Embed Size (px)
Citation preview
GeoNet Seminar
Theta-Graph
Strukturen • Motivation• Definition von Theta-Graph• Beispiel nach der Definition• Eingenschafen von Theta-Graph• Implemetierungsalgorithmus von Theta-Graph • Beispiel nach des Algorithmus• Definition des Spanners• Theta-Graph ist Spanner• Beweis• Folgerung
Motivation
•Realisierung Spanner (approximativ vollständiger Graph)
•Entwicklung der Approximationsalgorithmen oder in der Heuristik
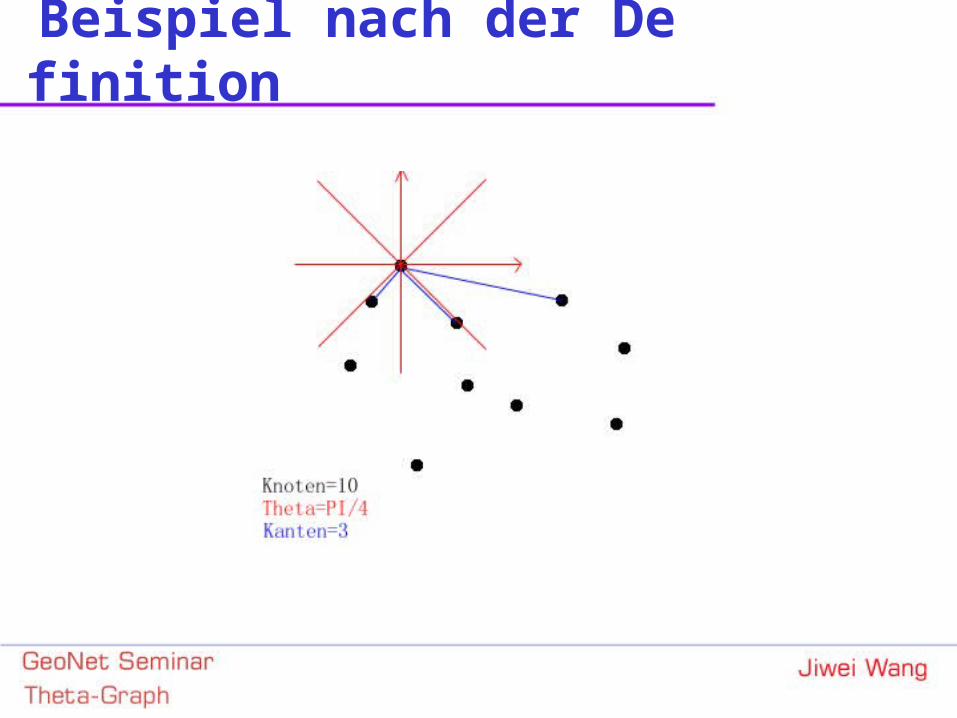
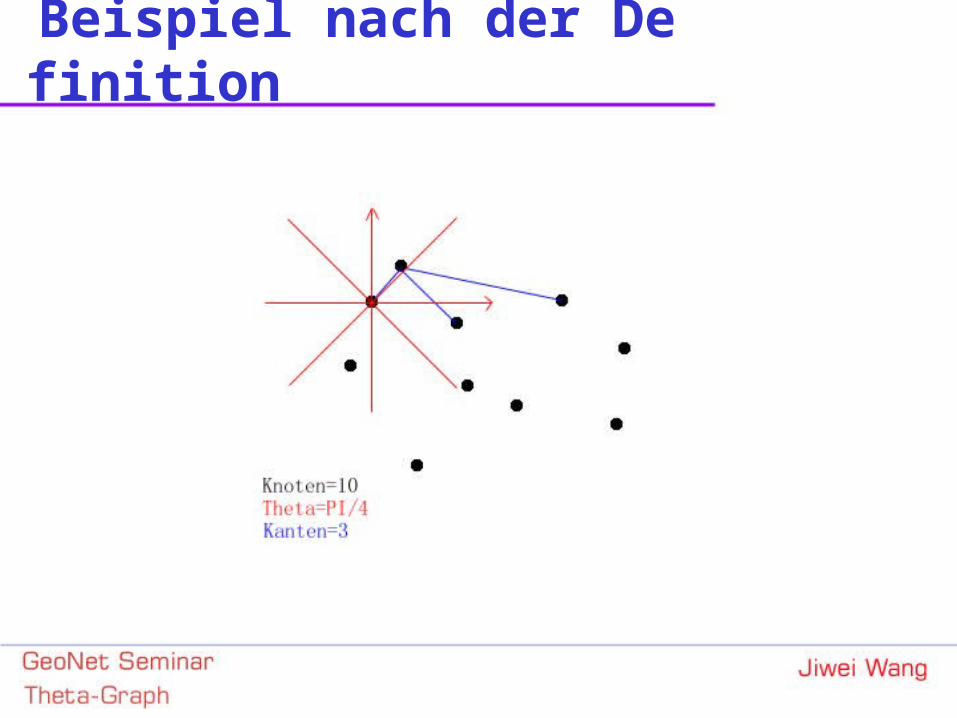
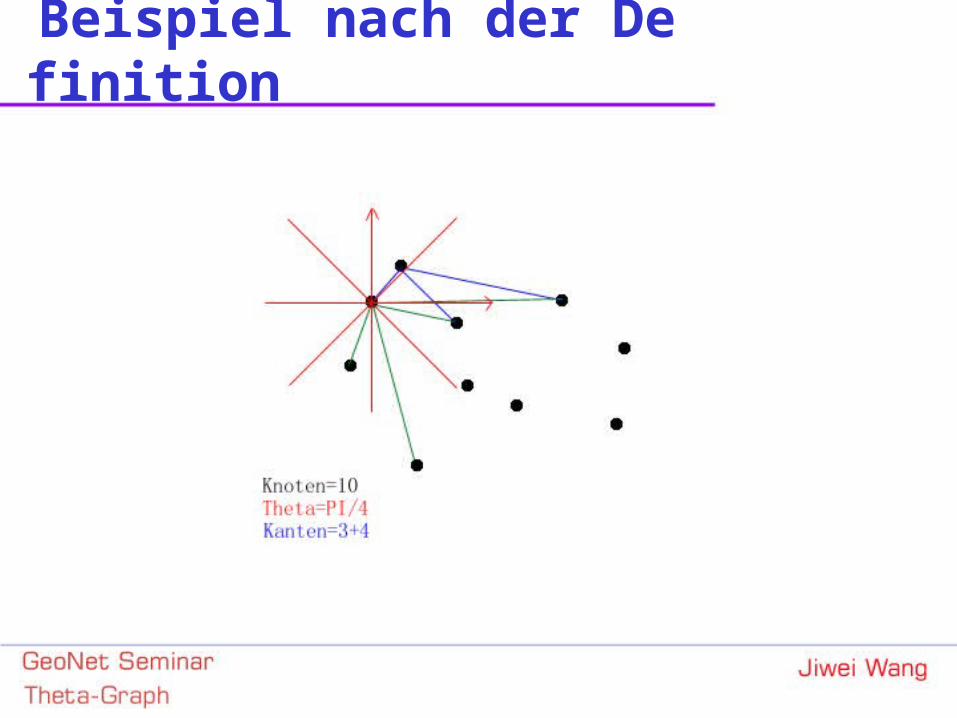
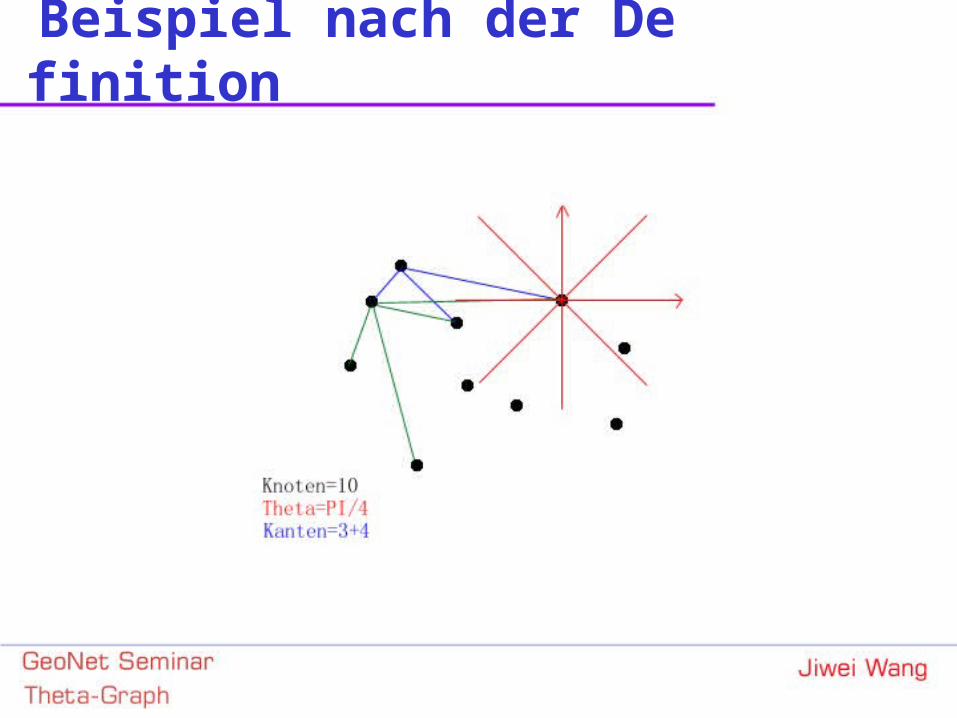
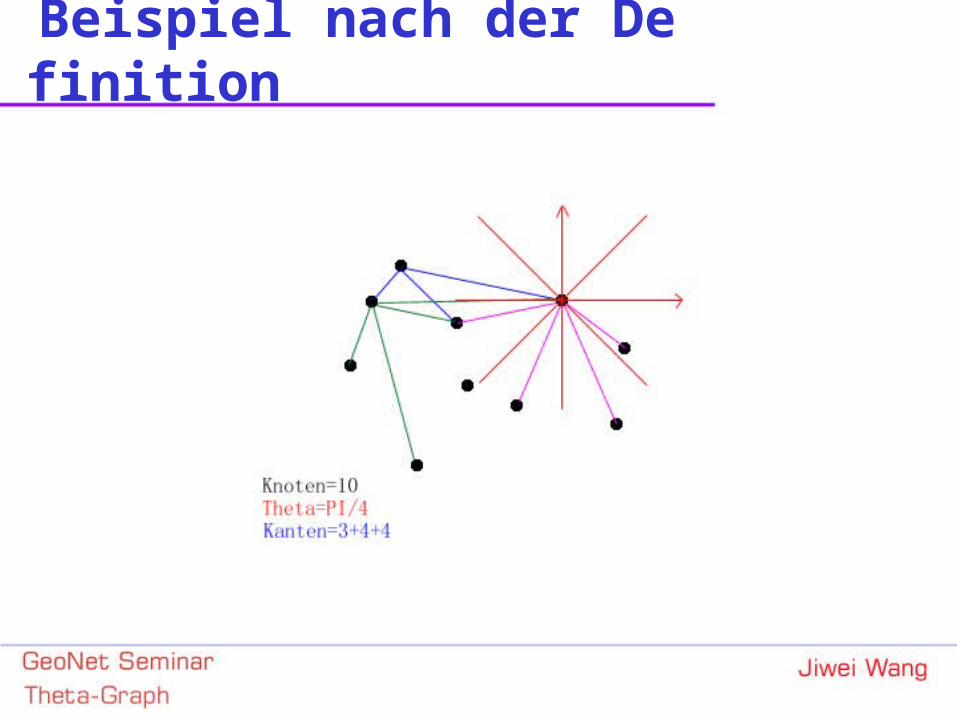
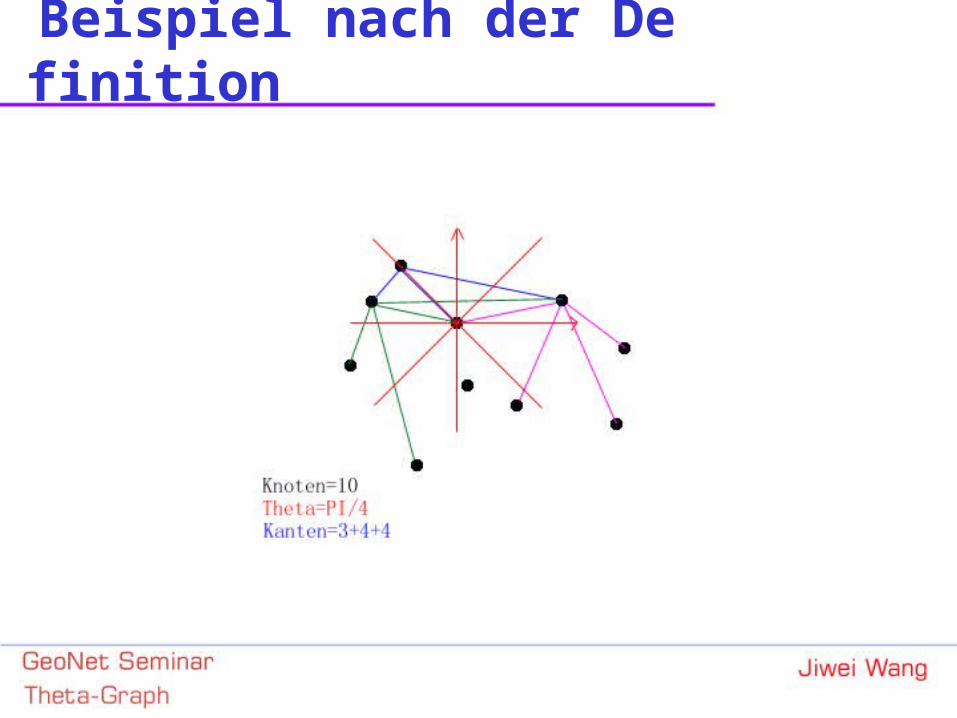
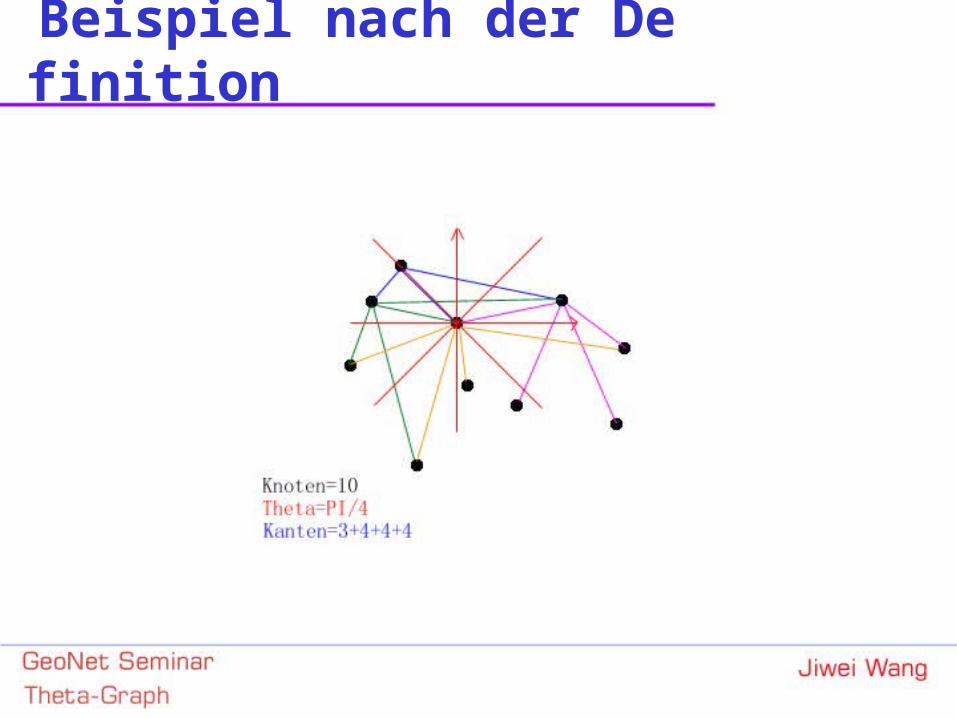
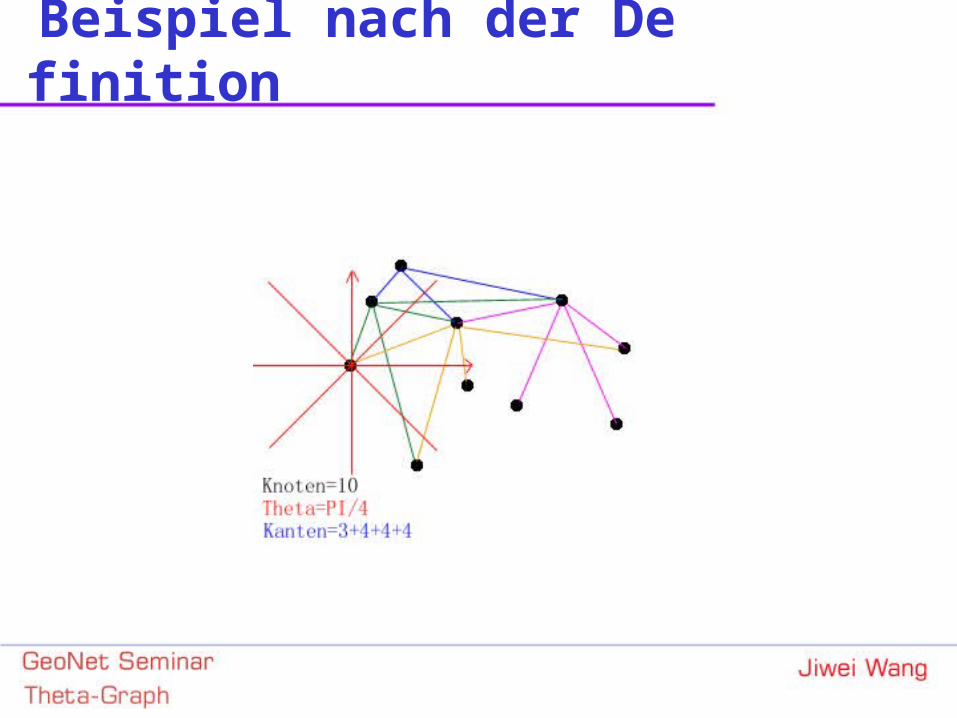
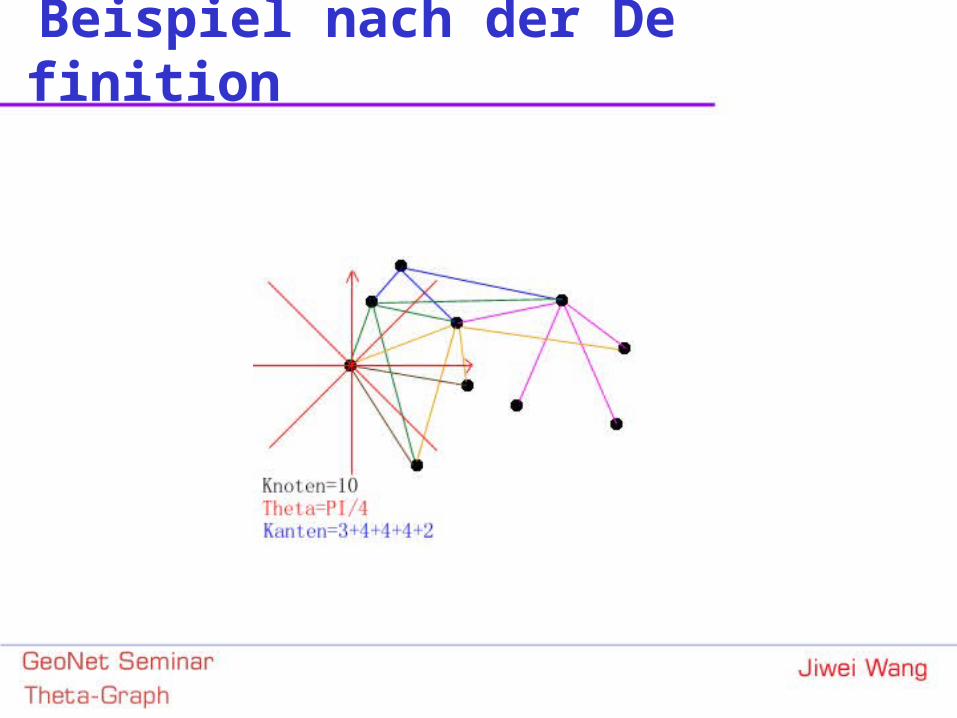
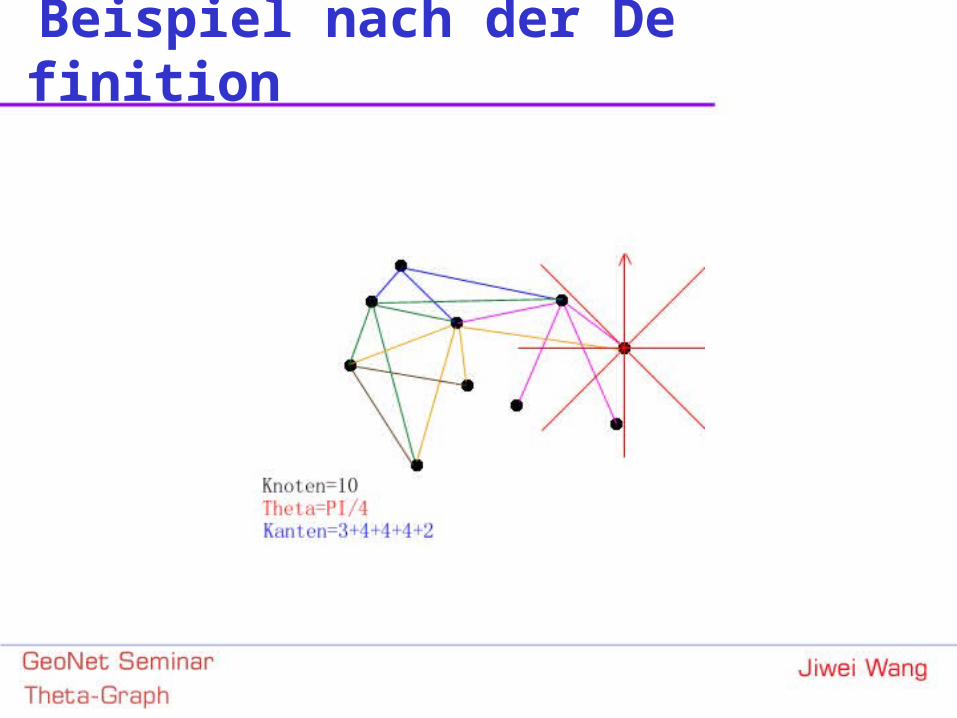
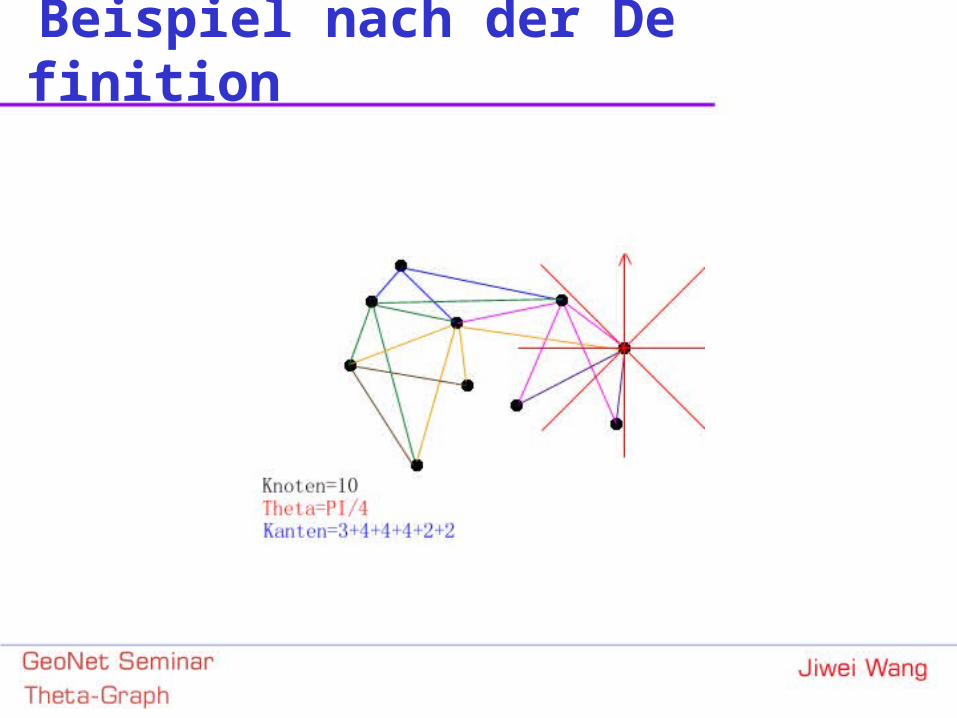
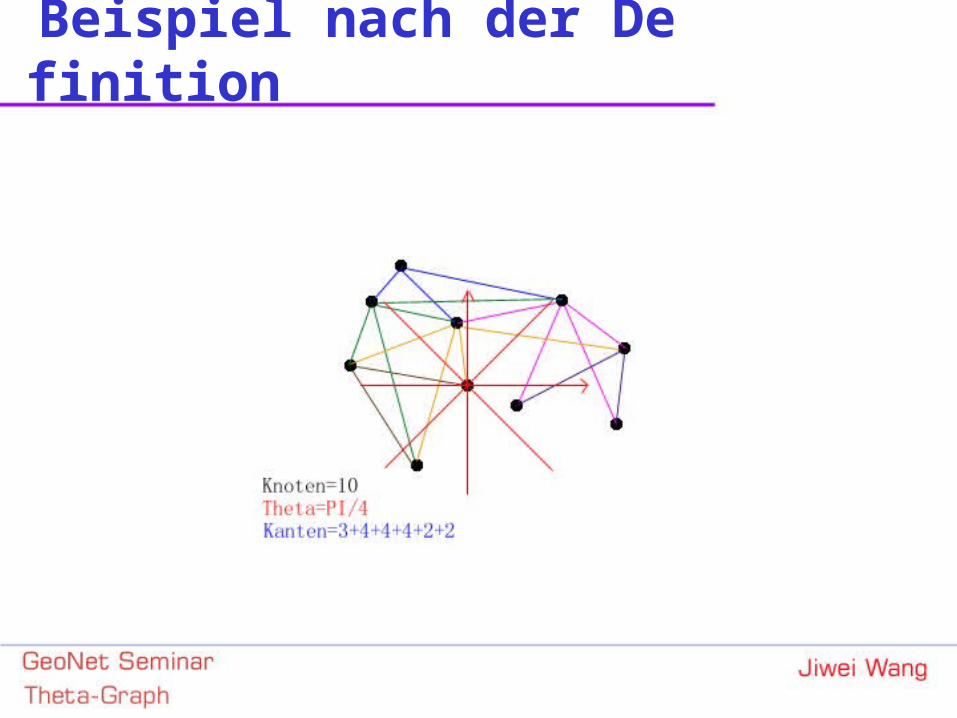
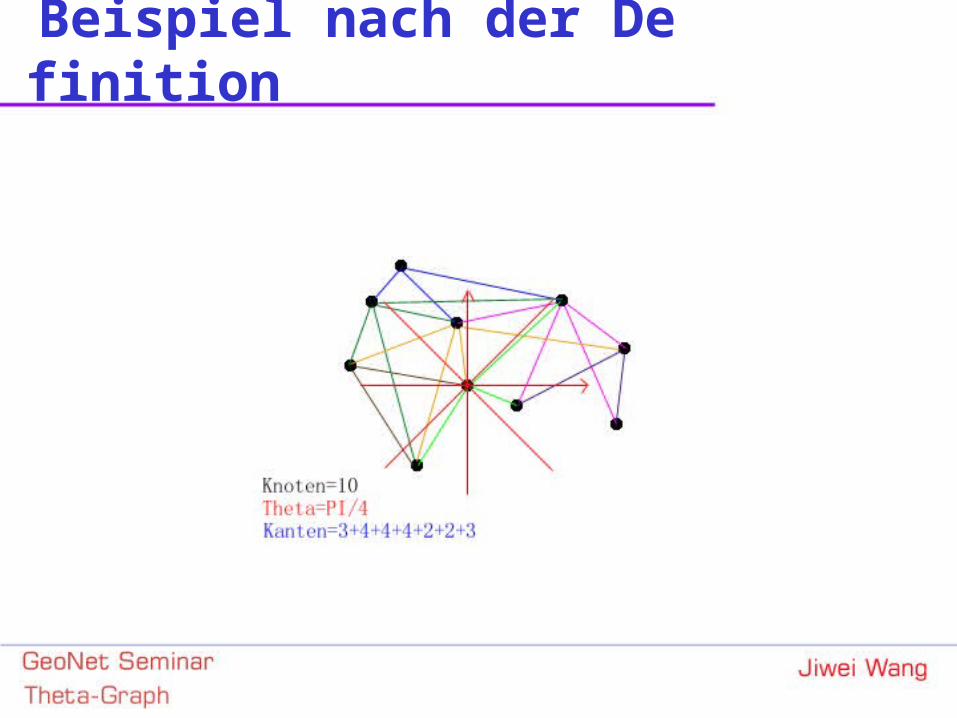
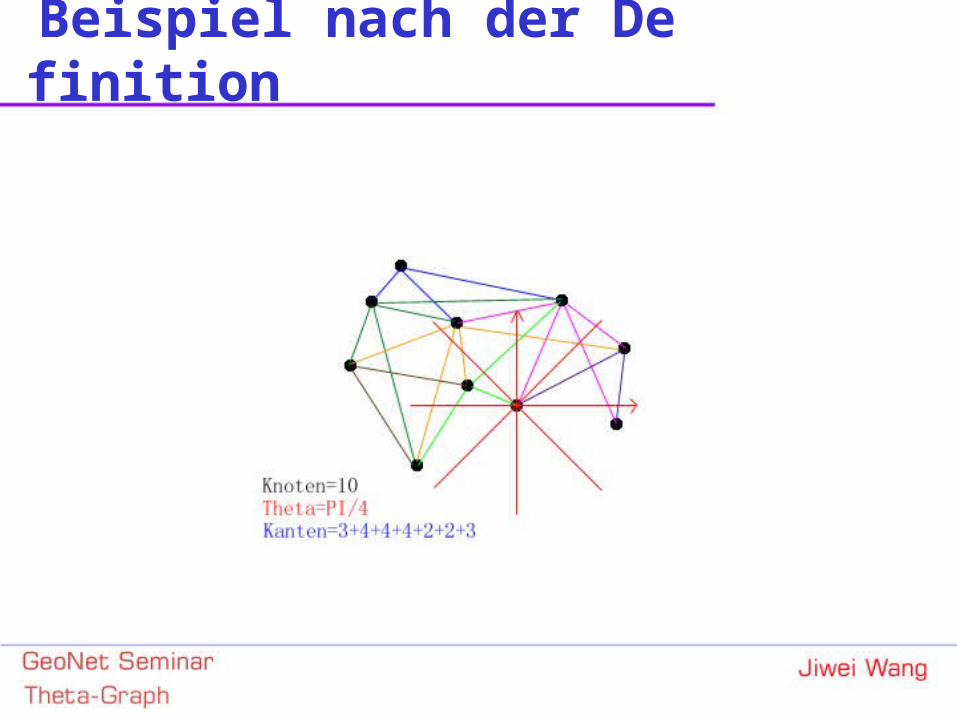
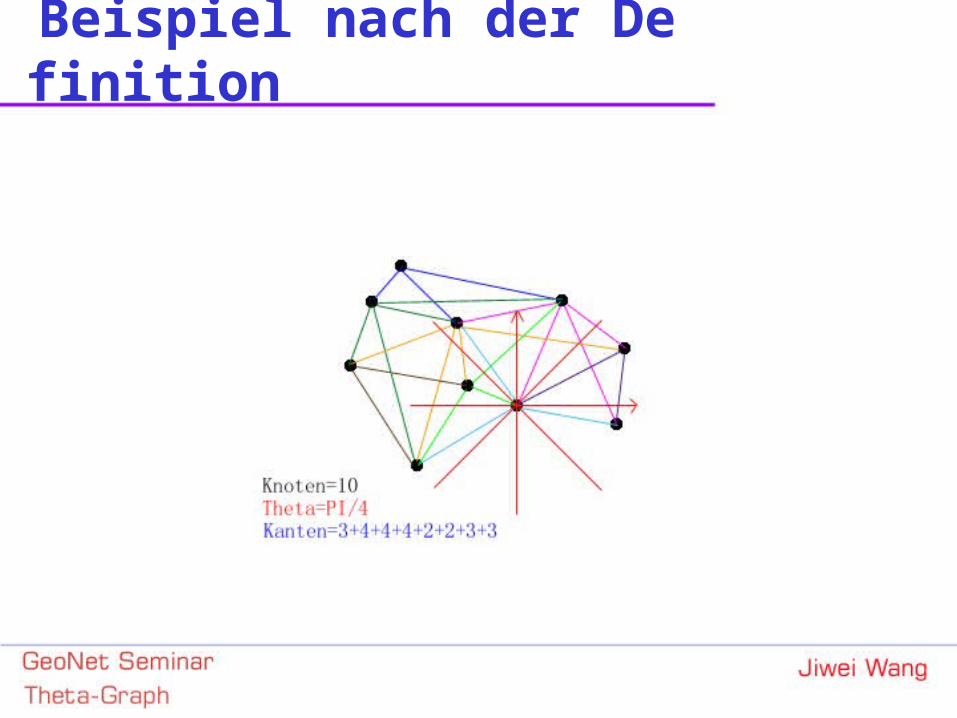
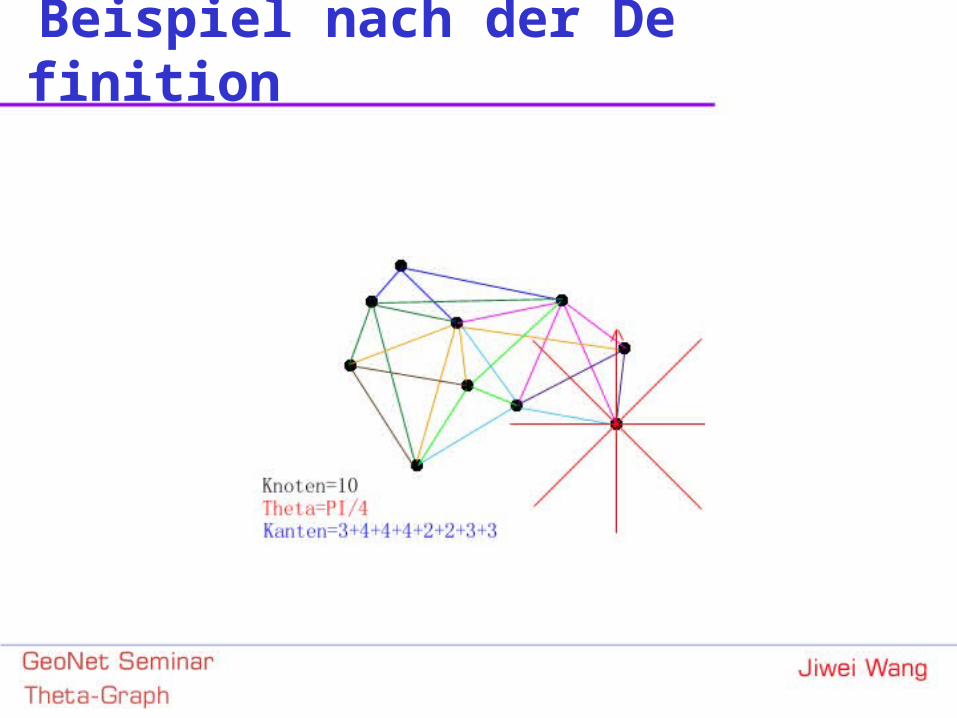
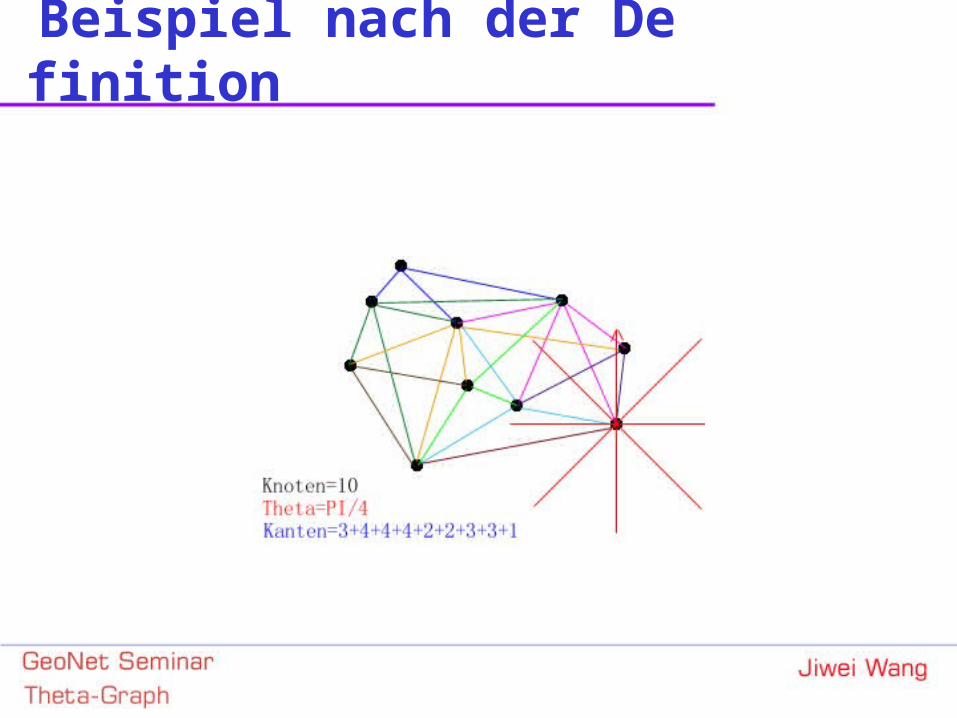
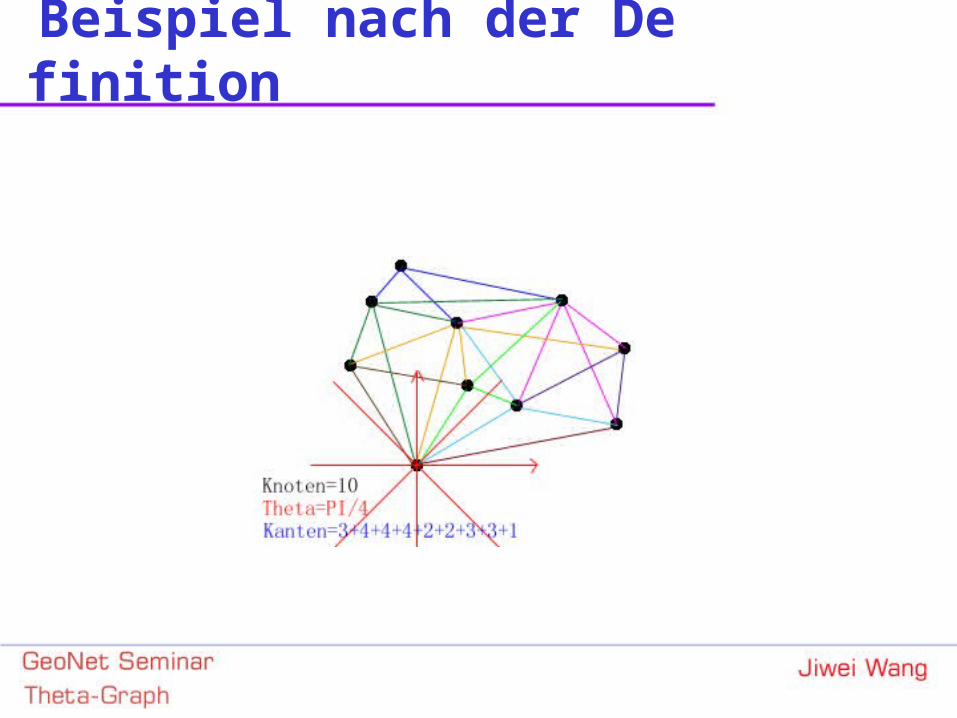
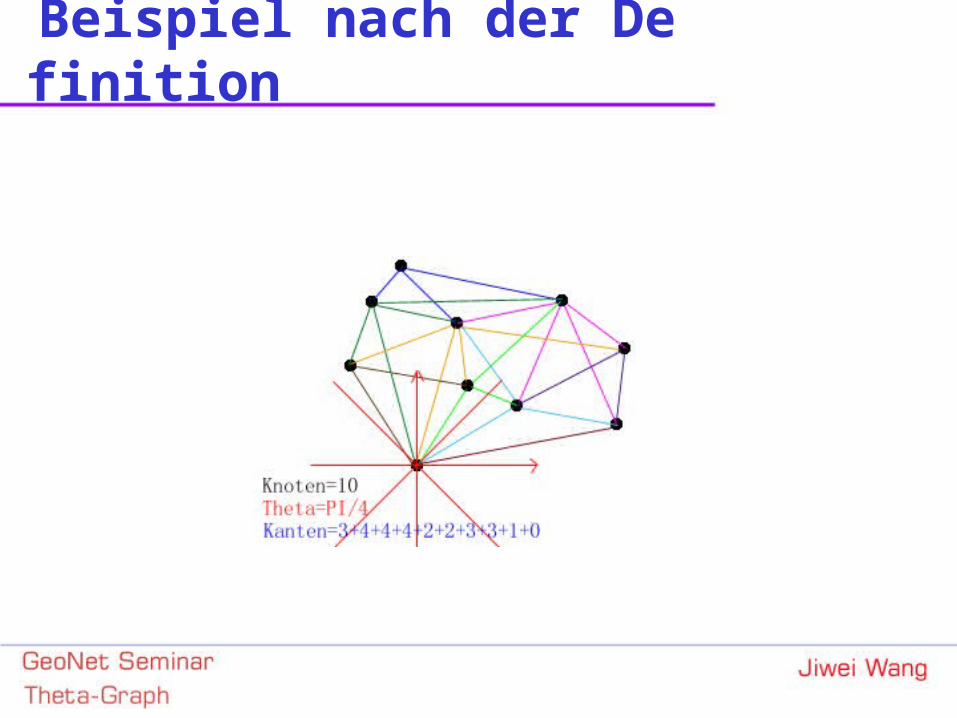
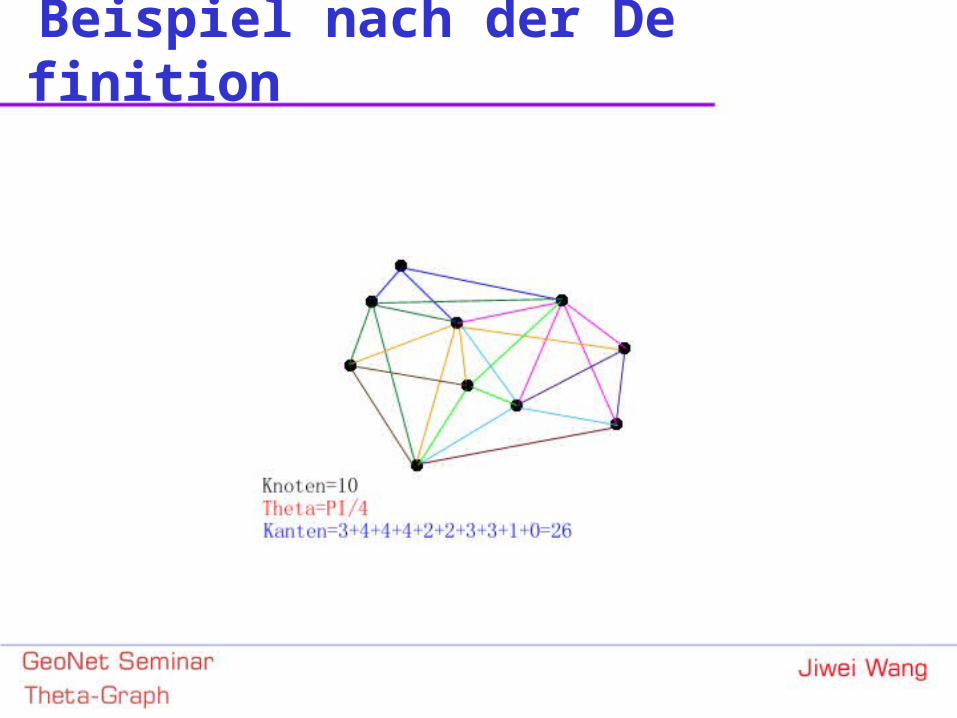
Definition von Theta-Graph• Theta-Graph In Fläche um jeden Knote in Sektoren von
