Embed Size (px)
Citation preview
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Fahrwerks- und Antriebskomponenten des VW Phaeton
Bild 4.1_1 Quelle: Der neue Phaeton, ATZ/MTZ-extra, Juli 2002
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Vor- und Nachteile von Kolbenmotoren
Vorteile von Kolbenmotoren:• Niedriges Leistungsgewicht• Hohe Energiedichte ⇒ geringes Gewicht• Guter Wirkungsgrad• Ausgereifte Technologie
Prinzipbedingte Nachteile von Kolbenmotoren:• Die maximale Leistung steht nur in einem bestimmten
Drehzahlband (Nenndrehzahl) zur Verfügung• Kein Drehmoment bei Motordrehzahl null• Der Motorwirkungsgrad und somit der Kraftstoffverbrauch
ist abhängig vom Betriebspunkt des Motors• Die Drehmoment- und Leistungskennlinie weisen
eine starke Drehzahlabhängigkeit auf
Bild 4.1_2 Quelle: Förster
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
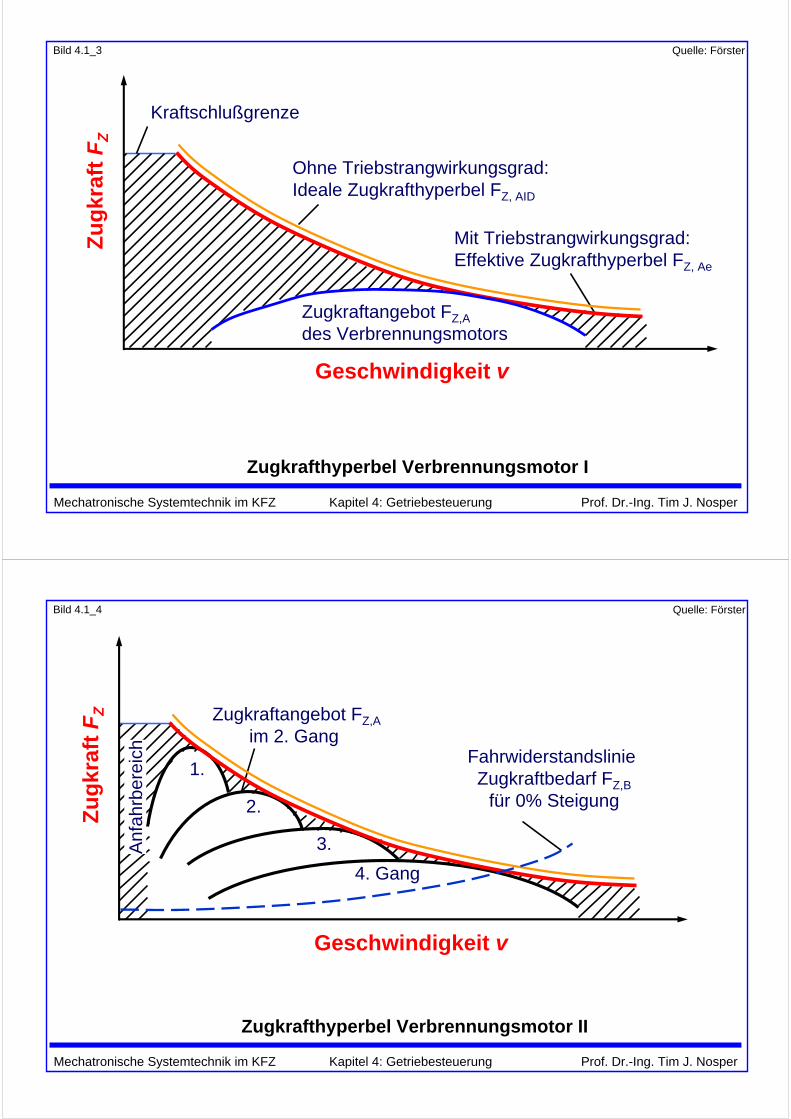
Zugkrafthyperbel Verbrennungsmotor I
Bild 4.1_3 Quelle: Förster
Zu
gkr
aft
FZ
Geschwindigkeit v
Kraftschlußgrenze
Mit Triebstrangwirkungsgrad:Effektive Zugkrafthyperbel FZ, Ae
Ohne Triebstrangwirkungsgrad:Ideale Zugkrafthyperbel FZ, AID
Zugkraftangebot FZ,A
des Verbrennungsmotors
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
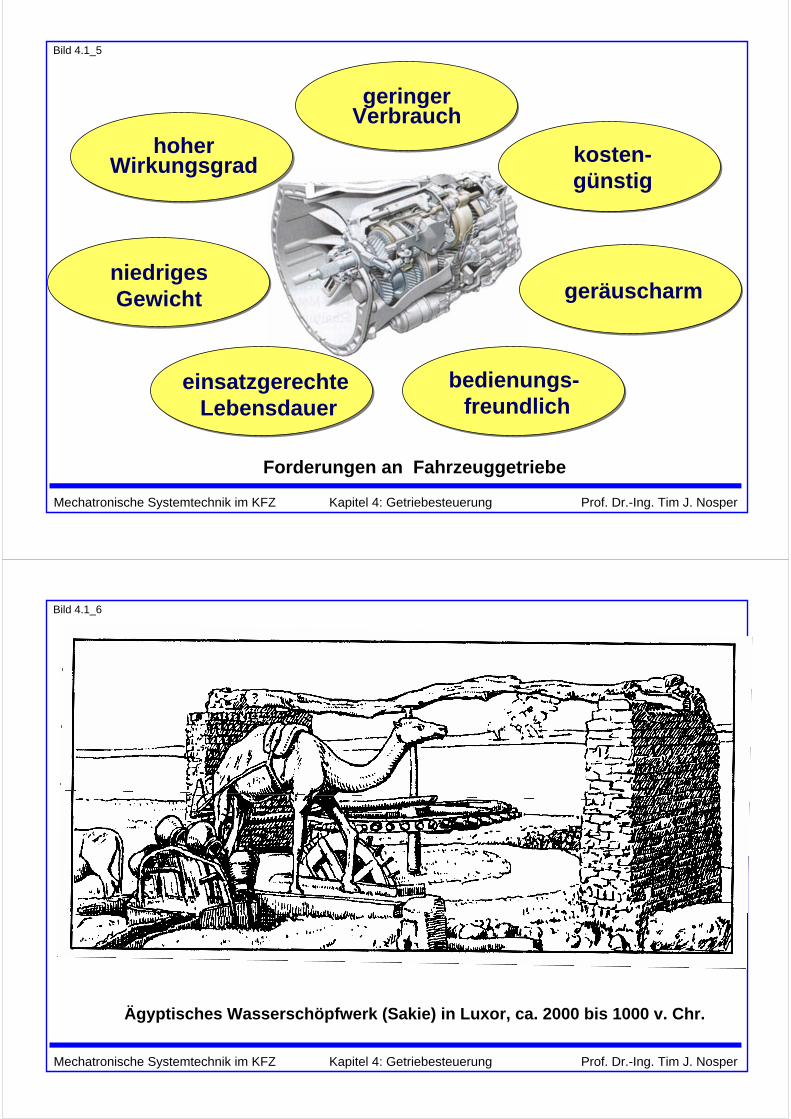
Zugkrafthyperbel Verbrennungsmotor II
Bild 4.1_4 Quelle: Förster
Fahrwiderstandslinie Zugkraftbedarf FZ,B
für 0% Steigung
Zugkraftangebot FZ,A
im 2. Gang
1.
2.
3.
4. Gang
Anf
ahrb
erei
ch
Zu
gkr
aft
FZ
Geschwindigkeit v
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Forderungen an Fahrzeuggetriebe
Bild 4.1_5
hoherWirkungsgrad
geringerVerbrauch
niedrigesGewicht
kosten-günstig
bedienungs-freundlich
geräuscharm
einsatzgerechteLebensdauer
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Ägyptisches Wasserschöpfwerk (Sakie) in Luxor, ca. 2000 bis 1000 v. Chr.
Bild 4.1_6
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
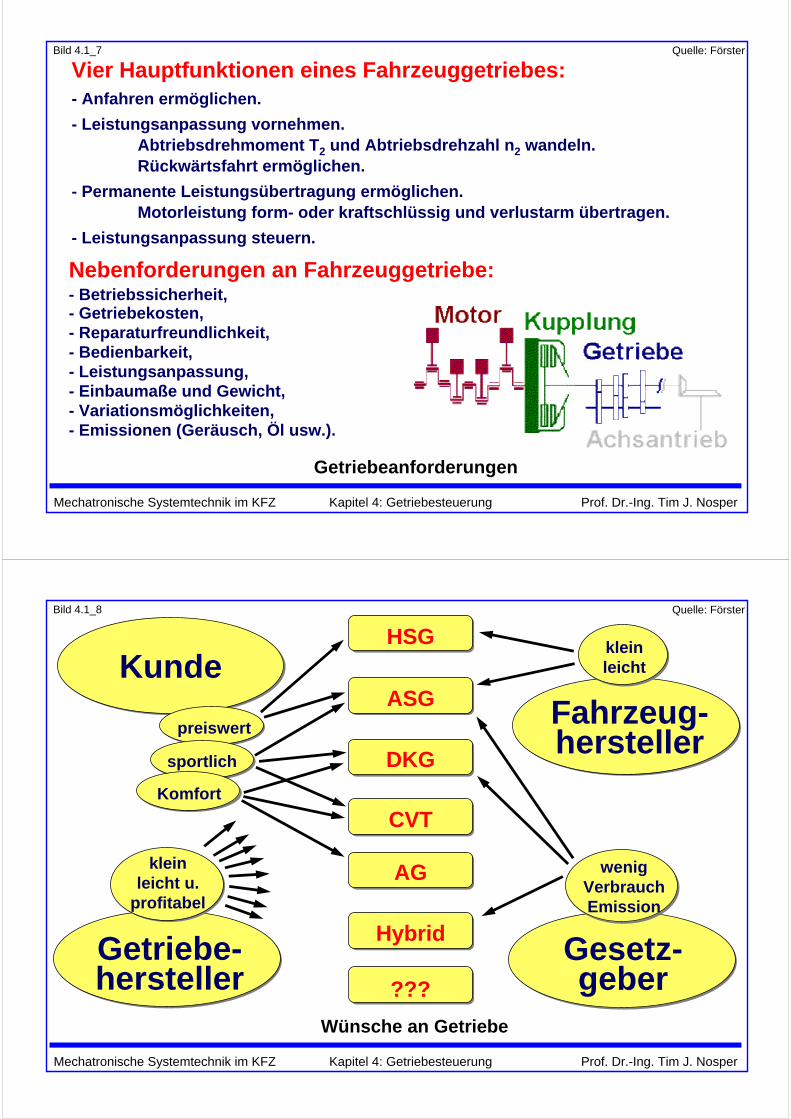
Getriebeanforderungen
Vier Hauptfunktionen eines Fahrzeuggetriebes:- Anfahren ermöglichen.
- Leistungsanpassung vornehmen.Abtriebsdrehmoment T2 und Abtriebsdrehzahl n2 wandeln. Rückwärtsfahrt ermöglichen.
- Permanente Leistungsübertragung ermöglichen. Motorleistung form- oder kraftschlüssig und verlustarm übertragen.
- Leistungsanpassung steuern.
Nebenforderungen an Fahrzeuggetriebe:- Betriebssicherheit,- Getriebekosten,- Reparaturfreundlichkeit,- Bedienbarkeit,- Leistungsanpassung,- Einbaumaße und Gewicht,- Variationsmöglichkeiten,- Emissionen (Geräusch, Öl usw.).
