Embed Size (px)
Citation preview
Anhang: UMAT – Unterprogramm, CD mit Simulationsergebnissen
Technische Universität Berlin
Fakultät V – Verkehrs- und Maschinensysteme
Institut für Mechanik
Studienarbeit
(Umfang: 300 Stunden)
Bestimmung des Wirkungsbereichs eines eindringenden Prüfkör-
pers bei Nanoindentationsversuchen
Eingereicht bei: Dr. rer. nat. Wolfgang. H. Müller
Vorgelegt von: Vitali Lehmann
Matr.Nr.: 301177

Selbstständigkeitserklärung
Ich versichere, dass ich die vorliegende Studienarbeit selbstständig und ohne unerlaubte
fremde Hilfe angefertigt habe. Externes Quellenmaterial habe ich in einer separaten Literaturlis-
te aufgeführt und, soweit vorhanden, zitiertes Material kenntlich gemacht.
Berlin, den
______________________ ______________________
Ort, Datum Lehmann Vitali
Inhaltsverzeichnis
Inhaltsverzeichnis
1. Einleitung ................................................................................................................................. 3
2. Nanoindentationsversuch ........................................................................................................ 4
3. Materialmodell .......................................................................................................................... 6
3.1 Verhalten des viskoelastischen Modells (Implementierung) .............................................. 7
3.1.1 Variation der Dämpferkonstante .................................................................................. 8
3.1.2 Variation des .......................................................................................................... 10
4. Implementierung des Nanoindentationsversuches2 .............................................................. 12
4.1 Teileerstellung ................................................................................................................... 12
4.2 Zuweisung der Materialeigenschaften .............................................................................. 13
4.3 Zusammenbau ................................................................................................................... 15
4.4 Definition der Simulationsschritte ...................................................................................... 15
4.5 Definition der Zwangsbedingung....................................................................................... 16
4.6 Netzerstellung .................................................................................................................... 16
4.7 Belastung ........................................................................................................................... 17
4.8 Starten der Simulation ....................................................................................................... 18
5. Auswertung der Simulationsergebnisse ................................................................................ 19
5.1 Darstellung der Tiefe des Wirkungsbereichs (plastische Zone) in ABAQUS CAE .......... 23
5.2 Analytische Berechnung der plastischen Zone................................................................. 26
6. Zusammenfassung ................................................................................................................ 27
7. Abkürzungsverzeichnis .......................................................................................................... 28
8. Abbildungsverzeichnis ........................................................................................................... 29
9. Tabellenverzeichnis ............................................................................................................... 29
10. Quellenverzeichnis ................................................................................................................. 30

01. Einleitung
3
1. Einleitung
Die Nanoindentation ist eine Methode zur Bestimmung materialspezifischer Kennwerte (z.B.
Härte, E-Modul). Vickers stellt ein ähnliches Vorgehen zur Bestimmung der Härte dar, benutzt
jedoch anstatt der dreiseitigen eine vierseitige Pyramide. Die erreichten Eindringtiefen bei der
Nanoindentation mit einem Berkovich – Indenter, der aus einem Diamant besteht, liegen im
µm - Bereich. Mit einer vorgegebenen Belastungsrate dringt die Pyramidenspitze in den Pro-
bekörper ein, bis er eine bestimmte Tiefe erreicht hat, und hinterlässt eine bleibende Verfor-
mung in Form eines Abdrucks in dem Material. Durch das Verdrängen des Materials beim
Einsinken des Prüfkörpers entsteht zudem ein gewisser Wirkungsbereich um den erzeugten
Eindruck des Indenters. Der genaue Wert der Größe des Wirkungsbereiches, der plastischen
Zone, ist nicht bekannt und stellt daher das wesentliche Ziel dieser Arbeit dar.
Um diese Zielsetzung zu erreichen, wird zunächst das Verhalten des implementierten Material-
modells untersucht. Des Weiteren wird anhand einer vorgelegten Kraft – Eindring – Kurve für
das Material Sn42Bi58 (Abbildung 14) eine Simulation mit Hilfe des FE – Programms Abaqus
angenähert und, durch entsprechende Visualisierung der Fließspannung in der Ausgabedatei,
der plastische Bereich dargestellt.
02. Nanoindentationsversuch
4
2. Nanoindentationsversuch
Die Nanoindentation stellt ein Verfahren zur Bestimmung der mechanischen Eigenschaften, wie
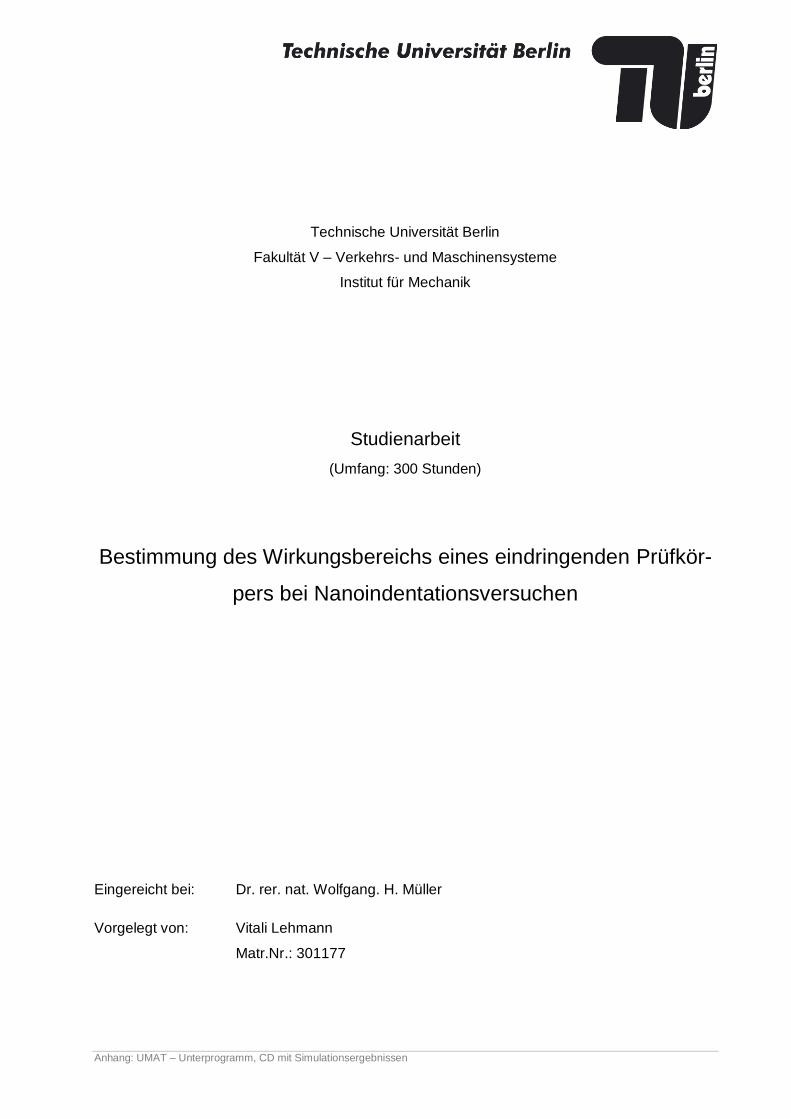
beispielsweise Härte und Elastizitätsmodul dar. Das Experiment erfolgt mit Hilfe des Berkovich
– Indenters (siehe Abbildung 1). Der Indenter ist eine dreiseitige Pyramide aus Diamant mit
einem E – Modul von 1141 GPa und einer Poissonzahl von 0,07.[1], Seite 293.
Abbildung 1: Geometrie des Berkovich - Indenters [2]
Diese Form des Indenters eliminiert ab einer bestimmten Eindringtiefe den fertigungsbedingten
Messfehler, der auch als Dachkante (Abbildung 2) bekannt ist. Die produktionsbedingte Dach-
kante kann bei einer vierseitigen Pyramide auftreten. Solche Pyramide kommt zum Beispiel
beim Vickers – Härteprüfverfahren zum Einsatz und führt zu einem Fehler des Härtewertes.
Abbildung 2: Dachkante "c" einer vierseitigen Pyramide [3]
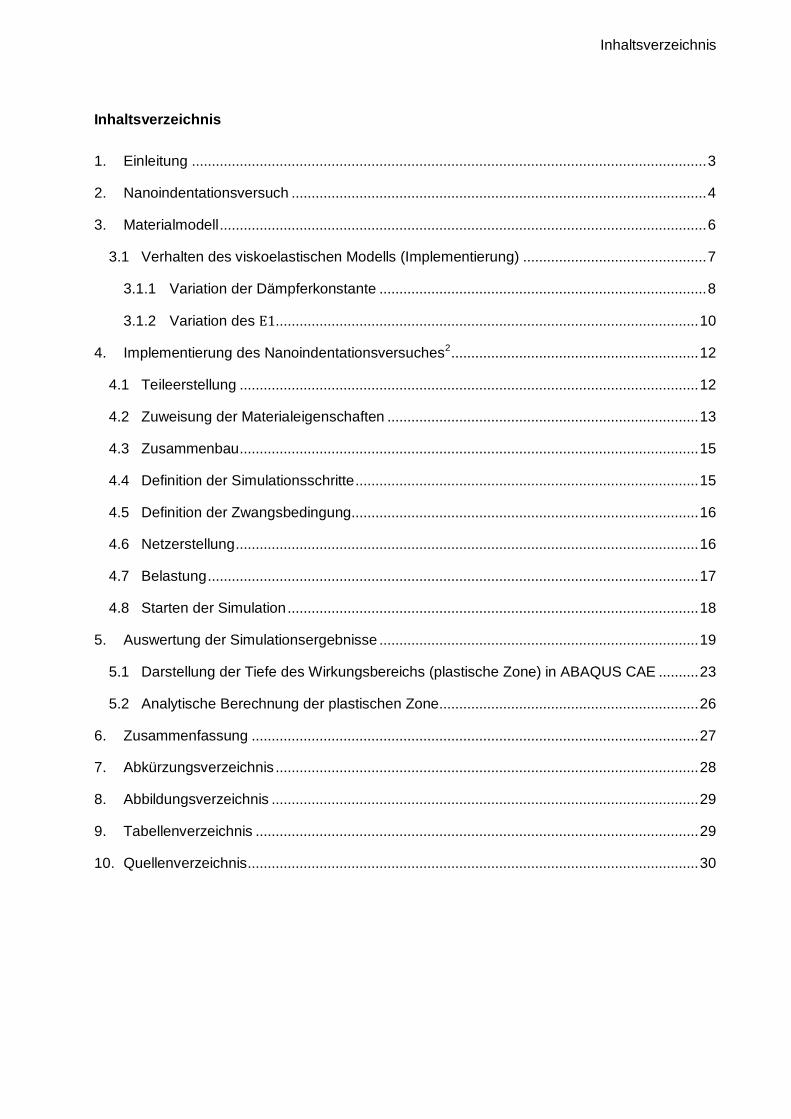
Die Härteprüfung nach Berkovich erfolgt in drei Phasen. In der ersten Phase wird der Diamant
mit einer bestimmten Belastungsrate (üblicherweise in mN/s Bereich), deren typischer Verlauf in
Abbildung 3 dargestellt ist, in das Werkstück gedrückt. Der erste Kontakt zwischen Indenter und
Oberfläche ist rein elastisch. Mit steigender Kraft kommt es zusätzlich zu Verzerrung des
Gitters, was eine plastische Verformung bewirkt. Nach Erreichen der vorgeschriebenen maxi-
malen Eindringtiefe wird die Kraft zwischen 30 s und 240 s konstant gehalten. In der letzten
Phase bildet sich die viskose Verfestigung zurück. Diese Phase wird auch als Relaxationsphase
bezeichnet.
02. Nanoindentationsversuch
5
Bei der Nanoindentation kann unter der Annahme einer rein elastischen Rückfederung der
Oberfläche, die Steifigkeit S beim Entlasten direkt aus der Entlastungskurve bestimmt werden.
Diese wird wiederum für die Berechnung des reduzierten Elastizitätsmoduls herangezogen.
Abbildung 3: Charakteristische Kraft - Eindring - Kurve [3]
Zur Durchführung des Experiments wird in der Maschine die Eindringtiefe des Diamanten
vorgegeben. Daraufhin erhöht die Maschine die Kraft mit einer bestimmten Rate bis der
Indenter die vorgegebene Tiefe erreicht hat. Während des gesamten Verfahrens wird die
Kraft P, die Eindringtiefe h und die Zeit t aufgezeichnet. Dies ermöglicht außerdem die Bestim-
mung der Härte und anderen Werkstoffeigenschaften. Die Härte wird aus dem Quotienten der
anliegenden Kraft P und der projizierten Fläche definiert:
Die projizierte Fläche beim Berkovich – Indenter beträgt c hc
. Wobei hc als Wert der
anliegenden Tangente im Anfangspunkt der Entlastungsphase definiert ist. Näheres dazu im
Abschnitt 5.1.