Koordinatesystem mit dem örtlichfestgelegten Winkel und schließen den Knote an den nächsten Nachbar in jedem Sektor
Beispiel nach der Definition
Beispiel nach der Definition
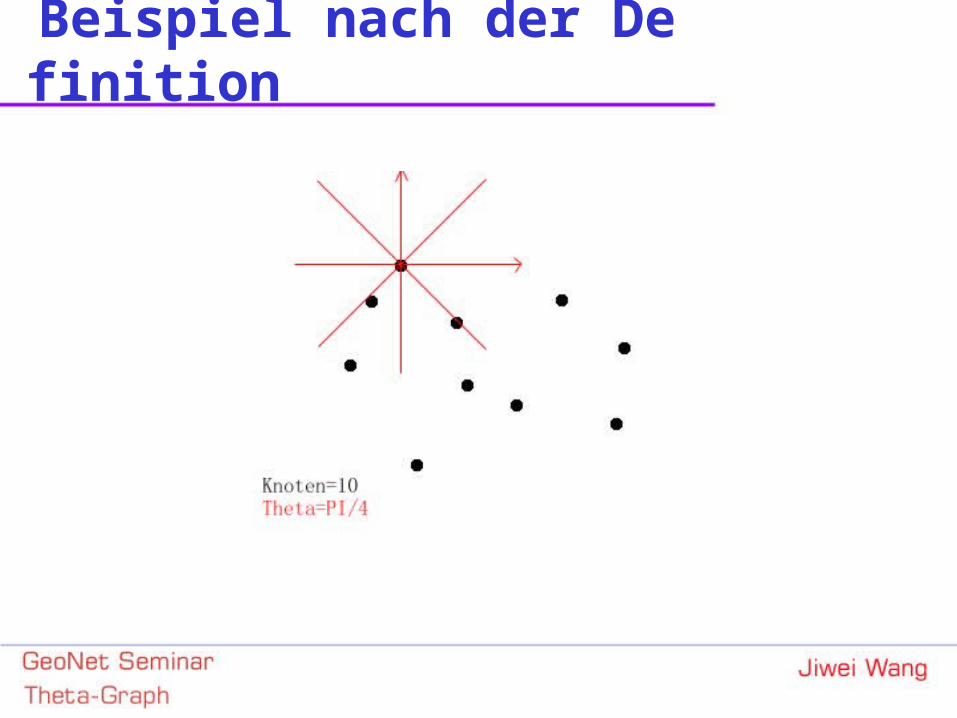
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Beispiel nach der Definition
Eingenschafen von Theta-Graph
• = ,wobei k ist eine Ganzzahl(k > 8) • Jeder Knoten hat höchsten k Kanten • Im allgemeinen hat ein Knoten Typ i Kanten wobei 1<=i<=k und
der winkel von eine kante und x-coordinate ist.
2k
2 ( 1) 2i ik k
Implemetierungsalgorithmus von Theta-Graph
• Methode Man findet alle Kanten nach Typ i (zuerste ist
Typ1 , dann ist Typ2 , usw.) für jede Knote.• Defintion Drei Ordnungen : In jeder Ordnung
werden die Knoten durch die Einrichtung ihrer Projektionen auf die orientierte Linie georgernet,die durch den Nullpunkt einen Winkel von mit der X-Achse bildet.
, ,
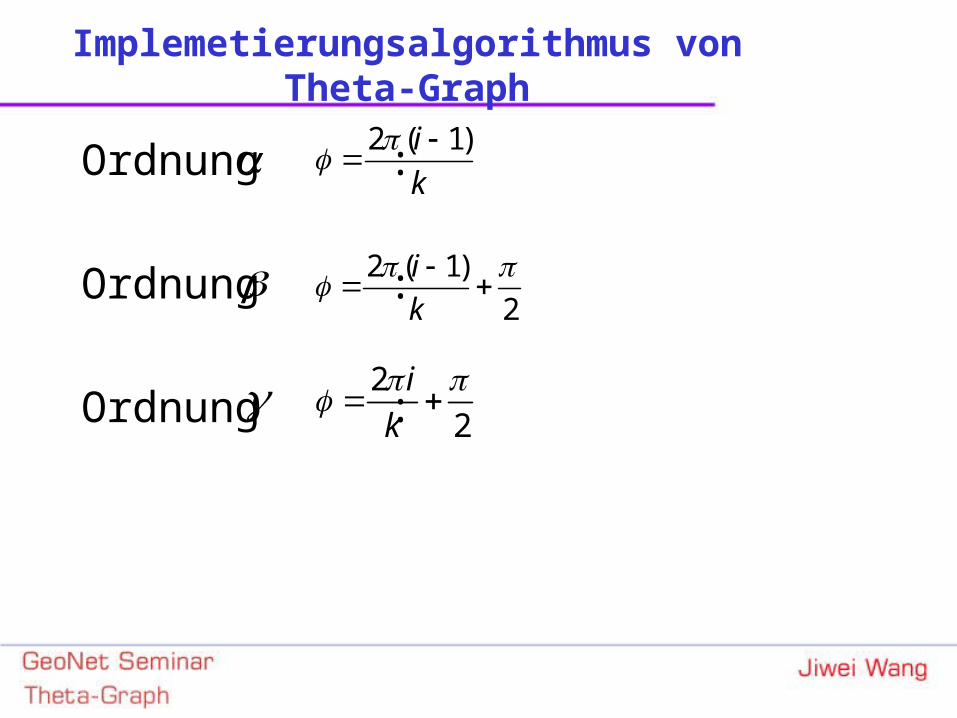
Ordnung :
Ordnung :
Ordnung :
Implemetierungsalgorithmus von Theta-Graph
2 ( 1)ik
2 ( 1)2
ik
22
ik
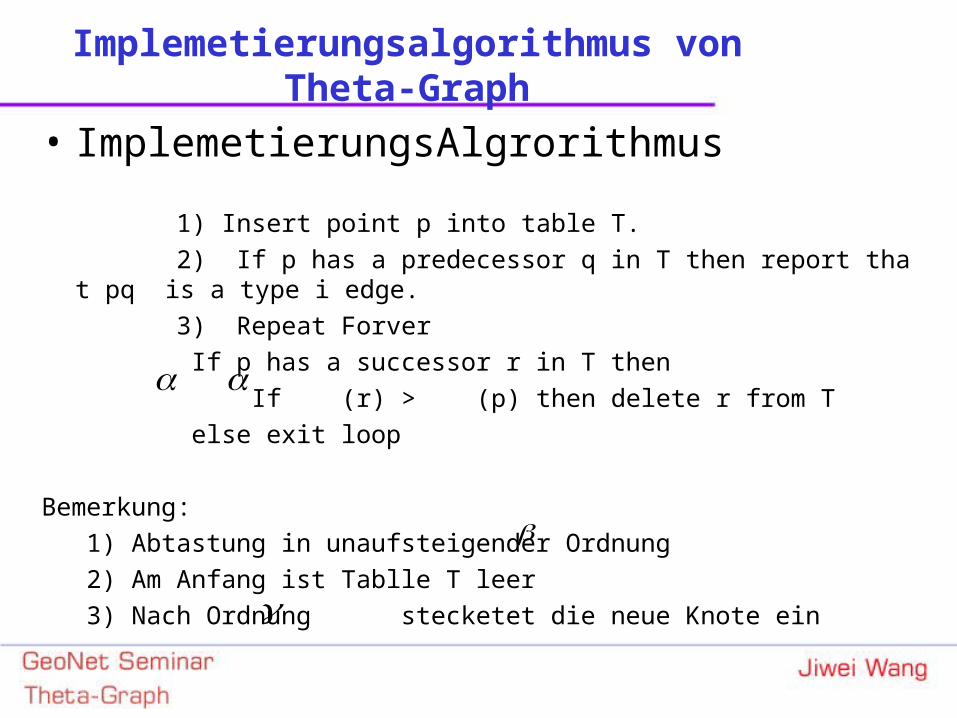
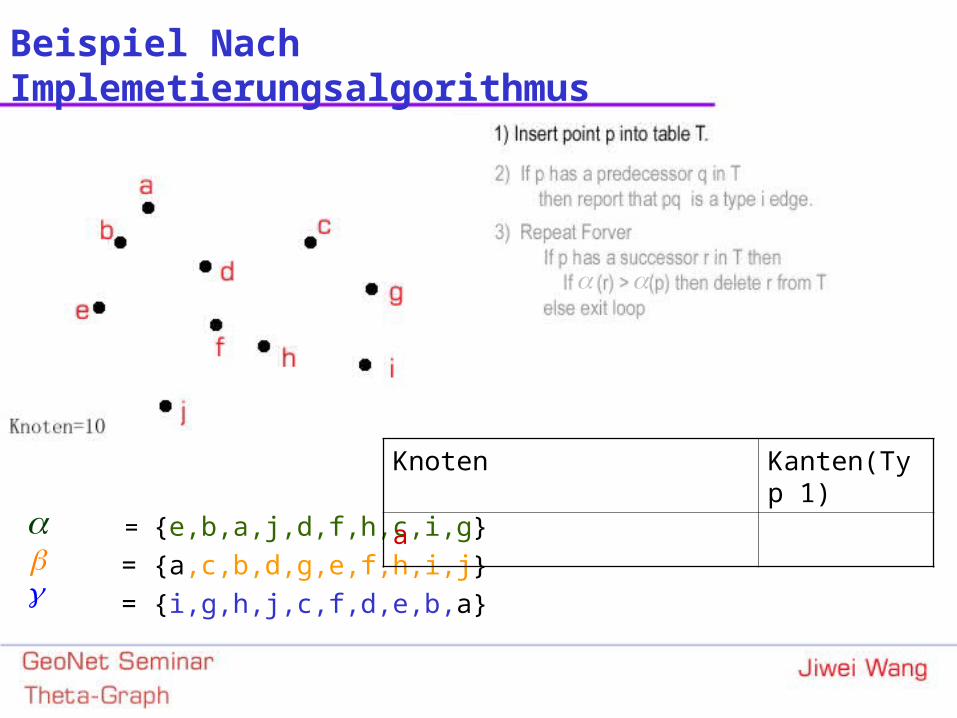
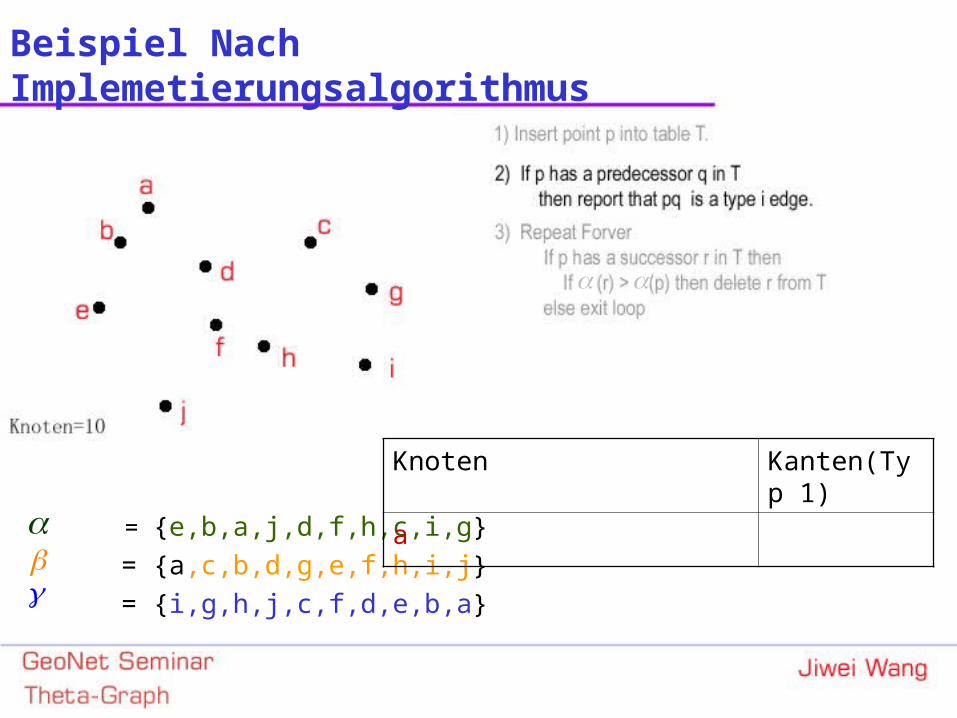
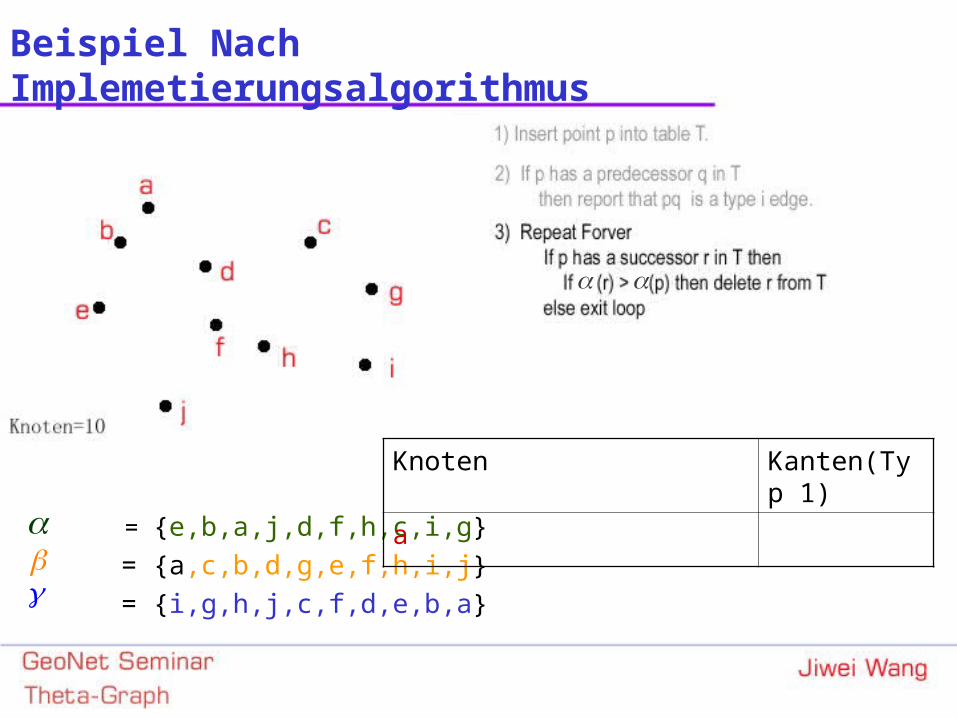
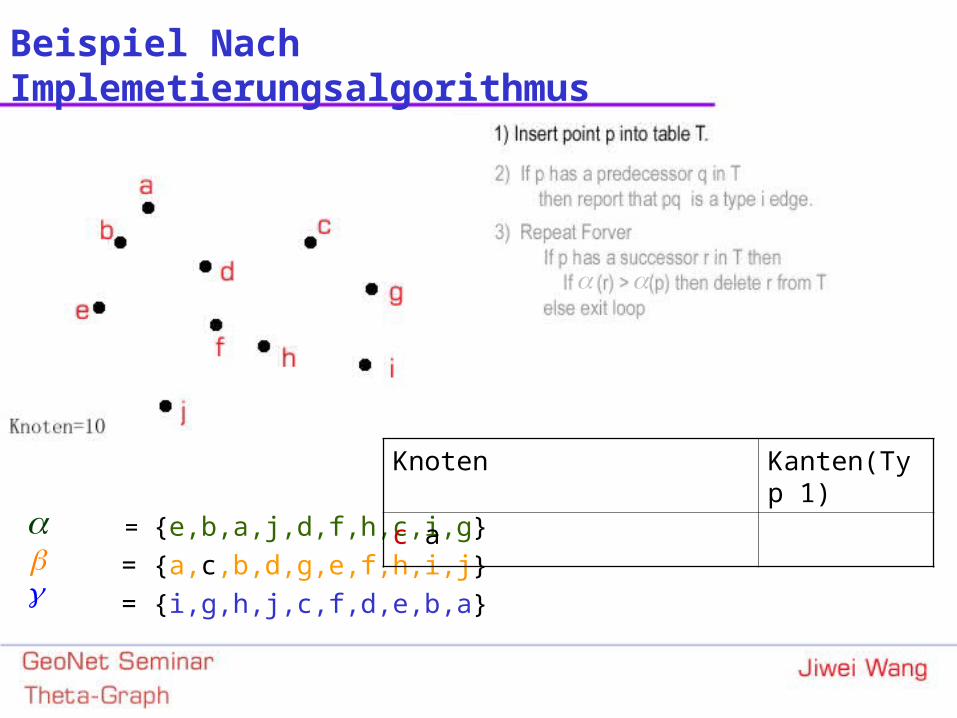
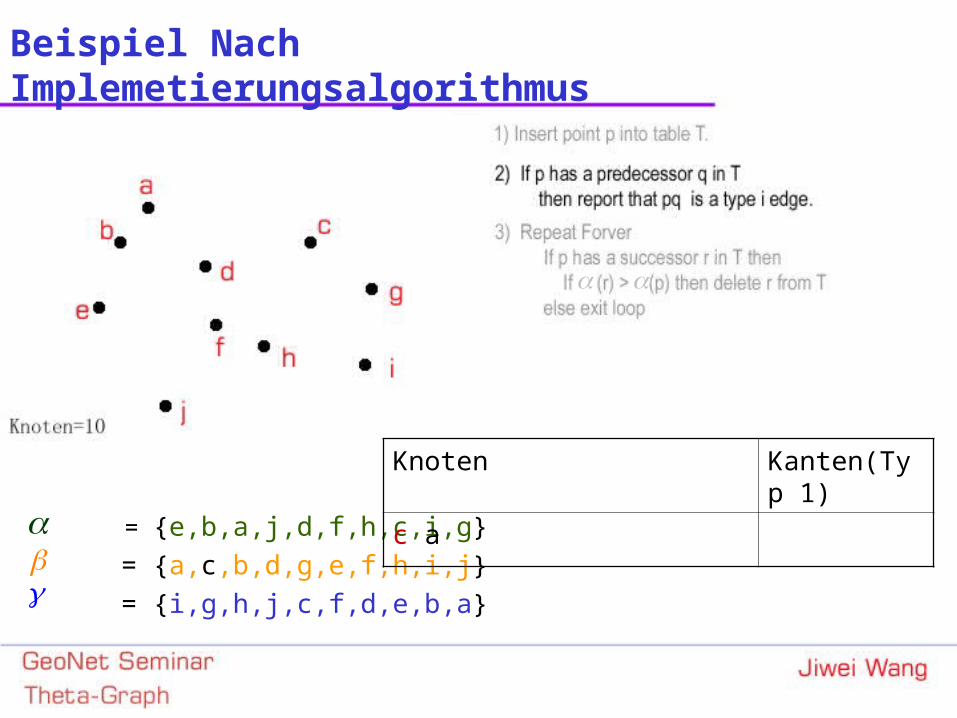
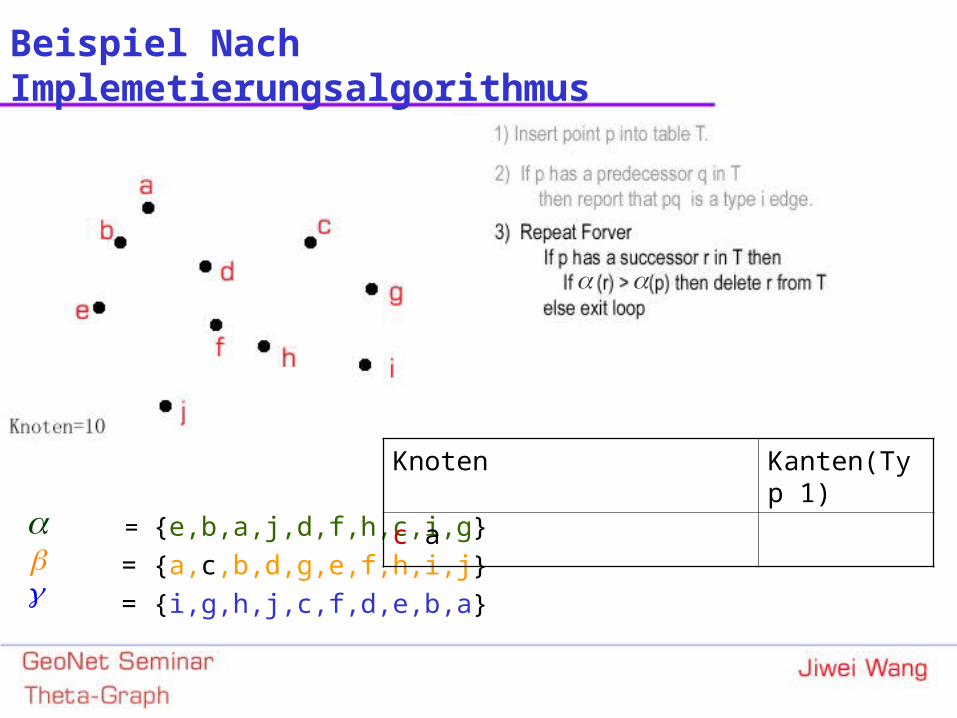
