Embed Size (px)
Citation preview
Automatisierungstechnik
Grundbegriffe 247
Schütze 249
Relais 251
Schutzbeschaltung 253
Befehls- und Meldegeräte 254
Speicherprogrammierbare Steuerungen (SPS) 256
Binäre Verknüpfungen 256
Speicher 261
Zeitfunktionen und Zählfunktionen 262
Sprungfunktionen 264Flankenauswertung 264
Ablaufsteuerung, Schrittsteuerung 265
GRAFCET 270
Strukturierte Programmierung 271
Sprachelemente, Datentypen, Variablen 272
Anweisungen 274
Wortverarbeitung, Analogwertverarbeitung 276
Kleinsteuerung 278
Regelungstechnik 280
Industriebussysteme 290
ASI-Bus 291
Profi bus 294
Interbus 298
CAN-Bus 298
Profi net-Industrial Elthernet 299
Maschinensicherheit 300
Not-Befehlseinrichtung 302
Erdschlusssicherheit 306
Steuertransformator 306
Elektromagnetische Verträglichkeit (EMV) 308
246 Automatisierungstechnik
Autom
a-tisierung
Automatisierungstechnik
Steuerungstechnik
Grundbegriffe
Begriff Erläuterung
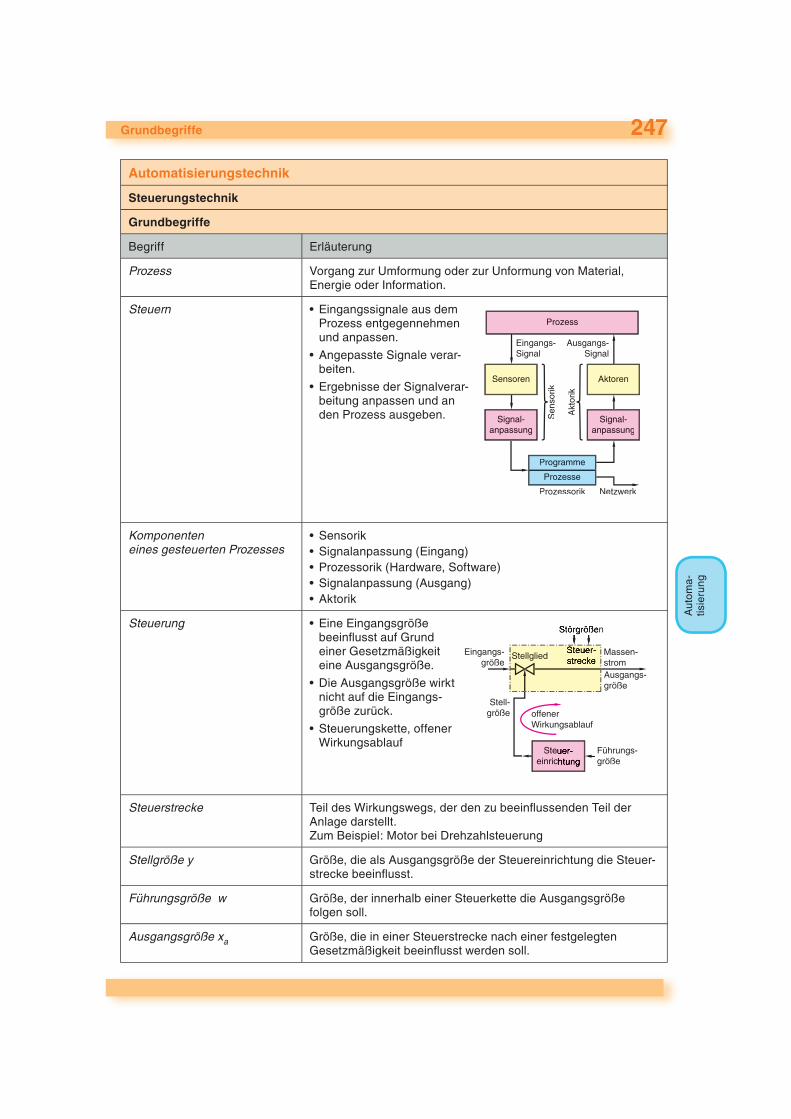
Prozess Vorgang zur Umformung oder zur Unformung von Material, Energie oder Information.
Steuern Eingangssignale aus dem Prozess entgegennehmen und anpassen.
Angepasste Signale verar-beiten.
Ergebnisse der Signalverar-beitung anpassen und an den Prozess ausgeben.
•
•
•
Komponenten eines gesteuerten Prozesses
SensorikSignalanpassung (Eingang)Prozessorik (Hardware, Software)Signalanpassung (Ausgang)Aktorik
•••••
Steuerung Eine Eingangsgröße beeinfl usst auf Grund einer Gesetzmäßigkeit eine Ausgangsgröße.
Die Ausgangsgröße wirkt nicht auf die Eingangs-größe zurück.
Steuerungskette, offener Wirkungsablauf
•
•
•
Steuerstrecke Teil des Wirkungswegs, der den zu beeinfl ussenden Teil der Anlage darstellt. Zum Beispiel: Motor bei Drehzahlsteuerung
Stellgröße y Größe, die als Ausgangsgröße der Steuereinrichtung die Steuer-strecke beeinfl usst.
Führungsgröße w Größe, der innerhalb einer Steuerkette die Ausgangsgröße folgen soll.
Ausgangsgröße xa Größe, die in einer Steuerstrecke nach einer festgelegten Gesetzmäßigkeit beeinfl usst werden soll.
Aut
oma-
tisie
rung
247Grundbegriffe
Prozess
Sensoren
Eingangs-Signal
Ausgangs-Signal
Programme
Sen
sorik
Akt
orik
Prozesse
Prozessorik Netzwerk
Signal-anpassung
Signal-anpassung
Aktoren
Automatisierungstechnik
Steuerungstechnik
Grundbegriffe
Begriff Erläuterung
Störgröße z Vor außen wirkende Größe, durch die die Ausgangsgröße unerwünscht beeinfl usst wird.
Wann Steuern? Wenn nur eine Störgröße auftritt, die nach Art und Verlauf bekannt ist.Wenn zwar Störgrößen auftreten, diese sich aber nur selten ändern.Wenn die Auswirkungen von Störgrößenänderungen vernach-lässigbar gering sind.
