Embed Size (px)
Citation preview
SIMOCRANE
Drive-Based Sway Control
Betriebsanleitung
gültig für:SIMOCRANE Drive-Based Sway Control, ab Version 1.0 SP1
11/2015
Vorwort
Grundlegende Sicherheitshinweise 1
Systembeschreibung 2
Hardware-Schnittstellen 3
Funktionsbeschreibung 4
Installation/Deinstallation 5
Inbetriebnahme 6
Parameter 7
Funktionsplan 8Ersatzteile, Zubehör und Wartung 9
Anhang A
Rechtliche HinweiseWarnhinweiskonzept
Dieses Handbuch enthält Hinweise, die Sie zu Ihrer persönlichen Sicherheit sowie zur Vermeidung von Sachschäden beachten müssen. Die Hinweise zu Ihrer persönlichen Sicherheit sind durch ein Warndreieck hervorgehoben, Hinweise zu alleinigen Sachschäden stehen ohne Warndreieck. Je nach Gefährdungsstufe werden die Warnhinweise in abnehmender Reihenfolge wie folgt dargestellt.
GEFAHRbedeutet, dass Tod oder schwere Körperverletzung eintreten wird, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
WARNUNGbedeutet, dass Tod oder schwere Körperverletzung eintreten kann, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
VORSICHTbedeutet, dass eine leichte Körperverletzung eintreten kann, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
ACHTUNGbedeutet, dass Sachschaden eintreten kann, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.Beim Auftreten mehrerer Gefährdungsstufen wird immer der Warnhinweis zur jeweils höchsten Stufe verwendet. Wenn in einem Warnhinweis mit dem Warndreieck vor Personenschäden gewarnt wird, dann kann im selben Warnhinweis zusätzlich eine Warnung vor Sachschäden angefügt sein.
Qualifiziertes PersonalDas zu dieser Dokumentation zugehörige Produkt/System darf nur von für die jeweilige Aufgabenstellung qualifiziertem Personal gehandhabt werden unter Beachtung der für die jeweilige Aufgabenstellung zugehörigen Dokumentation, insbesondere der darin enthaltenen Sicherheits- und Warnhinweise. Qualifiziertes Personal ist auf Grund seiner Ausbildung und Erfahrung befähigt, im Umgang mit diesen Produkten/Systemen Risiken zu erkennen und mögliche Gefährdungen zu vermeiden.
Bestimmungsgemäßer Gebrauch von Siemens-ProduktenBeachten Sie Folgendes:
WARNUNGSiemens-Produkte dürfen nur für die im Katalog und in der zugehörigen technischen Dokumentation vorgesehenen Einsatzfälle verwendet werden. Falls Fremdprodukte und -komponenten zum Einsatz kommen, müssen diese von Siemens empfohlen bzw. zugelassen sein. Der einwandfreie und sichere Betrieb der Produkte setzt sachgemäßen Transport, sachgemäße Lagerung, Aufstellung, Montage, Installation, Inbetriebnahme, Bedienung und Instandhaltung voraus. Die zulässigen Umgebungsbedingungen müssen eingehalten werden. Hinweise in den zugehörigen Dokumentationen müssen beachtet werden.
MarkenAlle mit dem Schutzrechtsvermerk ® gekennzeichneten Bezeichnungen sind eingetragene Marken der Siemens AG. Die übrigen Bezeichnungen in dieser Schrift können Marken sein, deren Benutzung durch Dritte für deren Zwecke die Rechte der Inhaber verletzen kann.
HaftungsausschlussWir haben den Inhalt der Druckschrift auf Übereinstimmung mit der beschriebenen Hard- und Software geprüft. Dennoch können Abweichungen nicht ausgeschlossen werden, so dass wir für die vollständige Übereinstimmung keine Gewähr übernehmen. Die Angaben in dieser Druckschrift werden regelmäßig überprüft, notwendige Korrekturen sind in den nachfolgenden Auflagen enthalten.
Siemens AGDivision Process Industries and DrivesPostfach 48 4890026 NÜRNBERGDEUTSCHLAND
Ⓟ 11/2015 Änderungen vorbehalten
Copyright © Siemens AG 2015.Alle Rechte vorbehalten
Vorwort
Das Dokument beschreibt das softwarebasierte Pendelregelungssystem SIMOCRANE Drive-Based Sway Control. Die Software ist Bestandteil des Pakets SIMOCRANE Advanced Technology für den Mid Range Markt.
ZielgruppeDas vorliegende Dokument wendet sich an Kunden, Inbetriebnahme-, Service- und Wartungspersonal.
NutzenDieses Handbuch vermittelt die für den Einsatz und die Inbetriebnahme benötigten Informationen, Vorgehensweisen und Bedienhandlungen.
Voraussetzung (Gültigkeitsbereich)Dieses Handbuch ist gültig für die Anwendung mit folgenden Produktversionen:
Hardware● SINAMICS S120 CU310-2 DP
● CompactFlash Speicherkarte mit Firmware V 4.7 HF11 CRANES
Software● STARTER ab V4.4 HF3
● SIMOCRANE Drive-Based Technology V1.0 SP1 HF2 (Optional)
Zusätzliche Informationen
Siemens Produkt-Support für SIMOCRANE Über die im Folgenden wiedergegebenen Adressen bekommen Sie Support für Ihre SIMOCRANE-Produkte:
● Internet:
– Ständig aktuelle Informationen zu den SIMOCRANE-Produkten, Produkt-Support, FAQs finden Sie im Internet hier (https://support.industry.siemens.com/cs/ww/de/ps/20087).
– Ständig aktuelle Informationen zu Crane Application Notes finden Sie im Internet hier (https://support.industry.siemens.com/cs/ww/de/ps/20087/ae).
● Support Request im Internet:
– Support Request (https://support.industry.siemens.com/cs/?lc=de-WW)
Drive-Based Sway ControlBetriebsanleitung, 11/2015 3
● Hotline Europa:
– Telefon: +49(0)911 895 7 222
– Fax: +49 (0)911 895 7 223
– Email: Support Europa (mailto:[email protected])
● Hotline Amerika:
– Telefon: +1 423 262 5710
– Fax: +1 423 262 2231
– Email: Support Amerika (mailto:[email protected])
● Hotline Asien/Pazifik
– Telefon: +86 10 6475 7575
– Fax: +86 10 6474 7474
– Email: Support Asien/Pazifik (mailto:[email protected])
Siemens Produkt-Support für SINAMICSStändig aktuelle Informationen zu den SINAMICS-Produkten, Produkt-Support, FAQs finden Sie im Internet hier (https://support.industry.siemens.com/cs/ww/de/ps/13229).
Copyright-Hinweis“MATLAB®. © 1984 - 2015 The MathWorks, Inc.”
Siemens bestätigt, einen gültigen Lizenzvertrag mit der Fa. MathWorks zu haben.
Vorwort
Drive-Based Sway Control4 Betriebsanleitung, 11/2015
Inhaltsverzeichnis
Vorwort.........................................................................................................................................................3
1 Grundlegende Sicherheitshinweise..............................................................................................................7
1.1 Allgemeine Sicherheitshinweise...............................................................................................7
1.2 Industrial Security.....................................................................................................................8
2 Systembeschreibung....................................................................................................................................9
2.1 Einführung................................................................................................................................9
2.2 Systemübersicht.......................................................................................................................9
2.3 Möglichkeiten der Inbetriebnahme.........................................................................................10
2.4 Anforderungen an Kran und Kranachse.................................................................................11
2.5 Lieferumfang..........................................................................................................................13
3 Hardware-Schnittstellen.............................................................................................................................15
3.1 CompactFlash Speicherkarte der CU310-2 DP.....................................................................15
3.2 Schnittstellen der CU310-2 DP..............................................................................................15
3.3 Basic Operator Panel BOP20................................................................................................18
4 Funktionsbeschreibung..............................................................................................................................21
4.1 Lizenzierung...........................................................................................................................21
4.2 Funktionsübergreifendes Zustandsverhalten des Drive-Based Sway Control Technologiepaketes...............................................................................................................21
4.3 Pendelgeregeltes Verfahren..................................................................................................22
4.4 Pendelregelung ein- und ausschalten....................................................................................22
4.5 Vorendschalterfunktion..........................................................................................................23
4.6 Dämpfungsfaktor....................................................................................................................25
4.7 "Ready-To-Run" Funktionen auf der CF-Karte......................................................................274.7.1 Logik zum Ein- und Ausschalten des Antriebs (AUS1)..........................................................284.7.2 Digitaler Meisterschalter.........................................................................................................284.7.3 Vorendschalterfunktion..........................................................................................................294.7.4 Einschalten der Pendelregelung............................................................................................30
5 Installation/Deinstallation............................................................................................................................31
5.1 Installation des Drive-Based Sway Control Technologiepaketes...........................................31
5.2 Drive-Based Sway Control Technologiepaket im Antriebsobjekt aktivieren...........................32
5.3 Projekt übersetzen und ins Zielgerät laden............................................................................34
5.4 Deinstallation des Drive-Based Sway Control Technologiepaketes......................................34
Drive-Based Sway ControlBetriebsanleitung, 11/2015 5
6 Inbetriebnahme...........................................................................................................................................35
6.1 Inbetriebnahme mit STARTER...............................................................................................366.1.1 Voraussetzungen...................................................................................................................366.1.2 Erfordernisse an das SINAMICS-Projekt...............................................................................366.1.3 Parametrierung des Drive-Based Sway Control Technologiepaketes...................................376.1.3.1 Grundlagen für die Parametrierung........................................................................................376.1.3.2 Drive-Based Sway Control Technologiepaket verschalten und aktivieren (Teil 1).................386.1.3.3 Vorendschalterbereich parametrieren....................................................................................406.1.3.4 Funktionen des Drive-Based Sway Control Technologiepaketes parametrieren...................416.1.3.5 Drive-Based Sway Control Technologiepaket verschalten und aktivieren (Teil 2).................426.1.3.6 Beispiel für Sollwertverläufe...................................................................................................426.1.4 Optionale Einstellungen.........................................................................................................44
6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser...................................456.2.1 Bedienung des BOP20...........................................................................................................466.2.2 Zugriff auf die Parameterlisten mit einem Webbrowser.........................................................486.2.3 Voraussetzungen für die Inbetriebnahme..............................................................................496.2.4 Betriebszustand der CU310-2 DP für die Inbetriebnahme herstellen....................................526.2.5 Inbetriebnahme des Motors vorbereiten................................................................................536.2.6 Motorinbetriebnahme und Motordatenidentifikation...............................................................546.2.7 Anpassung der Bremsensteuerung........................................................................................576.2.8 Konfiguration des Gebers (optional)......................................................................................586.2.9 Parametrieren von Drive-Based Technology (optional).........................................................586.2.10 Parametrieren des Analogeingangs für die Hubhöhe............................................................596.2.11 Parametrieren der Funktionen des Drive-Based Sway Control Technologiepaketes............60
7 Parameter...................................................................................................................................................63
7.1 Beschreibung der Parameter.................................................................................................63
7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes............................65
8 Funktionsplan.............................................................................................................................................73
9 Ersatzteile, Zubehör und Wartung..............................................................................................................75
A Anhang.......................................................................................................................................................77
A.1 Abkürzungsverzeichnis..........................................................................................................77
A.2 Glossar...................................................................................................................................78
A.3 Literaturverzeichnis................................................................................................................79
Inhaltsverzeichnis
Drive-Based Sway Control6 Betriebsanleitung, 11/2015
Grundlegende Sicherheitshinweise 11.1 Allgemeine Sicherheitshinweise
WARNUNG
Lebensgefahr durch Nichtbeachtung von Sicherheitshinweisen und Restrisiken
Durch Nichtbeachtung der Sicherheitshinweise und Restrisiken in der zugehörigen Hardware-Dokumentation können Unfälle mit schweren Verletzungen oder Tod auftreten.● Halten Sie die Sicherheitshinweise der Hardware-Dokumentation ein.● Berücksichtigen Sie bei der Risikobeurteilung die Restrisiken.
WARNUNG
Lebensgefahr durch Fehlfunktionen der Maschine infolge fehlerhafter oder veränderter Parametrierung
Durch fehlerhafte oder veränderte Parametrierung können Fehlfunktionen an Maschinen auftreten, die zu Körperverletzungen oder Tod führen können.● Schützen Sie die Parametrierungen vor unbefugtem Zugriff.● Beherrschen Sie mögliche Fehlfunktionen durch geeignete Maßnahmen (z. B. NOT-HALT
oder NOT-AUS).
WARNUNG
Lebensgefahr durch unkontrollierten Wechsel des Betriebszustands
Durch unkontrollierten Wechsel des Betriebszustands können Fehlfunktionen an Maschinen auftreten, die zu Körperverletzungen oder Tod führen können.● Beurteilen Sie diesen Wechsel des Betriebszustands bei der Risikoanalyse.● Sehen Sie geeignete Sicherheitsmaßnahmen vor, z. B. NOT-AUS.
Drive-Based Sway ControlBetriebsanleitung, 11/2015 7
1.2 Industrial Security
HinweisIndustrial Security
Siemens bietet Produkte und Lösungen mit Industrial Security-Funktionen an, die den sicheren Betrieb von Anlagen, Lösungen, Maschinen, Geräten und/oder Netzwerken unterstützen. Sie sind wichtige Komponenten in einem ganzheitlichen Industrial Security-Konzept. Die Produkte und Lösungen von Siemens werden unter diesem Gesichtspunkt ständig weiterentwickelt. Siemens empfiehlt, sich unbedingt regelmäßig über Produkt-Updates zu informieren.
Für den sicheren Betrieb von Produkten und Lösungen von Siemens ist es erforderlich, geeignete Schutzmaßnahmen (z. B. Zellenschutzkonzept) zu ergreifen und jede Komponente in ein ganzheitliches Industrial Security-Konzept zu integrieren, das dem aktuellen Stand der Technik entspricht. Dabei sind auch eingesetzte Produkte von anderen Herstellern zu berücksichtigen. Weitergehende Informationen über Industrial Security finden Sie unter dieser Adresse (http://www.siemens.com/industrialsecurity).
Um stets über Produkt-Updates informiert zu sein, melden Sie sich für unseren produktspezifischen Newsletter an. Weitere Informationen hierzu finden Sie unter dieser Adresse (http://support.automation.siemens.com).
WARNUNG
Gefahr durch unsichere Betriebszustände wegen Manipulation der Software
Manipulationen der Software (z. B. Viren, Trojaner, Malware, Würmer) können unsichere Betriebszustände in Ihrer Anlage verursachen, die zu Tod, schwerer Körperverletzung und zu Sachschäden führen können.● Halten Sie die Software aktuell.
Informationen und Newsletter hierzu finden Sie unter dieser Adresse (http://support.automation.siemens.com).
● Integrieren Sie die Automatisierungs- und Antriebskomponenten in ein ganzheitliches Industrial Security-Konzept der Anlage oder Maschine nach dem aktuellen Stand der Technik.Weitergehende Informationen finden Sie unter dieser Adresse (http://www.siemens.com/industrialsecurity).
● Berücksichtigen Sie bei Ihrem ganzheitlichen Industrial Security-Konzept alle eingesetzten Produkte.
Grundlegende Sicherheitshinweise1.2 Industrial Security
Drive-Based Sway Control8 Betriebsanleitung, 11/2015

Systembeschreibung 22.1 Einführung
Ende 2010 wurde eine Branchenlösung mit der SINAMICS-Plattform SIMOCRANE Drive-Based Technology im Markt eingeführt. Damit wird der breit gefächerte Mid-Performance Markt bedient, der sich in den letzten Jahren sehr dynamisch weiterentwickelt hat.
Mit den zunehmenden Produktivitätsanforderungen fordert dieser Markt auch gewisse Advanced Technologien, z. B. eine Funktion zur Dämpfung der Lastpendelung. Siemens Cranes stellt sich mit SIMOCRANE Drive-Based Sway Control den Herausforderungen dieses Markts.
Jede Bewegung des Katzfahrwerks führt zu Pendelungen der Last. Der Positioniervorgang wird dadurch erschwert und dauert, je nach Erfahrung des Kranführers, entsprechend länger. Hauptaufgabe des Pendelregelungssystems ist die Beseitigung der Pendelbewegungen, um manuelle Fahrten des Kranführers zu erleichtern. Damit wird eine Entlastung der Kranführer und eine Erhöhung der Produktivität erreicht.
Diese neue Mid-Performance-Kranlösung wird die vorhandenen SIMOCRANE Sway Control Systeme nicht verdrängen. SIMOCRANE Drive-Based Sway Control ist vielmehr eine perfekte Ergänzung des SIMOCRANE Produktportfolios.
SIMOCRANE Drive-Based Sway Control ist antriebsbasiert und kann standalone oder mit SIMOCRANE Drive-Based Technology verwendet werden. Beide Technologien zusammen bieten eine kompakte Lösung innerhalb der SINAMICS-Welt für die meisten Mid-Performance Kran-Applikationen. Weitere Informationen zu SIMOCRANE Drive-Based Technology, siehe Ref. [1].
Vorteile von SIMOCRANE Drive-Based Sway Control sind:
● einfache und schnelle Inbetriebnahme,
● hohe Flexibilität durch viele Anpassungsmöglichkeiten,
● Last kann pendelgedämpft verfahren werden.
Ein Highlight der Version 1.0 SP1 ist ein vorkonfiguriertes Projekt direkt auf der CF-Karte. Es bietet dem Anwender zusätzliche Möglichkeiten für die Durchführung der Inbetriebnahme ohne Engineering. Bei diesen Inbetriebnahmen werden ein Basic Operator Panel BOP20 oder ein Webbrowser genutzt. Die vorkonfigurierte CF-Karte kombiniert SIMOCRANE Drive-Based Technology und SIMOCRANE Drive-Based Sway Control und stellt eine komplette Lösung sowohl für Trolley als auch für Gantry zur Verfügung.
2.2 SystemübersichtDie Hauptfunktion von Drive-Based Sway Control ist ein pendelgeregeltes Verfahren einer Kranachse bei manueller Fahrt.
Drive-Based Sway ControlBetriebsanleitung, 11/2015 9
Sie erfüllt damit folgende Aufgaben:
● Das Pendeln wird bei der manuellen Fahrt gedämpft. Für die Bewegungen bei der manuellen Fahrt wird die Geschwindigkeit z. B. durch einen Meisterschalter vorgegeben. Ein Vorgeben von Zielpositionen oder ein positionsgeregeltes Verfahren ist nicht möglich.
● Nach dem Anhalten der Achse ist nur eine geringe bis gar keine Lastpendelung vorhanden.
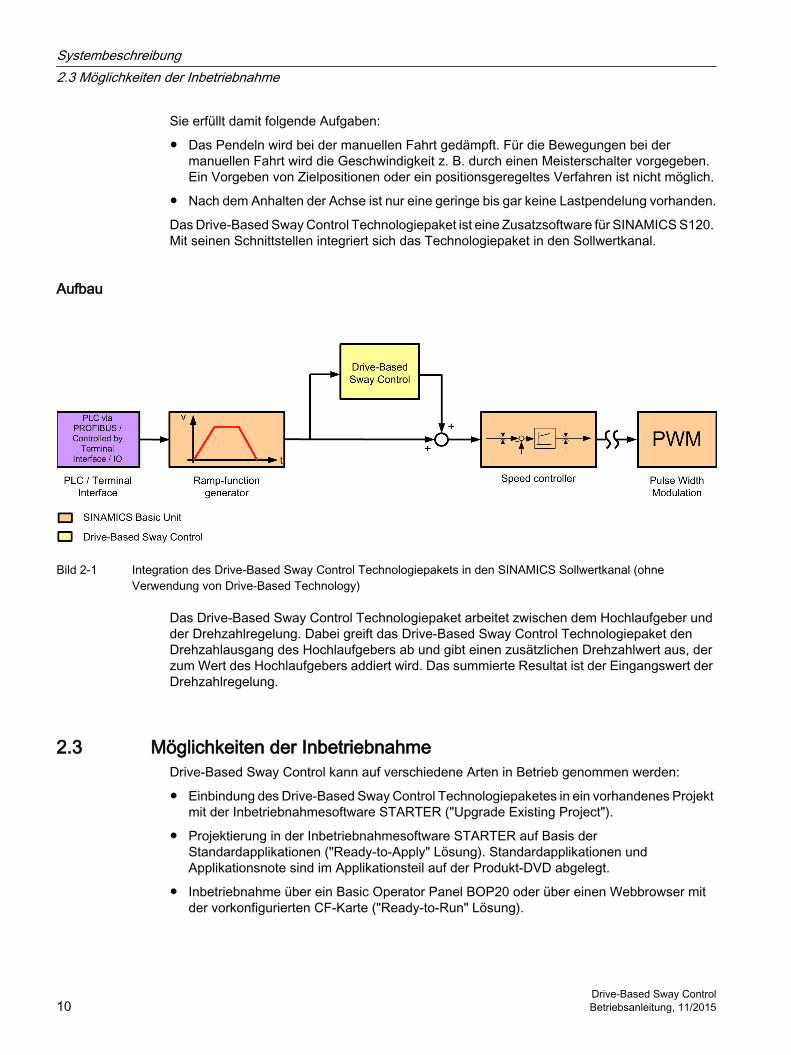
Das Drive-Based Sway Control Technologiepaket ist eine Zusatzsoftware für SINAMICS S120. Mit seinen Schnittstellen integriert sich das Technologiepaket in den Sollwertkanal.
Aufbau
Bild 2-1 Integration des Drive-Based Sway Control Technologiepakets in den SINAMICS Sollwertkanal (ohne Verwendung von Drive-Based Technology)
Das Drive-Based Sway Control Technologiepaket arbeitet zwischen dem Hochlaufgeber und der Drehzahlregelung. Dabei greift das Drive-Based Sway Control Technologiepaket den Drehzahlausgang des Hochlaufgebers ab und gibt einen zusätzlichen Drehzahlwert aus, der zum Wert des Hochlaufgebers addiert wird. Das summierte Resultat ist der Eingangswert der Drehzahlregelung.
2.3 Möglichkeiten der InbetriebnahmeDrive-Based Sway Control kann auf verschiedene Arten in Betrieb genommen werden:
● Einbindung des Drive-Based Sway Control Technologiepaketes in ein vorhandenes Projekt mit der Inbetriebnahmesoftware STARTER ("Upgrade Existing Project").
● Projektierung in der Inbetriebnahmesoftware STARTER auf Basis der Standardapplikationen ("Ready-to-Apply" Lösung). Standardapplikationen und Applikationsnote sind im Applikationsteil auf der Produkt-DVD abgelegt.
● Inbetriebnahme über ein Basic Operator Panel BOP20 oder über einen Webbrowser mit der vorkonfigurierten CF-Karte ("Ready-to-Run" Lösung).
Systembeschreibung2.3 Möglichkeiten der Inbetriebnahme
Drive-Based Sway Control10 Betriebsanleitung, 11/2015
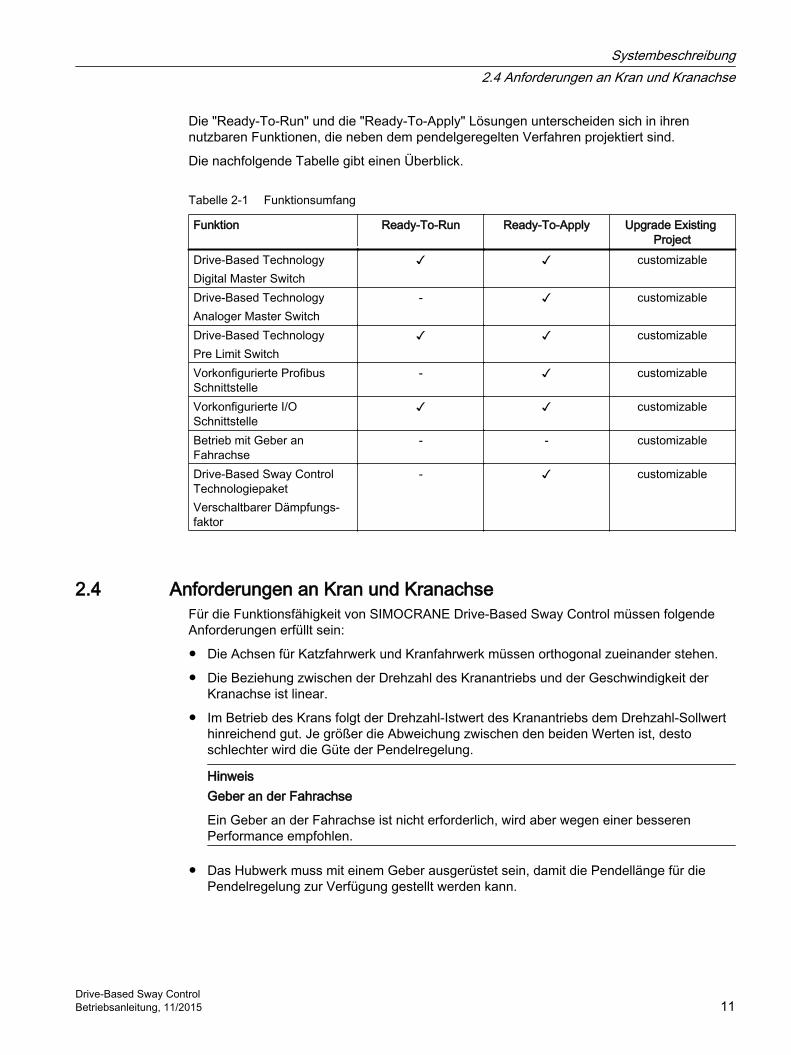
Die "Ready-To-Run" und die "Ready-To-Apply" Lösungen unterscheiden sich in ihren nutzbaren Funktionen, die neben dem pendelgeregelten Verfahren projektiert sind.
Die nachfolgende Tabelle gibt einen Überblick.
Tabelle 2-1 Funktionsumfang
Funktion Ready-To-Run Ready-To-Apply Upgrade Existing Project
Drive-Based TechnologyDigital Master Switch
✓ ✓ customizable
Drive-Based TechnologyAnaloger Master Switch
- ✓ customizable
Drive-Based TechnologyPre Limit Switch
✓ ✓ customizable
Vorkonfigurierte Profibus Schnittstelle
- ✓ customizable
Vorkonfigurierte I/O Schnittstelle
✓ ✓ customizable
Betrieb mit Geber an Fahrachse
- - customizable
Drive-Based Sway Control TechnologiepaketVerschaltbarer Dämpfungs‐faktor
- ✓ customizable
2.4 Anforderungen an Kran und KranachseFür die Funktionsfähigkeit von SIMOCRANE Drive-Based Sway Control müssen folgende Anforderungen erfüllt sein:
● Die Achsen für Katzfahrwerk und Kranfahrwerk müssen orthogonal zueinander stehen.
● Die Beziehung zwischen der Drehzahl des Kranantriebs und der Geschwindigkeit der Kranachse ist linear.
● Im Betrieb des Krans folgt der Drehzahl-Istwert des Kranantriebs dem Drehzahl-Sollwert hinreichend gut. Je größer die Abweichung zwischen den beiden Werten ist, desto schlechter wird die Güte der Pendelregelung.
HinweisGeber an der Fahrachse
Ein Geber an der Fahrachse ist nicht erforderlich, wird aber wegen einer besseren Performance empfohlen.
● Das Hubwerk muss mit einem Geber ausgerüstet sein, damit die Pendellänge für die Pendelregelung zur Verfügung gestellt werden kann.
Systembeschreibung2.4 Anforderungen an Kran und Kranachse
Drive-Based Sway ControlBetriebsanleitung, 11/2015 11
● Die Pendelung der Last muss in etwa der eines mathematischen Pendels entsprechen. Es dürfen vor allem keine mechanischen Pendeldämpfungssysteme vorhanden sein (z. B. separate Seilverspannung). Mechanische Pendeldämpfungssysteme können zu einer starken Abweichung zwischen dem internen Pendelmodell und dem real vorhandenen Pendeln der Last führen. In diesem Fall funktioniert die Pendelregelung mit Drive-Based Sway Control nicht.
● SIMOCRANE Drive-Based Sway Control arbeitet ohne Kameramesssystem. Deshalb können folgende Pendelbewegungen nicht erkannt werden:
– Pendeln der Last vor dem Start der pendelgeregelten Fahrt,
– Pendeln, das durch eine Kollision, durch Wind oder durch asymmetrische Lastverteilung entsteht,
– Pendeln, das durch ein schräges Anheben des Last verursacht wird.
Um die erwartete Pendelregelung zu gewährleisten, müssen die oben erwähnten Störungen beim Einsatz des Produkts vermieden werden.
● Wird der SINAMICS-Antrieb über PROFIBUS angesteuert, muss eine nicht-taktsynchrone Kommunikation konfiguriert sein.
Die Voraussetzungen an die Projektierung und Parametrierung des SINAMICS-Antriebs sind im Abschnitt Erfordernisse an das SINAMICS-Projekt (Seite 36) beschrieben.
Hinweis
SIMOCRANE Drive-Based Sway Control setzt die SINAMICS Firmware für Cranes voraus und kann nur bei Regelungsart Vector-Control eingesetzt werden.
