Embed Size (px)
Citation preview
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
IndoorIndoor Positionierung mit GPS Positionierung mit GPS
und alternative Verfahrenund alternative Verfahren
Torben SchülerTorben Schüler
Institut für Erdmessung und NavigationInstitut für Erdmessung und Navigation
Universität der Bundeswehr MünchenUniversität der Bundeswehr München
Ringvorlesung »NEXUS«Ringvorlesung »NEXUS«
Universität StuttgartUniversität Stuttgart
26. Juni 200726. Juni 2007
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
Gliederung des VortragsGliederung des Vortrags
-- Motivation: Warum Motivation: Warum IndoorIndoor--Positionierung?Positionierung?
-- Herausforderungen an die GPSHerausforderungen an die GPS--EmpfängerEmpfänger
-- Welche weiteren Verbesserungen sind denkbar?Welche weiteren Verbesserungen sind denkbar?
-- Testbeispiele zum SIRFTestbeispiele zum SIRF--II und III GPSII und III GPS--ChipChip
-- Welche Alternativen existieren?Welche Alternativen existieren?
-- SchlussbemerkungenSchlussbemerkungen
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
22
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
Motivation: Notruf mit OrtungMotivation: Notruf mit Ortung
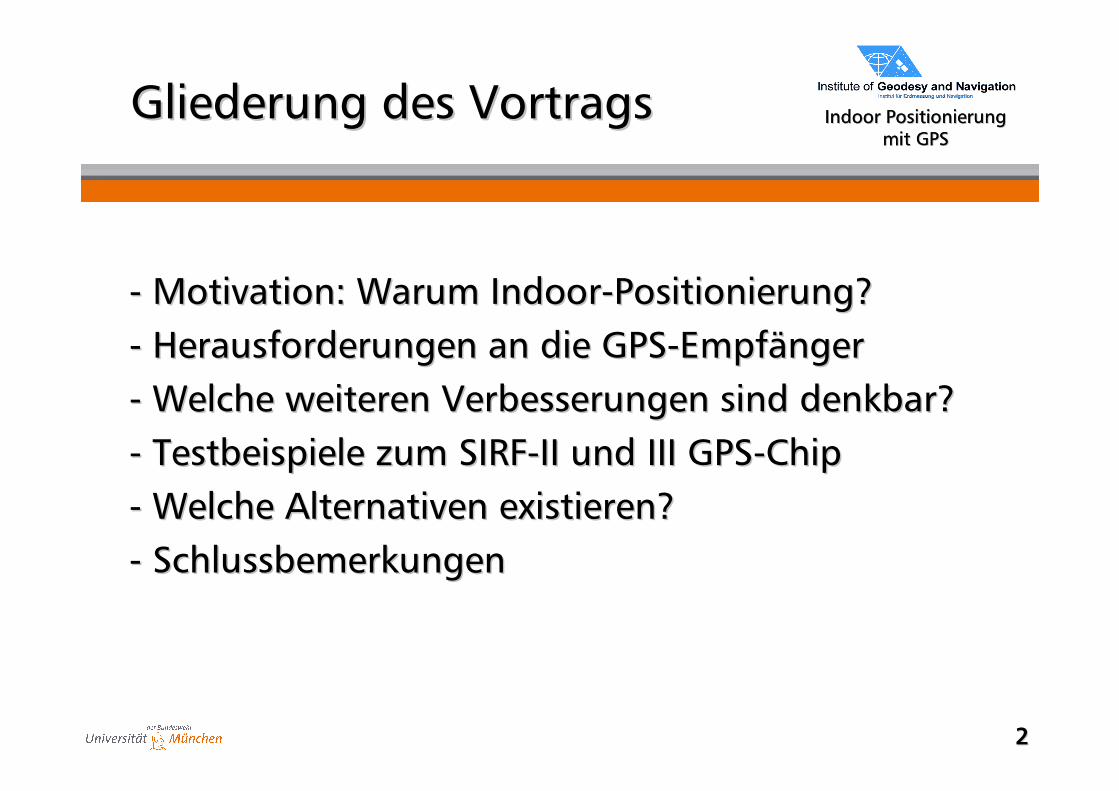
Entscheidung der Federal Communications Commission (FCC) 1999 in den USA in Bezug auf Notruf E-911:
• Jeder Notruf muss automatisch mit einem Ortsstempel
versehen sein, um den Ablauf des Rettungseinsatzes zu optimieren
• Genauigkeitsanforderungen 2005
• Anstoß zu vielen Innovationen im Bereich GPS-Handys
• Entwicklung in Europa?
Netzwerk-basiert Geräte-basiert
100 m 50 m67 %
300 m 150 m95 %
Ansatz
Konfidenzbereich
33
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
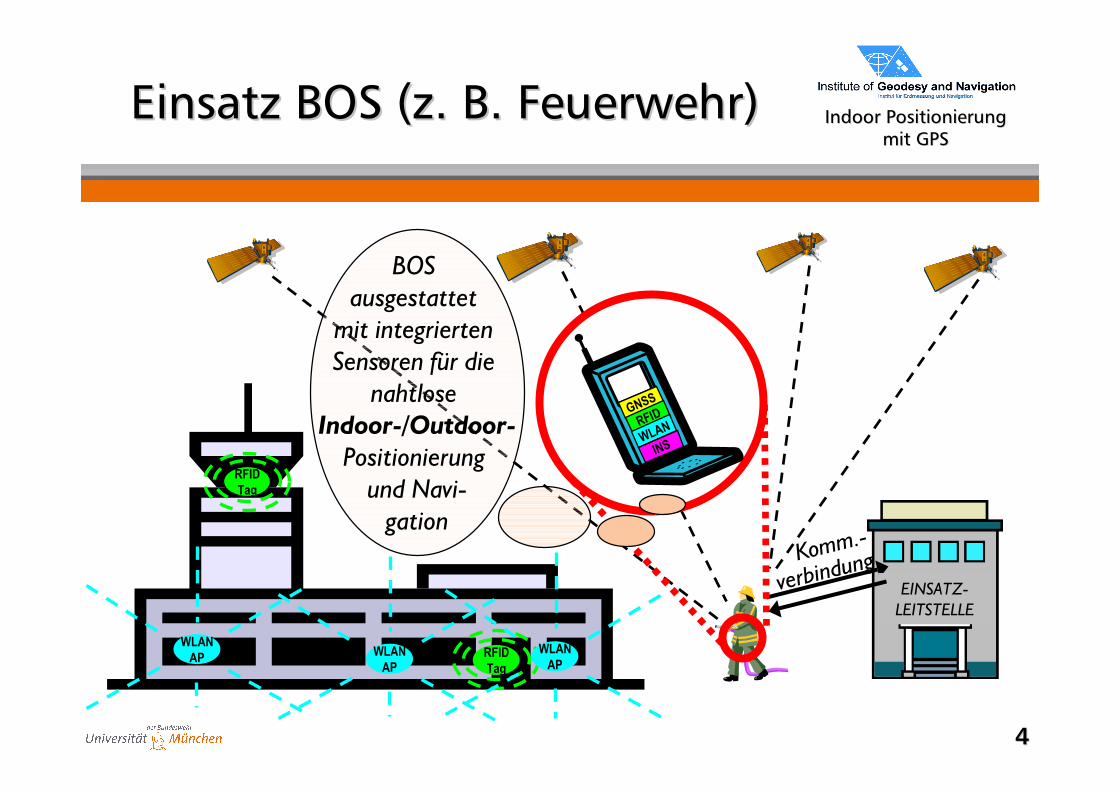
Einsatz BOS (z. B. Feuerwehr)Einsatz BOS (z. B. Feuerwehr)
Komm.-
verbindung
EINSATZ-
LEITSTELLE
GNSS
RFID
WLAN
INS
RFID
Tag
RFID
Tag
WLAN
APWLAN
AP
WLAN
AP
BOS
ausgestattet
mit integrierten
Sensoren für die
nahtlose
Indoor-/Outdoor-
Positionierung
und Navi-
gation
44
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
Weitere AnwendungsfelderWeitere Anwendungsfelder
•• WarenverfolgungWarenverfolgung
•• Logistik / LagerhaltungLogistik / Lagerhaltung
•• MonitoringMonitoring mobiler Gerätemobiler Geräte
in Krankenhäusernin Krankenhäusern
•• Ortung bei NotrufaussendungOrtung bei Notrufaussendung
•• SeniorenbetreuungSeniorenbetreuung
•• Kommerziell / ortsabhängige WerbungKommerziell / ortsabhängige Werbung
•• Freizeit / „Freizeit / „FriendFriend--findingfinding““
[ daneben auch militärische Anwendungsgebiete ]
