Embed Size (px)
Citation preview
1
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieTachymetrieTachymetrie , , RichtungsRichtungs und Winkelmessungund Winkelmessung
Aufbau moderner elektronischer Tachymeter
Achsysteme und Achsbedingungen
Achsabweichungen und Einfluss auf die Richtungsmessung
Aufnahme und Absteckung mit Tachymetern
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Z
X
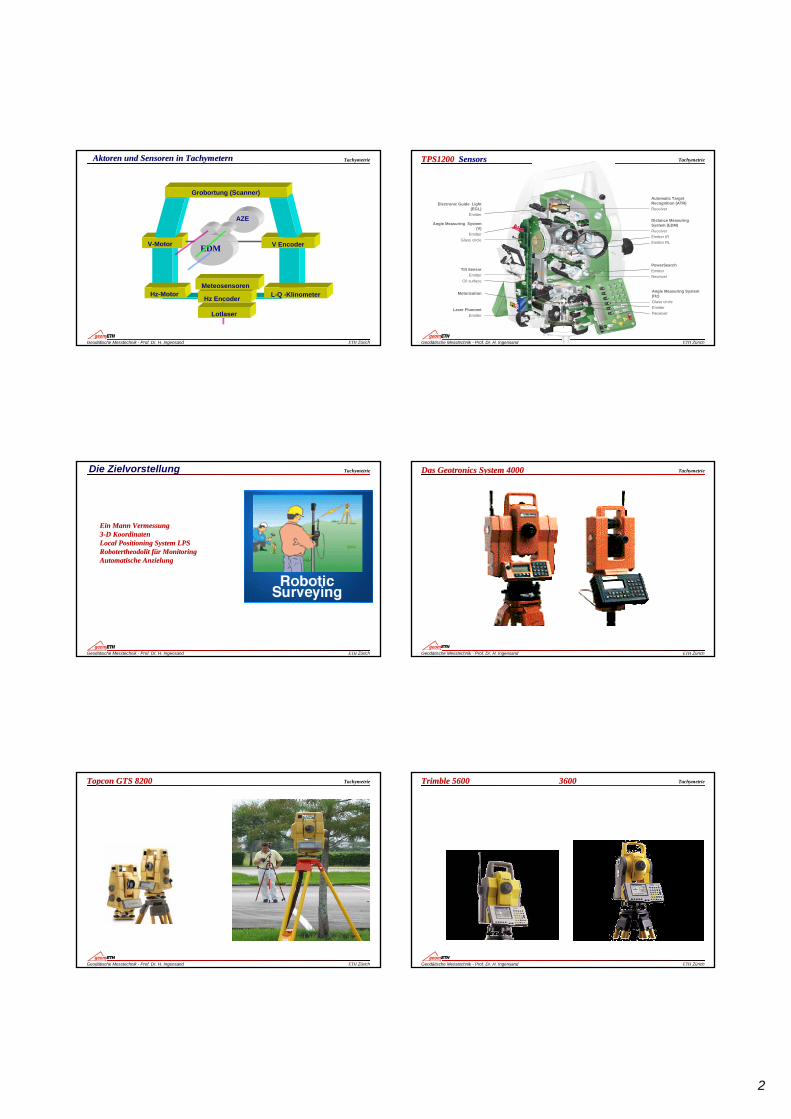
3D Polarverfahren: 3D Polarverfahren: TachymetrieTachymetrie Richtung+ DistanzRichtung+ Distanz
Y
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieTachymeter Begriffe und Tachymeter Begriffe und SynnonymeSynnonymeTachymeter = Kombination von Theodolit (Richtungs- und Winkelmessung ) und DistanzmessungTachymeter (gr.) Schnellmesser (Tacheometer engl.)Total Station (angloamerikanisch)Informatiktheodolit/Theomat/TachymatGeorobot (motorisierter selbstzielender Tachymeter für Monitoringaufgaben)Local Positioning System (LPS) Trackingfähige TachymeterTPS (Theodolite based Positioning System)One man SystemLasertracker in der Industrielle Messtechnik
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
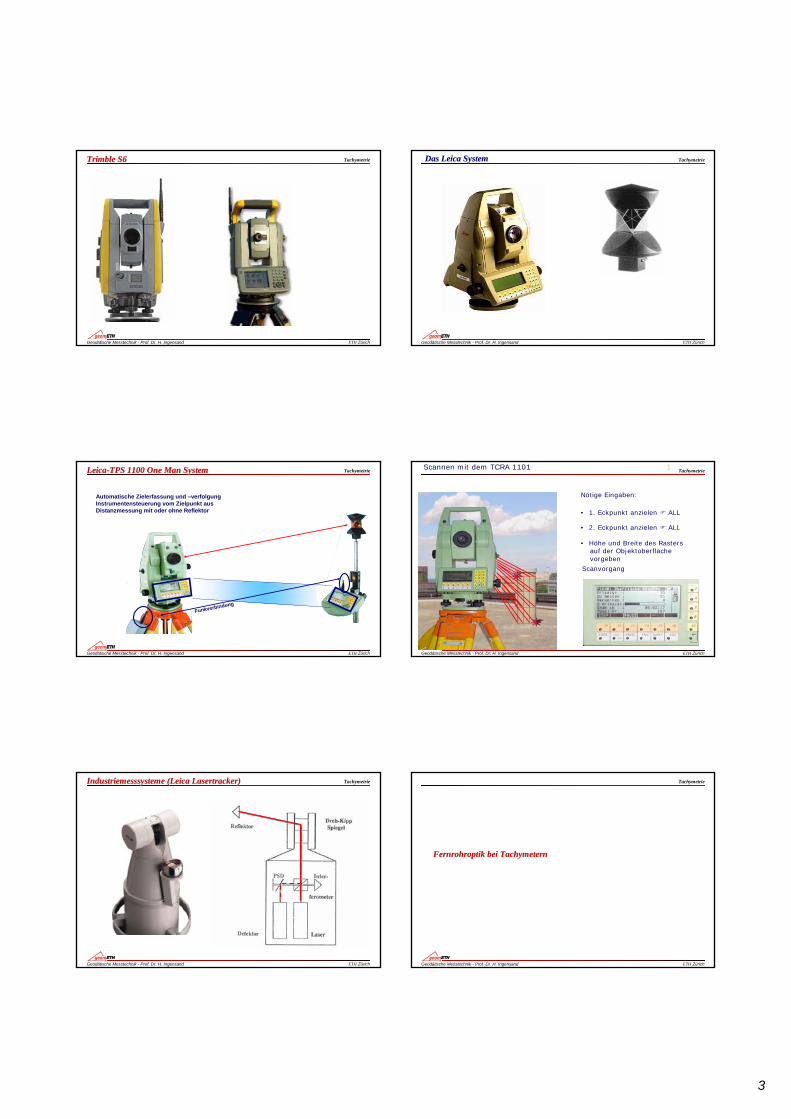
TachymetrieEntwicklungsstammbaum Entwicklungsstammbaum TheodolitTheodolit TachymeterTachymeter
Optischer Theodolit
Elektronischer Theodolit
Totalstation/Tachymeter
Informatiktheodolit
Local Positioning System
Trackingfähiger Tachymeter
El. Teilkreisabgriff
EDM
µP und Software
Motorisierung CCD
2004 Schweiz
1986 Schweden
1982 Schweiz
1976 Schweiz, Schweden, USA
1973 Deutschland
1968 Deutschland
1540 England
Fusion m. GPS Smart Station
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieLeistungen moderner TachymeterLeistungen moderner Tachymeter
Automatische Elektronische Anzielung und TrackingfähigkeitBiaxiale elektronische Neigungsmesser und Korrektur von Abweichungen Elektronische Distanzmesser z.T. auch berührungslosScanfunktionMotorisiertLeistungsfähige Software und Datenbank Austauschbare Speichermedien (PCMCIA) Schnittstellen: Datenfunk/BluetoothFernsteuerbar „One man Systems“Kombination mit GPS
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
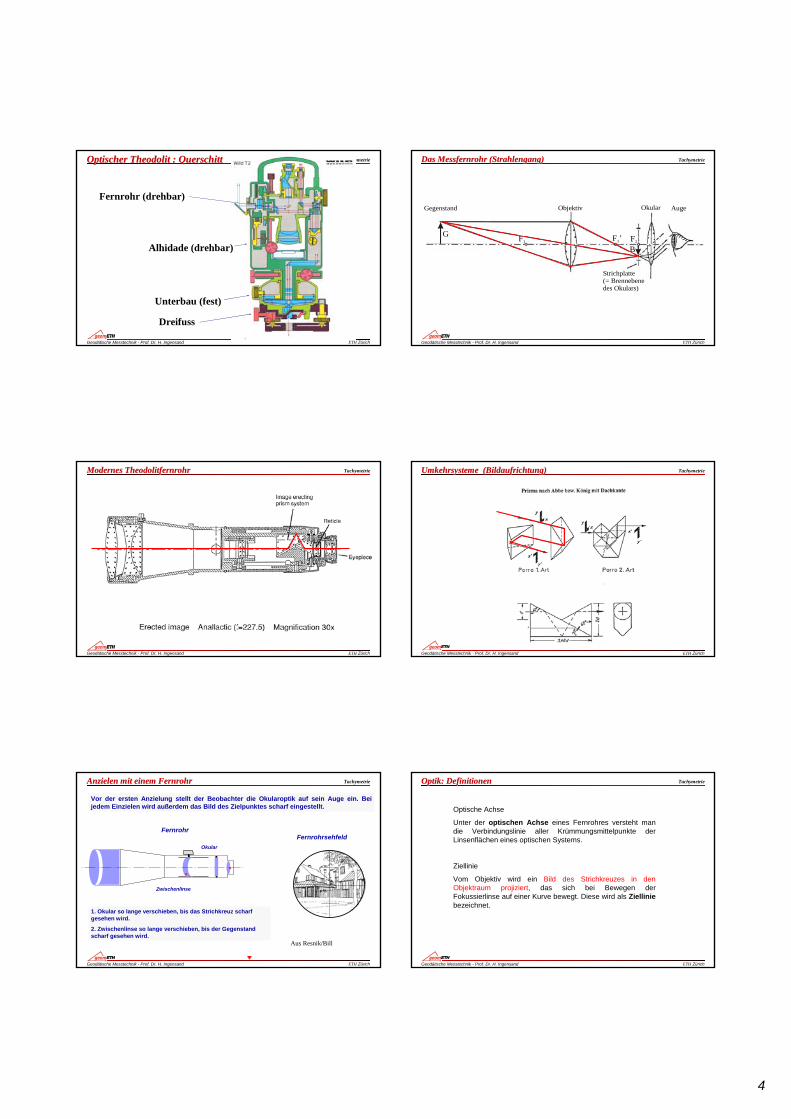
TachymetrieHeuteHeute: : MethodenMethoden & & SensorfusionSensorfusion in in einemeinem InstrumentInstrument
GPS
CCD
Encoder
Neigungssensoren
Satellitengeodäsie
Photogrammetrie
Tachymetrie
Informatik
EDM
Scanner
Computer
2
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Lotlaser
AktorenAktoren und Sensoren in Tachymeternund Sensoren in Tachymetern
L-Q -KlinometerHz Encoder
V-Motor
AZE
MeteosensorenHz-Motor
V EncoderEDM
Grobortung (Scanner)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieTPS1200 TPS1200 SensorsSensors
Automatic Target Recognition (ATR)Receiver
Distance MeasuringSystem (EDM)ReceiverEmitter IREmitter RL
PowerSearchEmitterReceiver
Angle Measuring System (Hz)Glass circleEmitterReceiver
Electronic Guide Light (EGL)
Emitter
Angle Measuring System (V)
EmitterGlass circle
Tilt SensorEmitter
Oil surface
Motorization
Laser PlummetEmitter
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Ein Mann VermessungEin Mann Vermessung33--D KoordinatenD KoordinatenLocalLocal PositioningPositioning System LPSSystem LPSRobotertheodolitRobotertheodolit ffüür r MonitoringMonitoringAutomatische AnzielungAutomatische Anzielung
Die Zielvorstellung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieDas Das GeotronicsGeotronics System 4000System 4000
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieTopcon GTS 8200Topcon GTS 8200
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieTrimble 5600 3600Trimble 5600 3600
3
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieTrimble S6Trimble S6
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieDas Leica SystemDas Leica System
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieLeicaLeica--TPS 1100 One Man SystemTPS 1100 One Man System
Funkverbindung
Automatische Zielerfassung und –verfolgungInstrumentensteuerung vom Zielpunkt ausDistanzmessung mit oder ohne Reflektor
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Nötige Eingaben:
Scannen mit dem TCRA 1101 1
• 1. Eckpunkt anzielen ALL
• 2. Eckpunkt anzielen ALL
• Höhe und Breite des Rastersauf der Objektoberflächevorgeben
Scanvorgang
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieIndustriemesssysteme (Leica Industriemesssysteme (Leica LasertrackerLasertracker))
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Fernrohroptik bei Tachymetern Fernrohroptik bei Tachymetern
4
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieOptischer Optischer TheodolitTheodolit : : QuerschittQuerschitt
Alhidade (drehbar)
Unterbau (fest)
Dreifuss
Fernrohr (drehbar)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieDas Messfernrohr (Strahlengang)Das Messfernrohr (Strahlengang)
Gegenstand Objektiv Okular Auge
G F ’1 F2
Strichplatte(= Brennebenedes Okulars)
BF1
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieModernes Modernes TheodolitfernrohrTheodolitfernrohr
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieUmkehrsysteme (Bildaufrichtung)Umkehrsysteme (Bildaufrichtung)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieAnzielen mit einem FernrohrAnzielen mit einem Fernrohr
Vor der ersten Anzielung stellt der Beobachter die Okularoptik auf sein Auge ein. Bei jedem Einzielen wird außerdem das Bild des Zielpunktes scharf eingestellt.