•
•
•
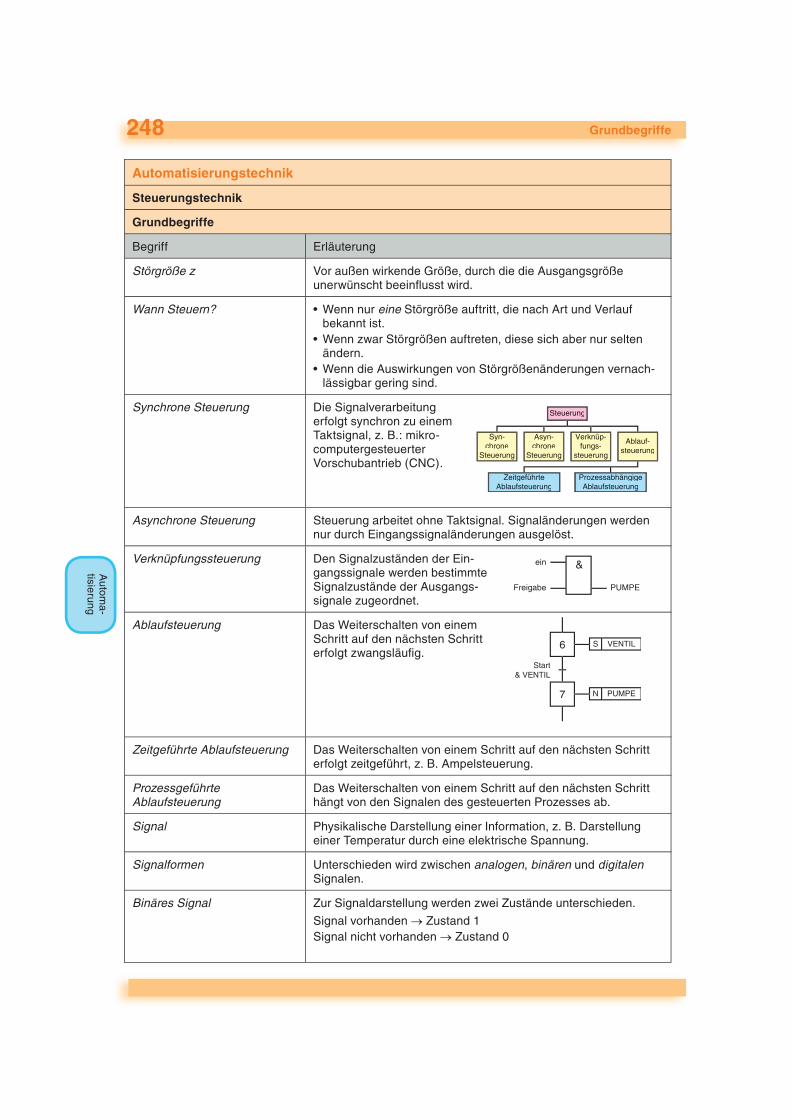
Synchrone Steuerung Die Signalverarbeitung erfolgt synchron zu einem Taktsignal, z. B.: mikro-computergesteuerter Vorschubantrieb (CNC).
Asynchrone Steuerung Steuerung arbeitet ohne Taktsignal. Signaländerungen werden nur durch Eingangssignaländerungen ausgelöst.
Verknüpfungssteuerung Den Signalzuständen der Ein-gangssignale werden bestimmte Signalzustände der Ausgangs-signale zugeordnet.
Ablaufsteuerung Das Weiterschalten von einem Schritt auf den nächsten Schritt erfolgt zwangsläufi g.
Zeitgeführte Ablaufsteuerung Das Weiterschalten von einem Schritt auf den nächsten Schritt erfolgt zeitgeführt, z. B. Ampelsteuerung.
Prozessgeführte Ablaufsteuerung
Das Weiterschalten von einem Schritt auf den nächsten Schritt hängt von den Signalen des gesteuerten Prozesses ab.
Signal Physikalische Darstellung einer Information, z. B. Darstellung einer Temperatur durch eine elektrische Spannung.
Signalformen Unterschieden wird zwischen analogen, binären und digitalen Signalen.
Binäres Signal Zur Signaldarstellung werden zwei Zustände unterschieden.
Signal vorhanden → Zustand 1Signal nicht vorhanden → Zustand 0
Verknüp-fungs-
steuerung
Steuerung
ZeitgeführteAblaufsteuerung
ProzessabhängigeAblaufsteuerung
Asyn-chrone
Steuerung
Syn-chrone
Steuerung
Ablauf-steuerung
248 Grundbegriffe
Autom
a-tisierung
Automatisierungstechnik
Steuerungstechnik
Grundbegriffe
Begriff Erläuterung
Digitales Signal Informationsdarstellung durch eine Anzahl von Binärsignalen nach einem bestimmten Code.
Analoges Signal Die Steuerungsgröße wird nach Betrag und Vorzeichen in Abhängig-keit von der Zeit kontinuierlich nachgebildet.
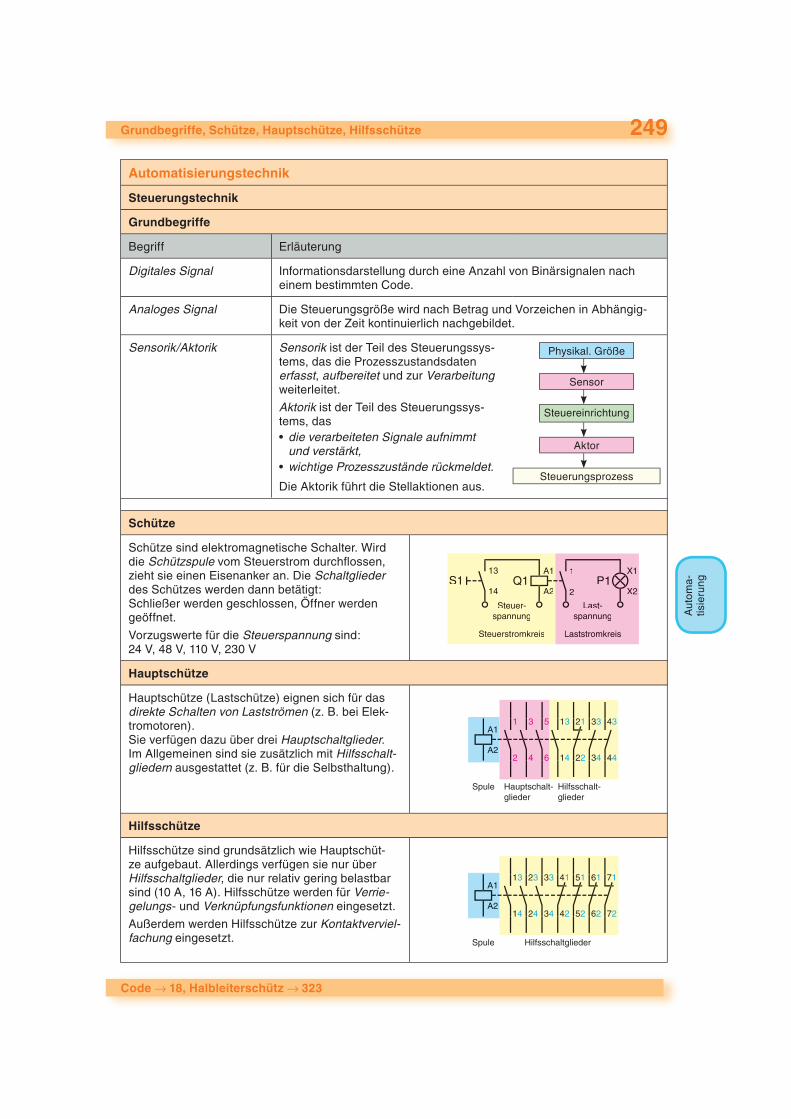
Sensorik/Aktorik Sensorik ist der Teil des Steuerungssys-tems, das die Prozesszustandsdaten erfasst, aufbereitet und zur Verarbeitung weiterleitet.
Aktorik ist der Teil des Steuerungssys-tems, das
die verarbeiteten Signale aufnimmt und verstärkt,wichtige Prozesszustände rückmeldet.
Die Aktorik führt die Stellaktionen aus.