Systembeschreibung2.4 Anforderungen an Kran und Kranachse
Drive-Based Sway Control12 Betriebsanleitung, 11/2015
2.5 LieferumfangIm Lieferumfang des Pakets SIMOCRANE Drive-Based Sway Control V1.0 SP1 (6GA7280-1AA10-0AB0) sind enthalten:
● eine vorkonfigurierte CompactFlash Speicherkarte mit:
– Kranspezifische Firmware-Version SINAMICS FW V4.7 HF11 Cranes
– Drive-Based Sway Control Technologiepaket
– Standardapplikation ("Ready-to-Run")
– Lizenzschlüssel für Drive-Based Sway Control Technologiepaket
● eine DVD mit:
– STARTER Installationsdatei des Drive-Based Sway Control Technologiepakets (oasp_db_sc_v1_1_oaif04703400.zip)
– Speicherkartenabbild für eine Wiederherstellung (DBSC_CF_card.zip)
– Produkt-Dokumentationen
– Readme-Dateien
– Applikationsbeispiele und Applikationsnote ("Ready-to-Apply")
● ein Lizenz-Zertifikat für das Drive-Based Sway Control Technologiepaket
Systembeschreibung2.5 Lieferumfang
Drive-Based Sway ControlBetriebsanleitung, 11/2015 13

Systembeschreibung2.5 Lieferumfang
Drive-Based Sway Control14 Betriebsanleitung, 11/2015
Hardware-Schnittstellen 33.1 CompactFlash Speicherkarte der CU310-2 DP
Auf der CompactFlash Speicherkarte befinden sich die im Abschnitt Lieferumfang (Seite 13) aufgelisteten Dateien.
Hinweis
Die CompactFlash Speicherkarte darf nur im spannungsfreien Zustand in die Control Unit CU310-2 DP gesteckt werden.
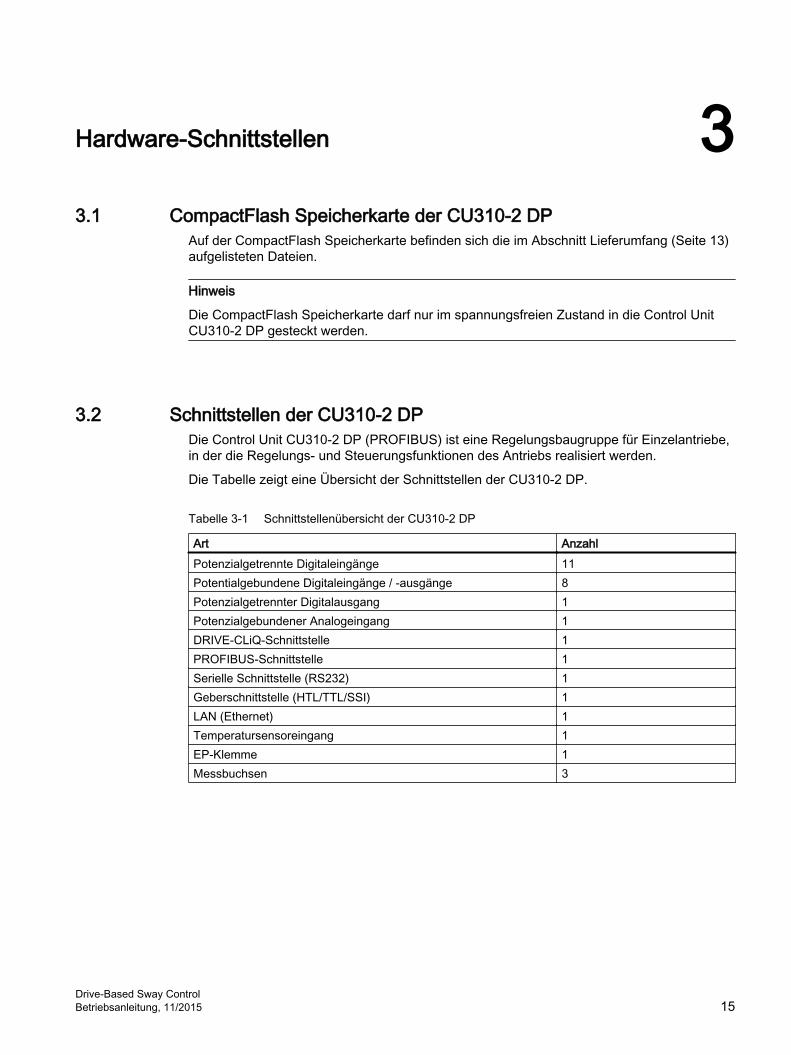
3.2 Schnittstellen der CU310-2 DPDie Control Unit CU310-2 DP (PROFIBUS) ist eine Regelungsbaugruppe für Einzelantriebe, in der die Regelungs- und Steuerungsfunktionen des Antriebs realisiert werden.
Die Tabelle zeigt eine Übersicht der Schnittstellen der CU310-2 DP.
Tabelle 3-1 Schnittstellenübersicht der CU310-2 DP
Art AnzahlPotenzialgetrennte Digitaleingänge 11Potentialgebundene Digitaleingänge / -ausgänge 8Potenzialgetrennter Digitalausgang 1Potenzialgebundener Analogeingang 1DRIVE-CLiQ-Schnittstelle 1PROFIBUS-Schnittstelle 1Serielle Schnittstelle (RS232) 1Geberschnittstelle (HTL/TTL/SSI) 1LAN (Ethernet) 1Temperatursensoreingang 1EP-Klemme 1Messbuchsen 3
Drive-Based Sway ControlBetriebsanleitung, 11/2015 15
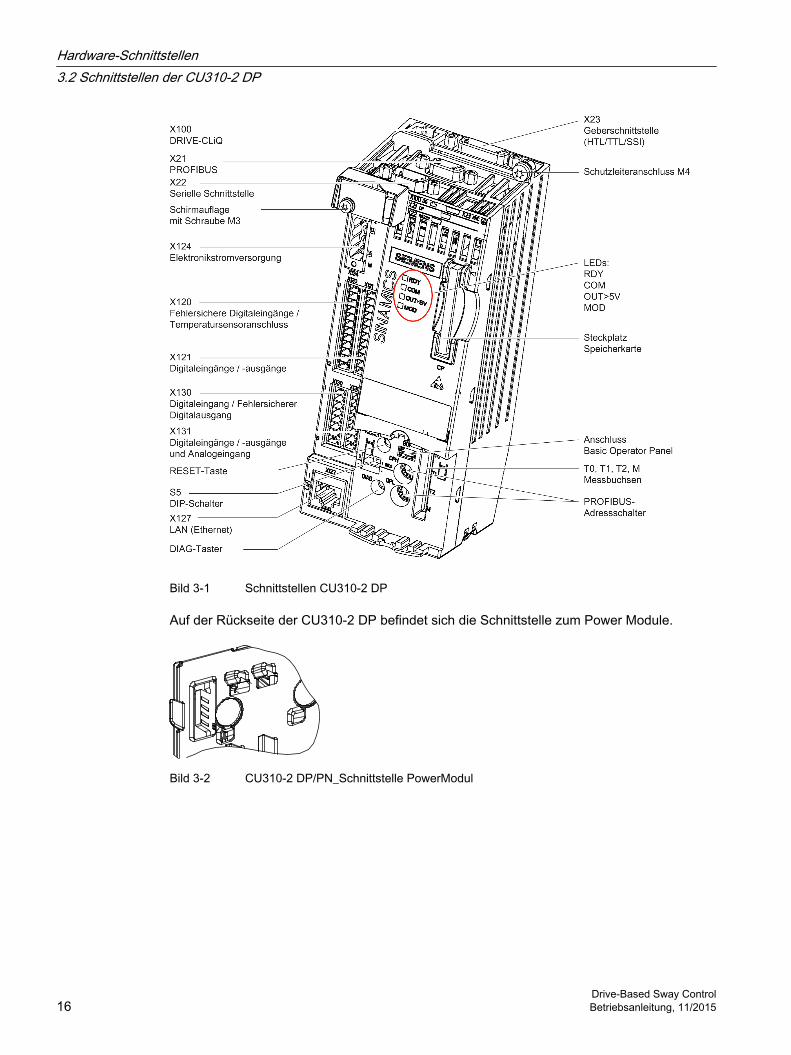
Bild 3-1 Schnittstellen CU310-2 DP
Auf der Rückseite der CU310-2 DP befindet sich die Schnittstelle zum Power Module.
Bild 3-2 CU310-2 DP/PN_Schnittstelle PowerModul
Hardware-Schnittstellen3.2 Schnittstellen der CU310-2 DP
Drive-Based Sway Control16 Betriebsanleitung, 11/2015
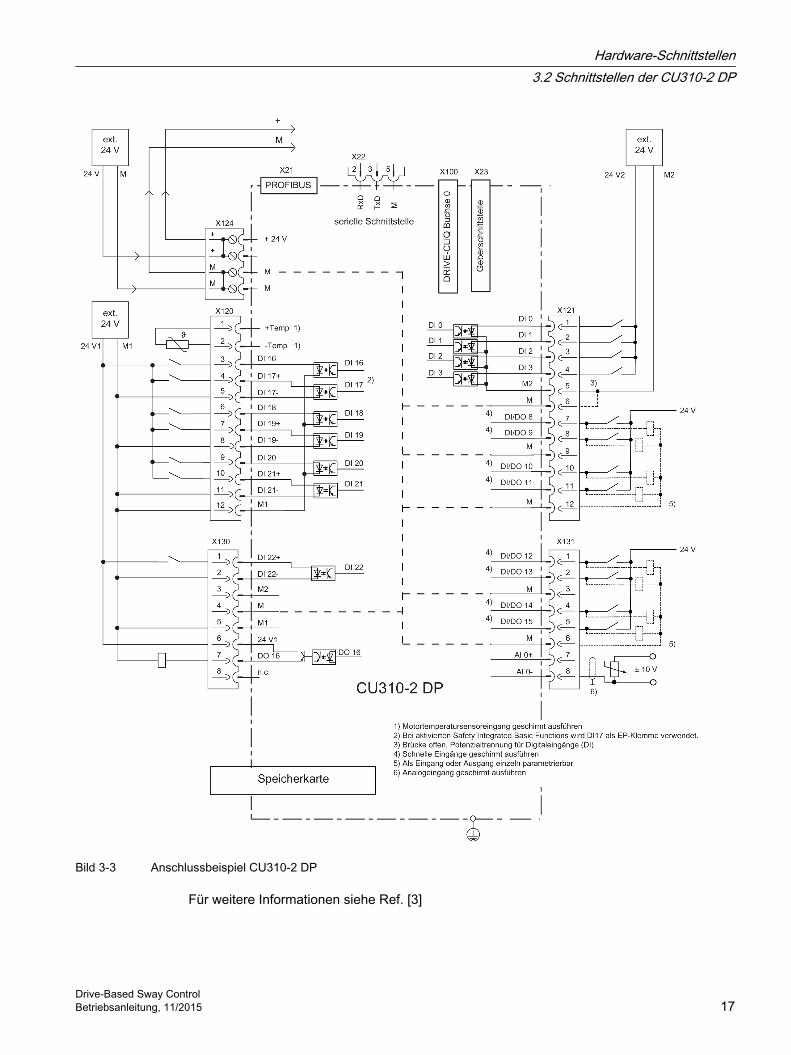
Bild 3-3 Anschlussbeispiel CU310-2 DP
Für weitere Informationen siehe Ref. [3]
Hardware-Schnittstellen3.2 Schnittstellen der CU310-2 DP
Drive-Based Sway ControlBetriebsanleitung, 11/2015 17
3.3 Basic Operator Panel BOP20
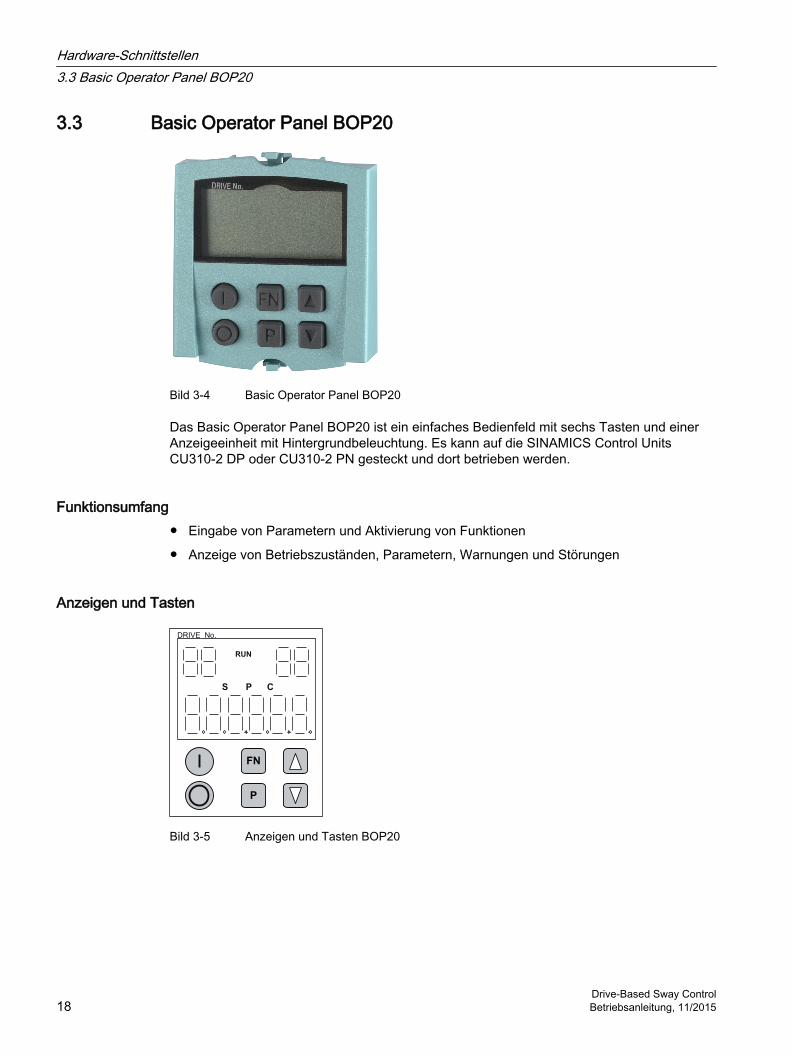
Bild 3-4 Basic Operator Panel BOP20
Das Basic Operator Panel BOP20 ist ein einfaches Bedienfeld mit sechs Tasten und einer Anzeigeeinheit mit Hintergrundbeleuchtung. Es kann auf die SINAMICS Control Units CU310-2 DP oder CU310-2 PN gesteckt und dort betrieben werden.
Funktionsumfang● Eingabe von Parametern und Aktivierung von Funktionen
● Anzeige von Betriebszuständen, Parametern, Warnungen und Störungen
Anzeigen und Tasten
S CP
RUN
FN
P
Bild 3-5 Anzeigen und Tasten BOP20
Hardware-Schnittstellen3.3 Basic Operator Panel BOP20
Drive-Based Sway Control18 Betriebsanleitung, 11/2015
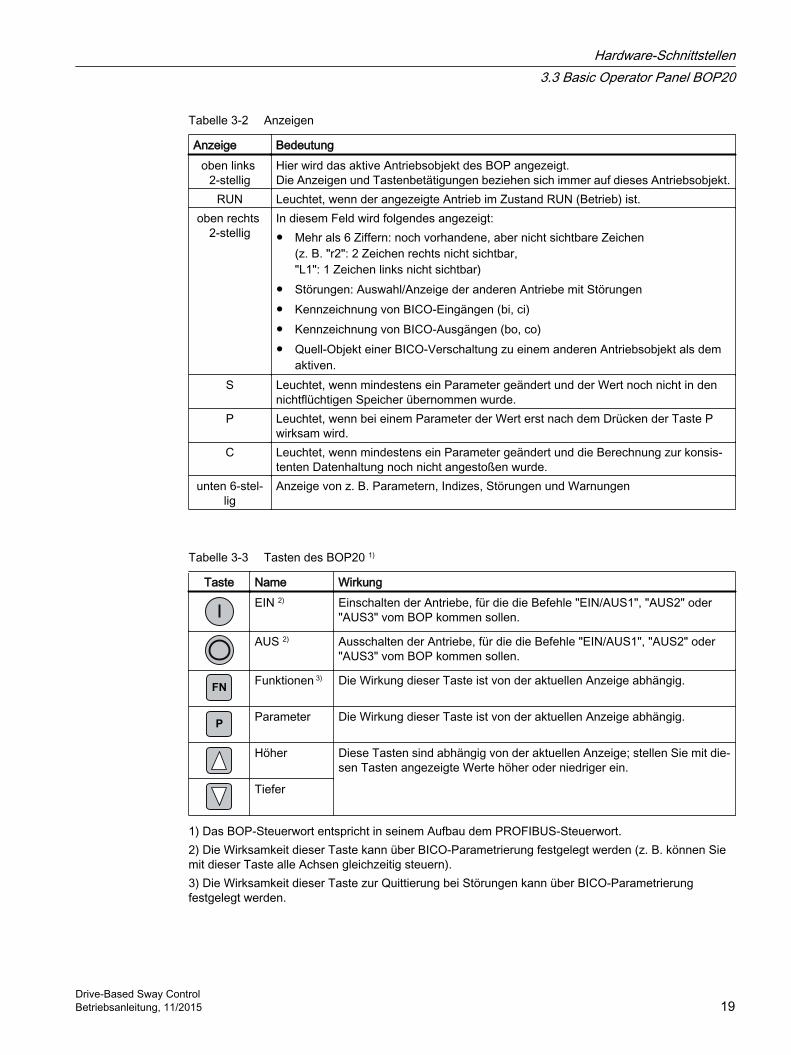
Tabelle 3-2 Anzeigen
Anzeige Bedeutungoben links
2-stelligHier wird das aktive Antriebsobjekt des BOP angezeigt. Die Anzeigen und Tastenbetätigungen beziehen sich immer auf dieses Antriebsobjekt.
RUN Leuchtet, wenn der angezeigte Antrieb im Zustand RUN (Betrieb) ist.oben rechts
2-stelligIn diesem Feld wird folgendes angezeigt:● Mehr als 6 Ziffern: noch vorhandene, aber nicht sichtbare Zeichen
(z. B. "r2": 2 Zeichen rechts nicht sichtbar,"L1": 1 Zeichen links nicht sichtbar)
● Störungen: Auswahl/Anzeige der anderen Antriebe mit Störungen● Kennzeichnung von BICO-Eingängen (bi, ci)● Kennzeichnung von BICO-Ausgängen (bo, co)● Quell-Objekt einer BICO-Verschaltung zu einem anderen Antriebsobjekt als dem
aktiven.S Leuchtet, wenn mindestens ein Parameter geändert und der Wert noch nicht in den
nichtflüchtigen Speicher übernommen wurde.P Leuchtet, wenn bei einem Parameter der Wert erst nach dem Drücken der Taste P
wirksam wird.C Leuchtet, wenn mindestens ein Parameter geändert und die Berechnung zur konsis‐
tenten Datenhaltung noch nicht angestoßen wurde.unten 6-stel‐
ligAnzeige von z. B. Parametern, Indizes, Störungen und Warnungen
Tabelle 3-3 Tasten des BOP20 1)
Taste Name WirkungEIN 2) Einschalten der Antriebe, für die die Befehle "EIN/AUS1", "AUS2" oder
"AUS3" vom BOP kommen sollen.
AUS 2) Ausschalten der Antriebe, für die die Befehle "EIN/AUS1", "AUS2" oder "AUS3" vom BOP kommen sollen.
FNFunktionen 3) Die Wirkung dieser Taste ist von der aktuellen Anzeige abhängig.
PParameter Die Wirkung dieser Taste ist von der aktuellen Anzeige abhängig.
Höher Diese Tasten sind abhängig von der aktuellen Anzeige; stellen Sie mit die‐sen Tasten angezeigte Werte höher oder niedriger ein.
Tiefer
1) Das BOP-Steuerwort entspricht in seinem Aufbau dem PROFIBUS-Steuerwort.2) Die Wirksamkeit dieser Taste kann über BICO-Parametrierung festgelegt werden (z. B. können Sie mit dieser Taste alle Achsen gleichzeitig steuern).3) Die Wirksamkeit dieser Taste zur Quittierung bei Störungen kann über BICO-Parametrierung festgelegt werden.
Hardware-Schnittstellen3.3 Basic Operator Panel BOP20
Drive-Based Sway ControlBetriebsanleitung, 11/2015 19

Hinweis
Weitere Informationen zum BOP20 finden Sie im "SINAMICS S120 Inbetriebnahmehandbuch" Ref. [4].
Hardware-Schnittstellen3.3 Basic Operator Panel BOP20
Drive-Based Sway Control20 Betriebsanleitung, 11/2015
Funktionsbeschreibung 4Dieses Kapitel beschreibt die Funktionen von Drive-Based Sway Control.
4.1 Lizenzierung
Nutzung nur mit LizenzDie Funktionen des Drive-Based Sway Control Technologiepaketes können nur genutzt werden, wenn eine entsprechende Lizenzierung vorhanden ist. Die SINAMICS Grundfunktionen können auch ohne Lizenzierung unbeschränkt genutzt werden.
Der Lizenzschlüssel ist auf der vorkonfigurierten CF-Karte abgelegt. Sie finden diesen im Ordner KEYS\SINAMICS in der Datei KEYS.txt.
Das Lizenzzertifikat ist ebenfalls im Lieferumfang von Drive-Based Sway Control enthalten.
Wenn die Lizenzierung fehlt, wird vom SINAMICS-Grundsystem die Warnung A13000 (Lizenzierung nicht ausreichend) generiert. Außerdem blinkt die RDY-LED an der Control Unit rot/grün mit einer Frequenz von 0,5 Hz.
4.2 Funktionsübergreifendes Zustandsverhalten des Drive-Based Sway Control Technologiepaketes
Das Drive-Based Sway Control Technologiepaket arbeitet intern mit folgenden zwei Zuständen:
● Stillstand
● Bewegung
Diese Zustände sind für einige Funktionen relevant und werden daher nachfolgend als funktionsübergreifendes Zustandsverhalten beschrieben.
Wechsel in den Zustand StillstandWenn sich das Eingangsignal p39049 "DB_SC Schwellwert Drehzahl unterschritten" von 0 auf 1 ändert und der Sollwertausgang des Hochlaufgebers (r1150) gleich 0 ist, wechselt das Drive-Based Sway Control Technologiepaket in den Stillstand.
Wechsel in den Zustand BewegungWenn der Parameter r1150 "Hochlaufgeber Drehzahlsollwert am Ausgang" ungleich 0 ist, wechselt das Drive-Based Sway Control Technologiepaket von Stillstand nach Bewegung.
Drive-Based Sway ControlBetriebsanleitung, 11/2015 21
4.3 Pendelgeregeltes Verfahren
Bereich der HubwerkspositionEin pendelgeregeltes Verfahren mit Drive-Based Sway Control ist nur in einem bestimmten Bereich der Hubwerksposition möglich.
Die Grenzen sind die Hubwerkspositionen, die den effektiven Pendellängen 200 mm bzw. 200000 mm entsprechen.
Intern wird die effektive Pendellänge auf den Bereich von 200 mm bis 200000 mm begrenzt und im Parameter r39042 angezeigt. Der Zusammenhang zwischen Hubwerksposition und effektiver Pendellänge ist im Kapitel Funktionen des Drive-Based Sway Control Technologiepaketes parametrieren (Seite 41) beschrieben.
Verfahrbereich der KranachseWenn die Pendelregelung aktiviert ist, verlängert sich beim Anhalten der Kranachse der Verfahrweg bis zum Stillstand. Gegenüber dem schnellstmöglichen Abbremsen muss bei aktivierter Pendelregelung ein adaptiertes Geschwindigkeitsprofil gefahren werden, siehe auch Beispiele im Kapitel Dämpfungsfaktor (Seite 25).
Beim Abbremsen mit aktivierter Pendelregelung kann die maximale Lastposition in Bewegungsrichtung größer sein als ohne aktivierte Pendelregelung.
WARNUNG
Systemverhalten mit aktivierter Pendelregelung
Um Schäden gegenüber Dritten zu verhindern, muss beim Anhalten des Krans mit aktivierter Pendelregelung das Systemverhalten berücksichtigt werden.
4.4 Pendelregelung ein- und ausschalten
Parameter 39001[1] "Pendelregelung einschalten"Mit dem Parameter (p39001[1]) "Pendelregelung einschalten" können Sie die Funktion der Pendelregelung ein- und ausschalten.
Den Eingang können Sie mit der PROFIBUS-Schnittstelle der SINAMICS-Control Unit oder mit einem digitalen Eingang der Control Unit verschalten.
Detaillierte Informationen finden Sie im Kapitel "Inbetriebnahme mit STARTER (Seite 36)".
FunktionsweiseDer Parameter r39003.1 "Pendelregelung aktiviert" zeigt an, ob die Pendelregelung im Drive-Based Sway Control Technologiepaket eingeschaltet (r39003.1 = 1) oder ausgeschaltet (r39003.1 = 0) ist. Wenn die Pendelregelung ausgeschaltet ist, ist der Additionswert für den Sollwertkanal (r39032) gleich 0.
Funktionsbeschreibung4.4 Pendelregelung ein- und ausschalten
Drive-Based Sway Control22 Betriebsanleitung, 11/2015
Der Zustand des Parameters p39001[1] = 1 bedeutet nicht immer, dass die Pendelregelung auch aktiviert ist , siehe z.B. Abbildung im Abschnitt Einschalten der Pendelregelung (Seite 30). Das Aktivieren der Pendelregelung ist nur im Stillstand der Achse möglich (vergleiche Kapitel Funktionsübergreifendes Zustandsverhalten des Drive-Based Sway Control Technologiepaketes (Seite 21)).
Wird der Zustand des Parameters p39001[1] während einer Bewegung der Kranachse von 0 auf 1 geändert, wird im Drive-Based Sway Control Technologiepaket die Pendelregelung nicht aktiviert, der Wert des Parameters r39003.1 bleibt 0.
Ist der Zustand des Parameters p39001[1] beim Erreichen des Stillstandes immer noch gleich 1, wird die Pendelregelung aktiviert.
Eine negative Flanke des Zustandes des Parameters p39001[1] bewirkt immer ein sofortiges Ausschalten der Pendelregelung.
Beim Ausschalten der Pendelregelung während einer Achsbewegung setzt das Drive-Based Sway Control Technologiepaket die Werte des Hochlaufgebers über die Parameter r39033 und r39034.0 (siehe auch Drive-Based Sway Control Technologiepaket verschalten und aktivieren (Teil 2) (Seite 42). Dadurch werden stetige Drehzahlverläufe am Eingang des Drehzahlreglers (r1170) ermöglicht.
Hinweis
Die Status von AUS1, AUS2 und AUS3 haben keinen Einfluss auf Verhalten des Drive-Based Sway Control Technologiepakets.
Allerdings wird bei AUS1 = 0 oder AUS3 = 0 der Additionswert vom Drive-Based Sway Control Technologiepaket (r39032, verschaltet auf p1169) im Sollwertkanal der SINAMICS Firmware nicht berücksichtigt (Vergleiche [6], Funktionsplan 3080). Damit wird bei AUS1 = 0 oder AUS3 = 0 ohne Pendelregelung gefahren.
Hinweis
Der Drehzahlsollwert des Drehzahlreglers (r1170) ist bei eingeschalteter Pendelregelung nicht ruckbegrenzt, sondern nur drehzahl- und beschleunigungsbegrenzt. Als Grenzen werden im Drive-Based Sway Control Technologiepaket folgende Parameter verwendet:● p1082[0] für die maximale Drehzahl ● p1120[0] für die Hochlauf- und Rücklaufzeit
Dies gilt sowohl für den einfachen als auch für den erweiterten Hochlaufgeber.
4.5 Vorendschalterfunktion
Parameter p39001[2] „Nicht im Vorendschalterbereich“Der Parameter p39001[2] "Nicht im Vorendschalterbereich", signalisiert dem Drive-Based Sway Control Technologiepaket das Erreichen eines Vorendschalterbereichs.
Ein gesetztes Bit (p39001[2] = 1) bedeutet, dass sich die Kranachse außerhalb des Vorendschalterbereichs befindet. Der Zustand des Parameters p39001[2] = 0 bedeutet, dass sich die Kranachse im Vorendschalterbereich befindet.
