Embed Size (px)
Citation preview
Bemerkungen zum Riesz-Fischerschen Satz und Ergodentheorie.
Voa C. CARATHI~ODORY in Milnchen.
ZUI"
Seinera Freunde G. Herglotz zura 60. Geburtstag.
1. Ziel der Untersuchung. Eine natnrliohe Gliederung des Integral- begriffs. Fiir die Si~tze der Integralreebnung kOnnen 6fters versehiedene Beweise gegeben werden, welche bei der Algebraisierung des Integral- begriffs nicht immer denselben Gfiltigkeitsbereieh besitzen. Es entsteht somit das Problem, in jedem einzelnen Falle Beweise aufzustellen, welehe den mtiglichst ausgedehnten Anwendungsbereich haben. Nach diesen Prinzipien sollen auf den folgenden Seiten der RIEsz-FIsc~nsche Satz und die Hauptsi~tze tier Ergodentheorie untersucht werden.
Zuerst miissen wir aber erklaren, was wir unter der Formel
0.1) ~(X) = f fd~ x
verstehen, und wie man solche lntegrale auf natfirliche Weise klassi- fizieren kann.
2. In der Formel (1.1) bedeutet das Zeichen X ein Element einer BOOLEschen Algebra, bei welcher die ,,Vereinigung" yon abzahlbar unendlich vielen Elementen immer existiert. Ein solches Element babe ich in frfiheren Arbeiten ein Sama genanntl); diese kurze Bezeiehnung ist sehr bequem, besonders weil man rait ihrer Hilfe fiir Be~riffe, welche in unserer Theorie immer wieder vorkommen, leichtversti~ndliche Benennungen schaffen kann.
Die Operation der ,,Summe" in einer BOoLEschen Algebra wird yon den raeisten Autoren nine ,,symmetrische "Differenz" genannt und sogar yon manchen unter ihnen mit dera Zeichen (A--B) dargestellt. Wieder andere Autoren schreiben A--B ftir die Operation A--AB, wodureh eine gewisse Verwirrung entsteht. Es ist deshalb besser, ein eigenes Zeiehen ffir die ,Sumrae" zu benutzen. Wir werden ira folgenden
I) C. CARATH~ODORY, Entwurf ftir nine Algebraisierung des Integralbegri'ffs. Sitzungsber. d. Bayer. Akad. d. Wiss. 1938, S. 27--68. Vgl. auch F. WECK~N, hbstrakte Integrale und fastperiodische Funktionen, Math. Ztschr., Bd. 45 (1939), S. 377--404/, ulld J. RIDDER, Mg~- und Iategraltheorie in Strukturen, Aeta Math., Bd. 73 (1941)~ S. 131--171; in jeder dieser hrbeiten wird weitere Literatur angegeben.
352 C. CaratModory.
diese Operation mit A + B
bezeielmen und sie nicht die ,,symmetrisehe Differenz" und auch nicht die ,.Summe", sondern die Verbindung der beiden Somen A und B nennen. Die Operation der Verbindung soll nun eine ABELsche Gruppe erzeugen, deren Einselement das leere Soma genannt und mit O bezeichnet wird, so da~ far alte Somen A die Gleichung
A + O - - A besteht.
Das Resultat A B der Produktoperation in unserer B00LESCheu Algebra wird der Durchsch~itt der beiden Somen A und B genannt. Die beiden 0perationen der Verbindt~ng und des Durchschnitts erzengen einen Ring, und man hat immer
A O = O .
Die Eigenschaft, durch welche eine beliebige Algebra als BOOLESChe eharakterisiert wird, wird durch die Gleichung
(2.1) AA ---- A
ausgedrtickt. Daraus folgert man dann die Richtigkeit der Gleichungen')
(2.2) A B = B A , A+. A = O.
Die Somen werden teilweise geordnet, wenn man festsetzt, daft die beiden Relationen (2.3) B ~ A , AB = B
die gleiehe Bedeutung haben sollen. Es zeigt sich dann, da~ das Soma
(2.4) V = A + B + . A B
dureh folgende Eigensehaften eharakterisiert wird:
A C V , B c V (2.5) = =
aus A ~ W u n d B ~ l V f o ] g t V c W .
Das Soma V ist also das kleinste Soma, yon dem A und B gleich- zeitig Teile sind; es wird die Verei,ni.qu~.q yon A und B genannt uud
2) Aus A + B ~ - ( A + B ) ( A ~ B ) ~ ( A � 8 9 .~BA) erhiilt man niimlich
A B + B A = O . FOr A - - - B folgt hieraus A + A = O . Endlich ist
A B = A B + O = A B t (AB ~ B A ) = ( A B + . .4B) . + B A ~ B A .

Riesz-Fiseherscher Satz und Ergodentheorie. 353
mit Hilfe des Symbols
(2.6) V = A 4 B bezeichnet.
Zwei Somen A und B werden fremd genannt, falls
(2.7) A B = 0
ist; wit schreiben dann (2.8) A o B.
Ftir fremde Somen gilt die Gleichung
(2.9) A-~ B = A + B
und aus (2.9)folgt (2.8). Falls (2.8) gilt (und nur dann), sprechen wir yon der Summe der" beiden Somen, welche wir mit
(2.10) A - t -B bezeichnen.
Es ist auch bequem, das Minuszeichen einzufiihren und yon der Differenz A - B yon zwei Somen zu reden. Wir verlangen aber aus- drficklich, dab in diesem Falle aus A - - B = G folgt A = B q- C. Es mug also B C = 0 und daher auch A B ~--- B , d. h. B ~ A sein. Man hat also immer
A . + B = A - - B , falls A B = B i s t ,
(2.11) A +. B = A + B , ,, A B ~ 0 ,,.
Ffir Somen soll, wie wir sehon bemerkten, aueh die Vereinigung
3
yon abziihlbar unendlich vielen Somen vorhanden sein. dat~ dann auch immer der Durehschnitt
Man beweist,
(2.13) D ~--- H Aj J
yon abzahlbar unendlieh vielen Somen existiert. 3. Eine Menge 9.l yon Somen bildet einen Somenring, wenn aus
A E 92, B E 92 folgt A + B E 92 und A B E 92. Es ist dann aueh j'eden- falls A ~- B E 92 und (A - - A B ) E 92. Ist augerdem ftir abzithlbar unend- lieh viele Somen Aj E 92 immer
92, 3
so soll 92 ein vollkommener Somenring genannt werden.
3 5 4 C. Carath6odory.
Ein Somenring wird vollstiindig genannt, falls aus A E 92 und B c A folgt B E 92. Ein vollkommener und vollsti~ndiger Somenring ist ein 1deal.
Wird ein vollkommener Somenring 92 durch die Gleichung
(3.2) X ' -~ aX (XE 92)
eindeutig auf eine Menge 92' von Somen Idesselben oder eines anderen Systems abgebildet, so ist diese Abbildung eine Homomorphie, wenn folgende Aussagen bestehen
(3.3) aus A) E92 und A =- . ~ - A j folgt A ' = . ~ - ~ A j ,
3 J
,, A o B folgt A 'oB' .
Bei Hombmorphien ist 92' auch ein vollkommener Somenring und die Menge ~ der Somen aus 92, welehe auf das leere Soma 0' abgebildet werden, ist ein Ideal. Umgekehrt kann man sieh ein be]iebiges Ideal yon 92 vorgeben und die Somen irgendeiner Homomorphie (3.2), bei welcher 9~ in O' transformiert wird, kOnnen als Restklassen mod 9~ gedeutet werden.
4. Wir kehren zur Deutung des Integrals (1.1) zurtick. Hierin bedeutet das Zeiehen f eine Ortsfunktion, welche fiir den Fall, da$ die Somen X gew0hnliche Punktmengen bedeuten, durch eine Punktfunktion f ( P ) ersetzt wird. Die einfachsten 0rtsfunktionen sind die endlich- wertigen~ welche folgendermafien erklart werden.
Wir betrachten den vollkommenen Somenring, der aus allen Tefl- somen X ~ M eines festen Somas M besteht. Jedem einzelnen Soma M~, M~, . . . , M~ einer Zerlegung
(4.1) M : M~+M~+ . . . -4- M~
des Somas M in endlich viele, paarweise fremde, nicht leere Somen ordnen wir eine Zahl yj (j~---1, 2 , . - . , p) zu. Durch diese Zuordnung entsteht eine endlichwertige 0rtsfunktion, welche wir symbolisch durch die Gleichung
(4.2) f = ~ y~ ~' j = 1
darsteUen. Diese Darstellung soll aber auf verschiedene Weisen realisier- bar sein. Wird durch die Gleichung
---:- M1 + M ~ + + M q (4.3) M " " . . . "
Riesz-Fischerscher Satz und Ergodentheorie. 355
eine zweite beliebige, der ersten analbge Zerlegung yon M gegeben, so soll f auch durch die Gleichung
(4.4) f = ,d~'yj(Mj M/~') j,k
dargestellt werden. Hierbei bedeutet der Akzent am Summenzeichen, dal3 nur solche Kombinationen tier Summationsbuehstaben j, k beriick- siehtigt werden sollen, fiir welche (Mr M~ ~) nicht leer ist.
Mit endlichwertigen 0rtsfunktionen kann man ebenso wie mit gew6hnlichen Zahlen rechnen, wenn man die Rechenoperationen durch folgende Formeln erkli~rt:
{ f ' ~-.~, ya Mj ', f " .~ z,. "*'" j ~ ' __ k
(4.5/ f ' ! f " = (yj -4- &) (Mj M{~'), j ,k
f ' f " ---~ X~' Yj zk (Mj M~'). j,k
Ist fiir alle Kombinationen der Indizes ], k, ffir welehe .I~'M/~' 4:0 ist, stets yj~zk, SO sehreibe man aui}erdem
(4.6) f ' ~ f " .
Eine 0rtsfunktion, welche konstant gleich einer Zahl a ist, werde mit a bezeichnet, so daft auch Relationen der Gestalt
(4.7) f'_>_ 0,. f"__< einen Sinn haben.