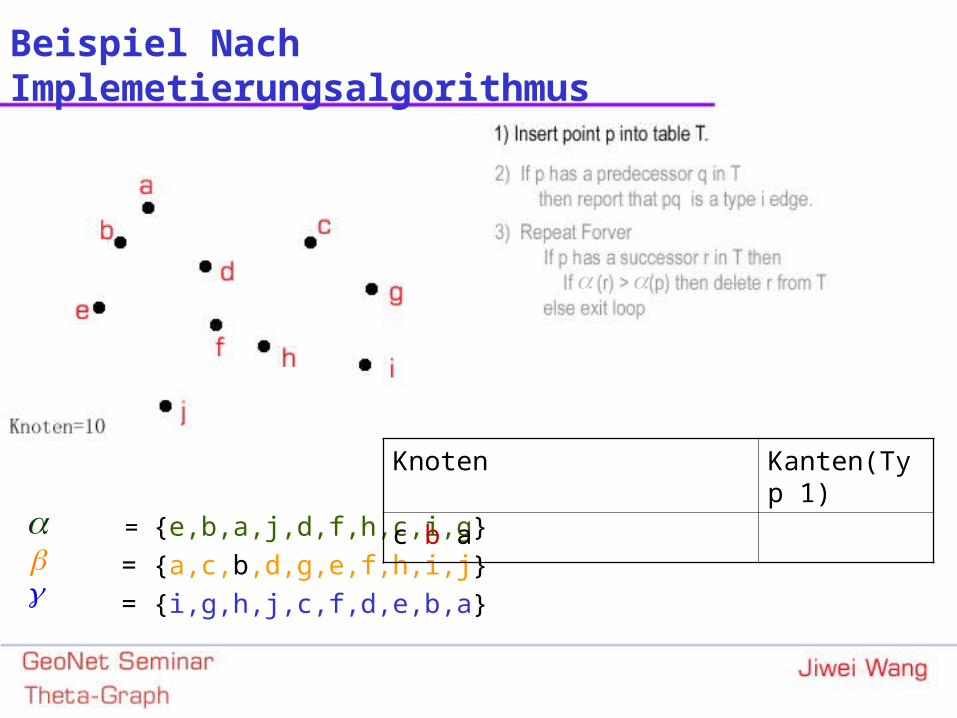
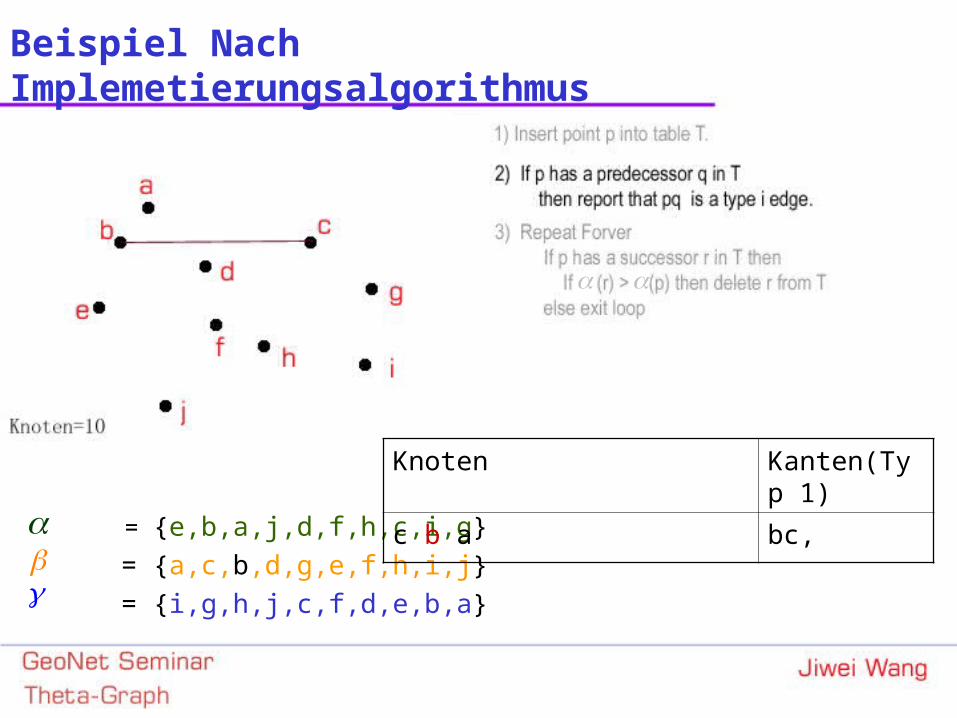
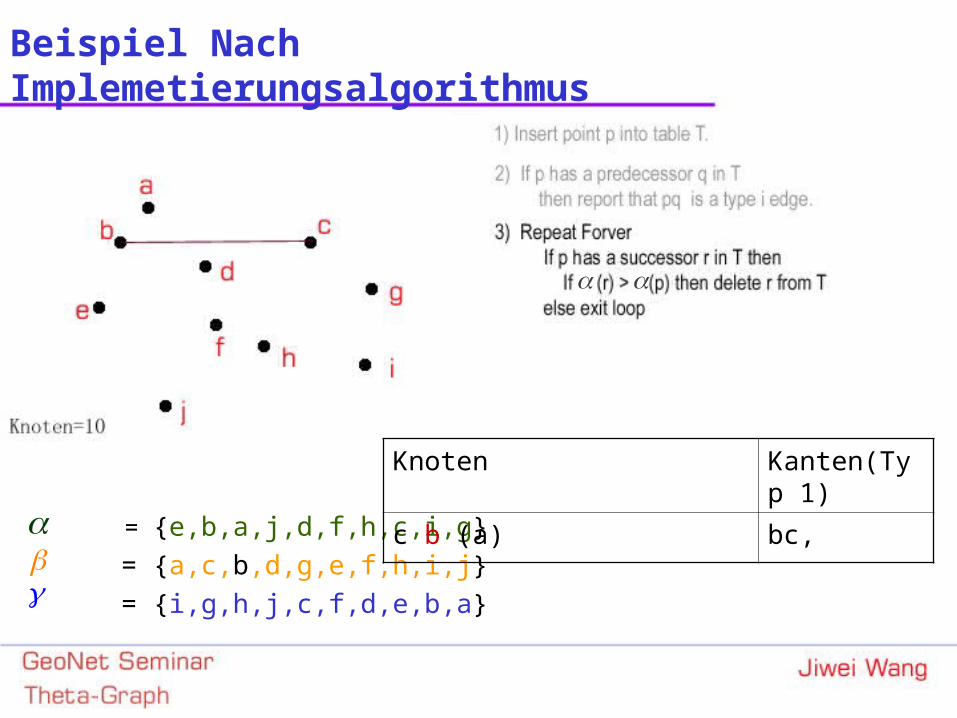
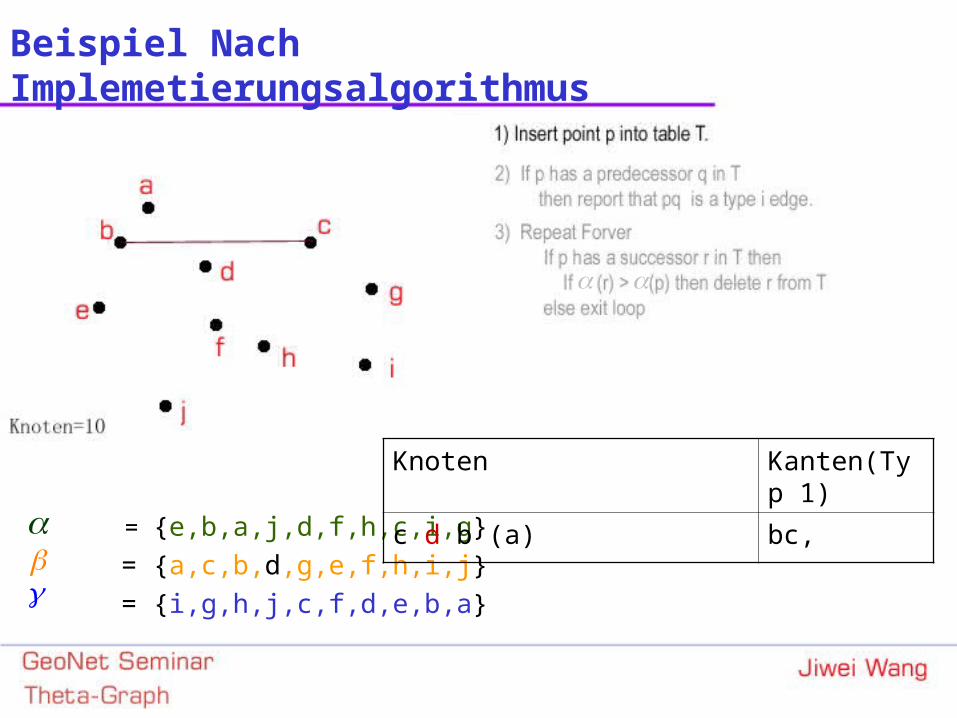
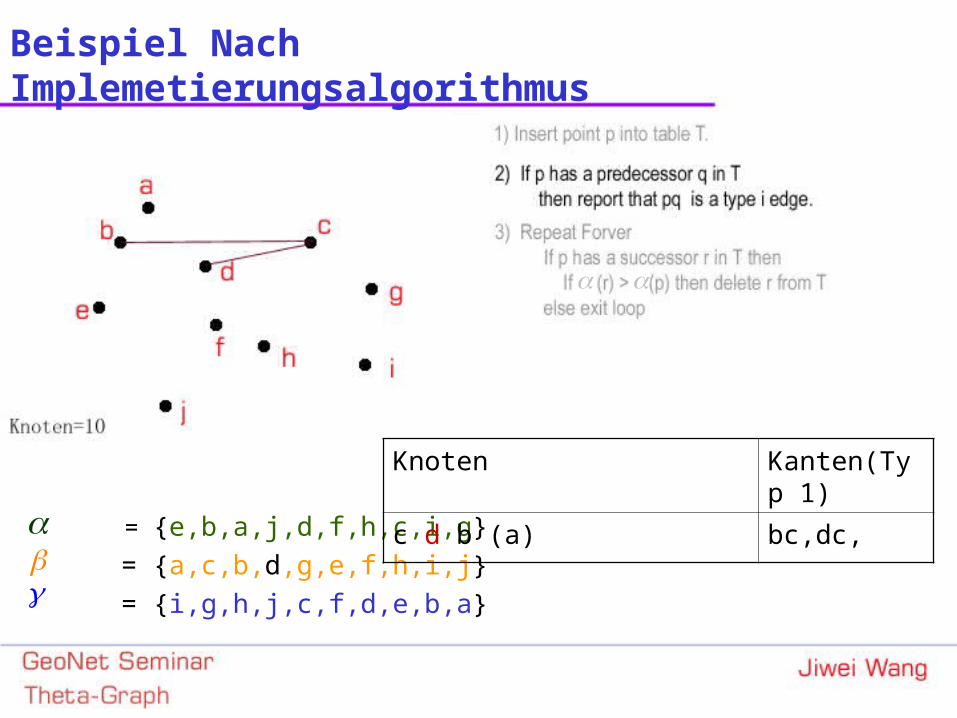
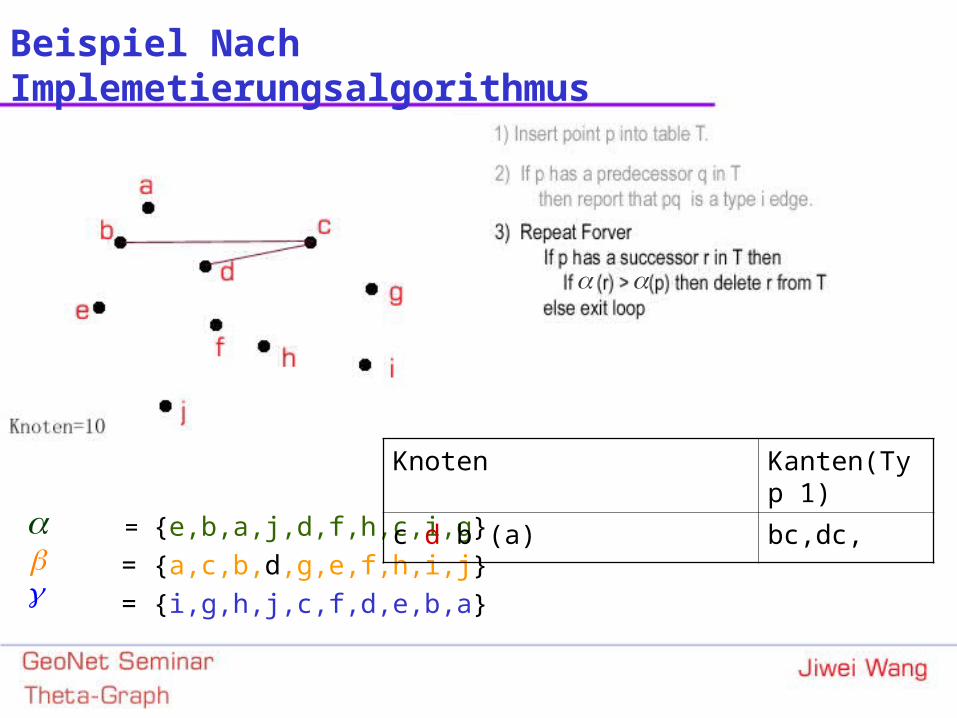
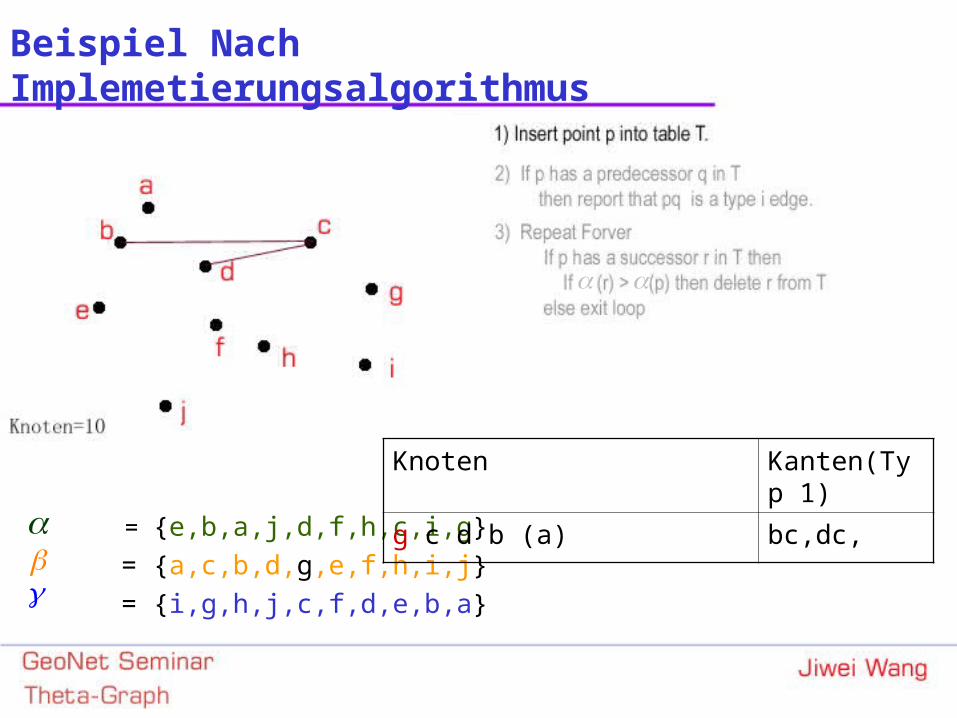
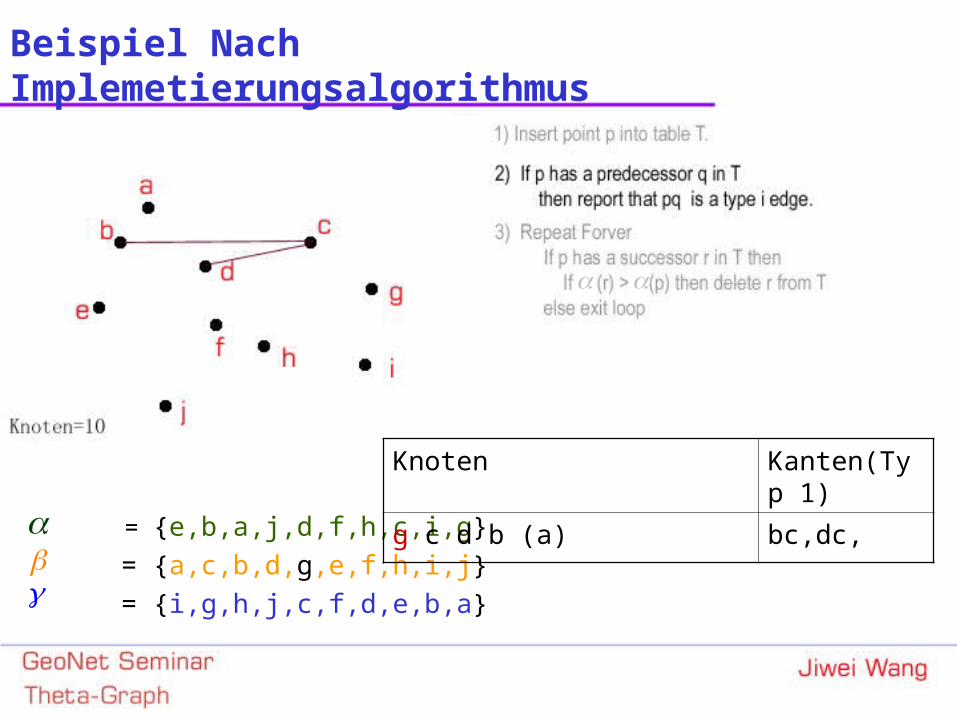
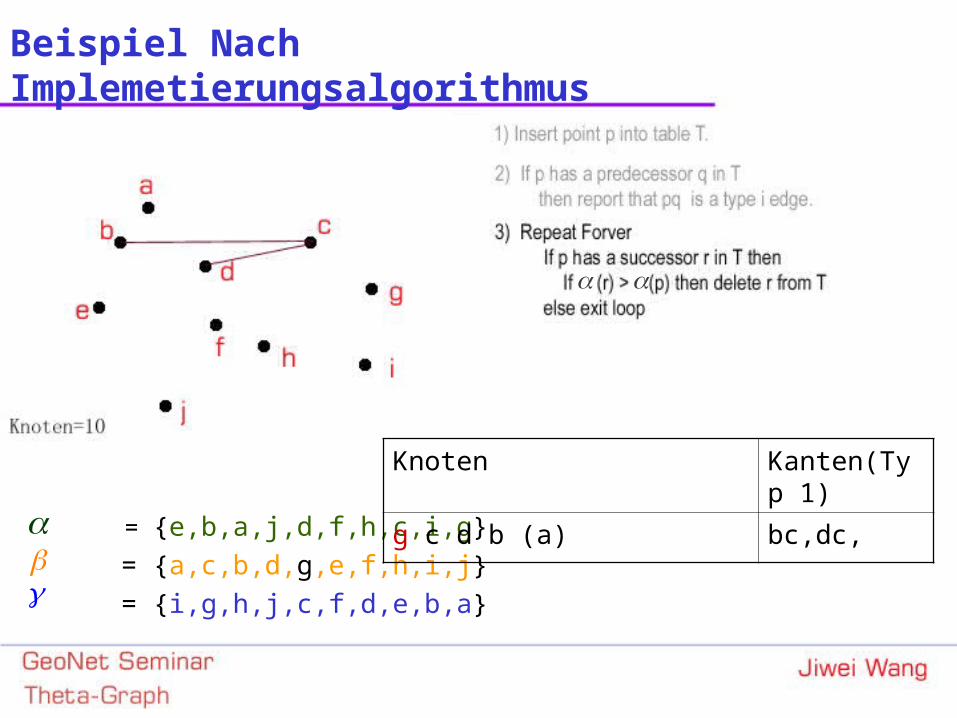
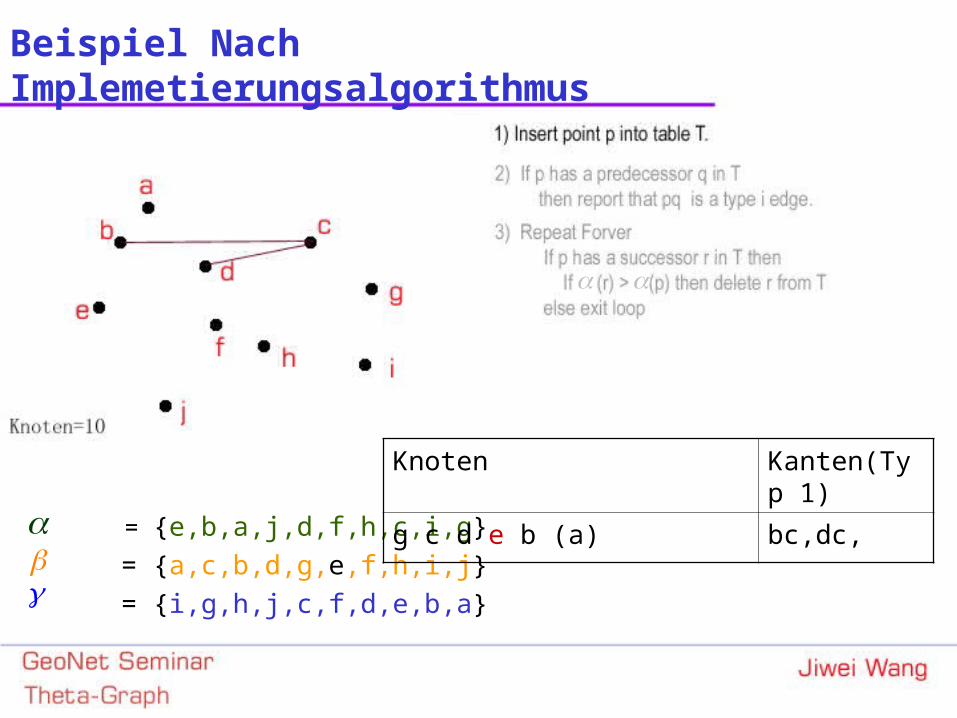
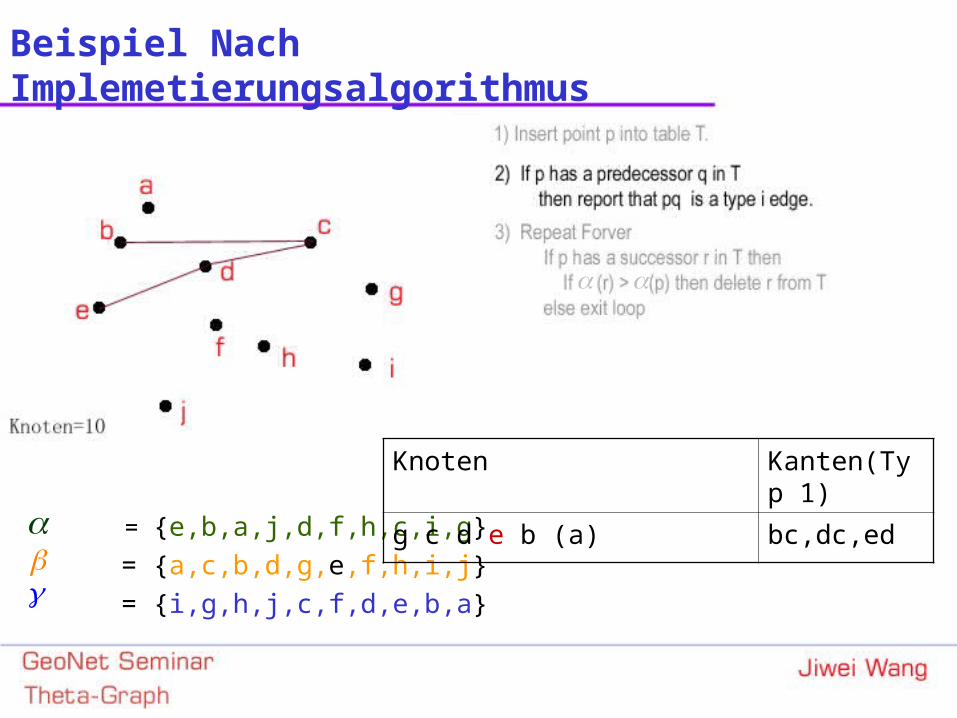
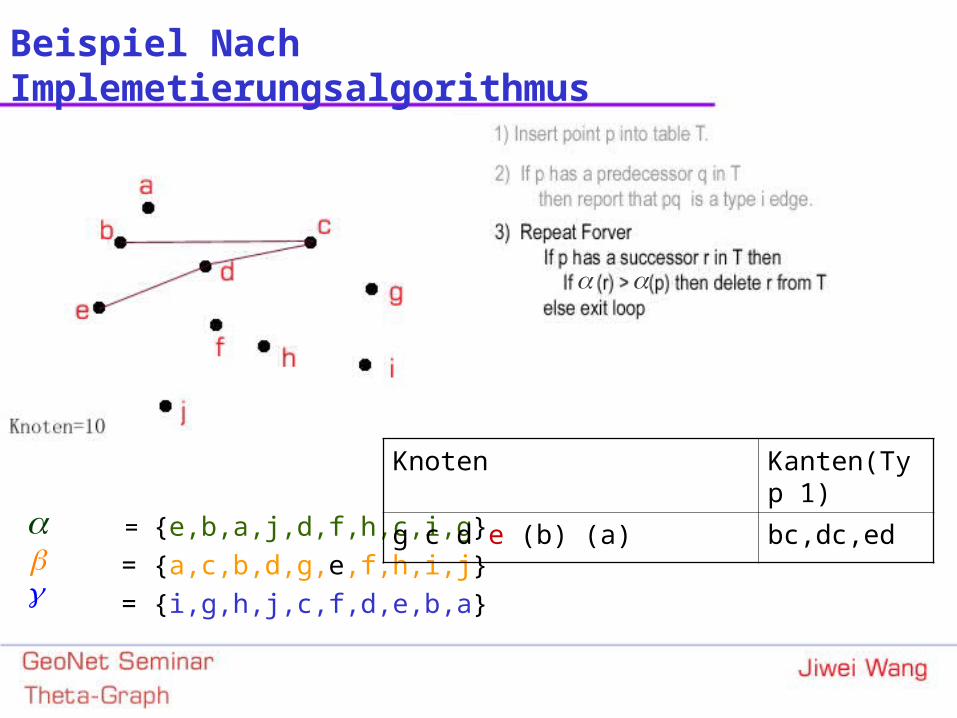
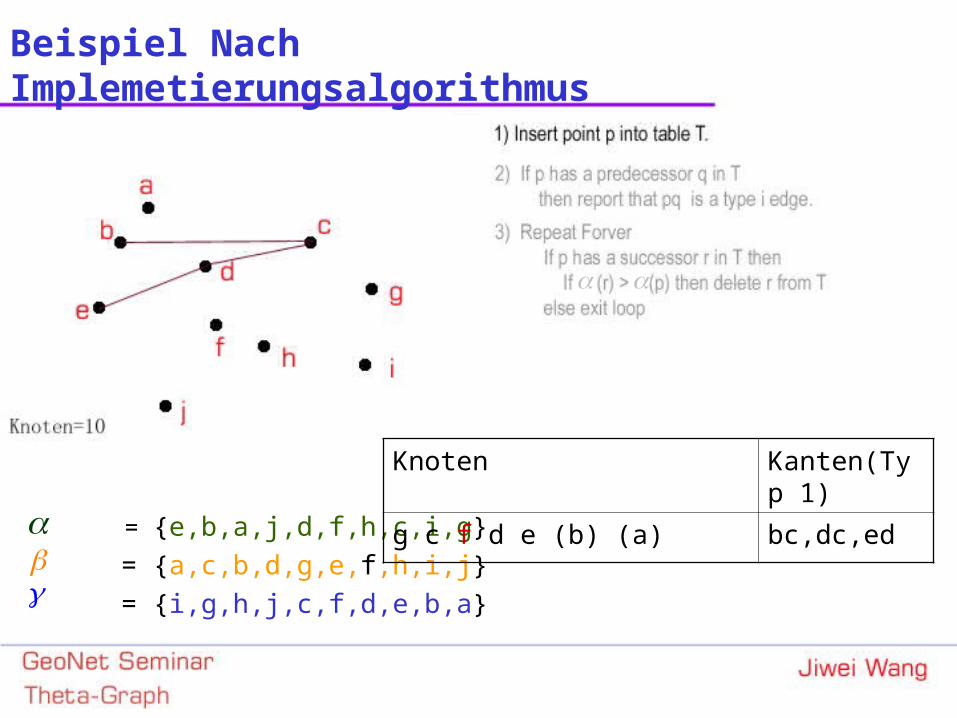
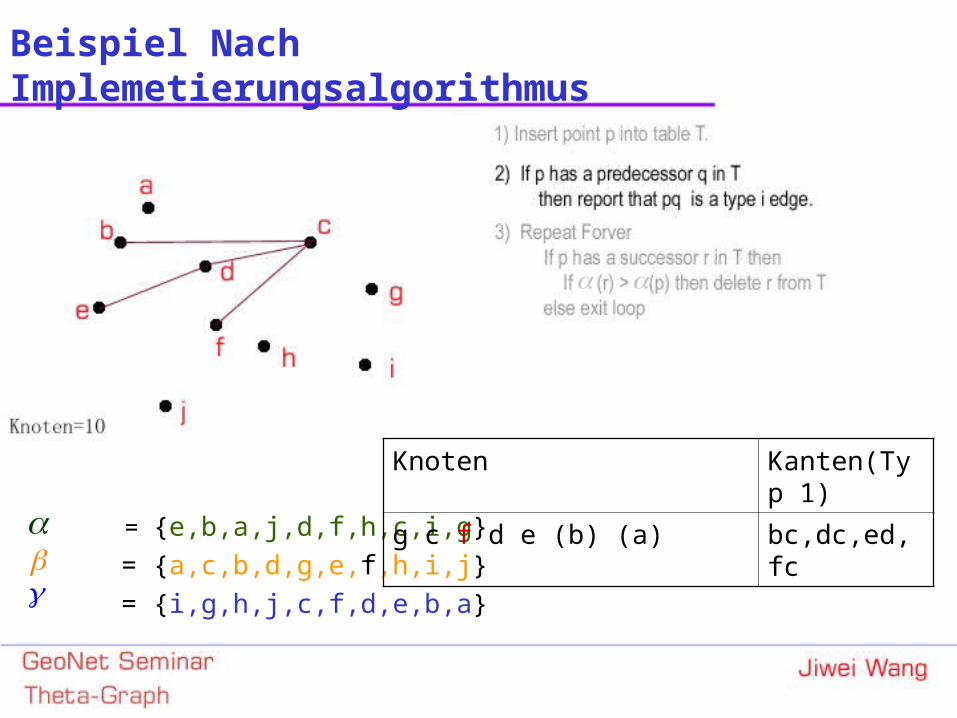
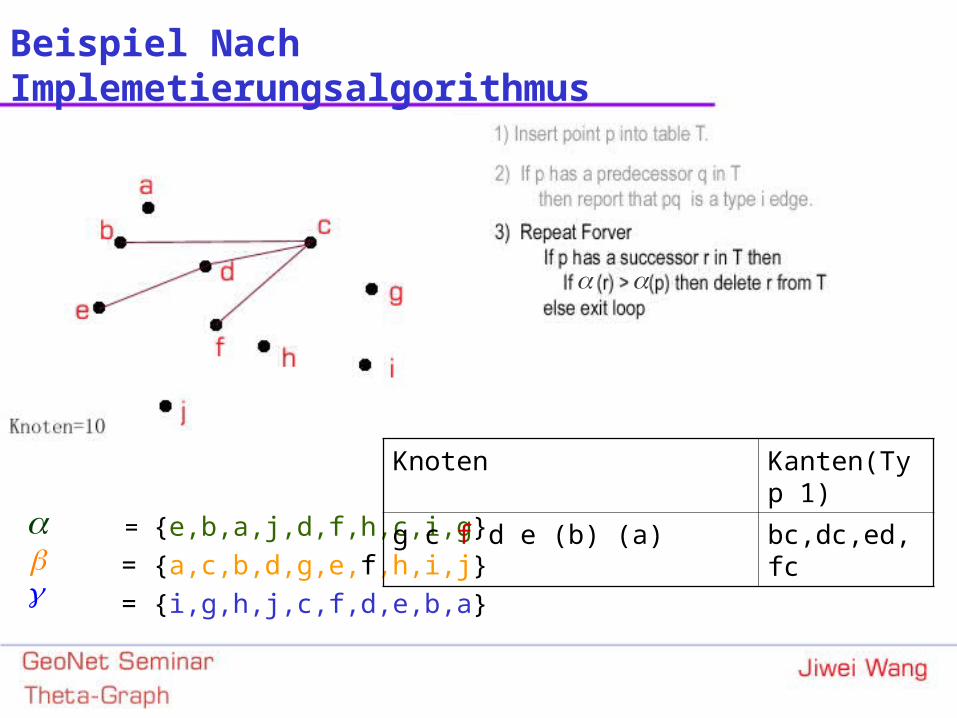
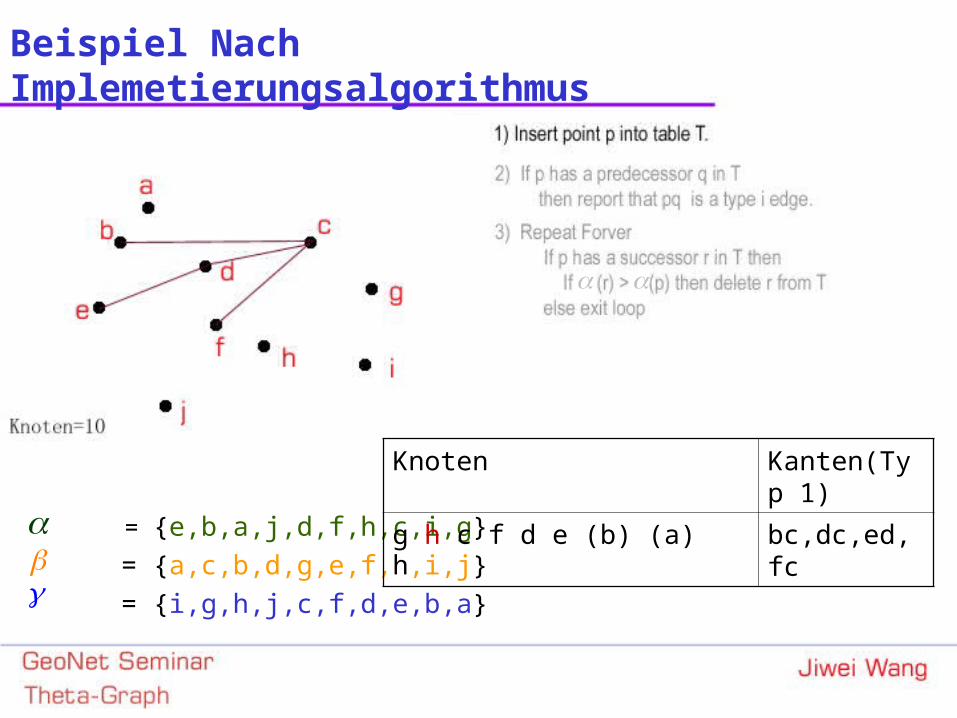
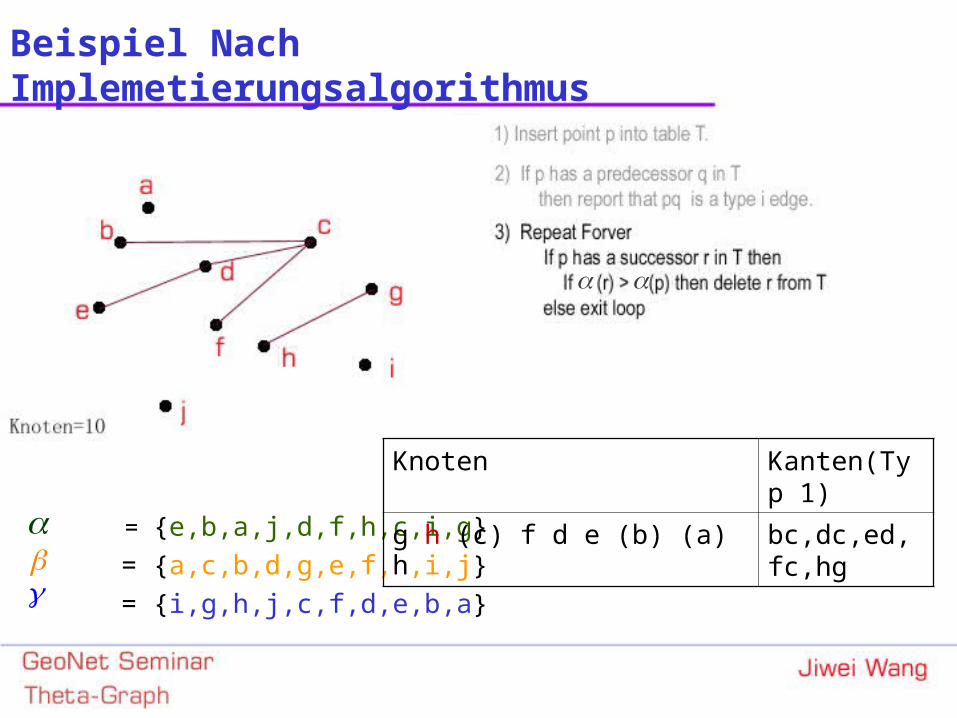
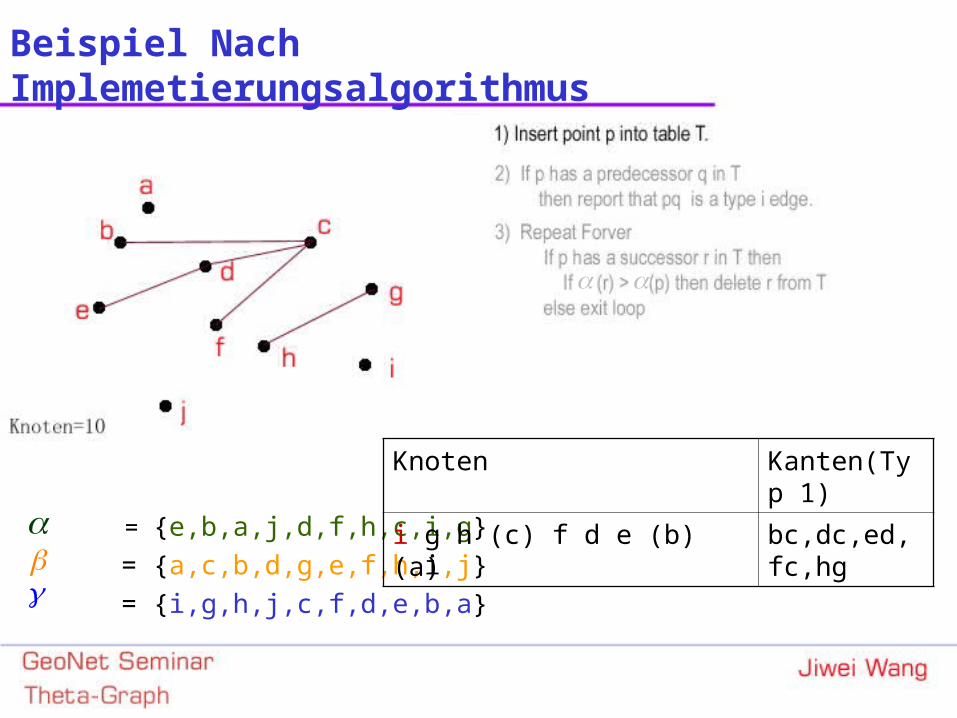
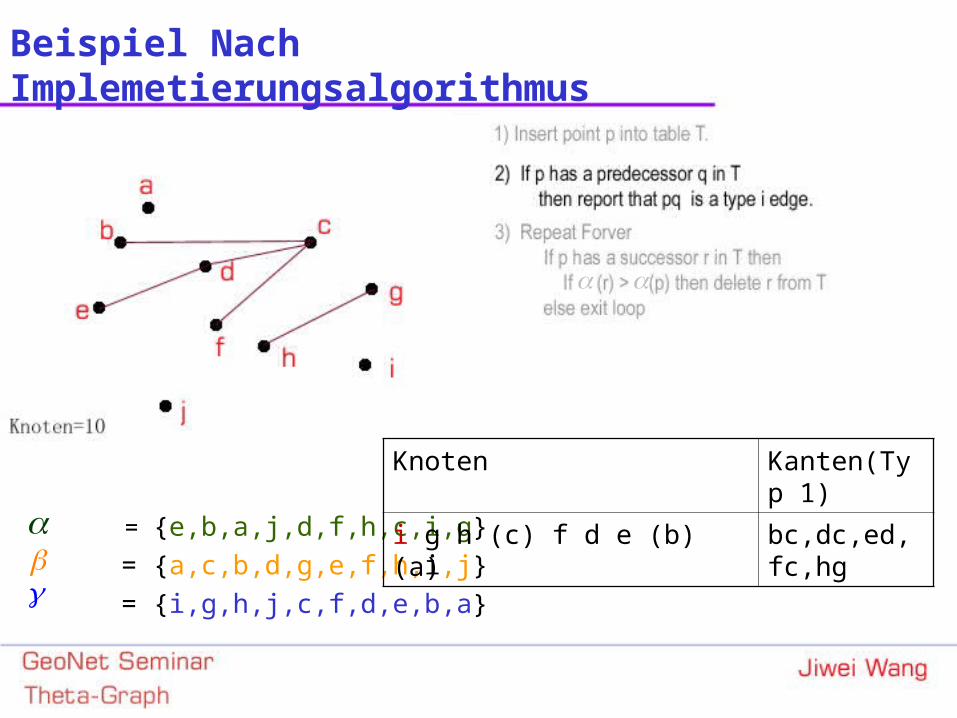
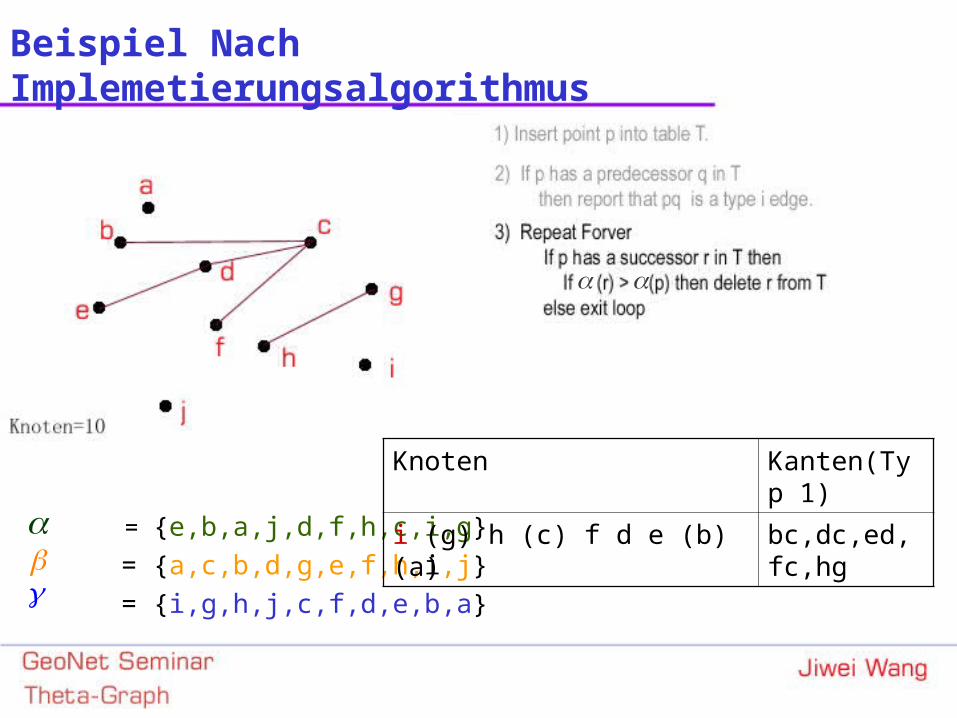
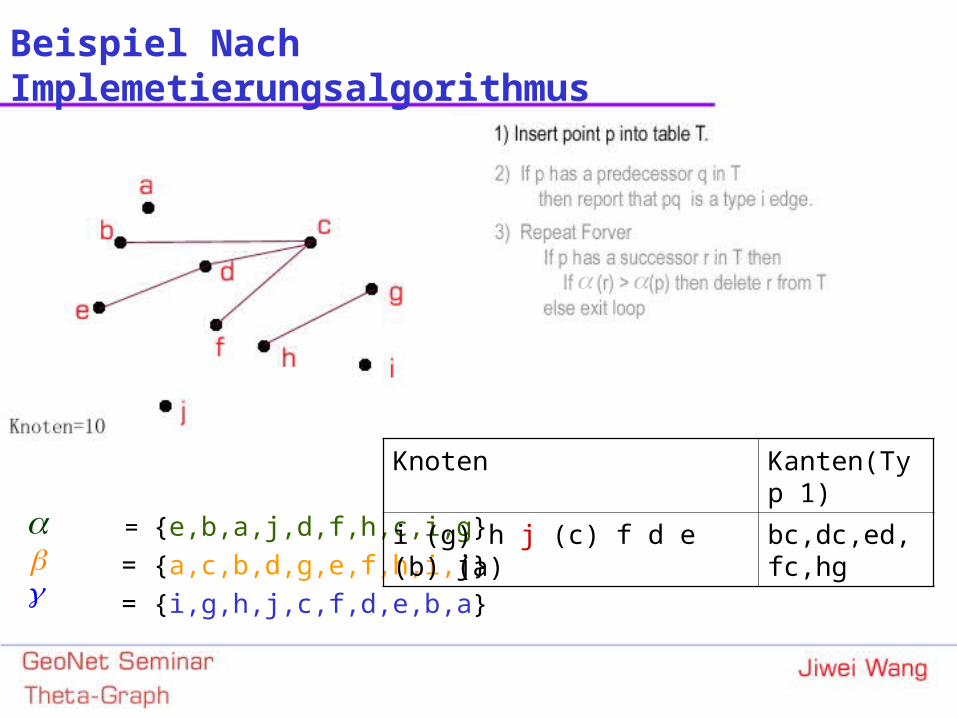
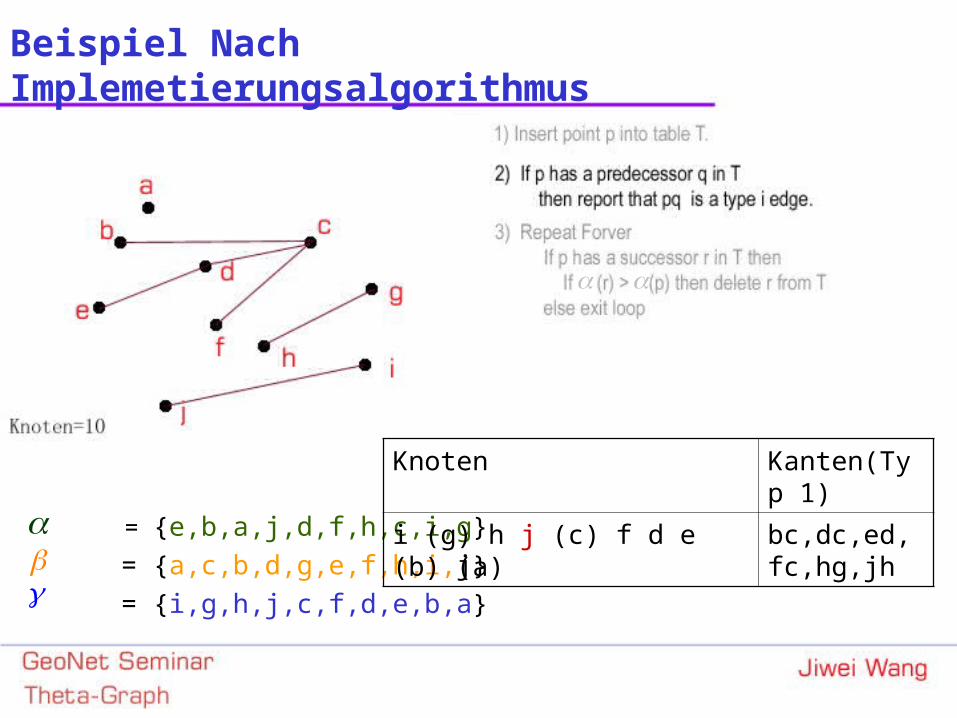
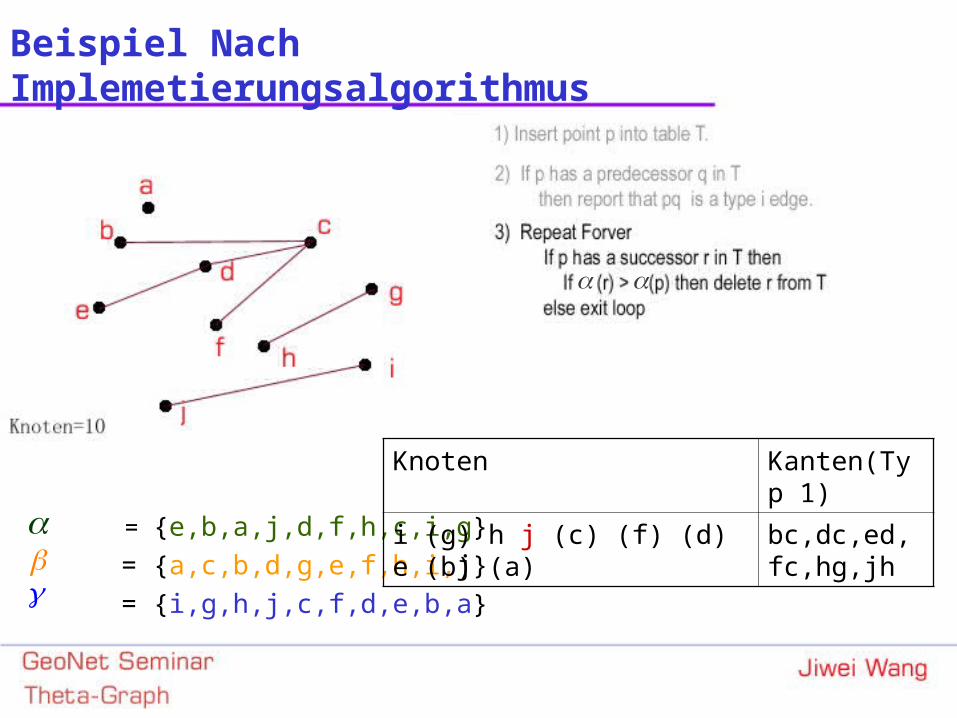
• ImplemetierungsAlgrorithmus 1) Insert point p into table T. 2) If p has a predecessor q in T then report that pq is a type i edge. 3) Repeat Forver If p has a successor r in T then If (r) > (p) then delete r from T else exit loop
Bemerkung: 1) Abtastung in unaufsteigender Ordnung 2) Am Anfang ist Tablle T leer 3) Nach Ordnung stecketet die neue Knote ein
Implemetierungsalgorithmus von Theta-Graph
