Embed Size (px)
Citation preview
Seite 1 von 33
Inbetriebnahme 9400 Highline TA CiA402 mit EtherCAT und Beckhoff NC
Inhaltsverzeichnis 1. Vorwort / Ziel des Applikationsberichtes..................................................................................................2 2. Einleitung ..........................................................................................................................................................3 2.1. Allgemeines zum EtherCAT ................................................................................................................3 2.2. Allgemeines zum CiA 402 ...................................................................................................................4
3. Komponenten...................................................................................................................................................5 4. Projektierungshinweise Lenze Engineer und 94xx Highline TA CiA 402...........................................6 4.1. Anlegen eines Engineerprojektes......................................................................................................6 4.2. Notwendige Konfigurationen der TA CiA 402 für die Beckhoff NC....................................... 11 4.3. Überwachungsreaktionen und Telegrammausfallerkennung............................................... 12 4.4. Diagnosemöglichkeiten.................................................................................................................... 13
5. Projektierungshinweise Beckhof IPC und TwinCAT............................................................................. 14 5.1. Projektierung der Beckhof NC mit Lenze EtherCAT und TA CiA 402 ..................................... 15
6. TwinCAT PLC Projekt anlegen und Variablenverknüpfung mit der NC .......................................... 27 7. exemplarischer Signalflussplan für die Sollposition Target Position.............................................. 30 8. Distributed Clocks (DC) EtherCAT Synchronisierung........................................................................... 31 9. Busanalyser Wireshark mit TwinCAT ...................................................................................................... 32
Seite 2 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
PC mit integrierte PCI-Express Ethernet Karte
Vorwort / Ziel des Applikationsberichtes
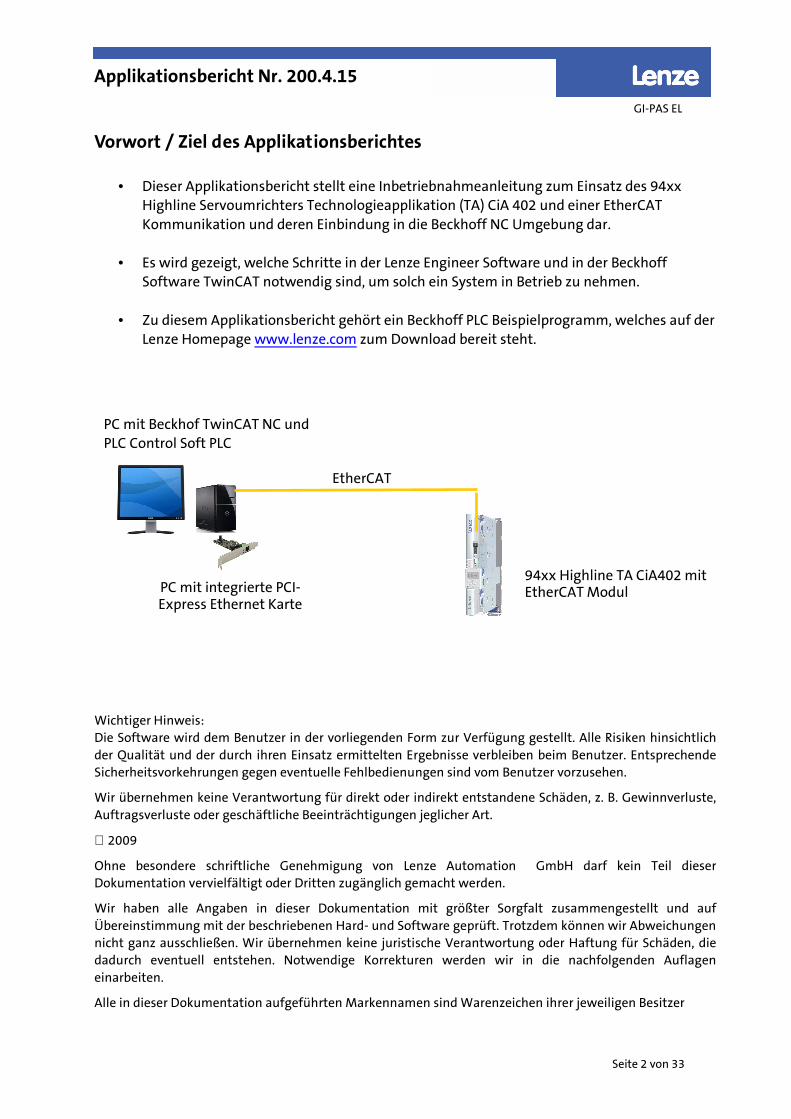
• Dieser Applikationsbericht stellt eine Inbetriebnahmeanleitung zum Einsatz des 94xx Highline Servoumrichters Technologieapplikation (TA) CiA 402 und einer EtherCAT Kommunikation und deren Einbindung in die Beckhoff NC Umgebung dar.
• Es wird gezeigt, welche Schritte in der Lenze Engineer Software und in der Beckhoff
Software TwinCAT notwendig sind, um solch ein System in Betrieb zu nehmen.
• Zu diesem Applikationsbericht gehört ein Beckhoff PLC Beispielprogramm, welches auf der Lenze Homepage www.lenze.com zum Download bereit steht.
Wichtiger Hinweis: Die Software wird dem Benutzer in der vorliegenden Form zur Verfügung gestellt. Alle Risiken hinsichtlich der Qualität und der durch ihren Einsatz ermittelten Ergebnisse verbleiben beim Benutzer. Entsprechende Sicherheitsvorkehrungen gegen eventuelle Fehlbedienungen sind vom Benutzer vorzusehen.
Wir übernehmen keine Verantwortung für direkt oder indirekt entstandene Schäden, z. B. Gewinnverluste, Auftragsverluste oder geschäftliche Beeinträchtigungen jeglicher Art.
2009
Ohne besondere schriftliche Genehmigung von Lenze Automation GmbH darf kein Teil dieser Dokumentation vervielfältigt oder Dritten zugänglich gemacht werden.
Wir haben alle Angaben in dieser Dokumentation mit größter Sorgfalt zusammengestellt und auf Übereinstimmung mit der beschriebenen Hard- und Software geprüft. Trotzdem können wir Abweichungen nicht ganz ausschließen. Wir übernehmen keine juristische Verantwortung oder Haftung für Schäden, die dadurch eventuell entstehen. Notwendige Korrekturen werden wir in die nachfolgenden Auflagen einarbeiten.
Alle in dieser Dokumentation aufgeführten Markennamen sind Warenzeichen ihrer jeweiligen Besitzer
PC mit Beckhof TwinCAT NC und PLC Control Soft PLC
EtherCAT
94xx Highline TA CiA402 mit EtherCAT Modul
Seite 3 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
1. Einleitung Dieser Bericht soll anhand eines Beispieles erläutern, wie ein Lenze Servoumrichter 94xx Highline mit TA CiA402 in Verbindung mit EtherCAT und einer Beckhoff TwinCAT NC in Betrieb genommen bzw. betrieben werden kann. Als erstes wird beschrieben, was auf der Lenze 94xx Seite hinsichtlich einer EtherCAT Kommunikation projektiert werden muss. Danach wird ausführlich beschrieben, wie die Projektierung im Beckhoff System Manager vorzunehmen ist und wie auf die Daten zugegriffen werden kann. Der letzte Teil des Berichtes beschreibt das TwinCAT NC Beispielprogramm.
1.1. Allgemeines zum EtherCAT
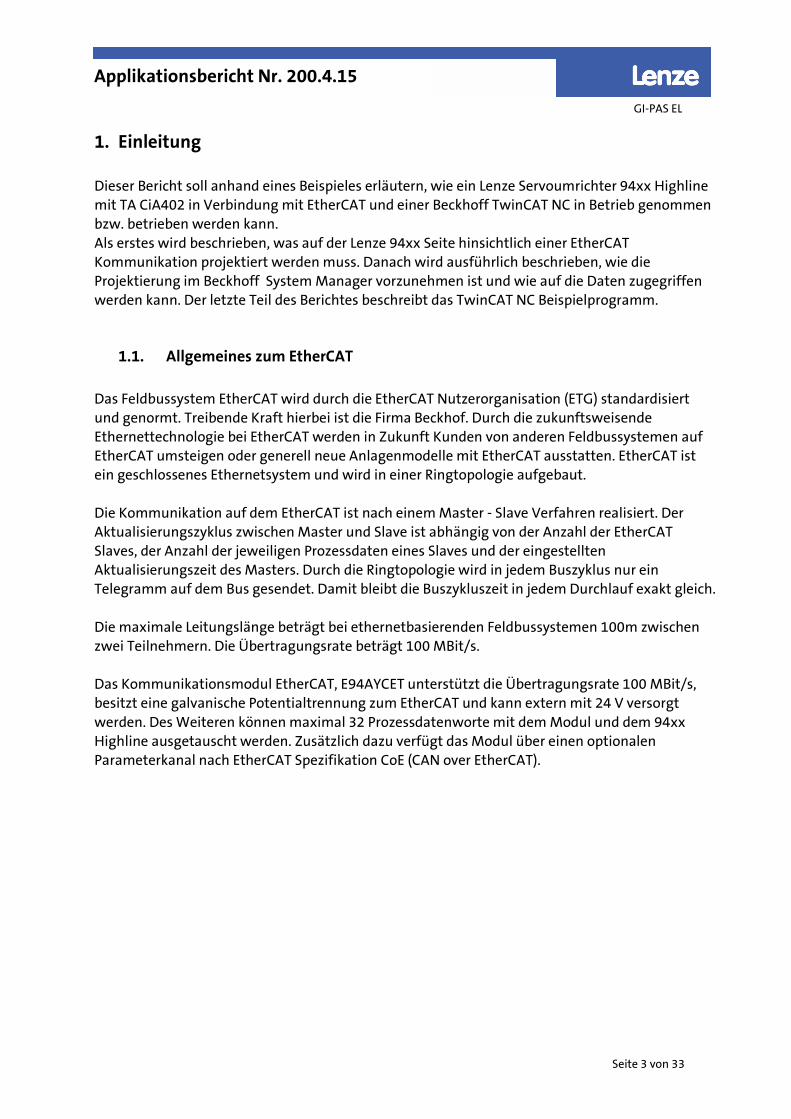
Das Feldbussystem EtherCAT wird durch die EtherCAT Nutzerorganisation (ETG) standardisiert und genormt. Treibende Kraft hierbei ist die Firma Beckhof. Durch die zukunftsweisende Ethernettechnologie bei EtherCAT werden in Zukunft Kunden von anderen Feldbussystemen auf EtherCAT umsteigen oder generell neue Anlagenmodelle mit EtherCAT ausstatten. EtherCAT ist ein geschlossenes Ethernetsystem und wird in einer Ringtopologie aufgebaut. Die Kommunikation auf dem EtherCAT ist nach einem Master - Slave Verfahren realisiert. Der Aktualisierungszyklus zwischen Master und Slave ist abhängig von der Anzahl der EtherCAT Slaves, der Anzahl der jeweiligen Prozessdaten eines Slaves und der eingestellten Aktualisierungszeit des Masters. Durch die Ringtopologie wird in jedem Buszyklus nur ein Telegramm auf dem Bus gesendet. Damit bleibt die Buszykluszeit in jedem Durchlauf exakt gleich. Die maximale Leitungslänge beträgt bei ethernetbasierenden Feldbussystemen 100m zwischen zwei Teilnehmern. Die Übertragungsrate beträgt 100 MBit/s. Das Kommunikationsmodul EtherCAT, E94AYCET unterstützt die Übertragungsrate 100 MBit/s, besitzt eine galvanische Potentialtrennung zum EtherCAT und kann extern mit 24 V versorgt werden. Des Weiteren können maximal 32 Prozessdatenworte mit dem Modul und dem 94xx Highline ausgetauscht werden. Zusätzlich dazu verfügt das Modul über einen optionalen Parameterkanal nach EtherCAT Spezifikation CoE (CAN over EtherCAT).
Seite 4 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
1.2. Allgemeines zum CiA 402
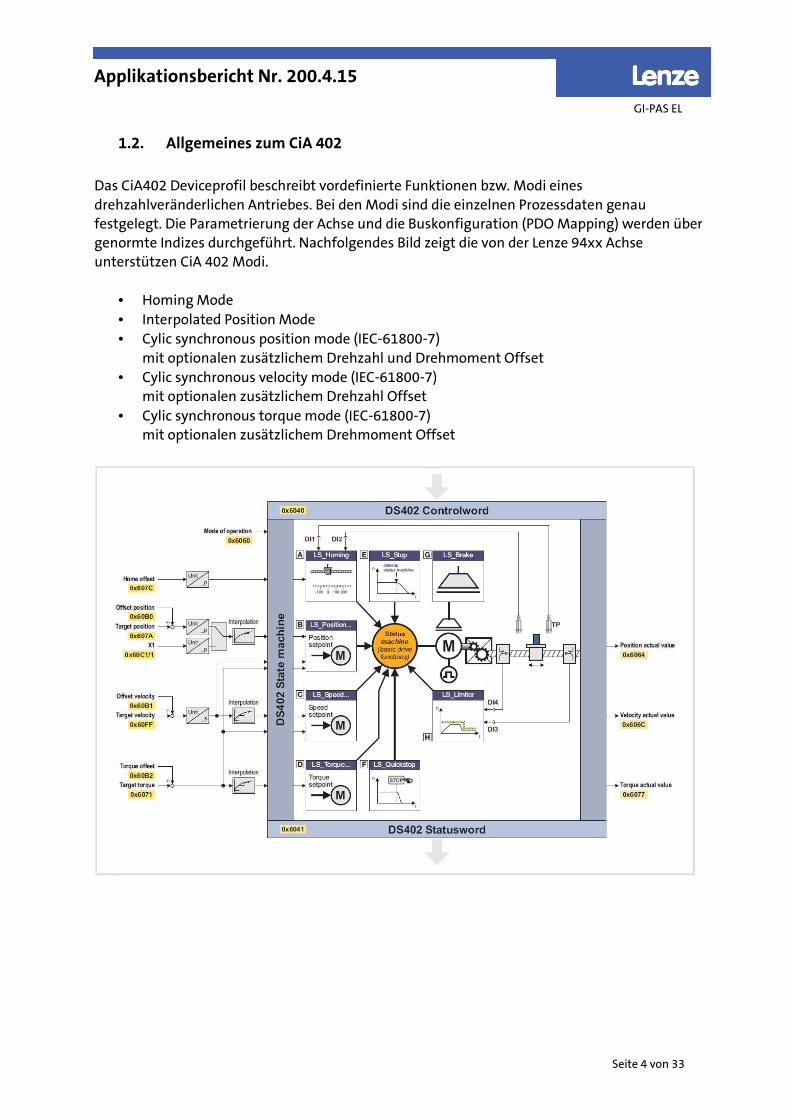
Das CiA402 Deviceprofil beschreibt vordefinierte Funktionen bzw. Modi eines drehzahlveränderlichen Antriebes. Bei den Modi sind die einzelnen Prozessdaten genau festgelegt. Die Parametrierung der Achse und die Buskonfiguration (PDO Mapping) werden über genormte Indizes durchgeführt. Nachfolgendes Bild zeigt die von der Lenze 94xx Achse unterstützen CiA 402 Modi.
