Embed Size (px)
Citation preview
Handbuch
PLC Lib: Tc2_Math
TwinCAT 3
1.012.04.2016
Version:Datum:

Inhaltsverzeichnis
Inhaltsverzeichnis1 Vorwort ....................................................................................................................................................... 4
1.1 Hinweise zur Dokumentation ............................................................................................................ 41.2 Sicherheitshinweise .......................................................................................................................... 5
2 Übersicht .................................................................................................................................................... 6
3 Funktionen ................................................................................................................................................. 83.1 FLOOR ............................................................................................................................................. 83.2 FRAC ................................................................................................................................................ 93.3 LMOD ............................................................................................................................................... 93.4 LTRUNC ......................................................................................................................................... 103.5 MODABS ........................................................................................................................................ 113.6 MODTURNS ................................................................................................................................... 12
4 [veraltete Funktionen] ............................................................................................................................. 144.1 F_GetVersionTcMath...................................................................................................................... 14
5 Globale Konstanten................................................................................................................................. 155.1 Bibliotheksversion........................................................................................................................... 15
PLC Lib: Tc2_Math 3Version: 1.0
Vorwort
1 Vorwort
1.1 Hinweise zur DokumentationDiese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs- undAutomatisierungstechnik, das mit den geltenden nationalen Normen vertraut ist.Zur Installation und Inbetriebnahme der Komponenten ist die Beachtung der nachfolgenden Hinweise undErklärungen unbedingt notwendig.
Das Fachpersonal hat sicherzustellen, dass die Anwendung bzw. der Einsatz der beschriebenen Produktealle Sicherheitsanforderungen, einschließlich sämtlicher anwendbaren Gesetze, Vorschriften, Bestimmungenund Normen erfüllt.
DisclaimerDiese Dokumentation wurde sorgfältig erstellt. Die beschriebenen Produkte werden jedoch ständig weiterentwickelt.Deshalb ist die Dokumentation nicht in jedem Fall vollständig auf die Übereinstimmung mit denbeschriebenen Leistungsdaten, Normen oder sonstigen Merkmalen geprüft.Falls sie technische oder redaktionelle Fehler enthält, behalten wir uns das Recht vor, Änderungen jederzeitund ohne Ankündigung vorzunehmen.Aus den Angaben, Abbildungen und Beschreibungen in dieser Dokumentation können keine Ansprüche aufÄnderung bereits gelieferter Produkte geltend gemacht werden.
MarkenBeckhoff®, TwinCAT®, EtherCAT®, Safety over EtherCAT®, TwinSAFE®, XFC®und XTS® sind eingetrageneund lizenzierte Marken der Beckhoff Automation GmbH.Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kannzu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen.
PatenteDie EtherCAT Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen undPatente:EP1590927, EP1789857, DE102004044764, DE102007017835mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern.
Die TwinCAT Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen undPatente:EP0851348, US6167425 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenenanderen Ländern.
EtherCAT® ist eine eingetragene Marke und patentierte Technologie lizensiert durch die BeckhoffAutomation GmbH, Deutschland
Copyright© Beckhoff Automation GmbH & Co. KG, Deutschland.Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sindverboten, soweit nicht ausdrücklich gestattet.Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmuster-oder Geschmacksmustereintragung vorbehalten.
PLC Lib: Tc2_Math4 Version: 1.0
Vorwort
1.2 Sicherheitshinweise
SicherheitsbestimmungenBeachten Sie die folgenden Sicherheitshinweise und Erklärungen!Produktspezifische Sicherheitshinweise finden Sie auf den folgenden Seiten oder in den Bereichen Montage,Verdrahtung, Inbetriebnahme usw.
HaftungsausschlussDie gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software-Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über diedokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss derBeckhoff Automation GmbH & Co. KG.
Qualifikation des PersonalsDiese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-,Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist.
Erklärung der SymboleIn der vorliegenden Dokumentation werden die folgenden Symbole mit einem nebenstehendenSicherheitshinweis oder Hinweistext verwendet. Die Sicherheitshinweise sind aufmerksam zu lesen undunbedingt zu befolgen!
GEFAHR
Akute Verletzungsgefahr!Wenn der Sicherheitshinweis neben diesem Symbol nicht beachtet wird, besteht unmittel-bare Gefahr für Leben und Gesundheit von Personen!
