Embed Size (px)
Citation preview
Lehrstuhl fürElektrische Antriebssysteme und Leistungselektronik
Fakultät EITechnische Universität München
„Elektrische Aktoren und Sensoren in geregelten Antrieben“
„Die elektrische Maschine als Aktor“
Prof. Dr.‐Ing. Ralph Kennel([email protected])
Technische Universität MünchenArcisstraße 21
80333 München
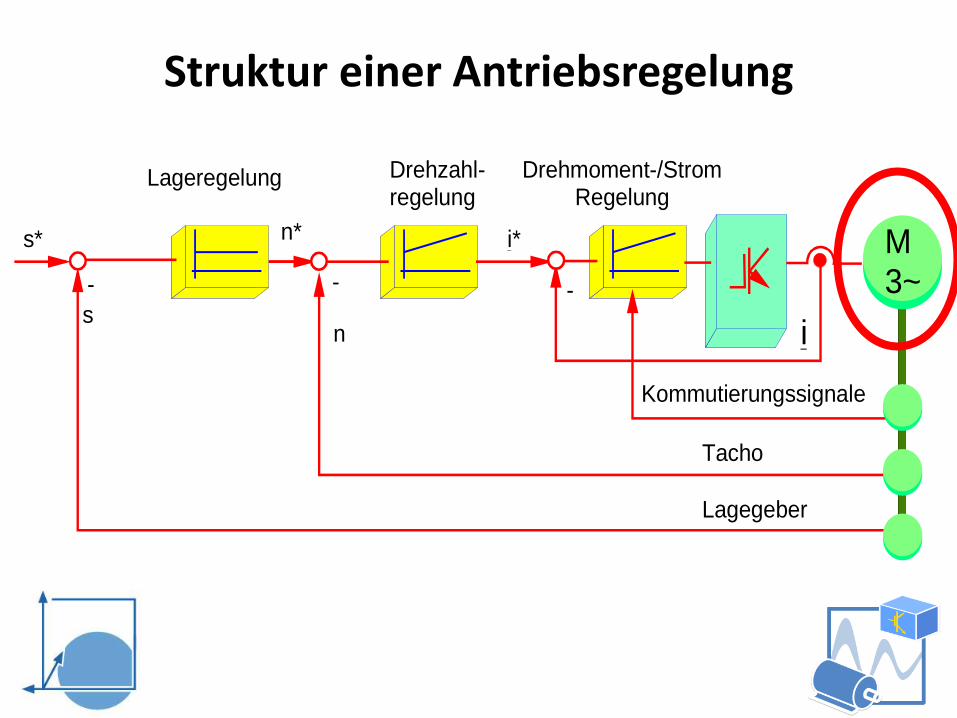
- --
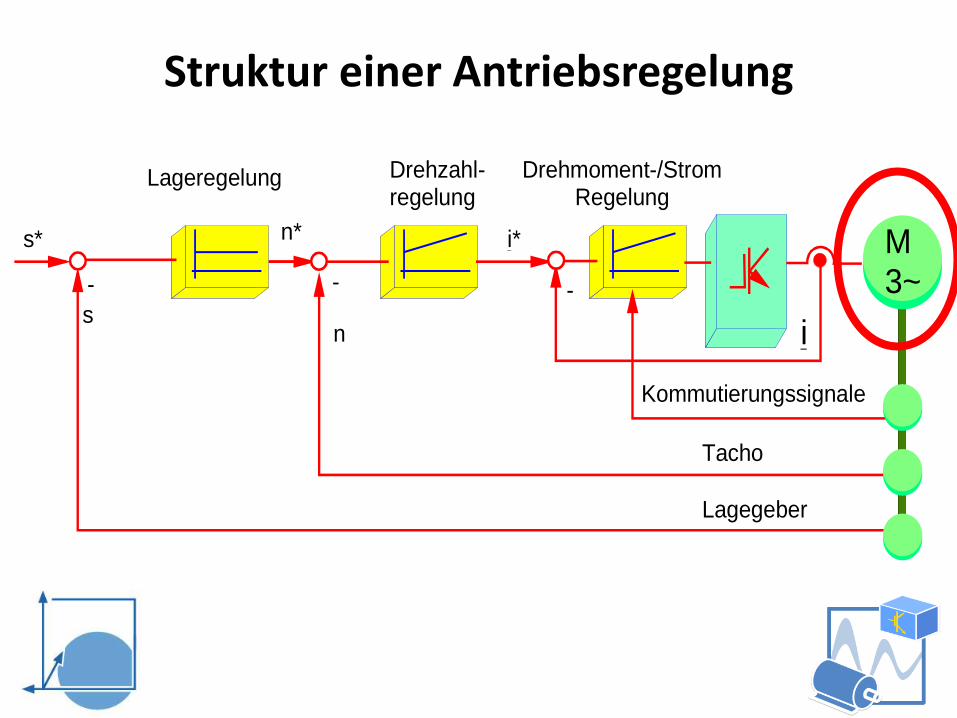
Drehzahl-regelung
Drehmoment-/StromRegelung
M3~
i
Lageregelung
Lagegeber
Tacho
Kommutierungssignale
s*
s
n* i*
n
Struktur einer Antriebsregelung
Lehrstuhl fürElektrische Antriebssysteme und Leistungselektronik
Fakultät EITechnische Universität München
„Elektrische Aktoren und Sensoren in geregelten Antrieben“
„Die elektrische Maschine als Aktor“
elektrische (Synchron-)Maschine
Krafterzeugung durch elektrische Energie
Die Umwandlung elektrischer in mechanische Energie … oder umgekehrt …
… richtet sich nach den Maxwell‘schen Gleichungen
1. Durchflutungsgesetz(Ampère‘s Gesetz mit Korrekturen von Maxwell)
2. Induktionsgesetz(Faraday‘s Gesetz)
3. Gesetz von Gauss(Ursprung elektrischer Feldlinien auf elektrischen Ladungen)
4. Gesetz von Gauss für magnetische Felder(es gibt keine magnetischen Monopole
– nur geschlossene magnetische Feldlinien)
… die Lorentz-Kraft
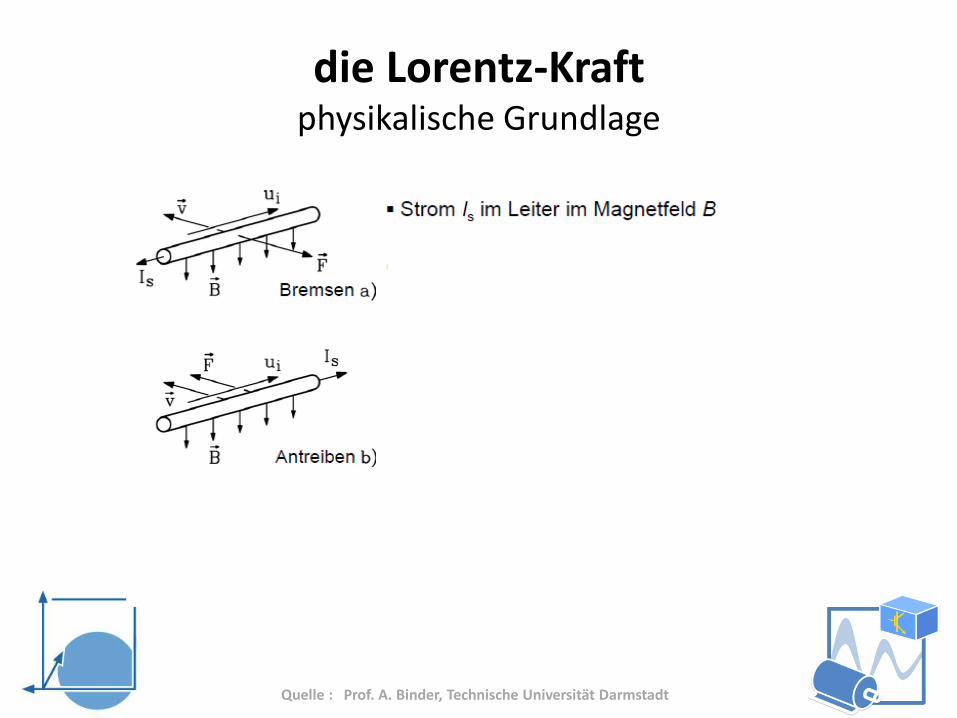
die Lorentz-Kraftphysikalische Grundlage