• Homing Mode • Interpolated Position Mode • Cylic synchronous position mode (IEC-61800-7)
mit optionalen zusätzlichem Drehzahl und Drehmoment Offset • Cylic synchronous velocity mode (IEC-61800-7)
mit optionalen zusätzlichem Drehzahl Offset • Cylic synchronous torque mode (IEC-61800-7)
mit optionalen zusätzlichem Drehmoment Offset
Seite 5 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
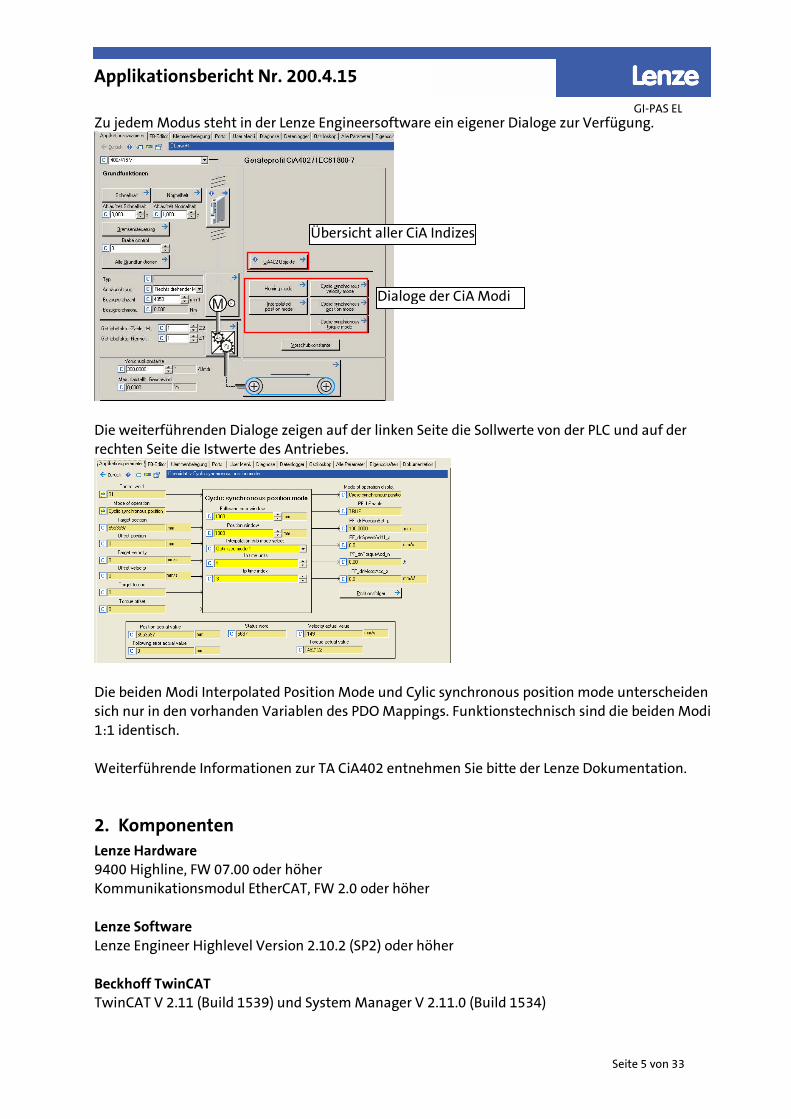
Zu jedem Modus steht in der Lenze Engineersoftware ein eigener Dialoge zur Verfügung.
Die weiterführenden Dialoge zeigen auf der linken Seite die Sollwerte von der PLC und auf der rechten Seite die Istwerte des Antriebes.
Die beiden Modi Interpolated Position Mode und Cylic synchronous position mode unterscheiden sich nur in den vorhanden Variablen des PDO Mappings. Funktionstechnisch sind die beiden Modi 1:1 identisch. Weiterführende Informationen zur TA CiA402 entnehmen Sie bitte der Lenze Dokumentation.
2. Komponenten Lenze Hardware 9400 Highline, FW 07.00 oder höher Kommunikationsmodul EtherCAT, FW 2.0 oder höher Lenze Software Lenze Engineer Highlevel Version 2.10.2 (SP2) oder höher Beckhoff TwinCAT TwinCAT V 2.11 (Build 1539) und System Manager V 2.11.0 (Build 1534)
Übersicht aller CiA Indizes
Dialoge der CiA Modi
Seite 6 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
3. Projektierungshinweise Lenze Engineer und 94xx Highline TA CiA 402
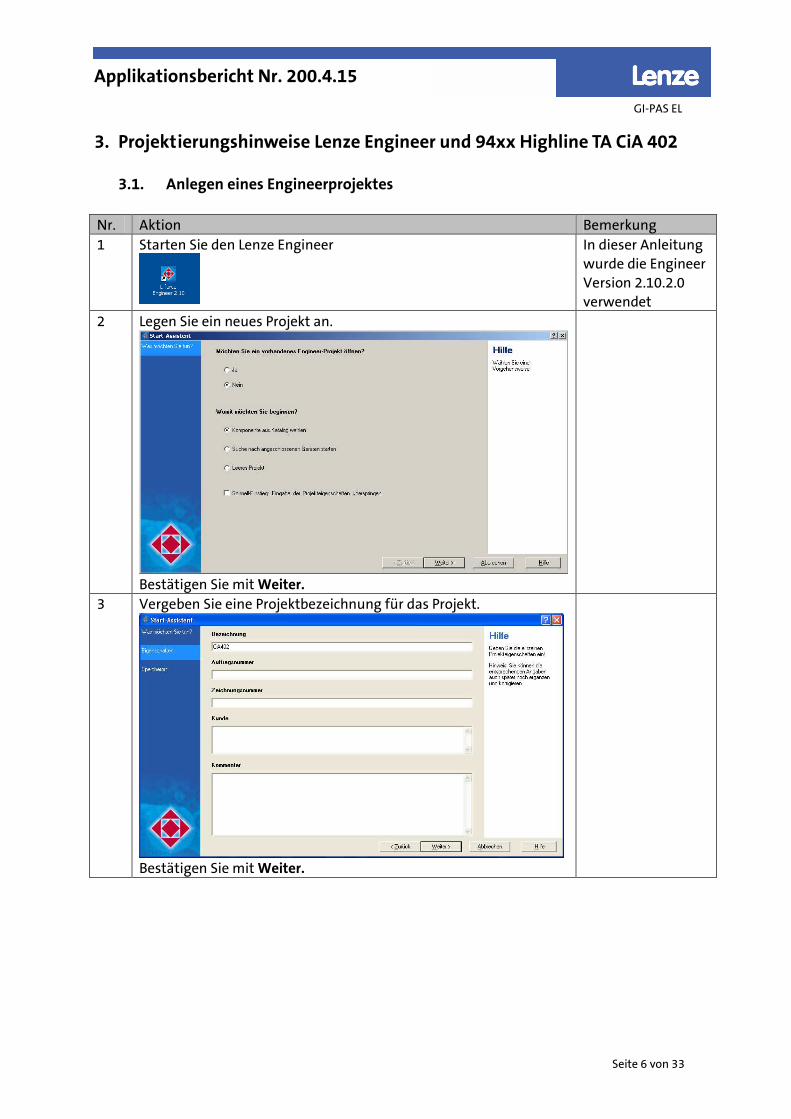
3.1. Anlegen eines Engineerprojektes Nr. Aktion Bemerkung 1 Starten Sie den Lenze Engineer
In dieser Anleitung wurde die Engineer Version 2.10.2.0 verwendet
2 Legen Sie ein neues Projekt an.
Bestätigen Sie mit Weiter.
3 Vergeben Sie eine Projektbezeichnung für das Projekt.
Bestätigen Sie mit Weiter.
Seite 7 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
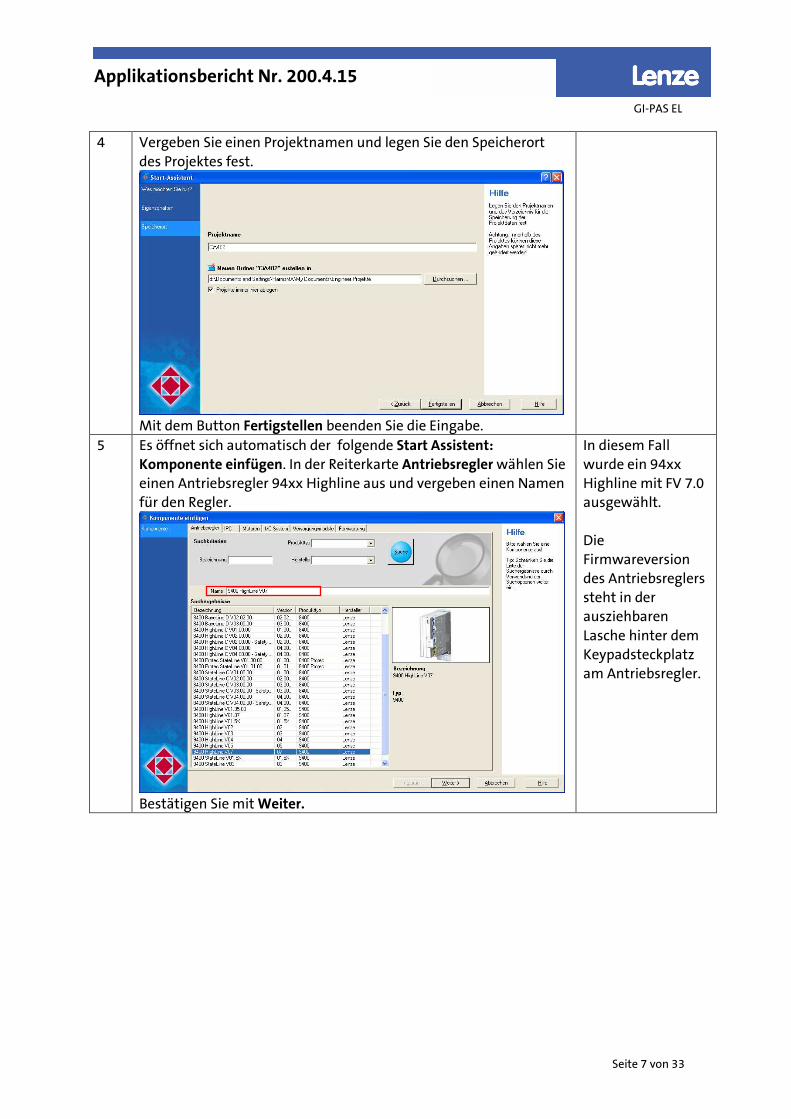
4 Vergeben Sie einen Projektnamen und legen Sie den Speicherort
des Projektes fest.
Mit dem Button Fertigstellen beenden Sie die Eingabe.
5 Es öffnet sich automatisch der folgende Start Assistent: Komponente einfügen. In der Reiterkarte Antriebsregler wählen Sie einen Antriebsregler 94xx Highline aus und vergeben einen Namen für den Regler.
Bestätigen Sie mit Weiter.
In diesem Fall wurde ein 94xx Highline mit FV 7.0 ausgewählt. Die Firmwareversion des Antriebsreglers steht in der ausziehbaren Lasche hinter dem Keypadsteckplatz am Antriebsregler.
Seite 8 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
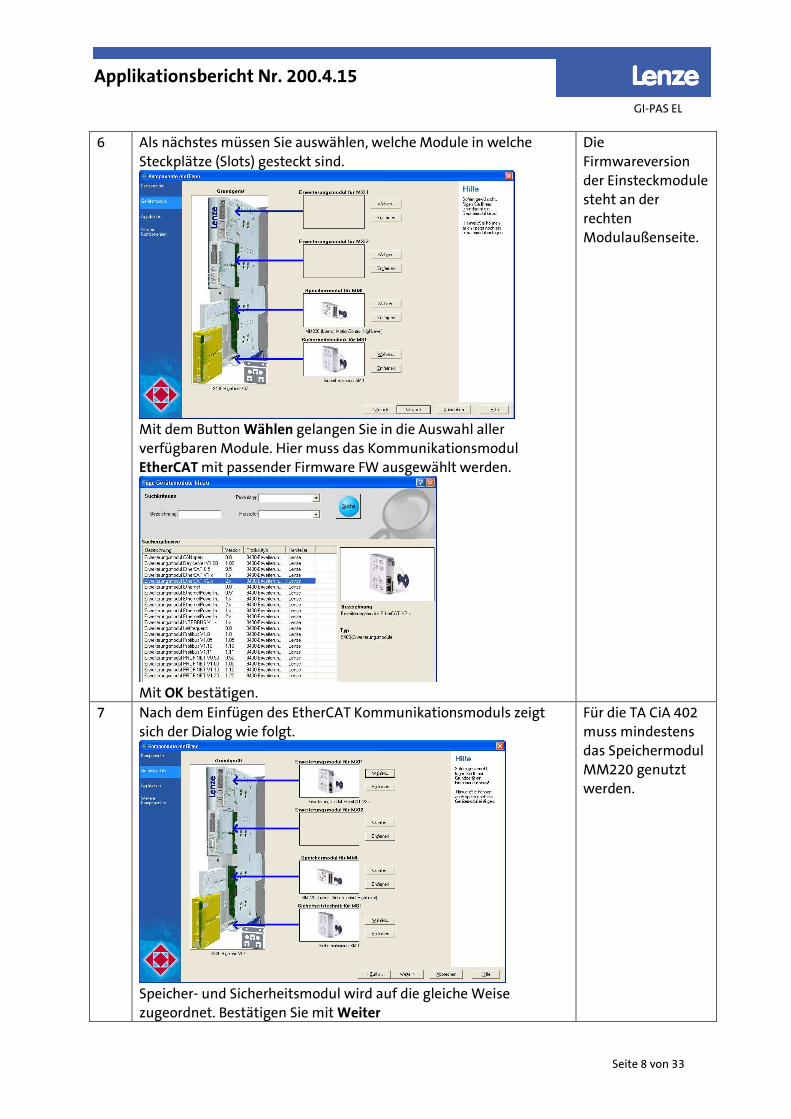
6 Als nächstes müssen Sie auswählen, welche Module in welche
Steckplätze (Slots) gesteckt sind.
Mit dem Button Wählen gelangen Sie in die Auswahl aller verfügbaren Module. Hier muss das Kommunikationsmodul EtherCAT mit passender Firmware FW ausgewählt werden.
Mit OK bestätigen.
Die Firmwareversion der Einsteckmodule steht an der rechten Modulaußenseite.
7 Nach dem Einfügen des EtherCAT Kommunikationsmoduls zeigt sich der Dialog wie folgt.
Speicher- und Sicherheitsmodul wird auf die gleiche Weise zugeordnet. Bestätigen Sie mit Weiter
Für die TA CiA 402 muss mindestens das Speichermodul MM220 genutzt werden.
Seite 9 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
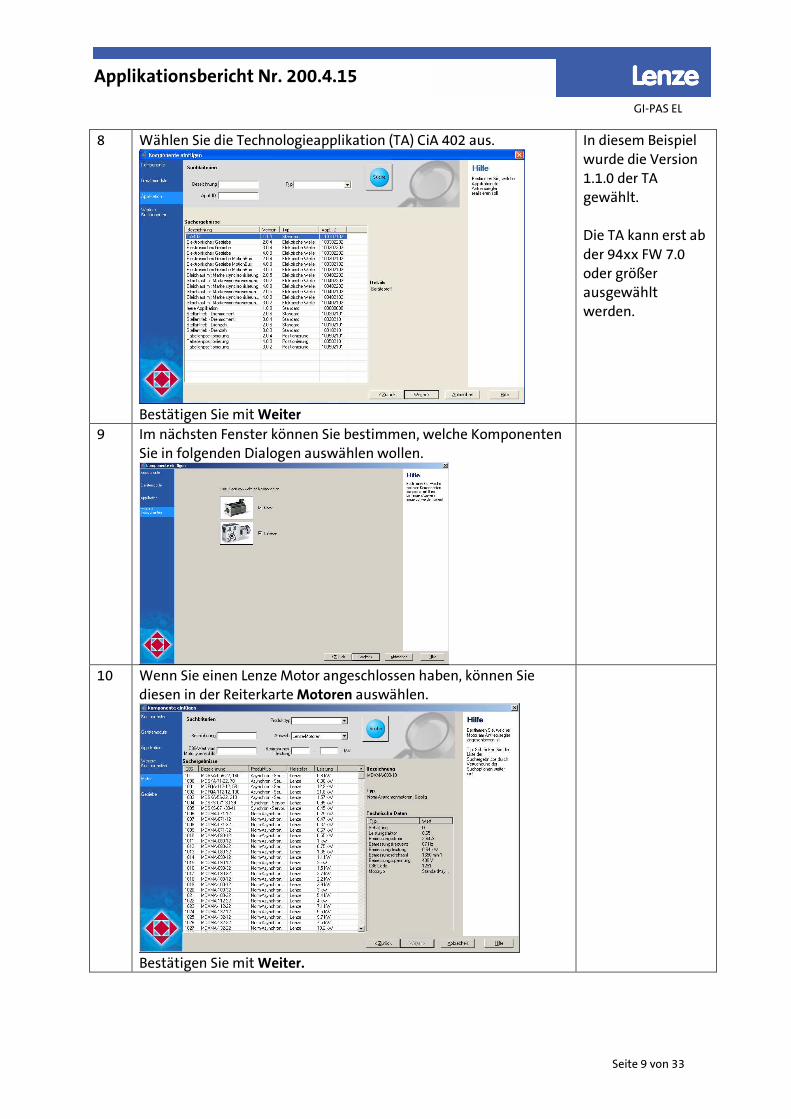
8 Wählen Sie die Technologieapplikation (TA) CiA 402 aus.
Bestätigen Sie mit Weiter
In diesem Beispiel wurde die Version 1.1.0 der TA gewählt. Die TA kann erst ab der 94xx FW 7.0 oder größer ausgewählt werden.
