Embed Size (px)
Citation preview

SCHNEIDER, J. : The Two-Parametric Matrix Eigenvalue Problem 109
%.4JIJI. %. angem. Math. Nech. 67 (1987) 2 , 1 0 9 - 1 2 0
SCIISEIDER. ,J
Die zweiparametrige Matrizeneigenwertaufgabe
,Ileincm rerehrten Lehrer, Hewn Professor Z)r.-Ing. S. F ILK in Dank und Bnerkennung zu seinem 65. Geburtstag am 6. Mai 1986 gewidmet.
D i e punktweise Losung nwhrpai anzetrigei Eigenzcertnufgaben ist aufwendig und von nur geringem qualitativem Aussage- wert. Uagegen ermbglicht die Kenntnis von Asymptoten, non..Staigungen und Krummungen in einigen Punkten sowie von RinschliePungsgebieten der Eigenkurven einen schnelleren Uberblick und erleichtert ihre rasche Konstruktion. Abgeleitet werden solche nnd ahnliche HilfsnussngPn snm f l i c h U U R der c~inrakteristischen Gkichung des Problems, drren explizite Auf- c fa l lnng jedoch stds rermipden wird.
The poin-by-point solution of niultipnranieti ic eigeizcnlue-problems i s connected with high effort and only little qualitatwe evidence. Otherwise the knowledge of asymptotes, gradients and curvatures in several points or of including areas of thc eigencurves allows a quicker survey and lightens their fast design. Such and other simalar auxiliary statements are all derived from the characteiisfic agnrifion of the problem, where its explicit establishing always is avoided.
IIoTosesHoe perrrerrme \IHoronapa\reTpII.recIcIrx aa~arr o C O ~ C T B ~ H H ~ I X ~ H ~ ~ ~ H H R X mmneTcfl ~OporocTo~wm If ee 3Ha9eIIHe &llR Ka'IeCTBC?HIIbIX BbICKa3bIBaHHa EIBJIReTCII TOJlbKO HL13KIIM. B CpaBHeHHH C 3THM 3HaHHe ZiCIIMIITOT, CKOPOCTH H3\IeIIeHHH H HpMBH3eH B HeCKOJILKHX TOgeK a TBKWe 3HaHMe o 6 , ~ a c ~ ~ BKJII09eHIIR CO6CTBeHHbIX KpIIBbIX II03BOJIReT CKOpee nOJIyrIHTb 061Uee IIOHFITHe 0 IIOBeEeIXHH pellIeHIIR II 06nersae~
OnHaIcO BCt'rna Il36el7aeTCJT, BLIBOWITCFI TaIiHe H I I O ~ O 6 H b l e BCI70\10raTe.7GHbIe BLICK~3bIBaHIIR. BbrcTpoe irocTpoeHrie pememrir . z.13 xapaHTepmcTnsecKoro ypaBHeHm a a x a s ~ , mmoe nocTpoeme IcoToporo
1. Einleitiing und Problenistellung
Das j'erhalten eines mechanischen Systems wird in dcr Kcgel von ciner I'ielzahl unterschiedlicher und teilweise in der Entwurfsphase noch nicht exakt quantifizierbarer Parameter bestinimt. Lafit sich deren Zusammenspiel durch ein System linearer Differentialgleichungen beschreiben, so finden sich alle Parameter in der zugeordneten Eigenwert- aufgabe wieder. Solche Falle treten beispielsweise dann auf, wenn die Betriebsbedingungen zuin Zeitpunkt der Be- rechnung noch ungewiB sind (wie beim gleichzeitigen Knicken und Schwingen von Staben [l]), wenn init Fehlern bei der Herstellung des Systems zu rechnen ist (wie beim Knicken verwundener Stabe [2]) oder einfach dadurch, daB der Konstrukteur bewuBt einige GroBen offen lafit, um zum SchluB gewisse Nebenbedingungen erfullen zu konnen (wie die Verineidung von Resonanzerscheinnngen oder die Erzeugung eines gewunschten Abklingverhaltens
Bereits in der Entwurfsphase sind dadurch haufig grobe Eigenwertabschatzungen in Abhangigkeit freier Parameter vonnoten, deren Zusammenhang untereinander letztlich durch die charakteristische Gleichung des Eigenwertprobleins festgelegt ist, die wiederum bei grofieren Strukturen unhandlich wird und deren Losungen sehr sensibel auf kleine Koeffizientenungenauigkeiten reagieren. So bleibt scheinbar nur die punktweise Losung des Problems im gesamten Yaranieterraum ubrig, eine aufwendige Methode und zudem schlecht geeignet, Hinweise auf zur Erzielung bestimmter Systemeigenschaften erforderliche Parameteranderungen zu geben.
131).
Wir wollen die Problematik aufzeigen an der homogenen Aufgabe
F(Ib, a) 3~ := [ A + AB + oC] x = 0; 2 # 0 , (1) mit quadratischen Matrizen A , B, C . Losungen 2, # o existieren fur genau jene Paare {A,, a,}, fur die die Koeffi- zientendeterminante
.F(I.,, a,) := det P(1.,, a,) = 0 (2) verschwindet. Die vorliegende Arbeit versucht unter anderem, Steigung, Krummung, Asymptoten und Einschlie- Sungsgebiete der durch (2) festgelegten Kurven in der A-a-Ebene zu berechnen, um die Wanderungen der Eigen- werte bei einer Anderung der Systemparameter A und a vorhersagen zu konnen, ohne gleich durch eine Fortset- zungsmethode [9] die kompletten Eigenkurven berechnen zu mussen. Zur Wahrung der Anschaulichkeit beschran- ken mir uns dabei zunachst auf reelle Matrizen und ebensolche Wertepaare { I , , a}, mithin also auf reelle Determinan- ten F(I., a), doch behalten alle Herleitungen ihre Giiltigkeit anch im Komplexen.
2. Die ErmitQlung von Stcigungen
2.1 Grundlagen und Vorgehensweise
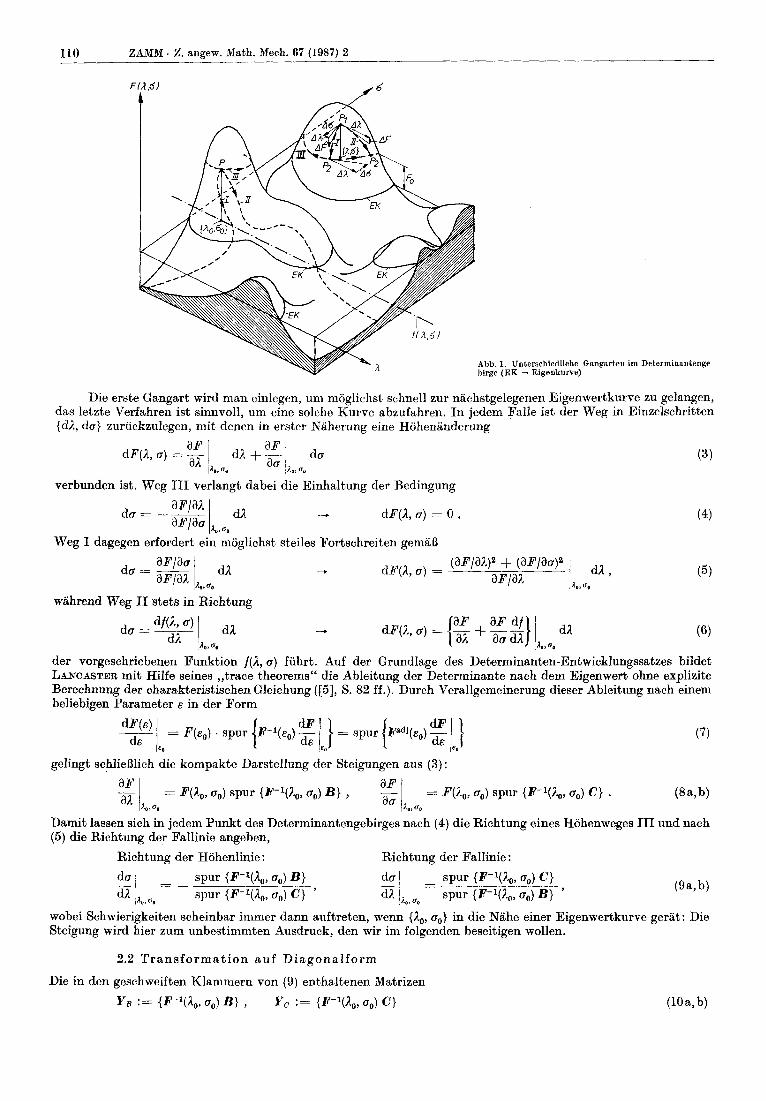
Alle Determinanten-Algorithmen (vgl. [4]) gelangen zu den Eigenwerten der Aufgabe (1) durch Wanderung von eineui Punkt P des Determinantengebirges in Abb. 1 hinab zur I.-o-Ebene, wobei drei extreme Gangarten denkbar sind :
I. Buf-lA4bstieg entlang einer Pallinie, 11. Wanderung ,,nach Karte" im standigen Auf und Ab entlang eines vorgescbriebenen Weges f ( A , a) = 0 oder
