Embed Size (px)
Citation preview

Simulation in Production and Logistics 2015 Markus Rabe & Uwe Clausen (eds.) Fraunhofer IRB Verlag, Stuttgart 2015
Entwicklung einer menschenähnlichen Puppe als Eingabegerät für die Menschsimulation
Design of a Humanlike Puppet as an Input Device for Human Simulation
David Wiegmann, Holger Brüggemann, Ostfalia Hochschule für angewandte Wissenschaften, Wolfenbüttel (Germany), [email protected],
Abstract: Ergonomic simulation offers high potential to improve ergonomics and productivity of future manual production processes. Nevertheless ergonomic simula-tion is used quite rarely in production planning processes, due to the high effort in time which is required to create human movements in the simulation. This paper presents a new approach to minimise the time required to create human simulation. A puppet is developed to be used as a tangible input device for digital humans in ergonomic simulation. The paper describes the state of the art of human motion creation in ergonomic simulation and the using of tangible input devices for other purposes. Furthermore the design, the properties and the functioning of the new input device is shown in this paper.
1 Einleitung Innerhalb der arbeitswissenschaftlichen Menschsimulation wird der Mensch in ergo-nomischer Hinsicht in der digitalen Fabrik abgebildet. Sie dient dem Zweck, Ar-beitssysteme unter ergonomischen, arbeitsmethodischen und zeitwirtschaftlichen Gesichtspunkten zu analysieren und zu bewerten (VDI 4499 Blatt 4). Die frühzeitige Durchführung von arbeitswissenschaftlichen Menschsimulationen im Produktions-planungs- und Gestaltungsprozess bietet die Möglichkeit, frühzeitig Einfluss auf zukünftige Produkte, Betriebsmittel und Produktionsprozesse zu nehmen. Dies stellt ein großes Potenzial zur Verbesserung der Ergonomie und der Produktivität von manuellen Arbeitsplätzen und deren Planungsprozessen dar. Im Gegensatz zum Ein-satz in der Produktentwicklung, z. B. im Fahrzeug- oder Flugzeugbau, hat die Be-wertung von Arbeitsplätzen mithilfe der Menschsimulation in der industriellen An-wendung bisher weniger an Bedeutung erlangt (VDI 4499 Blatt 4).
Häufig erfolgt die Absicherung manueller Arbeitsplätze durch Prototypen, aus der Erfahrung von Experten oder virtuell ohne den Einsatz eines Menschmodells. Kommt dennoch die Menschsimulation zum Einsatz, dann meist bei gezielten,
692 Wiegmann, David; Brüggemann, Holger
kritischen Vorgängen oder neuen Konzepten (Rodríguez 2010). Der gravierendste Nachteil und somit das größte Hindernis eines stärkeren Einsatzes von arbeitswis-senschaftlicher Menschsimulation ist der hohe zeitliche Aufwand für die Erstellung der Simulation (Mühlstedt 2012; Rodríguez 2010; Mun und Rim 2011).
Das BMBF-geförderte Forschungsprojekt Human Engineering Computer Interface (HECI), das am Institut für Produktionstechnik der Ostfalia durchgeführt wird, ver-folgt einen neuen Ansatz zur Verkürzung der Erstellungszeit für eine arbeitswissen-schaftliche Menschsimulation. Mit einem Eingabegerät in Form einer menschenähn-lichen Puppe soll der Aufwand für die Generierung von Bewegungen des Mensch-modells erheblich verringert werden. Das Eingabegerät soll direkt an das Simula-tionsprogramm Process Simulate von Siemens angebunden werden und dort das Menschmodell Jack steuern.
2 Stand der Wissenschaft und Technik Der verhältnismäßig größte Zeitbedarf bei der Erstellung einer Menschsimulation fällt bei der Generierung von Bewegungen des digitalen Menschmodells an. Hierzu bieten die am Markt bestehenden Simulationstools unterschiedliche Methoden an. Diese und die Anwendung gestaltartiger Eingabegeräte soll im Folgenden aufgezeigt werden.
