Embed Size (px)
Citation preview

Baukasten für intelligente,sehende und fühlendeGreifer im OTS Einsatz
Fraunhofer InstitutProduktionstechnik undAutomatisierung
IPA

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 2Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Marktführend im BereichGreifsysteme
Weltgrößter Anbieter im BereichDehnspanntechnik
Weltgrößter Anbieter vonSpannbacken
Automationsmodule
WerkzeughalterStationäreSpannsysteme
Spannbacken Drehfutter
1.200 MitarbeiterWeltweit vertreten4 Fertigungsstätten120 Mio € Umsatz
Einige Worte zu Fa. SCHUNK

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 3Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Grundlagen der Greiftechnik
Greifertypen1) Zangen oder Backengreifer2) Mehr Gelenk - Fingergreifer3) Saug - Greifer4) Magnet - Greifer
Greifprinzipien1) Kraftschluss2) Formschluss
Greiferbackenführung1) Parallelgreifer2) Schwenkgreifer3) Mehrgelenkgreifer4) Sonstige Mechanismen
1 2 3 4
1 2
1 2 3 4

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 4Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Grundlagen der Greiftechnik
Die häufigsten Kraftübertragung
Direkt Spindel
Kullise Zahnstange Hebel
Riemen, Baudenzüge oder Seile

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 5Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Was sind die Funktionen / Aufgaben eines Greifers ?
Grundlagen der Greiftechnik
Grundfunktionen eines GreifersGreifen
Innengreifen (Teil wird durch Öffnen der Finger gespannt.)Aussengreifen
Kraftschluss (Greifkraft und Reibwert sind entscheidend.)Krafterhaltung (Feder oder Sperrventile)
Formschluss (Nur die Position der Finger ist entscheidend.) Positionserhaltung (Bremse oder Selbsthemmung)
Positionieren (vorpositionieren, um Taktzeit zu sparen oder Störkanten zu umgehen)
ÜberwachungsfunktionenPositionsüberwachungKraftüberwachungUmgebungsüberwachung
ZusatzfunktionenVermessenOptische Funktionen

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 6Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Greifertyp Hub[mm]
Zeit/Hub[sec]
Greifkraft[N]
Federsicherung[N]
Werkstückgewicht[Kg]
Eigengewicht[Kg]
MaxFingerlänge[m]
2 Fingerparallegreifer PGN50 8 0,02 140 70 0,7 0,17 642 Fingerparallegreifer PGN 300 70 0,5 6.000 3.000 30 14 3502 Fingerparallegreifer PFH 200 400 1 2.200 - 15 22 6002 Fingerparallegreifer MPG 20 4 0,03 28 - 0,14 0,038 203 Fingerzentrischgreifer PZN 200 50 1,2 18.000 4.000 35,5 15,7 250
PGN PZN
PFH
Grundlagen der GreiftechnikBeispiele aus der Praxis pneumatisch

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 7Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Grundlagen der GreiftechnikBeispiele aus der Praxis elektrisch
Greifertyp Hub[mm]
Zeit/Hub[sec]
Greifkraft[N]
Max.Temp.[°C]
Werkstückgewicht[Kg]
Eigengewicht[Kg]
MaxFingerlänge[m]
2 Fingerparallegreifer EGN 100 24 0,2 600 100 6 0,9 1502 Fingerparallegreifer PT AP 70 70 1 200 45 2 1,4 1402 Fingerparallegreifer MPGE 50 16 1 120 60 1,2 0,7 503 Fingerparallegreifer EZN 64 20 0,2 400 100 4 0,8 1503 Fingerwinkelgreifer CDG 50 2,4 0,01 21 40 0,1 0,25 10
MEG 50 EGN 100 PT AP 70

