Embed Size (px)
Citation preview
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 1/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-1
2. Lagrange-Gleichungen
●
Mit dem Prinzip der virtuellen Leistung lassen sich dieBewegungsgleichungen für komplexe Systeme einfachaufstellen.
● Aus dem Prinzip der virtuellen Leistung lassen sich dieLagrange-Gleichungen herleiten, mit denen sich das Auf-
stellen der Bewegungsgleichungen weiter vereinfacht.● Besonders einfach werden die Lagrange-Gleichungen für
konservative Systeme. Konservative Systeme sind Sys-teme, bei denen alle eingeprägten Kräfte konservativ sind.
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 2/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-2
2. Lagrange-Gleichungen
2.1 Lagrange-Gleichungen für allgemeine Systeme2.2 Lagrange-Gleichungen für konservative Systeme
2.3 Beispiel: Federpendel
2.4 Beispiel: Hallenkran
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 3/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-3
2.1 Allgemeine Systeme
●
Verallgemeinerte Koordinaten: – Bei einem System von n Massenpunkten wird die Lage der
Massenpunkte durch n Ortsvektoren r i beschrieben.
– Wenn das System f Freiheitsgrade hat, dann sind die n Ortsvektoren Funktionen von f unabhängigen verallge-meinerten Koordinaten q
j :
– Für die virtuellen Geschwindigkeiten gelten die linearisiertenBeziehungen
r i =r i q1 , , q f , i =1, , n
˙r i =
∂ r i
∂q1 q1
∂r i
∂q f q f =∑ j
∂r i
∂ q j q j , i =1, , n
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 4/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-4
2.1 Allgemeine Systeme
●
Virtuelle Leistung der eingeprägten Kräfte: – Für die virtuelle Leistung der eingeprägten Kräfte gilt:
– Die Reihenfolge der Summation darf vertauscht werden:
– Mit den verallgemeinerten Kräften
folgt:
P =∑i
F i
e⋅ r i =∑
i
F i
e ⋅∑ j
∂ r i
∂ q j
q j =∑i
∑ j
F i
e ⋅∂ r
i
∂ q j
q j
P =∑ j
∑i
F i
e ⋅∂ r
i
∂ q j
q j
Q j =∑i
F i
e ⋅∂ r
i
∂ q j
P =∑ j
Q j q j
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 5/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-5
2.1 Allgemeine Systeme
–
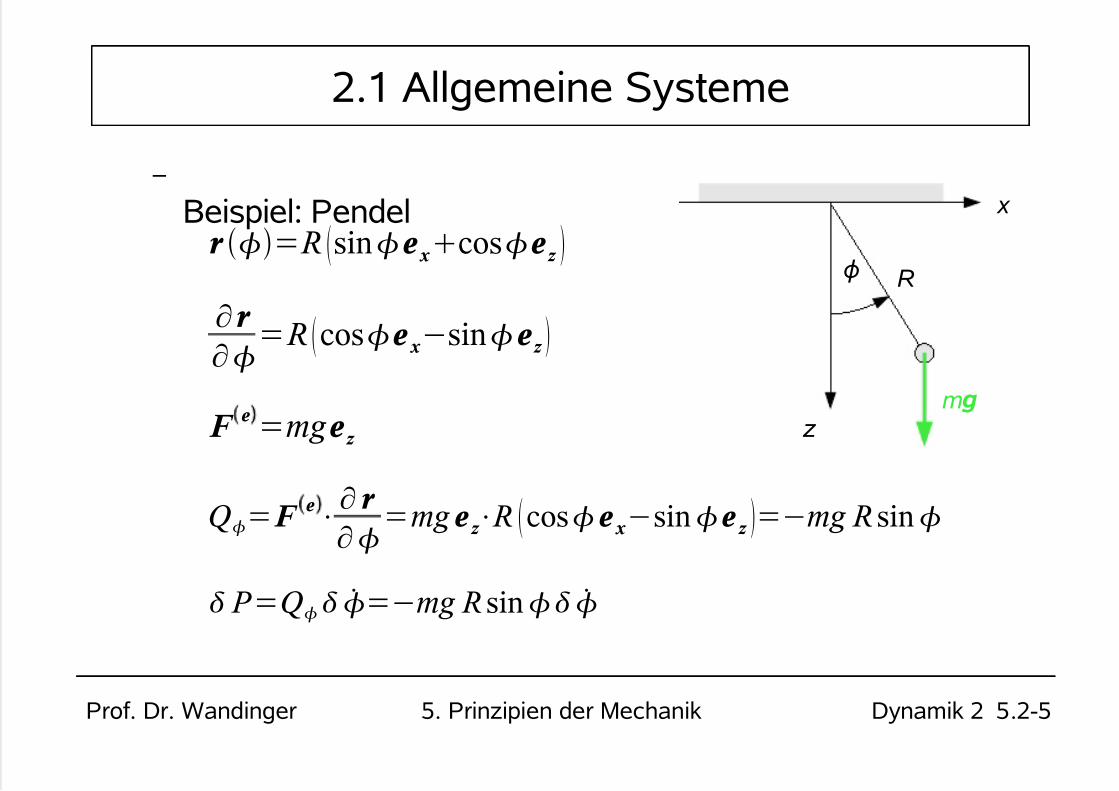
Beispiel: Pendel x
z
Rφ
m g
r = R sin e x
cose z
F e =mg e
z
∂ r
∂= R cose
x−sin e
z
Q= F e ⋅
∂ r
∂ =mg e
z ⋅ R cose
x−sine
z =−mg R sin
P =Q =−mg R sin
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 6/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-6
2.1 Allgemeine Systeme
●
Virtuelle Leistung der Trägheitskräfte: – Für die virtuelle Leistung der Trägheitskräfte gilt:
– Wegen
gilt:
P T =−∑i
mi r i ⋅ r i =−∑
i
mi r i ⋅∑ j
∂ r i
∂ q j
q j
=−∑i ∑ j mi r i ⋅
∂ r i
∂ q j q j =−∑ j ∑i
mi r i ⋅
∂ r i
∂ q j q j
d
dt r i ⋅∂ r i
∂ q j = r
i ⋅
∂ r i
∂ q j
r i ⋅
∂ r i
∂ q j
mi r i ⋅∂ r i
∂ q j
=mi d dt
r i ⋅∂ r i
∂ q j −mi r i ⋅∂ r i
∂ q j
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 7/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-7
2.1 Allgemeine Systeme
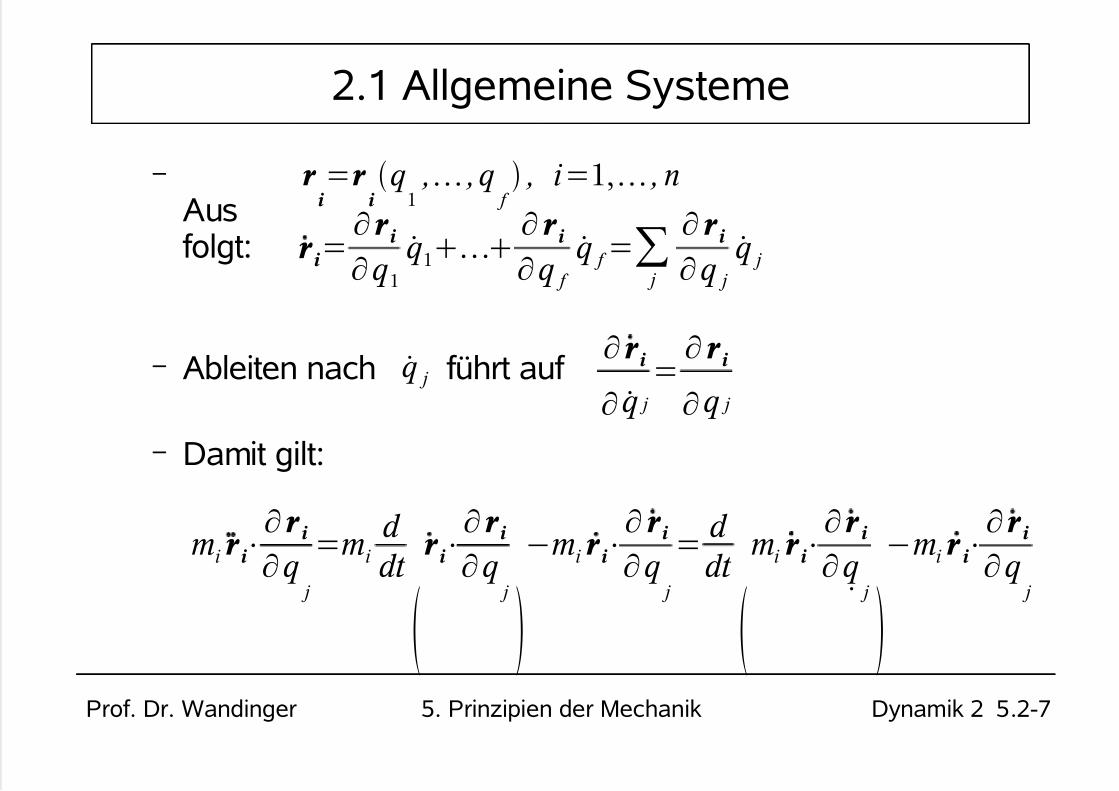
–
Ausfolgt:
– Ableiten nach führt auf
– Damit gilt:
r i
=r i
q1
, , q f
, i =1, , n
r i =
∂ r i
∂ q1
q1