2.1 Bewegungsgenerierung in der Menschsimulation
Eine häufig angewandte Möglichkeit zur Bewegungsgenerierung ist das so genannte Keyframing, das ursprünglich in der Filmindustrie angewandt wurde. Hierbei wer-den charakteristische Körperhaltungen bzw. Posen (Keyframes) des Menschmodells generiert. Eine diskretisierte Bewegung wird durch die meist lineare Interpolation zwischen den Posen erzeugt (Abb. 1). Diese Art der Bewegungsgenerierung erzeugt aber nur dann realistische Bewegungen, wenn sich Start- und Endpose nicht zu stark voneinander unterscheiden. Dementsprechend viele Keyframes werden für eine realistische Bewegung benötigt (Rodríguez 2010). Die einzelnen Posen lassen sich grundsätzlich mit den Methoden der Vorwärtskinematik oder der inversen Kinema-tik generieren. Bei der Vorwärtskinematik muss jedes einzelne Gelenk ausgewählt und eingestellt werden. Das Ermitteln und Einstellen geeigneter Gelenkwinkel gestaltet sich hierbei als schwierig und zeitaufwändig. Bei der inversen Kinematik werden die Zielpositionen und -orientierungen der Endeffektoren des Menschmo-dells angegeben. Die daraus resultierenden Gelenkwinkel der gesamten kinemati-schen Kette des Menschmodells werden dann errechnet. Allerdings besitzen die digitalen Menschmodelle in der Regel mehr als sechs Freiheitsgrade, was zu Mehr-deutigkeiten führt (Rieseler 1992; Weber 2013). Als Abhilfe wird bisher versucht, Randbedingungen zu formulieren wie etwa die Minimierung der potentiellen Ener-gie oder die minimale Quadratsumme der Winkelinkremente, damit das Menschmo-dell eine natürliche Haltung einnimmt (Arlt 1999). Bisher wurde allerdings noch keine korrekte Randbedingung gefunden, sodass hier Vereinfachungen getroffen werden (VDI 4499 Blatt 4).
Eine weitere Möglichkeit der Bewegungsgenerierung stellt das Motion Capturing dar. Hierbei führen Probanden die Bewegungsvorgänge der zukünftigen Arbeitsvor-gänge durch. Dabei werden die Bewegungsdaten durch Verfolgung bestimmter

Mensche
SchlüsseAnschlietragen (MrealistiscSystem mDurchfühhäufig eist in deresultiereÄnderunder Simu
Abbildun
Ein weitgungsgentypischendien abgSimulatiVerrichtutelt (z. Bbesteht VerrichtuZusätzlicbisher no
2.2
Als gestdie in ihrdells darfolgreichdienen si
enähnliche Pu
el-Punkte am eßend werdenMapping) (Mechen Bewegunmit Hardwarehrung der Bin Prototyp vr Regel eine enden Beweg
ngen (z. B. duulationsumgeb
ng 1: Bewegu
terer Ansatz znerierung. Din, von Parame
geleitet wurdenon werden diung) und zum
B. Position dedie Problemaungen mit allch ist es beioch nicht mög
Gestaltart
altartige Eingrer physikalisrstellen. In andh eingesetzt unind. An dieser
uppe als Einga
menschlichen die Beweguenache 2010).ngen (Arlt 19ekosten bis zuewegungsaufz
von Produkt uextensive Dat
gungen sind zurch eine neuebung durchfüh
ungsgenerieru
zur Generierune Bewegung detern abhängin (Schönherr ie Parameter
m anderen vomes Betriebsmitatik, dass dielen möglicheni komplexen glich ideale Be
ige Eingab
gabegeräte solschen Form eideren Bereichnd zeigten insr Stelle sollen
abegerät für di
en Körper räuungsdaten auf. Das Motion 999). Jedoch iu € 250.000 nzeichnung mi
und/oder Betritenaufbereitun
zudem unabhäe Schrauberpohrbar (Arlt 199
ng durch Keyf
ng von Bewegdes Menschmgen, idealen B2014; Gläserzum einen v
m Programm attels). Bei diee Ableitung n Parametern
Bewegungenewegungsmus
begeräte
llen in diesemn Abbild eine
hen wurden gesbesondere, daausgewählte
ie Menschsimu
umlich und zf das digitaleCapturing fühist der finanznicht unerhebit hohem Auiebsmittel notng notwendigängig von Einosition) sind z99).
