Embed Size (px)
Citation preview
1
D○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Geschichtliches S.2
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Grundlagen der Pneumatik S.2
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Bewegung mit Luft erzeugen S.2
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Luft lässt sich zusammendrücken S.3
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Druckluft erzeugen und speichern – der Kompressor S.3
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Druckluft schalten – das elektromagnetische Ventil S.4
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Betätigen eines Pneumatikzylinders S.4Zusammenspiel von elektrischer und pneumatischer
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Schaltung S.5Steuerlogik mit der Software ROBO-Pro und dem
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
fischertechnik-Interface S.5
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Die Steuereinheit S.6
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Förderband mit Stapelmagazin S.7
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Bearbeitungsstation mit Schlechtteilausstoß S.9
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Sortieranlage S.11
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Bearbeitungsstation mit Vakuumgreifer S.13
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Kartengeber / Kartensortierer S.15
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Fehlersuche S.16
Inhalt
2
D ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
■ Schon vor vielen Jahrtausenden verwendeten unsere Vorfahren Luft als technisches Hilfsmittel. Nochheute ist dir sicherlich der Blasebalg zum Entfachen von Feuer bekannt.
Ktesibios aus Alexandria - Ägypten, (* 296 v. Chr. in Alexandria, † 228 v. Chr.), war ein griechischer Tech-niker, Erfinder und Mathematiker, der in der ersten Hälfte des 3. Jahrhundert v. Chr. lebte.
Eine seiner wichtigsten Erfindungen war ein Federkatapult (Luftspanner): In 2 Bronzezylindern wurde Luftkomprimiert und damit Bronzeblattfedern vorgespannt. Beim Öffnen der Ventile wurden durch die Ent-spannung der Blattfedern Gegenstände wie z.B. Steine weggeschleudert.
Somit ist es kein Wunder, dass die Technik der „Pneumatik“ ihren Namen aus dem griechischen Wort„pneuma“, was übersetzt „Luft“ bedeutet, bezogen hat.
Aus der modernen Industrie ist die Pneumatik heute nicht mehr wegzudenken. Überall findet man pneuma-tisch angetriebene Maschinen und Automationsanlagen. So werden z. B. auf Montagestraßen verschiede-ne Einzelteile zu einem Gesamtteil montiert und auf Funktion geprüft, es werden Waren sortiert oderverpackt.
■ Luft kann für unterschiedliche Zwecke in der Technik eingesetzt werden. Wind treibt zur Energiegewinnungz. B. riesige Windkrafträder an. Die Pneumatik nutzt die Luft dazu, Bewegungen zu erzeugen und Kräfte zuübertragen.
Sicher ist dir ein pneumatisch arbeitendes Werkzeug bekannt – die Luftpumpe. Sieentspricht den physikalischen und technischen Eigenschaften der Zylinder, die in die-sem Baukasten vorgestellt werden, z. B. bei der Drucklufterzeugung durch den Kom-pressor.
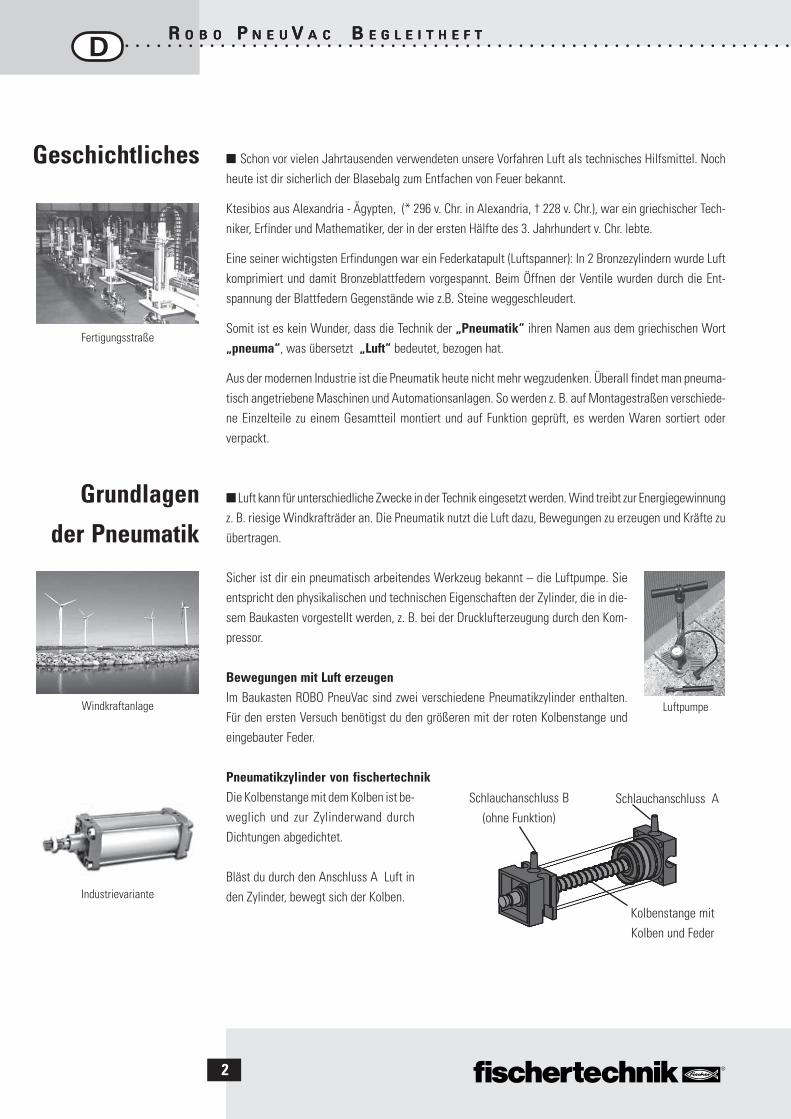
Bewegungen mit Luft erzeugenIm Baukasten ROBO PneuVac sind zwei verschiedene Pneumatikzylinder enthalten.Für den ersten Versuch benötigst du den größeren mit der roten Kolbenstange undeingebauter Feder.
Pneumatikzylinder von fischertechnikDie Kolbenstange mit dem Kolben ist be-weglich und zur Zylinderwand durchDichtungen abgedichtet.
Bläst du durch den Anschluss A Luft inden Zylinder, bewegt sich der Kolben.
Geschichtliches
Grundlagen
der Pneumatik
Fertigungsstraße
Windkraftanlage
Industrievariante
Kolbenstange mitKolben und Feder
Schlauchanschluss B(ohne Funktion)
Schlauchanschluss A
Luftpumpe
3
D○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Dieser Zylinder kann pneumatisch nur in eine Richtung bewegt werden. Die Rückstellung erfolgt mit Hilfeeiner Feder. Solche Zylinder heißen „einfach wirkende Zylinder“.
Hinweis:Der Anschluss, über den du den Kolben ausfährst, hat die Kennung „A“, eingefahren wird der Kolben mitHilfe einer Feder.
Luft lässt sich zusammendrückenWer heute mit pneumatischen Anlagen arbeitet, sollte auch etwas über die physikalischen Eigenschaftenvon Luft wissen. Teste dies in einem kleinen Versuch:
Ziehe die rote Kolbenstange des Zylinders ganz heraus. Halte dann den Anschluss A miteinem Finger zu. Lasse nun die Kolbenstange los. Was kannst du beobachten?
Die Kolbenstange wird von der Feder nur ein kleines Stück hineingedrückt.
Ergebnis:Die Luft im Zylinder wird zusammengedrückt und verhindert, dass sich die Kolbenstange bewegen lässt.Je mehr die Luft zusammengepresst wird, desto größer wird der Luftdruck im Zylinder. Diesen Druck kannman mit einem Manometer messen aber auch berechnen. Die Einheit für den Druck ist „bar“ oder „Pas-cal“.
Hierfür kannst du dir folgende Formel merken:
Druck = Kraft/Fläche oder p = F/A
Aus dieser Formel ist zu erkennen, dass der Druck davon abhängt, wieviel Kraft auf eine runde Fläche imZylinder ausgeübt wird.