9 Im nächsten Fenster können Sie bestimmen, welche Komponenten Sie in folgenden Dialogen auswählen wollen.
10 Wenn Sie einen Lenze Motor angeschlossen haben, können Sie diesen in der Reiterkarte Motoren auswählen.
Bestätigen Sie mit Weiter.
Seite 10 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
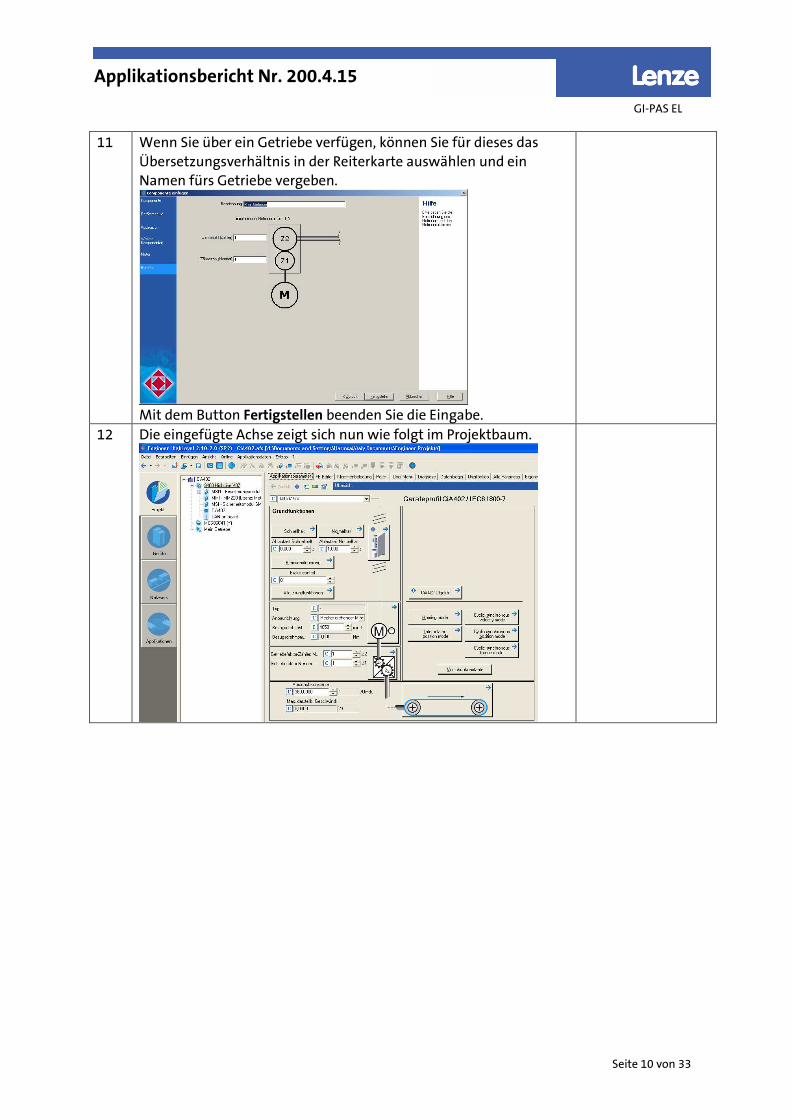
11 Wenn Sie über ein Getriebe verfügen, können Sie für dieses das
Übersetzungsverhältnis in der Reiterkarte auswählen und ein Namen fürs Getriebe vergeben.
Mit dem Button Fertigstellen beenden Sie die Eingabe.
12 Die eingefügte Achse zeigt sich nun wie folgt im Projektbaum.
Seite 11 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
3.2. Notwendige Konfigurationen der TA CiA 402 für die Beckhoff NC
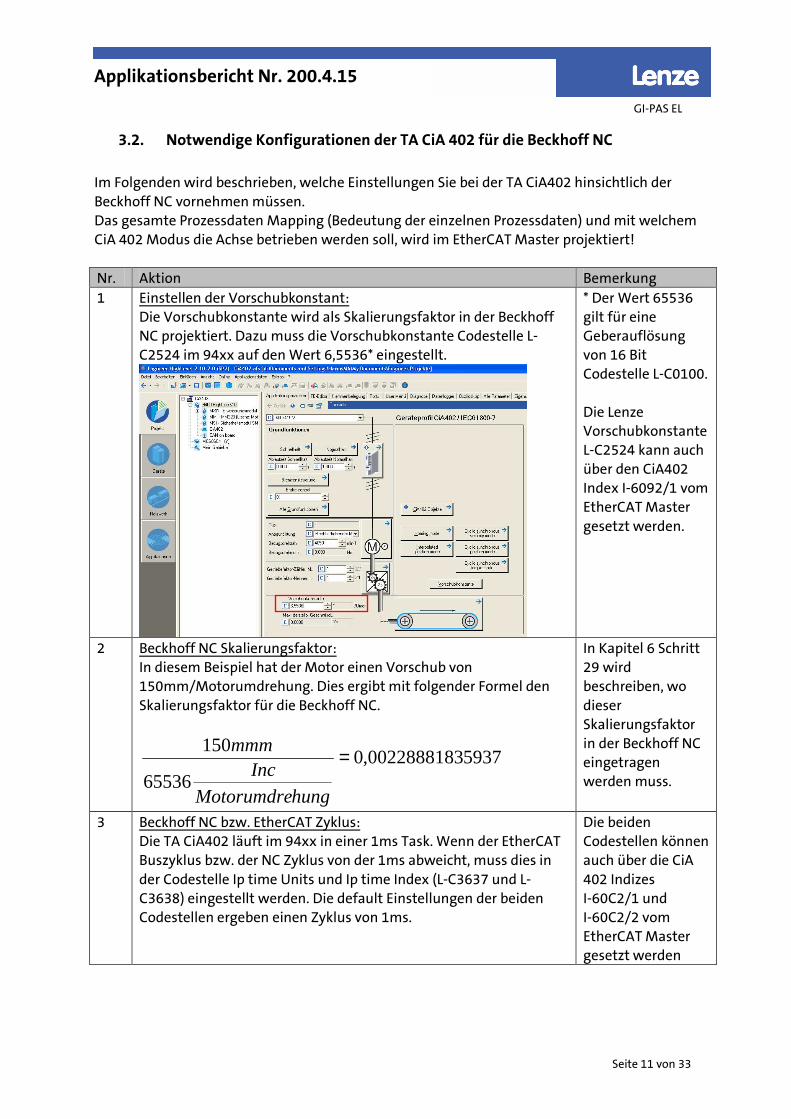
Im Folgenden wird beschrieben, welche Einstellungen Sie bei der TA CiA402 hinsichtlich der Beckhoff NC vornehmen müssen. Das gesamte Prozessdaten Mapping (Bedeutung der einzelnen Prozessdaten) und mit welchem CiA 402 Modus die Achse betrieben werden soll, wird im EtherCAT Master projektiert! Nr. Aktion Bemerkung 1 Einstellen der Vorschubkonstant:
Die Vorschubkonstante wird als Skalierungsfaktor in der Beckhoff NC projektiert. Dazu muss die Vorschubkonstante Codestelle L-C2524 im 94xx auf den Wert 6,5536* eingestellt.
* Der Wert 65536 gilt für eine Geberauflösung von 16 Bit Codestelle L-C0100. Die Lenze Vorschubkonstante L-C2524 kann auch über den CiA402 Index I-6092/1 vom EtherCAT Master gesetzt werden.
2 Beckhoff NC Skalierungsfaktor: In diesem Beispiel hat der Motor einen Vorschub von 150mm/Motorumdrehung. Dies ergibt mit folgender Formel den Skalierungsfaktor für die Beckhoff NC.
59370022888183,065536
150 =
hungMotorumdre
Incmmm
In Kapitel 6 Schritt 29 wird beschreiben, wo dieser Skalierungsfaktor in der Beckhoff NC eingetragen werden muss.
3 Beckhoff NC bzw. EtherCAT Zyklus: Die TA CiA402 läuft im 94xx in einer 1ms Task. Wenn der EtherCAT Buszyklus bzw. der NC Zyklus von der 1ms abweicht, muss dies in der Codestelle Ip time Units und Ip time Index (L-C3637 und L-C3638) eingestellt werden. Die default Einstellungen der beiden Codestellen ergeben einen Zyklus von 1ms.
Die beiden Codestellen können auch über die CiA 402 Indizes I-60C2/1 und I-60C2/2 vom EtherCAT Master gesetzt werden
Seite 12 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
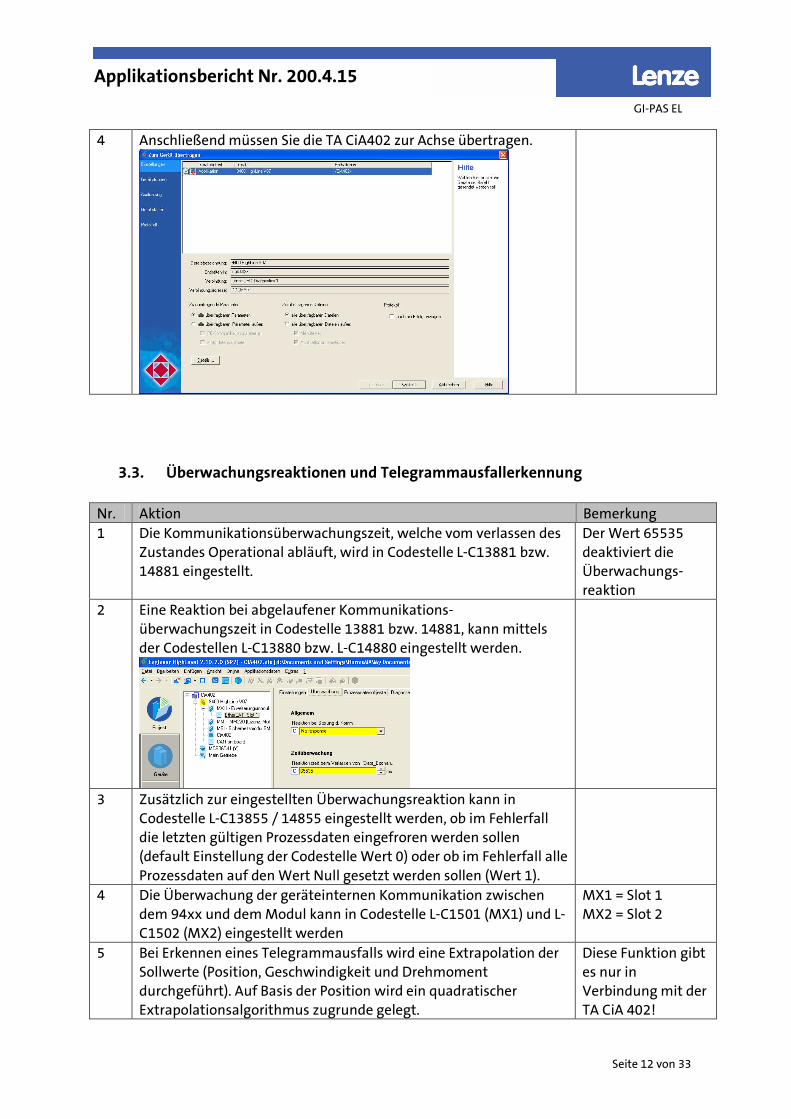
4 Anschließend müssen Sie die TA CiA402 zur Achse übertragen.
3.3. Überwachungsreaktionen und Telegrammausfallerkennung Nr. Aktion Bemerkung 1 Die Kommunikationsüberwachungszeit, welche vom verlassen des
Zustandes Operational abläuft, wird in Codestelle L-C13881 bzw. 14881 eingestellt.
Der Wert 65535 deaktiviert die Überwachungs-reaktion
2 Eine Reaktion bei abgelaufener Kommunikations-überwachungszeit in Codestelle 13881 bzw. 14881, kann mittels der Codestellen L-C13880 bzw. L-C14880 eingestellt werden.
3 Zusätzlich zur eingestellten Überwachungsreaktion kann in Codestelle L-C13855 / 14855 eingestellt werden, ob im Fehlerfall die letzten gültigen Prozessdaten eingefroren werden sollen (default Einstellung der Codestelle Wert 0) oder ob im Fehlerfall alle Prozessdaten auf den Wert Null gesetzt werden sollen (Wert 1).
4 Die Überwachung der geräteinternen Kommunikation zwischen dem 94xx und dem Modul kann in Codestelle L-C1501 (MX1) und L-C1502 (MX2) eingestellt werden
MX1 = Slot 1 MX2 = Slot 2
5 Bei Erkennen eines Telegrammausfalls wird eine Extrapolation der Sollwerte (Position, Geschwindigkeit und Drehmoment durchgeführt). Auf Basis der Position wird ein quadratischer Extrapolationsalgorithmus zugrunde gelegt.
Diese Funktion gibt es nur in Verbindung mit der TA CiA 402!
Seite 13 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
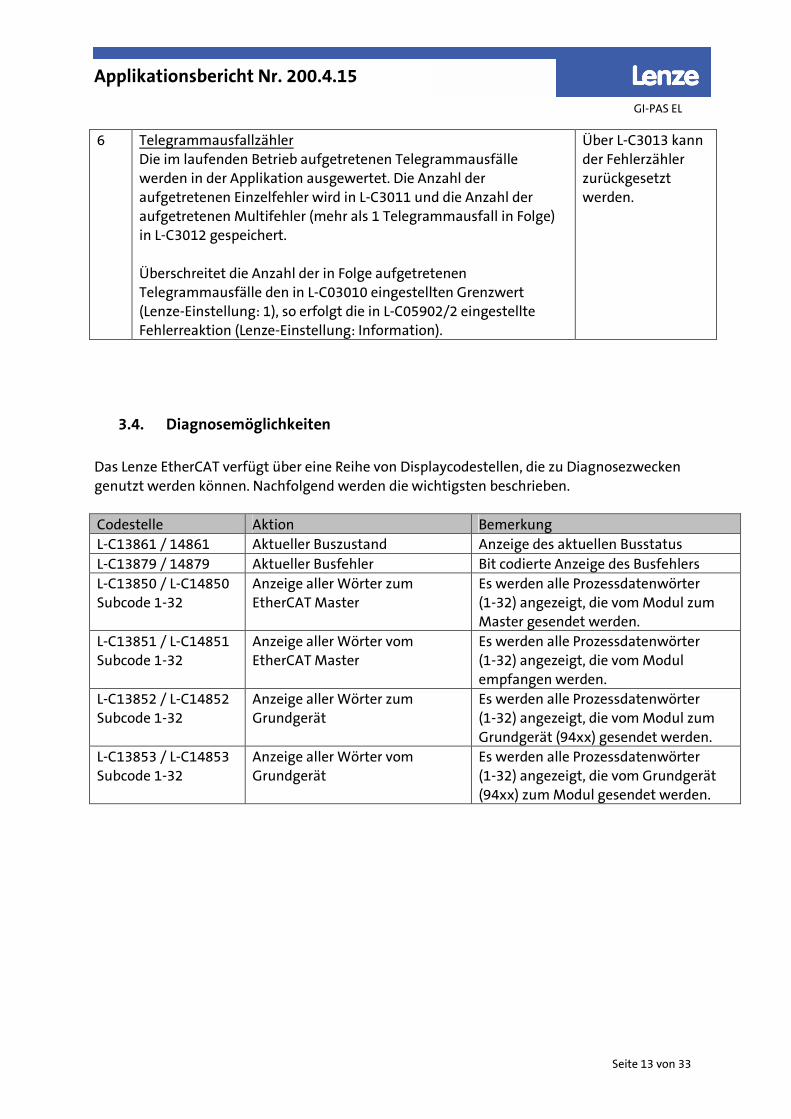
6 Telegrammausfallzähler
Die im laufenden Betrieb aufgetretenen Telegrammausfälle werden in der Applikation ausgewertet. Die Anzahl der aufgetretenen Einzelfehler wird in L-C3011 und die Anzahl der aufgetretenen Multifehler (mehr als 1 Telegrammausfall in Folge) in L-C3012 gespeichert. Überschreitet die Anzahl der in Folge aufgetretenen Telegrammausfälle den in L-C03010 eingestellten Grenzwert (Lenze-Einstellung: 1), so erfolgt die in L-C05902/2 eingestellte Fehlerreaktion (Lenze-Einstellung: Information).
