Embed Size (px)
Citation preview

Zusammenfassung: Heutige und zukünftige Fahrerassistenzsysteme ermöglichen die Fahrer-unterstützung auf der Bahnführungsebene. Durch die Vielfalt neuer Funktionen sind auch zusätzliche Bedienkonzepte hinzugekommen. Dadurch wächst die Komplexität der Bedienung und die Aufgabenfülle des Fahrers. Mit einer Umstellung der Fahrerassistenz von paralleler zu serieller Assistenz lässt sich ein Konzept entwickeln, das durchgängig die Fahrzeugführung von der Stabilisierungsebene bis zur Bahnführungsebene und im Grundsatz auch bis zum autonomen Fahren ermöglicht, und das sich an die für die Unterstützung zur Verfügung stehende Infrastruktur und/oder den Unterstützungsgradwunsch des Fahrers anpasst. Schlüsselwörter: Autonomes Fahren, Bahnführungsassistenz, Bedienkomplexität, X-by-Wire
1 Einleitung Moderne Fahrerassistenzsysteme versorgen den Fahrer mit neuen oder erweiterten Informationen, warnen vor kritischen Situationen und greifen intervenierend oder dauerhaft in die Fahrzeugführung ein. Abgebildet auf das literaturbekannte Drei-Ebenen-Modell (siehe [3]) führen die Fahrerassistenzsysteme auf allen Ebenen zu einer Erhöhung der Komplexität, siehe Abbildung 1.
______________________________ * Prof. Dr. rer. nat. Hermann Winner ist Leiter des Fachgebiets Fahrzeugtechnik der TU Darmstadt,
Petersenstraße 30, D-64287 Darmstadt (e-mail:[email protected]). † Dipl.-Ing. Stephan Hakuli ist wissenschaftlicher. Mitarbeiter am Fachgebiet Fahrzeugtechnik der TU
Darmstadt, Petersenstraße 30, D-64287 Darmstadt (e-mail:[email protected]). ‡ Prof. Dr.-Ing. Ralph Bruder ist Leiter des Fachgebiets Arbeitswissenschaft der TU Darmstadt,
Petersenstraße 30, D-64287 Darmstadt (e-mail:[email protected]). § Prof. Dr.-Ing. Ulrich Konigorski ist Leiter des Fachgebiets Regelungstechnik und Mechatronik der TU
Darmstadt, Landgraf-Georg-Str. 4, D-64283 Darmstadt (e-mail:[email protected]). ** Prof. Dr.-Ing. Bernt Schiele ist Leiter des Fachgebiets Muldimodale Interaktive Systeme der TU
Darmstadt, Hochschulstraße 10, D-64289 Darmstadt (e-mail:[email protected]).
Conduct-by-Wire – ein neues Paradigma für die Weiterentwicklung der Fahrerassistenz
Hermann Winner*, Stephan Hakuli†, Ralph Bruder‡, Ulrich Konigorski§, Bernt Schiele**
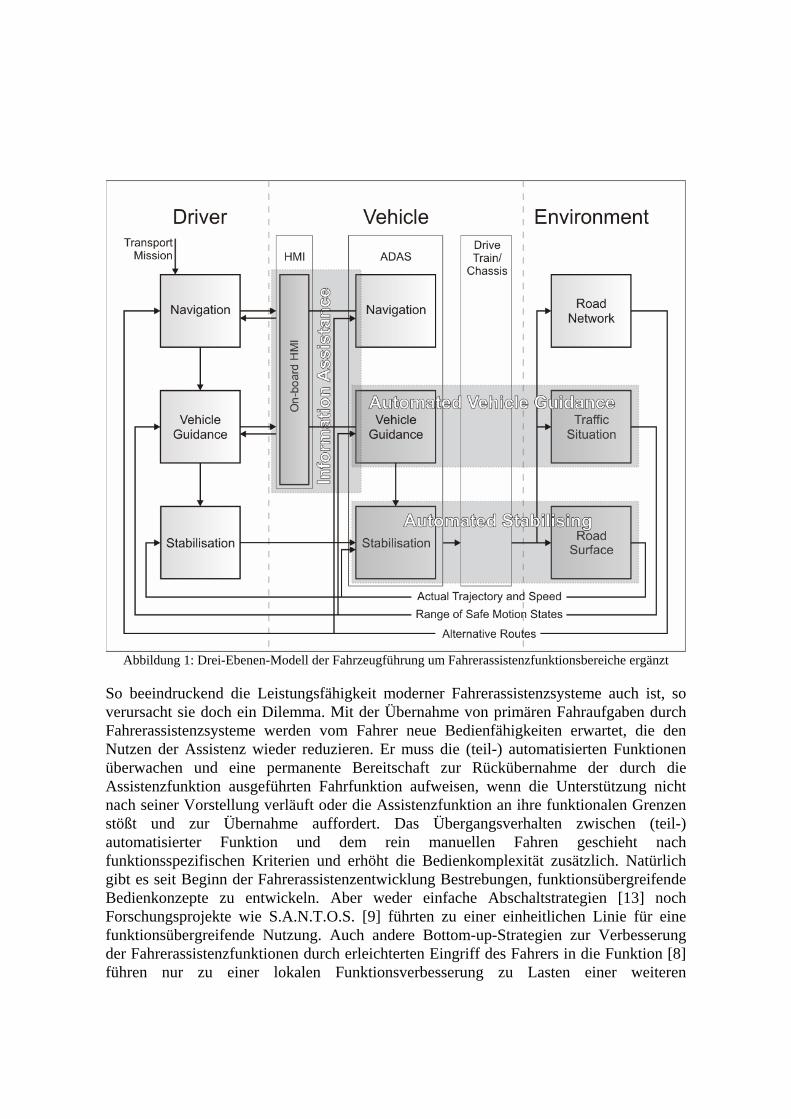
Abbildung 1: Drei-Ebenen-Modell der Fahrzeugführung um Fahrerassistenzfunktionsbereiche ergänzt
So beeindruckend die Leistungsfähigkeit moderner Fahrerassistenzsysteme auch ist, so verursacht sie doch ein Dilemma. Mit der Übernahme von primären Fahraufgaben durch Fahrerassistenzsysteme werden vom Fahrer neue Bedienfähigkeiten erwartet, die den Nutzen der Assistenz wieder reduzieren. Er muss die (teil-) automatisierten Funktionen überwachen und eine permanente Bereitschaft zur Rückübernahme der durch die Assistenzfunktion ausgeführten Fahrfunktion aufweisen, wenn die Unterstützung nicht nach seiner Vorstellung verläuft oder die Assistenzfunktion an ihre funktionalen Grenzen stößt und zur Übernahme auffordert. Das Übergangsverhalten zwischen (teil-) automatisierter Funktion und dem rein manuellen Fahren geschieht nach funktionsspezifischen Kriterien und erhöht die Bedienkomplexität zusätzlich. Natürlich gibt es seit Beginn der Fahrerassistenzentwicklung Bestrebungen, funktionsübergreifende Bedienkonzepte zu entwickeln. Aber weder einfache Abschaltstrategien [13] noch Forschungsprojekte wie S.A.N.T.O.S. [9] führten zu einer einheitlichen Linie für eine funktionsübergreifende Nutzung. Auch andere Bottom-up-Strategien zur Verbesserung der Fahrerassistenzfunktionen durch erleichterten Eingriff des Fahrers in die Funktion [8] führen nur zu einer lokalen Funktionsverbesserung zu Lasten einer weiteren
