Embed Size (px)
Citation preview

Die ersten Blätter des neuen Kartenwerks „Topographic Image Map Mars 1:200 000”
JÖRG ALBERTZ1, STEPHAN GEHRKE1, HARTMUT LEHMANN1, TINO SCHUMACHER1,
GERHARD NEUKUM2 und das HRSC CO-INVESTIGATOR TEAM
Zusammenfassung: Die „High Resolution Stereo Camera“ (HRSC) an Bord der euro-päischen Mars Express Mission liefert seit Januar 2004 dreidimensionale, multispektrale Bilddaten vom Mars. Diese bilden unter anderem die Grundlage für qualitativ hoch-wertige Kartenprodukte der Mars-Oberfläche, allen voran das großmaßstäbige Karten-werk „Topographic Image Map Mars 1:200 000“. An der Technischen Universität Berlin wurden in Zusammenarbeit mit dem Deutschen Zentrum für Luft- und Raumfahrt (DLR) bereits die ersten Blätter dieses Kartenwerkes auf der Basis von HRSC-Ortho-bildmosaiken generiert. Die Kartenherstellung erfolgt weitestgehend automatisch; den zentralen Teil der Prozesskette bildet das an der TU Berlin entwickelte Softwarepaket „Planetary Image Mapper“ (PIMap).
1 Einleitung
ESA�s Mars Express ist eine von insgesamt fünf verschiedenen Missionen, die zurzeit auf der Oberfläche unseres Nachbarplaneten bzw. in dessen Orbit arbeiten. An Bord des Mars Express Orbiters befindet sich das High Resolution Stereo Camera (HRSC) Experiment, wel-ches speziell unter photogrammetrischen und kartographischen Gesichtspunkten konzipiert worden ist. Seit Januar 2004 liefert die Kamera multispektrale Stereo-Daten der Mars-Ober-fläche, die Wissenschaft und Öffentlichkeit gleichermaßen begeistern. Principal Investigator des Experiments ist Prof. GERHARD NEUKUM von der FU Berlin.
HRSC-Bildstreifen werden in nahezu polaren Orbits mit einer Auflösung von 10-20 m/Pixel aufgenommen. Die kleinste Streifenbreite beträgt damit etwa 60 km, während die Längen je nach Aufnahmekonfiguration, Übertragungsrate und Zielgebiet stark schwanken und durch-aus einige 1000 km erreichen können.
Die Datenprozessierung umfasst die systematischen geometrischen und radiometrischen Kor-rekturen der Originaldaten sowie die photogrammetrische Auswertung bis hin zur Ableitung Digitaler Geländemodelle (DGMs) und Orthobildmosaike als Basisdaten der hier vorge-stellten kartographischen Produkte und wird innerhalb des HSRC Co-Investigator Teams aus-geführt. Erste Erfahrungen mit den HRSC-Daten und ihrer Prozessierung legen OBERST et al. (2004) dar.
Das Standardkartenwerk der Mars Express Mission ist die Topographic Image Map Mars 1:200 000. Sie stellt darüber hinaus auch den Rahmen für abgeleitete Produkte, z.B. Karten größerer Maßstäbe, sowie für die zukünftige topographische und thematische Kartographie
1 Technische Universität Berlin, Institut für Geodäsie und Geoinformationstechnik, Sekretariat EB9, Straße des 17. Juni 135, 10623 Berlin, E-Mail: {albertz | stephan | hartmut | tino}@fpk.tu-berlin.de 2 Freie Universität Berlin, Institut für Geologische Wissenschaften, Malteserstr. 74-100, 12249 Berlin, E-Mail: [email protected]
dar (ALBERTZ et al., 2004). Für die automatisierte Kartenherstellung wurde an der TU Berlin das Software-Paket Planetary Image Mapper (PIMap) entwickelt. Ausgehend von sehr detaillierten Benutzervorgaben können mittels PIMap sämtliche Bestandteile einer Karte automatisch generiert und zum digitalen Blatt zusammengefügt werden. Diese Vorgehens-weise stellt einen bedeutenden Fortschritt innerhalb der planetaren Kartographie dar.
An der TU Berlin wurden in Zusammenarbeit mit dem DLR bereits erste Kartenprodukte der Mars-Oberfläche erstellt. Auf Grundlage der von der HRSC aufgenommenen Bilder wurden seit Januar 2004 � angepasst an die jeweilige Lage der Bildstreifen � Sonderblätter wissen-schaftlich interessanter Gebiete angefertigt (vgl. ALBERTZ et al., 2004). Im Zuge der ständig wachsenden Abdeckung des Planeten bestehen mehr und mehr Möglichkeiten, Mosaike aus sich überlappenden Streifen zu bilden. Auf dieser Basis liegen nunmehr die ersten Karten innerhalb des Regelblattschnitts der Topographic Image Map Mars 1:200 000 vor.
