Embed Size (px)
Citation preview

Didaktisch integratives Labor für Automatisierungs-Regelungs- und Steuerungstechnik (DILARS)
www.dhbw-mannheim.de
ProjektübersichtFred Ackermann, Prof. Dr.-Ing. Michael Voits
DILARS - Projekt
In diesem Projekt soll die bisherige Laboreinrichtung auf dem Campus Eppelheim durch digitale Komponenten der Automatisierungstechnik, Steuerungstechnik, hochmodernen permanenterregten Synchronmaschinen (PSM) mit feldorientierter Regelung, Robotersystemen, Motion Control und leistungsfähigen Software-Tools zur Projektierung mit der Möglichkeit der Anbindung an unterschiedliche Bussysteme (Profibus,INTERBUS, ASI, SERCOS ...) ergänzt und erweitertet werden.
Eine integrative Leittechnik, zum Aufbau einer komplette Hierarchie der Automatisierung, von der Feldebene (Sensoren, Aktoren, Antriebe usw.), über die Regelungs- und Steuerungsebene (SPS, Automatisierungsgeräte usw.) bis zur Bedienebene (Leitstand usw.) ist weiterhin notwendig. Mit der Möglichkeit einer Einbindung in das Intranet wird ein neues didaktisches Hilfsmittel für Vorlesungen, Seminare und Gruppenarbeiten geschaffen. Hierbei ist auch daran gedacht, die bisherigen CAD-Stationen (Raum E47 + E51) mit einzubeziehen.
Mit Hilfe des oben dargestellten kompletten Laborkonzeptes ist es möglich, den späteren beruflichen Anforderungen unserer Studierenden im Hinblick der wachsenden Automatisierungsgrade von Maschinen, Anlagen und Prozessen, in der Ausbildung mit der Verbindung von Theorie und Praxis, gerecht zu w erden.
