Embed Size (px)
Citation preview
Innovative Lichtsysteme
erhöhen die
Verkehrssicherheit
Die Scheinwerfertechnik hat sich in den vergangenen zwei Jahrzehnten entscheidend weiterentwickelt. Moderne Systeme machen die nächtliche Fahrt bereits heute deutlich sicherer. Ein weiteres Plus an Sicherheit werden Beleuchtungssysteme liefern, die rech-nergestützt und mit bildverarbeitender Sensorik arbeiten. Der Zulieferer Valeo erarbeitet solche zukünftigen Beleuchtungssysteme.
ENTWICKLUNG
ATZ 03I2008 Jahrgang 110210
Fahrerassistenzsysteme

1 Einleitung
Trotz des viel geringeren Verkehrsauf-kommens ist das Unfallrisiko, insbeson-dere eines tödlichen Unfalls, nachts ver-hältnismäßig hoch – heißt es in einer aktuellen Studie des TÜV Rheinland. Wären alle in Deutschland zugelassenen Fahrzeuge mit Xenonlicht statt mit her-kömmlichen Halogenscheinwerfern ausgerüstet, ließen sich nach den Er-gebnissen der TÜV-Analyse bei Nacht-fahrten auf Landstraßen jährlich mehr als 50 %, auf Autobahnen mehr als 30 % der schweren Unfälle vermeiden. Dies wären insgesamt 6 % weniger Unfälle mit Verletzten und 18 % weniger Todes-opfer. Dabei haben die Experten die Un-fallhäufigkeit von Fahrzeugen der Ober-klasse mit hohem Xenonanteil mit Fahr-zeugen aus den Segmenten ohne nen-nenswerten Xenonanteil verglichen. Es wurde nachgewiesen, dass es auf Land-straßen und Autobahnen einen statis-tisch signifikanten Einfluss des Xenon-lichts auf die Unfallhäufigkeit gibt. Dieses Ergebnis ist unabhängig von an-deren technischen Neuerungen wie An-tiblockiersystemen oder elektronischen Stabilitätsprogrammen.
Derzeit sind den Angaben zufolge rund zehn Prozent aller in Deutschland zugelassenen Autos mit Xenonlicht aus-gerüstet. Eine im Jahr 2005 durchgeführ-te Studie betrachtete das Alter des Unfall-fahrzeugführers im Zusammenhang mit der Unfallursache, Bild 1. Wahrnehmungs-fehler gehören bereits bei jüngeren Fahr-ern zu den häufigsten Unfallursachen, deren Anteil steigt bei den über 60jäh-rigen Fahrern sogar auf mehr als 70 %. In Europa (EU25) werden im Jahr 2025 mehr als 100 Mio. über 64 Jahre alte Men-schen leben, wovon ein Großteil aktive Fahrer sein werden.
Begleitend zu diesen Untersuchungen analysiert Valeo auch regelmäßig die Ak-zeptanz und die Erwartungen der Auto-käufer in Bezug auf Fahrerassistenzsyste-me. Diese Studien werden weltweit jähr-lich durchgeführt und kombinieren sozi-okulturelle Trendanalysen, Internetum-fragen und die Auswertung von Endkun-deninterviews.
Ein wichtiges Untersuchungsergebnis ist der Anspruch auf verbesserte Sichtver-hältnisse. Dieser Anspruch gilt für alle Marktsegmente und nicht ausschließlich
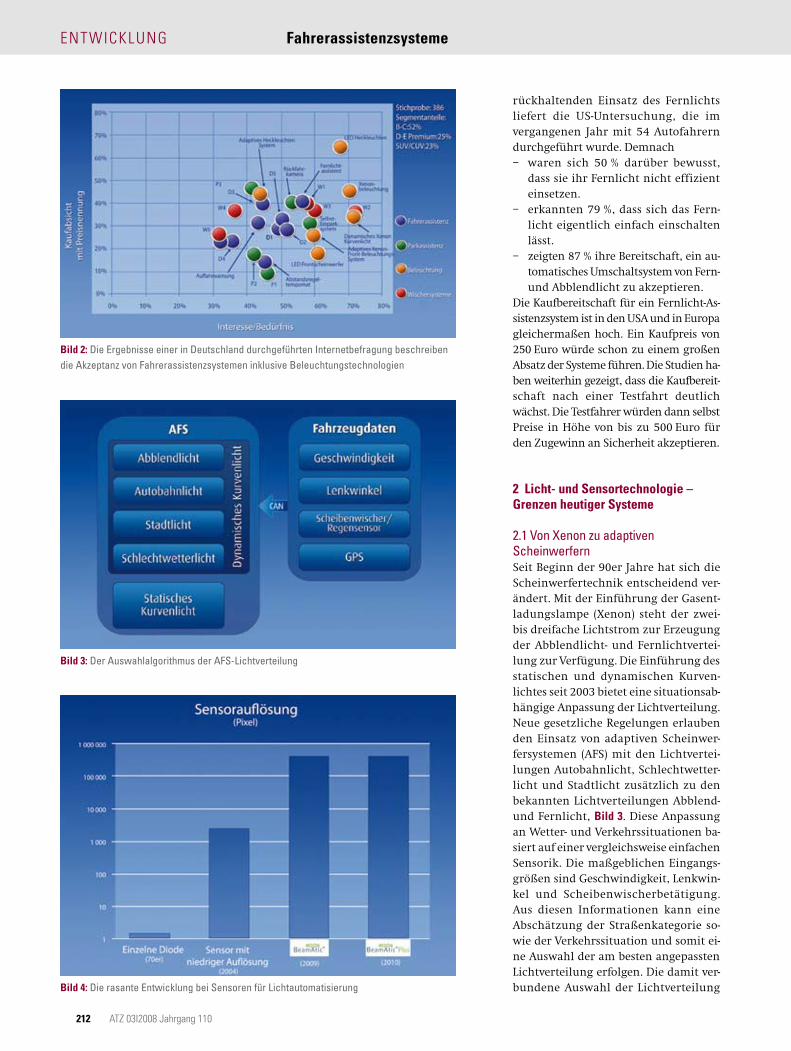