111. Hohenwegwanderung entlang einer Hohenlinie mit F(A, a) = const.
110 ZAMM . Z . angew. Math. Mech. 67 (1987) 2
Abb. 1. Unt,erschiedliche Gangarten birge (EK = Eigenkurve)
im Determinantenge
Die erste Gangart wird man einlegen, uni moglichst schnell zur nachstgelegenen Eigenwert,kurve zu gelangen, das letzte Verfahren ist sinnvoll, um eine solche Kurve abzufahren. In jedem Falle ist der Weg in Einzelschritten id], da} zuriickzulegen, mit denen in erster Naherung eine Hohenanderung
verbunden ist. Weg I11 verlangt dabei die Einhaltung der Bedingung
-t dF(A, 0) = 0 .
Weg I dagegen erfordert ein moglichst steiles Fortschreiten gema13
wiihrend Weg I1 stets in Richtung
(4)
der vorgeschriebenen Funktion f ( A , a) fuhrt. Auf der Grundlage des Determinanten-Entwicklungssatzes bildet LANCASTER mit Hilfe seines ,,trace theorems" die Ableitung der Determinante nach dem Eigenwert ohne explizite Berechnung der charakteristischen Gleichung ([5], S. 82 ff.). Durch Verallgemeinerung dieser Ableitung nach einem beliebigen Parameter B in der Form
Ul = F(E,) . spur P-l(e ) - { d e / i €0
gelingt schlieBlich die kompakte Darstellung der Steigungen aus (3) :
(7)
Damit lassen sich in jedem Punkt des Determinantengebirges nach (4) die Richtung eines Hohenweges I11 und nach (5) die Richtung der Fallinie angeben,
Richtung der Hohenlinie: Richtung der Fallinie:
wobei Schwierigkeiten scheinbar immer dann auftreten, wenn {Ao, a,} in die Niihe einer Eigenwertkurve gerat: Die Steigung wird hier zum unbestimniten Ausdruck, den wir im folgenden beseitigen wollen.
2.2 Trans fo rma t ion auf Diagonal form
Die in den geschweiften Klammern von (9) enthaltenen Matrizen
YB := {F-'(&, go) B } , Y c := {F-'(A0, go) c }
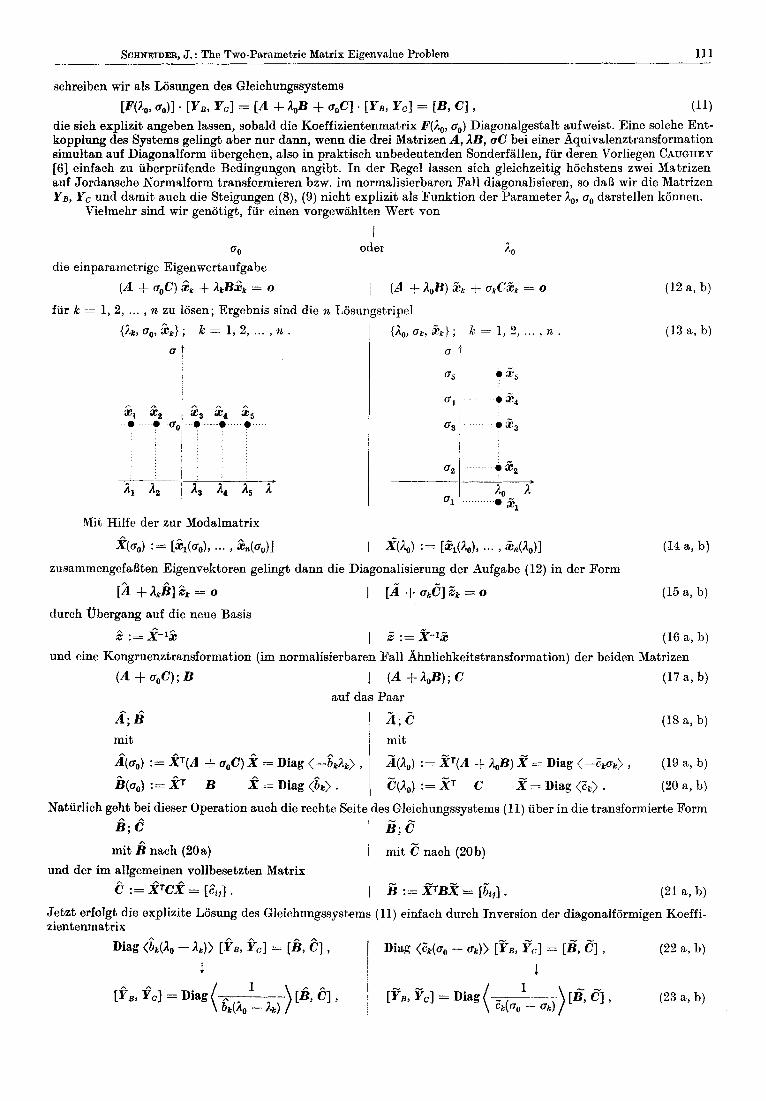
SCJINEIDER, J. : The Two-Parametric Matrix Eigenvalue Problem 111
{I.#, o,,, &} ; k = 1, 2, ... , n . a ?
schreiben wir als Losungen des Gleichungssystems
(11) die sich explizit angeben lassen, sobald die Koeffizientenmatrix #'(Lo, a,,) Diagonalgestalt aufweist. Eine solche Ent- kopplung des Systems gelingt aber nur d a m , wenn die drei Matrizen A, IB, aC bei einer Aquivalenztransformation simultan auf Diagonalform iibergehen, also in praktisch unbedeutenden Sonderfiillen, fur deren Vorliegen CAUGHEY [6] einfach zu iiberprufende Bedingungen angibt. In der Regel lassen sich gleichzeitig hochstens zwei Matrizen auf Jordansche Normalform transformieren bzw. im normalisierbaren Fall diagonalisieren, so daB wir die Matrizen YB, Yc und damit auch die Steigungen (8), (9) nicht explizit als Funktion der Parameter A,, o, darstellen konnen.
I 0 0 oder I.,
[W,, a,)] * [YE, YcI = [A +LOB + ooC] [YE, Yc] = [B, C] ,
Vielmehr sind wir genotigt, fur einen vorgewiihlten Wert von
die einparametrige Eigenwertaufgabe
( A + u,C) 2, + &B& = o ( A &B) Z k + a k c % k = 0
{A,, ak, &} ; k = 1, 2, ... , n . o f
0 5 0 g5
A^; li mit
A^(@,,) := *T(A + a,C) 2 = Diag (-&A,> , &a,) := gT B = Diag (8,) .