Zwischenlinse
Okular
FernrohrsehfeldFernrohr
1. Okular so lange verschieben, bis das Strichkreuz scharf gesehen wird.
2. Zwischenlinse so lange verschieben, bis der Gegenstand scharf gesehen wird.
Aus Resnik/Bill
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieOptik: DefinitionenOptik: Definitionen
Optische Achse
Unter der optischen Achse eines Fernrohres versteht man die Verbindungslinie aller Krümmungsmittelpunkte der Linsenflächen eines optischen Systems.
Ziellinie
Vom Objektiv wird ein Bild des Strichkreuzes in den Objektraum projiziert, das sich bei Bewegen der Fokussierlinse auf einer Kurve bewegt. Diese wird als Zielliniebezeichnet.
5
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
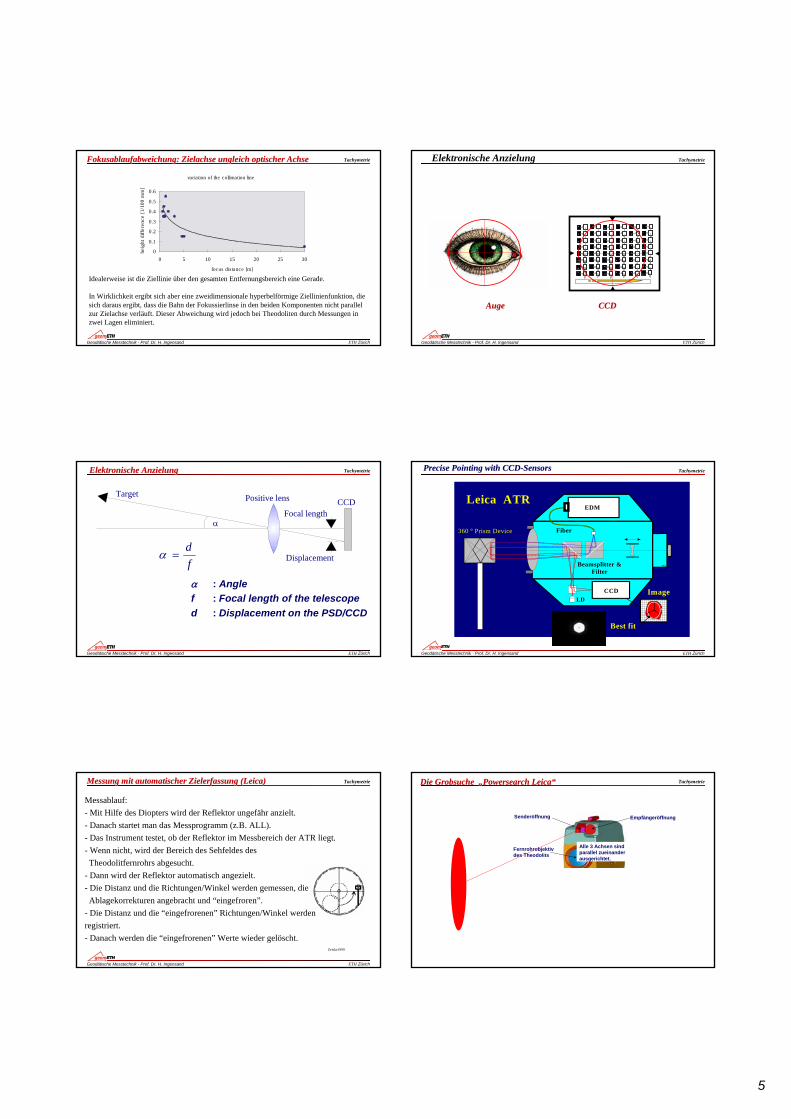
TachymetrieFokusablaufabweichung: Zielachse ungleich optischer AchseFokusablaufabweichung: Zielachse ungleich optischer Achse
variation of the collimation line
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20 25 30
focus distance [m]
heig
ht d
iffer
ence
[1/1
00 m
m]
Idealerweise ist die Ziellinie über den gesamten Entfernungsbereich eine Gerade.
In Wirklichkeit ergibt sich aber eine zweidimensionale hyperbelförmige Ziellinienfunktion, die sich daraus ergibt, dass die Bahn der Fokussierlinse in den beiden Komponenten nicht parallel zur Zielachse verläuft. Dieser Abweichung wird jedoch bei Theodoliten durch Messungen in zwei Lagen eliminiert.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
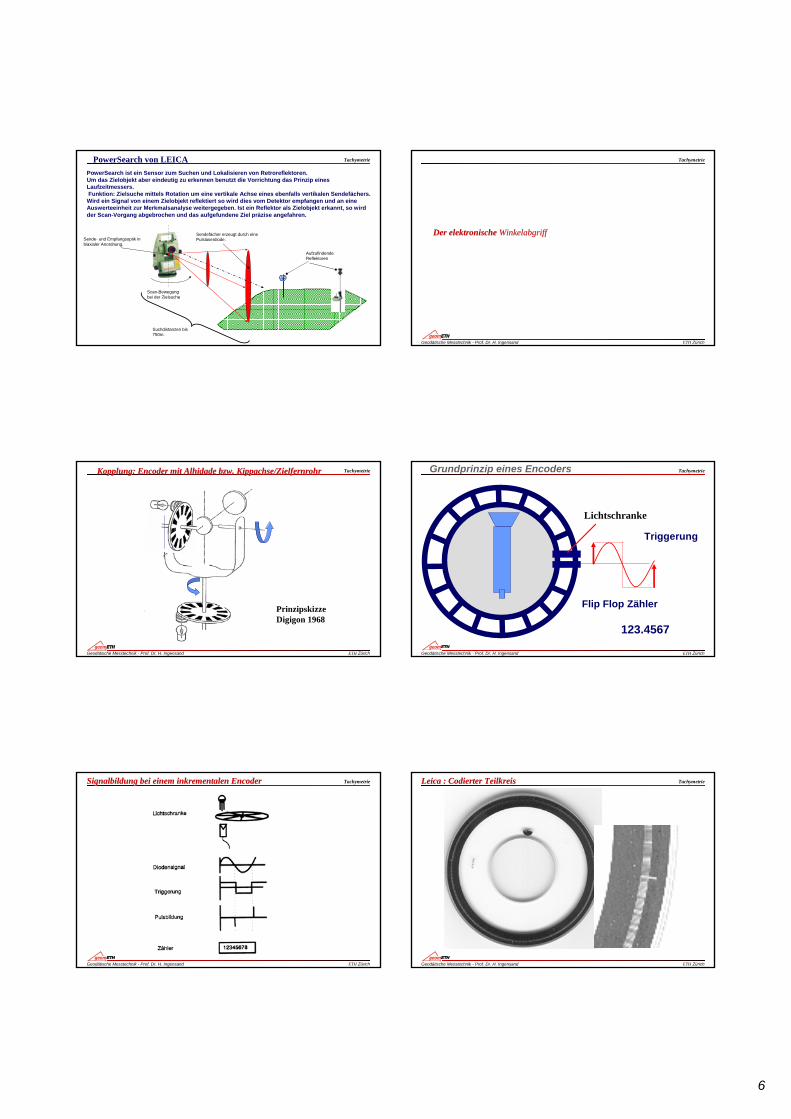
AugeAuge CCDCCD
Elektronische Anzielung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
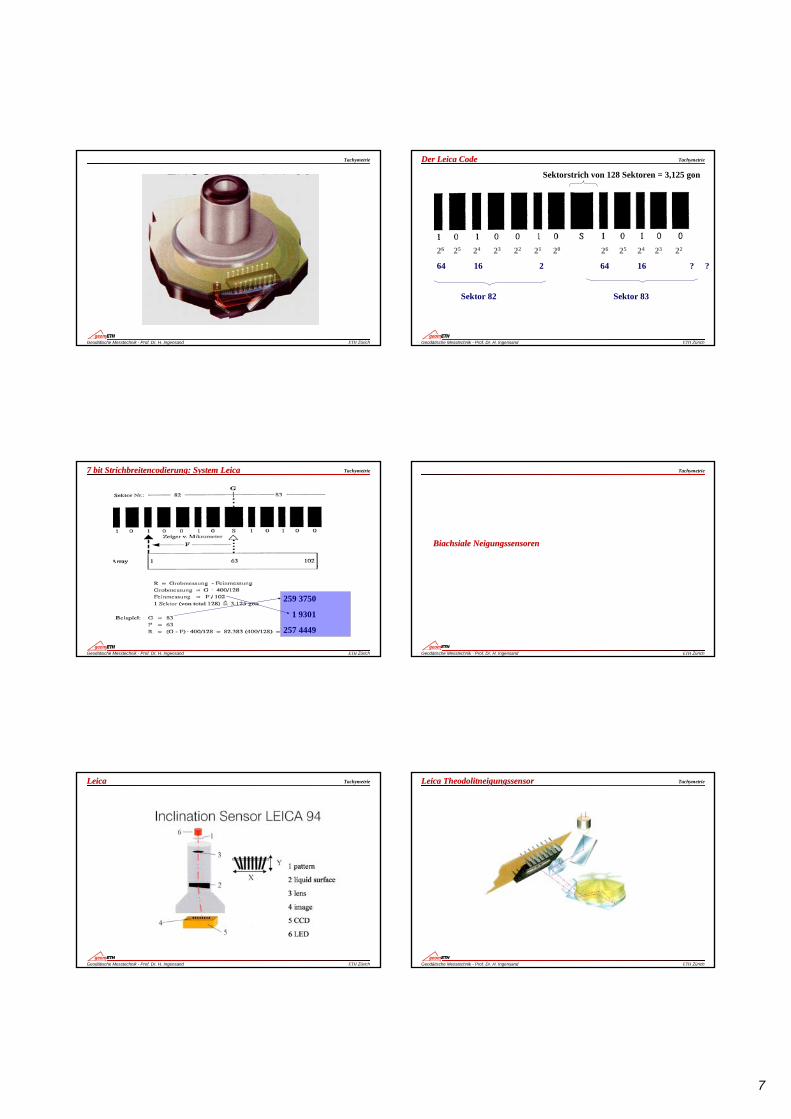
TachymetrieElektronische AnzielungElektronische Anzielung
Target
Focal length
Displacement
CCDPositive lens
α
fd
=α
α : Anglef : Focal length of the telescoped : Displacement on the PSD/CCD
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
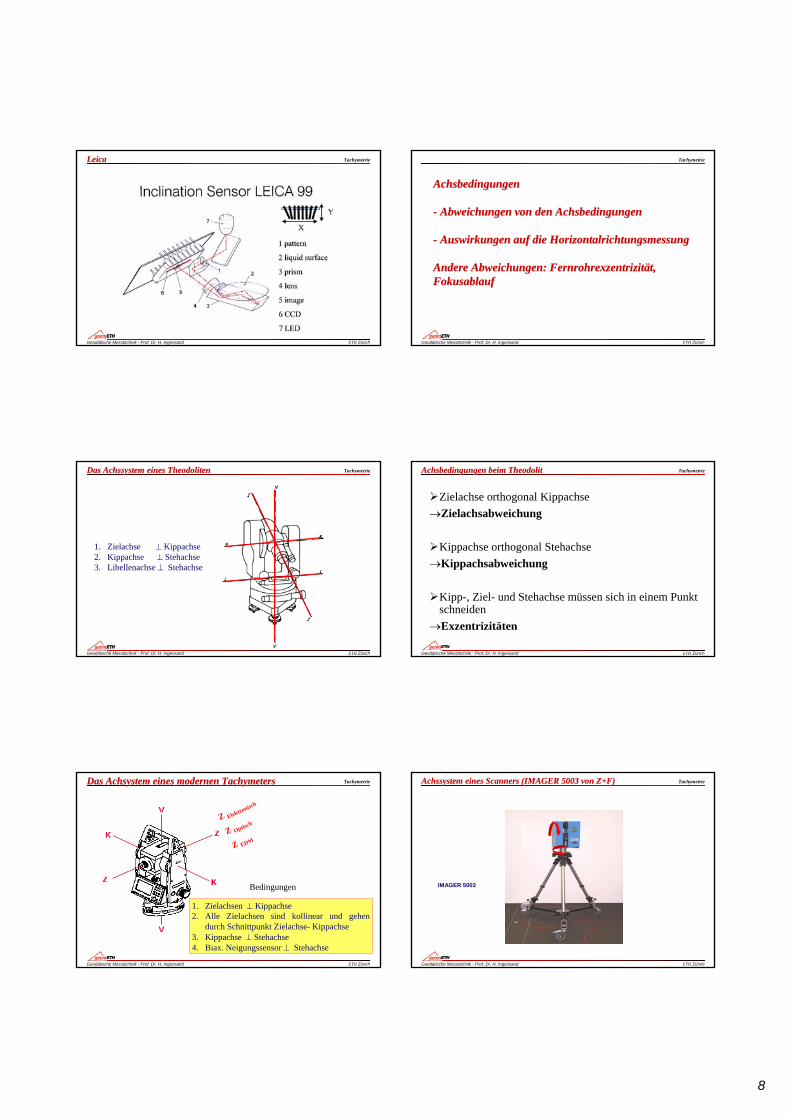
TachymetriePrecisePrecise PointingPointing withwith CCDCCD--SensorsSensors
EDM
CCD
Beamsplitter &Filter
Fiber
Leica ATR
360 ° Prism Device
Best fit
Image
ING
LD
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieMessungMessung mitmit automatischerautomatischer ZielerfassungZielerfassung ((LeicaLeica))