2 Das kartographische Konzept
Die kartographischen Grundlagen � geodätische Bezugsflächen des Planeten Mars, Karten-projektionen, usw. � sind im Folgenden zusammenfassend beschrieben. Details können GEHRKE et al. (2003b) und ALBERTZ et al. (2004) entnommen werden.
2.1 Bezugssysteme und Kartenprojektionen
Der Lagebezug auf dem Mars wird durch ein Rotationsellipsoid beschrieben, welches im Massenzentrum gelagert ist. Nach Definition durch die Internationale Astronomische Union (IAU) beträgt die Länge der äquatorialen Halbachse 3396,19 km, die der polaren Halbachse 3376,20 km. Diese Parameter des Mars IAU 2000 Ellipsoides wurden im Jahr 2003 bestätigt (SEIDELMANN et al., 2002, SEIDELMANN et al., 2004). Planetozentrische Breiten in Kombi-nation mit östlich positiv gezählten Längen bilden das Referenzsystem auf der Mars-Ober-fläche; der Nullmeridian ist durch den Krater Airy-0 festgelegt.
Für den Höhenbezug auf dem Mars ist eine Äquipotentialfläche, das so genannte Areoid, definiert (Seidelmann et al., 2004).
Das Kartenwerk Topographic Image Map Mars 1:200 000 basiert auf flächentreuen Karten-projektionen. Für Blätter zwischen 85° südlicher und nördlicher Breite wird die Sinusoidal-projektion, für die Polbereiche die Azimutal-Abbildung nach Lambert angewendet.
2.2 Das Kartenwerk Topographic Image Map Mars 1:200 000
Die Grundkonzepte der Topographic Image Map Mars 1:200 000 wurden bereits für die fehl-geschlagene Mars96 Mission mit dem Ziel definiert, eine optimale Darstellung der Mars-Oberfläche zu ermöglichen (LEHMANN et al., 1997). Sie stellt mit entsprechenden Anpas-sungen wie beispielsweise der Übernahme aktueller Definitionen der Referenzsysteme auch den Standard für Mars Express dar. Die bestehende Bandbreite von Karten kleiner und mitt-lerer Maßstäbe wird durch die Topographic Image Map Mars 1:200 000 um das benötigte großmaßstäbige Kartenwerk ergänzt. Damit sind folgende Maßstäbe bzw. Kartenwerke für den Mars in Gebrauch (ALBERTZ et al., 2004):
• Globale Karten, im Wesentlichen in 1:25 Mill. (25M) und 1:15 Mill. (15M)
• Kartenwerke Mars Charts MC 5M und MC 2M
• Karten mittlerer Maßstäbe (1M)
• Kartenwerk Mars Transverse Mercator MTM 500k
• Topographic Image Map Mars 1:200 000 (200k) und daraus abgeleitete großmaß-stäbige Produkte (100k, 50k)
Während den meisten dieser Karten konforme Projektionen � Mercator, Lambertsche Kegel-projektion bzw. Stereographische Projektion � zu Grunde liegen, ist die Topographic Image Map Mars 1:200 000 flächentreu (s.o.). Die Sinusoidalprojektion wird dabei für jedes Kartenblatt mit einem eigenen Bezugsmeridian, welcher der Blattmitte entspricht, ausgeführt. Damit verfügt jedes dieser Blätter über individuelle Projektionsparameter, so dass insbeson-dere in Anbetracht des großen Maßstabes lediglich marginale Verzerrungen auftreten. Die Unterschiede zwischen diesen flächentreuen und konformen Kartenblättern sind daher gering. Dennoch bietet die Topographic Image Map Mars 1:200 000 die beispielsweise für wissen-schaftliche Interpretationen wichtige Eigenschaft der Flächentreue.
Gemäß den aktuellen IAU-Definitionen basiert der Blattschnitt auf planetozentrischen Breiten und östlichen Längen. Jedes Kartenblatt deckt in der Breite 2° ab. Die Ausdehnung in der Länge nimmt auf Grund der Meridiankonvergenz mit der Breite zu; sie schwankt zwischen 2° am Äquator und 360° für die beiden Poldarstellungen. Die gesamte Mars-Ober-fläche ist in 10 372 einzelne Kartenblätter eingeteilt.