für das Premiumsegment. Zudem lässt sich ein grundsätzlich höheres Interesse sowie eine höhere Kaufbereitschaft bei Beleuchtungssystemen als bei anderen Fahrerassistenzsystemen, Bild 2, feststel-len. Dies wurde in einer in diesem Jahr in Köln durchgeführten Untersuchung zur Akzeptanz von Fahrerassistenzsyste-men bestätigt. Unabhängige Marktfor-scher haben Fahrer von Fahrzeugen der Segmente B, C und D befragt. Sichtwei-tenverbesserung wurde als wichtigster Bereich der Optimierung identifiziert. Die Erwartungen an eine optimierte Be-leuchtung sind dabei die automatisierte Fernlichtschaltung sowie die Anpassung an Straßen- und Verkehrsverhältnisse. Wie wichtig die automatische Umschal-tung zwischen Abblend- und Fernlicht ist, zeigt eine weitere Studie. Die im Jahr 2007 in Detroit durchgeführte Untersu-chung ermittelte eine durchschnittliche nächtliche Nutzung des Fernlichts von lediglich 3,1 % der Fahrtzeit. Selbst un-ter günstigsten Bedingungen, ohne wei-teren Autoverkehr und in ländlicher Ge-gend, wird das Fernlicht nur während 25 % der Fahrtstrecke eingeschaltet. Ähnliche Ergebnisse lieferte eine von Valeo in Heidelberg durchgeführte Stu-die. Dort wurde eine durchschnittliche Fernlichtnutzung von 8 % (60 Fahrer, 3.400 km) festgestellt. Gleichzeitig zeigte die Studie, dass ein gut ausgelegtes auto-matisches Fernlichtsystem die Nutzung des Fernlichts um den Faktor 4,7 erhö-hen kann. Die Begründung für den zu-
Die Autoren
Dipl.-Ing. MSc Patrice Reilhac ist Direktor Innovation
der Domäne Fahreras-
sistenz bei Valeo in
Bietigheim-Bissingen.
Bild 1: Fahrfehler als Unfallursache
Julien Moizard ist Projektleiter in der
Domäne Fahrerassis-
tenzsysteme bei Valeo
in Bietigheim-Bissingen.
Dr.-Ing. Martin Grimm leitet die Vorentwick-
lung bei Valeo Lighting
Systems in Bietigheim-
Bissingen.
Benoit Reiss ist Manager in der
Vorentwicklung bei
Valeo Lighting Sys-
tems in Bietigheim-
Bissingen.
ATZ 03I2008 Jahrgang 110 211
rückhaltenden Einsatz des Fernlichts liefert die US-Untersuchung, die im vergangenen Jahr mit 54 Autofahrern durchgeführt wurde. Demnach– waren sich 50 % darüber bewusst,
dass sie ihr Fernlicht nicht effizient einsetzen.
– erkannten 79 %, dass sich das Fern-licht eigentlich einfach einschalten lässt.
– zeigten 87 % ihre Bereitschaft, ein au-tomatisches Umschaltsystem von Fern- und Abblendlicht zu akzeptieren.
Die Kaufbereitschaft für ein Fernlicht-As-sistenzsystem ist in den USA und in Europa gleichermaßen hoch. Ein Kaufpreis von 250 Euro würde schon zu einem großen Absatz der Systeme führen. Die Studien ha-ben weiterhin gezeigt, dass die Kaufbereit-schaft nach einer Testfahrt deutlich wächst. Die Testfahrer würden dann selbst Preise in Höhe von bis zu 500 Euro für den Zugewinn an Sicherheit akzeptieren.