WARNUNG
Verletzungsgefahr!Wenn der Sicherheitshinweis neben diesem Symbol nicht beachtet wird, besteht Gefahr fürLeben und Gesundheit von Personen!
VORSICHT
Schädigung von Personen!Wenn der Sicherheitshinweis neben diesem Symbol nicht beachtet wird, können Personengeschädigt werden!
Achtung
Schädigung von Umwelt oder GerätenWenn der Hinweis neben diesem Symbol nicht beachtet wird, können Umwelt oder Gerätegeschädigt werden.
Hinweis
Tipp oder FingerzeigDieses Symbol kennzeichnet Informationen, die zum besseren Verständnis beitragen.
PLC Lib: Tc2_Math 5Version: 1.0
Übersicht
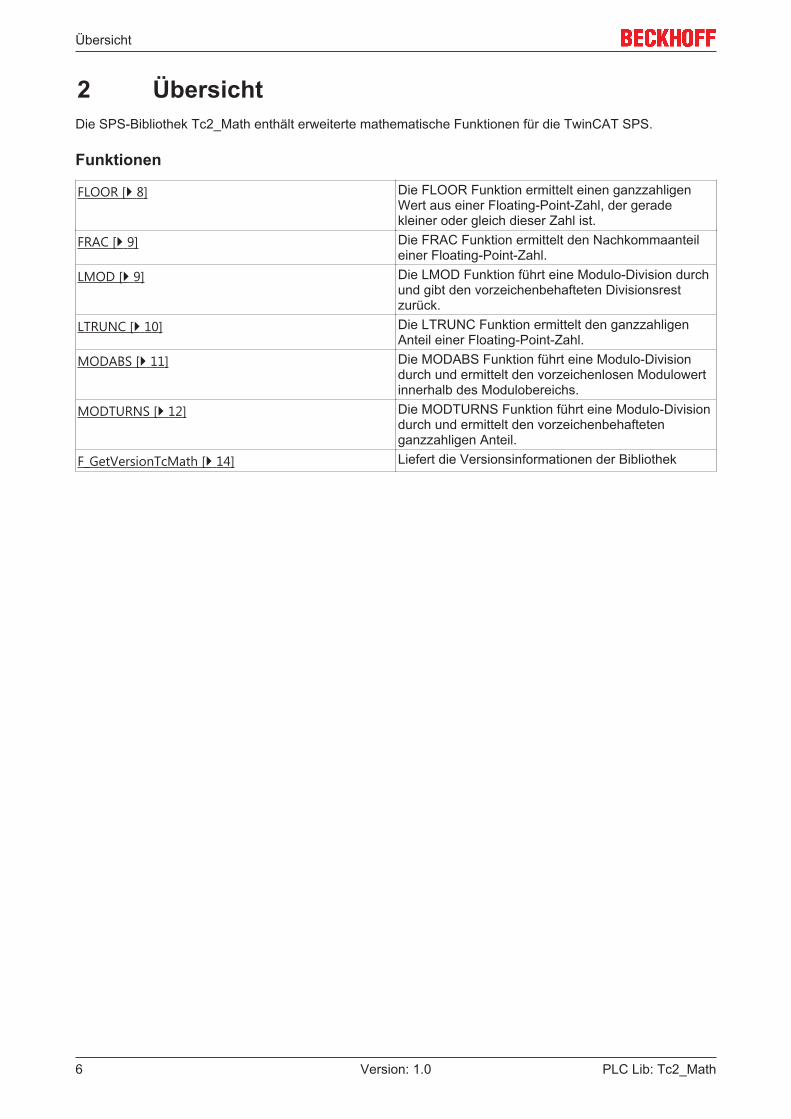
2 ÜbersichtDie SPS-Bibliothek Tc2_Math enthält erweiterte mathematische Funktionen für die TwinCAT SPS.
Funktionen
FLOOR [} 8] Die FLOOR Funktion ermittelt einen ganzzahligenWert aus einer Floating-Point-Zahl, der geradekleiner oder gleich dieser Zahl ist.
FRAC [} 9] Die FRAC Funktion ermittelt den Nachkommaanteileiner Floating-Point-Zahl.
LMOD [} 9] Die LMOD Funktion führt eine Modulo-Division durchund gibt den vorzeichenbehafteten Divisionsrestzurück.