Grundsätzlich bilden diese Definitionen und Layout-Vorgaben (siehe Kapitel 3) die Basis für weitere Kartenprodukte. Karten der Maßstäbe 1:100 000 und 1:50 000 lassen sich � ähnlich wie das System der amtlichen topographischen Kartenwerke in Deutschland � aus dem Maß-stab 1:200 000 systematisch ableiten. Darüber hinaus ist die Erstellung thematischer Karten geplant. Damit stellt das moderne Kartenwerk Topographic Image Map Mars 1:200 000 auch die Grundlage für zukünftige Mars-Kartographie dar.
3 Karteninhalte und Blattlayout
Im Folgenden werden die einzelnen Inhalte eines Kartenblattes der Topographic Image Map Mars 1:200 000 bzw. ähnlicher, abgeleiteter Produkte beschrieben. Sämtliche Komponenten können dabei automatisch mit dem Softwarepaket PIMap generiert werden (vgl. Kapitel 4). Eine Übersicht über das prinzipielle Layout eines Kartenblattes gibt Abbildung 3.
3.1 Bilddaten
Die Basis der Topographic Image Map Mars 1:200 000 sind Bilddaten der Mars-Oberfläche, d.h. farbige Orthobildmosaike, die aus HRSC-Daten abgeleitet sind. Diese georeferenzierten Mosaike werden durch das HSRC Co-Investigator Team � beim Deutschen Zentrum für Luft- und Raumfahrt (DLR) in Berlin-Adlershof bzw. an der FU Berlin � erstellt.
Für die Einbindung als Kartengrundlage müssen die Bilddaten dem Blattschnitt entsprechend zugeschnitten werden. Eine vorausgehende Umprojektion einschließlich Resampling ist nötig, wenn Projektionsparameter � wie beispielsweise der Bezugsmeridian der Sinusoidal-projektion � zwischen den gegebenen Bilddaten und dem zu erstellenden Kartenblatt differieren.
3.2 Höhenlinien
Digitale Geländemodelle (DGMs) der Mars-Oberfläche werden innerhalb des HRSC-Teams aus den Stereokanälen der Kamera berechnet. Sie repräsentieren in Grauwerten codierte Höhenraster und weisen daher den Bilddaten vergleichbare Eigenschaften auf.
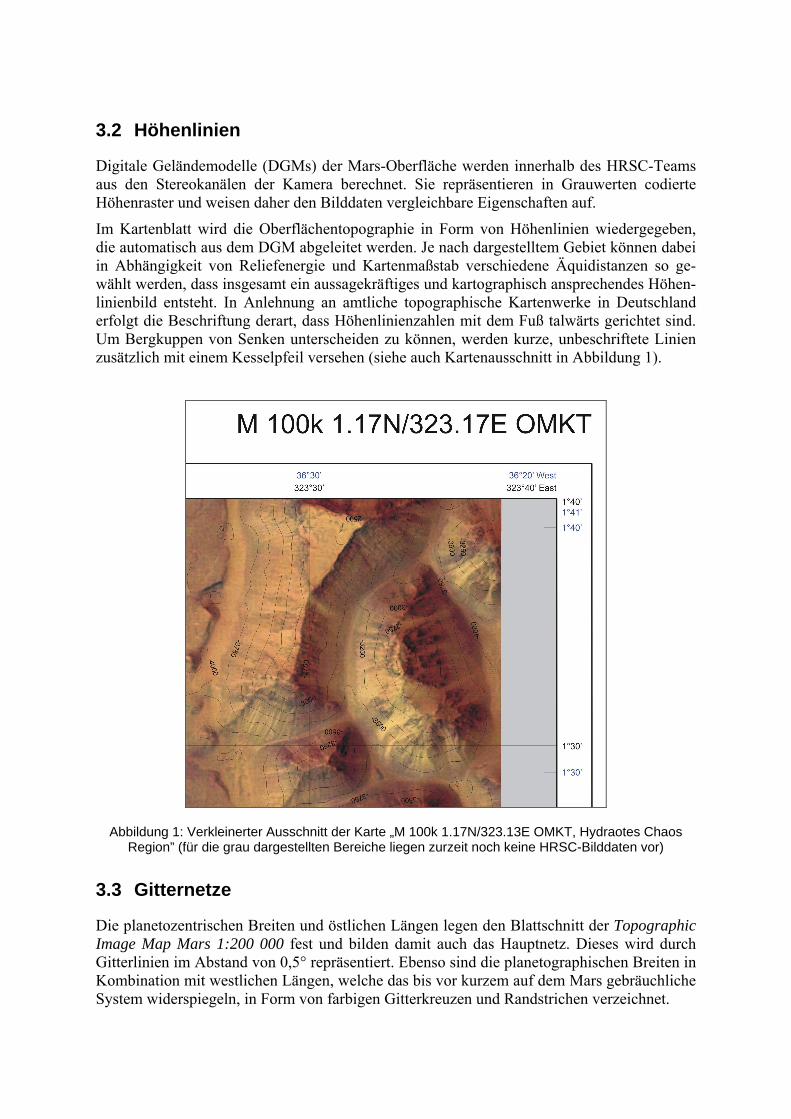
Im Kartenblatt wird die Oberflächentopographie in Form von Höhenlinien wiedergegeben, die automatisch aus dem DGM abgeleitet werden. Je nach dargestelltem Gebiet können dabei in Abhängigkeit von Reliefenergie und Kartenmaßstab verschiedene Äquidistanzen so ge-wählt werden, dass insgesamt ein aussagekräftiges und kartographisch ansprechendes Höhen-linienbild entsteht. In Anlehnung an amtliche topographische Kartenwerke in Deutschland erfolgt die Beschriftung derart, dass Höhenlinienzahlen mit dem Fuß talwärts gerichtet sind. Um Bergkuppen von Senken unterscheiden zu können, werden kurze, unbeschriftete Linien zusätzlich mit einem Kesselpfeil versehen (siehe auch Kartenausschnitt in Abbildung 1).