∂ r i
∂ q f
q f =∑ j
∂ r i
∂ q j
q j
q j
∂ r i
∂ q j
=∂ r
i
∂ q j
mi r i ⋅∂ r
i
∂ q j
=mi
d
dt
r i ⋅
∂ r i
∂ q j
−mi r i ⋅
∂ r i
∂ q j
=d
dt
mi r i ⋅
∂ r i
∂˙q
j
−mi r i ⋅
∂ r i
∂ q j
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 8/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-8
2.1 Allgemeine Systeme
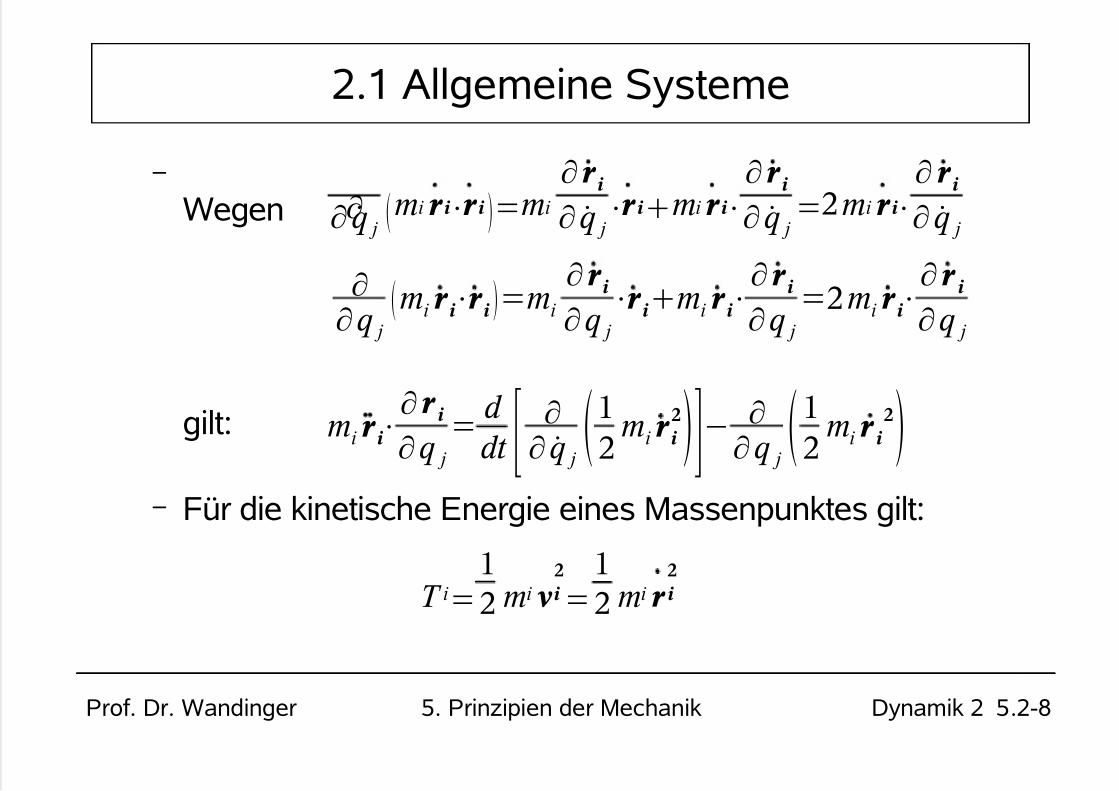
–
Wegen
gilt:
– Für die kinetische Energie eines Massenpunktes gilt:
∂∂ q j mi r i ⋅r i =mi
∂ r i
∂ q j ⋅r i mi r i ⋅
∂ r i
∂ q j =2mi r i ⋅
∂ r i
∂ q j
∂∂ q j
mi r i ⋅r i =mi
∂ r i
∂ q j
⋅r i mi r i ⋅
∂ r i
∂ q j
=2mi r i ⋅∂ r
i
∂ q j
mi r i ⋅∂ r
i
∂ q j
=d
dt [ ∂∂ q j
12 mi r i 2]− ∂
∂ q j 12 mi r i
2
T i =1
2 mi v i
2
=1
2 mi r i 2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 9/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-9
2.1 Allgemeine Systeme
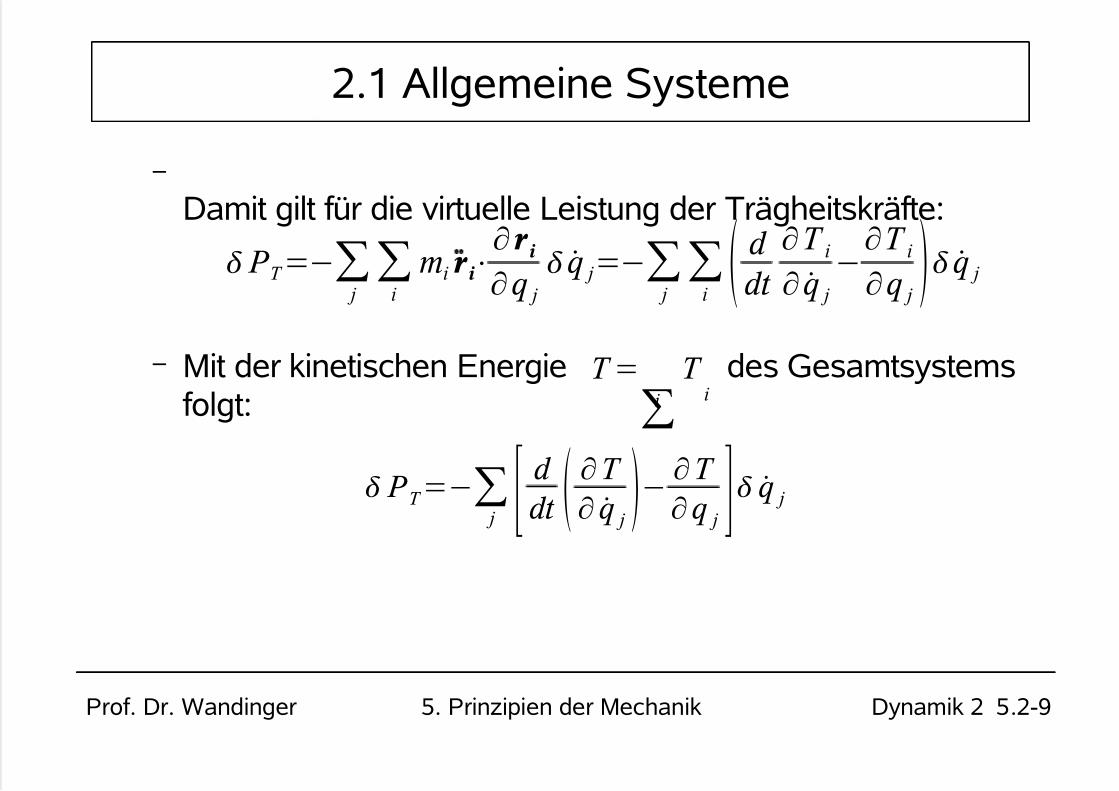
–
Damit gilt für die virtuelle Leistung der Trägheitskräfte:
– Mit der kinetischen Energie des Gesamtsystemsfolgt:
P T =−∑ j
∑i
mi r i ⋅∂r
i
∂ q j
q j =−∑ j
∑i
d
dt
∂T i
∂ q j
−∂T i
∂q j q j
T =
∑i
T i
P T =−∑ j [ d
dt ∂ T
∂ q j −
∂ T
∂ q j ] q j
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 10/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-10
2.1 Allgemeine Systeme
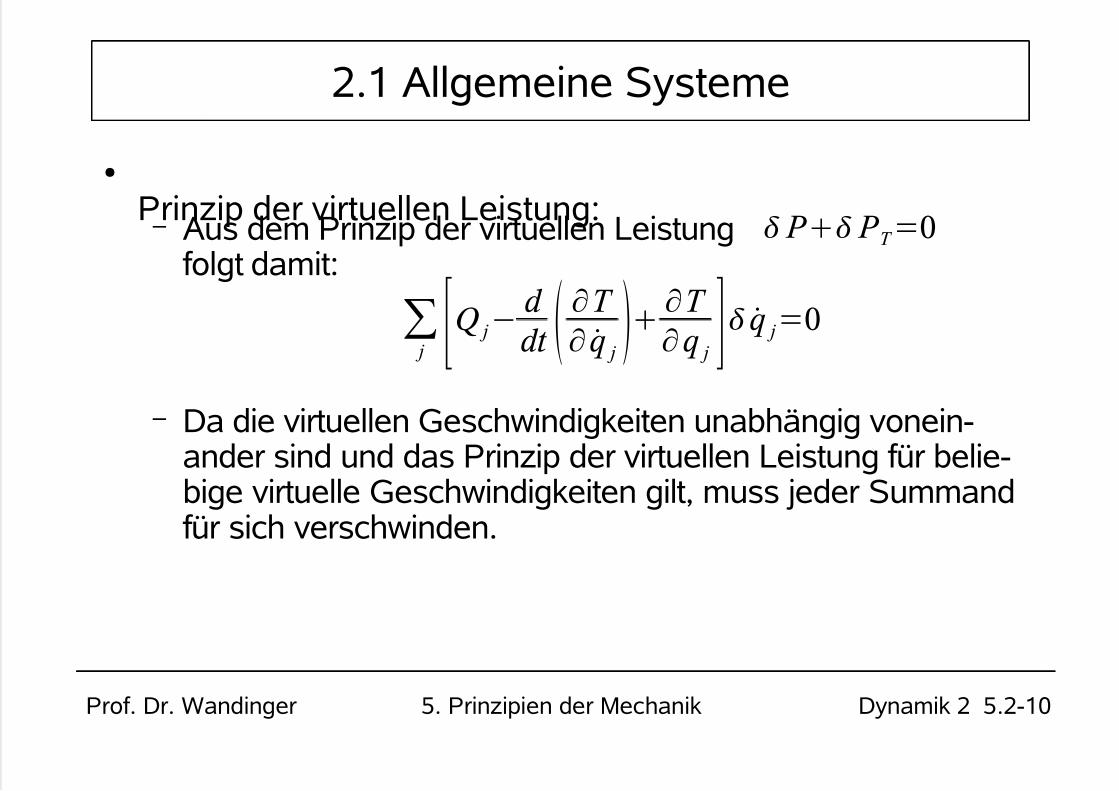
●
Prinzip der virtuellen Leistung: – Aus dem Prinzip der virtuellen Leistung
folgt damit:
– Da die virtuellen Geschwindigkeiten unabhängig vonein-ander sind und das Prinzip der virtuellen Leistung für belie-bige virtuelle Geschwindigkeiten gilt, muss jeder Summandfür sich verschwinden.
P P T =0
∑ j [Q j −
d
dt ∂T
∂ q j ∂T
∂ q j ] q j =0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 11/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-11
2.1 Allgemeine Systeme
●
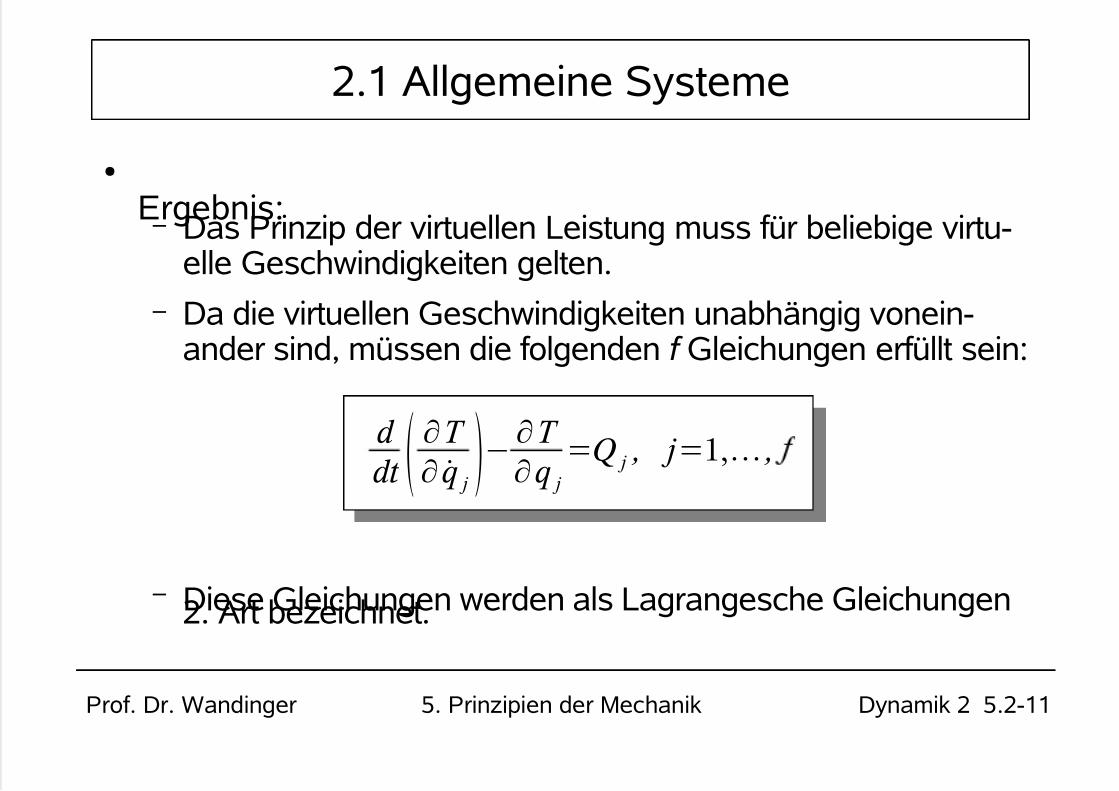
Ergebnis: – Das Prinzip der virtuellen Leistung muss für beliebige virtu-
elle Geschwindigkeiten gelten. – Da die virtuellen Geschwindigkeiten unabhängig vonein-
ander sind, müssen die folgenden f Gleichungen erfüllt sein:
– Diese Gleichungen werden als Lagrangesche Gleichungen2. Art bezeichnet.
d
dt ∂ T
∂ q j − ∂ T
∂ q j
=Q j , j =1, ,
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 12/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-12
2.1 Allgemeine Systeme
●
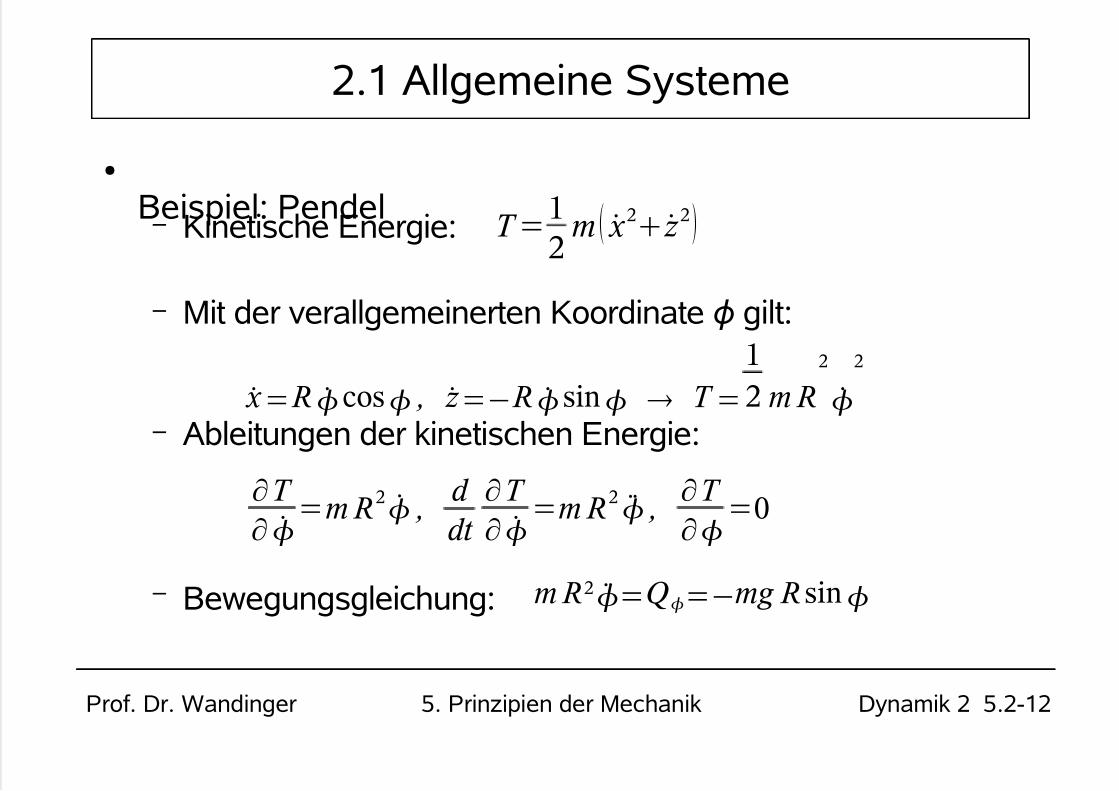
Beispiel: Pendel – Kinetische Energie:
– Mit der verallgemeinerten Koordinate φ gilt:
– Ableitungen der kinetischen Energie:
– Bewegungsgleichung:
T =1
2m ˙ x
2 ˙ z 2
˙ x = R cos , ˙ z =− R sin T =
1
2 m R
2
2
∂ T
∂ =m R
2 ,d
dt
∂ T
∂ =m R
2 ,∂T
∂=0
m R2=Q=−mg R sin
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 13/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-13
2.2 Konservative Systeme
●
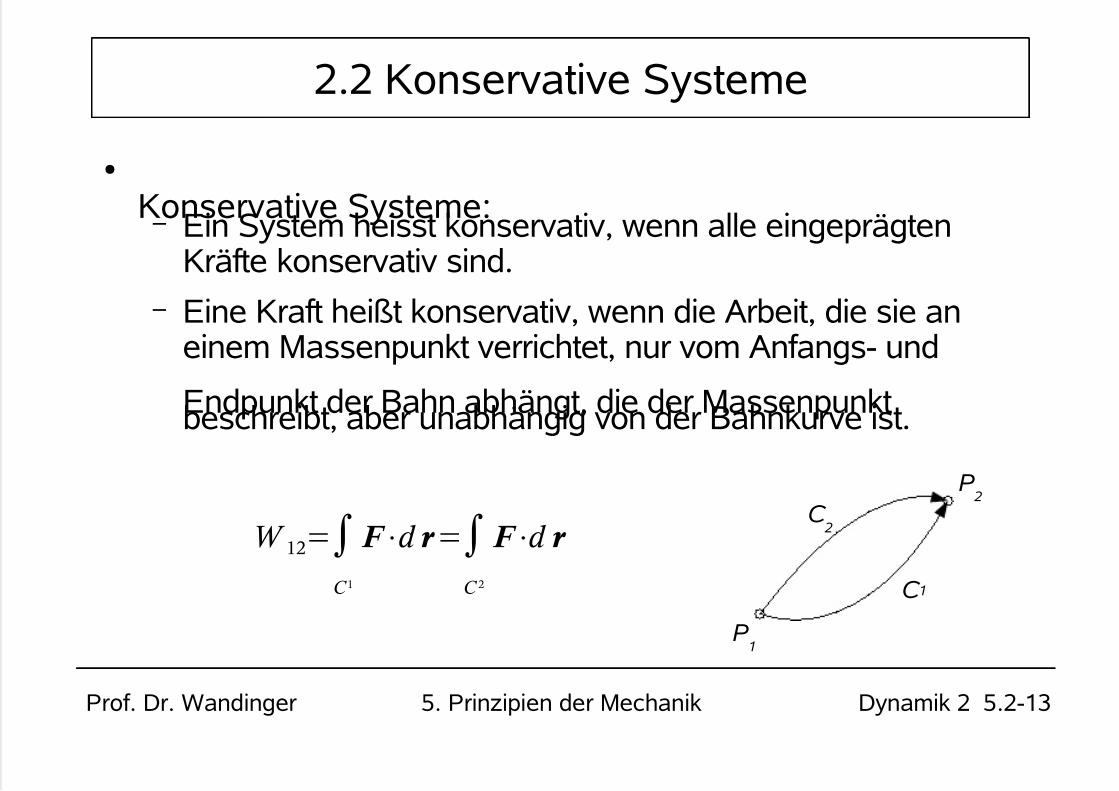
Konservative Systeme: – Ein System heisst konservativ, wenn alle eingeprägten
Kräfte konservativ sind. – Eine Kraft heißt konservativ, wenn die Arbeit, die sie an
einem Massenpunkt verrichtet, nur vom Anfangs- und
Endpunkt der Bahn abhängt, die der Massenpunktbeschreibt, aber unabhängig von der Bahnkurve ist.
