Embed Size (px)
Citation preview
Institut für Softwaretechnologie
Konstruktion Mobiler RoboterKonstruktion Mobiler RoboterEinführung Software
Gerald SteinbauerInstitut für Softwaretechnologie
Gerald Steinbauer1
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Agenda
R b t O ti S t (ROS)• Robot Operating System (ROS)• Selbstlokalisation und Navigation• Kinect & Point Cloud Library (PCL)• Grasping & Arm Navigation
Gerald Steinbauer2
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Robot Operating System (ROS)
F k fü di E t i kl• Framework für die Entwicklung von Roboter Softwaresoll OS like Funktionalität bieten• soll OS-like Funktionalität bieten
• ursprünglich entwickelt von Stanford AI Lab (SAIL)Lab (SAIL)
• mittlereile führend weiter entwickelt von Willow GarageWillow Garage
• Open Source Plafform• verwendet von alle führenden Robotik-• verwendet von alle führenden Robotik-
Labs • bietet viel Funktionalität auf allen Level
Gerald Steinbauer3
Konstruktion Mobiler Roboter, PR, WS12
bietet viel Funktionalität auf allen Level
Institut für Softwaretechnologie
(Einige) Unterstützte Plattformen
Gerald Steinbauer4
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Prinzipien von ROS
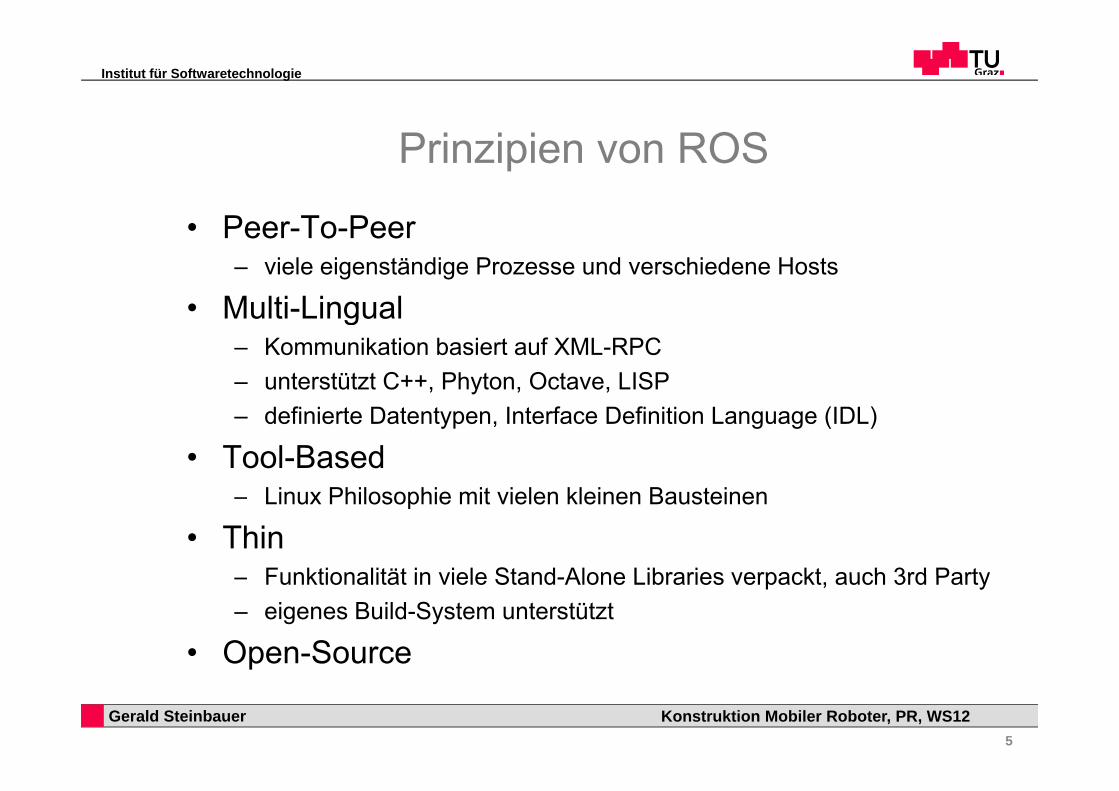
P T P• Peer-To-Peer– viele eigenständige Prozesse und verschiedene Hosts
• Multi Lingual• Multi-Lingual– Kommunikation basiert auf XML-RPC– unterstützt C++, Phyton, Octave, LISP– definierte Datentypen, Interface Definition Language (IDL)
• Tool-Based– Linux Philosophie mit vielen kleinen Bausteinen
• ThinFunktionalität in viele Stand Alone Libraries verpackt auch 3rd Party– Funktionalität in viele Stand-Alone Libraries verpackt, auch 3rd Party
– eigenes Build-System unterstützt
• Open-Source
Gerald Steinbauer5
Konstruktion Mobiler Roboter, PR, WS12
p
Institut für Softwaretechnologie
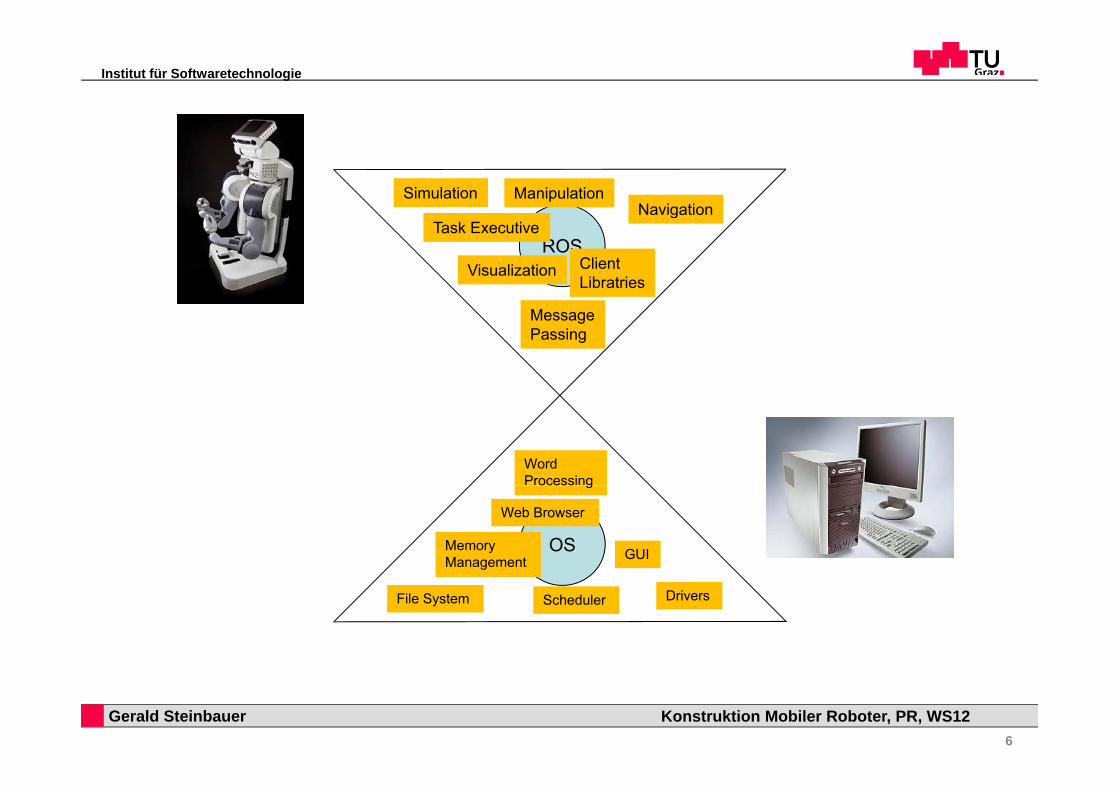
NavigationSimulation Manipulation
ROSVisualization
gTask Executive
ClientLibratries
MessagePassing
WordProcessing
OS
ocess g
Web Browser
GUIMemoryManagement
File System Scheduler Drivers
Gerald Steinbauer6
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
ROS - Operation
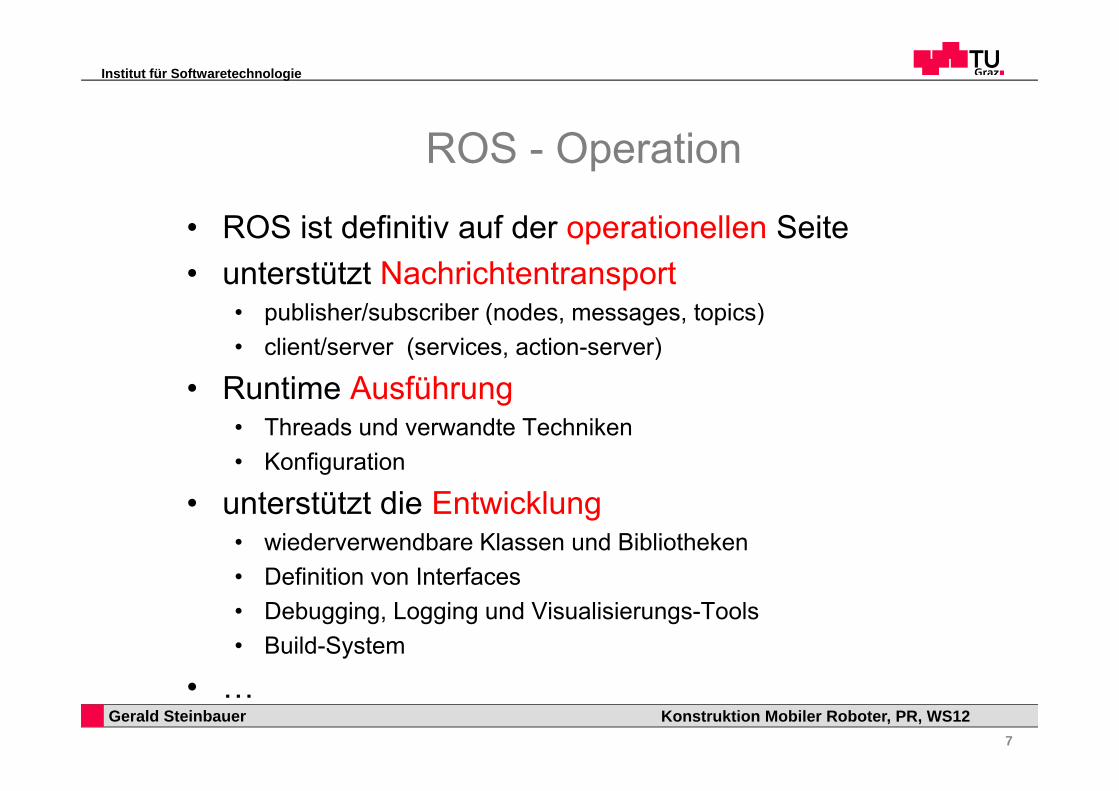
