Embed Size (px)
Citation preview
Diplomarbeit
Georg Rupert Müller
Betreuer: Prof. Dr. Jörg Conradt, Dominik Stengel
Ausgabe: 01.08.2011
Abgabe: 29.02.2012
AIS-Nr.: 550DA0811
Lehrstuhl für
Automatisierung und
Informationssysteme
Prof. Dr.-Ing. B. Vogel-Heuser
Technische Universität München
Boltzmannstraße 15 - Geb. 1
85748 Garching bei München
Telefon 089 / 289 – 164 00
Telefax 089 / 289 – 164 10
http://www.ais.mw.tum.de
3D Object Tracking with embedded Event Based
Vision Sensors


Erklärung:
Ich versichere hiermit eidesstattlich, dass ich die vorliegende Diplomarbeit selbstständig
verfasst und nur die angegebenen Quellen und Hilfsmittel verwendet habe. Die aus fremden
Quellen wörtlich oder sinngemäß übernommenen Gedanken sind als solche gekennzeichnet.
Die Arbeit wurde bisher keiner anderen Prüfungsbehörde vorgelegt.
München, den 29. Februar 2012
Georg Müller

Abstract
Recognizing and tracking objects is a key function in any application of robots which depends
on appropriate perception, intelligent sensing and understanding of the environment. This
thesis presents a new approach for real-time 3D-target tracking, which can be applied on
autonomous moving robots in cluttered environments for tracking multiple objects. It is based
on a vision system, which includes two new biologically inspired, high-speed asynchronous
temporal contrast vision sensors (DVS-sensors) and active target markers. The sensors, which
could be independently placed in the environment, react to illumination changes in the
environment and thus track the position of light flashing objects on the basis of events with
the use of a new algorithm running on the ARM7 microcontroller of the eDVS-sensor board.
Two sensors were added to the system to provide orientation within the 3D space based on
their observation of the target from different position angles. The sensors were mounted on
pan-tilts to extend their surveillance area and were calibrated as a device set to report accurate
actual angular positions to the tracked targets in space. A feed-forward neural network was
used to transform the observed angular positions into 3D Cartesian space. Angular positions
of three LEDs, which were placed as active markers on a target stimulus and were
simultaneously observed from both sensors, were grouped together as synchronized angular
position sets. Such angular position sets were established from moving the target along an
arbitrary trajectory in 3D Cartesian space and applied as training input data set of the neuronal
network. The trained neural network had to represent the geometry of the 3D target stimulus
with active markers at fixed defined distance on its output. This was used to adjust learning of
the network by back-propagation without the presence of output training patterns. Testing of
the performance of the trained neural network with a new undefined data set showed that it
could predict and track a moving target at any positioning in a cube with high speed and very
high precision. The neural network and the new training method have been implemented in C
for fast processing. It can be used during tracking from a computer connected online to the
DVS-sensor via an USB interface. Usually a terminal program is used which transmits
commands to the DVS-sensor. For more convenient adjustment of the parameters a Matlab
GUI has been designed which enables communication with the sensor via a COM-port and
transmits commands for different tracking algorithm coefficients from the computer
automatically. The parameters can be modified via intuitive sliders and also loaded and stored
to a text file. With this interface no commands for the terminal program have to be
remembered. The new 3D tracking algorithm requires only low-power consuming hardware
(ARM7) and thus can be applied even to small robots with high hardware and software
flexibility. The applications of this system could be, for instance, the measuring of distances
to other robots or the autonomous assemblage of marked pieces belonging to one product in
factories.
Acknowledgements
I would like to thank Prof. Jörg Conradt for permitting to join his work group at the LSR-
department in 2010 in order to perform a Bachelor thesis first and then for inviting me to do
my Diploma´s thesis. You have taught me first steps in robotic science and always kept a
keen stimulating eye over my work.
To Dominik Stengel who agreed to be my examiner from the AIS-Department within the
Faculty of Maschinenbau and has effectively volunteered to supervise, read and review this
thesis - many thanks!
Finally to my girlfriend and my family for their help in any way possible and whenever!

Contents
Page I
1. Introduction ........................................................................................................................ 1
1.1. Problems and Challenges............................................................................................. 1
1.2. Current Methods for Tracking ..................................................................................... 2
1.3. Specific Aims and Structure of this Thesis ................................................................. 2
2. Background and Conception .............................................................................................. 5
2.1. Methods for Target Detection ...................................................................................... 5
2.2. Biologically Inspired Embedded Dynamic Vision Sensor (eDVS) ............................. 6
2.3. Artificial Neural Networks .......................................................................................... 9
3. Event-Based Target Detection Algorithm ........................................................................ 17
3.1. Algorithm and Hardware Implementation ................................................................. 17
3.2. Results ....................................................................................................................... 23
4. 3D Tracking ...................................................................................................................... 25
4.1. Tracking Concept ...................................................................................................... 25
4.2. Hardware Components .............................................................................................. 27
5. Neural Network for 3D Position Estimation .................................................................... 31
5.1. Network Design ......................................................................................................... 31
5.2. Training the Neural Network ..................................................................................... 32
5.3. Evaluation of Training Success ................................................................................. 34
6. Test Data Acquisition & System Evaluation .................................................................... 37
6.1. Evaluation in a Semi-Stationary System ................................................................... 37
6.2. Prediction of Target Motion ...................................................................................... 39
6.3. Data Acquisition ........................................................................................................ 42
6.4. Performance of Learning ........................................................................................... 43
6.5. 3D Performance ......................................................................................................... 47
7. Conclusion and Perspectives ............................................................................................ 51
Appendix A .............................................................................................................................. 53
Appendix B .............................................................................................................................. 54
List of Figures .......................................................................................................................... 57
List of Tables ............................................................................................................................ 57
References ................................................................................................................................ 59


1.1 Problems and Challenges
Page 1
1. Introduction
Today´s applications of robots depend in large parts on their appropriate perception and
intelligent sensing of the environment. Humans and animals can rely on several sensory
receptors such as proprioception sensors, visual sensors and vestibular sensors dynamically
percept their surroundings. Current robotic systems usually need a large number of
exteroceptive sensors only operating with a sufficient source of high computing power.
Nevertheless significant progress has been made in robot perception by different, meanwhile
also commercially available object tracking systems which have been mainly explored by the
Computer Vision and Augmented Reality Communities, but are also applied in military
defense, assisted driving and home living. They are often built on hybrid ultrasound-inertial
tracking technology electromagnetic tracking, most frequently, however, on vision-based
techniques.
Robust object tracking systems based on computer vision with multiple cameras as sensors
and vision data recorded in the form of image frames of grayscale or color have been
developed, but are limited in real-time data processing and 3D-object detection.
While many 3D object tracking strategies have been proposed, it still remains a particular
challenging task on mobile robots. The focus of this thesis here is to introduce a new method
for real-time 3D tracking with the use of a new tracking algorithm for object recognition and
identification and implementation of a neuronal network for position measurement of objects.
A common approach is to make use of vision-based tracking devices. Such systems, however,
are usually too expensive and complex to perform real-time tracking in cluttered 3D
environments. The new proposed system is promising for wider practical use as a new vision-
based 3D tracking technique for mobile robots because of its precision, robustness, low power
consumption and low management costs. The first section of this thesis provides a short
overview on today´s still existing difficulties and challenges of object tracking in general and
on mobile robots. Section two refers to currently applied methods for object identification and
tracking on mobile robots and ends up in a final introductory paragraph with further details on
the objective and structure of this thesis.
1.1. Problems and Challenges
In recent years, robots have made a big step forward from huge machines which assemble
product parts in factories to small autonomous robots which progressively infiltrate private
homes and official environments for diverse appliances. As personal or domestic home robots
they promise to simplify annoying household chores like cleaning floors and to free up users´
time, furthermore as intelligent self-correcting robots which also can be remote controlled
they may become key elements for the success of projects which are too difficult or
dangerous to be reached by humans like collecting probes on the Mars. As these systems have
to operate more and more autonomously in the future, they must gain further abilities besides
secure collision avoidance and precise navigation through unknown environments. 3D object
recognition and position measurement in real time have to be achieved, but cannot yet be
provided on small autonomous robots. This will be an essential requirement for intelligent
autonomous robots which should be able to perform high level tasks.
Several methods have been developed to recognize and classify objects [1]. These methods,
however, demand powerful hardware for image processing and object categorization. Thus
they are difficult to apply on autonomous robots due to their excessive power consumption. In
1.2 Current Methods for Tracking
Page 2
this thesis a new, low-cost 3D tracking system is presented which runs in real time on low
computing power hardware. This system comprises two vision sensors and senses positions of
several marked objects simultaneously at 100Hz. Another special feature of this system is that
the sensors can be placed arbitrarily in the environment. After a short calibration the system
independently tracks objects in 3D with high precision.
1.2. Current Methods for Tracking
Recognizing objects or obstacles is a key function in any robotic appliances. Several different
types of sensors have been developed which help robots already to avoid collisions with other
objects or follow targets. These sensors comprise infrared sensors [2], ultrasonic sensors [3]
and laser range finders [4] and can be found on several autonomous robots. All these sensors,
however, can only recognize objects within a limited distance and angle.
Camera vision based tracking and object identification has been an interesting field of
research throughout the past years. Several image based methods for object recognition have
been developed which can be mainly classified as either geometrically based [5] or
appearance based [2] techniques. Tracking and object identification of autonomous robots
with these systems, however, had to focus on off-line computation for a long time due to the
lack of powerful hardware for processing of the recorded images in real time. Because of the
continuously increasing performance of the computer hardware, tracking algorithms
meanwhile can be also applied on mobile robots. [6] and [7] present a camera based
stereovision system used on mobile robots which track objects autonomously. Since the start
of Microsoft’s Xbox Kinect, which also offers 3D depth information of an image besides
RGB-color data, a new field of research for object recognition and identification has emerged.
This motion sensing input device, which captures video data in 3D, has also been applied for
target identification and tracking [8].
All the presently camera based tracking systems still demand powerful hardware such as a
laptop at least for tracking only. A mobile robot, however, should not assign all its computing
resources for object tracking. Therefore tracking has to become more efficient.
Recently, a completely new sensor technology has been introduced with the development of
so-called biologically inspired dynamic vision sensors (DVS-sensors). These sensors operate
with a drastically reduced amount of recorded data as they only sense and signal changes of
brightness within the environment and thus reduce the computational complexity and the
requirements of the hardware. Tracking of objects is also possible with these sensors. Some of
them even offer localization of the tracked object on their hardware output [9]. Other
developments showed tracking of cars and persons with a monocular DVS-sensor system
using a cluster algorithm [10]. Recently a dynamic stereovision system has been published
comprising two biologically inspired sensors for tracking people in 3D [11]. The performance
of this system has been shown for the fixed device in a dynamic scene and not mounted on a
mobile robot. All these biologically inspired systems also still lack reliable object recognition.
1.3. Specific Aims and Structure of this Thesis
In this thesis, a new 3D tracking method in cluttered environments is developed which can be
used on small autonomous robots with little computing power. It relies on two biologically
inspired vision sensors and an active target marker. Conventional systems, as described in
chapter 1.2, are limited in their adaptability due to high computational complexity. Recently

1.3 Specific Aims and Structure of this Thesis
Page 3
developed tracking systems, which are based on biologically inspired sensors [11], overcome
these difficulties, however, lack flexibility and capability of realigning sensors to different,
not predefined positions.
The new 3D tracking system developed in this thesis consists of two biologically inspired
vision sensors and an active marker. The sensors can be independently placed in the
environment. Each of these sensors autonomously tracks the active marker and reports its
angular positions to a trained neural network running on one of the sensors. The neural
network allows transformation of the angular positions into 3D real world positions online.
In chapter 2 of this thesis, basic aspects of object tracking are illustrated with special
references to a 3D mode as well as to benefits of biologically inspired sensors in comparison
to ordinary vision sensors in this application field. The last chapter of this section also
addresses fundamentals of neural networks and why they have been exploited for this use. In
chapter 3 a newly developed event-based tracking algorithm is described which has been
applied to the biologically inspired sensors for the detection of the active marker. The
complete, new 3D tracking system is presented in detail with the use of this new algorithm
and special focus on the hardware necessary for tracking in chapter 4. Chapter 5 describes an
advanced training method of the neural network which differs from ordinary techniques and is
applied for mapping of the 4D sensory data into 3D. In chapter 6 the complete new 3D
tracking system is presented in detail with performance tests as well as documentation of its
capabilities in practice. Chapter 7 provides an outlook on prospective fields of application and
future improvements of the system.