A~ A, A, A, A, X
2 ; 45 (18 a, b) mit
&A,) : = z T ( A + A,B) 2 = Diag ( -Ekak} , (19 a, b) - 8(Ao) := XT C 2 = Diag (a,> . (20 a, b)
a1 , 1-1: . ... ____. 2i
112 ZAMM Z. angew. Math. Mech. 67 (1987) 2
und die Steigungen (8) der Determinante betragen uber einer beliebigen SteHe I,, a, der La-Ebene
Nahern wir uns nun mit
A, - I r I 0, -+ a k
der k-ten Eigenkurve, so sind die Gleichungen (24), (25) lediglich mit
(10 -2k) 1 (00 - O k )
zu erweitern, und auf der Eigenkurve selbst arbeiten wir dann mit den Steigungen
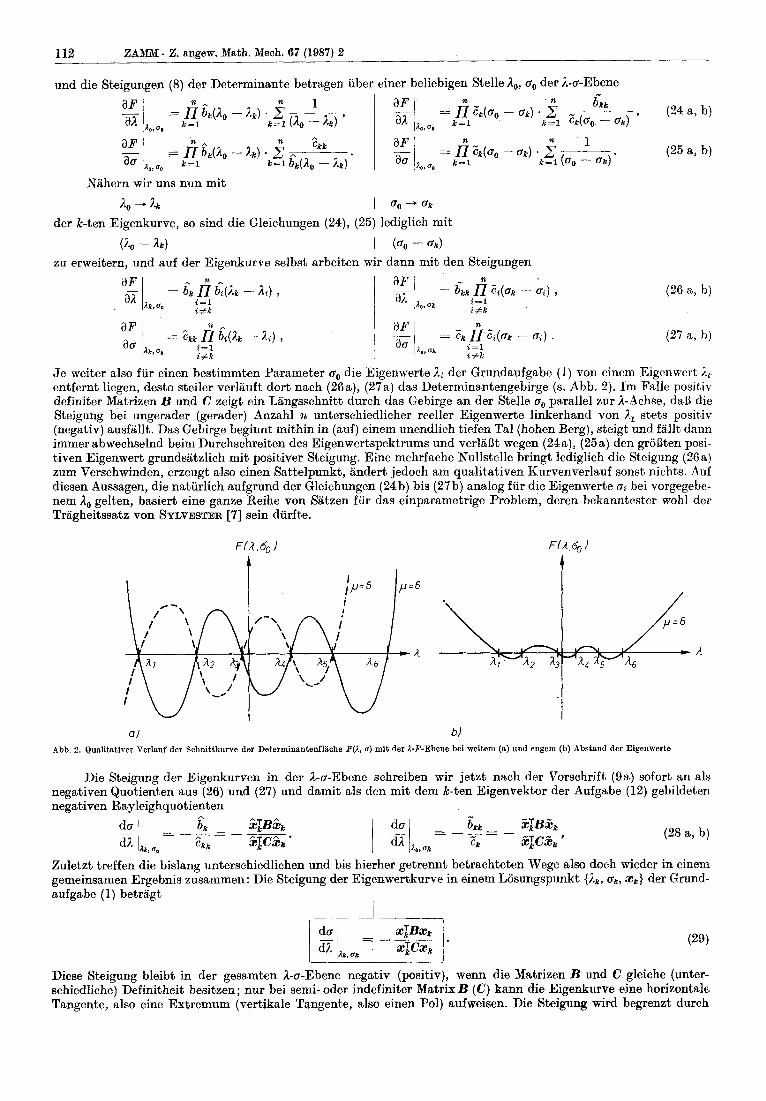
J e weiter also fur einen bestimmten Parameter 0, die Eigenwerte hi der Grundaufgabe (1) von einem Eigentvert i., entfernt liegen, desto steiler verlauft dort nach (26a), (27a) das Determinantengebirge (s. Abb. 2) . Im Falle positiv definiter Matrizen B und C zeigt ein Langsschnitt durch das Gebirge an der Stelle a, parallel zur I-Achse, daB die Steigung bei ungerader (gerader) Anzahl n unterschiedlicher reeller Eigenwerte linkerhand von lvl stets positiv (negativ) ausfallt. Das Gebirge beginnt mithin in (auf) einem unendlich tiefen Tal (hohen Berg), steigt und fd l t dann immer abwechselnd beim Durchschreiten des Eigenwertspektrums und verlLIJt wegen (24a), (25 a) den groBten posi- tiven Eigenwert grundsatzlich mit positiver Steigung. Eine mehrfache Nullstelle bringt lediglich die Steigung (26 a) zum Verschwinden, erzeugt also einen Sattelpunkt, andert jedoch am qualitativen Kurvenverlauf sonst nichts. Auf diesen Aussagen, die naturlich aufgrund der Gleichungen (24b) bis (27 b) analog fur die Eigenwerte at bei vorgegebe- nem A, gelten, basiert eine ganze Reihe von Satzen fur das einparametrige Problem, deren bekanntest,er wohl der Tragheitssatz von SYLVESTER [7] sein durfte.
F(2,60/ F//i,do I A
I ,p=6 p=6 i
- 2 n
a/ bl Abb. 2. Qualitative1 Verlauf der Schnittkurve der Determiuantenflaohe R(A, a) rnit der I-F-Ebene bei weitem (a) und engem (b) Abstand der Eigenwerte
Die Steigung der Eigenkurven in der I-o-Ebene schreiben wir jetzt nach der Vorschrift (9a) sofort an als negativen Quotienten aus (26) und (27) und damit als den mit dem k-ten Eigenvektor der Aufgabe (12) gebildeten negativen Rayleighquotienten
Zuletzt treffen die bislang unterschiedlichen und bis hierher getrennt betrachteten Wege also doch wieder in einem gemeinsamen Ergebnis zusammen : Die Steigung der Eigenwertkurve in einem Losungspunkt { h k , c k , x k } der Grund- aufgabe (1) betragt
I ,
I I
Diese Steigung bleibt in der gesamten I-a-Ebene negativ (positiv), wenn die Matrizen B und C gleiche (unter- schiedliche) Definitheit besitzen; nur bei semi- oder indefiniter Matrix B (C) kann die Eigenkurve eine horizontale Tangente, also eine Extremum (vertikale Tangente, also einen Pol) aufweisen, Die Steigung wird begrenzt durch
SCIIKEIDER, J. : The Two-Parametric Matrix Eigenvalue Problem 113
C- te : igenkurve -.
