Embed Size (px)
Citation preview
Fourieranalysis und Anwendungen
PD Dr. Swanhild Bernstein
Sommersemester 2010

Inhaltsverzeichnis
1 Signale 3
2 Fourierreihen 62.1 Periodische Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 Fourier-Reihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 Besselsche Ungleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Lösung für das Problem der schwingenden Saite . . . . . . . . . . . . . . . . . . 14
2.4.1 Zur Eindeutigkeit der Lösung . . . . . . . . . . . . . . . . . . . . . . . . . 152.4.2 Zur Differenzierbarkeit der Lösung . . . . . . . . . . . . . . . . . . . . . . 15
2.5 Die Fourierreihe der periodischen Faltung . . . . . . . . . . . . . . . . . . . . . . 162.5.1 Beweis der Parsevalschen Gleichung. . . . . . . . . . . . . . . . . . . . . 16
3 Fourier-Transformation und Inversionsformel 183.1 Faltung im Zeitbereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.1.1 Parsevalsche Gleichung und Multiplikationssatz . . . . . . . . . . . . . . 233.1.2 Gibbs Phänomen und Glättung . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Heisenbergsche Unschärferelation . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 Diskrete Fouriertransformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.4 Diskrete Approximation oder Aliasing . . . . . . . . . . . . . . . . . . . . . . . . . 303.5 Abtastsatz von Shannon, Sampling Theorem . . . . . . . . . . . . . . . . . . . . 333.6 Die gefensterte Fourier-Transformation . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Wavelets 394.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.1.1 Die Umkehrformel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.2 Haar-Wavelets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.3 Auflösungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2
KAPITEL 1
Signale
Die physikalische Repräsentation eines akustischen Ereignisses oder der zu übertragenden In-formation nennt man ein Signal. Schallsignale, elektrische, elektromagnetische, digitale, ... Si-gnale können mit Methoden der Signaltheorie beschrieben werden. Schallsignale können wiefolgt klassifiziert werden:
Wahrnehmung Technische Beschreibung
Tonhöhe (Grund-)frequenz
Lautstärke Amplitude
Klangfarbe Signalform
Die Signalform kann
regelmäßig,sich wiederholend
oder unregelmäßig,unstrukturiert
periodisch oder aperiodischsein. Als Analyse-Methode für Signale verwendet man in vielen Fällen die sogenannte Fre-quenzanalyse. Für eine große Klasse von Signalen kann die Frequenzanlyse mit Hilfe von so-genannten Sinusoiden (Adjektiv sinusoidal). Ein Sinusoid ist eine sinusförmige Funktion, dieaus der Sinusfunktion durch Skalierung von Amplitude und Frequenz sowie Phasenverschie-bung gebildet wird:
x (t) = A sin (ωt + φ) .
Darin ist
• A die Skalierung der Amplitude,
• ω die Skalierung der Kreisfrequenz und
• ϕ die Phasenverschiebung.
3

1 Signale
Neben dem Sinus ist der Cosinus mit cos (t) = sin (t + π/2) ebenfalls ein Sinusoid, die ande-ren trigonometrischen Funktionen jedoch nicht. Da sin(ωt + π
2 ) = cos(ωt) ist, kann man denSinus als das Sinusoid mit der Phase Null und den Kosinus als das Sinusoid mit der Phase π
2betrachten. Allerdings betrachtet man in vielen Fällen den Kosinus als Sinusoid mit der PhaseNull. Man beachte, welche Definition verwandt wird.
Beispiel 1.1Berechnung der Periodenlänge T :
3 sin(
2π · 2, 5t +π
4
)= 3 sin
(2π · 2, 5t +
π
4+ 2π
)= 3 sin
(2π · 2, 5
(t +
12, 5
)+
π
4
),
x(t) = x(
t +1
2, 5
), T =
12, 5
= 0, 4.
Summen von Sinusoiden sind z.B.
x(t) = A1 sin t + A2 sin(
4t +π
3
)+ A3 sin
(8t +
π
2
).
Als Frequenzanalyse bezeichnet man die Untersuchung des Spektrums des Signals. DasAmplitudenspektrum stellt die Abhängigkeit zwischen Amplitude und (Kreis)Frequenz her:
Beispiel 1.2
x(t) = 0, 5 · sin(1 · t) + 1 · sin(
4 · t + π
3
)+ 0, 5 · sin
(8 · t + π
2
).
In analoger Weise kann man das Phasenspektrum, d.h. die Phase in Abhängigkeit von der(Kreis)Frequenz darstellen:
Beispiel 1.3
x(t) = 0, 5 · sin(1 · t) + 1 · sin(
4 · t + π
3
)+ 0, 5 · sin
(8 · t + π
2
).
Beispiel 1.4AmplitudenmodulationNiederfrequente Nutzsignale wie Sprache oder Musik können häufig nicht direkt übertragenwerden. Zur Übertragung muss das Signal im Frequenzbereich verschoben werden. Man erhältein moduliertes Signal, wenn man zum (niederfrequenten=NF) Nutzsignal
uNF = UNF cos(ωt)
einen Gleichanteil UT (T=Träger) addiert und anschließend mit einer hochfrequenten Träger-schwingung cos(Ωt), Ω >> ω multipliziert, also
uAM = (UT + UNF cos(ωt)) · cos(Ωt) = UT cos(Ωt) + UNF cos(ωt) cos(Ωt)
= UT cos(Ωt) +UNF
2(cos((Ω−ω)t) + cos((Ω + ω)t))
Wenn sich die Amplitude der modulierten Schwingung ändert, dann ändert sich auch die Am-plitude der Seitenfrequenzen.
4

1 Signale
Die Einhüllende von UNF2 (cos((Ω−ω)t)+ cos((Ω+ω)t)) ist gleich dem Ausgangssignal UNF cos(ωt).
Kohärente Demodulation (Synchrondemodulation)Beim Empfänger existiert ein lokaler Träger, der in Phase zum Träger des empfangenen Signalsist, beide sind folglich zueinander synchron und damit kohärent (technisch sehr aufwendig, abermathematisch gut zu beschreiben). Zunächst wird das empfangene (modulierte) Signal mit demlokalen Träger multipliziert:
uDAM = uAM cos(Ωt)
=
(UT cos(Ωt) +
UNF2
(cos((Ω−ω)t) + cos((Ω + ω)t)))· cos(Ωt)
= UT cos2(Ωt) +UNF
2(cos((Ω−ω)t) · cos(Ωt) + cos((Ω + ω)t) · cos(Ωt))
Mit Hilfe der Additionstheoreme
cos α cos β =12(cos(α− β) + cos(α + β)) , cos2 α =
12(1 + cos(2α)) ,
erhält man
uDAM =UT2
(cos(0 · t)+ cos(2Ωt))+UNF
4(cos(−ωt)+ cos((2Ω−ω)t)+ cos(ωt)+ cos((2Ω+ω)t)).
Anschließend werden die unerwünschten hohen Frequenzanteile mit einem Tiefpass und derGleichanteil mit einem Hochpass herausgefiltert, wodurch nur noch das Nutzsignal mit halberAmplitude übrig bleibt:
uTP =UNF
4(cos(−ωt) + cos(ωt)) =
UNF2
cos(ωt).
5
KAPITEL 2
Fourierreihen
2.1 Periodische Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Fourier-Reihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Besselsche Ungleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Lösung für das Problem der schwingenden Saite . . . . . . . . . . . . . . . . . . . . 14
2.4.1 Zur Eindeutigkeit der Lösung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4.2 Zur Differenzierbarkeit der Lösung . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5 Die Fourierreihe der periodischen Faltung . . . . . . . . . . . . . . . . . . . . . . . . 16
2.5.1 Beweis der Parsevalschen Gleichung. . . . . . . . . . . . . . . . . . . . . . . . . . 16
Die wesentliche Entdeckung für die Signaltheorie war nun, dass sich eine „große Klasse“ peri-odischer Signale als Fourier-Reihe (Jean Baptiste Fourier (1768–1830)) darstellen lässt.
2.1 Periodische Funktionen
Definition 2.1Eine Funktion f : R → R (oder auch f : R → C) heißt periodisch mit der Periode T(oder auch T-periodisch), falls für alle t ∈ R gilt f (t + T) = f (t).
Beispiel 2.2sin t, cos t, eit = cos t + i sin t, ak cos(kt) + bk sin(kt) sind alle 2π-periodische Funktionen.
6

2 Fourierreihen
Bemerkung 2.31. Sind f (t) und g(t) T-periodisch, so ist auch α f (t) + βg(t) T-periodisch.
2. Ist f (t) eine T-periodische Funktion, so wird diese durch die Substitution
x :=2π
Tt
in eine 2π-periodische Funktion
f (x) := f(
T2π
x)
, x ∈ R,
transformiert.
3. Ist f (t) T-periodisch und integrierbar, so gilt für beliebige a ∈ R :
∫ T
0f (t) dt =
∫ T+a
af (t) dt.
2.2 Fourier-Reihen
Definition 2.4Eine Reihe der Form
f (t) =a0
2+
∞
∑k=1
[ak cos(kωt) + bk sin(kωt)] =∞
∑k=−∞
ck ei k ω t
mit ak, bk ∈ R bzw. ck ∈ C heißt trigonometrische Reihe. Dabei sei ω = 2πT > 0.
Die zugehörigen Partialsummen
fn(t) =a0
2+
n
∑k=1
[ak cos(kωt) + bk sin(kωt)] =n
∑k=−n
ck ei k ω t
heißen trigonometrische Polynome.
7

2 Fourierreihen
Durch Umformung erhält man für die Partialsummen:
fn(t) =a0
2+
n
∑k=1
[ak cos(kωt) + bk sin(kωt)]
=a0
2+
n
∑k=1
[ak2
(eikωt + e−ikωt
)+
bk2i
(eikωt − e−ikωt
)]=
a0
2+
n
∑k=1
[ak − ibk
2eikωt +
ak + ibk2
e−ikωt]
=n
∑k=−n
ckeikωt.
Folglich gilt für k = 0, 1, 2, . . .
c0 = 12 a0, ck =
12 (ak − ibk), c−k =
12 (ak + ibk),
a0 = 2c0, ak = ck + c−k, bk = i(ck − c−k).
Man beachte, dass damit noch nichts über die Konvergenz der Reihe ausgesagt wird!!
Definition 2.5Die Folge (ck)k∈Z der Fourierkoeffizienten einer periodischen Funktion f wird als diskretesSpektrum von f bezeichnet. Für periodische, reelle Signale f : R → R ist dann wegenck = c−k das Betragsspektrum (|ck|)k∈Z symmetrisch.
Wegen an = cn + c−n, bn = i(cn − c−n) ist
An =√
a2n + b2
n =√
4cnc−n = 2|cn|
die Amplitude der n-ten Oberschwingung von
|c0|+∞
∑k=1
2|ck| cos(kω0t + arg (ck)).
Die Folge (2|ck|)k∈Z heißt Amplitudenspektrum, die Folge (arg (ck))k∈Z Phasenspektrumund c0 = a0
2 ist der Gleichanteil.
Definition 2.6Eine Funktion f : [a, b] → C heißt stückweise stetig bzw. stückweise stetig differen-zierbar, falls f (t) bis auf endlich viele Stellen t0 < t1 < . . . < tm in [a, b] stetig bzw. stetigdifferenzierbar ist und in den Ausnahmepunkten die einseitigen Grenzwerte von f (t−)bzw. f (t+) und f ′(t) existieren. (Es sind Sprungstellen erlaubt, aber keine Polstellen.)
8
2 Fourierreihen
Definition 2.7Fourier-Reihe.
1. Für eine stückweise stetige Funktion f : [0, T] → C werden die Fourier-Koeffizienten von f (t) definiert durch
ck :=1T
∫ T
0f (t) e−ikωt dt, k ∈ Z, bzw. (2.1)
ak :=2T
∫ T
0f (t) cos(kωt) dt, bk :=
2T
∫ T
0f (t) sin(kωt) dt, k ∈N0. (2.2)
2. Die mit den obigen Koeffizienten gebildete Reihe
Ff (t) =a0
2+
∞
∑k=1
[ak cos(kωt) + bk sin(kωt)] =∞
∑k=−∞
ck ei k ω t
heißt Fourier-Reihe von f (t).
Dabei ist ω = 2πT die Kreisfrequenz.
Beispiel 2.8Sägezahlfunktion.
S(t) :=
0, t = 0, t = 2π,
12 (π − t), 0 < t < 2π.
Anschließend wird S(t) periodisch fortgesetzt.Da S(t) eine ungerade Funktion ist, gilt
ak :=1π
∫ 2π
0
12 (π − t) cos(kt) dt = 0 (gilt immer für ungerade Funktionen)
und
bk :=1π
∫ 2π
0
12 (π − t) sin(kt) dt =
2π
∫ π
0
12 (π − t) sin(kt) dt
=∫ π
0sin(kt) dt− 1
π
∫ π
0t sin(kt) dt
= −1k
cos(kt)∣∣∣∣π0
− 1π
− tk
cos(kt)∣∣∣∣π0+
1k
∫ π
0cos(kt) dt︸ ︷︷ ︸
= −1
kcos(kπ) +
1k
+1k
cos(kπ) + 0 =1k
9