03. Materialmodell
1 Technische Universität Berlin, Fak. V, Institut für Mechanik, Lehrstuhl Kontinuumsmechanik und Materialtheorie,
MS2 Einsteinufer 5, D10587 6
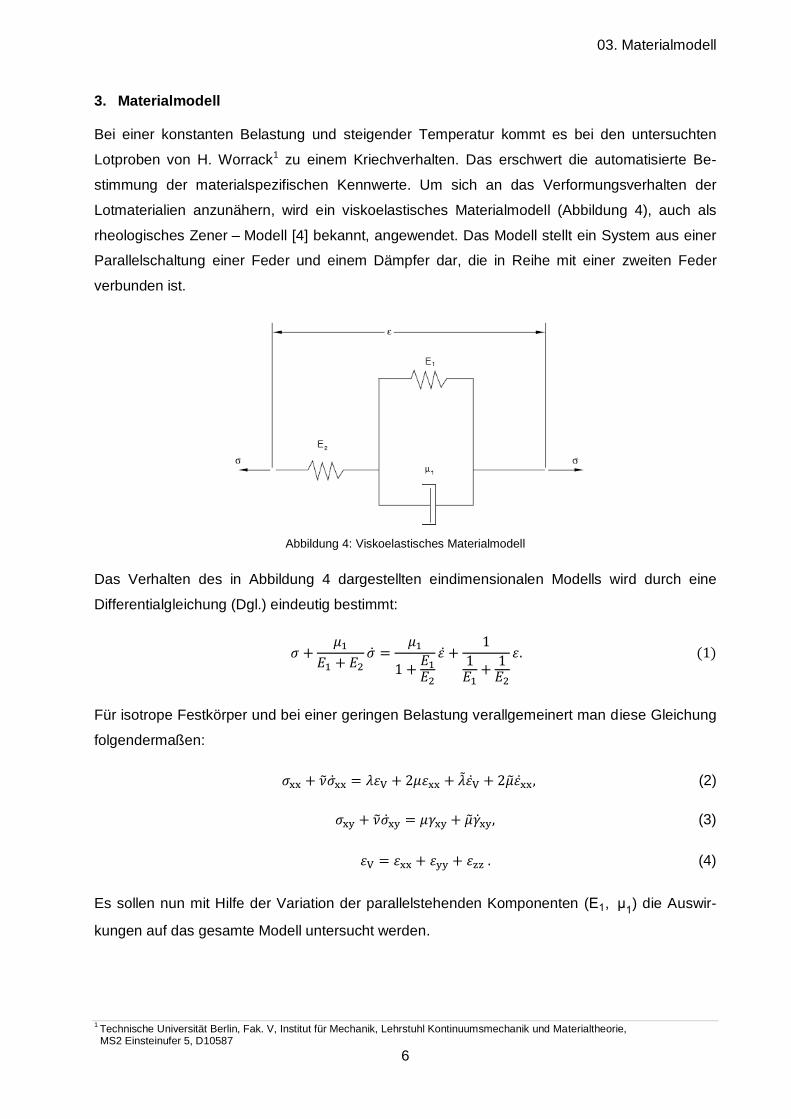
3. Materialmodell
Bei einer konstanten Belastung und steigender Temperatur kommt es bei den untersuchten
Lotproben von H. Worrack1 zu einem Kriechverhalten. Das erschwert die automatisierte Be-
stimmung der materialspezifischen Kennwerte. Um sich an das Verformungsverhalten der
Lotmaterialien anzunähern, wird ein viskoelastisches Materialmodell (Abbildung 4), auch als
rheologisches Zener – Modell [4] bekannt, angewendet. Das Modell stellt ein System aus einer
Parallelschaltung einer Feder und einem Dämpfer dar, die in Reihe mit einer zweiten Feder
verbunden ist.
Abbildung 4: Viskoelastisches Materialmodell
Das Verhalten des in Abbildung 4 dargestellten eindimensionalen Modells wird durch eine
Differentialgleichung (Dgl.) eindeutig bestimmt:
Für isotrope Festkörper und bei einer geringen Belastung verallgemeinert man diese Gleichung
folgendermaßen:
(2)
(3)
(4)
Es sollen nun mit Hilfe der Variation der parallelstehenden Komponenten ( ) die Auswir-
kungen auf das gesamte Modell untersucht werden.
03. Materialmodell
7
3.1 Verhalten des viskoelastischen Modells (Implementierung)
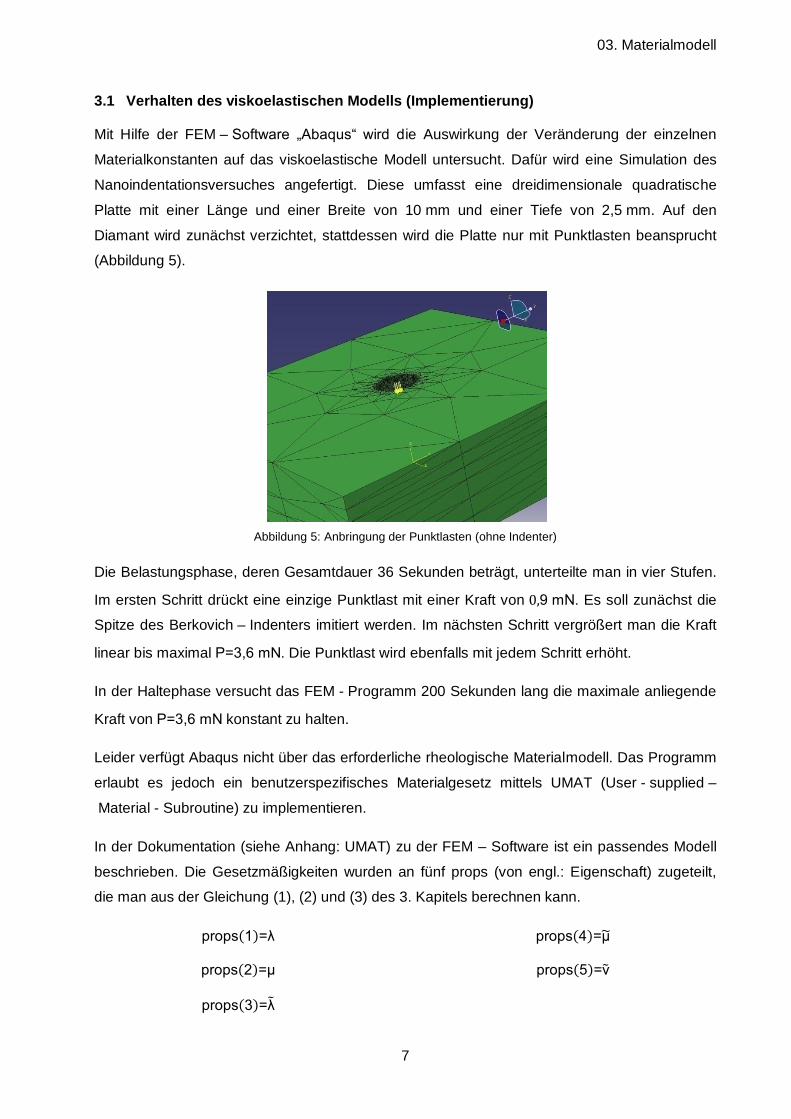
Mit Hilfe der FEM – Software „ baqus“ wird die Auswirkung der Veränderung der einzelnen
Materialkonstanten auf das viskoelastische Modell untersucht. Dafür wird eine Simulation des
Nanoindentationsversuches angefertigt. Diese umfasst eine dreidimensionale quadratische
Platte mit einer Länge und einer Breite von 10 mm und einer Tiefe von 2,5 mm. Auf den
Diamant wird zunächst verzichtet, stattdessen wird die Platte nur mit Punktlasten beansprucht
(Abbildung 5).
Abbildung 5: Anbringung der Punktlasten (ohne Indenter)
Die Belastungsphase, deren Gesamtdauer 36 Sekunden beträgt, unterteilte man in vier Stufen.
Im ersten Schritt drückt eine einzige Punktlast mit einer Kraft von m . Es soll zunächst die
Spitze des Berkovich – Indenters imitiert werden. Im nächsten Schritt vergrößert man die Kraft
linear bis maximal m . Die Punktlast wird ebenfalls mit jedem Schritt erhöht.
In der Haltephase versucht das FEM - Programm 200 Sekunden lang die maximale anliegende
Kraft von m konstant zu halten.
Leider verfügt Abaqus nicht über das erforderliche rheologische Materialmodell. Das Programm
erlaubt es jedoch ein benutzerspezifisches Materialgesetz mittels UMAT (User - supplied –
Material - Subroutine) zu implementieren.
In der Dokumentation (siehe Anhang: UMAT) zu der FEM – Software ist ein passendes Modell
beschrieben. Die Gesetzmäßigkeiten wurden an fünf props (von engl.: Eigenschaft) zugeteilt,
die man aus der Gleichung (1), (2) und (3) des 3. Kapitels berechnen kann.
props
props
props
props
props
03. Materialmodell
8
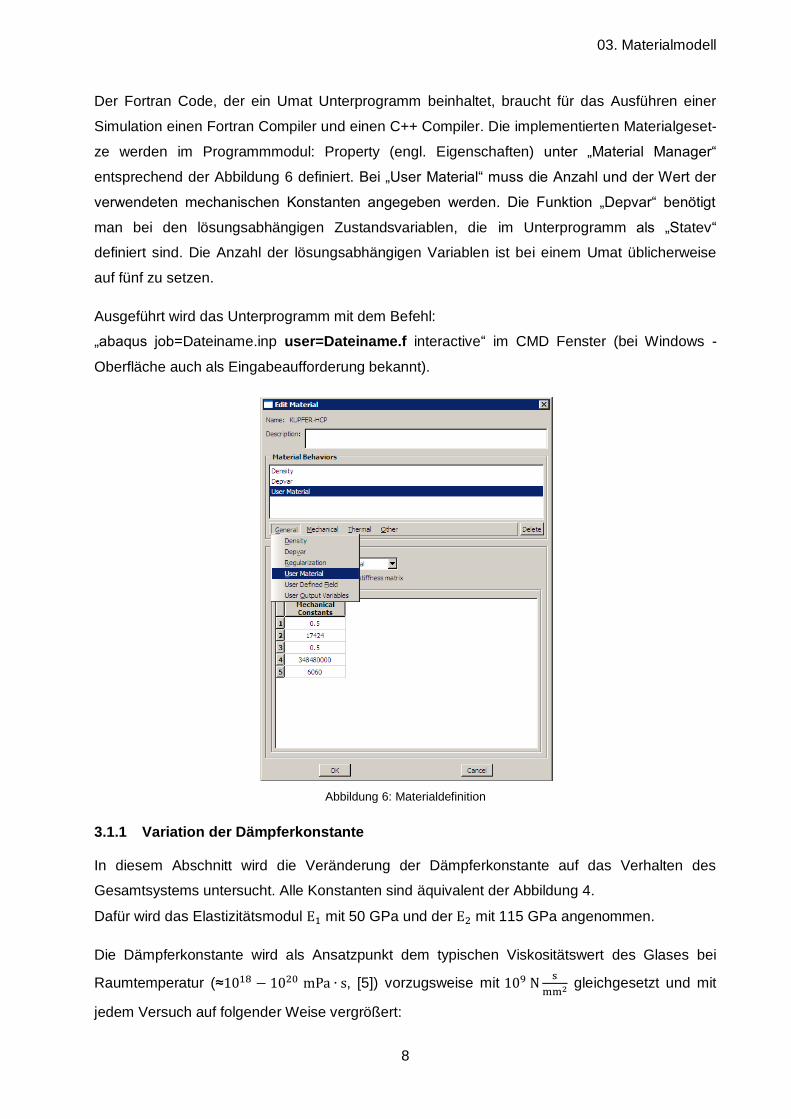
Der Fortran Code, der ein Umat Unterprogramm beinhaltet, braucht für das Ausführen einer
Simulation einen Fortran Compiler und einen C++ Compiler. Die implementierten Materialgeset-
ze werden im Programmmodul: Property (engl. Eigenschaften) unter „Material Manager“
entsprechend der Abbildung 6 definiert. Bei „User Material“ muss die nzahl und der Wert der
verwendeten mechanischen Konstanten angegeben werden. Die Funktion „Depvar“ benötigt
man bei den lösungsabhängigen Zustandsvariablen, die im Unterprogramm als „Statev“
definiert sind. Die Anzahl der lösungsabhängigen Variablen ist bei einem Umat üblicherweise
auf fünf zu setzen.
Ausgeführt wird das Unterprogramm mit dem Befehl:
„abaqus job Dateiname.inp user=Dateiname.f interactive“ im CMD Fenster (bei Windows -
Oberfläche auch als Eingabeaufforderung bekannt).
Abbildung 6: Materialdefinition
3.1.1 Variation der Dämpferkonstante
In diesem Abschnitt wird die Veränderung der Dämpferkonstante auf das Verhalten des
Gesamtsystems untersucht. Alle Konstanten sind äquivalent der Abbildung 4.
Dafür wird das Elastizitätsmodul mit 50 GPa und der mit 115 GPa angenommen.
Die Dämpferkonstante wird als Ansatzpunkt dem typischen Viskositätswert des Glases bei
Raumtemperatur ( , [5]) vorzugsweise mit
gleichgesetzt und mit
jedem Versuch auf folgender Weise vergrößert:
03. Materialmodell
9
Im ersten Versuch ist die Dämpferkonstante:
Im zweiten Versuch ist die Dämpferkonstante:
Im dritten Versuch ist die Dämpferkonstante:
Im vierten Versuch ist die Dämpferkonstante:
Die Einheit für die Dämpferkonstante setzt sich aus Differenz der Spannung (Einheit
mm ) und
der zeitlichen Ableitung der Verschiebung (Einheit
s) zusammen.
Es ist aus der Abbildung 7 zu entnehmen, dass der Verlauf in der Belastungsphase in allen
Simulationsabläufen annähernd identisch ist. Der wesentliche Unterschied wird in der Erho-
lungsphase erkenntlich. Das Experiment mit der kleinsten Dämpferkonstante weist in der
zweiten Phase die größte Steigung auf. Daraus kann geschlossen werden, dass im Zener -
Modell Kriechverhalten bewirkt. Mit Herabsetzen der Konstante wird eine größere Verschie-
bung am Ende der Simulation erwartet.
Wie in Abbildung 7 (vergrößerten Darstellung) ersichtlich, wird an der Schnittstelle zwischen der
ersten und der zweiten Phase keine regelmäßige Tendenz festgestellt. Um aber die Auswirkung
der Reduzierung des Dämpfers zu untersuchen, werden in jedem Versuch die Verschiebungs-
werte am Ende der ersten Phase (36 Sekunden) und nach Abschluss des Versuchs (236 Se-
kunden) aufgenommen.
Die grüne Linie, die den Verlauf des vierten Versuchs beschreibt, erreicht nach 36 Sekunden
den größten Verschiebungswert von h -
mm (Tabelle 1). Simulationen zwei und drei
erreichen die kleinste Verschiebung und sind vergleichbar mit h -
mm zu bewerten. Der
Verlauf mit der geringsten Dämpferkonstante befindet sich zwischen dem größten und dem
kleinsten Verschiebungswert und beträgt h -
mm.