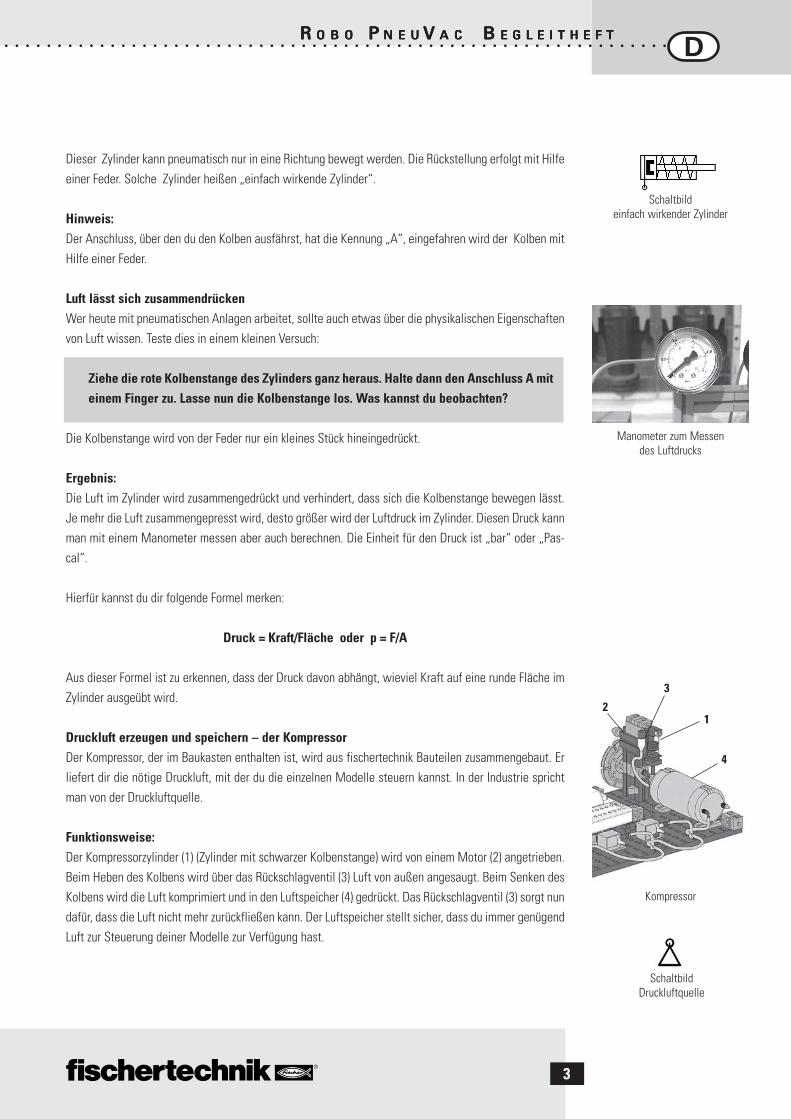
Druckluft erzeugen und speichern – der KompressorDer Kompressor, der im Baukasten enthalten ist, wird aus fischertechnik Bauteilen zusammengebaut. Erliefert dir die nötige Druckluft, mit der du die einzelnen Modelle steuern kannst. In der Industrie sprichtman von der Druckluftquelle.
Funktionsweise:Der Kompressorzylinder (1) (Zylinder mit schwarzer Kolbenstange) wird von einem Motor (2) angetrieben.Beim Heben des Kolbens wird über das Rückschlagventil (3) Luft von außen angesaugt. Beim Senken desKolbens wird die Luft komprimiert und in den Luftspeicher (4) gedrückt. Das Rückschlagventil (3) sorgt nundafür, dass die Luft nicht mehr zurückfließen kann. Der Luftspeicher stellt sicher, dass du immer genügendLuft zur Steuerung deiner Modelle zur Verfügung hast.
Manometer zum Messendes Luftdrucks
SchaltbildDruckluftquelle
Schaltbildeinfach wirkender Zylinder
Kompressor
12
3
4
4
D ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Hinweis:Der vom Kompressor erzeugte Überdruck beträgt ca. 0,5 bar. Der Kolben des Kompressors muss sich leicht-gängig bewegen lassen. Es kann sein, dass du ihn bei Bedarf mit einem kleinen Tropfen säurefreiem Öl(z. B. Siliconöl) schmieren musst.
Benutzt du den Kompressor längere Zeit nicht, empfiehlt es sich, den Antriebsriemen zu entfernen, dadieser mit der Zeit seine Spannung verliert und dann durchrutschen oder reißen kann.
Druckluft schalten – das elektromagnetische VentilIn der Pneumatik hat ein Ventil die Aufgabe, den Luftstrom zum Pneumatikzylinder so zu steuern, dass derZylinder entweder aus- oder einfährt. Die Betätigung eines Ventils kann entweder von Hand, pneumatischoder wie bei deinen technischen Modellen elektromagnetisch erfolgen.
Technische Daten des Ventils: 3/2-Wege-Ventil, 9V DC/130 mA3/2-Wege-Ventil bedeutet, dass es 3 Anschlüsse und 2 Schaltzustände aufweist.
Hinweis:Beim Anschluss des Ventils an die Stromquelle bzw. an das Interface musst du nicht auf die richtige Polungachten.
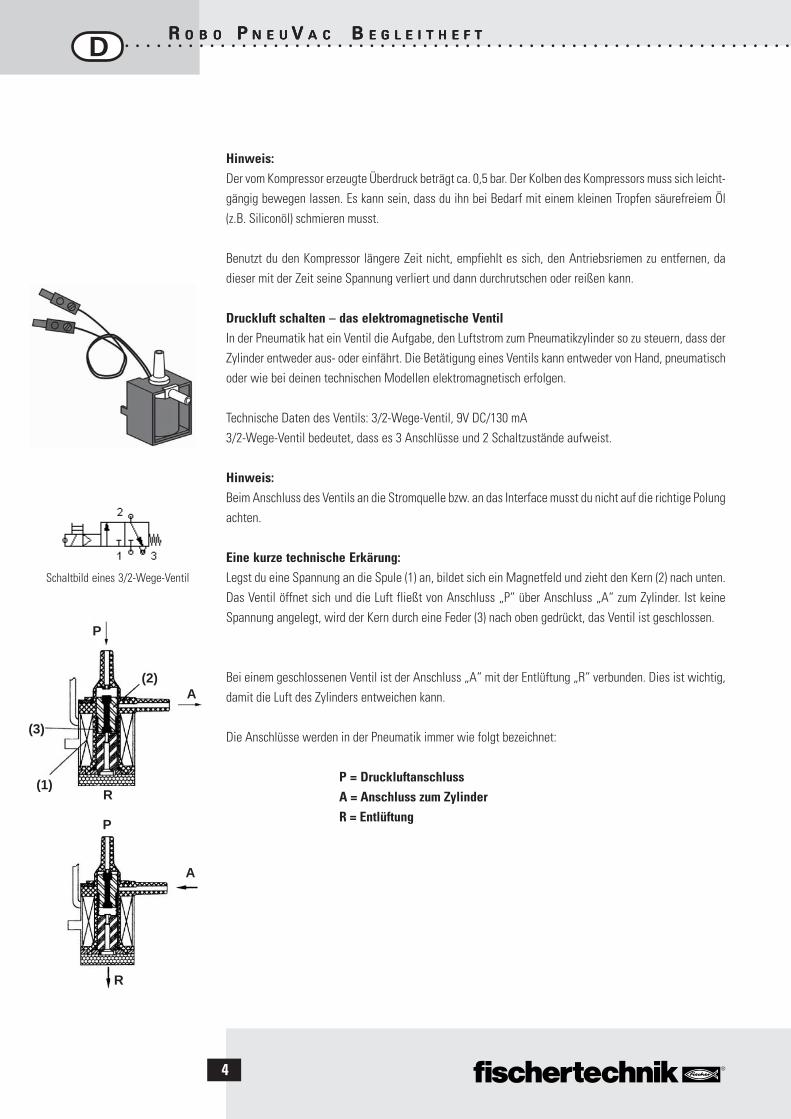
Eine kurze technische Erkärung:Legst du eine Spannung an die Spule (1) an, bildet sich ein Magnetfeld und zieht den Kern (2) nach unten.Das Ventil öffnet sich und die Luft fließt von Anschluss „P“ über Anschluss „A“ zum Zylinder. Ist keineSpannung angelegt, wird der Kern durch eine Feder (3) nach oben gedrückt, das Ventil ist geschlossen.
Bei einem geschlossenen Ventil ist der Anschluss „A“ mit der Entlüftung „R“ verbunden. Dies ist wichtig,damit die Luft des Zylinders entweichen kann.