Wir betraehten nun D~DF_aalVDsche Schnitte {h}, {g} yon endlieh- wertigen Ortsfanktionen, d. h. beliebige Mengen solcher Funktionen, ftir welche gilt
a) aus h ({h} und g ( {g} folgt h ~ g ,
b) jeder positiven Zahl ~ > 0 kann man mindestens ein h aus {h} und ein g aus {g } zuordnen, fiir welehe
g - - h ~ e ist. Die D~D~KmDSehen Schnitte werden dazu benutzt, um die all-
gemeinsten, beschrankten 0rtsftmktionen zu definieren. Jedem Schnitt {h}, {g} wird eine 0rtsfunktion f zugeordnet. Sind f ' und f " zwei 0rtsfunktionen, welche durch die Schnitte {h'}, {g'} bzw. {h"}, {g"} gegeben werden, so soU dann und nur dann f ' ~ J " sein, wenn immer h' <: g" aus h'E{h'}, g"E{g"} folgt. Ferner soil dann und nur dann
356 C. Carath6odory.
f'-~-~ f " gesetzt werden, wenn gleiehzeitig f ' ~ f " und f " ~ f ' ist. Aus diesen Prinzipien kann man das Rechnen mit beliebigen, beschrAnkten 0rtsfunktionen ebenso begriinden wie das Rechnen mit reellen Zahlen, wenn man diese aus den rationalen mit Hilfe yon DEDEKINOSChen Schnitten definiert.
Dasselbe gilt fiir die allgemeinsten Ortsfunktionefi, welche man nach Zerlegung yon M in abziihlbar unendlich viele, paarweise fa-emde Somen M; dadurch erhMt, dal~ man f auf jedem dieser Mj gleieh einer beschriinkten Ortsfunktion oder gleich einer der Konstanten -4-zc setzt.
5. Wir betrachten wieder die endlichwertige Ortsfunktion (4.2) sowie ein beliebiges Soma X c M. Unter den Zahlen yi, fiir welche der Durchschnitt XMj yon X mit dem zugeordneten Mj nicht leer ist, bestimmen wit die kleinste, die wir mit u (~), und die gr0gte, die wit mit ~(X) bezeichnen. Wir erhalten auf diese Weise zwei Somenfunktionen, welche wir als die untere und die obere Grenze yon f auf X bezeichnen. Es ist nicht schwer iihnliche Begriffsbildungen auch ffir die allgemeinsten Ortsfunktionen aufzustellen.
Unter den vielen Relationen, welche beim Rechnen mit Ortsfunk- tionen zwischen diesen unteren und oberen Grenzea bestehen, heben wir eine hervor, welche wit im folgenden benutzen werden: es sei
= ,)r + f ; (5.1) f " "
dann gilt fill" jedes Soma X ~ 31 die Relation
(5.2) . (x) < ~' (x) + . " (x).
8. Die 0rtsfunktionen k6nnen auch mit Hilfe yon Somenskalen berechnet werden. Hiermit bezeichnen wir Seharen von Somen S(y), welche von einem Parameter y (-- ~c < y < + Qc) abhangen und welehe die Eigenschaft haben, daft immer mit y < z
(6.1) S(y) ~ S(z) ~ M sein soll.
Es ist miiglich jeder Somenskala S(y) eine 0rtsfunktion f zuzu- ordnen, welche eindeutig durch folgende Forderungen bestimmt ist: fth' jedes Soma X c M i s t die untere Grenze a (X) yon f auf X gleich der oberen Gi, enze der Wertc yon y, ffir welche X o S(y) ist. Dann ist aueh ~(X) gleieh der unteren Grenze aller Werte yon y, fiir welehe X ~ S(y) ist.
Werden auf diese Weise den Somenskalen S(y) und T(y) die Orts- funktionen f bzw. g zugeordnet, so ist dann und nur dann g ~,.1'i wenn
Riesz-Fischerscher Satz und Ergodentheorie. 357
stets mit y < z die Relation
(6.2) S(y) ~ T(z) besteht.
Eine uud dieselbe Ortsfunktion kann somit durch verschiedene Somenskalen erzeugt werden. Dies ist namlich der Fall, wenn mit y < z gleiehzeitig S(y) ~ T(z) und T(y) ~ S(z) stets stattfindet.
Unter den verschiedenen Somenskalen, wetche eine Ortsfimktion f erzeugen, gibt es zwei ausgezeichnete, welche unter Umsti~nden aueh zusammenfallen k0nnen: n~mlich die untere Somenskala So(y) und die obere Somenskala S~ von f i Jede Schar S(y) yon Somen, welehe fiir alle Werte von y der Relation
(6.3) So(y) ~ S(y) ~ S~
genfigt, ist eine Somenskala von f u n d umgekehrt genfigt jede Somen- skala yon 3' der Relation (6,3).
Piir die untere bzw. die ~bere Somenskala yon f gelten die Aus- sagen:
{aus .(X) -___ y folgt X o So(y), (6.4) ,, ~(X) ~ y ,, X ~ S ~
Endlich werden wir noch die Somenskalen der oberen Grenze yon endlich oder abzi~hlbar unendlieh vielen Ortsfunktionen ] ] , f ~ , . . . zu betraehten haben. Ist S,~ (y) eine beliebige Somenskala von f,,, so erhi~lt man eine Somenskala S(y) yon
(6.5) f = G(/;, f.., ...) durch die Formel
(6,6) x(y) - - l - I J
7. Um das Integral (l.1) zu definieren, brauehen wir noeh den Begriff der Maflfunktion ~ (X). Wir verstehen unter Mal~flmktion eine Somenfunktion, welche ffir alle Somen eines vollkommenen Ringes definiert ist und welche folgende Eigenschaften besitzt:
I. ffir das leere Soma 0 ist ~(0) = t),
2. aus X ~ ~ ~-1) folgt ~(X) ~ ~ y ~ ( ] ) ) . 3 3
Hierbei sall die Anzahl der Some~l I ) end l i ch oder abzahlbar unendlich seiu. Ffir alle Somen X aus ~ ist folglich ~ ( X ) ~ 0; ffir gewisse, eventuell far alle nicht leeren Somen aus ~ darf abel" ~(X) ~-- + ~c sein.
358 C. Carath~odory.
Ein Soma U heil~t meflbar fiir ~ (X), falls ftir alle Somen X aus ~J
(7.1) = x u )
ist. Die fiir ~ (X) meflbaren Somen besitzen die bemerkenswerte Eigen-
schaft, daft ihre Gesamtheit ~l~ einen vollkommenen Ring bildet, den wir den Meflbarkeitsring yon ~(X) nennen. Auf ihrem Meflbarkeitsring ist ~ (X) eine totaladditive Somenfunktion.
Die Gesamtheit ~ tier h'ullsomen N yon ~ (X), d. h. der Somen. fiir welehe (7.2) (2v) ---- o
ist, ist ein Ideal. Fiir alle Elemente einer Restklasse rood 9~ sind die Werte yon ~ (X) einander gleieh. Ordnet man jeder dieser Restklassen diesen Zahlenwert zu, so erh~lt man eine Maflfunktion ~'(X'), welche in vielen F~tllen ~ (X) ersetzen kann. So k0nnen alle S~tze der LEBESGUE- sehen Theorie, welche ,,bis auf eine Nulhnenge" oder wie man aueh sagt ,fast iiberall" gelten, als S~tze fiir solche Restklassen angesehen werden.
8. Eine Ortshmktion f soll meflbar fiir ~ (X) genannt werden, weml mindestens eine ihrer Somenskalen S(y) (und dann notwendig auch die extremen Somenskalen So(y) und S~(y)) aus lauter Somen des Mel~bar- keitsringes ~ yon ~ (X) besteht. Die fib' ~ (X) meBbaren 0rtsfunktionen bilden einen K~rper, der nieht nur fiir alle Elementaroperationen, sondern auch fiir alle Grenziiberg~tnge, Limesbildungen usf. abgeschlossen ist. Fiir diesen KSrper yon Ortsfunktionen ~ l t insbesondere der EGOROFF- sche Satz.
Es sei nun M ein Soma aus ~.1, ftir welches
(8.1)
ist, und f sei eine endlichwertige, ffir ~ (X) mefbare und auf M definierte Ortsfunktion, welehe z. B. durch das Symbol (4.2) dargestellt wird. Dann definiere man das Integral (1.1) fiir alle X ~ M durch die Gleichung
j = l X
Der Wert der rechten Seite dieser Gleichung ist, wegen der Mel~barkeit yon f , unabh~ingig yon der Darstellung, welche man fiir f gew~thlt hat.
Nun kann man jede beschr~tnkte, fiir ~ (X) me5bare Ortsfunktion f durch DEDEKINDsche Schnitte {h}, {g} bestimmen, welche aus lauter
Riesz-Fischerscher Satz und Ergodentheorie. 359
endlichwertigen Ortsfunktionen bestehen,'welche ebenfalls fiir 90 (X) reef- bar sind. Es existieren also nach (8.2) die Integrale
S /' (8.3) h d ~,, g d ~. x x
und fiir jedes einzehm Soma X bilden die Zahlen (8.3) einen DaDE- KINDsehen Schnitt. Die dureh diesen letzteren DEDEKINDsehen Sehnitt bestimmte Zahl wird definitionsgem~tl~ als der Wert des Integrals
f r x
betrachtet. Von hier ausgehend kann man sich dann leicht yon der Voraus-
setzung befreien, daI~ die Ortsfunktionf beschrankt sein soll und daft 90 (M)< -{-- ~ ist.
9. Ehe wir die Eigenschaften des 'Integrals bespreehen, ist es zweckmiifig, die Ma~funktionen 9o (X) zu klassifizieren. Hierzu gehen wir yon der Tatsache aus, daft der vollkommene Somenring ~I, aaf welchem 90 (X) definiert ist, jedenfalls Somenmengen !~ enthMt, welche folgende Eigensehaften besitzen:
a) Fiir jedes Soma U aus !8 ist 90 (U) ~ + ~ ,
b) ist der We~'t yon 90 (U) filr jedes Soma U E !~ bekannt, so kann man 90 (X) fiir jedes Soma X E ~ berechnen.
Jede Somenmenge ~, welche die beiden erwahnten Eigenschaften besitzt, heifit eine Basis der Maffunktion 90 (X).