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 8Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Greifer für den OTS Einsatz
Personalbezogen•Einsatz des Greifers bei
•sicherer Abwesenheit von Personen
•sicherem Abstand zu Personen
•Übergabe von Werkstücken an den Greifer
•sicher freiem Greifraum
•Körperteilen im GreifraumGreifart bezogen
•Formschlüssiges GreifenPositionserhaltung verhindert den Verlust des Greifobjektes.Diese Modi ist bei Greifarbeiten über Kopf/Fuß von Menschen denkbar.Es kann mit sehr geringer Greifkraft gegriffen werden!
•Kraftschlüssiges GreifenDer Kontakt zwischen Greifer und Greifobjekt erfolgt im Kraftschluss -->Krafterhaltung verhindert den Verlust des Greifobjektes.Diese Modi ist bisher bei Greifern der häufigste!
Denkbare Szenarien

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 9Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Greifer für den OTS Einsatz
•Beladen des Greifers mit Werkstücken
•Führen des Roboters am Greifer (Greifer an die Hand nehmen = Teachen)
•Führen der Finger von Hand (Finger Positionieren = Teachen)
•Manipulieren am gegriffenem Werkstück (Roboter als Schraubstock)
•Gemeinsames Sortieren von Teilen durch Mensch und Roboter
•Eingreifen des Menschen in den Arbeitsraum von Roboter und Greifer
•Gemeinsames tragen von langen Bauteilen
•Führen des Menschen durch den Roboter ( Mensch an die Hand nehmen)
•Roboter als Hubbühne ( Mensch greifen und hochheben)
Spezielle Beispiele als Szenarien (extreme Beispiele in Kursiv)

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 10Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Greifer für den OTS EinsatzGefährdete Körperteile
Wenn sich ein Mitarbeiter und eine Komponente des Greifers den Arbeitsraumteilen, sind die folgenden Körperteile gefährdet:
Hand, Arm, Bauch, Kopf
GefährdungsartDie folgenden Gefährdungsarten wurden identifiziert:• Quetschen• Stossen, z. B. durch Öffnen oder Schließen der Backen• Abreißen von Hand oder Arm durch Bewegung des Roboters oder
durch Bewegung der Greiferbacken
• Gefahren ausgehend von der Greiferform (Nadeln, scharfe Kanten)
• Thermischer Einfluss (Überhitzung eines Elektro-Modules)
• Loslassen des zu greifenden Teiles oder Abfallen defekter Bauteiledurch Fehlprogrammierung/Beschleunigung

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 11Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Greifer für den OTS EinsatzSicherheitsbereiche aus Sicht eines Greifers
Für jeden der Bereiche sind definierte, systemabhängige Reaktionen zu erarbeiten. !!
Bereich 0 Kontakt mit den Finger des Greifers (Kapazitiv/DMS)
Bereich 1 Raum zwischen Finger (Kamera/ Kapazitiv)
Bereich 2 Kontakt mit dem Greifer (Kapazitiv/KraftMomentensensor)
Bereich 3 Nahumfeld des Greifers 50mm (Kamera /Kapazitiv)
Bereich 4 Fernumfeld des Greifers 500mm (Kamera/Sick-Sensor)

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 12Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Greifer für den OTS Einsatz
Daraus resultierende Aufgabenstellung für Greifer im OTS Einsatz
1. ‚Sichere‘ sensorische Abdeckung der Bereich
3. Kompakte Bauweise
4. Vertretbarer Preis oder : zusätzlicher wirtschaftlicher Nutzen der Sensorik
2. ‚Sicheres‘ Abschalten der Aktorik im Notfall, bei Erhaltung der Greiffunktion!
Die Punkte 1 & 2 stehen im Gegensatz zu den Punkten 3 & 4 !
Mit dem heutigen Stand der Technik dürfte es unmöglich sein,allen Aufgaben gerecht zu werden!