Komplexitätserhöhung. Es zeigt sich offensichtlich ein Dilemma: mit der Übernahme von Fahraufgaben durch Fahrerassistenzsysteme werden neue Bedienfähigkeiten vom Fahrer erwartet, die den Nutzen der Assistenz wieder reduzieren. Auch wenn mechatronische Komponenten wie Radarsensoren oder Bremsregelsysteme gleichzeitig für verschiedene Assistenzarten eingesetzt werden, so verfügen die einzelnen Assistenzfunktionen dennoch über eine jeweils eigene Bedienfunktionalität. Von einer integrierten Assistenz kann nicht gesprochen werden, was dazu führt, dass der Fahrer die jeweiligen Zustände der Einzelsysteme zu einer schlüssigen Zustandsbeschreibung des Gesamtsystems kombinieren muss. Es muss gewährleistet sein, dass ihm jederzeit bewusst ist, in welcher Situation (Situation Awareness) und in welchem Modus (Mode Awareness) das Assistenzsystem arbeitet. Eine übliche Art der Systemverbesserung besteht nun darin, einzelne Unterstützungssysteme so zu entwerfen, dass die einzelnen Ursachen für Handlungsdefizite bzw. Diskomfort verhindert oder zumindest gemindert werden. Da es sich im Zusammenhang mit komplexen Mensch-Maschine-Systemen in der Regel nicht um monokausale Auslöser für Handlungsdefizite bzw. Diskomfort handelt, kommt es zu einem parallelen Einsatz mehrerer Unterstützungssysteme. Zur Lösung des Dilemmas, dass trotz partieller Verbesserung von Teilsystemen die Bedienkomplexität des Gesamtsystems steigt und die Systemzuverlässigkeit des Gesamtsystems sogar sinken kann, bedarf es eines neuen Ansatzes in der Entwicklung von Benutzungskonzepten für komplexe Mensch-Maschine-Systeme. Die Optimierung bisheriger Ansätze verspricht keinen Ausweg aus dem Dilemma. Daher ist zu überprüfen, ob die Entwicklung nach dem richtigen Paradigma verläuft und nachzuschauen, ob ein anderes Paradigma einen Ausweg aufweist. Ein neues Paradigma ist das der seriellen Assistenz, übertragen auf die Fahrzeugführung als Conduct-by-Wire bezeichnet. An die Stelle einer Addition von Einzelsystemen mit individuellen Bedienkonzepten tritt ein übergreifendes Bedienkonzept, das es dem Nutzer ermöglicht, über eine vereinheitlichte Schnittstelle mit diversen Subsystemen zu interagieren. Trotz des höheren Abstraktionsgrades der daraus folgenden Benutzungssprache ist es dabei dem Nutzer stets möglich, auch auf einzelne Subsysteme Einfluss zu nehmen. Das Paradigma der seriellen Assistenz als Kernstück von Conduct-by-Wire wird im Folgenden vorgestellt.
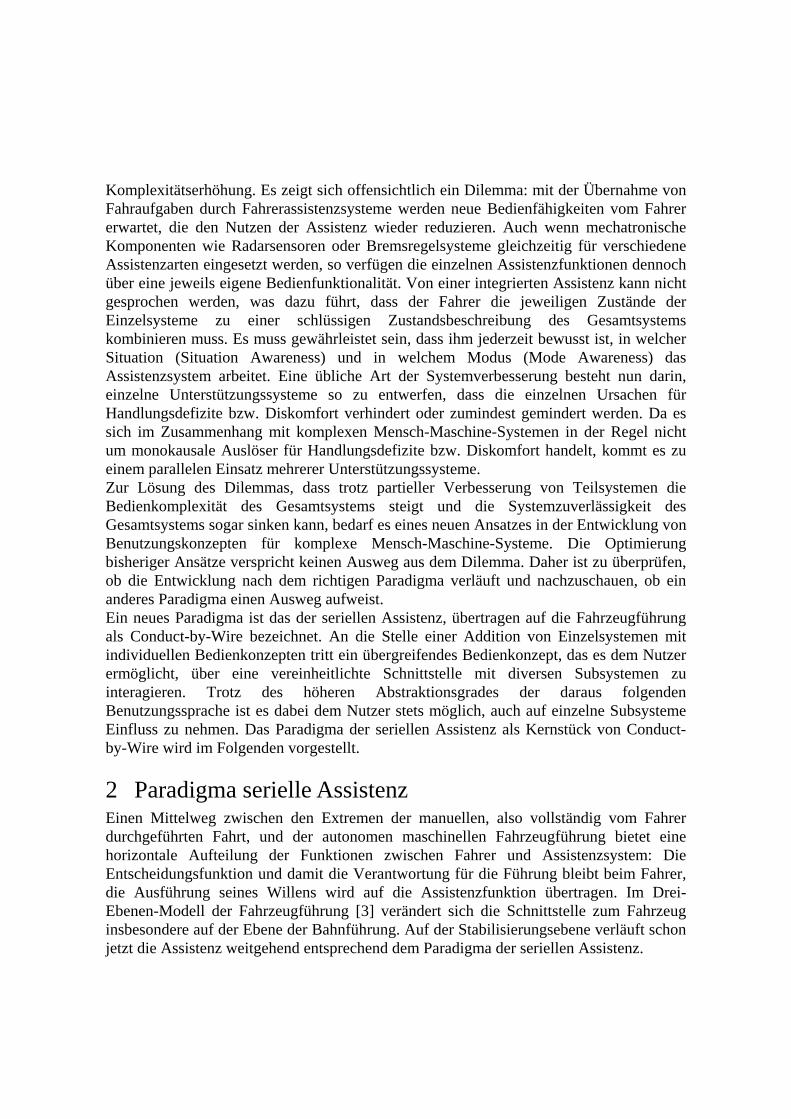
2 Paradigma serielle Assistenz Einen Mittelweg zwischen den Extremen der manuellen, also vollständig vom Fahrer durchgeführten Fahrt, und der autonomen maschinellen Fahrzeugführung bietet eine horizontale Aufteilung der Funktionen zwischen Fahrer und Assistenzsystem: Die Entscheidungsfunktion und damit die Verantwortung für die Führung bleibt beim Fahrer, die Ausführung seines Willens wird auf die Assistenzfunktion übertragen. Im Drei-Ebenen-Modell der Fahrzeugführung [3] verändert sich die Schnittstelle zum Fahrzeug insbesondere auf der Ebene der Bahnführung. Auf der Stabilisierungsebene verläuft schon jetzt die Assistenz weitgehend entsprechend dem Paradigma der seriellen Assistenz.
