Embed Size (px)
Citation preview
R. WE~TZE~B~CL Die lnvarianten do~ (Jalileiol~ewton-Gruppe 75
Die Invarianten der Galilei-:New~on-Gruppe.
(Aus einem Briefe an Herrn F. Klein).
Yon
ROLAND WEITZENBOCK in Prag.
Die Grundgleichungen der klassischen Mechanik gestatten bekanntlich die Transformationen einer zehngliedrigen Gruppe, die man Galilei-l~ewton- Gruppe nennt. Die Transformationen dieser Gruppe bedeut~n die Ein- fh'hrung eines neuen, vierdimensionalen Bezugssystems (x~ y, ~, t), dessen r'~umliche Achsen (x, y, z) irgendwie gegen das alte Aehsenkreuz verdreht siud und dessert Anfangspunkt sich geradlinig mi~ konstanter Geschwindig- keit fortbewegt.
Herr F. Klein stellt in einer Ausarbeitung seiner Seminarvortr~ige*) die Fgrderung auf, ,,man mSge eine systemutische Invariantentheorie der Galilei-Newton-Gruppe ausarbeiten." Es wird in dieser Arbei~ das durch diese Forderung gegebene Problem exakt formuliert (w 1) und dessert LSsung gegeben (w 2). Den Beweis f~ihre ieh nur in groBen Ziigen dutch, er stfitzt sich auf S~itze fiber Drehungs- und Bewegungsinvarianten, die in Arbeit.en yon E. Study Und mir bewiesen worden sinai. Bemerkt sei nocb, daI3 ich nur die algebraische Seite des Problems behandle und auf physi- kaliscbe Fragen nicht eingehe.
Das entsprechende Problem ftir die Lorentz-Gruppe hat eine bedeutend einfaehere L~sung, die dureh eine Arbeit yon E. Study gegeben wurde.**)
w Es seien x, y, z die rechtwinkligen r[tumlichen Koordinaten eines
Massenpunktes P, t die Zeit, zu der sich P an der Stelle (x, y, z) be- finder. Die vier GrSl~en x, y, ~ und t sind dann die Koordinaten des Welt- punktes P beziiglich eines vierdimensionalen Koordinatensystems K.
*) Die Entwicklung tier Mathematik im 19. Jahrhunder~, 4. Teil~ X. Kapitel, GSttinge n 1916117,
**) E. Study, ~ber die Invarianten der projektlven Gruppe einer quadratischen Mannigfaltigkeit yon nicht verschwindender Diskriminante, Leipziger Berichte ~9 (1897) S. 442,461.
Ferner seien m, y, z und t die Koordinaten desselben Weltpunktes P beziiglich eines zweiten Koordinatensystems K. K und K h~ingen dann als zwei zuliissige Koordinatensysteme der klassischen Mechanik durch die Formeln zusammen:
x = ~n2 + ~s2Y § %~5 + cat: + rl
(1) r . . . z = e3sX + ~s~Y + ess ~k + c s t + ~s "
t = •
Hierbei b.ilden die e,k eine orthogonale Matrix. Die r~ sind die Ko- ordinaten des Anfangspunktes () yon K im System K und die c, sind die Komponenten der konstanten 8eschwindigkeit, mit der sieh O im
Raumo,(x, y, z) geradlinig fortbewegt. Lassen wir in der durch (1) gegebenen Transformation T die ~,, weg,
so entsteht eine homogene Transformation Ti,. Eine Linearform r t a , ' x + b~ y + cs'~ + d~ t,
die bei T h invariant bleibt, ist ein Tensor 1. Stufe; seine Komponenten ' v v �9 as , b / , cl , d s transformieren sich kontragredient zu den Komponenten x, y, z, t des Weltvektors (x, y, z, t).
I)as zu liisende Problem liil~t sich jetzt so formulieren: Gegeben s ind e ine R e i h e yon W e l t p u n k t e n
Xl, Yl, ZS, tl; X2' Y2, zs, t z ; . . .
u n d e ine R e i h e yon T e n s o r e n I. S tu f e
' b" c / d " ' b ' " d " �9 as , I , , 1; as , ~., c~, ~ ; . . .