framing
gungen ist diemodells erfolgtBewegungsmur et al. 2014). om Benutzer
aus der Simulaeser Art der Bvon Bewegueinen immens
n (etwa zur Kster abzuleiten
m Beitrag solces zu manipuliestaltartige Einass diese einfBeispiele darg
mulation
zeitlich aufgee Menschmodhrt zwar aus Pielle Aufwand
blich. Weiterhufwand verbutwendig ist. Z
g (Menache 20nflussparamet
zunächst nicht
e parametrischt hierbei auf Bustern, die in LBei der Erstegesetzt (z. B
ationsumgebuBewegungsgenungen aller msen Aufwand Kollisionsvermn (Gläser et al
che bezeichnetierenden digitngabegeräte b
fach und intuitgestellt werde
693
ezeichnet. dell über-Prinzip zu d je nach
hin ist die unden, da Zusätzlich 010). Die tern, d. h. t direkt in
he Bewe-Basis von Laborstu-ellung der
B. Art der ung ermit-nerierung
möglichen darstellt.
meidung) . 2014).
t werden, talen Mo-bereits er-tiv zu be-en.

694
Über denKnep et wurden mputeranimser TechSzenen (Hayes erstmals sches Skrung abgund wurdFlugzeug
Abbildun
Yoshikazlichen PuNutzerstmit der MPuppe daktiven ADennochkeine auEine wemodularlette annihrem Sy
Da die bBezug zinwieweübertrag
n Einsatz gestal. (1995) mi
mit Eingabegemierten Szene
hnik wurde imsog. Bugs m1998). Den EEsposito et a
kelett dar, desgeleitet sind unde für Menschgen eingesetzt
ng 2: Monkey
zi et al. (2011uppe, deren Gtudie ihr EingaMaus beim P
das MenschmoAntrieben warh wird erwähnuf das Mensceitere Nutzerses, konfigurie
nehmen kann, ystem sich sch
bisherigen Nutzur arbeitswisseit sich die Een lassen.
taltartiger Einit ihrem Dinoeräten in Formen beim Keyfr
m Film Starshipmit einem enEinsatz einesal. (1995). Ihrsen Maße vomnd im Maßstahsimulationent. Abbildung 2
y (links, Hayes
1) entwickelteGelenke mit Aabegerät mit a
Posing. Im Raodell schnelleren die Probannt, dass die Ahmodell zuge
studie zeigen erbares Systemmit der Maus
hneller an Ziel
tzerstudien zusenschaftliche
Ergebnisse au
Wieg
ngabegeräte inosaur Input Dm von Dinosaframing manipp Troopers an
ntsprechenden menschenähr Eingabegeräm 50. Perzentab 1:3 verkleinn im Rahmen d2 zeigt das Ein
s 1998) und D
en ein EingabAntrieben ausgaktivierten Anahmen der Stuer und präzisenden zudem sAussagekraft eschnittene pa
Jacobson et m, das Gestals. Ihre Studie lposen annähe
ur Anwendungen Menschsimuf die Simula
gmann, David
n der FilminduDevice (DID).auriern virtuelpuliert. Eine Wngewandt, wo
Eingabegerähnlichen Eingät Monkey steltil der nordamnert sind. Es bdes Produktenngabegerät Mo
DID (rechts, K
begerät in Formgestattet sind. ntrieben, mit pudie konnten er in eine Zieschneller als bdieses Ergebnassive Puppe al. (2014) au
lten in Form ergab unter a
ert als mit der
g gestaltartigermulation nehmation menschl
d; Brüggemann
ustrie berichteIm Film Jurale Dinosaurie
Weiterentwickfür computer
ät kontrolliertgabegeräts besllt ein elektro
merikanischen besaß 35 Freihntwicklungspr
Monkey und das
Knep 2014)
m einer mensSie verglichen
passiven Antridie Probandenelpose überfühbei passiven Anisses begrenzur Verfügun
uf. Sie verglunterschiedlic
anderem, dassMaus.
r Eingabegerämen, ist es fralicher Arbeits
n, Holger
en bereits assic Park r in com-
klung die-ranimierte t wurden schreiben
omechani-Bevölke-
heitsgrade rozess bei s DID.
schenähn-n in einer ieben und n mit der hren. Bei
Antrieben. nzt ist, da ng stand. ichen ihr cher Ske-s man mit
äte keinen agwürdig, sprozesse

Menschenähnliche Puppe als Eingabegerät für die Menschsimulation 695
3 Entwicklung eines gestaltartigen Eingabegeräts für die Menschsimulation
Im Folgenden soll der Aufbau und die Nutzung des auf die arbeitswissenschaftliche Menschsimulation zugeschnittenen Eingabegeräts vorgestellt werden, das im Rah-men des HECI-Projektes entwickelt wurde. Mit dem Eingabegerät in Form einer kleinen menschenähnlichen Puppe sollen Bewegungen des Menschmodells nach dem Keyframing-Ansatz erzeugt werden, indem die Gelenkwinkel der Puppe auf das digitale Modell übertragen werden.