Funktionsbeschreibung4.5 Vorendschalterfunktion
Drive-Based Sway ControlBetriebsanleitung, 11/2015 23
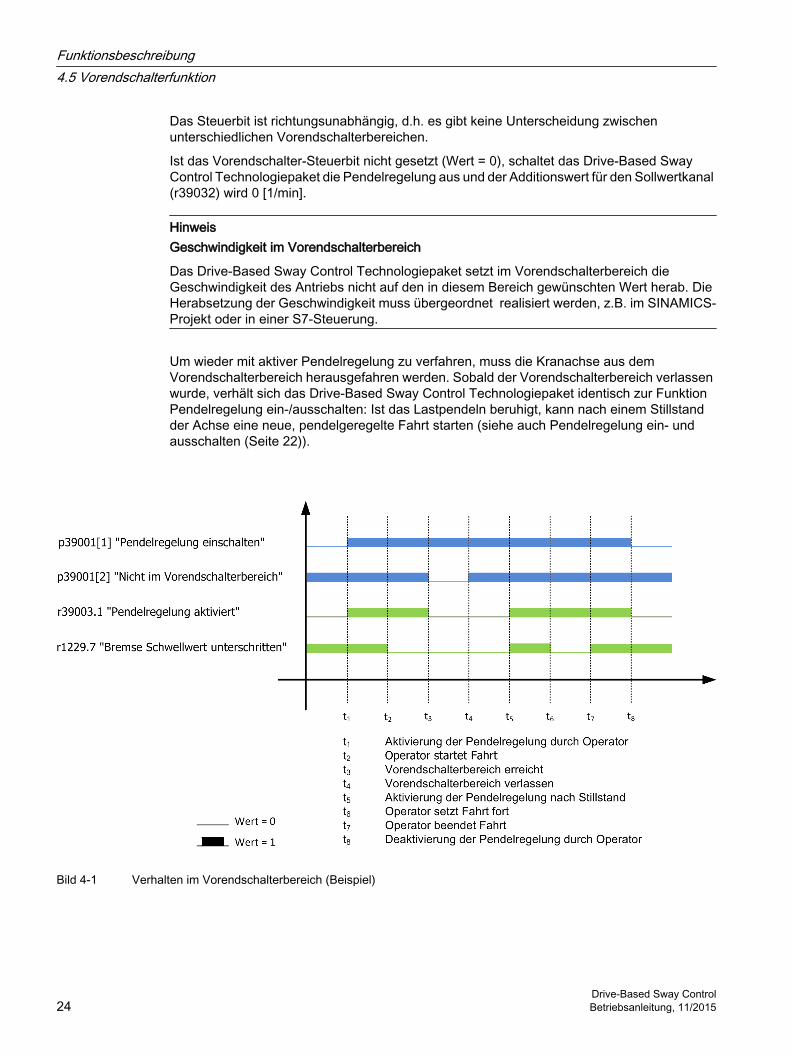
Das Steuerbit ist richtungsunabhängig, d.h. es gibt keine Unterscheidung zwischen unterschiedlichen Vorendschalterbereichen.
Ist das Vorendschalter-Steuerbit nicht gesetzt (Wert = 0), schaltet das Drive-Based Sway Control Technologiepaket die Pendelregelung aus und der Additionswert für den Sollwertkanal (r39032) wird 0 [1/min].
HinweisGeschwindigkeit im Vorendschalterbereich
Das Drive-Based Sway Control Technologiepaket setzt im Vorendschalterbereich die Geschwindigkeit des Antriebs nicht auf den in diesem Bereich gewünschten Wert herab. Die Herabsetzung der Geschwindigkeit muss übergeordnet realisiert werden, z.B. im SINAMICS-Projekt oder in einer S7-Steuerung.
Um wieder mit aktiver Pendelregelung zu verfahren, muss die Kranachse aus dem Vorendschalterbereich herausgefahren werden. Sobald der Vorendschalterbereich verlassen wurde, verhält sich das Drive-Based Sway Control Technologiepaket identisch zur Funktion Pendelregelung ein-/ausschalten: Ist das Lastpendeln beruhigt, kann nach einem Stillstand der Achse eine neue, pendelgeregelte Fahrt starten (siehe auch Pendelregelung ein- und ausschalten (Seite 22)).
Bild 4-1 Verhalten im Vorendschalterbereich (Beispiel)
Funktionsbeschreibung4.5 Vorendschalterfunktion
Drive-Based Sway Control24 Betriebsanleitung, 11/2015
4.6 Dämpfungsfaktor
Wirkung des Dämpfungsfaktors auf die PendelregelungDer Dämpfungsfaktor parametriert den Grad der Pendelregelung. Der Wert kann über den Parameter p39026 oder über den BICO-Eingang p39027 an das Drive-Based Sway Control Technologiepaket übergeben werden. Wenn das Eingangssignal ungleich 0 ist, wird der Wert des BICO-Signals p39027 verwendet. Wenn das Eingangssignal gleich 0 ist, wird der Wert des Parameters p39026 verwendet.
Der Dämpfungsfaktor hat einen Einstellbereich von 0,3 bis 1,1.
Eine Änderung des Dämpfungsfaktors während einer Bewegung (vergleiche Kapitel Funktionsübergreifendes Zustandsverhalten des Drive-Based Sway Control Technologiepaketes (Seite 21)) wirkt erst, wenn die Achse wieder im Stillstand ist.
Die Wirkung des Dämpfungsfaktors wird mit den nachfolgenden Grafiken veranschaulicht.
Funktionsbeschreibung4.6 Dämpfungsfaktor
Drive-Based Sway ControlBetriebsanleitung, 11/2015 25
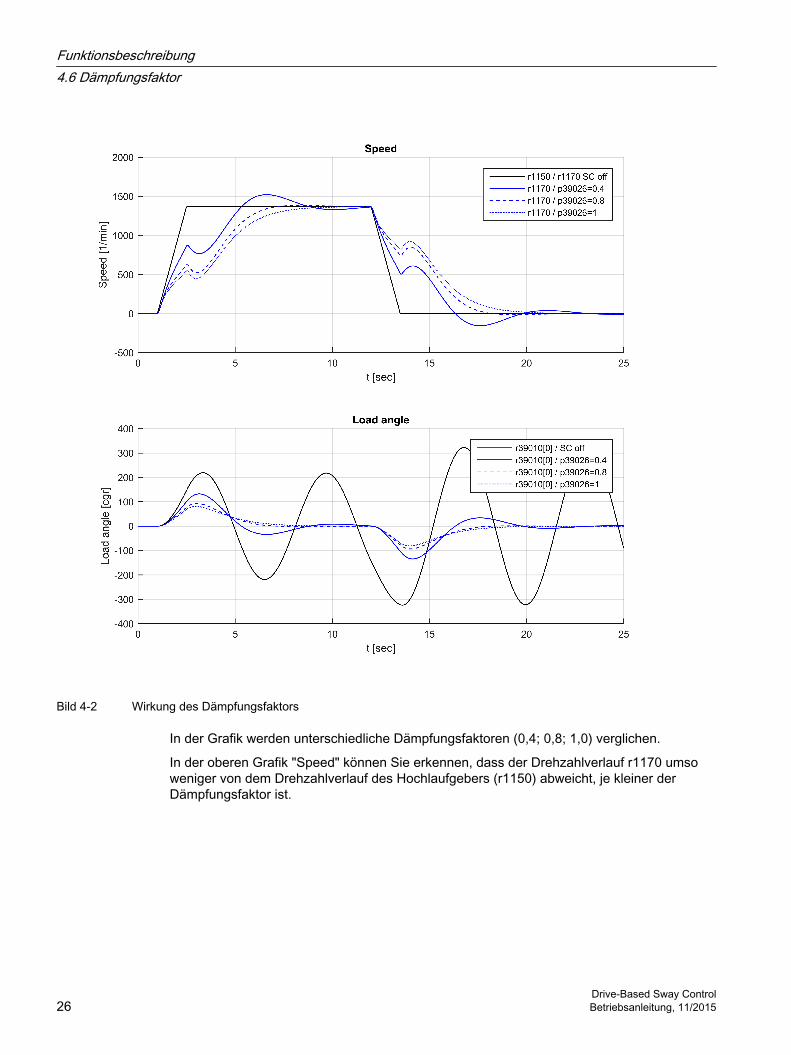
Bild 4-2 Wirkung des Dämpfungsfaktors
In der Grafik werden unterschiedliche Dämpfungsfaktoren (0,4; 0,8; 1,0) verglichen.
In der oberen Grafik "Speed" können Sie erkennen, dass der Drehzahlverlauf r1170 umso weniger von dem Drehzahlverlauf des Hochlaufgebers (r1150) abweicht, je kleiner der Dämpfungsfaktor ist.
Funktionsbeschreibung4.6 Dämpfungsfaktor
Drive-Based Sway Control26 Betriebsanleitung, 11/2015
Wählen Sie einen hohen Dämpfungsfakor, z.B. 0,8, ist das Überschwingen der Drehzahl geringer als bei einem kleinerem Wert. Damit wird während der Fahrt mit konstanter Geschwindigkeit das Lastpendeln schneller beruhigt (siehe untere Grafik "Load angle").
Hinweis
Die Wahl des Dämpfungsfaktors ist abhängig vom konkreten Anwendungsszenario des Krans. Steht ein geringes Restpendeln im Vordergrund, wird ein höherer Dämpfungsfaktor empfohlen.
Der Dämpfungsfaktor muss daher im Zuge der Inbetriebnahme entsprechend der Anwendung optimiert werden.
4.7 "Ready-To-Run" Funktionen auf der CF-KarteDie vorkonfigurierte CF-Karte enthält eine Projektierung, mit der Sie Drive-Based Sway Control über das Basic Operator Panel BOP20 oder über einen Webbrowser in Betrieb nehmen können. Das Inbetriebnahme-Tool STARTER wird damit nicht benötigt.
In der Projektierung sind einige Funktionen bereits vorkonfiguriert. Diese können direkt nach der Inbetriebnahme verwendet werden. Die Funktionen sind in den nachfolgenden Abschnitten beschrieben.
Funktionsbeschreibung4.7 "Ready-To-Run" Funktionen auf der CF-Karte
Drive-Based Sway ControlBetriebsanleitung, 11/2015 27
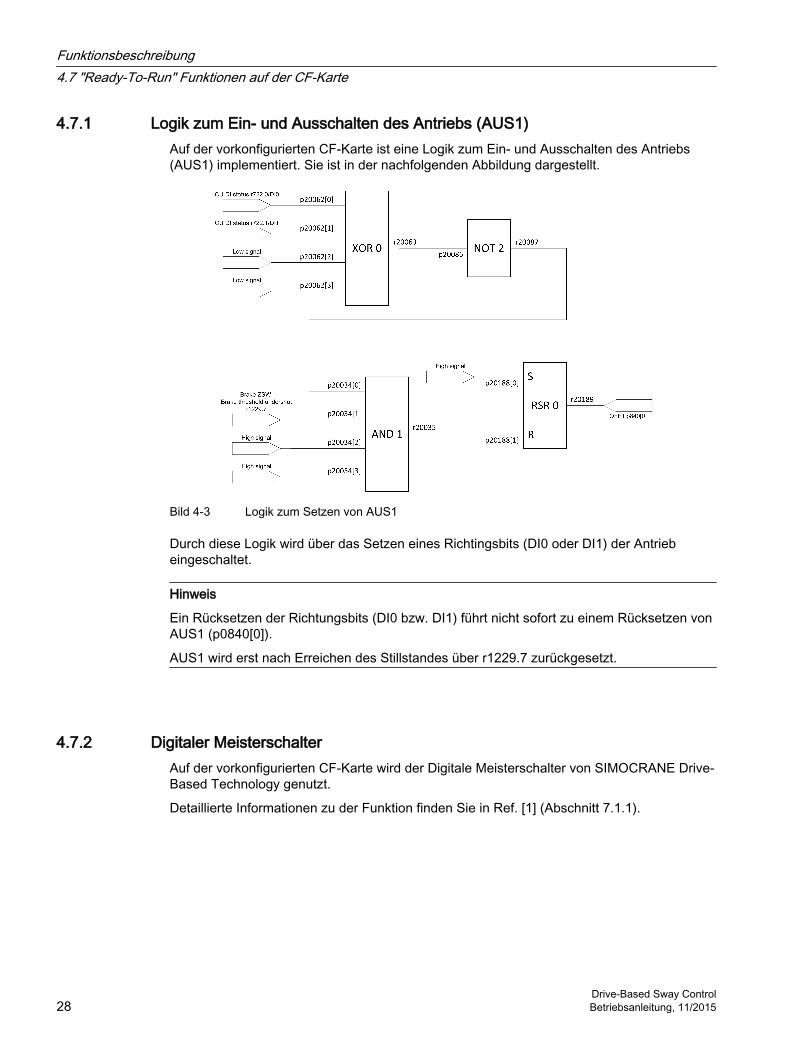
4.7.1 Logik zum Ein- und Ausschalten des Antriebs (AUS1)Auf der vorkonfigurierten CF-Karte ist eine Logik zum Ein- und Ausschalten des Antriebs (AUS1) implementiert. Sie ist in der nachfolgenden Abbildung dargestellt.
Bild 4-3 Logik zum Setzen von AUS1
Durch diese Logik wird über das Setzen eines Richtingsbits (DI0 oder DI1) der Antrieb eingeschaltet.
Hinweis
Ein Rücksetzen der Richtungsbits (DI0 bzw. DI1) führt nicht sofort zu einem Rücksetzen von AUS1 (p0840[0]).
AUS1 wird erst nach Erreichen des Stillstandes über r1229.7 zurückgesetzt.
4.7.2 Digitaler MeisterschalterAuf der vorkonfigurierten CF-Karte wird der Digitale Meisterschalter von SIMOCRANE Drive-Based Technology genutzt.
Detaillierte Informationen zu der Funktion finden Sie in Ref. [1] (Abschnitt 7.1.1).
Funktionsbeschreibung4.7 "Ready-To-Run" Funktionen auf der CF-Karte
Drive-Based Sway Control28 Betriebsanleitung, 11/2015
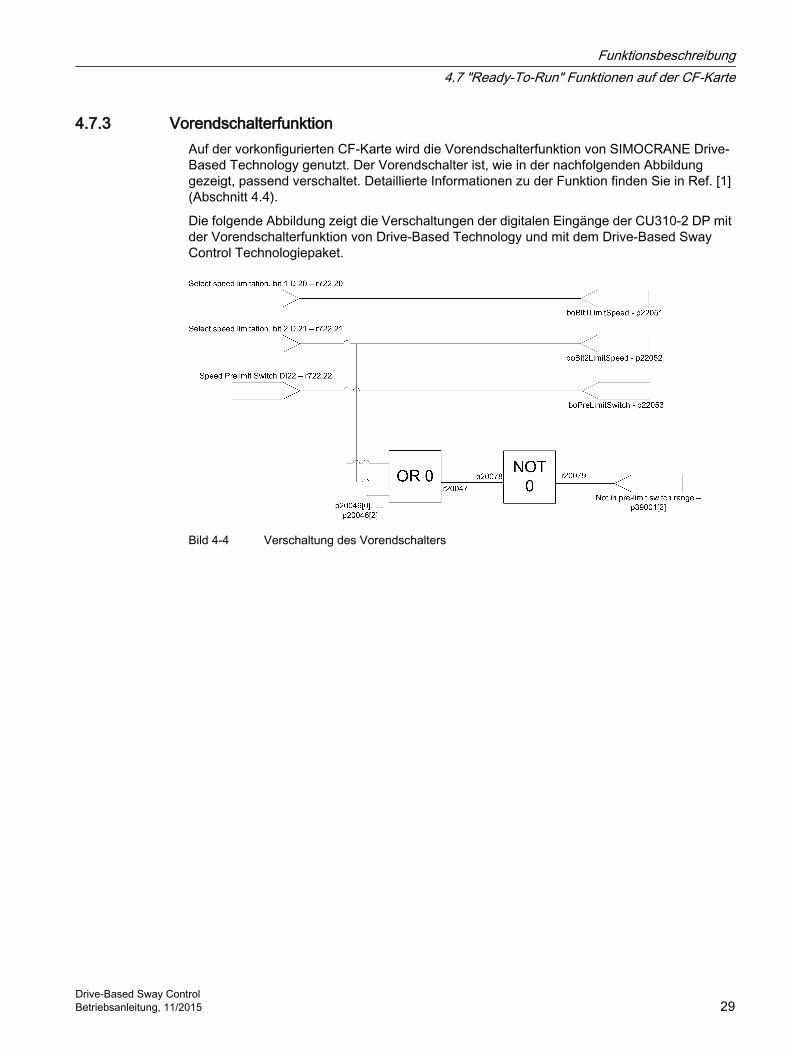
4.7.3 VorendschalterfunktionAuf der vorkonfigurierten CF-Karte wird die Vorendschalterfunktion von SIMOCRANE Drive-Based Technology genutzt. Der Vorendschalter ist, wie in der nachfolgenden Abbildung gezeigt, passend verschaltet. Detaillierte Informationen zu der Funktion finden Sie in Ref. [1] (Abschnitt 4.4).
Die folgende Abbildung zeigt die Verschaltungen der digitalen Eingänge der CU310-2 DP mit der Vorendschalterfunktion von Drive-Based Technology und mit dem Drive-Based Sway Control Technologiepaket.
Bild 4-4 Verschaltung des Vorendschalters
Funktionsbeschreibung4.7 "Ready-To-Run" Funktionen auf der CF-Karte
Drive-Based Sway ControlBetriebsanleitung, 11/2015 29
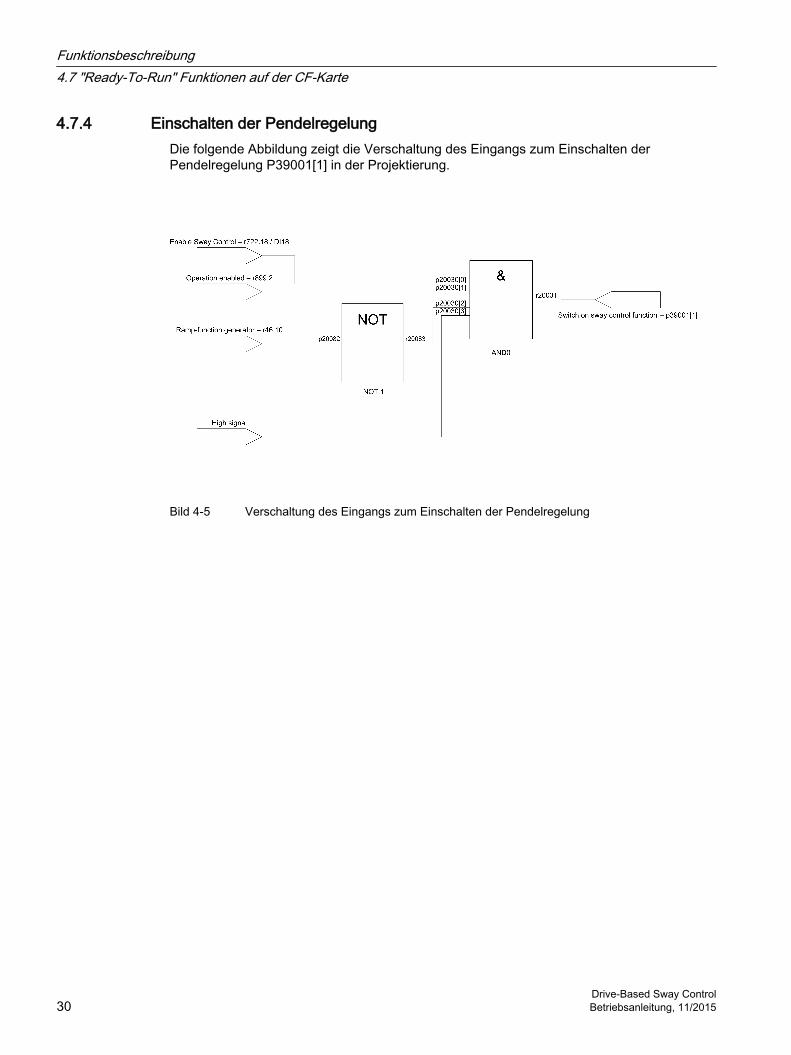
4.7.4 Einschalten der PendelregelungDie folgende Abbildung zeigt die Verschaltung des Eingangs zum Einschalten der Pendelregelung P39001[1] in der Projektierung.
Bild 4-5 Verschaltung des Eingangs zum Einschalten der Pendelregelung
Funktionsbeschreibung4.7 "Ready-To-Run" Funktionen auf der CF-Karte
Drive-Based Sway Control30 Betriebsanleitung, 11/2015
Installation/Deinstallation 5Wenn Sie die Inbetriebnahme mit der vorkonfigurierten CF-Karte über ein BOP20 oder mit einem Webbrowser durchführen, ist dieses Kapitel für Sie nicht relevant. Lesen Sie weiter im Kapitel Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser (Seite 45).
5.1 Installation des Drive-Based Sway Control TechnologiepaketesIm Folgenden wird die Installation des Drive-Based Sway Control Technologiepaktes im Inbetriebnahme-Tool STARTER beschrieben.
Voraussetzung● Das Inbetriebnahme-Tool STARTER ist geöffnet (Offline-Modus).
● Es ist kein Projekt geöffnet.
Drive-Based Sway ControlBetriebsanleitung, 11/2015 31
VorgehensweiseGehen Sie wie folgt vor:
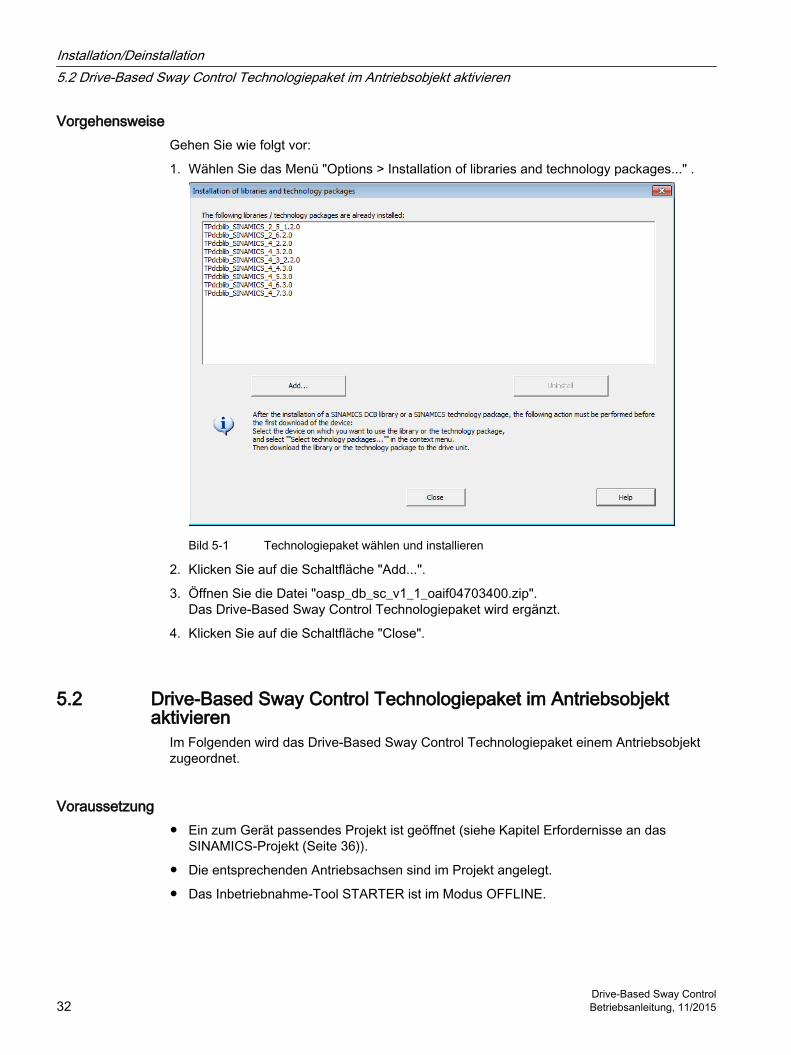
1. Wählen Sie das Menü "Options > Installation of libraries and technology packages..." .
Bild 5-1 Technologiepaket wählen und installieren
2. Klicken Sie auf die Schaltfläche "Add...".
3. Öffnen Sie die Datei "oasp_db_sc_v1_1_oaif04703400.zip".Das Drive-Based Sway Control Technologiepaket wird ergänzt.
4. Klicken Sie auf die Schaltfläche "Close".
5.2 Drive-Based Sway Control Technologiepaket im Antriebsobjekt aktivieren
Im Folgenden wird das Drive-Based Sway Control Technologiepaket einem Antriebsobjekt zugeordnet.
Voraussetzung● Ein zum Gerät passendes Projekt ist geöffnet (siehe Kapitel Erfordernisse an das
SINAMICS-Projekt (Seite 36)).
● Die entsprechenden Antriebsachsen sind im Projekt angelegt.
● Das Inbetriebnahme-Tool STARTER ist im Modus OFFLINE.
Installation/Deinstallation5.2 Drive-Based Sway Control Technologiepaket im Antriebsobjekt aktivieren
Drive-Based Sway Control32 Betriebsanleitung, 11/2015
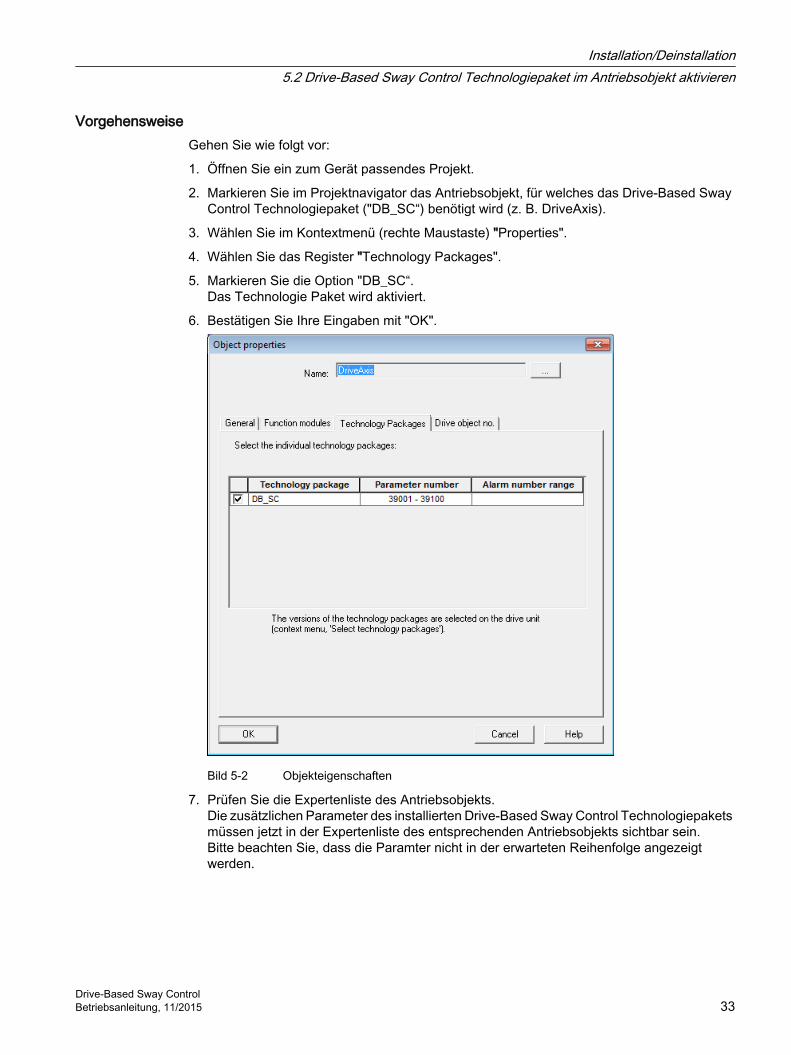
VorgehensweiseGehen Sie wie folgt vor:
1. Öffnen Sie ein zum Gerät passendes Projekt.
2. Markieren Sie im Projektnavigator das Antriebsobjekt, für welches das Drive-Based Sway Control Technologiepaket ("DB_SC“) benötigt wird (z. B. DriveAxis).
3. Wählen Sie im Kontextmenü (rechte Maustaste) "Properties".
4. Wählen Sie das Register "Technology Packages".
5. Markieren Sie die Option "DB_SC“. Das Technologie Paket wird aktiviert.
6. Bestätigen Sie Ihre Eingaben mit "OK".
Bild 5-2 Objekteigenschaften
7. Prüfen Sie die Expertenliste des Antriebsobjekts.Die zusätzlichen Parameter des installierten Drive-Based Sway Control Technologiepakets müssen jetzt in der Expertenliste des entsprechenden Antriebsobjekts sichtbar sein.Bitte beachten Sie, dass die Paramter nicht in der erwarteten Reihenfolge angezeigt werden.
Installation/Deinstallation5.2 Drive-Based Sway Control Technologiepaket im Antriebsobjekt aktivieren
Drive-Based Sway ControlBetriebsanleitung, 11/2015 33
5.3 Projekt übersetzen und ins Zielgerät ladenIm Folgenden wird das Laden und Übersetzen des Projekts mit dem Drive-Based Sway Control Technologiepaket beschrieben.
Voraussetzungen● Die in den vorhergehenden Abschnitten beschriebenen Handlungsschritte wurden
durchgeführt:
– Das Drive-Based Sway Control Technologiepaket ist im STARTER installiert
– Das Drive-Based Sway Control Technologiepaket ist im Antriebsobjekt aktiviert
● Das Inbetriebnahme-Tool STARTER ist im Modus OFFLINE.
VorgehensweiseGehen Sie wie folgt vor:
1. Speichern und übersetzen Sie das Antriebsgerät, in dessen Antriebsobjekt Sie das Drive-Based Sway Control Technologiepaket aktiviert haben.
2. Stellen Sie eine ONLINE-Verbindung mit dem Zielgerät her.
3. Laden Sie das Antriebsgerät in das Zielgerät.
5.4 Deinstallation des Drive-Based Sway Control TechnologiepaketesIm Folgenden wird das Drive-Based Sway Control Technologiepaket über das Tool STARTER deinstalliert.
Die Deinstalltion erfolgt in der umgekehrten Reihenfolge der Installation.
