σ2
0
ΣFF = F1σ2
0
ΣxxFT ,
QFF = FQxxFT . (2.61)
Wir konnen in (2.36) also die Kovarianzmatrizen durch die entsprechenden Ko-faktormatrizen ersetzen und erhalten so das allgemeine Kofaktorfortpflanzungs-gesetz (2.61).
2.4.2 Kofaktoren a posteriori
Die Kofaktoren a posteriori bei der ”Ausgleichung vermittelnder Be-obachtungen“
Zunachst wollen wir analog zu (2.12) auch fur die ausgeglichenen Beobachtungeneinen gekurzten Beobachtungsvektor einfuhren:
L = L0 + l. (2.62)
Damit konnen wir (2.41) umschreiben zu
l = AN−1AT Pl. (2.63)
Die Gleichungen (2.39), (2.63) und (2.40) beschreiben nun Funktionen des Vek-tors l. Zusammen mit der identen Abbildung I · l konnen wir zur Anwendungdes Kofaktorfortpflanzungsgesetzes diese Funktionen in einer Matrix F zusam-menfassen:
f =
lxlv
= F · l =
IN−1AT P
AN−1AT PAN−1AT P− I
· l. (2.64)
Die Anwendung des Kofaktorfortpflanzungsgesetzes ergibt
Qff =
IN−1AT P
AN−1AT PAN−1AT P− I
·Qll ·
(I PAN−1 PAN−1AT PAN−1AT − I
)
(2.65)
und mit Qll = P−1:
Qff =
P−1 AN−1 AN−1AT AN−1AT −P−1
N−1AT N−1 N−1AT 0AN−1AT AN−1 AN−1AT 0
AN−1AT −P−1 0 0 P−1 −AN−1AT
.
(2.66)Damit konnen wir aus der Hauptdiagonalen die fur uns wichtigen Matrizenablesen:
Qll = P−1, (2.67)Qxx = N−1, (2.68)Qll = AN−1AT , (2.69)Qvv = Qll −Qll. (2.70)

20 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
Desweiteren konnen wir aus (2.12),(2.7) und (2.63) leicht schließen:
QLL = Qll, (2.71)QXX = Qxx, (2.72)QLL = Qll. (2.73)
Hinzuweisen ist außerdem auf die lineare stochastische Unabhangigkeit zwischendem Verbesserungsvektor und dem Vektor der ausgeglichenen Beobachtungenbzw. den Verbesserungen und den ausgeglichenen Unbekannten (Nullmatrizenin (2.66)).
Im Ubrigen gilt die so genannte Gewichtsreziprokenprobe nach Ansermet :Die Summe der Hauptdiagonalglieder der Produktmatrix P ·QLL muss gleichder Anzahl der Unbekannten sein:
tr (P ·QLL) = u. (2.74)
Die Kofaktoren a posteriori bei der ”Ausgleichung bedingter Beob-achtungen“
Um die Kofaktormatrizen der an der bedingten Ausgleichung beteiligten Vekto-ren zu erhalten, gehen wir zunachst davon aus, dass fur das linearisierte Modellhinreichend genau gilt:
BL ≈ w. (2.75)
Damit konnen wir (2.48) und (2.49) umschreiben zu
k = −N−1B BL, (2.76)
v = −QLLBT N−1B BL (2.77)
und (2.6) zuL = (I−QLLBT N−1
B B)L. (2.78)
Die Gleichungen (2.75), (2.76), (2.77) und (2.78) beschreiben Funktionen desVektors L. Zusammen mit der identen Abbildung I ·L konnen wir sie wieder ineiner Matrix F zusammenfassen:
f =
LwkvL
= F · L
IB
−N−1B B
−QLLBT N−1B B
I−QLLBT N−1B B
· L (2.79)
worauf wir das Kofaktorfortpflanzungsgesetz anwenden
Qff = F ·QLL · FT (2.80)
und unter Vorwegnahme der Bezeichnung
Qvv = QLLBT N−1B BQLL
folgende Kofaktormatrix erhalten:
QFF =
QLL QLLBT −QLLBT N−1B Qvv QLL −Qvv
BQLL NB −I −BQLL 0
−N−1B BQLL −I N−1
B N−1B BQLL 0
−Qvv −QLLBT QLLBT N−1B Qvv 0
QLL −Qvv 0 0 0 QLL −Qvv
.
(2.81)

2.4. STOCHASTISCHES MODELL A POSTERIORI 21
In der Hauptdiagonalen finden wir die fur uns wichtigen Kofaktormatrizen
Qvv = QLLBT N−1B BQLL, (2.82)
QLL = QLL −Qvv. (2.83)
Außerdem konnen wir an den Nullmatrizen in (2.81) wieder lineare stochastischeUnabhangigkeiten erkennen, und zwar zwischen dem Vektor der ausgeglichenenBeobachtungen und jenem der Widerspruche bzw. den ausgeglichenen Beobach-tungen und dem Verbesserungsvektor (sowie zwischen L, und k, was aber keineweitere Bedeutung hat).
Die Kofaktoren a posteriori bei der ”vermittelnden Ausgleichung mitBedingungen“
Bei der Ausgleichung vermittelnder Beobachtungen mit Bedingungsgleichungenzwischen den Unbekannten kann die fur uns zunachst interessante Kofaktor-matrix des verkurzten Unbekanntenvektors direkt aus der invertierten Matrixabgelesen werden:
(AT
1 PA1 AT2
A2 0
)−1
=(
Qxx Qxk
QTxk Qkk
). (2.84)
Unter Verwendung einer Normalgleichungsmatrix Nvb
Nvb = AT1 PA1 (2.85)
konnen wir obige Kofaktormatrizen aber auch explizit angeben:
Qkk = (A2NvbAT2 )−1, (2.86)
Qxx = N−1vb −N−1
vb AT2 QkkA2N−1
vb (2.87)
und schlussendlich
QXX = Qxx, (2.88)
QLL = A1QxxAT1 . (2.89)
Die Kofaktoren a posteriori bei der ”bedingten Ausgleichung mit Un-bekannten“
Bei einer Ausgleichung bedingter Beobachtungen mit Unbekannten kann die furuns zunachst interessante Kofaktormatrix des verkurzten Unbekanntenvektorsdirekt aus der invertierten Matrix abgelesen werden:
(BP−1BT A
AT 0
)−1
=(
Qkk Qkx
QTkx −Qxx
). (2.90)
Unter Verwendung einer Normalgleichungsmatrix Na
Na = BP−1BT (2.91)
konnen wir obige Kofaktormatrizen auch explizit angeben:
Qxx = (AT N−1a A)−1, (2.92)
Qkk = N−1a −N−1
a AQxxAT N−1
a (2.93)

22 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2
beziehungsweise
QXX = Qxx, (2.94)Qww = Na, (2.95)Qvv = P−1BT QkkBP−1, (2.96)QLL = QLL −Qvv. (2.97)
2.4.3 Varianz der Gewichtseinheit a posteriori
Am Beginn der Ausgleichung wurde im stochastischen Modell a priori aus derKovarianzmatrix der Faktor σ2
0 - die Varianz der Gewichtseinheit - herausge-hoben und damit die Kofaktormatrix Q bestimmt. Dies hatte den Grund vorallem auch darin, dass in vielen Fallen die tatsachlichen Genauigkeitsverhaltnis-se a priori gar nicht bekannt sind, sondern nur die relativen Genauigkeiten derBeobachtungen untereinander angegeben werden konnen. Fur die Gewichtungder Beobachtungen war diese Information ausreichend.
Im Zuge des Ausgleichungsverfahrens haben wir nun neben den ausgegliche-nen Großen im letzten Abschnitt auch deren Kofaktormatrizen erhalten. Wirkonnten nun die Varianz der Gewichtseinheit wieder mit den einzelnen Ko-faktormatrizen multiplizieren und erhalten so Kovarianzmatrizen, z.B. fur dieausgeglichenen Unbekannten
ΣXX = σ20QXX . (2.98)
Ublicherweise verwenden wir allerdings nicht das theoretische a priori-Modellzur Angabe der Genauigkeiten der aus empirischen Beobachtungen bestimmtenParameter, sondern ebenfalls ein empirisches Modell. Dazu greifen wir auf dieallgemeine Definition der Varianz zuruck. Demnach erhalt man die Varianz ausder Quadratsumme der Verbesserungen, dividiert durch die Anzahl der Frei-heitsgrade. Wir verwenden nun nicht die einfache Quadratsumme, sondern diegewichtete Quadratsumme vT Pv (2.2), die die Grundlage des Ausgleichungs-verfahrens ist, und dividieren sie durch die Anzahl der Freiheitsgrade. Damitergibt sich fur die empirische Varianz der Gewichtseinheit:
s20 =
vT Pvnf
(2.99)
wobei - je nach verwendetem Verfahren - fur nf entweder nfv oder nfbeinzu-
setzen ist.
2.4.4 Varianzen, Kovarianzen und Standardabweichungender ausgeglichenen Großen und ihrer Funktionen
Man kann nun jede der oben erhaltenen Kofaktormatrizen mit der empirischenVarianz der Gewichtseinheit multiplizieren und erhalt somit empirischen Kova-rianzmatrizen:
CXX = s20 ·QXX , (2.100)
CLL = s20 ·QLL, (2.101)
Cvv = s20 ·Qvv. (2.102)

2.4. STOCHASTISCHES MODELL A POSTERIORI 23
In den Hauptdiagonalen dieser Kovarianzmatrizen stehen die Varianzen der je-weiligen Großen, die restlichen Elemente geben die Kovarianzen und somit dielinearen stochastischen Zusammenhange zwischen den einzelnen Großen an.
Die positiven Quadratwurzeln aus den Hauptdiagonalelementen sind die ent-sprechenden Standardabweichungen.
Neben den Varianz-Kovarianz-Informationen der Vektoren X, L und v kon-nen wir auf ebendiese Vektoren im Anschluss an die Ausgleichung noch weite-re Funktionen anwenden und unter Verwendung des allgemeinen Varianzfort-pflanzungsgesetzes auch die Standardabweichungen dieser Funktionen angeben.Funktionen der ausgeglichenen Unbekannten haben zum Beispiel die empirischeKovarianzmatrix
Cff = FCXXFT = s20 · FQXXFT (2.103)
woraus wir in der Hauptdiagonalen die Varianzen bzw. durch Wurzelziehen dieStandardabweichungen der Funktionen angeben konnen.

24 KAPITEL 2. METHODE DER KLEINSTEN QUADRATE 2

Kapitel 3
Datumsproblematik
Bei der Behandlung von Ausgleichungsproblemen nach der Methode der klein-sten Quadrate sind wir bisher immer davon ausgegangen, dass die Normalglei-chungsmatrix regular ist. Mit dieser Annahme kann beispielsweise die Ausglei-chung nach vermittelnden Beobachtungen mit Hilfe der Inversion gelost werden.Wenn wir uns jedoch ein einfachen Beispiel ansehen, werden wir schnell feststel-len, dass die Regularitat nicht immer gegeben ist:
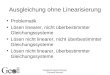
Betrachten wir einmal die in Abbildung 3.1 dargestellten Aufgabe. In demDreieck wurden alle drei Winkel gemessen. Da nur zwei Winkel notwendig sind,um die Geometrie zu beschreiben (der dritte Winkel ergibt sich ja aus der Dif-ferenz zu 200g), liegt ein Ausgleichungsproblem vor. Trotzdem ist es uns nichtmoglich, Koordinaten fur die Punkte anzugeben oder auch nur die Strecke zwi-schen zwei Punkten zu bestimmen. Der Grund dafur ist, dass die verwendeteBeobachtungen Relativbeobachtungen sind. Das trifft auf viele in der Vermes-sung ubliche Beobachtungen zu. Wir messen also keine absoluten Koordinatensondern nur Koordinatendifferenzen und keine absoluten (orientierten) Richtun-gen sondern nur relative Richtungen. Diese Beobachtungen legen Beziehungenzwischen zwei Punkten fest und definieren in ihrer Summe die innere Geome-trie des Netzes. Zur Bestimmung von Koordinaten enthalten die Beobachtungenjedoch keine oder nur unzureichende Informationen.
Wenn wir das Dreieck aus Abbildung 3.1 nun in eine ubergeordnetes Koor-dinatensystem einbetten wollen, so stellen wir fest, dass wir Position und Großeim Koordinatensystem nicht kennen. Falls wir trotzdem versuchen, eine ver-mittelnde Ausgleichung zu rechnen, wird die Designmatrix A und in weitererFolge auch die Normalgleichungsmatrix N singular. Um die absolute Positionder Figur festzulegen, musste (wie es bisher immer der Fall war) ein Punkt koor-dinativ vorgegeben werden. Die Orientierung der Figur benotigt zusatzlich dieAngabe einer Richtung fur eine der Seiten und schließlich ist auch der Maßstabunbekannt, da keine Streckenmessungen vorliegen. Orientierung und Maßstabkonnen wir beispielsweise durch Azimut- und Streckenmessungen bestimmen.Beides konnen wir aber auch bestimmen, indem wir einen zweiten Punkt koor-dinativ vorgeben. Wir sehen also, dass wir die Informationen uber die Lagerungder Figur nicht aus den Beobachtungen bekommen sondern durch Informationenuber bekannte Punkte. In Summe mussten wir also maximal vier Koordinatenfesthalten um die Lagerung des Dreiecks eindeutig festzulegen. Beim zu losendenProblem handelt es sich also um die Lagerung der lokalen Geometrie in einem
25

26 KAPITEL 3. DATUMSPROBLEMATIK
Abbildung 3.1: Ein Dreieck, in dem alle drei Winkel gemessen wurden. In ei-nem Koordinatensystem bleiben als freie Parameter Position, Orientierung undMaßstab.
X
Y
X
Y
12
3
1
1
2
2
3
3
ubergeordneten Koordinatenrahmen. In der Vermessung spricht man auch vonder Bestimmung des (geodatischen) Datums.
”Bei einer geodatischen Datumsfestlegung wird ein eindeutiger Bezugzwischen der aus Messungen bestimmten Geometrie des Netzverbundesund dem Koordinatenrahmen hergestellt, ohne die innere Geometrie zuzerstoren.“ (Niemeier, 2002, S. 230)
Der Parameter Maßstab in obigem Beispiel ist jedoch ein Sonderfall. In unse-rem Beispiel ist er nicht durch Beobachtungen festgelegt. Wenn wir Strecken-beobachtungen durchfuhren, so erhalten wir einen (Naherungs-)Wert fur denMaßstab. Dieser muss allerdings nicht mit dem Maßstab im Koordinatensystemubereinstimmen, da manche Koordinatensysteme explizit Streckenverzerrungeneinfuhren1. Zusatzlich kann naturlich auch das verwendete Messgerat einen bis-her nicht bekannten Maßstabsfaktor aufweisen, der unser Ergebnis beeinflusst.
Naturlich gibt es auch in der Geodasie Messmittel, mit denen absolute Wer-te bestimmt werden konnen. Kreiselmessungen und astronomische Azimute be-stimmen absolute Richtungen, barometrische Hohenmessungen liefern absolutePunkthohen und eine GPS-Einzelpunktbestimmung ergibt absolute Punktko-ordinaten. Es hat sich jedoch gezeigt, dass diese Methoden nur schwer mitvorhandenen Koordinatensystemen (z.B. der Landesvermessung) in Einklangzu bringen sind. Das liegt vor allem auch daran, dass diese Koordinatensystememeist von einem oder mehreren Punkten ausgehend sukzessive erweitert wurden.Die dabei aufgetretenen, nicht eliminierbaren Abweichungen erschweren heutedie Definition eines eindeutigen funktionalen Zusammenhanges zwischen diesemKoordinatensystem und dem System, in dem der absolute Messwert ermitteltwurde. Dazu kommt naturlich noch, dass auch diese ”absoluten“ Werte eigent-lich nur relative gemessen wurden - namlich relativ zur Rotationsachse der Erde,relativ zur eingestellten Hohe oder relativ zu den verwendeten GPS-Satelliten.
1Vergleiche die Streckung von gemessenen Distanzen fur die Gauß-Kruger-Abbildung.

3.1. DAS MATHEMATISCHE PROBLEM 27
Nicht immer ist es jedoch ein unbestimmtes geodatisches Datum, das die Un-bestimmtheit verursacht. Bei der praktischen Umsetzung von geodatischen Net-zen kann es durch unzureichende messtechnische Verknupfung zwischen Punk-ten bzw. Netzteilen ebenfalls zu Singularitaten in der NormalgleichungsmatrixN kommen. Da es sich um Probleme der Konfiguration handelt, sprechen wirin diesem Zusammenhang von Konfigurationsdefekten. Konfigurationsdefekteentstehen oft durch ”vergessene“ oder im Zuge einer Optimierung eliminierteBeobachtungen. Grundsatzlich sind solche Defekte naturlich vermeidbar. DieSuche nach solchen Defekten ist einfach, auch wenn sie bei umfangreichen Net-zen einen großen Arbeitsaufwand verursachen kann. Deshalb wurden auch Wegegesucht, Konfigurationsdefekte automatisch zu finden. Einen moglichen Ansatzdafur bietet die Graphentheorie. Falls der Graph (das Netz) in mehrere Teilezerfallt, so liegt definitiv ein Konfigurationsdefekt vor. Der Umkehrschluss istjedoch nur bei Nivellementnetzen moglich. Die Behandlung der entsprechendenAlgorithmen wurde jedoch weit uber den Rahmen dieses Textes hinausgehenund wird daher ausgeklammert. Wegen der Vermeidbarkeit und der einfachenAuffindbarkeit werden wir Konfigurationsdefekte hier nicht weiter behandeln.Sie wurden nur der Vollstandigkeit halber erwahnt2.
Im Rahmen dieses Kapitels werden wir nun untersuchen, welche Auswirkun-gen eine fehlende Bestimmung des geodatischen Datums auf unsere Extremwert-aufgabe hat und wie wir das Datum bestimmen konnen. Zunachst betrachtenwir nur das mathematische System und untersuchen, warum ein unbestimm-tes geodatisches Datum Probleme bei der Berechnung verursacht. Anhand eineseinfachen Beispieles werden wir uns auch uberlegen, wie das Problem behobenwerden kann. Wir werden auch sehen, wie bestimmte Beobachtungen Teile desgeodatischen Datums beinhalten und wie wir diesen Beobachtungen wieder ih-re volle Bewegungsfreiheit im Rahmen der Ausgleichung zuruckgeben konnen.Anschließend lernen wir die drei Standardverfahren fur die Datumsfestlegung,namlich ”gezwangte Ausgleichung“, ”zwangsfreie Ausgleichung“ und ”freie Aus-gleichung“, kennen. Die anschließende S-Transformation erlaubt uns einen ein-fachen Ubergang von einer Datumsfestlegung zu einer anderen. Einige abschlie-ßende Bemerkungen, beispielsweise uber die Festlegung des Datums in Netzender Landesvermessung, runden das Kapitel ab.
3.1 Das mathematische Problem
Ausgehend von einer Ausgleichung vermittelnder Beobachtungen ist das linea-risierte System nach (2.33)
v = Ax− l. (3.1)
Bisher war die (n, u)-Matrix A (n Beobachtungen, u Unbekannte) immer re-gular. Wenn wir von einem uberbestimmten System ausgehen, also ist n > ugilt, dann ist der Rang der Matrix gegeben durch:
rankA = u. (3.2)
2Und auch weil sie in der Praxis leider immer wieder vorkommen ...

28 KAPITEL 3. DATUMSPROBLEMATIK
Abbildung 3.2: Hohennetz mit drei Punkten
Hdh
1
12
H2
H3
dh13 dh
23
Die daraus bestimmte quadratische Form N ist dann (unabhangig davon, obwir eine Gewichtsmatrix einfuhren oder nicht) eine (u, u) Matrix mit Rang
rankN = rank(AT A) = rank(AT PA) = u. (3.3)
Die Matrix N ist symmetrisch, positiv definit und hat kein Rangdefizit. Matri-zen mit vollem Rang sind regular und regulare Matrizen haben eine eindeutigeInverse Qxx = N−1 (Zurmuhl und Falk, 1984). Die (Kofaktor-)Matrix Qxx istals Inverse einer regularen Matrix wiederum regular und besitzt vollen Rang.Wir konnen somit den Losungsvektor eines regularen Ausgleichungsproblemsgemaß (2.37) schreiben als
x = (AT PA)−1AT Pl. (3.4)
Um zu untersuchen, was ein unbestimmtes geodatisches Datum mathema-tisch bewirkt, gehen wir wieder von einem einfachen Beispiel aus: In einemDreieck wurden entlang der Dreiecksseiten Nivellementzuge gemessen (siehe Ab-bildung 3.2). Der Ansatz nach vermittelnden Beobachtungen liefert direkt einlineares Gleichungssystem:
dh12 = H2 −H1,dh23 = H3 −H2,dh31 = H1 −H3.
(3.5)
Daraus erhalten wir sofort die Designmatrix
A =
−1 1 0
0 −1 11 0 −1
. (3.6)
Diese Matrix hat jedoch einen Rangdefekt. Das erkennen wir unschwer, indemwir die drei Zeilen- oder Spaltenvektoren addiert. Bei einer Matrix ohne Rang-defekt gibt es fur
a1v1 + a2v2 + a3v3 = 0 (3.7)
(mit v1, v2 und v3 den Zeilen- oder Spaltenvektoren der Matrix A) nur die tri-viale Losung a1 = a2 = a3 = 0. Im vorliegenden Fall ist auch a1 = a2 = a3 = 1eine Losung und die Vektoren sind daher linear abhangig. Der aus der Abhangig-keit resultierende Rangdefekt bleibt auch bei der Bildung von AT PA bzw. AT A

3.1. DAS MATHEMATISCHE PROBLEM 29
erhalten, da das Ergebnis denselben Rang besitzt wie die ursprungliche MatrixA (Zurmuhl und Falk, 1984, S. 128). Eine Designmatrix mit Rangdefekt fuhrtalso zu einer singularen Normalgleichungsmatrix. Somit kann die vermittelndeAusgleichung nicht wie ublich uber x = (AT PA)−1AT Pl gelost werden.
Der Rangdefekt (auch: das Rangdefizit) ist in diesem Beispiel 1, es reichtalso, einen Zeilenvektor der Matrix A zu eliminieren, um des Rangdefekt zubeheben. Wir erhalten also nach Elimination einer Unbekannten eine MatrixAT PA mit vollem Rang. Das Rangdefizit wird meist mit d bezeichnet und esgilt
rankA = u− d, (3.8)
wobei u den maximalen Rang darstellt3.
Fur singulare Matrizen ist die inverse Matrix nicht definiert. Wir habenjedoch bereits in A1 mit den generalisierten Inversen eine Losung fur diesesProblem kennen gelernt. Die Moore-Penrose-Inverse muss einige Eigenschaftenerfullen, unter anderem muss
NN+N = N
fur die generalisierte Inverse N+ gelten. Problematisch ist dabei jedoch, dasses unendlich viele inverse Matrizen N+ gibt, von denen jede auf eine andereLosung fur die ausgeglichenen Unbekannten fuhrt. Jede dieser Losungen ist zu-dem mathematisch korrekt. Wir wollen jedoch eine eindeutige Losung fur unsereuberbestimmte Aufgabe, mussen also andere Wege beschreiten.
3.1.1 Direkte Losung
Neben der Moore-Penrose Pseudoinverse haben wir in A1 auch noch die Sin-gularwertzerlegung (z.B. Forsthuber et al., 1987) kennen gelernt. Jetzt wollen wiruns mit der Bjerhammar’schen Inverse4 (Bjerhammar, 1973) noch eine weitereMethode ansehen.
Ausgangspunkt der Uberlegungen ist ein Gleichungssystem
Cy = x. (3.9)
Dabei ist C eine Matrix mit m Zeilen und n Spalten, wobei m ≤ n und derRang r ≤ m ist. C ist somit im Allgemeinen eine liegende Rechtecksmatrix. DieLosung des Systems ist gegeben durch
y = CT (CCT )−1x (3.10)
wobei der Losungsvektor minimale Lange bekommt, also gilt
yT y = min . (3.11)3Im Falle der Ausgleichungsrechnung nach vermittelnden Beobachtungen ist der Rang der
Designmatrix maximal so groß wie die Anzahl der Beobachtungen. Das bedeutet dann, dass esgenau so viele linear unabhangige Vektoren gibt, wie Unbekannte vorhanden sind. In diesemFall ist der Rangdefekt klarerweise 0 und die resultierende Normalgleichungsmatrix regular.
4Arne Bjerhammar, schwedischer Geodat

30 KAPITEL 3. DATUMSPROBLEMATIK
Die Gultigkeit von (3.10) konnen wir leicht nachweisen. Eine generalisierte In-verse muss AA−1A = A erfullen. Der Beweis, dass die Matrix CT (CCT )−1
diese Bedingung erfullt, ist einfach:
C ·CT (CCT )−1
︸ ︷︷ ︸=I
·C = C
Gleichungssysteme der Art (3.9) haben wir bei der Ausgleichung bedingter Be-obachtungen bereits kennen gelernt5. Bei gleich genauen Beobachtungen, alsoP = I, erhalten wir den hier angegebenen Formelapparat. Bisher haben wirallerdings immer r = n gehabt, es war also kein Rangdefizit vorhanden und dieMatrix CCT war regular.
Wir definieren nun den Ausdruck CT (CCT )−1 als Bjerhammar’sche Nor-malinverse der Matrix C (Bjerhammar, 1958). Wenden wir die Normalinversenun auf ein singulares Normalgleichungssystem
Nx = n (3.12)
an (also m = n und r < n), so konnen wir mit C = CT = N (das Normalglei-chungssystem ist symmetrisch) fur den Losungsvektor x schreiben:
x = N(NN)−1n wobei gilt xT x = min . (3.13)
Fur den Losungsvektor x als Funktion der Beobachtungen l gilt also
x = N(NN)−1AT l = Dl. (3.14)
Nach dem Fehlerfortpflanzungsgesetz folgt fur die Kofaktormatrix Q der Unbe-kannten x wegen P = Q−1
ll = I
Q = DDT = N(NN)−1AT A(NN)−1N, (3.15)
alsoQ = N(NN)−1N(NN)−1N, (3.16)
mit der singularen Normalgleichungsmatrix N = AT A (bzw. N = AT PA beiungleich gewichteten Beobachtungen). Fur den Fall, dass N regular ist, folgensofort die bekannten Formeln Q = N−1 und x = QAT l.
Die Matrix Q in (3.16) heißt stochastische Ringinverse von N. Die Eigen-schaften von Q sind (ohne Beweis):
• Q ist quadratisch.
• Q ist symmetrisch.
• Q ist singular6, also gilt detQ = 0.
• Fur den Losungsvektor x gilt x = Qn, da nach Bjerhammar Matrizen derArt (3.16) eine inverse Matrix darstellen, die das konstante Gleichungssy-stem Nx = n ebenso unter der Bedingung xT x = min losen.
5Als BT v + w = 0.6Das gilt naturlich nur, wenn die Normalgleichungsmatrix singular ist. Bei einer regularen
Normalgleichungsmatrix wird die Matrix Q ebenfalls regular.

3.1. DAS MATHEMATISCHE PROBLEM 31
• Q hat minimale Spur, also gilt trQ = min.
• Die Spuren der Kovarianzmatrizen Q und der Normalinversen sind gleich,also gilt trQ = tr
[N(NN)−1
].
Die praktische Rechnung fuhrt zur singularen Normalgleichungsmatrix N. Nunbildet man die (ebenfalls singulare) Matrix NN, welche man durch Streichenvon d (Rangdefizit!) Zeilen und Spalten regular macht. Anschließend berechnetman den Losungsvektor x und seine Kofaktormatrix Q nach (3.13) bzw. (3.16)und fullt dann die gestrichenen Zeilen und Spalten wieder auf. Die Resultatehangen nicht davon ab, welche Zeilen und Spalten gestrichen werden.
Wegen der minimalen Spur besitzt der Losungsvektor eine interessante Ei-genschaft. Beim Ausgleichen eines freien Nivellementnetzes ist die Summe allerHohenanderungen gleich Null. Die Hohe des ”Schwerpunktes“ des Netzes bleibtjedoch unverandert. Entsprechend sind die Resultate bei anderen Netztypen.
Mit Hilfe der generalisierten Matrizeninversion kann auch die Methode derkleinsten Quadrate hergeleitet werden. Die entsprechenden Ableitungen findetman bei Koch (1975).
3.1.2 Pragmatische Losung
Wenn wir zum Beispiel 3.2 zuruckkehren, konnen wir uns auch uberlegen, wel-che anderen Moglichkeiten zur Elimination des Datumsdefektes wir haben. Dazumussen wir zunachst wissen, wie groß unser Datumsdefekt ist. Im Fall unseresNivellementnetzes ist der Datumsdefekt 1. Das Netz kann also beliebig um die z-Achse verschoben werden. Wir haben am Anfang des Abschnittes gesehen, dassdurch Elimination einer Unbekannten (also einer Punkthohe) das Rangdefizitbehoben wird. Geometrisch bedeutet das, dass fur einen Punkt eine Hohe vor-gegeben wird. Die anderen Punkthohen werden dann in Relation zu dieser einenHohe bestimmt. Die Festsetzung der Punkthohe kann beispielsweise mit einerabsoluten Hohenbestimmung durch ein Barometer erfolgen. Diese Punkthohe istdann mathematisch gesehen keine Unbekannte mehr, nimmt also an der Aus-gleichung nicht teil. Daher bekommen wir aber auch keine Kofaktoren fur diePunkthohe, konnen also keine Standardabweichung fur die Punkthohe angeben.Es liegt also eine eher willkurliche Festlegung des Datums vor, da wir im All-gemeinen nicht argumentieren konnen, warum gerade dieser Punkt festgehaltenwird und ein anderer Punkt nicht.
Bedingung fur die Hohen der Punkte
Zu einer anderen Losung gelangen wir, wenn wir eine Bedingung fur die Hohender Punkte einfuhren (Reißmann, 1976a). Eine mogliche Bedingung ware dieVorgang einer mittleren Hohe fur das Netz. Bei Vorgabe einer mittleren Hohe

32 KAPITEL 3. DATUMSPROBLEMATIK
von Null erhalten wir die folgende Bedingung:
3∑
i=1
Hi = H1 + H2 + H3 = 0 (3.17)
Wir haben das Problem also auf eine vermittelnde Ausgleichung mit Bedin-gungsgleichungen zuruckgefuhrt. Das Problem der Losung ist allerdings, dasssich bei Einfuhrung weiterer Punkte das mittlere Niveau verandert. Vor allembei der Ausgleichung großer Netze wird es aber vorkommen, dass man im Zugeder Fehlersuche Punkte ausschließt, wenn man in diesen Punkten Fehlerquel-len vermutet. Wenn man nun die Bedingung wie angegeben definiert, kann sichdie Hohe aller Punkte drastisch verschieben, wenn der ausgeschlossene Punktbeispielsweise der hochste oder niedrigste Punkt war.
Bedingung fur die Verbesserungen von Naherungswerten
Wir konnen auch Naherungswerte H0i fur die gesuchten Hohen definieren und
eine Bedingung fur die Verbesserungen einfuhren. Die Hohen konnten beispiels-weise alle barometrisch gemessen worden sein. Die Bedingung ist dann:
3∑
i=1
dhi = dh1 + dh2 + dh3 = 0 mit Hi = H0i + dhi. (3.18)
Diese Bedingung leitet sich aus einer Erweiterung zur ursprunglichen Extrem-wertaufgabe ab. Zusatzlich zu vT Pv = min wird noch die Bedingung xT x = mineingefuhrt. Es soll also die Quadratsumme der Koordinatenzuschlage minimalwerden.
Die Bedingung xT x = min abgeleitet und gleich Null gesetzt ergibt∑
2dhi = 0
oder eben (3.18).
Die hinzugefugte Bedingung ist im Ubrigen ein Eigenvektor zum Eigenwertλ = 0 der singularen Normalgleichungsmatrix N. Zur selben Losung kommt manauch mit anderen Eigenvektoren, also beispielsweise mit den normierten (Pelzer,1974b). Eine Moglichkeit zur Bestimmung der Bedingungen besteht also darin,eine Spektralzerlegung7 von N durchzufuhren und dann die Bedingungen ausden d Eigenvektoren zum d-fachen Eigenwerten λ = 0 zusammenzusetzen. Dasist insbesondere dann nutzlich, wenn der Defekt nicht von vornherein bekanntist.
Eine etwas andere Problematik stellen singulare Kofaktormatrizen fur dieBeobachtungen dar. Sie fuhren ebenfalls zu singularen Ausgleichungsproblemen,
7Eine Spektralzerlegung ist die Zerlegung einer Matrix N in ihre Modalmatrix M undSpektralmatrix S, sodass gilt: N = MSMT . Die Spektralmatrix S ist eine Diagonalmatrixmit den Eigenwerten λi in der Hauptdiagonalen; in M stehen spaltenweise die zugehorigennormierten Eigenvektoren. Da in unserem Fall die Matrix symmetrisch ist, bietet sich zur(programmgesteuerten) Berechnung von Eigenwerten und -vektoren das Jacobi-Verfahren an(siehe A1).

3.1. DAS MATHEMATISCHE PROBLEM 33
konnen aber nicht wie hier angegeben gelost werden. Fur die in dem Fall notwen-dige Vorgangsweise sei auf die entsprechende Fachliteratur verwiesen (Pelzer,1974c; Wolf, 1979b).
3.1.3 Geometrische Interpretation
Zu Beginn dieses Kapitels habe wir gesehen, dass geodatische Beobachtungenmeist relativer Natur sind und sie daher nur die innere Geometrie unseres Netzesbestimmen. Die absolute Positionierung des Netzes in einem ubergeordneten Ko-ordinatensystem (z.B. dem Landessystem) erfolgt durch Festlegung des Datums.Im Folgenden werden wir zunachst untersuchen, welche Arten von Datumsde-fekt bei den unterschiedlichen Netztypen auftreten und wie diese Parameterdurch die Wahl der Beobachtungen beeinflusst wird.
Datumsdefekte
Im Fall des Nivellementnetzes haben wir gesehen, das wir das Netz in Richtungder z-Achse verschieben konnen, ohne die innere Geometrie zu beeinflussen.Dieselben Uberlegungen mussen wir nun fur zwei- und dreidimensionale Netzeanwenden:
• 2D-Netze: An dem in Abbildung 3.1 gezeigten Beispiel eines Lagenetzeskonnen wir erkennen, dass wir das Dreieck verschieben, verdrehen undskalieren konnen, ohne die innere Geometrie zu zerstoren. Verschieben be-deutet dabei eine Translation des Netzes parallel zu den Koordinatenach-sen. Unter Drehung verstehen wir eine Drehung um die (bei der Punktlagenicht verwendeten) z-Achse. Die Skalierung bewirkt schließlich eine Anpas-sung des Maßstabes an den Maßstab des Koordinatensystems. Wir habenalso 4 freie Datumsparameter8, die wir zur Bestimmung des geodatischenDatums benotigen.
• 3D-Netze: Ein 3D-Netz lasst sich genau wie ein 2D-Netz um die x- und y-Achse verschieben. Dazu kommt jedoch noch eine Translation entlang derz-Achse. Somit haben wir im 3D-Fall drei Translationen. Das Netz kannnun auch um alle drei Koordinatenachsen gedreht werden. Das war imzweidimensionalen Fall nicht moglich, da sonst die Punkte die xy-Ebeneverlassen hatten. Somit haben wir zusatzlich 3 Rotationen. Schließlichkonnen wir auch einen Maßstab anbringen. Somit hat ein 3D-Netz 7 freieDatumsparameter.
Tabelle 3.1 fasst die unterschiedlichen Datumsparameter bei den verschiedenenNetztypen zusammen.
8Unter freien Datumsparametern verstehen wir also die Bewegungsmoglichkeiten unseresNetzes, die durch die Singularitat der Designmatrix ermoglicht werden.

34 KAPITEL 3. DATUMSPROBLEMATIK
Netwerktyp Datumsparameter Anz3D-Netzwerk 3 Translationen dx: in x-Richtung 7
dy: in y-Richtungdz: in z-Richtung
3 Rotationen wx: um x-Achsewy: um y-Achsewz: um z-Achse
1 Maßstab m: MaßstabsfaktorLagenetz Strecken 2 Translationen dx: in x-Richtung 4
dy: in y-Richtung1 Rotation wz: um z-Achse1 Maßstab m: Maßstabsfaktor
Richtungen 2 Translationen dx: in x-Richtung 3dy: in y-Richtung
1 Rotation wz: um z-AchseHohennetz 1 Translation dz: in z-Richtung 1
Tabelle 3.1: Maximal moglicher Datumsdefekt und freie Datumsparameter beitypischen Netzen (nach Kuang, 1996, S. 100)
Datumsbestimmende Anteile von Beobachtungen
Wie bereits zu Beginn dieses Kapitels anhand der Streckenmessung diskutiert,konnen einzelne Parameter des geodatischen Datums auch durch bestimmte Be-obachtungstypen definiert werden. Auch in Tabelle 3.1 erkennen wir, dass Lage-netze eine unterschiedliche Anzahl von Datumsparametern haben konnen. DieAnzahl ist hier abhangig, ob es sich um eine Triangulation (4 freie Datumspa-rameter) oder um eine Trilateration (nur 3 freie Datumsparameter) handelt.
Wenn wir uns die modernen Messmittel genauer betrachte, so stellen wirfest, dass wir die storenden Singularitat zumindest teilweise beseitigen konnen,indem wir geeignete Beobachtungen verwenden. So konnen wir beispielswei-se Maßstabsinformationen aus Streckenmessungen und Orientierungsinforma-tionen aus Azimuten ableiten. Wir mussen dann nur noch den verbleibendenDatumsdefekt behandeln. Wenn wir ”absolute“ GPS-Koordinaten oder GPS-Koordinatenunterschiede (Basislinien) als Messgroßen einfuhren, konnen wirden Datumsdefekt sogar noch weiter reduzieren. Wir hatten dann zumindestrein numerisch die Singularitat eliminiert bzw. stark reduziert. Problematischan dieser Methode ist jedoch die Ubereinstimmung zwischen Realisierung desGPS-Koordinatensystems und Realisierung des Koordinatensystems in dem dasNetz gerechnet werden soll. GPS-Koordinaten werden im WGS849 ermitteltund mussen in das benotigte Koordinatensystem transformiert werden. Die da-zu notwendigen Transformationsparameter mussen aus Passpunkten berechnetwerden. Dadurch erhalten wir wieder eine unerwunschte, willkurliche Festle-gung bestimmter Punkte als Datumspunkte. Wir werden daher nur sehr seltenden gesamten Datumsdefekt mit Hilfe von speziellen Beobachtungen eliminie-ren. Trotzdem ist es sinnvoll, uber die datumsbestimmenden Anteile der unter-
9World Geodetic System 1984

3.1. DAS MATHEMATISCHE PROBLEM 35
Dim. Netztyp Art der Beobachtung Datums- freie Parameterdefekt
f = 1 Hohennetz Hohenunterschiede d = 1 1 Translation
f = 2 Lagenetz Strecken und Azimute d = 2 Translation in x- undy-Richtung
Strecken oder Streckenund Richtungen
d = 3 2 Translationen, Rota-tion um z-Achse
Richtungen, Strecken-verhaltnisse, oder wiebei d = 3 inkl. Maß-stabsunbekannte
d = 4 2 Translationen, 1 Ro-tation, 1 Skalierung
f = 3 Raumnetz Strecken und Zenit-winkel oder Streckenund Horizontalrich-tungen oder Strecken,Horizontalrichtungenund Zenitwinkel
d = 4 Translation in x-, y-und z-Richtung, Rota-tion um die z-Achse
Horizontalrichtungenund Zenitwinkel oderwie bei d = 4 (f = 3)inkl. Maßstabsunbe-kannte
d = 5 3 Translationen, 1 Ro-tation, 1 Skalierung
Strecken d = 6 3 Translationen, Rota-tion um die x-, y- undz-Achse
wie bei d = 6 inkl.Maßstabsunbekannte
d = 7 3 Translationen, 3 Ro-tationen, 1 Skalierung
Tabelle 3.2: Netztypen mit dem jeweiligen Datumsdefekt und erforderlichenDatumsverfugungen(Auszug aus Niemeier, 2002, S. 213)
schiedlichen Beobachtungstypen Bescheid zu wissen. Tabelle 3.2 zeigt, wie sichdas Datum unterschiedlicher Netztypen andert, wenn bestimmte Beobachtungeneingefuhrt werden.
3.1.4 Datumsfreies Konzept und Zusatzparameter
Wir haben im letzten Abschnitt gesehen, dass unsere Beobachtungen nichtvollstandig relativer Natur sind. Viele Beobachtungen beinhalten auch Informa-tionen uber das geodatische Datum. Wir konnen also unterscheiden zwischendatumsbestimmenden und datumsfreien Informationen (Niemeier, 1987). Wiejedoch bereits im letzten Abschnitt diskutiert, ist es nicht immer sinnvoll, diedatumsbestimmenden Informationen vollstandig zu nutzen (vergleiche Uberle-gungen zu GPS). Somit sollte fur jedes Projekt separat gepruft werden, ob derdatumsbestimmende Anteil verwendet werden kann bzw. soll.
Tabelle 3.3 zeigt den Zusammenhang zwischen Messgroßen und datums-bestimmenden Informationen fur haufig verwendete Arten von Messdaten. Eszeigt sich wiederum die Bedeutung dieser Frage bei der Einbindung von GPS-Messungen, da GPS scheinbar alle Datumsparameter bestimmt.

36 KAPITEL 3. DATUMSPROBLEMATIK
Messgroße datumsbestimmende InformationenStrecken Maßstab des NetzesAzimute Orientierung um die z-Achsemind. 2 Zenitdistanzen Rotation um die x- und y-AchseHohendifferenzen Maßstab der HohenGPS-Koordinaten fur mind. 2Punkte
3 Translationen, 3 Rotationen, Maßstab
GPS-Koordinatendifferenzenfur mind. 2 Punkte
3 Rotationen, Maßstab
Tabelle 3.3: Datumsbestimmende Anteile ublicher Beobachtungen (Niemeier,2002, S. 220)
Bisher haben wir uberlegt, wie wir die datumsbestimmenden Informationenverwendet konnen, um den Datumsdefekt zu eliminieren. Manchmal ist es je-doch auch sinnvoll, die datumsbestimmenden Informationen durch Einfuhrungzusatzlicher Parameter zu eliminieren. Fur Streckenmessungen bedeutet das,dass die Messungen nicht mehr fur die Maßstabsbestimmung herangezogen wer-den. Der Maßstab muss dann uber andere Beziehungen ermittelt werden. Sinn-voll ist diese Methode vor allem dann, wenn systematische Einflusse nicht aus-geschlossen werden konnen. Wir werden nun fur die wichtigsten Beobachtungs-typen zeigen, wie die datumsbestimmenden Informationen eliminiert werdenkonnen.
Streckenmessung
Streckenbeobachtungen beinhalten Information uber den Maßstab des Netzes.Um diese Information zu eliminieren, mussen wir einen weiteren Maßstabsfaktoreinfuhren. Dies geschieht, indem der Maßstab in die Beobachtungsgleichungeingefugt wird. Der Maßstab wird im Allgemeinen nahe Eins liegen. Um dieUnbekannte moglichst kein zu halten, ist also ein Ansatz der Form (1 + m) furden Maßstabsfaktor sinnvoll.
Bei der Verwendung unterschiedlicher Distanzmessgerate kann es sich alssinnvoll erweisen, unterschiedliche Maßstabsfaktoren anzusetzen. Bei der Einfuhrungeines einzelnen Faktors wird das gesamte Netz gleichmaßig skaliert. Das kannbei unterschiedlichen Geraten oder sogar unterschiedlichen Messmethoden (z.B.elektronischen Distanzmessgeraten, optischen Messungen, Maßband-Messungen,differentiellen Weggebern) ungunstig sein. Die Maßstabsfaktoren werden danngruppenweise fur unterschiedliche Gerate oder Messmethoden angesetzt und ge-trennt bestimmt.
Die Beobachtungsgleichung mit Maßstab sieht folgendermaßen aus:
s12 = (1 + m)√
(x2 − x1)2 + (y2 − y1)2. (3.19)
Die Linearisierung erfolgt wie in A1 angegeben.

3.1. DAS MATHEMATISCHE PROBLEM 37
Azimutmessungen
Azimutmessungen konnen sowohl astronomische Azimute, als auch Kreiselazi-mute sein. Die Bedeutung von astronomischen Azimuten ist zwar zuruckgegan-gen, dafur werden am Kreiselazimute immer haufiger. Vor allem bei Tunnelver-messungen, bei denen GPS klarerweise nicht verwendet werden kann, werdenhaufig Kreiselazimute zur Richtungsstabilisierung verwendet. Azimutmessun-gen enthaltenen Information uber die Orientierung des Netzes (die Rotation umdie z-Achse). Diese Information kann eliminiert werden, indem eine weitere Ori-entierungsunbekannte eingefugt wird. Prinzipiell geht man davon aus, dass dieOrientierung durch die Azimutmessung naherungsweise korrekt ist. Somit wirddie zusatzliche Orientierungsunbekannte klein sein. Die Azimute selbst werdenmathematisch wie ein Richtungssatz behandelt. Die Beobachtungsgleichung furein Azimut hat somit dieselbe Form wie eine Richtungsbeobachtung.
t12 = atanx2 − y1
x2 − x1+ OA (3.20)
Dabei ist OA die Orientierungsunbekannte fur die Azimute und t12 eine Azi-mutmessung.
Wurden in einem Netz mehrere verschiedene Methoden oder unterschiedli-che Gerate verwendet, so konnen klarerweise unterschiedliche Orientierungsun-bekannte eingefuhrt werden. Jedes Gerat bzw. jede Methode erhalt dann eineeigene Unbekannte. Dadurch werden methodische Abweichungen bzw. Kalibrie-rungsfehler von Gerate berucksichtigt.
GPS-Koordinaten
GPS ist mittlerweile eine Standardmethode zur Messung großraumiger Netze.Die eigentlichen Beobachtungen (der GPS-Phasen) werden von speziellen Aus-werteprogrammen verarbeitet. Das Resultat sind dann entweder 3D-Koordinatenoder 3D-Basislinien (also Vektoren). Oft liefern die Programme zusatzlich nocheine Kovarianzmatrix. Die Ergebnisse werden in einem geozentrischen Koordi-natensystem (WGS84) berechnet und mussen dann noch in das verwendete Ko-ordinatensystem umgerechnet werden. Fur die Umrechnung gibt es zwei Ansatze(vergleiche Kapitel 9):
• Es gibt Parametersatze fur alle verwendeten Koordinatensysteme (z.B. dasosterreichische Landessystem M34). Diese Parameter werden nur nahe-rungsweise gelten, da lokale Abweichungen nicht berucksichtigt sind.
• Falls idente Punkte bekannt sind, konnen wir diese verwenden, um Trans-formationsparameter zu bestimmen. Hier gehen wir meist so vor, dass wirzunachst die Punkte transformieren (also von Lagerung WGS84 auf La-gerung Landessystem umrechnen) und sie dann erst verebnen (also dieProjektion des Landessystems anbringen).
In Tabelle 3.3 haben wir gesehen, dass GPS-Beobachtungen große Teile des Da-tumsdefektes losen konnen. GPS-Vektoren beispielsweise beinhalten die Rota-

38 KAPITEL 3. DATUMSPROBLEMATIK
tionen und den Maßstab, eine einzelne GPS-Koordinate auch die Translationen.In sich sind GPS-Datensatze meist sehr gut bestimmt, das Problem sind (wieschon angesprochen) die lokalen Abweichungen des zu verwendenden Koordi-natensystems. Diese lokalen Abweichungen konnen wir eliminieren, wenn wirdem GPS-Datensatz seine Bewegungsfreiheit wiedergeben. Dazu mussen wirZusatzparameter einfuhren, welche die datumsbestimmenden Anteile des GPS-Datensatzes eliminieren. Ein weiterer Vorteil ist, dass der Datensatz im Zielkoor-dinatensystem beweglich ist und somit sie Genauigkeit der Transformation nurmehr eine untergeordnete Rolle spielt - Abweichungen bei der Transformationwerden von den zusatzlichen Parametern aufgefangen. Daher konnen genaher-te Transformationsparameter verwendet werden. In der Netzausgleichung wirddann nu mehr die innere Geometrie des GP-Datensatzes verwendet. Es ist jedochauch moglich, Mischformen umzusetzen, bei denen einige datumsbestimmendeInformationen im Netz verwendet werden und andere nicht (beispielsweise kannder Maßstab aus den GPS-Vektoren ermittelt werden, die Rotationen jedochnicht). Im Folgenden diskutieren wir den Falle eines 2D-Netzes unter Verwen-dung von ”absolut“ gemessene Koordinaten (Niemeier, 2002, S. 224-226):
Wenn wir ein Netz einer Rotation oder einer Skalierung unterziehen, soandern sich nicht alle Koordinaten gleich stark. Punkte mit kleinem Abstandzum Rotations- oder Maßstabsursprung werden kleinere Anderungen erfahrenals solche, die weit entfernt vom Ursprung liegen. Nun wird fur den Ursprungoft der Schwerpunkt des Netzes gewahlt. Daher sollten auch die Anderungen inbezug auf den Schwerpunkt ausgedruckt werden. Wir gehen also aus von einerauf den Schwerpunkt bezogenen Polarkoordinatendarstellung:
x = xs + s cos t,y = ys + s sin t.
(3.21)
Dabei ist s die ”gemessene“ Strecke und t das ”gemessene“ Azimut. Fuhren wirnun fur die Strecke eine Maßstabsunbekannte ein und fur das Azimut eine Ori-entierungsunbekannte, so erhalten wir mit den entsprechenden Erweiterungen
s = (1 + m)s,t = t + oA
(3.22)
ein geandertes Gleichungssystem der Form
x = xs + (1 + m)s cos(t + oA),y = ys + (1 + m)s sin(t + oA). (3.23)
Das Auflosen der Summe in Sinus und Cosinus liefert
x = xs + (1 + m)s cos t cos oA − (1 + m)s sin t sin oA,y = ys + (1 + m)s sin t cos oA + (1 + m)s cos t sin oA.
(3.24)
Wir haben nun ein neues Polarkoordinatensystem (s, t) eingefuhrt, in dem wirauch Koordinaten berechnen konnen. Dieser Koordinaten berechnen wir uber
x− xs = s cos t,y − ys = s sin t.
(3.25)
Wenn wir nun noch Translationen fur den Schwerpunkt erlauben, so habenwir die notwendigen beiden Translationen, den Maßstab und die Rotation als

3.2. STANDARDVERFAHREN 39
Zusatzparameter eingefuhrt:
x = xs + ∆x + (x− xs)(1 + m) cos oA − (y − ys)(1 + m) sin oA,y = ys + ∆y + (y − ys)(1 + m) cos oA + (x− xs)(1 + m) sin oA.
(3.26)
Dabei sind die Koordinaten (y, x) die mit GPS gemessenen Koordinaten. Zunachsterweitern wir die Gleichungen um x− x bzw. y − y und erhalten:
x = x− (x− xs) + ∆x + (x− xs)[(1 + m) cos oA − 1]− (y − ys)(1 + m) sin oA,y = y − (y − ys) + ∆y + (y − ys)[(1 + m) cos oA − 1] + (x− xs)(1 + m) sin oA.
Nach einfachen Umformungen erhalten wir jetzt die endgultigen nichtlinearenVerbesserungsgleichungen
x = x + ∆x + (x− xs)[(1 + m) cos oA − 1]− (y − ys)(1 + m) sin oA,y = y + ∆y + (y − ys)[(1 + m) cos oA − 1] + (x− xs)(1 + m) sin oA.
(3.27)
3.2 Standardverfahren
Nachdem wir uns bisher die mathematischen Moglichkeiten angesehen haben,kommen wir nun zu praktischen Vorgangsweisen. Die besprochenen Verfahrensind die, die sich in der geodatischen Praxis bewahrt haben. Problematisch istjedoch, dass die anfanglich verwendete Definition der Datumsfestlegung, nachder die Festlegung des Datums die innere Geometrie nicht zerstoren darf. Leiderist das nicht bei allen Verfahren der Fall. Wenn wir beispielsweise ein Netz inein vorhandenes Festpunktfeld einschalten und mehr Festpunkte verwenden alsfur eine exakte Datumsfestlegung notwendig, so wird sich die Geometrie desNetzes an die Geometrie der Festpunkte anpassen mussen, also verzerrt werden.Trotzdem werden wir auch diesen Fall (die ”hierarchische Ausgleichung“) als
”Datumsfestlegung“ bezeichnen.
3.2.1 Zwangsfreie Ausgleichung
Die Grundidee der zwangsfreien Lagerung ist simpel. Wenn wir ein Netz mitDatumsdefekt d ausgleichen sollen, so konnen wir den Datumsdefekt durch Eli-mination von d geeigneten Unbekannten losen. Die Elimination erfolgt dadurch,dass die Werte fur d Unbekannte vorgegeben werden. Die Unbekannten werdenalso zu bekannten Parametern. Dadurch entfallen die entsprechenden Spaltenin der A-Matrix bzw. aus dem Parametervektor x und das Rangdefizit ver-schwindet. In der Praxis werden wir dies durch Einfuhrung von (koordinativbekannten) ”Festpunkten“ erreichten. In einem Lagenetz mit Rangdefekt d = 4benotigen wir also 2 Festpunkte. Das Eliminieren von Unbekannten aus derAusgleichung bedeutet aber gleichzeitig, dass diese Unbekannten auch in derQxx nicht mehr enthalten sind. Wir konnen also fur diese Unbekannten keineGenauigkeiten angeben.
Eine andere Sichtweise auf diesen Ansatz ist folgende: Zusatzlich zu unserervermittelnden Ausgleichung fuhren wir d Bedingungen der Form xi = ai mit

40 KAPITEL 3. DATUMSPROBLEMATIK
expliziten Werte fur ai ein. Die Losung dieses Ausgleichungsproblems erfolgt nundurch Elimination von Unbekannten. Mit jeder eingefuhrten Bedingung kanndie entsprechende Unbekannte aus der vermittelnden Ausgleichung eliminiertwerden.
Da wir bei der Festlegung des Datums nur so viele Unbekannte eliminie-ren wie unbedingt notig, bleibt die innere Geometrie unverandert; es wird alsokein Zwang ausgeubt. Daher wird diese Art der Datumsfestlegung auch varianz-freie Berechnungsbasis (engl. zero-variance computational base) genannt. DieseBezeichnung druckt aus, dass wir fur die festgehaltenen Unbekannten keine Va-rianzinformationen bekommen. Wir mussen jedoch immer beachten, dass dieVarianzen der berechneten Koordinaten von der Wahl der festgehaltenen Koor-dinaten abhangen.
Wenn andere Koordinaten festgehalten werden, werden sich die Varian-zen im Allgemeinen andern. Die Fehlerellipsen haben daher keine objek-tive Aussagekraft (Mittermayer, 1971).
Wichtig ist auch, dass nicht jede Kombination von festgehaltenen Koordinatenden Rangdefekt auch wirklich lost. Prinzipiell muss jede verwendete Dimensionbei den gestrichenen Koordinaten vorkommen. Bei einem Lagenetz mussen alsosowohl x, als auch y-Koordinaten gestrichen werden. Im dreidimensionalen Fallwird es sogar noch schwieriger. Wenn man drei Vollpasspunkte10 verwendet, hatman die Moglichkeit, drei Rotationen, drei Skalierungen und drei Maßstabe alsDatumsparameter anzusetzen. Wenn sich die Passpunkte jedoch auf einer Liniebefinden, ist das resultierende System immer noch singular (das gesamte Netzkann dann um diese Linie gedreht werden).
3.2.2 Freie Ausgleichung
Von freier Lagerung sprechen wir, wenn einerseits die innere Geometrie durchdie Lagerung nicht beeinflusst wird und andererseits auch die Datumspunktean der Ausgleichung teilnehmen. Somit konnen wir auch fur die DatumspunkteGenauigkeiten angeben. Wir unterscheiden bei der freien Lagerung zwischenGesamtspurminimierung und Teilspurminimierung. Im ersten Fall ist das Datumdurch alle vorhandenen Netzpunkte bestimmt, wahrend im zweiten Fall nureine Auswahl von Netzpunkten das Datum festlegt. Wir werden zunachst dieGesamtspurminimierung besprechen und dann die Teilspurminimierung ubereine Erganzung zur Gesamtspurminimierung herleiten.
Ansatz
In Abschnitt 3.1.2 haben wir eine Losung gesehen, bei der wir den Datums-defekt durch Einfuhrung einer Bedingung fur die Unbekanntenzuschlage gelosthaben. Bei einem Lagenetz konnen wir analog einem Hohennetz vorgehen (Reiß-mann, 1976b). Da der Datumsdefekt bei einem Lagenetz maximal den Wert 4
10Bei einem Vollpasspunkt werden alle drei Koordinaten festgehalten.

3.2. STANDARDVERFAHREN 41
(2 Translationen, 1 Rotation, 1 Maßstab) annehmen kann, benotigen wir bis zuvier Bedingungen (analog zur zwangsfreien Lagerung wo bis zu 4 Unbekannteeliminiert wurden). Falls einer oder mehrere Datumsparameter durch Beobach-tungen abgedeckt ist (z.B. der Maßstab durch gemessene Strecken), entfallt dieentsprechende Bedingung. Zur Bestimmung der Bedingungen gehen wir wie-der aus von xT x = min (Mittermayer, 1971; Wolf, 1972). Die Betrachtung derdifferentiellen Datumsanderungen unter dieser Bedingung fuhren zu den untenabgegebenen Gleichungen (Kuang, 1996, S. 106-107). Dabei sind die dxi unddyi die Zuschlage auf die Naherungskoordinaten xi und yi (Niemeier, 2002, S.215).
Translation in x∑
dxi = 0Translation in y
∑dyi = 0
Rotation um z∑
(yi dxi − xi dyi) = 0Maßstab
∑(xi dxi + yi dyi) = 0
(3.28)
Diese Bedingungen entsprechen den Forderungen der Helmert-Transformation(z.B. Kahmen, 1993, S. 281), die wir spater noch behandeln werden. Die Me-thode ist gleichzeitig aber auch eng verwandt mit den Losungen, die uber ver-allgemeinerte Matrizen (siehe Abschnitt 3.1.1) arbeiten (Mittermayer, 1972).
Es erfolgt ein ”Einschwimmen“ der inneren Netzgeometrie auf die gegebe-nen Naherungskoordinaten bzw. das Netz wird auf die Naherungskoordinaten
”aufgefeldert“ (Wolf, 1973). Die Naherungskoordinaten sind dabei von großerBedeutung, da sie das Zielkoordinatensystem reprasentieren.
Die Matrix fur die Bedingungen ergibt sich zu
GT =
0 1 . . . 0 11 0 . . . 1 0
−xi yi . . . −xm ym
y1 x1 . . . ym xm
. (3.29)
Dabei sind die Parameter in x in der Reihenfolge y, x eingefuhrt. Diese Bedin-gungsgleichungen werden auch Hansen’sche11 Bedingungsgleichungen genannt(Hansen, 1839). Unsere Bedingungen in (3.28) sind Bedingungen zwischen denKoordinatenzuschlagen. Diese haben am Beginn der Berechnung keinen Wert.Daher setzen wir den Widerspruchsvektor w gleich dem Nullvektor 0. Das er-weiterte Normalgleichungssystem lautet somit:
(AT PA GGT 0
)(xk
)=
(AT Pl
0
). (3.30)
Die Berechnung erfolgt wie bei einer ”Ausgleichung vermittelnder Beobachtungenmit Bedingungen“ ublich. Die Auflosung liefert neben den Unbekannten auchihre Kofaktormatrix Qxx:
(AT PA GGT 0
)−1
=(
Qxx Qxk
QTxk Qkk
). (3.31)
Die Anzahl der Freiheitsgrade dieses Ausgleichungsproblems ist gleich n−u+d;daher ist
s0 =
√vT Pv
n− u + d. (3.32)
11Peter Andreas Hansen, deutscher Astronom und Geodat, 1795 - 1874

42 KAPITEL 3. DATUMSPROBLEMATIK
Diese Methode heißt auch Randerungsmethode, da die Normalgleichungsmatrixam Rand erweitert (gerandert) wird. Die Matrix G wird dementsprechend auchals Randerungsmatrix bezeichnet.
Bei einem 3D-Netz gehen wir analog vor. Wir haben dann einen Datums-defekt von maximal 7: 3 Translationen, 3 Rotationen und einem Maßstab. DieRanderungsmatrix ergibt sich hier zu (Daxinger und Stirling, 1995)
GT =
1 0 0 . . . 1 0 00 1 0 . . . 0 1 00 0 1 . . . 0 0 10 −z1 y1 . . . 0 −zn yn
z1 0 −x1 . . . zn 0 −xn
−y1 x1 0 . . . −yn xn 0x1 y1 z1 . . . xn yn zn
(3.33)
Anmerkung: Bisher hatten wir bei einer ”Ausgleichung vermittelnder Beob-achtungen mit Bedingungen“ die Koordinaten der Neupunkte als Unbekannte.Zwischen ihnen wurden die Bedingungen formuliert und mit Hilfe der Nahe-rungskoordinaten Widerspruche berechnet. Bei der Einfuhrung von Naherungs-werten fur die Unbekannten und der anschließenden Linearisierung der Bedingungs-und Verbesserungsgleichungen wurden stillschweigend die Koordinatenzuschlagezu den Unbekannten des Ausgleichungsproblems. Im Gegensatz dazu definierenwir bei der ”Anfelderung“ von vornherein Bedingungen zwischen den Koordi-natenzuschlagen.
Bereits in Abschnitt 3.1.2 haben wir festgestellt, dass die Zeilen der MatrixGT Eigenvektoren zum d-fachen Eigenwert λ = 0 der singularen Normalglei-chungsmatrix N sind. Diese Aussage gilt naturlich auch hier.
Gesamtspurminimierung
Nun haben wir die grundlegenden Formeln behandelt, die wir fur eine freieAusgleichung brauchen. Stellen wir nun die G-Matrix fur alle Netzpunkte nach(3.18), (3.29) oder (3.33) auf, so sprechen wir von der Datumsfestlegung mittelsGesamtspurminimierung. Das geodatische Datum (also schlussendlich die Ko-ordinaten der Netzpunkte) wird dabei in Abhangigkeit von allen an der Ausglei-chung teilnehmenden Punkten berechnet. Die einzige an G zu stellende Bedin-gung ist dabei, dass sie das Rangdefizit der Matrix der Beobachtungsgleichungenbzw. der Normalgleichungsmatrix ausgleicht.
Im Gegensatz zur zwangsfreien Lagerung erhalten wir bei der Gesamtspur-minimierung Varianzinformationen fur alle Koordinaten. Die resultierende Ge-nauigkeit wird dabei ”innere Genauigkeit“ genannt, d.h. die Genauigkeit ist nuraus den Messgroßen bestimmt (Meissl, 1962, 1969).

