Upload
cristian-basoalto
View
217
Download
0
Embed Size (px)
DESCRIPTION
manual de motores maxon
Citation preview
36
maxon motor
Das Wichtigste AusgabeApril2011/nderungenvorbehalten
maxon DC motor und maxon EC motorDasWichtigste
Der Motor als Energiewandler
DerElektromotorwandeltelektrischeLeistungPel(StromIundSpannungU)inmechanischeLeistungPmech(DrehzahlnundDrehmomentM)um.DiedabeientstehendenVerlusteteilensichindieReibverluste,diezuPmechgezhltwerden,undindieJoulscheVerlustleistungPJderWicklung(WiderstandR)auf.EisenverlustetretenbeideneisenlosenmaxonDC-Motorenpraktischnichtauf.BeimmaxonECmotorwerdensieformalwieeinzustzlichesReibmomentbehandelt.DieLeistungsbilanzkannsomitformuliertwerdenals:
ImDetailergibtsich
Elektromechanische MotorkonstantenDiegeometrischeAnordnungvonMagnetkreisundWicklungdefiniert,wiederMotorimDetaildieelektrischeEingangsleistung(Strom,Spannung)indiemechanischeAbgabeleistung(Drehzahl,Drehmoment)umwandelt.ZweiwichtigeKennzahlendieserEnergieumwandlungsinddieDrehzahl-konstanteknunddieDrehmomentkonstantekM.DieDrehzahlkonstanteverbindetdieDrehzahlnmitderinderWicklungin-duziertenSpannungUind(=EMK).UindistproportionalzurDrehzahl,esgilt:
AnalogverknpftdieDrehmomentkonstantedasmechanischeDrehmo-mentMmitdemelektrischenStromI.
DieKernaussagedieserProportionalittist,dassfrdenmaxon-MotordieGrssenDrehmomentundStromquivalentsind.IndenMotordiagrammenwirddieStromachsedeshalbauchparallelzurDrehmomentachsegezeichnet.
Sieheauch:Technikkurzundbndig,ErklrungenzudenMotordaten
Motorkennlinien
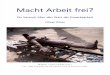
ZujedemmaxonDC-undEC-MotorlsstsicheinDiagrammerstellen,ausdemdiefrvieleAnwendungenwichtigstenMotordatenentnom-menwerdenknnen.ObwohlToleranzenundTemperatureinflssenichtbercksichtigtsind,reichendieWertefrberschlagsmssigeBetrach-tungenaus.ImDiagrammwerdenbeikonstanterSpannungU,Drehzahln,StromI,AbgabeleistungP2undWirkungsgradhalsFunktiondesDrehmomentsMaufgetragen.
DrehzahlkennlinieDieseKennliniebeschreibtdasmechanischeVerhaltendesMotorsbeikonstanterSpannungU: MitsteigendemDrehmomentnimmtdieDrehzahllinearab. JeschnellerderMotordreht,destowenigerDrehmomentkannerabgeben.
MitHilfederbeidenEndpunkte,LeerlaufdrehzahlnoundAnhaltemo-mentMH,lsstsichdieKennliniebeschreiben(vgl.Zeilen2und7indenMotordaten).DC-MotorenknnenbeibeliebigenSpannungenbetriebenwerden.Leer-laufdrehzahlundAnhaltemomentverndernsichproportionalzurange-legtenSpannung,waseinerParallelverschiebungderDrehzahl-KennlinieimDiagrammgleichkommt.ZwischenLeerlaufdrehzahlundSpannunggiltinguterNherungdiewichtigeProportionalitt
wobeikndieDrehzahlkonstanteist(Zeile13derMotordaten).
SpannungsunabhngigwirddieKennlinieamzweckmssigstendurchdieKennliniensteigungbeschrieben(Zeile14derMotordaten).
Herleitung der DrehzahlkennlinieErsetztmanmittelsderDrehmomentkonstanteinderdetailliertenLeistungsbilanzdenStromIdurchdasDrehmomentMsoerhltman
UmgeformtundunterBercksichtigungderengenVerwandtschaftvonkMundkn,erhltmandieGleichungeinerGeradenzwischenDrehzahlnundDrehmomentM.
odermitderKennliniensteigungundderLeerlaufdrehzahln0
EinheitenInallenFormelnsinddieGrssenindenEinheitengemssKatalog(vgl.PhysikalischeGrssenundihreEinheitenSeite42)einzusetzen.
Speziellgilt: AlleDrehmomenteinmNm AlleStrmeinA(auchLeerlaufstrme) Drehzahl(min-1)stattWinkelgeschwindigkeit(rad/s)
MotorkonstantenDrehzahlkonstanteknundDrehmomentkonstantekMsindnichtunab-hngigvoneinander.Esgilt
DieDrehzahlkonstantenenntmanauchspezifischeDrehzahl.SpezifischeSpannung,Generator-oderSpannungskonstantesindimWesentlichenderKehrwertderDrehzahlkonstanteundbeschrei-bendieimMotorinduzierteSpannungproDrehzahl.DieDrehmo-mentkonstantewirdauchalsspezifischesDrehmomentbezeichnet.DerKehrwertheisstspezifischerStromoderStromkonstante.
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
1104_Technology.indd36 10.02.201108:20:27
37
maxon motor
AusgabeApril2011/nderungenvorbehalten Das Wichtigste
U = UN
n0
IA
Drehzahl n
Drehmoment M
Strom I
n0
MH Drehmoment M
DieKennliniensteigungisteinederaussagekrftigstenKennzahlenunderlaubtdendirektenVergleichzwischenverschiedenenMotoren.JekleinerdieSteigung,destowenigerempfindlichreagiertdieDrehzahlaufDrehmoment(Last)-nderungenunddestokrftigeristderMotor.BeimmaxonmotoristdieKennliniensteigunginnerhalbderWicklungsreiheeinesMotortyps(jeweilsaufeinerKatalogseite)praktischkonstant.
Strom-KennlinieDiequivalenzdesStromszumDrehmomentwirddurcheinezumDrehmomentparalleleAchsedargestellt:JemehrStromdurchdenMotorfliesst,destomehrDrehmomentwirderzeugt.DieStromskalawirddurchdiebeidenPunkteLeerlaufstromI0undAnlaufstromIA(Zeilen3und8derMotordaten)festgelegt.DerLeerlaufstromentsprichtdemReibmo-mentMR,dasdieinnereReibunginLagernundKommutierungssystembeschreibt.
max
max
max max max
M
BeimmaxonECmotortretenanstellederReibverlusteimKommutierungs-systemdiestarkdrehzahlabhngigenEisenverlusteimStatorpaketauf.
DashchsteDrehmomententwickelndieMotorenbeimAnlauf.EsistumeinMehrfachesgrsseralsdasnormaleBetriebsdrehmoment.Ent-sprechendistauchdieStromaufnahmeamgrssten.FrAnhaltemomentMHundAnlaufstromIAgilt:
max
max
max max max
M
Wirkungsgrad-KennlinieDerWirkungsgradhbeschreibtdasVerhltnisvonabgegebenermecha-nischerLeistungzuaufgenommenerelektrischerLeistung
max
max
max max max
M
Manerkennt,dassbeikonstanterSpannungUundwegenderProportio-nalittvonDrehmomentundStromderWirkungsgradmitzunehmenderDrehzahl(abnehmendemDrehmoment)linearzunimmt.BeikleinenDrehmomentenwerdendieReibverlusteimmerbedeutenderundderWirkungsgradgehtsteilgegenNull.DermaximaleWirkungsgrad(Zeile9derMotordaten)berechnetsichausAnlaufstromundLeerlaufstromundistspannungsabhngig
max
max
max max max
M
AlsFaustregelgilt,dassdermaximaleWirkungsgradbeietwaeinemSiebteldesAnhaltemomentsauftritt.Dasheisst,maximalerWirkungs-gradundmaximaleAbgabeleistungtretennichtbeigleichemDrehmo-mentauf.
Nennarbeitspunkt
DerNennarbeitspunktisteinausgezeichneterArbeitspunktdesMotorsundergibtsichausdemBetriebbeiNennspannungUN(Zeile1derMotor-daten)undNennstromIN(Zeile6).AusderquivalenzvonDrehmomentundStromfolgtdaserzeugteNenndrehmomentMN(Zeile5)indiesemArbeitspunktundgemssderDrehzahlkennliniestelltsichdieNenndreh-zahlnN(Zeile4)ein.DieWahlderNennspanungfolgtausberlegungen,wodiemaximaleLeerlaufdrehzahlliegensollte.DerNennstromergibtsichausderthermischmaximalzulssigenDauerbelastungdesMotors.
1104_Technology.indd37 10.02.201108:20:28
38
maxon motor
Das Wichtigste AusgabeApril2011/nderungenvorbehalten
5
4
3
2
1
010 20 30 40 50 60 70 80 90 tON%
TION / IN
Zeit
10 20 40
20000
15000
10000
5000
0.4 0.8 1.2
25000
30
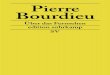
Betriebsbereichdiagramm
Motordiagramme, Betriebsbereiche
ImKatalogfindetmanzujedemmaxonDC-undEC-MotortypeinDia-gramm,dasanhandeinestypischenMotorsdieBetriebsbereichederWicklungsreiheexemplarischdarstellt.
DauerbetriebsbereichDiebeidenKriterienzulssigesDauerdrehmomentundGrenzdreh-zahlbegrenzendenDauerbetriebsbereich.BetriebspunkteinnerhalbdiesesBereichessindthermischnichtkritischundfhrenimAllgemeinennichtzuerhhtemVerschleissdesKommutierungssystems.
KurzzeitbetriebsbereichDerMotordarfausthermischenGrndendauerndnurmitdemmaximalzulssigenDauerstrombelastetwerden.KurzzeitigsindaberdurchaushhereStrme(Drehmomente)erlaubt.SolangedieWicklungstemperaturunterhalbdeskritischenWertesliegt,wirddieWicklungkeinenSchadennehmen.PhasenmiterhhtenStrmensindzeitlichbegrenzt.EinMass,wielangesolchekurzzeitigenberbelastungendauerndrfen,gibtdiethermischeZeitkonstantederWicklung(Zeile19derMotordaten).DieGrssenordnungderZeitenmitberlastliegtimBereicheinigerSekun-denfrdiekleinstenMotoren(6bis13mmDurchmesser)biszuetwaeinerMinutefrdiegrsstenMotoren(60bis90mmDurchmesser).DieBerechnungderexaktenberlastzeithngtstarkvomMotorstromundderStarttemperaturdesRotorsab.
Zulssiger Dauerstrom, zulssiges DauerdrehmomentDieStromwrmeverlusteheizendieWicklungauf.DieentstehendeWrmemussabfliessenknnen,sodassdiemaximaleWicklungstempe-ratur(Zeile22derMotordaten)nichtberschrittenwird.DiesdefiniertdenmaximalzulssigenDauerstrom,beidemunterStandardbedingungen(25CUmgebungstemperatur,keineWrmeabfuhrberdenFlansch,freieLuftzirkulation)diemaximaleWicklungstemperaturerreichtwird.Grs-sereMotorstrmeergebenzuhoheWicklungstemperaturen.DerNennstromwirdsogewhlt,dasserdiesemmaximalzulssigenDau-erstromentspricht.Eriststarkwicklungsabhngig.DnndrahtwicklungenhabenkleinereNennstrmealsDickdrahtwicklungen.Beisehrniederoh-migenWicklungenkanndieStromaufnahmefhigkeitdesBrstensystemsdenzulssigenDauerstromweiterbegrenzen.BeiGraphitbrstenmotorensteigendieReibverlustebeihherenDrehzahlstarkan.BeiEC-MotorennehmendieWirbelstromverlusteimRckschlussmitsteigenderDrehzahlzuunderzeugeneinezustzlicheErwrmung.EntsprechendnimmtdermaximalzulssigeDauerstrombeihherenDrehzahlenab.DasdemNennstromzugeordneteNenndrehmoment,istinnerhalbderWicklungs-reiheeinesMotortypspraktischkonstantundstellteinecharakteristischeGrssedesMotortypsdar.
Die maximale Drehzahl (Grenzdrehzahl)DiesewirdbeimDC-MotorprimrdurchdasKommutierungssystembe-grenzt.BeisehrhohenDrehzahlenwerdenKollektorundBrstenstrkerabgentzt.DieGrndesind: ErhhtermechanischerVerschleissdurchdengrossenzurckgelegtenWegdesKollektors
ErhhteElektroerosiondurchBrstenvibrationundFunkenbildung
EinweitererGrund,dieDrehzahlzubeschrnken,istdiemechanischeRestunwuchtdesRotors,diedieLebensdauerderLagerbeeintrchtigt.HhereDrehzahlenalsdieGrenzdrehzahlnmax(Zeile23)sinddurchausmglich,werdenabermeistmiteinerreduziertenLebenserwartungerkauft.DieGrenzdrehzahlbeimEC-MotorwirddurchLebensdauer-berlegungenderKugellager(mindestens20000Stunden)beimaximalzulssigerRestunwuchtundLagerbelastungberechnet.
