Embed Size (px)
Citation preview
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
GPS-Verfahren -Einsatzgebiete – Rahmenbedingungen
- Kombinationslösungen
GPS-Verfahren -Einsatzgebiete – Rahmenbedingungen
- Kombinationslösungen
Prof. Dipl.-Ing. Rainer Kettemann
HfT Stuttgart, Schellingstraße 24, 70174 Stuttgart
Tel. 0711/121-2608, Fax 0711/121-2556
Email: [email protected]
GPS für GISim Umweltbereich und Naturschutz
Landesanstalt für UmweltschutzBaden-Württemberg
Baden-Württemberg
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
Einführung – Allgemeines
Verschiedene GPS-Verfahren
Einflussfaktoren – Zielgruppen der Gerätehersteller
Roverkomponenten – Geräteauswahl
Datumsübergang von Satelliten- in Landeskoordinaten
Alternativen und Ergänzungen zu GPS
Einige Internetadressen
Inhalte
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
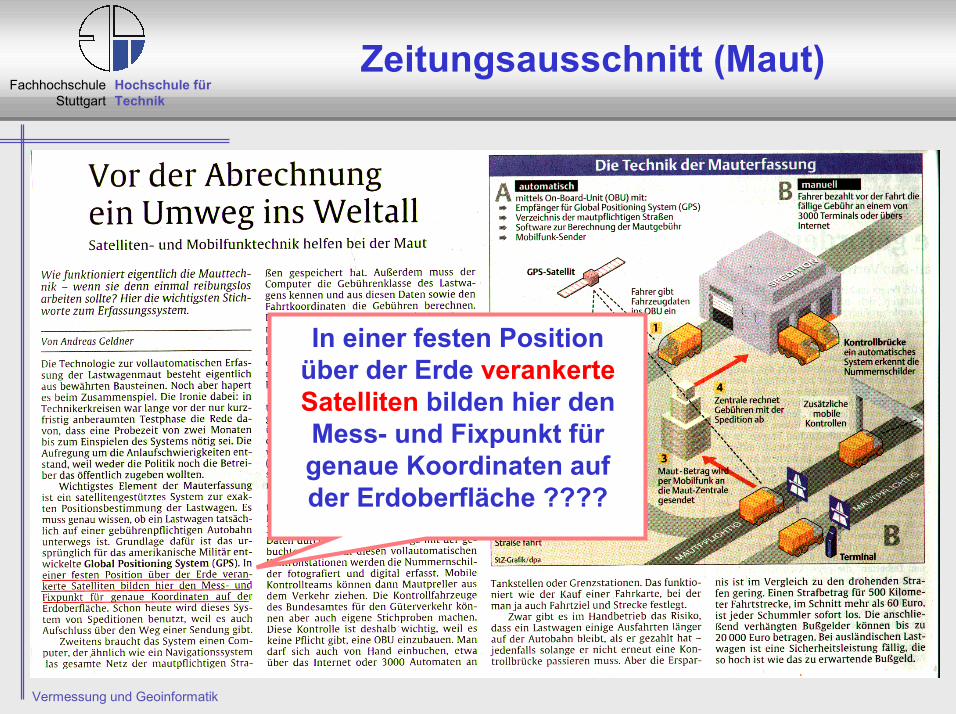
Zeitungsausschnitt (Maut)
In einer festen Position über der Erde verankerte Satelliten bilden hier den Mess- und Fixpunkt für genaue Koordinaten auf der Erdoberfläche ????
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
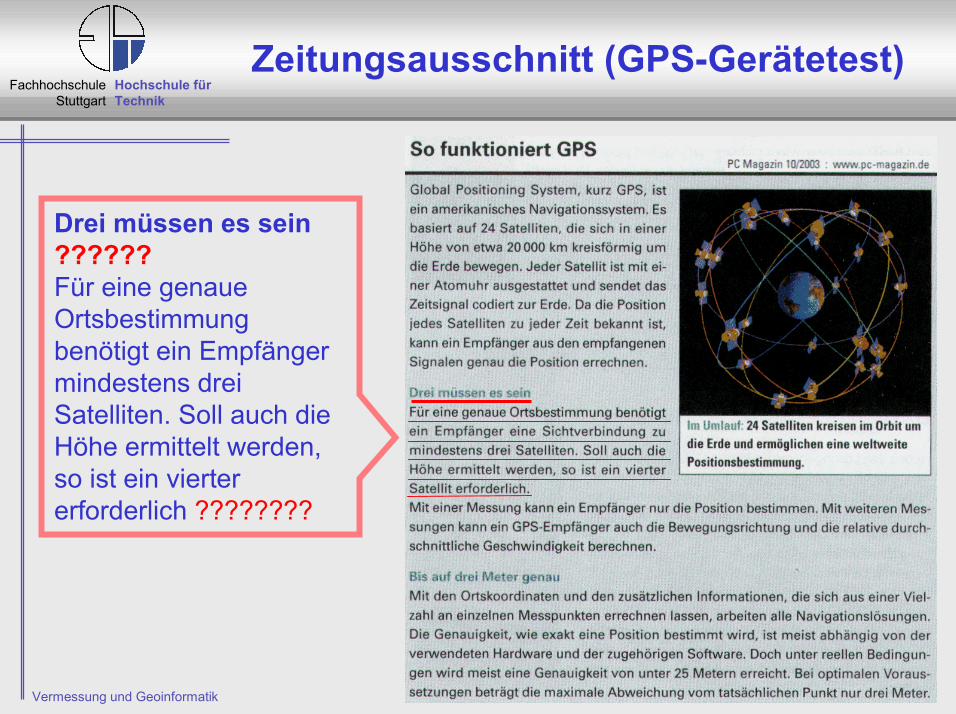
Zeitungsausschnitt (GPS-Gerätetest)
Drei müssen es sein ??????Für eine genaue Ortsbestimmung benötigt ein Empfänger mindestens drei Satelliten. Soll auch die Höhe ermittelt werden, so ist ein vierter erforderlich ????????
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
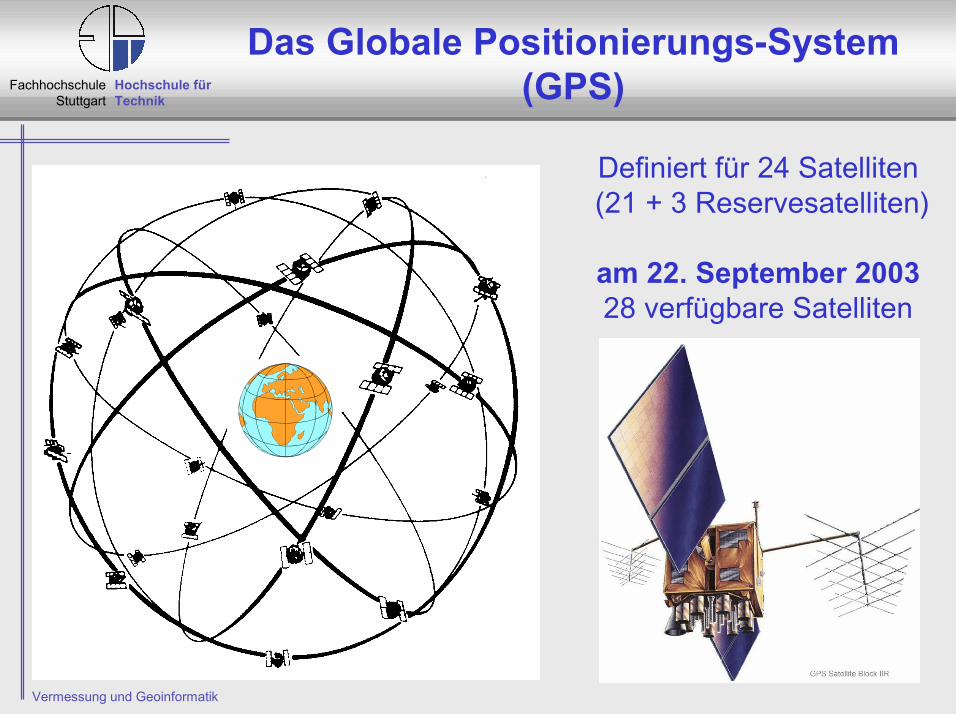
Das Globale Positionierungs-System (GPS)