LTRUNC [} 10] Die LTRUNC Funktion ermittelt den ganzzahligenAnteil einer Floating-Point-Zahl.
MODABS [} 11] Die MODABS Funktion führt eine Modulo-Divisiondurch und ermittelt den vorzeichenlosen Modulowertinnerhalb des Modulobereichs.
MODTURNS [} 12] Die MODTURNS Funktion führt eine Modulo-Divisiondurch und ermittelt den vorzeichenbehaftetenganzzahligen Anteil.
F_GetVersionTcMath [} 14] Liefert die Versionsinformationen der Bibliothek
PLC Lib: Tc2_Math6 Version: 1.0
Übersicht
PLC Lib: Tc2_Math 7Version: 1.0
Funktionen
3 Funktionen
3.1 FLOOR
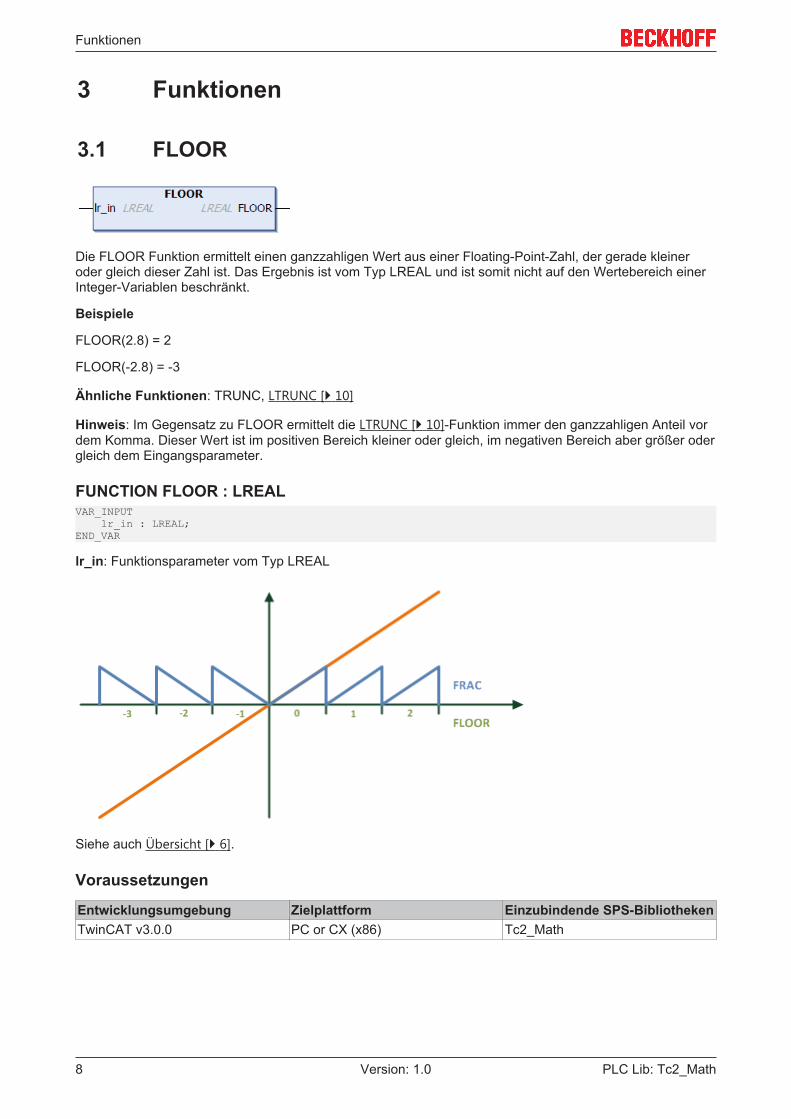
Die FLOOR Funktion ermittelt einen ganzzahligen Wert aus einer Floating-Point-Zahl, der gerade kleineroder gleich dieser Zahl ist. Das Ergebnis ist vom Typ LREAL und ist somit nicht auf den Wertebereich einerInteger-Variablen beschränkt.
Beispiele
FLOOR(2.8) = 2
FLOOR(-2.8) = -3
Ähnliche Funktionen: TRUNC, LTRUNC [} 10]
Hinweis: Im Gegensatz zu FLOOR ermittelt die LTRUNC [} 10]-Funktion immer den ganzzahligen Anteil vordem Komma. Dieser Wert ist im positiven Bereich kleiner oder gleich, im negativen Bereich aber größer odergleich dem Eingangsparameter.