Akl
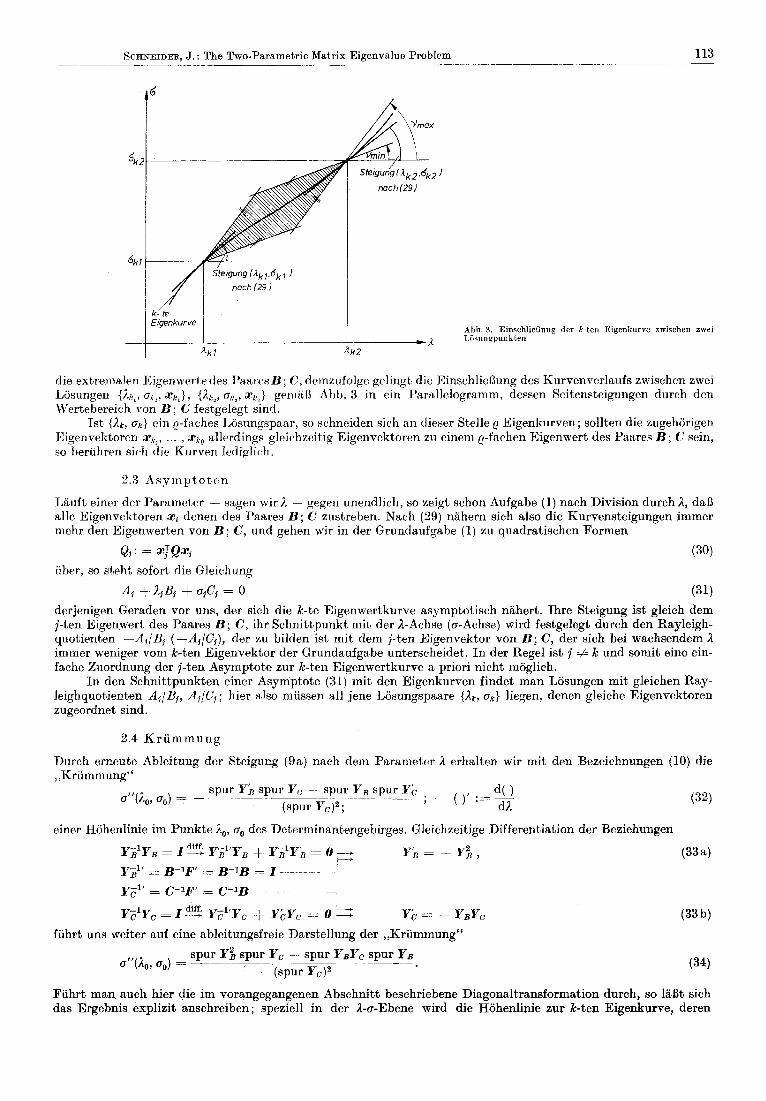
Abb. 3. EiuschlieBnng der k-tell Eigenkurve zwischen m e i Liisungpunkten
2
die extrcnialen Eigenwerte dvs I'aares B ; G, demznfolge gelingt die Einschliehng des Kurvenverlaufs zwischen zwei Lijsungen (&,, ai,, x L , } , C T ~ ~ , xk,} gmiaIJ Ahb. 3 in ein Pardlelograinm, dessen Seitensteigungen durch den m7ertebereich ron I); C festgelegt sind.
1st {&, at} cin o-faches Losungspaar, so schneiden sich an dieser Stelle Q Eigenkurven; sollten die zugehorigen Eigenvektoren xL,, ... , xie allerdings gleichzeitig Eigenvektoren zii eineui e-fachen Eigenwert des Paares R ; C sein, so heruhren sich die Kurven Icdiglic 1 1 .
2.3 A s y i i i p t o t ~ n
Lauft einer der Parameter - sagen wir 3. - gegen unendlich, so zeigt schon Aufgabe (1) nach Division durch A, daB alle Eigenvektoren x, denen des Paares B ; C zustreben. Nach (29) nahern sich also die Kurvensteigungen immer mehr den Eigenwerten von B ; C, und gehen wir in der Grundaufgabe (1) zu quadratischen Formen
Qj: = x ~ Q x , (30)
A, +%B, + sic, = 0 (31)
iiber, so steht sofort die Gleichung
derjenigen Geraden vor uns, der sich die k-te Eigenwertkurve asymptotisch nilhert. Ihre Steigung ist gleich dem j-ten Eigenwert des Paares B ; C, ihr Schnittpunkt mit der A-Achse (0-Achse) wird festgelegt durch den Rayleigh- quotienten - A , / 4 ( -A, /Cf) , der zu bilden ist mit dem +ten Eigenvektor von B ; C, der sich bei wachsendem 3, immer weniger vom k-ten Eigenvektor der Grundaufgabe unterscheidet. In der Regel ist j f k und somit eine ein- fache Ziiordnung der j-ten Asymptote zur k-ten Eigenwertkurve a priori nicht moglich.
In den Schnittpunkten einer Asymptote (31) mit den Eigenkurven findet man Losungen mit gleichen Ray- leighquotienten A f / B j , A j /C , ; hier also miissen all jene Losungspaare {An, at} liegen, denen gleiche Eigenvektoren zugeordnet sind.
2.4 Kri immung
Durch erneute Ableitung der Steigung (9a) naeh den1 Parameter A erhaken wir mit den Bezeichnungen (10) die , ,Kriimmung"
einer Hohenlinie im Punkte i.,, a, des neterminantengebirges. Gleichzeitige Differentiation der Beziehungen
y i = - y2 diff. YXlYB = I - Y51'YB + Y51YZ = 0 -+ - R ,
y-1' = B-lP' = B-II) = 1- - y-1' = C-lFf = C-lB
I B
c
(33b) diff. YEIYc = I -+ Y$YC + YbY, = 0 '= Yb = - YBYc
fiihrt uns weiter auf eine ableitungsfreie Darstellung der ,,Kriimmung"
F'iihrt man auch hier die im vorangegangenen Abschnitt beschriebene Diagonaltransformation durch, so lBBt sich das Ergebnis explizit anschreiben; speziell in der A-a-Ebene wird die Hohenlinie zur k-ten Eigenkurve, deren

_____ - ZAMM . Z. angew. MIath. Mech. 67 (1987) 2 - 114
Krummung an der Stelle A, = I t , a,, k = I, 2, ... , n, mit den Abkurzungen (30) schlieBlich lautet (a"(A,, a,) analog):
Im Gegensatz zur Steigung hangt also die Kriimniung der k-ten Eigenkurve an der Stelle u, gleichzeitig von a l len anderen Eigenwerten und Eigenvektoren der Grundaufgabe (1) an der Stelle a, ah. Sie wachst init zunehmender Nachbarschaft zweier Kurven an und dies uinso starker, je groBer der Rayleighquotient B,IC, nusfallt ; fiir groBe A-Werte verschwindet sie schlieBlich, d. h. die Kurven gehen letztlich in Geraden iiher.
2.5 Dyadischer Zusa tz
Besondere Erwahnung verdient ein fur den Ingenienr wiclitiger Sonderfall, in dem sich die Losung des Gleichungs- systems (11) und demzufolge die Steigun;: tier Eigenwertlturven explizit als Funktion von A und (T angeben lafit.
Verandert man namlich die Steifigkcit eines finit iibcrsetzten Kontinuiims durch die Anbringiing eines diskre- ten clastischen Elementes oder will man beispielsweise die Stahilitat eines elastischen Netzwerkes durch Hinzrrfiigen eines einzigen Stabes von noch unhestiminter Dehnsteifigkeit a erst zii einem spateren Zeitpunkt festschreiben, so tritt in der Eigenwertaufgahe zur Steifiglrcitsmxtrix des Systems einc einzige Dyade
aC = UCCT (36)
mit vorlriufig noeh variableni Faktor a hinm .
Problem Im Zuge der Vorwegrliagon~lisierrlng der hfntrizen A , I3 diwch Transformation der Grundaufgabe auf das
e. %z := [A + xi? + U E ] 2 = 0 ;
A := z T A g = Diag (-&A,),
2 = x-12, (37)
(38), (39) h
B := gTBg = Diag (g,) mit Hilfe der zur Modalmatrix $zusammengefnBten Losungsvektoren 53, der Aufgabe
k = 1,2, ... , n , [ A + AkB]& = 0 ; (40) bleibt die dyadische Struktiir der Matrix C nnangetastet,, d . h . es gilt weiterhin - h
aC := aEZT mit E := XTc . Damit besteht die Koeffizientenmatrix
3 = Diag (&(A - A,)) + aEET (42)
des Gleichungssystems (11) nur noch aus einer (leicht invertierbaren) Diagonalmatrix mit dyadischem Zusatz.
als Die Inverse einer reguliiren, um eine Dyade uvT erweiterten Matrix M 1aBt sich aber nach [8] explizit angeben
M - L v ~ M - ~ 1 + vTM-lu '
(M + U V ~ ) - ' = M-1 -
fur unseren Sonderfall mit u = v = E bedeutet das
- . I 1 \ ^^__. I 1 \
1 +aETDiog(-F,, A , -) Z
(43)
\ Uk\A - ilk) I
Nun werden die Matrizen (10) gebildet, ihre Spuren berechnet und schlieBlich nach (9a) die Steigung einer Hohen- linie angeschrieben :
Speziell in den Losungspunkten {A l , a,} der Grundaufgabe, also in der A-a-Ebene auf den Eigenkurven des Pro- blems gibt Gleichung (45) deren Steigung an, ohne dazu (im Unterschied zum allgemeinen Fall (29)) auf die jeweils zugehorigen Eigenvektoren zuruckgreifen zu mussen. I n allen Punkten der Eigenkurven w i d lediglich von denselben und deshrtlb nur einmalig vorweg nach (40) zu berechnenden Eigenwerten A, und Eigenvektoren & des Paares A ; B Gebrauch gemacht.
