Embed Size (px)
Citation preview
Die homogene Differentialgleichung
Lösungsverfahren zu ganz einfachen Differentialgleichungen
Jetzt, da wir eine Teilmenge der möglichen Probleme und die dazugehörigen Lösungen kennen, wird
es uns einfacher fallen, die allgemeinen Lösungsverfahren für unbekannte Probleme zu verstehen
und anzuwenden.
Als ganz einfache DGLn definieren wir dabei:
Ganz einfache Differentialgleichungen sind solche, bei denen neben 𝒚 und 𝒚′
auch noch genau eine Funktion 𝒖(𝒙) mit diesen durch Multiplikation verknüpft ist
Gemäß der Klassifikation von DGLn wären dies Gewöhnliche, Homogene, Lineare DGLn I. Ordnung.
Welche Gestalt haben diese Gleichungen?
Wir schrieben sie in expliziter Form als: 𝒚′ = 𝒚 ∗ 𝒖(𝒙), die implizite Form wäre: 𝒚′ ± 𝒚 ∗ 𝒖(𝒙) = 𝟎
Die DGL heißt homogen, weil außer der mit 𝒚 verbundenen Funktion 𝒖(𝒙) keine weitere Funktion
𝒔(𝒙) in der Gleichung vorhanden ist, wie in 𝒚′ = 𝒚 ∗ 𝒖(𝒙) + 𝒔(𝒙) bzw. 𝒚′ + 𝒚 ∗ 𝒖(𝒙) = 𝒔(𝒙).
Eine solche Funktion würde uns stören, man nennt sie deswegen auch Störfunktion.
Die DGL wäre dann inhomogen.
Eine homogene DGL besitzt keine Störfunktionen, ansonsten wäre sie inhomogen
Solche DGLn besitzen die grundsätzliche Lösung 𝒚 = 𝒄𝟏 ∗ 𝒆𝑳(𝒙) mit einer noch unbekannten
Lösungsfunktion 𝑳(𝒙), die wir zur Lösung der DGL eben herauszufinden haben.
Der Weg zur Ermittlung der unbekannten Funktion 𝑳(𝒙) , also zur Lösung solcher DGLn nennt sich:
Methode der Trennung der Variablen
Sie ist grundlegend wichtig, deswegen werden wir sie auf der nächsten Seite ausführlich herleiten.
Beginnen wir mit der einfachsten Form, wenn nämlich einer der Partner in der DGL mit einer
Konstanten multipliziert wird: 𝒚′ = 𝒚 ∗ 𝒏 (𝒏 ∈ 𝑹).
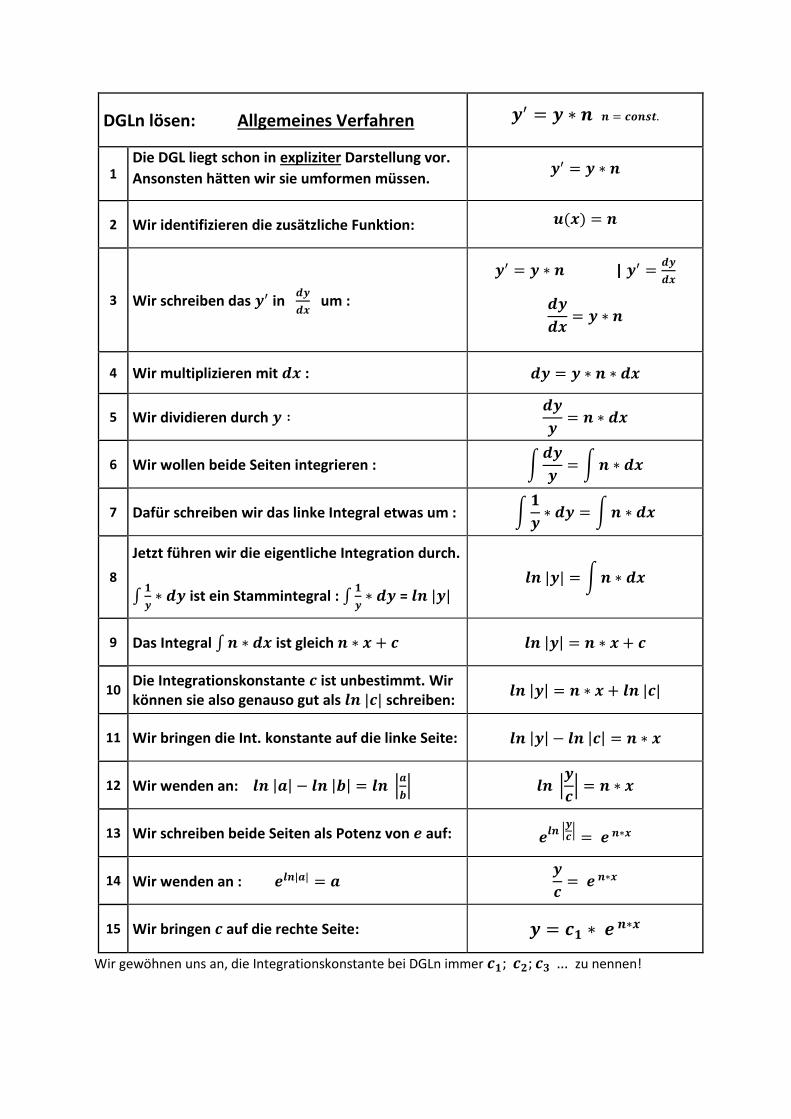
DGLn lösen: Allgemeines Verfahren 𝒚′ = 𝒚 ∗ 𝒏 𝒏 = 𝒄𝒐𝒏𝒔𝒕.