FUNCTION FLOOR : LREALVAR_INPUT lr_in : LREAL;END_VAR
lr_in: Funktionsparameter vom Typ LREAL
Siehe auch Übersicht [} 6].
Voraussetzungen
Entwicklungsumgebung Zielplattform Einzubindende SPS-BibliothekenTwinCAT v3.0.0 PC or CX (x86) Tc2_Math
PLC Lib: Tc2_Math8 Version: 1.0
Funktionen
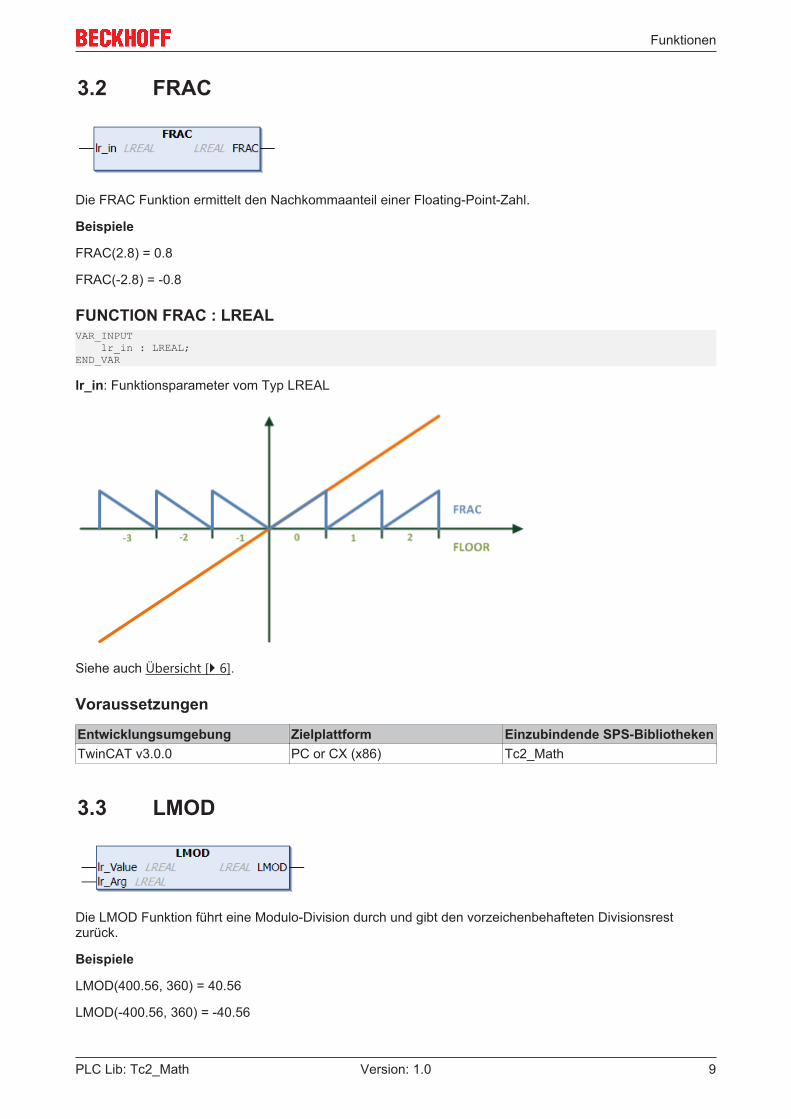
3.2 FRAC
Die FRAC Funktion ermittelt den Nachkommaanteil einer Floating-Point-Zahl.
Beispiele
FRAC(2.8) = 0.8
FRAC(-2.8) = -0.8
FUNCTION FRAC : LREALVAR_INPUT lr_in : LREAL;END_VAR
lr_in: Funktionsparameter vom Typ LREAL
Siehe auch Übersicht [} 6].