2 Licht- und Sensortechnologie – Grenzen heutiger Systeme
2.1 Von Xenon zu adaptiven ScheinwerfernSeit Beginn der 90er Jahre hat sich die Scheinwerfertechnik entscheidend ver-ändert. Mit der Einführung der Gasent-ladungslampe (Xenon) steht der zwei- bis dreifache Lichtstrom zur Erzeugung der Abblendlicht- und Fernlichtvertei-lung zur Verfügung. Die Einführung des statischen und dynamischen Kurven-lichtes seit 2003 bietet eine situationsab-hängige Anpassung der Lichtverteilung. Neue gesetzliche Regelungen erlauben den Einsatz von adaptiven Scheinwer-fersystemen (AFS) mit den Lichtvertei-lungen Autobahnlicht, Schlechtwetter-licht und Stadtlicht zusätzlich zu den bekannten Lichtverteilungen Abblend- und Fernlicht, Bild 3. Diese Anpassung an Wetter- und Verkehrssituationen ba-siert auf einer vergleichsweise einfachen Sensorik. Die maßgeblichen Eingangs-größen sind Geschwindigkeit, Lenkwin-kel und Scheibenwischerbetätigung. Aus diesen Informationen kann eine Abschätzung der Straßenkategorie so-wie der Verkehrssituation und somit ei-ne Auswahl der am besten angepassten Lichtverteilung erfolgen. Die damit ver-bundene Auswahl der Lichtverteilung
Bild 2: Die Ergebnisse einer in Deutschland durchgeführten Internetbefragung beschreiben die Akzeptanz von Fahrerassistenzsystemen inklusive Beleuchtungstechnologien
Bild 3: Der Auswahlalgorithmus der AFS-Lichtverteilung
Bild 4: Die rasante Entwicklung bei Sensoren für Lichtautomatisierung
ENTWICKLUNG
ATZ 03I2008 Jahrgang 110212
Fahrerassistenzsysteme
ist jedoch nicht in allen Fällen korrekt. Daher sind die Lichtverteilungen so aus-gelegt, dass sie eine Blendungsbegren-zung für andere Verkehrsteilnehmer garantieren.
Eine weitere Optimierung der licht-technischen Leistung kann nur durch die Einführung einer Kamera in das Sys-tem erreicht werden. Dadurch lässt sich die heutige Limitierung aufheben, denn die Blendungsbegrenzung erfolgt nicht mehr durch die Lichtverteilung. Viel-mehr erlaubt die genaue Analyse der Ver-kehrssituation eine Adaption auf dem Niveau des Fernlichtes. Der damit ver-bundene Zugewinn an Sichtweite und damit an Sicherheit ist enorm. Gleichzei-tig ist das Blenden anderer Verkehrsteil-nehmer ausgeschlossen.
2.2 Vom automatischen Abblendlicht bis zum FernlichtassistentenDie Automatisierung der Fahrzeugbe-leuchtung hat eine lange Tradition. Die ersten Versuche erfolgten während der 60er und 70er Jahre in den USA und in Europa – allerdings mit mäßigem Erfolg. Die Leistungsfähigkeit der damaligen Sensorik war zu gering. Sie war noch nicht in der Lage, vorausfahrende oder querende Fahrzeuge eindeutig zu erken-nen. Zudem schränkten zahlreiche Falscherfassungen die Nutzbarkeit der Systeme stark ein.
Die erste Einführung eines Fernlichtas-sistenten auf Basis eines Sensors mit 2500 Pixeln zeigte einen deutlichen Zugewinn an Funktionalität. Allerdings treten auch deutlich die Limitierungen des Systems zu Tage: Falscherkennung von Objekten, hohe Aktivierungs- und Deaktivierungs-schwellen, Schwierigkeiten der Nebeler-kennung und damit verbunden die Selbst-blendung des Fahrers bei Nebel.
Eine neue Generation von Comple-mentary Metal Oxide Semiconductor (CMOS)-Sensoren setzt Valeo seit 2004 für die Fahrspurwechsel-Warnsysteme ein, mit denen die Infiniti-Modelle von Nis-san ausgestattet sind. Diese Sensoren er-öffnen auch vielfältige Chancen und Möglichkeiten für die Entwicklung neu-er automatischer Beleuchtungssysteme. Die Auflösung dieser neuen Sensorgene-rationen, Bild 4, hat ein Niveau erreicht, das die genaue Darstellung des Fahrzeu-gumfeldes erlaubt. Valeo nennt diese Sys-teme „BeamAtic“ und „BeamAtic Plus“.
H & K Messe GmbH & Co. KGFriedrichstraße 3970174 StuttgartTelefon: +49 (0) 7 11 / 72 23 10-0Telefax: +49 (0) 7 11 / 72 23 [email protected]
Automotive Software & ElectronicsNeueste Technologien und Entwicklungen auf höchstem fachlichen Niveau.
Effi ziente Kontakte und Problemlö sungen durch Kombination von » Fachmesse» Fachkongress » Fachevent
Gestalten Sie die Zukunft des Automobils mit!
driveIT – Impulsgeber für Innovationen.