55
1. Inhalt der Vortrags üüüü
2. Warum Indoor-Positionier ... üüüü
3. Herausforderungen an GPS
4. denkbare Verbesserungen
5. Testbeispiele SIRF-II/III-Chip
6. Welche Alternativen existieren?
7. Schlussbemerkungen
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
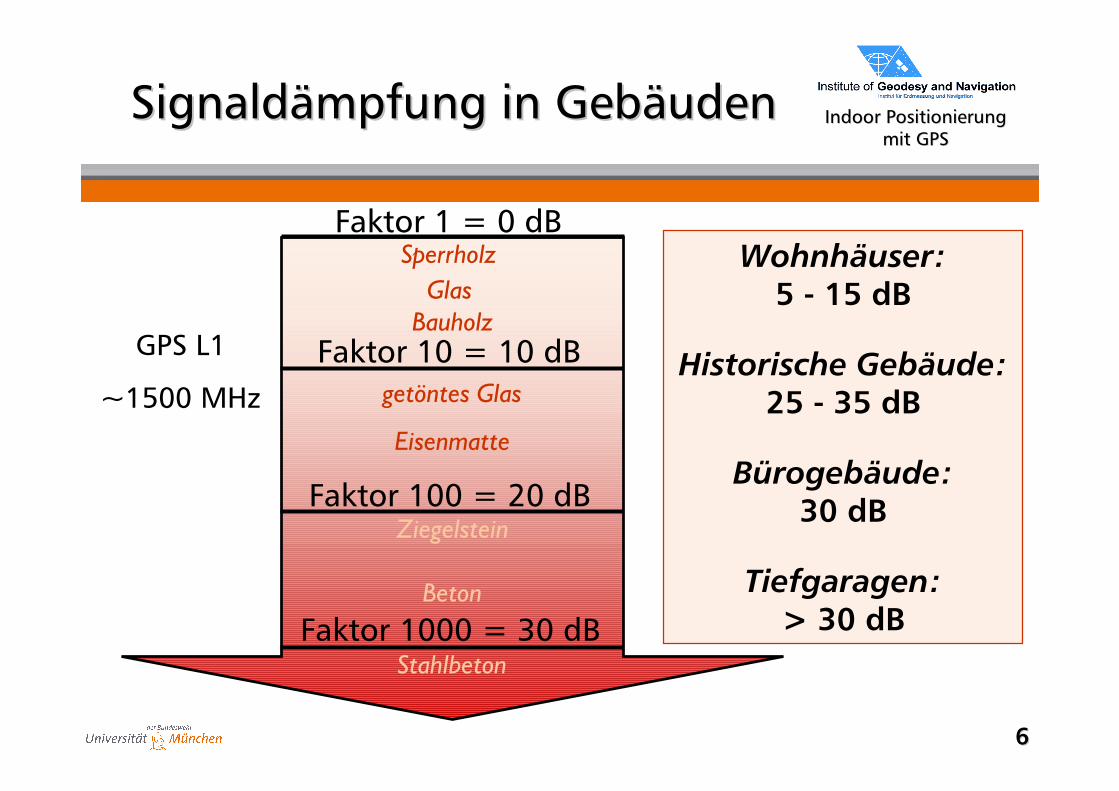
Signaldämpfung in GebäudenSignaldämpfung in Gebäuden
Faktor 10 = 10 dB
Faktor 100 = 20 dB
Faktor 1000 = 30 dB
Faktor 1 = 0 dBSperrholz
Glas
Bauholz
getöntes Glas
Eisenmatte
Beton
Stahlbeton
Ziegelstein
Wohnhäuser:5 - 15 dB
Historische Gebäude:25 - 35 dB
Bürogebäude:30 dB
Tiefgaragen:> 30 dB
GPS L1
~1500 MHz
66
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
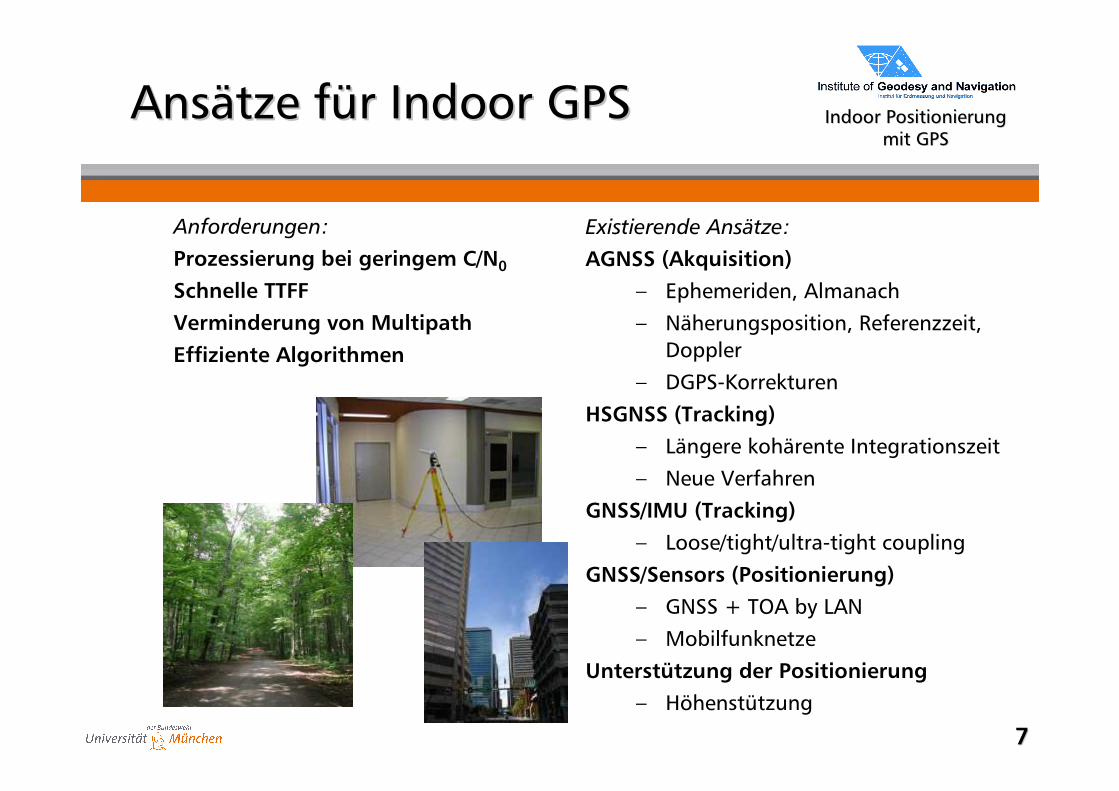
Ansätze für Ansätze für IndoorIndoor GPSGPS
Anforderungen:
Prozessierung bei geringem C/N0
Schnelle TTFF
Verminderung von Multipath
Effiziente Algorithmen
Existierende Ansätze:
AGNSS (Akquisition)
– Ephemeriden, Almanach
– Näherungsposition, Referenzzeit, Doppler
– DGPS-Korrekturen
HSGNSS (Tracking)
– Längere kohärente Integrationszeit
– Neue Verfahren
GNSS/IMU (Tracking)
– Loose/tight/ultra-tight coupling
GNSS/Sensors (Positionierung)
– GNSS + TOA by LAN
– Mobilfunknetze
Unterstützung der Positionierung
– Höhenstützung
77
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
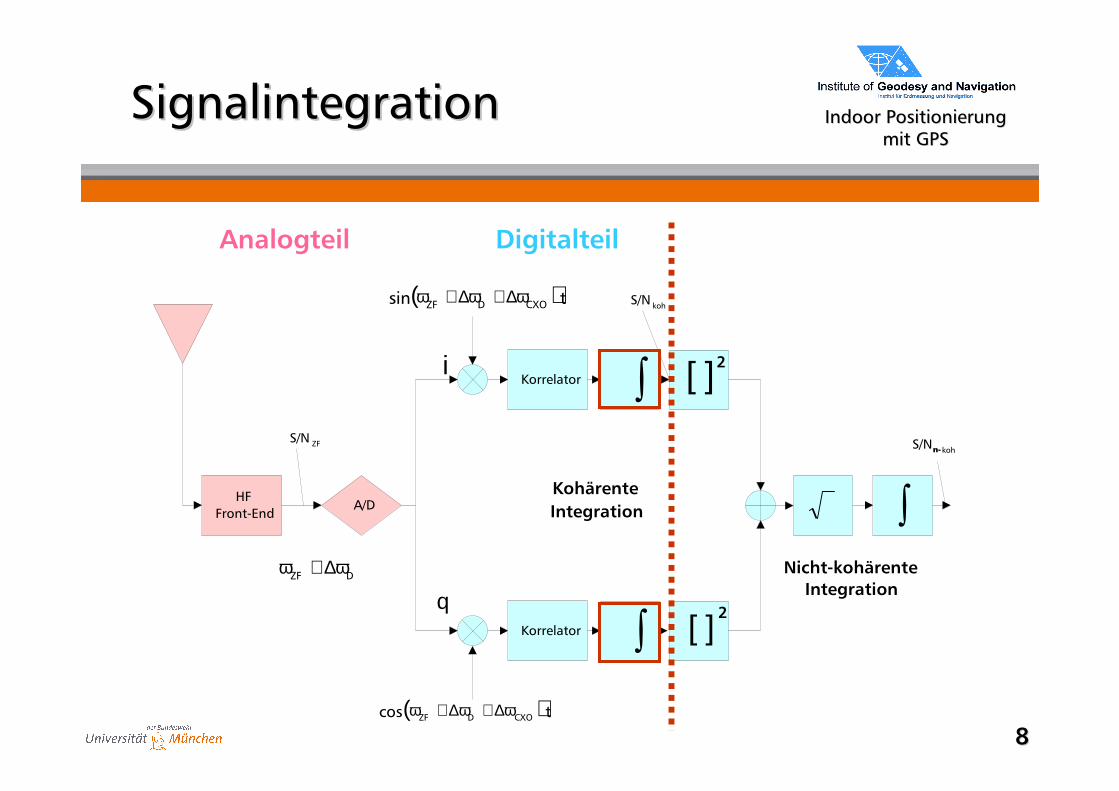
SignalintegrationSignalintegration
HF Front-End
A/D
Korrelator
Korrelator
[ ]
[ ]
i
qDZF ω∆+ω
( )tCXODZF ω∆+ω∆+ωsin
( )tCXODZF ω∆+ω∆+ωcos
Analogteil Digitalteil
∫
∫
∫
Kohärente
Integration
Nicht-kohärente
Integration
S/N ZF
S/N koh
S/Nn-koh
2
2
88
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
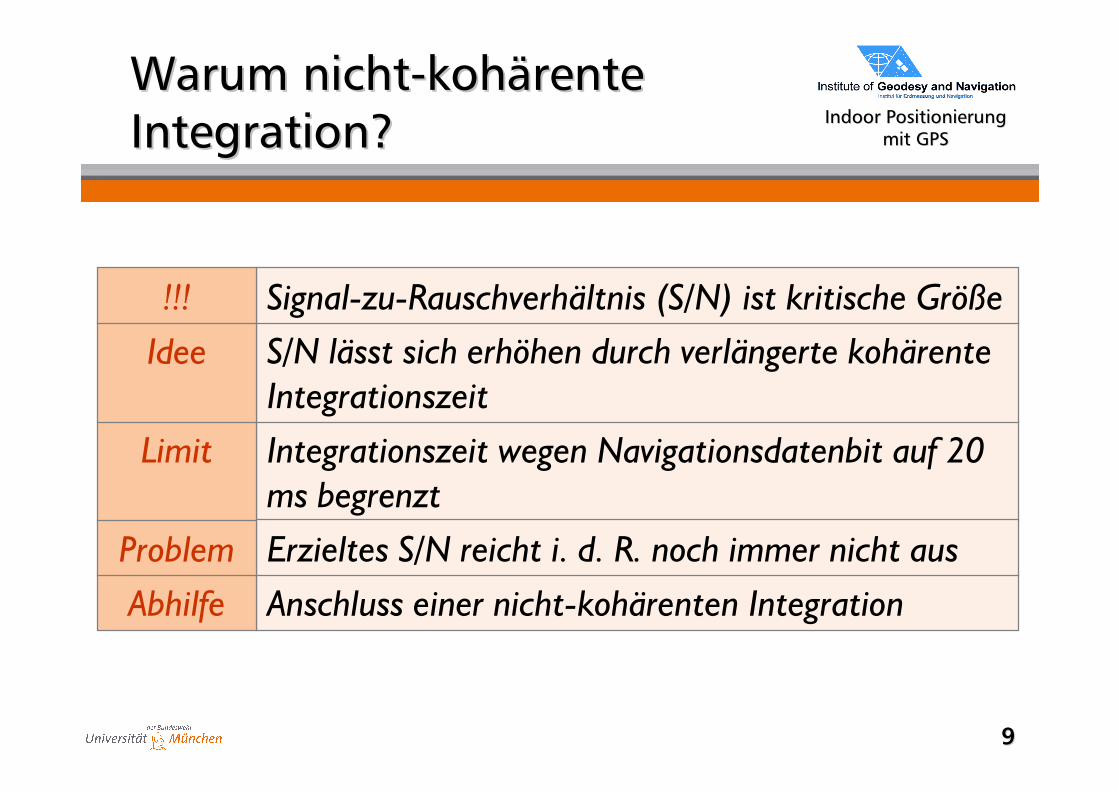
Warum nichtWarum nicht--kohärente kohärente Integration?Integration?
