Embed Size (px)
Citation preview
Diss. ETH Nr. 15617
Lagerlose Scheibenläufermotoren höherer Leistung
ABHANDLUNG zur Erlangung des Titels
DOKTOR DER TECHNISCHEN WISSENSCHAFTEN
der EIDGENÖSSISCHEN TECHNISCHEN HOCHSCHULE ZÜRICH
vorgelegt von
Pascal Nang Bösch
Dipl. El.-Ing. ETH geboren am 22. Mai 1975
von Nesslau SG
Angenommen auf Antrag von Prof. Dr. J. Hugel, Referent
Prof. Dr. K. Fröhlich, Korreferent
2004
1
Vorwort Die vorliegende Arbeit entstand während meiner Tätigkeit als wissen-schaftlicher Mitarbeiter und Assistent an der Professur für Elektrotechni-sche Entwicklungen und Konstruktionen (EEK) bei Herrn Prof. Dr. J. Hugel an der Eidgenössischen Technischen Hochschule (ETH) in Zürich. Meinem Doktorvater Herr Prof. Dr. J. Hugel danke ich ganz herzlich für das angenehme Arbeitsklima, das entgegengebrachte Vertrauen und für die Unterstützung meiner Arbeit. Ebenfalls danke ich Herr Prof. Dr. K. Fröh-lich für die freundliche Übernahme des Korreferats. Meine Dissertation entstand im Rahmen einer engen Zusammenarbeit mit der Firma Levitronix GmbH im Technopark in Zürich. Ein besonderer Dank richtet sich an Herr Dr. N. Barletta und Herr Dr. R. Schöb für die un-eingeschränkte, fachliche Unterstützung und für die zahlreichen konstruk-tiven Gespräche und Anregungen. Besonderer Dank gilt auch allen Arbeitskollegen an der ETH Zürich und der Firma Levitronix GmbH für die kollegiale und beispielhafte Zusam-menarbeit und Unterstützung. Des Weiteren danke ich allen Studenten, die im Rahmen ihrer Semester- und Diplomarbeiten zum guten Gelingen dieser Arbeit beigetragen haben. Meinen Eltern und meiner Familie möchte ich für die Schaffung und Er-möglichung des Umfeldes und für den Rückhalt während meiner Ausbil-dungszeit und während dieser Arbeit ganz speziell danken. Juni 2004 Pascal Bösch

2
3
Inhaltsverzeichnis Vorwort ........................................................................................................1 Inhaltsverzeichnis ........................................................................................3 Kurzfassung .................................................................................................7 Abstract ........................................................................................................9 Symbolverzeichnis .....................................................................................11 1. Einleitung ...............................................................................................17
1.1 Stand der Technik............................................................................18 1.1.1 Der lagerlose Scheibenläufermotor .............................................20 1.1.2 Anwendungsbereiche von lagerlosen Scheibenläufermotoren ...21 1.1.3 Lagerlose Zentrifugalpumpen .....................................................23
1.2 Problemstellung und Zielsetzung der Arbeit ................................25
1.2.1 Motivation für den Bau von lagerlosen Zentrifugalpumpen höherer Leistung ...................................................................................25 1.2.2 Modellgesetze..............................................................................27 1.2.3 Zielsetzung der Arbeit .................................................................31
1.3 Aufbau der Arbeit............................................................................32
2. Grundlagen und Konzepte lagerloser Scheibenläufermotoren ........33
2.1 Grundlagen lagerloser Scheibenläufermotoren............................35 2.1.1 Drehmoment- und Kraftbildung..................................................35 2.1.2 Passive Magnetlagerung..............................................................39 2.1.3 Aktive radiale Magnetlagerung ...................................................41 2.1.4 Antriebssystem ............................................................................44
2.2 Motorkonfigurationen .....................................................................48
2.2.1 Nut-, Polpaar- und Phasenzahl ....................................................48 2.2.2 Auswahl von Motorkonfigurationen ...........................................50
2.3 Analyse und Bewertung verschiedener Motorkonfigurationen ..50
2.3.1 Kraft und Drehmomentberechnung.............................................50 2.3.2 Motoren mit 6 Nuten ...................................................................54
Inhaltsverzeichnis
4
2.3.3 Motoren mit 8 Nuten ...................................................................65 2.3.4 Motoren mit 12 Nuten .................................................................69 2.3.5 Bewertung der Motorkonfigurationen.........................................75
2.4 Analyse verschiedener Motorbauformen ......................................75
2.4.1 Rotorabmessungen ......................................................................75 2.4.2 Radialbauformen .........................................................................76 2.4.3 Tempelbauform ...........................................................................77
2.5 Schlussfolgerungen ..........................................................................79
3. Der zweipolige lagerlose Scheibenläufermotor höherer Leistung....81
3.1 Rotoraufbau......................................................................................81 3.1.1 Rotor mit sinusförmiger Magnetisierung ....................................82 3.1.2 Rotor mit diametral magnetisierten Magnetsegmenten ..............84 3.1.3 Rotor mit radialer Magnetisierung ..............................................85 3.1.4 Diskussion ...................................................................................86
3.2 Realisierung des zweiphasigen Scheibenläufermotors .................88
3.2.1 Aufbau mit sinusförmig magnetisiertem Rotor...........................88 3.2.2 Regelstruktur ...............................................................................89
3.3 Realisierung des dreiphasigen Scheibenläufermotors..................91
3.3.1 Aufbau mit sinusförmig magnetisiertem Rotor...........................91 3.3.2 Regelstruktur ...............................................................................92 3.3.3 Aufbau mit diametral magnetisiertem Rotor...............................93 3.3.4 Regelstruktur ...............................................................................94
3.4 Schlussfolgerung ..............................................................................97
4. Der vierpolige, lagerlose Scheibenläufermotor höherer Leistung....99
4.1 Rotoraufbau......................................................................................99 4.1.1 Rotor mit sinusförmig magnetisierten Magnetsegmenten ........100 4.1.2 Rotor mit diametral magnetisierten Magnetsegmenten ...........101 4.1.3 Rotor mit radialer Magnetisierung ............................................102 4.1.4 Diskussion .................................................................................103
4.2 Realisierung des vierpoligen Scheibenläufermotors ..................104
4.2.1 Aufbau mit diametral magnetisiertem Rotor.............................104 4.2.2 Regelstruktur .............................................................................109
Inhaltsverzeichnis
5
4.3 Gegenüberstellung und Bewertung..............................................109 5. Minimierung der Verluste bei lagerlosen Scheibenläufermotoren 111
5.1 Verluste im lagerlosen Scheibenläufermotor ..............................111 5.1.1 Verlustaufteilung im lagerlosen Tempelmotor .........................111 5.1.2 Modellierung der Verluste.........................................................113
5.2 Verluste beim Tempelmotor mit sechs Nuten .............................117
5.2.1 Charakterisierung ......................................................................117 5.2.2 Ursachen ....................................................................................118
5.3 Magnetisierung des Rotors............................................................119
5.4 Optimierung des Eisenrückschlusses ...........................................121
5.4.1 Rückschlussform .......................................................................122 5.4.2 Rückschlusshöhe .......................................................................124
5.5 Optimierung der Nutzähne ...........................................................125
5.6 Resultat ...........................................................................................127
6. Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugal-pumpen .....................................................................................................133
6.1 Grundlagen und Probleme lagerloser Zentrifugalpumpen höherer Leistung ..................................................................................133
6.1.1 Grundlagen lagerloser Zentrifugalpumpen ...............................133 6.1.2 Axialschub in einer lagerlosen Zentrifugalpumpe ....................139
6.2 Auslegung einer Zentrifugalpumpe .............................................141
6.2.1 Grundlagen für die Auslegung des Laufradkanals....................141 6.2.2 Ausführungsformen von Pumpengehäusen und Laufradkanälen............................................................................................................143
6.3 Methoden für die hydrodynamische, axiale Ausbalancierung von Laufrädern............................................................................................145
6.3.1 Staudruckplatte ..........................................................................147 6.3.2 Ventiltechnik .............................................................................148 6.3.3 Rückschaufeln ...........................................................................148 6.3.4 Rillentechnik..............................................................................149 6.3.5 Vorgehensweise für die axiale Ausbalancierung von Laufrädern............................................................................................................151
Inhaltsverzeichnis
6
6.4 Realisierung lagerloser Zentrifugalpumpen höherer Leistung154 7. Realisierung..........................................................................................157
7.1 Systemübersicht lagerloser Pumpsysteme...................................158
7.2 Umrichter........................................................................................159
7.3 Die vierpolige, lagerlose Pumpe mit einer mechanischen Motor-leistung bis 1 kW ..................................................................................161
7.4 Die zweipolige lagerlose Pumpe mit einer mechanischen Motor-leistung bis 1,2 kW ...............................................................................163
7.5 Die zweipolige lagerlose Pumpe mit einer mechanischen Motor-leistung bis 4 kW ..................................................................................167
8. Zusammenfassung und Ausblick .......................................................173
8.1 Zusammenfassung und Ergebnisse der Arbeit ...........................173
8.2 Ausblick...........................................................................................174 Literaturverzeichnis ................................................................................177 Publikationen ...........................................................................................181 Lebenslauf ................................................................................................183
7
Kurzfassung Lagerlose Scheibenläufermotoren arbeiten vollständig berührungs- und verschleissfrei. Mit diesen Eigenschaften lassen sich berührungsfreie, her-metisch abgeschlossene und abnützungsfreie, rotierende Systeme aufbauen. Die Einsatzmöglichkeiten von lagerlosen Scheibenläufermotoren sind viel-fältig und werden zukünftig vermehrt an Bedeutung gewinnen. Lagerlose Zentrifugalpumpen bilden dabei eine der wichtigsten Anwen-dungsgebiete von lagerlosen Scheibenläufermotoren. Eine der Hauptvorzü-ge von lagerlosen Zentrifugalpumpen ist, dass sie keine mechanischen La-ger besitzen und hermetisch dicht sind. Flüssigkeiten können so ohne Ver-unreinigungen (durch Lagerabnützung und Schmierstoffen) in einem kon-tinuierlichen Fluss gefördert werden. In früheren Arbeiten wurden bereits lagerlose Zentrifugalpumpen für das Fördern von hochreinen Flüssigkeiten in der Prozessumgebung der Halbleiterindustrie realisiert. Mit diesen Pumpsystemen können hydraulische Leistungen bis 100 W erzeugt werden, wobei dafür mechanische Antriebsleistungen von etwa 300 W nötig sind. Damit lagerlose Pumpsysteme beispielsweise im Bereich der Chemikalien-versorgung (chemical delivery) eingesetzt werden können, müssen die Pumpen je nach Anwendung hydraulische Leistungen bis 1 kW erzeugen können. Für den Antrieb dieser Pumpen werden Scheibenläufermotoren mit einer mechanischen Antriebsleistung von 3-4 kW benötigt. In dieser Arbeit werden basierend auf den Arbeiten von Schöb [Schö/93], Barletta [Barl/98], Silber [Silb/00] und Neff [Neff/03] neue lagerlose An-triebskonzepte höherer Leistung (> 1 kW) untersucht. Aufbauend auf dem lagerlosen Scheibenläufermotor aus [Barl/98] werden neue Motorkonfigu-ration und Bauformen für die Realisierung lagerloser Scheibenläufermoto-ren höherer Leistung erarbeitet und einer Bewertung unterzogen. Folgende Motorkonfigurationen werden dabei näher untersucht:
• 2-poliger Scheibenläufermotor in Tempelbauform mit 6 Nuten • 2-poliger Scheibenläufermotor in Tempelbauform mit 8 Nuten
• 4-poliger Scheibenläufermotor in Radialbauform mit 12 Nuten
Kurzfassung
8
Neben der Erarbeitung neuer Konzepte, befasst sich diese Arbeit mit der Optimierung lagerloser Scheibenläufermotoren höherer Leistung bezüglich den entstehenden Verlusten. Bei der Gestaltung lagerloser Zentrifugalpumpen höherer Leistung ist die axiale Ausbalancierung des Laufrades eine der schwierigsten Aufgaben welche es zu lösen gilt. In diesem Zusammenhang werden verschiedene Lösungsansätze für die axiale Stabilisierung von Laufrädern höherer Leis-tung erarbeitet und vorgeschlagen. Die Realisierung der Prototypen umfasste die Auslegung und Optimierung des Scheibenläufermotors höherer Leistung, der lagerlosen Zentrifugal-pumpe und der Umrichterelektronik mit integriertem Signalprozessor für die Regelung des Systems. Anhand von aufgebauten Prototypen wird die praktische Realisierbarkeit eines vierpoligen, lagerlosen 1 kW Pumpsys-tems, eines zweipoligen lagerlosen 1,2 kW Pumpsystems für die Halblei-terindustrie und eines zweipoligen lagerlosen 4 kW Pumpsystems für die Chemikalienversorgung gezeigt. Mit dem Eintritt in eine höhere Leistungsklasse wird der Zugang für An-wendungen in der Pharma-, Lebensmittel- und der chemischen Industrie erstmals für lagerlose Scheibenläufermotoren möglich gemacht.
9
Abstract Bearingless slice motors work completely contact- and wearless. With these properties, contactless, hermetically sealed and wearless rotating systems can be designed. The applications of bearingless slice motors are multifaceted and will become more important in the future. Bearingless centrifugal pumps are one of the most important application areas of bearingless slice motors. One of the main amenities of bearingless centrifugal pumps is the lack of mechanical bearings and the hermetical impermeability. Liquids can be pumped with a continuous flow without contamination (abrasion of mechanical bearing and lubricant). Bearingless centrifugal pumps for high-purity delivery applications in the semiconductor industry have already been realised in previous works. These pump systems can produce a hydraulic power of up to 100W, whereas a mechanical power of about 300W is required. In order that bearingless pump systems can be used for chemical delivery applications, hydraulic powers up to 1 kW are required. Such bearingless centrifugal pumps need bearingless slice motors with a mechanical power between 3-4 kW. This work researches new bearingless high power drive concepts (> 1 kW) which are based on the works of Schöb [Schö/93], Barletta [Barl/98], Silber [Silb/00] and Neff [Neff/03]. Based on the principle of the bearingless slice motor [Barl/98], new configurations and mechanical structures for high-power bearingless slice motors are developed and evaluated. Thereby the following motor configurations are more precisely researched:
• 2 pole slice motor of temple design with 6 slots
• 2 pole slice motor of temple design with 8 slots
• 4 pole slice motor of radial design with 12 slots In addition to the development of new concepts, this work deals with the optimisation of power losses in high-power bearingless slice motors. The axial balancing of high-power centrifugal pump impellers is one of the most difficult tasks that must be solved. In this regard, different methods of resolution for the axial stabilisation will be developed and proposed.
Abstract
10
The realisation of the prototypes involved the design and optimisation of the high power bearingless slice motor, the design of the bearingless centrifugal pump and the power electronics with integrated processor for the control of the system. The realized prototypes prove the pactical realisability of a four pole, bearingless 1 kW pump system, a two pole, bearingless 1,2 kW pump system for the semiconductor industry and a two pole, bearingless 4 kW pump system for chemical delivery applications. With the introduction of a higher engine-power class of bearingless slice motors, an approach for applications in the pharmaceutical, food and chemical industry will be possible for the first time.