1 Die DGL liegt schon in expliziter Darstellung vor.
Ansonsten hätten wir sie umformen müssen. 𝒚′ = 𝒚 ∗ 𝒏
2 Wir identifizieren die zusätzliche Funktion: 𝒖(𝒙) = 𝒏
3 Wir schreiben das 𝒚′ in 𝒅𝒚
𝒅𝒙 um :
𝒚′ = 𝒚 ∗ 𝒏 | 𝒚′ =𝒅𝒚
𝒅𝒙
𝒅𝒚
𝒅𝒙= 𝒚 ∗ 𝒏
4 Wir multiplizieren mit 𝒅𝒙 : 𝒅𝒚 = 𝒚 ∗ 𝒏 ∗ 𝒅𝒙
5 Wir dividieren durch 𝒚 ∶ 𝒅𝒚
𝒚= 𝒏 ∗ 𝒅𝒙
6 Wir wollen beide Seiten integrieren : ∫𝒅𝒚
𝒚= ∫𝒏 ∗ 𝒅𝒙
7 Dafür schreiben wir das linke Integral etwas um : ∫𝟏
𝒚∗ 𝒅𝒚 = ∫𝒏 ∗ 𝒅𝒙
8
Jetzt führen wir die eigentliche Integration durch.
∫𝟏
𝒚∗ 𝒅𝒚 ist ein Stammintegral : ∫
𝟏
𝒚∗ 𝒅𝒚 = 𝒍𝒏 |𝒚|
𝒍𝒏 |𝒚| = ∫𝒏 ∗ 𝒅𝒙
9 Das Integral ∫𝒏 ∗ 𝒅𝒙 ist gleich 𝒏 ∗ 𝒙 + 𝒄 𝒍𝒏 |𝒚| = 𝒏 ∗ 𝒙 + 𝒄
10 Die Integrationskonstante 𝒄 ist unbestimmt. Wir können sie also genauso gut als 𝒍𝒏 |𝒄| schreiben:
𝒍𝒏 |𝒚| = 𝒏 ∗ 𝒙 + 𝒍𝒏 |𝒄|
11 Wir bringen die Int. konstante auf die linke Seite: 𝒍𝒏 |𝒚| − 𝒍𝒏 |𝒄| = 𝒏 ∗ 𝒙
12 Wir wenden an: 𝒍𝒏 |𝒂| − 𝒍𝒏 |𝒃| = 𝒍𝒏 |𝒂
𝒃| 𝒍𝒏 |
𝒚
𝒄| = 𝒏 ∗ 𝒙
13 Wir schreiben beide Seiten als Potenz von 𝒆 auf: 𝒆𝒍𝒏 |𝒚𝒄| = 𝒆 𝒏∗𝒙
14 Wir wenden an : 𝒆𝒍𝒏|𝒂| = 𝒂 𝒚
𝒄= 𝒆 𝒏∗𝒙
15 Wir bringen 𝒄 auf die rechte Seite: 𝒚 = 𝒄𝟏 ∗ 𝒆 𝒏∗𝒙
Wir gewöhnen uns an, die Integrationskonstante bei DGLn immer 𝒄𝟏; 𝒄𝟐; 𝒄𝟑 … zu nennen!
Anwendungen der Differentialgleichungen III.
Lineare, inhomogene Differentialgleichungen I. Ordnung
Das Wachstumsmodell des beschränkten Wachstums befriedigt nicht in allen Fällen. Die
Wachstumsgeschwindigkeit ist am Anfang sehr hoch und wird dann stetig kleiner. Es wird bei den
meisten realen Wachstumsprozessen wohl eher so sein, dass das Wachstum zu Beginn (ohne eine
Hemmung) exponentiell stattfindet, dann die Hemmung doch eine Wirkung zeigt und das Wachstum
dann in ein beschränktes übergeht.
Man kann beide Modelle miteinander verbinden. Anfangs soll das Wachstum exponentiell sein und
dann allmählich in ein beschränktes Wachstum übergehen.