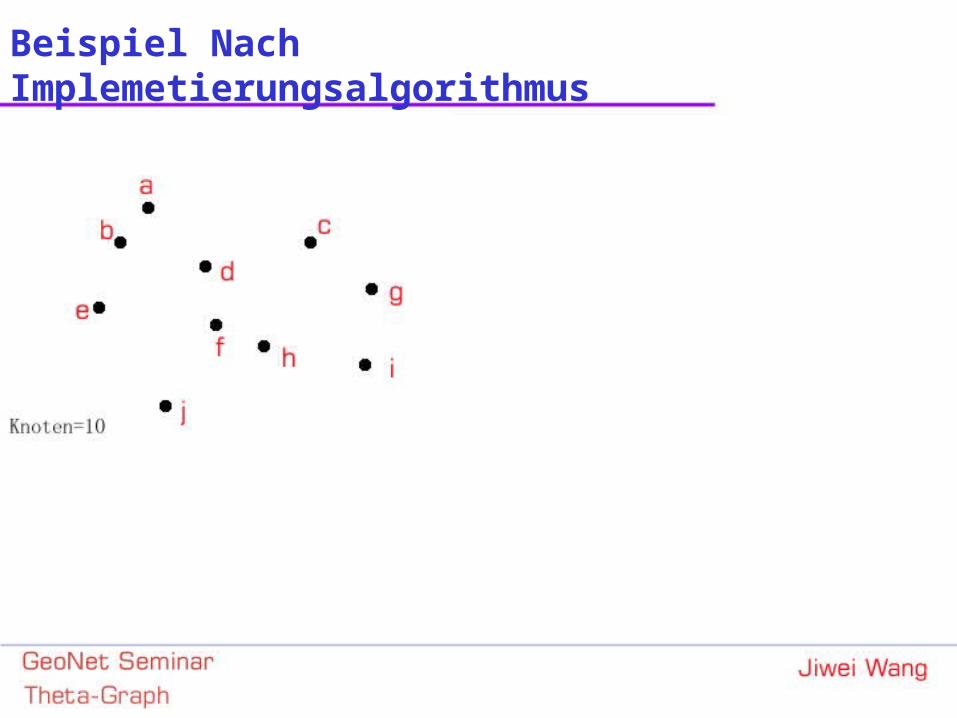
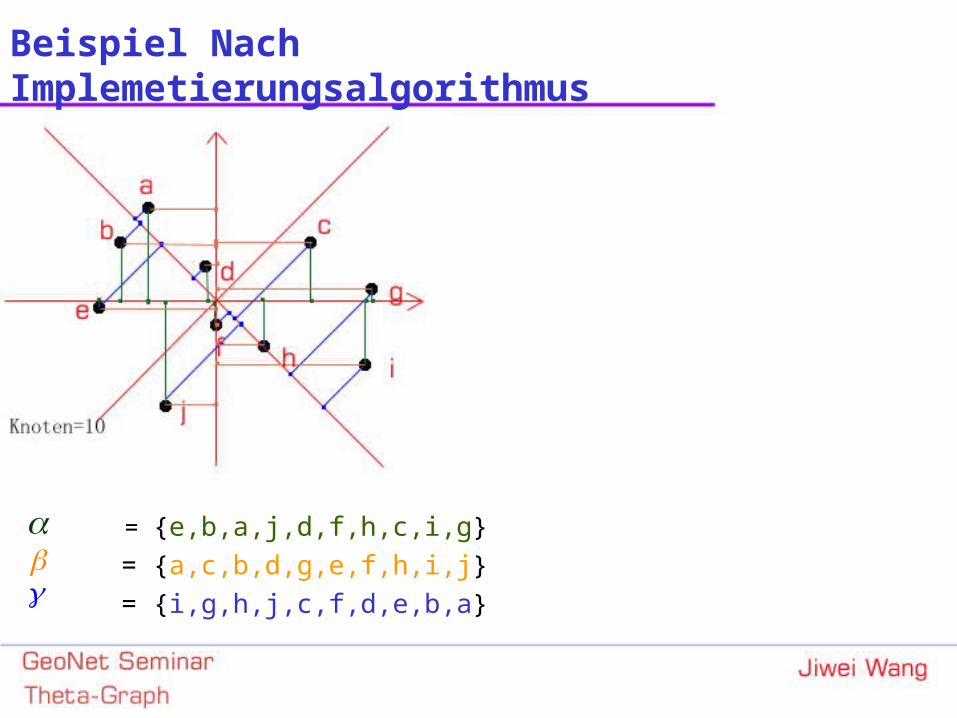
Beispiel Nach Implemetierungsalgorithmus
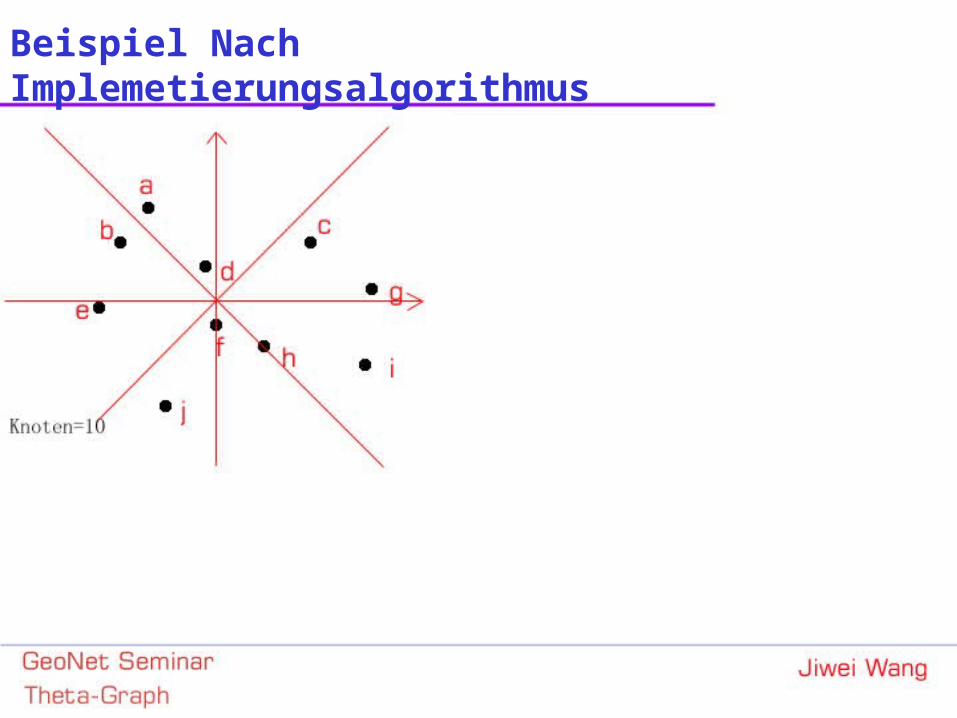
Beispiel Nach Implemetierungsalgorithmus
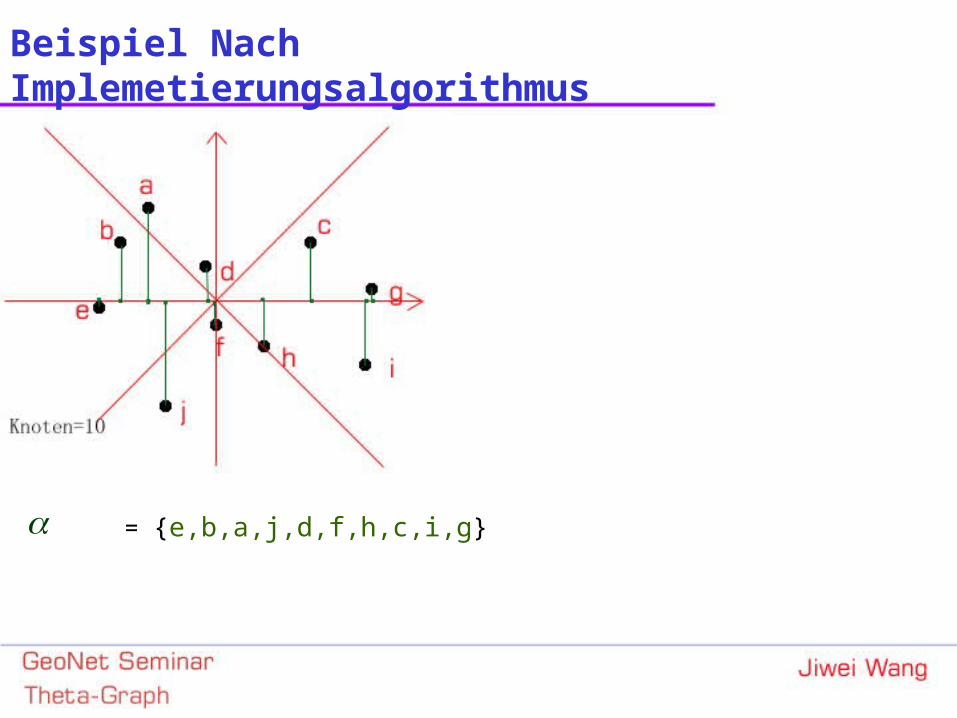
= {e,b,a,j,d,f,h,c,i,g}
Beispiel Nach Implemetierungsalgorithmus
Beispiel Nach Implemetierungsalgorithmus
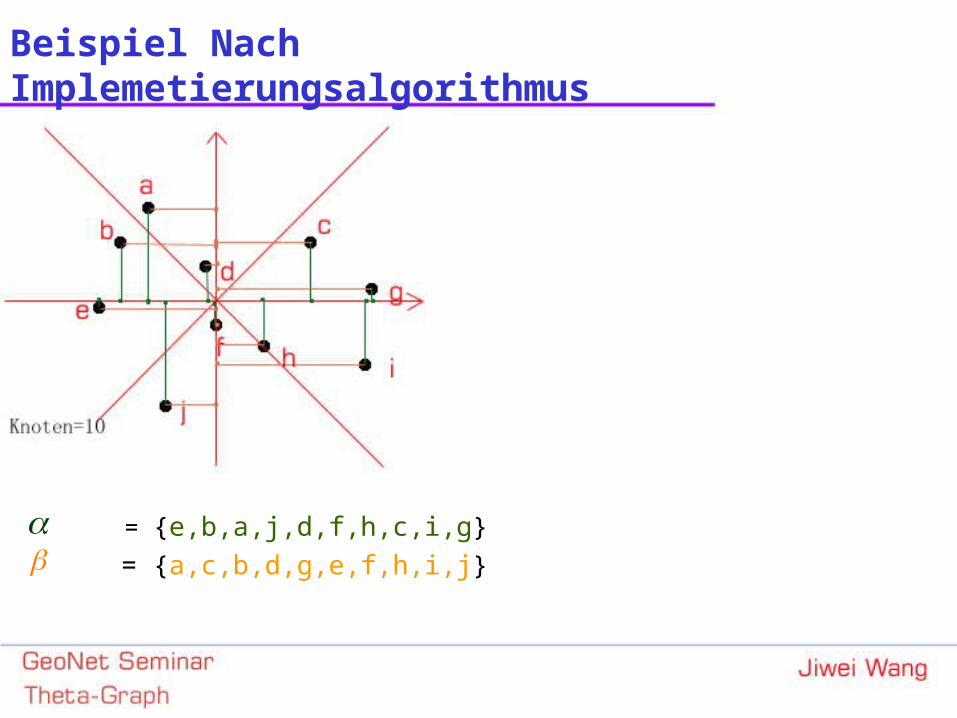
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j}
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
a
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
a
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
a
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
c a
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
c a
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
c a
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
c b a
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
c b a bc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
c b (a) bc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
c d b (a) bc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
c d b (a) bc,dc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
c d b (a) bc,dc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
g c d b (a) bc,dc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