Maximal zulssige WicklungstemperaturDerMotorstromfhrtaufGrunddesWicklungswiderstandeszueinerErwrmungderWicklung.DamitderMotornichtberhitzt,mussdieseWrmeberdenStatorandieUmgebungabgegebenwerden.Dieselbst-tragendeWicklungistderthermischkritischeBereich.DiemaximaleRotortemperaturdarfauchkurzzeitignichtberschrittenwerden.SiebetrgtbeiGraphitbrstenmotorenundEC-MotorenmitihrertendenziellhherenStrombelastung125C(inEinzelfllenbis155C).Edelmetall-kommutierteMotorenerlaubennurgeringereStrombelastungen,sodassdieRotortemperaturen85Cnichtberschreitendrfen.Einbautech-nischeMassnahmen,wieguteLuftzirkulationoderKhlbleche,knnendieTemperaturendeutlichsenken.
ON MotorinBetriebOFF MotorstehtstillION Max.SpitzenstromIN Max.Dauerbelastungsstrom(Zeile6)tON Einschaltzeit[s],solltetw(Zeile19) nichtberschreitenT ZykluszeittON + tOFF [s]tON% EinschaltdauerinProzentenderZykluszeit. BeiderEinschaltdauervonX%darfderMotorum dasVerhltnisION / INberlastetwerden.
max
max
max max max
M
1104_Technology.indd38 10.02.201108:20:29
39
maxon motor
AusgabeApril2011/nderungenvorbehalten Das Wichtigste
n n
M
n n
M
maxon flat motor
Diemehrpoligenmaxon-FlachmotorenbentigenfreineMotorum-drehungeinehhereAnzahlKommutierungsschritte(6xAnzahlPolpaare).SieweisenaufgrundderbewickeltenStatorzhneeinehhereAnschluss-induktivittalsMotorenmiteisenloserWicklungauf.BeihohenDrehzahlenkannsichderStromwhrendderentsprechendkurzenKommutierungs-intervallenichtmehrvollausbilden,sodassdaserzeugteDrehmomententsprechendkleinerausfllt.ZustzlichwirdStromindieEndstufedesReglerszurckgespiesen.AlsResultatergibtsicheinvonderideellenlinearenKennlinieabweichendesVerhalten,dasvonderSpannungundderDrehzahlabhngt:DiescheinbareSteigungderKennlinieistbeihohenDrehzahlensteiler.BeidenFlachmotorenistvorallemderDauerbetriebinteressant.DortkanndieKennliniedurcheineGeradezwischenderLeerlaufdrehzahlunddemNennarbeitspunktangenhertwerden.FrdieseerreichbareKenn-liniensteigunggiltangenhert:
max
max
max max max
M
Die Beschleunigung
GemssdenelektrischenRandbedingungen(Netzgert,Steuerung,Batte-rie)sindprinzipiellzweiverschiedeneAnlaufvorgngezuunterscheiden: AnlaufbeikonstanterSpannung(ohneStrombegrenzung) AnlaufbeikonstantemStrom(mitStrombegrenzung)
Anlauf bei konstantem StromEineStrombegrenzungbedeutetimmer,dassderMotornureinbe-schrnktesDrehmomentabgebenkann.ImDrehzahl-Drehmoment-Dia-grammsteigtdieDrehzahlaufeinersenkrechtenLiniemitkonstantemDrehmoment.DieBeschleunigungistebenfallskonstant,wasdieBerech-nungenvereinfacht.AnlaufbeikonstantemStromfindetmanmeistensinAnwendungenmitServoverstrkern,wodieBeschleunigungsmomentedurchdenSpitzen-stromdesVerstrkersbegrenztsind.
Winkelbeschleunigunga(inrad/s2)beikonstantemStromIoderkonstantemDrehmomentMbeimAntriebeinerzustzlichenMassen-trgheitJL:
HochlaufzeitDt(inms)beieinerDrehzahlnderungDnbeimAntriebeinerzustzlichenMassentrgheitJL:
(alleGrsseninEinheitengemssKatalog)
Anlauf bei konstanter KlemmenspannungDabeisteigtdieDrehzahlvomAnhaltemomentausgehendentlangderDrehzahlkennlinie.DasgrssteDrehmomentunddamitdiegrssteBeschleunigungsindbeimStartwirksam.JeschnellerderMotordreht,destokleineristdieBeschleunigung.DieDrehzahlnimmtlangsamerzu.DieseexponentiellabflachendeZunahmewirddurchdiemechanischeZeitkonstantetmbeschrieben(Zeile15derMotordaten).NachdieserZeithatderRotorbeifreiemWellenende63%derLeerlaufdrehzahlerreicht.NachetwadreimechanischenZeitkonstantenhatderRotornahezudieLeerlaufdrehzahlerreicht.
MechanischeZeitkonstantetm(inms)desunbelastetenMotors:
MechanischeZeitkonstantetm (inms)beimAntriebeinerzustz-lichenMassentrgheitJL:
MaximaleWinkelbeschleunigungamax(inrad/s2)desunbelastetenMotors:
MaximaleWinkelbeschleunigungamax(inrad/s2)beimAntriebeinerzustzlichenMassentrgheitJL:
Hochlaufzeit(inms)beikonstanterSpannungbiszumBetriebspunkt(MB , nB ):
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
1104_Technology.indd39 10.02.201108:20:30
40
maxon motor
Das Wichtigste AusgabeApril2011/nderungenvorbehalten
Toleranzen
InkritischenBereichenlassensichdieToleranzennichtmehrvernach-lssigen.DiemglichenAbweichungendermechanischenMassesindindenbersichtszeichnungenzufinden.DieMotordatensindMittelwerte.DasnebenstehendeDiagrammmachtdieAuswirkungenderToleranzenaufdieKurvencharakteristiksichtbar.SiewerdenimWesentlichendurchUnterschiedeimMagnetfeldundimDrahtwiderstandverursacht,wenigerdurchmechanischeEinflsse.ImDiagrammsinddieVernderungenzumbesserenVerstndnisstarkberzeichnetundvereinfachtdargestellt.Eswirdaberdeutlich,dassimeigentlichenBetriebsbereichdesMotorsdieToleranzbreitewenigergrossistalsimAnlaufbzw.Leerlauf.UnsereCom-puterbltterenthaltenhierfralleDetailangaben.
KalibrierenDurchgezieltesEntmagnetisierenderMotorenknnendieToleranzeneingeschrnktwerden.Motordatenwerdenauf1bis3%genauspezifi-zierbar.AllerdingsliegendieMotorkennwerteimunterenTeilderblichenToleranzbreite.
Das thermische Verhalten
IneinemvereinfachtenModellsindfrdieErwrmungdesMotorsprimrdieJouleschenVerlustePJinderWicklungmassgebend.DieseWrme-energiemussberdieWicklungs-undMotoroberflcheabgefhrtwerden.DieErhhungDTWderWicklungstemperaturTWgegenberderUmgebungstemperaturTUentstehtdurchdieproduziertenWrmeverlustePJunddieWrmewiderstndeRth1undRth2.
max
max
max max max
M
DabeikennzeichnetderWrmewiderstandRth1denWrmebergangzwi-schenWicklungundStator(RckschlussundMagnet),whrendRth2denWrmebergangvomGehuseandieUmgebungbeschreibt.DieMontagedesMotorsaufeinemwrmeabgebendenChassissenktdenWrmewider-standRth2merklich.DieindenDatenbltternangegebenenWertefrdieWrmewiderstndeunddenzulssigenDauerstromwurdeninVersuchs-reihenermittelt,beidenenderMotorstirnseitigaufeinevertikaleKunst-stoffplattemontiertwar.DerimspeziellenAnwendungsfallauftretendeWrmewiderstandRth2mussunteroriginalenEinbau-undUmgebungsbe-dingungenermitteltwerden.BeiMotorenmitMetallflanschverringertsichderthermischeWiderstandRth2umbiszu80%,sofernderMotoraneinegutwrmeleitende(z.B.metallische)Aufnahmeangekoppeltwird.
DieErwrmungverluftfrWicklungundStatorwegenderunterschied-lichenMassenunterschiedlichschnell.NachEinschaltendesStromeserwrmtsichzuerstdieWicklung(mitZeitkonstantenvoneinigenSekundenbisetwaeinehalbeMinute).DerStatorreagiertvieltrger.SeineZeitkonstanteliegtjenachMotorgrsseimBereichvon1bis30Minuten.NacheinigerZeitstelltsicheinthermischesGleichgewichtein.DieTemperaturdifferenzderWicklunggegenberderUmgebungstempe-raturlsstsichimDauerbetriebmitHilfedesStromsI(oderimzyklischenBetriebmitdemEffektivwertdesStromsI = IRMS )bestimmen.
max
max
max max max
M
DabeimussderelektrischeWiderstandRbeideraktuellenUmgebungs-temperatureingesetztwerden.
Einfluss der TemperaturEineerhhteMotortemperaturbeeinflusstdenWicklungswiderstandunddieMagnetkennwerte.
DerWicklungswiderstandsteigtgemssdemthermischenWider-standskoeffizientfrKupferlinearan:
Beispiel:EineWicklungstemperaturvon75CbewirkteineErhhungdesWicklungswiderstandesumfast20%.
DerMagnetwirdbeihhererTemperaturschwcher.JenachMagnet-materialbetrgtdieAbnahme1bis10%bei75C.
DiewichtigsteKonsequenzeinererhhtenMotortemperaturist,dassdieDrehzahlkennliniesteilerwirdundsichdamitdasAnhaltemomentverringert.DasvernderteAnhaltemomentkanninersterNherungausderSpannungunddemerhhtenWicklungswiderstandberechnetwerden
max
max
max max max
M
max
max
max max max
M
1104_Technology.indd40 10.02.201108:20:30
41
maxon motor
AusgabeApril2011/nderungenvorbehalten Das Wichtigste
Motorauswahl
BevorzurMotorauswahlgeschrittenwerdenkann,mssendieAnforde-rungenandenAntriebdefiniertwerden. WieschnellundbeiwelchenDrehmomentenbewegtsichdieLast? WielangedauerndieeinzelnenLastphasen? WelcheBeschleunigungentretenauf? WiegrosssinddieTrgheitsmomente?VielfachistderAntriebindirekt,dasheisst,esfindeteinemechanischeUmformungderMotor-AbgabeleistungdurchRiemen,Getriebe,Spindelnundhnlichesstatt.DieAntriebsgrssensindalsoaufdieMotorwelleumzurechnen.DiezustzlichenSchrittefreineGetriebeauslegungsinduntenaufgefhrt.
Weitergiltes,dieVoraussetzungenderStromversorgungabzuklren. WelchemaximaleSpannungstehtamMotorzurVerfgung? WelcheEinschrnkungengeltenbezglichdesStromes?BeimitBatterieoderSolarzellenversorgtenMotorensindStromundSpannungsehrstarkeingeschrnkt.BeiAnsteuerungderEinheitbereinenServoverstrkerstelltdermaximaleStromdesVerstrkersofteinewichtigeGrenzedar.
Auswahl der MotortypenDieMotortypenwerdenanhanddergefordertenDrehmomenteausge-whlt.Einerseitsgiltes,dasSpitzendrehmomentMmaxzubercksichtigen,andererseitsdaseffektiveDauerdrehmomentMRMS.DerDauerbetriebistdurcheineneinzigenBetriebspunktcharakterisiert(MB, nB ).DieinFragekommendenMotortypenmsseneinNennmo-ment(=max.Dauerdrehmoment)MNaufweisen,dasgrsseristalsdasBetriebsdrehmomentMB.
BeiArbeitszyklen,wieStart-Stopp-Betrieb,mussdasNennmomentdesMotorsgrsserseinalsdaseffektiveLastdrehmoment(quadratischgemittelt).DasvermeideteineberhitzungdesMotors.
DasAnhaltemomentdesgewhltenMotorssollteimNormalfalldasauf-tretendeLast-Spitzenmomentbersteigen.
Auswahl der Wicklung: Elektrische AnforderungenBeiderAuswahlderWicklungistsicherzustellen,dassdiedirektamMotoranliegendeSpannungausreicht,insmtlichenBetriebspunktendientigeDrehzahlzuerreichen.
Ungeregelter AntriebBeiAnwendungenmitnureinemBetriebspunktsolldieseroftmiteinerfestenSpannungUerreichtwerden.GesuchtistsomitdiejenigeWicklung,derenKennliniebeivorgegebenerSpannungdurchdenBe-triebspunktgeht.DieBerechnungnutztdieTatsache,dassalleMotoreneinesTypspraktischdieselbeKennliniensteigungaufweisen.VomBetriebspunkt(nB, MB )ausgehendlsstsichdeshalbeineSoll-Leerlauf-drehzahln0, theorberechnen.