Über L-C3013 kann der Fehlerzähler zurückgesetzt werden.
3.4. Diagnosemöglichkeiten
Das Lenze EtherCAT verfügt über eine Reihe von Displaycodestellen, die zu Diagnosezwecken genutzt werden können. Nachfolgend werden die wichtigsten beschrieben. Codestelle Aktion Bemerkung L-C13861 / 14861 Aktueller Buszustand Anzeige des aktuellen Busstatus L-C13879 / 14879 Aktueller Busfehler Bit codierte Anzeige des Busfehlers L-C13850 / L-C14850 Subcode 1-32
Anzeige aller Wörter zum EtherCAT Master
Es werden alle Prozessdatenwörter (1-32) angezeigt, die vom Modul zum Master gesendet werden.
L-C13851 / L-C14851 Subcode 1-32
Anzeige aller Wörter vom EtherCAT Master
Es werden alle Prozessdatenwörter (1-32) angezeigt, die vom Modul empfangen werden.
L-C13852 / L-C14852 Subcode 1-32
Anzeige aller Wörter zum Grundgerät
Es werden alle Prozessdatenwörter (1-32) angezeigt, die vom Modul zum Grundgerät (94xx) gesendet werden.
L-C13853 / L-C14853 Subcode 1-32
Anzeige aller Wörter vom Grundgerät
Es werden alle Prozessdatenwörter (1-32) angezeigt, die vom Grundgerät (94xx) zum Modul gesendet werden.
Seite 14 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
Im PC integrierte PCI-Express Ethernet Karte
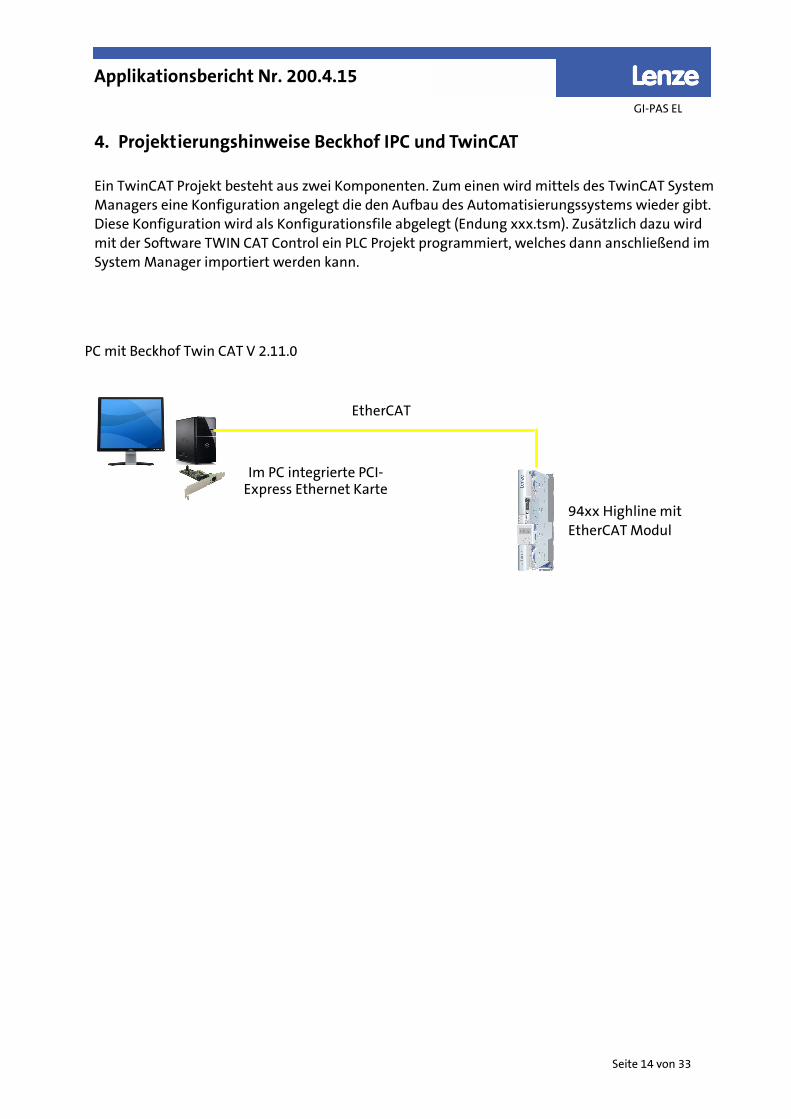
4. Projektierungshinweise Beckhof IPC und TwinCAT Ein TwinCAT Projekt besteht aus zwei Komponenten. Zum einen wird mittels des TwinCAT System Managers eine Konfiguration angelegt die den Aufbau des Automatisierungssystems wieder gibt. Diese Konfiguration wird als Konfigurationsfile abgelegt (Endung xxx.tsm). Zusätzlich dazu wird mit der Software TWIN CAT Control ein PLC Projekt programmiert, welches dann anschließend im System Manager importiert werden kann.
PC mit Beckhof Twin CAT V 2.11.0
EtherCAT
94xx Highline mit EtherCAT Modul
Seite 15 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
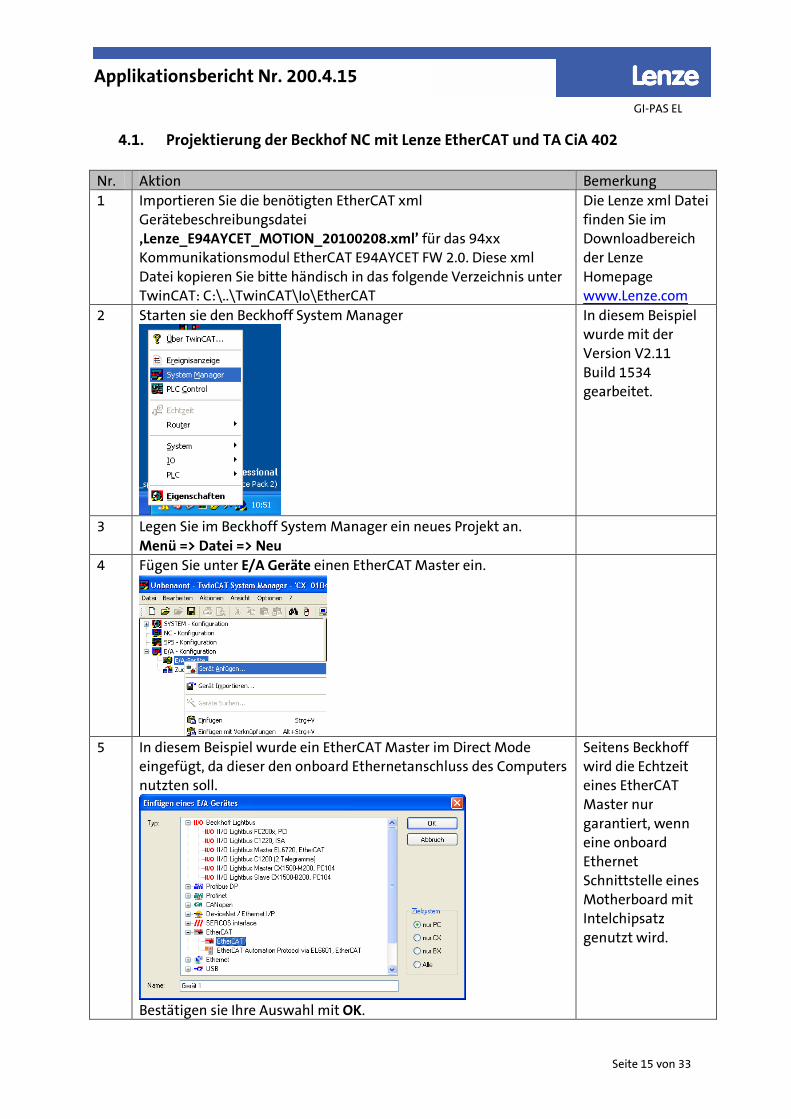
4.1. Projektierung der Beckhof NC mit Lenze EtherCAT und TA CiA 402 Nr. Aktion Bemerkung 1 Importieren Sie die benötigten EtherCAT xml
Gerätebeschreibungsdatei ‚Lenze_E94AYCET_MOTION_20100208.xml’ für das 94xx Kommunikationsmodul EtherCAT E94AYCET FW 2.0. Diese xml Datei kopieren Sie bitte händisch in das folgende Verzeichnis unter TwinCAT: C:\..\TwinCAT\Io\EtherCAT
Die Lenze xml Datei finden Sie im Downloadbereich der Lenze Homepage www.Lenze.com
2 Starten sie den Beckhoff System Manager
In diesem Beispiel wurde mit der Version V2.11 Build 1534 gearbeitet.
3 Legen Sie im Beckhoff System Manager ein neues Projekt an. Menü => Datei => Neu
4 Fügen Sie unter E/A Geräte einen EtherCAT Master ein.
5 In diesem Beispiel wurde ein EtherCAT Master im Direct Mode eingefügt, da dieser den onboard Ethernetanschluss des Computers nutzten soll.
Bestätigen sie Ihre Auswahl mit OK.
Seitens Beckhoff wird die Echtzeit eines EtherCAT Master nur garantiert, wenn eine onboard Ethernet Schnittstelle eines Motherboard mit Intelchipsatz genutzt wird.
Seite 16 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
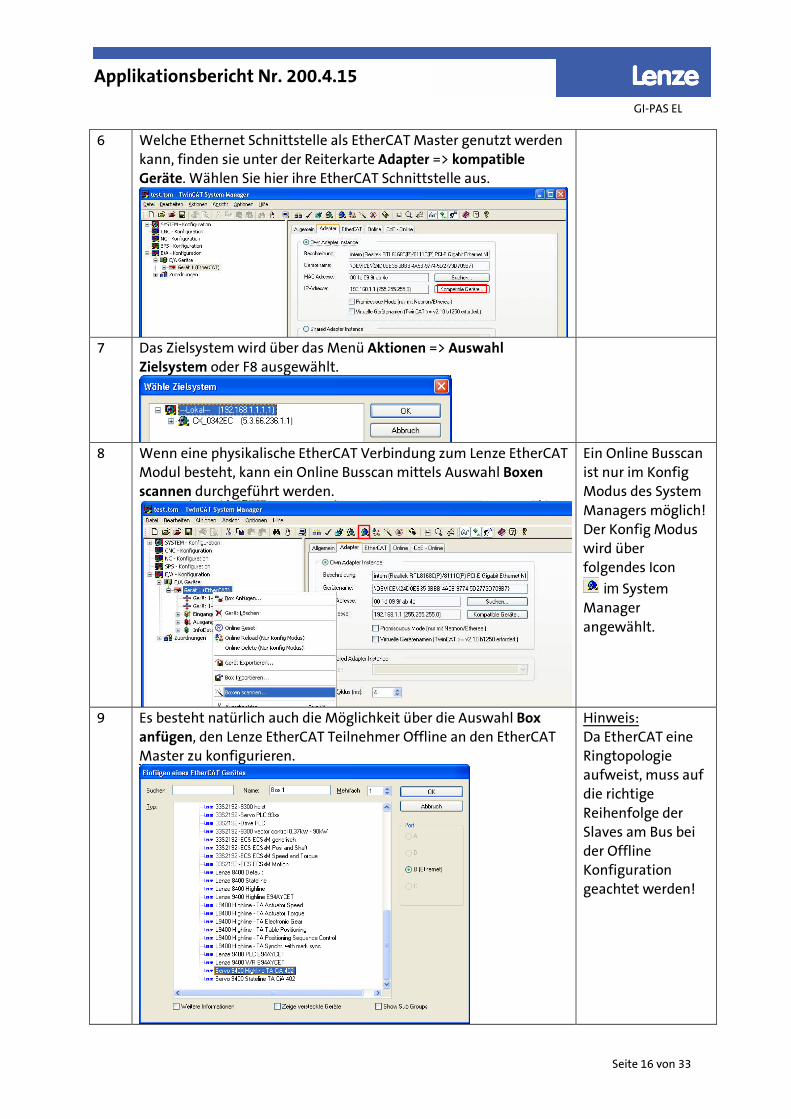
6 Welche Ethernet Schnittstelle als EtherCAT Master genutzt werden
kann, finden sie unter der Reiterkarte Adapter => kompatible Geräte. Wählen Sie hier ihre EtherCAT Schnittstelle aus.
7 Das Zielsystem wird über das Menü Aktionen => Auswahl Zielsystem oder F8 ausgewählt.
8 Wenn eine physikalische EtherCAT Verbindung zum Lenze EtherCAT Modul besteht, kann ein Online Busscan mittels Auswahl Boxen scannen durchgeführt werden.
Ein Online Busscan ist nur im Konfig Modus des System Managers möglich! Der Konfig Modus wird über folgendes Icon
im System Manager angewählt.
9 Es besteht natürlich auch die Möglichkeit über die Auswahl Box anfügen, den Lenze EtherCAT Teilnehmer Offline an den EtherCAT Master zu konfigurieren.
Hinweis: Da EtherCAT eine Ringtopologie aufweist, muss auf die richtige Reihenfolge der Slaves am Bus bei der Offline Konfiguration geachtet werden!
Seite 17 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
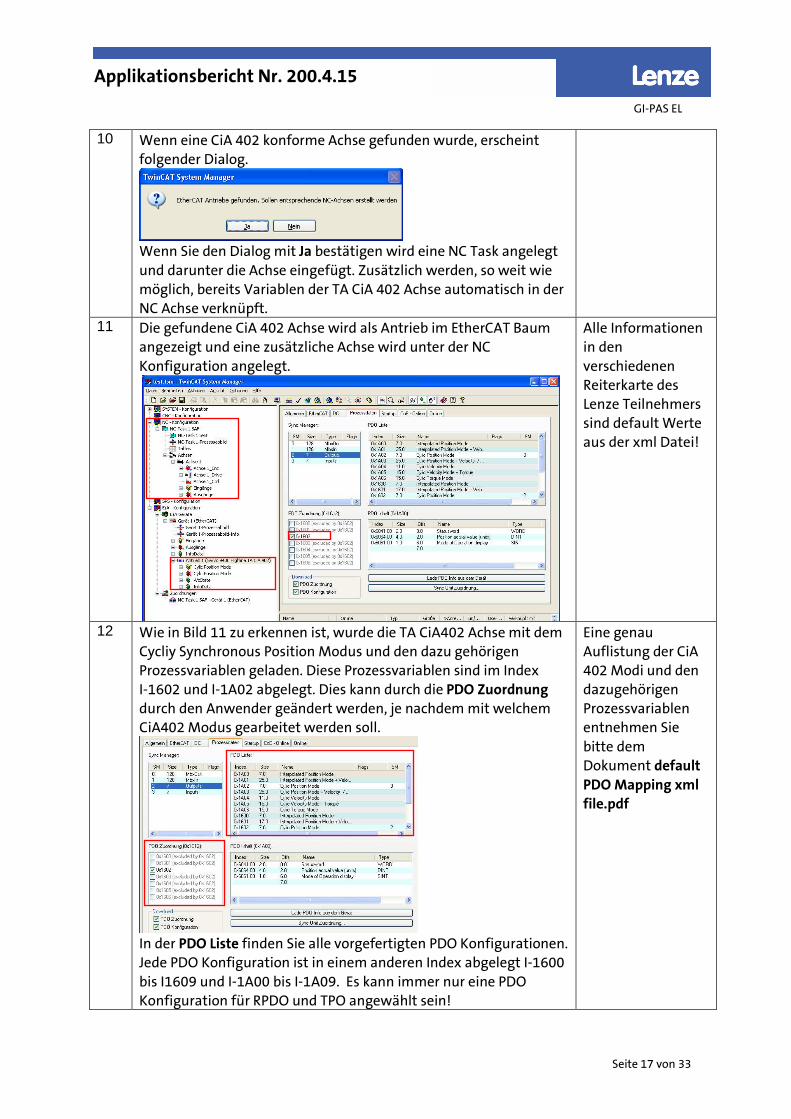
10 Wenn eine CiA 402 konforme Achse gefunden wurde, erscheint
folgender Dialog.
Wenn Sie den Dialog mit Ja bestätigen wird eine NC Task angelegt und darunter die Achse eingefügt. Zusätzlich werden, so weit wie möglich, bereits Variablen der TA CiA 402 Achse automatisch in der NC Achse verknüpft.