g c d b (a) bc,dc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
g c d b (a) bc,dc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
g c d e b (a) bc,dc,
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
g c d e b (a) bc,dc,ed
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
g c d e (b) (a) bc,dc,ed
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
g c f d e (b) (a) bc,dc,ed
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
g c f d e (b) (a) bc,dc,ed,fc
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
g c f d e (b) (a) bc,dc,ed,fc
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
g h c f d e (b) (a) bc,dc,ed,fc
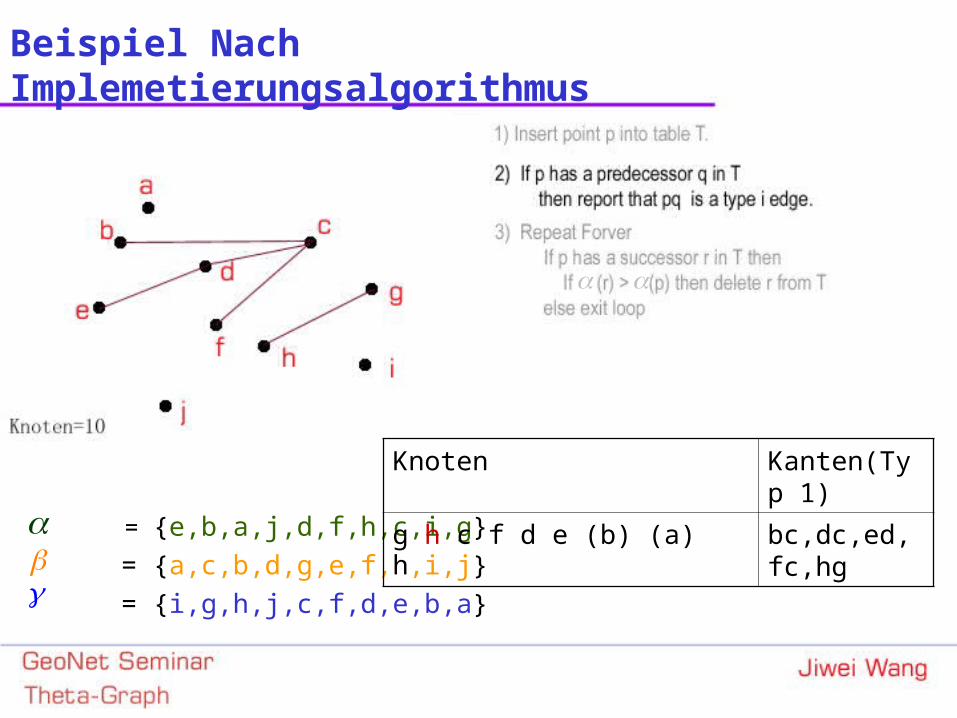
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
g h c f d e (b) (a) bc,dc,ed,fc,hg
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
g h (c) f d e (b) (a) bc,dc,ed,fc,hg
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
i g h (c) f d e (b) (a) bc,dc,ed,fc,hg
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
i g h (c) f d e (b) (a) bc,dc,ed,fc,hg
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Beispiel Nach Implemetierungsalgorithmus
Knoten Kanten(Typ 1)
i (g) h (c) f d e (b) (a) bc,dc,ed,fc,hg
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
i (g) h j (c) f d e (b) (a) bc,dc,ed,fc,hg
Beispiel Nach Implemetierungsalgorithmus