Quelle : Prof. A. Binder, Technische Universität Darmstadt
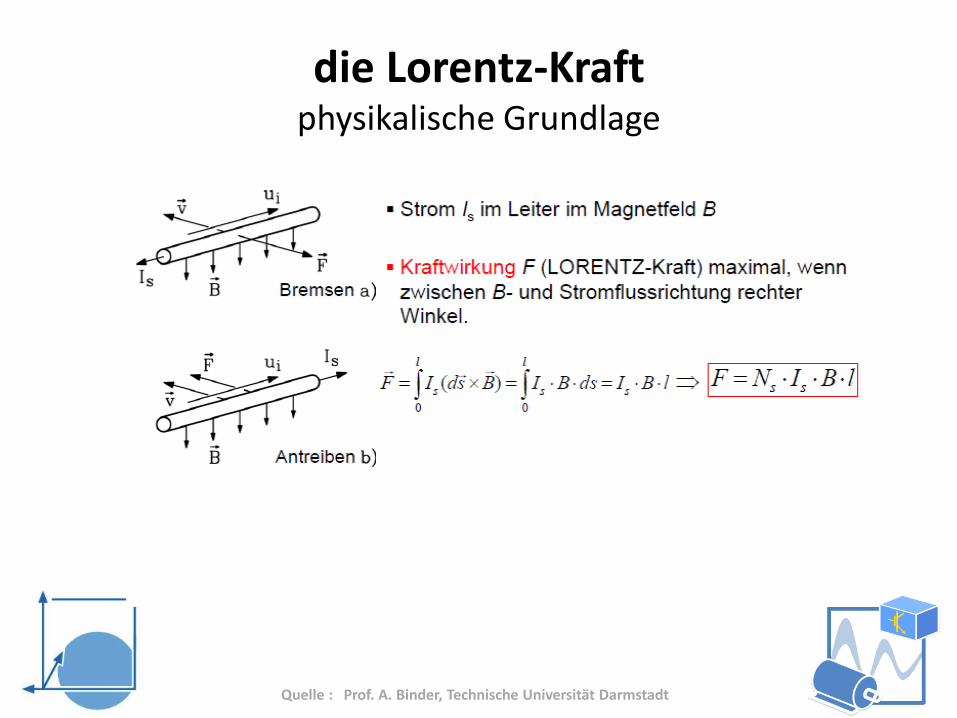
die Lorentz-Kraftphysikalische Grundlage
Quelle : Prof. A. Binder, Technische Universität Darmstadt
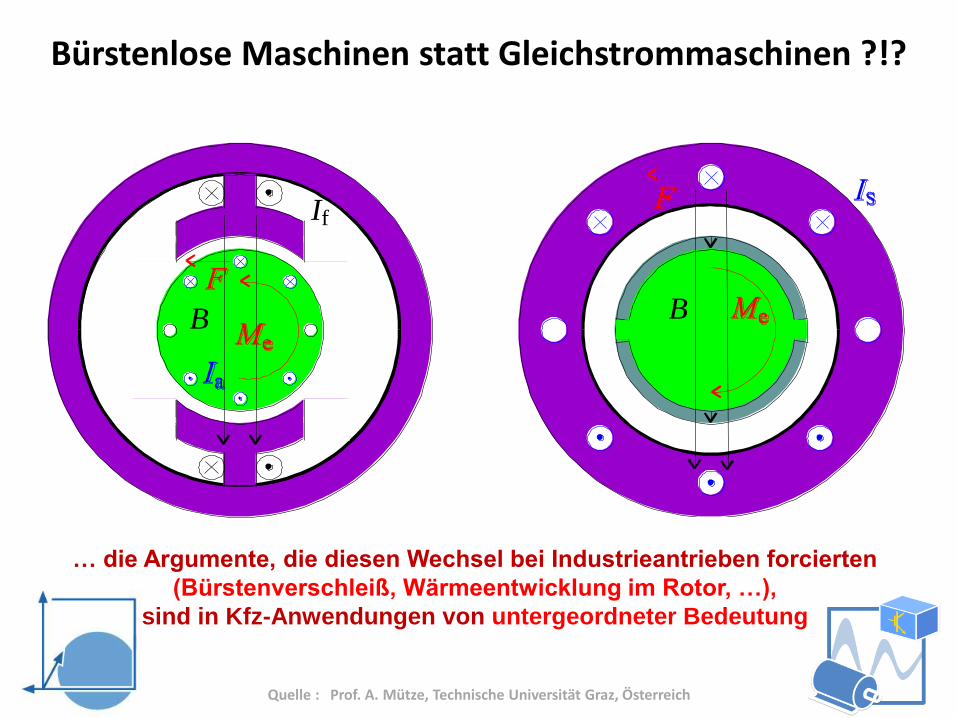
Bürstenlose Maschinen statt Gleichstrommaschinen ?!?
B
Quelle : Prof. A. Mütze, Technische Universität Graz, Österreich
If
B
… die Argumente, die diesen Wechsel bei Industrieantrieben forcierten
(Bürstenverschleiß, Wärmeentwicklung im Rotor, …),
sind in Kfz-Anwendungen von untergeordneter Bedeutung
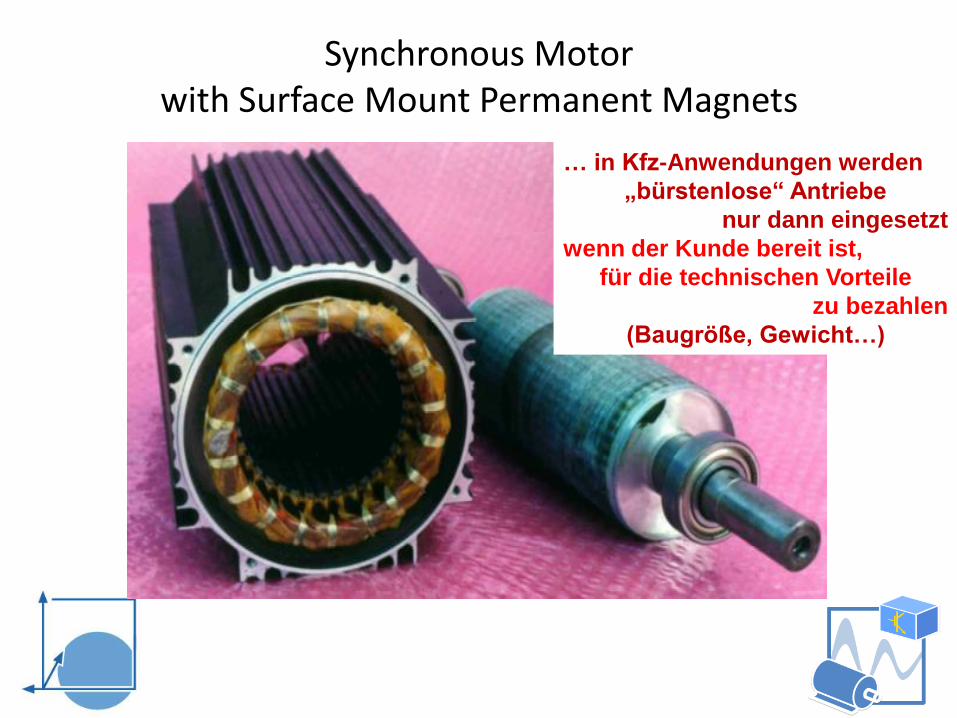
Synchronous Motorwith Surface Mount Permanent Magnets
… in Kfz-Anwendungen werden
„bürstenlose“ Antriebe
nur dann eingesetzt
wenn der Kunde bereit ist,
für die technischen Vorteile
zu bezahlen
(Baugröße, Gewicht…)
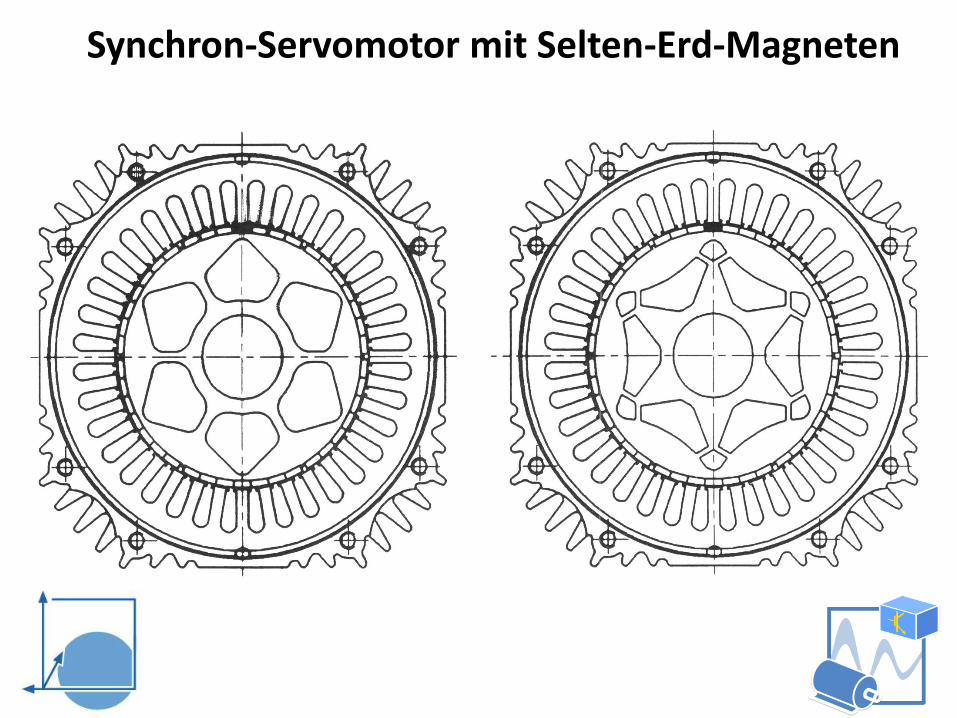
Synchron-Servomotor mit Selten-Erd-Magneten
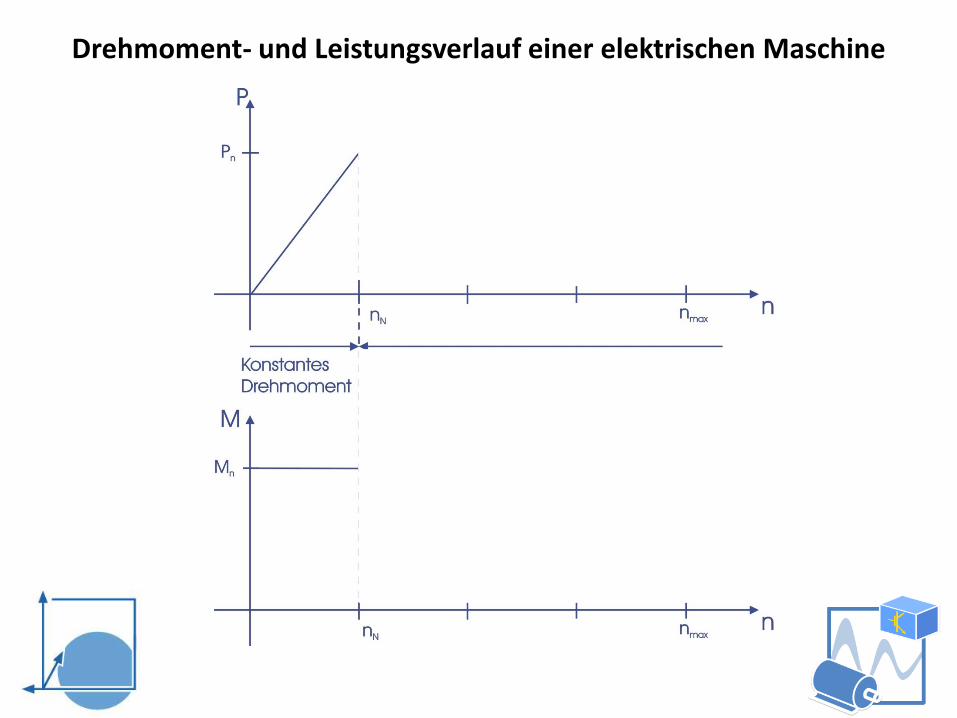
Drehmoment- und Leistungsverlauf einer elektrischen Maschine
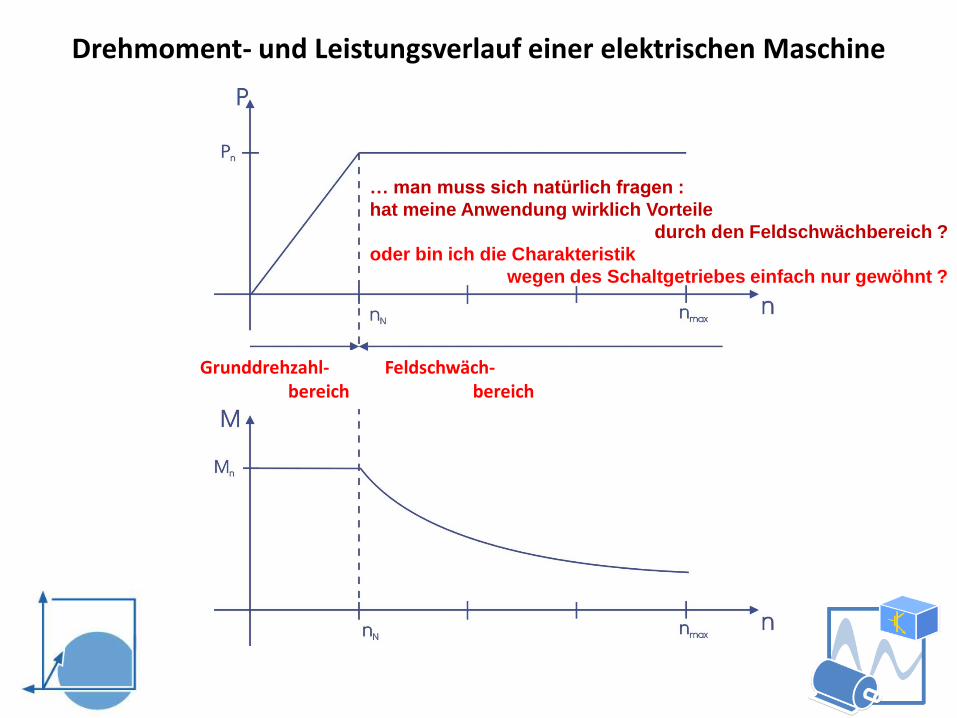
Drehmoment- und Leistungsverlauf einer elektrischen Maschine
Grunddrehzahl-bereich
Feldschwäch-bereich
… man muss sich natürlich fragen :
hat meine Anwendung wirklich Vorteile
durch den Feldschwächbereich ?
oder bin ich die Charakteristik
wegen des Schaltgetriebes einfach nur gewöhnt ?
Auslegungskriterien für elektrische Motoren