11 Die gefundene CiA 402 Achse wird als Antrieb im EtherCAT Baum angezeigt und eine zusätzliche Achse wird unter der NC Konfiguration angelegt.
Alle Informationen in den verschiedenen Reiterkarte des Lenze Teilnehmers sind default Werte aus der xml Datei!
12 Wie in Bild 11 zu erkennen ist, wurde die TA CiA402 Achse mit dem Cycliy Synchronous Position Modus und den dazu gehörigen Prozessvariablen geladen. Diese Prozessvariablen sind im Index I-1602 und I-1A02 abgelegt. Dies kann durch die PDO Zuordnung durch den Anwender geändert werden, je nachdem mit welchem CiA402 Modus gearbeitet werden soll.
In der PDO Liste finden Sie alle vorgefertigten PDO Konfigurationen. Jede PDO Konfiguration ist in einem anderen Index abgelegt I-1600 bis I1609 und I-1A00 bis I-1A09. Es kann immer nur eine PDO Konfiguration für RPDO und TPO angewählt sein!
Eine genau Auflistung der CiA 402 Modi und den dazugehörigen Prozessvariablen entnehmen Sie bitte dem Dokument default PDO Mapping xml file.pdf
Seite 18 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
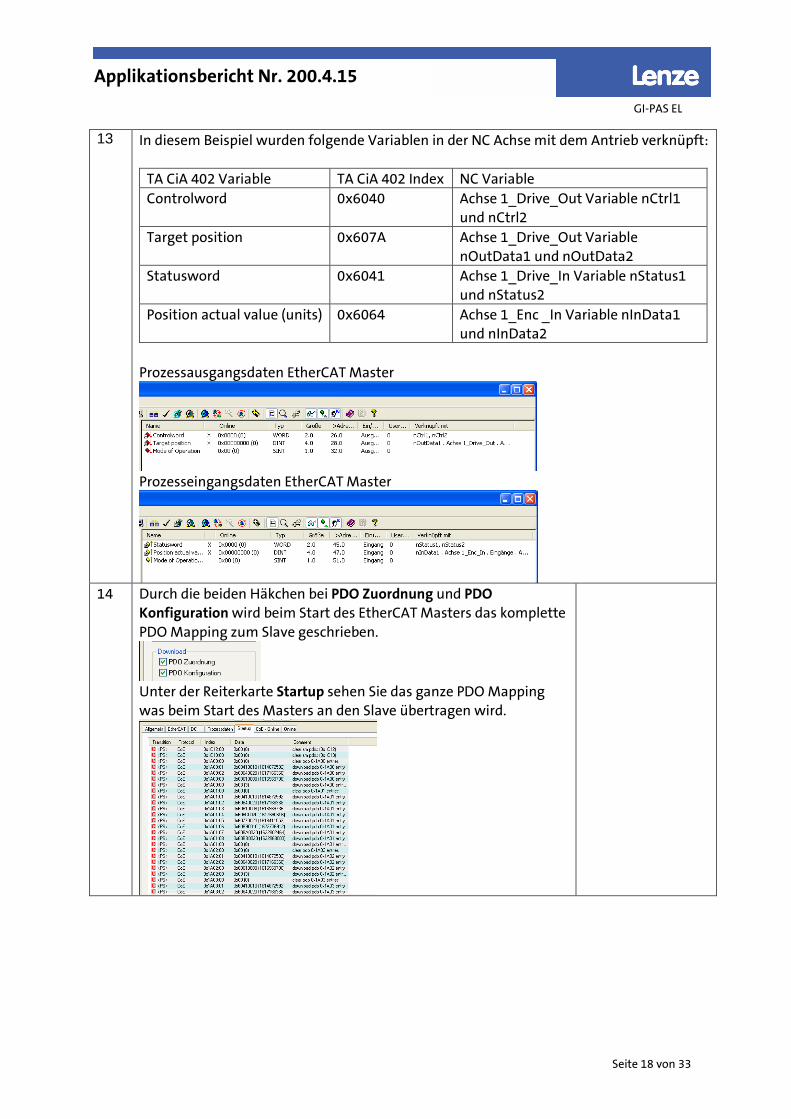
13 In diesem Beispiel wurden folgende Variablen in der NC Achse mit dem Antrieb verknüpft:
TA CiA 402 Variable TA CiA 402 Index NC Variable Controlword 0x6040 Achse 1_Drive_Out Variable nCtrl1
und nCtrl2 Target position 0x607A Achse 1_Drive_Out Variable
nOutData1 und nOutData2 Statusword 0x6041 Achse 1_Drive_In Variable nStatus1
und nStatus2 Position actual value (units) 0x6064 Achse 1_Enc _In Variable nInData1
und nInData2 Prozessausgangsdaten EtherCAT Master
Prozesseingangsdaten EtherCAT Master
14 Durch die beiden Häkchen bei PDO Zuordnung und PDO
Konfiguration wird beim Start des EtherCAT Masters das komplette PDO Mapping zum Slave geschrieben.
Unter der Reiterkarte Startup sehen Sie das ganze PDO Mapping was beim Start des Masters an den Slave übertragen wird.
Seite 19 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
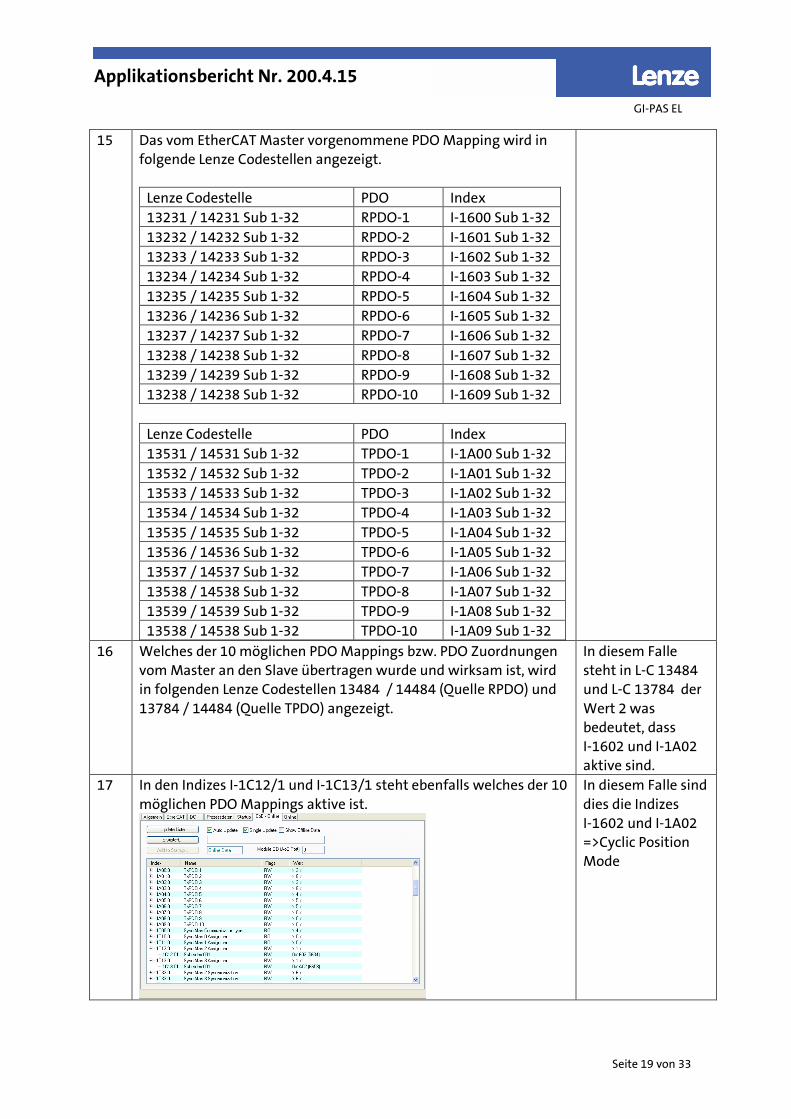
15 Das vom EtherCAT Master vorgenommene PDO Mapping wird in
folgende Lenze Codestellen angezeigt. Lenze Codestelle PDO Index 13231 / 14231 Sub 1-32 RPDO-1 I-1600 Sub 1-32 13232 / 14232 Sub 1-32 RPDO-2 I-1601 Sub 1-32 13233 / 14233 Sub 1-32 RPDO-3 I-1602 Sub 1-32 13234 / 14234 Sub 1-32 RPDO-4 I-1603 Sub 1-32 13235 / 14235 Sub 1-32 RPDO-5 I-1604 Sub 1-32 13236 / 14236 Sub 1-32 RPDO-6 I-1605 Sub 1-32 13237 / 14237 Sub 1-32 RPDO-7 I-1606 Sub 1-32 13238 / 14238 Sub 1-32 RPDO-8 I-1607 Sub 1-32 13239 / 14239 Sub 1-32 RPDO-9 I-1608 Sub 1-32 13238 / 14238 Sub 1-32 RPDO-10 I-1609 Sub 1-32 Lenze Codestelle PDO Index 13531 / 14531 Sub 1-32 TPDO-1 I-1A00 Sub 1-32 13532 / 14532 Sub 1-32 TPDO-2 I-1A01 Sub 1-32 13533 / 14533 Sub 1-32 TPDO-3 I-1A02 Sub 1-32 13534 / 14534 Sub 1-32 TPDO-4 I-1A03 Sub 1-32 13535 / 14535 Sub 1-32 TPDO-5 I-1A04 Sub 1-32 13536 / 14536 Sub 1-32 TPDO-6 I-1A05 Sub 1-32 13537 / 14537 Sub 1-32 TPDO-7 I-1A06 Sub 1-32 13538 / 14538 Sub 1-32 TPDO-8 I-1A07 Sub 1-32 13539 / 14539 Sub 1-32 TPDO-9 I-1A08 Sub 1-32 13538 / 14538 Sub 1-32 TPDO-10 I-1A09 Sub 1-32
16 Welches der 10 möglichen PDO Mappings bzw. PDO Zuordnungen vom Master an den Slave übertragen wurde und wirksam ist, wird in folgenden Lenze Codestellen 13484 / 14484 (Quelle RPDO) und 13784 / 14484 (Quelle TPDO) angezeigt.
In diesem Falle steht in L-C 13484 und L-C 13784 der Wert 2 was bedeutet, dass I-1602 und I-1A02 aktive sind.
17 In den Indizes I-1C12/1 und I-1C13/1 steht ebenfalls welches der 10 möglichen PDO Mappings aktive ist.
In diesem Falle sind dies die Indizes I-1602 und I-1A02 =>Cyclic Position Mode
Seite 20 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
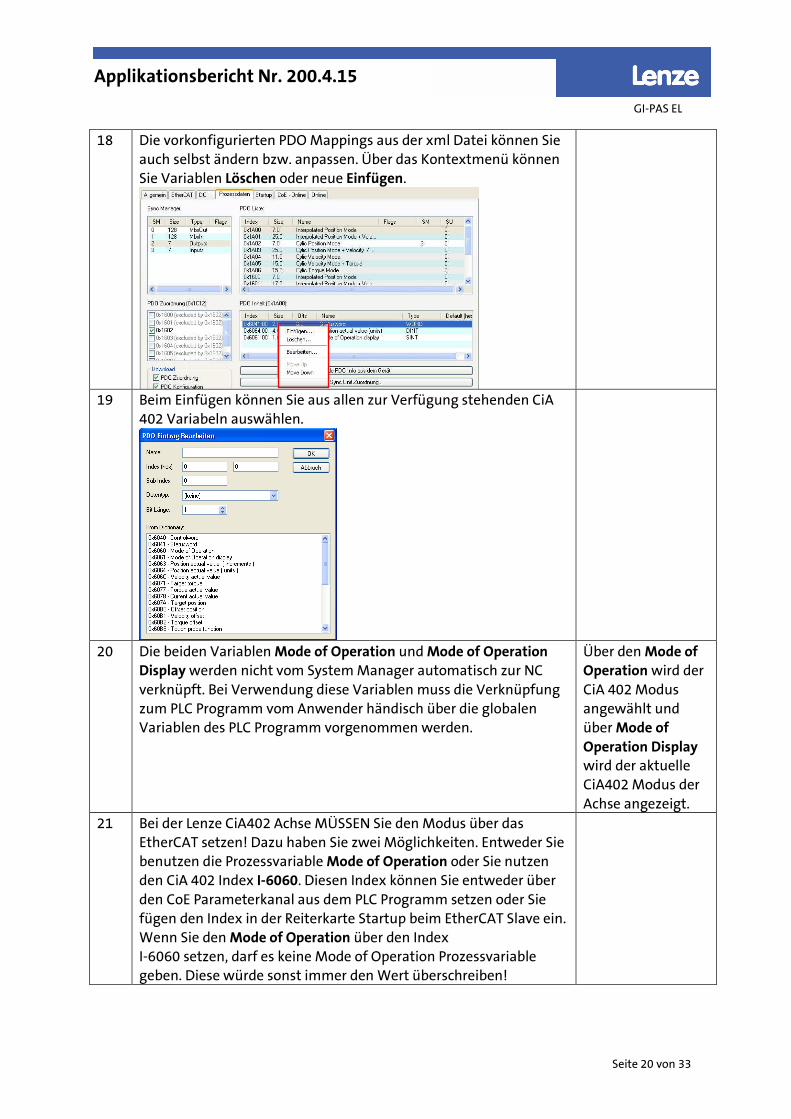
18 Die vorkonfigurierten PDO Mappings aus der xml Datei können Sie
auch selbst ändern bzw. anpassen. Über das Kontextmenü können Sie Variablen Löschen oder neue Einfügen.
19 Beim Einfügen können Sie aus allen zur Verfügung stehenden CiA 402 Variabeln auswählen.
20 Die beiden Variablen Mode of Operation und Mode of Operation Display werden nicht vom System Manager automatisch zur NC verknüpft. Bei Verwendung diese Variablen muss die Verknüpfung zum PLC Programm vom Anwender händisch über die globalen Variablen des PLC Programm vorgenommen werden.
Über den Mode of Operation wird der CiA 402 Modus angewählt und über Mode of Operation Display wird der aktuelle CiA402 Modus der Achse angezeigt.
21 Bei der Lenze CiA402 Achse MÜSSEN Sie den Modus über das EtherCAT setzen! Dazu haben Sie zwei Möglichkeiten. Entweder Sie benutzen die Prozessvariable Mode of Operation oder Sie nutzen den CiA 402 Index I-6060. Diesen Index können Sie entweder über den CoE Parameterkanal aus dem PLC Programm setzen oder Sie fügen den Index in der Reiterkarte Startup beim EtherCAT Slave ein. Wenn Sie den Mode of Operation über den Index I-6060 setzen, darf es keine Mode of Operation Prozessvariable geben. Diese würde sonst immer den Wert überschreiben!
Seite 21 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
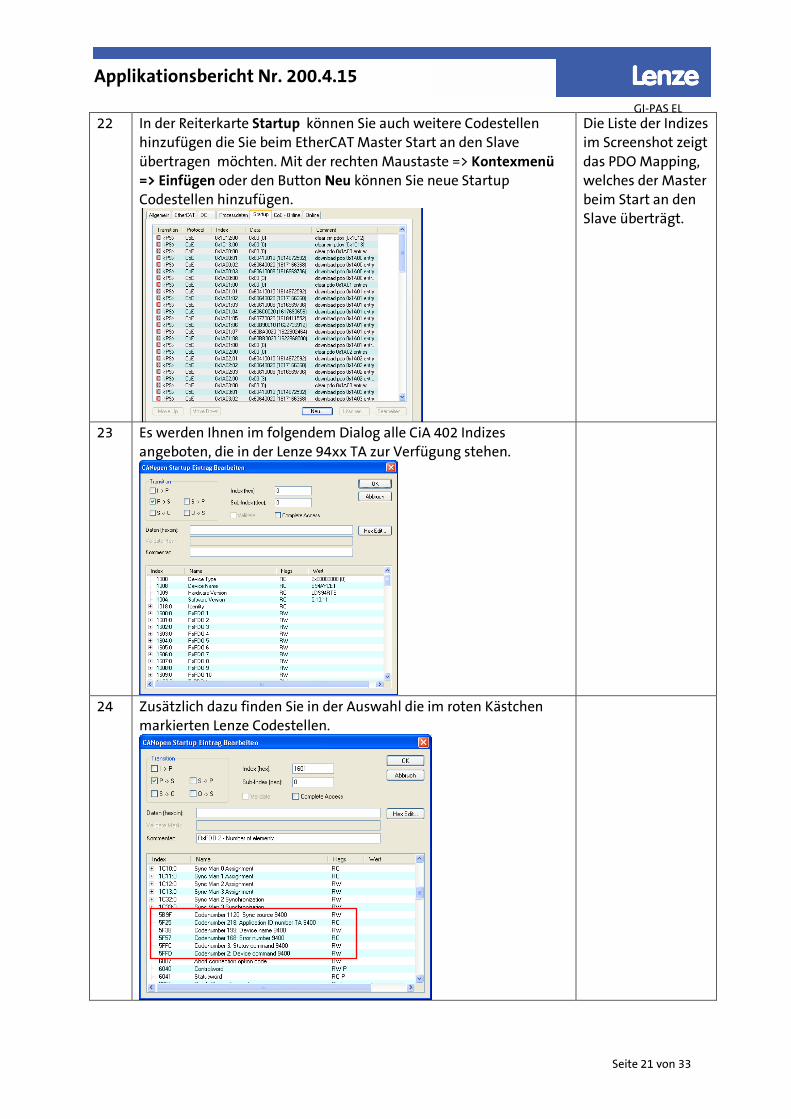
22 In der Reiterkarte Startup können Sie auch weitere Codestellen hinzufügen die Sie beim EtherCAT Master Start an den Slave übertragen möchten. Mit der rechten Maustaste => Kontexmenü => Einfügen oder den Button Neu können Sie neue Startup Codestellen hinzufügen.