2 Fourierreihen
Damit ist FS(t) =∞∑
k=1
sin(kt)k .
Lemma 2.1• Sei f (t) eine stückweise stetige, T-periodische, gerade Funktion, dann gilt
ak =4T
∫ T2
0f (t) cos(kωt) dt, bk = 0.
• Sei f (t) eine stückweise stetige, T-periodische, ungerade Funktion, dann gilt
ak = 0, bk =4T
∫ T2
0f (t) sin(kωt) dt.
• Ableitung: Ist f (t) stetig und stückweise stetig differenzierbar, so gilt:
f ′(t) ∼∞
∑k=−∞
(ikωck)eikωt =∞
∑k=1
(kω)(bk cos(kωt)− ak sin(kωt)).
• Integration. Gilt a0 = c0 =T∫0
f (t) dt = 0, so gilt:
∫ t
0f (τ) dτ ∼ − 1
T
∫ T
0t f (t) dt−
∞
∑k=1
[bkkω
cos(kωt)− akkω
sin(kωt)]
.
(Berechnung der Koeffizienten nach Formel (2.1) mittels partieller Integration, wobei
u(t) =t∫
0f (τ) dτ und v′(t) = e−ikωt ist.)
Beispiel 2.9Die Funktion
f (t) =∞
∑k=1
cos(kt)k2
ist stetig und stückweise stetig differenzierbar. Gliedweise Differentation ergibt die Sägezahn-reihe −S(t).
Bemerkung 2.10Gliedweise Differentation von Fourierreihen unstetiger Funktionen führt i. Allg. auf divergenteReihen. Zum Beispiel ergibt die gliedweise Differentation der Sägezahnreihe
f (t) =∞
∑k=1
sin(kt)k
eine Reihe, die an keiner Stelle mehr konvergiert.
10

2 Fourierreihen
Beispiel 2.11Die Sägezahnreihe
f (t) =∞
∑k=1
sin(kt)k
besitzt einen verschwindenden Gleichanteil. Integration von 0 bis t ergibt die 2π-periodischeFunktion
F(t) =∫ t
0f (x)dx =
π2
6−
∞
∑k=1
cos(kt)k2 .
Für 0 ≤ t ≤ 2π ist F(t) = 2πt−t2
4 .
Was passiert an den Unstetigkeitsstellen von f (t)??
Beispiel 2.12Rechteckschwingung.
R(t) =
0, t = 0, t = π, t = 2π,
1, 0 < t < π,
−1, π < t < 2π
Wiederum ist R(t) eine ungerade Funktion und somit
ak = 0, k = 0, 1, 2, . . . , und
bk =2π
∫ π
0sin(kt) dt =
0, k gerade,
4kπ , k ungerade.
Man erhält also
R(t) ∼ 4π
(sin t
1+
sin(3t)3
+sin(5t)
5+ . . .
).
Die Reihensumme für t = kπ, k ∈ Z, ist offensichtlich Null!
Was hat die Fourier-Reihe mit der Funktion zu tun??
Satz 2.13 (Konvergenzsatz.)Sei f : R→ C T-periodisch und stückweise stetig differenzierbar. Dann gelten folgendeKonvergenzaussagen für die zugehörige Fourier-Reihe:
Ff (t) =a0
2+
∞
∑k=1
[ak cos(kωt) + bk sin(kωt)] .
1. Die Reihe konvergiert punktweise für alle t ∈ R und es gilt
Ff (t) =
f (t), f ist stetig in t,
12 ( f (t + 0) + f (t− 0)), f ist unstetig in t.
11
2 Fourierreihen
2. In allen beschränkten und abgeschlossenen Intervallen [a, b], in denen f (t) stetigist, ist die Konvergenz gleichmäßig.
3. In allen Unstetigkeitsstellen überschwingen die Partialsummen
Sn(t) =a0
2+
n
∑k=1
[ak cos(kωt) + bk sin(kωt)]
für große n den Sprung um ca. 17,89 %. (Gibbs-Phänomen)
Bemerkung 2.14Fourier selbst glaubte, dass sich jedes periodische Signal als Fourier-Reihe darstellen lässt,dem ist aber nicht so! Das erste konkrete Beispiel einer stetigen Funktion f , deren Fourier-Reihebei x = 0 divergiert, wurde von DuBois-Reymond gegeben. Diese Funktion hat die Gestaltf (x) = A(x) sin(ω(x)x) mit geeigneten A(x)→ 0 und ω(x)→ ∞ für x → ∞.
Bemerkung 2.15Verschwinden des Gibbs-Phänomens bei Fejérschen Mitteln.1. Ist f eine stetige periodische Funktion, dann konvergieren die arithmetischen Mittel
1N + 1
(S0 + S1 + . . . SN)
der Partialsummen Sn, gleichmäßig gegen f .2. Wenn die Fourierreihe einer stückweise stetigen periodischen Funktion f an einer Stelle t0überhaupt konvergiert, dann konvergiert sie dort gegen 1
2 ( f (t0+) + f (t0−)).Benutzt man die Fejérschen arithmetischen Mittel zur Approximation einer stückweisen stetigdifferenzierbaren periodischen Funktion, so tritt das Gibbs Phänomen nicht auf.Schreibt man die arithmetischen Mittel der Partialsummen in der Form
1N + 1
(S0 + S1 + . . . SN) =N
∑k=−N
(1− |k|
N + 1
)ckeikωt,
so sieht man deutlich eine schwächere Gewichtung der höherfrequenten Anteile.
Im Beispiel der Sägezahnfunktion sieht man gut, dass an den Sprungstellen, in diesem Fall s =2kπ, k ∈ Z, die wahren Funktionswerte über- bzw. unterschwungen werden.
12

2 Fourierreihen
2.3 Besselsche Ungleichung
Satz 2.16 (Bessel-Ungleichung)Für die Koeffizienten der Fourierreihe der Funktion f gilt
|a0|24
+12
∞
∑k=1
(|ak|2 + |bk|2) =∞
∑k=−∞
|ck|2 ≤1T
∫ T
0| f (t)|2 dt.
Für die Partialsumme SN(t) der Fourierreihe gilt
1T
∫ T
0f (t)SN(t) dt =
N
∑k=−N
ck1T
∫ T
0f (t)e−ikωt dt =
N
∑k=−N
ckck =N
∑k=−N
|ck|2.
Wegen ∫ T
0eiωkte−iωlt dt =
0, k 6= l,
T, k = l
folgt1T
∫ T
0SN(t)SN(t) dt =
N
∑k=−N
|ck|2.
Damit ist
0 ≤ 1T
∫ T
0| f (t)− SN(t)|2 dt =
1T
∫ T
0| f (t)|2 dt−
N
∑k=−N
|ck|2.
Hieraus folgt die Bessel-Ungleichung durch Grenzübergang N → ∞. Außerdem ist
|ak|2 + |bk|2 = (ck + c−k)(ck + c−k)+ i(ck− c−k)(−i)(ck− c−k) = 2ckck + 2c−kc−k = 2(|ck|2 + |c−k|2).
Folgerungen:
• Die Fourierkoeffizienten von f sind quadratisch summierbar.
• Riemann-Lebesgue-Lemma Für die Fourierkoeffizienten gilt
limk→∞
ak = limk→∞
bk = lim|k|→∞
|ck|2 = 0.
• Man kann zeigen, dass nicht nur die Besselsche Ungleichung, sondern die ParsevalscheGleichung gilt, d.h.
|a0|24
+12
∞
∑k=1
(|ak|2 + |bk|2) =∞
∑k=−∞
|ck|2 =1T
∫ T
0| f (t)|2 dt.
13

2 Fourierreihen
2.4 Lösung für das Problem der schwingenden Saite
Differentialgleichung:utt = c2 uxx, 0 < x < l, t > 0,
Randbedingungen:u(0, t) = u(l, 0) = 0, t ≥ 0,
(an den Enden fest eingespannt)Anfangsbedingungen:
u(x, 0) = f (x), ut(x, 0) = g(x).
(2 Anfangsbedingungen, da 2 Ableitungen nach der Zeit).
Lösung mittels Separationsansatz:
u(x, t) = X(x)T(t),
einsetzen in den Differentialgleichung ergibt:
X′′(x)T(t) =1c2 X(x)T(t)
X′′(x)X(x)
=1c2 = −λ2 = const.
Erhalten aus der Differentialgleichung und den Randbedingungen ein Eigenwertproblem fürX(x) :
X′′(x) + λX(x) = 0, X(0) = X(l) = 0.
Für λ ≤ 0 gibt es nur die triviale Lösung und damit sind alle Werte λ ≤ 0 keine Eigenwerte. Fürλ > 0 folgt als Lösung der Dgl.:
X(x) = c1 cos(√
λx) + c2 sin(√
λx), X(0) = c1 = 0
und damitX(l) = c2 sin(
√λl) = 0
es gibt also nichttriviale Lösungen√
λl = kπ, l ∈N,
da λ > 0 vorausgesetzt wurde. Alle möglichen Lösungen sind damit:
Xk(x) = c2 sin(kπ
lx), k = 1, 2, . . . .
Mit den Eigenwerten λ löst man nun die weitere Differentialgleichung, also λ = ( kπl )2 und
T′′(t) + c2T(t) = 0.
14