• Drehmoment– Dauermoment, Stillstandmoment
– Überlastverhalten
(bei Servoantrieben liegt das Verhältnis
Dauer-Drehmoment zu Maximal-Drehmoment
zwischen 1:3 und 1:6)
– das Maximal-Drehmoment bestimmt die Baugröße !!!
• Drehzahl– Stellbereich (Maximal-Drehzahl)
– Rundlaufeigenschaften bei kleinen Drehzahlen
– Leistungssteigerung über Drehzahlerhöhung möglich
(ohne Vergrößerung des Motors !)
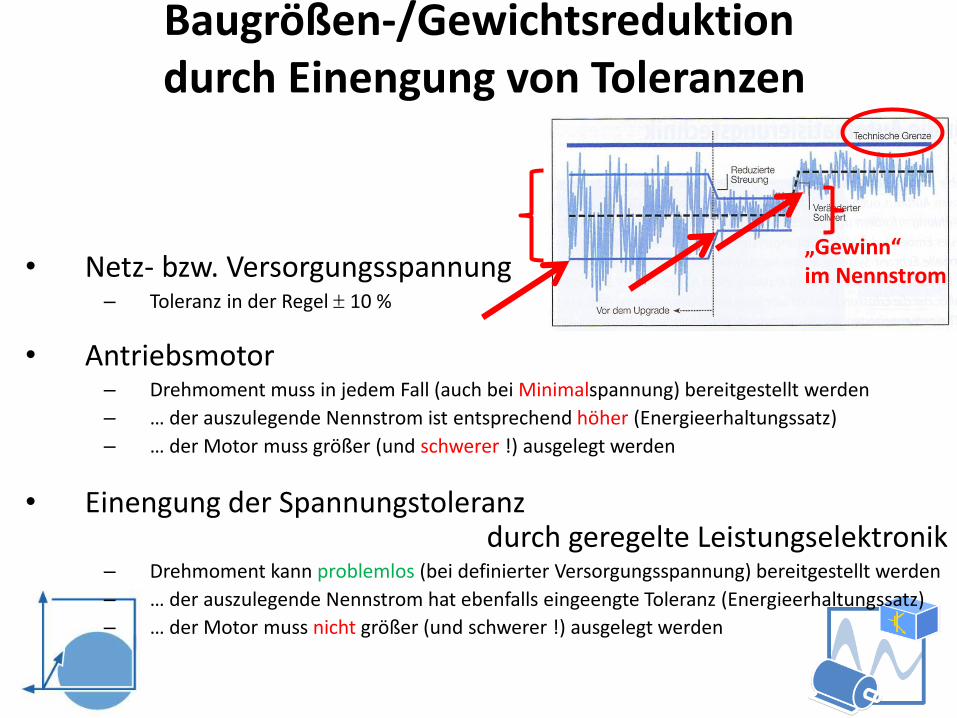
Baugrößen-/Gewichtsreduktiondurch Einengung von Toleranzen
• Netz- bzw. Versorgungsspannung– Toleranz in der Regel 10 %
• Antriebsmotor– Drehmoment muss in jedem Fall (auch bei Minimalspannung) bereitgestellt werden
– … der auszulegende Nennstrom ist entsprechend höher (Energieerhaltungssatz)
– … der Motor muss größer (und schwerer !) ausgelegt werden
• Einengung der Spannungstoleranzdurch geregelte Leistungselektronik
– Drehmoment kann problemlos (bei definierter Versorgungsspannung) bereitgestellt werden
– … der auszulegende Nennstrom hat ebenfalls eingeengte Toleranz (Energieerhaltungssatz)
– … der Motor muss nicht größer (und schwerer !) ausgelegt werden
„Gewinn“im Nennstrom
Quelle : Prof. A. Binder, Technische Universität Darmstadt
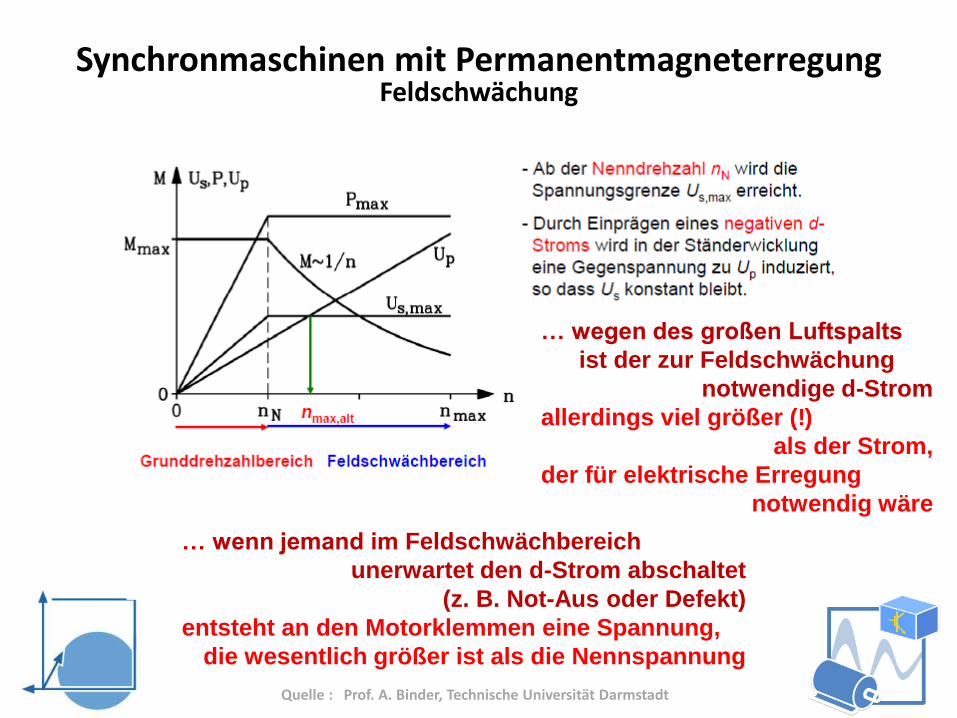
Synchronmaschinen mit PermanentmagneterregungFeldschwächung
… wegen des großen Luftspalts
ist der zur Feldschwächung
notwendige d-Strom
allerdings viel größer (!)