11
Symbolverzeichnis Konventionen Die Zugehörigkeit zu einem Koordinatensystem wird sowohl für Vektoren als auch für Vektorkomponenten hochgestellt in Klammern angegeben. Mat-rizen werden doppelt und Vektoren einfach unterstrichen. Indizes kenn-zeichnen verschiedene Eigenschaften wie Stator- oder Rotorgrössen, Soll- oder Istwert. Scheitelwerte sind durch das Zeichen ^ über dem Formelzei-chen gekennzeichnet. Formelzeichen A Fläche As Strombelag B magnetische Induktion BPM magnetische Induktion im Permanentmagneten Br Remanenz Induktion Bδ magnetische Induktion im Luftspalt b Laufradhöhe C Parktransformationsmatrix c Absolutgeschwindigkeit cHy Hystereseverlustkoeffizient ci Kraft-Strom-Kreuzkopplungskonstante cm Drehmomentkonstante cs Kraft-Weg-Kreuzkopplungskonstante cu Spannungskonstante cWs Wirbelstromverlustkoeffizient czk axiale Kraftkonstante D Drehtransformationsmatrix dFe Blechdicke dr Rotordurchmesser dra Rotoraussendurchmesser dri Rotorinnendurchmesser da äussere Dämpfung dk Kippdämpfung ds geschwindigkeitsabhängige Dämpfung e Einheitsvektor F Kraft Fs Störkraft FL Lorenz-Kraft FM Maxwell-Kra
Symbolverzeichnis
12
Fm Magnetlagerkraft welche am Rotor wirkt Fr Reluktanzkraft FRadial Radialkraft Fx, Fy, Fz Kraft in x-, y-, und z-Richtung des Stators Fz passive, axiale Reluktanzkraft Fzhydr hydraulischer Axialschub f Frequenz, Füllfaktor fe elektrische Frequenz G(s) Übertragungsfunktion Ga(s) Übertragungsfunktion des Drehzahlregelkreises Gk(s) Übertragungsfunktion des passiven Kipplagers GL(s) Übertragungsfunktion der Strecke eines Magnetlagers Gp(s) Übertragungsfunktion des passiven Axiallagers GZL(s) vereinfachte Störübertragungsfunktion eines Magnetlagers H magnetische Feldstärke, Förderhöhe Hopt optimale Förderhöhe Hth theoretische Förderhöhe mit endlich vielen Laufradschaufeln Hth∞ theoretische Förderhöhe mit unendlich vielen Laufradschaufeln HVR Kanalreibungsverluste HVSt Stossverluste hr Rotorhöhe I Betrag des Stromes Is Betrag des Strangstromes Im Drehmomentstrom i Kleinsignalstrom is Strangstrom Jr Rotorträgheitsmoment um eine Achse senkrecht zur
Drehachse Jy Rotorträgheitsmoment um die Kippachse Jz Rotorträgheitsmoment um die Drehachse KL Lorenz-Kraftkonstante KM Maxwell-Kraftkonstante Ki Kraft-Strom-Matrix Km winkelabhängige Kraft-Strom-Matrix KR Radialkraftbeiwert Ks Kraft-Weg-Matrix ka Steifigkeit ki Kraft-Strom-Konstante kk Kippsteifigkeit ks Kraft-Weg-Konstante kz axiale Steifigkeit L Induktivität Lσ Streuinduktivität Lh Hauptinduktivität
Symbolverzeichnis
13
l Länge, Dicke lr Rotorhöhe ls Statorlänge lw mittlere Windungslänge M Drehmoment MFe durch Eisenverluste erzeugtes Bremsmoment Mm Lastmoment Ms Antriebsmoment Mzx, Mzy Störkippmoment um die x-, y-Achse m Masse, Strang-/Phasenzahl mFe Masse Eisenkreis N Nutzahl n Drehzahl nopt optimale Drehzahl nq spezifische Drehzahl P Leistung, Druck PCu Kupferverluste Pe elektrische Leistung PFe Eisenverluste Ph hydraulische Förderleistung Pth theoretische Antriebsleistung PHy Hystereseverluste Pm mechanische Antriebsleistung PV Motorverluste PVRad Radreibungsverluste PVRez Rezirkulationsverluste PWs Wirbelstromverluste p Polpaarzahl pr Druckverlauf in den Radseitenräumen Q Fluss Qopt optimaler Fluss Qh Hauptfluss QI Leckagefluss im Radseitenraum I QII Leckagefluss im Radseitenraum II qi Nutzahl pro Pol und Strang R Widerstand Rs Strangwiderstand r Radius rs Radius Statorbohrung s Wegvektor TL elektrische Zeitkonstante TM maxwellscher Spannungstensor Tm mechanische Zeitkonstante t Zeit
Symbolverzeichnis
14
U Betrag der Spannung u Spannung, Umfangsgeschwindigkeit W Spulenweite w Windungszahl x, y, z Auslenkung in der x-, y-, und z-Richtung αpb Flusserfassungswinkel einer Spule des Tragsystems αpd Flusserfassungswinkel einer Spule des Antriebssystems α,β,γ Drehwinkel um die x-, y-, und z-Achse β1 Laufradeintrittswinkel β2 Laufradaustrittswinkel γm mechanischer Rotorwinkel γs Winkel zwischen Rotorfeld- und Statorkoordinatensystem µ magnetische Permeabilität µm Minderleistungsfaktor µr relative magnetische Permeabilität µ0 magnetische Permeabilität im Vakuum ξ Wicklungsfaktor η Wirkungsgrad, dynamische Viskosität ν kinematische Viskosität ρ Dichte ρCu spezifischer elektrischer Widerstand δ Luftspalt σ Grenzflächenspannung Φ magnetischer Fluss ΦPM magnetischer Fluss des Rotors Ψ verketteter Fluss ΨPM verketteter Rotorfluss ω Winkelfrequenz ωfl Rotationsgeschwindigkeit der Flüssigkeit ωm mechanische Kreisfrequenz ωs Stator-Kreisfrequenz Indizes 1 Antriebssystem, p1-polpaariges System 2 Tragsystem, p2-polpaariges System d,q Vektorkomponenten des dq-Zweiphasenersatzsystem
einer elektrischen Maschine a,b,c Vektorkomponenten des elektrischen Dreiphasensystems a,b Vektorkomponenten des elektrischen Zweiphasensystems s Soll- oder Modellgrösse PM Index für Permanentmagnet
Symbolverzeichnis
15
Koordinatensystembezeichnung ab Zweiphasensystem einer elektrischen Maschine abc Dreiphasensystem einer elektrischen Maschine dq orthogonales Zweiphasenersatzsystem F Rotorfeldkoordinatensystem S Ständerfeldkoordinatensystem xyz kartesisches Koordinatensystem αβγm Drehwinkel um die Koordinatenachsen (xyz) Abkürzungen EEK Professur für elektrotechnische Entwicklungen und
Konstruktionen der ETH Zürich CMP Chemisch-mechanisches Polieren (chemical mechanical
polishing/planarization) BPS Bearingless Pump System BSM Bearingless Slice Motor PM Permanentmagnet PD-Regler Proportional-Differential-Regler PID-Regler Proportional-Integral-Differential-Regler PI-Regler Proportional-Integral-Regler FET Field-Effect-Transistor IGBT Insulated-Gate-Bipolar-Transistor DSP Digitaler Signalprozessor AC Wechselspannung DC Gleichspannung/Gleichstrom MCDS Entwicklungssoftware für Magnetlagersteuerung der
Firma Levitronix (Magnetic Control Development Studio)
M330-35A Elektroblech-Sortenbezeichnung nach DIN EN 10106 M330-50A Elektroblech-Sortenbezeichnung nach DIN EN 10106 NPSH Netto-Energiehöhe im Saugstutzen (net positive suction
head) PWM Pulsweitenmodulation PVDF Polyvinylidenfluorid PFA Perfluoralkoxy-Copolymerisat Bewertungsschlüssel zu den Tabellen ++ gut + brauchbar - schlecht - - sehr schlecht

16
17
1. Einleitung Pumpen zählen zu den ältesten Arbeitsmaschinen, deren sich der Mensch bedient. Bis zur Mitte des 19. Jahrhunderts kamen vor allem hydrostatische Fördersysteme wie Schöpfwerke und Kolbenpumpen zur Anwendung. Die bereits um 1689 vom Marburger Professor Denis Papin in der „Acta Erud-torium“ beschriebene Zentrifugalpumpe wurde nur von wenigen Hauptab-nehmern, den kommunalen Wasserversorgungsbetrieben, angewendet. Mit der Erfindung des Verbrennungs- und Elektromotors standen leistungsstar-ke, direkt kuppelbare Antriebe mit hohen Drehzahlen zur Verfügung, die den Einsatz von hydrodynamischen Kreiselpumpen, mit den bekannten Vorzügen, wie kontinuierliche Förderweise und drosselbare Kennlinie, möglich machten. Die mathematischen und physikalischen Grundlagen der Zentrifugalpumpe schufen die beiden Professoren Daniel Bernoulli (1700 – 1782) und Leonard Euler (1707 – 1783). Bernoulli formulierte den Energieerhaltungssatz für die stationäre Bewegung einer reibungsfreien, inkompressiblen Flüssigkeit. Leonard Euler stellte die erste Hauptglei-chung für Wasserturbinen auf und schuf damit die rechnerische Basis für die Energieübertragung im Laufrad der Zentrifugalpumpe [Hilg/92]. Zent-rifugalpumpen wurden erst gegen Ende des 19. Jahrhunderts in grösseren Stückzahlen hergestellt. In Abbildung 1.1 ist eine elektrisch angetriebene Zentrifugalpumpe aus dem Jahre 1895 zu sehen [Wilk/99].
Abb. 1.1: Zentrifugalpumpe mit elekrischem Antrieb Ende 19. Jahrhundert Bei den meisten elektrischen Antrieben wurden zu dieser Zeit Gleich-strommotoren oder sogenannte Universalmotoren (Abbildung 1.1) verwen-det, die sowohl mit Gleich- wie auch Wechselspannung betrieben werden konnten. Der Nachteil dieser Motoren liegt bei der höheren Lärmentwick-lung und bei der Abnützung des Stromwenders.
Kapitel 1: Einleitung
18
Im Vergleich zu Elektromotoren mit mechanischen Stromwendern, lassen sich Kurzschlussläufer Asynchronmotoren und Permanentmagnet erregte Synchronmotoren wesentlich wartungsfreier gestalten. Bis auf die Abnüt-zung der Lager weisen diese Motorarten praktisch keine anderen Ver-schleisserscheinungen auf und können nahezu wartungsfrei betrieben wer-den. Konventionelle Zentrifugalpumpen werden heutzutage überwiegend mit Asynchron- und Synchronmotoren betrieben. 1.1 Stand der Technik Magnetgelagerte Motoren können im Gegensatz zu Motoren mit konventi-onellen Lagern praktisch verschleissfrei betrieben werden, da die mechani-schen Lager bei diesen Motoren wegfallen. Die Magnetlager positionieren den Rotor mit Hilfe von magnetischen Kräften in die gewünschte Lage, wobei der Rotor frei im Raum schwebt. Um einen Rotor stabil in Schwebe halten zu können, müssen fünf von sechs Freiheitsgraden im Raum stabili-siert werden.
a.) b.)
Motor & Radial-Magnetlager
Axial-Magnetlager
Axial-Magnetlager
Motor & Radial-Magnetlager
Radial-Magnetlager
Radial-MagnetlagerMotor
a.) b.)
Motor & Radial-Magnetlager
Axial-Magnetlager
Axial-Magnetlager
Motor & Radial-Magnetlager
Radial-Magnetlager
Radial-MagnetlagerMotor
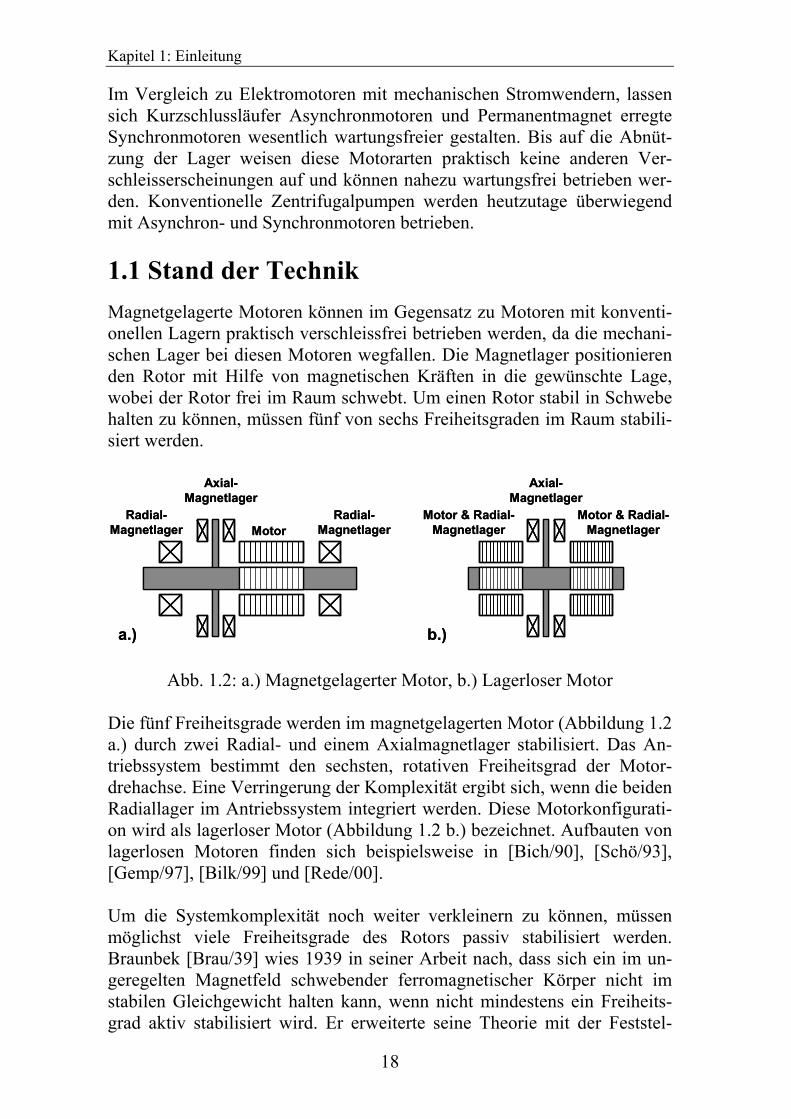
Abb. 1.2: a.) Magnetgelagerter Motor, b.) Lagerloser Motor Die fünf Freiheitsgrade werden im magnetgelagerten Motor (Abbildung 1.2 a.) durch zwei Radial- und einem Axialmagnetlager stabilisiert. Das An-triebssystem bestimmt den sechsten, rotativen Freiheitsgrad der Motor-drehachse. Eine Verringerung der Komplexität ergibt sich, wenn die beiden Radiallager im Antriebssystem integriert werden. Diese Motorkonfigurati-on wird als lagerloser Motor (Abbildung 1.2 b.) bezeichnet. Aufbauten von lagerlosen Motoren finden sich beispielsweise in [Bich/90], [Schö/93], [Gemp/97], [Bilk/99] und [Rede/00]. Um die Systemkomplexität noch weiter verkleinern zu können, müssen möglichst viele Freiheitsgrade des Rotors passiv stabilisiert werden. Braunbek [Brau/39] wies 1939 in seiner Arbeit nach, dass sich ein im un-geregelten Magnetfeld schwebender ferromagnetischer Körper nicht im stabilen Gleichgewicht halten kann, wenn nicht mindestens ein Freiheits-grad aktiv stabilisiert wird. Er erweiterte seine Theorie mit der Feststel-
Kapitel 1: Einleitung
19
lung, dass ein stabiles und freies Schweben eines Körpers im magnetischen Feld eines anderen Körpers dann möglich ist, wenn in einem der beiden Körper diamagnetische Materie der relativen Permeabilität µr < 1 vorhan-den ist. Vorschläge, vollständig passive Magnetlager mit diamagnetischen Werkstoffen aufzubauen, erlangten bis heute keine technische Bedeutung, da solche Lager auf kleine Systeme mit schlechten Lagereigenschaften be-schränkt sind. Demnach sind magnetgelagerte Motoren, welche nur mit passiven Magnetlagern betrieben werden, schwierig zu realisieren. Bei passiven Lagern unterscheidet man zwischen passiven Permanentmag-netlagern und Reluktanzlagern. In passiven Permanentmagnetlagern wer-den die anziehenden oder die abstossenden Kräfte zwischen den Magneten für die Lagerung ausgenützt. Bei der auf anziehenden Kräften basierenden Lagerung, kann unter Verwendung von Eisen eine Steigerung der magneti-schen Flussdichten und somit eine Erhöhung der Lagerkraft bewirkt wer-den. Das Reluktanzlager beruht auf der anziehenden Kraft zwischen mag-netisierten Eisenteilen. Der Magnetkreis strebt nach einem möglichst klei-nen magnetischen Widerstand (Reluktanz). Die dadurch entstehenden Kräfte können zur passiven Stabilisierung verwendet werden. Das für die Lagerkraft erforderliche Feld kann beim Reluktanzlager sowohl mit einem Permanentmagnet als auch mit einem Elektromagnet erzeugt werden. La-gerlose Motoren können nach dem Prinzip des Käfigläuferasynchronmo-tors, des Synchronreluktanzmotors oder des permanentmagnetisch erregten Synchronmotors realisiert werden. In [Barl/98] wurde für lagerlose Moto-ren mit geringer Rotorhöhe gezeigt, dass permanentmagnetisch erregte la-gerlose Synchronmotoren wesentliche Vorteile gegenüber lagerlosen Syn-chronreluktanz- und Asynchronmotoren besitzen. Die wichtigsten Kriterien, beispielsweise für die Verwendung von lagerlo-sen Motoren in hermetischen Pumpsystemen, sind hohe Lagersteifigkeiten, hohe Drehmomente, geringe Verluste und die Realisierung grosser Luft-spalte zwischen Rotor und Stator. Der lagerlose, permanentmagnetisch er-regte Synchronmotor schneidet bezüglich dieser Punkte am besten ab. Beim permanentmagnetisch erregten Synchronmotor wird das Magnetisie-rungsfeld durch die Dauermagnete im Rotor erzeugt. Durch das Wegfallen des Magnetisierungsstromes in der Statorwicklung werden die Wicklungs-verluste reduziert und höhere Luftspaltinduktionen erreicht. Die hohe, magnetische Vorspannung des Rotors verbessert die Lagersteifigkeit und ermöglicht die Erzeugung höherer Drehmomente. Bedingt durch die ge-nannten Vorteile befasst sich diese Arbeit ausschliesslich mit dem perma-nentmagnetisch erregten Synchronmotor.