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
i (g) h j (c) f d e (b) (a) bc,dc,ed,fc,hg,jh
= {e,b,a,j,d,f,h,c,i,g} = {a,c,b,d,g,e,f,h,i,j} = {i,g,h,j,c,f,d,e,b,a}
Knoten Kanten(Typ 1)
i (g) h j (c) (f) (d) e (b) (a) bc,dc,ed,fc,hg,jh
Beispiel Nach Implemetierungsalgorithmus
Beispiel Nach Implemetierungsalgorithmus
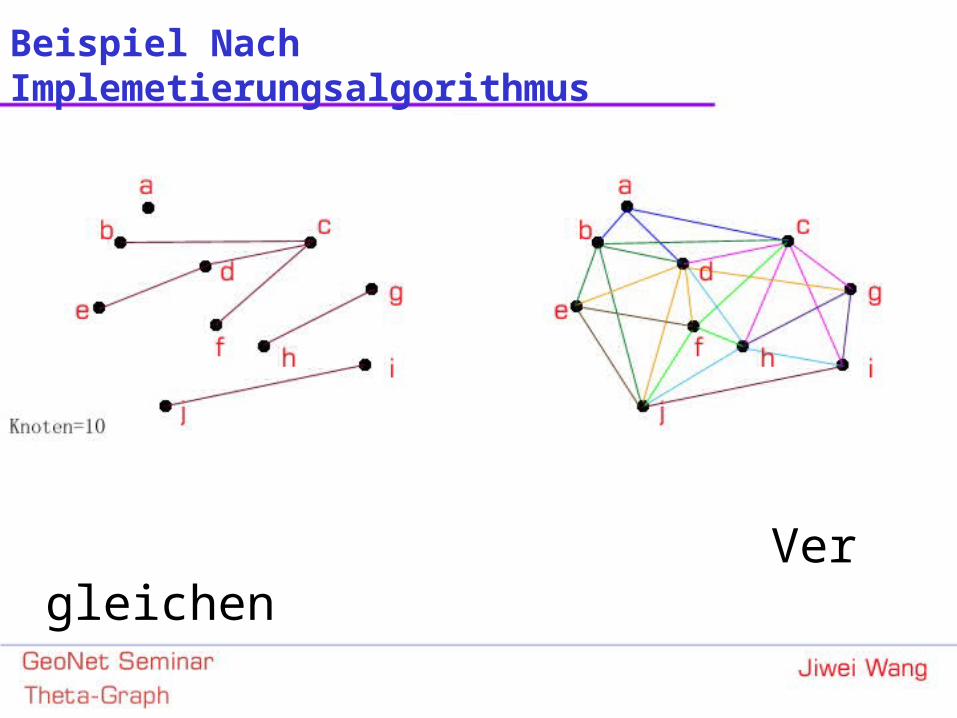
Vergleichen
Definition des Spanners
• Difintion p,q= zwei beliebige konten in graph G d(p,q)=euklidische distanz G(p,q)=länge eines kürzesten wegs in graph G• Spanner Spanner ist ein Subgraph von G und im Spanner ist
der Maximalwert des Verhältnisse G(p,q) / d(p,q) in konstantem Rahmen.
Theta-Graph ist Spanner
• Definiton : Länge eines kürzesten Wegs von p bis q in theta-
graph m: die Anzahl von Knoten in d(p,q) : euklidische distanz• Lemma Wenn es ein kürzesten Weg von p bis q in Theta-graph ,
(k ist eine Ganzzahl und k > 8 ) gibt, und der
Weg fährt über m Knoten durch,dann
( , )p q
2k
( , )p q
( , ) 1 tan 1 tan( , ) cos tan 1
mmp q
d p q
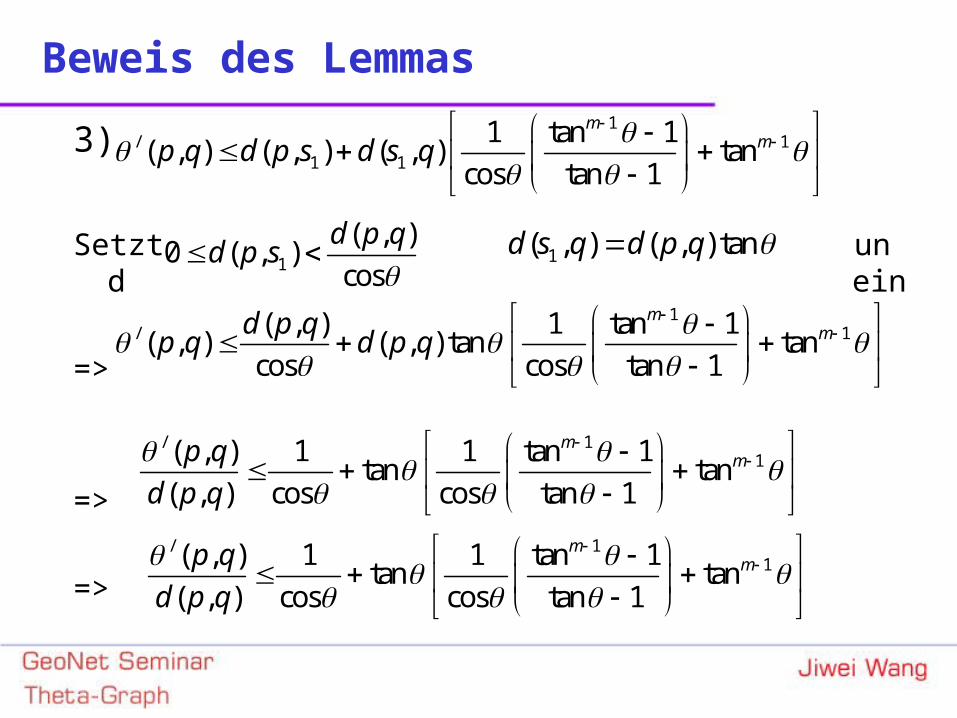
Beweis des Lemmas
• Methode durch Induktionsbeweis• Definition : n-te Knoten im Weg von p bis q in theta-
graph ( 0<=i<=m ),davon : Länge eines kürzesten Wegs von p bis
q in theta-graph
: Länge eines Wegs p bis q in theta-graph mit solche Beschränkung:
ns
( , )p q0s p
/ ( , )p q
