Embed Size (px)
Citation preview
Mathematische Systemtheorie
Prof. Dr. Franz Locher
Kurs 01370
LESEPROBE
Das Werk ist urheberrechtlich geschutzt. Die dadurch begrundeten Rechte, insbesondere das Recht der Vervielfaltigung
und Verbreitung sowie der Ubersetzung und des Nachdrucks bleiben, auch bei nur auszugsweiser Verwertung, vorbe-
halten. Kein Teil des Werkes darf in irgendeiner Form (Druck, Fotokopie, Mikrofilm oder ein anderes Verfahren) ohne
schriftliche Genehmigung der FernUniversitat reproduziert oder unter Verwendung elektronischer Systeme verarbeitet,
vervielfaltigt oder verbreitet werden.
Inhaltsverzeichnis
0 Das Modellproblem: Audio 30.1 Tone, Klange, Gerausche . . . . . . . . . . . . . . . . . . . . . . . . . 30.2 Digitale Verarbeitung akustischer Signale . . . . . . . . . . . . . . . . 7
1 Fehler und Stabilitat 121.1 Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2 Sensitivitatsanalyse nichtlinearer Systeme . . . . . . . . . . . . . . . . 141.3 Zahlendarstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.4 Gleitkomma-Arithmetik und numerische Stabilitat . . . . . . . . . . . 24
2 Polynome und rationale Funktionen 282.1 Polynome und Polynomauswertung . . . . . . . . . . . . . . . . . . . 282.2 Spezielle Polynome . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.3 Rationale Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.4 Interpolation mit algebraischen Polynomen . . . . . . . . . . . . . . . 50
3 Praliminarien aus der Funktionentheorie 573.1 Komplexe Zahlen und komplexe Funktionen . . . . . . . . . . . . . . 573.2 Einige spezielle Abbildungen . . . . . . . . . . . . . . . . . . . . . . . 613.3 Kurven und Kurvenintegrale . . . . . . . . . . . . . . . . . . . . . . . 693.4 Holomorphie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 743.5 Laurent-Reihen und Residuensatz . . . . . . . . . . . . . . . . . . . . 78
4 Diskrete LTI-Systeme und die z-Transformation 884.1 Diskrete LTI-Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . 884.2 Die z-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . 994.3 Untersuchung diskreter LTI-Systeme mit Hilfe der z-Transformierten 1164.4 Das Anfangswertproblem fur lineare Differenzengleichungen . . . . . . 1304.5 Lattice-Filter und Strukturzerlegungen von Allpassen . . . . . . . . . 1344.6 Amplituden- und Phasengang . . . . . . . . . . . . . . . . . . . . . . 1464.7 Systeme mit speziellem Amplituden- oder Phasengang . . . . . . . . 157
5 Fourier-Reihen 1675.1 Grundzuge der Fourier-Theorie (formaler Teil) . . . . . . . . . . . . . 1675.2 Approximation im Mittel durch das Fourier-Polynom . . . . . . . . . 1795.3 Darstellung von Funktionen durch ihre Fourier-Reihen (Fourier-Syn-
these) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
1
Lese
probe
2 INHALTSVERZEICHNIS
5.4 Der Dirichlet-Kern und das Gibbssche Phanomen . . . . . . . . . . . 192
6 Analoge LTI-Systeme und die Fourier-Transformation 2046.1 Die Fourier-Transformation (formaler Teil) . . . . . . . . . . . . . . . 2046.2 B-Splines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2156.3 Analoge LTI-Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . 2196.4 LTI-Systeme, die durch lineare Differentialgleichungen beschrieben
werden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2276.5 Lineare Systeme erster oder zweiter Ordnung . . . . . . . . . . . . . . 2326.6 Strukturzerlegungen von LTI-Systemen mit rationaler Systemfunktion 242
7 Abtastung analoger Signale und ihre Rekonstruktion 2477.1 Die ideale Abtastung analoger Signale . . . . . . . . . . . . . . . . . . 2477.2 Das Abtasttheorem von Whittacker-Shannon-Kotelnikov . . . . . . . 2547.3 Abtastung bandbegrenzter analoger Signale und ihre Rekonstruktion 2657.4 Quantisierung und Codierung . . . . . . . . . . . . . . . . . . . . . . 268
8 Mehrphasenrealisierungen diskreter LTI-Systeme 2788.1 Up-Sampling und Down-Sampling . . . . . . . . . . . . . . . . . . . . 2788.2 Die Mehrphasen-Zerlegung eines diskreten LTI-Systems . . . . . . . . 291
9 Wavelets 3029.1 Trigonometrische Wavelets . . . . . . . . . . . . . . . . . . . . . . . . 3029.2 Nochmals: B-Splines . . . . . . . . . . . . . . . . . . . . . . . . . . . 3089.3 Spline-Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3229.4 Translate und die semidiskrete Faltung . . . . . . . . . . . . . . . . . 3269.5 Spline-Wavelets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3389.6 Wavelet-Transformationen . . . . . . . . . . . . . . . . . . . . . . . . 350
Index 355
Symbolverzeichnis 362
Lese
probe
0. Das Modellproblem: Audio
In vielen Bereichen der Naturwissenschaft und Technik spielt die Erzeugung, Ver-
arbeitung, Speicherung oder Ubertragung von Signalen eine zentrale Rolle. Wirnennen nur einige von vielen Beispielen:
• Telefon, Rundfunk, Fernsehen, Unterhaltungselektronik
• Medizindiagnostik (Ultraschalluntersuchung, Computer- und Kernspin-Tomo-graphie, EKG, EEG)
• Geologie (Seismik, Erdbebenforschung, Lagerstattenexploration)
• Wettervorhersage mit Hilfe von Satellitenaufnahmen
• Radaruberwachung
Die genannten Beispiele spannen einen weiten Rahmen, sowohl was die Art der Si-gnale (Frequenz, Intensitat), als auch was die zugehorigen Datenmengen anbetrifft.Bei einer Theorie, die die genannten Phanomene beschreibt, kann man das Augen-merk auf grundlegende Gemeinsamkeiten richten. Dies ergibt dann eine einheitlicheSicht von verwandten Phanomenen. Trotzdem bleiben aber fur das tiefere Verstand-nis eines bestimmten Anwendungsbeispiels noch viele Besonderheiten zu beachten,die eben dieses auszeichnen. Aus diesem Grund und auch weil man das mathema-tische Modell an Hand einer konkreten Anwendung auf den Prufstand stellen muß,stellen wir im folgenden das Modell des digitalen Audio vor, wie es beim digitalen
Telefon oder bei der digitalen Aufnahme, Verarbeitung und Ubertragung von Musik(CD, digitale Rundfunksendungen) zum Einsatz kommt. Aus naheliegenden Grun-den ist die Analyse des Audio-Modells sehr phanomenologisch, und auch manche derauftretenden Begriffe werden fur denjenigen, der den folgenden Abschnitt zum er-sten Mal liest, unbekannt sein. Aber wir meinen, daß durch eine erste (vielleicht nurgrobe) Lekture zu Beginn und vor allem aber durch haufiges Zuruckblattern, wennan spaterer Stelle Systeme detailliert untersucht werden, ein tieferes, durch die Mo-dellbildung getragenes Verstandnis von Systemen, Signalen und ihrer Verarbeitungentwickelt werden kann. In diesem Sinne!
0.1 Tone, Klange, Gerausche
Fur ein Verstandnis von Geraten, die akustische Signale (Sprache, Musik) aufneh-men, verarbeiten, ubertragen oder wiedergeben (Telefon, Hifi-Anlage, . . . ), benotigt
3
Lese
probe
4 0. Das Modellproblem: Audio
man gewisse Kenntnisse aus der Akustik und der Physiologie der Tonerzeugungund Tonwahrnehmung. Akustische Vorgange haben ihren Ursprung in Bewegun-gen von Luftteilchen, die das Sinnesorgan
”Gehor“ aufnimmt, in elektrische Impulse
umwandelt und an das Gehirn weiterleitet. Dabei findet eine”Verarbeitung“, d.h.
eine Analyse nach Tonhohe, Lautstarke, raumliche Trennung nach unterschiedlichenTonquellen, Identifikation einer Tonquelle durch Vergleich mit bekannten und vomGedachtnis gespeicherten Mustern, . . . teilweise im Ohr und zum anderen Teil imGehirn statt.
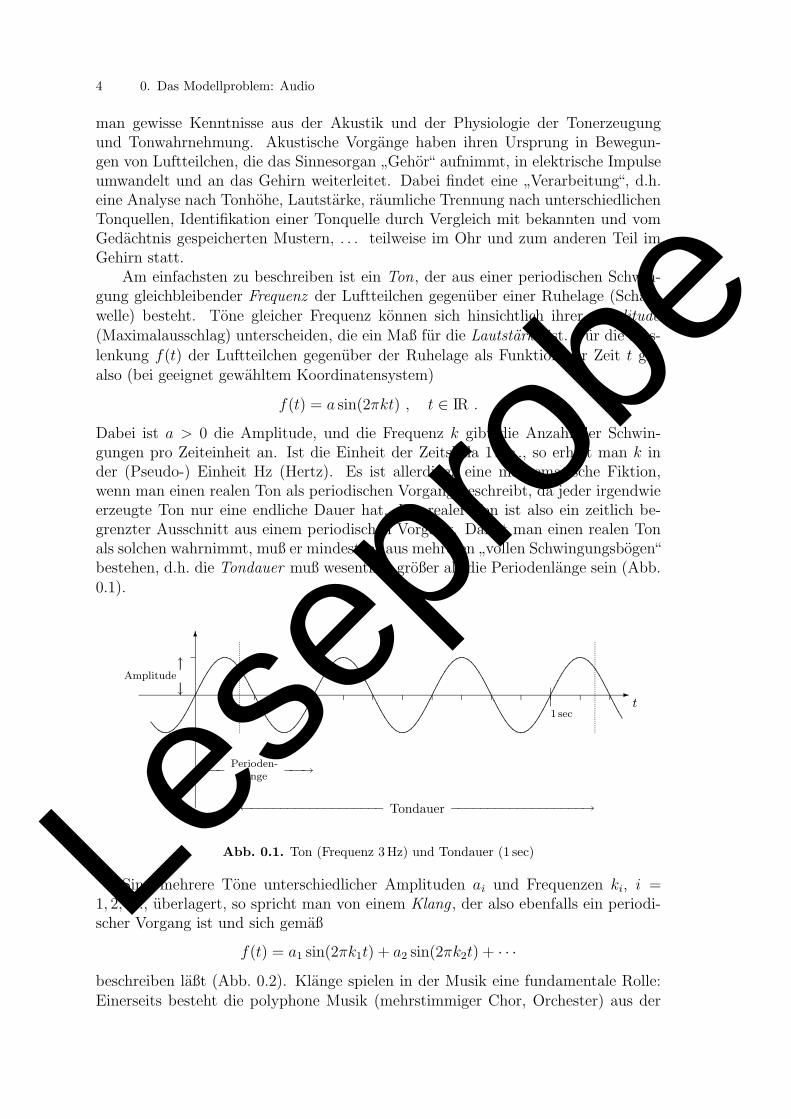
Am einfachsten zu beschreiben ist ein Ton, der aus einer periodischen Schwin-gung gleichbleibender Frequenz der Luftteilchen gegenuber einer Ruhelage (Schall-welle) besteht. Tone gleicher Frequenz konnen sich hinsichtlich ihrer Amplitude(Maximalausschlag) unterscheiden, die ein Maß fur die Lautstarke ist. Fur die Aus-lenkung f(t) der Luftteilchen gegenuber der Ruhelage als Funktion der Zeit t giltalso (bei geeignet gewahltem Koordinatensystem)
f(t) = a sin(2πkt) , t ∈ IR .
Dabei ist a > 0 die Amplitude, und die Frequenz k gibt die Anzahl der Schwin-gungen pro Zeiteinheit an. Ist die Einheit der Zeitskala 1 sec ., so erhalt man k inder (Pseudo-) Einheit Hz (Hertz). Es ist allerdings eine mathematische Fiktion,wenn man einen realen Ton als periodischen Vorgang beschreibt, da jeder irgendwieerzeugte Ton nur eine endliche Dauer hat. Ein realer Ton ist also ein zeitlich be-grenzter Ausschnitt aus einem periodischen Vorgang. Damit man einen realen Tonals solchen wahrnimmt, muß er mindestens aus mehreren
”vollen Schwingungsbogen“
bestehen, d.h. die Tondauer muß wesentlich großer als die Periodenlange sein (Abb.0.1).
-t
6
............................................................................................................................................................................................................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................................................................................................................
......................................................................................................................................................................................................................................................................................................................................................................................................
......................................................................................................................................................................................................................................................................................................................................
Amplitude↑|
|↓
←−−− Perioden-lange
−−−→
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
.
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
.
←−−−−−−−−−−−−−−−−−− Tondauer −−−−−−−−−−−−−−−−−−→
1 sec
Abb. 0.1. Ton (Frequenz 3Hz) und Tondauer (1 sec)
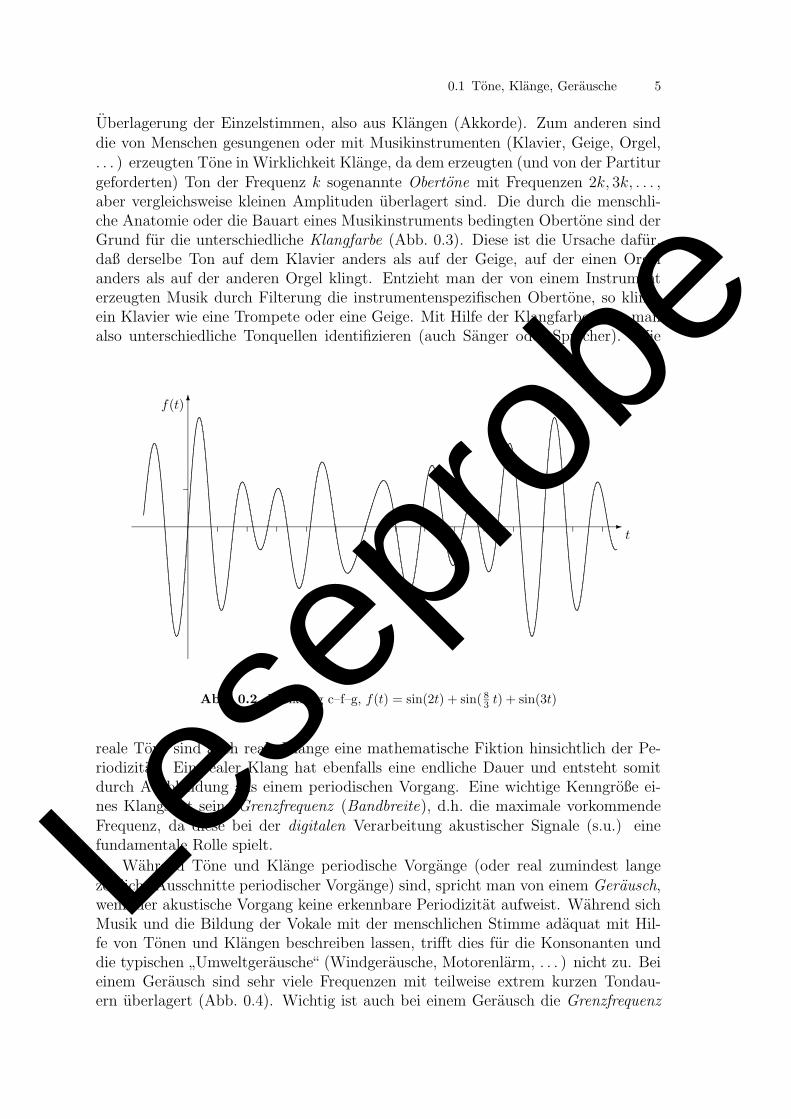
Sind mehrere Tone unterschiedlicher Amplituden ai und Frequenzen ki, i =1, 2, . . ., uberlagert, so spricht man von einem Klang , der also ebenfalls ein periodi-scher Vorgang ist und sich gemaß
f(t) = a1 sin(2πk1t) + a2 sin(2πk2t) + · · ·beschreiben laßt (Abb. 0.2). Klange spielen in der Musik eine fundamentale Rolle:Einerseits besteht die polyphone Musik (mehrstimmiger Chor, Orchester) aus der
Lese
probe
0.1 Tone, Klange, Gerausche 5
Uberlagerung der Einzelstimmen, also aus Klangen (Akkorde). Zum anderen sinddie von Menschen gesungenen oder mit Musikinstrumenten (Klavier, Geige, Orgel,. . . ) erzeugten Tone in Wirklichkeit Klange, da dem erzeugten (und von der Partiturgeforderten) Ton der Frequenz k sogenannte Obertone mit Frequenzen 2k, 3k, . . . ,aber vergleichsweise kleinen Amplituden uberlagert sind. Die durch die menschli-che Anatomie oder die Bauart eines Musikinstruments bedingten Obertone sind derGrund fur die unterschiedliche Klangfarbe (Abb. 0.3). Diese ist die Ursache dafur,daß derselbe Ton auf dem Klavier anders als auf der Geige, auf der einen Orgelanders als auf der anderen Orgel klingt. Entzieht man der von einem Instrumenterzeugten Musik durch Filterung die instrumentenspezifischen Obertone, so klingtein Klavier wie eine Trompete oder eine Geige. Mit Hilfe der Klangfarbe kann manalso unterschiedliche Tonquellen identifizieren (auch Sanger oder Sprecher). Wie
-t
6f(t)
......
......
.......
......
......
.......
......
......
.......
......
......
.......
......
.......
......
.......
......
.......
......
.......
....................................................................................................................................................................................................................................................................................................................................................................................................................
.........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................................................................................................................................................
.....................................................................................................................................................................................................................................................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.............................................................................................................................................................................................................................................................................................................................................................................................................................................................
................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.................................................................................................................................................................................................................................................................................
..............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................
Abb. 0.2. Dreiklang c–f–g, f(t) = sin(2t) + sin( 83 t) + sin(3t)
reale Tone sind auch reale Klange eine mathematische Fiktion hinsichtlich der Pe-riodizitat. Ein realer Klang hat ebenfalls eine endliche Dauer und entsteht somitdurch Ausblendung aus einem periodischen Vorgang. Eine wichtige Kenngroße ei-nes Klangs ist seine Grenzfrequenz (Bandbreite), d.h. die maximale vorkommendeFrequenz, da diese bei der digitalen Verarbeitung akustischer Signale (s.u.) einefundamentale Rolle spielt.
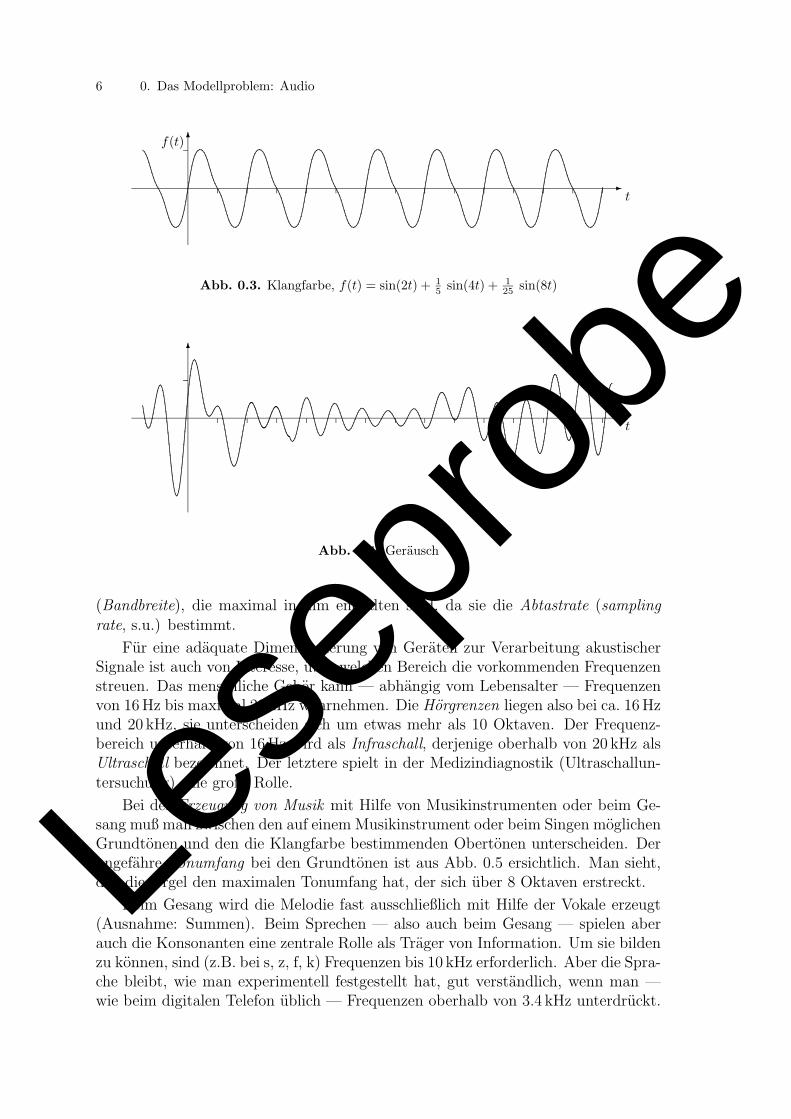
Wahrend Tone und Klange periodische Vorgange (oder real zumindest langezeitliche Ausschnitte periodischer Vorgange) sind, spricht man von einem Gerausch,wenn der akustische Vorgang keine erkennbare Periodizitat aufweist. Wahrend sichMusik und die Bildung der Vokale mit der menschlichen Stimme adaquat mit Hil-fe von Tonen und Klangen beschreiben lassen, trifft dies fur die Konsonanten unddie typischen
”Umweltgerausche“ (Windgerausche, Motorenlarm, . . . ) nicht zu. Bei
einem Gerausch sind sehr viele Frequenzen mit teilweise extrem kurzen Tondau-ern uberlagert (Abb. 0.4). Wichtig ist auch bei einem Gerausch die Grenzfrequenz
Lese
probe
6 0. Das Modellproblem: Audio
-t
6f(t)........................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................................................................
.........................................................................................................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................................................................
.........................................................................................................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................................................................
........................................................................................................................................................................................................................................................................................................................................................
......................................................................................................................................................................................................................................................................................................................................................
...........................................................................
Abb. 0.3. Klangfarbe, f(t) = sin(2t) + 15 sin(4t) + 1
25 sin(8t)
-t
6
................................................................................................................................................................................................................................................................................................................................................................................
.......
......
.......
......
.......
......
......
.......
......
......
......
.......
......
......
.......
......
......
......
.......
......
......
......
.......
......
......
......
.......
......
......
......
.......
......
......
.......
......
......
.......
......
.......
..................................................................................................................................................
...............................................................................................................................................................
...........................................................................................................................................................................................................................
.........................................................................................................................................................
.................................................................................................................................................................................
..........................................................................................................................................
.........................................................................................................
...........................................................................................
................................................................................................
..............................................................................................................................................................
........................................................................................................................................................................................................
......................................................................................................................................................................................................................
........................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................................................................................
...............................................................................................................................................
Abb. 0.4. Gerausch
(Bandbreite), die maximal in ihm enthalten sind, da sie die Abtastrate (samplingrate, s.u.) bestimmt.
Fur eine adaquate Dimensionierung von Geraten zur Verarbeitung akustischerSignale ist auch von Interesse, uber welchen Bereich die vorkommenden Frequenzenstreuen. Das menschliche Gehor kann — abhangig vom Lebensalter — Frequenzenvon 16Hz bis maximal 20 kHz wahrnehmen. Die Horgrenzen liegen also bei ca. 16Hzund 20 kHz, sie unterscheiden sich um etwas mehr als 10 Oktaven. Der Frequenz-bereich unterhalb von 16Hz wird als Infraschall, derjenige oberhalb von 20 kHz alsUltraschall bezeichnet. Der letztere spielt in der Medizindiagnostik (Ultraschallun-tersuchung) eine große Rolle.
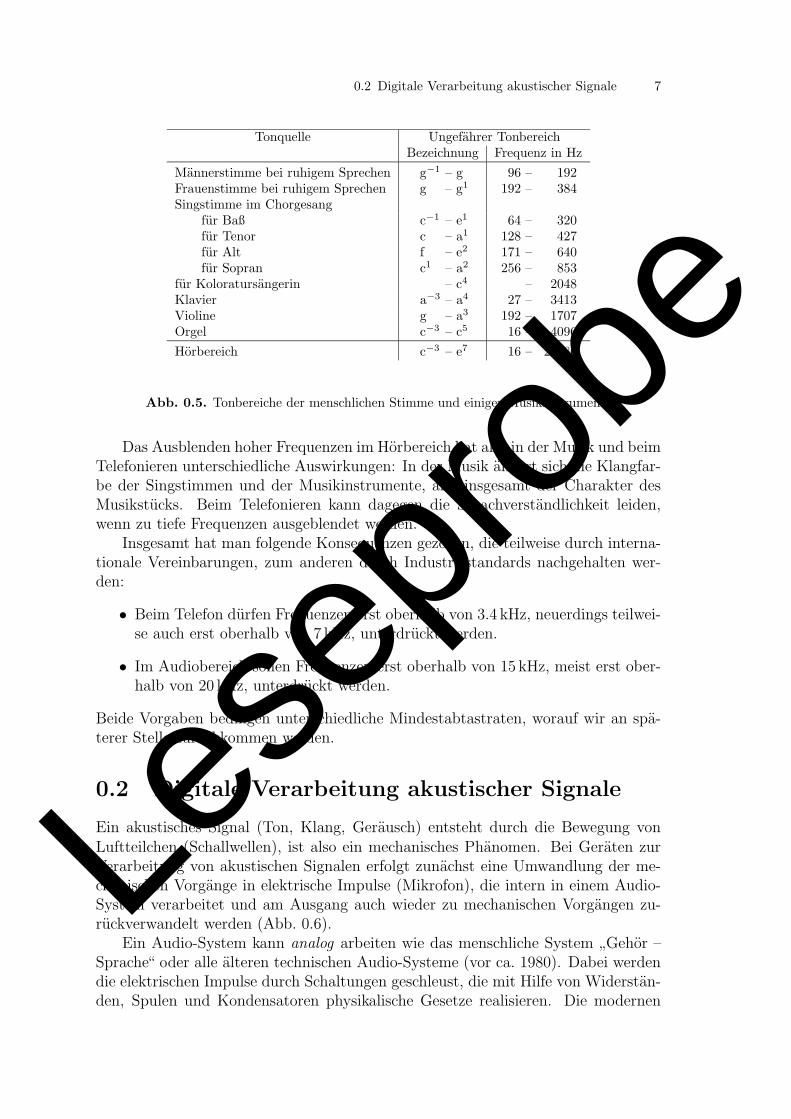
Bei der Erzeugung von Musik mit Hilfe von Musikinstrumenten oder beim Ge-sang muß man zwischen den auf einem Musikinstrument oder beim Singen moglichenGrundtonen und den die Klangfarbe bestimmenden Obertonen unterscheiden. Derungefahre Tonumfang bei den Grundtonen ist aus Abb. 0.5 ersichtlich. Man sieht,daß die Orgel den maximalen Tonumfang hat, der sich uber 8 Oktaven erstreckt.
Beim Gesang wird die Melodie fast ausschließlich mit Hilfe der Vokale erzeugt(Ausnahme: Summen). Beim Sprechen — also auch beim Gesang — spielen aberauch die Konsonanten eine zentrale Rolle als Trager von Information. Um sie bildenzu konnen, sind (z.B. bei s, z, f, k) Frequenzen bis 10 kHz erforderlich. Aber die Spra-che bleibt, wie man experimentell festgestellt hat, gut verstandlich, wenn man —wie beim digitalen Telefon ublich — Frequenzen oberhalb von 3.4 kHz unterdruckt.
Lese
probe
0.2 Digitale Verarbeitung akustischer Signale 7
Tonquelle Ungefahrer TonbereichBezeichnung Frequenz in Hz
Mannerstimme bei ruhigem Sprechen g−1 – g 96 – 192Frauenstimme bei ruhigem Sprechen g – g1 192 – 384Singstimme im Chorgesang
fur Baß c−1 – e1 64 – 320fur Tenor c – a1 128 – 427fur Alt f – e2 171 – 640fur Sopran c1 – a2 256 – 853
fur Koloratursangerin – c4 – 2048Klavier a−3 – a4 27 – 3413Violine g – a3 192 – 1707Orgel c−3 – c5 16 – 4096
Horbereich c−3 – e7 16 – 20480
Abb. 0.5. Tonbereiche der menschlichen Stimme und einiger Musikinstrumente
Das Ausblenden hoher Frequenzen im Horbereich hat also in der Musik und beimTelefonieren unterschiedliche Auswirkungen: In der Musik andert sich die Klangfar-be der Singstimmen und der Musikinstrumente, also insgesamt der Charakter desMusikstucks. Beim Telefonieren kann dagegen die Sprachverstandlichkeit leiden,wenn zu tiefe Frequenzen ausgeblendet werden.
Insgesamt hat man folgende Konsequenzen gezogen, die teilweise durch interna-tionale Vereinbarungen, zum anderen durch Industriestandards nachgehalten wer-den:
• Beim Telefon durfen Frequenzen erst oberhalb von 3.4 kHz, neuerdings teilwei-se auch erst oberhalb von 7 kHz, unterdruckt werden.
• Im Audiobereich sollen Frequenzen erst oberhalb von 15 kHz, meist erst ober-halb von 20 kHz, unterdruckt werden.
Beide Vorgaben bedingen unterschiedliche Mindestabtastraten, worauf wir an spa-terer Stelle zuruckkommen werden.
0.2 Digitale Verarbeitung akustischer Signale
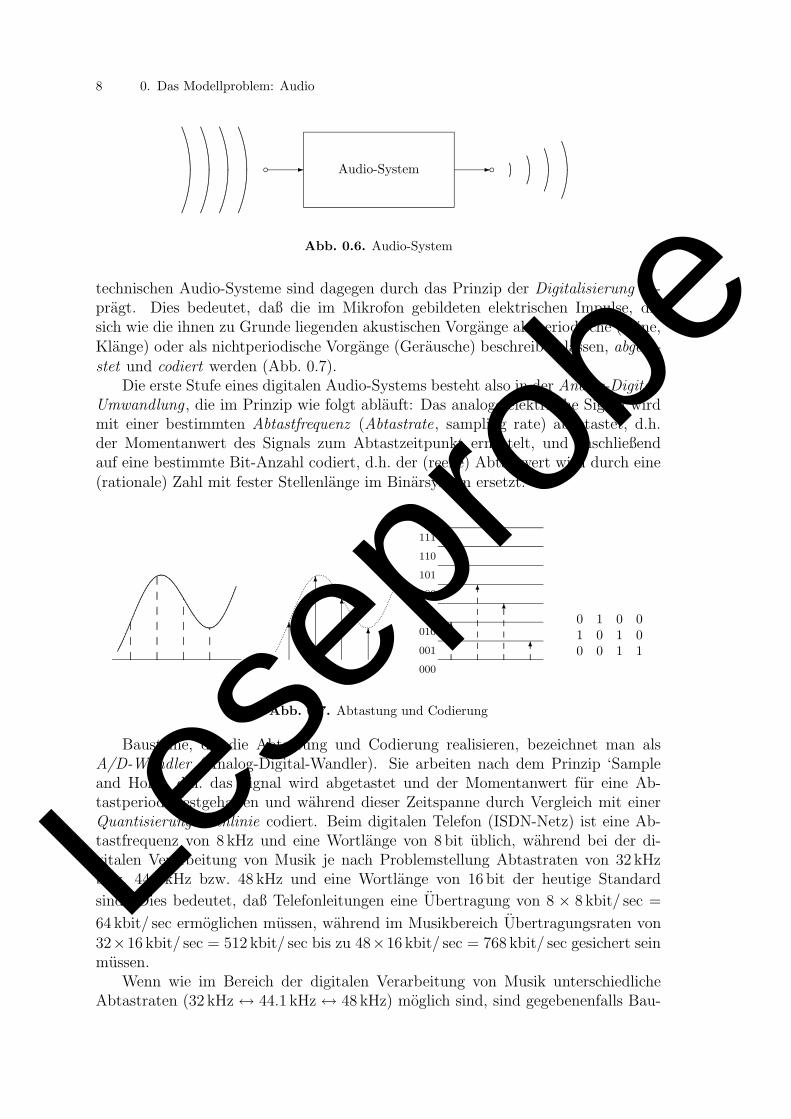
Ein akustisches Signal (Ton, Klang, Gerausch) entsteht durch die Bewegung vonLuftteilchen (Schallwellen), ist also ein mechanisches Phanomen. Bei Geraten zurVerarbeitung von akustischen Signalen erfolgt zunachst eine Umwandlung der me-chanischen Vorgange in elektrische Impulse (Mikrofon), die intern in einem Audio-System verarbeitet und am Ausgang auch wieder zu mechanischen Vorgangen zu-ruckverwandelt werden (Abb. 0.6).
Ein Audio-System kann analog arbeiten wie das menschliche System”Gehor –
Sprache“ oder alle alteren technischen Audio-Systeme (vor ca. 1980). Dabei werdendie elektrischen Impulse durch Schaltungen geschleust, die mit Hilfe von Widerstan-den, Spulen und Kondensatoren physikalische Gesetze realisieren. Die modernen
Lese
probe
8 0. Das Modellproblem: Audio
Audio-System-b - b ............................
......
......
................
............................
......
......
......
......
..................
..........................................
......
......
......
......
......
..........................
........................................................
......
......
......
......
......
......
......
..........................................
....................................................................................
......
......
......
......
......
......
......
......
....................................
....................................................................................
......
......
......
......
......
......
......
......
....................................
....................................................................................
......
......
......
......
......
......
......
..........................................
....................................................................................
Abb. 0.6. Audio-System
technischen Audio-Systeme sind dagegen durch das Prinzip der Digitalisierung ge-pragt. Dies bedeutet, daß die im Mikrofon gebildeten elektrischen Impulse, diesich wie die ihnen zu Grunde liegenden akustischen Vorgange als periodische (Tone,Klange) oder als nichtperiodische Vorgange (Gerausche) beschreiben lassen, abgeta-stet und codiert werden (Abb. 0.7).
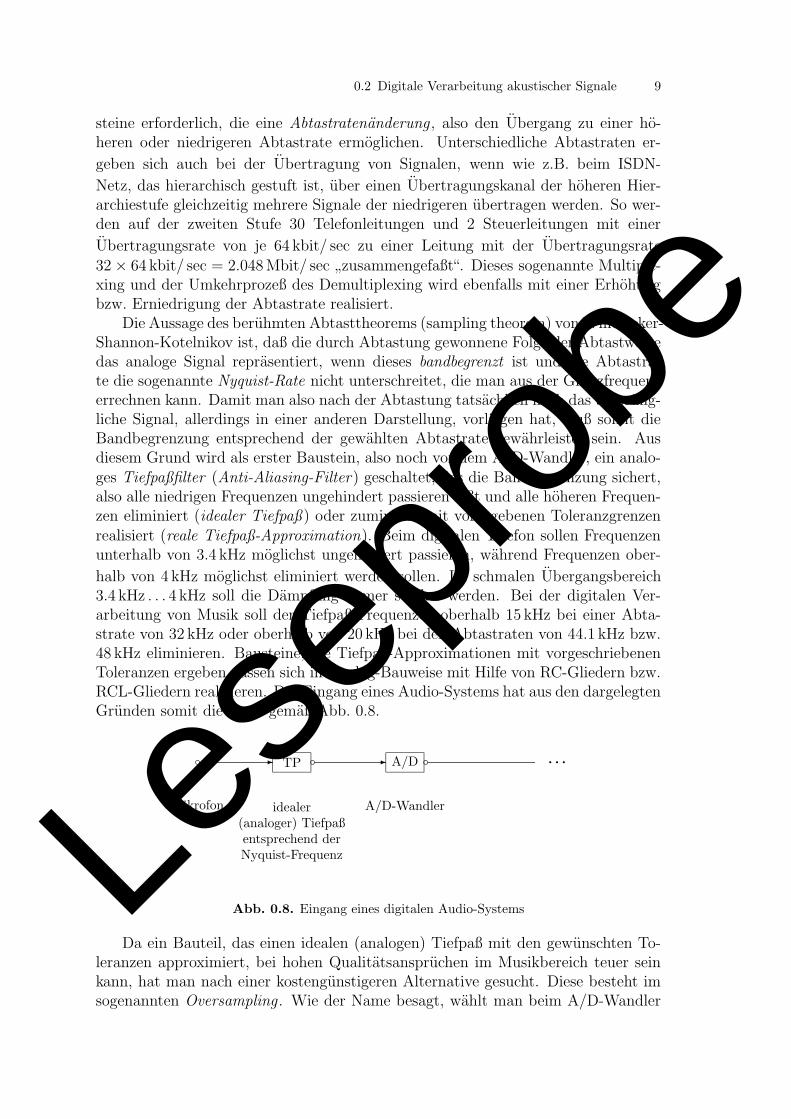
Die erste Stufe eines digitalen Audio-Systems besteht also in der Analog-Digital-Umwandlung , die im Prinzip wie folgt ablauft: Das analoge elektrische Signal wirdmit einer bestimmten Abtastfrequenz (Abtastrate, sampling rate) abgetastet, d.h.der Momentanwert des Signals zum Abtastzeitpunkt ermittelt, und anschließendauf eine bestimmte Bit-Anzahl codiert, d.h. der (reelle) Abtastwert wird durch eine(rationale) Zahl mit fester Stellenlange im Binarsystem ersetzt.
..............................................................................................................................................................................................................................................................................................................................................................................
............................................................................................
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
......
......
...
...
......
......
...
......
......
...
....
............................................................................................
.......................
6
6
6
6
000
001
010
011
100
101
110
111
......
.....
......
.....
......
.....
......
..
6
......
.....
......
.....
......
.....
......
.....
......
.....
......
.....
......
.....
6
......
.....
......
.....
......
.....
......
.....
......
.....
.
6
......
.....
......
.....
6
0 1 0 01 0 1 00 0 1 1
Abb. 0.7. Abtastung und Codierung
Bausteine, die die Abtastung und Codierung realisieren, bezeichnet man alsA/D-Wandler (Analog-Digital-Wandler). Sie arbeiten nach dem Prinzip ‘Sampleand Hold’, d.h. das Signal wird abgetastet und der Momentanwert fur eine Ab-tastperiode festgehalten und wahrend dieser Zeitspanne durch Vergleich mit einerQuantisierungskennlinie codiert. Beim digitalen Telefon (ISDN-Netz) ist eine Ab-tastfrequenz von 8 kHz und eine Wortlange von 8 bit ublich, wahrend bei der di-gitalen Verarbeitung von Musik je nach Problemstellung Abtastraten von 32 kHzbzw. 44.1 kHz bzw. 48 kHz und eine Wortlange von 16 bit der heutige Standard
sind. Dies bedeutet, daß Telefonleitungen eine Ubertragung von 8 × 8 kbit/ sec =
64 kbit/ sec ermoglichen mussen, wahrend im Musikbereich Ubertragungsraten von32×16 kbit/ sec = 512 kbit/ sec bis zu 48×16 kbit/ sec = 768 kbit/ sec gesichert seinmussen.
Wenn wie im Bereich der digitalen Verarbeitung von Musik unterschiedlicheAbtastraten (32 kHz↔ 44.1 kHz ↔ 48 kHz) moglich sind, sind gegebenenfalls Bau-
Lese
probe
0.2 Digitale Verarbeitung akustischer Signale 9
steine erforderlich, die eine Abtastratenanderung , also den Ubergang zu einer ho-heren oder niedrigeren Abtastrate ermoglichen. Unterschiedliche Abtastraten er-
geben sich auch bei der Ubertragung von Signalen, wenn wie z.B. beim ISDN-
Netz, das hierarchisch gestuft ist, uber einen Ubertragungskanal der hoheren Hier-archiestufe gleichzeitig mehrere Signale der niedrigeren ubertragen werden. So wer-den auf der zweiten Stufe 30 Telefonleitungen und 2 Steuerleitungen mit einer
Ubertragungsrate von je 64 kbit/ sec zu einer Leitung mit der Ubertragungsrate32× 64 kbit/ sec = 2.048Mbit/ sec
”zusammengefaßt“. Dieses sogenannte Multiple-
xing und der Umkehrprozeß des Demultiplexing wird ebenfalls mit einer Erhohungbzw. Erniedrigung der Abtastrate realisiert.
Die Aussage des beruhmten Abtasttheorems (sampling theorem) vonWhittacker-Shannon-Kotelnikov ist, daß die durch Abtastung gewonnene Folge der Abtastwertedas analoge Signal reprasentiert, wenn dieses bandbegrenzt ist und die Abtastra-te die sogenannte Nyquist-Rate nicht unterschreitet, die man aus der Grenzfrequenzerrechnen kann. Damit man also nach der Abtastung tatsachlich noch das ursprung-liche Signal, allerdings in einer anderen Darstellung, vorliegen hat, muß somit dieBandbegrenzung entsprechend der gewahlten Abtastrate gewahrleistet sein. Ausdiesem Grund wird als erster Baustein, also noch vor dem A/D-Wandler, ein analo-ges Tiefpaßfilter (Anti-Aliasing-Filter) geschaltet, das die Bandbegrenzung sichert,also alle niedrigen Frequenzen ungehindert passieren laßt und alle hoheren Frequen-zen eliminiert (idealer Tiefpaß) oder zumindest mit vorgegebenen Toleranzgrenzenrealisiert (reale Tiefpaß-Approximation). Beim digitalen Telefon sollen Frequenzenunterhalb von 3.4 kHz moglichst ungehindert passieren, wahrend Frequenzen ober-
halb von 4 kHz moglichst eliminiert werden sollen. Im schmalen Ubergangsbereich3.4 kHz . . . 4 kHz soll die Dampfung immer starker werden. Bei der digitalen Ver-arbeitung von Musik soll der Tiefpaß Frequenzen oberhalb 15 kHz bei einer Abta-strate von 32 kHz oder oberhalb von 20 kHz bei den Abtastraten von 44.1 kHz bzw.48 kHz eliminieren. Bausteine, die Tiefpaß-Approximationen mit vorgeschriebenenToleranzen ergeben, lassen sich in Analog-Bauweise mit Hilfe von RC-Gliedern bzw.RCL-Gliedern realisieren. Der Eingang eines Audio-Systems hat aus den dargelegtenGrunden somit die Form gemaß Abb. 0.8.
b - bTP - bA/D · · ·
Mikrofon idealer(analoger) Tiefpaßentsprechend derNyquist-Frequenz
A/D-Wandler
Abb. 0.8. Eingang eines digitalen Audio-Systems
Da ein Bauteil, das einen idealen (analogen) Tiefpaß mit den gewunschten To-leranzen approximiert, bei hohen Qualitatsanspruchen im Musikbereich teuer seinkann, hat man nach einer kostengunstigeren Alternative gesucht. Diese besteht imsogenannten Oversampling . Wie der Name besagt, wahlt man beim A/D-Wandler
Lese
probe
10 0. Das Modellproblem: Audio
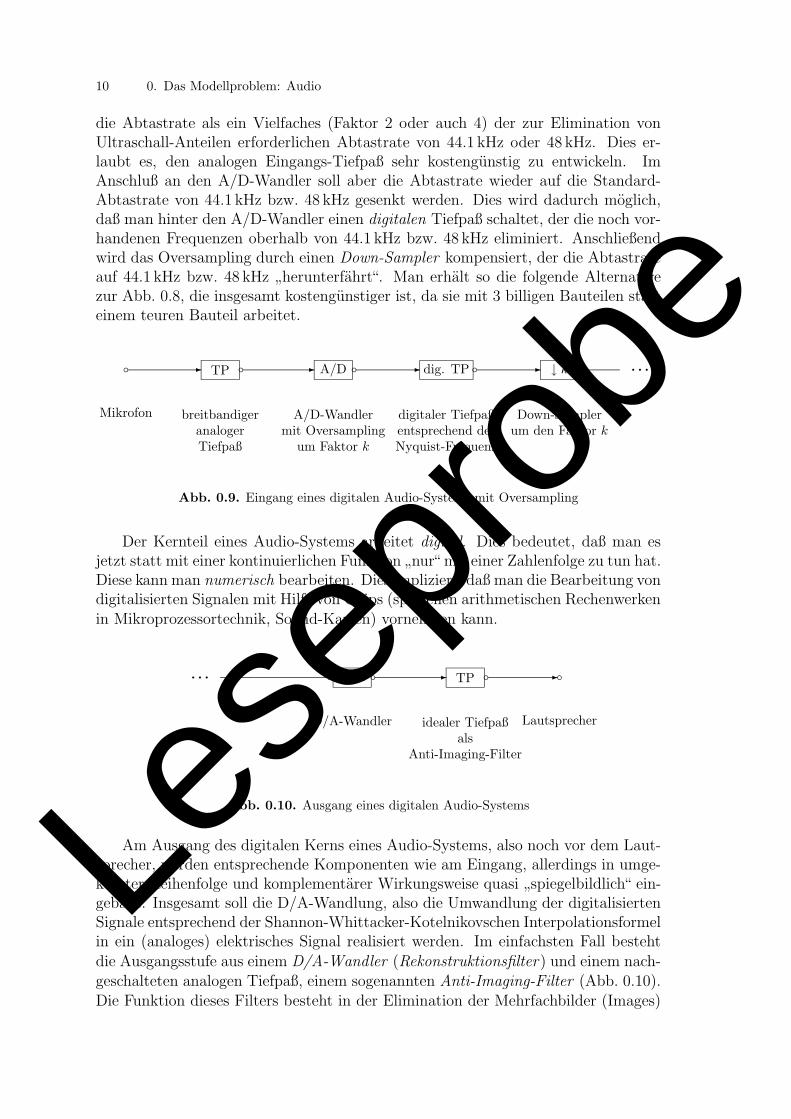
die Abtastrate als ein Vielfaches (Faktor 2 oder auch 4) der zur Elimination vonUltraschall-Anteilen erforderlichen Abtastrate von 44.1 kHz oder 48 kHz. Dies er-laubt es, den analogen Eingangs-Tiefpaß sehr kostengunstig zu entwickeln. ImAnschluß an den A/D-Wandler soll aber die Abtastrate wieder auf die Standard-Abtastrate von 44.1 kHz bzw. 48 kHz gesenkt werden. Dies wird dadurch moglich,daß man hinter den A/D-Wandler einen digitalen Tiefpaß schaltet, der die noch vor-handenen Frequenzen oberhalb von 44.1 kHz bzw. 48 kHz eliminiert. Anschließendwird das Oversampling durch einen Down-Sampler kompensiert, der die Abtastrateauf 44.1 kHz bzw. 48 kHz
”herunterfahrt“. Man erhalt so die folgende Alternative
zur Abb. 0.8, die insgesamt kostengunstiger ist, da sie mit 3 billigen Bauteilen statteinem teuren Bauteil arbeitet.
b - bTP - bA/D - dig. TP b - b↓ k · · ·
Mikrofon breitbandigeranalogerTiefpaß
A/D-Wandlermit Oversampling
um Faktor k
digitaler Tiefpaßentsprechend derNyquist-Frequenz
Down-Samplerum den Faktor k
Abb. 0.9. Eingang eines digitalen Audio-Systems mit Oversampling
Der Kernteil eines Audio-Systems arbeitet digital. Dies bedeutet, daß man esjetzt statt mit einer kontinuierlichen Funktion
”nur“ mit einer Zahlenfolge zu tun hat.
Diese kann man numerisch bearbeiten. Dies impliziert, daß man die Bearbeitung vondigitalisierten Signalen mit Hilfe von Chips (speziellen arithmetischen Rechenwerkenin Mikroprozessortechnik, Sound-Karten) vornehmen kann.
· · · - bD/A - bTP - bD/A-Wandler idealer Tiefpaß
alsAnti-Imaging-Filter
Lautsprecher
Abb. 0.10. Ausgang eines digitalen Audio-Systems
Am Ausgang des digitalen Kerns eines Audio-Systems, also noch vor dem Laut-sprecher, werden entsprechende Komponenten wie am Eingang, allerdings in umge-kehrter Reihenfolge und komplementarer Wirkungsweise quasi
”spiegelbildlich“ ein-
gebaut. Insgesamt soll die D/A-Wandlung, also die Umwandlung der digitalisiertenSignale entsprechend der Shannon-Whittacker-Kotelnikovschen Interpolationsformelin ein (analoges) elektrisches Signal realisiert werden. Im einfachsten Fall bestehtdie Ausgangsstufe aus einem D/A-Wandler (Rekonstruktionsfilter) und einem nach-geschalteten analogen Tiefpaß, einem sogenannten Anti-Imaging-Filter (Abb. 0.10).Die Funktion dieses Filters besteht in der Elimination der Mehrfachbilder (Images)
Lese
probe
0.2 Digitale Verarbeitung akustischer Signale 11
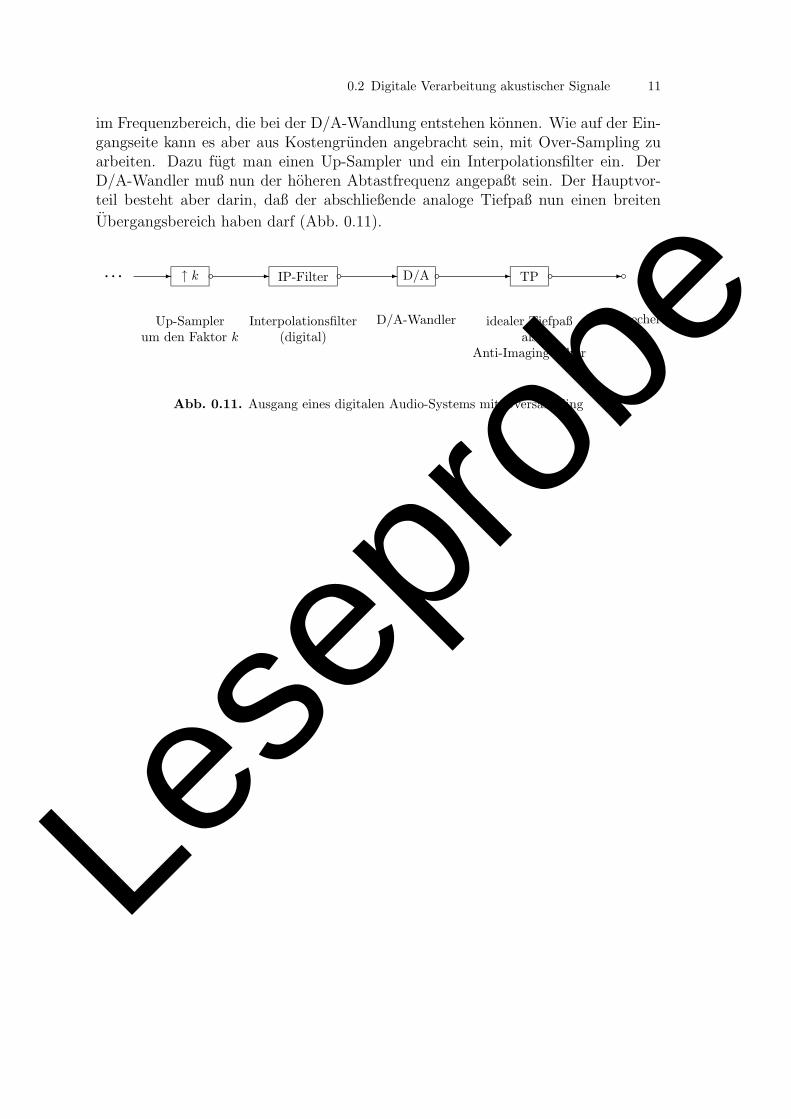
im Frequenzbereich, die bei der D/A-Wandlung entstehen konnen. Wie auf der Ein-gangseite kann es aber aus Kostengrunden angebracht sein, mit Over-Sampling zuarbeiten. Dazu fugt man einen Up-Sampler und ein Interpolationsfilter ein. DerD/A-Wandler muß nun der hoheren Abtastfrequenz angepaßt sein. Der Hauptvor-teil besteht aber darin, daß der abschließende analoge Tiefpaß nun einen breiten
Ubergangsbereich haben darf (Abb. 0.11).
· · · - b↑ k - IP-Filter b - bD/A - bTP - bUp-Sampler
um den Faktor kInterpolationsfilter
(digital)
D/A-Wandler idealer Tiefpaßals
Anti-Imaging-Filter
Lautsprecher
Abb. 0.11. Ausgang eines digitalen Audio-Systems mit Oversampling
Lese
probe
Die Seiten 12 bis 87 sind in dieser Vorschau nicht verfügbar
Lese
probe
4. Diskrete LTI-Systeme und diez-Transformation
4.1 Diskrete LTI-Systeme
Bei der digitalen Signalverarbeitung spielen die sogenannten diskreten LTI-Systeme(linear time invariant) eine fundamentale Rolle. Diese sind von folgendem Typ: Zueinem festen Zeittakt τ > 0 wird im Zeitpunkt tn = nτ, n ∈ ZZ, das Signal x[n] aufdas System S gegeben, worauf dieses mit dem Signal y[n]
”antwortet“. In konkreten
Anwendungen kann τ uber weite Bereiche streuen. So liegt τ beim menschlichenNervensystem im Bereich von Millisekunden, wahrend in der Elektronik Nanose-kundentakte ublich sind. Auch was man unter einem Signal zu verstehen hat, istproblemabhangig (elektrische, optische, akustische Signale). Wir betrachten ein ma-thematisches Modell und verstehen unter einem Signal eine reelle Zahl, obwohl ohneProbleme auch komplexe Zahlen oder allgemeiner Vektoren fester Lange von reellenoder komplexen Zahlen als Signale angesehen werden konnen.
x[n] b - bS - b y[n]Faßt man die Eingangssignale x[n] und die Ausgangssignale y[n], n ∈ ZZ, jeweilszu einer beidseitig unendlichen Folge x = (x[n])n∈ZZ, y = (y[n])n∈ZZ zusammen, soproduziert also S aus x die Folge y = S{x}:
x b - bS - b S{x} = y .
Dabei charakterisieren zwei spezifische Eigenschaften ein diskretes LTI-System:
• Linearitat, d.h. zu linear gekoppelten Eingangsfolgen gehoren entsprechend ge-koppelte Ausgangsfolgen. Fur a, b ∈ IR und zwei Folgen u, v gilt
S{au+ bv} = aS{u}+ bS{v} .
• Zeitinvarianz (Verschiebungsinvarianz, Translationsinvarianz ), d.h. zu einemum einen Zeittakt verschobenen Eingangssignal gehort das entsprechend um einenZeittakt verschobene Ausgangssignal.
Mathematisch laßt sich die Verschiebungsinvarianz mit Hilfe des Shift-OperatorsT beschreiben, der einer Folge x = (x[n])n∈ZZ die Folge Tx := (x[n − 1])n∈ZZ zuord-net. (Bei einer technischen Realisierung von T als Verzogerungsglied lauft es darauf
88
Lese
probe