•
•
Physikal. Größe
Sensor
Steuereinrichtung
Aktor
Steuerungsprozess
Schütze
Schütze sind elektromagnetische Schalter. Wird die Schützspule vom Steuerstrom durchfl ossen, zieht sie einen Eisenanker an. Die Schaltglieder des Schützes werden dann betätigt: Schließer werden geschlossen, Öffner werden geöffnet.
Vorzugswerte für die Steuerspannung sind:24 V, 48 V, 110 V, 230 V
Q1 P1
Steuer-spannung
Steuerstromkreis Laststromkreis
Last-spannung
S113
14
A1
A2
1
2
X1
X2
Hauptschütze
Hauptschütze (Lastschütze) eignen sich für das direkte Schalten von Lastströmen (z. B. bei Elek-tromotoren).Sie verfügen dazu über drei Hauptschaltglieder. Im Allgemeinen sind sie zusätzlich mit Hilfsschalt-gliedern ausgestattet (z. B. für die Selbsthaltung).
Hilfsschütze
Hilfsschütze sind grundsätzlich wie Hauptschüt-ze aufgebaut. Allerdings verfügen sie nur über Hilfsschaltglieder, die nur relativ gering belastbar sind (10 A, 16 A). Hilfsschütze werden für Verrie-gelungs- und Verknüpfungsfunktionen eingesetzt.
Außerdem werden Hilfsschütze zur Kontaktverviel-fachung eingesetzt.
249Grundbegriffe, Schütze, Hauptschütze, Hilfsschütze
Code Æ 18, Halbleiterschütz Æ 323
Aut
oma-
tisie
rung
Automatisierungstechnik
Steuerungstechnik
Anschlussbezeichnung
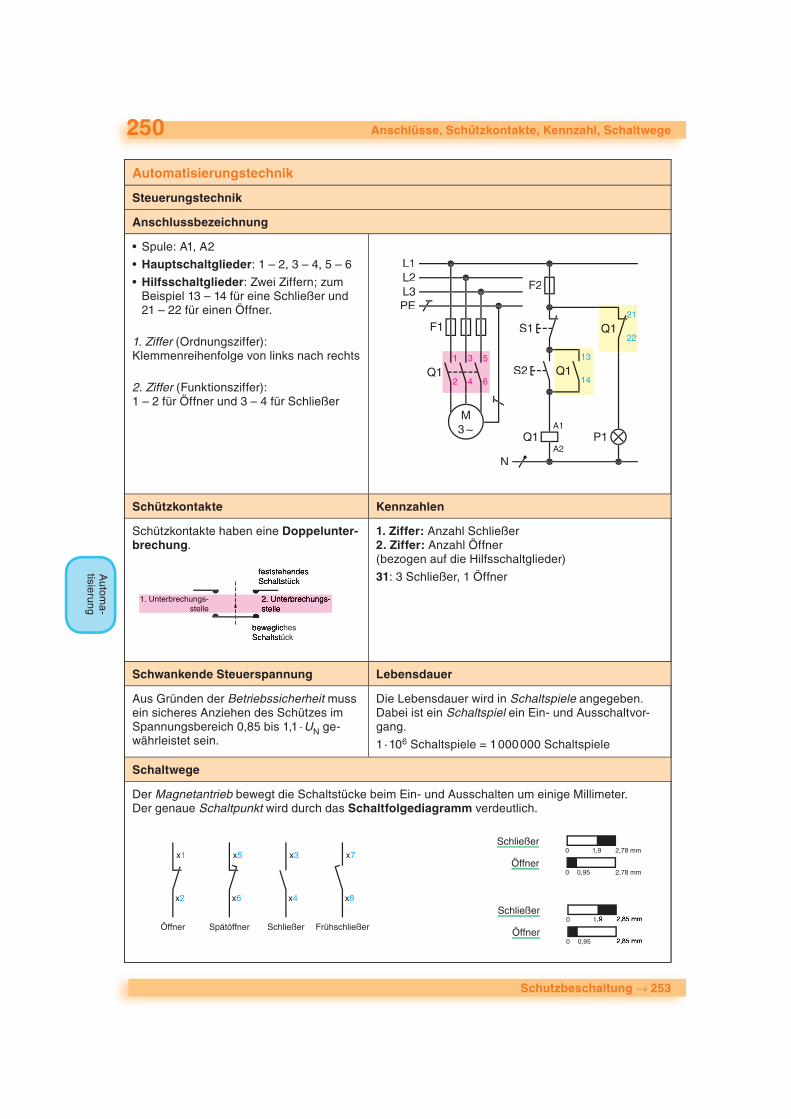
Spule: A1, A2
Hauptschaltglieder: 1 – 2, 3 – 4, 5 – 6
Hilfsschaltglieder: Zwei Ziffern; zum Beispiel 13 – 14 für eine Schließer und 21 – 22 für einen Öffner.
1. Ziffer (Ordnungsziffer): Klemmenreihenfolge von links nach rechts
2. Ziffer (Funktionsziffer): 1 – 2 für Öffner und 3 – 4 für Schließer
•
•
•
Schützkontakte Kennzahlen
Schützkontakte haben eine Doppelunter-brechung.
1. Ziffer: Anzahl Schließer2. Ziffer: Anzahl Öffner(bezogen auf die Hilfsschaltglieder)
31: 3 Schließer, 1 Öffner
Schwankende Steuerspannung Lebensdauer
Aus Gründen der Betriebssicherheit muss ein sicheres Anziehen des Schützes im Spannungsbereich 0,85 bis 1,1 · UN ge-währleistet sein.
Die Lebensdauer wird in Schaltspiele angegeben. Dabei ist ein Schaltspiel ein Ein- und Ausschaltvor-gang.
1 · 106 Schaltspiele = 1 000 000 Schaltspiele
Schaltwege
Der Magnetantrieb bewegt die Schaltstücke beim Ein- und Ausschalten um einige Millimeter. Der genaue Schaltpunkt wird durch das Schaltfolgediagramm verdeutlich.