Messablauf:- Mit Hilfe des Diopters wird der Reflektor ungefähr anzielt.- Danach startet man das Messprogramm (z.B. ALL).- Das Instrument testet, ob der Reflektor im Messbereich der ATR liegt.- Wenn nicht, wird der Bereich des Sehfeldes desTheodolitfernrohrs abgesucht.
- Dann wird der Reflektor automatisch angezielt.- Die Distanz und die Richtungen/Winkel werden gemessen, dieAblagekorrekturen angebracht und “eingefroren”.
- Die Distanz und die “eingefrorenen” Richtungen/Winkel werdenregistriert.- Danach werden die “eingefrorenen” Werte wieder gelöscht.
Zeiske1999
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieDie Grobsuche Die Grobsuche „„PowersearchPowersearch LeicaLeica““
Senderöffnung Empfängeröffnung
Fernrohrobjektiv des Theodolits
Alle 3 Achsen sind parallel zueinander ausgerichtet.
6
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetriePowerSearch von LEICAPowerSearch ist ein Sensor zum Suchen und Lokalisieren von Retroreflektoren. Um das Zielobjekt aber eindeutig zu erkennen benutzt die Vorrichtung das Prinzip eines Laufzeitmessers.Funktion: Zielsuche mittels Rotation um eine vertikale Achse eines ebenfalls vertikalen Sendefächers. Wird ein Signal von einem Zielobjekt reflektiert so wird dies vom Detektor empfangen und an eine Auswerteeinheit zur Merkmalsanalyse weitergegeben. Ist ein Reflektor als Zielobjekt erkannt, so wird der Scan-Vorgang abgebrochen und das aufgefundene Ziel präzise angefahren.
Aufzufindende Reflektoren
Scan-Bewegungbei der Zielsuche
Sende- und Empfangsoptik in biaxialer Anordnung.
Sendefächer erzeugt durch eine Pulslaserdiode.
Suchdistanzen bis 750m.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Der elektronischeDer elektronische WinkelabgriffWinkelabgriff
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieKopplungKopplung: Encoder : Encoder mitmit AlhidadeAlhidade bzwbzw. . Kippachse/ZielfernrohrKippachse/Zielfernrohr
PrinzipskizzeDigigon 1968
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
123.4567
Triggerung
Flip Flop Zähler
Grundprinzip eines Encoders
Lichtschranke
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieSignalbildungSignalbildung beibei einemeinem inkrementaleninkrementalen EncoderEncoder
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieLeica : Codierter TeilkreisLeica : Codierter Teilkreis
7
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieDer Leica CodeDer Leica Code
26 25 24 23 22 21 20 26 25 24 23 22
64 16 2 64 16 ? ?