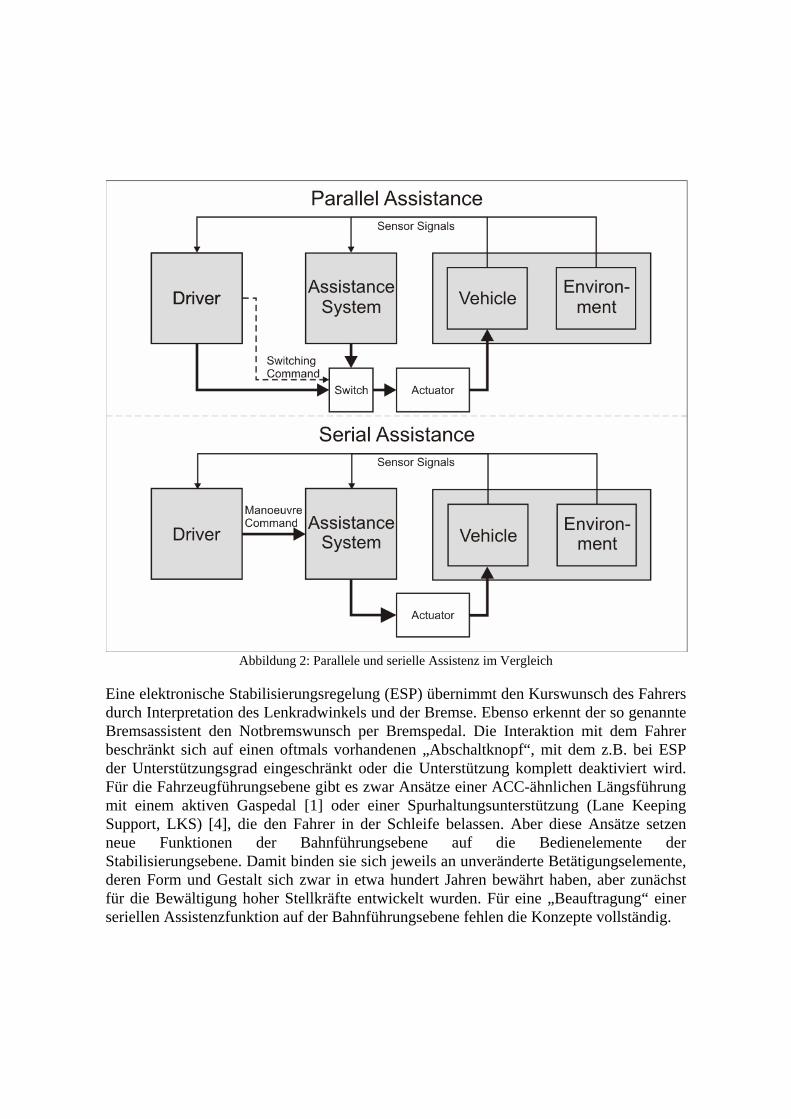
Abbildung 2: Parallele und serielle Assistenz im Vergleich
Eine elektronische Stabilisierungsregelung (ESP) übernimmt den Kurswunsch des Fahrers durch Interpretation des Lenkradwinkels und der Bremse. Ebenso erkennt der so genannte Bremsassistent den Notbremswunsch per Bremspedal. Die Interaktion mit dem Fahrer beschränkt sich auf einen oftmals vorhandenen „Abschaltknopf“, mit dem z.B. bei ESP der Unterstützungsgrad eingeschränkt oder die Unterstützung komplett deaktiviert wird. Für die Fahrzeugführungsebene gibt es zwar Ansätze einer ACC-ähnlichen Längsführung mit einem aktiven Gaspedal [1] oder einer Spurhaltungsunterstützung (Lane Keeping Support, LKS) [4], die den Fahrer in der Schleife belassen. Aber diese Ansätze setzen neue Funktionen der Bahnführungsebene auf die Bedienelemente der Stabilisierungsebene. Damit binden sie sich jeweils an unveränderte Betätigungselemente, deren Form und Gestalt sich zwar in etwa hundert Jahren bewährt haben, aber zunächst für die Bewältigung hoher Stellkräfte entwickelt wurden. Für eine „Beauftragung“ einer seriellen Assistenzfunktion auf der Bahnführungsebene fehlen die Konzepte vollständig.
3 Conduct-by-Wire - Umsetzung des Paradigmas der seriellen Assistenz bis zur Bahnführungsebene
In radikaler Ausprägung verzichtet die Fahrer/Fahrzeugeinheit nun auf den Block der Stabilisierung durch den Fahrer, siehe Abbildung 5. Damit verengt sich die Schnittstelle zum Fahrzeug auf die Ebene der Fahrzeugführung, die allerdings auch allen Führungswünschen des Fahrers Rechnung tragen muss.