Versuch
Nr.:
Verschiebung nach
36 Sekunden
Verschiebung nach
236 Sekunden Delta
Prozentuale
Differenz
1 2,5979E-05 mm 2,8306E-05 mm 2,3271E-06 mm 0 %
2 2,5885E-05 mm 2,6476E-05 mm 5,9150E-07 mm 393,4 %
3 2,5871E-05 mm 2,6168E-05 mm 2,9660E-07 mm 199,4 %
4 2,6093E-05 mm 2,6243E-05 mm 1,4980E-07 mm 197,9 %
Tabelle 1: Prozentuale Darstellung des Kriechens
Das Delta in Tabelle 1 stellt die Differenz der Verschiebung zwischen dem erreichten Wert nach
236 Sekunden und nach 36 Sekunden dar, also die absolute Verschiebung nur in der Erho-
03. Materialmodell
10
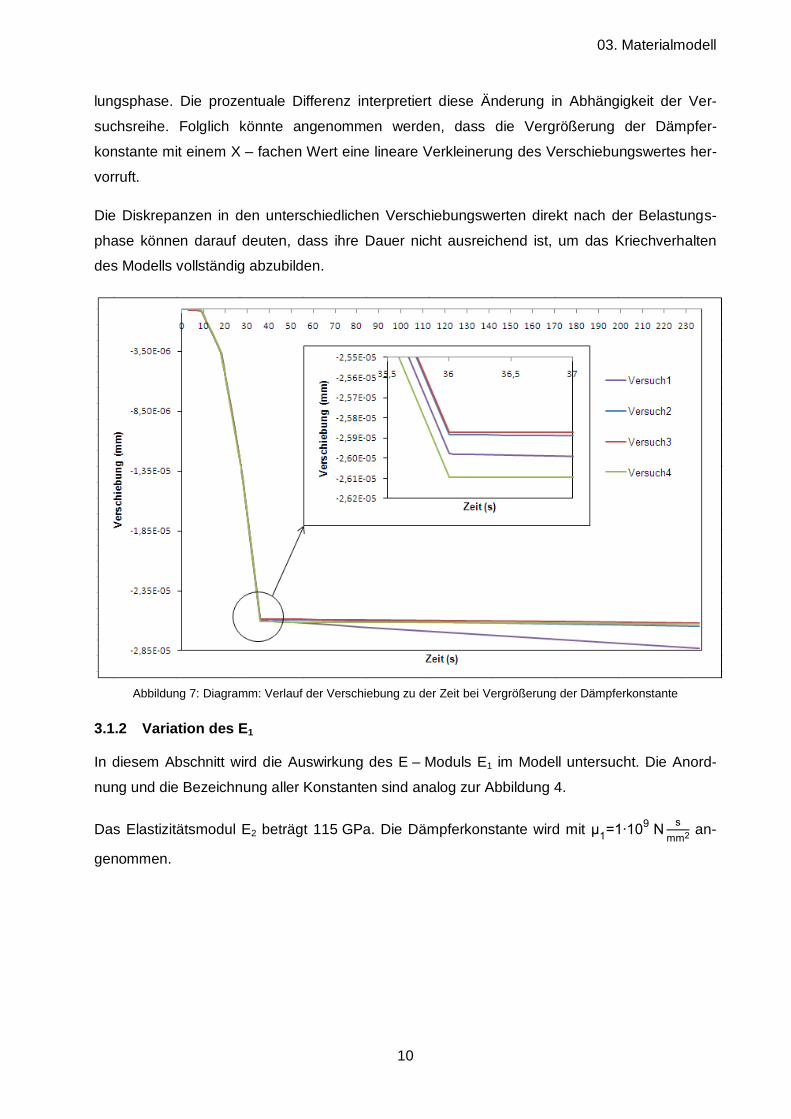
lungsphase. Die prozentuale Differenz interpretiert diese Änderung in Abhängigkeit der Ver-
suchsreihe. Folglich könnte angenommen werden, dass die Vergrößerung der Dämpfer-
konstante mit einem X – fachen Wert eine lineare Verkleinerung des Verschiebungswertes her-
vorruft.
Die Diskrepanzen in den unterschiedlichen Verschiebungswerten direkt nach der Belastungs-
phase können darauf deuten, dass ihre Dauer nicht ausreichend ist, um das Kriechverhalten
des Modells vollständig abzubilden.
Abbildung 7: Diagramm: Verlauf der Verschiebung zu der Zeit bei Vergrößerung der Dämpferkonstante
3.1.2 Variation des E1
In diesem Abschnitt wird die Auswirkung des E – Moduls E1 im Modell untersucht. Die Anord-
nung und die Bezeichnung aller Konstanten sind analog zur Abbildung 4.
Das Elastizitätsmodul E2 beträgt 115 GPa. Die Dämpferkonstante wird mit
s
mm an-
genommen.
03. Materialmodell
11
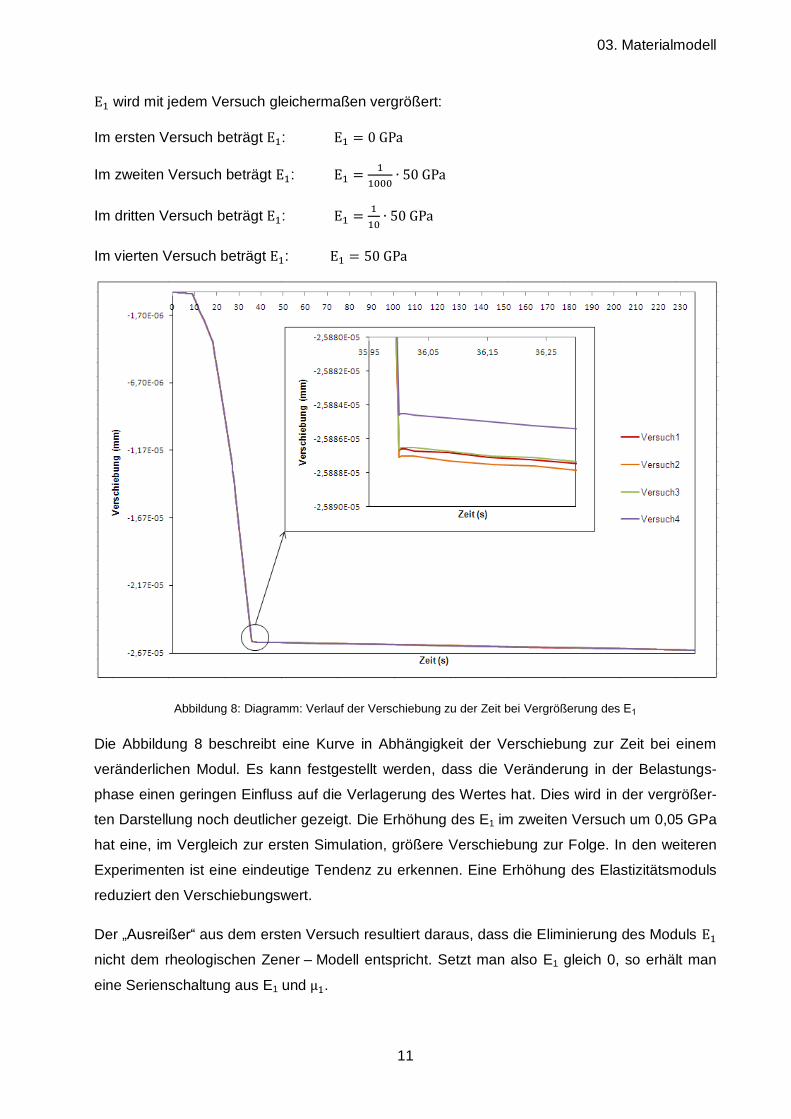
wird mit jedem Versuch gleichermaßen vergrößert:
Im ersten Versuch beträgt :
Im zweiten Versuch beträgt :
Im dritten Versuch beträgt :
Im vierten Versuch beträgt :
Abbildung 8: Diagramm: Verlauf der Verschiebung zu der Zeit bei Vergrößerung des
Die Abbildung 8 beschreibt eine Kurve in Abhängigkeit der Verschiebung zur Zeit bei einem
veränderlichen Modul. Es kann festgestellt werden, dass die Veränderung in der Belastungs-
phase einen geringen Einfluss auf die Verlagerung des Wertes hat. Dies wird in der vergrößer-
ten Darstellung noch deutlicher gezeigt. Die Erhöhung des E1 im zweiten Versuch um 0,05 GPa
hat eine, im Vergleich zur ersten Simulation, größere Verschiebung zur Folge. In den weiteren
Experimenten ist eine eindeutige Tendenz zu erkennen. Eine Erhöhung des Elastizitätsmoduls
reduziert den Verschiebungswert.
Der „ usreißer“ aus dem ersten Versuch resultiert daraus, dass die Eliminierung des Moduls
nicht dem rheologischen Zener – Modell entspricht. Setzt man also E1 gleich 0, so erhält man
eine Serienschaltung aus E1 und .
04. Implementierung des Nanoindentationsversuches
2 Darstellung wie in ABAQUS CAE 10.1 12
4. Implementierung des Nanoindentationsversuches2
4.1 Teileerstellung
Die Gestaltung des Versuches im Simulationsprogramm Abaqus wird auf zwei wesentliche
Baugruppen begrenzt. Zunächst wird im „Modul: Part“ (von engl.: Teil) eine Extrusionsfigur
erstellt, die eine dreidimensionale Platte analog dem Abschnitt 3.1 entspricht. Im nächsten
Schritt muss die Platte in drei Zellen partitioniert werden. Die Aufteilung in die Segmente ist für
die spätere Netzerstellung erforderlich, denn so kann eine unnötig große Anzahl der Element-
knoten und somit auch große Rechenzeit vermieden werden. Der Aufbau der Zellen beginnt mit
der Erstellung der versetzten Ebene mit Feature „Create Datum Plane: Offset From Plane“
(von engl.: Erstellen der Bezugsebene: versetzt von der Ebene). Dazu werden im Abstand von
jeweils 1 mm von der oberen Oberfläche der Platte zwei Bezugsebenen konfiguriert. Anschlie-
ßend werden entlang dieser Ebenen mit Hilfe von „Partition Cell: Use Datum Plane“ Zellen
gefertigt. Im weiteren Vorgang wird mit „Partition Face: Scetch“ drei Kreismuster mit dem
Radius von 0,4 m (obere Oberfläche, erste Bezugsebene, zweite Bezugsebene) erzeugt, die
für die adaptive Netzverfeinerung gebraucht werden.
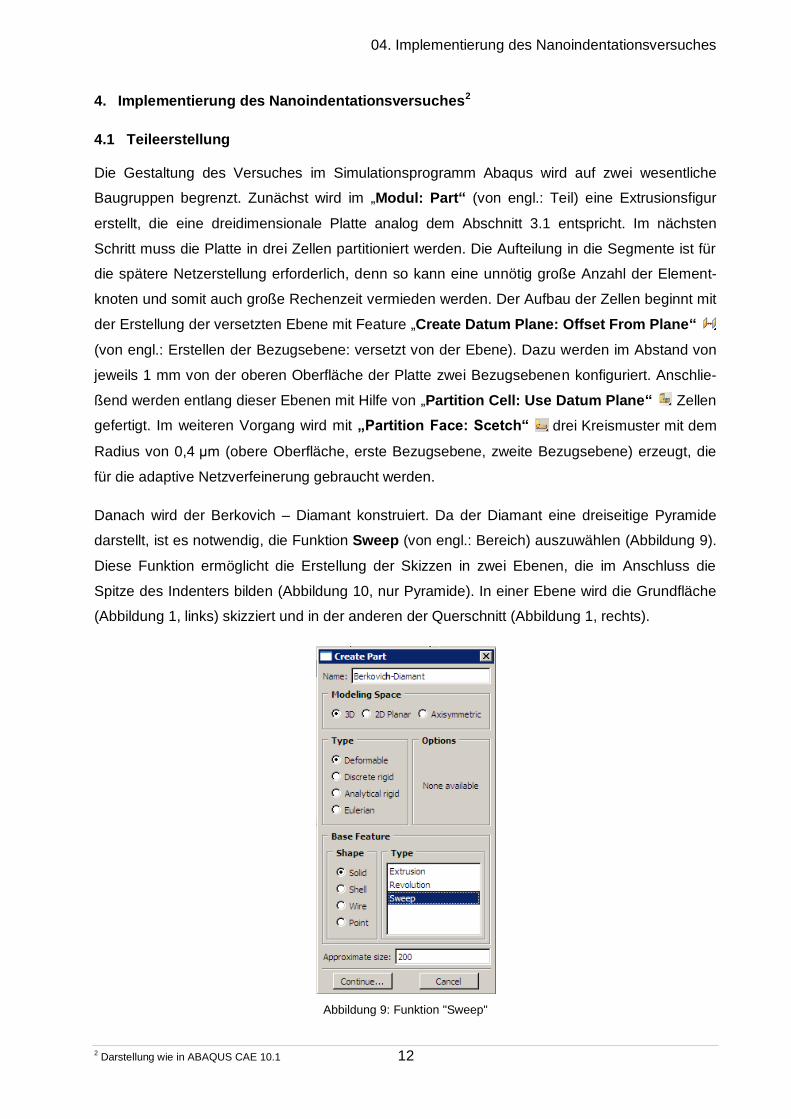
Danach wird der Berkovich – Diamant konstruiert. Da der Diamant eine dreiseitige Pyramide
darstellt, ist es notwendig, die Funktion Sweep (von engl.: Bereich) auszuwählen (Abbildung 9).
Diese Funktion ermöglicht die Erstellung der Skizzen in zwei Ebenen, die im Anschluss die
Spitze des Indenters bilden (Abbildung 10, nur Pyramide). In einer Ebene wird die Grundfläche
(Abbildung 1, links) skizziert und in der anderen der Querschnitt (Abbildung 1, rechts).
Abbildung 9: Funktion "Sweep"
04. Implementierung des Nanoindentationsversuches
13
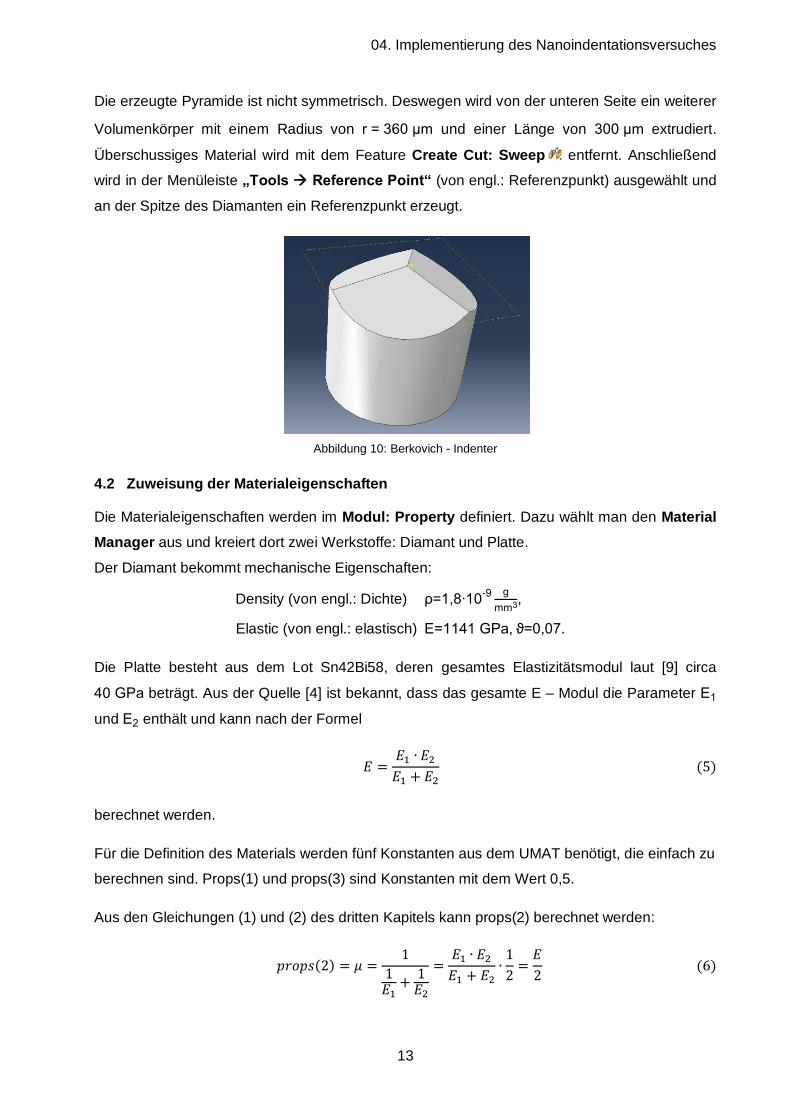
Die erzeugte Pyramide ist nicht symmetrisch. Deswegen wird von der unteren Seite ein weiterer
Volumenkörper mit einem Radius von r m und einer Länge von m extrudiert.