2 4 6
1 3 5
Q1
L1
F1
L2L3PE
22
21
Q1
14
13
Q1
Q1 P1
N
F2
M3∼
S1
S2
A1
A2
Schutzbeschaltung Æ 253
250 Anschlüsse, Schützkontakte, Kennzahl, Schaltwege
Autom
a-tisierung
Automatisierungstechnik
Steuerungstechnik
Schaltwege
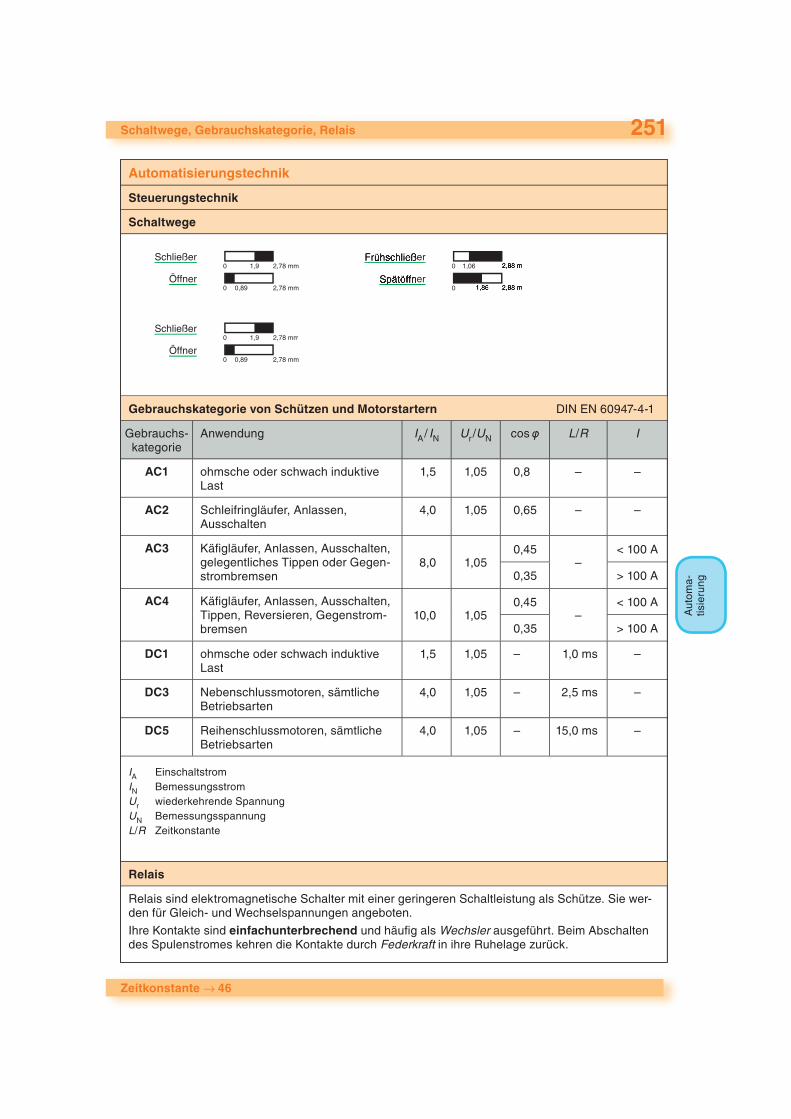
Gebrauchskategorie von Schützen und Motorstartern DIN EN 60947-4-1
Gebrauchs-kategorie
Anwendung IA / IN Ur /UN cos ϕ L/R I
AC1 ohmsche oder schwach induktive Last
1,5 1,05 0,8 – –
AC2 Schleifringläufer, Anlassen, Ausschalten
4,0 1,05 0,65 – –
AC3 Käfi gläufer, Anlassen, Ausschalten, gelegentliches Tippen oder Gegen-strombremsen
8,0 1,050,45
–< 100 A
0,35 > 100 A
AC4 Käfi gläufer, Anlassen, Ausschalten, Tippen, Reversieren, Gegenstrom-bremsen
10,0 1,050,45
–< 100 A
0,35 > 100 A
DC1 ohmsche oder schwach induktive Last
1,5 1,05 – 1,0 ms –
DC3 Nebenschlussmotoren, sämtliche Betriebsarten
4,0 1,05 – 2,5 ms –
DC5 Reihenschlussmotoren, sämtliche Betriebsarten
4,0 1,05 – 15,0 ms –
IA EinschaltstromIN BemessungsstromUr wiederkehrende SpannungUN BemessungsspannungL/R Zeitkonstante
Relais
Relais sind elektromagnetische Schalter mit einer geringeren Schaltleistung als Schütze. Sie wer-den für Gleich- und Wechselspannungen angeboten.
Ihre Kontakte sind einfachunterbrechend und häufi g als Wechsler ausgeführt. Beim Abschalten des Spulenstromes kehren die Kontakte durch Federkraft in ihre Ruhelage zurück.
251Schaltwege, Gebrauchskategorie, Relais
Zeitkonstante Æ 46
Aut
oma-
tisie
rung
Automatisierungstechnik
Steuerungstechnik
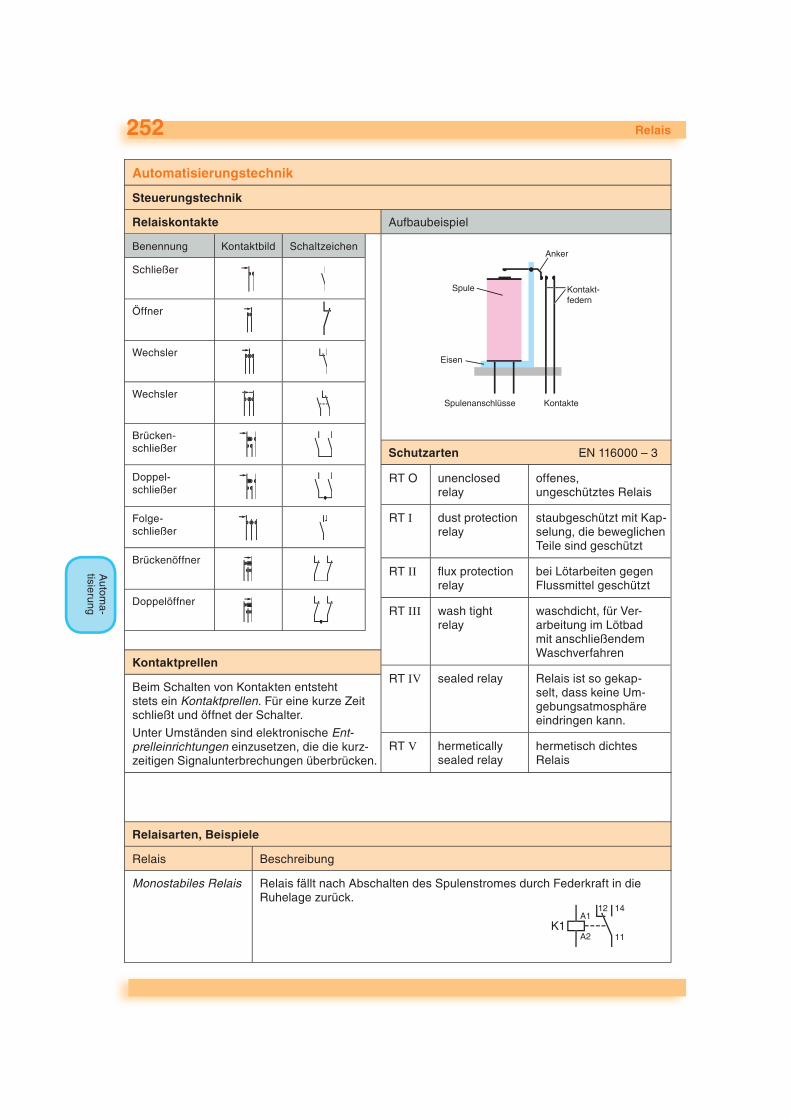
Relaiskontakte Aufbaubeispiel
Benennung Kontaktbild Schaltzeichen
Schließer
Öffner
Wechsler
Wechsler
Brücken-schließer
Doppel-schließer
Folge-schließer
Brückenöffner
Doppelöffner
Schutzarten EN 116000 – 3
RT O unenclosed relay
offenes, ungeschütztes Relais
RT I dust protection relay
staubgeschützt mit Kap-selung, die beweglichen Teile sind geschützt
RT II fl ux protection relay
bei Lötarbeiten gegen Flussmittel geschützt
RT III wash tight relay
waschdicht, für Ver-arbeitung im Lötbad mit anschließendem Waschverfahren
RT IV sealed relay Relais ist so gekap-selt, dass keine Um-gebungsatmosphäre eindringen kann.