Kapitel 1: Einleitung
20
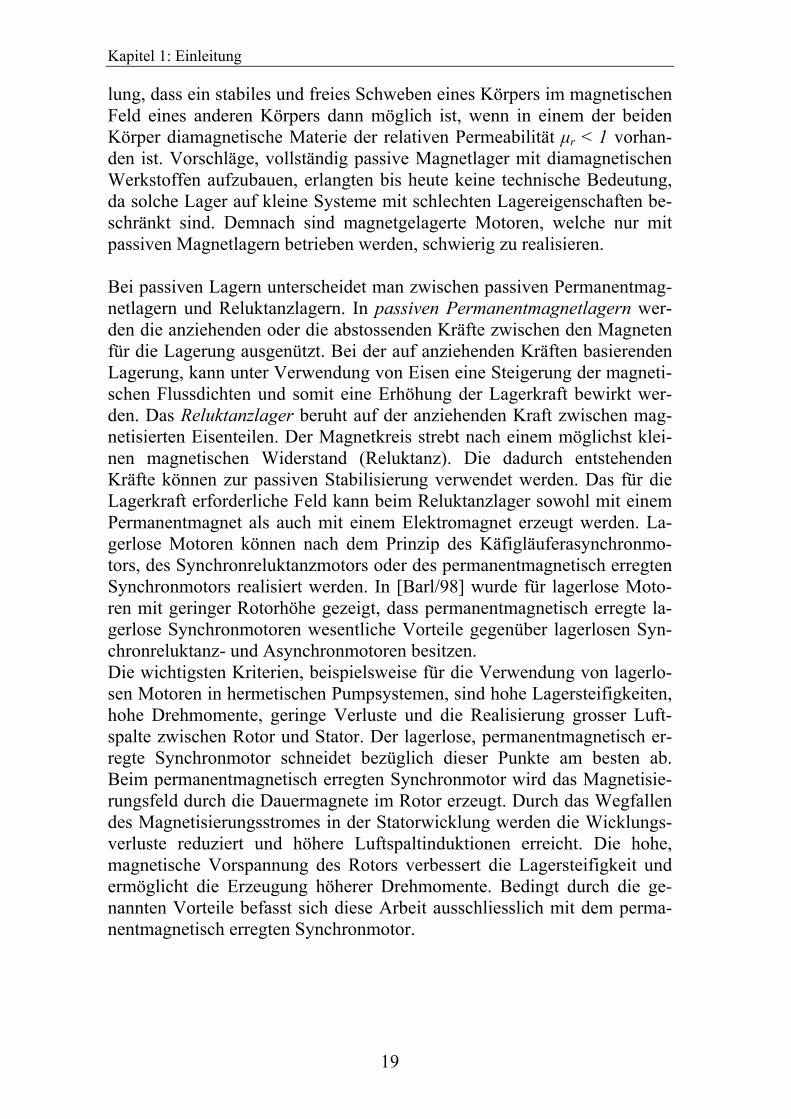
1.1.1 Der lagerlose Scheibenläufermotor Wird der Permanentmagnetrotor eines lagerlosen Synchronmotors auf eine flache Scheibe reduziert, kann auf das aktive Axiallager und auf eines der beiden radialen, aktiven Magnetlager verzichtet werden. Bedingt durch die geometrische Struktur des Rotors und des Stators, wird der Rotor in axialer Richtung und in den Verkippungsrichtungen der Rotorebene passiv stabili-siert. In Abbildung 1.3 a.) wird die translatorische, passive Stabilisierung des Rotors in axialer Richtung und in Abbildung 1.3 b.) die Stabilisierung der beiden rotativen Freiheitsgrade in der Rotorebene gezeigt. Die Stabili-sierung der beiden translatorischen Freiheitsgrade in der Rotorebene wer-den durch die aktive, radiale Magnetlagerung übernommen. Der sechste rotative Freiheitsgrad der Rotordrehachse wird durch den Antrieb be-stimmt.
z
FrFr
Fz
F Fω
Fz
F FrFz
F
zω
M
a) b)
FzFr
z
FrFr
Fz
F Fω
Fz
F FrFz
F
zω
M
a) b)
FzFr
Abb. 1.3: Passive Stabilisierung von drei Freiheitsgraden
Der lagerlose Scheibenläufermotor ist die einfachste Bauform des lagerlo-sen Motors und wurde von [Barl/98] erstmals aufgebaut. Man spricht von einem Scheibenläufermotor, wenn das Trägheitsmoment Jz des Rotors um die Drehachse grösser ist, als das Trägheitsmoment Jr um eine Achse senk-recht zur Drehachse. Der Rotor besteht aus einem ringförmigen, zweipolig ausgeführten Seltenerden-Permanentmagnet welcher in der Rotorebene diametral magnetisiert ist. Mit Seltenerden-Magneten lassen sich genügend hohe magnetische Feldstärken erreichen, um damit ausreichende Tragkräf-te erzeugen zu können. Vor allem die Entwicklung von kostengünstigen und relativ temperaturstabilen Neodym-Eisen-Bor Magneten (NdFeB), machte den Aufbau von Dauermagnetlagern erst möglich.
Kapitel 1: Einleitung
21
L-förmige Nutzähne
Rotor
Tragwicklung
Antriebswicklung
Eisenrückschluss
L-förmige Nutzähne
Rotor
Tragwicklung
Antriebswicklung
Eisenrückschluss
Abb. 1.4: Aufbau eines lagerlosen Scheibenläufermotors in
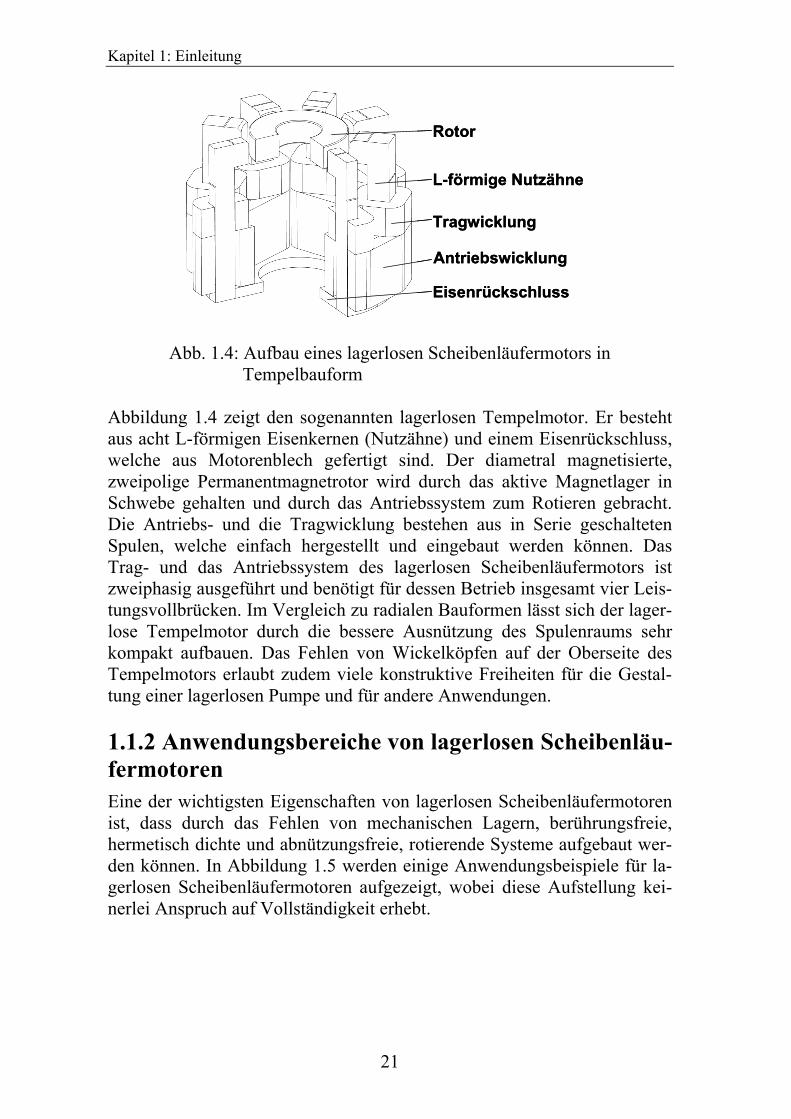
Tempelbauform Abbildung 1.4 zeigt den sogenannten lagerlosen Tempelmotor. Er besteht aus acht L-förmigen Eisenkernen (Nutzähne) und einem Eisenrückschluss, welche aus Motorenblech gefertigt sind. Der diametral magnetisierte, zweipolige Permanentmagnetrotor wird durch das aktive Magnetlager in Schwebe gehalten und durch das Antriebssystem zum Rotieren gebracht. Die Antriebs- und die Tragwicklung bestehen aus in Serie geschalteten Spulen, welche einfach hergestellt und eingebaut werden können. Das Trag- und das Antriebssystem des lagerlosen Scheibenläufermotors ist zweiphasig ausgeführt und benötigt für dessen Betrieb insgesamt vier Leis-tungsvollbrücken. Im Vergleich zu radialen Bauformen lässt sich der lager-lose Tempelmotor durch die bessere Ausnützung des Spulenraums sehr kompakt aufbauen. Das Fehlen von Wickelköpfen auf der Oberseite des Tempelmotors erlaubt zudem viele konstruktive Freiheiten für die Gestal-tung einer lagerlosen Pumpe und für andere Anwendungen. 1.1.2 Anwendungsbereiche von lagerlosen Scheibenläu-fermotoren
Eine der wichtigsten Eigenschaften von lagerlosen Scheibenläufermotoren ist, dass durch das Fehlen von mechanischen Lagern, berührungsfreie, hermetisch dichte und abnützungsfreie, rotierende Systeme aufgebaut wer-den können. In Abbildung 1.5 werden einige Anwendungsbeispiele für la-gerlosen Scheibenläufermotoren aufgezeigt, wobei diese Aufstellung kei-nerlei Anspruch auf Vollständigkeit erhebt.
Kapitel 1: Einleitung
22
Extrakorporale Blutpumpen
Lagerlose Scheibenläufermotoren
Lagerlose Messsysteme
Implantierbare Blutpumpen
Lagerlose Produktionsprozesspumpen
Lagerlose Bioreaktoren
Wafer Rotationssysteme
Lagerlose Rotationssysteme
ProdukteProjekte
Hermetische, lagerlose Zentrifugalpumpen
Hermetische lagerlose Zentrifugalpumpen
Viskositätsmessgeräte Halbleiterindustrie Biomechanik
Lagerlose Rührwerke
HalbleiterindustrieMedizinaltechnik
Extrakorporale Blutpumpen
Extrakorporale Blutpumpen
Lagerlose Scheibenläufermotoren
Lagerlose Messsysteme
Lagerlose Messsysteme
Implantierbare Blutpumpen
Lagerlose Produktionsprozesspumpen
Lagerlose Produktionsprozesspumpen
Lagerlose Bioreaktoren
Lagerlose Bioreaktoren
Wafer Rotationssysteme
Wafer Rotationssysteme
Lagerlose Rotationssysteme
Lagerlose Rotationssysteme
ProdukteProjekte
Hermetische, lagerlose Zentrifugalpumpen
Hermetische lagerlose ZentrifugalpumpenHermetische, lagerlose
ZentrifugalpumpenHermetische lagerlose
Zentrifugalpumpen
ViskositätsmessgeräteViskositätsmessgeräte HalbleiterindustrieHalbleiterindustrie BiomechanikBiomechanik
Lagerlose RührwerkeLagerlose Rührwerke
HalbleiterindustrieHalbleiterindustrieMedizinaltechnikMedizinaltechnik
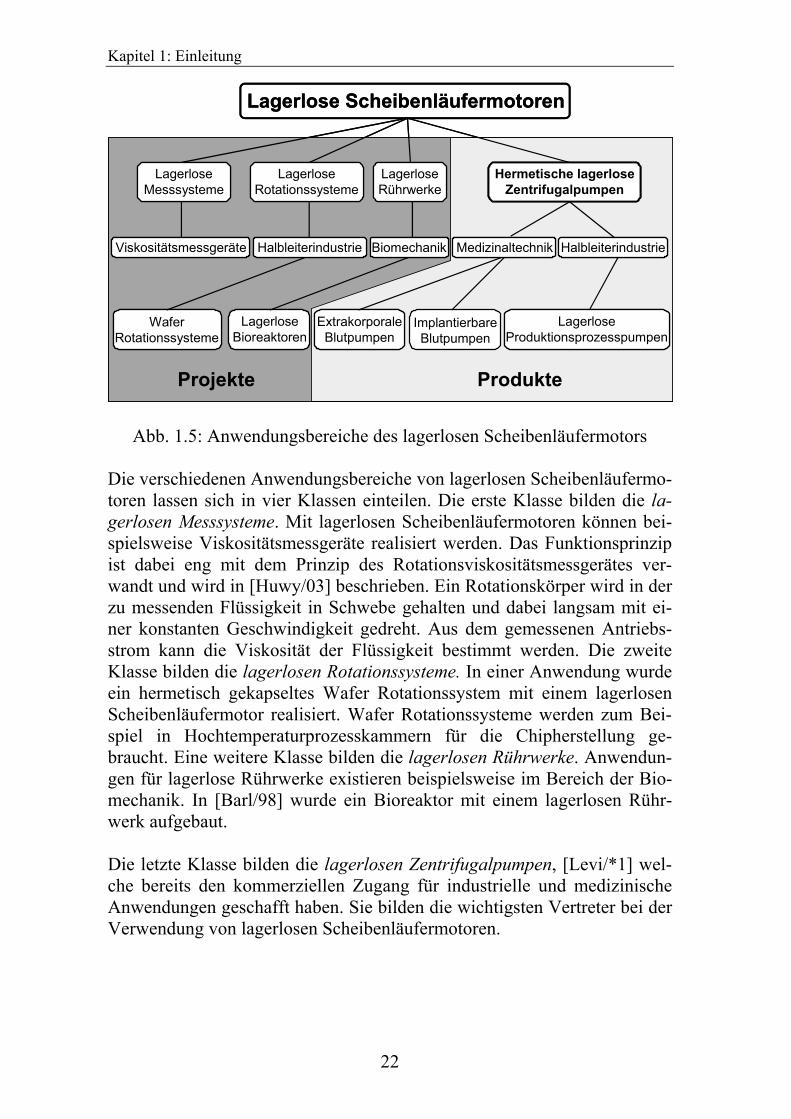
Abb. 1.5: Anwendungsbereiche des lagerlosen Scheibenläufermotors
Die verschiedenen Anwendungsbereiche von lagerlosen Scheibenläufermo-toren lassen sich in vier Klassen einteilen. Die erste Klasse bilden die la-gerlosen Messsysteme. Mit lagerlosen Scheibenläufermotoren können bei-spielsweise Viskositätsmessgeräte realisiert werden. Das Funktionsprinzip ist dabei eng mit dem Prinzip des Rotationsviskositätsmessgerätes ver-wandt und wird in [Huwy/03] beschrieben. Ein Rotationskörper wird in der zu messenden Flüssigkeit in Schwebe gehalten und dabei langsam mit ei-ner konstanten Geschwindigkeit gedreht. Aus dem gemessenen Antriebs-strom kann die Viskosität der Flüssigkeit bestimmt werden. Die zweite Klasse bilden die lagerlosen Rotationssysteme. In einer Anwendung wurde ein hermetisch gekapseltes Wafer Rotationssystem mit einem lagerlosen Scheibenläufermotor realisiert. Wafer Rotationssysteme werden zum Bei-spiel in Hochtemperaturprozesskammern für die Chipherstellung ge-braucht. Eine weitere Klasse bilden die lagerlosen Rührwerke. Anwendun-gen für lagerlose Rührwerke existieren beispielsweise im Bereich der Bio-mechanik. In [Barl/98] wurde ein Bioreaktor mit einem lagerlosen Rühr-werk aufgebaut. Die letzte Klasse bilden die lagerlosen Zentrifugalpumpen, [Levi/*1] wel-che bereits den kommerziellen Zugang für industrielle und medizinische Anwendungen geschafft haben. Sie bilden die wichtigsten Vertreter bei der Verwendung von lagerlosen Scheibenläufermotoren.