Sektor 82 Sektor 83
Sektorstrich von 128 Sektoren = 3,125 gon
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie7 bit 7 bit StrichbreitencodierungStrichbreitencodierung: System : System LeicaLeica
259 3750
1 9301
257 4449
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
BiachsialeBiachsiale NeigungssensorenNeigungssensoren
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieLeicaLeica
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieLeica Leica TheodolitneigungssensorTheodolitneigungssensor
8
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieLeicaLeica
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
AchsbedingungenAchsbedingungen
-- Abweichungen von den Achsbedingungen Abweichungen von den Achsbedingungen
-- Auswirkungen auf die HorizontalrichtungsmessungAuswirkungen auf die Horizontalrichtungsmessung
Andere Abweichungen: FernrohrexzentrizitAndere Abweichungen: Fernrohrexzentrizitäät, t, FokusablaufFokusablauf
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieDas Achssystem eines Das Achssystem eines TheodolitenTheodoliten
1. Zielachse ⊥ Kippachse2. Kippachse ⊥ Stehachse3. Libellenachse ⊥ Stehachse
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieAchsbedingungen beim TheodolitAchsbedingungen beim Theodolit
Zielachse orthogonal Kippachse→Zielachsabweichung
Kippachse orthogonal Stehachse→Kippachsabweichung
Kipp-, Ziel- und Stehachse müssen sich in einem Punkt schneiden
→Exzentrizitäten
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieDas Das AchsystemAchsystem eineseines modernenmodernen TachymetersTachymeters
1. Zielachsen ⊥ Kippachse2. Alle Zielachsen sind kollinear und gehen
durch Schnittpunkt Zielachse- Kippachse 3. Kippachse ⊥ Stehachse4. Biax. Neigungssensor ⊥ Stehachse
Z Elektronisch
Z Optisch
Z EDM
Bedingungen
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieAchssystem eines Scanners (IMAGER 5003 von Z+F)Achssystem eines Scanners (IMAGER 5003 von Z+F)
IMAGER 5003
9
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
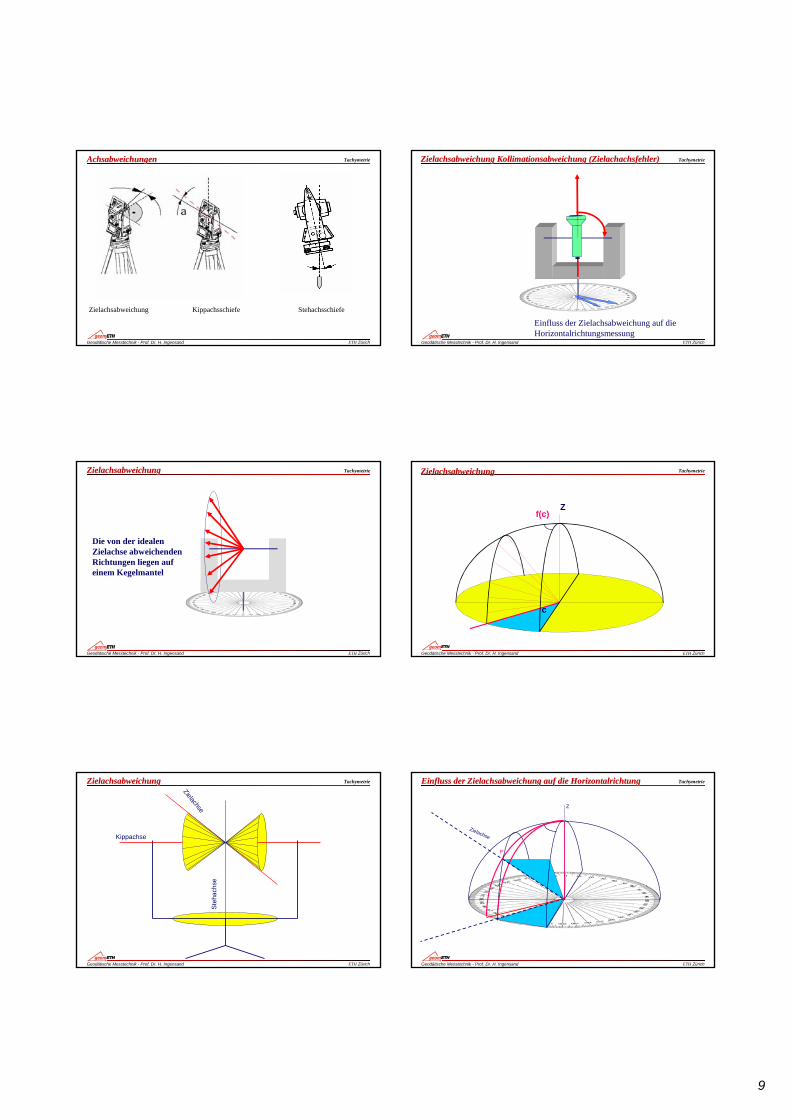
TachymetrieAchsabweichungenAchsabweichungen
Zielachsabweichung Kippachsschiefe Stehachsschiefe
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieZielachsabweichung Zielachsabweichung KollimationsabweichungKollimationsabweichung ((ZielachachsfehlerZielachachsfehler))
Einfluss der Zielachsabweichung auf die Horizontalrichtungsmessung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieZielachsabweichungZielachsabweichung
Die von der idealen Zielachse abweichenden Richtungen liegen auf einem Kegelmantel
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieZielachsabweichungZielachsabweichung
f(c)
c
Z
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Ste
hach
se
Kippachse
Zielachse
ZielachsabweichungZielachsabweichung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Z
P´
Zielachse
Einfluss der Zielachsabweichung auf die HorizontalrichtungEinfluss der Zielachsabweichung auf die Horizontalrichtung
10
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
sin(z)
f(c)
Z
sin(c)P
P´
c
Zielachse
∆ (P´,P,Z)
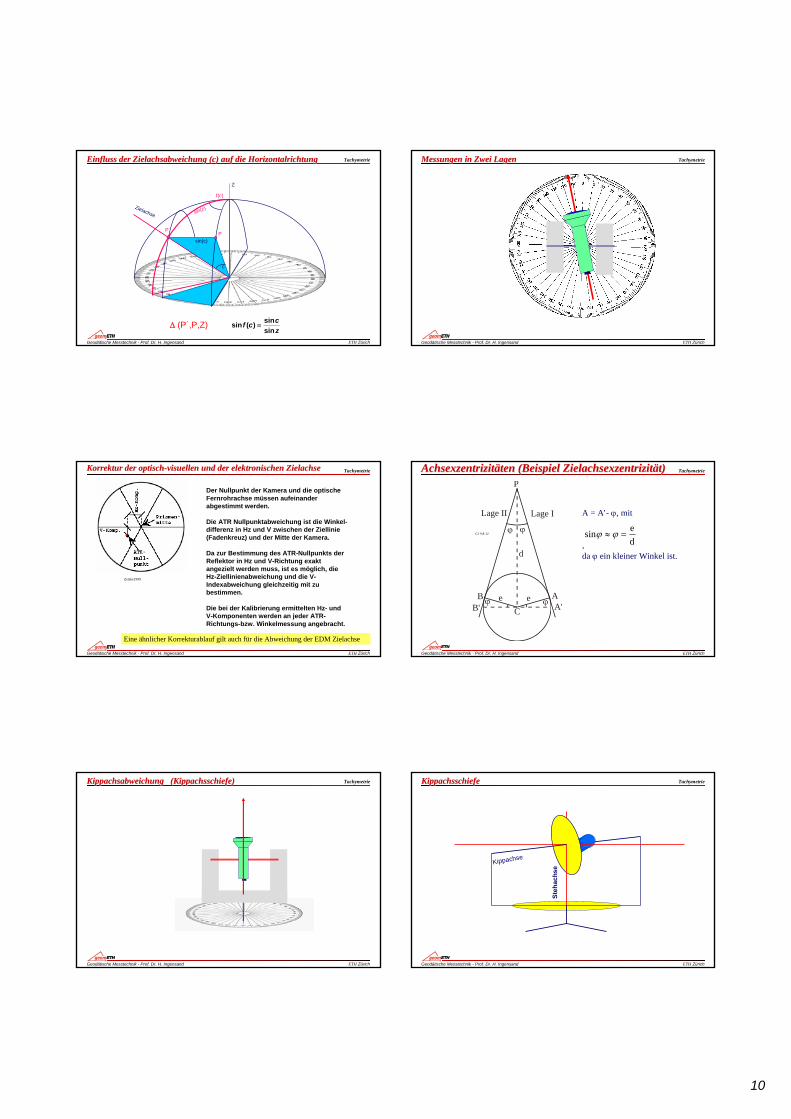
Einfluss der Zielachsabweichung (c) auf die HorizontalrichtungEinfluss der Zielachsabweichung (c) auf die Horizontalrichtung
zccf
sinsin)(sin =
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieMessungen in Zwei LagenMessungen in Zwei Lagen
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieKorrekturKorrektur derder optischoptisch--visuellenvisuellen und und derder elektronischenelektronischen ZielachseZielachse
Der Nullpunkt der Kamera und die optischeFernrohrachse müssen aufeinanderabgestimmt werden.
Die ATR Nullpunktabweichung ist die Winkel-differenz in Hz und V zwischen der Ziellinie(Fadenkreuz) und der Mitte der Kamera.
Da zur Bestimmung des ATR-Nullpunkts derReflektor in Hz und V-Richtung exaktangezielt werden muss, ist es möglich, die Hz-Ziellinienabweichung und die V-Indexabweichung gleichzeitig mit zubestimmen.
Die bei der Kalibrierung ermittelten Hz- und V-Komponenten werden an jeder ATR-Richtungs-bzw. Winkelmessung angebracht.
Eine ähnlicher Korrekturablauf gilt auch für die Abweichung der EDM Zielachse
Zeiske1999
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieAchsexzentrizitAchsexzentrizitäätenten ((BeispielBeispiel ZielachsexzentrizitZielachsexzentrizitäätt))P
Lage ILage II
ϕ
ϕ ϕ
ϕ
d
eeBB'
AA'C
desin =≈ ϕϕGl. 9.8-12
A = A′- ϕ, mit
, da ϕ ein kleiner Winkel ist.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieKippachsabweichung (Kippachsschiefe)Kippachsabweichung (Kippachsschiefe)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
Steh
achs
e
Kippachse
KippachsschiefeKippachsschiefe
11
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