E s s ind al le g a n z e n r a t i o n a l e n F u n k t i o n e n der x~, y ~ , . . . , t - ; at, b , , . . , z u f i nden , die bei den oo 1~ T r a n s f o r m a t i o n e n T der Ga-
l i l e i - N e w t o n - G r u p p e (1) i n v a r i a n t b le iben .
w
Wir greifen nun dem weiter unten gegebenem Beweise vor und geben die LSsung des eben formulierten Problemes an. Sie.lautet:
S ind x,, y~, z,, t, (i = 1, 2, . . . , m) die K o o r d i n a t e n yon m W e l t - �9 t t �9 �9 p u n k t e n , a, , b,, c,, d, (~ = 1, '2, . . . , n ) die K o o r d i n a t e n v on n T e n ~ 0 r e n
e r s t e r S tu fe , so g i b t es e ino e n d l i c h e A n z a h l yon g a n z e n r a t i o n a l e n F u n k t i o n e n I(x~, y , , . . . ; a,', b , ' , . . . ) m i t f o l g e n d e n E i g e n s e h a f t e n :
1 . J edes I i s t e i ne I n v a r i a n t e der (}a l i l e i -Newton- (~ruppe . 2. J e d e ganze r a t i o n a l e I n v a r i a n t e der m W e l t p u n k t e Und
T e n s o r e n b e z t t g l i e h d i e se r G r u p p e i s t ganz u n d r a t i o n a l du rch d ie I ausd r i i ckba r .
Die luvarianteu der G~lilei-Newton-Gruppe
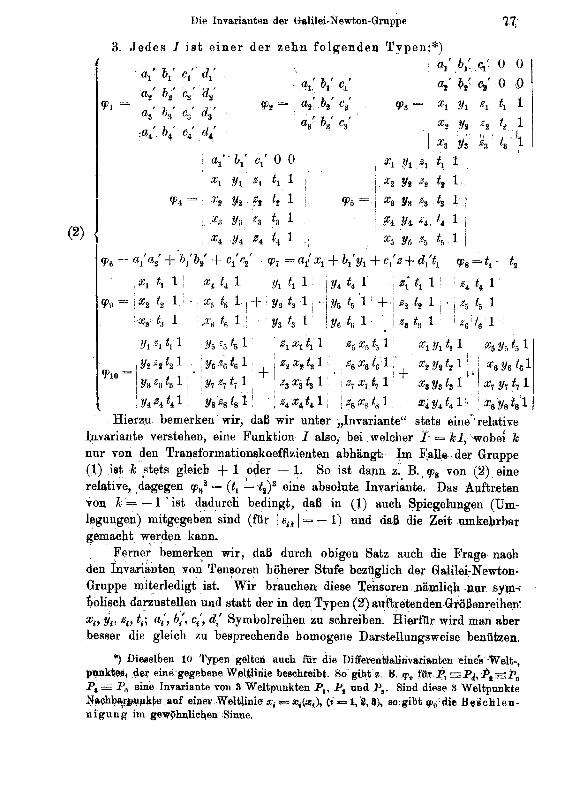
3. Jedes 1 ist einer der zehn folgenden Typen:*)
i p r a 1 b I' e 1 d l '
a~ b,~ c,-o" d a
a ' b ' Q ' d ' : 4. 4, , '~
, a~ 'b~ c~ 0 0
x~ y~ z i t~ 1
i. x,~ y~ z a ta 1
' a l ~ , b l r c1 '
a ' b ' ~ Cf~" ! a~ b~( c~
a l "
as"
q)~ ~ x~
x2
x3
i x~ y, z, t, :1
i i ;Xt .Y4 Z~, t t
, x 4 y~ z~ t~ 1 i: . x~ y~ z~ t~,
r = a~ a~" -4- th b~ + c~ c~ q~ = af x l + b~'y~ + c~ z + d~ t~
x, t, 1', x , t, 1~ y, t, 1 i y , t, 1 z i t i 1!
qg:,=jx~ t, l:-,x: t~ l i-J- y .t~ I i.iy.~ t~'l'q-.]z~t, li.
