Embed Size (px)
Citation preview
Interpolation, numerische Integration
8. Vorlesung170 004 Numerische Methoden I
Clemens Brand und Erika Hausenblas
Montanuniversität Leoben
8. Mai 2014
Gliederung
1 InterpolationpolynomialSpline
2 Numerische IntegrationKlassisch: Newton-CotesWeitere Quadraturformeln
InterpolationDefinition der Aufgabenstellung
Gegeben:
Datenpunkte
Gesucht:
• Eine Funktion, die durch die gegebenen Datenpunkte verläuft.
• Ein Wert zwischen den Datenpunkten
• Trend über den gegebenen Datenbereich hinaus: Extrapolation
Anwendung:
Zwischenwerte in Tabellen, „glatte“ Kurven für Graphik. . .
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 3 / 23
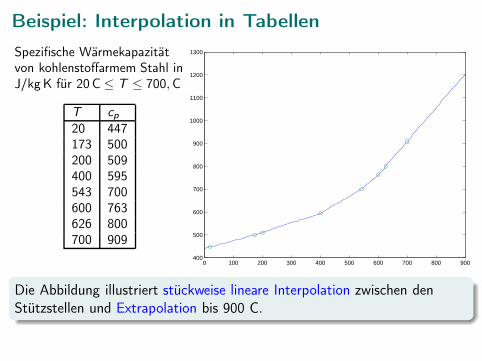
Beispiel: Interpolation in Tabellen
Spezifische Wärmekapazitätvon kohlenstoffarmem Stahl inJ/kg K für 20 C ≤ T ≤ 700,C
T cp
20 447173 500200 509400 595543 700600 763626 800700 909
0 100 200 300 400 500 600 700 800 900400
500
600
700
800
900
1000
1100
1200
1300
Die Abbildung illustriert stückweise lineare Interpolation zwischen denStützstellen und Extrapolation bis 900 C.
Polynomiale InterpolationDie einfachsten Interpolations-Funktionen sind Polynome...
Durch zwei Punkte der xy -Ebene geht genau eine Gerade. Durch dreibeliebige Punkte lässt sich eindeutig eine Parabel legen. Durch n + 1Punkte ist ein Polynom n-ten Grades eindeutig bestimmt. (Ausnahme,wenn x-Werte zusammenfallen)
Aufgabenstellung:
• gegeben n + 1 Wertepaare (xi , yi ), i = 0, . . . , n, wobei die xi
paarweise verschieden sind.
• gesucht ist das eindeutig bestimmte Polynom n-ten Grades p, dasdurch die gegebenen Datenpunkte verläuft:
p(xi ) = yi für i = 0, . . . , n
.
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 5 / 23
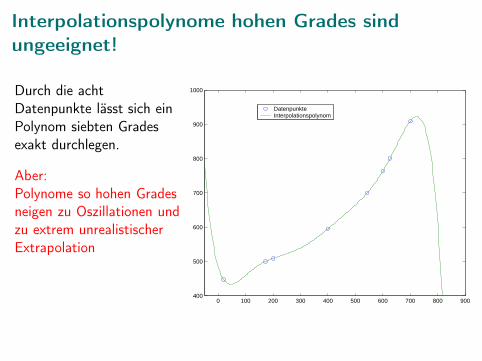
Interpolationspolynome hohen Grades sind
ungeeignet!
Durch die achtDatenpunkte lässt sich einPolynom siebten Gradesexakt durchlegen.
Aber:Polynome so hohen Gradesneigen zu Oszillationen undzu extrem unrealistischerExtrapolation
0 100 200 300 400 500 600 700 800 900400
500
600
700
800
900
1000
DatenpunkteInterpolationspolynom
Rechenverfahren zur polynomialen Interpolation
• Alle Verfahren für polynomiale Regression liefern für entsprechendhohen Polynomgrad das Interpolationspolynom. Rechenaufwand isthöher als bei den folgenden Methoden.
• Lagrangesches Interpolationspolynom: Eine Formel, die das Polynomdirekt hinschreibt.
• Newtonsches Interpolationspolynom: besonders rechengünstig.
• Es gibt noch einige andere Rechenschemen (im Skript:Neville-Verfahren; wir lassen es heuer aus)
Trotz unterschiedlicher Namen und Schreibweisen liefern alle Verfahrendasselbe (eindeutig bestimmte) Polynom.