Überschussiges Material wird mit dem Feature Create Cut: Sweep entfernt. Anschließend
wird in der Menüleiste „Tools Reference Point“ (von engl.: Referenzpunkt) ausgewählt und
an der Spitze des Diamanten ein Referenzpunkt erzeugt.
Abbildung 10: Berkovich - Indenter
4.2 Zuweisung der Materialeigenschaften
Die Materialeigenschaften werden im Modul: Property definiert. Dazu wählt man den Material
Manager aus und kreiert dort zwei Werkstoffe: Diamant und Platte.
Der Diamant bekommt mechanische Eigenschaften:
Density (von engl.: Dichte) - g
mm ,
Elastic (von engl.: elastisch) a .
Die Platte besteht aus dem Lot Sn42Bi58, deren gesamtes Elastizitätsmodul laut [9] circa
a beträgt. Aus der Quelle [4] ist bekannt, dass das gesamte E – Modul die Parameter
und enthält und kann nach der Formel
berechnet werden.
Für die Definition des Materials werden fünf Konstanten aus dem UMAT benötigt, die einfach zu
berechnen sind. Props(1) und props(3) sind Konstanten mit dem Wert 0,5.
Aus den Gleichungen (1) und (2) des dritten Kapitels kann props(2) berechnet werden:
04. Implementierung des Nanoindentationsversuches
14
Props(4) wird aus den Gleichungen (1) und (2) entnommen und ergibt mit der Gleichung (5):
Props(5) wird aus den Gleichungen (1) und (2) entnommen und ergibt mit der Gleichung (7):
wird mit jedem Versuch bis maximal a erhöht und auf den Wert
.
s
mm verkleinert. Es wird dadurch versucht, sich an die reale Nanoindentation
anzunähern. Nun ist es möglich die Grenzwerte in den Gleichungen (6), (7), (8) und (9) einzu-
setzen und die Materialeigenschaften folgendermaßen zu definieren:
Density - g
mm ,
Depvar analog zum bschnitt . . .
User Material props ,
props
props
props
props
Danach werden im Section Manager Abschnitte definiert. Die erste Sektion beinhaltet einen
homogenen Festkörper (engl.: solid, homogeneous) mit den Materialeigenschaften des Diaman-
ten. Die Andere ist ebenfalls ein homogener Festkörper, jedoch mit den Materialeigenschaften
des Lots.
Die Definition des „ roperty“ Moduls wird mit der Zuordnung der erstellten Sektionen zur
jeweiligen Geometrie abgeschlossen. Dazu wird das Feature Section Assignment Manager
(von engl.: Zuordnungsmanager der Sektionen) aufgerufen und nach Auswahl des geeigneten
Teiles der entsprechenden Sektion bestätigt.
04. Implementierung des Nanoindentationsversuches
15
4.3 Zusammenbau
Zum Ausführen der Simulation ist es notwendig, die getrennten Teile im Modul Assembly
(Zusammenbau) zusammenzusetzen. Dadurch wird es möglich, die Definition der Kontaktbe-
dingungen zu umgehen. Zunächst wir die Platte in die graphische Oberfläche des Programms
eingefügt und in den Koordinatenursprung positioniert. Danach wird der Indenter so eingesetzt,
dass die Spitze die Platte im Mittelpunkt berührt. Im Anschluss hilft das Feature Merge / Cut
Instances (von engl.: verbinden / schneiden der Instanzen) beide Geometrien zu verbin-
den.
Mit dem Fusionieren der Teile definiert man indirekt eine Kontaktbedingung in dem Punkt, wo
der Diamant an der Oberfläche der Platte anliegt. Ohne diesen Zwischenschritt würde der
Indenter beim Anlegen einer externen Last die Platte sofort durchdringen und ins Unendliche
verschoben werden.
4.4 Definition der Simulationsschritte
Die Simulationsschritte werden im Modul: Step erstellt. Mit Hilfe von „Create Step“ (von
engl.: kreiere Schritt) wird zunächst die Belastungsphase, die eine Dauer (engl.: Time Period)
von 30 Sekunden beträgt, und danach die Ruhephase mit einer Dauer von 60 Sekunden
erstellt. Die Größe der Inkrementschritte (engl.: Increment size: initial) ist in der ersten Phase
mit 0,01 vollkommen ausrechend. In der zweiten Phase wird diese Größe auf 0,00001 verklei-
nert. Die maximale Anzahl der Inkremente kann in beiden Schritten auf 100.000.000 geändert
werden. Die Änderung der Werte ist für das Umgehen der Fehlermeldung „Too many Attempts“
(von engl.: Zu viele Versuche) erforderlich.
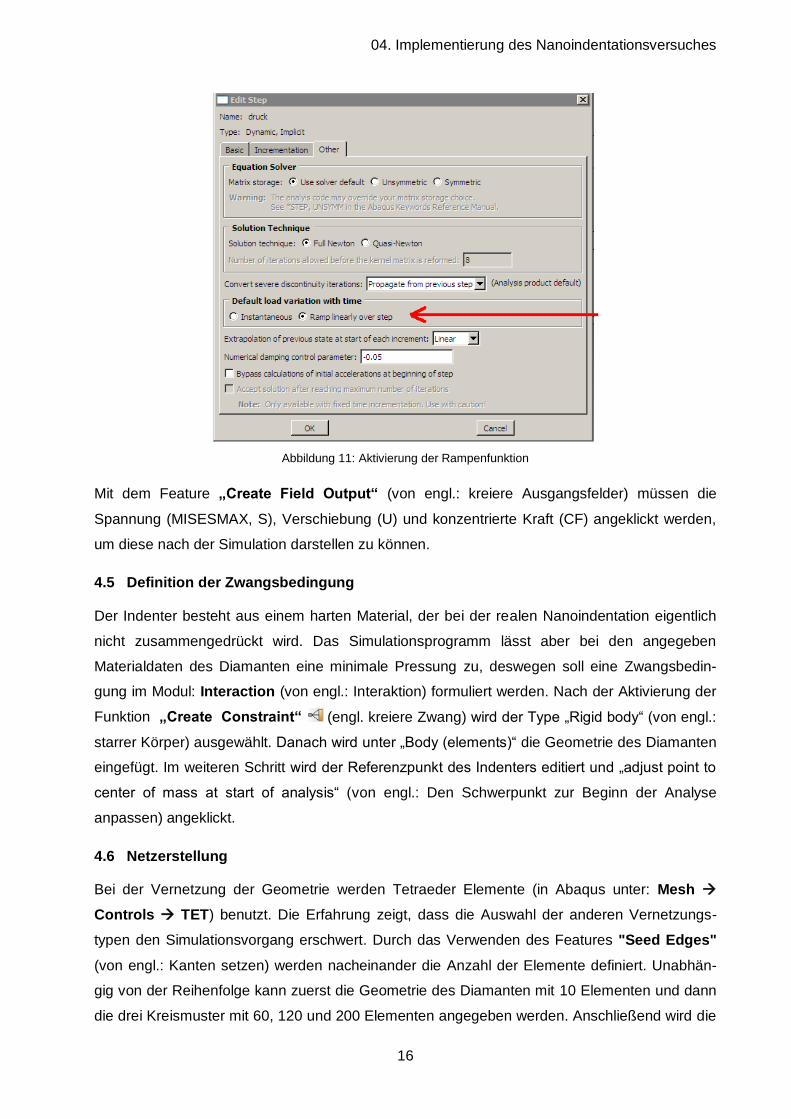
Die Belastung wird proportional mit der Zeit ansteigen, dafür muss die Rampenfunktion in der
ersten Phase entsprechen der Abbildung 11 aktiviert werden. In der Ruhephase wählt man
anstatt der Rampenfunktion eine Belastung mit Hilfe von „instantaneous“ (von engl.: unverzüg-
lich) aus.
04. Implementierung des Nanoindentationsversuches
16
Abbildung 11: Aktivierung der Rampenfunktion
Mit dem Feature „Create Field Output“ (von engl.: kreiere Ausgangsfelder) müssen die
Spannung (MISESMAX, S), Verschiebung (U) und konzentrierte Kraft (CF) angeklickt werden,
um diese nach der Simulation darstellen zu können.
4.5 Definition der Zwangsbedingung
Der Indenter besteht aus einem harten Material, der bei der realen Nanoindentation eigentlich
nicht zusammengedrückt wird. Das Simulationsprogramm lässt aber bei den angegeben
Materialdaten des Diamanten eine minimale Pressung zu, deswegen soll eine Zwangsbedin-
gung im Modul: Interaction (von engl.: Interaktion) formuliert werden. Nach der Aktivierung der
Funktion „Create Constraint“ (engl. kreiere Zwang) wird der Type „Rigid body“ (von engl.:
starrer Körper) ausgewählt. Danach wird unter „Body (elements)“ die Geometrie des Diamanten
eingefügt. Im weiteren Schritt wird der Referenzpunkt des Indenters editiert und „adjust point to
center of mass at start of analysis“ (von engl.: Den Schwerpunkt zur Beginn der Analyse
anpassen) angeklickt.
4.6 Netzerstellung
Bei der Vernetzung der Geometrie werden Tetraeder Elemente (in Abaqus unter: Mesh
Controls TET) benutzt. Die Erfahrung zeigt, dass die Auswahl der anderen Vernetzungs-
typen den Simulationsvorgang erschwert. Durch das Verwenden des Features "Seed Edges"
(von engl.: Kanten setzen) werden nacheinander die Anzahl der Elemente definiert. Unabhän-
gig von der Reihenfolge kann zuerst die Geometrie des Diamanten mit 10 Elementen und dann
die drei Kreismuster mit 60, 120 und 200 Elementen angegeben werden. Anschließend wird die
04. Implementierung des Nanoindentationsversuches
17
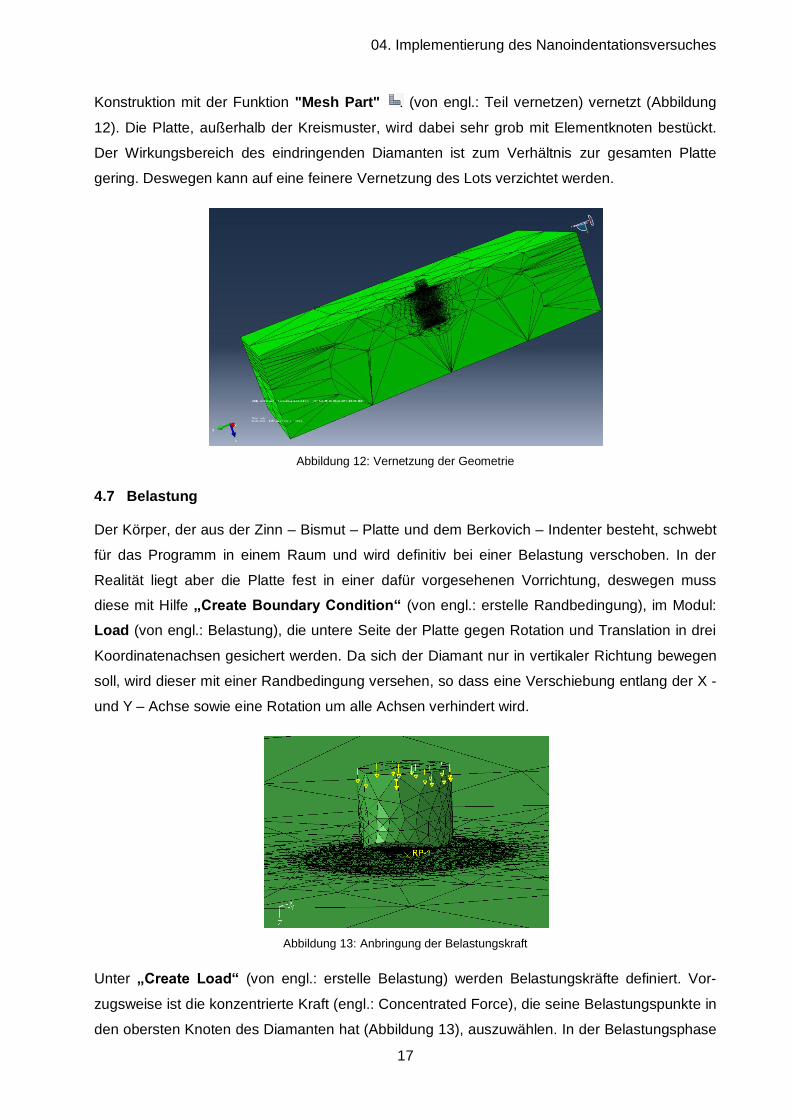
Konstruktion mit der Funktion "Mesh Part" (von engl.: Teil vernetzen) vernetzt (Abbildung
12). Die Platte, außerhalb der Kreismuster, wird dabei sehr grob mit Elementknoten bestückt.
Der Wirkungsbereich des eindringenden Diamanten ist zum Verhältnis zur gesamten Platte
gering. Deswegen kann auf eine feinere Vernetzung des Lots verzichtet werden.
Abbildung 12: Vernetzung der Geometrie
4.7 Belastung
Der Körper, der aus der Zinn – Bismut – Platte und dem Berkovich – Indenter besteht, schwebt
für das Programm in einem Raum und wird definitiv bei einer Belastung verschoben. In der
Realität liegt aber die Platte fest in einer dafür vorgesehenen Vorrichtung, deswegen muss
diese mit Hilfe „Create Boundary Condition“ (von engl.: erstelle Randbedingung), im Modul:
Load (von engl.: Belastung), die untere Seite der Platte gegen Rotation und Translation in drei
Koordinatenachsen gesichert werden. Da sich der Diamant nur in vertikaler Richtung bewegen
soll, wird dieser mit einer Randbedingung versehen, so dass eine Verschiebung entlang der X -
und Y – Achse sowie eine Rotation um alle Achsen verhindert wird.