Die Anschlüsse werden in der Pneumatik immer wie folgt bezeichnet:
P = DruckluftanschlussA = Anschluss zum ZylinderR = EntlüftungP
R
A
P
A
R(1)
(2)
(3)
Schaltbild eines 3/2-Wege-Ventil
5
D○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
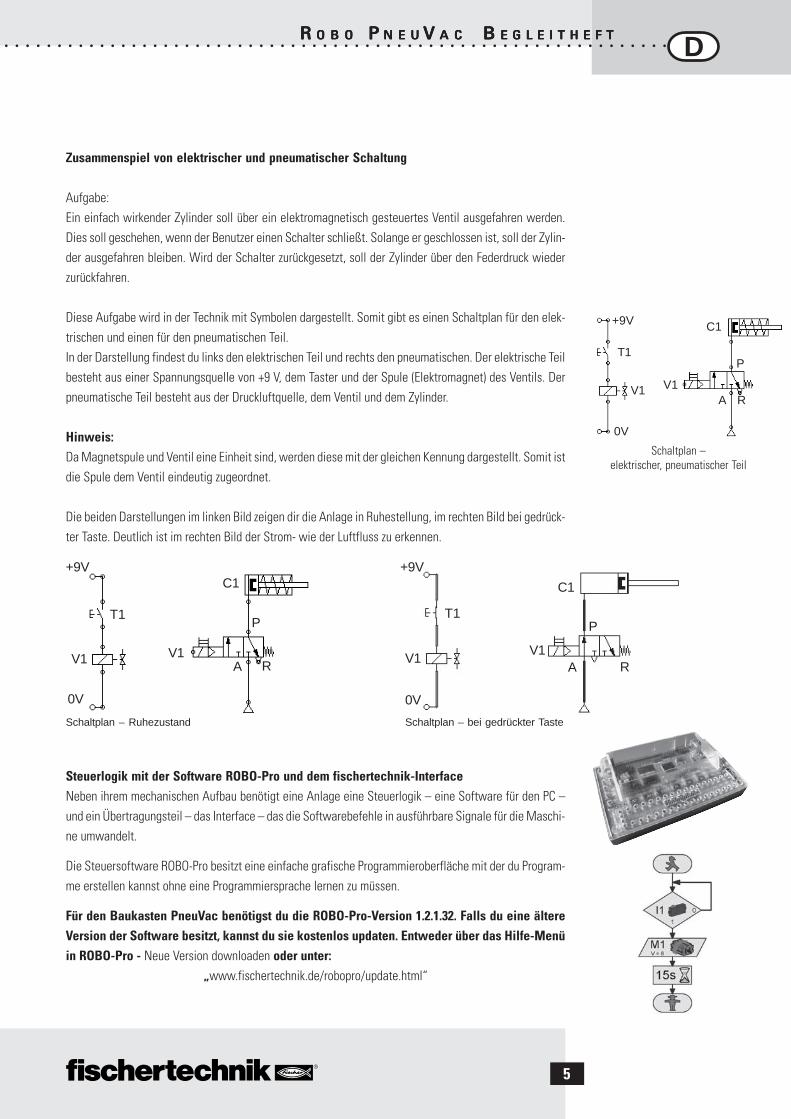
Zusammenspiel von elektrischer und pneumatischer Schaltung
Aufgabe:Ein einfach wirkender Zylinder soll über ein elektromagnetisch gesteuertes Ventil ausgefahren werden.Dies soll geschehen, wenn der Benutzer einen Schalter schließt. Solange er geschlossen ist, soll der Zylin-der ausgefahren bleiben. Wird der Schalter zurückgesetzt, soll der Zylinder über den Federdruck wiederzurückfahren.
Diese Aufgabe wird in der Technik mit Symbolen dargestellt. Somit gibt es einen Schaltplan für den elek-trischen und einen für den pneumatischen Teil.In der Darstellung findest du links den elektrischen Teil und rechts den pneumatischen. Der elektrische Teilbesteht aus einer Spannungsquelle von +9 V, dem Taster und der Spule (Elektromagnet) des Ventils. Derpneumatische Teil besteht aus der Druckluftquelle, dem Ventil und dem Zylinder.
Hinweis:Da Magnetspule und Ventil eine Einheit sind, werden diese mit der gleichen Kennung dargestellt. Somit istdie Spule dem Ventil eindeutig zugeordnet.
Die beiden Darstellungen im linken Bild zeigen dir die Anlage in Ruhestellung, im rechten Bild bei gedrück-ter Taste. Deutlich ist im rechten Bild der Strom- wie der Luftfluss zu erkennen.
Steuerlogik mit der Software ROBO-Pro und dem fischertechnik-InterfaceNeben ihrem mechanischen Aufbau benötigt eine Anlage eine Steuerlogik – eine Software für den PC –und ein Übertragungsteil – das Interface – das die Softwarebefehle in ausführbare Signale für die Maschi-ne umwandelt.
Die Steuersoftware ROBO-Pro besitzt eine einfache grafische Programmieroberfläche mit der du Program-me erstellen kannst ohne eine Programmiersprache lernen zu müssen.
Für den Baukasten PneuVac benötigst du die ROBO-Pro-Version 1.2.1.32. Falls du eine ältereVersion der Software besitzt, kannst du sie kostenlos updaten. Entweder über das Hilfe-Menüin ROBO-Pro - Neue Version downloaden oder unter:
„www.fischertechnik.de/robopro/update.html“
Schaltplan –elektrischer, pneumatischer Teil
+9V
T1
V1 V1
0V
C1
P
A R
+9V
T1
V1 V1
0V
C1
P
A R
+9V
T1
V1 V1
0V
C1
P
A R
Schaltplan – Ruhezustand Schaltplan – bei gedrückter Taste

6
D ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Die Steuereinheit
Aktoren
ROBO Interface
■ Wie du schon auf den vorangegangenen Sei-ten erfahren hast, benötigst du für den Be-trieb von pneumatischen Modellen denKompressor als Druckluftquelle, Ventile undfür die programmtechnische Umsetzung dasROBO Interface (nicht im Baukasten enthalten). Diese Ein-heit wird auf einer eigenen Bauplatte aufgebaut und kann für alle Modelle verwendet werden ohne sieimmer wieder neu aufzubauen.
Aufgabe 1: SteuereinheitBaue anhand der Bauanleitung die Steuereinheit auf und verdrahte sie entsprechendden Vorgaben. Schließe das mitgelieferte USB-Kabel am Interface und am Computersowie die Stromversorgung (Netzteil) an.
ElektromotorUm den Kompressor anzutreiben, benötigst du einen Elektromotor. Dieser wird am Interface am AusgangM1 angeschlossen. Über ein Schwungrad wird der Kolben bewegt, und Luft über das Rückschlagventil inden Luftspeicher gepumpt.
3/2-Wege MagnetventilDas 3/2-Wege Magnetventil dient dazu, den Luftstrom vom Kompressor zum Zylinder zu steuern. Wird dasVentil geöffnet, strömt Druckluft zum Zylinder und lässt dessen Kolben aus- oder einfahren. Angeschlos-sen werden die roten Stecker der Magnetventile an den Interfaceausgang O5, O6 und O7. Die Kabel mitden grünen Steckern werden mit dem gemeinsamen Massepol verbunden.
■ Das wichtigste Bauteil, um die Ventile sowie die elektischen Komponenten der Modelle zu steuern istdas ROBO Interface, welches fest in die Steuereinheit eingebaut wird. An ihm schließt du je nach Bedarfweitere Sensoren und Aktoren an. Die Modellverdrahtung entnimmst du der Bauanleitung.
Aufgabe 2: Test der SteuereinheitStarte die ROBO Pro Software. Aktiviere dem Button . Es erscheint der Arbeits-bildschirm zum Testen des Interfaces, der angeschlossenen Sensoren und Aktoren.
7
D○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Förderband mit
Stapelmagazin
Aktor
Sensor
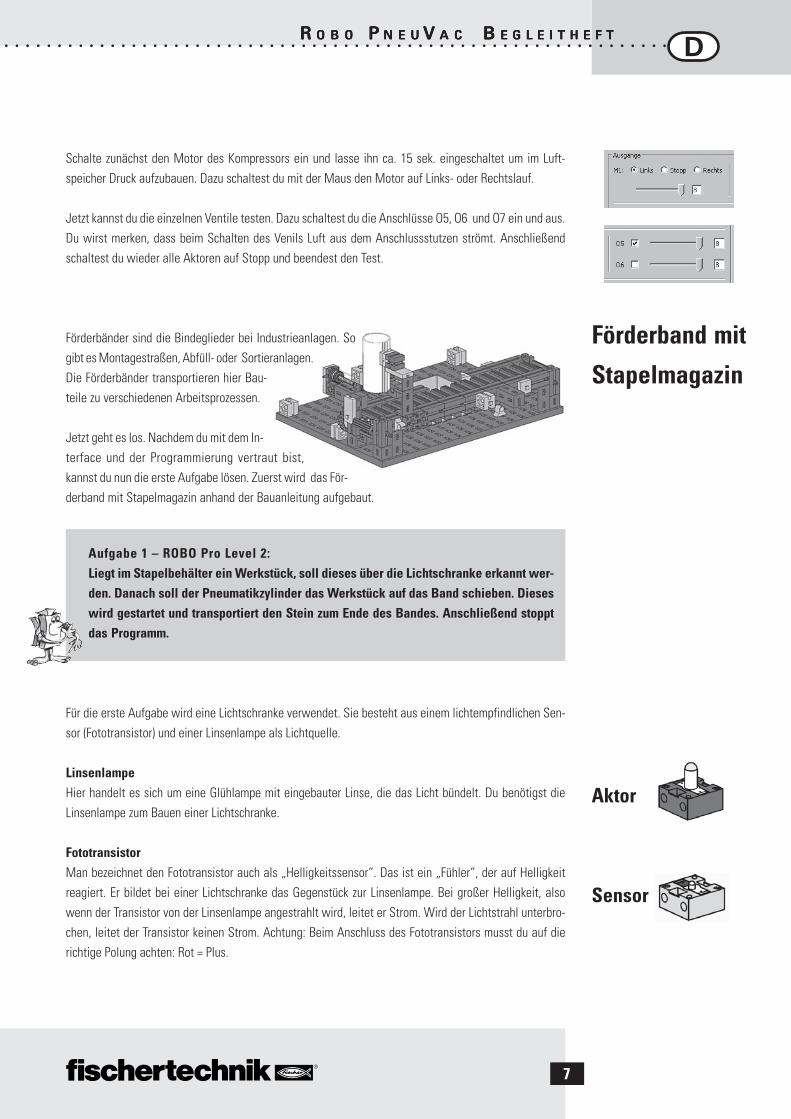
Schalte zunächst den Motor des Kompressors ein und lasse ihn ca. 15 sek. eingeschaltet um im Luft-speicher Druck aufzubauen. Dazu schaltest du mit der Maus den Motor auf Links- oder Rechtslauf.
