Embed Size (px)
Citation preview

Dynamic characterization of the A400M acoustics fuselagedemonstrator
René WINTER1; Jörn BIEDERMANN2; Marc BÖSWALD3; Martin WANDEL4
1,2,3 Deutsches Zentrum für Luft- und Raumfahrt e.V., Germany4 AIRBUS Operations GmbH, Germany
ABSTRACTTurboprop engines generate vibrations in the mid frequency range which are transmitted as structure-bornsound to an aircraft fuselage. There it is radiated into the cabin as noise. To manage the acoustic impactvalidated simulation models and analysis methods are necessary. The A400M Acoustic Fuselage Demon-strator, a full scale aircraft fuselage, was used to develop test methods providing the validation data needed.The mid frequency range provides great challenges for such tests: To expand the well-established method ofexperimental modal analysis (EMA) into higher frequencies a very large number of measurement points isnecessary. To ensure high quality results testing procedures from ground vibration tests (GVT) were adaptedto the mid frequency range. The resulting sensor grid is a mixture of an optimized sensor distribution forlow frequency analysis and a high density grid in the propeller plane of the A400M. To measure the approx-imately 2800 sensor positions a roving sensor method was used. Using several sensors permanently fixedto the structure the overall consistency of the data was analyzed. The methods presented here were able toprovide high quality data used in later works for both model updating and method validation
Keywords: Modal analysis, vibro-acoustic testingINCE Classification: 73.6, 75.6
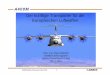
1. INTRODUCTIONThe A400M acoustics fuselage demonstrator (see figure 1) is setup at the Helmut Schmidt University of theFederal Armed Forces in Hamburg. It is used as a test structure for new acoustic and vibro-acoustic methodsand developments. The demonstrator is an actual Airbus A400M fuselage based on a predecessor designslightly different to the final aircraft.
The German Aerospace Center (DLR) performed two measurement campaigns spanning a total time ofseven weeks to acquire a set of vibrational data. The data contains information for the low and mid-frequencyrange on thousands of measurement points using dozens of excitation configurations. The one goal wasthe generation of high quality frequency response data of the A400M fuselage structure. Another was thedevelopment as well as the validation of methods suitable to conduct similar tests in the future within shortertime frames or with higher data quality.
The acquired data was used for several applications: Experimental modal analysis (EMA) was performedin the low frequency range using commercially available tools (LMS and the PolyMAX algorithm). With theresults of this analysis a modal model of the structure was created. This model was used to update a finiteelement model of the A400M acoustics fuselage demonstrator. The latter was derived from the finite elementmodels originally employed during the A400M development phase (1).
The EMA analysis itself allowed for several observations concerning its limitations when approachingthe mid-frequency range. Finally the measurement data was also utilized to perform energy correlation (asdescribed in (2) and (3)) employing the previously mentioned updated FE-Model.
[email protected]@[email protected]@airbus.com
INTER-NOISE 2016
3296

c©AIRBUS S.A.S. 2014. All rights reserved
Figure 1: The A400M acoustics fuselage demonstrator during the first measurement campaignwithout acoustic boundary elements.
As mentioned above the data was acquired over the course of two measurement campaigns: A first cam-paign with a strong focus on experimental modal analysis and a second campaign focused on acoustic exci-tation. During the first campaign four electrodynamic shakers and as many excitation points were employed.The second campaign used a 132 channel loudspeaker array for acoustic excitation. The array created a soundpressure field resembling the one generated by the A400M engines. Both campaigns had the exact same sen-sor grid layout but different excitation methods. Due to a scheduling conflict a significant structural differencewas introduced in between the two campaigns by the addition of acoustic boundaries to the fuselage cavity.To evaluate the impact of these boundaries a electrodynamic shaker and excitation point was added to thesecond campaign. This created comparable data sets for both campaigns.
Presented in here are the methods developed and used to acquire and process the data and an analysis ofthe data’s quality as well as its usability for experimental modal analysis (EMA) is performed. Additionallya comparison of the modal model acquired using the first and second campaign is presented to give anestimation of the impact of said modifications on the structure.
Since the measurements were conducted within a very limited time frame an optimized sensor grid was de-veloped. It combines algorithmically placed measurement points for the measurement of the lower frequencyvibrations and a very dense grid of sensors around the propeller plane. The latter is the most significant partof the structure for mid-frequency analysis of the operational deflection shapes. The realization of said sensorgrid with limited resources was done using a roving grid of sensors. Subsequently, the data was processedand merged to get a single set of frequency responses for each excitation configuration and all measurementpoints. The quality of the acquired data was checked both for the signal-to-noise ratio (SNR) and for dataconsistency. The latter being a crucial piece of information when merging data acquired over the courseof weeks with slight changes to the structures weight loading due to the moving grid of sensors as well asenvironmental conditions.
The final results presented here are an overview of the experimental modal analysis performed, the impli-cations for its usability in the mid-frequency range of aircraft fuselage structures. Also a comparison of themodal data of the structure before and after the addition of the acoustic boundaries is presented.
INTER-NOISE 2016
3297