.x,: t, 1 Z~ t, 1 . Ys t, 1 ] y~ t, 1- ' ! z, t,~ 1
:Yl .zi t l l Y~ z~, t~ 1
1
' y~ z~ t~ 1 Ys z s t8 1 i
+i.,x.r �9 ' z~ xa t~ ;1 i
z~ x~ t61 x~ y~ t~ z~ x~ t~ 1 -t- x~ y~ ts
Zs x8 ts 1 : x~ y~ t~
'.ca ' o 0 1 'I e4 ,
y~ z~ t~ 1 I y~ z~ t.~ i
1; I l i
l i
Z~, I t~ l
1 ' i x~ y.~ t.~ 1
1 x~ y~ t~ i /
1:: x systs'l Hierzu. bemerken wir, dab wir unter ,Invanante stets eine"relative
]nvariante verstehen, sine Funk~ion I also, bei .welcher f = k I , wobel' k nut yon den Transformationskoeffizienten abh~ngk, I m Falls. der Gruppe (1) ist ks te t s gleich ~- 1 oder - 1. So ist dann z: B. cps v0n (2)sine relative, dagegen ~8~= (t, ~.t~) s sine absolut~ Invari~mte. Das Auf~reten yon k . - i 'ist dadurefi bedingt, dab in ( ! ) aueh Spiegelungen (Um- legungen ) mitgegeben sind (ftlr [~i~ t = _ 1) nnd dab die Zeit .umkehrbar gemaeht werden kann.
Ferner bemerken wit, dab dureh obigen Satz aueh die Frago naoh den Invarianten Yon Tensoren hSherer Stufe bezfiglich dea" Ga!ilei:Newtom Gruppe miter]edigt ist. w i t brauche~ diese Tehsoren _nEmliqh nu t sym~ 6olisch darzustellen und start der in den:Typen (~)aUftretenden.G~Benreihen~
:; z l : t i ~ , , , x~, y~, ; a~, b~', c~, d~ Symbolreihen zu sehreiben. Hierflir wird man abet besser die gleleh zu besprechende homogene DarsteUungsweise bentitzen.
*) Dicselben 10 Typen g01ten aueh fiir die .Diffe~n~ialirivarian~en eine's-,Wel~-, p~nlrte~,~ .de~ ein ~gegebene WBlt.linie beschreibt. So giht z. B, ~, f ~ , P~ -~- P~, "P~ ~ P~ Ps ~--- Po sine Invariante yon 3 Weltpunkten P1, Ps und Ps. Sind diese 3 Weltpunkte N~ohb~!'~u~kte auf einer Weltlini~ x i ~= ~(x~), (i == I,:'~, ~), s0:gibt qo~!die B~ehleu- n i g u n g im gew~hnlichen Sinne,
7'8 R. W~aTz~.~ cz
w
Wir ftthren jetzt an Stelle der Koordinaten x, 71, z, t eines Weltpanktes x homogene Koordinaten x~ : x, : x 3 : x~ : x s sin, indem wir. z. B. setzen:
x t x : zn t xA �9 x = x~..' y = x , . " ~ = z ~ - ' = x~
�9 t t t Ebenso seien a~ : a, : a s : a, ' : a~ di~ homogenen Koordinaten eines Ten- ,ors a'. x ~ - - 0 g ib t . aann den unelgentliehen (oo-fernen) Raum 27~ tier Welt, die homogenen Koordinaten dieses R 3 sind dana 0 : 0 : 0 : 0 : 1 and dieso GrSSenroihe be~eiehaen wir mit k'.