Abbildung 13: Anbringung der Belastungskraft
Unter „Create Load“ (von engl.: erstelle Belastung) werden Belastungskräfte definiert. Vor-
zugsweise ist die konzentrierte Kraft (engl.: Concentrated Force), die seine Belastungspunkte in
den obersten Knoten des Diamanten hat (Abbildung 13), auszuwählen. In der Belastungsphase
04. Implementierung des Nanoindentationsversuches
18
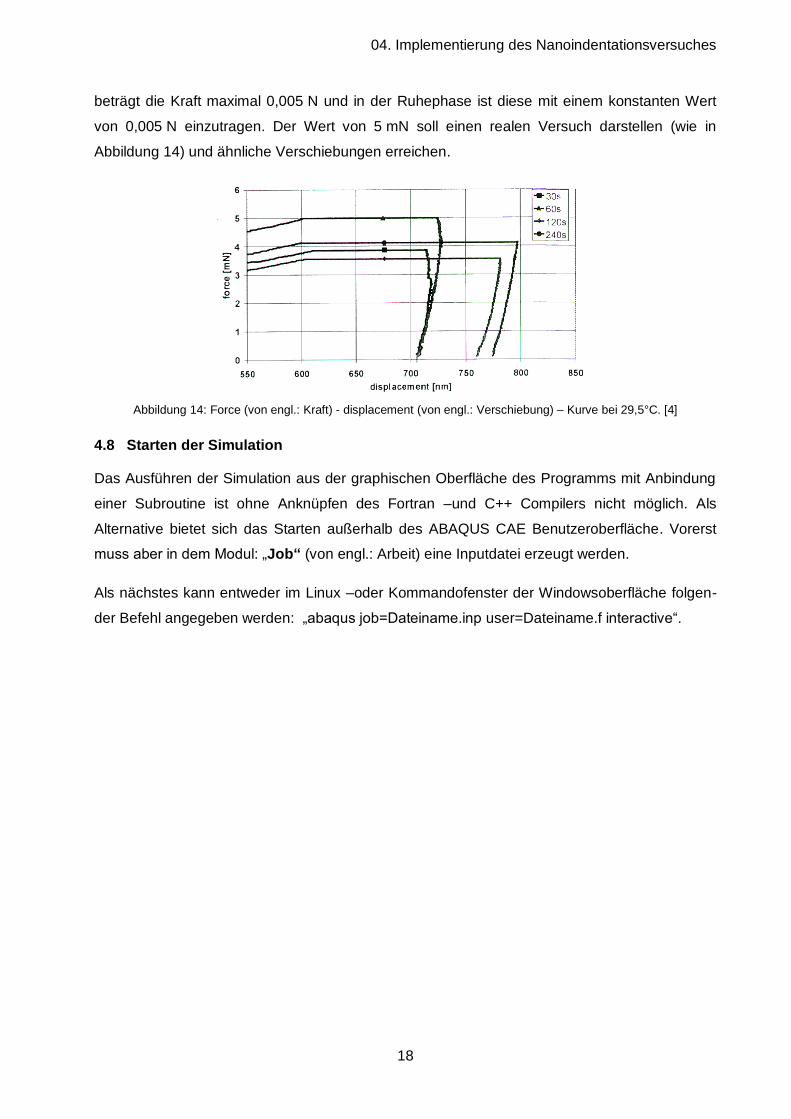
beträgt die Kraft maximal 0,005 N und in der Ruhephase ist diese mit einem konstanten Wert
von 0,005 N einzutragen. Der Wert von 5 mN soll einen realen Versuch darstellen (wie in
Abbildung 14) und ähnliche Verschiebungen erreichen.
Abbildung 14: Force (von engl.: Kraft) - displacement (von engl.: Verschiebung) – Kurve bei 29,5°C. [4]
4.8 Starten der Simulation
Das Ausführen der Simulation aus der graphischen Oberfläche des Programms mit Anbindung
einer Subroutine ist ohne Anknüpfen des Fortran –und C++ Compilers nicht möglich. Als
Alternative bietet sich das Starten außerhalb des ABAQUS CAE Benutzeroberfläche. Vorerst
muss aber in dem Modul: „Job“ (von engl.: Arbeit) eine Inputdatei erzeugt werden.
Als nächstes kann entweder im Linux –oder Kommandofenster der Windowsoberfläche folgen-
der Befehl angegeben werden: „abaqus job Dateiname.inp user=Dateiname.f interactive“.
05. Auswertung der Simulationsergebnisse
19
5. Auswertung der Simulationsergebnisse
Nach Durchführung mehrerer Simulationen kann festgestellt werden, dass eine Erhöhung des
E1 Moduls eine Verringerung des E2 Wertes bewirkt. Die Reduzierung dieses Wertes hatte
gleichzeitig eine Vergrößerung des Verschiebungswertes in der Belastungsphase zur Folge.
Selbst mit 1.000 GPa, was ungefähr dem E2 Modul von 41,6 GPa entspricht, konnte keine
ausreichende Verschiebung des Diamanten erreicht werden. Zu beachten ist dabei, dass der E2
Wert nach der Gleichung (7) des Abschnitts 4.2 nicht 40 GPa unterschreiten darf. Wird E2
kleiner als 40 GPa gesetzt, so wird das andere Elastizitätsmodul negativ.
Die erste Simulation umfasste insgesamt ca. 76.000 Elemente und die Diamantenspitze er-
reichte mit . a und .
s
mm eine Translation in vertikaler Richtung um
70,61 nm. Im nächsten Schritt muss der numerische Fehler des FE – Pragramms untersucht
werden. Dafür wird die Elementenanzahl auf circa 350.000 vergrößert. Infolgedessen konnte
eine Erhöhung der Verschiebung um ca. 29 % beobachtet werden. Um den Fehler zu reduzie-
ren, wird erneut die Anzahl der Elemente auf fast 770.000 verdoppelt. Der numerische Fehler
kann trotzdem festgestellt werden. Daher wird auf weitere Erhöhung der Elemente verzichtet.
Es ist nicht auszuschließen, dass das vorliegende, vereinfachte Simulationsmodell mit 770.000
Elementen noch nicht einen realen Versuchsaufbau darstellt. Die Definition der Kontaktbedin-
gungen zwischen der Platte und Diamanten mit Hilfe der Oberfläche zu Oberfläche (engl.:
Surface to Surface) Kontaktdefinition im Abaqus – Programm führten ebenfalls nicht zu einer
konvergierten Lösung.
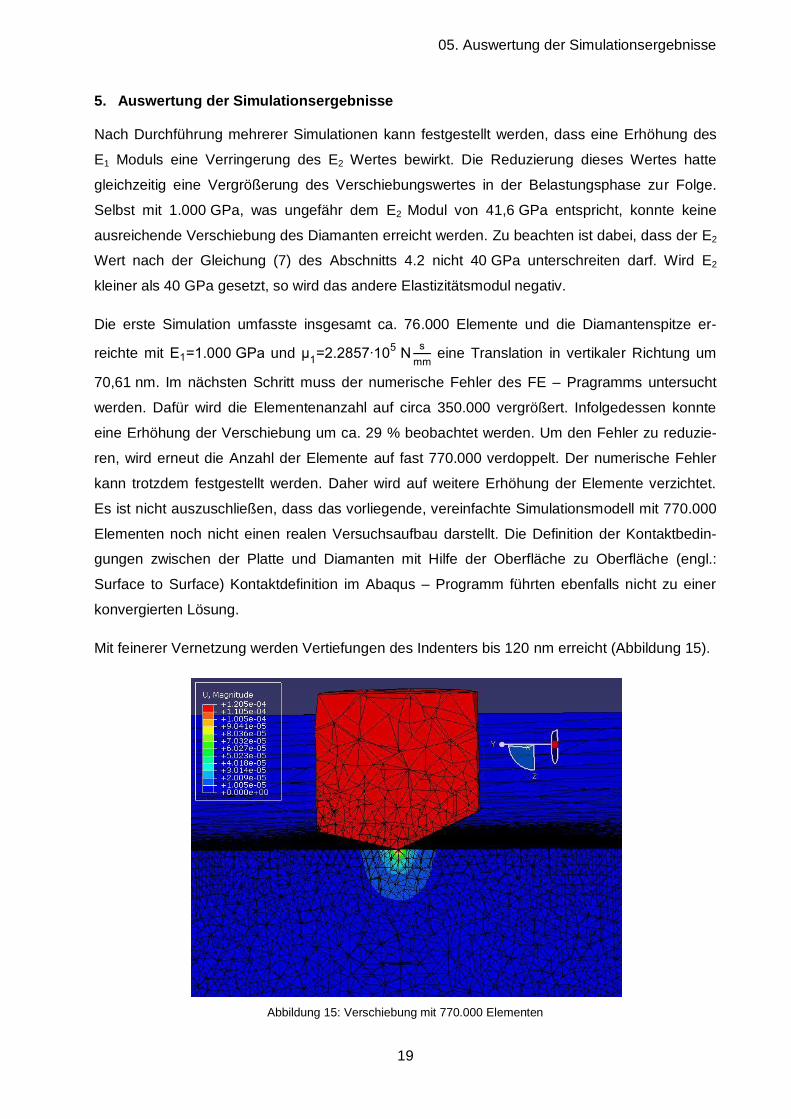
Mit feinerer Vernetzung werden Vertiefungen des Indenters bis 120 nm erreicht (Abbildung 15).
Abbildung 15: Verschiebung mit 770.000 Elementen
05. Auswertung der Simulationsergebnisse
20
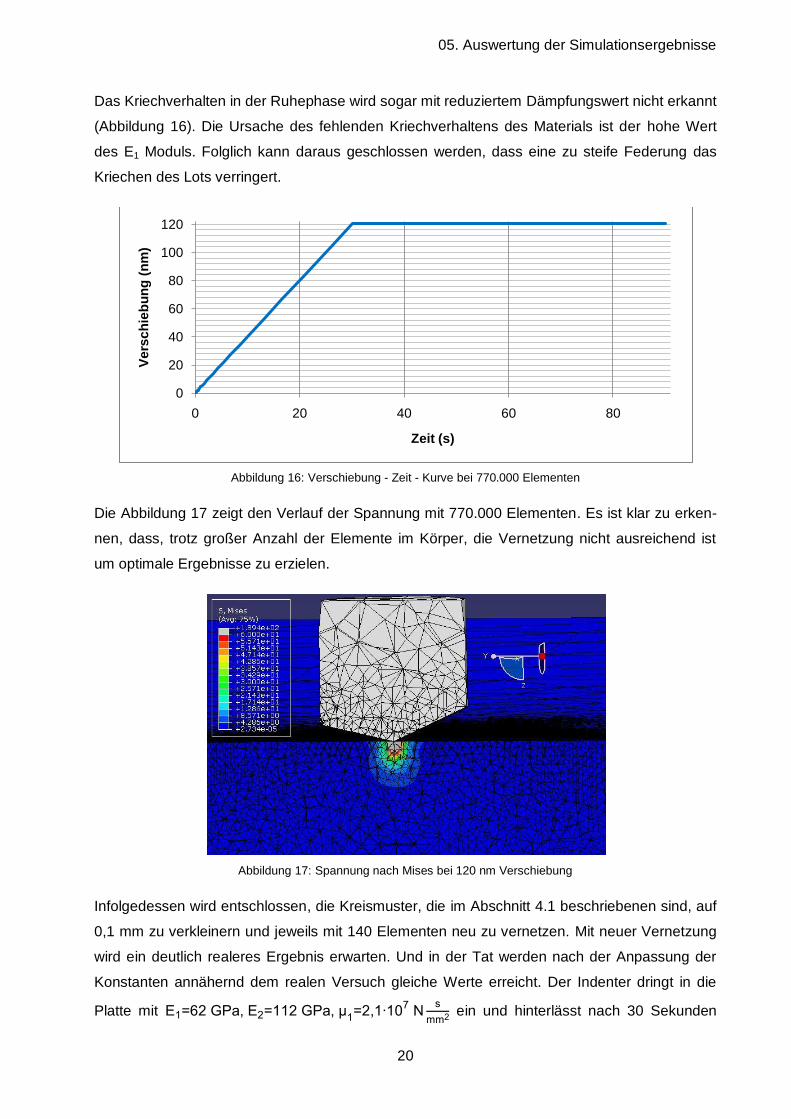
Das Kriechverhalten in der Ruhephase wird sogar mit reduziertem Dämpfungswert nicht erkannt
(Abbildung 16). Die Ursache des fehlenden Kriechverhaltens des Materials ist der hohe Wert
des E1 Moduls. Folglich kann daraus geschlossen werden, dass eine zu steife Federung das
Kriechen des Lots verringert.
Abbildung 16: Verschiebung - Zeit - Kurve bei 770.000 Elementen
Die Abbildung 17 zeigt den Verlauf der Spannung mit 770.000 Elementen. Es ist klar zu erken-
nen, dass, trotz großer Anzahl der Elemente im Körper, die Vernetzung nicht ausreichend ist
um optimale Ergebnisse zu erzielen.
Abbildung 17: Spannung nach Mises bei 120 nm Verschiebung
Infolgedessen wird entschlossen, die Kreismuster, die im Abschnitt 4.1 beschriebenen sind, auf
0,1 mm zu verkleinern und jeweils mit 140 Elementen neu zu vernetzen. Mit neuer Vernetzung
wird ein deutlich realeres Ergebnis erwarten. Und in der Tat werden nach der Anpassung der
Konstanten annähernd dem realen Versuch gleiche Werte erreicht. Der Indenter dringt in die
Platte mit a a
s
mm ein und hinterlässt nach 30 Sekunden
0
20
40
60
80
100
120
0 20 40 60 80
Ve
rsc
hie
bu
ng
(n
m)
Zeit (s)
05. Auswertung der Simulationsergebnisse
21
Belastungsdauer einen Eindruck von 603 nm Tiefe. In der Haltephase dringt der Diamant um
weitere 150 nm in das Material ein und vollzieht somit nach insgesamt 90 Sekunden Belas-
tungs- und Haltedauer eine Translation von 753 nm (Abbildung 18). Zur Erinnerung ist zu
erwähnen, dass der Diamant im realen Versuch eine Verschiebung in der ersten Phase um ca.
603 nm und in der zweiten Phase um weitere 125 nm erreicht hat.
Um die Konvergenz der Ergebnisse zu bestätigen, werden zusätzlich Simulationen mit 30 Se-
kunden und 120 Sekunden Haltephase durchgeführt. Da die maximale Belastungskraft in den
Versuchen variiert, muss dementsprechend auch die Belastungsdauer angepasst werden.