Fallt einer der Eigenwerte Ak mit einein Eigenwert A der Grundaufgabe zusammen, so erhlilt man die Stei- gung dort nach einem Grenzubergang A -+ ebenfalls aus Gleichung (45).
SCENEIDEX, J. : The Two-Parametric &Iatrix Eigenvalue Problem
3. Anwendungen
3.1 K o n s t r u k t i o n u n d Einschl ieBung von E igenkurven
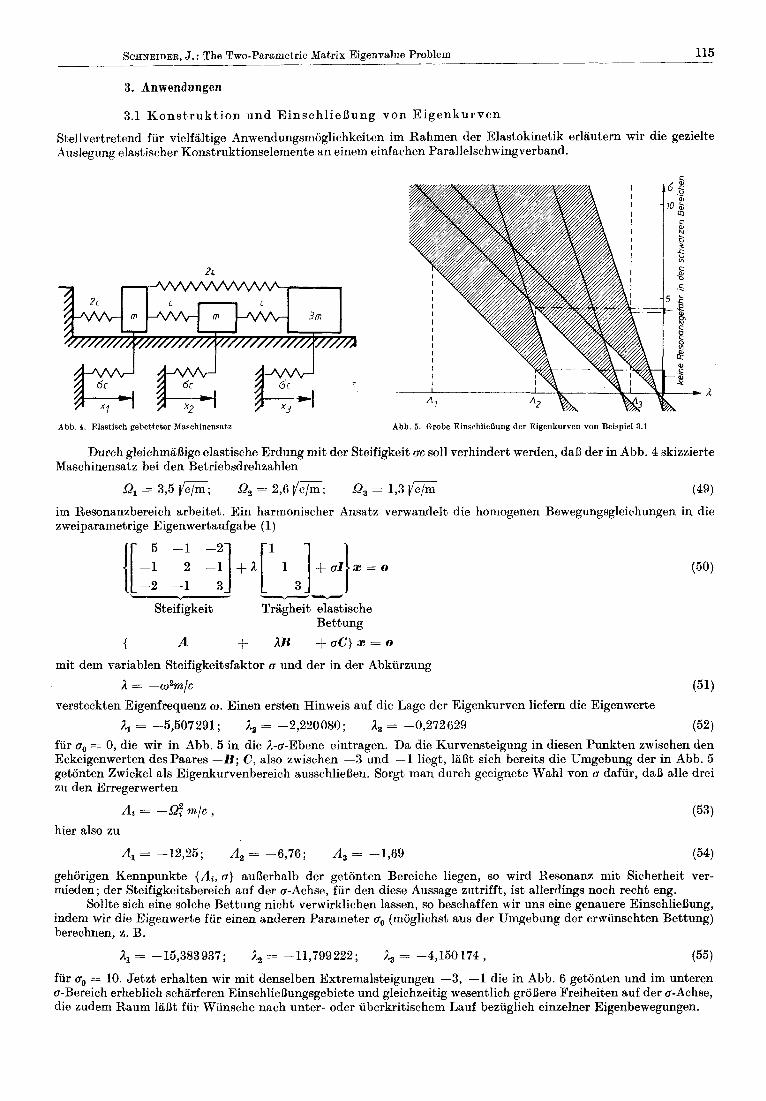
Stellvertretend fur vielfaltige Anwendungsmoglichkeiten im Rahmen der Elastokinetik erlautern wir die gezielte Auslegung elastischer Konstruktionselemente an einem einfachen Parallelschwingverband.
115
Zc
A bb. 4. Elastisch gebetteter Maschinensatz Abb. 5. Grobe EinschlieOung tier Eigenkurven von Beispiel 3.1
Durch gleichmiiflige elastische Erdung mit der Steifigkeit ac sol1 verhindert werden, daB der in Abb. 4 skizzierte Maschinensatz bei den Betriebsdrehzahlen
Ql = 3,5 m; Q2 = 2,6 fG Q, = 1,3 J& (49)
im Resonanzbereich arbeitet. Ein harmonischer Ansatz verwandelt die homogenen Bewegungsgleichungen in die zweiparametrige Eigenwertaufgabe (1)
Steifigkeit Triigheit elastische Bettung
{ A + AB +CrC}z=o
a = - o2mlc (51)
A, = -5,507291 ; a, = -2,220080; A, = -0,272629 (52)
mit dem variablen Steifigkeitsfaktor a und der in der Abkurzung
versteckten Eigenfrequenz cu. Einen ersten Hinweis auf die Lage der Eigenkurven liefern die Eigenwerte
fur a. = 0, die wir in Abb. 5 in die A-a-Ebene eintragen. Da die Kurvensteigung in diesen Punkten zwischen den Eckeigenwerten desPaares -B; C, also zwischen -3 und -1 liegt, 1aBt sich bereits die Umgebung der in Abb. 5 getonten Zwickel als Eigenkurvenbereich ausschlieflen. Sorgt man durch geeignete Wahl von dafur, dafl alle drei zu den Erregerwerten
A, = -L?f mlc , (53)
A1 = -12,25; A, = -6,76; A3 = -1,69 (54)
hier also zu
gehorigen Kennpunkte { A { , a} auBerhalb der getonten Bereiche liegen, so wird Resonanz mit Sicherheit ver- mieden; der Steifigkeitsbereich auf der a-Achse, fur den diese Aussage zutrifft, ist allerdings noch recht eng.
Sollte sich eine solche Bettung nicht verwirklichen lassen, so beschaffen wir uns eine genauere EinschlieBung, indem wir die Eigenwerte fur einen anderen Parameter a,, (moglichst aus der Umgebung der erwunschten Bettung) berechnen, z. B.