Jetzt kannst du die einzelnen Ventile testen. Dazu schaltest du die Anschlüsse O5, O6 und O7 ein und aus.Du wirst merken, dass beim Schalten des Venils Luft aus dem Anschlussstutzen strömt. Anschließendschaltest du wieder alle Aktoren auf Stopp und beendest den Test.
Förderbänder sind die Bindeglieder bei Industrieanlagen. Sogibt es Montagestraßen, Abfüll- oder Sortieranlagen.Die Förderbänder transportieren hier Bau-teile zu verschiedenen Arbeitsprozessen.
Jetzt geht es los. Nachdem du mit dem In-terface und der Programmierung vertraut bist,kannst du nun die erste Aufgabe lösen. Zuerst wird das För-derband mit Stapelmagazin anhand der Bauanleitung aufgebaut.
Aufgabe 1 – ROBO Pro Level 2:Liegt im Stapelbehälter ein Werkstück, soll dieses über die Lichtschranke erkannt wer-den. Danach soll der Pneumatikzylinder das Werkstück auf das Band schieben. Dieseswird gestartet und transportiert den Stein zum Ende des Bandes. Anschließend stopptdas Programm.
Für die erste Aufgabe wird eine Lichtschranke verwendet. Sie besteht aus einem lichtempfindlichen Sen-sor (Fototransistor) und einer Linsenlampe als Lichtquelle.
LinsenlampeHier handelt es sich um eine Glühlampe mit eingebauter Linse, die das Licht bündelt. Du benötigst dieLinsenlampe zum Bauen einer Lichtschranke.
FototransistorMan bezeichnet den Fototransistor auch als „Helligkeitssensor“. Das ist ein „Fühler“, der auf Helligkeitreagiert. Er bildet bei einer Lichtschranke das Gegenstück zur Linsenlampe. Bei großer Helligkeit, alsowenn der Transistor von der Linsenlampe angestrahlt wird, leitet er Strom. Wird der Lichtstrahl unterbro-chen, leitet der Transistor keinen Strom. Achtung: Beim Anschluss des Fototransistors musst du auf dierichtige Polung achten: Rot = Plus.
8
D ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
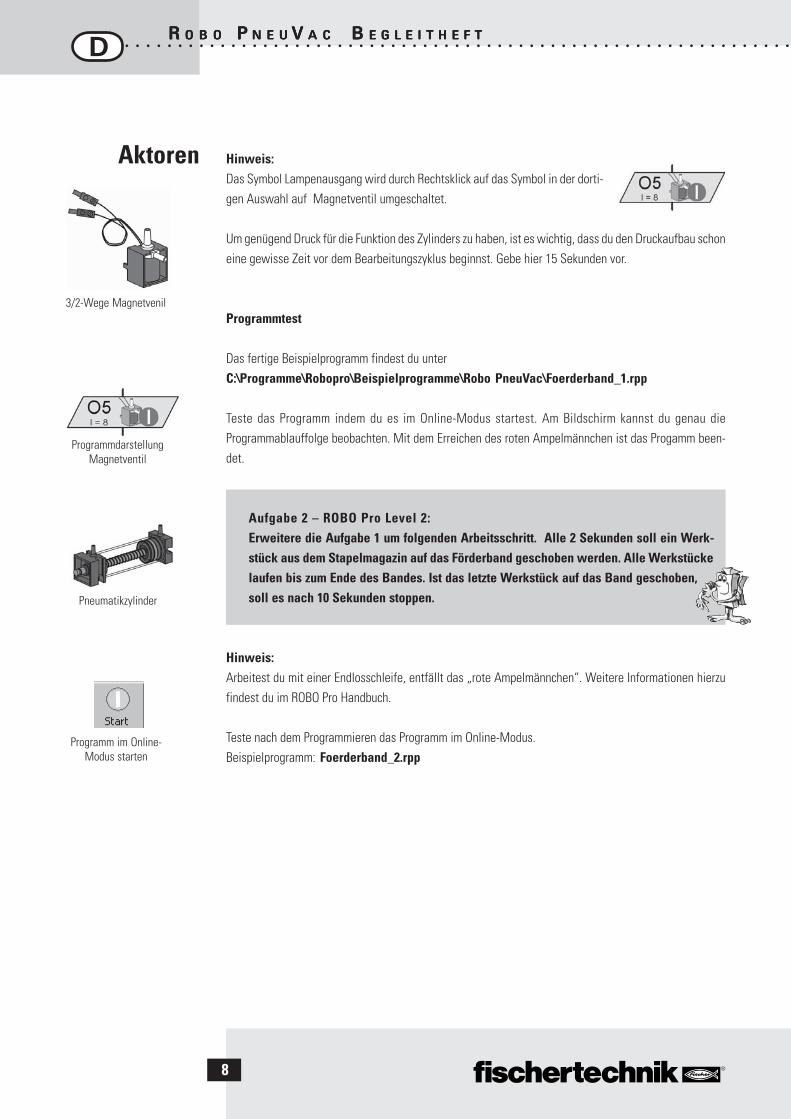
Aktoren Hinweis:Das Symbol Lampenausgang wird durch Rechtsklick auf das Symbol in der dorti-gen Auswahl auf Magnetventil umgeschaltet.
Um genügend Druck für die Funktion des Zylinders zu haben, ist es wichtig, dass du den Druckaufbau schoneine gewisse Zeit vor dem Bearbeitungszyklus beginnst. Gebe hier 15 Sekunden vor.
Programmtest
Das fertige Beispielprogramm findest du unterC:\Programme\Robopro\Beispielprogramme\Robo PneuVac\Foerderband_1.rpp
Teste das Programm indem du es im Online-Modus startest. Am Bildschirm kannst du genau dieProgrammablauffolge beobachten. Mit dem Erreichen des roten Ampelmännchen ist das Progamm been-det.
Aufgabe 2 – ROBO Pro Level 2:Erweitere die Aufgabe 1 um folgenden Arbeitsschritt. Alle 2 Sekunden soll ein Werk-stück aus dem Stapelmagazin auf das Förderband geschoben werden. Alle Werkstückelaufen bis zum Ende des Bandes. Ist das letzte Werkstück auf das Band geschoben,soll es nach 10 Sekunden stoppen.
Hinweis:Arbeitest du mit einer Endlosschleife, entfällt das „rote Ampelmännchen“. Weitere Informationen hierzufindest du im ROBO Pro Handbuch.
Teste nach dem Programmieren das Programm im Online-Modus.Beispielprogramm: Foerderband_2.rpp
Programm im Online-Modus starten
ProgrammdarstellungMagnetventil
3/2-Wege Magnetvenil
Pneumatikzylinder
9
D○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Bearbeitungs-
station mit
Schlechtteil-
ausstoß
Unterprogramm
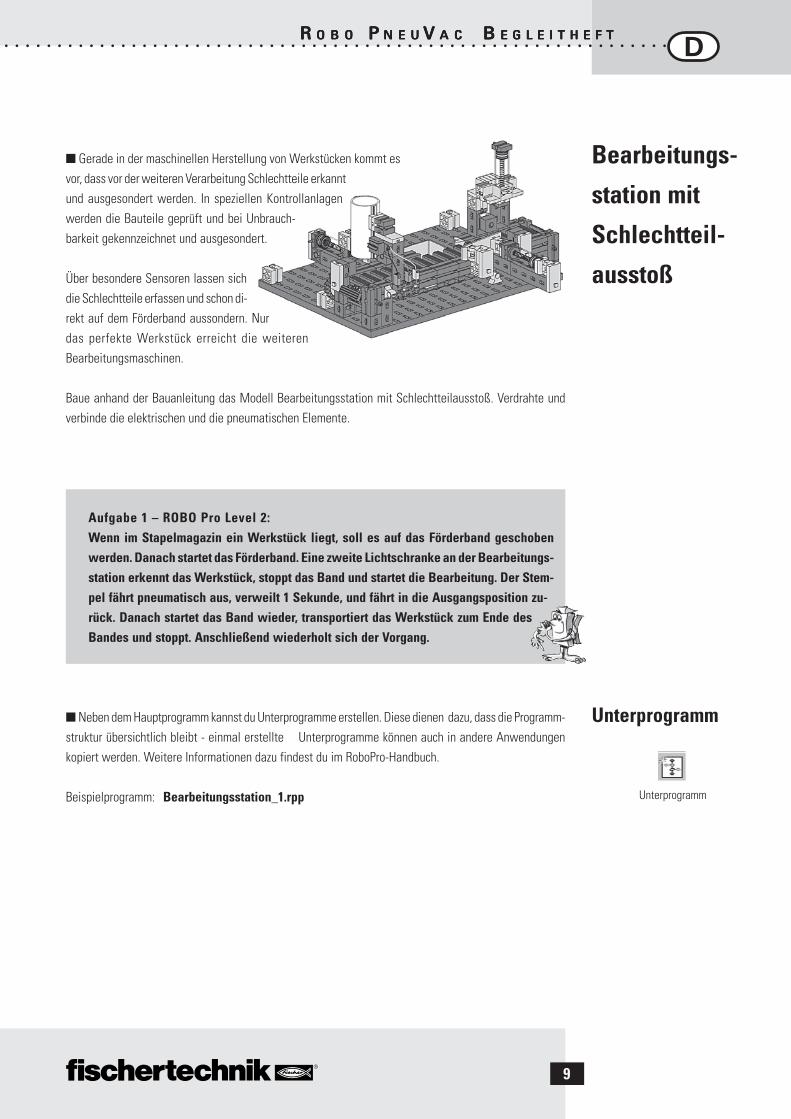
■ Gerade in der maschinellen Herstellung von Werkstücken kommt esvor, dass vor der weiteren Verarbeitung Schlechtteile erkanntund ausgesondert werden. In speziellen Kontrollanlagenwerden die Bauteile geprüft und bei Unbrauch-barkeit gekennzeichnet und ausgesondert.