Bild 4.1_7 Quelle: Förster
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
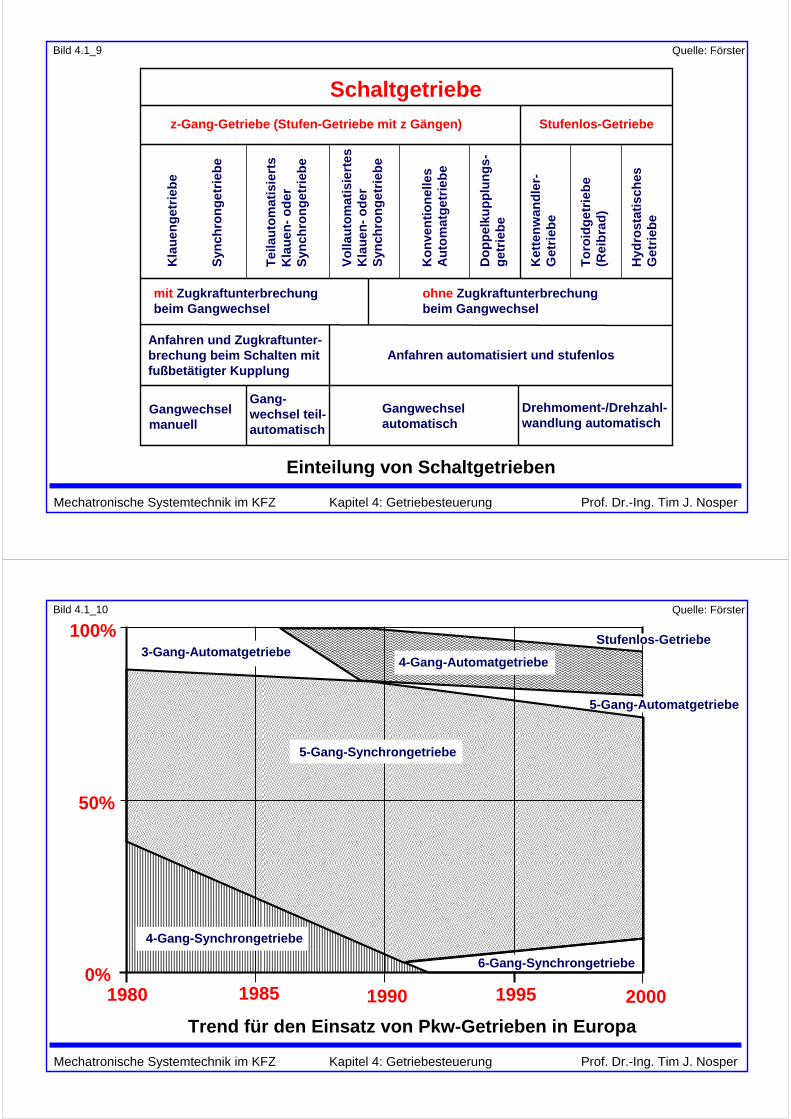
Wünsche an Getriebe
Bild 4.1_8 Quelle: Förster
HSG
???
ASG
DKG
CVT
AG
Hybrid
KundeFahrzeug-hersteller
Getriebe-hersteller
Gesetz-geber
preiswert
sportlich
Komfort
kleinleicht
wenigVerbrauchEmission
kleinleicht u.
profitabel
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
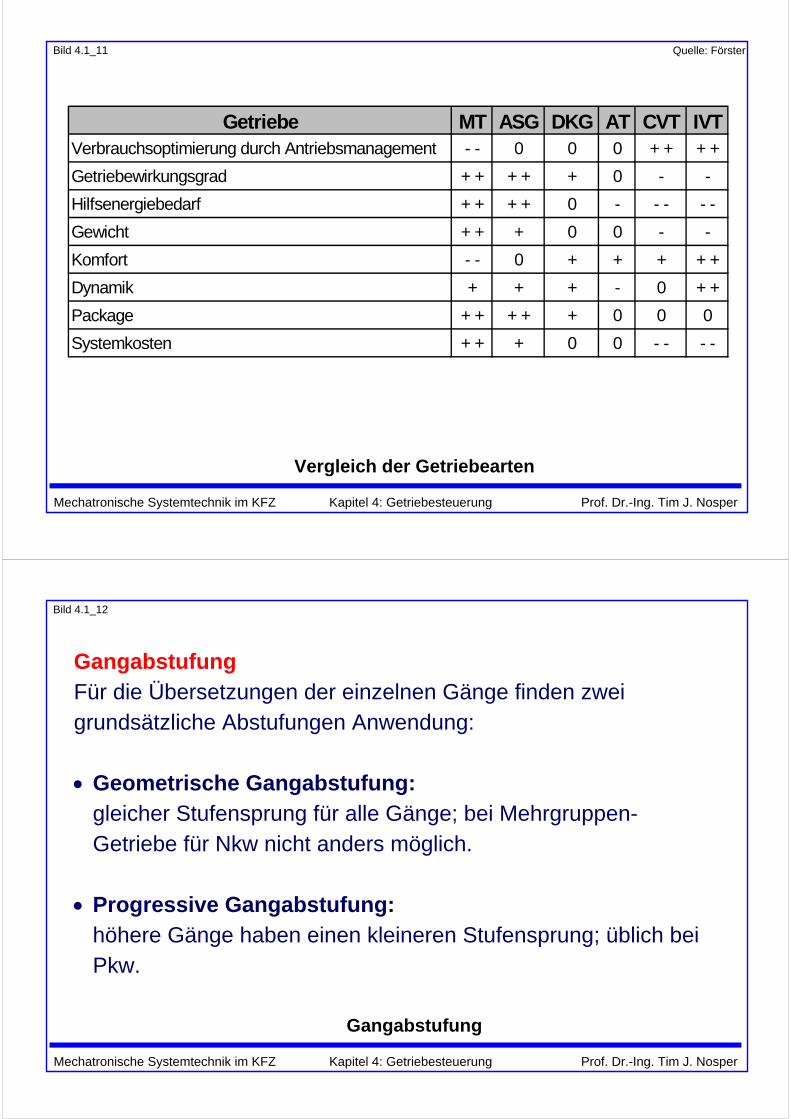
Einteilung von Schaltgetrieben
Syn
chro
ng
etri
ebe
Kla
uen
get
rieb
e
Schaltgetriebe
z-Gang-Getriebe (Stufen-Getriebe mit z Gängen) Stufenlos-Getriebe
mit Zugkraftunterbrechungbeim Gangwechsel
ohne Zugkraftunterbrechungbeim Gangwechsel
Ko
nve
nti
on
elle
sA
uto
mat
get
rieb
e
Do
pp
elku
pp
lun
gs-
get
rieb
e
Ket
ten
wan
dle
r-G
etri
ebe
Hyd
rost
atis
ches
Get
rieb
e
Anfahren automatisiert und stufenlos
Tei
lau
tom
atis
iert
sK
lau
en-
od
erS
ynch
ron
get
rieb
e
Vo
llau
tom
atis
iert
esK
lau
en-
od
erS
ynch
ron
get
rieb
e
Gangwechselmanuell
Gangwechselautomatisch
Gang-wechsel teil-automatisch
Anfahren und Zugkraftunter-brechung beim Schalten mitfußbetätigter Kupplung
Drehmoment-/Drehzahl-wandlung automatisch
To
roid
get
rieb
e(R
eib
rad
)
Bild 4.1_9 Quelle: Förster
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
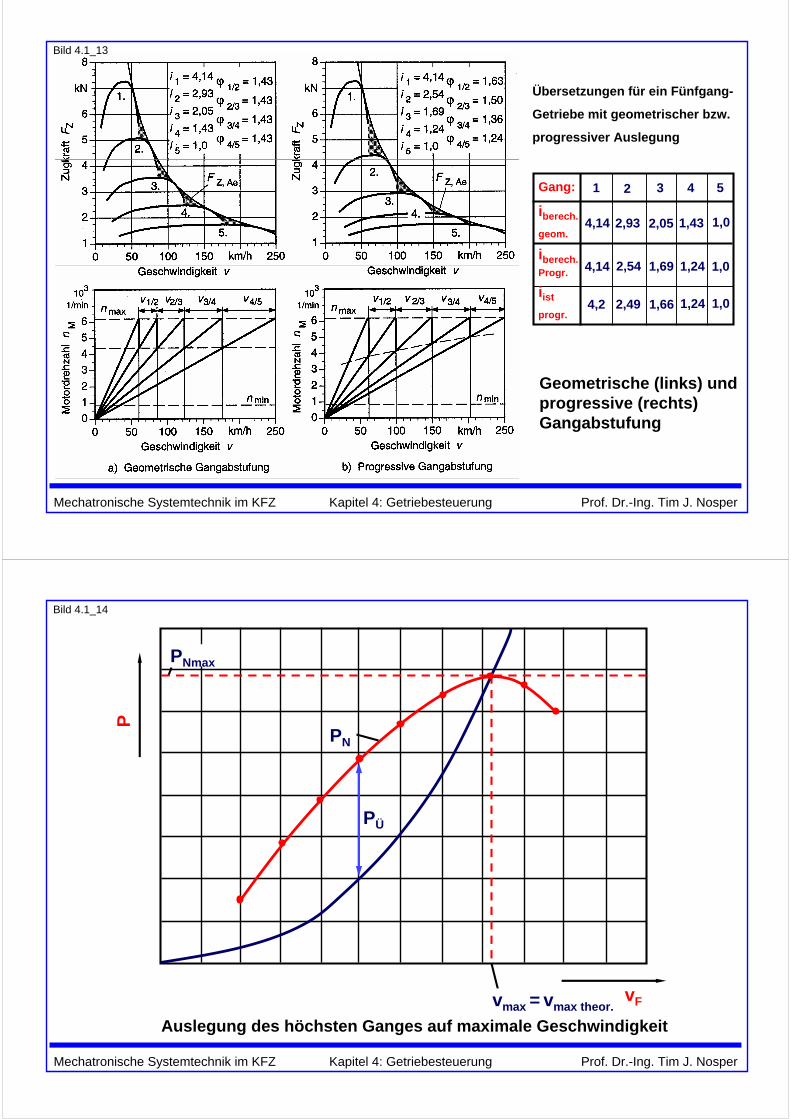
Trend für den Einsatz von Pkw-Getrieben in Europa
Bild 4.1_10 Quelle: Förster
100%
50%
0%1980 1985 1990 1995 2000
5-Gang-Automatgetriebe
6-Gang-Synchrongetriebe
Stufenlos-Getriebe3-Gang-Automatgetriebe
4-Gang-Automatgetriebe
4-Gang-Synchrongetriebe
5-Gang-Synchrongetriebe
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Vergleich der Getriebearten
Getriebe MT ASG DKG AT CVT IVTVerbrauchsoptimierung durch Antriebsmanagement - - 0 0 0 + + + +
Getriebewirkungsgrad + + + + + 0 - -
Hilfsenergiebedarf + + + + 0 - - - - -
Gewicht + + + 0 0 - -
Komfort - - 0 + + + + +
Dynamik + + + - 0 + +
Package + + + + + 0 0 0
Systemkosten + + + 0 0 - - - -
Bild 4.1_11 Quelle: Förster
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Gangabstufung
Bild 4.1_12
GangabstufungFür die Übersetzungen der einzelnen Gänge finden zweigrundsätzliche Abstufungen Anwendung:
• Geometrische Gangabstufung:gleicher Stufensprung für alle Gänge; bei Mehrgruppen-Getriebe für Nkw nicht anders möglich.
