Embed Size (px)
Citation preview

Hybride Systeme
Wolfgang Kleier
Universitat Bayreuth
27. Juni 2008

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Inhalt
1 EinleitungWas ist ein hybrides System?Hybrider Automat
2 BeispieleWasserstandskontrollsystemHupfender BallGehemmtes Pendel
3 Unstetige dynamische SystemeFallunterscheidung
4 LosungskonzepteEinfachste konvexe DefinitionMethode der aquivalenten SteuerungDrittes Konzept
5 Weitere Beispiele1. Beispiel2. Beispiel
6 Literatur

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Was ist ein hybrides System?
Mathematische Beschreibung:
Sei X =n⋃
i=1Xi mit Xi ∩ Xj = Ø fur i 6= j
Es gelte x = fi (x) fur x ∈ Xi
Andere Moglichkeit:
x(t) = f (x(t), i(t))i(t) = ν(x(t), i(t−))
Dabei ist x(t) ∈ Rn, i(t) ∈ I ⊂ Z

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Hybrider Automat
Hybrider Automat
Hybrider Automat = (L,X , Inv ,Act,E )
L: endliche Menge der diskreten Zustande
X ⊂ Rn: kontinuierlicher Zustandsraum
Inv : L→ P(X ), l 7→ Inv(l) ⊂ X Ortsinvariante von l
Act ordnet jedem l ∈ L eine Differenzialgleichung zu:
x = fl(x)
E : endliche Menge von Kanten (Ubergangen, Ereignissen)
Kante E = (l , l ′,Guardll ′ , Jumpll ′)
l , l ′ ∈ L
Guardll ′ ⊂ X Sprungbedingung
Jumpll ′ ⊂ X × X : Sprung

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Hybrider Automat

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Hybrider Automat
Trajektorien des hybriden Automaten
Definition: stetige Trajektorie (l , δ, x)
l ∈ L
δ > 0 Dauer der Trajektorie
x : [0, δ]→ X stetig differenzierbar mit
x(t) ∈ Inv(l)∀t ∈]0, δ[x(t) = fl(x(t))∀t ∈]0, δ[
Definition:Trajektorie des Automaten
Folge von stetigen Trajektorien, sodass zu den Ereigniszeitpunkten
t0 = δ0, tj+1 = tj + δj+1, j = 0, 1, 2, ...
gilt:
xj(tj) ∈ Guardll ′
(xj(tj), xj+1(tj)) ∈ Jumpll ′

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Beispiele

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Wasserstandskontrollsystem
Wasserstandskontrollsystem
Beschreibung:
y(t) ∈ R+: Wasserstand
x(t) ∈ R+: Zeit seit dem letzten Steuersignal
Wasser steigt um 1 Mengeneinh. pro Zeiteinh., wenn Pumpelauft.
Wasser fallt um 2 Mengeneinh. pro Zeiteinh., wenn Pumpesteht.
Bei Wasserstand y(t) = 10 schaltet Pumpe nach 2 Sek. ab.
Bei Wasserstand y(t) = 5 schaltet Pumpe nach 2 Sek. an.

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Wasserstandskontrollsystem

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Hupfender Ball
Hupfender Ball
Beschreibung:
Ball hupft auf einem Tisch
Sprunge ohne Zeitverlust
Stoßzahl e ∈]0, 1[
keine diskreten Variablen
eine kontinuierliche Variable q(Abstand zwischen Tisch und Ball)

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Hupfender Ball
Mathematische Darstellung:
q(t) = −1, falls q(t) > 0q(t+) = −eq(t−), falls q(t) = 0 ∧ q(t) ≤ 0
Kompatibilitatsbedingungen:
Sei q(τ) = 0, q(τ) ≤ 0:
limt↗τ
q(t) = q(τ) = q(τ+) = limt↘τ
q(t)
limt↗τ
q(t) = q(τ−)
q(τ+) = limt↘τ
q(t)

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Hupfender Ball
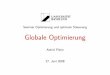
Mit Anfangsbedingungen: q(0+) = 0 und q(0+) = 1 findenSprunge zu den Zeiten 2, 2 + 2e, 2 + 2e + 2e2, ... statt.
⇒ Haufungspunkt bei 21−e
Menge der Ereigniszeitpunkte: ετ = {2k−1∑j=0
e j |k ∈ N} ∪ { 21−e }
Dennoch gibt es eine Losung:
q(t) =
−12
(t −
k−1∑j=0
e j
)(t −
k∑j=0
e j
), fur
t ∈
]2
k−1∑j=0
e j , 2k∑
j=0e j
[,
k = 0, 1, 2, ...0, fur
t > 21−e

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Hupfender Ball
Graphische Darstellung der Losung:

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Gehemmtes Pendel
Gehemmtes Pendel
Beschreibung:
Pendellange l
Stift verkurzt Pendellangeauf ls
Auslenkungswinkel φ
Bahngeschwindigkeit v amEnde des Pendels
kontinuierlicheZustandsraumvariable:x = (φ, v)
Zwei Zustande:gehemmt: φ ≤ φStift
ungehemmt: φ > φStift

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Gehemmtes Pendel
Im ungehemmten Fall, φ ≤ φStift , gilt:
φ =1
lv
v = −g sinφ
Im gehemmten Fall, φ > φStift , gilt:
φ =1
lsv
v = −g sinφ
x = (φ, v) verhalt sich auch zu den Ereigniszeitpunkten stetig, dierechte Seite dagegen unstetig.