Voraussetzungen
Entwicklungsumgebung Zielplattform Einzubindende SPS-BibliothekenTwinCAT v3.0.0 PC or CX (x86) Tc2_Math
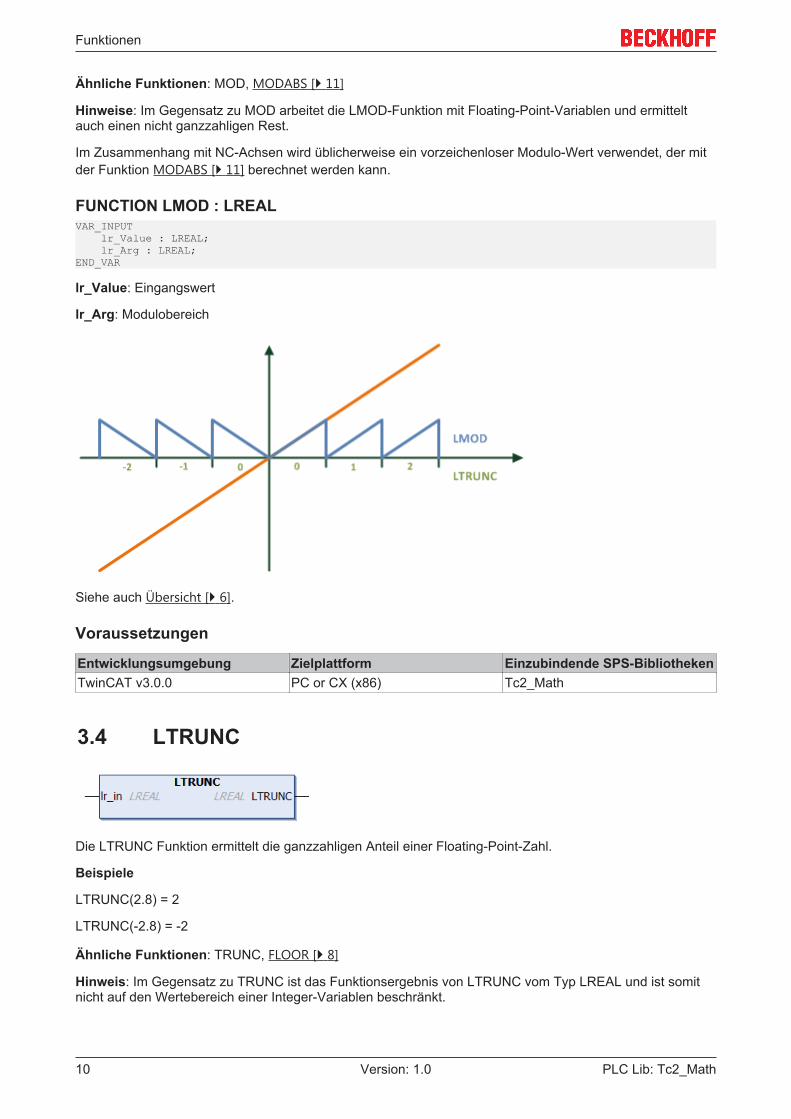
3.3 LMOD
Die LMOD Funktion führt eine Modulo-Division durch und gibt den vorzeichenbehafteten Divisionsrestzurück.
Beispiele
LMOD(400.56, 360) = 40.56
LMOD(-400.56, 360) = -40.56
PLC Lib: Tc2_Math 9Version: 1.0
Funktionen
Ähnliche Funktionen: MOD, MODABS [} 11]
Hinweise: Im Gegensatz zu MOD arbeitet die LMOD-Funktion mit Floating-Point-Variablen und ermitteltauch einen nicht ganzzahligen Rest.
Im Zusammenhang mit NC-Achsen wird üblicherweise ein vorzeichenloser Modulo-Wert verwendet, der mitder Funktion MODABS [} 11] berechnet werden kann.
FUNCTION LMOD : LREALVAR_INPUT lr_Value : LREAL; lr_Arg : LREAL;END_VAR
lr_Value: Eingangswert
lr_Arg: Modulobereich
Siehe auch Übersicht [} 6].