ROS i t d fi iti f d ti ll S it• ROS ist definitiv auf der operationellen Seite• unterstützt Nachrichtentransport
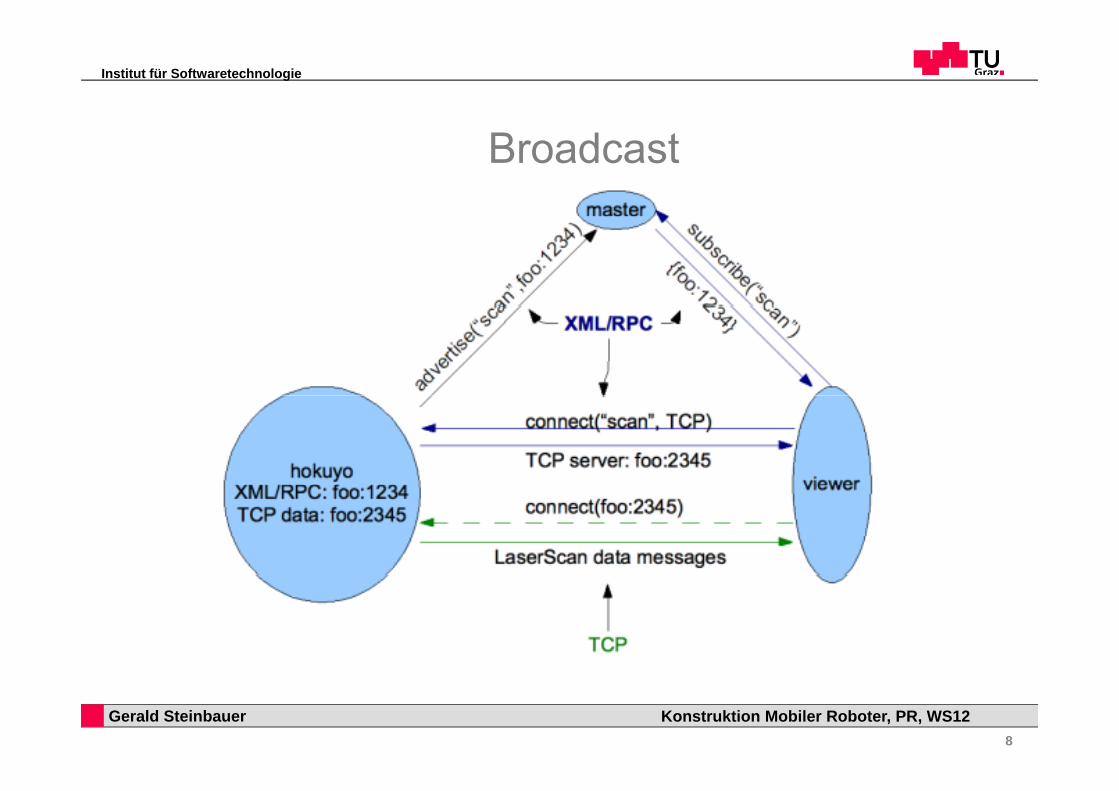
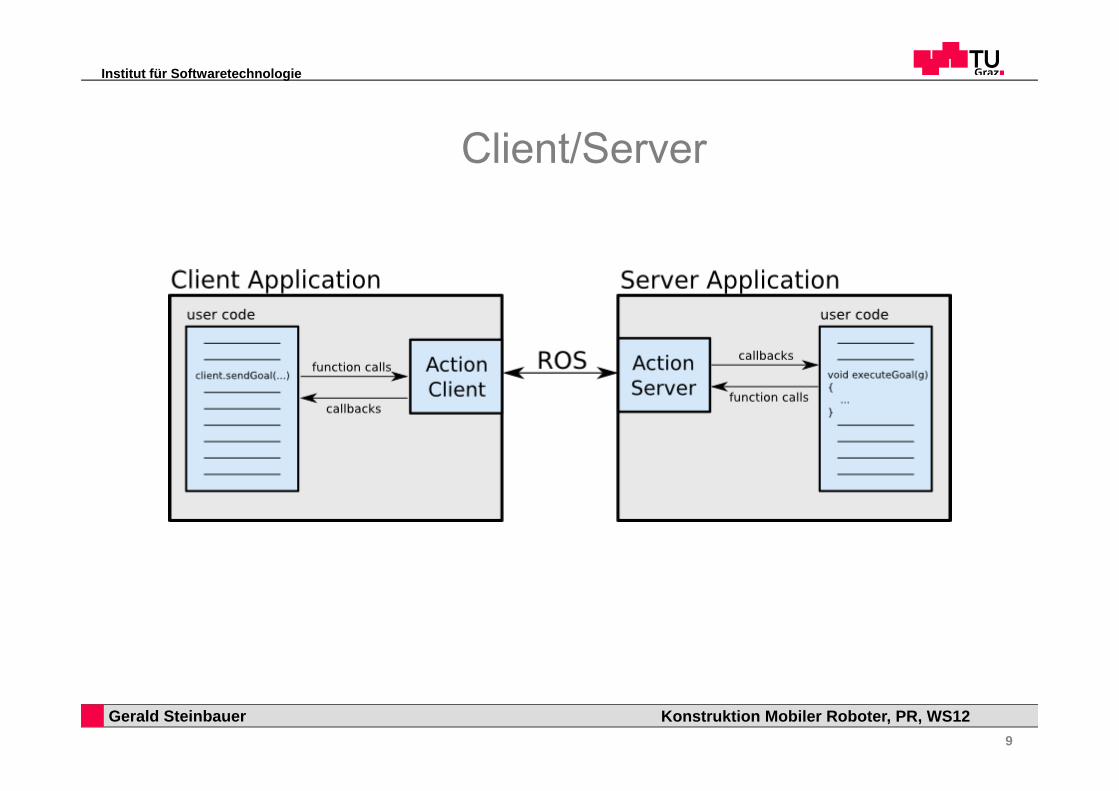
bli h / b ib ( d t i )• publisher/subscriber (nodes, messages, topics)• client/server (services, action-server)
• Runtime AusführungRuntime Ausführung• Threads und verwandte Techniken• Konfiguration
• unterstützt die Entwicklung• wiederverwendbare Klassen und Bibliotheken• Definition von Interfaces• Definition von Interfaces• Debugging, Logging und Visualisierungs-Tools• Build-System
Gerald Steinbauer7
Konstruktion Mobiler Roboter, PR, WS12• …
Institut für Softwaretechnologie
Broadcast
Gerald Steinbauer8
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Client/Server
Gerald Steinbauer9
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
ROS - Funktion
ROS t tüt t d f kti ll Si ht• ROS unterstützt den funktionelle Sicht• Behavioral Control
l l th l• local path planner• obstacle avoidance• trajectory generationtrajectory generation
• Executive• global path plannerg p p• SMACH – state machine for task-level control
• Planning• Cognitive Robot Abstract Machine (CARM) von TUM• Knowledge Processing for Autonomous Personal Robots
(KnowRob) von TUM
Gerald Steinbauer10
Konstruktion Mobiler Roboter, PR, WS12
(KnowRob) von TUM
Institut für Softwaretechnologie
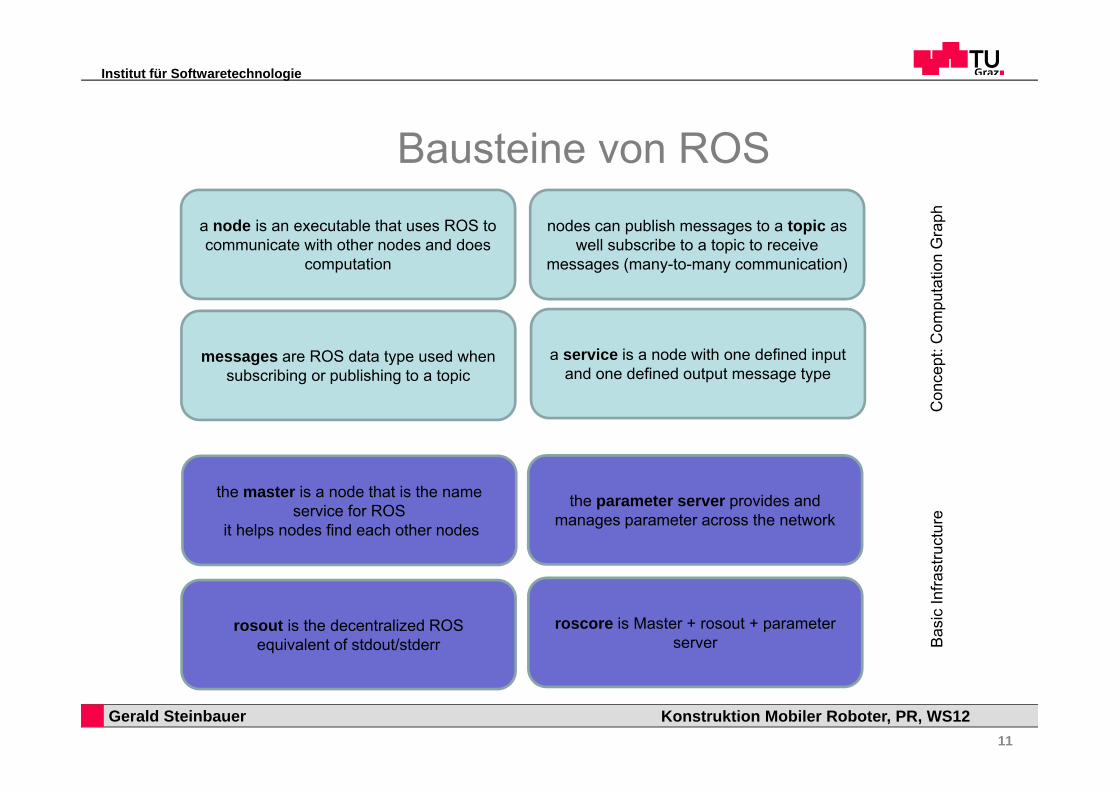
Bausteine von ROS
pha node is an executable that uses ROS to communicate with other nodes and does
computation
nodes can publish messages to a topic as well subscribe to a topic to receive
messages (many-to-many communication)
puta
tion
Gra
p
messages are ROS data type used when subscribing or publishing to a topic
a service is a node with one defined input and one defined output message type
once
pt: C
omp
Co
the master is a node that is the name service for ROS
it helps nodes find each other nodes
the parameter server provides and manages parameter across the network
astru
ctur
e
rosout is the decentralized ROS equivalent of stdout/stderr
roscore is Master + rosout + parameter server B
asic
Infra
Gerald Steinbauer11
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