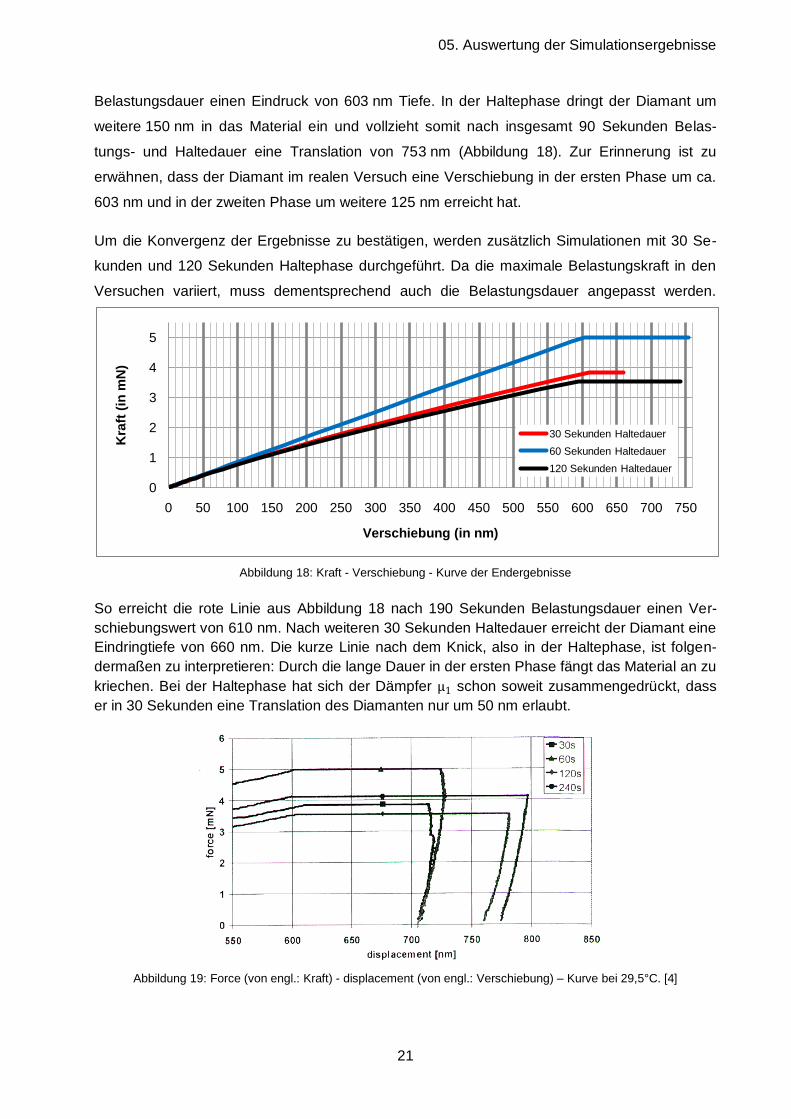
Abbildung 18: Kraft - Verschiebung - Kurve der Endergebnisse
So erreicht die rote Linie aus Abbildung 18 nach 190 Sekunden Belastungsdauer einen Ver-
schiebungswert von 610 nm. Nach weiteren 30 Sekunden Haltedauer erreicht der Diamant eine
Eindringtiefe von 660 nm. Die kurze Linie nach dem Knick, also in der Haltephase, ist folgen-
dermaßen zu interpretieren: Durch die lange Dauer in der ersten Phase fängt das Material an zu
kriechen. Bei der Haltephase hat sich der Dämpfer schon soweit zusammengedrückt, dass
er in 30 Sekunden eine Translation des Diamanten nur um 50 nm erlaubt.
Abbildung 19: Force (von engl.: Kraft) - displacement (von engl.: Verschiebung) – Kurve bei 29,5°C. [4]
0
1
2
3
4
5
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750
Kra
ft (
in m
N)
Verschiebung (in nm)
30 Sekunden Haltedauer
60 Sekunden Haltedauer
120 Sekunden Haltedauer
05. Auswertung der Simulationsergebnisse
22
Die schwarze Linie beschreibt die Simulation mit 3,5 mN Belastungskraft. Nach 235 Sekunden
Belastungsdauer vollzieht der Diamant eine Verschiebung von 595 nm. Nach weiteren 120 Se-
kunden Haltedauer erreicht er eine Eindringtiefe von 742 nm. Wie auch bei der roten Linie sind
hier die Belastungskraft und die Belastungsdauer ungefähr identisch. Dementsprechend ist
auch die Belastungsrate der beiden Experimente ähnlich. Eine vierfache Vergrößerung der
Haltedauer bewirkt in diesem Fall fast die doppelte Kriechweite.
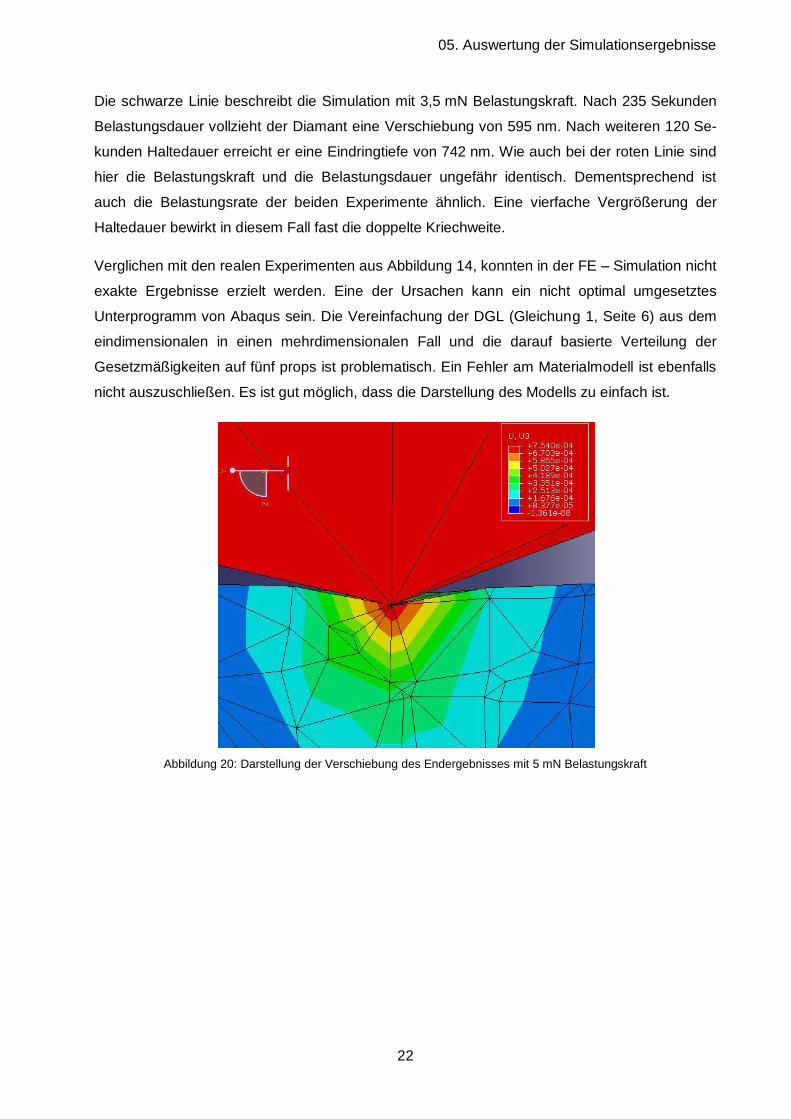
Verglichen mit den realen Experimenten aus Abbildung 14, konnten in der FE – Simulation nicht
exakte Ergebnisse erzielt werden. Eine der Ursachen kann ein nicht optimal umgesetztes
Unterprogramm von Abaqus sein. Die Vereinfachung der DGL (Gleichung 1, Seite 6) aus dem
eindimensionalen in einen mehrdimensionalen Fall und die darauf basierte Verteilung der
Gesetzmäßigkeiten auf fünf props ist problematisch. Ein Fehler am Materialmodell ist ebenfalls
nicht auszuschließen. Es ist gut möglich, dass die Darstellung des Modells zu einfach ist.
Abbildung 20: Darstellung der Verschiebung des Endergebnisses mit 5 mN Belastungskraft
05. Auswertung der Simulationsergebnisse
23
5.1 Darstellung der Tiefe des Wirkungsbereichs (plastische Zone) in ABAQUS CAE
Über die Definition der Ansichtseinstellungen kann der plastische Bereich in Abaqus dargestellt
werden. Dafür muss zunächst die Fließspannung des Materials bekannt sein.
Als Erstes muss die Querschittsfläche, die der Diamant als Abdruck im Material hinterlässt,
berechnet werden. Wie bereits erwähnt, ist diese aus dem Produkt der Zahl 24,56 und dem
Quadrat von definier, wobei in der Literatur auch genannt wird. Laut Quelle [3], Seite 41
kann wie folgt berechnet werden:
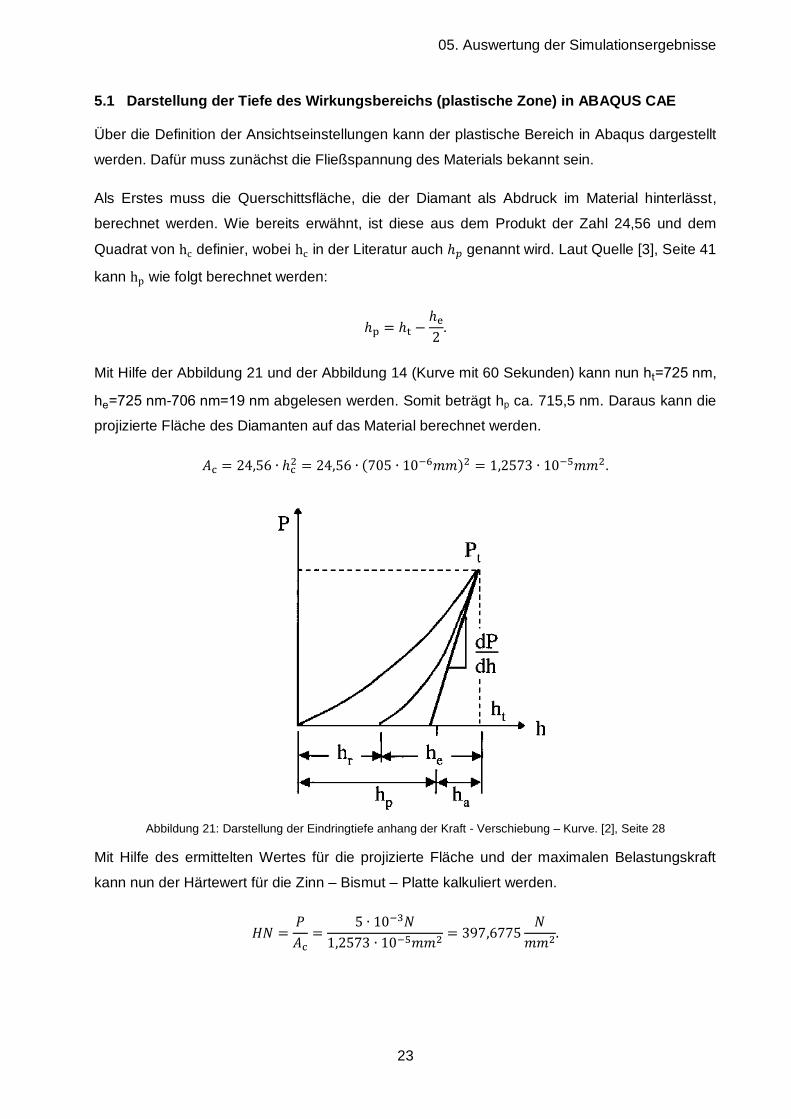
Mit Hilfe der Abbildung 21 und der Abbildung 14 (Kurve mit 60 Sekunden) kann nun ht nm
he nm- nm nm abgelesen werden. Somit beträgt hp ca. 715,5 nm. Daraus kann die
projizierte Fläche des Diamanten auf das Material berechnet werden.
Abbildung 21: Darstellung der Eindringtiefe anhang der Kraft - Verschiebung – Kurve. [2], Seite 28
Mit Hilfe des ermittelten Wertes für die projizierte Fläche und der maximalen Belastungskraft
kann nun der Härtewert für die Zinn – Bismut – Platte kalkuliert werden.

05. Auswertung der Simulationsergebnisse
24
Im nächsten Schritt wird aus Quelle [7] eine Formel vorgeschlagen, die eine ungefähre Berech-
nung der Fließspannung aus dem Härtegrad und dem effektiven Öffnungswinkel des Diamanten
darstellen soll.
Zu beachten ist, dass dieser Wert die Fließspannung des Materials nur ungefähr angibt. Für ein
exakteres Ergebnis wird die Durchführung des Zugversuches zur Ermittlung der Fließspannung
empfohlen.
Nun kann in der Outputdatei (*.odb) die Spannungen von Mises aktiviert und anschließend die
Fließspannung unter „Contour Options“ (von engl.: Konturoptionen) äquivalent der
Abbildung 22 angegeben werden.
Abbildung 22: Aktivierung der Visualisierung des plastischen Bereichs
Der plastische Bereich, der sich bis zu einer Tiefe von ca. 0,0205 mm ausbreitet, wird in der
Abbildung 23 grau dargestellt. Wie auch deutlich zu erkennen ist, wird der Wirkungsbereich jetzt
viel feiner vernetzt, als es in der Abbildung 17 dargestellt wird. Daraus kann geschlossen wer-
den, dass der numerische Fehler des FE – Programms so gering ist, dass dadurch das Ender-
gebnis nicht wesentlich beeinflusst wird.