Definiert für 24 Satelliten(21 + 3 Reservesatelliten)
am 22. September 200328 verfügbare Satelliten
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
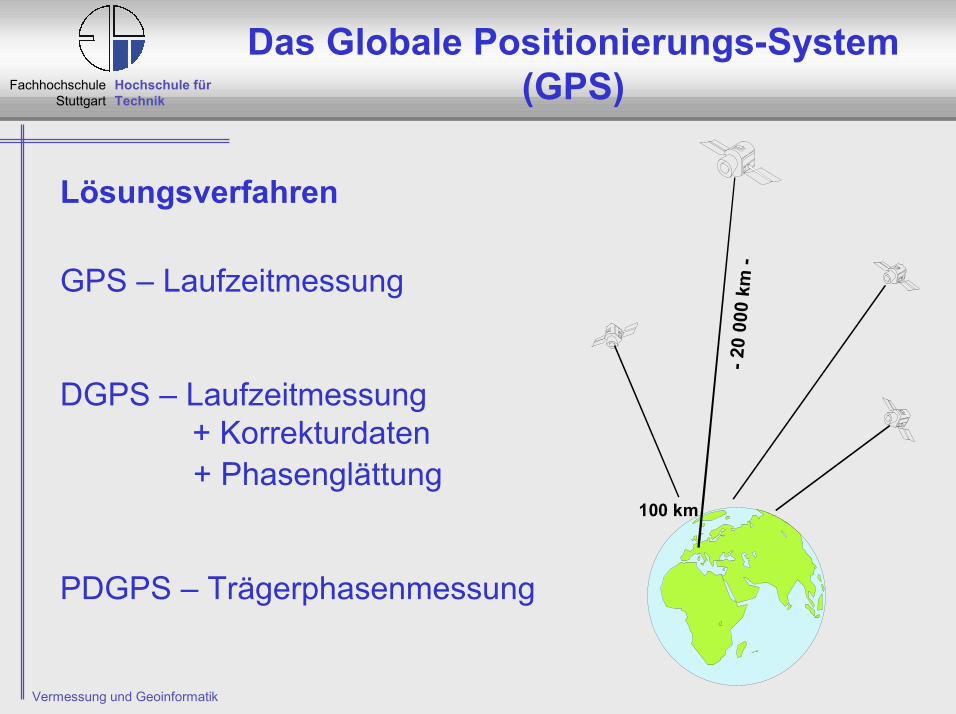
Das Globale Positionierungs-System (GPS)
100 km
- 20
000
km -
Lösungsverfahren
GPS – Laufzeitmessung
PDGPS – Trägerphasenmessung
DGPS – Laufzeitmessung + Korrekturdaten+ Phasenglättung
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
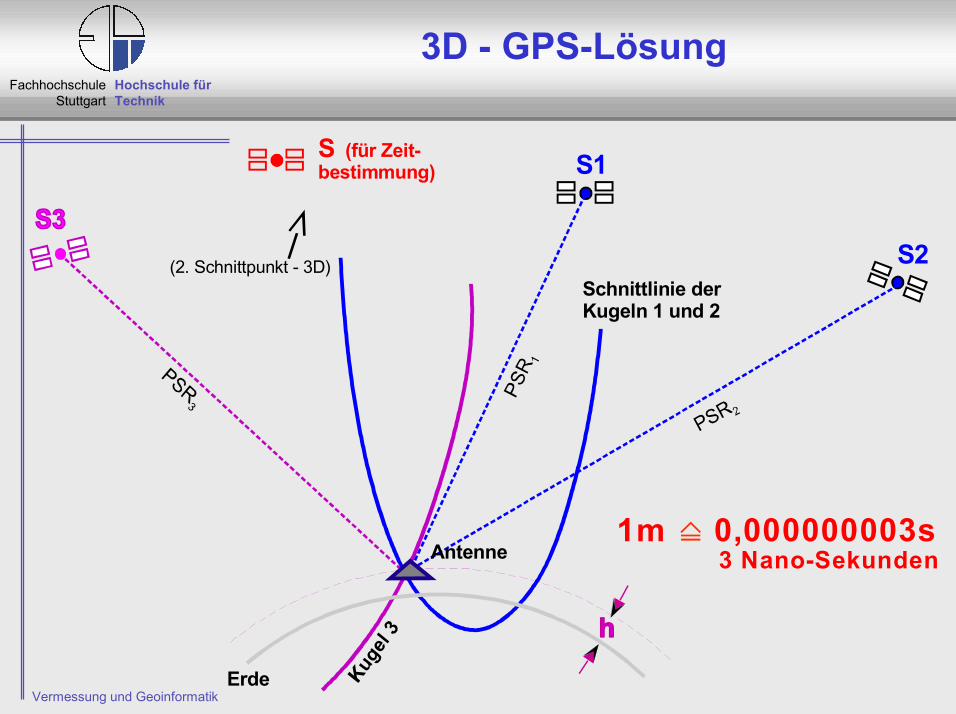
(2. Schnittpunkt - 3D)
3D - GPS-Lösung
S1
S2Schnittlinie der Kugeln 1 und 2
Erde
Antenne
S (für Zeit-bestimmung)
1m ========0,000000003s 3 Nano-Sekunden
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
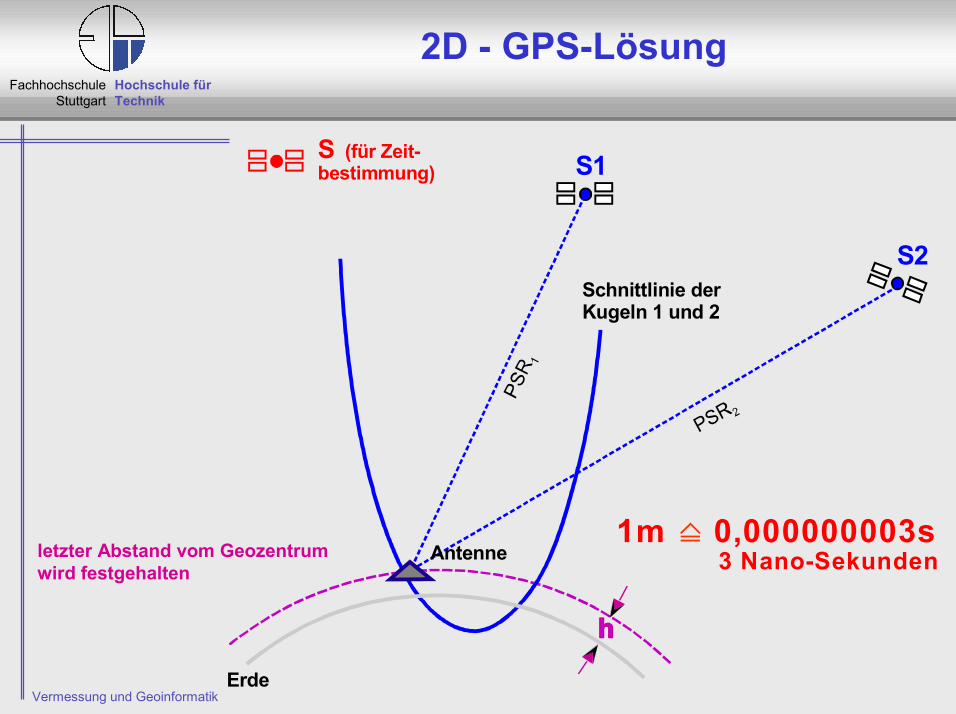
2D - GPS-Lösung
S1
S2Schnittlinie der Kugeln 1 und 2
Erde
Antenne
S (für Zeit-bestimmung)
1m ========0,000000003s 3 Nano-Sekundenletzter Abstand vom Geozentrum
wird festgehalten
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
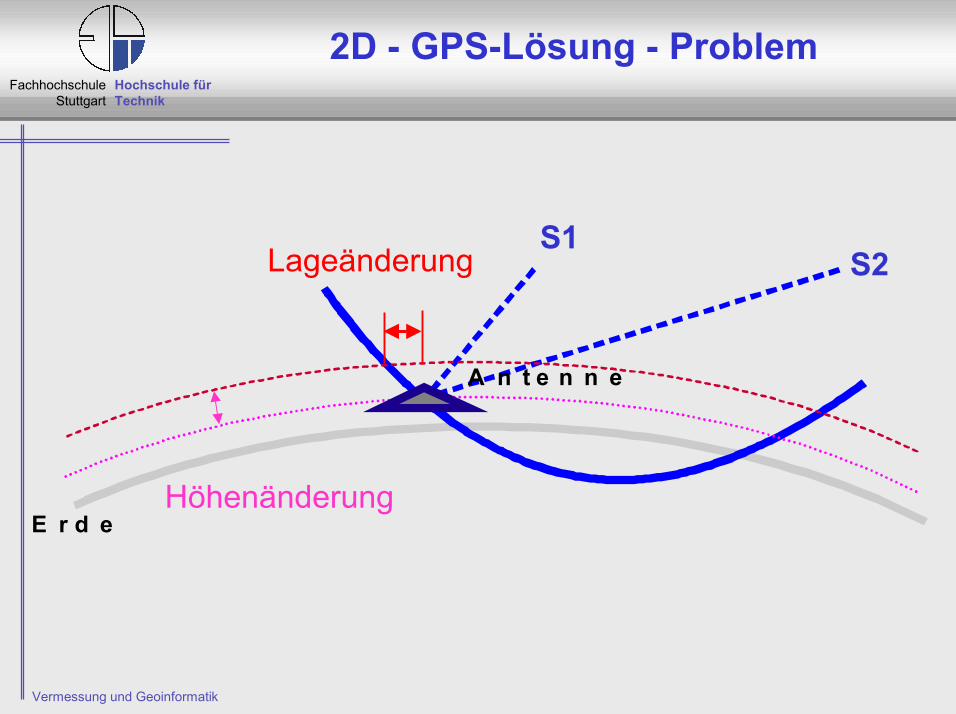
2D - GPS-Lösung - Problem
E r d e
A n t e n n e
S1S2
Höhenänderung
Lageänderung
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
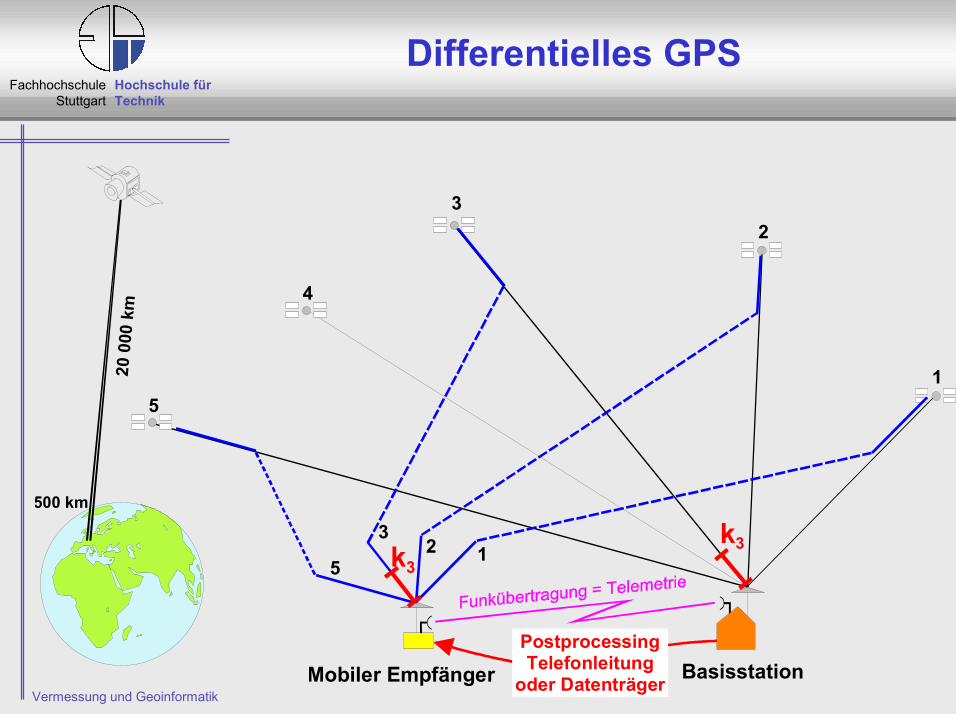
PostprocessingTelefonleitung
oder Datenträger
Differentielles GPS
1
2
4
3
5
13
52 k3
Basisstation
500 km
20 0
00 k
m
Mobiler Empfänger
k3
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
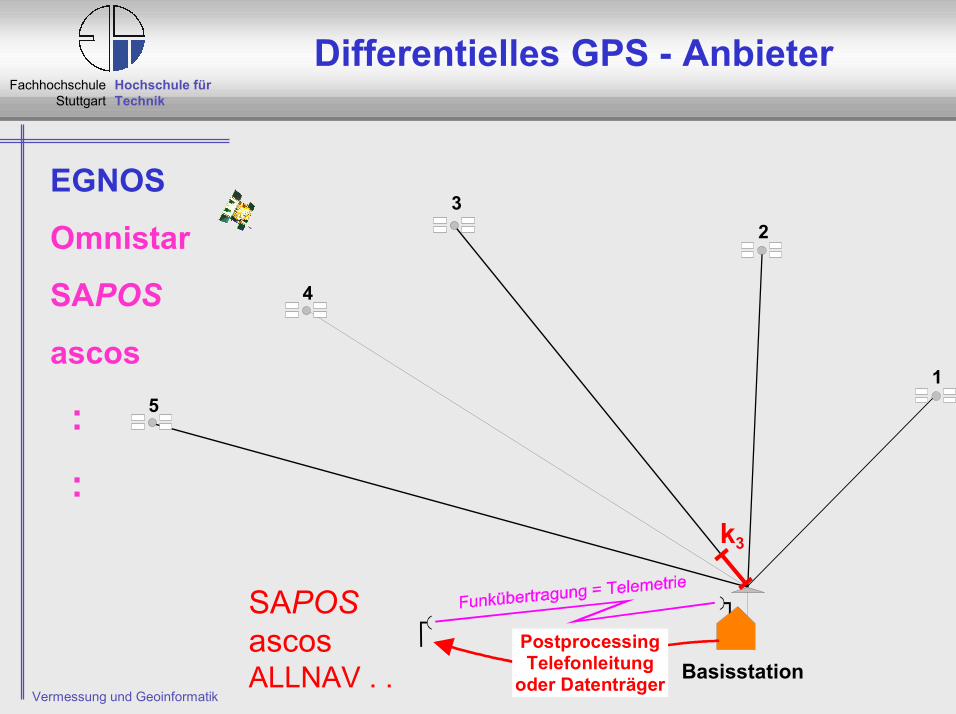
Differentielles GPS - Anbieter
1
2
4
3
5
k3
Basisstation
EGNOS
Omnistar
SAPOS
ascos
:
:
PostprocessingTelefonleitung
oder Datenträger
SAPOSascosALLNAV . .