als der Strom,
der für elektrische Erregung
notwendig wäre
… wenn jemand im Feldschwächbereich
unerwartet den d-Strom abschaltet
(z. B. Not-Aus oder Defekt)
entsteht an den Motorklemmen eine Spannung,
die wesentlich größer ist als die Nennspannung
Quelle : Prof. A. Binder, Technische Universität Darmstadt
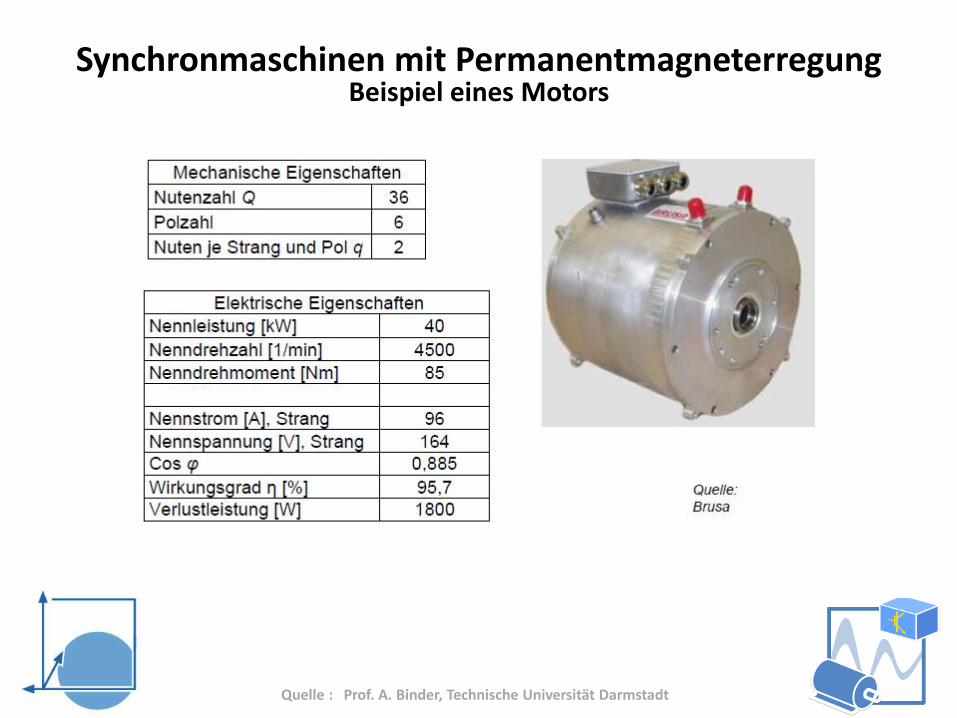
Synchronmaschinen mit PermanentmagneterregungBeispiel eines Motors
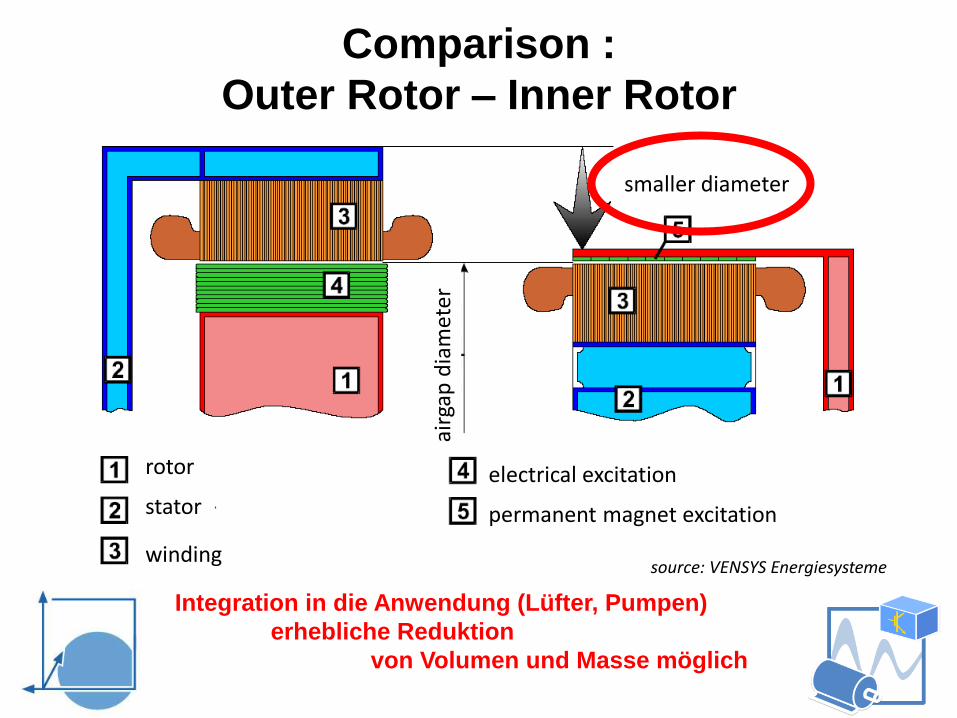
Comparison :
Outer Rotor – Inner Rotor
source: VENSYS Energiesysteme
rotor
stator
airg
ap d
iam
eter
smaller diameter
winding
electrical excitation
permanent magnet excitation
Integration in die Anwendung (Lüfter, Pumpen)
erhebliche Reduktion
von Volumen und Masse möglich

Quelle : Prof. A. Binder, Technische Universität Darmstadt
Zahnspulenwicklungbei einer Außenläufer-Synchronmaschine
… hier können die gleichen Fertigungseinrichtungenwie bei der Herstellung von Gleichstrom-Ankern
verwendet werden !!!