1.3 Specific Aims and Structure of this Thesis
Page 4

2.1 Methods for Target Detection
Page 5
2. Background and Conception
In this project a miniature, low power, standalone 3D tracking system, which could take
advantage of a new biologically inspired sensor, had to be designed and developed for real
time tracking of marker-targeted objects. Essential methods for labeling and identifying
targets are first introduced in section 2.1. Thereafter the basic constituents of a biologically
inspired sensor used in this project are presented in section 2.2 and their benefits are
expounded in compared to conventional CCD- or CMOS-sensors. Tracked marker positions
of two of these sensors are then inserted into a specifically trained neural network used to
transform these data into 3D real world coordinates. In section 2.3 a survey of the structure of
neural networks is provided and conventional training methods with reference to important
differences of the approach shown in chapter 5 are explained.
2.1. Methods for Target Detection
Precise nearby object detection and tracking are indispensable functions of many robotic
systems. They are necessary in several robotic applications to enable definition of self-
positioning and secure movement of autonomous robots in their environment as well as allow
human-robot-interactions in particular. Several highly advanced techniques for collision
avoidance that also became standard features of autonomous robots are meanwhile available.
However, object identification is still a challenging task. Therefore many different solutions
have been designed which today can be grouped into three basic configurations with respect
to the component used for the target identification, such as an active marker, an active sensor
or a marker-less passive sensor. They can be further overviewed in brief as follows:
Marker-based tracking is generally a cheap solution to detect objects. The systems usually
rely on an aligned target marker and sensor and thus can only be used to fulfill specific,
predefined tasks like homing of autonomous robots.
Active markers as one specific option of these systems are usually paired with a passive
sensor. The absolute requirement of an active marker for each identifiable object, however, is
a major drawback for a wider use of such a system in object tracking. Such devices usually
can detect only predefined objects. They are not suitable for tasks like collision avoidance in
cluttered unmarked environments. In spite of these negative aspects and deficiencies, such
systems generally detect and identify many predefined objects robustly and pretty easily [12].
Another advantage of these systems is their management on simple hardware, which makes
them applicable also for small autonomous robots and allows longer system running time on
batteries as reduced computing requirements decrease the size, the costs and the power
consumption of the whole system.
Active sensors instead are used in these systems for various scenarios for instance for airplane
navigation by radar or laser optical measurements of objects, for industrial processes with
movement recognition by motion sensors using ultrasound [13]. “Active sensors transmit a
signal from a transmitter and with a receiver detect changes or reflections of the signal” [13].
The targets usually do not need a special preparation for their detection by an active sensor.
However, it is very challenging to specifically identify such objects without any attached even
passive label. For instance, it is difficult to discriminate a flying object on the radar as a B52
or A340 airplane, whereas it is obviously much easier to identify it, if the airplane transmits
identification data by itself like through active markers. Today active sensors are in particular
used for collision avoidance. Although such a system does not require labeling of each object
2.2 Biologically Inspired Embedded Dynamic Vision Sensor (eDVS)
Page 6
in the environment, a lot of research effort still has to be put into differentiated enhancement
of object identification. Various techniques have been developed which allow optimized
usage of active sensors in combination with passive, predefined target markers. Examples of
such devices are target identification via barcode or radio frequency scanning.
Systems with a marker-less passive sensor are most prospective and preferable as they
provide facilities for operation in diverse situations without special preparation of the
environment. They rely on technically highly advanced object detection and recognition
which nowadays is still a major challenge and favored research area. Up-to-now, these
systems require specialized, expensive sensors and an enormous computing power for object
detection and specific identification. Usually an image sensor captures a scene of the relevant
surrounding, of which essential image features are extracted by specialized algorithms. The
extraction procedure is thus based on highly computerized data processing which limits the
speed of object tracking. The gained information is then compared to key views of a scene or
geometrical constraints or reference structures such as models of objects [14]. This is a
complicated task and explains why these systems on small autonomous robots still fail for fast
object identification as the amount of data which has to be processed dramatically increases,
the faster these systems operate. System configurations which include high performance
hardware for sophisticated image processing usually have to be balanced against the limited
power supply from batteries and the demand of long operating times in these systems.
2.2. Biologically Inspired Embedded Dynamic Vision Sensor (eDVS)
Current 3D tracking systems relying on ordinary CCD- or CMOS-sensors, as described in
section 1.2, need powerful hardware to process the often massively redundant data in real-
time. However, this is not possible on small, battery powered robots. For solving such a
problem of high computational requirements a biologically inspired embedded dynamic
vision sensor, a high-speed asynchronous temporal contrast vision sensor called DVS, was
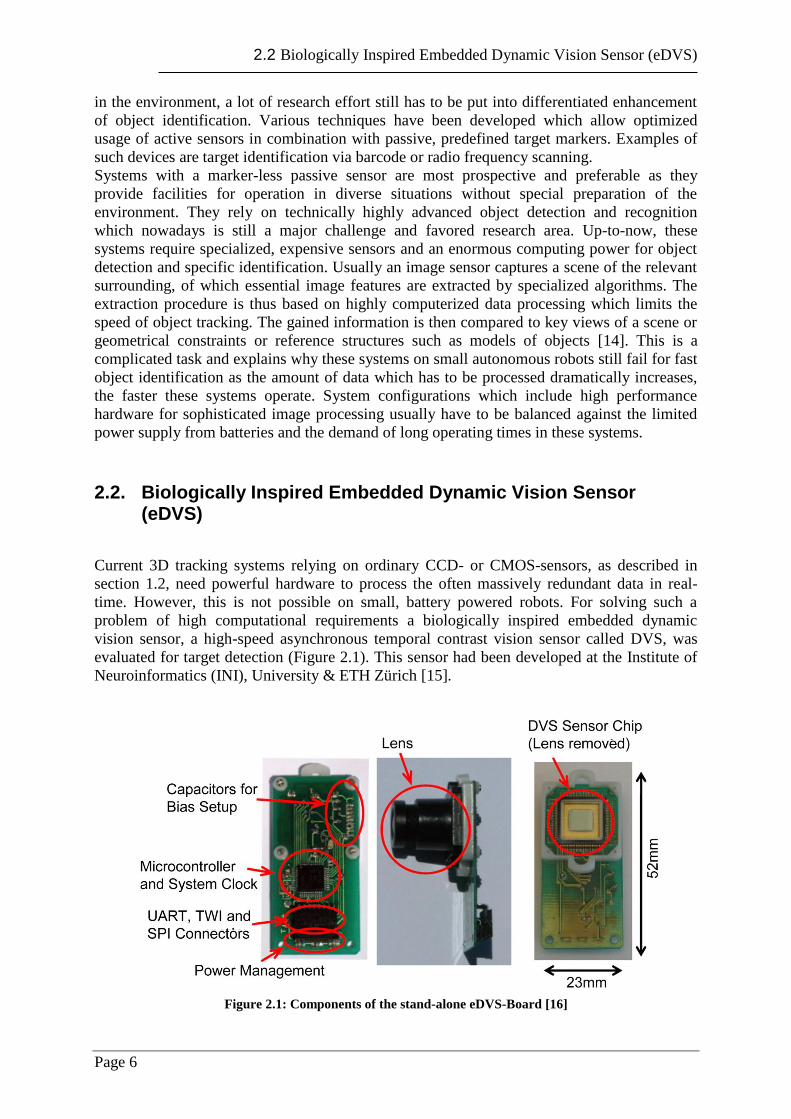
evaluated for target detection (Figure 2.1). This sensor had been developed at the Institute of
Neuroinformatics (INI), University & ETH Zürich [15].
Figure 2.1: Components of the stand-alone eDVS-Board [16]
2.2 Biologically Inspired Embedded Dynamic Vision Sensor (eDVS)
Page 7
Its main structure resembles that of ordinary CMOS-sensors. CMOS-sensors in cameras
capture full image frames usually with an update rate of 30 or 60 frames per second. Each
time a frame is captured, the brightness on all pixels is evaluated. Images are established with
the information of the sensed brightness and position of each pixel and serialized for the time
tested. The DVS-sensor also represents a light sensitive device. However, no image frames
are recorded. This sensor instead individually and continuously recognizes only illumination
changes on each pixel in the environment. This property of the DVS-sensor drastically
reduces the generated data which have to be processed, as only information of dynamic
brightness changes are recorded and passed on for fast and sensitive object detection and
recognition. “Each pixel independently and continuously quantifies local relative light
intensity changes to generate spike events” [15]. If the luminance of an object is increasing
above a predefined bias level at one pixel, a so-called “on-event” is generated at the output of
the DVS-sensor. In case the specific object turns darker again an “off-event” will be sent. In
case of a static scene a CMOS-sensor captures 30 image frames per second with complete
redundancy of the recorded data, whereas a DVS-sensor traces only sparse background noise.
A simple ARM7 microcontroller therefore is sufficient to process the minimal amount of data
recorded by the DVS-sensor. The current version of the DVS-sensor cannot yet recognize
colors. It only compares the actual brightness level with the stored preset luminance on each
pixel and reports an event if a rapid change has occurred. After a predefined delay, the so-
called refractory period, the current brightness level of this pixel is stored as a new reference
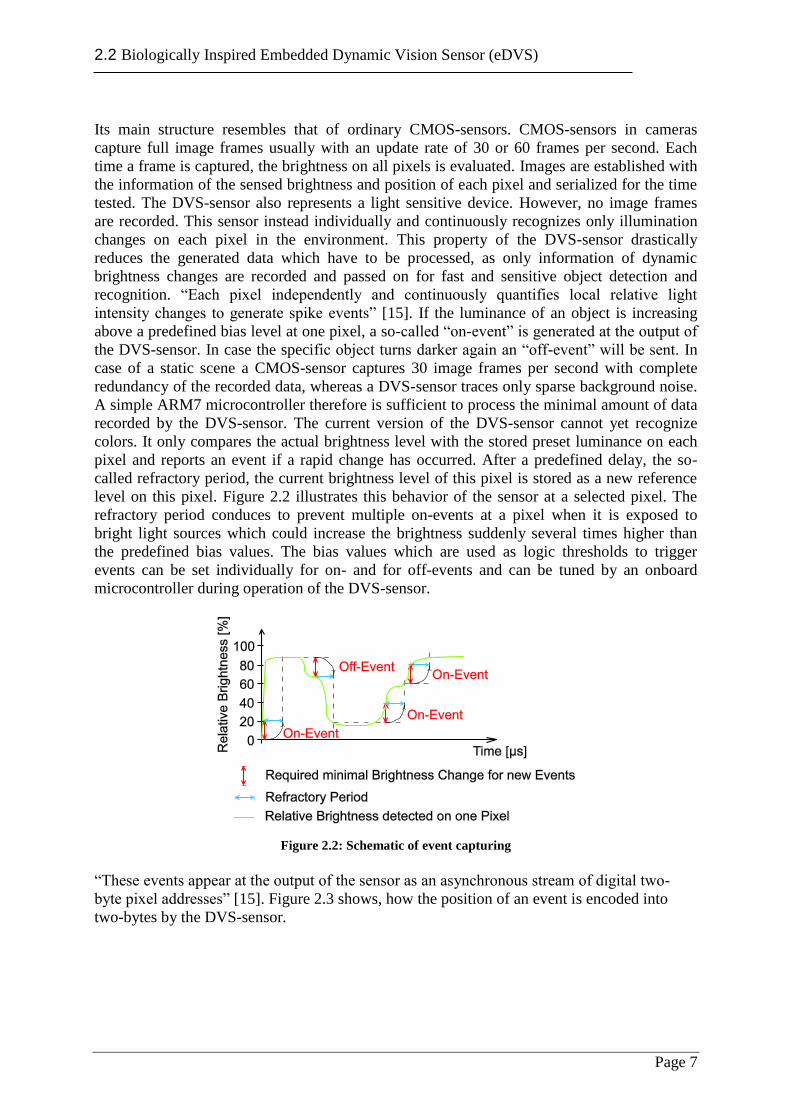
level on this pixel. Figure 2.2 illustrates this behavior of the sensor at a selected pixel. The
refractory period conduces to prevent multiple on-events at a pixel when it is exposed to
bright light sources which could increase the brightness suddenly several times higher than
the predefined bias values. The bias values which are used as logic thresholds to trigger
events can be set individually for on- and for off-events and can be tuned by an onboard
microcontroller during operation of the DVS-sensor.
Figure 2.2: Schematic of event capturing
“These events appear at the output of the sensor as an asynchronous stream of digital two-
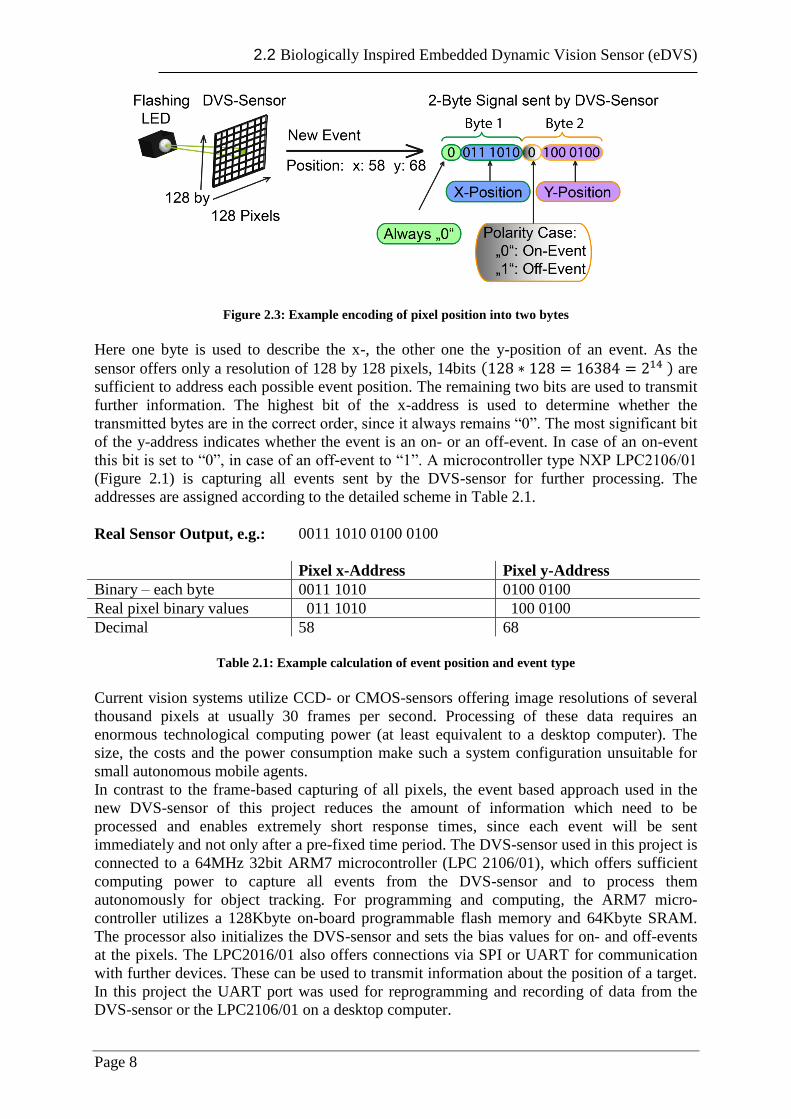
byte pixel addresses” [15]. Figure 2.3 shows, how the position of an event is encoded into
two-bytes by the DVS-sensor.
2.2 Biologically Inspired Embedded Dynamic Vision Sensor (eDVS)
Page 8
Figure 2.3: Example encoding of pixel position into two bytes
Here one byte is used to describe the x-, the other one the y-position of an event. As the
sensor offers only a resolution of 128 by 128 pixels, 14bits ( ) are
sufficient to address each possible event position. The remaining two bits are used to transmit
further information. The highest bit of the x-address is used to determine whether the
transmitted bytes are in the correct order, since it always remains “0”. The most significant bit
of the y-address indicates whether the event is an on- or an off-event. In case of an on-event
this bit is set to “0”, in case of an off-event to “1”. A microcontroller type NXP LPC2106/01
(Figure 2.1) is capturing all events sent by the DVS-sensor for further processing. The
addresses are assigned according to the detailed scheme in Table 2.1.
Real Sensor Output, e.g.: 0011 1010 0100 0100
Pixel x-Address Pixel y-Address
Binary – each byte 0011 1010 0100 0100
Real pixel binary values 011 1010 100 0100
Decimal 58 68
Table 2.1: Example calculation of event position and event type
Current vision systems utilize CCD- or CMOS-sensors offering image resolutions of several
thousand pixels at usually 30 frames per second. Processing of these data requires an
enormous technological computing power (at least equivalent to a desktop computer). The
size, the costs and the power consumption make such a system configuration unsuitable for
small autonomous mobile agents.
In contrast to the frame-based capturing of all pixels, the event based approach used in the
new DVS-sensor of this project reduces the amount of information which need to be
processed and enables extremely short response times, since each event will be sent
immediately and not only after a pre-fixed time period. The DVS-sensor used in this project is
connected to a 64MHz 32bit ARM7 microcontroller (LPC 2106/01), which offers sufficient
computing power to capture all events from the DVS-sensor and to process them
autonomously for object tracking. For programming and computing, the ARM7 micro-
controller utilizes a 128Kbyte on-board programmable flash memory and 64Kbyte SRAM.
The processor also initializes the DVS-sensor and sets the bias values for on- and off-events
at the pixels. The LPC2016/01 also offers connections via SPI or UART for communication
with further devices. These can be used to transmit information about the position of a target.
In this project the UART port was used for reprogramming and recording of data from the
DVS-sensor or the LPC2106/01 on a desktop computer.
2.3 Artificial Neural Networks
Page 9
The combination of the microcontroller with the DVS-sensor offers a low-cost embedded
stand-alone system, here referred to as eDVS-board, for 2D target detection. The eDVS-board
has a size of 52x23mm and a height of 6mm (30mm with lens). It weighs just 5g (12g with
lens). The power consumption of this embedded system (eDVS) is less than 200mW and thus
can be easily powered by a LiPo-cell [16]. Depending on the operation purpose, the DVS-
sensor can be equipped with different lenses to increase the field of view or to zoom into the
observed area. Because of the limited spatial resolution of the sensor, a distortion-free
telephoto lens, offering a view angle of just 11,3°, was used to remain a high resolution also at
far distances. With this lens the sensor could clearly identify its positioning angle to an object
within 0,088°.
2.3. Artificial Neural Networks
Current vision 3D tracking systems cannot run on small mobile robots due to their high
computing power requirements. Beside this fundamental condition a 3D tracking system also
has to be easily adaptable to the geometry of a robot for wider engineering use and should not
demand that the design of the robot has to be fitted. The biologically inspired tracking system
[11] introduced in section 1.2 still lacks this quality as it relies on a predefined, fixed design
of the detecting sensor. For gain of system flexibility, implementation of an artificial neural
network was endeavored that could transform varying angular positions of a tracked object
recorded from two DVS-sensors into 3D real-world data and allow use of a specific 3D
tracking algorithm. The following chapters introduce basic characteristics of artificial neural
networks, how their output can be calculated on a feed-forward network. Neural networks
cannot be used directly after initialization. Therefore it is explained in brief, how they can be
trained for specific application on different methods developed meanwhile.
Basics
Artificial neural networks (ANN) are programming constructs that try to mimic biological
neural networks, as they represent interconnected neurons in the nervous system of animals
and humans, for solving intelligence problems. The human brain consists of over 100 billion
neurons interconnected via synapses for exchange of information via electrical and chemical
signals. Single biological neurons are usually connected with axons and dendrites to many
other neurons forming extensive networks which function in groups of complex ordered
signaling circuits for all cognitive processes such as perception, motion, memory and learning
as major examples of only some of the tasks of the brain. With these neuronal networks
humans and animals can spontaneously adapt to new environments and perfectly and easily
perform tasks of orientation and perception of any objects that, although they look simple in
their performance, are still highly complex to be imitated by robots.
The development of artificial neural networks has been inspired by the biological structure
and behavior of the biological neural networks and was aimed at building mathematical or
computational models of the nervous system for simulation of properties and function of the
brain. Similar to the biological neurons, artificial networks are based on single operating
“units” also named “artificial neurons” or “nodes” which are interconnected in functional
groups. Various models have been developed to endow the systems with functions of the
humans’ brain.
ANNs mostly are non-linear statistical data modeling tools. They usually consist of complex
interconnections (“synapses”) of artificial neurons in different layers, which may be addressed
as input neurons, secondary layer neurons and output neurons via internal or external
2.3 Artificial Neural Networks
Page 10
information signals. Most systems use “weights” to change the parameters of information
flow and to regulate the connections between the neurons.
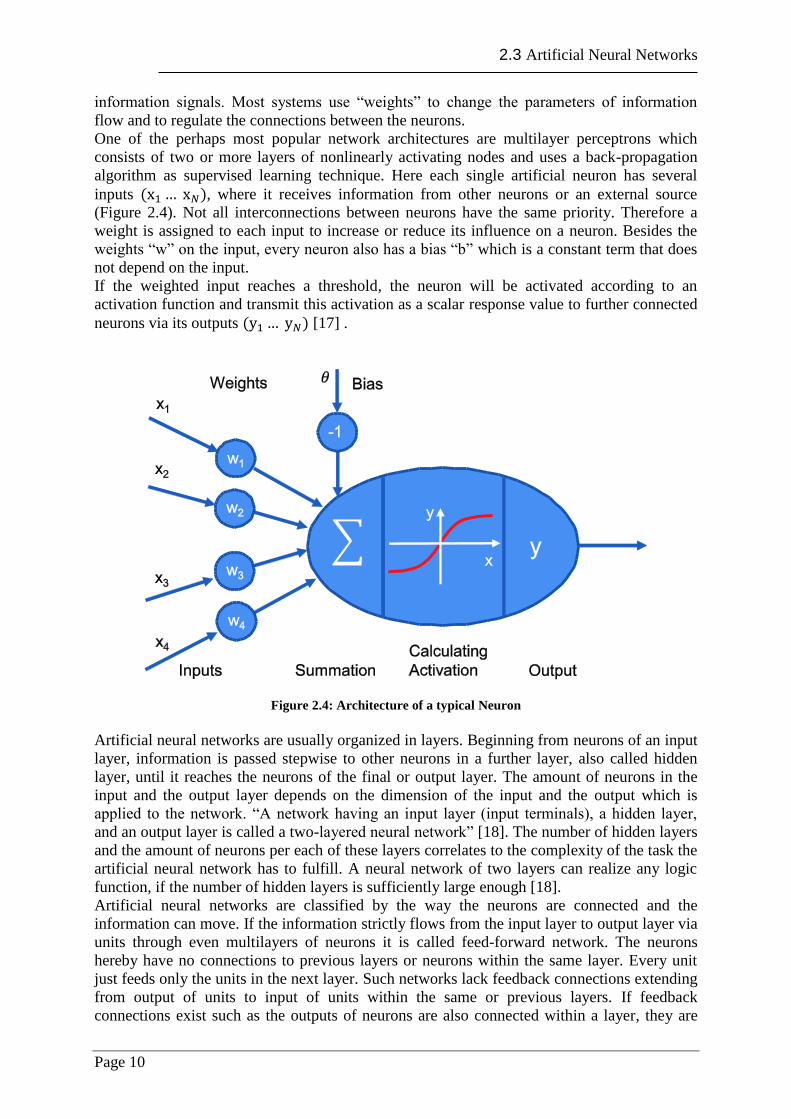
One of the perhaps most popular network architectures are multilayer perceptrons which
consists of two or more layers of nonlinearly activating nodes and uses a back-propagation
algorithm as supervised learning technique. Here each single artificial neuron has several
inputs ( ), where it receives information from other neurons or an external source
(Figure 2.4). Not all interconnections between neurons have the same priority. Therefore a
weight is assigned to each input to increase or reduce its influence on a neuron. Besides the
weights “w” on the input, every neuron also has a bias “b” which is a constant term that does
not depend on the input.
If the weighted input reaches a threshold, the neuron will be activated according to an
activation function and transmit this activation as a scalar response value to further connected
neurons via its outputs ( ) [17] .
Figure 2.4: Architecture of a typical Neuron
Artificial neural networks are usually organized in layers. Beginning from neurons of an input
layer, information is passed stepwise to other neurons in a further layer, also called hidden
layer, until it reaches the neurons of the final or output layer. The amount of neurons in the
input and the output layer depends on the dimension of the input and the output which is
applied to the network. “A network having an input layer (input terminals), a hidden layer,
and an output layer is called a two-layered neural network” [18]. The number of hidden layers
and the amount of neurons per each of these layers correlates to the complexity of the task the
artificial neural network has to fulfill. A neural network of two layers can realize any logic
function, if the number of hidden layers is sufficiently large enough [18].
Artificial neural networks are classified by the way the neurons are connected and the
information can move. If the information strictly flows from the input layer to output layer via
units through even multilayers of neurons it is called feed-forward network. The neurons
hereby have no connections to previous layers or neurons within the same layer. Every unit
just feeds only the units in the next layer. Such networks lack feedback connections extending
from output of units to input of units within the same or previous layers. If feedback
connections exist such as the outputs of neurons are also connected within a layer, they are
2.3 Artificial Neural Networks
Page 11
called lateral networks. “The structure of the interconnection network does not change over
time” [19].
The size of a neural network, the amount of layers and the number of neurons in each layer,
has major impact on its ability to reproduce complex functions. In general, increasing the
network size not only affects its complexity but also learning time and training quality, thus it
should be chosen deliberately. Increasing the size may considerably influence the capability
of the network for pattern recognition and approximation particularly for data not presented in
training sets under supervised learning conditions [20]. If the complexity and capacity of a
neural network exceeds the amount of testable free parameters in data training sets, a problem
called “over-fitting” arises. Training patterns usually include some noise values which the
network should not reproduce from the training data. In this case the network may perform
well on pattern recognition within the training set but fail to generalize or reproduce in unseen
data examples.
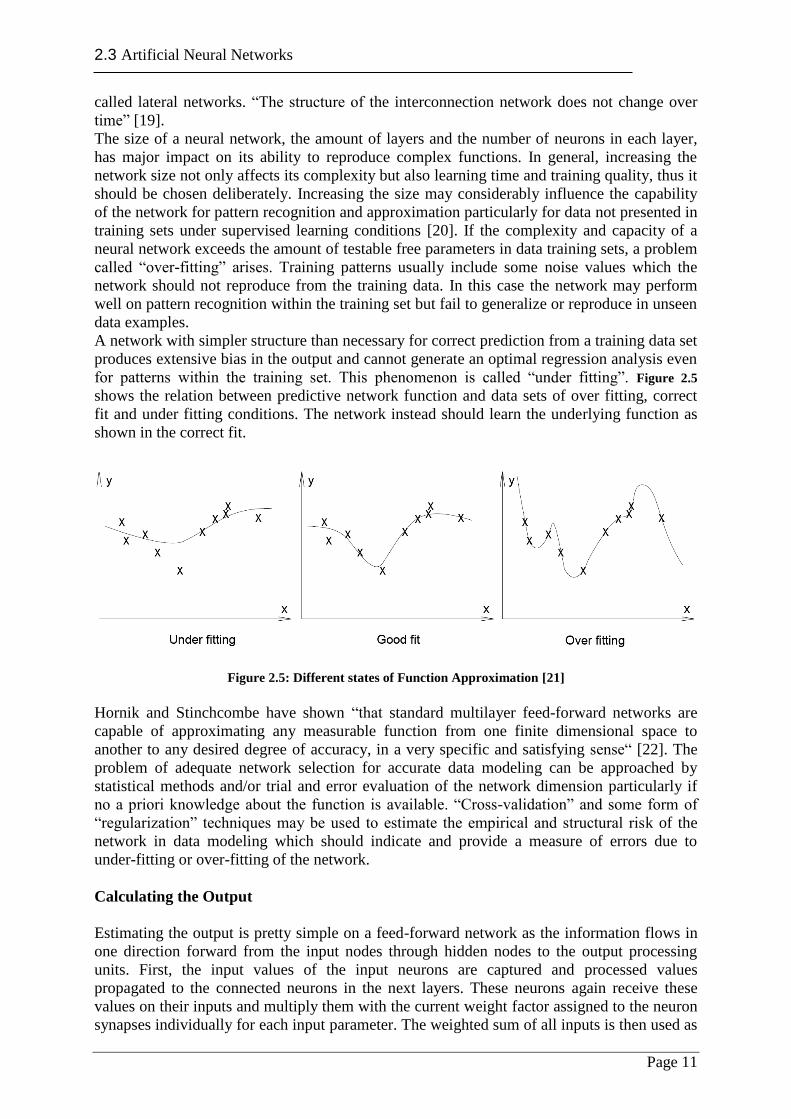
A network with simpler structure than necessary for correct prediction from a training data set
produces extensive bias in the output and cannot generate an optimal regression analysis even
for patterns within the training set. This phenomenon is called “under fitting”. Figure 2.5
shows the relation between predictive network function and data sets of over fitting, correct
fit and under fitting conditions. The network instead should learn the underlying function as
shown in the correct fit.
Figure 2.5: Different states of Function Approximation [21]
Hornik and Stinchcombe have shown “that standard multilayer feed-forward networks are
capable of approximating any measurable function from one finite dimensional space to
another to any desired degree of accuracy, in a very specific and satisfying sense“ [22]. The
problem of adequate network selection for accurate data modeling can be approached by
statistical methods and/or trial and error evaluation of the network dimension particularly if
no a priori knowledge about the function is available. “Cross-validation” and some form of
“regularization” techniques may be used to estimate the empirical and structural risk of the
network in data modeling which should indicate and provide a measure of errors due to
under-fitting or over-fitting of the network.
Calculating the Output
Estimating the output is pretty simple on a feed-forward network as the information flows in
one direction forward from the input nodes through hidden nodes to the output processing
units. First, the input values of the input neurons are captured and processed values
propagated to the connected neurons in the next layers. These neurons again receive these
values on their inputs and multiply them with the current weight factor assigned to the neuron
synapses individually for each input parameter. The weighted sum of all inputs is then used as

2.3 Artificial Neural Networks
Page 12
input for the activation function of the neuronal network as shown in Figure 2.4. A common
nonlinear activation function can be continuous like ( ) or non-continuous like signum
functions (eq. 2.1). In each node the sum of products of the inputs and of the weights is
calculated. If it exceeds a certain threshold value, the unit fires and shows the activated value,
otherwise it takes the deactivated value. The value of activation of a neuron is then
transmitted to neurons in the next layer as their new input values.
( ) 2.1
: bias
: signum activaton function
: neuron inputs 1….n
: neuron output
This type of propagation of information is typical for neural feed-forward networks and
continuous until the final layer, the so-called output layer, which then shows the output of the
neural network. “The only significant delay within the neural system is the synaptic
delay”[19].
Training a Neural Network
When designing an artificial neural network for a specific task, its structure and topology
have to be specified such as the amount of neurons in each layer, the activation function and
the connections between the neurons. If weights and biases of the connection units are
initially set to random values, an artificial neural network cannot be immediately utilized
because of unspecific initialization. It first has to be trained to adjust weights and biases of
each neuron connection with a set of input-output data patterns. The structure of the unit
interconnections and the activation functions do not change over the training period, thus only
the weights and biases of the connections between the processing units are tuned. The goal of
the training is to find values of these adjustable parameters that for any input x the output y of
the network is a good approximation of the desired value. The training is performed via
suitable “learning” algorithms that tune the adjustable parameters so that an input training
data set maps well to corresponding outputs of the network. The output values of the system
are iteratively compared to the desired values to compute values of a predefined error function
and further adjust performance of the network by back-propagation learning. There is no a
priori knowledge to adjusts weights properly and optimally before training [23].
To train and validate a neural network a huge set of sample data has to be generated with data
values equally spread for all possible inputs and outputs. These examples are then divided
into three data subsystems, A, B and C [17]. In A the biggest amount of sample data is stored
and used for training the neural network. Training a neural network with relatively limited
numbers of training samples can lead to “over-training” or “over-fitting” of the neural
network. This means that the neural network fails generalization and pattern recognition of
the training data set. The general purpose of the training can be described as function
approximation of the network. In this context classification involves deriving a function that
will separate data into categories or classes characterized by distinct sets of features. If a
neural network can only operate on input data, it cannot be trained to produce the desired
output data on a “supervised” way, but must be able to recognize hidden structures and
patterns in the input data without “supervision” by employing so-called self-organization
capabilities. Unsupervised operating networks may be regarded as classifiers that imply
detection of constellations of clusters within the raw input data.
2.3 Artificial Neural Networks
Page 13
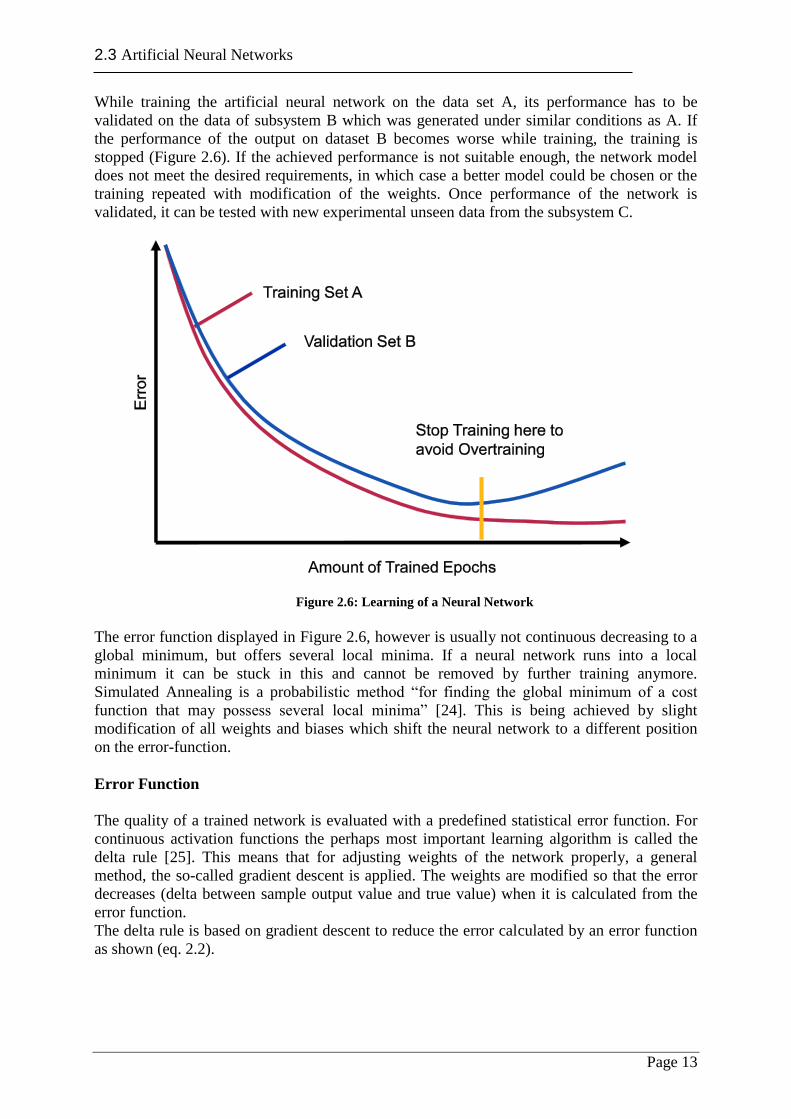
While training the artificial neural network on the data set A, its performance has to be
validated on the data of subsystem B which was generated under similar conditions as A. If
the performance of the output on dataset B becomes worse while training, the training is
stopped (Figure 2.6). If the achieved performance is not suitable enough, the network model
does not meet the desired requirements, in which case a better model could be chosen or the
training repeated with modification of the weights. Once performance of the network is
validated, it can be tested with new experimental unseen data from the subsystem C.
Figure 2.6: Learning of a Neural Network
The error function displayed in Figure 2.6, however is usually not continuous decreasing to a
global minimum, but offers several local minima. If a neural network runs into a local
minimum it can be stuck in this and cannot be removed by further training anymore.
Simulated Annealing is a probabilistic method “for finding the global minimum of a cost
function that may possess several local minima” [24]. This is being achieved by slight
modification of all weights and biases which shift the neural network to a different position
on the error-function.
Error Function
The quality of a trained network is evaluated with a predefined statistical error function. For
continuous activation functions the perhaps most important learning algorithm is called the
delta rule [25]. This means that for adjusting weights of the network properly, a general
method, the so-called gradient descent is applied. The weights are modified so that the error
decreases (delta between sample output value and true value) when it is calculated from the
error function.
The delta rule is based on gradient descent to reduce the error calculated by an error function
as shown (eq. 2.2).