2 Fourierreihen
Welche die Lösung
Tk(t) = a cos(
ckπ
lt)+ b sin
(c
kπ
lt)
, k = 1, 2, 3, . . .
hat. Die Lösung des linearen Anfangswertproblems ergibt sich nun aus dem Superpositions-ansatz
u(x, t) =∞
∑k=1
sin(kπ
l)
(Ak cos
(c
kπ
lt)+ Bk sin
(c
kπ
lt))
.
Dieser Ansatz erfüllt die Differentialgleichung und die Randbedingungen. Um die Anfangsbe-dingungen zu erfüllen, betrachten wir
u(x, 0) =∞
∑k=1
sin(kπ
l)Ak=: f (x),
d.h. f wird in eine reine Sinusreihe entwickelt und die Fourierkoeffizienten dieser Fourierreihesind gerade die Ak :
Ak =2l
∫ l
0f (x) sin
(kπx
l
)dx.
Analog erhält man für
ut(x, 0) =∞
∑k=1
sin(kπ
l)
ckπ
lBk=: g(x),
und dies ist eine reine Sinusreihe für g(x), deren Fourierkoeffizienten gerade die Bk sind:
Bk =2
ckπ
∫ l
0g(x) sin
(kπx
l
)dx.
2.4.1 Zur Eindeutigkeit der Lösung
Durch die Betrachtung des Energieintegrals
E(t) =∫ l
0
12
ρu2t +
12
Pu2x dx
mit der kinetischen Energiedichte (rot) und der potentiellen Energiedichte (blau), P Gewichts-kraft an den Befestigungsenden, ρ Massendichte der Saite., erhält man die Eindeutigkeit derLösung des Anfangswertproblems für die schwingende Saite.
2.4.2 Zur Differenzierbarkeit der Lösung
Satz 2.17Ist f zweimal stetig differenzierbar auf R und f ′′′ stückweise stetig, g stetig differenzierbarauf R und g′′ stückweise stetig, dann ist die Lösung u zweimal stetig partiell differenzierbar.
15
2 Fourierreihen
Durch zweimalige gliedweise Differentation nach x oder t entstehen gleichmäßig konver-gente Reihen, die stetige Funktionen darstellen.
2.5 Die Fourierreihe der periodischen Faltung
Definition 2.18Die T-periodische Faltung stückweiser stetiger T-periodischer Funktionen f (t) und h(t)ist definiert durch
( f ∗ h)T(t) =1T
∫ T
0f (u)h(t− u) du.
Fourierreihe der Faltung, Bestimmung der Fourierkoeffizienten durch Vertauschen der Integra-tionsreihenfolge:
1T
∫ T
0
1T
∫ T
0f (u)h(t− u) du e−ikωt dt =
1T
∫ T
0f (u)
1T
∫ T
0h(t− u)e−ikωt dtdu
=1T
∫ T
0f (u)e−ikωuhkdu = ckhk,
wenn ck bzw. hk die entsprechenden Fourierkoeffizienten von f bzw. h sind und wegen
1T
∫ T
0h(t− u)e−ikωt dt =
1T
∫ T−u
−uh(τ)e−ikω(τ+u) dτ
= e−ikωu 1T
∫ T−u
−uh(τ)e−ikωτ dτ = e−ikωu 1
T
∫ T
0h(τ)e−ikωτ dτ.
Die Fourierkoeffizienten der T-periodischen Faltung ( f ∗ h)T sind das Produkt der entspre-chenden Fourierkoeffizienten von f und h. Wegen 2|hk| |ck| ≤ |ck|2 + |hk|2 und der Bessel-Ungleichung folgt die gleichmäßige Konvergenz der Fourierreihe der periodischen Faltung.
2.5.1 Beweis der Parsevalschen Gleichung.
Ist f auf [0, T] stückweise stetig mit den Fourierkoeffizienten ck, dann gilt die ParsevalscheGleichung:
1T
∫ T
0| f (u)|2 du =
∞
∑k=−∞
|ck|2.
Dann besitzt die Funktion f (−t) die Fourierkoeffizienten ck und es gilt für die periodische Fal-tung
g(t) =1T
∫ T
0f (u) f (u− t) du =
∞
∑−∞|ck|2 eikωt.
16

2 Fourierreihen
und insbesondere
g(0) =1T
∫ T
0| f (u)|2 du =
∞
∑−∞|ck|2.
Bemerkung 2.19Man kann die Stetigkeit der Faltung ( f ∗ h)T auch für T-periodische, auf [0, T] quadratischLebesgue-integrierbare Funktionen f und h beweisen. Aus der Parsevalschen Gleichung folgtdann die Konvergenz der Fourierreihen für solche Funktionen.
17
KAPITEL 3
Fourier-Transformation undInversionsformel
3.1 Faltung im Zeitbereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.1.1 Parsevalsche Gleichung und Multiplikationssatz . . . . . . . . . . . . . . . . . . . 23
3.1.2 Gibbs Phänomen und Glättung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Heisenbergsche Unschärferelation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Diskrete Fouriertransformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 Diskrete Approximation oder Aliasing . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5 Abtastsatz von Shannon, Sampling Theorem . . . . . . . . . . . . . . . . . . . . . . 33
3.6 Die gefensterte Fourier-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Es sei f eine reellwertige Funktion, die auf jedem beschränkten Intervall stückweise stetig dif-ferenzierbar ist. Dann besitzt f auf
(− T
2 , T2
), T > 0, eine Darstellung als Fourierreihe mit der
Mittelwerteigenschaft:
f (t− 0) + f (t + 0)2
=∞
∑k=−∞
ck e2π ikt
T , ck =1T
∫ T2
− T2
f (s) e−2π iks
T ds.
Setzt man nun ∆ω = 2πT und definieren
f (k∆ω) =∫ T
2
− T2
f (s) e−is(k∆ω) ds = ckT.
18

3 Fourier-Transformation und Inversionsformel
Setzt man das in die Fourierreihendarstellung von f ein, so ergibt sich
f (t− 0) + f (t + 0)2
= limN→∞
12π
N
∑k=−N
f (k∆ω) eit(k∆ω)∆ω
mit den Abtastwerten f (k∆ω)
Lassen wir T gegen Unendlich streben, so ergibt sich
f (ω) =∫ ∞
−∞f (s) e−iωs ds
und man erhält für die Inversion
f (t− 0) + f (t + 0)2
=1
2π
∫ ∞
−∞f (ω) eiωt dt.
Das alles ist mehr oder weniger Heuristik!! Aber im entsprechenden Kontext durchausmathematisch korrekt nachweisbar.
Definition 3.1Die Abbildung f → f ,
f (ω) =∫ ∞
−∞f (s) e−iωs ds
heißt Fourier-Transformation. f heißt Fourier-Transformierte von f .
Satz 3.2Für eine integrierbare, stückweise stetig differenzierbare Funktion f auf R und ihreFourier-Transformierte f gilt an jeder Stelle t ∈ R die folgende Umkehrformel:
f (t− 0) + f (t + 0)2
=1
2πlim
Ω→∞
∫ Ω
−Ωf (ω) eiωt dω.
Bemerkung 3.3f integrierbar bedeutet f ∈ L1(R) und dann gilt für die Fourier-Transformierte
| f (ω)| =∣∣∣∣∫ ∞
−∞f (s) e−iωs ds
∣∣∣∣ ≤ ∫ ∞
−∞| f (s)| ds = || f ||L1 .
Beispiel 3.4Rechteckfunktion
rT(t) = χ[−T,T](t) =
1 für −T ≤ t ≤ T,
0 für |t| > T.
19

3 Fourier-Transformation und Inversionsformel
Dann ist die Fouriertransformierte:
rT(ω) =∫ T
−Te−iωs ds = − 1
iω
(e−iωT − eiωT
)= 2T
sin(ωT)ωT
.
Offensichtlich ist die Rechteckfunktion r(t) integrierbar, die Spektralfunktion = Fouriertransfor-mierte r(ω) ist jedoch nicht absolut integrierbar obwohl ihr uneigentliches Riemann-Integralexistiert! Vernachlässigt man die Frequenzanteile für Kreisfrequenzen oberhalb von π
T und be-zeichnet man π
T als Bandbreite, so stellt man fest:Je kürzer die zeitliche Dauer des Rechteckimpuls ist, desto größer ist seine Bandbreite.
Beispiel 3.5Für die Dreiecksfunktion
f (t) =
1− |t|T , für |t| ≤ T,
0, für |t| > T,ergibt sich die Fouriertransformierte
f (ω) =∫ T
0
(1− t
T
)(e−iωt + eiωt) dt = 2
∫ T
0
(1− t
T
)cos(ωt) dt
= 2(
1− tT
)sin(ωt)
ω
∣∣∣∣T0+
2T
∫ T
0
sin(ωt)ω
dt
=2
Tω2 (− cos(ωT) + 1) =4
Tω2 sin2(
Tω
2
).
Auch hier gilt, je kürzer die zeitliche Dauer des Dreieckimpuls ist, desto größer ist seine Band-breite.
Lemma 3.1Die Funktion f sei integrierbar, stetig und stückweise stetig differenzierbar, dann gilt:
1. lim|ω|→∞
| f (ω)| = 0,
2. limω→ω0
f (ω) = f (ω0).
Die Fourier-Transformierte f ist eine stetige und beschränkte Funktion.
3. Ist f zusätzlich k-mal stetig differenzierbar und die Ableitungen f , f ′, . . . , f (k) inte-grierbar sind, dann gilt
ˆf (k)(ω) = (iω)k f (ω)
und damit|ω|k | f (ω)| ≤
∫ ∞
−∞| f (k)(t)| dt.
Je glatter f ist, umso schneller fällt f ab.
4. Ist g(t) = tk f (t) integrierbar, dann ist f k-mal stetig differenzierbar und es gilt
g(ω) = ik f (k)(ω).
20

3 Fourier-Transformation und Inversionsformel
Je schneller f abfällt, umso glatter ist f .
21
3 Fourier-Transformation und Inversionsformel
3.1 Faltung im Zeitbereich
Satz 3.6Die auf R definierten Funktionen f und g seien integrierbar und stückweise stetig diffe-
renzierbar. Für die Fourier-Transformierte f ∗ g der Faltung f ∗ g gilt
f ∗ g = f · g
Bemerkung 3.7Es bezeichne δ das Diracsche Delta-Funktional. Insbesondere ist δ keine Funktion, sonderneine Distribution und ist definiert als
〈δ, f 〉 =∫ ∞
−∞δ(x) f (x) dx = f (0)
für alle beliebig oft differenzierbaren Funktionen f .
Lemma 3.2Die Faltung einer Funktion f mit dem Delta-Funktional ist
( f ∗ δ)(t) =∫ ∞
−∞f (τ)δ(t− τ) dτ = f (t).
Damit ist( f ∗ δ)(ω) = f (ω)δ(ω) = f (ω)
und folglich ist δ(ω) = 1.
Beweisidee des Faltunssatzes: Durch Vertauschung der Integrationsreihenfolge ergibt sich
f ∗ g(ω) =∫ ∞
−∞
(∫ ∞
−∞f (s)g(t− s) ds
)e−iωt dt
=∫ ∞
−∞
(∫ ∞
−∞g(t− s) e−iω(t−s) dt
)f (s) e−iωs ds
=∫ ∞
−∞g(ω) f (s) e−iωs ds = f (ω)g(ω).
Das ist mathematisch so nicht richtig, da man hier die Integrationsreihenfolge nicht vertau-schen darf. Trotzdem ist eine Begründung warum die Formel gilt.
22
3 Fourier-Transformation und Inversionsformel
3.1.1 Parsevalsche Gleichung und Multiplikationssatz
Satz 3.8Die Funktionen f und g seien quadratisch integrierbar ( f , g ∈ L2(R)), d.h. f und g sindmessbare Funktionen mit
∫ ∞−∞ | f (t)|
2 dt < ∞. Dann gilt
1. die Parsevalsche Gleichung∫ ∞
−∞| f (t)|2 dt =
12π
∫ ∞
−∞| f (ω)|2 dω,∫ ∞
−∞f (t) g(t) dt =
12π
∫ ∞
−∞f (ω) g(ω) dω.
2. und der Multiplikationssatz
f · g =1
2πf ∗ g.
Bemerkung 3.9Die linke Seite der Parsevalschen Gleichung wird als normierte Signalenergie bezeichnet. DieFunktion f mit
∫ ∞−∞ | f (t)|
2 dt < ∞ nennt man auch Energiesignale. Die Signalenergie kannauch aus der Spektralfunktion berechnet werden. Insbesondere ist die Spektralfunktion vonEnergiesignalen wieder eine quadratisch integrierbare Funktion. Der Multiplikationssatz spielteine wichtige Rolle bei der Amplitudenmodulation in der Nachrichtenübertragung und wird da-her oft auch als Modulationtheorem bezeichnet.
Beweis der Parsevalschen Gleichung und des Multiplikationssatzes:Es sei
h(s) =∫ ∞
−∞f (t) f (t− s) dt.
Die Faltung ist unter obigen Voraussetzungen eine integrierbare, beschränkte und stetige Funk-tion. Dies folgt aus dem Satz von Wheeden und Zygmund (1977) (ohne Beweis). Nach dem Fal-tungssatz und der Symmetriebeziehung besitzt h die Fouriertransformierte
h(ω) = f (ω) f (ω) = | f (ω)|2.
Es gilt
h(0) =∫ ∞
−∞| f (t)|2 dt
und mit
δn(t) =n
π(1 + n2t2)δn(t) = n δ1(nt) mit∫ ∞
−∞δ1(t) dt =
∫ ∞
−∞
1π(1 + t2)
dt =1π
arctan t|∞−∞ = 1,
23