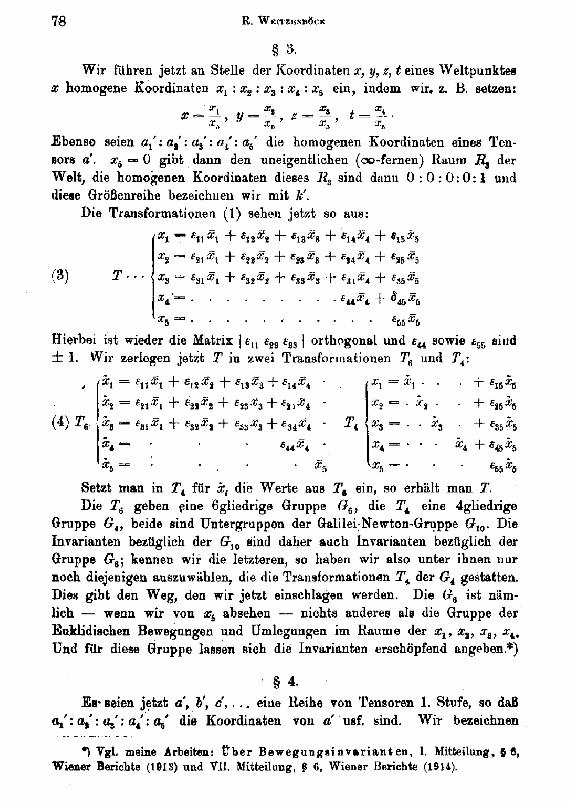
Die Transformationen (1) sehen je~zt so aus:
[
ix a" . . . . . . . . . ~ua~ + ~a~a =
% . . . . . . . . . . . . % x~
Hierbei ist wieder die Matrix ]e u e~ ~s~ I orthogonal uad e~ sowie ~s rand + I. Wit zerleffen jetzt T in zwei Transforma~ionen T~ und T~:
(4) Ts + + + T , . . +
8etzt man in T, flit f~ die Werte aus T s sin, so erh~It man T. Die T s gebea 9ins 6gliedrigo Grappe G s , die T, eine 4gliedrige
Omppe G,, beido sind Untergruppen der Oalilei:Ne~rton-Grn.ppe Glo- Die Invarianten bezflglieh der ~1o sind daher auch lnvarianten beziiglieh der Orappe Gs; konneu wit die letzteren, so haben wir also unter ihnen nur noeh diejenigen auszuwlihlen, die die Transformatlon~n T~ der G, gestatten. Dies gibt den Weg, den wir jetzt einschlagen werden. Die G~ ist nRm- lich - - wena wit vou x s absehen - - nichts auderes ale die Oruppe der guklidischen Bewegungen und Umlegungen im Kaume der xl , x:, :ra~ xt. Und filr diese Gruppe lassen sieh die Invarianten ers~h~ipfend angeben.*)
w Es, seien jetz~ a', b', d,... eine Reih0 yon Tensoren I. Stufe, so dab
at': as' : as" a,'. a5 ~ die Koordinaten yon s usf. sind. Wir bezeichnen
*} YgL meine Arbeiten: ~bcr Beweguugsinvari~nten, I. Mitteilung, w 6~ Wiener Berichte (1913) und VII. Mi~teilung, ,~ 6, Wiener Be~dch~e (1914).

Die Invarianten der Galilei-Newton Gruppe 79
fe rne r mit k' die GrSBenreihe 0 : 0 : 0 : 0 : 1 0 : 0 : 0 : 1 : 0 . minante
und setzen noch
(5)
Es ist dann z. B.
(6) b' c" d' k') ---
und
(7) (a' b" c' 1 ~ k') --~
und mit l" die GriiSenreihe Dann bezeichnen wir mit (a' b" c' d' e') die 5-reihige Deter-
�9 t I �9
a t a, a s" a s a 5 �9 �9 t t
bl bs bs bs b 6' t C 1
d t"
el" e5 ~
(a' f l f) = al 'b l" + as'b~" + as'c a'
t �9 t t �9
a t a~ a s a 4 a a t t r �9
bl bz ba b4 bs" ' �9 r �9
e I C9.' Cs t C 4 C 5'
ds" d4" ds'il 0 0 0 0 1
t ' t t
a t a~ a z' a s b 1" C(
i d / ds' ds"
t r �9 t �9
az az as a4 a~ ' ' b j ' ' b t b, b, b, lJ t �9 t t �9 ct cs ca cs c5
0 0 0 1 0
0 0 0 0 1
a 1' a 2' a s' -- b t' bj' b 8'
c,' c z' c s"
Es sei nun I e eine Invariante der Tensoren a', b , c ' . . . beziiglieh der G,. Nach dem ersten Fundamentalsatz far Bewegungsvarianten*) ist dann jedes I 6 ganz und rational darstellbar dutch
(a" b" d d" e'), (a" b" c" a r k'), (a" b" d l" k'), (v( y b'), as , b,', . . .
und da jede Invariante 11o beziiglich der Galilei-New~on-Oruppe G1o aueh eine ie ist, so haben wir
(8) 11o ffi F((a" c" b' d' e'), (a" b" c" ar k'), (a" b' c" l" k'), (a ' fb ' ) ; a~," 'bs,.: .),
wobei F eine gauze, rationale and homogene Funktioa der Grii6enreihen r �9 a', b , c , . . bedeutet. Jetzt kann man beweisen, dal~ in (8) rechts die az' , b s " . . , nicht mehr
explizite auftreten dliri~n, wenn Ilo auch 'die Transformatlonen T 4 der Gruppe G~ gestatten son. Bei T 4 tmnsformieren sieh die a~, hi', . . . k0ntr~- gredient zu den x~; wir haben:
") Vg][. die oblge Anmerkung.