3.2. STANDARDVERFAHREN 43
Teilspurminimierung
Verwenden wir nicht alle Netzpunkte fur die Festlegung des geodatischen Da-tums, so sprechen wir von Teilspurminimierung. Es gibt eine ganze Reihe vonGrunden, warum wir manche Punkt nicht bei der Datumsfestlegung verwendenwollen. Drei Falle, in denen nicht alle Unbekannten verwendet werden sollten,sind einleuchtend:
• Wenn wir ein vorhandenes Netz verdichten, haben wir es mit zwei Artenvon Netzpunkten zu tun: bereits koordinativ bekannte Netzpunkte undneue Netzpunkte. Hier wird es zweckmaßig sein, das Netz nur auf denbereits bekannten Punkten zu lagern12.
• Die Qualitat der Naherungskoordinaten kann sehr unterschiedlich sein.Naherungskoordinaten aus einer Vorausgleichung haben eine wesentlichbessere Qualitat als solche, die uber GPS-Einzelpunktbestimmung ermit-telt oder sogar nur aus topographischen Karten abgegriffen wurden. DieTeilspurminimierung ermoglicht es nun, das Netz optimal auf die gut be-stimmten Punkte anpassen.
• In einem Ausgleichungssatz sind auch eine Anzahl Unbekannter enthal-ten, die keine Koordinaten reprasentieren (Additions- und Maßstabspa-rameter, Refraktionsunbekannte, Lotabweichungen, Orientierungsparame-ter, ...). Diese sind im Rahmen der Netzlagerung nicht geometrisch inter-pretierbar. Die Netzgeometrie sollte daher nur auf den Koordinaten derNetzpunkte gelagert sein, nicht jedoch auf den weiteren Unbekannten. So-mit verwenden wir fur die Bedingungen nur einen Teil der Unbekannten.
Das Grundmodell der Teilspurminimierung ist eine Anpassung der Randerungs-matrix an das Problem. Dies geschieht durch
Gi = EiG (3.34)
mit der Auswahlmatrix Ei. Die Auswahlmatrix definiert dabei, welche Unbe-kannten fur die Bestimmung des Datums verwendet werden. Sie ist eine (u, u)-Diagonalmatrix mit 0 oder 1 in der Hauptdiagonalen. Eine 0 zeigt an, dass dieentsprechende Unbekannte nicht an der Datumsbestimmung teilnimmt, ein Wertvon 1 bindet die Unbekannte in die Gi-Matrix ein. Die eigentliche Losung derAusgleichungsaufgabe erfolgt dann genau wie bei der Gesamtspurminimierung.
3.2.3 Gezwangte Ausgleichung
Die Vermessungen im Zuge der Landesvermessung (z.B. bei der Katastralver-messung) schreibt die Verwendung ”ubergeordneter“ Punkte mit unveranderli-chen, ”festen“ Koordinaten (Festpunkt) vor (z.B. Austrian Ministry for Econo-mics, 1994). Ursache dafur sind z.T. rechtliche Aspekte, da sich sonst ein auf
12Das ist zwar auch mit gezwangter Ausgleichung moglich, hat aber den Nachteil fehlenderVarianzinformationen fur die Datumspunkte (siehe Abschnitt 3.2.3). Wenn wir eventuell vor-handene Spannung aufdecken oder die Identitat von Punkten prufen wollen, durfen wir alsokeine gezwangte Ausgleichung durchfuhren.

44 KAPITEL 3. DATUMSPROBLEMATIK
Koordinaten basierender Kataster wie er in Osterreich vorliegt, nicht realisierenließe. Andererseits war diese Vorgangsweise die einzige Moglichkeit, um großeNetze auszugleichen, da eine Gesamtausgleichung beispielsweise des osterreichi-schen Festpunktfeldes nicht durchfuhrbar war. Somit wurden Verdichtungsnetzein vorhandene Netze eingeschaltet, wobei die Punkte der vorhandenen Netze un-verandert ubernommen wurden (vergleiche Helmert, 1880, S. 492-493). Werdendabei mehr Koordinaten festgehalten, als zur Losung des Rangdefektes notwen-dig, so sprechen wir auch von gezwangter Ausgleichung.
Da man dann ein Netz hierarchisch berechnet und zwangsweise an Fest-punkte anschließt, nennt man diese Art der Ausgleichung auch hierarchischeAusgleichung oder Ausgleichung unter Anschlusszwang . Formal lauft die Aus-gleichung wie eine zwangsfreie Ausgleichung ab. Der Anschluss besteht abernun aus mehr Koordinaten als notwendig ware (mehr als das Ausgleichen desRangdefektes erfordert). Die Festpunktkoordinaten sollen sich nicht verandern.Somit nehmen sie an der Ausgleichung gar nicht teil. Die entsprechenden Spal-ten im Ausgleichungsmodell werden ”gestrichen“13. Die Festpunktkoordinatenkonnen somit fur Messungen zwischen einem Festpunkt und einem Neupunktin den partiellen Ableitungen wie Konstante behandelt werden. Analog werdenMessungen zwischen Festpunkten in der Ausgleichung nicht berucksichtigt. Nurwenn sie einen datumsbestimmenden Anteil (z.B. Richtungsbeobachtung zwi-schen zwei Festpunkten zur Orientierung eines Richtungssatzes) haben, fließensie in die Ausgleichung ein. Diese Vorgangsweise hat folgende Auswirkungen:
• Die innere Geometrie des Netzes wird verzerrt. Die Starke der Verzerrunghangt dabei von der Gute der Anschlusspunkte ab. Im ubergeordnetenNetz vorhandene Spannungen werden auf den neuen Netzteil ubertragen.Daher handelt es sich streng genommen bei der gezwangten Ausgleichungnicht um eine Bestimmung des geodatischen Datums (vgl. Definition S.26).
• Da die Anschlusspunkte nicht an der Ausgleichung teilnehmen, konnenauch keine Genauigkeiten geschatzt werden. Somit kann z.B. keine Iden-titatsprufung fur diese Punkte stattfinden.
• Genauigkeits- und Zuverlassigkeitsmaße, die wir im nachsten Kapitel ken-nen lernen werden, sind von der Wahl der Festpunkte abhangig. Wir wer-den im nachsten Kapitel bei einem Beispiel sehen, wie stark sich die Maßeandern konnen.
3.3 Datumswechsel uber die S-Transformation
Ein wesentlicher Aspekt der Datumsfestlegung ist der, dass das Netz in eineubergeordnete Struktur eingepasst wird. Diese ubergeordnete Struktur (das Ko-ordinatensystem) ist dabei mit Hilfe der verwendeten Passpunkte realisiert. Um
13Analog wie bei der zwangsfreien Ausgleichung fuhren wir Bedingungen fur die Koordinatender Festpunkte ein und verwenden diese Bedingungen, um die Unbekannten aus dem Modellzu eliminieren

3.3. DATUMSWECHSEL UBER DIE S-TRANSFORMATION 45
eine echte Festlegung des geodatischen Datums zu haben, muss die Einpassungohne Verzerrung der inneren Geometrie erfolgen. Problematisch dabei ist, dasssich die Varianz-Kovarianzmatrizen der verschiedenen Datumsfestlegungen von-einander unterscheiden. Baarda14 hat eine Methode erarbeitet, mit deren Hilfezwischen verschiedenen Datumsfestlegungen gewechselt werden kann ohne einevollstandig neue Ausgleichung durchzufuhren. Das hierzu von ihm entwickelteWerkzeug ist die S-Transformation15 (Baarda, 1973). Dabei handelt es sich umeine differentielle Helmert-Transformation (siehe Kapitel 9), die auf die Para-metervektoren und die Kovarianzmatrizen angewendet wird (Illner, 1985).
Wir haben bisher ein bestimmtes geodatische Datum dadurch festgelegt,dass wir Bedingungsgleichungen hinzugefugt haben. Ein spezielles Datum i istalso gekennzeichnet durch die Auswahl von d Bedingungsgleichungen
GTi xi = 0. (3.35)
Diese Bedingungsgleichungen haben unser vermittelndes Ausgleichungsmodellerweitert zu (
N Gi
GTi 0
) (xi
k
)=
(n0
)mit n = AT Pl. (3.36)
Daraus erhalten wir uber die bekannte Ausflosung(
xi
k
)=
(N Gi
GTi 0
)−1 (n0
)=
(Q11,i Q12,i
Q21,i Q22,i
)(n0
)(3.37)
den Losungsvektor
xi = Q11,in (3.38)mit Qxx,i = Q11,i = Qi. (3.39)
Die Kofaktormatrix Qi der Unbekannten erhalten wir durch Gesamtinversiondes erweiterten Systems (3.36). Der in den Formeln (3.35) bis (3.39) verwendeteIndex i soll anzeigen, dass es sich bei Gi, xi und Qi um eine spezielle Losunghandelt, die von der Wahl des Datums i abhangig ist16. Die Ergebnisse sind alsodatumsabhangig.
Wenn wir die Matrix des Gesamtsystems (3.36) mit ihrer Inversen multipli-zieren, so erhalten wir bekanntermaßen die Einheitsmatrix:
(N Gi
GTi 0
)(Q11,i Q12,i
Q21,i Q22,i
)=
(I 00 I
). (3.40)
Fur die Einzelprodukte gilt also (jeweils vorausgesetzt, dass die Produkte auchwirklich existieren):
NQ11,i + GiQ21,i = I, (3.41)NQ12,i + GiQ22,i = 0, (3.42)
GTi Q11,i = 0, (3.43)
GTi Q12,i = I. (3.44)
14Willem Baarda, hollandischer Geodat, 1917 - 2005.15Das
”S“ steht dabei fur
”similarity“, es handelt sich also um eine
”similarity transforma-
tion“, also eine Ahnlichkeitstransformation.16Trotzdem ist diese Losung naturlich optimal!

46 KAPITEL 3. DATUMSPROBLEMATIK
Wenn wir nun die orthonormale17 (u, d)18-Eigenvektormatrix E der Ausglei-chungsaufgabe Nx = n berucksichtigen, so gelten folgende Beziehungen (ohneBeweis): AE = 0 und ET AT = 0. Multiplizieren wir nun (3.41) von links mitET , so ergibt sich
=0︷ ︸︸ ︷ET AT PAQ11,i + ET GiQ21,i = ET
ET GiQ21,i = ET . (3.45)
Die Bedingungsmatrix Gi besteht, wie auf Seite 32 erlautert, aus d linear un-abhangigen Zeilen. Diese Zeilen mussen zusatzlich linear unabhangig von der De-signmatrix A sein, da sie sonst den Datumsdefekt von A nicht beheben wurden.Somit liegen Gi und E im Sinne der linearen Algebra im selben Vektorraum unddas Produkt ET Gi ist regular (und somit invertierbar). Somit konnen wir (3.45)schreiben als
Q21,i = (ET Gi)−1ET . (3.46)
Wenn wir (3.46) nun in (3.41) einsetzen, so erhalten wir
NQ11,i + Gi(ET Gi)−1ET = I. (3.47)
Durch Einsetzen von (3.39) in (3.47) und eine einfache Umformung erhalten wirschließlich
NQi = I−Gi(ET Gi)−1ET . (3.48)
Diese transponierte Form dieser Matrix heißt Si-Matrix
Si = I−E(GTi E)−1GT
i = QiN. (3.49)
Betrachten wir nun eine Kofaktormatrix Qk, die durch eine andere Datums-festlegung Gk entstanden ist. Diese Kofaktormatrix multiplizieren wir von linksmit Si und von rechts mit ST
i . Daraus erhalten wir unter Berucksichtigung von(3.49)
SiQkSTi = QiNQkNQi. (3.50)
Die Matrix Qk lost jedoch das ursprunglichen (singulare) AusgleichungsproblemNx = n und ist somit eine verallgemeinerte Inverse von N. Somit gilt QkNQk =Qk bzw. NQkN = N. Dasselbe gilt fur Qi und N. Unter Verwendung dieserBeziehungen erhalten wir
SiQkSTi = QiNQi = Qi. (3.51)
Nun haben wir also einen Zusammenhang zwischen den Kofaktormatrizen zwei-er Datumsfestlegungen. Dieser Zusammenhang erlaubt uns einen problemlosenDatumswechsel. Das gilt naturlich nur, solange sich an dem grundsatzlichenAusgleichungsproblem nichts geandert hat, also solange wir uns innerhalb einund desselben Datumssystems bewegen.
Analog konnen wir auch den Losungsvektor xi transformieren. Dazu gehenwir aus vom ursprunglichen, nichtlinearen Normalgleichungssystem
Nx = n. (3.52)17Also: ET E = I.18Mit u Unbekannten und Rangdefizit d.

3.4. ABSCHLIESSENDE BEMERKUNGEN 47
Wir multiplizieren es von links mit Qi und erhalten
QiNx = Qin. (3.53)
Der Losungsvektor x in (3.53) ist ein beliebiger Losungsvektor, da ja (3.52) furalle Losungen des Gleichungssystems gilt. Somit durfen wir auch die spezielleLosung xk verwenden. Aus (3.53) folgt dann unter Verwendung von (3.49) dieBeziehung
Sixk = xi. (3.54)
Wir haben nun alle notwendigen Formeln fur die S-Transformation. Wollen wireine gegebene Losung (xk,Qk) im Datum k in das Datum i transformieren, soberechnen wir uns zunachst die Si-Matrix uber (3.49). Die eigentliche Transfor-mation erfolgt anschließend mittels der Beziehungen
xi = Sixk,
Qi = SiQkSTi .
(3.55)
Dieser Formelapparat ermoglicht uns somit ein a priori festgelegtes Datum imnachhinein zu andern. Dabei muss keine erneute Ausgleichung durchgefuhrtwerden und wir kommen daher ohne eine rechenintensive (also ”teure“) Matri-zeninversion aus.
Detaillierte Untersuchungen zur Verwendung der S-Transformation zur Aus-gleichung freier Netze bei unterschiedlichen Rangdefiziten findet man bei Illner(1983).
3.4 Abschließende Bemerkungen
3.4.1 Weiche Lagerung
Zunehmender Beliebtheit erfreut sich die Verwendung von stochastischer Vorin-formation uber die Qualitat der Anschlusspunkte (Grimm-Pitzinger und Otep-ka, 2003). Dieses Instrument ist sehr flexibel. Ausgangspunkt ist die Uberlegung,dass sehr haufig ein Genauigkeitsbereich fur die Koordinaten der Anschlus-spunkte bekannt ist. Wenn dieser Genauigkeitsbereich nicht deutlich besser alsdie erwartete Genauigkeit der Neupunkte ist, dann ist es nicht gerechtfertigt,sie als varianzfreie Festpunkte zu verwenden.
Fur die Erweiterung unseres Ausgleichungsmodells benotigen wir ein - even-tuell sogar nur fiktives - stochastisches Modell fur die Anschlusspunkte. Dazunehmen wir zunachst die schon bekannten Verbesserungsgleichungen her, elimi-nieren aber diesmal nicht die Spalten fur die Anschlusspunkte (die ja bisher alsFestpunkte nicht an der Ausgleichung teilgenommen haben). Die Spalten grup-pieren wir jetzt so, dass zuerst die Neupunkte und danach die Anschlusspunktestehen:
vN =(
AN AA
)(xN
xA
)− lN . (3.56)
Zugleich sollen nach der Ausgleichung die ausgeglichenen Koordinaten der An-schlusspunkte gleich den Koordinaten vor der Ausgleichung plus den Zuschlagen

48 KAPITEL 3. DATUMSPROBLEMATIK
sein, alsolA + vA = IAxA. (3.57)
Zusammen ergeben die beiden Gleichungen folgendes System:(
vN
vA
)=
(AN AA
0 IA
)(xN
xA
)−
(lNlA
). (3.58)
Dabei enthalt der ”Beobachtungsvektor“ lA die gegebenen Koordinaten der An-schlusspunkte als direkte Beobachtungen fur xA. Ein regulares System liegt vor,wenn die Anzahl der so eingefuhrten Koordinaten großer ist als das Rangdefizitdes Systems AN (des ”normalen“ Modells) und die eingefuhrten Koordinatendas Rangdefizit losen konnen (vergleiche Abschnitt 3.2.1). Fur lA fuhren wirdie Kovarianzinformation ΣAA ein, die oftmals aus pauschalen Abschatzungenbesteht19. Das stochastisches Modell ergibt sich somit zu
Σ =(
Σll 00 ΣAA
). (3.59)
Unser gesamter Verbesserungsvektor ist nun [vTN vT
A]. Auf diesen wenden wirnun die Forderung vT Pv → min an. Das fuhrt zu
vTNΣ−1
ll vN + vTAΣ−1
AAvA = min . (3.60)
Eine solche Funktion nennt man eine hybride Minimumsfunktion. Bei einersolchen Minimumsfunktion wird immer auch die innere Geometrie des Netzesverandert. Den Einfluss der Varianzen der Anschlusspunkte kann man uber dieWahl von ΣAA bzw. bei der ublichen Zerlegung
ΣAA = σ20AQAA (3.61)
uber den Varianzfaktor σ20A steuern. Diese Vorgangsweise hat zunehmend an
Bedeutung bei der Einpassung von GPS-Netzen in bestehende Koordinatensy-steme gewonnen. Das Verhaltnis zwischen σ2
0A und σ20 bestimmt, welcher Ein-
fluss starker gewichtet wird: die Koordinaten der ubergeordneten Netzpunkte(σ2
0A klein in Relation zu σ20) oder die innere Geometrie des Netzes (σ2
0A großin Relation zu σ2
0). In der Literatur sind fur diesen Ansatz unterschiedlicheNamen verwendet: ”Weiche Lagerung“, ”schwaches Datum“, ”teilweise dyna-mische Ausgleichung“ oder ”Ausgleichung mit stochastischer Vorinformation“.Die Herleitung der notwendigen Gleichungen fur eine bedingte Ausgleichung(die bei schwach uberbestimmten Problemen zu kleineren Gleichungssystemenfuhrt) findet man bei Borkowski (1973).
Eine etwas andere Herangehensweise an die Problematik schlagt Daxinger(1995) vor. Er schatzt den Einfluss der Varianzen der Festpunktskoordinatenauf die Beobachtungen mittels Fehlerfortpflanzungsgesetz ab und verandert dieVarianz der Beobachtungen in entsprechender Weise. Eine Diskussion verschie-dener Vorgangsweisen fur die Anwendung im osterreichischen Kataster findetsich bei Staudinger und Otepka (2001)).
19Oft wird angenommen, dass die Koordinaten gleich genau und stochastisch unabhangigsind. ΣAA ist dann eine Diagonalmatrix.

3.4. ABSCHLIESSENDE BEMERKUNGEN 49
3.4.2 Netze der Landesvermessung
In vielen Staaten liegen abgeschlossene, nationale Landesvermessungs-Operatevor und bilden die Grundlage fur Kataster und topographische Kartographie. Sieberuhen zumeist auf Theodolitmessungen, Maßstabsmessungen mit Invardraht-basis und astronomischen Messungen fur Lagerung und Orientierung. Dabeiwurde so vorgegangen, dass zunachst ein weitmaschiges Netz gemessen wur-de (das Netz erster Ordnung). Dieses Netz wurde dann schrittweise verfeinert(in Osterreich zweite bis funfte Ordnung und anschließend Einschaltpunkte mitHilfe von Polygonzugen). Streng ausgeglichen ist (hochstens) das Netz ersterOrdnung, sonst wurden nur Netzteile mit Koordinatenzwangen fur sich ausge-glichen.
Durch immer genauer werdende Messmethoden sowie internationale Zusam-menarbeit wurden Verzerrungen und Klaffungen immer offensichtlicher unduberschreiten bei weitem die Messgenauigkeit. Trotzdem wurden die traditionellerhaltenen Gebrauchskoordinaten konservativ weiter verwendet, da von ihnenwirtschaftlich-rechtlich bedeutsame Informationssysteme hangen. In Osterreichbasiert beispielsweise der gesamte Kataster auf dem Gebrauchsnetz. Grund-stucke werden durch Koordinaten spezifiziert. Das dabei verwendete Koordina-tensystem wird durch die verwendeten Festpunkte definiert. Somit wurde eineAnderung der Festpunktskoordinaten ohne Anderung der Punktlage auch eineVeranderung der Grundstuckskoordinaten bei einer Nachmessung verursachen.Zur Durchfuhrung einer solchen Anderung ware allerdings die Zustimmung desEigentumers notwendig...
Klaffungen zwischen den Koordinaten von Festpunkten entstehen aber nichtnur wegen der unterschiedlichen Standardabweichungen von alten und neuenMessungen. Auch die Erde selbst bewegt sich. Verschiebungen der Kontinental-platten fallen meistens nur bei Messungen zwischen Kontinenten auf. Eine Aus-nahme ist die San Andreas-Spalte in Kalifornien, wo es in den letzten hundertJahren zu Verschiebungen im Dezimeter- und teilweise sogar im Meter-Bereichgekommen ist. Zusatzlich bewegt sich aber auch die Erdoberflache. Muren sinddabei die auffalligste Art der Bodenbewegung. Viel haufiger sind jedoch langsamwandernde Hange (Rutschungshange). Dabei werden auch eventuell vorhandeneFestpunkte verschoben ohne dass dieser Vorgang durch einer Anderung der Ko-ordinaten berucksichtigt wird. Somit (bei neuerlicher Verwendung der verscho-benen Punkte) werden Fehler in das Netz eingefuhrt. Speziell bei der Detektionvon Rutschungshangen kann die Ausgleichungsrechnung Verwendung finden. Eswird dabei ein Testnetz zu zwei (genugend weit auseinander liegenden) Zeit-punkten gemessen. Einige Punkte liegen in Bereichen, von denen angenommenwird, dass sich der Boden bewegt, andere Punkte liegen in stabilen Teilen. Diebeiden Epochen werden zwangsfrei ausgeglichen. Anschließend wird mit statisti-schen Methoden untersucht, ob signifikante Unterschiede zwischen den Punktenvorliegen. Diese Methode ist die Deformationsanalyse. Eine genauere Beschrei-bung der Vorgangsweise findet sich in Kapitel 8.
Intern bemuht sich das BEV20, Schwachstellen zu orten und zu bereinigen.
20Bundesamt fur Eich- und Vermessungswesen, zustandig u.a. fur das Osterreichische Fest-punktfeld.

50 KAPITEL 3. DATUMSPROBLEMATIK
Ein einmaliges Abgehen von den Gebrauchskoordinaten, zufolge dem Stand derTechnik und Ubergang auf ein neues, konsistentes Koordinatensystem konnteein homogenes Netz schaffen, wurde aber auf langere Sicht die Probleme derlokalen und globalen Krustenbewegungen sowie des weiteren technologischenFortschritts nicht losen. Zusatzlich ware der administrative Aufwand fur dieAnderung samtlicher Koordinaten enorm. Die eigentliche Arbeit ware hier abernicht das Andern der Koordinaten (das konnte innerhalb einer Nacht automa-tionsgestutzt geschehen), sondern die juristische Seite des Problems. Es musstenamlich entweder jeder Grundeigentumer seine Zustimmung geben oder es wirdein Gesetz geschaffen, das diese Zustimmung in diesem speziellen Fall erlasst.
Nur Netze die in den letzten Jahren angelegt wurden basieren auf GPS.Solche Netze sind ublicherweise auch streng ausgeglichen. Bei der Nachfuhrungoder langer andauernder (uber Jahrzehnte hinweg) Nutzung des Netzes ergebensich jedoch dieselben Probleme wie oben beschrieben.
Eine mogliche Losung des Problems ware die Abkehr von den Koordina-ten und Ubergang zu Systemen die auf Messdaten aufbauen. Die Idee ist, dassman nicht die Koordinaten sondern die Messdaten samt Genauigkeitsangabenspeichert. Ublicherweise werden nur sehr selten Koordinaten wirklich benotigt.Die Absteckung von Punkten erfolgt polar, also mit gerechneten Messdaten.Flachenberechnungen konnen ebenfalls uber Messdaten durchgefuhrt werden.Die Kontrolle neu aufgenommener Daten erfolgt durch eine lokale Ausglei-chung21 und Beurteilung der resultierenden Genauigkeitsangaben. Diese Vor-gangsweise ist allerdings bisher nur angedacht und wurde noch nicht praktischdurchgefuhrt.
21Gemeint ist eine Ausgleichung aller Messdaten, die in einem bestimmten Bereich um dieneuen Messdaten jemals bestimmt wurden.

Kapitel 4
Qualitat von Netzen
4.1 Was ist Qualitat?
Eines der Probleme der Geodasie ist es von jeher, Aussagen uber die Qualitatder Beobachtungen und der Resultate zu machen. Bereits zu Beginn des 20.Jahrhunderts findet sich folgende Aussage:
”Selbst eine mit großter Sorgfalt vorgenommene Messung gibt nicht denabsolut richtigen Wert der gemessenen Große, sondern wird im allgemei-nen mit kleinen Fehlern behaftet sein. Werden die gemessenen Großenbenutzt, um aus ihnen andere Großen durch Rechnung zu ermitteln, sokonnen demnach diese ebenfalls nicht absolut richtig erhalten werden. Esentsteht nunmehr die Frage, was vorzukehren sein, damit die unvermeid-lichen Messungsfehler auf das erreichbare kleinste Ausmaß reduziert wer-den und welchen Einfluß die Ungenauigkeiten der Messungsdaten auf diegesuchte Große, das Ergebnis der vorgenommenen Operationen, ausubenkonnen.“ (Hartner et al., 1910)
Es ist also wichtig, einerseits die Qualitat unserer Beobachtungen selbst zu ken-nen, andererseits aber auch die Qualitat von abgeleiteten Großen zu ermitteln.Diese Forderung ist mittlerweile in (fast) allen Bereichen der Technik und invielen weiteren Gebieten zu finden. Die verwendeten Qualitatskriterien mussendabei
• allgemein anerkannt,
• nachvollziehbar,
• objektiv und
• adaquat
sein. In der Geodasie unterteilt man die Qualitat oft in zwei Kategorien:
51

52 KAPITEL 4. QUALITAT VON NETZEN
• Die Angabe der Genauigkeit1 druckt aus, wie prazise ein Werte be-stimmt wurde. Es handelt sich dabei um die statistische Verteilung derRealisierungen. Der Wert ist allerdings nur dann richtig, wenn die funk-tionalen Beziehungen zwischen den Messgroßen und den zu schatzendenParametern korrekt sind und die a priori getroffenen Annahmen uber dieStandardabweichung und Korrelation der Messgroßen zutreffen.
Die Genauigkeit kennzeichnet also die Qualitat des Entwurfes. Besondersdeutlich wird dies durch die Tatsache, dass wir auch ohne Messungenbereits Genauigkeitsabschatzungen fur die Unbekannten angeben konnen.
• Die Zuverlassigkeit2 bezieht sich auf die Kontrollmoglichkeiten, die imAusgleichungsmodell fur die Beobachtungen und die Auswirkungen vonAbweichungen auf die Unbekannten gegeben sind. Fur Geodaten ist esselbstverstandlich, die eigene Arbeit durch unabhangige Kontrollen zuuberprufen (vergleiche etwa Helmert, 1872, S. 1). Allerdings gibt es erstseit verhaltnismaßig kurzer Zeit ein theoretisches Fundament fur die Ab-schatzung von Zuverlassigkeiten (Baarda, 1968). Dadurch gibt es heuteobjektive Kriterien fur die Kontrollierbarkeit von Beobachtungen sowie furdie Abschatzung des Einflusses nicht aufdeckbarer Fehler auf die Unbe-kannten. Dementsprechend kann die Zuverlassigkeit als Qualitat der Rea-lisierung angesehen werden.
Zuverlassigkeitsmaße treffen Aussagen uber den Schutz vor groben Feh-lern und sind damit eher interne geodatische Kriterien. Daher kann manauch sagen, dass geodatische Messungen dann zuverlassig sind, wenn gro-be Fehler mit hoher Wahrscheinlichkeit aufgedeckt werden konnen undnicht aufdeckbare grobe Fehler ohne spurbaren Einfluss sind.
Eine sehr kompakte Ubersicht findet mach bei Murle und Bill (1984). DieseArbeit enthalt auch eine Beurteilung tatsachlich gemessener Netze hinsichtlichihrer Genauigkeit und Zuverlassigkeit.
4.2 Beurteilung der Genauigkeit
Wichtig bei der geodatischen Punktbestimmungen ist immer die Frage der erfor-derlichen bzw. der tatsachlich erreichten Genauigkeit. Geodatische Netze wer-den nicht aus Spaß gemessen sondern haben einen bestimmten Zweck. Um die-sem Zweck zu dienen mussen gewisse, vordefinierte Genauigkeitskriterien erfulltsein. Diese konnen vom Auftraggeber vorgegeben3 oder vom Geodaten aus derAufgabenstellung heraus abgeleitet sein4. Dafur gibt es verschiedene Genau-igkeitskriterien und -maße. Genauigkeitskriterien fur Punkte sind geometrisch
1engl. precision2engl. reliability3”Bestimmen Sie die Punkte auf der Staumauer mit 2mm Standardabweichung.“
4Aus der vermuteten Geschwindigkeit einer Rutschungs- oder Setzungsbewegung leitet manbei einer Deformationsanalyse die erforderliche Genauigkeit sowie der zeitliche Abstand derEpochen ab.

4.2. BEURTEILUNG DER GENAUIGKEIT 53
anschaulich und gerade deswegen in der Praxis am weitesten verbreitet. Dane-ben gibt es aber auch noch andere Genauigkeitsmaße fur Funktionen der Unbe-kannten oder fur das gesamte Netz (globale Genauigkeitsmaße). Wir werden imFolgenden die wichtigsten Genauigkeitsmaße fur geodatische Lagenetze (unbe-kannt sind die Lagekoordinaten x und y) angeben. Zu beachten ist dabei jedochimmer, dass die meisten Genauigkeitsmaße datumsabhangig sind.
Fur die Genauigkeit der Netzpunkte ist die Kofaktormatrix Qxx, bzw. dieKovarianzmatrix Σxx maßgeblich:
Σxx = s20Qxx mit s2
0 =vT Pv
ff . . . Anzahl der Freiheitsgrade. (4.1)
Zu beachten ist aber, dass s20 naturlich nur ein Schatzwert fur die Gewichtsein-
heit σ20 ist. Der Schatzwert wird umso genauer sein, je großer die Anzahl der
Freiheitsgrade f ist, also je großer die Differenz zwischen Beobachtungen undUnbekannten (n− u) ist.
Bei einer a-priori Ausgleichung (d.h. der Berechnung der KofaktormatrixQxx ohne Vorliegen von Beobachtungen) gilt:
Σxx = σ20Qxx, (4.2)
d.h. man geht von der a priori festgelegten Varianz der Gewichtseinheit σ20 aus.
Zu beachten ist dann jedoch auch, dass bei der Bestimmung von Konfidenzbe-reichen die χ2-Verteilung statt der F -Verteilung verwendet werden muss. Diesgilt fur alle im Folgenden angegebenen Formeln, in denen s2
0 vorkommt.
Um die Genauigkeitsmaße zu berechnen, greift man auf verschiedene Ele-mente der Qxx zu. Abbildung 4.1 zeigt, welche Elemente fur welche Genauig-keitsmaße notwendig sind. (Bei Vorliegen von Σxx sind einfach die qii durch diesii zu ersetzen).
Die Genauigkeit von Koordinaten wird in Form der Standardabweichungoder als mittlere Koordinatengenauigkeit angegeben. Fur Punkte sind Fehler-und Konfidenzellipsen, sowie unterschiedliche Punktlagefehler ublich, z.B. derHelmert’sche Punktlagefehler, den wir in A1 kennen gelernt haben. Zwischenverschiedenen Punkten konnen relative Fehler- und Konfidenzellipsen angege-ben werden. Außerdem konnen generell Genauigkeiten von Funktionen der Un-bekannten (also z.B. der Strecke zwischen zwei Punkten) angegeben werden. Diegesamte Matrix wird fur die folgenden Angaben verwendet:
• Konfidenzhyperellipsoid,
• Rayleigh-Relation,
• Eigenwertkriterien,
• Hauptkomponentenanalyse,
• Kriteriummatrix.

54 KAPITEL 4. QUALITAT VON NETZEN
Abbildung 4.1: Submatrizen der Kofaktormatrix. Die strichliert eingerahmtenWerte liefern die Genauigkeit der einzelnen Koordinaten, die durchgezogen ein-gerahmten Submatrizen die der Punkte und die strichpunktiert eingerahmtenSubmatrizen relative Genauigkeiten (von Funktionen der Unbekannten). Diegesamte Matrix wird verwendet um das Konfidenzhyperellipsoid zu bestimmenoder eine Hauptkomponentenanalyse durchzufuhren (nach Niemeier, 2002, S.254).
qx1x1
qx1y1
qy1x1
qy1y1
qx1x2
qx1y2
qy1x2
qy1y2
qx1x3
qx1y3
qy1x3
qy1y3
qx1xp
qx1yp
qy1xp
qy1yp
qx2x1
qx2y1
qy2x1
qy2y1
qx2x2
qx2y2
qy2x2
qy2y2
qx2x3
qx2y3
qy2x3
qy2y3
qx2xp
qx2yp
qy2xp
qy2yp
qx3x1
qx3y1
qy3x1
qy3y1
qx3x2
qx3y2
qy3x2
qy3y2
qx3x3
qx3y3
qy3x3
qy3y3
qx3xp
qx3yp
qy3xp
qy3yp
qxpx1
qxpy1
qypx1
qypy1
qxpx2
qxpy2
qypx2
qypy2
qxpx3
qxpy3
qypx3
qypy3
qxpxp
qxpyp
qypxp
qypyp
4.2.1 Lokale Genauigkeitskriterien
Genauigkeit einer einzelnen Koordinatenunbekannten
Ein gebrauchliches Kriterium zu Beurteilung von einzelnen Unbekannten istdie Bestimmung der Standardabweichung σxi einzelner Koordinatenunbekann-ter xi. Dies ist naturlich vor allem dort interessant, wo zu jeder Messstelle nurein einziger Wert ermittelt wird, also beispielsweise bei Hohen- und Schwerenet-zen. Fur 2D-Punkte wird die Angabe von Koordinatengenauigkeiten weniger oftverwendet, aber ist durchaus moglich. Aus der Kovarianzmatrix Σxx konnen dieStandardabweichungen von einzelnen Unbekannten direkt abgelesen werden, beider Kofaktormatrix muss noch die Varianz der Gewichtseinheit berucksichtigtwerden:
sxi = √sxixi und syi = √
syiyi , bzw.sxi = s0
√qxixi und syi = s0
√qyiyi .
(4.3)
Die Standardabweichungen sx und sy der einzelnen Unbekannten hangen jedochvon der - an sich zufalligen - Lage des Koordinatensystems ab. Daher wird dieseAngabe fur Lagenetze eher selten verwendet.

4.2. BEURTEILUNG DER GENAUIGKEIT 55
Abbildung 4.2: Standardabweichung der Strecke PP bei veranderlichem Rich-tungswinkel (E=Ellipse, F=Fußpunktkurve)
x
y
P (ξ,η)
s x
r
y
P
E
Ft
γ
s
s
(x,y)
Helmert’sche Fehlerellipse
Wir gehen aus von sx und sy, den Genauigkeiten der Koordinaten in Richtungder x- bzw. y-Achse. Der mittlere lineare Fehler des Punktes in einer beliebigenRichtung beschreibt die Fußpunktskurve einer Ellipse mit den Halbachsen Aund B. Die Herleitung dieser Tatsache ist nicht allzu schwer.
Wir gehen von folgender Konfiguration aus: Ein Punkt P mit den Koordi-naten x und y besitzt die Genauigkeiten sx und sy. Außerdem sei ein PunktP mit den Koordinaten ξ und η fehlerfrei gegeben (vergleiche Abbildung 4.2).Den Punkt P bewegen wir nun auf einer Kreisbahn um den Punkt P mit demfesten Radius r und untersuchen die Auswirkungen des Koordinatenfehlers aufdie Strecke. Es ist
r2 = (x− ξ)2 + (y − η)2 und somit2r dr = 2(x− ξ) dx + 2(y − η) dy.
Durch Anwendung des Fehlerfortpflanzungsgesetzes erhalt man
s2r =
(x− ξ
r
)2
s2x +
(y − η
r
)2
s2y. (4.4)
Wenn man die Gleichungen
ξ − x
r= cos γ,
η − y
r= sin γ
in (4.4) einsetzt, erhalt man
s2r = s2
x cos2 γ + s2y sin2 γ. (4.5)

56 KAPITEL 4. QUALITAT VON NETZEN
(4.5) ist jedoch die Gleichung der Fußpunktskurve einer Ellipse mit den Halb-achsen sx und sy (siehe Abbildung 4.2). Die Kurve wird konstruiert, indemTangenten an die Ellipse gelegt werden. Der Mittelpunkt der Ellipse wird nunauf die Tangente abgelotet und ergibt einen Punkt der Fußpunktskurve.
Die Ellipse nennt man ”mittlere Fehlerellipse nach Helmert“, manchmal auch
”Standard-Ellipse“. Fallt P auf die x- bzw. y-Achse, so ist γ = 0 bzw. γ = π2
und sr fallt mit den Halbachsen sx bzw. sy dieser Ellipse zusammen.
In (4.4) haben wir angenommen, dass sx und sy voneinander unabhangigsind, was in der Praxis allerdings nur selten vorkommt. Es lasst sich jedochnachweisen, dass auch bei sxy 6= 0 eine Beziehung ahnlich (4.5) gilt, welchezu einer Fußpunktskurve und zugehorigen Fehlerellipse fuhrt. Die notwendigeTransformation lautet:
t = +x cosϕ + y sin ϕ,
u = −x sin ϕ + y cos ϕ.
Vermittels des allgemeinen Fehlerfortpflanzungsgesetzes erhalt man aus der Ko-faktorenmatrix Qxx (oder des entsprechenden Anteils) die Kofaktorenmatrix imgedrehten System:
qtt = cos2 ϕqxx + 2qxy sin ϕ cos ϕ + sin2ϕqyy,quu = sin2 ϕqxx − 2qxy sin ϕ cos ϕ + cos2ϕqyy,qtu = cos ϕ sin ϕ(qyy − qxx) + qxy(cos2 ϕ− sin2 ϕ).
(4.6)
Wir fragen nun nach den Extremwerten bzw. nach den Richtungen, in die dieseauftreten. Die Ableitung nach ϕ ergibt:
dqtt
dϕ= −2 sin ϕ cosϕqxx + (cos2 ϕ− sin2 ϕ)2qxy + 2 sin ϕcosϕqyy = 0 (4.7)
und als Extremwertaufgabe gleich Null gesetzt:
0 = − 2 sin ϕ cos ϕ︸ ︷︷ ︸sin 2ϕ
(qxx− qyy) + (cos2 ϕ− sin2 ϕ)︸ ︷︷ ︸cos 2ϕ
2qxy. (4.8)
Vergleichen wir nun (4.6) mit (4.8), so erkennen wir, dass im Falle qtu = 0der Drehwinkel ϕ gleich der Richtung der maximalen Varianz (Θ) wird. Mitanderen Worten ist ϕ gleich der Richtung der maximalen Varianz, so gilt fur dieKofaktoren qtt und quu Unabhangigkeit und außerdem nehmen sie dabei nach(4.8) die extremen Werte an:
tan 2ϕmin,max =2qxy
qxx − qyy:= tan 2Θ, (4.9)
sin 2ϕextr = tan 2ϕ√1+tan2 2ϕ
= 2qxy√(qxx−qyy)2+4q2
xy
,
cos 2ϕextr = 1√1+tan2 2ϕ
= qxx−qyy√(qxx−qyy)2+4q2
xy
,(4.10)
cos2 ϕ =12(1 + cos 2ϕ) sin2 ϕ =
12(1− cos 2ϕ). (4.11)

4.2. BEURTEILUNG DER GENAUIGKEIT 57
Uberbestimmung Sicherheitswahrscheinlichkeitf 1− α1 29,32 33,35 36,610 37,9∞ 39,4
Tabelle 4.1: Sicherheitswahrscheinlichkeit 1−α fur die Helmert’sche Fehlerellipsein Abhangigkeit von der Anzahl der Freiheitsgrade des Netzes
(4.11) bzw. (4.10) wird in (4.6) eingesetzt:
Qttmin,max=
12(qxx + qyy)± 1
2
√(qxx − qyy)2 + 4q2
xy := qξξ, qηη. (4.12)
In Netzbildern wird anstelle der Fußpunktskurve meist nur die achsengleicheEllipse als Genauigkeitskriterium eingezeichnet. Ellipsen sind leichter zu hand-haben und mit den ublichen Hilfsmitteln auch wesentlich einfacher zu zeichnenals Fußpunktskurven. Dabei gelten fur die Helmert’sche Fehlerellipse folgendeBeziehungen:
A2F =
12(s2
x + s2y + w), (4.13)
B2F =
12(s2
x + s2y − w) (4.14)
mit der Hilfsgroße w2 = (s2x − s2
y)2 + 4s2xy.
Der Richtungswinkel Θ der Halbachse A berechnet sich aus5:
ΘF =12atan(
2sxy
s2x − s2
y
). (4.15)
Die Wahrscheinlichkeit dafur, dass die wahre Punktlage innerhalb der Hel-mert’schen Fehlerellipse liegt6, betragt - abhangig von der Anzahl der Frei-heitsgrade - zwischen 29 und 39%. Man musste die Achsen auf mehr als dasDoppelte vergroßern, um die Wahrscheinlichkeit auf 90% zu erhohen, und ummehr als das Dreifache, um sie auf 99% zu bringen. Flachenmaßig wurde die-se Ellipse dann den nahezu 10-fachen Bereich der Helmert’schen Fehlerellipseeinnehmen. Tabelle 4.1 gibt einige Beispiele fur Sicherheitswahrscheinlichkeitenbei unterschiedlichen Freiheitsgraden an.
Die Helmert’sche Fehlerellipse kann auch uber eine Spektralzerlegung vonQii (des zum Punkt i gehorenden Ausschnittes aus der Kofaktormatrix Qxx)ermittelt werden. Wir erhalten dann eine Spektralmatrix D mit den Eigen-werten λ1 und λ2 auf den Hauptdiagonalen und eine Modalmatrix S mit denEigenvektoren s1 und s2:
Qii = SiDiSTi =
(s1 s2
)(λ1 00 λ2
)(sT1
sT2
). (4.16)
5Achtung auf die Quadrantenregel!6eigentlich: Die Wahrscheinlichkeit dafur, dass die Fehlerellipse die wahre Lage des Punktes
uberdeckt.

58 KAPITEL 4. QUALITAT VON NETZEN
Nun gelten fur die Kenngroßen der Helmert’schen Fehlerellipse folgende Be-ziehungen (wobei s1x und s1y die Komponenten von s1 in x- bzw. y-Richtungsind):
A2F = s2
0λ1,B2
F = s20λ2,
tanΘF = s1x
s1y.
(4.17)
Genauigkeit eines Koordinatenpaares (Punktfehler)
Ein haufig benutztes skalares Kriterium zur Kennzeichnung der Punktgenauig-keit sind die so genannten Punktfehler. Man unterscheidet zwischen zwei Punkt-fehlermaßen:
• Helmert’scher (mittlerer) Punktfehler(Helmert, 1868; Jordan und Eggert,1948, S. 456-457)
s2H = s2
x + s2y = s2
0 trQii = s20(λ1 + λ2), (4.18)
• Werkmeister’scher7 Punktfehler (Werkmeister, 1920)
s2W = s2
x · s2y − s2
xy = s20 detQii = s2
0 · λ1 · λ2. (4.19)
Der Helmert’sche Punktfehler stellt ein Langenmaß dar, wahrenddessen derWerkmeister’sche Punktfehler eine Flache (oder ein Volumen im 3D-Fall) re-prasentiert und somit als Flachenkriterium oder Volumenkriterium bezeichnetwird. Eine andere Bezeichnung fur den Helmert’schen Punktfehler ist Spurkri-terium, da die Spur von Qii verwendet wird.
Zwischen den Halbachsen der Ellipse und dem Helmert’schen Punktlagefeh-ler besteht die Beziehung:
s2H = s2
x + s2y = A2
F + B2F . (4.20)
Daraus folgt, dass Punkte, die unterschiedliche Fehlerellipsen haben, mitun-ter den numerisch gleichen Wert fur den Helmert’schen Punktfehler sH habenkonnen. Weiters sieht man daraus, dass der Helmert’sche Punktlagefehler gleichder halben Diagonale des die Fehlerellipse umschreibenden Rechtecks ist.
Eine Wahrscheinlichkeitsaussage wie bei der Standardabweichung ist beimmittleren Fehler nicht moglich. Die Ergebnisse einer Fehlerrechnung fur eindi-mensionale Großen ist nicht auf zweidimensionale Großen anwendbar (Kossina,1972). Fur praxisnahe Achsverhaltnisse der Fehlerellipsen differieren die Wahr-scheinlichkeiten nur um etwa 13% und somit konnen grobe Richtwerte ange-geben werden. Im zweidimensionalen Fall liegen etwa 63% der Realisierungeninnerhalb des Helmert’schen Punktlagefehlers. Im dreidimensionalen Fall sindes etwa 60%. Um zu 99%-iger Sicherheit zu kommen muss der dreifache Hel-mert’sche Punktlagefehler verwendet werden (Grafarend, 1970).
7Paul Werkmeister, deutscher Geodat, 1878 - 1944

4.2. BEURTEILUNG DER GENAUIGKEIT 59
Hingegen ist der Werkmeister’sche Punktlagefehler gleich einem Viertel derFlache des die Fehlerellipse umschreibenden Rechtecks. Das Problem des Werk-meister’schen Punktlagefehlers ist es, dass extreme Achslangen nicht erkanntwerden, wenn gleichzeitig die andere Achse sehr kurz ist (also die Fehlerellipsesehr inhomogen ist). Dieses Problem tritt beim Helmert’schen Punktlagefehlernicht auf, da er immer großer als der großte Koordinatenfehler ist.
Ein logisches Problem beim Helmert’schen Punktlagefehler ist, dass seinWert großer als die große Halbachse der Fehlerellipse ist. Das wird dann klar,wenn man von einer kreisformigen Fehlerellipse ausgeht. Dann wurde man denRadius des Kreises als Punktlagefehler erwarten. Der Helmert’sche Punktla-gefehler ergibt sich dann jedoch zu
√2r. Dieses Manko sollte beim ”totalen“
mittleren Punktfehler nach Friedrich (1927) behoben werden:
sF = A2F . (4.21)
Allerdings hat sich dieses Fehlermaß nie wirklich durchsetzen konnen.
Relative Fehlerellipse
In vielen Fallen ist nicht nur ein punktbezogenes Genauigkeitsmaß von Be-deutung, sondern auch die Relativgenauigkeit zwischen zwei Punkten Pi undPk. Dazu wird die Fußpunktskurve des geometrischen Ortes, der in beliebigerRichtung liegenden mittleren linearen Lagefehler der Verbindungsstrecke zweierPunkte herangezogen und die relative Fehlerellipse bestimmt.
Zu ihrer Bestimmung wird zunachst die Kovarianzmatrix Σik∆∆ der Koordi-
natendifferenzen ∆xik. gebildet:
Σik∆∆ = Σii + Σkk − Σik − Σki. (4.22)
Die Elemente der relativen Fehlerellipse berechnen sich nun aus:
A2R =
12(s2
∆x + s2∆y + wR), (4.23)
B2R =
12(s2
∆x + s2∆y − wR), (4.24)
ΘR =12atan(
2s∆x∆y
s2∆x − s2
∆y
) (4.25)
mit der Hilfsgroße w2R = (s2
∆x − s2∆y)2 + 4s2
∆x∆y.
Bei der graphischen Darstellung wird die relative Fehlerellipse gewohnlich in derMitte der Verbindungsgeraden PiPk eingezeichnet.
Die relative Fehlerellipse existiert auch fur zwei Punkte mit dem Abstand0, wenn sie unabhangig voneinander bestimmt wurden. Daraus kann man z.B.den Durchschlagsfehler eines Tunnels ableiten.

60 KAPITEL 4. QUALITAT VON NETZEN
Konfidenzellipse und relative Konfidenzellipse
Wie bereits weiter oben erwahnt, betragt die Wahrscheinlichkeit dafur, dass diewahre Punktlage innerhalb der Helmert’schen Fehlerellipse liegt, maximal rund39%. Fragt man nun nach einem Bereich, innerhalb dessen die wahre Punktlagemit der vorgegebenen Wahrscheinlichkeit 1−α liegt, so fuhrt dies auf die Kon-fidenzellipse. Ihre Kenngroßen erhalt man aus den entsprechenden Elementender Helmert’schen Fehlerellipse durch Multiplikation mit
• χ22,1−α bei Vorliegen eines theoretischen Wertes fur die Varianz der Ge-
wichtseinheit σ0, also z.B. bei einem a priori-Ausgleich, bzw. mit
• 2F2,f,1−α, wenn ein verlasslicher Schatzwert fur s0 aus einer ausreichenduberbestimmten Ausgleichung vorliegt.
χ22,1−α ist das (1−α)-Quantil der χ2-Verteilung mit 2 Freiheitsgraden (entspre-
chend 2 unbekannten Koordinaten x und y). Die Elemente der Konfidenzellipselauten dann:
A2K = χ2
2,1−α ·A2F , B2
K = χ22,1−α ·B2
F , ΘK = ΘF . (4.26)
F2,f,1−α ist das Quantil der F-Verteilung mit dem zweiten Freiheitsgrad f derAnzahl der uberschussigen Beobachtungen (= der Nenner bei der Berechnungvon s0). Die Elemente der Konfidenzellipse lauten:
A2K = 2 · F2,f,1−α ·A2
F , B2K = 2 · F2,f,1−α ·B2
F , ΘK = ΘF . (4.27)
Fur die relative Konfidenzellipse lauten die entsprechenden Formeln:
A2RK = 2 · F2,f,1−α ·A2
R, B2RK = 2 · F2,f,1−α ·B2
R, ΘRK = ΘR. (4.28)
Genauigkeitsmaße fur Funktionen der Unbekannten
Die Aufgabe eines Netzes konnte auch als Bestimmung von Funktionen derUnbekannten definiert werden. Dan stellt sich die Frage, welche Genauigkeitendiese Funktionen besitzen. Eine beliebige lineare Funktion und die zugehorigeVarianz sind gegeben durch:
ϕ = fT x, (4.29)σ2
ϕ = fT Σxxf. (4.30)
Diese Formeln sind bereits aus A1 bekannt und beschreiben das Kovarianzfort-pflanzungsgesetz.
4.2.2 Globale Genauigkeitsmaße
Neben den lokalen Genauigkeitsmaßen Standardabweichung, Punktfehler undFehlerellipse werden auch globale Genauigkeitskriterien zur Charakterisierung

4.2. BEURTEILUNG DER GENAUIGKEIT 61
und Gesamtbeurteilung Geodatischer Netze benotigt. Global bedeutet dabei,dass die gesamte Σxx fur die Berechnung der Genauigkeitsmaße herangezogenwird. Speziell beim Vergleich verschiedener Netzvarianten bei der Netzoptimie-rung konnen derartige Kriterien herangezogen werden.
Konfidenzhyperellipsoid und abgeleitete Genauigkeitsmaße
Bei der Herleitung der Fehlerellipsen (siehe Seite 55) und Konfidenzellipsen (sie-he Seite 60) haben wir uns auf den zweidimensionalen Fall beschrankt. Die Ver-allgemeinerung der dort angestellten Uberlegungen auf einen Parametervektormit u Unbekannten fuhrt zu einem Hyperellipsoid. Auch dafur kann eine Wahr-scheinlichkeitsbeziehung abgeleitet werden. Das u-dimensionale Konfidenzhype-rellipsoid ist zwar nicht geometrisch anschaulich, doch die Halbachsen sind - wieim zweidimensionalen Fall nach dem Gleichungssystem (4.17) - uber eine Spek-tralzerlegung der Kovarianzmatrix Σxx bzw. der Kofaktormatrix Qxx formalrecht einfach zu ermitteln:
Qxx =(
s1 s2 . . . su
)
λ1 0λ2
. . .0 λu
sT1
sT2...
sTu
. (4.31)
Auch hier bezeichnen die λi die Eigenwerte,. Diese sollen in absteigender Rei-henfolge geordnet sein (λmax = λ1). Die si sind dann die entsprechenden Eigen-vektoren. Die Halbachsen Ai des Konfidenzhyperellipsoides fur eine vorgegebeneSicherheitswahrscheinlichkeit 1− α bestimmen sich daher uber
A2i = s2
0λi χ2u,1−α. (4.32)
Zur Beschreibung der Gute des Netzes kann nun beispielsweise das Volumendieses Konfidenzhyperellipsoides verwendet werden. Als Kriterium konnten wirverlangen, dass das Volumen eine gewisse Große nicht uberschreitet. Das fuhrtzur folgender Forderung
det(Σxx) = det(s20Qxx) = s2
0λ1 · s20λ2 · . . . · s2
0λu =u∏
i=1
s20λi → min . (4.33)
Das Volumen stellt eine Verallgemeinerung des Werkmeister’schen Punktfehlersdar und weist naturlich auch denselben Nachteil auf. Es konnen also auch beiminimalem Volumen einzelne Achsen relativ gross werden.
Dieser Nachteil wird bei der Betrachtung analog zum Helmert’schen Punkt-fehler vermieden. Hier wird nicht das Volumen sondern die Summe der Achs-langen minimiert. Diese haufig angewendete Forderung heißt auch Spur- oderVarianzkriterium. Sie lautet
tr (s20Qxx) = s2
0λ1 + s20λ2 + . . . + s2
0λu = s20
u∑
i=1
λi → min . (4.34)

62 KAPITEL 4. QUALITAT VON NETZEN
Als durchschnittlichen Eigenwert oder auch mittlere Koordinatengenauigkeit be-zeichnet man die Große8
λ =tr s2
0Qxx
u= s2
0
∑ λi
u, u ... Anzahl der Unbekannten. (4.35)
Ein weiteres globales Genauigkeitsmaß ist der durchschnittliche (Helmert’sche)Punktfehler :
s2H =
2tr s20Qxx
u= 2s2
0
∑ λi
u= 2λ. (4.36)
Statt mit den Eigenwerten der Kofaktormatrix kann man auch mit den Ei-genwerten der Kovarianzmatrix arbeiten. Die Eigenwerte der Kovarianzmatrixerhalt man aus denen der Kofaktormatrix durch Multiplikation mit s2
0. In denFormeln (4.32) bis (4.36) entfallen dann an den entsprechenden Stellen die s2
0.
Homogenitat und Isotropie
Homogenitat und Isotropie kann man folgendermaßen definieren:
• Homogenitat: Es gibt keinen Punkt, der sich von einem anderen Punktin irgendeiner Weise unterscheidet.
• Isotropie: Es gibt keine von anderen ausgezeichnete Richtung. Hier istdie Verwendung jedoch nicht einheitlich. Manchmal, aber nicht immer,beinhaltet Isotropie auch Homogenitat.
Umgelegt auf geodatische Netze bedeutet das folgendes: Wenn die lokalenGenauigkeitskriterien (z.B. die Helmert’sche Fehlerellipse) in jedem Punkt die-selben Tendenz zeigen (also gleiche Orientierung und gleiches Verhaltnis zwi-schen großer und kleiner Halbachse), so spricht man von einem homogenen Netz.Sind hingegen die Genauigkeiten in jede Richtung gleich groß (also alle Fehle-rellipsen Kreise), so ist das Netz isotrop. Zur Beurteilung der Homogenitat undIsotropie werden oft der maximale und minimale Eigenwert herangezogen:
λmax
λminbzw. λmax − λmin. (4.37)
Beide Formulierungen werden in der Praxis naturlich nur naherungsweise erfulltsein. Homogenitat und Isotropie nehmen zu, je naher der Quotient bei 1, bzw.die Differenz bei 0 liegt. Der optimale Fall ware also gegeben, wenn alle λi gleichgroß sind.
Nicht immer ist ein homogenes und isotropes Netz das ”optimale“ Netz.Wahrend fur Netze der Landesvermessung naturlich eine moglichst homogeneund isotrope Genauigkeitssituation optimal ist, kann es z.B. fur Absteckungs-und Uberwachungsnetze sinnvoller sein, in bestimmten Vorzugsrichtungen einegroßere Genauigkeit (also eine bessere Auflosung) zu haben als in anderen.
8In der verwendet man die Gleichheit zwischen Summe der Eigenwerte einer Matrix undder Spur dieser Matrix.

4.2. BEURTEILUNG DER GENAUIGKEIT 63
Hauptkomponentenanalyse
Die Hauptkomponentenanalyse (engl. Principal Component Analysis) kommtaus der multivariaten Statistik. Sie wird verwendet, um charakteristische Eigen-schaften hoherdimensionaler Kovarianzmatrizen anschaulich darzustellen. Beikorrelierten Variablen haben die ersten Hauptkomponenten wesentlichen Anteilan der Gesamtvarianz.
Die Berechnung ist einfach: Ausgangspunkt ist wieder die Spektralzerlegungder Kovarianzmatrix Σxx nach (4.31). Die erste Hauptkomponente ist danndefiniert als
p1 = s1
√λ1 mit λ1 = max(λi), (4.38)
d.h. als Funktion aus dem großten Eigenwert λ1 und dem zugehorigen Eigenvek-tor s1. Entsprechend bildet man die zweite Hauptkomponente aus dem zweit-großten Eigenvektor usf.
Die Hauptkomponenten zeigen Schwachstellen in Netzen an. Das sind alsoRichtungen, die relativ ungenau bestimmt sind. Fur extreme Netzkonfiguratio-nen (z.B. Tunnelvortriebsnetze) kann der großte Eigenwert 40 - 60% oder mehrder Gesamtvarianz
∑λi ausmachen. In diesen Fallen scheint es gerechtfertigt,
vom ”wesentlichen Eigenvektor“ zu sprechen.
Optimierung
Bei der Beurteilung verschiedener Netzvarianten im Zuge eines Optimierungs-prozesses sind folgende Klassifizierungen ublich (Kuang, 1996, S. 206):
• Eine Losung nach A-Optimalitat minimiert die Spur trΣxx, d.h.
∑λi → min;
• Eine D-optimale Losung hat minimale det Σrxx,
∏λr
i → min;
wobei Σrxx gleich die aus den nicht-verschwindenden Eigenwerten der Ma-
trix Σxx (mit Rang r) gebildete Diagonalmatrix ist.
• E-Optimalitat wird erreicht, wenn
λmax → min;
Diese Forderung kann von der Rayleigh-Relation abgeleitet werden (Nie-meier, 2002, S. 265).
• Eine Losung nach S-Optimalitat schließlich erfullt die Forderung
(λmax − λmin) → min .

64 KAPITEL 4. QUALITAT VON NETZEN
Genauigkeitsmaße fur die Beobachtungen
A priori-Genauigkeit: Zunachst einmal ist (wird) jeder Beobachtung einea-priori-Genauigkeit (Standardabweichung) zugeordnet. Sie ist abhangig vonMessverfahren und -system, Streckenlange, Zielweite, Wiederholungszahl etc.Zusammen mit Korrelationsinformationen werden die Varianzen in der Kova-rianzmatrix Σll zusammengefasst und definieren das stochastische Modell desAusgleichungsproblems.
A posteriori erhalt man die Kofaktormatrix Qll der ausgeglichenen Beob-achtungen wegen l = Ax aus:
Qll = AQxxAT (4.39)
und daraus durch Multiplikation mit der Varianz der Gewichtseinheit a poste-riori die Kovarianzmatrix Σll = s2
0Qll, aus der man die Varianzen der ausgegli-chenen Beobachtungen ablesen kann.
Kofaktoren / Kovarianzen der Verbesserungen: Die Verbesserungen vsind die Differenz der ursprunglichen und ausgeglichenen Beobachtungen. IhreKofaktormatrix folgt daher aus dem Kovarianzfortpflanzungsgesetz:
Qvv = Qll −Qll bzw. Σvv = Σll − Σll. (4.40)
4.3 Beurteilung der Zuverlassigkeit
Durchgreifende Kontrolle der eigenen Arbeit gehoren zum grundlegenden Prin-zip geodatischer Arbeitsweise. Die Kontrollen sollen die Korrektheit des Er-gebnisses gewahrleisten und etwaige Unstimmigkeiten aufdecken. Eine einfachKontrolle einer Messung ware die Wiederholung dieser Messung. Dabei muss je-doch beachtet werden, dass die neuerliche Messung unabhangig von der erstenMessung sein muss, um die erste Messung durchgreifend zu kontrollieren. Beieinem elektronischen Distanzmessgerat erhalt man durch neuerliches Auslosender Messung keine durchgreifende Kontrolle. Es konnen immer noch folgendeFehlerquellen auftreten:
• Die Refraktion verfalscht das Ergebnis.
• Die vom Gerat angebrachten Korrekturen sind falsch.
• Das Gerat ist nicht genau zentriert.
• Der angezielte Reflektor steht auf einem falschen Punkt.
• u.v.m.
Um eine durchgreifende Kontrolle zu haben, hat es sich daher bewahrt, geo-metrisch anders wirkende Kontrollmessungen durchzufuhren. Ein einfaches Bei-spiel soll das erlautern. Abbildung 4.3 zeigt eine einfache Konfiguration, bei der

4.3. BEURTEILUNG DER ZUVERLASSIGKEIT 65
Abbildung 4.3: Beispiel fur eine Punktbestimmung
P
DD
P
N
βα
1 2
12
ausgehend von den Punkten P1 und P2 ein Neupunkt N bestimmt wird. Mogli-che Messgroßen sind dabei die Strecken D1 und D2 von den Festpunkten zumNeupunkt, sowie die Winkel α und β in den Festpunkten.
Eine nicht uberbestimmte Losung erhalt man durch Messung der beidenStrecken9. Diese Messungen konnen sogar ausreichen, um den Neupunkt mitder notwendigen Genauigkeit zu bestimmen, wobei die Genauigkeit der Punkt-bestimmung uber das Fehlerfortpflanzungsgesetz ableitbar ist. Es gibt jedochkeinerlei Kontrolle des Ergebnisses. Wenn also eine der beiden Messungen grobfalsch ist, wird das bei der Berechnung nicht auffallen10.
Fugen wir jedoch eine geometrisch anders wirkende Messung hinzu, bei-spielsweise einen der beiden Winkel, so fallt uns ein vorhandener Fehler nachder Ausgleichung bei den Verbesserungen der Messwerte auf. Es ist also ei-ne Kontrollmoglichkeit vorhanden. Eine weitere Kontrollmoglichkeit ware einezusatzliche Streckenmessung zu einem dritten Festpunkt.
Ist noch eine weitere unabhangige Messgroße vorhanden (z.B. eine zweiteWinkelmessung), so ist die uberbestimmte (also kontrollierte) Punktbestim-mung auch bei Auftreten eines Fehlers immer noch moglich. Die fehlerhafteMessung kann dann eliminiert und das System trotzdem noch kontrolliert be-rechnet werden.
Ein geodatisches Netz ist ”zuverlassig“, wenn man in der Lage ist, allfalligeModellfehler zu entdecken und zu eliminieren. Zuverlassigkeitskriterien beant-worten demnach folgende wichtige Fragen zur Beurteilung eines Netzes:
• Gibt es ”grobe Fehler“? Wie groß ist die Wahrscheinlichkeit, diese aufzu-spuren?
• Ist eine bestimmte Beobachtung durch andere genugend kontrolliert?
• Wo liegt die Grenze fur nicht erkennbare Fehler fur jede Beobachtung?
• Welchen Einfluss hat dieser Grenzwertfehler auf die berechneten Koordi-naten?
9Hier tritt naturlich das Problem der Mehrdeutigkeit auf, da die Strecken Kreise um dieFestpunkte definieren und sich diese Kreise zwei Mal schneiden. Diese Mehrdeutigkeit kannaber durch Angabe einer Skizze gelost werden.
10Der Fehler wird uns nur dann auffallen, wenn er so groß ist, dass es keinen Schnittpunktmehr gibt.