Beantrag: 250.000 € Bewilligt: 200.000 €
2
Projektantrag 03/2014
DILARS - Projekt
3
Ext. AktionsplätzeExt. Aktionsplätze
FestoFesto
FestoFesto
Fes
toF
esto
Fes
toF
esto
Fes
toF
esto
Fes
toF
esto
Roboteranlage –Produktionsanlage
Ext. AktionsplätzeExt. Aktionsplätze
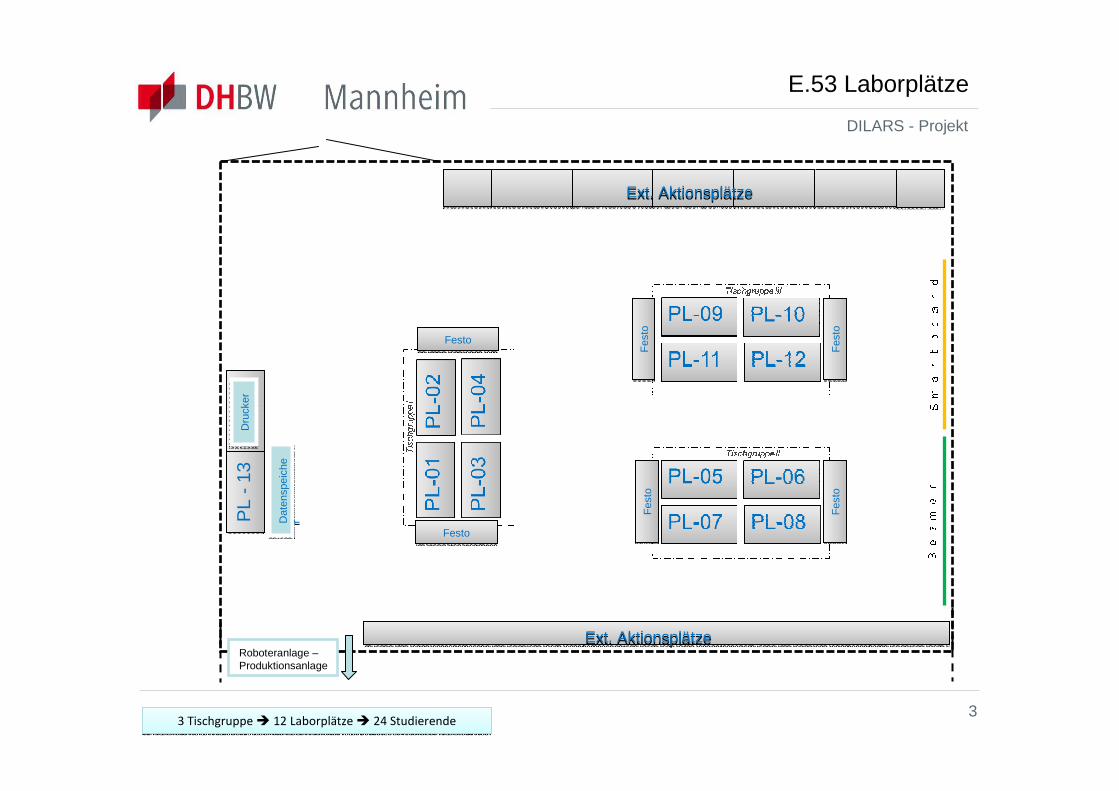
E.53 Laborplätze
PL
-13
PL
-13
Dat
ensp
eich
erD
aten
spei
che
r
Dru
cker
Dru
cker
3 Tischgruppe � 12 Laborplätze � 24 Studierende3 Tischgruppe � 12 Laborplätze � 24 Studierende

DILARS - Projekt
4
Roboteranlage –Produktionsanlage
Ext. AktionsplätzeExt. Aktionsplätze
Roboterlinie/RobotereinzelplätzeRoboterlinie/Robotereinzelplätze
E.53 Anlagen
Produktionsanlage - FestoProduktionsanlage - Festo
DILARS - Projekt
PL-01PL-01 PL-02PL-02
PL-03PL-03 PL-04PL-04
Tischgruppe I
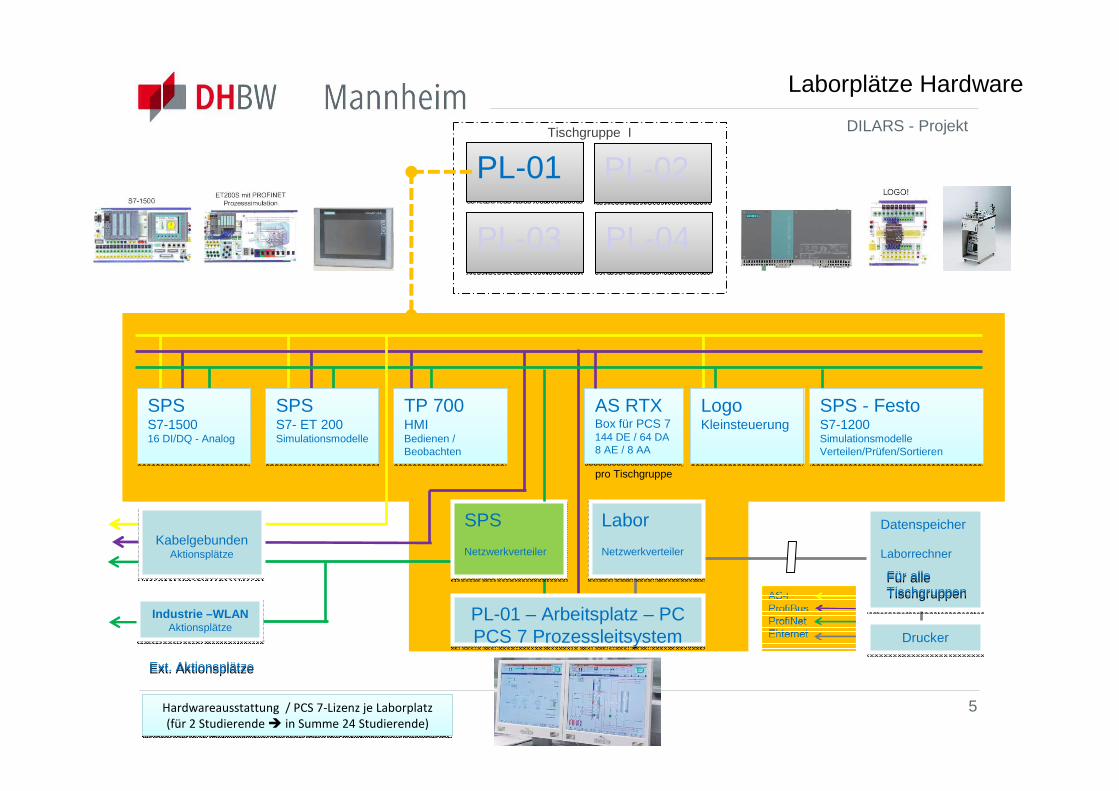
Hardwareausstattung / PCS 7-Lizenz je Laborplatz
(für 2 Studierende � in Summe 24 Studierende)
Hardwareausstattung / PCS 7-Lizenz je Laborplatz
(für 2 Studierende � in Summe 24 Studierende)
5
Laborplätze Hardware
Ext. AktionsplätzeExt. Aktionsplätze
PL-01 – Arbeitsplatz – PCPCS 7 ProzessleitsystemPL-01 – Arbeitsplatz – PCPCS 7 Prozessleitsystem
SPSS7-150016 DI/DQ - Analog
SPSS7-150016 DI/DQ - Analog
SPSS7- ET 200Simulationsmodelle
SPSS7- ET 200Simulationsmodelle