05. Auswertung der Simulationsergebnisse
25
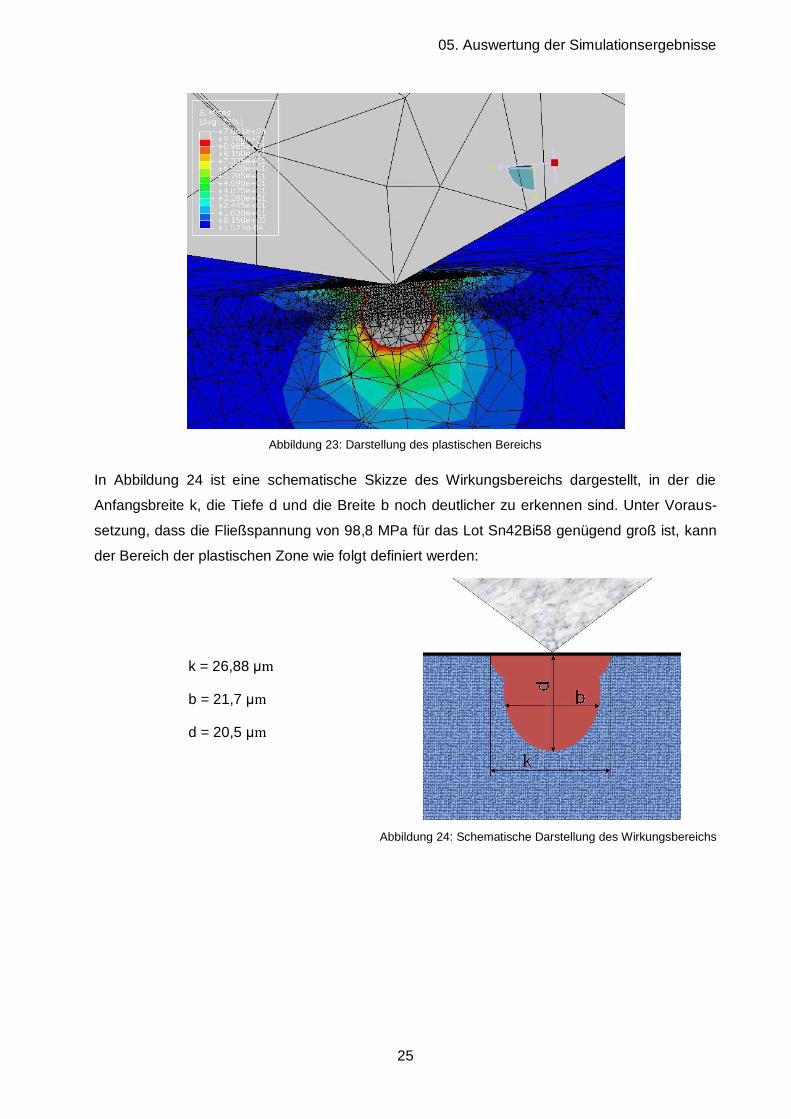
Abbildung 23: Darstellung des plastischen Bereichs
In Abbildung 24 ist eine schematische Skizze des Wirkungsbereichs dargestellt, in der die
Anfangsbreite k, die Tiefe d und die Breite b noch deutlicher zu erkennen sind. Unter Voraus-
setzung, dass die Fließspannung von 98,8 MPa für das Lot Sn42Bi58 genügend groß ist, kann
der Bereich der plastischen Zone wie folgt definiert werden:
k = 26,88
b = 21,7
d = 20,5
Abbildung 24: Schematische Darstellung des Wirkungsbereichs
05. Auswertung der Simulationsergebnisse
26
5.2 Analytische Berechnung der plastischen Zone
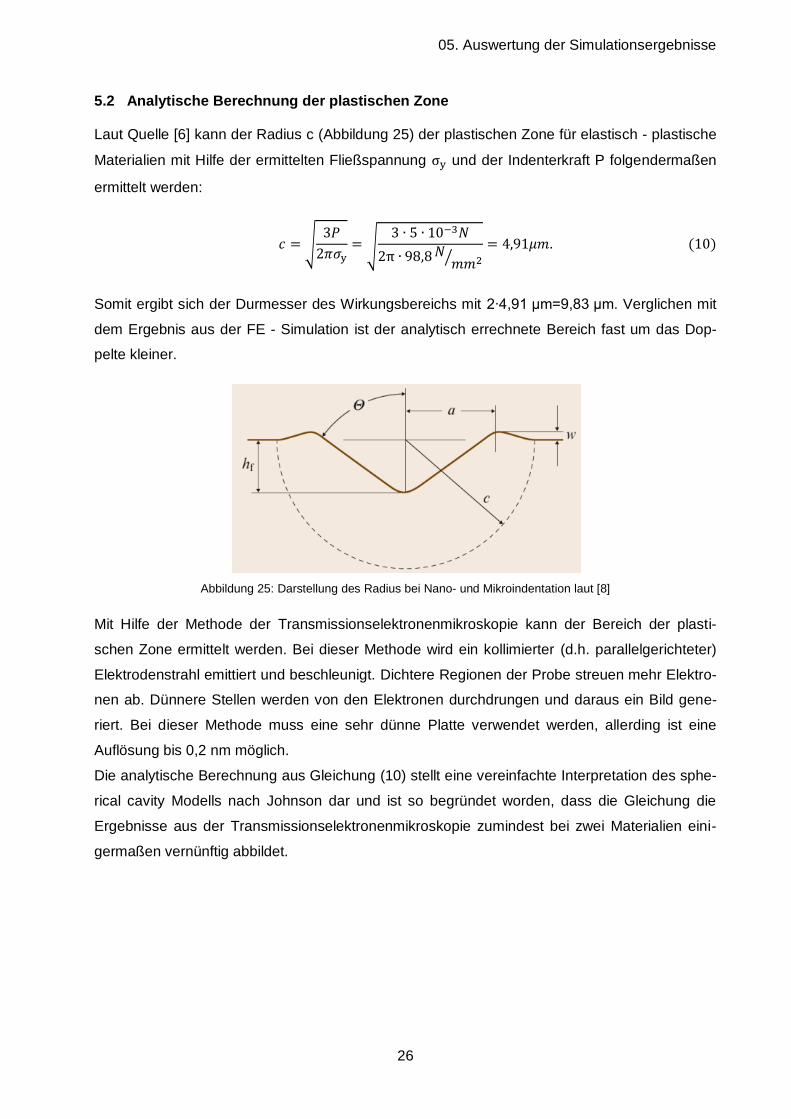
Laut Quelle [6] kann der Radius c (Abbildung 25) der plastischen Zone für elastisch - plastische
Materialien mit Hilfe der ermittelten Fließspannung und der Indenterkraft P folgendermaßen
ermittelt werden:
Somit ergibt sich der Durmesser des Wirkungsbereichs mit m m. Verglichen mit
dem Ergebnis aus der FE - Simulation ist der analytisch errechnete Bereich fast um das Dop-
pelte kleiner.
Abbildung 25: Darstellung des Radius bei Nano- und Mikroindentation laut [8]
Mit Hilfe der Methode der Transmissionselektronenmikroskopie kann der Bereich der plasti-
schen Zone ermittelt werden. Bei dieser Methode wird ein kollimierter (d.h. parallelgerichteter)
Elektrodenstrahl emittiert und beschleunigt. Dichtere Regionen der Probe streuen mehr Elektro-
nen ab. Dünnere Stellen werden von den Elektronen durchdrungen und daraus ein Bild gene-
riert. Bei dieser Methode muss eine sehr dünne Platte verwendet werden, allerding ist eine
Auflösung bis 0,2 nm möglich.
Die analytische Berechnung aus Gleichung (10) stellt eine vereinfachte Interpretation des sphe-
rical cavity Modells nach Johnson dar und ist so begründet worden, dass die Gleichung die
Ergebnisse aus der Transmissionselektronenmikroskopie zumindest bei zwei Materialien eini-
germaßen vernünftig abbildet.
06. Zusammenfassung
27
6. Zusammenfassung
Ziel der Arbeit war es den Wirkungsbereich eines elastisch - plastischen Materials Sn42Bi58 bei
einem Nanoindentationversuch zu bestimmen. Zur Erreichung dieser Zielsetzung wurde das FE
- Programm Abaqus verwendet. Das elastisch - plastische Verhalten des Materials kann durch
ein viskoelastisches Modell (Abbildung 4) beschrieben werden. Da die Relationen der einzelnen
Komponenten im Modell bis jetzt unbekannt waren, wurden mit Hilfe eines implementierten
Unterprogramms in Abaqus Simulationen durchgeführt. Als Resultat konnte festgestellt werden,
dass die Komponente überwiegend Kriechverhalten im Material bewirkt. Die Komponenten
E1 und E2 wirken im Material analog einer Feder und sind für die Verschiebung des Diamanten
hauptsächlich in der Belastungsphase zuständig.
Durch dieses Wissen konnte im Programm eine Einwirkung des Diamanten in die Zinn - Bis-
mutplatte so simuliert werden, dass seine Verschiebung (Abbildung 18) der aus realen Ex-
perimenten (Abbildung 14) ähnlich ist. Unter der Voraussetzung, dass das Elastizitätsmodul für
das SN42Bi58 40 GPa ist, beträgt somit a a und
. Mit
dem vorgeschlagenen Materialmodell kann im FE - Programm das Verhalten wie beispielsweise
Verschiebung und Kriechen gut approximiert werden. Exakte Werte analog dem realen Versuch
wurden jedoch nicht erreicht. Das kann unteranderem auf die vereinfachte Darstellung des
Materialmodells beruhen.
Anschließend wurde eine ungefähre Fließspannung des Materials von M a analytisch
berechnet. Der Wert der Spannung kann vom eigentlichen Wert für dieses Material abweichen.
Daher wurde die Durchführung eines Zugversuches vorgeschlagen. Die Fließspannung wurde
dann in der Ausgabedatei des Programms bei der Visualisierung der Spannung nach Mises so
gewählt, dass der Bereich der plastischen Zone, der eine Tiefe von m hat, dargestellt
wird.
Eine andere Methode zur Ermittlung des Wirkungsbereichs stellt die analytische Berechnung
laut [6] dar. Mit der gleichen Fließspannung ergibt sich die Tiefe der plastischen Zone von
m.
Mit dem FE – Programm konnte zwar die plastische Zone ermittelt werden, das Endergebnis
kann jedoch vom realen Ergebnis abweichen. Die analytische Berechnung des plastischen
Bereichs weicht vom FE – Programm ab, schließt aber ein verfälschtes Ergebnis nicht aus. Laut
Quelle [6] ist die Gleichung (10) für die Berechnung der plastischen Zone aus den gewonnen
Resultaten der Transmissionselektronenmikroskopie entstanden. Diese Methode konnte jedoch
lediglich bei zwei Materialen (Wolfram und Fe ± 3 Gew.% Si) die Ergebnisse gut abbilden. Die
Funktionalität dieser Methode auf alle Materialen ist demnach fraglich.
07. Abkürzungsverzeichnis
28
7. Abkürzungsverzeichnis
Ac projizierte Fl che
E – Modul lastizit tsmodul
E -Modul
Ei -Modul des Indenters
Er reduziertes -Modul
E1, E2 -Module des viskoelastischen Modells
engl. nglisch
FEM Finite lement Methode
GPa iga ascal ascal
HN H rtewert
h indringtiefe
hc Kontakttiefe nach der ntlastungsphase
MPa Mega ascal ascal
mm
mN milli ewton - ewton
mm milli Meter - m
nm nano Meter - m
P anliegende Kraft
r Radius des Indenters
S Steifigkeit
s Sekunden
t eit
uerkontraktionszahl des Indenters
effektiver ffnungswinkel des Diamanten
Dehnung
D mpferkonstante
mikro Meter - m
uerkontraktionszahl des gepr ften Materials
Materialkonstanten
Dichte des Materials
Spannung
Fließspannung
oissonzahl
08. Abbildungsverzeichnis/ 09. Tabellenverzeichnis
29
8. Abbildungsverzeichnis
Abbildung 1: Geometrie des Berkovich - Indenters [2] ................................................................... 4
Abbildung 2: Dachkante "c" einer vierseitigen Pyramide [3] .......................................................... 4
Abbildung 3: Charakteristische Kraft - Eindring - Kurve [3] ............................................................ 5
Abbildung 4: Viskoelastisches Materialmodell................................................................................ 6
Abbildung 5: Anbringung der Punktlasten (ohne Indenter) ............................................................ 7
Abbildung 6: Materialdefinition ........................................................................................................ 8
Abbildung 7: Diagramm: Verlauf der Verschiebung zu der Zeit bei Vergrößerung der
Dämpferkonstante .................................................................................................... 10
Abbildung 8: Diagramm: Verlauf der Verschiebung zu der Zeit bei Vergrößerung des ......... 11
Abbildung 9: Funktion "Sweep" ..................................................................................................... 12
Abbildung 10: Berkovich - Indenter ............................................................................................... 13
Abbildung 11: Aktivierung der Rampenfunktion ........................................................................... 16
Abbildung 12: Vernetzung der Geometrie .................................................................................... 17
Abbildung 13: Anbringung der Belastungskraft ............................................................................ 17
Abbildung 14: Force (von engl.: Kraft) - displacement (von engl.: Verschiebung) – Kurve bei
29,5°C. [4] .............................................................................................................. 18
Abbildung 15: Verschiebung mit 770.000 Elementen .................................................................. 19
Abbildung 16: Verschiebung - Zeit - Kurve bei 770.000 Elementen ............................................ 20
Abbildung 17: Spannung nach Mises bei 120 nm Verschiebung ................................................. 20
Abbildung 18: Kraft - Verschiebung - Kurve der Endergebnisse ................................................. 21
Abbildung 19: Force (von engl.: Kraft) - displacement (von engl.: Verschiebung) – Kurve bei
29,5°C. [4] .............................................................................................................. 21
Abbildung 20: Darstellung der Verschiebung des Endergebnisses mit 5 mN Belastungskraft ... 22
Abbildung 21: Darstellung der Eindringtiefe anhang der Kraft - Verschiebung – Kurve. [2], Seite
28 ........................................................................................................................... 23
Abbildung 22: Aktivierung der Visualisierung des plastischen Bereichs ...................................... 24
Abbildung 23: Darstellung des plastischen Bereichs ................................................................... 25
Abbildung 24: Schematische Darstellung des Wirkungsbereichs ................................................ 25
Abbildung 25: Darstellung des Radius bei Nano- und Mikroindentation laut [8] .......................... 26
9. Tabellenverzeichnis
Tabelle 1: Prozentuale Darstellung des Kriechens ........................................................................ 9
10. Quellenverzeichnis
30
10. Quellenverzeichnis
[1] W. H. Müller, H. Worrack, M. Sbeiti, The Influence of Creep Effects on the Determination of
Local Material Parameters.
[2] A.C. Fischer-Cripps, Nanoindentation, Mechanical Engeneering Series (Springer - Verlag,
New York, 2002).
[3] A. Hässe, Dissertation, Miniaturmessverfahren zur Bestimmung mechanischer Kennwerte
von Lotwerkstoffen aus der Mikroelektronik.
[4] http://www.science-at-home.de/wiki/index.php/Viskosit%C3%A4t.
[5] Lau, J. Gleason, J. Schroeder, V, Hanshall, G. Dauksher, W. Sullivan, Design, Materials
and Assembly Prozess of High – Density Packages with a Low – temperature Lead – Free
Solder (SnBiAg) ,Vol 20, No. 2.
[6] D. Kramer, H. Huang, M. Kriese, J. Robach, J. Nelson, A. Wright, D. Bahr, W.W. Gerberich,
Yied strength predictions from the plastic zone around nanocontacts, Seite 333.
