Embed Size (px)
Citation preview

Galileo above ���� Dirk Abel, Aachen ���� 20.4.2011 ���� Folie 1
automotiveGATE und railGATE:Galileo-basierte Fahrzeugführung für bodengebundenen Verkehr
Prof. Dr.- Ing. Dirk AbelRWTH Aachen
Institut für Regelungstechnik
Vortrag im Braunschweiger VerkehrskolloquiumDLR ���� 6. Dezember 2012
Quelle DLR
Satellitennavigationssysteme
2 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
� Satelliten und Ortung
� Galileo-Testgebiete
� Anwendungen
Satellitennavigationssysteme
3 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
� Satelliten und Ortung
� Galileo-Testgebiete
� Anwendungen
Einsatzgebiete Satellitennavigation
4 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Luftverkehr
Schifffahrt
Straßenverkehr
Mobil-Navigation
Flottenmanagement
Vermessung
Tourismus
Landwirtschaft
Schienenverkehr
Rettungswesen
Zeitsynchronisation
Logistik
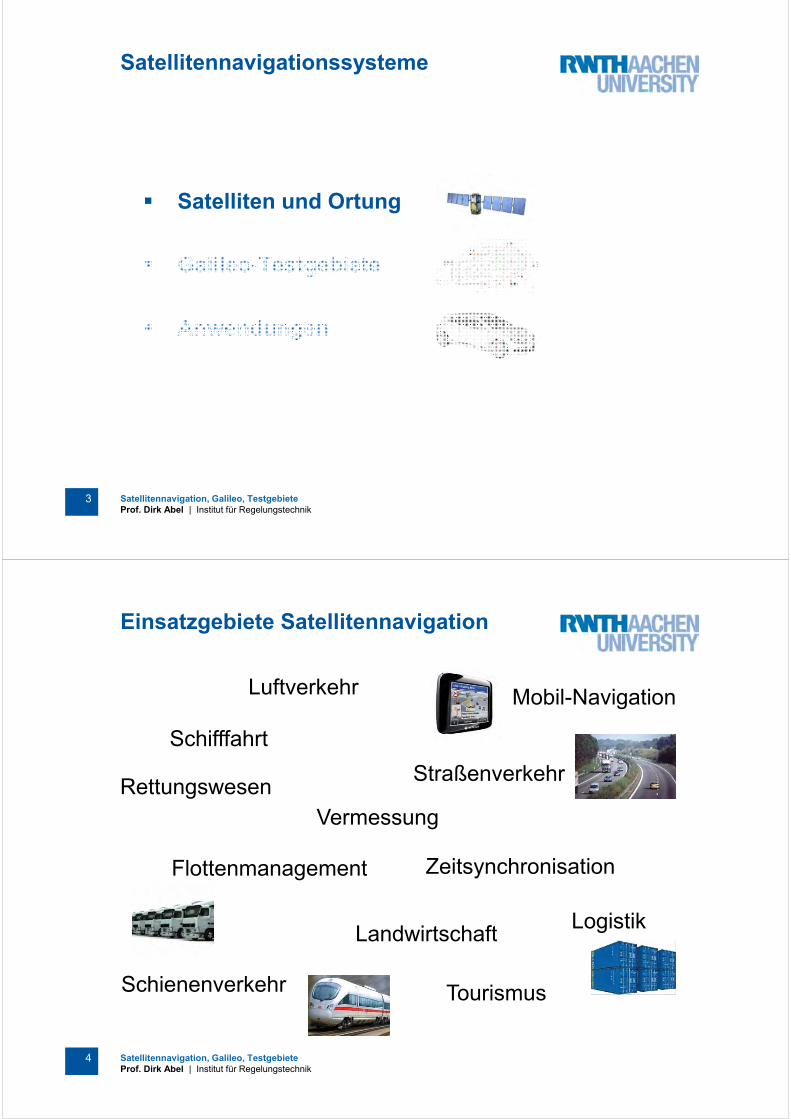
Satellitennavigationssysteme
5 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
GPSin Betrieb, U.S.-amerikanisch
Glonassin Betrieb, russisch
Galileoim Aufbau, europäisch
Compassim Aufbau, chinesisch
IRNSSin Planung, indisch, regional
QZSSin Planung, japanisch, region.
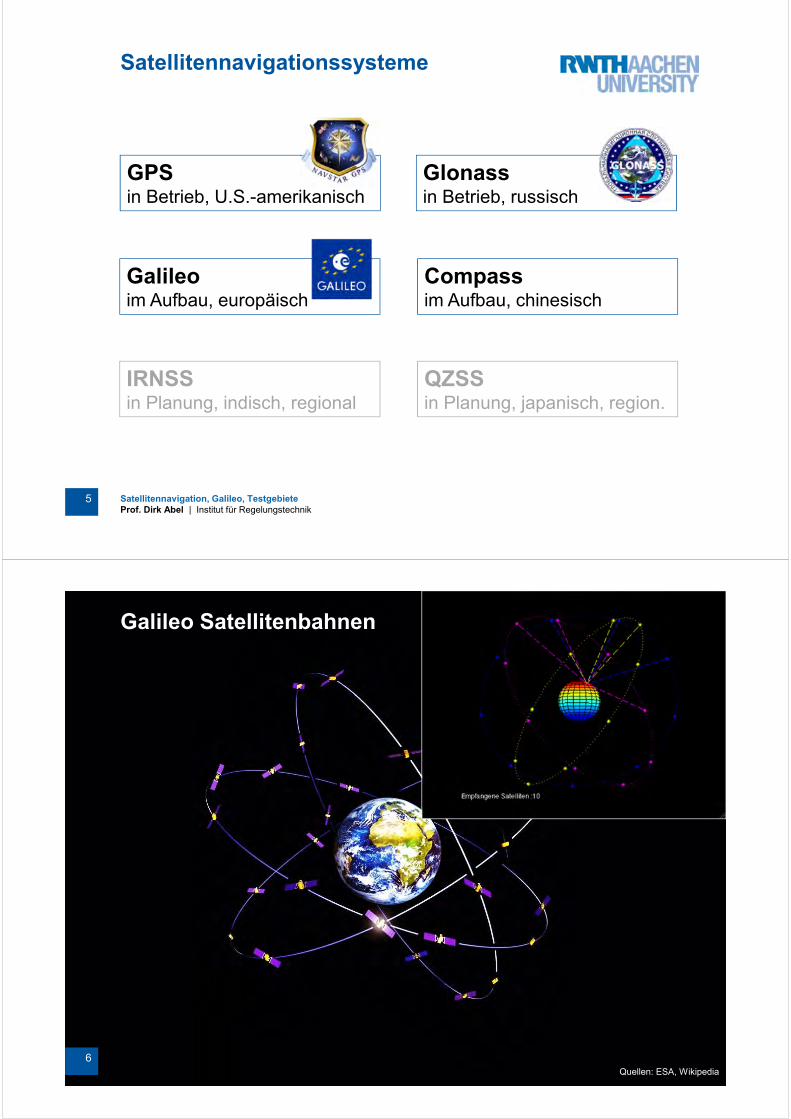
Satellitennavigation, Galileo, TestgebieteThomas Engelhardt | Institut für Regelungstechnik Quellen: ESA, Wikipedia
Galileo Satellitenbahnen
6
Galileo Satellitennavigationssystem
Zeitliche Eckdaten� IOC (Initial Operational Capability): ca. 2014
� FOC (Full Operational Capability): ca. 2016-2018