VorgehensweiseGehen Sie wie folgt vor:
1. Deaktivieren Sie das Drive-Based Sway Control Technologiepaket im Antriebsobjekt (siehe Kapitel Drive-Based Sway Control Technologiepaket im Antriebsobjekt aktivieren (Seite 32)).
2. Deinstallieren Sie das Drive-Based Sway Control Technologiepaket im STARTER (siehe Kapitel Installation des Drive-Based Sway Control Technologiepaketes (Seite 31)).
Installation/Deinstallation5.4 Deinstallation des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway Control34 Betriebsanleitung, 11/2015
Inbetriebnahme 6Drive-Based Sway Control können Sie auf verschiedene Arten in Betrieb nehmen:
● Mit der Inbetriebnahmesoftware STARTER (Einbindung in ein vorhandenes Projekt oder Projektierung auf Basis der Standardapplikationen).
● Mit dem Basic Operator Panel BOP20 oder über einen Webbrowser.
Hinweise für das Sicherheitskonzept der Krananlage
WARNUNG
Lebensgefahr durch Fehlfunktionen der Maschine als Folge eines Ausfalls bzw. Wackelkontakts des Hubwerkgebers oder seiner Verdrahtung
Wenn sich die effektive Pendellänge sprunghaft ändert (z. B. durch einen Ausfall/Wackelkontakt des Hubwerkgebers oder seiner Verdrahtung), kann diese Änderung zu unvorhersehbaren Bewegungen der Kranachse führen.● Schützen Sie die Parametrierungen vor unbefugtem Zugriff.● Beherrschen Sie mögliche Fehlfunktionen durch geeignete Maßnahmen (z. B. NOT-HALT
oder NOT-AUS).
Berücksichtigen Sie beim Sicherheitskonzept für die Krananwendung folgende Systemeigenschaft und beachten Sie zwingend die nachfolgend vorgeschlagenen Abschaltvarianten.
Sprünge im Verlauf der Hubwerksposition können dazu führen, dass trotz Drehzahleingang p39050 (des Drive-Based Sway Control Technologiepaketes) gleich 0 der Drehzahlausgang (des Drive-Based Sway Control Technologiepaketes) in der nachfolgenden Zeit nicht konstant auf 0 geht. Bei weiterhin anliegenden Freigaben hält die Kranachse in diesen Situationen nicht an.
Abschaltvarianten bei Verwendung der vorkonfigurierten CF-Karte:
● Rücksetzen des Eingangs "Pendelregelung aktivieren" (Digitaler Eingang DI18) führt den Drehzahlsollwert am Eingang der Drehzahlregelung (r1170) auf den Wert 0.
● Rücksetzen von AUS2 über Digitaleingang DI10 (z.B. über die Not-Aus-Kette). Vor einer erneuten Fahrt mit aktivierter Pendelregelung muss der Eingang "Pendelregelung aktivieren" (Digitaler Eingang DI18) kurzzeitig rückgesetzt werden.
Abschaltvariante bei Verwendung des Drive-Based Sway Control Technologiepaketes in einer anwenderspezifischen Projektierung:
● Rücksetzen von AUS1 oder AUS2 kombiniert mit einem Rücksetzen des Eingangs "Pendelregelung einschalten" (p39001[1]).
Drive-Based Sway ControlBetriebsanleitung, 11/2015 35
6.1 Inbetriebnahme mit STARTER
6.1.1 VoraussetzungenDie Inbetriebnahme von SIMOCRANE Drive-Based Sway Control setzt Folgendes voraus:
● Der Kran erfüllt die technologischen Anforderungen (siehe Kapitel Anforderungen an Kran und Kranachse (Seite 11)).
● Der SINAMICS Antrieb ist so projektiert, dass eine Achse verfahren werden kann (siehe nachfolgenden Abschnitt Erfordernisse an das SINAMICS-Projekt (Seite 36)).
● Das Inbetriebnahme-Tool STARTER ab Version V4.4 muss installiert sein.
Hinweis
Im Folgenden wird davon ausgegangen, dass die Inbetriebnahme von SPS Steuerung (wenn vorhanden) und Antrieb abgeschlossen ist.
6.1.2 Erfordernisse an das SINAMICS-ProjektDie SINAMICS-Projektierung ist bereits vorhanden und muss folgende Voraussetzungen erfüllen:
● Das Inbetriebnahme-Tool STARTER ist installiert.
● Ein STARTER-Projekt wurde erstellt, kann übersetzt und auf die SINAMICS Control Unit (CU310-2 DP) geladen werden.
● Der Antrieb, insbesondere die Drehzahl- und Stromregelung, ist in Betrieb genommen und optimiert.
● Im Antriebsobjekt wird der Hochlaufgeber verwendet.
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway Control36 Betriebsanleitung, 11/2015
● Wenn die Kranachse keine Bremse hat oder die Bremse über das BICO-Signal r1229.1 gesteuert wird, muss p1215=3 (Motorhaltebremse wie Ablaufsteuerung, Anschluss über BICO) eingestellt werden. Wenn die vorhandene Bremse der Kranachse über den antriebsintegrierten Bremsenanschluss gesteuert, muss p1215=1 eingestellt werden.
● Im Antrieb muss für die Achse die erweiterte Bremsenansteuerung aktiviert sein. Dabei müssen Sie die Parameter p1226[0] und p1228 passend einstellen. Diese beiden Parameter sind für das Bit r1229.7 relevant, das in der Stillstandserkennung des Drive-Based Sway Control Technologiepaketes verwendet wird.Nur mit dieser Aktivierung und Parametrierung funktioniert das Zustandsverhalten im Drive-Based Sway Control Technologiepaket wie vorgesehen (siehe Kapitel Funktionsübergreifendes Zustandsverhalten des Drive-Based Sway Control Technologiepaketes (Seite 21)).Details zur erweiterten Bremsenansteuerung, siehe Ref. [5].
Hinweis
Die erweiterte Bremsenansteuerung im Projekt muss immer aktiviert und parametriert (p1226[0], p1228) werden.
Die Aktivierung und Parametrierung gilt auch, wenn die Bremse der Achse nicht über SINAMICS gesteuert wird oder wenn gar keine Bremse vorhanden ist.
6.1.3 Parametrierung des Drive-Based Sway Control Technologiepaketes
6.1.3.1 Grundlagen für die ParametrierungIm Folgenden werden die Grundlagen für die Parametrierung des Drive-Based Sway Control Technologiepaketes beschrieben.
ParameterbereicheDie zum Drive-Based Sway Control Technologiepaket ("DB_SC") gehörenden Parameter liegen im Nummernbereich 39000-39100.
HinweisHandhabung der Parameter
Die Parameter (Verschaltung, Änderung, …) werden wie andere SINAMICS-Parameter gehandhabt, siehe Ref. [6].
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway ControlBetriebsanleitung, 11/2015 37
Prüfen Sie vor der Parametrierung und Verschaltung des Drive-Based Sway Control Technologiepaketes folgende Einstellungen im STARTER-Projekt. Passen Sie diese bei Bedarf an. Vor einer Anpassung muss der Parameter p0112 auf "Expert" gesetzt werden.
● Wählen Sie aus der nachfolgenen Liste eine der fünf Möglichkeiten, um die Parameter p0115[3] und p0115[1] der Achse (Abtastzeiten für interne Regelkreise) einzustellen:
– p0115[3] = 8000, p0115[1] = 1000
– p0115[3] = 4000, p0115[1] = 1000
– p0115[3] = 2000, p0115[1] = 1000
– p0115[3] = 2000, p0115[1] = 500
– p0115[3] = 1000, p0115[1] = 500
Hinweis
Um das ordnungsgemäße Funktionieren der Pendelregelung sicherzustellen, muss einer der fünf oben genannten Verhältnisse zwischen p0115[1] und p0115[3] eingestellt werden. Das Einstellen anderer Verhältnisse wird nicht empfohlen und kann zu Fehlfunktionen führen.
● Die Interpolatoren im Sollwertkanal müssen folgendermaßen eingestellt sein:
– p1189[0].0 = Ja
– p1189[0].1 = Nein
● Die Hoch- und Rücklaufzeiten (p1120[0] und p1121[0]) des Hochlaufgebers müssen identisch sein.
● Drive-Based Sway Control setzt keine bestimmte Einstellung für die Steuerungs-/Regelungsbetriebsart (p1300) voraus. Wenn in Ihrer Hardwarekonfiguration kein Geber vorhanden ist, können Sie sowohl U/f-Steuerung (p1300=0..7) als auch die geberlose Drehzahlregelung (p1300=20) einstellen. Wenn ein Geber vorhanden ist, wird die Drehzahlregelung mit Geber (p1300=21) empfohlen.
● Als Grundvoraussetzung für das Funktionieren des pendelgeregelten Verfahrens der Kranachse gilt, dass der Drehzahl-Istwert dem Drehzahl-Sollwert hinreichend gut folgt (siehe Anforderungen an Kran und Kranachse (Seite 11).
6.1.3.2 Drive-Based Sway Control Technologiepaket verschalten und aktivieren (Teil 1)Im Folgenden wird die Verschaltung des Drive-Based Sway Control Technologiepaketes beschrieben.
Verschaltung mit dem SINAMICS-Sollwertkanal1. Verschalten Sie den Ausgang des Hochlaufgebers (r1150) mit dem Parameter p39050.
2. Aktivieren Sie das Drive-Based Sway Control Technologiepaket über den Parameter p39001[0].
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway Control38 Betriebsanleitung, 11/2015
Verschaltung mit der SINAMICS-StillstandsüberwachungVerschalten Sie den Parameter r1229.7 mit dem Parameter p39049.
Verschaltung der Hubhöhe Für die Verschaltung der Hubhöhe haben Sie zwei Möglichkeiten:
entweder über SINAMICS-IO oder über PROFIBUS wie nachfolgend beschrieben.
Option 1: Verschaltung der Hubhöhe über SINAMICS-IO1. Wenn dem Drive-Based Sway Control Technologiepaket die Hubwerksposition über
Analogeingänge der Control Unit zur Verfügung gestellt wird, verschalten Sie r755[0] mit dem Parameter p39051.Der Parameter r755[0] hat die Normierung PERCENT. Nach der Verschaltung mit dem Parameter p39051 wird im Drive-Based Sway Control Technologiepaket allerdings der Absolutwert verwendet (d.h., 100 % entspricht dem Integerwert 1.073.741.824, usw.Beispiel: leff = s_Hoist • Factor + Offset, wobei s_Hoist im Bereich -2.147.483.648 bis 2.147.483.647 liegt.
Hinweis
Damit keine Werte verloren gehen, beachten Sie bei der Skalierung des Analogwerts folgendes:
Der Absolutwert des Parameters r755[0] muss innerhalb des Integer-32-Wertebereichs (-2.147.483.648 bis 2.147.483.647) des Eingangs für die Hubwerksposition p39051 liegen.
2. Mit dem Parameter r39052 können Sie den Eingangswert p39051 verifizieren und überprüfen, wie der Wert im Drive-Based Sway Control Technologiepaket verarbeitet wird.
Option 2: Verschaltung der Hubhöhe über PROFIBUS1. Wenn dem Drive-Based Sway Control Technologiepaket die Hubwerksposition über eine
PROFIBUS-Schnittstelle zur Verfügung gestellt wird, verschalten Sie den Parameter p39051 (Integer-32) mit einem entsprechenden PROFIBUS-Parameter.Folgende PROFIBUS-Parameter können Sie verschalten:
– Antriebsobjekt: r2050[i], i = 0…31
– Antriebsobjekt: r2060[i], i = 0…30
– Control Unit: r2050[i], i = 0…19
2. Mit dem Parameter r39052 können Sie den Eingangswert p39051 verifizieren und überprüfen, wie der Wert im Drive-Based Sway Control Technologiepaket verarbeitet wird.
Verschaltung des Eingangssignals zum Aktivieren der PendelregelungWenn Sie die Funktion Pendelregelung ein- und ausschalten nutzen wollen (siehe Kapitel Pendelregelung ein- und ausschalten (Seite 22)) , müssen Sie den BICO-Eingang p39001[1] verschalten. Dafür haben Sie zwei Möglichkeiten:
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway ControlBetriebsanleitung, 11/2015 39
entweder über SINAMICS-IO oder über PROFIBUS, wie nachfolgend beschrieben.
Hinweis
Wenn die Pendelregelung immer aktiviert sein soll, ist eine Verschaltung des Parameters p39001[1] nicht erforderlich. Der BICO-Eingang kann konstant auf 1 gesetzt werden.
In diesem Fall können Sie die beiden folgenden Optionsabschnitte überspringen.
Option 1: Verschaltung des Parameters p39001[1] über SINAMICS-IO1. Wenn dem Drive-Based Sway Control Technologiepaket das Signal zum Ein- und
Ausschalten der Pendelregelung über einen Digitaleingang der Control Unit zur Verfügung gestellt wird, verschalten Sie den entsprechenden Parameter, z.B. r722.0, mit p39001[1].
Option 2: Verschaltung des Parameters p39001[1] über PROFIBUS1. Wenn dem Drive-Based Sway Control Technologiepaket das Signal zum Ein- und
Ausschalten der Pendelregelung über PROFIBUS zur Verfügung gestellt wird, verschalten Sie den entsprechenden PROFIBUS-Parameter mit p39001[1].Folgende PROFIBUS-Parameter können Sie verschalten:
– Antriebsobjekt/Control Unit: r2090.0 bis r2090.15
– Antriebsobjekt/Control Unit: r2091.0 bis r2091.15
– Antriebsobjekt/Control Unit: r2092.0 bis r2092.15
– Antriebsobjekt/Control Unit: r2093.0 bis r2093.15
– Antriebsobjekt/Control Unit: r2094.0 bis r2094.15
– Antriebsobjekt/Control Unit: r2095.0 bis r2095.15
6.1.3.3 Vorendschalterbereich parametrierenIm Folgenden wird die Verschaltung des Drive-Based Sway Control Technologiepaketes für die Nutzung der Vorendschalterfunktion beschrieben.
Verschaltung mit Parameter „Nicht im Vorendschalterbereich“Wenn die Parametrierung korrekt ist, muss das Auswertesignal der Vorendschalter mit dem Steuerbit für den Vorendschalter des Drive-Based Sway Control Technologiepaketes verschaltet werden.
1. Verschalten Sie das Signal der Vorendschalter mit dem Eingangsparameter p39001[2].
Hinweis
Das Steuerbit zum Erreichen eines Vorendschalterbereiches kann für einen oder mehrere Vorendschalterbereiche genutzt werden.
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway Control40 Betriebsanleitung, 11/2015
6.1.3.4 Funktionen des Drive-Based Sway Control Technologiepaketes parametrieren
Umrechnung Drehzahl in translatorische GeschwindigkeitFür die Pendelregelung wird die translatorische Geschwindigkeit der Kranachse benötigt. Das Drive-Based Sway Control Technologiepaket rechnet deshalb den Drehzahleingang p39050 in eine translatorische Geschwindigkeit um.
Diese Umrechnung wird mit p39021 parametriert.
1. Stellen Sie den Parameter so ein, damit Folgendes gilt:Translatorische Geschwindigkeit der Kranachse [mm/s] = p39021 · Drehzahl [1/min]
Das Ergebnis der Umrechnung kann mit Parameter r39010[1] verifiziert werden.
Effektive PendellängeDie Pendelregelung basiert auf einem internen Pendelmodell. Dieses Modell benötigt die aktuelle effektive Pendellänge, die mit folgender Formel berechnet wird:
Effektive Pendellänge (leff) [mm] = p39022 · p39052 + p39023
Hinweis: Die Parameter p39022 und p39023 haben die Einheit Millimeter (mm).
Der Zusammenhang zwischen effektiver Pendellänge und Pendelfrequenz f ist:
f = (1/(2π)) · √(g/(leff))
(g ≈ 9.81 m/s² (= Erdbeschleunigung))
Gehen Sie bei der Berechnung der Parameter p39022 und p39023 folgendermaßen vor:
1. Fahren Sie das Hubwerk in eine untere Position und notieren Sie den Wert des Parameters ((DB_SC Hubwerksposition intern) p39052 (= h1).
2. Bewegen Sie die Kranachse, damit eine Schwingung entsteht.
3. Zählen Sie mehrere Schwingungen (>5) und dividieren Sie die verstrichene Zeitdauer durch die Anzahl der Schwingungen. Daraus ergibt sich die Periodendauer T1 einer Schwingung.Die Pendelfrequenz in dieser Hubhöhe ist damit f1 = 1 / T1 Die effektive Pendellänge ist leff1 = 1000 · g / (2π · f1)²
4. Fahren Sie das Hubwerk in eine obere Position und notieren Sie den aktuellen Wert des Parameters p39052 (=h2).
5. Berechnen Sie entsprechend zu Schritt 3 die Werte T2, f2 und leff2.
6. Bestimmen Sie die Parameter wie folgt:p39022 = (leff1 – leff2) / (h1 – h2) p39023 = leff1 - p39022 · h1
Die Einstellung kann mit den beiden Ausgangsparametern r39042 und r39043 verifiziert werden. Für die Verifikation muss der Parameter p39001[0] aktiv sein.
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway ControlBetriebsanleitung, 11/2015 41
Glättung der effektiven PendellängeDie Auflösung und ein eventuelles Rauschen des Signals der Hubwerksposition überträgt sich auf die effektive Pendellänge. Auflösung und Rauschen haben einen Einfluss auf die Güte der Pendelregelung. Grundsätzlich gilt: Je gröber die Auflösung und je größer das Rauschen, desto schlechter funktioniert die Pendelregelung.
Bei einer groben Auflösung können Sie das Signal glätten. Stellen Sie mit Parameter p39028 die Stärke der Glättung ein.
Wenn für die Hubwerkposition der analoge Eingang der CU310-2 DP verwendet wird, ist das Signal verrauscht. Stellen Sie in diesem Fall p39028 mindestens auf den Wert 50ms.
6.1.3.5 Drive-Based Sway Control Technologiepaket verschalten und aktivieren (Teil 2)Im Folgenden wird die abschließende Verschaltung des Drive-Based Sway Control Technologiepaketes beschrieben.
Verschaltung mit dem SINAMICS-SollwertkanalWenn die Parametrierung korrekt ist, müssen Ausgänge des Drive-Based Sway Control Technologiepaketes mit dem SINAMICS Sollwertkanal verschaltet werden.
1. Verschalten Sie den Drehzahladditionssollwert r39032 auf den Eingangsparameter (Drehzahlregler Drehzahlsollwert 2) p1160[0] des SINAMICS Sollwertkanals.
2. Verschalten Sie den Ausgangsparameter (Hochlaufgeber Setzwert) r39033 auf den Parameter p1144[0].
3. Verschalten Sie den Ausgangsparameter (Hochlaufgeber Setzwert übernehmen) r39034.0 auf den Parameter p1143[0].
Damit ist die Inbetriebnahme abgeschlossen und der Kran verfährt pendelgeregelt entsprechend der beschriebenen Randbedingungen.
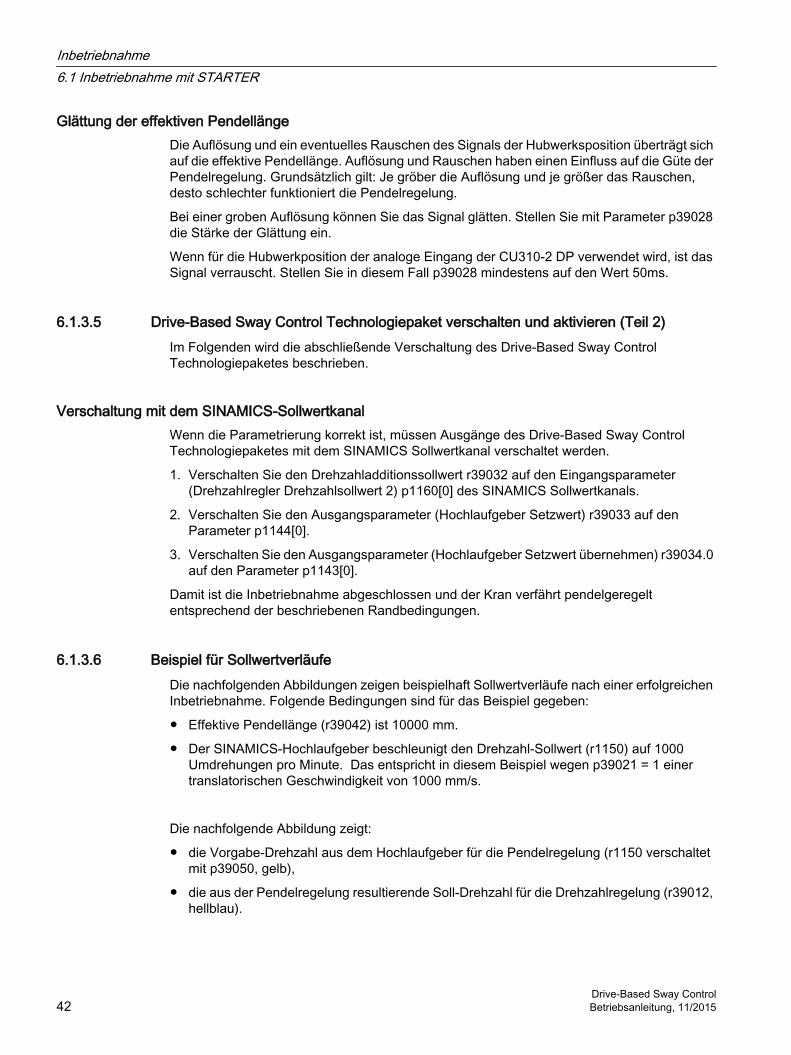
6.1.3.6 Beispiel für SollwertverläufeDie nachfolgenden Abbildungen zeigen beispielhaft Sollwertverläufe nach einer erfolgreichen Inbetriebnahme. Folgende Bedingungen sind für das Beispiel gegeben:
● Effektive Pendellänge (r39042) ist 10000 mm.
● Der SINAMICS-Hochlaufgeber beschleunigt den Drehzahl-Sollwert (r1150) auf 1000 Umdrehungen pro Minute. Das entspricht in diesem Beispiel wegen p39021 = 1 einer translatorischen Geschwindigkeit von 1000 mm/s.
Die nachfolgende Abbildung zeigt:
● die Vorgabe-Drehzahl aus dem Hochlaufgeber für die Pendelregelung (r1150 verschaltet mit p39050, gelb),
● die aus der Pendelregelung resultierende Soll-Drehzahl für die Drehzahlregelung (r39012, hellblau).
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway Control42 Betriebsanleitung, 11/2015
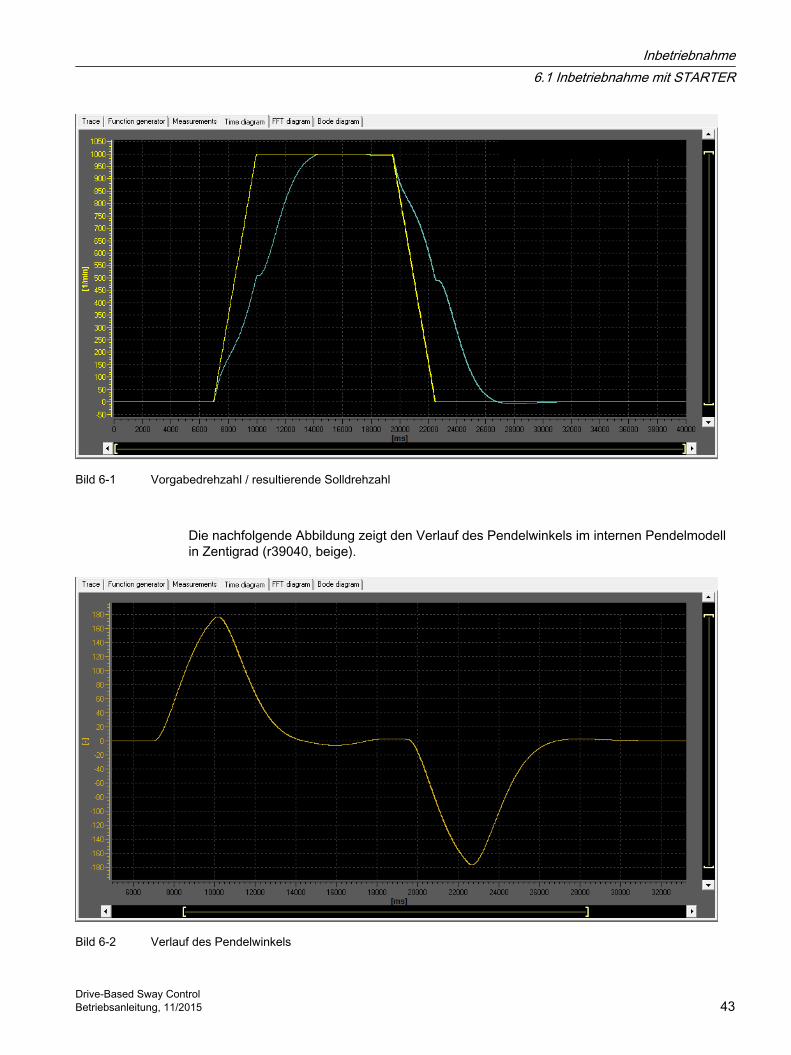
Bild 6-1 Vorgabedrehzahl / resultierende Solldrehzahl
Die nachfolgende Abbildung zeigt den Verlauf des Pendelwinkels im internen Pendelmodell in Zentigrad (r39040, beige).
Bild 6-2 Verlauf des Pendelwinkels
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway ControlBetriebsanleitung, 11/2015 43
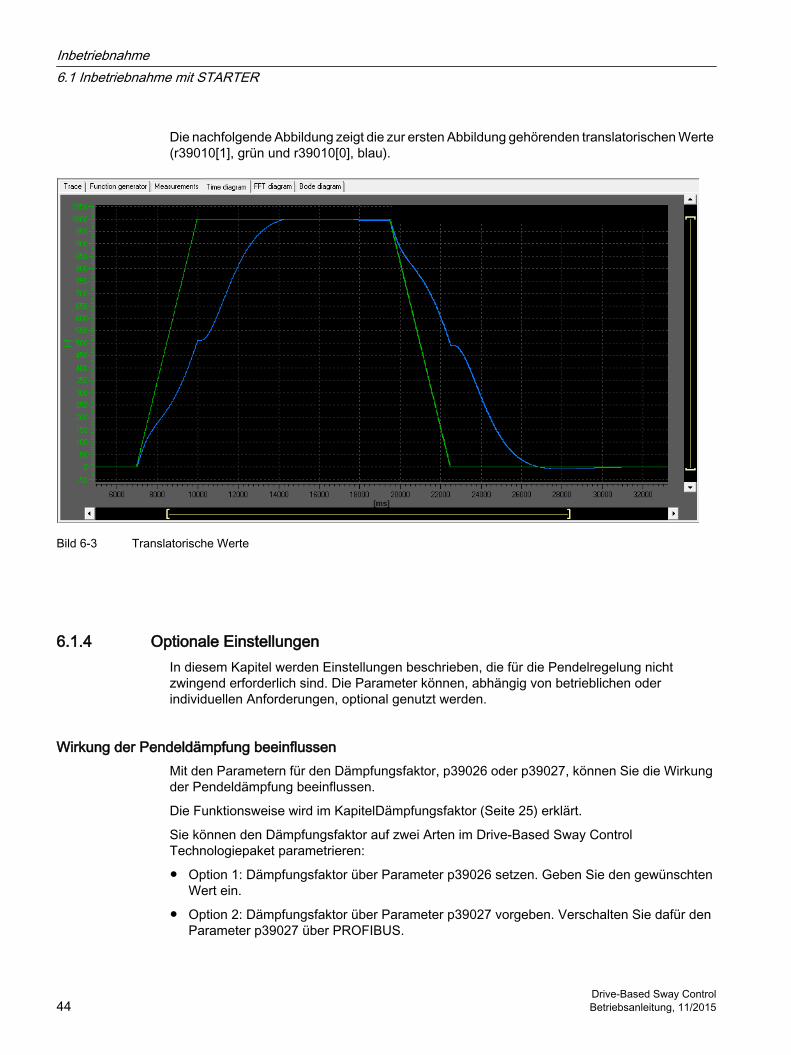
Die nachfolgende Abbildung zeigt die zur ersten Abbildung gehörenden translatorischen Werte (r39010[1], grün und r39010[0], blau).
Bild 6-3 Translatorische Werte
6.1.4 Optionale EinstellungenIn diesem Kapitel werden Einstellungen beschrieben, die für die Pendelregelung nicht zwingend erforderlich sind. Die Parameter können, abhängig von betrieblichen oder individuellen Anforderungen, optional genutzt werden.
Wirkung der Pendeldämpfung beeinflussenMit den Parametern für den Dämpfungsfaktor, p39026 oder p39027, können Sie die Wirkung der Pendeldämpfung beeinflussen.
Die Funktionsweise wird im KapitelDämpfungsfaktor (Seite 25) erklärt.
Sie können den Dämpfungsfaktor auf zwei Arten im Drive-Based Sway Control Technologiepaket parametrieren:
● Option 1: Dämpfungsfaktor über Parameter p39026 setzen. Geben Sie den gewünschten Wert ein.
● Option 2: Dämpfungsfaktor über Parameter p39027 vorgeben. Verschalten Sie dafür den Parameter p39027 über PROFIBUS.