[7] W. H. Müller und H. Worrack, Die Nanoindentation als Instrument zur Bestimmung materi-
alspezifischer Kennwerte als Funktion der Temperatur, Seite 1.
[8] W. N. Sharpe, Springer Handbook of Experimental Solid Mechanics, ISBN: 978-0-387-
26883-5, Seite 397.
[9] ABAQUS: User Subroutine (Dokumentation).
[10] Projekt zur finiten Elementmethoden (Abaqus Tutorial) von http://mechanik.tu-
berlin.de/mueller/lehre0607/fepraktikum/ABAQUS-Tutorial20060721Endversion.pdf.
[11] W. H. Müller und H. Worrack, High temperature indentation behavior of eutectic lead-free
solder materials.
[12] http://people.fh-landshut.de/~jwanding/Elastodynamik_1/v2_2.pdf, Seite 2.
[13] http://www.imtek.de/cpi/images/images/vl-ofa/2007-vl-ofa-06-topografie-
elektronenmikroskopie.pdf.
Anhang – UMAT Unterprogramm
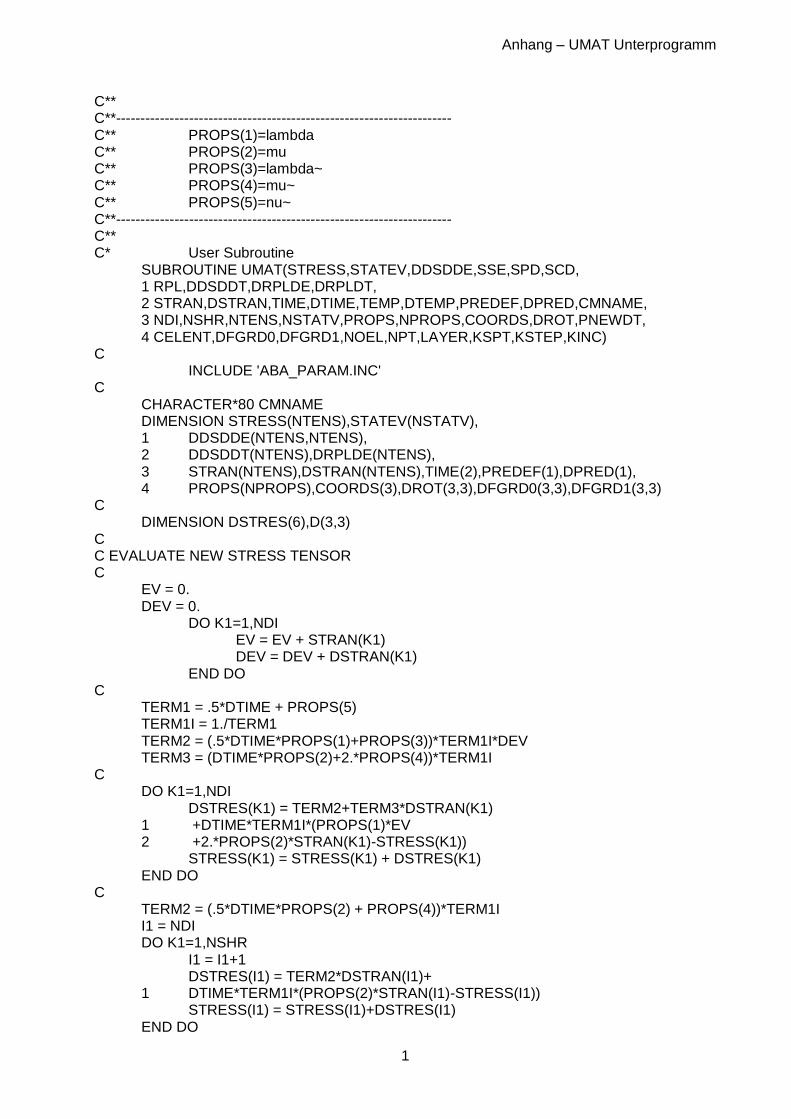
1
C** C**--------------------------------------------------------------------- C** PROPS(1)=lambda C** PROPS(2)=mu C** PROPS(3)=lambda~ C** PROPS(4)=mu~ C** PROPS(5)=nu~ C**--------------------------------------------------------------------- C** C* User Subroutine SUBROUTINE UMAT(STRESS,STATEV,DDSDDE,SSE,SPD,SCD, 1 RPL,DDSDDT,DRPLDE,DRPLDT, 2 STRAN,DSTRAN,TIME,DTIME,TEMP,DTEMP,PREDEF,DPRED,CMNAME, 3 NDI,NSHR,NTENS,NSTATV,PROPS,NPROPS,COORDS,DROT,PNEWDT, 4 CELENT,DFGRD0,DFGRD1,NOEL,NPT,LAYER,KSPT,KSTEP,KINC) C INCLUDE 'ABA_PARAM.INC' C CHARACTER*80 CMNAME DIMENSION STRESS(NTENS),STATEV(NSTATV), 1 DDSDDE(NTENS,NTENS), 2 DDSDDT(NTENS),DRPLDE(NTENS), 3 STRAN(NTENS),DSTRAN(NTENS),TIME(2),PREDEF(1),DPRED(1), 4 PROPS(NPROPS),COORDS(3),DROT(3,3),DFGRD0(3,3),DFGRD1(3,3) C DIMENSION DSTRES(6),D(3,3) C C EVALUATE NEW STRESS TENSOR C EV = 0. DEV = 0. DO K1=1,NDI EV = EV + STRAN(K1) DEV = DEV + DSTRAN(K1) END DO C TERM1 = .5*DTIME + PROPS(5) TERM1I = 1./TERM1 TERM2 = (.5*DTIME*PROPS(1)+PROPS(3))*TERM1I*DEV TERM3 = (DTIME*PROPS(2)+2.*PROPS(4))*TERM1I C DO K1=1,NDI DSTRES(K1) = TERM2+TERM3*DSTRAN(K1) 1 +DTIME*TERM1I*(PROPS(1)*EV 2 +2.*PROPS(2)*STRAN(K1)-STRESS(K1)) STRESS(K1) = STRESS(K1) + DSTRES(K1) END DO C TERM2 = (.5*DTIME*PROPS(2) + PROPS(4))*TERM1I I1 = NDI DO K1=1,NSHR I1 = I1+1 DSTRES(I1) = TERM2*DSTRAN(I1)+ 1 DTIME*TERM1I*(PROPS(2)*STRAN(I1)-STRESS(I1)) STRESS(I1) = STRESS(I1)+DSTRES(I1) END DO
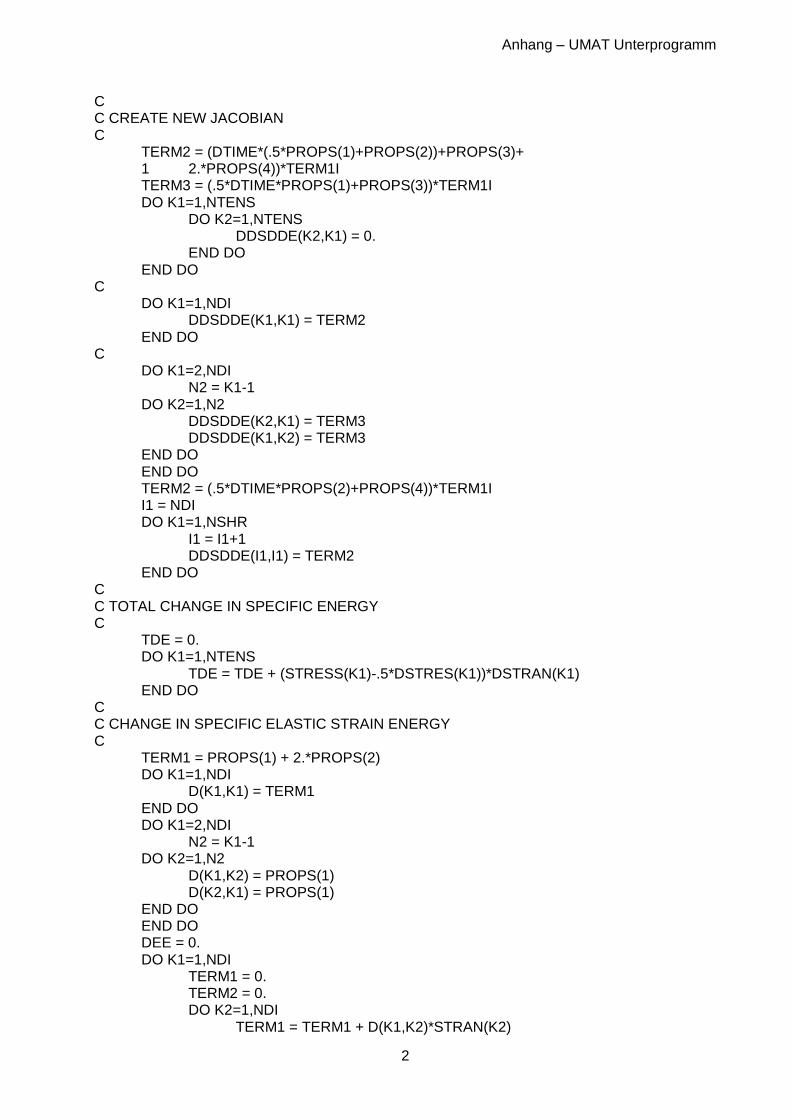
Anhang – UMAT Unterprogramm
2
C C CREATE NEW JACOBIAN C TERM2 = (DTIME*(.5*PROPS(1)+PROPS(2))+PROPS(3)+ 1 2.*PROPS(4))*TERM1I TERM3 = (.5*DTIME*PROPS(1)+PROPS(3))*TERM1I DO K1=1,NTENS DO K2=1,NTENS DDSDDE(K2,K1) = 0. END DO END DO C DO K1=1,NDI DDSDDE(K1,K1) = TERM2 END DO C DO K1=2,NDI N2 = K1-1 DO K2=1,N2 DDSDDE(K2,K1) = TERM3 DDSDDE(K1,K2) = TERM3 END DO END DO TERM2 = (.5*DTIME*PROPS(2)+PROPS(4))*TERM1I I1 = NDI DO K1=1,NSHR I1 = I1+1 DDSDDE(I1,I1) = TERM2 END DO C C TOTAL CHANGE IN SPECIFIC ENERGY C TDE = 0. DO K1=1,NTENS TDE = TDE + (STRESS(K1)-.5*DSTRES(K1))*DSTRAN(K1) END DO C C CHANGE IN SPECIFIC ELASTIC STRAIN ENERGY C TERM1 = PROPS(1) + 2.*PROPS(2) DO K1=1,NDI D(K1,K1) = TERM1 END DO DO K1=2,NDI N2 = K1-1 DO K2=1,N2 D(K1,K2) = PROPS(1) D(K2,K1) = PROPS(1) END DO END DO DEE = 0. DO K1=1,NDI TERM1 = 0. TERM2 = 0. DO K2=1,NDI TERM1 = TERM1 + D(K1,K2)*STRAN(K2)
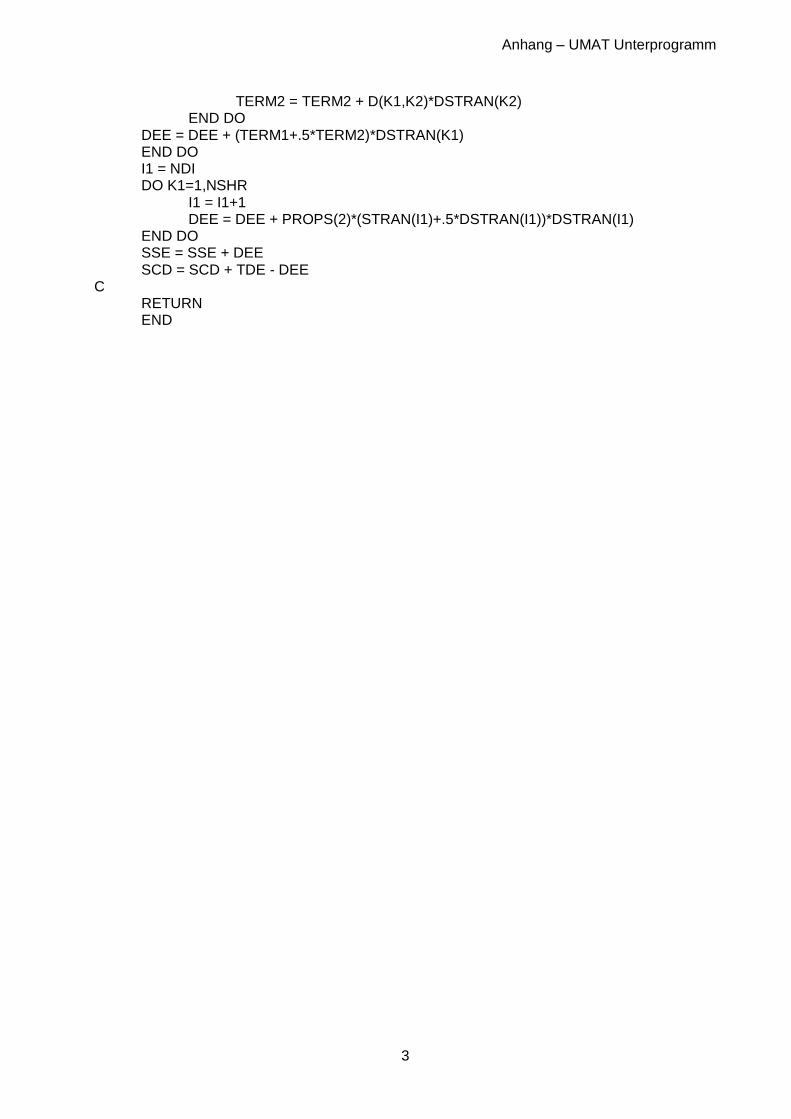
Anhang – UMAT Unterprogramm
3
TERM2 = TERM2 + D(K1,K2)*DSTRAN(K2) END DO DEE = DEE + (TERM1+.5*TERM2)*DSTRAN(K1) END DO I1 = NDI DO K1=1,NSHR I1 = I1+1 DEE = DEE + PROPS(2)*(STRAN(I1)+.5*DSTRAN(I1))*DSTRAN(I1) END DO SSE = SSE + DEE SCD = SCD + TDE - DEE C RETURN END





















![4 IGT Master 2017.pptx [Read-Only] - ethz.ch€“ ABAQUS Examples Constitutive & Numerical Modelling in Geotechnics 0 ... Theoretische und experimentelle Bodenmechanik …](https://img.pdfslide.org/doc/110x75/5ac1ae167f8b9a213f8d5ce8/4-igt-master-2017pptx-read-only-ethzch-abaqus-examples-constitutive-numerical.jpg)







