Embed Size (px)
Citation preview
Dokumentation
EK1110, EK1110-0008
EtherCAT-Verlängerung
2.328.11.2018
Version:Datum:

Inhaltsverzeichnis
EK1110, EK1110-0008 3Version: 2.3
Inhaltsverzeichnis1 Vorwort ....................................................................................................................................................... 5
1.1 Hinweise zur Dokumentation............................................................................................................. 51.2 Sicherheitshinweise........................................................................................................................... 61.3 Ausgabestände der Dokumentation .................................................................................................. 71.4 Versionsidentifikation von EtherCAT-Geräten................................................................................... 7
2 Produktübersicht ..................................................................................................................................... 122.1 Einführung ....................................................................................................................................... 122.2 Technische Daten............................................................................................................................ 132.3 Start ................................................................................................................................................. 13
3 Grundlagen der Kommunikation............................................................................................................ 143.1 Systemeigenschaften ...................................................................................................................... 143.2 EtherCAT-Grundlagen..................................................................................................................... 173.3 EtherCAT-Verkabelung - Drahtgebunden ....................................................................................... 173.4 EtherCAT State Machine................................................................................................................. 183.5 CoE-Interface: Hinweis .................................................................................................................... 193.6 Distributed Clock ............................................................................................................................. 19
4 Montage und Verdrahtung...................................................................................................................... 214.1 M8 Anschluss Verkabelung ............................................................................................................. 214.2 Anzugsdrehmoment für den Steckverbinder ................................................................................... 234.3 Tragschienenmontage..................................................................................................................... 234.4 Montagevorschriften für Klemmen mit erhöhter mechanischer Belastbarkeit ................................. 254.5 Einbaulagen..................................................................................................................................... 264.6 Anschlusstechnik ............................................................................................................................. 284.7 Positionierung von passiven Klemmen............................................................................................ 314.8 ATEX - Besondere Bedingungen (Standardtemperaturbereich) ..................................................... 324.9 ATEX - Besondere Bedingungen (erweiterter Temperaturbereich)................................................. 334.10 ATEX-Dokumentation...................................................................................................................... 344.11 UL-Hinweise .................................................................................................................................... 34
5 Inbetriebnahme........................................................................................................................................ 365.1 EK1110/ EK1110-0008 - Konfiguration mit dem TwinCAT System Manager.................................. 36
6 Fehlerbehandlung und Diagnose........................................................................................................... 386.1 Diagnose-LED ................................................................................................................................. 38
7 Anhang ..................................................................................................................................................... 397.1 EtherCAT AL Status Codes............................................................................................................. 397.2 Firmware Kompatibilität ................................................................................................................... 397.3 Firmware Update EL/ES/EM/EPxxxx .............................................................................................. 39
7.3.1 Gerätebeschreibung ESI-File/XML .................................................................................. 407.3.2 Erläuterungen zur Firmware ............................................................................................ 437.3.3 Update Controller-Firmware *.efw ................................................................................... 447.3.4 FPGA-Firmware *.rbf ....................................................................................................... 457.3.5 Gleichzeitiges Update mehrerer EtherCAT-Geräte ......................................................... 49
7.4 Support und Service ........................................................................................................................ 50

Inhaltsverzeichnis
EK1110, EK1110-00084 Version: 2.3
Vorwort
EK1110, EK1110-0008 5Version: 2.3
1 Vorwort
1.1 Hinweise zur Dokumentation
Zielgruppe
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs- undAutomatisierungstechnik, das mit den geltenden nationalen Normen vertraut ist.Zur Installation und Inbetriebnahme der Komponenten ist die Beachtung der Dokumentation und dernachfolgenden Hinweise und Erklärungen unbedingt notwendig.Das Fachpersonal ist verpflichtet, für jede Installation und Inbetriebnahme die zu dem betreffenden Zeitpunktveröffentliche Dokumentation zu verwenden.
Das Fachpersonal hat sicherzustellen, dass die Anwendung bzw. der Einsatz der beschriebenen Produktealle Sicherheitsanforderungen, einschließlich sämtlicher anwendbaren Gesetze, Vorschriften, Bestimmungenund Normen erfüllt.
Disclaimer
Diese Dokumentation wurde sorgfältig erstellt. Die beschriebenen Produkte werden jedoch ständig weiterentwickelt.Wir behalten uns das Recht vor, die Dokumentation jederzeit und ohne Ankündigung zu überarbeiten und zuändern.Aus den Angaben, Abbildungen und Beschreibungen in dieser Dokumentation können keine Ansprüche aufÄnderung bereits gelieferter Produkte geltend gemacht werden.
Marken
Beckhoff®, TwinCAT®, EtherCAT®, EtherCAT P®, Safety over EtherCAT®, TwinSAFE®, XFC® und XTS® sindeingetragene und lizenzierte Marken der Beckhoff Automation GmbH.Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kannzu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen.
Patente
Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen undPatente: EP1590927, EP1789857, DE102004044764, DE102007017835 mit den entsprechendenAnmeldungen und Eintragungen in verschiedenen anderen Ländern.
Die TwinCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen undPatente: EP0851348, US6167425 mit den entsprechenden Anmeldungen und Eintragungen inverschiedenen anderen Ländern.
EtherCAT® ist eine eingetragene Marke und patentierte Technologie lizensiert durch die BeckhoffAutomation GmbH, Deutschland.
Copyright
© Beckhoff Automation GmbH & Co. KG, Deutschland.Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sindverboten, soweit nicht ausdrücklich gestattet.Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmuster-oder Geschmacksmustereintragung vorbehalten.
Vorwort
EK1110, EK1110-00086 Version: 2.3
1.2 Sicherheitshinweise
Sicherheitsbestimmungen
Beachten Sie die folgenden Sicherheitshinweise und Erklärungen!Produktspezifische Sicherheitshinweise finden Sie auf den folgenden Seiten oder in den Bereichen Montage,Verdrahtung, Inbetriebnahme usw.
Haftungsausschluss
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software-Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über diedokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss derBeckhoff Automation GmbH & Co. KG.
Qualifikation des Personals
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-,Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist.
Erklärung der Hinweise
In der vorliegenden Dokumentation werden die folgenden Hinweise verwendet. Diese Hinweise sind aufmerksam zu lesen und unbedingt zu befolgen!
GEFAHRAkute Verletzungsgefahr!Wenn dieser Sicherheitshinweis nicht beachtet wird, besteht unmittelbare Gefahr für Leben und Gesundheitvon Personen!
WARNUNGVerletzungsgefahr!Wenn dieser Sicherheitshinweis nicht beachtet wird, besteht Gefahr für Leben und Gesundheit von Perso-nen!
VORSICHTSchädigung von Personen!Wenn dieser Sicherheitshinweis nicht beachtet wird, können Personen geschädigt werden!
HINWEISSchädigung von Umwelt/Geräten oder DatenverlustWenn dieser Hinweis nicht beachtet wird, können Umweltschäden, Gerätebeschädigungen oder Datenver-lust entstehen.
Tipp oder FingerzeigDieses Symbol kennzeichnet Informationen, die zum besseren Verständnis beitragen.
Vorwort
EK1110, EK1110-0008 7Version: 2.3
1.3 Ausgabestände der DokumentationVersion Änderungen2.3 • Technische Daten aktualisiert
• Update Struktur2.2 • Technische Daten aktualisiert
• Update Struktur2.1 • EK1110-0008 ergänzt2.0 • Migration1.4 • Technische Daten ergänzt
• Kapitel "Montagehinweise bei erhöhter mechanischer Belastbarkeit" ergänzt1.3 • Technische Daten ergänzt
• Update Struktur1.2 • Technische Daten ergänzt1.1 • Technische Daten angepasst1.0 • Technische Daten ergänzt0.1 • Erste vorläufige Version
1.4 Versionsidentifikation von EtherCAT-Geräten
Bezeichnung
Ein Beckhoff EtherCAT-Gerät verfügt über eine 14stellige technische Bezeichnung, die sich zusammensetztaus
• Familienschlüssel• Typ• Version• Revision
Beispiel Familie Typ Version RevisionEL3314-0000-0016 EL-Klemme
(12 mm, nicht steckbareAnschlussebene)
3314 (4 kanaligeThermoelementklemme)
0000 (Grundtyp)
0016
ES3602-0010-0017 ES-Klemme(12 mm, steckbareAnschlussebene)
3602 (2 kanalige Spannungsmessung)
0010(HochpräziseVersion)
0017
CU2008-0000-0000 CU-Gerät 2008 (8 Port FastEthernet Switch)
0000 (Grundtyp)
0000
Hinweise• die oben genannten Elemente ergeben die technische Bezeichnung, im Folgenden wird das Beispiel
EL3314-0000-0016 verwendet.• Davon ist EL3314-0000 die Bestellbezeichnung, umgangssprachlich bei „-0000“ dann oft nur EL3314
genannt. „-0016“ ist die EtherCAT-Revision.• Die Bestellbezeichnung setzt sich zusammen aus
- Familienschlüssel (EL, EP, CU, ES, KL, CX, ...)- Typ (3314)- Version (-0000)
• Die Revision -0016 gibt den technischen Fortschritt wie z. B. Feature-Erweiterung in Bezug auf dieEtherCAT Kommunikation wieder und wird von Beckhoff verwaltet.Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn nichtanders z. B. in der Dokumentation angegeben.
Vorwort
EK1110, EK1110-00088 Version: 2.3
Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCATSlave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“.
• Typ, Version und Revision werden als dezimale Zahlen gelesen, auch wenn sie technisch hexadezimalgespeichert werden.
Identifizierungsnummer
Beckhoff EtherCAT Geräte der verschiedenen Linien verfügen über verschiedene Arten vonIdentifizierungsnummern:
Produktionslos/Chargennummer/Batch-Nummer/Seriennummer/Date Code/D-Nummer
Als Seriennummer bezeichnet Beckhoff im IO-Bereich im Allgemeinen die 8-stellige Nummer, die auf demGerät aufgedruckt oder auf einem Aufkleber angebracht ist. Diese Seriennummer gibt den Bauzustand imAuslieferungszustand an und kennzeichnet somit eine ganze Produktions-Charge, unterscheidet aber nichtdie Module einer Charge.
Aufbau der Seriennummer: KK YY FF HH
KK - Produktionswoche (Kalenderwoche)YY - ProduktionsjahrFF - Firmware-StandHH - Hardware-Stand
Beispiel mit Ser. Nr.: 12063A02: 12 - Produktionswoche 12 06 - Produktionsjahr 2006 3A - Firmware-Stand 3A 02 -Hardware-Stand 02
Ausnahmen können im IP67-Bereich auftreten, dort kann folgende Syntax verwendet werden (siehejeweilige Gerätedokumentation):
Syntax: D ww yy x y z u
D - Vorsatzbezeichnungww - Kalenderwocheyy - Jahrx - Firmware-Stand der Busplatiney - Hardware-Stand der Busplatinez - Firmware-Stand der E/A-Platineu - Hardware-Stand der E/A-Platine
Beispiel: D.22081501 Kalenderwoche 22 des Jahres 2008 Firmware-Stand Busplatine: 1 Hardware StandBusplatine: 5 Firmware-Stand E/A-Platine: 0 (keine Firmware für diese Platine notwendig) Hardware-StandE/A-Platine: 1
Eindeutige Seriennummer/ID, ID-Nummer
Darüber hinaus verfügt in einigen Serien jedes einzelne Modul über eine eindeutige Seriennummer.
Siehe dazu auch weiterführende Dokumentation im Bereich
• IP67: EtherCAT Box
• Safety: TwinSafe• Klemmen mit Werkskalibrierzertifikat und andere Messtechnische Klemmen
Vorwort
EK1110, EK1110-0008 9Version: 2.3
Beispiele für Kennzeichnungen
Abb. 1: EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer undRevisionskennzeichnung (seit 2014/01)
Abb. 2: EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer
Abb. 3: CU2016 Switch mit Seriennummer/ Chargennummer
Vorwort
EK1110, EK1110-000810 Version: 2.3
Abb. 4: EL3202-0020 mit Seriennummer/ Chargennummer 26131006 und eindeutiger ID-Nummer 204418
Abb. 5: EP1258-00001 IP67 EtherCAT Box mit Chargennummer/ DateCode 22090101 und eindeutigerSeriennummer 158102
Abb. 6: EP1908-0002 IP67 EtherCAT Safety Box mit Chargennummer/ DateCode 071201FF und eindeutigerSeriennummer 00346070
Abb. 7: EL2904 IP20 Safety Klemme mit Chargennummer/ DateCode 50110302 und eindeutigerSeriennummer 00331701
Vorwort
EK1110, EK1110-0008 11Version: 2.3
Abb. 8: ELM3604-0002 Klemme mit eindeutiger ID-Nummer (QR Code) 100001051 und Seriennummer/Chargennummer 44160201
Produktübersicht
EK1110, EK1110-000812 Version: 2.3
2 Produktübersicht
2.1 Einführung
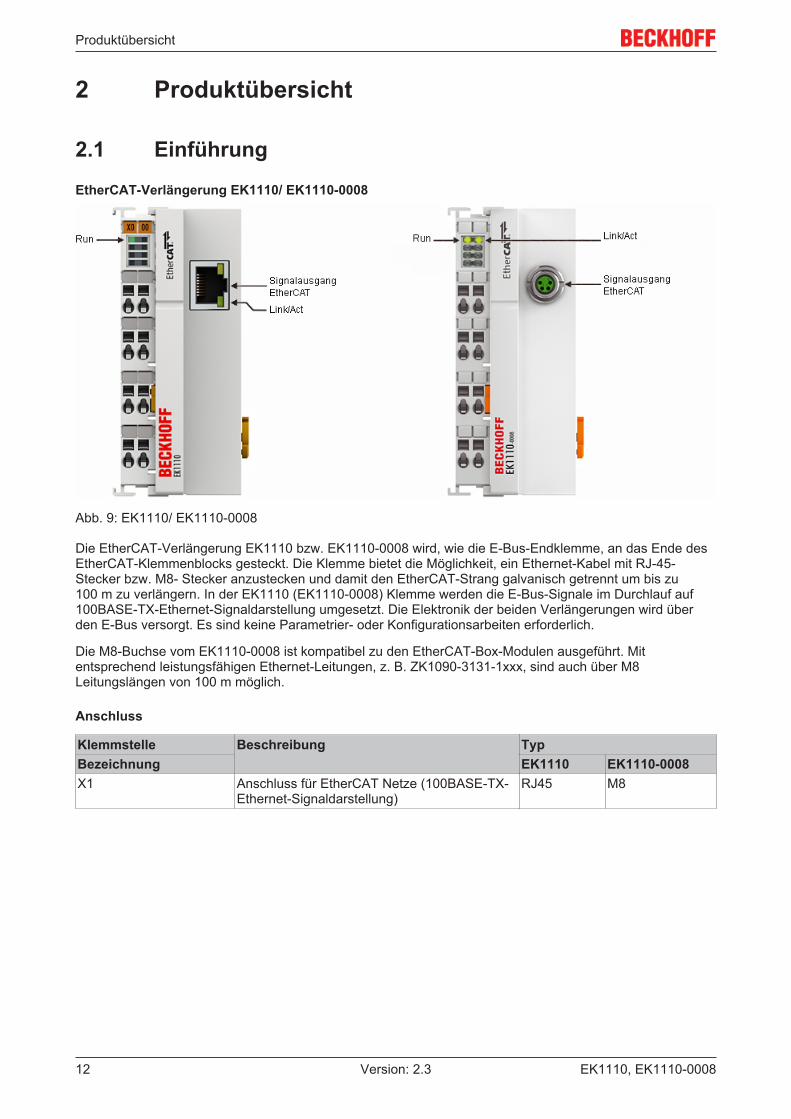
EtherCAT-Verlängerung EK1110/ EK1110-0008
Abb. 9: EK1110/ EK1110-0008
Die EtherCAT-Verlängerung EK1110 bzw. EK1110-0008 wird, wie die E-Bus-Endklemme, an das Ende desEtherCAT-Klemmenblocks gesteckt. Die Klemme bietet die Möglichkeit, ein Ethernet-Kabel mit RJ-45-Stecker bzw. M8- Stecker anzustecken und damit den EtherCAT-Strang galvanisch getrennt um bis zu100 m zu verlängern. In der EK1110 (EK1110-0008) Klemme werden die E-Bus-Signale im Durchlauf auf100BASE-TX-Ethernet-Signaldarstellung umgesetzt. Die Elektronik der beiden Verlängerungen wird überden E-Bus versorgt. Es sind keine Parametrier- oder Konfigurationsarbeiten erforderlich.
Die M8-Buchse vom EK1110-0008 ist kompatibel zu den EtherCAT-Box-Modulen ausgeführt. Mitentsprechend leistungsfähigen Ethernet-Leitungen, z. B. ZK1090-3131-1xxx, sind auch über M8Leitungslängen von 100 m möglich.
Anschluss
Klemmstelle Beschreibung TypBezeichnung EK1110 EK1110-0008X1 Anschluss für EtherCAT Netze (100BASE-TX-
Ethernet-Signaldarstellung)RJ45 M8
Produktübersicht
EK1110, EK1110-0008 13Version: 2.3
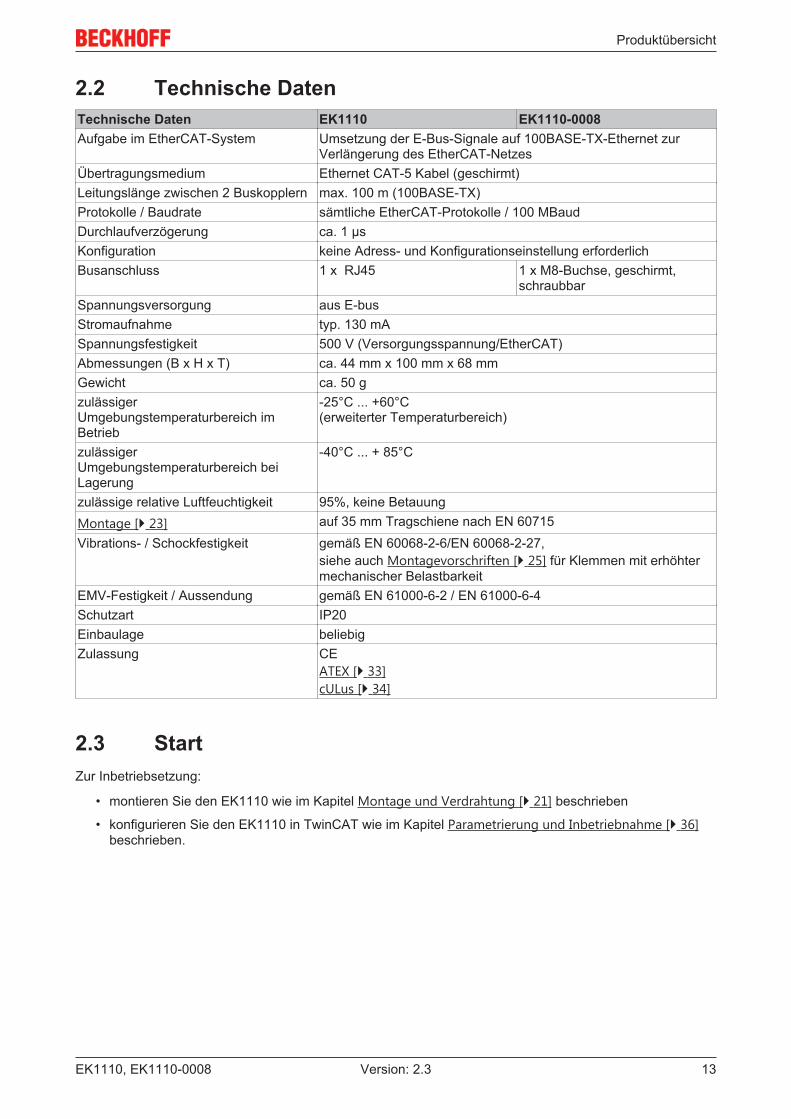
2.2 Technische DatenTechnische Daten EK1110 EK1110-0008Aufgabe im EtherCAT-System Umsetzung der E-Bus-Signale auf 100BASE-TX-Ethernet zur
Verlängerung des EtherCAT-NetzesÜbertragungsmedium Ethernet CAT-5 Kabel (geschirmt)Leitungslänge zwischen 2 Buskopplern max. 100 m (100BASE-TX)Protokolle / Baudrate sämtliche EtherCAT-Protokolle / 100 MBaudDurchlaufverzögerung ca. 1 µsKonfiguration keine Adress- und Konfigurationseinstellung erforderlichBusanschluss 1 x RJ45 1 x M8-Buchse, geschirmt,
schraubbarSpannungsversorgung aus E-busStromaufnahme typ. 130 mASpannungsfestigkeit 500 V (Versorgungsspannung/EtherCAT)Abmessungen (B x H x T) ca. 44 mm x 100 mm x 68 mmGewicht ca. 50 gzulässigerUmgebungstemperaturbereich imBetrieb
-25°C ... +60°C(erweiterter Temperaturbereich)
zulässigerUmgebungstemperaturbereich beiLagerung
-40°C ... + 85°C
zulässige relative Luftfeuchtigkeit 95%, keine BetauungMontage [} 23] auf 35 mm Tragschiene nach EN 60715Vibrations- / Schockfestigkeit gemäß EN 60068-2-6/EN 60068-2-27,
siehe auch Montagevorschriften [} 25] für Klemmen mit erhöhtermechanischer Belastbarkeit
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4Schutzart IP20Einbaulage beliebigZulassung CE
ATEX [} 33]cULus [} 34]
2.3 StartZur Inbetriebsetzung:
• montieren Sie den EK1110 wie im Kapitel Montage und Verdrahtung [} 21] beschrieben
• konfigurieren Sie den EK1110 in TwinCAT wie im Kapitel Parametrierung und Inbetriebnahme [} 36]beschrieben.
