Embed Size (px)
Citation preview
Epson Roboter
Das Innovations-Prinzip
Epson Roboter
Epson hat die Lösung
Inhalt
�º¢� Die�drei�Roboterkinematiken
� º∞� EZ-Module
º§� Epson�ProSix�6-Achsroboter�
º•� Scara�Roboter�
� ¡™� PC-basierte�Roboter�Steuerungen������ � 14:�Optionen�
� � 15:�Epson�OP500RC�Steuereinheit
¡§� Epson�Vision������ � 17:�Fließbandverfolgung
¡•� Epson�RC170�Roboter�Steuerung������ � 20:�Optionen
™ ¡� Lieferumfang
™™� Epson�RC+�Entwicklungsoberfläche
™¢� Machbarkeitsstudien
™∞� Epson�Schulungen�
™§� Epson�Steuerbefehle
™•� Kontakt
Vorwort
Sie�sägen,�fräsen,�bohren,�führen,�schleifen,�montieren,�bewegen,�
bauen�zusammen�und�beschriften�auch�Torten.�Sie�arbeiten�in�atembe-
raubender�Geschwindigkeit,�mit�enormer�Präzision�und�außerordentlich�
zuverlässig.�Sie�ermüden�nicht,�obwohl�sie�oft�24�Stunden�pro�Tag�an�
bis�zu�365�Tagen�im�Jahr�arbeiten.�Sie�sind�schlicht�und�ergreifend�der�
Garant�für�das�Funktionieren�einer�modernen�Industriegesellschaft,�wie�
wir�sie�heute�kennen.
Die�Rede�ist�von�Industrierobotern�–�Epson�Industrierobotern.�Ihren�
Ursprung�haben�sie�in�der�SEIKO�Corporation:�Seit�der�ersten�Quarz-�
�uhr�von�SEIKO�sind�die�Anforderungen�an�Genauigkeit�und�Geschwin-
digkeit�so�hoch,�dass�die�Produktion�nur�noch�mit�Robotern�gewähr-
leistet�werden�konnte.�Und�dabei�ging�–�und�geht�–�es�nicht�nur�
um�Präzision�und�Geschwindigkeit;�auch�und�gerade�Flexibilität�ist�
entscheidend�für�Erfolg�oder�Misserfolg�einer�Automatisierungslösung.�
Epson�Robotersysteme�sind�für�ihre�Qualität�bekannt�und�geschätzt.
Epson�Robotersysteme�unterteilen�sich�in�drei�Kategorien.�Die�erste�
Gruppe�sind�die�so�genannten�Linearachsmodule.�Diese�Roboter�sind�
die�einfachsten�und�am�leichtesten�zu�steuernden�Systeme,�weil�hier�
einfach�verschiedene,�je�nach�Anwendung�zu�konfigurierende�lineare�
Achsen�zu�einem�System�kombiniert�werden�können.�Die�zweite�Gruppe�
bilden�so�genannte�Scara�Roboter�–�Roboter,�die�in�ihrer�Kinematik�
der�Beweglichkeit�eines�menschlichen�Arms�nachgebildet�sind.�Die�
letzte�Gruppe�bilden�die�6-Achsroboter.�Diese�Roboter�besitzen�sechs�
Freiheitsgrade�und�sind�besonders�aus�dem�Automobilbau�bekannt.�Der�
Vorteil�dieser�Roboter�besteht�darin,�dass�sie�nahezu�alle�Bewegungen�
und�Orientierungen�eines�Armes�inklusive�einer�Hand�nachvollziehen�
können.�Dies�bedeutet,�dass�selbst�für�komplexe�Bewegungsabläufe,�
wie�sie�zum�Beispiel�bei�der�Montage�kleiner�oder�aufwändiger�Bauteile�
notwendig�sind,�eine�einzige�Maschine�ausreichend�ist.�
Inhalt
�º¢� Die�drei�Roboterkinematiken
� º∞� EZ-Module
º§� Epson�ProSix�6-Achsroboter�
º•� Scara�Roboter�
� ¡™� PC-basierte�Roboter�Steuerungen������ � 14:�Optionen�
� � 15:�Epson�OP500RC�Steuereinheit
¡§� Epson�Vision������ � 17:�Fließbandverfolgung
¡•� Epson�RC170�Roboter�Steuerung������ � 20:�Optionen
™ ¡� Lieferumfang
™™� Epson�RC+�Entwicklungsoberfläche
™¢� Machbarkeitsstudien
™∞� Epson�Schulungen�
™§� Epson�Steuerbefehle
™•� Kontakt
£
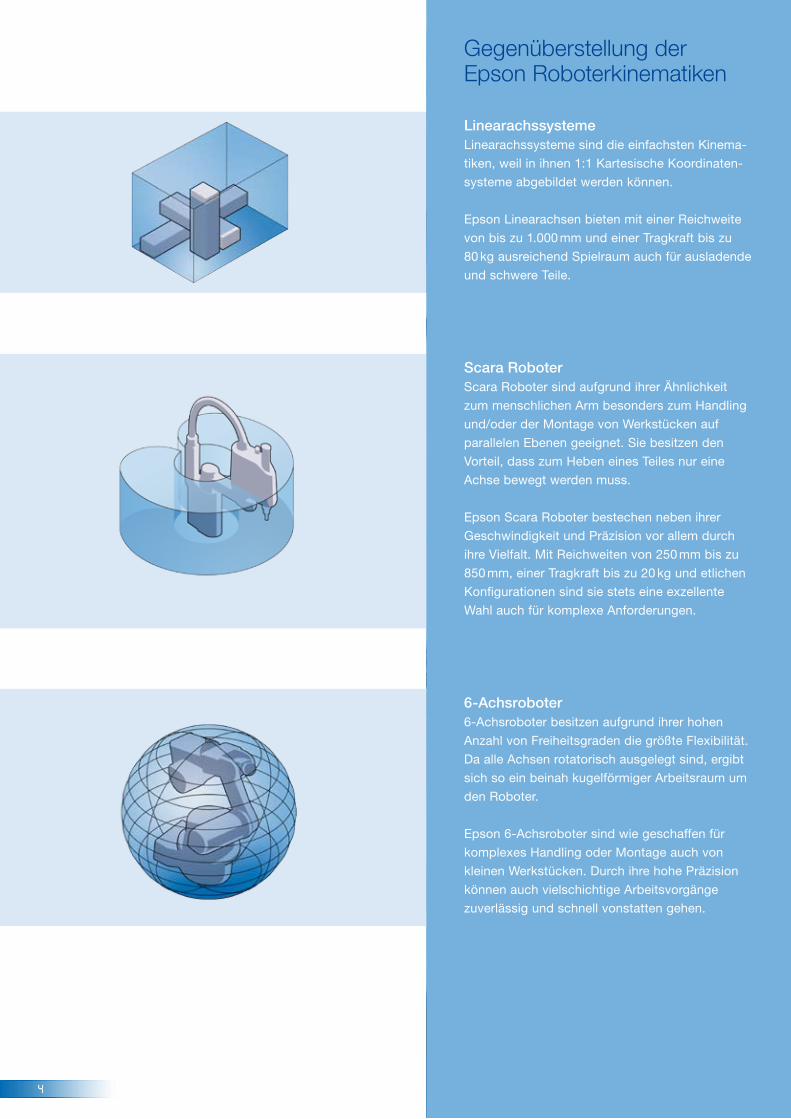
Gegenüberstellung der Epson Roboterkinematiken
LinearachssystemeLinearachssysteme�sind�die�einfachsten�Kinema-
tiken,�weil�in�ihnen�1:1�Kartesische�Koordinaten-
systeme�abgebildet�werden�können.�
Epson�Linearachsen�bieten�mit�einer�Reichweite�
von�bis�zu�1.000�mm�und�einer�Tragkraft�bis�zu�
80�kg�ausreichend�Spielraum�auch�für�ausladende�
und�schwere�Teile.
Scara RoboterScara�Roboter�sind�aufgrund�ihrer�Ähnlichkeit�
zum�menschlichen�Arm�besonders�zum�Handling�
und/oder�der�Montage�von�Werkstücken�auf�
parallelen�Ebenen�geeignet.�Sie�besitzen�den�
Vorteil,�dass�zum�Heben�eines�Teiles�nur�eine�
Achse�bewegt�werden�muss.
Epson�Scara�Roboter�bestechen�neben�ihrer�
Geschwindigkeit�und�Präzision�vor�allem�durch�
ihre�Vielfalt.�Mit�Reichweiten�von�250�mm�bis�zu�
850�mm,�einer�Tragkraft�bis�zu�20�kg�und�etlichen�
Konfigurationen�sind�sie�stets�eine�exzellente�
Wahl�auch�für�komplexe�Anforderungen.
6-Achsroboter6-Achsroboter�besitzen�aufgrund�ihrer�hohen�
Anzahl�von�Freiheitsgraden�die�größte�Flexibilität.�
Da�alle�Achsen�rotatorisch�ausgelegt�sind,�ergibt�
sich�so�ein�beinah�kugelförmiger�Arbeitsraum�um�
den�Roboter.
Epson�6-Achsroboter�sind�wie�geschaffen�für�
komplexes�Handling�oder�Montage�auch�von�
kleinen�Werkstücken.�Durch�ihre�hohe�Präzision�
können�auch�vielschichtige�Arbeitsvorgänge�
zuverlässig�und�schnell�vonstatten�gehen.
¢
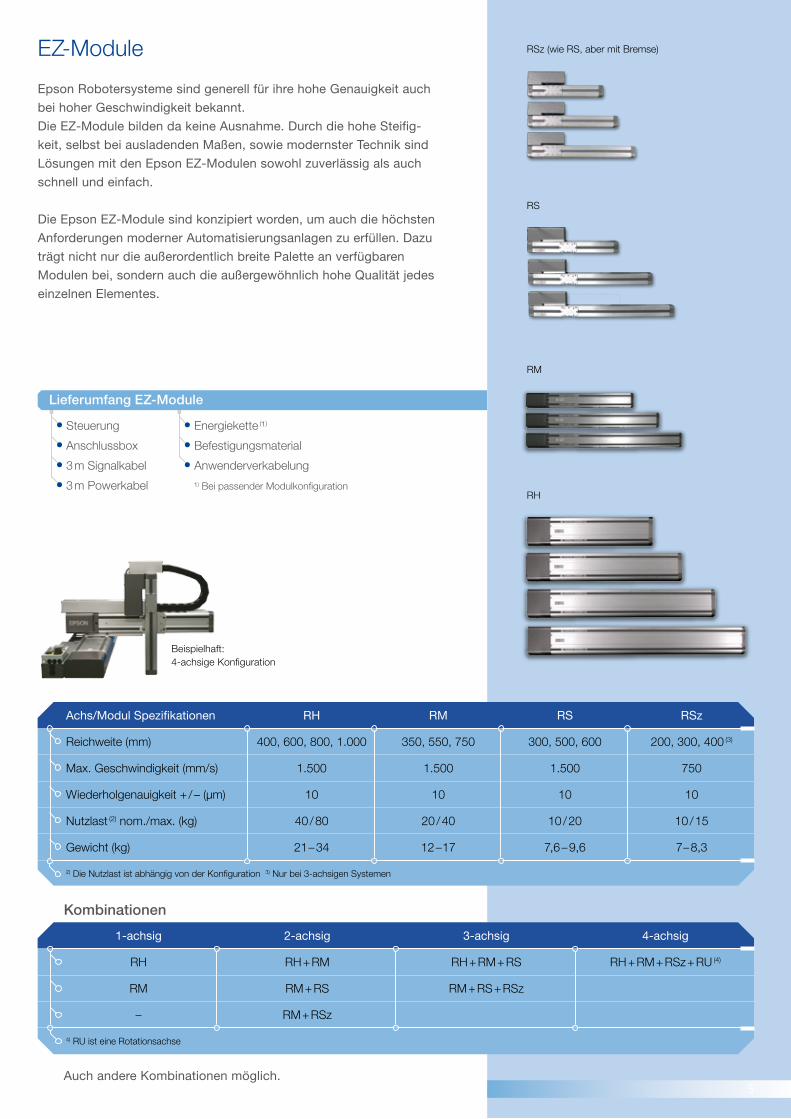
Achs/Modul�Spezifikationen RH RM RS� RSz
Reichweite (mm) 400, 600, 800, 1.000 350, 550, 750 300, 500, 600 200, 300, 400 (3)
Max. Geschwindigkeit (mm/s) 1.500 1.500 1.500 750
Wiederholgenauigkeit + / – (μm) 10 10 10 10
Nutzlast (2) nom./max. (kg) 40 / 80 20 / 40 10 / 20 10 / 15
Gewicht (kg) 21 – 34 12 – 17 7,6 – 9,6 7 – 8,3
2) Die Nutzlast ist abhängig von der Konfiguration 3) Nur bei 3-achsigen Systemen
1-achsig 2-achsig 3-achsig� 4-achsig
RH RH + RM RH + RM + RS RH + RM + RSz + RU (4)
RM RM + RS RM + RS + RSz
– RM + RSz
4) RU ist eine Rotationsachse
Kombinationen
EZ-Module
Epson�Robotersysteme�sind�generell�für�ihre�hohe�Genauigkeit�auch�
bei�hoher�Geschwindigkeit�bekannt.�
Die�EZ-Module�bilden�da�keine�Ausnahme.�Durch�die�hohe�Steifig-
keit,�selbst�bei�ausladenden�Maßen,�sowie�modernster�Technik�sind�
Lösungen�mit�den�Epson�EZ-Modulen�sowohl�zuverlässig�als�auch�
schnell�und�einfach.