sehr interessant für BOSCH
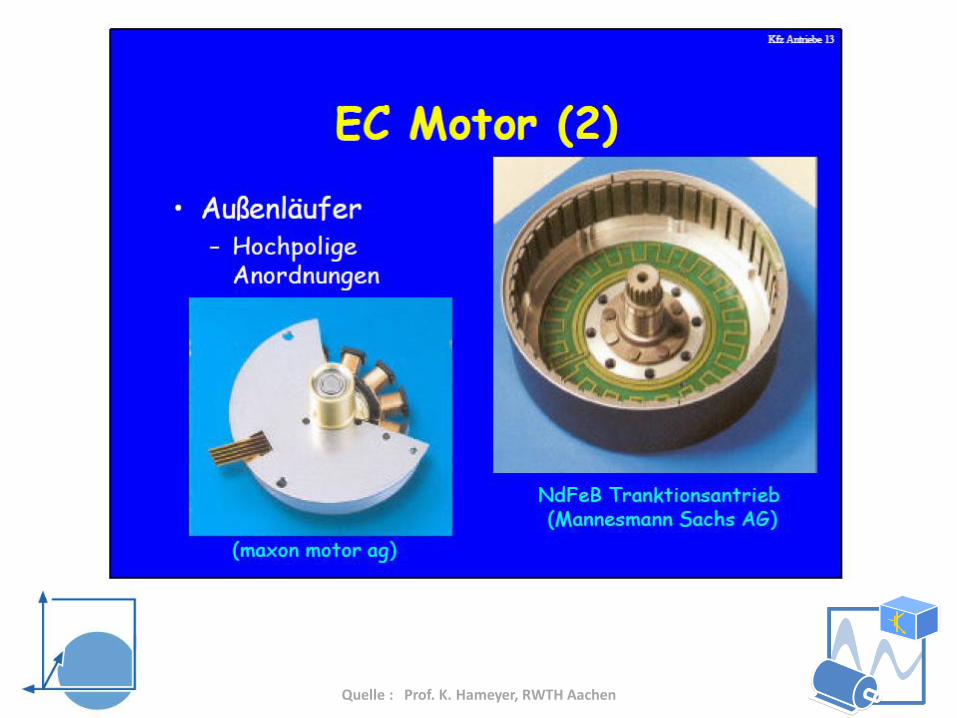
Quelle : Prof. K. Hameyer, RWTH Aachen
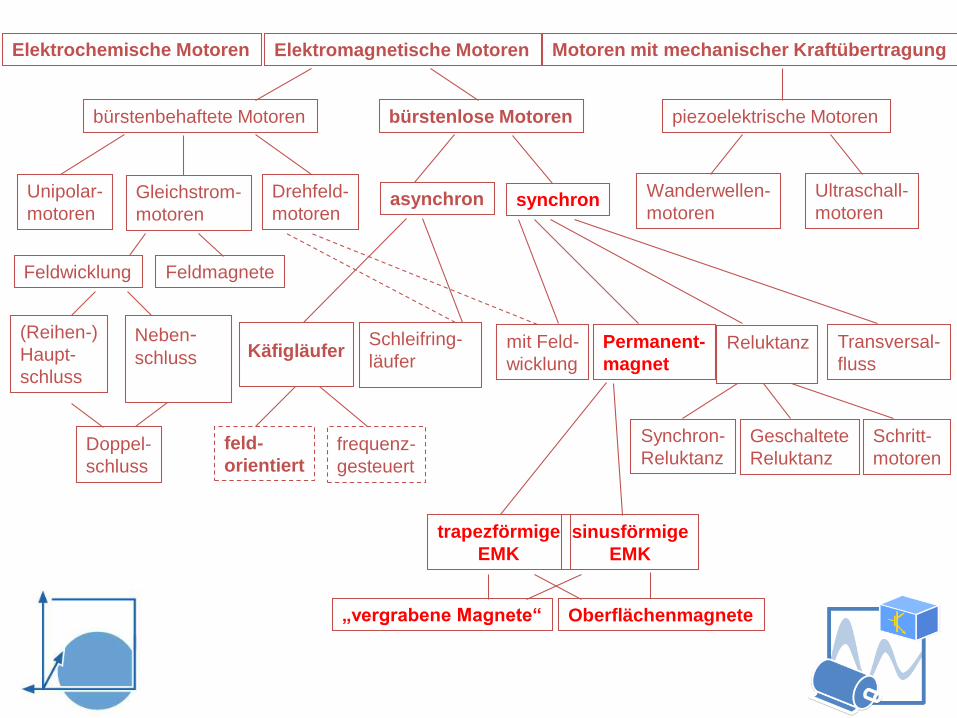
Elektrochemische Motoren Elektromagnetische Motoren Motoren mit mechanischer Kraftübertragung
bürstenbehaftete Motoren bürstenlose Motoren piezoelektrische Motoren
Unipolar-
motoren Gleichstrom-
motoren
Drehfeld-
motorenasynchron
Feldwicklung Feldmagnete
(Reihen-)
Haupt-
schluss
synchronWanderwellen-
motoren
Ultraschall-
motoren
Schleifring-
läufer
Neben-schluss Käfigläufer
mit Feld-
wicklung
Permanent-
magnet
Transversal-
flussReluktanz
Doppel-
schluss
frequenz-
gesteuert
feld-
orientiert
Synchron-
Reluktanz
Geschaltete
Reluktanz
Schritt-
motoren
trapezförmige
EMK
sinusförmige
EMK
„vergrabene Magnete“ Oberflächenmagnete
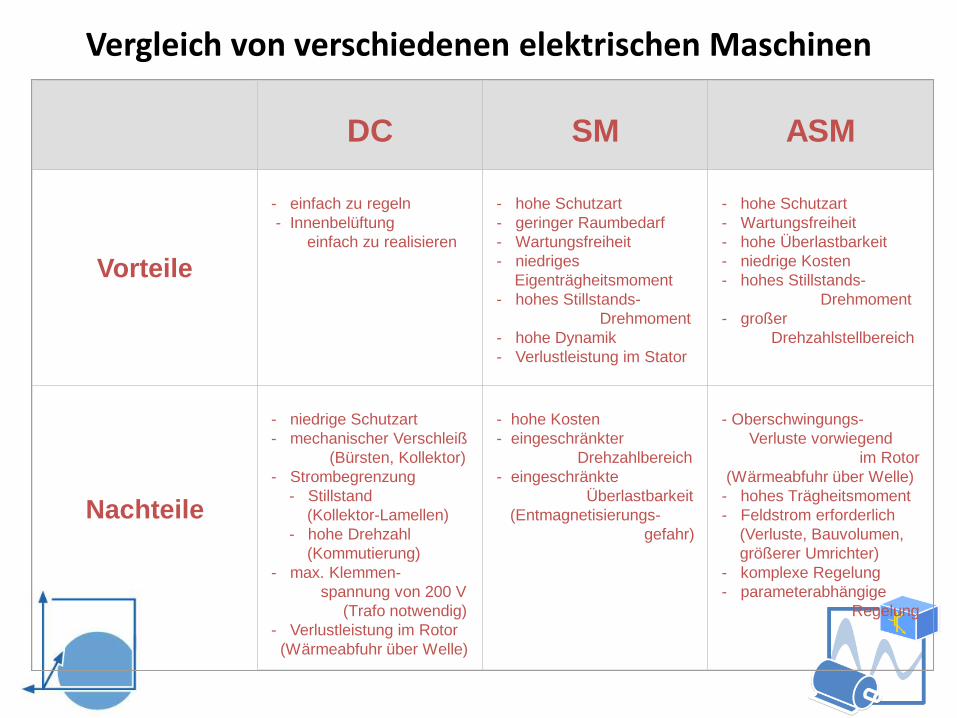
DC SM ASM
Vorteile
Nachteile
- einfach zu regeln
- Innenbelüftung
einfach zu realisieren
- hohe Schutzart
- geringer Raumbedarf
- Wartungsfreiheit
- niedriges
Eigenträgheitsmoment
- hohes Stillstands-
Drehmoment
- hohe Dynamik
- Verlustleistung im Stator
- hohe Schutzart
- Wartungsfreiheit
- hohe Überlastbarkeit
- niedrige Kosten
- hohes Stillstands-
Drehmoment
- großer
Drehzahlstellbereich
- niedrige Schutzart
- mechanischer Verschleiß
(Bürsten, Kollektor)
- Strombegrenzung
- Stillstand
(Kollektor-Lamellen)
- hohe Drehzahl
(Kommutierung)
- max. Klemmen-
spannung von 200 V
(Trafo notwendig)
- Verlustleistung im Rotor
(Wärmeabfuhr über Welle)
- hohe Kosten
- eingeschränkter
Drehzahlbereich
- eingeschränkte
Überlastbarkeit
(Entmagnetisierungs-
gefahr)
- Oberschwingungs-
Verluste vorwiegend
im Rotor
(Wärmeabfuhr über Welle)
- hohes Trägheitsmoment
- Feldstrom erforderlich
(Verluste, Bauvolumen,
größerer Umrichter)
- komplexe Regelung
- parameterabhängige
Regelung
Vergleich von verschiedenen elektrischen Maschinen
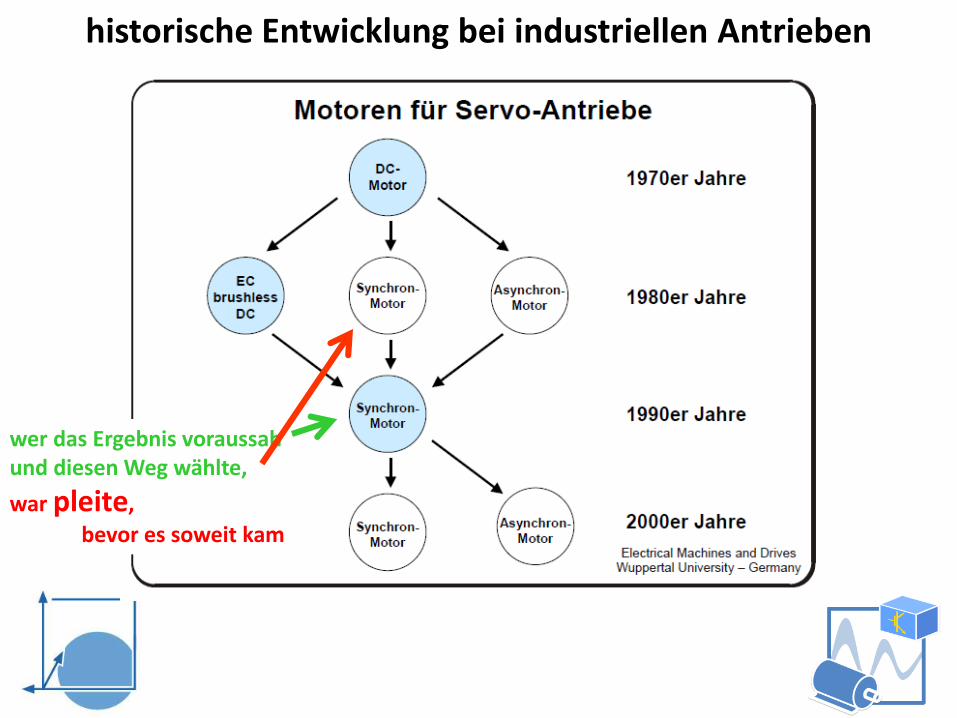
historische Entwicklung bei industriellen Antrieben
wer das Ergebnis voraussahund diesen Weg wählte,
war pleite,
bevor es soweit kam
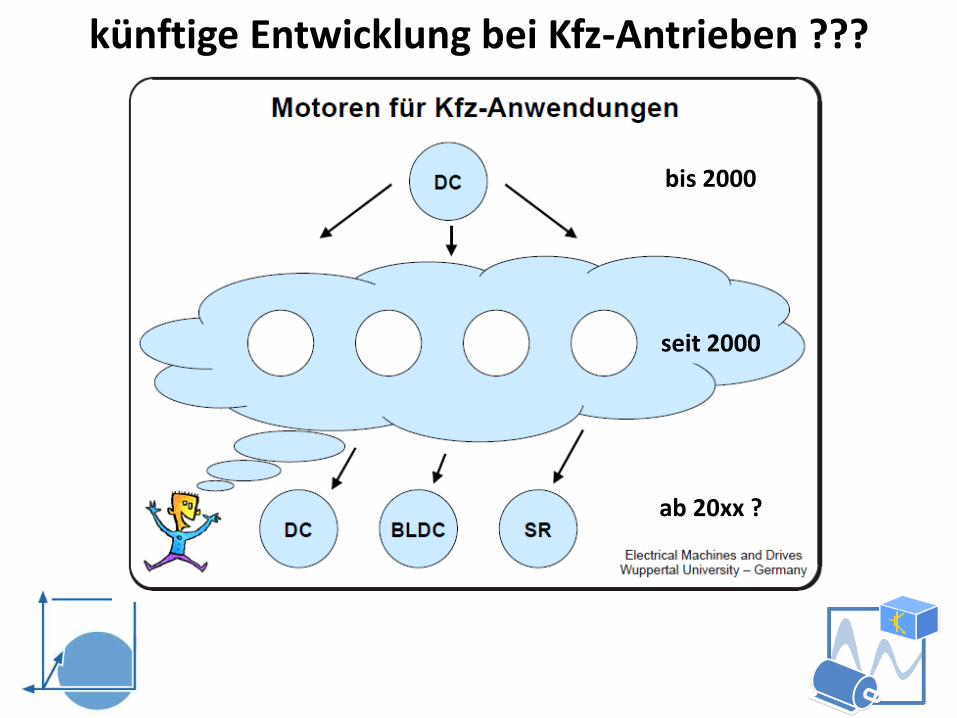
künftige Entwicklung bei Kfz-Antrieben ???