2.3 Artificial Neural Networks
Page 14
∑( )
2.2
The basic principle is to find the minimum of an error surface which represents the
cumulative error over the dataset of subsystem “A” as a function of network weights and
biases as displayed in Figure 2.6. For detecting the minimum of this function, various
techniques have been developed like Levenberg Marquardt algorithm or back-propagation
which will be now explained in detail.
Back-Propagation
Back-propagation is one of the most popular methods for neural network training based on a
supervised learning method which means that the network is trained by providing it with input
and matched output patterns. The sample output is compared to the correct values to calculate
delta from a predefined error function. “The reason for the popularity is the underlying
simplicity and relative power of the algorithm” [26]. The strength of back-propagation is that
it can be used to also train nonlinear neural networks with any order of synapses between the
neurons. The simplicity is that it is based on a gradient descent of a defined error function.
The activation function of the neurons in the neural network needs to be differentiable that
back-propagation can be applied.
The back-propagation algorithm is separated into two steps, a feed-forward path and an error
back-propagation path. In the feed-forward path an input is fed into the network and the
activation of the neural network on the output calculated and the error calculated according to
an error function (eq. 2.2).
In the second step the error is back-propagated for each neuron through the whole network
beginning at the output layer. The weights and biases on each neuron are then modified in
order to reduce the value of the error function. Given for instance the error function (eq. 2.2)
the gradient can be calculated according to equation 2.3.
2.3
whereas
{ ( )( )
( )∑
2.4
2.3 Artificial Neural Networks
Page 15
Using the back-propagation algorithm the error is now reduced by modifying each weight
with the negative gradient as shown in equation 2.3. When the same data set is applied in this
training procedure to the network, it can be assured that the output error will be reduced
appropriately by this method.