Inbetriebnahme6.1 Inbetriebnahme mit STARTER
Drive-Based Sway Control44 Betriebsanleitung, 11/2015
1. Wenn dem Drive-Based Sway Control Technologiepaket der Dämpfungsfaktor über eine PROFIBUS-Schnittstelle zur Verfügung gestellt wird, verschalten Sie den Parameter p39027 (Integer-16) mit einem entsprechenden PROFIBUS-Parameter. Sie können folgende PROFIBUS-Parameter verschalten:
– Antriebsobjekt: r2050[i], i = 0…31
– Control Unit: r2050[i], i = 0…19
Hinweis
Beachten Sie die Wirksamkeit der zwei verschiedenen Parameter.
Der Dämpfungsfaktor wird von Parameter p39026 übernommen, solange der BICO Parameter p39027 gleich 0 ist. Sobald der BICO Parameter p39027 ungleich 0 ist, wird dieser Wert als Dämpfungsfaktor genutzt und p39026 ignoriert.
6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder WebbrowserDieser Abschnitt beschreibt, wie Sie die vorkonfigurierte CF-Karte über das Basic Operator Panel BOP20 oder über einen Webbrowser in Betrieb nehmen.
Eine Verwendung der Inbetriebnahmesoftware STARTER ist nicht notwendig.
In beiden Fällen wird Drive-Based Sway Control durch das Einstellen und Auslesen der gleichen Parameter der CU310-2 DP in Betrieb genommen. Die Parameter sind durch ihre Nummern eindeutig identifizierbar.
Die beiden Möglichkeiten der Inbetriebnahme unterscheiden sich in der Art des Zugriffs.
● BOP20In dieser Variante wird die Parametrisierung direkt vor-Ort an der CU310-2 DP vorgenommen. Das BOP20 dient dabei als Eingabe- und Anzeigegerät.Siehe Bedienung des BOP20 (Seite 46) und Basic Operator Panel BOP20 (Seite 18).
● WebbrowserFür die Inbetriebnahme mit einem Webbrowser sind erforderlich:
– ein Programmiergerät, Notebook, PC oder Tablet mit einem aktuellen Browser
– Netzwerkzugriff auf die Control Unit CU310-2 DP
In dieser Variante wird die Webserver Funktionalität der CU310-2 DP genutzt. Dabei dient der Webbrowser als Schnittstelle für die Parametrisierung. Eine ausführliche Beschreibung zum Webserver finden Sie im "SINAMICS S120 Funktionshandbuch" Ref. [5].
HinweisIP-Adresse der CU310-2 DP
Im ausgelieferten Zustand ist 169.254.11.22 als IP-Adresse und 255.255.0.0 als Subnetzmaske für die CU310-2 DP eingestellt. Diese IP-Adresse wird für den Verbindungsaufbau über einen Webbrowser benötigt.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 45
Der Antrieb wird ausschließlich über die analogen und digitalen Eingänge der CU310-2 DP gesteuert.
Im Folgenden sind die in den Inbetriebnahmeschritten angegebenen Parameter über BOP oder Webbrowser zu parametrieren.
6.2.1 Bedienung des BOP20In diesem Abschnitt wird die Bedienung von SINAMICS S120 über das Basic Operator Panel BOP20 skizziert. Eine ausführliche Beschreibung zum BOP20 finden Sie im "SINAMICS S120 Funktionshandbuch" Ref. [5].
Wechsel zwischen Betriebs- und ParameteranzeigeNach dem Einschalten und dem Hochlauf der Control Unit wechselt die Anzeige des BOP20 in die Betriebsanzeige. Dort werden anliegende Fehler angezeigt.
1. Mit den "Pfeil"-Tasten können Sie zwischen den Fehlernummern wechseln.
2. Durch Drücken der "P"-Taste wechseln Sie in die Parameteranzeige.In der Parameteranzeige wird oben links die gerade gewählte Antriebsobjekt-Nummer angezeigt.
3. Durch erneutes Drücken der "P"-Taste wechseln Sie wieder in die Betriebsanzeige.
Speichern der Parameterwerte (RAM to ROM)Ein kleines "S" in der Mitte der oberen Anzeigehälfte weist auf ungespeicherte Parameter hin.
1. Drücken Sie die "P"-Taste für etwa 3 Sekunden, bis die Anzeige blinkt.Nach dem Speichern verschwindet das kleines "S" mehr in der Mitte der oberen Anzeigehälfte.
Quittieren von Fehlern1. Wechseln Sie in die Fehler- bzw. Betriebsanzeige (siehe oben "Wechsel zwischen
Betriebs- und Parameteranzeige").
2. Durch Drücken der "FN"-Taste quittieren Sie die anliegenden Fehler. Werden weiterhin Fehler angezeigt, liegen immer noch Fehler an.
Ändern des aktiven Antriebsobjektes 1. Wechseln Sie in die Parameteranzeige (siehe oben "Wechsel zwischen Betriebs- und
Parameteranzeige").
2. Halten Sie die "FN"-Taste gedrückt und drücken Sie die "Pfeil nach oben"-Taste, bis die Antriebsobjekt-Nummer oben links blinkt.
3. Wählen Sie mit den "Pfeil"-Tasten das gewünschte Antriebsobjekt.
4. Bestätigen Sie mit der "P"-Taste die Auswahl. Das gewählte Antriebsobjekt wird links oben auf dem Display angezeigt.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control46 Betriebsanleitung, 11/2015
Anzeigen von Parameterwerten 1. Wechseln Sie in die Parameteranzeige (siehe oben "Wechsel zwischen Betriebs- und
Parameteranzeige").
2. Wählen Sie mit den "Pfeil"-Tasten den gewünschten Parameter.Hinweis: Mit der "FN"-Taste springen Sie zurück zu Parameter r0000.
3. Durch Drücken der "P"-Taste erscheint der aktuelle Wert des Parameters.Hinweis zur WertedarstellungAuf der Anzeige können nur sechs Zeichen dargestellt werden. Wenn der Parameter mehr als sechs Zeichen hat, wird dies rechts oben in der Anzeige wie folgt angegeben:BitfelderAuf der Anzeige werden entweder die Bits 0 bis 15 (r4 oben rechts in Anzeige) oder die Bits 16 bis 31 (L4 oben rechts in Anzeige) angezeigt.DezimalzahlenBei Dezimalzahlen wird angezeigt, wie viele Zeichen rechts bzw. links nicht sichtbar sind (z. B. "r2": 2 Zeichen rechts nicht sichtbar, "L1": 1 Zeichen links nicht sichtbar).
4. Drücken Sie gleichzeitig die "P"-Taste und eine "Pfeil"-Taste, um zwischen den Bit-Bereichen zu wechseln.
Ändern eines Parameterwertes1. Wechseln Sie in die Parameteranzeige (siehe oben "Wechsel zwischen Betriebs- und
Parameteranzeige").
2. Wählen Sie das gewünschte Antriebsobjekt (siehe oben "Ändern des aktiven Antriebsobjektes").
3. Wählen Sie mit den "Pfeil"-Tasten den gewünschten Parameter.
4. Bei Parametern ohne Index: Drücken Sie die "P"-Taste. Der aktuelle Parameterwert wird angezeigt.Bei Parametern mit Index: Drücken Sie die "P"-Taste. Es wird ein Indexwert angezeigt (z. B. in0000). Wählen Sie mit den "Pfeil"-Tasten den gewünschten Index und drücken Sie dann die "P"-Taste.Der aktuelle Parameterwert wird angezeigt.
5. Drücken Sie die "FN"-Taste, um die richtige Stelle der Ziffer zu wählen.Die rechte Ziffer der Wertanzeige beginnt zu blinken
6. Drücken Sie die "Pfeil"-Tasten um den Wert zu ändern.
7. Drücken Sie die erneut die "FN"-Taste.Die Ziffer einer Stelle weiter links beginnt zu blinken.
8. Wiederholen Sie diesen Schritt je nach Stellenanzahl.
9. Drücken Sie die "Pfeil"-Tasten, um den Wert zu ändern.
10.Drücken Sie die "P"-Taste. Die Änderungen des Wertes sind abgeschlossen. Erscheint der eingestellte Wert nicht in der unteren Hälfte der Anzeige, konnte der Wert nicht übernommen werden.Hinweis: Davon ausgenommen sind Parameter, bei denen die SINAMICS-Firmware automatisch den Wert wieder anpasst, z. B. p340.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 47
6.2.2 Zugriff auf die Parameterlisten mit einem WebbrowserWenn Sie die Inbetriebnahme mit einem Webbrowser durchführen, beachten Sie bitte nachfolgende Handlungsschritte
Zugriff auf die Parameterlisten vorbereiten1. Öffnen Sie den Webbrowser auf ihrem Computer und geben Sie die gültige IP-Adresse
Ihrer CU310-2 DP im Adressfeld ein.Die voreingestellte IP-Adresse ist 169.254.11.22.
2. Loggen Sie sich mit dem Namen "SINAMICS" im Feld Username ein. Es ist kein Passwort erforderlich.
3. Wählen Sie im linken Menübereich den Menüpunkt "Parameter".
Anwenderspezifische Parameterliste im WebbrowserAuf der vorkonfigurierten CF-Karte sind Parameterlisten hinterlegt. Diese enthalten die notwendigen Parameter für die hier beschriebene typische Inbetriebnahme.
Wenn Sie Parameter anpassen oder einsehen wollen, die nicht in diesen Listen enthalten sind, können Sie anwenderspezifische Listen anlegen.
Gehen Sie dazu folgendermaßen vor:
1. Wählen Sie den Menüpunkt "Parameter".
2. Öffnen Sie die Registerkarte "Define".
3. Legen Sie mit der Schaltfläche "Add new list" die anwenderspezifische Parameterliste an.
HinweisNachkommastellen im Webbrowser
Die Parameterwerte werden im Webbrowser nur mit zwei Nachkommastellen angezeigt. Die Werte sind jedoch mit höherer Genauigkeit in der CU310-2 DP gespeichert.
Sie können jederzeit Parameterwerte mit höherer Genauigkeit über den Webbrowser eingeben.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control48 Betriebsanleitung, 11/2015
6.2.3 Voraussetzungen für die InbetriebnahmeDie Inbetriebnahme von SIMOCRANE Drive-Based Sway Control mit der vorkonfigurierten CF-Karte über BOP20 oder über einen Webbrowser setzt Folgendes voraus:
● Der Kran erfüllt die technologischen Anforderungen (siehe Kapitel Anforderungen an Kran und Kranachse (Seite 11)).
● Die Analog- und Digitaleingänge sowie die Digitalausgänge der CU310-2 DP sind entsprechend der nachfolgenden Abbildung verdrahtet. Bei der Inbetriebnahme über den Webserver kann die Parameterliste "IO-Monitoring" genutzt werden, um die Verschaltungen zu verifizieren. Die Liste zeigt den Status aller Ein- und Ausgänge (siehe auch Zugriff auf die Parameterlisten mit einem Webbrowser (Seite 48)).
● Bei Inbetriebnahme mit Basic Operator Panel: BOP20 (nicht im Lieferumfang enthalten) ist auf die CU310-2 DP gesteckt.
● Bei Inbetriebnahme mit Webbrowser: Programmiergerät, Notebook, PC oder Tablet mit Netzwerkwerkverbindung zur CU310-2 DP und Webbrowser.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 49
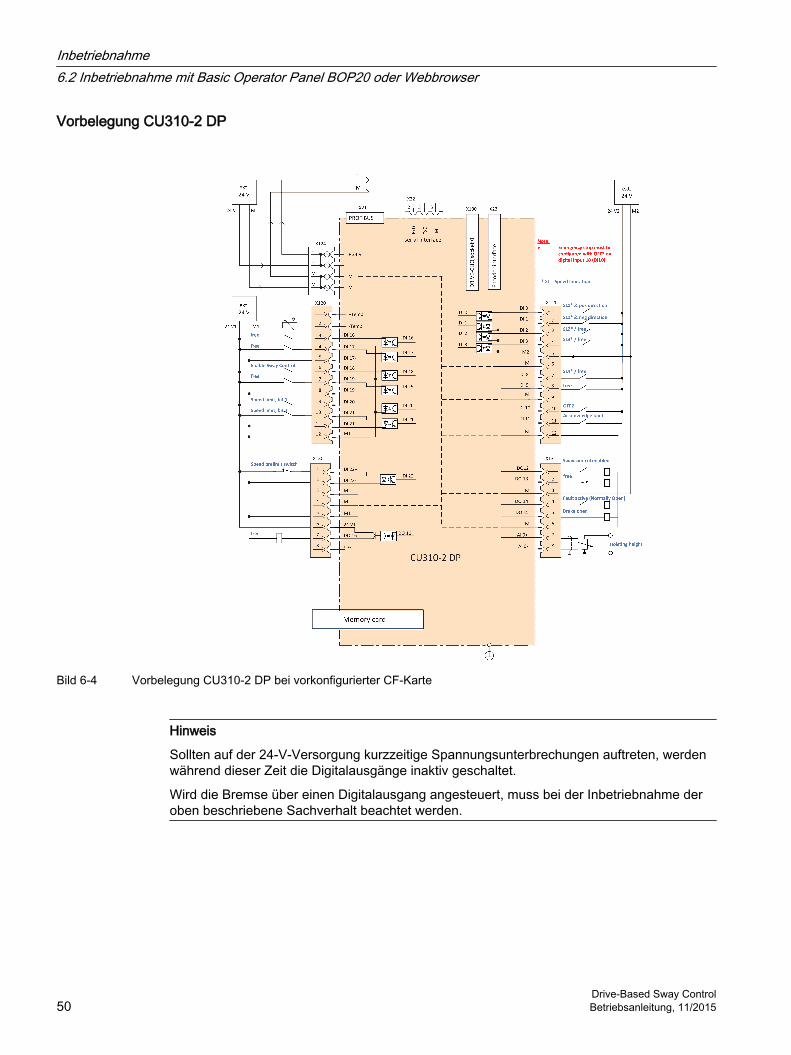
Vorbelegung CU310-2 DP
Bild 6-4 Vorbelegung CU310-2 DP bei vorkonfigurierter CF-Karte
Hinweis
Sollten auf der 24-V-Versorgung kurzzeitige Spannungsunterbrechungen auftreten, werden während dieser Zeit die Digitalausgänge inaktiv geschaltet.
Wird die Bremse über einen Digitalausgang angesteuert, muss bei der Inbetriebnahme der oben beschriebene Sachverhalt beachtet werden.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control50 Betriebsanleitung, 11/2015
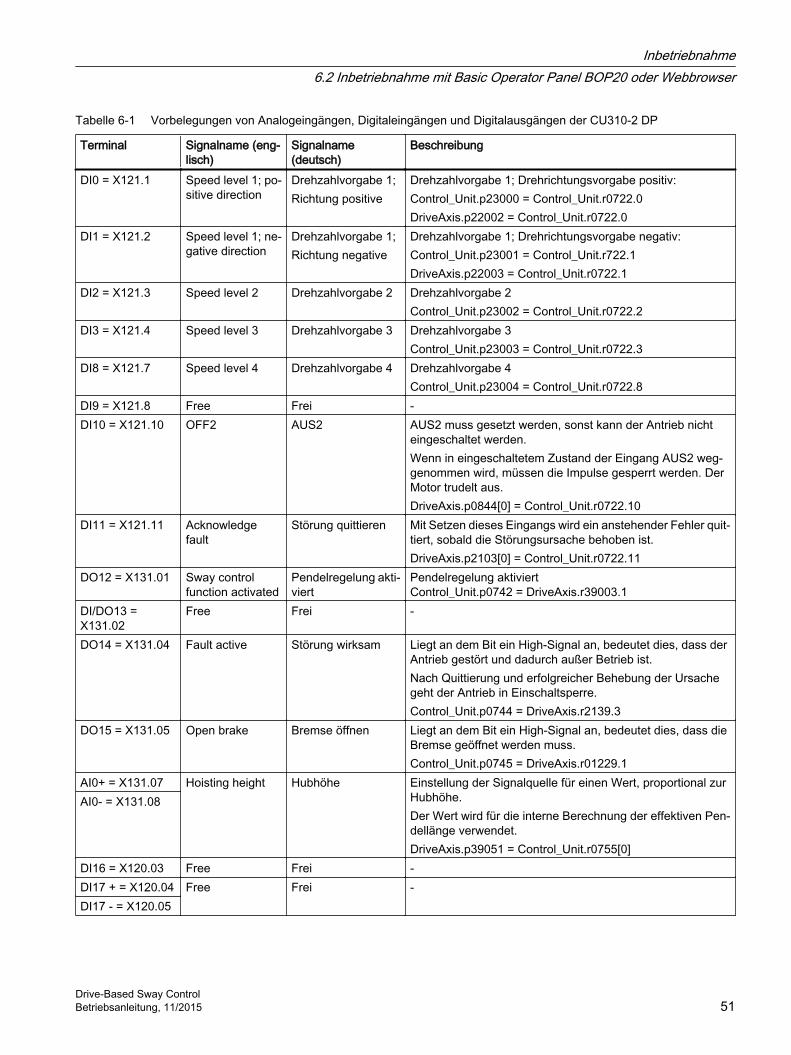
Tabelle 6-1 Vorbelegungen von Analogeingängen, Digitaleingängen und Digitalausgängen der CU310-2 DP
Terminal Signalname (eng‐lisch)
Signalname (deutsch)
Beschreibung
DI0 = X121.1 Speed level 1; po‐sitive direction
Drehzahlvorgabe 1;Richtung positive
Drehzahlvorgabe 1; Drehrichtungsvorgabe positiv:Control_Unit.p23000 = Control_Unit.r0722.0 DriveAxis.p22002 = Control_Unit.r0722.0
DI1 = X121.2 Speed level 1; ne‐gative direction
Drehzahlvorgabe 1;Richtung negative
Drehzahlvorgabe 1; Drehrichtungsvorgabe negativ:Control_Unit.p23001 = Control_Unit.r722.1 DriveAxis.p22003 = Control_Unit.r0722.1
DI2 = X121.3 Speed level 2 Drehzahlvorgabe 2
Drehzahlvorgabe 2Control_Unit.p23002 = Control_Unit.r0722.2
DI3 = X121.4 Speed level 3 Drehzahlvorgabe 3
Drehzahlvorgabe 3Control_Unit.p23003 = Control_Unit.r0722.3
DI8 = X121.7 Speed level 4 Drehzahlvorgabe 4 Drehzahlvorgabe 4Control_Unit.p23004 = Control_Unit.r0722.8
DI9 = X121.8 Free Frei -DI10 = X121.10 OFF2 AUS2 AUS2 muss gesetzt werden, sonst kann der Antrieb nicht
eingeschaltet werden. Wenn in eingeschaltetem Zustand der Eingang AUS2 weg‐genommen wird, müssen die Impulse gesperrt werden. Der Motor trudelt aus.DriveAxis.p0844[0] = Control_Unit.r0722.10
DI11 = X121.11 Acknowledge fault
Störung quittieren Mit Setzen dieses Eingangs wird ein anstehender Fehler quit‐tiert, sobald die Störungsursache behoben ist.DriveAxis.p2103[0] = Control_Unit.r0722.11
DO12 = X131.01 Sway control function activated
Pendelregelung akti‐viert
Pendelregelung aktiviertControl_Unit.p0742 = DriveAxis.r39003.1
DI/DO13 = X131.02
Free Frei -
DO14 = X131.04 Fault active Störung wirksam Liegt an dem Bit ein High-Signal an, bedeutet dies, dass der Antrieb gestört und dadurch außer Betrieb ist. Nach Quittierung und erfolgreicher Behebung der Ursache geht der Antrieb in Einschaltsperre.Control_Unit.p0744 = DriveAxis.r2139.3
DO15 = X131.05 Open brake Bremse öffnen Liegt an dem Bit ein High-Signal an, bedeutet dies, dass die Bremse geöffnet werden muss.Control_Unit.p0745 = DriveAxis.r01229.1
AI0+ = X131.07 Hoisting height Hubhöhe Einstellung der Signalquelle für einen Wert, proportional zur Hubhöhe. Der Wert wird für die interne Berechnung der effektiven Pen‐dellänge verwendet.DriveAxis.p39051 = Control_Unit.r0755[0]
AI0- = X131.08
DI16 = X120.03 Free Frei -DI17 + = X120.04 Free Frei -DI17 - = X120.05
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 51
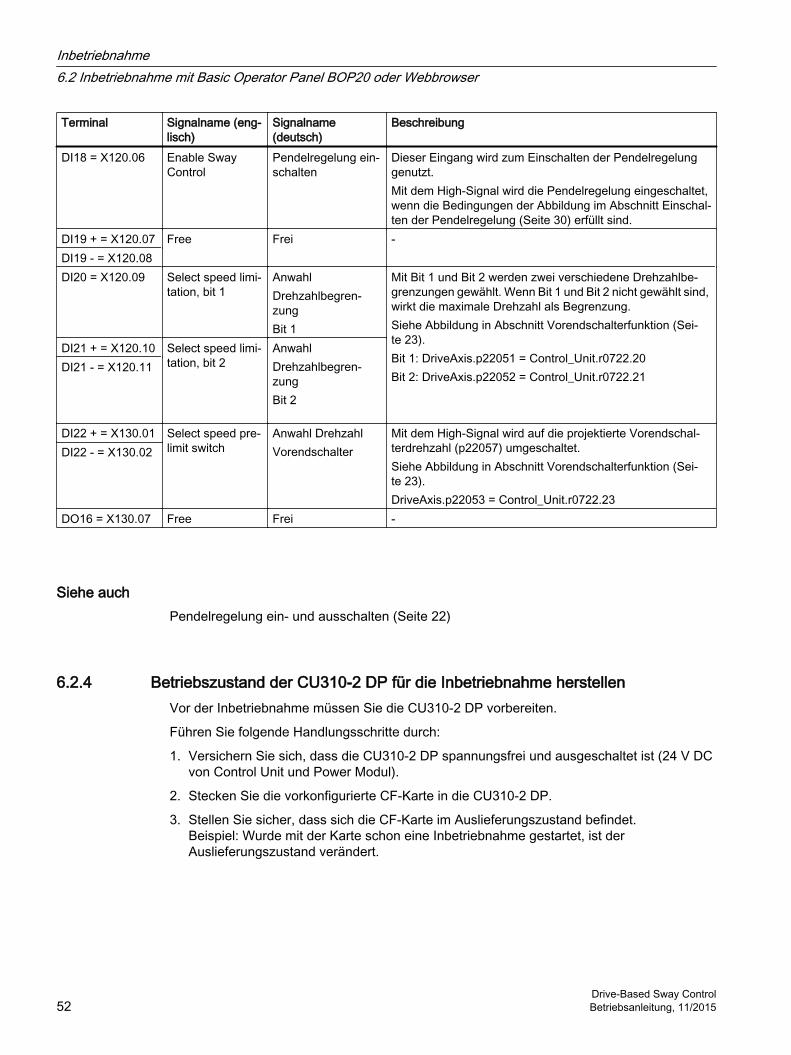
Terminal Signalname (eng‐lisch)
Signalname (deutsch)
Beschreibung
DI18 = X120.06 Enable Sway Control
Pendelregelung ein‐schalten
Dieser Eingang wird zum Einschalten der Pendelregelung genutzt. Mit dem High-Signal wird die Pendelregelung eingeschaltet, wenn die Bedingungen der Abbildung im Abschnitt Einschal‐ten der Pendelregelung (Seite 30) erfüllt sind.
DI19 + = X120.07 Free Frei -DI19 - = X120.08DI20 = X120.09 Select speed limi‐
tation, bit 1AnwahlDrehzahlbegren‐zungBit 1
Mit Bit 1 und Bit 2 werden zwei verschiedene Drehzahlbe‐grenzungen gewählt. Wenn Bit 1 und Bit 2 nicht gewählt sind, wirkt die maximale Drehzahl als Begrenzung.Siehe Abbildung in Abschnitt Vorendschalterfunktion (Sei‐te 23).Bit 1: DriveAxis.p22051 = Control_Unit.r0722.20Bit 2: DriveAxis.p22052 = Control_Unit.r0722.21
DI21 + = X120.10 Select speed limi‐tation, bit 2
AnwahlDrehzahlbegren‐zungBit 2
DI21 - = X120.11
DI22 + = X130.01 Select speed pre‐limit switch
Anwahl DrehzahlVorendschalter
Mit dem High-Signal wird auf die projektierte Vorendschal‐terdrehzahl (p22057) umgeschaltet.Siehe Abbildung in Abschnitt Vorendschalterfunktion (Sei‐te 23).DriveAxis.p22053 = Control_Unit.r0722.23
DI22 - = X130.02
DO16 = X130.07 Free Frei -
Siehe auchPendelregelung ein- und ausschalten (Seite 22)
6.2.4 Betriebszustand der CU310-2 DP für die Inbetriebnahme herstellenVor der Inbetriebnahme müssen Sie die CU310-2 DP vorbereiten.
Führen Sie folgende Handlungsschritte durch:
1. Versichern Sie sich, dass die CU310-2 DP spannungsfrei und ausgeschaltet ist (24 V DC von Control Unit und Power Modul).
2. Stecken Sie die vorkonfigurierte CF-Karte in die CU310-2 DP.
3. Stellen Sie sicher, dass sich die CF-Karte im Auslieferungszustand befindet. Beispiel: Wurde mit der Karte schon eine Inbetriebnahme gestartet, ist der Auslieferungszustand verändert.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control52 Betriebsanleitung, 11/2015
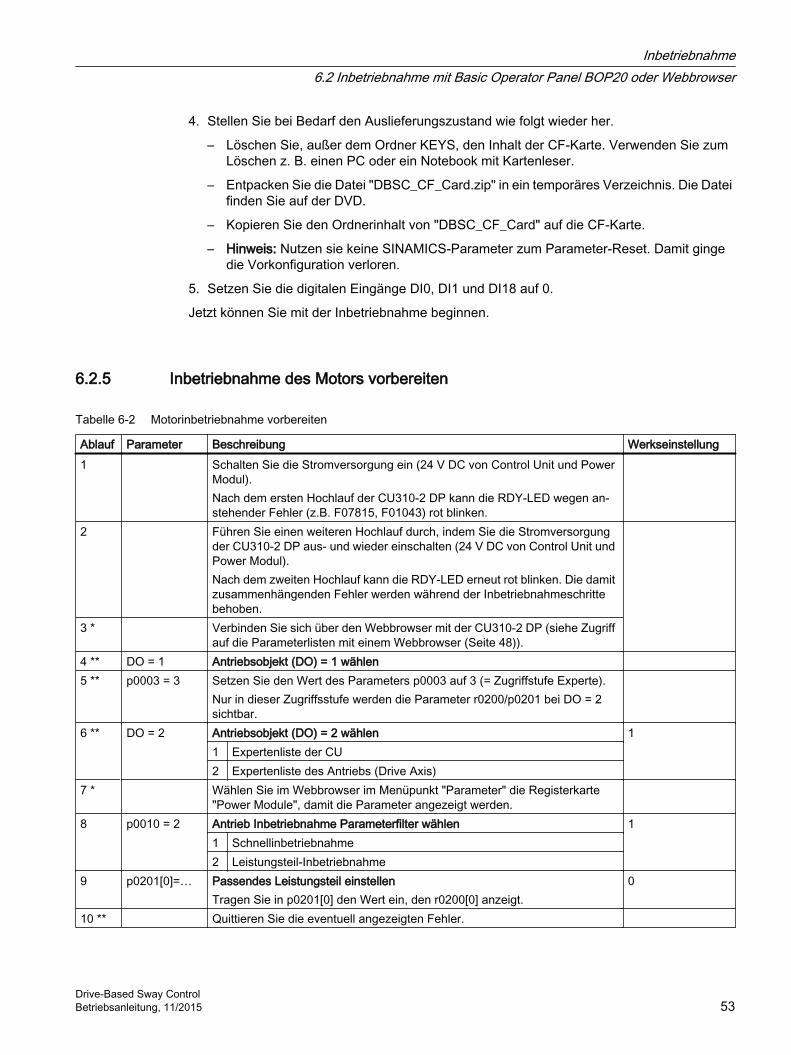
4. Stellen Sie bei Bedarf den Auslieferungszustand wie folgt wieder her.
– Löschen Sie, außer dem Ordner KEYS, den Inhalt der CF-Karte. Verwenden Sie zum Löschen z. B. einen PC oder ein Notebook mit Kartenleser.
– Entpacken Sie die Datei "DBSC_CF_Card.zip" in ein temporäres Verzeichnis. Die Datei finden Sie auf der DVD.
– Kopieren Sie den Ordnerinhalt von "DBSC_CF_Card" auf die CF-Karte.
– Hinweis: Nutzen sie keine SINAMICS-Parameter zum Parameter-Reset. Damit ginge die Vorkonfiguration verloren.
5. Setzen Sie die digitalen Eingänge DI0, DI1 und DI18 auf 0.
Jetzt können Sie mit der Inbetriebnahme beginnen.
6.2.5 Inbetriebnahme des Motors vorbereiten
Tabelle 6-2 Motorinbetriebnahme vorbereiten
Ablauf Parameter Beschreibung Werkseinstellung 1 Schalten Sie die Stromversorgung ein (24 V DC von Control Unit und Power
Modul).Nach dem ersten Hochlauf der CU310-2 DP kann die RDY-LED wegen an‐stehender Fehler (z.B. F07815, F01043) rot blinken.