4.1 Diskrete LTI-Systeme 89
hinaus, daß das Signal zum Zeitpunkt nτ einen Zeittakt lang gespeichert wird.) Sist zeitinvariant, wenn fur beliebige Signale x mit y = S{x} die Beziehung
S{Tx} = TS{x} ⇐⇒ S{(x[n− 1])n∈ZZ
}= (y[n− 1])n∈ZZ
gilt. Man kann diesen Sachverhalt kurz so formulieren:”S und T sind vertauschbar“.
Wir wenden uns nun dem Problem zu, wie man ein diskretes LTI-System Scharakterisieren kann. Dazu fuhrt man den sogenannten δ-Impuls (shock) ein; diesist die spezielle Folge δ mit
δ[n] =
{1 , falls n = 0 ,0 , sonst.
Durch Shift von δ erhalt man die Folgen δk mit
δk[n] := δ[n− k] ={
1 , falls n = k ,0 , sonst.
(Man kann die Folge δk als eine”beidseitig unendliche“ Verallgemeinerung des k-
ten kanonischen Einheitsvektors ek = (0, . . . , 0, 1︸︷︷︸k
, 0, . . . , 0)T im IRn ansehen.) Mit
Hilfe des Shift-Operators T gilt
δk = Tδk−1 = T2δk−2 = · · · = Tkδ0 = Tkδ;
dabei bewirkt Tk einen k-fachen Shift, d.h. es gilt fur eine beliebige Folge x
Tk(x[n])n∈ZZ = (x[n− k])n∈ZZ .
Eine Folge x = (x[n])n∈ZZ konnen wir in der Form
x =∞∑
k=−∞x[k] δk =
∞∑
k=−∞x[k] Tkδ
schreiben. Dabei ergeben sich keine Konvergenzprobleme bei dieser unendlichenReihe, weil fur jedes n ∈ ZZ hochstens ein Summand von Null verschieden ist:
∞∑
k=−∞x[k] δk[n] = x[n] , n ∈ ZZ .
Wegen der Linearitat von S erhalt man nun
S{x} = S
∞∑
k=−∞x[k] Tkδ
=
∞∑
k=−∞x[k]S
{Tkδ
}.
Die Zeitinvarianz bedeutet, wie wir oben gesehen haben, daß
S{Tδ} = TS{δ}
Lese
probe
90 4. Diskrete LTI-Systeme und die z-Transformation
gilt. Dann gilt aber auch
S{Tkδ
}= TS
{Tk−1δ
}= · · · = TkS{δ} .
Von besonderer Bedeutung ist die sogenannte Impulsantwort (shock response) desSystems S, also die Ausgangsfolge h := S{δ}, die zum δ-Impuls gehort. Denn fureine beliebige Folge x folgt so
S{x} =∞∑
k=−∞x[k]S
{Tkδ
}=
∞∑
k=−∞x[k] TkS{δ} =
∞∑
k=−∞x[k] Tkh .
Wegen Tkh = (h[n− k])n∈ZZ erhalt man
S{x} =
∞∑
k=−∞x[k]h[n− k]
n∈ZZ
.
Mit Hilfe einer Summationsanderung κ := n− k folgt auch
∞∑
k=−∞x[k]h[n− k] =
∞∑
k=−∞x[n− k]h[k] .
Man sieht also, daß die Impulsantwort das System charakterisiert und sich mit ihrerHilfe zu jeder Eingangsfolge x die zugehorige Ausgangsfolge berechnen laßt. Wirhalten fest:
4.1.1 Satz
Die Impulsantwort h := S{δ} charakterisiert das diskrete LTI-System S. Die zurEingangsfolge x = (x[n])n∈ZZ gehorende Ausgangsfolge erhalt man durch
S{x} =
∞∑
k=−∞x[k]h[n− k]
n∈ZZ
bzw. S{x} =
∞∑
k=−∞h[k]x[n− k]
n∈ZZ
.
Die Ausgangsfolge S{x} wird aus der Eingangsfolge x und der Impulsantworth auf eine spezielle Weise gebildet, die man als (diskrete) Faltung bezeichnet. Wirwerden noch weitere Faltungsbegriffe kennenlernen, so daß es manchmal notwendigsein wird, den Zusatz
”diskret“ ausdrucklich zu erwahnen. Wenn aus dem Zusam-
menhang klar ist, um welche Art der Faltung es sich handelt, werden wir nur von
”Faltung“,
”Faltungsprodukt“ etc. sprechen.
4.1.2 Definition
Fur zwei (beidseitig unendliche) Folgen a = (a[n])n∈ZZ, b = (b[m])m∈ZZ bezeichnetman die Folge c = (c[k])k∈ZZ mit
c[k] :=∞∑
m=−∞a[m] b[k −m] , k ∈ ZZ ,
Lese
probe