66 KAPITEL 4. QUALITAT VON NETZEN
Diese Fragestellungen konnen mit Hilfe statistischer Testverfahren beantwor-tet werden. Es ist aber nicht immer notig, genaue Tests durchzufuhren undWahrscheinlichkeiten anzugeben; oft ist nur der Vergleich der Zuverlassigkeitmehrerer Netzvarianten von Interesse. Wir werden im Folgenden einige solcherZuverlassigkeitsindikatoren angeben.
Ein einfaches Zuverlassigkeitskriterium fur eine Messung ist beim ersten,fluchtigen Beurteilen des Ergebnisses einer Netzausgleichung der Betrag ihrerVerbesserung, die bei der Ausgleichung angebracht wird. Man konnte z.B. eineGrob-Fehlersuche derart durchfuhren, dass man Beobachtungen verwirft oderals (grob) fehlerhaft betrachtet, deren Verbesserungen die dreifache Standard-abweichung ubertreffen11.
4.3.1 Standardisierte Verbesserung
Die aus einem Ausgleich erhaltenen Verbesserungen sind normalverteilte Zu-fallsvariablen mit dem Erwartungswert 0 und der Standardabweichung
σvi = s0
√q(ii)vv . (4.41)
Dividiert man die einzelnen Verbesserungen durch ihre Standardabweichung σvi
so erhalt man die standardisierten Verbesserungen
wi =vi
σvi
(4.42)
(mit Erwartungswert 0 und Standardabweichung σw = 1). Beobachtungen miteinem großem wi mussen naher untersucht (Vergleich der Beobachtungsproto-kolle) und gegebenenfalls eliminiert werden.
4.3.2 Redundanzanteil
Um den Einfluss grober Fehler auf unser Ergebnis zu untersuchen setzen wirzunachst einen statistischen Test an. Dazu mussen wir eine entsprechende Mess-große herleiten. Mit der Redundanz nf = n− u bei der vermittelnden Ausglei-chung bzw nf = n−n0 bei der bedingten Ausgleichung schatzen wir die Streuungder wahren Fehler
σ2 = E (pεε) (4.43)
mit Hilfe unserer Verbesserungen uber
s2 =vT Pv
nf. (4.44)
Fur unseren Test heißt die Nullhypothese nun H0 : σ20 = s2 oder
E(vT Pv|H0
)= s2 · nf . (4.45)
11Da bei Normalverteilung innerhalb der dreifachen Standardabweichung 99% der Werteliegen ist das Auftreten einer so hohen Verbesserung unwahrscheinlich und kann als Indiz fureinen groben Fehler gewertet werden.

4.3. BEURTEILUNG DER ZUVERLASSIGKEIT 67
Die Nullhypothese sagt aus, dass unsere Stichprobe der Grundgesamtheit an-gehort, in unserem System also nur zufallige Fehler auftreten. Die Alternativ-hypothese behauptet, dass die Stichprobe nicht der Grundgesamtheit angehort,dass es also grobe Fehler gibt. Die Alternativhypothese lasst sich formulierenuber
E(vT Pv|Ha
)= s2(nf + λ) (4.46)
oder
λ = E
(vT Pv
s2|Ha
)− E
(vT Pv
s2|H0
). (4.47)
Mit der Einfuhrung der Abkurzung ∆v fur die Differenz der Verbesserungen beiNull- und Alternativhypothese, also
∆v = v|Ha − v|H0, (4.48)
wird wegen des Verschwindens der gemischten Glieder E(∆vT Pv
)= 0 und mit
E(s2
) .= σ20
λ =1σ2
0
E(∆vT P∆v
). (4.49)
Somit hat der Parameter λ zwei unterschiedliche Bedeutungen. Nach (4.46) istλ eine (fiktive) Erweiterung der Redundanz. Nach (4.49) ist λ die normierteDifferenz der quadratischen Form vT Pv von Null- und Alternativhypothese.Betrachten wir nun die in A1 kennen gelernte Macht eines Tests. Die Wahr-scheinlichkeit dafur, dass eine falscher Hypothese angenommen wird ist 1 − β.In unserem Fall erhalten wir also den Ausdruck
1− β = P
(s2
σ2< F1−α,m,n|Ha
). (4.50)
Die Testgroße F1−α,m,n ist dabei nach Fisher verteilt. Die Parameter m und nsind die Redundanzen bei der Berechnung von s2 bzw. σ2.
Damit lasst sich nun λ darstellen uber
λ = λ (α, β,m = k, n = ∞) (4.51)
da sich β auch schreiben lasst als
β =
∞∫
F1−α,m,n
f(Fm,n,λ) dF (m, n, λ) (4.52)
mit m = k, n = ∞ und der fiktiven Differenz der Freiheitsgrade λ wie obendefiniert.Wenn wir nun von Erwartungswerten auf konkrete Werte ubergehen,so wird (4.49) zu
λ =1σ2
∆vT P∆v =1σ2
∆lT PQvvP∆l (4.53)
Um diese Beziehung uberprufen zu konnen mussen wir uns zunachst den Zu-sammenhang zwischen den Verbesserungen v und dem Beobachtungsvektor l

68 KAPITEL 4. QUALITAT VON NETZEN
herleiten. Ausgangspunkt sind die Verbesserungsgleichung fur vermittelnde Be-obachtungen (2.33) und die Losung fur x (2.37:
v = Ax− l,
x = (AT PA)−1AT Pl.
Wenn man nun die Gleichung fur x in die Gleichung fur v einsetzt erhalt man
v = (AN−1AT P− I)l. (4.54)
Zusatzlich haben wir fur die Kofaktoren a posteriori die Beziehungen (2.67) bis(2.70):
Qll = P−1,
Qxx = N−1,
Qll = AN−1AT ,
Qvv = Qll −Qll.
Wir konnen nun fur Qvv einsetzen:
Qvv = Qll −Qll = Qll −AN−1AT ,
= P−1 −AN−1AT PP−1,
=[I−AN−1AT P
]P−1,
= −[AN−1AT P− I
]P−1,
Qvv = −[AN−1AT P− I
]Qll,
QvvQ−1ll = −
[AN−1AT P− I
]. (4.55)
Wenn wir nun (4.55) von rechts mit −l multiplizieren, so erhalten wir auf derrechten Seite nach (4.54) v:
−QvvQ−1ll l =
[AN−1AT P− I
]l = v.
Somit ergibt sichv = −QvvQ
−1ll l. (4.56)
Zu (4.53) gelangen wir nun indem wir v = Ax − l in den Ausdruck vT Pveinsetzen:
vT Pv = (xT AT − lT )T P(Ax− l) = −lT PAx + lT Pl.
Auf der rechten Seite des Ausdrucks konnen wir −lT P herausheben und erhalten
vT Pv = −lT P(Ax− l) = −lT Pv.
Hier konnen wir nun (4.56) einsetzen und wir erhalten mit P = Q−1ll
vT Pv = lT PQvvPl.

4.3. BEURTEILUNG DER ZUVERLASSIGKEIT 69
Der Ubergang auf die Differenzen der Verbesserungen liefert dann
∆vT P∆v = ∆lT PQvvP∆l.
In (4.53) interessiert uns bei einer konkreten Alternativhypothese Haiim Vek-
tor ∆l gerade jene Komponente ∇li12, die fur sich alleine eine Verschiebung λ
bewirken wurde. Man setzt also
∆lT =(
0 . . . 0 ∇li 0 . . . 0)
(4.57)
und erhalt
∇li = σ
√λ
(PQvvP)ii. (4.58)
Der Nenner ergibt sich uber die Beziehungen (2.67) bis (2.70) zu
PQvvP = P−PA(AT PA)−1AT P. (4.59)
Im Falle gleich genauer Beobachtungen (P = I) ergibt sich somit fur (4.58)
∇li = σ
√λ0
(I− (A(AT A)−1AT ))ii
. (4.60)
Der Nenner unter der Wurzel gibt die Genauigkeitssteigerung der Beobachtungdurch die Ausgleichung an.
λ0 bestimmt man mit konkreten Werten fur α0 und β0, sowie k = 1 undn = ∞. α0 und β0 werden in der Literatur mit kleinem Produzenten- (α0 klein)und großem Konsumentenrisiko (β0 groß) angesetzt. Der Wert fur k ist hier 1,da wir nur eine konkrete Beobachtung li betrachten und nicht den gesamtenVektor.
Je großer ∇li, desto großer kann der entsprechende Fehler der Messung i beigleicher Verschiebung λ0 sein. Ein grober Fehler fallt also solange nicht auf, alser kleiner als ∇li ist.
Fur ”normale“ Ausgleichungsgeometrien, also fur solche, bei denen die Wertein der Hauptdiagonale von QvvQ
−1ll großer sind also die ubrigen Werte einer Zei-
le, darf davon ausgegangen werden, dass sich ein grober Fehler in einer Beobach-tung vor allem in der Verbesserung eben dieser Beobachtung niederschlagt. DerFehler wird sich zwar auch auf die ubrigen Verbesserungen auswirken, er wirddiese aber nicht so stark beeinflussen wie die zur Beobachtung selbst gehorendeVerbesserung. Diese Voraussetzung gilt jedoch nicht mehr, wenn die Elementeder Hauptdiagonale sehr klein sind. Ein Beispiel fur einen solchen Fall werdenwir in Kapitel 6 kennen lernen. Dort werden wir allerdings nur den Standardfallbehandeln. Die Auswirkung eines groben Fehlers ∇li auf die entsprechende Ver-besserung vi wird (wenn wir von einem einzigen groben Fehler ausgehen) durchdas Hauptdiagonalelement der Matrix bestimmt:
∇vi = −(QvvQ−1ll )ii∇li = −ri∇li. (4.61)
12sprich: Nabla

70 KAPITEL 4. QUALITAT VON NETZEN
Zusammen mit der Formel fur Qvv und (4.60) lassen sich nun auch Grenzwertefur einzelne Verbesserungen rechnen. Zeigt sich in der Ausgleichung eine Ver-besserung, die (4.61) uberschreitet, so konnte alleine dieser Beobachtung dasAbweichen ∆vT P∆v von der Nullhypothese angelastet und die Beobachtungals grob falsch angesehen werden.
Die in (4.61) auftretende Große ri (also die entsprechenden Hauptdiago-nalglieder der Matrix QvvQ
−1ll ) wird als Redundanzanteil13 der i-ten Beobach-
tung an der Gesamtredundanz r bezeichnet. Er beschreibt, wie viel Prozent einesBeobachtungsfehlers sich in der zugehorigen Verbesserung vi zeigt (Forstner,1979b). Es gilt:
O ≤ ri ≤ 1 (bzw.0% ≤ ri ≤ 100%) undtr (QvvQ
−1ll ) = Σri = r = n− u.
(4.62)
Je großer ri, umso eher kann man der Verbesserung den Betrag des Beobach-tungsfehlers entnehmen und umso direkter schlagt sich der Fehler in der Verbes-serung nieder. Mit zunehmendem Betrag von ri ist die zugehorige Beobachtungdurch die ubrigen Beobachtungen zunehmend kontrolliert. Je kleiner ri, umsogroßer musste ein Fehler sein, um durch ein uberproportionales vi aufzufallen.
• ri = 0: Die betreffende Große wurde nicht kontrolliert. Fehler, egal wiegroß, werden nicht entdeckt (außer intuitiv) (z.B. einmalige polare Be-stimmung eines Punktes).
• ri < 0, 3: Sehr geringer Wert. Die Beobachtungen sind nicht oder nurschlecht kontrollierbar, eine Aufdeckung grober Fehler ist also kaum moglich(Murle und Bill, 1984). Durch die Einfuhrung weiterer Beobachtungenkann ri vergroßert werden.
• 0, 3 < ri < 0, 7: Gute gegenseitige Kontrollierbarkeit der Beobachtungen.
• ri > 0, 7: Die Beobachtung ist sehr gut durch andere Beobachtung kon-trolliert und konnte eventuell weggelassen werden. Zu beachten ist dabeijedoch die Auswirkung der Elimination auf die Redundanzen der ubrigenBeobachtungen.
• ri = 1: Die Beobachtung wird durch andere vollstandig kontrolliert. Ent-sprechende Beobachtungen sind uberflussig und konnen ohne Verluste ausdem Beobachtungsplan entfernt werden (z.B. Distanzmessung zwischenzwei Festpunkten).
Ein optimales Netz darf keine unkontrollierten Beobachtungen enthalten. Imgunstigsten Fall sind alle ri gleich groß. Dann ist die Uberbestimmung auf alleBeobachtungen gleichmaßig verteilt. Haufige Werte uber 70-80% deuten daraufhin, dass das Netz zu stark uberbestimmt ist und noch optimiert werden sollte.Die Optimierung erfolgt dann durch Elimination von Beobachtungen. Dabeiergeben sich die Redundanzanteile nach der Elimination der Beobachtung lk zu
ri = (1− ρik)ri (4.63)
13In der Literatur wird der Redundanzanteil manchmal auch Teilredundanz genannt.

4.3. BEURTEILUNG DER ZUVERLASSIGKEIT 71
mit dem Korrelationskoeffizienten ρik zwischen der eliminierten und der geradebetrachteten Beobachtung.
Die lokale Zuverlassigkeit zi wird direkt aus dem Quotienten der entspre-chenden Diagonalglieder berechnet:
zi =q(ii)vv
q(ii)ll
. (4.64)
Anm.: Die Summe der lokalen Zuverlassigkeiten Σzi nimmt im allgemeinen Wer-te großer n − u an. Nur im Falle unkorrelierter Beobachtungen (d.h. Σll bzw.Qll ist Diagonalmatrix) ist zi = ri und daher auch die Summe gleich n− u.
Eine weitere Moglichkeit ist die Angabe der Große
ui =q(ii)vv
q(ii)
ll
. (4.65)
Hier gilt wieder: Ist ui = 0, so ist die entsprechende Beobachtung nicht kontrol-liert; im anderen Grenzfall ui = ∞ ist sie uberflussig.
Die Redundanzanteile konnen auch zur Suche nach Ausreißern in den Be-obachtungen verwendet werden. Fur Herleitung und Anwendung dieser Testsfinden sich in der Literatur (Koch, 1983, 1985).
4.3.3 Innere Zuverlassigkeit
Die Kontrollierbarkeit der Beobachtungen innerhalb des Netzes wird als innereZuverlassigkeit bezeichnet. Die oben angegebenen Großen sind Maße der in-neren Zuverlassigkeit. Ein weiteres Maß ist der Grenzwert ∇0li, der den Wertangibt, den ein grober Fehler annehmen muss, damit er (mit einer vorgegebenenSicherheit) gerade noch aufgedeckt werden kann:
∇0li =σli√ri· δ0. (4.66)
Der dabei auftretende Nichtzentralitatsparameter δ0 gibt das Zentrum der Nor-malverteilung der standardisierten Verbesserung wi an14. δ0 is abhangig vomSignifikanzniveau α0 und der Macht (”Gute“) β0. Ublicherweise wird fur α0 =0, 1% und fur β = 80% gewahlt, was fur δ0 nach Tabelle 4.2 einen Wert von4,13 ergibt:
∇0li =σli√ri· 4, 13. (4.67)
14Wenn bei einer Beobachtung ein grober Fehler auftritt, ist die Wahrscheinlichkeitsvertei-lung dieser Beobachtung gegenuber der fehlerfreien Beobachtung verschoben. Dasselbe trifftfur die Wahrscheinlichkeitsverteilung der entsprechenden wi zu. Der Betrag dieser Verschie-bung ist δ.

72 KAPITEL 4. QUALITAT VON NETZEN
β0 α0 = 0, 01% α0 = 0, 1% α0 = 1, 0% α0 = 5, 0%70 % 4,42 3,82 3,10 2,4980 % 4,72 4,13 3,42 2,7990 % 5,18 4,57 4,57 3,24
Tabelle 4.2: Nichtzentralitatsparameter δ0 (Albert, 1987)
4.3.4 Außere Zuverlassigkeit
Neben den inneren Zuverlassigkeitsmaßen gibt es noch außere Zuverlassigkeits-maße. Diese geben an, wie sich unentdeckte Beobachtungsfehler auf die abgelei-teten Unbekannten auswirken. Dieser Wert hat fur den Nutzer oft einen wesent-lich hoheren Wert als die innere Genauigkeit, da fur ein Netz haufig bestimmteGenauigkeiten (Konfidenzellipsen, Kriteriummatrix) der Punkte gefordert wer-den, die der außeren Zuverlassigkeit gegenubergestellt werden konnen. Ein oftverwendetes Maß fur die außere Zuverlassigkeit ist der durchschnittliche Ein-fluss eines Beobachtungsfehlers, auch als Netzverformung oder Einflussfaktorbezeichnet (Forstner, 1979a):
δ0i =√
1− ri
ri· δ0 bzw. δ0i =
√1− ri
ri· 4, 13. (4.68)
Der Einflussfaktor sollte moglichst klein (→ 0) sein, sodass nicht entdeckba-re Fehler die Richtigkeit des Ergebnisses moglichst wenig beeinflussen. Eineangenehme Eigenschaft des Einflussfaktors ist die Datumsinvarianz. Diese Ei-genschaft kann direkt aus (4.68) abgelesen werden, da sich alle vorkommendenParameter nur auf die Beobachtungen beziehen.
4.3.5 Alternative
Die hier angegebenen Formeln sind nur eine Moglichkeit, die man in der Lite-ratur findet. Schadlich beispielsweise geht bei seinen Uberlegungen von einemstatistischen Zuverlassigkeitstest aus. Auch er verwendet die Redundanzanteile,um eine Abschatzung fur den maximalen Betrag eines unentdeckt gebliebenenFehlers anzugeben (Schadlich, 1983).
4.3.6 Optimierung
Genauso wie bezuglich ihrer Genauigkeit konnen Netze auch hinsichtlich der Zu-verlassigkeit optimiert werden. Ansatze dazu findet man in der Literatur (z.B.Benning, 1984; Deren, 1991). Benning geht bei seinem iterativen Ansatz vomNichtzentralitatsparameter δ0 aus und leitet davon die entsprechenden Nicht-zentralitatsparameter fur die Unbekannten ab. Anhand dieser Parameter werdeneinzelne Beobachtungen aus einem zuverlassigen Netzentwurf gestrichen. Derenschlagt die Verwendung von Kriterion-Matrizen (Grafarend und Schaffrin, 1979)fur Zuverlassigkeiten vor (Deren, 1989).

4.4. BEISPIEL STRECKENNETZ 73
Einen mathematisch anspruchsvolleren Weg beschreitet Schachinger (1997,1998). Er verwendet Simulated Annealing (Laarhoven und Aarts, 1987), um zueiner Losung zu gelangen, die sowohl genau als auch zuverlassig ist und da-bei minimale Kosten verursacht. Als Parameter fur die Genauigkeit verwendetSchachinger die Lange der großen Halbachse der Konfidenzellipse und fur dieZuverlassigkeit den maximalen Einflussvektor15 in einem Punkt. Es konnen je-doch auch problemlos andere Parameter verwendet werden.
4.4 Beispiel Streckennetz
Zum Abschluss dieses Kapitels wollen wir uns noch ein Beispiel ansehen, umden Bezug zwischen geodatischem Datum und der Netzqualitat herzustellen16.Abbildung 4.4 zeigt die Anordnung. Das Beispiel ist einem Netz der Tunnel-vermessung nachempfunden und bietet uns die Moglichkeit, verschiedene Artender Lagerung durchzurechnen und die resultierenden Fehlerellipsen zu deuten.Da es keine Messungen gibt, wird jeweils nur eine a priori-Ausgleichung durch-gefuhrt, d.h. nur die Qxx-Matrix bestimmt und daraus die Genauigkeits- undZuverlassigkeitsmaße berechnet. Die Punkte haben die Naherungskoordinatenaus Tabelle 4.3.
Abbildung 4.4: Beispiel eines Streckennetzes2 3 4 5 6 7 8 9 10
13 14 15 16 17 18 19 20 21
11
2212
1
Das Netz besteht also aus 22 Punkten mit 45 Unbekannten (22 · 2 Koor-dinaten und der Maßstab). Die Naherungskoordinaten konnen Tabelle 4.3 ent-nommen werden. Von jedem Punkt aus wurde jede Strecke zu den umliegendenPunkten gemessen. Somit ist jede Strecke doppelt bestimmt und es gibt 102Horizontalstrecken als Beobachtungen. Somit ergibt sich die Anzahl der Frei-heitsgrade zu 57, es wurden also mehr als doppelt so viele Strecken gemessen,als eigentlich notwendig ware. Als Genauigkeit der Streckenbeobachtung wur-den 2 mm + 1 ppm (also bei einer maximalen Streckenlange von 14 m praktisch2mm) angenommen.
4.4.1 Zwangsfreie Ausgleichung
Bei der Zwangsfreien Ausgleichung mussen wir so viele Parameter festhalten,dass der Datumsdefekt ausgeglichen wird. Im Falle eines Streckennetzes ist derDatumsdefekt d = 4, wenn wir die Strecken nicht zur Bestimmung des Maßsta-bes verwenden. Somit mussen wir 2 Punkte festhalten. Um die Auswirkungender Datumsfestlegung auf die Fehlerellipsen zu zeigen, wurden einmal die Punk-te 1 und 12 und beim zweiten Mal die Punkte 1 und 11 festgehalten. In beiden
15Als Einflussvektor wird die Auswirkung der inneren Zuverlassigkeit auf einen einzelnenPunkt bezeichnet.
16Ein weiteres Beispiel findet man bei Even-Tzur (2006).

74 KAPITEL 4. QUALITAT VON NETZEN
PNr y x PNr y x1 -100 10 12 -100 -102 -80 10 13 -80 -103 -60 10 14 -60 -104 -40 10 15 -40 -105 -20 10 16 -20 -106 0 10 17 0 -107 20 10 18 20 -108 40 10 19 40 -109 60 10 20 60 -10
10 80 10 21 80 -1011 100 10 22 100 -10
Tabelle 4.3: Naherungskoordinaten der Netzpunkte
Fallen betragt die Anzahl der Unbekannten nur mehr 41 und die Redundanz61.
Festhalten der Punkte 1 und 12
Diese Konstellation ergibt sich beispielsweise bei der Steuerung von Tunnelvor-triebsmaschinen. Die Festpunkte befinden sich außerhalb des Tunnels und dasNetz wird in einem schmalen Schlauch vorangetrieben.
Abbildung 4.5: Zwangsfreie Ausgleichung mit festgehaltenen Punkten 1 und 12
1
12
Die Genauigkeit der Punkte sind in Tabelle 4.4 zusammengefasst (Genauigkei-ten und Halbachsen der Fehlerellipse in [mm], Winkel der großen Halbachse derFehlerellipse in [gon]). Die erste Spalte enthalt die Nummer des Punktes, danachkommen die Koordinatengenauigkeit fur y und x, der Helmert’sche Punktlage-fehler und die Helmert’sche Fehlerellipse mit den drei Parametern große undkleine Halbachse, sowie Richtung der großen Halbachse. Wir sehen, dass wir furdie Festpunkte keine Genauigkeiten erhalten.
Abbildung 4.5 ist die grafische Darstellung der Fehlerellipsen. Man siehtdeutlich, dass die Fehlerellipsen immer großer werden, je weiter wir von denFestpunkten weg sind. Diesem Problem konnte durch Einfuhrung von Kreisel-messungen gegengesteuert werden.
Fur die ersten Messungen sind die Redundanzen (in %) in Tabelle 4.5 zu-sammengefasst. Wie man sieht betragt die Redundanz immer zwischen 56 und

4.4. BEISPIEL STRECKENNETZ 75
PNr sy sx sH A B ϕ1 — — — — — —2 2.0 2.0 2.8 2.0 2.0 15.73 3.4 3.9 5.2 4.0 3.2 26.84 4.8 6.5 8.1 6.7 4.6 28.55 6.1 9.7 11.5 9.9 5.9 29.36 7.5 13.4 15.3 13.5 7.2 29.87 8.8 17.5 19.6 17.6 8.6 30.18 10.2 21.9 24.1 22.0 9.9 30.39 11.5 26.7 29.0 26.8 11.3 30.4
10 12.8 31.7 34.2 31.8 12.6 30.511 14.2 37.1 39.7 37.2 13.9 30.612 — — — — — —13 2.0 2.0 2.8 2.0 2.0 15.714 3.4 3.9 5.2 4.0 3.2 4.615 4.8 6.5 8.1 6.7 4.6 2.916 6.1 9.7 11.5 9.9 5.9 2.117 7.5 13.4 15.3 13.5 7.2 1.618 8.8 17.5 19.6 17.6 8.6 1.319 10.2 21.9 24.1 22.0 9.9 1.120 11.5 26.7 29.0 26.8 11.3 1.021 12.8 31.7 34.2 31.8 12.6 0.922 14.2 37.1 39.7 37.2 13.9 0.8
Tabelle 4.4: Punktgenauigkeit nach der Ausgleichung
63%. Die Redundanzen der ubrigen Messungen liegen ebenfalls in diesem Be-reich. Somit sind alle Beobachtungen gut kontrollierbar. Etwas uberraschend istallerdings auf den ersten Blick, dass der Redundanzanteil der Strecke von Punkt1 zu Punkt 12 nicht 100% betragt. Das liegt am eingefuhrten Maßstabsfaktor.Die Strecke hilft mit, den Maßstabsfaktor zu bestimmen und ist daher nicht voll-kommen uberflussig. Wenn man das Netz versuchsweise ohne Maßstabsfaktorrechnet, erhalt man fur den Redundanzanteil der beiden gemessenen Streckenzwischen den Punkten 1 und 12 jeweils den Wert 100%.
von nach ri von nach ri
1 2 56 2 13 611 12 56 2 14 631 13 63 3 2 562 1 56 3 4 562 3 56 3 13 632 12 63 3 14 61
Tabelle 4.5: Redundanzanteil der Beobachtungen beim Festhalten der Punkte 1und 2

76 KAPITEL 4. QUALITAT VON NETZEN
Festhalten der Punkte 1 und 11
Bei dieser Konstellation sind die außersten Punkte der oberen Reihe festge-halten. Wenn wir bei unserem Tunnelbeispiel bleiben konnte es sich um eineAusgleichung der Messungen nach erfolgtem Durchstich handeln.
PNr sy sx sH A B ϕ1 — — — — — —2 1.3 3.7 3.9 3.7 1.3 0.03 1.7 6.2 6.4 6.2 1.7 0.04 2.0 8.0 8.2 8.0 2.0 0.05 2.1 9.1 9.4 9.1 2.1 0.06 2.1 9.5 9.7 9.5 2.1 0.07 2.1 9.1 9.4 9.1 2.1 31.48 2.0 8.0 8.2 8.0 2.0 31.49 1.7 6.2 6.4 6.2 1.7 31.4
10 1.3 3.7 3.9 3.7 1.3 31.411 — — — — — —12 3.7 1.4 4.0 3.7 1.4 14.913 3.1 3.9 5.0 4.9 1.2 6.614 2.6 6.5 7.0 6.8 1.4 3.315 2.2 8.3 8.6 8.4 1.6 1.816 1.9 9.4 9.6 9.4 1.7 0.817 1.7 9.8 9.9 9.8 1.7 31.418 1.9 9.4 9.6 9.4 1.7 30.619 2.2 8.3 8.6 8.4 1.6 29.620 2.6 6.5 7.0 6.8 1.4 28.121 3.1 3.9 5.0 4.9 1.2 24.822 3.7 1.4 4.0 3.7 1.4 16.5
Tabelle 4.6: Punktgenauigkeit nach der Ausgleichung
Die Genauigkeit der Punkte ist in Tabelle 4.6 zusammengefasst. Abbildung 4.6ist die grafische Darstellung der Fehlerellipsen. Man sieht deutlich, dass dieFehlerellipsen zwischen den Festpunkten großer werden. Diesem Problem konn-te durch Einfuhrung von Richtungsbeobachtungen gegengesteuert werden. InSumme ist die Fehlersituation aber gunstiger als im ersten Fall, da die Halbach-sen der Fehlerellipsen kleiner bleiben.
Abbildung 4.6: Zwangsfreie Ausgleichung mit festgehaltenen Punkten 1 und 111 11
Fur die Redundanzen der Messungen gilt dasselbe wie im ersten Fall. Nur wurdein diesem Fall keine Strecke zwischen den Festpunkten gemessen. Somit gibt esauch bei Weglassen der Maßstabsunbekannten keine Messungen mit Redundan-zanteil 1.

4.4. BEISPIEL STRECKENNETZ 77
4.4.2 Gezwangte Ausgleichung
Bei diesem Beispiel wurden die vier Eckpunkte des Netzes als Festpunkte vorge-geben. Wir haben also nur mehr 18 Neupunkte und somit 37 Unbekannte. DerFreiheitsgrad betragt 65. Man sieht, dass die Fehlerellipsen wesentlich kleinersind als in den beiden vorhergegangenen Fallen. Die Fehlerellipsen sind nur et-wa halb so groß wie vorher. Fur die vier verwendeten Festpunkte konnten keineGenauigkeiten abgeleitet werden.
Die wesentlich kleineren Fehlerellipsen im a priori-Ausgleich durfen abernicht daruber hinwegtauschen, dass sich eventuell vorhandene Fehler zwischenden Festpunkten stark auf die Qualitat des Ergebnisses auswirken. Spannungenim Festpunktfeld verzerren das gemessene Netz und verschlechtern die Genau-igkeit signifikant.
PNr sy sx sH A B ϕ1 — — — — — —2 1.2 1.7 2.1 1.8 1.0 27.93 1.5 3.0 3.3 3.0 1.3 29.34 1.6 4.1 4.4 4.1 1.5 30.25 1.6 4.8 5.1 4.8 1.6 30.96 1.6 5.1 5.4 5.1 1.6 0.07 1.6 4.8 5.1 4.8 1.6 0.58 1.6 4.1 4.4 4.1 1.5 1.29 1.5 3.0 3.3 3.0 1.3 2.1
10 1.2 1.7 2.1 1.8 1.0 3.511 — — — — — —12 — — — — — —13 1.2 1.7 2.1 1.8 1.0 3.514 1.5 3.0 3.3 3.0 1.3 2.115 1.6 4.1 4.4 4.1 1.5 1.216 1.6 4.8 5.1 4.8 1.6 0.517 1.6 5.1 5.4 5.1 1.6 31.418 1.6 4.8 5.1 4.8 1.6 30.919 1.6 4.1 4.4 4.1 1.5 30.220 1.5 3.0 3.3 3.0 1.3 29.321 1.2 1.7 2.1 1.8 1.0 27.922 — — — — — —
Tabelle 4.7: Punktgenauigkeit nach der gezwangten Ausgleichung
Abbildung 4.7: Gezwangten Ausgleichung mit Festpunkten 1, 2, 11 und 121
11
12 22
Fur die ersten Messungen sind die Redundanzen in Tabelle 4.8 zusammengefasst.Fur die Strecke zwischen den Punkten 1 und 12 (zwei unserer Festpunkte) wirdein Redundanzanteil von 98% ausgewiesen. Diese Messung ist somit zwar nicht

78 KAPITEL 4. QUALITAT VON NETZEN
ganz unnotig, sie tragt aber auch nicht viel zur Verbesserung des Netzes bei.Auch hier ist der Wert nur deshalb nicht 100% weil wir einen Maßstabsfaktormitfuhren.
von nach ri von nach ri
1 2 66 2 13 621 12 98 2 14 631 13 64 3 2 632 1 66 3 4 612 3 63 3 13 632 12 64 3 14 61
Tabelle 4.8: Redundanzanteil der Beobachtungen bei der gezwangten Ausglei-chung
4.4.3 Gesamtspurminimierung
Bei der Gesamtspurminimierung gibt es keine Festpunkte. Es werden alle vor-handenen Punkte zur Definition des geodatischen Datums herangezogen. Somitbesteht das Netz nur noch aus 22 Neupunkten mit 45 Unbekannten. Der Frei-heitsgrad betragt also 61 (dieser Wert ergibt sich aus den 102 Beobachtungenund den 4 Lagerungsbedingungen abzuglich der 45 Unbekannten). Wenn manin Tabelle 4.9 die Helmert’schen Punktlagefehler betrachtet fallt auf, dass dieWerte fur die Eckpunkte etwa doppelt so groß sind wie fur die anderen Punkte.Das liegt daran, dass diese Punkte durch weniger Messungen, also ungenauer,bestimmt sind. Die kleinsten Fehlerellipsen gibt es bei den Punkten 3, 9, 14 und20. Hier sind die Fehlerellipsen auch nahezu kreisformig. Insgesamt werden dieMessunsicherheiten aber auf alle Punkte moglichst gleichmaßig verteilt.
Es stellt sich nun die Frage, ob die Genauigkeitsangaben dieser Ausgleichungmit denen der zwangsfreien bzw. der gezwangten Ausgleichung verglichen wer-den durfen. Nach Reißmann ist die Antwort nein. Die Genauigkeitsangaben inder zwangsfreien Ausgleichung beziehen sich auf die Verbindung zwischen einembeliebigen Datumspunkt und dem betrachteten Punkt. Die Genauigkeitsanga-ben bei der Gesamtspurminimierung beziehen sich jedoch auf den Schwerpunktdes Netzes. Es handelt sich bei der zwangsfreien und gezwangten Ausgleichungum eine außere Genauigkeit, wohingegen es sich im Falle der freien Ausgleichungum eine innere Genauigkeit handelt (Reißmann, 1985, 1987).
Abbildung 4.8: Gesamtspurminimierung
Fur die Redundanzanteile der Messungen gilt dasselbe wie bisher. Alle Beob-achtungen sind gut kontrolliert und keine Messung hat einen Redundanzanteilvon uber 63%. Somit sind grobe Fehler gut aufdeckbar.

4.4. BEISPIEL STRECKENNETZ 79
PNr sy sx sH A B ϕ1 2.1 5.7 6.1 5.9 1.3 2.92 1.8 2.8 3.3 3.1 1.3 4.53 1.5 1.9 2.4 1.9 1.5 28.34 1.3 3.0 3.3 3.1 1.2 29.25 1.2 4.0 4.2 4.0 1.2 30.56 1.2 4.3 4.5 4.3 1.2 31.47 1.2 4.0 4.2 4.0 1.2 0.98 1.3 3.0 3.3 3.1 1.2 2.39 1.5 1.9 2.4 1.9 1.5 3.2
10 1.8 2.8 3.3 3.1 1.3 26.911 2.1 5.7 6.1 5.9 1.3 28.512 2.1 5.7 6.1 5.9 1.3 28.513 1.8 2.8 3.3 3.1 1.3 26.914 1.5 1.9 2.4 1.9 1.5 3.215 1.3 3.0 3.3 3.1 1.2 2.316 1.2 4.0 4.2 4.0 1.2 0.917 1.2 4.3 4.5 4.3 1.2 0.018 1.2 4.0 4.2 4.0 1.2 30.519 1.3 3.0 3.3 3.1 1.2 29.220 1.5 1.9 2.4 1.9 1.5 28.321 1.8 2.8 3.3 3.1 1.3 4.522 2.1 5.7 6.1 5.9 1.3 2.9
Tabelle 4.9: Punktgenauigkeit nach der Ausgleichung mit Gesamtspurminimie-rung
4.4.4 Teilspurminimierung
Fur die Bestimmung des geodatischen Datums mit Hilfe der Teilspurminimie-rung wurden wieder, wie bei der gezwangten Ausgleichung die Punkte 1, 11,12 und 22 ausgewahlt. Die Redundanz ist allerdings dieselbe wie im Fall derGesamtspurminimierung, namlich 61 (da sich weder die Anzahl der Messdatennoch die der Unbekannten oder der Bedingungen geandert hat). Die Fehlerel-lipsen sind hier von der Große her vergleichbar mit den Ellipsen im Fall derzwangsfreien Ausgleichung mit den Festpunkten 1 und 11. Der große Unterschiedbesteht nun darin, dass wir in den Punkten 1 und 11 ebenfalls Genauigkeiten ab-leiten konnen. Die bei der Gesamtspurminimierung angefuhrten Uberlegungentreffen jedoch auch auf diesen Vergleich zu.
Abbildung 4.9: Teilspurminimierung mit Passpunkten 1, 11, 12 und 221 11
1222
Die Redundanzanteile der Messungen sind hier nicht mehr explizit aufgelistet.Die Redundanz betragt wie bei der zwangsfreien Ausgleichung immer zwischen56 und 63%. Somit sind alle Beobachtungen gut kontrollierbar. Da sich die Geo-metrie nicht geandert hat war auch kein Unterschied zu erwarten. Da allerdings

80 KAPITEL 4. QUALITAT VON NETZEN
PNr sy sx sH A B ϕ1 1.9 0.7 2.0 1.9 0.7 15.92 1.8 3.6 4.0 3.9 1.1 27.53 1.8 6.2 6.4 6.3 1.4 29.64 1.7 8.0 8.2 8.0 1.6 30.55 1.7 9.1 9.3 9.1 1.7 31.06 1.7 9.5 9.6 9.5 1.7 0.07 1.7 9.1 9.3 9.1 1.7 0.48 1.7 8.0 8.2 8.0 1.6 0.99 1.8 6.2 6.4 6.3 1.4 1.8
10 1.8 3.6 4.0 3.9 1.1 3.911 1.9 0.7 2.0 1.9 0.7 15.512 1.9 0.7 2.0 1.9 0.7 15.513 1.8 3.6 4.0 3.9 1.1 3.914 1.8 6.2 6.4 6.3 1.4 1.815 1.7 8.0 8.2 8.0 1.6 0.916 1.7 9.1 9.3 9.1 1.7 0.417 1.7 9.5 9.6 9.5 1.7 0.018 1.7 9.1 9.3 9.1 1.7 31.019 1.7 8.0 8.2 8.0 1.6 30.520 1.8 6.2 6.4 6.3 1.4 29.621 1.8 3.6 4.0 3.9 1.1 27.522 1.9 0.7 2.0 1.9 0.7 15.9
Tabelle 4.10: Punktgenauigkeit nach der Ausgleichung mit Teilspurminimierung
kein Festpunkt mehr in der Ausgleichung vorkommt, kann es bei unserer Konfi-guration auch keine Messung mit Redundanzanteil 100% mehr geben. Das giltauch bei Weglassen des Maßstabsfaktors.
4.5 Abschließende Bemerkungen
Die Beurteilung der Qualitat eines Netzes beruht zu einem großen Teil auf Erfah-rung. Man lernt zwar relativ schnell, Qualitatsparameter zu bestimmen, jedochist die Handhabung in der Praxis etwas schwieriger. Wie groß eine Fehlerellipsein der Praxis sein darf um noch das gewunschte Ergebnis zu liefern, ist oft ei-ne Frage des Fingerspitzengefuhls. Wenn man daher ein Netz plant, muss manbei den Anforderungen an die Netzqualitat sehr vorsichtig sein um einerseitsuberschussige Beobachtungen zu vermeiden (kosten Geld!) aber andererseitsdas Netz fur die zu losenden Aufgabe verwenden zu konnen.
Die fur ein Netz erforderliche Qualitat hangt immer sehr stark von der An-wendung ab, fur die das Netz benotigt wird. Geodatische Netze werden ubli-cherweise nicht um ihrer selbst willen gemessen, sondern sollen eine bestimmteFunktion erfullen. Die Funktion eines Netzes der Landesvermessung ist bei-spielsweise die Bereitstellung einer moglichst homogenen Basis fur unabhangigvoneinander durchgefuhrte Messungen, die jedoch zueinander in Bezug gesetztwerden mussen. Daher sollten Netze der Landesvermessung moglichst homo-

4.5. ABSCHLIESSENDE BEMERKUNGEN 81
Abbildung 4.10: Einteilung der verschiedenen QualitatsangabenQualitätskriterien
ZuverlässigkeitGenauigkeit
äußereinnere
R edundanzStatistische T ests
Nabla-Operator
E influss einesFehlers auf dieUnbekanntenE influss einesMesswertes auf die
Punktlage
äußereinnere
a priori Genauigkeit
lokal
a posteriori GenauigkeitPunktfehlerFehlerellipseK onfidenzellipse
relative Fehlerellipse
relative K onfidenzellipse
global
K onfidenzhyper-ellipsoidHauptkomponenten-analyseHomogenität
Isotropie
gen und isotrop sein. Bei Spezialnetzen der Ingenieurgeodasie kann es jedochvorkommen, dass die Genauigkeit nur in bestimmten Richtungen relevant ist.Bei der Uberwachung eines Rutschhanges ist beispielsweise die Richtung dervermuteten Bewegung viel wichtiger als die Richtung orthogonal dazu. DieserUmstand wird sich auch in der Form der Fehlerellipsen niederschlagen, sie wer-den also ihre große Halbachse ungefahr in Richtung der Hohenschichtlinien ha-ben. Ahnliches gilt fur das Abstecken von Gleis- oder Bruckenachsen, bei denenhauptsachlich die Querabweichungen relevant sind. Gute Programme konnen je-doch bei der Beurteilung der Qualitat geodatischer Netze Hilfestellung leisten.Bereits seit den 70er-Jahren des 20. Jahrhunderts gibt es entsprechende Software(z.B. Forstner, 1979a).
Erschwerend kommt noch hinzu, dass in unterschiedlichen Fachbereichenauch unterschiedliche Begriffe fur die Genauigkeitsangaben verwendet werden.Zusatzlich konnen auch mit einzelnen Begriffen unterschiedliche Standardabwei-chungen beschrieben werden. Durch Angabe des Wertes fur die Konfidenzellip-se beispielsweise ist die Standardabweichung noch nicht genau bestimmt. Erstdurch Angabe des Signifikanzniveaus kann man den Bezug zwischen Konfiden-zellipse und (einfacher) Fehlerellipse herstellen.
Abbildung 4.10 zeigt abschließend noch einmal, welche Qualitatsparameteres gibt und ordnet die Parameter in einer Struktur an. Zunachst gilt es, zwischenGenauigkeit und Zuverlassigkeit zu unterscheiden. Die Genauigkeit bestimmt,wie prazise die Werte ermittelt wurden, wahrend die Zuverlassigkeit angibt, wieweit grobe Fehler aufdeckbar sind. Weiters unterscheiden wir zwischen innerenund außeren Parametern. Dabei geben die inneren Parameter die Qualitat desEntwurfes an, sind also a priori bestimmbar (die Verbesserungen sind fur dieBerechnung nicht notwendig - auch nicht in der Form des mittleren Gewichtsein-heitsfehlers). Die außeren Parameter bestimmen dann die tatsachlich erreichte

82 KAPITEL 4. QUALITAT VON NETZEN
Qualitat. Schließlich gibt es die Unterscheidung zwischen lokalen und globalenParametern bei der außeren Genauigkeit. Diese Unterscheidung deutet aller-dings nur an, wie groß der Bereich der Kofaktormatrix ist, der fur die Berech-nung der Parameter herangezogen wird. Fur die Bestimmung einer Fehlerellipsesind 4 Werte notwendig, also nur ein kleiner Ausschnitt der Kofaktormatrix.Daher ist eine Fehlerellipse ein lokales Maß. Fur die Angabe des Konfidenzhy-perellipsoides hingegen braucht man die gesamte Kofaktormatrix und es handeltsich somit um ein globales Genauigkeitsmaß.
Ein in der Praxis immer wieder auftretendes Problem ist fehlerhafte Kom-munikation der Qualitatsparameter. Speziell Juristen (die auf dem Gebiet desKatasters oft Entscheidungen treffen oder technische Ausfuhrungen prufen) ha-ben kein Konzept fur stochastische Unsicherheit (Twaroch, 2005). Auch beimUmgang mit Baunormen kommen wir oft mit statistischen Aussagen nicht wei-ter. Hier gilt es, auf ein Konzept der Toleranzen (also der maximal vertretbarenAbweichungen) uberzugehen (Peters, 1974).

Kapitel 5
Bestimmung vonNaherungskoordinaten
Bisher wurde die Bestimmung von Naherungskoordinaten bei Netzmessungenimmer als sekundares Problem angesehen. Bei der manuellen Aufbereitung derMessdaten war der zusatzliche Aufwand fur die Bestimmung von Naherungsko-ordinaten vernachlassigbar gering. Zusatzlich hatte der Bearbeiter ja ein Netz-bild vor Augen und konnte daher die geometrisch gunstigste Variante fur dieBestimmung wahlen. Heutzutage streben wir allerdings einen automatischenDatenfluss an. Die Messdaten werden vom Messgerat in den Computer einge-spielt und ein Softwarepaket fuhrt die Ausgleichung der Daten und Berechnungder Unbekannten automatisch durch. Der Mensch sollte nach Moglichkeit nichtmehr notwendig sein. Eine der Grundvoraussetzungen dafur ist allerdings eineautomatische Berechnung von Naherungskoordinaten.
Die Bestimmung guter Naherungskoordinaten basiert auf folgenden Bedin-gungen:
• Das Koordinatensystem muss definiert sein. Bei einer Netzverdichtungsind somit im 2D-Fall mindestens 2, im 3D-Fall mindestens 3 Festpunktenotwendig. Bei Ingenieurnetzen, die oft frei ausgeglichen werden, ist ei-ne solche Vorgabe ebenfalls notwendig, auch wenn die Punkte nicht alsFestpunkte behandelt werden. Bei GPS-Messungen ist es wichtig, etwaigeVerzerrungen der verwendeten Projektion (z.B. Gauß-Kruger-Verzerrung)anzubringen.
• Die rohen Messdaten mussen bereits aufbereitet sein. Bei den verwende-ten Messungen mussen alle notwendigen Korrekturen (Temperatur, Luft-druck, Gauß-Kruger, evtl. 3D nach 2D, Reflektorkonstante ...) vor der Wei-terverarbeitung in einer Ausgleichung angebracht werden. Zu beachten istdabei, dass manche Korrekturen (z.B. die Gauß-Kruger-Verzerrung) nurangebracht werden konnen, wenn die Koordinaten der beteiligten Punktebekannt sind. Hier ist dann eventuell (abhangig von den Genauigkeitsan-forderungen und der Große der Anderungen) eine iterative Vorgangsweise
83

84 KAPITEL 5. BESTIMMUNG VON NAHERUNGSKOORDINATEN
Abbildung 5.1: Problematik der Naherungskoordinaten bei der Taylor-Reihenentwicklung (Niemeier, 2002, S. 302)
notig (Berechnung des Netzes, Korrektur der Daten, neuerliche Berech-nung des Netzes usw.).
5.1 Iterative Ausgleichung
Fur die Ausgleichung nach kleinsten Quadraten benotigen wir lineare Verbes-serungsgleichungen. Wenn die vorliegenden Gleichungen nichtlinear sind (wieim Fall der Strecken- oder Richtungsmessung) mussen wir eine Linearisierungdurchfuhren. Dies geschieht durch Entwicklung in eine Taylor-Reihe und an-schließenden Abbruch der Entwicklung nach der ersten Ableitung. Fur den ein-dimensionalen Fall sieht die Taylor-Entwicklung folgendermaßen aus:
f(X0 + x) = f(X0) +(
∂f
∂X
)
X=X0
· x +12
(∂2f
∂X2
)
X=X0
· x2 + ... (5.1)
Dieser Ansatz setzt voraus, dass
• der Funktionsverlauf hinreichend stetig ist und
• die Naherungswerte der Unbekannten hinreichend genau bekannt sind.
Fur Anwendungen in der Geodasie kann ublicherweise ein stetiger Verlauf vor-ausgesetzt werden. Problematisch ist dagegen die Bestimmung der Naherungs-koordinaten. Ein Indiz fur die Gute der Naherungskoordinaten ist die bereitsin A1 besprochene Haupt- oder Schlussprobe. Bei ihr wird genau die in Abbil-dung 5.1 gezeigte Differenz zwischen Funktionswert und Wert der linearisiertenFunktion bestimmt.
Wenn die Differenzen fur einzelne oder sogar fur alle Beobachtungen großerals erwartet sind, so kann eine iterative Ausgleichung (eventuell auch in meh-reren Schritten) erfolgen. Die Große der noch tolerablen Differenzen hangt vonder Rechenscharfe ab, sollte aber auf jeden Fall um mindestens 3 Zehnerpoten-zen kleiner als die letzte im Ergebnis angegebene Nachkommastelle sein. Beider iterativen Ausgleichung wird die A-Matrix neu bestimmt. Damit ist dieses

5.2. HERKOMMLICHE ANSATZE 85
Verfahren eine komplett neue Ausgleichung der Beobachtungen. Die technischeDurchfuhrung ist kein Problem, da einfach die Ergebnisse der letzten Ausglei-chung als Naherungswerte fur den neuen Iterationsschritt verwendet werden:
1. Iteration: X0 → X1 = X0 + x1
2. Iteration: X01 = X1 → X2 = X1 + x2
...(5.2)
Das Abbruchkriterium muss dann entweder fur die Hauptprobe oder fur denParametervektor x definiert werden. Eine Moglichkeit ware beispielsweise dieForderung, dass die Norm des Parametervektors x kleiner als ein vorgegebenerGrenzwert (z.B. 10−3) ist. Eine weitere Moglichkeit geht davon aus, dass dieNorm von x mit genugender Genauigkeit Null geworden ist. Damit werden dieVerbesserungen gleich den verkurzten Beobachtungen (v = Ax − l = l wennx = 0). Somit ergibt sich als Kriterium
lT l− vT v ≤ ε (5.3)
oder in Relation zu den verkurzten Beobachtungen (um der Problematik derunterschiedlichen Maßeinheiten auszuweichen)
lT l− vT v = εlT l. (5.4)
Fur ε kann dabei beispielsweise ein Wert von 10−4 gewahlt werden. Zu beachtenist jedoch, dass das Verfahren nur dann konvergiert, wenn die Naherungswertegut genug sind.
5.2 Herkommliche Ansatze zur Berechnung vonNaherungskoordinaten
5.2.1 Hohennetze
Die Naherungskoordinaten spielen bei Hohennetzen eine untergeordnete Rolle,da die Beobachtungsgleichungen lineare Gleichungen sind und somit keine Un-genauigkeit durch eine Linearisierung entstehen kann. Fruher wurden trotzdemNaherungswerte verwendet um mit kleinen Zahlen rechnen zu konnen. In Hin-blick auf die Datumsproblematik kann es aber auch heute noch sinnvoll sein,Naherungskoordinaten einzufuhren.
In Hohennetzen ist die Bestimmung der Naherungswerte recht einfach. Manwahlt fur einen Punkt eine Hohe und leitet die ubrigen Hohen uber die ge-messenen Hohenunterschiede von dieser Hohe ab. Etwaige weitere Punkte mitbekannter Hohe konnen dabei als Kontrolle verwendet werden.
5.2.2 Lagenetze
Fur die Bestimmung der Naherungskoordinaten in Lagenetzen wird haufig einAnsatz gewahlt, der sich an der manuellen Berechnung orientiert. Ausgehend

86 KAPITEL 5. BESTIMMUNG VON NAHERUNGSKOORDINATEN
Abbildung 5.2: Beispiel fur ein Streckennetz.1
B
A
3
24
von bekannten Punkten werden die Naherungskoordinaten der ubrigen Punktedurch Vorwarts- und Ruckwartsschnitte, polares Anhangen, Polygonzuge undfreie Stationierung berechnet.
Dazu ist es jedoch notwendig, dass die Konfiguration eine solche Losung aucherlaubt, was nicht immer der Fall ist. Abbildung 5.2 zeigt ein Streckennetz, beidem es nicht moglich ist, die Naherungskoordinaten mit herkommlichen Mittelnzu bestimmen. Die Punkte A und B sind Festpunkte und die Punkte 1 bis 4Neupunkte. Naherungskoordinaten konnten hier nur dann bestimmt werden,wenn es sich um einen Sonderfall handelt (z.B. die Punkte 2 und 4 auf derVerbindungsgeraden von A nach B liegen). Liegt kein solcher Sonderfall vor,so gibt es nur eine mogliche Vorgangsweise: Man wahlt die Koordinaten furzwei beliebige Netzpunkte und berechnet alle weiteren Koordinaten in Bezugauf diese Koordinaten in einem lokalen Netz. Dieses lokale Netz wird dann uberdie vorhandenen Festpunkte ins ubergeordnete System transformiert.
5.3 Direkter Ansatz zur Bestimmung von Nahe-rungskoordinaten
Ein Nachteil der herkommlichen Bestimmungsmethoden fur Naherungskoordi-naten ist der, dass sie nicht leicht fur den Computer umzusetzen sind, da esvon der jeweiligen Situation abhangt, in welcher Reihenfolge und mit welchenAlgorithmen die Neupunktskoordinaten bestimmt werden. Ideal ware eigentlicheine Losung, bei der die Naherungskoordinaten mit Hilfe von Beobachtungsglei-chungen und Matrizenoperationen bestimmt werden. Einer dieser automations-gerechten Ansatze wird hier stellvertretend fur alle anderen vorgestellt.
Ausgangspunkt der Uberlegungen ist die Forderung nach linearen Beziehun-gen zwischen den Koordinaten. Lineare Gleichungen haben den Vorteil, dasskeine Naherungswerte notwendig sind. Die Losung solcher Beziehungen wurdedann Koordinaten ergeben, die als Naherungswerte fur die tatsachliche Aus-gleichung verwendet werden konnen. Fur die Messgroßen Strecke und Richtungerhalt man solche Beziehungen ausgehend von:
∆Xij = sij · cos tij = sij · cos(rij + oi),∆Yij = sij · sin tij = sij · sin(rij + oi).
(5.5)

5.3. DIREKTER ANSATZ 87
Die Koordinatenunterschiede ∆Xij und ∆Yij zwischen den Netzpunkten sinddie abgeleiteten Funktionen. Sie konnen nun als Beobachtungen in ein linea-res Ausgleichungsmodell zur Bestimmung der Naherungskoordinaten eingefuhrtwerden:
∆Xij + v∆Xij = Xj0 −Xi0,∆Yij + v∆Yij
= Yj0 −Yi0.(5.6)
Die Berechnung dieser Ausgleichungsaufgabe erfolgt nun in drei aufeinanderfolgenden Schritten. Zunachst mussen die Orientierungsunbekannten ermitteltwerden, da diese zur Bestimmung der Koordinatendifferenzen notwendig sind.Anschließend konnen die Koordinatendifferenzen in einem linearen System aus-geglichen werden. Schlussendlich werden fur die Punkte Naherungskoordinatenbestimmt, die bisher ausgeschlossen werden mussten.
5.3.1 Schritt 1: Ubertragung der Orientierungsunbekann-ten
Die Anwendung der Gleichungen (5.5) erfordert fur jeden Standpunkt die Kennt-nis der Orientierungsunbekannten oi. Lasst man zunachst fur jeden Standpunkteine Orientierungsunbekannte zu, die dem Richtungswinkel der Nullrichtung desTheodolits entspricht, so gilt:
oi − oj = rij − rji ± 200g. (5.7)
Dabei sind rij und rji die tatsachlich gemessenen Richtungen. Nun betrachtenwir die Orientierungen als Unbekannte und die Differenzen ∆rij = rij − rji alsabgeleitete Beobachtungen. Dann konnen wir ein lineares Ausgleichungsmodellaufstellen:
∆rij + vij = oi − oj ± 200g. (5.8)
Informationen uber die Orientierungsunbekannten liegen aber nicht nur uber diedirekte Verbindung vor. Auch weitere Netzpunkte liefern hierzu Informationen.Somit ist (5.8) das funktionale Modell einer uberbestimmten Ausgleichungsauf-gabe1.
Das Datum des Netzes wird bestimmt, indem fur einen beliebigen Punkt dieOrientierungsunbekannte gewahlt wird. Dieser Punkt sollte jedoch gut in dasNetz eingebundenen sein. Haufig wird fur die Orientierung der Wert 0 gewahlt,also die x-Achse des lokalen Systems in die Nullrichtung des Theodolits in diesemPunkt gelegt.
Zu beachten ist bei der Berechnung allerdings, dass sich noch grobe Fehlerim Datenmaterial befinden konnen. Daher sollte ein geeignetes (moglichst gegenFehlereinflusse resistentes = robustes) Verfahren zur Ausgleichung verwendetwerden.
1Die Richtigkeit dieser Aussage kann man sich einfach an einem Dreieck uberlegen. Furein Dreieck kann man drei solche Gleichungen aufstellen. Von den drei Orientierungen sindallerdings nur zwei frei wahlbar, weil sich die dritte aus den ubrigen beiden ergibt.

88 KAPITEL 5. BESTIMMUNG VON NAHERUNGSKOORDINATEN
5.3.2 Schritt 2: Ausgleichung der Koordinatendifferenzen
Nach dem ersten Schritt konnen wir fur einen zusammenhangenden Teil mitgegenseitigen Richtungs- und Streckenbeobachtungen Gleichungen nach (5.5)aufstellen. Fur die resultierenden Koordinatenunterschiede liegt nach (5.6) einlineares Ausgleichungsmodell vor. Es wird in der Regel ein uberbestimmtes Mo-dell sein2. Als stochastisches Modell genugt (da wir ja nur Naherungskoordina-ten bestimmen wollen) die Einheitsmatrix.
Auch in diesem Schritt muss wieder mit dem Vorhandensein grober Feh-ler gerechnet werden. Somit mussen wir wieder ein geeignetes Verfahren zurAusgleichung verwenden.
5.3.3 Schritt 3: Bestimmung von Naherungskoordinatenfur die ubrigen Punkte
Wir haben nun Naherungskoordinaten fur das Teilnetz bestimmt, bei dem ge-genseitige Messungen durchgefuhrt wurden. Fur Punkte, die polar angehangtoder uber Vorwartsschnitt bestimmt wurden, haben wir jedoch noch keine Koor-dinaten. Die Koordinaten dieser Punkte werden nun ausgehend von den bereitsbestimmten Punkten berechnet. Diese Aufgabenstellung ist im Allgemeinen ein-facher als fur die Ausgangssituation, da es sich nur noch um vereinzelte Punktehandelt.
Schlussendlich mussen wir die lokal bestimmten Koordinaten noch uber dieFestpunkte in das gewunschte Koordinatensystem transformieren.
5.4 Strategie fur 3D-Netze
Der fur 2D-Netze vorgestellte direkte Ansatz ist leider bei der Anwendung auf3D-Netze, bei denen Raumstrecken, horizontale Richtungen Vertikalwinkel u.a.gemessen wurden, numerisch nicht stabil. Somit ist das Verfahren fur 3D-Netzenicht verwendbar. Stabil ist jedoch die Aufspaltung des Problems in die getrenn-te Bestimmung der Lage- und Hohenkoordinaten. Fur diese beiden Teile werdennach den oben vorgestellten Methoden Naherungskoordinaten bestimmt und zu3D-Koordinaten fur die ”echte“ 3D-Ausgleichung zusammengefugt.
Wichtig ist dabei aber, dass eine zusatzliche Aufarbeitung der Messgroßendurchgefuhrt werden muss. Raumstrecken mussen fur die Berechnung der Nahe-rungskoordinaten uber die Zenitdistanz auf horizontale Strecken oder Hohenun-terschiede reduziert werden. Fur die endgultige Ausgleichung weden aber wiederdie Raumstrecken benotigt.
Stehen GPS-Punkte im gewunschten Datum zur Verfugung (”gemessene“3
2Vergleiche die Uberlegung von Schritt 1.3Eigentlich handelt es sich bei den GPS-Koordinaten nicht um die Messwerte, weil bei
GPS ja Phasendifferenzen gemessen werden. Die Koordinaten sind dann abgeleitete Großen

5.4. STRATEGIE FUR 3D-NETZE 89
Koordinaten), so sind diese Koordinaten in der Regel ausreichend genau um alsNaherungskoordinaten zu dienen. Eventuell ist jedoch eine Transformation uberidente Punkte notwendig, um Abweichungen zwischen den Koordinatesystemenauszugleichen.
(Hofmann-Wellenhof et al., 1997). Diese Unterscheidung wird jedoch ublicherweise nicht ge-macht, da uber die Beschreibung der Koordinaten als Zufallsvariable der Prozess genau genugmodelliert wird.

90 KAPITEL 5. BESTIMMUNG VON NAHERUNGSKOORDINATEN

Kapitel 6
Robuste Schatzung
Die Ausgleichungsrechnung beschaftigt sich mit der Schatzung von Parametern.Die Bestimmung unbekannter Parameter, wie in A1 kennen gelernt und in Ka-pitel 2 wiederholt, ist nichts anderes als die Bestimmung von Schatzwerten furdie Unbekannten. Die Methode der kleinsten Quadrate, die wir bisher immerverwendet haben, ist somit ein Schatzverfahren. Die Eigenschaften der Methodeder kleinsten Quadrate sind
• großte Wahrscheinlichkeit fur die ausgeglichenen Beobachtungswerte und
• Erwartungstreue.
Beliebt ist die Methode der kleinsten Quadrate vor allem deshalb, weil sie alseinzige Schatzfunktion auf einen linearen Schatzer fuhrt und somit einfach zuhandhaben ist. Alternative Methoden sind mathematisch unubersichtlicher underwiesen sich in der Vergangenheit als rechnerisch nicht (leicht) beherrschbar.Diese rechentechnischen Einschrankungen verlieren jedoch mit fortschreitenderComputertechnologie an Bedeutung. Die mittlerweile auch in der Alltagspraxiszur Verfugung stehenden Rechnerkapazitaten ermoglichen es, auch fur prakti-sche Anwendungen nichtlineare Schatzfunktionen in Betracht zu ziehen.
Ein Nachteil der Methode der kleinsten Quadrate ist ihre Anfalligkeit ge-genuber Abweichungen der Verteilung der Messfehler von der Normalverteilung(Gleinsvik, 1971, 1972). Besonders gravierend ist der Einfluss von bei grobenFehlern. Anhand von Beispiel 6.1 werden wir untersuchen, wie sich ein groberFehler auf die Verbesserungen eines Streckennetzes auswirkt. Wir werden sehenwie schwer es ist, einen Fehler exakt zu lokalisieren.
In der Praxis ware es oft wunschenswert, auf Anhieb sehen zu konnten, wo einFehler bei den Messungen passiert ist. Das ist aber nur dann moglich, wenn dieVerbesserungen von grob falschen Beobachtungen um vieles großer sind als dieVerbesserungen ”korrekter“ Beobachtungen. Das ist sicher dann gegeben, wenndie falschen Beobachtungen das Ergebnis der Schatzung nicht oder zumindestfast nicht beeinflussen. Dann werden sich grob falsche Messungen namlich an die
91

92 KAPITEL 6. ROBUSTE SCHATZUNG
Ergebnisse der ubrigen Messdaten anpassen. Methoden, bei denen das passiert,fasst man unter dem Begriff ”robuste Schatzer“ zusammen. Wir werden Beispiel6.1 auch mit einem robusten Schatzverfahren losen und dabei die Vorteile derrobusten Methoden sehen.
Bereits im letzten Kapitel haben wir einen Fall kennen gelernt, bei dem ro-buste Schatzung verwendet werden sollte: den direkten Ansatz zur Bestimmungvon Naherungskoordinaten. Prinzipiell werden robuste Schatzer uberall dort er-folgreich eingesetzt, wo große Datenmengen vorliegen und grobe Fehler nichteinfach aufzufinden sind. Daher ist die robuste Schatzung unter anderem auchin der Photogrammetrie ein wichtiges Hilfsmittel.
6.1 Einfuhrung
Bisher sind wir bei der Schatzung von Parametern davon ausgegangen, dass dieFehler unserer Messungen normalverteilt sind. Diese Annahme haben wir auf-grund des zentralen Grenzwertsatzes getroffen (siehe A1). Voraussetzung fur dieGultigkeit dieser Annahme ist, dass unsere Messungen folgende Eigenschaftenaufweisen:
• Sie sind frei von groben Fehlern.
• Sie sind unberuhrt von systematischen Einflussen.
Diese idealen Voraussetzungen sind in der Praxis leider recht selten anzutref-fen. Untersuchungen an umfangreichem Datenmaterial haben gezeigt, dass dieAnnahme der Normalverteilung bei geodatischen Beobachtungen in den mei-sten Fallen nicht in vollem Umfang bestatigt werden kann (Birkenbach, 1916;Borutta, 1988; Bretterbauer, 1967; Caspary, 1988). Das folgende Beispiel sollnun zeigen, wie sich ein grober Fehler im Datenmaterial auf die geschatztenParameter auswirkt.
Beispiel 6.1 Gegeben sind die Festpunkte 1 bis 5, von denen jeweils dieStrecke zum Neupunkt X gemessen wurde. Die Festpunkte liegen dabei auf dery-Achse und haben folgende Koordinaten:
PNr. y x1 -200 02 -100 03 0 04 100 05 200 0
Die Messwerte sind in nachstehender Tabelle zusammengefasst. Als Stan-dardabweichung der Streckenmessungen wurden einheitlich 2mm angenommen.