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
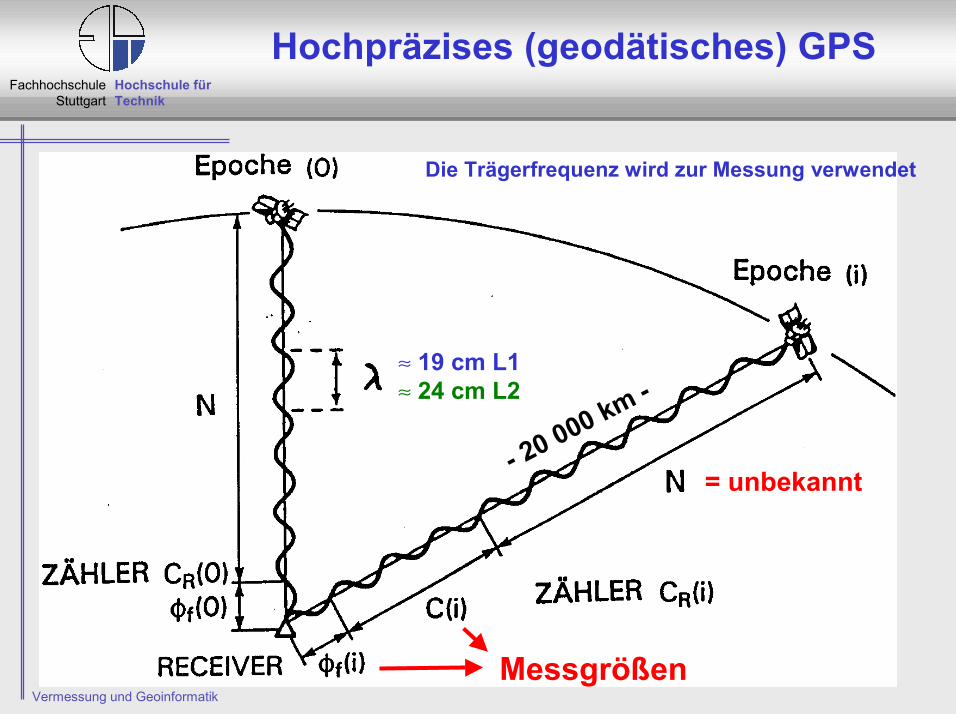
Hochpräzises (geodätisches) GPS
≈ 19 cm L1≈ 24 cm L2
= unbekannt
Messgrößen
Die Trägerfrequenz wird zur Messung verwendet
- 20 000 km -
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
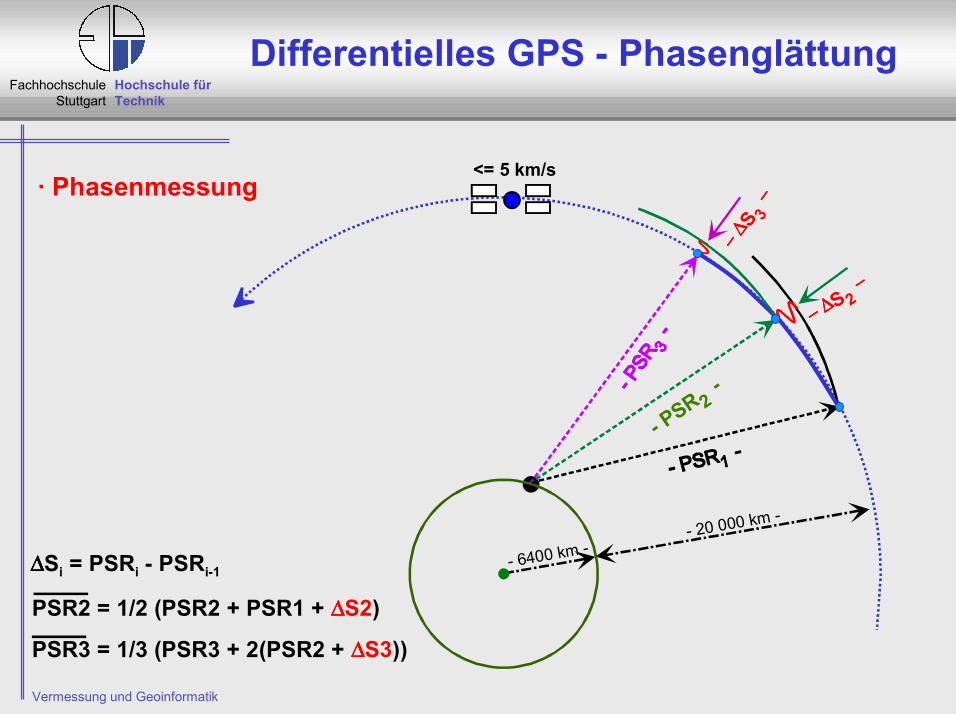
- 6400 km -- 20 000 km -
<= 5 km/s
- PSR 2 -
Differentielles GPS - Phasenglättung
−−−−====∆∆∆∆S 2 −−−−
−−−−====∆∆∆∆S 3
−−−−· Phasenmessung
PSR2 = 1/2 (PSR2 + PSR1 + ∆∆∆∆S2)
PSR3 = 1/3 (PSR3 + 2(PSR2 + ∆∆∆∆S3))
∆∆∆∆Si = PSRi - PSRi-1
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
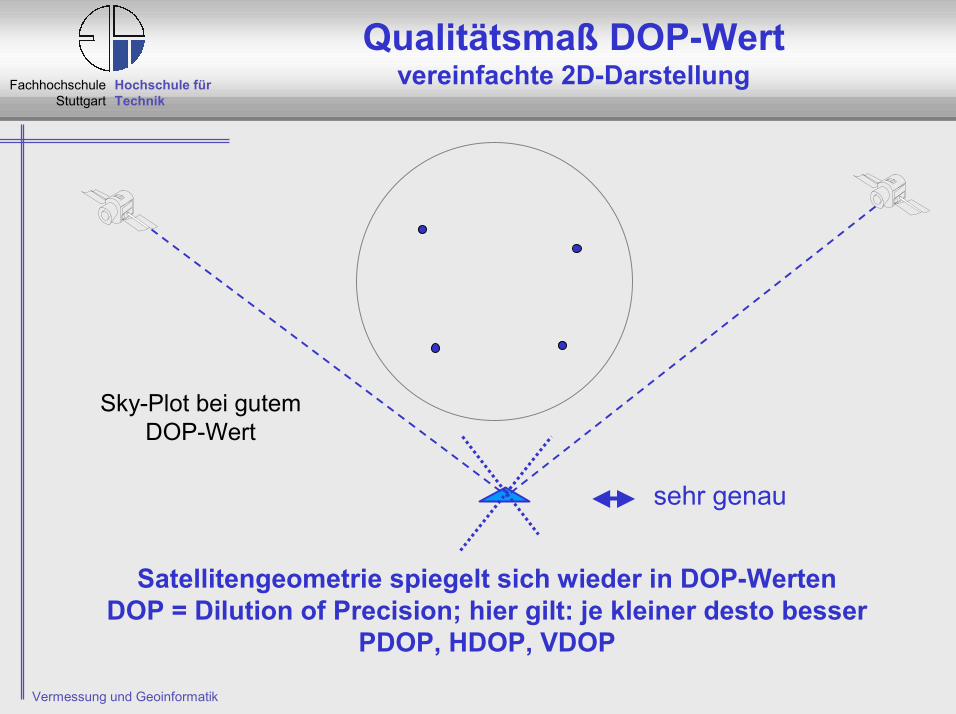
Qualitätsmaß DOP-Wertvereinfachte 2D-Darstellung
Satellitengeometrie spiegelt sich wieder in DOP-WertenDOP = Dilution of Precision; hier gilt: je kleiner desto besser
PDOP, HDOP, VDOP
sehr genau
Sky-Plot bei gutem DOP-Wert
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
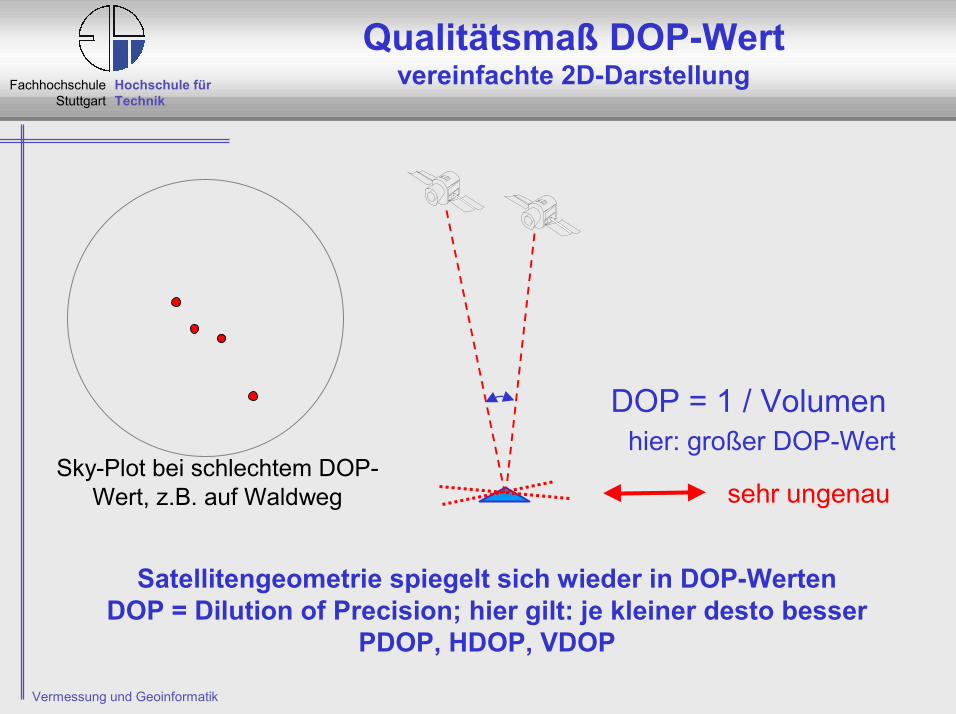
Qualitätsmaß DOP-Wertvereinfachte 2D-Darstellung
