12 13
AUTOMATISIERUNG AUTOMATISIERUNG
12 13
AUTOMATISIERUNG AUTOMATISIERUNG
12
AUTOMATISIERUNGAUTOMATISIERUNG
AUTOMATISIERTES FAHREN ALS MASSNAHME ZUR REDUKTION DES
ENERGIEVERBRAUCHS IM REALBETRIEB FEV BERECHNET DEN EINFLUSS VON
FAHRSTRATEGIEN HOCHAUTOMATISIERTER FAHRZEUGE UND
ANWENDUNGSSPEZIFISCH OPTIMIERTEN ANTRIEBSSTRÄNGEN AUF DEN
ENERGIEVERBRAUCH
Auch bei stark elektrifizierten oder sogar reinelektrischen
Fahrzeugen besteht weiteres Potenzial, den Energieverbrauch im
Realbetrieb zu senken. Die Automatisierung erweist sich dabei als
eine attraktive Maßnahme. Hierzu hat FEV eine umfangreiche Studie
angelegt und Einsparpotenziale für verschiedene Fahrzeugkonzepte
berechnet und mögliche Umsetzungsstrategien zusammen mit AImotive
beschrieben.
AUTOMATISIERUNG
01 SMART VEHICLE UND SMART MOBILITY
Bereits heute werden unterschied-liche Maßnahmen genutzt, um
Verbrauchseinsparungen im Re-albetrieb zu erzielen: So leiten
beispielsweise Eco-Fahr-Systeme den Fahrer zu einer ökonomischeren
Fahr-weise an, oder aktuelle Verkehrs- und Routeninformationen
werden genutzt, um die Streckenführung sowie die Be-triebsstrategie
des Antriebsstrangs zu optimieren.
Der zunehmende Grad der Automatisie-rung und Vernetzung wird es
ermöglichen, den Fahrer zunehmend aus dem Regel-kreis zu nehmen,
wodurch die Prädizier-barkeit und damit die zu erwartenden
Energieeinsparungen im Realbetrieb steigen. Die Potentiale setzen
sich dabei aus zwei Teilen zusammen:
1Die anwendungsspezifische Aus-legung des Antriebsstrangs, die
sich aus auf den konkreten Anwen-dungszweck optimierten
Fahrzeugkon-zepten ergeben
2Die aus der Automatisierung resul-tierenden optimierten
Fahrstrate-gien; d.h. aus der Anpassung des Fahrprofils und der
Optimierung der Betriebsstrategie des Antriebs
Potentiale in der Antriebsstrang- und Komponentenauslegung durch
anwendungs-spezifische DimensionierungEine aktuelle Umfrage von FEV
zeigt: Für hochautomatisierte Fahrzeuge verlieren
performanceorientierte Eigenscha� en wie Motorleistung oder
Beschleunigungs-vermögen an Bedeutung, während die
Komfortanforderungen aufgrund der sich ändernden Nutzung und
Aktivität inner-halb des Fahrzeugs weiter an Wichtigkeit
zunehmen.
Dadurch kann der Antriebsstrang mit der Auslegung seiner
Komponenten für an-wendungsspezifische Fahrzeugkonzepte optimiert
werden, was Energieeinsparpo-tentiale ermöglicht.
13
Prognostizierte Energieeinsparpotentiale im Realbetrieb
Im Rahmen der Studie hat FEV Einsparpo-tentiale für drei
verschiedene Fahrzeug-konzepte berechnet. Hierbei wurde ein
All-round- und ein dediziertes Stadtfahrzeug des SAE-Level 4
(Konzept 1 und 2) betrach-tet, die ihren Betrieb weitgehend im
auto-nomen Fahrmodus darstellen können. Außerdem wurde ein Fahrzeug
mit SAE Le-vel 3 Highway-Chauf-feur Funktion (Kon-zept 3)
analysiert. In den Konzepten 1 und 3 kommt ein Plug-In-Hybrid
An-triebsstrangkon-zept zur Anwendung während es sich bei Konzept 2
um ein batterieelektrisches Fahrzeug handelt. Auf Basis einer
statistischen Analyse der 12.000 reale Fahrzyklen zugrunde liegen,
wurde das Fahrprofil entsprechend dem Verhalten hochautomatisierter
Fahrzeuge angenä-hert und die entsprechenden Potentiale berechnet.