Grundlagen der Kommunikation
EK1110, EK1110-000814 Version: 2.3
3 Grundlagen der Kommunikation
3.1 Systemeigenschaften
Protokoll
Das für Prozessdaten optimierte EtherCAT-Protokoll wird dank eines speziellen Ether-Types direkt imEthernet-Frame transportiert. Es kann aus mehreren Sub-Telegrammen bestehen, die jeweils einenSpeicherbereich des bis zu 4 Gigabyte großen logischen Prozessabbildes bedienen. Die datentechnischeReihenfolge ist dabei unabhängig von der physikalischen Reihenfolge der Ethernet-Klemmen im Netz, eskann wahlfrei adressiert werden. Broadcast, Multicast und Querkommunikation zwischen Slaves sindmöglich. Die Übertragung direkt im Ethernet-Frame wird stets dann eingesetzt, wenn EtherCAT-Komponenten im gleichen Subnetz wie der Steuerungsrechner betrieben werden.
Der Einsatzbereich von EtherCAT ist jedoch nicht auf ein Subnetz beschränkt: EtherCAT UDP verpackt dasEtherCAT Protokoll in UDP/IP-Datagramme. Hiermit kann jede Steuerung mit Ethernet-Protokoll-StackEtherCAT-Systeme ansprechen. Selbst die Kommunikation über Router hinweg in andere Subnetze istmöglich. Selbstverständlich hängt die Leistungsfähigkeit des Systems in dieser Variante von denEchtzeiteigenschaften der Steuerung und ihrer Ethernet-Protokollimplementierung ab. Die Antwortzeiten desEtherCAT-Netzwerks an sich werden jedoch nur minimal eingeschränkt: lediglich in der ersten Station mussdas UDP-Datagramm entpackt werden.
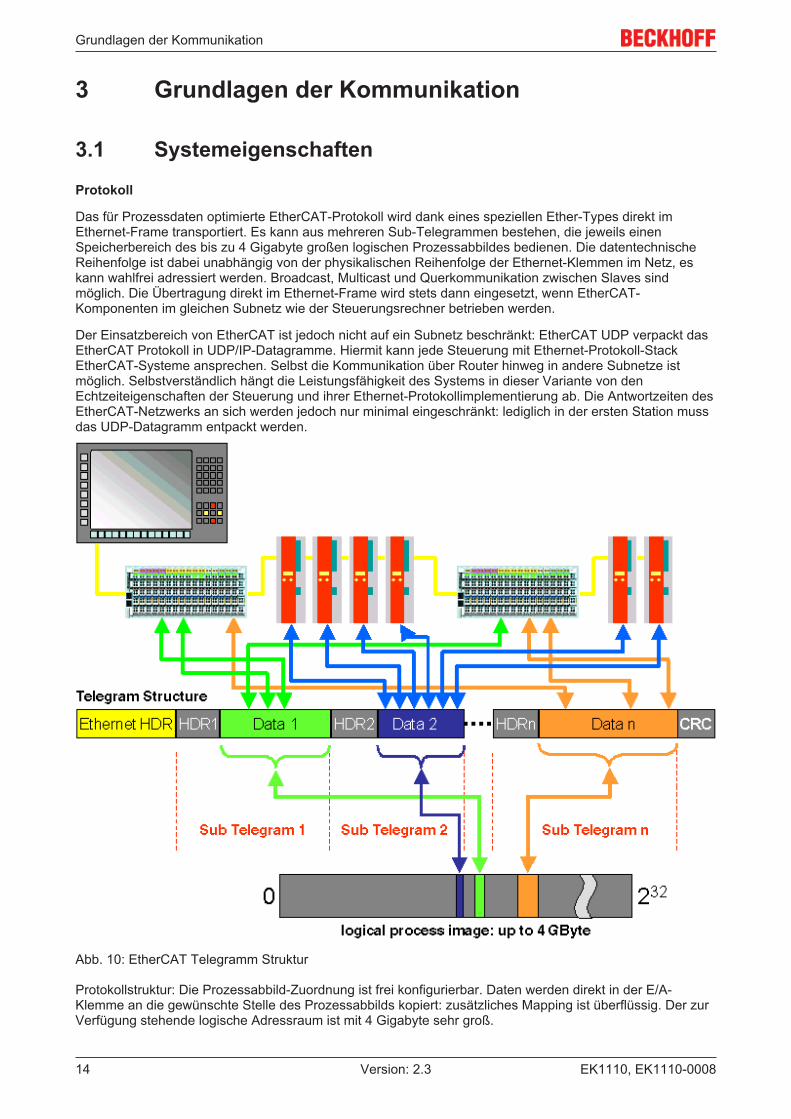
Abb. 10: EtherCAT Telegramm Struktur
Protokollstruktur: Die Prozessabbild-Zuordnung ist frei konfigurierbar. Daten werden direkt in der E/A-Klemme an die gewünschte Stelle des Prozessabbilds kopiert: zusätzliches Mapping ist überflüssig. Der zurVerfügung stehende logische Adressraum ist mit 4 Gigabyte sehr groß.
Grundlagen der Kommunikation
EK1110, EK1110-0008 15Version: 2.3
Topologie
Linie, Baum oder Stern: EtherCAT unterstützt nahezu beliebige Topologien. Die von den Feldbussen herbekannte Bus- oder Linienstruktur wird damit auch für Ethernet verfügbar. Besonders praktisch für dieAnlagenverdrahtung ist die Kombination aus Linie und Abzweigen bzw. Stichleitungen. Die hierzu benötigtenSchnittstellen sind auf den Kopplern vorhanden; zusätzliche Switches werden nicht benötigt. Natürlich kannaber auch die klassische Switch-basierte Ethernet-Sterntopologie eingesetzt werden.
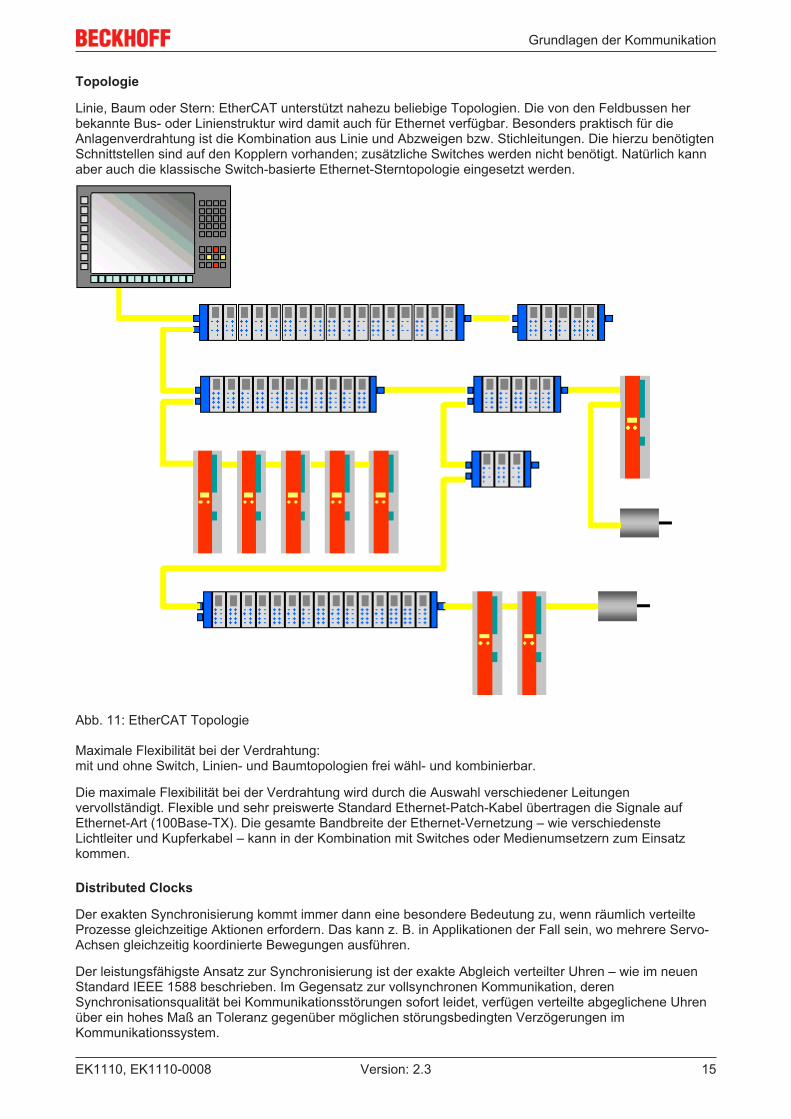
Abb. 11: EtherCAT Topologie
Maximale Flexibilität bei der Verdrahtung:mit und ohne Switch, Linien- und Baumtopologien frei wähl- und kombinierbar.
Die maximale Flexibilität bei der Verdrahtung wird durch die Auswahl verschiedener Leitungenvervollständigt. Flexible und sehr preiswerte Standard Ethernet-Patch-Kabel übertragen die Signale aufEthernet-Art (100Base-TX). Die gesamte Bandbreite der Ethernet-Vernetzung – wie verschiedensteLichtleiter und Kupferkabel – kann in der Kombination mit Switches oder Medienumsetzern zum Einsatzkommen.
Distributed Clocks
Der exakten Synchronisierung kommt immer dann eine besondere Bedeutung zu, wenn räumlich verteilteProzesse gleichzeitige Aktionen erfordern. Das kann z. B. in Applikationen der Fall sein, wo mehrere Servo-Achsen gleichzeitig koordinierte Bewegungen ausführen.
Der leistungsfähigste Ansatz zur Synchronisierung ist der exakte Abgleich verteilter Uhren – wie im neuenStandard IEEE 1588 beschrieben. Im Gegensatz zur vollsynchronen Kommunikation, derenSynchronisationsqualität bei Kommunikationsstörungen sofort leidet, verfügen verteilte abgeglichene Uhrenüber ein hohes Maß an Toleranz gegenüber möglichen störungsbedingten Verzögerungen imKommunikationssystem.
Grundlagen der Kommunikation
EK1110, EK1110-000816 Version: 2.3
Beim EtherCAT basiert der Datenaustausch vollständig auf einer reinen Hardware-Maschine. Da dieKommunikation eine logische (und dank Vollduplex-Fast-Ethernet auch physikalische) Ringstruktur nutzt,kann die Mutter-Uhr den Laufzeitversatz zu den einzelnen Tochter-Uhren einfach und exakt ermitteln – undumgekehrt. Auf Basis dieses Wertes werden die verteilten Uhren nachgeführt und es steht eine hochgenauenetzwerkweite Zeitbasis zur Verfügung, deren Jitter deutlich unter einer Mikrosekunde beträgt.
Hochauflösende verteilte Uhren dienen aber nicht nur der Synchronisierung, sondern können auch exakteInformationen zum lokalen Zeitpunkt der Datenerfassung liefern. Steuerungen berechnen beispielsweisehäufig Geschwindigkeiten aus nacheinander gemessenen Positionen. Speziell bei sehr kurzen Abtastzeitenführt schon ein kleiner zeitlicher Jitter in der Wegerfassung zu großen Geschwindigkeitssprüngen.Konsequenterweise werden mit EtherCAT auch neue, erweiterte Datentypen eingeführt (Timestamp undOversampling Data Type). Mit dem Messwert wird die lokale Zeit mit einer Auflösung von bis zu 10 nsverknüpft - die große Bandbreite von Ethernet macht das möglich. Damit hängt dann die Genauigkeit einerGeschwindigkeitsberechnung nicht mehr vom Jitter des Kommunikationssystems ab. Sie wird umGrößenordnungen besser als diejenige von Messverfahren, die auf jitterfreier Kommunikation basieren.
Performance
Mit EtherCAT werden neue Dimensionen in der Netzwerk-Performance erreicht. Dank FMMU-Chip in derKlemme und DMA-Zugriff auf die Netzwerkkarte des Masters erfolgt die gesamte Protokollbearbeitung inHardware. Sie ist damit unabhängig von der Laufzeit von Protokoll-Stacks, von CPU-Performance oderSoftware-Implementierung. Die Update-Zeit für 1000 E/As beträgt nur 30 µs – einschließlich Klemmen-Durchlaufzeit. Mit einem einzigen Ethernet-Frame können bis zu 1486 Bytes Prozessdaten ausgetauschtwerden – das entspricht fast 12000 digitalen Ein- und Ausgängen. Für die Übertragung dieser Datenmengewerden dabei nur 300 µs benötigt.
Für die Kommunikation mit 100 Servoachsen werden nur 100 µs benötigt. In dieser Zeit werden alle Achsenmit Sollwerten und Steuerdaten versehen und melden ihre Ist-Position und Status. Mit den Distributed-Clocks können die Achsen dabei mit einer Abweichung von deutlich weniger als einer Mikrosekundesynchronisiert werden.
Die extrem hohe Performance der EtherCAT-Technologie ermöglicht Steuerungs- und Regelungskonzepte,die mit klassischen Feldbussystemen nicht realisierbar waren. So kann beispielsweise nicht nur dieGeschwindigkeitsregelung, sondern neu auch die Stromregelung verteilter Antriebe über das Ethernet-System erfolgen. Die enorme Bandbreite erlaubt es, zu jedem Datum z. B. auch Status-Informationen zuübertragen. Mit EtherCAT steht eine Kommunikationstechnologie zur Verfügung, die der überlegenenRechenleistung moderner Industrie-PCs entspricht. Das Bussystem ist nicht mehr der Flaschenhals imSteuerungskonzept. Verteilte E/As werden schneller erfasst, als dies mit den meisten lokalen E/A-Schnittstellen möglich ist. Das EtherCAT Technologieprinzip ist skalierbar und nicht an die Baudrate von 100MBaud gebunden – eine Erweiterung auf GBit Ethernet ist möglich.
Diagnose
Die Erfahrungen mit Feldbussystemen zeigen, dass die Verfügbarkeit und Inbetriebnahme Zeitenentscheidend von der Diagnosefähigkeit abhängen. Nur eine schnelle und präzise erkannte und eindeutiglokalisierbare Störung kann kurzfristig behoben werden. Deshalb wurde bei der Entwicklung des EtherCAT-Systems besonderer Wert auf vorbildliche Diagnoseeigenschaften gelegt.
Bei der Inbetriebnahme gilt es zu prüfen, ob die Ist-Konfiguration der E/A-Klemmen mit der Soll-Konfiguration übereinstimmt. Auch die Topologie sollte der gespeicherten Konfiguration entsprechen. Durchdie eingebaute Topologie-Erkennung bis hinunter zu den einzelnen Klemmen kann nicht nur dieseÜberprüfung beim Systemstart stattfinden – auch ein automatisches Einlesen des Netzwerkes ist möglich(Konfigurations-Upload).
Bitfehler in der Übertragung werden durch die Auswertung der CRC-Prüfsumme zuverlässig erkannt: das32 Bit CRC-Polynom weist eine minimale Hamming-Distanz von 4 auf. Neben der Bruchstellenerkennungund -lokalisierung erlauben Protokoll, Übertragungsphysik und Topologie des EtherCAT-Systems eineindividuelle Qualitätsüberwachung jeder einzelnen Übertragungsstrecke. Die automatische Auswertung derentsprechenden Fehlerzähler ermöglicht die exakte Lokalisierung kritischer Netzwerkabschnitte.Schleichende oder wechselnde Fehlerquellen wie EMV-Einflüsse, fehlerhafte Steckverbindungen oderKabelschäden werden erkannt und lokalisiert, auch wenn sie die Selbstheilungsfähigkeit des Netzwerkesnoch nicht überfordern.
Grundlagen der Kommunikation
EK1110, EK1110-0008 17Version: 2.3
Integration von Beckhoff Standard-Busklemmen
Neben den neuen Busklemmen mit E-Bus-Anschluss (ELxxxx) lassen sich auch sämtliche Busklemmen ausdem bewährten Standardprogramm mit K-Bus-Anschluss (KLxxxx) über den Buskoppler BK1120 oderBK1250 anschließen. Damit sind Kompatibilität und Durchgängigkeit zum bestehenden BeckhoffBusklemmensystemen gewährleistet. Bestehende Investitionen werden geschützt.
3.2 EtherCAT-GrundlagenGrundlagen zum Feldbus EtherCAT entnehmen Sie bitte der EtherCAT System-Dokumentation.
3.3 EtherCAT-Verkabelung - DrahtgebundenDie zulässige Leitungslänge zwischen zwei EtherCAT-Geräten darf maximal 100 Meter betragen. Diesresultiert aus der FastEthernet-Technologie, die vor allem aus Gründen der Signaldämpfung über dieLeitungslänge eine maximale Linklänge von 5 + 90 + 5 m erlaubt, wenn Leitungen mit entsprechendenEigenschaften verwendet werden. Siehe dazu auch die Auslegungsempfehlungen zur Infrastruktur fürEtherCAT/Ethernet.
Kabel und Steckverbinder
Verwenden Sie zur Verbindung von EtherCAT-Geräten nur Ethernet-Verbindungen (Kabel + Stecker), diemindestens der Kategorie 5 (CAT5) nach EN 50173 bzw. ISO/IEC 11801 entsprechen. EtherCAT nutzt 4Adern des Kabels für die Signalübertragung.
EtherCAT verwendet beispielsweise RJ45-Steckverbinder. Die Kontaktbelegung ist zum Ethernet-Standard(ISO/IEC 8802-3) kompatibel.
Pin Aderfarbe Signal Beschreibung1 gelb TD+ Transmission Data +2 orange TD- Transmission Data -3 weiß RD+ Receiver Data +6 blau RD- Receiver Data -
Aufgrund der automatischen Kabelerkennung (Auto-Crossing) können Sie zwischen EtherCAT-Geräten vonBeckhoff sowohl symmetrisch (1:1) belegte als auch Cross-Over-Kabel verwenden.
Empfohlene KabelGeeignete Kabel zur Verbindung von EtherCAT-Geräten finden Sie auf der Beckhoff Website!
E-Bus-Versorgung
Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 Vversorgen, i.d.R. ist ein Koppler dabei bis zu 2 A belastbar (siehe Dokumentation des jeweiligen Gerätes).Zu jeder EL-Klemme ist die Information, wie viel Strom sie aus der E-Bus-Versorgung benötigt, online und imKatalog verfügbar. Benötigen die angefügten Klemmen mehr Strom als der Koppler liefern kann, sind anentsprechender Position im Klemmenstrang Einspeiseklemmen (z.B. EL9410) zu setzen.
Im TwinCAT Systemmanager wird der vorberechnete theoretische maximale E-Bus-Strom angezeigt. EineUnterschreitung wird durch negativen Summenbetrag und Ausrufezeichen markiert, vor einer solchen Stelleist eine Einspeiseklemme zu setzen.