2 Führen Sie einen weiteren Hochlauf durch, indem Sie die Stromversorgung der CU310-2 DP aus- und wieder einschalten (24 V DC von Control Unit und Power Modul).Nach dem zweiten Hochlauf kann die RDY-LED erneut rot blinken. Die damit zusammenhängenden Fehler werden während der Inbetriebnahmeschritte behoben.
3 * Verbinden Sie sich über den Webbrowser mit der CU310-2 DP (siehe Zugriff auf die Parameterlisten mit einem Webbrowser (Seite 48)).
4 ** DO = 1 Antriebsobjekt (DO) = 1 wählen 5 ** p0003 = 3 Setzen Sie den Wert des Parameters p0003 auf 3 (= Zugriffstufe Experte).
Nur in dieser Zugriffsstufe werden die Parameter r0200/p0201 bei DO = 2 sichtbar.
6 **
DO = 2
Antriebsobjekt (DO) = 2 wählen 1 1 Expertenliste der CU
2 Expertenliste des Antriebs (Drive Axis)7 * Wählen Sie im Webbrowser im Menüpunkt "Parameter" die Registerkarte
"Power Module", damit die Parameter angezeigt werden.
8 p0010 = 2 Antrieb Inbetriebnahme Parameterfilter wählen 11 Schnellinbetriebnahme2 Leistungsteil-Inbetriebnahme
9 p0201[0]=… Passendes Leistungsteil einstellenTragen Sie in p0201[0] den Wert ein, den r0200[0] anzeigt.
0
10 ** Quittieren Sie die eventuell angezeigten Fehler.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 53
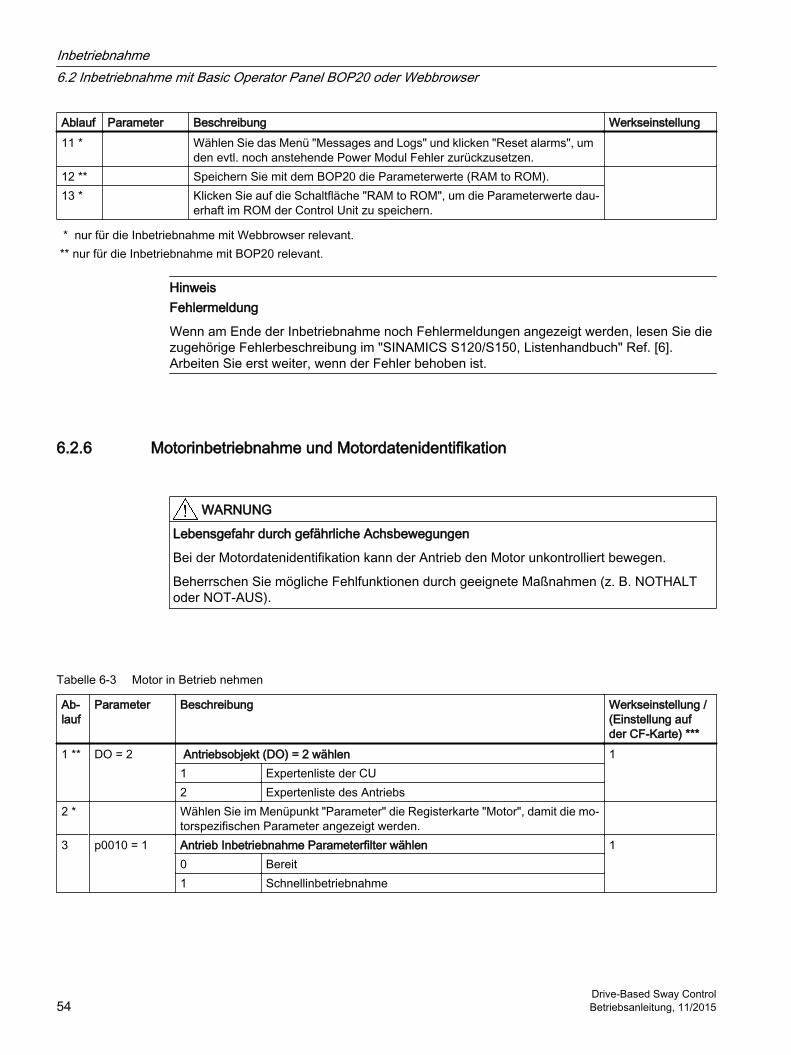
Ablauf Parameter Beschreibung Werkseinstellung 11 * Wählen Sie das Menü "Messages and Logs" und klicken "Reset alarms", um
den evtl. noch anstehende Power Modul Fehler zurückzusetzen.
12 ** Speichern Sie mit dem BOP20 die Parameterwerte (RAM to ROM). 13 * Klicken Sie auf die Schaltfläche "RAM to ROM", um die Parameterwerte dau‐
erhaft im ROM der Control Unit zu speichern.
* nur für die Inbetriebnahme mit Webbrowser relevant. ** nur für die Inbetriebnahme mit BOP20 relevant.
HinweisFehlermeldung
Wenn am Ende der Inbetriebnahme noch Fehlermeldungen angezeigt werden, lesen Sie die zugehörige Fehlerbeschreibung im "SINAMICS S120/S150, Listenhandbuch" Ref. [6]. Arbeiten Sie erst weiter, wenn der Fehler behoben ist.
6.2.6 Motorinbetriebnahme und Motordatenidentifikation
WARNUNG
Lebensgefahr durch gefährliche Achsbewegungen
Bei der Motordatenidentifikation kann der Antrieb den Motor unkontrolliert bewegen.
Beherrschen Sie mögliche Fehlfunktionen durch geeignete Maßnahmen (z. B. NOTHALT oder NOT-AUS).
Tabelle 6-3 Motor in Betrieb nehmen
Ab‐lauf
Parameter Beschreibung Werkseinstellung / (Einstellung auf der CF-Karte) ***
1 ** DO = 2 Antriebsobjekt (DO) = 2 wählen 11 Expertenliste der CU2 Expertenliste des Antriebs
2 * Wählen Sie im Menüpunkt "Parameter" die Registerkarte "Motor", damit die mo‐torspezifischen Parameter angezeigt werden.
3 p0010 = 1 Antrieb Inbetriebnahme Parameterfilter wählen 10 Bereit1 Schnellinbetriebnahme
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control54 Betriebsanleitung, 11/2015
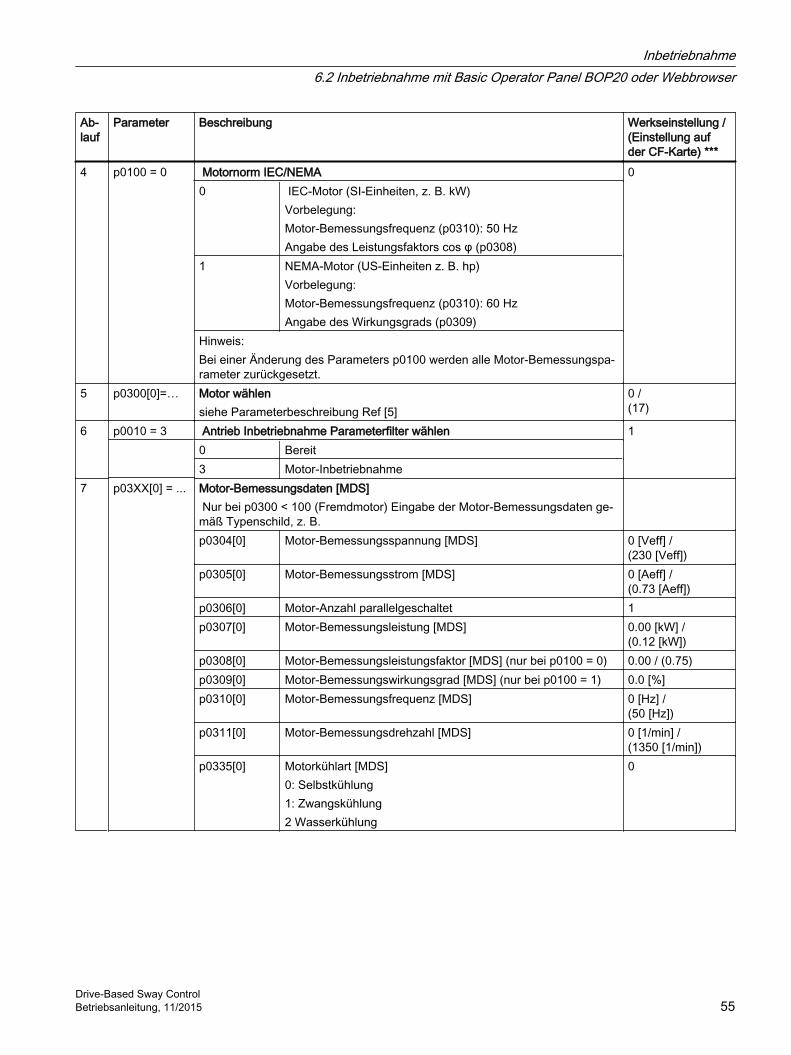
Ab‐lauf
Parameter Beschreibung Werkseinstellung / (Einstellung auf der CF-Karte) ***
4 p0100 = 0 Motornorm IEC/NEMA 00 IEC-Motor (SI-Einheiten, z. B. kW)
Vorbelegung: Motor-Bemessungsfrequenz (p0310): 50 Hz Angabe des Leistungsfaktors cos φ (p0308)
1 NEMA-Motor (US-Einheiten z. B. hp) Vorbelegung: Motor-Bemessungsfrequenz (p0310): 60 Hz Angabe des Wirkungsgrads (p0309)
Hinweis: Bei einer Änderung des Parameters p0100 werden alle Motor-Bemessungspa‐rameter zurückgesetzt.
5 p0300[0]=… Motor wählensiehe Parameterbeschreibung Ref [5]
0 / (17)
6 p0010 = 3 Antrieb Inbetriebnahme Parameterfilter wählen 1 0 Bereit
3 Motor-Inbetriebnahme7 p03XX[0] = ... Motor-Bemessungsdaten [MDS]
Nur bei p0300 < 100 (Fremdmotor) Eingabe der Motor-Bemessungsdaten ge‐mäß Typenschild, z. B.
p0304[0] Motor-Bemessungsspannung [MDS] 0 [Veff] / (230 [Veff])
p0305[0] Motor-Bemessungsstrom [MDS] 0 [Aeff] / (0.73 [Aeff])
p0306[0] Motor-Anzahl parallelgeschaltet 1p0307[0] Motor-Bemessungsleistung [MDS] 0.00 [kW] /
(0.12 [kW]) p0308[0] Motor-Bemessungsleistungsfaktor [MDS] (nur bei p0100 = 0) 0.00 / (0.75)p0309[0] Motor-Bemessungswirkungsgrad [MDS] (nur bei p0100 = 1) 0.0 [%] p0310[0] Motor-Bemessungsfrequenz [MDS] 0 [Hz] /
(50 [Hz])p0311[0] Motor-Bemessungsdrehzahl [MDS] 0 [1/min] /
(1350 [1/min])p0335[0] Motorkühlart [MDS]
0: Selbstkühlung 1: Zwangskühlung 2 Wasserkühlung
0
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 55
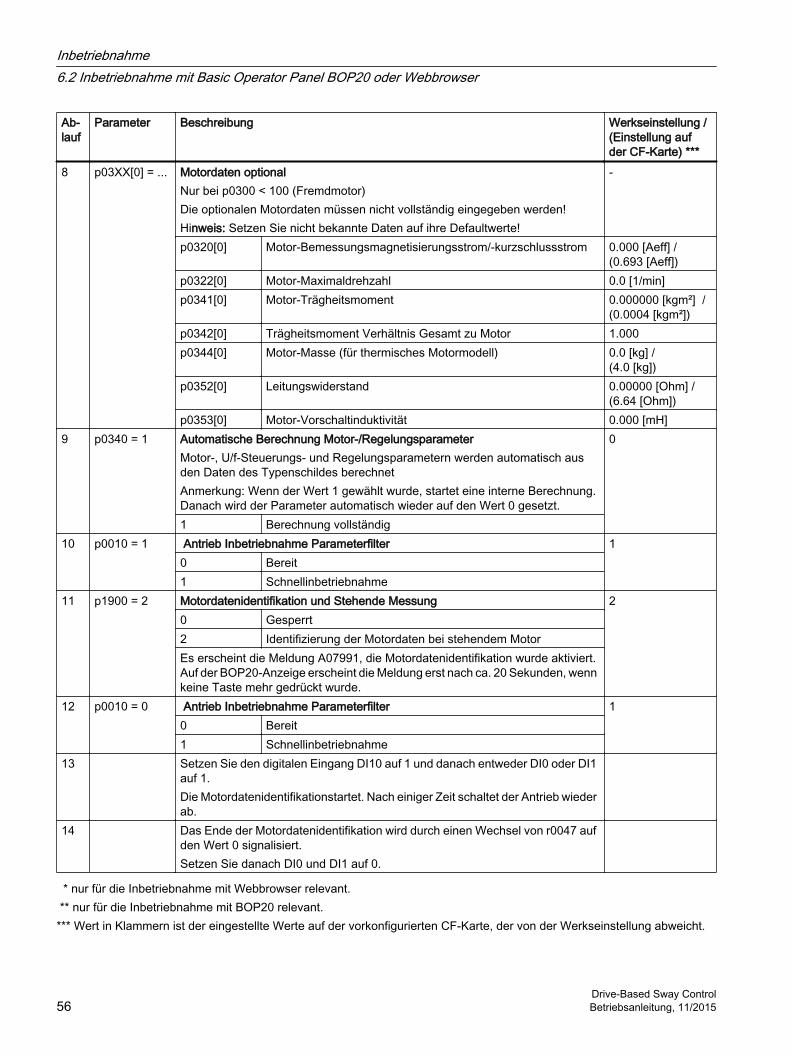
Ab‐lauf
Parameter Beschreibung Werkseinstellung / (Einstellung auf der CF-Karte) ***
8 p03XX[0] = ... Motordaten optionalNur bei p0300 < 100 (Fremdmotor)Die optionalen Motordaten müssen nicht vollständig eingegeben werden!Hinweis: Setzen Sie nicht bekannte Daten auf ihre Defaultwerte!
-
p0320[0] Motor-Bemessungsmagnetisierungsstrom/-kurzschlussstrom 0.000 [Aeff] / (0.693 [Aeff])
p0322[0] Motor-Maximaldrehzahl 0.0 [1/min]p0341[0] Motor-Trägheitsmoment 0.000000 [kgm²] /
(0.0004 [kgm²])p0342[0] Trägheitsmoment Verhältnis Gesamt zu Motor 1.000p0344[0] Motor-Masse (für thermisches Motormodell) 0.0 [kg] /
(4.0 [kg])p0352[0] Leitungswiderstand 0.00000 [Ohm] /
(6.64 [Ohm])p0353[0] Motor-Vorschaltinduktivität 0.000 [mH]
9 p0340 = 1 Automatische Berechnung Motor-/RegelungsparameterMotor-, U/f-Steuerungs- und Regelungsparametern werden automatisch aus den Daten des Typenschildes berechnetAnmerkung: Wenn der Wert 1 gewählt wurde, startet eine interne Berechnung. Danach wird der Parameter automatisch wieder auf den Wert 0 gesetzt.
0
1 Berechnung vollständig10
p0010 = 1 Antrieb Inbetriebnahme Parameterfilter 10 Bereit 1 Schnellinbetriebnahme
11 p1900 = 2 Motordatenidentifikation und Stehende Messung 20 Gesperrt 2 Identifizierung der Motordaten bei stehendem Motor Es erscheint die Meldung A07991, die Motordatenidentifikation wurde aktiviert. Auf der BOP20-Anzeige erscheint die Meldung erst nach ca. 20 Sekunden, wenn keine Taste mehr gedrückt wurde.
12
p0010 = 0 Antrieb Inbetriebnahme Parameterfilter 10 Bereit 1 Schnellinbetriebnahme
13 Setzen Sie den digitalen Eingang DI10 auf 1 und danach entweder DI0 oder DI1 auf 1. Die Motordatenidentifikationstartet. Nach einiger Zeit schaltet der Antrieb wieder ab.
14 Das Ende der Motordatenidentifikation wird durch einen Wechsel von r0047 auf den Wert 0 signalisiert. Setzen Sie danach DI0 und DI1 auf 0.
* nur für die Inbetriebnahme mit Webbrowser relevant. ** nur für die Inbetriebnahme mit BOP20 relevant.*** Wert in Klammern ist der eingestellte Werte auf der vorkonfigurierten CF-Karte, der von der Werkseinstellung abweicht.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control56 Betriebsanleitung, 11/2015
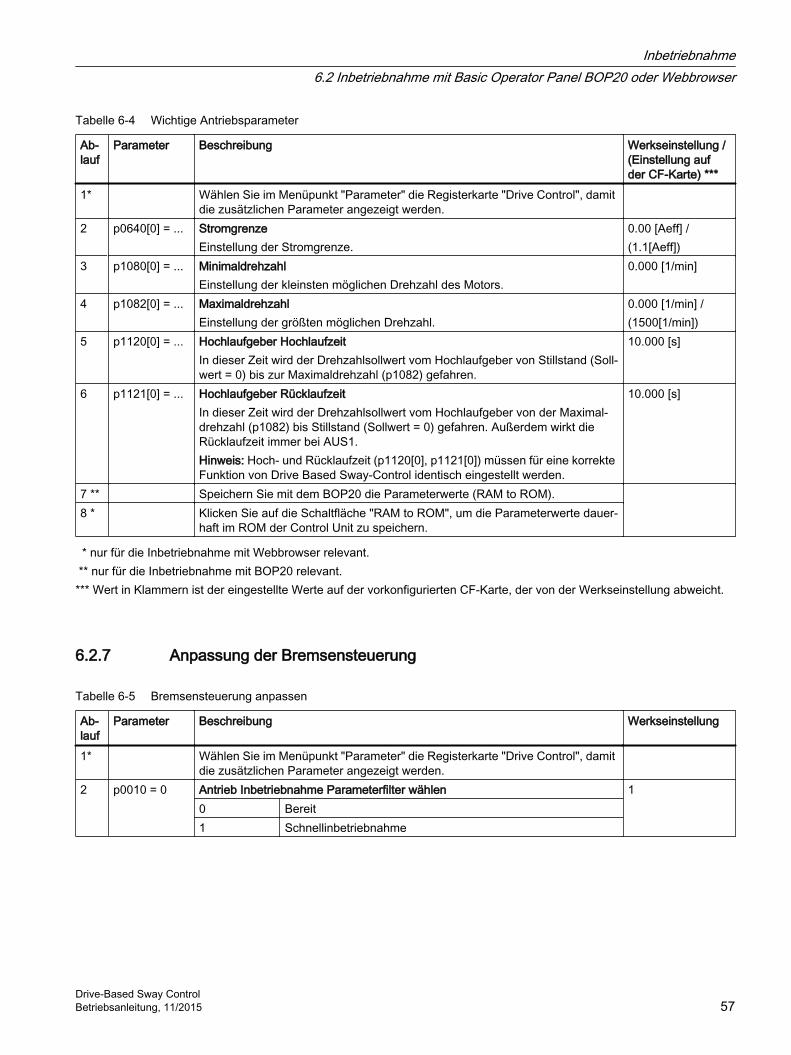
Tabelle 6-4 Wichtige Antriebsparameter
Ab‐lauf
Parameter Beschreibung Werkseinstellung /(Einstellung auf der CF-Karte) ***
1* Wählen Sie im Menüpunkt "Parameter" die Registerkarte "Drive Control", damit die zusätzlichen Parameter angezeigt werden.
2 p0640[0] = ... StromgrenzeEinstellung der Stromgrenze.
0.00 [Aeff] / (1.1[Aeff])
3 p1080[0] = ... MinimaldrehzahlEinstellung der kleinsten möglichen Drehzahl des Motors.
0.000 [1/min]
4 p1082[0] = ... MaximaldrehzahlEinstellung der größten möglichen Drehzahl.
0.000 [1/min] /(1500[1/min])
5 p1120[0] = ... Hochlaufgeber HochlaufzeitIn dieser Zeit wird der Drehzahlsollwert vom Hochlaufgeber von Stillstand (Soll‐wert = 0) bis zur Maximaldrehzahl (p1082) gefahren.
10.000 [s]
6 p1121[0] = ... Hochlaufgeber RücklaufzeitIn dieser Zeit wird der Drehzahlsollwert vom Hochlaufgeber von der Maximal‐drehzahl (p1082) bis Stillstand (Sollwert = 0) gefahren. Außerdem wirkt die Rücklaufzeit immer bei AUS1. Hinweis: Hoch- und Rücklaufzeit (p1120[0], p1121[0]) müssen für eine korrekte Funktion von Drive Based Sway-Control identisch eingestellt werden.
10.000 [s]
7 ** Speichern Sie mit dem BOP20 die Parameterwerte (RAM to ROM). 8 * Klicken Sie auf die Schaltfläche "RAM to ROM", um die Parameterwerte dauer‐
haft im ROM der Control Unit zu speichern.
* nur für die Inbetriebnahme mit Webbrowser relevant. ** nur für die Inbetriebnahme mit BOP20 relevant.*** Wert in Klammern ist der eingestellte Werte auf der vorkonfigurierten CF-Karte, der von der Werkseinstellung abweicht.
6.2.7 Anpassung der Bremsensteuerung
Tabelle 6-5 Bremsensteuerung anpassen
Ab‐lauf
Parameter Beschreibung Werkseinstellung
1* Wählen Sie im Menüpunkt "Parameter" die Registerkarte "Drive Control", damit die zusätzlichen Parameter angezeigt werden.
2 p0010 = 0 Antrieb Inbetriebnahme Parameterfilter wählen 10 Bereit1 Schnellinbetriebnahme
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 57
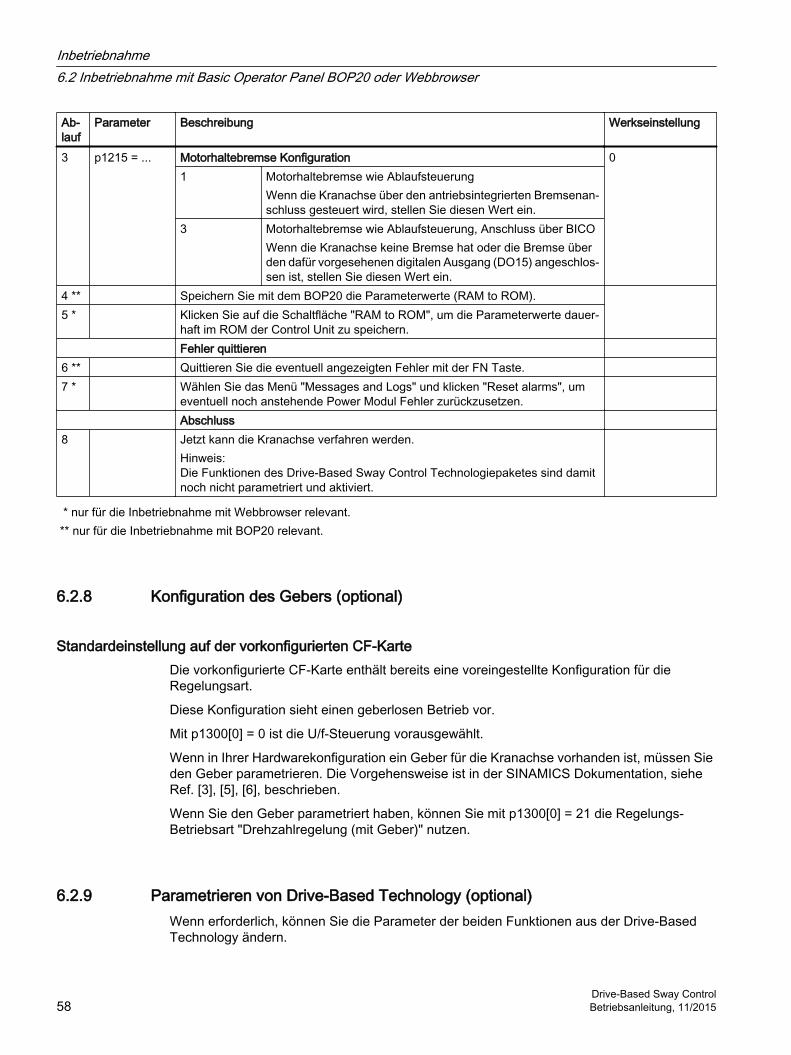
Ab‐lauf
Parameter Beschreibung Werkseinstellung
3 p1215 = ... Motorhaltebremse Konfiguration 01 Motorhaltebremse wie Ablaufsteuerung
Wenn die Kranachse über den antriebsintegrierten Bremsenan‐schluss gesteuert wird, stellen Sie diesen Wert ein.
3 Motorhaltebremse wie Ablaufsteuerung, Anschluss über BICOWenn die Kranachse keine Bremse hat oder die Bremse über den dafür vorgesehenen digitalen Ausgang (DO15) angeschlos‐sen ist, stellen Sie diesen Wert ein.
4 ** Speichern Sie mit dem BOP20 die Parameterwerte (RAM to ROM). 5 * Klicken Sie auf die Schaltfläche "RAM to ROM", um die Parameterwerte dauer‐
haft im ROM der Control Unit zu speichern. Fehler quittieren 6 ** Quittieren Sie die eventuell angezeigten Fehler mit der FN Taste. 7 * Wählen Sie das Menü "Messages and Logs" und klicken "Reset alarms", um
eventuell noch anstehende Power Modul Fehler zurückzusetzen.
Abschluss 8 Jetzt kann die Kranachse verfahren werden.
Hinweis:Die Funktionen des Drive-Based Sway Control Technologiepaketes sind damit noch nicht parametriert und aktiviert.
* nur für die Inbetriebnahme mit Webbrowser relevant. ** nur für die Inbetriebnahme mit BOP20 relevant.
6.2.8 Konfiguration des Gebers (optional)
Standardeinstellung auf der vorkonfigurierten CF-KarteDie vorkonfigurierte CF-Karte enthält bereits eine voreingestellte Konfiguration für die Regelungsart.
Diese Konfiguration sieht einen geberlosen Betrieb vor.
Mit p1300[0] = 0 ist die U/f-Steuerung vorausgewählt.
Wenn in Ihrer Hardwarekonfiguration ein Geber für die Kranachse vorhanden ist, müssen Sie den Geber parametrieren. Die Vorgehensweise ist in der SINAMICS Dokumentation, siehe Ref. [3], [5], [6], beschrieben.
Wenn Sie den Geber parametriert haben, können Sie mit p1300[0] = 21 die Regelungs-Betriebsart "Drehzahlregelung (mit Geber)" nutzen.
6.2.9 Parametrieren von Drive-Based Technology (optional)Wenn erforderlich, können Sie die Parameter der beiden Funktionen aus der Drive-Based Technology ändern.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control58 Betriebsanleitung, 11/2015
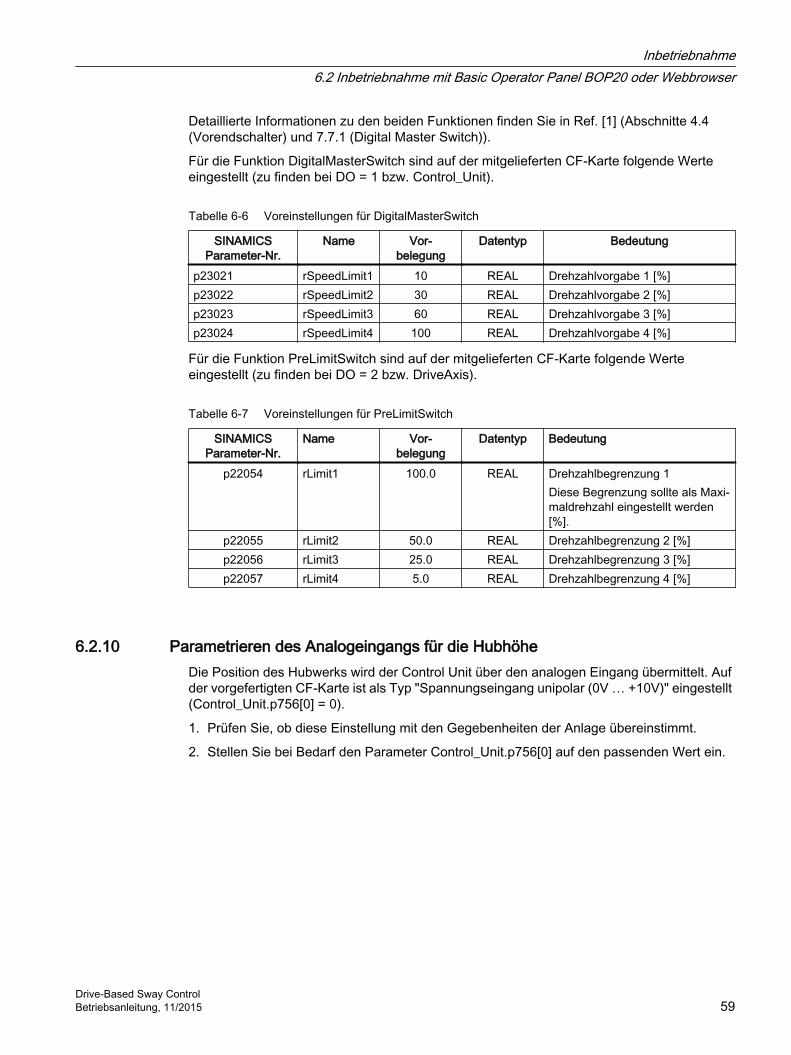
Detaillierte Informationen zu den beiden Funktionen finden Sie in Ref. [1] (Abschnitte 4.4 (Vorendschalter) und 7.7.1 (Digital Master Switch)).