• Progressive Gangabstufung:höhere Gänge haben einen kleineren Stufensprung; üblich bei Pkw.
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Gang:
iberech.
geom.
1 2 3 54
4,14 2,93 2,05 1,43 1,0
4,14
4,2
2,54
2,49
1,69
1,66
1,24
1,24
1,0
1,0
iberech.Progr.
iist
progr.
Übersetzungen für ein Fünfgang-
Getriebe mit geometrischer bzw.
progressiver Auslegung
Bild 4.1_13
Geometrische (links) undprogressive (rechts)Gangabstufung
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Auslegung des höchsten Ganges auf maximale Geschwindigkeit
Bild 4.1_14
P
vF
PNmax
vmax = vmax theor.
PN
PÜ
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
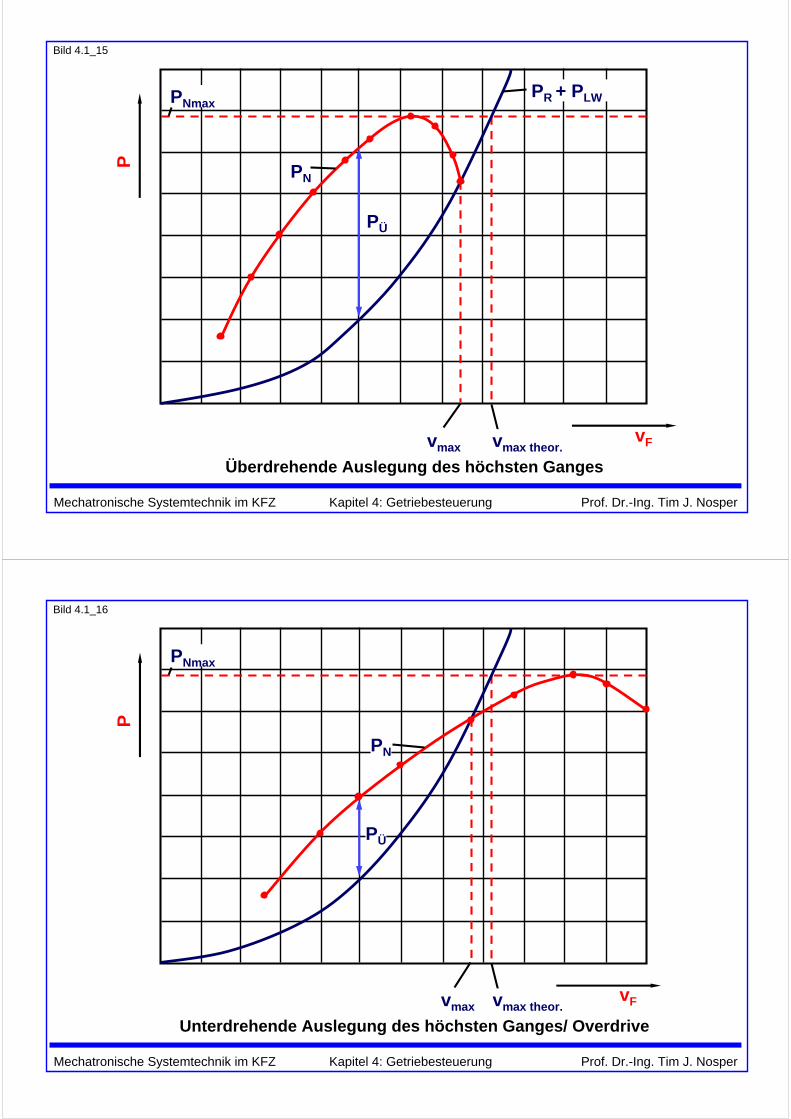
Überdrehende Auslegung des höchsten Ganges
Bild 4.1_15
P
vF
PNmaxPR + PLW
PN
PÜ
vmax theor.vmax
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
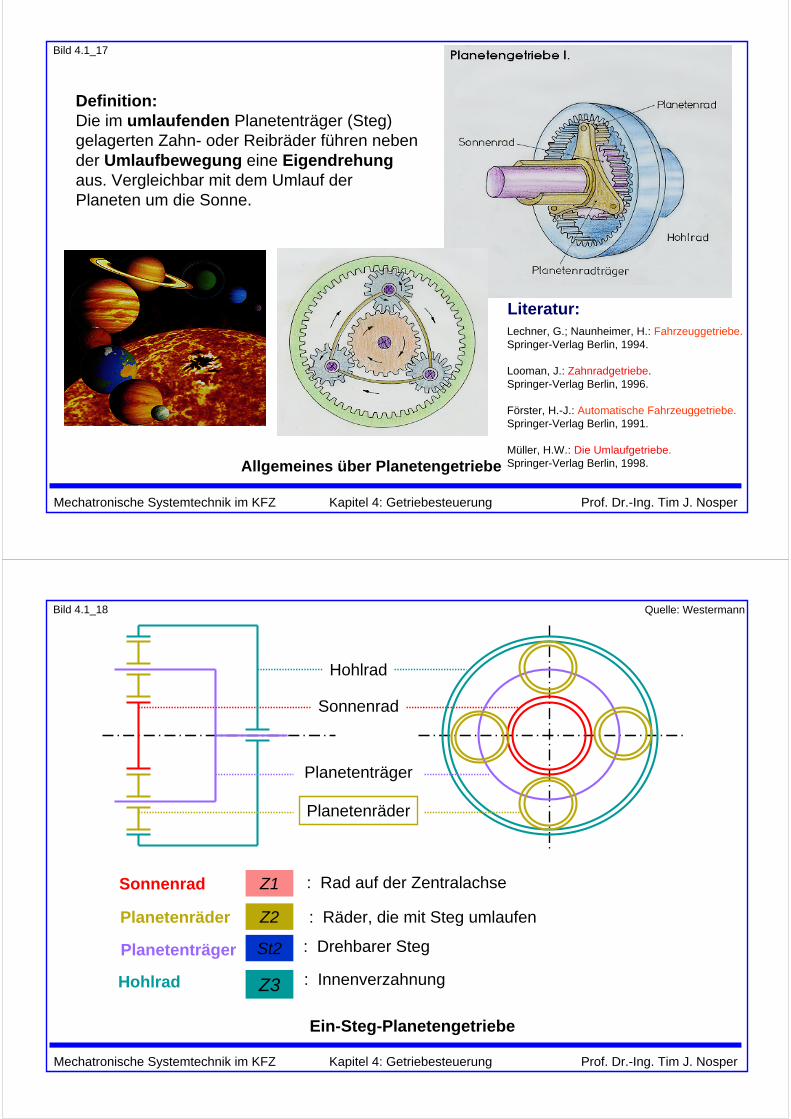
Unterdrehende Auslegung des höchsten Ganges/ Overdrive
Bild 4.1_16
P
vF
PNmax
PN
PÜ
vmax theor.vmax
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
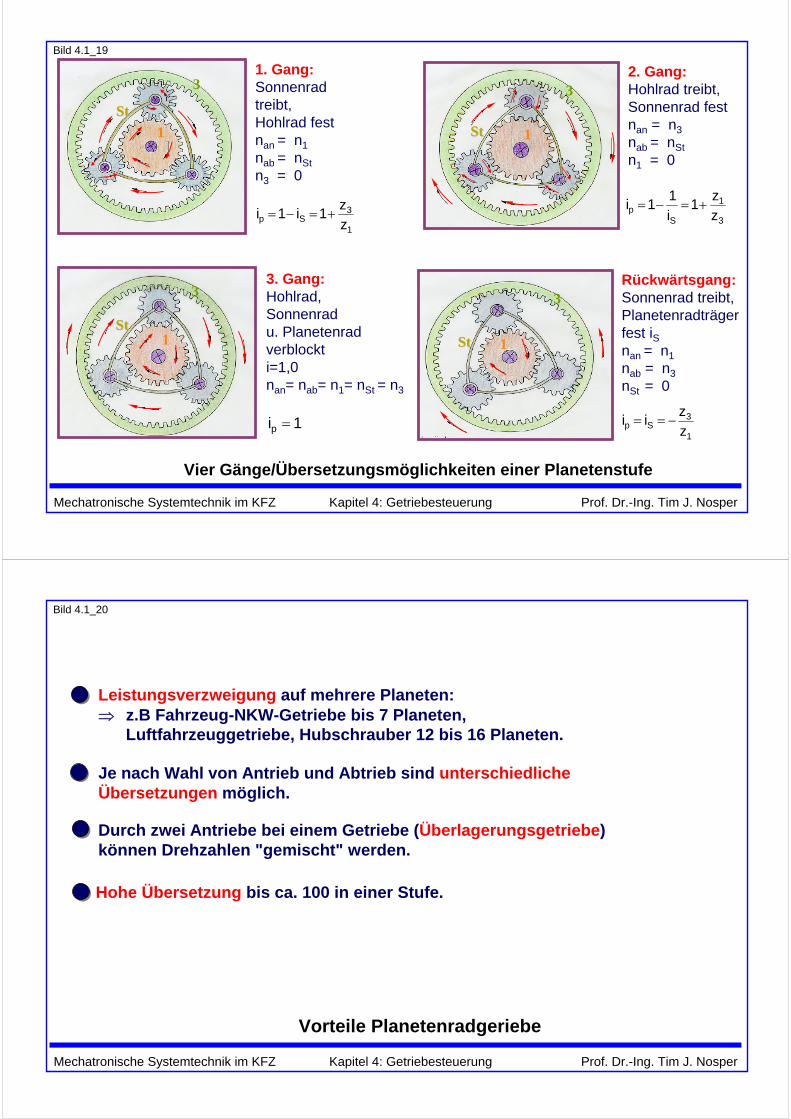
Allgemeines über Planetengetriebe
Bild 4.1_17
Definition:Die im umlaufenden Planetenträger (Steg) gelagerten Zahn- oder Reibräder führen neben der Umlaufbewegung eine Eigendrehungaus. Vergleichbar mit dem Umlauf der Planeten um die Sonne.
Lechner, G.; Naunheimer, H.: Fahrzeuggetriebe.Springer-Verlag Berlin, 1994.
Looman, J.: Zahnradgetriebe.Springer-Verlag Berlin, 1996.
Förster, H.-J.: Automatische Fahrzeuggetriebe.Springer-Verlag Berlin, 1991.
Müller, H.W.: Die Umlaufgetriebe.Springer-Verlag Berlin, 1998.