Voraussetzungen
Entwicklungsumgebung Zielplattform Einzubindende SPS-BibliothekenTwinCAT v3.0.0 PC or CX (x86) Tc2_Math
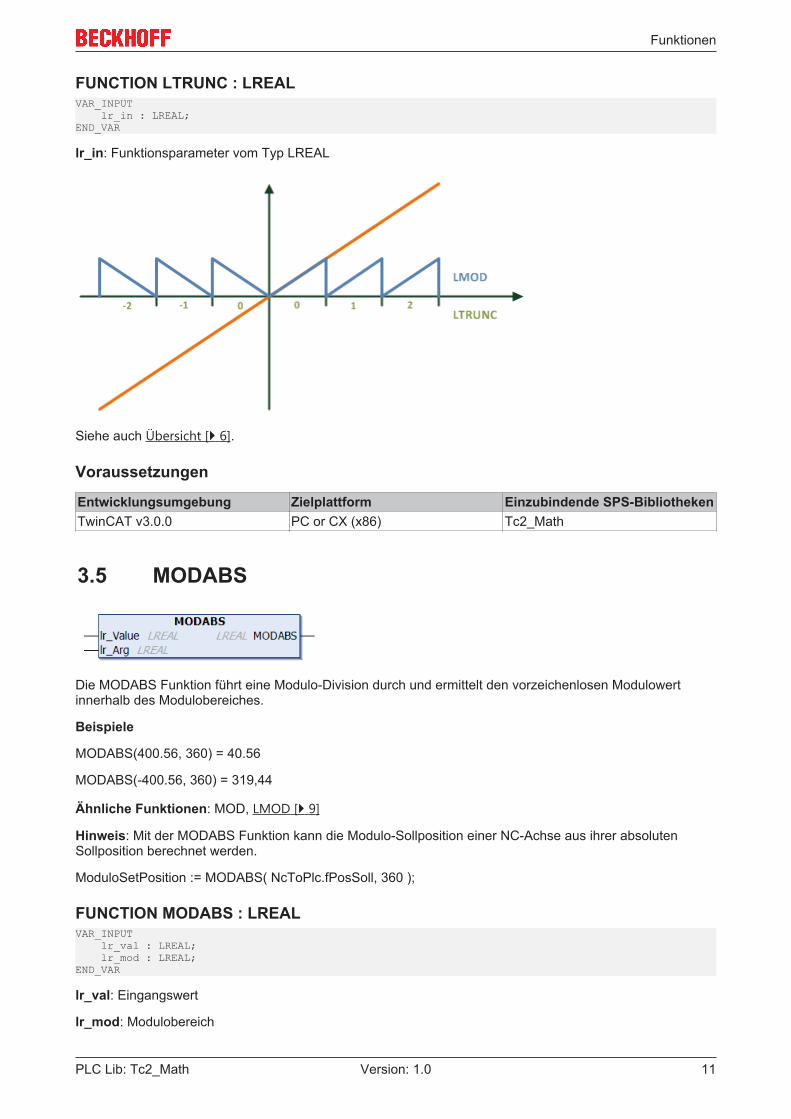
3.4 LTRUNC
Die LTRUNC Funktion ermittelt die ganzzahligen Anteil einer Floating-Point-Zahl.
Beispiele
LTRUNC(2.8) = 2
LTRUNC(-2.8) = -2
Ähnliche Funktionen: TRUNC, FLOOR [} 8]
Hinweis: Im Gegensatz zu TRUNC ist das Funktionsergebnis von LTRUNC vom Typ LREAL und ist somitnicht auf den Wertebereich einer Integer-Variablen beschränkt.
PLC Lib: Tc2_Math10 Version: 1.0
Funktionen
FUNCTION LTRUNC : LREALVAR_INPUT lr_in : LREAL;END_VAR
lr_in: Funktionsparameter vom Typ LREAL
Siehe auch Übersicht [} 6].
Voraussetzungen
Entwicklungsumgebung Zielplattform Einzubindende SPS-BibliothekenTwinCAT v3.0.0 PC or CX (x86) Tc2_Math
3.5 MODABS
Die MODABS Funktion führt eine Modulo-Division durch und ermittelt den vorzeichenlosen Modulowertinnerhalb des Modulobereiches.
Beispiele
MODABS(400.56, 360) = 40.56
MODABS(-400.56, 360) = 319,44
Ähnliche Funktionen: MOD, LMOD [} 9]
Hinweis: Mit der MODABS Funktion kann die Modulo-Sollposition einer NC-Achse aus ihrer absolutenSollposition berechnet werden.
ModuloSetPosition := MODABS( NcToPlc.fPosSoll, 360 );
FUNCTION MODABS : LREALVAR_INPUT lr_val : LREAL; lr_mod : LREAL;END_VAR
lr_val: Eingangswert
lr_mod: Modulobereich
PLC Lib: Tc2_Math 11Version: 1.0
Funktionen
Siehe auch Übersicht [} 6].