Dazu verbinden wir die beiden Prozesse 𝑦′ = 𝑘 ∗ 𝑦 (exponentielles Wachstum) und 𝑦′ = 𝑘 ∗ (𝑆 − 𝑦)
(beschränktes Wachstum) miteinander zu:
𝒚′ = 𝒌 ∗ 𝒚 ∗ (𝑺 − 𝒚)
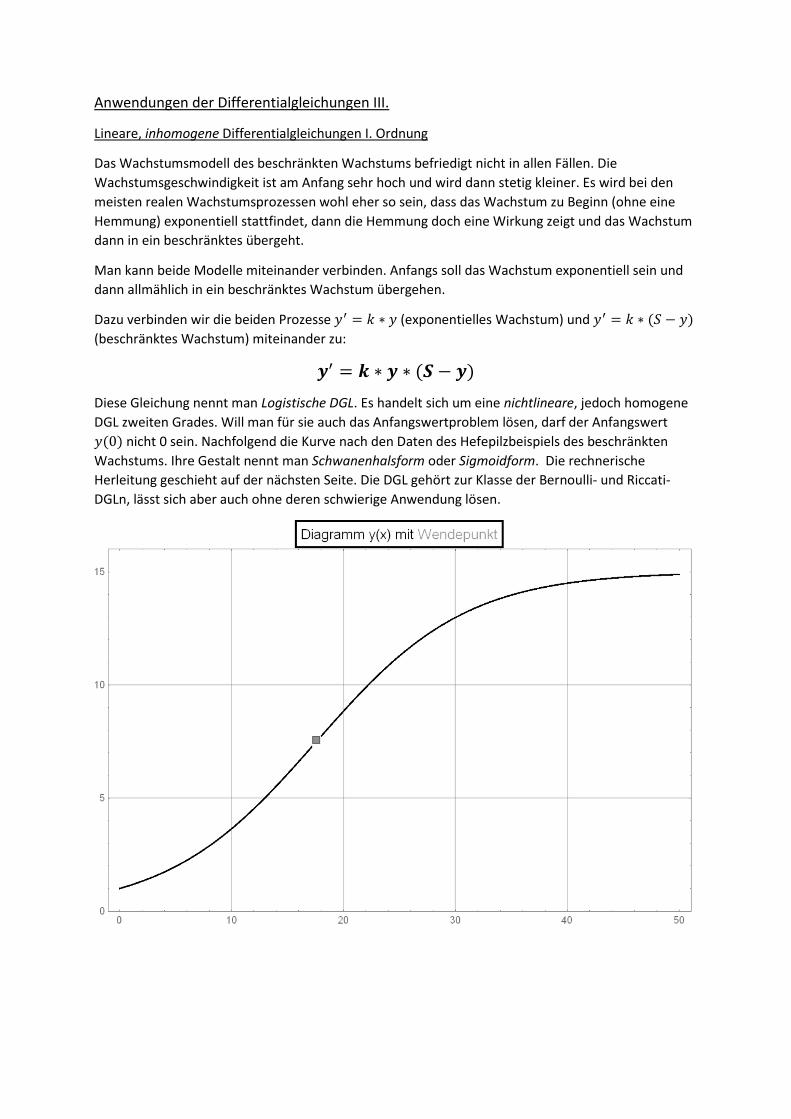
Diese Gleichung nennt man Logistische DGL. Es handelt sich um eine nichtlineare, jedoch homogene
DGL zweiten Grades. Will man für sie auch das Anfangswertproblem lösen, darf der Anfangswert
𝑦(0) nicht 0 sein. Nachfolgend die Kurve nach den Daten des Hefepilzbeispiels des beschränkten
Wachstums. Ihre Gestalt nennt man Schwanenhalsform oder Sigmoidform. Die rechnerische
Herleitung geschieht auf der nächsten Seite. Die DGL gehört zur Klasse der Bernoulli- und Riccati-
DGLn, lässt sich aber auch ohne deren schwierige Anwendung lösen.