2.3 Artificial Neural Networks
Page 16

3.1 Algorithm and Hardware Implementation
Page 17
3. Event-Based Target Detection Algorithm
Visual detection and tracking of objects is an essential requirement in many robotic
applications ranging from navigation and self-localization to interactive manipulation of
objects [27]. Especially in dynamic environments which can be experienced in human robot
interactions, detection of relevant objects and their reliable tracking are indispensable features
of robotic systems to avoid collision. Real-time computer vision based tracking on ordinary
CMOS- or CCD-sensors, however, relies on powerful hardware for fast extraction and
processing of key object features from each input image frame. Up to now most systems
could not incorporate full object sensing and tracking in real-time, particularly as the limited
computing power usually also has to be shared with further data processing tasks relevant for
other simultaneous functions of the robot system like grasping or navigating.
In this chapter, a new approach is presented offering high-speed visual tracking of active
markers also on autonomous robots. The algorithm was especially designed for the DVS-
sensor presented in section 2.2 and is fast enough to run on the ARM7 microcontroller of the
eDVS-sensor board. This 2D tracking algorithm is fundamental for the 3D tracking system
presented in chapter 4. The first section of this chapter introduces the event based tracking
algorithm with specific references to its advantages in comparison to ordinary visual tracking
methods. In section two application scenarios are shown, which demonstrate the performance
of the tracking algorithm.
3.1. Algorithm and Hardware Implementation
Unlike ordinary vision sensors, the DVS-sensor asynchronously records illumination changes
in the environment independently on each pixel. As no full frames of images are generated in
this vision system, standard object tracking techniques cannot be applied. A simple frame-
based tracking algorithm, which runs on the eDVS board, had been previously developed
specifically for the DVS-sensor to optimally track an active stimulus (Figure 3.1) flashing at
frequencies above 500Hz [28]. The portable, active stimulus is equipped with a Nichia
Superflux warmwhite LED which flashes at user-predefined frequencies and stimulates
continuously events on the DVS-sensor.
The previous algorithm continuously collects on-events within a predefined time period and
then assumes the target position where most events were recognized. Although this algorithm
works pretty well in this tracking setup, its limitations are that it only offers a position update
at 100Hz. In addition it is unable to reliably track and discriminate multiple flashing targets.
This, however, is a necessary feature for calibration of the 3D tracking system shown in
chapter 4.
3.1 Algorithm and Hardware Implementation
Page 18
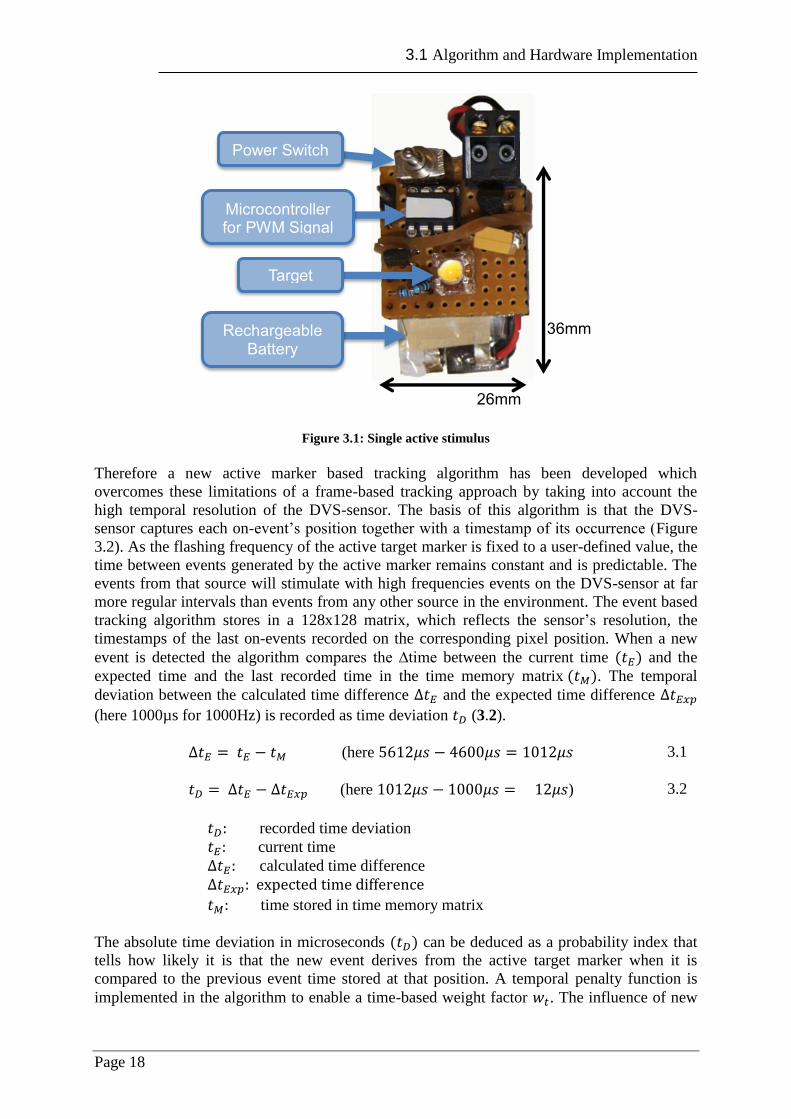
Figure 3.1: Single active stimulus
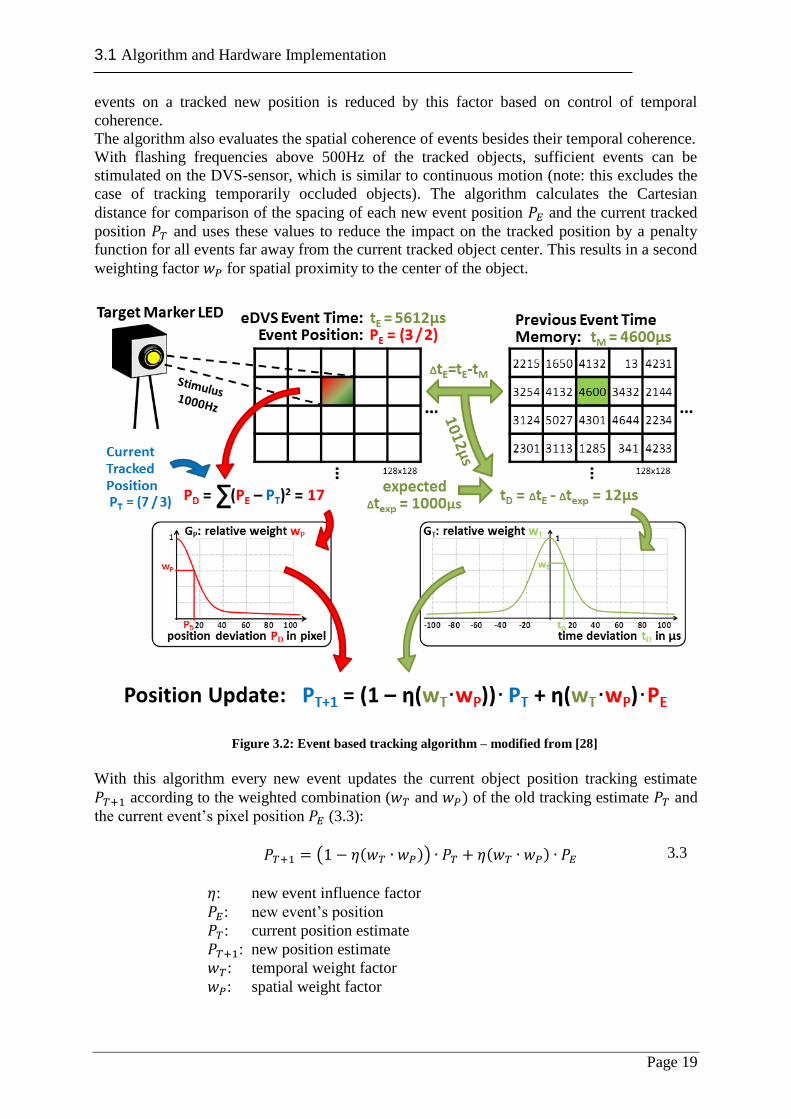
Therefore a new active marker based tracking algorithm has been developed which
overcomes these limitations of a frame-based tracking approach by taking into account the
high temporal resolution of the DVS-sensor. The basis of this algorithm is that the DVS-
sensor captures each on-event’s position together with a timestamp of its occurrence (Figure
3.2). As the flashing frequency of the active target marker is fixed to a user-defined value, the
time between events generated by the active marker remains constant and is predictable. The
events from that source will stimulate with high frequencies events on the DVS-sensor at far
more regular intervals than events from any other source in the environment. The event based
tracking algorithm stores in a 128x128 matrix, which reflects the sensor’s resolution, the
timestamps of the last on-events recorded on the corresponding pixel position. When a new
event is detected the algorithm compares the ∆time between the current time ( ) and the
expected time and the last recorded time in the time memory matrix ( ). The temporal
deviation between the calculated time difference and the expected time difference
(here 1000µs for 1000Hz) is recorded as time deviation (3.2).
(here 3.1
(here ) 3.2
recorded time deviation
current time
calculated time difference
time stored in time memory matrix
The absolute time deviation in microseconds ( ) can be deduced as a probability index that
tells how likely it is that the new event derives from the active target marker when it is
compared to the previous event time stored at that position. A temporal penalty function is
implemented in the algorithm to enable a time-based weight factor . The influence of new
26mm
36mm
Target LED
Rechargeable Battery
Microcontroller for PWM Signal
Power Switch
3.1 Algorithm and Hardware Implementation
Page 19
events on a tracked new position is reduced by this factor based on control of temporal
coherence.
The algorithm also evaluates the spatial coherence of events besides their temporal coherence.
With flashing frequencies above 500Hz of the tracked objects, sufficient events can be
stimulated on the DVS-sensor, which is similar to continuous motion (note: this excludes the
case of tracking temporarily occluded objects). The algorithm calculates the Cartesian
distance for comparison of the spacing of each new event position and the current tracked
position and uses these values to reduce the impact on the tracked position by a penalty
function for all events far away from the current tracked object center. This results in a second
weighting factor for spatial proximity to the center of the object.
Figure 3.2: Event based tracking algorithm – modified from [28]
With this algorithm every new event updates the current object position tracking estimate
according to the weighted combination ( and ) of the old tracking estimate and
the current event’s pixel position (3.3):
( ( )) ( ) 3.3
: new event influence factor
: new event’s position
: current position estimate
: new position estimate
: temporal weight factor
: spatial weight factor
3.1 Algorithm and Hardware Implementation
Page 20
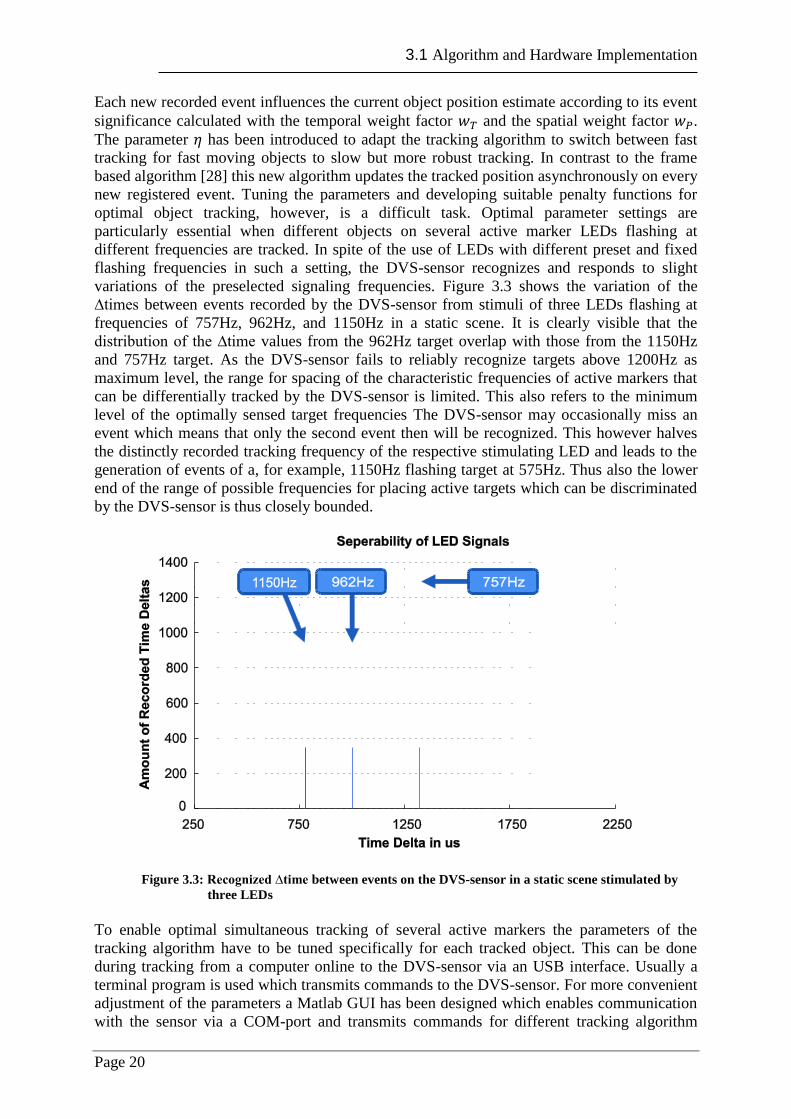
Each new recorded event influences the current object position estimate according to its event
significance calculated with the temporal weight factor and the spatial weight factor .
The parameter has been introduced to adapt the tracking algorithm to switch between fast
tracking for fast moving objects to slow but more robust tracking. In contrast to the frame
based algorithm [28] this new algorithm updates the tracked position asynchronously on every
new registered event. Tuning the parameters and developing suitable penalty functions for
optimal object tracking, however, is a difficult task. Optimal parameter settings are
particularly essential when different objects on several active marker LEDs flashing at
different frequencies are tracked. In spite of the use of LEDs with different preset and fixed
flashing frequencies in such a setting, the DVS-sensor recognizes and responds to slight
variations of the preselected signaling frequencies. Figure 3.3 shows the variation of the
∆times between events recorded by the DVS-sensor from stimuli of three LEDs flashing at
frequencies of 757Hz, 962Hz, and 1150Hz in a static scene. It is clearly visible that the
distribution of the ∆time values from the 962Hz target overlap with those from the 1150Hz
and 757Hz target. As the DVS-sensor fails to reliably recognize targets above 1200Hz as
maximum level, the range for spacing of the characteristic frequencies of active markers that
can be differentially tracked by the DVS-sensor is limited. This also refers to the minimum
level of the optimally sensed target frequencies The DVS-sensor may occasionally miss an
event which means that only the second event then will be recognized. This however halves
the distinctly recorded tracking frequency of the respective stimulating LED and leads to the
generation of events of a, for example, 1150Hz flashing target at 575Hz. Thus also the lower
end of the range of possible frequencies for placing active targets which can be discriminated
by the DVS-sensor is thus closely bounded.
Figure 3.3: Recognized ∆time between events on the DVS-sensor in a static scene stimulated by
three LEDs
To enable optimal simultaneous tracking of several active markers the parameters of the
tracking algorithm have to be tuned specifically for each tracked object. This can be done
during tracking from a computer online to the DVS-sensor via an USB interface. Usually a
terminal program is used which transmits commands to the DVS-sensor. For more convenient
adjustment of the parameters a Matlab GUI has been designed which enables communication
with the sensor via a COM-port and transmits commands for different tracking algorithm
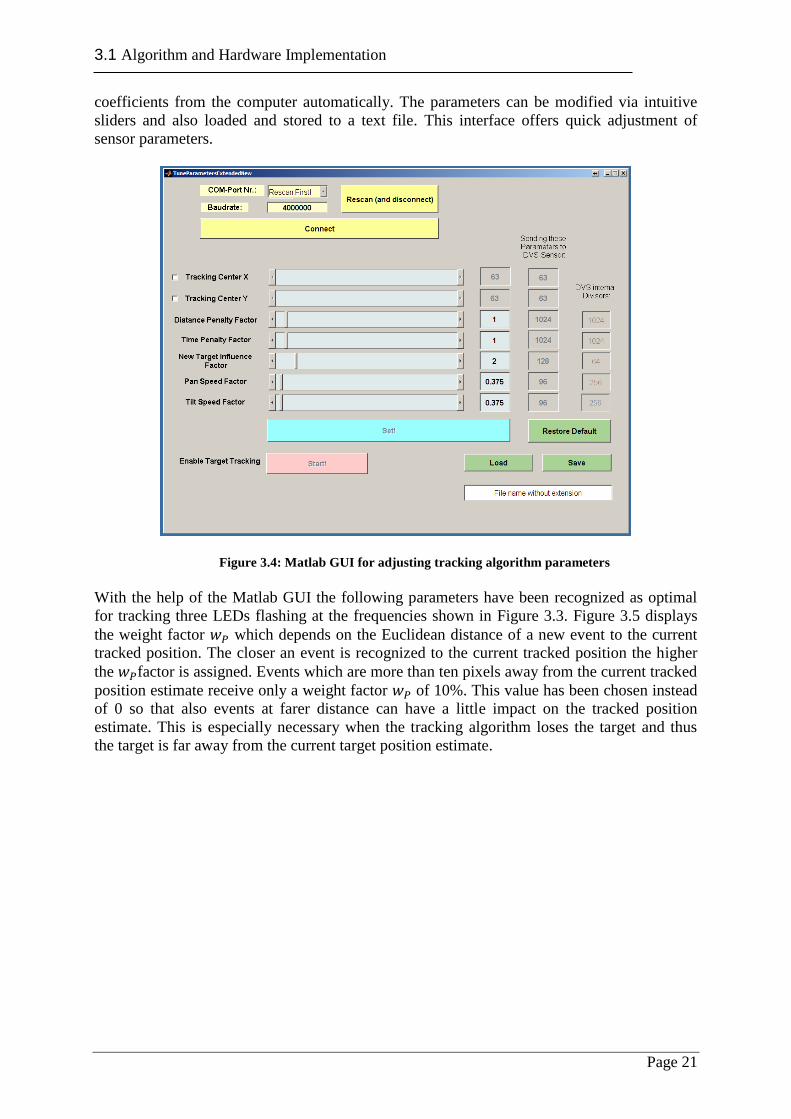
3.1 Algorithm and Hardware Implementation
Page 21
coefficients from the computer automatically. The parameters can be modified via intuitive
sliders and also loaded and stored to a text file. This interface offers quick adjustment of
sensor parameters.
Figure 3.4: Matlab GUI for adjusting tracking algorithm parameters
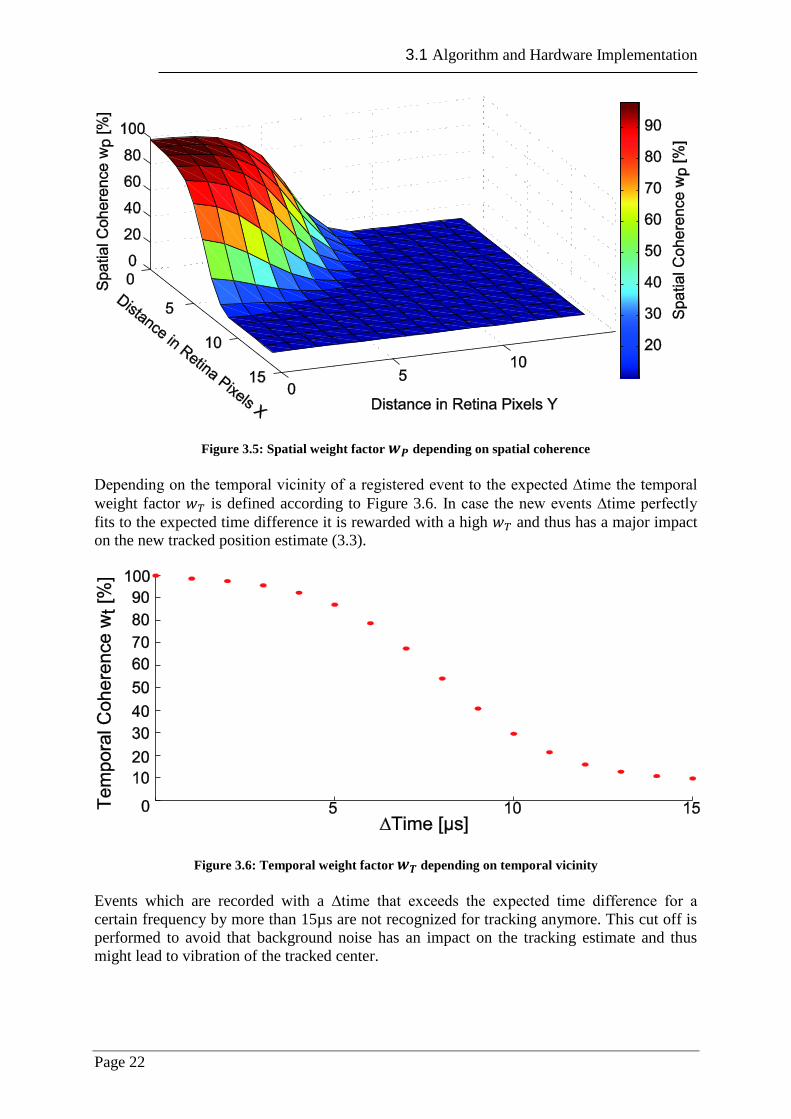
With the help of the Matlab GUI the following parameters have been recognized as optimal
for tracking three LEDs flashing at the frequencies shown in Figure 3.3. Figure 3.5 displays
the weight factor which depends on the Euclidean distance of a new event to the current
tracked position. The closer an event is recognized to the current tracked position the higher
the factor is assigned. Events which are more than ten pixels away from the current tracked
position estimate receive only a weight factor of 10%. This value has been chosen instead
of 0 so that also events at farer distance can have a little impact on the tracked position
estimate. This is especially necessary when the tracking algorithm loses the target and thus
the target is far away from the current target position estimate.
3.1 Algorithm and Hardware Implementation
Page 22
Figure 3.5: Spatial weight factor depending on spatial coherence
Depending on the temporal vicinity of a registered event to the expected ∆time the temporal
weight factor is defined according to Figure 3.6. In case the new events ∆time perfectly
fits to the expected time difference it is rewarded with a high and thus has a major impact
on the new tracked position estimate (3.3).
Figure 3.6: Temporal weight factor depending on temporal vicinity
Events which are recorded with a ∆time that exceeds the expected time difference for a
certain frequency by more than 15µs are not recognized for tracking anymore. This cut off is
performed to avoid that background noise has an impact on the tracking estimate and thus
might lead to vibration of the tracked center.
3.2 Results
Page 23
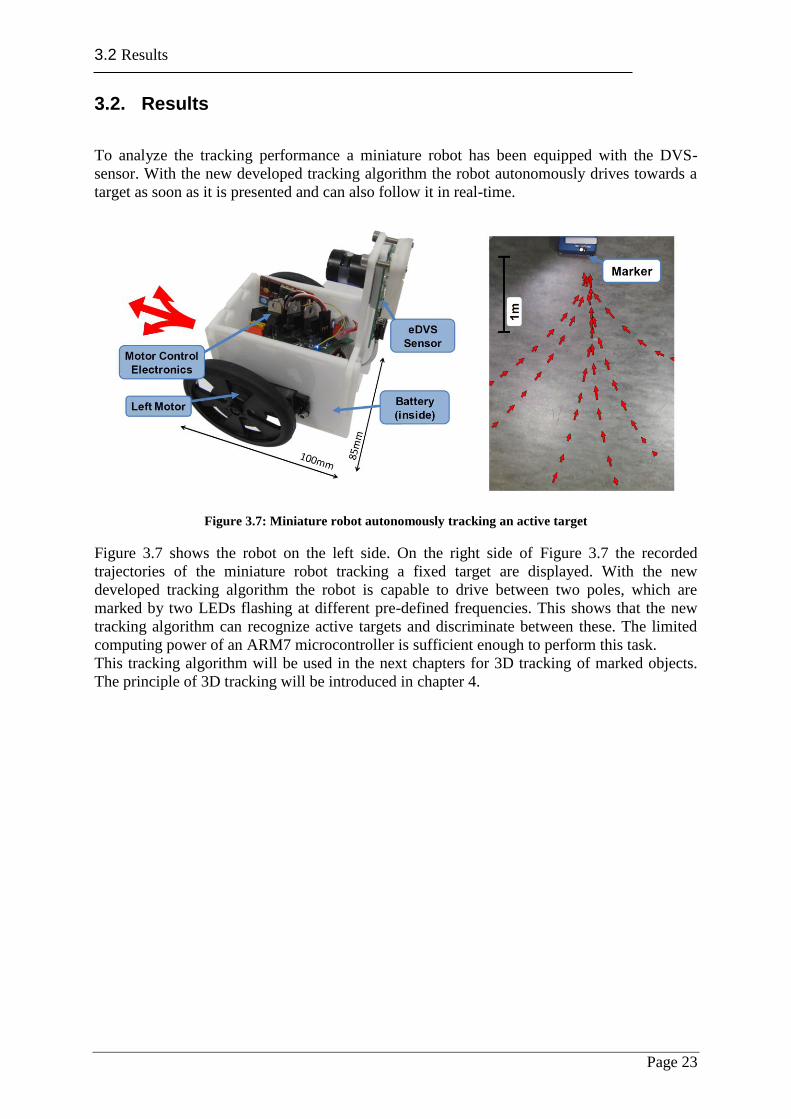
3.2. Results
To analyze the tracking performance a miniature robot has been equipped with the DVS-
sensor. With the new developed tracking algorithm the robot autonomously drives towards a
target as soon as it is presented and can also follow it in real-time.
Figure 3.7: Miniature robot autonomously tracking an active target
Figure 3.7 shows the robot on the left side. On the right side of Figure 3.7 the recorded
trajectories of the miniature robot tracking a fixed target are displayed. With the new
developed tracking algorithm the robot is capable to drive between two poles, which are
marked by two LEDs flashing at different pre-defined frequencies. This shows that the new
tracking algorithm can recognize active targets and discriminate between these. The limited
computing power of an ARM7 microcontroller is sufficient enough to perform this task.
This tracking algorithm will be used in the next chapters for 3D tracking of marked objects.
The principle of 3D tracking will be introduced in chapter 4.
3.2 Results
Page 24
4.1 Tracking Concept
Page 25
4. 3D Tracking
The first section of this chapter outlines principle ideas and basic structure of a 3D tracking
system developed in this thesis. All necessary hardware components and the software
programming are described in the following sections. The last section shows the performance
of the 3D tracking system.
4.1. Tracking Concept
Distance estimation is an essential acquirement for many applications of robots such as for
robotic product assembling, for human robot interactions or for the explorative use of
autonomous robots. Autonomous robots frequently offer only limited computing power.
Visual 3D tracking of objects in real-time, however, affords a fast computing hardware which
often cannot be sufficiently supplied with energy from batteries that are frequently the sole
power source on mobile robots.
In this project, a stand-alone 3D tracking system of lightweight and small size with low power
consumption was developed for application on mobile autonomous robots, The system
consists of two DVS-sensors. It was intended that the sensor could be flexibly positioned onto
the robot and versatile fitted to its geometry.
Two biologically inspired sensors (DVS-sensors) that could fulfill these requirements were
chosen. In comparison to ordinary CCD- or CMOS- sensors these devices had the major
advantage that they generated a very limited amount of data that had to be processed during
sensitive object detection. As shown in chapter 3 the DVS-sensor tracked marked objects at