3.1 Sensorik
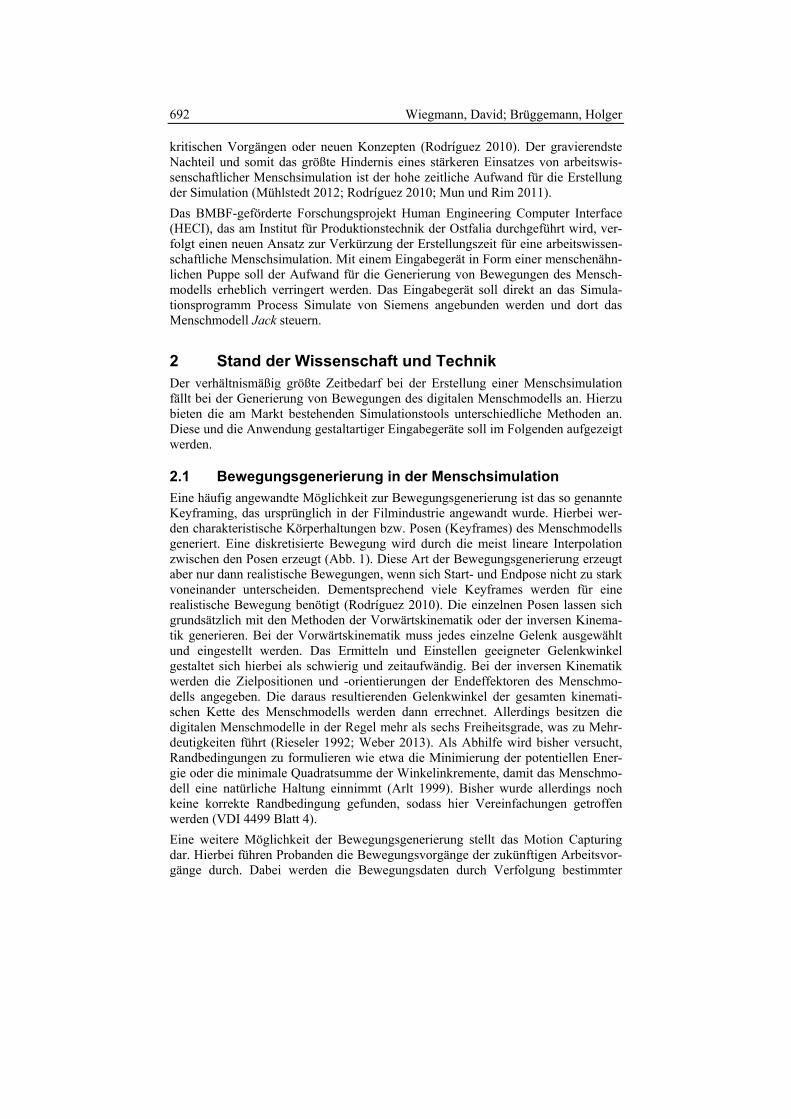
Die Gelenkwinkel des Eingabegerätes werden durch kleine optische inkrementelle Drehgeber erfasst. Zusammen mit den Körperteilen der Puppe bilden sie ein elektro-mechanisches Trackingsystem. Die Drehgeber haben einen Gehäusedurchmesser von 7,2 mm bei einer Länge von 13,5 mm und einen Wellendurchmesser von 1,5 mm. Durch die Sensoren werden Gelenkdrehungen in Schritten von 0,225° er-fasst. Die Drehbewegungen werden durch binäre Signale über einen Open-Collector-Ausgang kodiert ausgegeben. Durch das binäre Signal ist die Übertragung der Signale sehr robust. Im Gegensatz zu anderen Sensoren, die bei elektromechani-schen Trackingsystemen zum Einsatz kommen, wie etwa Potentiometern, stellt ein Rauschen des Signals hierbei kein nennenswertes Problem dar. Auch die Erfassung des Winkels an sich ist sehr unempfindlich gegenüber Störungen im Vergleich zu anderen Trackingverfahren. Bei magnetischen Trackingverfahren kann es zu Störun-gen durch elektromagnetische Quellen oder metallische Komponenten kommen, bei optischen Verfahren können äußere Lichteinflüsse stören und bei Trackingverfahren auf Basis von Inertialsensoren kann der mit der Zeit ansteigende Winkelfehler (Drift) zu Problemen führen.