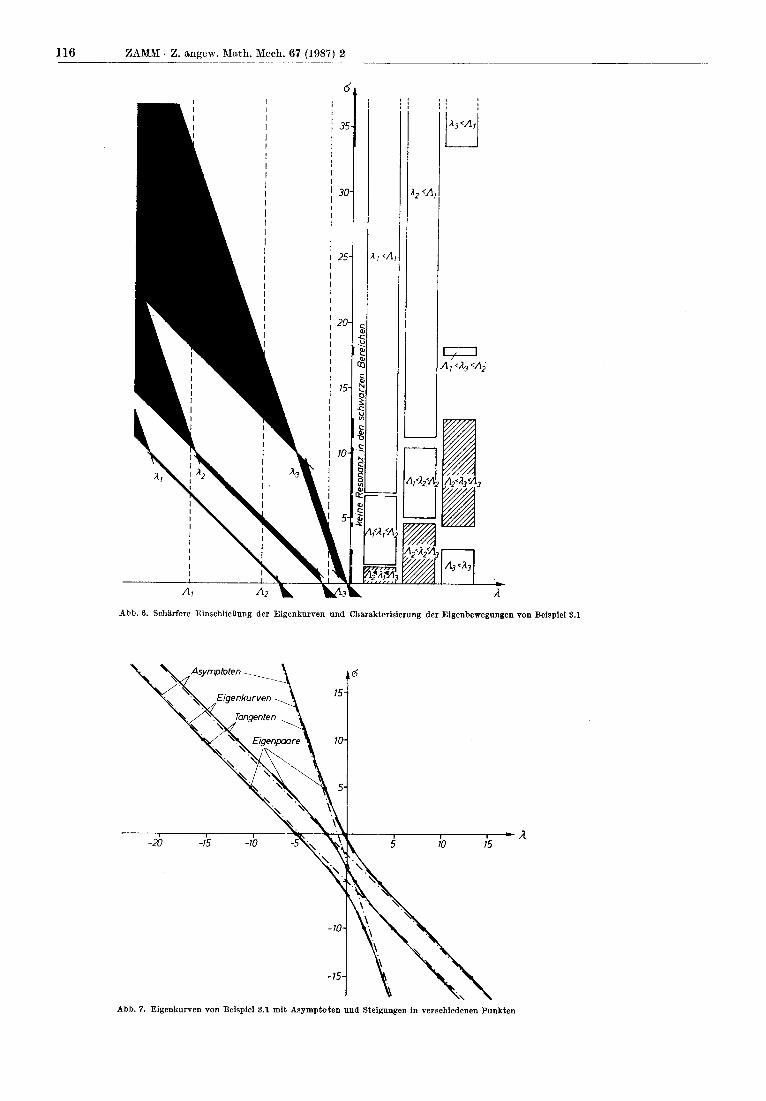
A1 = -15,383937; A, = -11,799222; A, = -4,150174 , (55) fur a0 = 10. Jetzt erhalten wir mit denselben Extreinalsteigungen -3, -1 die in Abb. 6 getonten und im unteren a-Bereich erheblich schiirferen Einschliehngsgebiete und gleichzeitig wesentlich groBere Freiheiten auf der a-Achse, die zudem Raum liil3t fur Wiinsche nach unter- oder iiberkritischem Lauf bezuglich einzelner Eigenbewegungen.
116 ZAMM. Z. angew. Math. Mech. 67 (1987) 2
C
R
Abb. 6. Schtirfere EinschlieBung der Eigenkurven und Charakterisierung der Eigenbewegungen von Beispiel 3.1
Abb. 7. Eigenkurven von Beispiel 3.1 mit Asymptoten und Steignngen in verschiedenen Punkten
SCHNEIDER, J. : The Two-Parametric Matrix Eigenvalue Problem 117
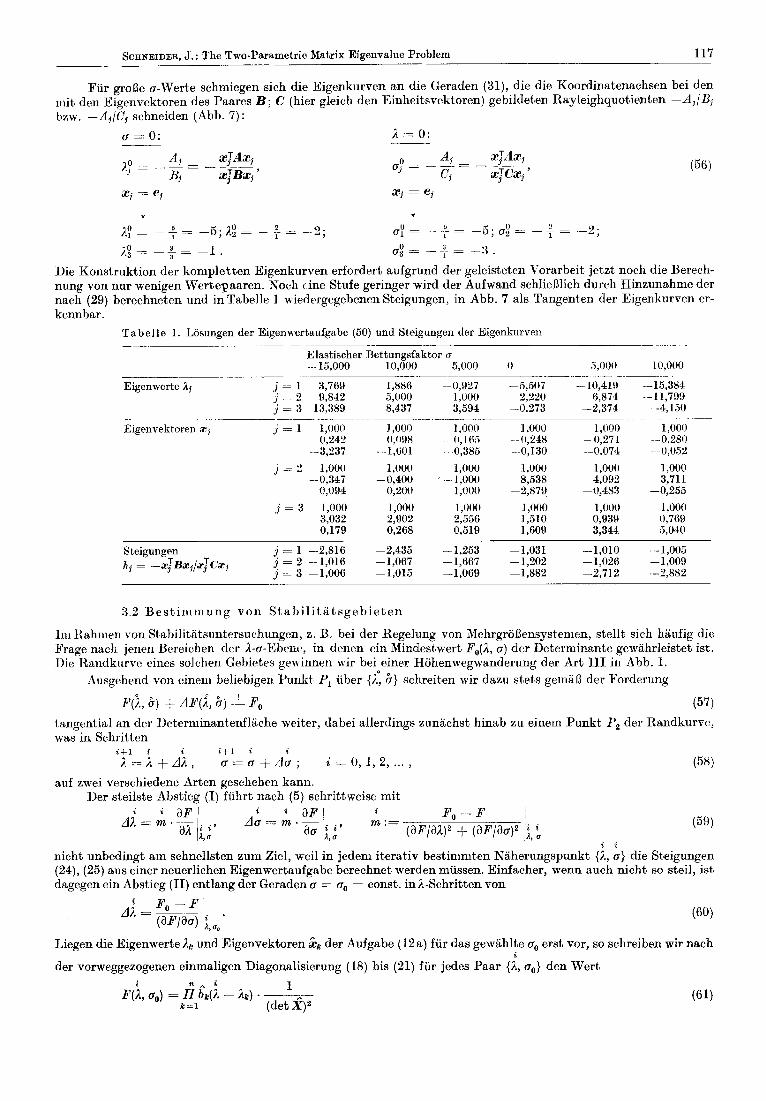
Fur grofle a-Werte schmiegen sich die Eigenkurven an die Geraden (31), die die Koordinatenachsen bei den niit den Eigenvektoren des Paares B ; C (hier gleich den Einheitsvektoren) gebildeten Rayleighquotienten --A,/Bj bzw. -A,/C, schneiden (Abh. 7) :
a = 0: A = 0 :
Die Konstruktion der kompletten Eigenkurven erfordert aufgrund der geleisteten Vorarbeit jetzt noch die Berech- nung von nur wenigen Wertepaaren. Noch tine Stufe geringer wird der Aufwand schlieBlich durch Hinzunahme der nach (29) berechneten und in Tabelle 1 wiedergegebenen Steigungen, in Abb. 7 als Tangenten der Eigenkurven er- kennbar.
Tabelle 1. Losungen der Eigenwertaufgabe (50) und Steigungen der Eigenknrveii
Elastischer Bettungsfaktor 0 -15,000 -10,000 -5,000 1) .5,000 10,000
Eigenwerte A, .j = 1 3,769 1,886 -0,927 -5,507 -10,419 -15,384 j = 2 9,842 5,000 1,000 --2,220 -6,874 --11,799 / = 3 13,389 8,437 3,594 -0,273 -2,374 -4,150
Eigenvektoren q j = 1 1,000 0,242
-3,237 j = 2 1,000
-0,347 0,094
j = 3 1,000 3,032 0,179
5: teigungen hf = - Z ~ B Z , / Z ~ C X ~
j = 1 -2,816 j = 2 -1,016 j = 3 -1,006
1,000 0.098
- - 1,601 1,000
-0,400 0,200 1,000 2,902 0,268
-1,067 -2,435
-1,015
1,000 --0,l65
0,385 1,000
- 1,000 1,000 1,000 2,556 0,519
1,000 -0,248 -0,130
1,000
-2,879 1,000 1,510
8,538
1,609
- 1,253 -1,667 -1,069
-1,031
-1,882 -1,202
1,000 -0,271 -44074
1 ,000 4,092
-0,483 1,000 0,939 3,344
-1,010 -1,026 -2,712
1,000 -0,280
- -0,056 1,000 3,711
-0,255 1,000 0,769 5,040
- 1,005 - 1,009 -2,882
3.2 B e B t i in ni ung v on 6 t a b i 1 i t a t sg e b i e t e n
1111 Rahinen von Stabilitiitsuntersuchungen, z. B. bei der Regelung von MehrgroBensystenien, stellt sich haufig die Frage nach jenen Bereichen der A-a-Ebene, in denen ein Mindestwert F,(A, a) der Determinante gewahrleistet ist. Die Itandkurve eines solchen Gebietes geminnen wir bei einer Hohenwegwanderung der Art I11 in Abb. 1.