Kapitel 1: Einleitung
23
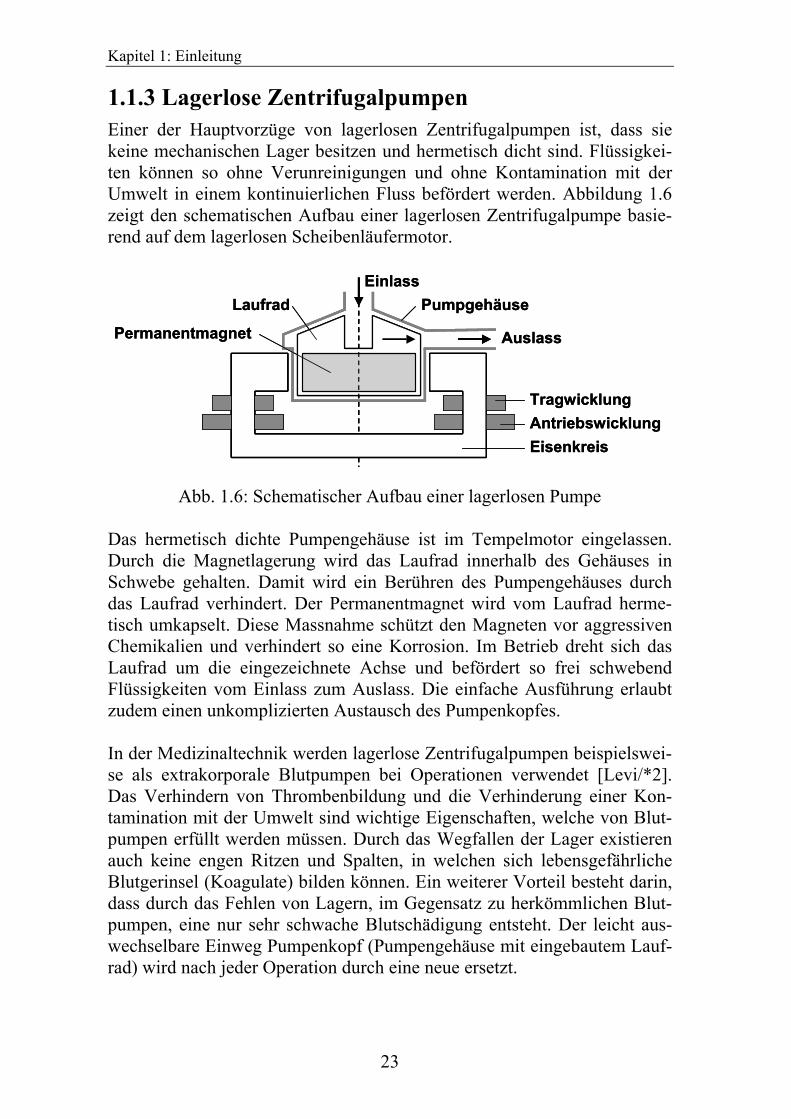
1.1.3 Lagerlose Zentrifugalpumpen Einer der Hauptvorzüge von lagerlosen Zentrifugalpumpen ist, dass sie keine mechanischen Lager besitzen und hermetisch dicht sind. Flüssigkei-ten können so ohne Verunreinigungen und ohne Kontamination mit der Umwelt in einem kontinuierlichen Fluss befördert werden. Abbildung 1.6 zeigt den schematischen Aufbau einer lagerlosen Zentrifugalpumpe basie-rend auf dem lagerlosen Scheibenläufermotor.
Auslass
Tragwicklung
Permanentmagnet
EisenkreisAntriebswicklung
EinlassPumpgehäuseLaufrad
Auslass
Tragwicklung
Permanentmagnet
EisenkreisAntriebswicklung
EinlassPumpgehäuseLaufrad
Abb. 1.6: Schematischer Aufbau einer lagerlosen Pumpe
Das hermetisch dichte Pumpengehäuse ist im Tempelmotor eingelassen. Durch die Magnetlagerung wird das Laufrad innerhalb des Gehäuses in Schwebe gehalten. Damit wird ein Berühren des Pumpengehäuses durch das Laufrad verhindert. Der Permanentmagnet wird vom Laufrad herme-tisch umkapselt. Diese Massnahme schützt den Magneten vor aggressiven Chemikalien und verhindert so eine Korrosion. Im Betrieb dreht sich das Laufrad um die eingezeichnete Achse und befördert so frei schwebend Flüssigkeiten vom Einlass zum Auslass. Die einfache Ausführung erlaubt zudem einen unkomplizierten Austausch des Pumpenkopfes.
In der Medizinaltechnik werden lagerlose Zentrifugalpumpen beispielswei-se als extrakorporale Blutpumpen bei Operationen verwendet [Levi/*2]. Das Verhindern von Thrombenbildung und die Verhinderung einer Kon-tamination mit der Umwelt sind wichtige Eigenschaften, welche von Blut-pumpen erfüllt werden müssen. Durch das Wegfallen der Lager existieren auch keine engen Ritzen und Spalten, in welchen sich lebensgefährliche Blutgerinsel (Koagulate) bilden können. Ein weiterer Vorteil besteht darin, dass durch das Fehlen von Lagern, im Gegensatz zu herkömmlichen Blut-pumpen, eine nur sehr schwache Blutschädigung entsteht. Der leicht aus-wechselbare Einweg Pumpenkopf (Pumpengehäuse mit eingebautem Lauf-rad) wird nach jeder Operation durch eine neue ersetzt.
Kapitel 1: Einleitung
24
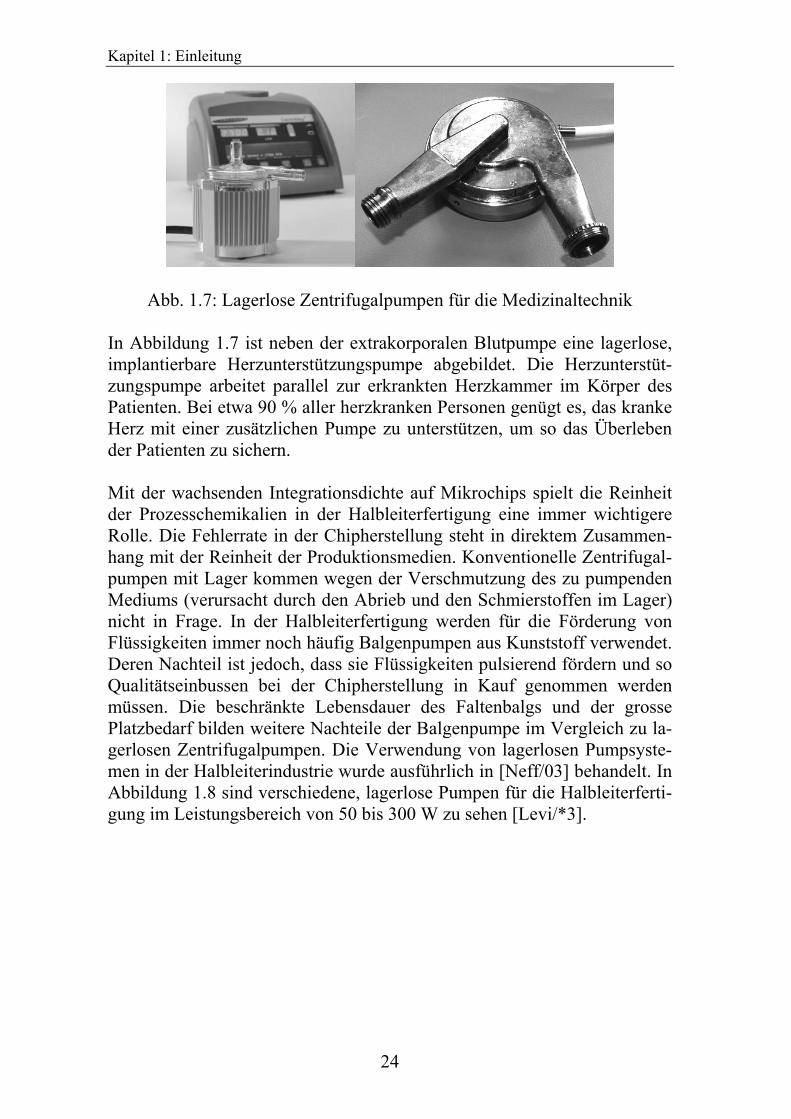
Abb. 1.7: Lagerlose Zentrifugalpumpen für die Medizinaltechnik In Abbildung 1.7 ist neben der extrakorporalen Blutpumpe eine lagerlose, implantierbare Herzunterstützungspumpe abgebildet. Die Herzunterstüt-zungspumpe arbeitet parallel zur erkrankten Herzkammer im Körper des Patienten. Bei etwa 90 % aller herzkranken Personen genügt es, das kranke Herz mit einer zusätzlichen Pumpe zu unterstützen, um so das Überleben der Patienten zu sichern.
Mit der wachsenden Integrationsdichte auf Mikrochips spielt die Reinheit der Prozesschemikalien in der Halbleiterfertigung eine immer wichtigere Rolle. Die Fehlerrate in der Chipherstellung steht in direktem Zusammen-hang mit der Reinheit der Produktionsmedien. Konventionelle Zentrifugal-pumpen mit Lager kommen wegen der Verschmutzung des zu pumpenden Mediums (verursacht durch den Abrieb und den Schmierstoffen im Lager) nicht in Frage. In der Halbleiterfertigung werden für die Förderung von Flüssigkeiten immer noch häufig Balgenpumpen aus Kunststoff verwendet. Deren Nachteil ist jedoch, dass sie Flüssigkeiten pulsierend fördern und so Qualitätseinbussen bei der Chipherstellung in Kauf genommen werden müssen. Die beschränkte Lebensdauer des Faltenbalgs und der grosse Platzbedarf bilden weitere Nachteile der Balgenpumpe im Vergleich zu la-gerlosen Zentrifugalpumpen. Die Verwendung von lagerlosen Pumpsyste-men in der Halbleiterindustrie wurde ausführlich in [Neff/03] behandelt. In Abbildung 1.8 sind verschiedene, lagerlose Pumpen für die Halbleiterferti-gung im Leistungsbereich von 50 bis 300 W zu sehen [Levi/*3].
Kapitel 1: Einleitung
25
Abb. 1.8: Lagerlose Zentrifugalpumpen für die Halbleiterindustrie
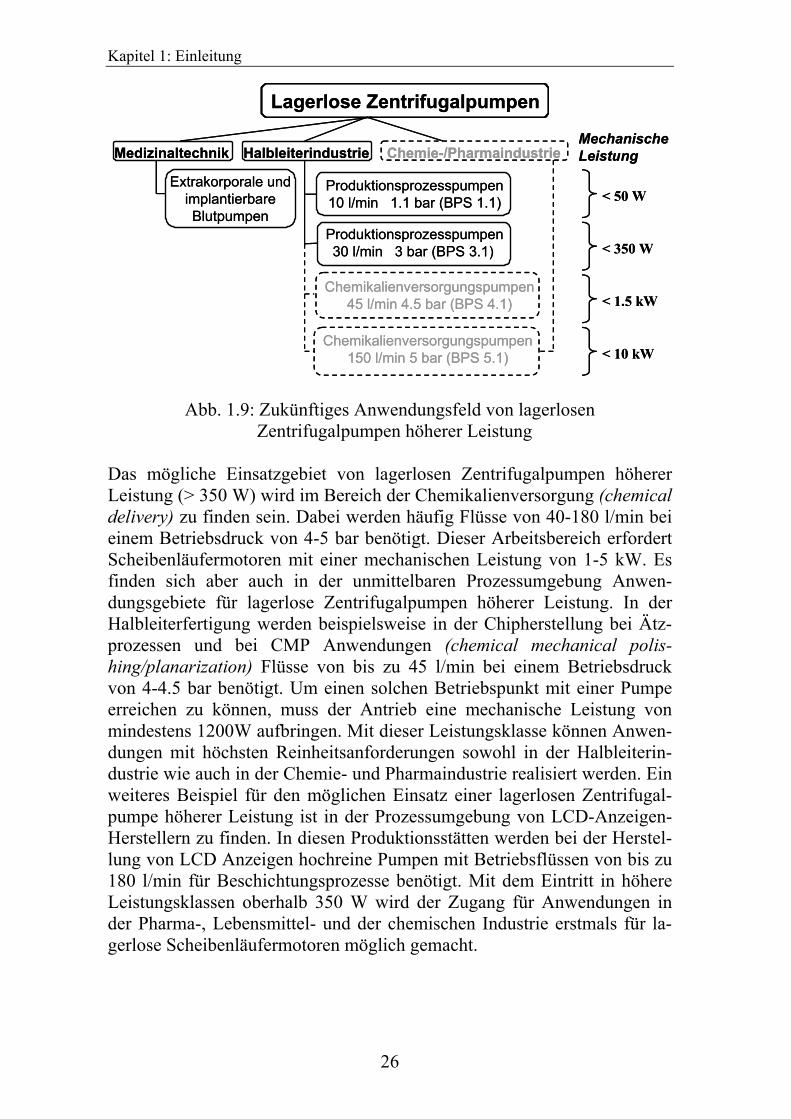
1.2 Problemstellung und Zielsetzung der Arbeit Die Leistungsklasse von lagerlosen Pumpsystemen bezeichnet in dieser Arbeit die mechanische Leistung, für welche der Motor ausgelegt wurde. Die lagerlose Pumpe selbst besitzt je nach Arbeitspunkt einen verhältnis-mässig bescheidenen Wirkungsgrad von ca. 12-46 %. Bei einer mechani-schen Motorleistung von 300 W sind Flüsse von bis zu 30 l/min bei einem Betriebsdruck von 3 bar möglich. Dies entspricht einer hydraulischen Leis-tung von etwa 100 W. Die restlichen 200 W mechanische Leistung gehen in Form von hydraulischen Verlusten in der Pumpe verloren. 1.2.1 Motivation für den Bau von lagerlosen Zentrifu-galpumpen höherer Leistung In einigen Anwendungen sind grössere Betriebsflüsse und Drücke gefor-dert. Soll der maximale Betriebsdruck erhöht werden, können zwei bau-gleiche Pumpen hydraulisch in Serie geschaltet werden. Der Betriebsdruck wird dabei verdoppelt. Werden zwei baugleiche Pumpen über Rückschlag-ventile hydraulisch parallel geschaltet, lässt sich der Gesamtfluss nähe-rungsweise verdoppeln. Solche Lösungen verhalten sich redundant bezüg-lich Betriebsausfällen einzelner Pumpen. Die Anschaffungskosten solcher Systeme sind aber im Vergleich zu Systemen, welche nur mit einer Pumpe höherer Leistung arbeitet, teurer. In Abbildung 1.9 sind in einem Überblick die wichtigsten, zukünftigen Anwendungsfelder von lagerlosen Zentrifu-galpumpen höherer Leistung dargestellt. Die gestrichelt umrandeten, lager-losen Produktionsprozesspumpen in den Leistungsklassen oberhalb 350 W, wurden bisher noch nicht mit einem Scheibenläufermotor realisiert und bilden deshalb den Schwerpunkt dieser Arbeit.
Kapitel 1: Einleitung
26
Lagerlose Zentrifugalpumpen
MedizinaltechnikMechanische LeistungChemie-/PharmaindustrieHalbleiterindustrie
< 50 W
< 350 W
< 1.5 kW
< 10 kW
Extrakorporale und implantierbare Blutpumpen
Produktionsprozesspumpen 10 l/min 1.1 bar (BPS 1.1)
Chemikalienversorgungspumpen 150 l/min 5 bar (BPS 5.1)
Produktionsprozesspumpen 30 l/min 3 bar (BPS 3.1)
Chemikalienversorgungspumpen 45 l/min 4.5 bar (BPS 4.1)
Lagerlose Zentrifugalpumpen
MedizinaltechnikMechanische LeistungChemie-/PharmaindustrieHalbleiterindustrie
< 50 W
< 350 W
< 1.5 kW
< 10 kW
Extrakorporale und implantierbare Blutpumpen
Produktionsprozesspumpen 10 l/min 1.1 bar (BPS 1.1)
Chemikalienversorgungspumpen 150 l/min 5 bar (BPS 5.1)
Produktionsprozesspumpen 30 l/min 3 bar (BPS 3.1)
Chemikalienversorgungspumpen 45 l/min 4.5 bar (BPS 4.1)
Abb. 1.9: Zukünftiges Anwendungsfeld von lagerlosen Zentrifugalpumpen höherer Leistung
Das mögliche Einsatzgebiet von lagerlosen Zentrifugalpumpen höherer Leistung (> 350 W) wird im Bereich der Chemikalienversorgung (chemical delivery) zu finden sein. Dabei werden häufig Flüsse von 40-180 l/min bei einem Betriebsdruck von 4-5 bar benötigt. Dieser Arbeitsbereich erfordert Scheibenläufermotoren mit einer mechanischen Leistung von 1-5 kW. Es finden sich aber auch in der unmittelbaren Prozessumgebung Anwen-dungsgebiete für lagerlose Zentrifugalpumpen höherer Leistung. In der Halbleiterfertigung werden beispielsweise in der Chipherstellung bei Ätz-prozessen und bei CMP Anwendungen (chemical mechanical polis-hing/planarization) Flüsse von bis zu 45 l/min bei einem Betriebsdruck von 4-4.5 bar benötigt. Um einen solchen Betriebspunkt mit einer Pumpe erreichen zu können, muss der Antrieb eine mechanische Leistung von mindestens 1200W aufbringen. Mit dieser Leistungsklasse können Anwen-dungen mit höchsten Reinheitsanforderungen sowohl in der Halbleiterin-dustrie wie auch in der Chemie- und Pharmaindustrie realisiert werden. Ein weiteres Beispiel für den möglichen Einsatz einer lagerlosen Zentrifugal-pumpe höherer Leistung ist in der Prozessumgebung von LCD-Anzeigen-Herstellern zu finden. In diesen Produktionsstätten werden bei der Herstel-lung von LCD Anzeigen hochreine Pumpen mit Betriebsflüssen von bis zu 180 l/min für Beschichtungsprozesse benötigt. Mit dem Eintritt in höhere Leistungsklassen oberhalb 350 W wird der Zugang für Anwendungen in der Pharma-, Lebensmittel- und der chemischen Industrie erstmals für la-gerlose Scheibenläufermotoren möglich gemacht.