Da die Drehgeber nur einen Freiheitsgrad besitzen, müssen Gelenke mit mehreren Freiheitsgraden, durch eine entsprechende Anzahl seriell angeordneter Gelenke er-setzt werden. Die statischen Gelenkstellungen der mehrdimensionalen Gelenke, die für die Bewegungserzeugung nach dem Keyframing-Ansatz notwendig sind, können hierdurch weiterhin durch das Eingabegerät abgebildet werden. Weiterhin ist es not-wendig die Gelenke vor der Verwendung des Eingabegerätes einmalig, durch eine Drehbewegung bis zu einer bestimmten Stellung zu referenzieren, da inkrementelle Drehgeber verwendet werden. In Abbildung 3 ist der Drehgeber sowie eine Gelenk-einheit mit einem und mit drei Freiheitsgraden dargestellt.
3.2 Mechanik
Das Eingabegerät basiert auf dem Menschmodell Jack aus Process Simulate und ent-spricht dem 50. Perzentil männlich nach DIN 33402 im Maßstab 1:5. Das Mensch-modell Jack verfügt über insgesamt 68 Gelenke mit 135 Freiheitsgraden (Spanner-Ulmer und Mühlstedt 2009). Hieraus wurde für die Puppe ein reduziertes kinemati-sches Skelett mit insgesamt 22 Freiheitsgraden abgeleitet. Gelenkgruppen des Jack-Modells wie etwa der Wirbelsäule oder des Schlüsselbein-Schulter-Verbundes wur-den hierbei durch je ein Gelenk im Skelett der Puppe ersetzt. Die Winkelstellung dieser einzelnen Gelenke dient als Stellglied, um die gesamte Gelenkgruppe des Jack-Modells zu manipulieren. Trotz dieser Vereinfachung gibt es eine hohe Über-einstimmung zwischen der Körperhaltung des Eingabegeräts und der des Jack-
696
Modells.manipulivor. AbbSkelett d
Abbildunmit drei
Abbildun
. Das digitaleiert werden. Dbildung 4 stelder Puppe geg
ng 3: DrehgebFreiheitsgrad
ng 4: Skelett d
e Modell kanDas Skelett siellt das Skelettenüber.
ber (links), Geden (rechts)
des digitalen M
Wieg
nn weiterhin eht keine Mant des digitalen
elenkeinheit m
Modells (links
gmann, David
in vollem Unipulation der Hn Modells Jac
mit einem Frei
s) und abgelei
d; Brüggemann
Umfang mit dHand- und Fuck und das ab
iheitsgrad (Mi
itetes Skelett (
n, Holger
der Puppe ußgelenke bgeleitete
Mitte) und
(rechts)

Mensche
Das EingDrehgebdes digitlen Modbei der PWinkelbteile der lenke wegung in räts und
Abbildun
3.3
Für das sodass dHierfür wgeräts au
In der StMikrokoWinkel schlossenSchnittstgeführt wAnwendSteuereinlungen a
enähnliche Pu
gabegerät wuber konstruierttalen Menschm
dells selbst durPuppe nicht m
bereiche wie dPuppe an ent
erden durch Rihrer Positiondas Menschm
ng 5: Konstru
Schnittste
Eingabegerädas Eingabegewurde eine Stuf das digitale
teuereinheit wontrollern erfaum. Die Mikn und sendentelle an den Cwird. Über di
dung programnheit liest. Anauf das digita
uppe als Einga
urde anschließt. Hierbei wurmodells anzunrchdringen kamöglich. Damdie des digitaletsprechenden Reibung in ihn bleiben. Abb
modell Jack ge
uktion des Eing
elle
ät wurde einerät direkt in eteuereinheit en Menschmode
werden die kodasst. Diese dekrokontroller n den Winkel Computer angie Programmi
mmiert, die dinschließend eale Menschm
abegerät für di
ßend auf Basisrde ebenfalls vnähern. Währeann und sich zmit trotzdem den Modells abStellen ausges
hrer Stellung bildung 5 stel
egenüber.