Die Liste der Indizes im Screenshot zeigt das PDO Mapping, welches der Master beim Start an den Slave überträgt.
23 Es werden Ihnen im folgendem Dialog alle CiA 402 Indizes angeboten, die in der Lenze 94xx TA zur Verfügung stehen.
24 Zusätzlich dazu finden Sie in der Auswahl die im roten Kästchen markierten Lenze Codestellen.
Seite 22 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
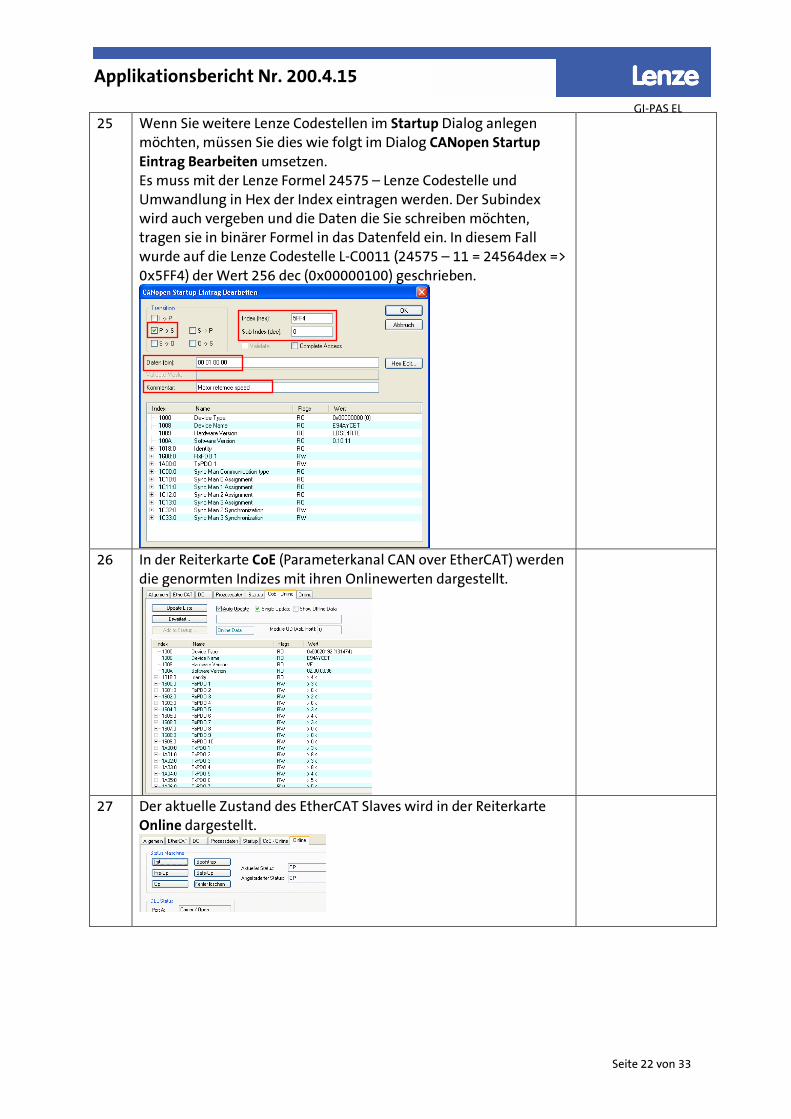
25 Wenn Sie weitere Lenze Codestellen im Startup Dialog anlegen möchten, müssen Sie dies wie folgt im Dialog CANopen Startup Eintrag Bearbeiten umsetzen. Es muss mit der Lenze Formel 24575 – Lenze Codestelle und Umwandlung in Hex der Index eintragen werden. Der Subindex wird auch vergeben und die Daten die Sie schreiben möchten, tragen sie in binärer Formel in das Datenfeld ein. In diesem Fall wurde auf die Lenze Codestelle L-C0011 (24575 – 11 = 24564dex => 0x5FF4) der Wert 256 dec (0x00000100) geschrieben.
26 In der Reiterkarte CoE (Parameterkanal CAN over EtherCAT) werden die genormten Indizes mit ihren Onlinewerten dargestellt.
27 Der aktuelle Zustand des EtherCAT Slaves wird in der Reiterkarte Online dargestellt.
Seite 23 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
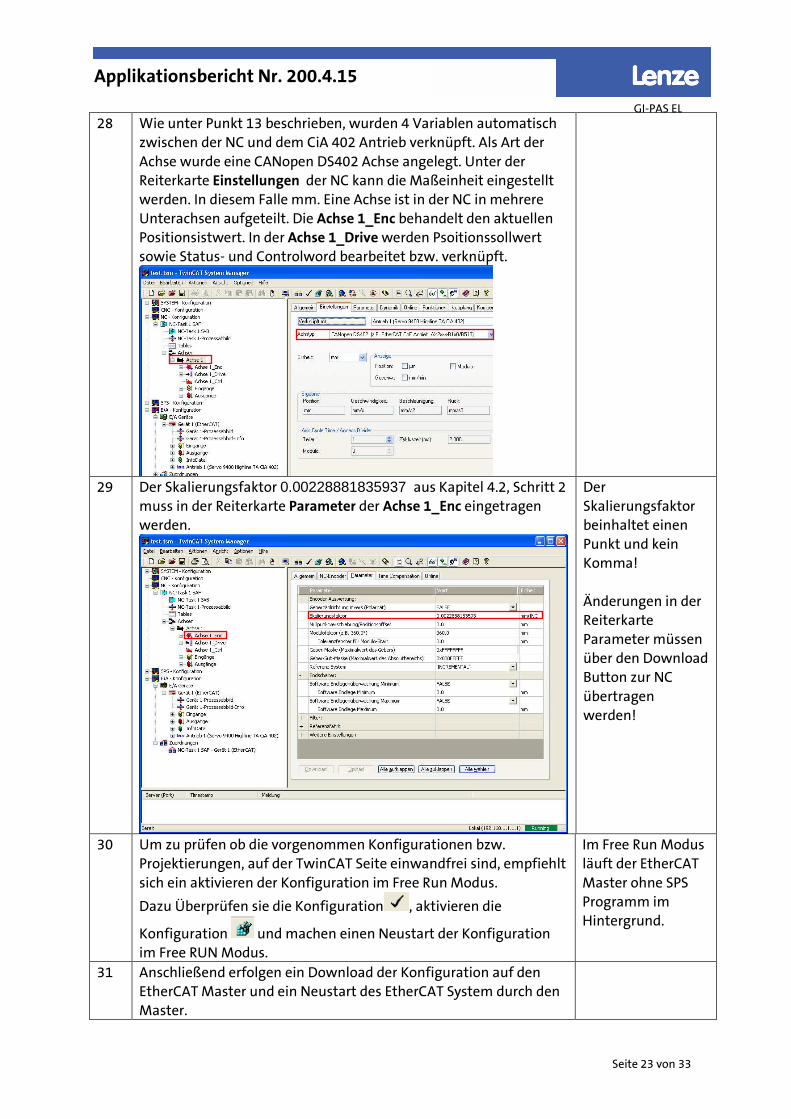
28 Wie unter Punkt 13 beschrieben, wurden 4 Variablen automatisch zwischen der NC und dem CiA 402 Antrieb verknüpft. Als Art der Achse wurde eine CANopen DS402 Achse angelegt. Unter der Reiterkarte Einstellungen der NC kann die Maßeinheit eingestellt werden. In diesem Falle mm. Eine Achse ist in der NC in mehrere Unterachsen aufgeteilt. Die Achse 1_Enc behandelt den aktuellen Positionsistwert. In der Achse 1_Drive werden Psoitionssollwert sowie Status- und Controlword bearbeitet bzw. verknüpft.
29 Der Skalierungsfaktor 0.00228881835937 aus Kapitel 4.2, Schritt 2 muss in der Reiterkarte Parameter der Achse 1_Enc eingetragen werden.
Der Skalierungsfaktor beinhaltet einen Punkt und kein Komma! Änderungen in der Reiterkarte Parameter müssen über den Download Button zur NC übertragen werden!
30 Um zu prüfen ob die vorgenommen Konfigurationen bzw. Projektierungen, auf der TwinCAT Seite einwandfrei sind, empfiehlt sich ein aktivieren der Konfiguration im Free Run Modus.
Dazu Überprüfen sie die Konfiguration , aktivieren die
Konfiguration und machen einen Neustart der Konfiguration im Free RUN Modus.
Im Free Run Modus läuft der EtherCAT Master ohne SPS Programm im Hintergrund.
31 Anschließend erfolgen ein Download der Konfiguration auf den EtherCAT Master und ein Neustart des EtherCAT System durch den Master.
Seite 24 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
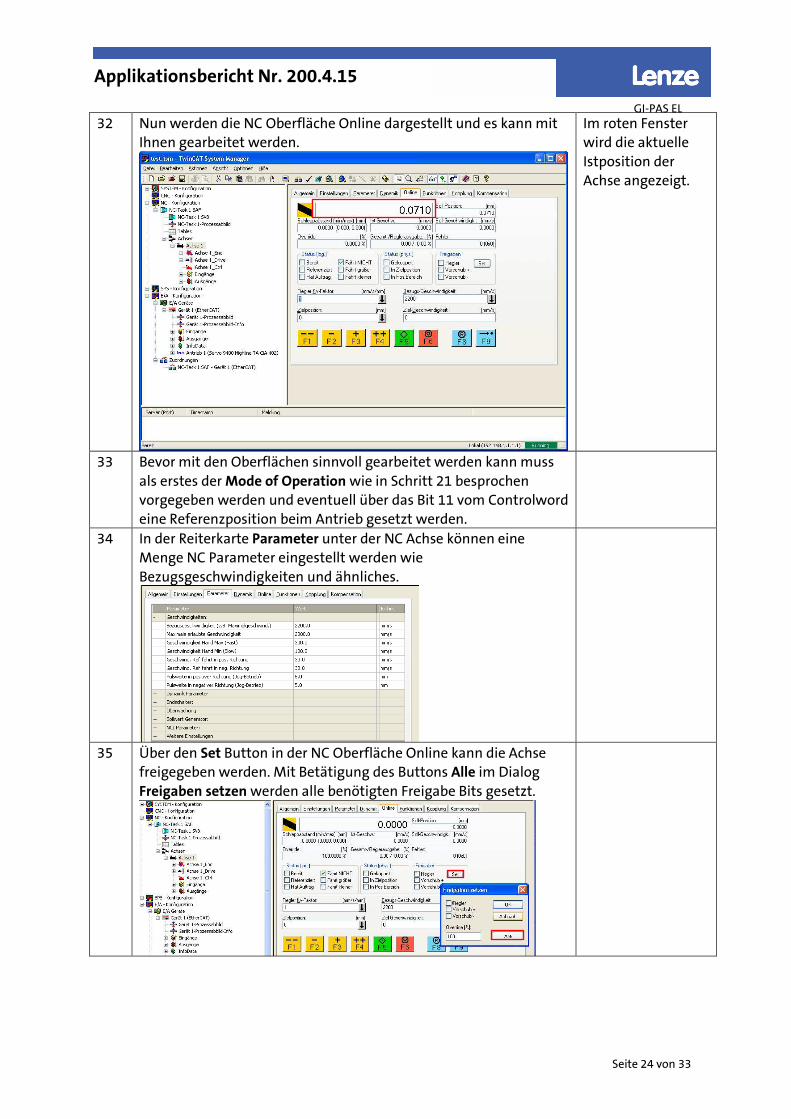
32 Nun werden die NC Oberfläche Online dargestellt und es kann mit Ihnen gearbeitet werden.
Im roten Fenster wird die aktuelle Istposition der Achse angezeigt.
33 Bevor mit den Oberflächen sinnvoll gearbeitet werden kann muss als erstes der Mode of Operation wie in Schritt 21 besprochen vorgegeben werden und eventuell über das Bit 11 vom Controlword eine Referenzposition beim Antrieb gesetzt werden.
34 In der Reiterkarte Parameter unter der NC Achse können eine Menge NC Parameter eingestellt werden wie Bezugsgeschwindigkeiten und ähnliches.
35 Über den Set Button in der NC Oberfläche Online kann die Achse freigegeben werden. Mit Betätigung des Buttons Alle im Dialog Freigaben setzen werden alle benötigten Freigabe Bits gesetzt.
Seite 25 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
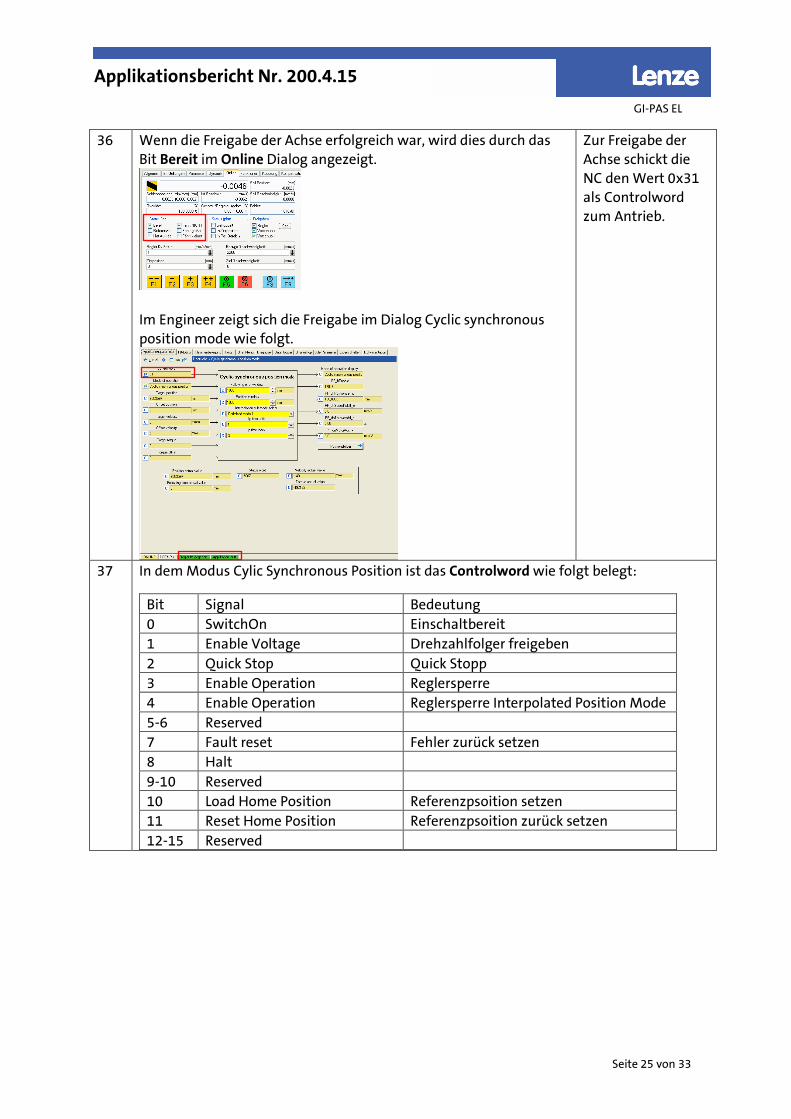
36 Wenn die Freigabe der Achse erfolgreich war, wird dies durch das
Bit Bereit im Online Dialog angezeigt.