Für die Funktion DigitalMasterSwitch sind auf der mitgelieferten CF-Karte folgende Werte eingestellt (zu finden bei DO = 1 bzw. Control_Unit).
Tabelle 6-6 Voreinstellungen für DigitalMasterSwitch
SINAMICSParameter-Nr.
Name Vor-belegung
Datentyp Bedeutung
p23021 rSpeedLimit1 10 REAL Drehzahlvorgabe 1 [%]p23022 rSpeedLimit2 30 REAL Drehzahlvorgabe 2 [%]p23023 rSpeedLimit3 60 REAL Drehzahlvorgabe 3 [%]p23024 rSpeedLimit4 100 REAL Drehzahlvorgabe 4 [%]
Für die Funktion PreLimitSwitch sind auf der mitgelieferten CF-Karte folgende Werte eingestellt (zu finden bei DO = 2 bzw. DriveAxis).
Tabelle 6-7 Voreinstellungen für PreLimitSwitch
SINAMICSParameter-Nr.
Name Vor-belegung
Datentyp Bedeutung
p22054 rLimit1 100.0 REAL Drehzahlbegrenzung 1Diese Begrenzung sollte als Maxi‐maldrehzahl eingestellt werden [%].
p22055 rLimit2 50.0 REAL Drehzahlbegrenzung 2 [%]p22056 rLimit3 25.0 REAL Drehzahlbegrenzung 3 [%]p22057 rLimit4 5.0 REAL Drehzahlbegrenzung 4 [%]
6.2.10 Parametrieren des Analogeingangs für die HubhöheDie Position des Hubwerks wird der Control Unit über den analogen Eingang übermittelt. Auf der vorgefertigten CF-Karte ist als Typ "Spannungseingang unipolar (0V … +10V)" eingestellt (Control_Unit.p756[0] = 0).
1. Prüfen Sie, ob diese Einstellung mit den Gegebenheiten der Anlage übereinstimmt.
2. Stellen Sie bei Bedarf den Parameter Control_Unit.p756[0] auf den passenden Wert ein.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 59
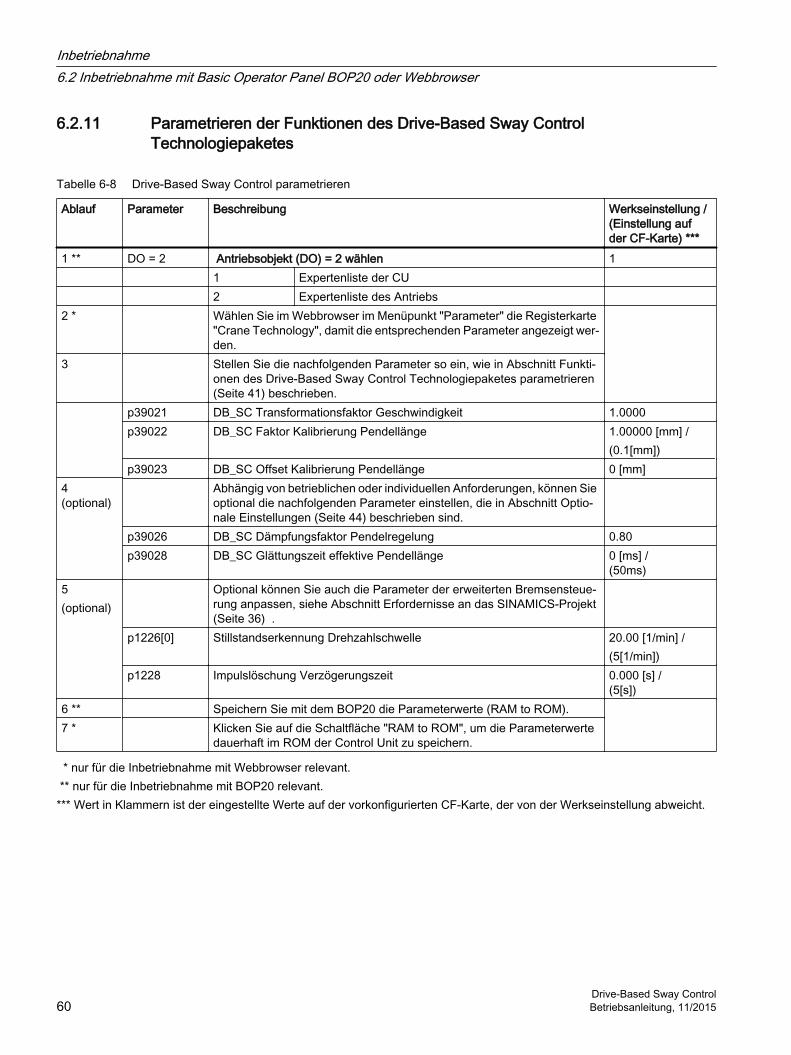
6.2.11 Parametrieren der Funktionen des Drive-Based Sway Control Technologiepaketes
Tabelle 6-8 Drive-Based Sway Control parametrieren
Ablauf Parameter Beschreibung Werkseinstellung /(Einstellung auf der CF-Karte) ***
1 ** DO = 2 Antriebsobjekt (DO) = 2 wählen 1 1 Expertenliste der CU 2 Expertenliste des Antriebs 2 * Wählen Sie im Webbrowser im Menüpunkt "Parameter" die Registerkarte
"Crane Technology", damit die entsprechenden Parameter angezeigt wer‐den.
3 Stellen Sie die nachfolgenden Parameter so ein, wie in Abschnitt Funkti‐onen des Drive-Based Sway Control Technologiepaketes parametrieren (Seite 41) beschrieben.
p39021 DB_SC Transformationsfaktor Geschwindigkeit 1.0000p39022 DB_SC Faktor Kalibrierung Pendellänge 1.00000 [mm] /
(0.1[mm])p39023 DB_SC Offset Kalibrierung Pendellänge 0 [mm]
4 (optional)
Abhängig von betrieblichen oder individuellen Anforderungen, können Sie optional die nachfolgenden Parameter einstellen, die in Abschnitt Optio‐nale Einstellungen (Seite 44) beschrieben sind.
p39026 DB_SC Dämpfungsfaktor Pendelregelung 0.80p39028 DB_SC Glättungszeit effektive Pendellänge 0 [ms] /
(50ms)5(optional)
Optional können Sie auch die Parameter der erweiterten Bremsensteue‐rung anpassen, siehe Abschnitt Erfordernisse an das SINAMICS-Projekt (Seite 36) .
p1226[0] Stillstandserkennung Drehzahlschwelle 20.00 [1/min] /(5[1/min])
p1228 Impulslöschung Verzögerungszeit 0.000 [s] /(5[s])
6 ** Speichern Sie mit dem BOP20 die Parameterwerte (RAM to ROM). 7 * Klicken Sie auf die Schaltfläche "RAM to ROM", um die Parameterwerte
dauerhaft im ROM der Control Unit zu speichern.
* nur für die Inbetriebnahme mit Webbrowser relevant. ** nur für die Inbetriebnahme mit BOP20 relevant.*** Wert in Klammern ist der eingestellte Werte auf der vorkonfigurierten CF-Karte, der von der Werkseinstellung abweicht.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control60 Betriebsanleitung, 11/2015
Damit ist die Inbetriebnahme abgeschlossen und der Kran kann pendelgeregelt verfahren werden. Gehen Sie dazu wie nachfolgend beschrieben vor.
1. Aktivieren Sie DI18 "Enable Sway Control".
2. Setzen Sie eine Drehzahlvorgabe und -richtung (DI0 oder DI1). Die Bewegung der Kranachse startet.
3. Prüfen Sie in Statusword r39003, ob das Drive-Based Sway Control Technologiepaket und die Pendelregelung eingeschaltet sind. Siehe auch Kapitel Pendelregelung ein- und ausschalten (Seite 22), Einschalten der Pendelregelung (Seite 30) und Vorendschalterfunktion (Seite 23).
Die angezeigten Werte r39003 haben folgende Bedeutung:0 Das Drive-Based Sway Control Technologiepaket und Pendelregelung sind nicht akti‐
viert (r39003.0 = 0; r39003.1 = 0).1 Das Drive-Based Sway Control Technologiepaket ist aktiviert (r39003.0 = 1; r39003.1
= 0).3 Das Drive-Based Sway Control Technologiepaket Das Drive-Based Sway Control Tech‐
nologiepaket und Pendelregelung sind aktiviert (r39003.0 = 1; r39003.1 = 1). Der Kran verfährt pendelgeregelt.
HinweisDatensicherung der CF-Karte
Wenn die Inbetriebnahme des Antriebs abgeschlossen ist, wird empfohlen, die Daten der CF-Speicherkarte zu sichern.
Auf die Datensicherung können Sie bei Bedarf zu einem späteren Zeitpunkten zurückgreifen.
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway ControlBetriebsanleitung, 11/2015 61
Inbetriebnahme6.2 Inbetriebnahme mit Basic Operator Panel BOP20 oder Webbrowser
Drive-Based Sway Control62 Betriebsanleitung, 11/2015
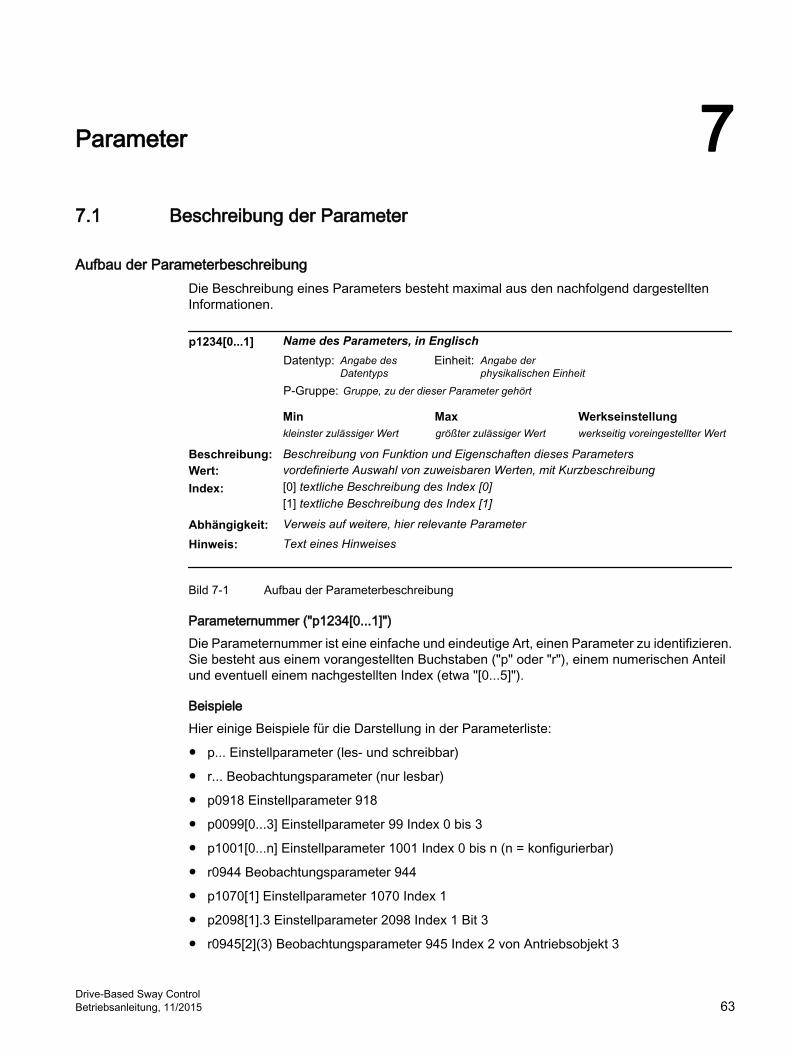
Parameter 77.1 Beschreibung der Parameter
Aufbau der ParameterbeschreibungDie Beschreibung eines Parameters besteht maximal aus den nachfolgend dargestellten Informationen.
Beschreibung von Funktion und Eigenschaften dieses Parameters
textliche Beschreibung des Index [1]
textliche Beschreibung des Index [0]
Text eines Hinweises
Verweis auf weitere, hier relevante Parameter
p1234[0...1]
Beschreibung:
Min Max Werkseinstellung
Index:
Abhängigkeit:
Hinweis:
Wert:
Name des Parameters, in Englisch
kleinster zulässiger Wert
Angabe des
Datentyps
Gruppe, zu der dieser Parameter gehört
Angabe der
physikalischen Einheit
größter zulässiger Wert werkseitig voreingestellter Wert
vordefinierte Auswahl von zuweisbaren Werten, mit Kurzbeschreibung
Bild 7-1 Aufbau der Parameterbeschreibung
Parameternummer ("p1234[0...1]")Die Parameternummer ist eine einfache und eindeutige Art, einen Parameter zu identifizieren. Sie besteht aus einem vorangestellten Buchstaben ("p" oder "r"), einem numerischen Anteil und eventuell einem nachgestellten Index (etwa "[0...5]").
BeispieleHier einige Beispiele für die Darstellung in der Parameterliste:
● p... Einstellparameter (les- und schreibbar)
● r... Beobachtungsparameter (nur lesbar)
● p0918 Einstellparameter 918
● p0099[0...3] Einstellparameter 99 Index 0 bis 3
● p1001[0...n] Einstellparameter 1001 Index 0 bis n (n = konfigurierbar)
● r0944 Beobachtungsparameter 944
● p1070[1] Einstellparameter 1070 Index 1
● p2098[1].3 Einstellparameter 2098 Index 1 Bit 3
● r0945[2](3) Beobachtungsparameter 945 Index 2 von Antriebsobjekt 3
Drive-Based Sway ControlBetriebsanleitung, 11/2015 63
● p0795.4 Einstellparameter 795 Bit 4
● r2129.0...15 Beobachtungsparameter 2129 mit Bitfeld (maximal 16 Bit)
Bei Einstellparametern gilt:
Der Parameterwert bei Werksauslieferung wird unter “Werkseinstellung” mit der dazugehörigen Einheit in eckigen Klammern angegeben. Der Wert kann in dem durch “Min” und “Max” festgelegten Bereich verändert werden.
Wird beim Ändern von Einstellparametern eine Beeinflussung von weiteren Parameter durchgeführt, so wird dies als Folgeparametrierung bezeichnet.
Folgeparametrierungen werden z. B. durch folgende Aktionen und Parameter ausgelöst:
● Makros ausführen p0015, p0700, p1000, p1500
● PROFIBUS-Telegramm einstellen (BICO-Verschaltungen) p0922
● Komponentenlisten einstellenp0230, p0300, p0301, p0400
● Automatisch berechnen und vorbelegenp0112, p0340, p0578, p3900
● Werkseinstellungen herstellenp0970
Bei Beobachtungsparametern gilt:
Die Felder “Min”, “Max” und “Werkseinstellung” werden mit einem Strich “-” und der dazugehörigen Einheit in eckigen Klammern angegeben.
Hinweis
Die Liste der Parameter kann Parameter enthalten, die in den Expertenlisten der jeweiligen Inbetriebnahme-Software nicht sichtbar sind (z. B. Parameter für Tracefunktion).
BICO: Parameterlangname / Parameterkurzname Vor dem Namen können bei BICO-Parametern folgende Abkürzungen stehen:
● BI: Binektoreingang (englisch: Binector Input) Dieser Parameter wählt die Quelle ei‐nes digitalen Signals.
● BO: Binektorausgang (englisch: Binector Output) Dieser Parameter steht als digitales Signal zur weiteren Verschaltung zur Verfügung.
● CI: Konnektoreingang (englisch: Connector Input) Dieser Parameter wählt die Quelle eines "analogen" Signals.
● CO: Konnektorausgang (englisch: Connector Output) Dieser Parameter steht als "ana‐loges" Signal zur weiteren Verschaltung zur Verfügung.
● CO/BO: Konnektor-/Binektorausgang (englisch: Connector/Binector Output) Dieser Para‐meter steht als "analoges" Signal und auch als digitale Signale zur weiteren Ver‐schaltung zur Verfügung.
Parameter7.1 Beschreibung der Parameter
Drive-Based Sway Control64 Betriebsanleitung, 11/2015
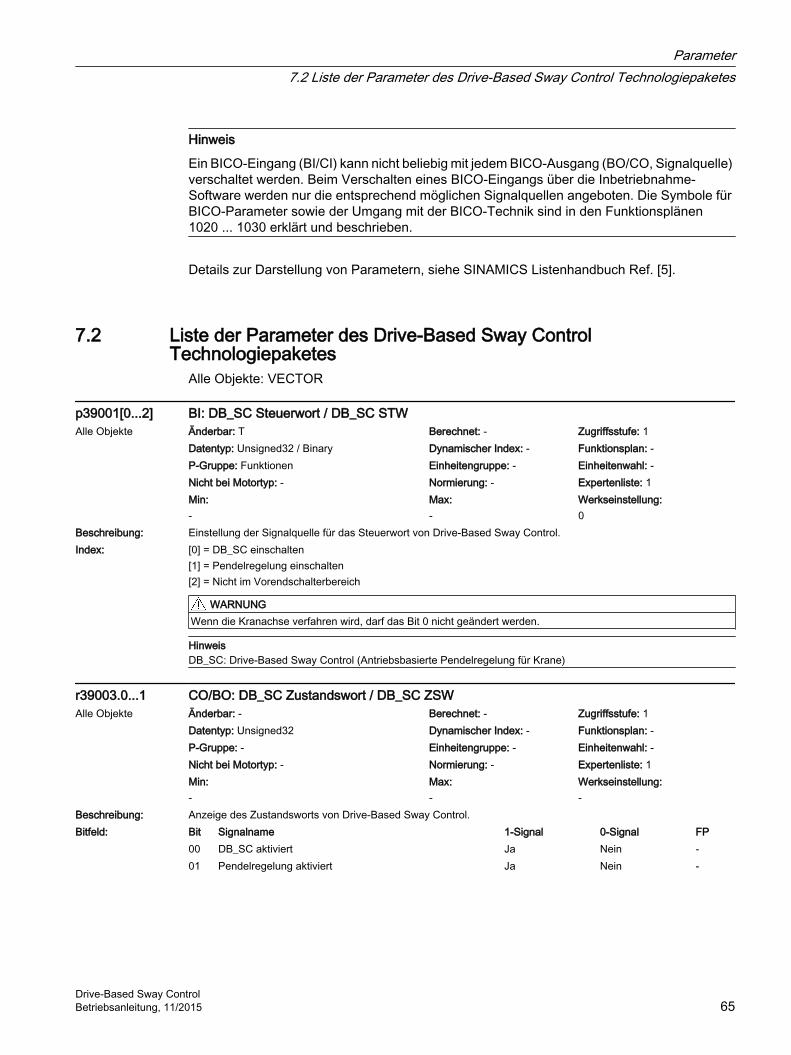
Hinweis
Ein BICO-Eingang (BI/CI) kann nicht beliebig mit jedem BICO-Ausgang (BO/CO, Signalquelle) verschaltet werden. Beim Verschalten eines BICO-Eingangs über die Inbetriebnahme-Software werden nur die entsprechend möglichen Signalquellen angeboten. Die Symbole für BICO-Parameter sowie der Umgang mit der BICO-Technik sind in den Funktionsplänen 1020 ... 1030 erklärt und beschrieben.
Details zur Darstellung von Parametern, siehe SINAMICS Listenhandbuch Ref. [5].
7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Alle Objekte: VECTOR
p39001[0...2] BI: DB_SC Steuerwort / DB_SC STWAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 1
Datentyp: Unsigned32 / Binary Dynamischer Index: - Funktionsplan: -P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -
Max: -
Werkseinstellung: 0
Beschreibung: Einstellung der Signalquelle für das Steuerwort von Drive-Based Sway Control.Index: [0] = DB_SC einschalten
[1] = Pendelregelung einschalten[2] = Nicht im Vorendschalterbereich
WARNUNGWenn die Kranachse verfahren wird, darf das Bit 0 nicht geändert werden.
HinweisDB_SC: Drive-Based Sway Control (Antriebsbasierte Pendelregelung für Krane)
r39003.0...1 CO/BO: DB_SC Zustandswort / DB_SC ZSWAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: Unsigned32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -
Max: -
Werkseinstellung: -
Beschreibung: Anzeige des Zustandsworts von Drive-Based Sway Control.Bitfeld: Bit Signalname 1-Signal 0-Signal FP 00 DB_SC aktiviert Ja Nein - 01 Pendelregelung aktiviert Ja Nein -
Parameter7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway ControlBetriebsanleitung, 11/2015 65
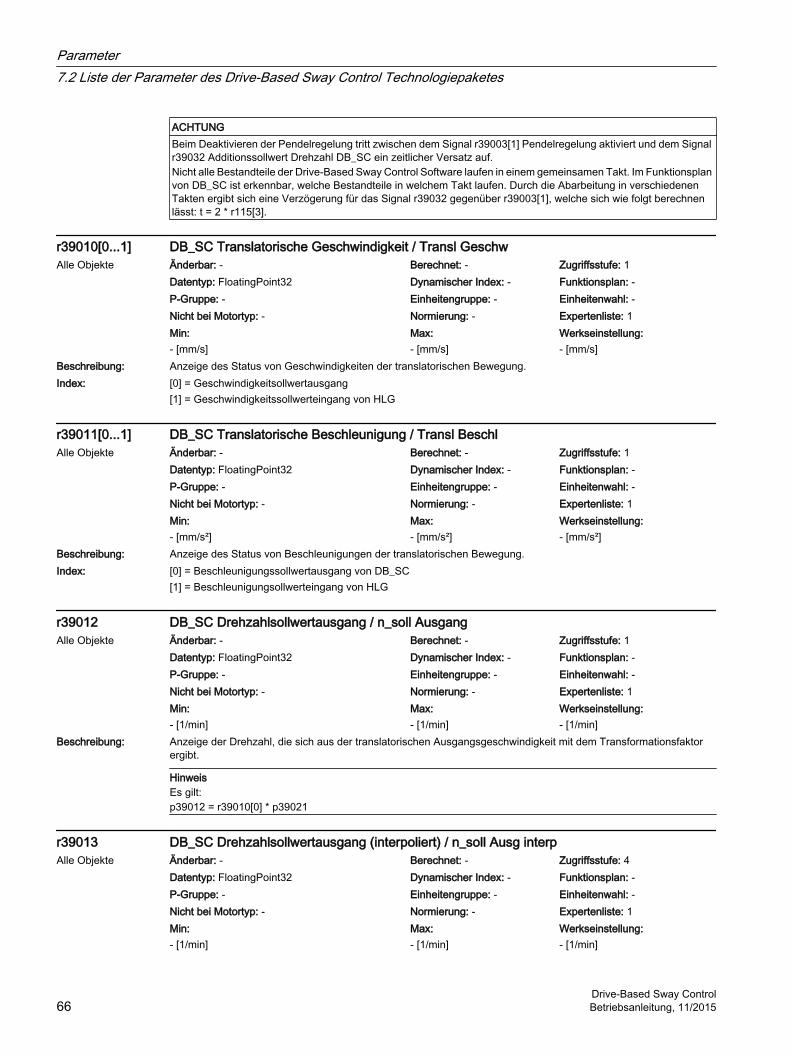
ACHTUNGBeim Deaktivieren der Pendelregelung tritt zwischen dem Signal r39003[1] Pendelregelung aktiviert und dem Signal r39032 Additionssollwert Drehzahl DB_SC ein zeitlicher Versatz auf.Nicht alle Bestandteile der Drive-Based Sway Control Software laufen in einem gemeinsamen Takt. Im Funktionsplan von DB_SC ist erkennbar, welche Bestandteile in welchem Takt laufen. Durch die Abarbeitung in verschiedenen Takten ergibt sich eine Verzögerung für das Signal r39032 gegenüber r39003[1], welche sich wie folgt berechnen lässt: t = 2 * r115[3].
r39010[0...1] DB_SC Translatorische Geschwindigkeit / Transl GeschwAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [mm/s]
Max: - [mm/s]
Werkseinstellung: - [mm/s]
Beschreibung: Anzeige des Status von Geschwindigkeiten der translatorischen Bewegung.Index: [0] = Geschwindigkeitsollwertausgang
[1] = Geschwindigkeitssollwerteingang von HLG
r39011[0...1] DB_SC Translatorische Beschleunigung / Transl BeschlAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [mm/s²]
Max: - [mm/s²]
Werkseinstellung: - [mm/s²]
Beschreibung: Anzeige des Status von Beschleunigungen der translatorischen Bewegung.Index: [0] = Beschleunigungssollwertausgang von DB_SC
[1] = Beschleunigungsollwerteingang von HLG
r39012 DB_SC Drehzahlsollwertausgang / n_soll AusgangAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [1/min]
Max: - [1/min]
Werkseinstellung: - [1/min]
Beschreibung: Anzeige der Drehzahl, die sich aus der translatorischen Ausgangsgeschwindigkeit mit dem Transformationsfaktor ergibt.
HinweisEs gilt:p39012 = r39010[0] * p39021
r39013 DB_SC Drehzahlsollwertausgang (interpoliert) / n_soll Ausg interpAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 4
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [1/min]
Max: - [1/min]
Werkseinstellung: - [1/min]
Parameter7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway Control66 Betriebsanleitung, 11/2015
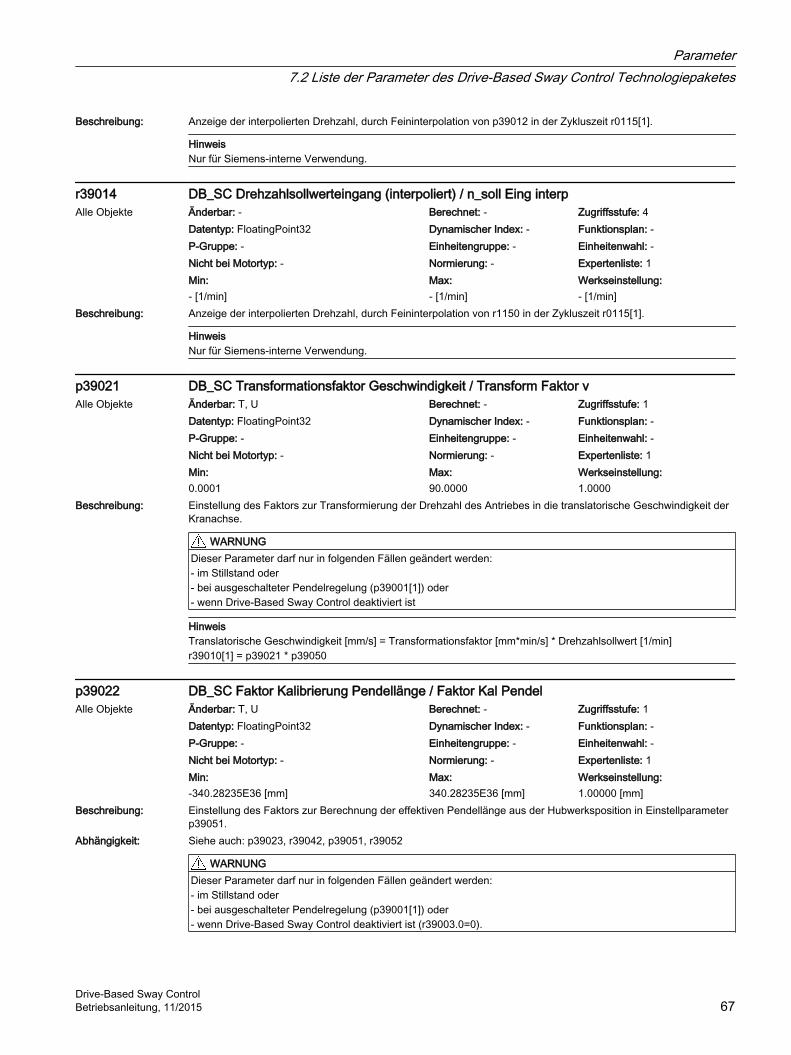
Beschreibung: Anzeige der interpolierten Drehzahl, durch Feininterpolation von p39012 in der Zykluszeit r0115[1].
HinweisNur für Siemens-interne Verwendung.
r39014 DB_SC Drehzahlsollwerteingang (interpoliert) / n_soll Eing interpAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 4
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [1/min]
Max: - [1/min]
Werkseinstellung: - [1/min]
Beschreibung: Anzeige der interpolierten Drehzahl, durch Feininterpolation von r1150 in der Zykluszeit r0115[1].
HinweisNur für Siemens-interne Verwendung.
p39021 DB_SC Transformationsfaktor Geschwindigkeit / Transform Faktor vAlle Objekte Änderbar: T, U Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: 0.0001
Max: 90.0000
Werkseinstellung: 1.0000
Beschreibung: Einstellung des Faktors zur Transformierung der Drehzahl des Antriebes in die translatorische Geschwindigkeit der Kranachse.