Abbildung 1: Verkleinerter Ausschnitt der Karte „M 100k 1.17N/323.13E OMKT, Hydraotes Chaos Region” (für die grau dargestellten Bereiche liegen zurzeit noch keine HRSC-Bilddaten vor)
3.3 Gitternetze
Die planetozentrischen Breiten und östlichen Längen legen den Blattschnitt der Topographic Image Map Mars 1:200 000 fest und bilden damit auch das Hauptnetz. Dieses wird durch Gitterlinien im Abstand von 0,5° repräsentiert. Ebenso sind die planetographischen Breiten in Kombination mit westlichen Längen, welche das bis vor kurzem auf dem Mars gebräuchliche System widerspiegeln, in Form von farbigen Gitterkreuzen und Randstrichen verzeichnet.
Die Darstellung beider Systeme ist die gängige Vorgehensweise in der aktuellen Mars-Karto-graphie; deshalb ändern bzw. ergänzen andere Institutionen zum Teil unter großem Aufwand ältere Versionen ihrer Karten entsprechend (vgl. z.B. ROSIEK et al., 2003).
3.4 Nomenklatur
Die Nomenklatur auf dem Mars wird durch die IAU geregelt. Bis heute sind mehr als 1500 Oberflächenformen in 24 verschiedenen Kategorien (Krater, Täler, usw.) benannt. Einen vollständigen und aktuellen Datensatz, der neben den Namen die Lagekoordinaten, Größen-angaben und Informationen zum jeweiligen Namensursprung enthält, wird vom United States Geological Survey (USGS, 2004) bereitgestellt. Auf Grundlage dieses Datensatzes werden sämtliche Oberflächenformen, welche in einem zu generierenden Kartenblatt liegen, automa-tisch beschriftet. Dabei wird nach Art und Größeneigenschaften unterschieden; Einzelheiten sind in GEHRKE et al. (2003b) beschrieben.
Des Weiteren enthalten die Karten Signaturen der Landeplätze einschließlich der Angaben von Missionsname und -datum.
3.5 Kartenrandangaben
Kartenblätter werden in ihrem Kopf üblicherweise mit der Gattung, einer Blattbezeichnung bzw. -nummer sowie einem eindeutigen Namen versehen. Die Kartengattung entspricht für alle Blätter der Topographic Image Map Mars 1:200 000 eben diesem Kartenwerksnamen. In der Blattbezeichnung sind Angaben über Art, Lage und Maßstab der Karte kodiert. Innerhalb der planetaren Kartographie ist diese Bezeichnung meist aus den fünf Elementen Planet � Maßstab � Blattzentrum � Kartentyp � Jahr (Map Sheet Designation Codes nach GREELEY & BATSON, 1990) aufgebaut. Mit �M 100k 1.17N/323.17E OMKT� (hier ohne Jahresangabe) ist ein Kartenblatt auf dem Planeten Mars (M) im Maßstab 1:100 000 (100k) bezeichnet, das bei 1°10� ≈ 1,17° nördlicher Breite und 323°10� ≈ 323,17° östlicher Länge liegt; es handelt sich um eine Topographische Karte (T) auf Grundlage eines Orthophotomosaiks (OM). Die Karte enthält Farb-Informationen (K), in diesem Fall die Bilddaten (vgl. Abbildung 1). Wenn mög-lich, werden die Kartenblätter zusätzlich mit dem Namen einer abgebildeten Oberflächen-form versehen.