Abbildung 3: Drei-Ebenen-Modell mit Conduct-by-Wire ohne Stabilisierungsaufgaben für den Fahrer
Die Kommunikation erfolgt über eine hier so genannte Manöverschnittstelle. Die vom Fahrer gewünschten Manöver werden in der Einheit Conduct-by-Wire selbstregelnd innerhalb der von der Fahrphysik oder der Umgebung bestimmen Grenzen ausgeführt. Das Konzept Conduct-by-Wire, erstmals vorgestellt bei [12], trägt seinen Namen, weil mit dem Übergang der seriellen Assistenz auf die Bahnführungsebene das Fahren zu einem Führen auf einer höheren Ebene wird. Daher ist die heutige Bindung des Fahrens an Betätigungselemente der Stabilisierungsebene aufzuheben und eine
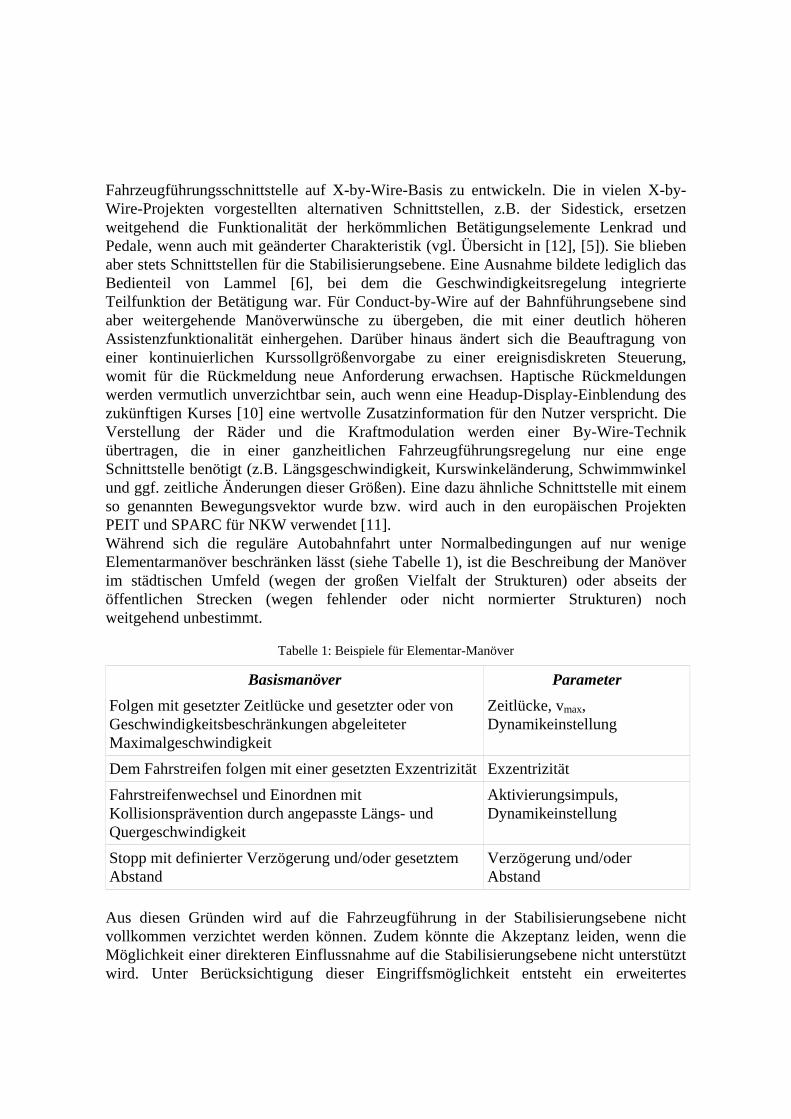
Fahrzeugführungsschnittstelle auf X-by-Wire-Basis zu entwickeln. Die in vielen X-by-Wire-Projekten vorgestellten alternativen Schnittstellen, z.B. der Sidestick, ersetzen weitgehend die Funktionalität der herkömmlichen Betätigungselemente Lenkrad und Pedale, wenn auch mit geänderter Charakteristik (vgl. Übersicht in [12], [5]). Sie blieben aber stets Schnittstellen für die Stabilisierungsebene. Eine Ausnahme bildete lediglich das Bedienteil von Lammel [6], bei dem die Geschwindigkeitsregelung integrierte Teilfunktion der Betätigung war. Für Conduct-by-Wire auf der Bahnführungsebene sind aber weitergehende Manöverwünsche zu übergeben, die mit einer deutlich höheren Assistenzfunktionalität einhergehen. Darüber hinaus ändert sich die Beauftragung von einer kontinuierlichen Kurssollgrößenvorgabe zu einer ereignisdiskreten Steuerung, womit für die Rückmeldung neue Anforderung erwachsen. Haptische Rückmeldungen werden vermutlich unverzichtbar sein, auch wenn eine Headup-Display-Einblendung des zukünftigen Kurses [10] eine wertvolle Zusatzinformation für den Nutzer verspricht. Die Verstellung der Räder und die Kraftmodulation werden einer By-Wire-Technik übertragen, die in einer ganzheitlichen Fahrzeugführungsregelung nur eine enge Schnittstelle benötigt (z.B. Längsgeschwindigkeit, Kurswinkeländerung, Schwimmwinkel und ggf. zeitliche Änderungen dieser Größen). Eine dazu ähnliche Schnittstelle mit einem so genannten Bewegungsvektor wurde bzw. wird auch in den europäischen Projekten PEIT und SPARC für NKW verwendet [11]. Während sich die reguläre Autobahnfahrt unter Normalbedingungen auf nur wenige Elementarmanöver beschränken lässt (siehe Tabelle 1), ist die Beschreibung der Manöver im städtischen Umfeld (wegen der großen Vielfalt der Strukturen) oder abseits der öffentlichen Strecken (wegen fehlender oder nicht normierter Strukturen) noch weitgehend unbestimmt.