Ausgeliend von einem beliebigen Punlit PI uber {g c?} sellreiten wir dazu stets gemail3 der Forderung
I@, 5 ) + OF& b) F, (57) tangential an der Deterniinantenfliiche weiter, dabei allerdings zunachst hinab zu einem Punkt P, der Randkurve, was in Schritten
i+l i i i i - l i i
i = i , + A A , a = a + d o ; i = O , 1 , 2 ,..., (58) auf zwei verschiedene Arten geschehen kann.
Der steilste Abst,ieg (I) fuhrt nach (5) schritt,weise mit
i i nicht unbedingt am schnellsten zum Ziel, weil in jedem iterativ bestinimten Naherungspunkt {A, a} die Steigungen (24), (25) aus einer neuerlichen Eigenwertaufgabe berechnet werden miissen. Einfacher, wenn auch nicht so steil, ist dagegen ein Abstieg (11) entlang der Geraden a = a, = const. in A-Schritten von
Liegen die Eigenwerte Ak und Eigenvektoren 28 der Aufgabe (12a) fur das gewahlte o, erst vor, so schreiben wir nach
der vorweggezogenen einmaligen Diagonalisierung (18) bis (21) fur jedes Paar {A, a,} den Wert i
n , i 1 i F(A, 0,) = 17 6r(A - A,) .
k = l (det 2 ) 2
118 ZAhIM. 2. angew. Math. Mech. 67 (1987) 2
und die Steigung
der Determinante und daniit auch den inkrementellen?&-Zuwachs (60) ohne erneute Losung ejnes Eigenwertproblems
explizit als Funktion der vorausgegangenen Niiherung A an. i
In Pz angekommen bleiben wir an der erreichten Hohenlinie, laufen also laut Vorschrift (57) in Richtung
Mit den Steigungen (24), (25) schreibt uns diese Gleichung in der Form
.i j nach freier Schrittwahl dA eine Schrittltinge Aa vor, die uns in erster Naherung immer wieder auf den Hohenweg zuriickfuhrt.
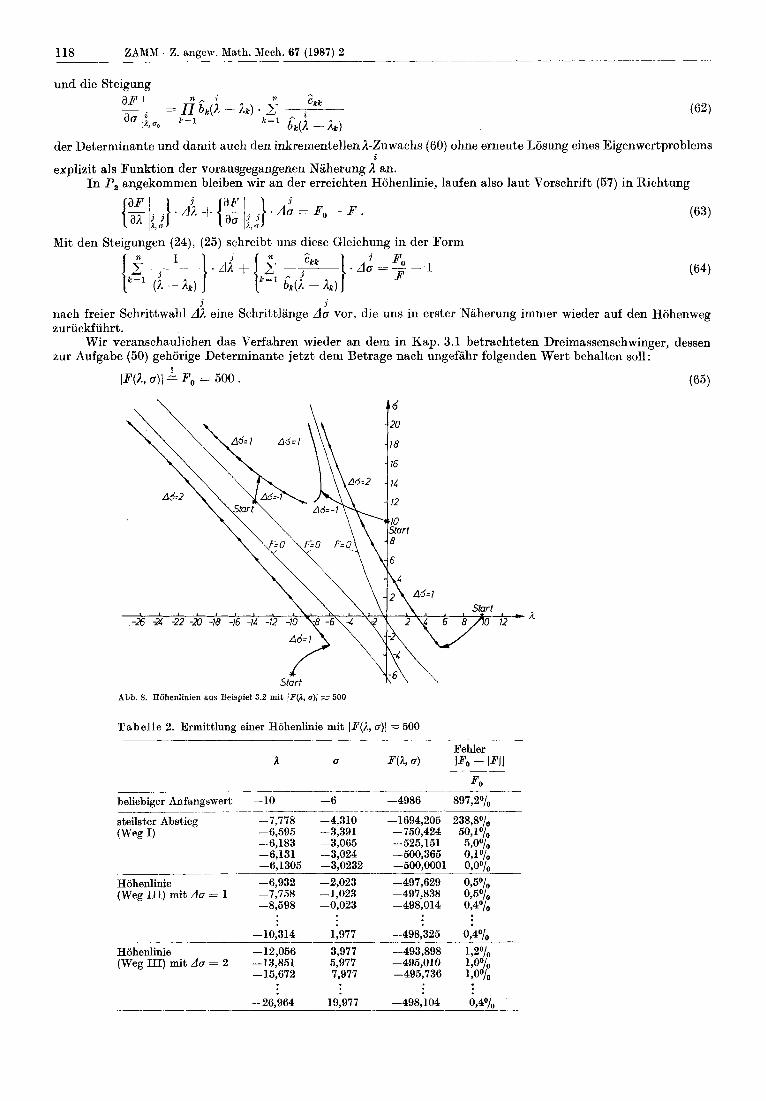
Wir veranschaulichen das Verfahren wieder an dem in Kap. 3.1 betrachteten Dreimassenschwinger, dessen zur Aufgabe (50) gehorige Determinante jetzt dem Betrage nach mgefiihr folgenden Wert behalten ~011:
I
a)\ F, = 500. (65)
S C ~ E I D E R , J. : The Two-Parametric Matrix Eigenvalue Problem 119
Ausgehend von Pl(-lO; -6) gelangen wir auf dem Wege I nach fiinf Schritten (58), (59) zum Punkt Pz( -6,130 519 3; -3, 023 188 6) mit F = -500,000081 und laufen ab hier in Schritten von do = 1 entlang des Weges I11 auf ungeflihr gleicher Hohe weiter; kleinere oder Zwischenschritte mit Aa = 0 erhohen die Genauig- keit. Die Ergebnisse sind in Tabelle 2 festgehalten; alle in Abb. 8 eingetragenen Hohenlinien mit F(A, a) N 500 wurden auf diese Weise gewonnen.
3.3 Gedampf te Sys teme
Auch die Beantwortung der Frage, welche Eigenformen eines gedampften Systems schwingen, welche kriechen und wie stark die Darnpfung gegebenenfalls gewahlt werden muB, damit das gewunscht,e Eigenverhalten eintritt, gelingt mit Hilfe von Eigenkurven oder einer ihrer mehr oder weniger groben Einschliehngen.