Grundlagen der Kommunikation
EK1110, EK1110-000818 Version: 2.3
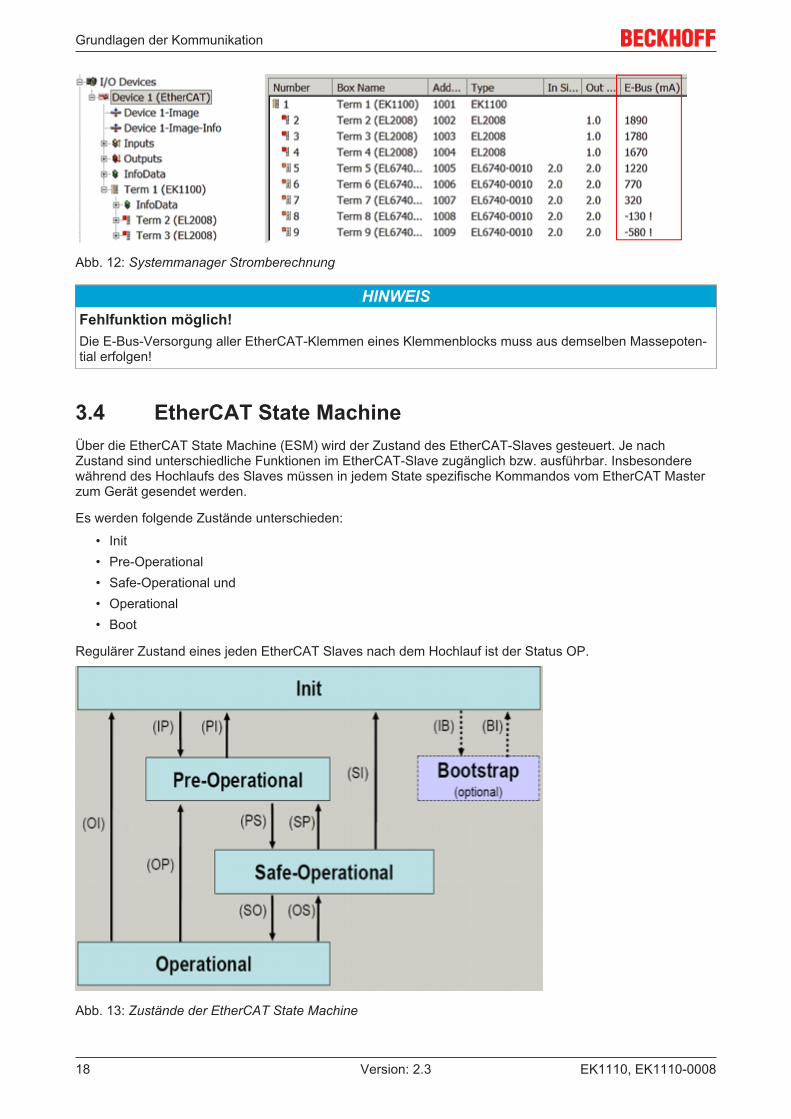
Abb. 12: Systemmanager Stromberechnung
HINWEISFehlfunktion möglich!Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demselben Massepoten-tial erfolgen!
3.4 EtherCAT State MachineÜber die EtherCAT State Machine (ESM) wird der Zustand des EtherCAT-Slaves gesteuert. Je nachZustand sind unterschiedliche Funktionen im EtherCAT-Slave zugänglich bzw. ausführbar. Insbesonderewährend des Hochlaufs des Slaves müssen in jedem State spezifische Kommandos vom EtherCAT Masterzum Gerät gesendet werden.
Es werden folgende Zustände unterschieden:
• Init• Pre-Operational• Safe-Operational und• Operational• Boot
Regulärer Zustand eines jeden EtherCAT Slaves nach dem Hochlauf ist der Status OP.
Abb. 13: Zustände der EtherCAT State Machine
Grundlagen der Kommunikation
EK1110, EK1110-0008 19Version: 2.3
Init
Nach dem Einschalten befindet sich der EtherCAT-Slave im Zustand Init. Dort ist weder Mailbox- nochProzessdatenkommunikation möglich. Der EtherCAT-Master initialisiert die Sync-Manager-Kanäle 0 und 1für die Mailbox-Kommunikation.
Pre-Operational (Pre-Op)
Beim Übergang von Init nach Pre-Op prüft der EtherCAT-Slave, ob die Mailbox korrekt initialisiert wurde.
Im Zustand Pre-Op ist Mailbox-Kommunikation aber keine Prozessdaten-Kommunikation möglich. DerEtherCAT-Master initialisiert die Sync-Manager-Kanäle für Prozessdaten (ab Sync-Manager-Kanal 2), dieFMMU-Kanäle und falls der Slave ein konfigurierbares Mapping unterstützt das PDO-Mapping oder dasSync-Manager-PDO-Assignement. Weiterhin werden in diesem Zustand die Einstellungen für dieProzessdatenübertragung sowie ggf. noch klemmenspezifische Parameter übertragen, die von denDefaulteinstellungen abweichen.
Safe-Operational (Safe-Op)
Beim Übergang von Pre-Op nach Safe-Op prüft der EtherCAT-Slave, ob die Sync-Manager-Kanäle für dieProzessdatenkommunikation sowie ggf. ob die Einstellungen für die Distributed-Clocks korrekt sind. Bevor erden Zustandswechsel quittiert, kopiert der EtherCAT-Slave aktuelle Inputdaten in die entsprechenden DP-RAM-Bereiche des EtherCAT-Slave-Controllers (ECSC).
Im Zustand Safe-Op ist Mailbox- und Prozessdaten-Kommunikation möglich, allerdings hält der Slave seineAusgänge im sicheren Zustand und gibt sie noch nicht aus. Die Inputdaten werden aber bereits zyklischaktualisiert.
Ausgänge im SAFEOPDie standardmäßig aktivierte Watchdogüberwachung bringt die Ausgänge im Modul in Abhängigkeitvon den Einstellungen im SAFEOP und OP in einen sicheren Zustand - je nach Gerät und Einstel-lung z.B. auf AUS. Wird dies durch Deaktivieren der Watchdogüberwachung im Modul unterbun-den, können auch im Geräte-Zustand SAFEOP Ausgänge geschaltet werden bzw. gesetzt bleiben.
Operational (Op)
Bevor der EtherCAT-Master den EtherCAT-Slave von Safe-Op nach Op schaltet, muss er bereits gültigeOutputdaten übertragen.
Im Zustand Op kopiert der Slave die Ausgangsdaten des Masters auf seine Ausgänge. Es ist Prozessdaten-und Mailbox-Kommunikation möglich.
Boot
Im Zustand Boot kann ein Update der Slave-Firmware vorgenommen werden. Der Zustand Boot ist nur überden Zustand Init zu erreichen.
Im Zustand Boot ist Mailbox-Kommunikation über das Protokoll File-Access over EtherCAT (FoE) möglich,aber keine andere Mailbox-Kommunikation und keine Prozessdaten-Kommunikation.
3.5 CoE-Interface: HinweisDieses Gerät hat kein CoE.
Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf derBeckhoff Website.
3.6 Distributed ClockDie Distributed Clock stellt eine lokale Uhr im EtherCAT Slave Controller (ESC) dar mit den Eigenschaften:

Grundlagen der Kommunikation
EK1110, EK1110-000820 Version: 2.3
• Einheit 1 ns• Nullpunkt 1.1.2000 00:00• Umfang 64 Bit (ausreichend für die nächsten 584 Jahre); manche EtherCAT-Slaves unterstützen
jedoch nur einen Umfang von 32 Bit, d.h. nach ca. 4,2 Sekunden läuft die Variable über• Diese lokale Uhr wird vom EtherCAT Master automatisch mit der Master Clock im EtherCAT Bus mit
einer Genauigkeit < 100 ns synchronisiert.
Detaillierte Informationen entnehmen Sie bitte der vollständigen EtherCAT-Systembeschreibung.
Montage und Verdrahtung
EK1110, EK1110-0008 21Version: 2.3
4 Montage und Verdrahtung
4.1 M8 Anschluss VerkabelungEine Auflistung der EtherCAT-Kabel, Powerkabel, Sensorkabel, Ethernet-/EtherCAT-Steckverbinder sowiefeldkonfektionierbare Steckverbinder finden Sie unter dem folgenden Link: http://download.beckhoff.com/download/document/catalog/main_catalog/german/Beckhoff_EtherCAT-Box-Zubehoer.pdf
Die dazugehörigen Datenblätter finden Sie unter dem folgenden Link: http://beckhoff.de/german/fieldbus_box/data_sheets.htm?id=69033899254355
EtherCAT-Kabel
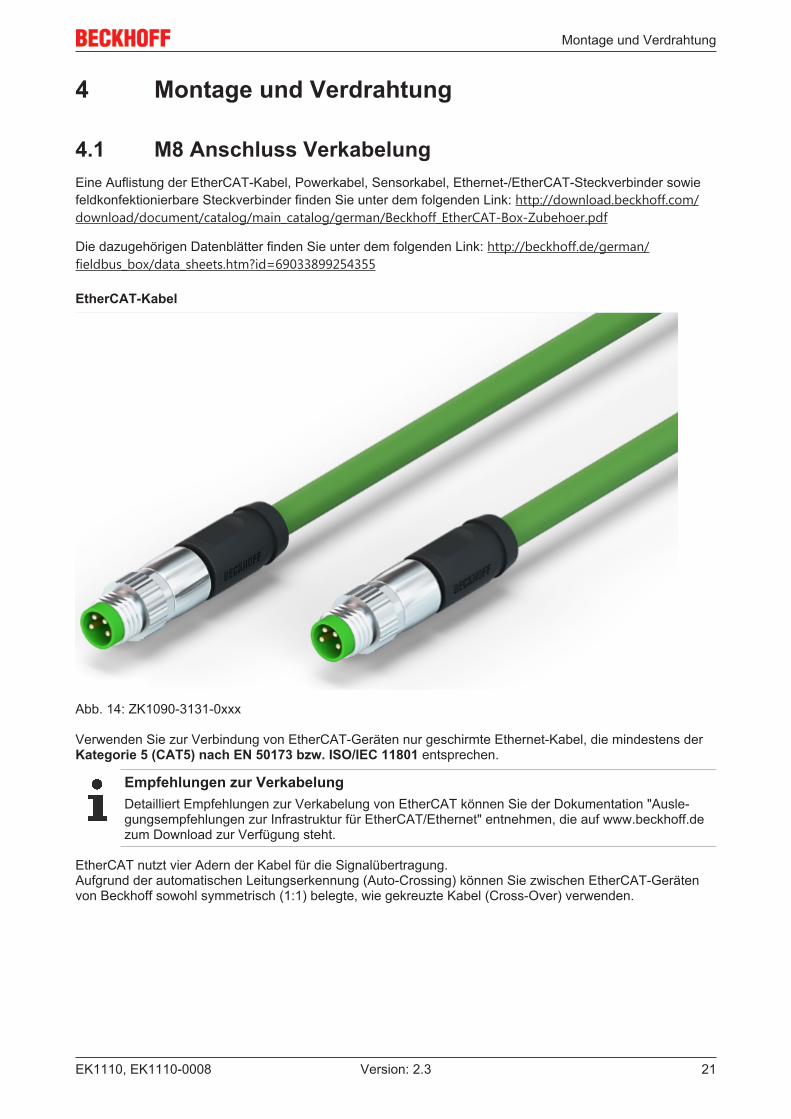
Abb. 14: ZK1090-3131-0xxx
Verwenden Sie zur Verbindung von EtherCAT-Geräten nur geschirmte Ethernet-Kabel, die mindestens derKategorie 5 (CAT5) nach EN 50173 bzw. ISO/IEC 11801 entsprechen.
Empfehlungen zur VerkabelungDetailliert Empfehlungen zur Verkabelung von EtherCAT können Sie der Dokumentation "Ausle-gungsempfehlungen zur Infrastruktur für EtherCAT/Ethernet" entnehmen, die auf www.beckhoff.dezum Download zur Verfügung steht.
EtherCAT nutzt vier Adern der Kabel für die Signalübertragung.Aufgrund der automatischen Leitungserkennung (Auto-Crossing) können Sie zwischen EtherCAT-Gerätenvon Beckhoff sowohl symmetrisch (1:1) belegte, wie gekreuzte Kabel (Cross-Over) verwenden.
Montage und Verdrahtung
EK1110, EK1110-000822 Version: 2.3
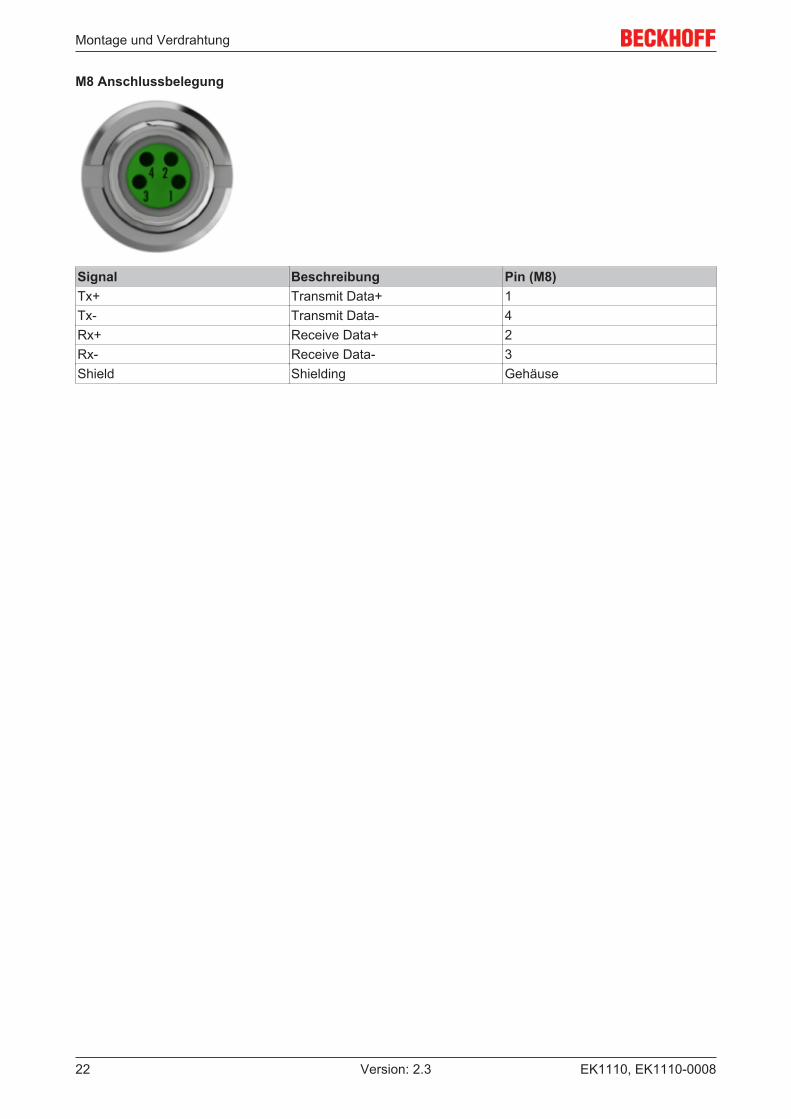
M8 Anschlussbelegung
Signal Beschreibung Pin (M8)Tx+ Transmit Data+ 1Tx- Transmit Data- 4Rx+ Receive Data+ 2Rx- Receive Data- 3Shield Shielding Gehäuse
Montage und Verdrahtung
EK1110, EK1110-0008 23Version: 2.3
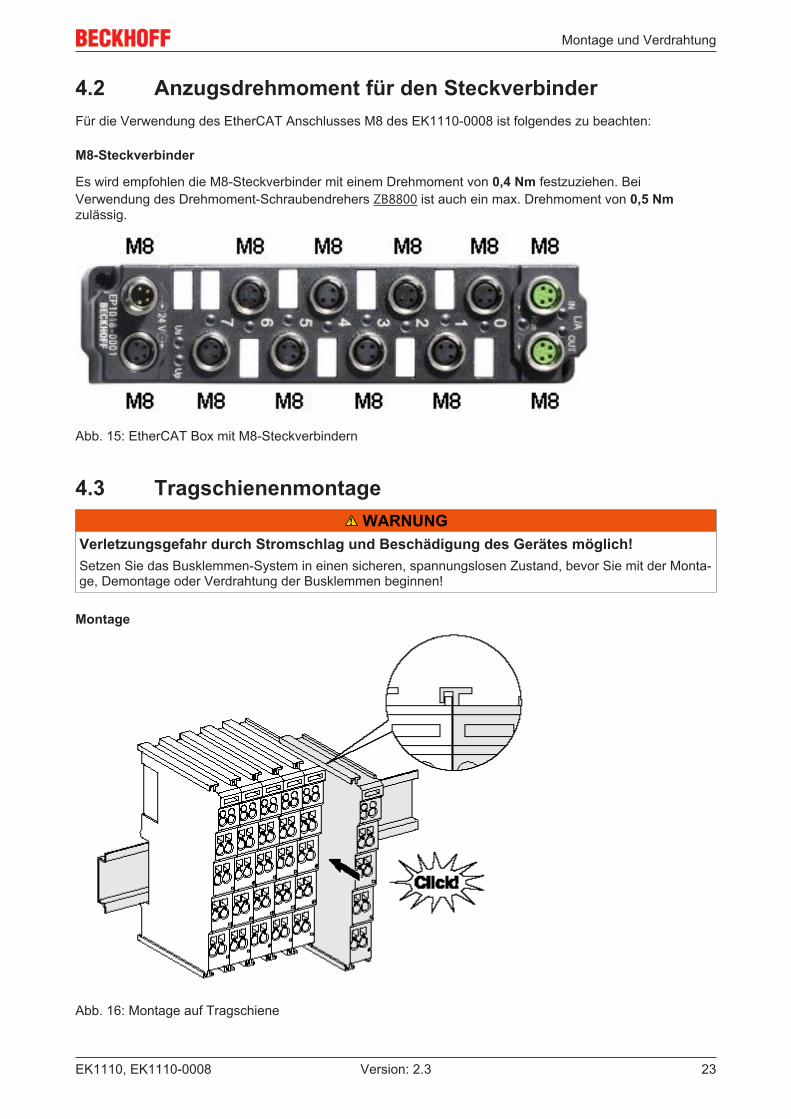
4.2 Anzugsdrehmoment für den SteckverbinderFür die Verwendung des EtherCAT Anschlusses M8 des EK1110-0008 ist folgendes zu beachten:
M8-Steckverbinder
Es wird empfohlen die M8-Steckverbinder mit einem Drehmoment von 0,4 Nm festzuziehen. BeiVerwendung des Drehmoment-Schraubendrehers ZB8800 ist auch ein max. Drehmoment von 0,5 Nmzulässig.
Abb. 15: EtherCAT Box mit M8-Steckverbindern
4.3 Tragschienenmontage WARNUNG
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta-ge, Demontage oder Verdrahtung der Busklemmen beginnen!
Montage
Abb. 16: Montage auf Tragschiene
Montage und Verdrahtung
EK1110, EK1110-000824 Version: 2.3
Die Buskoppler und Busklemmen werden durch leichten Druck auf handelsübliche 35 mm Tragschienen(Hutschienen nach EN 60715) aufgerastet:
1. Stecken Sie zuerst den Feldbuskoppler auf die Tragschiene.2. Auf der rechten Seite des Feldbuskopplers werden nun die Busklemmen angereiht. Stecken Sie dazu
die Komponenten mit Nut und Feder zusammen und schieben Sie die Klemmen gegen die Tragschie-ne, bis die Verriegelung hörbar auf der Tragschiene einrastet.Wenn Sie die Klemmen erst auf die Tragschiene schnappen und dann nebeneinander schieben ohnedas Nut und Feder ineinander greifen, wird keine funktionsfähige Verbindung hergestellt! Bei richtigerMontage darf kein nennenswerter Spalt zwischen den Gehäusen zu sehen sein.
TragschienenbefestigungDer Verriegelungsmechanismus der Klemmen und Koppler reicht in das Profil der Tragschiene hin-ein. Achten Sie bei der Montage der Komponenten darauf, dass der Verriegelungsmechanismusnicht in Konflikt mit den Befestigungsschrauben der Tragschiene gerät. Verwenden Sie zur Befesti-gung von Tragschienen mit einer Höhe von 7,5 mm unter den Klemmen und Kopplern flache Mon-tageverbindungen wie Senkkopfschrauben oder Blindnieten.