Tabelle 1: Beispiele für Elementar-Manöver
Basismanöver Parameter Folgen mit gesetzter Zeitlücke und gesetzter oder von Geschwindigkeitsbeschränkungen abgeleiteter Maximalgeschwindigkeit
Zeitlücke, vmax, Dynamikeinstellung
Dem Fahrstreifen folgen mit einer gesetzten Exzentrizität Exzentrizität Fahrstreifenwechsel und Einordnen mit Kollisionsprävention durch angepasste Längs- und Quergeschwindigkeit
Aktivierungsimpuls, Dynamikeinstellung
Stopp mit definierter Verzögerung und/oder gesetztem Abstand
Verzögerung und/oder Abstand
Aus diesen Gründen wird auf die Fahrzeugführung in der Stabilisierungsebene nicht vollkommen verzichtet werden können. Zudem könnte die Akzeptanz leiden, wenn die Möglichkeit einer direkteren Einflussnahme auf die Stabilisierungsebene nicht unterstützt wird. Unter Berücksichtigung dieser Eingriffsmöglichkeit entsteht ein erweitertes
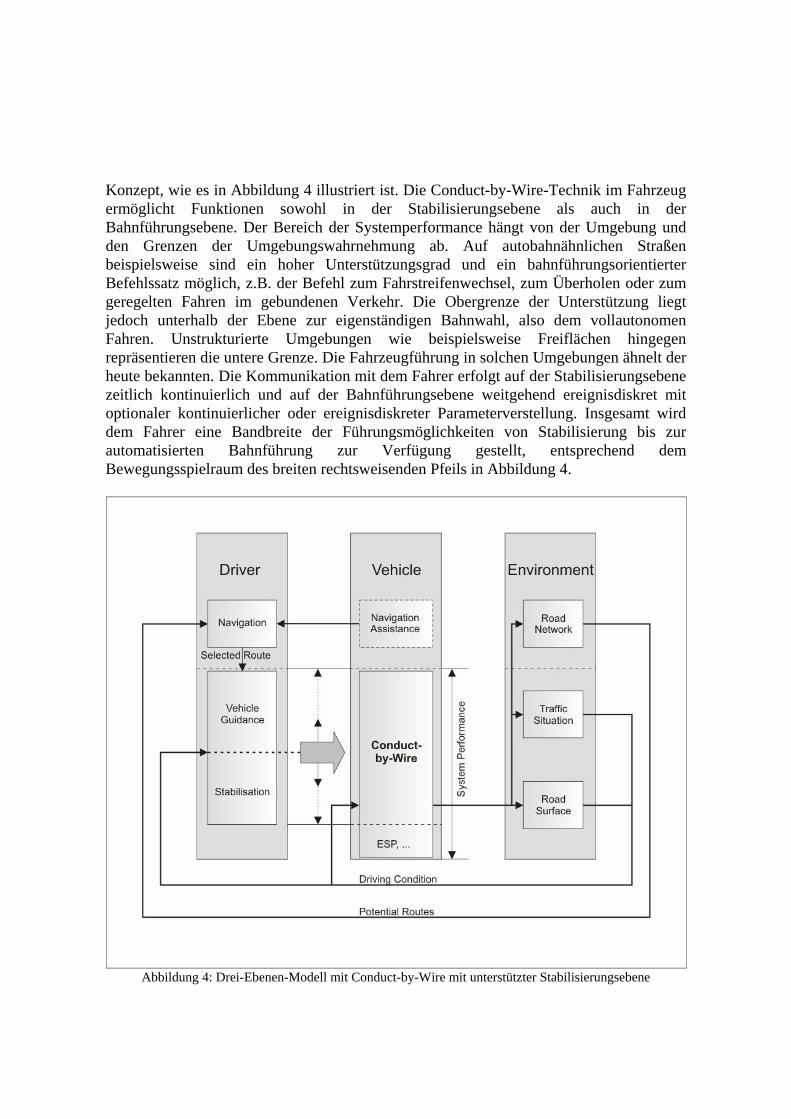
Konzept, wie es in Abbildung 4 illustriert ist. Die Conduct-by-Wire-Technik im Fahrzeug ermöglicht Funktionen sowohl in der Stabilisierungsebene als auch in der Bahnführungsebene. Der Bereich der Systemperformance hängt von der Umgebung und den Grenzen der Umgebungswahrnehmung ab. Auf autobahnähnlichen Straßen beispielsweise sind ein hoher Unterstützungsgrad und ein bahnführungsorientierter Befehlssatz möglich, z.B. der Befehl zum Fahrstreifenwechsel, zum Überholen oder zum geregelten Fahren im gebundenen Verkehr. Die Obergrenze der Unterstützung liegt jedoch unterhalb der Ebene zur eigenständigen Bahnwahl, also dem vollautonomen Fahren. Unstrukturierte Umgebungen wie beispielsweise Freiflächen hingegen repräsentieren die untere Grenze. Die Fahrzeugführung in solchen Umgebungen ähnelt der heute bekannten. Die Kommunikation mit dem Fahrer erfolgt auf der Stabilisierungsebene zeitlich kontinuierlich und auf der Bahnführungsebene weitgehend ereignisdiskret mit optionaler kontinuierlicher oder ereignisdiskreter Parameterverstellung. Insgesamt wird dem Fahrer eine Bandbreite der Führungsmöglichkeiten von Stabilisierung bis zur automatisierten Bahnführung zur Verfügung gestellt, entsprechend dem Bewegungsspielraum des breiten rechtsweisenden Pfeils in Abbildung 4.