3 Fourier-Transformation und Inversionsformel
erhalten wir:
limn→∞
∫ ∞
−∞h(t) δn(t) dt = lim
n→∞
∫ ∞
−∞h(t) nδ1(nt) dt = lim
n→∞
∫ ∞
−∞h(t/n) δ1(t) dt
Wegen∫ ∞−∞ δ1(t) dt = 1 gilt wegen der Stetigkeit von h, dass |δ1(t)h(t/n)| ≤ |δ(t)|maxt∈R |h(t)|
kann man Limesbildung und Integration nach dem Satz von Lebesgue über die majorisierteKonvergenz:
limn→∞
∫ ∞
−∞δn(t)h(t) dt =
∫ ∞
−∞δ1(t) lim
n→∞h(t/n) dt = h(0).
Bemerkung 3.10Das bedeutet nichts anderes als, dass δn(t) für n→ ∞ das Deltafunktional approximiert.
Weil δn(t) die Fouriertransformierte von 12π e−|ω|/n ist, ergibt sich
h(0) =1
2πlim
n→∞
∫ ∞
−∞h(t)
(∫ ∞
−∞e−|ω|/n eiωt dω
)dt
=1
2πlim
n→∞
∫ ∞
−∞e−|ω|/n (h(t) e−ωt dt
)dω
=1
2πlim
n→∞
∫ ∞
−∞e−|ω|/n h(ω) dω =
12π
∫ ∞
−∞| f (ω)|2 dω,
die Vertauschung der Grenzwertbildung mit dem Integral im letzten Schritt ist möglich, dae−|ω|/n h(ω) ≥ 0 sind und eine aufsteigende Funktionenfolge bilden (Satz über die monoto-ne Konvergenz). Damit ist die erste Aussage über die Parsevalsche Gleichung gezeigt.Da L2(R) ein normierter Raum ist, dessen Norm die Paralelleogrammgleichung erfüllt, d.h.
||x + y||2 + ||x− y||2 = 2(||x||2 + ||y||2)
gilt die Polarisationsgleichung, d.h.
〈 f , g〉 = 14
(|| f + g||2 − || f − g||2
)+
i4
(|| f + ig||2 − || f − ig||2
)und erzeugt damit das Skalarprodukt. Damit erhält man die 2. Aussage der ParsevalschenGleichung.
Für h(t) = g(t)eiωt ist h(s) = g(s−ω) = g(ω− s) und damit∫ ∞
−∞f (t)h(t) dt =
∫ ∞
−∞f (t)g(t) eiωt dt =
∫ ∞
−∞f (t) g(t) e−iωt dt = f · g
=1
2π
∫ ∞
−∞f (ω) h(ω) dω =
12π
∫ ∞
−∞f (t) g(s−ω) dω =
12π
f ∗ g.
24

3 Fourier-Transformation und Inversionsformel
3.1.2 Gibbs Phänomen und Glättung
Bei der Fourierschen Umkehrformel hatten wir f als punktweisen Limes der Funktionen fΩ fürΩ→ ∞ erhalten:
limΩ→∞
fΩ(t) =f (t + 0) + f (t− 0)
2,
mit
fΩ(t) =1
2π
∫ Ω
−Ωf (ω) eiωt dt =
12π
∫ ∞
−∞f (ω)rΩ eiωt dt.
Wie bei Fourierreihen ist an Sprungstellen von f bei der Näherung durch fΩ wieder das Gibbs-Phänomen zu beobachten:
Satz 3.11 (Gibbs-Phänomen der Fouriertransformation)Ist f stetig in [a, t0) und (t0, b], f (t + 0)− f (t− 0) > 0 und erfüllt f ansonsten die Voraus-setzungen der Umkehrformel, dann ist
limΩ→∞
maxa<t<t0
( f (t)− fΩ(t)) = limΩ→∞
maxt0<t<b
( fΩ(t)− f (t)) ≈ 0.09 · ( f (t + 0)− f (t− 0)).
Zur Erklärung nehmen wir an, dass f nur eine einzige Sprungstelle bei t0 = 0 besitzt. Dann istf von der Form
f (t) = fc(t) + ( f (0 + 0)− f (0− 0))H(t)
mit einer stetigen Funktion fc. Im Sinne des Cauchysche Hauptwertes gilt folglich:
fΩ(t) =∫ ∞
−∞fc(s)
sin(Ω(t− s))π(t− s)
ds + ( f (0 + 0)− f (0− 0))∫ ∞
0
sin(Ω(t− s))π(t− s)
ds,
wobei das erste Integral für Ω → ∞ überall gegen fc(t) konvergiert. Mit der Substitution Ω(t−s) = x ergibt das zweite Integral:
∫ ∞
0
sin(Ω(t− s))π(t− s)
ds =∫ Ωt
−∞
sin(x)πx
dx =∫ 0
−∞
sin(x)πx
dx +∫ Ωt
0
sin(x)πx
dx
=12+
1π
Si (Ωt).
Dieses Integral besitzt für jedes Ω > 0 auf der positiven Halbachse bei t = πΩ das Maximmum
12 + 1
π Si (π) ≈ 1.09, entsprechend bei t = − πΩ das Minimum von ca. −1.09. Damit ergibt sich
auch für beliebig große Ω ein Überschwingen in der Nähe der Sprungstelle um ca. 9% derSprunghöhe von f .
Bemerkung 3.12Glättung durch Gewichtsfunktionen. Verwendet man dagegen ein Dreickfenster als Gewichts-funktion, so wird die Näherungsfunktion geglättet und das Gibbs-Phänomen eliminiert. Für einestetige Funktion f erhält man nun sogar gleichmäßige Konvergenz der geglätteten Näherungs-
25
3 Fourier-Transformation und Inversionsformel
funktion fΩ gegen f , wenn
fΩ(t) =1
2π
∫ Ω
−Ωf (ω)
(1− |ω|
Ω
)eiωt dω =
12π
∫ Ω
−Ω
∫ ∞
−∞f (s)
(1− |ω|
Ω
)eiω(t−s) ds dω.
Mit Vertauschung der Integrationsreihenfolge und der Fouriertransformierten des Dreieckfens-ters ergibt sich
fΩ(t) =∫ ∞
−∞f (s)
2 sin2(Ω(t− s)/2)πΩ(t− s)2 ds.
Weil der Faltungskern positiv ist, ist die Annäherung in der Nähe der Sprungstelle von f mo-noton. Daran erkennt man das verschwinden des Gibbs-Phänomens. Durch des geringere Ge-wicht der höheren Frequenzanteile wird die Näherung fΩ im Vergleich zu fΩ weniger wellig unddie Konvergenz gegen f für Ω→ ∞ verbessert. Der zum Dreieckfenster gehörige Faltungskernwird als Fejér-Kern bezeichnet. Ähnliche Resultate lassen sich auch mit anderen Fensterfunk-tionen, zum Beispiel mit der Gaußschen Glockenkurve, erzielen.
3.2 Heisenbergsche Unschärferelation
Wir haben bereits festgestellt, dass ein Zeitsignal f und seine Fourier-Transformierte f nichtgleichzeitig in einem kleinen Bereich der t- bzw. ω-Achse lokalisiert sein können:
• nach der Skalierungsregel verflacht und weitet sich f unter einer zeitlichen Kompressionvon f aus,
• die Fourier-Transformierte einer an den Stellen ±a abgebrochenen Funktion besitzt denTräger R und ist für |ω| → ∞ nicht einmal integrierbar,
• ein Zeitsignal mit kompaktem Träger kann nicht bandbegrenzt sein.
Um quantitative Aussagen über die beobachtete Kopplung von Kompression und Expansion imZeit-Frequenz-Bereich zu erhalten, benötigt man ein Maß für die Zeitdauer und die Bandbreitevon Signalen. Eine für die immense Vielfalt möglicher Signale einheitliche Definition von Zeit-dauer und Bandbreite gibt es zwar nicht, jedoch eignet sich für eine große Klasse von Signalendie Definition der Streuung, um diese Begriffe einzuführen.Voraussetzungen: Die Funktion f sei stetig und stückweise stetig differenzierbar, mit f (t) seienauch t f (t) und f (t) quadratisch integrierbar.
Definition 3.13Es sei
1. die Streuung (=Varianz) ∆2a( f ) von f 6= 0 um den Punkt a
∆2a( f ) =
∫ ∞−∞(t− a)2| f (t)|2 dt∫ ∞
−∞ | f (t)|2 dt,
26

3 Fourier-Transformation und Inversionsformel
2. die effektive Zeitdauer (Standardabweichung) Dt( f ) von f 6= 0
Dt( f ) = ∆a( f ) mit a =
∫ ∞−∞ t| f (t)|2 dt∫ ∞−∞ | f (t)|2 dt
, (Erwartungswert),
3. die effektive Bandbreite (Standardabweichung) Dω( f ) von f 6= 0
Dω( f ) = ∆b( f ) mit b =
∫ ∞−∞ ω| f (ω)|2 dω∫ ∞−∞ | f (ω)|2 dω
, (Erwartungswert).
Bemerkung 3.14Interpretiert man
| f (t)|2∫ ∞−∞ | f (t)|2 dt
als Dichte einer Wahrscheinlichkeitsverteilung, dann ist
S =
∫ ∞−∞ t| f (t)|2 dt∫ ∞−∞ | f (t)|2 dt
der Erwartungswert und ∆2S( f ) die Varianz der Wahrscheinlichkeitsverteilung.
Satz 3.15 (Unschärferelation für das Zeitdauer-Bandbreite-Produkt.)Für quadratisch integrierbare Signale f 6= 0 und beliebige a, b ∈ R gilt
∆2a( f )∆2
b( f ) ≥ 14
.
Insbesondere gilt für das Zeitdauer-Bandbreite-Produkt immer
Dt( f )Dω( f ) ≥ 12
.
Es gilt dabei genau dann die Gleichheit, wenn | f | eine Gauß-Funktion ist, d.h., wenn
f (t) = ceiate−(t−m)2/(4σ2)
mit beliebigen reellen Konstanten a, m, c 6= 0, σ 6= 0 ist.
Beweis: Wir können annehmen, dass mit f auch t f (t) und f (t) quadratisch integrierbar sind,da andernfalls ∆2
a( f ) = ∞ oder ∆2b( f ) = ∞ gelten würde und die Ungleichung trivialerweise
27