Die�Epson�EZ-Module�sind�konzipiert�worden,�um�auch�die�höchsten�
Anforderungen�moderner�Automatisierungsanlagen�zu�erfüllen.�Dazu�
trägt�nicht�nur�die�außerordentlich�breite�Palette�an�verfügbaren�
Modulen�bei,�sondern�auch�die�außergewöhnlich�hohe�Qualität�jedes�
einzelnen�Elementes.
Lieferumfang EZ-Module
Energiekette (¹)
Befestigungsmaterial
Anwenderverkabelung
¹) Bei passender Modulkonfiguration
Steuerung
Anschlussbox
3 m Signalkabel
3 m Powerkabel
Beispielhaft: 4-achsige Konfiguration
Auch�andere�Kombinationen�möglich.
RSz (wie RS, aber mit Bremse)
RS
RM
RH
∞
A2+
P-Punkt
P-Bereich
A2–
A3+
A3–
A5+
A5–
GF
H
I
J
KL
A4– A4+
A6– A6+
A1+
A1–
P-Punkt
P-BereichB
C
D
E
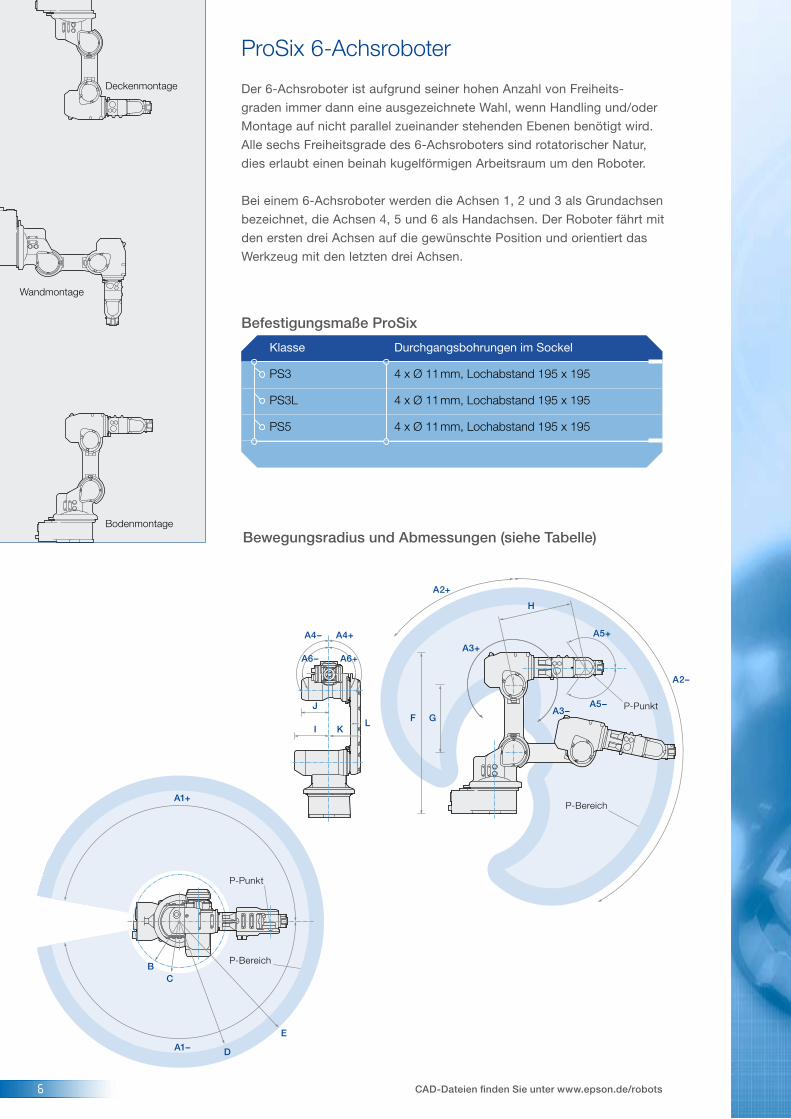
ProSix 6-Achsroboter
Der�6-Achsroboter�ist�aufgrund�seiner�hohen�Anzahl�von�Freiheits-
graden�immer�dann�eine�ausgezeichnete�Wahl,�wenn�Handling�und/oder�
Montage�auf�nicht�parallel�zueinander�stehenden�Ebenen�benötigt�wird.�
Alle�sechs�Freiheitsgrade�des�6-Achsroboters�sind�rotatorischer�Natur,�
dies�erlaubt�einen�beinah�kugelförmigen�Arbeitsraum�um�den�Roboter.�
Bei�einem�6-Achsroboter�werden�die�Achsen�1,�2�und�3�als�Grundachsen�
bezeichnet,�die�Achsen�4,�5�und�6�als�Handachsen.�Der�Roboter�fährt�mit�
den�ersten�drei�Achsen�auf�die�gewünschte�Position�und�orientiert�das�
Werkzeug�mit�den�letzten�drei�Achsen.
Bewegungsradius und Abmessungen (siehe Tabelle)Bodenmontage
Wandmontage
Deckenmontage
CAD-Dateien finden Sie unter www.epson.de/robots
Klasse Durchgangsbohrungen�im�Sockel
PS3 4 x Ø 11 mm, Lochabstand 195 x 195
PS3L 4 x Ø 11 mm, Lochabstand 195 x 195
PS5 4 x Ø 11 mm, Lochabstand 195 x 195
Befestigungsmaße ProSix
§
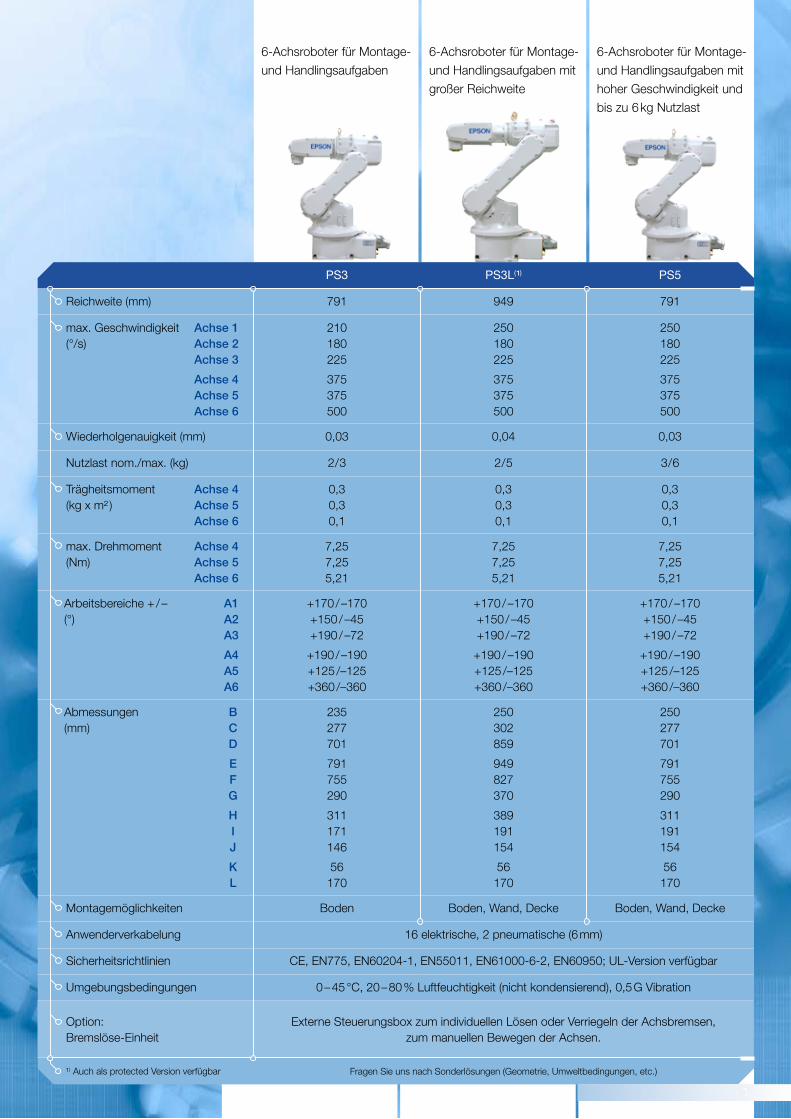
PS3 PS3L(¹) PS5
Reichweite (mm) 791 949 791
max. Geschwindigkeit Achse 1 (°/s) Achse 2 Achse 3
Achse 4 Achse 5 Achse 6
210 180 225
375 375 500
250 180 225
375 375 500
250 180 225
375 375 500
Wiederholgenauigkeit (mm) 0,03 0,04 0,03
Nutzlast nom./max. (kg) 2 / 3 2 / 5 3 / 6
Trägheitsmoment Achse 4 (kg x m² ) Achse 5 Achse 6
0,30,30,1
0,30,30,1
0,30,30,1
max. Drehmoment Achse 4 (Nm) Achse 5 Achse 6
7,257,255,21
7,257,255,21
7,257,255,21
Arbeitsbereiche + / – A1 (°) A2 A3
A4 A5 A6
+170 / –170 +150 / –45 +190 / –72
+190 / –190 +125 /–125 +360 /–360
+170 / –170 +150 / –45 +190 / –72
+190 / –190 +125 /–125 +360 /–360
+170 / –170 +150 / –45 +190 / –72
+190 / –190 +125 /–125 +360 /–360
Abmessungen B (mm) C D
E F G
H I J
K L
235 277 701
791 755 290
311 171 146
56 170
250 302 859
949 827 370
389 191 154
56 170
250 277 701
791 755 290
311 191 154
56 170
Montagemöglichkeiten Boden Boden, Wand, Decke Boden, Wand, Decke
Anwenderverkabelung 16 elektrische, 2 pneumatische (6 mm)
Sicherheitsrichtlinien CE, EN775, EN60204-1, EN55011, EN61000-6-2, EN60950; UL-Version verfügbar
Umgebungsbedingungen 0 – 45 °C, 20 – 80 % Luftfeuchtigkeit (nicht kondensierend), 0,5 G Vibration
Option: Bremslöse-Einheit
Externe Steuerungsbox zum individuellen Lösen oder Verriegeln der Achsbremsen, zum manuellen Bewegen der Achsen.