6.1. EINFUHRUNG 93
von nach s1 X 282,8442 X 223,6033 X 199,9984 X 223,6085 X 282,842
Die Naherungskoordinaten fur den Punkt X sind (200/0). Die ausgeglicheneKoordinaten und die Verbesserungen der Beobachtungen ergeben sich zu
PNr. y xX -0,0006 199,9989
von nach v [mm]1 X -2,52 X 2,63 X 0,94 X -1,95 X 0,4
Betrachten wir die Verbesserungen, so sehen wir, dass sie sich im Rahmen derStandardabweichung der Messungen bewegen. Grobe Fehler konnten wir dortvermuten, wo Verbesserungen von mehr als 6mm (der dreifachen Standardab-weichung) auftreten (vergleiche Seite 66).
Wenn wir nun in der Strecke von 1 nach X einen Fehler von 10m einfuhren,also die Beobachtung auf 292,844m andern, so schlagt sich diese Anderung inden Ergebnissen wie folgt nieder:
PNr. y xX 5,0502 201,9631
von nach v [mm]1 X -5.042,22 X 4.018,23 X 1.965,14 X -503,95 X -2.182,2
Durch den groben Fehler werden die ausgeglichenen Koordinaten in x-Richtungum nahezu 2m, in y-Richtung um uber 5m verfalscht. Die Verbesserungen derBeobachtungen weisen durchwegs große Werte auf. Die Verbesserung der mit ei-nem Fehler versehenen Beobachtung hat zwar den betragsmaßig großten Wert1,aber auch die ubrigen Verbesserungen sind viel großer als man anhand der Mess-genauigkeit erwarten sollte. Im vorliegenden Fall mit einem einzelnen grobenFehler kann man noch auf die falsche Messung und mit Hilfe der Redundanzan-teile auf die Große des Fehlers schließen. Sind aber zwei oder mehr Messungengrob falsch, so uberlagern sich die Einflusse und es ist nicht mehr ersichtlich,welche Messwerte falsch sind.
1Fur den Redundanzanteil der Messung von 1 nach X ergibt sich ein Wert von 50,4%.Wenn man diesen Prozentsatz auf den groben Fehler von 10m anwendet, so erhalt man einenWert fur die Verbesserung von 5,04m. Es zeigt sich also deutlich der Zusammenhang zwischeneinem groben Fehler in der Messung und der Auswirkung in der Verbesserung, der bei derBehandlung der Redundanzanteile angesprochen wurde.

94 KAPITEL 6. ROBUSTE SCHATZUNG
Ursache fur das ”Versagen“ der Methode der kleinsten Quadrate ist, dassnicht alle Voraussetzungen erfullt sind. Die Methode der kleinsten Quadrateliefert nur dann die Schatzwerte mit der großten Wahrscheinlichkeit, wenn dieBeobachtungen normalverteilt sind. Bei nicht streng normalverteilten Beobach-tungen liefern andere Schatzfunktionen wesentlich bessere Ergebnisse. GrobeFehler (Ausreißer) verfalschen die Modellannahme und fuhren zu Verteilungen,die nicht mehr streng normalverteilt sind.
Seit Mitte der sechziger Jahre des zwanzigsten Jahrhunderts wurden neue,robuste Verfahren der Parameterschatzung entwickelt (z.B. Huber2, 1964). DerZusatz ”robust“ soll dabei zum Ausdruck bringen, dass bei diesen Ansatzenqualitativ gute Schatzungen der unbekannten Parameter ermittelt werden. Dasfunktioniert auch dann, wenn die Modellanforderungen fur die Methode derkleinsten Quadrate nicht gegeben sind. Robuster Schatzverfahren zeichnen sichsomit durch folgende Eigenschaften aus (Caspary, 1988):
• Der Schatzer soll verteilungsrobust sein. Fehlerhafte Annahmen im stocha-stischen Modell sollen das Ergebnis moglichst wenig storen.
• Der Schatzer soll datenrobust sein. Das Verfahren soll auch dann nochbrauchbare Ergebnisse liefern, wenn grobe Fehler in den Ausgangsdatenvorliegen. ”Schlechte“ Daten (also z.B. auch grob falsche Daten) solleneinen moglichst geringen Einfluss auf das Ergebnis haben.
• Der Schatzer soll modellrobust sein. Die Ergebnisse der Schatzung sollenhauptsachlich von den guten Daten beeinflusst werden. Der Einfluss vonDaten, die dem Modell widersprechen (bei geodatischen Anwendungenmeist grobe Fehler), soll im Ergebnis moglichst gedampft sein.
• Der Schatzer soll eine hohe Trennfahigkeit aufweisen. Grobe Fehler undSchwachen des Modells sollen sich klar von guten Beobachtungen und rich-tigen Modellannahmen abheben. Das geschieht beispielsweise durch kleineVerbesserungen fur ”gute“ Beobachtungen und große Verbesserungen fur
”schlechte“ Beobachtungen.
• Der Schatzer soll bei Abwesenheit von Modell- oder groben Fehlern opti-male Ergebnisse liefern. Die erhaltenen Ergebnisse sollten im Optimalfallgleich den Ergebnissen der Methode der kleinsten Quadrate sein.
Die in vielen Gebieten erfolgreiche und uns Geodaten so vertraute Methode derkleinsten Quadrate wird durch robuste Schatzverfahren nicht ersetzt. Vielmehrkonnen beide Methoden parallel eingesetzt werden, um je nach Modellkenntnis-sen und Datenqualitat die bestmoglichen Ergebnisse zu erzielen.
Beispiel 6.1 Fortsetzung Um die Gute der robusten Verfahren einschatzenzu konnen betrachten wir noch einmal die Angabe aus Beispiel 6.1. Diesmal losenwir die Aufgabe allerdings mit einem robusten Verfahren, der LMS-Schatzung(Least Median Square, siehe Abschnitt 6.5). Dabei werden alle moglichen, nicht
2Peter Huber, schweizer Mathematiker und Statistiker.

6.1. EINFUHRUNG 95
uberbestimmten Losungen ermittelt, fur jede Losung die Verbesserungsquadrateberechnet und dann der Median dieser Werte gesucht. Die Losung nach LMSist die Variante, die den minimalem Wert fur den Median aufweist.
Bei unserer Problemstellung ist eine nicht uberbestimmte Losung gegeben,wenn wir jeweils zwei Strecken herausgreifen und einen Bogenschnitt rechnen.Das ergibt 10 verschiedene Losungen. Die Mediane der quadrierten Verbesse-rungen ergeben sich zu folgenden Werten (in m2):
223,8 40,311,6 10,2
9,6E-07 3,0E-071,4E-06 9,6E-072,4E-06 3,2E-05
Der Minimalwert betragt 3,0E-07 und die zugehorige Losung ist:
PNr. y xX -0,0056 199,9985
Somit unterscheidet sich die Losung von der ursprunglichen Losung (der Losungohne groben Fehler) um 5mm in y- und um 0,4mm in x-Richtung. Das ist beieinem Anteil von 20% grob falschen Messungen (1 von 5) ein sehr gutes Ergebnis.Die zu dieser Losung gehorenden Verbesserungen betragen:
von nach v [mm]1 X -10006,32 X 0,03 X 0,54 X 0,05 X 3,6
Anhand der Verbesserungen konnen wir erkennen, dass es sich um die Losungunter Verwendung der Punkte 2 und 4 handelt (die entsprechenden Verbesserun-gen sind gleich 0). Sehr deutlich ist aber auch der grobe Fehler in der Messungvon 1 nach X.
Eine weitere Methode fur eine robuste Schatzung von Parametern bestehtdarin, die groben Fehler in einem iterativen Prozess durch eine Schatzung nachkleinsten Quadraten zu eliminiert. Dazu wird von der Annahme ausgegangen,dass die Messungen mit den großten Verbesserungen wahrscheinliche Kandi-daten fur grobe Fehler sind. Es werden daher zunachst alle Messungen gleichgenau angesetzt und in jedem Iterationsschritt das Gewicht als Funktion derVerbesserung gesetzt (Kegel, 1987; Kraus, 1996; Schuh, 1984). Es handelt sichdabei um eine Adaption der danischen Methode nach Krarup zum Auffindengrober Fehler. Wesentlich fur die Geschwindigkeit der Iteration ist dabei derAnsatz, mit dessen Hilfe die Gewichte neu ermittelt werden. Schuh schlagt dieFunktionen
p =(e−| v
σ |4,4)0,05
fur die 2. und 3. Iteration (6.1)

96 KAPITEL 6. ROBUSTE SCHATZUNG
p =(e−| v
σ |3,0)0,05
fur die folgenden Iterationen (6.2)
vor (Schuh, 1984). In unserem Beispiel verwenden wir als einfachere Form denKehrwert der Verbesserung in [m] als Gewicht und erhalten:
Iterationsschritt 1:
von nach Gewicht v [mm]1 X 1 -5.042,22 X 1 4.018,23 X 1 1.965,14 X 1 -503,95 X 1 -2.182,2
Iterationsschritt 2:
von nach Gewicht v [mm]1 X 0,198327932 -6.306,82 X 0,248870548 3.080,93 X 0,508880462 1.657,74 X 1,984673522 -116,55 X 0,458257116 -1.352,3
Iterationsschritt 3:
von nach Gewicht v [mm]1 X 0,158560208 -7.384,32 X 0,324582083 2.207,13 X 0,603240232 1.227,74 X 8,586832467 -11,95 X 0,739487041 -882,9
Wie man unschwer erkennen kann wird die Verbesserung der Strecke von 1nach X (von der wir wissen, dass sie einen groben Fehler enthalt) immer großer,wahrend die ubrigen Verbesserungen kleiner werden. Dadurch wird auch dasGewicht (also der Einfluss) dieser Beobachtung immer geringer und die Losungimmer ”richtiger“3. Nach der 17. Iteration stehen die Werte der Koordinatenfest (die Werte der ersten vier Nachkommastellen andern sich nicht mehr). DieKoordinaten des Neupunktes und die Verbesserungen fur die Beobachtungenergeben sich zu
PNr. y xX 0,0043 200,0035
von nach v [mm]1 X -9.995,82 X 8,83 X 5,54 X 0,05 X 0,2
3Eigentlich musste man sagen: Immer weniger vom groben Fehler beeinflusst.

6.2. GRUNDLAGEN DER PARAMETERSCHATZUNG 97
Ein Vergleich mit der Losung aus der ersten Variante zeigt, dass sich dieWerte voneinander unterscheiden. Das heißt aber nicht, dass eine der beidenLosungen falsch ist. Beide Losungen sind korrekt. Unterschiedlich ist jedoch dieRandbedingung. Wahrend bei unserem ersten Beispiel der Median der Verbesse-rungsquadratsumme minimiert wurde war es im zweiten Beispiel die Summe derVerbesserungs-Absolutbetrage. Den theoretischen Hintergrund dieser Ansatzewerden wir im weiteren Verlauf dieses Kapitels noch kennen lernen.
6.2 Grundlagen der Parameterschatzung
Bevor wir uns naher mit den Prinzipien der robusten Schatzung beschafti-gen mussen wir noch einige Begriffe einfuhren. Es handelt sich dabei um dieSchatzfunktion, mit deren Hilfe unbekannte Parameter geschatzt werden, dieEinflussfunktion, die das Verhalten der Schatzfunktion bei Anderungen im Da-tenbestand (z.B. Hinzufugen einer Messung) beschreibt, und die Verlustfunktion,welche die Abweichung einer Schatzfunktion vom gesuchten optimalen Schatz-ergebnis angibt.
6.2.1 Schatzfunktion
Oft ist es nicht moglich, eine Große direkt zu messen. Die Große muss dannaus anders gearteten Großen abgeleitet werden und die Ableitung erfolgt uberFunktionen der Messgroßen. Beispielsweise werden fur die Bestimmung der Ko-ordinaten von Punkten Großen wie Strecken, Richtungen und Azimute gemessenund diese Messgroßen uber die aus A1 bekannten Funktionen mit den eigentlichgesuchten Koordinaten verknupft.
Eine Schatzfunktion ist eine reelle Funktion t(x1, x2, . . . , xn) mit den Mes-sungen x1, x2, . . . , xn als Parameter. Wir betrachten nun den Schatzwert Tn
fur einen unbekannten Parameter τ um die Eigenschaften der Schatzfunktionenuntersuchen zu konnen. Den Schatzwert
Tn = t(X1, X2, . . . , Xn) (6.3)
wird dabei aus einer Reihe von Zufallsvariablen Xi mit i = 1 . . . n geschatzt.
Konsistenz einer Schatzfunktion
Eine Schatzfunktion Tn fur einen zu schatzenden Parameter τ ist konsistent,wenn ihr Wert bei wachsendem Umfang n der Stichprobe gegen den zu schatzen-den Parameter τ konvergiert. Daraus ergibt sich: Je großer der Stichprobenum-fang n, desto sicherer wird die Schatzung durch die Schatzfunktion.

98 KAPITEL 6. ROBUSTE SCHATZUNG
Erwartungstreue einer Schatzfunktion
Eine Schatzfunktion, bei welcher der Erwartungswert gleich dem zu schatzendenParameter ist, nennt man erwartungstreu, wenn
E(Tn) = E (t (X1, X2, . . . , Xn)) = τ (6.4)
gilt, und dies unabhangig von der Anzahl der Realisierungen n. Die Differenz
B = E(Tn)− τ (6.5)
heißt Bias. Bei erwartungstreuen Schatzern ist diese Differenz gleich Null.
Effizienz einer Schatzfunktion
Die Schatzvarianz4, also V (Tn) = E((Tn − τ)2), ist ein Maß fur die Streuungder Schatzfunktion um den Erwartungswert. Dieser Wert sollte moglichst kleinsein, da sie die Qualitat der Schatzung widerspiegelt. Das Ergebnis der Schatz-funktion sollte also bei unterschiedlichen Stichproben moglichst wenig streuen.Als Effizienz wird nun das Verhaltnis zwischen der kleinsten durch eine Schatz-funktion erreichbaren Varianz und der Varianz der benutzten SchatzfunktionV (Tn) bezeichnet:
e(Tn) =Vmin(Tn)V (Tn)
. (6.6)
In praktischen Anwendungen ist es wunschenswert, eine moglichst hohe, asym-ptotische Effizienz zu erreichen, also
limn→∞
e(Tn) = 1. (6.7)
Oft muss man sich mit der relativen Effizienz begnugen: Eine Schatzfunktionist relativ effizient, wenn ihre Varianz kleiner ist als die jeder anderen moglichenSchatzfunktion fur diesen Parameter.
Suffizienz einer Schatzfunktion
Eine Schatzfunktion ist suffizient5, wenn sie alle jeweils relevanten Informatio-nen der Stichprobe tatsachlich nutzt. Diese Eigenschaft ware dann gefahrdet,wenn bestimmte Informationen nicht in die Bestimmung einfließen. Wenn bei-spielsweise ein Punkt durch Streckenmessungen von drei bekannten Punktenbestimmt wurde, der Schatzer aber nur die ersten beiden Werte berucksichtigt,so ist er nicht suffizient.
4Die Varianz der Schatzung.5lat. sufficiens = (von der Funktion oder Leistungsfahigkeit) ausreichend, hinreichend,
genugend

6.2. GRUNDLAGEN DER PARAMETERSCHATZUNG 99
Abbildung 6.1: Empirischen Verteilungsfunktion Fn−1 (Wicki, 1999, S. 27)
Abbildung 6.2: Empirischen Verteilungsfunktion δx (Wicki, 1999, S. 28)
6.2.2 Einflussfunktion
Um den wichtigen Begriff der Schatzfunktion herzuleiten, gehen wir von folgen-der Uberlegung aus: Wir haben (n− 1) Zufallsvariablen Xi. Die SchatzfunktionTn−1 fur die Zufallsvariablen Xi mit i = 1 . . . n− 1 und der empirischen Vertei-lung Fn−1 (siehe Abbildung 6.1) sei
Tn−1 = T (Fn−1) = tn−1(X1, X2, . . . , Xn−1). (6.8)
Wir fugen dieser Schatzfunktion nun eine weitere Zufallsvariable Xn mit der(unbekannten) Verteilung δx (vgl. Abbildung 6.2) hinzu. Daraus ergibt sich eineneue Schatzfunktion, namlich
Tn = T (Fn) = tn(X1, X2, . . . , Xn) (6.9)
und die Verteilungsfunktion als Summe der Einzelverteilungen
Fn =n− 1
nFn−1 +
1n
δx. (6.10)
Multiplizieren wir nun die Differenz der beiden Schatzfunktionen (6.8) und (6.9)mit der Anzahl n der Zufallsvariablen, so erhalten wir die Sensibilitatskurve SC

100 KAPITEL 6. ROBUSTE SCHATZUNG
(sensibility curve). Diese beschreibt den Einfluss, den eine zusatzlich zur Stich-probe hinzugefugte Beobachtung auf das Ergebnis der Schatzfunktion ausubt.
SCn−1 = n(Tn − Tn−1) =T
(n−1
n Fn−1 + 1nδx
)− T (Fn−1)1n
(6.11)
Wenn wir nun n gegen ∞ gehen lassen und 1n durch das kleine Intervall ε erset-
zen, so bekommen wir die Einflussfunktion IF 6 der gegebenen SchatzfunktionT mit ihrer Verteilung F (Hampel et al., 1986)7.
IF (x; T ; F ) = limε→0
T ((1− ε)F + εδx)− T (F )ε
(6.12)
Die Einflussfunktion beschreibt den Effekt, den eine infinitesimale Veranderungin den Daten x auf den Schatzer T ausubt. Sie ist ein theoretisch strenges,leider jedoch auch sehr abstraktes, Maß zur Unterscheidung von Schatzfunk-tionen. Hinsichtlich vorhandener grober Fehler kann nur eine Schatzfunktionmit beschrankter Einflussfunktion zu einer robusten Schatzung fuhren. Somitmussen wir fur einen robusten Schatzer fordern, dass der Einfluss grober Fehlerbeschrankt ist.
Qualitativ werden hauptsachlich vier Typen von Schatzfunktionen unter-schieden (Details zu den Schatzfunktionen werden spater im Kapitel angege-ben). Die Schatzfunktionen werden anhand der Eigenschaften der Einflussfunk-tion unterschieden:
• monoton und unbeschrankt - z.B. arithmetisches Mittel8,
• monoton und beschrankt - z.B. Median, Huber-Schatzer,
• beschrankt mit Sprung zuruck auf Null - z.B. arithmetisches Mittel mitVerwerfungsregel,
• beschrankt mit stetigem Ubergang zuruck auf Null - z.B. Hampel-Schatzer.
6.2.3 Verlustfunktion
Da die Einflussfunktion nicht anschaulich war, benotigen wir ein anschauliche-res Instrument. Diese ist durch eine weitere Kenngroße, die Verlustfunktion ρ,gegeben. Bisher haben wir fur die ausgeglichenen Beobachtungen li angesetzt:
li = li + vi, (6.13)
wobei wir Verbesserungen eingefuhrt haben, weil die ursprunglichen Beobach-tungen das funktionale Modell nicht erfullen (sonst ware ja keine Ausgleichungnotwendig gewesen).
Um die Verbesserungen eindeutig bestimmen zu konnen, benotigen wir eineSchatzfunktion. Wir argumentieren hier also mit den Verbesserungen und nicht
6engl. influence function7Frank Hampel, schweizer Statistiker.8Dieser Typ Schatzfunktion ist klarerweise nicht robust.

6.3. MODELLANSATZE 101
mit den Parametern. Wir fuhren nun eine neue Große ein, namlich den Verlusteiner Schatzfunktion. Die Verlustfunktion ρ(vi) ist nun die Differenz zwischenSchatzfunktion und (gesuchtem) optimalem Schatzergebnis. Dabei fordern wirauch, dass die ausgeglichene Beobachtungen gute Schatzungen fur die Erwar-tungswerte der Beobachtungen sein sollen. Somit ist das Ziel der Berechnung,die Summe der Verluste zu minimieren. Das fuhrt zu einer Extremwertaufgabe(vergleiche A1).
Haufig werden folgende Verlustfunktionen verwendet:
• Gauß’sche Verlustfunktion ρ(vi) = v2i : Die Minimierung der Summe dieser
Verlustfunktion fuhrt zur Methode der kleinsten Quadrate.
• ρ(vi) = |vi|s: Die Minimierung der Summe dieser Verlustfunktion fuhrt zuder Klasse der Ls-Norm-Schatzungen.
6.3 Modellansatze
6.3.1 Stochastisches Modell
Wir konnen eine Wahrscheinlichkeit P angeben, mit der unsere Messfehler Wertein einem bestimmten Bereich annehmen. Dazu betrachten wir die Messfehler xvon Beobachtungen als Zufallsvariablen X. Die Wahrscheinlichkeit kann dannals als Verteilungsfunktion dargestellt werden:
F (x) = P (X ≤ x). (6.14)
Seit Gauß nimmt man in der geodatischen Ausgleichungsrechnung (und in vielenanderen Fachbereichen) an, dass die Messfehler (und damit die Beobachtungen)normalverteilt sind9, also
F (x) ≈ N(0, σ). (6.15)
Diese Hypothese ist nur dann richtig, wenn die Messungen unberuhrt von syste-matischen Einflussen und frei von groben Fehlern sind. Das ist bei geodatischenMessungen meist nicht vollstandig gegeben. Grobe Fehler konnen zwar meistrasch eliminiert werden, systematische Einflusse wie Refraktion oder Tempera-tur sind aber oft vorhanden.
Den meisten robusten Schatzverfahren liegt eine andere Verteilungsannahmezugrunde. Wir gehen davon aus, dass ein Großteil der Messfehler einer Stamm-verteilung G(x) angehort. Ein (kleiner) Teil der Messfehler (z.B. grobe Fehler)weichen allerdings von der Stammverteilung ab. Fur sie wird die StorverteilungS(x) verwendet. Der Wert ε definiert eine (meist geringe) Wahrscheinlichkeit
9Diese Annahme ist zwar bereits lange widerlegt, Messfehler sind aber im Allgemeinenbeinahe normalverteilt. Auch wenn schon 1960 gezeigt wurde, dass schon kleine Abweichungenvon der Normalverteilung ausreichen, um falsche Ergebnisse bei der Methode der kleinstenQuadrate zu verursachen, wird die Methode der kleinsten Quadrate immer noch verwendet,da sie (verglichen mit den ubrigen Methoden) einfach zu handhaben ist.

102 KAPITEL 6. ROBUSTE SCHATZUNG
dafur, dass ein bestimmter Messfehler nicht der Stammverteilung sondern derStorverteilung angehort.
F (x) ≈ (1− ε)G(x) + εS(x) (6.16)
Dabei wird fur die Stammverteilung G(x) meist die Normalverteilung N(0, σ)angenommen.
6.3.2 Herleitung der Schatzfunktion
Wir wollen uns das Prinzip der Herleitung einer Schatzfunktion anhand einesbekannten Beispiels ansehen; der Methode der kleinsten Quadrate. Dazu gehenwir im eindimensionalen Fall von einer Schatzfunktion
X = t(X1, X2, . . . , Xn) (6.17)
fur einen beliebigen Parameter aus und wahlen als Verlustfunktion die Gauß’scheVerlustfunktion
ρ(vi) = ρ(X −Xi) = (X −Xi)2 = v2i . (6.18)
Daraus ergibt sich die Extremwertaufgabe zur Minimierung der Verluste zu
∑ρ(vi) =
n∑
i=1
(X −Xi)2 =n∑
i=1
v2i → min . (6.19)
Fur die Losung dieser Extremwertaufgabe bilden wir die erste Ableitung undsetzen sie gleich Null:
n∑
i=1
2(X −Xi) =n∑
i=1
2vi = 0. (6.20)
Als Losung fur den eindimensionalen Fall erhalten wir die bekannte Formel desarithmetischen Mittels
X =1n
n∑
i=1
Xi. (6.21)
Im mehrdimensionalen Fall gehen wir von unkorrelierten, gleich genauen Mes-sungen aus. Daher ist Qll = P = I. Das lineare10 System der Verbesserungs-gleichungen ist dann gegeben durch
v = Ax− l. (6.22)
Fur die Verlustfunktion ρ(vi) fordern wir nun wie im eindimensionalen Fall, dassdie Summe der Verlustfunktionen fur alle Verbesserungen zu einem Minimumwird, also
n∑
i=1
ρ(vi) → min . (6.23)
10Eventuell erst nach erfolgter Linearisierung.

6.3. MODELLANSATZE 103
Zur Bestimmung des Minimums bilden wir zunachst die erste Ableitung Ψ derVerlustfunktion:
Ψ(vi) = ρ′(vi) =∂ρ(vi)∂vi
. (6.24)
Eigentlich sind in unserem vermittelnden Modell (6.22) aber die (zunachst un-bekannten) Parameter x und nicht unsere Verbesserungen die variablen Großen.Daher muss die Extremwertaufgabe (6.23) gemaß der Kettenregel gebildet wer-den:
n∑
i=1
∂ρ(vi)∂xj
=n∑
i=1
∂ρ(vi)∂vi
· ∂vi
∂xj=
n∑
i=1
Ψ(vi) · ∂vi
∂xjmit j = 1, 2, . . . , u. (6.25)
Daraus folgt mit (6.22)
n∑
i=1
Ψ(vi)aij = 0 mit j = 1, 2, . . . , u (6.26)
bzw. nach Einfuhrung von ai =(
ai1 ai2 . . . aiu
)als dem Zeilenvektor der
A-Matrixn∑
i=1
Ψ(vi)aTi = 0. (6.27)
Durch Ubergang auf Matrizenschreibweise erhalten wir mit Einfuhrung einer inVektorform angeschriebenen ersten Ableitung der Verlustfunktion
Ψ =(
Ψ(v1) Ψ(v2) . . . Ψ(vn))
das NormalgleichungssystemAT Ψ = 0. (6.28)
Wir wahlen nun eine leicht modifizierte11 Gauß’sche Verlustfunktion ρ(vi) = v2i
2und erhalten fur die erste Ableitung dieser Verlustfunktion
Ψ(vi) = vi. (6.29)
Aus (6.28) wird somitAT v = 0 (6.30)
und durch Einsetzen von (6.22) in (6.30) erhalt man das bekannte Gleichungs-system fur die Normalgleichungen
AT (Ax− l) = 0,
AT Ax = AT l. (6.31)
Die Gauß’sche Verlustfunktion fuhrt also sowohl im ein-, als auch im mehrdi-mensionalen Fall auf bekannte Gleichungen. Wie wir bereits wissen, sind die-se Gleichungen allerdings nicht robust. Im Folgenden werden wir uns also mitAnsatzen beschaftigen, die zu robusten Schatzfunktionen fuhren.
11Das Original wurde halbiert.

104 KAPITEL 6. ROBUSTE SCHATZUNG
6.3.3 M-Schatzer
Eine Schatzfunktion Li = g(L1, L2, . . . , Ln) wird als robust bezeichnet, wenn sieauch fur nicht streng normalverteilte Beobachtungen gute Schatzwerte liefert.Eine Klasse von Schatzfunktionen, die eine Verallgemeinerung der Maximum-Likelihood-Methode darstellen, sind die von Huber entwickelten M-Schatzer(Huber, 1964, 1972, 1981). Diese sind eng mit der Methode der kleinsten Qua-drate verwandt und daher fur geodatische Anwendungen interessant. Andersals bei der Methode der kleinsten Quadrate wird die Verlustfunktion ρ(vi) sogewahlt, dass die resultierende Schatzfunktion robust ist. Fur diese Verlustfunk-tion wird dann wieder die bekannte Bedingung angesetzt:
n∑
i=1
ρ(Li − Li) =n∑
i=1
ρ(vi) → min . (6.32)
Der eindimensionale Fall (Li = L) mit der Verlustfunktion ρ(L−Li) = (L−Li)2
fuhrt zum arithmetischen Mittel:n∑
i=1
(L− Li) = 0,
L =1n
n∑
i=1
Li. (6.33)
Diese Schatzung ist, wie bereits bekannt, nicht robust.
Zur Beurteilung der Eigenschaften einer Verlustfunktion mussen wir die Ein-flussfunktion bestimmen und diskutieren. Die u-dimensionale Einflussfunktionfur den M-Schatzer wird von Hampel et al. (1986) und Borutta (1988) beschrie-ben durch (ohne Herleitung)
IFi(A, l, x, G) = −S−11 aT
i Ψ(vi), (6.34)
wobei gilt
S1 = AT YA (6.35)mit Y = diag
(E(Ψ′(v1)) E(Ψ′(v2)) . . . E(Ψ′(vn))
). (6.36)
Die Zeile ai enthalt dabei die i-te Beobachtung li. Wir betrachten nun derenEinfluss auf den Vektor der Unbekannten x. Dieser Einfluss setzt sich aus demskalaren Einfluss der Verbesserungen, dem Gewicht der Beobachtung und einemdesignabhangigen, vektorartigen Anteil zusammen.
Die Funktion Ψ(vi) (die erste Ableitung der Verlustfunktion nach den Ver-besserungen) ist bei M-Schatzern nach (6.34) proportional zur Einflussfunkti-on. Sobald eine beschrankte Einflussfunktion bzw. Ψ-Funktion vorliegt, ist dieSchatzfunktion robust. Somit konnen wir die Diskussion der Robustheit einerVerlustfunktion auf ihre Ψ-Funktion beschranken. Das erlaubt meist den Ver-zicht der expliziten Bestimmung der Einflussfunktion.
Fur eine Verteilungsannahme der Messunsicherheiten nach (6.17), d.h. einenormalverteilte Stammverteilung G und eine Storverteilung S, konnen wir eine

6.3. MODELLANSATZE 105
Abbildung 6.3: ρ- und Ψ-Funktion des Huber-Schatzers (Wicki, 1999, S. 70)
stetige und konvexe Verlustfunktion aufstellen. Diese weist bei entsprechenderWahl der Parameter robuste Eigenschaften auf:
ρc(vi) =
12v2
i fur |vi| < c,c|vi| − 1
2c2 fur |vi| ≥ c,(6.37)
bzw.
Ψc(vi) =
vi fur |vi| < c,sign(vi)c fur |vi| ≥ c.
(6.38)
Die Ψ-Funktion hat innerhalb der Grenzen [−c,+c] eine konstante Steigung,außerhalb des Intervalls ist die Steigung gleich Null. Die Große von c kann jenach der erwarteten Große der groben Fehler gewahlt werden.
6.3.4 L-Schatzer
L-Schatzer entstehen aus Linearkombinationen von Ordnungsstatistiken. Im ein-fachsten Fall (bei direkt beobachteten Großen) ordnen wir die n Beobachtungenihrer Große nach:
L(1) ≤ L(2) ≤ . . . ≤ L(n). (6.39)

106 KAPITEL 6. ROBUSTE SCHATZUNG
Dabei ist L(i) die i-te Ordnungsstatistik der Stichprobe (L1, L2, . . . , Ln). Diein Klammern gesetzten Indizes zeigen an, dass die entsprechenden Werte ihrerGroße nach geordnet sind.
Eine Schatzfunktion Li = g(L1, L2, . . . , Ln) hat somit folgenden Typ
L = g(L1, L2, . . . , Ln) =n∑
i=1
aiLi mitn∑
i=1
ai = 1. (6.40)
Im eindimensionalen Fall und mit den Gewichten ai = 1n erhalt man sofort das
einfache arithmetische Mittel. Setzt man die Gewichte so an, dass gilt a1 = an =12 und alle anderen Gewichte gleich Null sind, erhalt man eine Schatzung nachTschebyscheff12:
L =L1 + Ln
2. (6.41)
Diesen beiden Schatzverfahren sind nicht robuste. Robuste Schatzer erhalt mandurch Abschneiden der großten und kleinsten Stichprobenwerte. Der Extremfall,bei dem alle Stichprobenwerte mit Ausnahme des mittleren (falls n ungeradeist) bzw. der beiden mittleren (falls n gerade ist) abgeschnitten werden, alsoai = 0, ist die bekannte, sehr robuste Medianschatzung:
n ungerade: an+12
= 1 → L = Ln+12
,
n gerade: an2
= an2 +1 = 1
2 → L = 12 (Ln
2+ Ln
2 +1).(6.42)
6.3.5 Ls-Norm-Schatzer
Wir haben bereits in Abschnitt 6.2.3 gesehen, dass eine Verlustfunktion auch alsbeliebige Potenz s der Verbesserungsbetrage |vi| gewahlt werden kann. Ansatzedieser Form heißen Ls-Norm-Schatzer. Mit
ρ(vi) = |vi|s mit 1 ≤ s ≤ ∞ (6.43)
ergibt sich fur die erste Ableitung nach der i-ten Verbesserungsgleichung dieΨ-Funktion zu
Ψ(vi) = s · vi · |vi|s−2 mit 1 ≤ s ≤ ∞. (6.44)
Fur die Normalgleichungen erhalten wir somit nach (6.27)
n∑
i=1
vi|vi|s−2aij = 0 mit j ∈ 1, . . . , u . (6.45)
Aus (6.44) sehen wir, dass die Ψ-Funktion nur im Bereich 1 ≤ s < 2 beschranktund die Schatzfunktion somit robust ist.
Bei s = 2 erhalten wir fur die Ψ-Funktion 2 · vi, das bei vi → ∞ gegenUnendlich strebt. Dieser Art der Schatzung heißt L2-Norm-Schatzung und ist
12Pafnuti Lwowitsch Tschebyscheff, russischer Mathematiker, 1821 - 1894, entwickelte dieApproximation von Funktionen mit Hilfe der Tschebyscheff-Polynome.

6.3. MODELLANSATZE 107
nicht robust. Aus
ρ(vi) = v2i (6.46)
Ψ(vi) = 2vi (6.47)
folgt fur die Normalgleichungen
n∑
i=1
viaij = 0 (6.48)
und damit die bekannten Formeln
AT x = 0
oder AT Ax−AT l = 0. (6.49)
Die Parameterschatzung nach der L2-Norm fuhrt somit zur Methode der klein-sten Quadrate. Die Ψ-Funktion ist eine Gerade und damit, wie bereits gezeigt,nicht beschrankt. Damit ist diese Art der Parameterschatzung nicht robust.
Bei s = 1 erhalten wir vi
|vi| = sign(vi) und somit nur die Werte +1, 0 und−1 fur Ψ. Diese Form bezeichnet man als L1-Norm-Schatzung. Aus
ρ(vi) = |vi| (6.50)Ψ(vi) = sign(vi) (6.51)
folgt fur die Schatzfunktion
n∑
i=1
ρ(vi) =n∑
i=1
|vi| → min . (6.52)
Die L1-Norm-Schatzung ist eine robuste Schatzung, da sie eine beschrankte Ψ-Funktion besitzt. Leider erfullt sie nicht die Forderung, fur fehlerfreie Daten einder optimalen Losung (L2-Norm bei streng normalverteilten Daten) nahe kom-men des Ergebnis zu liefern. Bereits geringe Abweichungen der Beobachtungenvon der Normalverteilung drehen dieses Verhaltnis um. Die Varianz der mit derL1-Norm berechneten Losung ist dann besser als die fur die Losung nach der L2-Norm. Die Aufdeckung grober Fehler ist mit der L1-Norm jedoch gut moglich.Fur die an die Grobfehlersuche anschließende Parameterschatzung ist jedochein anderes Schatzverfahren notwendig, beispielsweise eine L2-Norm-Schatzung(Ziqiang, 1990).
Die Algorithmen zur Berechnung der L1-Norm sind mathematisch unuber-sichtlicher und komplexer als die der L2-Norm. Der bekannteste Algorithmusist der Simplex-Algorithmus (z.B. Schwarz, 1986, S. 66-72). Die Anwendungdes Simplex-Algorithmus auf geodatische Netze erfordert zwar einige Umfor-mungen, ist aber nicht besonders komplex (Burstedde und Cremer, 1986). Dader Simplex-Algorithmus rechenzeit- und speicherintensiv ist, wurden auch an-dere Algorithmen entwickelt, beispielsweise Innere-Punkt-Methoden (Benninget al., 1997; Benning, 1997). Die Anwendung der L1-Norm-Schatzung ist auchfur Ausreißertests fur moglich (Kampmann, 1990).

108 KAPITEL 6. ROBUSTE SCHATZUNG
Um die Anwendung der L1-Norm zu vereinfachen ware es gunstig, wennman die L1-Norm mit den Algorithmen der L2-Norm bestimmen konnte. DenAlgorithmus zur Losung dieser Aufgabe haben wir in Beispiel 6.1 kennen gelernt.Ausgehend von gleich genauen bzw. homogenisierten Beobachtungen bestimmenwir die Losung nach der L2-Norm. Die resultierenden Verbesserungen werdennun als Gewichtsreziproke fur die entsprechende Beobachtung verwendet unddie L2-Norm neuerlich berechnet. Dieser Vorgang wird so lange durchgefuhrt,bis sich die Ergebnisse fur die Unbekannten eingependelt haben.
Die herkommliche L1-Norm-Schatzung ist nicht in der Lage, Korrelationenabzubilden. Da geodatische Beobachtungen im Allgemeinen korreliert sind, istdie Annahme unkorrelierter Beobachtungen nicht erwunscht. Daher wurde dasModell der L1-Norm-Schatzung erweitert, um mit Korrelationen umgehen zukonnen (Kampmann und Wolf, 1989).
6.4 Eigenschaften robuster Schatzverfahren
Literatur uber Statistik unterscheidet haufig zwischen den Eigenschaften resi-stent und robust (Caspary, 1996). Resistent heißt in diesem Zusammenhangunempfindlich gegenuber Veranderungen der Daten. Dabei ist es unerheblich,ob ein geringer Anteil der Daten um große Betrage verandert wird (z.B. grobeFehler) oder ein großer Anteil der Daten um kleine Betrage (z.B. Rundung). Re-sistente Methoden sind rein datenorientiert. Sie dienen vorwiegend der Analysevon Daten. Robust beinhaltet Resistenz, setzt jedoch zusatzlich die Erfullungeines theoretisch begrundeter Schatzkriterien voraus. Diese Kriterien wurdenin 6.1 beschrieben. Eine resistente Methode ist beispielsweise die L1-Norm-Schatzung wahrend die M-Schatzer robust sind.
Es ist schwer, alle Eigenschaften gleichzeitig zu erfullen. Daher wird oft, jenach Aufgabenstellung, die eine oder andere Eigenschaft hoher bewertet. DieKriterien, nach denen optimiert wird, konnen in drei Hauptzielen zusammenge-fasst werden:
• Das Schatzverfahren soll einen hohen Bruchpunkt aufweisen. Der Bruch-punkt definiert den gerade noch tolerierbaren Anteil grob falscher Mes-sungen. Liegt der Anteil an Fehlern uber dem Bruchpunkt, so erfolgt ein
”Zusammenbruch“ des Systems und die Ergebnisse werden vollkommenunzuverlassig (Wicki, 1999).
• Die Einflussfunktion der Schatzfunktion soll kontinuierlich und uberall be-schrankt sein. Das bewirkt, dass grobe Fehler keinen dominierenden Ein-fluss auf die Schatzung erhalten konnen.
• Fur gute Daten soll zudem eine moglichst hohe Effizienz erreicht werden.
Bei der Auswahl des Verfahrens ist es oft notig, einen moglichst guten Kompro-miss zwischen Robustheit und Effizienz zu finden.

6.4. EIGENSCHAFTEN ROBUSTER SCHATZVERFAHREN 109
Abbildung 6.4: Einfluss einer Hebelbeobachtung (Hebelpunkt) auf eine ausglei-chende Gerade (Wicki, 1999, S. 59)
Bei eindimensionalen Verteilungen kann ein Bruchpunkt von nahezu 50%(z.B. beim Median genau 50%) erreicht werden. Die mehrdimensionale Parame-terschatzung (z.B. Ausgleichung geodatischer Netze) bietet in dieser Hinsichtgroßere Probleme Probleme. Es wurden Methoden mit derart hohem Bruch-punkt entwickelt. Diese sind aber aufwandig zu berechnen. Glucklicherweisemuss bei geodatischen Anwendungen normalerweise nicht mit einem Anteil von50% groben Fehlern gerechnet werden. Daher muss ein so hoher Bruchpunkt furgeodatische Aufgabenstellungen nicht angestrebt werden. Zudem kommt noch,dass geodatische Netze manchmal bereits durch Elimination weniger Beobach-tungen singular werden. Falls dann grobe Fehler in diesen Beobachtungen auf-treten, kann auch der beste Schatzer kein sinnvolles Ergebnis liefern.
6.4.1 Hebelbeobachtungen
Hebelbeobachtungen sind Daten, die geometrisch weit entfernt von der Masseder ubrigen Daten liegen. Daher erhalten sie ein wesentlich großeres Gewichtals jede andere Beobachtung. Am anschaulichsten kann die Hebelproblematikam Beispiel der ausgleichenden Geraden (siehe A1) erlautert werden (vergleicheAbbildung 6.4). Hier ist auch die oft verwendete Bezeichnung Hebelpunkt (engl.leverage point) sehr anschaulich.
Hebelpunkte sind hier Punkte, die deutlich vom Schwerpunkt bzw. von dergeometrischen Anordnung der ubrigen Beobachtungen entfernt liegen und da-durch einen sehr großen Einfluss auf das Ergebnis der Schatzung ausuben. Beimehrdimensionalen Ausgleichungsproblemen, wenn also die Schatzung der Pa-rameter kein 2-dimensionales, punktbezogenes Problem darstellt, ist die Be-zeichnung Hebelbeobachtung sinnvoller. Es handelt sich dabei namlich um eineAussage zur Geometrie im Beobachtungsraum und nicht um die (Netz)-Punkteim Parameterraum.
Fur eine Beobachtungsgleichung in einer vermittelnden Ausgleichung mitQll = I gilt:
v = Ax− l. (6.53)

110 KAPITEL 6. ROBUSTE SCHATZUNG
Durch Einsetzen der Losung nach der L2-Norm kommt man auf
v = A[(AT A)−1AT l
]− l
= A(AT A)−1AT
︸ ︷︷ ︸H
l− l
= (H− I)l.
Den gesamte Verbesserungsvektor ergibt sich somit zu (vgl. (2.40))
v = −(I−H)l. (6.54)
Nun fuhren wir eine fur die vorzunehmenden Betrachtungen wichtige Große, dieProjektionsmatrix , auch Hat-Matrix genannt, ein:
H = A(AT A)−1AT . (6.55)
Die Kofaktormatrix der Verbesserungen Qvv ergibt sich dann zu
Qvv = I−H (6.56)
und fur die Spur von Qvv13 gilt
tr(Qvv) = tr(I−H) =n∑
i=1
(1− hii) = n−n∑
i=1
hii = n− u. (6.57)
Es entspricht also die Spur der idempotenten14 Matrix (I−H) ihrem Rang n−u.In (6.57) ist hii das i-te Diagonalelement der Matrix H. Die Spur von Qvv ent-spricht also der Redundanz r des Ausgleichungsproblems bzw. den Freiheitsgra-den n− u. Wie wir in Kapitel 4 gesehen haben, hat jede einzelne Beobachtunggewissen einen Anteil an der Gesamtredundanz, den Redundanzanteil ri (ver-gleiche 4.3.2). Fur gleich genaue, unkorrelierte Beobachtungen konnen wir dannansetzen:
tr(Qvv) =n∑
i=1
(qvv)ii = n− u =n∑
i=1
ri. (6.58)
Somit haben wir einen Bezug zwischen den Redundanzanteilen ri und der Hat-Matrix H (und damit zur Geometrie des Netzes) hergestellt:
ri = (qvv)ii = 1− hii. (6.59)
Man kann nun eine Beobachtung li als Hebelbeobachtung bezeichnen, wenn ihrWert hii groß ist (Huber, 1981). Bei n Beobachtungen und u Unbekannten erhaltman als Mittelwert fur den Redundanzanteil h = u
n . Ausgehend von 0 ≤ hii ≤ 1sind große Werte hii also solche, die deutlich großer als u
n sind. Das ist sicherdann der Fall, wenn sie in der Nahe von 1 liegen.
Umgekehrt betrachtet sind Beobachtungen mit geringem Redundanzanteil ri
Hebelbeobachtungen. Sie sind kaum durch andere Beobachtungen kontrolliert.13Beachte, dass gilt: tr(QvvQ
−1ll ) = n − u und dass in unserem Fall angenommen wurde
P = Q−1ll = I, also dass gilt tr(Qvv) = n− u.
14Fur eine idempotente Matrix Mi gilt Mi ·Mi = Mi und außerdem ist die Spur gleichdem Rang.

6.4. EIGENSCHAFTEN ROBUSTER SCHATZVERFAHREN 111
Abbildung 6.5: Beispiel einer Hebelbeobachtung (Wicki, 1999, S. 61)
Damit konnen grobe Fehler in diesen Beobachtungen nur schwer lokalisiert wer-den. Sie gehen normalerweise in ihrem vollen Umfang in die Parameterschatzungein. ”Gute“ Hebelbeobachtungen haben jedoch wieder einen starken positivenEinfluss auf das Schatzergebnis. Hier gilt es also, die Hebelbeobachtung bei-zubehalten, gleichzeitig aber sicherzustellen, dass die Beobachtung kontrolliertist.
In der Literatur gibt es drei Ansatze, um die Problematik von Hebelbeob-achtungen zu bearbeiten (Caspary, 1996):
• Optimierung geodatischer Beobachtungsplane: Mit Hilfe von Optimierungs-strategien wird hier der Beobachtungsaufwand so verteilt, dass die Ge-nauigkeit und/oder die Zuverlassigkeit der Schatzwerte optimiert wird.Bei reiner Genauigkeitsoptimierung verteilt sich der zusatzliche Aufwandauf Beobachtungen mit geringem Redundanzanteil, da hier die großtenGenauigkeitssteigerungen zu erzielen sind
• Entgeometrisierung des Modells: Der Einfluss von Hebelbeobachtungenwird hier beschrankt, indem eine zusatzliche ”Gewichtsmatrix“ dafur sorgt,dass die Hauptdiagonalelemente der Hat-Matrix alle gleich groß werden.Dieses von Huber (1987) entwickelte Modell wird auch als balancierteAusgleichung propagiert. Problematisch dabei ist, dass die statistischenEigenschaften des manipulierten Modells unklar sind (vergleiche Caspary,1998) und der Anspruch auf Losung des Problems der Hebelbeobachtun-gen nach Koch (1996) nicht bestatigt werden kann.
• Hampel-Krasker-Schatzung : Der Einfluss von Hebelbeobachtungen wirdreduziert, falls die Verbesserungen dieser Beobachtungen groß ausfallen.Die Begrundung der Gewichtsreduktion ist der Verdacht auf Vorliegeneines Ausreißers.
Leider ist es nicht zwingend, dass Hebelbeobachtungen kleine Redundan-zanteile haben. Bei maskierten Hebelbeobachtungen bilden mehrere Hebelbe-obachtungen eine Gruppe. Dadurch erhoht sich ihr Redundanzanteil und dieHebelbeobachtung fallt bei den Redundanzanteilen nicht mehr auf. MaskierteHebelbeobachtungen konnen in geodatischen Netzen auftreten, beispielsweisewenn eine Beobachtung mehrmals wiederholt wird, dies aber nicht unabhangiggeschieht.

112 KAPITEL 6. ROBUSTE SCHATZUNG
Zur Illustration dieser Aussage wollen wir uns ein Beispiel ansehen (Wicki,1999, S. 61). Abbildung 6.5 zeigt die Bestimmung eines Neupunktes durch dasMessen der Strecken zu drei Festpunkten. Die Besonderheit ist nun, dass derNeupunkt N zufallig auf der Verbindungsgeraden der Festpunkte A und B liegt.
Als Ergebnis der Ausgleichung erhalten wir unter Annahme der angefuhrtenStandardabweichung σi die in Tabelle 6.1 zusammengefassten Resultate: Die ge-
Tabelle 6.1: Resultate der Ausgleichung
Distanz σi [mm] ri [%]a 8 31b 12 69c 8 0
Punkt NKoordinaten: Y [m] 601.000,000
X [m] 200.000,000außere NA [mm] ∞Zuverlassigkeit NB [mm] 51,4
messene Distanz c ist den Redundanzanteilen zufolge vollstandig unkontrolliertund somit eine Hebelbeobachtung. Die unendlich große außere Zuverlassigkeit inNS-Richtung des Neupunktes weist darauf hin, dass ein grober Fehler in der be-treffenden Beobachtung (hier also in der Distanz c) vollstandig auf das Resultatdurchschlagen kann.
Verfalscht man die Beobachtung c durch einen groben Fehler von 10m, sobleiben die Redundanzen unverandert, die Verbesserungen vi der Distanzmes-sungen und die Koordinaten des Neupunktes nehmen aber die Werte aus Tabelle6.2 an. Die Verbesserungen der als ”fehlerfrei“ angenommenen Beobachtungen
Tabelle 6.2: Resultate der Ausgleichung mit grobem Fehler in cDistanz vi [mm]
a 23b 52c 0
Punkt NKoordinaten: Y [m] 600.999,973
X [m] 200.010,000
werden vergroßert, die falsche Beobachtung bleibt jedoch unentdeckt. Der Fehlergeht somit unentdeckt und in vollem Umfang in das Ergebnis ein. Eine (schein-bare) Abhilfe ist die doppelte Messung der Strecke. Wird die Distanz c doppeltgemessen, so wird die Hebelbeobachtung c maskiert, was sich an der Erhohungdes Redundanzanteiles ri zeigt (siehe Tabelle 6.3). Ist die Wiederholungsmes-
Tabelle 6.3: Resultate der Ausgleichung bei doppelter Messung der Distanz cDistanz σi [mm] ri [%]
a 8 31b 12 69
c (1. Mess.) 8 50c (2. Mess.) 8 50
Außere Zuverlassigkeit von NNA [mm] 51,4NB [mm] 29,1
sung der Distanz c unabhangig von der ersten Messung erfolgt, so kontrolliertsie die Hebelbeobachtung. Der in der ersten Messung der Distanz c eingefuhr-te grobe Fehler von 10m wird in den Verbesserungen der Distanzmessungen

6.4. EIGENSCHAFTEN ROBUSTER SCHATZVERFAHREN 113
ersichtlich. Die Redundanzanteile und die außere Zuverlassigkeit des Neupunk-tes bleiben unverandert (siehe Tabelle 6.4). Probleme ergeben sich allerdings,
Tabelle 6.4: Resultate der Ausgleichung mit grobem Fehler in cDistanz vi [mm]
a 6b 13
c (1. Mess.) -5025c (2. Mess.) 4975
Punkt NKoordinaten: Y [m] 600.999,993
X [m] 200.004,975
wenn bei beiden Messungen derselbe grobe Fehler gemacht wurde. Der grobeFehler wird dann maskiert und kann anhand der Verbesserungen nicht mehraufgedeckt werden. Ein Beispiel dafur ware ein Fehler bei der Horizontierungder Strecke. Um von der gemessenen Raumstrecke zur (in der Rechnung ver-wendeten) Horizontalstrecke zu kommen, konnen wir mit Hilfe der Zenitdistanzoder (was bei langen Strecken genauer ist) mit Hilfe des Hohenunterschiedes dieStrecke horizontieren. Falls wir nun bei einem der Punkte einen Fehler in derPunkthohe haben, wird er sich auf beide Strecken gleich auswirken und somitbeide Strecken gleich verfalschen. Der grobe Fehler fallt nicht mehr auf.
6.4.2 Bruchpunkt
Der Bruchpunkt15 einer Schatzung ist der Grenzwert fur den prozentualen An-teil grob falscher Messungen im Datensatz. Ein Bruchpunkt von 10% bedeutetetwa, dass bis zu 10% der Messungen grob falsch sein durfen und das Ergeb-nis ist immer noch korrekt. Im eindimensionalen Fall ist die Bestimmung desBruchpunktes einfach. Das arithmetische Mittel hat beispielsweise einen Bruch-punkt von 0%16. Der Median andererseits erreicht den hochstmoglichen Wertvon 50%. Bei Uberschreiten des Prozentsatzes von 50% waren mehr grobe Feh-ler als ”korrekte“ Beobachtungen im Datensatz enthalten und das Ergebnis hatkeinerlei Aussagekraft mehr.
Die Ausgleichungsprobleme der Geodasie stellen u-dimensionale Parameter-schatzungen dar. Die Wirkung grober Fehler hangt hierbei nicht nur vom Schatz-verfahren, sondern auch von der Geometrie (A-Matrix), vom stochastischenModell (P-Matrix) und von der lokalen Verteilung der groben Fehler ab. Somitverhindert auch eine allgemeine Angabe fur den Bruchpunktes. Die Ausnahmeist naturlich ein Schatzer mit einem Bruchpunkt von 0%.
Bei der Verwendung von robusten M-Schatzern oder dem L1-Norm-Schatzerkann man grobe Fehler in Hebelpunkten nicht lokalisieren. Streng genommenhaben diese Verfahren somit einen Bruchpunkt von 0%. Bei Vermeidung vonHebelbeobachtungen sind jedoch sowohl M-Schatzer als auch L1-Norm-Schatzerbrauchbare Verfahren zur Aufdeckung grober Fehler.
15engl. break down point16Wenn ich in einer beliebig großen Menge an Messwerten statt eines beliebigen Wertes
einen Wert nahe ∞ einfuhre, so ist das Ergebnis grob falsch!

114 KAPITEL 6. ROBUSTE SCHATZUNG
6.5 Weitere Schatztypen
Die bisher angefuhrten Typen L-, M- und Ls-Norm-Schatzer sind nur die wich-tigsten Typen von Schatzern. Zu jedem dieser Schatzer gibt es noch unzahligeUntertypen wie beispielsweise Huber-Schatzer (Huber, 1964), Hampel-Schatzer,modifizierte M-Schatzer (von Mallows, Andrews, Hill & Ryan, Schweppe, ...),BIBER-Schatzer (Wicki, 1999) und balancierte L2-Norm-Schatzung (Kamp-mann, 1994). Alle diese Schatztypen naher betrachten zu wollen wurde denRahmen der Lehrveranstaltung sprengen. Einen Schatztyp wollen wir uns aberdennoch etwas naher ansehen, vor allem da wir ihm schon in Beispiel 6.1 begeg-net sind: Die LMS-Schatzung oder Least Median Square (Rousseeuw, 1984).
Dieser Schatzer ist hinsichtlich des Bruchpunktes einer der wirksamstenSchatzer. Der Bruchpunkt von LMS liegt bei nahezu 50%, also darf fast je-de zweite Beobachtung grob falsch sein und das Verfahren liefert immer nochbrauchbare Ergebnisse17. Ein weiterer Vorteil der LMS-Schatzung ist, dass derEinfluss der Geometrie, speziell von Hebelbeobachtungen, minimiert wird (Koch,1996). Die Losung wird dabei so bestimmt, dass der Median der quadriertenVerbesserungen minimiert wird, also
med(v2i ) → min . (6.60)
Es mussen also alle moglichen Verbesserungsverteilungen bestimmt werden unddann die Losung mit dem minimalen Median herausgesucht werden. Dazu mussdas ursprungliche Gleichungssystem durch Streichen von Beobachtungen in eineindeutig losbares Gleichungssystem ubergefuhrt und der Losungsvektor be-stimmt werden. Das wird nun fur jede mogliche18 Kombination von gestrichenenBeobachtungen durchgefuhrt.
Im schlimmsten Fall kann es jedoch passieren, dass man(
nu
)Gleichungs-
systeme losen muss. Selbst bei einem kleinen Netz mit 50 Beobachtungen und 8Unbekannten mussen bereits 536.878.650 verschiedene Gleichungssysteme gelostwerden. Was das bei einem Netz mit 2.000 Beobachtungen und 500 Unbekann-ten bedeuten wurde kann sich wohl jeder vorstellen. Der große Rechenaufwandist somit einer der gravierendsten Nachteile des LMS-Verfahrens.
17Das gilt klarerweise nicht fur jede Verteilung der groben Fehler. Wenn beispielsweise in ei-nem geodatischen Netz alle Messungen in der ostlichen Halfte grob falsch und in der westlichenHalfte richtig sind, so kann auch LMS kein brauchbares Ergebnis liefern.
18Nicht jede Kombination von gestrichenen Beobachtungen ermoglicht auch eine Losung.Speziell bei geodatischen Netzen ist die Bestimmung aller Losungen eine komplexe Aufgabe,da jeder einzelne Punkt eindeutig bestimmt sein muss.

Kapitel 7
Einschub: Zufallsprozesse
7.1 Einleitung
Kontinuierliche Messverfahren gewinnen bei der Untersuchung dynamischer Sy-steme im Vermessungswesen immer mehr an Bedeutung. Damit werde auchModelle immer wichtiger, die den Faktor ”Zeit“ schon im Auswerteverfahrenberucksichtigen. Oft ist dabei die Bezeichnung ”kontinuierlich“ nicht ganz zu-treffend: In der Praxis werden die Messwerte in der Regel nicht kontinuierlich1
erfasst sondern es liegen diskrete Messwerte in engen zeitlichen Abstanden vor.Solche Datenmengen werden Zeitreihe genannt und die entsprechende statisti-sche Auswertung Zeitreihenanalyse unter Verwendung der Zeitreihentheorie .
In unseren Anwendungen hat bisher die zeitliche Komponente der Messun-gen keine Rolle gespielt. Messergebnisse wurden nur durch Zustandsparameterbeschrieben. Im einfachsten Fall einer eindimensionalen Zufallsgroße sind dienotwendigen Parameter empirischer Mittelwert und Varianz, die man aus dermehrmaligen Beobachtung der Messgroße (also der Messreihe) errechnet. Dabeigeht man von der Voraussetzung aus, dass die Einzelbeobachtungen normalver-teilt sind und die Zufallsgroße selbst unverandert bleibt.
Im Folgenden werden wir uns mit der statistischen Untersuchungen zeitab-hangiger Zufallsgroßen befassen. Ausgangspunkt ist dabei die Beobachtung, dasszeitlich aufeinander folgende Realisierungen einer Zufallsvariable meist nichtvollig willkurlich sind, sondern einer stochastischen Abhangigkeit unterliegen.Wenn die Temperatur heute hoch ist, wird sie auch morgen eher hoch sein (Dasgilt nicht immer: Wenn wir zum Beispiel beim Wurfeln eine 5 erhalten haben,heißt das noch lange nicht, dass wir beim nachsten Wurf etwas ahnliches oderwieder eine 5 erhalten werden).
Wichtig ist fur die statistische Untersuchung, dass die Zeitreihen keine gro-ben Fehler mehr beinhalten. Eine Moglichkeit der Bereinigung waren beispiels-weise Ausreißertests (Jakob, 1985). Diese Aufgabe soll hier jedoch nicht weiter
1vom lat. continuus: (raumlich oder zeitlich) zusammenhangend, fortlaufend
115

116 KAPITEL 7. ZUFALLSPROZESSE
Abbildung 7.1: Ein stochastischer Prozess und seine Realisierungen (Niemeier,1980)
vertieft werden. Im Folgenden gehen wir daher von ”sauberen“ Messdaten aus.
7.2 Stochastische Prozesse
Eine durch einen (nicht zufalligen) Parameter t geordnete Menge von Zufalls-großen
X(t) (7.1)
wird in der mathematischen Statistik als stochastischer Prozess (auch: Zu-fallsprozess) bezeichnet. Der Parameter t, der den Zufallsgroßen zugeordnetwird, kann z.B. die Zeit, den Ort oder die Temperatur reprasentieren. Stocha-stische Prozesse im engeren Sinn sind jene, bei denen der Parameter t fur die Zeitsteht. Sie werden manchmal auch als zeitvariate stochastische Prozesse bezeich-net. Stochastische Prozesse, die die raumliche Struktur des zufalligen Systemsbeschreiben, werden wir im Kapitel ”Geostatistik“ untersuchen.
Im Sinne der Wahrscheinlichkeitstheorie stellen stochastische Prozesse ei-ne theoretische Große, analog zur Grundgesamtheit dar. Zu jedem der unend-lich vielen Zeitpunkte gibt es unendlich viele Werte der Zufallsgroße. Praktischkonnen wir aber meistens nur zu endlich vielen Zeitpunkten endlich viele (oftnur eine pro Zeitpunkt) Messgroßen beobachten. Es liegt also eine Stichprobe

7.2. STOCHASTISCHE PROZESSE 117
vor, genannt Zeitreihe. Die zu den Zeitpunkten ti registrierten Messwerte bildenzusammen eine Funktion des Parameters t - eine Realisierung des stochastischenProzesses. Hat man je Zeitpunkt mehrere Messwerte2, so erhalt man entspre-chend verschiedene Realisierungen. Die Menge aller Realisierungen bilden inihrer Gesamtheit die Zeitreihe3.
In der Praxis mussen die Messwerte, wenn sie als Zeitreihe bzw. stocha-stischer Prozess modelliert werden sollen, einen konstanten zeitlichen Abstandbesitzen, die Schrittweite ∆t. Eventuell fehlende Daten innerhalb dieser aqui-distanten Reihe wurden die Analyse und Berechnung der Kennwerte verzerren.Sie sind daher durch geeignete Interpolation, z.B. arithmetische Mittelung al-ler oder der jeweils benachbarten Werte, rechnerisch zu ermitteln. Generell istfur sinnvolle statistische Aussagen eine entsprechend große Anzahl (≥ 50) vonRealisierungen notwendig.
Obwohl meist nur zu diskreten Zeitpunkten Messwerte vorliegen, werden diezu Grunde liegenden stochastischen Prozesse in der Regel kontinuierlich mo-delliert. Insbesondere in der graphischen Darstellung gelingt es damit besser,Aussagen uber die Zusammenhange der Zufallsgroßen zu machen und diese visu-ell hervorzuheben. Außerdem wird damit klar, dass das beobachtete Phanomen(Temperatur, Grundwasserstand, etc.) naturlich auch zu den nicht beobachtetenZeitpunkten einen bestimmten Wert hat.
7.2.1 Parameter stochastischer Prozesse
Ahnlich wie bei nicht geordneten Zufallsgroßen gibt man auch bei stochastischenProzessen die ihnen zugeordneten Verteilungen durch einige wichtige Parameteran (vergleiche Jakob, 1983; Lilienblum, 1983; Schneider et al., 1995).
Erwartungswert und Varianz
Alle Messwerte zum Zeitpunkt ti konnen ihrerseits als Realisierungen einer Zu-fallsgroße Xi aufgefasst werden. Fur jede dieser Zufallsgroßen sind die Kenn-großen ”Erwartungswert“ und ”Varianz“ definiert.
Der Erwartungswert eines stochastischen Prozesses (auch: Erwartungsfunk-tion oder Mittelwertfunktion) ist definiert als die Funktion
µ(t) = E[X(t)] (7.2)
deren Wert fur jeden Parameterwert t = ti gleich dem Erwartungswert µi derZufallsgroße X(ti) ist. µ(t) stellt dann eine ”mittlere Funktion“ dar, um die sich
2Beispiel: Eine Strecke wird zur gleichen Zeit mit mehreren Distanzmessgeraten gemes-sen. Oder: Der Parameter t reprasentiert die Tageszeit und an verschiedenen Tagen werdenMessungen zu den jeweils gleichen Tageszeiten durchgefuhrt.
3Man kann es naturlich auch umgekehrt sehen: Wahrend sonst die Realisierung einer Zu-fallsgroße ein Wert ist, ist hier jede Realisierung eine Funktion vom genannten Parameter ineinem definierten Bereich dieses Parameters. Die Menge aller Realisierungen bildet in ihrerGesamtheit den
”zufalligen Prozess“.