high speed with the use of an ARM7 microcontroller only. When these sensors were used in
the 3D tracking system, they recorded their angular positions to specific active markers on a
traced target. Three Nichia NSSL 157T-H3 LEDs were individually selected on a specific
flashing frequency and mounted onto the target at a fixed mutual distance (Figure 4.6). The
algorithm presented in chapter 3 was trained to track each of the LEDs selectively and
calculate the angular position from the center of a fixed pan tilt coordinate system to each
LED (Figure 4.1).
4.1 Tracking Concept
Page 26
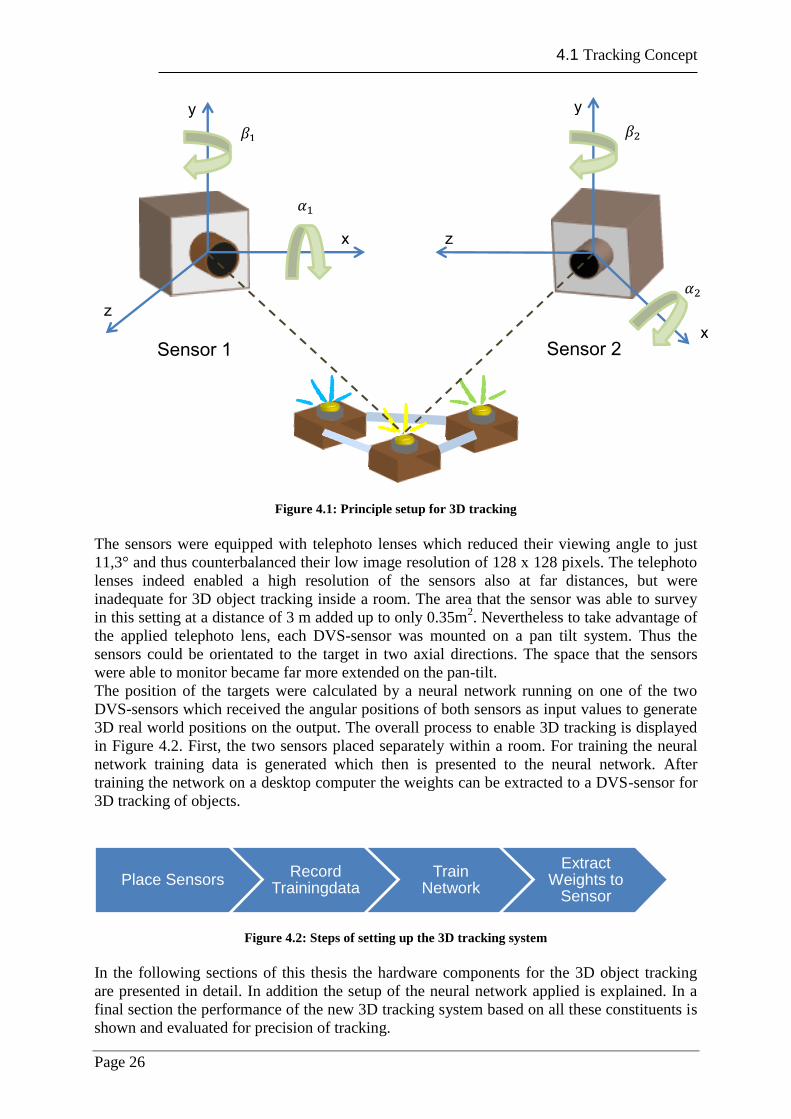
Figure 4.1: Principle setup for 3D tracking
The sensors were equipped with telephoto lenses which reduced their viewing angle to just
11,3° and thus counterbalanced their low image resolution of 128 x 128 pixels. The telephoto
lenses indeed enabled a high resolution of the sensors also at far distances, but were
inadequate for 3D object tracking inside a room. The area that the sensor was able to survey
in this setting at a distance of 3 m added up to only 0.35m2. Nevertheless to take advantage of
the applied telephoto lens, each DVS-sensor was mounted on a pan tilt system. Thus the
sensors could be orientated to the target in two axial directions. The space that the sensors
were able to monitor became far more extended on the pan-tilt.
The position of the targets were calculated by a neural network running on one of the two
DVS-sensors which received the angular positions of both sensors as input values to generate
3D real world positions on the output. The overall process to enable 3D tracking is displayed
in Figure 4.2. First, the two sensors placed separately within a room. For training the neural
network training data is generated which then is presented to the neural network. After
training the network on a desktop computer the weights can be extracted to a DVS-sensor for
3D tracking of objects.
Figure 4.2: Steps of setting up the 3D tracking system
In the following sections of this thesis the hardware components for the 3D object tracking
are presented in detail. In addition the setup of the neural network applied is explained. In a
final section the performance of the new 3D tracking system based on all these constituents is
shown and evaluated for precision of tracking.
Place Sensors Record
Trainingdata Train
Network
Extract Weights to
Sensor
x
y
z
x
y
z
𝛼
𝛽
𝛼
𝛽
Sensor 1 Sensor 2
4.2 Hardware Components
Page 27
4.2. Hardware Components
Pan Tilt
The spatial resolution of the DVS-sensor used for the new 3D tracking system was extremely
low with 128 by 128 pixels and therefore not sufficient for optimal object tracing even in the
nearer neighboring space within a room. When the DVS-sensor was equipped with a wide
angle lens to get a viewing field of 9 square meters at a two meter distance for instance, the
minimal distance between objects 2 meters away from the DVS-sensor had to be 10,99cm so
that they could be discriminated and recognized by the DVS-sensor. This discriminatory
capacity and detection accuracy was by far not sufficient for tracking or grasping objects in
3D even when two sensors were combined.
The DVS-sensors therefore have been equipped with narrow lenses that provided a viewing
angle of 11,3°, thus narrowed down the observation area of the sensors with an increase in
sensitivity and capacity for object discrimination. For regain of a larger supervision area
which was essential for any object tracking function the sensors were then mounted on pan tilt
systems which allowed the positioning of the sensors in two dimensions with a freedom of
90° at the vertical and of 120° at the horizontal axis. Two different pan tilt systems have been
setup for the orientation of the DVS-sensor. Both of them are based on serial kinematics.
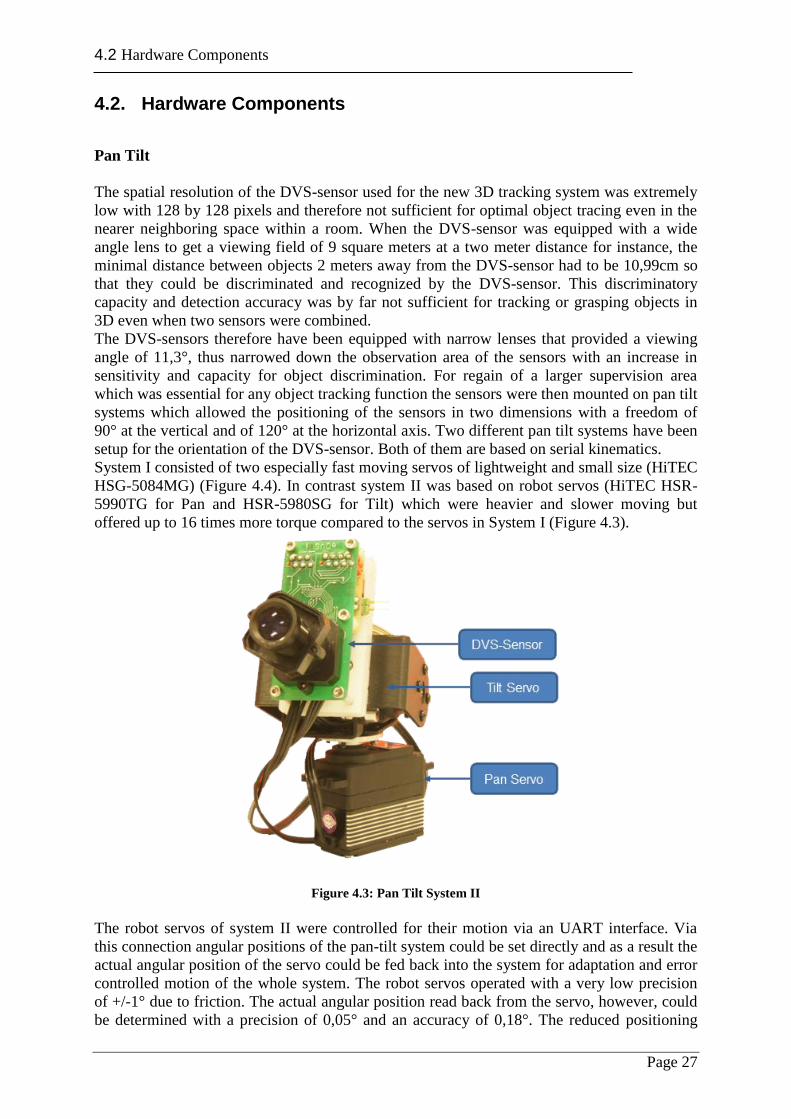
System I consisted of two especially fast moving servos of lightweight and small size (HiTEC
HSG-5084MG) (Figure 4.4). In contrast system II was based on robot servos (HiTEC HSR-
5990TG for Pan and HSR-5980SG for Tilt) which were heavier and slower moving but
offered up to 16 times more torque compared to the servos in System I (Figure 4.3).
Figure 4.3: Pan Tilt System II
The robot servos of system II were controlled for their motion via an UART interface. Via
this connection angular positions of the pan-tilt system could be set directly and as a result the
actual angular position of the servo could be fed back into the system for adaptation and error
controlled motion of the whole system. The robot servos operated with a very low precision
of +/-1° due to friction. The actual angular position read back from the servo, however, could
be determined with a precision of 0,05° and an accuracy of 0,18°. The reduced positioning
4.2 Hardware Components
Page 28
precision of the pan tilt system to reach a desired position was not a major drawback for its
use in object tracking, as the actual orientation of the servo can be read back with sufficient
precision and accuracy.
In system I the servos were controlled via PWM signals from the microcontroller on the
DVS-sensor board. The orientation of the pan tilt was determined by the PWM signal length.
No sensory feedback of the real orientation and positioning of the servos could be recorded by
this method. However, the servos themselves could detect and recognize their position with a
built-in potentiometer and correct positioning errors of the system to a tracked object with
these signals fed back into the system. Due to inherent inertia and friction of the system the
servos achieved to position the sensor on the pan tilt with a very limited precision. In specific
analyses of the motion control and positioning this pan tilt system I was shown to reach an
accuracy of about +/- 1°. This suggested that a tracking point at two meters distance to the
DVS-sensor could only be detected within +/- 3,5cm, if the sensor was tracking it perfectly.
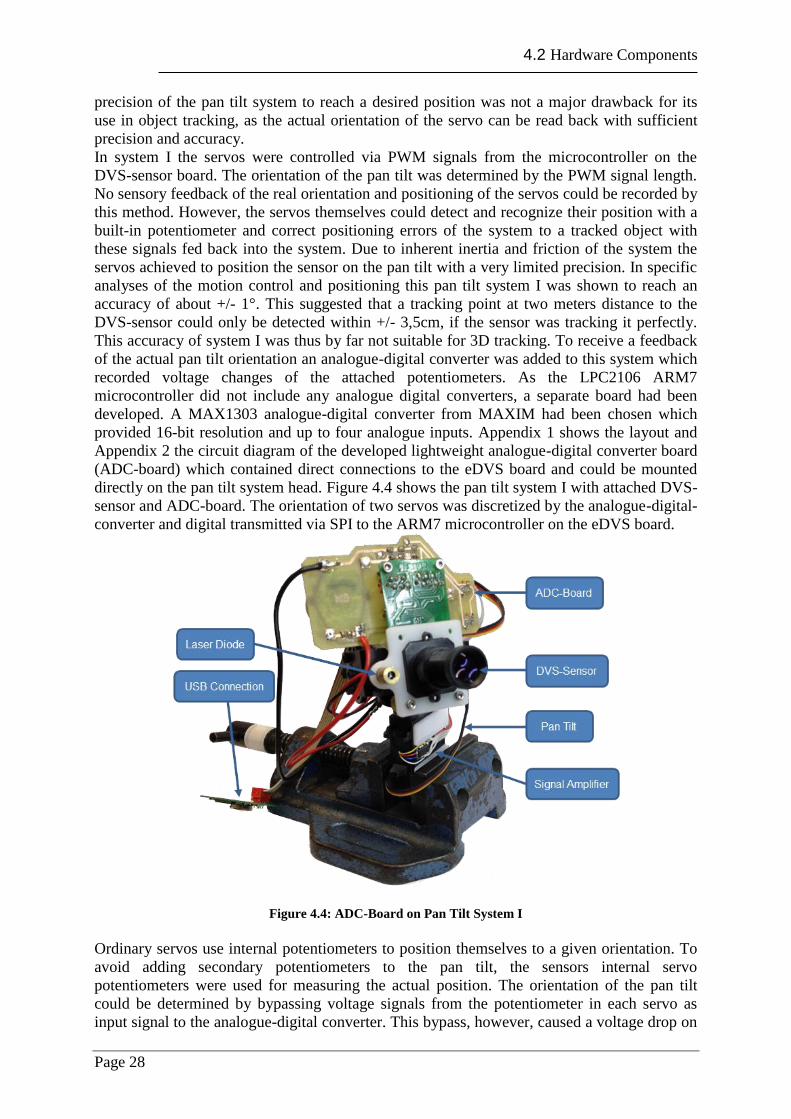
This accuracy of system I was thus by far not suitable for 3D tracking. To receive a feedback
of the actual pan tilt orientation an analogue-digital converter was added to this system which
recorded voltage changes of the attached potentiometers. As the LPC2106 ARM7
microcontroller did not include any analogue digital converters, a separate board had been
developed. A MAX1303 analogue-digital converter from MAXIM had been chosen which
provided 16-bit resolution and up to four analogue inputs. Appendix 1 shows the layout and
Appendix 2 the circuit diagram of the developed lightweight analogue-digital converter board
(ADC-board) which contained direct connections to the eDVS board and could be mounted
directly on the pan tilt system head. Figure 4.4 shows the pan tilt system I with attached DVS-
sensor and ADC-board. The orientation of two servos was discretized by the analogue-digital-
converter and digital transmitted via SPI to the ARM7 microcontroller on the eDVS board.
Figure 4.4: ADC-Board on Pan Tilt System I
Ordinary servos use internal potentiometers to position themselves to a given orientation. To
avoid adding secondary potentiometers to the pan tilt, the sensors internal servo
potentiometers were used for measuring the actual position. The orientation of the pan tilt
could be determined by bypassing voltage signals from the potentiometer in each servo as
input signal to the analogue-digital converter. This bypass, however, caused a voltage drop on
4.2 Hardware Components
Page 29
the potentiometer signal which was also recorded by the servo and interfered with its self-
positioning. The servo thus tried to reposition itself according to a falsified signal. To avoid
the consecutive unpredictable movement a signal amplifier was added to increase the input
signal strength of the analogue-digital converter without affection of the potentiometer signal
(Figure 4.4).
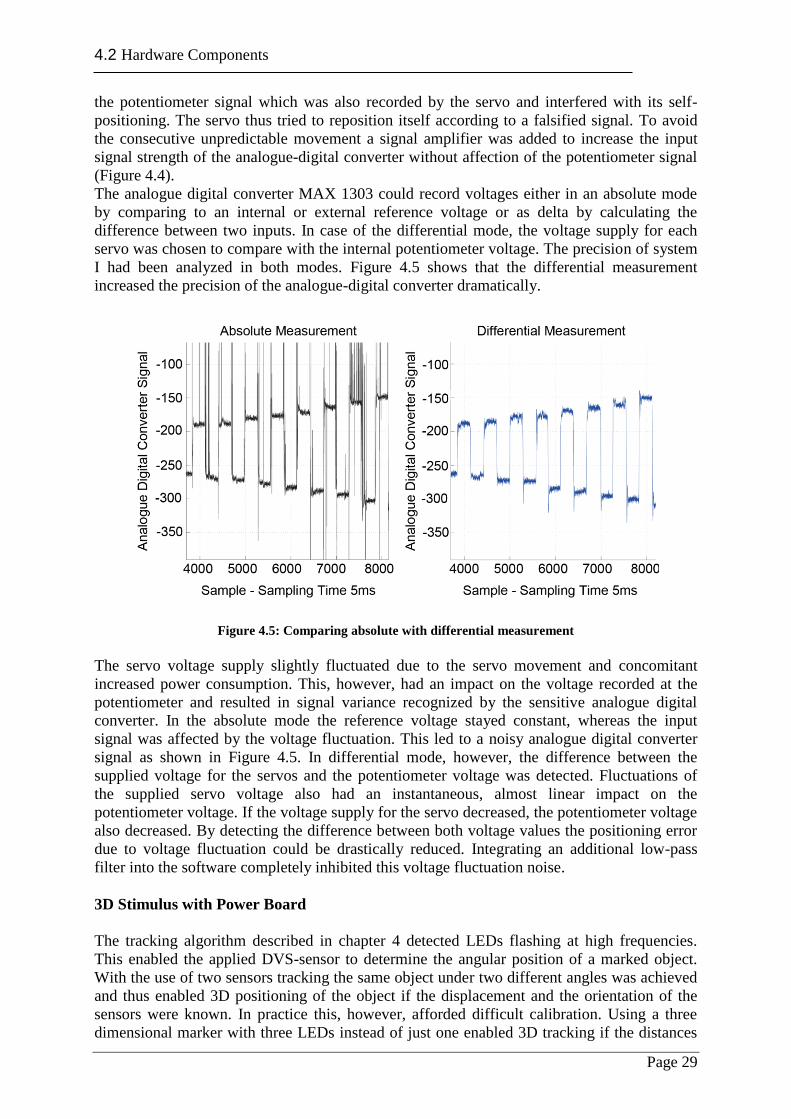
The analogue digital converter MAX 1303 could record voltages either in an absolute mode
by comparing to an internal or external reference voltage or as delta by calculating the
difference between two inputs. In case of the differential mode, the voltage supply for each
servo was chosen to compare with the internal potentiometer voltage. The precision of system
I had been analyzed in both modes. Figure 4.5 shows that the differential measurement
increased the precision of the analogue-digital converter dramatically.
Figure 4.5: Comparing absolute with differential measurement
The servo voltage supply slightly fluctuated due to the servo movement and concomitant
increased power consumption. This, however, had an impact on the voltage recorded at the
potentiometer and resulted in signal variance recognized by the sensitive analogue digital
converter. In the absolute mode the reference voltage stayed constant, whereas the input
signal was affected by the voltage fluctuation. This led to a noisy analogue digital converter
signal as shown in Figure 4.5. In differential mode, however, the difference between the
supplied voltage for the servos and the potentiometer voltage was detected. Fluctuations of
the supplied servo voltage also had an instantaneous, almost linear impact on the
potentiometer voltage. If the voltage supply for the servo decreased, the potentiometer voltage
also decreased. By detecting the difference between both voltage values the positioning error
due to voltage fluctuation could be drastically reduced. Integrating an additional low-pass
filter into the software completely inhibited this voltage fluctuation noise.
3D Stimulus with Power Board
The tracking algorithm described in chapter 4 detected LEDs flashing at high frequencies.
This enabled the applied DVS-sensor to determine the angular position of a marked object.
With the use of two sensors tracking the same object under two different angles was achieved
and thus enabled 3D positioning of the object if the displacement and the orientation of the
sensors were known. In practice this, however, afforded difficult calibration. Using a three
dimensional marker with three LEDs instead of just one enabled 3D tracking if the distances
4.2 Hardware Components
Page 30
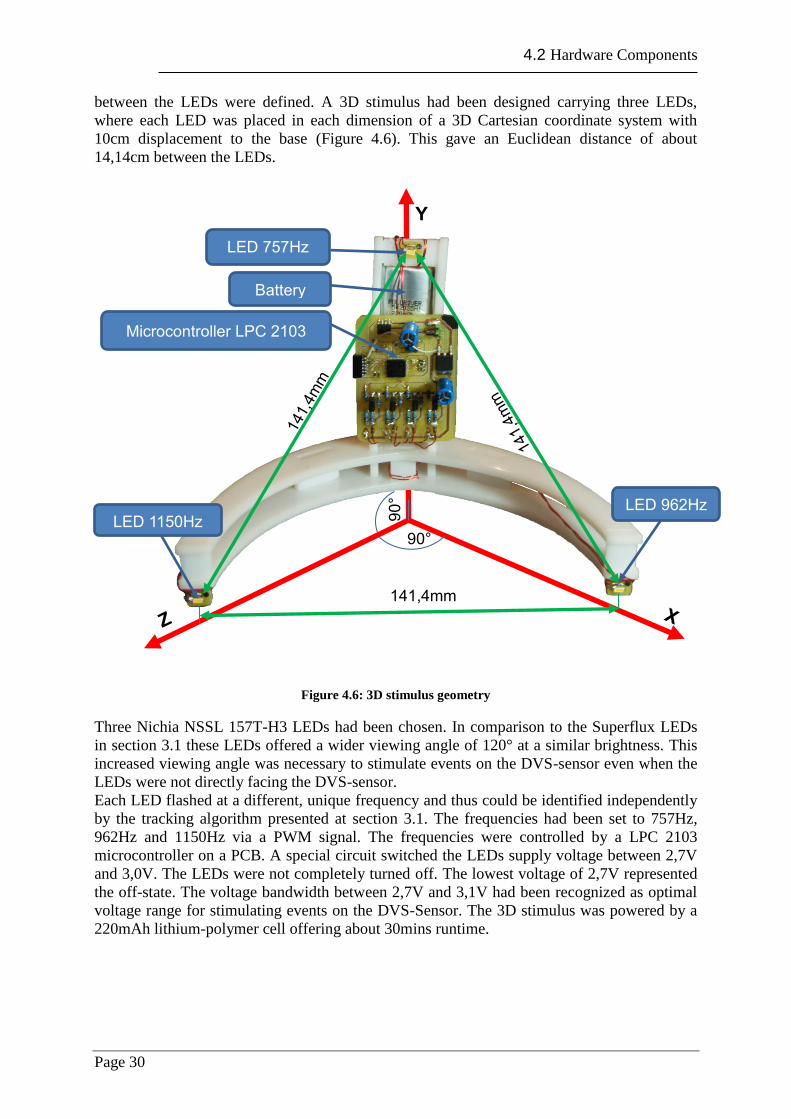
between the LEDs were defined. A 3D stimulus had been designed carrying three LEDs,
where each LED was placed in each dimension of a 3D Cartesian coordinate system with
10cm displacement to the base (Figure 4.6). This gave an Euclidean distance of about
14,14cm between the LEDs.
Figure 4.6: 3D stimulus geometry
Three Nichia NSSL 157T-H3 LEDs had been chosen. In comparison to the Superflux LEDs
in section 3.1 these LEDs offered a wider viewing angle of 120° at a similar brightness. This
increased viewing angle was necessary to stimulate events on the DVS-sensor even when the
LEDs were not directly facing the DVS-sensor.
Each LED flashed at a different, unique frequency and thus could be identified independently
by the tracking algorithm presented at section 3.1. The frequencies had been set to 757Hz,
962Hz and 1150Hz via a PWM signal. The frequencies were controlled by a LPC 2103
microcontroller on a PCB. A special circuit switched the LEDs supply voltage between 2,7V
and 3,0V. The LEDs were not completely turned off. The lowest voltage of 2,7V represented
the off-state. The voltage bandwidth between 2,7V and 3,1V had been recognized as optimal
voltage range for stimulating events on the DVS-Sensor. The 3D stimulus was powered by a
220mAh lithium-polymer cell offering about 30mins runtime.
141,4mm
90°
90
°
Y
Microcontroller LPC 2103
Battery
LED 1150Hz LED 962Hz
LED 757Hz
5.1 Network Design
Page 31
5. Neural Network for 3D Position Estimation
5.1. Network Design
A neural network was applied in this project to map 4D data, consisting of tracked angular
positions of marked targets with two sensors, into 3D real world data. The advantage of using
a neural network instead of mathematic equations was that the output of a neural network
could be easily calculated, also on a less powerful hardware. For mapping, the neural network
offered four inputs for the pan and tilt angles of each sensor respectively. The output layer
consisted of three neurons, each for one dimension of the Cartesian 3D space.
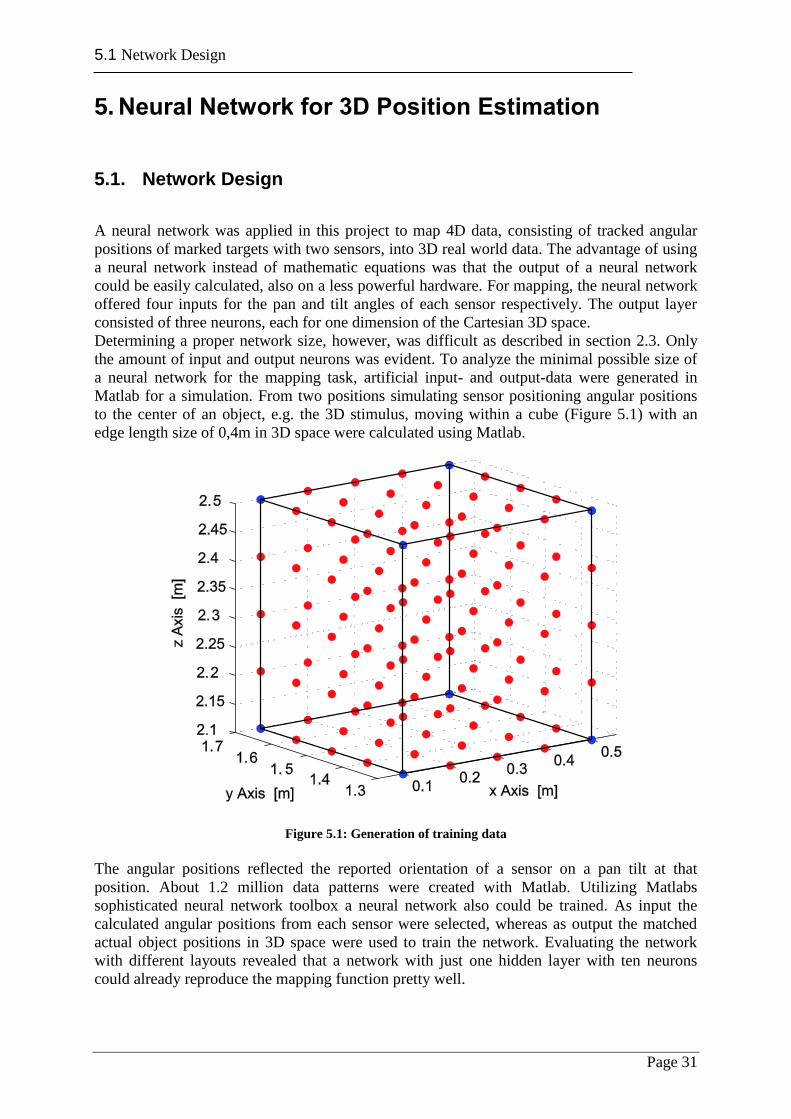
Determining a proper network size, however, was difficult as described in section 2.3. Only
the amount of input and output neurons was evident. To analyze the minimal possible size of
a neural network for the mapping task, artificial input- and output-data were generated in
Matlab for a simulation. From two positions simulating sensor positioning angular positions
to the center of an object, e.g. the 3D stimulus, moving within a cube (Figure 5.1) with an
edge length size of 0,4m in 3D space were calculated using Matlab.
Figure 5.1: Generation of training data
The angular positions reflected the reported orientation of a sensor on a pan tilt at that
position. About 1.2 million data patterns were created with Matlab. Utilizing Matlabs
sophisticated neural network toolbox a neural network also could be trained. As input the
calculated angular positions from each sensor were selected, whereas as output the matched
actual object positions in 3D space were used to train the network. Evaluating the network
with different layouts revealed that a network with just one hidden layer with ten neurons
could already reproduce the mapping function pretty well.