DieseSoll-LeerlaufdrehzahlmussmitdervorhandenenSpannungUerreichtwerden,wasdieSoll-Drehzahlkonstantekn,theordefiniert.
DiejenigeWicklung,derenknmglichstnahebeikn,theorliegt,wirdsomitbeigegebenerSpannungdenBetriebspunktambestenannhern.EineetwasgrssereDrehzahlkonstantebewirkteineetwashhereDrehzahl,einekleinereDrehzahlkonstanteeinetiefere.DasVariierenderSpannunggleichtdieDrehzahldemgefordertenWertan,einPrinzip,dasauchServoverstrkeranwenden.
DerMotorstromIerrechnetsichausderDrehmomentkonstantekMdergewhltenWicklungunddemBetriebsdrehmomentMB.
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
Tipps zur Evaluation der Anforderungen:VielfachsinddieLastpunkte(insbesonderedieDrehmomente)nochunbestimmtoderlassensichnurschwerermitteln.InsolchenFllenhilfteinKniff:BetreibenSieIhrGertmiteinemnachBaugrsseundLeistunggrobabgeschtztenMessmotor.VariierenSiedieSpannungbisdiegewnschtenBetriebspunkteundBewegungsabfolgenerreichtsind.MessenSieSpannungundStromverlauf.MitdiesenAngabenundderBestellnummerdesMessmotorsknnenIhnenunsereIngeni-eureoftmalsdenfrIhrenAnwendungsfallgeeignetenMotorangeben.
WeitereOptimierungskriteriensindzumBeispiel: diezubeschleunigendeMasse(Art,Massentrgheit) dieBetriebsart(kontinuierlich,intermittierend,reversierend) dieUmgebungsbedingungen(Temperatur,Luftfeuchtigkeit,Medium) dieSpannungsversorgung(Batterie,Netzgert)
BeiderWahldesMotortypsspielenauchRandbedingungeneinegrosseRolle. WelchemaximaleLngedarfdieAntriebseinheitinklusiveGetriebeundEncoderhaben?
WelcherDurchmesser? WelcheLebensdauerwirdvomMotorerwartetundwelchesKommu-tierungssystemsollverwendetwerden?
EdelmetallkommutierungfrDauerbetriebbeikleinenStrmen(FaustregelfrhchsteLebensdauer:bisca.50%vonIN )
GraphitkommutierungfrhoheDauerstrme(Faustregel:50%bisca.75%vonIN )undhufigeStromspitzen(Start-Stopp-Betrieb,Reversierbetrieb).
ElektronischeKommutierungfrhchsteDrehzahlenundLebens-dauer.
WiegrosssinddieKrfteaufdieWelle,mssenKugellagerver-wendetwerdenoderreichenpreisgnstigereSinterlager?
1104_Technology.indd41 10.02.201108:20:31
42
maxon motor
Das Wichtigste AusgabeApril2011/nderungenvorbehalten
n
M
Beispiel zur Motor-Getriebe-Auswahl
EinAntriebsollsichgemssfolgendemDrehzahldiagrammzyklischbewegen.
DiezubeschleunigendeTrgheitderLastJLbetrage130000gcm2.DaskonstanteReibmomentsei300mNm.DerMotorsollmitdemlinearen4-Q-Servoverstrkervonmaxon(LSC)angetriebenwerden.VomNetzge-rtstehenmaximal5Aund24VzurVerfgung.
Berechnung der LastdatenDasfrdieBeschleunigungunddasAbbremsenbentigteDrehmomentberechnetsichfolgendermassen(VernachlssigungderMotor-undGetriebetrgheit):
max
max
max max max
M
ZusammenmitdemReibmomentergebensichsomitfolgendeDrehmo-mentefrdieverschiedenenBewegungsphasen: Beschleunigungsphase (Dauer0.5s) 463mNm konstanteGeschwindigkeit (Dauer2s) 300mNm Abbremsen(dieReibungbremstmit300mNm) (Dauer0.5s) 137mNm
Stillstand (Dauer0.7s) 0mNm
DasSpitzendrehmomenttrittbeimBeschleunigenauf.DasRMS-gemittelteDrehmomentdesgesamtenArbeitszyklusist
max
max
max max max
M
DiemaximaleDrehzahl(60min-1)trittamEndederBeschleunigungs-phasebeimmaximalenDrehmoment(463mNm)auf.DiemechanischeSpitzenleistungistsomit
max
max
max max max
M
Geregelte ServoantriebeBeiArbeitszyklenmssenalleBetriebspunkteunterhalbderKennliniebeimaximalerSpannungUmaxliegen.Mathematischheisstdies,dassfralleBetriebspunkte(nB, MB )geltenmuss:
max
max
max max max
M
BeiderVerwendungvonServoverstrkerngehenmeisteinigeVoltderSpannungberdenLeistungstransistorenverloren,sodassdieeffektivamMotoranliegendeSpannungumdiesenBetragkleinerist.DiesgiltesbeiderFestlegungdermaximalenVersorgungsspannungUmaxzubercksichtigen.Eswirdempfohlen,eineRegelreservevonetwa20%einzubeziehen,sodassdieRegelungauchbeiungnstigerToleranzlagevonMotor,Last,VerstrkerundVersorgungsspannunggewhrleistetist.SchliesslichwirddiemittlereStrombelastungundderSpitzenstromberechnetundsichergestellt,dassderverwendeteServoverstrkerdieseStrmeliefernkann.AllenfallsmusseinehherohmigeWicklunggewhltwerden,sodassdieStrmekleinerwerden.DiebentigteSpannungerhhtsichdannallerdings.
Physikalische Grssen und ihre Einheiten SI Katalogi Getriebeuntersetzung*I Motorstrom A A,mAIA Anlaufstrom* A A,mAI0 Leerlaufstrom* A mAIRMS RMS-gemittelterStrom A A,mAIN Nennstrom(=max.Dauerstrom)* A A,mAJR TrgheitsmomentdesRotors* kgm2 gcm2JL TrgheitsmomentderLast kgm2 gcm2kM Drehmomentkonstante* Nm/A mNm/Akn Drehzahlkonstante* min-1/VM (Motor-)Drehmoment Nm mNmMB Betriebsdrehmoment Nm mNmMH Anhalte(dreh)moment* Nm mNmMmot Motordrehmoment Nm mNmMR Reibdrehmoment Nm mNmMRMS RMS-gemitteltesDrehmoment Nm mNmMN Nennmoment (=max.Dauerdrehmoment)* Nm mNmMN,G Max.DrehmomentdesGetriebes* Nm Nmn Drehzahl min-1nB Betriebsdrehzahl min-1nmax GrenzdrehzahldesMotors* min-1nmax,G GrenzdrehzahldesGetriebes* min-1nmot Motordrehzahl min-1n0 Leerlaufdrehzahl* min-1Pel ElektrischeLeistung W WPJ JoulscheVerlustleistung W WPmech MechanischeLeistung W WR Anschlusswiderstand W WR25 Widerstandbei25C* W WRT WiderstandbeiTemperatur W WRth1 WrmewiderstandWicklung-Gehuse* K/WRth2 WrmewiderstandGehuse-Luft* K/Wt Zeit s sT Temperatur K CTmax Max.zul.Wicklungstemperatur* K CTU Umgebungstemperatur K CTW Wicklungstemperatur K CU Motorspannung V VUind InduzierteSpannung(EMK) V VUmax Max.Versorgungsspannung V VUN Nennspannung* V VaCu WiderstandskoeffizientvonCu amax MaximaleWinkelbeschleunigung rad/s2Dn/DM Kennliniensteigung* min-1/mNmDTW Temperaturdiff.Wickl.-Umgeb. K KDt Hochlaufzeit s msh (Motor-)Wirkungsgrad %hG (Getriebe-)Wirkungsgrad* %hmax MaximalerWirkungsgrad* %tm MechanischeZeitkonstante* s mstS Therm.ZeitkonstantedesStators* s stW Therm.ZeitkonstantederWicklung* s s(*indenMotor-undGetriebedatengegeben)
1104_Technology.indd42 10.02.201108:20:32
43
maxon motor
AusgabeApril2011/nderungenvorbehalten Das Wichtigste
Wahl des GetriebesGesuchtisteinGetriebemiteinemmaximalenDauerdrehmomentvonmindestens0.28NmundeinemKurzzeitdrehmomentvonmindestens0.46Nm.DieseAnforderungerflltbeispielsweisedasPlanetengetriebemitDurchmesser22mm(Metallversion).DiemaximaleGetriebeeingangsdrehzahlvon6000min-1erlaubteinemaximaleUntersetzungvon
max
max
max max max
M
WirwhlendasdreistufigeGetriebemitdernchstkleinerenUntersetzungvon84:1(Lagerprogramm).DerWirkungsgradbetrgtmaximal59%.
Wahl des MotortypsDrehzahlundDrehmomentwerdenaufdieMotorwelleumgerechnet
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
DiemglichenMotoren,diegemssdemmaxonBaukastensystemmitdemobenausgewhltenGetriebezusammenpassen,sindinderneben-stehenden Tabellezusammengefasst.DieTabelleenthltnurMotorenmitGraphitkommutierung,diefrStart-Stopp-Betriebbessergeeignetsind.
DieWahlflltaufeinenA-max22,6W,dereingengendgrossesDauerdrehmomentaufweist.DerMotorsollteeineDrehmomentreservehaben,umauchbeietwasungnstigeremWirkungsgraddesGetriebeszufunktionieren.DiezustzlicheDrehmomentanforderungwhrendderBeschleunigungkannvondemMotorproblemloserbrachtwerden.DaskurzzeitigeSpitzendrehmomentistnichteinmaldoppeltsohochwiedaszulssigeDauerdrehmomentdesMotors.
Wahl der WicklungDerMotortypA-max22,6W,hateinemittlereKennliniensteigungvonetwa480min-1/mNm.Allerdingsistzubeachten,dassdiebeidennie-derohmigstenWicklungeneineetwassteilereKennlinieaufweisen.DiegewnschteLeerlaufdrehzahlerrechnetsichwiefolgt:
max
max
max max max
M
BeiderBerechnungistnatrlichderextremeArbeitspunkteinzusetzen(max.Drehzahlundmax.Drehmoment),dadieKennliniederWicklungoberhalballerArbeitspunkteimDrehzahl-Drehmoment-Diagrammverlaufensoll.DieseSoll-LeerlaufdrehzahlmussmitdermaximalvonderSteuerung(LSC)abgegebenenSpannungU=19Verreichtwerden(SpannungsabfallberderEndstufederLSC5V),wasdieminimaleDrehzahlkonstantekn, theordesMotorsdefiniert.
max
max
max max max
M
DenBerechnungenfolgend,flltdieWahlaufdenMotor110162,dermitgengendhohenDrehzahlkonstanten(689min-1/V),unddereinzweitesWellenendezurMontageeinesEncodershat.DiehhereDrehzahlkon-stantederWicklunggegenberdemSollwertbedeutet,dassderMotorbei19Vschnellerluftalsverlangt,wassichabermitdemReglerausgleichenlsst.DieseWahlstelltauchsicher,dasseineDrehzahl-Regelreservevonber20%besteht.DamitsindauchungnstigeToleranzenkeinProblem.DieDrehmomentkonstantedieserWicklungbetrgt13.9mNm/A.DasmaximaleDrehmomententsprichtsomiteinemSpitzenstromvon.
max
max
max max max
M
DieserStromistkleineralsderMaximalstrom(2A)desReglers(LSC).
SomitisteinGetriebemotorgefunden,derdieAnforderungen(Drehmo-mentundDrehzahl)erflltundmitdemvorgesehenenReglerbetriebenwerdenkann.
Motor MN EignungA-max22,6W 6.9mNm gutA-max19,2.5W 3.8mNm zuschwachRE-max21,6W 6.8mNm gut
1104_Technology.indd43 10.02.201108:20:33
36
ma
xon
mo
tor
Key information May 2011 edition / subject to change
maxon DC motor and maxon EC motorKey information
The motor as an energy converter
The electrical motor converts electrical power Pel (current I and voltage U) into mechanical power Pmech (speed n and torque M). The losses that arise are divided into frictional losses, attributable to Pmech and in Joule power losses PJ of the winding (resistance R). Iron losses do not occur in the coreless maxon DC motors. In maxon EC motors, they are treated for-mally like an additional friction torque. The power balance can therefore be formulated as:
The detailed result is as follows
Electromechanical motor constantsThe geometric arrangement of the magnetic circuit and winding defines in detail how the motor converts the electrical input power (current, voltage) into mechanical output power (speed, torque). Two important character-istic values of this energy conversion are the speed constant kn and the torque constant kM. The speed constant combines the speed n with the voltage induced in the winding Uind (=EMF). Uind is proportional to the speed; the following applies:
Similarly, the torque constant links the mechanical torque M with the electrical current I.