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 7 / 23
Lagrangesche Interpolationsformel
Das Interpolationspolynom durch die n + 1 Wertepaare(xi , yi ), i = 0, . . . , n ist gegeben durch
p(x) = L0(x)y0 + L1(x)y1 + ...+ Ln(x)yn,
wobei
Li(x) =(x − x0)(x − x1)...(x − xi−1)(x − xi+1)...(x − xn)
(xi − x0)(xi − x1)...(xi − xi−1)(xi − xi+1)...(xi − xn)
Es ist für die rechnerische Durchführung nicht ratsam, nach Einsetzen der Datenpunkte
die Li (x) durch symbolisches Ausmultiplizieren noch weiter zu „vereinfachen“. Die
x-Werte direkt einsetzen!
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 8 / 23
Weitere InterpolationsverfahrenNicht alle Funktionen lassen sich vorteilhaft durch Polynome interpolieren
Andere wichtige Verfahren sind
• Rationale Interpolation
• Spline-Interpolation (Kubisch, Bezier,...)
• Stückweise Hermite-Interpolation (MATLAB pchip)
• Trigonometrische Interpolation
• Interpolation in zwei oder mehr Dimensionen
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 9 / 23
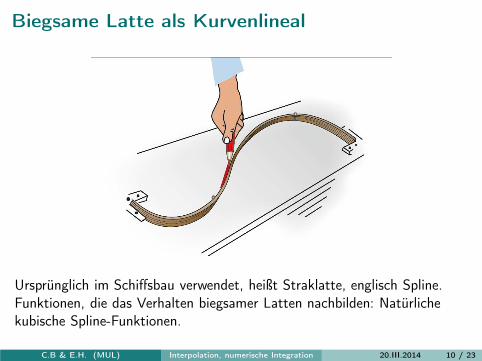
Biegsame Latte als Kurvenlineal
Ursprünglich im Schiffsbau verwendet, heißt Straklatte, englisch Spline.Funktionen, die das Verhalten biegsamer Latten nachbilden: Natürlichekubische Spline-Funktionen.
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 10 / 23
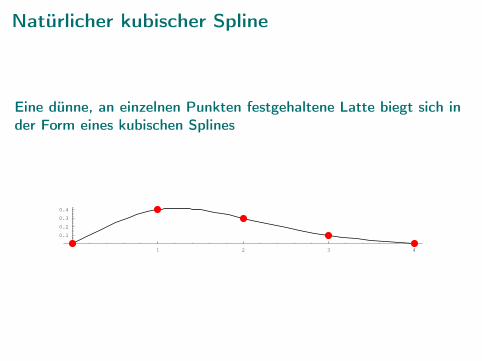
Natürlicher kubischer Spline
Eine dünne, an einzelnen Punkten festgehaltene Latte biegt sich inder Form eines kubischen Splines
1 2 3 4
0.1
0.2
0.3
0.4
Natürlicher kubischer Spline
Ein kubischer Spline s(x) durch die n + 1 Wertepaare (xi , yi ),i = 0, . . . , n ist folgendermaßen charakterisiert:
• In den einzelnen Intervallen (xi−1, xi ) ist s(x) jeweils ein kubischesPolynom
• An den Intervallgrenzen stimmen die Funktionswerte, die ersten unddie zweiten Ableitungen rechts- und linksseitig überein.
• Zusatzbedingung: zweite Ableitung an den Rändern wird Null gesetzt.
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 12 / 23
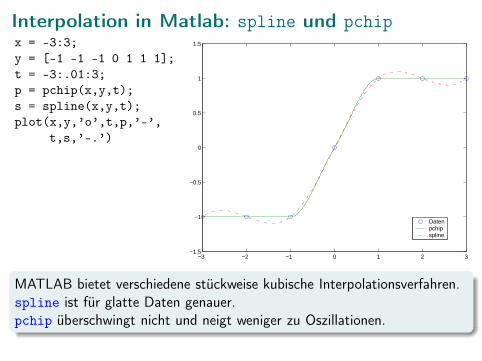
Interpolation in Matlab: spline und pchipx = -3:3;
y = [-1 -1 -1 0 1 1 1];
t = -3:.01:3;
p = pchip(x,y,t);
s = spline(x,y,t);
plot(x,y,’o’,t,p,’-’,
t,s,’-.’)
−3 −2 −1 0 1 2 3−1.5
−1
−0.5
0
0.5
1
1.5
Datenpchipspline
MATLAB bietet verschiedene stückweise kubische Interpolationsverfahren.spline ist für glatte Daten genauer.pchip überschwingt nicht und neigt weniger zu Oszillationen.