RT V hermetically sealed relay
hermetisch dichtes Relais
Kontaktprellen
Beim Schalten von Kontakten entsteht stets ein Kontaktprellen. Für eine kurze Zeit schließt und öffnet der Schalter.
Unter Umständen sind elektronische Ent-prelleinrichtungen einzusetzen, die die kurz-zeitigen Signalunterbrechungen überbrücken.
Relaisarten, Beispiele
Relais Beschreibung
Monostabiles Relais Relais fällt nach Abschalten des Spulenstromes durch Federkraft in die Ruhelage zurück.
252 Relais
Autom
a-tisierung
Automatisierungstechnik
Steuerungstechnik
Relaisarten, Beispiele
Relais Beschreibung
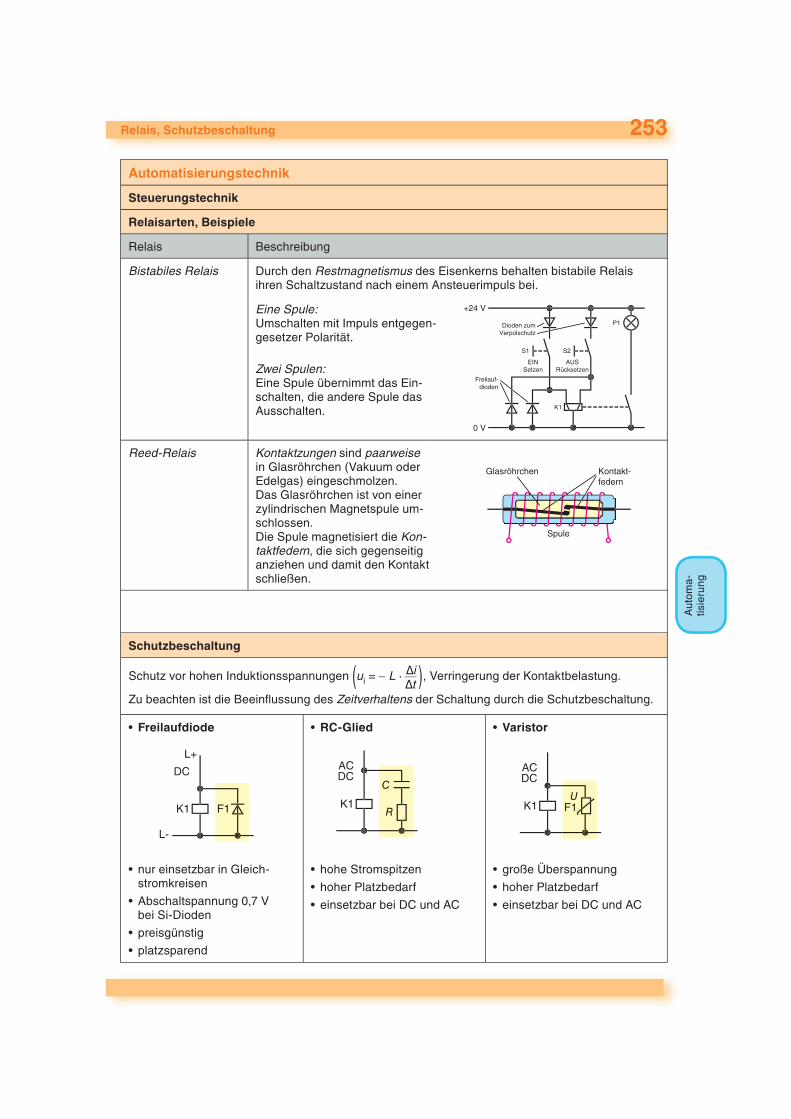
Bistabiles Relais Durch den Restmagnetismus des Eisenkerns behalten bistabile Relais ihren Schaltzustand nach einem Ansteuerimpuls bei.
Eine Spule:Umschalten mit Impuls entgegen-gesetzer Polarität.
Zwei Spulen:Eine Spule übernimmt das Ein-schalten, die andere Spule das Ausschalten.
Reed-Relais Kontaktzungen sind paarweise in Glasröhrchen (Vakuum oder Edelgas) eingeschmolzen. Das Glasröhrchen ist von einer zylindrischen Magnetspule um-schlossen.Die Spule magnetisiert die Kon-taktfedern, die sich gegenseitig anziehen und damit den Kontakt schließen.
Schutzbeschaltung
Schutz vor hohen Induktionsspannungen (ui = − L · Δi __ Δt
) , Verringerung der Kontaktbelastung.
Zu beachten ist die Beeinfl ussung des Zeitverhaltens der Schaltung durch die Schutzbeschaltung.
Freilaufdiode
nur einsetzbar in Gleich-stromkreisen
Abschaltspannung 0,7 V bei Si-Dioden
preisgünstig
platzsparend
•
•
•
•
•
RC-Glied
hohe Stromspitzen
hoher Platzbedarf
einsetzbar bei DC und AC
•
•
•
•
Varistor
große Überspannung
hoher Platzbedarf
einsetzbar bei DC und AC
•
•
•
•
253Relais, Schutzbeschaltung
Aut
oma-
tisie
rung
Automatisierungstechnik
Steuerungstechnik
Befehls- und Meldegeräte
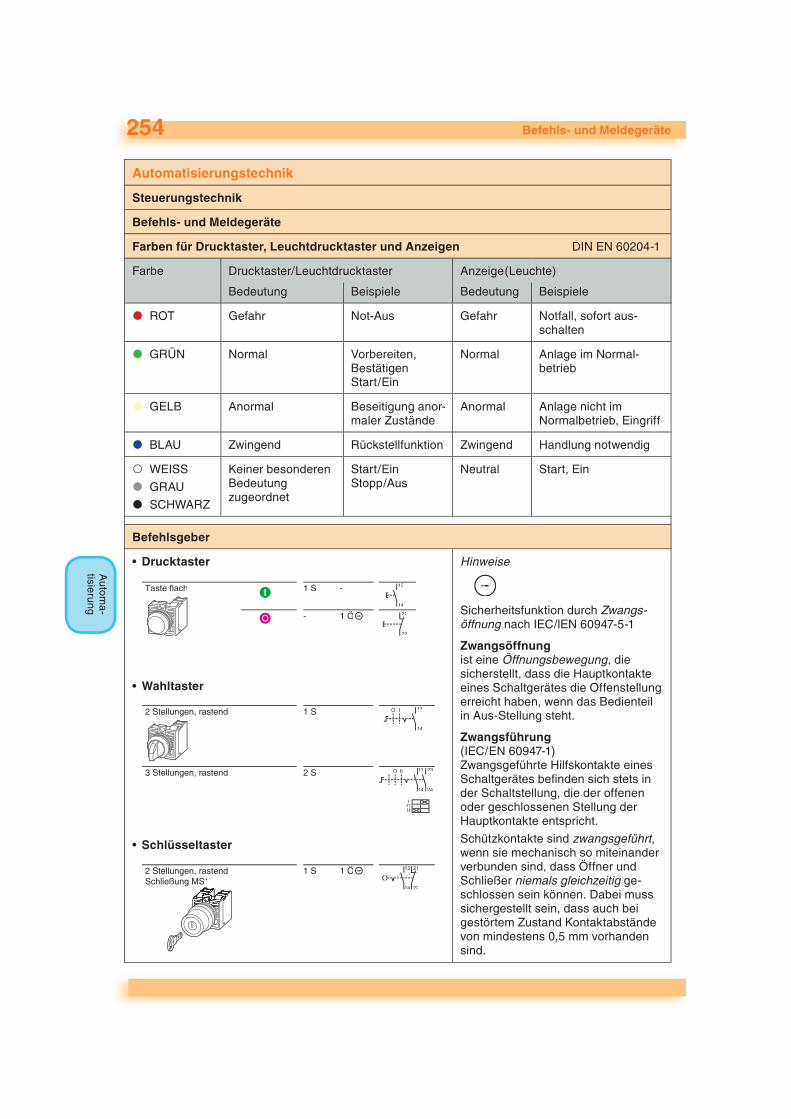
Farben für Drucktaster, Leuchtdrucktaster und Anzeigen DIN EN 60204-1
Farbe Drucktaster/Leuchtdrucktaster Anzeige(Leuchte)
Bedeutung Beispiele Bedeutung Beispiele
ROT Gefahr Not-Aus Gefahr Notfall, sofort aus-schalten
GRÜN Normal Vorbereiten, BestätigenStart/Ein
Normal Anlage im Normal-betrieb
GELB Anormal Beseitigung anor-maler Zustände
Anormal Anlage nicht im Normalbetrieb, Eingriff
BLAU Zwingend Rückstellfunktion Zwingend Handlung notwendig
WEISS
GRAU
SCHWARZ
Keiner besonderen Bedeutung zugeordnet
Start/EinStopp/Aus
Neutral Start, Ein
Befehlsgeber
Drucktaster
Wahltaster
Schlüsseltaster
•
•
•
Hinweise
Sicherheitsfunktion durch Zwangs-öffnung nach IEC/lEN 60947-5-1
Zwangsöffnungist eine Öffnungsbewegung, die sicherstellt, dass die Hauptkontakte eines Schaltgerätes die Offenstellung erreicht haben, wenn das Bedienteil in Aus-Stellung steht.