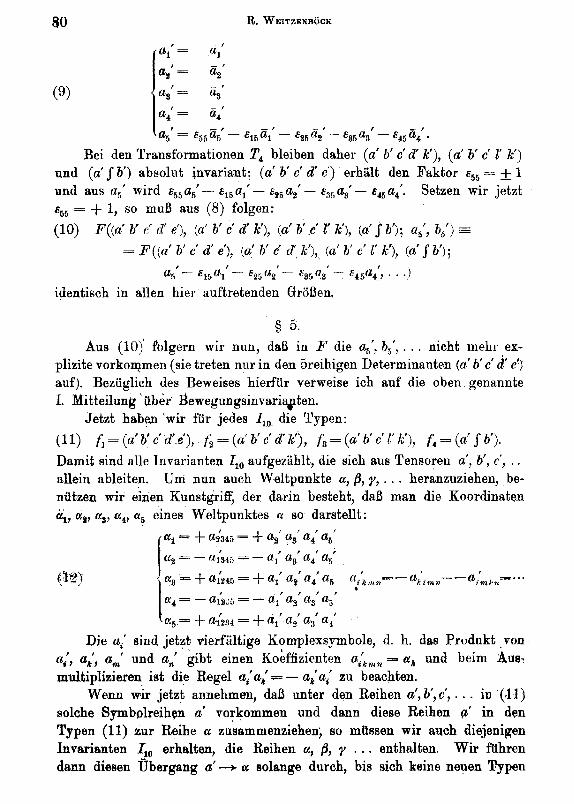
8 0 B. W E I T Z E N B O C K
i , a I ~ a 1
a 9 = a 2 - - v
(9) a s' = a s -- v
a4, = a 4 -- r ? - - t
% a 5 = ~ 5 5 a 5 " - ~ l S a l ' - ~ 2 5 6 2 - - ~ $ 5 a 3 - - ~ 4 5 a 4 �9
Bei den Transformationen T a bleiben daher (a" b" c' d" k'), (a' b" c' l' k') und (a' f b') absolut invariant; (a' b' c' d' e ) erh~ilt den Faktor ~a~ = _ 1 und aus a~' wird e~a~'-- ~ a ~ ~ - ~sa~ ' - - %,as ' -- raa~'. Setzen wir jetzt ~ = + 1, so muB aus (8) folgen:
(10) F((a" b" c" d' e'), (a' b" c' d" k'), (a'b;.d l" k'), (a 'fb'); a~', b~')
= E((a ' b' c' d' e'), (a' b' d d" k'),, (a'b' c" l' k'), (a ' fb ');
identisch in allen bier auftretenden GrS$en.
w
Aus (10)' folgern wir nun, da$ in F die as' , b s ' , . . , niehg mehr ex- plizite vorkon~men (sie treten nur in den 5reihigen Determinanten (a' b' c' t~'d) auf). Bez~iglich des Beweises hiefffir verweise ich auf die oben genannte I. Mitteilung 'fibdr Bewegungsinvaria~ten.
Jetzt habem 'wir ffir jedes 11 a die Typen:
(11) f~=(a 'b:c 'd 'e ' ) , f ~ = ( a ' b ' c ' d ' k ' ) , f s = ( a ' b ' c ' l ' k ' ) , f~=(a ' J 'b ' ) .