4. – 6. November 2008Messe Stuttgart
0350
2 ©
200
8
www.drive-it-expo.com
3 Neue Lichtassistenzsysteme
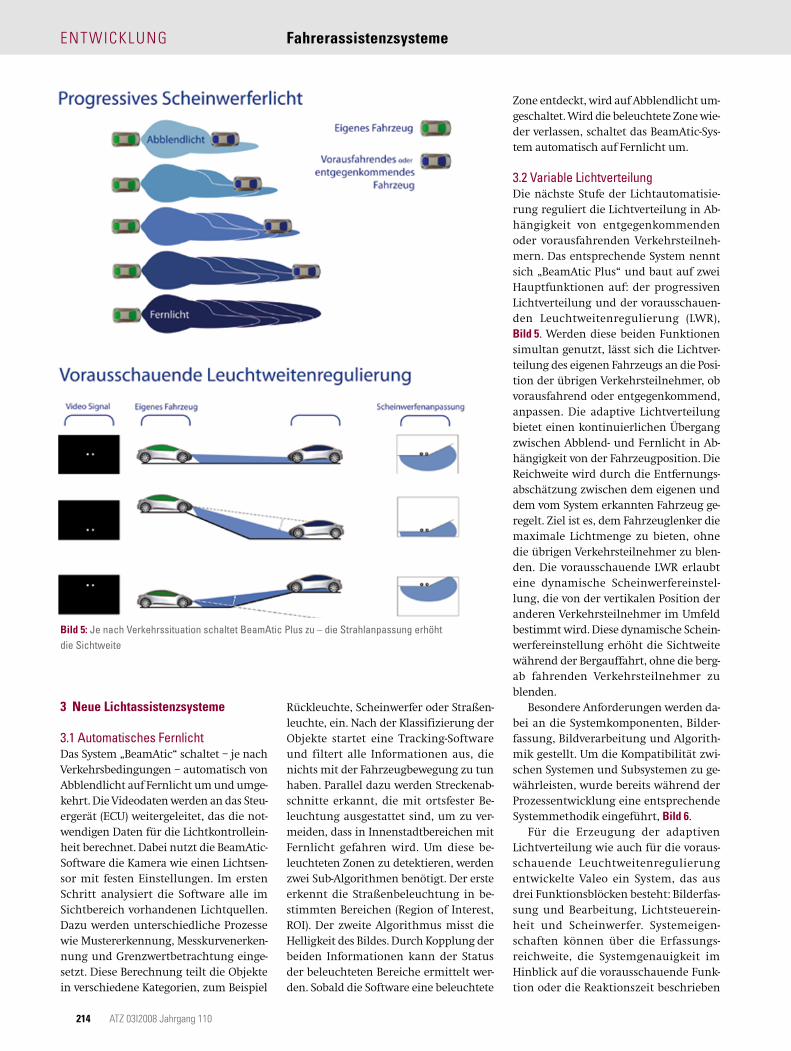
3.1 Automatisches FernlichtDas System „BeamAtic“ schaltet – je nach Verkehrsbedingungen – automatisch von Abblendlicht auf Fernlicht um und umge-kehrt. Die Videodaten werden an das Steu-ergerät (ECU) weitergeleitet, das die not-wendigen Daten für die Lichtkontrollein-heit berechnet. Dabei nutzt die BeamAtic-Software die Kamera wie einen Lichtsen-sor mit festen Einstellungen. Im ersten Schritt analysiert die Software alle im Sichtbereich vorhandenen Lichtquellen. Dazu werden unterschiedliche Prozesse wie Mustererkennung, Messkurvenerken-nung und Grenzwertbetrachtung einge-setzt. Diese Berechnung teilt die Objekte in verschiedene Kategorien, zum Beispiel
Rückleuchte, Scheinwerfer oder Straßen-leuchte, ein. Nach der Klassifizierung der Objekte startet eine Tracking-Software und filtert alle Informationen aus, die nichts mit der Fahrzeugbewegung zu tun haben. Parallel dazu werden Streckenab-schnitte erkannt, die mit ortsfester Be-leuchtung ausgestattet sind, um zu ver-meiden, dass in Innenstadtbereichen mit Fernlicht gefahren wird. Um diese be-leuchteten Zonen zu detektieren, werden zwei Sub-Algorithmen benötigt. Der erste erkennt die Straßenbeleuchtung in be-stimmten Bereichen (Region of Interest, ROI). Der zweite Algorithmus misst die Helligkeit des Bildes. Durch Kopplung der beiden Informationen kann der Status der beleuchteten Bereiche ermittelt wer-den. Sobald die Software eine beleuchtete
Zone entdeckt, wird auf Abblendlicht um-geschaltet. Wird die beleuchtete Zone wie-der verlassen, schaltet das BeamAtic-Sys-tem automatisch auf Fernlicht um.
3.2 Variable LichtverteilungDie nächste Stufe der Lichtautomatisie-rung reguliert die Lichtverteilung in Ab-hängigkeit von entgegenkommenden oder vorausfahrenden Verkehrsteilneh-mern. Das entsprechende System nennt sich „BeamAtic Plus“ und baut auf zwei Hauptfunktionen auf: der progressiven Lichtverteilung und der vorausschauen-den Leuchtweitenregulierung (LWR), Bild 5. Werden diese beiden Funktionen simultan genutzt, lässt sich die Lichtver-teilung des eigenen Fahrzeugs an die Posi-tion der übrigen Verkehrsteilnehmer, ob vorausfahrend oder entgegenkommend, anpassen. Die adaptive Lichtverteilung bietet einen kontinuierlichen Übergang zwischen Abblend- und Fernlicht in Ab-hängigkeit von der Fahrzeugposition. Die Reichweite wird durch die Entfernungs-abschätzung zwischen dem eigenen und dem vom System erkannten Fahrzeug ge-regelt. Ziel ist es, dem Fahrzeuglenker die maximale Lichtmenge zu bieten, ohne die übrigen Verkehrsteilnehmer zu blen-den. Die vorausschauende LWR erlaubt eine dynamische Scheinwerfereinstel-lung, die von der vertikalen Position der anderen Verkehrsteilnehmer im Umfeld bestimmt wird. Diese dynamische Schein-werfereinstellung erhöht die Sichtweite während der Bergauffahrt, ohne die berg-ab fahrenden Verkehrsteilnehmer zu blenden.