118 KAPITEL 7. ZUFALLSPROZESSE
die einzelnen Realisierungen des Prozesses gruppieren. Im Allgemeinen ist siekeine Gerade.
Die Varianz (auch: Varianzfunktion) eines stochastischen Prozesses ist dieFunktion
σ2(t) = Var[X(t)] = E[(X(t)− µ(t))2] (7.3)
deren Werte fur jeden Parameterwert t = ti gleich der Varianz σ2i der Zufalls-
große X(ti) ist.
Zeichnet man in einem Diagramm einerseits die Erwartungsfunktion undtragt von ihr jeweils nach oben und unten die entsprechenden Standardabwei-chungen (Quadratwurzel aus der Varianz) ein, so erhalt man ein Streuungsband ,also einen Bereich, innerhalb dessen die Realisierungen des stochastischen Pro-zesses mit einer gewissen Wahrscheinlichkeit liegen.
Mit Erwartungsfunktion und Varianzfunktion alleine ist ein stochastischerProzess allerdings noch nicht umfassend beschrieben. Analog zu ungeordnetenZufallsgroßen definieren wir auch hier weitere Parameter, welche die stochasti-schen Abhangigkeiten der Zufallsgroßen beschreiben.
Kovarianzfunktionen und Korrelationsfunktionen
Betrachtet man aus dem stochastischen Prozess zu verschiedenen Zeitpunktent1 und t2 die zugehorigen Zufallsgroßen X(t1) und X(t2), so lasst sich die linearestochastische Abhangigkeit zwischen X(t1) und X(t2) durch
γxx(t1, t2) = Cov(X(t1), X(t2)) = E[(X(t1)− µ(t1))(X(t2)− µ(t2))] (7.4)
beschreiben. Durchlaufen t1 und t2 alle zugelassenen Werte des Parameters t, sobeschreibt γxx(t1, t2) eine zweidimensionale Funktion - die Autokovarianzfunk-tion des stochastischen Prozesses.
Normiert man die Autokovarianzfunktion (indem man durch die jeweiligenStandardabweichungen dividiert), so erhalt man die Autokorrelationsfunktionρxx(t1, t2):
ρxx(t1, t2) =γxx(t1, t2)√σ2(t1)σ2(t2)
. (7.5)
Die Autokorrelationsfunktion gibt an, wie die Zufallsgroßen des stochastischenProzesses zu verschiedenen Zeitpunkten untereinander korreliert sind, d.h. sieuntersucht die inneren Zusammenhange eines einzelnen stochastischen Prozes-ses. Sie erlaubt es, Aussagen uber die Erhaltungstendenz eines Prozesses zu ma-chen. Eine rasch abfallende Autokorrelationsfunktion deutet auf einen ”shortmemory“-Effekt des Prozesses hin, d.h. es gibt eine geringe Erhaltungstendenzund es kann zu starken Schwankungen im Prozess kommen. Es ist dann schwie-riger, aus der Aufzeichnung und Analyse eines stochastischen Vorgangs ubereine endliche Zeit auf den Verlauf des Vorgangs in der Zukunft zu schließen.
Betrachtet man zwei stochastische Prozesse X(t) und Y (t) und fasst sie

7.2. STOCHASTISCHE PROZESSE 119
zu einem neuen, zweidimensionalen Prozess zusammen4, so konnen analog zuoben eine Kreuzkovarianzfunktion
γxy(t1, t2) = Cov(X(t1), Y (t2)) = E[(X(t1)− µx(t1))(Y (t2)− µy(t2))] (7.6)
und eine Kreuzkorrelationsfunktion
ρxy(t1, t2) =γxy(t1, t2)√σ2
x(t1)σ2y(t2)
(7.7)
gebildet werden. Die Kreuzkorrelationsfunktion liefert Informationen uber dieWechselbeziehung zwischen zwei gleichzeitigen, stochastischen, zeitabhangigenVorgangen.
7.2.2 Weitere wichtige Eigenschaften
Stationare Prozesse
Einen stochastischen Prozess, bei dem die wahrscheinlichkeitstheoretische Struk-tur (die Verteilungsparameter) invariant gegenuber einer zeitlichen Verschie-bung ist, nennt man einen stationaren Prozess. Gilt dies tatsachlich fur alleParameter, so spricht man auch von starker Stationaritat ; gilt diese Forderungnur fur die oben angegebenen ersten beiden statistischen Momente (Erwartungs-wertfunktion und Varianzfunktion), so liegt immerhin noch schwache Stationa-ritat vor. Schwach stationare Prozesse haben also Erwartungswerte und Vari-anzen, die von t unabhangig sind. Die Autokorrelationsfunktion hangt in demFall nur von der Zeitdifferenz τ = t2 − t1 ab.
Beispiele fur stationare Prozesse sind das Rauschen in Elektronenrohren,das Fading, Abweichungen selbstregelnder Systeme die unter konstanten auße-ren Bedingungen arbeiten, usw. Ein Beispiel aus der Geodasie ware eine Test-messung mit einem elektronischen Distanzmessgerat auf einer Eichbasis mitverschiedenen, bekannten Teilstreckenabschnitten ti. Wir fassen die Messungals Zufallsprozess auf. Dabei ist die Lange der Teilstrecken der Zufallsparame-ter und die Abweichungen der gemessenen Distanzen vom Soll-Wert in Relationzur gemessenen Lange sind die einzelnen Realisierungen. Es liegt genau dann einstationarer Prozess vor, wenn das Distanzmessgerat nur ein Additionskonstantehat, also die Abweichungen nicht von der gemessenen Distanz abhangen.
Instationaritat eines stochastischen Prozesses kann durch einen ”Trend“ (al-so eine unperiodische zeitliche Veranderung des Systems) oder eine periodischeKomponente (eine zyklisch wiederkehrende Veranderung des Systems) verur-sacht werden. Trend und Periode sind deterministische Großen, die in unserenAnwendungsbeispielen oft durch physikalische Einflusse bestimmt werden. Inder Physik spricht man in diesem Fall auch von einem ”Signal“ (im Gegensatzzum ”Rauschen“, dem zufallsbedingten Anteil des Prozesses). Wir werden in
4Dazu benotigen wir naturlich eine Unterscheidungsmoglichkeit fur die Laufvariablen, wes-wegen wir t1 und t2 statt t verwenden.

120 KAPITEL 7. ZUFALLSPROZESSE
Abschnitt 11.2 sehen, wie man Zeitreihen von Trend und periodischem Anteilbefreien kann und somit stationare Prozesse erhalt.
Es gibt mehrere Kriterien, mit denen ein stochastischer Prozess auf Instatio-naritat untersucht werden kann (Jakob, 1982). Das Zufallskriterium von Cornuund das Kriterium von Abbe prufen, ob ein stochastischer Prozess frei von sy-stematischen Einflussen ist. Das Zufallskriterium von Cornu lautet
∣∣∣∣π
2t2
s2− 1
∣∣∣∣ <
∣∣∣∣∣
√2 (π − 2)
n
∣∣∣∣∣ (7.8)
mit
t =
∑∣∣∣ vi
si
∣∣∣n
und s2 =vT Pv
n
Das Kriterium von Abbe pruft ebenfalls, ob eine Reihe von Fehler frei vonsystematischen Einflussen ist. Dazu bildet man die Hilfsgroßen
A =n∑
i=1
v2i und
B =n−1∑
i=1
(vi − vi+1)2.
Der Prozess ist genau dann frei von systematischen Einflussen, wenn gilt
A
B= 2. (7.9)
Ergodische Prozesse
Ein Prozess, bei dem die einzelnen Zufallsgroßen (und damit die Messwerte) nor-malverteilt sind, heißt Gauß’scher Prozess. Da im Fall so einer multivariatenNormalverteilung bereits die ersten beiden Momente zur vollstandigen Beschrei-bung ausreichen, braucht nicht mehr zwischen ”starker“ und ”schwacher“ Sta-tionaritat unterschieden werden. Wenn außerdem eine Realisierung ausreicht,um den Prozess vollstandig zu beschreiben, so ist dies ein ergodischer Prozess.Ergodische Prozesse sind immer stationar (aber nicht umgekehrt).
Fur ergodische Prozesse gilt:
• Erwartungswert und Varianz sind konstant.
• Die Kovarianzfunktion ist stetig und hangt nicht von den absoluten Zeit-punkten t1, und t2, sondern nur von der Differenz τ = t2 − t1 ab.
• Die statistischen Informationen, die man normalerweise aus den einzelnenRealisierungen erhalt, kann man auch aus der zeitlichen Mittelbildunguber eine einzige vorhandene Realisierung erhalten.

7.3. EMPIRISCHE SCHATZUNG STOCHASTISCHER PROZESSE 121
In der Praxis kann man mitunter bereits nach dem Augenschein Prozesse aufStationaritat beurteilen: Wenn in der graphischen Darstellung jeder beliebige
”Fensterausschnitt“ immer ein qualitativ ahnliches Bild zeigt, kann man Statio-naritat vermuten. Sind hingegen systematische Veranderungen erkennbar, liegtNichtstationaritat vor.
7.3 Empirische Schatzung stochastischer Prozes-se
7.3.1 Statistische Schatzwerte eines allgemeinen stocha-stischen Prozesses
Voraussetzung zur empirischen Bestimmung von Mittelwertfunktion und Kova-rianzfunktion ist das Vorliegen einer hinreichend großen Anzahl von unabhangi-gen Realisierungen. Die Anzahl der Realisierungen sei n.
Zunachst wird ein Anfangspunkt t0 = 0 des Parameters t gewahlt. Von die-sem Anfangspunkt beginnend werden k gleich lange Intervalle ∆t abgetragen.Fur jedes Intervallende ti bestimmt man das arithmetische Mittel der n Wertex1(ti), x2(ti), ..., xn(ti) Somit erhalt man k Mittelwerte; durch Annaherung dereinzelnen Mittel durch eine geeignete Kurve erhalt man die empirische Mittel-wertfunktion des stochastischen Prozesses.
Als Schatzwert fur die Kovarianzfunktion berechnet man zunachst
Cxx =1n
n∑
j=1
[xj(t1)− x(t1)][xj(t2)− x(t2)] (7.10)
wobei xj(t1) und xj(t2) die Werte der j-ten Realisierung in den Punkten t1 undt2 sind. Lasst man t1 und t2 alle Werte tk durchlaufen, erhalt man eine Reihe vonSchatzwerten; nahert man diese durch eine geeignete zweidimensionale Funktion(also eine Flache) an, so erhalt man eine Schatzung fur die Autokovarianzfunk-tion des stochastischen Prozesses. Analog bestimmt man die empirischen Wertefur die Kreuzkovarianzfunktion, wobei die entsprechende Formel lautet:
Cxy =1n
n∑
j=1
[xj(t1)− x(t1)][yj(t2)− y(t2)]. (7.11)
7.3.2 Statistische Schatzwerte eines ergodischen stocha-stischen Prozesses
Liegt ein ergodischer (und somit stationarer) Prozess vor, vereinfacht sich dieBerechnung. Man kommt mit einer Realisierung des Prozesses aus. Vorausset-zung: Man hat sie uber ein hinreichend langes Parameterintervall beobachtet

122 KAPITEL 7. ZUFALLSPROZESSE
(normalerweise sind das zwischen einhundert und mehreren tausend Messwer-ten).
Man tragt auf der t-Achse n gleich große Intervalle ∆t ab und die Messwertex1, x2, ..., xn als zugehorige Ordinatenwerte der Realisierung x(t). Das arith-metische Mittel dieser Werte bildet den Schatzwert fur den (konstanten) Erwar-tungswert des stochastischen Prozesses.
Dann berechnet man (Niemeier, 1980)
Cxx(k) =1
n− k
n−k∑
i=1
[xi − x][xi+k − x] (7.12)
fur alle k = 0, 1, 2, ...,m, wobei m ≤ n10 sein soll.
Der zugehorige zeitliche Abstand ist τ = k · ∆t, das heißt k gibt an, wieviele Schrittweiten die betrachteten Messwerte auseinander liegen. Die Autoko-varianzfunktion an der Stelle k = 0 stellt gleichzeitig die empirische Varianz desProzesses dar.
Um den gesamten Verlauf der Autokovarianzfunktion Cxx(τ) zu erhalten,wird durch die diskreten Stutzwerte Cxx(k) eine geeignete Funktion gelegt (ap-proximiert).
Fur diskrete Stutzwerte der Kreuzkovarianzfunktion zweier stationarer sto-chastischer Prozesse gilt analog:
Cxy(k) =1
n− k
n−k∑
i=1
[xi − x][yi+k − y]. (7.13)
Um den gesamten Verlauf der Kreuzkovarianzfunktion Cxy(τ) zu erhalten, wirdwieder mit Hilfe der Kreuzkovarianzfunktion eine geeignete Funktion approxi-miert.
Die entsprechenden Stutzwerte der Korrelationsfunktionen erhalt man durchNormierung mit den entsprechenden Kovarianzfunktionen an der Stelle 0, alsodie Autokorrelationsfunktion durch (Niemeier, 1980)
Rxx(k) =Cxx(k)Cxx(0)
(7.14)
und die Kreuzkorrelationsfunktion durch
Rxy(k) =Cxy(k)Cxy(0)
. (7.15)

Kapitel 8
Deformationsanalyse
8.1 Einleitung
Die Deformationsanalyse ist eine Anwendung der Methoden, die wir bisherkennen gelernt haben. Ausgangspunkt ist folgende Problemstellung: Bei einenPunkthaufen wird vermutet, dass sich die Position einiger (nicht aller!) Punktein Abhangigkeit von der Zeit andert. In anderen Worten: Das Netz wird defor-miert. Im weiteren Verlauf wollen wir davon ausgehen, dass der Nachweis mitHilfe mehrfach gemessener Netze erfolgen soll1. Jede Messung wird als eine Epo-che bezeichnet. Anwendungsgebiete der Deformationsanalyse sind sowohl in derLandes- als auch in der Ingenieurvermessung.
• In der Landesvermessung wird ublicherweise vorausgesetzt, dass wir aufeiner stabilen, unveranderlichen Erdoberflache arbeiten. Daher werdenPunkte ein Mal bestimmt und die Koordinaten dann als unveranderlichangenommen. Leider ist diese Voraussetzung nicht immer erfullt. Bei rut-schenden Hangen beispielsweise bewegen sich Festpunkte mit dem sie um-gebenden Teil der Erdoberflache und andern somit ihre Position in Re-lation zu den umgebenden Punkten. Da man solche Bewegungen oftmalsmit freiem Auge nicht erkennt, kann es (z.B. als Vorarbeiten fur eine hier-archische Ausgleichung) notwendig werden, die Stabilitat von Punkten zuuberprufen.
• Bei Uberwachungsaufgaben der Ingenieurgeodasie gibt es eine ahnlicheProblemstellung. Auch hier ist oftmals nicht klar, welche Punkte sichin welcher Richtung um welchen Betrag bewegen. Eine neue Staumau-er verformt sich beim Fullen des Stausees. Das Fullen muss langsam undkontrolliert erfolgen, da die Verformungserscheinungen uberwacht werdenmussen. Es muss sich bei gleich bleibendem Wasserspiegel ein stabiler Ver-
1Es ist auch moglich, solche Untersuchungen mit Geraten durchzufuhren, die kontinuierlichDaten liefern. Beispiele dafur sind Weggeber und Beschleunigungsmesser bei Bauwerks- oderTunneluberwachungen.
123

124 KAPITEL 8. DEFORMATIONSANALYSE
formungszustand ergeben2, da sonst die Mauer zwangslaufig irgendwannbrechen wird. Dazu ist es notwendig, Punkte auf der Staumauer und ingroßerer Entfernung von der Staumauer in einer Netzkonfiguration einzu-messen. Die Punkte auf der Staumauer liefern dabei Informationen uberdie Verformungen der Mauer selbst. Die ubrigen Punkte zeigen, ob sichdie Mauer bezuglich ihrer Umgebung betwegt. Dazu mussen diese Punktejedoch in einem Bereich liegen, der auch bei der Flutung des Staubeckensstabil bleibt.
Man unterscheidet zwischen relativen und absoluten Modellen. Bei absolutenModellen werden die Bewegungen eines Objektes (reprasentiert durch Punkte)in Bezug auf außere Stutzpunkte bestimmt. Bei relativen Modellen gibt es keinesolchen Stutzpunkte und daher konnen nur relative Bewegungen zwischen denPunkten bestimmt werden.
Die Problemstellungen der Deformationsanalyse kann man wie folgt zusam-menfassen:
• Signifikanz: Mit Hilfe der Deformationsanalyse sollen Deformationen anParametern festgestellt werden. Zur Bestimmung der Parameter verwen-den wir Messungen. Messungen sind jedoch immer mit zufalligen Fehlernbehaftet. Wir mussen also die Messanordnung so konzipieren, dass dieAuswirkungen der zufalligen Fehler auf die Parameter geringer sind alsdie erwarteten Deformationen. Nur dann konnen wir gesicherte Aussagenuber das Auftreten oder Ausbleiben von Bewegungen treffen.
• Ausreißer: Zusatzlich zu den zufalligen Fehlern konnen auch Ausreißer(grobe Fehler) bei den Messungen auftreten. Diese mussen vor der Defor-mationsanalyse gefunden werden. Es muss somit vor Beginn der Analyseeine Grobfehlersuche durchgefuhrt werden. Jedoch konnen immer nochkleine und daher nicht entdeckbare Fehler vorhanden sein, die das Er-gebnis beeinflussen. Eine Beurteilung der Zuverlassigkeit sollte also un-umganglich Bestandteil jeder Deformationsanalyse sein.
• Festpunkte: Um ein absolutes Deformationsmodell aufzubauen sind Fest-punkte notwendig. Diese Punkte mussen in jedem Fall zwischen den Mess-epochen stabil bleiben. Dabei ist zu beachten, dass die Festpunkte somitgleichzeitig weit weg vom Objekt (Stabilitat) und moglichst nahe (Genau-igkeit und Messaufwand) sein sollen. Hier gilt es, einen guten Kompromisszu finden. Da aber die Stabilitat von Punkten nie garantiert werden kann,muss eine mathematische Uberprufung der Stabilitat der Festpunkte statt-finden.
Das hier vorgestellte Hannoversche Verfahren(Niemeier, 1985) der Deformati-onsanalyse wird zu den Methoden der strengen Deformationsanalyse gezahlt.Die wesentlichen Grundprinzipien sind:
2Die Mauer darf sich nach einiger Zeit nicht mehr in sich verformen oder relativ zur Um-gebung bewegen.

8.2. STRENGE DEFORMATIONSANALYSE BEI 2 EPOCHEN 125
• Die innere Netzgeometrie wird fur jede Epoche separat bestimmt. AlsErgebnis der Bestimmung erhalt man fur jede Epoche einen Satz ausge-glichener kartesischer3 Koordinaten xi und eine Kovarianzmatrix Σxxi
.
• Fur die Datumsfestlegung wird die Gesamtspurminimierung verwendet. Eswird also a priori kein Festpunkt als stabil angesehen. Dabei werden furalle Epochen dieselben Naherungskoordinaten verwendet.
• Die eigentliche Deformationsanalyse erfolgt erst im Anschluss an die epo-chenweise Netzausgleichung.
• Eine Anderungen der Netzkonfiguration zwischen den Epochen kann beider Auswertung berucksichtigt werden. Dieser Aspekt ist bei langeren Be-obachtungsintervallen wichtig, da es notwendig sein kann, einzelne Punk-te aus dem Netz herauszunehmen (z.B. wenn verloren) oder zu verlegen.Zusatzlich kann auch eine Erganzung oder Abmagerung des Beobachtungs-planes durch Anderungen an den verwendeten Messgeraten notwendigwerden. Bei allen Epochen muss jedoch der gleiche Datumsdefekt vor-handen sein (wiederum wegen der verwendeten S-Transformation).
8.2 Strenge Deformationsanalyse bei 2 Epochen
8.2.1 Teilaufgaben
Ausgangspunkt ist ein geodatisches Netz, das zu zwei verschiedenen Zeitpunkten(Epochen) vollstandig ausgemessen wurde. Zusatzlich nehmen wir zunachst an,dass sich zwischen den Epochen die Konfiguration nicht geandert hat. Da sichdie Beobachtungen zwischen den Epochen wegen der unvermeidbaren zufalligenFehler voneinander unterscheiden, werden auch die resultierenden Punktkoordi-naten Unterschiede aufweisen. Diese Unterschiede liegen allerdings im Rahmender durch die Netzkonfiguration und die Messgenauigkeit bestimmten Koor-dinatengenauigkeit. Solche Abweichungen sind also kein Indiz fur tatsachlichePunktverschiebungen. Punktverschiebungen sind nur dann anzunehmen, wennsich die resultierenden Koordinaten um Betrage unterscheiden, die, verglichenmit der erreichten Genauigkeit, nicht mehr zulassig sind.
Vor einer Deformationsuntersuchung ist zu uberprufen, ob die beiden Netzekongruent sind. Zwei Netze sind dann kongruent, wenn ein Netz in das anderedurch eine isometrische Abbildung4 ubergefuhrt werden kann. Bei der Prufungmussen jedoch stochastische Informationen berucksichtigt werden. Entsprechen-de Tests werden Kongruenztests genannt.
Die Kongruenzprufung besteht aus zwei Teilen. Zunachst muss festgestelltwerden, ob es uberhaupt signifikante Verschiebungen zwischen den Netzen gibt(globaler Kongruenztest). Anschließend mussen die verschobenen Punkte loka-lisiert werden (Lokalisierung). Wenn der globale Kongruenztest keine Verschie-
3Es mussen kartesische Koordinaten sein, da wir spater die S-Transformation verwendenwerden, die nur fur kartesische Koordinatensysteme definiert ist.
4Eine umkehrbar eindeutige Abbildung, bei der Strecken nicht verandert werden.

126 KAPITEL 8. DEFORMATIONSANALYSE
bungen anzeigt, wird auch keine Lokalisierung durchgefuhrt (es gibt ja keinesignifikanten Verschiebungen).
8.2.2 Globaler Kongruenztest
Ausgangsmodell fur den globalen Kongruenztest ist der funktionale Ansatz(
v1
v2
)=
(A11 00 A22
)(x1
x2
)−
(l1l2
)(8.1)
mit dem stochastischen Modell
Σll = σ20Qll = σ2
0
(Q11 00 Q22
). (8.2)
Im Modell wird also fur jede Epoche ein eigener Koordinatenvektor eingefuhrt.In der Designmatrix des Gesamtsystems kann es außer den Matrizen A11 undA22 auch noch die Matrizen A12 und A21 geben. Diesen Teilmatrizen wurdenfunktionale Zusammenhange zwischen den aus unterschiedlichen Epochen stam-menden Parametern (z.B. die Identitat von Punkten oder die Invarianz vonPunktabstanden) ausdrucken. Wir wollen hier aber einen hypothesen- und vor-gabenfreien Fall betrachten und setzen diese beiden Matrizen daher gleich derNullmatrix.
Fur die Beantwortung der Frage, ob es signifikante Punktlageanderungenzwischen den Epochen gibt, setzen wir die Nullhypothese
H0 : E x1 = E x2 (8.3)
an. Diese definiert die Gleichheit der Punktkoordinaten fur beide Epochen. Einelineare Hypothese bekommen wir daraus uber
H0 : x2 − x1 = 0, (8.4)
oder in Form einer Bedingungsgleichung als
H0 =( −I I
)(x1
x2
)= 0. (8.5)
Wir haben nun zu unserer Ausgleichung vermittelnder Beobachtungen nocheine zusatzliche Bedingung hinzugefugt. Die Frage ist nun, ob sich die Verbes-serungsquadratsumme des ursprunglichen Systems durch die Hinzunahme derHypothese H0 signifikant verandert hat. Um diese Frage zu beantworten mussenwir einen linearen Hypothesentest durchfuhren.
Linearer Hypothesentest
Wenn wir den neuen ausgeglichenen Parametervektor als xH bezeichnen, sokonnen wir die Ausgleichungsforderung nun anschreiben als
(l−AxH)T P(l−AxH) + 2kT (BxH −w) → min . (8.6)

8.2. STRENGE DEFORMATIONSANALYSE BEI 2 EPOCHEN 127
Dabei sind die 2k wieder die Lagrange’schen Multiplikatoren. Die partiellenAbleitungen nach xH und k ergeben die beiden Bestimmungsgleichungen
AT PAxH + BT k = AT Pl, (8.7)BxH = w (8.8)
und aus (8.7) folgt dann fur den Parametervektor xH
xH = (AT PA)+(AT Pl−BT k), (8.9)
wobei (AT PA)+ die Moore-Penrose Pseudoinverse des Normalgleichungssy-stems ist5. Prinzipiell kann jedoch jede beliebige generalisierte Inverse verwendetwerden. Mit der Beziehung x = QxxA
T Pl konnen wir (8.8) umschreiben in
xH = x− (AT PA)+BT k. (8.10)
Eingesetzt in (8.8) ergibt sich dann die Bestimmungsgleichung fur k zu
BxH = Bx−B(AT PA)+BT k = w, (8.11)k = B(AT PA)+BT +(Bx−w), (8.12)
wobei die Pseudoinverse wiederum nicht zwingend verwendet werden muss. Dieendgultige Form der Zuschlagsformel (8.10) ergibt sich nun zu
xH = x− (AT PA)+BT B(AT PA)+BT +(Bx−w). (8.13)
Leider ist Gleichung (8.13) recht unhandlich. Wir suchen daher eine einfacherArt der Bestimmung.
Wir konnen fur die Verbesserungsquadratsumme ΩH formal auch schreiben
ΩH = (l−AxH)T P(l−AxH). (8.14)
Mit der rein formalen Erweiterung
l−AxH = l−Ax + A(x− xH) (8.15)
erhalten wir fur Ω
ΩH = (l−Ax)T P(l−Ax)+(x− xH)T AT PA(x− xH). (8.16)
Setzen wir nun fur (x − xH) den Ausdruck aus (8.13), so erhalt man unterBerucksichtigung von
Ω = vT v = (l−Ax)T (l−Ax)= lT (I− xAT )l= lT (I−AN+AT )l
5Wir haben es mit einer singularen Ausgleichung zu tun weswegen wir keine”normale“
Inversion durchfuhren konnen.

128 KAPITEL 8. DEFORMATIONSANALYSE
die endgultige Form, wobei der Zuschlag zur ursprunglichen Verbesserungsqua-dratsumme meist mit R bezeichnet wird.
ΩH = Ω + (Bx−w)T B(AT PA)+BT +(Bx−w)︸ ︷︷ ︸R
(8.17)
bzw.R = (Bx−w)T B(AT PA)+BT +(Bx−w). (8.18)
Der Zuschlag R ist eine quadratische Form, sodass fur die Verteilung von R inallgemeiner Form gilt
mT Mm ≈ χ2[rankM, λ =12EmT MEm]. (8.19)
Den Rang der Formmatrix in (8.17) bezeichnen wir mit h und es gilt
h = rankB(AT PA)+BT . (8.20)
Den Nichtzentralitatsparameter von R konnen wir formal ausdrucken als
λH =1
2σ20
E(Bx−w)T B(AT PA)+BT +E(Bx−w). (8.21)
Dieser Nichtzentralitatsparameter wird genau dann Null, wenn die HypotheseH0 gilt, also
EBx−w = 0. (8.22)
Somit erhalten wir fur R die Verteilungsaussage
R
σ20
≈ χ2[h, λH ]. (8.23)
Ω selbst folgt ebenfalls einer χ2-Verteilung. Wir nehmen jedoch an, dass derNichtzentralitatsparameter von Ω verschwindet, also das ursprungliche Ausglei-chungsmodell korrekt ist. Ohne Beweis nehmen wir weiters an, dass Ω und Rstochastisch unabhangig sind (Beweis siehe Koch, 1976). Damit haben wir alleVoraussetzungen fur einen Test der Nullhypothese H0. Die optimale Testgroßeist der Quotient der beiden χ2-verteilten Großen:
F =RhΩ
n−r
=R · (n− r)
Ω · h =R
s20 · h
. (8.24)
Dieser Quotient folgt einer nicht zentralen F-Verteilung
F ≈ F [h, n− r, λH ] (8.25)
mit den Freiheitsgraden h und n − r und dem Nichtzentralitatsparameter λH .F folgt der zentralen F-Verteilung nur bei Gultigkeit von H0. Daher gilt fur denTest der linearen Hypothese H0 die Wahrscheinlichkeitsbeziehung
PF > Fh,n−r,1−α|H0 = α. (8.26)
Uberschreitet der empirische Wert F den entsprechenden Grenzwert der F-Verteilung fur ein gewahltes Signifikanzniveau (1− α), so ist die Nullhypothesezu verwerfen. Mit diesem Wissen konnen wir nun den globalen Kongruenztestdurchfuhren.

8.2. STRENGE DEFORMATIONSANALYSE BEI 2 EPOCHEN 129
Globaler Kongruenztest uber einen linearen Hypothesentest
Setzen wir nun unsere Nullhypothese (8.5) in Gleichung (8.18) ein, so erhaltenwir
R = dxT
(( −I I) (
A11 00 A22
)( −II
))+
dx (8.27)
mit A11 = (AT1 P1A1)+, A22 = (AT
2 P2A2)+
und dx = x2 − x1.
Durch Auflosen der Matrizen wird daraus
R = (x2 − x1)T [(AT1 P1A1)+ + (AT
2 P2A2)+]+(x2 − x1). (8.28)
Durch Einfuhrung von
d = x2 − x1 (8.29)Qdd = Qx1x1
+ Qx2x2= (AT
1 P1A1)+ + (AT2 P2A2)+ (8.30)
wird darausR = dT Q+
ddd. (8.31)
Der Rang der Matrix Qdd ergibt sich formal zu
h = rank(Qx1x1+ Qx2x2
). (8.32)
Ausgehend von identischen Netzkonfigurationen und gleicher Datumsverfugungin beiden Epochen gilt dann
h = rankQx1x1= rankQx2x2
= u− d = r (8.33)
mit d als Anzahl der freien Datumsparameter.
Den Schatzwert s20 fur die Varianz der Gewichtseinheit σ2
0 erhalten wir ausder Ausgleichung im Ausgangsmodell vH = AH xH − l mit R = ΩH − Ω. DieseAusgleichung wird naturlich nicht geschlossen durchgefuhrt, sondern getrenntnach den Epochen. Bei Gultigkeit der Hypothese, dass alle Epochen dieselbeVarianz der Gewichtseinheit haben, gilt somit
Ω = vT1 P1v1 + vT
2 P2v2, (8.34)
s20 =
vT1 P1v1 + vT
2 P2v2
(n1 − r1) + (n2 − r2)=
Ω1 + Ω2
f1 + f2=
Ωf
. (8.35)
Die Testgroße des globalen Kongruenztests ist somit analog zu (8.24)
F =dQ+
ddds20 · h
=R
s20 · h
. (8.36)
Die Wahrscheinlichkeitsbeziehung fur den Test lautet somit
PF > Fh,n−r,1−α|H0 = α. (8.37)
Uberschreitet nun der Wert von F den zugehorigen Grenzwert der F-Verteilung,so kann mit einem Signifikanzniveau von 1− α darauf geschlossen werden, dass

130 KAPITEL 8. DEFORMATIONSANALYSE
irgendwo im Netz Deformationen vorliegen. Die verschobenen Punkte konnenjedoch erst nach einer erfolgten Lokalisierung angegeben werden.
Einen Verallgemeinerung dieses Hypothesentests findet man bei Wolf (1980).Er entwickelt ein allgemeines Testmodell und Zeigt, wie der hier verwendetenund einige andere Tests in dieses Modell passen.
Globaler Kongruenztest uber implizite Hypothesenformulierung
Der globale Kongruenztest kann genauso uber eine implizit formulierte Hypothe-se durchgefuhrt werden. Die Nullhypothese ist wiederum, dass die Koordinatenbeider Systeme gleich sind. Das bedeutet aber, dass wir fur die ausgegliche-nen Koordinaten in beiden Systemen denselben Vektor verwenden konnen, dass(8.1) also jetzt folgendermaßen aussieht:
(v1
v2
)=
(A11
A22
)xH −
(l1l2
). (8.38)
Aus diesem System erhalt man direkt die Verbesserungsquadratsumme ΩH . Ausder getrennten Ausgleichung der beiden Epochen erhalt man außerdem noch dieentsprechenden Fehlerquadratsummen Ω1 und Ω2. Der Zuschlag R kann nunberechnet werden uber
R = ΩH − Ω1 − Ω2. (8.39)
Wenn nur Koordinatenunbekannten im System vorkommen, so gilt fur die Frei-heitsgrade
fH = n1 + n2 − u + df1 = n1 − u + df2 = n2 − u + d
(8.40)
Damit ergibt sichh = fH − f1 − f2 = u− d = r, (8.41)
also dieselbe Anzahl wie bei (8.33).
Der wesentliche Vorteil der impliziten Hypothesenformulierung ist es, dassfur die Berechnung von R kein spezielles Rechenprogramm notwendig ist. DieBerechnung kann mit jedem herkommlichen Ausgleichungsprogramm durch-gefuhrt werden, solange es die Verbesserungsquadratsumme ausgibt.
Globaler Kongruenztest bei unterschiedlichen Konfigurationen
Wenn es bei den Epochen unterschiedliche Konfigurationen gibt, ist eine Vor-gangsweise wie bisher beschrieben nicht moglich. Zunachst mussen die Epo-chen auf ein gemeinsames Datum gebracht werden. Dazu gibt es prinzipiell dreiMoglichkeiten:
1. Elimination der nicht identen Punkte: Es ist moglich, einzelne Unbe-kannte aus einem Ausgleichungsmodell zu eliminieren, indem sie durch alsFunktion der ubrigen Unbekannten abgesetzt werden. Wenn man das mit

8.2. STRENGE DEFORMATIONSANALYSE BEI 2 EPOCHEN 131
allen Punkten durchfuhrt, die nicht in beiden Epochen vorhanden sind, soerhalt man Systeme, die dieselben Unbekannten enthalten und daher wiebisher behandelt werden konnen.
2. Bestimmung des Datums durch Teilspurminimierung: Gleichwer-tig ist die Lagerung der Netze nur auf den identen Punkten uber Teil-spurminimierung. Die Durchfuhrung einer solchen Lagerung haben wirin Kapitel 3.2.2 kennen gelernt. Bei der Bestimmung der fur den globalenKongruenztest notwendigen Werte hD und RD durfen dann aber auch nurdie Datumspunkte verwendet werden (Differenzvektor, Kofaktormatrix,Anzahl der Unbekannten) Eine genaue Beschreibung der Vorgangsweisefindet sich bei Niemeier (2002).
3. Datumswechsel uber eine S-Transformation: Analog zur Teilspur-minimierung kann das Datum auch uber eine S-Transformation angepasstwerden, die nach der Ausgleichung durchgefuhrt wird. Dieses Verfahrenbietet sich an, wenn die Ergebnisse der Ausgleichung bereits bekanntsind und man sich eine neuerliche Ausgleichung ersparen mochte. Pro-blematisch bei großen Netzen ist dabei die aufwandige Berechnung derS-Transformation. Daher wurden Verfahren gesucht, die S-Transformationzu vermeiden. Eines davon ist beispielsweise die doppelte Inversion (Grundiget al., 1985).
Macht des Tests
Die Macht eines statistischen Tests ist umso großer, je kleiner die Gefahr einesFehlers 2. Art ist (vgl. A1). Bei den bisherigen Tests wurde auf eine Bestimmungdes Fehlers 2. Art immer verzichtet, da die Kosten im Fall eines Fehlers 2. Artdie eines Fehlers 1. Art nicht ubersteigen. Bei Deformationsanalysen ist dasanders. Ein Fehler 1. Art ware die falsche Klassifizierung eines Punktes alsverschoben. Das Ergebnis ware beispielsweise bei einem Bauwerk eine unnotigeVerstarkung. Ein Fehler 2. Art ist jedoch eine nicht entdeckte Verschiebung,die - im Extremfall - zum Zusammenbruch eines Bauwerkes fuhren kann. DieHerleitung der notwendigen Formelapparate findet man bei Koch (1981).
Zusatzlich konnen noch Uberlegungen angestellt werden, was beim Auftretennicht entdeckter systematischer oder grober Fehler in den Messdaten passiert.Man spricht dann von Fehlern 3. Art und Fehlern 4. Art (Mierlo, 1975). Auchhier kann eine Wahrscheinlichkeit angegeben werden(Mierlo und Kaltenbach,1988).
8.2.3 Lokalisierung signifikant verschobener Einzelpunkte
Das Ergebnis des globalen Kongruenztests ist eine statistisch gesichert Aussagedaruber, ob Deformationen im Netz vorliegen. War das Ergebnis die Aussage,dass keine Deformationen vorliegen, so ist die Arbeit beendet. Liegen jedoch De-formationen vor, stellt sich die Frage, welche Punkte betroffen sind und wie dieDeformationen aussehen (Richtung und Betrag). Prinzipiell geht man dabei so

132 KAPITEL 8. DEFORMATIONSANALYSE
vor, dass man den Zuschlag R auf die Verbesserungsquadratsumme in Anteile furdie einzelnen Punkte aufspaltet. Der Punkt mit dem maximalen Klaffungsanteilwird als verschoben angesehen und aus dem Datum eliminiert. Nun wird (mitdem neuen Datum) ein weiterer globaler Kongruenztest durchgefuhrt. Wenn derTest zeigt, dass keine Deformationen vorliegen, so ist die Aufgabe beendet, an-dernfalls bestimmt man wieder die Klaffungsanteile und eliminiert den Punktmit dem großten Wert aus dem Datum. Das ist die Methode der maximalenKlaffungsanteile und wurde von Pelzer6 entwickelt (Pelzer, 1974a).
Zur Bestimmung der Klaffungsanteile werden der Differenzvektor d und dieInverse der Kofaktormatrix Qxx in Submatrizen aufgeteilt:
d =(
dF
dB
), (8.42)
Q+xx = Pxx =
(PFF PFB
PBF PBB
). (8.43)
In den Matrizen mit dem Index B befinden sich jeweils die Werte fur den geradegetesteten Punkt. Nacheinander werden also samtliche Punkte des Netzes in dieentsprechenden Matrizen verschoben. Bei einem Netz mit n Punkten sind alson Gleichungssysteme zu losen.
Der Klaffungsanteil berechnet sich dann (ohne Herleitung) nach:
Ri = dT
BPBBdB , (8.44)mit dB = dB + P−1
BBPBF dF . (8.45)
Neben der Methode der maximalen Klaffungsanteile kann man die Lokalisie-rung auch uber eine S-Transformation oder mit impliziter Hypothesenformulie-rung durchfuhren. Die Beschreibung fur diese Methoden findet sich bei Niemeier(1985).
8.3 Deformationsanalyse bei mehreren Epochen
Wenn von einem Netz mehr als zwei Epochen gemessen wurden, reicht die bisherbesprochene Methode nicht mehr aus. Es ist zwar moglich, mehrere 2-Epochen-Vergleiche zu verwenden, die Ergebnisse dieser Vorgangsweise sind aber nichteindeutig. Es kann beispielsweise bei 3 Epochen immer mit der ersten Epo-che verglichen werden (also Vergleiche 1-2 und 1-3). Es ist aber auch moglich,aufeinander folgende Epochen zu vergleichen (Vergleich 1-2 und 2-3). Zwischendiesen beiden Moglichkeiten kann es zu Unterschieden bei den Ergebnissen kom-men. Daher ist es sinnvoll, eine strenge Kongruenzprufung durchzufuhren. DieMethode besteht dabei aus 3 Teilen:
1. Globaler Kongruenztest: Hier wird festgestellt, ob es uberhaupt zuVerschiebungen gekommen ist.
6Hans Pelzer, deutscher Geodat.

8.4. DEFORMATIONSANALYSE MIT HILFE ROBUSTER SCHATZVERFAHREN133
2. Zeitliche Lokalisierung: Die zeitliche Lokalisierung stellt fest, in wel-chen Epochen signifikante Punktverschiebungen stattgefunden haben.
3. Raumliche Lokalisierung: Im dritten Schritt werden schließlich die ver-schobenen Punkte identifiziert.
Auf die Beschreibung der genauen Durchfuhrung soll in diesem Skriptum ver-zichtet werden. Sie kann beispielsweise bei Niemeier (1985) nachgelesen werden.
8.4 Deformationsanalyse mit Hilfe robuster Schatz-verfahren
Robuste Schatzverfahren, wie wir sie in Kapitel 6 kennen gelernt haben, konnenauch fur die Deformationsanalyse eingesetzt werden (Caspary und Borutta,1986; Kampmann, 1991, 1994). Die Idee dabei ist folgende: Die Verschiebungwirkt sich bei der gemeinsamen Ausgleichung prinzipiell so aus wie ein groberFehler. Daher werden die Verbesserungen von Beobachtungen zu verschobenenPunkten den Einfluss der Deformation eliminieren.

134 KAPITEL 8. DEFORMATIONSANALYSE

Kapitel 9
Transformationen
Das Gebiet der Transformationen ist fur die Geodaten schon seit jeher ein wich-tiges Feld. Transformationen erlauben uns den Ubergang von einem Koordina-tensystem auf ein anderes Koordinatensystem. Die fur uns Geodaten haufigsteAufgabe ist dabei die Transformation von einem lokalen System in ein globalesSystem (z.B. freie Stationierung) und umgekehrt (z.B. Rechnen von Absteckda-ten). Mit der Einfuhrung von GPS und der immer großer werdenden Bedeutungvon GIS nimmt die Wichtigkeit von Transformationen sogar noch zu. Geanderthat sich jedoch die Komplexitat des Problems. Benotigte Daten sind meist nichtim gewunschten Koordinatensystem verfugbar, fur landerubergreifende Auswer-tungen (z.B. im Rahmen der EU) muss ein einheitliches Referenzsystem verwen-det werden usw. Hier treten aber oft nicht Transformationen innerhalb einesKoordinatensystems auf sondern wir haben es mit einem Wechsel des Bezugs-systems zu tun, der meist nicht mehr in einem einzigen Schritt durchgefuhrtwerden kann.
Die traditionellen Transformationsprobleme waren zweidimensional. Es han-delte sich hauptsachlich um den Ubergang von einem lokalen auf ein ubergeord-netes Koordinatensystem und umgekehrt. Die Problematik im zweidimensiona-len Fall ist anschaulich und geometrisch leicht verstandlich. Daher werden indiesem Kapitel auch gerade diese Probleme genauer erlautert. Die in der Pho-togrammetrie, bei der Nutzung von GPS und beim Wechsel von einem Landes-system in ein anderes Landessystem wichtigen 3D-Transformations-Aufgabenwerden aber ebenfalls angesprochen.
Die Ausgangssituation bei einer Transformation ist folgende: Es liegen nPunkte in einem Ausgangskoordinatensystem A vor und m davon (mit m < n)auch in einem Zielkoordinatensystem B. Zur Unterscheidung der Koordinatenim Ausgangs- und Zielkoordinatensystem werden wir folgende Schreibweise ver-wenden: Die Aufgabe ist die Umrechnung (Transformation) der Koordinaten
Ausgangskoordinatensystem: Kleinbuchstaben (xi, yi, zi)Zielkoordinatensystem : Großbuchstaben (Xi, Yi, Zi)
135

136 KAPITEL 9. TRANSFORMATIONEN
von A nach B. Das geschieht in zwei Schritten:
• Bestimmung der Transformationsfunktion und der Transformationspara-meter zwischen den beiden Koordinatensystemen. Dafur benotigen wirgenugend vielen idente Punkte (auch Passpunkte genannt). Das sind Punk-te, fur die wir Koordinaten in beiden Systemen kennen. Fur diese identenPunkte wird dann die Transformationsfunktion aufgestellt:
(X, Y ) = F (x, y).
Dabei muss die Transformationsfunktion sorgfaltig ausgewahlt werden.Welche Funktion am besten passt hangt immer von der Problemstellungab, wird aber auch von der Anzahl der Passpunkte beeinflusst.
• Durchfuhrung der Transformation, also Umrechnung der Punkte. Die An-zahl der Punkte kann dabei (z.B. bei digital vorliegenden Datensatzen)sehr gross werden. Wichtig ist auch, die Passpunkte ebenfalls zu transfor-mieren, da wir dadurch eine Kontrolle fur die Bestimmung der Parameterhaben.
Manchmal entfallt der erste Schritt auch und es werden bekannte Parameter furdie Transformation verwendet. Das ist vor allem bei Standardaufgaben wie derTransformation von GPS-Koordinaten ins Landessystem sinnvoll. Die Koordi-naten werden dann aufgrund lokaler Abweichungen in den meisten Fallen nichtoptimal passen, diese Klaffungen konnen dann aber beispielsweise mit einer lo-kalen (also einfacheren) Transformation bereinigt werden. Es kann aber auchsein, dass wir in einem bestimmten Gebiet bereits gemessen haben und daherschon Transformationsparameter kennen. Hier muss man jedoch abwagen, obwir durch die neu durchgefuhrten Messungen nicht neue Passpunkte erhalten,die eventuell eine Verbesserung der Transformationsparameter bewirken konn-ten.
9.1 Modelle der Koordinatentransformation
9.1.1 Helmert-Transformation
Die zweidimensionale Transformation nach Helmert, auch konforme oder Ahn-lichkeitstransformation genannt, ist eine der am haufigsten verwendeten Trans-formationen. Abbildung 9.1 zeigt den Ansatz.
Es handelt sich um eine Transformation mit vier Unbekannten:
• 2 Translationen a und b: Diese Translationen werden entlang der X- undY-Achse ausgefuhrt und verschieben den Ursprung des lokalen Systems.
• Rotationswinkel α: Um diesen Winkel ist das Ausgangskoordinatensystemgegenuber dem Zielkoordinatensystem verdreht. Es handelt sich somit umden Winkel zwischen X- und x-Achse bzw. zwischen Y- und y-Achse.

9.1. MODELLE DER KOORDINATENTRANSFORMATION 137
Abbildung 9.1: Modell der Helmert-Transformation
a
b
X
Y
x
y
α
Der Drehwinkel wird bei geodatischen Koordinatensystemen im Uhrzei-gersinn1 gemessen.
• Maßstabsfaktor m: Es gibt zwischen den Koordinatensystemen nur einenMaßstabsfaktor. In Abbildung 9.1 ist der Maßstabsfaktor dadurch kennt-lich gemacht, dass die Einheiten auf den Achsen im (x,y)- und im (X,Y)-System unterschiedlich lang sind.
Die Transformationsgleichungen werden separat fur X und Y aufgestellt. Furdie Transformation eines Punktes Pi mit den Koordinaten xi und yi ergebensich
X = a + m(cos α)x−m(sinα)y,Y = b + m(sin α)x + m(cos α)y.
(9.1)
In Matrizenschreibweise sieht (9.1) folgendermaßen aus(
XY
)=
(ab
)+ m
(cos α − sin αsin α cosα
)(xy
). (9.2)
Mit der Rotationsmatrix Rα, die eine Drehung um den Winkel α ausdruckt
Rα =(
cos α − sin αsin α cos α
)(9.3)
gelangt man zu der haufig verwendete Schreibweise(
XY
)=
(ab
)+ mRα
(xy
). (9.4)
1Positive Richtung fur die Winkelmessung ist immer die Richtung von positiver x-Achsezu positiver y-Achse. Daher wird bei mathematischen Koordinatensystem im Gegenzeigersinnund bei geodatischen Koordinatensystemen (bei denen x- und y-Achse vertauscht sind) imUhrzeigersinn gemessen.

138 KAPITEL 9. TRANSFORMATIONEN
Abbildung 9.2: Modell der affinen Transformation.
a
b
X
Y
x
y
α
β + 90°
Fur manche Aufgaben kann es sinnvoll sein, fur beide Systeme einen identenMaßstab anzusetzen. Der Maßstabsfaktor wird dann auf m = 1 gesetzt undman spricht von einer 3-Parameter-Transformation. Ein Anwendungsbeispieldafur ware eine freie Stationierung.
Die Helmert-Transformation erhalt die Gestalt transformierter Figuren. Ge-raden und Kreise bleiben erhalten, parallele Linien bleiben parallel und Winkelwerden ebenfalls nicht verzerrt. Zudem bleibt die innere Genauigkeit der trans-formierten Punkte unverandert (Kahler, 1987).
9.1.2 Affin-Transformation
Die affine Transformation (siehe Abbildung 9.2) unterscheidet sich von derHelmert-Transformation in zwei Punkten:
• Die Koordinatenachsen werden nicht um denselben Winkel verdreht, son-dern die Achsen haben unterschiedliche Drehwinkel α und β. Somit ist dieRechtwinkligkeit beider Koordinatensysteme nicht mehr erfullt.
• Die Koordinatenachsen weisen außerdem unterschiedliche Maßstabsfakto-ren auf.
In der Praxis ist der Fall oft beim Digitalisieren alter Plane oder Karten gegeben,wenn der Zeichnungstrager ungleichmaßigen Papierverzug aufweist.
Die Transformationsgleichungen haben nun folgendes Aussehen:
X = a + mx(cos α)x−my(sinβ)y,Y = b + mx(sinα)x + my(cos β)y.
(9.5)

9.1. MODELLE DER KOORDINATENTRANSFORMATION 139
Als Transformationsparameter haben wir nun
• 2 Translationen a und b: Diese Translationen werden entlang der X- undY-Achse ausgefuhrt und verschieben den Ursprung des lokalen Systems.
• 2 Rotationswinkel α und β: Um diese Winkel sind die Koordinatenachsendes Ausgangskoordinatensystem gegenuber den Koordinatenachsen desZielkoordinatensystem verdreht. Es handelt sich bei α um den Winkelzwischen X- und x-Achse und bei β um den Winkel zwischen Y- undy-Achse.
• 2 Maßstabsfaktoren mx und my: Es gibt zwischen den Koordinatensyste-men zwei Maßstabsfaktoren, von denen einer entlang der x-Achse undeiner entlang der y-Achse wirkt. In Abbildung 9.2 ist der Maßstabsfaktordadurch kenntlich gemacht, dass die Einheiten auf den Achsen im (x,y)-und im (X,Y)-System unterschiedlich lang sind, wobei sich die Langenauch zwischen x-Achse und y-Achse unterscheiden.
Wenn wir die Rechtwinkligkeit zwischen den Koordinatenachsen erhalten wollen,so konnen wir die Winkel α und β gleich setzen. Es gibt dann nur mehr 5Parameter und folglich spricht man von einer 5-Parameter-Transformation.
Bei einer affinen Transformation bleibt die Form von Figuren nicht erhalten.Geradlinigkeit und Parallelitat bleiben allerdings bestehen.
9.1.3 Polynomiale Transformation
Allgemein kann man als Transformationsformel auch einen allgemeinen polyno-mialen Ansatz wahlen:
X = a0 + a1x + a2y + a3x2 + a4y
2 + a5xy + a6x3 + . . .
Y = b0 + b1x + b2y + b3x2 + b4y
2 + b5xy + b6x3 + . . .
(9.6)
Die Parameter a0, a1, ... und b0, b1, ... sind hier jedoch geometrisch bzw. phy-sikalisch nicht mehr zu deuten. Sinnvoll ist ein derartiger Ansatz immer dann,wenn es zwischen den Systemen komplexe Verzerrungen gibt, abgebildet werdensollen.
Die Frage, wann die Entwicklung abgebrochen wird, hangt von der Anzahlder vorhandenen Passpunkte ab. Eine langere Entwicklung bewirkt naturlichauch eine feinere Erfassung der Verzerrungen. Das kann jedoch manchmal un-erwunscht sein, wenn beispielsweise Auswirkungen zufalliger Fehler das Ergeb-nis der Transformation beeinflussen. Grundsatzlich wird man aus Grunden derEinfachheit bestrebt sein, den Grad des Polynoms niedrig zu halten.
9.1.4 Dreidimensionale Helmert-Transformation
Die dreidimensionale, konservative Transformation nach Helmert (siehe Abbil-dung 9.3) spielt in vielen Bereichen eine große Rolle. Beispiele sind die Photo-

140 KAPITEL 9. TRANSFORMATIONEN
Abbildung 9.3: Modell der dreidimensionalen Helmert-Transformation (Niemei-er, 2002, S. 314).
grammetrie, die Transformation von Punkten zwischen verschiedenen Ellipsoi-den (oder zwischen verschiedenen Lagerungen eines Ellipsoids) oder ingenieur-geodatische 3D-Messverfahren.
Ausgangspunkt sind 3D-Koordinatensatze in zwei unterschiedlichen Koor-dinatensystemen. Wir bezeichnen die Koordinaten im Ausgangskoordinatensy-stem wieder mit Kleinbuchstaben, also (x, y, z), und die im Zielkoordinaten-system mit Großbuchstaben, also (X, Y, Z). Die 3D-Helmert-Transformationerhalt wie die zweidimensionale Variante die rechten Winkel zwischen den Ko-ordinatenachsen und fuhrt einen einheitlichen Maßstabsfaktor m fur die Trans-formation ein.
Wird von rechtsdrehenden Koordinatensystemen ausgegangen, so ergibt sichdie Transformationsfunktion, analog zu (9.4) zu
XYZ
=
X0
Y0
Z0
+ (1 + m) ·R(ω1, ω2, ω3)
xyz
. (9.7)
Die Bedeutung der einzelnen Parameter ist:
X0, Y0, Z0: Translationsparameter zwischen den Ursprungen derbeiden kartesischen dreidimensionalen Koordinaten-systeme,
ω1, ω2, ω3: Drehwinkel um die Koordinatenachsen x, y und z furden gesamten Ausgangskoordinatensatz,
m: Maßstabsfaktor.

9.1. MODELLE DER KOORDINATENTRANSFORMATION 141
Wenn wir die Rotationsmatrix R(ω1, ω2, ω3) in ihre einzelnen Komponentenzerlegen, erhoht das die Ubersichtlichkeit:
R(ω1, ω2, ω3) = Rz(ω3) ·Ry(ω2) ·Rx(ω1) (9.8)
mit den fundamentalen Rotationsmatrizen
Rx(ω1) =
1 0 00 cos ω1 sin ω1
0 − sinω1 cos ω1
,
Ry(ω2) =
cosω2 0 − sin ω2
0 1 0sin ω2 0 cos ω2
,
Rz(ω3) =
cosω3 sin ω3 0− sin ω3 cosω3 0
0 0 1
.
(9.9)
zerlegen. Ausmultipliziert ergibt sich
R =
cω2cω3 cω1sω3 + sω1sω2cω3 sω1sω3 − cω1sω2cω3
−cω2sω3 cω1cω3 − sω1sω2sω3 sω1cω3 + cω1sω2sω3
sω2 −sω1cω2 cω1cω2
(9.10)
mit den Abkurzungen c fur Cosinus und s fur Sinus.
Bei dieser Bestimmung der Rotationsmatrix werden die Rotationen in derReihenfolge x, y und z ausfuhrt, es wird also zuerst um die x-Achse, dann umdie y-Achse und abschließend um die z-Achse rotiert. Andere Reihenfolgen furdie Einzeldrehungen konnen durch Anderung von (9.8) erzielt werden.
Zusammen mit (9.7) definiert (9.9) die allgemeine 7-Parameter-Transfor-mation. Diese Transformation ist beispielsweise die Grundlage fur die Integrati-on von GPS-Messungen in Netze der Landesvermessung. Bei dem angegebenenModell handelt es sich um das Bursa2-Wolf3-Modell fur die dreidimensionaleHelmert-Transformation.
In vielen Landern gibt es bereits ”beste“ Transformationsparameter, die glo-bal oder lokal angepasst wurden. Vor Anwendung dieser Parameter muss jedochgepruft werden, ob die Genauigkeit des Ergebnisses fur die jeweilige Aufgabeausreicht. Was jedoch auf jeden Fall erreicht wird ist eine naherungsweise Uber-tragung der Ausgangskoordinaten in das Zielkoordinatensystem.
Bei sehr kleinen Drehwinkeln kann der Sinus durch den Winkel selbst (imBogenmaß) und der Cosinus durch Eins ersetzt werden. Das Produkt zweier(oder mehrerer) Sinus wird vernachlassigt. Dann ergibt sich fur die Drehmatrixfolgende, einfach Form.
R =
1 ω3 −ω2
−ω3 1 ω1
ω2 −ω1 1
(9.11)
2Milan Bursa, tschechischer Geodat, * 19293Helmut Wolf, deutscher Geodat, 1910 - 1994.

142 KAPITEL 9. TRANSFORMATIONEN
9.1.5 Weitere dreidimensionale Transformationen
Genauso wie die Helmert-Transformation kann man auch die affine Transforma-tion fur den dreidimensionalen Fall definieren. Hier geht man dann davon aus,dass man einen Translationsterm hat und den Punkt im Ausgangskoordinaten-system mit einer Matrix multipliziert. Man erhalt fur die Transformationsglei-chungen somit
XYZ
=
X0
Y0
Z0
+
a11 a12 a13
a21 a22 a23
a31 a32 a33
xyz
. (9.12)
Fur die Bestimmung der 12 Unbekannten X0, Y0, Z0 und a11 bis a33 brauchtman 12 Gleichungen, i.A. also 4 Punkte in beiden Systemen. Die Transformationist (wie auch die Helmert-Transformation) geraden-, parallelen- und verhaltni-streu, allerdings verandert sich bei transformierten Figuren die Form. Die affineTransformation kann genutzt werden, um Naherungswerte fur eine Helmert-Transformation zu bestimmen.
Einen Sonderfall der 3D-Helmert-Transformation erhalten wir, wenn wir furdie drei Koordinatenachsen unterschiedliche Maßstabe annehmen. Es ergebensich dann folgende Transformationsgleichungen (Spath, 2004)
XYZ
=
X0
Y0
Z0
+
mx 0 00 my 00 0 mz
R(ω1, ω2, ω3)
xyz
. (9.13)
9.2 Anwendung von Transformationsmodellen
Sobald man fur eine durchzufuhrende Transformation eines der Transformati-onsmodelle gewahlt hat, besteht die nachste Aufgabe darin, die Transformati-onsparameter zu bestimmen. Fur bestimmte Standardaufgaben (z.B. Wechselvom WGS844 zum Osterreichischen Landessystem) gibt es zwar bereits Trans-formationsparameter, diese werden die tatsachlich durchzufuhrende Transforma-tion aber nicht optimal erfullen, da sie die lokalen Gegebenheiten nicht beruck-sichtigen. Daher kann es notwendig sein, die Transformationsparameter aus Pas-spunkten zu berechnen. Ublicherweise werden dabei mehr Punkte verwendet alsfur eine eindeutige Losung notwendig sind um eine Kontrollmoglichkeit zu ha-ben. Es liegt also eine Ausgleichungsaufgabe vor.
In den folgenden Abschnitten werden wir die Vorgangsweise bei der Bestim-mung von Transformationsparametern an einfachen, charakteristischen Beispie-len betrachten. Fur komplexere Fragestellungen sollte die entsprechende Fachli-teratur herangezogen werden.
4Das WGS84 ist ein geozentrisches Koordinatensystem, in dem beispielsweise die Koordi-naten eines GPS-Receivers bestimmt werden.

9.2. ANWENDUNG VON TRANSFORMATIONSMODELLEN 143
9.2.1 Bestimmung der Parameter fur die Helmert-Trans-formation
Fur das Modell der zweidimensionalen Helmert-Transformation haben wir fol-genden Formelapparat (9.1) kennen gelernt.
X = a + m(cos α)x−m(sinα)y = a + cx− dyY = b + m(sin α)x + m(cos α)y = b + dx + cy
Wir fassen nun die Parameter der Abbildungsgleichungen in einem Parameter-vektor x zusammen.
x =
abcd
=
X0
Y0
m · cos αm · sinα
(9.14)
Wir nehmen an, dass wir fur n Punkte die Koordinaten (xi, yi) im Ausgangs-koordinatensystem kennen und fur die ersten p von diesen Punkten (mit p ≤ n)auch die Koordinaten (Xi, Yi) im Zielkoordinatensystem. Die p Punkte, derenKoordinaten wir in beiden Systemen kennen, sind unsere Passpunkte oder identePunkte.
Die Koordinaten im Zielkoordinatensystem konnen wir analog zum klassi-schen Modell der Ausgleichungsrechnung als ”Beobachtungen“ auffassen unddie Transformationsgleichungen wie Beobachtungsgleichungen behandeln. DieBeobachtungsgleichungen der Helmert-Transformation lauten somit
Xi + vxi = a +xic −yid,Yi + vyi = b +yic +xid.
(9.15)
Formal ist unser Modell also eine Ausgleichung vermittelnder Beobachtungen.Da wir 4 Unbekannte haben benotigen wir also 4 Gleichungen (p = 2) fur eineeindeutige Losung. Man spricht dann von einer einfachen Koordinatentransfor-mation. Bei mehr als 4 Gleichungen (p > 2) liegt eine Ausgleichungsaufgabevor und man spricht von einer uberbestimmten Koordinatentransformation. DieKoeffizientenmatrix konnen wir aus 9.15 sofort ableiten.
A =
1 0 x1 −y1
0 1 y1 x1
1 0 x2 −y2
0 1 y2 x2
......
......
1 0 xp −yp
0 1 yp xp
(9.16)
Im klassischen Fall der Helmert-Transformation nehmen wir fur die Koordinatender Passpunkte im Zielkoordinatensystem gleiche Genauigkeit an. Daher wirddie Gewichtsmatrix zur Einheitsmatrix, wenn man σ0 mit der Genauigkeit dereinzelnen Koordinaten gleich setzt.