gabegeräts im
e Schnittstelleeiner Simulationtwickelt, dieell übertragen
dierten binärenekodieren die sind als Slavan einen Mas
geschlossen wierschnittstelleie Winkelstel
erfolgt ein Mamodell in der
ie Menschsimu
s des Skelettsversucht sich end sich die äzudem auch vdie Gelenke dbdecken könnespart. Die einzgehalten, sodllt die Konstr
m Vergleich zu
e zu Process onsumgebung
e die Winkelst.
n Signale der Signale und
ve-Teilnehmerster-Teilnehm
wird, auf dem e von Processllungen des Eapping der ein
Simulationsu
mulation
s und der verwan der äußere
äußere Haut derformen läss
der Puppe dieen, wurden diezelnen Gliede
dass diese nacruktion des Ei
um Menschmo
Simulate geg genutzt werdtellungen des
Sensoren zunäwandeln sie
r an einen Bmer, der über d
die Simulatios Simulate wuEingabegerätsngelesenen Wumgebung, so
697
wendeten en Gestalt des digita-st, ist dies gleichen e Körper-er der Ge-ch Betäti-ingabege-
odell Jack
eschaffen, den kann. Eingabe-
ächst von in einen
Bus ange-die USB-on durch-urde eine s aus der
Winkelstel-odass die
698
Körperhstimmt.
3.4
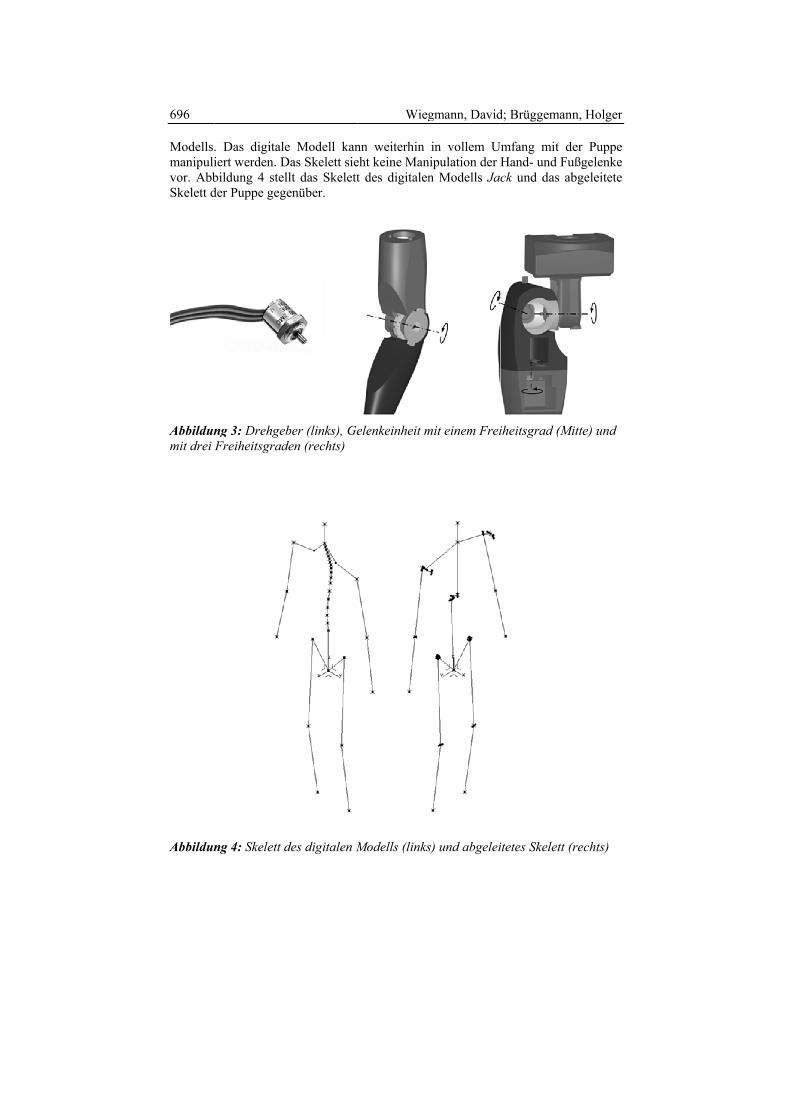
Gemäß bdung 6 dgungsverfahren hfestigt, skann. DBildschirdie Geleperhaltunwender Keyfram
Abbildun
In einembegerät aPuppe eiMaus zunung als
altung der Pu
Bedienung
beschriebenerdargestellt ist.rfahren und k
hergestellt. Zusodass der Anas Eingabegerms positionie
enke der Puppng einnimmt, kann dann
mes erstellen, a
ng 6: Prototyp
m ersten Test, ials auch mit in positives Fufriedener mits komfortabler
uppe mit der d
g und erste
r Konstruktion Dabei wurde
komplexe formur besseren Hnwender mit berät wird direert, auf dem d
pe eingestellt wwird direkt dMithilfe de
aus denen dan
p des Eingabe
in denen Probder Maus in
Feedback. Diet dem Eingabr wahr und ko
Wieg
des digitalen
er Test des
n wurde ein en funktionsgemgebende Bauandhabung wbeiden Händeekt am Simuldie Simulationwerden und ddas digitale Mes Eingabegenn die gewüns
egeräts
banden das Mebestimmte Kö
e Probanden gbegerät warenonnten zudem
gmann, David
Menschmode
s Eingabeg
Prototyp angebende Teile uteile durch a
wurde die Pupen die Gelenklationsarbeitspnsumgebung ddadurch dieseMenschmodellerätes innerhchte Bewegun
enschmodell sörperhaltungegaben an, dasn. Weiterhin nm Keyframes i
d; Brüggemann
lls annähernd
eräts