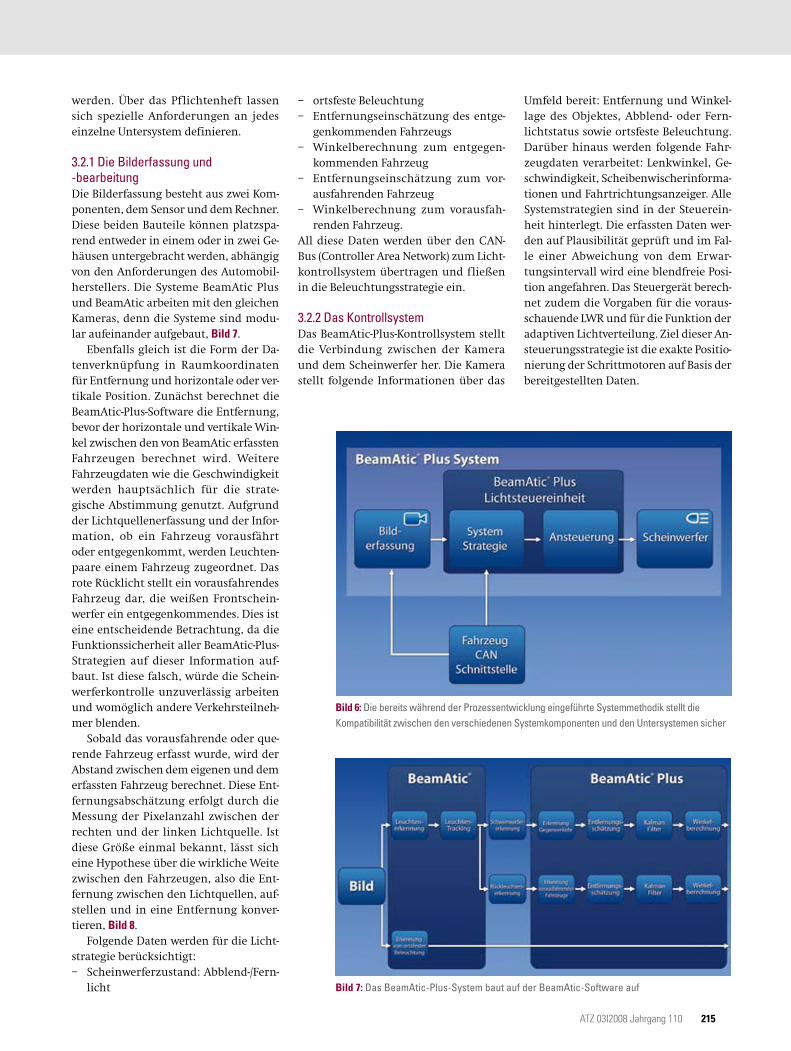
Besondere Anforderungen werden da-bei an die Systemkomponenten, Bilder-fassung, Bildverarbeitung und Algorith-mik gestellt. Um die Kompatibilität zwi-schen Systemen und Subsystemen zu ge-währleisten, wurde bereits während der Prozessentwicklung eine entsprechende Systemmethodik eingeführt, Bild 6.
Für die Erzeugung der adaptiven Lichtverteilung wie auch für die voraus-schauende Leuchtweitenregulierung entwickelte Valeo ein System, das aus drei Funktionsblöcken besteht: Bilderfas-sung und Bearbeitung, Lichtsteuerein-heit und Scheinwerfer. Systemeigen-schaften können über die Erfassungs-reichweite, die Systemgenauigkeit im Hinblick auf die vorausschauende Funk-tion oder die Reaktionszeit beschrieben
Bild 5: Je nach Verkehrssituation schaltet BeamAtic Plus zu – die Strahlanpassung erhöht die Sichtweite
ENTWICKLUNG
ATZ 03I2008 Jahrgang 110214
Fahrerassistenzsysteme
werden. Über das Pflichtenheft lassen sich spezielle Anforderungen an jedes einzelne Untersystem definieren.
3.2.1 Die Bilderfassung und -bearbeitungDie Bilderfassung besteht aus zwei Kom-ponenten, dem Sensor und dem Rechner. Diese beiden Bauteile können platzspa-rend entweder in einem oder in zwei Ge-häusen untergebracht werden, abhängig von den Anforderungen des Automobil-herstellers. Die Systeme BeamAtic Plus und BeamAtic arbeiten mit den gleichen Kameras, denn die Systeme sind modu-lar aufeinander aufgebaut, Bild 7.
Ebenfalls gleich ist die Form der Da-tenverknüpfung in Raumkoordinaten für Entfernung und horizontale oder ver-tikale Position. Zunächst berechnet die BeamAtic-Plus-Software die Entfernung, bevor der horizontale und vertikale Win-kel zwischen den von BeamAtic erfassten Fahrzeugen berechnet wird. Weitere Fahrzeugdaten wie die Geschwindigkeit werden hauptsächlich für die strate-gische Abstimmung genutzt. Aufgrund der Lichtquellenerfassung und der Infor-mation, ob ein Fahrzeug vorausfährt oder entgegenkommt, werden Leuchten-paare einem Fahrzeug zugeordnet. Das rote Rücklicht stellt ein vorausfahrendes Fahrzeug dar, die weißen Frontschein-werfer ein entgegenkommendes. Dies ist eine entscheidende Betrachtung, da die Funktionssicherheit aller BeamAtic-Plus-Strategien auf dieser Information auf-baut. Ist diese falsch, würde die Schein-werferkontrolle unzuverlässig arbeiten und womöglich andere Verkehrsteilneh-mer blenden.