Kapitel 1: Einleitung
27
1.2.2 Modellgesetze Bei der Leistungserhöhung von lagerlosen Scheibenläufermotoren treten verschiedene Probleme bezüglich der technischen Realisierung auf, welche in diesem Abschnitt in einem kurzen Überblick aufgezeigt werden sollen. Eine Leistungserhöhung kann bei einem konventionellen Motor erreicht werden, indem bei gleichbleibendem Antriebsmoment die Drehzahl erhöht wird. Dabei steigen die Eisenverluste überproportional mit der Drehzahl. Da die Eisenverluste bei einem konventionellen Motor in der Regel klein gegenüber den Kupferverlusten ausfallen, bewirken die höheren Eisenver-luste bei tiefen Drehzahlen (1500-4000 U/min) nur eine geringe Erhöhung der Motorgesamtverluste. Umgekehrt kann bei konstanter Drehzahl mit der Erhöhung des Antriebsmomentes die Antriebsleistung ebenfalls vergrössert werden. Dies kann mit einer Erhöhung des Antriebsstromes erreicht wer-den. Dabei würden die Motorverluste eines konventionellen Motors, bei gleichbleibender Motorgrösse, aber massiv steigen. Beim lagerlosen Tempelmotor fallen die Eisenverluste, bedingt durch den geometrischen Aufbau des Eisenkreises, wesentlich höher aus als bei kon-ventionellen Motoren [Neff/03]. Im optimalen Betriebspunkt sind die Mo-torgesamtverluste des Tempelmotors am kleinsten. Dieser optimale Be-triebspunkt stellt sich ein, wenn die Eisenverluste etwa in der gleichen Grössenordnung wie die Kupferverluste liegen. Wird eine Leistungserhö-hung durch die Erhöhung der Drehzahl erreicht, ist mit einer starken Zu-nahme der Eisenverluste bzw. gesamten Motorverluste zu rechnen. Im speziellen Fall des Tempelmotors ist deshalb eine Leistungserhöhung durch eine Vergrösserung des Drehmomentes, bezüglich den entstehenden Verlusten, vorteilhafter. Um die Kupferverluste bei einer Erhöhung des Drehmomentes im Verhältnis zur Antriebsleistung klein zu halten, muss der Motor grösser gebaut werden. Durch die Vergrösserung lässt sich zu-dem eine grössere Verlustleistung über die Oberfläche des Motors abfüh-ren. Damit die Herstellungskosten des Motors möglichst klein bleiben, muss nach einfacheren Motorkonfigurationen gesucht werden. Werden die Abmessungen aller Bauteile bei einem bestehenden lagerlosen Scheibenläufermotor um den Längenfaktor k vergrössert, lassen sich die Veränderungen der Motorparameter durch die in Tabelle 1.1 definierten Umrechnungsfaktoren bestimmen. Bei den folgenden Betrachtungen wird eine konstante Stromdichte vorausgesetzt. Der Wärmeübergangsleitwert durch Konvektionskühlung ist nicht durch einen festen Faktor bestimmt. Dieser Leitwert ist bei Motoren mit Durchmessern zwischen 5 und 50 cm aber nahezu proportional zur Oberfläche, also zum Quadrat der Länge. Die Grundlagen für die Berechnungen der Wachstumsgesetze wurden aus [Ausd/04] und [Fisc/95] entnommen.
Kapitel 1: Einleitung
28
Wicklungswiderstand Ω 1/k
Kupferverluste W k3
Eisenverluste W k3
Masse kg k3
Oberfläche m2 k2
Wärmeübergangsleitwert W/K ~k2
Maximale Dauerverlustleistung W ~k2
Flussdichte, permanenterregt T 1
Axialkraft N k2
Drehzahl rad/s 1
Rastmoment Nm k2
Dauerdrehmoment Nm k4
Leistung W k4
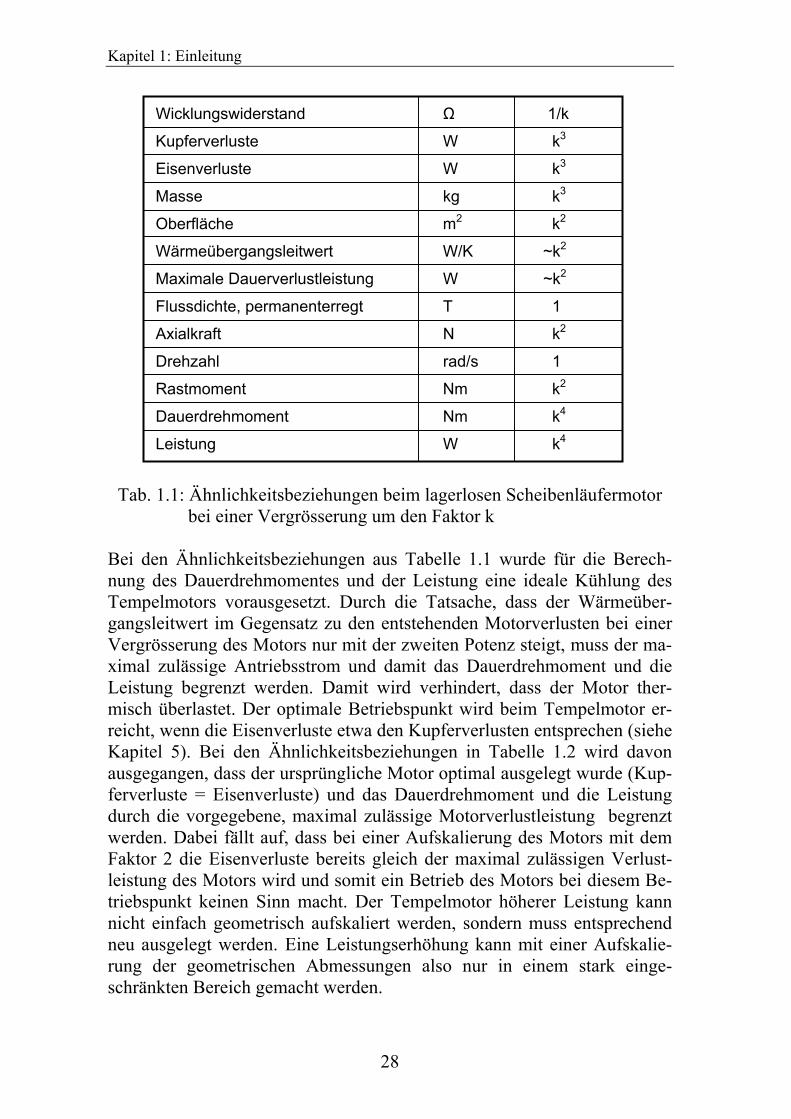
Tab. 1.1: Ähnlichkeitsbeziehungen beim lagerlosen Scheibenläufermotor
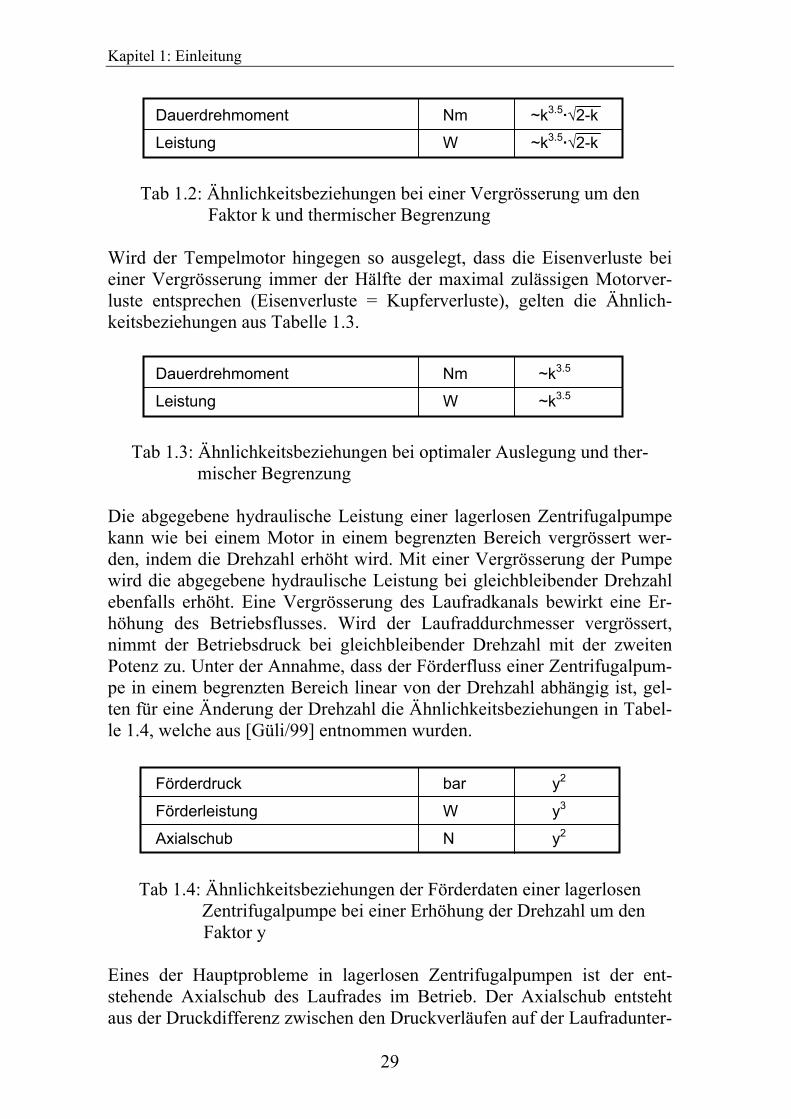
bei einer Vergrösserung um den Faktor k Bei den Ähnlichkeitsbeziehungen aus Tabelle 1.1 wurde für die Berech-nung des Dauerdrehmomentes und der Leistung eine ideale Kühlung des Tempelmotors vorausgesetzt. Durch die Tatsache, dass der Wärmeüber-gangsleitwert im Gegensatz zu den entstehenden Motorverlusten bei einer Vergrösserung des Motors nur mit der zweiten Potenz steigt, muss der ma-ximal zulässige Antriebsstrom und damit das Dauerdrehmoment und die Leistung begrenzt werden. Damit wird verhindert, dass der Motor ther-misch überlastet. Der optimale Betriebspunkt wird beim Tempelmotor er-reicht, wenn die Eisenverluste etwa den Kupferverlusten entsprechen (siehe Kapitel 5). Bei den Ähnlichkeitsbeziehungen in Tabelle 1.2 wird davon ausgegangen, dass der ursprüngliche Motor optimal ausgelegt wurde (Kup-ferverluste = Eisenverluste) und das Dauerdrehmoment und die Leistung durch die vorgegebene, maximal zulässige Motorverlustleistung begrenzt werden. Dabei fällt auf, dass bei einer Aufskalierung des Motors mit dem Faktor 2 die Eisenverluste bereits gleich der maximal zulässigen Verlust-leistung des Motors wird und somit ein Betrieb des Motors bei diesem Be-triebspunkt keinen Sinn macht. Der Tempelmotor höherer Leistung kann nicht einfach geometrisch aufskaliert werden, sondern muss entsprechend neu ausgelegt werden. Eine Leistungserhöhung kann mit einer Aufskalie-rung der geometrischen Abmessungen also nur in einem stark einge-schränkten Bereich gemacht werden.
Kapitel 1: Einleitung
29
Dauerdrehmoment Nm ~k3.5·√2-k
Leistung W ~k3.5·√2-k
Tab 1.2: Ähnlichkeitsbeziehungen bei einer Vergrösserung um den
Faktor k und thermischer Begrenzung Wird der Tempelmotor hingegen so ausgelegt, dass die Eisenverluste bei einer Vergrösserung immer der Hälfte der maximal zulässigen Motorver-luste entsprechen (Eisenverluste = Kupferverluste), gelten die Ähnlich-keitsbeziehungen aus Tabelle 1.3. Dauerdrehmoment Nm ~k3.5
Leistung W ~k3.5
Tab 1.3: Ähnlichkeitsbeziehungen bei optimaler Auslegung und ther-
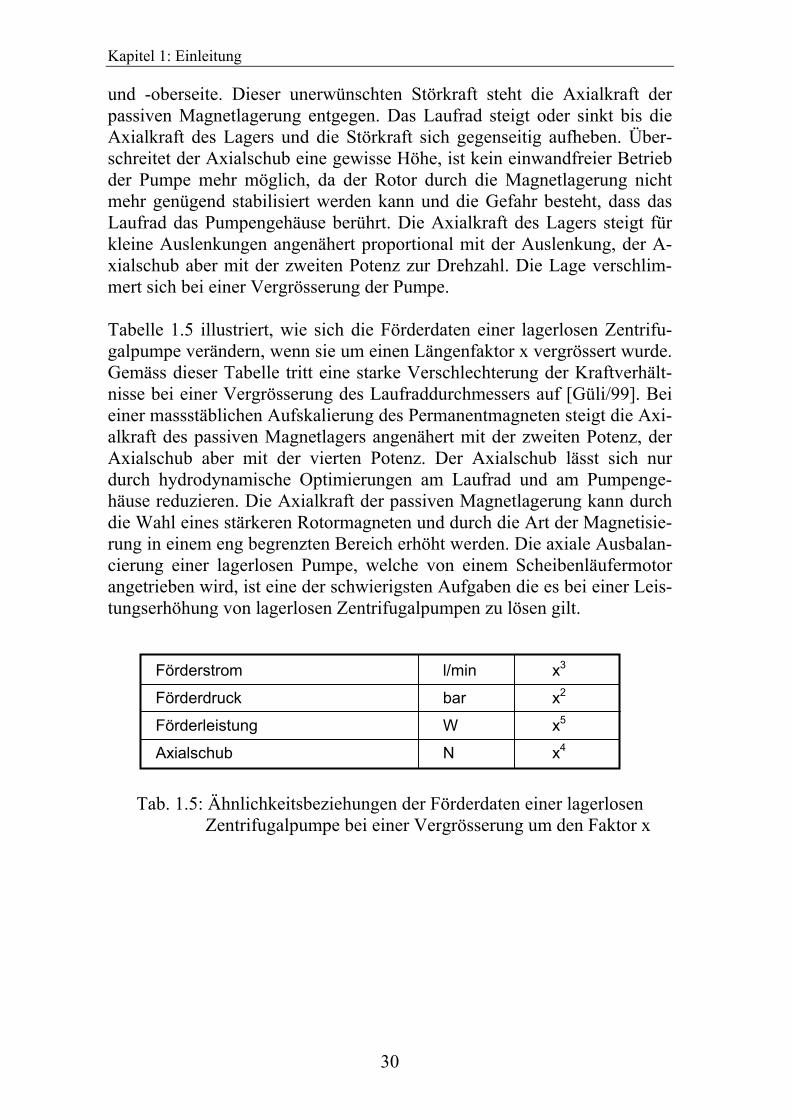
mischer Begrenzung Die abgegebene hydraulische Leistung einer lagerlosen Zentrifugalpumpe kann wie bei einem Motor in einem begrenzten Bereich vergrössert wer-den, indem die Drehzahl erhöht wird. Mit einer Vergrösserung der Pumpe wird die abgegebene hydraulische Leistung bei gleichbleibender Drehzahl ebenfalls erhöht. Eine Vergrösserung des Laufradkanals bewirkt eine Er-höhung des Betriebsflusses. Wird der Laufraddurchmesser vergrössert, nimmt der Betriebsdruck bei gleichbleibender Drehzahl mit der zweiten Potenz zu. Unter der Annahme, dass der Förderfluss einer Zentrifugalpum-pe in einem begrenzten Bereich linear von der Drehzahl abhängig ist, gel-ten für eine Änderung der Drehzahl die Ähnlichkeitsbeziehungen in Tabel-le 1.4, welche aus [Güli/99] entnommen wurden.