Demontage
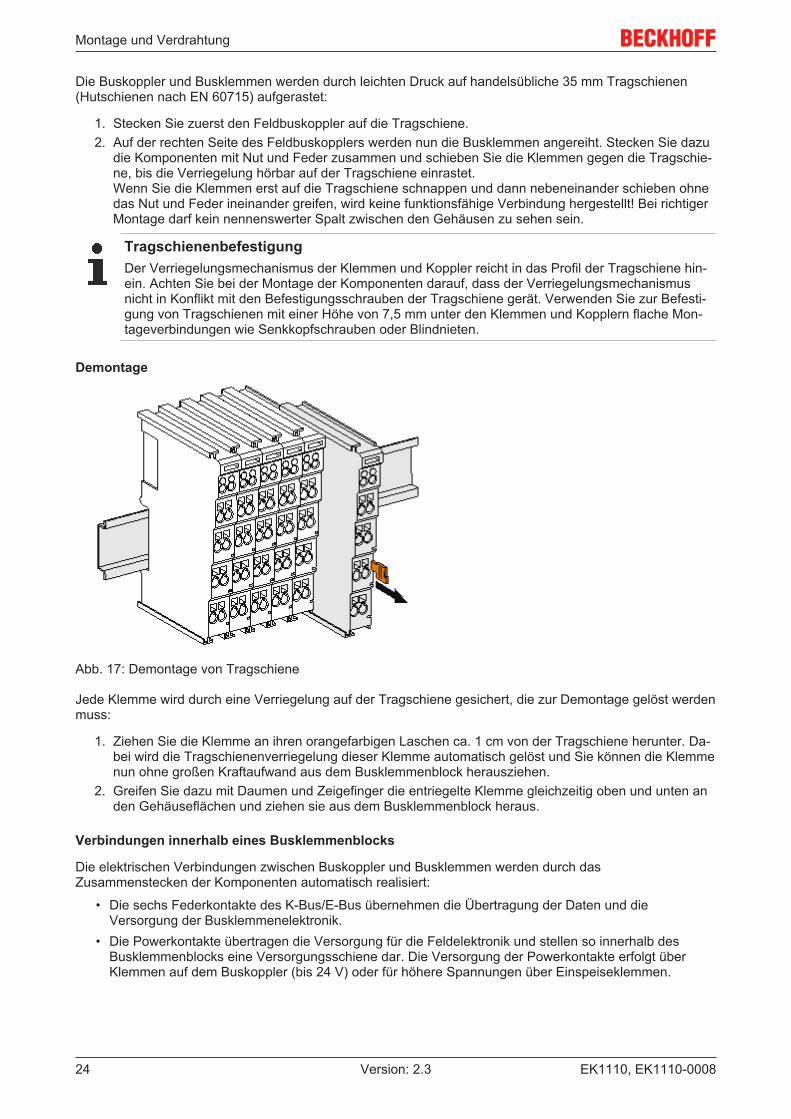
Abb. 17: Demontage von Tragschiene
Jede Klemme wird durch eine Verriegelung auf der Tragschiene gesichert, die zur Demontage gelöst werdenmuss:
1. Ziehen Sie die Klemme an ihren orangefarbigen Laschen ca. 1 cm von der Tragschiene herunter. Da-bei wird die Tragschienenverriegelung dieser Klemme automatisch gelöst und Sie können die Klemmenun ohne großen Kraftaufwand aus dem Busklemmenblock herausziehen.
2. Greifen Sie dazu mit Daumen und Zeigefinger die entriegelte Klemme gleichzeitig oben und unten anden Gehäuseflächen und ziehen sie aus dem Busklemmenblock heraus.
Verbindungen innerhalb eines Busklemmenblocks
Die elektrischen Verbindungen zwischen Buskoppler und Busklemmen werden durch dasZusammenstecken der Komponenten automatisch realisiert:
• Die sechs Federkontakte des K-Bus/E-Bus übernehmen die Übertragung der Daten und dieVersorgung der Busklemmenelektronik.
• Die Powerkontakte übertragen die Versorgung für die Feldelektronik und stellen so innerhalb desBusklemmenblocks eine Versorgungsschiene dar. Die Versorgung der Powerkontakte erfolgt überKlemmen auf dem Buskoppler (bis 24 V) oder für höhere Spannungen über Einspeiseklemmen.
Montage und Verdrahtung
EK1110, EK1110-0008 25Version: 2.3
PowerkontakteBeachten Sie bei der Projektierung eines Busklemmenblocks die Kontaktbelegungen der einzelnenBusklemmen, da einige Typen (z.B. analoge Busklemmen oder digitale 4-Kanal-Busklemmen) diePowerkontakte nicht oder nicht vollständig durchschleifen. Einspeiseklemmen (KL91xx, KL92xxbzw. EL91xx, EL92xx) unterbrechen die Powerkontakte und stellen so den Anfang einer neuen Ver-sorgungsschiene dar.
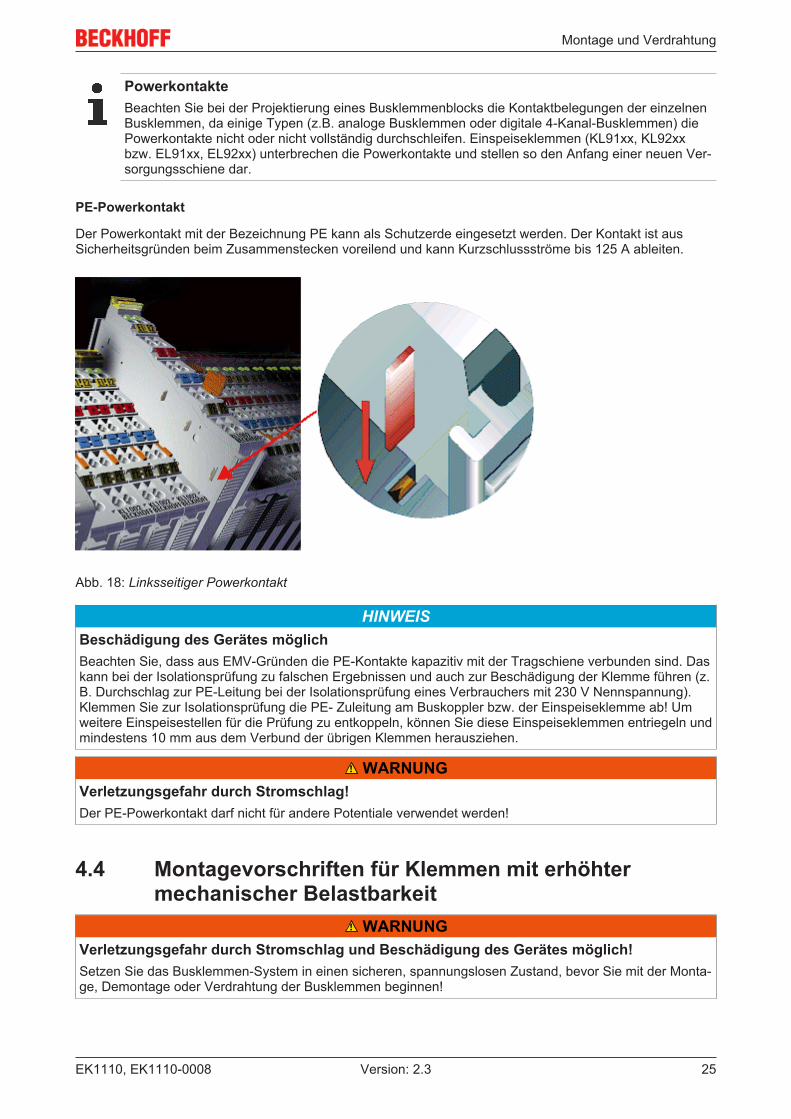
PE-Powerkontakt
Der Powerkontakt mit der Bezeichnung PE kann als Schutzerde eingesetzt werden. Der Kontakt ist ausSicherheitsgründen beim Zusammenstecken voreilend und kann Kurzschlussströme bis 125 A ableiten.
Abb. 18: Linksseitiger Powerkontakt
HINWEISBeschädigung des Gerätes möglichBeachten Sie, dass aus EMV-Gründen die PE-Kontakte kapazitiv mit der Tragschiene verbunden sind. Daskann bei der Isolationsprüfung zu falschen Ergebnissen und auch zur Beschädigung der Klemme führen (z.B. Durchschlag zur PE-Leitung bei der Isolationsprüfung eines Verbrauchers mit 230 V Nennspannung).Klemmen Sie zur Isolationsprüfung die PE- Zuleitung am Buskoppler bzw. der Einspeiseklemme ab! Umweitere Einspeisestellen für die Prüfung zu entkoppeln, können Sie diese Einspeiseklemmen entriegeln undmindestens 10 mm aus dem Verbund der übrigen Klemmen herausziehen.
WARNUNGVerletzungsgefahr durch Stromschlag!Der PE-Powerkontakt darf nicht für andere Potentiale verwendet werden!
4.4 Montagevorschriften für Klemmen mit erhöhtermechanischer Belastbarkeit
WARNUNGVerletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta-ge, Demontage oder Verdrahtung der Busklemmen beginnen!
Montage und Verdrahtung
EK1110, EK1110-000826 Version: 2.3
Zusätzliche Prüfungen
Die Klemmen sind folgenden zusätzlichen Prüfungen unterzogen worden:
Prüfung ErläuterungVibration 10 Frequenzdurchläufe, in 3-Achsen
6 Hz < f < 60 Hz Auslenkung 0,35 mm, konstante Amplitude60,1 Hz < f < 500 Hz Beschleunigung 5 g, konstante Amplitude
Schocken 1000 Schocks je Richtung, in 3-Achsen25 g, 6 ms
Zusätzliche Montagevorschriften
Für die Klemmen mit erhöhter mechanischer Belastbarkeit gelten folgende zusätzliche Montagevorschriften:
• Die erhöhte mechanische Belastbarkeit gilt für alle zulässigen Einbaulagen• Es ist eine Tragschiene nach EN 60715 TH35-15 zu verwenden• Der Klemmenstrang ist auf beiden Seiten der Tragschiene durch eine mechanische Befestigung, z.B.
mittels einer Erdungsklemme oder verstärkten Endklammer zu fixieren• Die maximale Gesamtausdehnung des Klemmenstrangs (ohne Koppler) beträgt:
64 Klemmen mit 12 mm oder 32 Klemmen mit 24 mm Einbaubreite• Bei der Abkantung und Befestigung der Tragschiene ist darauf zu achten, dass keine Verformung und
Verdrehung der Tragschiene auftritt, weiterhin ist kein Quetschen und Verbiegen der Tragschienezulässig
• Die Befestigungspunkte der Tragschiene sind in einem Abstand vom 5 cm zu setzen• Zur Befestigung der Tragschiene sind Senkkopfschrauben zu verwenden• Die freie Leiterlänge zwischen Zugentlastung und Leiteranschluss ist möglichst kurz zu halten; der
Abstand zum Kabelkanal ist mit ca.10 cm zu einhalten
4.5 EinbaulagenHINWEIS
Einschränkung von Einbaulage und BetriebstemperaturbereichEntnehmen Sie den technischen Daten zu einer Klemme, ob sie Einschränkungen bei Einbaulage und/oderBetriebstemperaturbereich unterliegt. Sorgen Sie bei der Montage von Klemmen mit erhöhter thermischerVerlustleistung dafür, dass im Betrieb oberhalb und unterhalb der Klemmen ausreichend Abstand zu ande-ren Komponenten eingehalten wird, so dass die Klemmen ausreichend belüftet werden!
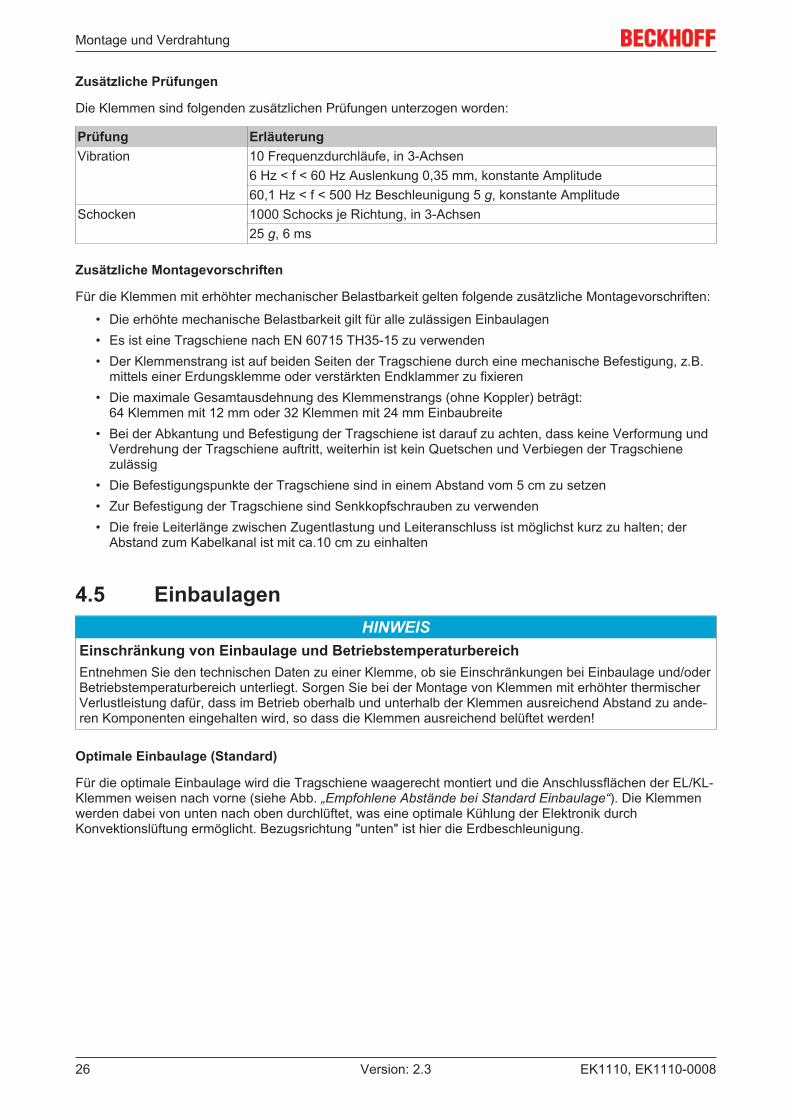
Optimale Einbaulage (Standard)
Für die optimale Einbaulage wird die Tragschiene waagerecht montiert und die Anschlussflächen der EL/KL-Klemmen weisen nach vorne (siehe Abb. „Empfohlene Abstände bei Standard Einbaulage“). Die Klemmenwerden dabei von unten nach oben durchlüftet, was eine optimale Kühlung der Elektronik durchKonvektionslüftung ermöglicht. Bezugsrichtung "unten" ist hier die Erdbeschleunigung.
Montage und Verdrahtung
EK1110, EK1110-0008 27Version: 2.3
Abb. 19: Empfohlene Abstände bei Standard Einbaulage
Die Einhaltung der Abstände nach Abb. „Empfohlene Abstände bei Standard Einbaulage“ wird empfohlen.
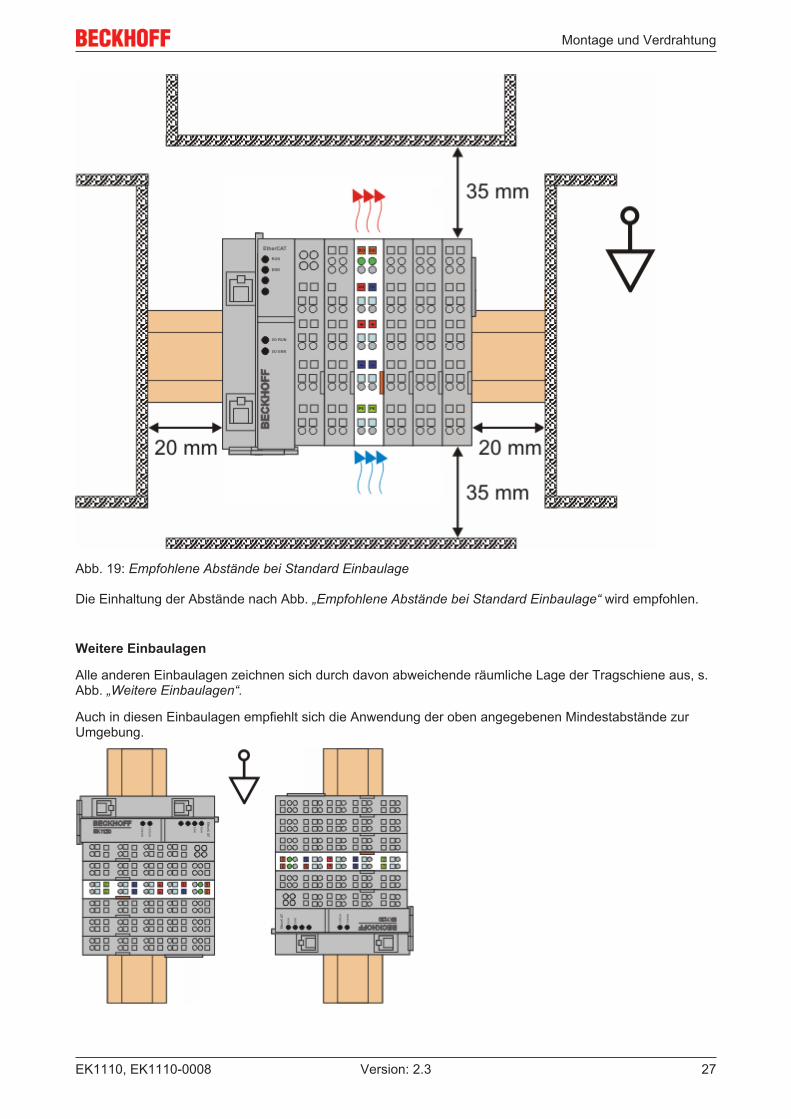
Weitere Einbaulagen
Alle anderen Einbaulagen zeichnen sich durch davon abweichende räumliche Lage der Tragschiene aus, s.Abb. „Weitere Einbaulagen“.
Auch in diesen Einbaulagen empfiehlt sich die Anwendung der oben angegebenen Mindestabstände zurUmgebung.
Montage und Verdrahtung
EK1110, EK1110-000828 Version: 2.3
Abb. 20: Weitere Einbaulagen
4.6 Anschlusstechnik WARNUNG
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich!Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Monta-ge, Demontage oder Verdrahtung der Busklemmen beginnen!
Übersicht
Mit verschiedenen Anschlussoptionen bietet das Busklemmensystem eine optimale Anpassung an dieAnwendung:
• Die Klemmen der Serien KLxxxx und ELxxxx mit Standardverdrahtung enthalten Elektronik undAnschlussebene in einem Gehäuse.
• Die Klemmen der Serien KSxxxx und ESxxxx haben eine steckbare Anschlussebene und ermöglichensomit beim Austausch die stehende Verdrahtung.
• Die High-Density-Klemmen (HD-Klemmen) enthalten Elektronik und Anschlussebene in einemGehäuse und haben eine erhöhte Packungsdichte.
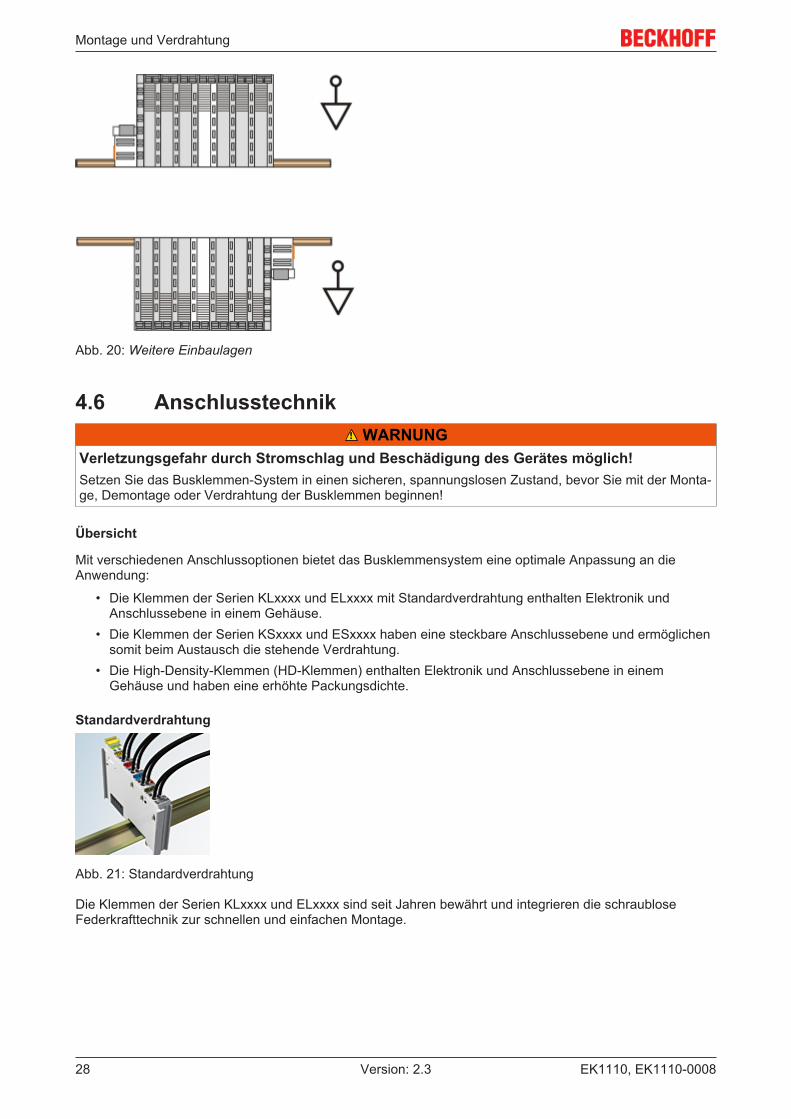
Standardverdrahtung
Abb. 21: Standardverdrahtung
Die Klemmen der Serien KLxxxx und ELxxxx sind seit Jahren bewährt und integrieren die schraubloseFederkrafttechnik zur schnellen und einfachen Montage.