Sobald das vorausfahrende oder que-rende Fahrzeug erfasst wurde, wird der Abstand zwischen dem eigenen und dem erfassten Fahrzeug berechnet. Diese Ent-fernungsabschätzung erfolgt durch die Messung der Pixelanzahl zwischen der rechten und der linken Lichtquelle. Ist diese Größe einmal bekannt, lässt sich eine Hypothese über die wirkliche Weite zwischen den Fahrzeugen, also die Ent-fernung zwischen den Lichtquellen, auf-stellen und in eine Entfernung konver-tieren, Bild 8.
Folgende Daten werden für die Licht-strategie berücksichtigt:– Scheinwerferzustand: Abblend-/Fern-
licht
– ortsfeste Beleuchtung– Entfernungseinschätzung des entge-
genkommenden Fahrzeugs– Winkelberechnung zum entgegen-
kommenden Fahrzeug– Entfernungseinschätzung zum vor-
ausfahrenden Fahrzeug– Winkelberechnung zum vorausfah-
renden Fahrzeug.All diese Daten werden über den CAN-Bus (Controller Area Network) zum Licht-kontrollsystem übertragen und fließen in die Beleuchtungsstrategie ein.
3.2.2 Das KontrollsystemDas BeamAtic-Plus-Kontrollsystem stellt die Verbindung zwischen der Kamera und dem Scheinwerfer her. Die Kamera stellt folgende Informationen über das
Umfeld bereit: Entfernung und Winkel-lage des Objektes, Abblend- oder Fern-lichtstatus sowie ortsfeste Beleuchtung. Darüber hinaus werden folgende Fahr-zeugdaten verarbeitet: Lenkwinkel, Ge-schwindigkeit, Scheibenwischerinforma-tionen und Fahrtrichtungsanzeiger. Alle Systemstrategien sind in der Steuerein-heit hinterlegt. Die erfassten Daten wer-den auf Plausibilität geprüft und im Fal-le einer Abweichung von dem Erwar-tungsintervall wird eine blendfreie Posi-tion angefahren. Das Steuergerät berech-net zudem die Vorgaben für die voraus-schauende LWR und für die Funktion der adaptiven Lichtverteilung. Ziel dieser An-steuerungsstrategie ist die exakte Positio-nierung der Schrittmotoren auf Basis der bereitgestellten Daten.
Bild 7: Das BeamAtic-Plus-System baut auf der BeamAtic-Software auf
Bild 6: Die bereits während der Prozessentwicklung eingeführte Systemmethodik stellt die Kompatibilität zwischen den verschiedenen Systemkomponenten und den Untersystemen sicher
ATZ 03I2008 Jahrgang 110 215
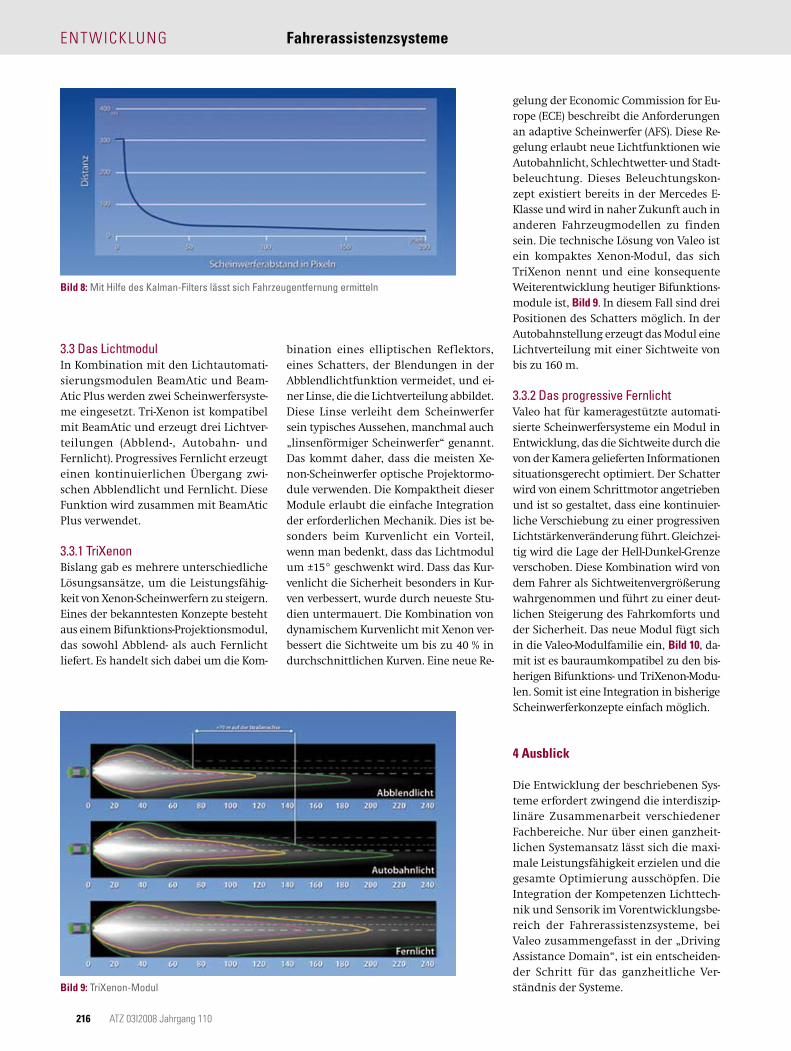
Bild 9: TriXenon-Modul
3.3 Das LichtmodulIn Kombination mit den Lichtautomati-sierungsmodulen BeamAtic und Beam-Atic Plus werden zwei Scheinwerfersyste-me eingesetzt. Tri-Xenon ist kompatibel mit BeamAtic und erzeugt drei Lichtver-teilungen (Abblend-, Autobahn- und Fernlicht). Progressives Fernlicht erzeugt einen kontinuierlichen Übergang zwi-schen Abblendlicht und Fernlicht. Diese Funktion wird zusammen mit BeamAtic Plus verwendet.