Damit sind alle Invarianten/lo aufgezKhlt, die sich aus Tensoren a', b', c', .. allein ableiten. Um nun auch Weltpunkte % ~, 7 , . . . heranzuziehen, be- nittzen wir einen Kunstgriff, der darin besteht, dal~ man die Koordinaten &l, as, a3, t~4, % eines Weltpunktes ~ so darstellt:
i a 1 = ~- a~'3,.~, = A- a~' a s' a," asi
�9 �9 v t �9 ~ t~ = - - ( 1 1 3 4 5 = - - a I a s a 4 a 5
v , v
~,~2) as == + al'~,.~ = + al" a~" a," a~ c~ , , , ,= - - aki~,=--aim~. ,=. . . f , t �9 p p l a , : - - a l ~ ; J r , = - - a l a ~ a s a 5 v �9 t �9 t
~ a 5 -~- a1~34 ~ -~- a l .a, , a~ a i
Die a~' sind jetzb vierf~Zltige Komplexsymbole, d. h. das Produkt yon �9 v v g t . v
aj, a~, a~ und a~' ibt einen Koeffiz~enten a . ~ k , , ~ a ~ und beim Auu, multiplizieren, ist die Regel a i ' a k ' = - a~'a~" zu beachten.
Wean ~i r jetz t annehmen, da$ unter den Reihen a ' ,b ' , c ' , . . , in (,1J) solche Symbolreihcn a" vorkommen und dann diese Reihen a' in den Typen (11) zur Reihe ~ zu'sammenziehen, so milssen wir auch diejenigen Invarianten /lo erhalten, die Reihen a, 09, 7 . . . enthalten. Wir ffihren dann diesen ~bergang a ' - -~ a solange durch, bis sich keine neuen Typen
(~)
Die Invarianten der Galflei-Newton-Gruppe ~I
mehr ergeben. Beztlglich ni~herer Ausffihrung dieser Reehnungen verweise ich auf meine obengenannte VII. Mitteilung fiber Bewegungsinvarianten.
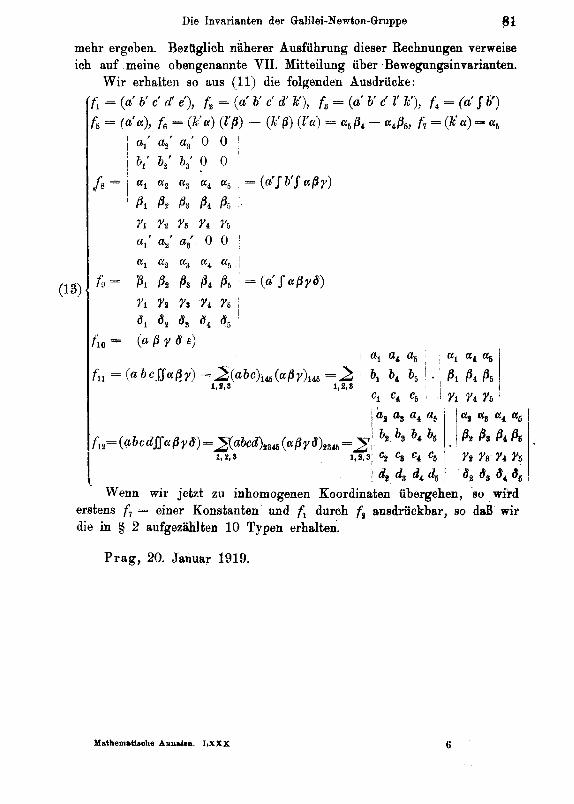
Wir erhalten so aus (11) die folgenden Ausdrficke:
]~=(a'b'c'd'e'), f~=(a'b'c'd'k'), f~=(a'b'c'l'k'), f,=(a'[5") f~ = (k ' .) a~ a~ 0
b~ b s 0
7~ ~a ~a as a~. 0
s
a !
b~'
~ f S ~ ~1
a l
f~= ~ 71
50= (a
0 !
0
/~5 "
0
~5
~ = ( a ' ~ . ~ r ~ )
a 1 aa a 5 b 1 b, b~ tJ~ t~, t~5 i fl, = (a b c J'fa ~ ?) = ~ ( a bc)m (a ~ ?) la = ~-,
I,~,8 1,2,$ cl q c5 ~1 ? 4 ? 5 '
aj as a4 a6 % % % % [
t~2=(abcd.ff.~r~)=~(abcd),8a(~flr~)~a=~~, ~,, ~, ~, 3 c~b' b 3cs b,c, bsc~ " ~r~ rs~8 r, ~' ~r~ "
Wenn wir j&zt zu inhomogenen Koordinaten fibergehen, so wird ers~ens f7 = einer Konstan~en' mad f~ dureh fs ausdriiekbar, so dab wir die in w 2 aufgeziilalten 10 Typen erhslten.
P r a g , 20. Januar 1919.
Mathem~ltsche Annalen. LXXX