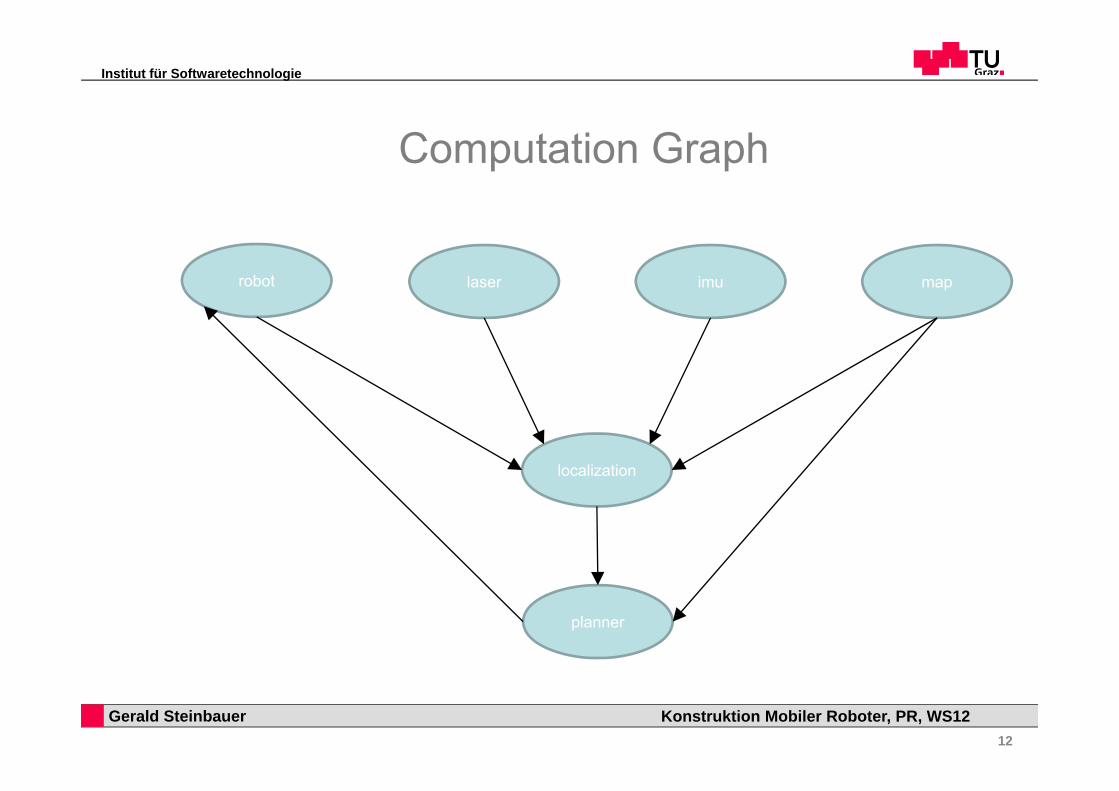
Computation Graph
robot laser imu map
localization
planner
Gerald Steinbauer12
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
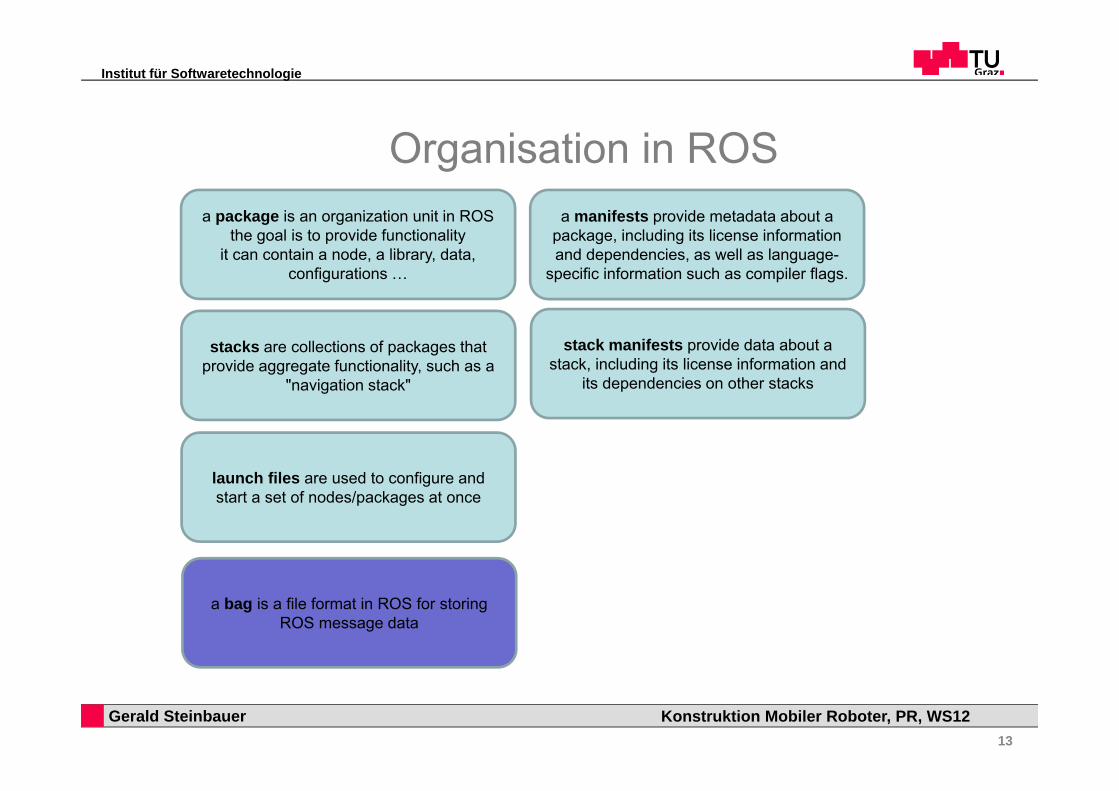
Organisation in ROSa package is an organization unit in ROS a manifests provide metadata about aa package is an organization unit in ROS
the goal is to provide functionalityit can contain a node, a library, data,
configurations …
a manifests provide metadata about a package, including its license information and dependencies, as well as language-
specific information such as compiler flags.
stacks are collections of packages that provide aggregate functionality, such as a
"navigation stack"
stack manifests provide data about a stack, including its license information and
its dependencies on other stacks
launch files are used to configure and gstart a set of nodes/packages at once
a bag is a file format in ROS for storingROS message data
Gerald Steinbauer13
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Naming in ROS
hi hi h N t kt• hierarchische Namenstruktur• verwendet für alle Ressourcen
d– nodes– parameter– topics– services
• nodes haben einen Namespace/ d /t i/node_name/topic_name
• parameter sind auch hirarchisch strukturiert/p3at/odometry/frequency/p3at/odometry/frequency
• können wie das Linux Dateisystem verwendet werden (relativ global)
Gerald Steinbauer14
Konstruktion Mobiler Roboter, PR, WS12
werden (relativ, global)
Institut für Softwaretechnologie
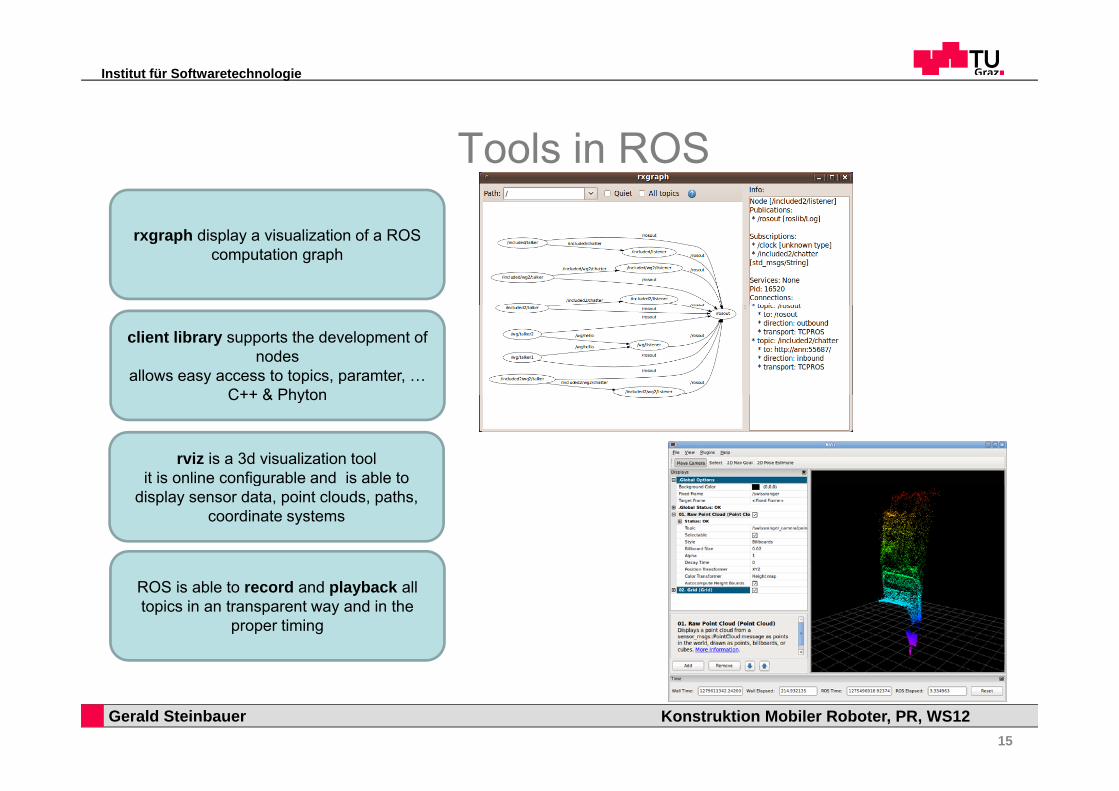
Tools in ROS
rxgraph display a visualization of a ROS computation graph
client library supports the development of nodes
allows easy access to topics, paramter, …C++ & PhytonC++ & Phyton
rviz is a 3d visualization toolit is online configurable and is able to g
display sensor data, point clouds, paths, coordinate systems
ROS is able to record and playback all topics in an transparent way and in the
proper timing
Gerald Steinbauer15
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
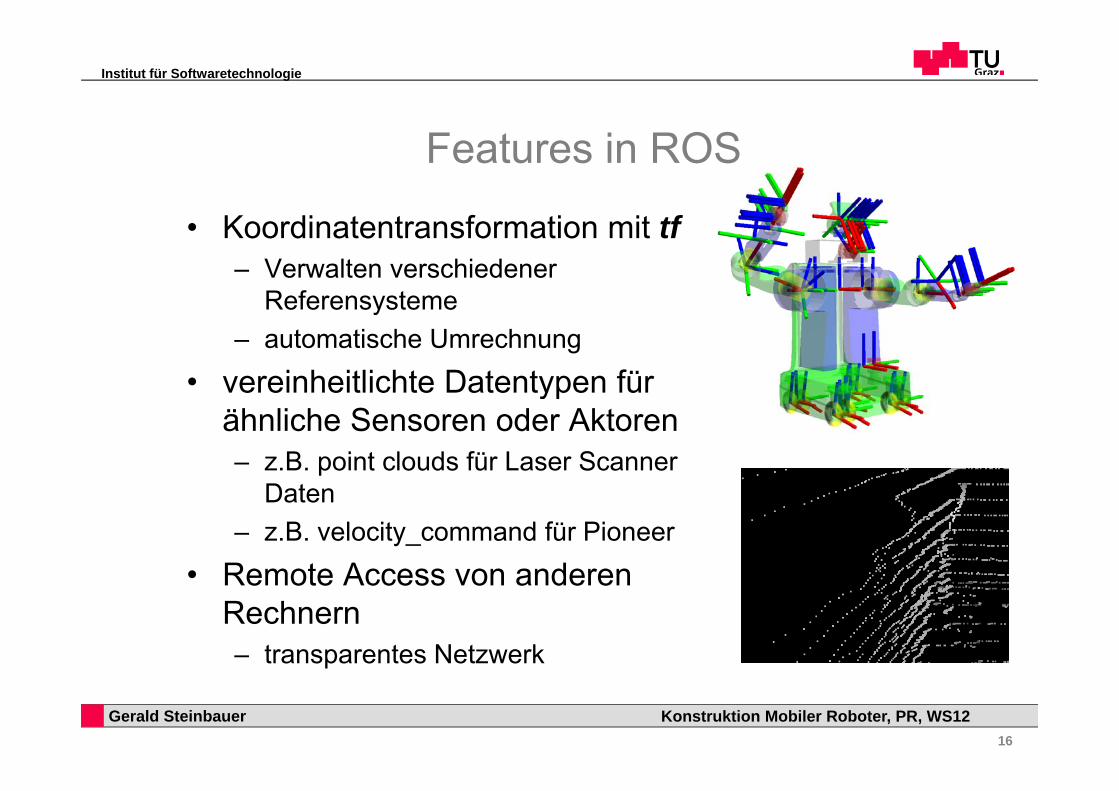
Features in ROS
K di t t f ti it tf• Koordinatentransformation mit tf– Verwalten verschiedener