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 13Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Greifer für den OTS EinsatzDer Lösungsansatz
Konzept :Alle Informationen werden mittels zweier unterschiedlicher physikalischen Effekte, mitzwei Sensoren getrennt erfaßt und getrennt zu einer sicheren Steuerung übertragen.Dort erfolgt eine Plausibilitätsprüfung
Alle Aktionen werden mittels eines Haupt-Aktor ausgeführt und können bei Gefahr oderPlausibilitätsabweichung in einer sicheren Steuerung, mittels eines sicheren Hilf -Aktor durch die sichere Steuerung gestoppt werden.
3. Keinen sicheren Greifer, sondern ein sicheres Robotersystem, inklusive Greifer !
2. Keine sichere Sensorik, sondern ausreichende Redundanz
1. Keine sichere Aktorik, aber eine sichere Stillegung und Positionserhaltung im Fehlerfall

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 14Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
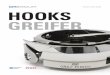
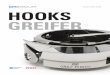
Ein Ausführungsbeispiel der Fa. Schunk
Kraftmessung:Kraftmessfinger
Greifraumüberwachung:Integrierte Kamera - Optik
Kraftmessung:Strommesung vom
Servomotor
Positionserfassungmittels
Analogmeßsystems
Umgebungsüberwachung:Taktiler Hautsensor
und externe Kamera
Positionserfassungmittels Resolver
Greifraumüberwachung:AbstandsensorikKapazitive Sensorik

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 15Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Ein Ausführungsbeispiel der Fa. Schunk
Greifkraftüberwachung:
Der Antrieb des Greifers ist ein BLDC Servomotor.--> die Greifkraft ist proportional zum Motorstrom
--> Indirekte Greifkraftmessung
Direkte Greifkraftmessung mittels eines neuen Messsystems : FMS
Die Auf die Finger einwirkende Kraft wirdmittels eins speziellen Fingeradapters direktgemessen. Auflösungen im Bereich von 1Nsind problemlos möglich !--> Jeder Kontakt wird sofort erkannt!
Hoher wirtschaftlicher Nutzen und kompakteBauweise bei hinreichender Sicherheit durchRedundanz wurde erreicht !

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 16Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Ein Ausführungsbeispiel der Fa. Schunk
Positionsüberwachung:
Der Antriebstrang des Greifers enthält einen Resolver. --> die Motorumdrehungen sind proportional zur Fingerposition
--> Indirekte Messung der Fingerposition
Direkte Messung der Fingerposition mittels eines neuen Systems: APS
Die Position der Finger wird mittels einesDifferenzdrosselprinzips mit einer Genauigkeitvon wenigen µ erkannt.--> Jede Fingerbewegung wird sofort erkannt!
Hoher wirtschaftlicher Nutzen und kompakteBauweise bei hinreichender Sicherheit durchRedundanz wurde erreicht !

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 17Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Ein Ausführungsbeispiel der Fa. Schunk
Umgebungsüberwachung:
Der Greifer soll an markanten Stellen einen digitalenkapazitiven Weitbereichssensor in Folienform erhalten,welcher sich der Umgebung anpasst, also nur auf unerwarteteVeränderung der Umgebung reagiert.Die Auswerteeinheit wird redundant ausgeführt und abgesetzt,z.B. am Roboterarm angebracht sein.
Mittels einer externen Kamera, welche den Roboter von oben imBlick behält, ist ein Plausibilitätsübehrwachung der kapazitivenSensoren zu erwarten. Die Prüfung müsste Zyklisch erfolgen, z.B.durch Annäherung des Sensors an eine Prüfstelle ....

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 18Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Ein Ausführungsbeispiel der Fa. Schunk
Greifraumüberwachung:
Greifraumüberwachung mittels Optik und speziellen Greiferfingern
Die Greiferfinger sollen an markanten Stellen einen digitalen kapazitivenNahbereichssensor in Folienform erhalten, welcher sich derFingerposition anpasst, also nur auf unerwartete Veränderung derUmgebung reagiert.Die Auswerteeinheit wird redundant ausgeführt und abgesetzt, z.B. amRoboterarm angebracht sein.