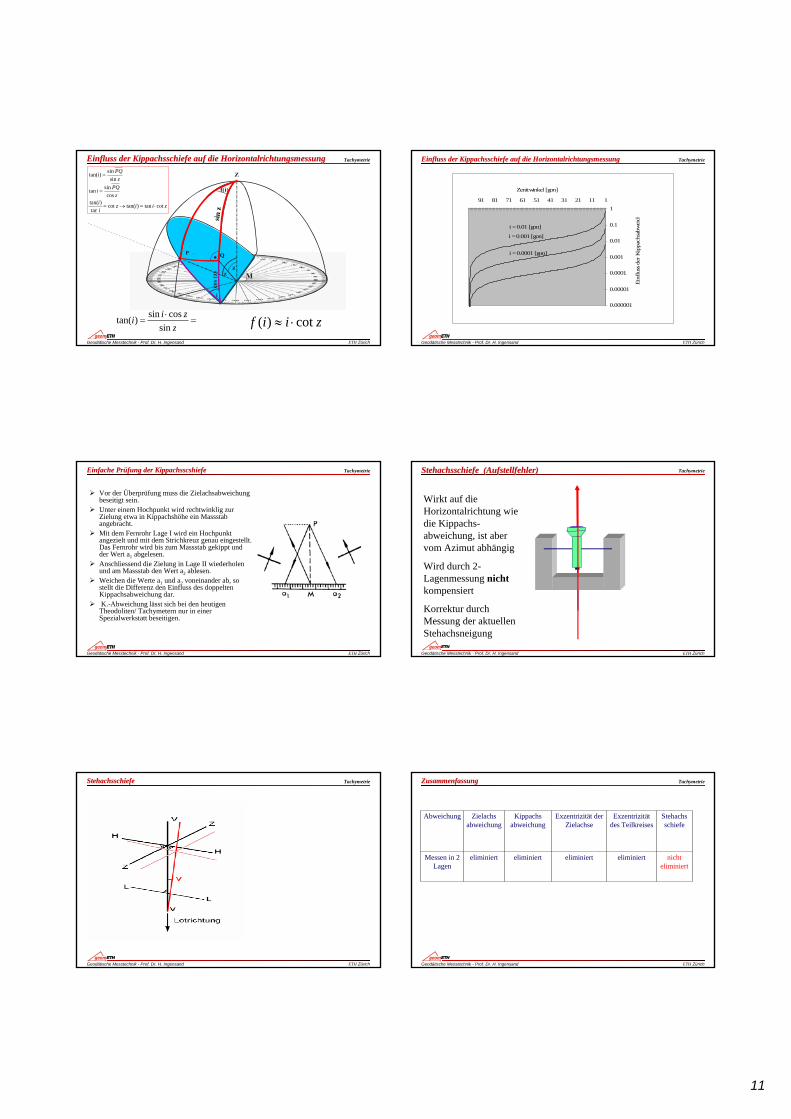
TachymetrieEinflussEinfluss derder KippachsschiefeKippachsschiefe auf die auf die HorizontalrichtungsmessungHorizontalrichtungsmessung
=⋅
=z
ziisin
cossin)tan( ziif cot)( ⋅≈
ziizii
zPQi
zPQi
cottan)tan(cottan
)tan(cos
sintan
sinsin)tan(
⋅=→=
=
=
P Q
sin z
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieEinflussEinfluss derder KippachsschiefeKippachsschiefe auf die auf die HorizontalrichtungsmessungHorizontalrichtungsmessung
0.000001
0.00001
0.0001
0.001
0.01
0.1
11112131415161718191
Zenitwinkel [gon]
Einf
luss
der
Kip
pach
sabw
eich
i = 0.0001 [gon]
i = 0.001 [gon]
i = 0.01 [gon]
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieEinfacheEinfache PrPrüüfungfung derder KippachsscshiefeKippachsscshiefe
Vor der Überprüfung muss die Zielachsabweichung beseitigt sein.Unter einem Hochpunkt wird rechtwinklig zur Zielung etwa in Kippachshöhe ein Massstabangebracht. Mit dem Fernrohr Lage I wird ein Hochpunkt angezielt und mit dem Strichkreuz genau eingestellt. Das Fernrohr wird bis zum Massstab gekippt und der Wert a1 abgelesen. Anschliessend die Zielung in Lage II wiederholen und am Massstab den Wert a2 ablesen. Weichen die Werte a1 und a2 voneinander ab, so stellt die Differenz den Einfluss des doppelten Kippachsabweichung dar. K.-Abweichung lässt sich bei den heutigen
Theodoliten/ Tachymetern nur in einer Spezialwerkstatt beseitigen.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieStehachsschiefe (Aufstellfehler)Stehachsschiefe (Aufstellfehler)
Wirkt auf die Horizontalrichtung wiedie Kippachs-abweichung, ist abervom Azimut abhängig
Wird durch 2-Lagenmessung nichtkompensiert
Korrektur durchMessung der aktuellenStehachsneigung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieStehachsschiefeStehachsschiefe
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieZusammenfassungZusammenfassung
nicht eliminiert
eliminierteliminierteliminierteliminiertMessen in 2 Lagen
Stehachsschiefe
Exzentrizität des Teilkreises
Exzentrizität der Zielachse
Kippachsabweichung
Zielachsabweichung
Abweichung
12
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
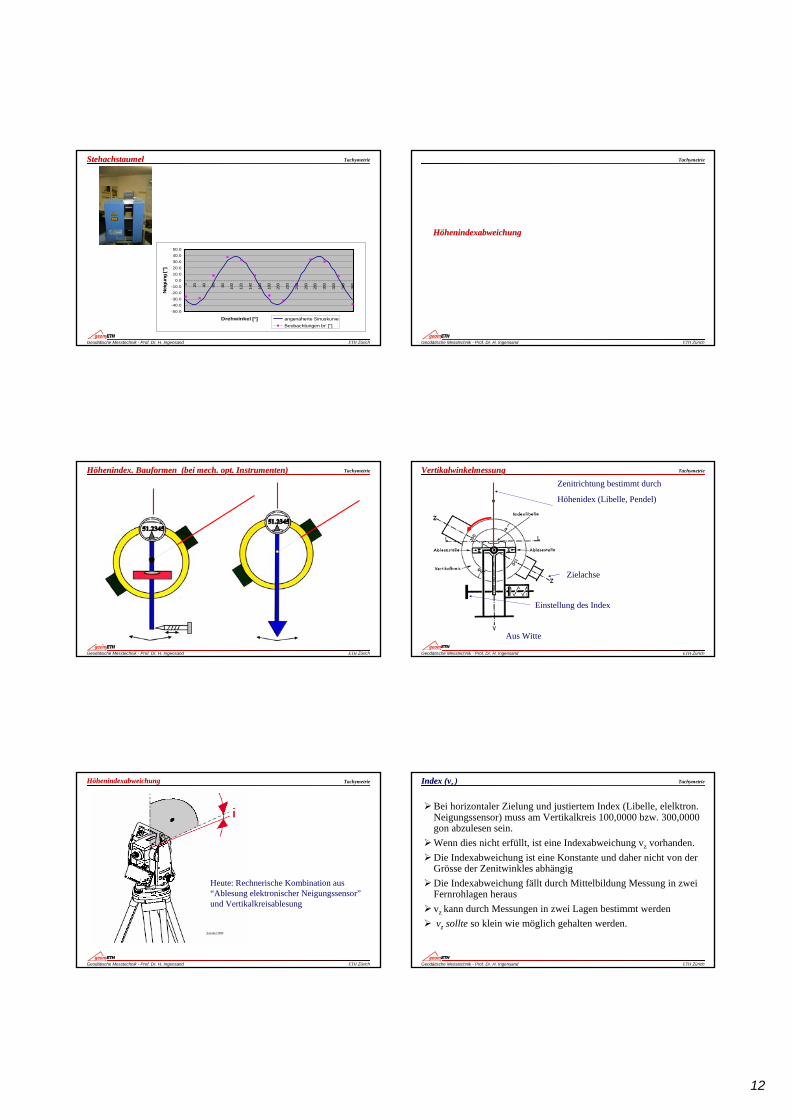
TachymetrieStehachstaumelStehachstaumel
-50.0-40.0-30.0-20.0-10.0
0.010.020.030.040.050.0
0 20 40 60 80 100
120
140
160
180
200
220
240
260
280
300
320
340
360
Drehwinkel [°]
Nei
gung
["]
angenäherte SinuskurveBeobachtungen br' ["]
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
HHööhenindexabweichunghenindexabweichung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieHHööhenindex. Bauformen (bei mech. opt. Instrumenten)henindex. Bauformen (bei mech. opt. Instrumenten)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieVertikalwinkelmessungVertikalwinkelmessungZenitrichtung bestimmt durch
Höhenidex (Libelle, Pendel)
Zielachse
Einstellung des Index
Aus Witte
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieHHööhenindexabweichunghenindexabweichung
Zeiske1999
Heute: Rechnerische Kombination aus“Ablesung elektronischer Neigungssensor”und Vertikalkreisablesung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieIndex (Index (vvz )
Bei horizontaler Zielung und justiertem Index (Libelle, elelktron. Neigungssensor) muss am Vertikalkreis 100,0000 bzw. 300,0000 gon abzulesen sein. Wenn dies nicht erfüllt, ist eine Indexabweichung vz vorhanden.Die Indexabweichung ist eine Konstante und daher nicht von der Grösse der Zenitwinkles abhängigDie Indexabweichung fällt durch Mittelbildung Messung in zwei Fernrohlagen heraus vz kann durch Messungen in zwei Lagen bestimmt werdenvz sollte so klein wie möglich gehalten werden.
13
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
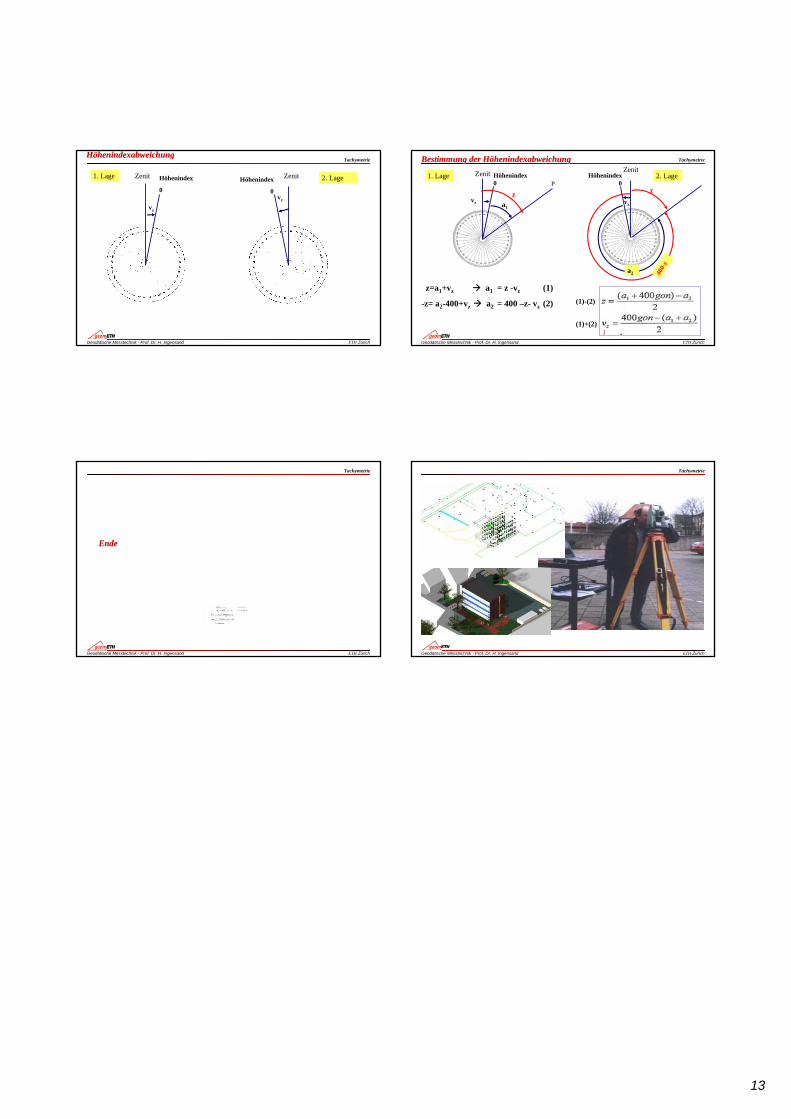
TachymetrieHHööhenindexabweichunghenindexabweichung
1. Lage Zenit Höhenindex
0
vz
Zenit 2. LageHöhenindex
0vz
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TachymetrieBestimmungBestimmung derder HHööhenindexabweichunghenindexabweichung
1. Lage 2. LageZenit Höhenindex0 P
zvz a1
Höhenindex0
Zenit
zvz
400-
z
a2
z=a1+vz a1 = z -vz
-z= a2-400+vz a2 = 400 –z- vz
(1)
(2) (1)-(2)
(1)+(2)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
EndeEnde
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Tachymetrie
1
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Die AufnahmeDie Aufnahme
Grundsätzliches zur Aufnahme
Methodik (Einzelpunkt, Punktwolke)
Messverfahren
Der „Digitale Messtisch“
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
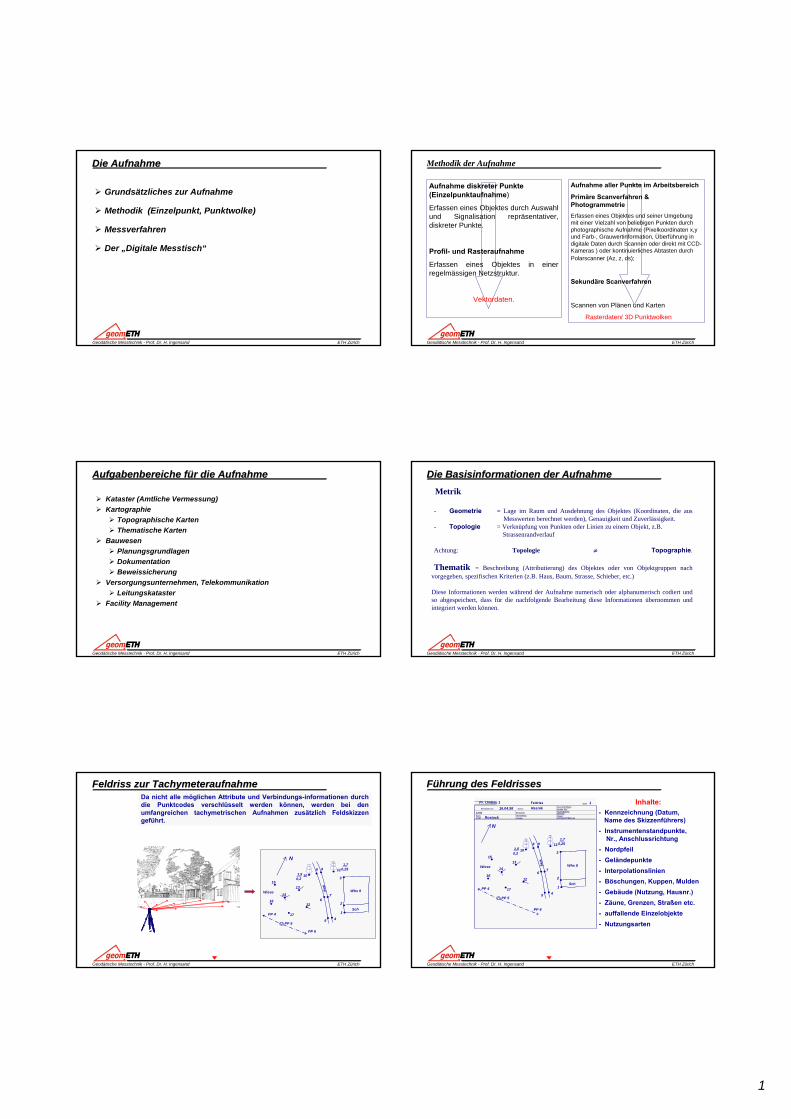
Methodik der Aufnahme
Aufnahme diskreter Punkte (Einzelpunktaufnahme)
Erfassen eines Objektes durch Auswahl und Signalisation repräsentativer, diskreter Punkte.