C 1
C 2
P1
P 2
W 12=∫C 1
F ⋅d r =∫C 2
F ⋅d r
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 14/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-14
2.2 Konservative Systeme
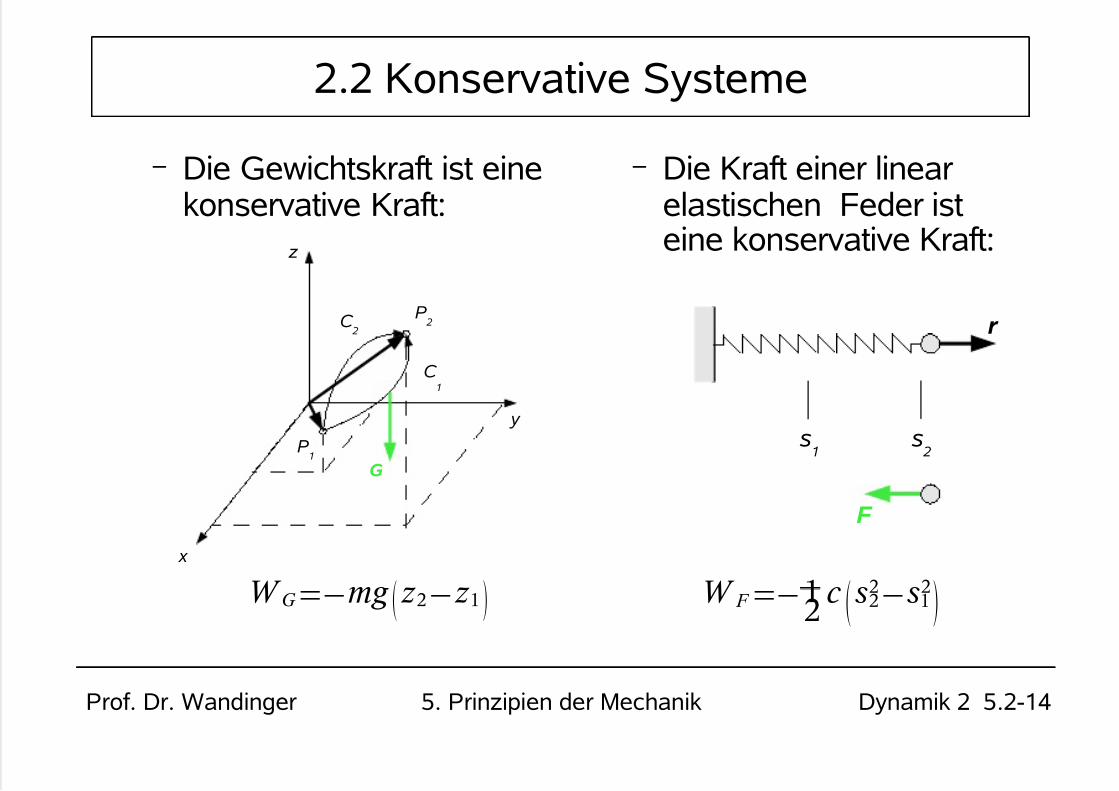
– Die Gewichtskraft ist einekonservative Kraft:
– Die Kraft einer linear elastischen Feder isteine konservative Kraft:
x
y
z
G
P1
P 2
C 1
C 2
W G=−mg z 2− z 1
F
s1
s 2
r
W F =−12
c s22−s1
2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 15/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-15
2.2 Konservative Systeme
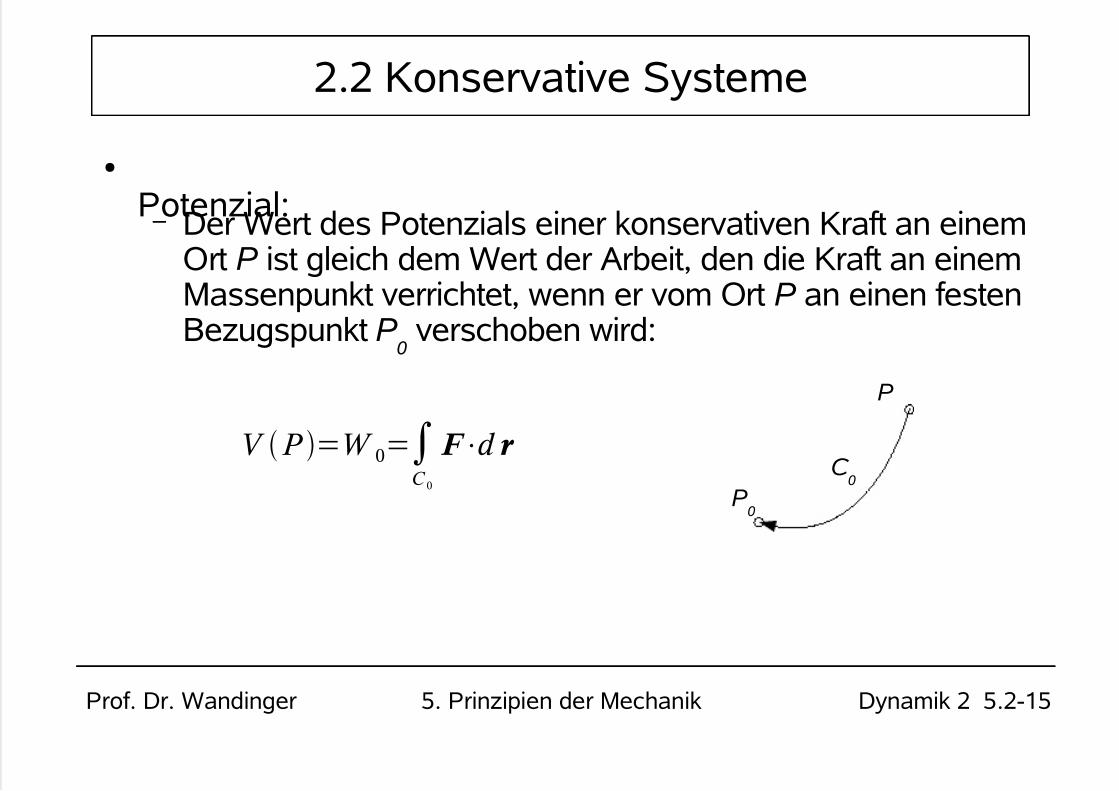
●
Potenzial: – Der Wert des Potenzials einer konservativen Kraft an einemOrt P ist gleich dem Wert der Arbeit, den die Kraft an einemMassenpunkt verrichtet, wenn er vom Ort P an einen festenBezugspunkt P
0verschoben wird:
P0
P
C 0
V P =W 0=∫C 0
F ⋅d r
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 16/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-16
2.2 Konservative Systeme
– Potenzial der Gewichtskraft:● Wird der Bezugspunkt bei z = 0 gewählt, dann gilt für
das Potenzial der Gewichtskraft in der Nähe der Erdoberfläche:
– Potenzial der Federkraft:● Wird als Bezugspunkt der unverformte Zustand gewählt, dann
gilt für das Potenzial der Federkraft:
V G x , y , z =mg z
V F s=1
2
c s2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 17/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-17
2.2 Konservative Systeme
●
Zusammenhang zwischen Kraft und Potenzial: – Für eine infinitesimale Änderung des Ortes gilt:
– Auf dem Weg vom Punkt mit den Koordinaten ( x , y , z ) anden Punkt mit den Koordinaten ( x+dx , y+dy , z+dz ) verrich-tet die Kraft die Arbeit
V x dx , ydy , z dz =V x , y , z dV
=V x , y , z ∂V
∂ x dx
∂ V
∂ ydy
∂V
∂ z dz
dV =∂ V
∂ x dx
∂ V
∂ ydy
∂V
∂ z dz
dW = F ⋅d r = F x dx F y dy F z dz
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 18/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-18
2.2 Konservative Systeme
– Aus folgt:
– Die Kraft ist gleich dem negativen Gradienten desPotentials.
– Schwerkraft:
– Federkraft:
dV =−dW F x =−∂ V ∂ x
F y=−∂ V
∂ y F =−
∂V
∂ r
F z =−∂ V
∂ z
V G x , y , z =mg z G z =−∂ V G
∂ z =−mg
V F s=1
2c s
2 F s=−∂ V F
∂ s=−c s
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 19/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-19
2.2 Konservative Systeme
●
Systeme von Massenpunkten: – Für ein System von Massenpunkten ist die potenzielleEnergie gleich der Summe der potenziellen Energien der Massenpunkte:
– Für die Kraft auf einen Massenpunkt folgt:
– Damit gilt für die verallgemeinerten Kräfte:
V r 1 , , r
n=∑
i
V i r i
F i
e =−∂ V i
∂ r i
=−∂V
∂ r i
Q j =∑i F i
e⋅
∂ r i
∂ q j =−∑i
∂V ∂ r i
⋅∂ r
i
∂ q j =− ∂ V ∂ q j
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 20/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-20
2.2 Konservative Systeme
– Dabei ist
● Lagrangesche Gleichungen für konservative Systeme:
– Wenn alle eingeprägten Kräfte konservative Kräfte sind,lauten die Lagrangeschen Gleichungen:
– Die Funktion
wird als Lagrangesche Funktion bezeichnet.
V q1
, , q f
=V
r 1q
1
, , q f
, , r n
q1
, , q f
d
dt ∂ T
∂ q j −∂ T
∂ q j
=− ∂V
∂ q j
d
dt ∂ T
∂ q j − ∂∂ q j
T −V =0
L=T −V
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 21/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-21
2.2 Konservative Systeme
– Da die potenzielle Energie nicht von den Geschwindigkeitenabhängt, erfüllt die Lagrangesche Funktion die Gleichungen
– Das sind die Lagrangeschen Gleichungen 2. Art für konser-vative Systeme.
– Zur Ermittlung der Bewegungsgleichungen müssen nur diekinetische und die potenzielle Energie berechnet werden.
– Die Bewegungsgleichungen folgen durch Differenzierennach den verallgemeinerten Koordinaten.
d
dt ∂ L
∂ q j − ∂ L
∂ q j
=0, j =1, , f
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 22/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-22
2.2 Konservative Systeme
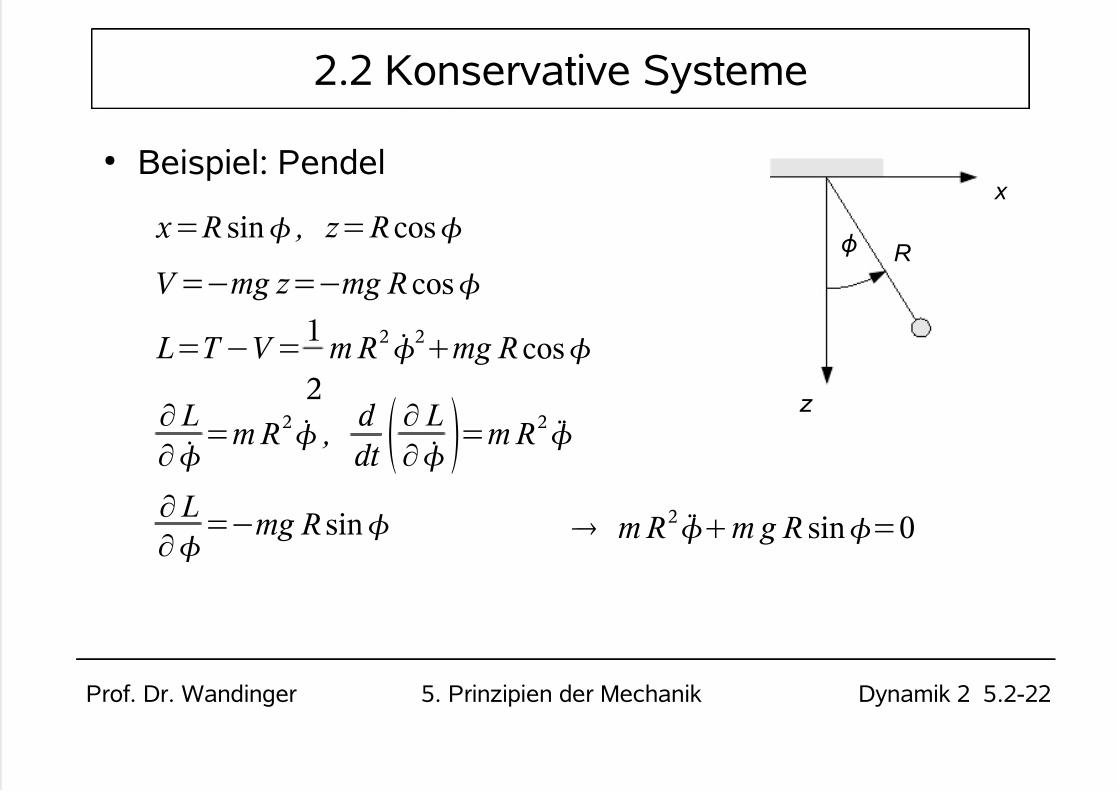
● Beispiel: Pendel x
z
Rφ x = R sin , z = R cos
V =−mg z =−mg R cos
L=T −V =1
2
m R2 2mg R cos
∂ L
∂ =m R
2 ,
d
dt ∂ L
∂ =m R2
∂ L
∂ =−mg R sin m R
2 m g R sin=0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 23/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-23
2.2 Konservative Systeme
● Systeme mit konservativen und dissipativen Kräfte:
– Wirken auf ein System konservative und dissipative Kräfte,dann können die konservativen Kräfte in der Lagrange-Funktion berücksichtigt werden.