Abbildung 4: Drei-Ebenen-Modell mit Conduct-by-Wire mit unterstützter Stabilisierungsebene
Die vom Fahrer gewünschten Manöver werden in der Einheit Conduct-by-Wire selbstregelnd innerhalb der von der Fahrphysik oder der Umgebung bestimmen Grenzen ausgeführt. Damit die Manöverschnittstelle zumindest eine gleichwertig leistungsfähige Fahrzeugführung erlaubt, ist auf ein intuitives HMI zu achten, das sowohl die Eingabe des Wunsches genauso intuitiv erlaubt wie die Rückmeldung des aktuellen Fahrzustands an den Fahrer. Der Unterstützungsgrad wird vom Fahrer selbst bestimmt und kann von der Stabilisierung bis zur Obergrenze der Systemperformance reichen. Eine untere Assistenzgradgrenze ist mit der Linie oberhalb der Fahrdynamikregelung festgelegt, womit angedeutet wird, dass es eine Sicherheitsebene gibt, die nicht unterschritten wird, weil ansonsten die Fahrdynamikgrenzen überschritten werden und ein nicht mehr beherrschbares Fahrzeugverhalten auftritt. Die Obergrenze der Systemperformance ist, wie oben erwähnt, keine feste Grenze, sondern skaliert mit den technischen Möglichkeiten und den Umgebungsbedingungen. Eine Fahrt auf einer freien Fläche ohne Markierung erlaubt keine Bahnführungsassistenz. Daher ist eine Kursvorgabe auf der Stabilisierungsebene unerlässlich. Aber auch nach oben ist eine Ausdehnung in Richtung autonomes Fahren denkbar, sobald die technischen und rechtlichen Randbedingungen dies zulassen. Im Unterschied zum bekannten Paradigma des autonomen Fahrens kann der Fahrer den Unterstützungsgrad in den Grenzen frei wählen. Auch das Problem des Übergangs vom automatischen zum manuellen Fahren und umgekehrt tritt nicht auf, da das Konzept den Übergang auf beliebiger Ebene beinhaltet.
4 Vorteile von Conduct-by-Wire Der hier vorgestellte Ansatz verspricht folgende Vorteile:
• Die Bedienungskomplexität herkömmlicher Fahrerassistenzfunktionen wird reduziert.
• Es wird der Weg zu einem skalierbaren Unterstützungskonzept aufgezeigt, bei dem eine große Variation der Unterstützung integriert ist, die sich nach den technischen Möglichkeiten, den Umweltbedingungen und dem expliziten Fahrerwunsch richtet.
• Es wird damit ein Höchstmaß der Automatisierung realisiert, ohne die Verantwortung vom Fahrer weg zu verlagern. Somit bleibt die Kompatibilität zur Wiener Konvention erhalten.
• Das Fahrzeug erhält eine einfache, deutlich weniger komplexe Systemarchitektur als bei heute üblichen Ansätzen, die um die klassischen Betätigungselemente herum konstruiert sind.
• Höhere Fahrsicherheit wird durch Einbindung von Sicherheitsfunktionen in die Fahrzeugführung erreicht.
• Eine potentielle Überforderung durch fehlende Mode Awareness wird vermieden. • Neue Konstruktionsfreiräume werden geschaffen, da das Fahrzeug über eine
Bewegungsvektorschnittstelle gesteuert wird. • Das Fahrzeugverhalten und insbesondere die Fahrdynamik kann situations- oder
fahreradaptiv ausgelegt werden.
Kurzum: Der Conduct-by-Wire-Ansatz entwickelt das Autofahren zum Autoführen weiter. Ebenso verändert er das Fahrzeug, das nun andere Betätigungselemente enthalten und ein vollständig mechatronisches, geregelte Fahrwerk aufweisen wird.
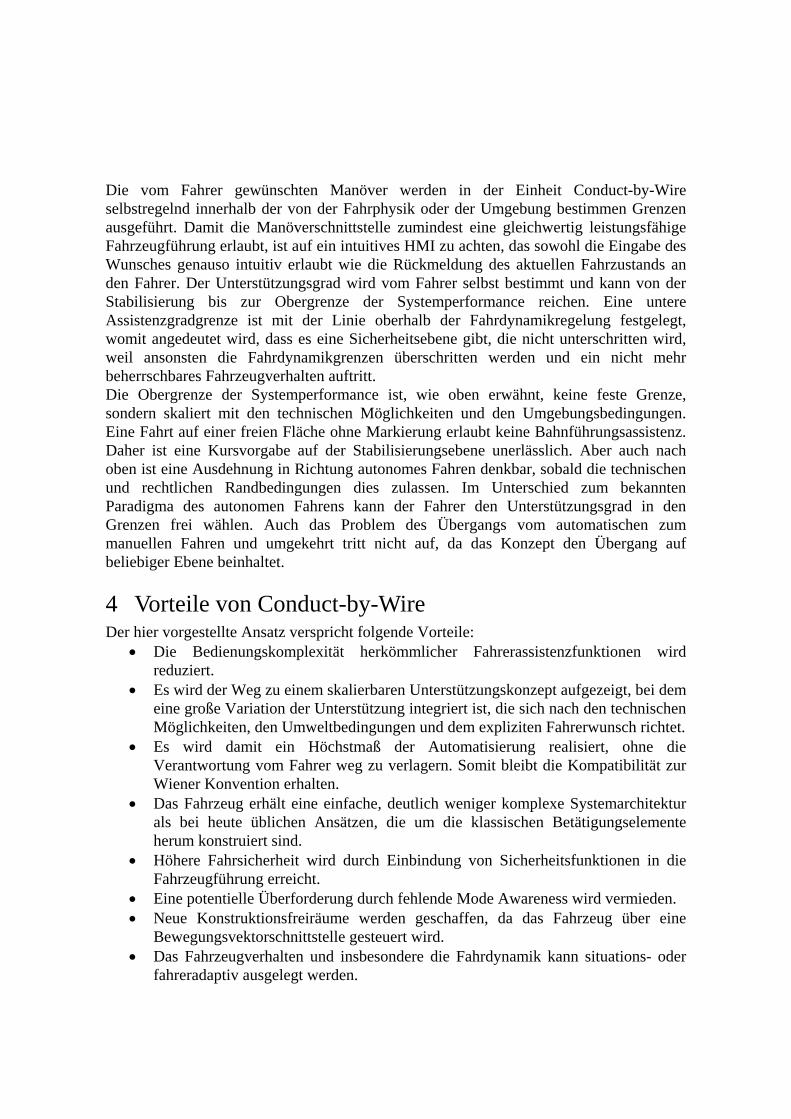
5 Conduct-by-Wire vs. Autonome Fahrzeugführung Auch die autonome Fahrzeugführung besitzt eine einfache Struktur, siehe Abbildung 5. Die Funktion des Fahrers beschränkt sich auf die Eingabe der Fahrmission an die Fahrzeugnavigation. Natürlich kann eine Umschaltung zwischen den beiden extremen Ansätzen der rein manuellen und der vollautomatischen Fahrt vorgesehen werden.