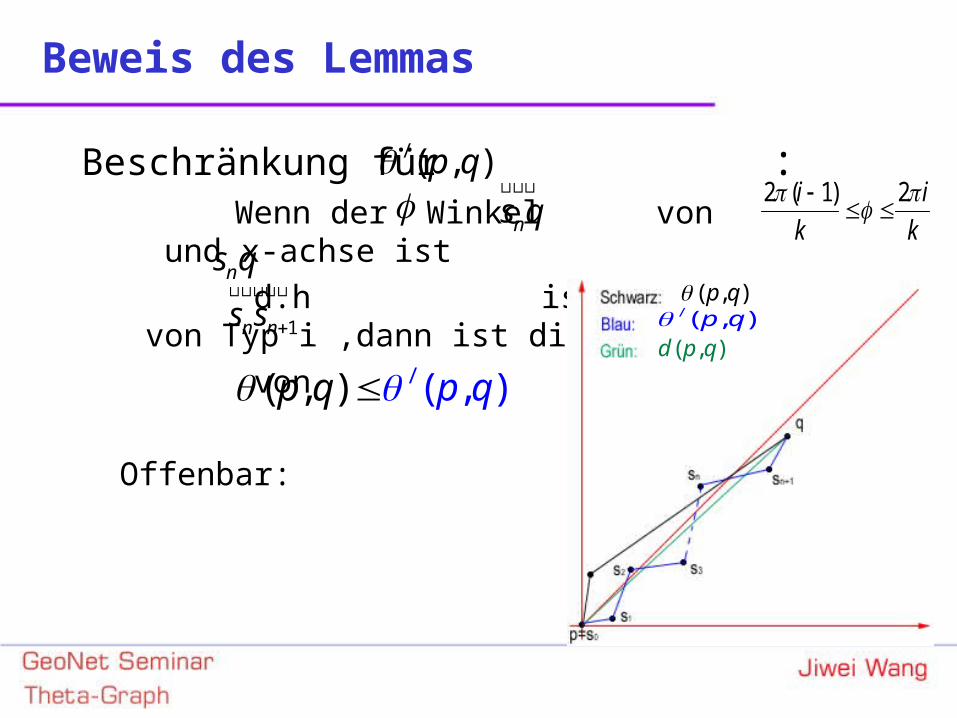
Beschränkung für : Wenn der Winkel von und x-achse ist d.h ist ein Kanten von Typ i ,dann ist die Kanten von auch Typ i
Offenbar:
Beweis des Lemmas
/ ( , )p q
ns q 2 ( 1) 2i i
k k
ns q
1n ns s
/( , ) ( , )q qp p
/ ( , )p q( , )p q
( , )d p q
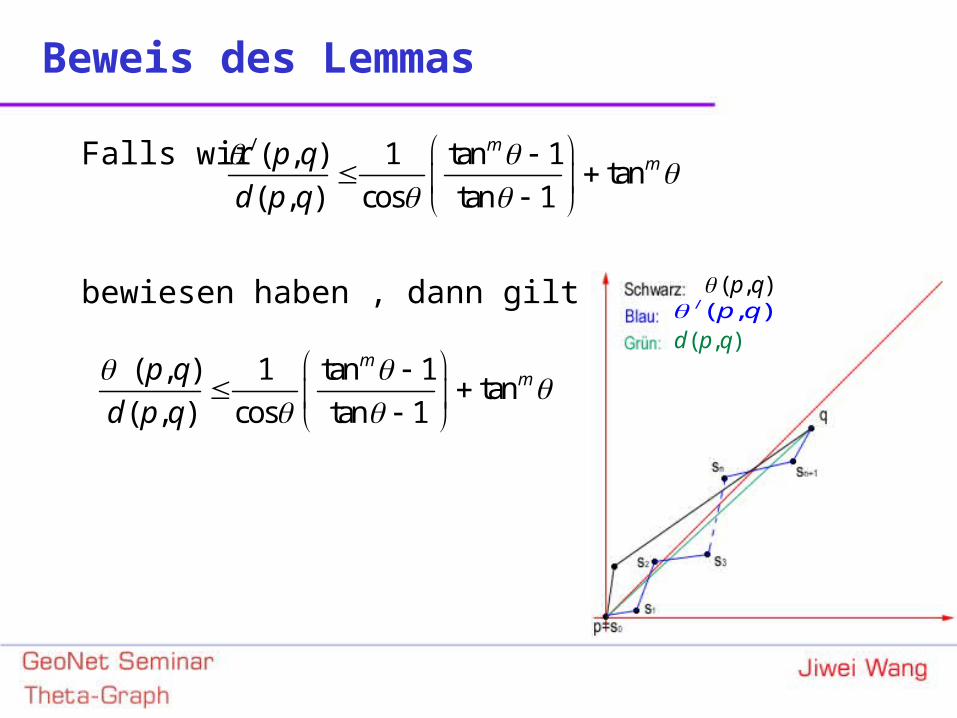
Falls wir
bewiesen haben , dann gilt auch
Beweis des Lemmas
( , ) 1 tan 1 tan( , ) cos tan 1
mmp q
d p q
/ ( , )p q( , )p q
( , )d p q
/ ( , ) 1 tan 1 tan( , ) cos tan 1
mmp q
d p q
1) Wenn m=0 ist , dann ist ;
2)Annahme: ist richtig
Claim: Verhältnis hat Maximumswert,genau
dann wenn (a) q im x-achse ist (b) der Winkel von und x-achse maximal ( ) hat
Beweis des Lemmas
/ ( , ) ( , )p q d p q
/ 11( , ) 1 tan 1 tan
( , ) cos tan 1
mmp q
d p q
/ ( , )( , )p q
d p q
1ps
20k
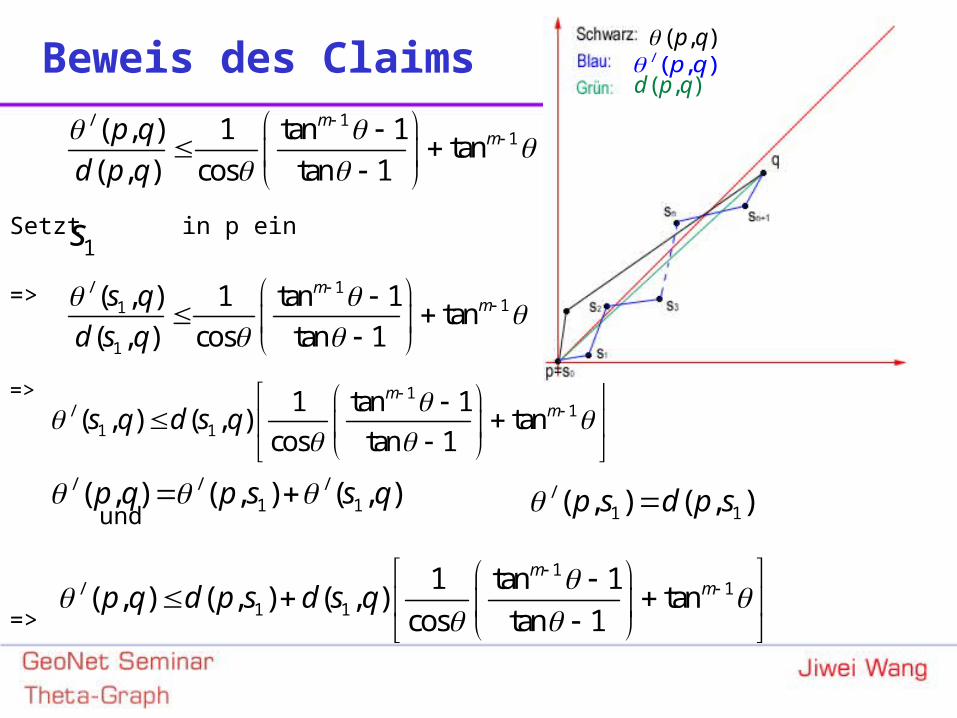
Setzt in p ein =>
=> und
=>
Beweis des Claims
1/ 1
1 11 tan 1( , ) ( , ) tan
cos tan 1
mms q d s q
/ 11( , ) 1 tan 1 tan
( , ) cos tan 1
mmp q
d p q
/ 111
1
( , ) 1 tan 1 tan( , ) cos tan 1
mms q
d s q
1s
/ / /1 1( , ) ( , ) ( , )p q p s s q /
1 1( , ) ( , )p s d p s
1/ 1
1 11 tan 1( , ) ( , ) ( , ) tan
cos tan 1
mmp q d p s d s q
( , )p q/ ( , )p q( , )d p q
q und werden sich im beschränkte Rahmen
( )beweget,aber die Verhältnis wird nicht weniger ,d.h. und werden nicht weniger ,und
wird sich nicht erhöht.