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Gehemmtes Pendel
Bei y = (φ, φ) als Zustandsraumvariable wurde die zweiteZustandsraumvariable zu den Ereigniszeitpunkten von φ zu l
lsφ
springen.
⇒ Komplexitat der Beschreibung ist also abhangig von der Wahlder Zustandsraumvariablen!

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Unstetige dynamische Systeme

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Unstetige dynamische Systeme
Sei φ eine glatte reellwertige Funktion auf dem Rn.
S− := {x ∈ Rn|φ(x) < 0}
S0 := {x ∈ Rn|φ(x) = 0}
S+ := {x ∈ Rn|φ(x) > 0}
Sei f+ ∈ C(S+ ∪ S0),f− ∈ C(S− ∪ S0) und f ∈ C(S+ ∪ S−) mit
f (x) :=
{f+(x), falls x ∈ S+
f−(x), falls x ∈ S−
Betrachte die Differentialgleichung
x(t) = f (x(t))

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
x(t) = f (x(t))
Weil x im Allgemeinen auf S0 nicht differenzierbar ist, ersetze dieDifferentialgleichung durch die Integralgleichung
x(t) = x(0) +
∫ t
0f (x(s))ds
(Caratheodory-Gleichung)

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Fallunterscheidung
Sei x0 ∈ S0. Dann gibt es f−(x0), f+(x0).
Fallunterscheidung
1 Beide Vektoren zeigen nach S+
⇒ Caratheodory-Interpretation ist ausreichend.
2 Beide Vektoren zeigen nach S−⇒ analog zu (1).
3 f+(x0) zeigt nach S+, f−(x0) zeigt nach S−4 f+(x0) zeigt nach S−, f−(x0) zeigt nach S+
⇒ Caratheodory-Interpretation liefert kein brauchbaresLosungskonzept

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Losungskonzepte

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Einfachste konvexe Definition
Einfachste konvexe Definition
Sei Situation (4) gegeben.
Fur alle x ∈ S0 sei Tx(S0) der Tangentialraum an S0 in x .
⇒ ∃α ∈]0, 1[:
αf−(x0) + (1− α)f+(x0) = f0(x0) ∈ Tx0(S0)
Dadurch kann eine Funktion f0 in einer Umgebung U(x0) von (x0)definiert werden, sodass ∀x ∈ U(x0) : f0(x) ∈ Tx(S0).
Die Differentialgleichung x(t) = f0(x) definiert eine Bewegung aufS0. (’Rutschbewegung’)

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Methode der aquivalenten Steuerung
Methode der aquivalenten Steuerung
Annahme: f = f (x , u(x))
Dabei sei u(x) eine mengenwertige Funktion, die fur x ∈ S+ ∪ S−einen reellen Funktionswert annimmt und fur x ∈ S0 einabgeschlossenes Intervall U(x) als Werte annimmt.
In (4): Fur x ∈ S0 suche uaq ∈ U(x) mit f (x , uaq(x)) ∈ Tx(S0).
Die Differentialgleichung x(t) = f (x , uaq(x)) beschreibt auch eineRutschbewegung.

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Drittes Konzept
Drittes Losungskonzept
Annahme: f = f (x , u(x))
Dabei sei wieder u(x) ∈ U(x), wobei U(x) fur x ∈ S+ ∪ S− eineinzelner Punkt und fur x ∈ S0 ein abgeschlossenes Intervall sei.
Fur gegebenes x0 sei F (x0) die kleinste konvexe Menge die{f (x0, u)|u ∈ U(x0)} enthalt.
Betrachte die Differentialinklusion x(t) ∈ F (x(t)) ∩ Tx(S0).
⇒ Losung nicht eindeutig⇒ Losungen konnen S0 nicht verlassen

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Drittes Konzept
Falls f (x , u) affin von u abhangt und U(x0) = [u+, u−] mitu+ = lim
x → x0x ∈ S+
u(x) und u− = limx → x0x ∈ S−
u(x), dann sind alle drei
Losungskonzepte gleich.

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Weitere Beispiele

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
1. Beispiel
1. Beispiel
Sei θ ∈]0, π[ und ein System gegeben durch:
x1(t) = cos(θu(t))
x2(t) = − sin(θu(t))
u(t) = sgn x2(t)
Fur x2 < 0 und x2 > 0 ist die rechte Seite konstant.Fur x2 = 0 ist ein Rutschzustand moglich.
Wende darauf die Losungskonzepte an.