Es gibt nun spezielle Mal~funktionen, welehe wir iiuriere Marie oder reguli~re Marifunktionen nennen und mit #* X, v* X, . . . bezeichnen und welche dm'ch folgende Eigenschaft charak'terisiert sind:
Es gibt mind~tens eine Basis ~ yon #* X, deren Somen U siimtlich im Meribarkei~'ing ~ von #* X enthalten sin&
Ftir jedes Soma X aus ~[, fib" welches /**X--~ + ac ist, ist dann #* X gleich der unteren Grenze yon #* V, wobei Y ~ X und meflbar ffir #*X ist. Ebenso werde, falls /~*X<Cq-ar ist, die obere Grenze aller Zahlen /** W fiir alle Somen W ~ X, welche mefbar sind, mit /,~ X bezeichnet und falls/** X ~ + mist , werde # . X = / * * X genommen; die auf diese Weise ffir alle Somen X aus 2 definierte Somenfunktion/** X wird ein inneres Mal~ genannt. Die i~neren Male sind im allgemeinen keine Magfunktionen; auf dem Meflbarkeitsring !lR,, yon /** X ist aber # * X = # . X und man kann den Stern weglassen und / ,X sehreibenS).
a) In der unter ~) zitierten Arbeit yon J. RIDDER hat dieser die inneren Mage dutch einfadie Eigenschaften unabhi~n~'ig von den ~tu~eren Ha~en charakterisieren k ~ , ~ r '
360 C. Carath6odory.
Gibt es unter den Basen !~ eines autieren MaiZes solche, welche aus einer abzi~hlbaren Menge yon mel~baren Somen bestehen, so soll das aul3ere Mal~ eine lnhaltsfunktion genannt und statt mit t~* X, v* X, �9 �9 �9 mit m* X, n* X , �9 �9 �9 bezeichnet werden.
Die Inhaltsfunktionen sind, wenn man von Nullsomen absieht, nieht wesentlieh verschieden yore gew0hnliehen BOREL-LEBESaUESChen linearen Mag auf der geraden Linie4). Dies rechtfertigt den Namen Inhaltsfunktion, den wir den regul~tren Malifunktionen mit abzahlbarer Basis geben; das BOREL-LEBES6UESChe Mat~ in beliebigen Euklidischen Rimmen oder auf dem unendlich-dimensionalen Torus, den B. JESSEN betrachtet hat, sind nach der obigen Definition Inhaltsfimktionen.
|D. Wir werden also dazu geffihrt, aug'er den Integralen all- gemeinster Art J.
~ ( X ) = f f d ~ x
(10.1)
solehe yon der Gestalt
(10.2) ff v* X ~-- dt~ x
zu betrachten, bei welchen t~*X eine regult~re Mal~funktion ist, und endlich die Integrale
(10.3) n* X = J f d m, x
bei welehen m* X eine Inhaltsfitnktion ist. Ftir f > 0 stellt die linke Seite jeder dieser Formeln eine Mal~funktion dar. Dabei ist in (10.2) die Funktion v * X eine regulitre Magfunktion und in (10.3) ist ~*X eine Inhaltsfunktion.
Ftir die Satze der InVegralreehnung ist es yon Bedeutung, fest- zustellen, ob sie ffir das allgemeinste Integral (10.1) gelten, oder ob sie nur ftir die Integrale v* X bz~v. n * X ausgesproehen oder aueh nur bewiesen werden kOnnen.
So bildet die Gesamtheit der tiber ein Soma M quadratiseh integrier- baren 0rtsfunktion, d.h. die Gesamtheit der Funktionen f , g , . . . , ftir welehe bei gegebenen ~ (X) die Bedingungen
(lo.4) < + < + X x
erffillt sind, einen abstrakten Raum, dessen Elemente die Funktionen ff~ g , . . . sind. In diesem Raum kann man eine Entfernungsfunktion
~) C. CARAT~ODORY, Die Homomorphien yon Somen und die Multiplikation yon Inhaltsfunktionen. Annali d. R. Scuola Norm. di Pisa (II), Vol. 8 (1939), p. 105--130.
Riesz-Fischerscher Satz und Ergodentheorie. 361
(10.5) E(J; g) = V ~(f--g)~d~~ M
definieren, fiir welche der Dreieckssatz gilt. Dieser Raum ist aber nur dann ein HILB~aTscher Raum, wenn er sel~arierbar ist, d .h. .wenn er abziihlbar viele Elemente enthalt, welche tiberall dicht liegen; und diese Separierbarkeit ist nur dann gesichert, wenn die Mal3funktion ~ (X) mit einer Inhaltsfunktion m*X zusammenfallt. Man daft also nicht behaupten, dal~ ein Satz ftir die Integrale (10.1) oder auch nur fiir die Integrale (10.2) gilt, wenn tier Beweis lediglich auf die Eigensehaften der HILaErtTschen Raume gestfitzt wird.
Ffir die allgemeinsten Integrale (10.1) gelten die meisten Satze deI- LEBESGUEschen Theorie. Es gibt aber einige Eigenschaften des Integrals, welche unter der Voraussetzung bewiesen werden, daft die Maflfunktion
(X) ein iiut~eres Mal~ ist. Nun existieren aber tatsachlich Mal~- funktionen, yon denen man beweisen kann, da/] sie nicht regular sind. Bezeichnet man z. B. mit m*X und m. X den aul~eren und den inneren BOREL-LEBESGU~.schen Inhalt yon Punktmengen eines beliebigen Euldidt- schen Rauraes, so ist die Somenfunktion
m* X q- m, X o(x) =
2 eine nicht regul~tre Mafifunktion~).
Ein sehr gutes Beispiel fiir die obigen Uberlegungen liefert der RIESZ-FISCHERsche Satz, dem wir uns nun zuwenden.
11. Der R,Esz-F, scsERsche Satz. Der RIESz-FlsCHERsche Satz kann folgendermafien ausgesprochen werden: Mit f~, ~ , �9 �9 �9 bezeichnen wi~" eine Folge yon Ortsfi~nktionen, welche im quadratischen Mittel konvergieren. Es sollen also die Beziehungen gelten
(11.1) f~d~ = c,,~< + m (n - - 1 , 2 , . . . ) , M
f ( 1 1 . 2 ) ' ' ~ ($m+,,--J,,)" d~ ~ 6~ (m, n ~- 1, 2 , . . ) , M
(11.3) lira G ---~ O. n ~ o o
Dann gibt es eine quadratisch inteqrierbare Ortsfunktion g, fiir welche
(11.4) lim ; (d '~ - -g )~ d~0 =- 0 M
ist.
5) 0, 0ARATHI~ODORY, Vorlesungen fiber reelle Funktionen, 9..kufl. Leipzig und Berlin, B. G. Teubner. 1927, Note II, S. 693.
362 C. Carathdodory.
Werden nun die Ortsfunktionen fi~ als Punkte eines HILBERTSChen Raumes angesehen, so kann der Inhalt des obigen Satzes mit der Existenz eines H~ufungspunktes gleichgesetzt werden, welche sehr leicht nach- zuweisen ist. Dies wiirde aber die Richtigkeit des RIESZ-FISCHERsChen Satzes nur fiir Integrale yon der Gestalt (10.3) gewithrleisten.
Ein ganz anders gearteter Beweis ffir unseren Satz wird in der Theorie der trigonometrischen Reihen benutzt ~) und ist wohl am meisten verbreitet. Bei diesem Beweise wird der LEBESGUESChe Satz angewendet, nach welch'era eine monotone, totalstetige Funktion einer Veranderlichen gleich dem Integral ihrer Ableitung ist. Bei der Algebraisierung des Integralbegriffs kann aber ein analoger Satz nut fiir die regul~ren Maflfunk- tionen behauptet werden. Nach dieser Methode kann also der RIEsz- FIscnEasche Satz zwar fiir Integrale derS.Gestalt (10.2), nicht aber fiir die allgemeinsten Integrale (10.1) bewiesen werden.
Eine dritte Beweismethode stammt yon H. WE~'L, tier die Ent- deckung gemacht hat, dal~ aus jeder Folge yon Funktionen, welche im Mittel konvergieren, Teilfolgen ausgesondert werden k5nnen, die -- nach Abzug einer Nullmenge - - im gewfihnlichen Sinne konvergieren~). Dieser Beweis von WEYL lt~flt sich ohne weiteres auf die allgemeinsten Inte- grale (10.1) tibertragen; er gestaltet sich folgenderma~en.
12. Aus dem Definitionsbereieh ~ einer Mal]funktion ~o (X) wahlen wir ein Soma M, fib. welches
(12.1) 0 < ? (M) < + ac
s e i .
funktionen g ~ , g s , �9 �9 � 9 die den Bedingungen
(12.2) f ig,,i d~o< +ar M
(12.3) . [ I g . 4 . , - - g.t < - - M
geniigen.
e) S. etwa L. TO~,'ELLI, Serie trigonometriehe. p. 257.
Wir betrachten auf M eine Folge yon ftir ~(X) megbaren Orts-
('~ : 1, 2, . . . ) ,
1 (~. m : 1, 2, . - . I
4 u
Bologna, N. Zaniehelli, 1928,
7) I'[. WEYL, Uber die Konvergenz von Reihen, die naeh 0rthogonalfunktionen fortschreiten. Math. Ann. 67 (1909), S. 225--245, insbes. S. 243. Einen ~hnIliehen Gedanken finder m~tn aueh in der gleiehzeitig erschienenen Arbeit yon F. RiEsz, Sur les suites de fonetions mesurables. C.R., Vol. 148 (1909), p. 1303. Aber schon drei Jahre frliher hatte B. LEVI, Sul principio di Dirichlet, Palermo Rend., Vol. 22 (1906). p. 293--360, eine ganz analoge Sohlufiweise auf das spezielle Problem der Dirichlet- sehen Minimalfolgen angewandt; freilieh ist hier das allgemeine Prinzip nirgends formuliert, und man darf also annehmen, dal~ sieh B. LEvi der Tragweite seiner ]~Iethode nieht bewuflt gewesen ist.