2. A400M ACOUSTICS FUSELAGE DEMONSTRATORIn vibrational testing the structure to be analyzed is the driving force for designing the test. The A400Macoustics fuselage demonstrator at the Helmut-Schmidt-University of the Federal Armed Forces (HSU) inHamburg (HSU) is an actual Airbus A400M fuselage. It was build prior to design changes to the A400Mline of aircrafts, making the fuselage accessible for testing purposes. It was suspended on two portals withina testing facility at the HSU. The suspension was fixed to the fuselage at three points creating a staticallydetermined system. The A400M acoustics fuselage demonstrator and its setup at the HSU is described indetail in (4). Table 1 lists some of the key characteristics of the structure:
Table 1: Key characteristics of the A400M acoustics fuselage demonstrator
Length 30 mDiameter 6 mWeight 13 tNo. of frames 54No. of stringers in circumference 99No. of stringers above cargo floor 72No. of skin fields in circumference 99No. of skin fields above cargo floor 71
As can be seen in figure 1 an aircraft fuselage is a ribbed cylindrical structure. Within this text the stiffenersin longitudinal direction are called stringers. The ones running perpendicular to the stringers are called frames.In this case the frames shape above the cargo floor identifiable in figure 1 is roughly circular.The parts of thefuselages aluminum skin in between the stiffeners are called skin fields.
3. EXPERIMENTAL SETUPThe tests conducted at the A400M acoustics fuselage demonstrator were designed to provide the best qualityof data possible while taking limitations imposed by available equipment and time constrains into account.To ensure a positive outcome equipment, measurement procedures and techniques originating from DLRsground vibration testing (GVT) experience at passenger aircrafts like the AIRBUS A350XWB MSN1 (5)were adopted to the problem at hand.
3.1 Measurement EquipmentThe sensor grid used during the campaigns at the A400M acoustics demonstrator was subjected to severallimitations: The overall number of sensor positions that could be measured simultaneously was determinedby the number of channels available on the measurement system (a LMS SCADAS III system in a 3 front-end configuration with 288 channels in total) and by the number of sensors available (230 ICP accelerationsensors, manufacturer PCB, model 352C65). Disregarding other limitations a total of 230 sensor positionscould be measured before moving the sensors to new parts of the fuselage.
3.2 Sensor placement and grid designBesides hardware and time constrains, the sensor grid design was driven by these test objectives:
• Determination of the upper limits of modal analysis on a full-scale fuselage structure.
• Realization of a high resolution and equally spaced sensor grid in a part of the fuselage which isessential for further development and application of a correlation criterion based on kinetic energydistribution.
• Collection of stringer and skin field vibrational data in the propeller plane to verify supposed localvibration effects of stringers and skin fields observed in earlier tests.
INTER-NOISE 2016
3298