Satellitengeometrie spiegelt sich wieder in DOP-WertenDOP = Dilution of Precision; hier gilt: je kleiner desto besser
PDOP, HDOP, VDOP
sehr ungenau
DOP = 1 / Volumenhier: großer DOP-Wert
Sky-Plot bei schlechtem DOP-Wert, z.B. auf Waldweg
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
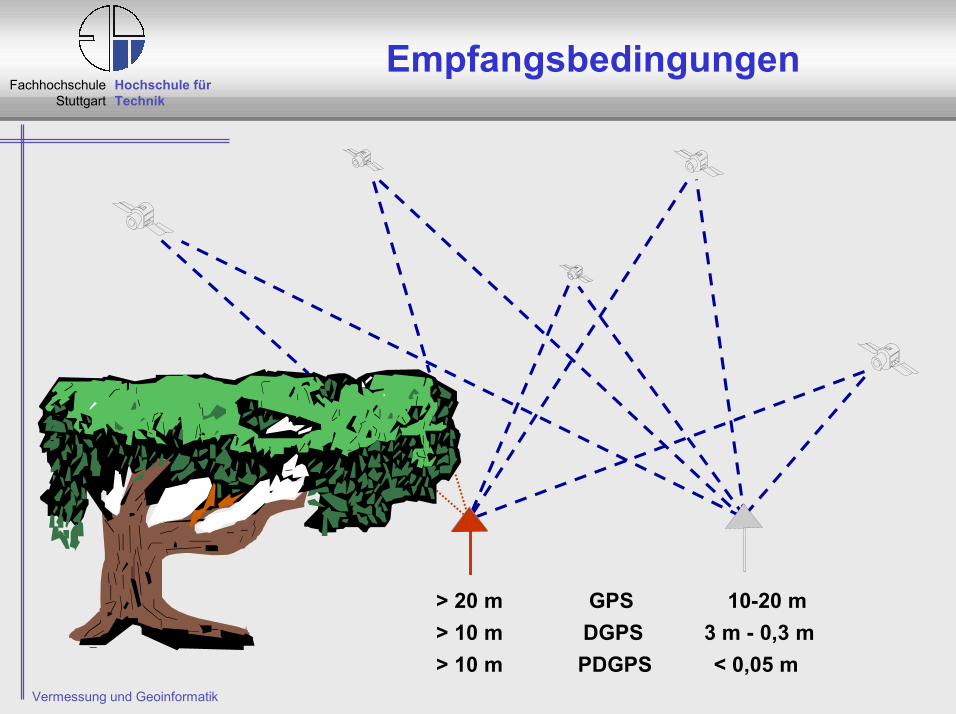
Empfangsbedingungen
> 20 m> 10 m> 10 m
3 m - 0,3 m< 0,05 m
GPSDGPSPDGPS
10-20 m
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
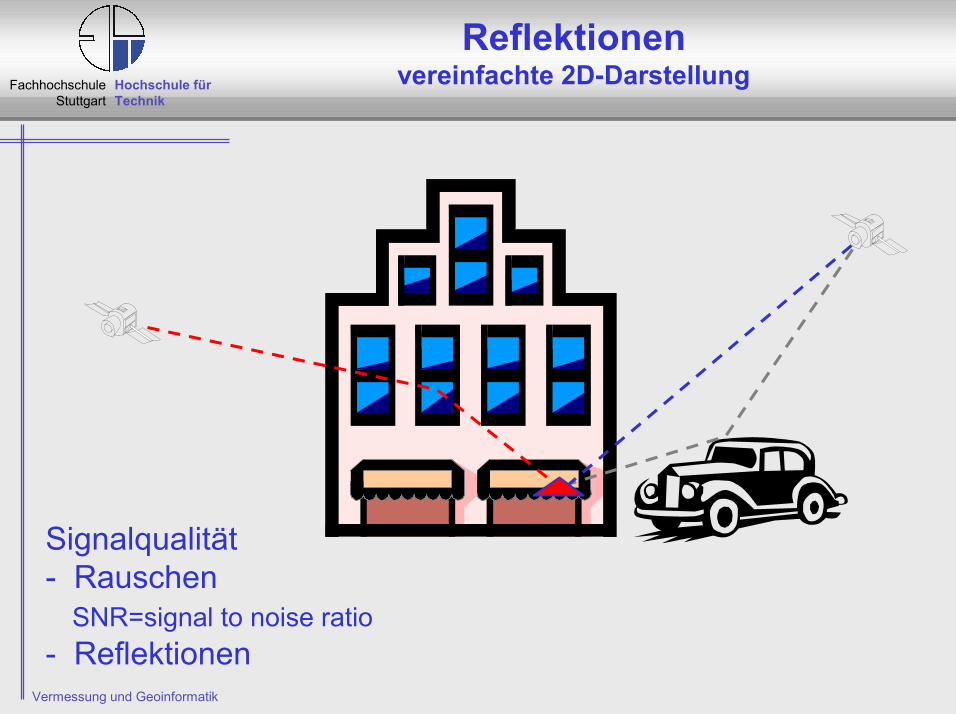
Reflektionenvereinfachte 2D-Darstellung
Signalqualität- Rauschen
SNR=signal to noise ratio- Reflektionen
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
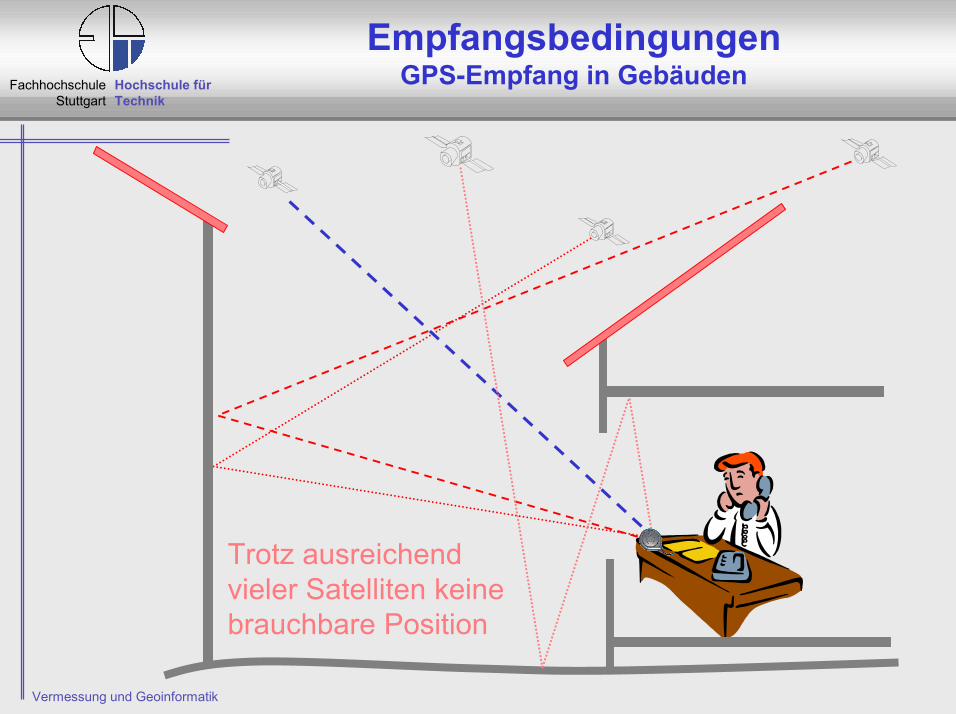
EmpfangsbedingungenGPS-Empfang in Gebäuden
Trotz ausreichend vieler Satelliten keine brauchbare Position
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
Auswertestrategien
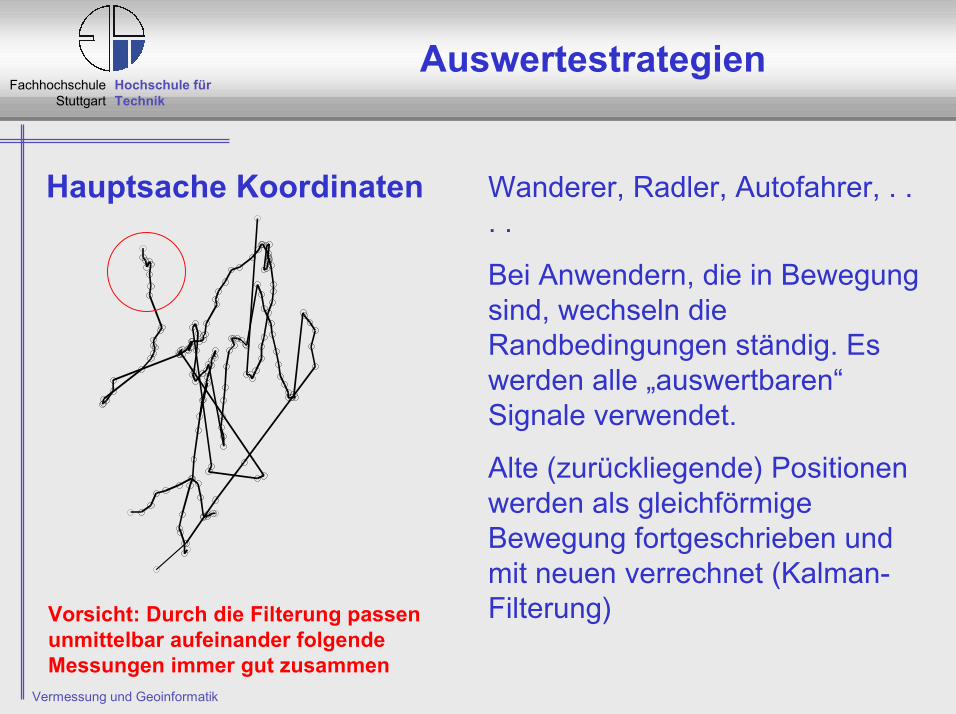
Hauptsache Koordinaten Wanderer, Radler, Autofahrer, . . . .