bis 2000
seit 2000
ab 20xx ?
Lehrstuhl fürElektrische Antriebssysteme und Leistungselektronik
Fakultät EITechnische Universität München
„Elektrische Aktoren und Sensoren in geregelten Antrieben“
„Die elektrische Maschine als Aktor“
Getriebe
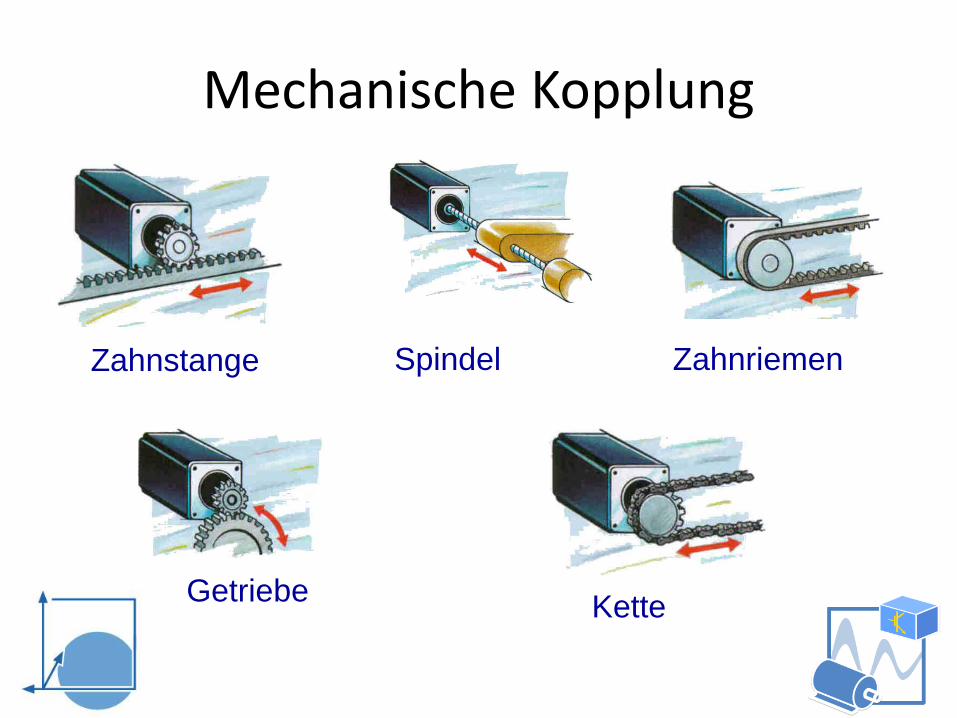
Mechanische Kopplung
SpindelZahnstange Zahnriemen
GetriebeKette
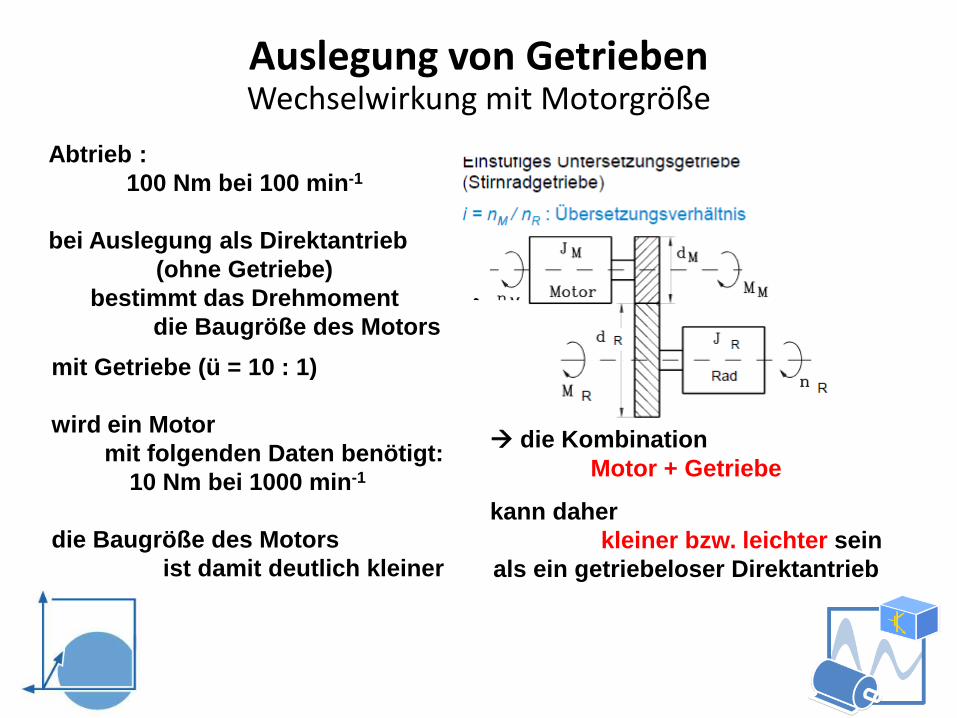
Auslegung von GetriebenWechselwirkung mit Motorgröße
mit Getriebe (ü = 10 : 1)
wird ein Motor
mit folgenden Daten benötigt:
10 Nm bei 1000 min-1
die Baugröße des Motors
ist damit deutlich kleiner
die Kombination
Motor + Getriebe
kann daher
kleiner bzw. leichter sein
als ein getriebeloser Direktantrieb
Abtrieb :
100 Nm bei 100 min-1
bei Auslegung als Direktantrieb
(ohne Getriebe)
bestimmt das Drehmoment
die Baugröße des Motors
Lehrstuhl fürElektrische Antriebssysteme und Leistungselektronik
Fakultät EITechnische Universität München
„Elektrische Aktoren und Sensoren in geregelten Antrieben“
„Die elektrische Maschine als Aktor“
Zusammenwirken der Komponenten
- --
Drehzahl-regelung
Drehmoment-/StromRegelung
M3~
i
Lageregelung
Lagegeber
Tacho
Kommutierungssignale
s*
s
n* i*
n
Struktur einer Antriebsregelung
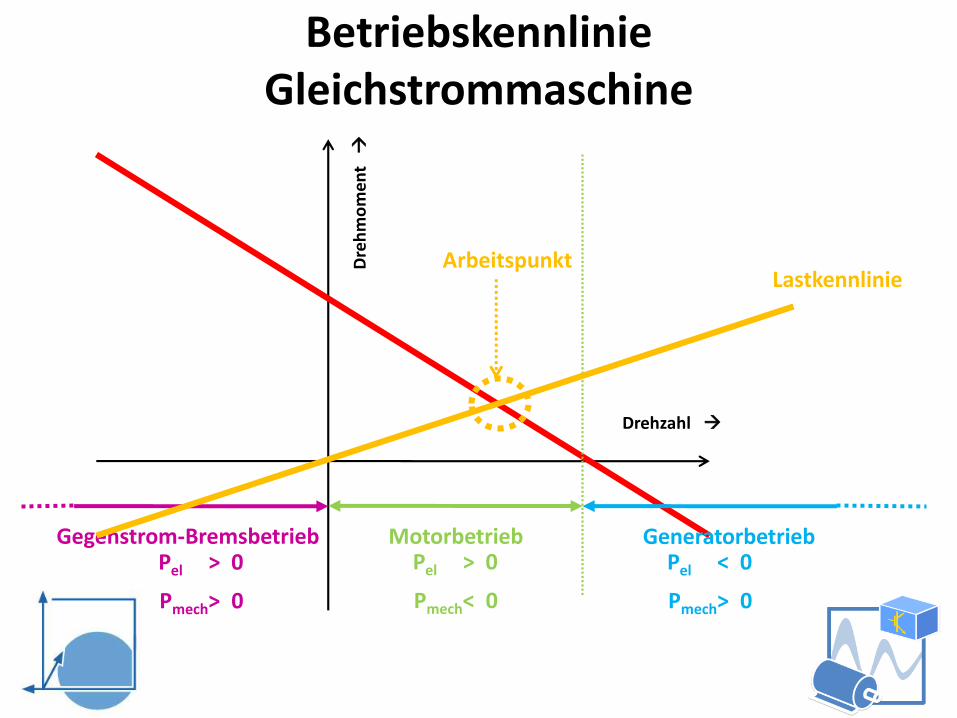
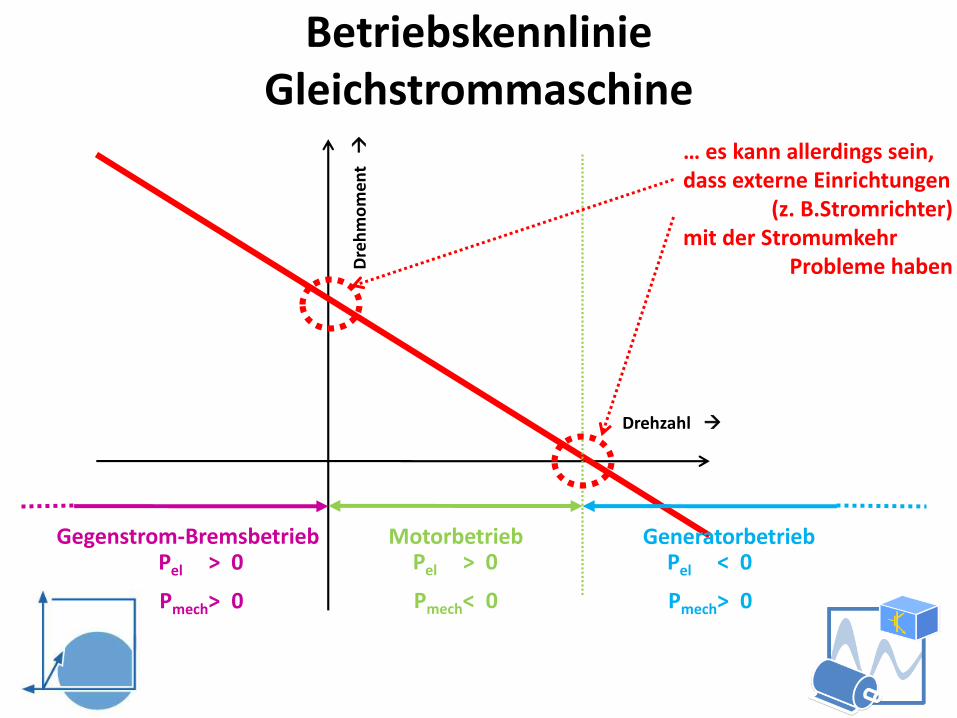
BetriebskennlinieGleichstrommaschine