gefertigt, der idurch klassisc
additive Fertigpe an einem
ke der Puppe eplatz in der Ndargestellt wireine gewünsc
l manipuliert. halb der Anng erzeugt wir
sowohl mit deen brachten, es sie im Vergnahmen sie din kürzerer Ze
n, Holger
d überein-
in Abbil-che Ferti-gungsver-Mast be-einstellen Nähe des rd. Indem chte Kör-Der An-
nwendung rd.
em Einga-erhielt die gleich zur ie Bedie-eit erzeu-

Menschenähnliche Puppe als Eingabegerät für die Menschsimulation 699
gen. Für verlässliche quantitative Aussagen hierzu werden in Zukunft weitere Versu-che durchgeführt.
Im weiteren Ablauf der Entwicklung soll das Eingabegerät weiter optimiert werden, mit dem Ziel die Eingabezeiten während der Simulation zu verkürzen. Ein Aspekt ist hierbei die Übereinstimmung der Körperhaltung zwischen der Puppe und dem digi-talem Menschmodell zu verbessern, damit der Benutzer während des Posings weniger Rückmeldung aus der Simulationsumgebung benötigt.
4 Zusammenfassung und Ausblick Durch frühzeitige Einflussnahme auf den Produktionsplanungs- und Gestaltungspro-zess bietet die arbeitswissenschaftliche Menschsimulation großes Potenzial die Ergonomie und die Produktivität manueller Produktionsprozesse zu verbessern. Dennoch wird die arbeitswissenschaftliche Menschsimulation bisher verhältnis-mäßig selten angewandt, was hauptsächlich auf den hohen zeitlichen Aufwand für die Generierung von Bewegung des digitalen Menschmodells zurückzuführen ist. Die bisherigen Methoden zur Bewegungsgenerierung bieten bisher noch keine zufriedenstellende, allgemeine Lösung, mit der man natürliche Bewegungen in kurzer Zeit erzeugen kann. In anderen Bereichen haben gestaltartige Eingabegeräte gezeigt, dass man mit diesen einfach und intuitiv die Körperhaltung digitaler kinematischer Modelle einstellen kann. Ziel des Forschungsprojektes HECI ist es mit einem für die arbeitswissenschaftliche Menschsimulation zugeschnittenen gestaltartigen Eingabegerät den Zeitbedarf für die Bewegungsgenerierung erheblich zu verkürzen. Auf Basis eines Prototyps konnten erste informelle Tests zur Anwendung dieses Eingabegerätes vorgenommen werden. In Zukunft soll die Entwicklung des Eingabegerätes abgeschlossen werden und in umfassenden Nutzer-studien die Gebrauchstauglichkeit des Eingabesystems evaluiert werden.