An extensive pre-test suggested an installation time of 4 h for 80 sensors given a two person installationteam. On site testing time was limited to 15 workdays with a 5 person team for each campaign. The two-ring configuration of the sensor grid allowed four persons to work on installation simultaneously. To ensurereproducibility of the roving sensor positions during both campaigns threaded sensor adapters were manufac-tured from POM (polyoxymethylene) and glued to all measurement positions directly on the fuselage. Thehardware limitation suggested a setup with moving sensors on a predefined grid. Considering the setup timeand space limitations in the A400M fuselage no more than 2800 sensor positions could be measured duringthe campaigns. To accomplish all the goals laid out above within the given constraints the sensor grid wascomposed of three subsections: The high frequency analysis was focused on the area between the front of thefuselage and the wing box (i.e. very stiff frames in the area where the wing is attached to the fuselage) andabove the cargo floor. In that area every skin field was installed with a sensor (71 sensors per ring) and everyframe of the structure was measured by an equally spaced sensor ring (72 sensors per ring).
Figure 2: Sensor grid configuration.
In addition the stringers between the 6 frames closest to the propeller plane were also installed with sensors(72 sensors per ring). In addition, every ring configuration in the front part of the fuselage was installed with 7sensors below the quasi-rigid cargo floor. Due to lack of access these sensors were installed from the outsideof the fuselage. In total, this installation results in approximately 80 sensors per ring.
The rest of the fuselage was installed with sensors according to the results of the effective independencesensor placement method (6) using a finite element model of the structure for the low frequency range pro-vided by Airbus. Due to known problems of mode visualization with an optimized sensor grid (7) and thedeficiencies of the FE-model originally designed for overall aircraft dynamics, the calculated grid for the midsection of the fuselage was overlaid with a grid of 8 sensors for every frame while 5 sensors were added toevery third frame of the rear cone section. The resulting sensor grid is shown in Figure 2. The gray areawas used for global modal analysis. The yellow area is an equally spaced grid for the further development ofhigher frequency correlation techniques. The red area is additionally fitted with sensors on the stringers ofthe structure.
A subset of 50 sensors from the configurations above were attached to fixed positions on the fuselage.These sensors were used to check the signal amplitudes between different measurements of the roving gridand to apply corrections if necessary. All sensor positions originating from the effective independence sensorplacement method were part of this subset. In theory the fixed sensor positions are sufficient for modal anal-ysis up to 50 Hz, even though the results would be hard to interpret visually.
INTER-NOISE 2016
3299

3.3 Excitation SignalsDuring the tests two kinds of vibration signals were used: Sinusoidal sweep and random excitation. Thesweep excitation was chosen because it should provide the best results for a linear system (8). The randomexcitation was used due to its simpler application and a lower sensitivity to structural defects. These werepresent in the form of mounting parts for the systems that usually go into a finished A400M aircraft. Not allof these could be removed before the measurements.
Sinusoidal and random signals were used in a single and a multi-point excitation configuration. To obtaina high signal-to-noise ratio (see 4.1) all signals used for the mid-frequency range were force limited (see(5)). This was done to ensure a homogeneous force input into the structure over the excited frequency bandof 50 Hz to 500 Hz. The signals used for the low-frequency experimental modal analysis were not modifiedusing force-notching. Instead several measurement runs at different force levels using only sinusoidal sweepexcitation were performed. Combining all measurements conducted during both campaigns seven shakerpositions were measured using two different excitation signals for the mid-frequency range and one signalfor the low-frequency range.
3.4 Test procedureThe sensor grid consisted of 30 rings of approximately 80 sensors in the front part of the fuselage with eachring containing only frame, skin field or stringer sensors and of 160 sensors spanning the mid and rear section.This grid was separated into 15 double ring configurations plus the so called global configuration. In orderto reduce systematic mass loading effects in the roving accelerometer tests, the double ring configurationsdid not use two consecutive frames, but instead it consisted of the first and sixteenth ring, the second andseventeenth ring, etc. This pattern allowed for easy cable routing with one cable harness leaving the structureto the front and one to the back. Also it separated the two rings of a single configuration by about 3 m,allowing for simple parallel installation.
Figure 3: Measurement process for a single sensor configuration.
INTER-NOISE 2016
3300