Drehzahl
Dre
hm
om
ent
MotorbetriebPel > 0
Pmech< 0
GeneratorbetriebPel < 0
Pmech> 0
Gegenstrom-BremsbetriebPel > 0
Pmech> 0
LastkennlinieArbeitspunkt
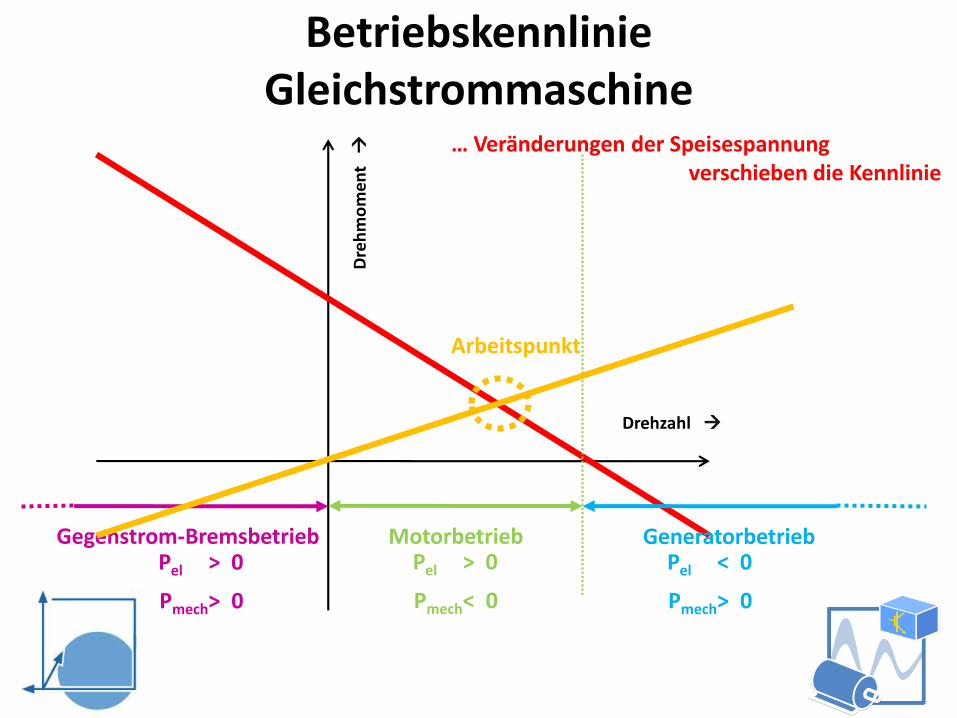
BetriebskennlinieGleichstrommaschine
Drehzahl
Dre
hm
om
ent
MotorbetriebPel > 0
Pmech< 0
GeneratorbetriebPel < 0
Pmech> 0
Gegenstrom-BremsbetriebPel > 0
Pmech> 0
… Veränderungen der Speisespannungverschieben die Kennlinie
Arbeitspunkt
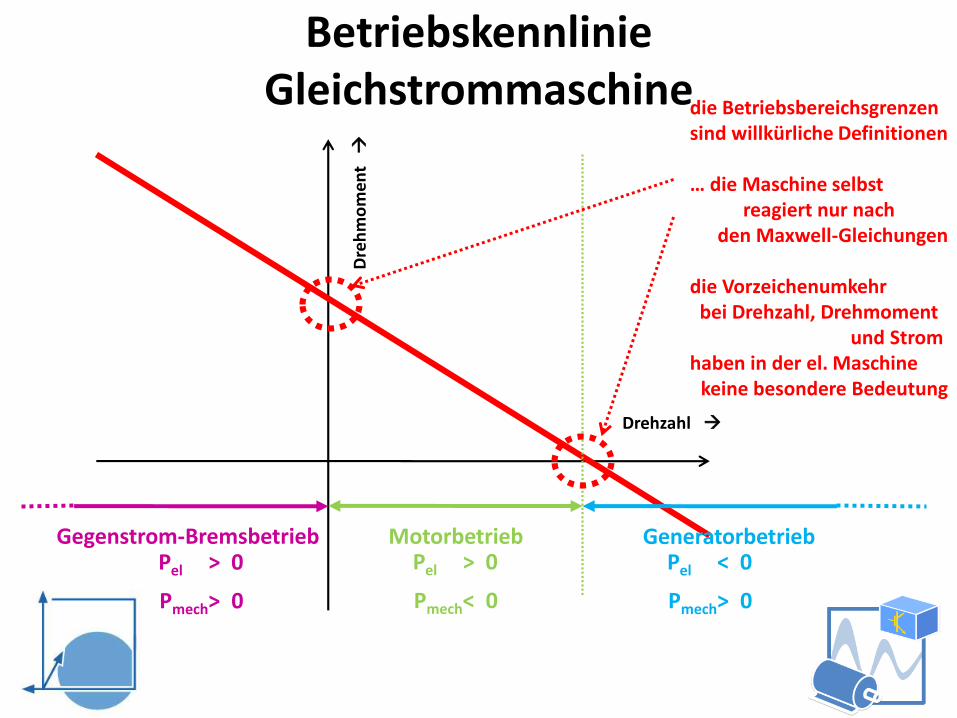
BetriebskennlinieGleichstrommaschine
Drehzahl
Dre
hm
om
ent
MotorbetriebPel > 0
Pmech< 0
GeneratorbetriebPel < 0
Pmech> 0
Gegenstrom-BremsbetriebPel > 0
Pmech> 0
die Betriebsbereichsgrenzensind willkürliche Definitionen
… die Maschine selbstreagiert nur nach
den Maxwell-Gleichungen
die Vorzeichenumkehrbei Drehzahl, Drehmoment
und Strom haben in der el. Maschine
keine besondere Bedeutung
BetriebskennlinieGleichstrommaschine
Drehzahl
Dre
hm
om
ent
MotorbetriebPel > 0
Pmech< 0
GeneratorbetriebPel < 0
Pmech> 0
Gegenstrom-BremsbetriebPel > 0
Pmech> 0
… es kann allerdings sein,dass externe Einrichtungen
(z. B.Stromrichter)mit der Stromumkehr
Probleme haben
eine elektrische Maschine mit Umrichterspeisung
und Drehzahlregelung
weist nach außen immer
die Kennlinie einer Synchronmaschine auf
… egal um welche Art