ReferensystemeReferensysteme– automatische Umrechnung
• vereinheitlichte Datentypen für ypähnliche Sensoren oder Aktoren– z.B. point clouds für Laser Scanner
D tDaten– z.B. velocity_command für Pioneer
• Remote Access von anderen• Remote Access von anderen Rechnern– transparentes Netzwerk
Gerald Steinbauer16
Konstruktion Mobiler Roboter, PR, WS12
p
Institut für Softwaretechnologie
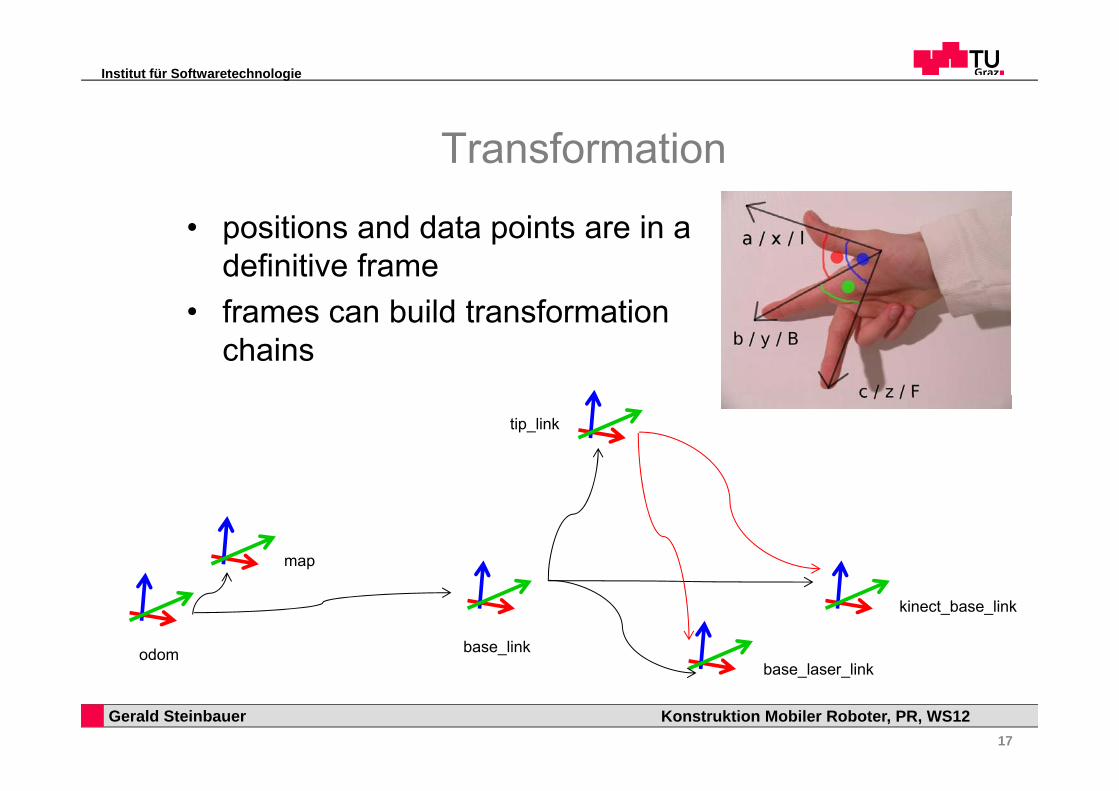
Transformation
iti d d t i t i• positions and data points are in a definitive frameframes can build transformation• frames can build transformation chains
tip_link
map
odom base_linkb l li k
kinect_base_link
Gerald Steinbauer17
Konstruktion Mobiler Roboter, PR, WS12
base_laser_link
Institut für Softwaretechnologie
Driver in ROS
ROS fü t üb i ß M St d d• ROS verfügt über eine große Menge von Standard-Nodes für Roboter und Sensoren
Pioneer Roboter Familie– Pioneer Roboter Familie– Forbot– Sick Laser Scanner Familie– Hokuyo Laser Scanner Familie– GPS (NMEA)– Xsense IMU– Roboter Arm
Firewire and USB Kameras– Firewire and USB Kameras– Kinect
Gerald Steinbauer18
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
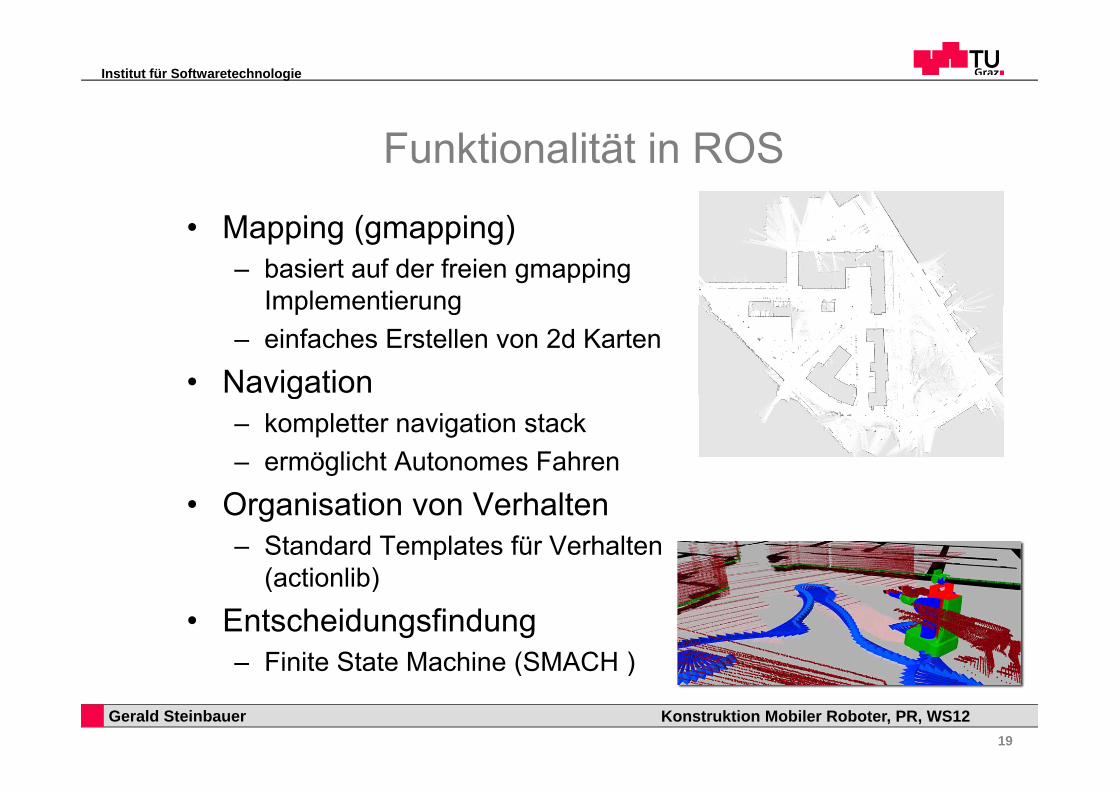
Funktionalität in ROS
M i ( i )• Mapping (gmapping)– basiert auf der freien gmapping
ImplementierungImplementierung– einfaches Erstellen von 2d Karten
• Navigationg– kompletter navigation stack– ermöglicht Autonomes Fahren
• Organisation von Verhalten– Standard Templates für Verhalten
(actionlib)(actionlib)
• Entscheidungsfindung– Finite State Machine (SMACH )
Gerald Steinbauer19
Konstruktion Mobiler Roboter, PR, WS12
Finite State Machine (SMACH )
Institut für Softwaretechnologie
Installation auf Ubuntu
ROS t tüt t ll Ub t• ROS unterstützt voll Ubuntu• eigenes Notebook hat Vorteile
A bi b it R b t d L b– Ausprobieren abseits von Roboter und Lab– Remote Access auf Roboter
• funktioniert am besten mit Ubuntu 12 04 und ROS• funktioniert am besten mit Ubuntu 12.04 und ROS Furet
• Step-by-Step Anleitung im ROS WikiStep by Step Anleitung im ROS Wikihttp://www.ros.org/
• Bootstrap System• zusätzliche Packages könne einfach nach installiert
(kompiliert) werden
Gerald Steinbauer20