Förderdruck bar y2
Förderleistung W y3
Axialschub N y2
Tab 1.4: Ähnlichkeitsbeziehungen der Förderdaten einer lagerlosen
Zentrifugalpumpe bei einer Erhöhung der Drehzahl um den Faktor y Eines der Hauptprobleme in lagerlosen Zentrifugalpumpen ist der ent-stehende Axialschub des Laufrades im Betrieb. Der Axialschub entsteht aus der Druckdifferenz zwischen den Druckverläufen auf der Laufradunter-
Kapitel 1: Einleitung
30
und -oberseite. Dieser unerwünschten Störkraft steht die Axialkraft der passiven Magnetlagerung entgegen. Das Laufrad steigt oder sinkt bis die Axialkraft des Lagers und die Störkraft sich gegenseitig aufheben. Über-schreitet der Axialschub eine gewisse Höhe, ist kein einwandfreier Betrieb der Pumpe mehr möglich, da der Rotor durch die Magnetlagerung nicht mehr genügend stabilisiert werden kann und die Gefahr besteht, dass das Laufrad das Pumpengehäuse berührt. Die Axialkraft des Lagers steigt für kleine Auslenkungen angenähert proportional mit der Auslenkung, der A-xialschub aber mit der zweiten Potenz zur Drehzahl. Die Lage verschlim-mert sich bei einer Vergrösserung der Pumpe. Tabelle 1.5 illustriert, wie sich die Förderdaten einer lagerlosen Zentrifu-galpumpe verändern, wenn sie um einen Längenfaktor x vergrössert wurde. Gemäss dieser Tabelle tritt eine starke Verschlechterung der Kraftverhält-nisse bei einer Vergrösserung des Laufraddurchmessers auf [Güli/99]. Bei einer massstäblichen Aufskalierung des Permanentmagneten steigt die Axi-alkraft des passiven Magnetlagers angenähert mit der zweiten Potenz, der Axialschub aber mit der vierten Potenz. Der Axialschub lässt sich nur durch hydrodynamische Optimierungen am Laufrad und am Pumpenge-häuse reduzieren. Die Axialkraft der passiven Magnetlagerung kann durch die Wahl eines stärkeren Rotormagneten und durch die Art der Magnetisie-rung in einem eng begrenzten Bereich erhöht werden. Die axiale Ausbalan-cierung einer lagerlosen Pumpe, welche von einem Scheibenläufermotor angetrieben wird, ist eine der schwierigsten Aufgaben die es bei einer Leis-tungserhöhung von lagerlosen Zentrifugalpumpen zu lösen gilt.
Förderstrom l/min x3
Förderdruck bar x2
Förderleistung W x5
Axialschub N x4
Tab. 1.5: Ähnlichkeitsbeziehungen der Förderdaten einer lagerlosen Zentrifugalpumpe bei einer Vergrösserung um den Faktor x
Kapitel 1: Einleitung
31
1.2.3 Zielsetzung der Arbeit Ziel der Arbeit ist der Entwurf und die Realisierung lagerloser Chemika-lienversorgungs- und Produktionsprozesspumpen höherer Leistung. Diese Arbeit untersucht mit welchen neuen Konzepten lagerlose Scheiben-läufermotoren höherer Leistung (< 10 kW) realisiert werden können wobei neben der technischen Realisierung auch wirtschaftlichen und produktions-technischen Aspekten Rechnung getragen werden muss. Ein Schwerpunkt bildet dabei die Realisierung und die systematische Optimierung von zwei-poligen und vierpoligen lagerlosen Scheibenläufermotoren höherer Leis-tung für den Antrieb von lagerlosen Zentrifugalpumpen. Lagerlose Zentrifugalpumpen im Leistungsbereich von einigen kW finden in folgenden Industriebereichen ihre Anwendung:
• Halbleiterfertigung
• Chemische Industrie
• Pharmaindustrie
• Lebensmittelindustrie
Bereichsübergreifend müssen für die Realisierung lagerloser Zentrifugal-pumpen im kW Bereich auch Probleme aus den Bereichen der Hydrody-namik gelöst werden. Eines der Hauptprobleme die es bei einer Leistungs-erhöhung zu lösen gilt, ist die axiale Stabilisierung des Laufrades. Unter Berücksichtigung der Betriebseigenschaften müssen neue Lösungsmetho-den für die axiale Ausbalancierung von Laufrädern in lagerlosen Zentrifu-galpumpen gesucht werden.
Kapitel 1: Einleitung
32
1.3 Aufbau der Arbeit Basierend auf früheren Arbeiten über den lagerlosen Scheibenläufermotor in Tempelbauform [Barl/98], [Neff/03] werden in dieser Arbeit folgende Problemkreise im Zusammenhang mit der Leistungserhöhung bei lagerlo-sen Scheibenläufermotoren behandelt: Das folgende Kapitel 2 beginnt mit der Einführung der Grundlagen für la-gerlose Scheibenläufermotoren höherer Leistung. Geeignete Motorkonfigu-rationen werden durch Simulationsuntersuchungen ausgewählt und bewer-tet. Am Ende des Kapitels werden die Motorbauformen für lagerlose Scheibenläufermotoren höherer Leistung festgelegt. In Kapitel 3 wird der zweipolige Scheibenläufermotor höherer Leistung bezüglich dem Aufbau, verschiedener Rotormagnetisierungen und der Re-gelstruktur untersucht. Kapitel 4 untersucht den vierpoligen Scheibenläufermotor höherer Leistung bezüglich dem Aufbau, verschiedener Rotormagnetisierungen und der Re-gelstruktur. In einer Gegenüberstellung zum zweipoligen Scheibenläufer-motor werden die beiden Motortypen betreffend der technischen Realisier-barkeit verglichen und bewertet. Kapitel 5 widmet sich der Minimierung von Verlusten bei lagerlosen Scheibenläufermotoren höherer Leistung. Ein Schwerpunkt bildet dabei die Minimierung von Eisenverlusten. Gestützt durch theoretische Verlustbe-trachtungen und Feldsimulationen werden verschiedene Eisenkreiskonfigu-rationen untersucht und optimiert. Kapitel 6 betrachtet verschiedene Problembereiche bei der Gestaltung la-gerloser Pumpen. Dabei werden verschiedene Lösungsansätze unter Be-rücksichtigung der Betriebseigenschaften von lagerlosen Scheibenläufer-motoren erarbeitet und vorgeschlagen. Das letzte Kapitel zeigt anhand von aufgebauten Prototypen die praktische Realisierbarkeit eines vierpoligen lagerlosen 1 kW Pumpsystems, eines zweipoligen lagerlosen 1,2 kW Pumpsystems für die Halbleiterfertigung und eines zweipoligen lagerlosen 4 kW Pumpsystems für die Chemikalien-versorgung. In der Zusammenfassung und im Ausblick werden die wichtigsten Ergeb-nisse dieser Arbeit zusammengefasst und auf zukünftige Forschungs- und Entwicklungsrichtungen hingewiesen.
33
2. Grundlagen und Konzepte lagerloser Scheibenläufermotoren In diesem Kapitel werden geeignete Magnetlager-Antriebs-Konfigura-tionen für Scheibenläufermotoren höherer Leistung ausgearbeitet. Dazu werden in Abschnitt 2.1 die Grundlagen der passiven und aktiven Magnet-lagerung sowie die Grundlagen für die Drehmomentbildung behandelt. In Abschnitt 2.2 werden aussagekräftige Motorkonfigurationen für spätere Untersuchungen ausgewählt. Diese Motorkonfigurationen werden in Ab-schnitt 2.3 mit Hilfe von Simulationen, bezüglich den erzeugbaren Trag-kräften und Drehmomenten untersucht und bewertet. Abschnitt 2.4 befasst sich mit den Vor- und Nachteilen verschiedener Motorbauformen. Der Ab-schluss des Kapitels bildet die Festlegung der Motorbauformen, welche in den späteren Kapiteln realisiert werden. Koordinatensysteme Das Antriebs- und das Tragsystem von lagerlosen Scheibenläufermotoren wurden bisher vorwiegend zweiphasig aufgebaut. Dies bringt den Vorteil, dass eine einfache Implementierung der Regelung in einem orthogonalen dq-Koordinatensystem möglich ist. Die Ströme und Spannungen im dq-Zweiphasenersatzsystem entsprechen für zweiphasige Motoren den Strö-men und Spannungen im elektrischen ab-Phasensystem. Für dreiphasige Motoren eignet sich die leistungsinvariante Park-Transformation (Glei-chung 2.3), welche Grössen wie Ströme und Spannungen vom abc-Dreiphasensystem in ein orthogonales dq-Zweiphasenersatzsystem trans-formiert. Die Transformation setzt voraus, dass die Summe der drei Ströme bzw. Spannungen im Dreiphasensystem verschwindet.
( )a
abcb
c
ii i
i
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= ( )
0
ddq
q
ii i
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= ( )a
abcb
c
uu u
u
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= ( )
0
ddq
q
uuu
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (2.1)
1( ) ( )abc dqi C i−= ⋅ ( ) ( )dq abci C i= ⋅ (2.2) 1( ) ( )abc dqu C u−= ⋅ ( ) ( )dq abcu C u= ⋅
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
34
1 112 2
3 3 302 2 2
1 1 12 2 2
C
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
− −
= ⋅ − 1 32
TC C− = ⋅ (2.3)
Bei der Beschreibung des lagerlosen Scheibenläufermotors werden Vek-torgrössen im Statorkoordinatensystem mit S und im Rotorfeldkoordinaten-system mit F bezeichnet. Das verwendete Koordinatensystem wird bei al-len Vektorgrössen in hochgestellten Klammern angegeben. Die Umrech-nung zwischen den beiden Koordinatensystemen kann mit der Drehtrans-formation nach Gleichung 2.4 vollzogen werden. ( )( ) ( )F S
Sa D aγ= ⋅ ( ) ( )1( ) ( ) ( )S F FS Sa D a D aγ γ−= ⋅ = − ⋅ (2.4)
( )( ) ( )( ) ( )
cos sin
sin cosS S
SS S
Dγ γ
γγ γ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
=−
(2.5)
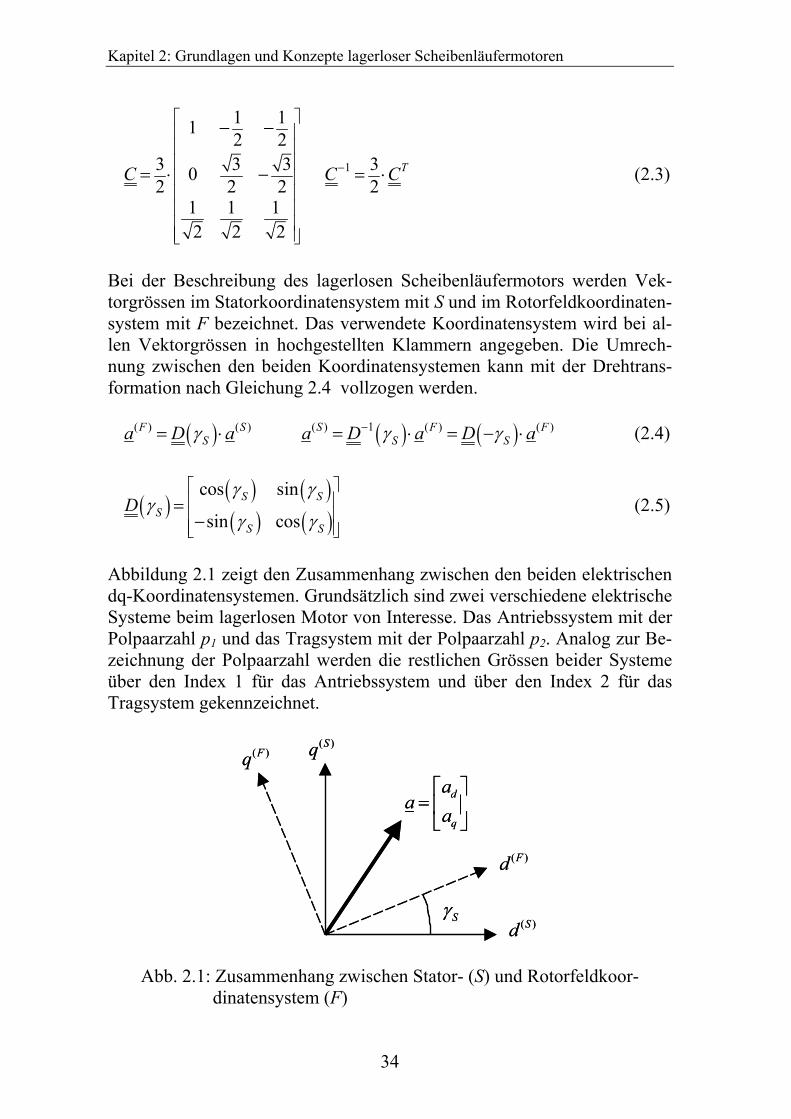
Abbildung 2.1 zeigt den Zusammenhang zwischen den beiden elektrischen dq-Koordinatensystemen. Grundsätzlich sind zwei verschiedene elektrische Systeme beim lagerlosen Motor von Interesse. Das Antriebssystem mit der Polpaarzahl p1 und das Tragsystem mit der Polpaarzahl p2. Analog zur Be-zeichnung der Polpaarzahl werden die restlichen Grössen beider Systeme über den Index 1 für das Antriebssystem und über den Index 2 für das Tragsystem gekennzeichnet.
( )Sd
( )Fd
( )Sq( )Fq
Sγ
d
q
aa
a⎡ ⎤
= ⎢ ⎥⎣ ⎦
( )Sd
( )Fd
( )Sq( )Fq
Sγ
d
q
aa
a⎡ ⎤
= ⎢ ⎥⎣ ⎦
Abb. 2.1: Zusammenhang zwischen Stator- (S) und Rotorfeldkoor- dinatensystem (F)
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
35
2.1 Grundlagen lagerloser Scheibenläufermoto-ren Die Grundlagen für die Berechnung der Drehmoment- und Kraftbildung wurden in den Arbeiten von [Schö/93], [Barl/98] und [Hütt/03] hergeleitet. 2.1.1 Drehmoment- und Kraftbildung Drehmomentbildung In elektrischen Maschinen sind zwei verschiedene magnetische Kraftwir-kungen bekannt: die Lorenz- und die Maxwellkraft [Küpf/59]. Maxwell-Kräfte treten in einem magnetischen Kreis an den Grenzflächen von Mate-rialien mit unterschiedlichen Permeabilitäten auf. Die Kraft dFM auf ein in-finitesimales Grenzflächenelement dA zwischen Luftspalt und hochperme-ablem Material (µr > 1), durch welches die Induktion B senkrecht hindurch tritt, berechnet sich aus der Maxwellschen Formel (2.6). Die Kraft steht dabei senkrecht zum Grenzflächenelement dA in den Luftspalt gerichtet.
2
02MB dAdF
µ⋅=
⋅ (2.6)
In Abbildung 2.2 a.) ist die Maxwellkraftverteilung qualitativ für eine Ma-schine mit einem sinusförmigen Antriebsfeld der Polpaarzahl p1=1 abge-bildet. Die resultierende Kraft am Rotor hebt sich bei einer symmetrischen Induktionsverteilung und zentrischen Anordnung auf. Erst eine Verlage-rung des Rotors aus dem Zentrum bewirkt eine Querkraft in die Verschie-bungsrichtung. Diese Querkräfte werden auch als Zugkräfte bezeichnet [Wied/67]. Die Kraft dFL, welche auf einen vom Strom I durchflossenen Leiter der Länge dl im Magnetfeld mit der Flussdichte B wirkt, wird als Lorenzkraft bezeichnet. LdF B I dl= ⋅ ⋅ ( )dl B⊥ (2.7) Die Lorenzkraft bildet die Basis bei der Berechnung des Drehmomentes in elektrischen Maschinen. Streng genommen sind bei Motoren mit Nuten die Lorenzkräfte nur schwach an der Bildung des Drehmomentes beteiligt. Die Tangentialkomponenten der Maxwell-Kräfte sind in Tat und Wahrheit für die Bildung des Drehmomentes zuständig, da die Leiter in den Nuten we-gen der hohen Permeabilität des Eisens praktisch im feldfreien Raum lie-gen. Die gesamten Kräfte besitzen jedoch den selben Wert, wie wenn sich die Leiter im Luftspalt befinden würden [Küpf/59].
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
36
Die Abbildung 2.2 b.) zeigt ein Antriebsfeld mit der Polpaarzahl p1=1, bei welcher mit einer Stromverteilung mit derselben Polpaarzahl tangentiale Lorenz-Kräftepaare erzeugt werden.
a) b)dFMaxwell
dFLorentzdFLorenz
dFMaxwell
a.) b.)
a) b)dFMaxwell
dFLorentzdFLorenz
dFMaxwell
a.) b.)