To reduce errors during sensor repositioning all measurement points were fitted with a custom madesensor adapter. This adapter was directly glued to the structure and enabled a threaded connection of thesensor. Furthermore, unique labeling of each sensor adapter was used denoting the unique sensor id andconfiguration name before any sensors were installed. This reduced the effort of moving the sensor gridto a simple repositioning of accelerometers along matching numbers on labels and sensors. The adapterswere also used to attach dummy masses to the unmeasured measurement points during the test lesseningthe error introduced by the shifting mass of sensors and cables in between measurement. During adapterinstallation each adapter was fitted with a dummy mass approximating the mass of a sensor and the cabledirectly attached to the structure near the measurement point. To assure a high signal quality of the measureddata a multi-point excitation pattern was used. Four exciters of two different types were available for the test:Two Prodera EX 520 C50 modified for application in the high frequency range and two RMS SW-122. TheProdera exciters were used at opposing sides of the propeller plane and made up the first exciter pair whilethe RMS exciters at the front of the structure and the wing box section made up the second exciter pair. Allexciters were attached to the outside of the fuselage pointing in radial direction. Only the push-pull rods wereremoved during configuration changes, everything else was left unchanged to ensure consistent data and afaster reconfiguration process.
Both crest optimized random and sinusoidal sweep signals were used for excitation (8). The random signalwas used for fast on site checks of the signal quality needing only a single excitation run and no external postprocessing to generate FRFs. The sinusoidal sweep was used to generate the final data set providing thehighest quality of FRFs. The process used to setup and measure a single configuration is detailed in Figure3. Original planning assumed an expenditure of 4 hours per configuration measured with a five person team.After the team got used to the process the time needed was reduced to about three hours freeing time tomeasure 4 additional configurations of 80 sensors each after the planned measurements were done.
3.5 Signal processingThe frequency response functions were calculated for each individual run and later merged into FRF sets.One set per exciter and signal type combination. The processing was done using conventional post processingmethods (9). To obtain the FRFs the H1 estimator was used. The auto- and cross-power spectral densitiesused in the H1 estimator were calculated using Welch’s method with a Hanning window and an overlap of75%.
In case of the sweep excitation, due to the correlated excitation signals the spectra from the symmetricand anti-symmetric runs had to be combined to a single input matrix before the H1 estimator was used. Thedata from the non-coherent crest-optimized random signals was directly processed thanks to the uncorrelatedexcitation signals. Due to the huge size of the resulting data and different requirements in the analysismethods it was necessary to do the post processing twice: Once with a frequency resolution of 0.195 Hz butlimited to a range of 50-200 Hz. This data was used for modal analysis. And once with a resolution of 0.5Hz in the full range of excitation (50-500 Hz) used for energy calculations.
4. RESULTSThe acquired data was checked for both quality and consistency. To get a measure of the data quality thesignal to noise ratio was evaluated. The consistency of the data was checked by calculating the deviation ofthe signals measured by the fixed sensors.
4.1 Data Quality and Data ConsistencyThe signal-to-noise ratio (SNR) was calculated to evaluate the necessary excitation forces and number ofshakers for future tests of similar structures. During the test procedure as outlined in 3.4 the noise floorwas measured for each configuration by measuring all channels in an unexcited state. Specifically the SNRfor dual shaker excitation and single shaker excitation and for multi-sine and sine-sweep excitation werecompared. An overview of the results is shown in Table 2. The results shown are averaged both over a widefrequency range of 50 Hz to 400 Hz and over all 50 fixed position sensors.
According to the test results the SNR increases by approximately 5 dB for dual-point excitation compared
INTER-NOISE 2016
3301

Table 2: SNR comparison for different excitation setups and signals. The SNR given below isaveraged between 50 Hz and 400 Hz and over all fixed sensor positions.
Signal Type No. Exciters SNR [dB]Sweep 1 25.8Sweep 2 31.4Random 1 20.4Random 2 25.8
to single-point excitation and by approximately the same when using a sine-sweep instead of a randomexcitation signal. These results point toward a multi-point sine-sweep excitation as optimal, if SNR is thedriving concern. On the other hand multi-point sine sweep excitation proved to be quite time consuming,requiring a measurement run per shaker. Random excitation requires just a single run for all shakers combined.Fewer shakers mean less equipment to be transported and setup. The most time efficient method of excitationis single-point random excitation. Combined with the results in Table 2 the trade-off to be made is onebetween signal quality and time.
A critical aspect of the test procedure was the measurement of a roving sensor grid. These measurementswere performed over the course of weeks. The test facility was not air conditioned leading to temperaturefluctuations. A total of 160 sensors and associated cables was moved through the structure between measure-ment runs changing the mass load slightly. Additionally the push-pull rods of the electromagnetic exciter hadto be disconnected before anyone could enter the structure to reconfigure for the next measurement run. To
Figure 4: Averaged FRF of a single fixed sensor acquired over all 20 measurement runs of the firstcampaign and its 2σ standard deviation.
check the data consistency the signals of 50 sensors placed at fixed locations on the fuselage was evaluatedby calculating the standard deviation over all 20 measurement runs conducted in a single campaign. Oneexample of this shown in figure 4 and table 3. The consistency of the data decreases with rising frequency.Especially the amplitude deviation rises while the phase stays relatively constant. As mentioned in 3.5 allFRFs where calculated using a Hanning window. This window function favors phase over amplitude informa-tion and is thus the most widely used window function for modal analysis. A study of the effects of differentwindow functions like a flattop favoring correct amplitudes on data consistency remains to be performed.
INTER-NOISE 2016
3302