Bei Anwendern, die in Bewegung sind, wechseln die Randbedingungen ständig. Es werden alle „auswertbaren“ Signale verwendet.
Alte (zurückliegende) Positionen werden als gleichförmige Bewegung fortgeschrieben und mit neuen verrechnet (Kalman-Filterung)Vorsicht: Durch die Filterung passen
unmittelbar aufeinander folgende Messungen immer gut zusammen
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
Auswertestrategien
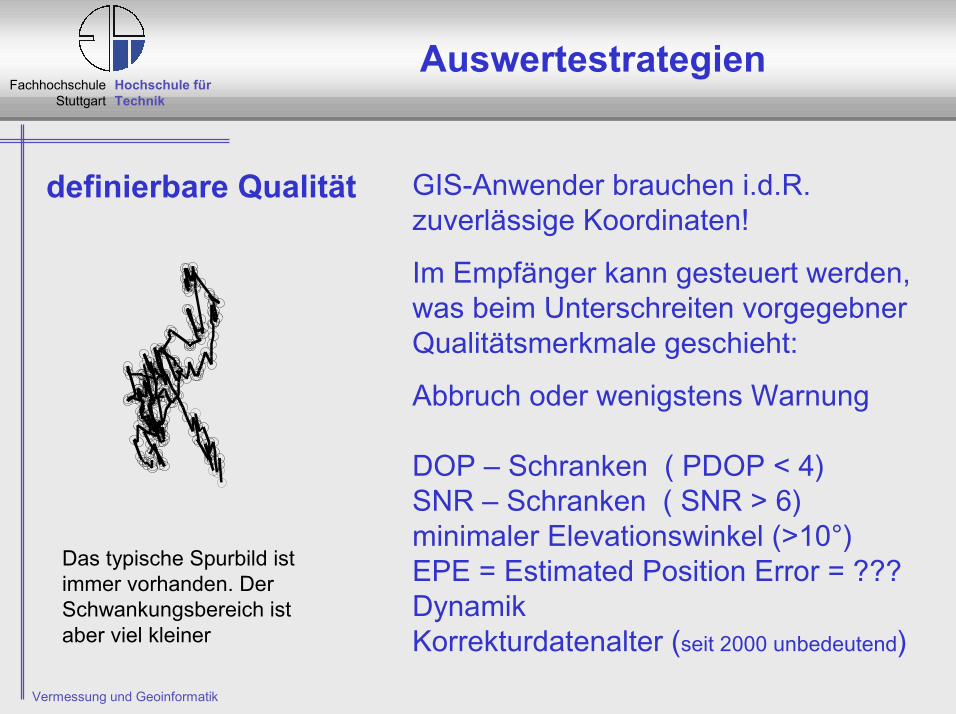
definierbare Qualität GIS-Anwender brauchen i.d.R. zuverlässige Koordinaten!
Im Empfänger kann gesteuert werden, was beim Unterschreiten vorgegebner Qualitätsmerkmale geschieht:
Abbruch oder wenigstens Warnung
DOP – Schranken ( PDOP < 4)SNR – Schranken ( SNR > 6)minimaler Elevationswinkel (>10°) EPE = Estimated Position Error = ???DynamikKorrekturdatenalter (seit 2000 unbedeutend)
Das typische Spurbild ist immer vorhanden. Der Schwankungsbereich ist aber viel kleiner
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
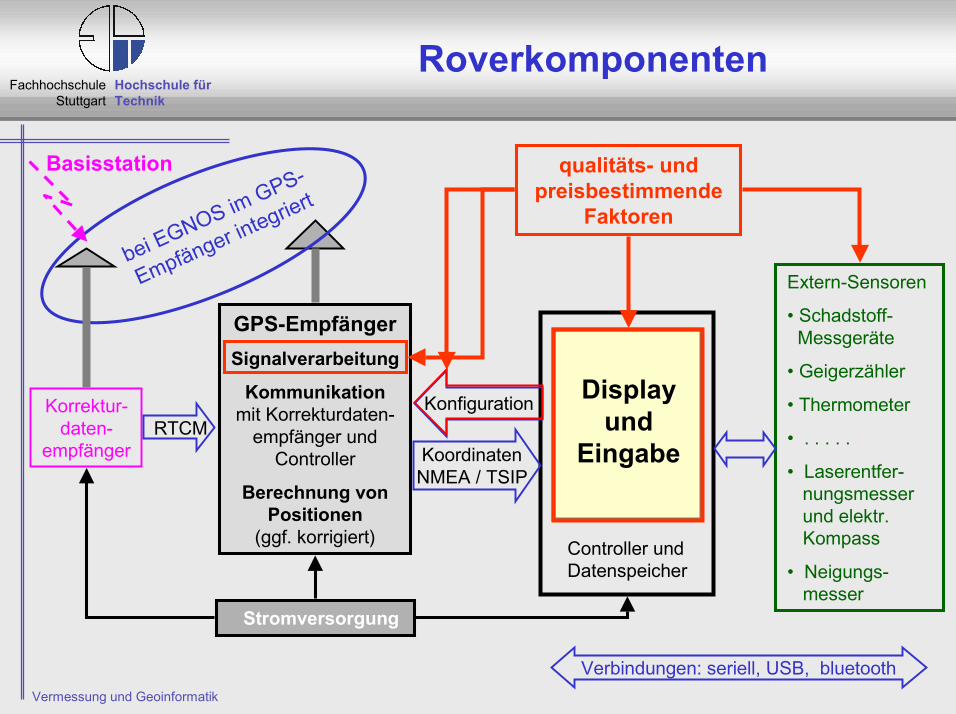
GPS-EmpfängerSignalverarbeitung
Kommunikationmit Korrekturdaten-
empfänger und Controller
Berechnung von Positionen
(ggf. korrigiert)
Roverkomponenten
Stromversorgung
KoordinatenNMEA / TSIP
bei EGNOS im GPS-
Empfänger integriert
Korrektur-daten-
empfängerRTCM
Basisstation
Extern-Sensoren
• Schadstoff-Messgeräte
• Geigerzähler
• Thermometer
• . . . . .