144 KAPITEL 9. TRANSFORMATIONEN
Die Bestimmung der Parameter und ihrer Varianzen folgt nun den bekanntenFormeln.
x = (AT A)−1AT l
Qxx = (AT A)−1
v = Ax− l
Auch hier kann, analog zu den ”klassischen“ Ausgleichungsaufgaben ein Schatz-wert fur den Varianzfaktor σ2
0 bestimmt werden. Aus den Verbesserungen folgt
s20 =
vT v2p− 4
. (9.17)
Dieser Schatzwert kann verwendet werden um die Qualitat des Transformati-onsmodells zu beurteilen. In Anlehnung an den Helmert’schen Punktlagefehlerist die Bezeichnung mittlere Klaffung des Punktes fur den Ausdruck
sP =√
2 s0 (9.18)
gebrauchlich.
Wegen der gemeinsamen Bestimmung von m und α uber die Unbekanntenc und d ist es naturlich schwieriger, Genauigkeitsangaben zu machen. Die Ko-varianzmatrix Qxx liefert uns die Varianzen und Kovarianzen der unbekanntenParameter a bis d. Somit konnen wir sofort die Varianzen der Translationenablesen (Wolf, 1966). Hingegen konnen wir erst nach Anwendung des Fehler-fortpflanzungsgesetzes Aussagen uber die Varianzen von Maßstabsfaktor undDrehwinkel machen (m =
√c2 + d2 und tan α = d
c ).
Wegen der besonderen Struktur der A-Matrix ist es auch moglich, die Nor-malgleichungsmatrix N und die rechte Seite der Normalgleichungen sofort an-zuschreiben.
N =
p 0p
∑xi∑yi
−∑yi∑xi∑
(x2i + y2
i ) 0∑(x2
i + y2i )
(9.19)
n =
∑Xi∑Yi∑
(yiYi) +∑
(xiXi)∑(xiYi)−
∑(yiXi)
(9.20)
Kovarianzinformationen fur die Helmert-Transformation
Wir haben bisher angenommen, dass die Passpunkte im Zielkoordinatensystemgleich genau und stochastisch unabhangig sind. Das hat uns zu dem System(9.19) fur die Normalgleichungen gebracht. Es ist aber problemlos moglich, furdie Koordinaten im Zielkoordinatensystem eine Kovarianzinformation zuzulas-sen (beispielsweise aus einer vorausgegangen Netzausgleichung).
Σll = ΣXY = σ20QXY (9.21)

9.2. ANWENDUNG VON TRANSFORMATIONSMODELLEN 145
So konnen idente Punkte (Xi, Yi) mit unterschiedlichen Varianzen berucksichtigtwerden. Diese Information kann man oftmals sogar Punktdatenbanken entneh-men. Wenn nicht nur die Hauptdiagonale von QXY belegt ist bedeutet das,dass die Koordinaten der Punkte korreliert sind (was ublicherweise der Fall ist).Zu beachten ist jedoch, dass der Rang der Matrix rk(QXY ) = 2p sein sollte.Daher darf keine singulare Matrix Qxx einer freien Netzausgleichung verwendetwerden. Die weitere Berechnung erfolgt im normalen Schema der vermittelndenAusgleichung.
Im angegebenen Ansatz ist es weder vorgesehen noch moglich, Kovarianz-informationen fur die Koordinaten (xi, yi) im Ausgangskoordinatensystem ein-zufuhren. Bei der Transformation eines lokalen Netzes oder von GPS-Messungensind solche Genauigkeitsinformationen allerdings oft in Form einer allgemeinenAbschatzung oder einer Kovarianzmatrix verfugbar. Eine gangige Moglichkeitist es, die beiden Kovarianzmatrizen zu addieren und als Gesamtkovarianzma-trix einzufuhren.
Σll = ΣXY + Σxy (9.22)
Dies ist zwar nur eine Naherungslosung, liefert jedoch im Allgemeinen brauchba-re Ergebnisse. Der Vorteil gegenuber einer strengen Losung (die auch moglichist - sie fuhrt zu einer Ausgleichung bedingter Beobachtungen mit Verbesse-rungsgleichungen) ist die direkte Verwendbarkeit mit Standard-Software.
Prufung der Ergebnisse
Eine Prufung der Ausgleichung kann selbstverstandlich wieder uber die Haupt-probe geschehen. Da das Ausgangsmodell ein lineares Modell war, pruft dieHauptprobe ausschließlich die Aufstellung der Gleichungen und die Berechnung.Die Hauptprobe pruft jedoch nicht die Korrektheit der Passpunkte. Die Vor-gangsweise ist die bei der Hauptprobe ubliche.
Eine sehr haufige Fehlerquelle bei uberbestimmten Transformationen sindschlechte Passpunkte. Der triviale Fall sind Passpunkte, bei denen die Qualitatder Punktbestimmung in einem der beiden Systeme signifikant schlechter ist alsbei den ubrigen Passpunkten. Wesentlich dramatischer ist jedoch, wenn ein gro-ber Fehler auftritt. Das kann beispielsweise eine Punktverwechslung oder einePunktverschiebung sein. Lenzmann (1984) schlagt einen statistischen Test vor,um solche Ausreißer zu finden. Er geht dabei aus vom linearisierten Ausglei-chungsmodell der Koordinatentransformation
L + v = Ax. (9.23)
Darin sind L die ”beobachteten“ Koordinaten im Zielkoordinatensystem, v dieVerbesserungen fur diese Koordinaten (die Klaffungen) und x die unbekanntenTransformationsparameter.
Nun wollen wir untersuchen, wie wir einen fehlerhaften Passpunkt Pi de-tektieren konnen. Dazu fuhren wir zunachst einen solch fehlerhaften Passpunktein, indem wir fur den Punkt Pi einen weiteren Unbekanntenvektor mit Koordi-natenzuschlagen einfuhren. Das erweiterte System sieht somit folgendermaßen

146 KAPITEL 9. TRANSFORMATIONEN
aus:L + v = Ax + Hiyi. (9.24)
Dabei enthalten v und x die neuen Werte der Verbesserungen und der Unbe-kannten. Die Matrix Hi dient dazu, den Vektor yi bei den korrekten Koordina-ten aufzuschlagen. Sie besteht aus Einheitsvektoren. Bei Lagenetzen setzt sichHi zusammen aus
Hi =(
eix ei
y
)mit ei
x =
0...10...0
und eiy =
0...01...0
. (9.25)
Nun ist es moglich, eine Prufgroße zu binden. Sie ergibt sich zu
T =n− u− d
d· y
Ti Q−1
yy yi
vT Pv(9.26)
Diese Prufgroße folgt einer Fischer-Verteilung mit f1 = d und f2 = n − u − dFreiheitsgraden.
Einen etwas anderen Test findet man bei Benning (1985). Hier ist es dannauch moglich, Aussagen uber die Zuverlassigkeit des Ergebnisses zu treffen. Wei-tere Betrachtungen gibt es beispielsweise auch bei Heck (1985). Aus einer Ana-lyse zur Zuverlassigkeit ist jedoch ablesbar, dass man nicht auf die Abwesenheitvon Identitatsfehlern schließen darf, wenn keine solchen Fehler signifikant nach-gewiesen werden konnen (Boljen, 1988). Es mussen immer die Grenzen der nochsignifikant nachweisbaren groben Fehler berucksichtigt werden.
9.2.2 Bestimmung der Parameter fur die dreidimensionaleHelmert-Transformation
Sind bei der 7-Parameter-Transformation die Parameter X0, Y0, Z0, m, ω1, ω2
und ω3 unbekannt, so benotigt man mindestens 3 Punkte in beiden Systemen,um die Parameter zu bestimmen. Da wir 7 Unbekannte haben waren eigentlichnur 2 Vollpasspunkte und eine weitere Koordinate notig. In der Praxis wird mandas Problem jedoch ublicherweise uberbestimmt losen. Wir konnen fur einemPasspunkt maximal drei Beobachtungsgleichungen aufstellen. Dann handelt essich um einen Vollpasspunkt. Haufig kommen in der Praxis auch Passpunktevor, bei denen nur zwei (Lage) oder sogar nur eine Koordinate (Hohe) bekanntist. Solche Punkte liefern dann auch maximal 2 bzw. 1 Gleichung.
Wir wollen den Fall der kleinen Rotationswinkel betrachten, also die Ma-trix (9.11) bestimmen. Als Naherungswert fur die Rotationsmatrix konnen wirdie Einheitsmatrix setzen. Als Naherungswert fur den Maßstab setzen wir Einsund den Naherungswert fur den Translationsvektor bestimmen wir mit Hilfe dergenaherten Rotationsmatrix und des genaherten Maßstabes aus den Passpunk-ten. Als funktionales Modell der Ausgleichung erhalten wir fur einen Passpunkt

9.2. ANWENDUNG VON TRANSFORMATIONSMODELLEN 147
X1 durch Ableitung des Systems (9.7) mit der Rotationsmatrix (9.11)
Ai =
1 0 0 Xi 0 −Zi Yi
0 1 0 Yi Zi 0 −Xi
0 0 1 Zi −Yi Xi 0
(9.27)
mit dem Unbekanntenvektor
dPT =(
dX0 dY0 dZ0 m ω1 ω2 ω3
). (9.28)
Nun wird fur jeden Passpunkt eine Matrix Ai aufgestellt und alle Teilmatrizenzum funktionalen Modell zusammengefasst.
A =
A1
A2
. . .An
(9.29)
Bei großeren Drehwinkeln wird das Problem schwieriger, da dann die Rota-tionsmatrix (9.9) in das Gleichungssystem (9.7) eingesetzt werden muss. Wirbenotigen dann Naherungswerte fur die Transformationsparameter und mussendie Gleichungen nach den Unbekannten ableiten. Daher verschafft man sich oftuber eine affine Transformation gute Naherungswerte fur die Berechnung. Daeine raumliche affine Transformation 12 Unbekannte besitzt benotigen wir 4Vollpasspunkte fur die Berechnung.
Eine Alternative stellt die in A1 kennen gelernte Grobner-Basis in Kom-bination it dem Gauß-Jacobi Kombinations-Algorithmus dar. Das Problem beidieser Losung ist jedoch, dass keine eindeutige Losung entsteht, da die verwende-ten Polynome mehrere Losungen (Nullstellen) besitzen (Awange und Grafarend,2002, 2003).
9.2.3 Bestimmung der Parameter fur die dreidimensionaleAffine-Transformation
Fur die affine 3D-Transformation, die in der Photogrammetrie von Bedeutungist, konnen die Parameter ebenfalls uberbestimmt hergeleitet werden. Nach dembisher Gesagten sollte es kein Problem darstellen, die entsprechenden Formel-apparate aus (9.5) herzuleiten. Eine genauere Behandlung findet man bei Leeb(1968)
9.2.4 Verwendung von Transformationen am Beispiel derTransformation von GPS-Datensatzen
Die Verknupfung von GPS-Datensatzen mit terrestrischen Koordinaten im Lan-dessystem sind ublicherweise mit einer Vielzahl unterschiedlicher Transformatio-nen verbunden. Daher ist es nicht mathematisch korrekt, GPS-Datensatze miteiner einzigen 7-Parameter-Transformation ins Landeskoordinatensystem uber-zufuhren. Der mathematisch korrekte Losungsweg zur Umrechnung von GPS-Messungen ins System der Landesvermessung ist folgender:

148 KAPITEL 9. TRANSFORMATIONEN
• Umrechnung der Landeskoordinaten in 3D-Koordinaten bezuglich dem ver-wendeten Rotationsellipsoid : Dabei sind mehrere Schritte notwendig. Zu-nachst muss von der Projektion des Landessystems (z.B. Gauß-Kruger,Meridian M28) auf ellipsoidische Koordinaten ubergegangen werden unddiese (φ, λ, h)-Koordinaten dann in (X, Y, Z)-Koordinaten umgerechnetwerden. ACHTUNG: Diese Koordinaten beziehen sich immer noch aufdas im Landessystem verwendete Rotationsellipsoid in dem verwendetengeodatischen Datum (in Osterreich Bessel-Ellipsoid mit Datum Habsburg-warte - Hundsheimer Berg).
• Freie Ausgleichung der GPS-Messungen und Bestimmung von WGS-84-Koordinaten: Dabei erfolgt eine Kontrolle der inneren Genauigkeit desNetzes und grobe Fehler, die beispielsweise aus der Eingabe einer falschenPunktnummer stammen, werden eliminiert. Das Ergebnis sind ausgegli-chene (x, y, z)-Koordinaten im System WGS-84.
• Bestimmung der Transformationsparameter und Transformation der Ko-ordinaten: Nun erfolgt der Wechsel des Bezugssystems. Die Koordinatenwerden mit einer 7-Parameter-Transformation5 vom WGS-84 auf das Ko-ordinatensystem aus dem ersten Schritt umgerechnet. Zunachst werdendabei uber die Passpunkte die Transformationsparameter bestimmt (odereventuell auch bekannte Parameter gewahlt) und dann die Neupunkte mitdiesen Parametern transformiert.
• Anbringung der Projektion der Landesvermessung : Die Koordinaten derPunkte werden zunachst wieder in ellipsoidische Koordinaten umgewan-delt und anschließend wird die Projektion ins System der Landesvermes-sung durchgefuhrt.
9.3 Robuste Transformation
Wie in Abschnitt 6 ausgefuhrt, gibt es außer der Methode der kleinsten Quadra-te auch die so genannten robusten Schatzverfahren. Im Gegensatz zur Methodeder kleinsten Quadrate setzen diese Verfahren fur die Beobachtungen keine Nor-malverteilung voraus und kommen auch dann zu plausiblem Schatzwerten wenngrobe Fehler im Beobachtungsvektor enthalten sind. Fur die oft angestrebte voll-automatische Abarbeitung (auch bei Transformationen) sind derartige Ansatzedeshalb attraktiv.
Typische Probleme bei Transformationen sind Fehler in den Informationenzum Zielkoordinatensystem. Beispiele dafur sind Punktverschiebungen, Punkt-verwechslungen und/oder Identitatsprobleme, abweichende Koordinaten durchunterschiedlichen Punktstatus und getrennte Netzbearbeitungen. Genauso gibtes derartige Fehlerquellen fur die Informationen des Ausgangskoordinatensy-stems. Bei herkommlicher Bearbeitung wirken sich diese als Fehler der Design-Matrix A aus und konnen nicht durch Ausreißertests oder ahnliches aufgedecktwerden. Es ist jedoch moglich, den maximalen Betrag eines nicht erkennbaren
5Dabei wird angenommen, dass die beteiligten Koordinatensysteme in allen Koordinaten-richtungen einen einheitlichen Maßstab besitzen.

9.3. ROBUSTE TRANSFORMATION 149
Ausreißers abzuschatzen. Dazu kann die innere Zuverlassigkeit des Modells her-angezogen werden (Albert, 1987):
∇0i=
σδ0√ri
.
Dabei ergibt sich der Redundanzanteil ri wegen der einheitlichen Gewichtungzu ri = Qvivi
.
Als Alternative zu den bisherigen Ansatzen konnen daher robuste Schatzme-thoden angewendet werden (Kanani, 2000). Gerade fur Transformationen, beidenen in der Regel nur wenige Parameter zu bestimmen sind, eignen sich dieseAnsatze besonders gut (vergleiche Somogyi und Kalmar, 1988). Wir wollen zweiAnsatze naher betrachten, die bereits fur Transformationen verwendet werden.
9.3.1 L1-Schatzung
Ls-Norm-Schatzungen besitzen eine Verlustfunktion der Form
ρ(vi) = |vi|s.Bei s = 2 ergibt sich die nicht robuste Schatzung nach der Methode der kleinstenQuadrate.
Die L1-Norm-Schatzung oder kurz L1-Schatzung besitzt die Verlustfunktion
ρ(vi) = |vi|und fur die Psi-Funktion erhalten wir
Ψ(vi) = sign(vi).
Diese Ψ-Funktion ist klar beschrankt und die Schatzung damit robust. Fur dieSchatzfunktion gilt
n∑
i=1
ρ(vi) =n∑
i=1
|vi| → min .
Leider sind die Ergebnisse der L1-Schatzung nicht effizient (bei fehlerfreien Da-ten weichen sie von den Ergebnissen der L2-Schatzung ab). Daher wird dieL1-Schatzung bei Transformationen oft nur zur Grobfehlersuche verwendet. Dieendgultige Schatzung der Parameter erfolgt dann mit der L2-Schatzung.
Zur numerischen Losung des Minimumproblems bei der L1-Schatzung, dasman auch anschreiben kann als
n∑
i=1
|aTi x− li| → min, (9.30)
gibt es in der Literatur mehrere Rechenverfahren auf der Grundlage des Simplex-Algorithmus. Dazu wird aus 9.30 ein lineares Problem
mit cT (v+ + v−) cT = [11 . . . 1]unter Ax + v+ − v− = l
mit v+i ,v−i > 0
(9.31)

150 KAPITEL 9. TRANSFORMATIONEN
formuliert. Dabei wird der Residuenvektor v in die beiden positiven Summandenv+ und v− aufgespalten. Die positiven Residuen fasst man in v+ zusammen,die negativen in v−. Einen Vergleich der Ergebnisse der L1-Norm-Schatzung fureine Helmert-Transformation mit denen der L2-Norm-Schatzung findet man beiHahn und Bill (1984).
Eine weitere Moglichkeit zur Berechnung ist der in Kapitel 6 gezeigte Weguber Iteration der L2-Norm-Schatzung mit Gewichtsanpassung. Das Problemdieser Losung ist der Umfang der Berechnungen wegen der notwendig Iterati-onsschritte. Der Vorteil der Methode ist allerdings die Ubersichtlichkeit und dieMoglichkeit, sie auch mit Standardprogrammen einzusetzen.
Effiziente Algorithmen zur Berechnung der L1-Approximation eines uberbe-stimmten linearen Gleichungssystems nach (9.30) stammen z.B. von Barrodaleund Roberts (1973).
9.3.2 LMS-Schatzung
Wir haben im Kapitel 6 gesehen, dass die Least-Median-Squares-Schatzung(LMS) optimale Eigenschaften in bezug auf kontaminierte Daten hat. Bei LMSwird der Median der quadrierten Residuen minimiert, die Forderung des LMS-Schatzers lautet also
med(v2i ) → min . (9.32)
Bei der praktischen Umsetzung werden aus den vorhandenen n Beobachtun-gen jeweils so viele gewahlt, dass ein eindeutig bestimmtes Gleichungssystementsteht. Dieses wird anschließend gelost. Fur diese Losung werden dann dieVerbesserungen aller Beobachtungen bestimmt, quadriert und dann der Mediander Quadrate ermittelt. Diese Berechnung werden fur alle moglichen Kombina-tionen von Beobachtungen durchgefuhrt. Dabei muss jedoch eine Losung desGleichungssystems moglich sein, es durfen also bei der Bestimmung von Trans-formationsparametern keine Singularitaten auftreten6. Der Satz von Parameternmit minimalem Wert fur den Median ist dann das Ergebnis der LMS-Schatzung.
LMS hat den Vorteil, nicht durch die Geometrie beeinflusst zu sein. Daherspielen auch Hebelpunkte keine Rolle. Bei diesem Verfahren konnen zudem biszu 50% fehlerbehafteter Daten (in Stutzstellen oder Beobachtungen) zugelassenwerden.
Das Problem von LMS ist die enorme Anzahl moglicher Kombinationen. Wie
bereits in Abschnitt 6.5 ausgefuhrt ergeben sich(
nu
)Kombinationsmoglich-
keiten, die eine eindeutige Losung erfordern. Gerade bei Transformationsauf-gaben ist es aber gelungen, die Anzahl der zu untersuchenden Kombinationenklein zu halten (Kanani, 2000).
6Das ware beispielsweise dann der Fall, wenn man im zweidimensionalen Fall nur x-Koordinaten als Beobachtungen heranzieht.

9.4. NACHBARSCHAFTSTREUE ANPASSUNG 151
Abbildung 9.4: Modell der maschenweisen Affin-Transformation (aus Niemeier,2002)
9.4 Nachbarschaftstreue Anpassung
Bei uberbestimmten Transformation ergeben sich in den Passpunkten Klaffun-gen. In vielen Anwendungsgebieten will oder darf man die Koordinaten derPasspunkte jedoch nicht andern. Ein Beispiel dafur sind Arbeiten im Kataster.Hier besteht Anschlusszwang an das amtliche Festpunktfeld. Hier besteht dasProblem darin, die Restklaffungen verschwinden zu lassen ohne die Nachbar-schaftsbeziehungen zu zerstoren. Drei Methoden wollen wir uns im folgendennaher ansehen.
9.4.1 Maschenweise Affin-Transformation
Eine einfache Uberlegung fuhrt zur maschenweise Affin-Transformation: Manzerlegt das Gebiet, in dem sich die zu transformierenden Punkte befinden, inDreiecke. Zu jedem Dreieck gibt es eine eindeutige Losung fur eine affine Trans-formation. Damit umgeht man die Problematik der Uberbestimmung und hataußerdem noch den Vorteil, dass samtliche Passpunkte genau (also ohne Rest-klaffungen) abgebildet werden. Aus den Transformationsgleichungen der Affin-Transformation
Xi = a + xic− yidYi = b + xie + yif
(9.33)
erkennen wir, dass bei genau drei Passpunkten eine eindeutige Bestimmung dersechs Transformationsparameter a bis f moglich ist. Man zerlegt also wie inAbbildung 9.4 das Gebiet in Dreiecke und transformiert jeweils die Punkte inden Dreiecken mit den eindeutig bestimmten Parametern. Da eine eindeutigeBestimmung der Transformationsparameter erfolgt, treten in den Passpunktenkeine Restklaffungen auf.
Entlang der Begrenzungslinien zwischen zwei Dreiecken, also den LinienP1P2, P2P5, P1P5 usw., gehen wir ebenso von einer Restklaffung der Große Nullaus. Damit ist dann auch der Ubergang zwischen zwei Netzmaschen moglich,d.h. fur zwei benachbarte Punkte, die in verschiedenen Maschen liegen, ist die

152 KAPITEL 9. TRANSFORMATIONEN
Nachbarschaft auch nach der Transformation gewahrt. Zu beachten ist jedoch,dass Linien von einem Dreieck in das nachste Dreieck im Allgemeinen an derBegrenzungslinie (leicht) geknickt werden.
Problematisch bei der maschenweisen Affin-Transformation ist die fehlen-de Kontrolle. Da samtliche Parameter ohne Uberbestimmung geschatzt wer-den, fallen fehlerhafte Daten nicht auf. Daher sollte die maschenweise Affin-Transformation niemals als einziges Verfahren verwendet werden. Eine Moglich-keit der Kontrolle ware beispielsweise die Bestimmung von Transformationspa-rametern mit der Methode der kleinsten Quadrate und Vergleich dieses Para-metersatzes mit den jeweils innerhalb einer Masche gultigen Parametern. Eineandere Moglichkeit ware eine vorgeschaltete robuste Schatzung, mit deren Hilfedie Punktidentitat uberpruft wird.
9.4.2 Abstandsgewichte
Eine weitere einfache Losung ist die Berechnung von Abstandsgewichten fur dienicht-identen Punkte. Dabei wird fur jeden Punkt j ein Anpassungsbetrag in x-und y-Richtung (uxj und uyj ) als gewichtetes Mittel aus allen Restklaffungender Passpunkte vXi und vYi ermittelt.
uXj = 1∑pij·∑n
i=1(pijvXi)uYj = 1∑
pij·∑n
i=1(pijvYi)(9.34)
Das Abstandsgewicht pij wird sinnvollerweise uber den geometrischen Abstandbestimmt nach
pij = s−kij (9.35)
mit sij als Strecke zwischen Stutzpunkt i und umzurechnenden Punkt j. Prinzi-piell werden bei dieser Vorgangsweise also fur einen zu transformierenden Punktdie Klaffungen an samtliche Passpunkten berucksichtigt. Die Klaffungen der inder Nahe des zu transformierenden Punktes liegenden Passpunkte haben al-lerdings einen wesentlich hoheren Einfluss als die der weiter weg liegenden Pas-spunkte. Nach Anbringung dieser Zuschlage an die transformierten Koordinatenwerden fur die identischen Punkte die vorgegebenen Koordinaten (also nicht diedurch die Transformation berechneten) weiter verwendet.Leider versagt das Ver-fahren bei sehr ungleichmaßiger Verteilung der Stutzpunkte, insbesondere beiVorliegen von Stutzpunktgruppen.
Fur den Exponenten k werden im Allgemeinen Werte von 1, 1, 5 oder 2 an-gesetzt werden. Wird bei der Bestimmung der Abstandsgewichte ein Glattungs-faktor m berucksichtigt, also
pij = (sij + m)−k (9.36)
so spricht man von einer deterministischen Pradiktion (Bjerhammar, 1973).

9.4. NACHBARSCHAFTSTREUE ANPASSUNG 153
9.4.3 Multiquadratische Interpolation
Dieses Verfahren wurde von Wolf (1968, 1975) und Hardy7 (1971, 1972) in derGeodasie eingefuhrte. Es beruht auf der Grundlage einer Interpolationsflache,die die aus einer Uberlagerung von n Flachen 2. Grades (Hyperboloiden) entste-hen. Hintergrund ist die Idee, dass jede unregelmaßige, glatte Flache durch dieSumme vieler kleiner, regelmaßiger Flachen approximiert werden kann. Dieseregelmaßigen Flachen sind durch die Stutzpunkte der Transformationsaufgabedefiniert.
Die Berechnungsformel fur jeden einzelnen Anpassungsbeitrag uj ergibt sichzu
uj = sTj S−1v. (9.37)
Dabei ist
sTj =
(sj1 sj2 . . . sjn
)der Abstandsvektor des Punktes j,
S =
S11 S12 . . . S1n
S21 S22 . . . S2n
......
. . ....
Sn1 Sn2 . . . Snn
die Stutzpunktmatrix und
vT =(
v1 v2 . . . vn
)die Restklaffungen.
Sik ist die Distanz zwischen den Stutzpunkten i und k. In der Hauptdiagonalenstehen somit Nullen. Je nach Daten und Aufgabe kann ein additiver Zuschlagzu den Distanzen sji (der Distanz zwischen dem zu transformierenden Punkt jund dem Stutzpunkt i ) und Sik angesetzt werden. Das fuhrt zu einer Glattungder Interpolationsflache.
Das Produkt S−1v muss nur einmal bestimmt werde. Es verbleibt somit eineMultiplikation pro zu transformierendem Punkt. Da nur Strecken (also Quadra-te und Wurzeln) und keine weiteren speziellen Parameter berechnet werdenmussen, ist die Methode relativ wirtschaftlich (Gopfert, 1977). Der Rechenauf-wand ist trotzdem groß, wenn es einerseits viele Passpunkte gibt und anderer-seits viele Punkte interpoliert werden mussen.
Eng verwandt mit diesem Ansatz ist die Nutzung eines stochastischen In-terpolationsansatzes, namlich die in Kapitel 11.2 behandelte Kollokation. EineDiskussion bezuglich der Anwendung auf Arbeiten im osterreichischen amtlichenFestpunktfeld samt Beispiel findet man bei Wieser et al. (2003).
7Rolland Lee Hardy, Geodat und Geophysiker.

154 KAPITEL 9. TRANSFORMATIONEN

Kapitel 10
Interpolation
10.1 Einleitung
Verschiedene Aufgaben im Vermessungs- und Geoinformationswesen benoti-gen Messwerte ”in jedem Punkt des betrachteten Gebietes“. Man mochte zumBeispiel Informationen uber die flachenhafte Struktur eines bestimmten beob-achteten Phanomens (Niederschlagsmengen, Stoff-Konzentrationen, Tempera-tur etc.). Tatsachlich werden aber selbst in dichten Netzen nur an relativ we-nigen Stutzstellen Messwerte beobachtet und mussen an dazwischen liegendenPunkten geschatzt werden. Wir sprechen in dem Fall auch von einer Interpo-lation. In weiten Teilen außerhalb der Gebiete mit Stutzstellen ist vielleichtuberhaupt keine Messung moglich oder wirtschaftlich sinnvoll. Dort muss durchExtrapolation auf die entsprechenden Werte geschlossen werden. Formal gese-hen ist Interpolation und Extrapolation dasselbe (und wird auch nicht immersprachlich unterschieden), wenngleich sich auch nicht alle mathematischen In-terpolationsverfahren so ohne weiteres fur die Extrapolation einsetzen lassen.Beide Verfahren werden auch als Pradiktion1 bezeichnet.
Eine weitere Notwendigkeit zur Interpolation besteht dann, wenn innerhalbeines Gebietes punktweise Daten erhoben wurden und zu einem spateren Zeit-punkt diese Daten zwar in derselben Region aber an anderen Orten erhobenwerden. Wie kann man diese Daten miteinander vergleichen?
Zwei Beispiele fur Extrapolation:
• Der Mathematiker Abraham de Moivre war einer der wenigen Menschender den Zeitpunkt seines Todes exakt pradizierte. Mit zunehmendem Al-ter fand er heraus, dass er jede Nacht einen 15 Minuten langeren Schlafbenotigte. Er wandte eine arithmetische Extrapolationsmethode an undsagte voraus, wenn diese Zeit auf 24 Stunden angewachsen sei, werde ergestorben sein. Er sollte Recht behalten.
1vom lat. praedico = vorhersagen, prophezeien.
155

156 KAPITEL 10. INTERPOLATION
• Der Schriftsteller Mark Twain2 hingegen merkte in seinem Buch ”Life onthe Mississippi“ an, dass der Mississippi im Laufe der Zeit auf Grund geo-logischer Vorgange seine Lange verkurzt. Twain selbst hat Aufzeichnungenvon einem Zeitraum uber 176 Jahre untersucht und daraus geschlossen,dass der Mississippi (heute ca. 3800 Kilometer lang) vor einer Million Jah-ren mehr als zwei Millionen Kilometer lang gewesen sein (und somit weitin den Golf von Mexico hineingeragt haben) muss und in ungefahr 650Jahren nur noch 3 Kilometer lang sein wird.
Es liegt also folgendes Problem vor: In einem bestimmten Gebiet sind anPunkten mit bekannter Position (den Stutzstellen) Messwerte gegeben (die Stutz-werte). Die Stutzstellen konnen eindimensional entlang einer Geraden, zweidi-mensional in einer Ebene, im 3-dimensionalen Raum oder aber ganz allgemeinim mehrdimensionalen Raum angeordnet sein. Zusammen mit den Messwer-ten ergibt sich dann eine mathematische Funktion, die um mindestens einenGrad hoher ist, als die Dimension der Stutzstellen. Wird beispielsweise an ver-schiedenen Stellen die Temperatur gemessen, so kommt zu den 2D- oder 3D-Koordinaten noch ein weiteres Element hinzu, namlich die gemessene Tempe-ratur. Zusatzlich sind in diesem Fall vielleicht auch noch Datum und Tages-zeit relevant, man erhalt also dann noch eine Dimension. Auf diese punktuellgemessenen Daten konnen, z.B. zur Hochwasservorhersage, raumliche Analy-sen durchgefuhrt werden und die Niederschlagswerte an jeder beliebigen Stelleraumlich interpoliert werden.
Allgemein gilt jedoch, dass die Dimension des Modells, das wir interpolie-ren von niedrigerer Ordnung sein muss als unser Punkthaufen. Wenn wir alsozweidimensionale Stutzstellen haben (z.B. Schwerewerte entlang einer Geraden)konnen wir nur eine Linie interpolieren, wenn wir dreidimensionale Stutzstellen(also z.B. Schwerewerte in einem 2D-Raster) gemessen haben, konnen wir eineFlache interpolieren.
Mathematisch gesehen wollen wir fur eine diskrete Funktion (die Stutzstellenund -werte) einen kontinuierlichen Verlauf modellieren. Bei den meisten Inter-polationsmethoden gelten dabei folgende Bedingungen:
• Raumlich nahe beieinander liegende Werte haben eine großere Ahnlichkeitals weiter voneinander entfernte.
• An den Stutzstellen mussen auch nach der Interpolation die Stutzwerteerhalten bleiben.
Die Eigenschaft der ”raumlichen Nahe“ kann sich dabei entweder nur auf dieDistanz oder aber auf Distanz und Richtung beziehen. Besteht uberhaupt keinraumlicher Zusammenhang, sind die Messwerte also unabhangig voneinander, isteine Interpolation nicht moglich, weil wir aus dem vorhandenen Datenmaterialkeine Information uber die dazwischen oder außerhalb liegenden Stellen ablesenkonnen.
2Mark Twain (Samuel Langhorne Clemens), amerikanischer Schriftsteller, 1835 - 1910.

10.2. GEOMETRISCHE INTERPOLATIONSVERFAHREN 157
Gilt die zweite Forderung nicht, ist es also nicht notwendig, dass die Funktiondurch die vorgegebenen Stutzstellen geht, so spricht man von Approximation.Ausgleichende Funktionen nach der Methode der kleinsten Quadrate sind z.B.Approximationen (die Beobachtungen erhalten Verbesserungen!). Auch in derComputergrafik werden zur Erzeugung glatter Kurven meist Approximations-methoden verwendet.
Am wichtigsten ist jedoch die Unterscheidung zwischen geometrischen undstatistischen Verfahren. Erstere werden oft auch als Interpolationsverfahren imengeren Sinn bezeichnet. Bei ihnen werden die Stutzwerte als Bedingungen an-gesehen, die es einzuhalten gilt. Die statistischen Verfahren werden auch alsals Pradiktionsverfahren. Bei ihnen sind die Stutzwerte Beobachtungen und wirkonnen daher eine Varianz-Kovarianzmatrix aufstellen.
Zusatzlich zu dieser Einteilung gibt es aber auch noch andere. Beispielsweisekann man die Methoden einteilen in (Mitas und Mitasova, 1999)
• lokale Methoden,
• geostatistische Methoden,
• Variationsmethoden und
• anwendungsspezifische Methoden.
Bei lokalen Methoden geht man von der Annahme aus, dass der Wert an zu in-terpolierenden Punkten hauptsachlich on den umliegenden Punkten beeinflusstwird. Daher wird der Interpolationswert als Funktion der umliegenden Punk-te ermittelt. Bei geostatistischen Methoden (sie wir in Kapitel 12 besprechenwerden) kommt noch eine Modellierung zufalliger Einflusse hinzu. Bei den Va-riationsmethoden wird die Interpolationsfunktion so bestimmt, dass die resultie-rende Funktion ”glatt“ sein soll. Schließlich gibt es noch viele Ansatze, die nur inspeziellen Gebieten einsetzbar sind (Voronoi-Polygone, Isolinien-Interpolation,Resampling usw.).
Einen Vergleich unterschiedlicher Interpolationsverfahren hinsichtlich Ge-nauigkeit und Wirtschaftlichkeit (also Geschwindigkeit) findet man bei Heinund Lenze (1979). Das verwendete Beispiel ist die Interpolation von Hohen aufeinen regelmaßigen Raster. Die besten Ergebnisse lieferten dabei die zweidimen-sionale Spline-Interpolation und die multiquadratische Methode, wobei letzterenur einen Bruchteil der Rechenzeit benotigte.
10.2 Geometrische Interpolationsverfahren
Ausgangslage fur alle hier betrachteten Verfahren ist eine an (n + 1) diskretenStutzstellen x0 < x1 < . . . < xn durch die Stutzwerte y0, y1, . . . , yn gegebeneFunktion f(x). Wir wollen nun den Werte dieser Funktion an einer beliebigenStelle x mit x0 < x < xn bestimmen.

158 KAPITEL 10. INTERPOLATION
Die hier angegebenen Verfahren sind nur die wichtigsten. Es gibt noch vieleweitere Moglichkeiten, es wurde aber den Rahmen der Veranstaltung sprengen,wenn wir alle im Detail besprechen wollten.
10.2.1 Polynominterpolation
Eine einfache Methode der Interpolation ist die Annahme eines Polynoms n-tenGrades. Ein solches Polynom hat (n + 1) Unbekannte und mit Hilfe der (n + 1)Stutzstellen konnen wir eine eindeutige Losung bestimmen. Problematisch beieiner solchen Polynominterpolation ist jedoch, dass die Funktion sehr stark aus-schwingt. Dieser Effekt kann reduziert werden, indem nicht alle Stutzpunkte furdie Interpolation verwendet werden. Der Extremfall ist dann die lineare Interpo-lation, bei der nur mehr die Stutzstellen links und rechts der zu interpolierendenStelle betrachtet werden.
Die Funktion der Polynominterpolation hat allgemein die Form
pn(x) = a0 + a1 x + a2 x2 + . . . + an xn. (10.1)
Zum Bestimmen der Losung wurden verschiedene Methoden entwickelt. AlsBeispiel sollen hier nur die Losung mit Lagrange-Polynomen, die Newton’sche3
Interpolationsformel, die Algorithmen von Aitken4 und Neville und auch dieHermite’sche5 Interpolation genannt werden. Die entsprechenden Formelappa-rate konnen in der Fachliteratur gefunden werden.
10.2.2 Spline-Interpolation
Charakterisierung und Herleitung der naturlichen kubischen Spline-Interpolierenden
Der Nachteil der Polynominterpolation ist die Welligkeit des Ergebnisses. Ei-gentlich ware es wunschenswert, eine Funktion zu haben, die einen moglichstglatten Kurvenverlauf hat und dabei auch noch stetig bzw. sogar stetig differen-zierbar ist. Im Schiffbau wird schon seit Jahrhunderten ein Verfahren eingesetzt,das genau die gewunschten Eigenschaften hat:
Eine ”dunne Latte“ (die so genannte ”Straklatte“) wird an den Stutzstellenso eingespannt, dass sich die Latte zwar in Langsrichtung verschieben, sie abernicht seitlich ausweichen kann. Die Latte muss dabei einen dunnen Querschnitthaben und moglichst homogen und isotrop sein. Die Position, welche die Latteeinnimmt, ist durch die minimale Biegeenergie6 gekennzeichnet.
∫ xn
x0
(s′′(x))2
(1 + (s′(x))2)52
dx (10.2)
3Sir Isaac Newton, englischer Mathematiker, 1643 - 1727.4Alexander Craig Aitken, australischer Mathematiker, 1895 - 1967.5Charles Hermite, franzosischer Mathematiker, 1822 - 1901.6Es wird dabei die Gesamtenergie, nicht jedoch die maximale Biegung minimiert. Eine
Minimierung der maximalen Biegung ware etwa bei Verkehrslinien sinnvoll (Heckmann, 1999)

10.2. GEOMETRISCHE INTERPOLATIONSVERFAHREN 159
Mit vereinfachten physikalischen und geometrischen Annahmen (Weglassen phy-sikalischer und geometrischer Konstanten und Reduktion des Problems auf eineunendlich dunne Latte) ergibt sich das Problem zu
∫ xn
x0
(s′′(x))2 dx → min . (10.3)
Die Spline-Interpolierende7 s(x) definieren wir nun als Losung der Variations-aufgabe mit folgenden Nebenbedingungen:
1. Die Funktion s(x) muss die Interpolationseigenschaften s(xi) = yi erfullen,also durch die Stutzwerte gehen.
2. Die Funktion s(x) soll an allen inneren Stutzstellen x1 bis xn−1 mindestenseinmal stetig differenzierbar sein.
3. Zwischen den Stutzstellen soll die Funktion (mindestens) viermal stetigdifferenzierbar sein.
4. s(x) soll das Integral E = 12
xn∫x0
(s′′(x))2 minimieren8.
Die Losung erfolgt mit den Methoden der klassischen Variationsrechnung undkann beispielsweise bei Schwarz (1986) nachgelesen werden. Als Ergebnis mussenfur Spline-Interpolierende folgende Eigenschaften erfullt sein:
1. s(x) ist in jedem Teilintervall [xi, xi+1] ein kubisches Polynom9. Die inter-polierende Spline-Funktion setzt sich stuckweise aus Polynomen drittenGrades zusammen.
2. Erste und zweite Ableitung von s(x) sind an den inneren Stutzstellenstetig.
3. Die zweite Ableitung verschwindet an den Stutzstellen x0 und xn.
Diese drei Eigenschaften bestimmen die interpolierende Spline-Funktion. Dabeiist die dritte Eigenschaft s′′(x0) = s′′(xn) = 0 die so genannte naturliche Bedin-gung als Folge der Variationsaufgabe. Man bezeichnet deshalb die resultierendeinterpolierende Funktion auch als naturliche kubische Spline-Funktion.
7Erstmals so genannt Isaac Jacob Schonberg, rumanischer Mathematiker, 1903 - 1990(Schonberg, 1946)
8Das ist der exakte Ausdruck fur die Deformationsenergie der Latte. Bei Berechnung derLosung wird aber die Ableitung gleich Null gesetzt, daher kann das 1
2weggelassen werden
und man erhalt (10.3).9Eine der bei der Losung der Variationsaufgabe auftretenden Bedingungen ist die, dass
die vierte Ableitung von s(x) Null ist. Da die Funktion aber auch viermal differenzierbar seinmuss bleibt im Allgemeinen nur mehr ein kubisches Polynom als Losung.

160 KAPITEL 10. INTERPOLATION
Verallgemeinerung der kubischen Spline-Interpolierenden
Die kubische Spline-Interpolation besitzt verschiedene Verallgemeinerungen undErweiterungen rein mathematischer Natur, die dann allerdings keine physikali-sche Motivation mehr besitzen. So kann in naheliegender Weise die Ableitungunter dem Variationsintegral (10.3) erhoht werden, wodurch gleichzeitig die Ne-benbedingungen 2 und 3 anzupassen sind. Fur eine ganze Zahl p ≥ 2 wird eineSpline-Funktion als Losung der folgenden Variationsaufgabe definiert:
1. Die Funktion s(x) muss die Interpolationseigenschaften s(xi) = yi erfullen,also durch die Stutzstellen gehen.
2. Die Funktion s(x) soll an allen inneren Stutzstellen x1 bis xn−1 mindestens(p− 1)-mal stetig differenzierbar sein.
3. Zwischen den Stutzstellen soll die Funktion mindestens 2p-mal stetig dif-ferenzierbar sein.
4. S(x) soll das Integral E = 12
xn∫x0
(s(p)(x))2 minimieren.
Diese Variationsaufgabe charakterisiert interpolierende Spline-Funktionen, diesich intervallweise aus Polynomen vom Grad (2p− 1) so zusammensetzen, dassihre ersten (2p− 2) Ableitungen an den inneren Stutzstellen stetig sind und dieAbleitungen s(p)(x), s(p+1)(x), . . . , s(2p−2)(x) an den Endpunkten als naturlicheBedingungen verschwinden.
Weitere Verallgemeinerung der Spline-Interpolierenden
Neben den kubischen Spline-Interpolierenden gibt es auch noch andere Splines.Moritz10 erwahnt neben den kubischen Splines auch noch quadratische Splines,bei der sowohl die Funktion selbst als auch ihre erste Ableitung stetig sind. Siewir jedoch kaum verwendet, da sie einige Probleme aufweist. Eines davon istdie Tatsache, dass sie nur fur eine gerade Anzahl an Stutzstellen definiert ist(Moritz, 1978).
Eine weitere Menge von Splines erhalt man in Hilbertraumen analytischerFunktionen, die so genannten analytischen Splines. Analytische Splines konnenvor allem in der physikalische Geodasie interessant sein, da sie neben den Ku-gelfunktionsreihen eine weitere Moglichkeit zur Losung der Laplace-Gleichung∆t = 0 bieten (Lelgemann, 1980).
Berechnung der kubischen Spline-Interpolierenden
Durch die eingangs gezeigten Eigenschaften ist die naturliche kubische Spline-Interpolierende eindeutig festgelegt. Wir konnen nun die Schritte fur die Be-
10Helmut Moritz, osterreichischer Geodat.

10.2. GEOMETRISCHE INTERPOLATIONSVERFAHREN 161
rechnung angeben. Wir gehen zunachst aus von dem kubischen Polynom
si(x) = ai(x− xi)3 + bi(x− xi)2 + ci(x− xi) + di (10.4)
als Losung fur das Teilintervall [xi, xx+1] mit der Lange
hi = xi+1 − xi. (10.5)
Fur den Wert des Polynoms und die ersten beiden Ableitungen an den Endendes Intervalls erhalten wir die nachstehenden Gleichungen.
si(xi) = di = yi
si(xi+1) = aih3i + bih
2i + cihi + di = yi+1
s′i(xi) = ci
s′i(xi+1) = 3aih2i + 2bihi + ci
s′′i (xi) = 2bi = y′′is′′i (xi+1) = 6aihi + 2bi = y′′i+1
(10.6)
Um die Interpolations- und Stetigkeitsbedingungen der ersten und zweiten Ab-leitungen an den Interpolationsstellen zu erfullen, ist es zweckmaßig und ublich,die Koeffizienten ai, bi, ci und di durch die gegebenen Stutzwerte yi und yi+1
und die unbekannten zweiten Ableitungen y′′i und y′′i+1 an den Enden des betref-fenden Teilintervalls [xi, xi+1] auszudrucken. Aus den ersten und letzten beidenGleichungen von (10.6) ergeben sich somit:
ai = 16hi
(y′′i+1 − y′′i
)bi = 1
2y′′ici = 1
hi(yi+1 − yi)− 1
6hi
(y′′i+1 + 2y′′i
)di = yi
(10.7)
Sobald neben den gegebenen Stutzwerten yk auch die zweiten Ableitungen y′′kan allen Stutzstellen bekannt sind, sind die kubischen Polynome si(x) in jedemTeilintervall eindeutig festgelegt und damit berechenbar. Mit diesen die Spline-Funktion beschreibenden Werten ist sowohl die Interpolationseigenschaft alsauch die Stetigkeit der Funktion selbst und die Stetigkeit ihrer zweiten Ablei-tung in den inneren Stutzpunkten sichergestellt. Es bleibt somit nur noch dieStetigkeit der ersten Ableitung an den inneren Stutzstellen zu erfullen. NachSubstitution der Darstellungen (10.7) in der vierten Gleichung von (10.6) ergibtsich fur die erste Ableitung am Ende des Intervalls
s′i(xi+1) =1hi
(yi+1 − yi) +16hi
(2y′′i+1 + y′′i
)(10.8)
und nach Substitution des Indexwertes i durch i− 1
s′i−1(xi) =1
hi−1(yi − yi−1) +
16hi−1
(2y′′i + y′′i−1
). (10.9)
Die Bedingung s′i−1(xi) = s′i(xi) fur eine innere Stutzstelle fuhrt wegen (10.9),der dritten Gleichung von (10.6) und (10.7) auf die Gleichung
1hi−1
(yi − yi−1) +hi−1
6(2y′′i + y′′i−1
)=
1hi
(yi+1 − yi)− hi
6(y′′i+1 + 2y′′i
),
(10.10)

162 KAPITEL 10. INTERPOLATION
die nach Multiplikation mit 6 und umsortiert folgendermaßen aussieht:
hi−1y′′i−1 + 2 (hi−1 + hi) y′′i + hiy
′′i+1 −
6hi
(yi+1 − yi) +6
hi−1(yi − yi−1) = 0.
(10.11)Diese Bedingung muss an allen inneren Stutzstellen xi mit i = 1, . . . , n−1 erfulltsein und ergibt fur die (n− 1) Unbekannten y′′1 , y′′2 , . . ., y′′n−1 einer naturlichenkubischen Spline-Funktion mit y′′0 = y′′n = 0 ein System von (n − 1) linearenGleichungen. Im Fall n = 5 lautet das Gleichungssystem
y′′1 y′′2 y′′3 y′′4 1
2(h0 + h1) h16
h0(y1 − y0)− 6
h1(y2 − y1) + h0y′′0
h1 2(h1 + h2) h26
h1(y2 − y1)− 6
h2(y3 − y2)
h2 2(h2 + h3) h36
h2(y3 − y2)− 6
h3(y4 − y3)
h3 2(h3 + h4) 6h3
(y4 − y3)− 6h4
(y5 − y4) + h4y′′5(10.12)
In Matrizenschreibweise sieht das System (10.12) folgendermaßen aus:
Ay′′ + l = 0. (10.13)
Im System (10.12) sind fur spatere Zwecke die Werte y′′0 und y′′5 in den Kon-stanten der ersten und letzten Gleichung mitgefuhrt worden. Fur eine naturlicheSpline-Interpolierende sind diese Werte gleich Null zu setzen. Das Gleichungs-system (10.12) hat eine symmetrische Matrix und eine Determinante ungleichNull. Somit ist das Gleichungssystem uber Matrizeninversion einfach losbar. Esgibt zwar auch andere Losungsmethoden, die die spezielle Form der Matrix11
berucksichtigen, fur unsere Zwecke reicht aber auch der allgemeine Losungsweg.
Im Fall von aquidistanten Stutzstellen vereinfacht sich das System (10.12)zu
y′′1 y′′2 y′′3 y′′4 14 1 − 6
h2 (y2 − 2y1 + y0) + y′′01 4 1 − 6
h2 (y3 − 2y2 + y1)1 4 1 − 6
h2 (y4 − 2y3 + y2)1 4 − 6
h2 (y5 − 2y4 + y3) + y′′5
(10.14)
Der Rechenweg fur die kubische Spline-Interpolierende s(x) liegt somit auf derHand. Zunachst werden aus den gegebenen Stutzstellen die Langen der Inter-valle hi bestimmt und das Gleichungssystem (10.12) aufgebaut. Nach seinerAuflosung haben wir die Werte fur die zweiten Ableitungen an samtlichen Stutz-stellen und konnen nach (10.7) die Parameter der zu den Teilstucken gehorigenkubischen Polynome (Parabeln) bestimmen.
Abschließend wollen wir uns ein Beispiel fur die Berechnung ansehen. Ge-geben sind die Punkte aus Tabelle 10.1. Wir haben also 15 aquidistante Stutz-punkte mit Abstand 1. Somit sind alle hi = h = 1 und wir konnen fur die Be-stimmung der zweiten Ableitungen das vereinfachte Gleichungssystem (10.14)verwenden.
11Es handelt sich um eine tridiagonale Matrix, die diagonal dominant ist. Es gibt dannLosungen, bei denen der Rechenaufwand linear zur Anzahl der Stutzstellen wachst. Das hatbei einer großen Anzahl von Stutzstellen bedeutende Vorteile. Es wurde jedoch zu weit fuhren,diese Aspekte in der Vorlesung zu behandeln.

10.2. GEOMETRISCHE INTERPOLATIONSVERFAHREN 163
Abbildung 10.1: Beispiel einer naturlichen kubischen Spline-Interpolation(Schwarz, 1986, S. 132)
Tabelle 10.1: Stutzpunktek xk yk k xk yk
0 1 7 8 9 51 2 6 9 10 72 3 4 10 11 63 4 4 11 12 44 5 5 12 13 45 6 4 13 14 56 7 2 14 15 77 8 3
Das Ergebnis der Gleichungsauflosung ist in der zweiten Spalte von Tabel-le 10.2 zusammengefasst. Die nachste Spalte enthalt die zweiten Ableitungenan den Stutzstellen. Anschließend stehen die Parameter a bis d der kubischenPolynome, wobei jeder Parametersatz beim Startpunkt des Intervalls steht.
Abbildung 10.1 zeigt die Spline-Interpolierende. Wie man erkennen kann,nahert sie die Punkte mit einer glatten Kurve an. Zum Vergleich ist auch dieLosung eines Interpolationspolynoms 14-ter Ordnung als gestrichelte Linie dar-gestellt. Wie man erkennen kann, schwingt das Interpolationspolynom wesent-lich starker aus als die Spline-Interpolierende.
Allgemeine kubische Spline-Interpolation
Manchmal werden die naturlichen Randbedingungen s′′(x0) = s′′(xn) = 0 denAnforderungen an eine Spline-Interpolierende nicht gerecht. Das trifft immerdann zu, wenn die zu approximierende Funktion an den Enden des Approxima-tionsintervalls eine große Krummung aufweist. In diesem Fall mussen wir dienaturlichen Randbedingungen durch andere Bedingungen ersetzen.

164 KAPITEL 10. INTERPOLATION
Tabelle 10.2: Parameter der Spline-Interpolierendenk l y′′ a b c d0 — -0,0000 -0,38 0,00 -0,62 71 6 -2,3064 0,92 -1,15 -1,77 62 -12 3,2257 -0,30 1,61 -1,31 43 -6 1,4034 -0,71 0,70 1,01 44 12 -2,8395 0,13 -1,42 0,29 55 6 -2,0453 1,18 -1,02 -2,16 46 -18 5,0209 -0,84 2,51 0,67 27 -6 -0,0381 0,19 -0,02 1,82 38 0 1,1315 -0,94 0,57 2,37 59 18 -4,4878 0,55 -2,25 0,69 7
10 6 -1,1803 0,73 -0,59 -2,14 611 -12 3,2090 -0,48 1,60 -1,13 412 -6 0,3443 0,18 0,17 0,65 413 -6 1,4139 -0,24 0,71 1,53 514 — 0,0000 — — — —
Es gibt dabei drei haufig verbreitete Ansatze:
• Vorgabe zweier von Null verschiedener Werte fur die zweite Ableitung anden Endpunkten.
• Vorgabe, dass die zweite Ableitung in den Endpunkten gleich einem be-stimmten positiven Vielfachen der zweiten Ableitung der benachbartenStutzpunkte sein soll.
• Vorgabe von Werten fur die erste Ableitung an den Endpunkten.
Der erste Ansatz folgt rechentechnisch genau den im letzten Abschnitt gezeigtenFormeln. Da in (10.12) bereits die Ableitungen an den Endpunkten eingefuhrt(und spater gleich Null gesetzt) wurden, andert sich am Rechenablauf nichts.
Der zweite Fall ist etwas anders. Hier sind die zweiten Ableitungen in denEndpunkten durch folgende Forderungen bestimmt:
y′′0 = αy′′1y′′n = βy′′n−1
(10.15)
Diese Forderungen andern im Gleichungssystem (10.12) nur die Diagonalelemen-te der ersten und letzten Zeile. Da die Werte fur α und β vorgegeben werdenmussen, kann das Gleichungssystem ohne Probleme aufgestellt werden. Haufigverwendete Werte fur α und β sind 1 oder 0,5.
Der dritte Fall ist der Fall, der am meisten Anderungen verursacht. Manlost ihn, indem man die zweiten Ableitungen in Anfangs- und Endpunkt alsUnbekannte ansetzt und die zusatzlichen Gleichungen
2h0y′′0 + h0y
′′1 −
6h0
(y1 − y0) + 6y′0 = 0, (10.16)
hn−1y′′n−1 + 2hny′′n −
6hn−1
(yn − yn−1)− 6y′n = 0 (10.17)

10.2. GEOMETRISCHE INTERPOLATIONSVERFAHREN 165
im System (10.12) als erste und letzte Gleichung einfuhrt.
Periodische kubische Spline-Interpolation
Ein weiterer Sonderfall von Spline-Interpolierenden ist die periodische Spline-Interpolierende. Hier wird davon ausgegangen, dass sich die Interpolierende au-ßerhalb des Intervalls von Stutzstellen periodisch fortsetzt, dass also gilt
s(x) = s(x + a · T ) mit T = xn − x0 und a ∈ N. (10.18)
Dabei ist T die Periode der Funktion.
Um einen glatten Funktionsverlauf zu erhalten, mussen fur die Endpunktedes Intervalls folgende Bedingungen erfullt sein:
s(x0) = s(xn), (10.19)s′(x0) = s′(xn), (10.20)s′′(x0) = s′′(xn). (10.21)
Das Gleichungssystem zur Bestimmung der zweiten Ableitungen sieht nun fol-gendermaßen aus:
y′′0 y′′1 y′′2 y′′3 y′′4 1
2(h4 + h0) h0 h4 - 6h0
(y1 − y0) + 6h4
(y0 − y4)
h0 2(h0 + h1) h1 - 6h1
(y2 − y1) + 6h0
(y1 − y0)
h1 2(h1 + h2) h2 - 6h2
(y3 − y2) + 6h1
(y2 − y1)
h2 2(h2 + h3) h3 - 6h3
(y4 − y3) + 6h2
(y3 − y2)
h4 h3 2(h3 + h4) - 6h4
(y5 − y4) + 6h3
(y4 − y3)
(10.22)
Glatte zweidimensionale Kurvendarstellung
Eine Anwendung der kubischen Spline-Interpolation besteht in der Konstruk-tion von glatten Kurven in der Ebene durch gegebene (n + 1) Punkte mit denKoordinaten (xk, yk), die sich in so allgemeiner Lage befinden, dass keine Dar-stellung der Form y = f(x) moglich ist. In diesem Fall ist fur die gesuchte Kurvedie Parameterdarstellung
x = x(t),y = y(t) (10.23)
mit dem Kurvenparameter t zu verwenden. Die Parameterwerte t0, t1, . . ., tn,welche den gegebenen (n + 1) Punkten entsprechen, konnen als zunehmendeWertefolge angenommen werden. Zu den beiden tabellierten Funktionen (tk, xk)und (tk, yk) mit k ∈ (0, . . . , n) werden die zugehorigen Spline-Interpolierendenbestimmt, die dann die Kurve in der Parameterdarstellung (10.23) beschreiben.
Als Kurvenparameter ware die Bogenlange der Kurve am geeignetsten. Daman diese aber a priori nicht kennt (sie andert sich schließlich beim Ausschwin-gen der Kurve), legt man die Parameterwerte tk durch die Distanzen der auf-einander folgenden Punkte so fest, dass gilt
t0 = 0,
tk = tk−1 +√
(xk − xk−1)2 + (yk − yk−1)2(10.24)

166 KAPITEL 10. INTERPOLATION
Abbildung 10.2: Zweidimensionale Kurvendarstellung
mit k ∈ (1, 2, . . . , n).
Abbildung 10.2 zeigt ein Beispiel fur eine glatte zweidimensionale Kurve. Dieverwendeten Stutzpunkte und die zweiten Ableitungen stehen in Tabelle 10.3.
Tabelle 10.3: Stutzpunkte und Ableitungen zu Abbildung 10.2k xk yk tk x′′k y′′K0 1,50 0,75 0,000 0,000000 0,0000001 0,90 0,90 0,618 0,026366 1,0293272 0,60 1,00 0,935 0,251299 -4,6866803 0,35 0,80 1,255 2,119916 -0,0186874 0,20 0,45 1,636 -1,918770 -0,6303585 0,10 0,20 1,905 6,768642 2,8621236 0,50 0,10 2,317 -1,602547 0,9311137 1,00 0,20 2,827 0,446407 -0,5207708 1,50 0,25 3,330 0,000000 0,000000
10.2.3 Inverse Distance Weighted Methode
Wahrend es bei der Spline-Interpolation um eine rein mathematische Interpola-tion einer Funktion gegangen ist, sehen wir uns jetzt ein raumliches Problem an.An verschiedenen Punkten haben wir Messwerte eines Phanomens beobachtet.Uns interessiert jedoch nicht nur der Wert an bestimmten Punkten sondern derVerlauf des Phanomens uber die gesamte betrachtete Flache. Bei der InverseDistance Weighted Methode (auch: Shepard-Methode) wird der Messwert z anden Interpolationspunkten x0 durch ein gewichtetes Mittel der n benachbar-ten Stutzwerte z(xi) geschatzt. Die Gewichte sind umgekehrt proportional zum

10.3. STATISTISCHE INTERPOLATIONSVERFAHREN 167
Abstand di zwischen Stutzpunkt und Interpolationspunkt, also
z(x0) =
∑ni=0
1di
z(xi)∑1di
. (10.25)
Die Anzahl der ”benachbarten“ Stutzwerte ist individuell festzulegen. Es konnenalle, oder aber nur eine bestimmte Anzahl inkludiert werden. Dies hangt auchvon den Abstanden der einzelnen Punkte zueinander ab. Ab einem gewissenAbstand ist der Einfluss auf Grund der Gewichtung verschwindend gering undbraucht somit nicht mehr berucksichtigt werden.
Andere oft verwendete geometrische Interpolationsverfahren sind Polygon-Methoden (Thiessen-Polygone) und die Interpolation mittels Triangulierung.Beide Verfahren sind aber nicht Gegenstand der vorliegenden Lehrveranstal-tung.
Die Annahme des (geometrischen) Zusammenhangs zwischen den Messwer-ten ist in allen besprochenen Verfahren intuitiv und in gewisser Weise auchwillkurlich. Damit sind diese Verfahren zwar fur rein geometrische Problem-stellungen geeignet, fur reale Probleme allerdings fraglich. Hier sind Verfahrenbesser, die aus dem vorhandenen Datenmaterial die raumlichen Zusammenhangedirekt modellieren konnen. Es sind dies die so genannten statistischen Interpo-lationsverfahren.
10.3 Statistische Interpolationsverfahren
Bei den Stutzwerten, von denen bisher die Rede war, handelt es sich in derRegel um (physikalische) Messgroßen. In der Physik werden sie dann auch alsSignal12 bezeichnet. Aufgabe der Pradiktion ist es dann, mit Hilfe einiger be-kannter Signale den gesamten Signalverlauf zu beschreiben. Dabei sind stati-stische Interpolationsverfahren losgelost von geometrischen Vorstellungen undgehen rein auf stochastische Modelle zuruck. Fur sie ist der Wert der Kovari-anzfunktion bzw. Korrelationsfunktion zwischen den Signalen an verschiedenenPunkten die entscheidende Kennzahl. Zusatzlich geht man davon aus, dass daszu pradizierende Signalfeld statistisch homogen und isotrop ist, d.h. seine Kor-relationsfunktion hangt nur vom Differenzvektor zweier Punkte, respektive vomAbstand dieser beiden Punkte, ab.
Man nimmt also an, dass die Messgroßen li Zufallsgroßen darstellen, diealle derselben Grundgesamtheit angehoren, und leitet daraus die Varianz- undKovarianzverhaltnisse des Signals entweder empirisch her oder ubernimmt sieaus anderen theoretischen Uberlegungen. Die zu den Stutzpunkten gehorigeKovarianzmatrix ist dabei in der Regel eine vollbesetzte Matrix.
12Ein Signal ist eine physikalische Große, die Information beinhaltet.