– Die Lagrange-Gleichungen enthalten zusätzlich die verall-
gemeinerten dissipativen Kräfte:
d
dt ∂ L
∂ q j − ∂ L
∂ q j
=Q j
d , j =1, , f
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 24/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-24
2.3 Beispiel: Federpendel
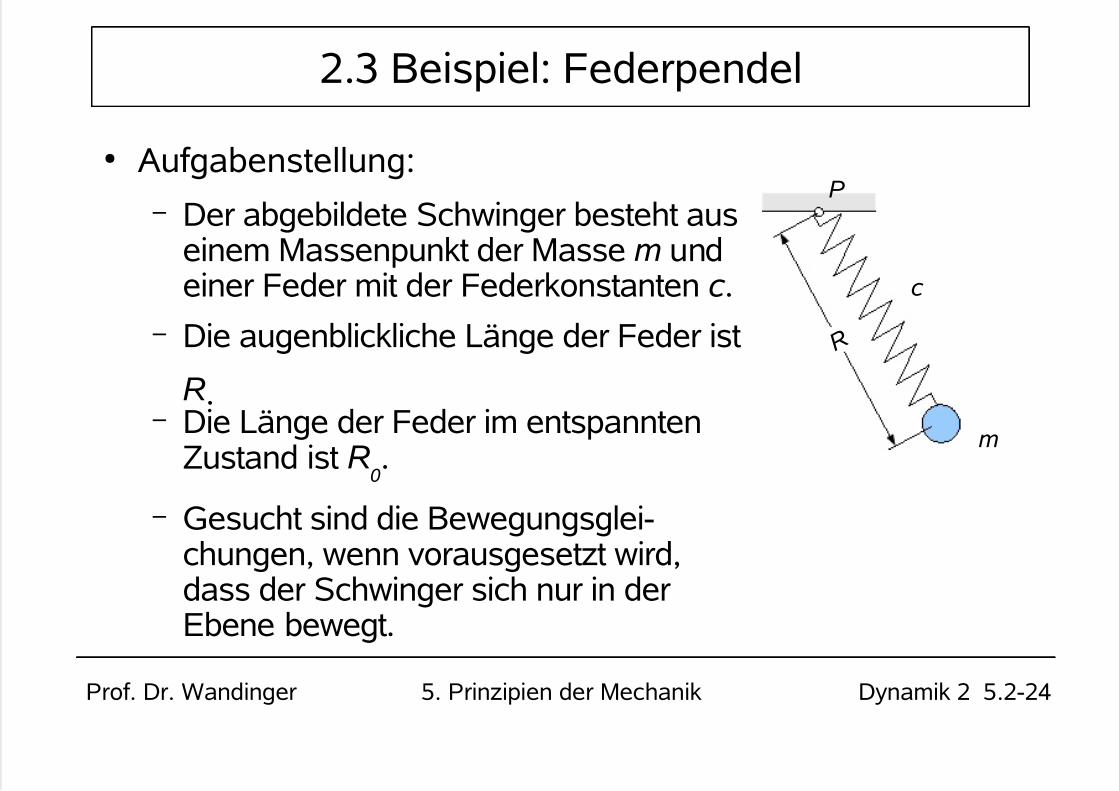
● Aufgabenstellung:
– Der abgebildete Schwinger besteht auseinem Massenpunkt der Masse m undeiner Feder mit der Federkonstanten c .
– Die augenblickliche Länge der Feder ist
R. – Die Länge der Feder im entspannten
Zustand ist R0.
– Gesucht sind die Bewegungsglei-chungen, wenn vorausgesetzt wird,dass der Schwinger sich nur in der Ebene bewegt.
c
m
P
R
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 25/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-25
2.3 Beispiel: Federpendel
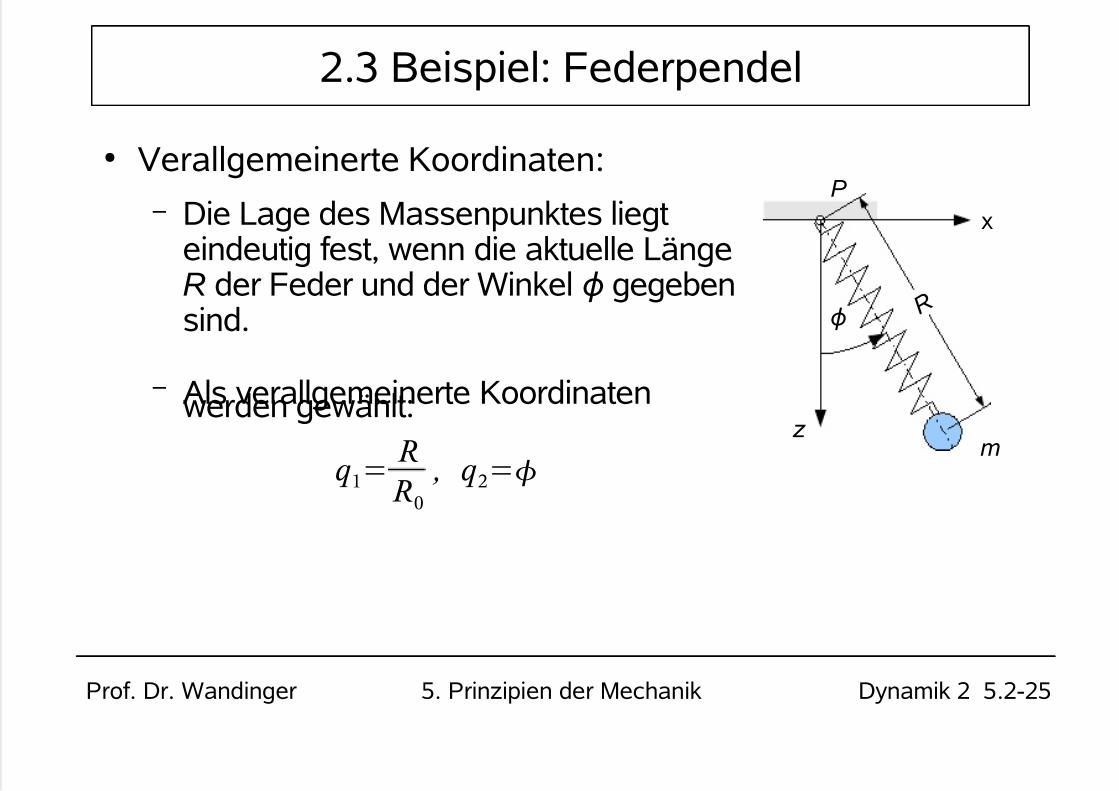
● Verallgemeinerte Koordinaten:
– Die Lage des Massenpunktes liegteindeutig fest, wenn die aktuelle LängeR der Feder und der Winkel φ gegebensind.
– Als verallgemeinerte Koordinatenwerden gewählt:m
P
R φ
z
x
q1=R
R0
, q2=
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 26/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-26
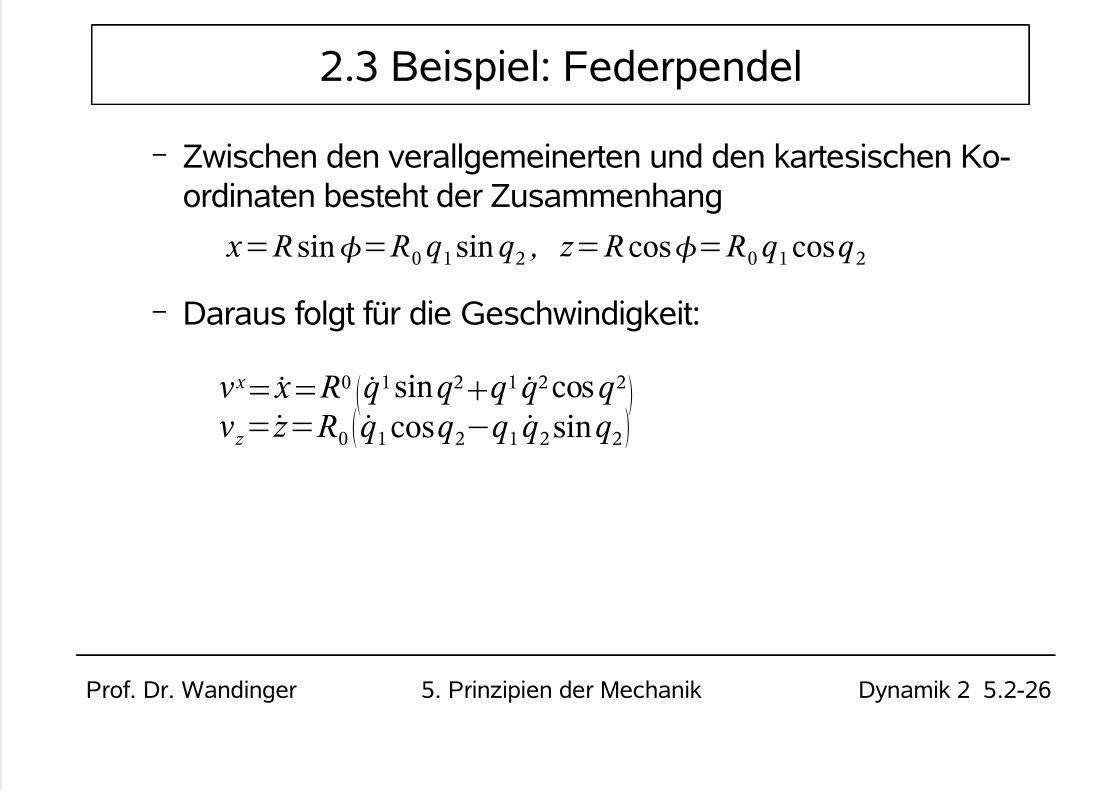
2.3 Beispiel: Federpendel
– Zwischen den verallgemeinerten und den kartesischen Ko-ordinaten besteht der Zusammenhang
– Daraus folgt für die Geschwindigkeit:
x = R sin= R0
q1sinq
2 , z = R cos= R
0q
1cosq2
v x = ˙ x = R0 q1sinq2q1 q2cosq2 v z = ˙ z = R0 q1cosq2−q1 q2sinq2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 27/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-27
2.3 Beispiel: Federpendel
● Kinetische Energie:
– Für die kinetische Energie des Massenpunkts gilt:
T q1 ,q2 , q1 , q2=1
2m v x
2v z
2
=1
2m R0
2
[ q1sinq2q1 q2cosq2
2
q1cosq2−q1 q2sinq2
2
]=
1
2m R0
2 q1
2q1
2q2
2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 28/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-28
2.3 Beispiel: Federpendel
● Potenzielle Energie:
– Die potenzielle Energie setzt sich zusammen aus der po-tenziellen Energie der Federkraft und der potenziellenEnergie der Gewichtskraft.
– Als Bezugspunkt für die potenzielle Energie der Federkraft
wird die entspannte Feder gewählt. – Dann gilt für die potenzielle Energie der Federkraft:
V F q1 , q2=1
2c R− R0
2=
1
2c R 0
2 q1−1 2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 29/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-29
2.3 Beispiel: Federpendel
– Als Bezugspunkt für die potenzielle Energie der Ge-wichtskraft wird Punkt P gewählt.