4.1 Diskrete LTI-Systeme 91
als das (diskrete) Faltungsprodukt von a und b, sofern die Reihen fur c[k], k ∈ ZZ,samtlich konvergieren. Man schreibt symbolisch c = a ∗ b.
Man sieht, daß das Faltungsprodukt ∗ kommutativ und assoziativ ist:
a ∗ b = b ∗ a , a ∗ (b ∗ c) = (a ∗ b) ∗ c .
Weiterhin hat die δ-Folge die Bedeutung eines Einselements: δ ∗ a = a. Man siehtauch leicht ein, daß eine Verzogerung T mit der Faltung ∗ vertauscht werden darf:Aus
h ∗ (Tx) =
∞∑
k=−∞h[n− k]x[k − 1]
n∈ZZ
folgt mit l = k − 1 durch eine Indexverschiebung bei der Summation
h ∗ (Tx) =
∞∑
l=−∞h[n− (l + 1)]x[l]
n∈ZZ
=
∞∑
l=−∞k[n− 1− l]x[l]
n∈ZZ
= T(h ∗ x) .
4.1.3 Beispiel
Ein einfaches LTI-System erhalt man durch einen Integrator , also einen Algorithmus, der eineNaherung fur die Stammfunktion F einer gegebenen Funktion f liefert. Fur eine stetige und
absolut integrable Funktion f : IR → IR, fur die also∫∞−∞
∣∣f(t)∣∣ dt existiert, entwickeln wir einen
Algorithmus, um
I :=
∫ ∞
−∞f(t) dt
numerisch zu bestimmen. Ist F ,
F (t) :=
∫ t
−∞f(τ) dτ ,
die Stammfunktion von f mit F (−∞) = 0, so folgt mit Hilfe der Trapez-Regel
F (n)− F (n− 1) =
∫ n
n−1f(τ) dτ ≈ 1
2
{f(n− 1) + f(n)
}.
Naherungen y(n) an die Werte F (n), n ∈ ZZ, erhalt man also, indem man die Rekursion
y(n)− y(n− 1) =1
2
{f(n− 1) + f(n)
}∈ ZZ ,
y(−∞) := 0 ,
auswertet. Durch Addition von aufeinanderfolgenden Gleichungen kann man diese Rekursion leichtauflosen. Man erhalt so
y(n) =
n−1∑
k=−∞f(k) +
1
2f(n) , n ∈ ZZ .
Man kann unser Vorgehen so deuten: Ausgehend von der Folge(f(n)
)n∈ZZ
haben wir eine neue
Folge(y(n)
)n∈ZZ
rekursiv durch
y(n) = y(n− 1) +1
2
{f(n− 1) + f(n)
}, n ∈ ZZ ,
Lese
probe
92 4. Diskrete LTI-Systeme und die z-Transformation
-1
6
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
........................................................................
..........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................× × × × × ×
×
×× × × × × × ×
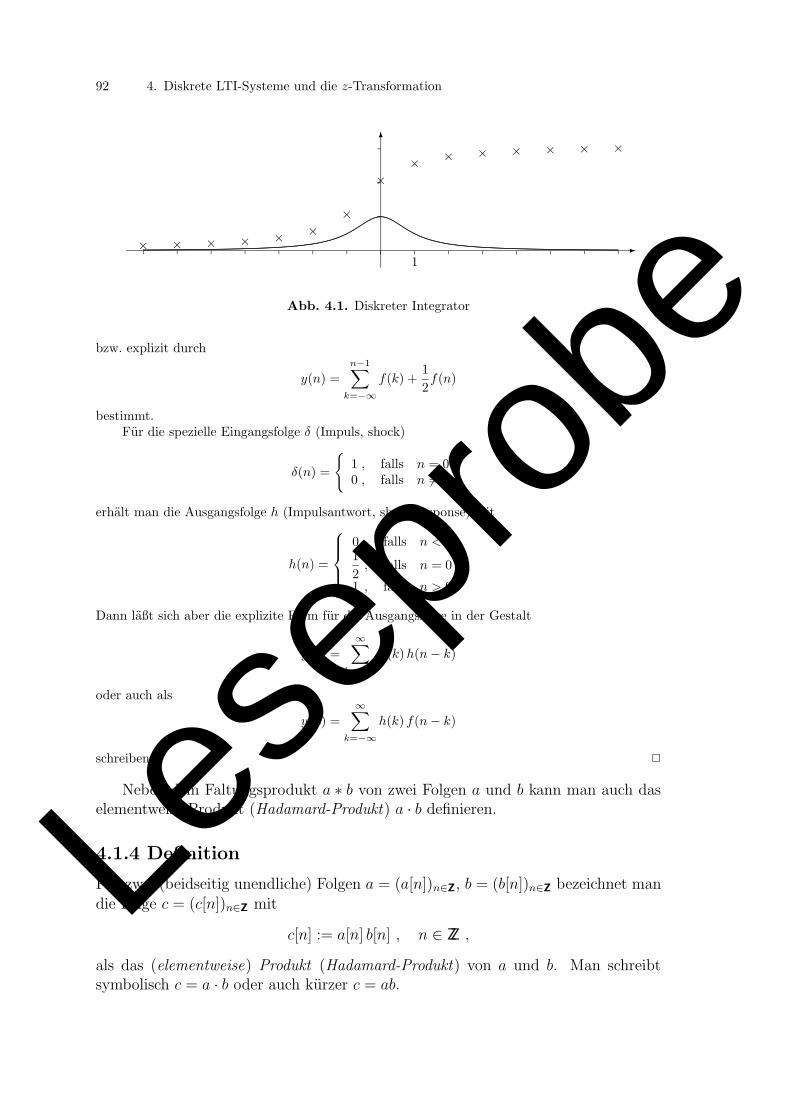
Abb. 4.1. Diskreter Integrator
bzw. explizit durch
y(n) =n−1∑
k=−∞f(k) +
1
2f(n)
bestimmt.Fur die spezielle Eingangsfolge δ (Impuls, shock)
δ(n) =
{1 , falls n = 0 ,0 , falls n 6= 0 ,
erhalt man die Ausgangsfolge h (Impulsantwort, shock response) mit
h(n) =
0 , falls n < 0 ,1
2, falls n = 0 ,
1 , falls n > 0 .
Dann laßt sich aber die explizite Form fur die Ausgangsfolge in der Gestalt
y(n) =∞∑
k=−∞f(k)h(n− k)
oder auch als
y(n) =
∞∑
k=−∞h(k) f(n− k)
schreiben. 2
Neben dem Faltungsprodukt a ∗ b von zwei Folgen a und b kann man auch daselementweise Produkt (Hadamard-Produkt) a · b definieren.
4.1.4 Definition
Fur zwei (beidseitig unendliche) Folgen a = (a[n])n∈ZZ, b = (b[n])n∈ZZ bezeichnet mandie Folge c = (c[n])n∈ZZ mit
c[n] := a[n] b[n] , n ∈ ZZ ,
als das (elementweise) Produkt (Hadamard-Produkt) von a und b. Man schreibtsymbolisch c = a · b oder auch kurzer c = ab.
Lese
probe