168 KAPITEL 10. INTERPOLATION
10.3.1 Interpolation nach der Methode der kleinsten Qua-drate
Startpunkt der Uberlegungen sind an den Stellen xT =(
x1 x2 . . . xn
)
gemessenen korrelierten Beobachtungen lT =(
L1 L2 . . . Ln
)mit der be-
kannten Kovarianzmatrix C. Gesucht ist der Wert lp an der Position xp. Dabeiwird angenommen, dass der Wert uber eine Linearkombination der Beobach-tungen bestimmt werden kann, also gilt
lP = aT l. (10.26)
Dabei sind die Koeffizienten aT =(
a1 a2 . . . an
)noch naher zu definie-
rende Großen. Denkt man sich den zu interpolierenden Wert mit einem (fiktiven)Wert z gemessen, so ist die (gedachte) Differenz d
d = z − xp = bT l =(
1 −aT)(
zl
). (10.27)
Weiters fuhren wir fur diesen fiktiven Wert auch noch eine Varianz Cpp undKovarianzen clp (zu den tatsachlich gemessenen Werten) ein und stellen damiteine erweiterte Kovarianzmatrix auf:
C =(
Cpp cTlp
clp C
)mit cT
lp =(
Cp1 Cp2 . . . Cpn
). (10.28)
Durch Anwendung des allgemeinen Fehlerfortpflanzungsgesetzes erhalten wirfur die Varianz der Abweichung d
σ2d = σ2
0bT Cb = σ2
0
(Cpp − 2aT clp + aT Ca
). (10.29)
Nach Moritz bestimmt man die Koeffizienten von a nun so, dass die Varianz derAbweichung d ein Minimum wird, also
∂σ2d
∂a= 0. (10.30)
Aus (10.29) erhalt man somit
σ20 (−2clp + 2Ca) = 0. (10.31)
Die Normalgleichungen ergeben sich zu
Ca− clp = 0 (10.32)
und als Ergebnis der Auflosung erhalt man
a = C−1clp. (10.33)
Mit (10.26) ergibt sich fur den zu interpolierenden Wert sofort
lp = cTlpC
−1l. (10.34)

10.3. STATISTISCHE INTERPOLATIONSVERFAHREN 169
Diese Methode heißt auch stochastische lineare Pradiktion, da sie Kovarianzin-formationen zwischen allen beteiligten Werten berucksichtigt (also ein stocha-stisches Modell verwendet) und den zu bestimmenden Wert uber eine Linear-kombination der Stutzstellen pradiziert.
clp = Kovarianzvektor zwischen pradiziertem Wert lP und Messwerten liC = Kovarianzmatrix der Messwertel = Vektor der gegebenen Messwerte
Die Elemente cpi von clp und cik von C werden mit Hilfe einer KovarianzfunktionC(s) berechnet. Haufig geht man dabei davon aus, dass diese Kovarianzen nurvon den Entfernungen sik der Punkte abhangig sind, nicht jedoch von Lage oderRichtung des Vektors PiPk; wir unterstellen also Homogenitat und Isotropie:
cpi = C(spi), (10.35)cik = C(sik). (10.36)
spi = Entfernung zwischen Interpolationspunkt P und Messpunkt Pi.sik = Entfernung der Messpunkte Pi und Pk.
Anmerkung: Als ”Entfernung“ gilt dabei der Abstand der Messpunkte und nichtder Abstand der aufgetragenen Messwerte. Wenn also in einem Gebiet Hohengemessen werden, so ist nur der horizontale Abstand zwischen den Punktenrelevant, nicht jedoch der Abstand im Raum.
Es konnen auch gleichzeitig die Werte an mehreren Stellen interpoliert wer-den. In diesem Fall wird der Vektor clp zur Kovarianzmatrix Clp:
lp = CTlpC
−1l. (10.37)
Die Pradiktionsvarianz erhalt man aus:
s2p = cT
lpC−1clp, (10.38)
Σp = CTlpC
−1Clp. (10.39)
Zu beachten ist dabei jedoch, dass die erhaltenen Werte nur dann aussagekraftigsind, wenn die Kovarianzen zwischen den Stutzstellen und den Interpolations-stellen richtig erfasst sind. Bei Fehlern in der Annahme der Kovarianzen wer-den immer zu optimistische werte fur die Pradiktionsvarianz geliefert (Monicke,1979).
Geodatische Anwendungsgebiete fur die stochastische lineare Pradiktion nachkleinsten Quadraten sind z.B. die Interpolation von Schwereanomalien und Lot-abweichungen sowie Interpolations- und Transformationsprobleme in der Pho-togrammetrie (Kraus, 1970) und Landesvermessung. Die Beziehung zwischendieser Methode und den robusten Schatzverfahren aus Kapitel 6 findet man beiKraus (1997).
10.3.2 Kovarianzfunktionen
Zentrale Bedeutung bei der Pradiktion nach kleinsten Quadraten kommt offen-bar der Kovarianzfunktion C(s) zu. Sie liefert die statistische Information uber

170 KAPITEL 10. INTERPOLATION
die Struktur des gemessenen Feldes.
Kovarianzfunktionen konnen aus umfangreichem Messdatenmaterial empi-risch bestimmt werden. Man berechnet die Varianzen aller Beobachtungen undKovarianzen zwischen jenen Punktepaaren, die einen bestimmten Abstand nichtuberschreiten. Diese Werte werden in einem Diagramm aufgetragen (Abszisse:Abstande der Messstellen; Ordinate: Kovarianzen). Anschließend verbindet mansie zu einer Kurve, die eine moglichst einfache analytische Form aufweist undbestimmt die Kurvenparameter durch eine ausgleichende Funktion. Ist auf denersten Blick keine augenscheinliche Funktion erkennbar, hilft oft die Untertei-lung in Abstandsklassen und anschließende Mittelbildung je Intervall.
Kovarianzfunktionen weisen im Allgemeinen die folgenden, leicht nachvoll-ziehbaren Eigenschaften auf:
1. Ihr Maximum ist an der Stelle 0.
2. Sie hat mit zunehmendem Abstand abnehmenden Wert.
3. Sie geht fur einen Abstand s →∞ gegen Null.
Manchmal besteht auch die Moglichkeit, von bekannten Verteilungen anderer Ei-genschaften des untersuchten Phanomens direkt auf die Kovarianzeigenschaftenzu schließen und gleich ihre mathematische Funktion anzugeben. Je nach An-wendung sind dabei eine Reihe von Funktionen denkbar. Haufig verwendet wird- abgesehen von empirischen Kovarianzfunktionen - eine Gauß’sche Glockenkur-ve
C(s) = C(0) · e−k2·s2(10.40)
oder das Modell von Hirvonen
C(s) =C(0)
(1 + A2 · s2)p. (10.41)
10.3.3 Multiquadratische Interpolation
Dieses Verfahren haben wir bereits bei den Transformationen besprochen (Kapi-tel 9.4.3). Hier sein nur noch einmal darauf hingewiesen, dass es sich dabei eben-falls um ein stochastisches Interpolationsverfahren handelt. Eine mogliche An-wendung dieser Interpolationsmethode ist beispielsweise die Interpolation vonGeoidhohen aus astro-geodatische Lotabweichungen (Monicke, 1980).

Kapitel 11
Regression und Kollokation
11.1 Regression
In den bisherigen Anwendungen der Ausgleichungsrechnung im Vermessungs-wesen - zum Beispiel bei geodatischen Netzen - war der funktionale Zusammen-hang zwischen den Beobachtungen und Unbekannten bekannt: Wir konnen dasso genannte ”funktionale Modell“ fur Strecken-, Richtungs- oder GPS-Vektor-Beobachtungen genau angeben und anschließend fur die Ausgleichung lineari-sieren. Im Allgemeinen ist das aber nicht immer so. Die funktionalen Zusam-menhange konnen auch unbekannt sein und nur vermutet werden; manchmalist nicht einmal von vornherein klar, welche Einflussgroßen eine Rolle spielen.Wir mussen dann versuchen, aus empirischen Daten ein theoretisches Modell zuschatzen und die Modellparameter durch eine Ausgleichung zu ermitteln.
Typische Beispiele fur Falle, in denen wir keinen genauen funktionalen Zu-sammenhang kennen, sind
• Der Zusammenhang zwischen dem Ertrag je Hektar und der Menge desverwendeten Kunstdungers.
• Der Zusammenhang zwischen den Ausgaben je Person fur die Anschaffungvon Buchern und der Schulbildung der betreffenden Person.
• Der Zusammenhang zwischen dem m2-Preis und der Widmung von Grund-stucken.
• Der Zusammenhang zwischen den Abweichungen von Soll- und Ist-Werteiner Streckenmessung in Abhangigkeit von der gemessenen Streckenlange.
Allgemein nennt man diesen Ansatz Regression1. Dies ist an sich eine nichts-sagende, unpassende Bezeichnung, die aber vom ”Erfinder“ dieser Methode,
1vom lat. regredior = zuruckgehen.
171

172 KAPITEL 11. REGRESSION UND KOLLOKATION
Galton, auf Grund eines einzigen Beispiels gepragt wurde: Galton (ein Cou-sin von Charles Darwin) versuchte, die Evolutionstheorie seines Cousins durchquantitative Beispiele zu untermauern. In einer großangelegten experimentellenStudie untersuchte er, ob es eine Beziehung zwischen der Korpergroße der El-tern und der ihrer Kinder gibt. Er fand heraus, dass tendenziell große Elternauch große Kinder haben und kleine Eltern kleine Kinder (das hatten wir wahr-scheinlich auch ohne Galton vermutet). Allerdings stellte sich ebenfalls heraus,dass die Kinder großer Eltern eher kleiner sind als ihre Eltern und umgekehrt.Eltern haben also meistens Kinder, deren Große naher als ihre eigene Große amDurchschnitt liegt. Er nannte diesen Zusammenhang ”regression to mediocrity“,also den ”Ruckschritt zum Mittelmaß“2.
Ausgangspunkt der Regression sind zwei Zufallsvariablen Y und X bezie-hungsweise deren Realisierungen yi und xi. Uns interessiert nun die Verteilungder Zufallsvariablen Y (der Zielgroße) in Abhangigkeit von X (der Einfluss-große), nicht aber umgekehrt (die Abhangigkeit der xi von den yi). Wir nennenY auch die abhangige und X die unabhangige Variable. In der Sprache der Aus-gleichungsrechnung konnen wir auch sagen: Wir modellieren die yi als Beobach-tungen, die xi aber ”nur“ als varianzfreie Parameter in der Designmatrix, auchwenn die xi tatsachlich ”beobachtet“ wurden und somit sowohl einen Erwar-tungswert als auch eine Varianz haben. Dieser Vergleich ist vor allem moglich,weil die Methode der kleinsten Quadrate Sonderfalle der Regression sind. Daswurde von Eberl (1959) fur die vermittelnde Ausgleichung und von Meissl (1960)fur die bedingte Ausgleichung gezeigt.
Beispiele fur Regression sind:
• Bei einem stochastischen Prozess ist der Wert der AutokovarianzfunktionCxx(k) die abhangige, k die unabhangige Variable.
• Bei der Pradiktion nach kleinsten Quadraten ist der Wert der Kovarianz-funktion C(s) die abhangige, die Entfernung s die unabhangige Variable.
• Bei einer Untersuchung des Zusammenhangs zwischen dem Gewicht undder Korpergroße erwachsener Personen ist das Gewicht die abhangige, dieGroße3 die unabhangige Variable.
Ganz allgemein kann man dieses Abhangigkeitsverhaltnis durch eine Funktionausdrucken:
Y = f(X, Θ) (11.1)
Dabei konnen neben der abhangigen Variablen Y und der unabhangigen Va-riablen X noch verschiedene Funktionsparameter Θ vorkommen. Die Aufgabelautet nun, diese Funktionsparameter Θ zu bestimmen. Zunachst muss man je-doch noch festlegen, mit welcher Art von Funktion die Regression uberhauptmodelliert werden soll.
2Dass wir eher zur Mittelmaßigkeit tendieren hatten wir wahrscheinlich auch ohne Galtonvermutet - aber er hat sogar eine Theorie dazu entwickelt, mit der er dies experimentellnachweisen konnte.
3Das macht sich auch im Alltags-Sprachgebrauch bemerkbar: Man kann zwar ubergewichtigsein, nicht aber untergroß.

11.1. REGRESSION 173
Abbildung 11.1: Zusammenhang zwischen Messwerten und Residuen bei derlinearen Regression mit zwei Variablen x und y (nach Niemeier, 2002, S. 340)
y
x
Einflussgröße x
Zielgröße
1 xi x
i
1
11.1.1 Lineare Regression
Der einfachste funktionale Zusammenhang ist eine Gerade und dementsprechendist auch das einfachste Regressionsmodell die lineare Regression. Im linearenRegressionsmodell gilt
yi + vi = b0 + b1xi. (11.2)
Die Verbesserungen geben hier den in y-Richtung gemessenen Abstand der yi
von der Geraden b0 + b1xi wieder. In einem mathematischen x, y-System ent-spricht das dem vertikalen Abstand der Messpunkte von der Geraden. Wirkonnen in (11.2) die vi auch auf die rechte Seite bringen und dann entspre-chend einer bereits bekannten Bezeichnungsweise (siehe deskriptive Statistik inA1) als Residuen ε bezeichnen (vergleiche auch Abbildung 11.1). In Matrizen-schreibweise lautet dann die Gleichung fur die Regressionsgerade
y = Xb + ε. (11.3)
Dabei ist - in der Sprache der Ausgleichungsrechnung - y der Vektor der Be-obachtungen yi, b der Vektor der unbekannten Parameter b0 und b1, X dieDesignmatrix , die die Ableitungen der Gleichung (11.2) nach den Unbekann-ten enthalt (also 1 bzw. xi) und ε der Vektor der negativen Verbesserungen(Residuen).
Als stochastisches Modell wahlen wir
Σyy = σ20I (11.4)
und erhalten somit eine Einheitsmatrix als Gewichtsmatrix. Es wird also ange-nommen, dass die Beobachtungen gleich genau und unkorreliert sind.
Wenn wir die Parameter nach der Methode der kleinsten Quadrate bestim-men, also mit der Forderung
εT ε → min,

174 KAPITEL 11. REGRESSION UND KOLLOKATION
so konnen wir die Losung entsprechend Formel (2.37) sofort angeben.
b = (XT X)−1XT y (11.5)ε = −Xb + y (11.6)
Qbb = (XT X)−1 (11.7)
s20 =
εT ε
n− u(11.8)
Dasselbe Ergebnis erhalten wir, wenn wir zuerst die Schwerpunktskoordinaten(xs, ys) berechnen. Bei praktischen Aufgaben wird oft mit schwerpunktbezoge-nen Koordinaten gearbeitet, weil es immer einen Translationsterm gibt, der beiUbergang auf den Schwerpunkt wegfallt. Dadurch kann dann die Signifikanzder ubrigen Einflussparameter besser bestimmt werden. Wir konnen die Losungdirekt angeben.
xs =1n
n∑
i=1
xi (11.9)
ys =1n
n∑
i=1
yi (11.10)
s2x =
1n− 1
n∑
i=1
(xi − xs)2 (11.11)
sxy =1
n− 1
n∑
i=1
(xi − xs)(yi − ys) (11.12)
=1
n− 1
(n∑
i=1
xi · yi − n · xs · ys
)(11.13)
b1 =sxy
s2x
(11.14)
b0 = ys − b1xs (11.15)
Der Term sxy ist die uns bereits bekannte Kovarianz der Zufallsvariablen x undy; die Steigung b1 der Regressionsgeraden wird auch als Regressionskoeffizientbezeichnet. Er kann positiv oder negativ sein und dementsprechend sprechenwir von positiver bzw. negativer linearer Regression.
An dieser Stelle wollen wir noch darauf hinweisen, dass verschiedene Da-tensatze durch ein und dasselbe lineare Regressionsmodell reprasentiert werdenkonnen, wie aus Abbildung 11.2 ersichtlich ist.
Bevor man lineare Regression ansetzt, sollte man sich allerdings vergewis-sern, ob auch tatsachlich ein linearer Zusammenhang zwischen den Variablenbesteht. Dazu bietet sich der Korrelationskoeffizient an. Dieser ist schließlichein Wert fur den linearen Zusammenhang zwischen den Variablen und wenn dieKorrelation nur schwach ausgepragt ist macht auch eine lineare Regression kei-nen oder wenig Sinn. Man muss jedoch aufpassen, dass keine Scheinkorrelationvorliegt. Scheinkorrelation liegt vor, wenn anscheinend zwischen Zufallsvaria-blen Korrelation vorliegt, die jedoch in Wirklichkeit nicht vorhanden ist. Diemathematisch berechenbare Korrelation kann reiner Zufall sein, es kann aber

11.1. REGRESSION 175
Abbildung 11.2: Vier verschiedene Datensatze, die durch dasselbe lineare Re-gressionsmodell reprasentiert werden
auch sein, dass durch komplexe Zusammenhange beide Zufallsvariablen von ei-nem dritten, nicht untersuchten Parameter abhangig sind. Ein bekanntes Bei-spiel fur eine Scheinkorrelation ist der Zusammenhang zwischen Storchen undGeburten in Deutschland in verschiedenen Jahren. Beide zeigen abnehmendeTendenz, was zu der Aussage verleiten konnte, dass es bei abnehmender Anzahlvon Storchen auch weniger Geburten gibt (oder umgekehrt). Die eigentliche Ur-sache ist wahrscheinlich wesentlich komplexer und musste mit einem Parameter
”Zivilisation“ ausgedruckt werden. Ein weiteres bekanntes Beispiel ist der Zu-sammenhang zwischen dem Anteil der Katholiken an der Gesamtbevolkerungund der Hohe uber dem Meeresspiegel. Aus dieser Korrelation darf keine Re-gression abgeleitet werden, da es sich ebenfalls nur um eine Scheinkorrelationhandelt.
11.1.2 Multiple und nichtlineare Regression
Wir konnen den linearen Ansatz (11.2) auch auf mehrdimensionale Einfluss-großen xi erweitern zu
yi = b0 + b1x1i + b2x2i + . . . + buxui ± εi. (11.16)
Das formale Vorgehen der Schatzung der Parameter b andert sich dadurch nicht.
Auch wenn der vermutete funktionale Zusammenhang uberhaupt nichtli-near ist, konnen nach erfolgter Linearisierung die entsprechenden Parametergeschatzt werden. Die Auflosung erfolgt wieder nach der oben beschriebenenMethode der kleinsten Quadrate.
Ein einfacher Fall fur multiple Regression ist beispielsweise die Bestimmung

176 KAPITEL 11. REGRESSION UND KOLLOKATION
Abbildung 11.3: Beispiele fur ubliche Kovarianzfunktionen (Niemeier, 2002, S.358)
einer Regressionsebene. Hierbei werden in einer Ebene an fehlerfrei gegebenenPunkten Messwerte bestimmt. Es ist nun der funktionale Zusammenhang zwi-schen Lagekoordinaten und Messwert gesucht. Bei einem linearen Ansatz siehtdie Beziehung aus wie folgt.
y = b0 + b1x + b2y + ε. (11.17)
Bei nichtlinearer Regression muss wie bei der Methode der kleinsten Quadra-te im Allgemeinen eine Linearisierung vorgenommen werden. Hier ist wiederumzu beachten, dass gute Naherungswerte fur die unbekannten Parameter benotigtwerden, um ein korrektes Ergebnis zu erhalten (Radouch, 1971).
Hinzuweisen ist an dieser Stelle noch auf Folgendes: Unsere Betrachtungensind rein mathematisch-statistischer Natur. Ob eine Regressionsfunktion kausalinterpretiert werden kann, muss von Fall zu Fall abhangig von Inhalt und An-wendung entschieden werden. In den meisten Fallen fuhren aber kausale Schlussezu Fehlinterpretationen und Missbrauch statistischer Methoden und enden dannoft mit Ausspruchen wie:
”Mit Statistik kann alles bewiesen werden - auch das Gegenteil.“
11.1.3 Kovarianzfunktion
Das gleichartige oder zumindest ahnliche Verhalten von Residuen kann zur Ver-feinerung von Approximationen verwendet werden. Man spricht von einer Er-haltensneigung innerhalb des Feldes. Analog zum Ansatz einer Autokovarianz-funktion wird versucht, diese Erhaltensneigung durch eine KovarianzfunktionC(τ) zu erfassen. Abbildung 11.3 skizziert einige typische Ansatze.
Die Kovarianzfunktion ist hauptsachlich durch zwei Parameter gekennzeich-net.
• Die Korrelationslange sagt aus, bis zu welchem Abstand die Erhaltensnei-gung wirksam ist.

11.2. KOLLOKATION 177
• Die Form druckt speziell aus, wie der Abfall der Korrelation als Funktiondes Abstandes verlauft.
Die mathematischen Ansatze fur typische Funktionen lauten:
• Linearer Ansatz: C(τ) = a · τ ,
• Exponentieller Ansatz: C(τ) = a · e−bτ ,
• Periodischer Ansatz: C(τ) = sin(a·τ)a·τ .
11.2 Kollokation
Bei den bisherigen Interpolationsverfahren haben wir - getrennt voneinander -verschiedene Parameter durch eine Ausgleichung bestimmt und anschließend anden nicht gemessenen Punkten Werte pradiziert. Man kann diese Verfahren auchgemeinsam anwenden und spricht dann von Kollokation4. In der Geodasie gehtdiese gemeinsame Betrachtungsweise auf Arbeiten in den 1970er Jahren durchKrarup5 (1969) und Moritz (1972, 1973) zuruck. Erste Uberlegungen in dieserRichtung wurden jedoch bereits in den 1960er Jahren angestellt (vergleiche Mo-ritz, 1965) Sie ist eine Verallgemeinerung der Methode der kleinsten Quadrateund fuhrt somit auch zu denselben Resultaten, wenn von dieselben Vorausset-zungen verwendet werden (Wolf, 1977, 1979a). Die Kollokation kommt aus derphysikalischen Geodasie; ursprungliches Anwendungsgebiet war die Anwendungder Pradiktionstheorie auf die Interpolation des Erdschwerefeldes.
Die Grundidee der Kollokation ist, dass jede geodatische Beobachtung zerlegtwerden kann in
1. einen systematischen Anteil, der von unbekannten Parametern abhangt(Trend),
2. einen unregelmaßigen Anteil, der den Einfluss des gravitativen Storfeldesauf die betrachtete Große ausdruckt (Signal) und
3. zufallige Messabweichungen (Rauschen).
Diese Grundidee ist in der Abbildung 11.4 dargestellt. Die dabei auftreten-den Signale resultieren aus (unregelmaßigen) Storfeldern wie z.B. Storpotential,Geoidhohen, Lotabweichungen, Schwereanomalien, Kugelfunktionskoeffizientenund Anderem. (Fast) alle geodatischen Messungen hangen vom Schwerefeld abund enthalten daher einen solchen Signalanteil. Die ”einfache“ Ausgleichungs-rechnung modelliert nur Beobachtungen, die mit zufalligen Abweichungen be-haftet sind, also nur Trend und Rauschen.
4vom lat. collocare = zusammenstellen.5Torben Krarup, danischer Geodat.

178 KAPITEL 11. REGRESSION UND KOLLOKATION
Abbildung 11.4: Grundidee der Kollokation: Filterung und Pradiktion am Bei-spiel des 2-dimensionalen Falles (Niemeier, 2002, S. 361)
11.2.1 Kollokationsansatz
Die Erweiterung des Regressionsansatzes (11.3) fur Kollokationsaufgaben ist
y = Xb + s + n, (11.18)
wobei wir den Vektor ε hier entsprechend der englischen Bezeichnungsweise mitn (fur das englische noise - im Deutschen: Messrauschen) ersetzt haben. DerVektor n beinhaltet also wie bisher die zufalligen Messfehler. Zusatzlich wurdedie Gleichung allerdings um das Signal s (ein Storfeld, das lokale Abweichungenverursacht) erweitert. Aufgabe der Kollokation ist es nun, aus diskreten Beob-achtungen y den Trend Xb (eigentlich: die - meist nichtlineare - Regression)und das Signal s zu bestimmen.
Eine mogliche Erweiterung ist hier die Einfuhrung eines linearen (bzw. li-nearisierten) Zusammenhangs zwischen dem Signal s und den Beobachtungen y.Dieser Zusammenhang kann in Form einer Multiplikation mit einer Matrix (wel-che den funktionalen Zusammenhang abbildet) durchgefuhrt werden. Entspre-chend ist diese Funktion in weiterer Folge mitzufuhren und zu berucksichtigen.Aus Grunden der Einfachheit habe ich darauf verzichtet, diesen Zusammenhangeinzufuhren.
Das stochastische Modell besteht nun ebenfalls aus zwei Teilen.
• Die zufalligen Fehler sind stochastisch voneinander unabhangig6. Ihre Ko-varianzmatrix kann somit als Diagonalmatrix angesetzt werden.
Σεε = σ20I oder Σεε = σ2
0D, (11.19)
wobei D eine (n, n)-Diagonalmatrix ist.
• Das Signal kann nicht stochastisch unabhangig sein, da es die systemati-schen Effekte darstellt. Somit haben wir hier eine vollbesetzte symmetri-sche Matrix.
Σss = σ20Css (11.20)
6Sie sind nicht von Parametern beeinflusst. Daher heißen sie auch”zufallige“ Fehler.

11.2. KOLLOKATION 179
Dabei entsteht die Matrix Css durch Anwendung der gewahlten Kovari-anzfunktion auf die gegebene Verteilung der Messwerte.
Css =
1 c12 C13 . . . C1n
1 C23 . . . C2n
1 . . . C3n
. . ....1
(11.21)
Mit der Beschreibung des systematischen Anteils der Abweichungen konnten wirnun beispielsweise eine Interpolation (Pradiktion) fur einen Neupunkt Pj durch-zufuhren. Dazu bestimmen wir einen Interpolations- oder Pradiktionsvektor ausden Abstanden zu allen ubrigen Punkten und der Kovarianzfunktion.
cTjs =
(Cj1 Cj2 . . . Cjn
)(11.22)
Werden mehrere Punkte gleichzeitig interpoliert, so erhalt man fur jeden Punkteine eigene Zeile und somit bei m zu interpolierenden Punkten und n Stutz-punkten eine Matrix mit m Zeilen und n Spalten.
Als Kreuzkovarianzmatrix zwischen den m zu pradizierenden Punkten undden n Stutzstellen ergibt sich die Matrix
CPs =
C11 C12 . . . C1n
C21 C22 . . . C2n
......
. . ....
Cm1 Cm2 . . . Cmn
. (11.23)
11.2.2 Schatzung der Zielfunktion
Wir wollen uns nun Schatzfunktionen ansehen, mit denen wir Schatzwerte furdie Zielfunktion aus Regressions- und/oder Signalanteil ermitteln konnen. Fureinen (n, 1)-Vektor von Beobachtungen y kann man (11.18) auch schreiben als
sy + n + Xb− y = 0. (11.24)
Die Bezeichnung sy druckt dabei aus, dass es sich dabei um den Signalanteilhandelt, der sich aus den Messwerten, also an den Stutzstellen ergibt.
Nun wollen wir aber noch zusatzlich fur die Interpolationspunkte die Funk-tionswerte pradizieren. Nach Abbildung 11.4 wird gefordert, dass die Interpola-tionspunkte auf der Funktion liegen, die sich aus Regression und Signal ergibt.Die Funktionsgleichung fur die zu pradizierenden Werte yP an den m Interpo-lationsstellen P lautet somit
yP = XP b + sP . (11.25)
Dabei ist das stochastische Signal sP nur uber die Kovarianzbeziehung (11.22)bestimmbar. Wir konnen rein formal aus den Gleichungssystemen (11.24) und

180 KAPITEL 11. REGRESSION UND KOLLOKATION
(11.25) ein gemeinsames Gleichungssystem aufbauen:
sy + n + Xb − y = 0sP + XP b = 0 (11.26)
Dabei gibt XP die ”Lage“ der zu pradizierenden Punkte an. In Matrixform kannman das Modell umschreiben in
[In In 00 0 Im
]
sy
nsP
+
[XXP
]b−
[y0
]= 0, (11.27)
also in ein System der Form
Bv + Ax− l = 0.
Das stochastische Modell konnen wir mit Hilfe der Kovarianzen der Stutzpunktenach (11.21) und der Kovarianzen der zu pradizierenden Punkte (nach denselbenRegeln aber mit den zu pradizierenden Stellen) sowie der KreuzkovarianzmatrixCPs nach (11.23) aufstellen:
Σyy =
Css 0 CTPs
0 D 0CPs 0 CPP
. (11.28)
Mit (11.27) liegt, wenn man w = −l setzt, eine Aufgabe der Form
Bv + Ax + w = 0
vor, also der Allgemeinfall der Ausgleichungsrechnung. Dabei entspricht der Vek-tor b dem Unbekanntenvektor x und die Vektoren sy, n und sP dem Beobach-tungsvektor v. In (11.27) wird zunachst nur der obere Teil weiterverarbeitet.Die Begrundung dafur ist einleuchtend: Der Signalanteil sy und die zufalligenMessfehler n werden ja nur durch die Beobachtungen beschrieben. Die zu appro-ximierenden Punkte haben außerdem keinerlei Einfluss auf die Regressionsfunk-tion (den Trend), da andernfalls die Regressionsfunktion von der Konfigurationder Approximationsstellen abhangig ware, was naturlich unsinnig ist. DieserKunstgriff wurde von Moritz eingefuhrt. Fur die Bedingungsgleichungen B1,gebildet durch
B1 =[
In In 0], (11.29)
ergeben sich durch Anwendung der Methode der kleinsten Quadrate das Nor-malgleichungssystem
[B1ΣyyBT
1 XXT 0
] [kb
]−
[y0
]= 0
oder (nach Ausmultiplizieren des Produktes B1ΣyyBT1 )
[Css + D X
XT 0
] [kb
]−
[y0
]= 0. (11.30)
Fur den Parametervektor b folgt somit
b = (XT (Css + D)−1X)−1XT (Css + D)−1y. (11.31)

11.2. KOLLOKATION 181
Der Korrelatenvektor k ergibt sich entsprechend zu
k = (Css + D)−1(y−Xb). (11.32)
Wenn man nun einen (n, 1)-Hilfsvektor z einfuhrt mit
z = y−Xb = s + n. (11.33)
Dieser Vektor entspricht dann dem Verbesserungsvektor der einfachen Regres-sion7, also der in Abbildung 11.4 gezeigten Differenz zwischen dem Beobach-tungswert yi und dem Funktionswert Xib. Genau diese Differenz wollen wirja in einen systematischen und einen zufalligen Anteil zerlegen. Entsprechendkonnen wir setzen
Czz = Css + D (11.34)
womit sich ergibt
k = C−1zz z. (11.35)
Mit Hilfe der Korrelaten k konnen wir jetzt auch die Signalanteile sP der zuinterpolierenden Punkte bestimmen. Dazu bestimmen wir Beziehung (11.32)unter Nutzung der vollen Bedingungsmatrix B aus (11.27). Wir erhalten
sy
nsP
= ΣyyBT k =
Css 0 CTPs
0 D 0CPs 0 CPP
In 0In 00 Im
C−1
zz z. (11.36)
Die Einzelkomponenten erhalten wir mit Σyy aus (11.28) uber getrennte Be-stimmungen:
• Signal in den Stutzstellen
sy = CssC−1zz z, (11.37)
• Fehlervektor in den Stutzstellen
n = DC−1zz z, (11.38)
• Signal in den Pradiktionsstellen
sP = CPsC−1zz z. (11.39)
7Daran erkennen wir auch, dass die Kollokation zweistufig durchgefuhrt werden konnte.Zunachst wird eine einfache Regression gerechnet wird und erst anschließend erfolgt die Zer-legung in die Anteile s und n.

182 KAPITEL 11. REGRESSION UND KOLLOKATION
11.2.3 Zusammenfassung der Bezeichnungen
Hier noch einmal kurz eine Ubersicht, was die einzelnen Matrizen und Vektoren
beinhalten:
s Signalsy gefiltertes Signal in den StutzstellensP pradiziertes Signaln zu filterndes MessrauschenXb TrendX linearisierter funktionaler Zusammenhang zwischen
Stutzstellen und Trendb Parameter der TrendfunktionD Varianz der zufalligen FehlerCss Varianzen und Kovarianzen der StutzstellenCPs Kovarianzen zwischen Stutzstellen und Pradiktions-
stelleny Funktionswerte (Messwerte)yP pradizierte Funktionswerte
11.2.4 Anwendung
In der geodatischen Literatur werden vor allem vier spezielle Anwendungsfalleunterschieden (Reißmann, 1979):
• Filterung: Das Ziel ist hier eine verbesserte Approximation des Signalsin den Stutzstellen. Es gibt keine Stellen, an denen Werte approximiertwerden sollen.
• Pradiktion: Hier ist eine Approximationsfunktion gegeben und wir wollendie Werte verbessern, die uns diese Funktion fur zu interpolierende Stellenliefert.
• Pradiktion trendfreier Großen: Hier gibt es weder Messrauschen noch un-bekannte Parameter. Es sollen nur die Signale interpoliert werden. DiesesVerfahren heißt auch Wiener-Kolmogoroff-Filter .
• Ausgleichung vermittelnder Großen: Besitzen die Messwerte kein Signal,sondern setzen sich nur aus Trend und Rauschen zusammen, so fuhrt dieLosung zu einer einfachen vermittelnden Ausgleichung.
Der Formelapparat fur diese beiden Spezialfalle kann beispielsweise bei Niemeier(2002) gefunden werden.
Beispiele fur Anwendungsgebiete in der Geodasie sind
• Schweremessungen: Beobachtet werden Gravimeterablesungen mit zufalli-gen Messfehlern, als Signal treten Schwereanomalien auf (Schwarz, 1976).
• Satellitenbeobachtungen: Xb bedeutet hier die ”normale“ Bahn, s bezeich-net Bahnstorungen durch das Schwerefeld.

11.2. KOLLOKATION 183
• Transformationen: Xb ist die Transformationsformel, s sind verbleibendeRestverzerrungen.
Einen interessanten Bezug gibt es zur multiquadratischen Interpolation. DieModelle stimmen formal uberein, daher kann man die multiquadratische In-terpolation als Kollokation auffassen, zumindest was das funktionale Modellbetrifft. Die multiquadratische Interpolation Hat jedoch ein gegenuber der Kol-lokation stark vereinfachtes stochastisches Modell. Es gibt nur Trend und Noise,Signal tritt keines auf (Wolf, 1981).
11.2.5 Beispiel
Um den Rechenweg bei der Kollokation besser zu verstehen wird nun ein ein-faches Beispiel (Reißmann, 1979) erlautert: An den Stellen 1 bis 5 mit deneindimensionalen Koordinaten Ai wurden die Messwerte Ui ermittelt.
i Ai Ui
1 0,5 6,32 3,5 23,23 6,5 29,14 9,5 36,75 12,5 36,9
Zusatzlich sind Koordinaten gegeben, an denen Messwerte interpoliert (pradi-ziert) werden sollen. Diese Punkte haben folgende Koordinaten:
i Ai
I 2,0II 5,0III 8,0IV 11,0
Als Trendfunktion wird eine lineare Funktion der Form Ui = x + Ai · y ange-nommen. Die Naherungswerten ergeben sich aus einer Skizze zu x0 = 9, 0 undy0 = 2, 6.
Gesucht sind:
• die Parameter der Trendfunktion,
• die ausgeglichenen Messwerte,
• das Signal in den Messpunkten,
• die interpolierten Werte I bis IV und
• das Signal in den Interpolationspunkten.

184 KAPITEL 11. REGRESSION UND KOLLOKATION
Als Varianz der Beobachtungen wird σ2L = 2, 3 angenommen. Als Kovari-
anzfunktion verwenden wir den folgenden exponentiellen Ansatz
C(sisk) = C0 · e−α2r2ik mit rik = Ak −Ai,
α = 0, 4,C0 = 10, 0.
Als Varianz der Gewichtseinheit nehmen wir σ20 = C0 womit sich fur die Matrix
D ergibt (mit qll = 2,310 )
D =
0, 23 0 0 0 00 0, 23 0 0 00 0 0, 23 0 00 0 0 0, 23 00 0 0 0 0, 23
.
Uber die Kovarianzfunktion und die Koordinaten der Stutzstellen erhalten wirdie notwendigen Kovarianzmatrizen.
Css =
1, 00 0, 24 0, 00 0, 00 0, 000, 24 1, 00 0, 24 0, 00 0, 000, 00 0, 24 1, 00 0, 24 0, 000, 00 0, 00 0, 24 1, 00 0, 240, 00 0, 00 0, 00 0, 24 1, 00
CPP =
1, 00 0, 24 0, 00 0, 000, 24 1, 00 0, 24 0, 000, 00 0, 24 1, 00 0, 240, 00 0, 00 0, 24 1, 00
CPs =
0, 70 0, 70 0, 04 0, 00 0, 000, 04 0, 70 0, 70 0, 04 0, 000, 00 0, 04 0, 70 0, 70 0, 040, 00 0, 00 0, 04 0, 70 0, 70
Unsere Verbesserungsgleichungen sehen wegen des linearen Ansatzes fur denTrend folgendermaßen aus:
Ui + vi =
Trend︷ ︸︸ ︷aix + biy +
Signal︷︸︸︷si mit i = 1, . . . , 5.
Dabei sind ai und bi die linearisierten Glieder fur die ausgleichende Gerade, alsoai = 1 und bi = Ai. Als Naherungswerte fur die Trendparameter x und y werdenaus einer Skizze die Werte x = 9, 0 und y = 2, 6 entnommen. Die umgeformtenVerbesserungsgleichungen ergeben sich somit zu
vi = aidx + bidy + si − ui mit (−ui) = x0 + biy0 − Ui
bzw.v = Xb + s− u.

11.2. KOLLOKATION 185
Daraus ergeben sich fur die Trendfunktion folgende Werte
X =
1, 0 0, 51, 0 3, 51, 0 6, 51, 0 9, 51, 0 12, 5
und − u =
4, 0−5, 1−3, 2−3, 0
4, 6
.
Die Bestimmungsgleichungen fur die zu pradizierenden Stellen sind
Uj = ajx + bjy + sj mit j = I, . . . IV, aj = 1, bj = Aj .
Die umgeformten Verbesserungsgleichungen ergeben sich damit zu
Uj = U0j + ajdx + bjdy + sj mit U0j = x0 + bjy0
bzw.UP = U0P + XP b + sP mit
X =
1, 0 2, 01, 0 5, 01, 0 8, 01, 0 11, 0
und U0P =
14, 222, 029, 837, 6
.
Nun konnen wir beginnen, das System aufzulosen. Als erstes berechnen wir dieCzz
Czz = Css + D =
1, 23 0, 24 0, 00 0, 00 0, 000, 24 1, 23 0, 24 0, 00 0, 000, 00 0, 24 1, 23 0, 24 0, 000, 00 0, 00 0, 24 1, 23 0, 240, 00 0, 00 0, 00 0, 24 1, 23
und ihre Inverse
C−1zz =
+0, 8455 −0, 1689 +0, 0315 −0, 0058 +0, 0010−0, 1689 +0, 8792 −0, 1752 +0, 0326 −0, 0058+0, 0315 −0, 1752 +0, 8803 −0, 1752 +0, 0315−0, 0058 +0, 0326 −0, 1752 +0, 8792 −0, 1689+0, 0010 −0, 0058 +0, 0315 −0, 1689 +0, 8455
.
Nun konnen wir die Parameter der Trendfunktion bestimmen:
XT C−1zz X =
(3, 1232 20, 3010
20, 3010 196, 2519
),
(XT C−1zz X)−1 =
(0, 9773 −0, 1011
−0, 1011 0, 0156
)= Qb,
b = QbXT C−1
zz u =(
0, 7374−0, 0937
).

186 KAPITEL 11. REGRESSION UND KOLLOKATION
Die Parameter der Trendfunktion ergeben sich nun durch Addition der Nahe-rungswerte zu b =
(9, 74 2, 51
).
Nun ergeben sich die Korrelaten zu
k = Czz(u−Xb) =
−4, 68404, 50531, 05113, 1179
−3, 9903
.
Die Verbesserungen sind dann
v = −Dk =
1, 08−1, 04−0, 24−0, 72
0, 92
und die Signalanteile sind
s = −Cssk =
−3, 6133, 6542, 8302, 436
−3, 248
und sP = −CPsk =
−0, 0833, 8152, 928
−0, 567
.
Die ausgeglichenen Werte ergeben sich nun zu
i Ui
1 7,42 22,23 28,94 36,05 37,8
und die pradizierten Werte zu
i Ui
I 14,7II 26,1III 32,7IV 36,7

Kapitel 12
Geostatistik
12.1 Einfuhrung
Die Geostatistik beschaftigt sich mit Statistik, die sich auf die Erde bezieht. DerBegriff wurde von verschiedenen Leuten in verschiedenen Geowissenschaften ge-pragt. Hart (1954) verwendet den Begriff beispielsweise in einem geographischenZusammenhang, Matheron1 (1963) im geologischen Zusammenhang fur die Be-urteilung von Lagerstatten. Cressie2 (1991) definiert einen allgemeineren Begriff.Er definiert die Geostatistik als statistische Theorie im Zusammenhang mit Pro-zessen, die mit raumlichen Indizes behaftet sind. Die Geostatistik beschaftigtsich also mit der Modellierung von Daten als Realisierung eines Zufallsprozesses
Z(x) : x ∈ D (12.1)
wobei x im Bereich D, des d-dimensionalen Raumes, kontinuierlich variierenkann. In der Praxis handelt es sich dabei um Schatzungen aufgrund einigerweniger Proben (z.B. Bergbau, Geophysik).
Die vorhandenen Daten werden als Realisierungen des Zufallsprozesses (12.1)angesehen, wobei D ein Bereich von Rd mit d-dimensionalem Volumen ist. Esist denkbar, die Uberlegungen auch fur einen raumlich-zeitlichen Bereich durch-zufuhren. Der Zufallsprozess wurde dann Z(x, t) : x ∈ D, t ∈ T aussehen.Im folgenden wird jedoch angenommen, dass der Datenbereich rein raumlichist, auch wenn die Daten oft uber langere Zeit erhoben wurden. Es soll hier ge-zeigt werden, wie Schlusse von Daten Z(x1), . . . , Z(xn) an bekannten Orten(x1, . . . ,xn) auf den Zufallsprozess Z(x) : x ∈ D moglich sind.
Geostatistik ist somit die Anwendung stochastischer Prozesse in den Geo-wissenschaften. Sie dient der Analyse und Modellierung raumbezogener Daten(Geodaten), wobei - anders als etwa beim ”Ziehen aus einer Urne“ oder sta-tistischen Modellen zur Wahlhochrechnung - der Raumbezug der Daten (die
1Georges Matheron, franzosischer Mathematiker, 1930 - 2000.2Noel A. Cressie, australischer Mathematiker.
187

188 KAPITEL 12. GEOSTATISTIK
absolute Lage oder die relative Lage zueinander) bei der statistischen Analy-se auch tatsachlich berucksichtigt wird. Die ”einfache“ Ausgleichungsrechnungnach der Methode der kleinsten Quadrate ist daher noch nicht Geostatistik, weilvon der Methode her keine Rucksicht auf den Raumbezug genommen wird, auchwenn die Daten Koordinaten oder Strecken etc. sind.
Die Geostatistik beschaftigt sich mit Daten von verschiedenster Herkunft.Der Statistiker wird oft nicht in der Lage sein, die Daten auf ihre Strukturen undAussagen hin richtig zu deuten. Daher ist es wichtig, bestimmte Arbeitsschritteim Team zu erledigen. Fur eine Analyse von Erzabbaugebieten konnte man sichz.B. ein Team vorstellen bestehend aus Geologe, Montanist und Finanzmanager.Die statistischen Auswertungen werden meist von Spezialsoftware ubernommen.Dementsprechend sind die Statistiker meist in den Entwicklungsburos zu finden.Die statistischen Aufgaben sind bei der Analyse:
• Erstellen eines Probenplanes,
• Zusammenfassen und Visualisieren der Daten,
• Suchen nach Ausreißern und raumlichen Strukturen,
• Schatzen des Gesamtwertes bzw. Durchschnittswertes fur den Bereich,
• Inter- und Extrapolation fur weitere Punkte, Bereiche oder Funktionen.
Beispiele fur Anwendungen geostatistischer Methoden: Exploration von Erzla-gerstatten (Messung des Erzgehalts von Probekorpern aus der vermuteten La-gerstatte) oder unterirdischen Erdolvorkommen, Analyse von Bodenverunreini-gungen (z.B. Schwermetallkonzentrationen von Bodenproben), Niederschlags-mengen oder Temperaturwerten an bestimmten Punkten, Grundwassermodel-lierungen etc. Die Daten gewinnt man durch Entnahme von Bodenproben, Er-fassung mittels Messgeraten oder durch direktes Beobachten. Das Ergebnis sindz.B. thematische Karten, auf denen durch Isolinien oder Grauwerte die interes-sierenden Daten dargestellt sind.
Die praktische Vorgangsweise der Geostatistik geht auf Krige3, Matern4 undGandin5 zuruck. Die Theorie - und auch die Bezeichnung ”Geostatistik“ - wurdevon Matheron publiziert (Matheron, 1963).
Um die Methodik etwas leichter fassbar zu machen, werden wir uns immerwieder auf ein Beispiel beziehen, das bei Cressie (1991) gefunden werden kann.Es handelt sich dabei um Messungen des Kohlengehaltes auf dem Gelande derRobena-Mine in Greene County, Pennsylvania, USA. Die Daten wurden in ei-nem nahezu regelmaßigen Raster mit einer Maschenweite von ca. 2500ft (etwa750m). Abbildung 12.1 zeigt die raumliche Verteilung der Messungen. Es istklar ersichtlich, dass die Messungen zwar in einem regelmaßigen Raster, nichtaber in einem rechteckigen Bereich durchgefuhrt wurden.
3Daniel G. Krige, sudafrikanischer Bergbauingenieur, der Anfang der 1950er Jahre stati-stische Interpolationsmethoden fur den Goldbergbau entwickelte.
4Bertil Matern, arbeitete in Schweden an statistischen Problemen in der Forstwirtschaft.5Lev S. Gandin, russisch-israelischer Meteorologe.

12.2. STATISTISCHE GRUNDBEGRIFFE 189
Abbildung 12.1: Raumliche Verteilung der Beispieldaten (Cressie, 1991, S. 32)
12.2 Statistische Grundbegriffe
12.2.1 Momente einer Verteilung
Da im weiteren Verlauf der Begriff der Verteilung ofter verwendet wird, werdenwir an dieser Stelle einige wichtige Begriffe in diesem Zusammenhang wiederho-len. Verteilungen werden durch die Momente 1. bis n.-Ordnung charakterisiert.Beispiele dafur sind der Mittelwert (Moment 1. Ordnung), die Streuung (zen-trales Moment 2. Ordnung) oder die Schiefe (zentrales Moment 3.Ordnung). Imallgemeinen verwenden wir in der Geodasie die Gauß’sche Normalverteilung.Diese ist charakterisiert durch Mittelwert und Streuung. Vom Standpunkt derStatistik aus sind Mittelwert und Streuung jedoch keine robusten Schatzer, d.h.sie sind durch Ausreißer sehr stark beeinflussbar.
12.2.2 Median, interquartiler Bereich und Quantile
Es gibt fur die Charakterisierung der Verteilung auch die Moglichkeit mit Medi-an und Quartil zu arbeiten. Fur die Definition dieser Großen ist es vorteilhaft,den Begriff der Quartil einzufuhren. Das α-Quantil ist jener Wert, fur den einα-Anteil der Daten kleiner und ein (1 − α)-Anteil der Daten großer ist als derWert. Wird der Anteil in % angegeben, so spricht man von Perzentilen. DerMedian ist jener Wert, bei dem 50% der Daten kleiner und 50% der Datengroßer sind. Der Median teilt also die Datenmenge in zwei gleich große Teile. Er

190 KAPITEL 12. GEOSTATISTIK
entspricht dem 0,5-Quantil oder dem 50%-Perzentil. Von seiner Definition hersieht man die Ahnlichkeit zum Mittelwert, er ist jedoch nicht so anfallig gegenAusreißer. Die Quartile sind die 0,25- und 0,75-Quantile. 50% der Daten liegenzwischen ihnen. Der interquartile Bereich (der Bereich zwischen dem 0,25- unddem 0,75-Quantil) ist vergleichbar mit der Streuung. Hier ist der Stabilitats-gewinn noch großer, da fur die Berechnung der Streuung (σ2 = (z−µ)2
n ) derFehlereinfluss durch Ausreißer noch quadriert wird. Wenn das Datenmaterialexakt normalverteilt ist, kann man die Streuung sogar durch den interquartilenBereich approximieren:
σapprox =< interquartiler Bereich >
1.394. (12.2)
12.3 Geostatistische Begriffe
12.3.1 Regionalisierte Zufallsvariable
Zum besseren Verstandnis wollen wir einige wichtige Begriffe noch einmal kurzabklaren:
Zufallsvariable: Eine Zufallsvariable Z ist eine (veranderliche) Große, dieman bei einem zufalligen Versuch untersucht und die verschiedene Werte an-nimmt. Sie hat eine Verteilung, die z.B. durch Erwartungswert und Streuungfestgelegt ist.
Zufallsprozess: Ein Zufallsprozess Z(t) ist eine Zufallsvariable, die nach demParameter t, ublicherweise der Zeit, geordnet ist. Ein Zufallsprozess besitzt so-mit zusatzlich zur statistischen Verteilung eine zeitliche Struktur (=Abhangig-keit). Diese Abhangigkeit wird durch den Parameter Kovarianzfunktion be-schrieben.
Regionalisierte Zufallsvariable = raumlicher Zufallsprozess: Eine re-gionalisierte Zufallsvariable Z(x) ist eine Zufallsvariable, die eine raumlicheStruktur aufweist. Der Parameter x ist dabei ein Ortsvektor im d-dimensionalenRaum D. Eine regionalisierte Zufallsvariable hat zusatzlich zur statistischenVerteilung eine raumliche Struktur (=Abhangigkeit). Diese Abhangigkeit wirddurch den Parameter Variogramm bzw. Kovariogramm beschrieben. (vgl. Kova-rianzfunktion bei Zufallsprozessen). Im Gegensatz zur zeitlichen Abhangigkeitgibt es hier jedoch keine Vergangenheit, Gegenwart und Zukunft und die Di-mension ist theoretisch nicht begrenzt. In der Regel gehen wir aber vom zwei-oder dreidimensionalen Raum aus.
Realisierung einer Zufallsvariablen Z(x): Die Realisierung einer Zufalls-variablen, bezeichnet mit z(x), ist im allgemeinen ein skalarer Wert. Es kann ein

12.3. GEOSTATISTISCHE BEGRIFFE 191
geometrischer Messwert sein, aber auch ein beliebiger anderer Wert wie Schad-stoffgehalt in der Luft, Gesteinsdichte oder Larmpegel.
Die Geostatistik beschaftigt sich also mit der statistischen Untersuchung vonDaten(satzen), die mit dem Ort verknupft sind, an dem sie erhoben wurden.Wir haben somit regionalisierte Zufallsvariablen. Die geostatistischen Methodenbasieren nun auf der Annahme, dass diese regionalisierten Zufallsgroßen einebestimmte Struktur aufweisen, d.h. dass eine Korrelation zwischen den Wertenz(x) und z(x + h) besteht. Dies scheint auch aus der Anschauung plausibel: Istder Wert fur einen bestimmten Faktor in einer Bodenprobe an der Stelle x sehrgroß, dann ist es wahrscheinlich, dass dieser Faktor ein kleines Stuck weiter (x+ h) ebenfalls groß ist. Daten, die raumlich eng beieinander liegen, sind sichalso ahnlicher als solche, die weiter auseinander liegen. Diese Abhangigkeit wirddurch das Variogramm bzw. Kovariogramm beschrieben.
12.3.2 Stationaritat
Fur die Bestimmung der Parameter der Verteilungsfunktion und des Vario-gramms ware die Messung mehrerer Datensatze auf jedem Punkt x notig. Dadies bei den meisten geostatistischen Anwendungen nicht moglich (es kann z.B.an einer Stelle nur eine Bodenprobe entnommen werden) oder zu teuer ist,muss man sich mit einem zusatzlichen Modellanteil helfen der Stationaritat. Siebesagt, dass sich bestimmte Eigenschaften der regionalisierten ZufallsvariablenZ(x) bei Veranderung von x nicht andern. Glucklicherweise ist dies eine Forde-rung die bei vielen Anwendungen erfullt ist, wenn man vorausgehende Transfor-mationen zulasst. Man sollte jedoch das vorliegende Datenmaterial dahingehenduberprufen, ob die Forderung auch in diesem Fall zutrifft. Dafur geeignete Me-thoden werden in 12.5 gezeigt.
Es gibt verschiedene Stufen der Stationaritat. Fur unsere Anwendungen ge-hen wir von der so genannten intrinsischen Stationaritat aus, fur die folgendeAussagen zutreffen:
1. Fur jedes Z(x) existiert ein Erwartungswert E(Z(x)), der unabhangig vomOrt x ist:
E(Z(x)) = µ , ∀ x. (12.3)
Insbesondere gilt auch
E(Z(x)− Z(x + h)) = 0, (12.4)
weshalb man auch sagt, die regionalisierte Zufallsvariable Z(x) ist (imFalle intrinsischer Stationaritat) frei von einem Trend kein systematischesVerhalten des Datenfeldes).
Fur µ kann aus n empirischen Probenwerten ein Wert m geschatzt werdennach:
m = E(Z) =1n
n∑
i=1
zi. (12.5)

192 KAPITEL 12. GEOSTATISTIK
2. Fur jedes Z(x) existiert eine Varianz Var(Z(x)), die unabhangig vom Ortx ist
Var(Z(x)) = σ2 , ∀ x, (12.6)
wobei σ2 aus n empirischen Probenwerten ein Wert s2 geschatzt werdenkann nach:
s2 = E(Z − µ)2 =1
n− 1
n∑
i=1
(zi −m)2. (12.7)
3. Die Varianz der Differenz Z(x1)−Z(x2) ist nur von der relativen Lage (=Abstand) der beiden Orte x1 und x2 zueinander abhangig:
E(Z(x1)− Z(x2))2 = C(x1 − x2) = C(h) , ∀ x1,x2. (12.8)
Mit x1 − x2 = h.
Solche stationaren Felder werden auch als homogen und isotrop bezeichnet.Wenn nicht anders angegeben, werden wir im folgenden immer homogene, iso-trope Felder voraussetzen.
12.4 Variogramm
12.4.1 Definition
Das Variogramm beschreibt die Korrelationen zwischen raumlich strukturiertenRealisierungen der regionalisierten Zufallsvariablen (vergleiche Autokovarianz-funktion bei Zufallsprozessen). Es ist fur homogene, isotrope Felder definiertals
2γ(x1 − x2) = 2γ(h) = var(Z(x1)− Z(x2)) = E(Z(x1)− Z(x2))2. (12.9)
Aus empirischen Daten kann die Variogrammfunktion fur einen bestimmtenAbstand h geschatzt werden nach
2γ(h) =1
N(h)
N(h)∑
i=1
(Z(xi)− Z(xi + h))2 (12.10)
mit N(h) = Anzahl der Messwertpaare mit dem Abstand h. Im Englischen wirddieser Abstand h ubrigens lag genannt.
Bei der praktischen Berechnung werden die Abstande evtl. vorher noch inAbstandsklassen eingeteilt: Aus den n gemessenen Werten werden alle (n · n−1
2 )moglichen Paare gebildet. Fur jedes Paar i, j wird der Abstand h und das Qua-drat der Messwertdifferenzen berechnet. Die Abstande werden in aquidistanteKlassen unterteilt, in denen die Anzahl der Paare, der Mittelwert der Entfer-nungen und die Messwertvarianzen berechnet werden. Der Variogrammwert fureine Entfernungsklasse berechnet sich dann nach
2γ(hm) =1
N(h)·
N(h)∑
i.j=1
(Zi − Zj)2, (12.11)

12.4. VARIOGRAMM 193
mit N(h) = Anzahl der Messwerte im Intervall,Zi, Zj = Messwerte, deren Entfernungen im Intervall liegen,
und hm = Mittelwert der Entfernungen der Datenpaare im ent-sprechenden Intervall, im 2-dimensionalen Fall istdas
hm =1
N(h)·
N(h)∑
i,j=1
√(xi − xj)2 + (yi − yj)2 (12.12)
mit xi, yi, xj , yj = Koordinaten der Datenentnahmestelle.
Anmerkung: Das Variogramm ist definiert als Funktion 2γ; man kann diesnaturlich auch so angeben: γ = 1
2 · V ar(Z(x1) − Z(x2)) und spricht dann voneinem Semi-Variogramm. Oft wird auch das Semi-Variogramm nur als Vario-gramm bezeichnet. Achtung also auf die Bezeichnungsweisen bei verschiedenenQuellen!
12.4.2 Eigenschaften
Eine wichtige Eigenschaft des Variogramms ist das Verhalten im Bereich desUrsprungs. Aufgrund der Definition des Variogramms ist ersichtlich, dass gilt
γ(0) = 0. (12.13)
In der Praxis wird man allerdings bei zwei Messpunkte mit sehr kleinem Abstandh → 0 fur das empirische Semi-Variogramm einen Wert γ(h) → σ2
F 6= 0 erhalten.σ2
F nennt man den Nugget Effekt (”Klumpenkonstante“). Die Begrundung furdieses Verhalten umfasst mehrere Gesichtspunkte. Zunachst besteht das Pro-blem, dass Messwerte nur in bestimmten kleinsten Abstanden wirtschaftlicherfasst werden konnen. Die letzte Information hin zum Null-Abstand muss al-so extrapoliert werden. Dann wird angenommen, dass im gemessenen Medium6
eine bestimmte kleinste Kornung (Nugget) besteht, unter der keine Variati-on mehr moglich ist. Diese Eigenschaft wird ”Microscale Effect“ genannt undmit σ2
MS oder σ2F bezeichnet. Das Problem ist, dass man, um diesen Effekt
nachzuweisen, die Probenentnahmen im Abstand dieser Korngroße durchfuhrenmusste. Da dies nicht moglich ist, nimmt man an, σF hat den Charakter vonweißem Rauschen. Ein weiterer Einfluss kommt von der Messgenauigkeit σ2
ME
bzw σ2I . Messgenauigkeit und Microscale Effekt werden dabei als voneinander
unabhangig modelliert. Das ist problemlos moglich, da es sich nur um ein theore-tisches Modell handelt, das die statistische ”Unmoglichkeit“ des Nugget-Effektesmathematisch begrundet. Die gesamte Varianz des Zufallsfeldes ist also
σ2 = σ2MS + σ2
ME = σ2F + σ2
I . (12.14)
Mit wachsendem h steigt auch das (Semi-)Variogramm im Allgemeinen. Oftmalsist dabei festzustellen, dass fur große h die Werte des empirischen Variogramms
6Da Variogramme hauptsachlich bei der Erkundung von Lagerstatten eingesetzt werdenist das Medium die untersuchte Gesteinsformation.

194 KAPITEL 12. GEOSTATISTIK
Abbildung 12.2: Korrelationsweite (range), Schwellenwert (sill) und Nuggetef-fekt (nugget) eines Variogramms
annahernd konstant sind. Das erklart sich daraus, dass fur Werte, die weit aus-einander liegen, die Kovarianz gleich Null ist. Sie sind also unabhangig vonein-ander und daher wird γ(∞) = σ2. Der Abstand, ab dem die Differenz zwischenσ2 und dem tatsachlichen Funktionswert kleiner als ein gewahlter Wert ε ist,wird Korrelationsweite (engl. range) - manchmal auch Reichweite - genannt.Der zugehorige Grenzwert σ2 heißt dann Schwellenwert (engl. sill) des Semiva-riogramms. In der graphischen Darstellung des Variogramms sind nugget, rangeund sill wie in Abbildung 12.2 eingezeichnet ersichtlich.
Außerdem gilt auch (immerhin ist h ein Vektor und -h somit sinnvoll)
γ(h) = γ(−h).
12.4.3 Theoretische Variogramme
Im allgemeinen wird σ2F durch Extrapolation aus den kurzesten Paaren ermit-
telt. Mit (12.10) bekommt man diskrete Funktionswerte von 2γ(h). Das so er-haltene Variogramm ist keine eindeutig bestimmte Funktion. Durch Anderungder Klassengroße oder der Anzahl der einbezogenen Daten kann sie sich deutlichandern. Sucht man eine Funktion fur jedes beliebige h, so muss diese Funkti-on bestimmte Bedingungen erfullen (z.B. negative Definitheit, Isotropie ... ).Es gibt nun eine Reihe von Modellen, fur die diese Bedingungen bereits uber-pruft sind; man kann also aus den empirisch erhaltenen Werten das theoretischeVariogramm durch Anpassung der Kurvenparameter erhalten.
Die wichtigsten Beispiele fur solche Funktionen sind (siehe auch Abbildung12.3):
• Lineares Modell
γ(h) =
0 h = 0σ2
F + c|h| h 6= 0 (12.15)
mit c ≥ 0. Hier gibt es keinen Schwellenwert.

12.4. VARIOGRAMM 195
Abbildung 12.3: Isotrope Modellansatze fur das Semivariogramm: (a) linea-res Modell, (b) spharisches Modell, (c) exponentielles Modell, (d) rational-quadratisches Modell, (e) Wellen-Modell, (f) Potenz-Modell (Cressie, 1991, S.63)
• Spharisches Modell
γ(h) =
0 h = 0
σ2F + σ2
I
(32|h|a − 1
2 ( |h|a )3)
0 < |h| ≤ a
σ2F + σ2
I |h| > a
(12.16)
mit a ≥ 0.
• Exponentielles Modell
γ(h) =
0 h = 0
σ2F + σ2
I
(1− exp
(− |h|
a
))h 6= 0
(12.17)
mit a ≥ 0. Der Schwellenwert betragt (σ2F +σ2
i ) und die Korrelationsweitea.

196 KAPITEL 12. GEOSTATISTIK
• Rational-Quadratisches Modell
γ(h) =
0 h = 0
σ2F + σ2
I |h|2
1+|h|2
a
h 6= 0 (12.18)
mit a ≥ 0.
• Wellen-Modell
γ(h) =
0 h = 0
σ2F + σ2
I
(1− a sin
|h|a
|h|
)h 6= 0
(12.19)
mit a ≥ 0.
• Potenz-Modell
γ(h) =
0 h = 0σ2
F + σ2I |h|λ h 6= 0 (12.20)
mit 0 < λ ≤ 2. Hier gibt es keinen Schwellenwert.
12.4.4 Anisotrope Variogramme
Bisher war h immer ein Vektor, d.h. das Variogramm war richtungsabhangig.Das ist fur bestimmte Anwendungen durchaus eine sinnvolle Annahme. Wennzum Beispiel die Messwerte Staubimmissionen sind, wird die Abhangigkeit (dasVariogramm) in Windrichtung grundsatzlich anders aussehen als quer zur Wind-richtung. Oft kann die Anisotropie mit einer linearen Transformation (affinenTransformation) behoben werden. Im Allgemeinen arbeitet man mit isotropenVariogrammen, und die oben angefuhrten Beispiele sind solche. Das ist moglich,da man die meisten Probleme auf eine isotrope Situation transformieren kann.Die Formel fur diese Situation lautet
2γ(h) = 2γ0(|A · h|), (12.21)
wobei A eine (d, d)-Matrix und γ0 das isotrope Semivariogramm in Abhangig-keit von der Entfernung als reeller Zahl ist. γ0 ist somit der Standardwert, derdurch den Faktor |A·h| in Abhangigkeit von der Richtung angepasst wird. DieseArt der Anisotropie nennt man auch geometrische Anisotropie, da die Anisotro-pie durch eine geometrisch definierte Operation (eine lineare Transformation)bestimmt wird.
12.4.5 Kovariogramm und Korrelogramm
Das Kovariogramm ist eine Funktion, die wie das Variogramm die raumlicheStruktur beschreibt. Es wird bei Stationaritat definiert durch die Formel
C(h) = cov(Z(x), Z(x + h)) (12.22)

12.5. EXPLORATIVE DATENANALYSE (EDA) 197
und entspricht der Autokovarianzfunktion bei Zeitprozessen. Das Korrelogrammerhalten wir durch normieren der Funktion, also
ρ(h) =C(h)C(0)
. (12.23)
Es gelten ahnlich wie beim Variogramm einige Beziehungen:
C(h) = C(−h), (12.24)ρ(h) = ρ(−h), (12.25)ρ(0) = 1. (12.26)
Da das Variogramm und das Kovariogramm die gleiche Struktur beschreiben, istes auch moglich sie unter bestimmten Voraussetzungen ineinander uberzufuhren.Die dafur notwendige Voraussetzung ist Stationaritat . Ausgehend von der Glei-chung7
var(Z(x)−Z(x+h)) = var(Z(x))+var(Z(x+h))−2cov(Z(x), Z(x+h)) (12.27)
kann man bei geltender Stationaritat schreiben
2γ(h) = var(Z(x)− Z(x + h)) = 2(C(0)− C(h)), (12.28)
da die Varianzen var(Z(x)) und var(Z(x+h)) bei Stationaritat gleich sind, undden Wert C(0) annehmen.
12.5 Explorative Datenanalyse (EDA)
Bevor man aufgrund von Messdaten weitere Schlusse zieht, muss man dieseanalysieren. Es ist notig, das Datenmaterial auf Ausreißer, Verteilung und dieraumliche Struktur hin zu uberprufen. Im folgenden werden einige Moglichkeitengezeigt, wie man bei der Datenanalyse vorgehen kann. Grundsatzlich geht esdarum, dass jene Daten, die nicht zum angenommenen Modell passen, erkanntwerden sollen. Im normalen, nicht raumlichen Fall ist dieses Modell gewohnlichdas Gauß’sche Modell, und Ausreißer werden mit den bekannten Tests gefunden.Im raumlichen Fall kommt noch der Modellanteil der Struktur (Stationaritat,Variogramm) dazu. Man sucht also nicht nur Daten die nicht zu ihrer Verteilungpassen, sondern auch solche, die nicht zu ihren Nachbarn passen.
12.5.1 Visualisierung der Daten
Zunachst werden die Daten als einfache Datensammlung ohne raumliche Struk-tur aufgefasst. Dieses Vorgehen ist wegen der zugrunde gelegten Stationaritat ge-rechtfertigt. Man kann sich dann mit einfachen Methoden einen Uberblick uberdie Verteilung der Daten machen. So kann man sie mit Hilfe von Histogrammen,Stamm-und-Blatt Darstellungen oder Box-Plots veranschaulichen. Kandidatenfur Ausreißer konnen durch Betrachten der Darstellungen festgestellt werden.
7Vergleiche allgemeines Fehlerfortpflanzungsgesetz!