3.3.1 TriXenonBislang gab es mehrere unterschiedliche Lösungsansätze, um die Leistungsfähig-keit von Xenon-Scheinwerfern zu steigern. Eines der bekanntesten Konzepte besteht aus einem Bifunktions-Projektionsmodul, das sowohl Abblend- als auch Fernlicht liefert. Es handelt sich dabei um die Kom-
bination eines elliptischen Reflektors, eines Schatters, der Blendungen in der Abblendlichtfunktion vermeidet, und ei-ner Linse, die die Lichtverteilung abbildet. Diese Linse verleiht dem Scheinwerfer sein typisches Aussehen, manchmal auch „linsenförmiger Scheinwerfer“ genannt. Das kommt daher, dass die meisten Xe-non-Scheinwerfer optische Projektormo-dule verwenden. Die Kompaktheit dieser Module erlaubt die einfache Integration der erforderlichen Mechanik. Dies ist be-sonders beim Kurvenlicht ein Vorteil, wenn man bedenkt, dass das Lichtmodul um ±15° geschwenkt wird. Dass das Kur-venlicht die Sicherheit besonders in Kur-ven verbessert, wurde durch neueste Stu-dien untermauert. Die Kombination von dynamischem Kurvenlicht mit Xenon ver-bessert die Sichtweite um bis zu 40 % in durchschnittlichen Kurven. Eine neue Re-
gelung der Economic Commission for Eu-rope (ECE) beschreibt die Anforderungen an adaptive Scheinwerfer (AFS). Diese Re-gelung erlaubt neue Lichtfunktionen wie Autobahnlicht, Schlechtwetter- und Stadt-beleuchtung. Dieses Beleuchtungskon-zept existiert bereits in der Mercedes E-Klasse und wird in naher Zukunft auch in anderen Fahrzeugmodellen zu finden sein. Die technische Lösung von Valeo ist ein kompaktes Xenon-Modul, das sich TriXenon nennt und eine konsequente Weiterentwicklung heutiger Bifunktions-module ist, Bild 9. In diesem Fall sind drei Positionen des Schatters möglich. In der Autobahnstellung erzeugt das Modul eine Lichtverteilung mit einer Sichtweite von bis zu 160 m.
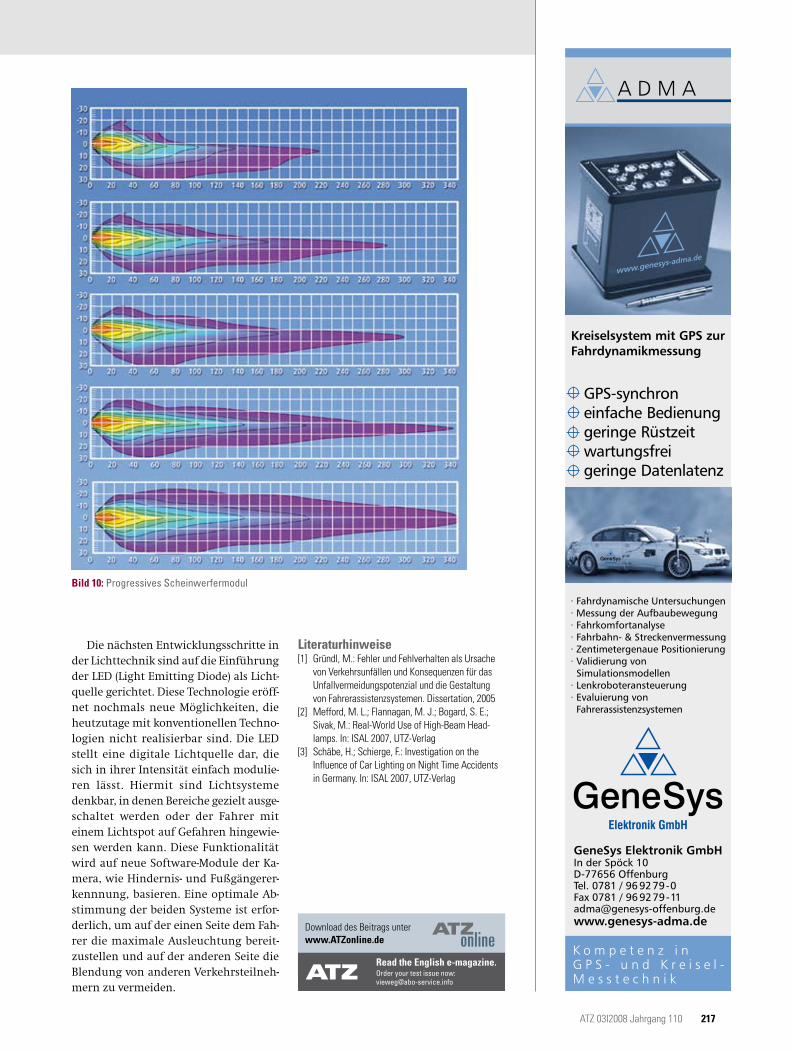
3.3.2 Das progressive FernlichtValeo hat für kameragestützte automati-sierte Scheinwerfersysteme ein Modul in Entwicklung, das die Sichtweite durch die von der Kamera gelieferten Informationen situationsgerecht optimiert. Der Schatter wird von einem Schrittmotor angetrieben und ist so gestaltet, dass eine kontinuier-liche Verschiebung zu einer progressiven Lichtstärkenveränderung führt. Gleichzei-tig wird die Lage der Hell-Dunkel-Grenze verschoben. Diese Kombination wird von dem Fahrer als Sichtweitenvergrößerung wahrgenommen und führt zu einer deut-lichen Steigerung des Fahrkomforts und der Sicherheit. Das neue Modul fügt sich in die Valeo-Modulfamilie ein, Bild 10, da-mit ist es bauraumkompatibel zu den bis-herigen Bifunktions- und TriXenon-Modu-len. Somit ist eine Integration in bisherige Scheinwerferkonzepte einfach möglich.