Innerhalb der Legende werden die grundlegenden Eigenschaften sowie Karteninhalte er-läutert. Im Einzelnen betrifft dies die Parameter der Kartenprojektion, des Referenzellipsoids, des Areoids (Höhenbezug) sowie die Gradnetze als Repräsentation der beiden ellipsoidischen Koordinatensysteme des Mars. Weiterhin werden Informationen zu den verwendeten Bild-daten � Nummern der HRSC-Bilder sowie Angaben zur Datenprozessierung � und Gelände-modellen gegeben. Eine Nebenkarte gibt die Lage des Kartenfeldes in Bezug zum Standard-kartenwerk an; zusätzlich ist die Referenzierung in den vertrauten, kleinmaßstäbigen Karten-werken MC 5M bzw. MC 2M zweckmäßig.
4 Automatisierte Kartenherstellung mit PIMap
Die Herstellung von Karten an der TU Berlin innerhalb der Mars Express Mission ist ein vollständig digitaler Prozess; im Mittelpunkt steht dabei das kartographische Software-Paket PIMap (Abbildung 2). Die Software PIMap wird seit 2001 in der Programmiersprache C++ an der TU Berlin entwickelt; sie ist sowohl unter Windows- als auch unter Linux-Umgebun-
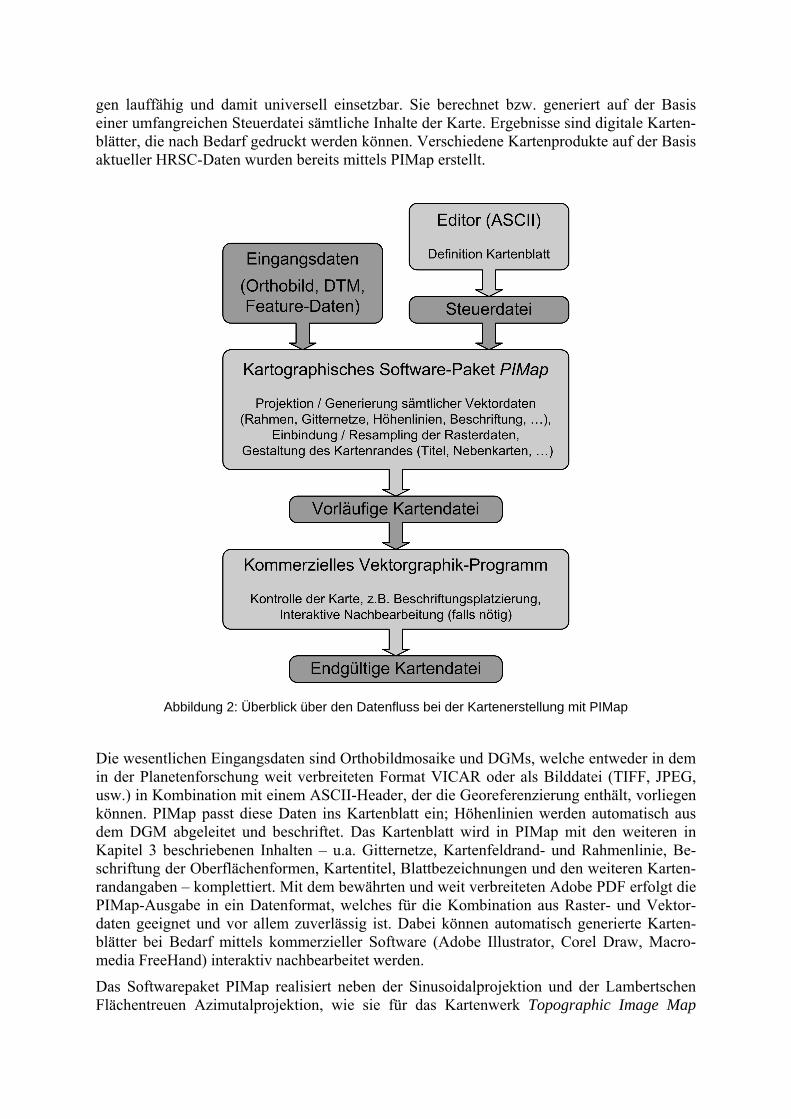
gen lauffähig und damit universell einsetzbar. Sie berechnet bzw. generiert auf der Basis einer umfangreichen Steuerdatei sämtliche Inhalte der Karte. Ergebnisse sind digitale Karten-blätter, die nach Bedarf gedruckt werden können. Verschiedene Kartenprodukte auf der Basis aktueller HRSC-Daten wurden bereits mittels PIMap erstellt.