The main point of this proportionality is that torque and current are equivalent for the maxon motor.The current axis in the motor diagrams is therefore shown as parallel to the torque axis as well.
See also: Technology short and to the point, explanation of the motor
Motor diagrams
A diagram can be drawn for every maxon DC and EC motor, from which key motor data can be taken. Although tolerances and temperature influences are not taken into consideration, the values are sufficient for a first estimation in most applications. In the diagram, speed n, current I, power output P2 and efficiency K are applied as a function of torque M at constant voltage U.
Speed-torque lineThis curve describes the mechanical behavior of the motor at a constant voltage U: Speed decreases linearly with increasing torque. The faster the motor turns, the less torque it can provide.The curve can be described with the help of the two end points, no-load speed n0 and stall torque MH (cf. lines 2 and 7 in the motor data).DC motors can be operated at any voltage. No-load speed and stall torque change proportionally to the applied voltage. This is equivalent to a parallel shift of the speed-torque line in the diagram. Between the no-load speed and voltage, the following proportionality applies in good approximation
where kn is the speed constant (line 13 of the motor data).
Independent of the voltage, the speed-torque line is described most prac-tically by the slope or gradient of the curve (line 14 of the motor data).
Derivation of the speed-torque lineThe following occurs if one replaces current I with torque M using the torque constant in the detailed power balance:
Transformed and taking account of the close relationship of kM and kn, an equation is produced of a straight line between speed n and torque M.
or with the gradient and the no-load speed n0
UnitsIn all formulas, the variables are to be used in the units according to the catalog (cf. physical variables and their units on page 42).
The following applies in particular: All torques in mNm All currents in A (even no-load currents) Speeds (rpm) instead of angular velocity (rad/s)
Motor constantsSpeed constant kn and torque constant kM are not independent of one another. The following applies:
The speed constant is also called specific speed. Specific voltage, generator or voltage constants are mainly the reciprocal value of the speed constant and describe the voltage induced in the motor per speed. The torque constant is also called specific torque. The recip-rocal value is called specific current or current constant.
M
37
maxon motor
May2011edition/subjecttochange Key information
U = UN
n0
IA
Speed n
Torque M
Current I
n0
MH
Thespeed-torquegradientisoneofthemostinformativepiecesofdataandallowsdirectcomparisonbetweendifferentmotors.Thesmallerthespeed-torquegradient,thelesssensitivethespeedreactstotorque(load)changesandthestrongerthemotor.Withthemaxonmotor,thespeed-torquegradientwithinthewindingseriesofamotortype(i.e.ononecatalogpage)remainspracticallyconstant.
Current gradientTheequivalenceofcurrenttotorqueisshownbyanaxisparalleltothetorque:morecurrentflowingthroughthemotorproducesmoretorque.Thecurrentscaleisdeterminedbythetwopointsno-loadcurrentI0andstartingcurrentIA(lines3and8ofmotordata).Theno-loadcurrentisequivalenttothefrictiontorqueMR,thatdescribestheinternalfrictioninthebearingsandcommutationsystem.
InthemaxonECmotor,therearestrong,speeddependentironlossesinthestatorironstackinsteadoffrictionlossesinthecommutationsystem.
Themotorsdevelopthehighesttorquewhenstarting.Itismanytimesgreaterthanthenormaloperatingtorque,sothecurrentuptakeisthegreatestaswell.ThefollowingappliesforthestalltorqueMHandstartingcurrentIA
Efficiency curveTheefficiencyhdescribestherelationshipofmechanicalpowerdeliveredtoelectricalpowerconsumed.
OnecanseethatatconstantappliedvoltageUandduetotheproportion-alityoftorqueandcurrent,theefficiencyincreaseswithincreasingspeed(decreasingtorque).Atlowtorques,frictionlossesbecomeincreasinglysignificantandefficiencyrapidlyapproacheszero.Maximumefficiency(line9ofmotordata)iscalculatedusingthestartingcurrentandno-loadcurrentandisdependentonvoltage.
Aruleofthumbisthatmaximumefficiencyoccursatroughlyoneseventhofthestalltorque.Thismeansthatmaximumefficiencyandmaximumoutputpowerdonotoccuratthesametorque.
Rated working point
TheratedworkingpointisanidealworkingpointforthemotorandderivesfromoperationatnominalvoltageUN(line1ofmotordata)andnominalcurrentIN(line6).ThenominaltorqueMNproduced(line5)inthisworkingpointfollowsfromtheequivalenceoftorqueandcurrent,andnominalspeednN(line4)isreachedinlinewiththespeedgradient.Thechoiceofnominalvoltagefollowsfromconsiderationsofwherethemaximumno-loadspeedshouldbe.Thenominalcurrentderivesfromthemotorsthermallymaximumpermissiblecontinuouscurrent.
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
1104_Technology.indd37 29.03.201111:20:55
38
maxon motor
Key information May2011edition/subjecttochange
Operating range diagram
5
4
3
2
1
010 20 30 40 50 60 70 80 90 ON%
TION / IN
Time
Motor diagrams, operating ranges
ThecataloguecontainsadiagramofeverymaxonDCandECmotortypethatshowstheoperatingrangesofthedifferentwindingtypesusingatypicalmotor.
Permanent operating rangeThetwocriteriamaximumcontinuoustorqueandmaximumpermis-siblespeedlimitthecontinuousoperatingrange.Operatingpointswithinthisrangearenotcriticalthermallyanddonotgenerallycauseincreasedwearofthecommutationsystem.
Short-term operating rangeThemotormayonlybeloadedwiththemaximumcontinuouscurrentforthermalreasons.However,temporaryhighercurrents(torques)areallowed.Aslongasthewindingtemperatureisbelowthecriticalvalue,thewindingwillnotbedamaged.Phaseswithincreasedcurrentsaretimelimited.Ameasureofhowlongthetemporaryoverloadcanlastisprovid-edbythethermaltimeconstantofthewinding(line19ofthemotordata).Themagnitudeofthetimeswithoverloadrangesfromseveralsecondsforthesmallestmotors(6mmto13mmdiameter)uptoroughlyoneminuteforthelargest(60mmto90mmdiameter).Thecalculationoftheexactoverloadtimeisheavilydependentonthemotorcurrentandtherotorsstartingtemperature.
Maximum continuous current, maximum continuous torqueTheJulepowerlossesheatupthewinding.Theheatproducedmustbeabletodissipateandthemaximumrotortemperature(line22ofthemotordata)shouldnotbeexceeded.Thisresultsinamaximumcontinuouscurrent,atwhichthemaximumwindingtemperatureisattainedunderstandardconditions(25Cambienttemperature,noheatdissipationviatheflange,freeaircirculation).Highermotorcurrentscauseexcessivewindingtemperatures.Thenominalcurrentisselectedsothatitcorrespondstothismaximumpermissibleconstantcurrent.Itdependsheavilyonthewinding.Thesethinwirewindingshavelowernominalcurrentlevelsthanthickones.Withverylowresistivewindings,thebrushsystemscapacitycanfurtherlimitthepermissibleconstantcurrent.Withgraphitebrushmotors,frictionlossesincreasesharplyathigherspeeds.WithECmotors,eddycurrentlossesincreaseinthereturnasspeedincreasesandproduceadditionalheat.Themaximumpermissiblecontinuouscurrentdecreasesatfasterspeedsaccordingly.Thenominaltorqueallocatedtothenominalcurrentisalmostconstantwithinamotortypeswindingrangeandrepresentsacharacteristicsizeofthemotortype.
The maximum permissible speedforDCmotorsisprimarilylimitedbythecommutationsystem.Thecommutatorandbrusheswearmorerapidlyatveryhighspeeds.Thereasonsare: Increasedmechanicalwearbecauseofthelargetraveledpathofthecommutator
Increasedelectro-erosionbecauseofbrushvibrationandsparkformation.
Afurtherreasonforlimitingthespeedistherotorsresidualmechanicalimbalancewhichshortenstheservicelifeofthebearings.Higherspeedsthanthelimitspeednmax(line23)arepossible,however,theyarepaidforbyareducedservicelifeexpectancy.ThemaximumpermissiblespeedfortheECmotoriscalculatedbasedonservicelifeconsiderationsoftheballbearings(atleast20 000hours)atthemaximumresidualimbal-anceandbearingload.
Maximum winding temperatureThemotorcurrentcausesthewindingtoheatupduetothewindingsre-sistance.Topreventthemotorfromoverheating,thisheatmustdissipatetotheenvironmentviathestator.Thecorelesswindingisthethermallycriticalpoint.Themaximumrotortemperaturemustnotbeexceeded,eventemporarily.WithgraphitebrushmotorsandECmotorswhichtendtohavehighercurrentloads,themaximumrotortemperatureis125C(inindividualcasesupto155C).Motorswithpreciousmetalcommutatorsonlyallowlowercurrentloads,sothattherotortemperaturesmustnotex-ceed85C.Favourablemountingconditions,suchasgoodaircirculationorcoolingplates,cansignificantlylowertemperatures.
ON MotorinoperationOFF MotorstationaryION Max.peakcurrentIN Max.permissiblecontinuouscurrent(line6)tON ONtime[s],shouldnotexeedtw(line19)T CycletimetON + tOFF [s]tON% Dutycycleaspercentageofcycletime. Themotormaybeoverloadedbytherelationship ION / INatX%ofthetotalcycletime.
max
max
max max max
M
1104_Technology.indd38 29.03.201111:20:55
39
maxon motor
May2011edition/subjecttochange Key information
n n
M
n n
M
maxon flat motor
MultipoleECmotors,suchasmaxonflatmotors,requireagreaternumberofcommutationstepsforamotorrevolution(6xnumberofpolepairs).Duetothewoundstatorteeththeyhaveahigherterminalinduct-ancethanmotorswithanironlesswinding.Asaresultathigherspeed,thecurrentcannotdevelopfullyduringthecorrespondinglyshortcommu-tationintervals.Therefore,theapparenttorqueproducedislower.Currentisalsofedbackintothecontrollerspowerstage.Asaresult,motorbehaviourdeviatesfromtheideallinearspeed-torquegradient.Theapparentspeed-torquegradientdependsonvoltageandspeed:Thegradientissteeperathigherspeeds.Mostly,flatmotorsareoperatedinthecontinuousoperationrangewheretheachievablespeed-torquegradientatnominalvoltagecanbeapproxi-matedbyastraightlinebetweenno-loadspeedandnominalworkingpoint.Theachievablespeed-torquegradientisapproximately.
Acceleration
Inaccordancewiththeelectricalboundaryconditions(powersupply,control,battery),adistinctionisprincipallymadebetweentwodifferentstartingprocesses: Startatconstantvoltage(withoutcurrentlimitation) Startatconstantcurrent(withcurrentlimitation)
Start under constant currentAcurrentlimitalwaysmeansthatthemotorcanonlydeliveralimitedtorque.Inthespeed-torquediagram,thespeedincreasesonaverticallinewithaconstanttorque.Accelerationisalsoconstant,thussimplifyingthecalculation.Startatconstantcurrentisusuallyfoundinapplicationswithservoamplifiers,whereaccelerationtorquesarelimitedbytheampli-fierspeakcurrent.
Angularaccelerationa(inrad/s2)atconstantcurrentIorconstanttorqueMwithanadditionalloadofinertiaJL:
Run-uptimeDt(inms)ataspeedchangeDnwithanadditionalloadinertiaJL:
(allvariablesinunitsaccordingtothecatalog)
Start with constant terminal voltageHere,thespeedincreasesfromthestalltorquealongthespeed-torqueline.Thegreatesttorqueandthusthegreatestaccelerationiseffectiveatthestart.Thefasterthemotorturns,thelowertheaccel-eration.Thespeedincreasesmoreslowly.Thisexponentiallyflatten-ingincreaseisdescribedbythemechanicaltimeconstanttm(line15ofthemotordata).Afterthistime,therotoratthefreeshaftendhasattained63%oftheno-loadspeed.Afterroughlythreemechanicaltimeconstants,therotorhasalmostreachedtheno-loadspeed.
Mechanicaltimeconstanttm(inms)oftheunloadedmotor:
Mechanicaltimeconstantstm(inms)withanadditionalloadinertiaJL:
Maximumangularaccelerationamax(inrad/s2)oftheunloadedmotor:
Maximumangularaccelerationamax(inrad/s2)withanadditionalloadinertiaJL:
Run-uptime(inms)atconstantvoltageuptotheoperatingpoint(MB , nB ):
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
1104_Technology.indd39 29.03.201111:20:57
40
maxon motor
Key information May2011edition/subjecttochange
Tolerances
Tolerancesmustbeconsideredincriticalranges.Thepossibledeviationsofthemechanicaldimensionscanbefoundintheoverviewdrawings.Themotordataareaveragevalues:theadjacentdiagramshowstheef-fectoftolerancesonthecurvecharacteristics.Theyaremainlycausedbydifferencesinthemagneticfieldstrengthandinwireresistance,andnotsomuchbymechanicalinfluences.Thechangesareheavilyexaggeratedinthediagramandaresimplifiedtoimproveunderstanding.Itisclear,however,thatinthemotorsactualoperatingrange,thetolerancerangeismorelimitedthanatstartoratno-load.Ourcomputersheetscontainalldetailedspecifications.