Merkmale� Ziviles System
� Verfügbarkeits-Garantie, Rechtssicherheit(vertraglich im Commercial Service)
� Integritätsinformationen (Safety of Life Service)Time to Alarm: 6 s
� Für Europa optimierte Konstellation (Walker)
� Mehrfrequenzbetrieb für Genauigkeiten bis 4-6 m
Vorteile hinsichtlich: Verfügbarkeit, Integrität und Genauigkeit
���� Wichtige Eigenschaften für sicherheitskritische Anwendungen
7 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Bildquelle: ESA
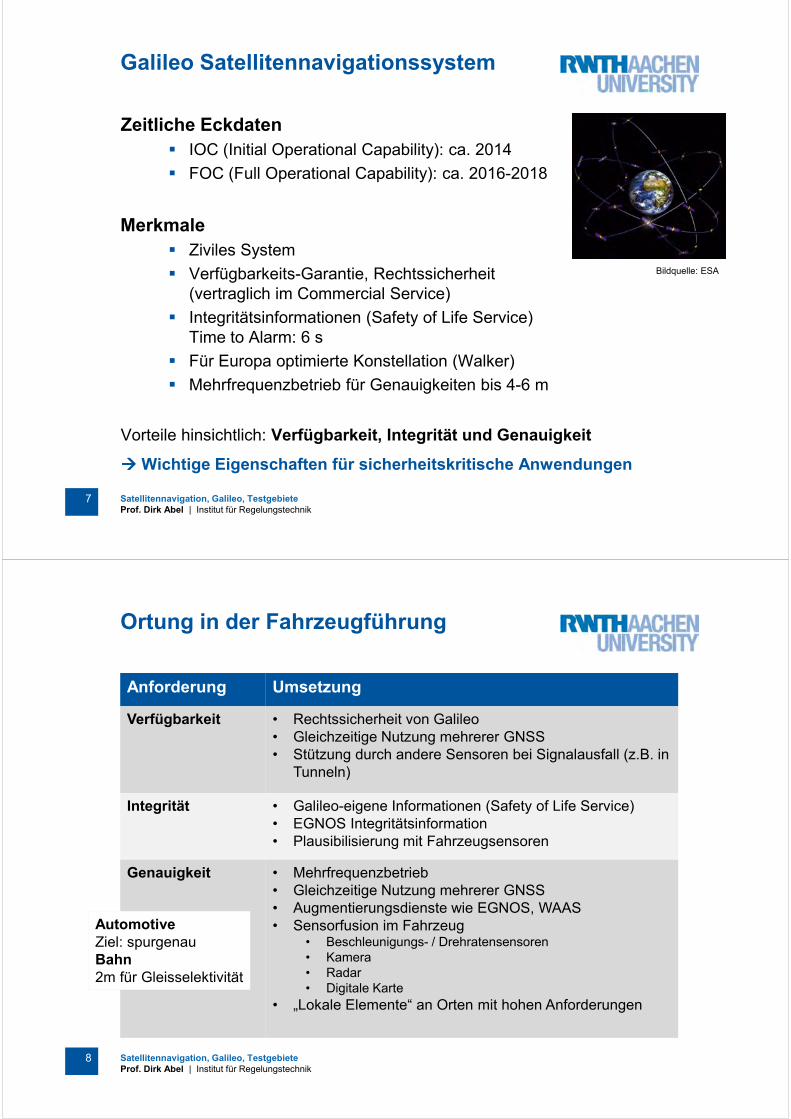
Ortung in der Fahrzeugführung
8 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Anforderung Umsetzung
Verfügbarkeit • Rechtssicherheit von Galileo• Gleichzeitige Nutzung mehrerer GNSS• Stützung durch andere Sensoren bei Signalausfall (z.B. in
Tunneln)
Integrität • Galileo-eigene Informationen (Safety of Life Service)• EGNOS Integritätsinformation• Plausibilisierung mit Fahrzeugsensoren
Genauigkeit • Mehrfrequenzbetrieb• Gleichzeitige Nutzung mehrerer GNSS• Augmentierungsdienste wie EGNOS, WAAS• Sensorfusion im Fahrzeug
• Beschleunigungs- / Drehratensensoren• Kamera• Radar• Digitale Karte
• „Lokale Elemente“ an Orten mit hohen Anforderungen
AutomotiveZiel: spurgenauBahn2m für Gleisselektivität
Satellitennavigationssysteme
9 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
� Satelliten und Ortung
� Galileo-Testgebiete
� Anwendungen
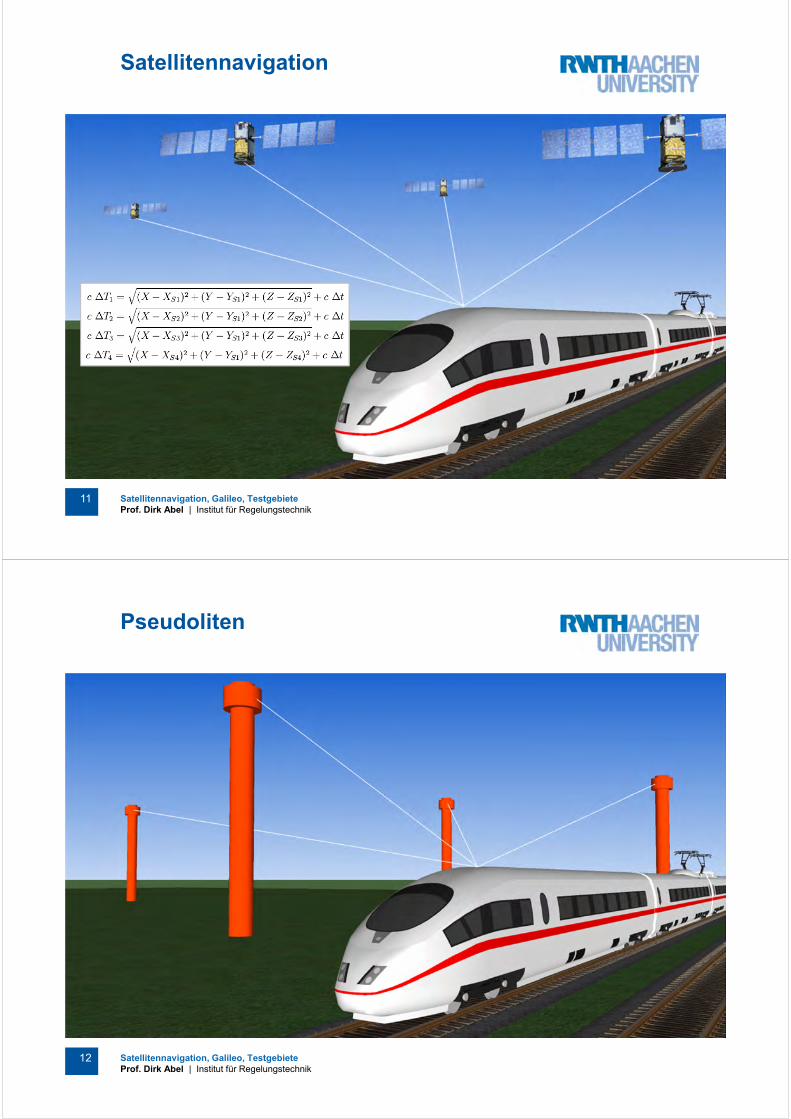
Ortung
10 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Satellitennavigation
11 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