4 Ausblick
Die Entwicklung der beschriebenen Sys-teme erfordert zwingend die interdiszip-linäre Zusammenarbeit verschiedener Fachbereiche. Nur über einen ganzheit-lichen Systemansatz lässt sich die maxi-male Leistungsfähigkeit erzielen und die gesamte Optimierung ausschöpfen. Die Integration der Kompetenzen Lichttech-nik und Sensorik im Vorentwicklungsbe-reich der Fahrerassistenzsysteme, bei Valeo zusammengefasst in der „Driving Assistance Domain“, ist ein entscheiden-der Schritt für das ganzheitliche Ver-ständnis der Systeme.
Bild 8: Mit Hilfe des Kalman-Filters lässt sich Fahrzeugentfernung ermitteln
ENTWICKLUNG
ATZ 03I2008 Jahrgang 110216
Fahrerassistenzsysteme
Die nächsten Entwicklungsschritte in der Lichttechnik sind auf die Einführung der LED (Light Emitting Diode) als Licht-quelle gerichtet. Diese Technologie eröff-net nochmals neue Möglichkeiten, die heutzutage mit konventionellen Techno-logien nicht realisierbar sind. Die LED stellt eine digitale Lichtquelle dar, die sich in ihrer Intensität einfach modulie-ren lässt. Hiermit sind Lichtsysteme denkbar, in denen Bereiche gezielt ausge-schaltet werden oder der Fahrer mit einem Lichtspot auf Gefahren hingewie-sen werden kann. Diese Funktionalität wird auf neue Software-Module der Ka-mera, wie Hindernis- und Fußgängerer-kennnung, basieren. Eine optimale Ab-stimmung der beiden Systeme ist erfor-derlich, um auf der einen Seite dem Fah-rer die maximale Ausleuchtung bereit-zustellen und auf der anderen Seite die Blendung von anderen Verkehrsteilneh-mern zu vermeiden.
Literaturhinweise[1] Gründl, M.: Fehler und Fehlverhalten als Ursache
von Verkehrsunfällen und Konsequenzen für das
Unfallvermeidungspotenzial und die Gestaltung
von Fahrerassistenzsystemen. Dissertation, 2005
[2] Mefford, M. L.; Flannagan, M. J.; Bogard, S. E.;
Sivak, M.: Real-World Use of High-Beam Head-
lamps. In: ISAL 2007, UTZ-Verlag
[3] Schäbe, H.; Schierge, F.: Investigation on the
Influence of Car Lighting on Night Time Accidents
in Germany. In: ISAL 2007, UTZ-Verlag
Kreiselsystem mit GPS zur
Fahrdynamikmessung
GPS-synchron
einfache Bedienung
geringe Rüstzeit
wartungsfrei
geringe Datenlatenz
· Fahrdynamische Untersuchungen
· Messung der Aufbaubewegung
· Fahrkomfortanalyse
· Fahrbahn- & Streckenvermessung
· Zentimetergenaue Positionierung
· Validierung von
Simulationsmodellen
· Lenkroboteransteuerung
· Evaluierung von
Fahrerassistenzsystemen
GeneSys Elektronik GmbH
www.genesys-adma.de
In der Spöck 10
D-77656 Offenburg
Tel. 0781 / 969279-0
Fax 0781 / 969279-11
GeneSysElektronik GmbH
K o m p e t e n z i n
G P S - u n d K r e i s e l -
M e s s t e c h n i k
A D M A
GeneSysElektronik GmbH
Bild 10: Progressives Scheinwerfermodul
Download des Beitrags unter
www.ATZonline.de
Read the English e-magazine.Order your test issue now: [email protected]
ATZ 03I2008 Jahrgang 110 217





