Voraussetzungen
Entwicklungsumgebung Zielplattform Einzubindende SPS-BibliothekenTwinCAT v3.0.0 PC or CX (x86) Tc2_Math
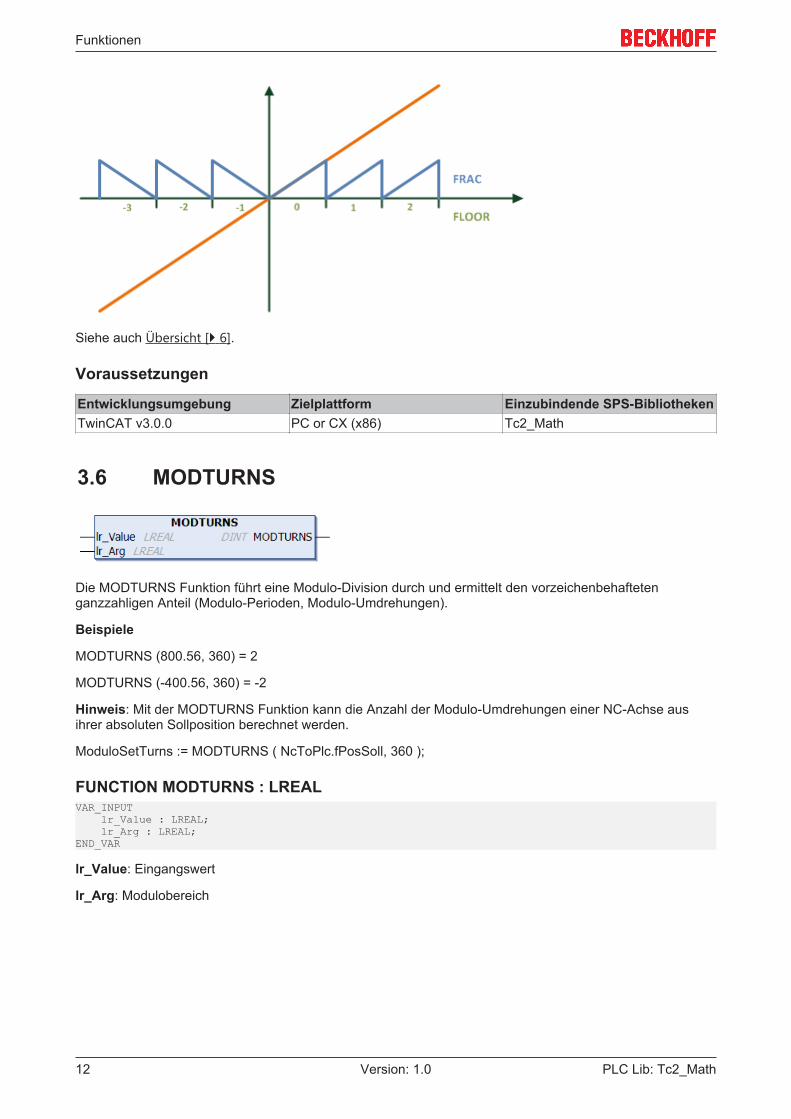
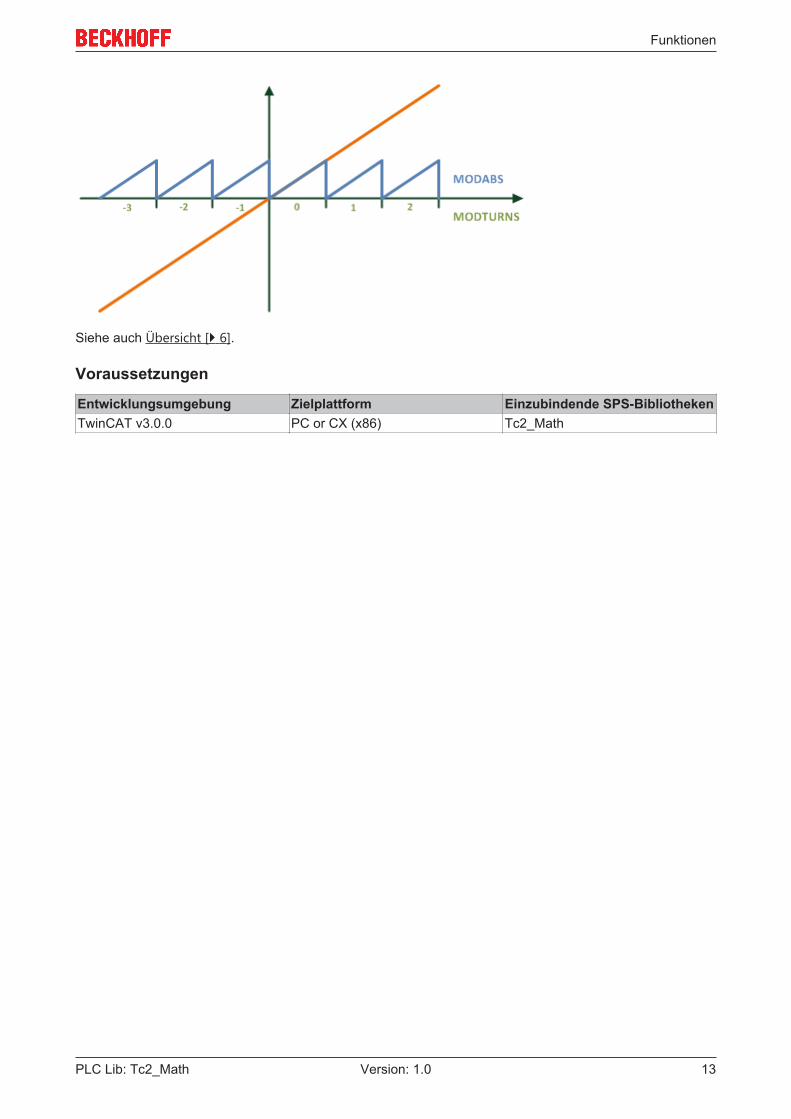
3.6 MODTURNS
Die MODTURNS Funktion führt eine Modulo-Division durch und ermittelt den vorzeichenbehaftetenganzzahligen Anteil (Modulo-Perioden, Modulo-Umdrehungen).
Beispiele
MODTURNS (800.56, 360) = 2
MODTURNS (-400.56, 360) = -2
Hinweis: Mit der MODTURNS Funktion kann die Anzahl der Modulo-Umdrehungen einer NC-Achse ausihrer absoluten Sollposition berechnet werden.
ModuloSetTurns := MODTURNS ( NcToPlc.fPosSoll, 360 );
FUNCTION MODTURNS : LREALVAR_INPUT lr_Value : LREAL; lr_Arg : LREAL;END_VAR
lr_Value: Eingangswert
lr_Arg: Modulobereich
PLC Lib: Tc2_Math12 Version: 1.0
Funktionen
Siehe auch Übersicht [} 6].
Voraussetzungen
Entwicklungsumgebung Zielplattform Einzubindende SPS-BibliothekenTwinCAT v3.0.0 PC or CX (x86) Tc2_Math
PLC Lib: Tc2_Math 13Version: 1.0
[veraltete Funktionen]
4 [veraltete Funktionen]
4.1 F_GetVersionTcMath