Literatur:
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Ein-Steg-Planetengetriebe
Bild 4.1_18 Quelle: Westermann
Sonnenrad
Hohlrad
Planetenträger
Planetenräder
Planetenträger : Drehbarer StegSt2
Sonnenrad : Rad auf der ZentralachseZ1
Planetenräder : Räder, die mit Steg umlaufen Z2
Hohlrad : InnenverzahnungZ3
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
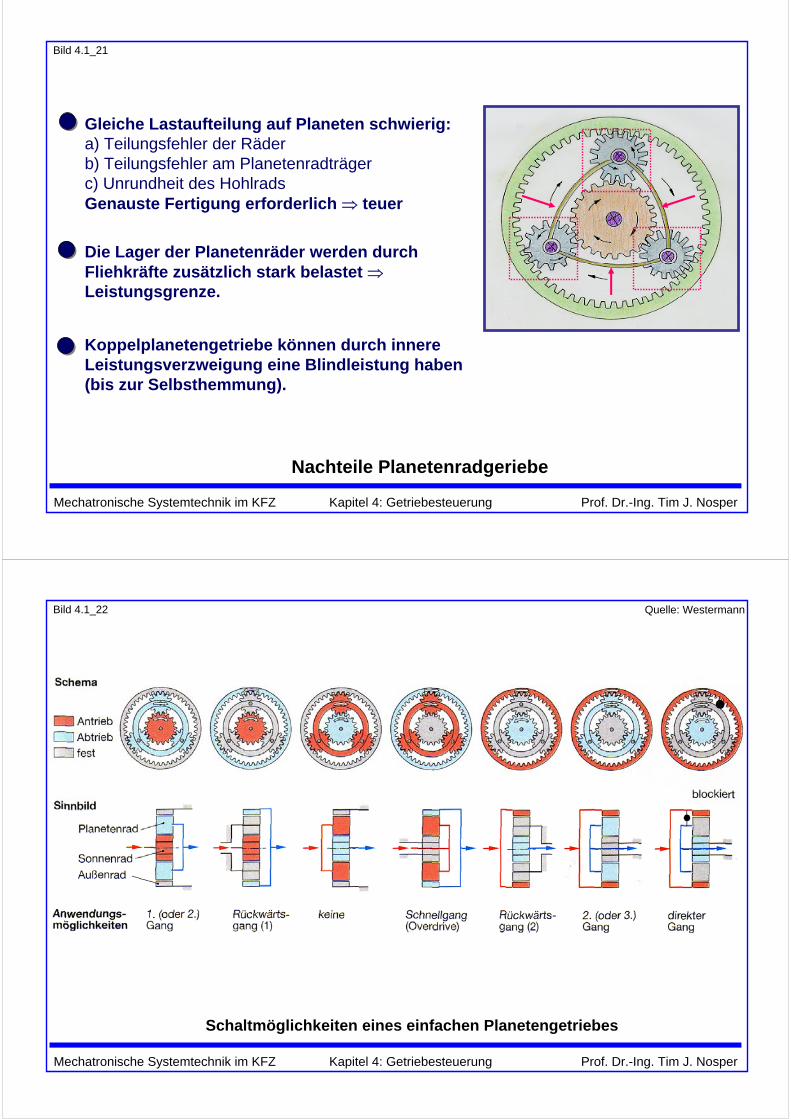
Vier Gänge/Übersetzungsmöglichkeiten einer Planetenstufe
Bild 4.1_19
1. Gang:Sonnenradtreibt,Hohlrad festnan = n1nab = nStn3 = 0
2. Gang:Hohlrad treibt,Sonnenrad festnan = n3nab = nStn1 = 0
3. Gang:Hohlrad,Sonnenradu. Planetenradverblockti=1,0nan= nab= n1= nSt = n3
Rückwärtsgang:Sonnenrad treibt,Planetenradträgerfest iSnan = n1nab = n3nSt = 0
1
3
StSt
1
3
StSt
1
3
StSt1
3
StSt
1
3Sp z
z1i1i +=−=
3
1
Sp z
z1
i
11i +=−=
1ip =1
3Sp z
zii −==
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Vorteile Planetenradgeriebe
Bild 4.1_20
Leistungsverzweigung auf mehrere Planeten:⇒ z.B Fahrzeug-NKW-Getriebe bis 7 Planeten,
Luftfahrzeuggetriebe, Hubschrauber 12 bis 16 Planeten.
Je nach Wahl von Antrieb und Abtrieb sind unterschiedliche Übersetzungen möglich.
Durch zwei Antriebe bei einem Getriebe (Überlagerungsgetriebe)können Drehzahlen "gemischt" werden.
Hohe Übersetzung bis ca. 100 in einer Stufe.
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Nachteile Planetenradgeriebe
Bild 4.1_21
Gleiche Lastaufteilung auf Planeten schwierig:a) Teilungsfehler der Räderb) Teilungsfehler am Planetenradträgerc) Unrundheit des HohlradsGenauste Fertigung erforderlich ⇒ teuer
Die Lager der Planetenräder werden durch Fliehkräfte zusätzlich stark belastet ⇒Leistungsgrenze.
Koppelplanetengetriebe können durch innere Leistungsverzweigung eine Blindleistung haben (bis zur Selbsthemmung).