Über besondere Sensoren lassen sichdie Schlechtteile erfassen und schon di-rekt auf dem Förderband aussondern. Nurdas perfekte Werkstück erreicht die weiterenBearbeitungsmaschinen.
Baue anhand der Bauanleitung das Modell Bearbeitungsstation mit Schlechtteilausstoß. Verdrahte undverbinde die elektrischen und die pneumatischen Elemente.
Aufgabe 1 – ROBO Pro Level 2:Wenn im Stapelmagazin ein Werkstück liegt, soll es auf das Förderband geschobenwerden. Danach startet das Förderband. Eine zweite Lichtschranke an der Bearbeitungs-station erkennt das Werkstück, stoppt das Band und startet die Bearbeitung. Der Stem-pel fährt pneumatisch aus, verweilt 1 Sekunde, und fährt in die Ausgangsposition zu-rück. Danach startet das Band wieder, transportiert das Werkstück zum Ende desBandes und stoppt. Anschließend wiederholt sich der Vorgang.
■ Neben dem Hauptprogramm kannst du Unterprogramme erstellen. Diese dienen dazu, dass die Programm-struktur übersichtlich bleibt - einmal erstellte Unterprogramme können auch in andere Anwendungenkopiert werden. Weitere Informationen dazu findest du im RoboPro-Handbuch.
Beispielprogramm: Bearbeitungsstation_1.rpp Unterprogramm
10
D ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
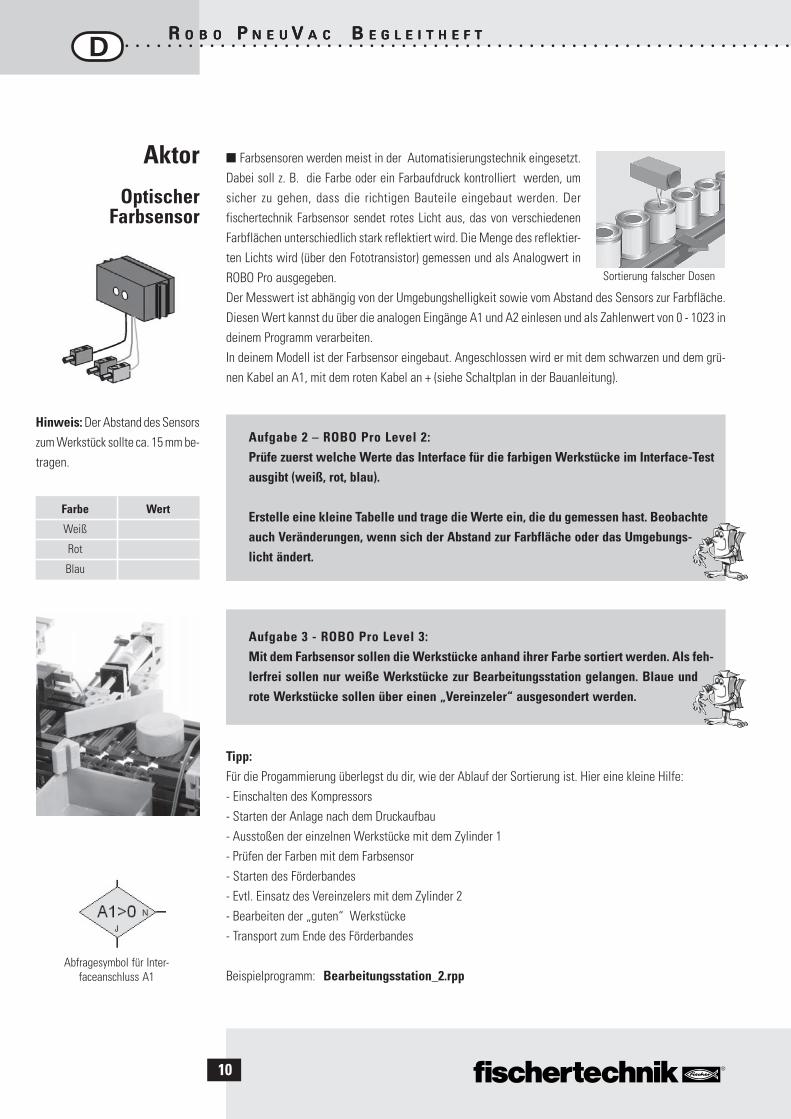
■ Farbsensoren werden meist in der Automatisierungstechnik eingesetzt.Dabei soll z. B. die Farbe oder ein Farbaufdruck kontrolliert werden, umsicher zu gehen, dass die richtigen Bauteile eingebaut werden. Derfischertechnik Farbsensor sendet rotes Licht aus, das von verschiedenenFarbflächen unterschiedlich stark reflektiert wird. Die Menge des reflektier-ten Lichts wird (über den Fototransistor) gemessen und als Analogwert inROBO Pro ausgegeben.Der Messwert ist abhängig von der Umgebungshelligkeit sowie vom Abstand des Sensors zur Farbfläche.Diesen Wert kannst du über die analogen Eingänge A1 und A2 einlesen und als Zahlenwert von 0 - 1023 indeinem Programm verarbeiten.In deinem Modell ist der Farbsensor eingebaut. Angeschlossen wird er mit dem schwarzen und dem grü-nen Kabel an A1, mit dem roten Kabel an + (siehe Schaltplan in der Bauanleitung).
Aufgabe 2 – ROBO Pro Level 2:Prüfe zuerst welche Werte das Interface für die farbigen Werkstücke im Interface-Testausgibt (weiß, rot, blau).
Erstelle eine kleine Tabelle und trage die Werte ein, die du gemessen hast. Beobachteauch Veränderungen, wenn sich der Abstand zur Farbfläche oder das Umgebungs-licht ändert.
Aufgabe 3 - ROBO Pro Level 3:Mit dem Farbsensor sollen die Werkstücke anhand ihrer Farbe sortiert werden. Als feh-lerfrei sollen nur weiße Werkstücke zur Bearbeitungsstation gelangen. Blaue undrote Werkstücke sollen über einen „Vereinzeler“ ausgesondert werden.
Tipp:Für die Progammierung überlegst du dir, wie der Ablauf der Sortierung ist. Hier eine kleine Hilfe:- Einschalten des Kompressors- Starten der Anlage nach dem Druckaufbau- Ausstoßen der einzelnen Werkstücke mit dem Zylinder 1- Prüfen der Farben mit dem Farbsensor- Starten des Förderbandes- Evtl. Einsatz des Vereinzelers mit dem Zylinder 2- Bearbeiten der „guten“ Werkstücke- Transport zum Ende des Förderbandes
Beispielprogramm: Bearbeitungsstation_2.rpp
Aktor
OptischerFarbsensor
Farbe Wert
Weiß
Rot
Blau
Sortierung falscher Dosen
Hinweis: Der Abstand des Sensorszum Werkstück sollte ca. 15 mm be-tragen.
Abfragesymbol für Inter-faceanschluss A1
11
D○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Farbe Wert
Weiß
Rot
Blau
Hinweis:Der Abstand des Sensors zum Werk-stück sollte ca. 15 mm betragen.