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Selbstlokalisation
f d t l P bl i d R b tik• fundamentales Problem in der Robotik• Bestimmung der Position des Roboters in Relation zu
seiner Umgebungseiner Umgebung• Pose = Position + Orientierung
I d i 3 di i l P bl ( Θ)• Indoor ein 3 dimensionales Problem (x,y,Θ)• Outdoor ein 6 dimensionales Problem (x,y,z,Φ,Θ,Ψ)
P bl• Probleme– Sensorungenauigkeiten– MehrdeutigkeitenMehrdeutigkeiten– mehrfache Hypothesen
Gerald Steinbauer21
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Lokalisierungsarten
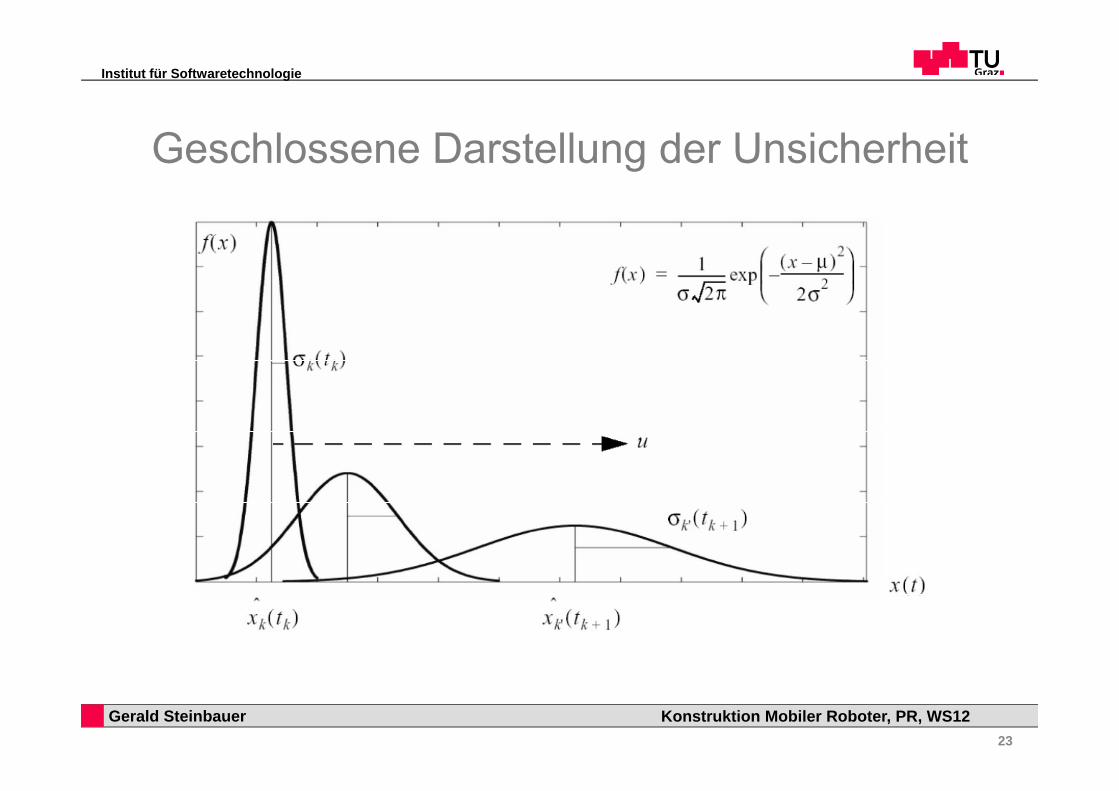
P T ki• Pose Tracking– Verfolgung einer bekannten Position– einfach zu löseneinfach zu lösen– für bestimmte Aufgaben ausreichend– Kalman-Filter
• Globale Lokalisierung– löst das “kidnapped robot” Problem
aufwendiger zu lösen– aufwendiger zu lösen– generelle Lösung– Partikelfilter
Gerald Steinbauer22
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Geschlossene Darstellung der Unsicherheit
Gerald Steinbauer23
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
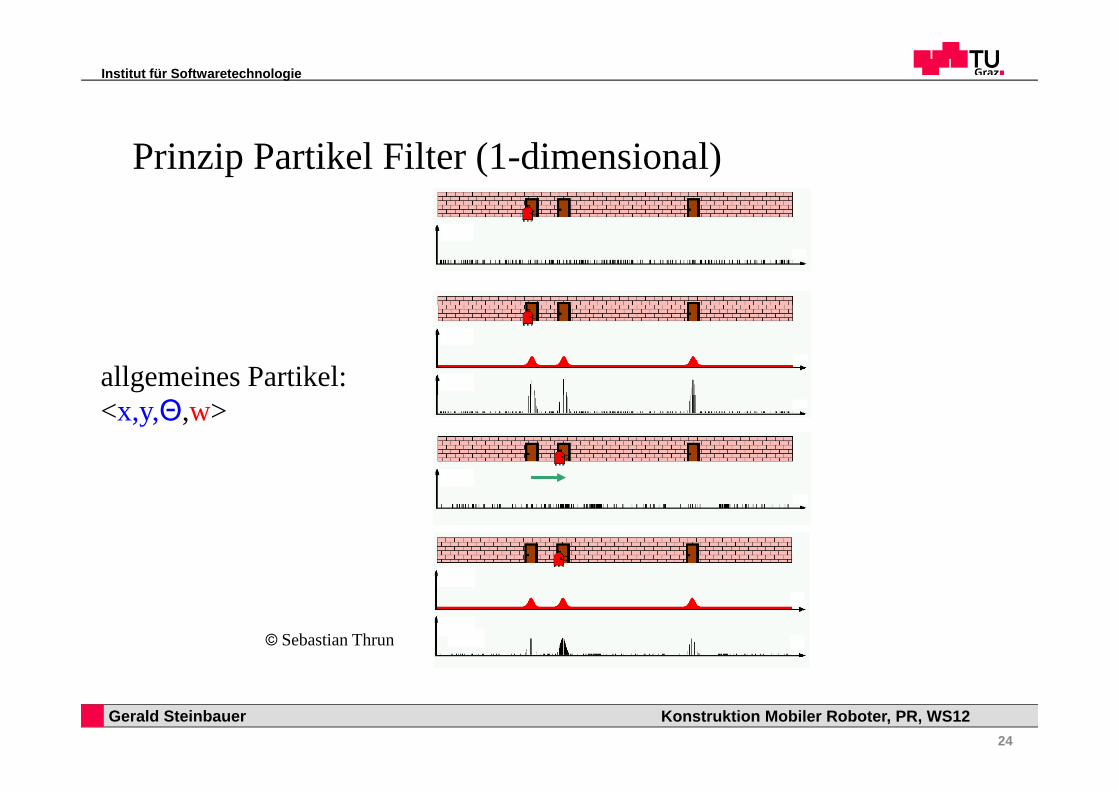
Prinzip Partikel Filter (1-dimensional)
allgemeines Partikel: <x,y,Θ,w>
© Sebastian Thrun
Gerald Steinbauer24
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Localization in ROS• ROS provides a ready to use localization stack• ROS provides a ready-to use localization stack• the “Adaptive Monte Carlo Localization” (amcl)
packagepackage• laser-based localization• particle filter localization (MCL)• KLD sampling to control the sample size• augmented MCL to recover from localization errors• Sensor model
• beam range finder model• likelihood field model
• Motion modelMotion model• sample-based odometry model (differential drive)• sample-based odometry model (omni-directional drive)
f d t l k t th t t i lGerald Steinbauer
25
Konstruktion Mobiler Roboter, PR, WS12
• for usage and parameter look to the tutorial
Institut für Softwaretechnologie
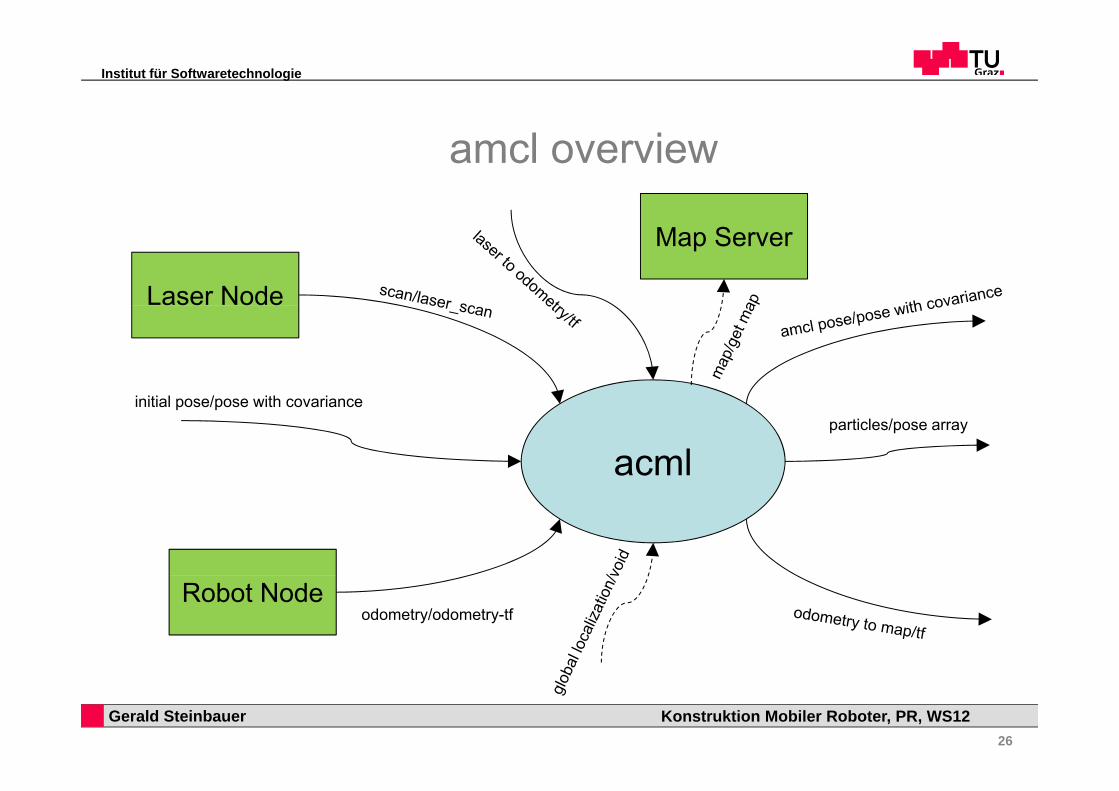
amcl overview
Map Server
Laser Node
i i i l / i h i
acml
initial pose/pose with covarianceparticles/pose array
Robot Nodeodometry/odometry-tf
Gerald Steinbauer26