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
1. Beispiel
Die Methode der aquivalenten Steuerung bestimmt u so, dass
x2 = − sin(θu) = 0
Daher ist u = 0 und damit der Rutschzustand gegeben durch
x1 = 1

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
1. Beispiel
Die einfachste konvexe Definition liefert eine Konvexkombination
der Vektoren
(cos θ− sin θ
),
(cos θsin θ
), sodass die zweite
Komponente verschwindet.Diese Kombination ist(
cos θ0
)=
1
2
(cos θ− sin θ
)+
1
2
(cos θsin θ
)Der Rutschzustand ist dann gegeben durch
x1 = cos θ

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
1. Beispiel
Das dritte Losungskonzept bestimmt zu jedem x0 = (x1, 0) diekleinste konvexe Menge, die
{f (x0, u)|u ∈ U(x)} =
{(cos(θu)− sin(θu)
)|u ∈ [−1, 1]
}enthalt, d.h.
F (x0) =
{(x1, x2)
∣∣∣∣ x1 ∈ [cos θ, 1]x2 ∈ [− sin θ, sin θ]
}
⇒ F (x0) ∩ {(x1, x2)|x2 = 0} = {(x1, x2)|x1 ∈ [cos θ, 1], x2 = 0}
Zu losen ist also die Differentialinklusion
x1 ∈ [cos θ, 1]

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
1. Beispiel
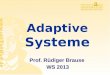
Approximation des gegebenen Systems durch ein glattes System:
Approximiere sgn x2 durch tanh(
x2ε
)mit ε > 0 klein.
Dies fuhrt zu dem glatten System:
x1 = cos(θ tanh(
x2ε
)),
x2 = − sin(θ tanh(
x2ε
)) Abbildung: ε = 0.1
Losung des Systems ist:
x1(t) = t + c, x2(t) = 0
Diese Losung erfullt die Bedingung des Rutschzustands nach derMethode der aquivalenten Steuerung.

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
1. Beispiel
Approximation des gegebenen Systems durch ein anderes glattesSystem:
x1 = cos(θ)
x2 = − tanh(x2
ε
)sin(θ)
Losung des Systems ist:
x1(t) = t cos θ + c
x2(t) = 0
Diese Losung erfullt die Bedingung des Rutschzustands nach dereinfachsten konvexen Definition.

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
1. Beispiel
Die Losung nach der einfachsten konvexen Definition kann manmit der Methode der aquivalenten Steuerung erhalten, wenn mandas System ersetzt durch:
x1 = cos θ
x2 = −u sin θ
u = sgn x2

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
2. Beispiel
2. Beispiel
Sei ein System gegeben durch:
x1 = −x1(t) + x2(t)− u(t)
x2 = 2x2(t)(u2(t)− u(t)− 1)
u = sgn x1(t)
In diesem System ist furx1 = 0
−1 ≤ x2 ≤ 1
ein Rutschzustand moglich. Wende darauf die Losungskonzepte an.

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
2. Beispiel
Die einfachste konvexe Definition liefert fur alle (x1, x2) mitx1 = 0,−1 ≤ x2 ≤ 1 eine Konvexkombination der Vektoren(−x1 + x2 − 1−2x2
),
(−x1 + x2 + 1
2x2
), sodass die erste
Komponente verschwindet.Diese Kombination ist
(0−2x2
2
)=
(x2 + 1)
2
(−x1 + x2 − 1−2x2
2
)−(x2 − 2)
2
(−x1 + x2 + 1
2x22
)Der Rutschzustand ist dann gegeben durch
x2 = −2x22

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
2. Beispiel
Die Methode der aquivalenten Steuerung bestimmt u so, dass
x1 = −x1 + x2 − u = 0
Daher ist u = x2 und damit der Rutschzustand gegeben durch
x2 = 2x2(x22 − x2 − 1)

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
2. Beispiel
Das dritte Losungskonzept bestimmt zu jedem x0 = (0, x2) diekleinste konvexe Menge, die {f (x0, u)|u ∈ U(x)} ={(
−x1(t) + x2(t)− u(t)2x2(t)(u2(t)− u(t)− 1)
)|u ∈ [−1, 1]
}enthalt, d.h.
F (x0) =
{(x1, x2)
∣∣∣∣ x1 ∈ [x2 − 1, x2 + 1]x2 ∈ [2x2(−5
4 ), 2x2]
}
⇒ F (x0)∩{(x1, x2)|x1 = 0} = {(x1, x2)|x1 = 0, x2 ∈ [2x2(−5
4), 2x2]}
Zu losen ist also die Differentialinklusion
x2 ∈ [2x2(−5
4), 2x2]

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Literatur:
A.F. Filippov, Differential Equations with Discontinuous RighthandSides, (Mathematics and Its Applications; 18), Kluwer, Dordrecht1988
A. van der Schaft, H. Schumacher, An Introduction to HybridDynamical Systems, (Lecture Notes in Control and InformationSciences ; 251), Springer, London 2000
M. Johansson, Piecewise Linear Control Systems, (Lecture Notesin Control and Information Sciences ; 284), Springer, Berlin 2003
I.P. Natanson, Theorie der Funktionen einer reellen Veranderlichen,Harri Deutsch, Thun 1977

Einleitung Beispiele Unstetige dynamische Systeme Losungskonzepte Weitere Beispiele Literatur
Vielen Dank!