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Schaltmöglichkeiten eines einfachen Planetengetriebes
Bild 4.1_22 Quelle: Westermann
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
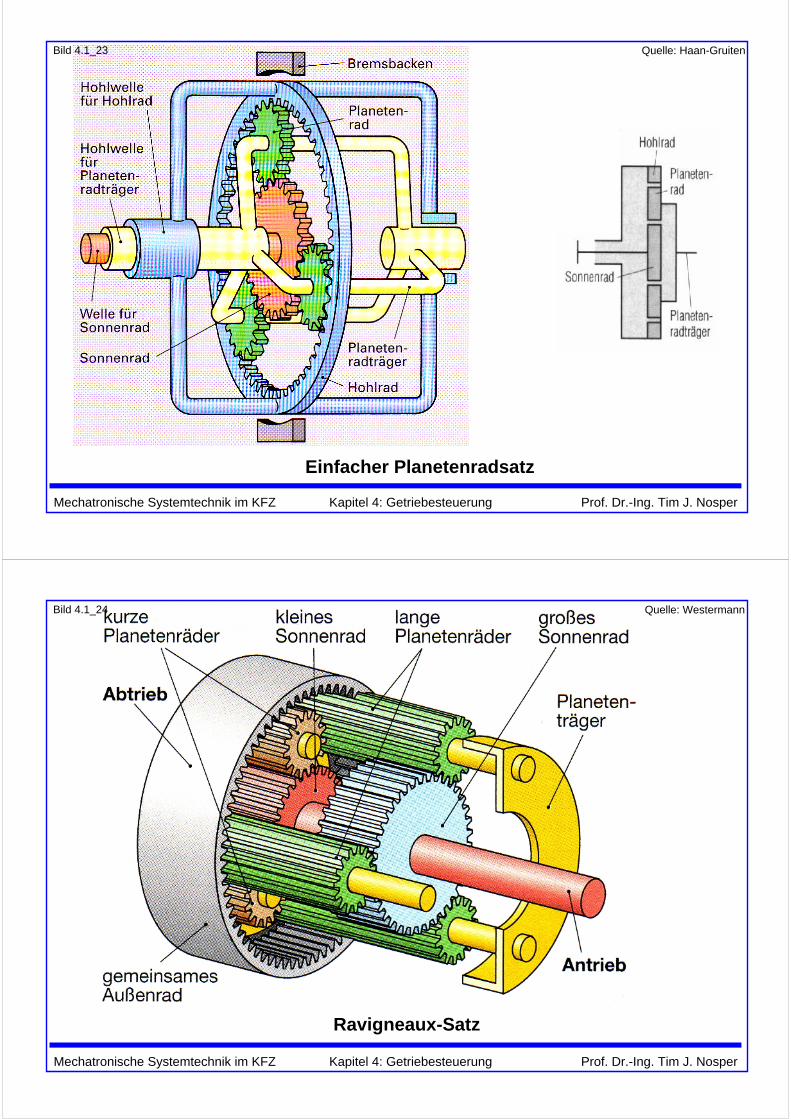
Einfacher Planetenradsatz
Bild 4.1_23 Quelle: Haan-Gruiten
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Ravigneaux-Satz
Bild 4.1_24 Quelle: Westermann
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
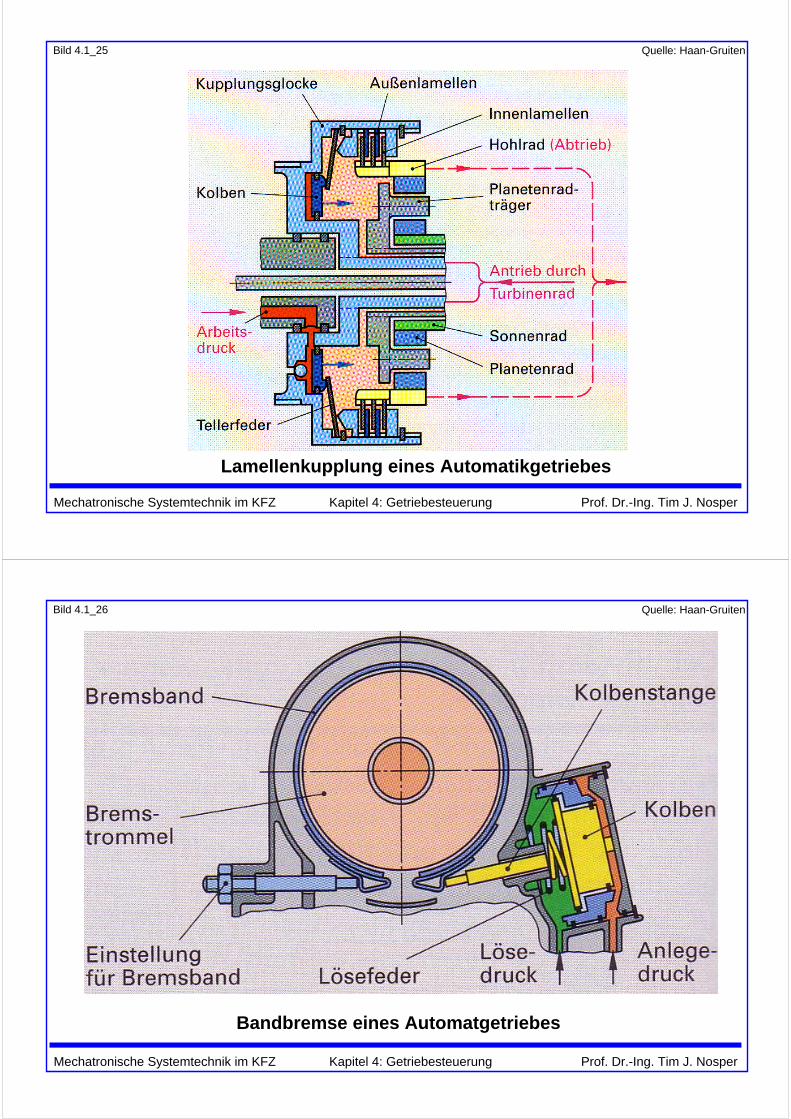
Lamellenkupplung eines Automatikgetriebes
Bild 4.1_25 Quelle: Haan-Gruiten
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Bandbremse eines Automatgetriebes
Bild 4.1_26 Quelle: Haan-Gruiten
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
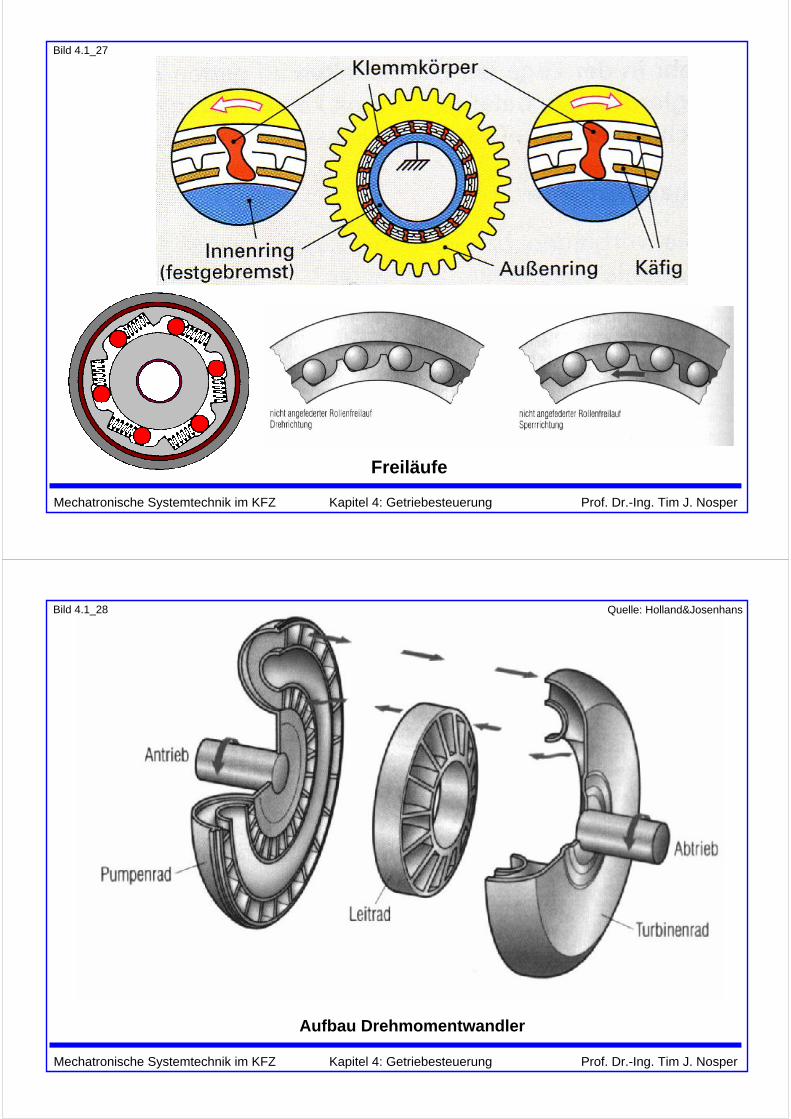
Freiläufe
Bild 4.1_27
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
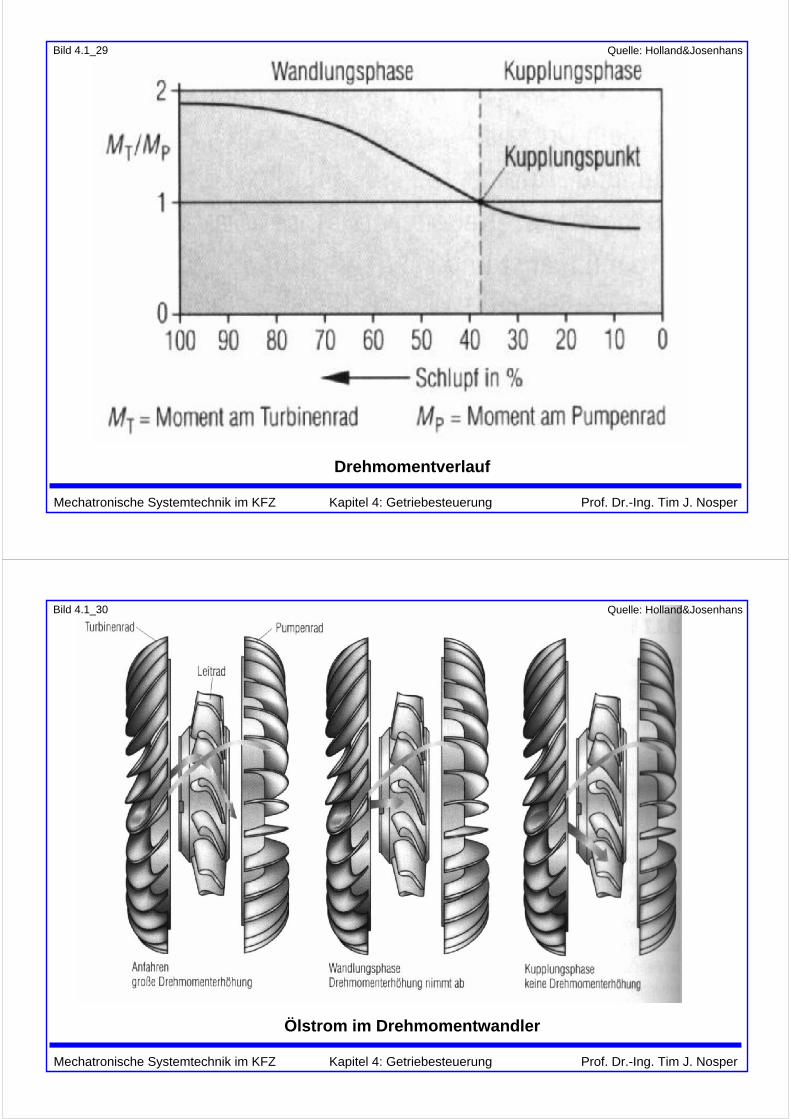
Aufbau Drehmomentwandler
Bild 4.1_28 Quelle: Holland&Josenhans
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Drehmomentverlauf
Bild 4.1_29 Quelle: Holland&Josenhans
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Ölstrom im Drehmomentwandler
Bild 4.1_30 Quelle: Holland&Josenhans
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
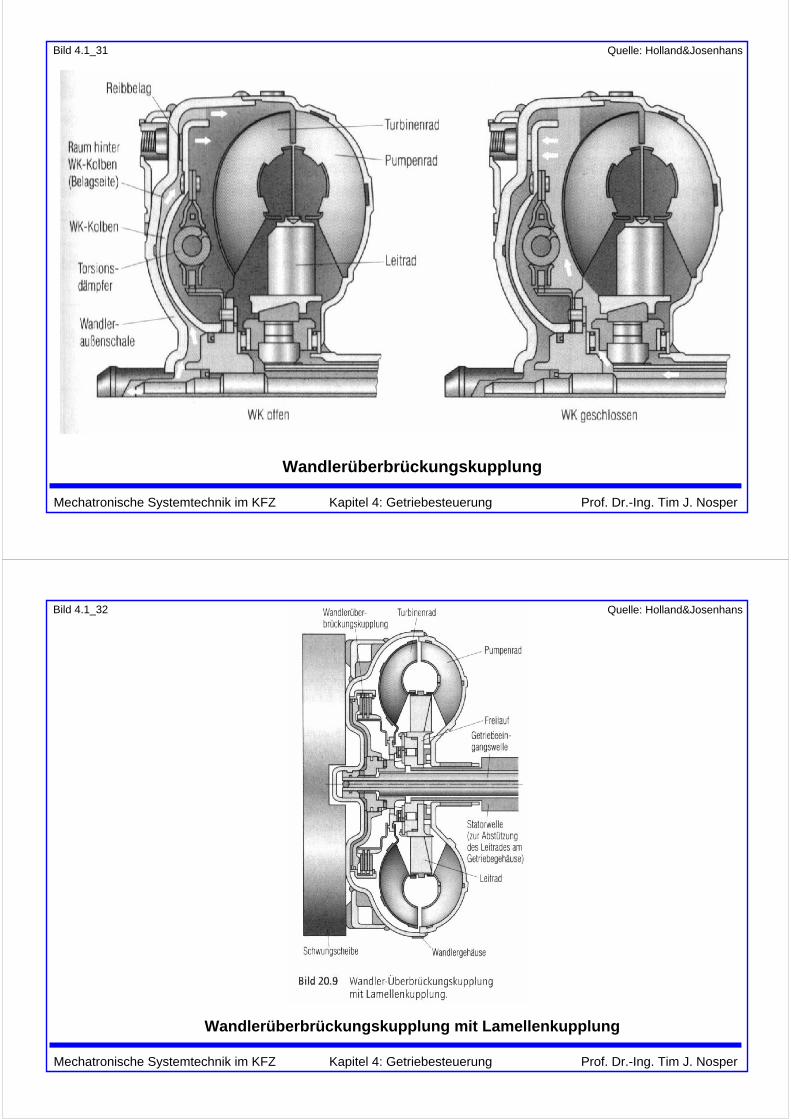
Wandlerüberbrückungskupplung
Bild 4.1_31 Quelle: Holland&Josenhans
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Wandlerüberbrückungskupplung mit Lamellenkupplung
Bild 4.1_32 Quelle: Holland&Josenhans
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
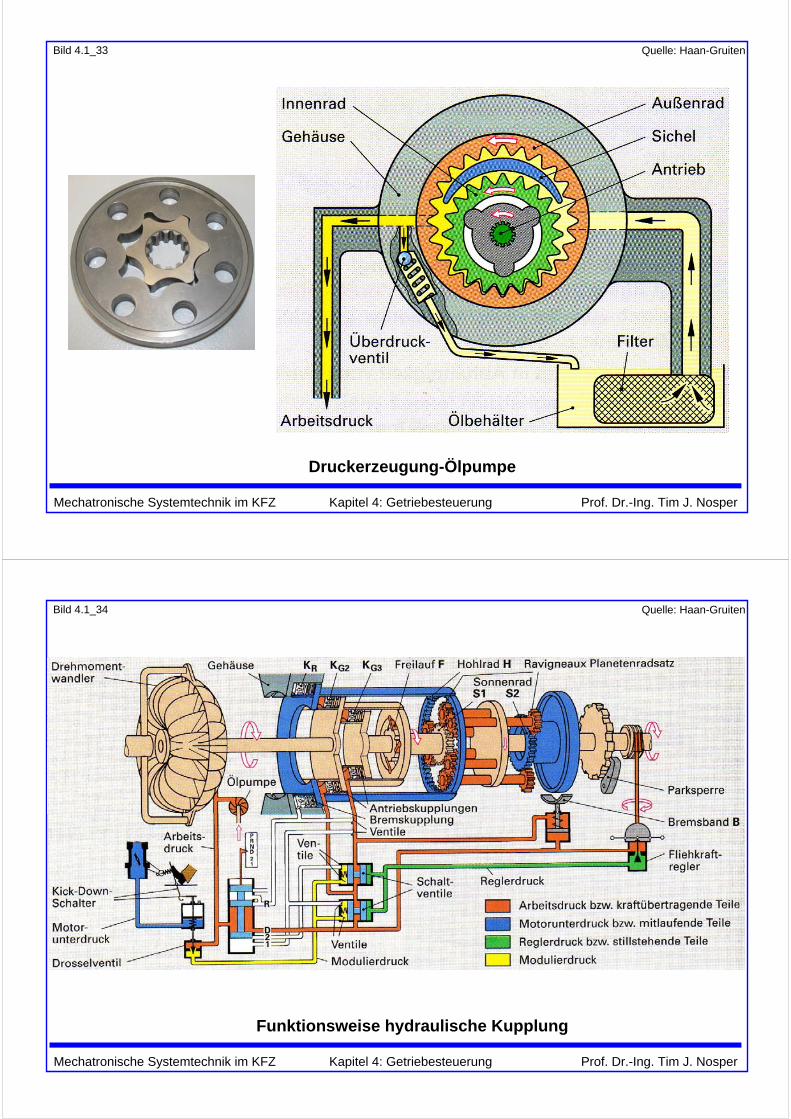
Druckerzeugung-Ölpumpe
Bild 4.1_33 Quelle: Haan-Gruiten
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Funktionsweise hydraulische Kupplung
Bild 4.1_34 Quelle: Haan-Gruiten
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