– Dann gilt für die potenzielle Energie der Gewichtskraft:
V G q1 , q2=−mg z =−mg R 0 q1 cos q2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 30/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-30
2.3 Beispiel: Federpendel
● Lagrange-Funktion:
– Für die Lagrange-Funktion gilt:
– Dabei ist
– Die Lagrange-Funktion ist also gegeben durch
Lq1 , q2 , q1 , q2=T q1 , q2 , q1 , q2−V q1 , q2
V q1 , q2=V F q1 ,q2V G q1 , q2
L=1
2m R0
2 q1
2q1
2q2
2 − 1
2c R0
2 q1−1 2mg R0 q1 cosq2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 31/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-31
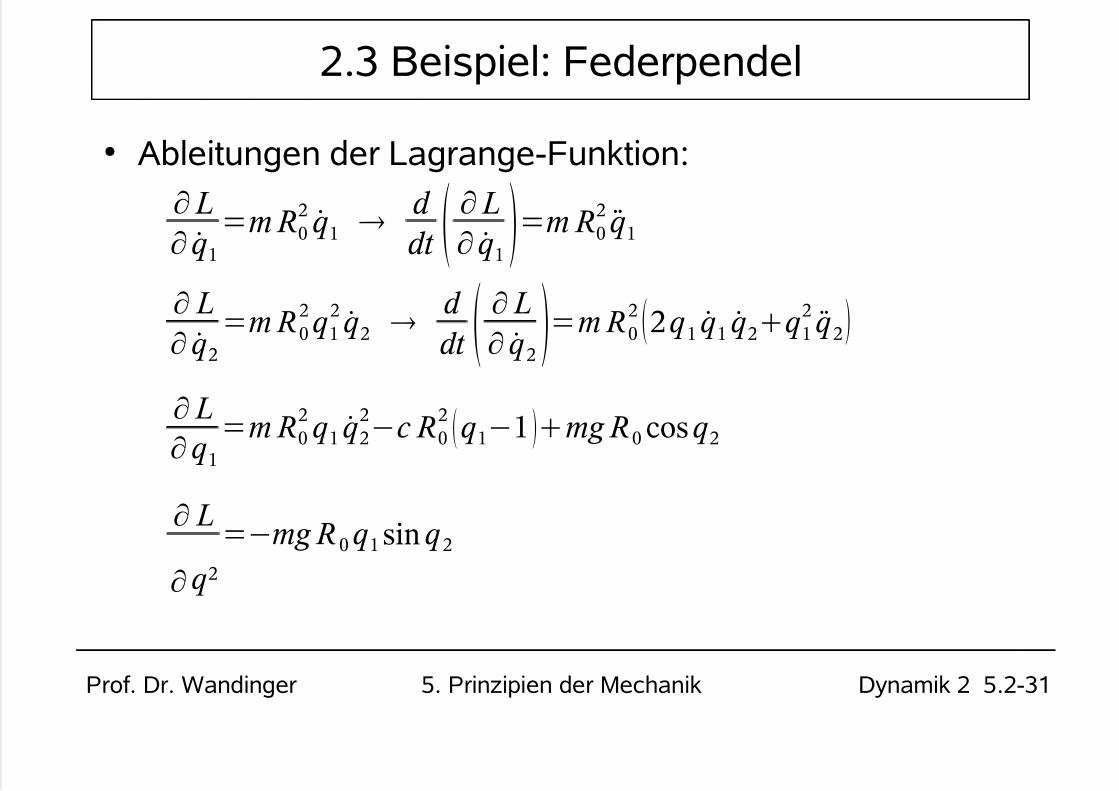
2.3 Beispiel: Federpendel
● Ableitungen der Lagrange-Funktion:
∂ L
∂ q1
=m R0
2q1
d
dt ∂ L
∂ q1=m R0
2q1
∂ L
∂ q2
=m R 0
2q1
2q2
d
dt ∂ L
∂ q2=m R 0
2 2 q1 q1 q2q1
2q2
∂ L
∂ q1
=m R0
2q1 q2
2−c R0
2 q1−1 mg R 0 cos q2
∂ L
∂ q2
=−mg R 0 q1 sin q2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 32/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-32
2.3 Beispiel: Federpendel
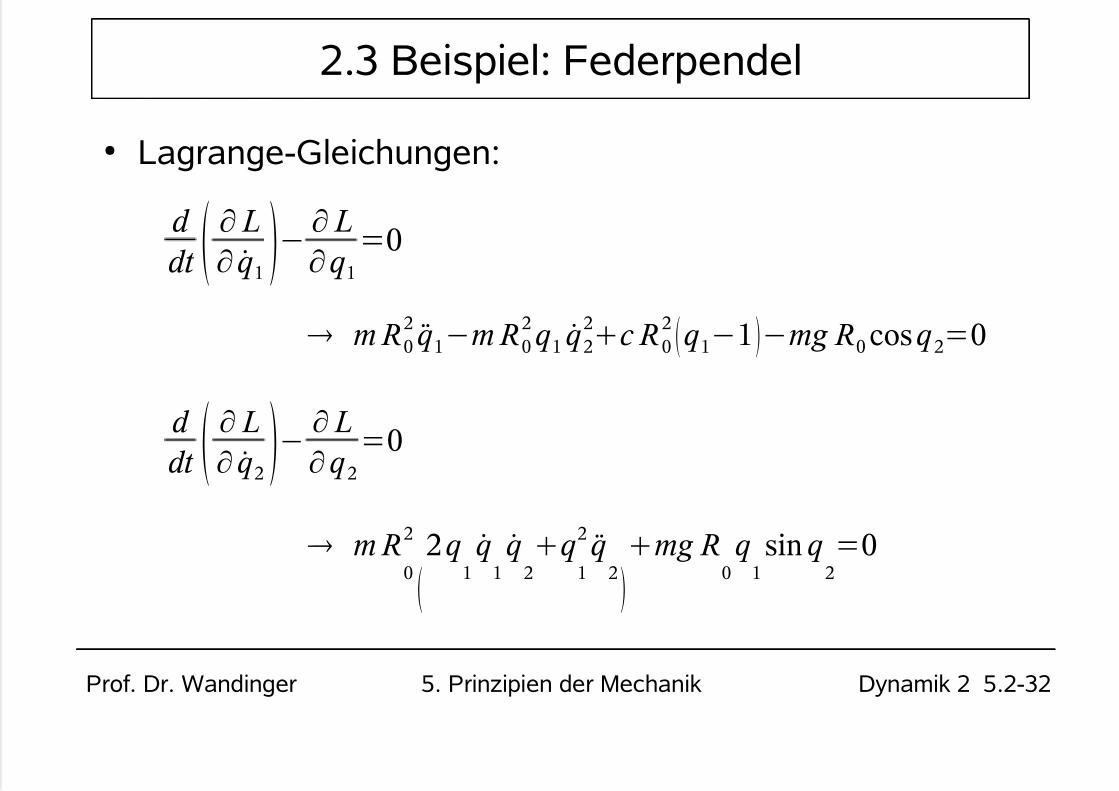
● Lagrange-Gleichungen:
d
dt ∂ L
∂ q1− ∂ L
∂ q1
=0
m R0
2q1−m R0
2q1 q2
2c R0
2 q1−1 −mg R0cosq2=0
d
dt ∂ L
∂ q2−
∂ L
∂ q2
=0
m R0
2
2 q
1
q1
q2
q1
2q
2
mg R
0
q1
sin q2
=0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 33/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-33
2.3 Beispiel: Federpendel
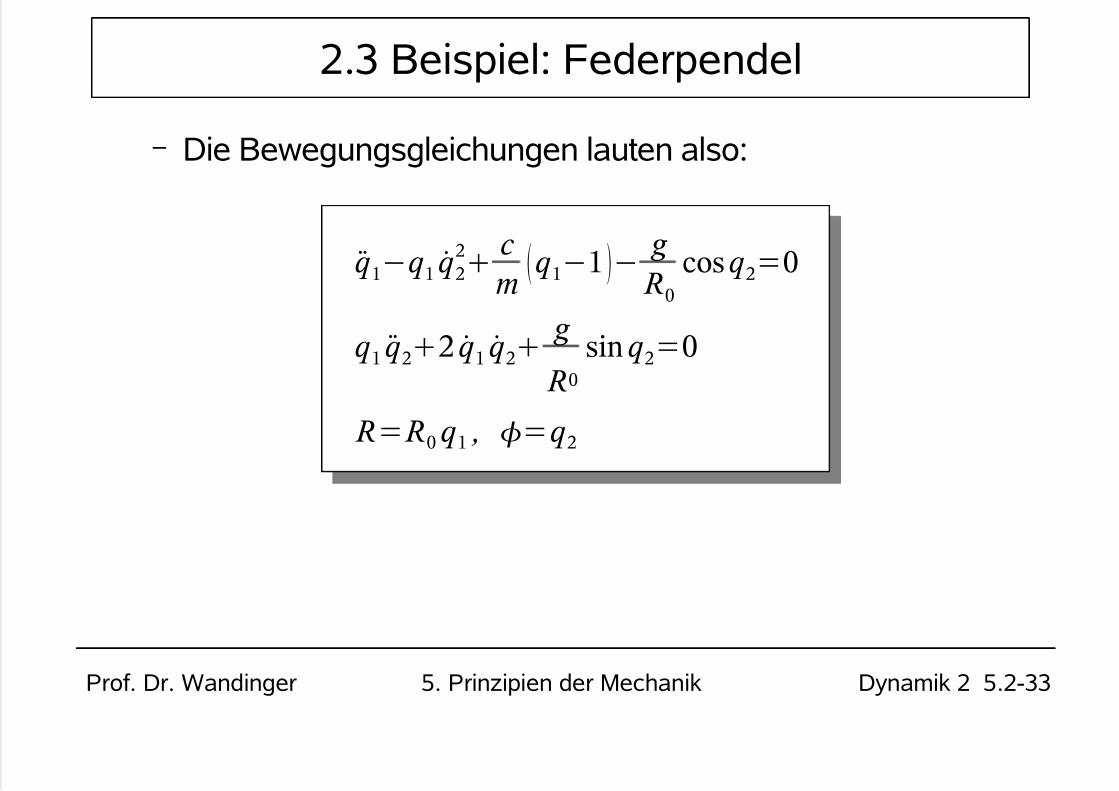
– Die Bewegungsgleichungen lauten also:
q1−q1 q2
2c
m q1−1 −
g
R0
cosq2=0
q1 q22 q1 q2g
R0
sinq2=0
R= R0 q1 , =q2
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 34/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-34
2.3 Beispiel: Federpendel
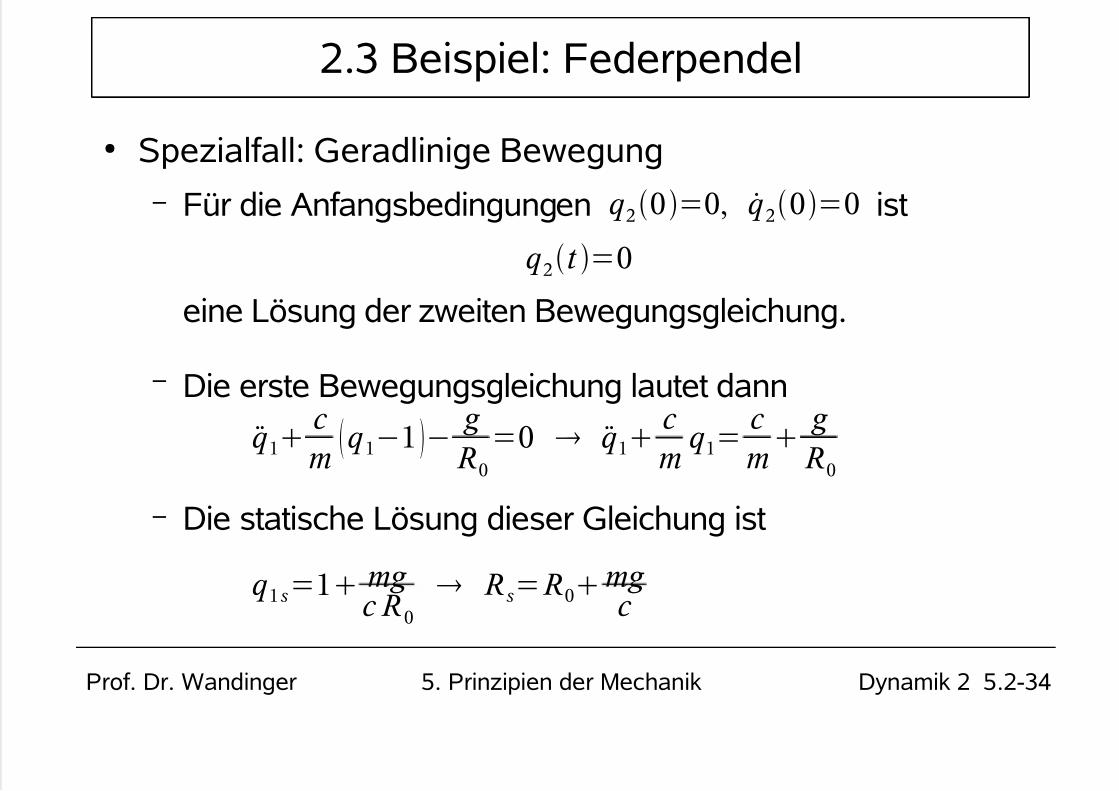
● Spezialfall: Geradlinige Bewegung
– Für die Anfangsbedingungen ist
eine Lösung der zweiten Bewegungsgleichung.
– Die erste Bewegungsgleichung lautet dann
– Die statische Lösung dieser Gleichung ist
q2 0=0, q20=0
q2 t =0
q1c
m q1−1 −
g
R0
=0 q1c
mq1=
c
m
g
R0
q1 s=1 mg c R 0
R s= R0 mg c
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 35/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-35
2.3 Beispiel: Federpendel
– Rs
ist die Länge, die die Feder infolge der Gewichtskraft in
der Ruhelage hat. – Mit folgt:
– Daraus folgt:
– Die Variable x misst die Auslenkung gegenüber der sta-tischen Ruhelage.
– Sie erfüllt die Schwingungsgleichung eines Einmassen-schwingers.
q1=q1 s x ¨ x c
m q1 s x =
c
m
g
R0
¨ x c
m
x =0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 36/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-36
2.3 Beispiel: Federpendel
● Grenzfall: Sehr steife Feder
– Für folgt aus der ersten Gleichung:
– Damit lautet die zweite Gleichung:
– Das ist die Schwingungsgleichung des mathematischenPendels.
c / m ∞ q1 1
q2g
R0
sin q2=0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 37/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-37
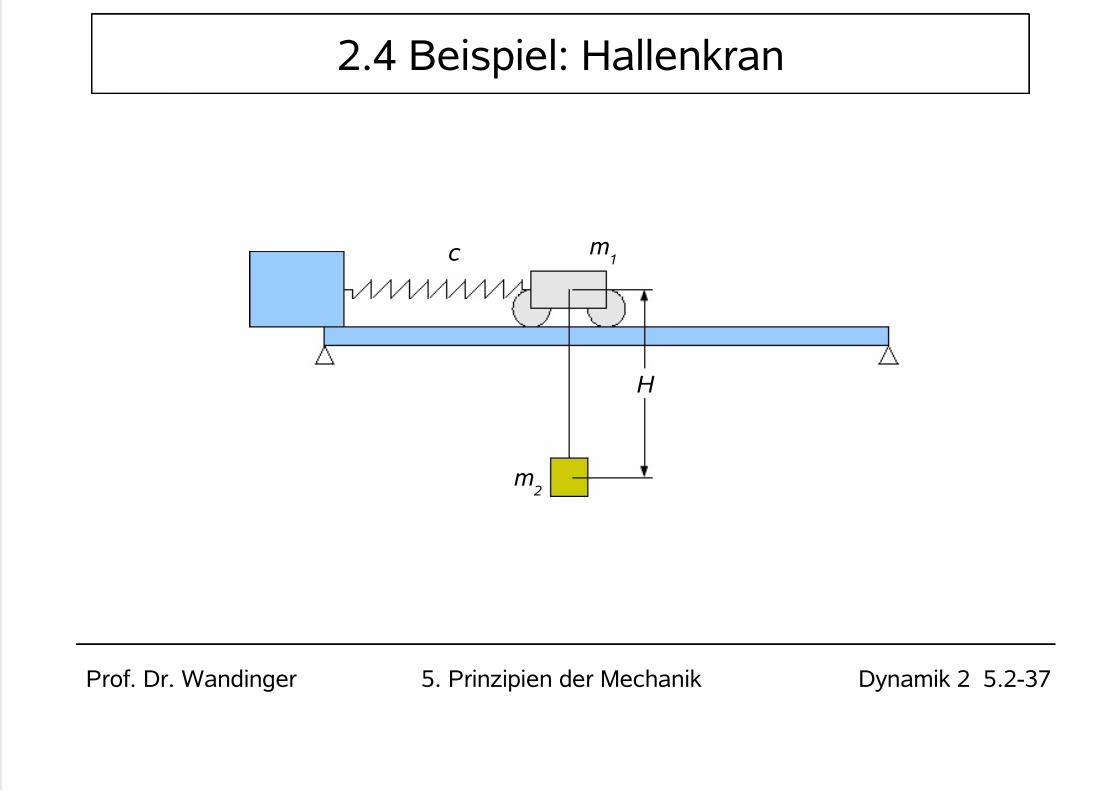
2.4 Beispiel: Hallenkran
m 2
m1c
H
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 38/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-38
2.4 Beispiel: Hallenkran
● Berechnungsmodell:
– Der Hallenkran besteht aus einem als starr angenommenenTräger, auf dem sich die Laufkatze bewegt.