4.1 Diskrete LTI-Systeme 93
4.1.5 Bemerkung
In der Literatur wird auch das Skalarprodukt
〈a, b〉 :=∞∑
n=−∞a[n] b[n]
der beiden Folgen a und b manchmal mit ab bezeichnet. Man beachte, daß dasSkalarprodukt zwei Folgen eine komplexe Zahl zuordnet, wahrend durch das Fal-tungsprodukt und das Hadamard-Produkt wieder eine Folge entsteht. 2
Neben dem δ-Impuls haben auch der Einheitssprung (unit step) u,
u[n] =
{0 , falls n < 0 ,1 , falls n ≥ 0 ,
und die Sprungantwort (unit step response) v := S{u} fur die Beschreibung einesdiskreten LTI-Systems S Bedeutung. Wegen
v = S{u} = h ∗ u ⇐⇒ v[n] =∞∑
k=−∞h[k]u[n− k] =
n∑
k=−∞h[k] , n ∈ ZZ ,
erhalt man die Sprungantwort aus der Impulsantwort durch Summation. (Impuls-antwort und Sprungantwort kann man als diskrete Analoga zur Verteilungsfunktionf und zur Dichte F einer Verteilung ansehen: F (x) =
∫ x−∞ f(t) dt.) Der Verlauf
der Sprungantwort charakterisiert das Tragheitsverhalten eines Systems. Denn je
breiter der Ubergangsbereich (punktierter Bereich in Abb. 4.2) ist, um so langsamerfolgt das System auf den Sprung des Einheitssprungs bei n = 0.
-
6u
• •
• • • •1
-
6h
• •• •
•
•16
23
-
6v
• ••
•• •1
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
Abb. 4.2. Einheitssprung u, Impulsantwort h mit h[n] =
16, n = 0, 2 ,
23, n = 1 ,
0 , sonst
und Sprungant-
wort v
Da die Impulsantwort h = S{δ} das System S charakterisiert, mussen sich spe-zielle Eigenschaften von S bei h widerspiegeln. Eine erste Einteilung der diskretenLTI-Systeme nimmt man vor, indem man sie danach unterscheidet, ob die Impuls-antwort von endlicher oder unendlicher Dauer ist.
Lese
probe
94 4. Diskrete LTI-Systeme und die z-Transformation
4.1.6 Definition
Sind bei einem diskreten LTI-System S nur endlich viele Glieder h[k] der Impuls-antwort von 0 verschieden, d.h.
h[k] = 0 fur |k| > N ,
so bezeichnet man es als System mit einer Impulsantwort endlicher Dauer (FIR-System von Finite-duration Impulse Response System), andernfalls als ein Sy-stem mit einer Impulsantwort unendlicher Dauer (IIR-System von Infinite-durationImpulse Response System).
Der im Beispiel 4.1.3 betrachtete Integrator ist ein IIR-System.Eine Eigenschaft, die bei einer technischen Modellierung eines Systems in Form
einer digitalen Schaltung unabdingbar ist, ist die Kausalitat oder (technische) Rea-lisierbarkeit eines Systems. Verarbeitet ein System zeitlich getaktete Signale undkommen bei der Modellierung physikalische Gesetze zur Anwendung, so unterliegtes dem Kausalitatsgesetz.
Die Kausalitat von S besagt, daß keine Wirkung vor ihrer Ursache existierenkann. Dies bedeutet, daß das Folgenglied y[n] nur von den Folgengliedern x[k], k ≤n, abhangig sein darf. Wegen
y[n] =∞∑
k=−∞h[n− k]x[k]
impliziert dies
h[n− k] = 0 fur k > n bzw. h[k] = 0 fur k < 0 .
4.1.7 Definition
Ein diskretes LTI-System S heißt kausal, wenn fur seine Impulsantwort h = S{δ}
h[k] = 0 fur k < 0
gilt.
Der im Beispiel 4.1.3 betrachtete Integrator ist also kausal.Offensichtlich gilt fur die Impulsantwort eines kausalen FIR-Systems
h[k] = 0 , falls k < 0 und k > N .
Ist das System kausal, so folgt aus h[k] = 0 fur k < 0 auch v[k] = 0 fur k < 0.Hat die Impulsantwort nur endlich viele von Null verschiedene Glieder h[k], so wirddie Sprungantwort schließlich konstant. Durch sie wird also beschrieben, wie dasSystem von einem stationaren Zustand in einen anderen ubergeht. Dabei ist der
Ubergangsbereich (vgl. Abb. 4.2) von besonderem Interesse.
Lese
probe
4.1 Diskrete LTI-Systeme 95
4.1.8 Bemerkung
Wahrend die Kausalitat eines Systems bei der technischen Realisierung und bei derEchtzeitverarbeitung von Signalen unabdingbar ist, spielt sie keine Rolle, wenn manaufgezeichnete (gespeicherte) Daten bearbeiten will, da dann die Abfolge der Datennur von einem Ort (namlich, wo das Datum x[n] gespeichert ist) und nicht vonder Zeit abhangt. Das System kann dann problemlos auf alle Daten x[n] zugreifen.Man muß also beispielsweise unterscheiden, ob man die Tonqualitat in einem Wie-dergabegerat verbessern will oder ob es darum geht, eine historische (
”verrauschte“)
Schallplattenaufnahme”nachzubearbeiten“. Das eine Problem unterliegt dem Kau-
salitatsgesetz, das andere nicht. Kausale Systeme dienen zur Echtzeitverarbeitungvon Signalen; nichtkausale Systeme kommen bei der Nachbehandlung gespeicherter
Daten (Bildbearbeitung, Zeitreihenanalyse in der Okonomie und den Sozialwissen-schaften) zur Anwendung. 2
Eine weitere wichtige Eigenschaft eines Systems S ist die Stabilitat , genauer diesogenannte bibo-Stabilitat (bounded input bounded output).
4.1.9 Definition
Ein diskretes LTI-System S heißt (bibo-) stabil, wenn zu jeder beschrankten Ein-gangsfolge x = (x[n])n∈ZZ eine beschrankte Ausgangsfolge y = (y[n])n∈ZZ = S{x}gehort:
Aus∣∣∣x[n]
∣∣∣ ≤M fur n ∈ ZZ folgt∣∣∣y[n]
∣∣∣ ≤ m fur n ∈ ZZ .
Ein bibo-stabiles System gerat also fur kontrollierte Eingangssignale nicht außerKontrolle.
4.1.10 Bemerkung
Man kann diskrete LTI-Systeme auch folgendermaßen deuten: In Verallgemeine-
rung des IRk bilden die beidseitig unendlichen Folgen (x[n])n∈ZZ, x[n] ∈ IR, einenunendlich-dimensionalen Vektorraum V uber IR, wenn man die Addition und Ska-larmultiplikation komponentenweise erklart, d.h. fur u, v ∈ V und α, β ∈ IR setztman
αu+ βv :=(αu[n] + βv[n]
)n∈ZZ
.
Eine Basis von V bilden z.B. die Shifts δk, k ∈ ZZ, des δ-Impulses. Ein diskretesLTI-System S entspricht einer speziellen linearen Abbildung von V nach V , die wirmit einer unendlichen Matrix H = (ank)n,k∈ZZ beschreiben konnen. Wegen
S{x} =
∞∑
k=−∞h[n− k]x[k]
n∈ZZ
= Hx =
∞∑
k=−∞ank x[k]
n∈ZZ
giltank = h[n− k] , n, k ∈ ZZ ,
Lese
probe

96 4. Diskrete LTI-Systeme und die z-Transformation
d.h. die unendliche Matrix
H =
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .· · · h[−1] h[−2] h[−3] · · ·· · · h[0] h[−1] h[−2] · · ·· · · h[1] h[0] h[−1] · · ·· · · h[2] h[1] h[0] · · ·. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
hat dieselben Eintrage langs jeder Schragzeile. Man bezeichnet eine solche Matrixals Toeplitz-Matrix, und die Untersuchung eines diskreten LTI-Systems ist damit aufdas Studium einer Matrix dieses Typs zuruckgefuhrt. 2
Stabile Systeme kann man vollstandig charakterisieren.
4.1.11 Satz
Ein diskretes LTI-System S ist genau dann bibo-stabil, wenn die zugehorige Impuls-
antwort h = S{δ} absolut summierbar ist, d.h. wenn∞∑
k=−∞
∣∣∣h[k]∣∣∣ <∞ gilt.
Beweis. (1) Es gelte M :=∞∑
k=−∞
∣∣∣h[k]∣∣∣ < ∞. Dann folgt fur eine beschrankte
Eingangsfolge x fur die Ausgangsfolge y := S{x} mit Hilfe der Dreiecksungleichungfur jedes n ∈ ZZ
∣∣∣y[n]∣∣∣ =
∣∣∣∣∣∣
∞∑
k=−∞x[n− k]h[k]
∣∣∣∣∣∣≤
∞∑
k=−∞
∣∣∣x[n− k]∣∣∣∣∣∣h[k]
∣∣∣
≤ maxk∈ZZ
∣∣∣x[k]∣∣∣
∞∑
k=−∞
∣∣∣h[k]∣∣∣ = max
k∈ZZ
∣∣∣x[k]∣∣∣ M .
Also bleiben die Komponenten von y beschrankt.(2) Jetzt sei S als bibo-stabil vorausgesetzt. Fur einen indirekten Beweis nehmen
wir an, daß∞∑
k=−∞
∣∣∣h[k]∣∣∣ nicht endlich ist. Dann folgt fur die spezielle Eingangsfolge
x mit x[k] := sign(h[−k]
), k ∈ ZZ, und n = 0
y[0] =∞∑
k=−∞x[−k]h[k] =
∞∑
k=−∞sign
(h[k]
)h[k] =
∞∑
k=−∞
∣∣∣h[k]∣∣∣ =∞ .
Also ist S nicht bibo-stabil, da die beschrankte Folge x eine Ausgangsfolge mitmindestens einem unbeschrankten Glied erzeugt. 2
Bei technischen Anwendungen von diskreten LTI-Systemen ist die Große
‖x‖2 :=√√√√
∞∑
k=−∞(x[k])2 , falls diese Reihe konvergiert,
Lese
probe
4.1 Diskrete LTI-Systeme 97
in der Regel proportional zur Energie, die in dem Signal x = (x[k])k∈ZZ enthaltenist. Man bezeichnet dann x als Signal endlicher Energie. (Dies ist eine Verallgemei-
nerung des Begriffs der euklidischen Lange ‖x‖2 =
√n∑
k=1x2k eines n-komponentigen
Vektors x ∈ IRn. Man bezeichnet deshalb ‖x‖2 auch als euklidische Norm des Si-
gnals x.) Man kann fragen, wann ein System S die Energie der Signale invariant
laßt, d.h. wann ‖x‖2 =∥∥∥S{x}
∥∥∥2gilt.
4.1.12 Definition
Ein diskretes LTI-System S bezeichnet man als Allpaß , falls fur jedes Signal x end-licher Energie mit y = S{x}
‖x‖2 =∥∥∥S{x}
∥∥∥2
⇐⇒
∞∑
k=−∞(x[k])2 =
∞∑
k=−∞(y[k])2
gilt.
4.1.13 Bemerkung
Man kann auch ein System, fur das
‖x‖2 = A∥∥∥S{x}
∥∥∥2
mit A > 0
gilt, als Allpaß bezeichnen. Dies ist aber eine unwesentliche Verallgemeinerung, da
man bei realen Anwendungen, wenn die”Energien“ ‖x‖2 und
∥∥∥S{x}∥∥∥2dimensions-
behaftete Großen sind, durch Anderung des Maßstabs stets A = 1 erreichen kann.2
Um Allpaß-Systeme zu charakterisieren, lassen wir uns vom endlich-dimensional-en Analogon leiten. Im IRn gilt fur Vektoren x und n-spaltige Matrizen A
‖x‖2 =√xTx , ‖Ax‖2 =
√xTATAx .
Aus ATA = E (Einheitsmatrix) folgt also ‖x‖2 = ‖Ax‖2 fur alle x ∈ IRn; man kannauch die Umkehrung zeigen. In Bemerkung 4.1.10 haben wir die Impulsantwort
h = S{δ} zur Definition der Toeplitz-MatrixH =(h[n− k]
)k,n∈ZZ
verwendet. Wegen
S{x} = Hx =
(∞∑
k=−∞h[n− k]x[k]
)
n∈ZZ
bleibt dann entsprechend zum Endlich-
dimensionalen die Energie konstant, falls HTH = E (unendliche Einheitsmatrix)gilt. (Man bezeichnet H als orthogonale Matrix, da die Spalten von H orthogonalzueinander sind.) Dies bedeutet
(HTH
)i,k
=∞∑
n=−∞h[n− i]h[n− k] = δ[i− k] .
Lese
probe

98 4. Diskrete LTI-Systeme und die z-Transformation
Setzt man n− i =: m, λ := k − i, so folgt
∞∑
m=−∞h[m]h
[m+ (i− k)
]=
∞∑
m=−∞h[m]h[m− λ] .
Fuhrt man nun die”gespiegelte“ Folge h−,
h−[n] := h[−n] , n ∈ ZZ ,
ein, so erhalt man
∞∑
m=−∞h[m]h[m− λ] =
∞∑
m=−∞h[m]h−[λ−m] , λ ∈ ZZ .
Insgesamt ergibt sich wegen δ[−λ] = δ[λ] eine neue Charakterisierung von Allpassen.
4.1.14 Satz
Ein diskretes LTI-System S ist genau dann ein Allpaß, wenn fur die Impulsantworth = S{δ}
h ∗ h− = δ ⇐⇒
∞∑
m=−∞h[m]h−[λ−m]
λ∈ZZ
= δ
gilt.
4.1.15 Beispiel
Es gelte
h[m] =
0 , m < 0 ,
−1
2, m = 0 ,
3 · 2−(m+1) , m = 1, 2, . . . ,
h−[m] =
0 , m > 0 ,
−1
2, m = 0 ,
3 · 2m−1 , m = −1,−2, . . . .
Dann folgt wegen h[m] = 0 fur m < 0
∞∑
m=−∞h[m]h−[λ−m] =
∞∑
m=−∞h[m]h[m− λ]
=
∞∑
m=0
h[m]h[m− λ] =∞∑
m=max(0,λ)
h[m]h[m− λ] .
(1) Fur λ > 0 folgt also
∞∑
m=−∞h[m]h−[λ−m] =
∞∑
m=λ
h[m]h[m− λ]
= h[λ]h[0] +
∞∑
m=λ+1
h[m]h[m− λ]
Lese
probe
4.2 Die z-Transformation 99
= 3 · 2−(λ+1)(− 12
)+
∞∑
m=λ+1
3 · 2−(m+1) · 3 · 2−(m−λ+1)
= −3 · 2−(λ+2) +∞∑
m=1
3 · 2−(m+λ+1) · 3 · 2−(m+1)
= 3 · 2−(λ+2)−1 +
∞∑
m=1
3 · 2−2m
= 3 · 2−(λ+2){−1 + 3
4· 1
1− 14
}
= 0 .
(2) Fur λ < 0 folgt entsprechend
∞∑
m=−∞h[m]h−[m− λ] =
∞∑
m=0
h[m]h[m− λ]
=
∞∑
m=−λ
h[m+ λ]h[m] .
Setzt man λ′ := −λ > 0, so folgt
∞∑
m=−∞h[m]h−[m− λ] =
∞∑
m=λ′
h[m− λ′]h[m] = 0 ,
wie bereits in (1) gezeigt wurde.
(3) Fur λ = 0 folgt
∞∑
m=−∞h[m]h−[m] =
∞∑
m=−∞
(h[m]
)2=
1
4+ 9
∞∑
m=1
2−2(m+1)
=1
4+
9
16· 43= 1 .
Also ist h die Impulsantwort eines Allpasses. 2
4.2 Die z-Transformation
Zur Untersuchung von strukturellen Eigenschaften diskreter LTI-Systeme wird diez-Transformation benutzt, der folgende Idee zu Grunde liegt: Eine Funktion f , diein einem Ring
Rαβ := {z ∈ CI | α < |z| < β}(α = 0 oder β =∞ zugelassen) der komplexen Ebene holomorph ist, laßt sich dortin eine Laurent-Reihe entwickeln, d.h. es gilt eine Reihendarstellung
f(z) =∞∑
n=−∞a[n] z−n , z ∈ Rαβ .
Dabei ist die Folge a := (a[n])n∈ZZ der Laurent-Koeffizienten durch die Funktion feindeutig bestimmt. Es ist ohne Belang, daß wir hier der ublichen Konvention folgen
Lese
probe

100 4. Diskrete LTI-Systeme und die z-Transformation
und nach negativen Potenzen von z summieren. Setzt man namlich α[n] := a[−n]und m := −n, so erhalt man eine Laurent-Reihe
f(z) =∞∑
n=−∞a[n] z−n =
∞∑
n=−∞α[−n] z−n =
∞∑
m=−∞α[m] zm
des Typs, wie sie in der Funktionentheorie ublicherweise behandelt wird. Man kannalso strukturelle Eigenschaften der Folge a bei entsprechenden Eigenschaften von fwiederfinden und umgekehrt. Der Ansatz mit negativen Potenzen von z hat seinenUrsprung darin, daß mit z := exp(jω), ω ∈ IR, die Laurent-Reihe in eine Fourier-Reihe
g(ω) := f(exp(jω)) =∞∑
n=−∞a[n] exp(−jnω)
ubergeht, die man als Approximation mit Hilfe der Mittelpunkt-Regel an das Fourier-Integral
(Ff)(ω) :=∫ ∞
−∞f(t) exp(−jωt) dt
ansehen kann. Darauf kommen wir an spaterer Stelle zuruck.Betrachtet man nun das Produkt h := fg von zwei Laurent-Reihen
f(z) =∞∑
n=−∞a[n] z−n , g(z) =
∞∑
m=−∞b[m] z−m ,
die beide in demselben Ring Rαβ konvergieren, so erhalt man die Laurent-Reihe vonh,
h(z) =∞∑
k=−∞c[k] z−k , z ∈ Rαβ ,
durch gliedweises Ausmultiplizieren und Umordnen. Dies ergibt
h(z) =
∞∑
n=−∞a[n] z−n
∞∑
m=−∞b[m] z−m
=
∞∑
n=−∞
∞∑
m=−∞a[n] b[m] z−(n+m) .
Setzt man k := n+m, so folgt
h(z) =∞∑
k=−∞
∞∑
m=−∞a[k −m] b[m]
z−k , z ∈ Rαβ ,
und man erhalt
c[k] =∞∑
m=−∞a[k −m] b[m] , k ∈ ZZ .
Durch die Substitution l := k −m folgt auch
c[k] =∞∑
l=−∞a[l] b[k − l] .
Lese
probe

4.2 Die z-Transformation 101
Nach Definition der Faltung gilt also
c = (c[k])k∈ZZ = a ∗ b = b ∗ a .
Die Folge der Laurent-Koeffizienten c = (c[k])k∈ZZ des Produkts h = fg ist alsogerade das Faltungsprodukt c = a ∗ b der Folgen der Laurent-Koeffizienten a und bvon f und g.
Der eindeutige Zusammenhang zwischen dem Produkt von zwei Laurent-Reihenund dem Faltungsprodukt ihrer Koeffizientenfolgen ist fundamental fur die Unter-suchung von diskreten LTI-Systemen, da man meist das punktweise Produkt zweierFunktionen leichter handhaben kann als das Faltungsprodukt von zwei Folgen. Wirhalten fest:
4.2.1 Satz
Die Funktionen f und g seien beide in dem Ring Rαβ = {z ∈ CI | α < |z| < β}holomorph. Dann ist auch das Produkt h mit h(z) = f(z)g(z) in Rαβ holomorph,und fur die Laurent-Reihen
f(z) =∞∑
n=−∞a[n] z−n , g(z) =
∞∑
m=−∞b[m] z−m , h(z) =
∞∑
k=−∞c[k] z−k , z ∈ Rαβ ,
gilt c = a ∗ b, d.h. komponentenweise
c[k] =∞∑
m=−∞a[m] b[k −m] bzw. c[k] =
∞∑
m=−∞a[k −m] b[m] , k ∈ ZZ .
4.2.2 Beispiel
Wir betrachten f(z) = 12
(exp(z) + exp( 1z )
), g(z) = z−2
2z−1 . Dann erhalt man mit Hilfe der exp-
Reihe
f(z) =1
2
1 +
∞∑
n=−∞
z−n
(|n|)!
, 0 < |z| <∞ ,
und mit Hilfe der geometrischen Reihe fur 12z−1 = 1
2z (1− 12z )
−1
g(z) =1
2− 3
2
∞∑
n=1
2−nz−n , |z| > 1
2.
Fur das Produkt h = fg folgt dann
h(z) =
∞∑
k=−∞c[k] z−k ,
1
2< |z| <∞ ,
wobei fur die Folge c = (c[k])k∈ZZ gilt
c = a ∗ b
Lese
probe
102 4. Diskrete LTI-Systeme und die z-Transformation
mit
a[n] =
1 , n = 0 ,1
2(|n|)! , n 6= 0 ,b[m] =
0 , m < 0 ,1
2, m = 0 ,
−3
22−m , m = 1, 2, . . . .
2
Man sieht an diesem Beispiel den Vorteil der z-Transformation, da man dasProdukt h(z) = f(z)g(z) in expliziter Form angeben kann, wahrend dies fur dasFaltungsprodukt c = a ∗ b der Folgen der Laurent-Koeffizienten nicht auf einfacheWeise moglich ist.
Nach einem Satz von Hadamard kennt man den Zusammenhang zwischen derAbnahmegeschwindigkeit der Koeffizienten der Laurent-Reihe und den Radien α undβ des Konvergenzrings Rαβ: Man zerlegt dazu die Laurent-Reihe in ihren linksseiti-
gen (aufsteigenden) und ihren rechtsseitigen (absteigenden) Teil gemaß f = f` + fr,wobei
f`(z) :=0∑
n=−∞a[n] z−n =
∞∑
n=0
a[−n] zn , fr(z) :=∞∑
n=1
a[n] z−n .
Mit Hilfe des Quotientenkriteriums fur Potenzreihen macht man sich leicht klar, daß
die Reihe fur f` fur alle z mit |z| < r2,1r2
:= lim supn→∞
n
√|a[−n]| und die Reihe fur
fr fur alle z mit |z| > r1, r1 := lim supn→∞
n
√|a[n]| konvergiert. Wenn umgekehrt eine
Folge a = (a[n])n∈ZZ gegeben ist, fur die die Großen
r2 :=1
lim supn→∞
n
√|a[−n]|
<∞ , r1 := lim supn→∞
n
√|a[n]| <∞
der Ungleichung r1 < r2 genugen, so erhalt man durch die Festsetzung
f(z) :=∞∑
n=−∞a[n] z−n
eine im Ring Rr1r2 holomorphe Funktion. In diesem Sinn entsprechen sich gewisseFolgen und Laurent-Reihen eindeutig.
Zu einer linksseitigen Folge a mit a[n] = 0 fur n > 0 gehort die Laurent-Reihe
f`(z) =∞∑
n=−∞a[n] z−n =
∞∑
n=0
a[−n] zn ,
also eine Taylor-Reihe mit dem Entwicklungspunkt z = 0. Folglich konvergiert diemit einer linksseitigen Folge gebildete Laurent-Reihe fur |z| < r2.
Analog gehort zu einer rechtsseitigen Folge a mit a[n] = 0 fur n < 0 die Laurent-Reihe
fr(z) =∞∑
n=0
a[n] z−n ,
also eine Taylor-Reihe mit dem Entwicklungspunkt z =∞. Folglich konvergiert diemit einer rechtsseitigen Folge gebildete Laurent-Reihe fur |z| > r1.
Lese
probe