Integrationszeit wegen Navigationsdatenbit auf 20
ms begrenzt
Limit
Anschluss einer nicht-kohärenten IntegrationAbhilfe
Erzieltes S/N reicht i. d. R. noch immer nicht ausProblem
S/N lässt sich erhöhen durch verlängerte kohärente
Integrationszeit
Idee
Signal-zu-Rauschverhältnis (S/N) ist kritische Größe!!!
99
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
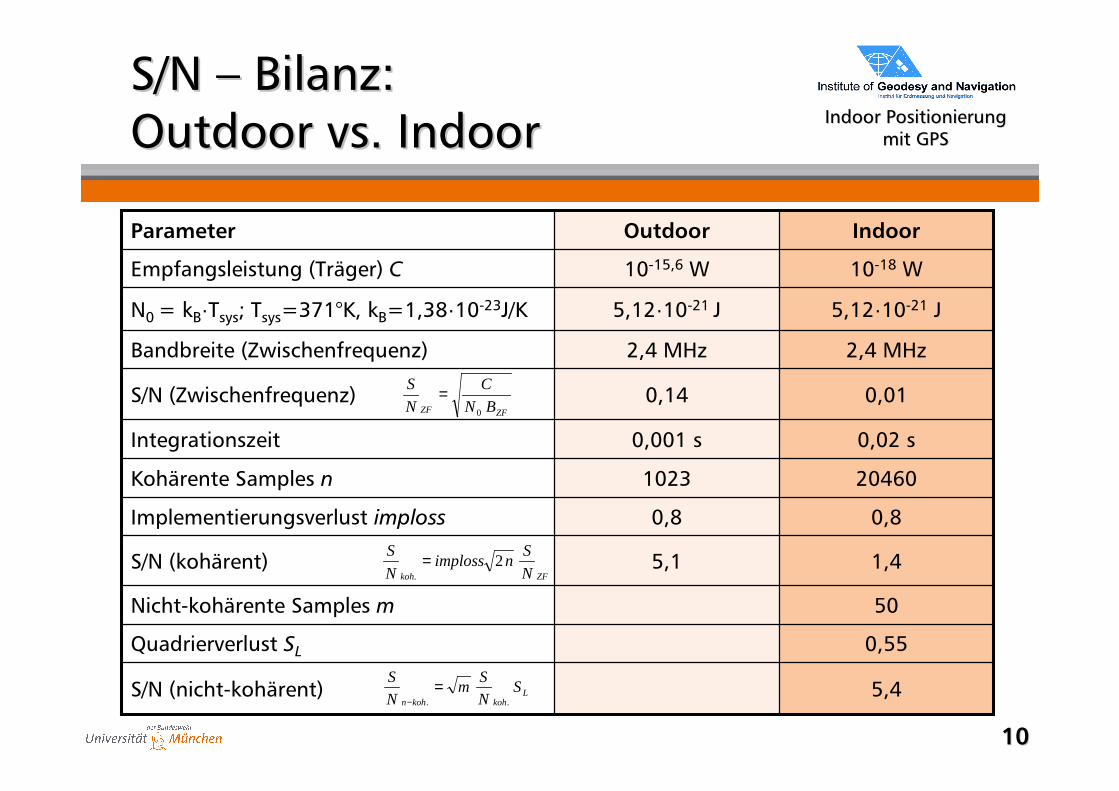
S/N S/N –– Bilanz: Bilanz: OutdoorOutdoor vs.vs. IndoorIndoor
5,4S/N (nicht-kohärent)
0,55Quadrierverlust SL
50Nicht-kohärente Samples m
1,45,1S/N (kohärent)
0,80,8Implementierungsverlust imploss
204601023Kohärente Samples n
0,02 s0,001 sIntegrationszeit
0,010,14S/N (Zwischenfrequenz)
2,4 MHz2,4 MHzBandbreite (Zwischenfrequenz)
5,12·10-21 J5,12·10-21 JN0 = kB·Tsys; Tsys=371°K, kB=1,38·10-23J/K
10-18 W10-15,6 WEmpfangsleistung (Träger) C
IndoorOutdoorParameter
ZFZF BN
C
N
S
0
=
ZFkoh N
Snimploss
N
S2
.
=
Lkohkohn
SN
Sm
N
S
..
=−
1010
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
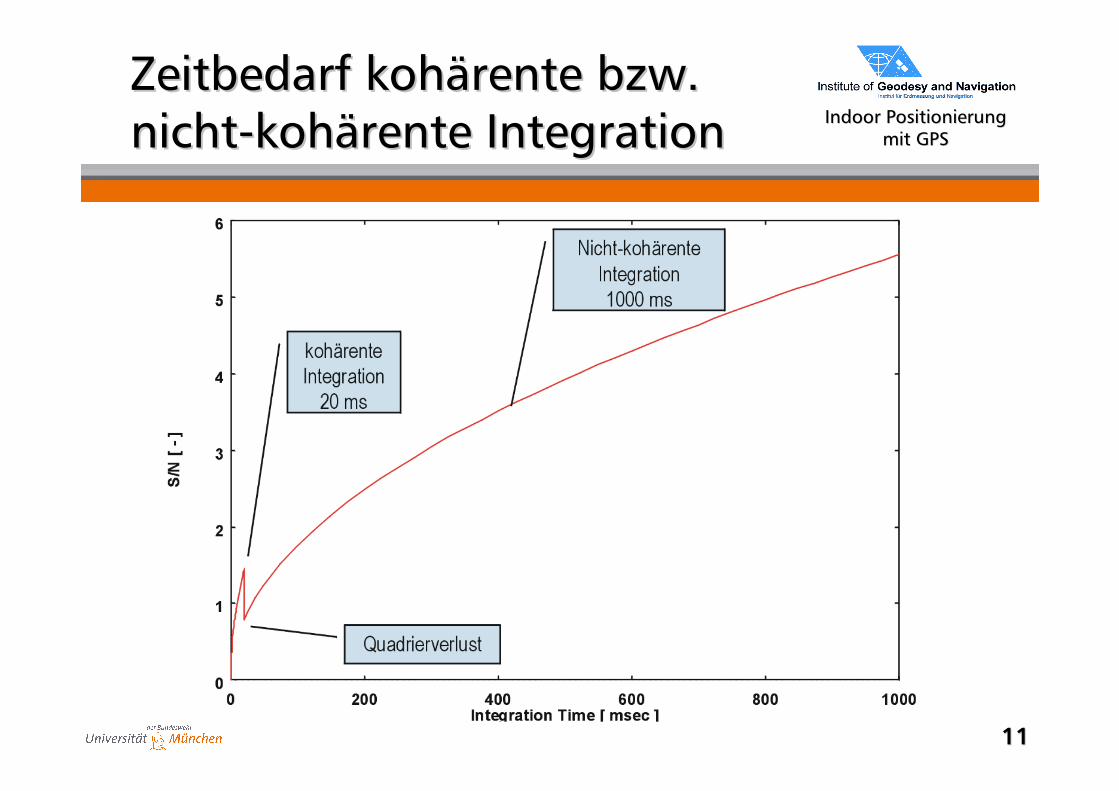
Zeitbedarf kohärente bzw. Zeitbedarf kohärente bzw. nichtnicht--kohärente Integrationkohärente Integration
1111

Indoor Indoor PositionierungPositionierungmit GPSmit GPS
FrequenzFrequenz--CodeCode--SuchraumSuchraum
50nicht-kohärente
Integrationsschritte
erforderlich
è
Integrationszeit
1 Sekunde
Ergebnis
Frequenz-Unsicherheit
∆f
Code-Unsicherheit ∆t
PRNj
1212
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
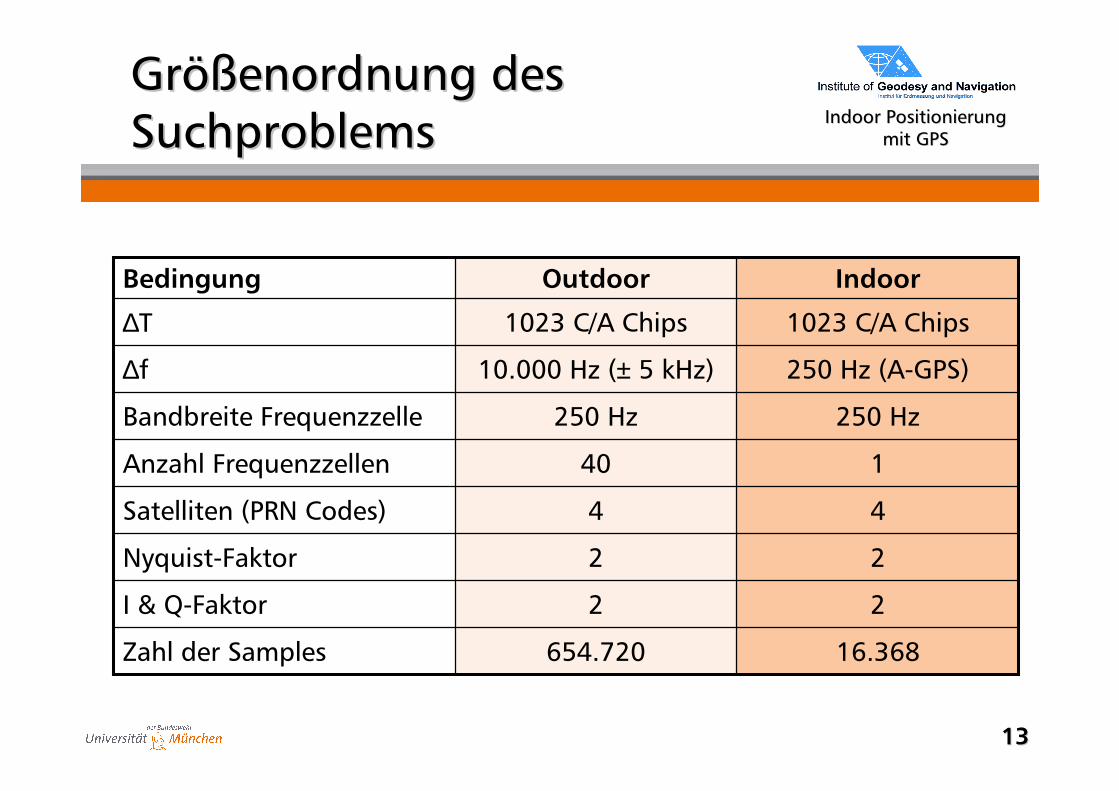
Größenordnung des Größenordnung des SuchproblemsSuchproblems
140Anzahl Frequenzzellen
Zahl der Samples
I & Q-Faktor
Nyquist-Faktor
Satelliten (PRN Codes)
Bandbreite Frequenzzelle
∆f
∆T
Bedingung
16.368654.720
22
22
44
250 Hz250 Hz
250 Hz (A-GPS)10.000 Hz (± 5 kHz)
1023 C/A Chips1023 C/A Chips
IndoorOutdoor
1313
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
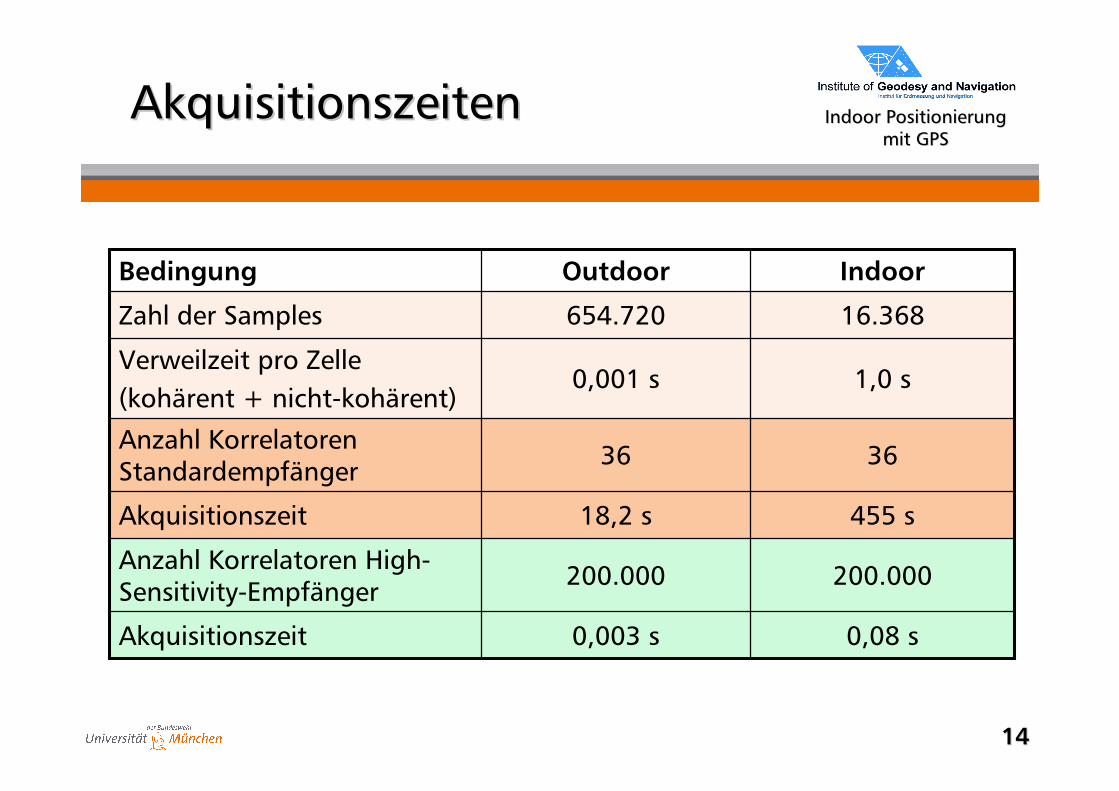