– Die Laufkatze hat eine Gesamtmasse m1.
– Die Elastizität des Antriebs wird durch eine lineare Feder mit der Federkonstanten c abgebildet.
– An der Laufkatze hängt an einem dehnstarren masselosenSeil der Länge H die Traglast der Masse m
2.
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 39/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-39
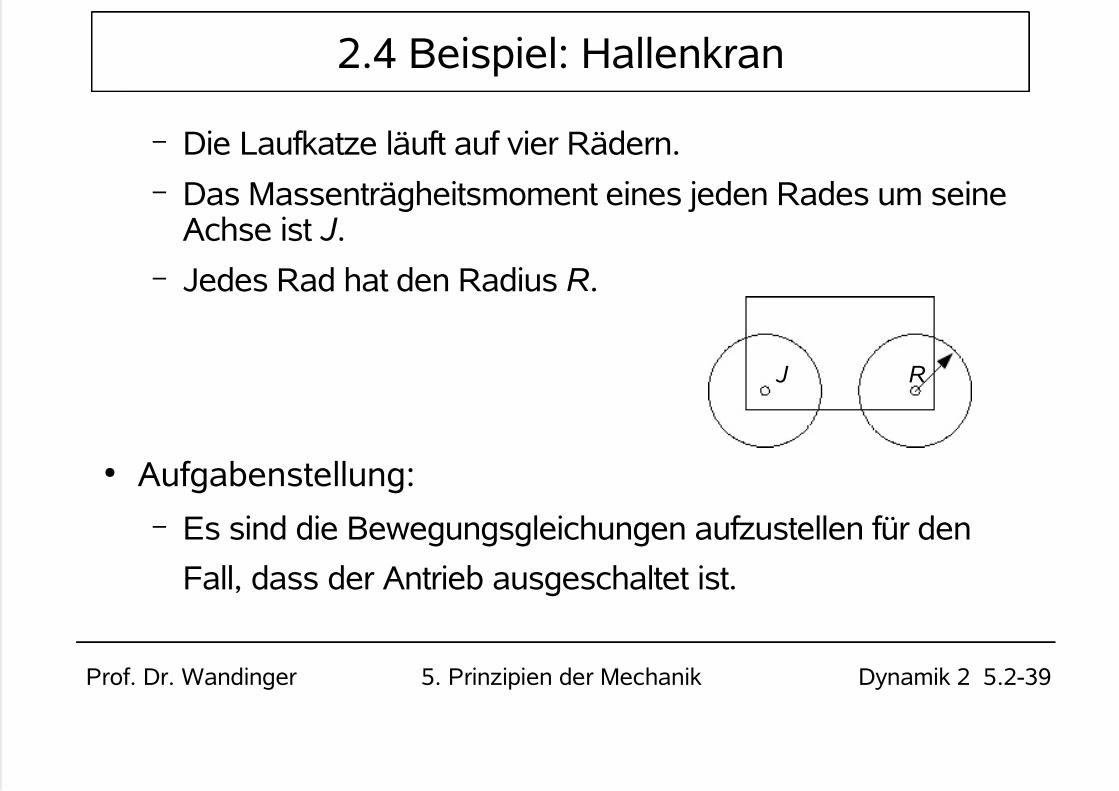
2.4 Beispiel: Hallenkran
– Die Laufkatze läuft auf vier Rädern. – Das Massenträgheitsmoment eines jeden Rades um seine
Achse ist J . – Jedes Rad hat den Radius R.
● Aufgabenstellung:
– Es sind die Bewegungsgleichungen aufzustellen für den
Fall, dass der Antrieb ausgeschaltet ist.
R J
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 40/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-40
2.4 Beispiel: Hallenkran
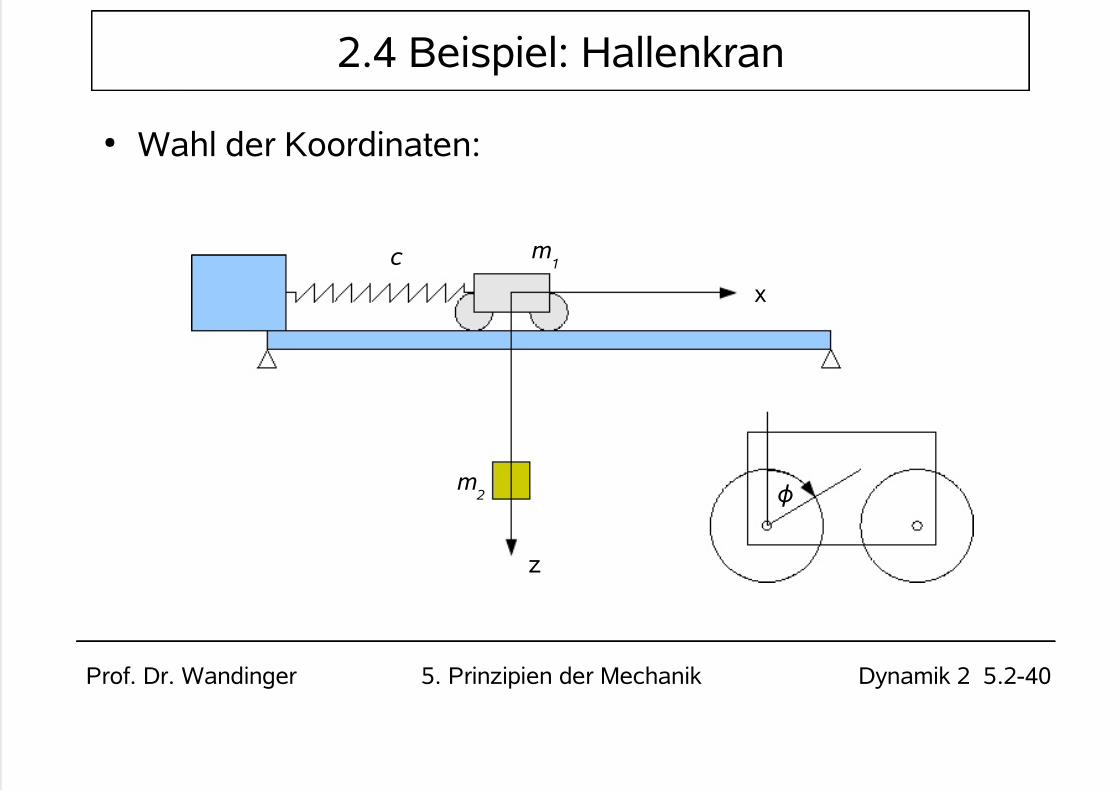
● Wahl der Koordinaten:
m 2
m1c
x
z
φ
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 41/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-41
2.4 Beispiel: Hallenkran
– Physikalische Koordinaten:
● Die Position der Laufkatze wird durch die Koordinate x 1
be-
schrieben, die ab der Ruheposition gemessen wird.● In der Ruheposition ist die Feder entspannt.● Die Stellung der Räder wird durch den Winkel φ beschrieben,
der ab der Stellung der Räder in der Ruheposition gemessenwird.● Es wird angenommen, dass die Räder rollen. Daher haben
alle Räder den gleichen Winkel φ.
● Die Position der Traglast wird durch die Koordinaten x 2
und z 2
beschrieben.
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 42/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-42
2.4 Beispiel: Hallenkran
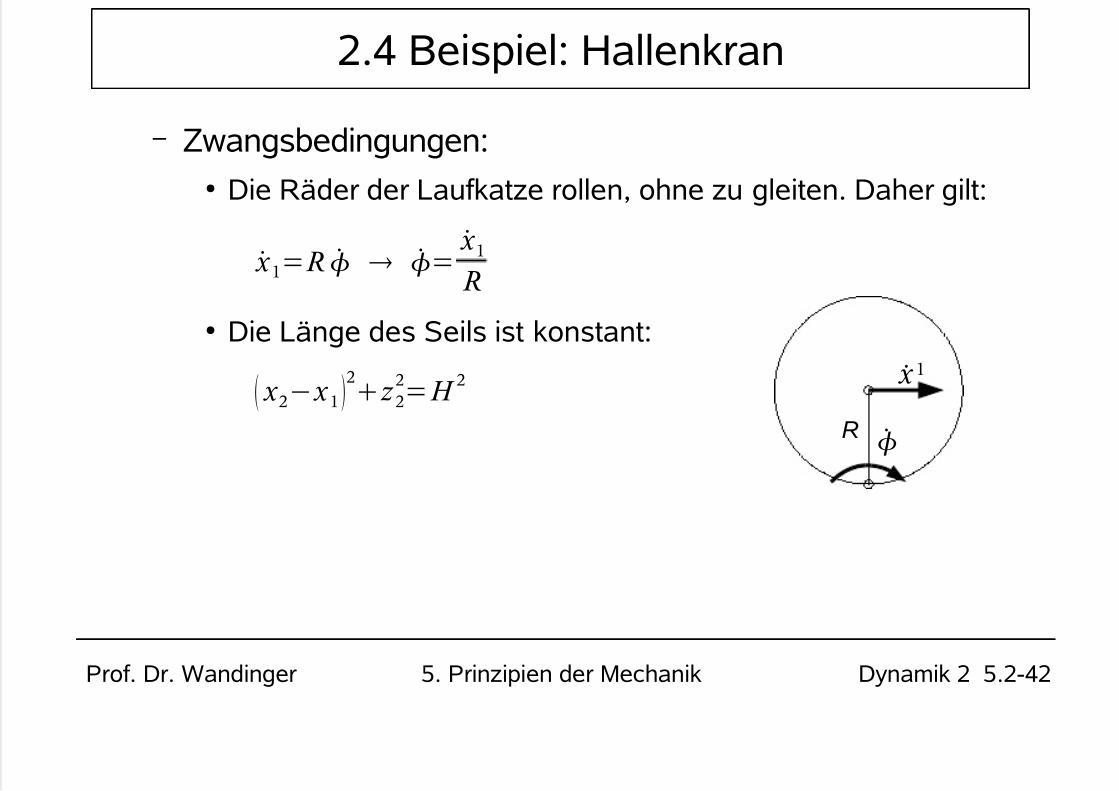
– Zwangsbedingungen:● Die Räder der Laufkatze rollen, ohne zu gleiten. Daher gilt:
● Die Länge des Seils ist konstant:
˙ x 1= R =˙ x 1
R
x 2− x 1 2 z 2
2= H
2
R
˙ x 1
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 43/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-43
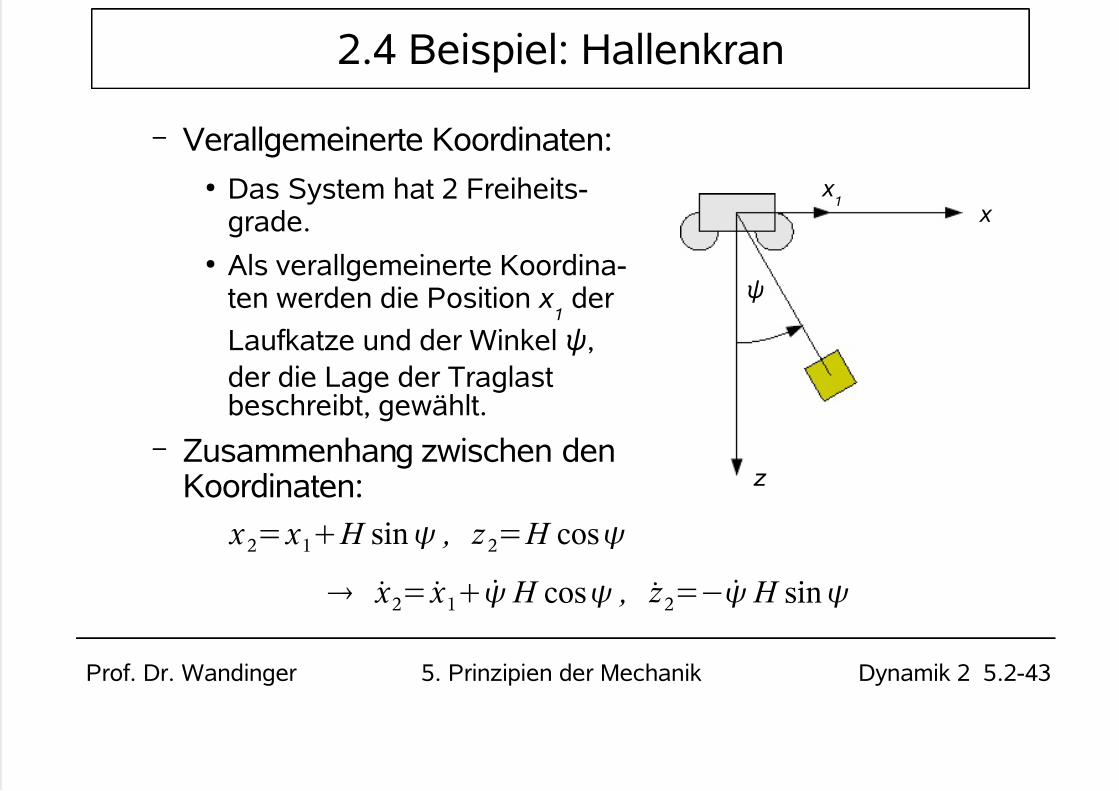
2.4 Beispiel: Hallenkran
– Verallgemeinerte Koordinaten:● Das System hat 2 Freiheits-
grade.● Als verallgemeinerte Koordina-
ten werden die Position x 1
der
Laufkatze und der Winkel ψ,der die Lage der Traglastbeschreibt, gewählt.