4.2 Die z-Transformation 103
4.2.3 Satz
(1) Zu jeder Folge a = (a[n])n∈ZZ mit
r1 := lim supn→∞
n
√|a[n]| < 1
lim supn→−∞
n
√|a[n]|
=: r2
gibt es genau eine im Ring Rr1r2 := {z ∈ CI | r1 < |z| < r2} holomorphe Funktion fderart, daß die Folge a gerade die Folge der Laurent-Koeffizienten von f ist, d.h. esgilt
f(z) =∞∑
n=−∞a[n] z−n , r1 < |z| < r2 .
(2) Ist die Folge a linksseitig, d.h. mit a[n] = 0 fur n > 0, so konvergiert diezugehorige Laurent-Reihe fur |z| < r2.
(3) Ist die Folge a rechtsseitig, d.h. mit a[n] = 0 fur n < 0, so konvergiert diezugehorige Laurent-Reihe fur |z| > r1.
Dieser Satz erlaubt es, fur gewisse Folgen a = (a[n])n∈ZZ wahlweise zur entspre-chenden, durch die Laurent-Reihe definierten Funktion f uberzugehen und umge-kehrt. Man beachte, daß die Angabe des Konvergenzrings Rr1r2 zwingend ist, um dieZuordnung zwischen einer Folge und einer zur Laurent-Reihe gehorenden Funktionf eindeutig zu machen. Dies zeigt auch das folgende Beispiel.
4.2.4 Beispiel
Die Funktion f, f(z) = −3(z−2)(1−2z) , hat Pole bei z1 = 1
2 und z2 = 2. Folglich existieren Laurent-
Entwicklungen fur die Ringe R0 12, R 1
22, R2∞. Man erhalt diese durch Partialbruchentwicklung
f(z) =−3
(z − 2)(1− 2z)=
2
1− 2z+
1
z − 2
und anschließende Reihenentwicklung mit Hilfe der geometrischen Reihe. Es gilt
2
1− 2z=
21
1− 2z= 2
∞∑
n=0
2nzn , |z| < 1
2,
−1
z
1
1− 12z
= −1
z
∞∑
n=0
2−nz−n ,1
2< |z| ,
1
z − 2=
1
z
1
1− 2z
=1
z
∞∑
n=0
2nz−n , 2 < |z| ,
−1
2
1
1− z2
= −1
2
∞∑
n=0
2−nzn , |z| < 2 .
Durch geeignete Kombination dieser Entwicklungen erhalt man die Laurent-Entwicklungen von f
fur |z| < 12 ,
12 < |z| < 2, 2 < |z|.
Lese
probe

104 4. Diskrete LTI-Systeme und die z-Transformation
(a) |z| < 12 : Hier folgt
f(z) = 2
∞∑
n=0
2nzn − 1
2
∞∑
n=0
2−nzn =
∞∑
n=0
[2n+1 − 2−(n+1)
]zn =
0∑
n=−∞
[2−n+1 − 2n+1
]z−n .
Also ist die Folge a mit
a[n] =
{2−n+1 − 2n+1 , n ≤ 0
0 , n > 0
die Folge der Laurent-Koeffizienten von f in der Kreisscheibe K 12:= {z ∈ CI | |z| < 1
2} (vgl. Satz4.2.3 (2)).
(b) 12 < |z| < 2: Hier folgt
f(z) = −1
z
∞∑
n=0
2−nz−n − 1
2
∞∑
n=0
2−nzn = −
∞∑
n=0
2−nz−(n+1) +∞∑
n=0
2−(n+1)zn
= −
∞∑
n=1
2−(n−1)z−n +0∑
n=−∞2n−1z−n
Also ist die Folge a mit
a[n] =
{−2n−1 , n ≤ 0 ,−2−(n−1) , n ≥ 1 ,
die Folge der Laurent-Koeffizienten von f im Ring (vgl. Satz 4.2.3 (1))
R 122 =
{z ∈ CI
∣∣∣∣1
2< |z| < 2
}.
(c) 2 < |z|: Hier folgt
f(z) = −1
z
∞∑
n=0
2−nz−n +1
z
∞∑
n=0
2nz−n
=∞∑
n=0
[−2−n + 2n
]z−(n+1) =
∞∑
n=1
[2n−1 − 2−(n−1)
]z−n .
Also ist die Folge a mit
a[n] =
{0 , n ≤ 0 ,
2n−1 − 2−n+1 , n ≥ 1 ,
die Folge der Laurent-Koeffizienten von f fur |z| > 2 (vgl. Satz 4.2.3 (3)). 2
Fur r1 = r2 =: r entartet der Ring Rr1r2 zur Kreislinie Rr := {z ∈ CI | |z| = r},und die zugehorige Reihendarstellung
f(z) =∞∑
n=−∞a[n] z−n , |z| = r ,
stellt keine holomorphe Funktion mehr dar, wohl aber u.U. eine auf der KreislinieRr stetige Funktion. Dies ist der Fall, wenn die Folge a absolut summierbar ist,
Lese
probe
4.2 Die z-Transformation 105
d.h. wenn∞∑
n=−∞|a[n]| < ∞ gilt. In diesem Fall ist nicht die Funktionentheorie,
sondern die Theorie der Fourier-Reihen das adaquate Hilfsmittel. Setzt man namlichz := r exp(−jt), so erhalt man
f(r exp(−jt)) =∞∑
n=−∞a[n] r−n exp(jnt) ,
also eine Fourier-Reihe mit den Koeffizienten a[n] r−n, n ∈ ZZ. Darauf kommen wiran spaterer Stelle zuruck.
4.2.5 Definition
Fur eine Folge a = (a[n])n∈ZZ bezeichnet man die Reihe Z{a},
Z{a}(z) :=∞∑
n=−∞a[n] z−n ,
als die z-Transformierte von a. Die z-Transformierte heißt linksseitig , falls a[n] = 0fur n > 0, und rechtsseitig, falls a[n] = 0 fur n < 0 gilt.
Es ist ublich, Folgen mit kleinen lateinischen Buchstaben und die zugehori-gen z-Transformierten mit dem entsprechenden Großbuchstben zu bezeichnen, alsoX(z) = Z{x}(z), H(z) = Z{h}(z), . . . .
Die Bedeutung der z-Transformierten liegt darin, daß man in vielen relevantenFallen die Reihe Z{a}
”geschlossen“ aufsummieren kann, d.h. man kennt einen ana-
lytischen Ausdruck fur die Summe. In anderen Fallen ist es leichter, Z{a} als aselbst zu erhalten. Ein weiterer Vorteil ist, wie wir schon im Satz 4.2.1 festgestellthaben, der Faltungssatz
Z{a ∗ b} = Z{a}Z{b} .Wir halten die wichtigsten Eigenschaften der z-Transformation fest.
4.2.6 Satz
Fur eine Folge a = (a[n])n∈ZZ und die zugehorige z-Transformierte Z{a},
Z{a}(z) =∞∑
n=−∞a[n] z−n ,
gelten folgende Konvergenzsatze:
(1) Setzt man r1 := lim supn→∞
n
√|a[n]|, 1
r2:= lim sup
n→∞n
√|a[−n]| und gilt r1 < r2, so
konvergiert Z{a} im Ring Rr1r2 := {z ∈ CI | r1 < |z| < r2} und stellt dort eineholomorphe Funktion dar.
(2) Fur eine linksseitige z-Transformierte, also mit a[n] = 0 fur n > 0, konvergiertZ{a} fur |z| < r2, wahrend sie fur eine rechtsseitige z-Transformierte, also mita[n] = 0 fur n < 0, fur |z| > r1 konvergiert.
Lese
probe

106 4. Diskrete LTI-Systeme und die z-Transformation
(3) Gilt r1 < 1 < r2, so umfaßt der Konvergenzbereich den Einheitskreis. Diesist fur eine linksseitige (rechtsseitige) z-Transformierte dann der Fall, wenn r1 < 1(r2 > 1) gilt.
(4) Gilt∞∑
n=−∞|a[n]| <∞, so liegt der Einheitskreis im Konvergenzbereich.
(5) Wenn die z-Transformierten Z{a}, Z{b} die Konvergenzbereiche
Ra := {z ∈ CI | τ1 < |z| < τ2}, Rb := {z ∈ CI | ρ1 < |z| < ρ2}
haben und dabei r1 := max(τ1, ρ1) < min(τ2, ρ2) =: r2 gilt, so hat das Faltungsprodukta∗ b die z-Transformierte Z{a∗ b} = Z{a}Z{b} mit dem Konvergenzbereich Ra∗b ={z ∈ CI | r1 < |z| < r2}.
6
-......................................
.......................................................................................................................................................................................... ......
......
......
......
...............................................................................
...................
........................
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.................................................................................................................................................
. .. .
. . .. . .
. . . .. . .
. . . .. . . .
. . . . .. . . .
. . . . .. . . .
. . . . .. . . .. . . .. . .
. . . .. . .. . .. .. .
. .. .
. . .. . .
. . . .. . .
. . . .. . . .
. . . . .. . . .
. . . . .. . . .
. . . . .. . . .
. . . .. . .
. . . .. . .
. . .. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.r1 r2
(1)
6
-
. .. . .
. . . .. . . . .
. . . . . .. . . . .
. . . . . .. . . . .. . . .. . .. .
......
......
............................................
..........................
.................................................................................................................................................................................................................................................................................................................................
r2
(2) a)
6
-.......................................................................
.........................
............................................................................................................................................................................................................................................................................................................................................................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .
. . .. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
. . .. . .
r1
(2) b)
6
-
. .. .
. . .. . .
. . . .. . .
. . . .. . . .
. . . . .. . . .
. . . . .. . . .
. . . . .. . . .. . . .. . .
. . . .. . .. . .. .. .
. .. .
. . .. . .
. . . .. . .
. . . .. . . .
. . . . .. . . .
. . . . .. . . .
. . . . .. . . .
. . . .. . .
. . . .. . .
. . .. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
... ... .. .. . .. .. . .. . .. . .. . .. . .. . .. . .. . .. . .. .. . .. .. ... ...
..
. ..
. .. .. . .. .. . .. . .. . .. . .. . .. . .. . .. . .. . .. .. . .. .. ..
. ..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
......
...............................
........................................................................................................................................................................................... ......
......
......................................
.............................
....................................................................................................................................................................................................................................................................................... ......
......
......
...........................................................
.....................
............................................
.....................................................................................................................................................................................................................................................................................................................................................
................................................................................................... ......
......
......
......
...............................................................................
...................
........................
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.................................................................................................................................................
τ1ρ1 ρ2 τ2
(5)
hier: r1 = ρ1, r2 = ρ2
Abb. 4.3. Konvergenzbereiche bei der z-Transformation
Fur eine Folge a, fur die der Einheitskreis zum Konvergenzbereich gehort, kannman speziell z = exp(−jω), ω ∈ IR, setzen und erhalt dann
Z{a}(z) = Z{a}(exp(−jω)
)=
∞∑
n=−∞a[n]
(exp(−jω)
)−n
Lese
probe
4.2 Die z-Transformation 107
=∞∑
n=−∞a[n] exp(jnω)
=: F−1p (a)(ω) .
Man erhalt so die sogenannte periodische Fourier-Transformierte der Folge a, d.h.die mit den Folgengliedern a[n], n ∈ ZZ, gebildete Fourier-Reihe. Wahrend diez-Transformierte als Laurent-Reihe fur in einem Ring holomorphe Funktionen gebil-det werden kann, ist die Fourier-Transformation fur allgemeinere Funktionenklassendurchfuhrbar. Darauf kommen wir an spaterer Stelle zuruck.
Mit Hilfe der z-Transformation kann man auch das Faltungsprodukt invertierenoder allgemeiner Faltungsgleichungen losen. Eine Folge b heißt Faltungsinverse zurFolge a, falls
b ∗ a = δ (δ: δ-Impuls)
gilt. Man schreibt b = a−1. Durch z-Transformation folgt
Z{b}(z)Z{a}(z) = Z{δ}(z) = 1
oder
Z{b}(z) = 1
Z{a}(z) .
Man erhalt also die Faltungsinverse von a dadurch, daß man die Funktion 1Z{a}(z) in
eine Laurent-Reihe entwickelt, wobei man allerdings Sorgfalt hinsichtlich der Kon-vergenzbereiche walten lassen muß.
4.2.7 Beispiel
Nach Beispiel 4.2.4 gehort zur Folge a,
a[n] =
{0 , n ≤ 0 ,
2n−1 − 2−n+1 , n ≥ 1 ,
die z-Transformierte Z{a},
Z{a}(z) = −3(z − 2)(1− 2z)
, 2 < |z| .
Also folgt
Z{a−1}(z) = − (z − 2)(1− 2z)
3= 2
3z2 − 5
3z +23 , |z| <∞ ,
also
a−1[n] =
0 , n ≤ −3 ,23 , n = −2 ,− 53 , n = −1 ,23 , n = 0 ,
0 , n ≥ 1 .
2
Lese
probe

108 4. Diskrete LTI-Systeme und die z-Transformation
Bisher hatten wir die z-Transformation betrachtet, die einer Folge a = (a[n])z∈ZZ
eine als Laurent-Reihe definierte Funktion Z{a},
Z{a}(z) =∞∑
n=−∞a[n] z−n , z ∈ Rαβ ,
zuordnet. Da sich a und Z{a} eineindeutig entsprechen, hat es Sinn, das Inversi-
onsproblem zu betrachten, d.h. die Zuordnung Z−1{f}, die einer in einem Ring Rαβ
holomorphen Funktion f die Folge a ihrer Laurent-Koeffizienten zuordnet gemaß
Z−1{f} = (a[n])n∈ZZ ,
wobei
f(z) =∞∑
n=−∞a[n] z−n , z ∈ Rαβ .
Das Inversionsproblem fur die z-Transformation entspricht also der Entwicklungeiner in einem Ring holomorphen Funktion in eine Laurent-Reihe. Allerdings sollteman dabei beachten, daß in der Funktionentheorie ublicherweise nach Potenzen zn
statt wie hier nach z−n summiert wird. Die Laurent-Koeffizienten lassen sich alsKurvenintegrale bestimmen. Dazu betrachtet man zunachst einen Kreis Γ% vomRadius % > 0,
Γ% := {z ∈ CI | z = % exp(jt), 0 ≤ t ≤ 2π} .Dann sind die Potenzen zn, n ∈ ZZ, wechselseitig orthogonal bzgl. Integration langsΓ%, denn es gilt
1
2πj
∫
Γ%z−nzm−1 dz =
1
2π%−n+m
∫ 2π
0exp(j(−n+m)t) dt =
{1 , falls n = m ,0 , falls n 6= m .
Da die Laurent-Entwicklung fur eine in dem Ring Rαβ holomorphe Funktion f ein-deutig ist, folgt fur % mit α < % < β
1
2πj
∫
Γ%f(z)zm−1 dz =
∞∑
n=−∞a[n]
1
2πj
∫
Γ%z−nzm−1 dz = a[m] , m ∈ ZZ .
Bekanntlich darf man den Integrationsweg, wie in der Funktionentheorie beim Be-weis des Cauchyschen Integralsatzes gezeigt wird, im Ring Rαβ ”
verbiegen“, ohnedaß sich der Wert des Integrals andert. Dies ergibt dann folgende Inversionsformel.
4.2.8 Satz
Die Funktion f sei in dem Ring Rαβ,
Rαβ := {v ∈ CI | α < |v| < β} ,
holomorph, und Γ sei ein in Rαβ verlaufender, positiv orientierter, doppelpunkt-freier, den Nullpunkt ein Mal umschlingender und stuckweise glatter Weg. Dann
Lese
probe

4.2 Die z-Transformation 109
gilt
Z−1{f} = (a[m])m∈ZZ ,
a[m] =1
2πj
∫
Γf(v) vm−1 dv , m ∈ ZZ .
Kennt man den Konvergenzbereich Rαβ genauer, so kann man den Weg Γ spe-zieller wahlen. Falls der Einheitskreis in Rαβ liegt, wird man diesen als Γ wahlen.Handelt es sich dagegen um eine rechtsseitige Entwicklung, so wird man einen
”sehr
großen“ Kreis wahlen, der alle Singularitaten im Innern enthalt. Der wichtigste Fallist glucklicherweise der, daß alle Singularitaten im Innern des Einheitskreises liegenund es sich um eine rechtsseitige z-Transformierte handelt, so daß Γ als Einheitskreisgewahlt werden kann.
Liegen die Singularitaten zi, i = 1, . . . , s, von f alle isoliert im Innengebiet vonΓ, so kann der Residuensatz angewendet werden. Dieser liefert dann
a[m] =s∑
i=1
Resz=zi
(f(z)zm−1
), m ∈ ZZ .
Allerdings darf man sich von dieser eleganten Darstellung fur die Praxis nicht zu vielerhoffen. Sie ist dann gut anwendbar, wenn f rational ist und die Pole alle bekanntsind. Aber fur diesen Fall, der in der Praxis der wichtigste ist, da man auf ihn beiLinearen Differenzengleichungssystemen stoßt (s. unten), kann man auch mit Hilfeder Partialbruchzerlegung die Laurent-Koeffizienten bestimmen.
4.2.9 Aufgabe
Man bestimme mit Hilfe des Residuensatzes die inverse z-Transformierte Z−1{f} fur die Funktionf, f(z) = 1
(z−2)(3z−1) , fur die drei Konvergenzbereiche |z| < 13 ,
13 < |z| < 2, 2 < |z|. 2
Fur die z-Transformation haben wir den Faltungssatz
Z{a ∗ b} = Z{a} · Z{b}
hergeleitet. Dabei ist von besonderer Bedeutung, daß links das komplizierte Fal-tungsprodukt ∗ von zwei Folgen a und b und rechts das (gewohnliche) punktweiseProdukt · der Laurent-Reihen Z{a} und Z{b} auftritt. Wir wollen nun eine ent-sprechende Formel fur das gewohnliche (oder Hadamard-) Produkt a · b,
a · b :=(a[n] b[n]
)n∈ZZ
,
herleiten. Mit f := Z{a}, g := Z{b}, d.h. a = Z−1{f}, b = Z−1{g}, folgt durchAnwendung von Satz 4.2.8
Z{a · b}(z) =∞∑
n=−∞(a · b)[n] z−n =
∞∑
n=−∞a[n] b[n] z−n =
∞∑
n=−∞Z−1{f}[n] b[n] z−n
=∞∑
n=−∞
(1
2πj
∫
Γf(v) vn
dv
v
)b[n] z−n .
Lese
probe

110 4. Diskrete LTI-Systeme und die z-Transformation
Falls Γ im Innern des gemeinsamen Konvergenzringes Rαβ von Z{a} und Z{b}verlauft, durfen Summation und Integration vertauscht werden. Dann folgt
Z{a · b}(z) = 1
2πj
∫
Γf(v)
∞∑
n=−∞vn b[n] z−n
dv
v
=1
2πj
∫
Γf(v)
∞∑
n=−∞b[n]
(z
v
)−n dv
v=
1
2πj
∫
Γf(v) g
(z
v
)dv
v
=1
2πj
∫
ΓZ{a}(v)Z{b}
(z
v
)dv
v.
Die eben hergeleitete Formel
Z{a · b} = 1
2πj
∫
ΓZ{a}(v)Z{b}
( ·v
)dv
v
legt es nahe, als das (komplexe) Faltungsprodukt f ∗k gder beiden in dem Ring Rαβ
holomorphen Funktionen die in Rαβ holomorphe Funktion
(f ∗k g)(z) :=1
2πj
∫
Γf(v) g
(z
v
)dv
v, z ∈ Rαβ ,
zu definieren. Man macht sich leicht klar, daß die komplexe Faltung ∗k assoziativund kommutativ ist:
f ∗k (g ∗k h) = (f ∗k g) ∗k h , f ∗k g = g ∗k f .Die obige Formel nimmt dann die pragnante Form
Z{a · b} = Z{a} ∗k Z{b}an.
Mit den obigen Bezeichnungen folgt dann weiterhin
Z−1{f · g} = Z−1{Z{a} · Z{b}
}= Z−1
{Z{a ∗ b}
}= a ∗ b = Z−1{f} ∗ Z−1{g}
sowie
Z−1{f ∗k g} = Z−1{Z{a} ∗k Z{b}
}= Z−1
{Z{a · b}
}= a · b = Z−1{f} · Z−1{g} .
Wir halten fest:
4.2.10 Satz
Fur die z-Transformation und die inverse z-Transformation von zwei Folgen a, bund von zwei in einem gemeinsamen Konvergenzring Rαβ holomorphen Funktionenf, g gelten die folgende Faltungssatze:
(1) Z{a ∗ b} = Z{a} · Z{b},
(2) Z{a · b} = Z{a} ∗k Z{b},
(3) Z−1{f ∗k g} = Z−1{f} · Z−1{g},
(4) Z−1{f · g} = Z−1{f} ∗ Z−1{g}.
Lese
probe
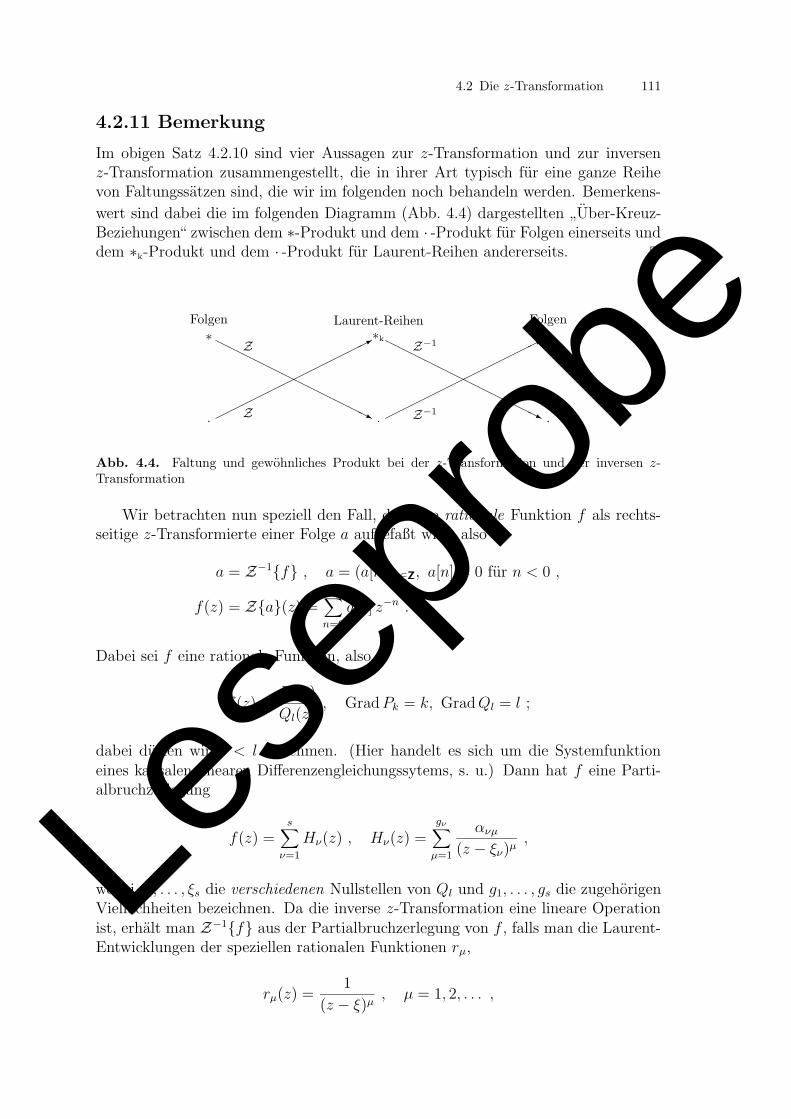
4.2 Die z-Transformation 111
4.2.11 Bemerkung
Im obigen Satz 4.2.10 sind vier Aussagen zur z-Transformation und zur inversenz-Transformation zusammengestellt, die in ihrer Art typisch fur eine ganze Reihevon Faltungssatzen sind, die wir im folgenden noch behandeln werden. Bemerkens-
wert sind dabei die im folgenden Diagramm (Abb. 4.4) dargestellten”Uber-Kreuz-
Beziehungen“ zwischen dem ∗-Produkt und dem · -Produkt fur Folgen einerseits unddem ∗k-Produkt und dem · -Produkt fur Laurent-Reihen andererseits. 2
Folgen
· ©©©©©©©©©©©©*
Z
∗HHHHHHHHHHHHj
Z
Laurent-Reihen
· ©©©
©©©©
©©©©©*
Z−1
∗kHHHHHHHHHHHHj
Z−1Folgen
·
∗
Abb. 4.4. Faltung und gewohnliches Produkt bei der z-Transformation und der inversen z-Transformation
Wir betrachten nun speziell den Fall, daß eine rationale Funktion f als rechts-seitige z-Transformierte einer Folge a aufgefaßt wird, also
a = Z−1{f} , a = (a[n])n∈ZZ, a[n] = 0 fur n < 0 ,
f(z) = Z{a}(z) =∞∑
n=0
a[n] z−n .
Dabei sei f eine rationale Funktion, also
f(z) =Pk(z)
Ql(z), GradPk = k, GradQl = l ;
dabei durfen wir k < l annehmen. (Hier handelt es sich um die Systemfunktioneines kausalen linearen Differenzengleichungssytems, s. u.) Dann hat f eine Parti-albruchzerlegung
f(z) =s∑
ν=1
Hν(z) , Hν(z) =gν∑
µ=1
ανµ
(z − ξν)µ,
wobei ξ1, . . . , ξs die verschiedenen Nullstellen von Ql und g1, . . . , gs die zugehorigenVielfachheiten bezeichnen. Da die inverse z-Transformation eine lineare Operationist, erhalt man Z−1{f} aus der Partialbruchzerlegung von f , falls man die Laurent-Entwicklungen der speziellen rationalen Funktionen rµ,
rµ(z) =1
(z − ξ)µ , µ = 1, 2, . . . ,
Lese
probe