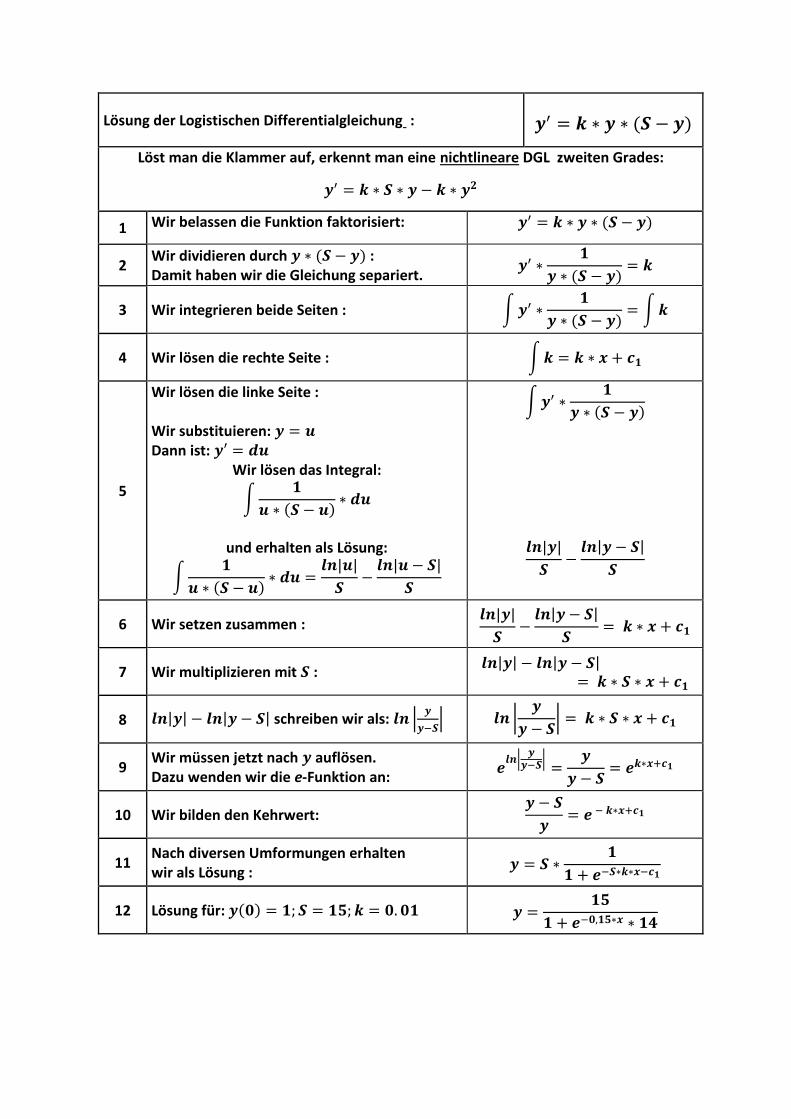
Lösung der Logistischen Differentialgleichung : 𝒚′ = 𝒌 ∗ 𝒚 ∗ (𝑺 − 𝒚)
Löst man die Klammer auf, erkennt man eine nichtlineare DGL zweiten Grades:
𝒚′ = 𝒌 ∗ 𝑺 ∗ 𝒚 − 𝒌 ∗ 𝒚𝟐
1 Wir belassen die Funktion faktorisiert: 𝒚′ = 𝒌 ∗ 𝒚 ∗ (𝑺 − 𝒚)
2 Wir dividieren durch 𝒚 ∗ (𝑺 − 𝒚) : Damit haben wir die Gleichung separiert.
𝒚′ ∗𝟏
𝒚 ∗ (𝑺 − 𝒚)= 𝒌
3 Wir integrieren beide Seiten : ∫𝒚′ ∗𝟏
𝒚 ∗ (𝑺 − 𝒚)= ∫𝒌
4 Wir lösen die rechte Seite : ∫𝒌 = 𝒌 ∗ 𝒙 + 𝒄𝟏
5
Wir lösen die linke Seite : Wir substituieren: 𝒚 = 𝒖 Dann ist: 𝒚′ = 𝒅𝒖
Wir lösen das Integral:
∫𝟏
𝒖 ∗ (𝑺 − 𝒖)∗ 𝒅𝒖
und erhalten als Lösung:
∫𝟏
𝒖 ∗ (𝑺 − 𝒖)∗ 𝒅𝒖 =
𝒍𝒏|𝒖|
𝑺−
𝒍𝒏|𝒖 − 𝑺|
𝑺
∫𝒚′ ∗𝟏
𝒚 ∗ (𝑺 − 𝒚)
𝒍𝒏|𝒚|
𝑺−
𝒍𝒏|𝒚 − 𝑺|
𝑺
6 Wir setzen zusammen : 𝒍𝒏|𝒚|
𝑺−
𝒍𝒏|𝒚 − 𝑺|
𝑺= 𝒌 ∗ 𝒙 + 𝒄𝟏
7 Wir multiplizieren mit 𝑺 : 𝒍𝒏|𝒚| − 𝒍𝒏|𝒚 − 𝑺|
= 𝒌 ∗ 𝑺 ∗ 𝒙 + 𝒄𝟏
8 𝒍𝒏|𝒚| − 𝒍𝒏|𝒚 − 𝑺| schreiben wir als: 𝒍𝒏 |𝒚
𝒚−𝑺| 𝒍𝒏 |
𝒚
𝒚 − 𝑺| = 𝒌 ∗ 𝑺 ∗ 𝒙 + 𝒄𝟏
9 Wir müssen jetzt nach 𝒚 auflösen. Dazu wenden wir die e-Funktion an:
𝒆𝒍𝒏|
𝒚𝒚−𝑺
|=
𝒚
𝒚 − 𝑺= 𝒆𝒌∗𝒙+𝒄𝟏
10 Wir bilden den Kehrwert: 𝒚 − 𝑺
𝒚= 𝒆 − 𝒌∗𝒙+𝒄𝟏
11 Nach diversen Umformungen erhalten wir als Lösung :
𝒚 = 𝑺 ∗𝟏
𝟏 + 𝒆−𝑺∗𝒌∗𝒙−𝒄𝟏
12 Lösung für: 𝒚(𝟎) = 𝟏; 𝑺 = 𝟏𝟓; 𝒌 = 𝟎. 𝟎𝟏 𝒚 =𝟏𝟓
𝟏 + 𝒆−𝟎,𝟏𝟓∗𝒙 ∗ 𝟏𝟒

Anwendungen der Differentialgleichungen V.