Abbildung 2: Überblick über den Datenfluss bei der Kartenerstellung mit PIMap
Die wesentlichen Eingangsdaten sind Orthobildmosaike und DGMs, welche entweder in dem in der Planetenforschung weit verbreiteten Format VICAR oder als Bilddatei (TIFF, JPEG, usw.) in Kombination mit einem ASCII-Header, der die Georeferenzierung enthält, vorliegen können. PIMap passt diese Daten ins Kartenblatt ein; Höhenlinien werden automatisch aus dem DGM abgeleitet und beschriftet. Das Kartenblatt wird in PIMap mit den weiteren in Kapitel 3 beschriebenen Inhalten � u.a. Gitternetze, Kartenfeldrand- und Rahmenlinie, Be-schriftung der Oberflächenformen, Kartentitel, Blattbezeichnungen und den weiteren Karten-randangaben � komplettiert. Mit dem bewährten und weit verbreiteten Adobe PDF erfolgt die PIMap-Ausgabe in ein Datenformat, welches für die Kombination aus Raster- und Vektor-daten geeignet und vor allem zuverlässig ist. Dabei können automatisch generierte Karten-blätter bei Bedarf mittels kommerzieller Software (Adobe Illustrator, Corel Draw, Macro-media FreeHand) interaktiv nachbearbeitet werden.
Das Softwarepaket PIMap realisiert neben der Sinusoidalprojektion und der Lambertschen Flächentreuen Azimutalprojektion, wie sie für das Kartenwerk Topographic Image Map
Mars 1:200 000 benötigt werden, alle gängigen Kartenprojektionen. Auch lassen sich Blatt-zentrum und -ausdehnungen sowie Maßstab frei wählen. Damit wird die automatische Erstel-lung beliebiger Karten der Mars-Oberfläche, insbesondere auch der in Kapitel 2.2 aufge-listeten Produkte, ermöglicht. Darüber hinaus unterstützt PIMap die Kartierung beliebiger planetarer Körper, sofern sie als Kugel oder Rotationsellipsoid parametrisierbar sind.
Aufgrund aktueller Entwicklungen und Ergebnisse der Planetenforschung werden entspre-chende Anpassungen und Updates notwendig; ein wesentliches Ziel ist dabei die auto-matisierte Herstellung thematischer Karten.
5 Überblick über die ersten Ergebnisse
5.1 Testblätter
Mit der grundlegenden Definition des Kartenwerks Topographic Image Map Mars 1:200 000 im Rahmen des Mars96 Mission wurden die Konzepte an Hand verschiedener Beispielkarten präsentiert. LEHMANN et al. (1999) haben auf Basis dieses Kartenwerks das Sonderblatt �Topographic Image Map Mars 1:200 000, Mars Pathfinder Landing Site, Mouth of Ares and Tiu Valles Region� hergestellt.
In Vorbereitung auf die Mars Express Mission wurden einige Kartenexemplare generiert, die bereits viele der in den Kapiteln 2 und 3 dargelegten Eigenschaften aufweisen (vgl. GEHRKE et al., 2003b). Neben der kartographischen Umsetzung und Präsentation dieser aktuellen Konzepte war dabei das Hauptziel, die Produktionslinie und vor allem das Softwarepaket PIMap eingehend zu testen. Diese Karten basieren auf Bildmaterial der Mars Orbiter Camera (MOC) und Geländemodellen des Mars Orbiter Laser Altimeter (MOLA); Ergebnisse wurden durch GEHRKE et al. (2003a, 2003b) vorgestellt.
Neben der Mars-Oberfläche wurde PIMap in Vorbereitung auf die Mission Cassini-Huygens für die Kartierung einiger Saturn-Monde am DLR eingesetzt. Nicht zuletzt dadurch hatte die Software ihre operationelle Einsatzfähigkeit bereits vor Beginn der Mars Express Mission unter Beweis gestellt.
5.2 Topographische Karten aus Mars Express Daten
Mit der Aufnahme der ersten HRSC-Daten und ihrer Prozessierung durch das DLR wurden an der TU Berlin zeitnah auch einige topographische Bildkarten der Mars-Oberfläche gene-riert. Dabei handelt es sich um Sonderblätter auf der Grundlage des Kartenwerks Topo-graphic Image Map Mars 1:200 000, deren Lage an die jeweiligen Bildstreifen so angepasst wurde, dass die ausgewählten Zielgebiete optimal dargestellt werden konnten (vgl. Albertz et al., 2004). Ein Beispiel ist das Kartenblatt �M 100k 1.17N/323.13E OMKT�, welches das Hydraotes Chaos Gebiet im Bereich der Valles Marineris im Maßstab 1:100 000 wiedergibt. Abbildung 1 zeigt einen Kartenausschnitt dieser Erosionslandschaft mit ihren charakteristi-schen Tafelbergen.