Zwangsführung(IEC/EN 60947-1)Zwangsgeführte Hilfskontakte eines Schaltgerätes befi nden sich stets in der Schaltstellung, die der offenen oder geschlossenen Stellung der Hauptkontakte entspricht.
Schützkontakte sind zwangsgeführt, wenn sie mechanisch so miteinander verbunden sind, dass Öffner und Schließer niemals gleichzeitig ge-schlossen sein können. Dabei muss sichergestellt sein, dass auch bei gestörtem Zustand Kontaktabstände von mindestens 0,5 mm vorhanden sind.
21
22
13
14
Taste flach II
O -
-
1 Ö
1 S
13
14
O I1 S -
2 S - 13
14
I
IOII
O 23
24
II
2 Stellungen, rastend
3 Stellungen, rastend
1 Ö 21
22
1 S 13
14
2 Stellungen, rastendSchließung MS1
254 Befehls- und Meldegeräte
Autom
a-tisierung
Automatisierungstechnik
Steuerungstechnik
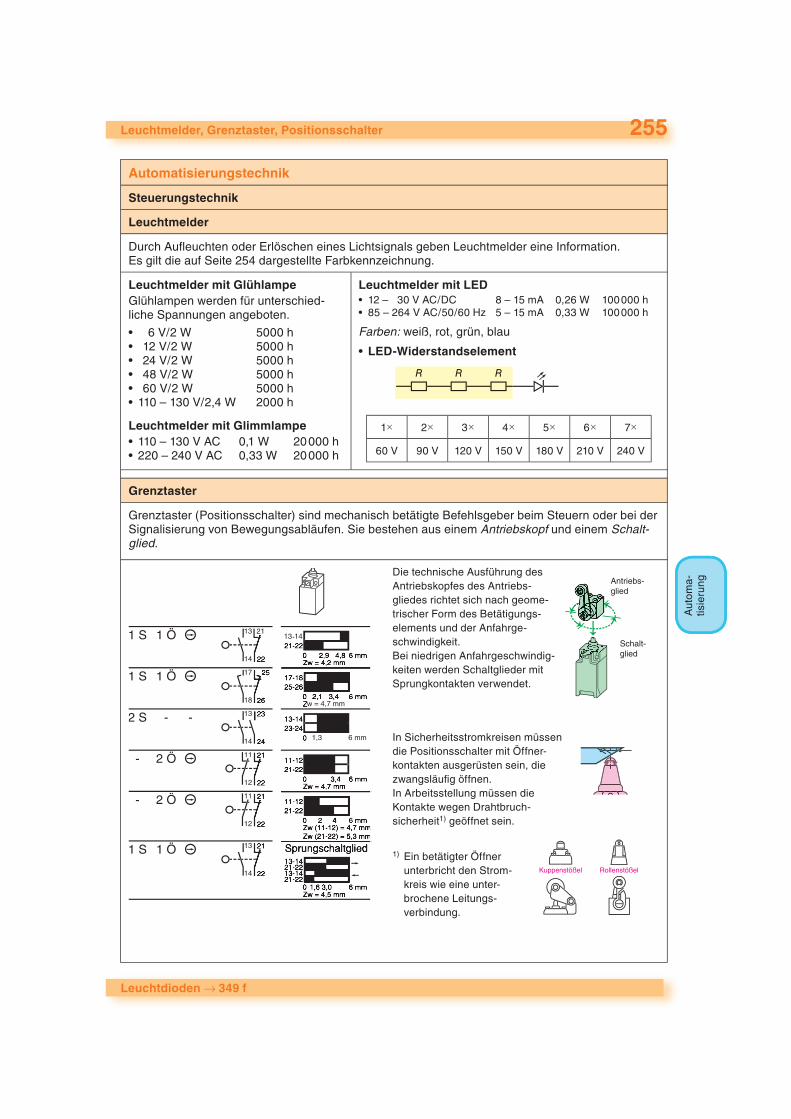
Leuchtmelder
Durch Aufl euchten oder Erlöschen eines Lichtsignals geben Leuchtmelder eine Information. Es gilt die auf Seite 254 dargestellte Farbkennzeichnung.
Leuchtmelder mit GlühlampeGlühlampen werden für unterschied-liche Spannungen angeboten.
6 V/2 W 5000 h 12 V/2 W 5000 h 24 V/2 W 5000 h 48 V/2 W 5000 h 60 V/2 W 5000 h110 – 130 V/2,4 W 2000 h
Leuchtmelder mit Glimmlampe110 – 130 V AC 0,1 W 20 000 h220 – 240 V AC 0,33 W 20 000 h
••••••
••
Leuchtmelder mit LED12 – 30 V AC/DC 8 – 15 mA 0,26 W 100 000 h85 – 264 V AC/50/60 Hz 5 – 15 mA 0,33 W 100 000 h
Farben: weiß, rot, grün, blau
LED-Widerstandselement
1× 2× 3× 4× 5× 6× 7×
60 V 90 V 120 V 150 V 180 V 210 V 240 V
••
•
Grenztaster
Grenztaster (Positionsschalter) sind mechanisch betätigte Befehlsgeber beim Steuern oder bei der Signalisierung von Bewegungsabläufen. Sie bestehen aus einem Antriebskopf und einem Schalt-glied.