Inhomogene Differentialgleichungen II. Ordnung
Schwingungen: DGL des harmonischen Oszillators - Ungedämpfte Schwingungen
Wenn eine erzwungene Ortsveränderung eine
rücktreibende Kraft erzeugt, entstehen
Schwingungen.
Auf die Kugel wirkt konstant die Gewichtskraft
�⃗⃗� = 𝒎 ∗ �⃗⃗� . Dieser entgegen wirkt als elastische
Gegenkraft die Federkraft, die dem Hookeschen
Gesetz unterliegt: �⃗⃗� = − 𝒎 ∗ 𝑫 ∗ �⃗�
In dieser Gleichung ist 𝐷 die
Federkonstante.
Wir setzen 𝑥 als Symbol für den Weg. Dann ist die Erdbeschleunigung 𝑔 die 2. Ableitung nach dem
Weg: 𝑥′′. Auch in der Federkraft ersetzen wir den Weg 𝑠 durch 𝑥.
In der Ruhelage sind beide Kräfte gleich groß, jedoch entgegengesetzt gerichtet:
𝐹 𝑔 = 𝑚 ∗ 𝑥′′ = 𝐹 𝐷 = − 𝑚 ∗ 𝐷 ∗ 𝑥 . Wir dividieren durch 𝑚 und erhalten unsere DGL für den Ort:
𝒙′′ = − 𝑫 ∗ 𝒙
Dies ist eine homogene DGL II. Ordnung. Wir lösten sie in ähnlicher Form bereits als: 𝑦′′ = − 𝑦
Wir ersparen uns Schreibarbeit, ersetzen 𝑥 mit 𝑦 und lösen nun
Herleitung der allgemeinen Lösung von : 𝒚′′ = − 𝑫 ∗ 𝒚
1 Wir addieren 𝑫 ∗ 𝒚 auf beiden Seiten : 𝒚′′ + 𝑫 ∗ 𝒚 = 𝟎
2 Wir schreiben beide 𝒚 in Differentialform: 𝒅𝟐
𝒅𝒙𝟐∗ 𝒚 + 𝑫 ∗ 𝒚 = 𝟎
3 Wir vermuten eine e-Funktion.
Wir substituieren 𝒚 = 𝒆𝒌∗𝒙: 𝒅𝟐
𝒅𝒙𝟐∗ 𝒆𝒌∗𝒙 + 𝑫 ∗ 𝒆𝒌∗𝒙 = 𝟎
4 Die zweite Ableitung von 𝒆𝒌∗𝒙 ist 𝒌𝟐 ∗ 𝒆𝒌∗𝒙 : 𝒌𝟐 ∗ 𝒆𝒌∗𝒙 + 𝑫 ∗ 𝒆𝒌∗𝒙 = 𝟎
5 Wir klammern 𝒆𝒌∗𝒙 aus : 𝒆𝒌∗𝒙 ∗ (𝒌𝟐 + 𝑫) = 𝟎
6 Wir lösen (𝒌𝟐 + 𝑫) = 𝟎 : (√𝑫 > 𝟎 ! ) 𝒌𝟐 = − 𝑫 →
𝒌𝟏 = 𝒊 ∗ √𝑫 ; 𝒌𝟐 = −𝒊 ∗ √𝑫
7 Die Lösung ist rein imaginär. Wir nehmen es gelassen hin :
𝒚 = 𝒚𝟏 + 𝒚𝟐
𝒚𝟏 = 𝒄𝟏 ∗ 𝒆+𝒊∗√𝑫∗𝒙
𝒚𝟐 = 𝒄𝟐 ∗ 𝒆−𝒊∗√𝑫∗𝒙
0
Ruhelage Min. Auslenk. Max. Auslenk.