AkquisitionszeitenAkquisitionszeiten
3636Anzahl KorrelatorenStandardempfänger
Akquisitionszeit
Anzahl Korrelatoren High-Sensitivity-Empfänger
Akquisitionszeit
Verweilzeit pro Zelle
(kohärent + nicht-kohärent)
Zahl der Samples
Bedingung
0,08 s0,003 s
200.000200.000
455 s18,2 s
1,0 s0,001 s
16.368654.720
IndoorOutdoor
1414
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
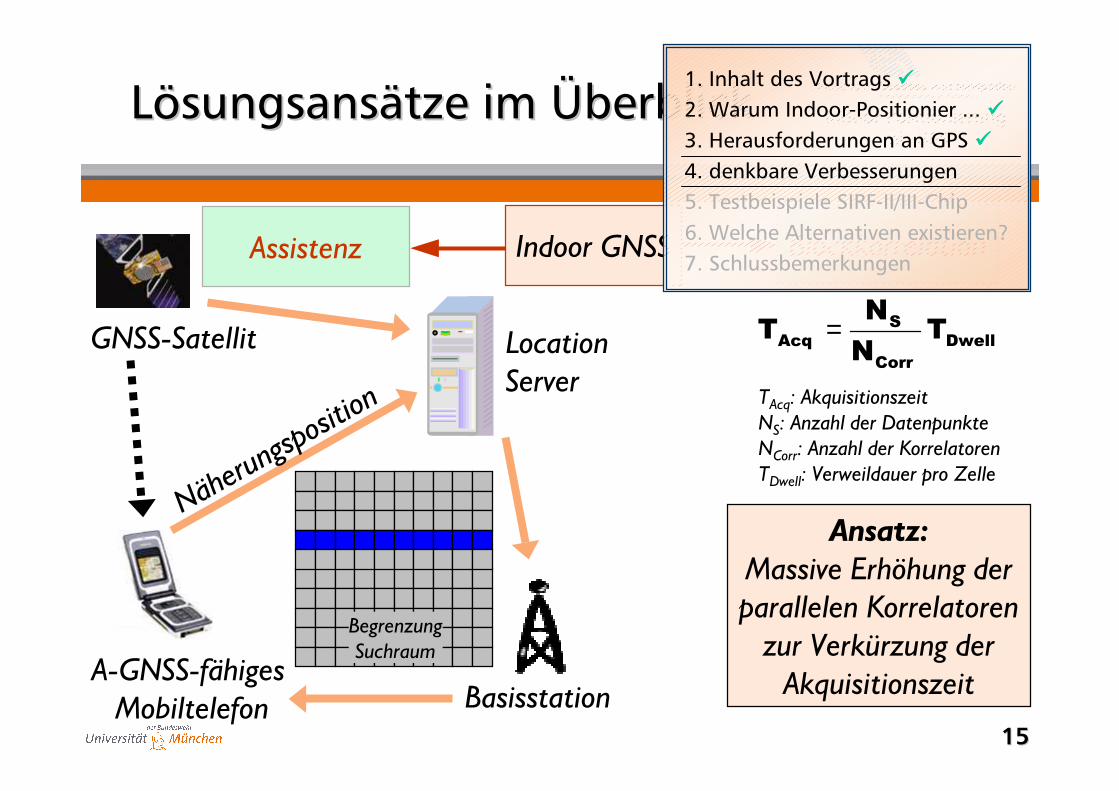
Lösungsansätze im ÜberblickLösungsansätze im Überblick
Indoor GNSS
A-GNSS-fähiges
Mobiltelefon
Location
Server
GNSS-Satellit Dwell
Corr
S
Acq TN
NT =
TAcq: Akquisitionszeit
NS: Anzahl der Datenpunkte
NCorr: Anzahl der Korrelatoren
TDwell: Verweildauer pro Zelle
Ansatz:
Massive Erhöhung der
parallelen Korrelatoren
zur Verkürzung der
Akquisitionszeit
Näherungsposition
Begrenzung
Suchraum
Basisstation
BlockkorrelationAssistenz
1515
1. Inhalt des Vortrags üüüü
2. Warum Indoor-Positionier ... üüüü
3. Herausforderungen an GPS üüüü
4. denkbare Verbesserungen
5. Testbeispiele SIRF-II/III-Chip
6. Welche Alternativen existieren?
7. Schlussbemerkungen
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
GPS GPS Indoor Indoor OptionenOptionen
• Effizienzsteigerung bei der Korrelation
• Verringerung der Kreuzkorrelationen der PRN Codes
• Generell optimierte Codes für Indoor-Empfang
• Sichere Detektion des Navigationsdatenbits zur
Verlängerung der kohärenten Integrationszeit
• Verbesserte Algorithmen für die nicht-kohärente
Korrelation
• Verbesserte Tracking Loops
• Sichere Schätzung des C/N0
• Modellierung der Signalausbreitung
1616
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
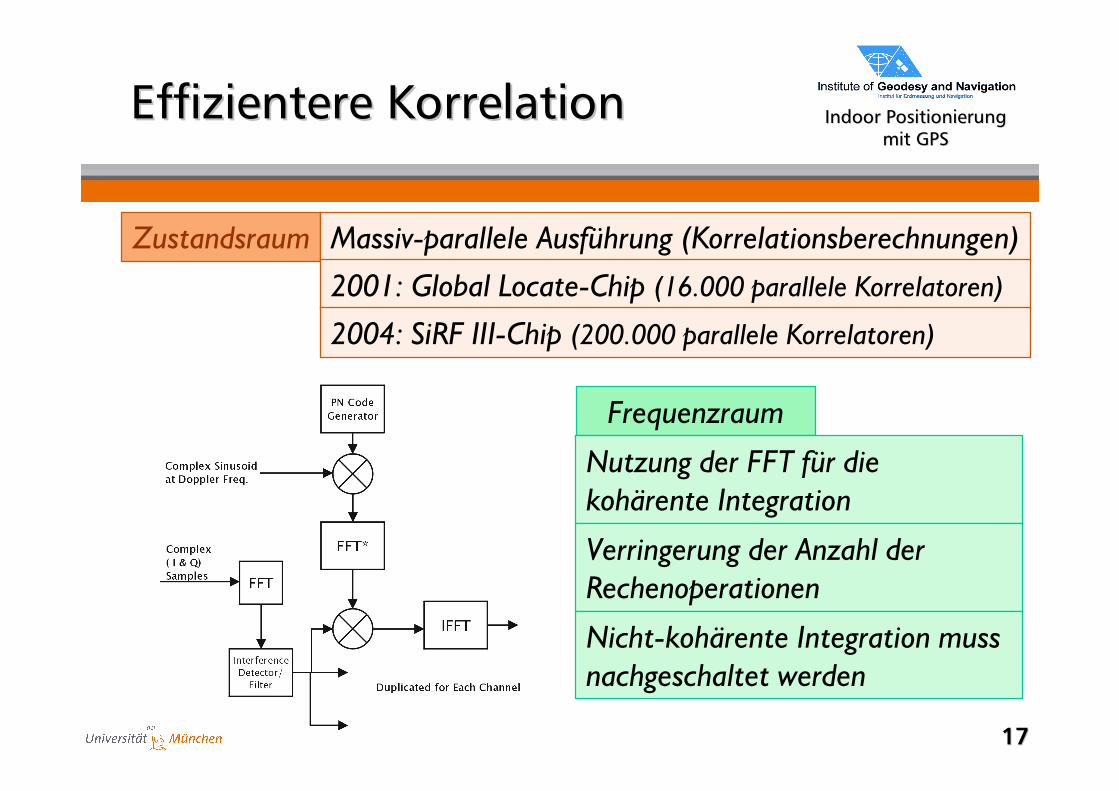
Effizientere KorrelationEffizientere Korrelation
Zustandsraum
Frequenzraum
Nutzung der FFT für die
kohärente Integration
Verringerung der Anzahl der
Rechenoperationen
Nicht-kohärente Integration muss
nachgeschaltet werden