Abbildung 5: Drei-Ebenen-Modell der autonomen Fahrzeugführung
Für die Umsetzung einer autonomen Fahrzeugführung bestehen zur Zeit noch erhebliche Hindernisse, die sich in die Kategorien Technik, Recht und Nutzerakzeptanz einordnen lassen. Die technischen Hindernisse sind vor allem die noch fehlende Leistungsfähigkeit der Sensoren und der Wahrnehmungs- und Situationsinterpretationsalgorithmen. Zwar wurden in definierten Umgebungen vollautomatisch durchgeführte Missionen erfolgreich
bewältigt, wie z.B. 2005 die DARPA Grand Challenge [2] oder die schon 1995 erfolgreiche Autobahnfahrt von München nach Odense [7]. Aber von der Wahrnehmungsleistungsfähigkeit des Menschen ist die aktuelle Technik noch sehr weit entfernt. Als Beispiel ist die Nachtfahrt bei Regen zu nennen, für die den Autoren keine fahrtaugliche maschinelle Lösung bekannt ist. Es ist zu erwarten, dass auch in den nächsten Dekaden oder darüber hinaus die maschinelle Wahrnehmung nur in klar definierten Situationen die Informationen für hinreichend fehlerarme Entscheidungen liefern kann. Die für eine automatische Mission notwendige 100%-Verfügbarkeit lässt sich in absehbarer Zeit nur auf speziell für diese Form des Fahrens entwickelter Infrastruktur durchführen. Dann kann schon ein erheblicher Nutzen entstehen, insbesondere eine erhöhte Verkehrsleistung, verringerte Staugefahr oder weniger Unfälle z.B. in einem Tunnel. Alternative Einsatzmöglichkeiten vollautomatischer Fahrzeuge sind hoch gefährdete Einsätze oder vollständig unbemannte Einsätze bei Katastrophenschutz oder Militäreinsätzen. Unter den heutigen rechtlichen Randbedingungen für Straßen-kraftfahrzeuge liegt die Verantwortung für das Führen allein beim Fahrer. Dies ist u.a. auch völkerrechtlich bindend in der Wiener Konvention für Straßenverkehr von 1968 festgelegt. Und selbst bei einer Erlaubnis für vollautomatisches Fahren fehlt eine Lösung für die zivilrechtliche Haftung bei Versagen der automatischen Funktion. Eine volle Übernahme der Verantwortung entsprechend den heutigen Gesetzen für die Produkthaftung durch den OEM erscheint aus heutiger Sicht kaum akzeptabel. Auch die Bedenken bzgl. der Nutzerakzeptanz können sich als Hindernis herausstellen. Die Vollautomatik wird nur selten die Aktion oder die Manöver so ausführen, wie ein Fahrer sie selbst durchgeführt hätte. Belässt man dem Fahrer Eingriffsmöglichkeiten, so ist es wiederum mit der Einfachheit der Struktur vorbei, da nun Übernahmeschnittstellen geschaffen und die Übergänge situations- und modusabhängig gestaltet werden müssten. Eine autonome Fahrzeugführung verspricht also nur dann komplexitätsreduzierend zu wirken, wenn keine Interaktion bei der Fahraufgabe erfolgt. Das Conduct-by-Wire-Konzept kann den Weg zum autonomen Fahren bereiten, nämlich als Fortentwicklung der Funktionalität auch über die Bahnführungsebene hinaus. So können dann vom Fahrer örtlich oder zeitlich begrenzte Teilmissionen beauftragt werden. Der besondere Nutzen des Conduct-by-Wire für eine Entwicklung zum autonomen Fahren ist die im Conduct-by-Wire vorgesehene variable Schnittstelle für die skalierbare Arbeitsteilung. Autonomes Fahren wäre dann, sobald die Technik und Gesetzeslage es zulässt, als logische Weiterentwicklung des Conduct-by-Wire-Ansatzes darstellbar. Eine andere Schrittmacherfunktion leistet Conduct-by-Wire durch die Reifung der Sensortechnik, wenn diese schon durch Conduct-by-Wire zu hoher Zuverlässigkeit geführt werden. Aus Forschungssicht sind die Algorithmen und Sensorprinzipien für beide Ansätze recht ähnlich. Nur die funktionalen Anforderungen sind voraussichtlich anders, denn die Wahrnehmung für das autonome Fahren ist die Voraussetzung für Entscheidungen zur Bahnführung. Beim nutzerzentrierten Ansatz Conduct-by-Wire ist die Aufgabe der Sensorik die Bereitstellung von Information, die für die Durchführung der vom Fahrer beauftragten Manöver erforderlich ist. In der Gegenüberstellung von Conduct-by-Wire und dem autonomen Fahren zeigt sich,
dass diese keine konkurrierenden Ansätze sind, sondern Conduct-by-Wire ein Weg ist, der das autonome Fahren als Weiterentwicklungsstufe vorbereitet.
6 Conduct-by-Wire – eine Herausforderung für die Forschung
Vor einer praxisnahen Umsetzung dieses Konzepts liegen noch große Herausforderungen, da nun unter einem neuen Paradigma die Art der Fahrzeugführung revolutioniert werden soll. Aus dem Paradigmenwechsel ergeben sich folgende neue Herausforderungen:
• Die Manöverschnittstelle muss in jedem realen Kontext zugleich vollständig und intuitiv die Fahrzeugführung ermöglichen. Für die Akzeptanz, aber auch für die Sicherheit des Betriebs ist die Forderung zu erheben, dass das Verhalten des Fahrzeugs mindestens so vorhersehbar ist wie bisher. Dazu ist das Verständnis über das Autofahren erheblich auszuweiten und in Manöverkataloge niederzuschreiben, die einerseits die Basis der Assistenzfunktion sind, andererseits aber auch konform zur Absicht und Erwartung des Fahrers sein müssen.
• Das Bedienkonzept hat die Anforderungen an die Manöverschnittstelle zu erfüllen. Eine detaillierte Kenntnis der Verarbeitungskette des Autofahrens ist dazu genauso unerlässlich wie ein konzeptioneller Vergleich mit beispielsweise der Luftfahrt oder anderen Branchen mit automatisierter Maschinenführung.