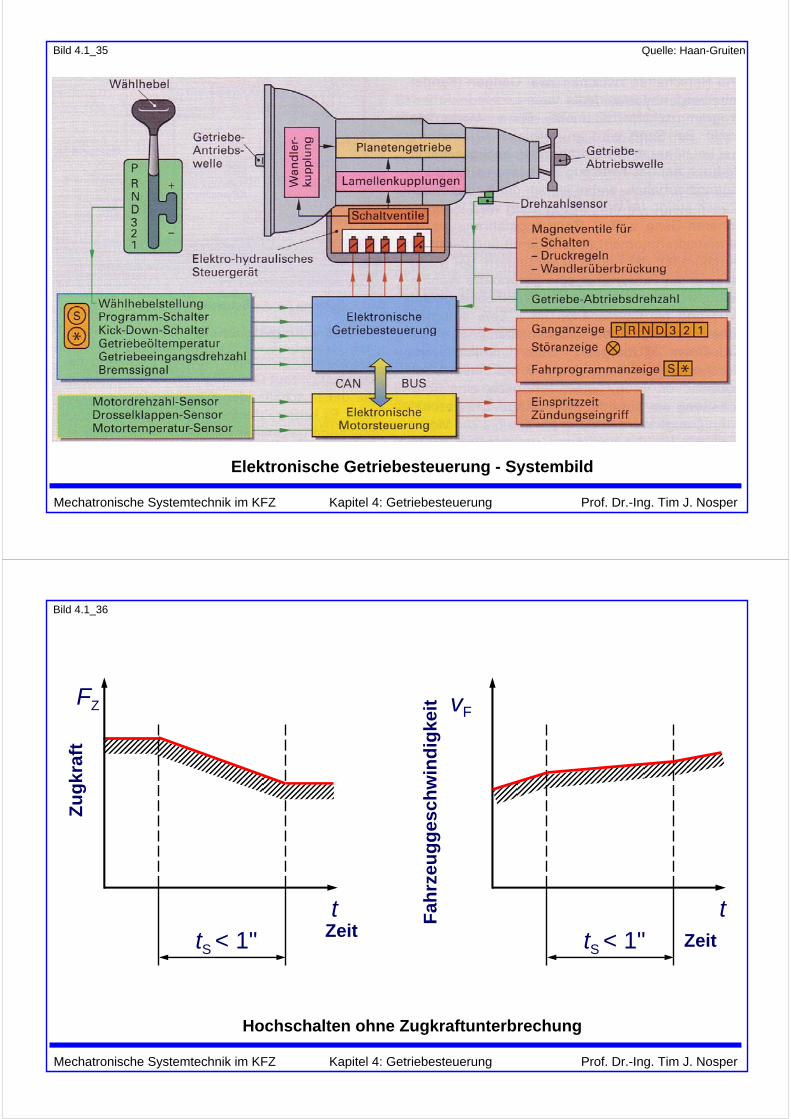
Elektronische Getriebesteuerung - Systembild
Bild 4.1_35 Quelle: Haan-Gruiten
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Hochschalten ohne Zugkraftunterbrechung
Bild 4.1_36
vF
ttS < 1"
t
FZ
tS < 1"
Fah
rzeu
gg
esch
win
dig
keit
Zu
gkr
aft
Zeit Zeit
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
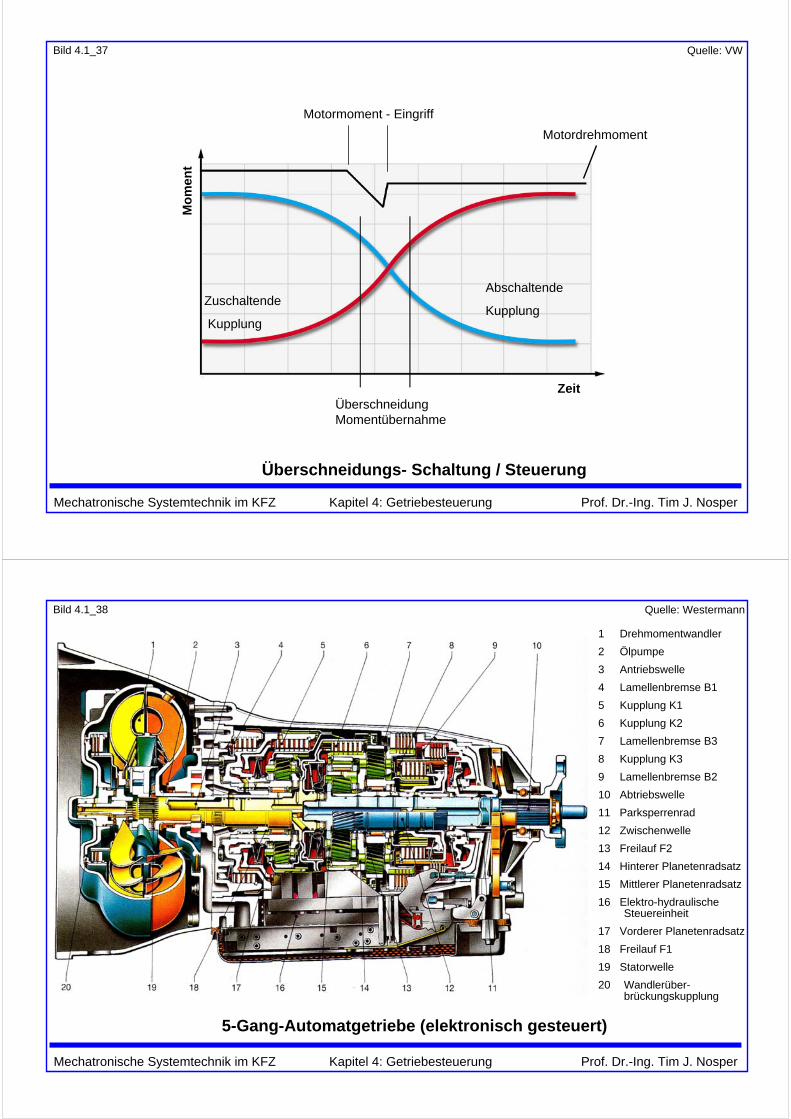
Überschneidungs- Schaltung / Steuerung
Bild 4.1_37 Quelle: VW
Motordrehmoment
Zuschaltende
Kupplung
Abschaltende
Kupplung
Motormoment - Eingriff
Zeit
Mo
men
t
ÜberschneidungMomentübernahme
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
1 Drehmomentwandler
2 Ölpumpe
3 Antriebswelle
4 Lamellenbremse B1
5 Kupplung K1
6 Kupplung K2
7 Lamellenbremse B3
8 Kupplung K3
9 Lamellenbremse B2
10 Abtriebswelle
11 Parksperrenrad
12 Zwischenwelle
13 Freilauf F2
14 Hinterer Planetenradsatz
15 Mittlerer Planetenradsatz
16 Elektro-hydraulische Steuereinheit
17 Vorderer Planetenradsatz
18 Freilauf F1
19 Statorwelle
20 Wandlerüber-brückungskupplung
5-Gang-Automatgetriebe (elektronisch gesteuert)
Bild 4.1_38 Quelle: Westermann
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
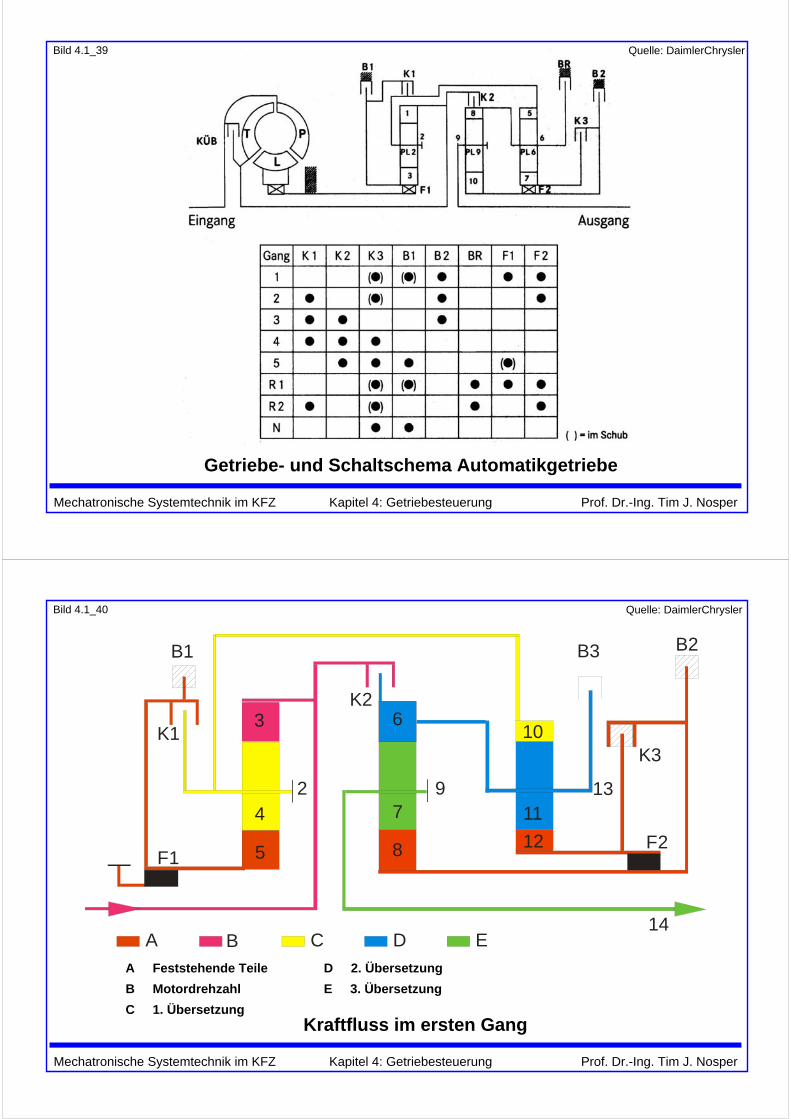
Getriebe- und Schaltschema Automatikgetriebe
Bild 4.1_39 Quelle: DaimlerChrysler
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Kraftfluss im ersten Gang
Bild 4.1_40 Quelle: DaimlerChrysler
A Feststehende Teile D 2. Übersetzung
B Motordrehzahl E 3. Übersetzung
C 1. Übersetzung
A EDCB
F1
B1
3
4
5
2
K2
K1
97
6
8 12
11
10
13
B3 B2
K3
F2
14
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
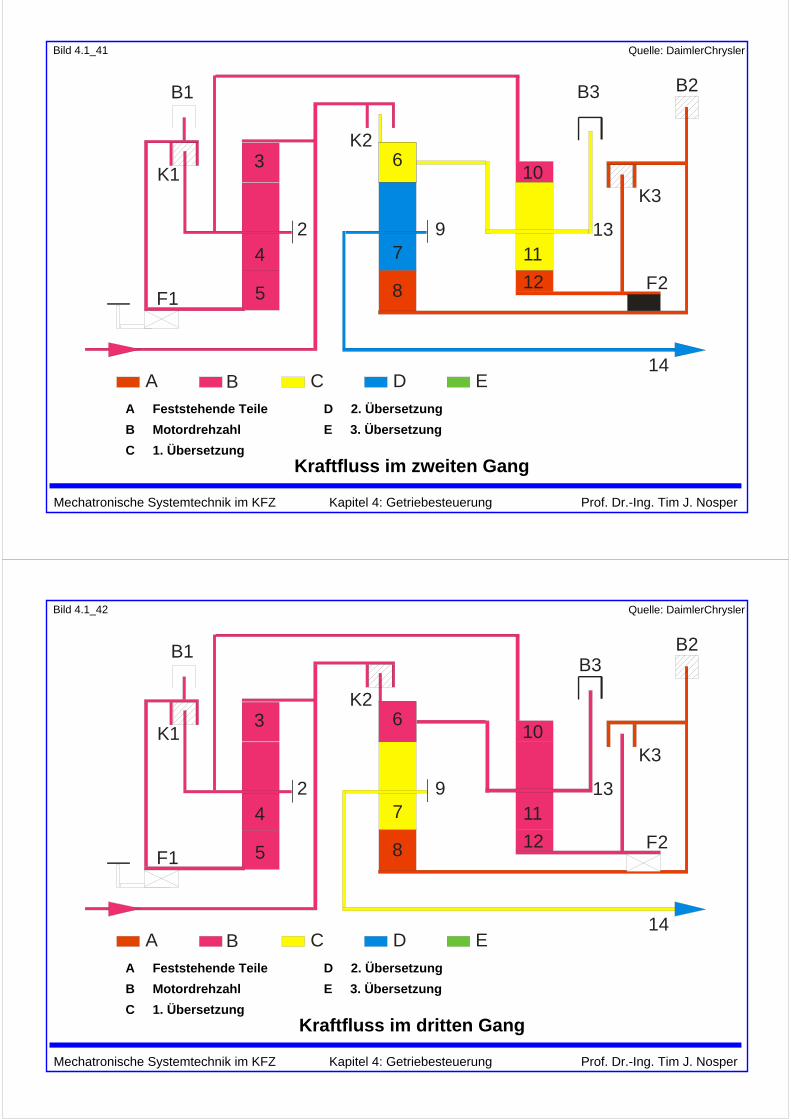
Kraftfluss im zweiten Gang
Bild 4.1_41 Quelle: DaimlerChrysler
A Feststehende Teile D 2. Übersetzung
B Motordrehzahl E 3. Übersetzung