Im Engineer zeigt sich die Freigabe im Dialog Cyclic synchronous position mode wie folgt.
Zur Freigabe der Achse schickt die NC den Wert 0x31 als Controlword zum Antrieb.
37 In dem Modus Cylic Synchronous Position ist das Controlword wie folgt belegt:
Bit Signal Bedeutung 0 SwitchOn Einschaltbereit 1 Enable Voltage Drehzahlfolger freigeben 2 Quick Stop Quick Stopp 3 Enable Operation Reglersperre 4 Enable Operation Reglersperre Interpolated Position Mode 5-6 Reserved 7 Fault reset Fehler zurück setzen 8 Halt 9-10 Reserved 10 Load Home Position Referenzpsoition setzen 11 Reset Home Position Referenzpsoition zurück setzen 12-15 Reserved
Seite 26 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
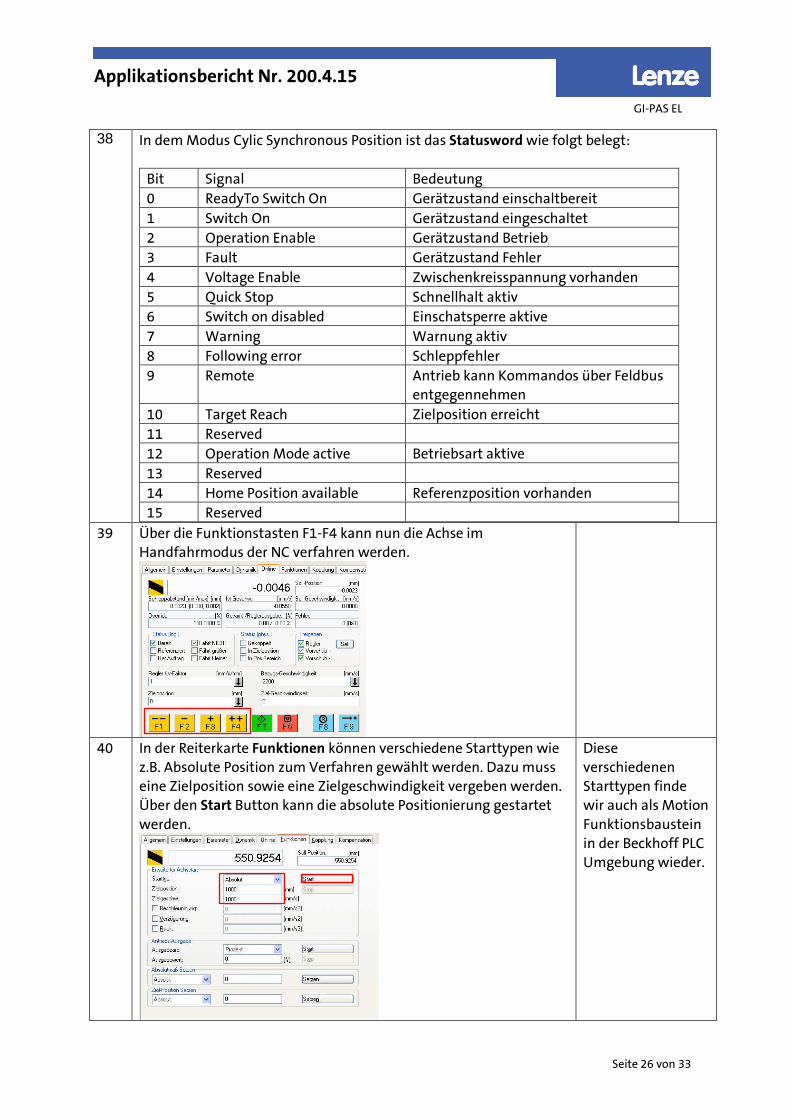
38 In dem Modus Cylic Synchronous Position ist das Statusword wie folgt belegt:
Bit Signal Bedeutung 0 ReadyTo Switch On Gerätzustand einschaltbereit 1 Switch On Gerätzustand eingeschaltet 2 Operation Enable Gerätzustand Betrieb 3 Fault Gerätzustand Fehler 4 Voltage Enable Zwischenkreisspannung vorhanden 5 Quick Stop Schnellhalt aktiv 6 Switch on disabled Einschatsperre aktive 7 Warning Warnung aktiv 8 Following error Schleppfehler 9 Remote Antrieb kann Kommandos über Feldbus
entgegennehmen 10 Target Reach Zielposition erreicht 11 Reserved 12 Operation Mode active Betriebsart aktive 13 Reserved 14 Home Position available Referenzposition vorhanden 15 Reserved
39 Über die Funktionstasten F1-F4 kann nun die Achse im Handfahrmodus der NC verfahren werden.
40 In der Reiterkarte Funktionen können verschiedene Starttypen wie z.B. Absolute Position zum Verfahren gewählt werden. Dazu muss eine Zielposition sowie eine Zielgeschwindigkeit vergeben werden. Über den Start Button kann die absolute Positionierung gestartet werden.
Diese verschiedenen Starttypen finde wir auch als Motion Funktionsbaustein in der Beckhoff PLC Umgebung wieder.
Seite 27 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
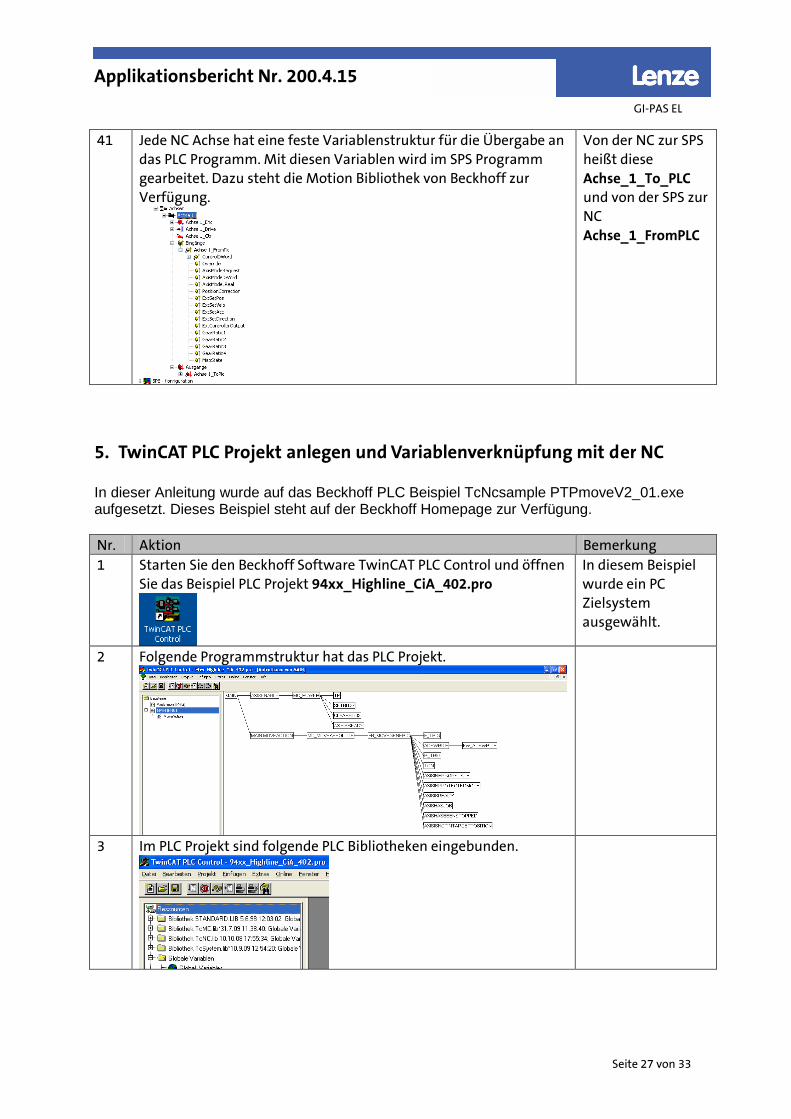
41 Jede NC Achse hat eine feste Variablenstruktur für die Übergabe an
das PLC Programm. Mit diesen Variablen wird im SPS Programm gearbeitet. Dazu steht die Motion Bibliothek von Beckhoff zur Verfügung.
Von der NC zur SPS heißt diese Achse_1_To_PLC und von der SPS zur NC Achse_1_FromPLC
5. TwinCAT PLC Projekt anlegen und Variablenverknüpfung mit der NC In dieser Anleitung wurde auf das Beckhoff PLC Beispiel TcNcsample PTPmoveV2_01.exe aufgesetzt. Dieses Beispiel steht auf der Beckhoff Homepage zur Verfügung. Nr. Aktion Bemerkung 1 Starten Sie den Beckhoff Software TwinCAT PLC Control und öffnen
Sie das Beispiel PLC Projekt 94xx_Highline_CiA_402.pro
In diesem Beispiel wurde ein PC Zielsystem ausgewählt.
2 Folgende Programmstruktur hat das PLC Projekt.
3 Im PLC Projekt sind folgende PLC Bibliotheken eingebunden.
Seite 28 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
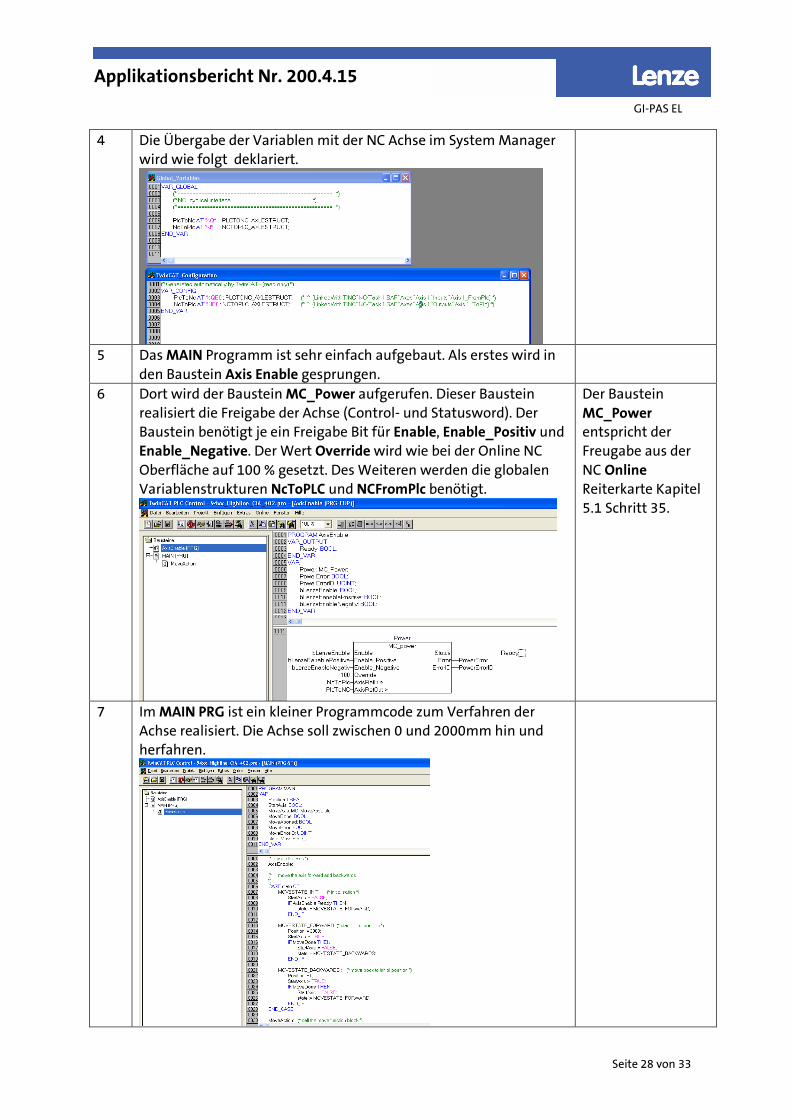
4 Die Übergabe der Variablen mit der NC Achse im System Manager
wird wie folgt deklariert.
5 Das MAIN Programm ist sehr einfach aufgebaut. Als erstes wird in den Baustein Axis Enable gesprungen.
6 Dort wird der Baustein MC_Power aufgerufen. Dieser Baustein realisiert die Freigabe der Achse (Control- und Statusword). Der Baustein benötigt je ein Freigabe Bit für Enable, Enable_Positiv und Enable_Negative. Der Wert Override wird wie bei der Online NC Oberfläche auf 100 % gesetzt. Des Weiteren werden die globalen Variablenstrukturen NcToPLC und NCFromPlc benötigt.
Der Baustein MC_Power entspricht der Freugabe aus der NC Online Reiterkarte Kapitel 5.1 Schritt 35.
7 Im MAIN PRG ist ein kleiner Programmcode zum Verfahren der Achse realisiert. Die Achse soll zwischen 0 und 2000mm hin und herfahren.
Seite 29 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
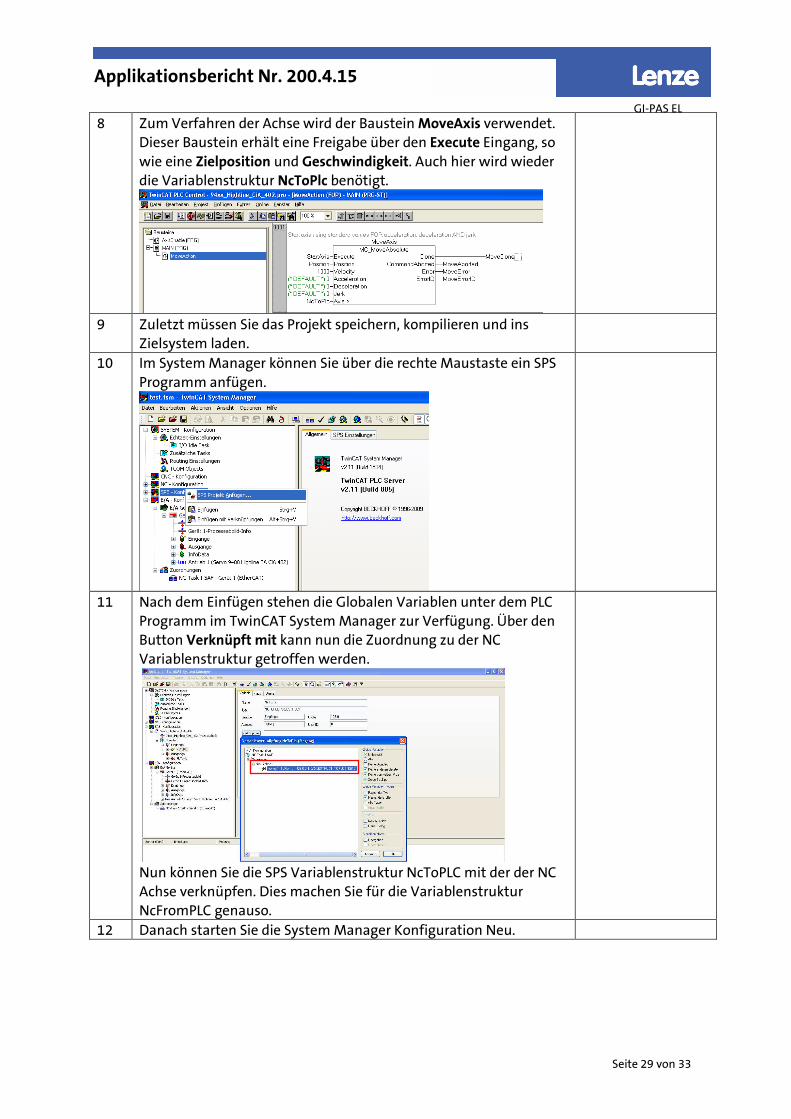
8 Zum Verfahren der Achse wird der Baustein MoveAxis verwendet. Dieser Baustein erhält eine Freigabe über den Execute Eingang, so wie eine Zielposition und Geschwindigkeit. Auch hier wird wieder die Variablenstruktur NcToPlc benötigt.
9 Zuletzt müssen Sie das Projekt speichern, kompilieren und ins Zielsystem laden.
10 Im System Manager können Sie über die rechte Maustaste ein SPS Programm anfügen.
11 Nach dem Einfügen stehen die Globalen Variablen unter dem PLC Programm im TwinCAT System Manager zur Verfügung. Über den Button Verknüpft mit kann nun die Zuordnung zu der NC Variablenstruktur getroffen werden.