Riesz-Fischerscher Satz und Ergodentheorie. 363
Mit Tn (y) bezeichnen wir eine Somenskala yon [g,,+~-- gn [ und ftihren die Bezeichnungen ein
(12.4) Un = M - - T, ( ~--TV ) ( n = 1,2, D D O~ ~
(12.5) M - - V k ~--- Us ~ Us+~4... (k = 1, 2, . . . ) .
1 Auf dem Soma 5~ ist also ]gn+l--g,, i ~ 2 n ;nach dem Mittelwertsatz
der Integralrechnung hat man also mit Berficksichtigung yon (12.3)
1 f 1 2, ~ ~(vn) ~ ign+x--gnld~ ~ 4 n . u,,
Es ist also 1
(12.6) ~ (U,,) <__ 2~
und nach (12.5) ~r 1
(12.7) ~ (M--Vs) ~ ,~, ~ (Us+i) ~ 2k_ ~ . j=0
Mit der Bezeiehnung
v =
erh~tlt man schliefilich (12.9) ~ ( M - - V) = 0.
13. Nach (12.5) und (12.4) mug Vs, welches zum Soma Us+,,, fremd" ist, Tell eines jeden der Somen
( 1 ) ( m - ~ - 0 , 1 , 2 , . . . )
sein. Daraus folgt, daft auf dem Soma Vs die Ungleichheiten
1 (13.1) Igk+~+l --gk+m t ~ 2s+=
gelten. Aus den Relationen
(m = O, 1, 2, . . .)
Igk+~,--gk] :(_--[gk+l--gk!'q-lgk+2--gk+l]"q-"" (•-----1,2,-...)
folgt daher fiir jeden Wert yon p
1 (13.2) [g~+2,--gk] ~ 2k_1.
364 C. Carath~odory.
Nun kann die letzte Relation geschrieben werden
1 1 (13.3) gk 2k_ 1 ~ gk+~ ~ gk q- 2k_ 1 (p ~- 1, 2 , . . . ) .
Daraus entnimmt man for die Hauptlimites g und .~- der Folge g~, g~,... die Relationen
1 1 (13.4) gk 2k_ 1 ~ g "-: .~! ~ g k + 2k_ 1 �9
Mit Ausnahme eines Nullsomas, auf welchem eventuell gk---- ~ ist, hat man also auf dem Soma Vk
l (13.5) 0 ~ ~ - - g <2 2~_ 2 .
Aus der Definitionsgleichung (12.5) ffir die Vk folgr dab diese Somen eine monoton wachsende Folge
bilden, so dab auch Vk ~ Vk+p+2 ist. Mit Ausnahme eines Nullsomas Nk gelten also nicht nur die Relationen (13.5), sondern auch die schttrferen
1 0 ~ ~--_g ~ 2k+v (p----- 1,2,. . .) .
Auf dem Soma (Vk--ND ist also die Folge der Ortsfunktionen gl, g,, �9 �9 �9 konvergent. Setzt man jetzt
(13.6) = ( M - - V ) 4 . . . ,
so ist N ein Nullsoma, und auf dem Soma (M--N) existiert die Orts- funktion (13.7) g ----- lira g,
r t ~ 0
and ist endlich. Wir definieren g auf dem ganzen Soma M, indem wir festsetzen, dab g auf dem Nullsoma N verschwinden soll.
14. Wir setzen nun
1 (14.1) sk ----- Ig,! + Ig~l+ "'" -{-[gkl + 2k_1 �9
und bemerken, daft ftir jedes k die Ortsfunktion sk eine Majorantc aller Funktionen gl, gs, �9 �9 �9 auf dem Soma Vk ist. Andererseits ist sk integrier-
Riesz-Fischerscher Satz und Ergodentheorie. 365
bar fiber Vk und es besteht die Ungleiehheit
Nach dem LEBESGUESChen Konvergenzsatz folgt also die Gleichung
(14.2) lim [ g--g,,]d7> -~- O. t J
aus (13.7)
Wir haben nun ftir jede Wahl der natfirliehen Zahlen k, m und n
f <= f + f Wegen (12.3) und (14.2) hat, man aber
I .q.+.~--g. ld~ < 4 - '
und es ist deshalb aueh
g,~+m -- gnl d ~.
lim f [ g - - g n + m l d ~ ~ 0,
1 (14.3) , l.q--.q,, d~ ~ 4"
v~
Daraus schliefit man weiter
(14.4) f l.q--.q,,l dw M
und erhalt die Relation
f ) 1 =kli g-g.ld <__ 4.
Vk
P (14.5) lira J lg- -g , , Id~ ~ O.
(k ---- 1, 2 , . . . ) .
M
(15.2) f If,.+.--f.] ~o < ~. M
(15.3) lira ~. ~--~ 0
best~hen.
(15.1) f !fnl d ~ < +or ,
(n ,m-~- 1, 2 , - - . ) ,
15. Wir betrachten jetzt eine Folge.fl , f~, �9 �9 �9 yon 0rtsfunktioneh, welche auf dem Soma M i m Mittel konvergieren. Es sollen mit anderen Worten die Relationen
366 C. Carath4odory.
Wir bestimmen eine wachsende Folge
(15.4) nl ~ n~ -~ n8 ~ .- �9
yon nattirlichen Zahlen, ftir welche
1 (15.5) enk ~ 4 k
ist, trod setzen
(15.6) fi~ = .qk.
( k = 1, ~, . . . )
u n d e s ist daher aueh
(16.2) a,,+,,, ~ a,, q- ,~,, (n, m ~ 1, 2, . . . ) .
Also ist al-]-~l eine obere Sehranke fiir alle Zahlen an; ftir die obere Grenze a dieser Zahlen kann man daher schreiben
(16.a) , , =< a < + ~ (n - - 1, 2 , . . . )
Nach den vorigen Paragraphen gibt es eine 0rtsfunktion g, ffir welche (14.5) gilt. Ist also n e i n e beliebige natiirliche Zahl und wiLhlt man aus (15.4) eine Zahl nk ~ n , so hat man
M M M
Daraus sehlieflt man mit Hflfe yon (15.2) und (14.5), daft man auch sehreiben kann
(15.7) f i g - - f ~ l d~ ~ en, M
und die Relation (15.3) zeigt, dab man aueh hat
(15.8) lira . f l g - - f , , t d~ = O.
16. Nun handelt es sieh alarum, das letzte Resultat auch fiir die Konvergenz im quadratischen Mittel abzuleiten. Dazu bemerken wir, daft naeh tier ScHwAmZsehen Ungleichung aus den Relationen (11.1) folgt
(16.1) f lf,,+,,,f,,Jd~ <= .,,+.,... X
Dm'eh Entwicklung der linken Seite yon (11.2) erh~lt man hieraus
Riesz-Fischerscher Satz und Ergodentheorie. 367
Bezeichnet man mit Sn(y) eine Somenskala von ]fn], so hat man jedenfalls
fl f (16.4) A ] d ~ ~ d ~ + ~ ~ ~(M) T a ~ < + ~ . M s~(t) .'4-s,,(~)
Die Ortsfunktionen Ifi~+,,--fi~[ sind demnach fiber M integrierbar und eine neue Anwendung der ScHwARzschen Ungleichheit liefert die Relation
1
(/ i ) ' (16.5) ]fn+,,,--fn[d~o ~ (fn+,,--fn)'d~" d~ M
Setzt man also
n n ~ n
so sind die Beziehungen (15.2) und (15.3) erffillt. Nach dem vorigen Paragraphen gibt es also eine Ortsfunktion g, fiir welche die Re- lation (15.8) besteht.
17. Diese Ortsfunktion g ist quadratisch integrierbar. Bezeichnet man niimlich mit Sg(y ) eine Somenskala yon Igl, so hat man
(17.1) ~d~ = lim g2d~. M y = or Sg (y)
Nun ist aber '2 (17.2) 0 < ( g _ f n ) 2 -~ ]n + 2g(g-- fn) - - f
und daraus folgt
sg (u) s, (~) sg (u)
.,+ey fjg-f,i 8 a (Y)
Indem wir (15.8) benutzen, finden wir
f g~ d ~ "< a ~ Sg (y)
(17.3)
u n d e s ist daher aueh
(17.4) M
18. Nach dem letzten Resultat sind auch die Ortsfunktionen
(18.1) hh ~ ~g--tn (n ~--- 1, 2 , . . . )
368 C. Carath~odory.
quadratisch integrierbar. Wir bezeiehnen mit T,,(y) eine der Somen- skalen yon ]hnl und sch~tzen das Integral
(18.2) f h 2 d~ = lim f h~ d~ M y = oo T. (y)
ab. Aus
(~+,.-- h.)' ---- ( fm+._ f . ) ,
folgt naeb (11.2) die Relation
(18.3) f (hn+,n-- hn) 2 d~p < d2 M
Andererseits ist aber
T.(y) T.(U) T. (9) T,~(y)
und es gilt daher die Relation
(18.4) f h2 d~o ~ O•-k-2y f Ihn+,,,!d~. T,~ (y) T. (y)
Null ist naeh (15.8)
aus (18.4) folgt also
lim f t h.-~,,,] d~ = o; W'b ~ O0
M
T. (y)
mud man erh•lt sehliefllich mit Benutzung yon (18.1) und (18.2)
(18.5) - - f . ) g~ _<_ ~.. r M
Nach Voraussetzung ist aber lim ~, = 0, und es ist also auch n~O0
j. (18.6) lira (g -- f.)2cl~ = O.
M
Hiermit ist der i m w 11 ausg'esproehene RIESZ-FISCHERsehe Satz aueh ffir die aUgemeinsten Integrale (10.1) bewiesen.
19. Die Ergodentheorie. Die Ergodentheorie ist aus der statistisehen Mechanik entsprungen, als man aus dem statistischen Verhalten einer Schar yon Bahnkurven fiber das asymptotische Verhalten der einze]nen Bahnkurven Schlfisse ziehen wollte. Es hat sich aber mehr und mehr
Riesz-Fischerscher Satz und Ergodentheorie. 369
gezeigt, daft die S~ttze, welche man in dieser Absicht aufgestellt hatte, t
fiir die ganze Integralrechnung yon grundlegender Bedeutung sind.