Literatur Arlt, F.: Untersuchung zielgerichteter Bewegungen zur Simulation mit einem CAD-
Menschmodell. München: Herbert Utz 1999. Esposito, C.; et al.: Of mice and monkeys: A specialized input device for virtual
body animation. In: Symposium on Interactive 3D Graphics (I3D ’95), Monterey (USA), 9-12 April 1995, S. 109ff.
Gläser, D.; et al.: Auf den Spuren der Humanmotorik. In: Gesellschaft für Arbeitswissenschaft e.V. (Hrsg.): Gestaltung der Arbeitswelt der Zukunft – Bericht zum 60. Kongress der Gesellschaft für Arbeitswissenschaft. Dortmund: GfA-Press 2014, S. 363-365.
Hayes, C.: Starship troopers. In: The 25th International Conference on Computer Graphics and Interactive Techniques (SIGGRAPH ’98), Orlando (USA), 19-24 Juli, S. 311.
Jacobson, A.; Panozzo, D.; Glauser, O.; Pradalier, C.; Hilliges, O.; Sorkine-Hor-nung, O.: Tangible and modular input device for character articulation. ACM Transactions on Graphics 33 (2014) 4, S.82:1-82:12.
Knep, B.: Brian Knep.: Dinosaur input device. http://www.blep.com/rd/special-effects/dinosaur-input-device/, Zugriff am 16.07.2014.
700 Wiegmann, David; Brüggemann, Holger
Knep, B.; Hayes, C.; Sayre, R.; Williams, T.: Dinosaur input device. In: Katz, I.; Mack, R.; Marks, L.; Rosson, M.B.; Nielsen, J. (Hrsg.): Proceedings of the Conference on Human Factors in Computing Systems (CHI ’95), Denver (CO), 7-11 Mai 1995, S. 304-309.
Menache, A.: Motion capture primer. In: Computer Animation Complete. All-in-One: Learn Motion Capture, Characteristic, Point-Cased, and Maya Winning Techniques. Amsterdam et al.: Morgan Kaufmann Publishers 2010, S. 71–104.
Mühlstedt, J.: Entwicklung eines Modells dynamisch-muskulärer Arbeitsbean-spruchung auf Basis digitaler Menschmodelle. Chemnitz: Universitätsverlag Chemnitz 2012.
Mun, J. H.; Rim Y.H.: Human body modeling. In: Canetta, L. (Hrsg.): Digital Factory for Human-oriented Production Systems. London: Springer 2011.
Rieseler, H.: Roboterkinematik – Grundlagen, Invertierung und Symbolische Berechnung. Braunschweig/Wiesbaden: Vieweg 1992.
Rodríguez Flick, D.: Virtuelle Absicherung manueller Fahrzeugmontagevorgänge mittels digitalem 3-D-Menschmodell – Optimierung der Mensch-Computer-Interaktion. München: TU München 2010.
Schönherr, R.: Simulationsbasierte Absicherung der Ergonomie mit Hilfe digital beschriebener Bewegungen. Chemnitz: TU Chemnitz 2014.
Spanner-Ulmer, B.; Mühlstedt, J.: Virtuelle Ergonomie mittels digitaler Menschmodelle und anderer Softwarewerkzeuge. In: Schenk, M. (Hrsg.): Digital Engineering – Herausforderung für die Arbeits- und Betriebsorganisation. Berlin: GITO 2009, S.153 -170.
VDI 4499, Blatt 4: Digitale Fabrik – Ergonomische Abbildung des Menschen in der Digitalen Fabrik. Berlin: Beuth 2015.
Weber, W.: Industrieroboter - Methoden der Steuerung und Regelung, 2.Aufl. München: Carl Hanser 2013.
Yoshikazi, W.; et al.: An actuated physical puppet as an input device for controlling a digital manikin. In: Conference on Human Factors in Computing System (CHI ’11), Vancouver (Kanada), 7-12 Mai 2011, S. 637-646.