Montage und Verdrahtung
EK1110, EK1110-0008 29Version: 2.3
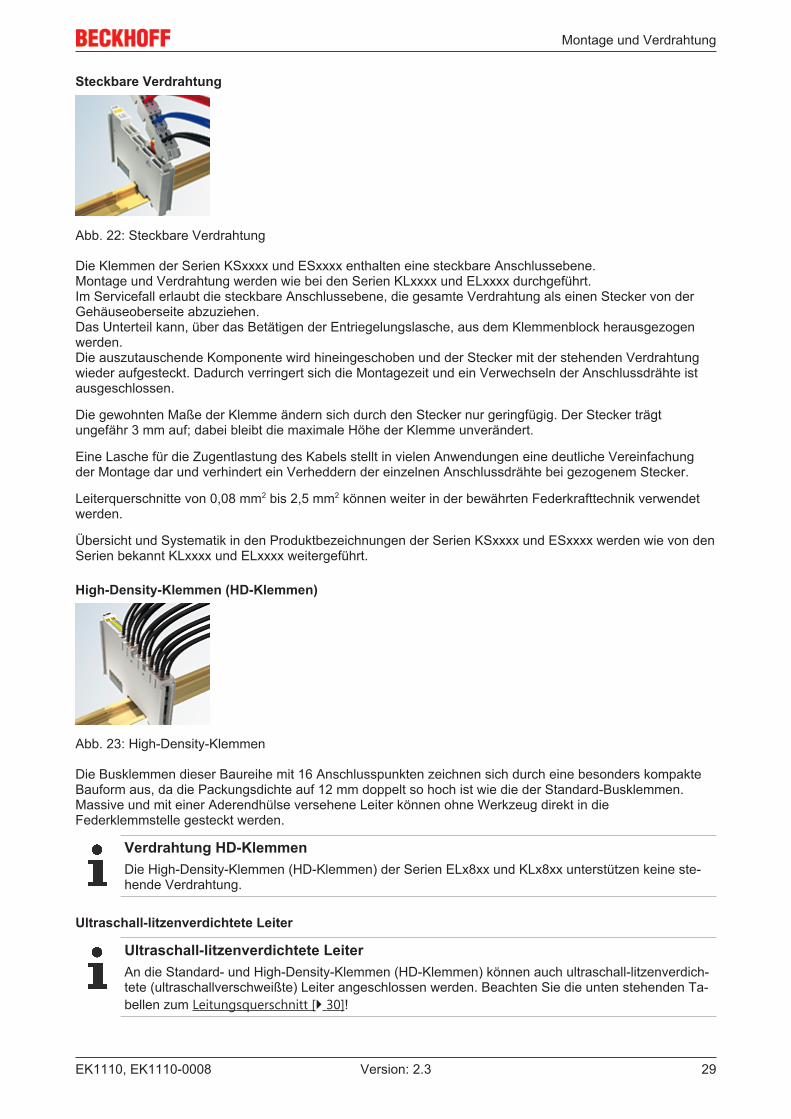
Steckbare Verdrahtung
Abb. 22: Steckbare Verdrahtung
Die Klemmen der Serien KSxxxx und ESxxxx enthalten eine steckbare Anschlussebene. Montage und Verdrahtung werden wie bei den Serien KLxxxx und ELxxxx durchgeführt.Im Servicefall erlaubt die steckbare Anschlussebene, die gesamte Verdrahtung als einen Stecker von derGehäuseoberseite abzuziehen.Das Unterteil kann, über das Betätigen der Entriegelungslasche, aus dem Klemmenblock herausgezogenwerden.Die auszutauschende Komponente wird hineingeschoben und der Stecker mit der stehenden Verdrahtungwieder aufgesteckt. Dadurch verringert sich die Montagezeit und ein Verwechseln der Anschlussdrähte istausgeschlossen.
Die gewohnten Maße der Klemme ändern sich durch den Stecker nur geringfügig. Der Stecker trägtungefähr 3 mm auf; dabei bleibt die maximale Höhe der Klemme unverändert.
Eine Lasche für die Zugentlastung des Kabels stellt in vielen Anwendungen eine deutliche Vereinfachungder Montage dar und verhindert ein Verheddern der einzelnen Anschlussdrähte bei gezogenem Stecker.
Leiterquerschnitte von 0,08 mm2 bis 2,5 mm2 können weiter in der bewährten Federkrafttechnik verwendetwerden.
Übersicht und Systematik in den Produktbezeichnungen der Serien KSxxxx und ESxxxx werden wie von denSerien bekannt KLxxxx und ELxxxx weitergeführt.
High-Density-Klemmen (HD-Klemmen)
Abb. 23: High-Density-Klemmen
Die Busklemmen dieser Baureihe mit 16 Anschlusspunkten zeichnen sich durch eine besonders kompakteBauform aus, da die Packungsdichte auf 12 mm doppelt so hoch ist wie die der Standard-Busklemmen.Massive und mit einer Aderendhülse versehene Leiter können ohne Werkzeug direkt in dieFederklemmstelle gesteckt werden.
Verdrahtung HD-KlemmenDie High-Density-Klemmen (HD-Klemmen) der Serien ELx8xx und KLx8xx unterstützen keine ste-hende Verdrahtung.
Ultraschall-litzenverdichtete Leiter
Ultraschall-litzenverdichtete LeiterAn die Standard- und High-Density-Klemmen (HD-Klemmen) können auch ultraschall-litzenverdich-tete (ultraschallverschweißte) Leiter angeschlossen werden. Beachten Sie die unten stehenden Ta-bellen zum Leitungsquerschnitt [} 30]!
Montage und Verdrahtung
EK1110, EK1110-000830 Version: 2.3
Verdrahtung
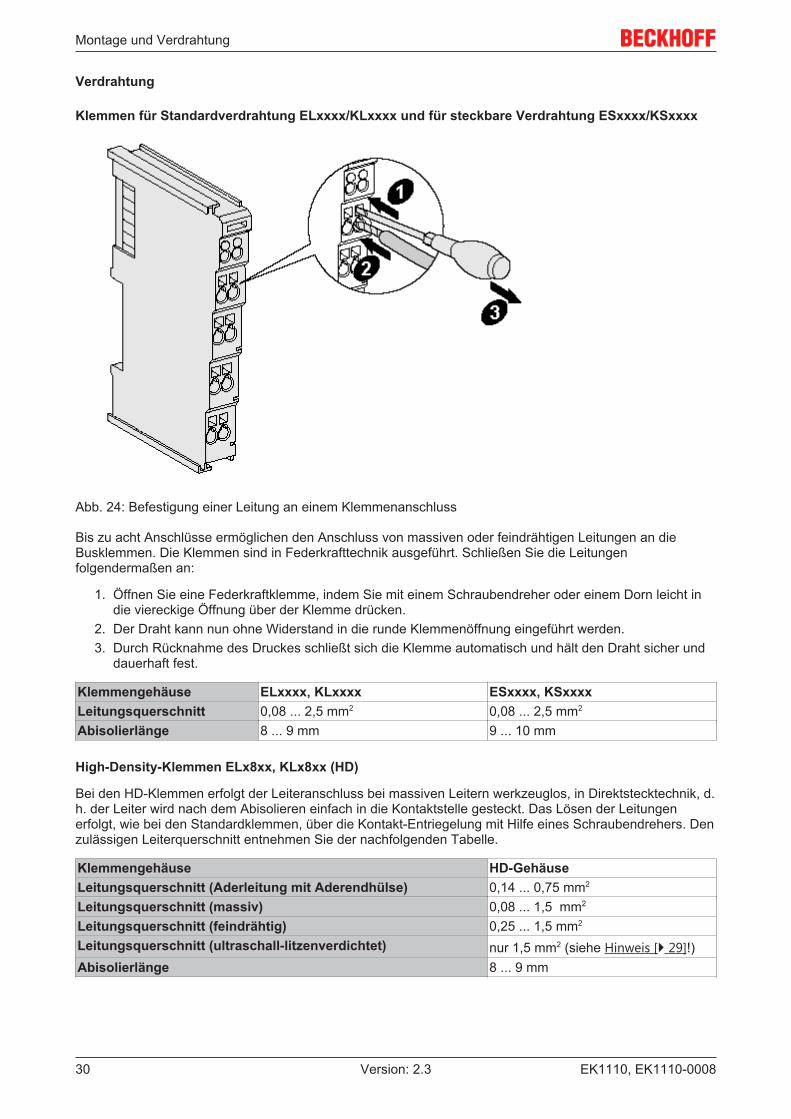
Klemmen für Standardverdrahtung ELxxxx/KLxxxx und für steckbare Verdrahtung ESxxxx/KSxxxx
Abb. 24: Befestigung einer Leitung an einem Klemmenanschluss
Bis zu acht Anschlüsse ermöglichen den Anschluss von massiven oder feindrähtigen Leitungen an dieBusklemmen. Die Klemmen sind in Federkrafttechnik ausgeführt. Schließen Sie die Leitungenfolgendermaßen an:
1. Öffnen Sie eine Federkraftklemme, indem Sie mit einem Schraubendreher oder einem Dorn leicht indie viereckige Öffnung über der Klemme drücken.
2. Der Draht kann nun ohne Widerstand in die runde Klemmenöffnung eingeführt werden.3. Durch Rücknahme des Druckes schließt sich die Klemme automatisch und hält den Draht sicher und
dauerhaft fest.
Klemmengehäuse ELxxxx, KLxxxx ESxxxx, KSxxxxLeitungsquerschnitt 0,08 ... 2,5 mm2 0,08 ... 2,5 mm2
Abisolierlänge 8 ... 9 mm 9 ... 10 mm
High-Density-Klemmen ELx8xx, KLx8xx (HD)
Bei den HD-Klemmen erfolgt der Leiteranschluss bei massiven Leitern werkzeuglos, in Direktstecktechnik, d.h. der Leiter wird nach dem Abisolieren einfach in die Kontaktstelle gesteckt. Das Lösen der Leitungenerfolgt, wie bei den Standardklemmen, über die Kontakt-Entriegelung mit Hilfe eines Schraubendrehers. Denzulässigen Leiterquerschnitt entnehmen Sie der nachfolgenden Tabelle.
Klemmengehäuse HD-GehäuseLeitungsquerschnitt (Aderleitung mit Aderendhülse) 0,14 ... 0,75 mm2
Leitungsquerschnitt (massiv) 0,08 ... 1,5 mm2
Leitungsquerschnitt (feindrähtig) 0,25 ... 1,5 mm2
Leitungsquerschnitt (ultraschall-litzenverdichtet) nur 1,5 mm2 (siehe Hinweis [} 29]!)Abisolierlänge 8 ... 9 mm
Montage und Verdrahtung
EK1110, EK1110-0008 31Version: 2.3
Schirmung
SchirmungAnaloge Sensoren und Aktoren sollten immer mit geschirmten, paarig verdrillten Leitungen ange-schlossen werden.
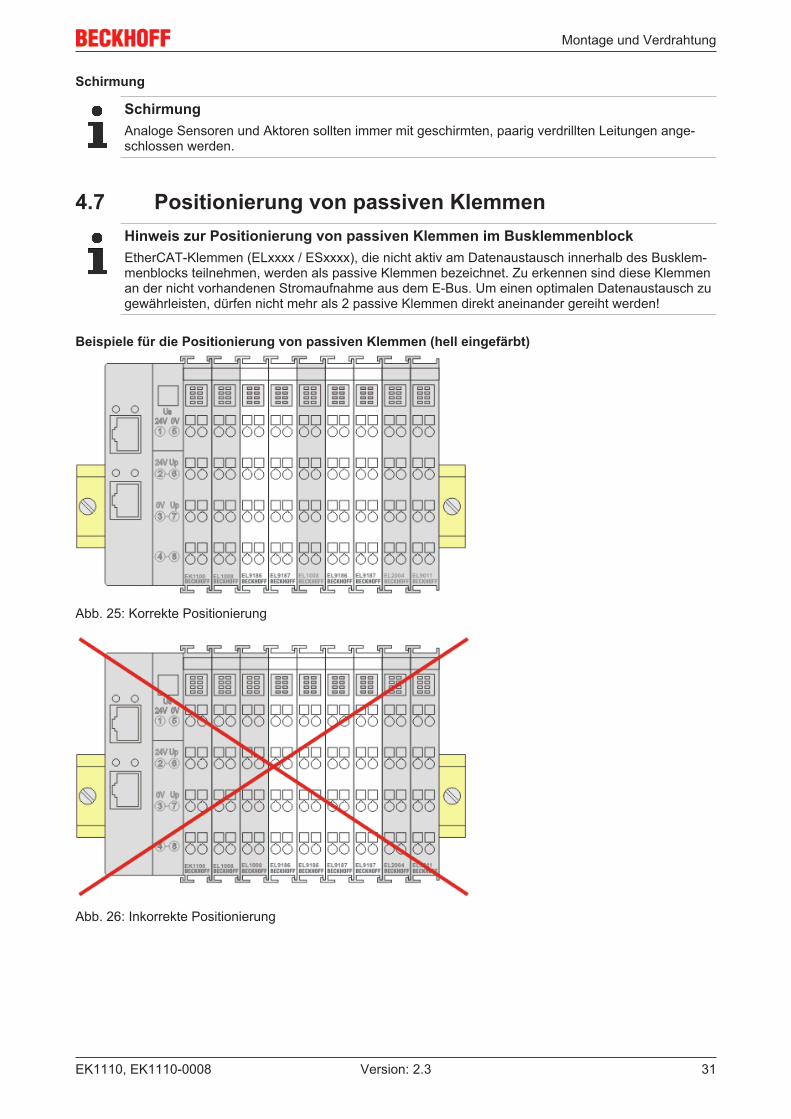
4.7 Positionierung von passiven KlemmenHinweis zur Positionierung von passiven Klemmen im BusklemmenblockEtherCAT-Klemmen (ELxxxx / ESxxxx), die nicht aktiv am Datenaustausch innerhalb des Busklem-menblocks teilnehmen, werden als passive Klemmen bezeichnet. Zu erkennen sind diese Klemmenan der nicht vorhandenen Stromaufnahme aus dem E-Bus. Um einen optimalen Datenaustausch zugewährleisten, dürfen nicht mehr als 2 passive Klemmen direkt aneinander gereiht werden!
Beispiele für die Positionierung von passiven Klemmen (hell eingefärbt)
Abb. 25: Korrekte Positionierung
Abb. 26: Inkorrekte Positionierung
Montage und Verdrahtung
EK1110, EK1110-000832 Version: 2.3
4.8 ATEX - Besondere Bedingungen(Standardtemperaturbereich)
WARNUNGBeachten Sie die besonderen Bedingungen für die bestimmungsgemäße Verwendung vonBeckhoff-Feldbuskomponenten mit Standardtemperaturbereich in explosionsgefährdetenBereichen (Richtlinie 94/9/EG)!• Die zertifizierten Komponenten sind in ein geeignetes Gehäuse zu errichten, das eine Schutzart von
mindestens IP54 gemäß EN 60529 gewährleistet! Dabei sind die Umgebungsbedingungen bei der Ver-wendung zu berücksichtigen!
• Wenn die Temperaturen bei Nennbetrieb an den Einführungsstellen der Kabel, Leitungen oder Rohrlei-tungen höher als 70°C oder an den Aderverzweigungsstellen höher als 80°C ist, so müssen Kabel aus-gewählt werden, deren Temperaturdaten den tatsächlich gemessenen Temperaturwerten entsprechen!
• Beachten für Beckhoff-Feldbuskomponenten mit Standardtemperaturbereich beim Einsatz in explosions-gefährdeten Bereichen den zulässigen Umgebungstemperaturbereich von 0 bis 55°C!
• Es müssen Maßnahmen zum Schutz gegen Überschreitung der Nennbetriebsspannung durch kurzzeiti-ge Störspannungen um mehr als 40% getroffen werden!
• Die einzelnen Klemmen dürfen nur aus dem Busklemmensystem gezogen oder entfernt werden, wenndie Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen At-mosphäre!
• Die Anschlüsse der zertifizierten Komponenten dürfen nur verbunden oder unterbrochen werden, wenndie Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen At-mosphäre!
• Die Sicherung der Einspeiseklemmen KL92xx/EL92xx dürfen nur gewechselt werden, wenn die Versor-gungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
• Adresswahlschalter und ID-Switche dürfen nur eingestellt werden, wenn die Versorgungsspannung ab-geschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
Normen
Die grundlegenden Sicherheits- und Gesundheitsanforderungen werden durch Übereinstimmung mit denfolgenden Normen erfüllt:
• EN 60079-0:2012+A11:2013• EN 60079-15:2010
Kennzeichnung
Die für den explosionsgefährdeten Bereich zertifizierten Beckhoff-Feldbuskomponenten mitStandardtemperaturbereich tragen eine der folgenden Kennzeichnungen:
II 3G KEMA 10ATEX0075 X Ex nA IIC T4 Gc Ta: 0 … 55°C
oder
II 3G KEMA 10ATEX0075 X Ex nC IIC T4 Gc Ta: 0 … 55°C
Montage und Verdrahtung
EK1110, EK1110-0008 33Version: 2.3
4.9 ATEX - Besondere Bedingungen (erweiterterTemperaturbereich)
WARNUNGBeachten Sie die besonderen Bedingungen für die bestimmungsgemäße Verwendung vonBeckhoff-Feldbuskomponenten mit erweitertem Temperaturbereich (ET) in explosionsge-fährdeten Bereichen (Richtlinie 94/9/EG)!• Die zertifizierten Komponenten sind in ein geeignetes Gehäuse zu errichten, das eine Schutzart von
mindestens IP54 gemäß EN 60529 gewährleistet! Dabei sind die Umgebungsbedingungen bei der Ver-wendung zu berücksichtigen!
• Wenn die Temperaturen bei Nennbetrieb an den Einführungsstellen der Kabel, Leitungen oder Rohrlei-tungen höher als 70°C oder an den Aderverzweigungsstellen höher als 80°C ist, so müssen Kabel aus-gewählt werden, deren Temperaturdaten den tatsächlich gemessenen Temperaturwerten entsprechen!
• Beachten Sie für Beckhoff-Feldbuskomponenten mit erweitertem Temperaturbereich (ET) beim Einsatzin explosionsgefährdeten Bereichen den zulässigen Umgebungstemperaturbereich von -25 bis 60°C!
• Es müssen Maßnahmen zum Schutz gegen Überschreitung der Nennbetriebsspannung durch kurzzeiti-ge Störspannungen um mehr als 40% getroffen werden!
• Die einzelnen Klemmen dürfen nur aus dem Busklemmensystem gezogen oder entfernt werden, wenndie Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen At-mosphäre!
• Die Anschlüsse der zertifizierten Komponenten dürfen nur verbunden oder unterbrochen werden, wenndie Versorgungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen At-mosphäre!
• Die Sicherung der Einspeiseklemmen KL92xx/EL92xx dürfen nur gewechselt werden, wenn die Versor-gungsspannung abgeschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
• Adresswahlschalter und ID-Switche dürfen nur eingestellt werden, wenn die Versorgungsspannung ab-geschaltet wurde bzw. bei Sicherstellung einer nicht-explosionsfähigen Atmosphäre!
Normen
Die grundlegenden Sicherheits- und Gesundheitsanforderungen werden durch Übereinstimmung mit denfolgenden Normen erfüllt:
• EN 60079-0:2012+A11:2013• EN 60079-15:2010
Kennzeichnung
Die für den explosionsgefährdeten Bereich zertifizierten Beckhoff-Feldbuskomponenten mit erweitertemTemperaturbereich (ET) tragen die folgende Kennzeichnung:
II 3G KEMA 10ATEX0075 X Ex nA IIC T4 Gc Ta: -25 … 60°C
oder
II 3G KEMA 10ATEX0075 X Ex nC IIC T4 Gc Ta: -25 … 60°C
Montage und Verdrahtung
EK1110, EK1110-000834 Version: 2.3
4.10 ATEX-DokumentationHinweise zum Einsatz der Beckhoff Klemmensysteme in explosionsgefährdeten Be-reichen (ATEX)Beachten Sie auch die weiterführende Dokumentation
Hinweise zum Einsatz der Beckhoff Klemmensysteme in explosionsgefährdeten Bereichen (ATEX)
die Ihnen auf der Beckhoff-Homepage http://www.beckhoff.de im Bereich Download zur Verfügungsteht!
4.11 UL-HinweiseApplicationThe modules are intended for use with Beckhoff’s UL Listed EtherCAT System only.
ExaminationFor cULus examination, the Beckhoff I/O System has only been investigated for risk of fireand electrical shock (in accordance with UL508 and CSA C22.2 No. 142).
For devices with Ethernet connectorsNot for connection to telecommunication circuits.
Grundlagen
Im Beckhoff EtherCAT Produktbereich sind je nach Komponente zwei UL-Zertifikate anzutreffen:
1. UL-Zertifikation nach UL508. Solcherart zertifizierte Geräte sind gekennzeichnet durch das Zeichen:
2. UL-Zertifikation nach UL508 mit eingeschränkter Leistungsaufnahme. Die Stromaufnahme durch dasGerät wird begrenzt auf eine max. mögliche Stromaufnahme von 4 A. Solcherart zertifizierte Gerätesind gekennzeichnet durch das Zeichen:
Annähernd alle aktuellen EtherCAT Produkte (Stand 2010/05) sind uneingeschränkt UL zertifiziert.