5.2 Training the Neural Network
Page 32
5.2. Training the Neural Network
Neural networks are usually trained with input-output data patterns [29]. To obtain such
matched data pairs the input and the output of a system have to be recorded during operation.
In the scenario of a moving object in 3D space, recording the output as the actual position of
an object in 3D space is a complicated task. Additional 3D tracking systems reporting the
tracked objects position in 3D can be used to collect the output training data.
To avoid the use of an additional tracking systems, a different approach was exploited that
allowed to train neural networks without knowing the absolute position of a 3D stimulus in
3D space and of the sensors´ spatial displacement to each other and to the 3D stimulus. In
contrast to standard techniques the neural network was adapted to reproduce the mapping just
by training with the recorded input data.
To evaluate the networks ability to learn these relations between stimulus and sensor
positioning in 3D space first a simulation was performed. Therefore, analogue to section 5.1,
training data was generated in Matlab. This time, the previous point object geometry was
virtually replaced by the geometry of the 3D stimulus (section 4.2). For each movement of the
3D stimulus within the cube the angles from both sensors to all LEDs on the 3D stimulus
were calculated and stored.
The angles to all three LEDs at a definite position of the 3D stimulus were grouped together
as so-called “position sets”. With each of these position sets the orientation and the position of
the 3D stimulus could be calculated. 325069 of these position sets were generated in Matlab
and after normalization between (-1, 1) applied for training of the network.
As each position set described like in a snapshot, angular positions to all LEDs of the 3D
stimulus, these physical relations between the input data were used to adapt the neural
network based on relations (Figure 5.2). First the recorded angular positions ( ) to one LED
were presented to the network as input. This signal was forward propagated through the
whole neural network and the network´s output stored. Directly thereafter, the angular
positions ( ) to a second LED from the same position set were fed into the neural network as
input and the network’s output was again calculated. Given the fact that the neural network
had not been trained, the output of the network had no informative value at this stage.
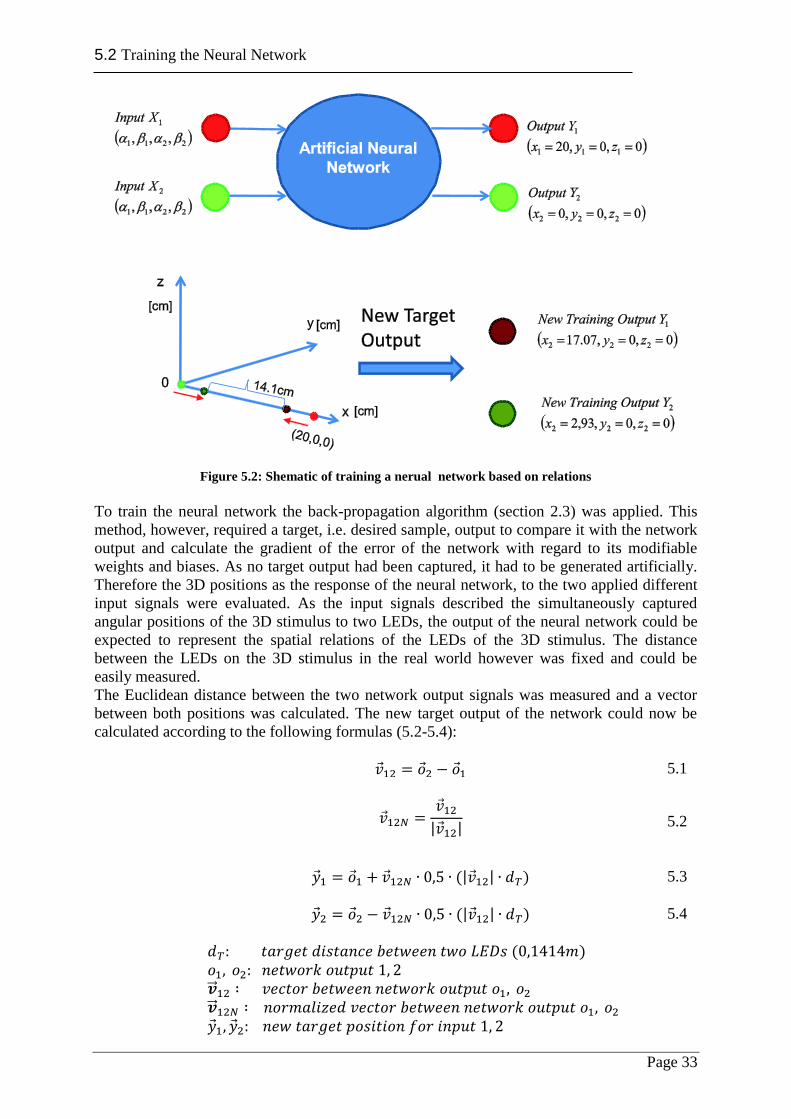
5.2 Training the Neural Network
Page 33
Figure 5.2: Shematic of training a nerual network based on relations
To train the neural network the back-propagation algorithm (section 2.3) was applied. This
method, however, required a target, i.e. desired sample, output to compare it with the network
output and calculate the gradient of the error of the network with regard to its modifiable
weights and biases. As no target output had been captured, it had to be generated artificially.
Therefore the 3D positions as the response of the neural network, to the two applied different
input signals were evaluated. As the input signals described the simultaneously captured
angular positions of the 3D stimulus to two LEDs, the output of the neural network could be
expected to represent the spatial relations of the LEDs of the 3D stimulus. The distance
between the LEDs on the 3D stimulus in the real world however was fixed and could be
easily measured.
The Euclidean distance between the two network output signals was measured and a vector
between both positions was calculated. The new target output of the network could now be
calculated according to the following formulas (5.2-5.4):
5.1
| | 5.2
(| | ) 5.3
(| | ) 5.4
( )
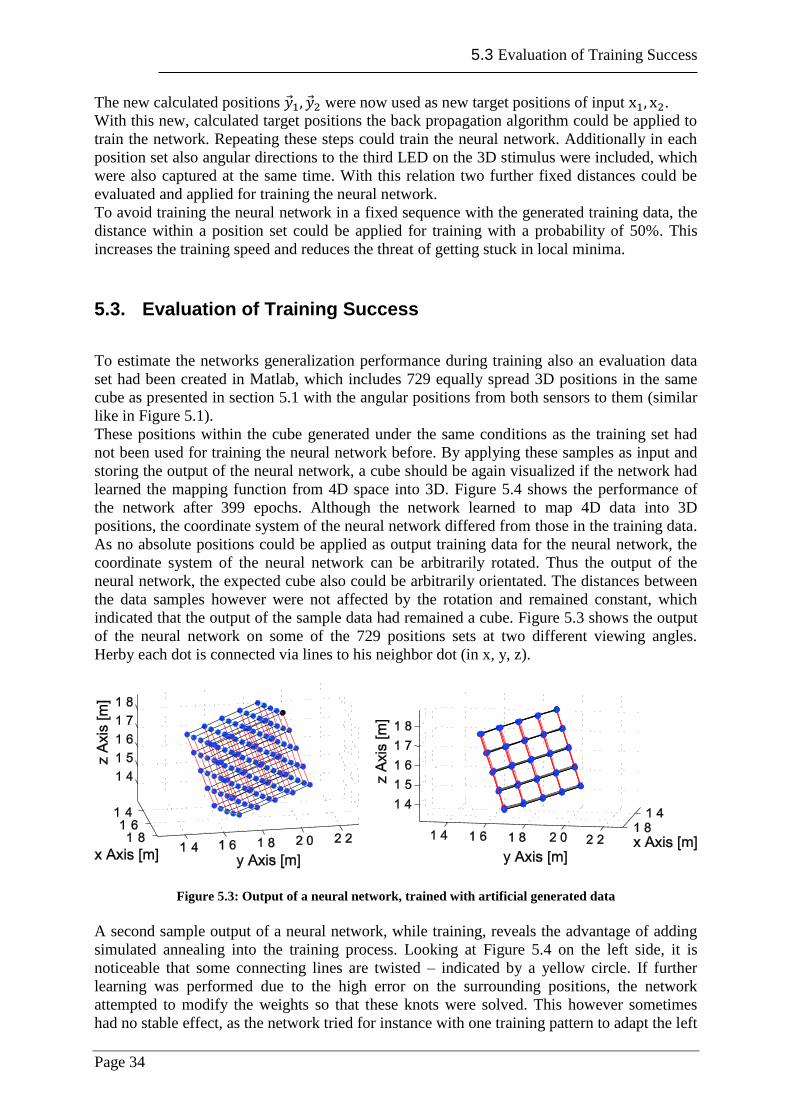
5.3 Evaluation of Training Success
Page 34
The new calculated positions were now used as new target positions of input .
With this new, calculated target positions the back propagation algorithm could be applied to
train the network. Repeating these steps could train the neural network. Additionally in each
position set also angular directions to the third LED on the 3D stimulus were included, which
were also captured at the same time. With this relation two further fixed distances could be
evaluated and applied for training the neural network.
To avoid training the neural network in a fixed sequence with the generated training data, the
distance within a position set could be applied for training with a probability of 50%. This
increases the training speed and reduces the threat of getting stuck in local minima.
5.3. Evaluation of Training Success
To estimate the networks generalization performance during training also an evaluation data
set had been created in Matlab, which includes 729 equally spread 3D positions in the same
cube as presented in section 5.1 with the angular positions from both sensors to them (similar
like in Figure 5.1).
These positions within the cube generated under the same conditions as the training set had
not been used for training the neural network before. By applying these samples as input and
storing the output of the neural network, a cube should be again visualized if the network had
learned the mapping function from 4D space into 3D. Figure 5.4 shows the performance of
the network after 399 epochs. Although the network learned to map 4D data into 3D
positions, the coordinate system of the neural network differed from those in the training data.
As no absolute positions could be applied as output training data for the neural network, the
coordinate system of the neural network can be arbitrarily rotated. Thus the output of the
neural network, the expected cube also could be arbitrarily orientated. The distances between
the data samples however were not affected by the rotation and remained constant, which
indicated that the output of the sample data had remained a cube. Figure 5.3 shows the output
of the neural network on some of the 729 positions sets at two different viewing angles.
Herby each dot is connected via lines to his neighbor dot (in x, y, z).
Figure 5.3: Output of a neural network, trained with artificial generated data
A second sample output of a neural network, while training, reveals the advantage of adding
simulated annealing into the training process. Looking at Figure 5.4 on the left side, it is
noticeable that some connecting lines are twisted – indicated by a yellow circle. If further
learning was performed due to the high error on the surrounding positions, the network
attempted to modify the weights so that these knots were solved. This however sometimes
had no stable effect, as the network tried for instance with one training pattern to adapt the left
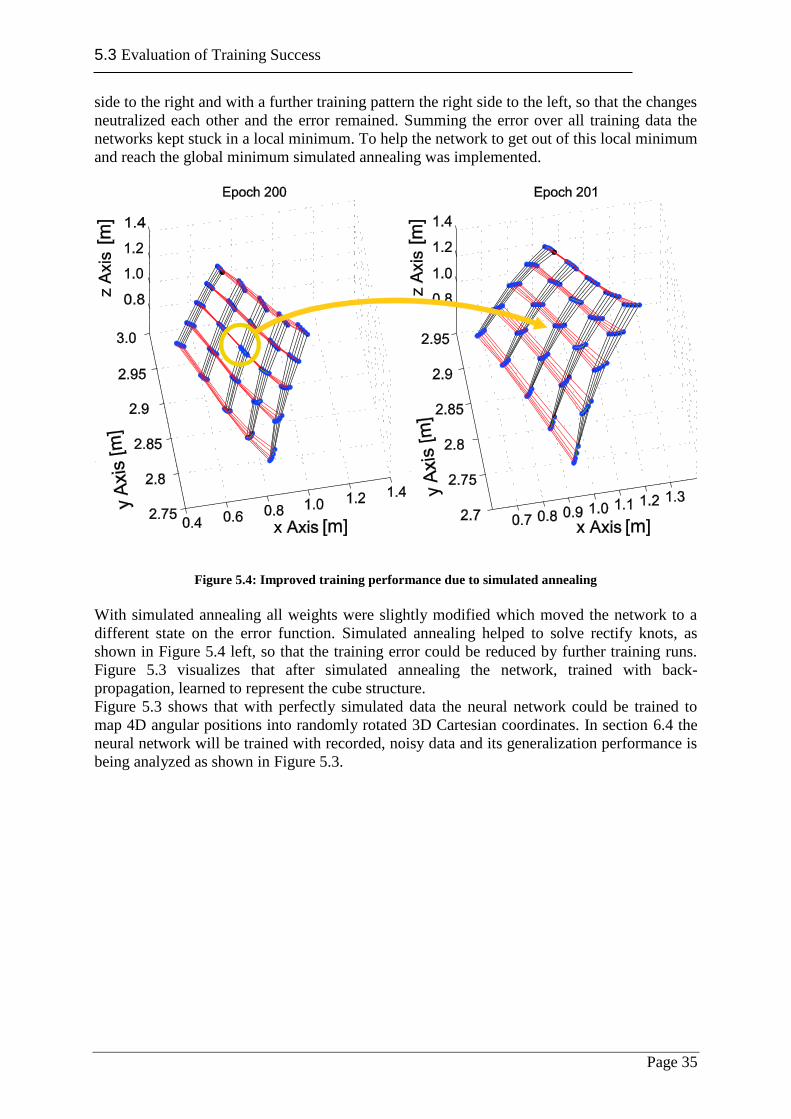
5.3 Evaluation of Training Success
Page 35
side to the right and with a further training pattern the right side to the left, so that the changes
neutralized each other and the error remained. Summing the error over all training data the
networks kept stuck in a local minimum. To help the network to get out of this local minimum
and reach the global minimum simulated annealing was implemented.
Figure 5.4: Improved training performance due to simulated annealing
With simulated annealing all weights were slightly modified which moved the network to a
different state on the error function. Simulated annealing helped to solve rectify knots, as
shown in Figure 5.4 left, so that the training error could be reduced by further training runs.
Figure 5.3 visualizes that after simulated annealing the network, trained with back-
propagation, learned to represent the cube structure.
Figure 5.3 shows that with perfectly simulated data the neural network could be trained to
map 4D angular positions into randomly rotated 3D Cartesian coordinates. In section 6.4 the
neural network will be trained with recorded, noisy data and its generalization performance is
being analyzed as shown in Figure 5.3.