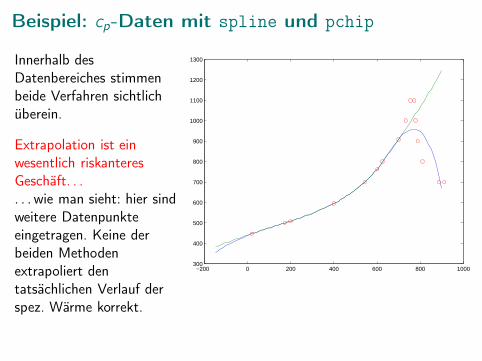
Beispiel: cp-Daten mit spline und pchip
Innerhalb desDatenbereiches stimmenbeide Verfahren sichtlichüberein.
Extrapolation ist einwesentlich riskanteresGeschäft. . .. . . wie man sieht: hier sindweitere Datenpunkteeingetragen. Keine derbeiden Methodenextrapoliert dentatsächlichen Verlauf derspez. Wärme korrekt.
−200 0 200 400 600 800 1000300
400
500
600
700
800
900
1000
1100
1200
1300
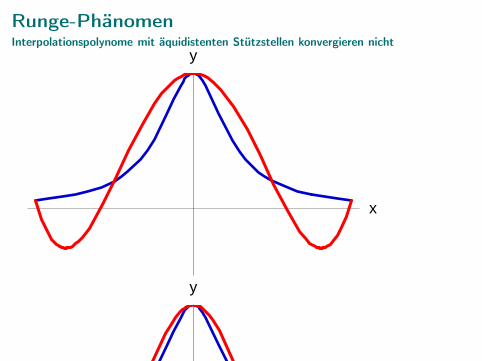
Runge-PhänomenInterpolationspolynome mit äquidistenten Stützstellen konvergieren nicht
x
y
y
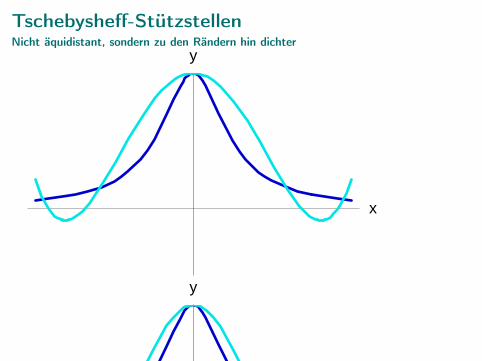
Tschebysheff-StützstellenNicht äquidistant, sondern zu den Rändern hin dichter
x
y
y
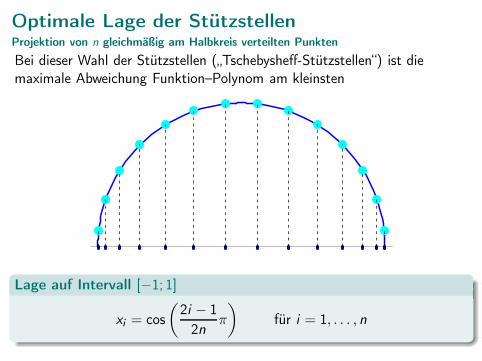
Optimale Lage der StützstellenProjektion von n gleichmäßig am Halbkreis verteilten Punkten
Bei dieser Wahl der Stützstellen („Tschebysheff-Stützstellen“) ist diemaximale Abweichung Funktion–Polynom am kleinsten
Lage auf Intervall [−1; 1]
xi = cos
(
2i − 1
2nπ
)
für i = 1, . . . , n
InterpolationsverfahrenÜbersicht und Zusammenfassung
• Newton-Polynom: rechengüstig; zusätzliche Datenpunkte lassen sichleicht anfügen
• Lagrange-Polynom: y -Werte lasen sich leicht ändern
• Polynome mit hohem Grad und äquidistanten Stützstellen:Ungeeignet! (Runge-Phänomen).
• Tschebysheff-Stützstellen: optimale Approximation
• Natürliche kubische Splines: meist bessere Anpassung als Polynome.
• Es gibt viele weitere Spline-Varianten
Numerische Integration
Gegeben:
eine Funktion f (x) in einem Intervall a ≤ x ≤ b.
Gesucht:
deren Integral∫
b
a
f (x)dx
Oft lässt sich das Integral nicht durch elementare Funktionen ausdrücken,oder die Funktion selbst ist nur tabellarisch gegeben. −→ Numerische
Verfahren
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 19 / 23
Integrationsformeln nach Newton-Cotes
Gegeben:
Eine Funktion f (x) in einem Intervall (a, b) durch ihre Werte fi an n + 1äquidistanten Stützstellen,
fi = f (a + ih), mit h =b − a
n, i = 0, . . . , n.