Den ersten genauen Ergodensatz verdankt man G. D. BIRKHOFFS). Neue Beweise und Verallgemeinerungen des BmKHOFFSChen Satzes warden yon A. KHINTCHINE 9) und E. HOPF ~~ gegeben. Fast gleichzeitig mit BIRKHOFF hat J. v. NEUMANN einen ~thnlichen Satz bewiesen, bei welchem die gew0hnliche Konvergenz durch die Konvergenz im quadratischen Mittel ersetzt wird~). Dieser letztelv Satz wurde zuerst fiir ~IILBERT- sche Ritume angesprochen und bewiesen~). In einer bemerkenswerten Arbeit, in welcher die S~tze der Ergodentheorie auch fiir Abelsche Gruppen mit mehreren erzeugenden Transformationen abgeleitet we~den, hat 1~. WIENER dem v. NEUMANNSchen Satz eine Wendung gegeben, welche ihm erlaubt hat, diesen Satz direkt zu beweisen~S). In der Formulierung von WIENER kann der v. NEUMAN~sche Ergodensatz ebenso wie der Bml(HOFFsche ftir die allgemeinsten Integrale (10.1) abgeleitet werden.
In Wirklichkeit liegen aber sowohl tier urspriingliche v. NEUMANI~- sche Satz wie auch die allgemeineren S~ttze, welche F. RI~sz aufgestellt hat~4), in einer anderen Ebene. Wir werden auf diesen Umstand noch im w 35 zuriickkommen.
20. Die BmKHOFFSChe Ungleichheit und ihre Folgerungen. Fiir alle Soraen X ~ M sei eine Ma/3funktion ~ (X) definiert, wobei
(2o.1) o < ~o (M) < +
s) GEOROE D. BIRKHOFF, Proof of a recurrence Theorem for strongly transitive Systems, Proc. Nat. Acad. of Science, Vol. 17 (1931), pp. 650--655. Proof of the ergodic Theorem, ibid. pp. 656--660.
9) A. KHX~TCHI~]~, Zu Birkhoffs Liisung des Ergodenproblems, Math. Ann., Bd. 107 0932), S. 485
10) ]~. HOPF, On the time average Theorem in Dynamics, Proc. Nat. Aead. of Science, Vol. 18 (1932), p. 93.
il) j. v. NEUMAN~, Proof of the quasi ergodic Hypothesis. Proe. Nat. Acad. of Science, Vol. ]8 (1932), p. 70.
12) Eine Arbeit yon B. 0. KOOPI~IAN, Hamiltonian Systems and linear Trans- formations in Hilbert Space. Proc. Nat. Acad. of Science, Vol. 17 (1931), p. 315, welche der v. NEUMA~Nschen Note vorangegangen ist, und die gleichzeitigen unabhitngigen Untersuchungen yon T. CARLEMAN, Applications de la th~orie des ~quations int~grales lin~aires anx ~quations diff~rentielles non lin6aires. Acta Math., Bd. 59 (1932), S.. 63, miissen in diesem Zusammenhang erw~hnt werden.
13) N. ~V'IENER, The ergodic Theorem. Duke Math. Journ., Vol. 50939), pp. 1--18. l~) F. RiEsz, Some mean ergodic theorems. Journ. London Mathem. Soc., Vol. 13
(1938), pp. 274--278. Auch fiir den Satz yon J. v. N~.US~ANS ist die RxRszsche Anordnung des Beweises die einfaehste. Einen Mteren diesbeztiglichen Ansatz yon RIESZ finder man schon bei E. HoPF, Ergodentheorie, Ergebnisse der Mathematik and ihrer Grenzgebiete, Bd. 5, 2. Berlin, J. Sprlnger, 1937, S. 23.
2 4
370 C. Carathfodory.
sein soll. Ferner sei eine maiitreue (isometrische) Isomorphie
(20.2) X ' = "g-X, X = ~t-IX t, M t = *M : M
gegeben, welehe den Ring X ~ M in sieh selbst transformiert. Ist dann f eine auf M definierte Ortsfunktion und bezeichnet man
mit S(y) eine Somenskala yon f, so werde mit ~ f die Ortsfunktion bezeichnet, welehe die Somenskala ~S(y) besitzt.
Die Transformierte v f yon f kann auch folgendermagen cllarak- terisiert werden: Bezeichnet man mit as(X), ~s(X) die untere bzw. die obere Grenze yon f auf dem Soma X und mit ars(X), ~rS(X) die ana- logen Somenfunktionen fiir die Ortsfunktion rf, so gelten die Gleichungen
(20.3)
welehe aueh gesehrieben werden k0nnen
(20.4) , , t ( x ) = , s (~-~lx) , ~ , s ( x ) = a s O - 1 x ) .
Die Mafltreue der Isomorphie wird durch die Gleichung
(20.5) (3 x ) = ~ ( x )
ausgedriickt. Aus der Theorie des Integrals folgt daml die Relation
(20.6) ,~ v f d ~ = j ' f d ~ , TX X
undes ist insbesondere auch
(20.7) . J ' , . / , ~ , = f . f d v . . I I .1/
21. Die Haupteigenschaften der Transformierten ~f einer Orts- funktionf k0nnen folgendermal~en zusammengefaflt werden:
a) Jeder auf Mdefinierten Ortsfunktionfentspricht eine Ortsfunktion , f und eine durch die Gleiehung .rg ~---f definierte Ortsfunktion
g = ~- l . f , b) die Operation v f ist linear; es gelten die Gleichungen
(21.1) * ( A + A ) = * A + * A , * ( a f ) = a (* f ) ,
wobei a eine konstante Ortsfunktion bedeutet. c) fiir jede Konstante a ist
(21.2) ~a = a,
giesz-Fischerscher Satz und Ergodentheorie. 371
d) aus f ~ 0 folgt v f ~ 0 und umgekehrt. Aus diesen Tatsachen allein folgt erstens
(21 .3) T--1 ( A ' ~ - A ) = g.-- l~. .~ g---1A
und dann allgemeiner
(21.4) vk(9~+j~ ) : , k f ~ + , k ~ ( k=1 , - -1 ,2 , - -2 , . . . ) .
Zweitens bezeichnen wir mit p, n , f f , n' nicht negative Orts- funktionen, ftir welche wir gleichzeitig haben
f = p - - n , ]fl = P + n , Aus
v f = , p - - v n , folgt dann
p' =< ~p, ~' ~ ~n,
, f = p ' - n ' , [ ' :fl = p ' + n ' .
f : , - lp '__ ~-t n,
--I P - - i t p < ~ p, n <
und woraus man die Gleichung (21.5) v[f[ = [v f} erschlie•t.
22 . Aus den Systemen
f, ~], ~,f, . . . , . . - i f bilden wir die Mittelwerte
(22.2) ,~ . f = f + ~ f + "'" + ~ " - l f - - n
und setzen aul~erdem (22.3) ,1 f = f. Mit Hilfe der Identitat
( n + m ) ~ n + m f = (1-- vm) + ~m(1-- ~") 1 - - v
erhalten wir dann die Gleichung
diese letzten Relationen zeigen, daft p ' : v p und n ' : v n ist,
(n = 2, 3 , . . . )
(1 - - vn) n ( 1 - ~ ) f
f
(22.4) (n + m)~n+ra f = mare f + n(~nvmj.
Bezeichnen wir also mit as(X), $~(X) die untere und die obere Grenze yon ak f auf dem Soma X, so liefert die Vergleiehung yon (22.4) mit (20.4) und (5.2) die Relation
(22.5) (n+ m) .,,+,,,(X) <__ mZ,,,(X) + n . . ( r " X ) ,
welehe wir spater benutzen werdon.

372
Mit 8n(y) setzen (22.6)
C. CaratModory.
bezeichnen wir die untere Somenskala yon ~f und
! , Sn (y) = M - - Sn (g).
Dann erhalten wir die Aussagen
(22.7) aus Xc__ S~(y) folgt ~ n ( i ) ~ y,
(22.8) aus X C= S/,(y) folgt an(X)>~y,
und weil S,~(y) eine untere Somenskala ist,
(22.9) aus an(X) >__ y folgt X ~ S'(y).
Man beachte noch, dag man aus (22.2) mit Beriicksichtigung yon (21.5) erhalt (22.10) I~,f l < ~,,Ifl.
Naeh (20.7)kann man also sehreiben
(2'2.11) J'o',)fd : fide, f! .fl <: f l f l as,. M M H M
23. Die Ortsfunktionen
(23.1) f * = max(al l , ~ 2 f , ' " , % f ) (n = 1, 2 , . . . )
besitzen die Somenskalen
(23.2) 8" (y) --~ S, (y) S, (y) . . . Sn (y) and es ist daher
n
(23.3) M - - S* (y) = . ~ ~- S~ (y). k = l
Der Kunstgriff yon t~RKHOFF kommt darauf hinaus, das Soma (23.3) auf eigentiimliehe Weise zu zerlegen.
Nach (23.2) hat man namlich
Sl (y) __D 82 (y) ~ . . . ; setzt man also
= sl (y), Rk(y) = & - l ( y ) - - '~k (y) (23.4) RI (y) M ~ * '*
(k = ~, 3, . . . ) , so hat man (23.5) M ~ S* = R~ n u .R~ -t- . ' . ,-I- R~
Riesz-Fischerscher Satz und Ergodentheorie. 373
und alle R~ sind paarweise fremd. Nun ist aber
R k = X~ S~ . . . & _ ~ +. 8 , S~ . . . &
(23.6) = 81 ~2 . - . Sk--1 (Sk ~ Sk) ~ S l ' ~ 2 " * " 8k
----- & & . - . & - l S L
Fiir k---~ n + m hat man also Ra+m ~ S,',+m und nach (22.8)
.,,+m (R,,+.O >= y;
ebenso folgt aus Rn+,,, ~ S,,~ nach (22.7)
~,~ (Rn+,,) < y.
Ersetzt man also in (22.5) das Soma X (lurch Rn+m(y), so erhMt man
- , , ( r ~ R . + m ) __> y,
und naeh (22.9) und (23.3) mug also
,;-" R,,+~ (y) c___ S~ (y) c M - - S , * (y)
sein. Mit Hilfe yon (23.5) erhalten wir schliefllich
(23.7) v-"* Rn+~ ~ R,-}- R~ + . . . + Rr,,
eine Relation, welehe ffir alle nattirliehen Zahlen n, m efffillt ist. 24. Jetzt halten wir die na'tfirliehe Zahl n fest und fiihren die
Somen ein (24.1) Tnt ==- Rn, Tnk ~ v--(k-OTnt (k ~ 2, 3, . . . , n).