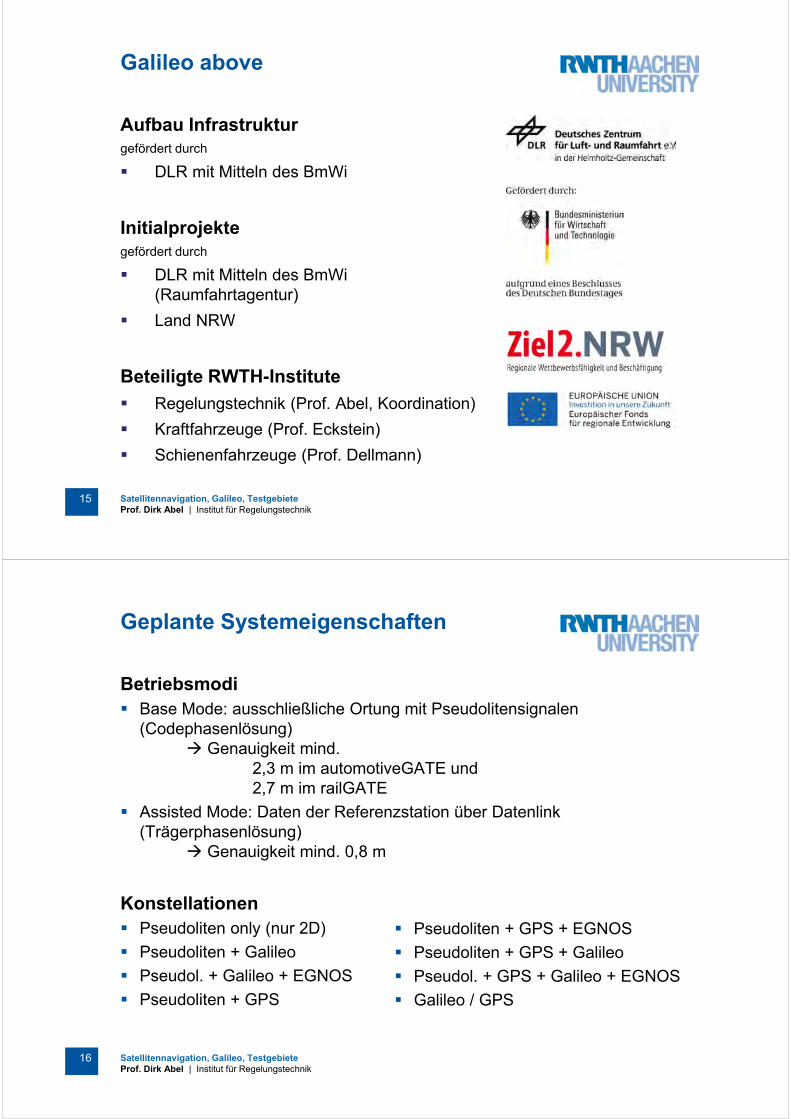
Pseudoliten
12 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik

Galileo Testgebiete mit Pseudoliten
13 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Galileo Testgebiete mit Pseudoliten
Galileo above
Anwendungszentrum für bodengebundenen Verkehr
Testgebiete
� railGATE (Wildenrath)Anwendungen im Schienenverkehr
� automotiveGATE (Aldenhoven)Anwendungen im Straßenverkehr
14 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Galileo above
15 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Aufbau Infrastrukturgefördert durch
� DLR mit Mitteln des BmWi
Initialprojektegefördert durch
� DLR mit Mitteln des BmWi(Raumfahrtagentur)
� Land NRW
Beteiligte RWTH-Institute
� Regelungstechnik (Prof. Abel, Koordination)
� Kraftfahrzeuge (Prof. Eckstein)
� Schienenfahrzeuge (Prof. Dellmann)
Geplante Systemeigenschaften
Betriebsmodi� Base Mode: ausschließliche Ortung mit Pseudolitensignalen
(Codephasenlösung)� Genauigkeit mind.
2,3 m im automotiveGATE und2,7 m im railGATE
� Assisted Mode: Daten der Referenzstation über Datenlink(Trägerphasenlösung)
� Genauigkeit mind. 0,8 m
Konstellationen� Pseudoliten only (nur 2D)
� Pseudoliten + Galileo
� Pseudol. + Galileo + EGNOS
� Pseudoliten + GPS
16 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
� Pseudoliten + GPS + EGNOS
� Pseudoliten + GPS + Galileo
� Pseudol. + GPS + Galileo + EGNOS
� Galileo / GPS
railGATETestgebiet für Bahn-Anwendungen
railGATETestgebiet für Bahn-Anwendungen