Table 3: Amplitude and phase error with increasing frequency for a single fixed sensor
Frequency Range Amplitude Deviation Phase Deviation8-100 Hz 11.7 % 25◦
100-200 Hz 16.9 % 30◦
200-300 Hz 44.0 % 20◦
300-400 Hz 43.0 % 25◦
4.2 Experimental Modal AnalysisTo investigate the limits of experimental modal analysis (EMA) for aircraft fuselage structure when approach-ing the mid-frequency range EMA was performed using the data of the first measurement campaign. Somegeneral observations were made during modal analysis of the FRFs obtained from this test. These observa-tions concern the data quality and the possibility of picking modes. These results were obtained using LMSTestLab with the PolyMAX estimator for modal analysis.
Figure 5: All 2850 FRFs calculated for a single excitation point using sweep excitation.
Up to 50 Hz modal analysis using PolyMAX works flawlessly. The synthesized FRFs fit the measureddata very well. At 70 Hz the resonance peaks begin to widen but the process of modal analysis still workswell. At approximately 90 Hz the peaks of the measured FRFs begin to blur into each other but modes canbe identified with reasonable accuracy. At 120 Hz it is still possible to pick some modes but the damping isstrongly underestimated using the PolyMAX algorithm. At 140 Hz and up no reasonable modal analysis ispossible due to the resonance peaks blurring into each other. Figure 5 shows all FRFs obtained from notchedsweep excitation calculated from a single excitation point. The behavior described above can easily be seen.The decrease in peak separability and the general rise of response towards higher frequencies is easy to spot.Figure 6 shows some exemplary modes identified from the data shown in Figure 6. The figure shows thehigh density front part of the sensor grid only. The modes shown there were identified in the frequency rangebetween 50 Hz and 100 Hz and are sorted according to their eigenfrequency, i.e. fA<fB<fC<fD. The dampingratio of these modes can be found between 1.1% and 1.5% critical damping. It is important to note that eachof the displayed modes was calculated from an FRF data set that was collected in 20 separate measurementruns with different sensor configurations. The occasional seemingly dead sensors originate from parts of thefuselage where installation of a sensor was simply not possible due to irregularities of the structure.
INTER-NOISE 2016
3303

Figure 6: Some modes identified from the FRFs shown in figure 5. The modes are sorted accordingto their eigenfrequency from lowest (A) to highest (D).
4.3 Influence of the acoustic boundariesAs mentioned earlier the two test campaigns were performed on slightly different configurations of theA400M acoustics fuselage demonstrator. For the second campaign the fuselage was closed using foam ab-sorber elements. These elements are attached to a rigid frame affixed to the testing hall in which the fuselagedemonstrator is located. To ensure minimal change of the dynamic characteristics of the fuselage itself thecavity within the fuselage is attached to the frame carrying the boundary elements by an flexible rubberconnection only. The setup is shown in figure 7.
(a) Front end acoustic boundary (b) Rear end acoustic boundary
Figure 7: Attachment of the acoustic boundary elements added to the fuselage structure between themeasurement campaigns. The rubber band connecting the edges of the fuselage cavity to the framecan be seen as a thin black line.
An analysis of the lower frequency dynamic mode shapes between 8 Hz and 80 Hz resulting from shakerexcitation of the two different campaigns shows that this setup changed the demonstrators dynamic character-istics more than expected. While a change of the rigid body modes of the structure located below 8 Hz wasexpected, the dynamic modes should have been mostly comparable. As can be seen by the MAC matrix (10)
INTER-NOISE 2016
3304