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
ROS Navigation Stack
ROS id f ll i ti t k• ROS provides a full navigation stack• global planning – A* and LPN• local planning – Dynamic Window
Approach or Trajectory Rolloutpp j y• supports differential drive and omni-directional robots• works with and without global localization and mapg p• can work with 2d and/or 3d maps and sensors
• for usage and parameter look to the tutorial
Gerald Steinbauer27
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
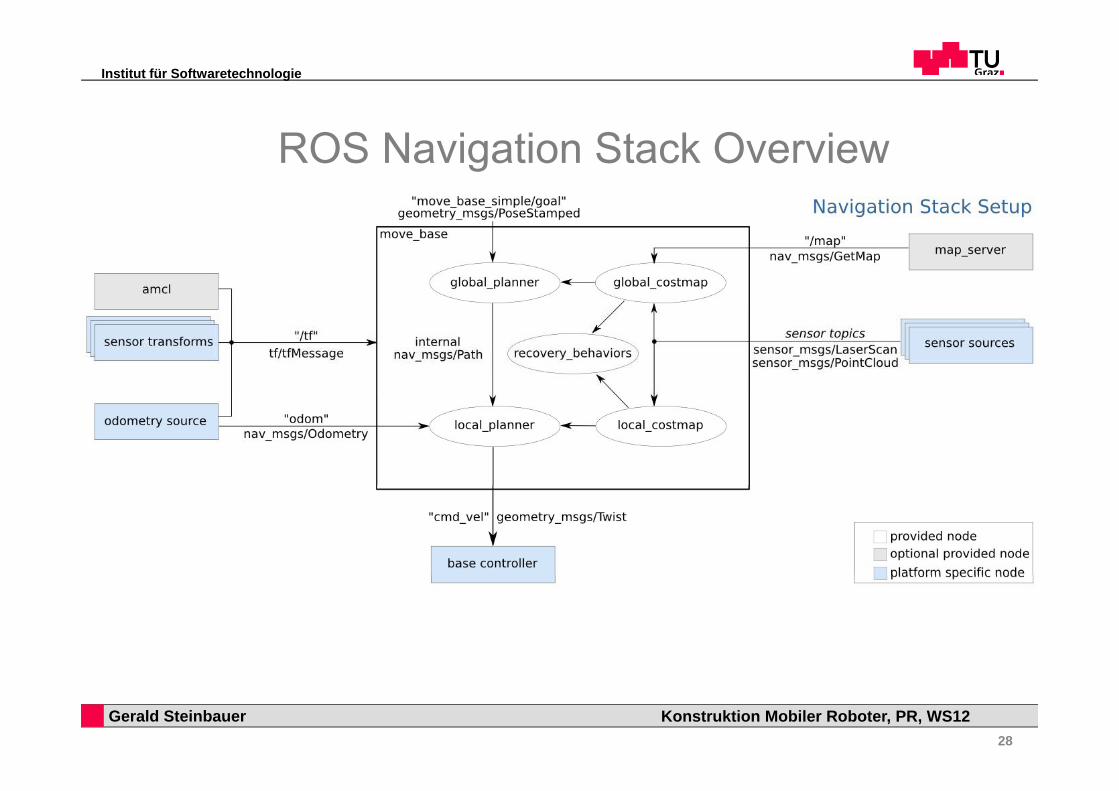
ROS Navigation Stack Overview
Gerald Steinbauer28
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Cost Maps
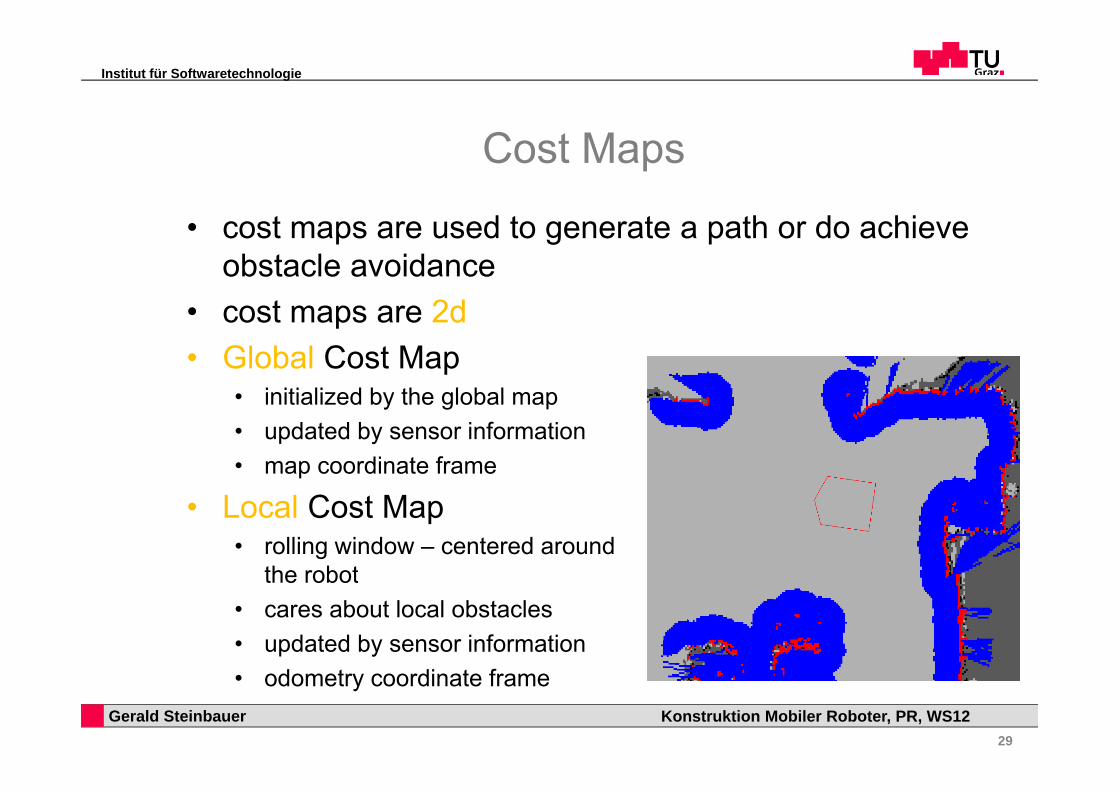
t d t t th d hi• cost maps are used to generate a path or do achieve obstacle avoidancecost maps are 2d• cost maps are 2d
• Global Cost Map• initialized by the global map• initialized by the global map• updated by sensor information• map coordinate frame
• Local Cost Map• rolling window – centered around
the robotthe robot• cares about local obstacles• updated by sensor information
Gerald Steinbauer29
Konstruktion Mobiler Roboter, PR, WS12
• odometry coordinate frame
Institut für Softwaretechnologie
Rescue Arena RoboCup 2012
Gerald Steinbauer30
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
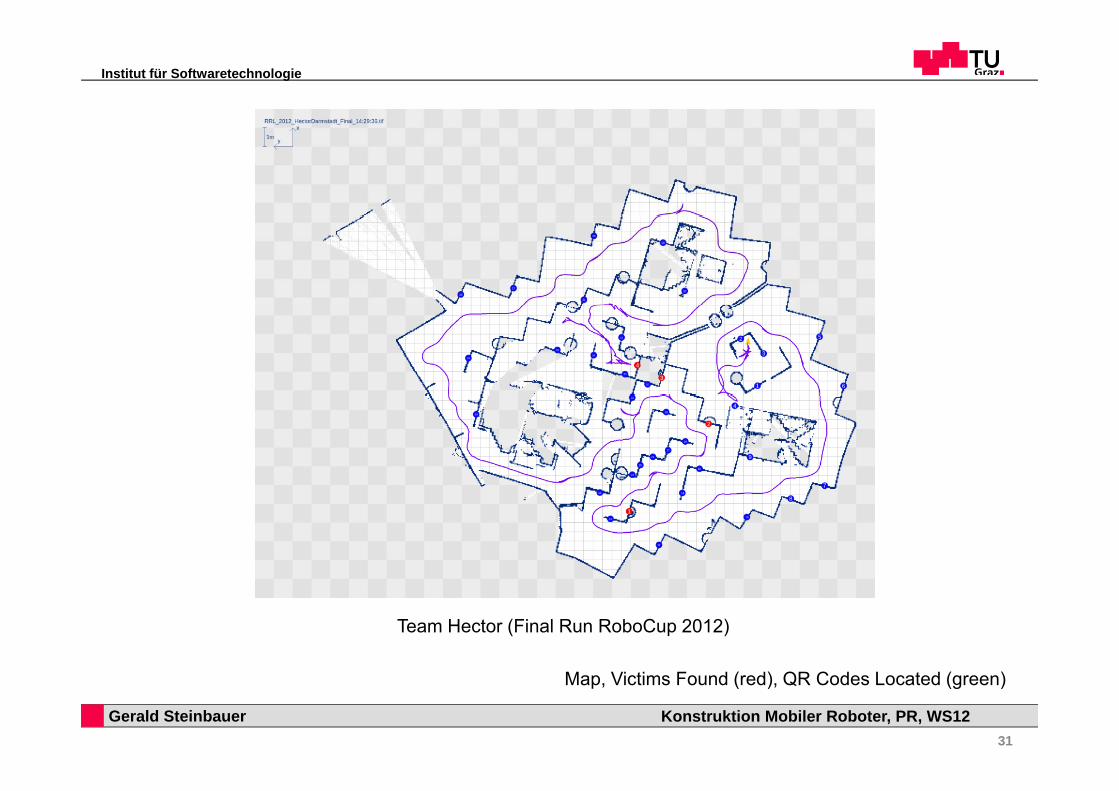
Team Hector (Final Run RoboCup 2012)
Gerald Steinbauer31
Konstruktion Mobiler Roboter, PR, WS12
Map, Victims Found (red), QR Codes Located (green)
Institut für Softwaretechnologie
Point Cloud
t ti f th ld• easy representation of the world• represent the scene as a collection/set (cloud) of nD
pointspoints• usually n = 3
b t h i t i ht h dditi l i f RGB• but each point might have additional info, e.g. RGB color, intensity, uncertainty (n>3)
• point cloud P with m points P={p p p p }• point cloud P with m points, P={p1,p2,…,pm-1,pm}, pi={xi,yi,zi}
• large amount of data for detailed representations• large amount of data for detailed representations
Gerald Steinbauer32
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
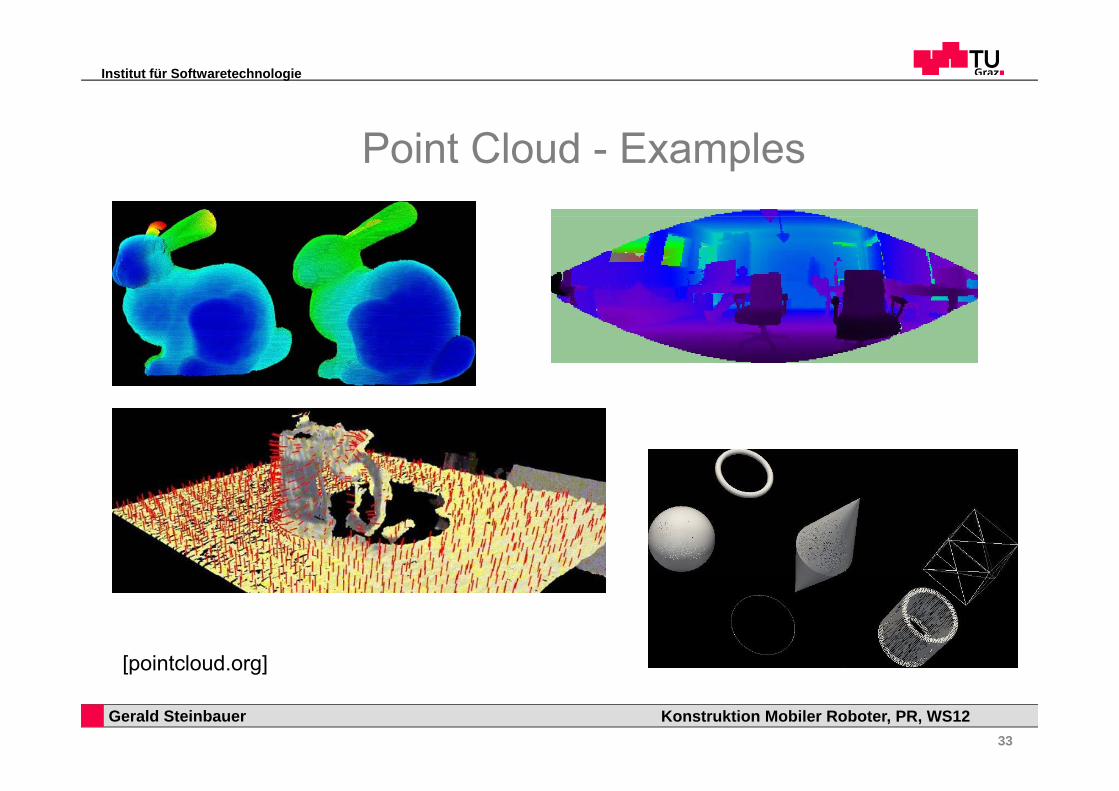
Point Cloud - Examples
[pointcloud org]
Gerald Steinbauer33