• Mit heute bekannten Assistenzmöglichkeiten ist Conduct-by-Wire nicht zu schaffen. Daher sind die Konzepte zu überdenken und auf das Konzept von Conduct-by-Wire anzupassen bzw. neue Funktionalitäten zu finden.
• Eine Umfelderfassung ist zu realisieren, die die gewünschten seriellen Assistenzfunktionen auch voll unterstützen kann. Diese Anforderungen werden voraussichtlich höher sein als die von eingeführten Systemen, liegen aber deutlich unter denen einer autonomen Fahrzeugführung, da die Manöverentscheidungen beim Fahrer verbleiben.
• Die Akzeptanzfaktoren für eine serielle Assistenz auf Bahnführungsebene sind zu ermitteln und auf die Conduct-by-Wire-Funktionalität zu übertragen. Dazu gehören insbesondere Fragen zur Kompatibilität mit heute gewohnter Bedienung, aber auch die Beibehaltung eines von vielen Fahrern gewünschten positiv erlebbaren Fahrgefühls.
• Eine neue Fahrzeugarchitektur für das geregelte Fahren ist erforderlich, die sowohl die funktionalen Verknüpfungen optimal ausnutzt als auch auf möglichst kostengünstige Weise die Sicherheit und Verfügbarkeit des Fahrzeugs in mindestens gleicher Qualität wie heute garantiert. Dies betrifft genauso die unterlagerten ursprünglichen Fahrfunktionen Längs- und Querführung wie die Sicherheit der Bahnführungsebene, die über eine durchgängige Sicherheits-philosophie verfügen muss.
• Während sich für die normale Autobahnfahrt nur wenige Elementarmanöver ausmachen lassen, ist die Beschreibung der Manöver im städtischen Umfeld (wegen der großen Vielfalt der Strukturen) oder abseits der öffentlichen Strecken
(wegen fehlender oder nicht normierter Strukturen) noch zu untersuchen. Alle genannten Punkte haben die Qualität potentieller „Show-Stopper“, d.h. sie können die Weiterverfolgung dieses Ansatzes stoppen, wenn die Herausforderung nicht bestanden wird. Aus der Liste wird somit auch deutlich, dass Conduct-by-Wire eine längerfristige Zielsetzung hat, für die heute die Grundlagen gelegt werden können. Für die Prüfung des Konzepts und Vorarbeiten zu den meisten der oben genannten Punkte wird ein Forschergruppenprojekt bei der DFG beantragt.
Literatur [1] Braess, H.-H., Reichart, G.: „Prometheus: Vision des intelligenten Automobils
auf intelligenter Straße – Versuch einer kritischen Würdigung – Teil 2“. ATZ Automobiltechnische Zeitschrift 97 (1995), 6, S. 330, 1995
[2] Darpa Grand Challenge: http://www.darpa.mil/grandchallenge/overview.html, 10/2005
[3] Donges, E.: „Aspekte der Aktiven Sicherheit bei der Führung von Personenkraftwagen“. In: Automobil-Industrie 2/82, S. 183-190, 1982
[4] Gayko, J.: „Evaluierung eines Spurhalteassistenten für das Honda Intelligent Driver Support System“. In: Maurer, M. & Stiller, C. (Hrsg.): „Fahrerassistenzsysteme mit maschineller Wahrnehmung“. Springer, Berlin, 2005
[5] Huang, P.: „Regelkonzepte zur Fahrzeugführung unter Einbeziehung der Bedienelementeigenschaften“. Dissertation an der TU München, Fakultät für Maschinenwesen, Lehrstuhl für Ergonomie, 2005
[6] Lammel, U.: „Gestaltung eines Fahrerarbeitsplatzes nach ergonomischen Gesichtspunkten“. Diplomarbeit FB Ind.-Design, FH München, 1983, zit. bei (Bolte 1991) und (Bubb 1985)
[7] Maurer, M.; Behringer, R.; Furst, S.; Thomanek, F.; Dickmanns, E.D.: “A compact vision system for road vehicle guidance”. Proceedings of the 13th International Conference on Pattern Recognition, Volume 3, 25-29 Aug. 1996 Page(s):313 - 317 vol.3, 1996
[8] Mayser, Ch.; Naab, K. & Kagerer, W.: “InterActive Cruise Control – A New Driver Interaction Concept for Adaptive Cruise Control Systems”. SAE Technical Paper Series 2006-01-0346, 2006
[9] König, W.,; Weiß, K.-E.; Mayser, C.: „S.A.N.T.O.S. (Situations-Angepasste und Nutzer-Typ-zentrierte Optimierung von Systemen zur Fahrerunterstützung)“. Gemeinsamer Abschlussbericht der Robert Bosch GmbH und der BMW Group, BMBF-Förderkennzeichen 19S9826A/B, TIB Hannover, 2004
[10] Schilgen, O.; Remlinger, W.: „Fahrzeugführungssystem“, Offenlegungsschrift DE 102 42 293 A1, Deutsches Patent- und Markenamt, 2004
[11] Spiegelberg, G.; Maisch, A.; Sulzmann, A.: „Intelligentes Fahrzeugkonzept auf Basis Drive-by-Wire: Umsetzungsschritte in den EU-Projekten PEIT und
SPARC“. Tagung „Aktive Sicherheit durch Fahrerassistenzsysteme“. München, 11./12.03.04, url: http://www.ftm.mw.tum.de/zubehoer/pdf/Tagung_AS/03_spiegelberg.pdf, Zugriff: Feb 2006.
[12] Winner, H.; Heuss, O.: „X-by-Wire-Betätigungselemente – Überblick und Ausblick“. In: Winner, H.; Landau, K. (Hrsg.): „Darmstädter Kolloquium Mensch & Fahrzeug – Cockpits für Straßenfahrzeuge der Zukunft“. TU Darmstadt 8./9. März 2005, Ergonomia-Verlag, Stuttgart, S. 79, 2005
[13] Winner, H.; König, W.: „Spurhalte- und Fahrgeschwindigkeitsregeleinrichtung für Kraftfahrzeuge“. Offenlegungsschrift DE 101 14 470 A1, Deutsches Patent- und Markenamt, 2001





