Profil- und Rasteraufnahme
Erfassen eines Objektes in einer regelmässigen Netzstruktur.
Vektordaten.
Aufnahme aller Punkte im Arbeitsbereich
Primäre Scanverfahren & PhotogrammetrieErfassen eines Objektes und seiner Umgebung mit einer Vielzahl von beliebigen Punkten durch photographische Aufnahme (Pixelkoordinaten x,y und Farb-, Grauwertinformation, Überführung in digitale Daten durch Scannen oder direkt mit CCD-Kameras ) oder kontinuierliches Abtasten durch Polarscanner (Az, z, ds);
Sekundäre Scanverfahren
Scannen von Plänen und Karten
Rasterdaten/ 3D Punktwolken
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Aufgabenbereiche fAufgabenbereiche füür die Aufnahmer die Aufnahme
Kataster (Amtliche Vermessung)Kartographie
Topographische KartenThematische Karten
BauwesenPlanungsgrundlagenDokumentationBeweissicherung
Versorgungsunternehmen, TelekommunikationLeitungskataster
Facility Management
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Die Basisinformationen der AufnahmeDie Basisinformationen der AufnahmeMetrik
- Geometrie = Lage im Raum und Ausdehnung des Objektes (Koordinaten, die ausMesswerten berechnet werden), Genauigkeit und Zuverlässigkeit.
- Topologie = Verknüpfung von Punkten oder Linien zu einem Objekt, z.B. Strassenrandverlauf
Achtung: Topologie ≠ Topographie.
Thematik = Beschreibung (Attributierung) des Objektes oder von Objektgruppen nach vorgegeben, spezifischen Kriterien (z.B. Haus, Baum, Strasse, Schieber, etc.)
Diese Informationen werden während der Aufnahme numerisch oder alphanumerisch codiert und so abgespeichert, dass für die nachfolgende Bearbeitung diese Informationen übernommen und integriert werden können.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Feldriss zur Feldriss zur TachymeteraufnahmeTachymeteraufnahmeDa nicht alle möglichen Attribute und Verbindungs-informationen durch die Punktcodes verschlüsselt werden können, werden bei den umfangreichen tachymetrischen Aufnahmen zusätzlich Feldskizzen geführt.
Whs 9
Sch1
2
3
45
67
108 9 11
17
12
1315
16
14
1,50,2
1,70,25
Weg
N
PP 5
PP 4
PP 6
Wiese
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
FFüührung des Feldrisseshrung des FeldrissesInhalte:
- Instrumentenstandpunkte,Nr., Anschlussrichtung
- Geländepunkte- Interpolationslinien
- Zäune, Grenzen, Straßen etc.- auffallende Einzelobjekte- Nutzungsarten
- Böschungen, Kuppen, Mulden- Gebäude (Nutzung, Hausnr.)
- Nordpfeil
- Kennzeichnung (Datum,Name des Skizzenführers)
Feldriss Seite
Gemessen am : durch :
Land GemeindeKreisStadt
GemarkungOrtsteil
Kennziffer/BlockStraße, FlurKartenblatt Nr.MaßstabObjektAuftrags-Nr.Maßstab
Whs 9
Sch1
2
3
45
67
10
8 9 11
17
12
1315
16
14
1,50,2
1,70,25
16.04.98 Resnik
Rostock
Pr. Umbau 1
Weg
N
PP 5
PP 4
PP 6
Wiese
1
2
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
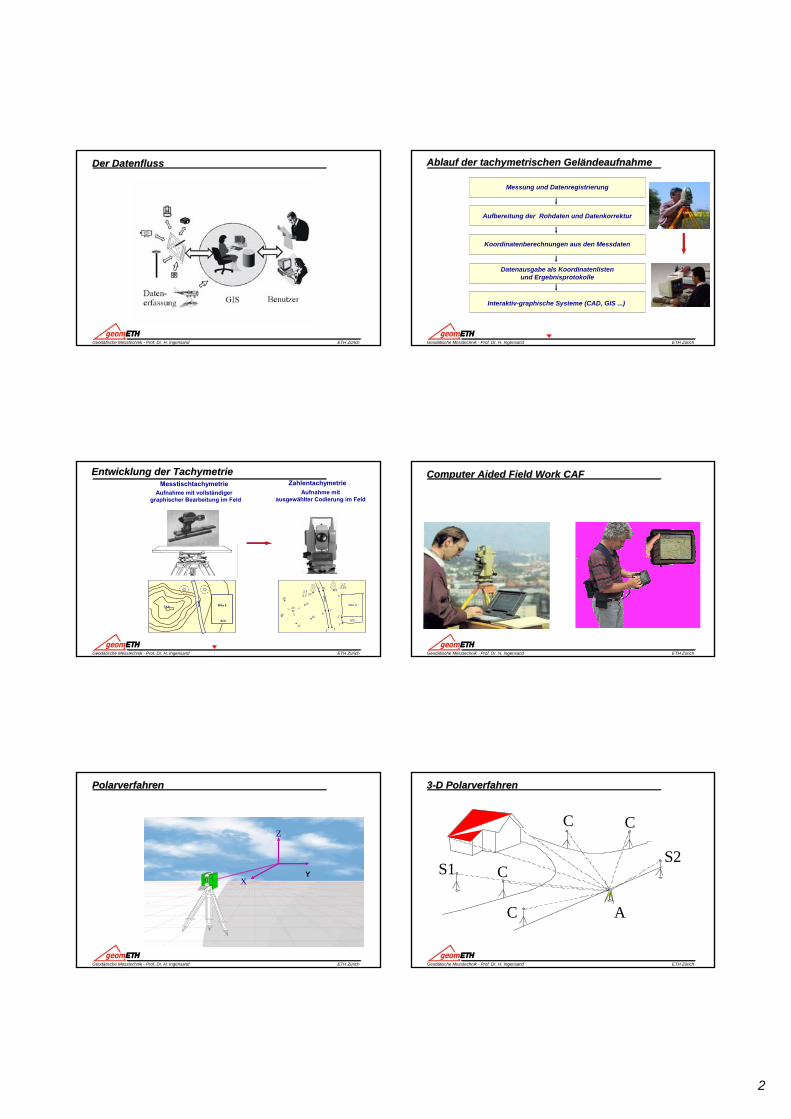
Der DatenflussDer Datenfluss
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Ablauf der Ablauf der tachymetrischentachymetrischen GelGeläändeaufnahmendeaufnahme
Messung und Datenregistrierung
Aufbereitung der Rohdaten und Datenkorrektur
Koordinatenberechnungen aus den Messdaten
Datenausgabe als Koordinatenlistenund Ergebnisprotokolle
Interaktiv-graphische Systeme (CAD, GIS ...)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Entwicklung der Entwicklung der TachymetrieTachymetrieMesstischtachymetrie
Aufnahme mit vollständiger graphischer Bearbeitung im Feld
ZahlentachymetrieAufnahme mit
ausgewählter Codierung im Feld
Whs 9
Sch1
2
3
45
67
10
8 911
17
12
13
15
16
14
1,50,2
1,70,25
WegW
eg Whs 9
Sch
34.4
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Computer Aided Computer Aided FieldField WorkWork CAFCAF
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Z
X
PolarverfahrenPolarverfahren
Y
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
33--D PolarverfahrenD Polarverfahren
A
C
C
C C
S1S2
3
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
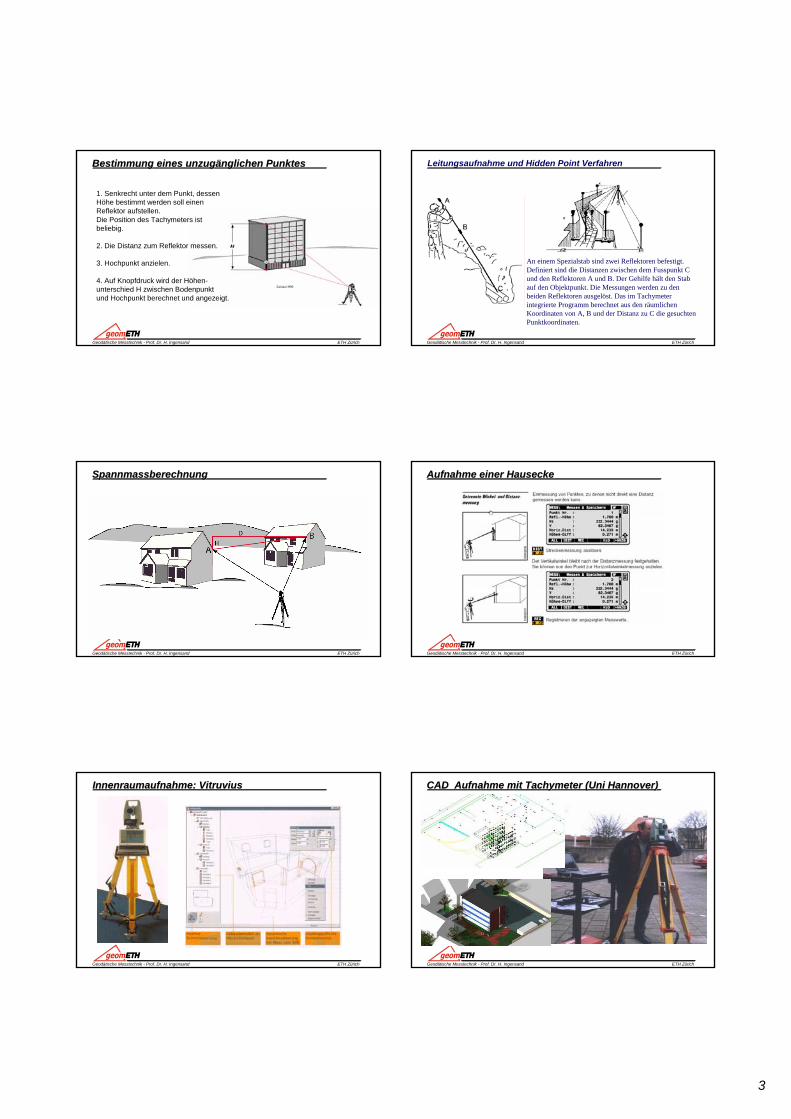
BestimmungBestimmung eineseines unzugunzugäänglichennglichen PunktesPunktes
1. Senkrecht unter dem Punkt, dessenHöhe bestimmt werden soll einenReflektor aufstellen.Die Position des Tachymeters istbeliebig.