Massiv-parallele Ausführung (Korrelationsberechnungen)
2001: Global Locate-Chip (16.000 parallele Korrelatoren)
2004: SiRF III-Chip (200.000 parallele Korrelatoren)
1717
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
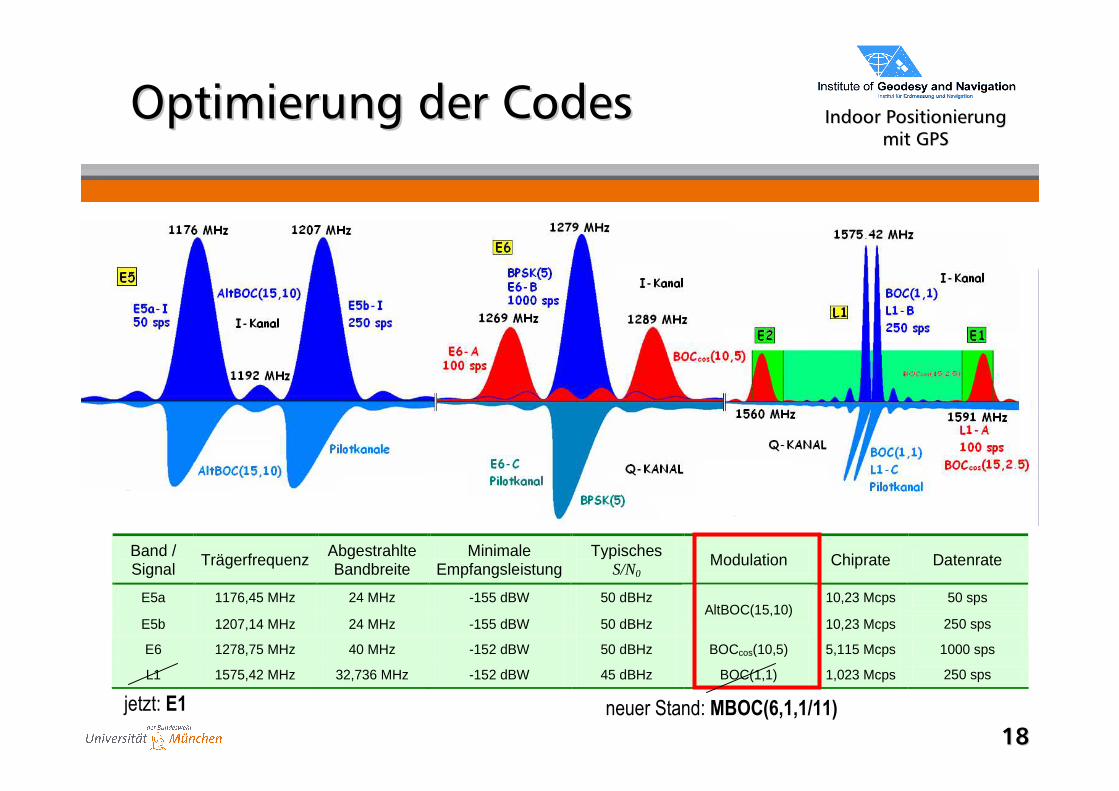
Optimierung der CodesOptimierung der Codes
Band / Signal
Trägerfrequenz Abgestrahlte Bandbreite
Minimale Empfangsleistung
Typisches S/N0
Modulation Chiprate Datenrate
E5a 1176,45 MHz 24 MHz -155 dBW 50 dBHz 10,23 Mcps 50 sps
E5b 1207,14 MHz 24 MHz -155 dBW 50 dBHz AltBOC(15,10)
10,23 Mcps 250 sps
E6 1278,75 MHz 40 MHz -152 dBW 50 dBHz BOCcos(10,5) 5,115 Mcps 1000 sps
L1 1575,42 MHz 32,736 MHz -152 dBW 45 dBHz BOC(1,1) 1,023 Mcps 250 sps
jetzt: E1 neuer Stand: MBOC(6,1,1/11)
1818
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
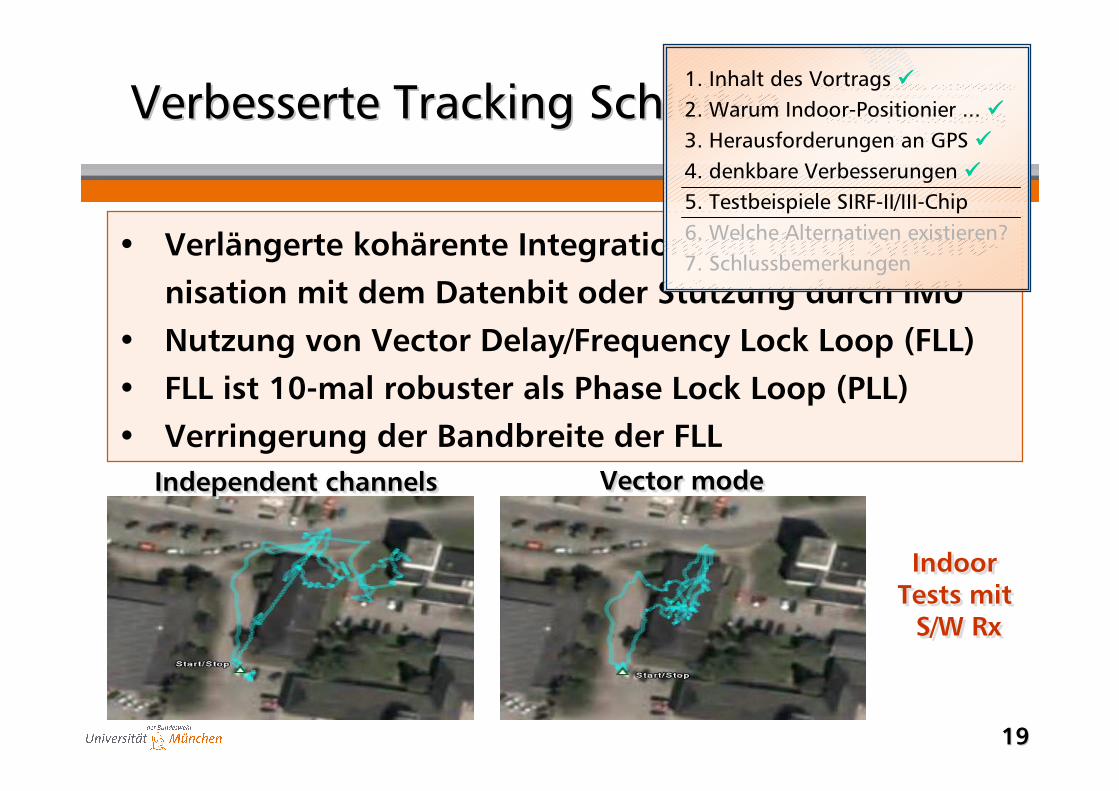
Verbesserte Verbesserte Tracking Tracking SchleifenSchleifen
• Verlängerte kohärente Integrationszeit durch Synchro-
nisation mit dem Datenbit oder Stützung durch IMU
• Nutzung von Vector Delay/Frequency Lock Loop (FLL)
• FLL ist 10-mal robuster als Phase Lock Loop (PLL)
• Verringerung der Bandbreite der FLL
Independent channelsIndependent Independent channelschannels Vector modeVector modeVector mode
IndoorTests mitS/W Rx
IndoorTests mitS/W Rx
1919
1. Inhalt des Vortrags üüüü
2. Warum Indoor-Positionier ... üüüü
3. Herausforderungen an GPS üüüü
4. denkbare Verbesserungen üüüü
5. Testbeispiele SIRF-II/III-Chip
6. Welche Alternativen existieren?
7. Schlussbemerkungen
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
EinschätzungEinschätzung IndoorIndoor GNSSGNSS
• Tracking eines Signales in einer Indoor-Umgebung ist
theoretisch möglich (lange Integrationszeiten, parallele
Rechenoperationen)
• Qualität der Navigationsinformation ist möglicherweise
sehr schlecht
Welchen Nutzen hat eine Information, wenn sie mit
einem Fehler im Bereich von Zehner Metern behaftet ist?