Prinzip:
Interpoliere f (x) durch ein Polynom p(x). Nähere das Integral von f durchdas Integral von p. Die Näherung ist gegeben als gewichtete Summe der fi ,
∫
b
a
f (x)dx ≈ (b − a)n
∑
i=0
αi fi
mit fixen Gewichten αi
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 20 / 23
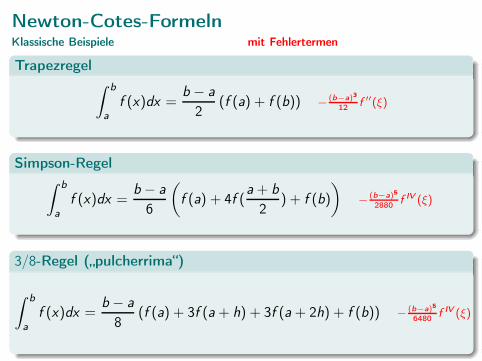
Newton-Cotes-FormelnKlassische Beispiele mit Fehlertermen
Trapezregel∫
b
a
f (x)dx =b − a
2(f (a) + f (b)) −
(b−a)3
12f′′(ξ)
Simpson-Regel∫
b
a
f (x)dx =b − a
6
(
f (a) + 4f (a + b
2) + f (b)
)
−
(b−a)5
2880f
IV (ξ)
3/8-Regel („pulcherrima“)
∫
b
a
f (x)dx =b − a
8(f (a) + 3f (a + h) + 3f (a + 2h) + f (b)) −
(b−a)5
6480f
IV (ξ)
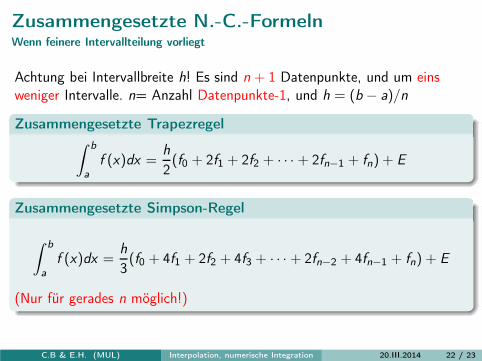
Zusammengesetzte N.-C.-FormelnWenn feinere Intervallteilung vorliegt
Achtung bei Intervallbreite h! Es sind n + 1 Datenpunkte, und um einsweniger Intervalle. n= Anzahl Datenpunkte-1, und h = (b − a)/n
Zusammengesetzte Trapezregel∫
b
a
f (x)dx =h
2(f0 + 2f1 + 2f2 + · · · + 2fn−1 + fn) + E
Zusammengesetzte Simpson-Regel
∫
b
a
f (x)dx =h
3(f0 + 4f1 + 2f2 + 4f3 + · · · + 2fn−2 + 4fn−1 + fn) + E
(Nur für gerades n möglich!)
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 22 / 23
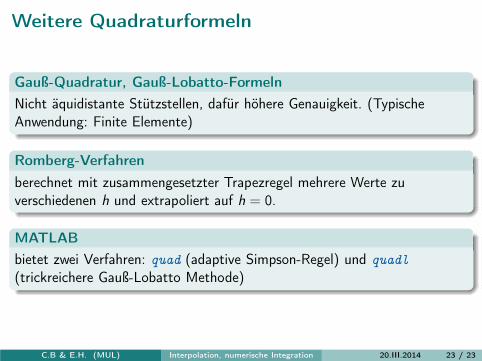
Weitere Quadraturformeln
Gauß-Quadratur, Gauß-Lobatto-Formeln
Nicht äquidistante Stützstellen, dafür höhere Genauigkeit. (TypischeAnwendung: Finite Elemente)
Romberg-Verfahren
berechnet mit zusammengesetzter Trapezregel mehrere Werte zuverschiedenen h und extrapoliert auf h = 0.
MATLAB
bietet zwei Verfahren: quad (adaptive Simpson-Regel) und quadl
(trickreichere Gauß-Lobatto Methode)
C.B & E.H. (MUL) Interpolation, numerische Integration 20.III.2014 23 / 23








![COSLAB [composite slabs] - DI Kraus · 2010. 9. 9. · wehrung nach brandschutztechnischen Gutachten (Rechenverfahren der Stufe 2) - im Grenzzustand der Gebrauch- stauglichkeit •](https://img.pdfslide.org/doc/110x75/61196b69b9307c1d823822fc/coslab-composite-slabs-di-2010-9-9-wehrung-nach-brandschutztechnischen.jpg)




