2. Die Distanz zum Reflektor messen.
3. Hochpunkt anzielen.
4. Auf Knopfdruck wird der Höhen-unterschied H zwischen Bodenpunktund Hochpunkt berechnet und angezeigt.
Zeiske1999
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Leitungsaufnahme und Hidden Point Verfahren
An einem Spezialstab sind zwei Reflektoren befestigt. Definiert sind die Distanzen zwischen dem Fusspunkt C und den Reflektoren A und B. Der Gehilfe hält den Stab auf den Objektpunkt. Die Messungen werden zu den beiden Reflektoren ausgelöst. Das im Tachymeter integrierte Programm berechnet aus den räumlichen Koordinaten von A, B und der Distanz zu C die gesuchten Punktkoordinaten.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
SpannmassberechnungSpannmassberechnung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Aufnahme einer HauseckeAufnahme einer Hausecke
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Innenraumaufnahme: Innenraumaufnahme: VitruviusVitruvius
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
CAD CAD AufnahmeAufnahme mitmit Tachymeter (Tachymeter (UniUni Hannover)Hannover)
4
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
AB
STE
CK
UN
G
AU
FN
AHM
E
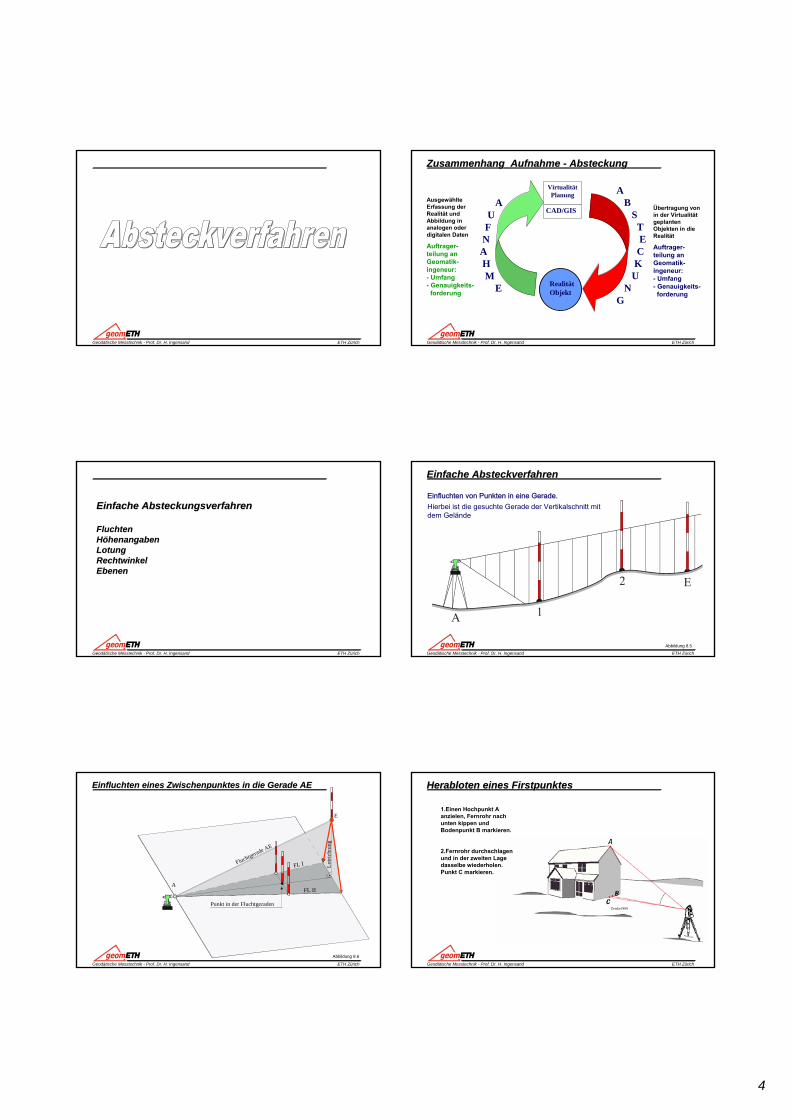
Zusammenhang Aufnahme Zusammenhang Aufnahme -- AbsteckungAbsteckung
VirtualitätPlanung
RealitätObjekt
CAD/GISAusgewählteErfassung derRealität und Abbildung in analogen oderdigitalen Daten
Auftrager-teilung an Geomatik-ingeneur:- Umfang- Genauigkeits-
forderung
Übertragung von in der VirtualitätgeplantenObjekten in die Realität
Auftrager-teilung an Geomatik-ingeneur:- Umfang- Genauigkeits-
forderung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Einfache AbsteckungsverfahrenEinfache Absteckungsverfahren
FluchtenFluchtenHHööhenangabenhenangabenLotungLotungRechtwinkelRechtwinkelEbenenEbenen
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Einfache AbsteckverfahrenEinfache Absteckverfahren
Einfluchten von Punkten in eine Gerade. Hierbei ist die gesuchte Gerade der Vertikalschnitt mit dem Gelände
Abbildung 8.5
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Fluchtgerade AE
E
A
Lotri
chtu
ng
FL I
FL II
Punkt in der Fluchtgeraden
Einfluchten eines Zwischenpunktes in die Gerade AEEinfluchten eines Zwischenpunktes in die Gerade AE
Abbildung 8.6
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
HerablotenHerabloten eineseines FirstpunktesFirstpunktes
1.Einen Hochpunkt Aanzielen, Fernrohr nachunten kippen undBodenpunkt B markieren.
2.Fernrohr durchschlagenund in der zweiten Lagedasselbe wiederholen.Punkt C markieren.
Zeiske1999
5
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
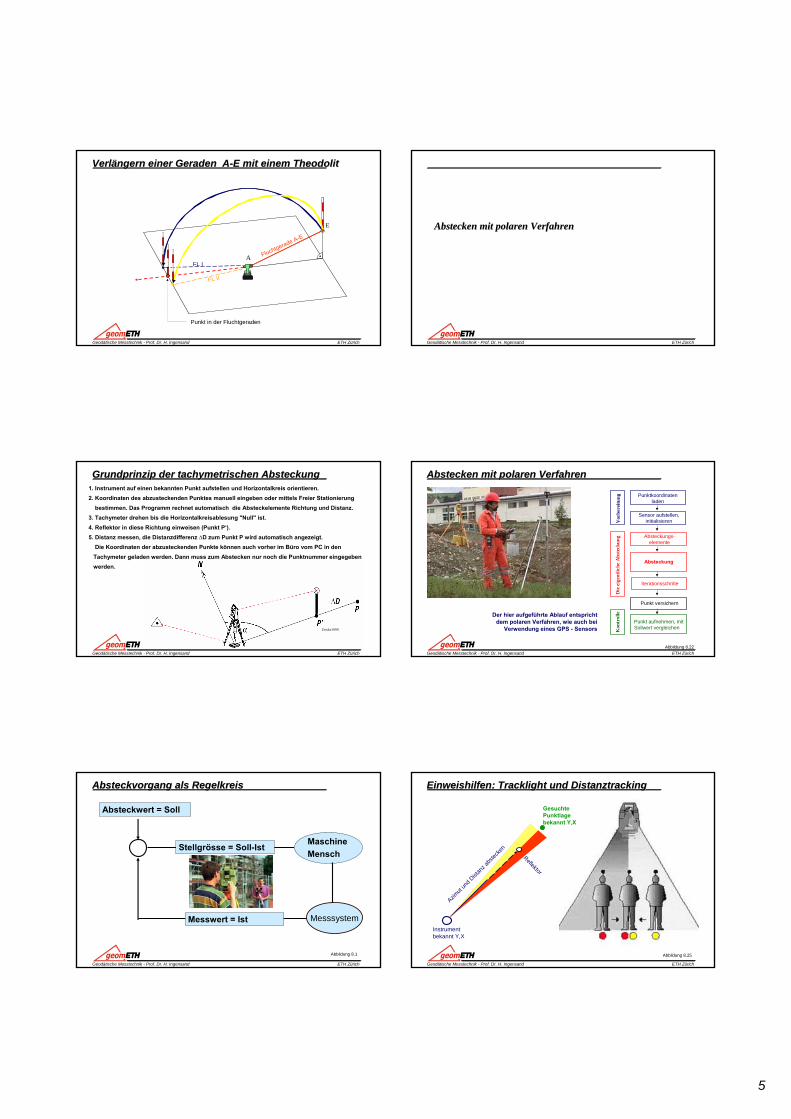
VerlVerläängern einer Geraden Angern einer Geraden A--E mit einem E mit einem TheodolitTheodolit
A
E
FL I
FL II
Fluchtgerade A-E
Punkt in der Fluchtgeraden
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Abstecken mit polaren VerfahrenAbstecken mit polaren Verfahren
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
GrundprinzipGrundprinzip derder tachymetrischentachymetrischen AbsteckungAbsteckung1. Instrument auf einen bekannten Punkt aufstellen und Horizontalkreis orientieren.2. Koordinaten des abzusteckenden Punktes manuell eingeben oder mittels Freier Stationierung
bestimmen. Das Programm rechnet automatisch die Absteckelemente Richtung und Distanz.3. Tachymeter drehen bis die Horizontalkreisablesung "Null" ist.4. Reflektor in diese Richtung einweisen (Punkt P‘).5. Distanz messen, die Distanzdifferenz ∆D zum Punkt P wird automatisch angezeigt.