TP 700HMIBedienen / Beobachten
TP 700HMIBedienen / Beobachten
SPS - FestoS7-1200 SimulationsmodelleVerteilen/Prüfen/Sortieren
SPS - FestoS7-1200 SimulationsmodelleVerteilen/Prüfen/Sortieren
SPS
Netzwerkverteiler
SPS
Netzwerkverteiler
Labor
Netzwerkverteiler
Labor
Netzwerkverteiler
LogoKleinsteuerung
LogoKleinsteuerung
Datenspeicher
Laborrechner
Datenspeicher
Laborrechner
Industrie –WLANAktionsplätze
Industrie –WLANAktionsplätze
Für alle TischgruppenFür alle Tischgruppen
DruckerDrucker
KabelgebundenAktionsplätze
KabelgebundenAktionsplätze
AS RTXBox für PCS 7144 DE / 64 DA8 AE / 8 AA
AS RTXBox für PCS 7144 DE / 64 DA8 AE / 8 AA
pro Tischgruppe
DILARS - Projekt
PL-01PL-01 PL-02PL-02
PL-03PL-03 PL-04PL-04
Tischgruppe I
PL-05PL-05 PL-06PL-06
PL-07PL-07 PL-08PL-08
Tischgruppe II
PL-09PL-09 PL-10PL-10
PL-11PL-11 PL-12PL-12
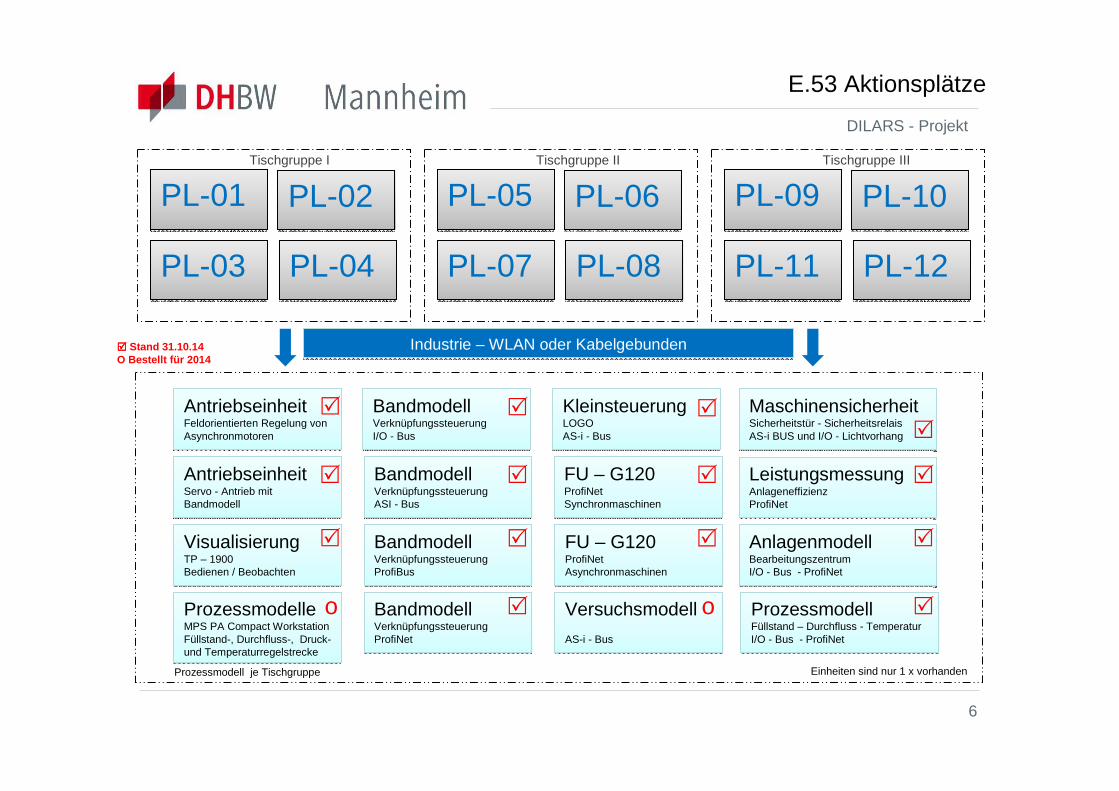
Tischgruppe III
Einheiten sind nur 1 x vorhanden
Industrie – WLAN oder KabelgebundenIndustrie – WLAN oder Kabelgebunden
6
���� Stand 31.10.14O Bestellt für 2014
E.53 Aktionsplätze
Prozessmodell je Tischgruppe
AntriebseinheitFeldorientierten Regelung von Asynchronmotoren
AntriebseinheitFeldorientierten Regelung von Asynchronmotoren
AntriebseinheitServo - Antrieb mit Bandmodell
AntriebseinheitServo - Antrieb mit Bandmodell
BandmodellVerknüpfungssteuerung I/O - Bus
BandmodellVerknüpfungssteuerung I/O - Bus