C 1. Übersetzung
A EDCB
B1
3
4
5
2
K2
K1
97
6
8 12
11
10
13
B3 B2
K3
F2
14
F1
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Kraftfluss im dritten Gang
Bild 4.1_42 Quelle: DaimlerChrysler
A Feststehende Teile D 2. Übersetzung
B Motordrehzahl E 3. Übersetzung
C 1. Übersetzung
A EDCB
B1
3
4
5
2
K2
K1
97
6
8 12
11
10
13
B3B2
K3
F2
14
F1
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
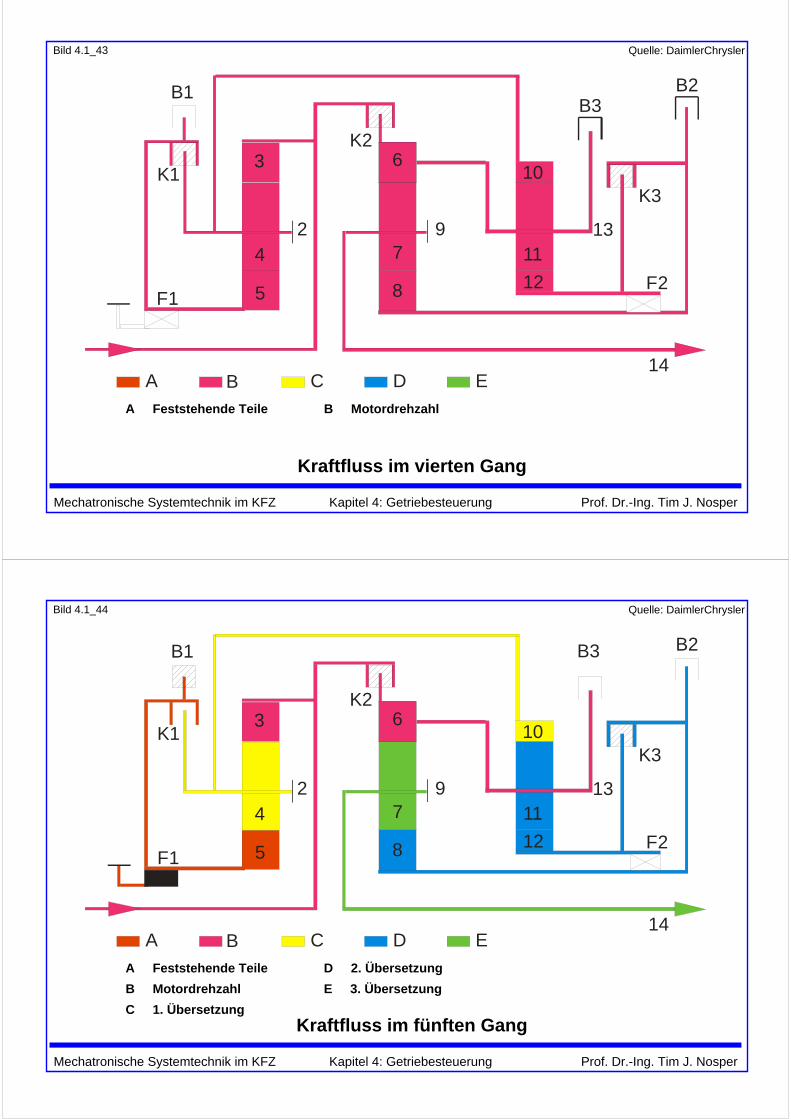
Kraftfluss im vierten Gang
Bild 4.1_43 Quelle: DaimlerChrysler
A Feststehende Teile B Motordrehzahl
A EDCB
B1
3
4
5
2
K2
K1
97
6
8 12
11
10
13
B3B2
K3
F2
14
F1
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Kraftfluss im fünften Gang
Bild 4.1_44 Quelle: DaimlerChrysler
A Feststehende Teile D 2. Übersetzung
B Motordrehzahl E 3. Übersetzung
C 1. Übersetzung
A EDCB
F1
B1
3
4
5
2
K2
K1
97
6
8 12
11
10
13
B3 B2
K3
F2
14
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
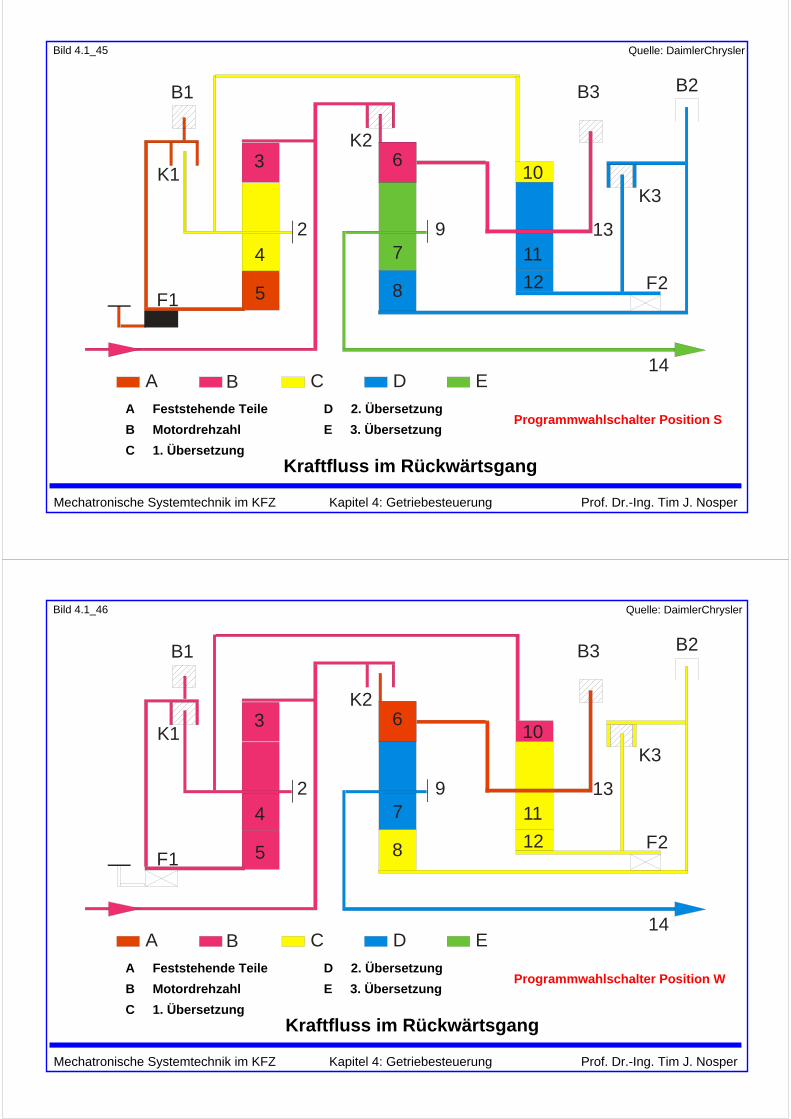
Kraftfluss im Rückwärtsgang
Bild 4.1_45 Quelle: DaimlerChrysler
A Feststehende Teile D 2. Übersetzung
B Motordrehzahl E 3. Übersetzung
C 1. Übersetzung
Programmwahlschalter Position S
A EDCB
B1
3
4
5
2
K2
K1
97
6
8 12
11
10
13
B3 B2
K3
F2
14
F1
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Kraftfluss im Rückwärtsgang
Bild 4.1_46 Quelle: DaimlerChrysler
A Feststehende Teile D 2. Übersetzung
B Motordrehzahl E 3. Übersetzung
C 1. Übersetzung
Programmwahlschalter Position W
A EDCB
B1
3
4
5
2
K2
K1
97
6
8 12
11
10
13
B3 B2
K3
F2
14
F1
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
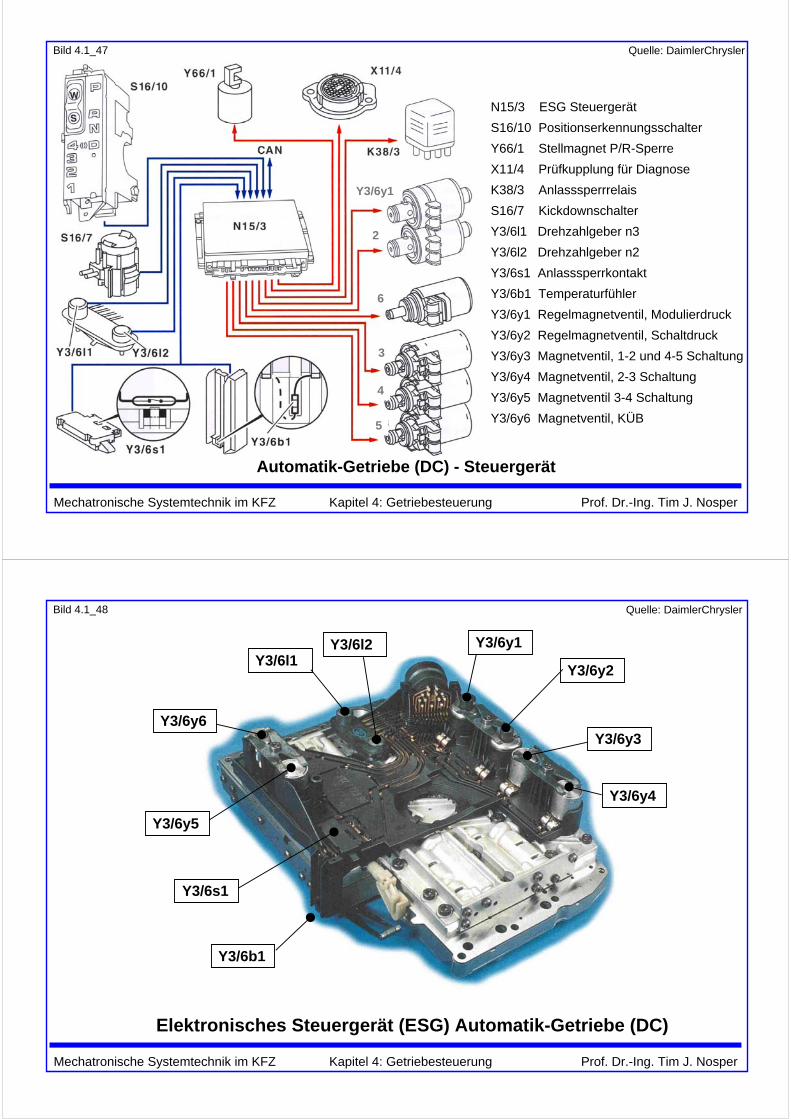
Bild 4.1_47 Quelle: DaimlerChrysler
N15/3 ESG Steuergerät
S16/10 Positionserkennungsschalter
Y66/1 Stellmagnet P/R-Sperre
X11/4 Prüfkupplung für Diagnose
K38/3 Anlasssperrrelais