Abb. 2.2: Lorenz- und Maxwell-Kräfte einer konventionellen
Drehfeldmaschine Kraftbildung Die Lorenz- und Maxwellkräfte können auch für die Erzeugung von Ver-schiebungskräften verwendet werden. In einem Drehfeldmotor mit der Pol-paarzahl p1 können steuerbare Querkräfte nach [Herm/74] und [Herm/75] mit einer zusätzlichen Wicklung der Polpaarzahl 2 1 1p p= ± (2.8) erzeugt werden. Diese radialen Kräfte setzen sich aus Lorenz- und Max-wellkräften zusammen [Schu/96]. Für den Fall einer Antriebs-Polpaarzahl p1=1 und einer Lager-Polpaarzahl p2=2 sind in Abbildung 2.3 für eine 2-polige sinusförmige Rotormagnetisierung die Maxwell-Querkräfte abgebil-det. Im linken Querschnitt von Abbildung 2.3 wird eine Kraft in x-Richtung erzeugt, indem die Flussdichte im Luftspalt rechts vom Rotor er-höht und links davon abgeschwächt wird. In y-Richtung heben sich die Kraftwirkungen des überlagerten Magnetflusses gesamthaft auf. Wird das Lagerfeld, wie in Abbildung 2.3 im rechten Querschnitt abgebildet, um 45° gedreht resultiert eine Kraft in y-Richtung. Damit können in jeder beliebi-gen Richtung radiale Maxwell-Kräfte erzeugt werden.
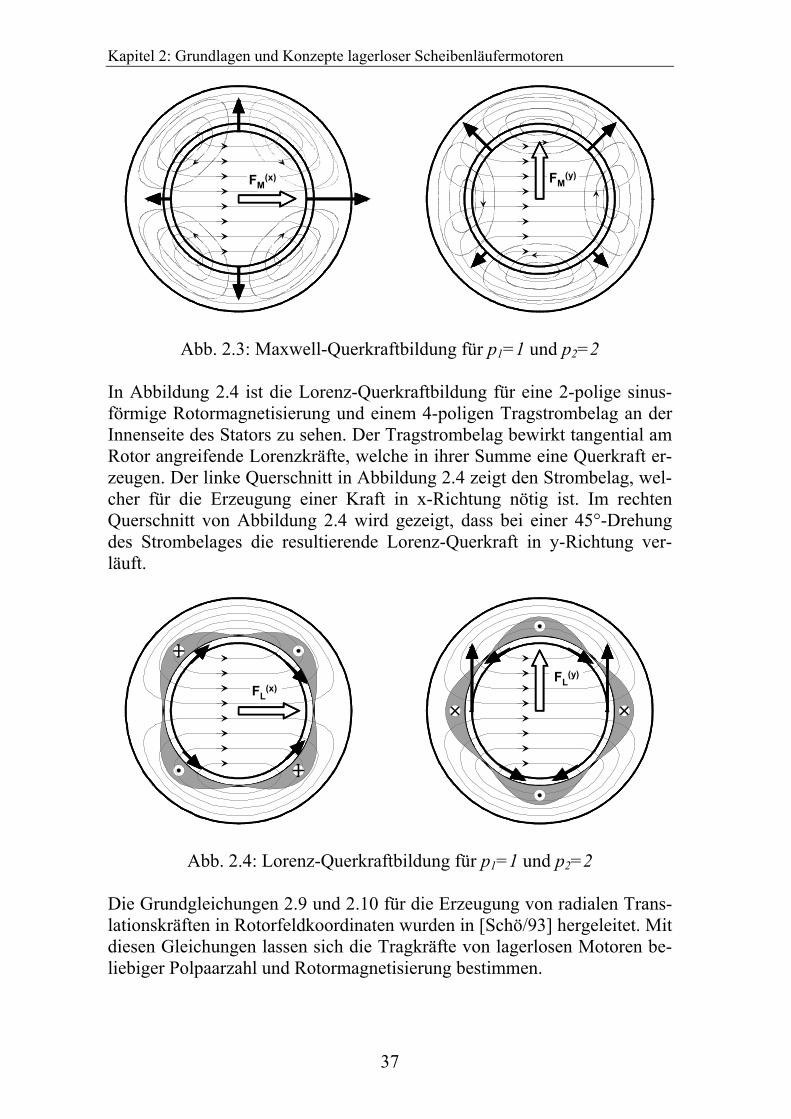
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
37
FxFyFM
(y)FM(x)Fx
FyFM(y)FM
(x)
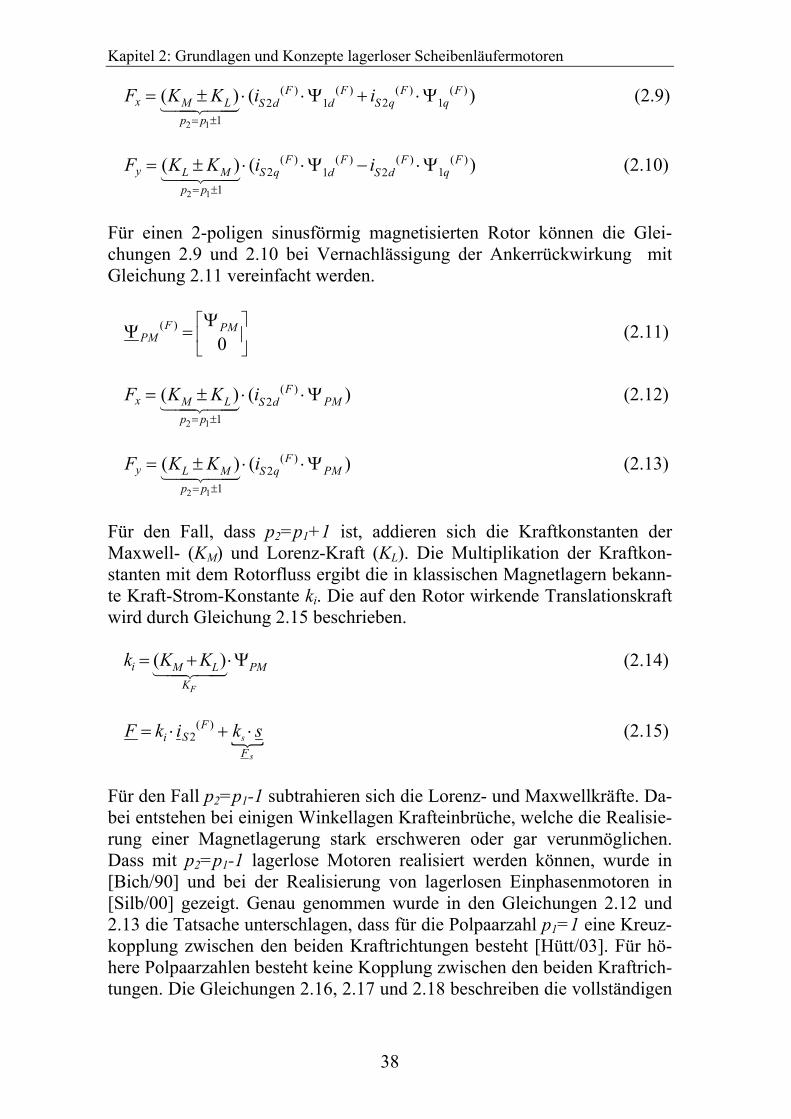
Abb. 2.3: Maxwell-Querkraftbildung für p1=1 und p2=2 In Abbildung 2.4 ist die Lorenz-Querkraftbildung für eine 2-polige sinus-förmige Rotormagnetisierung und einem 4-poligen Tragstrombelag an der Innenseite des Stators zu sehen. Der Tragstrombelag bewirkt tangential am Rotor angreifende Lorenzkräfte, welche in ihrer Summe eine Querkraft er-zeugen. Der linke Querschnitt in Abbildung 2.4 zeigt den Strombelag, wel-cher für die Erzeugung einer Kraft in x-Richtung nötig ist. Im rechten Querschnitt von Abbildung 2.4 wird gezeigt, dass bei einer 45°-Drehung des Strombelages die resultierende Lorenz-Querkraft in y-Richtung ver-läuft.
Fx
FyFL
(x)FL
(y)
Fx
FyFL
(x)FL
(y)
Abb. 2.4: Lorenz-Querkraftbildung für p1=1 und p2=2
Die Grundgleichungen 2.9 und 2.10 für die Erzeugung von radialen Trans-lationskräften in Rotorfeldkoordinaten wurden in [Schö/93] hergeleitet. Mit diesen Gleichungen lassen sich die Tragkräfte von lagerlosen Motoren be-liebiger Polpaarzahl und Rotormagnetisierung bestimmen.
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
38
2 1
( ) ( ) ( ) ( )2 12 1
1
( ) ( )F F F Fx M L S q qS d d
p p
F K K i i= ±
= ± ⋅ ⋅Ψ + ⋅Ψ (2.9)
2 1
( ) ( ) ( ) ( )2 11 2
1
( ) ( )F F F Fy L M S q qd S d
p p
F K K i i= ±
= ± ⋅ ⋅Ψ − ⋅Ψ (2.10)
Für einen 2-poligen sinusförmig magnetisierten Rotor können die Glei-chungen 2.9 und 2.10 bei Vernachlässigung der Ankerrückwirkung mit Gleichung 2.11 vereinfacht werden.
( )
0F PM
PM⎡ ⎤⎢ ⎥⎣ ⎦
ΨΨ = (2.11)
2 1
( )2
1
( ) ( )Fx M L PMS d
p p
F K K i= ±
= ± ⋅ ⋅Ψ (2.12)
2 1
( )2
1
( ) ( )Fy L M PMS q
p p
F K K i= ±
= ± ⋅ ⋅Ψ (2.13)
Für den Fall, dass p2=p1+1 ist, addieren sich die Kraftkonstanten der Maxwell- (KM) und Lorenz-Kraft (KL). Die Multiplikation der Kraftkon-stanten mit dem Rotorfluss ergibt die in klassischen Magnetlagern bekann-te Kraft-Strom-Konstante ki. Die auf den Rotor wirkende Translationskraft wird durch Gleichung 2.15 beschrieben. ( )
F
i M L PMK
k K K= + ⋅Ψ (2.14)
( )
2 s
s
FSi
F
F k i k s= ⋅ + ⋅ (2.15)
Für den Fall p2=p1-1 subtrahieren sich die Lorenz- und Maxwellkräfte. Da-bei entstehen bei einigen Winkellagen Krafteinbrüche, welche die Realisie-rung einer Magnetlagerung stark erschweren oder gar verunmöglichen. Dass mit p2=p1-1 lagerlose Motoren realisiert werden können, wurde in [Bich/90] und bei der Realisierung von lagerlosen Einphasenmotoren in [Silb/00] gezeigt. Genau genommen wurde in den Gleichungen 2.12 und 2.13 die Tatsache unterschlagen, dass für die Polpaarzahl p1=1 eine Kreuz-kopplung zwischen den beiden Kraftrichtungen besteht [Hütt/03]. Für hö-here Polpaarzahlen besteht keine Kopplung zwischen den beiden Kraftrich-tungen. Die Gleichungen 2.16, 2.17 und 2.18 beschreiben die vollständigen
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
39
Kraftgleichungen für einen sinusförmig magnetisierten Rotor der Polpaar-zahl p1=1.
( )
2( )
2
cos(2 ) sin(2 )1 0sin(2 ) cos(2 )0 1
i
Fx S ds s
i i i Fy s s S q
K
iFF k cF i
γ γγ γ
⎡ ⎤⎛ ⎞⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥⎜ ⎟⋅⎢ ⎥ ⎢ ⎥⎢ ⎥⎜ ⎟ ⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎝ ⎠ ⎣ ⎦
⋅ ⋅= = ⋅ − ⋅
⋅ − ⋅ (2.16)
cos(2 ) sin(2 )1 0sin(2 ) cos(2 )0 1
s
sx s ss s s
sy s ssK
F xF k cF yγ γγ γ
⎛ ⎞⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤⎜ ⎟⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎜ ⎟⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎝ ⎠
⋅ ⋅= = ⋅ + ⋅ ⋅
⋅ ⋅ (2.17)
( )
2F
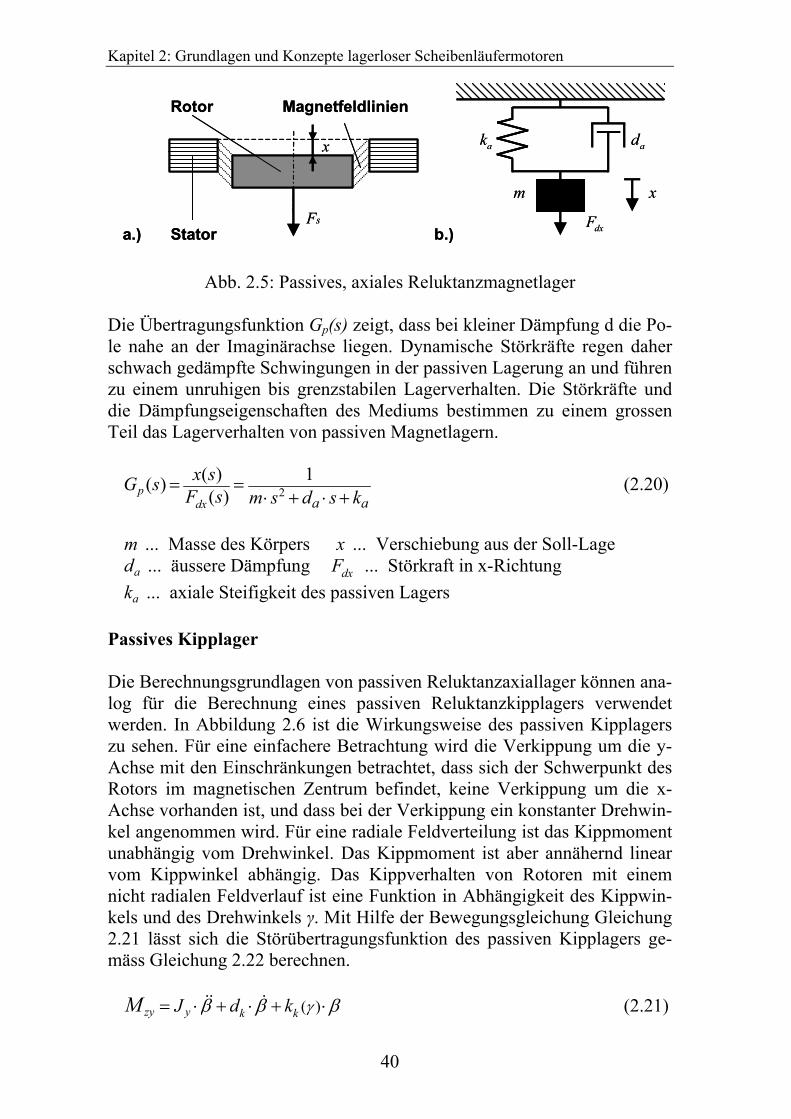
Si sF K i K s= ⋅ + ⋅ (2.18) ci ... Kraft-Strom-Kreuzkopplungskonstante Ki ... Kraft-Strom-Matrix cs ... Kraft-Weg-Kreuzkopplungskonstante Ks ... Kraft-Weg-Matrix Da das Betriebsverhalten des Tragsystems bei Verwendung einer sinus-förmigen Rotormagnetisierung durch die Kreuzkopplungen nicht massge-bend beeinflusst wird, wurde sie bei den folgenden Modellbildungen ver-nachlässigt. 2.1.2 Passive Magnetlagerung Passives Axiallager Ein passives, axiales Reluktanzmagnetlager kann als mechanisches Feder-Masse-System modelliert werden und besitzt deshalb auch vergleichbare Eigenschaften. In Abbildung 2.5 a.) ist das passive, axiale Reluktanzlager und in Abbildung 2.5 b.) das mechanische Ersatzmodell des Reluktanzla-gers abgebildet. Für kleine Auslenkungen um die Ruhelage kann das Re-luktanzlager durch folgende, linearisierte Differentialgleichung beschrie-ben werden. z a adxF m x F d x k x= ⋅ = − ⋅ − ⋅ (2.19) Wobei die Dämpfung d beim Magnetlager von der Geometrie des Lagers, von den Wirbelstromverlusten im Magnetkreis und vor allem vom Medium in welchem sich der Rotor befindet, abhängt. In schwach viskosen Medien, z.B. in Gasen, ist die Dämpfung sehr klein.
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
40
Rotor Magnetfeldlinien
StatorFs
a.) b.) dxF
x
ak ad
m
x
Rotor Magnetfeldlinien
StatorFs
a.) b.) dxF
x
ak ad
m
x
Abb. 2.5: Passives, axiales Reluktanzmagnetlager
Die Übertragungsfunktion Gp(s) zeigt, dass bei kleiner Dämpfung d die Po-le nahe an der Imaginärachse liegen. Dynamische Störkräfte regen daher schwach gedämpfte Schwingungen in der passiven Lagerung an und führen zu einem unruhigen bis grenzstabilen Lagerverhalten. Die Störkräfte und die Dämpfungseigenschaften des Mediums bestimmen zu einem grossen Teil das Lagerverhalten von passiven Magnetlagern.