• In Indoor-Umgebungen können u. U. nur wenige
Dezimeter darüber entscheiden, in welchem Raum sich
ein Nutzer befindet, d.h. der Genauigkeitsanspruch
steigt im Allgemeinen gegenüber Outdoor-Umgebungen!2020
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
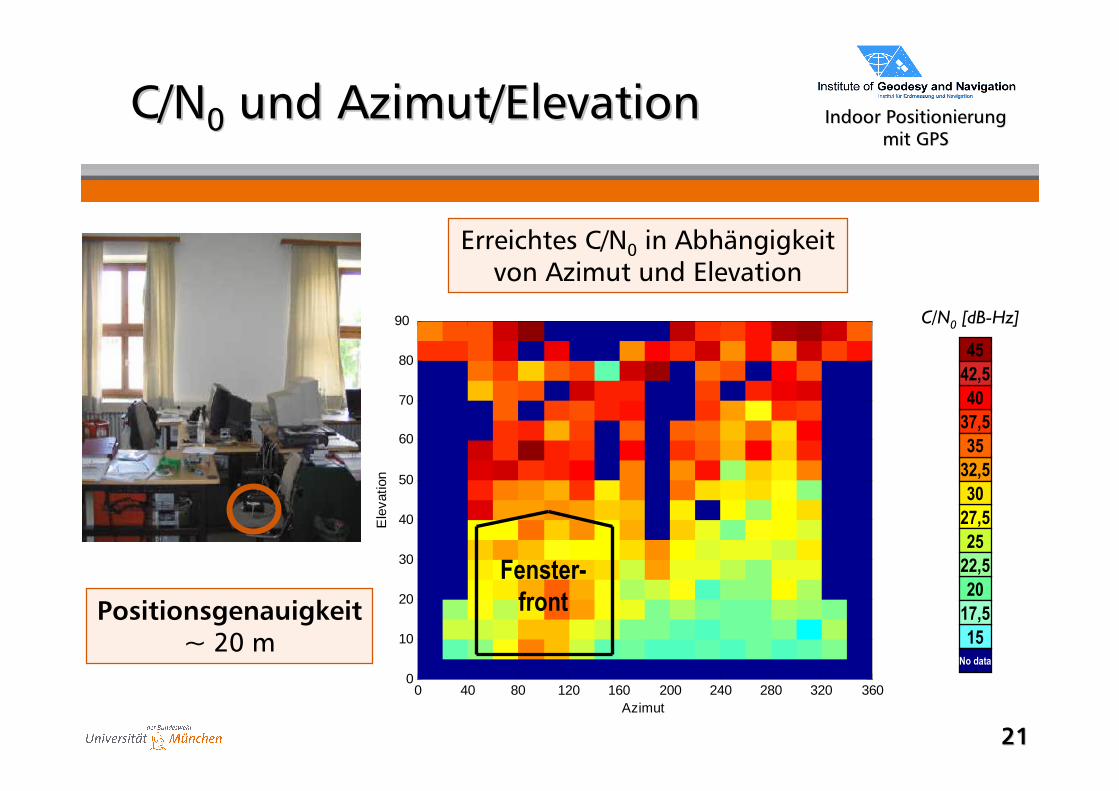
C/NC/N00 und Azimut/Elevationund Azimut/Elevation
Erreichtes C/N0 in Abhängigkeit von Azimut und Elevation
37,5
45
32,5
27,5
25
20
15
35
40
42,5
30
22,5
17,5
No data
C/N0 [dB-Hz]
Azimut
Ele
vatio
n
0 40 80 120 160 200 240 280 320 360
90
80
70
60
50
40
30
20
10
0
Fenster-
frontPositionsgenauigkeit ~ 20 m
2121
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
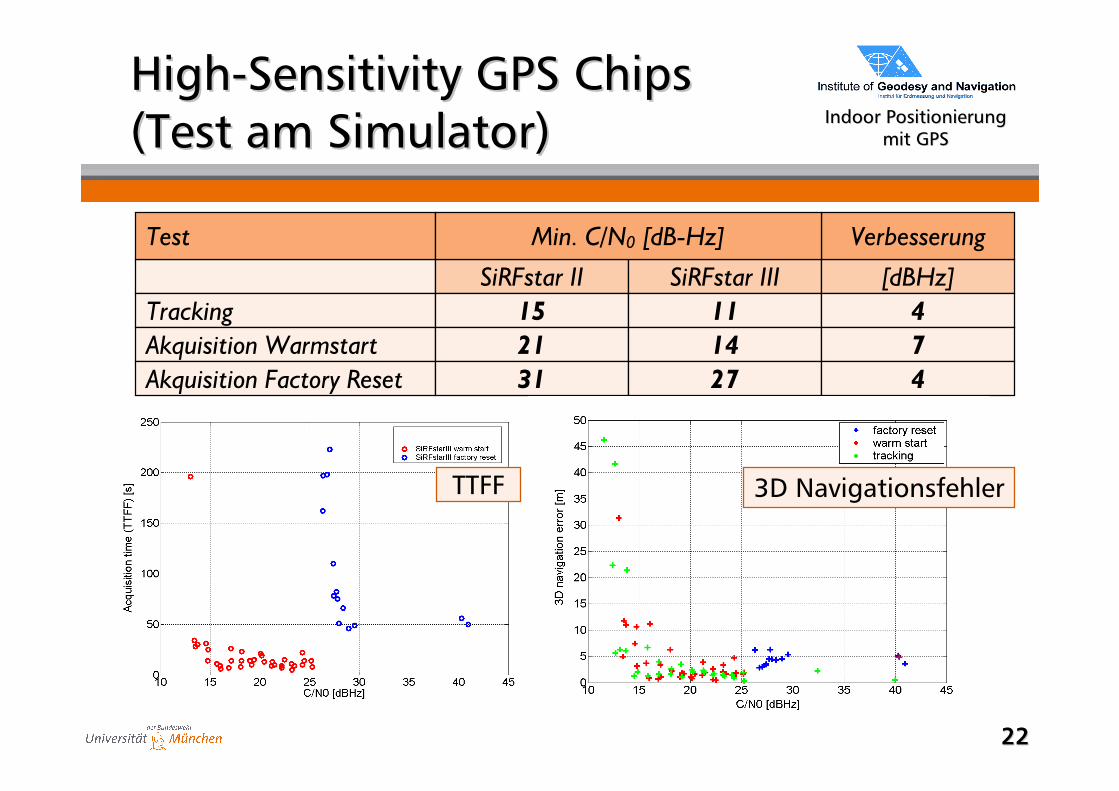
HighHigh--Sensitivity Sensitivity GPS ChipsGPS Chips(Test am Simulator)(Test am Simulator)
Tracking
Akquisition Warmstart
Akquisition Factory Reset
SiRFstar II
15
21
31
SiRFstar III
11
14
27
[dBHz]
4
7
4
Test VerbesserungMin. C/N0 [dB-Hz]
TTFF 3D Navigationsfehler
2222
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
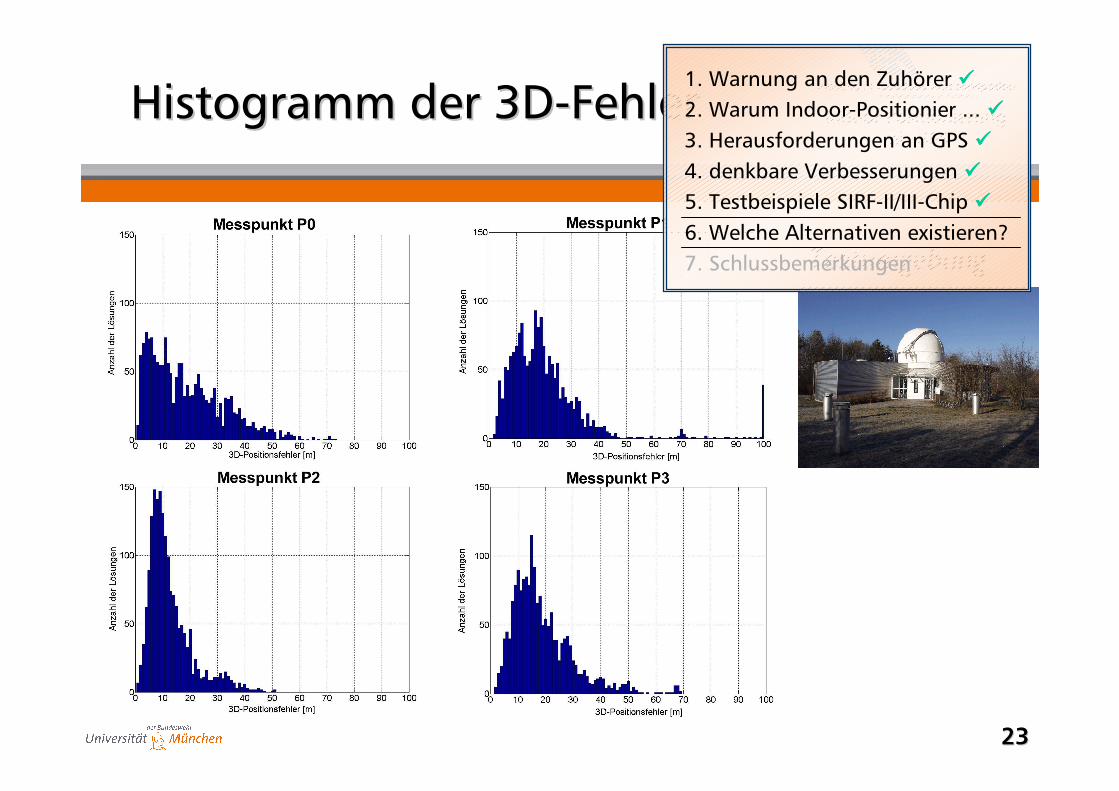
Histogramm Histogramm der 3Dder 3D--FehlerFehler
Testumgebung
2323
1. Warnung an den Zuhörer üüüü
2. Warum Indoor-Positionier ... üüüü
3. Herausforderungen an GPS üüüü
4. denkbare Verbesserungen üüüü
5. Testbeispiele SIRF-II/III-Chip üüüü
6. Welche Alternativen existieren?
7. Schlussbemerkungen
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
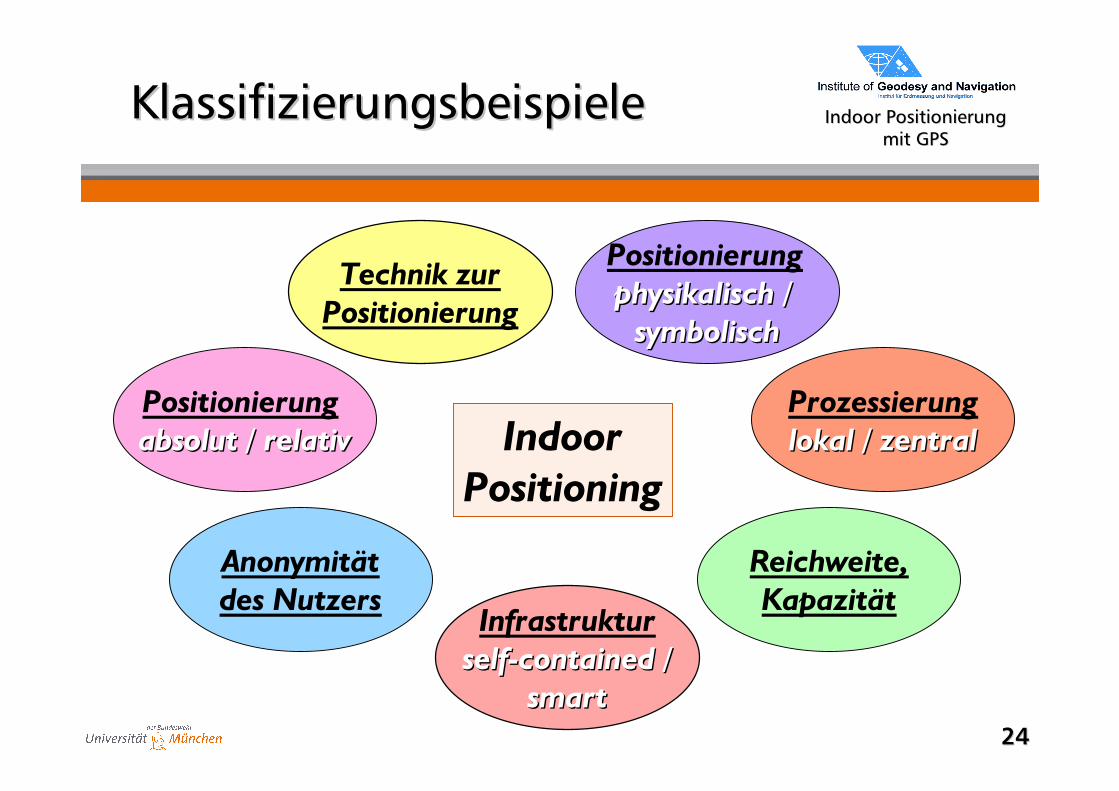
KlassifizierungsbeispieleKlassifizierungsbeispiele
Positionierung
physikalisch / physikalisch /
symbolischsymbolisch
Technik zur
Positionierung
Reichweite,
Kapazität
Anonymität
des NutzersInfrastruktur
selfself--containedcontained //
smartsmart
Prozessierung
lokal / zentrallokal / zentral
Positionierung
absolut / relativabsolut / relativ Indoor
Positioning
2424