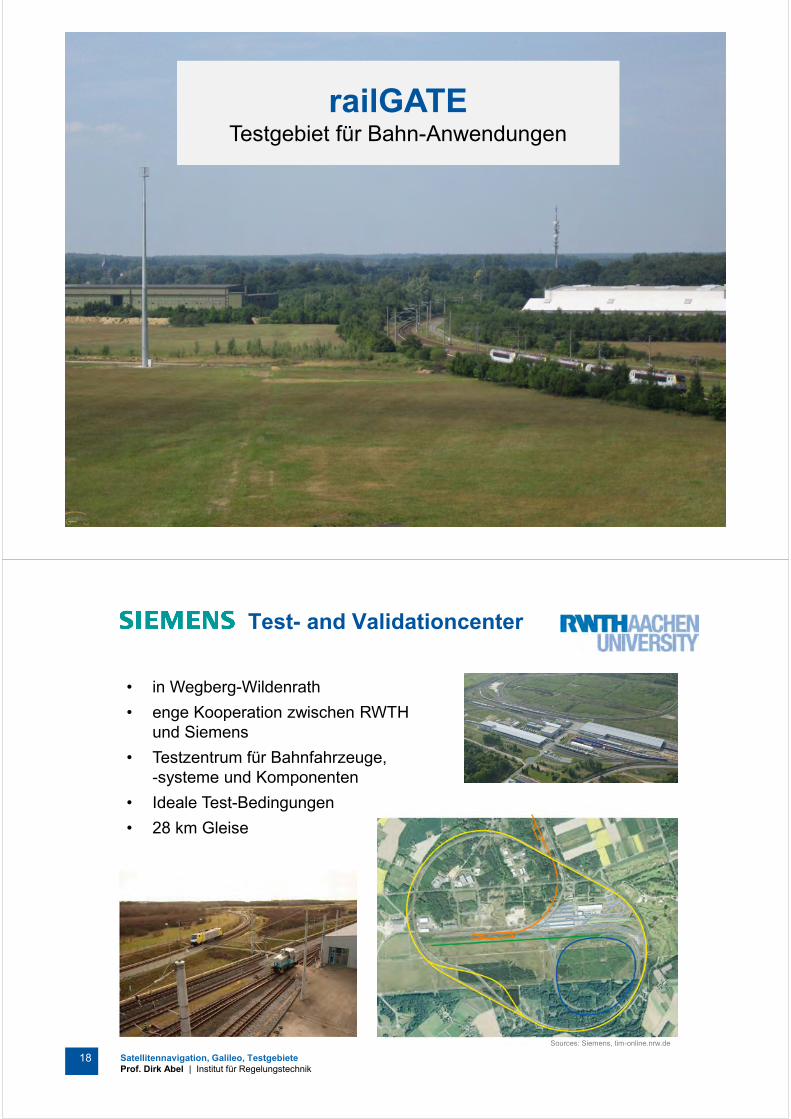
Test- and Validationcenter
18 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
• in Wegberg-Wildenrath
• enge Kooperation zwischen RWTHund Siemens
• Testzentrum für Bahnfahrzeuge,-systeme und Komponenten
• Ideale Test-Bedingungen
• 28 km Gleise
Sources: Siemens, tim-online.nrw.de
19
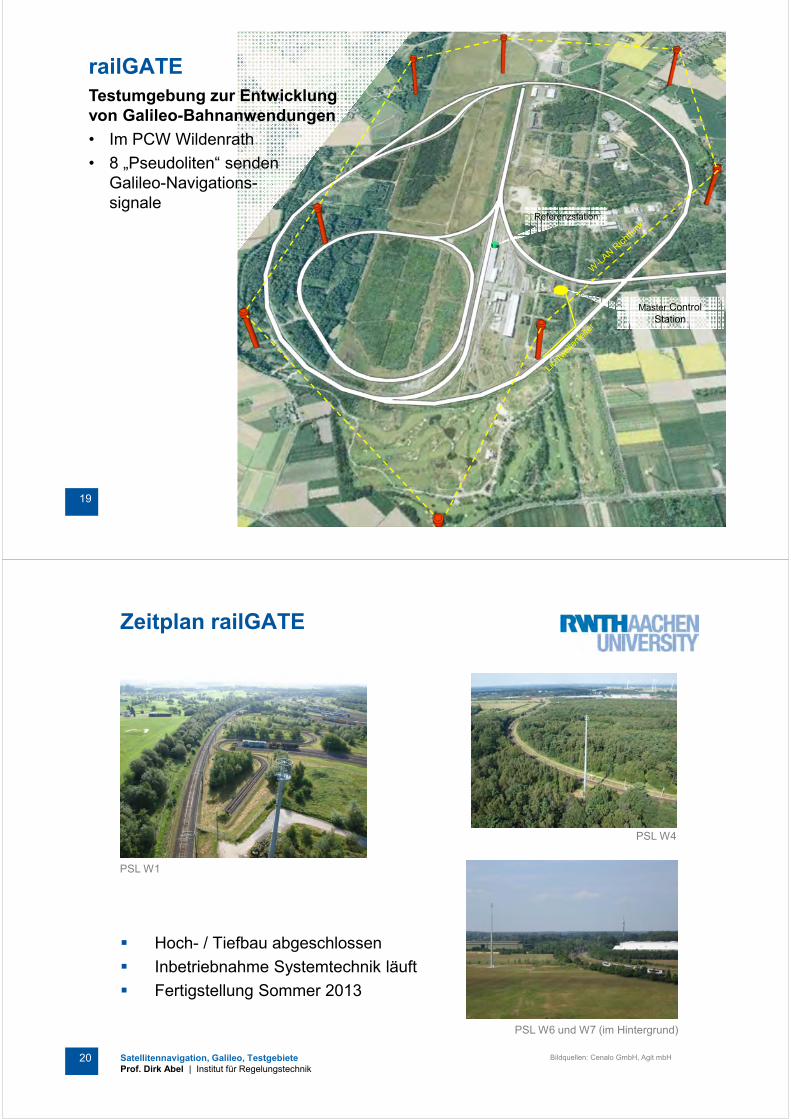
railGATE
Referenzstation
Master Control Station
Testumgebung zur Entwicklungvon Galileo-Bahnanwendungen
• Im PCW Wildenrath
• 8 „Pseudoliten“ sendenGalileo-Navigations-signale
Zeitplan railGATE
� Hoch- / Tiefbau abgeschlossen
� Inbetriebnahme Systemtechnik läuft
� Fertigstellung Sommer 2013
20 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
PSL W1
PSL W6 und W7 (im Hintergrund)
PSL W4
Bildquellen: Cenalo GmbH, Agit mbH
21
automotiveGATETestgebiet für Automobil-Anwendungen
automotiveGATETestgebiet für Automobil-Anwendungen
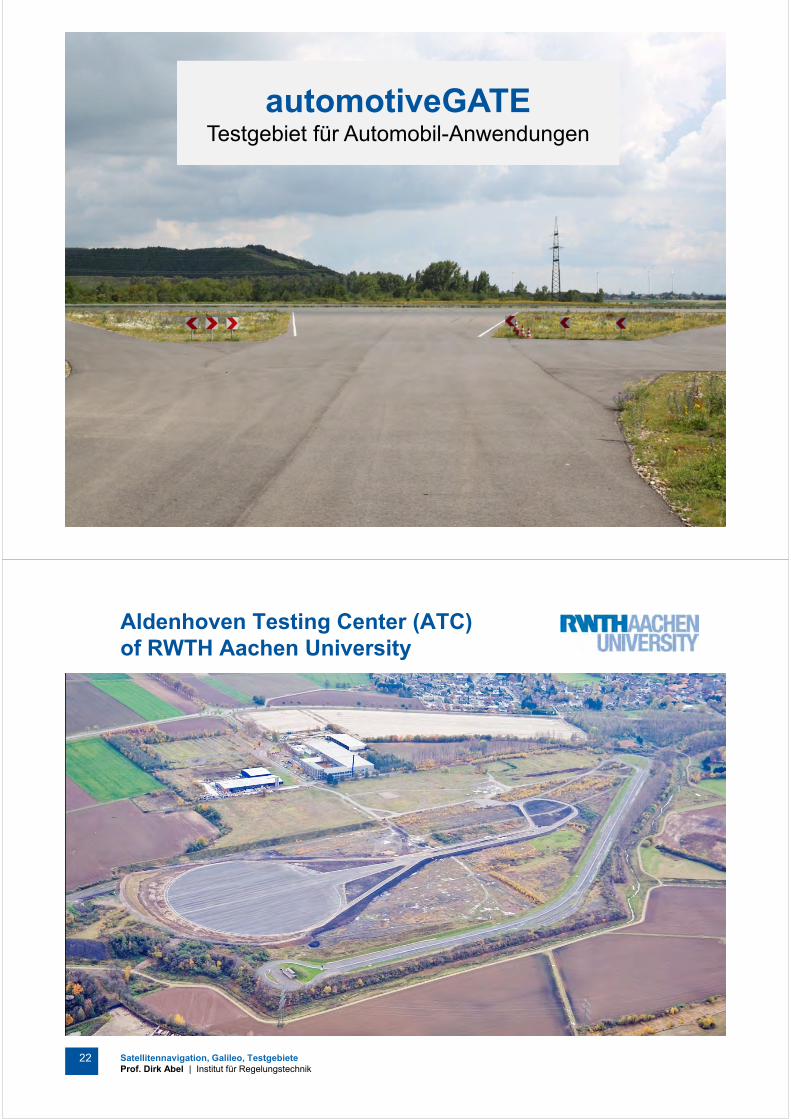
Aldenhoven Testing Center (ATC)of RWTH Aachen University
22 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Fahrdynamikfläche ATC
23 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
50 m AnfahrtRückfahrtrichtung
D = 200 mL = 400 m
R = 45 m
B1 = 6 m
B2 = 3 m
B3 = 10,5 m
B5 = 4 m
B4 = 40 m
B6 = 4 m
Geländezugang
R = 40 m
Luftaufnahme der Fahrdynamikfläche (01/2010)
Eigenschaften der FahrdynamikflächeBefahrbarer RadiusBeschleunigungsspurNutzlastOberfläche – Asphalt
Die Fahrdynamikfläche verfügt über eine unabhängige Rückführung, die einen kontinuierlichen Testablauf ermöglicht.