BandmodellVerknüpfungssteuerung ASI - Bus
BandmodellVerknüpfungssteuerung ASI - Bus
BandmodellVerknüpfungssteuerung ProfiBus
BandmodellVerknüpfungssteuerung ProfiBus
BandmodellVerknüpfungssteuerung ProfiNet
BandmodellVerknüpfungssteuerung ProfiNet
KleinsteuerungLOGO AS-i - Bus
KleinsteuerungLOGO AS-i - Bus
MaschinensicherheitSicherheitstür - SicherheitsrelaisAS-i BUS und I/O - Lichtvorhang
MaschinensicherheitSicherheitstür - SicherheitsrelaisAS-i BUS und I/O - Lichtvorhang
FU – G120ProfiNetSynchronmaschinen
FU – G120ProfiNetSynchronmaschinen
FU – G120ProfiNetAsynchronmaschinen
FU – G120ProfiNetAsynchronmaschinen
LeistungsmessungAnlageneffizienzProfiNet
LeistungsmessungAnlageneffizienzProfiNet
Versuchsmodell
AS-i - Bus
Versuchsmodell
AS-i - Bus
AnlagenmodellBearbeitungszentrumI/O - Bus - ProfiNet
AnlagenmodellBearbeitungszentrumI/O - Bus - ProfiNet
ProzessmodellFüllstand – Durchfluss - TemperaturI/O - Bus - ProfiNet
ProzessmodellFüllstand – Durchfluss - TemperaturI/O - Bus - ProfiNet
VisualisierungTP – 1900 Bedienen / Beobachten
VisualisierungTP – 1900 Bedienen / Beobachten
�
� �
�
�
�
�
�
�
�
�
� �
�
ProzessmodelleMPS PA Compact WorkstationFüllstand-, Durchfluss-, Druck-und Temperaturregelstrecke
ProzessmodelleMPS PA Compact WorkstationFüllstand-, Durchfluss-, Druck-und Temperaturregelstrecke
o o
DILARS - Projekt
7
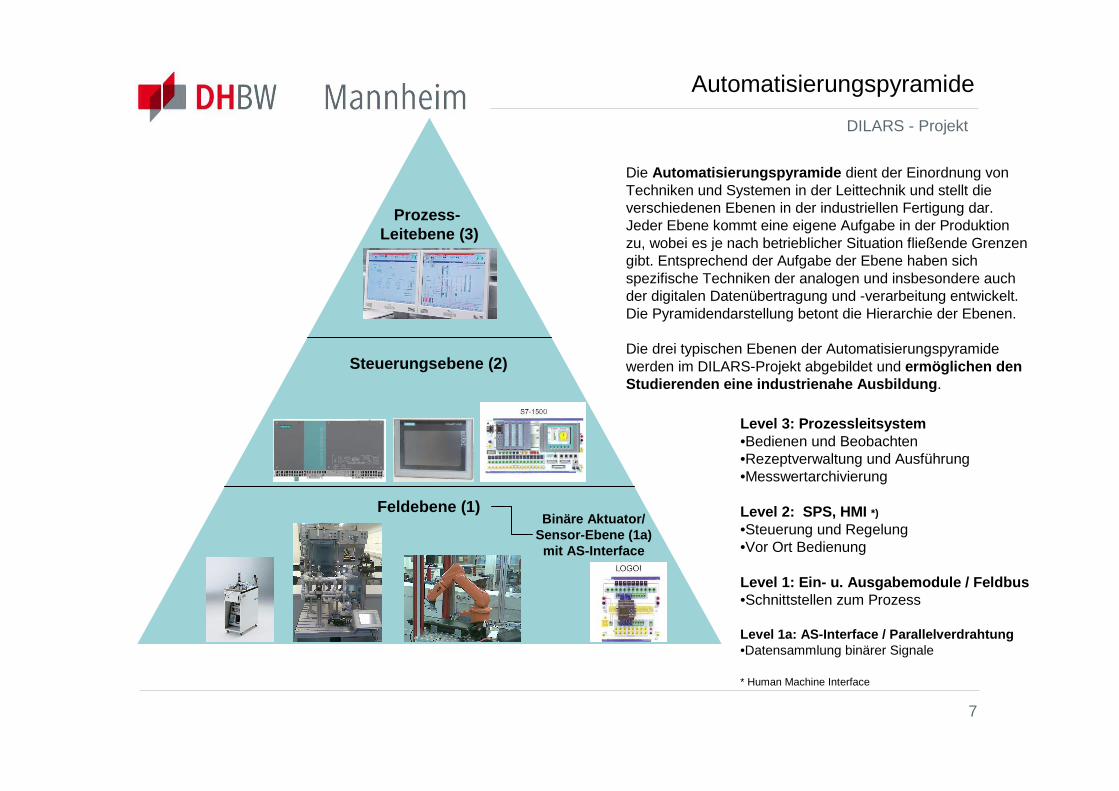
Automatisierungspyramide