112 4. Diskrete LTI-Systeme und die z-Transformation
kennt. Diese kann man sich aber mit Hilfe der geometrischen Reihe leicht beschaffen.Es gilt
1
z − ξ =1
z
1
1− ξz
=1
z
∞∑
n=0
ξnz−n =∞∑
n=1
ξn−1z−n , |ξ| < |z| .
Also folgt
Z−1{r1} = (a1[n])n∈ZZ , a1[n] =
{ξn−1 , n = 1, 2, 3, . . . ,0 , n = 0,−1,−2, . . . .
Fur |z| > |ξ| ist gliedweises Differenzieren der obigen Reihe erlaubt, und man erhalt
(1
z − ξ
)′=
−1(z − ξ)2 =
∞∑
n=1
ξn−1z−n
′
= −∞∑
n=1
ξn−1 n z−(n+1) ,
also1
(z − ξ)2 =∞∑
n=2
ξn−2(n− 1)z−n
und somit
Z−1{r2} = (a2[n])n∈ZZ , a2[n] =
{(n− 1)ξn−2 , n = 2, 3, . . . ,
0 , n = 1, 0,−1, . . . .
Es ist evident, wie man durch sukzessives Differenzieren Z−1{rµ}, µ = 1, 2, . . . ,erhalten kann. Wir halten das Resultat fest.
4.2.12 Satz
Fur die rationale Funktion rµ, rµ(z) =1
(z−ξ)µ, µ = 1, 2, . . . , gilt fur |z| > |ξ|
Z−1{rµ} = (aµ[n])n∈ZZ ,
aµ[n] =
(n−1)···(n−(µ−1))ξn−µ(µ−1)! , n = µ, µ+ 1, . . . ,
0 , n = µ− 1, µ− 2, . . . .
Damit kann man bei gegebener Partialbruchzerlegung von f die inverse z-Trans-formierte Z−1{f}
”zusammenbauen“.
4.2.13 Beispiel
Fur f ,
f(z) =8z2 + z − 5
(z + 2)(2z − 1)2,
Lese
probe
4.2 Die z-Transformation 113
erhalt man durch den Ansatz
f(z) =A
z + 2+
B
2z − 1+
C
(2z − 1)2
=A(2z − 1)2 +B(z + 2)(2z − 1) + C(z + 2)
(z + 2)(2z − 1)2
=(4A+ 2B)z2 + (−4A+ 3B + C)z + (A− 2B + 2C)
(z + 2)(2z − 1)2
durch Koeffizientenvergleich der Zahlerpolynome das lineare Gleichungssystem
4A+ 2B = 8
− 4A+ 3B + C = 1
A− 2B + 2C = − 5
mit der Losung A = 1, B = 2, C = −1, also
f(z) = 1z+2 +
22z−1 − 1
(2z−1)2
= 1z+2 +
1z− 1
2
− 14
1(z− 1
2)2,
ξ1 = −2 , ξ2 =12 .
Nach Satz 4.2.12 gilt
1
z + 2=
∞∑
n=1
(−1)n−12n−1z−n , |z| > 2 ,
1
z − 12
=
∞∑
n=1
2−(n−1)z−n , |z| > 1
2,
1
(z − 12 )2=
∞∑
n=2
(n− 1)2−(n−2)z−n , |z| > 1
2.
Man erhalt somit
f(z) = 2z−1 +∞∑
n=2
{(−1)n−12n−1 + 2−(n−1) − 1
4(n− 1)2−(n−2)
}z−n
= 2z−1 +∞∑
n=2
{(−1)n−12n−1 + 2−n(−n+ 3)
}z−n , |z| > 2 ,
also
Z−1{f} = (a[n])n∈ZZ , a[n] =
0 , n = 0,−1,−2, . . . ,3 , n = 1 ,
(−1)n−12n−1 + 2−(n−2)(−n+ 2) , n = 2, 3, . . . .
2
Bei spateren Anwendungen spielen gewisse Operationen mit Folgen und derenz-Transformation eine wichtige Rolle. Dies ist zunachst das
”Modulieren“ einer Folge
h = (h[n])n∈ZZ durch Ubergang zur Folge h∼, wobei
h∼[n] := (−1)nh[n] , n ∈ ZZ ,
Lese
probe

114 4. Diskrete LTI-Systeme und die z-Transformation
gesetzt wird. Dann gilt
Z{h∼}(z) =∞∑
n=−∞h∼[n] z−n =
∞∑
n=−∞(−1)nh[n] z−n
=∞∑
n=−∞h[n](−z)−n = Z{h}(−z) .
Fur die Faltung von h mit h∼ folgt dann
Z{h ∗ h∼}(z) = Z{h}(z) · Z{h}(−z) .Also ist die z-Transformierte von h ∗ h∼ eine gerade Funktion. Somit verschwindendie Koeffizienten mit ungeraden Indizes. Also gilt
Z{h ∗ h∼}(z) =∞∑
n=−∞a[2n] z−2n =
∞∑
n=−∞a[2n](z2)−n .
4.2.14 Satz
Es bezeichne h∼ =((−1)nh[n]
)n∈ZZ
die aus h durch”Modulation“ entstehende Folge.
Dann gilt
(1) Z{h∼}(z) = Z{h}(−z).
(2) Z{h ∗ h∼} = Z{h}(z)Z{h}(−z) ,Z−1{h ∗ h∼}[2n+ 1] = 0 , n ∈ ZZ .
Bei der Definition von Allpassen hatten wir die zu einer Folge x = (x[n])n∈ZZ
gespiegelte Folge x− = (x[−n])n∈ZZ eingefuhrt. Hier gilt
Z{x−}(z) =∞∑
n=−∞x[−n] z−n =
∞∑
n=−∞x[n] zn
=∞∑
n=−∞x[n]
(1
z
)−n
= Z{x}(1
z
).
4.2.15 Satz
Es bezeichne x− = (x[−n])n∈ZZ die zu x = (x[n])n∈ZZ gespiegelte Folge. Dann gilt
Z{x−}(z) = Z{x}(1
z
).
Fur die Impulsantwort h eines Allpasses gilt h ∗ h− = δ, also
Z{h}(z)Z{h−}(z) = Z{δ}(z) = 1 ,
und folglich
Z{h}(z) = 1
Z{h−}(z) =1
Z{h}(1z
) .
Lese
probe
4.2 Die z-Transformation 115
4.2.16 Satz
Fur die Impulsantwort h eines Allpasses gilt
Z{h}(z) = 1
Z{h}(1z
) .
Fur eine Folge h = (h[n])n∈ZZ mit h[2n+1] = 0, n ∈ ZZ, kann man alle Glieder mitungeraden Indizes ohne Informationsverlust unterdrucken. Dies ist das sogenannte
Down-sampling (Dezimierung), also der Ubergang von h = (h[n])n∈ZZ zu der Folgeh↓2 mit
h↓2[n] := h[2n] , n ∈ ZZ .
(Bei einer Folge, fur die gewisse oder sogar alle Glieder h[2n+1] 6= 0 sind, fuhrt dasDown-sampling zu einem Informationsverlust.) Durch Einsetzen ist leicht folgenderSatz zu verifizieren.
4.2.17 Satz
Es gilt
Z{h↓2}(z) =1
2
(Z{h}(
√z) + Z{h}(−
√z)).
Die Umkehroperation zum Down-sampling ist das Up-sampling, also der Uber-gang von der Folge h = (h[n])n∈ZZ zur Folge h↑2 mit
h↑2[n] =
{h[n
2] , falls n gerade ,
0 , falls n ungerade .
Es ist wiederum leicht, folgenden Satz zu verifizieren.
4.2.18 Satz
Es gilt
Z{h↑2}(z) = Z{h}(z2) .
4.2.19 Aufgabe
Sei T der im Abschnitt 4.1 eingefuhrte Shift-Operator. Man zeige: Fur eine beliebige Folge h =(h[n])n∈ZZ gilt
[Th ∗ h∼]↓2 = 0 (Nullfolge) .
2
Lese
probe
116 4. Diskrete LTI-Systeme und die z-Transformation
4.3 Untersuchung diskreter LTI-Systeme mit Hil-
fe der z-Transformierten
Ein diskretes LTI-System S wird, wie wir im Abschnitt 4.1 gesehen haben, durch dieImpulsantwort h := S{δ} charakterisiert. Mit Hilfe der Faltung laßt sich der zumInput x = (x[n])n∈ZZ gehorende Output y := S{x} als y = h∗x beschreiben. Mit Hilfeder z-Transformation folgt dann Z{y} = Z{h}Z{x}, d.h. die Faltung h ∗ x gehtin die gewohnliche Multiplikation der z-Transformierten Z{h} und Z{x} uber. DasSystem S wird durch die Impulsantwort h = S{δ} und diese wiederum durch ihrez-Transformierte Z{h} charakterisiert. Also konnen wir typische Eigenschaften vonS — Stabilitat, Kausalitat — bei Z{h} wiederfinden. Dies legt folgende Definitionnahe.
4.3.1 Definition
Fur ein diskretes LTI-System S mit der Impulsantwort h = S{δ} bezeichnet mandie z-Transformierte Z{h},
Z{h}(z) :=∞∑
n=−∞h[n] z−n , z ∈ Rr1r2 ,
als Systemfunktion von S. (Man beachte, daß die Angabe des KonvergenzringsRr1r2 wesentlich ist, insbesondere dann, wenn die Summation der Laurent-Reihein geschlossener Form moglich ist und man nur die sich dabei ergebende Funktionbetrachtet; vgl. Beispiel 4.2.4).
4.3.2 Bemerkung
Fur die Beschreibung und die graphische Darstellung eines diskreten LTI-Systemsstehen uns nun mehrere Moglichkeiten wahlweise zur Verfugung:
•”Modulare“ Darstellung, d.h. wir visualisieren ein komplexes System S mitHilfe von einfacheren Teilsystemen Si, i = 1, . . . , p.
• Darstellung im Zeitbereich mit Hilfe der Impulsantwort h gemaß
y = S{x} = h ∗ x .
• Darstellung mit Hilfe der z-Transformation gemaß
Z{y}(z) = Z{h}(z)Z{x}(z) .
Diese drei Darstellungsarten sind gleichwertig. Wir konnen uns also wahlweise aufeine davon zuruckziehen, je nachdem welche Form mehr Einsicht in die Eigenschaftendes Systems liefert (vgl. auch Abb. 4.8 – 4.10). 2
Aus den Resultaten des vorigen Abschnitts erhalt man unmittelbar die folgendenAussagen. Man beachte dabei, daß Kausalitat des Systems bedingt, daß die z-Transformierte rechtsseitig ist.
Lese
probe
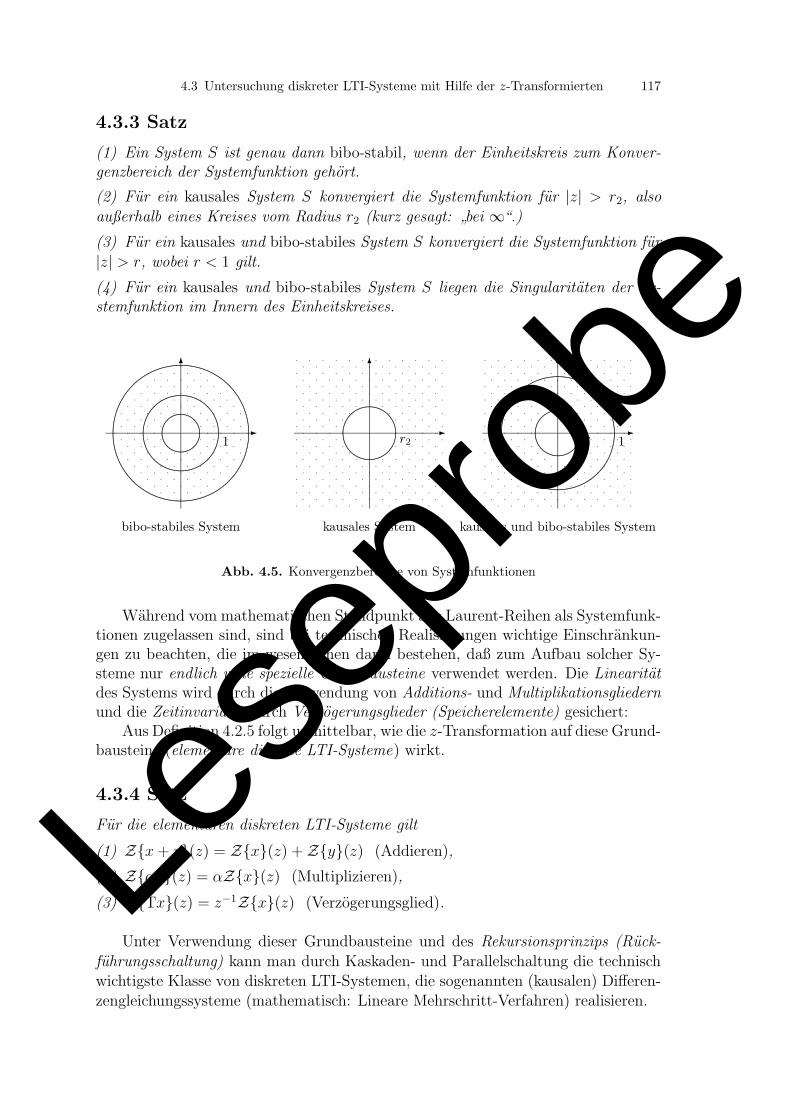
4.3 Untersuchung diskreter LTI-Systeme mit Hilfe der z-Transformierten 117
4.3.3 Satz
(1) Ein System S ist genau dann bibo-stabil, wenn der Einheitskreis zum Konver-genzbereich der Systemfunktion gehort.
(2) Fur ein kausales System S konvergiert die Systemfunktion fur |z| > r2, alsoaußerhalb eines Kreises vom Radius r2 (kurz gesagt:
”bei ∞“.)
(3) Fur ein kausales und bibo-stabiles System S konvergiert die Systemfunktion fur|z| > r, wobei r < 1 gilt.
(4) Fur ein kausales und bibo-stabiles System S liegen die Singularitaten der Sy-stemfunktion im Innern des Einheitskreises.
6
-.....................................
........................................................................................................................................................................................... ......
......
....................................................
..........................
..................................................................................................................................................................................................................................................................................................................................................................... ......
......
......
......
......
.........................................................................
...................
........................
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.................................................................................................................................................
..
. .. .
. . .. . .
. . . .. . .
. . . .. . . .
. . . .. . .
. . . .. . .
. . .. .
. ..
.
..
. .. .
. . .. . .
. . . .. . .
. . . .. . . .
. . . .. . .
. . . .. . .
. . .. .
. ..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 1
bibo-stabiles System
6
-...........................................
..............................................................................................................................................................................................................................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .
r2
kausales System
6
-............................................
....................................................................................................................................................................................
............................................. ......
......
......
......
..................................................................
.....................
................................
...........................................................................................................................................................................................................................................................................................................................................................................................................................
.....................................................................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .. . . .
. . . .
r 1
kausales und bibo-stabiles System
Abb. 4.5. Konvergenzbereiche von Systemfunktionen
Wahrend vom mathematischen Standpunkt alle Laurent-Reihen als Systemfunk-tionen zugelassen sind, sind bei technischen Realisierungen wichtige Einschrankun-gen zu beachten, die im wesentlichen darin bestehen, daß zum Aufbau solcher Sy-steme nur endlich viele spezielle Grundbausteine verwendet werden. Die Linearitatdes Systems wird durch die Verwendung von Additions- und Multiplikationsgliedernund die Zeitinvarianz durch Verzogerungsglieder (Speicherelemente) gesichert:
Aus Definition 4.2.5 folgt unmittelbar, wie die z-Transformation auf diese Grund-bausteine (elementare diskrete LTI-Systeme) wirkt.
4.3.4 Satz
Fur die elementaren diskreten LTI-Systeme gilt
(1) Z{x+ y}(z) = Z{x}(z) + Z{y}(z) (Addieren),
(2) Z{αx}(z) = αZ{x}(z) (Multiplizieren),
(3) Z{Tx}(z) = z−1Z{x}(z) (Verzogerungsglied).
Unter Verwendung dieser Grundbausteine und des Rekursionsprinzips (Ruck-fuhrungsschaltung) kann man durch Kaskaden- und Parallelschaltung die technischwichtigste Klasse von diskreten LTI-Systemen, die sogenannten (kausalen) Differen-zengleichungssysteme (mathematisch: Lineare Mehrschritt-Verfahren) realisieren.
Lese
probe
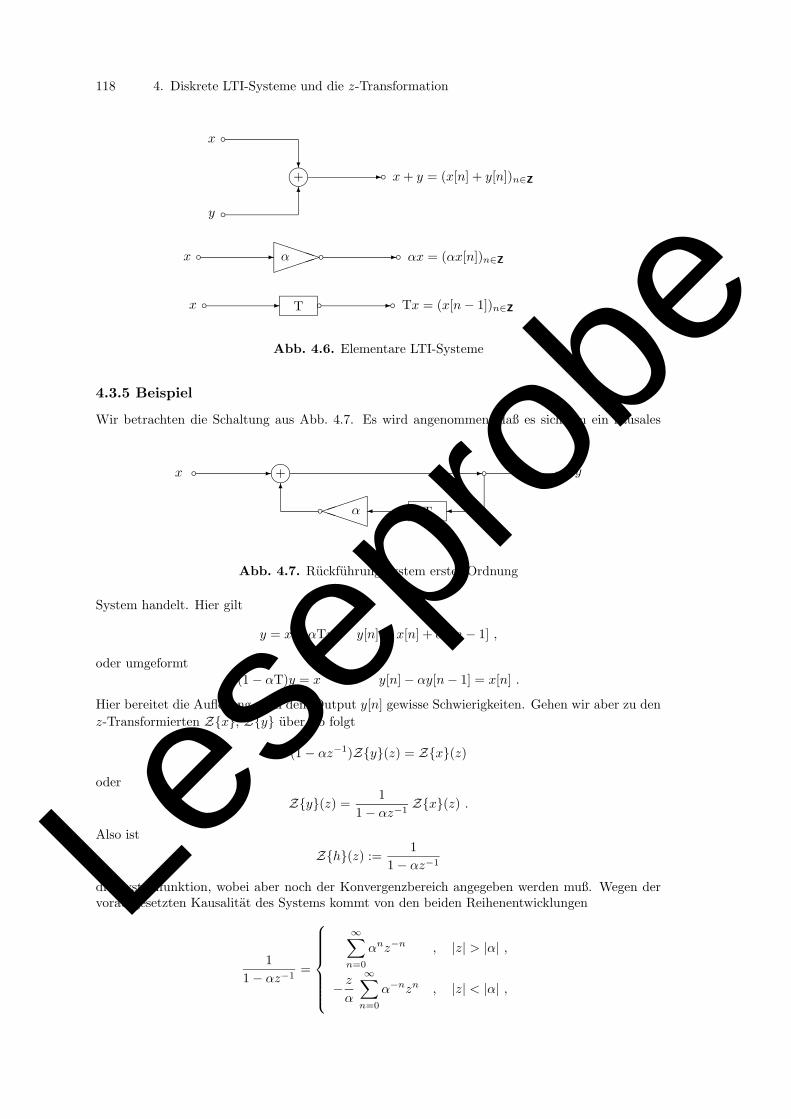
118 4. Diskrete LTI-Systeme und die z-Transformation
y b 6
x b?m+ - b x+ y = (x[n] + y[n])n∈ZZ
x b -³³
³³PPPP bα - b αx = (αx[n])n∈ZZ
x b - bT - b Tx = (x[n− 1])n∈ZZ
Abb. 4.6. Elementare LTI-Systeme
4.3.5 Beispiel
Wir betrachten die Schaltung aus Abb. 4.7. Es wird angenommen, daß es sich um ein kausales
x b - m+ - b - b y6
¾b T¾PP
PP³³³³b α
Abb. 4.7. Ruckfuhrungssystem erster Ordnung
System handelt. Hier gilt
y = x+ αTy , y[n] = x[n] + αy[n− 1] ,
oder umgeformt(1− αT)y = x ⇐⇒ y[n]− αy[n− 1] = x[n] .
Hier bereitet die Auflosung nach dem Output y[n] gewisse Schwierigkeiten. Gehen wir aber zu den
z-Transformierten Z{x}, Z{y} uber, so folgt
(1− αz−1)Z{y}(z) = Z{x}(z)
oder
Z{y}(z) = 1
1− αz−1 Z{x}(z) .
Also ist
Z{h}(z) := 1
1− αz−1
die Systemfunktion, wobei aber noch der Konvergenzbereich angegeben werden muß. Wegen dervorausgesetzten Kausalitat des Systems kommt von den beiden Reihenentwicklungen
1
1− αz−1 =
∞∑
n=0
αnz−n , |z| > |α| ,
− zα
∞∑
n=0
α−nzn , |z| < |α| ,
Lese
probe