¹) Auch als protected Version verfügbar
6-Achsroboter für Montage- und Handlingsaufgaben
6-Achsroboter für Montage- und Handlingsaufgaben mit großer Reichweite
6-Achsroboter für Montage- und Handlingsaufgaben mit hoher Geschwindigkeit und bis zu 6 kg Nutzlast
Fragen Sie uns nach Sonderlösungen (Geometrie, Umweltbedingungen, etc.)
¶
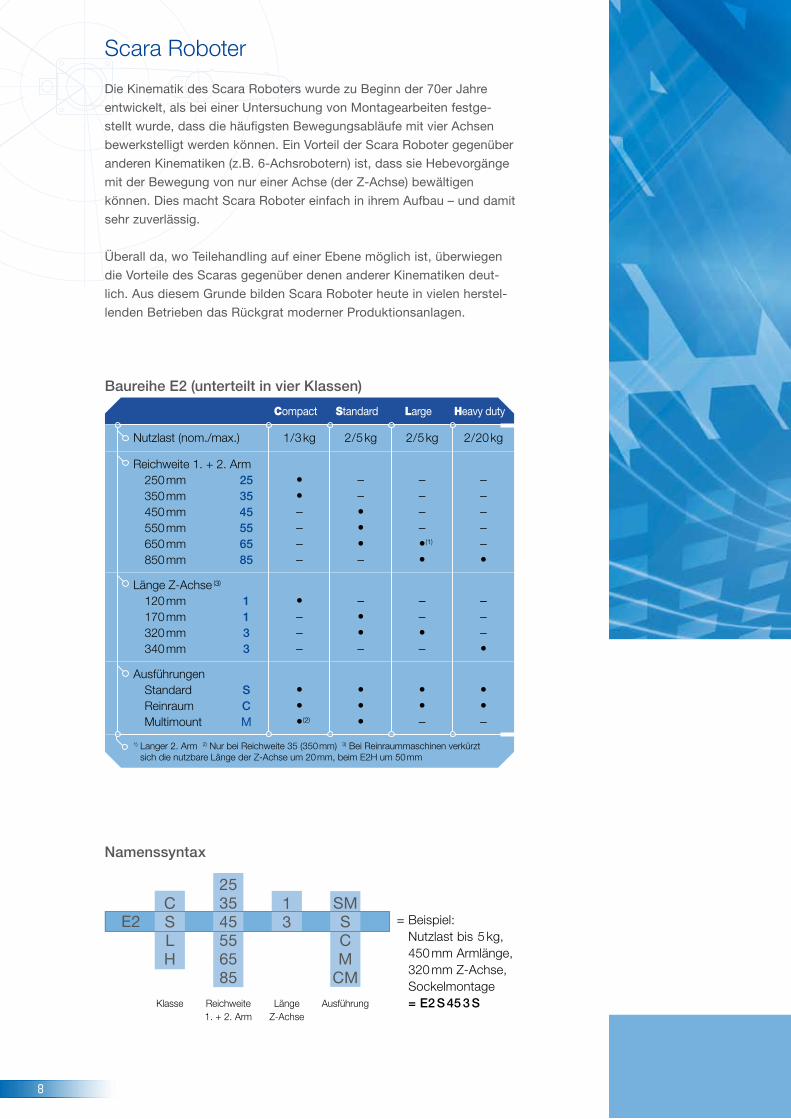
Scara Roboter
Die�Kinematik�des�Scara�Roboters�wurde�zu�Beginn�der�70er�Jahre�
entwickelt,�als�bei�einer�Untersuchung�von�Montagearbeiten�festge-
stellt�wurde,�dass�die�häufigsten�Bewegungsabläufe�mit�vier�Achsen�
bewerkstelligt�werden�können.�Ein�Vorteil�der�Scara�Roboter�gegenüber�
anderen�Kinematiken�(z.B.�6-Achsrobotern)�ist,�dass�sie�Hebevorgänge�
mit�der�Bewegung�von�nur�einer�Achse�(der�Z-Achse)�bewältigen�
können.�Dies�macht�Scara�Roboter�einfach�in�ihrem�Aufbau�–�und�damit�
sehr�zuverlässig.�
Überall�da,�wo�Teilehandling�auf�einer�Ebene�möglich�ist,�überwiegen�
die�Vorteile�des�Scaras�gegenüber�denen�anderer�Kinematiken�deut-
lich.�Aus�diesem�Grunde�bilden�Scara�Roboter�heute�in�vielen�herstel-
lenden�Betrieben�das�Rückgrat�moderner�Produktionsanlagen.
Compact Standard Large Heavy�duty
Nutzlast (nom./max.) 1 / 3 kg 2 / 5 kg 2 / 5 kg 2 / 20 kg
Reichweite 1. + 2. Arm250 mm 25 350 mm 35 450 mm 45 550 mm 55 650 mm 65 850 mm 85
• • – – – –
– – • • • –
– – – –
•(1) •
– – – – – •
Länge Z-Achse (³)
120 mm 1 170 mm 1 320 mm 3 340 mm 3
• – – –
– • • –
– – • –
– – – •
AusführungenStandard S Reinraum C Multimount M
• •
•(²)
• • •
• • –
• • –
1) Langer 2. Arm 2) Nur bei Reichweite 35 (350 mm) 3) Bei Reinraummaschinen verkürzt sich die nutzbare Länge der Z-Achse um 20 mm, beim E2H um 50 mm
E2CSLH
25�3545556585
13
SM�SCM�
CM
Namenssyntax
= Beispiel: Nutzlast bis 5 kg, 450 mm Armlänge, 320 mm Z-Achse, Sockelmontage = E2 S 45 3 S
Baureihe E2 (unterteilt in vier Klassen)
Klasse Reichweite 1. + 2. Arm
Länge Z-Achse
Ausführung
•

E2H853SE2S553S E2L853SE2C351S
Alle Maschinen sind auch als UL-Version verfügbar.
Beispiel: Multimount
Multimount Wand
Standardversion Sockelmontage
Multimount Träger unten
Multimount Träger oben
Multimount Decke
ª
A4 A4
A2 A2
I
J
A1 A1
B
C
ED
E D
A3 I H FG
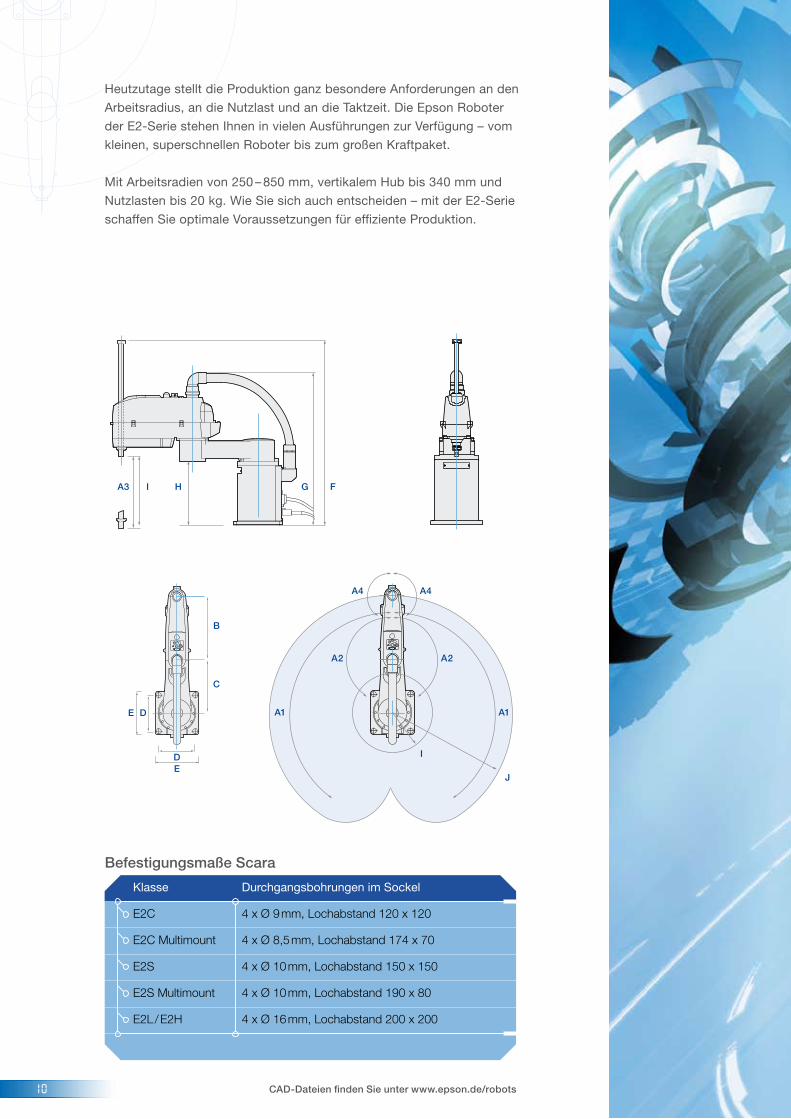
Heutzutage�stellt�die�Produktion�ganz�besondere�Anforderungen�an�den�
Arbeitsradius,�an�die�Nutzlast�und�an�die�Taktzeit.�Die�Epson�Roboter�
der�E2-Serie�stehen�Ihnen�in�vielen�Ausführungen�zur�Verfügung�–�vom�
kleinen,�superschnellen�Roboter�bis�zum�großen�Kraftpaket.
Mit�Arbeitsradien�von�250�–�850�mm,�vertikalem�Hub�bis�340�mm�und�
Nutzlasten�bis�20�kg.�Wie�Sie�sich�auch�entscheiden�–�mit�der�E2-Serie�
schaffen�Sie�optimale�Voraussetzungen�für�effiziente�Produktion.
CAD-Dateien finden Sie unter www.epson.de/robots
Klasse Durchgangsbohrungen�im�Sockel
E2C 4 x Ø 9 mm, Lochabstand 120 x 120
E2C Multimount 4 x Ø 8,5 mm, Lochabstand 174 x 70
E2S 4 x Ø 10 mm, Lochabstand 150 x 150
E2S Multimount 4 x Ø 10 mm, Lochabstand 190 x 80
E2L / E2H 4 x Ø 16 mm, Lochabstand 200 x 200
Befestigungsmaße Scara
¡º

E2C251 E2C351 E2S45�x�(¹) E2S55�x�(¹) E2S65�x�(¹) E2L653 E2L853 E2H853
Reichweite (mm) Achse 1+2 250 350 450 550 650 650 850 850
Max. Geschwindigkeit + / –(° / s) Achse 1+2 (mm / s) Achse 3(° / s) Achse 4
2.900 1.100 2.600
3.600 1.100 2.600
5.400 1.100 1.870
6.000 1.100 1.870
6.300 1.100 1.870
5.200 1.100 1.870
6.100 1.100 1.870
5.266 1.100 1.870
Wiederholgenauigkeit + / –(mm) Achse 1+2 (mm) Achse 3 (°) Achse 4
0,008 0,010 0,020
0,010 0,010 0,020
0,015 0,010 0,020
0,015 0,010 0,020
0,015 0,010 0,020
0,020 0,010 0,020
0,020 0,010 0,020
0,025 0,010 0,025
Nutzlast nom./max. (kg) 1 / 3 1 / 3 2 / 5 2 / 5 2 / 5 2 / 5 2 / 5 2 / 20
Trägheitsmoment (kg x m² )(nom.) Achse 4 (max.) Achse 4
0,0050,05
0,0050,05
0,010,12
0,010,12
0,010,12
0,010,12
0,010,12
0,020,45
Einpresskraft (N) 150 150 150 150 150 200 200 200
Arbeitsbereiche + / – (°) A1 + / – (°) A2 (mm) A3 (mm) Reinraum A3 + / – A4
90
135 120 100 360
110 135 120 100 360
125 140
170/320 150/300
360
125 140
170/320 150/300
360
125 140
170/320 150/300
360
130 140 320 300 360
130 140 320 300 360
145 147 340 290 360
Abmessungen (mm) B C D
E F G
H I
125 125 120
140 680 552
235 217
125 225 120
140 700 552
235 217
235 215 150
180 706
674 / 824
312 289
235 315 150
180 706
674 / 824
312 289
235 415 150
180 706
674/ 824
312 289
350 300 200
240 706 845
318 310
350 500 200
240 706 845
318 310
350 500 200
240 782 916
318 341
Anwenderverkabelung 15 elektrische (1 A), 3 pneumatische (6/4 mm)
Sicherheitsrichtlinien CE-Konformität für alle Modelle, UL-Version verfügbar
Umgebungsbedingungen 5 – 40 °C, 10 – 80 % Luftfeuchtigkeit (nicht kondensierend)
¹) x = Z-Achsenlänge: 1 = 170 mm, 3 = 320 mm
Alle Maschinen sind auch als UL-Version inkl.