7 Übertrag vorherige Seite : 𝒚𝟏 = 𝒄𝟏 ∗ 𝒆+𝒊∗√𝑫∗𝒙
𝒚𝟐 = 𝒄𝟐 ∗ 𝒆−𝒊∗√𝑫∗𝒙
8
Wir wenden die Eulersche Identität an:
𝒆(𝜶+ 𝒊∗𝜷)∗𝒙 =
𝒆𝜶 ∗ 𝒄𝒐𝒔(𝜷 ∗ 𝒙) + 𝒊 ∗ 𝒆𝜶 ∗ 𝒔𝒊𝒏(𝜷 ∗ 𝒙)
Wir beachten: 𝜶 = 𝟎 → 𝒆 𝜶 = 𝟏 (!); 𝜷 = √𝑫
𝒚𝟏 = 𝒄𝟏 ∗ (𝒄𝒐𝒔(√𝑫 ∗ 𝒙) + 𝒊 ∗ 𝒔𝒊𝒏(√𝑫 ∗ 𝒙))
𝒚𝟐 = 𝒄𝟐 ∗ (𝒄𝒐𝒔(√𝑫 ∗ 𝒙) − 𝒊 ∗ 𝒔𝒊𝒏(√𝑫 ∗ 𝒙))
Wir addieren jetzt nicht, sondern überlegen, ob wir auch ohne dies auf die richtige Lösung kommen ...
Wir setzen vorläufig als Lösung : 𝒚 = 𝒄𝟏 ∗ 𝒄𝒐𝒔(√𝑫 ∗ 𝒙) + 𝒄𝟐 ∗ 𝒔𝒊𝒏(√𝑫 ∗ 𝒙)
Um die Lösung richtig interpretieren zu können,
müssen wir noch einmal zu den grundlegenden
Eigenschaften der Sinus- und Cosinusfunktionen
zurückkehren. Hier ein Graph beider Funktionen.
Aus der Cosinusfunktion wird die Sinusfunktion durch
Verschieben um 𝜋
2 und umgekehrt.
Zusätzlich ein Graph für die Summe beider
Funktionen.
Die Funktionswerte erhöhen sich auf das 1,5-fache,
der Graph selbst ist um 𝜋
4 gegenüber den beiden
anderen verschoben.
Wir lösen nun das Anfangswertproblem, d.h. wir
weisen den Konstanten 𝒄𝟏 und 𝒄𝟐 konkrete Werte zu.
Der Zeitpunkt des Starts in unserem Experiment ist derjenige, in dem die angehobene oder
heruntergezogene Kugel losgelassen wird. Dann ist die Auslenkung 𝒅𝒙 gerade gleich 1 oder -1. Dies
ist die Cosinusfunktion, die Sinusfunktion können wir ausschließen.
Selbst wenn wir für die Summe 𝒄𝟏 ∗ 𝐜𝐨𝐬(𝒙) + 𝒄𝟐 ∗ 𝐬𝐢𝐧 (𝒙) die Integrationskonstanten so geschickt
wählen, dass sie zum Zeitpunkt 0 gerade 1 ergeben würden, bekämen wir zu einem späteren
Zeitpunkt irgendwann 𝑦 > 1 und das ist aus Gründen der Energieerhaltung ausgeschlossen. Darum
gilt 𝒄𝟏 = ±𝟏 und 𝒄𝟐 = 𝟎 und unsere Lösung wird zu:
𝒚 = ±1 ∗ 𝑐𝑜𝑠(√𝐷 ∗ 𝑥) + 0 ∗ 𝑠𝑖𝑛(√𝐷 ∗ 𝑥) = ± 𝐜𝐨𝐬(√𝑫 ∗ 𝒙)
Umso schöner, dass beim Addieren der Teillösungen der imaginäre Teil sowieso entfallen wäre …
Allzweckprogramme im Internet
Da kommt natürlich niemand vorbei an:
https://www.wolframalpha.com/
Es bietet einen reduzierten Funktionsumfang des Computeralgebrasystems (CAS) Mathematica an.
Aber selbst der reduzierte Funktionsumfang ist noch beeindruckend. Außerdem kann man auch
Wissensdatenbanken für andere Gebiete, wie Physik und Chemie nutzen.
In der Grundversion ist es kostenlos, für ca. 6$/Monat kann man einen erweiterten Funktionsumfang
mieten, der u.a. für bestimmte Berechnungen auch den Lösungsweg anzeigt.
Die Bedienung geschieht ausschließlich in Englisch. Das System versucht, mittels einer Art Künstlicher
Intelligenz, auch umgangssprachlich formulierte Probleme zu lösen und allfällige Fehleingaben
abzufangen. Das funktioniert mal so, mal so. Jedenfalls nur auf Englisch.