5.3 Evaluation of Training Success
Page 36
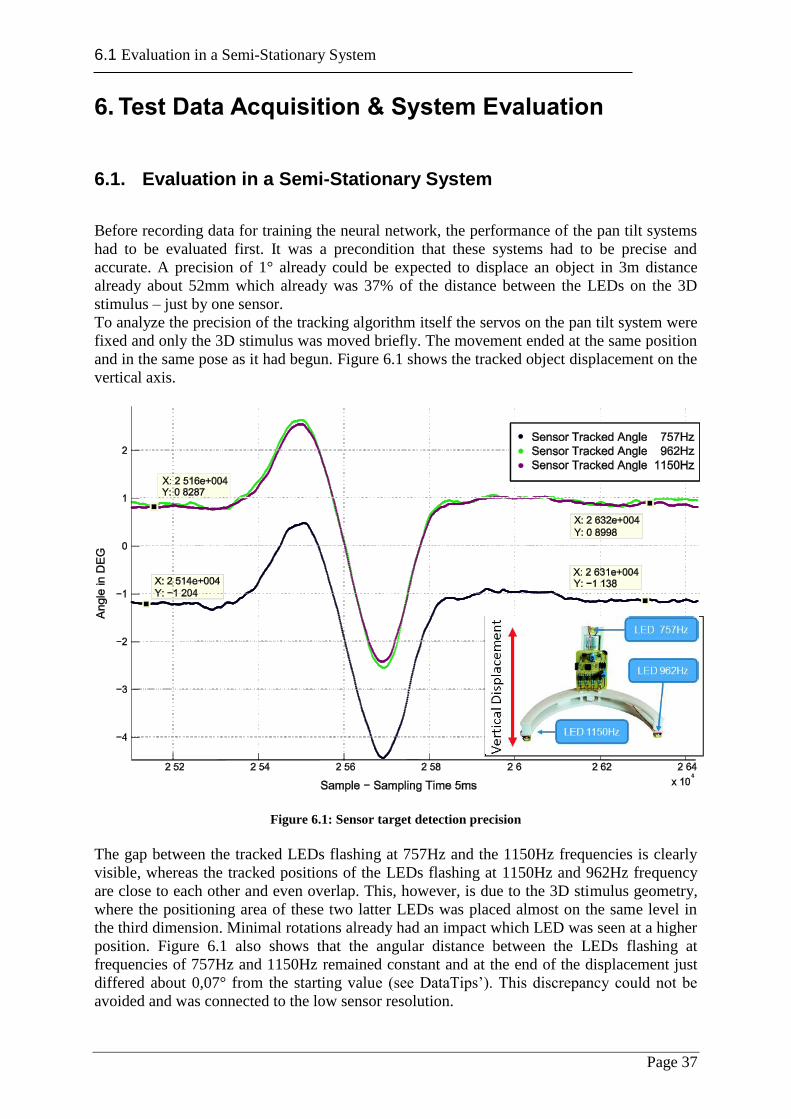
6.1 Evaluation in a Semi-Stationary System
Page 37
6. Test Data Acquisition & System Evaluation
6.1. Evaluation in a Semi-Stationary System
Before recording data for training the neural network, the performance of the pan tilt systems
had to be evaluated first. It was a precondition that these systems had to be precise and
accurate. A precision of 1° already could be expected to displace an object in 3m distance
already about 52mm which already was 37% of the distance between the LEDs on the 3D
stimulus – just by one sensor.
To analyze the precision of the tracking algorithm itself the servos on the pan tilt system were
fixed and only the 3D stimulus was moved briefly. The movement ended at the same position
and in the same pose as it had begun. Figure 6.1 shows the tracked object displacement on the
vertical axis.
Figure 6.1: Sensor target detection precision
The gap between the tracked LEDs flashing at 757Hz and the 1150Hz frequencies is clearly
visible, whereas the tracked positions of the LEDs flashing at 1150Hz and 962Hz frequency
are close to each other and even overlap. This, however, is due to the 3D stimulus geometry,
where the positioning area of these two latter LEDs was placed almost on the same level in
the third dimension. Minimal rotations already had an impact which LED was seen at a higher
position. Figure 6.1 also shows that the angular distance between the LEDs flashing at
frequencies of 757Hz and 1150Hz remained constant and at the end of the displacement just
differed about 0,07° from the starting value (see DataTips’). This discrepancy could not be
avoided and was connected to the low sensor resolution.
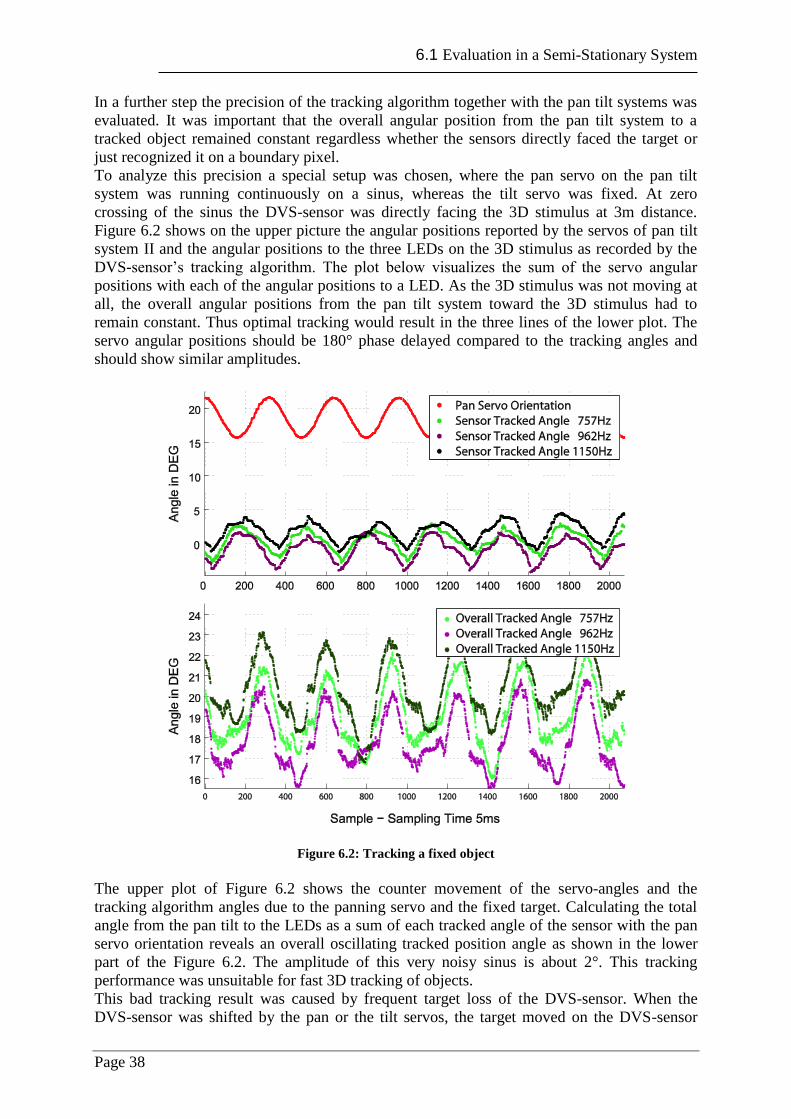
6.1 Evaluation in a Semi-Stationary System
Page 38
In a further step the precision of the tracking algorithm together with the pan tilt systems was
evaluated. It was important that the overall angular position from the pan tilt system to a
tracked object remained constant regardless whether the sensors directly faced the target or
just recognized it on a boundary pixel.
To analyze this precision a special setup was chosen, where the pan servo on the pan tilt
system was running continuously on a sinus, whereas the tilt servo was fixed. At zero
crossing of the sinus the DVS-sensor was directly facing the 3D stimulus at 3m distance.
Figure 6.2 shows on the upper picture the angular positions reported by the servos of pan tilt
system II and the angular positions to the three LEDs on the 3D stimulus as recorded by the
DVS-sensor’s tracking algorithm. The plot below visualizes the sum of the servo angular
positions with each of the angular positions to a LED. As the 3D stimulus was not moving at
all, the overall angular positions from the pan tilt system toward the 3D stimulus had to
remain constant. Thus optimal tracking would result in the three lines of the lower plot. The
servo angular positions should be 180° phase delayed compared to the tracking angles and
should show similar amplitudes.
Figure 6.2: Tracking a fixed object
The upper plot of Figure 6.2 shows the counter movement of the servo-angles and the
tracking algorithm angles due to the panning servo and the fixed target. Calculating the total
angle from the pan tilt to the LEDs as a sum of each tracked angle of the sensor with the pan
servo orientation reveals an overall oscillating tracked position angle as shown in the lower
part of the Figure 6.2. The amplitude of this very noisy sinus is about 2°. This tracking
performance was unsuitable for fast 3D tracking of objects.
This bad tracking result was caused by frequent target loss of the DVS-sensor. When the
DVS-sensor was shifted by the pan or the tilt servos, the target moved on the DVS-sensor
6.2 Prediction of Target Motion
Page 39
pixels. By moving to a neighboring pixel, two events, which were recorded with a predefined
time gap, were necessary to update the tracked position estimation. The timestamp first event
had to be stored in the time stamp matrix (Figure 3.2) so that it could be later compared with
the newer timestamp of the second event to evaluate the affiliation to one of the tracked
targets. This, however, limited the maximum angular velocity of a tracked target.
Furthermore, by far more events were stimulated on the DVS-sensor when it was panned than
the 3D stimulus was moved itself. This huge amount of events could not be completely
processed by the DVS-sensor and the microcontroller. This led to increased event drop which
falsified the recognized event frequency. The dropped events had no impact on the tracking
estimate. The tracked position update, thus could not be kept up with the angular velocity of
the panning servo. In the next section a method to overcome these difficulties will be
introduced.
6.2. Prediction of Target Motion
To improve the overall tracking performance shown in Figure 6.2, target loss due to DVS-
sensor rotation had to be avoided. Since the angular shift of the pan and the tilt servos could
be detected, the current tracked position estimated in the tracking algorithm could be
continuously counter shifted. Figure 6.3 exemplifies application of this method. The left
frame shows the 128 by 128 pixels of the DVS-sensor where the actual target position (dark
blue) is being shifted from the boundary pixels towards a pixel in the center of the DVS-
sensor (bright blue). This shift is performed by the tilt servo, which rotated the DVS-sensor
around the horizontal axis. The tracking algorithm failed to reliably track the target when the
servos were moving (section 6.1).
To improve the reliability of tracking, the angular tracked position estimate was updated
according to the angular shift of the tilt servos. With this method pixel positions of stationary
objects on the DVS-sensor which shifted due to pan or tilt servo movements could be
predicted without actually tracking the object. Figure 6.3 shows in the right frame, that the
position estimate of the target is shifted according to the measured servo movement.
This method also improved tracking of moving targets. Events which were related to the
tracked target frequency stayed closer to estimates of the tracked position with use of this
method than without consideration of the shifting variance. This was important for increasing
the maximum velocity of objects that still could be tracked by the 3D tracking algorithm.
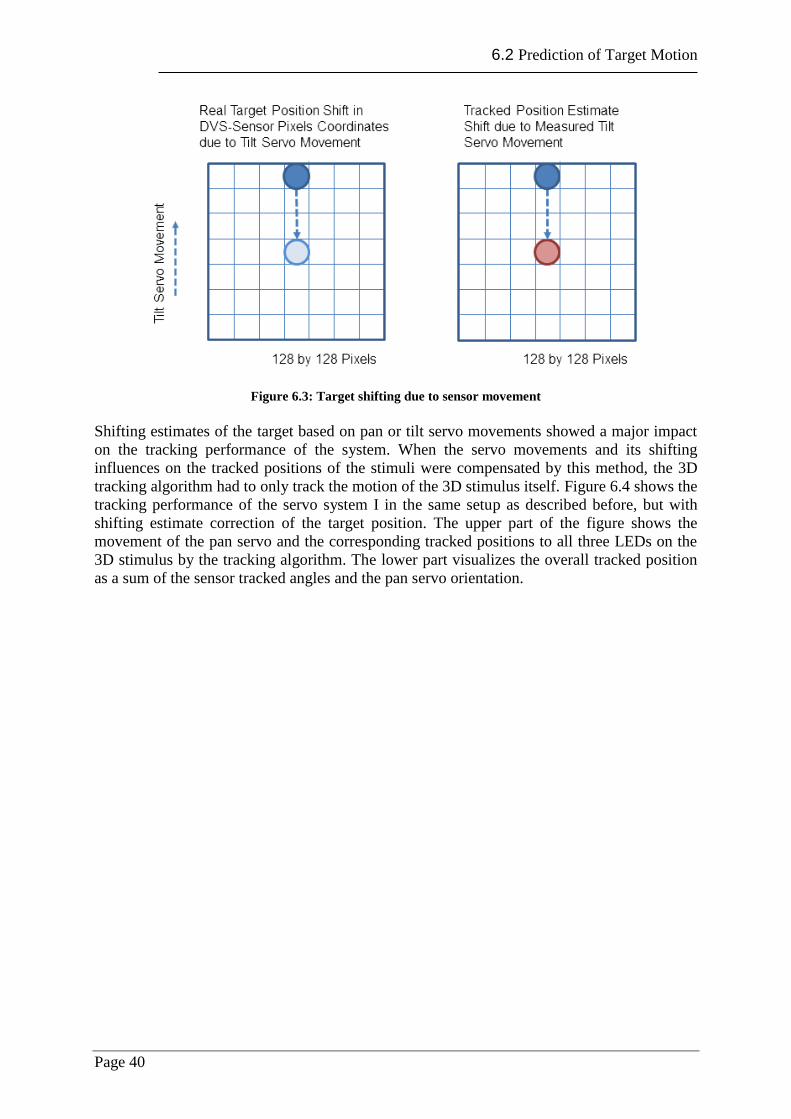
6.2 Prediction of Target Motion
Page 40
Figure 6.3: Target shifting due to sensor movement
Shifting estimates of the target based on pan or tilt servo movements showed a major impact
on the tracking performance of the system. When the servo movements and its shifting
influences on the tracked positions of the stimuli were compensated by this method, the 3D
tracking algorithm had to only track the motion of the 3D stimulus itself. Figure 6.4 shows the
tracking performance of the servo system I in the same setup as described before, but with
shifting estimate correction of the target position. The upper part of the figure shows the
movement of the pan servo and the corresponding tracked positions to all three LEDs on the
3D stimulus by the tracking algorithm. The lower part visualizes the overall tracked position
as a sum of the sensor tracked angles and the pan servo orientation.
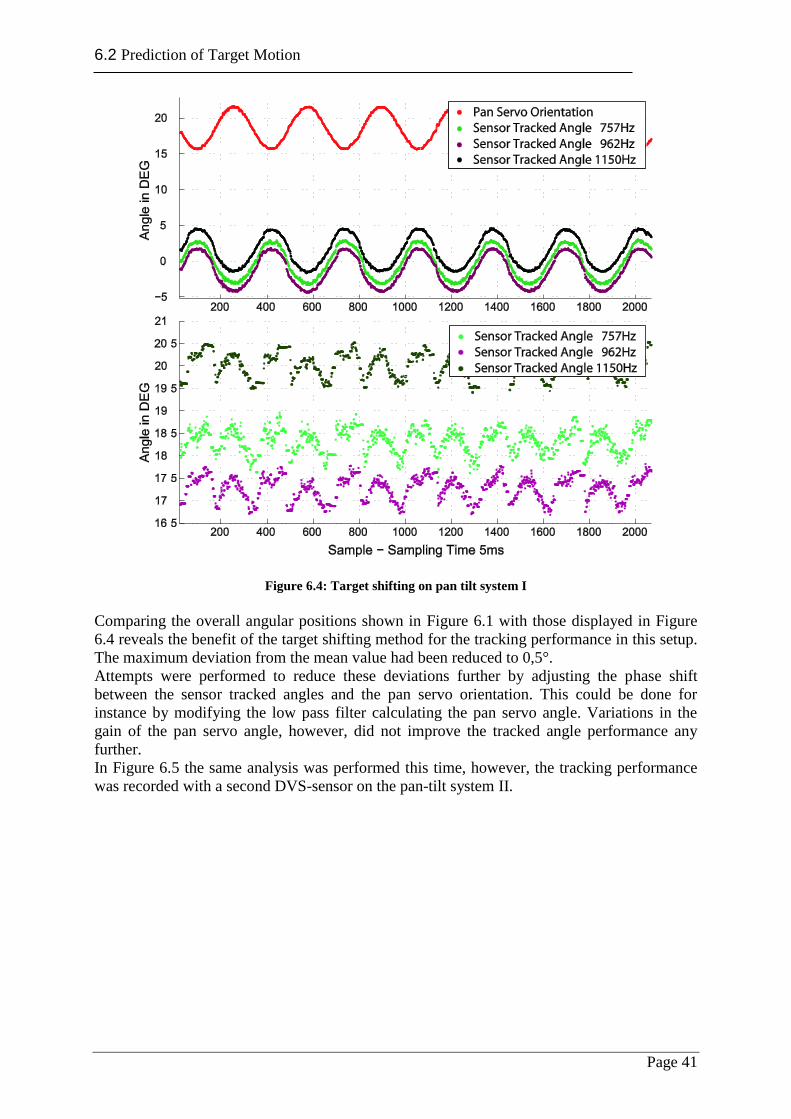
6.2 Prediction of Target Motion
Page 41
Figure 6.4: Target shifting on pan tilt system I
Comparing the overall angular positions shown in Figure 6.1 with those displayed in Figure
6.4 reveals the benefit of the target shifting method for the tracking performance in this setup.
The maximum deviation from the mean value had been reduced to 0,5°.
Attempts were performed to reduce these deviations further by adjusting the phase shift
between the sensor tracked angles and the pan servo orientation. This could be done for
instance by modifying the low pass filter calculating the pan servo angle. Variations in the
gain of the pan servo angle, however, did not improve the tracked angle performance any
further.
In Figure 6.5 the same analysis was performed this time, however, the tracking performance
was recorded with a second DVS-sensor on the pan-tilt system II.
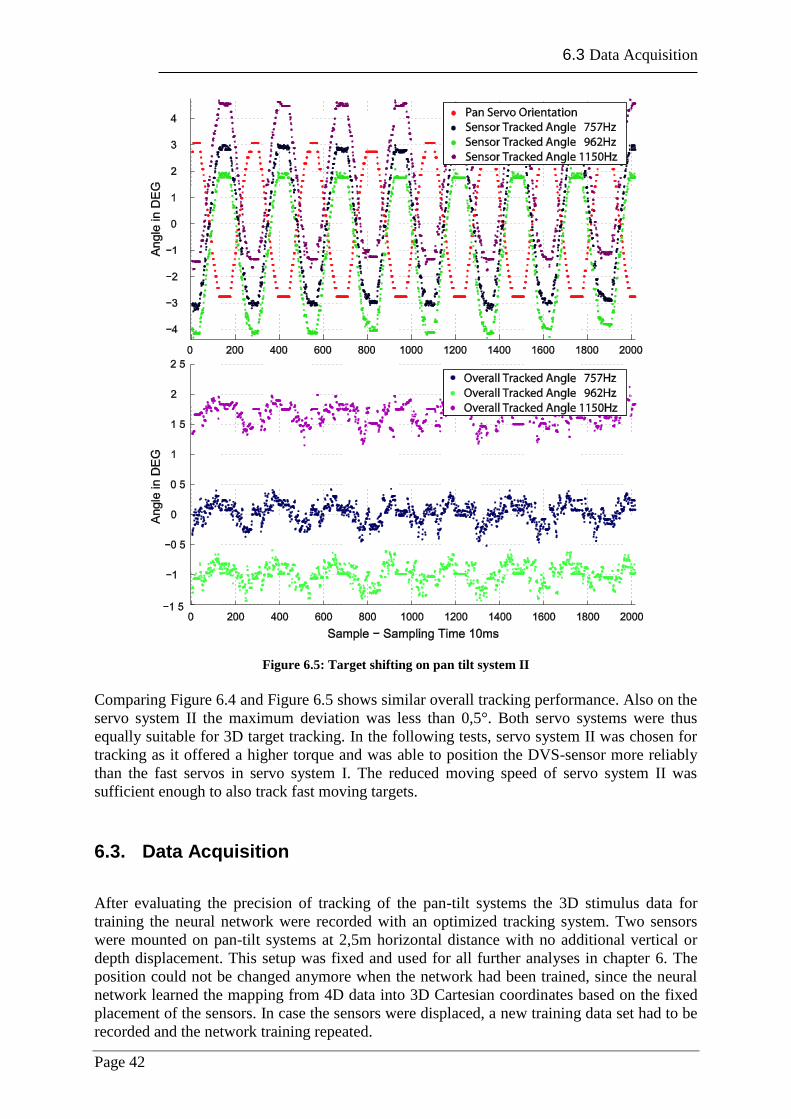
6.3 Data Acquisition
Page 42
Figure 6.5: Target shifting on pan tilt system II
Comparing Figure 6.4 and Figure 6.5 shows similar overall tracking performance. Also on the
servo system II the maximum deviation was less than 0,5°. Both servo systems were thus
equally suitable for 3D target tracking. In the following tests, servo system II was chosen for
tracking as it offered a higher torque and was able to position the DVS-sensor more reliably
than the fast servos in servo system I. The reduced moving speed of servo system II was
sufficient enough to also track fast moving targets.
6.3. Data Acquisition
After evaluating the precision of tracking of the pan-tilt systems the 3D stimulus data for
training the neural network were recorded with an optimized tracking system. Two sensors
were mounted on pan-tilt systems at 2,5m horizontal distance with no additional vertical or
depth displacement. This setup was fixed and used for all further analyses in chapter 6. The
position could not be changed anymore when the network had been trained, since the neural
network learned the mapping from 4D data into 3D Cartesian coordinates based on the fixed
placement of the sensors. In case the sensors were displaced, a new training data set had to be
recorded and the network training repeated.
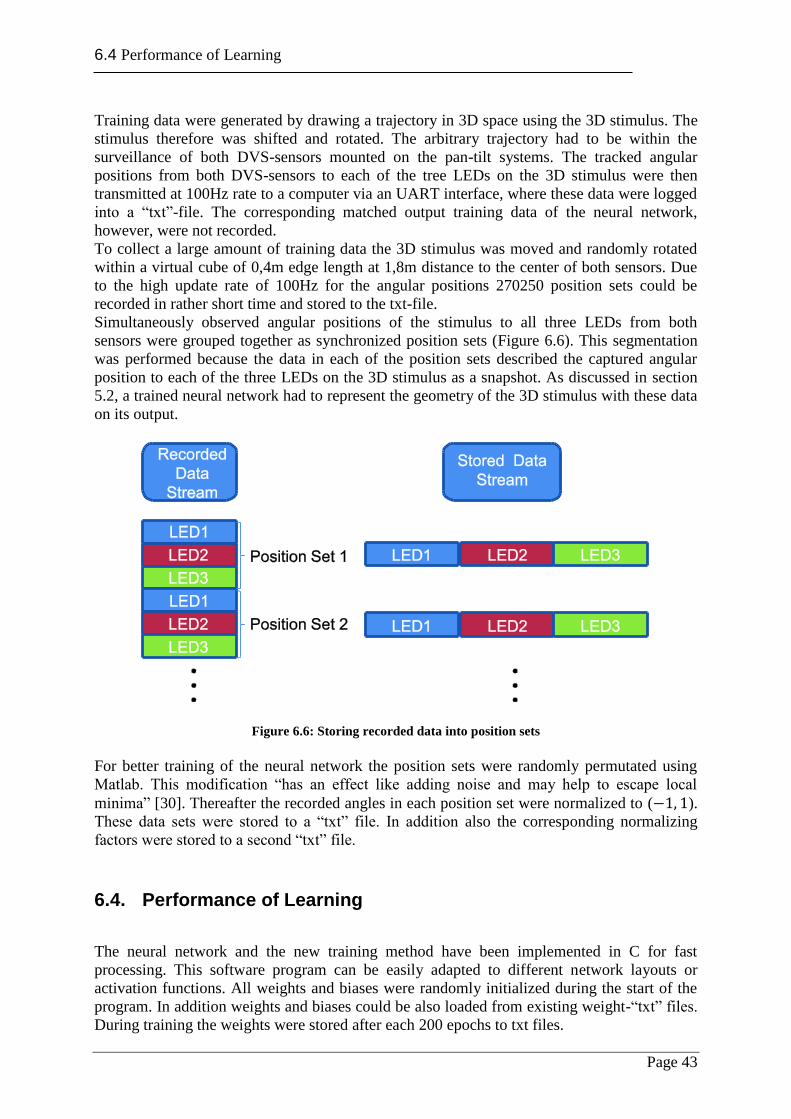
6.4 Performance of Learning
Page 43
Training data were generated by drawing a trajectory in 3D space using the 3D stimulus. The
stimulus therefore was shifted and rotated. The arbitrary trajectory had to be within the
surveillance of both DVS-sensors mounted on the pan-tilt systems. The tracked angular
positions from both DVS-sensors to each of the tree LEDs on the 3D stimulus were then
transmitted at 100Hz rate to a computer via an UART interface, where these data were logged
into a “txt”-file. The corresponding matched output training data of the neural network,
however, were not recorded.
To collect a large amount of training data the 3D stimulus was moved and randomly rotated
within a virtual cube of 0,4m edge length at 1,8m distance to the center of both sensors. Due
to the high update rate of 100Hz for the angular positions 270250 position sets could be
recorded in rather short time and stored to the txt-file.
Simultaneously observed angular positions of the stimulus to all three LEDs from both
sensors were grouped together as synchronized position sets (Figure 6.6). This segmentation
was performed because the data in each of the position sets described the captured angular
position to each of the three LEDs on the 3D stimulus as a snapshot. As discussed in section
5.2, a trained neural network had to represent the geometry of the 3D stimulus with these data
on its output.
Figure 6.6: Storing recorded data into position sets
For better training of the neural network the position sets were randomly permutated using
Matlab. This modification “has an effect like adding noise and may help to escape local
minima” [30]. Thereafter the recorded angles in each position set were normalized to ( ).
These data sets were stored to a “txt” file. In addition also the corresponding normalizing
factors were stored to a second “txt” file.
6.4. Performance of Learning
The neural network and the new training method have been implemented in C for fast
processing. This software program can be easily adapted to different network layouts or
activation functions. All weights and biases were randomly initialized during the start of the
program. In addition weights and biases could be also loaded from existing weight-“txt” files.
During training the weights were stored after each 200 epochs to txt files.
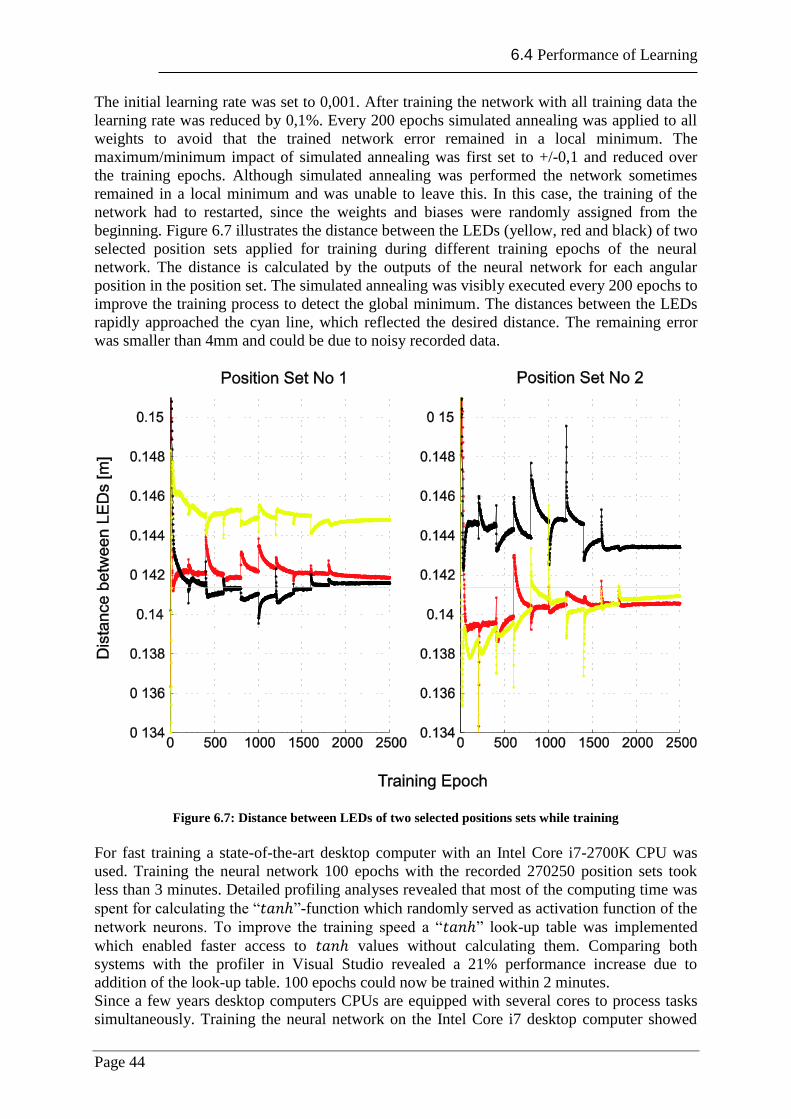
6.4 Performance of Learning
Page 44
The initial learning rate was set to 0,001. After training the network with all training data the
learning rate was reduced by 0,1%. Every 200 epochs simulated annealing was applied to all
weights to avoid that the trained network error remained in a local minimum. The
maximum/minimum impact of simulated annealing was first set to +/-0,1 and reduced over
the training epochs. Although simulated annealing was performed the network sometimes
remained in a local minimum and was unable to leave this. In this case, the training of the
network had to restarted, since the weights and biases were randomly assigned from the
beginning. Figure 6.7 illustrates the distance between the LEDs (yellow, red and black) of two
selected position sets applied for training during different training epochs of the neural
network. The distance is calculated by the outputs of the neural network for each angular
position in the position set. The simulated annealing was visibly executed every 200 epochs to
improve the training process to detect the global minimum. The distances between the LEDs
rapidly approached the cyan line, which reflected the desired distance. The remaining error
was smaller than 4mm and could be due to noisy recorded data.
Figure 6.7: Distance between LEDs of two selected positions sets while training
For fast training a state-of-the-art desktop computer with an Intel Core i7-2700K CPU was
used. Training the neural network 100 epochs with the recorded 270250 position sets took
less than 3 minutes. Detailed profiling analyses revealed that most of the computing time was
spent for calculating the “ ”-function which randomly served as activation function of the
network neurons. To improve the training speed a “ ” look-up table was implemented
which enabled faster access to values without calculating them. Comparing both
systems with the profiler in Visual Studio revealed a 21% performance increase due to
addition of the look-up table. 100 epochs could now be trained within 2 minutes.
Since a few years desktop computers CPUs are equipped with several cores to process tasks
simultaneously. Training the neural network on the Intel Core i7 desktop computer showed
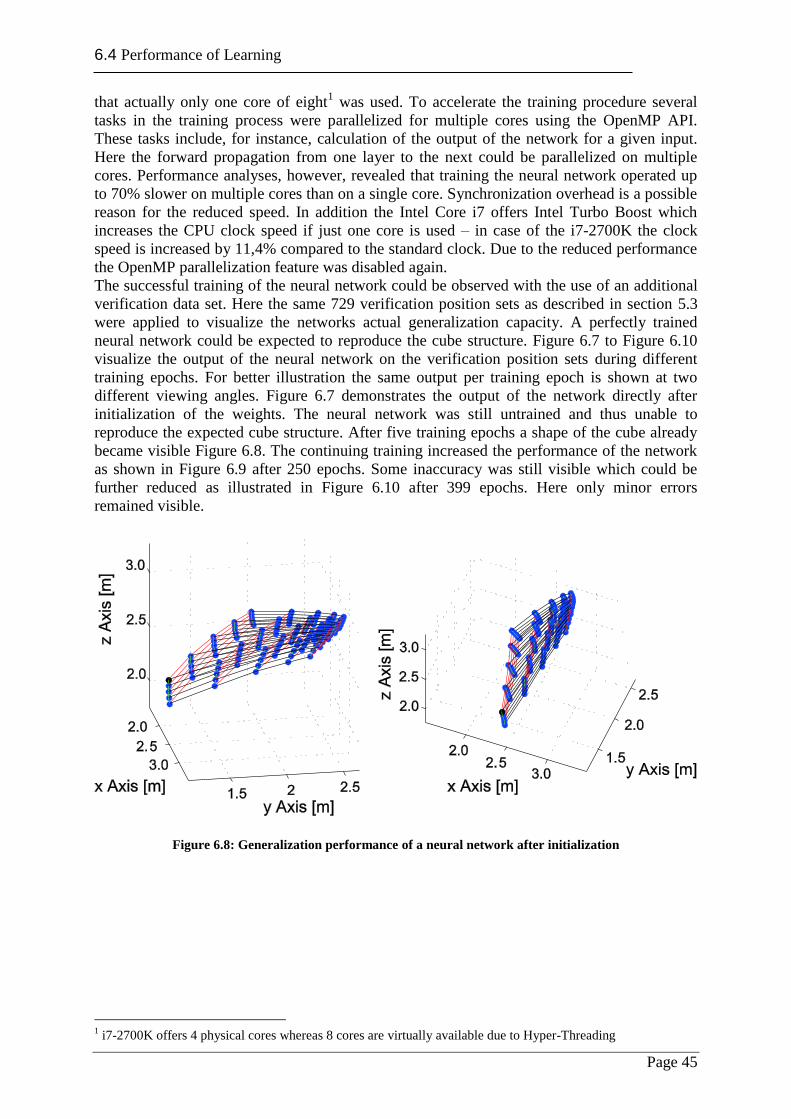
6.4 Performance of Learning
Page 45
that actually only one core of eight1 was used. To accelerate the training procedure several
tasks in the training process were parallelized for multiple cores using the OpenMP API.
These tasks include, for instance, calculation of the output of the network for a given input.
Here the forward propagation from one layer to the next could be parallelized on multiple
cores. Performance analyses, however, revealed that training the neural network operated up
to 70% slower on multiple cores than on a single core. Synchronization overhead is a possible
reason for the reduced speed. In addition the Intel Core i7 offers Intel Turbo Boost which
increases the CPU clock speed if just one core is used – in case of the i7-2700K the clock
speed is increased by 11,4% compared to the standard clock. Due to the reduced performance
the OpenMP parallelization feature was disabled again.
The successful training of the neural network could be observed with the use of an additional
verification data set. Here the same 729 verification position sets as described in section 5.3
were applied to visualize the networks actual generalization capacity. A perfectly trained
neural network could be expected to reproduce the cube structure. Figure 6.7 to Figure 6.10
visualize the output of the neural network on the verification position sets during different
training epochs. For better illustration the same output per training epoch is shown at two
different viewing angles. Figure 6.7 demonstrates the output of the network directly after
initialization of the weights. The neural network was still untrained and thus unable to
reproduce the expected cube structure. After five training epochs a shape of the cube already
became visible Figure 6.8. The continuing training increased the performance of the network
as shown in Figure 6.9 after 250 epochs. Some inaccuracy was still visible which could be
further reduced as illustrated in Figure 6.10 after 399 epochs. Here only minor errors
remained visible.
Figure 6.8: Generalization performance of a neural network after initialization
1 i7-2700K offers 4 physical cores whereas 8 cores are virtually available due to Hyper-Threading
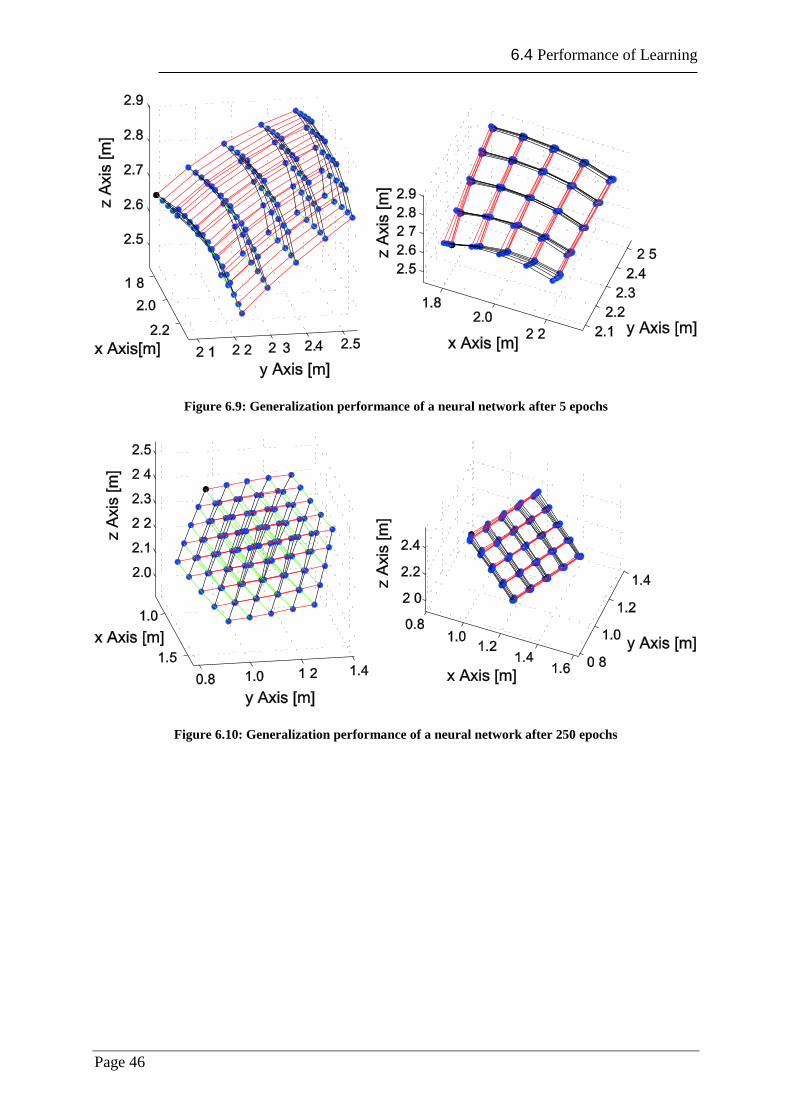
6.4 Performance of Learning
Page 46
Figure 6.9: Generalization performance of a neural network after 5 epochs
Figure 6.10: Generalization performance of a neural network after 250 epochs
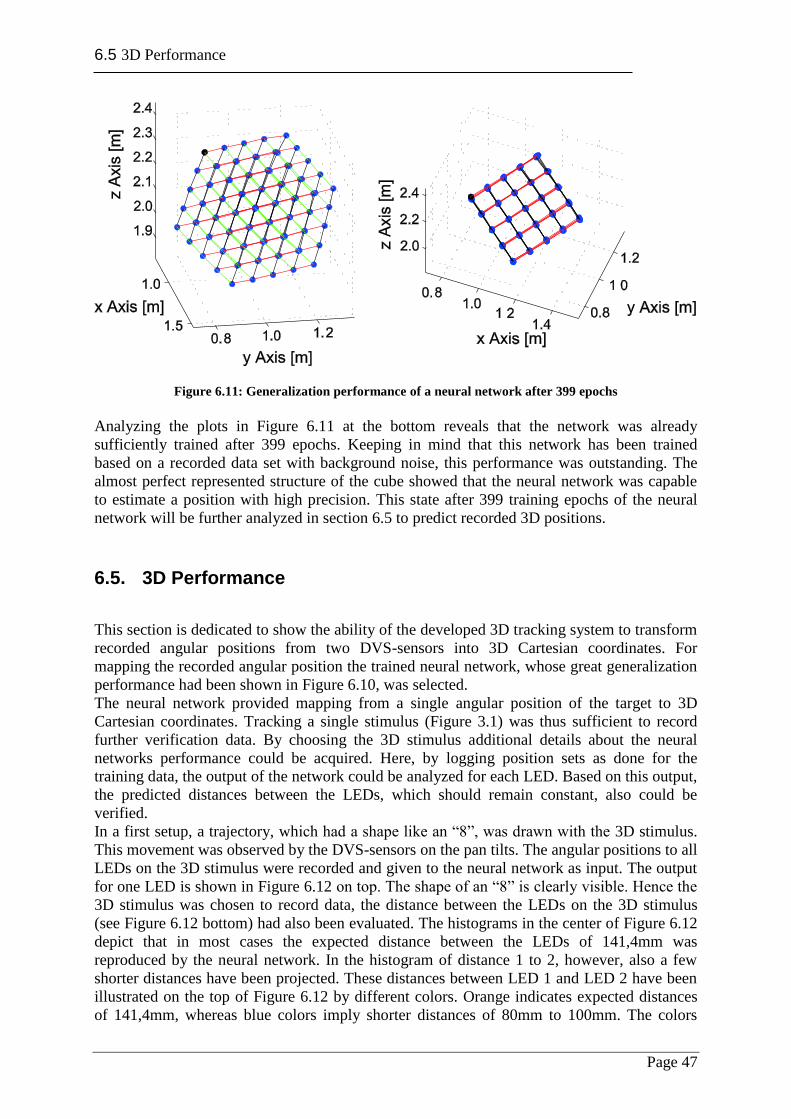
6.5 3D Performance
Page 47
Figure 6.11: Generalization performance of a neural network after 399 epochs
Analyzing the plots in Figure 6.11 at the bottom reveals that the network was already
sufficiently trained after 399 epochs. Keeping in mind that this network has been trained
based on a recorded data set with background noise, this performance was outstanding. The
almost perfect represented structure of the cube showed that the neural network was capable
to estimate a position with high precision. This state after 399 training epochs of the neural
network will be further analyzed in section 6.5 to predict recorded 3D positions.
6.5. 3D Performance
This section is dedicated to show the ability of the developed 3D tracking system to transform
recorded angular positions from two DVS-sensors into 3D Cartesian coordinates. For
mapping the recorded angular position the trained neural network, whose great generalization
performance had been shown in Figure 6.10, was selected.
The neural network provided mapping from a single angular position of the target to 3D
Cartesian coordinates. Tracking a single stimulus (Figure 3.1) was thus sufficient to record
further verification data. By choosing the 3D stimulus additional details about the neural
networks performance could be acquired. Here, by logging position sets as done for the
training data, the output of the network could be analyzed for each LED. Based on this output,
the predicted distances between the LEDs, which should remain constant, also could be
verified.
In a first setup, a trajectory, which had a shape like an “8”, was drawn with the 3D stimulus.
This movement was observed by the DVS-sensors on the pan tilts. The angular positions to all
LEDs on the 3D stimulus were recorded and given to the neural network as input. The output
for one LED is shown in Figure 6.12 on top. The shape of an “8” is clearly visible. Hence the
3D stimulus was chosen to record data, the distance between the LEDs on the 3D stimulus
(see Figure 6.12 bottom) had also been evaluated. The histograms in the center of Figure 6.12
depict that in most cases the expected distance between the LEDs of 141,4mm was
reproduced by the neural network. In the histogram of distance 1 to 2, however, also a few
shorter distances have been projected. These distances between LED 1 and LED 2 have been
illustrated on the top of Figure 6.12 by different colors. Orange indicates expected distances
of 141,4mm, whereas blue colors imply shorter distances of 80mm to 100mm. The colors
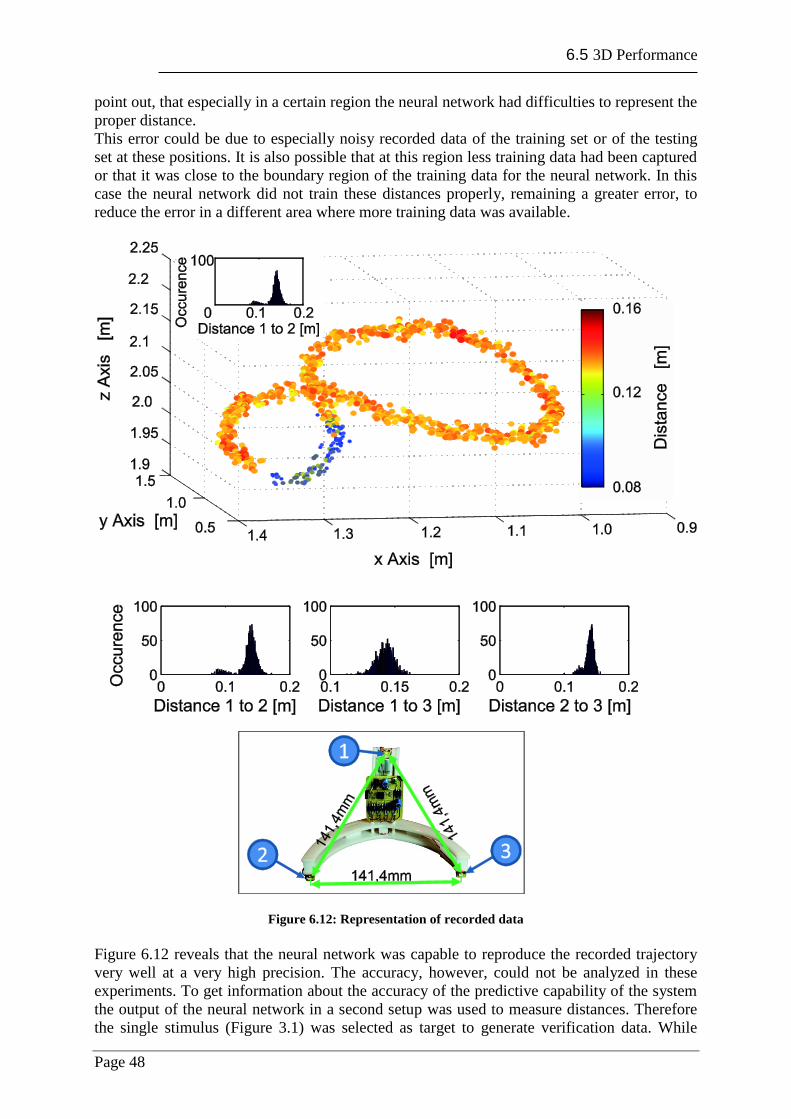
6.5 3D Performance
Page 48
point out, that especially in a certain region the neural network had difficulties to represent the
proper distance.
This error could be due to especially noisy recorded data of the training set or of the testing
set at these positions. It is also possible that at this region less training data had been captured
or that it was close to the boundary region of the training data for the neural network. In this
case the neural network did not train these distances properly, remaining a greater error, to
reduce the error in a different area where more training data was available.
Figure 6.12: Representation of recorded data
Figure 6.12 reveals that the neural network was capable to reproduce the recorded trajectory
very well at a very high precision. The accuracy, however, could not be analyzed in these
experiments. To get information about the accuracy of the predictive capability of the system
the output of the neural network in a second setup was used to measure distances. Therefore
the single stimulus (Figure 3.1) was selected as target to generate verification data. While
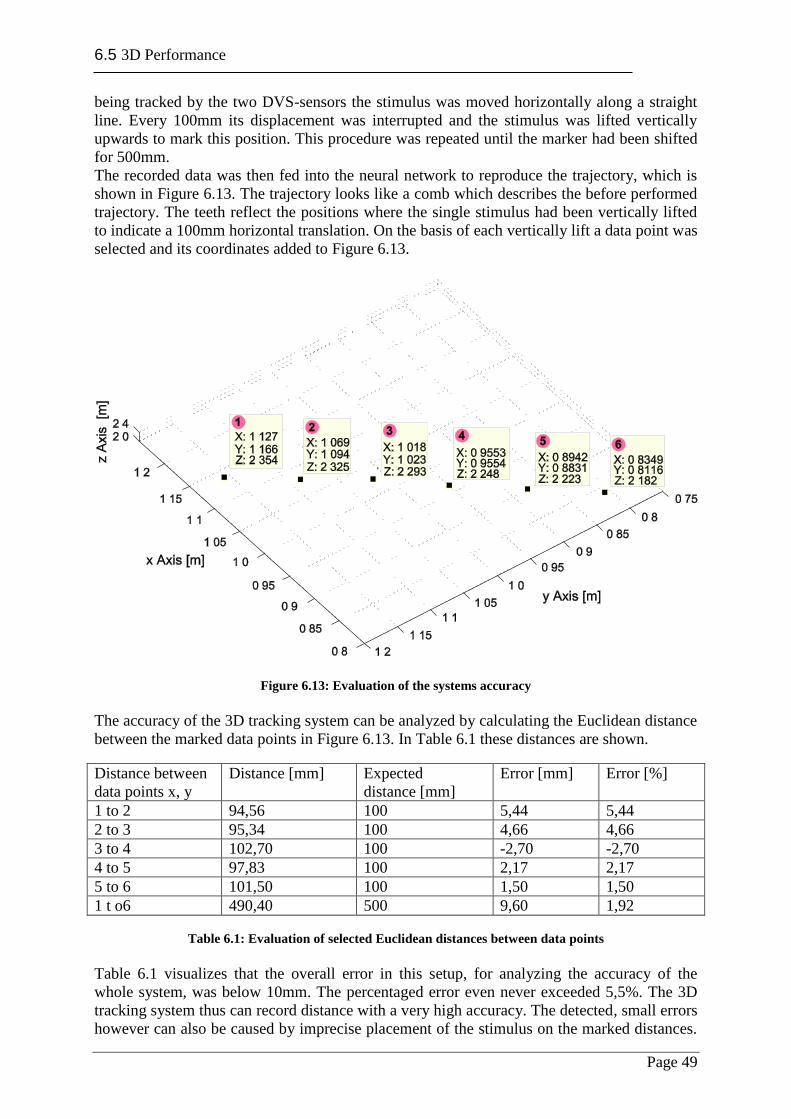
6.5 3D Performance
Page 49
being tracked by the two DVS-sensors the stimulus was moved horizontally along a straight
line. Every 100mm its displacement was interrupted and the stimulus was lifted vertically
upwards to mark this position. This procedure was repeated until the marker had been shifted
for 500mm.
The recorded data was then fed into the neural network to reproduce the trajectory, which is
shown in Figure 6.13. The trajectory looks like a comb which describes the before performed
trajectory. The teeth reflect the positions where the single stimulus had been vertically lifted
to indicate a 100mm horizontal translation. On the basis of each vertically lift a data point was
selected and its coordinates added to Figure 6.13.
Figure 6.13: Evaluation of the systems accuracy
The accuracy of the 3D tracking system can be analyzed by calculating the Euclidean distance
between the marked data points in Figure 6.13. In Table 6.1 these distances are shown.
Distance between
data points x, y
Distance [mm] Expected
distance [mm]
Error [mm] Error [%]
1 to 2 94,56 100 5,44 5,44
2 to 3 95,34 100 4,66 4,66
3 to 4 102,70 100 -2,70 -2,70
4 to 5 97,83 100 2,17 2,17
5 to 6 101,50 100 1,50 1,50
1 t o6 490,40 500 9,60 1,92
Table 6.1: Evaluation of selected Euclidean distances between data points
Table 6.1 visualizes that the overall error in this setup, for analyzing the accuracy of the
whole system, was below 10mm. The percentaged error even never exceeded 5,5%. The 3D
tracking system thus can record distance with a very high accuracy. The detected, small errors
however can also be caused by imprecise placement of the stimulus on the marked distances.