Notausschalter verfügbar
Fragen Sie uns nach Sonderlösungen (Geometrie, Umweltbedingungen, etc.)
¡¡
486
450
482
461
101,
6
185
427
470
483
101,
6
189
383
433
41535
448
470
4-Achs Drive Unit
6-Achs Drive Unit 9999
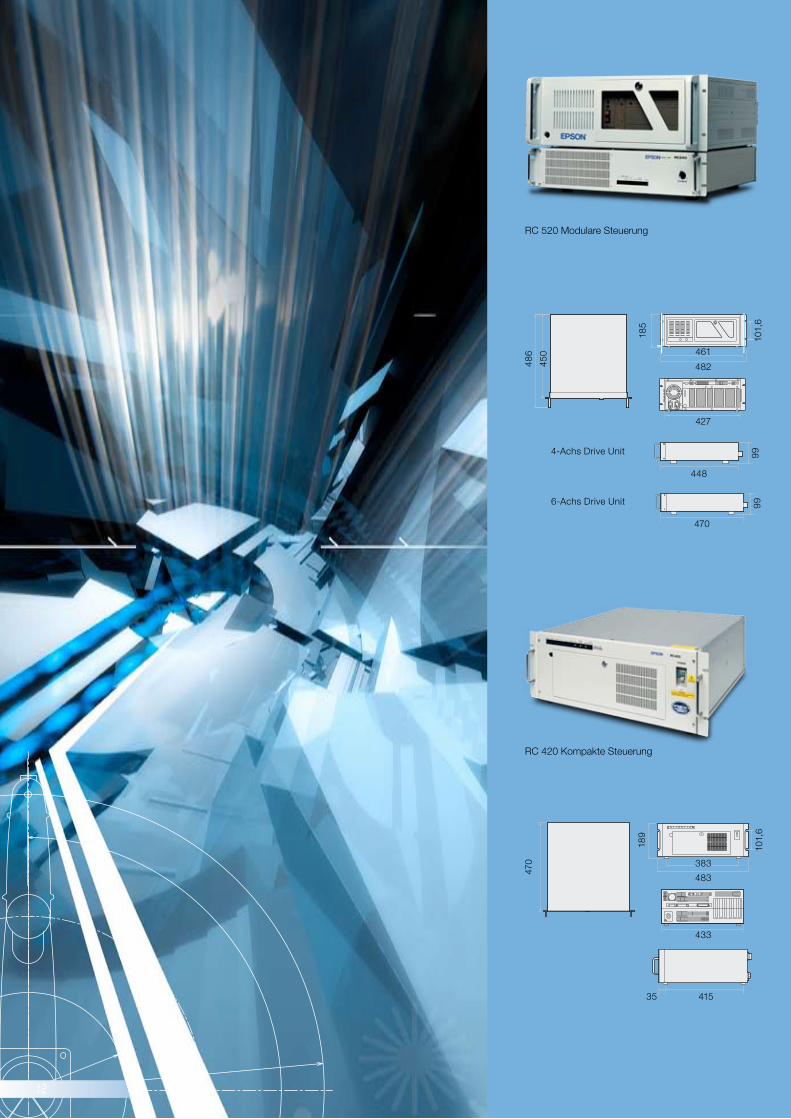
RC 520 Modulare Steuerung
RC 420 Kompakte Steuerung
¡™
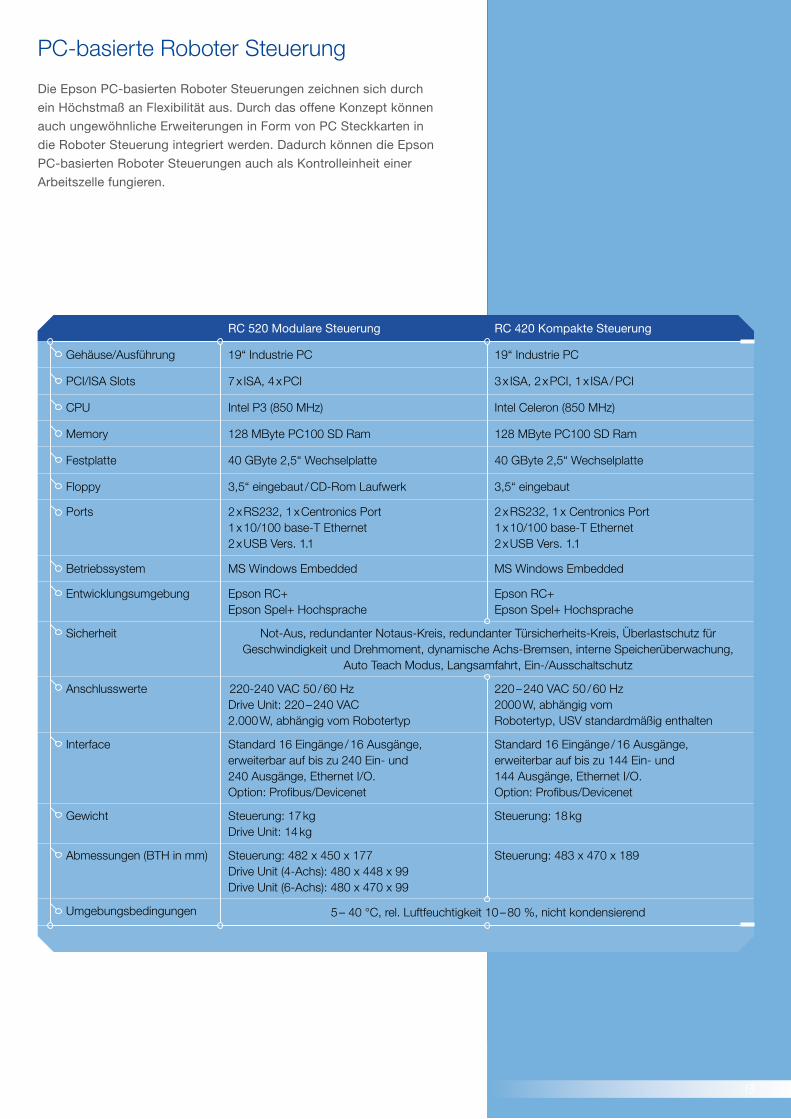
PC-basierte Roboter Steuerung
Die�Epson�PC-basierten�Roboter�Steuerungen�zeichnen�sich�durch�
ein�Höchstmaß�an�Flexibilität�aus.�Durch�das�offene�Konzept�können�
auch�ungewöhnliche�Erweiterungen�in�Form�von�PC�Steckkarten�in�
die�Roboter�Steuerung�integriert�werden.�Dadurch�können�die�Epson�
PC-basierten�Roboter�Steuerungen�auch�als�Kontrolleinheit�einer�
Arbeitszelle�fungieren.
RC�520�Modulare�Steuerung RC�420�Kompakte�Steuerung
Gehäuse/Ausführung 19“ Industrie PC 19“ Industrie PC
PCI/ISA Slots 7 x ISA, 4 x PCI 3 x ISA, 2 x PCI, 1 x ISA / PCI
CPU Intel P3 (850 MHz) Intel Celeron (850 MHz)
Memory 128 MByte PC100 SD Ram 128 MByte PC100 SD Ram
Festplatte 40 GByte 2,5“ Wechselplatte 40 GByte 2,5“ Wechselplatte
Floppy 3,5“ eingebaut / CD-Rom Laufwerk 3,5“ eingebaut
Ports 2 x RS232, 1 x Centronics Port 1 x 10/100 base-T Ethernet2 x USB Vers. 1.1
2 x RS232, 1 x Centronics Port 1 x 10/100 base-T Ethernet2 x USB Vers. 1.1
Betriebssystem MS Windows Embedded MS Windows Embedded
Entwicklungsumgebung Epson RC+ Epson Spel+ Hochsprache
Epson RC+ Epson Spel+ Hochsprache
Sicherheit Not-Aus, redundanter Notaus-Kreis, redundanter Türsicherheits-Kreis, Überlastschutz für Geschwindigkeit und Drehmoment, dynamische Achs-Bremsen, interne Speicherüberwachung,
Auto Teach Modus, Langsamfahrt, Ein-/Ausschaltschutz
Anschlusswerte 220-240 VAC 50 / 60 HzDrive Unit: 220 – 240 VAC2.000 W, abhängig vom Robotertyp
220 – 240 VAC 50 / 60 Hz2000 W, abhängig vom Robotertyp, USV standardmäßig enthalten
Interface Standard 16 Eingänge / 16 Ausgänge,erweiterbar auf bis zu 240 Ein- und 240 Ausgänge, Ethernet I/O. Option: Profibus/Devicenet
Standard 16 Eingänge / 16 Ausgänge,erweiterbar auf bis zu 144 Ein- und 144 Ausgänge, Ethernet I/O.Option: Profibus/Devicenet
Gewicht Steuerung: 17 kgDrive Unit: 14 kg
Steuerung: 18 kg
Abmessungen (BTH in mm) Steuerung: 482 x 450 x 177Drive Unit (4-Achs): 480 x 448 x 99Drive Unit (6-Achs): 480 x 470 x 99
Steuerung: 483 x 470 x 189
Umgebungsbedingungen 5 – 40 °C, rel. Luftfeuchtigkeit 10 – 80 %, nicht kondensierend
¡£

Optionen für PC-basierte Steuerung
Produkt Beschreibung
Hardware
Erweiterungs E/A Karte Pro Erweiterungskarte sind zusätzliche 32 Eingänge und 32 Ausgänge verfügbar. Abhängig vom Steuerungstyp können bis zu zehn Karten eingesetzt werden. NPN, PNP Schaltungen möglich.
Epson PG Motion System Mit dem Epson PG Motion System können Sie auch Roboter ansteuern, die aus externen Komponenten bestehen. Es werden sowohl Servo- als auch Schrittmotoren unterstützt.
Feldbus Karte Erweiterungskarte zum Anschluss oder zum Aufbau eines Feldbus Netzwerkes. Die Karte kann sowohl als Master oder Slave konfiguriert werden. Verfügbare Bussysteme sind Profibus und Devicenet, ein Mischbetrieb ist möglich.
Software
Epson VB-Guide Active-X Control für die einfache und komfortable Anbindung Ihrer Anwendung an externe Software.
Epson Code Reading Ermöglicht die Erkennung von OCR-A/OCR-B sowie 1D und 2D Codes. Epson Code Reading ist nur in Verbindung mit der Epson Vision verfügbar.