Die Koordinaten der abzusteckenden Punkte können auch vorher im Büro vom PC in den Tachymeter geladen werden. Dann muss zum Abstecken nur noch die Punktnummer eingegebenwerden.
Zeiske1999
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Abstecken mit polaren VerfahrenAbstecken mit polaren Verfahren
Punktkoordinaten laden
Sensor aufstellen, initialisieren
Absteckungselemente
Absteckung
Punkt versichern
Iterationsschritte
Punktkoordinaten laden
Absteckungs-elemente
Punkt aufnehmen, mit Sollwert vergleichen
Die
eig
entli
che
Abs
teck
ung
Vor
bere
itung
Kon
trol
leDer hier aufgeführte Ablauf entsprichtdem polaren Verfahren, wie auch bei
Verwendung eines GPS - Sensors
Abbildung 8.22
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
AbsteckAbsteckvorgangvorgang als Regelkreisals Regelkreis
Stellgrösse = Soll-Ist MaschineMensch
Messwert = Ist
Absteckwert = Soll
Messsystem
Abbildung 8.1
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Einweishilfen: Einweishilfen: TracklightTracklight und und DistanztrackingDistanztracking
Abbildung 8.25
Azimut
und D
istan
z abs
tecke
n
Instrumentbekannt Y,X
Reflektor
Gesuchte Punktlagebekannt Y,X
6
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
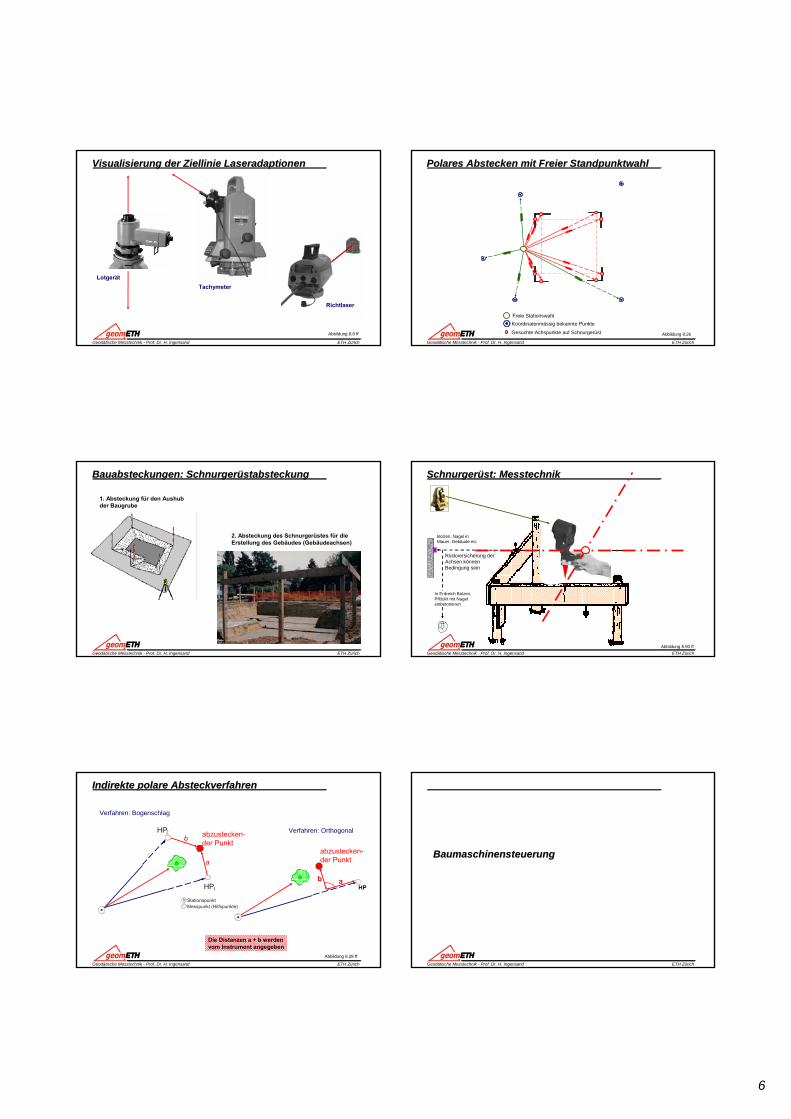
Visualisierung der Ziellinie Laseradaptionen Visualisierung der Ziellinie Laseradaptionen
LotgerätTachymeter
Richtlaser
Abbildung 8.8 ff
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Polares Abstecken mit Freier StandpunktwahlPolares Abstecken mit Freier Standpunktwahl
Freie StationswahlKoordinatenmässig bekannte PunkteGesuchte Achspunkte auf Schnurgerüst Abbildung 8.26
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Bauabsteckungen: SchnurgerBauabsteckungen: Schnurgerüüstabsteckungstabsteckung
1. Absteckung für den Aushub der Baugrube
2. Absteckung des Schnurgerüstes für die Erstellung des Gebäudes (Gebäudeachsen)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
SchnurgerSchnurgerüüst: Messtechnikst: Messtechnik
Rückversicherung der Achsen können Bedingung sein
Bolzen, Nagel in Mauer, Gebäude etc
In Erdreich Bolzen, Pflöckli mit Nagel einbetonieren
Abbildung 8.90 ff
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Indirekte polare AbsteckverfahrenIndirekte polare Absteckverfahren
HP1
HP2 abzustecken-der Punkt
a
b
StationspunktMesspunkt (Hilfspunkte)
Verfahren: Bogenschlag
Die Distanzen a + b werden vom Instrument angegeben
Verfahren: Orthogonal
HP
abzustecken-der Punkt
ab
Abbildung 8.28 ff
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
BaumaschinensteuerungBaumaschinensteuerung
7
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
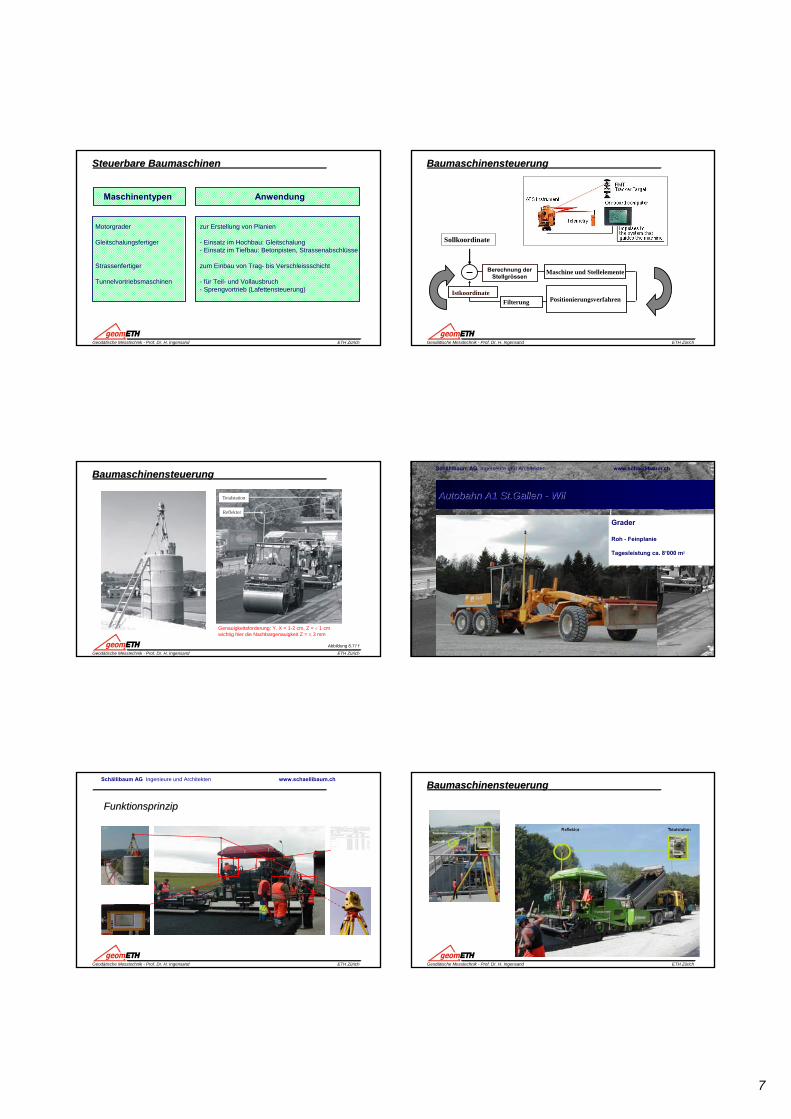
Steuerbare BaumaschinenSteuerbare Baumaschinen
Maschinentypen
Motorgrader
Gleitschalungsfertiger
Strassenfertiger
Tunnelvortriebsmaschinen
Anwendung
zur Erstellung von Planien
- Einsatz im Hochbau: Gleitschalung- Einsatz im Tiefbau: Betonpisten, Strassenabschlüsse
zum Einbau von Trag- bis Verschleissschicht
- für Teil- und Vollausbruch- Sprengvortrieb (Lafettensteuerung)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
BaumaschinensteuerungBaumaschinensteuerung
Sollkoordinate
Maschine und Stellelemente
PositionierungsverfahrenFilterungIstkoordinate
Berechnung derStellgrössen
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
BaumaschinensteuerungBaumaschinensteuerung
Totalstation
Reflektor
Genauigkeitsforderung: Y, X = 1-2 cm, Z = < 1 cmwichtig hier die Nachbargenauigkeit Z = ≤ 3 mm
Abbildung 8.77 f
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Autobahn A1 Autobahn A1 St.GallenSt.Gallen -- WilWil
Schällibaum AG Ingenieure und Architekten www.schaellibaum.ch
Grader
Roh - Feinplanie
Tagesleistung ca. 8‘000 m2
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
FunktionsprinzipFunktionsprinzip
Schällibaum AG Ingenieure und Architekten www.schaellibaum.ch
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
BaumaschinensteuerungBaumaschinensteuerung
8
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Baumaschinensteuerung weitere BeispieleBaumaschinensteuerung weitere Beispiele
Gleitschalungsfertiger zum Einbau von Betonpisten. Genauigkeitsforderung: Y, X = 1 cm, Z = 3 mm
Spritzbetonmaschine zum verkleiden / stabilisieren des Tunnelausbruchs. Genauigkeitsforderung: Y, X, Z = 2-3 cm
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
EndeEnde





