3 Fourier-Transformation und Inversionsformel
erfüllt wäre. Für a = b = 0 ergibt die partielle Integration:∫ β
αt f (t) f (t) dt = t| f (t)|2
∣∣∣βα−∫ β
α
(| f (t)|2 + t f (t) f (t)
)dt,
also ∫ β
α| f (t)|2 dt = −2Re
(∫ β
αt f (t) f (t) dt
)+ t| f (t)|2
∣∣∣βα
.
Aufgrund der Voraussetzungen existieren die Grenzwerte der Integrale für α → −∞, β → ∞und es ist lim
α→−∞α| f (α)|2 = lim
β→∞β| f (β)|2 = 0. Damit folgt
∫ ∞
−∞| f (t)|2 dt = −2Re
(∫ ∞
−∞t f (t) f (t) dt
).
Mit der Cauchy-Schwarzschen Ungleichung und der Parsevalschen Gleichung erhält man hieraus:(∫ ∞
−∞| f (t)|2 dt
)2≤ 4
(∫ ∞
−∞t2| f (t)|2 dt
)(∫ ∞
−∞| f (t)|2 dt
)= 4
(∫ ∞
−∞t2| f (t)|2 dt
)(1
2π
∫ ∞
−∞ω2| f (ω)|2 dω
)und damit der Unschärferelation
∆20( f )∆2
0( f ) ≥ 14
.
Der allgemeine Fall ergibt sich mit g(t) = e−ibt f (t + a). Da dann ∆2a( f ) = ∆2
0(g) und ∆2b( f ) =
∆20(g) ist, also
∆2a( f )∆2
b( f ) = ∆20(g)∆2
0(g) ≥ 14
.
Die Cauchy-Schwarzsche Ungleichung ist genau dann eine Gleichung, wenn t f (t) und f (t)linear abhängig sind, also wenn die Differentialgleichung:
kt f (t) = f (t)
gilt, die einzigen nichttrivialen, quadratisch integrierbaren Lösungen sind von der Form f (t) =cekt2/2 mit c 6= 0 und k < 0. Mit k = − 1
(2σ2)ergibt sich die letzte Aussage des Satzes.
3.3 Diskrete Fouriertransformation
Fourierreihen eignen sich im besonderen zur Untersuchung von Signalen. Messen kann manaber nur an diskreten Stellen und deshalb wird ein Signal nicht als f (t) aufgenommen sondernals f (ti) zu diskreten Zeiten tj, j = 1, 2, . . . , N. Dazu passend wollen wir nun die Fourierreihediskretisieren. Dazu gehen wir zunächst wieder von einer 2π-periodischen Funktion f (t) ausund bilden ihre Fourierreihe (in komplexer Form):
f (t) =∞
∑k=−∞
ckeikt.
28

3 Fourier-Transformation und Inversionsformel
An jeder Stelle ti gilt
f (tj) =∞
∑k=−∞
ckeiktj .
Nehmen wir nun an, dass die Funktion eine endliche Fourierreihe besitzt bzw. hinreichend gutdadurch approximiert wird, so erhalten wir durch abschneiden der Fourierreihe (filtern):
f (tj) =N−1
∑k=0
ckeiktj
Sind die Stellen tj im Intervall [0, 2π] gleichverteilt, so gilt tj =2π jN und
f(
2π jn
)=
N−1
∑k=0
ckeik 2π jN , j = 0, 1, 2, . . . , N − 1.
Nun stellen wir fest, dass
eik 2π jN =
(ei 2π j
N
)k
gilt und setzt man
wj := ei 2π jN
dann sind dies gerade die N komplexen Wurzeln aus 1 = e2πi.Bilden wir nun die Matrix
Wn :=
w0
0 w10 . . . wn−1
0
w01 w1
1 . . . wn−11
......
. . ....
w0n−1 w1
n−1 . . . wn−1n−1
dann ist
~f =
f (0)
f( 2π
n)
f( 2π·2
n)
...
f(
2π(n−1)n
)
=
1 1 1 . . . 1
1 w1 w21 . . . wn−1
1
1 w2 w22 . . . wn−1
2...
......
. . ....
1 wn−1 w2n−1 . . . wn−1
n−1
c0
c1
c2...
cn−1
= Wn~c.
Mit Hilfe dieser Gleichung kann man nun die diskrete Fourier-Transformation definieren, derVektor ~c ist die diskrete Fourier-Transformierte des Vektors ~f . Wie kann man sie berechnen?Wie man leicht nachrechnet gilt
WnW∗n = W∗n Wn = n · I
29

3 Fourier-Transformation und Inversionsformel
und die inverse Matrix zu W ist gerade 1n W∗, deshalb gilt
~f = ~c =
f0
f1
f2...
fn−1
:=
1n
W∗n~f =1n
1 1 1 . . . 1
1 w1 w2 . . . wn−1
1 w21 w2
2 . . . w2n−1
......
.... . .
...
1 wn−11 wn−1
2 . . . wn−1n−1
f (0)
f( 2π
n)
f( 2π·2
n)
...
f(
2π(n−1)n
)
.
Folglich gilt für die Koeffizienten fk der diskreten Fourier-Transformation (DFT):
fk =1n
N−1
∑m=0
fm e−ikm 2πn , fm = f (tm) = f
(2πm
N
).
Beispiel 3.16Für n = 4 sieht die Matrix W mit wj := ei 2π j
4 , also w0 = 1, w1 = ei π2 = i, w2 = w2
1 = eiπ = −1
und w3 = w31 = ei 3π
2 = −i wie folgt aus:
W4 =
1 i0 (i2)0 (i3)0
1 i i2 i3
1 i2 (i2)2 (i3)2
1 i3 (i2)3 (i3)3
=
1 1 1 1
1 i −1 −i
1 −1 1 −1
1 −i −1 i
.
3.4 Diskrete Approximation oder Aliasing
Vergleich der DFT mit der Fourierreihe einer T-periodischen Funktion.
Die Fourierreihe einer T-periodischen Funktion wird gebildet mit Hilfe der Fourierkoeffizien-ten:
ck =1T
∫ T
0f (t)e−ikωt dt, ω =
2π
T,
die Approximation der Fourierkoeffizienten mittels DFT ist
ck =1T
N
∑j=0
f (N∆t)e−ikjω∆t∆T =1N
N−1
∑j=0
yje−ikj2π/N .
Wegen e−ikj2π/N = e−ikj2π/N+m2π gilt
ck = cl , mit l = k + mN.
Die entstehende Folge (ck)k∈Z ist damit n periodisch, andererseits gilt für die Fourierkoeffizien-ten, das Riemann-Lebesgue-Lemma, d.h. lim|k|→∞ |ck| = 0. Man kann daher höchstens einen
30
3 Fourier-Transformation und Inversionsformel
Abschnitt der Länge N dieser Folge für Näherungen von N Spektralwerten verwenden.Wie verhalten sich die Koeffizienten zueinander? Mit
f (N∆t) =∞
∑l=−∞
cleil j2π/N
erhält man
ck =1N
N−1
∑j=0
yje−ikj2π/N =1N
N−1
∑j=0
f (N∆t)e−ikj2π/N
=1N
N−1
∑j=0
∞
∑l=−∞
cleil j2π/Ne−ikj2π/N
=∞
∑m=−∞
ck+mN ,
da für die geometrische Reihe
1N
N−1
∑j=0
e−i(k−l)j2π/N =
1, für l = k + mN,
1N ·
1−e−i(k−l)2πN N
1−e−i(k−l)2π/n = 0, für l 6= k + mN,
gilt. Der Koeffizient ck ist die Summe aller exakten Fourierkoeffizienten ck+mN von f , d.h.die zugehörigen harmonischen Schwingungen ei(k+mN)ωt mit den Kreisfrequenzen (k + mN)ω
können anhand der Abtastwerte f (jT/N) nicht unterschieden werden, weil alle Funktionenei(k+mN)ωt an allen Stellen jT/N übereinstimmen. Man nennt diese Tatsache „Alias-Effekt“.Man ordnet nun cl der betragsmäßig kleinsten Kreisfrequenz kω zu, für welche l = k + mN ist.Für ungerade N ergibt sich dadurch eine eindeutige Zuordnung.
Beispiel 3.17Für N = 15 dienen
(c0, c1, . . . , c7) als Näherung für (c0, c1, . . . , c7),
(c8, c9, . . . , c14) als Näherung für (c−7, c−6, . . . , c−1).
Die gleiche Zuordnung treffen unsere Sinne bei visuellen Eindrücken, die Trägheit des mensch-lichen Auges lässt Bildfolgen mit 24 Aufnahmen pro Sekunde zu kontinuierlichen Vorgängenverschmelzen.
In der Signalverarbeitung erreicht man eine eindeutige Zuordnung dadurch, dass man das Si-gnal vor der Abtastung durch ein Tiefpassfilter bandbegrenzt, d.h. bei gegebener Abtastfre-quenz N/T nur Schwingungen mit Frequenzen |ν| < N/(2T) durch das Filter lässt.Zusammenfassung: Bei der Abtastung des Signals f an n äquidistanten Stellen tj = j∆t in[0, T) verhindert der Alias-Effekt das Aufdecken periodischer Anteile mit Frequenzen, die grö-ßer als N/(2T) sind. Anders herum gesagt, um periodische Vorgänge mit einer Frequenz ν zubeobachten ist eine Abtastfrequenz größer als 2ν erforderlich.
Wie funktionieren Tief-, Hoch- bzw. Bandpassfilter? Ein vorliegendes Signal, EingangssignalU0eiωt wird durch ein „System“ so verändert, dass das Ausgangssignal gerade U0H(iω)eiωt ist.
31

3 Fourier-Transformation und Inversionsformel
Die Funktion H(iω) drückt Verstärkung bzw. Dämpfung und Phasenverschiebung in Abhängig-keit von der Eingangsfrequenz ω aus. Für T-periodische stückweise stetige Eingangssignale fmit den Fourierkoeffizienten ck lässt sich daher das Verhalten des linearen Systems im einge-schwungenen Zustand beschreiben mit den Faktoren
hk = H(
i2π k
T
), k ∈ Z,
wenn man f als Überlagerung von harmonischen Schwingungen mit den Kreisfrequenzen2πk/T auffasst. Sei
h(t) =∞
∑k=0
hkeikωt, ω =2π
T,
dann sind die Fourierkoeffizienten des Ausgangssignals ( f ∗ h)T das Produkt der entsprechen-den Fourierkoeffizienten von f und h. Der praktische Nutzen besteht darin, dass eine derartigeSignalbearbeitung technisch möglich ist.
Beispiel 3.18Tiefpassfilter. Das folgende RCL-Tiefpassfilter mit dem Ohmschen Widerstand R, der Indukti-vität L und der Kapazität C wird beschrieben durch die Differentialgleichung
LCd2Ua
dt2 (t) + RCdUa
dt(t) + Ua(t) = Ue(t).
Nullstellen des charakteristischen Polynoms:
λ1,2 =
− R2L ±
√R2
4L2 − 1LC , für R2
4L2 ≥ 1LC ,
− R2L ± i
√1
LC −R2
4L2 , für R2
4L2 < 1LC ,
Für Ue(t) = U0eikωt, ω = 2πT , ergibt sich für t→ ∞
Ua(t) =U0
1 + ikωRC− k2ω2LCeikωt,
die T-periodische Übertragungsfunktion ist deshalb
∞
∑k=−∞
hkeikωt =∞
∑k=−∞
11 + ikωRC− k2ω2LC
eikωt.
Für k ∈ Z ist
|hk| = (k4ω4L2C2 + k2(ω2R2C2 − 2ω2LC) + 1)−1/2 =1k2
(α +
β
k2 +1k4
)−1/2≤ M
k2 .
Folglich konvergiert die Reihe gleichmäßig gegen eine T-periodische stetige Funktion.
Bemerkung 3.19Die Spektralfolge
(hk)k∈Z =
(1
1 + ikωRC− k2ω2LC
)k∈Z
32