Epson Conveyor Tracking Unterstützt die Verfolgung von Förderbändern mittels Visionsystem oder Sensoren. Es können mehrere Bänder gesteuert werden. Ein Conveyor Tracking Kit enthält: PG Board, Kabel, 2 Terminalblocks, Software.
Epson Ethernet I / O License Ermöglicht den Anschluss von Opto 22 Komponenten.
Epson Security Guide Für eine komfortable Zuweisung von Rechten an unterschiedliche Benutzer. Es enthält des Weiteren eine umfangreiche Protokollfunktion zur Überwachung Ihrer Anlage.
Erweiterungs E/A Karte Epson PG Motion Karte Feldbus Karte
¡¢

JOG & Teach Panel
Steuerung aller Achsen mittels Touch-
screen Bedienelementen.
Einstellmöglichkeit der Verfahrwege
(kurz, mittel, lang, kontinuierlich).
Auswahl des Koordinatensystems der
Verfahrwege (World, Joint, Tool, lokal).
Einstellen der Verfahrgeschwindigkeit.
Epson OP500RC Steuereinheit
Produkt Beschreibung
Kabelsets / Terminalblocks
Std. I / O Kabel für RC 420 eins. offen, 3 m, 6 m
Std. I / O Kabel für RC 520 eins. offen, 3 m, 6 m
Sicherheitskreiskabel eins. offen, 3 m, 6 m
Ext. I/O Kabel Kit 100 pol. auf 2 x 50 pol., 2 m Board, 2 Terminalblocks
Power- & Signalkabel Signalkabel gerader Stecker, Powerkabel wahlweise gerade oder abgewinkelte Stecker 3 m (¹), 5 m (¹), 10 m (¹), 20 m(2)
Power- & Signalkabel für 6-Achsroboter
3 m, 5 m, 10 m
Verlängerungskabel OP-500RC
2 m (ergibt 5 m Kabellänge) 7 m (ergibt 10 m Kabellänge)
¹) Wahlmöglichkeiten: – Gerade Stecker – Einseitig an der Manipulatorseite abgewinkelt – Beidseitig abgewinkelt
2) Nur gerade Stecker
Point Editor Panel
Punkte individuell teachfähig.
Positionen sind in Absolutmaßen definierbar.
Punktdateien einfach bearbeitbar.
Motion Control Panel
Punkte individuell anfahrbar.
Auswählbare Fahrkommandos
(Jump, Go, Move).
Bewegungsbeschränkungen
auswählbar (Limz).
Robot Control Panel
Motoren ein- und ausschaltbar.
Motorleistung umschaltbar.
Roboter, Arm und Werkzeug auswählbar.
Auf Knopfdruck in Homeposition verfahrbar.
I/O Command Panel
Setzen und Rücksetzen von Ein- und
Ausgängen mittels Tastendruck.
Free Joints Panel
Für Scaras ist jede Achse individuell
freischaltbar (beweglich).
User Page
Definieren Sie einfach Ihre eigene
Bedienoberfläche.
Volle�Kontrolle�über�den�Roboter��
vor�Ort�–�in�einer�Einheit
¡∞
ABCDEFGHIJKLMNOPQRSTUVWXYZabcdefghijklmnopqrstuvwxyz!“§$%&/()=?[]+*#‘<>,;.:-–⑀
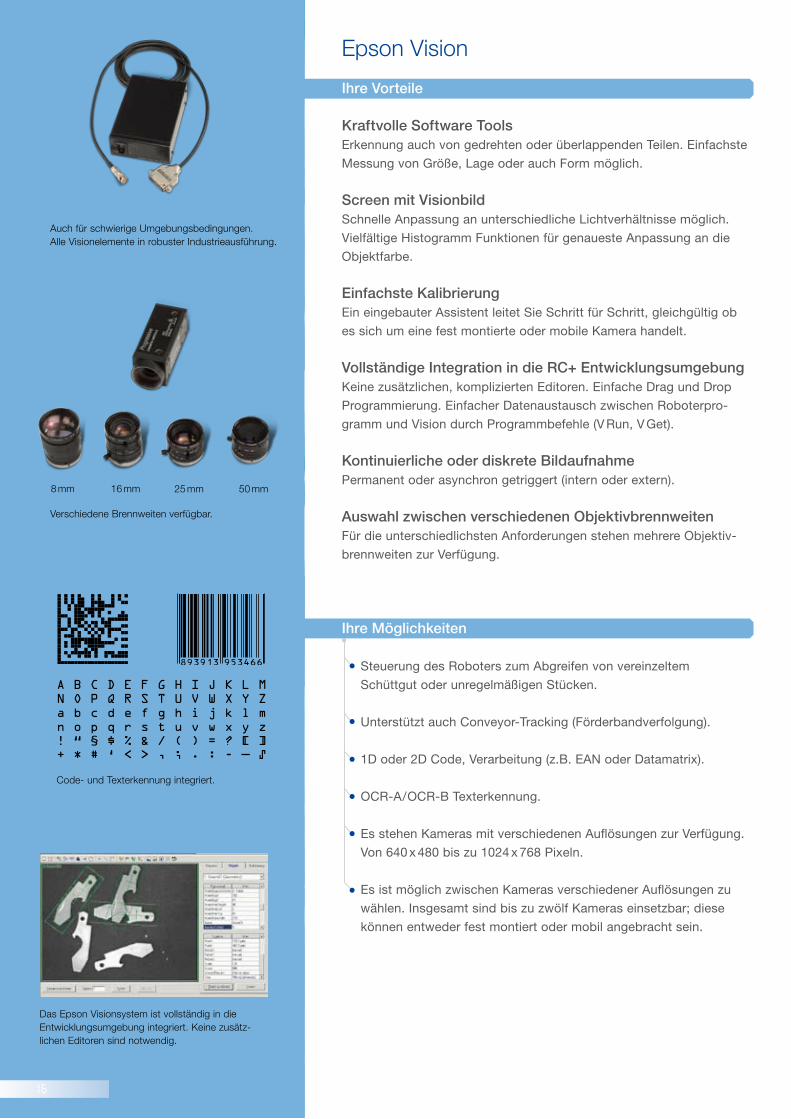
Epson Vision
Ihre Vorteile
Kraftvolle Software Tools Erkennung�auch�von�gedrehten�oder�überlappenden�Teilen.�Einfachste�
Messung�von�Größe,�Lage�oder�auch�Form�möglich.
Screen mit VisionbildSchnelle�Anpassung�an�unterschiedliche�Lichtverhältnisse�möglich.
Vielfältige�Histogramm�Funktionen�für�genaueste�Anpassung�an�die�
Objektfarbe.
Einfachste KalibrierungEin�eingebauter�Assistent�leitet�Sie�Schritt�für�Schritt,�gleichgültig�ob�
es�sich�um�eine�fest�montierte�oder�mobile�Kamera�handelt.�
Vollständige Integration in die RC+ EntwicklungsumgebungKeine�zusätzlichen,�komplizierten�Editoren.�Einfache�Drag�und�Drop�
Programmierung.�Einfacher�Datenaustausch�zwischen�Roboterpro-
gramm�und�Vision�durch�Programmbefehle�(V�Run,�V�Get).
Kontinuierliche oder diskrete BildaufnahmePermanent�oder�asynchron�getriggert�(intern�oder�extern).
Auswahl zwischen verschiedenen ObjektivbrennweitenFür�die�unterschiedlichsten�Anforderungen�stehen�mehrere�Objektiv-
brennweiten�zur�Verfügung.�
Auch für schwierige Umgebungsbedingungen. Alle Visionelemente in robuster Industrieausführung.
Das Epson Visionsystem ist vollständig in die Entwicklungsumgebung integriert. Keine zusätz-lichen Editoren sind notwendig.
Ihre Möglichkeiten
Steuerung�des�Roboters�zum�Abgreifen�von�vereinzeltem��
Schüttgut�oder�unregelmäßigen�Stücken.
Unterstützt�auch�Conveyor-Tracking�(Förderbandverfolgung).
1D�oder�2D�Code,�Verarbeitung�(z.B.�EAN�oder�Datamatrix).
OCR-A�/�OCR-B�Texterkennung.
Es�stehen�Kameras�mit�verschiedenen�Auflösungen�zur�Verfügung.��
Von�640�x�480�bis�zu�1024�x�768�Pixeln.
Es�ist�möglich�zwischen�Kameras�verschiedener�Auflösungen�zu�
wählen.�Insgesamt�sind�bis�zu�zwölf�Kameras�einsetzbar;�diese�
können�entweder�fest�montiert�oder�mobil�angebracht�sein.
Code- und Texterkennung integriert.
50 mm8 mm 16 mm 25 mm
Verschiedene Brennweiten verfügbar.
¡§
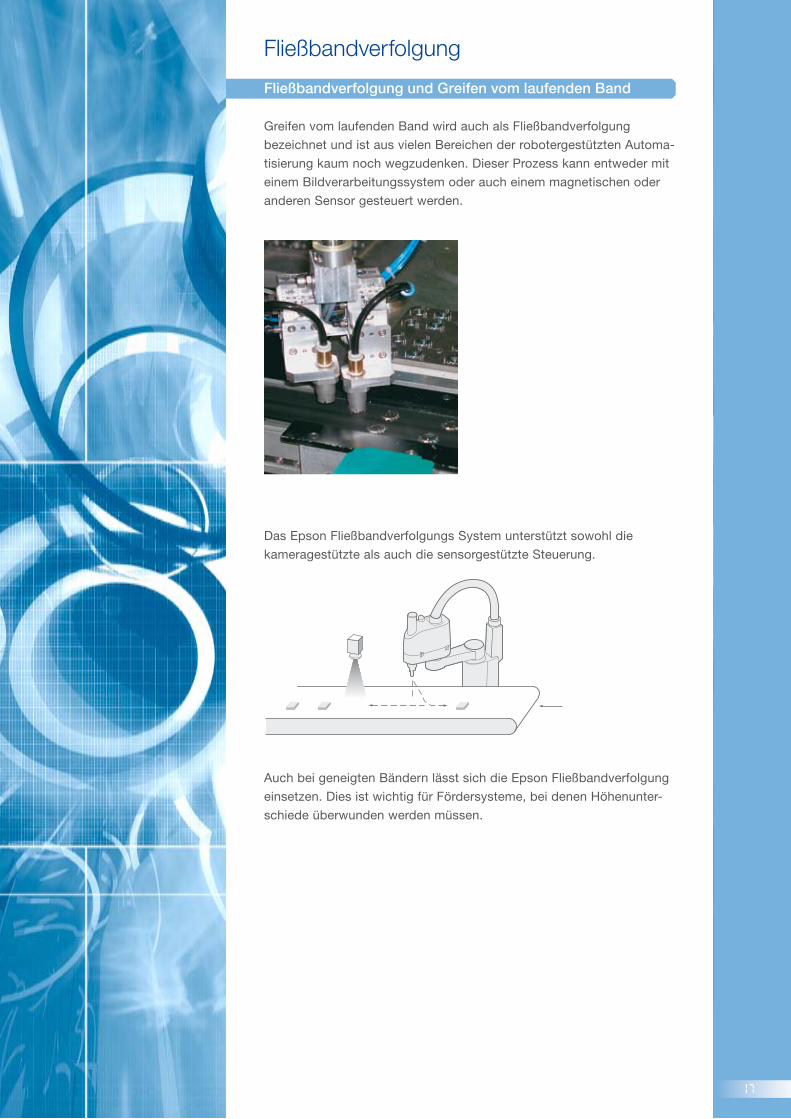
Fließbandverfolgung
Fließbandverfolgung und Greifen vom laufenden Band
Greifen�vom�laufenden�Band�wird�auch�als�Fließbandverfolgung�
bezeichnet�und�ist�aus�vielen�Bereichen�der�robotergestützten�Automa-
tisierung�kaum�noch�wegzudenken.�Dieser�Prozess�kann�entweder�mit�
einem�Bildverarbeitungssystem�oder�auch�einem�magnetischen�oder�
anderen�Sensor�gesteuert�werden.�
�
Das�Epson�Fließbandverfolgungs�System�unterstützt�sowohl�die�
kameragestützte�als�auch�die�sensorgestützte�Steuerung.�
Auch�bei�geneigten�Bändern�lässt�sich�die�Epson�Fließbandverfolgung�
einsetzen.�Dies�ist�wichtig�für�Fördersysteme,�bei�denen�Höhenunter-
schiede�überwunden�werden�müssen.