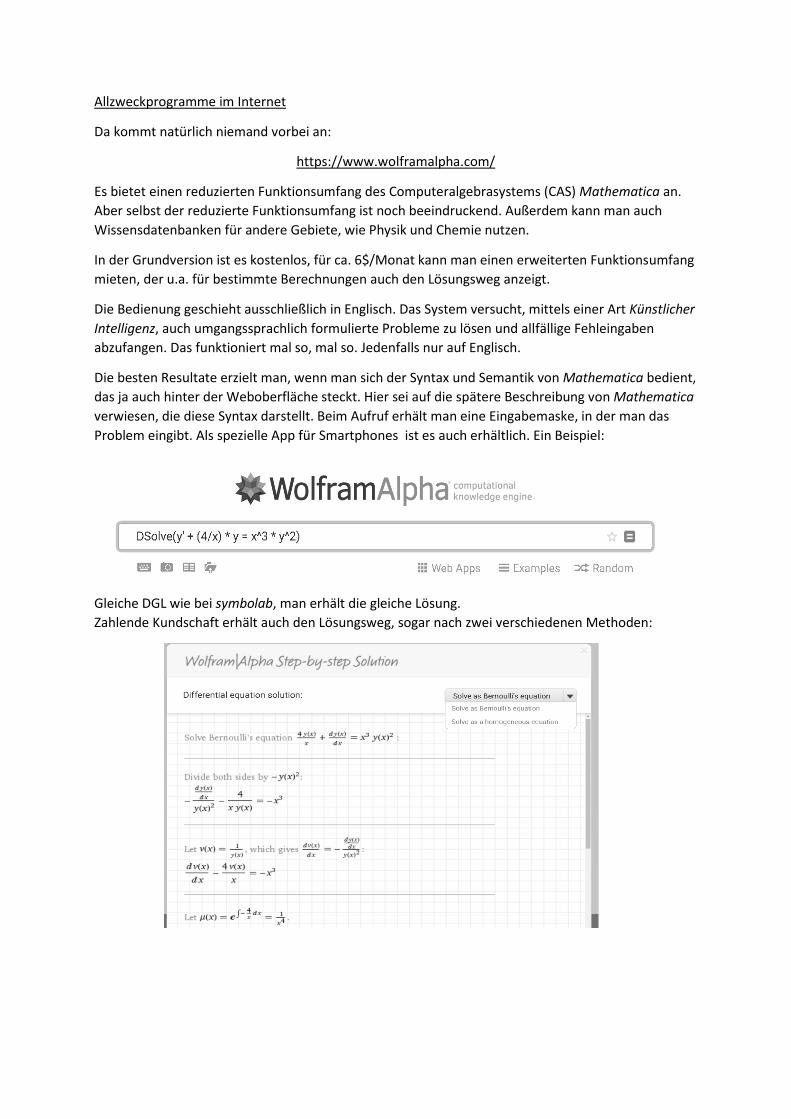
Die besten Resultate erzielt man, wenn man sich der Syntax und Semantik von Mathematica bedient,
das ja auch hinter der Weboberfläche steckt. Hier sei auf die spätere Beschreibung von Mathematica
verwiesen, die diese Syntax darstellt. Beim Aufruf erhält man eine Eingabemaske, in der man das
Problem eingibt. Als spezielle App für Smartphones ist es auch erhältlich. Ein Beispiel:
Gleiche DGL wie bei symbolab, man erhält die gleiche Lösung.