Anwendung
Werden eingeschränkt zertifizierte Klemmen verwendet, ist die Stromaufnahme bei 24 VDC entsprechend zubeschränken durch Versorgung
• von einer isolierten, mit einer Sicherung (entsprechend UL248) von maximal 4 A geschützten Quelle,oder

Montage und Verdrahtung
EK1110, EK1110-0008 35Version: 2.3
• von einer Spannungsquelle die NEC class 2 entspricht.Eine Spannungsquelle entsprechend NEC class 2 darf nicht seriell oder parallel mit einer anderenNEC class 2 entsprechenden Spannungsquelle verbunden werden!
Diese Anforderungen gelten für die Versorgung aller EtherCAT Buskoppler, Netzteilklemmen, Busklemmenund deren Power-Kontakte.
Inbetriebnahme
EK1110, EK1110-000836 Version: 2.3
5 Inbetriebnahme
5.1 EK1110/ EK1110-0008 - Konfiguration mit demTwinCAT System Manager
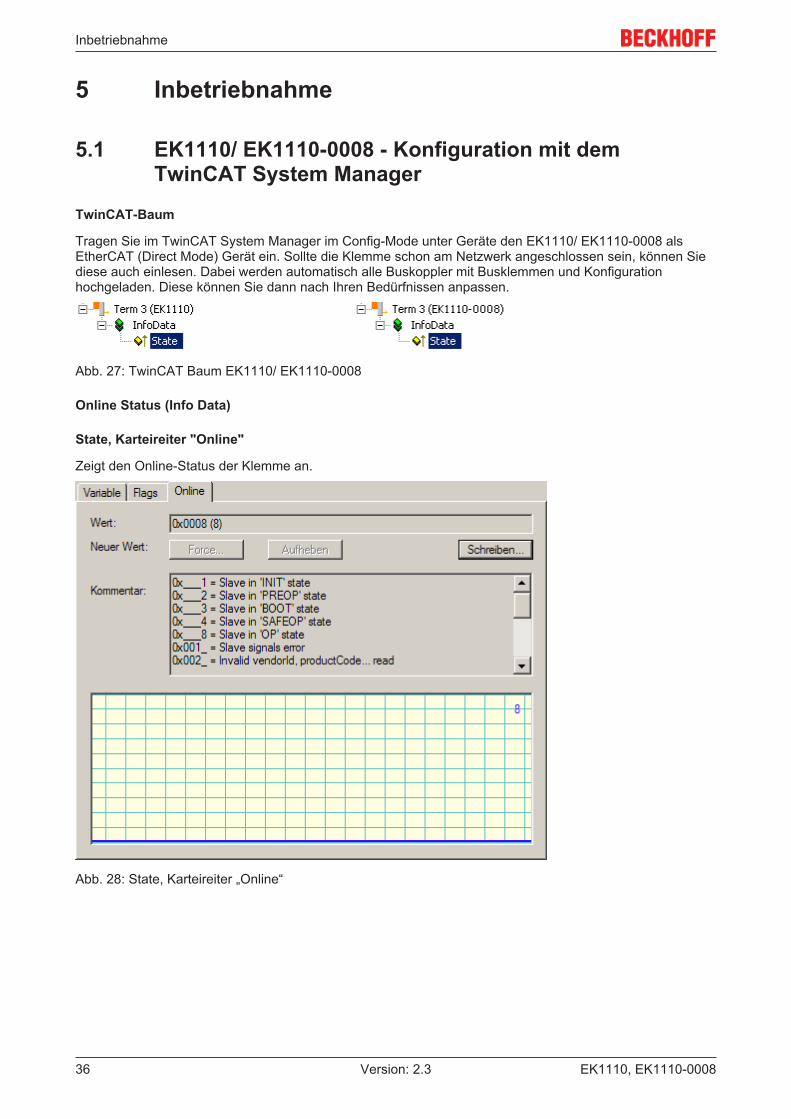
TwinCAT-Baum
Tragen Sie im TwinCAT System Manager im Config-Mode unter Geräte den EK1110/ EK1110-0008 alsEtherCAT (Direct Mode) Gerät ein. Sollte die Klemme schon am Netzwerk angeschlossen sein, können Siediese auch einlesen. Dabei werden automatisch alle Buskoppler mit Busklemmen und Konfigurationhochgeladen. Diese können Sie dann nach Ihren Bedürfnissen anpassen.
Abb. 27: TwinCAT Baum EK1110/ EK1110-0008
Online Status (Info Data)
State, Karteireiter "Online"
Zeigt den Online-Status der Klemme an.
Abb. 28: State, Karteireiter „Online“
Inbetriebnahme
EK1110, EK1110-0008 37Version: 2.3
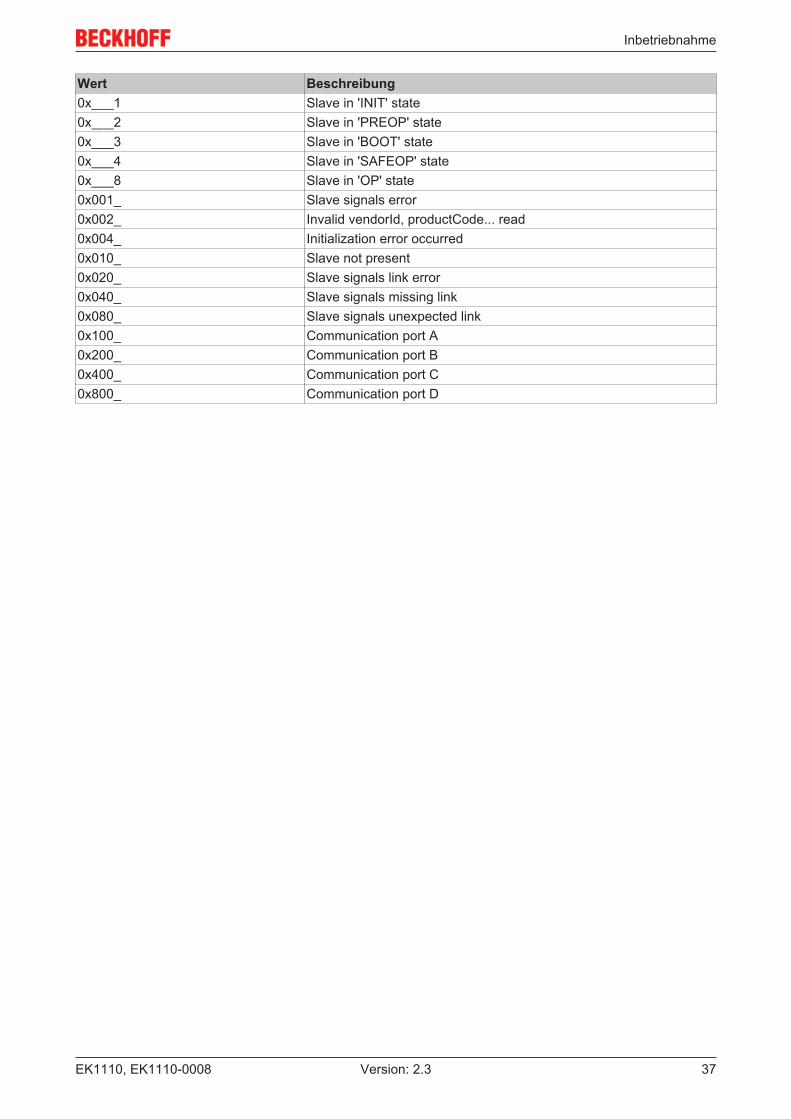
Wert Beschreibung0x___1 Slave in 'INIT' state0x___2 Slave in 'PREOP' state0x___3 Slave in 'BOOT' state0x___4 Slave in 'SAFEOP' state0x___8 Slave in 'OP' state0x001_ Slave signals error0x002_ Invalid vendorId, productCode... read0x004_ Initialization error occurred0x010_ Slave not present0x020_ Slave signals link error0x040_ Slave signals missing link0x080_ Slave signals unexpected link0x100_ Communication port A0x200_ Communication port B0x400_ Communication port C0x800_ Communication port D
Fehlerbehandlung und Diagnose
EK1110, EK1110-000838 Version: 2.3
6 Fehlerbehandlung und Diagnose
6.1 Diagnose-LED
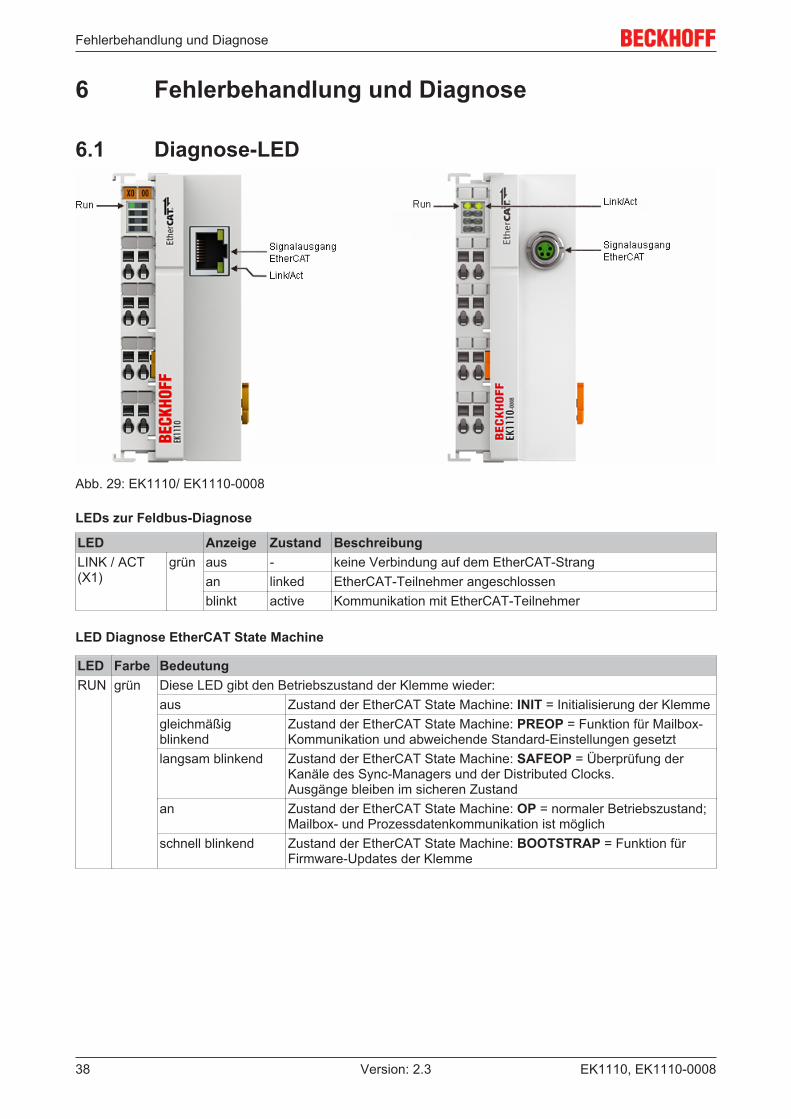
Abb. 29: EK1110/ EK1110-0008
LEDs zur Feldbus-Diagnose
LED Anzeige Zustand BeschreibungLINK / ACT(X1)
grün aus - keine Verbindung auf dem EtherCAT-Strangan linked EtherCAT-Teilnehmer angeschlossenblinkt active Kommunikation mit EtherCAT-Teilnehmer
LED Diagnose EtherCAT State Machine
LED Farbe BedeutungRUN grün Diese LED gibt den Betriebszustand der Klemme wieder:
aus Zustand der EtherCAT State Machine: INIT = Initialisierung der Klemmegleichmäßigblinkend
Zustand der EtherCAT State Machine: PREOP = Funktion für Mailbox-Kommunikation und abweichende Standard-Einstellungen gesetzt
langsam blinkend Zustand der EtherCAT State Machine: SAFEOP = Überprüfung derKanäle des Sync-Managers und der Distributed Clocks.Ausgänge bleiben im sicheren Zustand
an Zustand der EtherCAT State Machine: OP = normaler Betriebszustand;Mailbox- und Prozessdatenkommunikation ist möglich
schnell blinkend Zustand der EtherCAT State Machine: BOOTSTRAP = Funktion fürFirmware-Updates der Klemme
Anhang
EK1110, EK1110-0008 39Version: 2.3
7 Anhang
7.1 EtherCAT AL Status CodesDetaillierte Informationen hierzu entnehmen Sie bitte der vollständigen EtherCAT-Systembeschreibung.
7.2 Firmware KompatibilitätDer EK1110 verfügt über keine Firmware.
7.3 Firmware Update EL/ES/EM/EPxxxxIn diesem Kapitel wird das Geräteupdate für Beckhoff EtherCAT Slaves der Serien EL/ES, EM, EK und EPbeschrieben. Ein FW-Update sollte nur nach Rücksprache mit dem Beckhoff Support durchgeführt werden.
Speicherorte
In einem EtherCAT-Slave werden an bis zu 3 Orten Daten für den Betrieb vorgehalten:
• Je nach Funktionsumfang und Performance besitzen EtherCAT Slaves einen oder mehrere lokaleController zur Verarbeitung von IO-Daten. Das darauf laufende Programm ist die sog. Firmware imFormat *.efw.
• In bestimmten EtherCAT Slaves kann auch die EtherCAT Kommunikation in diesen Controller integriertsein. Dann ist der Controller meist ein so genannter FPGA-Chip mit der *.rbf-Firmware.
• Darüber hinaus besitzt jeder EtherCAT Slave einen Speicherchip, um seine eigeneGerätebeschreibung (ESI; EtherCAT Slave Information) zu speichern, in einem sog. ESI-EEPROM.Beim Einschalten wird diese Beschreibung geladen und u.a. die EtherCAT Kommunikationentsprechend eingerichtet. Die Gerätebeschreibung kann von der Beckhoff Website (http://www.beckhoff.de) im Downloadbereich heruntergeladen werden. Dort sind alle ESI-Dateien als Zip-Datei zugänglich.
Kundenseitig zugänglich sind diese Daten nur über den Feldbus EtherCAT und seineKommunikationsmechanismen. Beim Update oder Auslesen dieser Daten ist insbesondere die azyklischeMailbox-Kommunikation oder der Registerzugriff auf den ESC in Benutzung.
Der TwinCAT Systemmanager bietet Mechanismen, um alle 3 Teile mit neuen Daten programmieren zukönnen, wenn der Slave dafür vorgesehen ist. Es findet üblicherweise keine Kontrolle durch den Slave statt,ob die neuen Daten für ihn geeignet sind, ggf. ist ein Weiterbetrieb nicht mehr möglich.
Vereinfachtes Update per Bundle-Firmware
Bequemer ist der Update per sog. Bundle-Firmware: hier sind die Controller-Firmware und die ESI-Beschreibung in einer *.efw-Datei zusammengefasst, beim Update wird in der Klemme sowohl die Firmware,als auch die ESI verändert. Dazu ist erforderlich
• dass die Firmware in dem gepackten Format vorliegt: erkenntlich an dem Dateinamen der auch dieRevisionsnummer enthält, z.B. ELxxxx-xxxx_REV0016_SW01.efw
• dass im Download-Dialog das Passwort=1 angegeben wird. Bei Passwort=0 (default Einstellung) wirdnur das Firmware-Update durchgeführt, ohne ESI-Update.
• dass das Gerät diese Funktion unterstützt. Die Funktion kann in der Regel nicht nachgerüstet werden,sie wird Bestandteil vieler Neuentwicklungen ab Baujahr 2016.
Nach dem Update sollte eine Erfolgskontrolle durchgeführt werden
• ESI/Revision: z.B. durch einen Online-Scan im TwinCAT ConfigMode/FreeRun – dadurch wird dieRevision bequem ermittelt
• Firmware: z.B. durch einen Blick ins Online-CoE des Gerätes
Anhang
EK1110, EK1110-000840 Version: 2.3
HINWEISBeschädigung des Gerätes möglich!Beim Herunterladen von neuen Gerätedateien ist zu beachten
• Das Herunterladen der Firmware auf ein EtherCAT-Gerät darf nicht unterbrochen werden• Eine einwandfreie EtherCAT-Kommunikation muss sichergestellt sein, CRC-Fehler oder LostFrames dür-fen nicht auftreten.• Die Spannungsversorgung muss ausreichend dimensioniert, die Pegel entsprechend der Vorgabe sein
Bei Störungen während des Updatevorgangs kann das EtherCAT-Gerät ggf. nur vom Hersteller wieder inBetrieb genommen werden!
7.3.1 Gerätebeschreibung ESI-File/XMLHINWEIS
ACHTUNG bei Update der ESI-Beschreibung/EEPROMManche Slaves haben Abgleich- und Konfigurationsdaten aus der Produktion im EEPROM abgelegt. Diesewerden bei einem Update unwiederbringlich überschrieben.
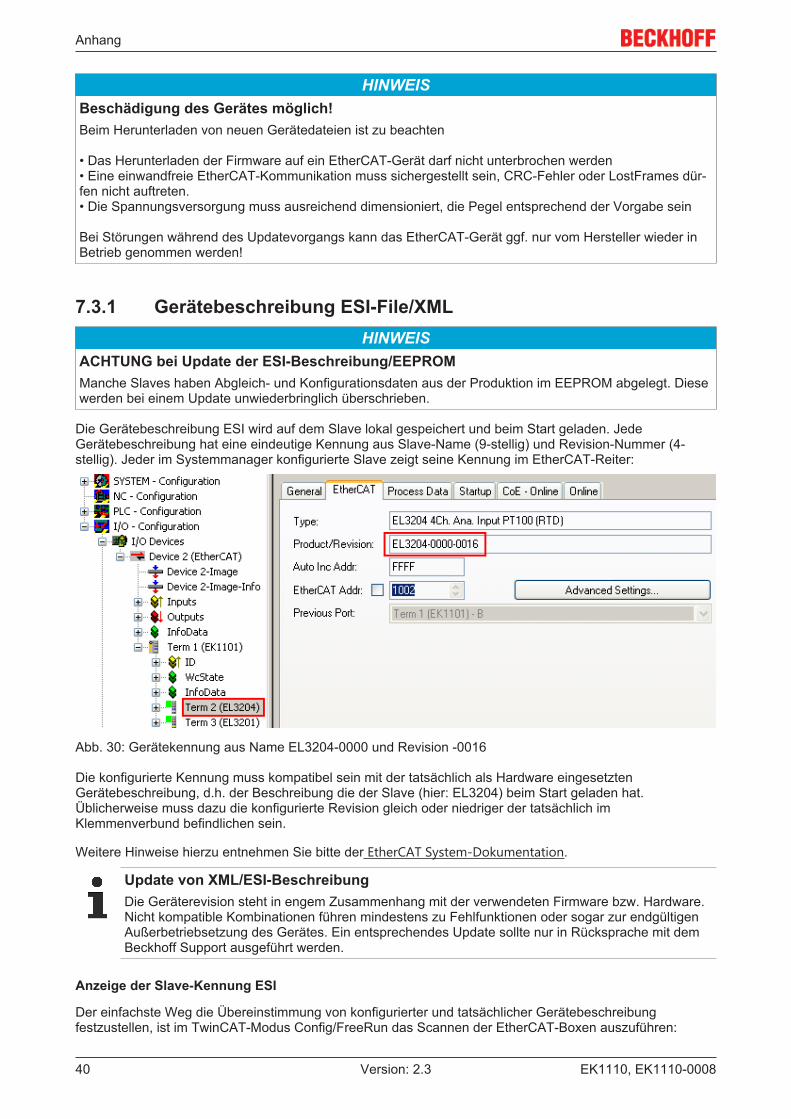
Die Gerätebeschreibung ESI wird auf dem Slave lokal gespeichert und beim Start geladen. JedeGerätebeschreibung hat eine eindeutige Kennung aus Slave-Name (9-stellig) und Revision-Nummer (4-stellig). Jeder im Systemmanager konfigurierte Slave zeigt seine Kennung im EtherCAT-Reiter:
Abb. 30: Gerätekennung aus Name EL3204-0000 und Revision -0016
Die konfigurierte Kennung muss kompatibel sein mit der tatsächlich als Hardware eingesetztenGerätebeschreibung, d.h. der Beschreibung die der Slave (hier: EL3204) beim Start geladen hat.Üblicherweise muss dazu die konfigurierte Revision gleich oder niedriger der tatsächlich imKlemmenverbund befindlichen sein.
Weitere Hinweise hierzu entnehmen Sie bitte der EtherCAT System-Dokumentation.