Prozess-Leitebene (3)
Die Automatisierungspyramide dient der Einordnung von Techniken und Systemen in der Leittechnik und stellt die verschiedenen Ebenen in der industriellen Fertigung dar. Jeder Ebene kommt eine eigene Aufgabe in der Produktion zu, wobei es je nach betrieblicher Situation fließende Grenzen gibt. Entsprechend der Aufgabe der Ebene haben sich spezifische Techniken der analogen und insbesondere auch der digitalen Datenübertragung und -verarbeitung entwickelt. Die Pyramidendarstellung betont die Hierarchie der Ebenen.
Die drei typischen Ebenen der Automatisierungspyramide werden im DILARS-Projekt abgebildet und ermöglichen den Studierenden eine industrienahe Ausbildung .
Feldebene (1)Binäre Aktuator/
Sensor-Ebene (1a)mit AS-Interface
Steuerungsebene (2)
Level 3: Prozessleitsystem•Bedienen und Beobachten •Rezeptverwaltung und Ausführung•Messwertarchivierung
Level 2: SPS, HMI *)
•Steuerung und Regelung •Vor Ort Bedienung
Level 1: Ein- u. Ausgabemodule / Feldbus•Schnittstellen zum Prozess
Level 1a: AS-Interface / Parallelverdrahtung•Datensammlung binärer Signale
* Human Machine Interface

DILARS - Projekt
Simulationsmodell
SPS - FestoS7-1200 SimulationsmodelleVerteilen/Prüfen/Sortieren
SPS - FestoS7-1200 SimulationsmodelleVerteilen/Prüfen/Sortieren
8

DILARS - Projekt
Prozessmodell
Lerninhalte aus den folgenden Bereichen können bearbeitet werden:
Mechanik– Mechanischer Aufbau einer Station. Verfahrenstechnik – Fließbilder und Dokumentationen lesen und erstellen (Prozessleitsystem)– Verrohren prozesstechnischer Komponenten.Elektrotechnik– Fachgerechtes Verdrahten elektrischer Komponenten. Sensorik– Fachgerechtes Verwenden von Sensoren.– Messen nicht-elektrischer, prozesstechnischer, regelungstechnische Größen.– Feldbustechnik, z. B. PROFIBUS, kennen lernen und parametrieren. Regelungstechnik – Grundlagen der Regelungstechnik.– Erweiterung von Messketten zu geschlossenen Regelkreisen.– Analyse von Regelstrecken.– P-, I-, D-Regler.– Optimierung eines Regelkreises. Regeleinrichtung (Industrieregler)– Konfiguration, Parametrierung und Optimierung eines Industriereglers.Inbetriebnahme – Inbetriebnahme eines Regelkreises.– Inbetriebnahme einer prozesstechnischen Anlage mit Prozessleitsystem.Fehlersuche – Prozesstechnische Anlagen überprüfen, warten und instand halten..– Systematische Fehlersuche an einer prozesstechnischen Anlage.Prozessführung – Prozesse mittels PC mit Prozessleitsystem (PLS) bedienen und beobachten.– Prozesse über PLS optimieren und anpassen.Prozessmodell Füllstand – Durchfluss – Temperatur
I/O - Bus - ProfiNet
Prozessmodell Füllstand – Durchfluss – Temperatur I/O - Bus - ProfiNetProzessmodell Füllstand – Durchfluss – Temperatur I/O - Bus - ProfiNet
Prozessmodell Füllstand – Durchfluss – Temperatur I/O - Bus - ProfiNet