S16/7 Kickdownschalter
Y3/6l1 Drehzahlgeber n3
Y3/6l2 Drehzahlgeber n2
Y3/6s1 Anlasssperrkontakt
Y3/6b1 Temperaturfühler
Y3/6y1 Regelmagnetventil, Modulierdruck
Y3/6y2 Regelmagnetventil, Schaltdruck
Y3/6y3 Magnetventil, 1-2 und 4-5 Schaltung
Y3/6y4 Magnetventil, 2-3 Schaltung
Y3/6y5 Magnetventil 3-4 Schaltung
Y3/6y6 Magnetventil, KÜB
3
4
5
6
2
Y3/6y1
Automatik-Getriebe (DC) - Steuergerät
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
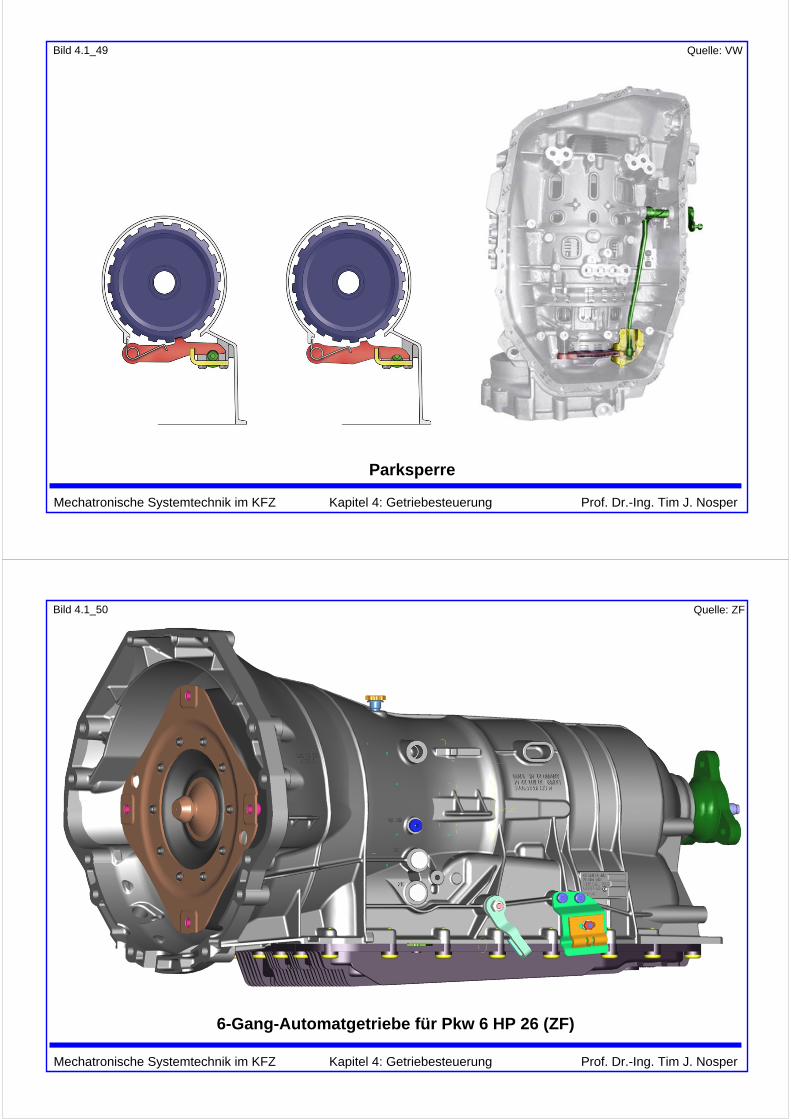
Elektronisches Steuergerät (ESG) Automatik-Getriebe (DC)
Bild 4.1_48 Quelle: DaimlerChrysler
Y3/6y1
Y3/6y2
Y3/6y3
Y3/6y4
Y3/6y5
Y3/6y6
Y3/6l1Y3/6l2
Y3/6s1
Y3/6b1
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
283_034
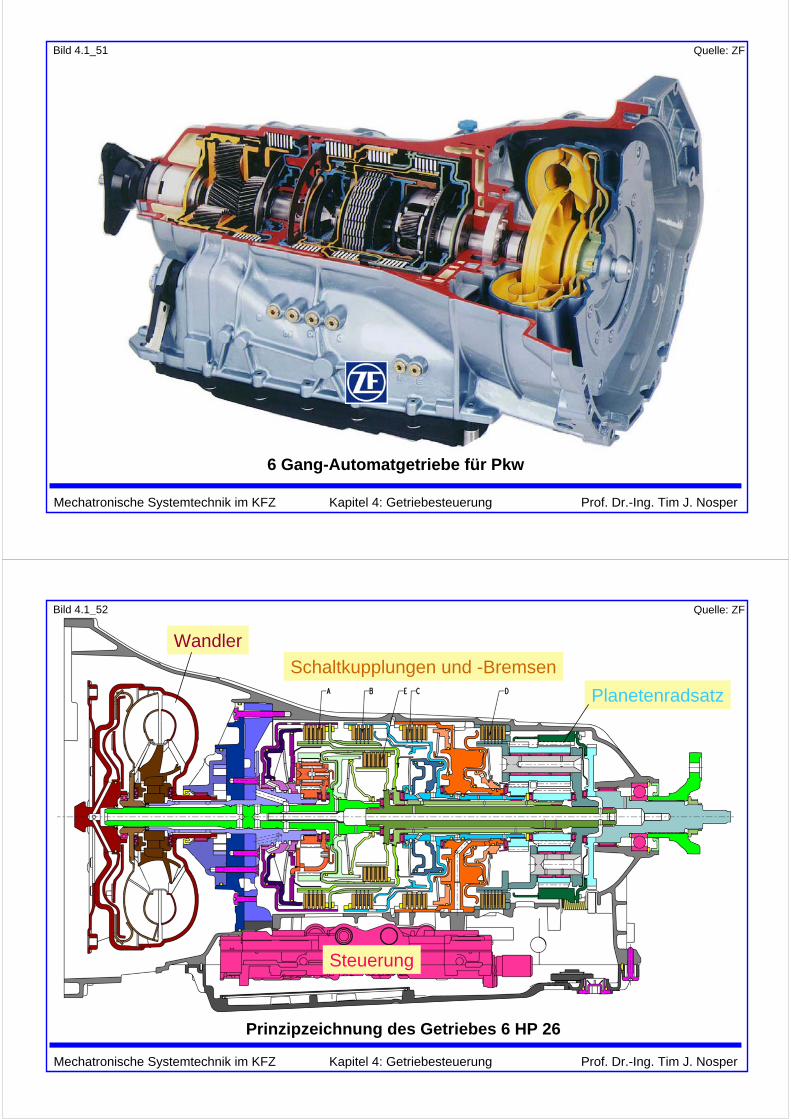
Bild 4.1_49 Quelle: VW
Parksperre
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
6-Gang-Automatgetriebe für Pkw 6 HP 26 (ZF)
Bild 4.1_50 Quelle: ZF
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
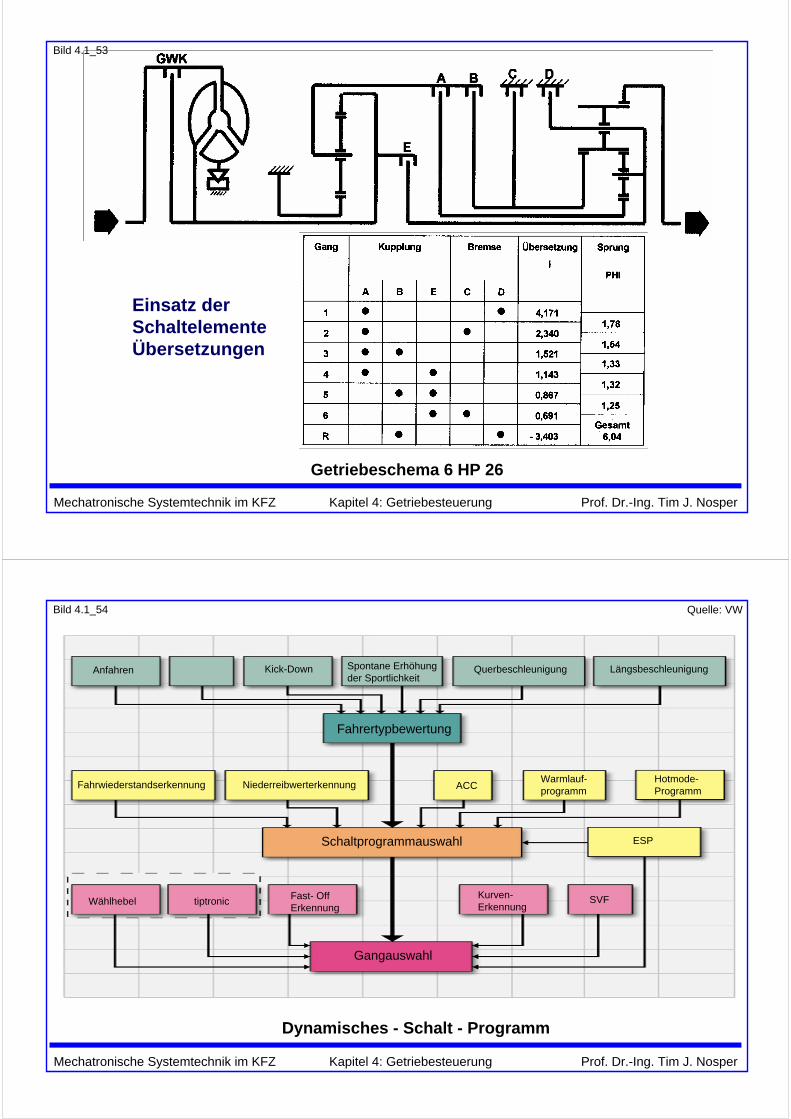
Bild 4.1_51
6 Gang-Automatgetriebe für Pkw
Quelle: ZF
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Bild 4.1_52 Quelle: ZF
Prinzipzeichnung des Getriebes 6 HP 26
Wandler
Schaltkupplungen und -Bremsen
Steuerung
Planetenradsatz
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Einsatz derSchaltelementeÜbersetzungen
Bild 4.1_53
Getriebeschema 6 HP 26
Mechatronische Systemtechnik im KFZ Kapitel 4: Getriebesteuerung Prof. Dr.-Ing. Tim J. Nosper
Anfahren
NiederreibwerterkennungFahrwiederstandserkennung
Fahrertypbewertung
LängsbeschleunigungKick-Down QuerbeschleunigungSpontane Erhöhungder Sportlichkeit
ACCWarmlauf-programm
Hotmode-Programm
ESPSchaltprogrammauswahl
Gangauswahl
Wählhebel tiptronic Fast- OffErkennung
Kurven-Erkennung
SVF
Bild 4.1_54 Quelle: VW
Dynamisches - Schalt - Programm