WARNUNGDieser Parameter darf nur in folgenden Fällen geändert werden:- im Stillstand oder- bei ausgeschalteter Pendelregelung (p39001[1]) oder- wenn Drive-Based Sway Control deaktiviert ist
HinweisTranslatorische Geschwindigkeit [mm/s] = Transformationsfaktor [mm*min/s] * Drehzahlsollwert [1/min]r39010[1] = p39021 * p39050
p39022 DB_SC Faktor Kalibrierung Pendellänge / Faktor Kal PendelAlle Objekte Änderbar: T, U Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -340.28235E36 [mm]
Max: 340.28235E36 [mm]
Werkseinstellung: 1.00000 [mm]
Beschreibung: Einstellung des Faktors zur Berechnung der effektiven Pendellänge aus der Hubwerksposition in Einstellparameter p39051.
Abhängigkeit: Siehe auch: p39023, r39042, p39051, r39052
WARNUNGDieser Parameter darf nur in folgenden Fällen geändert werden:- im Stillstand oder- bei ausgeschalteter Pendelregelung (p39001[1]) oder- wenn Drive-Based Sway Control deaktiviert ist (r39003.0=0).
Parameter7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway ControlBetriebsanleitung, 11/2015 67
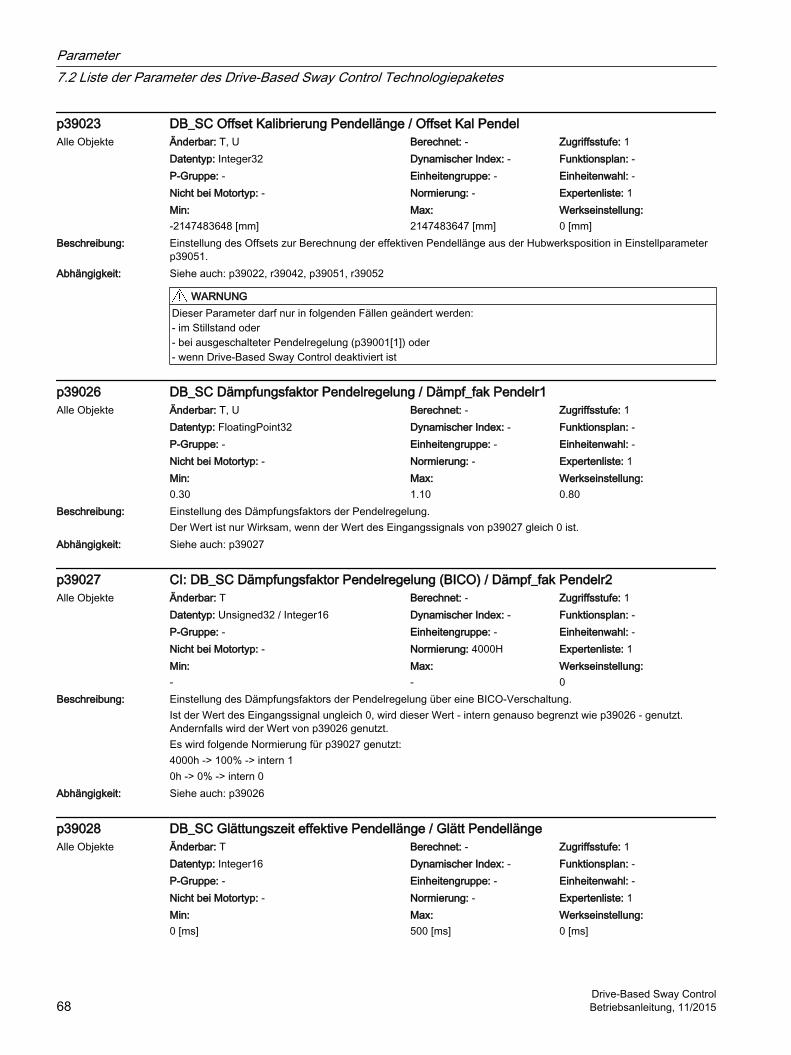
p39023 DB_SC Offset Kalibrierung Pendellänge / Offset Kal PendelAlle Objekte Änderbar: T, U Berechnet: - Zugriffsstufe: 1
Datentyp: Integer32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -2147483648 [mm]
Max: 2147483647 [mm]
Werkseinstellung: 0 [mm]
Beschreibung: Einstellung des Offsets zur Berechnung der effektiven Pendellänge aus der Hubwerksposition in Einstellparameter p39051.
Abhängigkeit: Siehe auch: p39022, r39042, p39051, r39052
WARNUNGDieser Parameter darf nur in folgenden Fällen geändert werden:- im Stillstand oder- bei ausgeschalteter Pendelregelung (p39001[1]) oder- wenn Drive-Based Sway Control deaktiviert ist
p39026 DB_SC Dämpfungsfaktor Pendelregelung / Dämpf_fak Pendelr1Alle Objekte Änderbar: T, U Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: 0.30
Max: 1.10
Werkseinstellung: 0.80
Beschreibung: Einstellung des Dämpfungsfaktors der Pendelregelung.Der Wert ist nur Wirksam, wenn der Wert des Eingangssignals von p39027 gleich 0 ist.
Abhängigkeit: Siehe auch: p39027
p39027 CI: DB_SC Dämpfungsfaktor Pendelregelung (BICO) / Dämpf_fak Pendelr2Alle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 1
Datentyp: Unsigned32 / Integer16 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: 4000H Expertenliste: 1Min: -
Max: -
Werkseinstellung: 0
Beschreibung: Einstellung des Dämpfungsfaktors der Pendelregelung über eine BICO-Verschaltung.Ist der Wert des Eingangssignal ungleich 0, wird dieser Wert - intern genauso begrenzt wie p39026 - genutzt. Andernfalls wird der Wert von p39026 genutzt.Es wird folgende Normierung für p39027 genutzt:4000h -> 100% -> intern 10h -> 0% -> intern 0
Abhängigkeit: Siehe auch: p39026
p39028 DB_SC Glättungszeit effektive Pendellänge / Glätt PendellängeAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 1
Datentyp: Integer16 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: 0 [ms]
Max: 500 [ms]
Werkseinstellung: 0 [ms]
Parameter7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway Control68 Betriebsanleitung, 11/2015
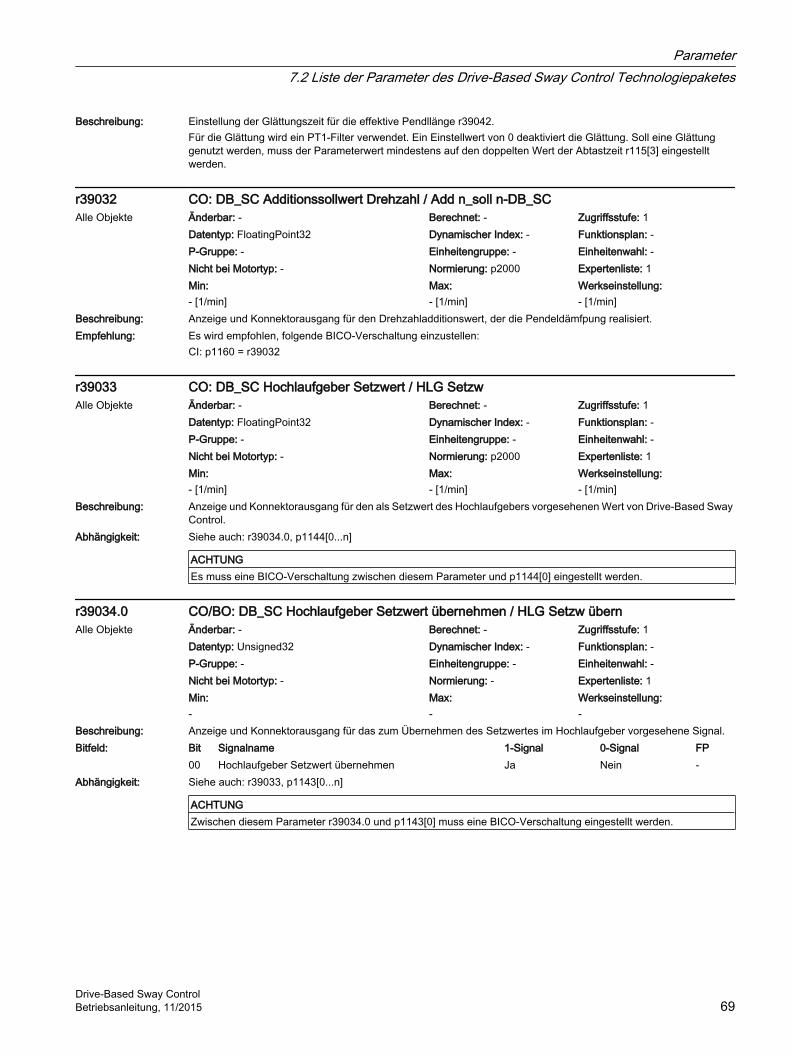
Beschreibung: Einstellung der Glättungszeit für die effektive Pendllänge r39042.Für die Glättung wird ein PT1-Filter verwendet. Ein Einstellwert von 0 deaktiviert die Glättung. Soll eine Glättung genutzt werden, muss der Parameterwert mindestens auf den doppelten Wert der Abtastzeit r115[3] eingestellt werden.
r39032 CO: DB_SC Additionssollwert Drehzahl / Add n_soll n-DB_SCAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: p2000 Expertenliste: 1Min: - [1/min]
Max: - [1/min]
Werkseinstellung: - [1/min]
Beschreibung: Anzeige und Konnektorausgang für den Drehzahladditionswert, der die Pendeldämfpung realisiert.Empfehlung: Es wird empfohlen, folgende BICO-Verschaltung einzustellen:
CI: p1160 = r39032
r39033 CO: DB_SC Hochlaufgeber Setzwert / HLG SetzwAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: p2000 Expertenliste: 1Min: - [1/min]
Max: - [1/min]
Werkseinstellung: - [1/min]
Beschreibung: Anzeige und Konnektorausgang für den als Setzwert des Hochlaufgebers vorgesehenen Wert von Drive-Based Sway Control.
Abhängigkeit: Siehe auch: r39034.0, p1144[0...n]
ACHTUNGEs muss eine BICO-Verschaltung zwischen diesem Parameter und p1144[0] eingestellt werden.
r39034.0 CO/BO: DB_SC Hochlaufgeber Setzwert übernehmen / HLG Setzw übernAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: Unsigned32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -
Max: -
Werkseinstellung: -
Beschreibung: Anzeige und Konnektorausgang für das zum Übernehmen des Setzwertes im Hochlaufgeber vorgesehene Signal.Bitfeld: Bit Signalname 1-Signal 0-Signal FP 00 Hochlaufgeber Setzwert übernehmen Ja Nein -Abhängigkeit: Siehe auch: r39033, p1143[0...n]
ACHTUNGZwischen diesem Parameter r39034.0 und p1143[0] muss eine BICO-Verschaltung eingestellt werden.
Parameter7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway ControlBetriebsanleitung, 11/2015 69
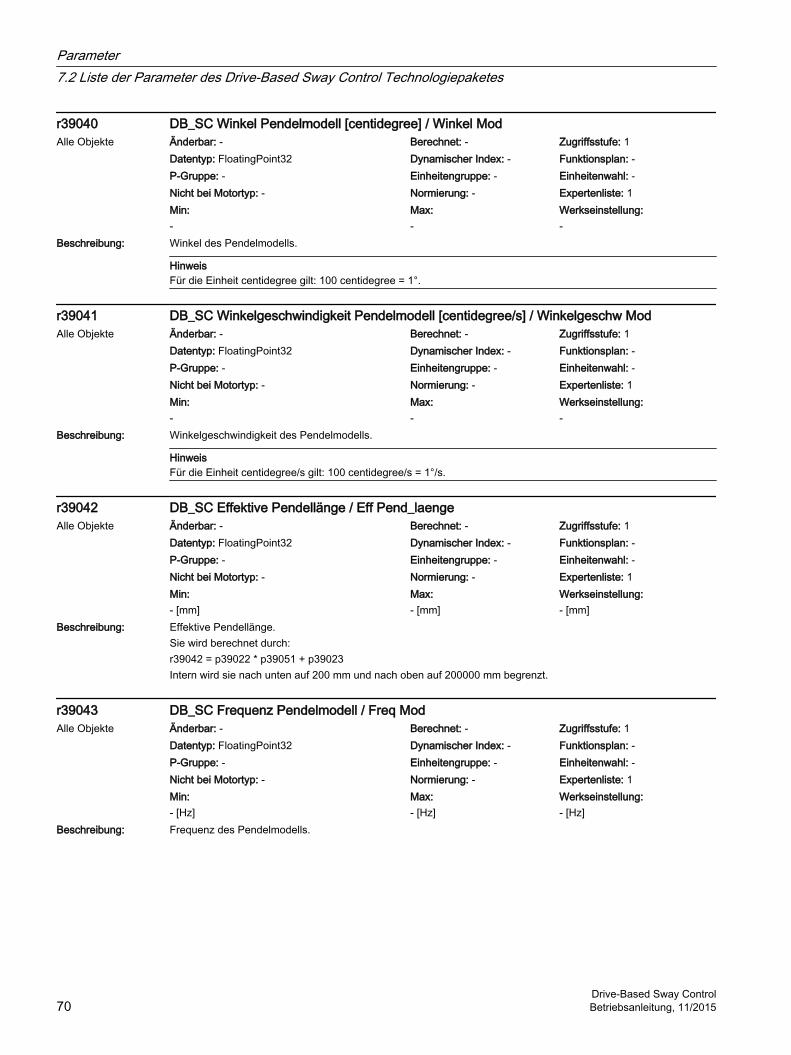
r39040 DB_SC Winkel Pendelmodell [centidegree] / Winkel ModAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -
Max: -
Werkseinstellung: -
Beschreibung: Winkel des Pendelmodells.
HinweisFür die Einheit centidegree gilt: 100 centidegree = 1°.
r39041 DB_SC Winkelgeschwindigkeit Pendelmodell [centidegree/s] / Winkelgeschw ModAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -
Max: -
Werkseinstellung: -
Beschreibung: Winkelgeschwindigkeit des Pendelmodells.
HinweisFür die Einheit centidegree/s gilt: 100 centidegree/s = 1°/s.
r39042 DB_SC Effektive Pendellänge / Eff Pend_laengeAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [mm]
Max: - [mm]
Werkseinstellung: - [mm]
Beschreibung: Effektive Pendellänge.Sie wird berechnet durch:r39042 = p39022 * p39051 + p39023Intern wird sie nach unten auf 200 mm und nach oben auf 200000 mm begrenzt.
r39043 DB_SC Frequenz Pendelmodell / Freq ModAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [Hz]
Max: - [Hz]
Werkseinstellung: - [Hz]
Beschreibung: Frequenz des Pendelmodells.
Parameter7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway Control70 Betriebsanleitung, 11/2015
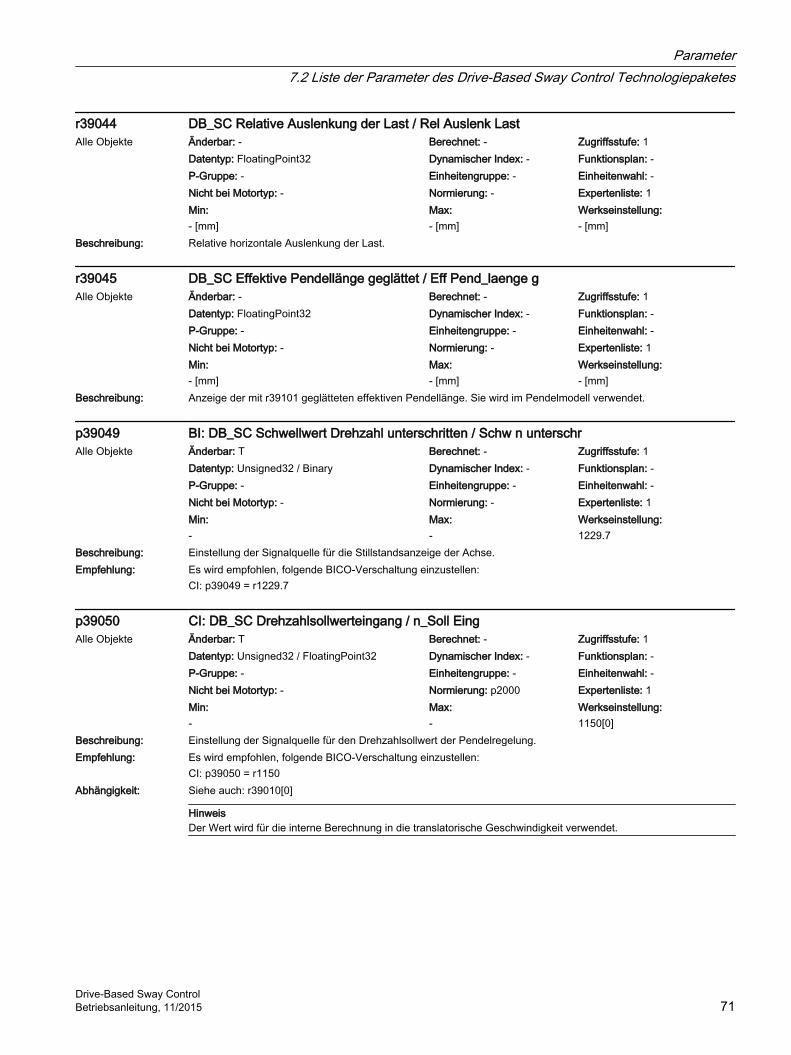
r39044 DB_SC Relative Auslenkung der Last / Rel Auslenk LastAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [mm]
Max: - [mm]
Werkseinstellung: - [mm]
Beschreibung: Relative horizontale Auslenkung der Last.
r39045 DB_SC Effektive Pendellänge geglättet / Eff Pend_laenge gAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: - [mm]
Max: - [mm]
Werkseinstellung: - [mm]
Beschreibung: Anzeige der mit r39101 geglätteten effektiven Pendellänge. Sie wird im Pendelmodell verwendet.
p39049 BI: DB_SC Schwellwert Drehzahl unterschritten / Schw n unterschrAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 1
Datentyp: Unsigned32 / Binary Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -
Max: -
Werkseinstellung: 1229.7
Beschreibung: Einstellung der Signalquelle für die Stillstandsanzeige der Achse.Empfehlung: Es wird empfohlen, folgende BICO-Verschaltung einzustellen:
CI: p39049 = r1229.7
p39050 CI: DB_SC Drehzahlsollwerteingang / n_Soll EingAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 1
Datentyp: Unsigned32 / FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: p2000 Expertenliste: 1Min: -
Max: -
Werkseinstellung: 1150[0]
Beschreibung: Einstellung der Signalquelle für den Drehzahlsollwert der Pendelregelung.Empfehlung: Es wird empfohlen, folgende BICO-Verschaltung einzustellen:
CI: p39050 = r1150Abhängigkeit: Siehe auch: r39010[0]
HinweisDer Wert wird für die interne Berechnung in die translatorische Geschwindigkeit verwendet.
Parameter7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway ControlBetriebsanleitung, 11/2015 71
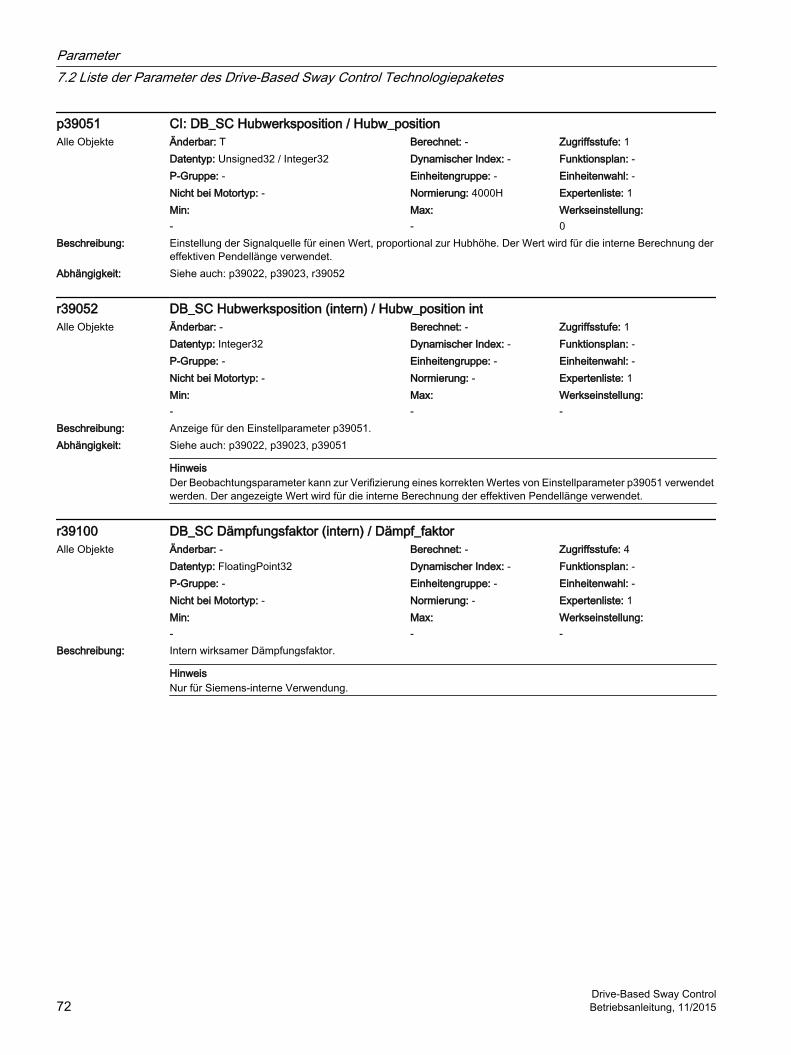
p39051 CI: DB_SC Hubwerksposition / Hubw_positionAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 1
Datentyp: Unsigned32 / Integer32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: 4000H Expertenliste: 1Min: -
Max: -
Werkseinstellung: 0
Beschreibung: Einstellung der Signalquelle für einen Wert, proportional zur Hubhöhe. Der Wert wird für die interne Berechnung der effektiven Pendellänge verwendet.
Abhängigkeit: Siehe auch: p39022, p39023, r39052
r39052 DB_SC Hubwerksposition (intern) / Hubw_position intAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 1
Datentyp: Integer32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -
Max: -
Werkseinstellung: -
Beschreibung: Anzeige für den Einstellparameter p39051.Abhängigkeit: Siehe auch: p39022, p39023, p39051
HinweisDer Beobachtungsparameter kann zur Verifizierung eines korrekten Wertes von Einstellparameter p39051 verwendet werden. Der angezeigte Wert wird für die interne Berechnung der effektiven Pendellänge verwendet.
r39100 DB_SC Dämpfungsfaktor (intern) / Dämpf_faktorAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 4
Datentyp: FloatingPoint32 Dynamischer Index: - Funktionsplan: -P-Gruppe: - Einheitengruppe: - Einheitenwahl: -Nicht bei Motortyp: - Normierung: - Expertenliste: 1Min: -
Max: -
Werkseinstellung: -
Beschreibung: Intern wirksamer Dämpfungsfaktor.
HinweisNur für Siemens-interne Verwendung.
Parameter7.2 Liste der Parameter des Drive-Based Sway Control Technologiepaketes
Drive-Based Sway Control72 Betriebsanleitung, 11/2015

Funktionsplan 8Funktionsplan
Drive-Based Sway ControlBetriebsanleitung, 11/2015 73
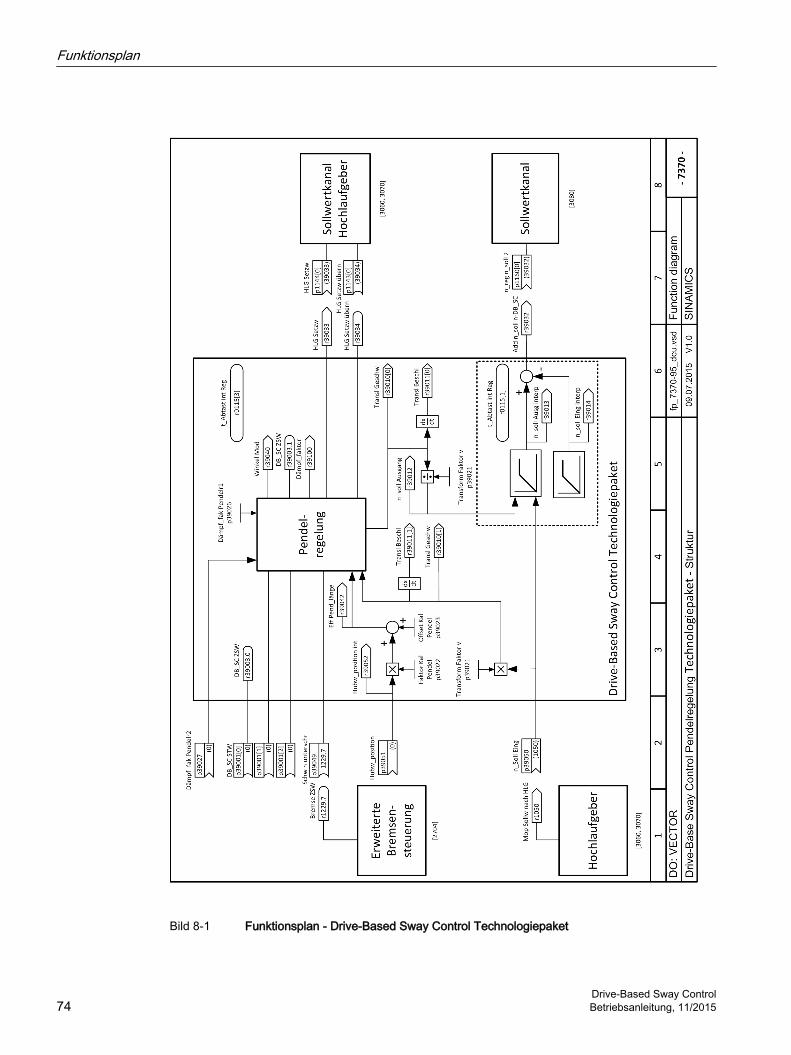
Bild 8-1 Funktionsplan - Drive-Based Sway Control Technologiepaket
Funktionsplan
Drive-Based Sway Control74 Betriebsanleitung, 11/2015
Ersatzteile, Zubehör und Wartung 9Ersatzteile
Es sind keine Ersatzteile notwendig.
Ergänzende Komponenten● SINAMICS S120 Control Unit CU310-2 DP (6SL3040-1LA00-0AA0)
● Basic Operator Panel BOP20 (6SL3055-0AA00-4BAx)
● SINAMICS Terminal Module TM31 (6SL3055-0AA00-3AA1)
● SINAMICS STARTER V4.4.0.3 (DVD) (6SL3072-0AA00-0AG0)
● Optional für den Einsatz der SIMOCRANE Drive-Based Technology:SINAMICS DCC V2.3 Volllizenz (6AU1810-1HA23-0XA0) SINAMICS DCC V2.3 Upgrade Lizenz (6AU1810-1HA23-0XE0)
Wartung
Überprüfung der Positionserfassung für das Hubwerk nach SeilwechselNach Wartungsarbeiten am Hubwerk und einem Wechsel der Seile müssen Sie die Positionserfassung überprüfen.
Eventuell müssen Sie eine Neureferenzierung durchführen.
Drive-Based Sway ControlBetriebsanleitung, 11/2015 75
Ersatzteile, Zubehör und Wartung
Drive-Based Sway Control76 Betriebsanleitung, 11/2015
Anhang AA.1 Abkürzungsverzeichnis
Die folgenden Abkürzungen werden in diesem Dokument verwendet:
Abkürzung Bedeutung BICO Binector Connector-Technologie BOP Basic Operator Panel CF CompactFlash Speicherkarte CU Control Unit DB Drive Based DCC Drive Control Chart DP PROFIBUS DP DVD Digital Versatile Disc HLG Hochlaufgeber OSS Open Source Software SC Sway Control
Drive-Based Sway ControlBetriebsanleitung, 11/2015 77
A.2 Glossar
Wichtige Begriffe
Effektive Pendellänge Die effektive Pendellänge ist die Pendellänge, die der eines physikalischen Pendels entspricht.
PendelmodellDas Pendelmodell ist ein berechnetes Modell der realen Pendelbewegung, das zur Realisierung der Pendeldämpfung genutzt wird.
VektorregelungDie Vektorregelung ist ein Regelungskonzept für drehzahlveränderbare Antriebe.
AnhangA.2 Glossar
Drive-Based Sway Control78 Betriebsanleitung, 11/2015
A.3 Literaturverzeichnis
Ref. 1 SIMOCRANE Betriebsanleitung Drive-Based Technology, 07/2012Ref. 2 SIMOCRANE Applikationsbeschreibung Drive-Based Sway Control, 10/2015Ref. 3 SINAMICS S120, Gerätehandbuch AC Drive, (GH6) 04/2014Ref. 4 SINAMICS S120, Inbetriebnahmehandbuch, (IH1) 04/2014Ref. 5 SINAMICS S120 Funktionshandbuch Antriebsfunktionen, 04/2014Ref. 6 SINAMICS S120/S150, Listenhandbuch, 04/2014
AnhangA.3 Literaturverzeichnis
Drive-Based Sway ControlBetriebsanleitung, 11/2015 79

AnhangA.3 Literaturverzeichnis
Drive-Based Sway Control80 Betriebsanleitung, 11/2015





