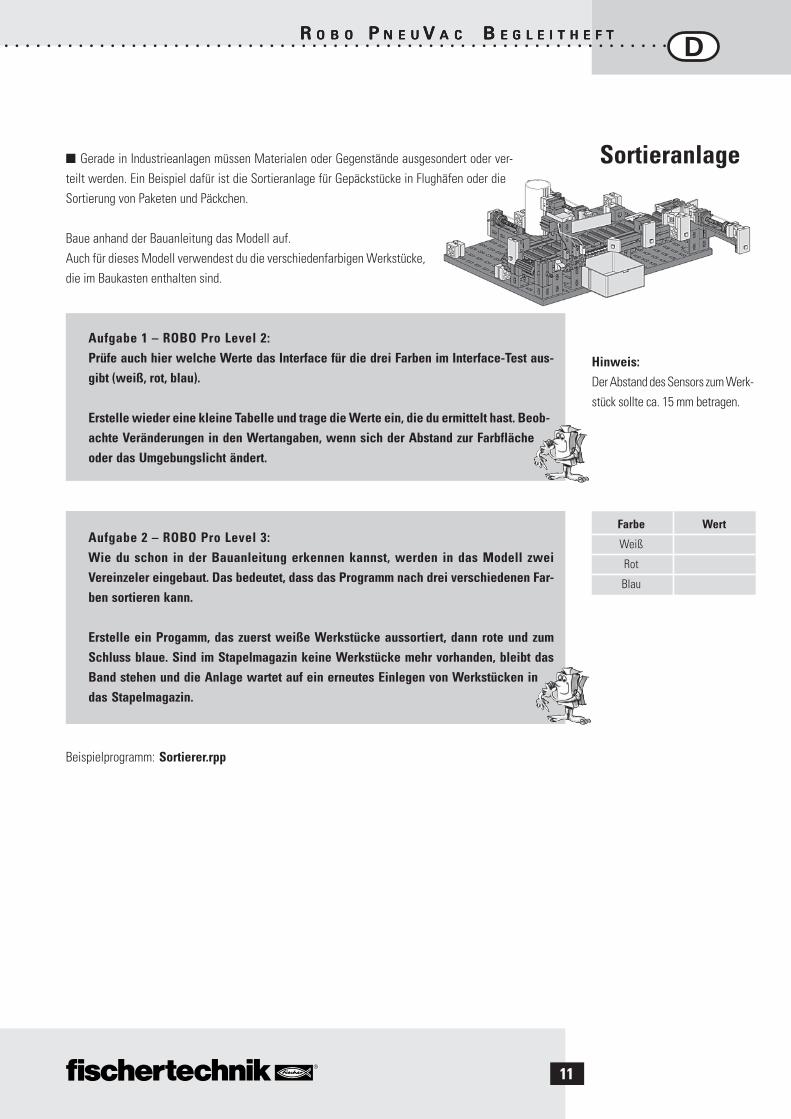
Sortieranlage■ Gerade in Industrieanlagen müssen Materialen oder Gegenstände ausgesondert oder ver-teilt werden. Ein Beispiel dafür ist die Sortieranlage für Gepäckstücke in Flughäfen oder dieSortierung von Paketen und Päckchen.
Baue anhand der Bauanleitung das Modell auf.Auch für dieses Modell verwendest du die verschiedenfarbigen Werkstücke,die im Baukasten enthalten sind.
Aufgabe 1 – ROBO Pro Level 2:Prüfe auch hier welche Werte das Interface für die drei Farben im Interface-Test aus-gibt (weiß, rot, blau).
Erstelle wieder eine kleine Tabelle und trage die Werte ein, die du ermittelt hast. Beob-achte Veränderungen in den Wertangaben, wenn sich der Abstand zur Farbflächeoder das Umgebungslicht ändert.
Aufgabe 2 – ROBO Pro Level 3:Wie du schon in der Bauanleitung erkennen kannst, werden in das Modell zweiVereinzeler eingebaut. Das bedeutet, dass das Programm nach drei verschiedenen Far-ben sortieren kann.
Erstelle ein Progamm, das zuerst weiße Werkstücke aussortiert, dann rote und zumSchluss blaue. Sind im Stapelmagazin keine Werkstücke mehr vorhanden, bleibt dasBand stehen und die Anlage wartet auf ein erneutes Einlegen von Werkstücken indas Stapelmagazin.
Beispielprogramm: Sortierer.rpp
12
D ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Bearbeitungs-
station mit
Vakuumgreifer
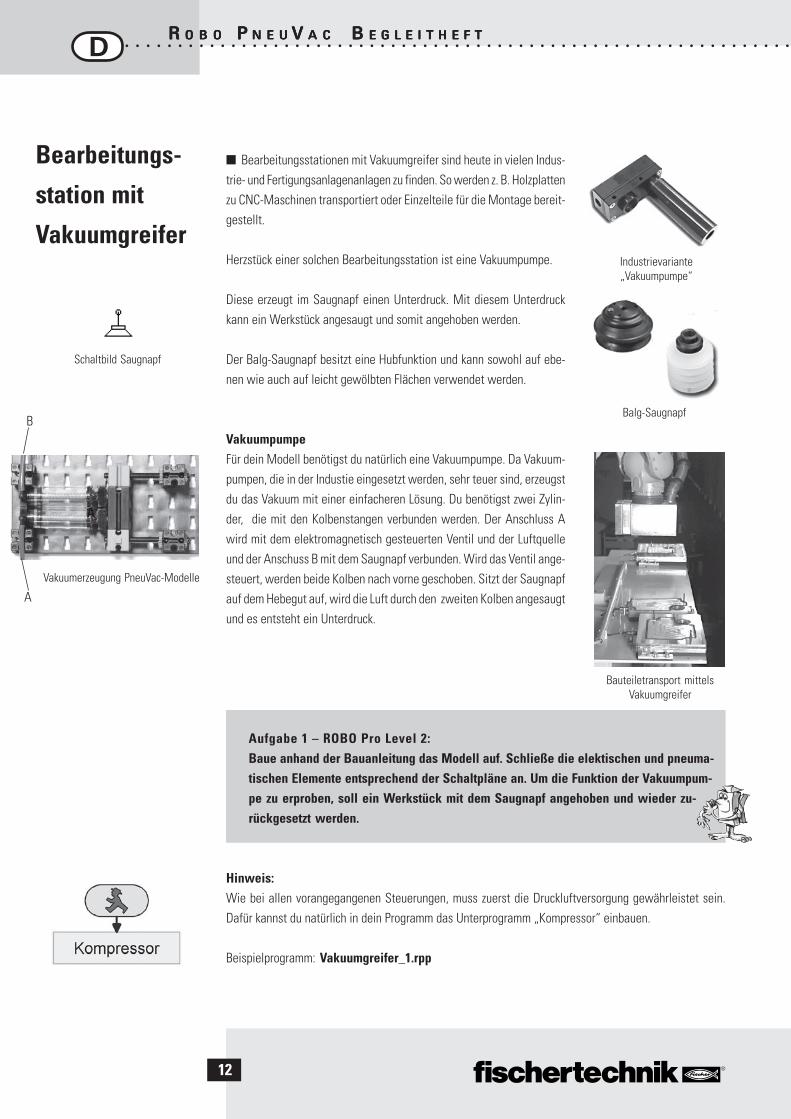
■ Bearbeitungsstationen mit Vakuumgreifer sind heute in vielen Indus-trie- und Fertigungsanlagenanlagen zu finden. So werden z. B. Holzplattenzu CNC-Maschinen transportiert oder Einzelteile für die Montage bereit-gestellt.
Herzstück einer solchen Bearbeitungsstation ist eine Vakuumpumpe.
Diese erzeugt im Saugnapf einen Unterdruck. Mit diesem Unterdruckkann ein Werkstück angesaugt und somit angehoben werden.
Der Balg-Saugnapf besitzt eine Hubfunktion und kann sowohl auf ebe-nen wie auch auf leicht gewölbten Flächen verwendet werden.
VakuumpumpeFür dein Modell benötigst du natürlich eine Vakuumpumpe. Da Vakuum-pumpen, die in der Industie eingesetzt werden, sehr teuer sind, erzeugstdu das Vakuum mit einer einfacheren Lösung. Du benötigst zwei Zylin-der, die mit den Kolbenstangen verbunden werden. Der Anschluss Awird mit dem elektromagnetisch gesteuerten Ventil und der Luftquelleund der Anschuss B mit dem Saugnapf verbunden. Wird das Ventil ange-steuert, werden beide Kolben nach vorne geschoben. Sitzt der Saugnapfauf dem Hebegut auf, wird die Luft durch den zweiten Kolben angesaugtund es entsteht ein Unterdruck.
Aufgabe 1 – ROBO Pro Level 2:Baue anhand der Bauanleitung das Modell auf. Schließe die elektischen und pneuma-tischen Elemente entsprechend der Schaltpläne an. Um die Funktion der Vakuumpum-pe zu erproben, soll ein Werkstück mit dem Saugnapf angehoben und wieder zu-rückgesetzt werden.
Hinweis:Wie bei allen vorangegangenen Steuerungen, muss zuerst die Druckluftversorgung gewährleistet sein.Dafür kannst du natürlich in dein Programm das Unterprogramm „Kompressor“ einbauen.