3 Fourier-Transformation und Inversionsformel
entspricht den Abtastwerten der kontinuiertlichen Funktion
H(iω) =1
1 + iωRC−ω2LC,
die in der E-Technik als Frequenzgang des Filters bezeichnet wird. Es handelt sich um einenTiefpassfilter, da die höheren Frequenzen stark gedämpft werden.
Folgerung: Hat das Eingangssignal die Gestalt Ue(t) = ∑∞k=−∞ ukeikωt, so hat das Ausgangssi-
gnal die Gestalt
Ua(t) =∞
∑k=−∞
hkukeikωt,
d.h.
Ua(t) = (h ∗Ue)(t) =1T
∫ T
0Ue(t)h(t− u) du mit h(t) =
∞
∑k=−∞
hkeikωt.
3.5 Abtastsatz von Shannon, Sampling Theorem
Zur Erinnerung: Bei der Abtastung des Signals f an n äquidistanten Stellen tj = j∆t in [0, T)verhindert der Alias-Effekt das Aufdecken periodischer Anteile mit Frequenzen, die größer alsn/(2T) sind. Anders herum gesagt, um periodische Vorgänge mit einer Frequenz ν zu beob-achten ist eine Abtastfrequenz größer als 2ν erforderlich.
Allgemein wird die Frage der Rekonstruierbarkeit von Signalen im Abtastsatz von Shannon bzw.im Sampling Theorem beantwortet. Die Frage lautet also: Ist es möglich, ein Zeitsignal f ausdiskreten Werten f (kT), k ∈ Z vollständig zu rekonstruieren?Im Allgemeinen ist die Antwort natürlich nein, aber es gilt:
Satz 3.20Ist f eine integrierbare Funktion, die durch ωg > 0 begrenzt ist, d.h. f = 0 für |ω| > ωg, undist mit f (t) auch t f (t) integrierbar sind, dann gilt für alle t ∈ R die folgende Abtastformel:
f (t) =∞
∑k=−∞
f(
kπ
ωg
)sin(ωgt− kπ)
ωgt− kπ.
Beweis: Aus den Voraussetzungen folgt, dass die Spektralfunktion f stetig differenzierbar ist.Sie wird daher durch ihre Fourier-Reihe in [−ωg, ωg] punktweise dargestellt und diese Reiheist absolut und gleichmäßig konvergent:
f (ω) =∞
∑k=−∞
ck e−ikωta , ta =π
ωg, |ω| ≤ ωg,
ck =1
2ωg
∫ ωg
−ωgf (ω) eikωta dω =
π
ωgf (kta).
33