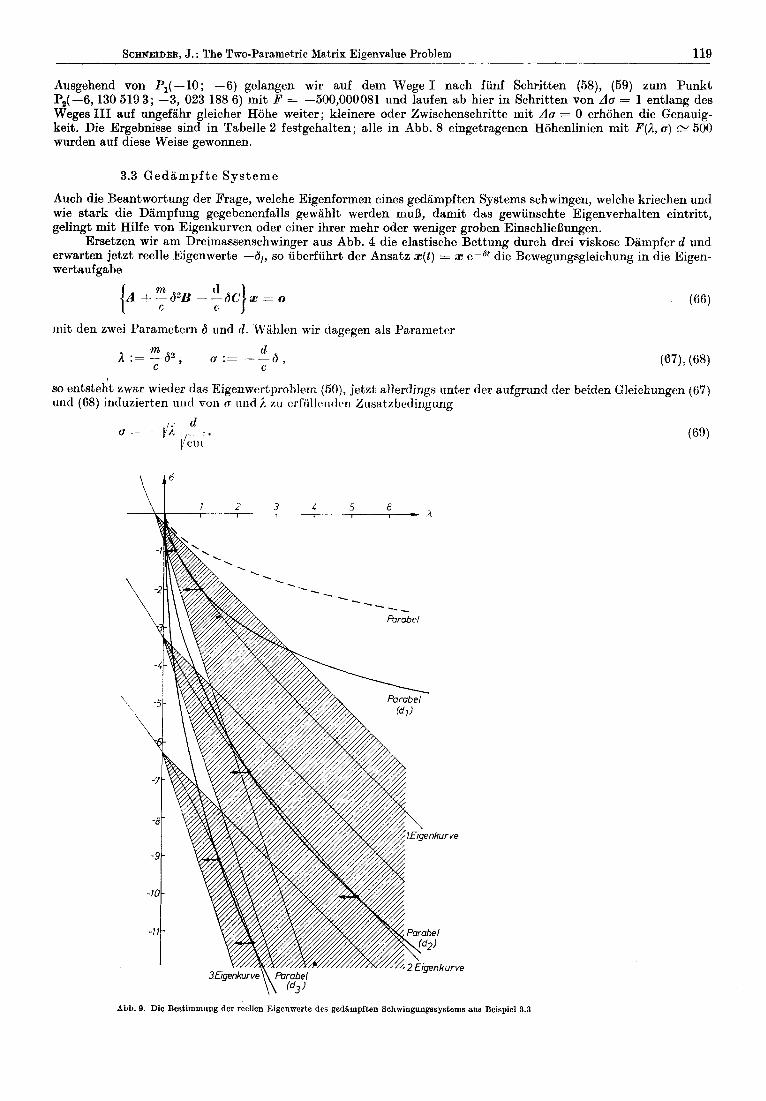
Ersetzen wir am Dreimassenschwinger aus Abb. 4 die elastische Bettung durch drei viskose Dampfer d und erwarten jetzt reelle Eigenwerte -df, so uberfiihrt der Ansatz x(t) = x ecat die Bewegungsgleichung in die Eigen- wertaufgabe
mit den zwei Paramctern 6 und d. Wahlen wir dagegen als Parameter
SO entsteht zwar wieder das Eigenwertproblem (501, jetzt allerdings unter der aufgrund der beiden Gleichungen (67) utid (68) induzierten iiiid von cr utid A zu erfiillciitlcii Zuvatzbeclingurig
Abb. 9. Die Bestimmung der reellen Eigenwerte des gedampften Schwingungssystems aus Beispiel 3.3

120
Jeder Dampfung d ist also eine Parabel (69) zugeordnet, welche die Eigenkurven von (50) a n mehreren Stellen o schneidet, zu denen dann naeh ( 6 7 ) , (68) bestimmte reelle Eigenwerte
ZAMM . 2. angew. Math. Mech. 67 (1987) 2
C
-O. 7 (70)
gehoren (vgl. Abb. 9). Mit wachsender Dampfung wird die Parabel (69) stetig flacher und schneidet inithin iinmer mehr Eigenkurven : Die Eigenwerte der gedampften Aufgabe wandern allmiihlich auf die reelle Achse, und nach- einander fangen die Eigenbewegungen an zu kriechen. Die Reihenfolge ist dabei durch die Reihenfolge der Eigen- kurven der Aufgabe (50) festgelegt, und erwartungsgemall treten (evtl. zusammenfallende) Schnittpunkte stets paatweise auf. Anschaulich verdeutlicht Abb. 9 die bekannte Tatsache, da13 durch das Abflachen der Parabel bei wachsender Dainpfung eine Halfte der Eigenwerte ins Unendliche strebt. Gleichzeitig nahert sich die andere Halfte den Schnittpunkten der Eigenkurven mit der o-Achse, d. h. die 6, streben den Eigenwerten des Paares cA; dC, mithin also denen des masselosen Systems zu, die ihrerseits mit zunehmender Dampfung stetig kleiner werden.
Denkbar sind natiirlich auch Eigenkurven, die den vierten Quadranten niemals erreichen. Solche Eigenbe- wegungen werden dann auch bei noch so starker Dainpfung schwingen ; hier hilft allein eine Strukturanderung der Dampfungsmatrix weiter init dem Eel , die betreffende Eigenkurve in den vierten Quadranten zu riicken.
Der Konstrukteur kann also durch gezielte Wahl von d bestimintc Eigenbewegungen wegdainpfen. Abb. 9 enthalt niit
_ _ (r, =- 3 , d, = 2 rs ci11 , d, = 11,5 10,4-;1rl (71)
jene l’arabelri, die die Nigenwertkurven gerade je zweiinal schneiden. In1 ersten Ball schu ingen noch die zu-eite unrl dritte, itu zweiten Fall nur noeh die ttrittle, wiihrend iin thitten Fall alle Eigenbewegungen kriechen.
Zufriedenstellende A4ussagen sind h i erheblich geringerein Aufwand oft schori durch Verwendung eirieb Einsohliellungsgebietes anstelle der koniplr~t ten Eigenkurve zu erzielen. So beueist der Verlauf der gestrichelteii Parabel ganzlich aulierhalb aller Kinwhlie Iiungsgebiete, dal) h i der eugehdrigen Ihiinpfung alle Eigenhewegungeii scliwingen, wogegen die €’araIwl bei d - tl, den obrrsten getonten %\?;irkel vollstantlig diirchdringt, die nietlrigstc Eigenbewegung also krieclit .
4. Zusammenfassung
Die vorliegende Arbeit gibt deiri Leser Werkzeuge zur Hand, init deren Hilfe er die ubliche punktweise Losung mehrparametriger Eigenwertaufgaben ersetzen kann durch globalere Verfahren unter Heranziehung von Steigung, Kriimmung, asymptotischem l’erhalten und EhschlieSungen der Eigenkurven. Steigungen und Kriiinniungen werden mit Hilfe des Determinanten-Entwicklungssatzes aus den Ableitungen der charakteristischen Gleichung gewonnen, ohne diese explizit aufstellen zu mussen. Asyinptoten erhalt man aus Rayleighquotienten, die mit den Matrizen der Grundaufgabe (1) zu bilden sind und deren Extrenialeigenschaften uberdies Einschliehngsgebiete der Eigenkurven liefern.
Drei Anwendungsfalle zeigen auf, wie die (u. C. mehreren Kebenbedingungen unterworfenen) FreigroBen einer Konstruktion auf dein Wege einer mehrparanietrigen Aufgabe mit Anwendung gezielter Strategien leichter zu finden sind als durch eine Vorgeliensweise nach Versuch und Irrtuni. Am Beispiel einer gedanipften Schwingung wird uberdies deutlich, daM die hergeleiteten Methoden tiefere Bhblicke auch in kompliziertere nichtlineare Eigen- wertaufgaben zu verinittelri inistande sind.
Literatur
1 LEIPEOLZ, H., Stabihtatstheorie, B. G . Teubner Htuttgart 1968. 2 Bass, D. ; NIXDORFF, K., Die Knickung verwundener StLbe als technisches Beispiel zur Gchaeferschen Theorie zweiparanietriger
3 HCHNEIDER, J., Beeinflussnng der Eigenwerte von ScliniripuiigssSsterner~ Init niodaler I>ampfuiig, 1ng.-Arch. 48 (1979), 393-401. 4 FALK, S. ; ZUILMWHL, R., Matrizen nnd ilire Anaendungen. Bd. 11. Springer-Vcrlag Berlin, Heidelberg. New York, Tokyo 1986,
5 LANCASTER, P., Lambda-Matrices and Vibrating Systems, Pergamon Press Oxford 1966. 6 CAUCHEY, T. K.; O’KELLY, M. E. J., Classical normal modes in damped linear systems, J. Appl. Irlech. 38 (1965), 583-588. 7 SYLVESTER, J. J., Philos. Mag. 37 (1850), 363. 8 WOODBURY, &I. A., Inverting Modified Matrices, Statist. Res. Group, Princeton Univ., N.J., Memor. Rep. 42, 1950. 9 MULLER, R. E., Numerical solution of multiparameter eigenvalueproblems, ZAMM 62 (1982), 681 -686.
Eingegangen am 4. Bebruar 1986
Ansehrift : Dr.-Ing. JORC SCHNEIDER, Technische Universitat Braunschweig, Mechanikzentrum, Institut fiir Angewandte Nechanik, D-3300 Braunschweig, BRD
Eigenwertprobleme, 1ng.-Arch. 37 (1968). 149-155.
234 ff.