Konstruktion Mobiler Roboter, PR, WS12
[pointcloud.org]
Institut für Softwaretechnologie
Kinect
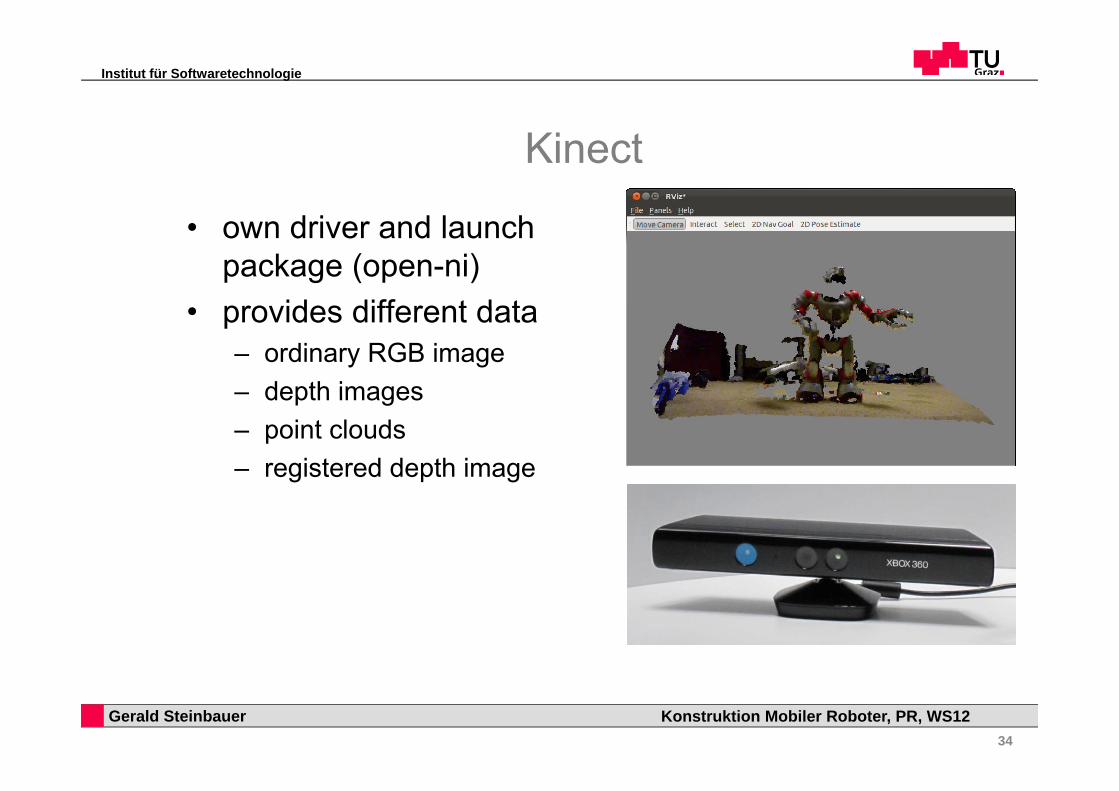
d i d l h• own driver and launch package (open-ni)provides different data• provides different data– ordinary RGB image– depth imagesdepth images– point clouds– registered depth image
Gerald Steinbauer34
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Point Cloud Library (PCL)
lib t d l ith i t l d• an open-source library to deal with point clouds• allows to represent and manipulate point clouds
easilyeasily• provides a number of standard building blocks –
basic algorithms are therebasic algorithms are there• based on work of Radu Bogdan Rusu (TUM)• stand alone library but developed and used by the• stand alone library but developed and used by the
ROS community as well• a standard representation of 3D data in ROS• a standard representation of 3D data in ROS
Gerald Steinbauer35
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
PCL Features
t l t b d t t l i t t• template-based to support several point types• a number of standard types, e.g. {X,Y,Z}• allows also more complex types e g including normal vectorsallows also more complex types, e.g. including normal vectors,
RGB color,…
• highly optimized• memory alignment (i.e., simple point types)• SSE support (i.e., simple point types)• reuses high performance libraries Eigen (linear algebra), FLANNreuses high performance libraries Eigen (linear algebra), FLANN
(nearest neighbor)• prepared for easy parallelization on multi-cores (Intel TBB)
id i i li• provides a processing pipeline• data acquisition – computation – visualization
• multi OS support (Windows Mac Linux Android)Gerald Steinbauer
36
Konstruktion Mobiler Roboter, PR, WS12
• multi-OS support (Windows, Mac, Linux, Android)
Institut für Softwaretechnologie
Useful Operations• PCL supports building blocks in several smaller libraries• filters
• standard filter mechanism, different types such as downsampling
• features• calculation of 3D features, surface normals, descriptors
I/O• I/O• reading/writing PCL files
• segmentation• segmentation• cluster extraction, consensus methods for parametric models (cylinder,..)