4.3 Untersuchung diskreter LTI-Systeme mit Hilfe der z-Transformierten 119
nur die erste in Betracht. Also ist Z{h},
Z{h}(z) = 1
1− αz−1 , |z| > |α| ,
die Systemfunktion und h,
h[n] =
{0 , falls n < 0 ,αn , falls n ≥ 0 ,
die Impulsantwort. Es gilt also auch
y = h ∗ x ⇐⇒ y[n] =
∞∑
k=0
αk x[n− k] , n ∈ ZZ .
Das System ist bibo-stabil, wenn |α| < 1 gilt, d.h. wenn der Pol z1 = α von Z{h} im Innern des
Einheitskreises und dieser dann im Konvergenzbereich von Z{h} liegt. 2
4.3.6 Definition
Ein kausales System S, bei dem der Input x = (x[n])n∈ZZ und der zugehorige Outputy = (y[n])n∈ZZ durch eine Rekursionsgleichung
M∑
µ=0
β[µ] y[n− µ] =M∑
µ=0
α[µ]x[n− µ] , n ∈ ZZ , (R)
verknupft sind, bezeichnet man als lineares Differenzengleichungssystem. Man be-zeichnet es als explizit, falls β[0] = 1 gilt, andernfalls als implizit. Es heißt nichtre-kursiv, falls β[1] = . . . = β[M ] = 0, andernfalls rekursiv.
Fuhrt man die beiden Folgen α := (α[n])n∈ZZ und β := (β[n])n∈ZZ ein, so ist (R)aquivalent zu
β ∗ y = α ∗ x ,wobei die Folgen α, β abbrechend sind, also nur fur endlich viele Indizes von n vonNull verschieden sind. Durch z-Transformation beider Seiten von (R) folgt dann
Z{β}Z{y} = Z{α}Z{x} ,
also
Z{y} = Z{α}Z{β} Z{x} .
Hier sind Z{α}, Z{β},
Z{α}(z) =M∑
µ=0
α[µ] z−µ , Z{β}(z) =M∑
µ=0
β[µ] z−µ ,
Polynome vom Hochstgrad M in der Variablen z−1. Somit ist
Z{h} := Z{α}Z{β}
Lese
probe
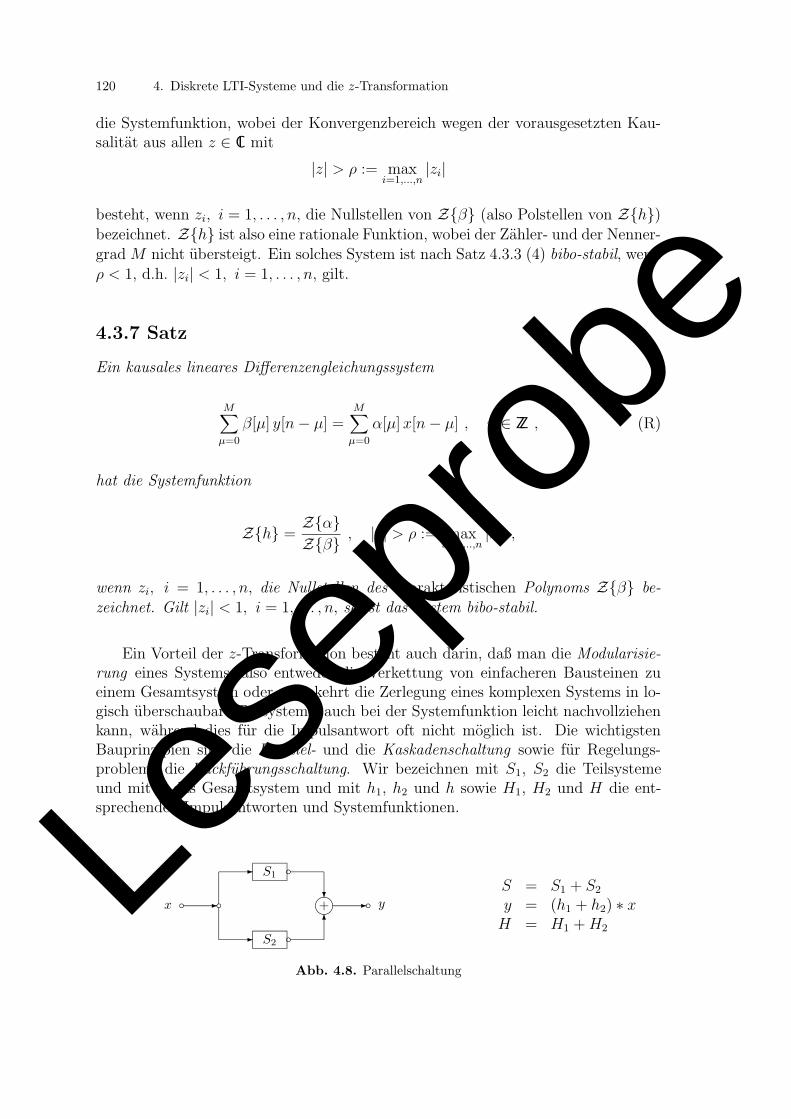
120 4. Diskrete LTI-Systeme und die z-Transformation
die Systemfunktion, wobei der Konvergenzbereich wegen der vorausgesetzten Kau-salitat aus allen z ∈ CI mit
|z| > ρ := maxi=1,...,n
|zi|
besteht, wenn zi, i = 1, . . . , n, die Nullstellen von Z{β} (also Polstellen von Z{h})bezeichnet. Z{h} ist also eine rationale Funktion, wobei der Zahler- und der Nenner-gradM nicht ubersteigt. Ein solches System ist nach Satz 4.3.3 (4) bibo-stabil, wennρ < 1, d.h. |zi| < 1, i = 1, . . . , n, gilt.
4.3.7 Satz
Ein kausales lineares Differenzengleichungssystem
M∑
µ=0
β[µ] y[n− µ] =M∑
µ=0
α[µ]x[n− µ] , n ∈ ZZ , (R)
hat die Systemfunktion
Z{h} = Z{α}Z{β} , |z| > ρ := maxi=1,...,n
|zi| ,
wenn zi, i = 1, . . . , n, die Nullstellen des charakteristischen Polynoms Z{β} be-zeichnet. Gilt |zi| < 1, i = 1, . . . , n, so ist das System bibo-stabil.
Ein Vorteil der z-Transformation besteht auch darin, daß man die Modularisie-rung eines Systems, also entweder die Verkettung von einfacheren Bausteinen zueinem Gesamtsystem oder umgekehrt die Zerlegung eines komplexen Systems in lo-gisch uberschaubare Teilsysteme, auch bei der Systemfunktion leicht nachvollziehenkann, wahrend dies fur die Impulsantwort oft nicht moglich ist. Die wichtigstenBauprinzipien sind die Parallel- und die Kaskadenschaltung sowie fur Regelungs-probleme die Ruckfuhrungsschaltung. Wir bezeichnen mit S1, S2 die Teilsystemeund mit S das Gesamtsystem und mit h1, h2 und h sowie H1, H2 und H die ent-sprechenden Impulsantworten und Systemfunktionen.
x b - b-
-
b
b
S1
S2
?
6
l+ - b y S = S1 + S2
y = (h1 + h2) ∗ xH = H1 +H2
Abb. 4.8. Parallelschaltung
Lese
probe

4.3 Untersuchung diskreter LTI-Systeme mit Hilfe der z-Transformierten 121
x b - bS1 - bS2 - b y S = S2 ◦ S1
y = (h2 ∗ h1) ∗ xH = H2H1
Abb. 4.9. Kaskadenschaltung
x b - l+ - bS2 - b - b y
¾b S1££££
BBBBb−16
S = S2 ◦ (id− S1 ◦ S)y = h2 ∗ (x− h1 ∗ y)H =
H2
1 +H2H1
Abb. 4.10. Ruckfuhrungsschaltung
4.3.8 Satz
Besteht das diskrete LTI-System S aus den beiden diskreten LTI-Teilsystemen S1
und S2 und bezeichnen h, h1, h2 die jeweiligen Impulsantworten und H,H1, H2 diezugehorigen Systemfunktionen, so gilt bei
(1) Parallelschaltung (Abb. 4.8)
h = h1 + h2 , H = H1 +H2 ,
(2) Kaskadenschaltung (Abb. 4.9)
h = h2 ∗ h1 , H = H2H1 ,
(3) Ruckfuhrungsschaltung (Abb. 4.10)
h = h2 ∗ (δ − h1 ∗ h) , H =H2
1 +H2H1
(δ: δ-Impuls).
Beweis. Nur die Ruckfuhrungsschaltung (3) erfordert etwas Uberlegung. Am Ein-gang von S1 liegt das Signal y = S{x} = h ∗ x und folglich am Ausgang
S1{y} = h1 ∗ y = (h1 ∗ h) ∗ x .
S2 hat das Eingangssignal
x− S1{y} = δ ∗ x− h1 ∗ y = δ ∗ x− (h1 ∗ h) ∗ x ,
also das Ausgangssignal
S2{x− S1{y}} = h2 ∗ (δ ∗ x− (h1 ∗ h) ∗ x) .
Dieses ist aber das Ausgangssignal des Gesamtsystems S; also gilt
y = h ∗ x = h2 ∗ (δ − h1 ∗ h) ∗ x
Lese
probe
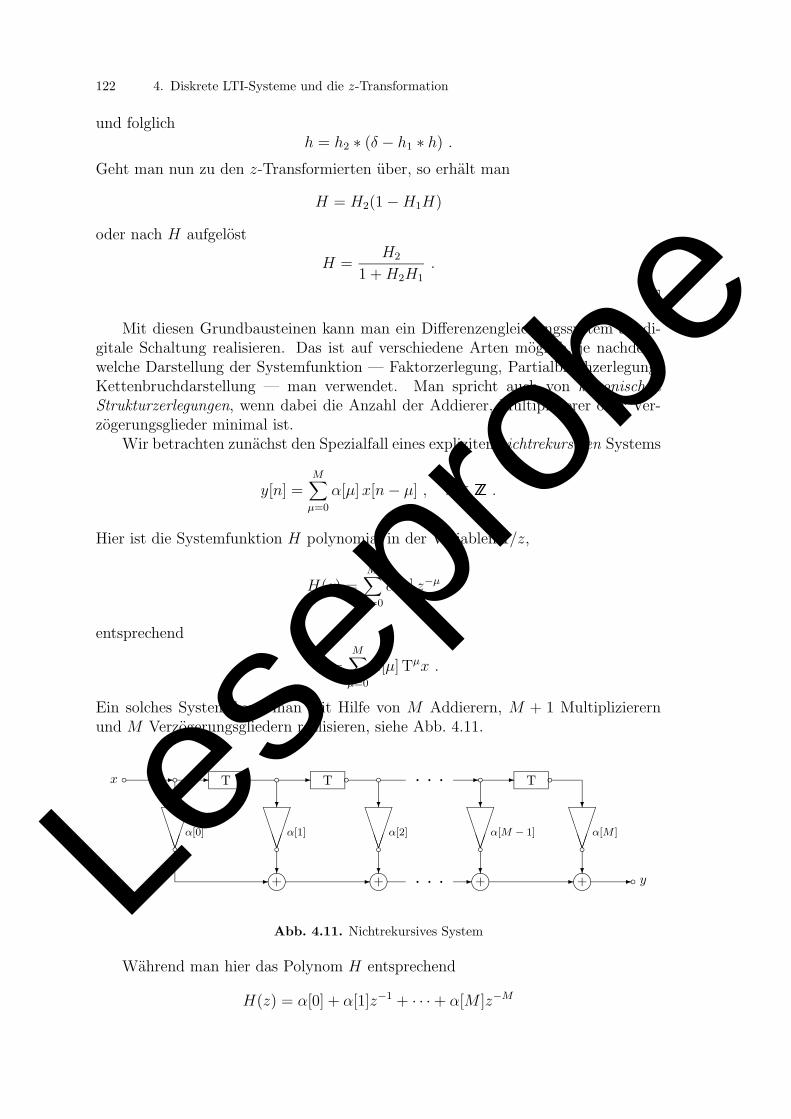
122 4. Diskrete LTI-Systeme und die z-Transformation
und folglichh = h2 ∗ (δ − h1 ∗ h) .
Geht man nun zu den z-Transformierten uber, so erhalt man
H = H2(1−H1H)
oder nach H aufgelost
H =H2
1 +H2H1
.
2
Mit diesen Grundbausteinen kann man ein Differenzengleichungssystem als di-gitale Schaltung realisieren. Das ist auf verschiedene Arten moglich, je nachdem,welche Darstellung der Systemfunktion — Faktorzerlegung, Partialbruchzerlegung,Kettenbruchdarstellung — man verwendet. Man spricht auch von kanonischenStrukturzerlegungen, wenn dabei die Anzahl der Addierer, Multiplizierer oder Ver-zogerungsglieder minimal ist.
Wir betrachten zunachst den Spezialfall eines expliziten nichtrekursiven Systems
y[n] =M∑
µ=0
α[µ]x[n− µ] , n ∈ ZZ .
Hier ist die Systemfunktion H polynomial in der Variablen 1/z,
H(z) =M∑
µ=0
α[µ] z−µ ,
entsprechend
y =M∑
µ=0
α[µ] Tµx .
Ein solches System kann man mit Hilfe von M Addierern, M + 1 Multiplizierernund M Verzogerungsgliedern realisieren, siehe Abb. 4.11.
bx - b?
BBBB
££££b α[0]
-
- bT
?BBBB
££££b?
α[1]
l+
b
-
- bT
?BBBB
££££b?
α[2]
l+
b . . . -
. . . -
?BBBB
££££b?
α[M − 1]
l+
b
-
- bT
?BBBB
££££b?
α[M ]
l+ - b yAbb. 4.11. Nichtrekursives System
Wahrend man hier das Polynom H entsprechend
H(z) = α[0] + α[1]z−1 + · · ·+ α[M ]z−M
Lese
probe