6.5 3D Performance
Page 50
The 3D tracking system therefore should be additionally evaluated by comparing the 3D
Cartesian Output to a professional 3D tracking system.

Conclusion and Perspectives
Page 51
7. Conclusion and Perspectives
A new 3D tracking system has been presented which can discriminate and track the
translation of marked objects in real-time. First an event-based tracking algorithm has been
developed for a biologically inspired sensor (DVS-sensor). This algorithm was used to track
marked objects in the environment at 100Hz.
For tracking an object in 3D, a second DVS-sensor was added to the system. The DVS-
sensors, which had a too limited resolution for 3D tracking, were equipped with telephoto
lenses which increased the sensors’ resolution at farer distances. The DVS-sensors have been
attached to pan tilt systems to increase the area of observance. The tracking precision of the
pan tilt systems with the attached DVS-sensors was evaluated and calibrated to report
accurate actual angular positions to the tracked targets.
The observed angular positions from two biologically inspired sensors to these objects were
transformed by a neural network into 3D Cartesian space. To train the neural network for
tracking and prediction of target positions an unconventional method was developed which
trained a feed-forward neural network by back propagation without the presence of output
training patterns. This drastically reduced the effort for calibrating the 3D sensor system.
Training a neural network with this method took less than 10 minutes on a desktop computer.
This training might thus also be applied directly on fast microcontrollers in the future.
The 3D tracking system has been recognized in a 2D setup to show error in measurement of
below 5,5%. Further detailed investigations should be performed to analyze the accuracy and
precision also within 3D space.
Currently the 3D tracking system reports 3D Cartesian coordinates independently for three
active markers. If these active markers are fixed on an object, e.g. the 3D stimulus, the
orientation of that object can also be estimated in addition.
The developed 3D tracking system can be applied in factories for assembling of marked
products. This stand-alone low power consuming system can also be applied on autonomous
robots to enable interaction with other robots or humans in future.
Page 52
Appendix A
Page 53
Appendix A
Used Programs
Program-Name: Visual Studio 2011
Version: 2010
Origin: Microsoft Cooperation
Program-Name: Matlab 2011b
Version: 7.13
Origin: The MathWorks
Program-Name: Eagle
Version: 5.11
Origin: CadSoft Computer GmbH
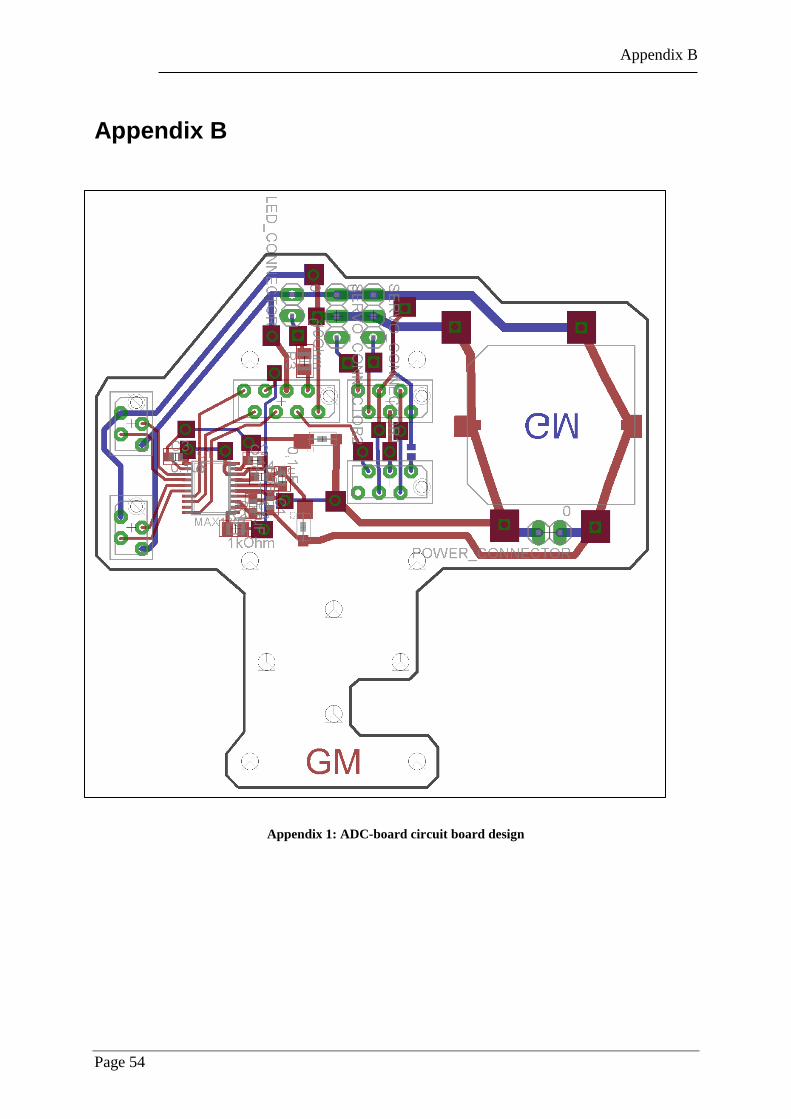
Appendix B
Page 54
Appendix B
Appendix 1: ADC-board circuit board design
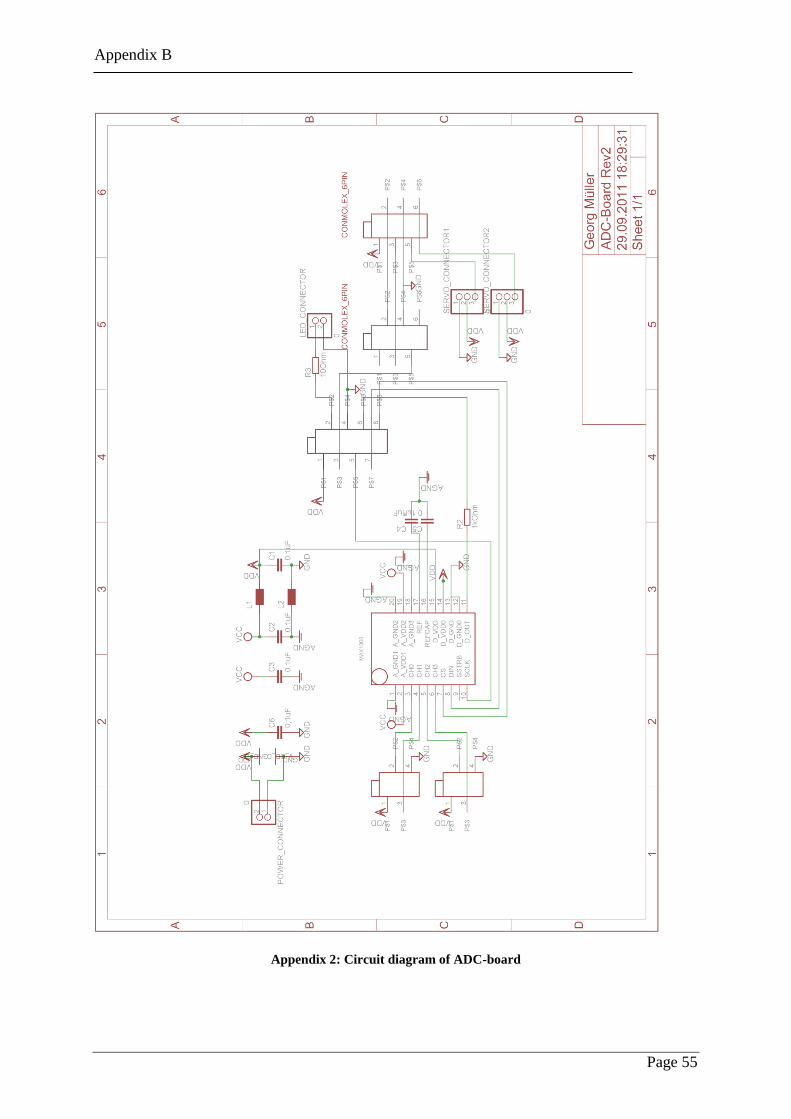
Appendix B
Page 55
Appendix 2: Circuit diagram of ADC-board
Page 56
List of Figures and Tables
Page 57
List of Figures
Figure 2.1: Components of the stand-alone eDVS-Board [16] .................................................. 6 Figure 2.2: Schematic of event capturing ................................................................................... 7 Figure 2.3: Example encoding of pixel position into two bytes ................................................. 8 Figure 2.4: Architecture of a typical Neuron ........................................................................... 10 Figure 2.5: Different states of Function Approximation [21] .................................................. 11
Figure 2.6: Learning of a Neural Network ............................................................................... 13 Figure 3.1: Single active stimulus ............................................................................................ 18 Figure 3.2: Event based tracking algorithm – modified from [28] .......................................... 19 Figure 3.3: Recognized ∆time between events on the DVS-sensor in a static scene
stimulated by three LEDs ...................................................................................... 20
Figure 3.4: Matlab GUI for adjusting tracking algorithm parameters ..................................... 21
Figure 3.5: Spatial weight factor wP depending on spatial coherence ..................................... 22
Figure 3.6: Temporal weight factor wT depending on temporal vicinity ................................. 22 Figure 3.7: Miniature robot autonomously tracking an active target ....................................... 23 Figure 4.1: Principle setup for 3D tracking .............................................................................. 26 Figure 4.2: Steps of setting up the 3D tracking system ............................................................ 26
Figure 4.3: Pan Tilt System II .................................................................................................. 27 Figure 4.4: ADC-Board on Pan Tilt System I .......................................................................... 28
Figure 4.5: Comparing absolute with differential measurement .............................................. 29 Figure 4.6: 3D stimulus geometry ............................................................................................ 30 Figure 5.1: Generation of training data .................................................................................... 31
Figure 5.2: Shematic of training a nerual network based on relations .................................... 33 Figure 5.3: Output of a neural network, trained with artificial generated data ........................ 34
Figure 5.4: Improved training performance due to simulated annealing ................................. 35 Figure 6.1: Sensor target detection precision ........................................................................... 37
Figure 6.2: Tracking a fixed object .......................................................................................... 38 Figure 6.3: Target shifting due to sensor movement ................................................................ 40 Figure 6.4: Target shifting on pan tilt system I ........................................................................ 41 Figure 6.5: Target shifting on pan tilt system II ....................................................................... 42
Figure 6.6: Storing recorded data into position sets ................................................................. 43 Figure 6.7: Distance between LEDs of two selected positions sets while training .................. 44 Figure 6.8: Generalization performance of a neural network after initialization ..................... 45 Figure 6.9: Generalization performance of a neural network after 5 epochs ........................... 46 Figure 6.10: Generalization performance of a neural network after 250 epochs ..................... 46
Figure 6.11: Generalization performance of a neural network after 399 epochs ..................... 47 Figure 6.12: Representation of recorded data .......................................................................... 48 Figure 6.13: Evaluation of the systems accuracy ..................................................................... 49
List of Tables
Table 2.1: Example calculation of event position and event type .............................................. 8 Table 6.1: Evaluation of selected Euclidean distances between data points ............................ 49

Page 58
References
Page 59
References
1. Andriluka, M., S. Roth, and B. Schiele, Monocular 3d pose estimation and
tracking by detection in IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), 2010, IEEE: San Francisco, CA p. 623 - 630
2. Ponce, J., et al. Toward true 3D object recognition. in Congrès de Reconnaissance
des Formes et Intelligence Artificielle. 2004. Toulouse, France.
3. Beom, H.R. and H.S. Cho, A sensor-based navigation for a mobile robot using
fuzzy logic and reinforcement learning. IEEE Transactions on Systems, Man and
Cybernetics, 1995. 25(3): p. 464-477.
4. Hancock, J., M. Hebert, and C. Thorpe. Laser intensity-based obstacle detection.
in Proceedings of International Conference on Intelligent Robots and Systems (
IEEE/RSJ). 1998. Victoria, BC , Canada: IEEE.
5. Cyr, C.M. and B.B. Kimia. 3D object recognition using shape similiarity-based
aspect graph. in Proceedings of Eighth IEEE International Conference on
Computer Vision (ICCV). 2001. Vancouver, BC , Canada: IEEE.
6. Chao, C.H., et al., Real-time target tracking and obstacle avoidance for mobile
robots using two cameras in ICCAS-SICE, 2009, IEEE: Fukuoka, . p. 4347-4352.
7. Shibata, M. and N. Kobayashi. Image-based visual tracking for moving targets
with active stereo vision robot. in International Joint Conference SICE-ICASE.
2006. Busan: IEEE.
8. Benavidez, P. and M. Jamshidi, Mobile robot navigation and target tracking system
in 2011 6th International Conference on System of Systems Engineering (SoSE),
2011, IEEE: Albuquerque, NM. p. 299 - 304
9. Indiveri, G., P. Oswald, and J. Kramer. An adaptive visual tracking sensor with a
hysteretic winner-take-all network. in IEEE International Symposium on Circuits
and Systems (ISCAS). 2002. Phoenix-Scottsdale, AZ , USA IEEE.
10. Litzenberger, M., et al. Embedded vision system for real-time object tracking using
an asynchronous transient vision sensor. in Digital Signal Processing Workshop,
12th - Signal Processing Education Workshop, 4th. 2006. Teton National Park,
WY: IEEE.
11. Schraml, S., et al. Dynamic stereo vision system for real-time tracking. in
Proceedings of 2010 IEEE International Symposium on Circuits and Systems
(ISCAS). 2010. Paris: IEEE.
12. Chen, I., B. MacDonald, and B. Wünsche, Markerless Augmented Reality for
Robotic Helicoptor Applications, in Robot Vision, G. Sommer and R. Klette,
Editors. 2008, Springer Berlin / Heidelberg. p. 125-138.
13. Garcia, M.L., Design and evaluation of physical protection systems2007:
Butterworth-Heinemann.
14. Schreer, O., P. Kauff, and T. Sikora, 3D videocommunication. 2005: Wiley Online
Library.
15. Lichtsteiner, P., C. Posch, and T. Delbruck, A 128× 128 120 dB 15 s latency
asynchronous temporal contrast vision sensor. Solid-State Circuits, IEEE Journal
of, 2008. 43(2): p. 566-576.
16. Conradt, J., et al. An embedded AER dynamic vision sensor for low-latency pole
balancing. 2009. IEEE.
17. Leigh, J.R., Control theory. 2004: The Institution of Engineering and Technology.
18. Hirose, A., Complex-valued neural networks. IEEJ Transactions on Electronics,
Information and Systems, 2011. 131(1): p. 2-8.
References
Page 60
19. Graupe, D., Principles of artificial neural networks. 2007: World Scientific
Publishing Company.
20. Bebis, G. and M. Georgiopoulos, Optimal feed-forward neural network
architectures. IEEE Potentials, 1994: p. 27-31.
21. Lawrence, S., C.L. Giles, and A.C. Tsoi, What size neural network gives optimal
generalization? Convergence properties of backpropagation. 1998.
22. Hornik, K., M. Stinchcombe, and H. White, Multilayer feedforward networks are
universal approximators. Neural networks, 1989. 2(5): p. 359-366.
23. Antal, P., et al., Extended bayesian regression models: a symbiotic application of
belief networks and multilayer perceptrons for the classification of ovarian tumors.
Artificial Intelligence in Medicine, 2001: p. 177-187.
24. Bertsimas, D. and J. Tsitsiklis, Simulated annealing. Statistical Science, 1993: p.
10-15.
25. Luger, G.F., Artificial intelligence: Structures and strategies for complex problem
solving. 2005: Addison-Wesley Longman.
26. Rumelhart, D.E., Backpropagation: theory, architectures, and applications. 1995:
Lawrence Erlbaum.
27. DeSouza, G.N. and A.C. Kak, Vision for mobile robot navigation: A survey. IEEE
Transactions on Pattern Analysis and Machine Intelligence, 2002. 24(2): p. 237-
267.
28. Georg R. Müller, J.C. A Miniature Low-Power Sensor System for Real Time 2D
Visual Tracking of LED Markers. in Proceedings of the IEEE International
Conference on Robotics and Biomimetics (IEEE-ROBIO). 2011. Phuket, Thailand.
29. Yegnanarayana, B., Artificial neural networks. 2004: PHI Learning Pvt. Ltd.
30. Alpaydin, E., Introduction to machine learning. 2004: The MIT Press.




