Mit dieser Funktion können Versionsinformationen der SPS-Bibliothek ausgelesen werden.
FUNCTION F_GetVersionTcMath : UINTVAR_INPUT nVersionElement : INT;END_VAR
nVersionElement : Versionselement, das gelesen werden soll. Mögliche Parameter:
• 1 : major number;• 2 : minor number;• 3 : revision number;
Voraussetzungen
Entwicklungsumgebung Zielplattform Einzubindende SPS-BibliothekenTwinCAT v3.0.0 PC or CX (x86) Tc2_Math
PLC Lib: Tc2_Math14 Version: 1.0

Globale Konstanten
5 Globale Konstanten
5.1 BibliotheksversionAlle Bibliotheken haben eine bestimmte Version. Diese Version ist u. a. im SPS-Bibliotheks-Repository zusehen. Eine globale Konstante enthält die Information über die Bibliotheksversion:VAR_GLOBAL CONSTANT stLibVersion_Tc2_Math : ST_LibVersion;END_VAR
Um zu sehen, ob die Version, die Sie haben auch die Version ist, die Sie brauchen, benutzen Sie dieFunktion F_CmpLibVersion (definiert in Tc2_System).
Hinweis: Alle anderen Möglichkeiten Bibliotheksversionen zu vergleichen, die Sie von TwinCAT 2 kennen,sind veraltet!
PLC Lib: Tc2_Math 15Version: 1.0