Ffir k ~ 2 hat man also mit Benutzung yon (23.7)
(-24.2) T,~k ~ Rt + R~ + . . . Rn-k+t.
Folglieh sind die Somen Tn, und T,k (k >= 2) zueinander fremd. Sind ferner j und k zwei nattirliche Zahlen, fiir welehe 2 ~ j < k ~ n ist, so hat man
Tnj : ~---(j--1) Tnl, Ynk. : v - ~ ] - z ) Yn(k--j+z);
da nun Tal und T,,(~..~j+~) zueinander fremd sind, mfissen aueh Tnj und Tnk fremd sein. Die Somen
(24.3) T . , , T,~, . - . , T,,,~
sind also paarweise fremd.
374 C. Caraths
Das Soma R. - z ist fremd zu den Somen T,~, T,8, . . . , Tn,, und kann h0chstens mit dem Soma T~2 Teile gemeinsam haben. Setzt man also (24.4) T(n-m = Rn-1 t Rn--1 T,~,
so ist T(,-X)l kemd zu jedem der Somen (24.3). Wir ffihren nun die weiteren Somen ein
(24.5) T(n--1)k ~ ~--(k-1) T0t_ l ) 1 (k---~ 2, 3 , . . . , (n - -1 ) )
und beweisen ebenso wie vorhin, dalt die ( n - 1) Somen
24.6) ~r~(n--l)l ~ T(n-1)2 , �9 �9 ,~ T(n-1) (n -1)
~k
M - - Sl
I
P~ x P4 x i I I I
l ! I I , z I Tss ' I r ~ I I
- - - ] - - -~- T '~ '1-T'43" i ! "
', rss' , r~ ', r~ ! . .~J ,,
I I --_[ .........
T41
P3 x P2 x PI.>.
' [: I T~ T~ ,,
T2,
r3,
R!
R 2
Ra
R4
e5
paarweise fremd sind. Alle Somen (24.6) sind in RaW Rs + . . . + Rn-1 enthalten und zum Soma T,,x ~ Rn fremd. Abet auch zwei beliebige Somen Tnj und T(,-t)k sind zueinander fremd. Ist z .B. k ~ j , so schreibe man
T(n -1 )k ~ r T(n-1) 'a , T n j ~ . ~g - -1 ) Tft(j_ak.t.1),
ist aber j < k, so sehreibe man
T(n-l)k ~ v -(j-l) T(n-n(k-j+u,
In beiden F~l|en folgt die Tatsache, daft T(,-l)k und T, j zuei~ander fTemd sind, aus unseren friiheren Resultaten. Die beiden Reihen (24.3) und (24.5) bestehen aus lauter paarweise fremden Somen. Auf diese Weise k0nncn wir fortfahren; wir setzen
T(n-2) l = Rn-2 +, Rn-9 (Tn2"Jf - Tns'~- T(n-1)2)
Riesz-Fischerscher Satz und Ergodentheorie. 375
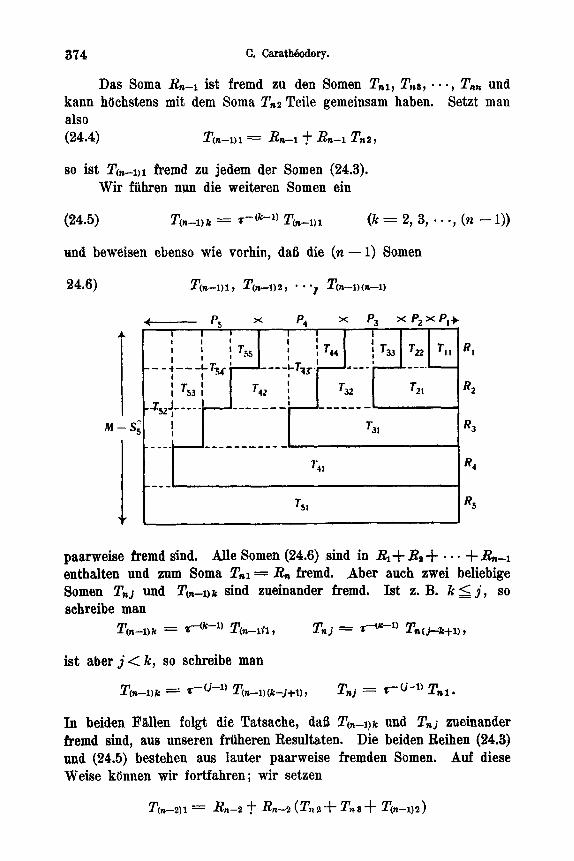
und bilden, ~thnlich wie vorhin, die Folge der T(,-2)~. Schlie•lich erhalten wir ein Schema von der Gestalt
2,1, T,, (24.7) Ts,, T,,, T,8
, ~ o , . �9 �9 �9 �9 o , , ,
T.1, T.2, 2 . , , - . . , 7 . . .
Dieses besteht aus lauter paarweise fremden Somen, die alle in der Summe (R,-t- P,~ + - . . -[- R~) enthalten sind, und jedes der 8omen R~ dieser Summe wird durch die Summe aller Tjk itberdeckt. Die Figur auf der vorhergehenden Seite illustriert diese Verhitltnisse flit n ~ 5.
Wir setzen nunmehr
(24.8) Pk ---~ Tk~ + Tk2 +-.. -F Tv,
und erhalten die Gleichung
(24.9) M - - S* (y) = P,-S P,-5 . . . +1:,,.
25. Wir betrachten jetzt die Relation
(25.1) ffa~ = ffd~+ ffd~+ . . . * f f d ~ .
Aus der Beziehung
T, fO-,) T~ T~,
folgt die Oleichung
(25.3) f fd~ = f ( / + , f + .. . + ,(k-1)f)d~ --- k fck fdg, . P#, Til T~I
Nach unserer Konstruktion ist aber
(25.4) Tk, (y) ~ R,~(y) C= S~ (y) und daher ist naeh (29.8)
ak (Tkl (y)) __> y.
Wegen des Mittelwertsatzes der Integralrechnung kann man daher sehreihen
(25.5) J'.f d~ >__ ky ~(T~I). P~
876 C. Carath~odory.
Andererseits is! nach (20.5)
so dati man auch hat
(25.6) k~(Tk,) = y (Tk , )+~(T~)+. . . +~(T~) =- ~(Pk).
An Stelle yon ('25.5) konnen wir daher schreiben
(25.7) o~f d~, >__ Y~(PD. P~
Indem wit fiber k summieren und (24.9) beachten, erhalten wir sehliefllieh
(25.8) f f d~ ~ y~(M--S*(y)). ~-s* (~)
26. Nun betrachten wir die obere Grenze
(26.1) f * = lira f . ,
aller anti Gleiehung (26.2)
Die untere Somenskala yon f * erhalten wir mit Hilfe der
S* (y) = lim S* (~().
Dann folgt aus (25.8) mit Hilfe eines Grenztiberganges die Relation
(26.3) < f f M--S* (y)
Dies ist die fundamentale Formel, welehe wir die B~RxxoF• Un- gleichheit nennen wollen, und welche den Generalschlfissel zu allen Satzen tier Ergodentheorie bildet15).
Zunachst wollen wit aber noeh zeigen, dab man in tier Relation (26.3) die untere Somenskala S*(y) yon f* durch eine beliebige andere Somenskala dieser Ortsfunktion ersetzen kann. Es sei also
T* (y) ---- S* (y) + A (y)
eine beliebige Somenskala yon f*. Falls ftir ein gegebenes y das Soma A (y) nicht leer ist, so mul~ auf diesem Soma f* konstant gleich y
1~) Die BIRKHOFFSChe Ungleiehheit ist zucrst yon K. YOSlDA und SH. KAKUTANI, BiFkhoffs ergodic Theorem and the maximal ergodic Thebrem, Proc. Imper. Acad. Tokyo, Vol. 15 (1939), pp. 165--168, aufgestellt worden. Diese Arbeit und eine Anzahl anderer derselben Autoren fiber verwandte Gegenstitnde findet man auch im Sammelband: Collected Papers from the Faculty of Science. Osaka Imperial University. Series A, Mathematics, Vol. 7 (1939).
Riesz-Fischerscher Satz und Ergodentheorie. 377
sein. Man hat also jedenfalls
f f*d~ ~- y~ (A(y)), A (y)
und es ist somit
y ~ ( M - - T * ( y ) ) + f f d ~ ~ y~(M--T*(y) )+ f f* d~ A (y) A (y)
= y ~ ( M - - S* (y)).
Nun folgt aus (26.3)
f f y~(M--T*(y)) ~ f d~-- f d~ ---- f d ~ , M-- S * (y) A (y) M - - T * (y)
und das ist gerade die Relation, welche wir beweisen wollten.
2Z Wir machen nun zuerst die Annahme, daft die Ortsfunktion f * ~ 0 ist; dann ist ffir alie y ~ 0
(27.1) S* (y) = O.
Folglieh ist unter derselben Voraussetzung naeh der BIRKHOFFSehen Un- gleichheit
(27.2) f f d~ ~ y ~ (M). M
Daraus entspringt der
Satz 1. Ist f* ~ O, so besteht immer die Relation
P 27.3) J f d ~ )_ O.
M
Mit anderen Worten: die obere Orenze f* aller anfkann nur dann eine nicht negative Orts]unktion sein, wenn der Mittelwert yon f 9r6fler oder gleich hull ist.
28. Es sei zweitens f > 0; dann hat man
f fd~ ffd~, M - - S* (y) M
und die BmKHOFFSChe Ungleichheit tiefert den
Satz 2. Fiir f .~ 0 auf Mist immer
(28.1) y ~ ( M - - S* (y)) <: f J d~.

378 C. Carath&~dory.
Der Satz 2 besagt zwar weniger als die ursprtingliehe Ungleiehheit (26.3); er ist aber viel handlicher zu gebrauchen als diese.