4.3 Untersuchung diskreter LTI-Systeme mit Hilfe der z-Transformierten 123
von links nach rechts ausgewertet hat, kann man auch entsprechend dem Horner-Algorithmus gemaß
H(z) =(· · ·
(α[M ]z−1 + α[M − 1]
)z−1 + · · ·+ α[1]
)z−1 + α[0]
vorgehen. Das ergibt die Schaltung aus Abb. 4.12. Man kann dies auch als Auswer-tung entsprechend
y =(· · ·
(α[M ]T + α[M − 1]
)T + · · ·α[1]T + α[0]
)x
deuten.
bx - b?
BBBB
££££b α[M ]
- bT -
-
?BBBB
££££b?
α[M − 1]
l+
b -
- bT -
?BBBB
££££b?
α[M − 2]
l+
b . . . -
. . . -
?BBBB
££££b?
α[1]
l+
b
- bT -
?BBBB
££££b?
α[0]
l+ - b yAbb. 4.12. Horner-Realisierung eines nichtrekursiven Systems
4.3.9 Bemerkung
Vergleicht man die beiden Schaltbilder 4.11 und 4.12 miteinander, so erkennt man,daß sie auseinander durch Transponierung hervorgehen. Man versteht darunterfolgendes wichtiges Bauprinzip: Man vertausche Eingang x und Ausgang y, kehrealle Pfeilrichtungen um und andere Addierer zu Verzweigungen und Verzweigungenzu Addierern. Dann bleibt die Systemfunktion unverandert. 2
4.3.10 Aufgabe
Im Fall M = 2k − 1, k = 3, realisiere man ein nichtrekursives System mit Hilfe des Divide-and-Conquer-Prinzips (vgl. Abb. 2.3). 2
Wir betrachten nun den allgemeineren Fall eines rekursiven Systems in expliziterForm
y[n]−N∑
ν=1
β[ν] y[n− ν] =M∑
µ=0
α[µ]x[n− µ] .
Man beachte, daß wir die Koeffizienten β[ν], ν = 1, . . . , N, hinsichtlich des Vor-zeichens umnormiert haben. Durch
”Auffullen“ mit Nullkoeffizienten konnen wir
M = N erreichen, so daß das System jetzt die Form
y[n]−M∑
µ=1
β[µ] y[n− µ] =M∑
µ=0
α[µ]x[n− µ]
Lese
probe
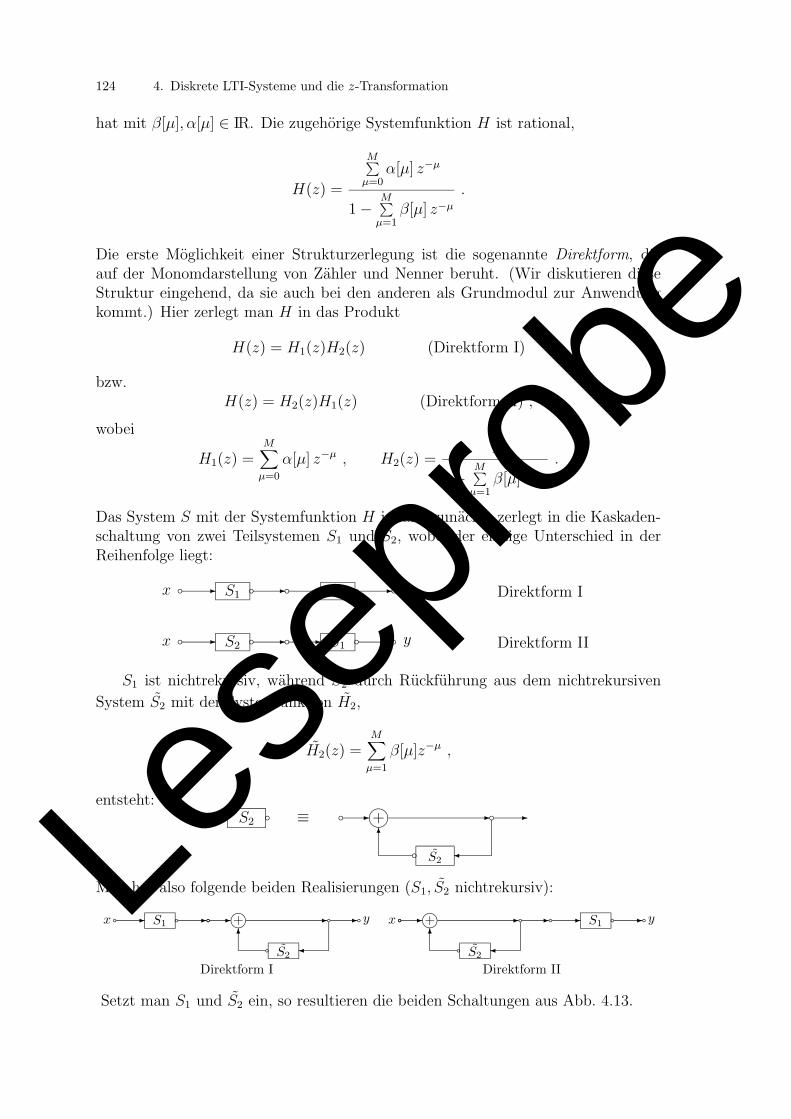
124 4. Diskrete LTI-Systeme und die z-Transformation
hat mit β[µ], α[µ] ∈ IR. Die zugehorige Systemfunktion H ist rational,
H(z) =
M∑µ=0
α[µ] z−µ
1−M∑µ=1
β[µ] z−µ
.
Die erste Moglichkeit einer Strukturzerlegung ist die sogenannte Direktform, dieauf der Monomdarstellung von Zahler und Nenner beruht. (Wir diskutieren dieseStruktur eingehend, da sie auch bei den anderen als Grundmodul zur Anwendungkommt.) Hier zerlegt man H in das Produkt
H(z) = H1(z)H2(z) (Direktform I)
bzw.H(z) = H2(z)H1(z) (Direktform II) ,
wobei
H1(z) =M∑
µ=0
α[µ] z−µ , H2(z) =1
1−M∑µ=1
β[µ] z−µ
.
Das System S mit der Systemfunktion H ist also zunachst zerlegt in die Kaskaden-schaltung von zwei Teilsystemen S1 und S2, wobei der einzige Unterschied in derReihenfolge liegt:
x b - bS1- b - bS2
- b y Direktform I
x b - bS2- b - bS1
- b y Direktform II
S1 ist nichtrekursiv, wahrend S2 durch Ruckfuhrung aus dem nichtrekursiven
System S2 mit der Systemfunktion H2,
H2(z) =M∑
µ=1
β[µ]z−µ ,
entsteht: bS2 ≡ b - m+ - b -¾b S2
6
Man hat also folgende beiden Realisierungen (S1, S2 nichtrekursiv):
x a - aS1 - aa - j+ - a -¾a S26
ayDirektform I
x aa - j+ - a -¾a S26
a - aS1 - ayDirektform II
Setzt man S1 und S2 ein, so resultieren die beiden Schaltungen aus Abb. 4.13.
Lese
probe
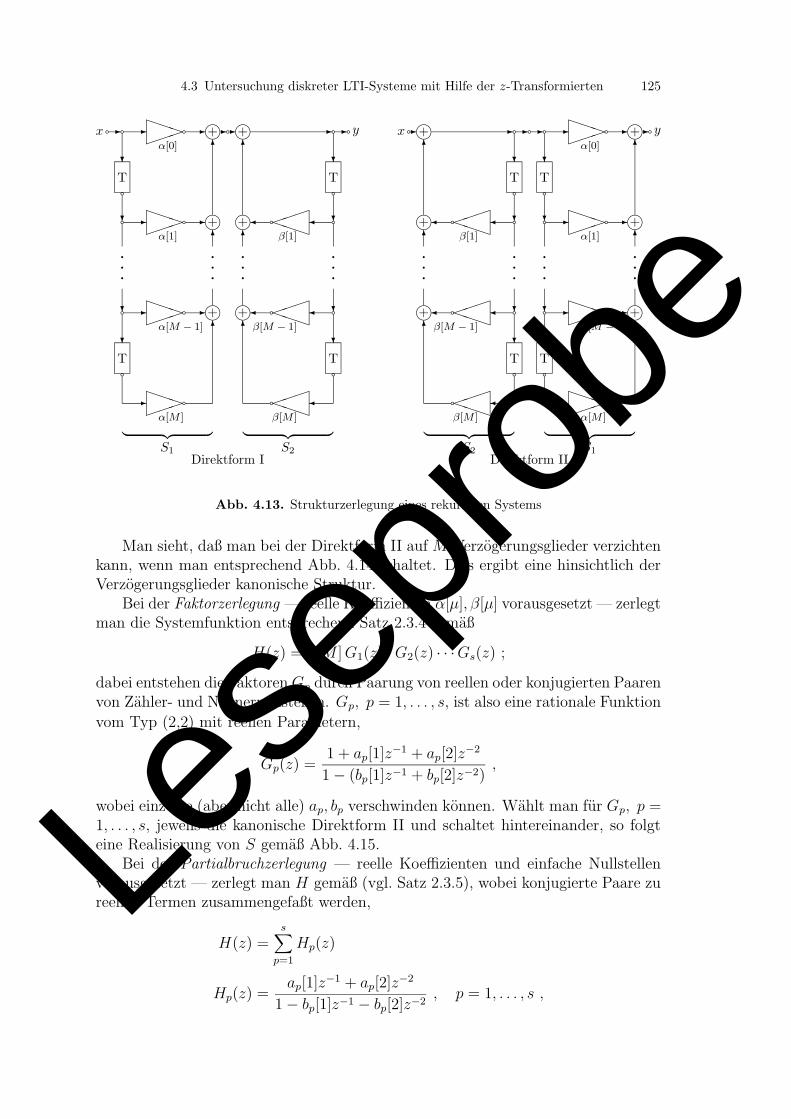
4.3 Untersuchung diskreter LTI-Systeme mit Hilfe der z-Transformierten 125
x a- a -³³³PPP a - j+
α[0]
a -³³³PPP a - j+
α[1]
6?
Ta?
?
.
.
.
6...
a -³³³PPP a - j+
α[M − 1]
-³³³PPP a
α[M ]
6?
Ta
︸ ︷︷ ︸S1
- a- -j+ a
a¾PPP³³³a¾j+
β[1]
6?
Ta?
?
.
.
.
6...
a¾PPP³³³a¾j+
β[M − 1]
¾PPP³³³a
β[M ]
6?
Ta
- ay
︸ ︷︷ ︸S2
Direktform I
x a- a -³³³PPP a - j+
α[0]
a -³³³PPP a - j+
α[1]
6?
Ta?
?
.
.
.
6...
a -³³³PPP a - j+
α[M − 1]
-³³³PPP a
α[M ]
6?
Ta
︸ ︷︷ ︸S1
- a--j+ a
a¾PPP³³³a¾j+
β[1]
6?
Ta?
?
.
.
.
6...
a¾PPP³³³a¾j+
β[M − 1]
¾PPP³³³a
β[M ]
6?
Ta
- ay
︸ ︷︷ ︸S2
Direktform II
Abb. 4.13. Strukturzerlegung eines rekursiven Systems
Man sieht, daß man bei der Direktform II auf M Verzogerungsglieder verzichtenkann, wenn man entsprechend Abb. 4.14 schaltet. Dies ergibt eine hinsichtlich derVerzogerungsglieder kanonische Struktur.
Bei der Faktorzerlegung — reelle Koeffizienten α[µ], β[µ] vorausgesetzt — zerlegtman die Systemfunktion entsprechend Satz 2.3.4 gemaß
H(z) = α[M ]G1(z) ·G2(z) · · ·Gs(z) ;
dabei entstehen die FaktorenGp durch Paarung von reellen oder konjugierten Paarenvon Zahler- und Nennernullstellen. Gp, p = 1, . . . , s, ist also eine rationale Funktion
vom Typ (2,2) mit reellen Parametern,
Gp(z) =1 + ap[1]z
−1 + ap[2]z−2
1− (bp[1]z−1 + bp[2]z−2),
wobei einzelne (aber nicht alle) ap, bp verschwinden konnen. Wahlt man fur Gp, p =1, . . . , s, jeweils die kanonische Direktform II und schaltet hintereinander, so folgteine Realisierung von S gemaß Abb. 4.15.
Bei der Partialbruchzerlegung — reelle Koeffizienten und einfache Nullstellenvorausgesetzt — zerlegt man H gemaß (vgl. Satz 2.3.5), wobei konjugierte Paare zureellen Termen zusammengefaßt werden,
H(z) =s∑
p=1
Hp(z)
Hp(z) =ap[1]z
−1 + ap[2]z−2
1− bp[1]z−1 − bp[2]z−2, p = 1, . . . , s ,
Lese
probe
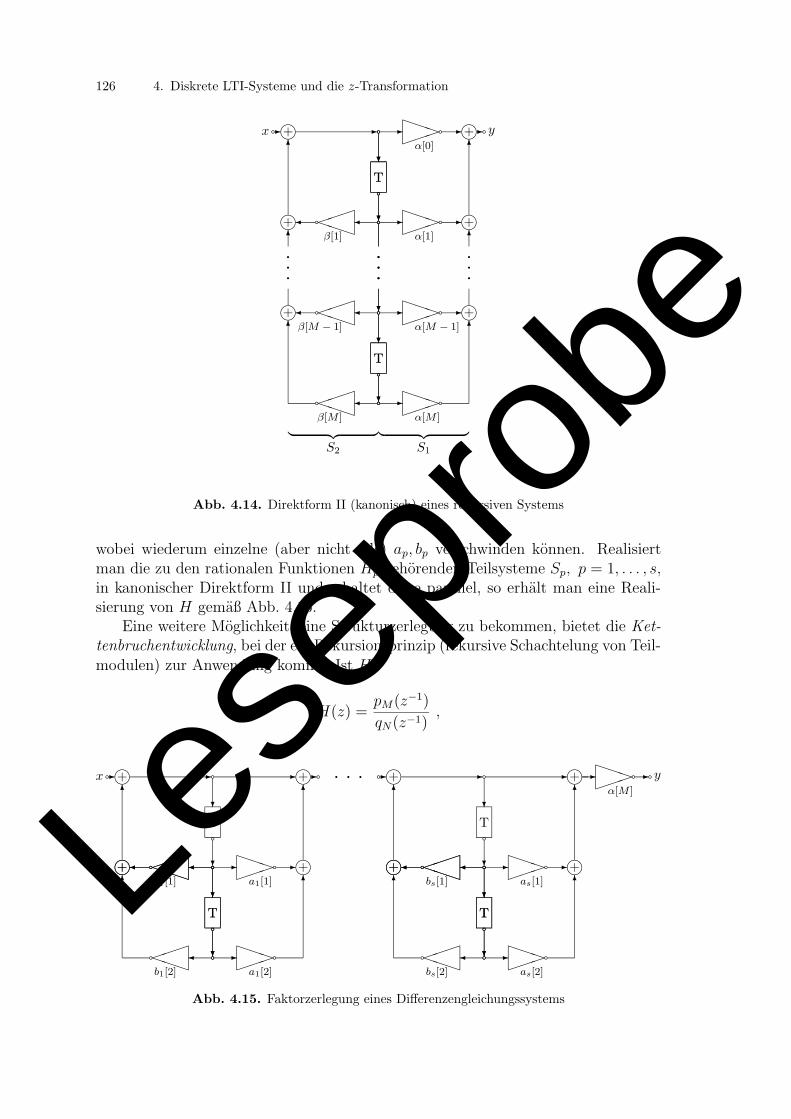
126 4. Diskrete LTI-Systeme und die z-Transformation
x a- a -³³³PPP a - j+
α[0]
a -³³³PPP a - j+
α[1]
6?
Ta?
?
.
.
.
6...
a -³³³PPP a - j+
α[M − 1]
a -³³³PPP a
α[M ]
6?
Ta?
︸ ︷︷ ︸S1
-j+ a
a¾PPP³³³a¾j+
β[1]
6?
Ta?
?
.
.
.
6...
a¾PPP³³³a¾j+
β[M − 1]
a¾PPP³³³a
β[M ]
6?
Ta?
- ay
︸ ︷︷ ︸S2
Abb. 4.14. Direktform II (kanonisch) eines rekursiven Systems
wobei wiederum einzelne (aber nicht alle) ap, bp verschwinden konnen. Realisiertman die zu den rationalen Funktionen Hp gehorenden Teilsysteme Sp, p = 1, . . . , s,in kanonischer Direktform II und schaltet diese parallel, so erhalt man eine Reali-sierung von H gemaß Abb. 4.16.
Eine weitere Moglichkeit, eine Strukturzerlegung zu bekommen, bietet die Ket-tenbruchentwicklung, bei der ein Rekursionsprinzip (rekursive Schachtelung von Teil-modulen) zur Anwendung kommt. Ist H,
H(z) =pM(z−1)
qN(z−1),
a¾PPP³³³a¾j+
b1[1]
a¾PPP³³³a
b1[2]
6?
Ta?
a -³³³PPP a - j+
a1[1]
a -³³³PPP a
a1[2]
6?
Ta?
-j+ a
a¾PPP³³³a¾j+
6?
Ta?
-
6
j+x -a a- . . .
a¾PPP³³³a¾j+
bs[1]
a¾PPP³³³a
bs[2]
6?
Ta?
a -³³³PPP a - j+
as[1]
a -³³³PPP a
as[2]
6?
Ta?
-j+ a
a¾PPP³³³a¾j+
6?
Ta?
-
6
j+a- -³³³PPP a
α[M ]
- ay
Abb. 4.15. Faktorzerlegung eines Differenzengleichungssystems
Lese
probe
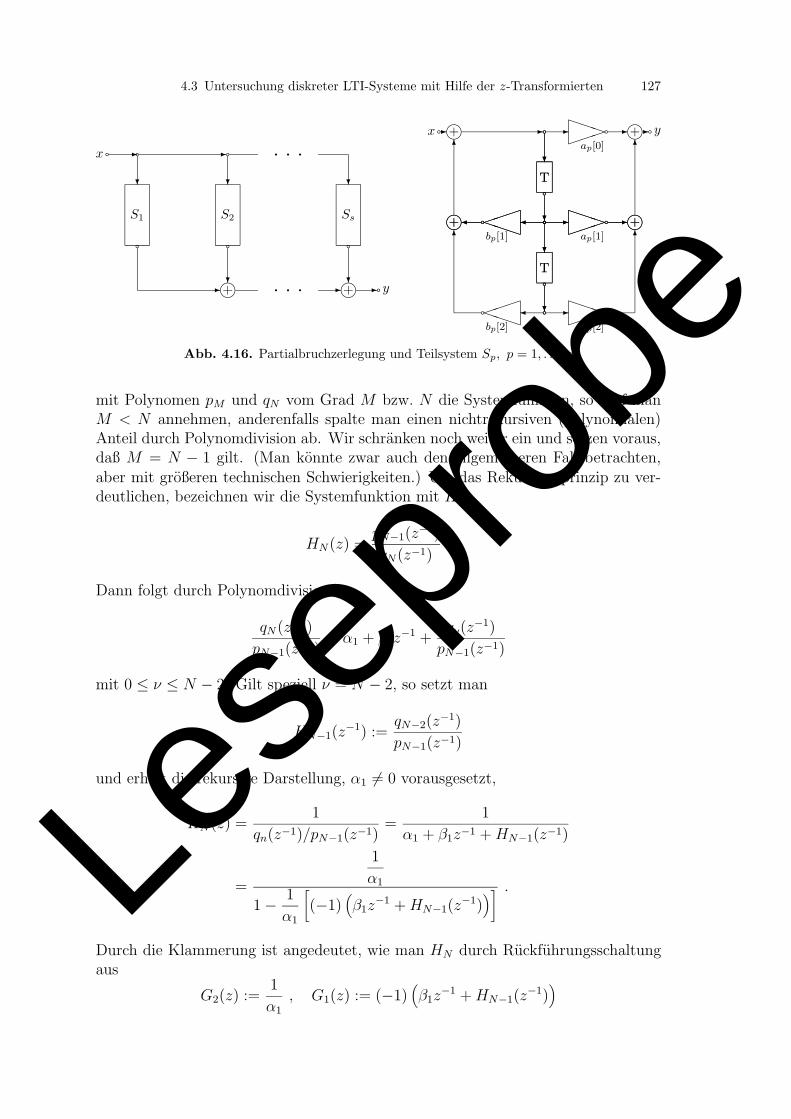
4.3 Untersuchung diskreter LTI-Systeme mit Hilfe der z-Transformierten 127
x a -a -
?
S1
a-
a?
S2
a?j+ . . .
. . .
?
Ss
a?- j+ - ay
a¾PPP³³³a¾j+
bp[1]
a¾PPP³³³a
bp[2]
6?
Ta?
a -³³³PPP a - j+
ap[1]
a -³³³PPP a
ap[2]
6?
Ta?
-j+ a
a¾PPP³³³a¾j+
6?
Ta?
a -³³³PPP a - j+
ap[0]
a -³³³PPP a - j+
6?
Ta?
x -a a- y
Abb. 4.16. Partialbruchzerlegung und Teilsystem Sp, p = 1, . . . , s
mit Polynomen pM und qN vom Grad M bzw. N die Systemfunktion, so darf manM < N annehmen, anderenfalls spalte man einen nichtrekursiven (polynomialen)Anteil durch Polynomdivision ab. Wir schranken noch weiter ein und setzen voraus,daß M = N − 1 gilt. (Man konnte zwar auch den allgemeineren Fall betrachten,aber mit großeren technischen Schwierigkeiten.) Um das Rekursionsprinzip zu ver-deutlichen, bezeichnen wir die Systemfunktion mit HN ,
HN(z) =pN−1(z
−1)
qN(z−1).
Dann folgt durch Polynomdivision
qN(z−1)
pN−1(z−1)= α1 + β1z
−1 +qν(z
−1)
pN−1(z−1)
mit 0 ≤ ν ≤ N − 2. Gilt speziell ν = N − 2, so setzt man
HN−1(z−1) :=
qN−2(z−1)
pN−1(z−1)
und erhalt die rekursive Darstellung, α1 6= 0 vorausgesetzt,
HN(z) =1
qn(z−1)/pN−1(z−1)=
1
α1 + β1z−1 +HN−1(z−1)
=
1
α1
1− 1
α1
[(−1)
(β1z
−1 +HN−1(z−1)
)] .
Durch die Klammerung ist angedeutet, wie man HN durch Ruckfuhrungsschaltungaus
G2(z) :=1
α1
, G1(z) := (−1)(β1z
−1 +HN−1(z−1)
)
Lese
probe
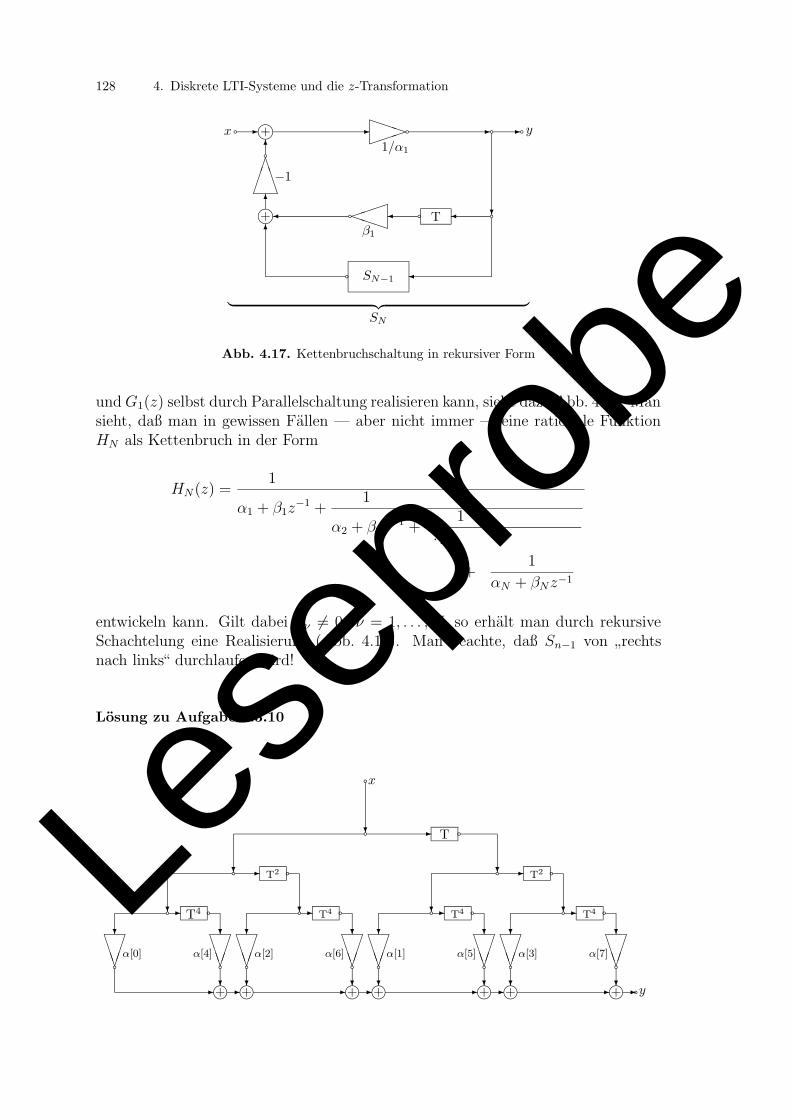
128 4. Diskrete LTI-Systeme und die z-Transformation
x a - - ayj+ -³³³PPP a1/α1
- a
6£££
BBBa−1
6
?a¾a T¾PPP³³³a
β1
¾j+6
¾SN−1a︸ ︷︷ ︸
SN
Abb. 4.17. Kettenbruchschaltung in rekursiver Form
undG1(z) selbst durch Parallelschaltung realisieren kann, siehe dazu Abb. 4.17. Mansieht, daß man in gewissen Fallen — aber nicht immer — eine rationale FunktionHN als Kettenbruch in der Form
HN(z) =1
α1 + β1z−1 +
1
α2 + β2z−1 +
1. . .
+1
αN + βNz−1
entwickeln kann. Gilt dabei αν 6= 0, ν = 1, . . . , N, so erhalt man durch rekursiveSchachtelung eine Realisierung (Abb. 4.18). Man beachte, daß Sn−1 von
”rechts
nach links“ durchlaufen wird!
Losung zu Aufgabe 4.3.10
ax?
?
a - aT
?a - aT2
? ?
a - aT2
? ?a- aT4
?BBB£££a α[0]
?BBB£££a?
α[4]
i+- -
a- aT4
?BBB£££a?
α[2]
i+
?BBB£££a?
α[6]
i+- -
a- aT4
?BBB£££a?
α[1]
i+
?BBB£££a?
α[5]
i+- -
a- aT4
?BBB£££a?
α[3]
i+
?BBB£££a?
α[7]
i+- -ay
Lese
probe
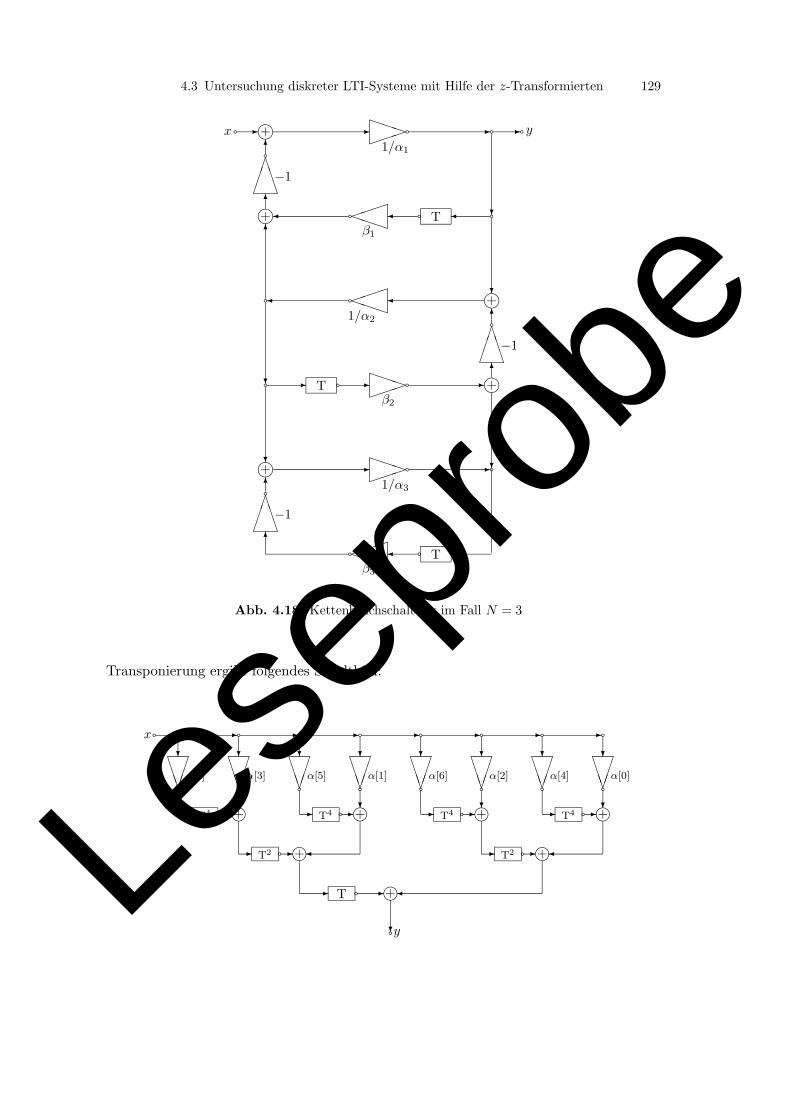
4.3 Untersuchung diskreter LTI-Systeme mit Hilfe der z-Transformierten 129
x a - - ayj+ -³³³PPP a1/α1
- a
6£££
BBBa−1
6
?a¾a T¾PPP³³³a
β1
¾j+6
?j+¾PPP³³³a
1/α2
¾a
?6£££
BBBa−1
6
a - aT -³³³PPP aβ2
- j+
? ?
a T¾PPP³³³a
β3
6£££
BBBa−1
6
j+ -³³³PPP a1/α3
- a
Abb. 4.18. Kettenbruchschaltung im Fall N = 3
Transponierung ergibt folgendes Schaltbild:
x a - a - a?BBB£££a α[7]
?BBB£££a?
α[3]
i+- aT4 -
a - a?BBB£££a α[5]
?BBB£££a?
α[1]
i+- aT4 -
a - a?BBB£££a α[6]
?BBB£££a?
α[2]
i+- aT4 -
a - a?BBB£££a α[4]
?BBB£££a?
α[0]
i+- aT4 -
- - -
- aT2 - i+¾ - aT2 - i+¾- aT - i+¾
?ayLese
probe




