• surfaces• meshing, convex hull
• registration
Gerald Steinbauer37
Konstruktion Mobiler Roboter, PR, WS12
• point cloud registration, e.g. ICP, own algorithms
Institut für Softwaretechnologie
OpenCV
i f l Vi i lib• is a powerful open source Vision library• fully integrated in ROS• bridge between ROS and OpenCV image format• supports a lot of functionality
– feature extraction– segmentation– tracking– tracking– transformation– filtering
Gerald Steinbauer38
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
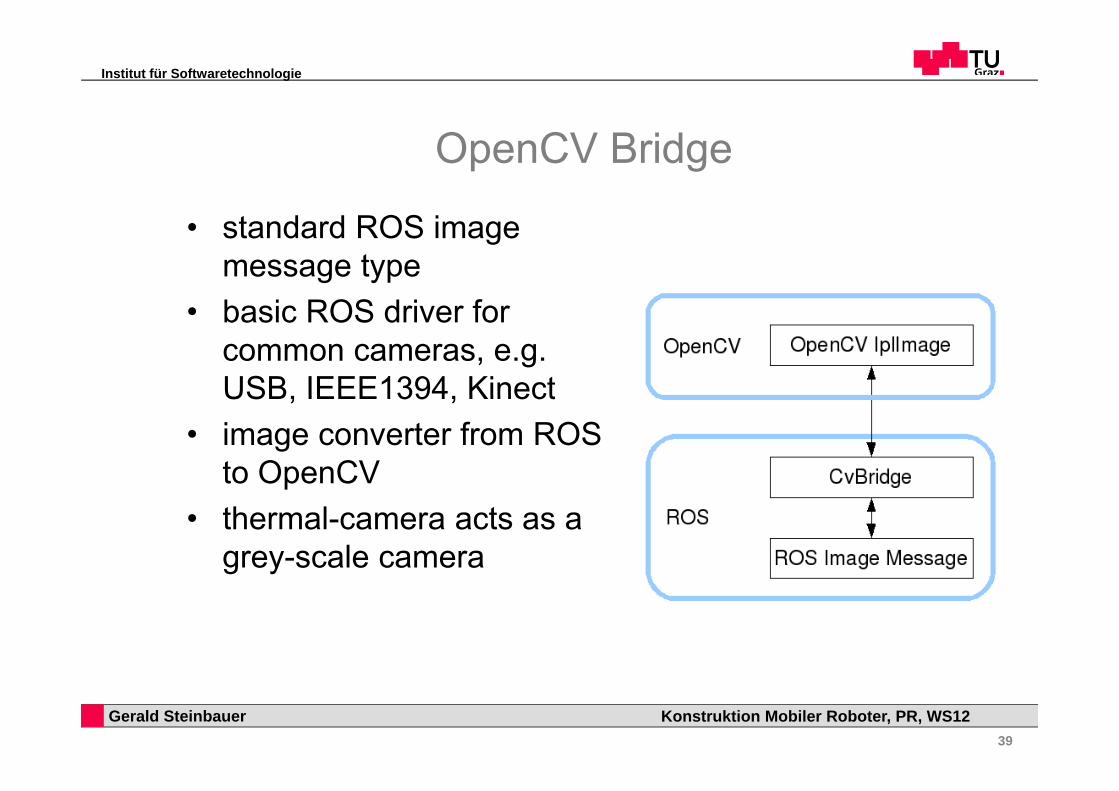
OpenCV Bridge
t d d ROS i• standard ROS image message typebasic ROS driver for• basic ROS driver for common cameras, e.g. USB IEEE1394 KinectUSB, IEEE1394, Kinect
• image converter from ROS to OpenCVp
• thermal-camera acts as a grey-scale camera
Gerald Steinbauer39
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
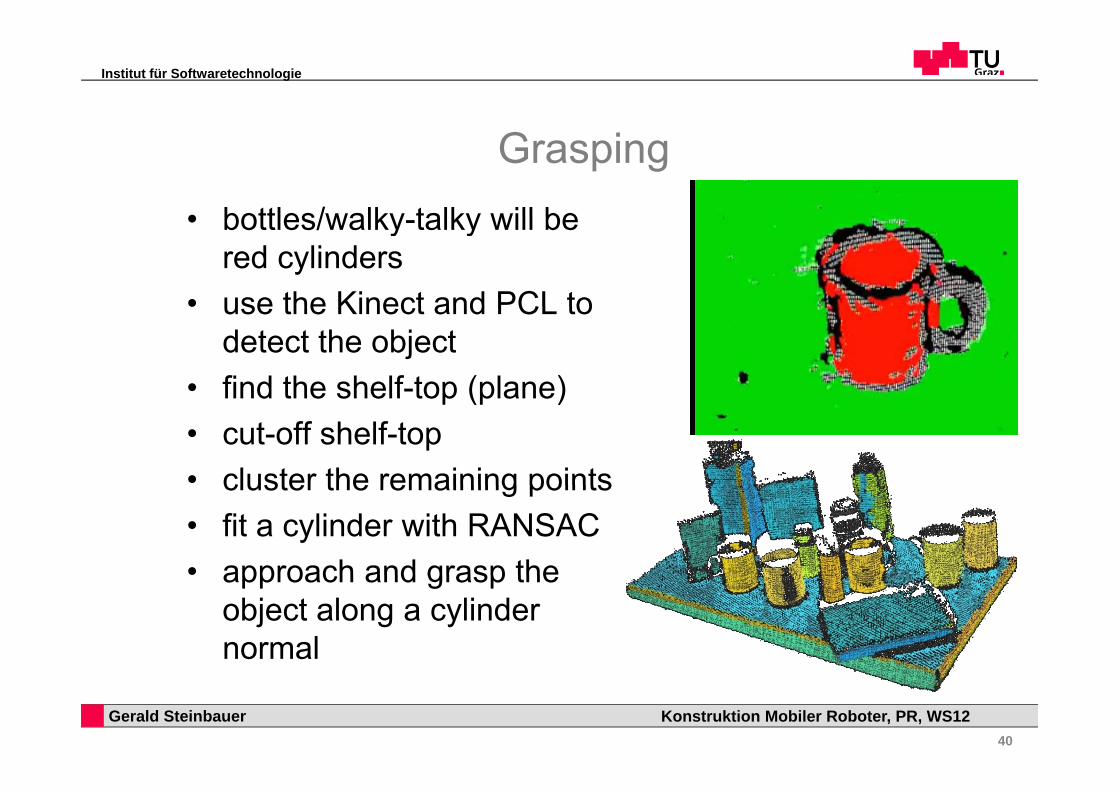
Grasping• bottles/walky talky will be• bottles/walky-talky will be
red cylinders• use the Kinect and PCL to• use the Kinect and PCL to
detect the object• find the shelf-top (plane)find the shelf top (plane)• cut-off shelf-top• cluster the remaining pointscluster the remaining points• fit a cylinder with RANSAC• approach and grasp theapproach and grasp the
object along a cylinder normal
Gerald Steinbauer40
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
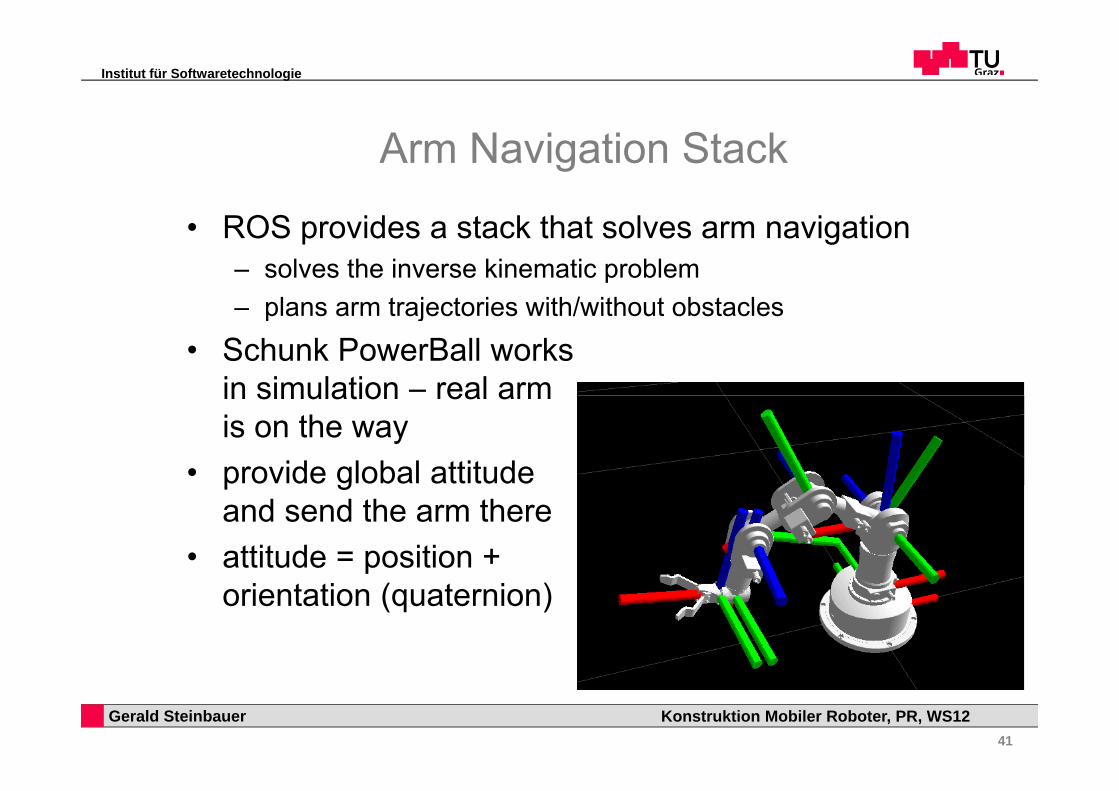
Arm Navigation Stack
ROS id t k th t l i ti• ROS provides a stack that solves arm navigation– solves the inverse kinematic problem
plans arm trajectories with/without obstacles– plans arm trajectories with/without obstacles
• Schunk PowerBall worksin simulation – real armin simulation real armis on the way
• provide global attitudep gand send the arm there
• attitude = position +orientation (quaternion)
Gerald Steinbauer41
Konstruktion Mobiler Roboter, PR, WS12
Institut für Softwaretechnologie
Empfohlene Literatur
M h I t d ti t AI R b ti• Murphy: Introduction to AI Robotics • Thrun, Fox, Burgard: Probabilistic Robotics• ROS Wiki (http://www.ros.org)• ROS Tutorials• Robotics Wiki am IST
(http://www.ist.tugraz.at/robotics)
• PDFs zum download auf der Praktikums-Webseite
Gerald Steinbauer42
Konstruktion Mobiler Roboter, PR, WS12