Dieser Simulation liegen fol-gende Prämissen zugrunde:
Stoppzeiten lassen sich mittels V2X-Konnektivität reduzieren Die
Prädiktion des Verkehrsflusses mittels Sensorik
Einordnung der betrachteten Fahrzeugkonzepte
SAE Level
Anforderungsprofil Optimierungspotential
Allround City Highway Antrieb Fahrstrategie
2
3 Konzept 3PHEV +4 Konzept 1PHEV
Konzept 2BEV + ++
5 ++ ++
BEV: Battery Electric Vehicle, PHEV: Plug-In Hybrid Electric
Vehicle
Kein signifikanter E� ekt
Signifikanter E� ekt+Sehr signifikanter E� ekt++
und Echtzeitkartendaten ermöglicht eine Glättung des
Geschwindigkeitsprofils, der au� retenden Beschleunigungen und
Maximalgeschwindigkeiten
Für das Allround-PHEV Konzept mit SAE Level 4
Automatisierungsgrad wurden An-passungen an den Antriebskomponenten
(inklusive Batterie) und eine Optimierung der Fahrstrategie
vorgenommen. Die kom-
binierte Leistung wurde um etwa 20 kW reduziert und die
Batteriekapazi-tät um 40 Prozent erhöht. Diese Maßnahmen senken,
unter Be-rücksichtigung der Utility-Faktor-An-passung, den Kra�
-sto� verbrauch um rund 43 Prozent, während gleichzei-tig der
Verbrauch an elektrischer Ener-gie um 12 Prozent
steigt. Die Einsparungen verteilen sich dabei zu etwa gleichen
Teilen auf die An-triebsoptimierungen sowie die optimierte
Fahrstrategie. Im Vergleich dazu kann für das Fahr-zeug mit
Highway-Chau� eur SAE Level 3 Funktion eine Einsparung von rund 7
Prozent an Kra� sto� und 3 Prozent an elektrischer Energie
realisiert werden. Das geringere Potential von Konzept 3 gegenüber
Konzept 1 geht auf zwei Fak-toren zurück: Die Optimierung der
Fahr-
FÜR ZULIEFERER ERGIBT SICH DIECHANCE SICH IM MARKT ALS
INNOVA-TIVER SYSTEM-LIEFERANT UND INTEGRATIONS-PARTNER FÜR
AUTOMATISIE-RUNGS-LÖSUNGEN ZU POSITIONIEREN
14 15
AUTOMATISIERUNG AUTOMATISIERUNG
14 15
AUTOMATISIERUNG AUTOMATISIERUNG
1514
AUTOMATISIERUNGAUTOMATISIERUNG01 SMART VEHICLE UND SMART
MOBILITY
strategie der Highway-Chau� eur Funktion erfolgt lediglich in
einem eingeschränkten Anwendungsbereich. Außerdem können die
Antriebskomponenten bei Konzepten mit niedrigerer
Automatisierungsstufe nicht angepasst werden, da im manuellen
Fahrbetrieb die gewohnte Performance für den Kunden abrufbar
bleiben muss.Für das Stadtfahrzeug (Konzept 2) er-geben sich
Einsparpotentiale von mehr als 10 Prozent. Das niedrigere Potential
resultiert hier aus dem vergleichs-weise geringem Gewicht des
klei-neren Fahrzeugs und dem reinelek-trischen Antrieb, welcher
gerin-gere Freiheits-grade und somit Optimierungs-potentiale in der
Betriebsstrategie gegenüber einem Hybridantrieb be-sitzt.