198 KAPITEL 12. GEOSTATISTIK
Ein nachster Schritt bei der Visualisierung der Daten ist es, die raumlicheStruktur der Daten darzustellen. Einfache Hilfsmittel dafur sind Lageplots derMesspunkte, Tabellen mit den eingetragenen Messwerten (besonders wenn dieDaten auf einem regelmaßigen Gitter aufgenommen wurden), axonometrische3D-Darstellungen der Daten. Mit diesen Mitteln kann man sich einen erstenEindruck uber die Stationaritat und eventuelle Trends verschaffen.
Wenn man unsere Beispieldaten ohne Bezug zur raumlichen Verteilung ana-lysieren wollte, konnte man beispielsweise ein Stamm-und-Blatt-Diagramm er-zeugen. Ein solches Diagramm sieht folgendermaßen aus:
667 0037 666788888998 001112222222348 566666667888888999999999 0000000011111222222233333334444449 555555666666666778888888888999999999
10 00000000111111122222233333444444410 5666666777778888889999911 000001112222222334411 56666891212 56813 11131414151516161717 6
Es ist klar ersichtlich, dass es einen Wert gibt, der sich stark von den ande-ren Werten unterscheidet. Wenn man den Wert in Abbildung 12.4 sucht (Zeile6, Spalte 5) und seine Nachbarn betrachtet, stellt man fest, dass die NachbarnWerte um 10,9 haben, sich also stark vom untersuchten Wert von 17,61 unter-scheiden. Solche starken Unterschiede sollten dem Auswerter immer verdachtigvorkommen und genauer untersucht werden, da es normalerweise einen starkenZusammenhang zwischen benachbarten Daten gibt und sprunghafte Anderun-gen im Datenmaterial eher die Ausnahme sind8.
Vor einer Visualisierung der Daten mit Berucksichtigung des raumlichen Zu-sammenhangs ist eine Neuorientierung des Rasters sinnvoll. Die Gitterlinien inAbbildung 12.1 verlaufen nicht in Nord-Sud- bzw. Ost-West-Richtung, sondernsind leicht verdreht. Nach einer leichten Drehung erhalten wir eine Ausrich-
8Eine Ausnahme von dieser Regel sind naturlich Untersuchungen in Erdbebengebieten, woes durch Verschiebungen durchaus zu sprunghaften Veranderungen kommen kann.

12.5. EXPLORATIVE DATENANALYSE (EDA) 199
Abbildung 12.4: Werte fur den Kohlengehalt in % an den Messstellen (Cressie,1991, S. 34)
Abbildung 12.5: Werte fur den Kohlengehalt in % in 3D-Darstellung (Cressie,1991, S. 35)
tung des Gitters parallel zu den Achsen. Eine solche Ausrichtung erleichtert dieAuswertung. Abbildung 12.4 zeigt die Daten als Tabelle.
Man kann die Daten auch in einer 3D-Ansicht darstellen. Man spricht dannvon einem 3D Scatter-Plot. Diese Art der Datenanzeige sieht zwar oft sehrimposant aus, ist fur die Datenanalyse aber wenig geeignet. Interessante Aspek-te des Datenmaterials konnen bei dieser Darstellung leicht durch andere Ein-flusse uberlagert und unsichtbar gemacht werden. Abbildung 12.5 zeigt ein Bei-spiel einer solchen 3D-Darstellung fur unsere Beispieldaten. Der Ausreißer, derim Stamm-und-Blatt-Diagramm wunderschon sichtbar war verschwindet fastvollstandig und ist (zumindest in dieser Perspektive) nur schwer sichtbar.

200 KAPITEL 12. GEOSTATISTIK
Abbildung 12.6: Werte fur den Kohlengehalt in % an den Messstellen (Cressie,1991, S. 37)
12.5.2 Komplexere Methoden der Analyse
Die bisherigen Methoden zielen auf die Veranschaulichung des unbearbeitetenDatenmaterials. Nicht stationare Stellen bzw. Trends konnen durch reihen- undspaltenweises Ermitteln von Mittelwert und Median erkannt werden. Wenn die-se einen annahernd konstanten Wert aufweisen, ist dies ein Indiz (µ=const.) furStationaritat. Ein weiterer Vorteil dieser Vorgangsweise ist der mogliche Ver-gleich von Median und Mittel. Wie bereits erwahnt, ist der Median ein robusterSchatzer. Wenn also die Differenz Median - Mittel uberdurchschnittlich großwird, kann man in dieser Zeile/Spalte einen Ausreißer vermuten.
Angenommen die Werte Yi sind unabhangig und gleichverteilt mit Erwar-tungswert µ, Varianz σ und Dichtefunktion f , dann konnen Mittel und Mediandurch folgende Formeln dargestellt werden.
Mittel: Y = µ +1n
∑(Yi − µ) (12.29)

12.6. PRADIKTION UND KRIGING 201
Abbildung 12.7: Werte fur den Kohlengehalt in % an den Messstellen (Cressie,1991, S. 39)
Median: Y = µ +1n
∑ sign(Yi − µ)2f(µ)
(12.30)
Ausgehend von diesen Formeln kann gezeigt werden, dass gilt
var(Y − Y ) =σ2
n
(π
2− 1
)(12.31)
und dass der Faktor u =√
n Y−Y0.7555σ die Differenz normiert. Ist der Betrag von
u großer als 3, so ist Vorsicht geboten.
Abbildung 12.6 zeigt das Ergebnis des Vergleiches von Mittel und Medianfur unsere Beispieldaten. Es scheint in unseren Daten einen linearen Trend inOst-West-Richtung zu geben. Zusatzlich ist auch in einigen Spalten bzw. Zeilender Abstand zwischen Median und Mittel recht gross. Diese Zeilen/Spalten sindKandidaten fur die Suche nach Ausreißern in den Messdaten.
Eine weitere Methode, um Ausreißer sichtbar zu machen, ist der bivariateScatter-Plot. Hierbei werden fur alle x auf der x-Achse die Werte fur z(x) undauf der y-Achse die Werte fur z(x + h) aufgetragen. Ausreißer fallen deutlichaus dem Schema heraus. In den Abbildungen 12.7 und 12.8 werden bivariateScatter-Plots gezeigt. Abbildung 12.7 zeigt den Plot fur die Ost-West-Richtung,Abbildung 12.8 den fur die Nord-Sud-Richtung. In beiden Darstellungen ist derAusreißer bei Position (5,6) deutlich erkennbar.
12.6 Pradiktion und Kriging
Bisher haben wir uns darauf beschrankt, die Daten an vorhandenen Stellen zubeurteilen. Im weiteren geht es jetzt darum, aufgrund dieser Basisdaten Wertean Stellen zu schatzen, an denen wir nicht gemessen haben. Ausgangsmodell

202 KAPITEL 12. GEOSTATISTIK
Abbildung 12.8: Werte fur den Kohlengehalt in % an den Messstellen (Cressie,1991, S. 39)
ist der Zufallsprozess Z(x) : x ∈ D ⊂ Rd von dem n Daten z(xi) erhobensind. Diese Daten werden verwendet, um den Prozess zu beschreiben. Ziel diesesAbschnittes ist es, eine bekannte Funktion gZ(x) : x ∈ D zu pradizieren. Imeinfachsten Fall ist die Funktion
g(F (·)) = Z(x0). (12.32)
Dann spricht man von Punktschatzung . Ein ebenfalls haufiger Vorgang ist es,den Durchschnitt eines Blocks zu schatzen. Die Funktion lautet dann
g(Z(·)) =1
VB
∫
B
Z(x) dx. (12.33)
Durch die Gestaltung der Funktion ist es moglich, Glattung, Filterung, Inter-polation und Pradiktion in einem Formelsatz durchzufuhren.
Kriging ist eine von der Methode der kleinsten Quadrate abgeleitete Pradik-tionsform. Den Begriff Krigen pragte Matheron fur optimale raumliche linearePradiktion. Der Name Krigen kommt von Daniel Krige der in den 50er Jah-ren des 20. Jahrhunderts empirische Methoden fur die Beurteilung der Erzver-teilung aufgrund von Erzproben entwickelte. Eine allgemeine Bezeichnung furdieses Verfahren ist Best Linear Unbiased Estimator (BLUE ). Darin steckenauch die wesentlichen Forderungen an das Verfahren. Best ist hier mit wirk-sam zu ubersetzen. Die Varianz des geschatzten Wertes soll also minimal sein.Linear bedeutet, dass die Schatzfunktion linear sein soll. Unbiased bedeutet er-wartungstreu, das heißt, der Erwartungswert des Schatzwertes soll gleich demwahren Wert sein. Das Verfahren der Kollokation ist ein ahnliches Verfahren,beinhaltet jedoch die Forderung nach der Erwartungstreue nicht.

12.6. PRADIKTION UND KRIGING 203
12.6.1 Pradiktor
Es soll nun der Wert Z(x0) aufgrund der Daten Z = (Z(x1), . . . , Z(xn)) pradi-ziert werden. Der Pradiktor wird mit p(Z;x0) bezeichnet. Als nachstes definierenwir die Verlustfunktion (engl. loss function)
L(Z(x0), p(Z;x0)). (12.34)
Sie gibt die Abweichung an, die sich ergibt,wenn man Z(x0) mit p(Z;x0) pradi-ziert. Ein optimaler Pradiktor ist einer, der das Bayes’sche Risiko
EL(Z(x0), p(Z;x0))
minimiert. Eine haufig verwendete Verlustfunktion ist der Quadratfehlerverlust(engl. squared-error loss)
L(Z(x0), p(Z;x0) = (Z(x0)− p(Z;x0))2. (12.35)
Fur den Pradiktor konnen sowohl lineare also auch nichtlineare Ansatze ver-wendet werden. Wir wollen uns auf lineare Pradiktoren beschranken, namlich
p(Z;x0) = k +∑
liZ(xi), (12.36)
wobei wir l1, l2, . . . , ln, k so bestimmen, dass E(Z(x0) − p(Z;x0))2 minimiertwird. Wenn man den Pradiktor in die Verlustfunktion einsetzt, erhalt man alsBayes’sches Risiko
E
(Z(x0)− k −
n∑i=1
liZ(xi))2
=
var(
Z(x0)−n∑
i=1
liZ(xi))
+(
µ(x0)− k −n∑
i=1
liµ(xi))2
,
(12.37)
wobei gilt µ(x) = E(Z(x)).
Setzt man k = µ(x0)−∑
liµ(xi) und
lT = cT Σ−1
mit c = (C(x0,x1), . . . , C(x0,xn))T und Σ die Matrix mit den ElementenC(xi,xj) and den Positionen (i, j) ist. Der optimale Pradiktor ergibt sich zu
p(Z;x0) = lT (Z− µ) + µ(x0) = cT Σ−1(Z− µ) + µ(x0), (12.38)
wobei µ = (µ(x1), . . . , µ(xn))T ist. Der minimalisierte Pradiktionsfehler ist dann
σ2SK = C(x0x0)− cT Σ−1c. (12.39)
Diese Form der Pradiktion nennt sich auch Simple Kriging9. Es beruht dar-auf, dass man die Mittelfunktion kennt. Es ist dies eine wirksame, aber keineerwartungstreue Form. Unter allen Versionen des Krigings hat sie jedoch dengeringsten Pradiktionsfehler σ2
SK .
9Daher auch der Zusatz ’SK’ in Formel (12.39).

204 KAPITEL 12. GEOSTATISTIK
12.6.2 Gewohnliches Krigen (Ordinary Kriging)
Die Voraussetzungen sind ahnlich wie zuvor. Es sind wieder die Daten an nPunkten xn bekannt: Z = (Z(x1), . . . , Z(xn))T . Die Pradiktionsfunktion lautetwieder p(Z;x0). In Erganzung zu vorher kommen allerdings 2 Annahmen dazu:
Z(x) = µ + δ(x), (12.40)
p(Z;x0) =∑
λiZ(xi) mit∑
λi = 1. (12.41)
Die erste Annahme besagt, dass der Mittelwert fur alle Werte gleich ist. DieVariation der Werte entsteht nur durch einen stationaren Zufallsprozess. DieBeschreibung dieses Prozesses geschieht durch ein Variogramm. Die zweite Be-dingung
∑λi = 1 bewirkt die Erwartungstreue. Die Verlustfunktion lautet
wieder wie oben, sodass die Minimierung uber die Funktion
E(Z(x0)− p(Z;x0))2 (12.42)
aus der Klasse der linearen Pradiktoren∑
λi ·Z(xi), die die Bedingung∑
λi = 1erfullen, erfolgt. Zu minimieren ist also die Funktion
E(Z(x0)−∑
λiZ(xi))2 − 2m(∑
λi − 1), (12.43)
wobei m ein Lagrange’scher Multiplikator ist. Unter der Bedingung∑
λi = 1kann man schreiben
(Z(x0)−∑i
λi · Z(xi))2 =
− 12
∑i
∑j
λiλj(Z(xi)− Z(xj))2 +∑i
λi(Z(x0)− Z(xi))2.(12.44)
Wenn das Modell Z(s) = µ + σ(s) gilt, kann man somit schreiben
E(Z(x0)−∑i
λiZ(xi))2 − 2m(∑i
λi − 1) =
−∑j
∑i
λiγ(xi − xj) + 2∑i
λiγ(x0 − xi)− 2m(∑i
λi − 1). (12.45)
Diese Gleichung nach λi und m differenziert und gleich Null gesetzt ergibt
−Σλi · γ(xi − xj) + γ(x0 − xi)−m = 0,
Σλi = 1.
Diese Gleichung in Vektorform gibt
γ(x1 − x1) . . . γ(x1 − xn) 1γ(x2 − x1) . . . γ(x2 − xn) 1
.... . .
......
γ(xn − x1) . . . γ(xn − xn) 11 . . . 1 0
︸ ︷︷ ︸Γ0
λ1
λ2
...λn
m
︸ ︷︷ ︸λ0
=
γ(x0 − x1)γ(x0 − x2)
...γ(x0 − xn)
1
︸ ︷︷ ︸γ0
und aufgelost nach λi ergibt sich
λ0 = Γ−10 γ0. (12.46)

12.6. PRADIKTION UND KRIGING 205
Die Method arbeitet analog zur Interpolation nach kleinsten Quadraten (Kraus,1998). Somit konnen Erfahrungen der Interpolation nach kleinsten Quadratenauch hier verwendet werden und umgekehrt.
Man kann sich uberlegen, dass sich das Ergebnis nicht andert, wenn manstatt dem Variogramm γ(h) das Variogramm γ(h) + c verwendet. Das kannzeitweise notig sein, um eine numerisch stabile Losung zu erhalten. Der mittlerePradiktionsfehler, oft auch als Kriging Varianz bezeichnet, ist
σ2K = λT
0 γ0 = Σλiγ(x0 − xj) + m = γT Γ−1γ − (1T Γ−1γ − 1)2
1T Γ−11. (12.47)
A priori Pradiktion
Im zweiten Teil der obigen Gleichung sieht man, dass der mittlere Pradikti-onsfehler nur vom Variogramm abhangt. Wenn man also das Variogramm fureine Region kennt, kann man einen geplanten Probenplan a priori untersuchen.Die notigen Koeffizienten ergeben sich aus dem Abstand der Punkte und demangenommenen Variogramm.
Einfluss des Nugget Effekts auf die Pradiktion
Zur Beurteilung der Effekte ist es notig, die Aufgliederung von σ2 in σ2F + σ2
I
vorzunehmen. σF ist der Anteil, der aufgrund eines stationaren Prozesses η(x)entsteht und σI ist der Anteil der durch ein weißes Messrauschen ε(x) entsteht.Dieser zweite Teil resultiert aus den Messfehlern. Das δ(x) im angenomme-nen Modell Z(x) = µ + δ(x) setzt sich aus dem stationaren Prozess und demMessrauschen zusammen.
δ(x) = ε(x) + η(x) (12.48)
Wenn man jetzt Z(x) mit dem vorigen Formelapparat pradiziert, erhalt maneinen Wert, bei dem Storeinflusse beinhaltet sind. Man durfte also diese Formelnnur dann anwenden, wenn das Storrauschen ε(x) = 0 ist.
Richtiger ware es eine messfehlerfreie Version von Z zu pradizieren, da manja den realen Wert an der Stelle x0 wissen will und nicht den durch Messfehlerverzerrten. Diese wird mit S(x0) bezeichnet wobei gilt
Z(x0) = S(x0) + ε(x0) (12.49)
oder auchS(x0) = µ + η(x). (12.50)
Es ist dannp(S;x0) =
∑νi · Z(xi) mit
∑νi = 1. (12.51)
Zu minimieren ist also die Funktion
E(S(x0)−∑
νi · Z(xi))2 − 2m(∑
νi − 1) (12.52)

206 KAPITEL 12. GEOSTATISTIK
und man kommt auf die Gleichung
ν0 = Γ−10 γ∗0 , (12.53)
wobei Γ0 die gleiche Bedeutung wie vorher hat.
ν0 = (ν1, . . . , νn,m)γ∗0 = (γ(x0 − x1), . . . , γ(x0 − xn), 1) wenn x0 6= xi
γ∗0 = σ2F wenn x0 = xi
Der mittlere Pradiktionsfehler ergibt sich dann zu
τ2K =
∑νiγ
∗(x0 − xj) + m− σ2I . (12.54)
Es ist wichtig diesen modifizierten Formelsatz zu verwenden, wenn Messfehlervorliegen.
Wenn man den Pradiktor p(Z;x0) verwendet bekommen die Stutzstellenwieder exakt den Messwert pradiziert. Wenn man jedoch den Pradiktor p(S;x0)verwendet, erhalt man geglattete Werte.
In beiden Fallen sind die Funktionen unstetig. Fur p(S;x0) reicht die Bedin-gung σF = 0 um Kontinuitat zu erreichen, im anderen Fall mussen σF und σI
gleich Null sein.
12.6.3 Universal Kriging
Das Universal Kriging erweitert die Theorie des Ordinary Kriging. Die Annah-me, dass
Z(x) = µ + δ(x) (12.55)
wird durch die Annahme
Z(x) =p+1∑
j=1
fj−1(x)βj−1 + δ(x) (12.56)
ersetzt. δ(x) hat die gleiche Bedeutung wie zuvor,p+1∑j=1
fj−1(x)βj−1 ist eine Li-
nearkombination aus bekannten Funktionen mit unbekannten Parametern, dieden Mittelwert beschreibt. Sie besteht aus p Funktionen f und hat die unbe-kannten Parameter β. Wenn man bedenkt, dass man jede beliebige Funktionlinearisieren kann (Satz von Taylor) ist dieses Modell sehr universell. Man kanndie Daten Z in Vektorform schreiben als
Z = Xβ + δ, (12.57)
mit β = (β0, . . . , βp). Dabei ist X eine (n, p + 1)-Matrix mit den Elementen(i, j) = fj−1(xi)
Z(x0) = χT β + δ(x0), (12.58)
mit χ = (f0(x0), . . . , fp(xp)).

12.6. PRADIKTION UND KRIGING 207
Der Pradiktor kann dann geschrieben werden als
p(Z;x0) =∑
λiZ(xi) mit λT X = χT . (12.59)
Diese Forderung λT X = χT sichert die Erwartungstreue. Die Verlustfunktionlautet wieder wie oben, sodass die Minimierung uber die Funktion
E(Z(x0)− p(Z;x0))2 (12.60)
erfolgt. Zu minimieren ist also die Funktion
E(Z(x0)−∑
λiZ(xi))2 − 2p+1∑
j=1
mj−1
n∑
i=1
λifj−1(xi)− fj−1(x0)
. (12.61)
Die p + 1 Faktoren m sind wieder Lagrange’sche Multiplikatoren, die die Be-dingung fur die Erwartungstreue λT X = χT berucksichtigen. Fur die weitereAbleitung ist f0(x0) = 1. Daraus folgt, dass eine der Bedingungsgleichungen∑
λi = 1 ist. Dann kann man schreiben(
Z(x0)−∑i
λiZ(x0))2
=
−∑j
∑i
λiλi(δ(xi)−δ(xj))
2
2 + 2∑i
λi(δ(x0)−δ(xi))
2
2
(12.62)
und mit Berucksichtigung eines isotropen Variogramms weiter
E(Z(x0)−∑i
λiZ(xi))2−
2p+1∑j=1
mj−1
n∑
i=1
λifj−1(xi)− fj−1(x0)
=
−∑j
∑i
λiλiγ(xi − xj) + 2∑i
λiγ(x0 − xi)−
2p+1∑j=1
mj−1
n∑
i=1
λifj−1(xi)− fj−1(x0)
.
(12.63)
Diese Gleichung in Vektorform und aufgelost nach λi gibt
λu = Γ−1u γu, (12.64)
wobei
λu = (λ1, . . . , λn,m0, . . . ,mp),γu = (γ(x0 − x1), . . . , γ(x0 − xn), 1, f1(x0), . . . , fp(x0))
und mit 1 = f0(x0) ergibt sich der nachstehende Ausdruck.
Γu =
γ(xi − xj) i = 1, . . . , n j = 1, . . . , nfj−1−n(xi) i = 1, . . . , n j = n + 1, . . . , n + p + 10 i = n + 1, . . . , n + p + 1 j = n + 1, . . . , n + p + 1
Der resultierende mittlere Fehler ist damit
σ2ku = λT
u γu =∑
i
λiγ(x0 − xj) +p+1∑
j=1
mj−1fj−1(x0). (12.65)

208 KAPITEL 12. GEOSTATISTIK
Damit ist die Vorlesung Ausgleichungsrechnung II zu Ende. Das Feldder Statistik und der Ausgleichungsrechnung sowie deren Anwendungin Geodasie und GIS ist sehr weit. Im Rahmen der Vorlesung konntenimmer nur Teilaspekte besprochen werden. Manchmal mussten wir unsmit einem ”Hineinschnuppern“ in Gebiete begnugen, die nur im Rahmenmehrstundiger Lehrveranstaltungen umfassend erklart werden konnen.Dieses Schnuppern wird aber hoffentlich bei Interesse oder beruflicherNotwendigkeit den Einstieg in das betreffende Gebiet erleichtern. Ichhoffe, dass jeder zumindest die Grundbegriffe der einzelnen Gebiete mitnach Hause nimmt.
Gerhard Navratil

Literaturverzeichnis
Albert, P. (1987): Koordinatentransformationen in der Ingenieurgeodasie. Ver-messungstechnik, 35. Jahrgang(7):242–244.
Austrian Ministry for Economics (1994): Verordnung des Bundesministers furwirtschaftliche Angelegenheiten uber Vermessung und Plane - Vermessungs-verordnung, VermV (Surveying Decree). BGBl.Nr. 562/1994.
Awange, Joseph L. und Erik W. Grafarend (2002): Linearized Least Squa-res and nonlinear Gauss-Jacobi combinatorial algorithm applied to the 7-parameter datum transformation C7(3) problem. Zeitschrift fur Vermessungs-wesen (ZfV), 127. Jahrgang(2):109–116.
Awange, Joseph L. und Erik W. Grafarend (2003): Polynomial Optimization ofthe 7-Parameter Datum Transformation Problem when only Three Stationsin Both Systems are Given. Zeitschrift fur Vermessungswesen (ZfV), 128.Jahrgang(4):266–270.
Baarda, Willem (1968): A Testing Procedure for Use in Geodetic Networks.Publications on Geodesy. Band 2 Reihe 5. Netherlands Geodetic Commission.
Baarda, Willem (1973): S-Transformation and Criterion Matrices. Publicationson Geodesy. Band 5 Reihe 1. Netherlands Geodetic Commission.
Barrodale, I. und F. D. K. Roberts (1973): An Improved Algorithm for DiscreteL1 Linear Approximation. SIAM Journal of Numerical Analysis, 10.
Benning, Wilhelm (1984): Zur Strategie des Entwurfes geodatischer Netze ausoptimierter Zuverlassigkeit. Zeitschrift fur Vermessungswesen (ZfV), 109.Jahrgang(11):563–569.
Benning, Wilhelm (1985): Test von Ausreißern bei der Helmerttransformation.Zeitschrift fur Vermessungswesen (ZfV), 110. Jahrgang(5):207–209.
Benning, Wilhelm (1997): Nochmals zur Beschleunigung der automatisier-ten Fehlersuche in geodatischen Anwendungen. Allgemeine Vermessungs-Nachrichten (AVN), 104. Jahrgang(11/12):411.
Benning, Wilhelm; Ashraf A. Elkoushy und Klaus Meer (1997): Innere-Punkt-Methoden fur die automatisierte Fehlersuche in geodatischen Anwendungen.Allgemeine Vermessungs-Nachrichten (AVN), 104. Jahrgang(8/9):319–324.
209

210 LITERATURVERZEICHNIS
Birkenbach, J. (1916): Ein Beitrag zur Beantwortung der Frage: ”Ist die Feh-lertheorie der kleinsten Quadrate die von der Natur geforderte?“. Zeitschriftfur Mathematik und Physik, Heft 2:168–195.
Bjerhammar, Arne (1958): A Generalized Matrix Algebra, Bd. 124 von BulletinNo. 9 from the Division of Geodesy. Transactions of the Royal Institute ofTechnology, Stockholm.
Bjerhammar, Arne (1973): Theory of Errors and Generalized Matrix Inverses.Elsevier, Amsterdam.
Boljen, Joachim (1988): Zuverlassigkeitsanalyse Helmert-transformierter Punkt-haufen. Zeitschrift fur Vermessungswesen (ZfV), 113. Jahrgang(3):121–123.
Borkowski, K. (1973): Bedingte Ausgleichung geodatischer Netze unter Beruck-sichtigung der Fehler in den Anschlußkoordinaten. Vermessungstechnik, 21.Jahrgang(3):97–99.
Borutta, Harald (1988): Robuste Schatzverfahren fur geodatische Anwendungen.Schriftenreihe Studiengang Vermessungswesen Universitat der Bundeswehr,Munchen.
Bretterbauer, Kurt (1967): Eine Statistik der Dreieckswiderspruche im osterrei-chischen Netz 1. Ordnung. Osterreichische Zeitschrift fur Vermessungswesen(OZ), 55. Jahrgang(2):29–34.
Burstedde, Ingolf und Konrad Cremer (1986): Zur Ausgleichung geodatischerNetze nach der 1-Norm. Allgemeine Vermessungs-Nachrichten (AVN), 93.Jahrgang(6):228–234.
Caspary, Wilhelm (1988): Fehlerverteilungen, Methode der kleinsten Qua-drate und Alternativen. Zeitschrift fur Vermessungswesen (ZfV), 113.Jahrgang(3):123–133.
Caspary, Wilhelm (1996): Anmerkungen zum robusten Schatzen. AllgemeineVermessungs-Nachrichten (AVN), 103. Jahrgang(7):287–289.
Caspary, Wilhelm (1998): Anmerkungen zur balancierten Ausgleichung. Zeit-schrift fur Vermessungswesen (ZfV), 123. Jahrgang(8):271–273.
Caspary, Wilhelm und Harald Borutta (1986): Geometrische Deformations-analyse mit robusten Schatzverfahren. Allgemeine Vermessungs-Nachrichten(AVN), 93. Jahrgang(8/9):315–326.
Cressie, Noel A. C. (1991): Statistics for Spatial Data. John Wiley & Sons, NewYork.
Daxinger, Werner (1995): Der Einfluß fehlerhafter Altpunkte auf die Bestim-mung von Neupunkten. Osterreichische Zeitschrift fur Vermessung und Geo-information (VGI), 83. Jahrgang(3):136–144.
Daxinger, Werner und Robert Stirling (1995): Kombinierte Ausgleichung vonterrestrischen und GPS-Messungen. Osterreichische Zeitschrift fur Vermes-sung und Geoinformation (VGI), 83. Jahrgang(1+2):48–55.

LITERATURVERZEICHNIS 211
Deren, Li (1989): A Thought of Optimization and Design of Geodetic Net-works in Consideration of Accuracy and Reliability. In: Festschrift FriedrichAckermann zum 60. Geburtstag, Institut fur Photogrammetrie der UniversitatStuttgart, Nr. 14 in Schriftenreihe.
Deren, Li (1991): Optimization and Design of Geodetic Networks in Considerati-on of Accuracy and Reliability. Allgemeine Vermessungs-Nachrichten (AVN)- International Edition, 98. Jahrgang(8):27–33.
Eberl, W. (1959): Die Ausgleichung vermittelnder Beobachtungen im Rahmender mathematischen Statistik. Osterreichische Zeitschrift fur Vermessungs-wesen (OZ), 47. Jahrgang(3):73–84.
Even-Tzur, Gilad (2006): Datum Definition and its Influence on the Reliabi-lity of Geodetic Networks. Zeitschrift fur Vermessungswesen (ZfV), 131.Jahrgang(2):87–95.
Forsthuber, J.; J. Schneid und Heinz Stanek (1987): Partitionierte Orthogo-nalisierung und Singularwertanalyse zur Losung der Ausgleichung nach ver-mittelnden Beobachtungen. Osterreichische Zeitschrift fur Vermessung undPhotogrammetrie, 75. Jahrgang(1):1–9.
Friedrich, Konrad (1927): Uber Punktgenauigkeit. Zeitschrift fur Vermessungs-wesen (ZfV), 56. Jahrgang(2, 3):33–41, 65–79.
Forstner, Wolfgang (1979a): Das Programm TRINA zur Ausgleichung undGutebeurteilung geodatischer Lagenetze. Zeitschrift fur Vermessungswesen(ZfV), 104. Jahrgang(2):61–72.
Forstner, Wolfgang (1979b): Ein Verfahren zu Schatzung von Varianz- undKovarianzkomponenten. Allgemeine Vermessungs-Nachrichten (AVN), 86.Jahrgang(11-12):446–453.
Gleinsvik, P. (1971): Zur Leistungsfahigkeit der Methode der kleinsten Quadratebei der Ausgleichung nicht-normalverteilter Beobachtungen. Zeitschrift furVermessungswesen (ZfV), 96. Jahrgang(6):224–233.
Gleinsvik, P. (1972): Zur Leistungsfahigkeit der Methode der kleinsten Quadratebei der Ausgleichung nicht-normalverteilter Beobachtungen - ExperimentellePrufung. Zeitschrift fur Vermessungswesen (ZfV), 97. Jahrgang(9):385–393.
Gopfert, Wolfgang (1977): Interpolationsergebnisse mit der multiquadra-tischen Interpolation. Zeitschrift fur Vermessungswesen (ZfV), 102.Jahrgang(10):567–460.
Grafarend, Erik (1970): Zur Wahrscheinlichkeitstheorie des HelmertschenPunktfehlers. Osterreichische Zeitschrift fur Vermessungswesen (OZ), 58.Jahrgang(2):33–41.
Grafarend, Erik; A. Kleusberg und Burkhard Schaffrin (1980): An Introductionto the Variance-Covariance-Component Estimation of Helmert Type. Zeit-schrift fur Vermessungswesen (ZfV), 105. Jahrgang(4):161–180.

212 LITERATURVERZEICHNIS
Grafarend, Erik und Burkhard Schaffrin (1979): Kriterion-Matrizen: Zweidi-mensionale homogene und isotrope geodatische Netze. Zeitschrift fur Ver-messungswesen (ZfV), 104. Jahrgang(4):133–149.
Grimm-Pitzinger, Albert und Klaus Hanke (1986): Bedeutung der Varianzkom-ponentenschatzung fur die geodatische Praxis. Osterreichische Zeitschrift furVermessungswesen und Photogrammetrie (OZ), 74. Jahrgang(2):101–112.
Grimm-Pitzinger, Albert und Johannes Otepka (2003): Eine Strategie zum au-tomatisierten Aufdecken von Festpunktfehlern in Katasternetzen. In: 12. In-ternationale Geodatische Woche Obergurgl. Universitat Innsbruck.
Grundig, Lothar; M. Neureither und Joachim Bahndorf (1985): Deformations-analyse und S-Transformation. Zeitschrift fur Vermessungswesen (ZfV), 110.Jahrgang(4):151–160.
Hahn, Michael und Ralf Bill (1984): Ein Vergleich der L1- und L2-Norm-Schatzung am Beispiel Helmerttransformation. Allgemeine Vermessungs-Nachrichten (AVN), 91. Jahrgang(11/12):440–450.
Hampel, Frank R.; Elvezio M. Ronchetti; Peter J. Roussew und Werner A.Stahel (1986): Robust Statistics, the Approach Based on Influence Functions.John Wiley & Sons, New York.
Hansen, Peter Andreas (1839): Auflosung einer allgemeinen Aufgabe aus derWahrscheinlichkeitsrechnung. Astronomische Nachrichten, 16(361).
Hardy, Rolland Lee (1971): Multiquadratic Equations of Topography and otherIrregular Surfaces. Journal of Geophysical Research, 76. Jahrgang.
Hardy, Rolland Lee (1972): Geodetic Applications of Multiquadratic Analysis.Allgemeine Vermessungs-Nachrichten (AVN), 79. Jahrgang(10):398–406.
Hart, John Fraser (1954): Central Tendency in Areal Distributions. EconomicGeography, 30.
Hartner, Friedrich; Josef Wastler und Eduard Dolezal (1910): Hand- und Lehr-buch der Niederen Geodasie. 1. Band - 1. Halfte. L.W. Seidel & Sohn, k.u.k.Hofbuchhandler, Wien, 10. Aufl.
Heck, Bernhard (1985): Ein- und zweidimensionale Ausreißertests bei der ebe-nen Helmert-Transformation. Zeitschrift fur Vermessungswesen (ZfV), 110.Jahrgang(10):461–471.
Heckmann, Hansjorg (1999): Linie kleinster Krummung durch viele Punkte.Allgemeine Vermessungs-Nachrichten (AVN), 106. Jahrgang(6):210–213.
Hein, Gunter W. und Klaus Lenze (1979): Zur Genauigkeit und Wirtschaftlich-keit verschiedener Interpolations- und Pradiktionsmethoden. Zeitschrift furVermessungswesen (ZfV), 104. Jahrgang(11):492–505.
Helmert, Friedrich R. (1868): Studien uber rationelle Vermessungen im Gebietder hoheren Geodasie. B.G. Teubner, Leipzig. Inaugural-Dissertation.

LITERATURVERZEICHNIS 213
Helmert, Friedrich R. (1872): Die Ausgleichungsrechnung nach der Methode derkleinsten Quadrate. B. G. Teubner, Leipzig.
Helmert, Friedrich R. (1880): Die mathematischen und physikalischen Theoriender hoheren Geodasie. B. G. Teubner, Leipzig.
Hofmann-Wellenhof, Bernhard; Herbert Lichtenegger und James Collins (1997):GPS Theory and Practice. Springer, Wien, 4. Aufl.
Huber, Peter J. (1964): Robust Estimation of a Location Parameter. Annals ofMathematical Statistics, Vol. 35:73–101.
Huber, Peter J. (1972): Robust Statistics: A Review. Annals of MathematicalStatistics, Vol. 4:1041–1067.
Huber, Peter J. (1981): Robust Statistics. John Wiley and Sons, New York.
Huber, Peter J. (1987): Statistical Data Analysis Based on the L1-Norm andRelated Methods, North-Holland, Amsterdam, Kap. The Place of the L1-Normin Robust Estimation, S. 23–33.
Illner, Ingrid (1983): Freie Netze und S-Transformation. AllgemeineVermessungs-Nachrichten (AVN), 90. Jahrgang(5):157–170.
Illner, Ingrid (1985): Datumsfestlegung in freien Netzen. Reihe C - Heft 309.Deutsche Geodatische Kommission, Munchen.
Jakob, G. (1982): Beitrag zur mathematisch-statistischen Untersuchung vonZeitreihen. Vermessungstechnik, 30. Jahrgang(8):268–271.
Jakob, G. (1983): Weitere Betrachtungen zur mathematisch-statistischen Un-tersuchung von Zeitreihen. Vermessungstechnik, 31. Jahrgang(7):234–237.
Jakob, G. (1985): Beitrag zur Bereinigung von Meß- und Zeitreihen. Vermes-sungstechnik, 33. Jahrgang(2):60–61.
Jordan, W. und Otto Eggert (1948): Handbuch der Vermessungskunde 1. Band.J.B.Metzlersche Verlagsbuchhandlung, Stuttgart, 9. Aufl.
Kahler, Dieter (1987): Ein Beitrag zur Theorie der inneren Genauigkeit vontransformierten Punktkoordinaten. Zeitschrift fur Vermessungswesen (ZfV),112. Jahrgang(4):153–157.
Kahmen, Heribert (1993): Vermessungskunde. de Gruyter Lehrbuch, Berlin, 18.Aufl.
Kampmann, Georg (1990): Robuster Ausreißertest mit Hilfe der beding-ten L1-Norm-Schatzung. Allgemeine Vermessungs-Nachrichten (AVN), 97.Jahrgang(11):27–32.
Kampmann, Georg (1991): Asymptotische Prufung von L1-Klaffungen imKongruenzmodell der Deformationsanalyse. Allgemeine Vermessungs-Nachrichten (AVN), 98. Jahrgang(7):221–229.

214 LITERATURVERZEICHNIS
Kampmann, Georg (1994): Robuste Deformationsanalyse mittels balancier-ter Ausgleichung. Allgemeine Vermessungs-Nachrichten (AVN), 101.Jahrgang(1):8–17.
Kampmann, Georg und Helmut Wolf (1989): L1-Norm-Schatzung mit kor-relierten Beobachtungen. Zeitschrift fur Vermessungswesen (ZfV), 114.Jahrgang(10):493–497.
Kanani, Entela (2000): Robust Estimators for Geodetic Transformations andGIS. Dissertation, Institut fur Geodasie und Photogrammetrie, ETH Zurich.
Kegel, Gabriele (1987): Zur Lokalisierung grober Datenfehler mit Hilfe robusterAusgleichungsverfahren. Vermessungstechnik, 35. Jahrgang(10):348–350.
Koch, Karl-Rudolf (1975): Herleitung der Methode der kleinsten Quadrate mitHilfe generalisierter Matrixinversen. Zeitschrift fur Vermessungswesen (ZfV),100. Jahrgang(12):561–571.
Koch, Karl-Rudolf (1976): Hypothesenprufung fur multivariate Ausgleichungen,Bd. 44. Mitteilungen des Institutes fur Theoretische Geodasie, UniversitatBonn.
Koch, Karl-Rudolf (1978): Schatzung von Varianzkomponenten. AllgemeineVermessungs-Nachrichten (AVN), 85. Jahrgang(7):264–269.
Koch, Karl-Rudolf (1981): Wahrscheinlichkeit des Fehlers 2. Art fur den Testeiner allgemeinen multivariaten Hypothese. Zeitschrift fur Vermessungswesen(ZfV), 106. Jahrgang(5):228–234.
Koch, Karl-Rudolf (1983): Ausreißertests und Zuverlassigkeitsmaße. Vermes-sungswesen und Raumordnung (VR), 45. Jahrgang(8):400–411.
Koch, Karl-Rudolf (1985): Test von Ausreißern in Beobachtungspaaren. Zeit-schrift fur Vermessungswesen (ZfV), 110. Jahrgang(1):34–38.
Koch, Karl-Rudolf (1996): Robuste Parameterschatzung. AllgemeineVermessungs-Nachrichten (AVN), 103. Jahrgang(1):1–18.
Kossina, Anton (1972): Die Genauigkeitsaussage des mittleren Punktlagefehlers.Osterreichische Zeitschrift fur Vermessungswesen (OZ), 60. Jahrgang(1):2–5.
Krarup, Torben (1969): A Contribution to the Mathematical Foundation of Phy-sical Geodesy. Techn. Ber. Meddelelse no. 44, Geodaetisk Institut, Kopenha-gen.
Kraus, Karl (1970): Interpolation nach kleinsten Quadraten in der Photogram-metrie. Zeitschrift fur Vermessungswesen (ZfV), 95. Jahrgang(9):387–390.
Kraus, Karl (1996): Photogrammetrie, Band 2. Dummler, Bonn.
Kraus, Karl (1997): Eine neue Methode zur Interpolation und Filterung vonDaten mit schiefen Fehlerverteilungen. Osterreichische Zeitschrift fur Ver-messung und Geoinformation (VGI), 85. Jahrgang(1):25–30.

LITERATURVERZEICHNIS 215
Kraus, Karl (1998): Interpolation nach kleinsten Quadraten versus Krige-Schatzer. Osterreichische Zeitschrift fur Vermessung und Geoinformation(VGI), 86. Jahrgang(1):45–48.
Kuang, Shanlong (1996): Geodetic Network Analysis and Optimal Design. AnnArbor Press.
Laarhoven, P. J. M. van und E. H. L. Aarts (1987): Simmulated Annealing:Theory and Applications. Mathematics and Its Applications. D. Reidel Pu-blishing Company, Dordrecht.
Leeb, Peter (1968): Uber raumliche Transformationen. Osterreichische Zeit-schrift fur Vermessungswesen (OZ), 56. Jahrgang(3):96–104.
Lelgemann, Dieter (1980): Kollokation und analytische Splinefunktion. Zeit-schrift fur Vermessungswesen (ZfV), 105. Jahrgang(10):466–478.
Lenzmann, Lothar (1984): Zur Aufdeckung von Ausreißern bei uberbestimmtenKoordinatentransformationen. Zeitschrift fur Vermessungswesen (ZfV), 109.Jahrgang(9):474–479.
Lilienblum, Horst (1983): Mathematisch-statistische Parameter zur Beschrei-bung von Zeitreihen. Vermessungstechnik, 31. Jahrgang(8):260–263.
Matheron, Georges (1963): Principles of Geostatistics. Economic Geology, 58.
Meissl, Peter (1960): Die Ausgleichung bedingter Beobachtungen im Rahmender mathematischen Statistik. Osterreichische Zeitschrift fur Vermessungs-wesen (OZ), 48. Jahrgang(1):17–23.
Meissl, Peter (1962): Die innere Genauigkeit eines Punkthaufens. Osterreichi-sche Zeitschrift fur Vermessungswesen (OZ), 50. Jahrgang(5):159–165.
Meissl, Peter (1969): Zusammenfassung und Ausbau der inneren Fehlertheo-rie eines Punkthaufens. In: Beitrage zur Theorie der geodatischen Netze imRaum, Hg. Karl Rinner; Karl Killian und Peter Meissl, Deutsche GeodatischeKommission, Munchen, Reihe A - Heft 61, S. 8–21.
Mierlo, Jan van (1975): Testing and Adjusting 2- and 3-Dimensional Networksfor Detecting Deformations. In: Proceedings of the International Symposiumon Deformation Measurements.
Mierlo, Jan van und H. Kaltenbach (1988): Fehler dritter Art bei der Deforma-tionsanalyse geodatischer Lagenetze. Allgemeine Vermessungs-Nachrichten(AVN), 95. Jahrgang(1):31–41.
Mitas, Lubos und Helena Mitasova (1999): Geographical Information Systems,John Wiley & Sons, New York, Bd. Vol. 1 Principles and Technical Issues,Kap. Spatial Interpolation, S. 481–492. 2. Aufl.
Mittermayer, Eberhard (1971): Eine Verallgemeinerung der Methode der klein-sten Quadrate zur Ausgleichung freier Netze. Zeitschrift fur Vermessungswe-sen (ZfV), 96. Jahrgang(9):401–410.

216 LITERATURVERZEICHNIS
Mittermayer, Eberhard (1972): Zur Ausgleichung freier Netze. Zeitschrift furVermessungswesen (ZfV), 97. Jahrgang(11):481–489.
Monicke, Hans-Joachim (1979): Zur Genauigkeitsschatzung der Interpolationnach kleinsten Quadraten. Allgemeine Vermessungs-Nachrichten (AVN), 86.Jahrgang(1):33–36.
Monicke, Hans-Joachim (1980): Multiquadratische Interpolation vonGeoidhohen aus astro-geodatischen Lotabweichungen im Testnetz Karlsruhe.Allgemeine Vermessungs-Nachrichten, 87. Jahrgang(2):70–74.
Moritz, Helmut (1965): Schwerevorhersage und Ausgleichungsrechnung. Zeit-schrift fur Vermessungswesen (ZfV), 90. Jahrgang(6):181–184.
Moritz, Helmut (1972): Least Squares Collocation. Techn. Ber. Report 130, OhioState University, Department of Geodetic Science and Surveying, Columbus,Ohio.
Moritz, Helmut (1973): Neuere Ausgleichungs- und Pradiktionsverfahren. Zeit-schrift fur Vermessungswesen (ZfV), 98. Jahrgang(4):137–146.
Moritz, Helmut (1978): Approximation Methods in Geodesy, Herbert Wichmann,Karlsruhe, Kap. Introduction to Interpolation and Approximation, S. 1–45.
Murle, Michael und Ralf Bill (1984): Zuverlassigkeits- und Genauigkeitsunter-suchungen ebener geodatischer Netze. Allgemeine Vermessungs-Nachrichten(AVN), 91. Jahrgang(2):45–62.
Niemeier, Wolfgang (1980): Zur Auswertung geodatischer Meßreihen. Allgemei-ne Vermessungs-Nachrichten (AVN), 87. Jahrgang(1):41–59.
Niemeier, Wolfgang (1985): Geodatische Netze in Landes- und Ingenieurvermes-sung II, Konrad Wittwer, Stuttgart, Kap. Deformationsanalyse, S. 559–623.
Niemeier, Wolfgang (1987): Zur Bestimmung von Datumsparametern aus Beob-achtungen. Zeitschrift fur Vermessungswesen (ZfV), 112. Jahrgang(4):139–153.
Niemeier, Wolfgang (2002): Ausgleichungsrechnung. Walter de Gruyter, Berlin.
Pelzer, Hans (1974a): Neuere Ergebnisse bei der statistischen Analyse von De-formationsmessungen. In: Archive of the 14th International Congress for Sur-veyors. Washington.
Pelzer, Hans (1974b): Zur Behandlung singularer Ausgleichungsaufgaben I -Unvollstandige Beobachtungen. Zeitschrift fur Vermessungswesen (ZfV), 99.Jahrgang(5):181–194.
Pelzer, Hans (1974c): Zur Behandlung singularer Ausgleichungsaufgaben II -Singulare Kofaktorenmatrix des Beobachtungsvektors. Zeitschrift fur Ver-messungswesen (ZfV), 99. Jahrgang(11):479–488.
Pelzer, Hans, Hg. (1985): Geodatische Netze in Landes- und Ingenieurvermes-sung II. Konrad Wittwer, Stuttgart.

LITERATURVERZEICHNIS 217
Perovic, Gligorije (2005): Least Squares. University of Belgrade, Faculty of CivilEngineering.
Peters, Kornelius (1974): Problematik von Toleranzen bei Ingenieur- sowie Be-sitzgrenzvermessungen. Osterreichischer Verein fur Vermessungswesen undPhotogrammetrie, Vienna, Austria, Sonderheft 29.
Radouch, Vladimır (1971): Korrelation bei nichtlinearen Beziehungen. Zeit-schrift fur Vermessungswesen (ZfV), 96. Jahrgang(5):187–193.
Reißmann, Gunter (1976a): Zur Ausgleichung freier Hohennetze. Vermessungs-technik, 24. Jahrgang(8):306–309.
Reißmann, Gunter (1976b): Zur Ausgleichung freier Lagenetze. Vermessungs-technik, 24. Jahrgang(12):451–454.
Reißmann, Gunter (1977): Die Ausgleichungsrechnung, klassisch und modern.Gedanken zur Entwicklung. Vermessungstechnik, 25. Jahrgang(7):222–223.
Reißmann, Gunter (1979): Die Kollokation - Ein allgemeinstes Ausgleichungs-verfahren. Vermessungstechnik, 27. Jahrgang(1):7–12.
Reißmann, Gunter (1985): Außere und innere Genauigkeit bei angeschlossenenund freien Hohennetzen. Vermessungstechnik, 33. Jahrgang(4):124–126.
Reißmann, Gunter (1987): Außere und innere Genauigkeit bei angeschlossenenund freien Lagenetzen. Vermessungstechnik, 35. Jahrgang(3):87–93.
Rousseeuw, P.J. (1984): Least Median of Squares Regression. Journal of theAmerican Statistics Association, 79.
Schachinger, Hartmut (1997): Optimierung von geodatischen Netzen. In: Procee-dings of AGIT97, Hg. Franz Dollinger und Josef Strobl. Institut fur Geogra-phie der Universitat Salzburg, Salzburg, Bd. 26 von Salzburger geographischeMaterialien, S. 133–142.
Schachinger, Hartmut (1998): Optimierung von geodatischen Netzen mit Simu-lated Annealing. Diplomarbeit, Technische Universitat Wien, Wien.
Schadlich, M. (1983): Zur Qualitatsprufung von Lagenetzen. Vermessungstech-nik, 31. Jahrgang(5):163–164.
Schonberg, Isaac Jacob (1946): Contributions to the Problem of Approximati-on of Equidistant Data by Analytic Functions. Part A – on the Problem ofSmoothing or Graduation. A first Class of Analytic Approximation Formulae.Quart. Appl. Math, 4:45–99.
Schneider, Wolfgang; Joachim Kornrumpf und Walter Mohr (1995): StatistischeMethodenlehre. R. Oldenbourg, Munchen, 2. Aufl.
Schuh, Wolf-Dieter (1984): Rasche und einfache automatische Fehlererkennungbei großen Datenmengen. Osterreichische Zeitschrift fur Vermessungswesenund Photogrammetrie, 72. Jahrgang(4):137–147.
Schwarz, Hans Rudolf (1986): Numerische Mathematik. Teubner Verlag, Stutt-gart.

218 LITERATURVERZEICHNIS
Schwarz, K.P. (1976): Numerische Probleme bei der Bestimmung des globalenErdschwerefeldes durch Kollokation. Zeitschrift fur Vermessungswesen (ZfV),101. Jahrgang(6):221–230.
Somogyi, Jozsef und J´anos Kalmar (1988): Verschiedene robuste Schatzungs-verfahren fur die Helmerttransformation. Allgemeine Vermessungs-Nachrichten (AVN), 95. Jahrgang(4):141–146.
Spath, Helmuth (2004): A Numerical Method for Determining the Spatial HEL-MERT Transformation in the Case of Differential Scale Vectors. Zeitschriftfur Vermessungswesen (ZfV), 129. Jahrgang(4):255–257.
Staudinger, Martin und Johannes Otepka (2001): Netzausgleichung unterBerucksichtigung der Punktlagegenauigkeit der Festpunkte. OsterreichischeZeitschrift fur Vermessung und Geoinformation (VGI), 89. Jahrgang(1):13–18.
Twaroch, Christoph (2005): Richter kennen keine Toleranz. In: InternationaleGeodatische Woche, Obergurgl, Austria. Wichmann Verlag.
Werkmeister, P. (1920): Uber die Genauigkeit trigonometrischer Punktbestim-mungen. Zeitschrift fur Vermessungswesen (ZfV), 49. Jahrgang(13, 14):401–412, 433–456.
Wicki, Fridolin (1999): Robuste Schatzverfahren fur die Parameterschatzung ingeodatischen Netzen. Dissertation, Institute for Geodesy and Photogramme-try, ETH Zurich.
Wieser, Andreas; Werner Lienhart und Fritz K. Brunner (2003): Nachbarschaft-streue Transformation zur Berucksichtigung von Spannungen im amtlichenFestpunktfeld. Osterreichische Zeitschrift fur Vermessung und Geoinforma-tion (VGI), 91. Jahrgang(2):115–122.
Wolf, Helmut (1966): Die Genauigkeit der fur eine Helmert-Transformationberechneten Konstanten. Zeitschrift fur Vermessungswesen (ZfV), 91.Jahrgang(2):33–34.
Wolf, Helmut (1968): Ausgleichungsrechnung nach der Methode der kleinstenQuadrate. Dummlerbuch 7820. Ferinand Dummler, Bonn.
Wolf, Helmut (1972): Helmerts Losung zum Problem der freien Netze mit sin-gularer Normalgleichungsmatrix. Zeitschrift fur Vermessungswesen (ZfV), 97.Jahrgang(5):189–182.
Wolf, Helmut (1973): Die Helmert-Inverse bei freien geodatischen Netzen. Zeit-schrift fur Vermessungswesen (ZfV), 98. Jahrgang(9):396–398.
Wolf, Helmut (1975): Ausgleichungsrechnung - Formelsammlung zur praktischenAnwendung. Ferinand Dummler, Bonn.
Wolf, Helmut (1977): Zur Grundlegung der Kollokationsmethode. Zeitschriftfur Vermessungswesen (ZfV), 102. Jahrgang(6):237–239.
Wolf, Helmut (1979a): Kollokation mit Hilfe des Gaußschen Algorithmus. Zeit-schrift fur Vermessungswesen (ZfV), 104. Jahrgang(1):13–19.

LITERATURVERZEICHNIS 219
Wolf, Helmut (1979b): Singulare Kovarianzen im Gauß-Helmert-Modell. Zeit-schrift fur Vermessungswesen (ZfV), 104. Jahrgang(10):437–442.
Wolf, Helmut (1980): Hypothesentests im Gauß-Helmert-Modell. AllgemeineVermessungs-Nachrichten (AVN), 87. Jahrgang(7):277–284.
Wolf, Helmut (1981): Multiquadratische Interpolation und Kollokation. Allge-meine Vermessungs-Nachrichten (AVN), 3(89-95).
Ziqiang, Ou (1990): Comparison of the Variance between L1 and L2 Estimation.Zeitschrift fur Vermessungswesen (ZfV), 115. Jahrgang(3):123–126.
Zurmuhl, Rudolf und Sigurd Falk (1984): Matrizen und ihre Anwendung, Bd. 1+ 2. Springer, Heidelberg.

Stichwortverzeichnis
Ahnlichkeitstransformation, 136
a posteriori, 6a priori, 5a priori Pradiktion, 205Abbruchkriterium, 85abhangige Variable, 172Abstandsgewicht, 152affine Transformation, 138
3D, 142, 147allgemeine kubische Spline, 163Anfelderung, 42Anschlusspunkt, 44Approximation, 157Ausgangskoordinatensystem, 135Ausgleichung
Allgemeinfall, 10bedingter Beobachtungen, 10, 15bedingter Beobachtungen mit Un-
bekannten, 10, 18direkter Beobachtungen, 14fiktive Beobachtungen, 17frei, 40funktionales Modell, 7, 8gezwangt, 43Hauptprobe, 13hierarchisch, 44iterativ, 14, 84lineare Verbesserungsgleichungen,
14linearisiertes funktionales Modell,
9stochastisches Modell, 18unter Anschlusszwang, 44vermittelnder Beobachtungen, 10,
11vermittelnder Beobachtungen mit
Bedingungsgleichungen, 11, 16zwangsfrei, 39
Ausreißertest, 71, 145Autokorrelationsfunktion, 118, 122
Autokovarianzfunktion, 118, 122, 172
Beobachtungsvektor, 7bivariater Scatter-Plot, 201Bjerhammar’sche Inverse, 29BLUE (Best Linear Unbiased Estima-
tor), 202Box-Plot, 197Bruchpunkt, 108, 113Bursa-Wolf-Modell, 141
datenrobust, 94Datum
Bedingung, 41geodatisches, 25, 26
datumsbestimmende Informationen, 35Datumsdefekt, 34datumsfreie Informationen, 35Deformationsanalyse, 123
absolute, 124mehrere Epochen, 132relative, 124strenge, 124
Designmatrix, 9, 173durchschnittlicher Eigenwert, 62durchschnittlicher Einfluss eines Beob-
achtungsfehlers, 72
Effizienz, 98, 108Einflussfaktor, 72Einflussfunktion, 99, 104, 108Einflussgroße, 172Einflussvektor, 73ergodischer Prozess, 120Erhaltensneigung, 176Erhaltungstendenz, 118Erwartungsfunktion, 117Erwartungstreue, 91, 98Erwartungswert, 117explorative Datenanalyse, 197Extrapolation, 155
220

STICHWORTVERZEICHNIS 221
Fehlergrobe, 91
Fehlerellipse, 53Helmert, 55, 56relativ, 53, 59
freie Datumsparameter, 34
Gauß’sche Verlustfunktion, 101Gauß’scher Prozess, 120Genauigkeit, 52
a priori, 64global, 53, 60
Geometrielokale, 25
Geostatistik, 116, 187gewohnliches Kriging, 204Gewicht, 6Gewichtskoeffizient, 7Gewichtsreziproke, 7Gewichtsreziprokenprobe nach Asermet,
20gezwangte Ausgleichung, 43glatte zweidimensionale Kurvendarstel-
lung, 165globale Genauigkeitsmaße, 53globaler Kongruenztest, 126, 129
unterschiedliche Konfigurationen,130
GPS, 147GPS-Koordinate, 37GPS-Vektor, 37grobe Fehler, 91Grundgesamtheit, 116
Hat-Matrix, 110Hauptkomponentenanalyse, 63Hebelbeobachtung, 109Hebelpunkt, 109Helmert’sche Fehlerellipse, 55, 56Helmert’scher Punktfehler, 58, 144
durchschnittlicher, 62Helmert-Transformation, 41
2D, 136, 1433D, 139, 146
Histogramm, 197Homogenitat, 62, 192hybride Minimumsfunktion, 48Hypothesentest, 126
idempotent, 110
implizite Hypothesenformulierung, 130Interpolation, 155, 157, 179
inverse distance weighted, 166multiquadratische, 153nach kleinsten Quadraten, 168Polynom-, 158Spline-, 158statistische, 167
interquartiler Bereich, 189intrinsische Stationaritat, 191Isotropie, 62, 192
Klaffungsanteil, 132kleinste Kornung, 193Kofaktor, 7, 64
a posteriori, 19Kofaktorfortpflanzungsgesetz, 18Kofaktormatrix, 7Kollokation, 153, 177, 202
Anwendung, 182Konfidenzellipse, 53, 60
relativ, 53, 60Konfidenzhyperellipsoid, 61Konfigurationsdefekt, 27konforme Transformation, 136Kongruenztest, 125Konsistenz, 97Korrelatenvektor, 10Korrelationsfunktion, 118Korrelationslange, 176Korrelationsweite, 194Korrelogramm, 196Kovarianz, 64Kovarianzfunktion, 118, 121, 169, 176
exponentieller Ansatz, 177Form, 177Gauß, 170Hirvonen, 170linearer Ansatz, 177periodischer Ansatz, 177
Kovarianzmatrix, 6Kovariogramm, 196Kreuzkorrelationsfunktion, 119, 122Kreuzkovarianzfunktion, 119, 121Kriging, 202
gewohnliches, 204ordinary, 204simple, 203universal, 206
Kriging Varianz, 205

222 STICHWORTVERZEICHNIS
Kriterium von Abbe, 120
L-Schatzer, 105L1-Norm-Schatzung, 107L2-Norm-Schatzung, 107Landesvermessung, 49Least Median Square (LMS), 114lineare Regression, 173linearer Hypothesentest, 126lokale Geometrie, 25Lokalisierung, 125, 131Ls-Norm-Schatzer, 106
M-Schatzer, 104Maßstab, 26, 36maschenweise Affin-Transformation, 151Matrix
generalisierte Inverse, 29maximaler Einflussvektor, 73Median, 189Messgenauigkeit, 193Methode der kleinsten Quadrate, 5Methode der maximalen Klaffungsan-
teile, 132Microscale Effect, 193Mittelwertfunktion, 117mittlere Klaffung, 144mittlere Koordinatengenauigkeit, 53, 62Modellmatrix, 9modellrobust, 94Momente einer Verteilung, 189multiquadratische Interpolation, 153
NaherungskoordinatenBestimmung, 83
Nabla, 69nachbarschaftstreue Anpassung, 151Netz
innere Geometrie, 25, 44Netzkonfiguration, 125Netzverformung, 72Nichtzentralitatsparameter, 71noise, 177, 178Normalgleichung, 12Normalgleichungsmatrix, 12Normalgleichungssystem, 103, 180Nugget, 193Nugget Effekt, 193, 205
Optimierung, 63
ordinary Kriging, 204Ordnungsstatistik, 105Orientierung, 37
Parametervektor, 8periodische kubische Spline, 165polynomiale Transformation, 139Polynominterpolation, 158Pradiktion, 157, 179
a priori, 205deterministische, 152Einfluss des Nugget Effekts, 205optimale raumliche lineare, 202stochastische lineare, 169, 172Verlustfunktion, 203
Pradiktionsfehler, 206Pradiktionsvarianz, 169Pradiktor, 203Projektionsmatrix, 110Psi-Funktion, 103, 104, 106Punktlagefehler, 53, 58
Helmert, 58, 144Werkmeister, 58
Punktschatzung, 202
Qualitat, 51der Realisierung, 52des Entwurfes, 52
Quantile, 189
raumlicher Prozess, 190Rangdefizit, 28Range, 194Rauschen, 119, 177, 178Redundanz, 5, 11Redundanzanteil, 66, 110Regression, 171, 178
lineare, 173multiple, 175negative lineare, 174nichtlineare, 175positive lineare, 174
Regression to mediocrity, 172Regressionsgerade, 173Regressionskoeffizient, 174Reichweite, 194Residuen, 173resistent, 108robust, 108robuste Schatzung, 91, 94

STICHWORTVERZEICHNIS 223
robuste Transformation, 148Rotationsmatrix
2D, 1373D, 141
S-Transformation, 44Schatzfunktion, 97, 102
Effizienz, 98Erwartungstreue, 98Konsistenz, 97Suffizienz, 98
Schrittweite, 117Schwellenwert, 194Sensibilitatskurve, 99Signal, 119, 177, 178Sill, 194Simple Kriging, 203Simulated Annealing, 73Spektralzerlegung, 32Spline, 158
allgemeine kubische, 163naturliche kubische, 158, 160periodische kubische, 165Verallgemeinerung, 160
Spurkriterium, 61Storverteilung, 101Stutzstelle, 156Stutzwert, 156Stamm-und-Blatt Darstellung, 197Stammverteilung, 101Standard-Ellipse, 56Standardabweichung, 53, 54stationarer Prozess, 119Stationaritat, 191, 197Stichprobe, 116stochastische lineare Pradiktion, 169stochastische Ringinverse, 30stochastischer Prozess, 116, 172stochastisches Modell, 101Streuungsband, 118Suffizienz, 98
Transformation, 135affine, 138
3D, 142, 147Bursa-Wolf-Modell, 141GPS-Datensatze, 147Helmert, 41maschenweise Affin-, 151nach Helmert
2D, 136, 1433D, 139, 146
polynomiale, 139Qualitat, 144robuste, 148
Trend, 177, 178Trennfahigkeit, 94tridiagonale Matrix, 162
unabhangige Variable, 172Universal Kriging, 206
Varianz, 117Varianz der Gewichtseinheit, 7, 22Varianzfaktor, 7varianzfreie Berechnungsbasis, 40Varianzfunktion, 118Varianzkriterium, 61Variogramm, 192
anisotrope Modelle, 196exponentielles Modell, 195lineares Modell, 194Potenz-Modell, 196rational-quadratisches Modell, 196spharisches Modell, 195Wellen-Modell, 196
Verbesserungstandardisiert, 66
Verbesserungen, 12Verbesserungsgleichung, 12Verbesserungsgleichungen
Linearisierung, 84Verlustfunktion, 100, 102, 106Verteilung
empirische, 99verteilungsrobust, 94
wahrer Wert, 7Wahrscheinlichkeit, 91Werkmeister’scher Punktfehler, 58WGS84, 34, 37Widerspruchsvektor, 8Wiener-Kolmogoroff-Filter, 182
Zeitreihe, 115zeitvariater stochastischer Prozess, 116Zielgroße, 172Zielkoordinatensystem, 135Zufallsfeld
Varianz, 193

224 STICHWORTVERZEICHNIS
Zufallskriterium von Cornu, 120Zufallsprozess, 115, 187, 190Zufallsvariable, 190
Realisierung, 190regionalisierte, 190
Zusatzparameter, 36Zuverlassigkeit, 52, 64
außere, 72innere, 71lokal, 71
zwangsfreie Lagerung, 39