CalibratingThetolerancescanbelimitedbycontrolledde-magnetizationofthemotors.Motordatacanbeaccuratelyspecifieddownto1to3%.However,themotorcharacteristicvalueslieinthelowerportionofthestandardtolerancerange.
Thermal behavior
TheJoulepowerlossesPJinthewindingdetermineheatingofthemotor.Thisheatenergymustbedissipatedviathesurfacesofthewindingandmotor.TheincreaseDTWofthewindingtemperatureTWwithregardtotheambienttemperaturearisesfromheatlossesPJandthermalresistancesRth1andRth2.
Here,thermalresistanceRth1relatestotheheattransferbetweenthewindingandthestator(magneticreturnandmagnet),whereasRth2de-scribestheheattransferfromthehousingtotheenvironment.Mountingthemotoronaheatdissipatingchassisnoticeablylowersthermalresist-anceRth2.Thevaluesspecifiedinthedatasheetsforthermalresistancesandthemaximumcontinuouscurrentweredeterminedinaseriesoftests,inwhichthemotorwasend-mountedontoaverticalplasticplate.ThemodifiedthermalresistanceRth2thatoccursinaparticularapplica-tionmustbedeterminedusingoriginalinstallationandambientcondi-tions.ThermalresistanceRth2onmotorswithmetalflangesdecreasesbyupto50%ifthemotoriscoupledtoagoodheat-conducting(e.g.metallic)retainer.
Theheatingrunsatdifferentratesforthewindingandstatorduetothedifferentmasses.Afterswitchingonthecurrent,thewindingheatsupfirst(withtimeconstantsfromseveralsecondstohalfaminute).Thestatorreactsmuchslower,withtimeconstantsrangingfrom1to30minutesdependingonmotorsize.Athermalbalanceisgraduallyestablished.Thetemperaturedifferenceofthewindingcomparedtotheambienttempera-turecanbedeterminedwiththevalueofthecurrentI(orinintermittentoperationwiththeeffectivevalueofthecurrentI = IRMS ).
Here,electricalresistanceRmustbeappliedattheactualambienttemperature.
Influence of temperatureAnincreasedmotortemperatureaffectswindingresistanceandmagneticcharacteristicvalues.
Windingresistanceincreaseslinearlyaccordingtothethermalresistancecoefficientforcopper:
Example:awindingtemperatureof75Ccausesthewindingresist-ancetoincreasebynearly20%.
Themagnetbecomesweakerathighertemperatures.Thereductionis1to10%at75Cdependingonthemagnetmaterial.
Themostimportantconsequenceofincreasedmotortemperatureisthatthespeedcurvebecomessteeperwhichreducesthestalltorque.Thechangedstalltorquecanbecalculatedinfirstapproxi-mationfromthevoltageandincreasedwindingresistance.
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
1104_Technology.indd40 29.03.201111:20:58
41
maxon motor
May2011edition/subjecttochange Key information
n
M
Motor selection
Thedriverequirementsmustbedefinedbeforeproceedingtomotorselection. Howfastandatwhichtorquesdoestheloadmove? Howlongdotheindividualloadphaseslast? Whataccelerationstakeplace? Howgreatarethemassinertias?Oftenthedriveisindirect,thismeansthatthereisamechanicaltransfor-mationofthemotoroutputpowerusingbelts,gears,screwsandthelike.Thedriveparameters,therefore,aretobecalculatedtothemotorshaft.Additionalstepsforgearselectionarelistedbelow.
Furthermore,thepowersupplyrequirementsneedtobechecked. Whichmaximumvoltageisavailableatthemotorterminals? Whichlimitationsapplywithregardtocurrent?Thecurrentandvoltageofmotorssuppliedwithbatteriesorsolarcellsareverylimited.Inthecaseofcontroloftheunitviaaservoamplifier,theamplifiersmaximumcurrentisoftenanimportantlimit.
Selection of motor typesThepossiblemotortypesareselectedusingtherequiredtorque.Ontheonehand,thepeaktorque,Mmax,istobetakenintoconsiderationandontheother,theeffectivetorqueMRMS.Continuousoperationischaracter-izedbyasingleoperatingpoint(MB, nB ).Themotortypesinquestionmusthaveanominaltorque(=max.continuoustorque)MNthatisgreaterthanoperatingtorqueMB.
Inworkcycles,suchasstart/stopoperation,themotorsnominaltorquemustbegreaterthantheeffectiveloadtorque(quadraticallyaveraged).Thispreventsthemotorfromoverheating.
Thestalltorqueoftheselectedmotorshouldusuallyexceedtheemerg-ingloadpeaktorque.
Selection of the winding: electric requirementInselectingthewinding,itmustbeensuredthatthevoltageapplieddirectlytothemotorissufficientforattainingtherequiredspeedinalloperatingpoints.
Unregulated operationInapplicationswithonlyoneoperatingpoint,thisisoftenachievedwithafixedvoltageU.Awindingissoughtwithaspeed-torquelinethatpassesthroughtheoperatingpointatthespecifiedvoltage.Thecalculationusesthefactthatallmotorsofatypefeaturepracticallythesamespeed-torquegradient.Atargetno-loadspeedn0,theoriscalculatedfromoperatingpoint(nB, MB).
Thistargetno-loadspeedmustbeachievedwiththeexistingvoltageU,whichdefinesthetargetspeedconstant.
Thosewindingswhoseknisascloseto kn, theoraspossible,willapproxi-matetheoperatingpointthebestatthespecifiedvoltage.Asomewhatlargerspeedconstantresultsinasomewhathigherspeed,asmallerspeedconstantresultsinalowerone.Thevariationofthevoltageadjuststhespeedtotherequiredvalue,aprinciplethatservoamplifiersalsouse.
MotorcurrentIiscalculatedfromthetorqueconstantkMoftheselectedwindingandtheoperatingtorqueMB.
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
Advices for evaluating the requirements:Oftentheloadpoints(especiallythetorque)arenotknownoraredifficulttodetermine.Insuchcasesyoucanoperateyourdevicewithameasuringmotorroughlyestimatedaccordingtosizeandpower.Varythevoltageuntilthedesiredoperatingpointsandmotionse-quenceshavebeenachieved.Measurethevoltageandcurrentflow.Usingthesespecificationsandtheordernumberofthemeasuringmotor,ourengineerscanoftenspecifythesuitablemotorforyourapplication.
Additionaloptimizationcriteriaare,forexample: Masstobeaccelerated(type,massinertia) Typeofoperation(continuous,intermittent,reversing) Ambientconditions(temperature,humidity,medium) Powersupply,battery
Whenselectingthemotortype,otherconstraintsalsoplayamajorrole: Whatmaximumlengthshouldthedriveunithave,includinggearandencoder?
Whatdiameter? Whatservicelifeisexpectedfromthemotorandwhichcommutationsystemshouldbeused?
Preciousmetalcommutationforcontinuousoperationatlowcurrents(ruleofthumbforlongestservicelife:uptoapprox.50%ofIN )
Graphitecommutationforhighcontinuouscurrents(ruleofthumb:50%toapprox.75%ofIN )andfrequentcurrentpeaks(start/stopoperation,reversingoperation).
Electroniccommutationforhighestspeedsandlongestservicelife. Howgreataretheforcesontheshaft,doballbearingshavetobeusedorarelessexpensivesinteredbearingssufficient?
1104_Technology.indd41 29.03.201111:20:59
42
maxon motor
Key information May2011edition/subjecttochange
n
M
n
0.5 2.5 3.0 3.7
Example for motor/gear selection
Adriveshouldmovecyclicallyinaccordancewiththefollowingspeeddiagram.
TheinertiaofloadJLtobeacceleratedis130000gcm2.Theconstantfric-tiontorqueis300mNm.Themotoristobedrivenwiththelinear4-Qservoamplifierfrommaxon(LSC).Thepowersupplydeliversmax.5Aand24V.
Calculation of load dataThetorquerequiredforaccelerationandbrakingarecalculatedasfollows(motorandgearheadinertiaomitted):
Togetherwiththefrictiontorque,thefollowingtorquesresultforthedifferentphasesofmotion. Accelerationphase (duration0.5s) 463mNm Constantspeed (duration2s) 300mNm Braking(frictionbrakeswith300mNm) (duration0.5s) 137mNm
Standstill (duration0.7s) 0mNm
Peaktorqueoccursduringacceleration.TheRMSdeterminedtorqueoftheentireworkcycleis
Themaximumspeed(60rpm)occursattheendoftheaccelerationphaseatmaximumtorque(463mNm).Thus,thepeakmechanicalpoweris:
Regulated servo drivesInworkcycles,alloperatingpointsmustliebeneaththecurveatamaxi-mumvoltage Umax.Mathematically,thismeansthatthefollowingmustapplyforalloperatingpoints(nB, MB):
Whenusingservoamplifiers,avoltagedropoccursatthepowerstage,sothattheeffectivevoltageappliedtothemotorislower.Thismustbetakenintoconsiderationwhendeterminingthemaximumsupplyvolt-ageUmax.Itisrecommendedthataregulatingreserveofsome20%beincluded,sothatregulationisevenensuredwithanunfavorabletolerancesituationofmotor,load,amplifierandsupplyvoltage.Finally,theaveragecurrentloadandpeakcurrentarecalculatedensuringthattheservoam-plifierusedcandeliverthesecurrents.Insomecases,ahigherresistancewindingmustbeselected,sothatthecurrentsarelower.However,therequiredvoltageisthenincreased.
Physical variables and their units SI Catalogi Gearreduction* I Motorcurrent A A,mAIA Startingcurrent* A A,mAI0 No-loadcurrent* A mAIRMS RMSdeterminedcurrent A A,mAIN Nominalcurrent* A A,mAJR Momentofinertiaoftherotor* kgm2 gcm2JL Momentofinertiaoftheload kgm2 gcm2kM Torqueconstant* Nm/A mNm/Akn Speedconstant* rpm/VM (Motor)torque Nm mNmMB Operatingtorque Nm mNmMH Stalltorque* Nm mNmMmot Motortorque Nm mNmMR Momentoffriction Nm mNmMRMS RMSdeterminedtorque Nm mNmMN Nominaltorque Nm mNmMN,G Max.torqueofgear* Nm Nmn Speed rpmnB Operatingspeed rpmnmax Limitspeedofmotor* rpmnmax,G Limitspeedofgear* rpmnmot Motorspeed rpmn0 No-loadspeed* rpmPel Electricalpower W WPJ Joulepowerloss W WPmech Mechanicalpower W WR Terminalresistance W WR25 Resistanceat25C* W WRT ResistanceattemperatureT W WRth1 Heatresistancewindinghousing* K/WRth2 Heatresistancehousing/air* K/Wt Time s sT Temperature K CTmax Max.windingtemperature* K CTU Ambienttemperature K CTW Windingtemperature K CU Motorvoltage V VUind Inducedvoltage(EMF) V VUmax Max.suppliedvoltage V VUN Nominalvoltage* V VaCu ResistancecoefficientofCu amax Maximumangleacceleration rad/s2Dn/DM Curvegradient* rpm/mNmDTW Temperaturedifferencewinding/ambientK KDt Runuptime s msh (Motor)efficiency %hG (Gear)efficiency* %hmax Maximumefficiency* %tm Mechanicaltimeconstant* s mstS Therm.timeconstantofthestator* s stW Therm.timeconstantofthewinding* s s(*Specifiedinthemotororgeardata)
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
1104_Technology.indd42 29.03.201111:21:00
43
maxon motor
May2011edition/subjecttochange Key information
Gear selectionAgearisrequiredwithamaximumcontinuoustorqueofatleast0.28Nmandanintermittenttorqueofatleast0.46Nm.Thisrequirementisfulfilled,forexample,byaplanetarygearwith22mmdiameter(metalversion).Therecommendedinputspeedof6000rpmallowsamaximumreductionof:
Weselectthethree-stagegearwiththenextsmallstreductionof84:1(stockprogram).Efficiencyismax.59%.
Motor type selectionSpeedandtorquearecalculatedtothemotorshaft
Thepossiblemotors,whichmatchtheselectedgearsinaccordancewiththemaxonmodularsystem,aresummarizedin the table opposite.Thetableonlycontainsmotorswithgraphitecommutationwhicharebettersuitedtostart/stopoperation.