Es sei wieder f__> 0, ferner bedeute z eine positive Zahl. Mit den Bezeichnungen
(28.2)
hat man
, 8(z) , , M - - 8 ( z )
f = A + ~ , * ~ f = * . f , + * ~ f , ,
A<__z, ~ . f , < z, f * < z .
Es ist also aueh
(28.3) f * < : , + : * g f +,.
Bezeiehnet man mit 8x*(y) eine Somenskala yon j~*, so ist 5'~ (y--z) eine Somenskala yon f * + ~ . Aus der Relation (28.3) folgt also ffir jedes 8 ~> 0
,~i (y - ~ - - , ) ~ ~* (y).
Also ist naeh Satz 2 ftir y > z + �9
(y ~ z - - e) 9' ( M - - 8 " (y)) _< ( 3 / - - ~ - - e) ~o ( M - - * ,~i (y - - z - - O)
<--_ f ft d~. M
Andererseits ist
f:,d If
Aus diesen Beziehungen folgt der Satt 3.
: f d~. M--Z(z)
Let f ~ 0 und y > z > O, so gilt die Relation
(28.4) (y- -z ) ~(M--S*(y)) ~ : f dg. M--S(I)
29. Der n~chste Satz stammt you N. WIENER. Wir gehen yon folgender Bemerkung aus: Im Intervall 0 ~ y =< + ~ sei eine monoton wachsende, beschrdnkte Funktion 2(y) definiert. Ferner sei fiir ein gegebenes v > 0 das STIELTJEsche Integral
Oo
(29.1) ,fyV+l d2 <= + av. o
Riesz-Fischerscher Satz und Ergodentheorie. B79
Dann ist fiir jedes y ~ 0 oo
f t '+1 dit ~ y"+~ u
und daraus folgt (29.2)
Zweitens sei
(29.3)
Dann ist
Nun hat man abet
Y
or f it Y
__ y , , . l (it ( ~ ) _ ~t (y)),
lim y,,+l (it (~) _ it (y)) = O. y ~ o o
f yv(it(Qv)--it(y))dy < + ~ . g
= 0 .
Y j. lim t v (it (oo) - - it ( t ) ) d t
y = o o �9 y 2
1 1
f 2v.j_1 t" (it (~1 - - it (t)) d t _> (;t ( ~ ) - - it (u)) Y"+~ v + 1 ; y__ 2
also ist (29.2) eine Folge yon (29.3). Nun ist aber
Y Y
r (it (~1 _ it (u)) = f ( , , + 11 t-(it (~1 - it (t)) a t _ f ~ , + l d~ . o o
Also ist immer
o o
wenn die linke Seite oder die reehte Seite dieser Gleiehung endlich ist. Es sei nun ftir die Ortsfunktion
f _ _ > o das Integral
(29.5) ff,,+la~ < + ~. M
Ist S(y) eine Somenskala yon f trod setzt man
(29.6)
so gilt die Gleichung
it (y) - - ~ ( s (u)),
oo
M 0
380 C. Carath6odory.
Es sei nun S*(y) eine Somenskala von f * und
(~9.8) ~* (y) - ~ (s* (y)).
Setzt man in (28.4) erstens z ~ y und zweitens ~ (M) ~---/.* (~c),
so erh~lt man
~-s(}) x 2
und es ist also auch oo ~ oo
0 0 y
2
Wir bereehnen das Doppelintegral auf der rechten Seite tier letzten
Relation, indem wir schreiben
ao oo ~ 2 z
o y_ o o 2
or
2v+1 f - - z v+j d)~
Y 0
_ _ 2 v+lj, f f~+l d 9. M
Andererseits ist mit Berticksichtigung yon (29.4), (29.7)und (29.8)
oo
1 f ( f , ) , + l d ~ . (29.10) f 0t* (ao) - - ~* (y)) yV dy - - v ..~ 1 0 M
Die Vergleichung der letzten Relationen liefert
(29.11) f ( f * ) V + l d y < 0 'q - l ) 2"+1 ~ f f ' + l d ~ , M M
und es gilt der
Satz 4. 1st unter der Voraussetzm~g f ~ 0 f~ir v > 0 das Integr(d
f fr+l d ~ < + ~c, lJl

Riesz-Fischerscher Satz und Ergodentheorie. ~81
so ist auch das Integral
f ( f , )v§ < + ~ . M
30. Die s Es sei f eine fiir welehe gilt (30.1) I f l = ~ < + ~ .
beschrankte Ortsfunktion,
Dann hat man fiir alle natfirlichen Zahlen n, m
(30.2) Ir'nf[ <= a, I~,~fl ~ a, ]~v"~ft ~ a
und Ahnliche Relationen gelten ffir die beiden Hauptlimites
(30.3) ~- = lim a'*f, g = lim a, , f . n = 0 0 n = O 0
Aus der Identitiit 1
(30.4) van f : ~nf + n (* '* f - - f )
berechnet man dann die Riehtigkeit der Oleichungen
(ao.5) Setzen wir dann
(30.6)
so erhalten wir
(30.7)
h = f - - g , anh ---- an f - - g ,
lira a, ,h = f f - - y ~ - O. 1 1 : 0 0
Bezeichnet man also mit h* die obere Grenze aller (r,,h, so ist
(30.8) h* ~ 0.
Nach dem Satze 1 des w 27 ist also auch
fldr __> o. M M"
eine Ungleichheit, welche auch geschrieben werden kann
M M
Aus der Gleiehung
lira a n ( - - f ) ~--- - - g n = o o
382 O. Carath6odory.
folgt auf gleiche Weise
(30.10) f f d~ ~ f q d~; .~1 at
da nun .q =< ~ ist, erhMt man aus (30.9) und (30.i0) die Oleichung
(30.11) f (,q--_g) d9, = O. a t
Es gibt also ein NuUsoma N, welches auch eventuell leer sein kann, so dab auf dem Soma (M--N) der Grenzwert
(30.12) lim #nf-~- 9 ~ 0 0
existiert. Setzt man noch g = 0 auf N, so besteht die Gleichung
(30.13) f gdg, .~ f f dF. M M
31. Wir nehmen zweitens an, daft f den Bedingungen
(31.1) f > o, f f d ~ < + oo K
geniigt, aber nicht mehr,, dab diese Ortsfunktion beschr~nkt ist. bestimmen eine monotone Folge
Wit
(31.2) A < f ~ < _ _ A < . . .
von beschritnkten nicht negativen Ortsfunktionen auf M, welche alle ~ ] sind, so dab mit der Bezeichnung
(31.3) die Ungleichheiten
(31.4)
gelten.
k~ ---- f - - f p ( p = 1 ,2 , . . . )
f 1 k, d~ ~ 4--p (p : 1, 2,. . .)
at
Zu jedem k~ bilden wir die k~ und Somenskala dieser letzteren Ortsfunktion. hat man dann
bezeichnen mit T~* (y) eine Nach dem Satz 2 des w 28
( /1)) 1 (31.5) ~ M - - ~ ; ~ - <_2~ kpa~<_ 2~" M
Riesz-Fischerscher Satz und Ergodentheorie. 383
(31.6)
Wir setzen, lthnlich wie im w 12,
i - - Vp = V,4 up+~ :~.. .,
v = v, ~ v~ 4 . . .
und beweisen, ebenso wie dort, daft
(31.7) ~ (M-- V) : 0 ist.
Jeder der gleichm~Big beschr~nkten Funktionenfolgen o~J~, ~jf~,... kann man ein Nullsoma Np zuordnen, so dab auf (M-- N~) der Grenzwert
(al.s)
existiert.
(31.9)
:Nun ist aber
(31.10)
(31.11)
Wir setzen
gp = lira a,.g~ n~O0
oo
N-= (M-- V)-]- ~ ~- N~. p = l
= , o <_ ~k~__< g ,
mit den Bezeichnungen (30.3) hat man also auf dem Soma (M- -~ )Vp
1 (31.1~) gv ~ g =< g- _--< gv+ - ~
und daher auch 1 (31.13) ~--.q < ~ .
Wegen V~ ~ V~+q muff dann auf jedem der Somen ( M ~ ) V p und folglich auch auf (M--N) die Folge der r konvergieren.
Da man jede Ortsfunktion als Diflerenz yon nicht negativen Orts- funktionen darstellen kann, l ~ t sich dieses Resultat auf Funktionen beliebigen Vorzeichens iibertragen und man erhMt den
8atz 5. Ist f eine Ortsfunktion, fiir welche
(31.14) f i l l d~< + M
384 C. Carath6odory.
ist, so gibt es ein (eventuell leeres) Soma N, fiir welches
(31.15) ~(N) -~- 0
ist, so daft auf M ~ N der Orenzwert
(31.16) lim #nf = g
existiert. 32. Es handelt sieh jetzt darum, zu zeigen, dab die Folge der
Ortsfunktionen a , f aueh im Mittel konvergiert. Wir nehmen zunAchst an, dal~ die Relationen (31.1) bis (31.4) gelten sollen. Dann folgt aus den Oleiehungen 1
o - . + . , f --- ,,.+,,,f~, + r k~,,
a,~f ~-~ a,, fp. + o',, kp die Relation
(32.1) Nun ist
i~ <_--', n+*fv-- '*nfpl +~,,+=kp+~,,kp.
; f J ' 1 ~ . + ~ k ~ d ~ = ~ . k ~ d ~ = k p d ~ <= ~ ; M M M
daraus erh~tlt man
f f (32.2) lcr.+~f--a,,J'!dw <= [a,+,, , fp--a,f~ld~+ ~---y. M M
Die Folge der anfp konvergiert im Mittel, weft sie aus gleich- m~ig besehr~tnkten Ortsfunktionen besteht und auflerdem konvergent ist. Jeder natiirliehen Zahl p kann man daher eine natiirliche Zahl n~ zuordnen, so da~ fiir n ~ np und fiir beliebige m
(32.3) f l..+.f- a,,f] d~ < 1 4 P - 1
M
ist. Also konvergiert die Folge der ~nf auch im Mittel, und naeh dem Resultat des w 15 gibt es eine Ortsfunktion g', fiir welche
(32.4) f g' d , < +ao, lira f l~nf --g' ld~ = 0 M n = ~ M
ist. Ferner gibt es ein Nullsoma N', so daft auf M - - N '
(32.5) lira ~np f ~ g' p ~ o o
ist. schlieBlich auch
(32.6) lim X
n = o O M
Endlich bemerke man noch, daft
(32.7) f = lim f grd M P f ~ 1 7 6
ist.