3 Fourier-Transformation und Inversionsformel
Die gliedweise Integration ist möglich, da die Reihe gleichmäßig konvergiert. Da bandbegrenzteFunktionen beliebig oft differenzierbar sind, folgt der Abtastsatz aus der Fourierschen Umkehr-formel:
f (t) =1
2π
∫ ωg
−ωgf (ω) eiωt dω =
12π
∫ ωg
−ωg
∞
∑k=−∞
ck e−ikωta eiωt dω
=∞
∑k=−∞
12ωg
f (kta)∫ ωg
−ωgeiω(t−kta) dω =
∞
∑k=−∞
f(
kπ
ωg
)sin(ωgt− kπ)
ωgt− kπ.
Der Abtastsatz ergibt eine Formel, mit der bei Kenntnis aller diskreten Werte f(
kπωg
), k ∈ Z,
die Werte von f zu Zeiten t 6= kπωg
interpoliert werden können. Die Abtastfrequenz muss dabei
mindestens doppelt so groß wie die Grenzfrequenz ωg2π sein. Was passiert, wenn man das nicht
beachtet?Dazu nehmen wir an, dass die Funktion f nicht bandbegrenzt mit ωg, sondern mit ωg < ω <
3ωg ist. Dann gilt
f (kta) =1
2π
∫ ω
−ωf (ω) eikωta dω =
12π
(∫ −ωg
−3ωg... +
∫ ωg
−ωg... +
∫ 3ωg
ωg...)
.
Substituiert man ω := ω′± 2ωg, dann gilt eikωta = eikω′ta wegen 2ωgta = 2π. D.h.
f (kta) =1
2π
∫ ωg
−ωgf (ω) + f (ω− 2ωg) + f (ω + 2ωg) eiktaω dω.
Dadurch kommt eine weitere Funktion g ins Spiel. Die Funktion g sei definiert durch
g(ω) :=
f (ω) + f (ω− 2ωg) + f (ω + 2ωg), |ω| ≤ ωg,
0, |ω| > ωg.
Auch für diese Funktion gilt
g(kta) =1
2π
∫ ωg
−ωgg(ω) eiktaω dω = f (kta)!
Folglich besitzt g dieselbe Abtastreihe wie f , ist aber tatsächlich ωg-bandbegrenzt. D.h.: Istdie wahre Bandbreite ω von f größer als ωg := π
ta(Nyquist-Frequenz), so werden die höher-
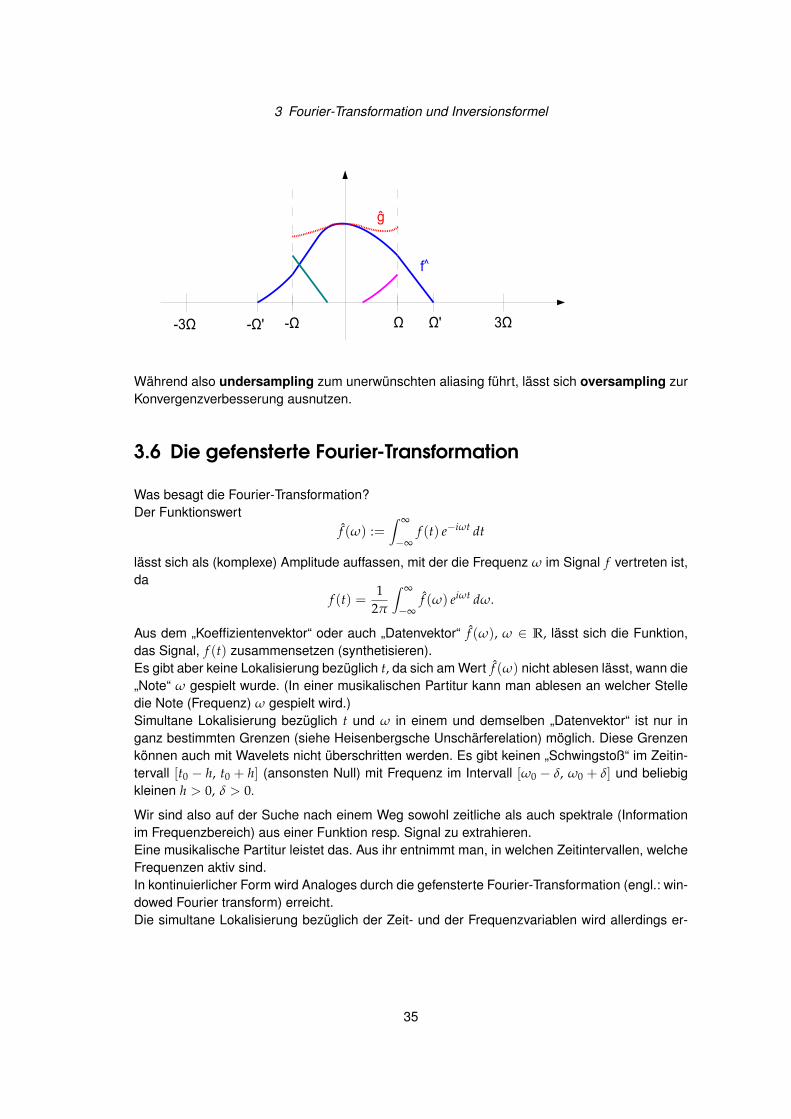
frequenten Anteile des Signals f nicht einfach „vergessen“ oder herausgefiltert, sondern sieerscheinen frequenzverschoben. Die Abtastreihe stellt eine ωg-bandbegrenzte Funktion g mitder Fourier-Transformierte g dar. Dies ist der sogenannte Alias-Effekt bzw. das aliasing.
34
3 Fourier-Transformation und Inversionsformel
-Ω-Ω'-3Ω 3ΩΩ'Ω
f^
ĝ
Während also undersampling zum unerwünschten aliasing führt, lässt sich oversampling zurKonvergenzverbesserung ausnutzen.
3.6 Die gefensterte Fourier-Transformation
Was besagt die Fourier-Transformation?Der Funktionswert
f (ω) :=∫ ∞
−∞f (t) e−iωt dt
lässt sich als (komplexe) Amplitude auffassen, mit der die Frequenz ω im Signal f vertreten ist,da
f (t) =1
2π
∫ ∞
−∞f (ω) eiωt dω.
Aus dem „Koeffizientenvektor“ oder auch „Datenvektor“ f (ω), ω ∈ R, lässt sich die Funktion,das Signal, f (t) zusammensetzen (synthetisieren).Es gibt aber keine Lokalisierung bezüglich t, da sich am Wert f (ω) nicht ablesen lässt, wann die„Note“ ω gespielt wurde. (In einer musikalischen Partitur kann man ablesen an welcher Stelledie Note (Frequenz) ω gespielt wird.)Simultane Lokalisierung bezüglich t und ω in einem und demselben „Datenvektor“ ist nur inganz bestimmten Grenzen (siehe Heisenbergsche Unschärferelation) möglich. Diese Grenzenkönnen auch mit Wavelets nicht überschritten werden. Es gibt keinen „Schwingstoß“ im Zeitin-tervall [t0 − h, t0 + h] (ansonsten Null) mit Frequenz im Intervall [ω0 − δ, ω0 + δ] und beliebigkleinen h > 0, δ > 0.
Wir sind also auf der Suche nach einem Weg sowohl zeitliche als auch spektrale (Informationim Frequenzbereich) aus einer Funktion resp. Signal zu extrahieren.Eine musikalische Partitur leistet das. Aus ihr entnimmt man, in welchen Zeitintervallen, welcheFrequenzen aktiv sind.In kontinuierlicher Form wird Analoges durch die gefensterte Fourier-Transformation (engl.: win-dowed Fourier transform) erreicht.Die simultane Lokalisierung bezüglich der Zeit- und der Frequenzvariablen wird allerdings er-
35
3 Fourier-Transformation und Inversionsformel
kauft mit einer riesigen Redundanz, da nun die Indexmenge zweidimensional ist:
G f (ω, s) : (ω, s) ∈ R×R.
Definition 3.21Die gefensterte Fourier-Transformation ist definiert als:
G f (ω, s) :=1√2π
∫ ∞
−∞f (t) g(t− s) e−iωt dt.
Das ist folgendermaßen zu verstehen, zunächst wird eine Fensterfunktion g : R → R≥ festgewählt. Die Funktion g sollte „mit Gesamtmasse 1 um t = 0 konzentriert“ sein, also z.B. kom-pakten Träger oder jedenfalls bei 0 ein ausgeprägtes Maximum haben. Besonders verbreitet istdas Fenster
g(t) := N(0, t) :=1√2πσ
exp(− t2
2σ2
)Gaußsche Glockenkurve.
Die dazugehörige Transformation wird auch als Gabor-Transformation bezeichnet.
Für gegebenes s ∈ R stellt die Funktion
gs : t 7→ g(t− s)
das um s nach rechts (falls s > 0) verschobene Fenster dar.
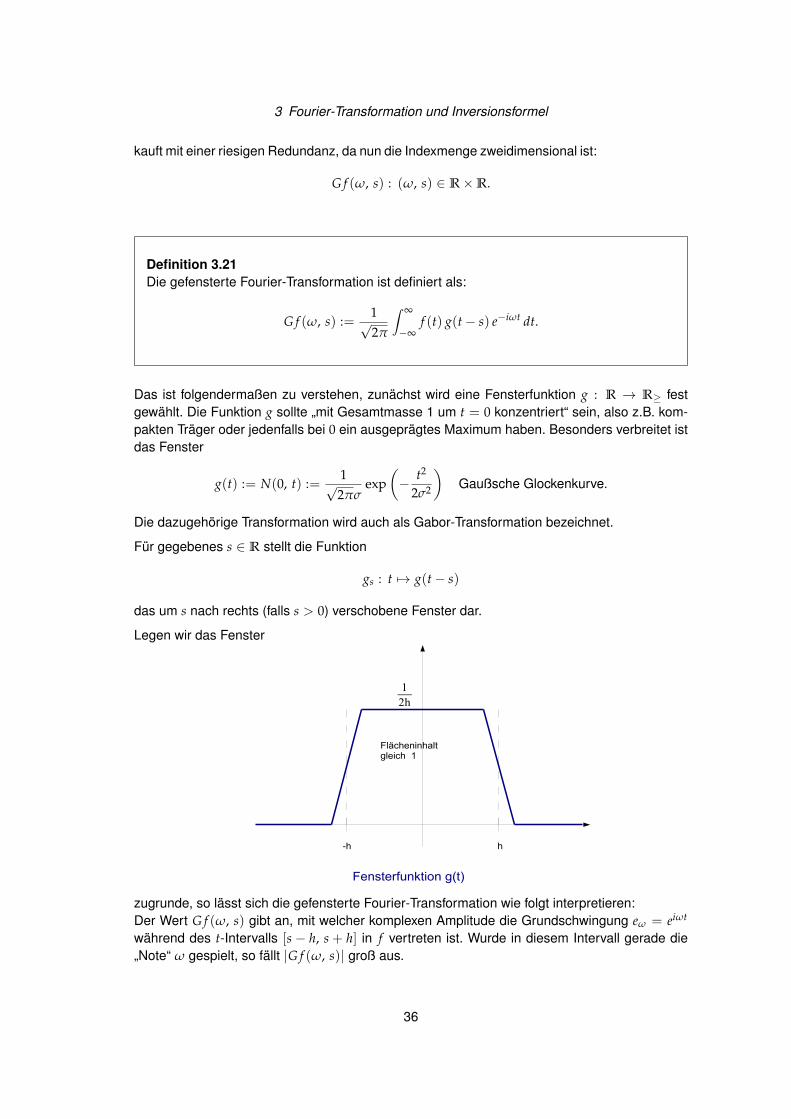
Legen wir das Fenster
12h
-h h
Flächeninhaltgleich 1
Fensterfunktion g(t)
zugrunde, so lässt sich die gefensterte Fourier-Transformation wie folgt interpretieren:Der Wert G f (ω, s) gibt an, mit welcher komplexen Amplitude die Grundschwingung eω = eiωt
während des t-Intervalls [s − h, s + h] in f vertreten ist. Wurde in diesem Intervall gerade die„Note“ ω gespielt, so fällt |G f (ω, s)| groß aus.
36
3 Fourier-Transformation und Inversionsformel
s-h s+h s-h s+h
y=g t−s cos t , ∣∣ groß y=g t−s cos t , ∣∣ klein
Fensterbreite 2h Fensterbreite 2h
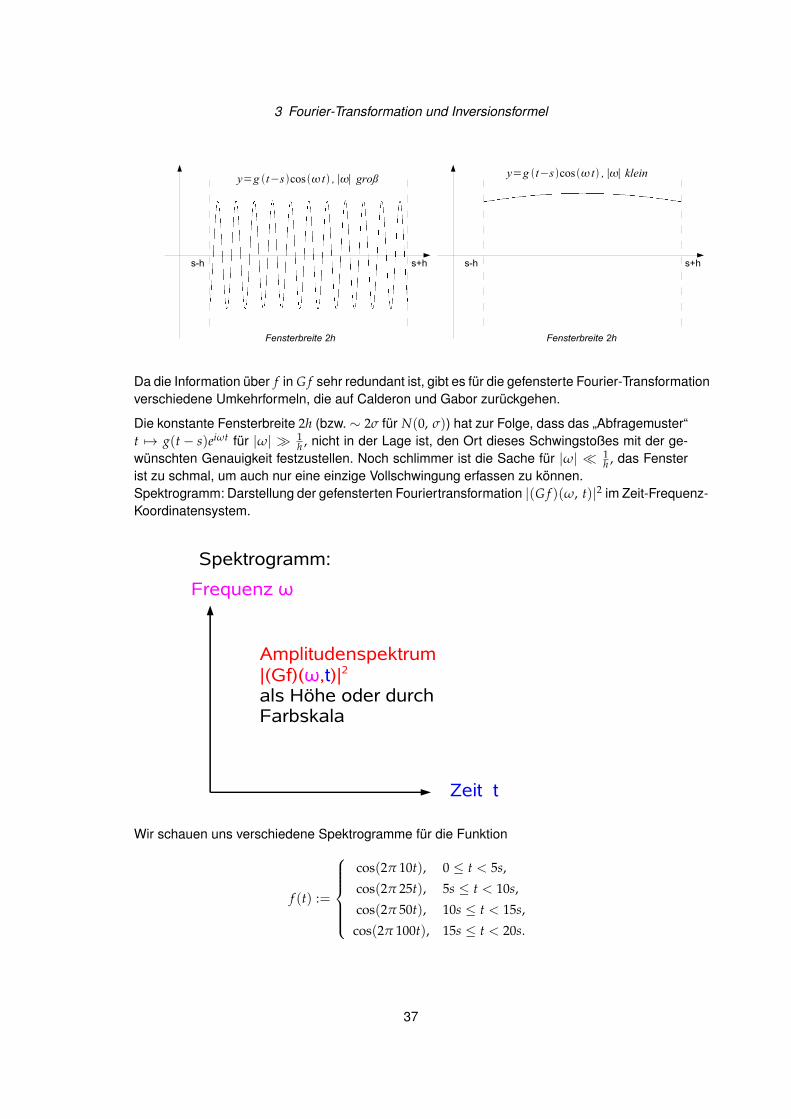
Da die Information über f in G f sehr redundant ist, gibt es für die gefensterte Fourier-Transformationverschiedene Umkehrformeln, die auf Calderon und Gabor zurückgehen.
Die konstante Fensterbreite 2h (bzw. ∼ 2σ für N(0, σ)) hat zur Folge, dass das „Abfragemuster“t 7→ g(t− s)eiωt für |ω| 1
h , nicht in der Lage ist, den Ort dieses Schwingstoßes mit der ge-wünschten Genauigkeit festzustellen. Noch schlimmer ist die Sache für |ω| 1
h , das Fensterist zu schmal, um auch nur eine einzige Vollschwingung erfassen zu können.Spektrogramm: Darstellung der gefensterten Fouriertransformation |(G f )(ω, t)|2 im Zeit-Frequenz-Koordinatensystem.
Frequenz ω
Zeit t
Amplitudenspektrum|(Gf)(ω,t)|2als Höhe oder durchFarbskala
Spektrogramm:
Wir schauen uns verschiedene Spektrogramme für die Funktion
f (t) :=
cos(2π 10t), 0 ≤ t < 5s,
cos(2π 25t), 5s ≤ t < 10s,
cos(2π 50t), 10s ≤ t < 15s,
cos(2π 100t), 15s ≤ t < 20s.
37
3 Fourier-Transformation und Inversionsformel
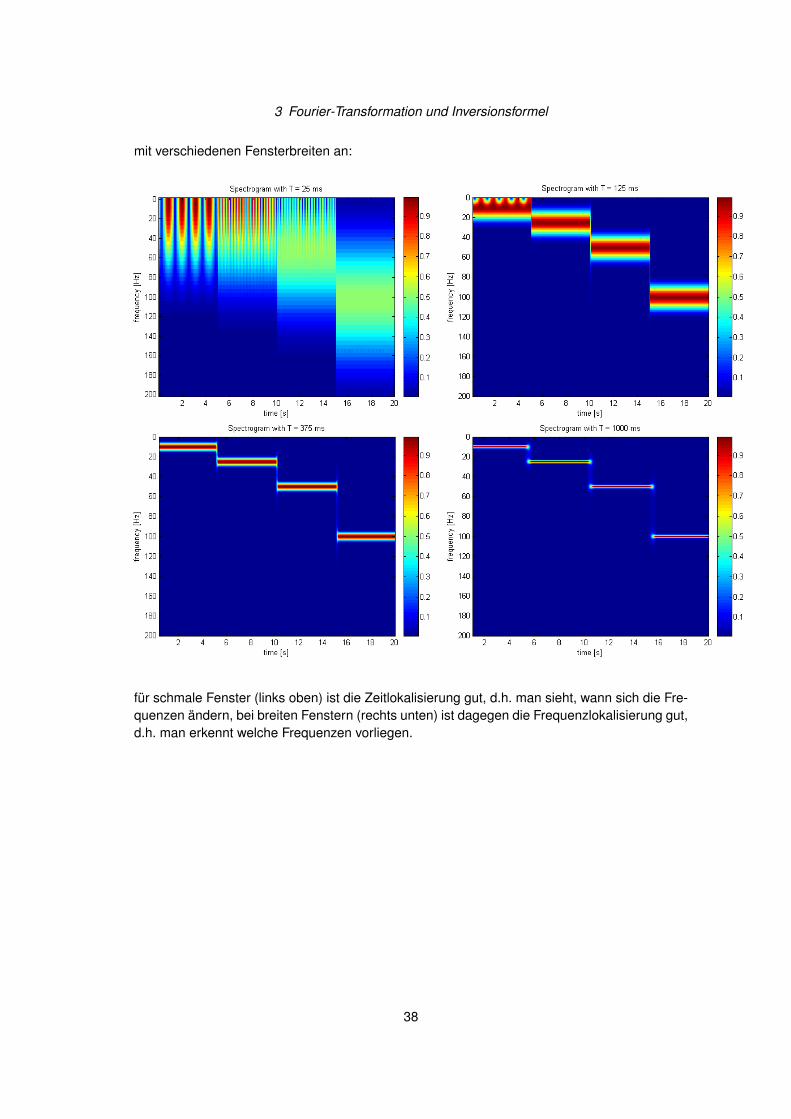
mit verschiedenen Fensterbreiten an:
für schmale Fenster (links oben) ist die Zeitlokalisierung gut, d.h. man sieht, wann sich die Fre-quenzen ändern, bei breiten Fenstern (rechts unten) ist dagegen die Frequenzlokalisierung gut,d.h. man erkennt welche Frequenzen vorliegen.
38
KAPITEL 4
Wavelets
4.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.1.1 Die Umkehrformel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.2 Haar-Wavelets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.3 Auflösungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.1 Einführung
Damit des entscheidende Neue der Wavelet-Transformation gegenüber den vorangehendenAnsätzen klarer herauskommt, halten wir fest:
• Die Fourier-Transformation von Funktionen f : R → C arbeitet mit einer speziellen (unddurch interessante analytische Eigenschaften ausgezeichneten) analysierenden Funktiont 7→ eit, die mit dem reellen Frequenzparameter α dilatiert (gestreckt bzw. gestaucht) wird:t 7→ eiαt.
• Bei der gefensterten Fourier-Transformation haben wir dieselbe analysierende Funktiont 7→ eit und ihre Dilatierten, dazu eine verschiebbare, im übrigen aber starre Fensterfunk-tion g; welche ziemlich willkürlich wählbar ist.
Das Grundmodell der Wavelet-Transformation bearbeitet ebenfalls komplexwertige Zeitsignalef : R → C. Man beginnt mit der Wahl eines geeigneten analysierenden Wavelets (Mother-Wavelet) oder auch nur Wavelet genannt, x → ψ(x). Dilatierte und verschobene Kopien des
39
4 Wavelets
Mother-Wavelets ψ heißen Wavelet-Funktionen. Die zur Analyse verwendeten „Abfragemuster“sind nun gerade derartige Wavelet-Funktionen, d.h. die Funktionen
ψa, b : R→ C, t 7→ 1|a|1/2 ψ
(t− b
a
),
wobei für (a, b) die Indexmenge R>0 ×R zugrundegelegt wird. Die Variable a ist der Skalie-rungparameter, b der Verschiebungsparameter. Der Vorfaktor 1
|a|1/2 sichert die Normierungsbe-dingnung ||ψ|| = 1. Wie man leicht sieht wächst die Breite des Abfragefensters bzw. -mustersproportional zu |a| und im Fenster ist immer eine vollständige und einfache Kopie des analysie-renden Wavelets ψ sichtbar. D.h.
• Skalenwerte a mit großen Betrag |a| 1 liefern ein breites Fenster und dienen zur Erfas-sung von langsamen Vorgängen bzw. langwelligen Schwingungsanteilen.
• Skalenwerte a mit 0 < |a| 1 liefern ganz schmale Fenster und dienen zum präzislokalisierten Nachweis hochfrequenter und/oder kurzlebiger Phänomene.
Man hat also den typischen „zoom in “ -Effekt.
Definition 4.1Die Wavelet-Transformierte
Wψ f : R>0 ×R→ C, (a, b) 7→ W f (a, b)
einer Funktion f ist definiert als
W f (a, b) := 〈 f , ψa, b〉 =1|a|1/2
∫ ∞
−∞f (t)ψ
(t− b
a
)dt.
Wir werden sehen, dass es auch für die Wavelet-Transformation eine Umkehrformel gibt. Siestellt das Ausgangsignal f als Linearkombination der Funktionen ψa, b dar, wobei die WerteWψ f (a, b) als Koeffizienten dienen und auf der Indexmenge R>0 ×R ein Haar-Maß zugrunde-gelegt wird. Es gilt:
f =1
C f
∫R>0×R
Wψ f (a, b)ψa,bda db|a|2 ,
wobei die Konstante Cψ nur von ψ abhängt.
40
4 Wavelets
Definition 4.2Die Funktion ψ : R→ C mit
ψ ∈ L2(R), ||ψ||L2 = 1 und 2π∫
R
|ψ(a)|2|a| da =: Cψ < ∞, (Zulässigkeitsbedingung)
heißt (Mutter-) Mother-Wavelet.
Bemerkung 4.3Alle praktisch vorkommenden Wavelets sind auch in L1(R), die meisten sind stetig (das Haar-Wavelet nicht), viele sind differenzierbar, und die in den Anwendungen beliebtesten Waveletshaben kompakten Träger.
Wann ist ψ ein Wavelet?
Satz 4.4Für ψ ∈ L2(R) und tψ ∈ L1(R), also
∫ ∞−∞ |t||ψ(t)| dt < ∞, ist die Zulässigkeitsbedingung
äquivalent zu ∫ ∞
−∞ψ(t) dt = 0 bzw. ψ(0) = 0.
Definition 4.5Für ein Mother-wavelet ψ heißt
W f (a, b) :=1|a|1/2
∫ ∞
−∞f (t)ψ
(t− b
a
)dt, a 6= 0,
die Wavelet-Transformierte des Zeitsignals f ∈ L2(R) bzg. ψ.
Der Definitionsbereich von W f ist die „zersägte Ebene“
R2− := (a, b) : a ∈ R\0, b ∈ R.
Oft werden nur positive a betrachtet.
Die Funktionen
ψa, b(t) =1|a|1/2
∫ ∞
−∞f (t)ψ
(t− b
a
)dt
41