R = 100 ml = 400 mm = 44 tµ ~ 0,8
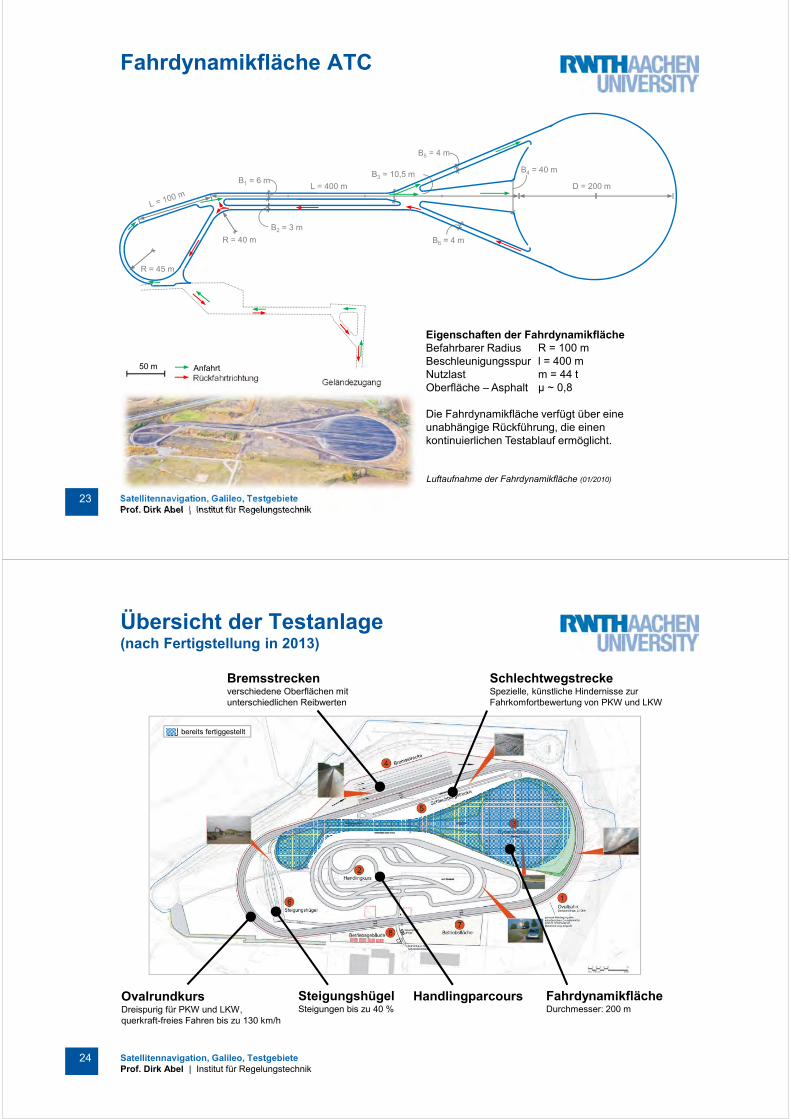
Übersicht der Testanlage(nach Fertigstellung in 2013)
24 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
FahrdynamikflächeDurchmesser: 200 m
OvalrundkursDreispurig für PKW und LKW, querkraft-freies Fahren bis zu 130 km/h
Handlingparcours
Bremsstreckenverschiedene Oberflächen mit unterschiedlichen Reibwerten
SchlechtwegstreckeSpezielle, künstliche Hindernisse zur Fahrkomfortbewertung von PKW und LKW
SteigungshügelSteigungen bis zu 40 %
bereits fertiggestellt

automotiveGATE
25 Satellitennavigation, Galileo, TestgebieteThomas Engelhardt | Institut für Regelungstechnik
Master Control Station
ReferenzstationNutzer
26 Satellitennavigation, Galileo, TestgebieteThomas Engelhardt | Institut für Regelungstechnik
Sendemast PSL A6, Filmautobahn, Fahrdynamikfläche im Hintergrund
Bildquelle: Cenalo GmbH
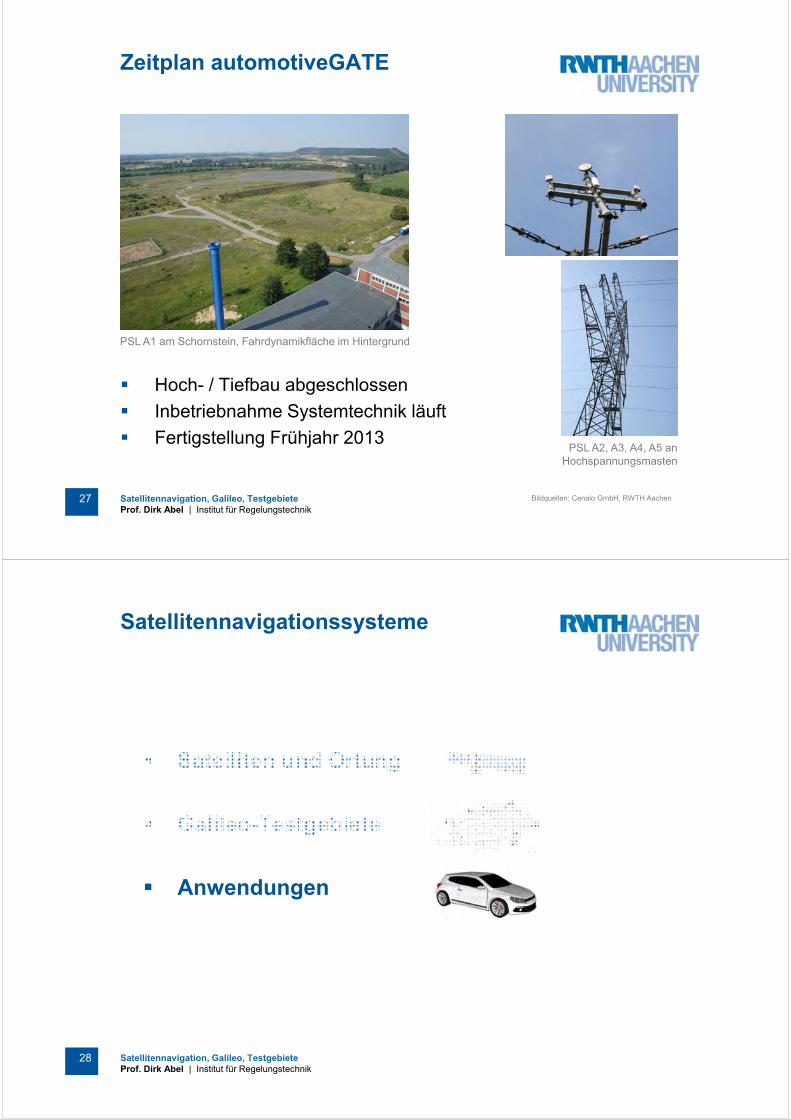
Zeitplan automotiveGATE
� Hoch- / Tiefbau abgeschlossen
� Inbetriebnahme Systemtechnik läuft
� Fertigstellung Frühjahr 2013
27 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
PSL A1 am Schornstein, Fahrdynamikfläche im Hintergrund
PSL A2, A3, A4, A5 an Hochspannungsmasten
Bildquellen: Cenalo GmbH, RWTH Aachen