Notwendige Hardware und So� ware zur Realisierung der
Potentiale
Die betrachteten Fahrzeugkonzepte erfor-dern umfangreiche Hard-
und So� ware. Ein skalierbarer und kostene� izienter Ansatz für die
Umgebungsmodellierung besteht aus einer Kombination bildge-bender
Erkennungsverfahren mit wei-
teren Radarsensoren. Zusätzlich ist eine V2X-Konnektivität
erforderlich, die Auf-schluss über den Verkehrsfluss gibt und
mittels Vernetzung mit anderen Verkehr-steilnehmern die
Fahrstrategie für einen erweiterten Horizont optimiert. Für die
Lokalisierung und weitere Opti-mierung der Fahrstrategie sind
hochauf-lösende (HD) Karten notwendig. Während frühere Generationen
hochautomatisier-ter Fahrzeuge hauptsächlich auf LIDAR
basierte Karten zurückgegri� en haben, werden aktuell
konven-tionelle Karten erweitert durch Meta-Informati-on
(Fahrbahn-markierungen, Geschwindig-keitsbegren-zungen etc.) und
„Landmarks“ (charakteris-tische Umge-
bungspunkte) bevorzugt. Dies wurde durch erhebliche Fortschritte
in der bild-basierten Objekterkennung ermöglicht und reduziert die
benötigte Datenmenge für HD Karten erheblich. In Zukun� ist zu
erwarten, dass leistungsfähigere Algo-rithmen die Anzahl an
„Landmarks“ und damit auch die Anforderungen an eine
Da-tenverbindung weiter reduzieren werden. Dies wird jedoch mit
einer Steigerung der erforderlichen on-board Rechenleistung
einhergehen.
Hochautomatisierte Fahrzeuge müssen zudem eine besondere
Entscheidungs-fähigkeit besitzen. Aktuelle So� ware Kits,
beispielsweise des So� ware-Anbieters AImotive, tre� en
Fahrstrategieentschei-dungen in einer „Motion Engine“. Diese
besteht aus verschiedenen Modulen, darunter Fremdobjektverfolgung
und Prädiktion, Fahrbahnberechnung, Fahr-profilerstellung,
Trajektorienplanung und Befehlserstellung. Die
Fremdobjektverfolgung und Prädik-tion erfolgt durch die Detektion,
Lokali-sierung und Nachverfolgung über meh-rere Zeitintervalle, die
mit verschiedenen klassischen statistischen Methoden und
künstlicher Intelligenz gepaart werden. Da die Genauigkeit der
Prädiktion direkte Auswirkungen auf die Bewegungsplanung hat,
entscheidet die Kalibrierung dieser Parameter direkt über die
Einsparpoten-tiale des Antriebs.Bei der Trajektorienplanung wird
das aktuelle Szenario mittels heuristischer und vordefinierter
Regeln dynamisch adaptiert. Auch auf dieser Ebene lassen sich
Funktionen zur E� izienzsteigerung einbetten, was zu optimierten
Geschwin-digkeits-, Beschleunigungs- und Lenk-profilen für ein
determiniertes Manöver führt. Als Konsequenz der Optimierung
neuraler Netze (NN) umfasst dies auch eine Trajektorienglättung.Das
essenzielle Training der „Motion En-gine“ wird in einer
Simulationsumgebung durchgeführt, die auf einem Fahrzeugmo-dell und
realen physikalischen Dynamiken basiert. Die NN der Motion Engine
können
durch Adaptierung des Modells für spe-zifische Fahrzeuge,
Antriebsstränge und Funktionen optimiert werden. So können sogar
bestehende Betriebsstrategien durch relativ einfache Adaptierung
direkt in die Künstliche Intelligenz eingebettet werden.