Update von XML/ESI-BeschreibungDie Geräterevision steht in engem Zusammenhang mit der verwendeten Firmware bzw. Hardware.Nicht kompatible Kombinationen führen mindestens zu Fehlfunktionen oder sogar zur endgültigenAußerbetriebsetzung des Gerätes. Ein entsprechendes Update sollte nur in Rücksprache mit demBeckhoff Support ausgeführt werden.
Anzeige der Slave-Kennung ESI
Der einfachste Weg die Übereinstimmung von konfigurierter und tatsächlicher Gerätebeschreibungfestzustellen, ist im TwinCAT-Modus Config/FreeRun das Scannen der EtherCAT-Boxen auszuführen:
Anhang
EK1110, EK1110-0008 41Version: 2.3
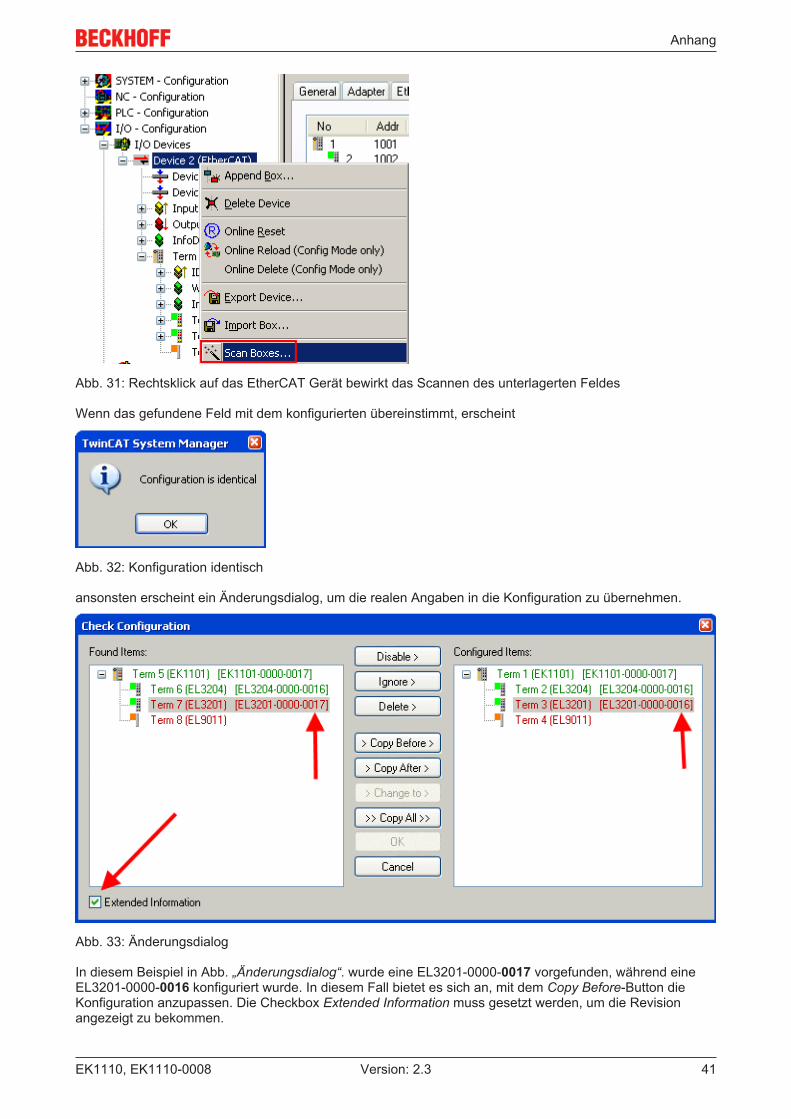
Abb. 31: Rechtsklick auf das EtherCAT Gerät bewirkt das Scannen des unterlagerten Feldes
Wenn das gefundene Feld mit dem konfigurierten übereinstimmt, erscheint
Abb. 32: Konfiguration identisch
ansonsten erscheint ein Änderungsdialog, um die realen Angaben in die Konfiguration zu übernehmen.
Abb. 33: Änderungsdialog
In diesem Beispiel in Abb. „Änderungsdialog“. wurde eine EL3201-0000-0017 vorgefunden, während eineEL3201-0000-0016 konfiguriert wurde. In diesem Fall bietet es sich an, mit dem Copy Before-Button dieKonfiguration anzupassen. Die Checkbox Extended Information muss gesetzt werden, um die Revisionangezeigt zu bekommen.
Anhang
EK1110, EK1110-000842 Version: 2.3
Änderung der Slave-Kennung ESI
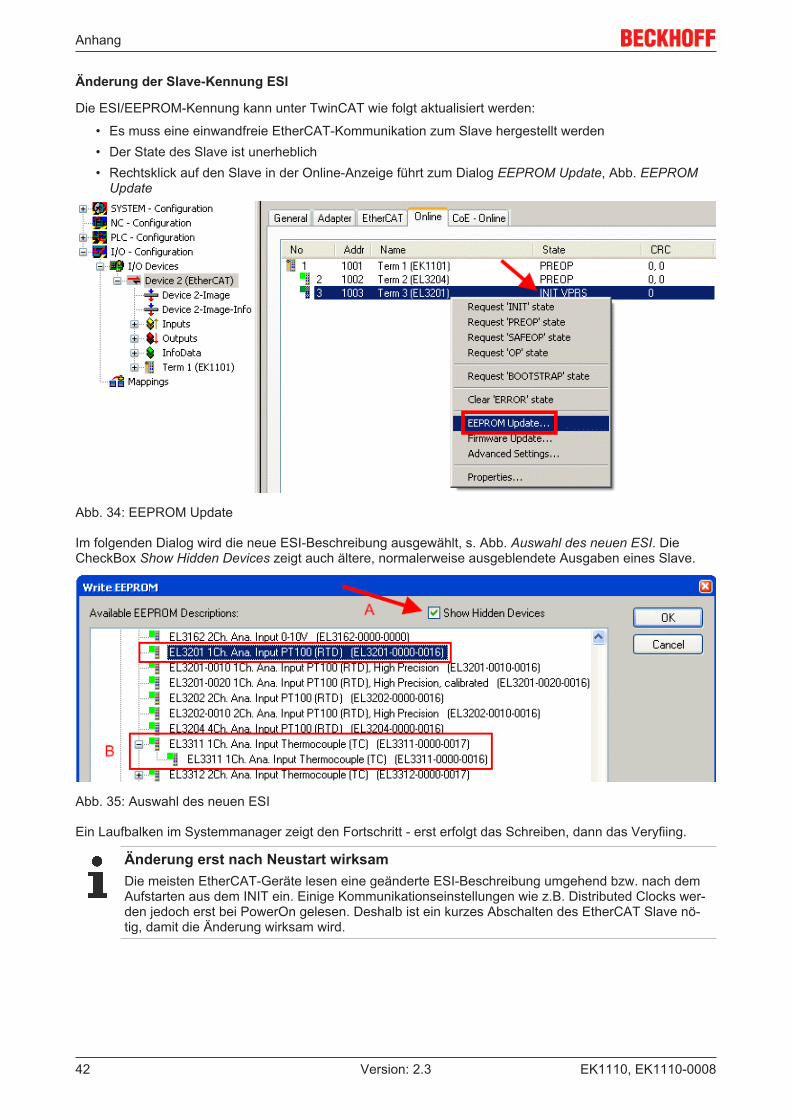
Die ESI/EEPROM-Kennung kann unter TwinCAT wie folgt aktualisiert werden:
• Es muss eine einwandfreie EtherCAT-Kommunikation zum Slave hergestellt werden• Der State des Slave ist unerheblich• Rechtsklick auf den Slave in der Online-Anzeige führt zum Dialog EEPROM Update, Abb. EEPROM
Update
Abb. 34: EEPROM Update
Im folgenden Dialog wird die neue ESI-Beschreibung ausgewählt, s. Abb. Auswahl des neuen ESI. DieCheckBox Show Hidden Devices zeigt auch ältere, normalerweise ausgeblendete Ausgaben eines Slave.
Abb. 35: Auswahl des neuen ESI
Ein Laufbalken im Systemmanager zeigt den Fortschritt - erst erfolgt das Schreiben, dann das Veryfiing.
Änderung erst nach Neustart wirksamDie meisten EtherCAT-Geräte lesen eine geänderte ESI-Beschreibung umgehend bzw. nach demAufstarten aus dem INIT ein. Einige Kommunikationseinstellungen wie z.B. Distributed Clocks wer-den jedoch erst bei PowerOn gelesen. Deshalb ist ein kurzes Abschalten des EtherCAT Slave nö-tig, damit die Änderung wirksam wird.
Anhang
EK1110, EK1110-0008 43Version: 2.3
7.3.2 Erläuterungen zur Firmware
Versionsbestimmung der Firmware
Versionsbestimmung nach Laseraufdruck
Auf einem Beckhoff EtherCAT Slave ist eine Seriennummer aufgelasert. Der Aufbau der Seriennummerlautet: KK YY FF HH
KK - Produktionswoche (Kalenderwoche)YY - ProduktionsjahrFF - Firmware-StandHH - Hardware-Stand
Beispiel mit Ser. Nr.: 12 10 03 02:
12 - Produktionswoche 1210 - Produktionsjahr 201003 - Firmware-Stand 0302 - Hardware-Stand 02
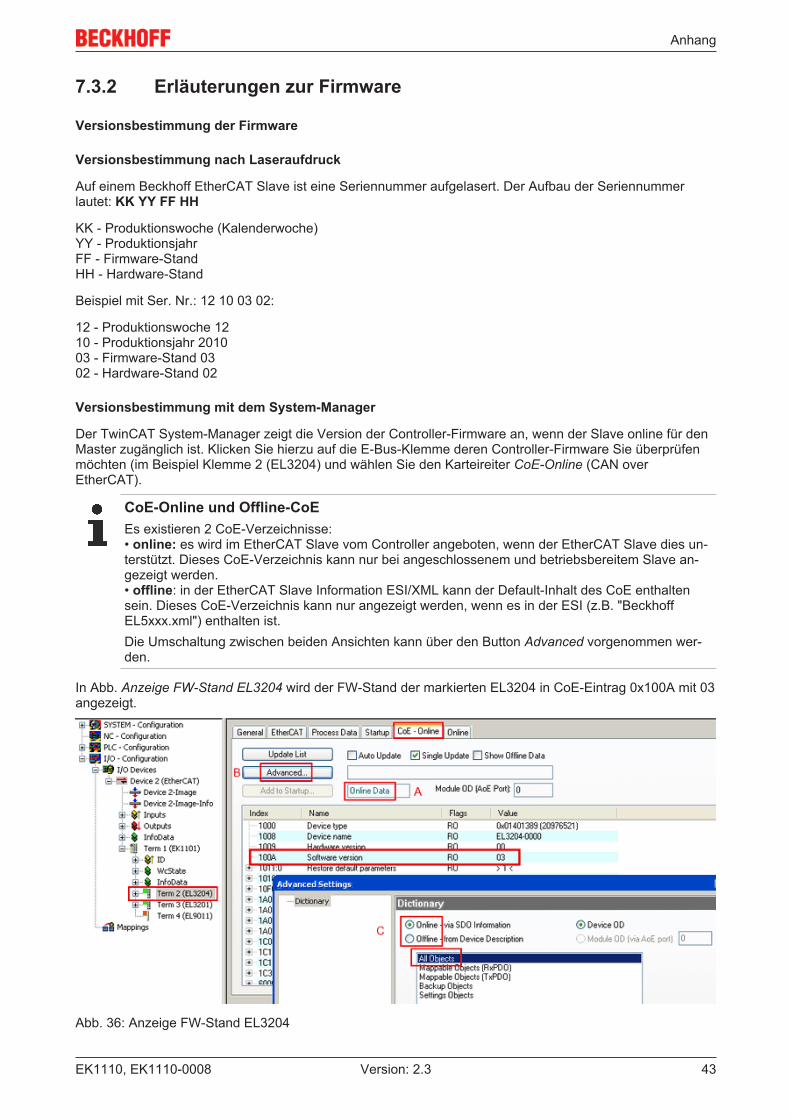
Versionsbestimmung mit dem System-Manager
Der TwinCAT System-Manager zeigt die Version der Controller-Firmware an, wenn der Slave online für denMaster zugänglich ist. Klicken Sie hierzu auf die E-Bus-Klemme deren Controller-Firmware Sie überprüfenmöchten (im Beispiel Klemme 2 (EL3204) und wählen Sie den Karteireiter CoE-Online (CAN overEtherCAT).
CoE-Online und Offline-CoEEs existieren 2 CoE-Verzeichnisse:• online: es wird im EtherCAT Slave vom Controller angeboten, wenn der EtherCAT Slave dies un-terstützt. Dieses CoE-Verzeichnis kann nur bei angeschlossenem und betriebsbereitem Slave an-gezeigt werden.• offline: in der EtherCAT Slave Information ESI/XML kann der Default-Inhalt des CoE enthaltensein. Dieses CoE-Verzeichnis kann nur angezeigt werden, wenn es in der ESI (z.B. "BeckhoffEL5xxx.xml") enthalten ist.Die Umschaltung zwischen beiden Ansichten kann über den Button Advanced vorgenommen wer-den.
In Abb. Anzeige FW-Stand EL3204 wird der FW-Stand der markierten EL3204 in CoE-Eintrag 0x100A mit 03angezeigt.
Abb. 36: Anzeige FW-Stand EL3204
Anhang
EK1110, EK1110-000844 Version: 2.3
TwinCAT 2.11 zeigt in (A) an, dass aktuell das Online-CoE-Verzeichnis angezeigt wird. Ist dies nicht der Fall,kann durch die erweiterten Einstellungen (B) durch Online und Doppelklick auf All Objects das Online-Verzeichnis geladen werden.
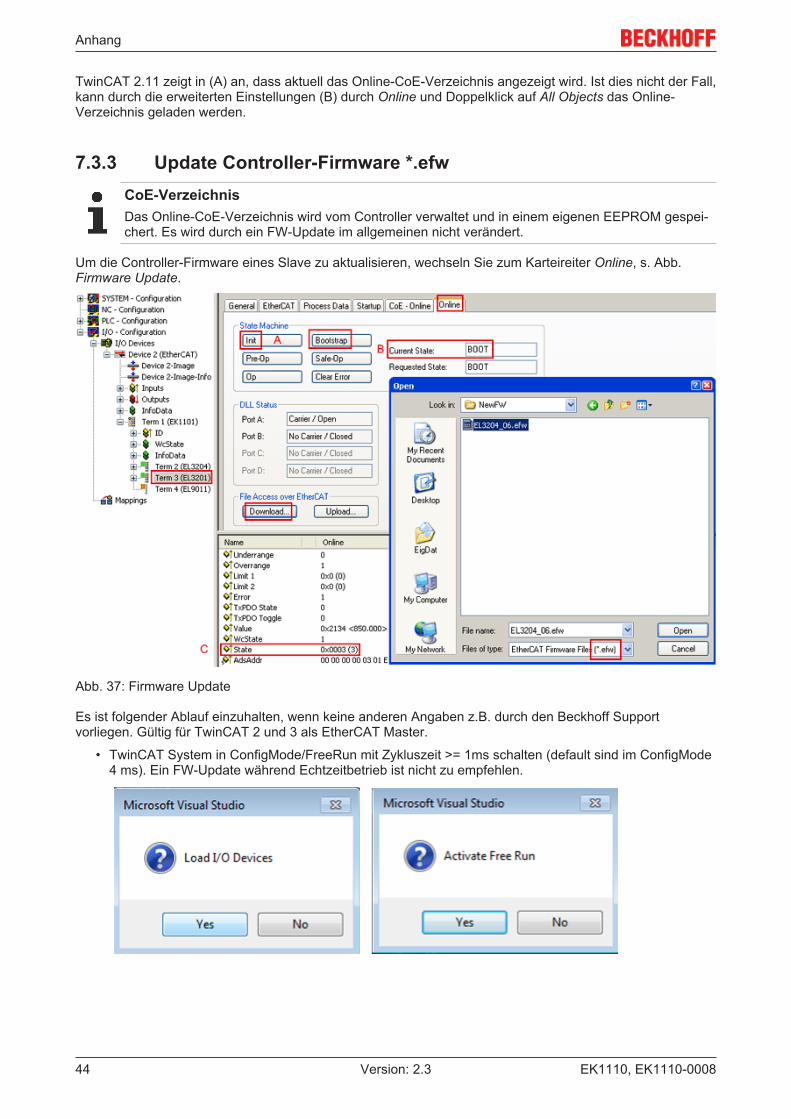
7.3.3 Update Controller-Firmware *.efwCoE-VerzeichnisDas Online-CoE-Verzeichnis wird vom Controller verwaltet und in einem eigenen EEPROM gespei-chert. Es wird durch ein FW-Update im allgemeinen nicht verändert.
Um die Controller-Firmware eines Slave zu aktualisieren, wechseln Sie zum Karteireiter Online, s. Abb.Firmware Update.
Abb. 37: Firmware Update
Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z.B. durch den Beckhoff Supportvorliegen. Gültig für TwinCAT 2 und 3 als EtherCAT Master.
• TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1ms schalten (default sind im ConfigMode4 ms). Ein FW-Update während Echtzeitbetrieb ist nicht zu empfehlen.
Anhang
EK1110, EK1110-0008 45Version: 2.3
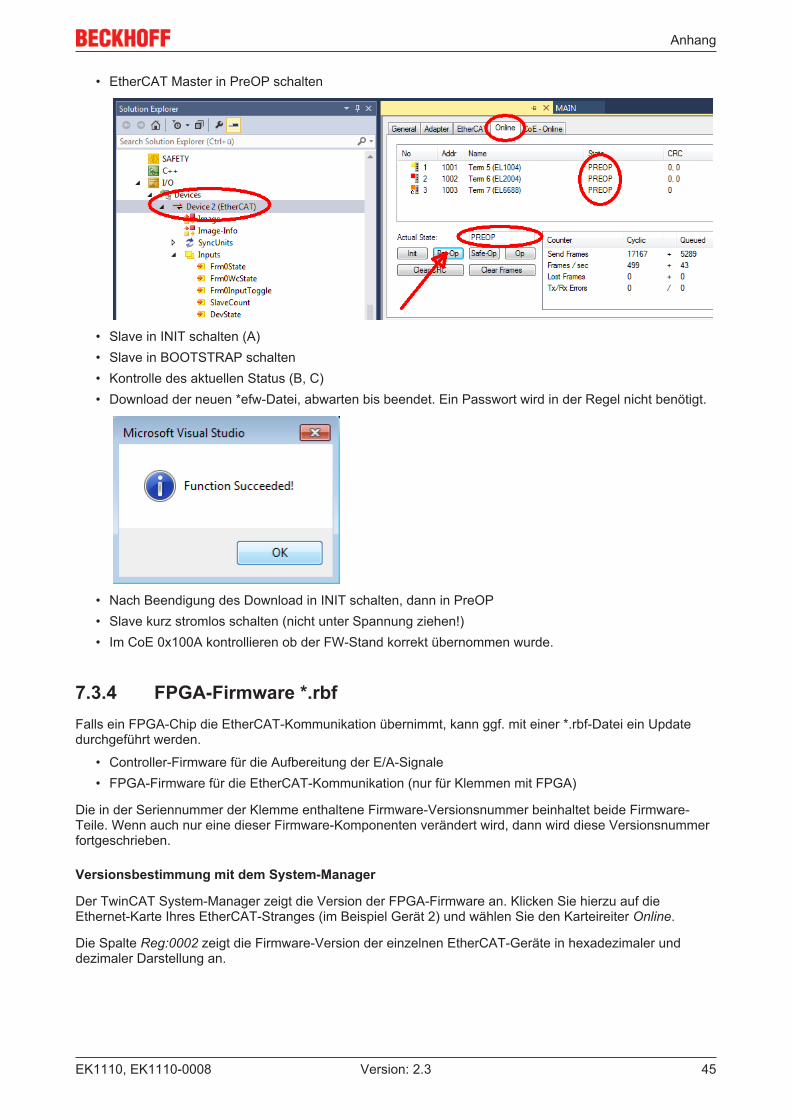
• EtherCAT Master in PreOP schalten
• Slave in INIT schalten (A)• Slave in BOOTSTRAP schalten• Kontrolle des aktuellen Status (B, C)• Download der neuen *efw-Datei, abwarten bis beendet. Ein Passwort wird in der Regel nicht benötigt.
• Nach Beendigung des Download in INIT schalten, dann in PreOP• Slave kurz stromlos schalten (nicht unter Spannung ziehen!)• Im CoE 0x100A kontrollieren ob der FW-Stand korrekt übernommen wurde.
7.3.4 FPGA-Firmware *.rbfFalls ein FPGA-Chip die EtherCAT-Kommunikation übernimmt, kann ggf. mit einer *.rbf-Datei ein Updatedurchgeführt werden.