SelectionfallsonanA-max22,6W,whichdemonstratesasufficientlyhighcontinuoustorque.Themotorshouldhaveatorquereservesothatitcanevenfunctionwithasomewhatunfavorablegearefficiency.Theadditionaltorquerequirementduringaccelerationcaneasilybedeliveredbythemotor.Thetemporarypeaktorqueisnoteventwiceashighasthecontinuoustorqueofthemotor.
Selection of the windingThemotortypeA-max22,6Whasanaveragespeed-torquegradientofsome450rpm/mNm.However,itshouldbenotedthatthetwolowestresistancewindingshaveasomewhatsteepergradient.Thedesiredno-loadspeediscalculatedasfollows:
Theextremeworkingpointshouldofcoursebeusedinthecalculation(max.speedandmax.torque),sincethespeed-torquelineofthewindingmustrunaboveallworkingpointsinthespeed/torquediagram.Thistargetno-loadspeedmustbeachievedwiththemaximumvoltageU=19Vsuppliedbythecontrol(LSC),(voltagedropofthepoweramplifieroftheLSC5V),whichdefinestheminimumtargetspeedconstantkn, theorofthemotor.
Basedonthecalculation,motor110162ischosenwhichcorrespondstothewindingwiththenexthighestspeedconstant(689rpm/V)andhasasecondshaftendformountingtheencoder.Thewindingshigherspeedconstantcomparedtothetargetvaluemeansthatthemotorrunsfasterthanrequiredat19Vwhich,however,canbecompensatedforbythecontroller.Thisselectionalsoensuresthatthereisaspeedregulatingreserveofmorethan20%.Thus,evenunfavorabletolerancesarenotaproblem.Thetorqueconstantofthiswindingis13.9mNm/A.Themaximumtorquecorrespondstoapeakcurrentof:
Thiscurrentislowerthanthemaximumcurrent(2A)ofthecontroller(LSC).
Therefore,agearmotorcombinationhasbeenfoundthatfulfillstherequirements(torqueandspeed)andcanbeoperatedwiththecontrollerprovided.
Motor MN SuitabilityA-max22,6W 6.9mNm GoodA-max19,2.5W 3.8mNm TooweakRE-max21,6W 6.8mNm Good
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
max
max
max max max
M
1104_Technology.indd43 29.03.201111:21:01
36
maxon m
otor
Informacin clave sobre Edicindejuliode2012/Sujetoamodificaciones
maxon DC motor y maxon EC motorInformacinclavesobre
El motor como transformador de energa
ElmotorelctricoconviertelapotenciaelctricaPel(corrienteIytensinU)enpotenciamecnicaPmech (velocidadnyparM).LasprdidasqueseproducensedividenenprdidasporfriccinenPmechyprdidadepotenciaenJuliosPJenelbobinado(resistenciaR).LosmotoresderotorsinhierromaxonDCmotornotienenprdidasenelhierro.EnlosmotoresECestasprdidassetratancomounpardefriccinadicional.Porlotanto,elequili-briodepotenciapuedesertratadocmosigue:
Pel = Pmech + PJ
Endetalleresultaen:U I = 30 000 n M + R I
2
Constantes electromecnicas del motorLadisposicingeomtricadelabobinayelcircuitomagnticodeterminadetalladamentecomotransformalapotenciaelctricaentrante(corriente,tensin)enpotenciamecnicadesalida(velocidad,par).DosimportantesvaloresdeestaconversindeenergasonlaconstantedevelocidadknylaconstantedeparkM.LaconstantedevelocidadcombinalavelocidadnconelvoltajeinducidoenelbobinadoUind(=FEM).Uindesproporcionalalavelocidadysepresentaas:
n = kn Uind
Demaneraanloga,laconstantedeparcombinaelparmecnicoMconlacorrienteelctricaI.
M = kM I
Elaspectomsimportantedeestarelacin,esqueenelcasodelosmo-toresmaxonlosvaloresdeparycorrientesonequivalentes.Elejedecorrienteenlosdiagramasdelmotorsemuestraparaleloalejedepar.
Vertambin:Tecnologabreveyconciso,explicacindedatosdelmotor
Curvas de motor
SepuederepresentarundiagramaparacadamotormaxonDCyECdelcualsepuedenextraerdatosclave.Aunquenosetienenencuentalasto-leranciasylainfluenciadelatemperatura,susvaloressonsuficientesparaunaprimeraestimacindelamayoradelasaplicaciones.Eneldiagrama,lavelocidadh,lacorriente I,lapotenciadesalidaP2ylaeficienciasoncalculadasenfuncindelparMatensinconstanteU.
Curva velocidad-parEstacurvadescribeelcomportamientomecnicodeunmotoravoltajeconstanteU: Lavelocidaddecrecelinealmentecuandoaumentaelpar Cuantomsrpidovaunmotor,menosparpuedesuministrar.Lacurvasepuededescribirmediantelosdosextremos,velocidadenvacon0yelpardearranqueMH(verlneas2y7delosdatosdemotor).LosmaxonDCmotorsepuedenalimentaracualquiertensin.Laveloci-dadenvacoyelpardearranquecambianproporcionalmentealvoltajeaplicado.Estoesequivalenteaundeslizamientoparalelodelalneavelocidad/pareneldiagrama.Entrelavelocidadenvacoyelvoltaje,lasiguienteproporcinseaplica
n0 kn U
Siendokn laconstantedevelocidad(lnea13delosdatosdemotor).
Independientementedelvoltaje,lalneavelocidad/parsedescribeprcti-camentecomolapendienteogradientedelacurva(lnea14delosdatosdelmotor).
n0 = MHnM
Derivacin de la curva velocidad-parSisesustituyelacorrienteI porelparMusandolaconstantedeparseobtiene:
U n M + R = 30 000MkM
MkM
2
TransformandoyteniendoencuentalarelacinentrekMykn,seobtienelaecuacindelalnearectaentrelavelocidadnyelparM
n = kn U 30 000
R
k M2 M
oconelgradienteylavelocidadenvacon0,setiene:
MnMn = n0
UnidadesEntodaslasfrmulas,lasvariablesseusarnconlasunidadesquefiguranenelcatlogo(vermagnitudesfsicasysusunidadesenpg.42).
Enparticular: TodoslosparessonenmNm TodaslascorrientesenA(inclusolascorrientesenvaco) Velocidadesenrpmenvezdevelocidadangular(rad/s)
Pel = U I PJ = R I2
Constantes del motorLaconstantedevelocidadknyconstantedeparkMsondependientesentres,comosigue:
Laconstantedevelocidadtambinsellamavelocidadespecfica.Elvoltajeespecfico,generadoroconstantesdevoltajesonprincipal-menteelvalorrecprocodelaconstantedevelocidadydescribenelvoltajeinducidoenelmotorporcadavuelta.Laconstantedepartambinsellamaparespecfico.Elvalorrecpro-coeslacorrienteespecficaoconstantedecorriente.
Pmech = 30 000 M n
1204_Technology.indd36 11.07.201209:54:19
37
maxon m
otor
Edicindejuliode2012/Sujetoamodificaciones Informacin clave sobre
U = UN
n0
IA
Velocidad n
Par M
Corriente I
n0
MH
Elgradientevelocidad-paresunodelosdatosmsimportantesypermiteunadirectacomparacinentrediferentesmotores.Cuantomspequeoseaelgradientevelocidad-par,lavelocidadsermenossensiblealoscambiosdepar(carga)yelmotorsermspotenteyestable.Conelmotormaxon,elgradientevelocidad-pardeuntipodemotorpermaneceprcticamenteconstanteconlosdiferentesbobinados(deunamismapgina).
Curva de corrienteLacurvadecorrienterepresentalaequivalenciaentreparycorriente:cuantomscorrientefluyaatravsdelmotor,msparseproduce.Lacurvadecorrientesepuedetrazarentrelospuntosdelosdosextremos;eldecorrienteenvacoI0ylacorrientedearranqueIA(lneas3y8delosdatosdelmotor).LacorrienteenvacoN0esequivalentealpardefriccinMRproducidoporlosrodamientosyelsistemadeconmutacin.
MR = kM I0
EnlosmotoresmaxonECexistenconsiderablesprdidasenelhierro,pro-ducidasenelestator,quedependendelavelocidad.Sinembargonotienenprdidasporfriccinenelsistemadeconmutacin.
Elmotordesarrollasumximoparcuandoarranca.Esteparesvariasvecessuperioralparnormaldefuncionamiento,yporlotantolacorrientetambinesmuysuperior.
MH = kM IA
Curva de eficienciaLaeficiencia hdescribelarelacinentrepotenciamecnicaentregadaypotenciaelctricaconsumida.
=
30 000n (M MR)
U I
SepuedeverqueaunvoltajeconstantedadoUydebidoalapropor-cionalidaddeparycorriente,laeficienciaaumentaconelaumentodelavelocidad(disminucindelpar).Aparesbajos,lasprdidasporfriccinsoncadavezmsrelevantesylaeficienciaseaproximaacero.Lamximaeficiencia(lnea9delosdatosdelmotor)secalculausandolacorrientedearranqueylavelocidadenvacoydependedelvoltaje.
max = 1 I0
IA
2
Lamximapotenciaylamximaeficiencianoseproducenalmismoniveldepar.
Punto de trabajo nominal
ElpuntodetrabajonominalesunpuntodetrabajoidealdelmotoryvienedelfuncionamientoatensinnominalUN (lnea1delosdatosdelmotor)yacorrientenominal(lnea6).ElparnominalMNproducido(lnea5)enestepuntodetrabajosiguelaconstantedecorriente/par.
MN kM (IN I0)
LavelocidadnominalnN(lnea4)siguelapendientedevelocidad.Latensinnominalhasidoescogidadeformaqueelmotornosobrepasesuvelocidadmximasincarga.Lacorrientenominalderivadelamximacorrienteencontinuo,limitadaporrazonestrmicas.
1204_Technology.indd37 11.07.201209:54:20
38
maxon m
otor
Informacin clave sobre Edicindejuliode2012/Sujetoamodificaciones
5
4
3
2
1
010 20 30 40 50 60 70 80 90 ON%
TION / IN
Tiempo
Rango de funcionamiento
Diagramas del motor, rangos de funcionamiento
ElcatlogocontieneparacadatipodemotormaxonCCyECundiagramaquemuestralosrangosdefuncionamientodelosdiferentesbobinadosusandounmotordeejemplo.
Rango de funcionamiento permanenteLosdoscriterios,mximoparencontinuoymximavelocidadpermisi-blelimitanenrangodefuncionamientoencontinuo.Lospuntosdetrabajodentrodeestazonanosoncrticostrmicamenteynocausanaumentodeldesgastedelsistemadeconmutacin.
Funcionamiento intermitenteElmotornodebefuncionarencontinuomsalladesumximacorrienteporrazonestrmicas.Sinembargosepuedenpermitircortosperiodosdecorrientes(pares)mselevadas.Siemprequeelbobinadoestpordebajodesumximatemperatura,nosufrirdaos.Losperiodosconcorrientesaltasdebensercortos.Unamedidadecuntopuededurarlasobrecargavienedadaporlaconstantetrmicadelbobinado(lnea19delosdatosdelmotor).Lamagnituddelostiemposdesobrecargavaradesdevariossegundosparalosmotorespequeos(6a13mmdedimetro)hastaaproximadamenteunminutoparalosmsgrandes(60a90mmdedime-tro).Elclculoexactodeltiempodesobrecargadependedelacorrienteenelmotorydelatemperaturainicialdelrotor.
Mxima corriente en continuo, mximo par en continuo LasprdidasporefectoJoulecalientanelbobinado.EstodalugaraunamximacorrienteencontinuoIcont.(lnea22delosdatosdelmotor),alacualsealcanzalamximatemperaturadelrotorencondicionesestndar(a25Cdetemperaturaambiente,nodisipacindecaloratravsdelabridadelmotor,librecirculacindeaire).Lascorrientesporencimadeestevalorcausantemperaturasexcesivasenelbobinado.Lacorrientenominalcorrespondeconlamximacorrienteencontinuoad-misible.Lamximacorrienteencontinuodependeprincipalmentedelbobi-nado.Loshilosfinosenelbobinadotienencorrientesencontinuomenoresqueloshilosmsgruesos.Enelcasodebobinadosdebajaresistenciahmica,lacapacidaddesoportarcorrientessevelimitadaporelsistemadeconmutacin.Enlosmotoresconescobillasdegrafitoalaumentarlavelocidad,lasprdidasporfriccinaumentanbruscamente.EnlosmotoresEC,lasprdidasporcorrientesdeEddyenelretornomag-ntico,aumentanconlavelocidadyproducenuncalentamientoadicional.Consecuentemente,alaumentarlavelocidad,lamximacorrienteencontinuoadmisibledisminuye.Elparnominalasignadoalacorrientenominalesprcticamenteconstanteparatodoslosbobinadosyrepresentaunacaractersticadeltamaoydeltipodemotor.