Gesteigerter Energiebedarf des Bordnetzes durch automatisiertes
Fahren
Mit der zunehmenden Sensorik und Daten-verarbeitung steigt auch
der Energiever-brauch im Fahrzeug. Die Bordnetzlast kann bei
Ansätzen mit mehreren Kameras oder LIDAR-Sensoren auf 1 kW und mehr
anstei-gen. Für die Zukun� besteht hingegen die Chance durch neue
Chip-Architekturen den Energieverbrauch signifikant zu senken.
MIT DER AUTOMATI-SIERUNG UND KON-NEKTIVITÄT NIMMT DIE
PRÄDIZIERBAR-KEIT UND DAMIT DIE ZU ERWARTENDE ENERGIEEINSPARUNG
HOCHAUTOMATISIER-TER FAHRZEUGE IM REALBETRIEB ZU
Herausforderungen und Chancen für OEM und Zulieferer
Für Automobilhersteller liegt die Heraus-forderung in der
Auswahl erforderlicher Technologien sowie in der hohen Anzahl der
zu generierenden Testcases, um mit einer e� izienten Hard- und So�
wareaus-stattung die Grundlage zur Realisierung der Potentiale zu
scha� en. Auch in der Verifikation der funktionalen Sicherheit von
selbstlernenden automatisierten Sys-temen besteht eine weitere
Herausforde-rung. Mit zunehmendem Vernetzungsgrad entstehen zudem
weitere Angri� svekto-ren, die durch geeignete
IT-Sicherheits-mechanismen geschützt werden müssen. Für Zulieferer
ergibt sich die Chance, diese
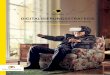
Übersicht der Simulationsergebnisse (links) und Verteilung des
Einsparpotentials beim Allround-PHEV
Trends früh zu erkennen und sich im Markt entsprechend als
innovativer Systemliefe-rant und Integrationspartner für
Automa-tisierungslösungen zu positionieren. So können durch die
Zusammenführung von So� ware- und Hardware-Komponenten neue
systemische Lösungen entstehen, die die Komplexität in
Entwicklungspro-jekten verringern und Synergien in der Validierung
scha� en.
Von:Denis Heckmann (FEV Consulting),
[email protected]
S. Tarnutzer (FEV North America)[email protected]
A. Takacs (AImotive)
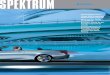
Funktionale Beschreibung des AImotive So� ware-Kits (©
AImotive)
Einordnung der betrachteten FahrzeugkonzepteGe
schw
indi
gkei
t / k
m/h
0
0 500 1000 1500
40
20
120
100
80
60
Zeit / s
Gesc
hwin
digk
eit /
km
/h
0
0 600400 1000
40
20
120
100
80
60
Zeit / s
Optimierte Fahrstrategie für Konzept 1 (SAE L4)Ausgangsbasis
Optimierte Fahrstrategie für Konzept 3 (SAE L3)Ausgangsbasis
-12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12
50
40
30
20
10
0
Siehe Detailabbildung
rechts
Reduktion Stromverbrauch [%]
Stro
mve
rbra
uch
[%]
Kra�
sto
� ver
brau
ch [%
]
ReduktionKra� sto� verbrauch [%] 100 %
100 %
Basis (L0/L1)
OptimierungAntrieb
OptimierungFahrstrategie
Konzept 1(Allround L4)
-21 %
20 % 112 %
-22 %
-8 %
57 %
57 %
Konzept 1 (Allround L4) Konzept 3 (Highway L3) Konzept 2 (City
L4)
- 43 %
+ 12 %
200 800
SensordatenfusionObjekterkennung und Identifizierung
Karten und Orientierungs-integrationRoutenplanung
Objektverfolgung und
PrädiktionFahrspurberechnungTrajektorienplanungEntscheidungsfindung
Steuerung von Aktuator und Nebenfunktionen
UMFELD-ERKENNUNG
LOKALISIERUNG BEWEGUNG STEUERUNG