Beispielprogramm: Vakuumgreifer_1.rpp
Industrievariante„Vakuumpumpe“
Schaltbild Saugnapf
Bauteiletransport mittelsVakuumgreifer
Balg-Saugnapf
Vakuumerzeugung PneuVac-Modelle
A
B
A
13
D○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
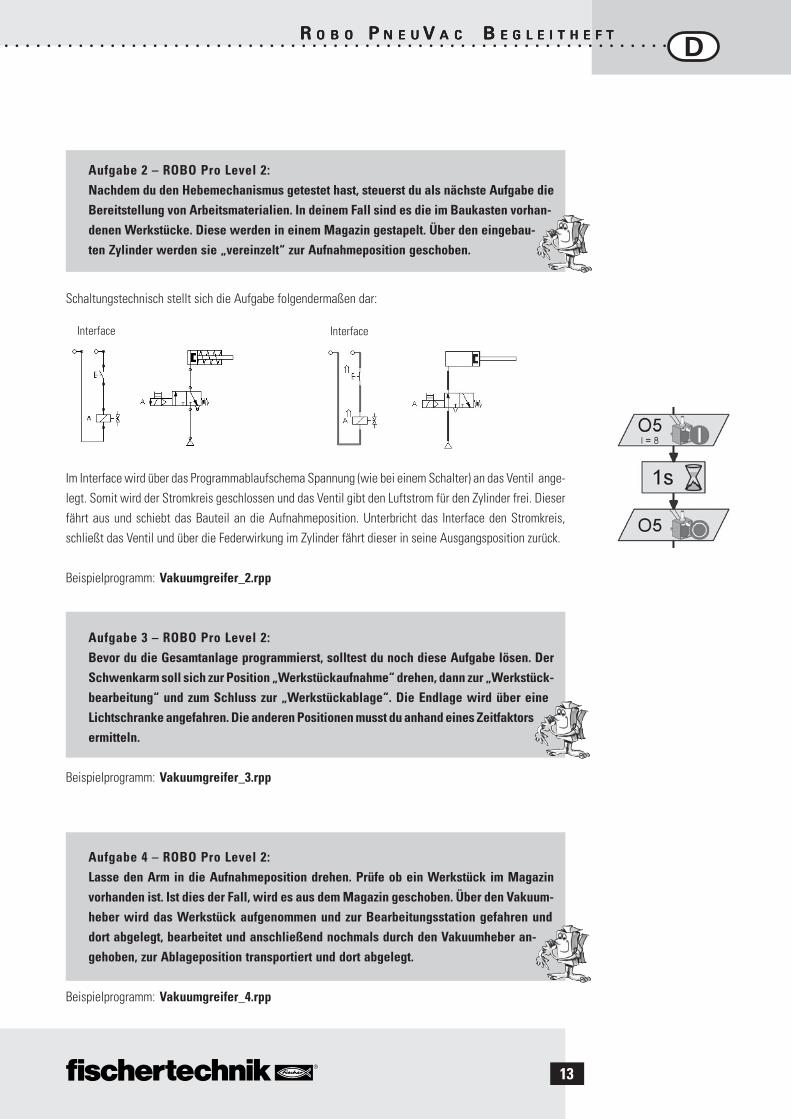
Schaltungstechnisch stellt sich die Aufgabe folgendermaßen dar:
Im Interface wird über das Programmablaufschema Spannung (wie bei einem Schalter) an das Ventil ange-legt. Somit wird der Stromkreis geschlossen und das Ventil gibt den Luftstrom für den Zylinder frei. Dieserfährt aus und schiebt das Bauteil an die Aufnahmeposition. Unterbricht das Interface den Stromkreis,schließt das Ventil und über die Federwirkung im Zylinder fährt dieser in seine Ausgangsposition zurück.
Beispielprogramm: Vakuumgreifer_2.rpp
Aufgabe 3 – ROBO Pro Level 2:Bevor du die Gesamtanlage programmierst, solltest du noch diese Aufgabe lösen. DerSchwenkarm soll sich zur Position „Werkstückaufnahme“ drehen, dann zur „Werkstück-bearbeitung“ und zum Schluss zur „Werkstückablage“. Die Endlage wird über eineLichtschranke angefahren. Die anderen Positionen musst du anhand eines Zeitfaktorsermitteln.
Beispielprogramm: Vakuumgreifer_3.rpp
Aufgabe 4 – ROBO Pro Level 2:Lasse den Arm in die Aufnahmeposition drehen. Prüfe ob ein Werkstück im Magazinvorhanden ist. Ist dies der Fall, wird es aus dem Magazin geschoben. Über den Vakuum-heber wird das Werkstück aufgenommen und zur Bearbeitungsstation gefahren unddort abgelegt, bearbeitet und anschließend nochmals durch den Vakuumheber an-gehoben, zur Ablageposition transportiert und dort abgelegt.
Beispielprogramm: Vakuumgreifer_4.rpp
Aufgabe 2 – ROBO Pro Level 2:Nachdem du den Hebemechanismus getestet hast, steuerst du als nächste Aufgabe dieBereitstellung von Arbeitsmaterialien. In deinem Fall sind es die im Baukasten vorhan-denen Werkstücke. Diese werden in einem Magazin gestapelt. Über den eingebau-ten Zylinder werden sie „vereinzelt“ zur Aufnahmeposition geschoben.
Interface Interface

14
D ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Kartengeber
Kartensortierer
Hinweis:Achte wie bei den vorherigenModellen auf einen Abstand vonca. 15 mm vom Sensor zurKartenoberfläche.
■■■■■ Kartengeber
Du machst das natürlich nicht wie im Wilden Westen. Heute hilft dirbeim Kartengeben dein Modell und das entsprechende Pro-gramm. Für die Progammieraufgabe kannst du die farbigenKarten aus der Bauanleitung ausschneiden oder z.B. Rommé-Karten verwenden.
Aufgabe 1 – ROBO Pro Level 2:Baue anhand der Bauanleitung das Modell auf. Schließe die elektrischen und pneuma-tischen Elemente entsprechend der Vorlage an. Um die Funktion der Vakuumpumpe zuerproben, soll eine Spielkarte mit dem Saugnapf angehoben und wieder zurückge-setzt werden.
Beispielprogramm: Kartengeber_1.rpp
Aufgabe 2 – ROBO Pro Level 2:Eine Spielrunde besteht aus 3 Spielern, die je 3 Karten vom Kartenstapel erhalten sol-len. Erstelle ein Programm, das den Arm in die Aufnahmeposition fährt. Dort soll dieerste Karte angehoben und dem ersten Spieler auf seinen Ablagestapel gelegt werden.Dann folgt die erste Karte für den 2. und 3. Spieler. Anschließend werden alle Spielermit den restlichen Karten bedient.
Beispielprogramm: Kartengeber_2.rpp
Programmierprofis können sich auch noch an die folgenden Aufgaben wagen. Dann mal los!
Aufgabe 3 – ROBO Pro Level 2:Erweitere das Programm dahin, dass das Programm unterbrochen wird, wenn keineKarte mehr vorhanden ist. Es wird erst fortgesetzt, wenn du wieder Karten einlegst.
Beispielprogramm: Kartengeber_3.rpp
Aufgabe 4 – ROBO Pro Level 3:Es kann vorkommen, dass eine Karte nicht angesaugt wird. Deshalb soll das Programmdies überpüfen. Eine Karte soll angehoben werden. Die Karte wird durch Ausfahrendes Armes unter den Farbsensor auf Vorhandensein prüft. Dies geschieht so oft, bisalle Spieler ihre Karten haben.
Fertiges Programm: Kartengeber_4.rpp

15
D○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
■■■■■ Kartensortierer
Dieses Anwendungsbeispiel findest du zwar nirgends in der Industrie, dennoch kann das Programm sehrhilfreich sein, denn es sortiert deine Karten nach Farben.
Dazu liegen Spielkarten mit der farbigen Rückseite nach oben im Stapelkasten. Am besten benutzt du einSpiel mit zwei unterschiedlichen Farbrückseiten oder die farbigen Karten aus der Bauanleitung. Somitlassen sich die Farbwerte für die Farberkennung gut definieren.
Aufgabe 5 – ROBO Pro Level 3:Wie in der Aufgabe 3 soll zuerst ermittelt werden, ob Karten vorhanden sind. Ist dies derFall wird die erste Karte angehoben und unter den Farbsensor gefahren. Dieser ermit-telt den Farbwert der Karte. Anschließend wird die Karte auf dem zugewiesen Stapel-platz abgelegt. Danach folgen die weiteren Sortierzyklen. Ist keine Karte mehr vor-handen, stoppt das Programm.
Beispielprogramm: Kartensortierer.rpp
Farbige Spielkartenrückseiten
16
D ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
RRRRR O B OO B OO B OO B OO B O P P P P P N E UN E UN E UN E UN E U VVVVV A CA CA CA CA C BBBBB E G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F TE G L E I T H E F T
Wen
n et
was
nic
ht ri
chtig
funk
tioni
ert
Was
gib
t es
Schl
imm
eres
als
ein
Mod
ell,
das
ferti
g ge
baut
und
ang
esch
loss
en w
urde
und
dan
n ni
cht f
unkt
ioni
ert?
Des
halb
wol
len
wir
dir e
in p
aar T
ipps
geb
en, w
oran
das
im E
inze
lfall
liege
n kö
nnte
und
wie
du
den
Fehl
er b
eheb
en k
anns
t.
Mög
liche
Urs
ache
Die
Stro
mve
rsor
gung
des
Mot
ors
ist n
icht a
usre
ichen
d
Der K
ompr
esso
rzylin
der i
st tr
ocke
ngel
aufe
n un
d lä
sst s
ich a
uch
mit
der H
and
nur s
chw
er b
eweg
en. I
n di
esem
Fal
l ist
im Z
ylind
erro
hrde
utlic
her A
brie
b zu
erk
enne
n.