La mxima velocidad permitidaEstlimitadaporelsistemadeconmutacin.Elcolectorylasescobillassedesgastanmsrpidamenteavelocidadesmuyaltas. Aumentodeldesgastemecnicodebidoaqueladistanciarecorridaporelcolectoresmayor.
Aumentodeldesgasteporelectroerosindebidoalavibracindelasescobillasylaformacindechispas.
Ademslavelocidaddebelimitarsedebidoaldesequilibradoresidualdelrotorelcualreducelavidatildelosrodamientos.Esposibleobtenervelo-cidadesporencimadelamximavelocidadpermisiblenmax(lnea23),perosepagaelprecioconunareduccindelavidatildelmotor.LamximavelocidadpermitidaenlosmotoresECsecalculaenfuncindelavidatildelosrodamientosabolas(comomnimo20000horas)conelmximodesequilibradodelrotorymximacargaadmisible.
Mxima temperatura del bobinadoLacorrientedelmotorcausaelcalentamientodelbobinadodebidoasuresistenciahmica.Paraevitarelsobrecalentamiento,estecalordebeserdisipadoalambienteatravsdelestator.Elbobinadodelrotorsinhierroeslapartemscrtica.Lamximatemperaturanodebeexcedersenisiquieradurantecortosperiodos.Losmotoresdeescobillasdegrafitosuelentenercorrientesmselevadas.Lamximatemperaturadelrotoresde125C(enalgunoscasoshasta155C).Losmotoresconconmutacindemetalpreciososolamenteadmitenbajascorrientes,detalmaneraquelatempe-raturadelrotornoexcedelos85C.
Lastemperaturassereducennotablementeencondicionesfavorables,comounabuenacirculacindeaireocondisipadoresdecalor.
ON MotorenfuncionamientoOFF MotorparadoION Mx.corrientedepicoIN Mx.corrienteencontinuo(lnea6)tON Tiempoenfuncionam.[s],debeserinferiortw(lnea19)T DuracindelciclodetrabajotON + tOFF [s] tON% tiempodefuncionam.comoporcentajedeltiempo
totalT.ElmotorpuedesersobrecargadoporlarelacinION/IcontduranteX%deltotalCiclodeTrabajo
Ion = IN TtON
10 20 40
20000
15000
10000
5000
0.4 0.8 1.2
25000
30 60
Rango defuncionamientopermanente
Mximopar en continuo
Velocidad permisible
Rango defuncionamientointermitente
Par [mNm]Corriente [A]
Velocidad [rpm]
1204_Technology.indd38 11.07.201209:54:21
39
maxon m
otor
Edicindejuliode2012/Sujetoamodificaciones Informacin clave sobre
n n
M
n n
M
maxon flat motor
LosmotoresECmultipolares,comolosmotoresplanosmaxon,necesitanunmayornmerodepasosdeconmutacinporcadavueltademotor(6xnmerodeparesdepolos).Tienenunainductanciamayorquelosmo-toresderotorsinhierrodebidoalosbobinadosdelestator.Avelocidadesmuyelevadas,elcortoespaciodetiempodeconmutacinnopermitequelacorrientealcancesuvalormximo,porloqueelparproducidoeslige-ramenteinferior.Adems,lacorrienteesdevueltaalaetapadepotencia.Comoresultado,elcomportamientodelmotorsedesvadelacurvaidealydependedelvoltajeylavelocidad.Elaparenteincrementoenlacurvaesmselevadoavelocidadesaltas.Enfuncionamientoencontinuo,losmotoresplanosalcanzanunacurvaqueseaproximaaunalnearectaentreelpuntodevelocidadenvacoyelpuntodetrabajonominal.Esteincrementodelgradienteseaproximaa:
n
M
n0 nN MN
Aceleracin
Deacuerdoconlaslimitacioneselctricas(alimentacin,sistemadecontrol,batera),sediferenciandostiposdearranque: Arranqueavoltajeconstante(sinlmitedecorriente) Arranqueconcorrienteconstante(conlmitedecorriente)
Arranque con corriente constanteUnlmitedecorrientesignificaqueelmotornoslopuedeentregarunparlimitado.Eneldiagramavelocidad-parlavelocidadaumentasiguiendounalneaverticalconunparconstante.Laaceleracintambinesconstante,simplificandoelclculo.Elarranqueconcorrienteconstanteestpicodelosservoamplificadores,dondeelpardeaceleracinestlimitadoporelpicodecorrientedelamplificador.
Aceleracinangulara(enrad/s2)acorrienteconstanteI,oparcons-tanteMconunacargaadicionaldeinerciaJL:
kM IJR + JL
MJR + JL
= 104 = 104
TiempodegiroDt(enms)concambiodevelocidadDnyunacargaadicionaldeinerciaJL:
300JR + JLkM I
t = n
(unidadesdeacuerdoconelcatlogo)
Arranque con voltaje constante en los terminalesEnestecaso,lavelocidadaumentadesdeelpuntodepardearran-quealolargodelacurvavelocidad-par.Elparmselevadoyporlotantolamayoraceleracin,tienenlugarenlaarrancada.Cuantomsrpidogiraelmotor,menoreslaaceleracin.Lavelocidadaumentamsdespacio.Estacurvaexponencial,quetiendeahacerseplana,estdescritaconlaconstantemecnicadetiempotm(lnea15delosdatosdelmotor).Despusdeestetiempo,elrotorsincargadelmotorhaalcanzadoel63%delavelocidadenvaco.Aproximadamentedespusdetresvecesestetiempotmelmotorcasihaalcanzadolavelocidadenvaco.
Constantemecnicadetiempotm(enms)delmotorenvaco:JR R
k2Mm = 100
Constantemecnicadetiempotm(enms)conunacargaadicionaldeinerciaJL:
m' = 100 1 +JR R
k2M
JLJR
Mximaaceleracinangularamax(enrad/s2)delmotorenvaco:MHJR
max = 104
Mximaaceleracinangularamax(enrad/s2)conunacargaadicionaldeinerciaJL:
MHJR + JL
max = 104
Tiempodegiro(enms)avoltajeconstantehastallegaralpuntodetrabajo(ML , nL ):
t = m' In
ML + MRMH
1 n0
1 ML + MR
MH n0 nL
1204_Technology.indd39 11.07.201209:54:23
40
maxon m
otor
Informacin clave sobre Edicindejuliode2012/Sujetoamodificaciones
Tolerancias
Hayqueconsiderarlastoleranciasenlaszonascrticas.Lasposiblesdesviacionesmecnicasseencuentranenlosdibujos.Losdatosdelmotorsondatosmedios:eldiagramadealladomuestralosefectosdelastoleranciasenlacurvacaracterstica.Principalmenteestncausadasporlasvariacionesenlafuerzadeloscamposmagnticos,ylasdiferenciasenlaresistenciadelhilodelbobinado.Nodependentantodeinfluenciasmecnicas.Estasdiferenciassehanexageradoysimplificadoeneldiagra-maparaunamejorvisualizacin.Enelrangodefuncionamientodelmotorlatoleranciaesmenorqueenlospuntosextremosdepardearranqueyvelocidadenvaco.Alolargodelacurvadelmotorlastoleranciassonmenoresqueenlosextremoslamisma(pardearranqueyfuncionamientoenvaco).
CalibracinLastoleranciassepuedenlimitarmedianteunadesmagnetizacincon-troladadelosmotores.Losdatosdelmotorsepuedenespecificarconprecisinentre1y3%.Noobstantelascaracteristicasdelmotorestarnenlaparteinferiordelrangonormaldetolerancia.
Comportamiento trmico
Enunmodelosimplificado,lasprdidasdepotenciaporelefectoJoulePJ enelbobinadodeterminanelcalentamientodelmotor.Laenergatrmicaproducidadebeserevacuadaatravsdelassuperficiesdelbobinadoylacarcasadelmotor.ElincrementoDTWdelatemperaturadelbobinadoTWconrespectoalatemperaturaambienteTUsurgedelasprdidasdecalorPJylasresistenciastrmicasRth1yRth2.
TW TU = DTW = (Rth1 + Rth2) PJ
AqularesistenciatrmicaRth1serefierealatransferenciadecalorentreelbobinadoyelestator(imnyretornomagntico),mientrasqueRth2describelatransferenciadecalordelacarcasadelmotoralambiente.MontandoelmotorenunchasisquedisipecalorsereducenotablementeelvalordelaresistenciatrmicaRth2.Losvaloresespecificadosenlasho-jasdedatosdelmotorparalasresistenciastrmicasylamximacorrienteencontinuohansidodeterminadosenunaseriedetests,enloscualeselmotorestabamontadoporunextremoenunaplacadeplsticovertical.LanuevaresistenciatrmicaRth2quetienelugarenunaaplicacinenparticu-lardebeserdeterminadausandolainstalacinoriginalyreproduciendolascondicionesambientales.
Elcalorsepropagaadiferentesvelocidadesparaelbobinadoyelestatordebidoaladiferenciademasas.Cuandoseconectalacorriente,elbobinadosecalientaprimero(conlasconstantesdetiempoquevaranentrealgunossegundosymediominuto).Elestatorreaccionamuchomslento,conconstantesentre1y30minutosdependiendodeltamaodelmotor.Elequilibriodecalorsealcanzagradualmente.LadiferenciaentrelatemperaturadelbobinadoylatemperaturaambientesepuededeterminarconelvalordelacorrienteI(oenfuncionamientointermitenteconelvalorefectivodelacorrienteI = IRMS ).
(Rth1 + Rth2) R I2
1 Cu (Rth1 + Rth2) R I2TW =
LaresistenciaelctricaRdebeseraplicadaalatemperaturaambienteactual.
Influencia de la temperaturaElincrementodelatemperaturadelmotorafectaalaresistenciadelbobinadoyalascaractersticasmagnticas.
Laresistenciadelbobinadoaumentalinealmentesiguiendoelcoefi-cientetrmicoderesistenciadelcobre(Cu = 0.0039):
RT = R25 (1 + Cu (T 25C ))
Ejemplo:Unatemperaturadebobinadode75Cprovocaunincremen-todelaresistenciadelbobinadodemsdel20%.
Elimnsedebiltaconlastemperaturasaltas.Laprdidaoscilaentreun1yel10%dependiendodelmaterialmagntico75C.
Laconsecuenciamsimportantedelaumentodetemperaturadelmotoresquelacurvadevelocidadsevuelvemsempinada,locualreduceelpardearranque.Elnuevopardearranquesepuedecalcu-larenunaprimeraaproximacinconelvoltajeyelincrementodelaresistenciadelbobinado.
URT
MHT = kM IAT = kM
1204_Technology.indd40 11.07.201209:54:24
41
maxon m
otor
Edicindejuliode2012/Sujetoamodificaciones Informacin clave sobre
n
M
Seleccin del motor
Losrequerimientosdelaaplicacindebenserdefinidosantesdeprocederaseleccionarelmotor. Conquparyaquvelocidadhademoverselacarga? Cuntoduranlosintervalosindividualesdecarga? Quaceleracioneshandeproducirse? Quvalorestienenlasinerciasdelasmasas?Amenudoelaccionamientoesindirecto,estosignificaqueexisteunatransformacinmecnicadelapotenciadesalidadelmotorusandocorreas,engranajes,tornillossinfinysimilares.Porlotanto,losparme-trosdelaccionamientosetienenqueconsiderarenelejedelmotor.Losconsiguientespasosparalaseleccindelreductorsedescribenmsadelante.
Ademshayquecomprobarlosrequisitosdelaalimentacin. Culesmximovoltajedisponibleenlosterminalesdelmotor? Qulimitacioneshayencuantoalacorriente?Lacorrienteyelvoltajedemotoresalimentadosconbateriasoenergasolarsonlimitadas.Enelcasodecontrolatravsdeunservoamplificador,lamximacorrientedelmismoesamenudounlmiteimportante.
Seleccin de los tipos de motorLaeleccindelostiposdemotorserealizaenfuncindelparrequerido.PorunladohayqueconsiderarelpicodeparMmax,yporelotroelparefectivo(medio)MRMS.Elfuncionamientopermanentesecaracterizaporunnicopuntodetrabajoodecarga(ML, nL).Lostiposdemotorencuestindebentenerunparnominal(=mx.parencontinuo)MNmayorqueelpardefuncionamientoMB.
MN > MB
Enfuncionamientocclico,comoaplicacionesdearranqueyparada,elparnominaldelmotordebesermayorqueelparefectivodelacarga(mediacuadrtica).Estoevitaqueelmotorsufraunsobrecalentamiento.
MN > MRMS
Elpardearranquedelmotorseleccionadonormalmentedeberasersuperioralparmximodelacarga.