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 19Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Die Fa. Vision Control
Die Vision Control ist Hersteller von Komponenten für die industrielleBildverarbeitung seit 1990
VICOTAR ® PICTOR® VICOSYS® VICOLUX®
Objektive Bildverarbeitungssysteme Beleuchtungen

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 20Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS EinsatzDie Bildverarbeitungskomponenten
Der bildverarbeitende Teil des Baukastens besteht aus mechanischkompakten und aufeinander abgestimmten Komponenten
Ø digitale Kameras /Smartkameras zur Montage am/im Greifer
Ø Optiken und Filter
Ø LED-Beleuchtungen , Laser...
Ø Software zur Prozesssteuerung

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 21Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Beispiele der Fa. Vision ControlGreifraumüberwachung mit Kamera/Smartkamera istnur sinnvoll mit zusätzlichem wirtschaftlichen Nutzen
•Sicherheitstechnischer Aspekt:
Ø ‚optische‘ Rückmeldungen : „wirklich gegriffen"„Greifraum frei“
(Kombination mit Informationen der Kraftmesseinrichtung / kapazitivem Sensor)
•Zusätzlicher Nutzen:
Ø Ermittlung der Greifposition während des Greifvorganges (Prozesszeit)
Ø mittig greifen (Belastung des Greifers) Ø Qualitätssicherung (Mess-und Prüfaufgaben)

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 22Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Beispiel für Greifraumüberwachung
USB2.0-Kamera undLED Auflichtbeleuchtung
Kraft-Sensoren
Linienlaser im Greiferfingermit Strahlumlenkung
ProduktangepassteGreiffinger

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 23Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Beispiel für Greifraumüberwachung
Kamera und LED-Beleuchtung
zwischen den Greiferfingern
Die Greiferfinger besitzen an der Innenseite einMuster, dass im Normalfall nicht gestört ist.
Ein Objekt im Greifraum stört das Muster
Die Bildverarbeitung erkennt die Störung des Musters
Überwachung des Raumes zwischen den Greiferfingern

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 24Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Beispiele der Fa. Vision Control
Überwachung des Nahumfeldes vor den Greiferfingern mit Laserlinie
Die Laserlinie wird erst dann im Bildfeldsichtbar, wenn sich ein Objekt in einemdefinierten Abständen vor dem Greiferfingerbefindet.
Die Form der Laserlinie hängt vom Objekt ab

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 25Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS EinsatzBeleuchtung und Fremdlichteinfluß
Kamerabild bei direkter Einstrahlung mit Halogenlicht links ohne Filter, rechts mit angepasstem Filter
Beleuchtung und Fremdlicht beeinflussen die Erkennungssicherheit
Beleuchtung des Objekts mit blauer LED-Beleuchtung links ohne Filter, rechts mit angepasstem Filter

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 26Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS EinsatzBildverarbeitungsbaugruppen
USB2.0 Smartkamera mit FPGA
(25mmx25mmx50mm)Smart-Kamera mit DSP
(43mmx 43mm x 45mm) ASIC:Smartkamera on Chip
(Chip im Testgehäuse)
OEM-Bildverarbeitungsbaugruppen für Greiferkameras

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 27Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Greifraumüberwachung mit Kamera
Digitale Kamera/Smartkamera zwischenden Greiferfingern
Bildverarbeitung als zusätzliche Sensorik erhöht die Sicherheit(Redundanz)
Greiferfinger
Fingerkraft-sensoren
Koppel- bzw.Wechselmodul
KMS-Modul
Flächensensormodul („Haut“)
Fingerpositionssensor
Smartkamera und Beleuchtung
am Greifer oder Roboter
Greiferantrieb

Datum: 04.10.05 Ersteller: Fellhauer / Dr. MaschottaFolie 28Greifer für den OTS Einsatz
Baukasten für intelligente, sehendeund fühlende Greifer im OTS Einsatz
Vielen Dank