9

DILARS - Projekt
Bandmodell
BandmodellVerknüpfungssteuerung ProfiBus
BandmodellVerknüpfungssteuerung ProfiBus
10

DILARS - Projekt
AntriebseinheitFeldorientierten Regelung von Asynchronmotoren
AntriebseinheitFeldorientierten Regelung von Asynchronmotoren
Antriebseinheit
11
DILARS - Projekt
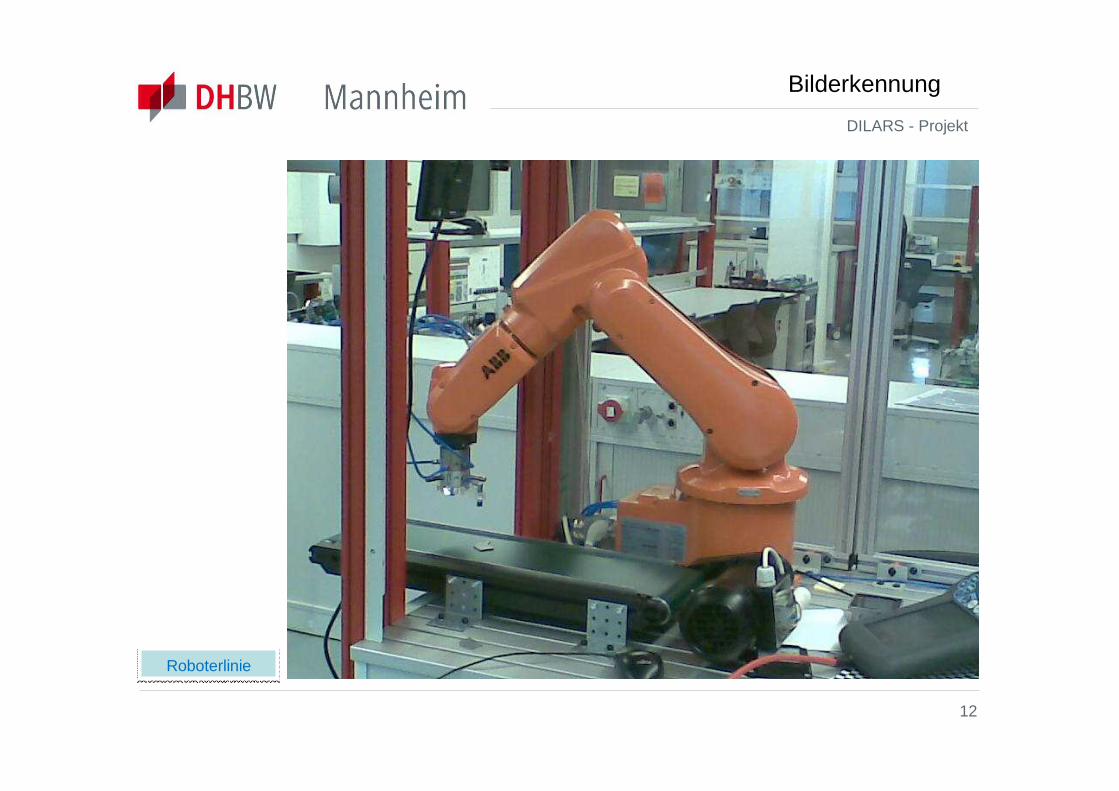
Bilderkennung
12
RoboterlinieRoboterlinie

DILARS - Projekt
Laserschweißen
13
RoboterlinieRoboterlinie

DILARS - Projekt
Gravieren
14
RoboterlinieRoboterlinie
DILARS - Projekt
15
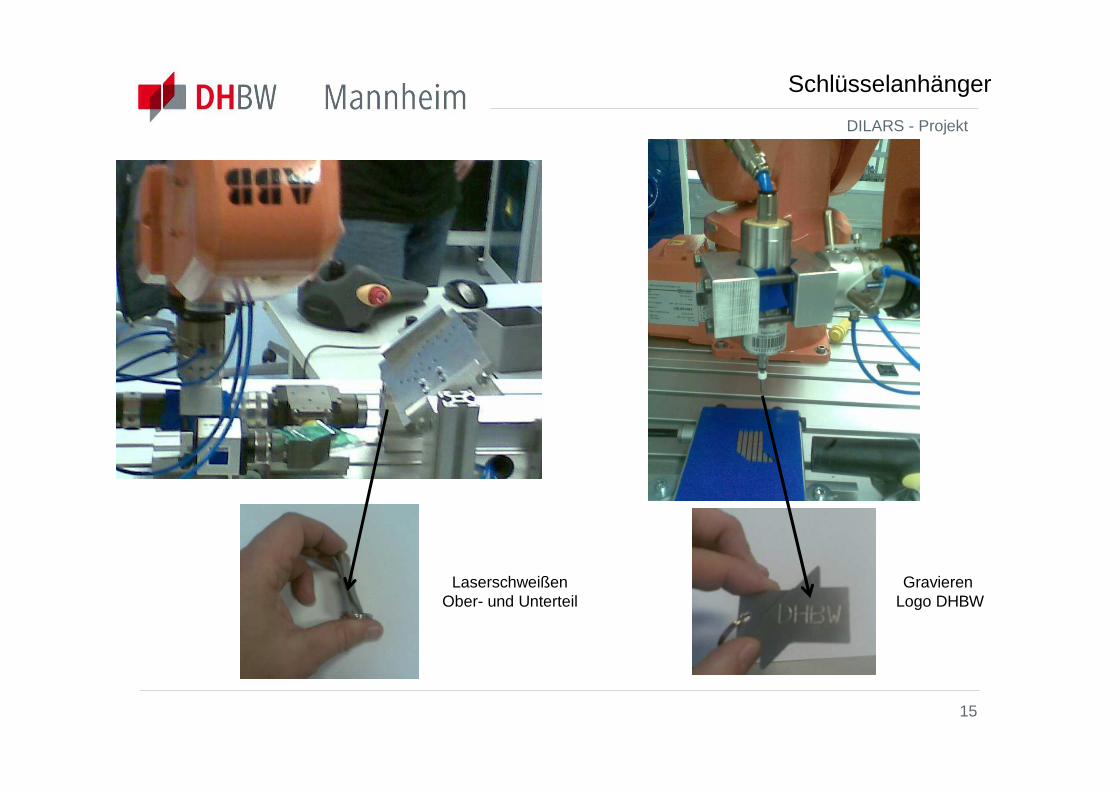
Schlüsselanhänger
LaserschweißenOber- und Unterteil
Gravieren Logo DHBW

DILARS - Projekt
Produktionsanlage
16
DILARS - Projekt
17
Neue Labore
• Inbetriebnahme TMT12SI im 5. Semester � wurde erstmals durchgeführt
• Instandhaltung TMT12AM im 5. Semester� wurde erstmals durchgeführt
• Industrieroboter (innerhalb des Wahlfachs) TMT12AM im 5. Semester� wurde bis 2013 bei ABB Robotics in Friedberg durchgeführt
Nachteile: Anfahrt nach Friedberg und zurück, Labore am Samstag
• Automatisierung (Prozessleitsystem) TMT12AM im 6. Semester � wurde bis 2013 an der DHBW Neuostheim durchgeführt
Nachteile: Anfahrt nach Neuostheim (und zurück), kein Betreuer von der DHBW Mannheim vorhanden, keine Integration in ein Labor und somit keine Aktionsplätze vorhanden, max. nur für 12 Studierende Plätze vorhanden. Ist mehr ein „Show-Room“.