– Zusammenhang zwischen denKoordinaten:
x
z
ψ
x 1
x 2= x 1 H sin , z 2= H cos
˙ x 2= ˙ x 1 H cos , ˙ z 2=− H sin
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 44/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-44
2.4 Beispiel: Hallenkran
● Kinetische Energie:
– Die kinetische Energie setzt sich zusammen aus der trans-latorischen kinetischen Energie der Laufkatze, der rotato-rischen kinetischen Energie der vier Räder und der kine-tischen Energie der Traglast.
–
Translatorische kinetische Energie der Laufkatze:
– Kinetische Energie der vier Räder:
T 1 T =1
2m1 ˙ x 1
2
T 1 R=4⋅1
2
J 2=2
J
R2
˙ x 12
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 45/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-45
2.4 Beispiel: Hallenkran
– Kinetische Energie der Traglast:
– Gesamte kinetische Energie:
T 2=1
2m2 ˙ x 2
2 ˙ z 2
2= 1
2m2 [ ˙ x 1 H cos
2
2 H
2sin
2]
=1
2m2 ˙ x 1
22 ˙ x 1 H cos H 2 2
T =T 1 T T 1 RT 2
=[ 1
2 m1m2 2
J
R2 ] ˙ x 1
2
1
2m2 H
2
22 ˙ x 1 H cos
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 46/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-46
2.4 Beispiel: Hallenkran
● Potenzielle Energie:
– Die potenzielle Energie setzt sich zusammen aus der po-tenziellen Energie der Federkraft und der potenziellenEnergie der Gewichtskraft.
– Die potenzielle Energie der Federkraft wird ab der Ruhe-
lage, in der die Feder entspannt ist, gemessen. Dann gilt
– Der Bezugspunkt für die potenzielle Energie der Ge-wichtskraft wird in den Ursprung des Koordinatensystems
gelegt. Dann gilt:
V F =1
2c x 1
2
V G=−m2 g z 2=−m2 g H cos
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 47/54
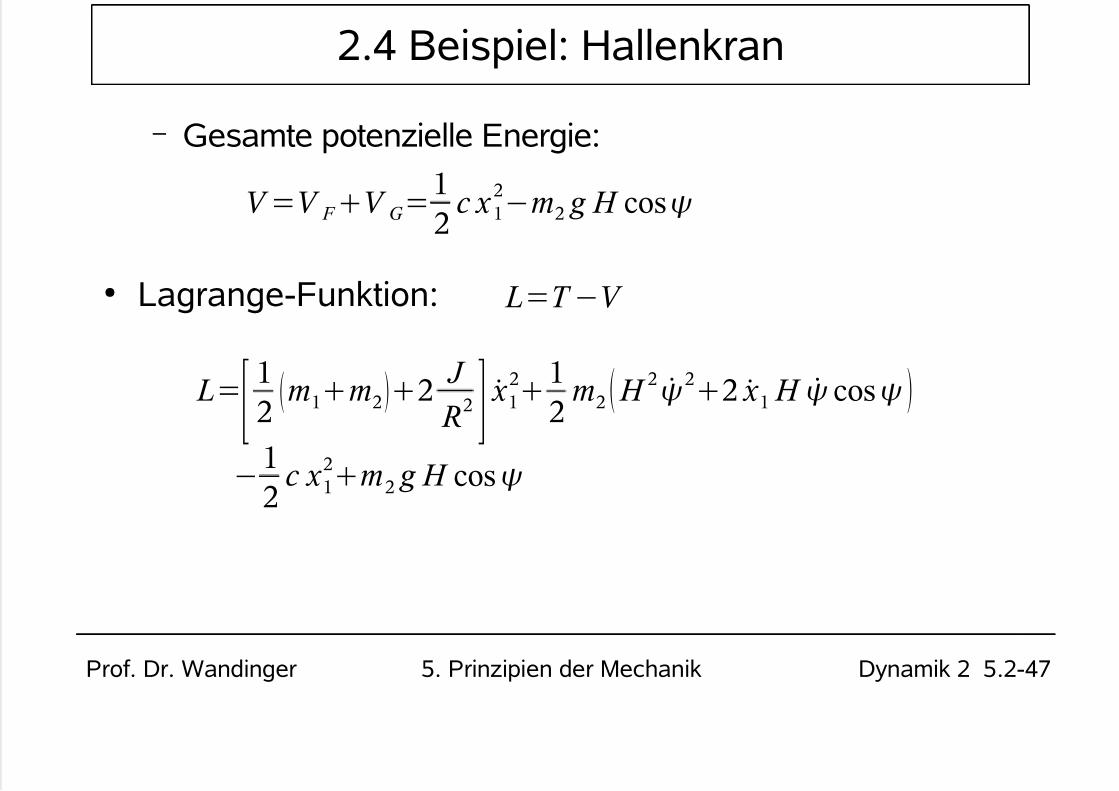
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-47
2.4 Beispiel: Hallenkran
– Gesamte potenzielle Energie:
● Lagrange-Funktion:
V =V F V G=1
2c x 1
2−m2 g H cos
L=T −V
L=[1
2m1m2 2
J
R2 ] ˙ x 1
21
2m2 H
222 ˙ x 1 H cos
−1
2c x 1
2m2 g H cos
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 48/54
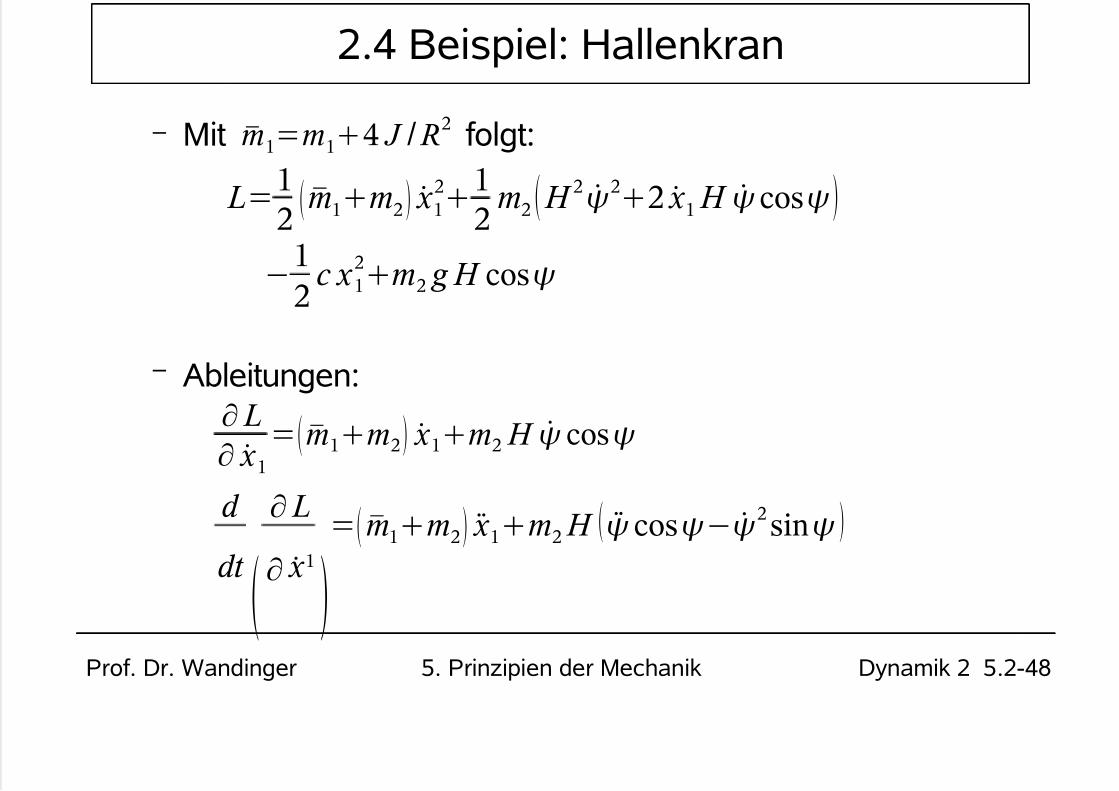
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-48
2.4 Beispiel: Hallenkran
– Mit folgt:
– Ableitungen:
m1=m14 J / R2
L=1
2 m1
m2 ˙ x 12
1
2m2 H
2 22 ˙ x 1 H cos
−1
2c x 1
2m2 g H cos
∂ L
∂ ˙ x 1= m1m2 ˙ x 1m2 H cos
d
dt
∂ L
∂ ˙ x 1
= m1m2 ¨ x 1m2 H cos− 2
sin