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
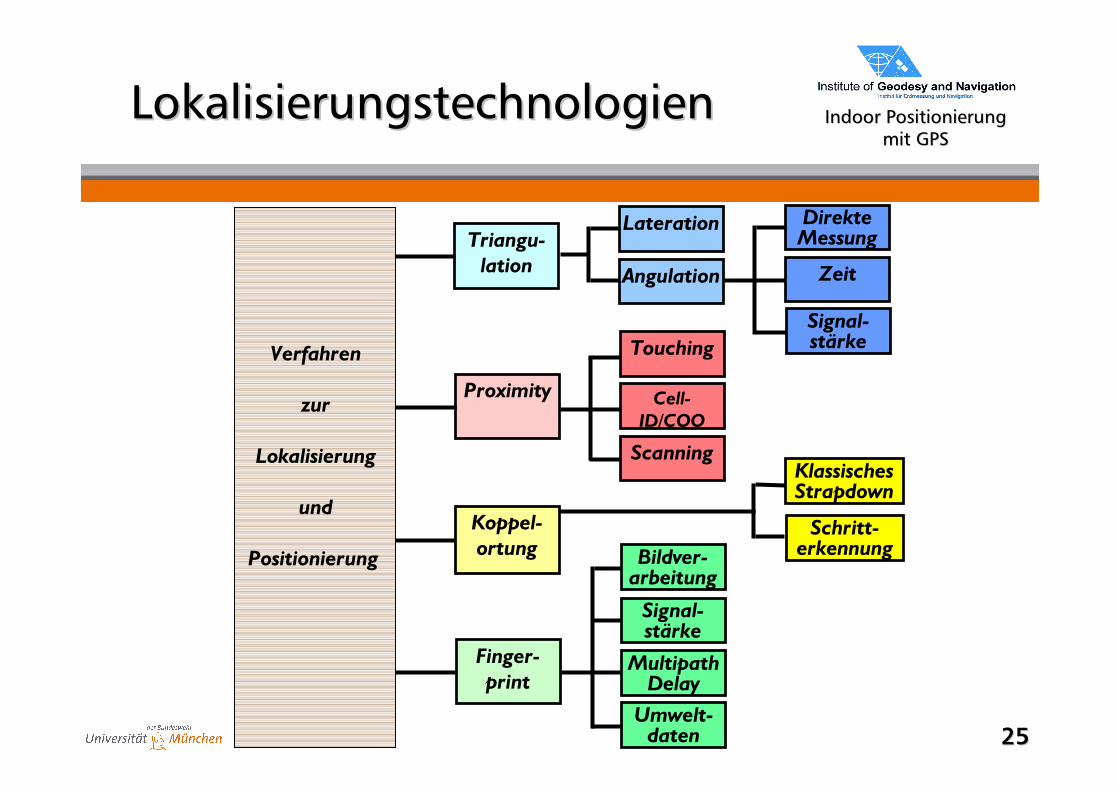
LokalisierungstechnologienLokalisierungstechnologien
Triangu-
lation
Finger-
Koppel-
ortung
Proximity
Lateration
Angulation
Signal-stärke
Zeit
DirekteMessung
Scanning
Cell-
ID/COO
TouchingVerfahren
zur
Lokalisierung
und
Positionierung
MultipathDelay
Bildver-arbeitung
Signal-stärke
Umwelt-daten
KlassischesStrapdown
Schritt-erkennung
2525
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
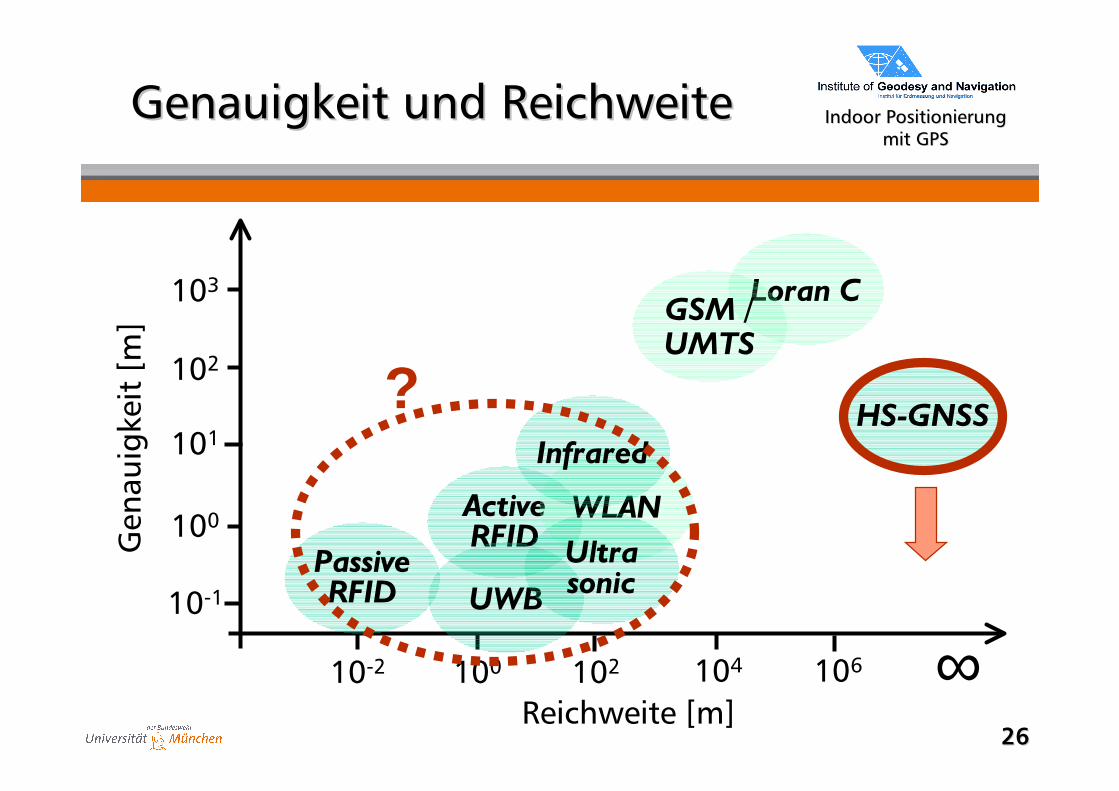
Genauigkeit und ReichweiteGenauigkeit und Reichweite
Reichweite [m]
Genauigkeit [m]
∞10-2 100 102 106104
10-1
101
103 Loran CGSM /UMTS
100
102
ActiveRFID
PassiveRFID
WLAN
UWB
Ultrasonic
Infrared
HS-GNSS?
2626
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
Idee »Idee »Ubiquitous PositioningUbiquitous Positioning««
Nutzung verfügbarer (Kommunikations-)Standards
Vorteile:
• Infrastruktur meist verfügbar
• Geringe Kosten trotz „smart environment“
Nachteile:
• Optimiert für Kommunikation
• Penetration wichtiger als Präzision
• Multipath erschwert Laufzeitmessung
2727
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
Einschätzung »WLAN«Einschätzung »WLAN«
• Laufzeitmessung schwierig aufgrund der ungenauenZeitstempel im WLAN-Standard
• Signalstärkemessungen ermöglichen bessere räumlicheAuflösung
• Allerdings starke Multipath-Effekte und Signalrauschenz.B. durch die Bewegung von Menschen
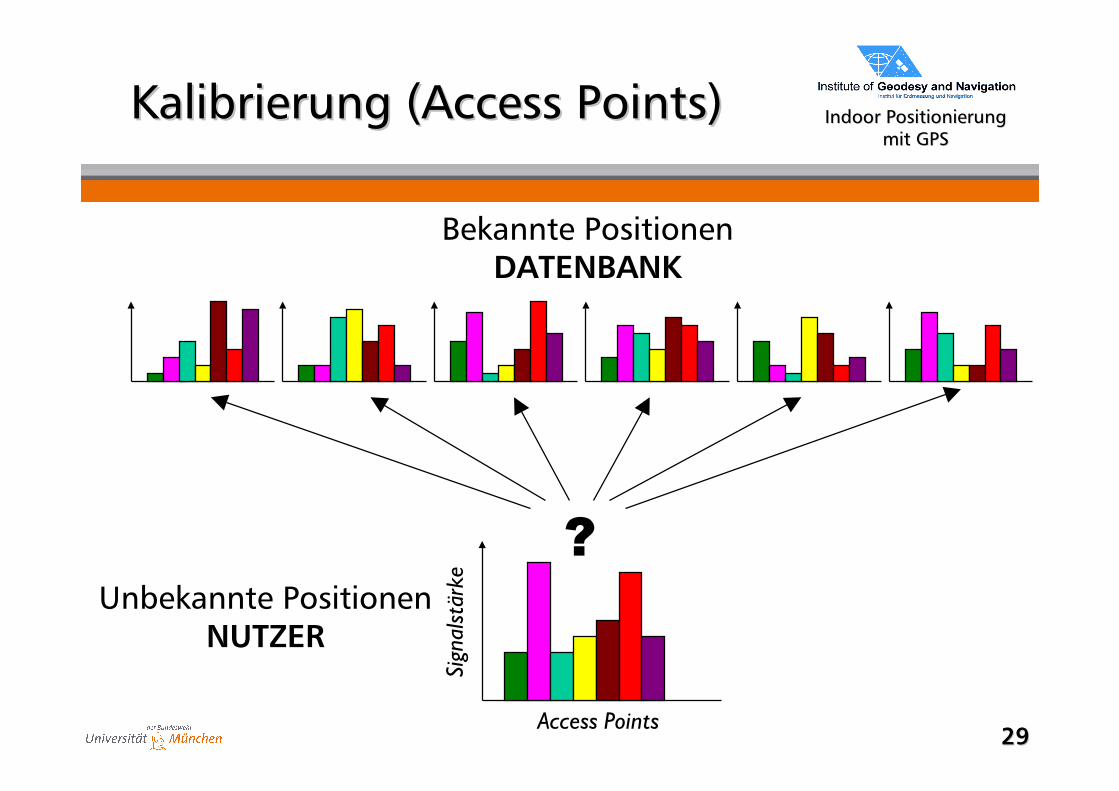
• Daher werden überwiegend Fingerprint-Verfahren, die eineKalibirierung der Umgebung voraussetzen, eingesetzt
• Bekanntestes kommerzielles Produkt:
Ekahau Positioning Engine
2828
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
Kalibrierung (Access Kalibrierung (Access PointsPoints))
Bekannte PositionenDATENBANK
Unbekannte PositionenNUTZER
Signa lstärke
Access Points
?