Der G
umm
iring
ist a
usge
leie
rt od
er fe
ttig
und
ruts
cht d
urch
.
Lufts
peic
her
leer
Kom
pres
sor
baut
kei
nen
oder
zu
wen
ig D
ruck
auf
. Prü
fung
: Am
Luf
tspe
icher
alle
Aus
gäng
e ve
rsch
ließe
n, L
ufts
peich
er m
itDr
ucklu
ft fü
llen
(ca. 1
5 se
c.). Ö
ffnet
man
ein
en S
tutze
n, m
uss
ein
laut
es Z
ische
n zu
hör
en s
ein.
Zisc
ht e
s nu
r gan
z le
icht o
der g
arni
cht,
ist z
u w
enig
Dru
ck v
orha
nden
.
Mög
liche
Urs
ache
n fü
r de
fekt
en K
ompr
esso
r:
Lufts
peic
her
undi
cht.
Prüf
ung:
wie
obe
n m
it Dr
ucklu
ft fü
llen
und
ins
Was
ser h
alte
n. S
teig
en B
lase
n au
f, ist
er u
ndich
t.
Rück
schl
agve
ntil
defe
kt. P
rüfu
ng:
a) D
as R
ücks
chla
gven
til m
uss
in S
perri
chtu
ng d
ruck
dich
t sei
n, d
as h
eißt
in d
en S
chla
ucha
nsch
luss
dar
f sich
kei
ne L
uft h
inei
n-bl
asen
bzw
. mit
eine
m Z
ylind
er h
inei
npre
ssen
lass
en.
b) D
en S
chla
ucha
nsch
luss
mit
eine
m P
-Sto
pfen
(Art.
Nr.
3170
8) v
ersc
hlie
ßen.
Luf
tans
augu
ng m
uss
bei v
ersc
hlos
sene
mSc
hlau
chan
schl
uss
mög
lich
sein
. Aus
blas
en v
on L
uft d
arf b
ei v
ersc
hlos
sene
m S
chla
ucha
nsch
luss
nich
t mög
lich
sein
.
Kom
pres
sorz
ylin
der
undi
cht.
Prüf
ung:
Di
e Ko
lben
stan
ge in
den
Zyli
nder
hin
eins
chie
ben
und
Ansc
hlus
s A
mit
eine
m P
-Sto
pfen
(Art.
Nr.
3170
8) v
ersc
hlie
ßen.
Dur
ch H
erau
szie
hen
der
Kolb
enst
ange
ein
en U
nter
druc
k im
Zyli
nder
erze
ugen
. Wird
die
Kol
bens
tang
e lo
sgel
asse
n m
uss
siesic
h in
ihre
Urs
prun
gspo
sitio
n zu
rück
bew
egen
.
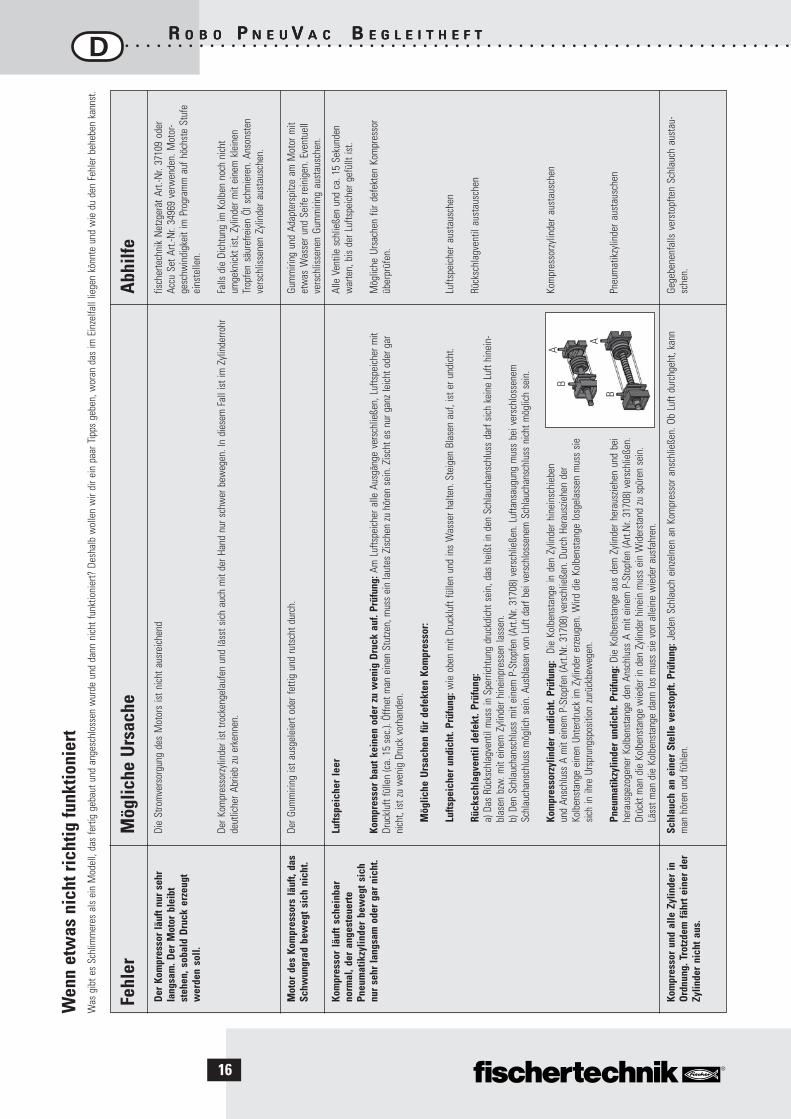
Pneu
mat
ikzy
linde
r un
dich
t. Pr
üfun
g: D
ie K
olbe
nsta
nge
aus
dem
Zyli
nder
her
ausz
iehe
n un
d be
ihe
raus
gezo
gene
r Kol
bens
tang
e de
n An
schl
uss
A m
it ei
nem
P-S
topf
en (A
rt.N
r. 31
708)
ver
schl
ieße
n.Dr
ückt
man
die
Kol
bens
tang
e w
iede
r in
den
Zylin
der h
inei
n m
uss
ein
Wid
erst
and
zu s
püre
n se
in.
Läss
t man
die
Kol
bens
tang
e da
nn lo
s m
uss
sie v
on a
llein
e w
iede
r aus
fahr
en.
Schl
auch
an
eine
r St
elle
ver
stop
ft. P
rüfu
ng: J
eden
Sch
lauc
h ei
nzel
nen
an K
ompr
esso
r ans
chlie
ßen.
Ob
Luft
durc
hgeh
t, ka
nnm
an h
ören
und
fühl
en.
Fehl
erDe
r Ko
mpr
esso
r lä
uft n
ur s
ehr
lang
sam
. Der
Mot
or b
leib
tst
ehen
, sob
ald
Druc
k er
zeug
tw
erde
n so
ll.
Mot
or d
es K
ompr
esso
rs lä
uft,
das
Schw
ungr
ad b
eweg
t sic
h ni
cht.
Kom
pres
sor
läuf
t sch
einb
arno
rmal
, der
ang
este
uerte
Pneu
mat
ikzy
linde
r be
weg
t si
chnu
r se
hr la
ngsa
m o
der
gar
nich
t.
Kom
pres
sor
und
alle
Zyl
inde
r in
Ordn
ung.
Tro
tzde
m fä
hrt e
iner
der
Zylin
der
nich
t aus
.
Abh
ilfe
fisch
erte
chni
k N
etzg
erät
Art.
-Nr.
3710
9 od
erAc
cu S
et A
rt.-N
r. 34
969
verw
ende
n. M
otor
-ge
schw
indi
gkei
t im
Pro
gram
m a
uf h
öchs
te S
tufe
eins
telle
n.
Falls
die
Dich
tung
im K
olbe
n no
ch n
icht
umge
knick
t ist
, Zyli
nder
mit
eine
m k
lein
enTr
opfe
n sä
uref
reie
n Öl
sch
mie
ren.
Ans
onst
enve
rsch
lisse
nen
Zylin
der
aust
ausc
hen.
Gum
miri
ng u
nd A
dapt
ersp
itze
am M
otor
mit
etw
as W
asse
r und
Sei
fe re
inig
en. E
vent
uell
vers
chlis
sene
n Gu
mm
iring
aus
taus
chen
.
Alle
Ven
tile
schl
ieße
n un
d ca
. 15
Seku
nden
war
ten,
bis
der L
ufts
peich
er g
efül
lt ist
.
Mög
liche
Urs
ache
n fü
r def
ekte
n Ko
mpr
esso
rüb
erpr
üfen
.
Lufts
peic
her
aust
ausc
hen
Rück
schl
agve
ntil
aust
ausc
hen
Kom
pres
sorz
ylin
der
aust
ausc
hen
Pneu
mat
ikzy
linde
r au
stau
sche
n
Gege
bene
nfal
ls v
erst
opfte
n Sc
hlau
ch a
usta
u-sc
hen.
B
B
A
A





