• Laserentfer-nungsmesserund elektr.Kompass
• Neigungs-messer
Verbindungen: seriell, USB, bluetooth
Display und
Eingabe
Controller und Datenspeicher
qualitäts- und preisbestimmende
Faktoren
Konfiguration

FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
Roverkomponenten und Positionsqualität
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
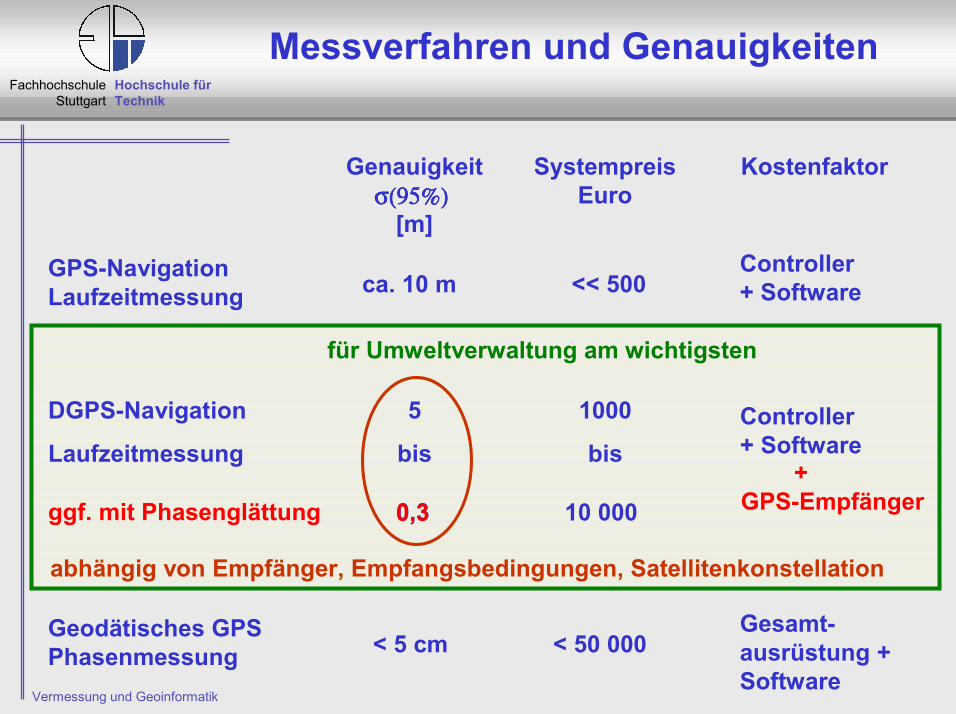
für Umweltverwaltung am wichtigsten
Messverfahren und Genauigkeiten
Genauigkeitσ(95%)σ(95%)σ(95%)σ(95%)=
==
=
[m]
SystempreisEuro
Kostenfaktor
GPS-NavigationLaufzeitmessung ca. 10 m << 500
Controller+ Software
DGPS-Navigation
Laufzeitmessung
5
bis
1000
bisController+ Software
0,3 10 000
Geodätisches GPSPhasenmessung < 50 000
Gesamt-ausrüstung + Software
< 5 cm
abhängig von Empfänger, Empfangsbedingungen, Satellitenkonstellation
ggf. mit Phasenglättung+
GPS-Empfänger0,3
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
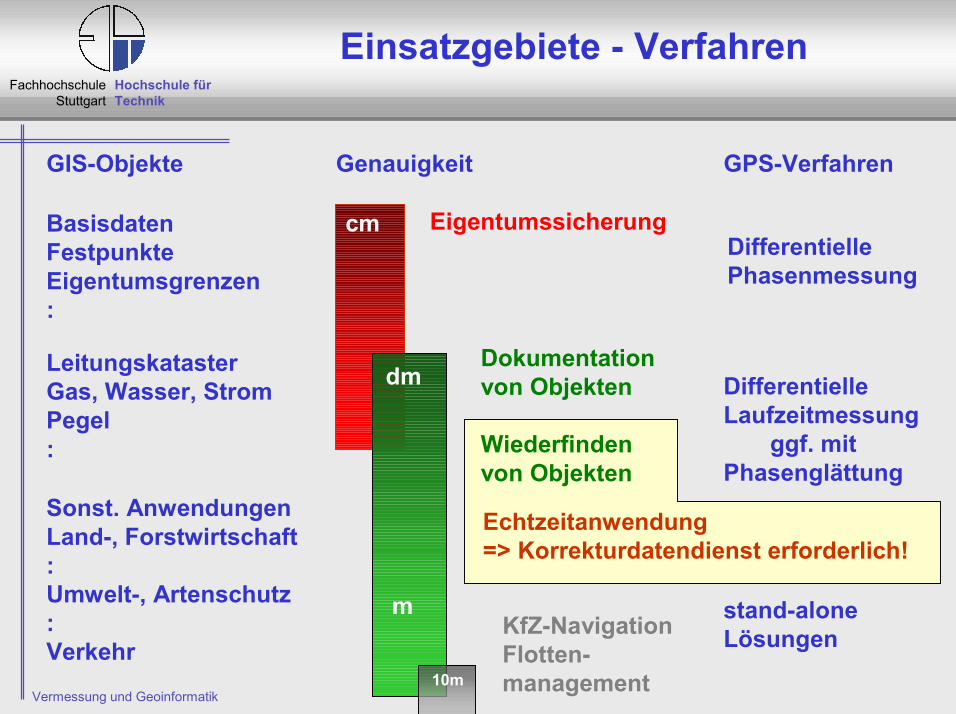
Echtzeitanwendung=> Korrekturdatendienst erforderlich!
Einsatzgebiete - Verfahren
GIS-Objekte
BasisdatenFestpunkteEigentumsgrenzen:
LeitungskatasterGas, Wasser, StromPegel:
Differentielle Phasenmessung
GPS-Verfahren
Sonst. AnwendungenLand-, Forstwirtschaft:Umwelt-, Artenschutz:Verkehr
Differentielle Laufzeitmessung
ggf. mit Phasenglättung
stand-alone Lösungen
Eigentumssicherung
Dokumentation von Objekten
Wiederfinden von Objekten
KfZ-NavigationFlotten-management
Genauigkeit
cm
dm
m
10m
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
Auswahl des GPS-Verfahrens
Feste Objektebei Ersterfassung möglichst genau
• Pegel Höhebetroffenes Grundstück
• Einleiter betroffenes Grundstück
• . . . . .
Spezialisten einschalten oder PDGPS- (DGPS-) Ausrüstung leihen
Wiederfinden ist mit einfachen Gräten möglich.
Sonstige Objekte - Toleranzgrenze bei eigenverantwortlicher Tätigkeit nicht zu hoch setzen sondern an den tatsächlichen Erfordernissen orientieren!
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
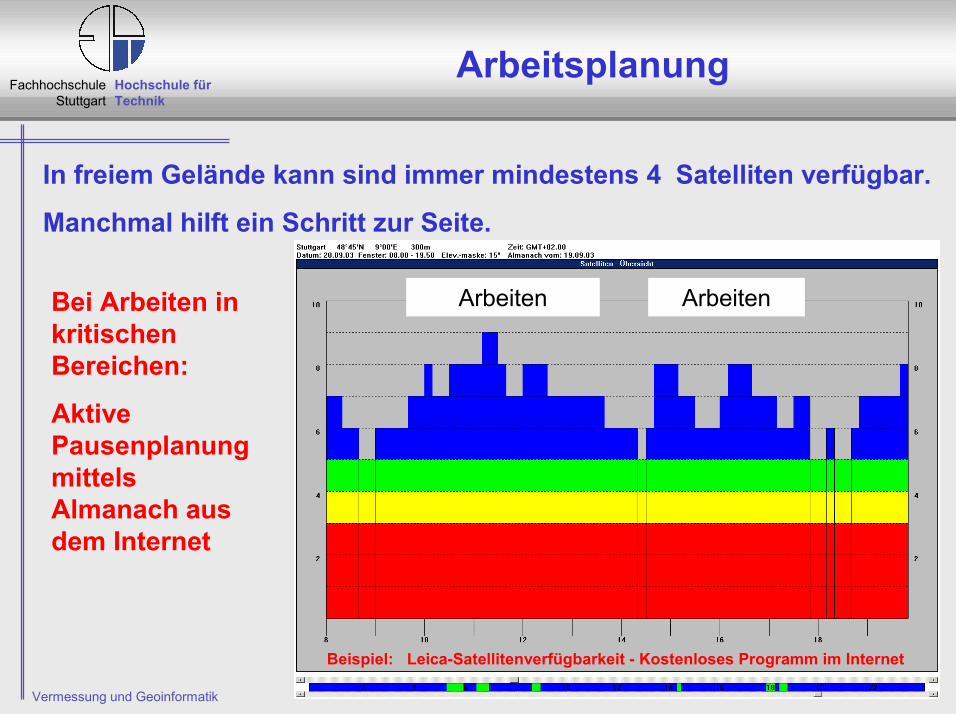
Arbeitsplanung
In freiem Gelände kann sind immer mindestens 4 Satelliten verfügbar.
Manchmal hilft ein Schritt zur Seite.