Die technische Ausführung des Antriebskopfes des Antriebs-gliedes richtet sich nach geome-trischer Form des Betätigungs-elements und der Anfahrge-schwindigkeit.Bei niedrigen Anfahrgeschwindig-keiten werden Schaltglieder mit Sprungkontakten verwendet.
In Sicherheitsstromkreisen müssen die Positionsschalter mit Öffner-kontakten ausgerüsten sein, die zwangsläufi g öffnen.In Arbeitsstellung müssen die Kontakte wegen Drahtbruch-sicherheit1) geöffnet sein.
1) Ein betätigter Öffner unterbricht den Strom-kreis wie eine unter-brochene Leitungs-verbindung.
255Leuchtmelder, Grenztaster, Positionsschalter
Leuchtdioden Æ 349 f
Aut
oma-
tisie
rung
Aut
oma-
tisie
rung
Automatisierungstechnik
Steuerungstechnik
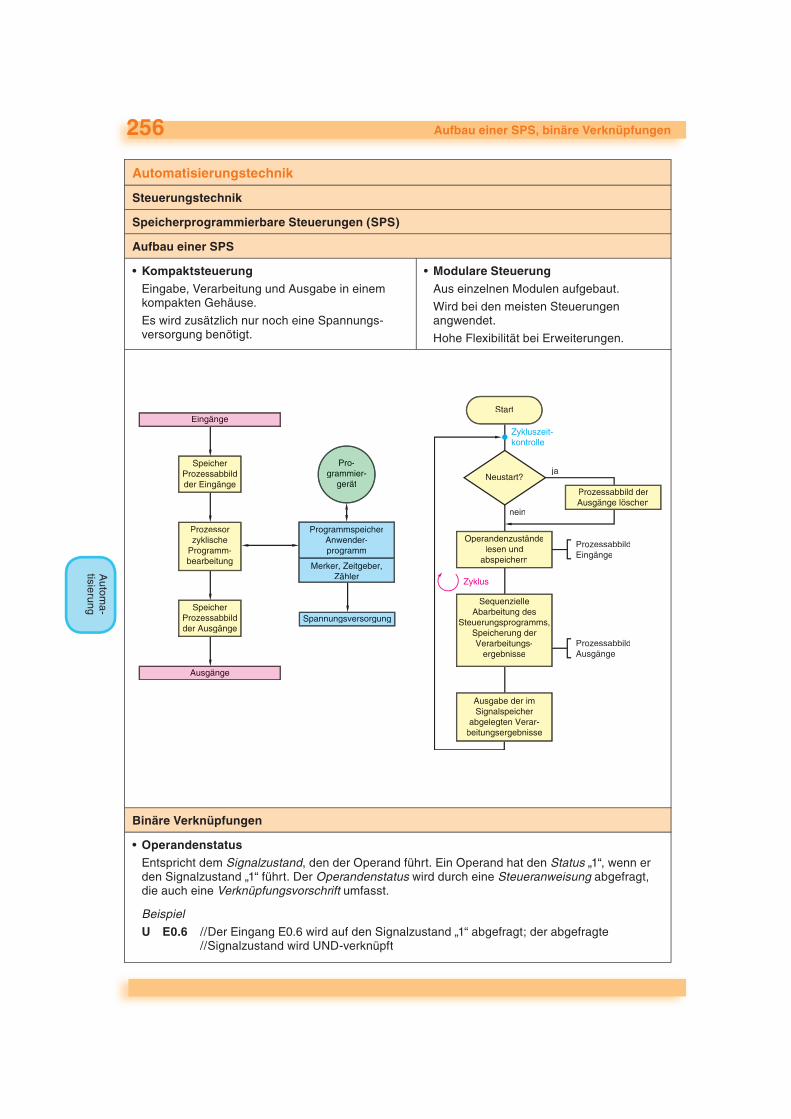
Speicherprogrammierbare Steuerungen (SPS)
Aufbau einer SPS
KompaktsteuerungEingabe, Verarbeitung und Ausgabe in einem kompakten Gehäuse.
Es wird zusätzlich nur noch eine Spannungs-versorgung benötigt.
• Modulare SteuerungAus einzelnen Modulen aufgebaut.
Wird bei den meisten Steuerungen angwendet.
Hohe Flexibilität bei Erweiterungen.
•
Binäre Verknüpfungen
OperandenstatusEntspricht dem Signalzustand, den der Operand führt. Ein Operand hat den Status „1“, wenn er den Signalzustand „1“ führt. Der Operandenstatus wird durch eine Steueranweisung abgefragt, die auch eine Verknüpfungsvorschrift umfasst.
Beispiel
U E0.6 //Der Eingang E0.6 wird auf den Signalzustand „1“ abgefragt; der abgefragte //Signalzustand wird UND-verknüpft
•
Prozessabbild derAusgänge löschen
Start
Zykluszeit-kontrolle
Zyklus
Neustart?ja
nein
Operandenzuständelesen und
abspeichern
ProzessabbildEingänge
SequenzielleAbarbeitung des
Steuerungsprogramms,Speicherung derVerarbeitungs-
ergebnisse
Ausgabe der imSignalspeicher
abgelegten Verar-beitungsergebnisse
ProzessabbildAusgänge
Eingänge
SpeicherProzessabbildder Eingänge
Ausgänge
Prozessorzyklische
Programm-bearbeitung
SpeicherProzessabbildder Ausgänge
Spannungsversorgung
ProgrammspeicherAnwender-programm
Pro-grammier-
gerät
Merker, Zeitgeber,Zähler
256 Aufbau einer SPS, binäre Verknüpfungen
Autom
a-tisierung
Automatisierungstechnik
Steuerungstechnik
Binäre Verknüpfungen
AbfrageergebnisGrundsätzlich wird nicht der Signalzustand des abgefragten Operanden verknüpft, es wird zunächst das Abfrageergebnis gebildet.
Abfrage auf Signalzustand „1“: Das Abfrageergebnis und der Signalzustand sind gleich.Abfrage auf Signalzustand „0“: Das Abfrageergebnis ist die Negation des Signalzustandes.
BeispielAm Eingang E1.0 liegt der Signalzustand „1“ (Schließer betätigt)
U E1.0: Status „1“, Abfrageergebnis „1“UN E1.0: Status „1“, Abfrageergebnis „0“
•
VerknüpfungsergebnisDas Verknüpfungsergebnis (VKE) ist der Signalzustand der CPU, der für die weitere binäre Si-gnalverarbeitung verwendet wird. Das VKE hat die Aufgabe, binäre Operanden zu setzen oder zurückzusetzen.Verknüpfungsergebnis erfüllt: VKE = „1“Verknüpfungsergebnis nicht erfüllt: VKE = „0“
•
ErstabfrageAuf eine bedingte Operation folgende Abfrageoperation. Dabei übernimmt die CPU das Abfrage-ergebnis direkt als Verknüpfungsergebnis. Die Verknüpfungsvorschrift UND bzw. ODER hat bei der Erstabfrage keine Bedeutung.U E1.1 ErstabfrageU E1.2 Abfrageoperation= A4.0 Bedingte Operation
•
AbfrageoperationDie Abfrageoperation bildet das Verknüpfungsergebnis. Durch Abfrageoperationen wird der Signalzustand eines Binäroperanden abgefragt und dessen logische Verknüpfung vorgenommen. Das Ergebnis wird in der CPU als neues Ergebnis gespeichert.