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 49/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-49
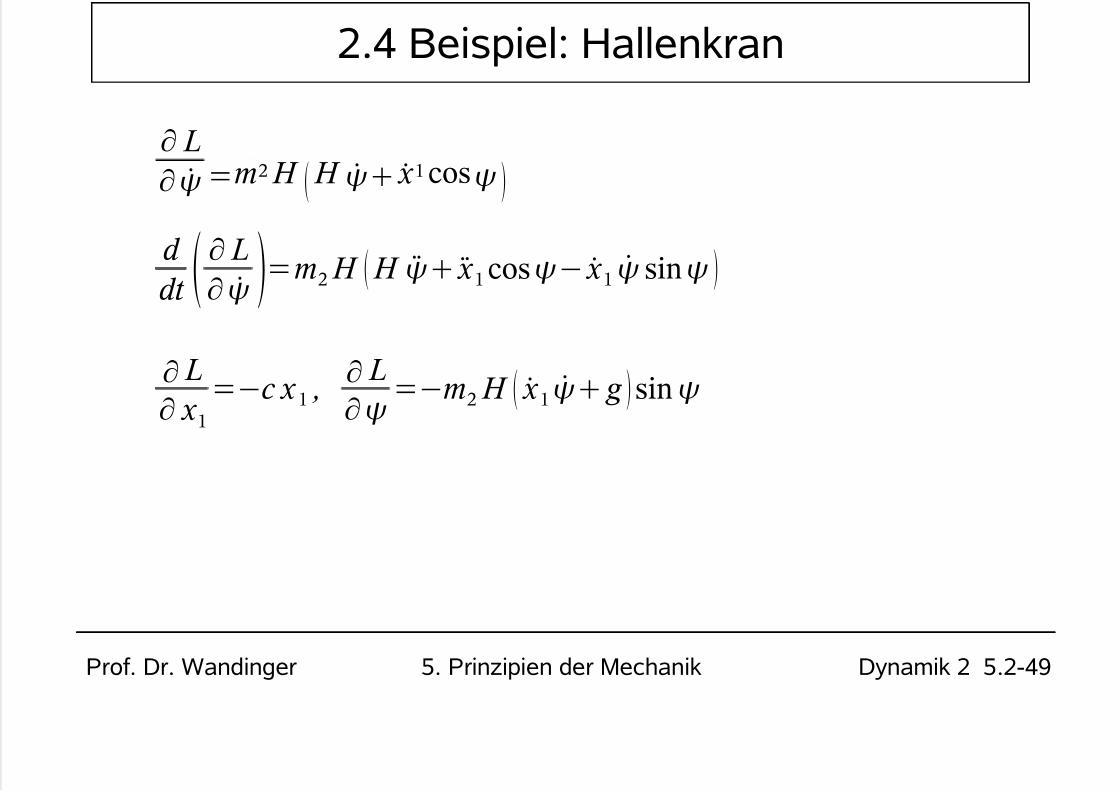
2.4 Beispiel: Hallenkran
∂ L
∂ =m2 H H ˙ x 1 cos
d
dt ∂ L
∂ =m2 H H ¨ x 1 cos − ˙ x 1 sin
∂ L
∂ x 1=−c x 1 ,
∂ L
∂ =−m2 H ˙ x 1 g sin
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 50/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-50
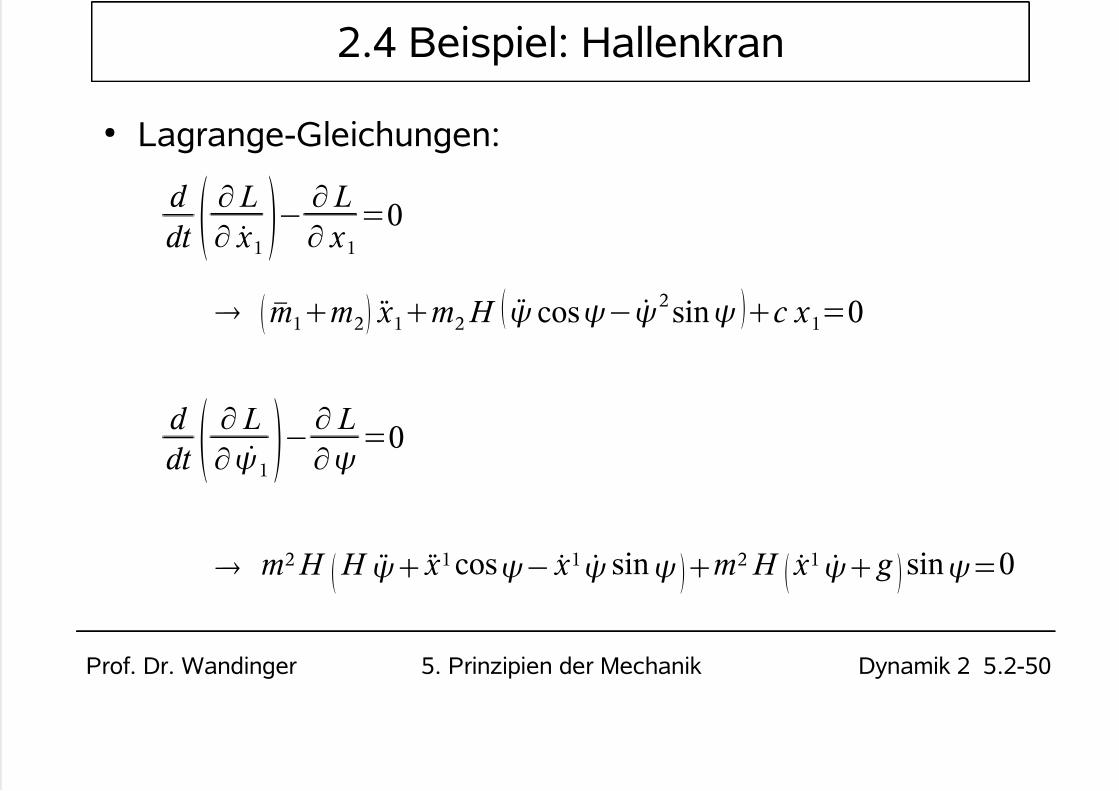
2.4 Beispiel: Hallenkran
● Lagrange-Gleichungen:
d
dt ∂ L
∂ ˙ x 1 − ∂ L
∂ x 1=0
m1m2 ¨ x 1m2 H cos −2sin c x 1=0
d
dt ∂ L
∂ 1−
∂ L
∂ =0
m2 H H ¨ x 1 cos − ˙ x 1 sin m2 H ˙ x 1 g sin =0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 51/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-51
2.4 Beispiel: Hallenkran
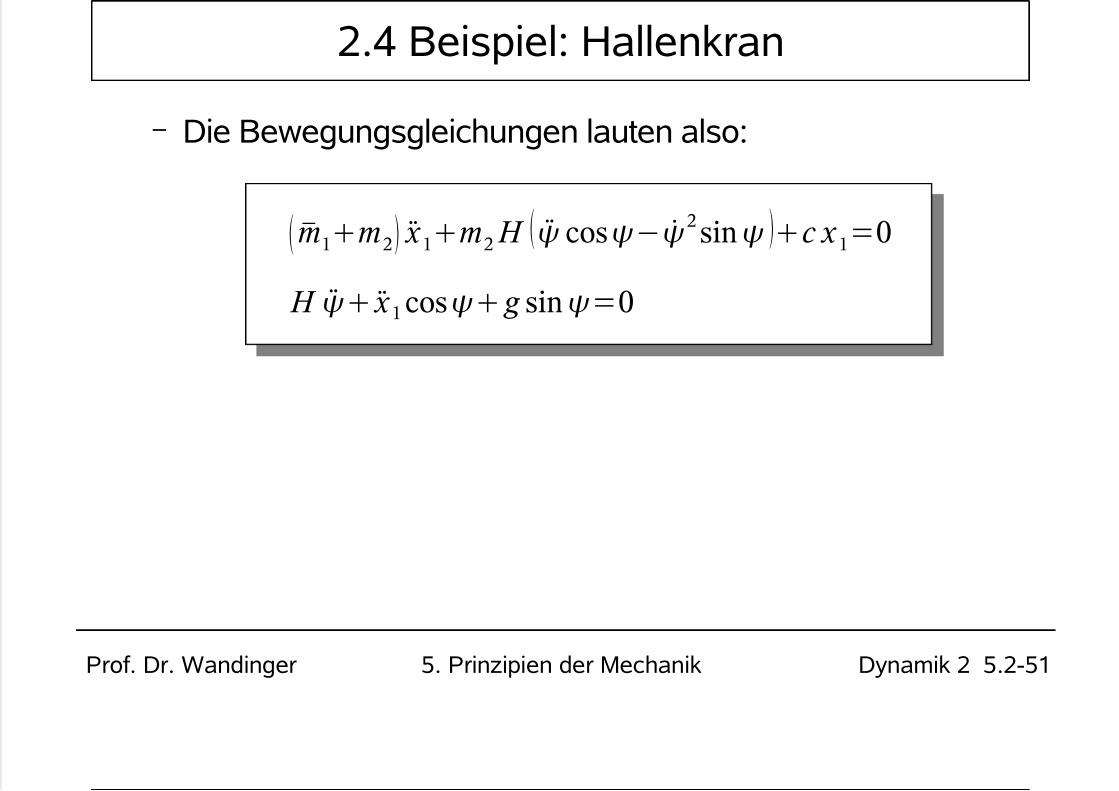
– Die Bewegungsgleichungen lauten also:
H ¨ x 1cos g sin=0
m1m2 ¨ x 1m2 H cos− 2sin c x 1=0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 52/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-52
2.4 Beispiel: Hallenkran
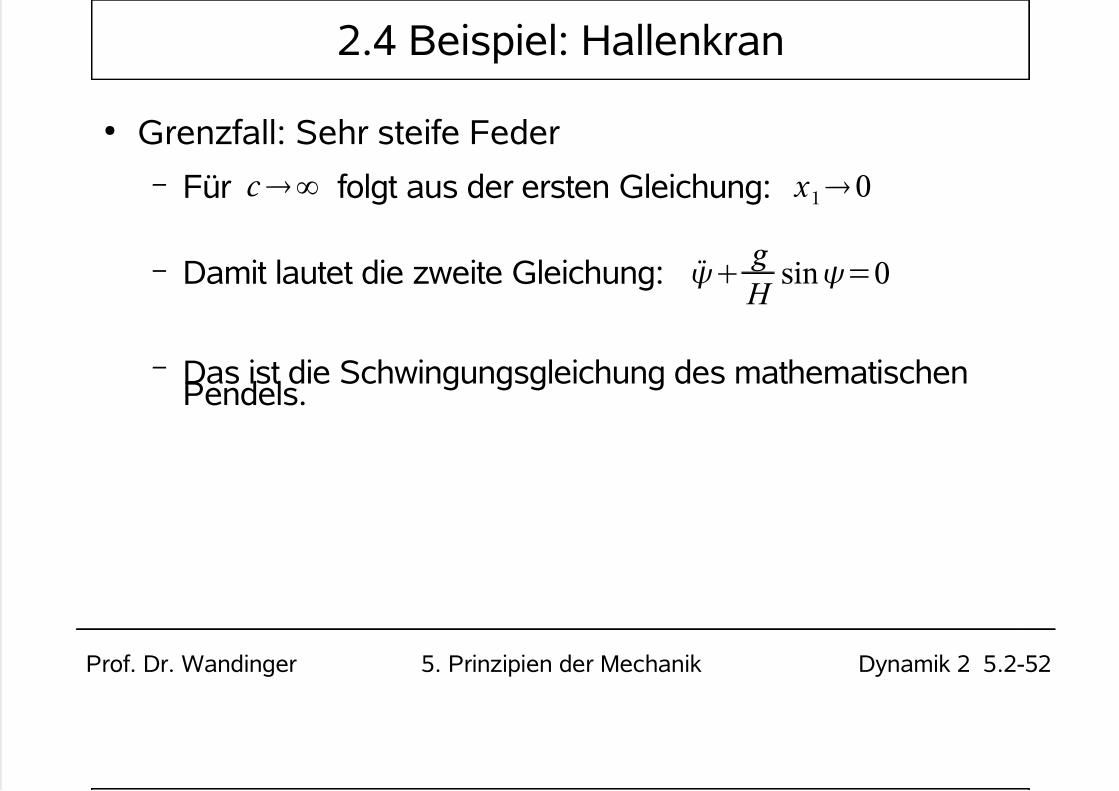
● Grenzfall: Sehr steife Feder
– Für folgt aus der ersten Gleichung:
– Damit lautet die zweite Gleichung:
– Das ist die Schwingungsgleichung des mathematischenPendels.
c ∞ x 1 0
g
H sin =0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 53/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-53
2.4 Beispiel: Hallenkran
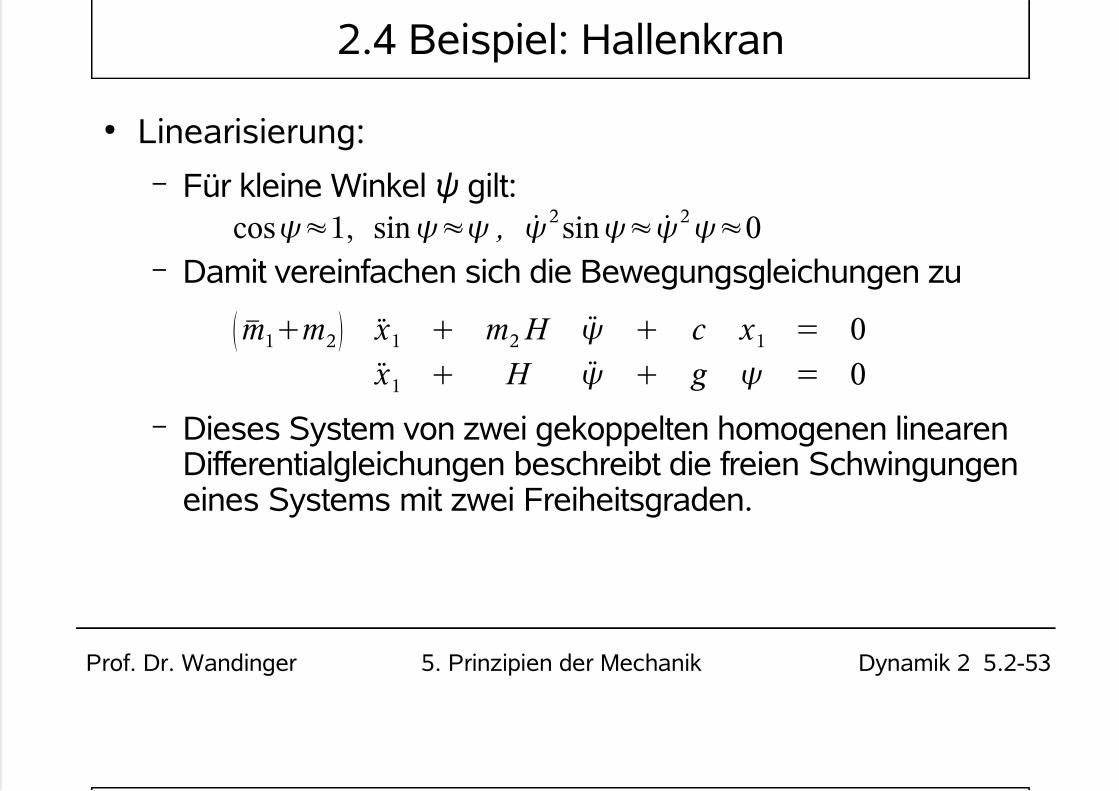
● Linearisierung:
– Für kleine Winkel ψ gilt:
– Damit vereinfachen sich die Bewegungsgleichungen zu
– Dieses System von zwei gekoppelten homogenen linearenDifferentialgleichungen beschreibt die freien Schwingungeneines Systems mit zwei Freiheitsgraden.
cos ≈1, sin ≈ , 2sin ≈2 ≈0
m1m2 ¨ x 1 m2 H c x 1 = 0
¨ x 1 H g = 0
5/11/2018 Federpendel - slidepdf.com
http://slidepdf.com/reader/full/federpendel 54/54
Prof. Dr. Wandinger 5. Prinzipien der Mechanik Dynamik 2 5.2-54
2.4 Beispiel: Hallenkran
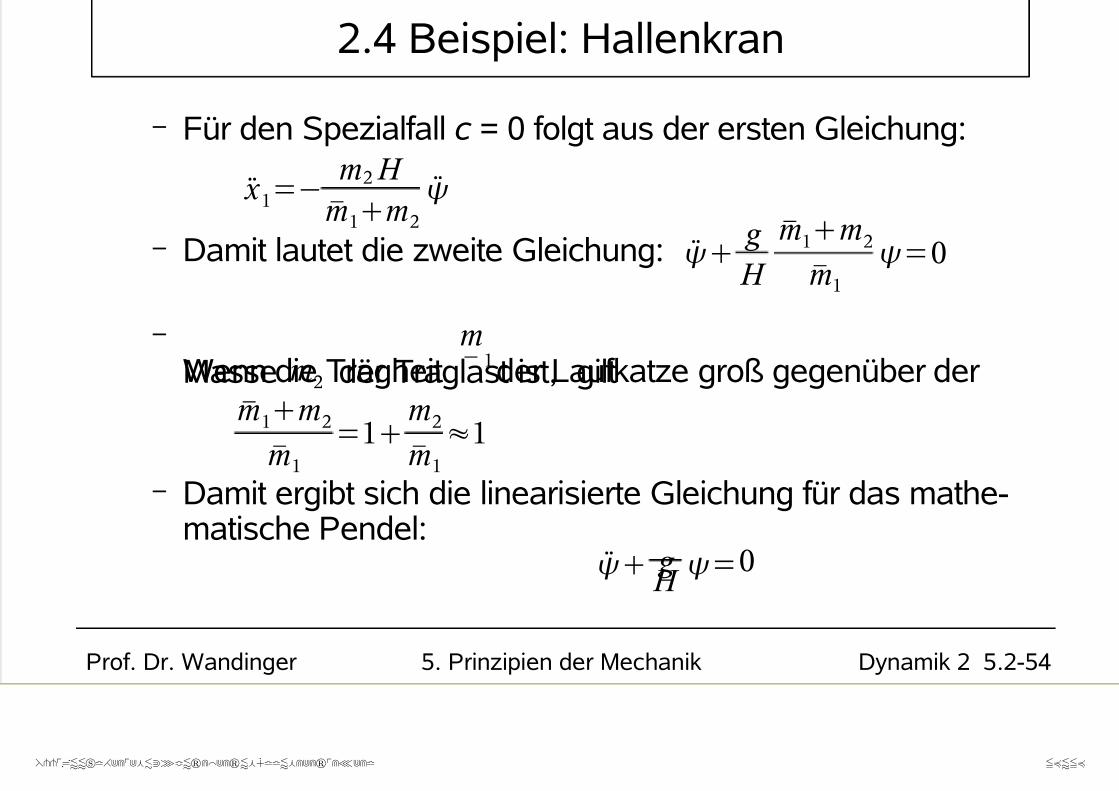
– Für den Spezialfall c = 0 folgt aus der ersten Gleichung:
– Damit lautet die zweite Gleichung:
–
Wenn die Trägheit der Laufkatze groß gegenüber der Masse der Traglast ist, gilt
– Damit ergibt sich die linearisierte Gleichung für das mathe-matische Pendel:
¨ x 1=−m2 H
m1m2
g
H
m1m2
m1
=0
m
1m2
m1m2
m1
=1m2
m1
≈1
g H
=0