¡¶

342300
75 190
230
240
170
375300
75 190
230
240
170
415
Epson RC170 Roboter Steuerung
Epson RC170 Roboter Steuerung mit Optionsbox
Epson RC170 Roboter Steuerung in 6-Achsausführung
¡•
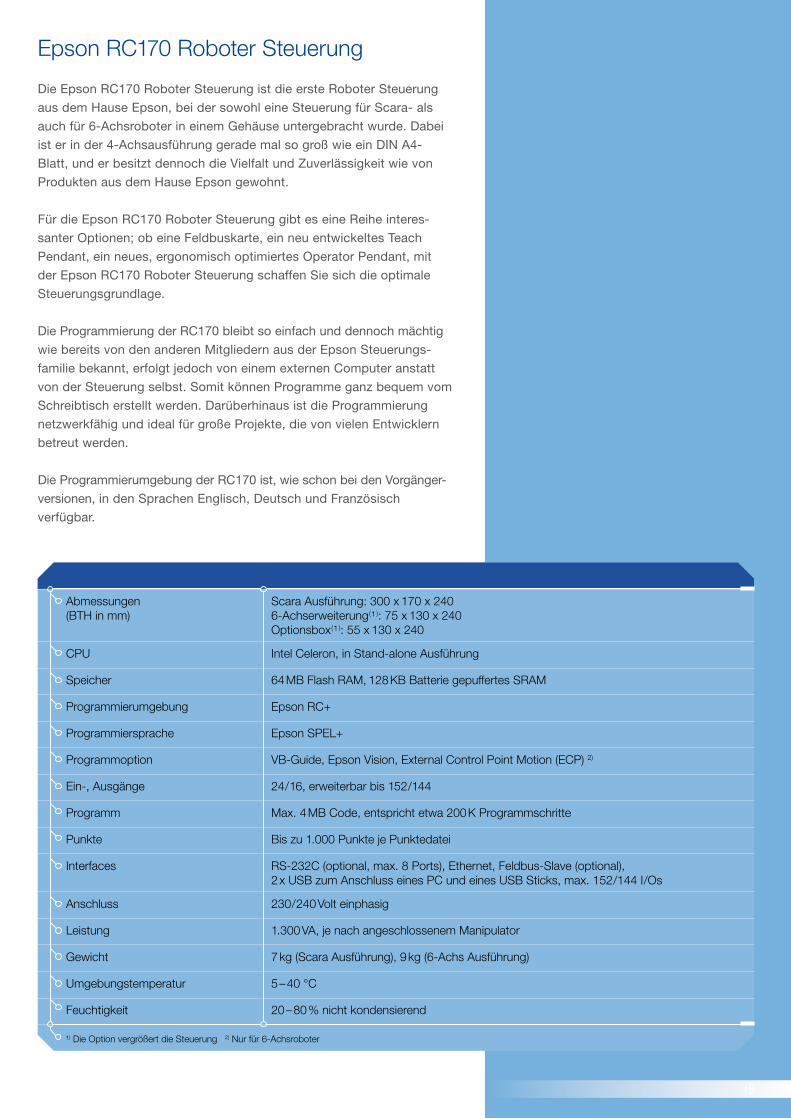
Epson RC170 Roboter Steuerung
Die�Epson�RC170�Roboter�Steuerung�ist�die�erste�Roboter�Steuerung�
aus�dem�Hause�Epson,�bei�der�sowohl�eine�Steuerung�für�Scara-�als�
auch�für�6-Achsroboter�in�einem�Gehäuse�untergebracht�wurde.�Dabei�
ist�er�in�der�4-Achsausführung�gerade�mal�so�groß�wie�ein�DIN�A4-�
Blatt,�und�er�besitzt�dennoch�die�Vielfalt�und�Zuverlässigkeit�wie�von�
Produkten�aus�dem�Hause�Epson�gewohnt.�
Für�die�Epson�RC170�Roboter�Steuerung�gibt�es�eine�Reihe�interes-
santer�Optionen;�ob�eine�Feldbuskarte,�ein�neu�entwickeltes�Teach�
Pendant,�ein�neues,�ergonomisch�optimiertes�Operator�Pendant,�mit�
der�Epson�RC170�Roboter�Steuerung�schaffen�Sie�sich�die�optimale�
Steuerungsgrundlage.
Die�Programmierung�der�RC170�bleibt�so�einfach�und�dennoch�mächtig�
wie�bereits�von�den�anderen�Mitgliedern�aus�der�Epson�Steuerungs-
familie�bekannt,�erfolgt�jedoch�von�einem�externen�Computer�anstatt�
von�der�Steuerung�selbst.�Somit�können�Programme�ganz�bequem�vom�
Schreibtisch�erstellt�werden.�Darüberhinaus�ist�die�Programmierung�
netzwerkfähig�und�ideal�für�große�Projekte,�die�von�vielen�Entwicklern�
betreut�werden.
Die�Programmierumgebung�der�RC170�ist,�wie�schon�bei�den�Vorgänger-
versionen,�in�den�Sprachen�Englisch,�Deutsch�und�Französisch�
verfügbar.
Abmessungen (BTH in mm)
Scara Ausführung: 300 x 170 x 240 6-Achserweiterung ( ¹ ): 75 x 130 x 240 Optionsbox ( ¹ ): 55 x 130 x 240
CPU Intel Celeron, in Stand-alone Ausführung
Speicher 64 MB Flash RAM, 128 KB Batterie gepuffertes SRAM
Programmierumgebung Epson RC+
Programmiersprache Epson SPEL+
Programmoption VB-Guide, Epson Vision, External Control Point Motion (ECP) 2)
Ein-, Ausgänge 24 / 16, erweiterbar bis 152 /144
Programm Max. 4 MB Code, entspricht etwa 200 K Programmschritte
Punkte Bis zu 1.000 Punkte je Punktedatei
Interfaces RS-232C (optional, max. 8 Ports), Ethernet, Feldbus-Slave (optional), 2 x USB zum Anschluss eines PC und eines USB Sticks, max. 152 /144 I /Os
Anschluss 230 / 240 Volt einphasig
Leistung 1.300 VA, je nach angeschlossenem Manipulator
Gewicht 7 kg (Scara Ausführung), 9 kg (6-Achs Ausführung)
Umgebungstemperatur 5 – 40 °C
Feuchtigkeit 20 – 80 % nicht kondensierend
¹) Die Option vergrößert die Steuerung 2) Nur für 6-Achsroboter
¡ª
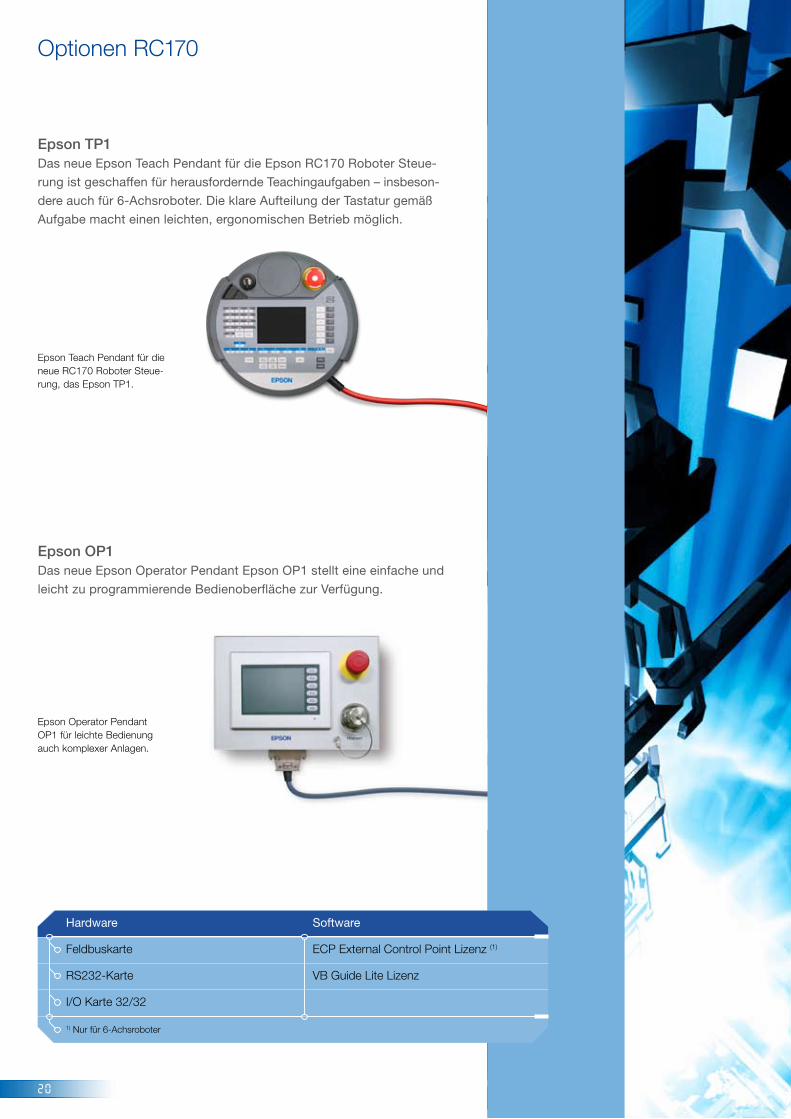
Epson Teach Pendant für die neue RC170 Roboter Steue-rung, das Epson TP1.
Optionen RC170
Epson Operator Pendant OP1 für leichte Bedienung auch komplexer Anlagen.
Epson OP1 Das�neue�Epson�Operator�Pendant�Epson�OP1�stellt�eine�einfache�und�
leicht�zu�programmierende�Bedienoberfläche�zur�Verfügung.
Epson TP1 Das�neue�Epson�Teach�Pendant�für�die�Epson�RC170�Roboter�Steue-
rung�ist�geschaffen�für�herausfordernde�Teachingaufgaben�–�insbeson-
dere�auch�für�6-Achsroboter.�Die�klare�Aufteilung�der�Tastatur�gemäß�
Aufgabe�macht�einen�leichten,�ergonomischen�Betrieb�möglich.