• Digitale Regelungstechnik TMT13AM im 4. / 5. Semester� wird erstmals durchgeführt (neues Labor)
• Automatisierung (Bussysteme) TMT13AM im 5. Semester� wird erstmals durchgeführt (neues Labor)
Dazu kommen Labore die bisher in anderen Räumen und mit anderen Mittel stattgefunden haben, z.B. Instandhaltung
�
�
ab 12.01.2015
ab September 2015
ab März/Oktober 2015
�
DILARS - Projekt
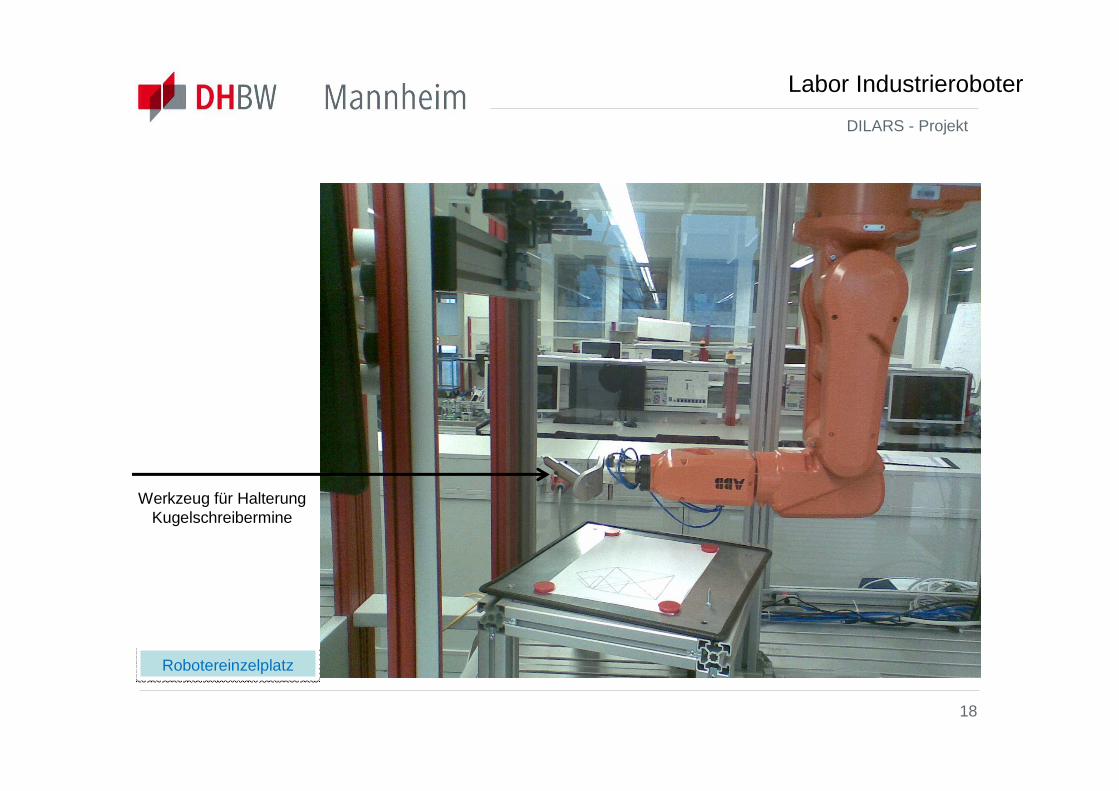
Labor Industrieroboter
18
RobotereinzelplatzRobotereinzelplatz
Werkzeug für HalterungKugelschreibermine
DILARS - Projekt
19
Studienarbeiten
• Studienarbeiten WS 2014
• Aufbau und Erprobung von Bussystemen für den Labor- und Versuchsbetrieb I+II
• SIMATIC-Anbindung an die Reglerbausteinen des RT-Labors I+II
• Inbetriebnahme und Laborversuche Feldorientierte Regelung von Asynchronmaschinen mit Matlab-Simulink I+II
• Sichtschutzkonzept für die Roboterschweißanlage I+II
• Sicherheitskonzept für die gesamte ABB-Roboterlinie
DILARS - Projekt
20
Studienarbeiten
• Studienarbeiten FS 2015
• Aufbau und Erstellung einer Versuchsanordnung (Antriebssteuerung - SEW) für das DILARS- Labor
• Digitale Regelungen mit Anbindung an das Leitsystem PCS 7 im DILARS-Labor I + II
• Aufbau und Erstellung einer Versuchsanordunng ( S7 - 1500 verteilen- prüfen - sortieren) für das DILARS Labor I + II
• Aufbau und Erstellung einer Versuchsanordnung ( AS-i Bus Modelle) für das DILARS -Labor
• Laborversuche Feldorientierte Regelung von Asynchronmaschinen mit Matlab-Simulink I+II
• Konzipierung und Ausarbeitung geeigneter Beispiele für werbewirksame Einsätze (Messen, DHBW-Infotag, …) der Roboterzellen
• Konkrete Umsetzung eines Sicherheitskonzeptes für die Roboterzellen
DILARS - Projekt
21
• Elektrische Maschinen (einschließlich Vorlesung)seit SS 2014Allgemeine Mechatronik im 4. Semester von der Werner-von-Siemens-Schulebisheriger Dozent
• Industrieroboter (innerhalb des Wahlfachs) seit WS 2014 Mechatronik im 5. Semestervon ABB Robotics in Friedbergbisheriger Dozent
• Automatisierung (Prozessleitsystem) ab FS 2015 Mechatronik im 6. Semester von der DHBW in Mannheim neuer Dozent
Bisherige auswärtige Labore