Auf Grund der Aufnahmekonfigurationen der HRSC auf Mars Express ist für die vollständige Abdeckung eines Kartenblattes im Maßstab 1:200 000 � bei 2° bzw. etwa 120 km Längen-ausdehnung � die Breite eines Bildstreifens in der Regel nicht ausreichend (vgl. Einleitung); Mosaikbildungen benachbarter Streifen sind erforderlich. Mit der fortschreitenden Erfassung der Mars-Oberfläche liegen jedoch zunehmend Überlappungsgebiete vor, so dass bereits
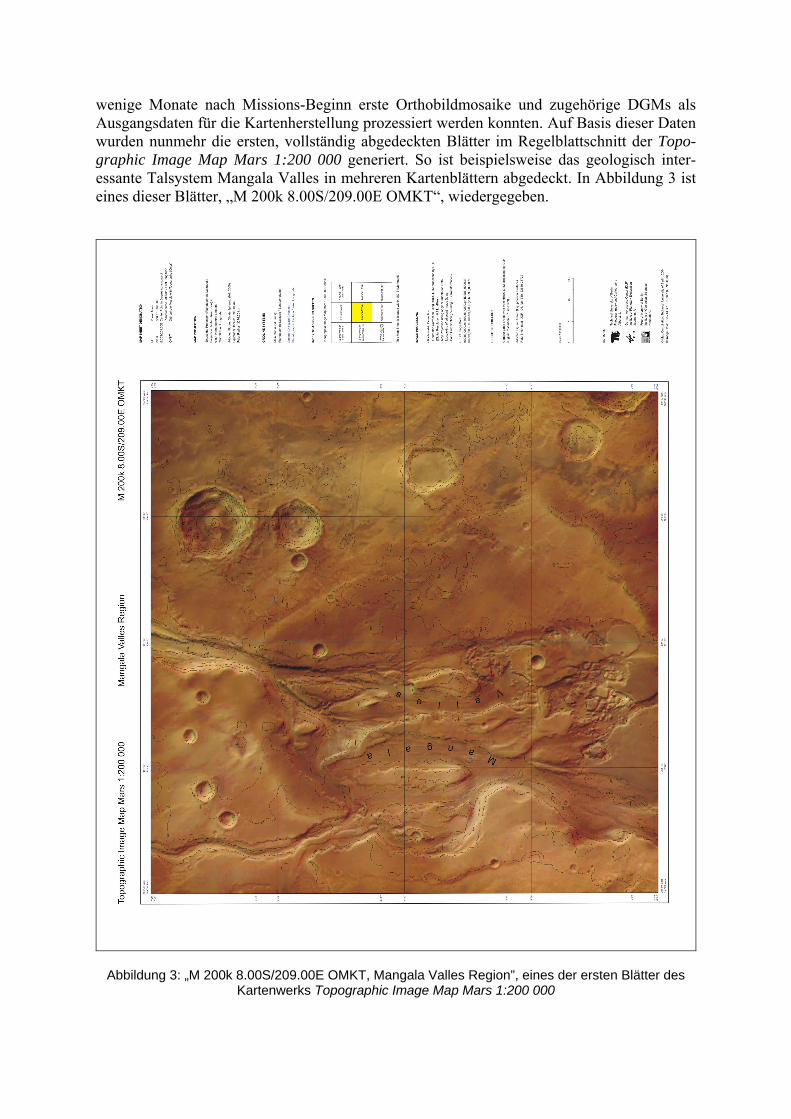
wenige Monate nach Missions-Beginn erste Orthobildmosaike und zugehörige DGMs als Ausgangsdaten für die Kartenherstellung prozessiert werden konnten. Auf Basis dieser Daten wurden nunmehr die ersten, vollständig abgedeckten Blätter im Regelblattschnitt der Topo-graphic Image Map Mars 1:200 000 generiert. So ist beispielsweise das geologisch inter-essante Talsystem Mangala Valles in mehreren Kartenblättern abgedeckt. In Abbildung 3 ist eines dieser Blätter, �M 200k 8.00S/209.00E OMKT�, wiedergegeben.
Abbildung 3: „M 200k 8.00S/209.00E OMKT, Mangala Valles Region”, eines der ersten Blätter des Kartenwerks Topographic Image Map Mars 1:200 000
6 Ausblick
Bereits zu Beginn der Mars Express Mission sind an der TU Berlin in Zusammenarbeit mit dem DLR verschiedene Kartenprodukte der Mars-Oberfläche aus von HRSC-Bilddaten ent-standen. Die ersten Blätter des neuen Kartenwerks Topographic Image Map Mars 1:200 000 liegen vor. Auf Grundlage dieser Ergebnisse und Erfahrungen werden systematisch weitere qualitativ hochwertige Karten generiert, um dem zunehmenden Bedarf � sowohl innerhalb des HSRC Co-Investigator Teams als auch für die Planung zukünftiger Mars-Missionen � nachzukommen.