2929
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
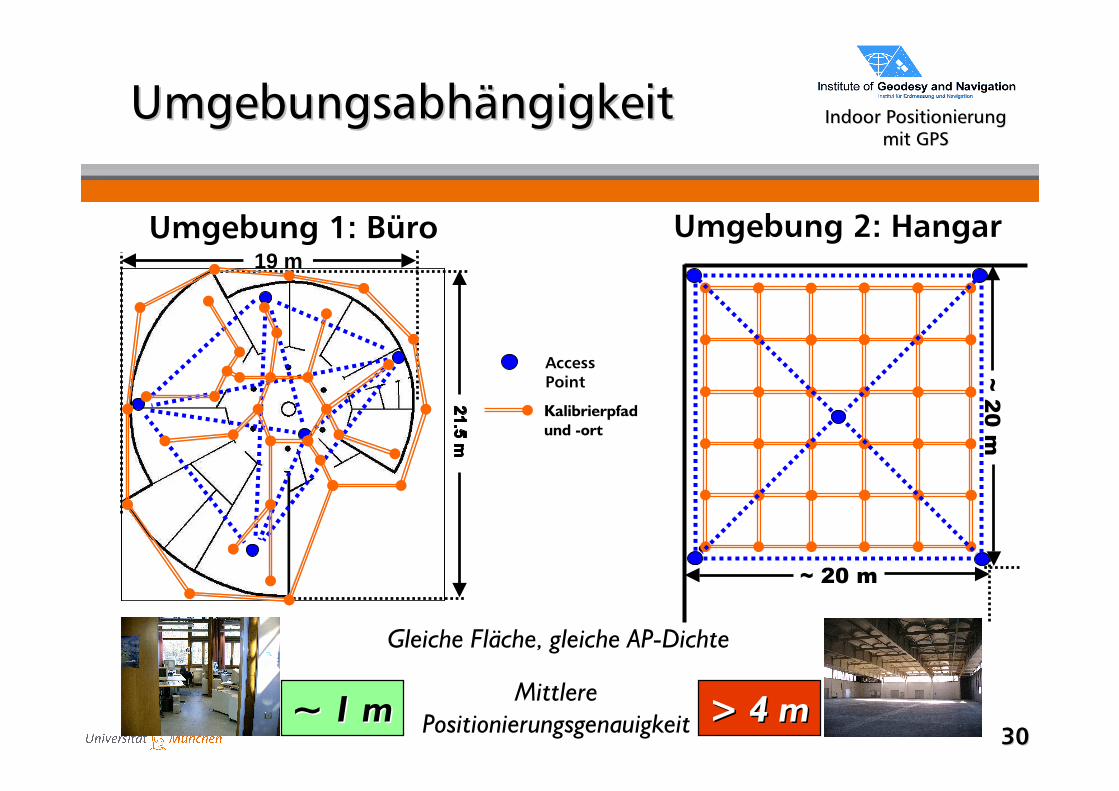
UmgebungsabhängigkeitUmgebungsabhängigkeit
19 m
AccessPoint
Kalibrierpfad
und -ort
~ 1 m~ 1 mMittlere
Positionierungsgenauigkeit
~ 20 m
~ 20 m
> 4 m> 4 m
Umgebung 1: Büro Umgebung 2: Hangar
Gleiche Fläche, gleiche AP-Dichte
3030
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
Einschätzung »UWB«Einschätzung »UWB«
• Hohe Bandbreite wird erzielt durch im Zeitbereich sehrkurze Pulse
• Erhöhung der theoretischen Genauigkeit durch hoheBandbreite (b im Nenner)
• Multipath-Signale können wegen der kurzen Pulse i.d.R.
eindeutig vom direkten Signal getrennt werden• Positionierungsalgorithmen, die auf Signalstärke basieren,nutzen dagegen die Eigenschaften von UWB nicht aus
• Daher werden überwiegend TOA-Verfahren oder kombinierte TOA/AOA-Verfahren eingesetzt
• Probleme, wenn nur NLOS-Signale empfangen werden
3131
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
Einschätzung »MEMS«Einschätzung »MEMS«
• Nutzung von Inertialsensoren, aber: kein klassischerStrapdown-Algorithmus
• Prediction nur bei Schritterkennung
• Ziel: kein extremes Weglaufen der Positionslösung• Preiswerte Sensoren• Prinzip „Step, stride, heading“, also Schritterkennung, Schrittlängenschätzung und Richtungsbestimmung
• Berücksichtigung von Sonderfällen wie Stehen, Drehen aufder Stelle, Treppen steigen/absteigen
• Anfangsposition sowie regelmäßige Updates müssendurch ein anderes Positionierungssystem vorliegen
3232
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
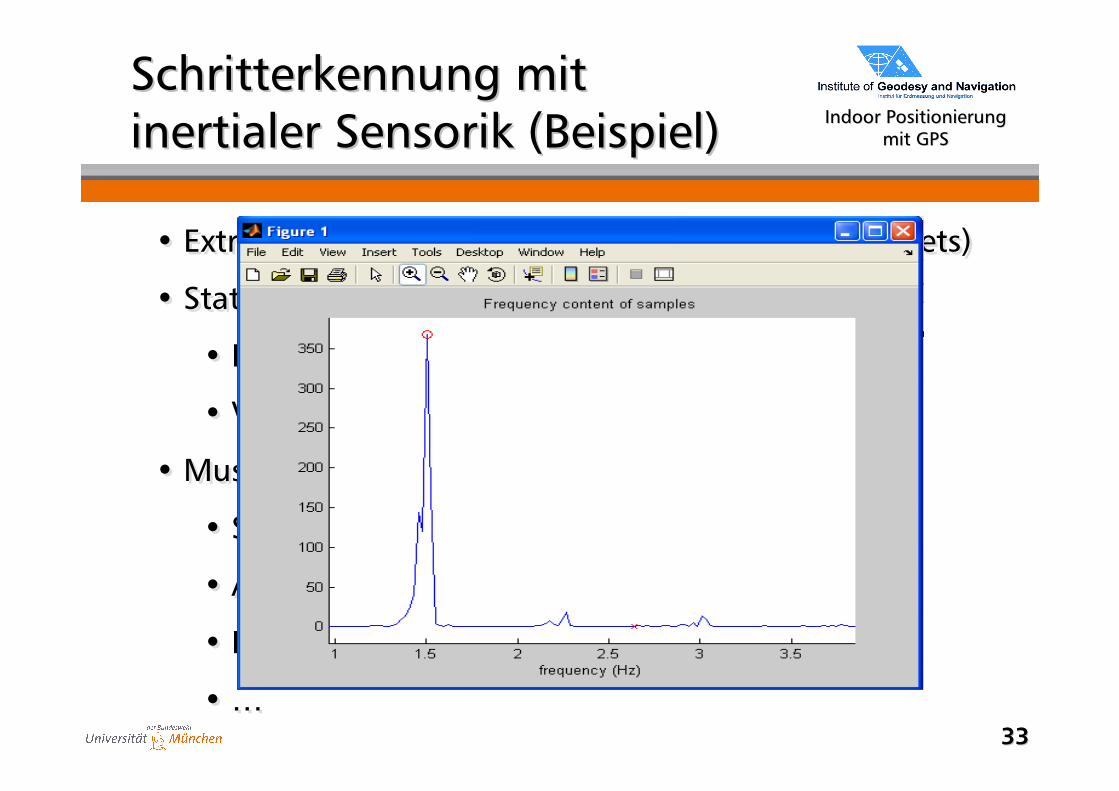
Schritterkennung mit Schritterkennung mit inertialer Sensorik inertialer Sensorik (Beispiel)(Beispiel)
• Extremasuche nach Signalglättung (Tiefpass, Wavelets)
• Statistische Untersuchung der IMU-Signale:
• Fourier-Analyse
• Varianzanalyse
• Mustererkennung mit Constraints
• Schrittfrequenz
• Amplituden
• Bewegungsmuster
• …
• Extremasuche nach Signalglättung (Tiefpass, Wavelets)
• Statistische Untersuchung der IMU-Signale:
• Fourier-Analyse
• Varianzanalyse
• Mustererkennung mit Constraints
• Schrittfrequenz
• Amplituden
• Bewegungsmuster
• …3333
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
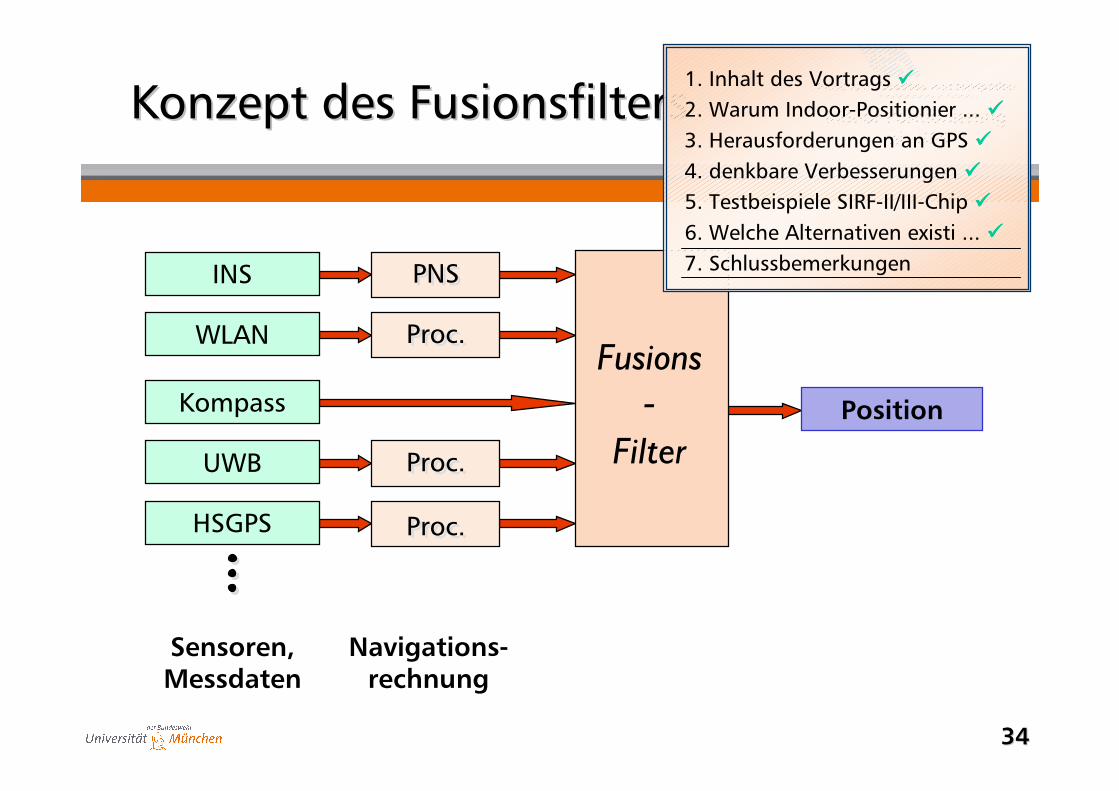
Konzept des FusionsfiltersKonzept des Fusionsfilters
Position
Sensoren,Messdaten
PNSPNS
Proc.Proc.
Proc.Proc.
Proc.Proc.
Navigations-rechnung
Fusions
-
Filter
INS
WLAN
Kompass
UWB
HSGPS
3434
1. Inhalt des Vortrags üüüü
2. Warum Indoor-Positionier ... üüüü
3. Herausforderungen an GPS üüüü
4. denkbare Verbesserungen üüüü
5. Testbeispiele SIRF-II/III-Chip üüüü
6. Welche Alternativen existi ... üüüü
7. Schlussbemerkungen
Indoor Indoor PositionierungPositionierungmit GPSmit GPS
SchlussbemerkungenSchlussbemerkungen
• Messbare GPS-Signale sind innerhalb von Gebäuden grund-sätzlich vorhanden.
• Auswertung der Signal erfordert einen qualitativ relativ
hochwertigen GPS-Empfänger.• Genauigkeit der Positionslösung ist nicht für alle Nutzer-gruppen befriedigend.
• Optimiertes Signal für Indoor-Positionierung in zukünftigenSatellitennavigationssystemen denkbar.
• Trotz möglicher Verbesserungen ist die Sensor Fusion, d.h.die Integration mit anderen – für die konkrete Anwendunggeeigneten – Sensoren sinnvoll und zumeist notwendig.
3535