Beweis des Claims1
/ 11 1
1 tan 1( , ) ( , ) ( , ) tancos tan 1
mmp q d p s d s q
1s/ ( , )( , )p q
d p q
1( , )d p s 1( , )d s q
20k
( , )d p q
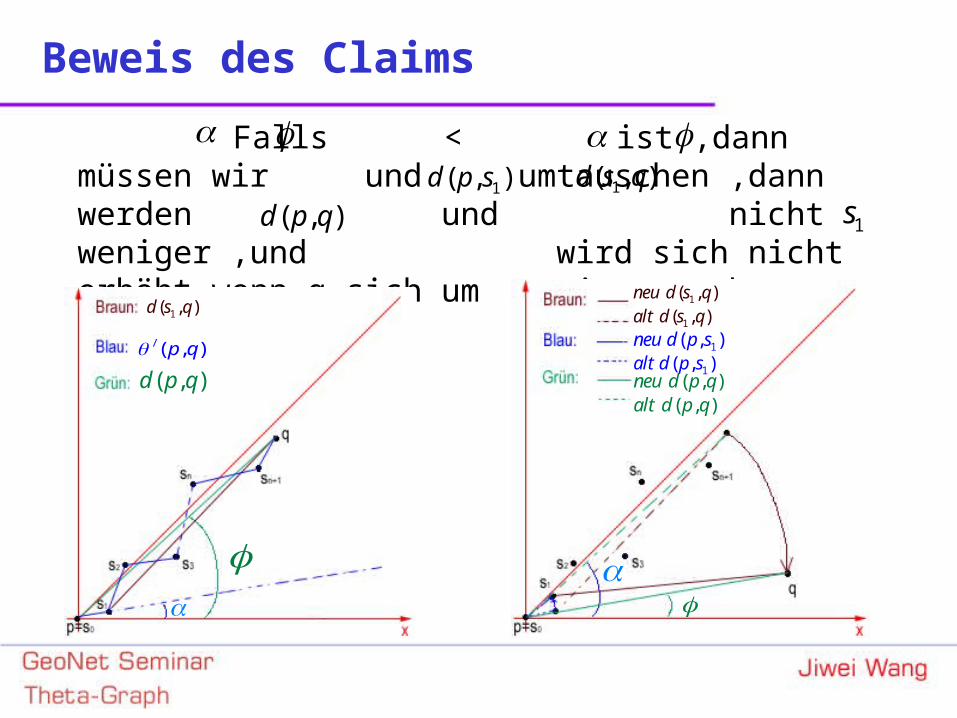
Falls < ist ,dann müssen wir und umtauschen ,dann werden und nicht weniger ,und wird sich nicht erhöht,wenn q sich um ins x-achse dreht.
=>
Beweis des Claims
1( , )d p s 1( , )d s q( , )d p q
1s
1( , )d s q
/ ( , )p q
( , )d p q
1( , )neu d s q1( , )alt d s q
1( , )neu d p s1( , )alt d p s
( , )neu d p q( , )alt d p q
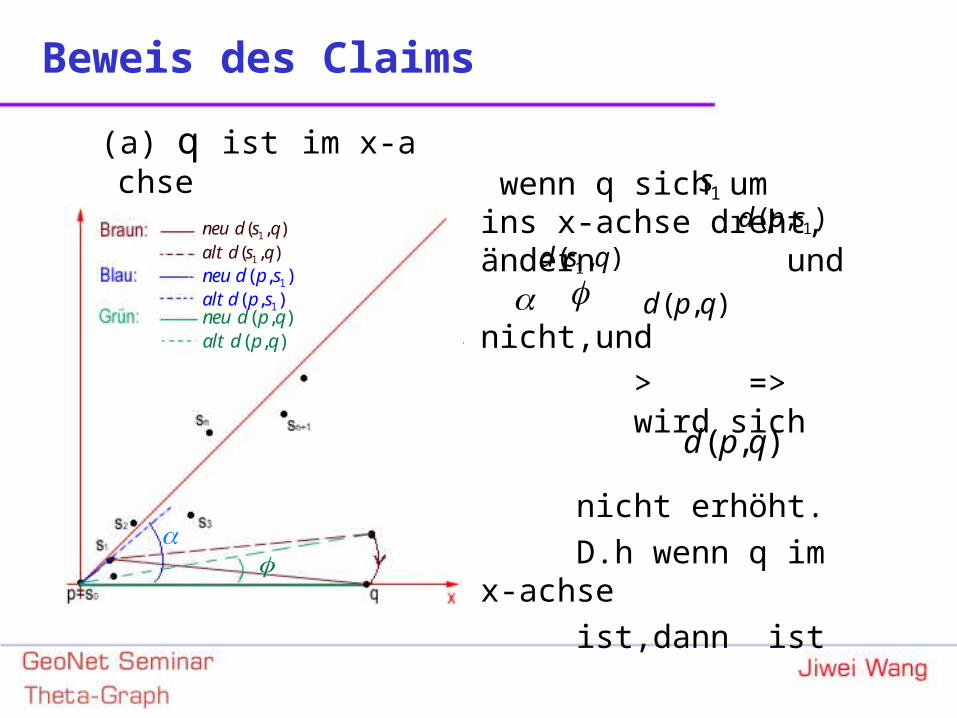
(a) q ist im x-achse
Beweis des Claims
wenn q sich um ins x-achse dreht, ändern und nicht,und > => wird sich nicht erhöht. D.h wenn q im x-achse ist,dann ist minimal .
1( , )d p s
1( , )d s q
( , )d p q
( , )d p q
1s1( , )neu d s q
1( , )alt d s q1( , )neu d p s
1( , )alt d p s( , )neu d p q
( , )alt d p q
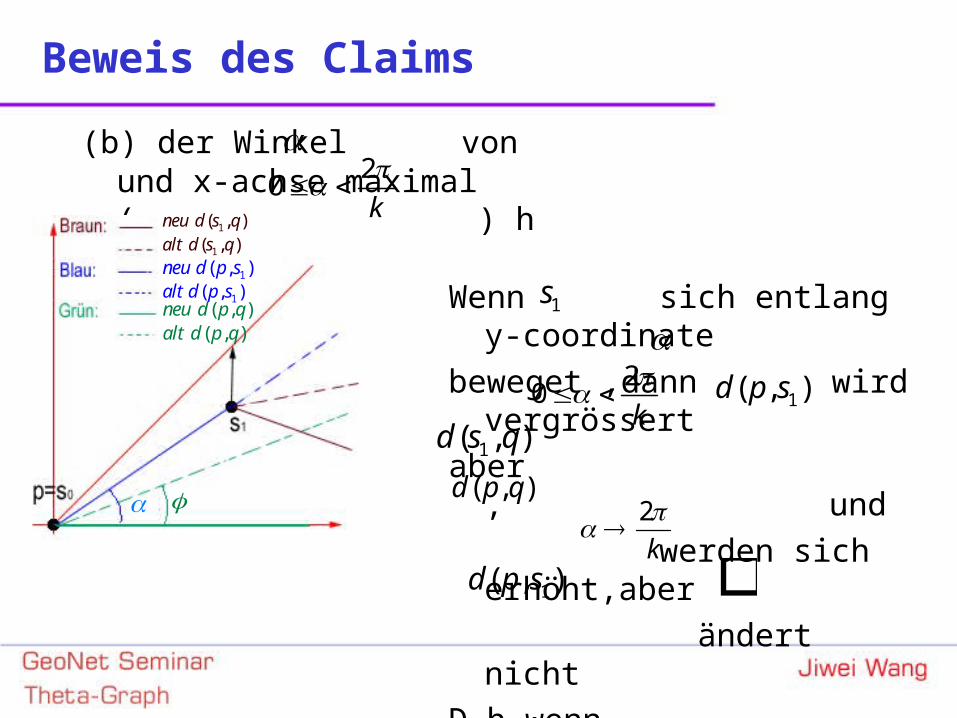
(b) der Winkel von und x-achse maximal ( ) hat
Beweis des Claims
20k
Wenn sich entlang y-coordinate beweget ,dann wird vergrössert
aber , und werden sich erhöht,aber ändert nicht D.h.wenn ist ,dann ist
maximal.
1s
20k
( , )d p q1( , )d s q
1( , )d p s
2k
1( , )d p s
1( , )neu d s q1( , )alt d s q
1( , )neu d p s1( , )alt d p s
( , )neu d p q( , )alt d p q
=>
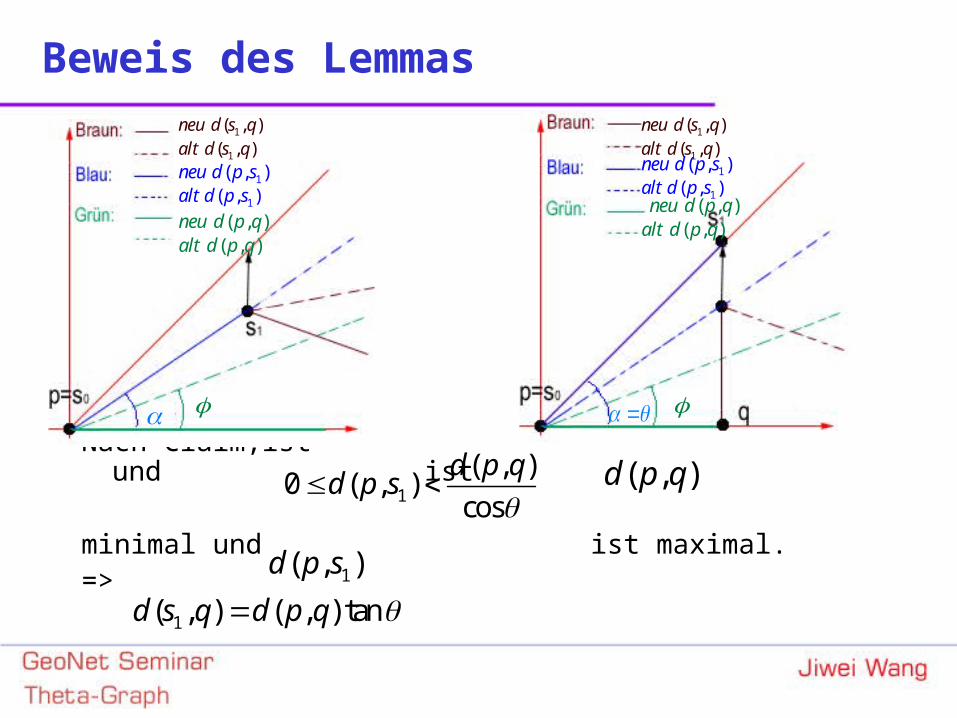
Nach Claim,ist und ist
minimal und ist maximal.=>
Beweis des Lemmas
1( , )0 ( , )cosd p qd p s
( , )d p q
1( , )d p s
1( , ) ( , ) tand s q d p q
1( , )neu d s q1( , )alt d s q
1( , )neu d p s1( , )alt d p s
( , )neu d p q( , )alt d p q
1( , )neu d s q1( , )alt d s q
1( , )neu d p s1( , )alt d p s
( , )neu d p q( , )alt d p q
3)
Setzt und ein
=>
=>
=>
Beweis des Lemmas1
/ 11 1
1 tan 1( , ) ( , ) ( , ) tancos tan 1
mmp q d p s d s q
1( , )0 ( , )cosd p qd p s
1( , ) ( , ) tand s q d p q
1/ 1( , ) 1 tan 1( , ) ( , ) tan tan
cos cos tan 1
mmd p qp q d p q
/ 11( , ) 1 1 tan 1tan tan
( , ) cos cos tan 1
mmp q
d p q
/ 1
1( , ) 1 1 tan 1tan tan( , ) cos cos tan 1
mmp q
d p q
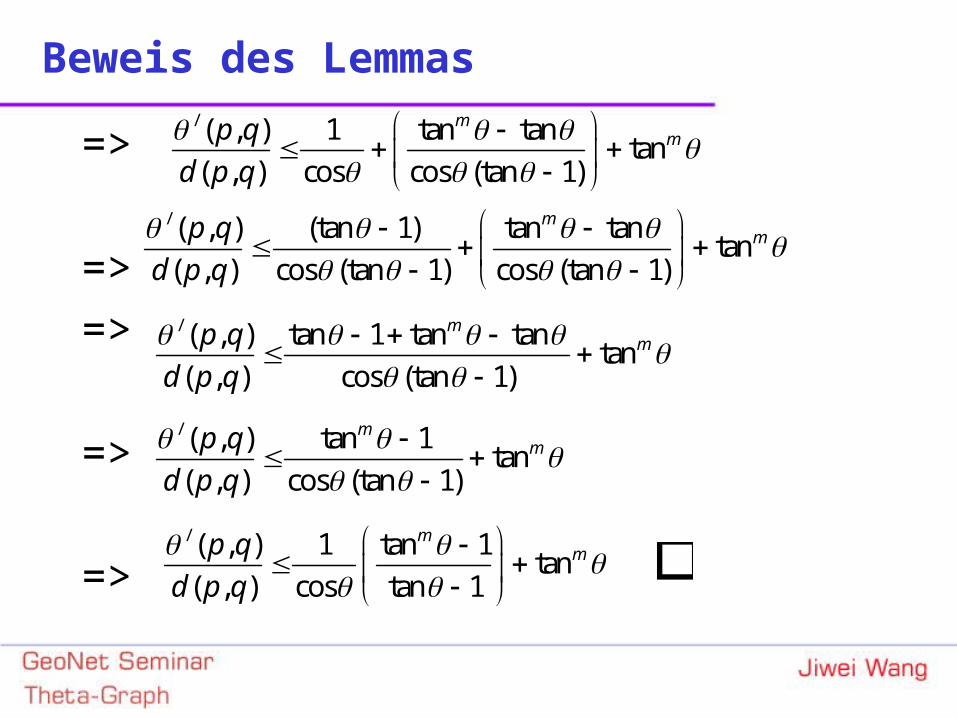
=>
=>=>
=>
=>
Beweis des Lemmas/ ( , ) 1 tan tan tan( , ) cos cos (tan 1)
mmp q
d p q
/ ( , ) (tan 1) tan tan tan( , ) cos (tan 1) cos (tan 1)
mmp q
d p q
/ ( , ) tan 1 tan tan tan( , ) cos (tan 1)
mmp q
d p q
/ ( , ) tan 1 tan( , ) cos (tan 1)
mmp q
d p q
/ ( , ) 1 tan 1 tan( , ) cos tan 1
mmp q
d p q
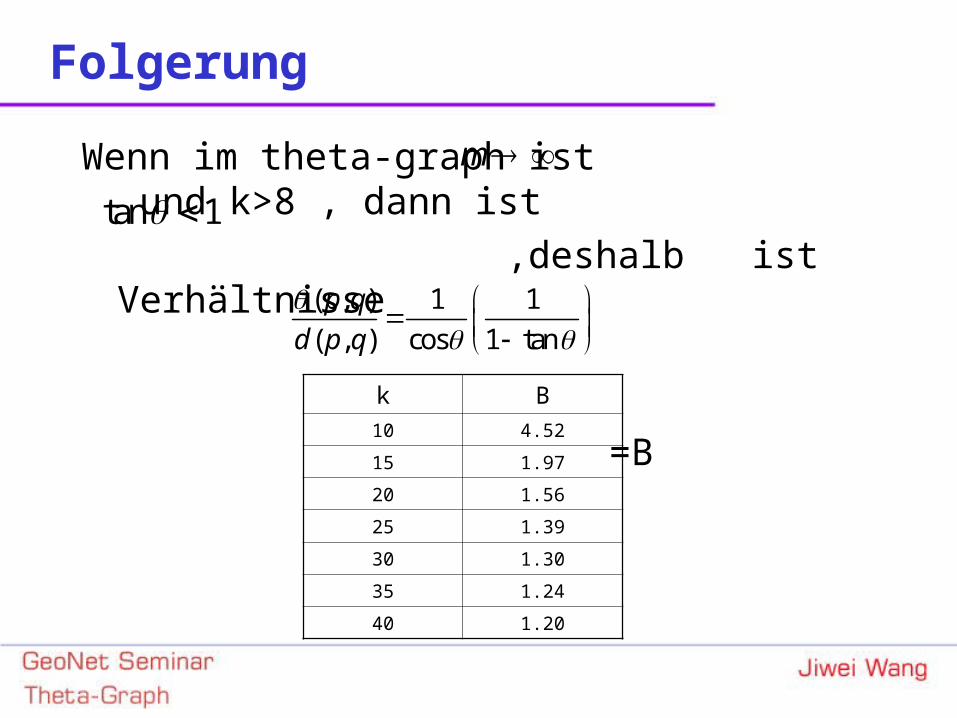
Folgerung
Wenn im theta-graph ist und k>8 , dann ist
,deshalb ist Verhältnisse
=B
( , ) 1 1( , ) cos 1 tanp q
d p q
m
tan 1
k B10 4.52
15 1.97
20 1.56
25 1.39
30 1.30
35 1.24
40 1.20
GeoNet Seminar
Schönen Dank