Satellitennavigationssysteme
28 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
� Satelliten und Ortung
� Galileo-Testgebiete
� Anwendungen
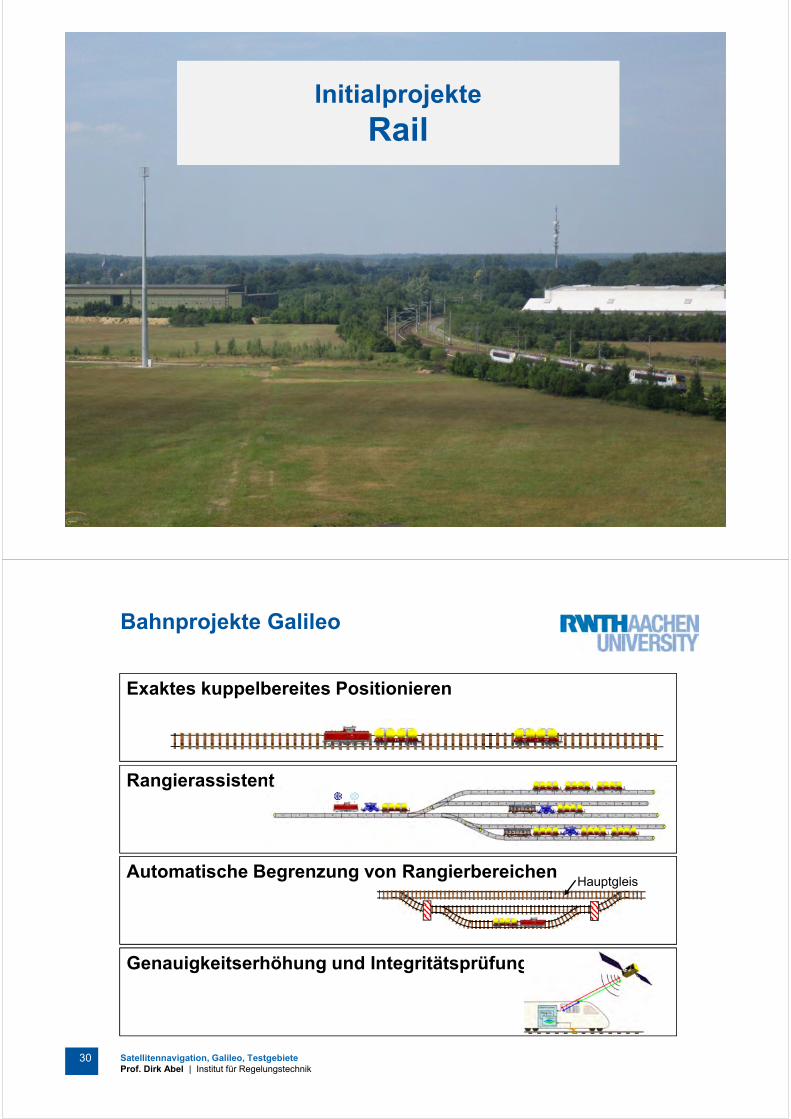
Initialprojekte
RailInitialprojekte
Rail
Bahnprojekte Galileo
30 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Exaktes kuppelbereites Positionieren
Rangierassistent
Genauigkeitserhöhung und Integritätsprüfung mit Balisen
Automatische Begrenzung von RangierbereichenHauptgleis

Exaktes kuppelbereites Positionieren
31 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Anforderungen
� Exakte Positionsbestimmung von Lok und Waggon
� Exakte Geschwindigkeitsbestimmung
� Schlupf-Bestimmung für dynamische Bremsmanöver � Zeitersparnis
� Erkennung des Aufeinandertreffens
DLR-Projekt
Erprobungsträger IFS
Rangierassistent
32 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Motivation
� Wenige zentrale Zugbildungsanlagen
� Lange Aufenthaltzeiten unattraktiv für Einzelwagenverkehr
Ziel
� Flachrangieren in dezentralen Zugbildungsanlagen
� Rationalisierung durch Teilautomatisierung
Rangiereinheit
Pseudolite
Disposition und Prozess-Steuerung
IKT.NRW Projekt
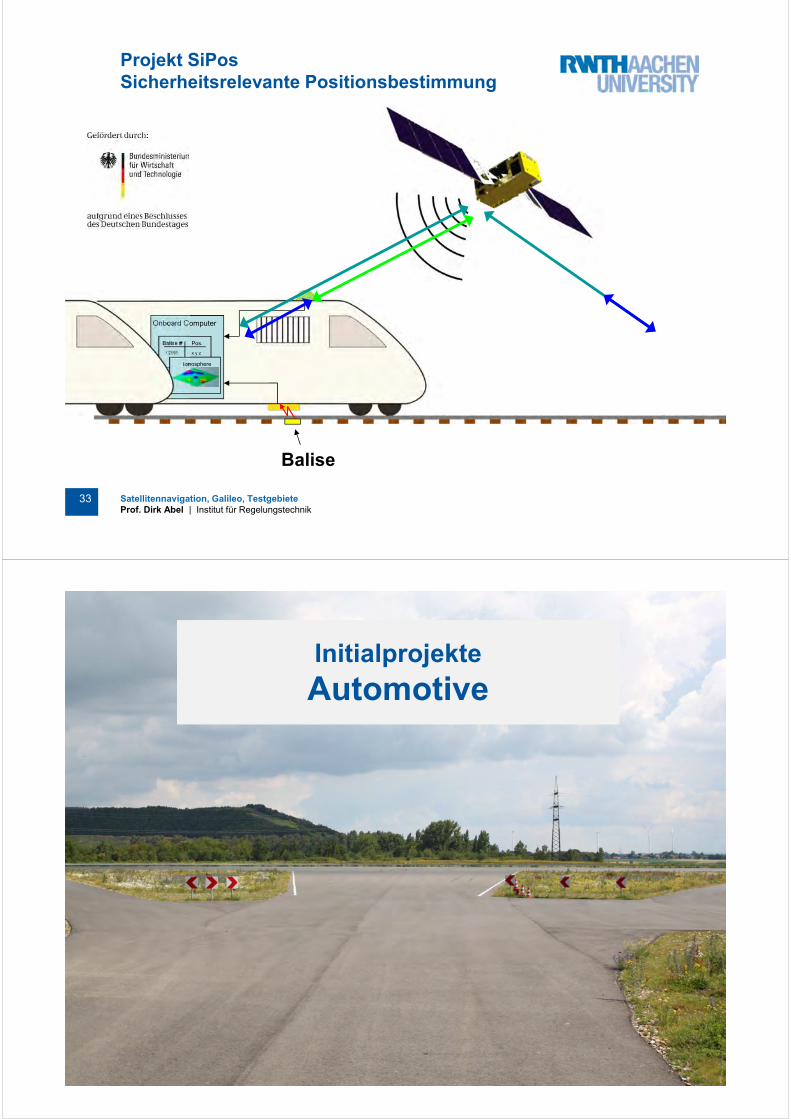
Projekt SiPosSicherheitsrelevante Positionsbestimmung