Riesz-Fischerscher Rata uad l~rgodeatheorie. 885
Nach dem Satz 5 muff g' auf M - - ( N ~ ~ ' ) gleich g sein, undes ist
= 0 .
= l i m f f ~ d ~ = f f d ~ P = ~ M M
Alle diese Resultate k(Innen auf Ortsfunktionen beliebigen Vor- zeichens tibertragen werden. Man erhMt den
Sab 6. Unter den Voraussetzungen des 8atzes 5 gdteti die Beziehungen
(32.8) fJgidg,=flfld,. M M M M
(32.9) lim ~l.q--a.fJd~ ~ O. n ~ a o x
# .1
33. Wir nehmen wieder f > 0 an und setzen voraus, daft fllr ein v > 0 die Relation
(33.1) f f v + l d~p < -Fav
besteht. Naeh dem Satz 4 ist dann
(33.2) f ( f*) '+l d~ < -4- zv. M
Aus a n f ~ 0, g => 0 folgt nun
[a,~f--gl ~= max (a,,f, g) <= f*
and flit jedes beliebige Soma X ~ M ist also
X X
Xhnlieh sehliefit man, daft auf einem Soma M~, auf welehem
(33.4) ist, die Relation
f * ~ P
]"nf --.q ]v+l~= pvlanf__g t

386
erfiillt sein muS. eine Zahl p ~ 0 und eine Zerlegung
M=M;+M;' yon M finden, so dafi
C. Carath~odory.
Nun kann man nach Vorgabe einer positiven Zahl
ist und auf dem Soma M~ die Relation (33.4) erfiillt ist. Dann folgt aus den obigen Beziehungen
~ l z n f - - g j , ' - ~ a d ~ = f i~,~/--gi,'+,d~+ f l(f,,f--.ql,'+~d~ M ~;, , ~/,,
~ l)" f l~,,f --gld~+~. M
Daraus folgt mit Berticksichtigung des Satzes 6
lira ~ 1 a n f - - g I ~+ld~ ~ ~,
und weft ~ beliebig gewahlt werden kann,
lim f [ ~ , f - - g ]"+~ d ~ : 0. n : O 0
M
34. Um dieses Resultat auch auf Ortsfunktionen beliebigen Vor- zeichens auszudehnen, gehen wir folgenderma~en vor. Es seien h' und h" zwei Ortsfunktionen, fiir welche
~f M
ist. Wir setzen
(34.2) h = m a x (I h'l, I h" I); dann gibt es eine Zerlegung
(34.3) M = M'-~ M",
so dab h ~ ] h' i auf M' und h ----- ]h"l auf M" ist. Daraus entnimmt man
M' M'
M " M "
es gilt also die Relation
(34;4) fh-+ld~ <__ , '+,". M
Riesz-Fischerscher Satz und Ergodentheorie. 387
Andererseits ist
th'+h"[ ~ Ih'J+lh"l <= 2h, Ih '+h" l "+' < 2"+'h '+' ,
und man kann sehlieglieh sehreiben
(34.5) f th'+ h" I ~+~ d ~ .~ 2 v+' (~/'+ ~i"). M
Nun sei f eine Ortsfunktion beliebigen Vorzeiehens, ffir welehe
M
ist. Es seien f ' und f " nieht negative Ortsfunktionen, ffir welehe
f = f ' - - ] " , I f J, ~--- f ' + f " ist. Setzt man
lim a,,f = g, lim a n f ' = g', lira a , f " = g",
so ist g = g'--g" und wegen (34.5) kann man schreiben
f l e a f - -g1 "+1 d~ M (34.6)
=:< 2"+1 | ] ~, , f-- .q ' I"+' d ~ + 2~+1 ] ] a,j~" - - g "L ~+1 d~.
Diese letzte Ungleichheit in Ver])indung mit dem Resultat des vorigen Paragraphen liefert den
Satz 7. Ist flit die Ortsfienklion f
(34.7) f !f[ "+~ d~ < + ~ (v > 0), M
SO ist auch f i i r die Grenze g der f fn f
(34.8) f n
mul es gilt die Gleichung
(34.9) lira f M
35. Vergleichung J. v. NEo.A...
[ g I"+1 dy) , ~ + ~ :
I~ , , f_g [,,+1 d~ --~ O.
des Satzea von BmX.OFF mit dem Satze yon Der Satz 5 des w 31 ist die direkte Verallgemeinerung
388 G. CaratMmdory.
des Satzes yon BIRKHOFF. Der letzte Satz 7 wird (Ifters ffir ~, = 1 als identisch mit dem Satz yon J. v. NEUMANN angesehen. Bei dieser letzteren Auffassung, welehe durch N, WIENER in tier unter is) zitierten Arbeit vertreten wird, ware also, wie wir gezeigt haben, der Satz yon NEUMANN ein einfaches Korollar des BIRKHOFFSChen Satzes. In Wirklichkeit sind aber die Voraussetzungen der beiden S~ttze v(illig verschieden.
Der NEUMANNsche Satz ist urspriinglich ein Satz fiber HmSERTsche R~tume und kann folgendermafen gedeutet werden. Es sei 1I eine unitRre, lineare Transformation eines HmsERTsehen Raumes, bei welcher der Punkt P ill einen Punkt PI, der Punkt PI in P~ und allgemein der Pankt P~t in ~:)J,-{--1 transformiert wird. Auferdem sol] der knfangspunkt der Koordinaten ein Fixpunkt der Transformation sein. Schon die ein- faehsten Beispiele zeigen, daft die Folgej der Punkte P~, P ~ , . . . nicht zu konvergieren braucht. Setzt man abet Q,, gleich dem Schwerpunkt der Punkte/)I , / )~, . . - , Pn, so konvergiert die Folge der Punkte Q~, Q~, . . . gegen einen invarianten Punkt Q.
Bilden nun die quadratisch integrierbaren Ortsfunktionen f einen HILBF.RTSehen Raum, so besagt die Anwendung des eben formulierten Satzes auf diesen Raum, daft die Gleichung (34.9) fib" ~,--:-1 gilt. Aber yon einer Isomorphie des Ringes X ~ M in sich, die wir doch gerade zum Beweise des Satzes 5 und damit auch des Satzes 7 gebraucht haben, ist hier im allgemeinen keine Rede; denn v. NEITMANN benutzt ]ediglich die Eigensehaflen tier Transformierten ~f, yon denen wit im w 21 gesproehen haben. Aus diesen Eigenschaften kann aber das Vor- handensein einer Isomorphie (20.2) nicht abgeleitet werden.
Es entsteht also die Frage, ob man unsere SRtze aueh erhalten kann, wenn man nicht yon einer Isomorphie des Ringes X ~ M aus- geht, sondern lediglieh yon einer linearen Transformation yon Orts- funktionen, wie wir sie im w 21 betrachtet haben.
Ffir den Satz 7 des vorigen Paragraphen i st diese Frage zu bejahen. Insbesondere hat F. Rmsz in d~r nnter 14) zitierten Arbeit eineu Beweis gegeben, den man kaum wird noch vereinfachen k0nnen. In diesem Beweise wird sogar die Voraussetzung
f t,fl"+,a =f lfl,'+,d M M
dutch die aUgemeinere
M M
ersetzt. Allerding~ gilt der Beweis yon RIEsZ nur fiir den Fall, dali die Integrale Inhaltsfunktionen sind. Fiir r = 1 hat N. Wm:~Ea in der
Riesz-Fischerscher Satz und Ergodentheorie. 389
schon erwahnten Arbeit einen e twas kompliz ier teren Beweis des Satzes 7 gegeben, welcher sogar fiir die al lgemeinsten In tegra le (10.1) gilt. Ob- gleich nun N.WIENER die Exis tenz einer Isomorphie ausdriicklich postuliert ,
kann man sich iiberzeugen, da~ er von dieser Exis tenz fiir den Beweis
des v. NEUMANNschen Satzes keinen Gebrauch macht~6).
Dagegen bleibt die F r a g e noch often, ob der eigentliche BIRKHOFF-
sche Satz 5 unter ahnlichen Voraussetzungen gilt. Sie dflrfte n i c ~
ganz leicht zu beantwor ten sein.
t6) Wiihrend des Druokes dieser Arbeit sind zwei neue Noten yon F. RIEsz erschienen mit den Titeln : Sur la thdorie ergodique des espaces abstraits, Acta Szeged, Vol. 10, p. 1--20. und Another proof of the mean ergodic theorem, ibid. p. 74--75. Nach der zweiten dieser Arbeiten, welche an GAI~I~ETT BInKHOFF, The mean ergodic theorem, Duke Mathem. Journ., Vol. 5 (1939), p. 19--20~ anschlieflt, scheint es, daft schon dieser letztere den v. NEu~A~cschen Satz for nicht separierbare HILBEltTsehe RRume fiir den Fall v ---- 0 bewiesen hat; bei N. WIENER steht, wie wir oben sagten, nur der viel einfaoher zu behandelnde Fall ~ ~ 1. AUerdings ist bei dieser Betrachtungs- weise die Existenz der Grenzfunktion g in (34.9) nieht gesiehert. Diese Existenz wird in sehr eigenartiger Weise in der ersten der zitierten neuen Arbeiten yon Ri~sz fest- gestellt, und dies fiir Funktionenr~ume, die viel allgemeiner sind als diejenigen: die wir hier betrachtet haben.












![Formulare zum Kurzbericht gemäss Störfallverordnung … · Stoff, Erzeugnis, Stoffgruppe Maximalmenge [kg] Bemerkungen. Ammoniak (wasserfrei) ……………………… ... Biodiesel,](https://img.pdfslide.org/doc/110x75/5ba0348009d3f2c2598c53ac/formulare-zum-kurzbericht-gemaess-stoerfallverordnung-stoff-erzeugnis-stoffgruppe.jpg)