Hardware Software
Feldbuskarte ECP External Control Point Lizenz (1)
RS232-Karte VB Guide Lite Lizenz
I/O Karte 32/32
1) Nur für 6-Achsroboter
™º

RC�420�Steuerung RC�520�Steuerung RC�170�Steuerung
1 x Manipulator 1 x Manipulator 1 x Manipulator
Powerkabel 3 mSignalkabel 3 m3 Tasten PC MausPC Tastatur
Powerkabel 3 mSignalkabel 3 m3 Tasten PC MausPC Tastatur
Powerkabel 3 mSignalkabel 3 m
Stecker für NotausBlindstecker für opt. Device AnschlussStecker für Standard I / O 50-pol. Sub-D2x Stecker für 15-pol. Sub-D
Stecker für NotausBlindstecker für opt. Device AnschlussStecker für Standard I / O 50-pol. Sub-D2x Stecker für 15-pol. Sub-D
Stecker für NotausBlindstecker für opt. Device AnschlussStecker für Standard I / O 50-pol. Sub-D
Windows Embedded LizenzWindows Embedded QuickstartSoftwaredongle inkl. Lizenzen
Windows Embedded LizenzWindows Embedded QuickstartSoftwaredongle inkl. Lizenzen
—
Treiber CDEpson RC+ CDBackup-Diskette
Treiber CDEpson RC+ CDBackup-Diskette
Backup-Diskette Epson RC+ 5.0 CD
Handbücher: Steuerung
Manipulator Programmierung User Guide
Handbücher: Steuerung
Manipulator Programmierung User Guide
Handbücher: Steuerung
Manipulator Programmierung User Guide
Wartungsfett für Z-Achse (1) Wartungsfett für Z-Achse (1) Wartungsfett für Z-Achse (1)
— Motionkabel Slotbleche Kaltgerätekabel 3 m Driveunit(s)
—
1) Nur bei Scara Roboter
Lieferumfang
Folgendes�Zubehör�gehört�zum�Standardlieferumfang�
eines�Epson�Roboters�und�muss�nicht�zusätzlich�als�
Option�erworben�werden.
™¡
Epson RC+ Entwicklungsoberfläche
Flexible Steuerungs-ArchitekturEpson�ist�ein�Spitzenreiter�bei�der�Entwicklung�von�Steuerungen�auf�
Basis�von�Industrie�PCs.�Die�Epson�Roboter�Programmiersprache�
SPEL+�ist�nicht�nur�besonders�einfach�zu�erlernen,�sondern�auch�
außerordentlich�mächtig.�Die�Epson�RC+�Programmierumgebung�stellt�
Ihnen�alle�Werkzeuge�zur�Verfügung,�die�Sie�zur�schnellen�und�effizi-
enten�Entwicklung�von�Roboterprogrammen�benötigen.�
Integrierter Quellcode Debugger
Integriertes Projektmanagement System
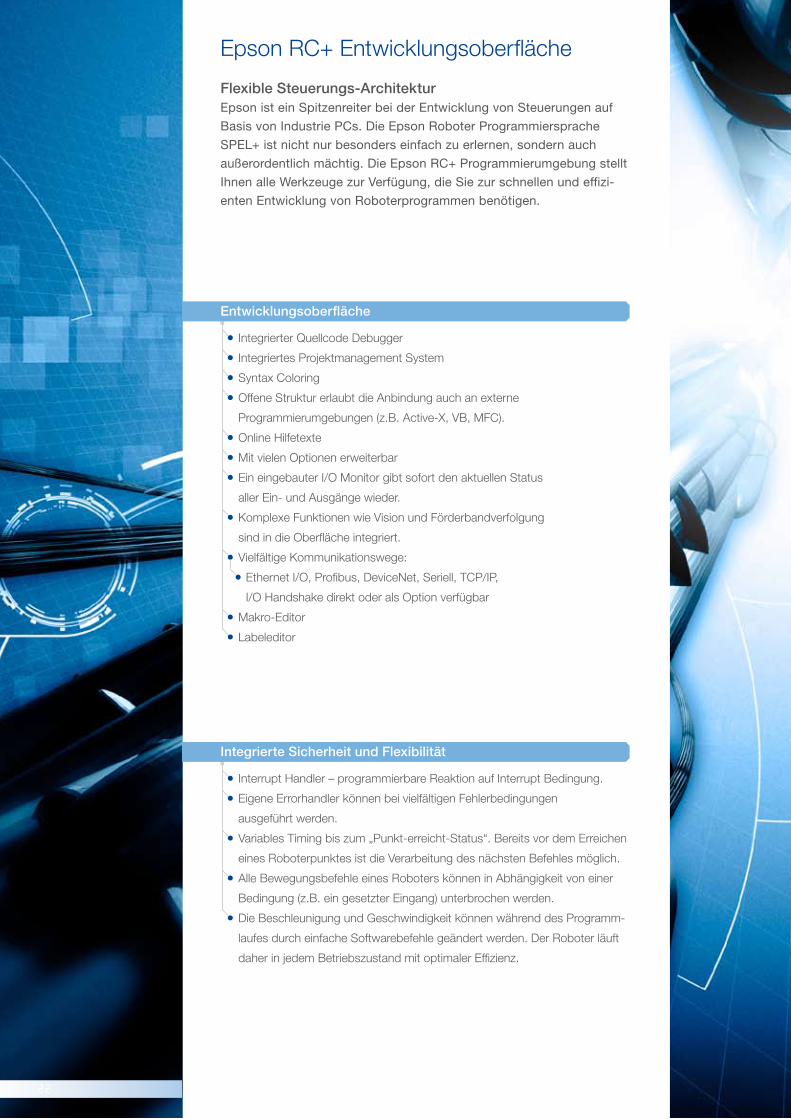
Syntax Coloring
Offene Struktur erlaubt die Anbindung auch an externe
Programmierumgebungen (z.B. Active-X, VB, MFC).
Online Hilfetexte
Mit vielen Optionen erweiterbar
Ein eingebauter I/O Monitor gibt sofort den aktuellen Status
aller Ein- und Ausgänge wieder.
Komplexe Funktionen wie Vision und Förderbandverfolgung
sind in die Oberfläche integriert.
Vielfältige Kommunikationswege:
Ethernet I/O, Profibus, DeviceNet, Seriell, TCP/IP,
I/O Handshake direkt oder als Option verfügbar
Makro-Editor
Labeleditor
Entwicklungsoberfläche
Interrupt Handler – programmierbare Reaktion auf Interrupt Bedingung.
Eigene Errorhandler können bei vielfältigen Fehlerbedingungen
ausgeführt werden.
Variables Timing bis zum „Punkt-erreicht-Status“. Bereits vor dem Erreichen
eines Roboterpunktes ist die Verarbeitung des nächsten Befehles möglich.
Alle Bewegungsbefehle eines Roboters können in Abhängigkeit von einer
Bedingung (z.B. ein gesetzter Eingang) unterbrochen werden.
Die Beschleunigung und Geschwindigkeit können während des Programm-
laufes durch einfache Softwarebefehle geändert werden. Der Roboter läuft
daher in jedem Betriebszustand mit optimaler Effizienz.
Integrierte Sicherheit und Flexibilität
™™
Task 1
Task 2
Task 3
Task 4
Task 5
Task n
Roboter 1
Roboter 2
Roboter 3
Vision System
Feeder
Display
Syntaxcoloring, kraftvolle Debugger, Eingabehilfen und eine frei definierbare Oberfläche helfen bei der Entwicklung.
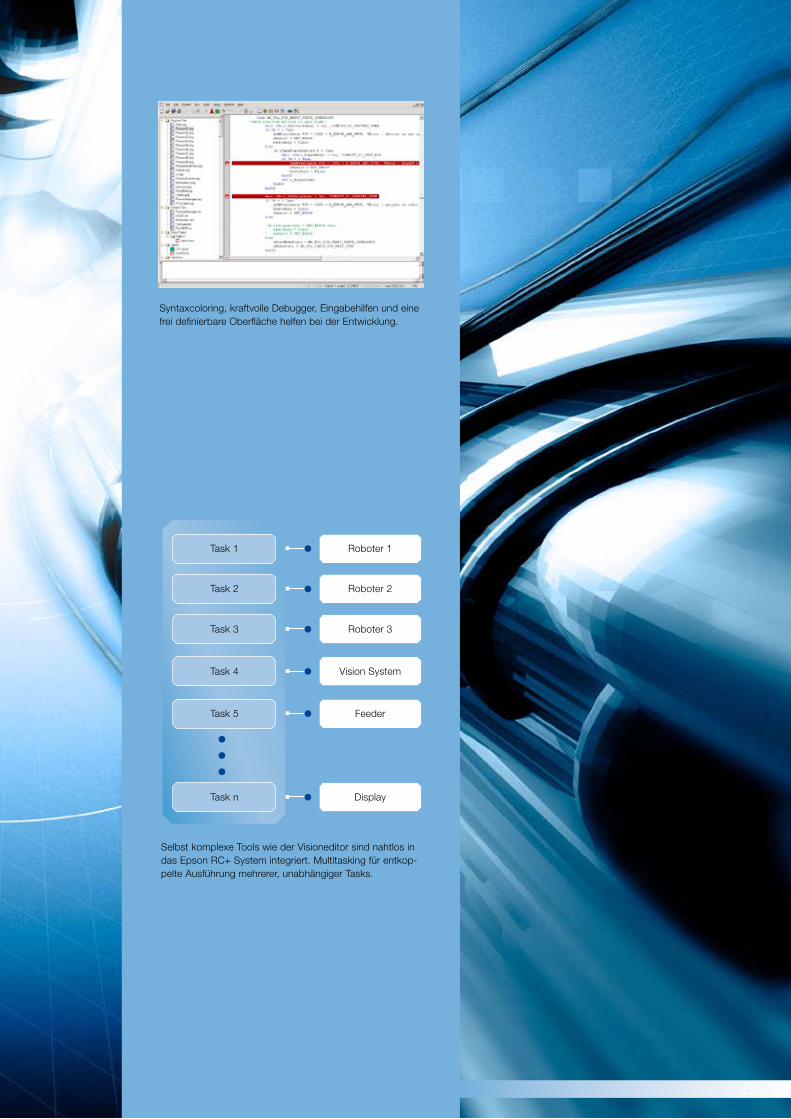
Selbst komplexe Tools wie der Visioneditor sind nahtlos in das Epson RC+ System integriert. Multitasking für entkop-pelte Ausführung mehrerer, unabhängiger Tasks.
™£
Y+
Center of axis #2
R 4
95
R 450
R 235
R 156
R 136
R 90
Machbarkeitsstudien
Mittels�einer�Machbarkeitsstudie�für�Ihren�Arbeitsprozess�
bietet�Epson�Ihnen�das�Know-how�von�über�20�Jahren�
Roboterbau�an.�Anstelle�von�theoretischen�Simulationen,�
mit�all�den�in�ihnen�enthaltenen�Unwägbarkeiten,�bieten�
wir�Ihnen�eine�Simulation�an�realen�Robotern�mit�möglichst�
realem�Umfeld�an.
Ganz�nach�Anspruch�können�Sie�aus�folgendem�Leistungs-
katalog�wählen:
Untersuchung des Arbeitsvorganges.
Optimierung des Arbeitsvorganges hinsichtlich Taktzeit oder
anderer Parameter.
Taktzeituntersuchung an realen Robotern.
Dokumentation des Prozessverhaltens in Wort, Bild und Film.
Programmiersupport bei besonders komplexen oder
zeitkritischen Abläufen.
Falls gewünscht erhalten Sie auch Support beim Aufbau Ihrer
Anlage durch Partner des Epson Integratoren Netzwerkes.
Integrierte Sicherheit und Flexibilität
™¢

Epson Schulungen
Training�ist�eine�Frage�der�Individualität.�Jeder�Mensch�nimmt�neues�
Wissen�anders�auf�–�aus�diesem�Grunde�sind�die�Schulungen�beson-
ders�effizient,�bei�denen�in�besonderer�Weise�auf�die�individuellen�
Eigenheiten�der�Teilnehmer�eingegangen�werden�kann.�Epson�bietet�
jeden�Trainingskurs�nur�für�eine�relativ�kleine�Zahl�an�Teilnehmern�an,�
damit�sowohl�großzügig�auf�spezielle�Fragen�eingegangen�werden�
kann,�aber�auch�Theorie�und�Praxis�Hand�in�Hand�gehen�können.