•
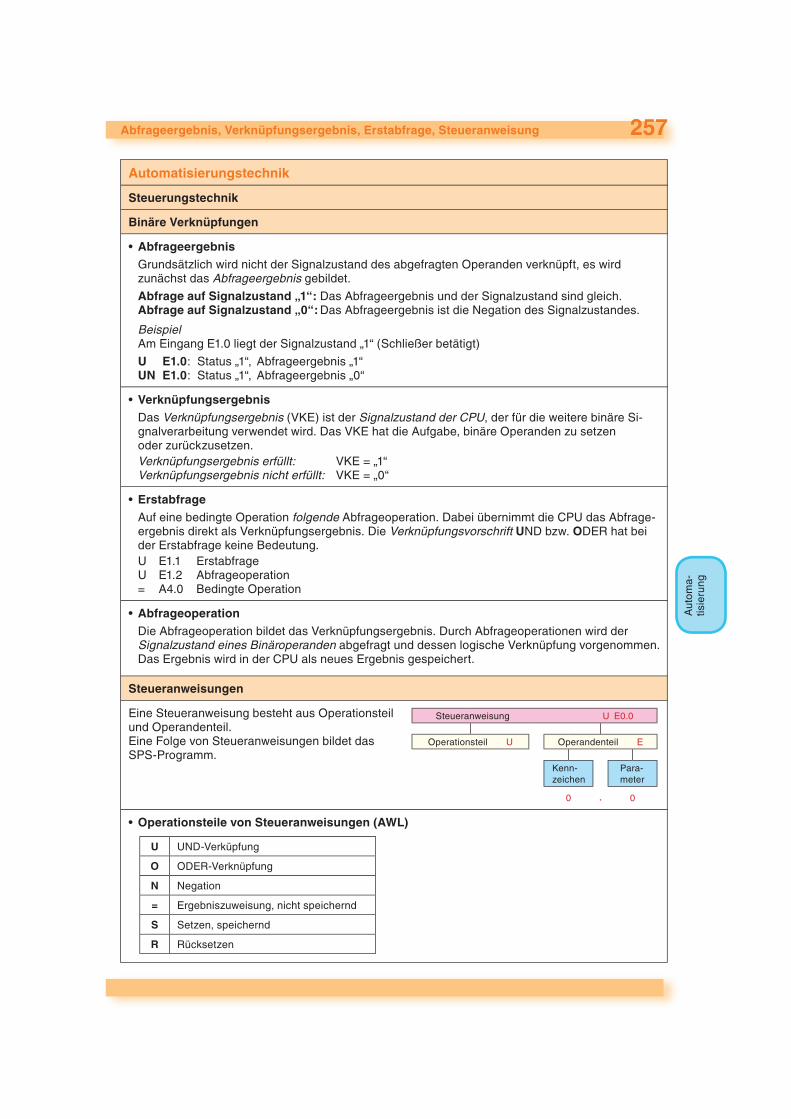
Steueranweisungen
Eine Steueranweisung besteht aus Operationsteil und Operandenteil. Eine Folge von Steueranweisungen bildet das SPS-Programm.
Steueranweisung U E0.0
Operationsteil U Operandenteil E
Kenn-zeichen
Para-meter
0 . 0
Operationsteile von Steueranweisungen (AWL)•
U UND-Verküpfung
O ODER-Verknüpfung
N Negation
= Ergebniszuweisung, nicht speichernd
S Setzen, speichernd
R Rücksetzen
257Abfrageergebnis, Verknüpfungsergebnis, Erstabfrage, Steueranweisung
Aut
oma-
tisie
rung
Automatisierungstechnik
Steuerungstechnik
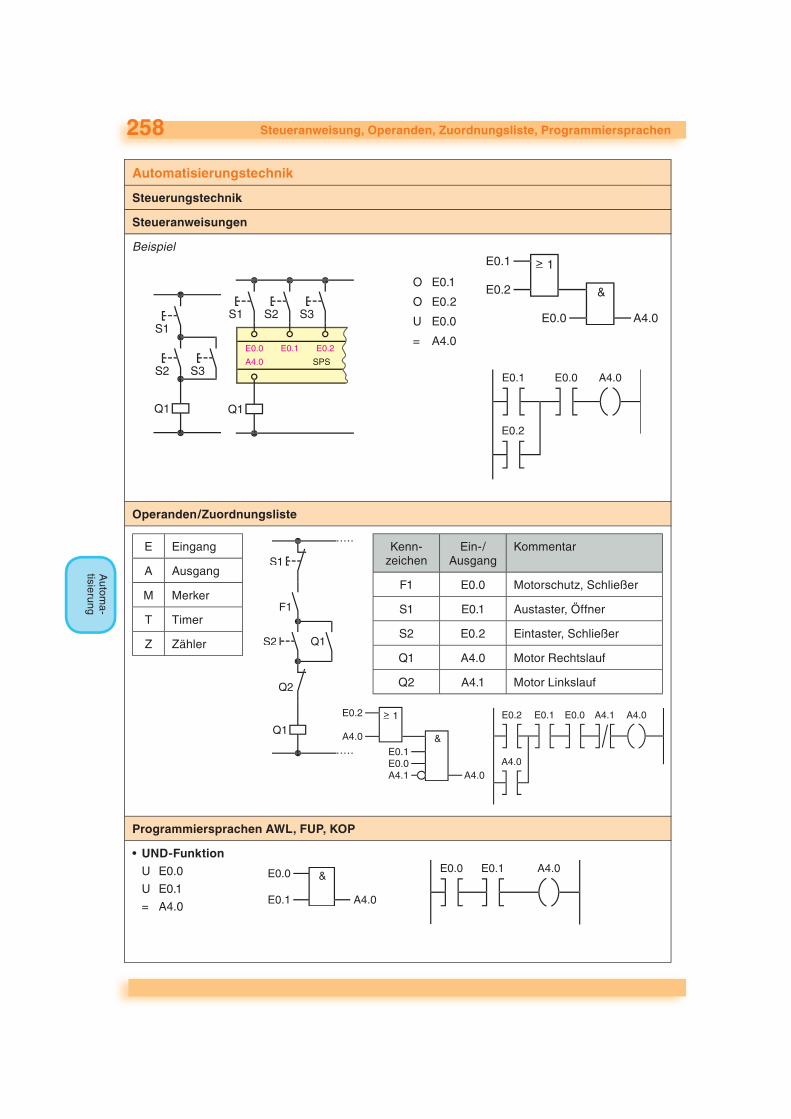
Steueranweisungen
Beispiel
O E0.1
O E0.2
U E0.0
= A4.0
Operanden/Zuordnungsliste
E Eingang
A Ausgang
M Merker
T Timer
Z Zähler
Q1
F1
S1
S2 Q1
Q2
Kenn-zeichen
Ein-/Ausgang
Kommentar
F1 E0.0 Motorschutz, Schließer
S1 E0.1 Austaster, Öffner
S2 E0.2 Eintaster, Schließer
Q1 A4.0 Motor Rechtslauf
Q2 A4.1 Motor Linkslauf
Programmiersprachen AWL, FUP, KOP
UND-Funktion U E0.0
U E0.1
= A4.0
•
258 Steueranweisung, Operanden, Zuordnungsliste, Programmiersprachen
Autom
a-tisierung





