Zahlende Kundschaft erhält auch den Lösungsweg, sogar nach zwei verschiedenen Methoden:
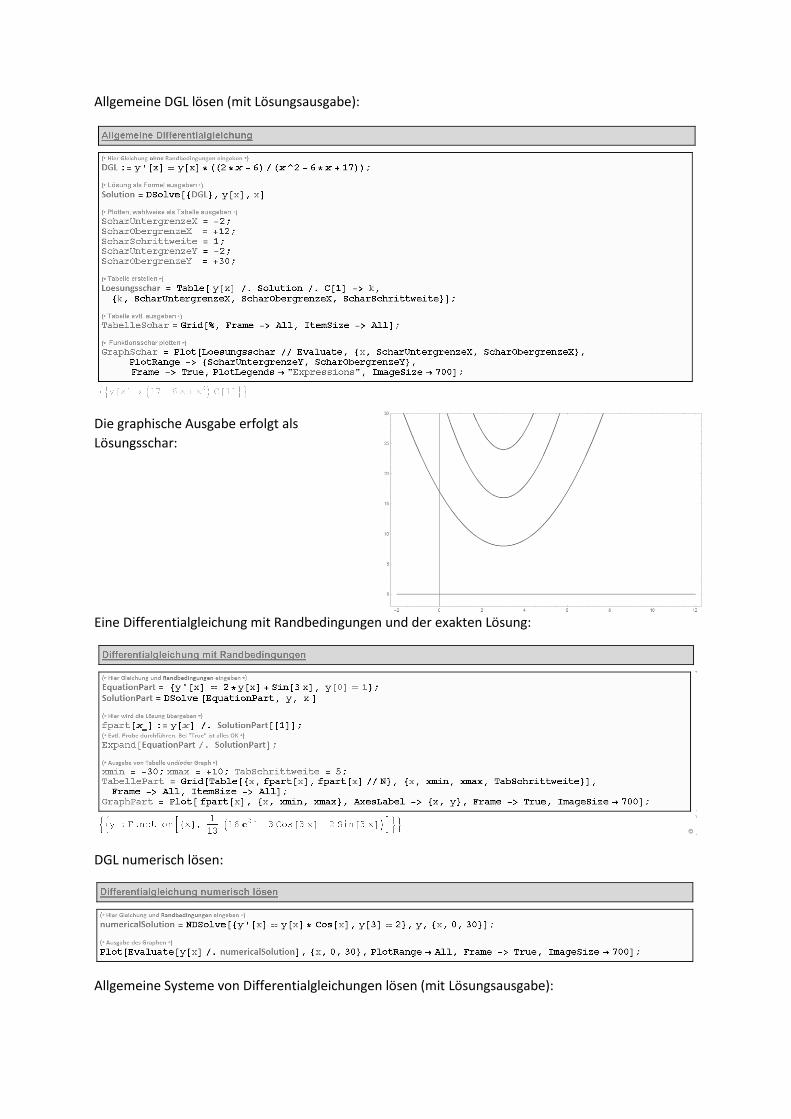
Allgemeine DGL lösen (mit Lösungsausgabe):
Die graphische Ausgabe erfolgt als
Lösungsschar:
Eine Differentialgleichung mit Randbedingungen und der exakten Lösung:
DGL numerisch lösen:
Allgemeine Systeme von Differentialgleichungen lösen (mit Lösungsausgabe):
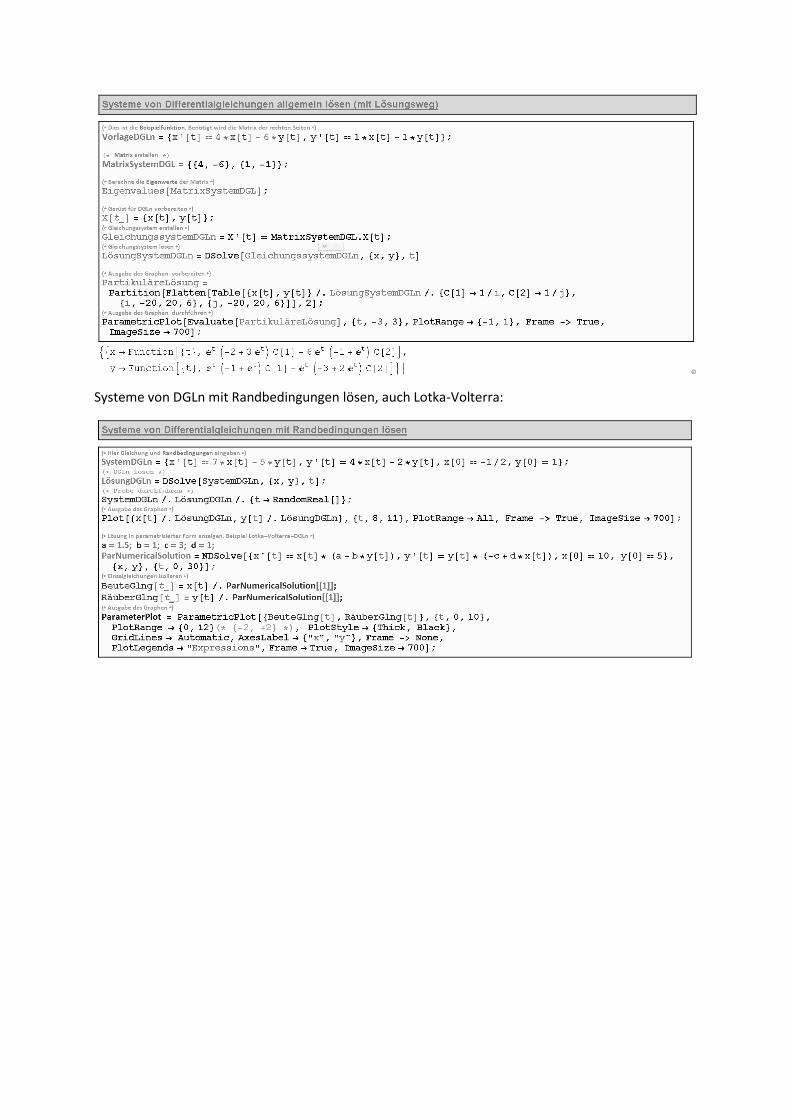
Systeme von DGLn mit Randbedingungen lösen, auch Lotka-Volterra:




