Bei Arbeiten in kritischen Bereichen:
Aktive Pausenplanungmittels Almanach aus dem Internet
Arbeiten Arbeiten
Beispiel: Leica-Satellitenverfügbarkeit - Kostenloses Programm im Internet
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
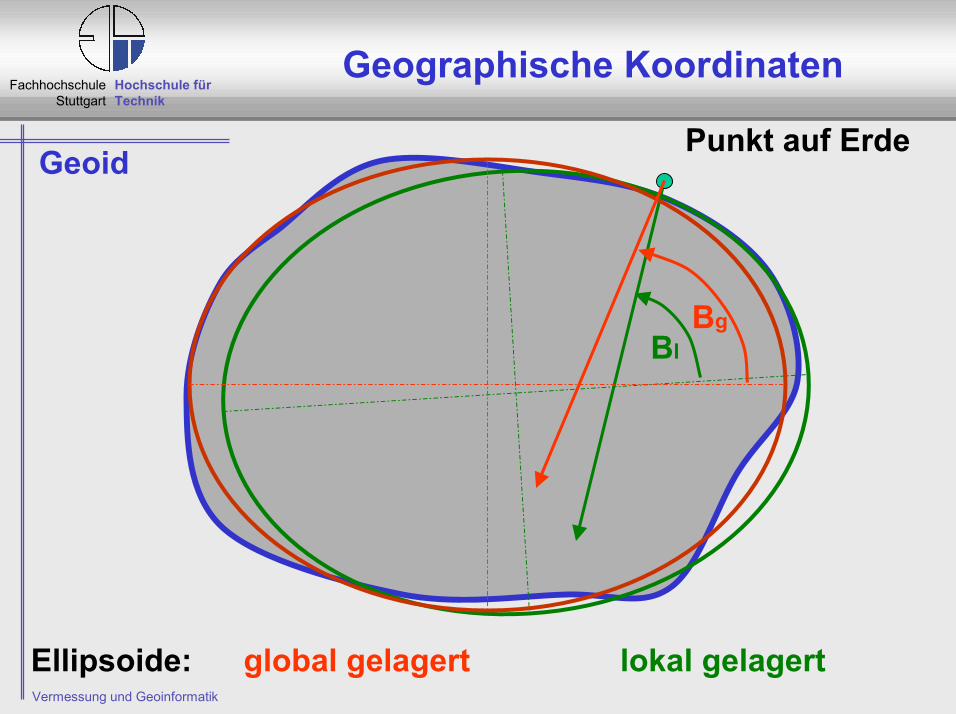
Geographische Koordinaten
Geoid
Ellipsoide:
Punkt auf Erde
lokal gelagert
Bl
global gelagert
Bg
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
3
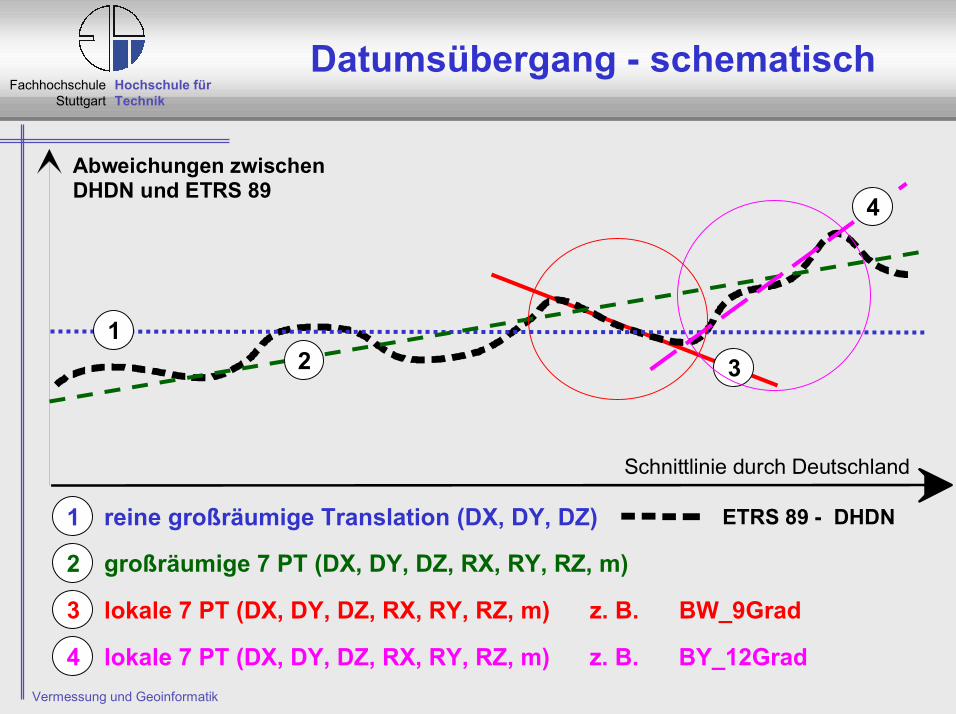
3 lokale 7 PT (DX, DY, DZ, RX, RY, RZ, m) z. B. BW_9Grad
Datumsübergang - schematisch
Abweichungen zwischenDHDN und ETRS 89
ETRS 89 - DHDN
Schnittlinie durch Deutschland
1
1 reine großräumige Translation (DX, DY, DZ)
2
2 großräumige 7 PT (DX, DY, DZ, RX, RY, RZ, m)
4
4 lokale 7 PT (DX, DY, DZ, RX, RY, RZ, m) z. B. BY_12Grad
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
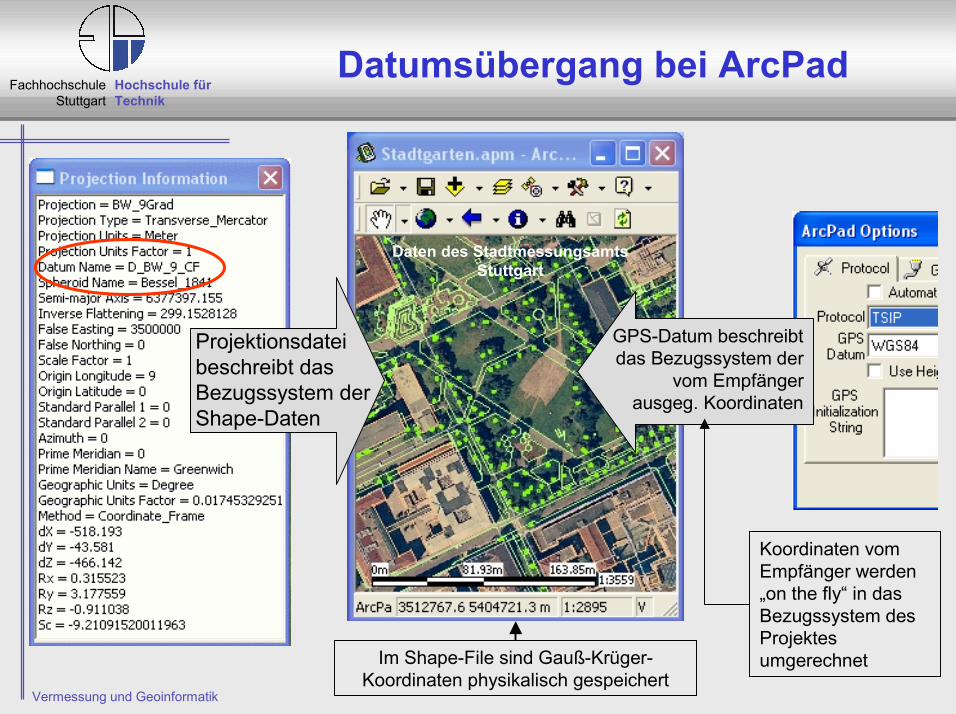
Datumsübergang bei ArcPad
Daten des StadtmessungsamtsStuttgart
Im Shape-File sind Gauß-Krüger-Koordinaten physikalisch gespeichert
Projektionsdatei beschreibt das Bezugssystem der Shape-Daten
Koordinaten vom Empfänger werden „on the fly“ in das Bezugssystem des Projektes umgerechnet
GPS-Datum beschreibt das Bezugssystem der
vom Empfänger ausgeg. Koordinaten
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
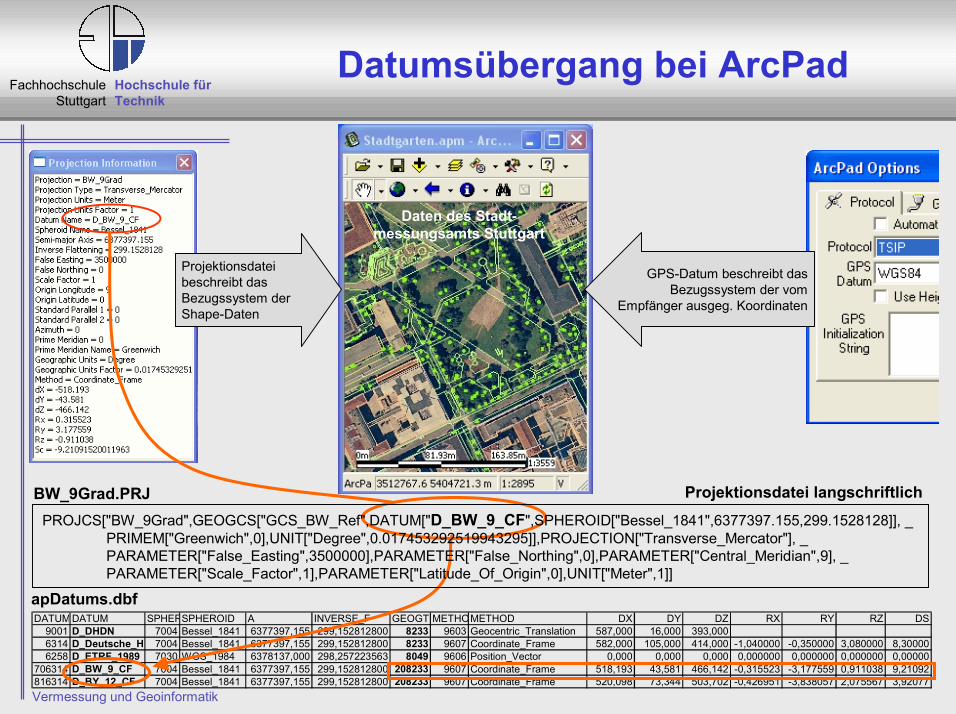
Datumsübergang bei ArcPad
Projektionsdatei beschreibt das Bezugssystem der Shape-Daten
GPS-Datum beschreibt das Bezugssystem der vom
Empfänger ausgeg. Koordinaten
Daten des Stadt-messungsamts Stuttgart
DATUM DATUM SPHERSPHEROID A INVERSE_F GEOGT METHOMETHOD DX DY DZ RX RY RZ DS9001 D_DHDN 7004 Bessel_1841 6377397,155 299,152812800 8233 9603 Geocentric_Translation 587,000 16,000 393,0006314 D_Deutsche_Ha 7004 Bessel_1841 6377397,155 299,152812800 8233 9607 Coordinate_Frame 582,000 105,000 414,000 -1,040000 -0,350000 3,080000 8,300006258 D_ETRF_1989 7030 WGS_1984 6378137,000 298,257223563 8049 9606 Position_Vector 0,000 0,000 0,000 0,000000 0,000000 0,000000 0,00000
706314 D_BW_9_CF 7004 Bessel_1841 6377397,155 299,152812800 208233 9607 Coordinate_Frame 518,193 43,581 466,142 -0,315523 -3,177559 0,911038 9,21092816314 D_BY_12_CF 7004 Bessel_1841 6377397,155 299,152812800 208233 9607 Coordinate_Frame 520,098 73,344 503,702 -0,426951 -3,838057 2,075567 3,92077
