-
70. BHT - FREIBERGER UNIVERSITÄTSFORUM 2019 KOLLOQUIUM 3
„KOLLEGE ROBOTER (?) – DIGITALISIERUNG IN DER BOHRTECHNIK“ AM 6.
UND 7. JUNI 2019
Lösch, Robert (TU Bergakademie Freiberg)
“DESIGN OF AN AUTONOMOUS ROBOT FOR MAPPING, NAVIGATION, AND
MANIPULATION IN UNDERGROUND MINES”
Untertägige Bergwerke sind gefährliche Arbeitsumgebungen und
daher könnten Roboter da-bei helfen weniger Menschen dieser Gefahr
auszusetzen. Konventionelle Roboter, Sensoren und Software
funktionieren aufgrund der erschwerten Umgebungsbedingungen
untertage oft nicht zuverlässig. Die Präsentation analysiert kurz
diese Umgebungsbedingungen und die dar-aus resultierenden
Anforderungen und zeigt schließlich ein Roboterdesign, welches
untertage in der Lage ist autonom zu navigieren und Objekte mit
einem Arm zu manipulieren. Die Basis bildet eine robuste Plattform
mit elektrischen Vier-Rad-All-Rad-Antrieb. Der Roboter ist mit
Farb- und Tiefenkameras, Beleuchtung, Laserscannern, einer
inertialen Messeinheit und ei-nem robotischem Arm ausgerüstet.
Zahlreiche Videos und Bilder veranschaulichen die Mani-pulations-
und Navigationsfähigkeiten des Roboters. Es werden zwei
verschiedene Navigati-onsansätze vorgestellt und abschließend auf
die Aufgabe des Roboters im Projekt ARIDuA eingegangen.
-
Design of an Autonomous Robot for Mapping, Navigation,
and Manipulation in Underground Mines
M.Sc. Robert Lösch, Institute of Computer Science, TU
Bergakademie Freiberg
-
2
Autonome Roboter und Internet der Dinge in untertägigen
Anlagen
ARIDuA
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
1. Environmental Conditions and Requirements
2. Research Robot Julius
3. Manipulation Tasks
4. Robot Navigation
5. Future Work
3
Design of an Autonomous Robot for Mapping, Navigation, and
Manipulation in Underground Mines
Table of Contents
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
4TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
5
Design of an Autonomous Robot for Mapping, Navigation, and
Manipulation in Underground Mines
• Darkness• High Humidity• Spaciousness• Manipulation of SSBs•
No GNSSs• Dimensional Constraints
• Light + Camera• Depth cameras• Protection against water
ingress• High battery capacity• Manipulator
Conditions Requirements Realization
1 Environmental Conditions and Requirements
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
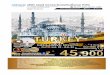
2D LIDAR
Lighting
Control Panel
RobotiqGripper
UR5
RGB-D Camera
Computer
3D LIDAR
6
-
• Innok Robotik Heros 444 FG
• 138 kg, 0.65 × 1.42 × 1.3 m (w×l×h)
• Electric 4-wheel differential drive
• IP67 upgrade
• 4 – 6 h operating time
• 4 LED spotlights
• 2 PCs7
2.1 Robot Platform
2 Research Robot Julius
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
8
2.2 Optical Sensors
2 Research Robot Julius
Name Range[m]FOV[°]
(Angular)Resolution
[°] or [px x px]
Depthaccuracy
[cm]Rate
Datarate
[MB/s]
Connec-tion
MicrosoftKinect One
(ToF)0.5 – 4.5 70 H60 V
1920×1080 RGB512×424 D ±1.8 30 fps 190 USB 3.0
Asus XtionPro Live 0.8 – 3.5
58 H45 V
1280×1024 RGB640×480 D ±0.2 30 fps 130 USB 2.0
Velodyne PuckVLP-16 0.5 – 300
360 H30 V
0.1 – 0.4 H2.0 V ±3.0 10 Hz 8.5
GigabitEthernet
SICK LMS 111 0.5 – 20 270 V 0.5 ±0.3 50 Hz 0.2 Ethernet
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
9
2.2 Optical Sensors
2 Research Robot Julius
Name Range[m]FOV[°]
(Angular)Resolution
[°] or [px x px]
Depthaccuracy
[cm]Rate
Datarate
[MB/s]Connection
MicrosoftKinect One (ToF) 0.5 – 4.5
70 H60 V
1920×1080 RGB512×424 D ±1.8 30 fps 190 USB 3.0
Asus XtionPro Live 0.8 – 3.5
58 H45 V
1280×1024 RGB640×480 D ±0.2 30 fps 130 USB 2.0
Velodyne PuckVLP-16 0.5 – 300
360 H30 V
0.1 – 0.4 H2.0 V ±3.0 10 Hz 8.5
GigabitEthernet
SICK LMS 111 0.5 – 20 270 V 0.5 ±0.3 50 Hz 0.2 Ethernet
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
Manipulation unit with:
• Universal Robots UR5
• Robotiq 3 Finger Gripper
• (Asus Xtion Pro Live)
• Rubber sleeve
• (Rubber) glove
10
2.3 Manipulators
2 Research Robot Julius
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
• 2 PCs: i7 (4 cores), 2.7 GHz, 16 GB RAM, 256 GB SSD• Time