Figure 8: The influence of the acoustic boundaries added to the A400M acoustics fuselage demon-strator. According to the MAC criterion there is only a weak correlation between the modes identifiedbefore and after the modification.
calculated for the modal model of the two different structural configurations in figure 8 there is next to nocorrelation of the mode shapes. The structural changes introduced by the absorber elements and their bearingare so significant that they resulted in fundamental changes of the dynamic characteristics of the A400Macoustics fuselage demonstrator.
5. SUMMARYThe methods developed to test the A400M acoustics fuselage demonstrator in the low- and mid-frequencyrange have been proven to work well. The overall quality of the acquired data is excellent and extensivetests with different excitation signals and shaker configurations will allow future test campaigns on similarstructures to balance the time and effort spent with the quality of data necessary for the problem at hand.Using a roving sensor grid method with dozens of sensors moving along the structure proved to be no problemfor the low-frequency results. Both the analytical consistency check and the EMA analysis proved a highdata consistency up to 150 Hz. With rising frequency the errors introduced by changing sensor positions andenvironmental changes over the course of the test campaigns impacted the results more significantly. Thismakes methods reliant on direct single sensor data unusable. Methods relying on averaged results, eitherspatially or in the frequency domain, are still usable though.
The methods developed during the testing of the A400M acoustics fuselage demonstrator form the basis offurther test procedures planned on a similar structure: The CRAFD (Cror Acoustics Fuselage Demonstrator)located in the ZAL TechCenter in Hamburg. In addition, the data was used for several subsequent studies:A finite element model based on the A400M was updated to reflect the properties of the A400M acousticsfuselage demonstrator as setup at the HSU, the data was used as a basis for planning the Acoustic FlightLABplatform (1) and to advance the development of a new correlation criterion for experimental and simulateddata (11) in the mid-frequency range of structural vibrations.
INTER-NOISE 2016
3305

ACKNOWLEDGEMENTSThe authors gratefully acknowledge the valuable support of Prof. Delf Sachau and Mr. Christian Köhne fromthe Helmut-Schmidt-University of the Federal Armed Forced in Hamburg for providing the A400M acousticsfuselage demonstrator and an ideal infrastructure for conducting vibro-acoustics experiments.
The work presented here was conducted in the course of the COCLEA project (Comfortable Cabin forLow Emission Aircraft) funded by the German Federal Ministry for Economic Affairs and Energy (BMWi)under the LuFo-4 Framework program.
REFERENCES1. Wandel M, Scheel H. Design Requirements of Acoustic Flight LAB Platform. In: Proceedings of
Inter-Noise 2016; 2016. .
2. Winter R, Norambuena M, Biedermann J, Böswald M. Experimental characterization of vibro-acousticproperties of an aircraft fuselage. In: Proceedings of ISMA International Conference on Noise andVibration Engineering. Katholieke Universiteit Leuven; 2014. .
3. Biedermann J. Energiebasierte Korrelation von strukturdynamischen Messungen mit numerischen Mod-ellen für Strukturen mit hoher modaler Dichte [Dissertation]. Technische Universität Braunschweig;2016.
4. Sachau D, Köhne C, Renger K, Scheel H. Vibroacoustic test bed with Airbus A400M-fuselage. In:Proceedings of the International Conference on Noise and Vibration Engineering ISMA 2014. Leuven,Belgium; 2014. p. 55–62.
5. Govers Y, Böswald M, Lubrina P, Giclais S, Stephan C, Botargues N. AIRBUS A350XWB GroundVibration Testing: Efficient techniques for customer oriented on-site modal identification. In: Proceed-ings of the International Conference on Noise and Vibration Engineering ISMA 2014. Leuven, Belgium;2014. p. 2495–2507.
6. Kammer DC. Sensor Placement for On-Orbit Modal Identification and Correlation of Large SpaceStructures. In: American Control Conference, 1990; 1990. p. 2984–2990.
7. Böswald M, Will B, Schulze B. Theoretical and practical implementation of sensor optimization forground vibration testing. In: Proceedings of the International Conference on Noise and Vibration Engi-neering ISMA 2012. Leuven, Belgium; 2012. p. 2055–2069.
8. Pintelon R, Schoukens J. System identification: a frequency domain approach. John Wiley & Sons;2012.
9. Füllekrug U, Böswald M, Göge D, Govers Y. Measurement of FRFs and modal identification in case ofcorrelated multi-point excitation. Shock and Vibration. 2008;15(3-4):435–445.
10. Allemang RJ, Brown DL. A Correlation Coefficent for Modal Vector Analysis. In: Proceedings IMACI - 1st International Modal Analysis Conference; 1982. p. 110–l16.
11. Biedermann J, Winter R, Böswald M, Wandel M. Advanced correlation criteria for the mid frequencyrange. In: Proceedings of Inter-Noise 2016; 2016. .
INTER-NOISE 2016
3306


























![Synthesis and Characterization of [n]Cumulenes](https://img.pdfslide.org/doc/110x75/58a181de1a28abb24d8c126c/synthesis-and-characterization-of-ncumulenes-.jpg)