33 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Balise # Pos.
x y z 12356
Onboard Computer
Ionosphere
Balise
34
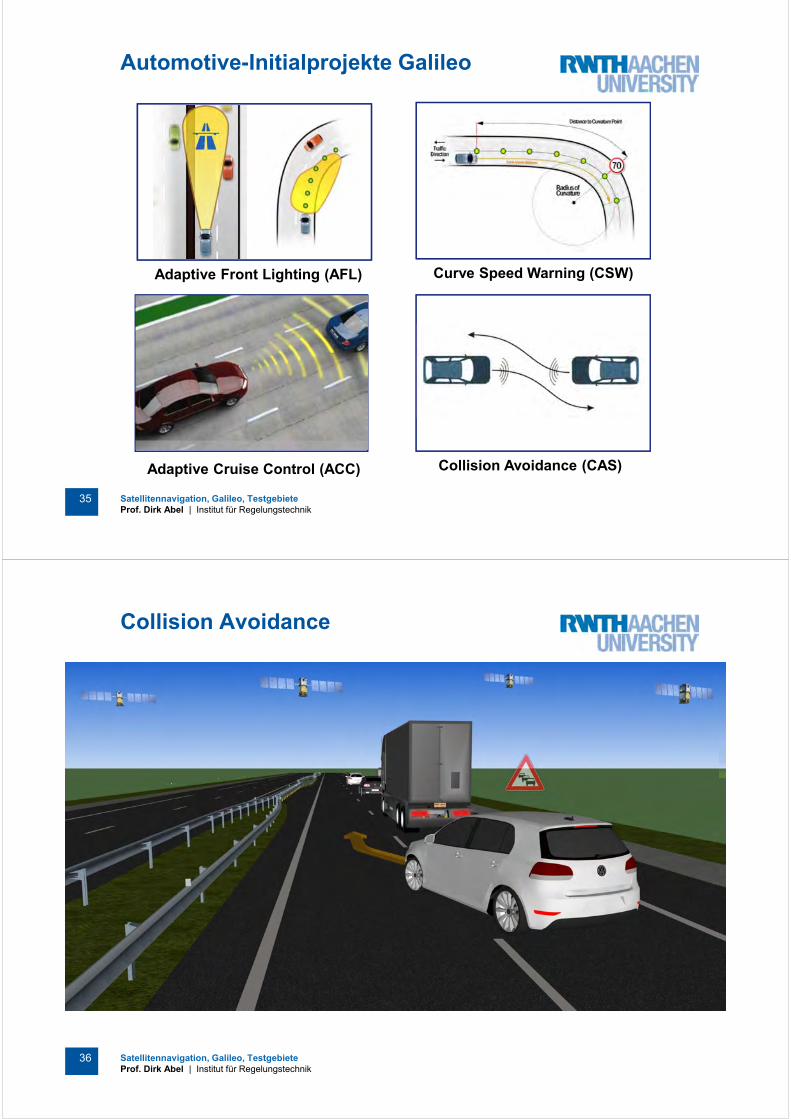
Initialprojekte
AutomotiveInitialprojekte
Automotive
35 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Collision Avoidance (CAS)
Curve Speed Warning (CSW)Adaptive Front Lighting (AFL)
Adaptive Cruise Control (ACC)
Automotive-Initialprojekte Galileo
Collision Avoidance
36 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
37 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
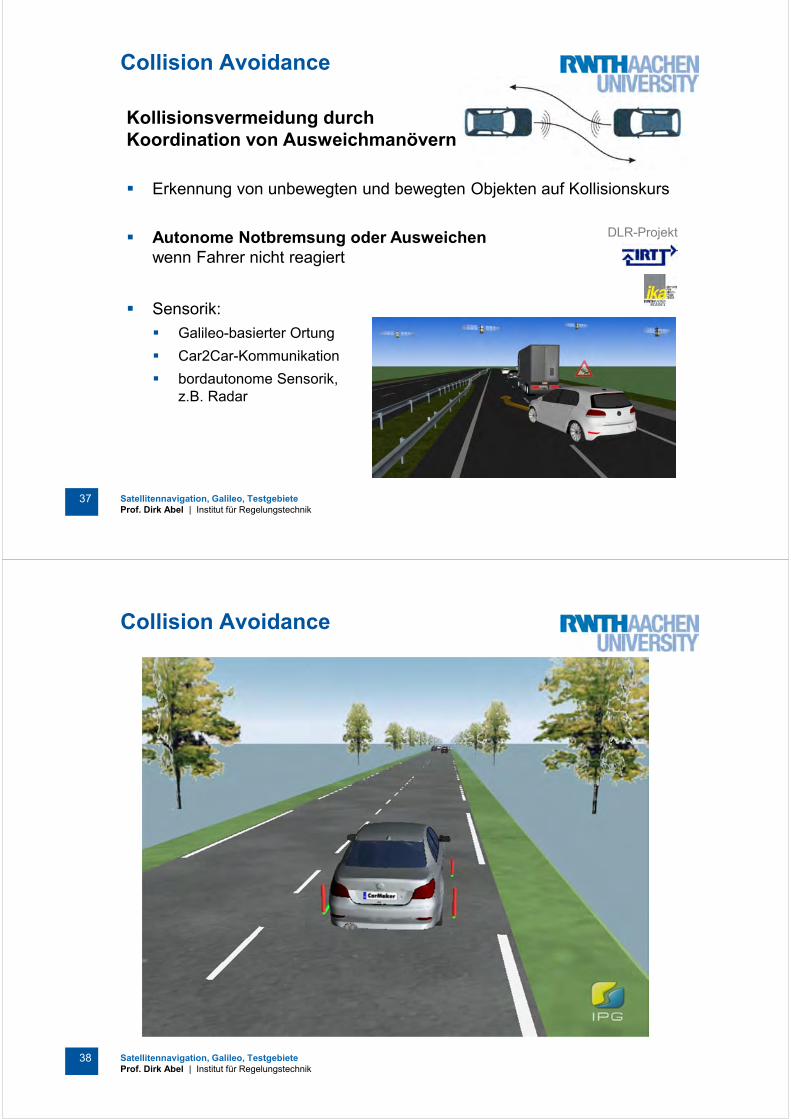
DLR-Projekt
Kollisionsvermeidung durchKoordination von Ausweichmanövern
� Erkennung von unbewegten und bewegten Objekten auf Kollisionskurs
� Autonome Notbremsung oder Ausweichen wenn Fahrer nicht reagiert
� Sensorik:
� Galileo-basierter Ortung
� Car2Car-Kommunikation
� bordautonome Sensorik,z.B. Radar
Collision Avoidance
38 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Collision Avoidance
39
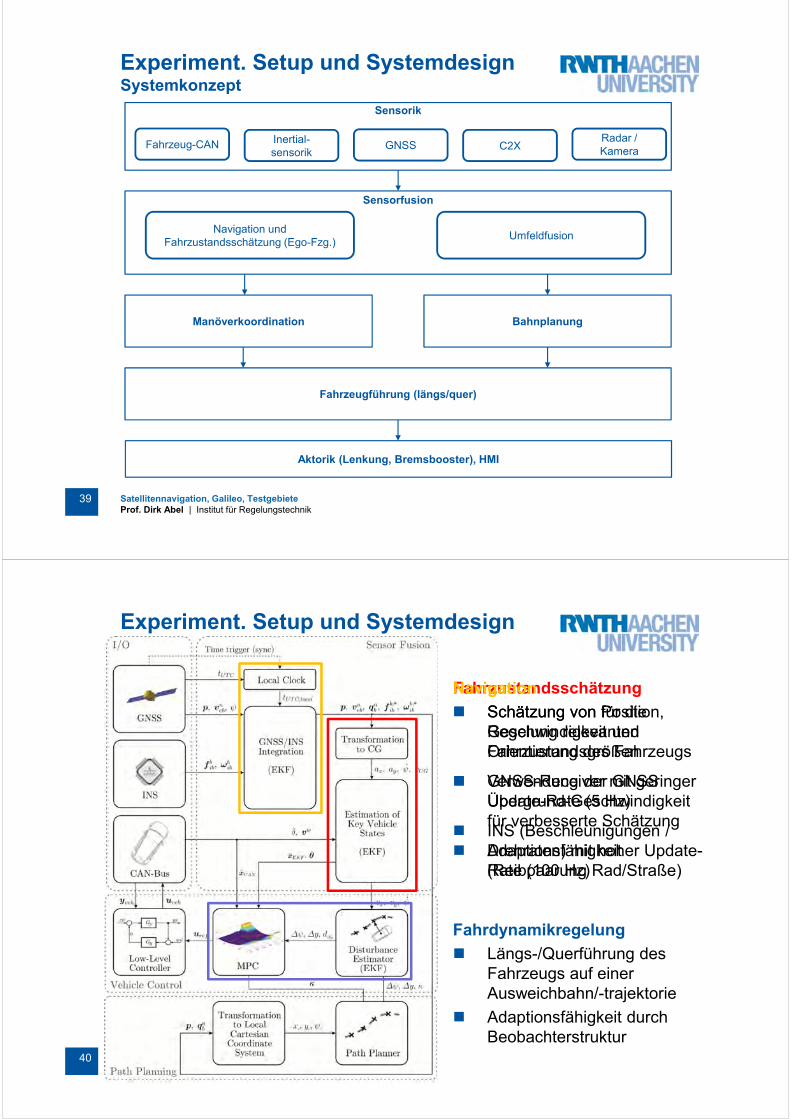
Experiment. Setup und SystemdesignSystemkonzept
Sensorik
Inertial-sensorik
GNSS C2XRadar / Kamera
Fahrzeug-CAN
Sensorfusion
Navigation und Fahrzustandsschätzung (Ego-Fzg.)