von elektrischer Maschine
es sich handelt
BetriebskennlinieDrehfeldmaschine mit Drehzahlregelung
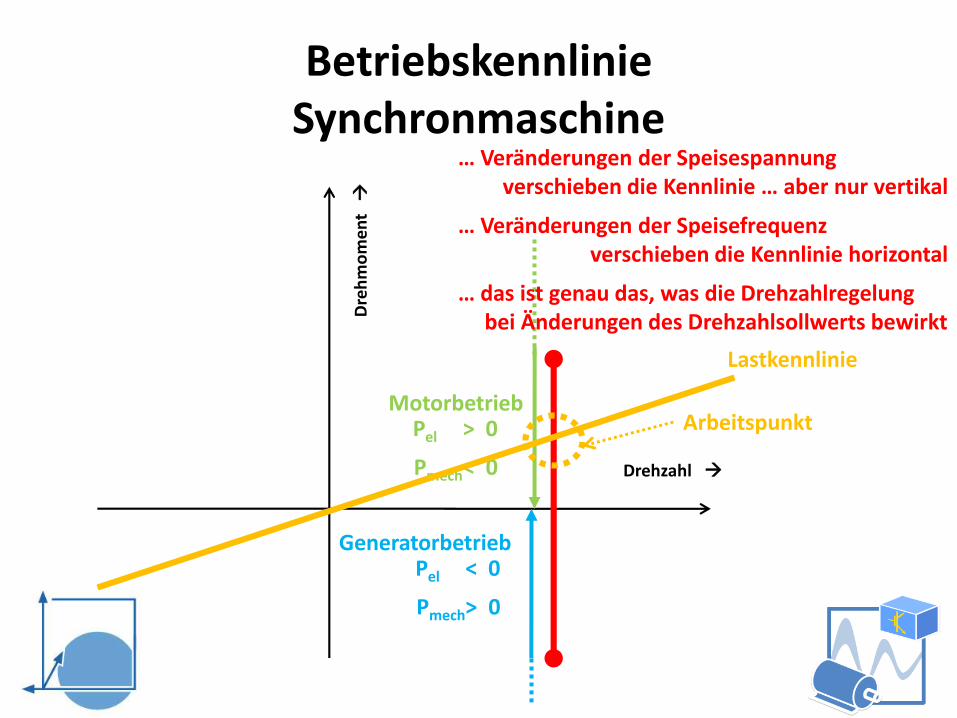
BetriebskennlinieSynchronmaschine
Drehzahl
Dre
hm
om
en
t
MotorbetriebPel > 0
Pmech< 0
GeneratorbetriebPel < 0
Pmech> 0
… Veränderungen der Speisespannungverschieben die Kennlinie … aber nur vertikal
… Veränderungen der Speisefrequenzverschieben die Kennlinie horizontal
Lastkennlinie
Arbeitspunkt
… das ist genau das, was die Drehzahlregelungbei Änderungen des Drehzahlsollwerts bewirkt
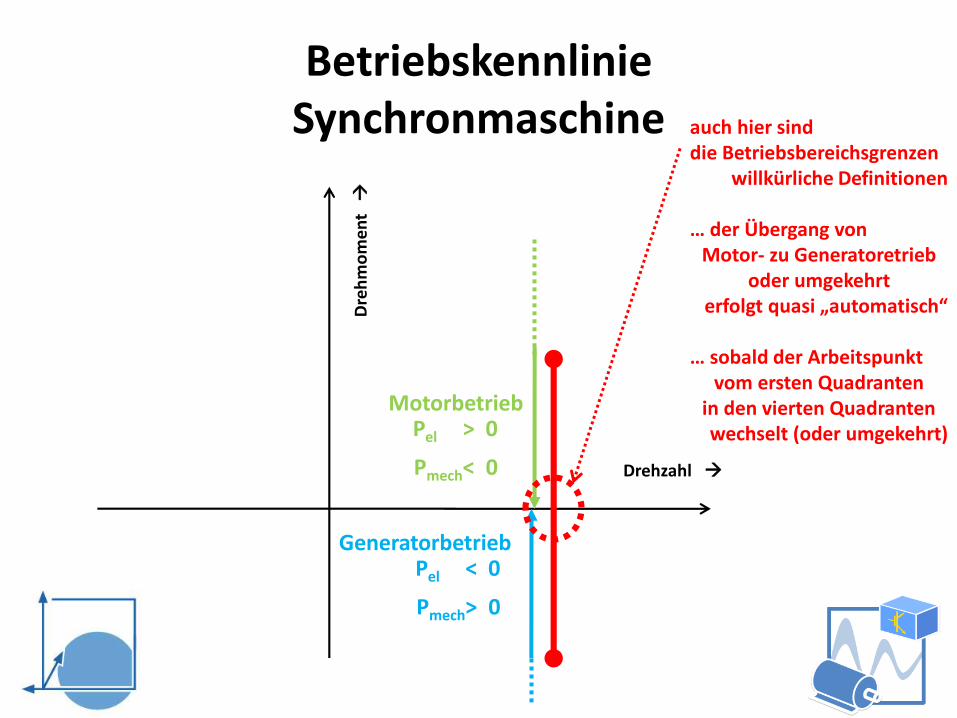
BetriebskennlinieSynchronmaschine
Drehzahl
Dre
hm
om
en
t
MotorbetriebPel > 0
Pmech< 0
GeneratorbetriebPel < 0
Pmech> 0
auch hier sinddie Betriebsbereichsgrenzen
willkürliche Definitionen
… der Übergang vonMotor- zu Generatoretrieb
oder umgekehrterfolgt quasi „automatisch“
… sobald der Arbeitspunktvom ersten Quadranten
in den vierten Quadrantenwechselt (oder umgekehrt)
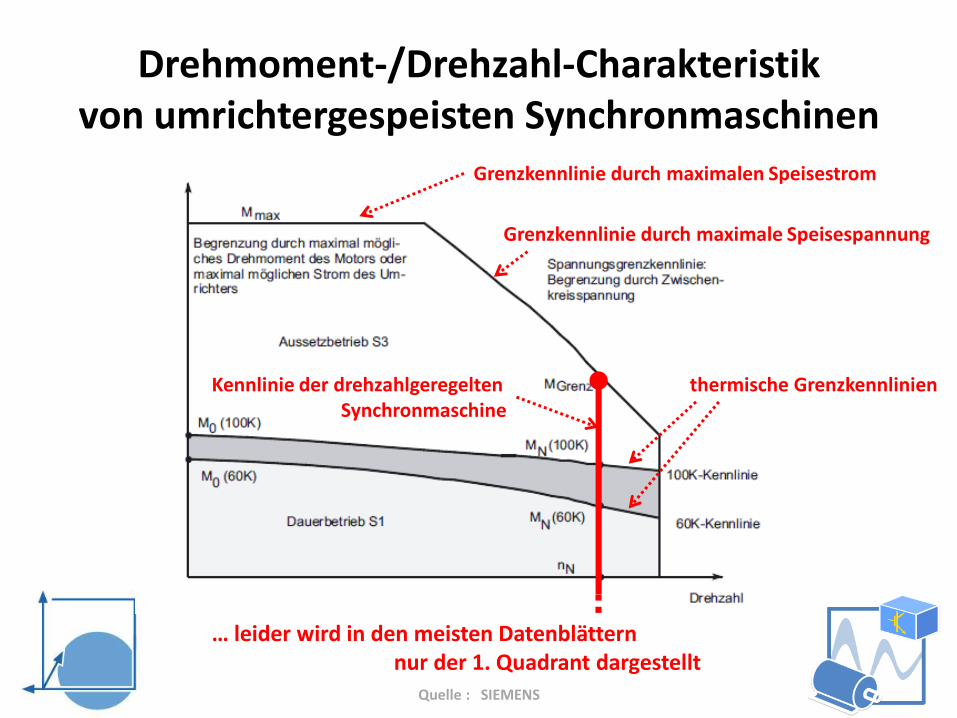
Drehmoment-/Drehzahl-Charakteristikvon umrichtergespeisten Synchronmaschinen
Quelle : SIEMENS
Kennlinie der drehzahlgeregeltenSynchronmaschine
thermische Grenzkennlinien
Grenzkennlinie durch maximale Speisespannung
Grenzkennlinie durch maximalen Speisestrom
… leider wird in den meisten Datenblätternnur der 1. Quadrant dargestellt