synchronized• Ubuntu 16.04, ROS Kinetic
11
2.4 Computation
2 Research Robot Julius
• Main• Basic
functions
• Utility• High
computational processes
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
• Battery:• Li-ion (NMC), 48 V, 20 Ah capacity
• Possible to change battery on site within seconds
(minutes)
12
2.5 Power supply
2 Research Robot Julius
underground 4 h
office6 h
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
• SSDs store maps and sensor data
• Sensors easily exchangeable
• Second, redundant, remote controller safeguards against
failures
• WiFi and Bluetooth(-like) communication possible
• Communication limited to line-of-sight
13
2.6 Miscellaneous
2 Research Robot Julius
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
14
2.7 Simulation
2 Research Robot Julius
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
15
2.7 Simulation
2 Research Robot Julius
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
16
2.7 Simulation
2 Research Robot Julius
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
Target-PoseTeleoperation allows theminer to pick the targetpose
for the sensor box
Grasped Sensor Box Box is autono-mously picked upand ready to be
setinto the mine
Water Sample Station
autonomous waterprobe extractionvia static routine
3 Manipulation Tasks
17TU Bergakademie Freiberg | ESF junior researcher group ARIDuA
| Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter
und Internet der Dinge in untertägigen Anlagen |
aridua.tu-freiberg.de | Robert Lösch | BHT | 06.06.2019
-
18
Localization• Via SLAM• Afterwards
Obstacle Avoidance• Dynamic Objects• Real-time
Mapping•Via SLAM•Beforehand
Path Planning•Global•Local
4 Robot Navigation
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
4. Robot Navigation
1. Absolute Navigation: Waypoint Navigation
2. Reactive Navigation
3. Mapping with IoT
19
Design of an Autonomous Robot for Mapping, Navigation, and
Manipulation in Underground Mines
Table of contents
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
20
4 Robot Navigation - Absolute Navigation
Mapping• RTAB-Map
(Real-Time Appearance Based)• Graph based• Graph optimization by
loop
closure detection• Occupancy Grid Map
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
21
4 Robot Navigation - Absolute Navigation
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
22
4 Robot Navigation - Absolute Navigation
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
https://youtu.be/rgeveCOBxzk
-
23
90°-90°
-60°
-30°30°
60°
Velodyne Pointcloud
Pointcloud compressed to Laser Scan
Distance Measures
Steering angle = 𝑎 σ𝑖=16 𝛼𝑖𝑟𝑖 w/ 𝛼 = angle, 𝑟 = distance
𝑎 unknown, but 𝑎 = 𝑓 ሶ𝑥
4 Robot Navigation - Reactive Navigation
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
24
4 Robot Navigation - Reactive Navigation
Separately Driving And Mapping
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
25
Mapping
4 Robot Navigation - Mapping with IoT
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
26
Error Minimization
4 Robot Navigation - Mapping with IoT
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
Future Work?
27
5 Future Work
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
28
Lösch, Robert, et al. "Design of an Autonomous Robot forMapping,
Navigation, and Manipulation in UndergroundMines." 2018 IEEE/RSJ
International Conference onIntelligent Robots and Systems (IROS).
IEEE, 2018.
TU Bergakademie Freiberg | ESF junior researcher group ARIDuA |
Project leader: Prof. Dr.-Ing. Helmut Mischo | Autonome Roboter und
Internet der Dinge in untertägigen Anlagen | aridua.tu-freiberg.de
| Robert Lösch | BHT | 06.06.2019
-
Since 1. July 2017, this junior research group investigating
„Autonomous Robots and Internet of Things in Underground
Facilities“ led by Prof. Dr. Ing. Helmut Mischo, Institute for
Mining of Raw Materials and Special Methods Underground at TU
BergakademieFreiberg, is funded by the state of Saxony with funds
of the European Social Fund (ESF).
Connect with us
.com/in/loeschrobert
tu-freiberg.de/en/aridua
[email protected]