Umfeldfusion
Manöverkoordination Bahnplanung
Fahrzeugführung (längs/quer)
Aktorik (Lenkung, Bremsbooster), HMI
Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
40
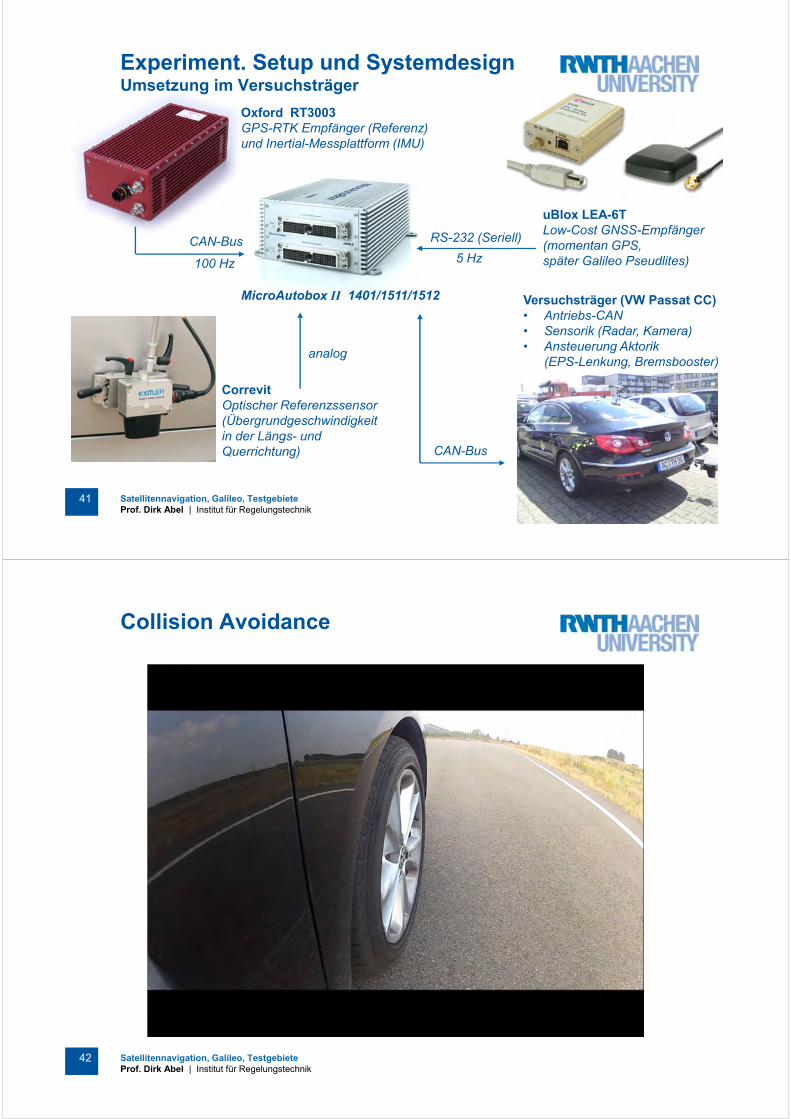
Experiment. Setup und Systemdesign
Fahrzustandsschätzung
� Schätzung von für die Regelung relevanten Fahrzustandsgrößen
� Verwendung der GNSS Übergrund-Geschwindigkeit für verbesserte Schätzung
� Adaptionsfähigkeit (Reibpaarung Rad/Straße)
Fahrdynamikregelung
� Längs-/Querführung des Fahrzeugs auf einer Ausweichbahn/-trajektorie
� Adaptionsfähigkeit durch Beobachterstruktur
Navigation
� Schätzung von Position, Geschwindigkeit und Orientierung des Fahrzeugs
� GNSS-Receiver mit geringer Update-Rate (5 Hz)
� INS (Beschleunigungen / Drehraten) mit hoher Update-Rate (100 Hz)
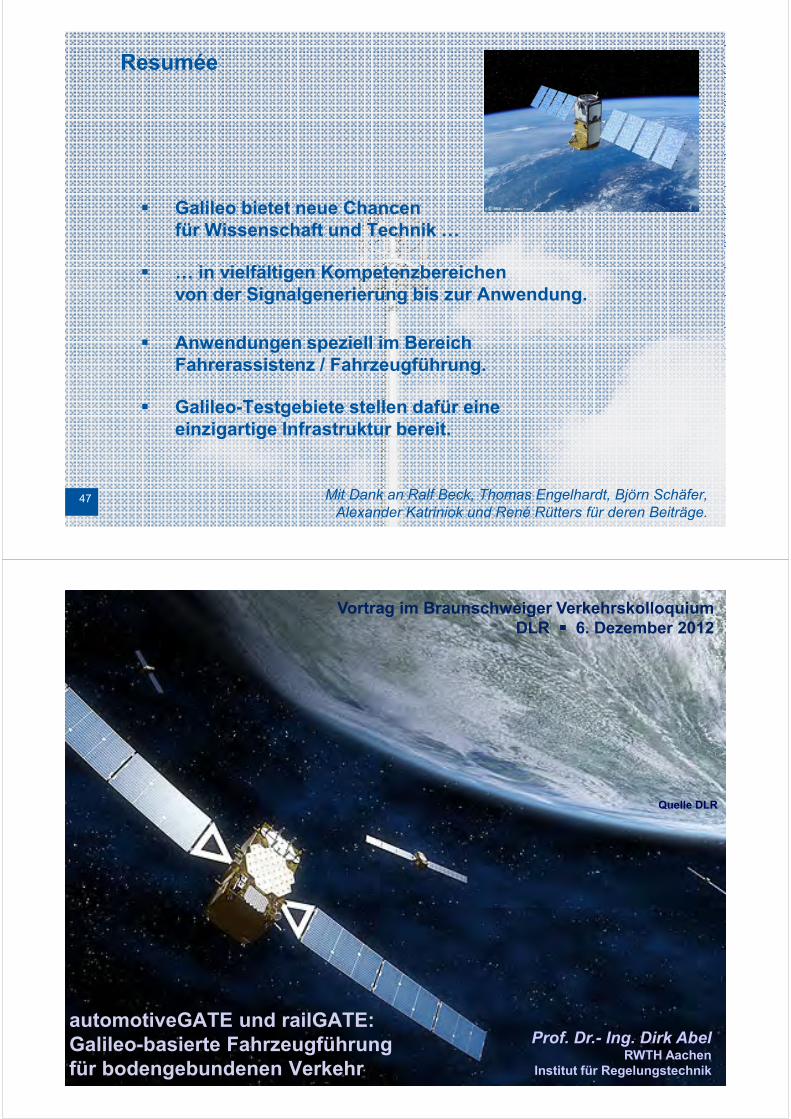
Experiment. Setup und SystemdesignUmsetzung im Versuchsträger
41
Versuchsträger (VW Passat CC)• Antriebs-CAN• Sensorik (Radar, Kamera)• Ansteuerung Aktorik
(EPS-Lenkung, Bremsbooster)
uBlox LEA-6TLow-Cost GNSS-Empfänger(momentan GPS,später Galileo Pseudlites)
MicroAutobox II 1401/1511/1512
Oxford RT3003GPS-RTK Empfänger (Referenz)und Inertial-Messplattform (IMU)
RS-232 (Seriell)CAN-Bus
CAN-Bus
100 Hz 5 Hz
CorrevitOptischer Referenzssensor(Übergrundgeschwindigkeitin der Längs- und Querrichtung)
analog
Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
42 Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Collision Avoidance

43
Autonomes Kreuzungsmanagement
Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Problemfeld
� Kreuzungen sind komplexe Fahrsituationen: über 30% aller Verkehrsunfälle in Deutschland ereignen sich an Kreuzungen
� Kreuzungen sind Verkehrsengpässe: Kapazitätslimit konventioneller ampelgesteuer-ter Kreuzungen bei ca. 2000 Fahrzeugen / h
� Bauliche Alternativen (Kreisverkehre) sind aus Platzgründen häufig nicht realisierbar
Ziel des Assistenzsystems
� Fahrzeuge fahren selbständig gemäß Routen-vorgaben einer zentralen Kreuzungssteuerung
� Vorteile:
o Steigerung der Kapazität um Faktor 3-4
o Steigerung der Verkehrssicherheit
44
Autonomes Kreuzungsmanagement
Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
Optimierung der Fahrzeugbewegung
� 4-armige Kreuzung ohne Abbiegerspuren
� Unterteilung der 12 Routen in Segmente i gemäß ihrer Kreuzungspunkte
� Optimierung der Beschleunigungen ai in den Sektoren für minimale Durchfahrtszeit
� Mindestzeitabstand ∆Ts zwischen zwei Fzg. an einem Knotenpunkt j
Optimierungsaufgabe
∑
∑
∆++∆≤
≤≤
≤≤
∆
j
Route
is
j
last
iii
i
Route
ia
tTTT
vvv
aaa
t
0
max,min,
maxmin
u.B.v.
min
x-Richtung [m]
y-Richtung [m
]
Geradeaus-Routen
Rechtsabbieger
Linksabbieger
Knotenpunkte

45
Autonomes Kreuzungsmanagement
Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
46
Autonomes Kreuzungsmanagement
Satellitennavigation, Galileo, TestgebieteProf. Dirk Abel | Institut für Regelungstechnik
47
� Galileo bietet neue Chancenfür Wissenschaft und Technik C
� C in vielfältigen Kompetenzbereichenvon der Signalgenerierung bis zur Anwendung.
� Anwendungen speziell im BereichFahrerassistenz / Fahrzeugführung.
� Galileo-Testgebiete stellen dafür eineeinzigartige Infrastruktur bereit.
Mit Dank an Ralf Beck, Thomas Engelhardt, Björn Schäfer,Alexander Katriniok und René Rütters für deren Beiträge.
Resumée
Galileo above ���� Dirk Abel, Aachen ���� 20.4.2011 ���� Folie 48
automotiveGATE und railGATE:Galileo-basierte Fahrzeugführung für bodengebundenen Verkehr
Prof. Dr.- Ing. Dirk AbelRWTH Aachen
Institut für Regelungstechnik
Vortrag im Braunschweiger VerkehrskolloquiumDLR ���� 6. Dezember 2012
Quelle DLR