Nun können Sie die SPS Variablenstruktur NcToPLC mit der der NC Achse verknüpfen. Dies machen Sie für die Variablenstruktur NcFromPLC genauso.
12 Danach starten Sie die System Manager Konfiguration Neu.
Seite 30 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
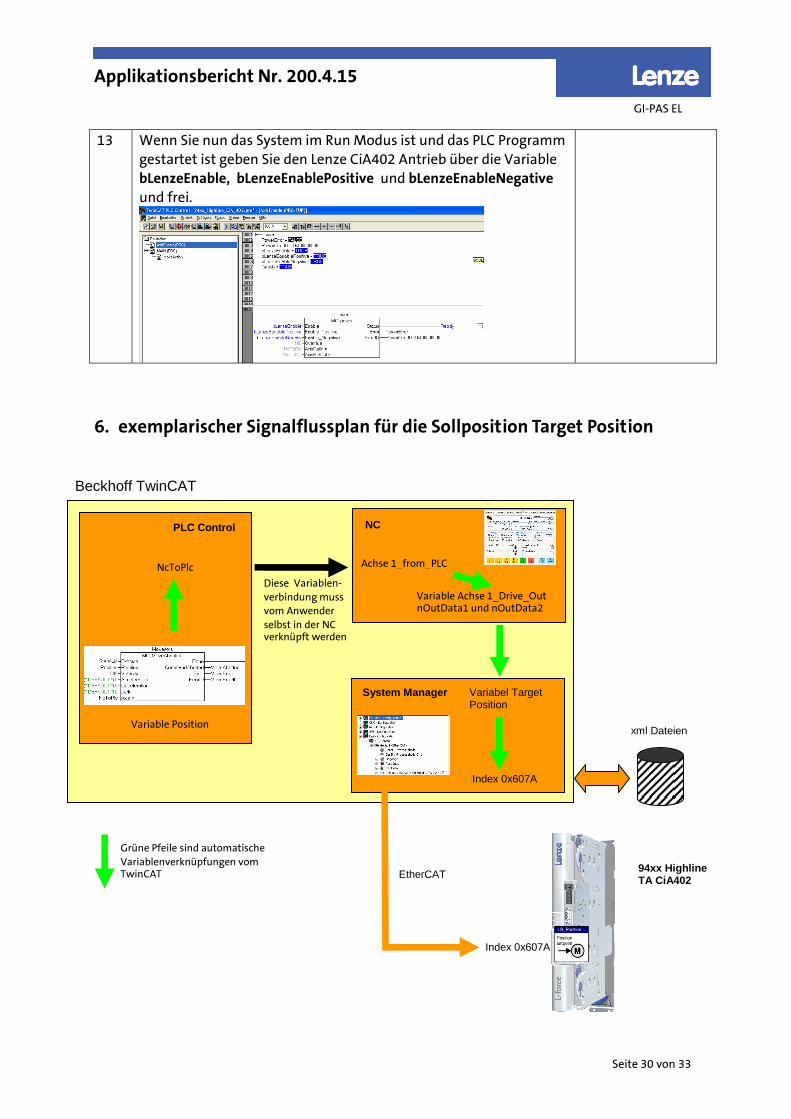
13 Wenn Sie nun das System im Run Modus ist und das PLC Programm
gestartet ist geben Sie den Lenze CiA402 Antrieb über die Variable bLenzeEnable, bLenzeEnablePositive und bLenzeEnableNegative und frei.
6. exemplarischer Signalflussplan für die Sollposition Target Position
System Manager
Beckhoff TwinCAT
NC PLC Control
EtherCAT 94xx Highline TA CiA402
xml Dateien
Index 0x607A
Index 0x607A
Variabel Target Position
Variable Achse 1_Drive_Out nOutData1 und nOutData2
NcToPlc Achse 1_from_PLC
Variable Position
Diese Variablen-verbindung muss vom Anwender selbst in der NC verknüpft werden
Grüne Pfeile sind automatische Variablenverknüpfungen vom TwinCAT
Seite 31 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
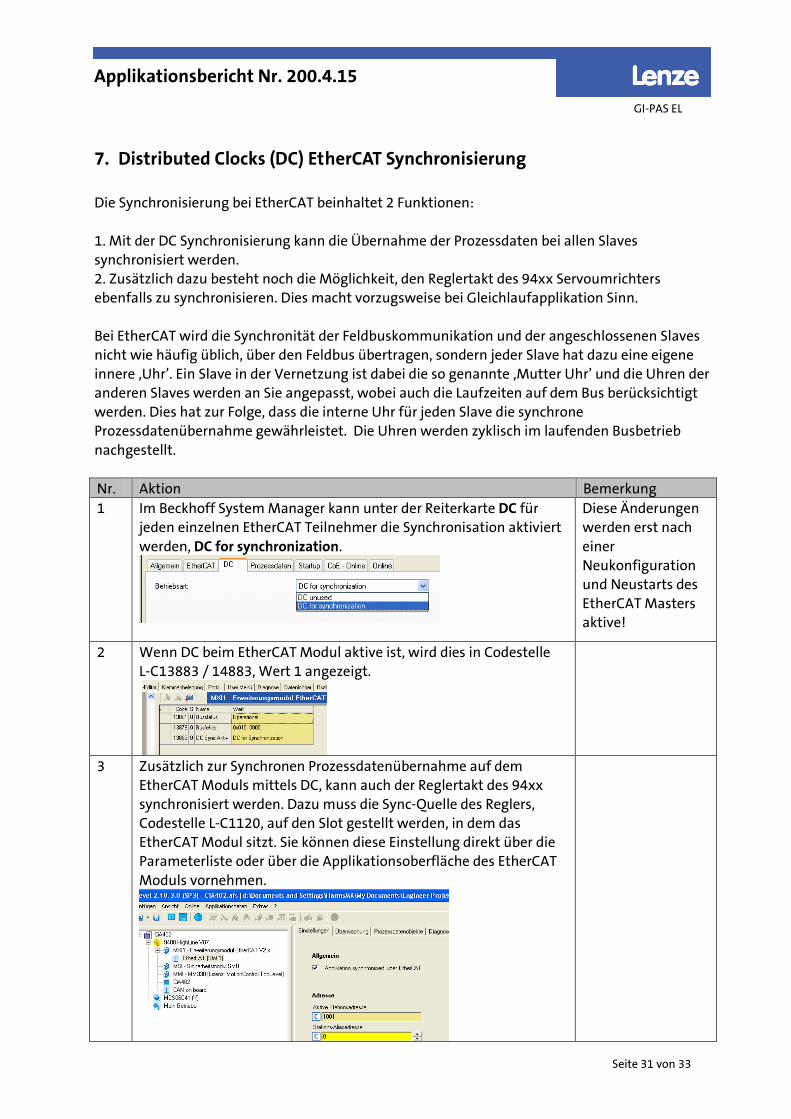
7. Distributed Clocks (DC) EtherCAT Synchronisierung Die Synchronisierung bei EtherCAT beinhaltet 2 Funktionen: 1. Mit der DC Synchronisierung kann die Übernahme der Prozessdaten bei allen Slaves synchronisiert werden. 2. Zusätzlich dazu besteht noch die Möglichkeit, den Reglertakt des 94xx Servoumrichters ebenfalls zu synchronisieren. Dies macht vorzugsweise bei Gleichlaufapplikation Sinn. Bei EtherCAT wird die Synchronität der Feldbuskommunikation und der angeschlossenen Slaves nicht wie häufig üblich, über den Feldbus übertragen, sondern jeder Slave hat dazu eine eigene innere ‚Uhr’. Ein Slave in der Vernetzung ist dabei die so genannte ‚Mutter Uhr’ und die Uhren der anderen Slaves werden an Sie angepasst, wobei auch die Laufzeiten auf dem Bus berücksichtigt werden. Dies hat zur Folge, dass die interne Uhr für jeden Slave die synchrone Prozessdatenübernahme gewährleistet. Die Uhren werden zyklisch im laufenden Busbetrieb nachgestellt. Nr. Aktion Bemerkung 1 Im Beckhoff System Manager kann unter der Reiterkarte DC für
jeden einzelnen EtherCAT Teilnehmer die Synchronisation aktiviert werden, DC for synchronization.
Diese Änderungen werden erst nach einer Neukonfiguration und Neustarts des EtherCAT Masters aktive!
2 Wenn DC beim EtherCAT Modul aktive ist, wird dies in Codestelle L-C13883 / 14883, Wert 1 angezeigt.
3 Zusätzlich zur Synchronen Prozessdatenübernahme auf dem EtherCAT Moduls mittels DC, kann auch der Reglertakt des 94xx synchronisiert werden. Dazu muss die Sync-Quelle des Reglers, Codestelle L-C1120, auf den Slot gestellt werden, in dem das EtherCAT Modul sitzt. Sie können diese Einstellung direkt über die Parameterliste oder über die Applikationsoberfläche des EtherCAT Moduls vornehmen.
Seite 32 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
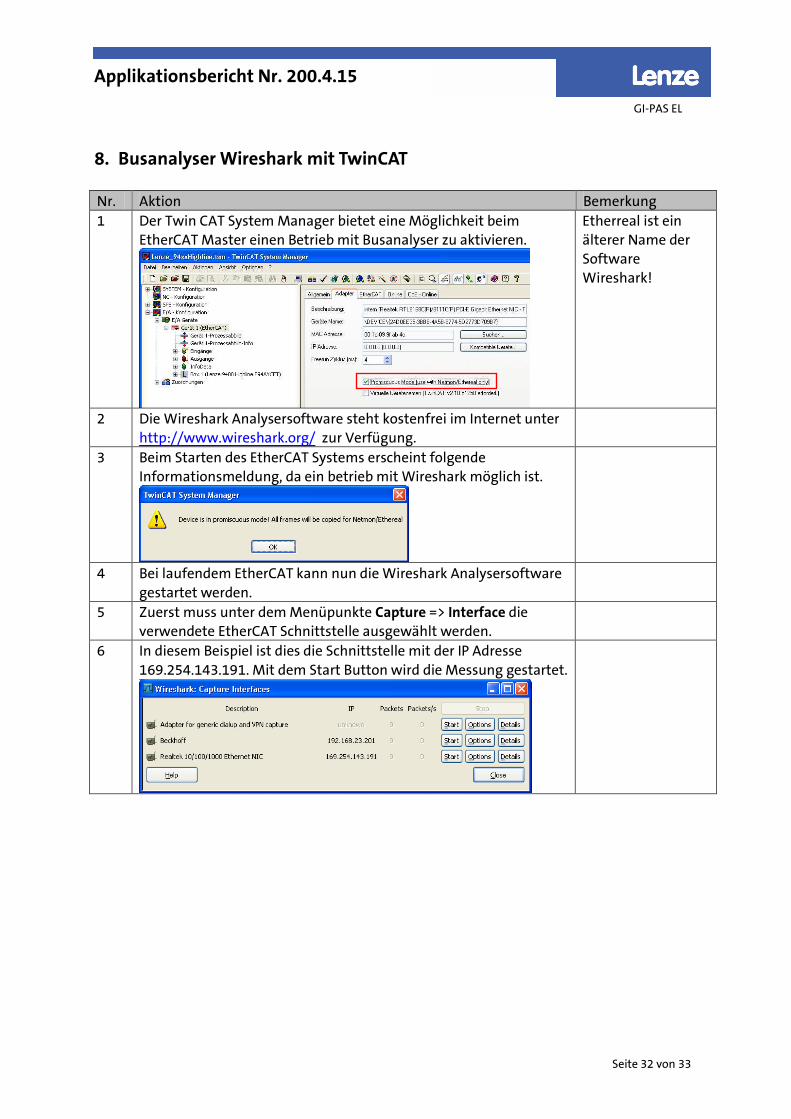
8. Busanalyser Wireshark mit TwinCAT Nr. Aktion Bemerkung 1 Der Twin CAT System Manager bietet eine Möglichkeit beim
EtherCAT Master einen Betrieb mit Busanalyser zu aktivieren.
Etherreal ist ein älterer Name der Software Wireshark!
2 Die Wireshark Analysersoftware steht kostenfrei im Internet unter http://www.wireshark.org/ zur Verfügung.
3 Beim Starten des EtherCAT Systems erscheint folgende Informationsmeldung, da ein betrieb mit Wireshark möglich ist.
4 Bei laufendem EtherCAT kann nun die Wireshark Analysersoftware gestartet werden.
5 Zuerst muss unter dem Menüpunkte Capture => Interface die verwendete EtherCAT Schnittstelle ausgewählt werden.
6 In diesem Beispiel ist dies die Schnittstelle mit der IP Adresse 169.254.143.191. Mit dem Start Button wird die Messung gestartet.
Seite 33 von 33
GI-PAS EL
Applikationsbericht Nr. 200.4.15
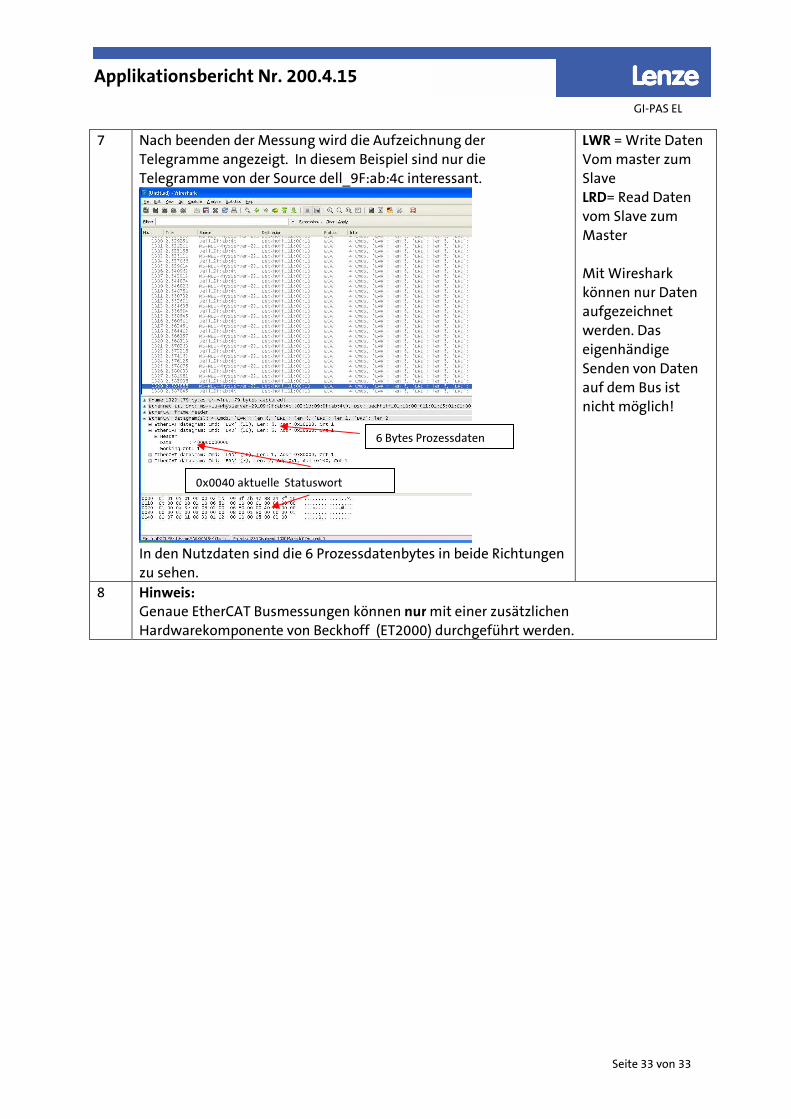
7 Nach beenden der Messung wird die Aufzeichnung der
Telegramme angezeigt. In diesem Beispiel sind nur die Telegramme von der Source dell_9F:ab:4c interessant.
In den Nutzdaten sind die 6 Prozessdatenbytes in beide Richtungen zu sehen.
LWR = Write Daten Vom master zum Slave LRD= Read Daten vom Slave zum Master Mit Wireshark können nur Daten aufgezeichnet werden. Das eigenhändige Senden von Daten auf dem Bus ist nicht möglich!
8 Hinweis: Genaue EtherCAT Busmessungen können nur mit einer zusätzlichen Hardwarekomponente von Beckhoff (ET2000) durchgeführt werden.
6 Bytes Prozessdaten
0x0040 aktuelle Statuswort





