apDatums.dbf
PROJCS["BW_9Grad",GEOGCS["GCS_BW_Ref",DATUM["D_BW_9_CF",SPHEROID["Bessel_1841",6377397.155,299.1528128]], _ PRIMEM["Greenwich",0],UNIT["Degree",0.017453292519943295]],PROJECTION["Transverse_Mercator"], _ PARAMETER["False_Easting",3500000],PARAMETER["False_Northing",0],PARAMETER["Central_Meridian",9], _PARAMETER["Scale_Factor",1],PARAMETER["Latitude_Of_Origin",0],UNIT["Meter",1]]
BW_9Grad.PRJ Projektionsdatei langschriftlich
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
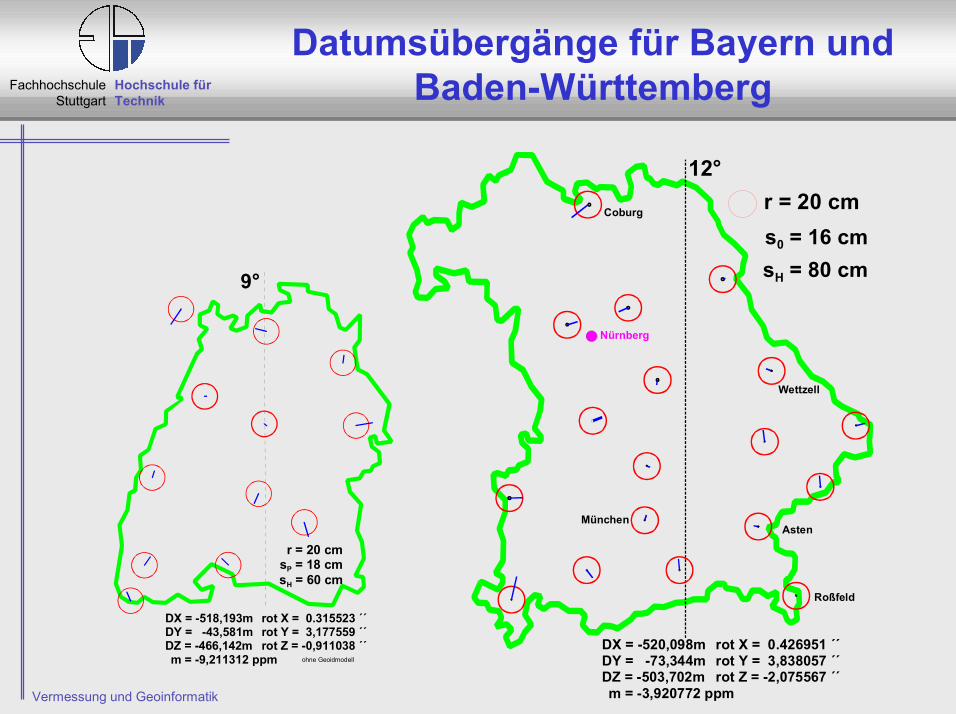
Datumsübergänge für Bayern und Baden-Württemberg
9°
ohne Geoidmodell
DX = -518,193mDY = -43,581mDZ = -466,142m
rot X = 0.315523 ´´rot Y = 3,177559 ´´rot Z = -0,911038 ´´
m = -9,211312 ppm
sP = 18 cmr = 20 cm
sH = 60 cm
DX = -520,098mDY = -73,344mDZ = -503,702m
rot X = 0.426951 ´´rot Y = 3,838057 ´´rot Z = -2,075567 ´´
m = -3,920772 ppm
r = 20 cms0 = 16 cmsH = 80 cm
12°
Coburg
Wettzell
Asten
Roßfeld
München
Nürnberg
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
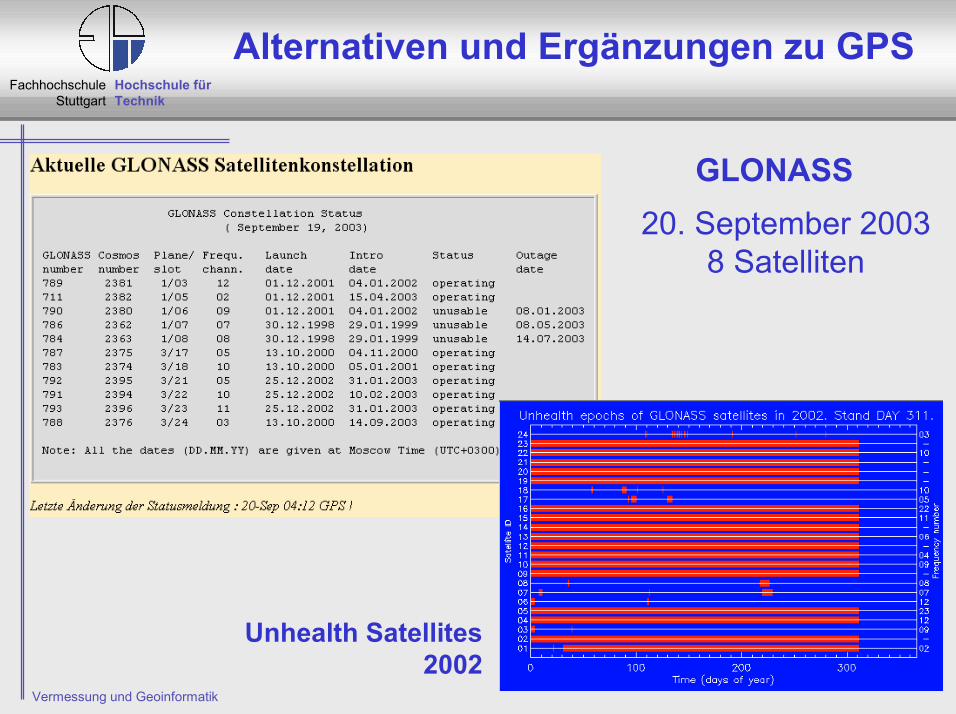
Alternativen und Ergänzungen zu GPS
GLONASS
Unhealth Satellites2002
20. September 2003 8 Satelliten
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
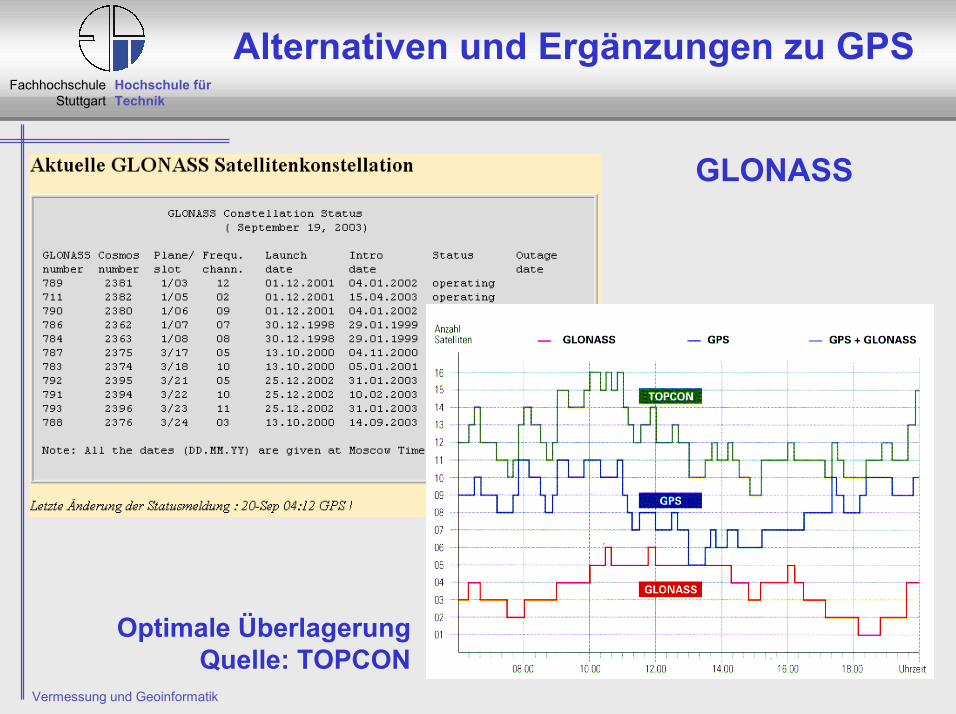
Alternativen und Ergänzungen zu GPS
GLONASS
Optimale ÜberlagerungQuelle: TOPCON
FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
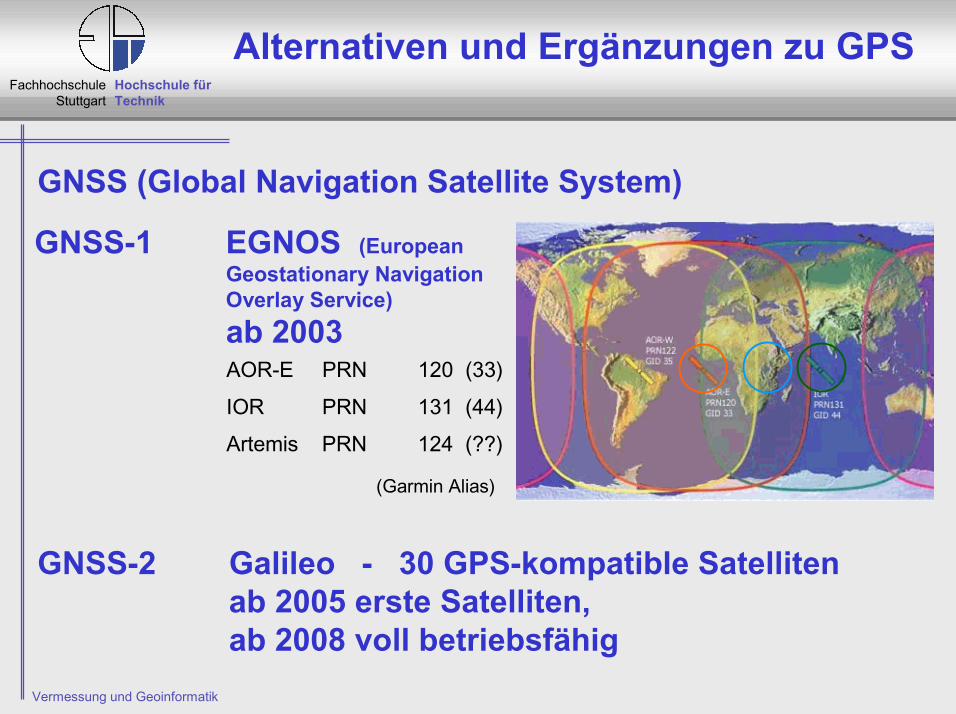
Alternativen und Ergänzungen zu GPS
GNSS-1 EGNOS (European Geostationary Navigation Overlay Service)ab 2003
GNSS (Global Navigation Satellite System)
GNSS-2 Galileo - 30 GPS-kompatible Satelliten ab 2005 erste Satelliten,ab 2008 voll betriebsfähig
AOR-E PRN 120 (33)
IOR PRN 131 (44)
Artemis PRN 124 (??)
(Garmin Alias)

FachhochschuleStuttgart
Hochschule fürTechnik
Vermessung und Geoinformatik
Literatur – eine Auswahl von URLs
http://gibs.leipzig.ifag.de
www.allnav.ch/wgps.htm
http://home.t-online.de/home/bgalitzki/
www.lv-bw.de/lvshop2/ProduktInfo/sapos/sapos_allg.htm
http://www.sapos.de
http://ascos.ruhrgas.de/
http://europa.eu.int/comm/energy_transport/en/gal_en.html
Danke für´s Zuhören
Fragen zu einem GPS-Intensiv-Seminar im Teilnehmerverzeichnis