MH > Mmax
Seleccin del bobinado: requerimientos elctricosAlahoradeelegirelbobinado,hayqueasegurarsedequeelvoltajeaplicadodirectamentealmotoressuficienteparaalcanzarlavelocidaddeseadaentodoslospuntosdefuncionamiento.
Funcionamiento sin regulacinEnaplicacionesconslounpuntodetrabajo,stoamenudoseconsigueconunvoltajefijoU.Unbobinadoserepresentaconunalneavelocidad-parquepasaatravsdelospuntosdefuncionamientoalvoltajeespe-cificado.Elclculosebasaenelhechodequetodoslosmotoresdeunmismotipopresentanprcticamentelamismacurvavelocidad-par.Lavelocidadenvacorequeridan0, theor,secalculaapartirdelpuntodetrabajo(nL, ML).
nMn0, theor = nL + ML
EstavelocidadenvacodeseadadebealcanzarseconlatensindisponibleU,quedefinelaconstantedevelocidadkn, theorrequerida.
n0, theorUkn, theor =
Aquellosbobinadoscuyaknestlomsprximaposibleakn, theorseaproxi-marnmejoralpuntodefuncionamientoconelvoltajeespecificado.Unaconstantedevelocidadalgomsgrandeproduceunavelocidadligeramen-temsaltayviceversa.Lavariacindelvoltajeajustalavelocidadalvalorrequerido,unprincipioquetambinusanlosservoamplificadores.
LacorrientedelmotorIsecalculaapartirdelaconstantedeparkMdelbobinadoelegidoydelpardelacargaML.
MLkM
I =
Consejos para la evaluacin de los requerimientos:Amenudolospuntosdetrabajo(especialmenteelpar)noseconocenosondifcilesdecalcular.Enestoscasospuedeaccionarsudispositi-voconunmotordemedidaqueestsobredimensionadoentamaoypotencia.Varelatensinhastaqueconsigaalcanzarelpuntodetra-bajodeseado.Entoncesmidaelvoltajeylacorriente.Conestosdatosyelnmerodereferenciadelmotordemedida,nuestrosingenieroscalcularnelmotorquemejorseajusteasuaplicacin.
Otroscriteriosdeoptimizacinson,porejemplo: Masaaacelerar(tipo,inerciadelamasa) Tipodefuncionamiento(continuo,intermitente,reversible) Condicionesambientales(temperatura,humedad,tipodeanclajeyderefrigeracin)
Fuentedealimentacin,bateras
Alahoradeelegireltipodemotor,hayunaseriedefactoresquetam-binjueganunpapelimportante: Culeslalongitudmximaquedebetenerelaccionamiento(motor),incluidoelreductoryencoder?
Qudimetro? Culeslavidatildelmotorqueseesperayqutipodesistemadeconmutacindeberausarse?
Escobillasdemetalpreciosoparafuncionamientocontinuoconbajascorrientes(recomendacinparaunalargavidatil:Utilicehastael50%deIcont.)
Escobillasdegrafitoparafuncionamientoconaltascorrientesencontinuo(recomendacinparaunalargavidatil:Utiliceentreel50y75%deIcont.)yfrecuentesarranques/paradaseinversionesdegiro.
Conmutacinelectrnicaparalasvelocidadesmsaltasylavidatilmslarga.
Quvalortienenlasfuerzasaxialesyradialeseneleje?,sonnece-sariosrodamientosabolasoserasuficienteconcojinetessinteriza-dos,mseconmicos?
1204_Technology.indd41 11.07.201209:54:25
42
maxon m
otor
Informacin clave sobre Edicindejuliode2012/Sujetoamodificaciones
n
0.5 2.5 3.0 3.7
Ejemplo del clculo de un motorreductor
Unmotordeberefectuarunmovimientocclicoconformealsiguientediagramadevelocidaddegiro.
LainerciadelacargaadesplazarJLesde140000gcm2.Elpardefriccinconstanteesdeunos300mNm.Paraaccionarelmotordebeemplearseelservoamplificador4-QdemaxonESCON36/2.Lafuentedealimentacinsuministraunmximode3Ay24V.
Clculo de los datos de la cargaElparnecesarioparalaaceleracinyfrenado,secalculadelasiguientemanera(seomitenlainerciadelmotoryreductor).
M = JL 30
nt
= 0.014 30600.5 = 0.176 Nm = 176 mNm
Juntoconelpardefriccin,lossiguientesparessonnecesariosparalasdiferentesfasesdelmovimiento: Fasedeaceleracin (duracin0.5s) 476mNm Velocidadconstante (duracin2s) 300mNm Frenado(frenadoconunpardefriccinde300mNm) (duracin0.5s) 124mNm
Motorparado (duracin0.7s) 0mNm
Lapuntadeparocurredurantelaaceleracin.ElparmedioRMSdelciclodetrabajocompletoes
t1 M2
1 + t2 M2
2 + t3 M2
3 + t4 M2
4MRMS = ttot
0.5 4762 + 2 3002 + 0.5 1242 + 0.7 0=
3.7 285 mNm
Lavelocidadmxima(60rpm)sealcanzaalfinaldelprocesodeaceleracinconelmximopar(463mNm).Porlotanto,elpicodepotenciamecnicaes.
Pmax = Mmax 30 nmax = 0.476
30 60 3 W
ServoaccionamientosEntodoslosciclos,lospuntosdetrabajodebenestarpordebajodelacurvaalmximovoltajeUmax.Matemticamenteestosignificaqueentodoslospuntosdetrabajo(nL, ML)sedebeaplicarlosiguiente:
nMkn Umax = n0 > nL + ML
Cuandoseusaunservoamplificador,seproduceunacadadetensinenlaetapadepotencia,porloqueelvoltajeaplicadoalmotoresmenor.EstodebetenerseencuentacuandosedeterminalatensindealimentacinUmax.Serecomiendaguardarunareservadel20%,parapoderhacerunaregulacincorrectainclusoenelcasodeunatoleranciadesfavorabledelmotor,lacarga,amplificadoryfuentedealimentacin.Finalmente,lacorrientemediaylospicosdecorrientesecalculanasegurandosedequeelservoamplificadorusadopuedeentregardichascorrientes.Enalgunoscasos,sedebeseleccionarunbobinadodemayorresistenciaparaquelascorrientesseanmenores.Porlotanto,elvoltajerequeridoenestecasosermselevado.
Variables fsicas y sus unidades SI Catlogoi Reduccin* I Corrientedelmotor A A,mAIA Corrientedearranque* A A,mAI0 Corrienteenvaco* A mAIRMS RMS-Corrientemedia A A,mAIN Corrientenominal* A A,mAJR Momentodeinerciadelrotor* kgm2 gcm2JL Momentodeinerciadelacarga kgm2 gcm2kM Constantedepar* Nm/A mNm/Akn Constantedevelocidad* min-1/VM Par(motor) Nm mNmML Pardecarga Nm mNmMH Pardearranque* Nm mNmMmot Pardelmotor Nm mNmMR Pardefriccin Nm mNmMRMS Parefectivo(medio)RMS Nm mNmMN Parnominal* Nm mNmMN,G Mx.Pardelreductor* Nm Nmn Velocidad rpmnL Velocidaddegirodetrabajodelacarga rpmnmax Mxvelocidaddelmotor* rpmnmax,G Mx.velocidaddelreductor* rpmnmot Velocidaddelmotor rpmn0 Velocidadenvaco* rpmPel Potenciaelctrica W WPJ PrdidasporefectoJoule W WPmech Potenciamecnica W WR Resistenciaenbornes W WR25 Resistenciaa25C* W WRT ResistenciaaT W WRth1 Resistenciatrmicabobinado/carcasa* K/WRth2 Resistenciatrmicacarcasa/ambiente* K/Wt Tiempo s sT Temperatura K CTmax Mx.Temperaturadelrotor* K CTU Temperaturaambiente K CTW Temperaturadelrotor K CU Tensindelmotor V VUind Tensininducida(FEM) V VUmax Mx.Tensindealimentacin V VUN Tensinnominal* V VaCu CoeficientederesistenciadelCu =0.0039amax Mx.aceleracinangular rad/s2Dn/DM Relacinvelocidad/par* rpm/mNmDTW Diferenciadetemp.bobinado/ambiente K KDt Tiempodeaceleracin s msh Rendimiento(motor) %hG Rendimiento(reductor)* %hmax Rendimientomximo* %tm Constantemecnicadetiempo* s mstS Const.detiempotrmicadelestator* s stW Const.detiempotrmicadelbobinado* s s(*indicadoenlosdatosdelmotorureductor)
1204_Technology.indd42 11.07.201209:54:26
43
maxon m
otor
Edicindejuliode2012/Sujetoamodificaciones Informacin clave sobre
n[rpm]
9.6 mNm, 5040 rpm
Seleccin del reductorSenecesitaunreductorconunparmximoencontinuodealmenos0.28Nmyunparintermitentedeporlomenos0.47Nm.Esterequerimien-tosealcanzaporejemplo,conunareductoraplanetariade22mmdedimetro(versinmetalGB22A).Lamx.velocidaddeentradarecomendadade6000rpmpermiteunareduccinmximade
imax = nmax, G
nB= 100:1= 600060
Seleccionamoselreductorde3etapasconlareduccininmediatamenteinfe-rior,enestecaso84:1(programastock).Laeficienciamximaesdel59%.
Seleccin del tipo de motorLavelocidadyelparsecalculanenelejedelmotor
nmot = i nL = 84 60 = 5040 rpm
MRMSMmot, RMS = i =285
84 0.59 5.8 mNm
MmaxMmot, max = i =476
84 0.59 9.6 mNm
Losposiblesmotoresque,segnelsistemamodularmaxon,semontanconlasreductorasseleccionadassemuestranenla tabla adjunta.LatablacontienesolamentemotoresCCconconmutacindegrafito,quesonmsaptosparaelfuncionamientoconarranque-parada,ascomomotoresECsinescobillas.
LaseleccinrecaesobreunA-max22,6W,queentregaunparencontinuosuficiente.Elmotordebetenerunareservadeparparapoderfun-cionarinclusoenelcasoderendimientosdesfavorablesenlareduccin.Elmotorpuedecubrirfcilmentelosrequerimientosadicionalesdepardurantelaaceleracin.Elpicodeparnoalcanzanidosveceselvalordelmximoparencontinuodelmotor.
Seleccin del bobinadoElmotortipoA-max22,6W,tieneungradientevelocidad-pardeaproxi-madamente450rpm/mNm.Sinembargo,hadetenerseencuentaquelos2bobinadosdemenorresistenciatienenungradientemsinclinado.Lavelocidadenvacodeseadasecalculadelasiguientemanera:
nn0, theor = nmot + M Mmax = 5040 + 450 9.6 = 9360 rpm
Elpuntodetrabajoextremo(mx.velocidadymx.par)deberadetomar-seenconsideracin,puestoquelalneadevelocidad/pardelbobinadodebeestarporencimadetodoslospuntosdetrabajodeldiagramavelo-cidad/par.EstavelocidadenvacorequeridadeberaseralcanzadaconelmximovoltajeU=24Vsuministradoporelcontrol(ESCON36/2).Estodefinelamnimaconstantedevelocidadrequeridakn, theordelmotor.
n0, theorkn, theor = U = = 390936024
rpmV
Siguiendolosclculos,laeleccinrecaeenelmotor110163,queconunavelocidaddegiroconstantede558min-1/Vpresentaunareservaderegulacindevelocidaddel20%.Deestamanera,lastoleranciaspocofa-vorablesnoconstituyenunproblema.Elvalormsaltodelaconstantedevelocidaddelbobinadorespectoalvalorcalculado,indicaqueelmotorgiraa24Vmsrpidodelorequerido,loquesepuedecompensarmedianteelregulador.Estemotorcuentatambinconunejetraseroparaelmontajedeunencoder.Laconstantedevelocidaddegirodeestebobinadoesde17,1mNm/A.Elparmximosecorrespondeasconunacorrientepicode:
MmaxImax = kM+ I0 = + 0.029 = 0.6 A
9.617.1
Estevalordecorrienteesinferioralacorrientemxima(4A)delreguladorydelafuentedealimentacin(3A).
Seencuentraasunmotorreductorquerenelosrequisitos(paryveloci-daddegiro)yquepuedehacersefuncionarconelreguladorprevisto.
Motor MN ComentariosA-max22,6W 6.9mNm buenoA-max19,2.5W 3.8mNm demasiadodbilRE-max21,6W 6.8mNm buenoEC16,30W 8.5mNm buenoEC16,60W 17mNm demasiadofuerteEC20flat,3W 3-4mNm demasiadodbilEC20flat,5W 7.5mNm buenoEC20flat,5W,iE. 7.5mNm bueno,posiblealternativacon
reguladordevelocidadintegra-do,noseprecisasistemadecontrolESCON
1204_Technology.indd43 11.07.201209:54:29
GermanEnglishSpain