In Kooperation mit anderen Fachdisziplinen wird an der Erstellung thematischer Karten des Mars gearbeitet. Topographische Basiskarten können dabei nahezu vollautomatisch � unter Verwendung der Software PIMap � generiert werden. Ein Schwerpunkt der zukünftigen For-schung in enger Zusammenarbeit innerhalb des HRSC-Teams wird die geeignete Einarbei-tung thematischer Informationen sein. Entsprechende Software-Erweiterungen sind geplant.
7 Danksagung
Die vorgestellten Arbeiten sind Teil des an der TU Berlin durchgeführten Forschungs-vorhabens �Software Development and Technical Support for Cartographic Data Processing� (�Software-Entwicklung und technische Unterstützung für die kartographische Daten-verarbeitung�) im Rahmen von �HRSC on Mars Express�. Dieses Vorhaben wird durch das DLR aus Mitteln des Bundesministeriums für Bildung und Forschung gefördert.
8 Literaturverzeichnis
ALBERTZ,. J., GEHRKE, S., WÄHLISCH, M., LEHMANN, H., SCHUMACHER, T., NEUKUM, G. and the HRSC Co-Investigator Team, 2004: Digital Cartography with HRSC on Mars Express. � IAPRS, Vol. XXXV, Instanbul.
DUXBURY, T.C., KIRK, R.L., ARCHINAL, B.A., NEUMANN, G.A., 2002: Mars Geodesy/ Cartography Working Group Recommendations on Mars Cartographic Constants and Coordinate Systems. � IAPRS, Vol. XXIV, Ottawa, Part 4.
GEHRKE, S., WÄHLISCH, M., LEHMANN, H., SCHUMACHER, T., ALBERTZ, J., 2003a: Carto-graphy with HRSC on Mars Express � A Specimen of the New Series �Topographic Image Map Mars 1:200,000�. � Proceedings of the ISPRS WG IV/9 Extraterrestrial Mapping Workshop, Houston.
GEHRKE, S., WÄHLISCH, M., LEHMANN, H., SCHUMACHER, T., ALBERTZ, J., 2003b: Carto-graphy with HRSC on Mars Express � The New Series �Topographic Image Map Mars 1:200,000�. � Vorträge 23. Jahrestagung der DGPF, Band 12, Bochum 2003: 451-458.
GREELEY, R., BATSON, R.M., 1990: Planetary Mapping. � 296 p., Cambridge University Press, Cambridge.
LEHMANN, H., SCHOLTEN, F., ALBERTZ, J., WÄHLISCH, M., NEUKUM, G., 1997: Mapping a Whole Planet � The New Topographic Image Map Series 1:200,000 for Planet Mars. � IAPRS, Vol. XXXI, Vienna, Part 4.
LEHMANN, H., ALBERTZ, J., WÄHLISCH, M., ZEITLER, W., NEUKUM, G., 1999: The Mars Pathfinder Landing Site � A Topographic Image Map 1:200,000. � Proceedings of the 19th International Cartographic Conference, Section 13, Ottawa: 15-23.
OBERST, J. et al., 2004: The Photogrammetric Performance of HRSC in Mars Orbit. � IAPRS, Vol. XXXV, Instanbul.
ROSIEK, M.R., HOWINGTON-KRAUS, E., HARE, T.M., REDDING, B.L., 2003. Mars Transverse Mercator (MTM) Map Series Updated with Planetocentric Grid. � Proceedings of the ISPRS WG IV/9 Extraterrestrial Mapping Workshop, Houston.
SEIDELMANN, P.K. et al., 2002: Report of the IAU/IAG Working Group on Cartographic Coordinates and Rotational Elements of the Planets, and Satellites: 2000. � Celestial Mechanics and Dynamical Astronomy, Vol. 82: 83-110.
SEIDELMANN, P.K. et al., 2004: Report of the IAU/IAG Working Group on Cartographic Coordinates and Rotational Elements: 2003. � Celestial Mechanics and Dynamical Astronomy, im Druck.
USGS, 2004: Gazetteer of Planetary Nomenclature. � http://planetarynames.wr.usgs.gov (10.06.2004).
Vorträge 24. Jahrestagung der DGPF, Band 13, Halle 2004: 555-564