• Controller-Firmware für die Aufbereitung der E/A-Signale• FPGA-Firmware für die EtherCAT-Kommunikation (nur für Klemmen mit FPGA)
Die in der Seriennummer der Klemme enthaltene Firmware-Versionsnummer beinhaltet beide Firmware-Teile. Wenn auch nur eine dieser Firmware-Komponenten verändert wird, dann wird diese Versionsnummerfortgeschrieben.
Versionsbestimmung mit dem System-Manager
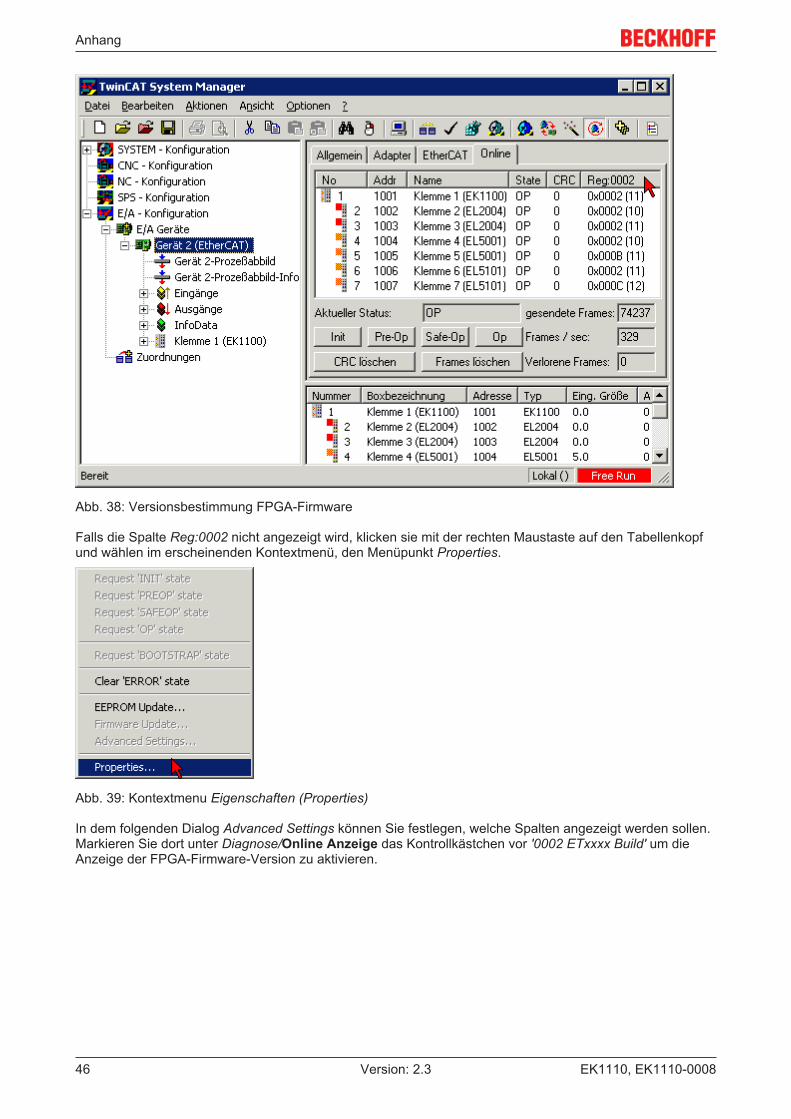
Der TwinCAT System-Manager zeigt die Version der FPGA-Firmware an. Klicken Sie hierzu auf dieEthernet-Karte Ihres EtherCAT-Stranges (im Beispiel Gerät 2) und wählen Sie den Karteireiter Online.
Die Spalte Reg:0002 zeigt die Firmware-Version der einzelnen EtherCAT-Geräte in hexadezimaler unddezimaler Darstellung an.
Anhang
EK1110, EK1110-000846 Version: 2.3
Abb. 38: Versionsbestimmung FPGA-Firmware
Falls die Spalte Reg:0002 nicht angezeigt wird, klicken sie mit der rechten Maustaste auf den Tabellenkopfund wählen im erscheinenden Kontextmenü, den Menüpunkt Properties.
Abb. 39: Kontextmenu Eigenschaften (Properties)
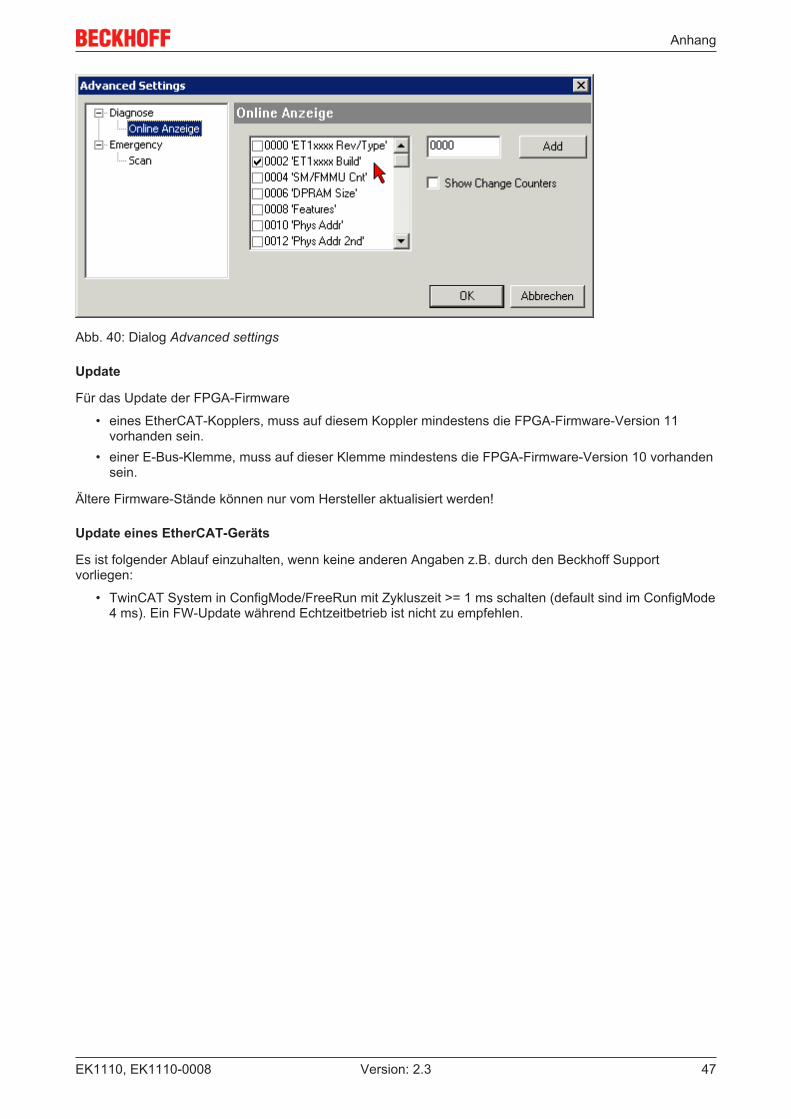
In dem folgenden Dialog Advanced Settings können Sie festlegen, welche Spalten angezeigt werden sollen.Markieren Sie dort unter Diagnose/Online Anzeige das Kontrollkästchen vor '0002 ETxxxx Build' um dieAnzeige der FPGA-Firmware-Version zu aktivieren.
Anhang
EK1110, EK1110-0008 47Version: 2.3
Abb. 40: Dialog Advanced settings
Update
Für das Update der FPGA-Firmware
• eines EtherCAT-Kopplers, muss auf diesem Koppler mindestens die FPGA-Firmware-Version 11vorhanden sein.
• einer E-Bus-Klemme, muss auf dieser Klemme mindestens die FPGA-Firmware-Version 10 vorhandensein.
Ältere Firmware-Stände können nur vom Hersteller aktualisiert werden!
Update eines EtherCAT-Geräts
Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z.B. durch den Beckhoff Supportvorliegen:
• TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1 ms schalten (default sind im ConfigMode4 ms). Ein FW-Update während Echtzeitbetrieb ist nicht zu empfehlen.
Anhang
EK1110, EK1110-000848 Version: 2.3
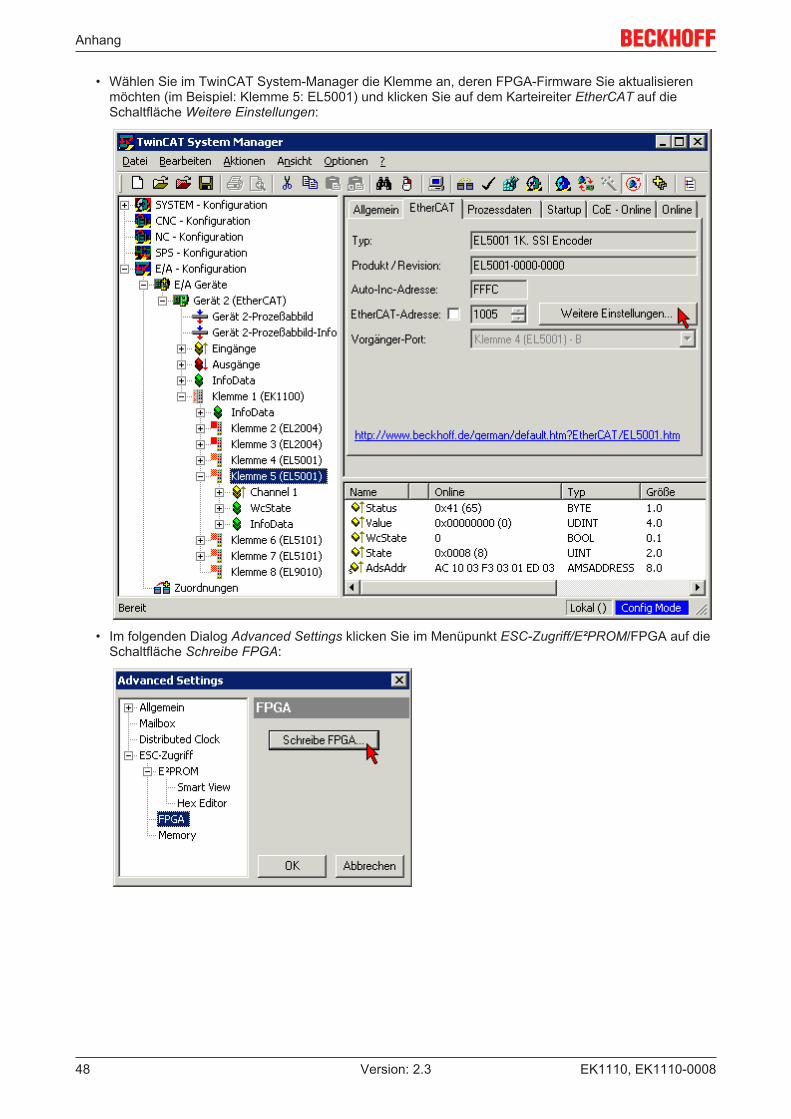
• Wählen Sie im TwinCAT System-Manager die Klemme an, deren FPGA-Firmware Sie aktualisierenmöchten (im Beispiel: Klemme 5: EL5001) und klicken Sie auf dem Karteireiter EtherCAT auf dieSchaltfläche Weitere Einstellungen:
• Im folgenden Dialog Advanced Settings klicken Sie im Menüpunkt ESC-Zugriff/E²PROM/FPGA auf dieSchaltfläche Schreibe FPGA:
Anhang
EK1110, EK1110-0008 49Version: 2.3
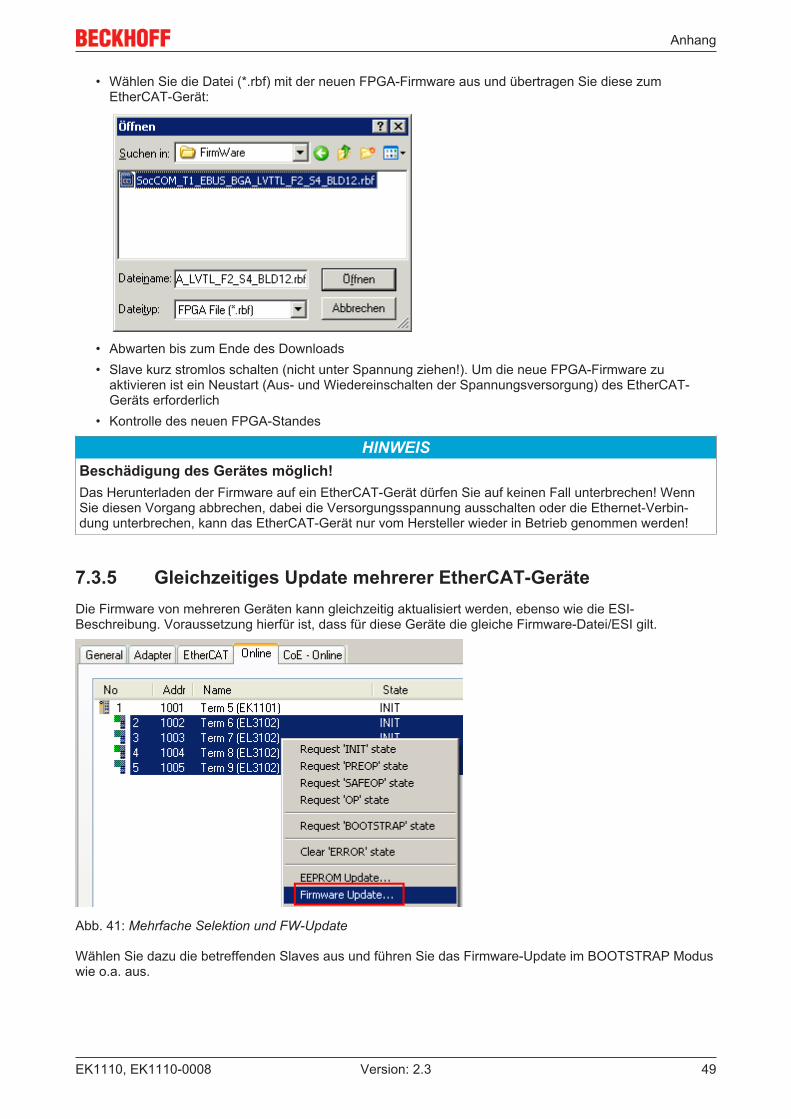
• Wählen Sie die Datei (*.rbf) mit der neuen FPGA-Firmware aus und übertragen Sie diese zumEtherCAT-Gerät:
• Abwarten bis zum Ende des Downloads• Slave kurz stromlos schalten (nicht unter Spannung ziehen!). Um die neue FPGA-Firmware zu
aktivieren ist ein Neustart (Aus- und Wiedereinschalten der Spannungsversorgung) des EtherCAT-Geräts erforderlich
• Kontrolle des neuen FPGA-Standes
HINWEISBeschädigung des Gerätes möglich!Das Herunterladen der Firmware auf ein EtherCAT-Gerät dürfen Sie auf keinen Fall unterbrechen! WennSie diesen Vorgang abbrechen, dabei die Versorgungsspannung ausschalten oder die Ethernet-Verbin-dung unterbrechen, kann das EtherCAT-Gerät nur vom Hersteller wieder in Betrieb genommen werden!
7.3.5 Gleichzeitiges Update mehrerer EtherCAT-GeräteDie Firmware von mehreren Geräten kann gleichzeitig aktualisiert werden, ebenso wie die ESI-Beschreibung. Voraussetzung hierfür ist, dass für diese Geräte die gleiche Firmware-Datei/ESI gilt.
Abb. 41: Mehrfache Selektion und FW-Update
Wählen Sie dazu die betreffenden Slaves aus und führen Sie das Firmware-Update im BOOTSTRAP Moduswie o.a. aus.
Anhang
EK1110, EK1110-000850 Version: 2.3
7.4 Support und ServiceBeckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eineschnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zurVerfügung stellt.
Beckhoff Support
Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatzeinzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:
• Support• Planung, Programmierung und Inbetriebnahme komplexer Automatisierungssysteme• umfangreiches Schulungsprogramm für Beckhoff Systemkomponenten
Hotline: +49(0)5246/963-157Fax: +49(0)5246/963-9157E-Mail: [email protected]
Beckhoff Service
Das Beckhoff Service-Center unterstützt Sie rund um den After-Sales-Service:
• Vor-Ort-Service• Reparaturservice• Ersatzteilservice• Hotline-Service
Hotline: +49(0)5246/963-460Fax: +49(0)5246/963-479E-Mail: [email protected]
Weitere Support- und Serviceadressen finden Sie auf unseren Internetseiten unter http://www.beckhoff.de.
Beckhoff Firmenzentrale
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 2033415 VerlDeutschland
Telefon: +49(0)5246/963-0Fax: +49(0)5246/963-198E-Mail: [email protected]
Die Adressen der weltweiten Beckhoff Niederlassungen und Vertretungen entnehmen Sie bitte unserenInternetseiten:http://www.beckhoff.de
Dort finden Sie auch weitere Dokumentationen zu Beckhoff Komponenten.
Abbildungsverzeichnis
EK1110, EK1110-0008 51Version: 2.3
AbbildungsverzeichnisAbb. 1 EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer und Revi-
sionskennzeichnung (seit 2014/01) ............................................................................................. 9Abb. 2 EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Seriennummer/ Chargennummer ...... 9Abb. 3 CU2016 Switch mit Seriennummer/ Chargennummer................................................................. 9Abb. 4 EL3202-0020 mit Seriennummer/ Chargennummer 26131006 und eindeutiger ID-Nummer
204418......................................................................................................................................... 10Abb. 5 EP1258-00001 IP67 EtherCAT Box mit Chargennummer/ DateCode 22090101 und eindeuti-
ger Seriennummer 158102 .......................................................................................................... 10Abb. 6 EP1908-0002 IP67 EtherCAT Safety Box mit Chargennummer/ DateCode 071201FF und ein-
deutiger Seriennummer 00346070 .............................................................................................. 10Abb. 7 EL2904 IP20 Safety Klemme mit Chargennummer/ DateCode 50110302 und eindeutiger Seri-
ennummer 00331701................................................................................................................... 10Abb. 8 ELM3604-0002 Klemme mit eindeutiger ID-Nummer (QR Code) 100001051 und Seriennum-
mer/ Chargennummer 44160201................................................................................................. 11Abb. 9 EK1110/ EK1110-0008 ................................................................................................................ 12Abb. 10 EtherCAT Telegramm Struktur ................................................................................................... 14Abb. 11 EtherCAT Topologie .................................................................................................................... 15Abb. 12 Systemmanager Stromberechnung ............................................................................................ 18Abb. 13 Zustände der EtherCAT State Machine ...................................................................................... 18Abb. 14 ZK1090-3131-0xxx ...................................................................................................................... 21Abb. 15 EtherCAT Box mit M8-Steckverbindern....................................................................................... 23Abb. 16 Montage auf Tragschiene ............................................................................................................ 23Abb. 17 Demontage von Tragschiene....................................................................................................... 24Abb. 18 Linksseitiger Powerkontakt .......................................................................................................... 25Abb. 19 Empfohlene Abstände bei Standard Einbaulage ........................................................................ 27Abb. 20 Weitere Einbaulagen .................................................................................................................. 28Abb. 21 Standardverdrahtung ................................................................................................................... 28Abb. 22 Steckbare Verdrahtung................................................................................................................ 29Abb. 23 High-Density-Klemmen................................................................................................................ 29Abb. 24 Befestigung einer Leitung an einem Klemmenanschluss ............................................................ 30Abb. 25 Korrekte Positionierung ............................................................................................................... 31Abb. 26 Inkorrekte Positionierung ............................................................................................................. 31Abb. 27 TwinCAT Baum EK1110/ EK1110-0008...................................................................................... 36Abb. 28 State, Karteireiter „Online“ ........................................................................................................... 36Abb. 29 EK1110/ EK1110-0008 ................................................................................................................ 38Abb. 30 Gerätekennung aus Name EL3204-0000 und Revision -0016 .................................................... 40Abb. 31 Rechtsklick auf das EtherCAT Gerät bewirkt das Scannen des unterlagerten Feldes................ 41Abb. 32 Konfiguration identisch ................................................................................................................ 41Abb. 33 Änderungsdialog.......................................................................................................................... 41Abb. 34 EEPROM Update......................................................................................................................... 42Abb. 35 Auswahl des neuen ESI............................................................................................................... 42Abb. 36 Anzeige FW-Stand EL3204 ......................................................................................................... 43Abb. 37 Firmware Update ......................................................................................................................... 44Abb. 38 Versionsbestimmung FPGA-Firmware ........................................................................................ 46Abb. 39 Kontextmenu Eigenschaften (Properties) .................................................................................... 46Abb. 40 Dialog Advanced settings ............................................................................................................ 47
Abbildungsverzeichnis
EK1110, EK1110-000852 Version: 2.3
Abb. 41 Mehrfache Selektion und FW-Update ......................................................................................... 49