Schulung – ProgrammierungObwohl�die�Epson�Programmiersprache�aufgrund�ihres�Basic-ähnlichen�
Charakters�bereits�zu�den�einfachsten�und�dennoch�mächtigsten�Robo-
terprogrammierwerkzeugen�am�Markt�gehört,�ist�ein�fundiertes�und�indi-
viduell�auf�Ihre�Bedürfnisse�abgestimmtes�Training�die�Grundlage�für�
einen�effizienten�und�zuverlässigen�Aufbau�einer�Roboterzelle.�Je�nach�
Ambition�können�Sie�aus�folgendem�Schulungskatalog�wählen:
Programmiertraining Grundlagen
Programmiertraining Vision
Programmiertraining Förderbandverfolgung
Programmiertraining Feldbus und I/O
Programmiertraining Individuell – hier kann auf Ihre ganz
spezifischen Probleme eingegangen werden.
Softwaretraining
Schulung – Service & SupportJede�noch�so�gute�und�zuverlässige�Anlage�kann�ausfallen.�Wenn�
eine�Anlage�ausfällt,�so�müssen�die�Folgen�wie�Produktionsstillstand�
und�ähnliche�minimiert�werden;�ein�entscheidender�Faktor�hierbei�ist�
die�Reaktionszeit�zwischen�Ausfall�und�Wiederanlaufen�der�Anlage.�
Obwohl�der�Epson�Service�bereits�ausgezeichnete�Reaktionszeiten�
bietet,�ist�die�kürzeste�Reaktionszeit�doch�dadurch�zu�erreichen,�wenn�
gut�trainierte�Mitarbeiter�bereits�im�Betrieb�tätig�sind.�Aus�diesem�
Grunde�bieten�wir�Ihnen�eine�Reihe�von�Schulungen�an,�die�zum�Ziel�
haben,�Ihre�Mitarbeiter�fit�zu�machen�für�den�Fall�der�Fälle.
Service Epson Roboter Grundlagen
Wartung Epson Roboter Grundlagen
Service Epson Scara Roboter
Service Epson 6-Achsroboter
Service Epson Steuerungen
Service- und Wartungstrainings
Auf�Wunsch�können�auch�verschiedene�Schulungseinheiten�kombiniert�
werden.�So�ist�es�denkbar,�dass�die�Programmierung�Vision�mit�einem�
Training�Service�Epson�Scara�Roboter�kombiniert�wird.
™∞
1
4
3
1210
1
4
3
1210
1
4
3
12101
4
3
1210
= 90°
P2
P1
P2
P1
= 90°
= 90° =| 90°
Epson Steuerbefehle
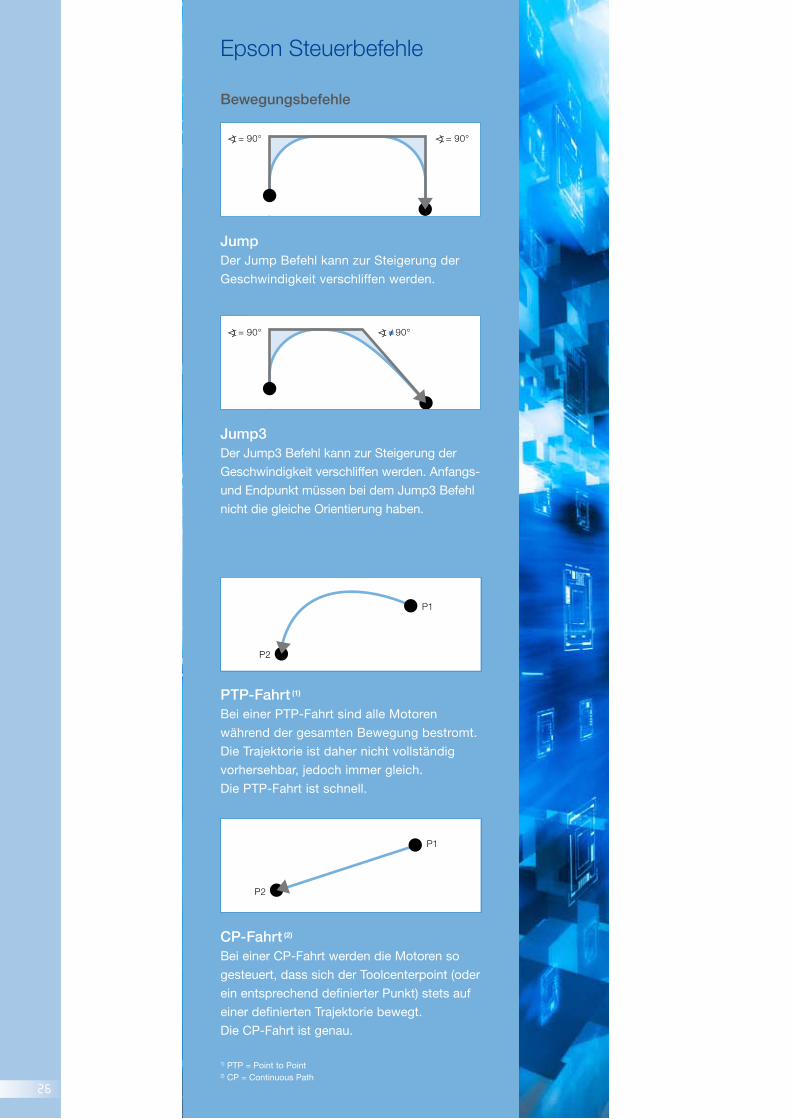
JumpDer�Jump�Befehl�kann�zur�Steigerung�der�
Geschwindigkeit�verschliffen�werden.�
Jump3Der�Jump3�Befehl�kann�zur�Steigerung�der�
Geschwindigkeit�verschliffen�werden.�Anfangs-�
und�Endpunkt�müssen�bei�dem�Jump3�Befehl�
nicht�die�gleiche�Orientierung�haben.
Bewegungsbefehle
PTP-Fahrt (1)
Bei�einer�PTP-Fahrt�sind�alle�Motoren�
während�der�gesamten�Bewegung�bestromt.�
Die�Trajektorie�ist�daher�nicht�vollständig�
vorhersehbar,�jedoch�immer�gleich.��
Die�PTP-Fahrt�ist�schnell.
CP-Fahrt (2)
Bei�einer�CP-Fahrt�werden�die�Motoren�so�
gesteuert,�dass�sich�der�Toolcenterpoint�(oder�
ein�entsprechend�definierter�Punkt)�stets�auf�
einer�definierten�Trajektorie�bewegt.��
Die�CP-Fahrt�ist�genau.
1)�PTP�=�Point�to�Point�2)�CP�=�Continuous�Path
™§
1
4
3
1210
1
4
3
12101
4
3
1210
P1 P2
P3
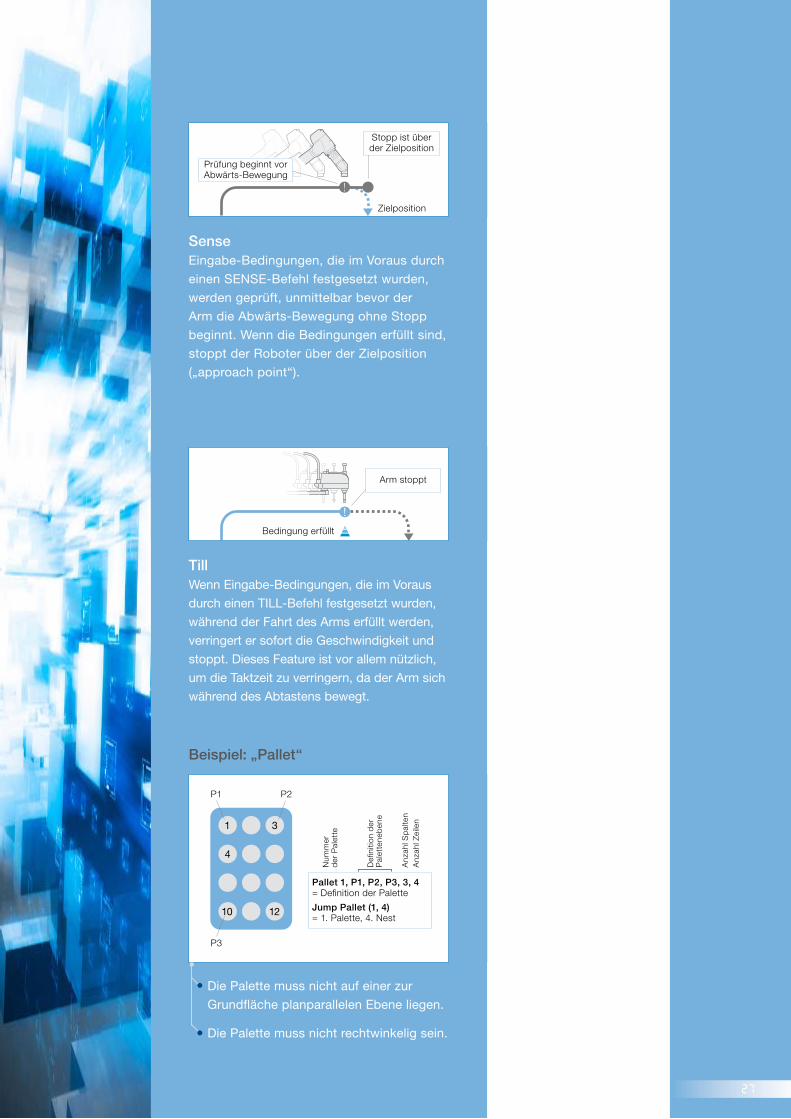
TillWenn�Eingabe-Bedingungen,�die�im�Voraus�
durch�einen�TILL-Befehl�festgesetzt�wurden,�
während�der�Fahrt�des�Arms�erfüllt�werden,�
verringert�er�sofort�die�Geschwindigkeit�und�
stoppt.�Dieses�Feature�ist�vor�allem�nützlich,�
um�die�Taktzeit�zu�verringern,�da�der�Arm�sich�
während�des�Abtastens�bewegt.�
SenseEingabe-Bedingungen,�die�im�Voraus�durch�
einen�SENSE-Befehl�festgesetzt�wurden,�
werden�geprüft,�unmittelbar�bevor�der�
Arm�die�Abwärts-Bewegung�ohne�Stopp�
beginnt.�Wenn�die�Bedingungen�erfüllt�sind,�
stoppt�der�Roboter�über�der�Zielposition�
(„approach�point“).
Prüfung beginnt vor Abwärts-Bewegung
Stopp ist über der Zielposition
Zielposition
Arm stoppt
Bedingung erfüllt
Die�Palette�muss�nicht�auf�einer�zur�
Grundfläche�planparallelen�Ebene�liegen.
Die�Palette�muss�nicht�rechtwinkelig�sein.
Beispiel: „Pallet“
Pallet 1, P1, P2, P3, 3, 4 = Definition der Palette
Jump Pallet (1, 4) = 1. Palette, 4. Nest
Num
mer
d
er P
alet
te
Defi
nitio
n d
er
Pal
ette
neb
ene
Anz
ahl S
pal
ten
Anz
ahl Z
eile
n
™¶

Europa
EPSON�DEUTSCHLAND�GmbHOtto-Hahn-Straße�4�40670�MeerbuschTel.:� +49�(0)�2159�/�538�1391Fax:�+49�(0)�2159�/�538�3170�E-Mail:�[email protected]�www.epson.de/robots
U S A
EPSON�AMERICA,�Inc.18300�Central�AvenueCarson,�CA�90746Tel.:� +1562290�–�5910Fax:�+1562290�–�5999E-Mail:�[email protected]
Asien
SEIKO�EPSON�Corp.1010�Fujimi,�Fujimi-machi,�Suwa�gun399-0295�Nagano-kenTel.:� +81�2666�–�11804Fax:�+81�2666�–�11846E-Mail:�[email protected]/fa/e
Irrtümer, Änderungen, Druckfehler und Änderungen in Verfahrensweisen vorbehalten.