4 Wavelets
entstehen alle aus der Funktion ψ(t) durch Dilatation (Streckung bzw. Stauchung) und anschlie-ßender Translation um b. Die Funktionen ψa,b(t) haben alle die Norm 1, denn
∫ ∞
−∞
∣∣∣∣∣ 1|a|1/2
∫ ∞
−∞f (t)ψ
(t− b
a
)dt
∣∣∣∣∣2
dt =
1|a|∫ ∞−∞ |ψ(τ)|
2 a dτ, a > 0,
1|a|∫ −∞
∞ |ψ(τ)|2 a dτ, a < 0,
=1|a|
∫ ∞
−∞|ψ(τ)|2 |a| dτ = 1
Das bedeutet,W f (a, b) = 〈 f , ψa,b〉
und|W f (a, b)| ≤ || f ||L2 · ||ψa,b||L2 = || f ||L2 für alle (a, b) ∈ R2
−.
Lemma 4.1Es sei ϕ eine k-fach, k ≥ 1, differenzierbare Funktion mit ϕ(k) ∈ L2(R) und ϕ(k) 6= 0. Dannist
ψ(t) := ϕ(k)(t)1
||ϕ(k)||L2
ein Wavelet.
Beispiel 4.6Mexikaner Hut:
ψ(t) :=2√3
π−1/4(1− t2)e−t2/2 =2√3
π−1/4g′′(t)
mit g(t) = −e−t2/2 und g′′(t) = (1− t2)e−t2/2 ∈ Ł2(R).Außerdem rechnet man leicht nach, dass ψ(ξ) = − 2√
3π−1/4(iξ)2 g(ξ) = 2√
3π−1/4ξ2e−ξ2/2 und
damit ψ(0) = 0.
Lemma 4.2Sei ψ ∈ L2(R) mit ||ψ||L2 = 1, mit kompaktem Träger und∫ ∞
−∞ψ(t) dt = 0,
dann ist ψ ein Wavelet.
Beispiel 4.7Haar-Wavelet
ψ(t) =
1, 0 ≤ t < 1
2 ,
−1, 12 ≤ t < 1,
0, sonst.
42
4 Wavelets
4.1.1 Die Umkehrformel
Lemma 4.3Die Fourier-Transformierte von W f (a, b) bzgl. b ist
√2π|a|1/2 f (ξ)ψ(aξ).
Satz 4.8Die Wavelet-Transformation zum Wavelet ψ
W : L2(R)→ L2(
R2−,
da dba2
)ist bis auf die Konstante Cψ eine Isometrie.
ohne Beweis
Folglich gilt die Inversionsformel:
f (t) = W−1W f (t) =1
Cψ
∫ ∞
−∞
∫ ∞
−∞
1|a|1/2 ψ
(t− b
a
)(W f )(a, b)
da dba2 .
Satz 4.9(Parsevalsche Gleichung):Für jedes gegebene Wavelet ψ gilt
〈W f , Wg〉L2(
R2− , da db
a2
) = Cψ〈 f , g〉L2(R)
für beliebige f , g ∈ L2(R).
4.2 Haar-Wavelets
1910 hat A. Haar zum ersten Mal ein vollständiges Orthonormalsystem für den Hilbert-RaumL2(R) beschrieben und damit bewiesen, dass dieser zum Folgenraum
l2 := (ck)k=0∞ :∞
∑k=0|ck|2 < ∞
43

4 Wavelets
isomorph ist. Heute interpretieren wir die von Haar angegebenen Basisfunktionen als dilatierteund verschobene Kopien eines Mother-Wavelets ψ :
ψ(t) :=
1, 0 ≤ t < 1
2 ,
−1, 12 ≤ t < 1,
0, sonst.
Offensichtlich gilt ∫ ∞
−∞ψ(t) dt = 0,
∫ ∞
−∞|ψ(t)|2 dt = 1.
Das Haar-Wavlet ist gut zeitlokalisiert, aber leider unstetig. Die Fourier-Transformierte von ψ
ist
ψ(ω) =∫ 1
2
0e−iωt dt−
∫ 1
12
e−iωt dt =1−iω
(e−iωt |
120 − e−iωt |.|11
2
)= i
sin2(ω/4)ω/4
e−iω/2.
Die (gerade) Funktion |ψ| erreicht ihr Maximum an der Stelle ω0 ≈ 1, 86 und nimmt für ω → ∞ab wie 1
ω . Hiernach ist ψ ziemlich gut lokalisiert bei der Frequenz ω0.Wir definieren nun die Wavelet-Funkionen:
ψr,k(t) = 2−r/2ψ
(t− k2r
2r
), r, k ∈ Z.
ψr,k ist ungleich Null auf dem Intervall Ir,k := [k2r, (k+ 1)2r), der Länge 2r.
• Zu größerem r gehören längere Intervalle und entsprechend „langwelligere“ Waveletfunk-tionen.
• ||ψr,k||2 =∫ ∞−∞ |ψr,k(t)|2 dt = 1 für alle r und alle k.
Satz 4.10Die ψr,k, r, k ∈ Z, bilden eine Orthonormalbasis von L2(R).
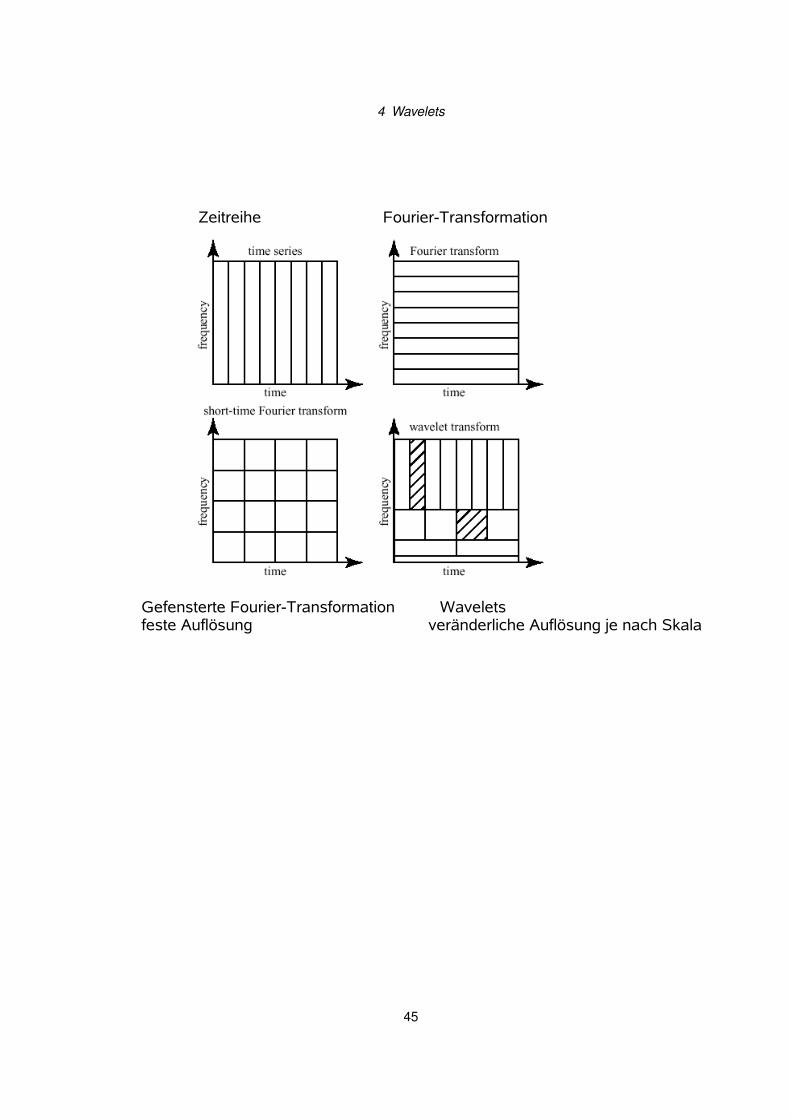
4.3 Auflösungen
Vergleich von Zeitreihen, Fouriertransformation, gefensterter Fouriertransformation und Wave-lets hinsichtlich der Auflösung.
44
4 Wavelets
Zeitreihe Fourier-Transformation
Gefensterte Fourier-Transformation Waveletsfeste Auflösung veränderliche Auflösung je nach Skala
45


![АНАЛИЗАТОР СЕТИ M2M - Electric Lineтока M2M ETHERNET, M2M PROFIBUS, M2M I/O Частотный интервал [Гц] 45 ÷ 65 Защитный T 0,5 A плавкий](https://img.pdfslide.org/doc/110x75/5f0da2507e708231d43b5325/-m2m-electric-m2m-ethernet-m2m-profibus.jpg)





![Management Geruch-Korro Gnirss 1 [Kompatibilitätsmodus] · Beton-Korrosionsrate H 2 S [ppm] mm/a T °C Quelle 00 0,5 0,5 [1] 31025[2] 511 [3] 20 15 25 [2] Innovationsforum Wasserwirtschaft](https://img.pdfslide.org/doc/110x75/5e2e2f853119c73e804c846b/management-geruch-korro-gnirss-1-kompatibilittsmodus-beton-korrosionsrate-h.jpg)