2( ) 1( )( )p
dx a a
x sG sF s m s d s k
= =⋅ + ⋅ +
(2.20)
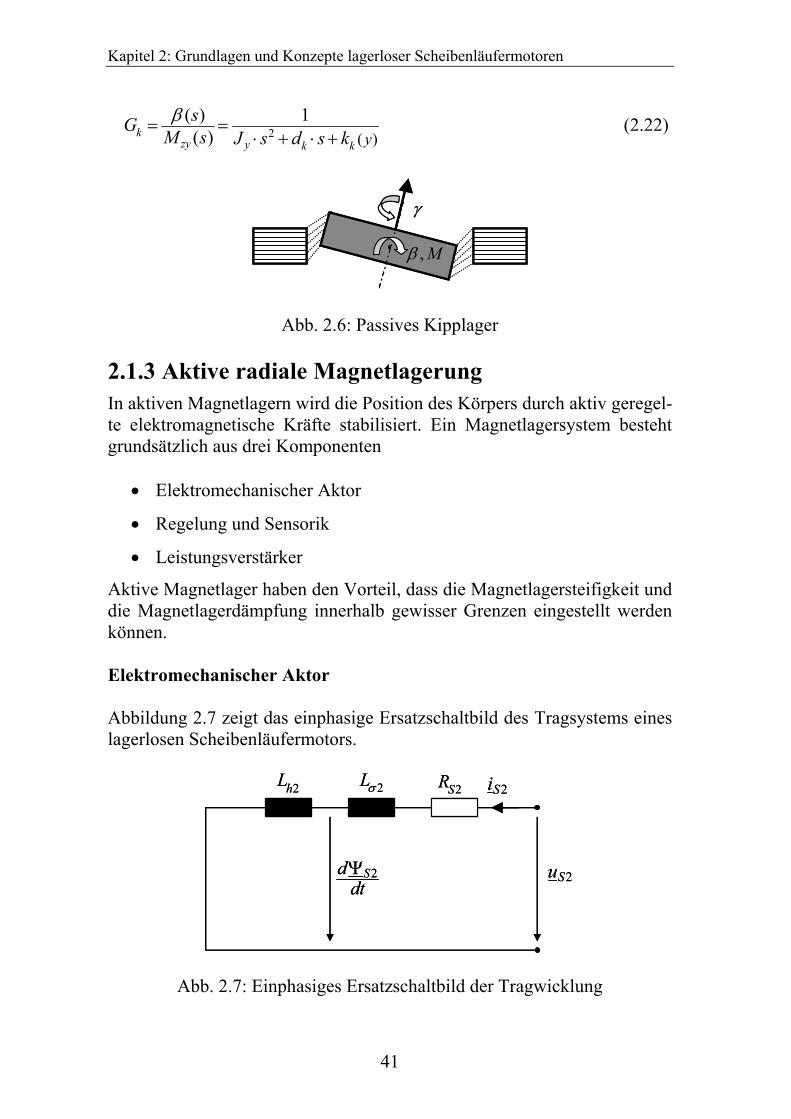
m ... Masse des Körpers x ... Verschiebung aus der Soll-Lage ad ... äussere Dämpfung dxF ... Störkraft in x-Richtung ak ... axiale Steifigkeit des passiven Lagers Passives Kipplager Die Berechnungsgrundlagen von passiven Reluktanzaxiallager können ana-log für die Berechnung eines passiven Reluktanzkipplagers verwendet werden. In Abbildung 2.6 ist die Wirkungsweise des passiven Kipplagers zu sehen. Für eine einfachere Betrachtung wird die Verkippung um die y-Achse mit den Einschränkungen betrachtet, dass sich der Schwerpunkt des Rotors im magnetischen Zentrum befindet, keine Verkippung um die x-Achse vorhanden ist, und dass bei der Verkippung ein konstanter Drehwin-kel angenommen wird. Für eine radiale Feldverteilung ist das Kippmoment unabhängig vom Drehwinkel. Das Kippmoment ist aber annähernd linear vom Kippwinkel abhängig. Das Kippverhalten von Rotoren mit einem nicht radialen Feldverlauf ist eine Funktion in Abhängigkeit des Kippwin-kels und des Drehwinkels γ. Mit Hilfe der Bewegungsgleichung Gleichung 2.21 lässt sich die Störübertragungsfunktion des passiven Kipplagers ge-mäss Gleichung 2.22 berechnen. ( )zy y k kJ d kM γβ β β= ⋅ + ⋅ + ⋅ (2.21)
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
41
2 ( )( ) 1( )k
zy y k k ysG
M s J s d s kβ= =
⋅ + ⋅ + (2.22)
, Mβ
γ
, Mβ
γ
Abb. 2.6: Passives Kipplager 2.1.3 Aktive radiale Magnetlagerung In aktiven Magnetlagern wird die Position des Körpers durch aktiv geregel-te elektromagnetische Kräfte stabilisiert. Ein Magnetlagersystem besteht grundsätzlich aus drei Komponenten
• Elektromechanischer Aktor
• Regelung und Sensorik
• Leistungsverstärker
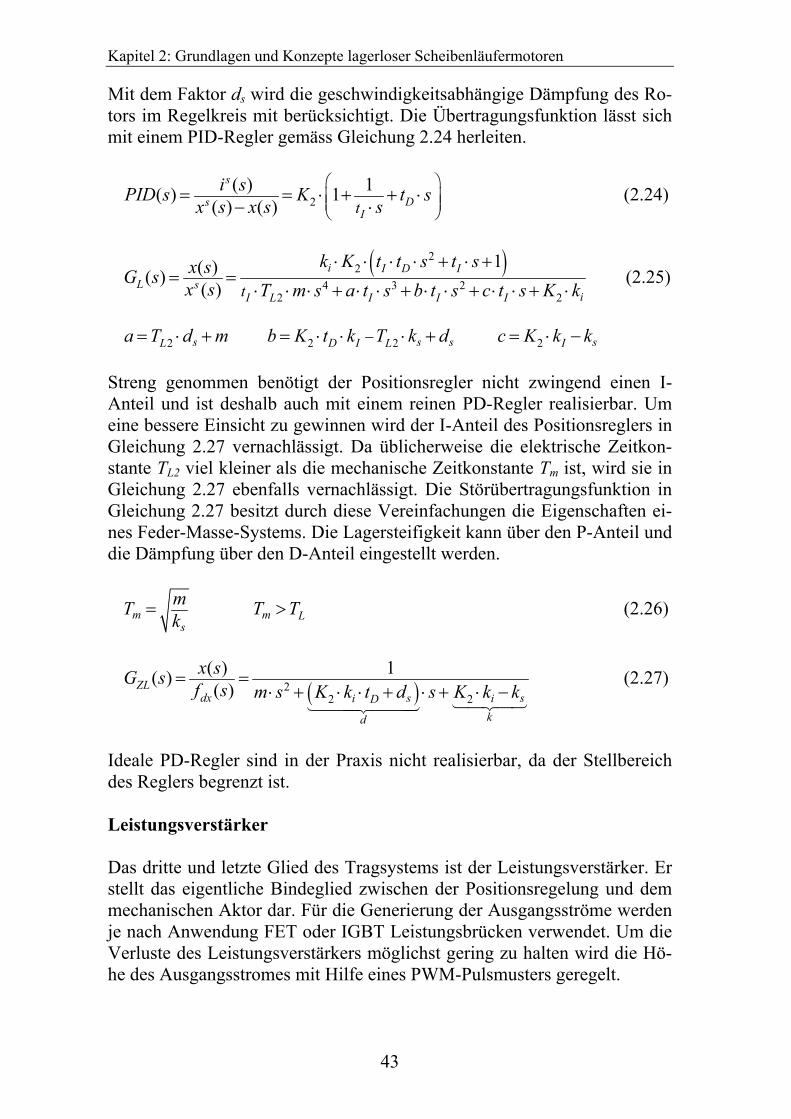
Aktive Magnetlager haben den Vorteil, dass die Magnetlagersteifigkeit und die Magnetlagerdämpfung innerhalb gewisser Grenzen eingestellt werden können. Elektromechanischer Aktor Abbildung 2.7 zeigt das einphasige Ersatzschaltbild des Tragsystems eines lagerlosen Scheibenläufermotors.
2SR2Lσ 2Si2hL
2Su2SddtΨ
2SR2Lσ 2Si2hL
2Su2SddtΨ
Abb. 2.7: Einphasiges Ersatzschaltbild der Tragwicklung
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
42
Durch die Bedingung, dass die Polpaarzahl der Tragwicklung p2=p1±1 ist, wird durch das drehende Rotorfeld in der Tragwicklung keine Spannung induziert. Die Maschengleichung des Ersatzsystems lautet somit:
2
( )( ) ( ) 2
2 22 2 2( )L
SS S S
S SS hdiu R i L L
dtσ= ⋅ + + (2.23)
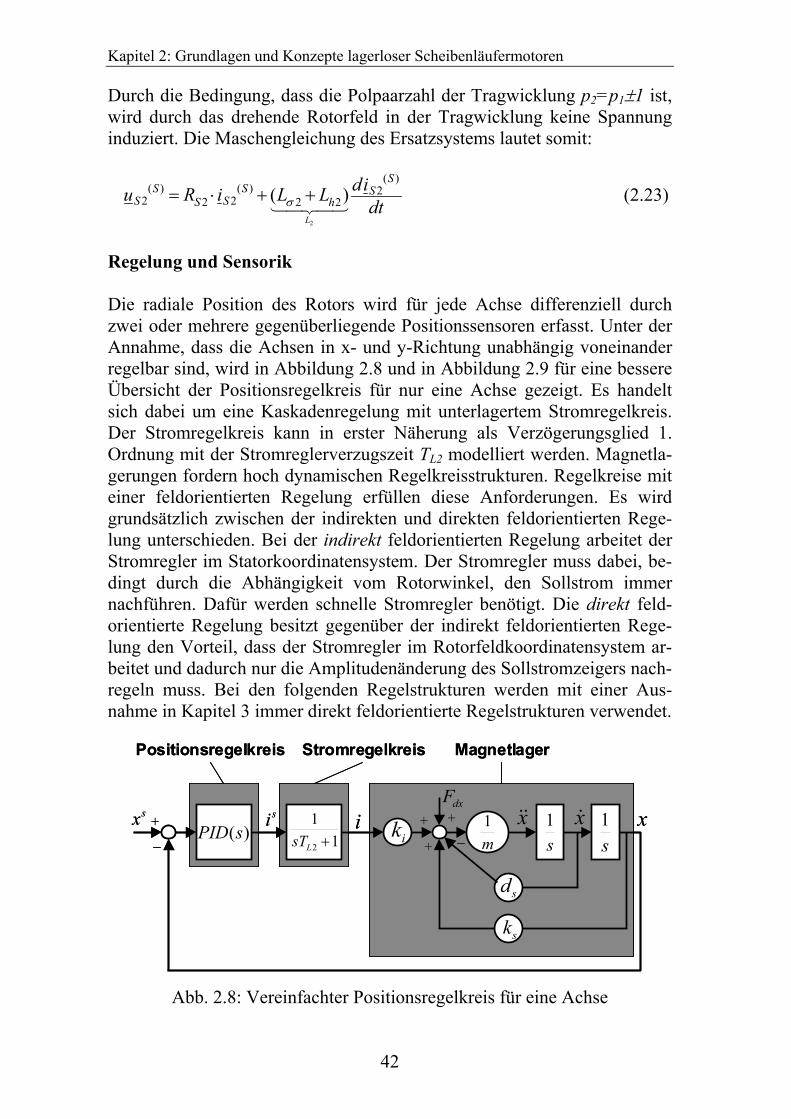
Regelung und Sensorik Die radiale Position des Rotors wird für jede Achse differenziell durch zwei oder mehrere gegenüberliegende Positionssensoren erfasst. Unter der Annahme, dass die Achsen in x- und y-Richtung unabhängig voneinander regelbar sind, wird in Abbildung 2.8 und in Abbildung 2.9 für eine bessere Übersicht der Positionsregelkreis für nur eine Achse gezeigt. Es handelt sich dabei um eine Kaskadenregelung mit unterlagertem Stromregelkreis. Der Stromregelkreis kann in erster Näherung als Verzögerungsglied 1. Ordnung mit der Stromreglerverzugszeit TL2 modelliert werden. Magnetla-gerungen fordern hoch dynamischen Regelkreisstrukturen. Regelkreise mit einer feldorientierten Regelung erfüllen diese Anforderungen. Es wird grundsätzlich zwischen der indirekten und direkten feldorientierten Rege-lung unterschieden. Bei der indirekt feldorientierten Regelung arbeitet der Stromregler im Statorkoordinatensystem. Der Stromregler muss dabei, be-dingt durch die Abhängigkeit vom Rotorwinkel, den Sollstrom immer nachführen. Dafür werden schnelle Stromregler benötigt. Die direkt feld-orientierte Regelung besitzt gegenüber der indirekt feldorientierten Rege-lung den Vorteil, dass der Stromregler im Rotorfeldkoordinatensystem ar-beitet und dadurch nur die Amplitudenänderung des Sollstromzeigers nach-regeln muss. Bei den folgenden Regelstrukturen werden mit einer Aus-nahme in Kapitel 3 immer direkt feldorientierte Regelstrukturen verwendet.
( )PID s1m2
11LsT + ik 1
sxsisx
sd
sk
1s
i xxdxF
+
+
++
Positionsregelkreis Stromregelkreis Magnetlager
( )PID s1m2
11LsT + ik 1
sxsisx
sd
sk
1s
i xxdxF
+
+
++
Positionsregelkreis Stromregelkreis Magnetlager
Abb. 2.8: Vereinfachter Positionsregelkreis für eine Achse
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
43
Mit dem Faktor ds wird die geschwindigkeitsabhängige Dämpfung des Ro-tors im Regelkreis mit berücksichtigt. Die Übertragungsfunktion lässt sich mit einem PID-Regler gemäss Gleichung 2.24 herleiten.
2( ) 1( ) 1
( ) ( )s
DsIt
i sPID s K t sx s x s s
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
= = ⋅ + + ⋅− ⋅
(2.24)
( )2
24 3 2
2 2
1( )( )( )
i I D IL s
iI I I ILt
k K t t s t sx sG sx s T m s a t s b t s c t s K k
⋅ ⋅ ⋅ ⋅ + ⋅ += =
⋅ ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅ (2.25)
2 sLa T d m= ⋅ + 2 2 s sD I Lb K t k T k d−= ⋅ ⋅ ⋅ + 2 sIc K k k= ⋅ − Streng genommen benötigt der Positionsregler nicht zwingend einen I-Anteil und ist deshalb auch mit einem reinen PD-Regler realisierbar. Um eine bessere Einsicht zu gewinnen wird der I-Anteil des Positionsreglers in Gleichung 2.27 vernachlässigt. Da üblicherweise die elektrische Zeitkon-stante TL2 viel kleiner als die mechanische Zeitkonstante Tm ist, wird sie in Gleichung 2.27 ebenfalls vernachlässigt. Die Störübertragungsfunktion in Gleichung 2.27 besitzt durch diese Vereinfachungen die Eigenschaften ei-nes Feder-Masse-Systems. Die Lagersteifigkeit kann über den P-Anteil und die Dämpfung über den D-Anteil eingestellt werden.
ms
mTk
= m LT T> (2.26)
( )2
2 2
( ) 1( )( )ZL
dx s si iDkd
x sG sf s m s K k t d s K k k
= =⋅ + ⋅ ⋅ + ⋅ + ⋅ −
(2.27)
Ideale PD-Regler sind in der Praxis nicht realisierbar, da der Stellbereich des Reglers begrenzt ist. Leistungsverstärker Das dritte und letzte Glied des Tragsystems ist der Leistungsverstärker. Er stellt das eigentliche Bindeglied zwischen der Positionsregelung und dem mechanischen Aktor dar. Für die Generierung der Ausgangsströme werden je nach Anwendung FET oder IGBT Leistungsbrücken verwendet. Um die Verluste des Leistungsverstärkers möglichst gering zu halten wird die Hö-he des Ausgangsstromes mit Hilfe eines PWM-Pulsmusters geregelt.
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
44
Positionsregelung
Leistungsverstärker Sensorik und elektromechanischer Aktor
N
S
x
sI
I
, mX F
Permanentmagnet
PositionssignalTragwicklung
Positionssensor
Positionsregelung
Leistungsverstärker Sensorik und elektromechanischer Aktor
N
S
x
sI
I
, mX F
Permanentmagnet
PositionssignalTragwicklung
Positionssensor
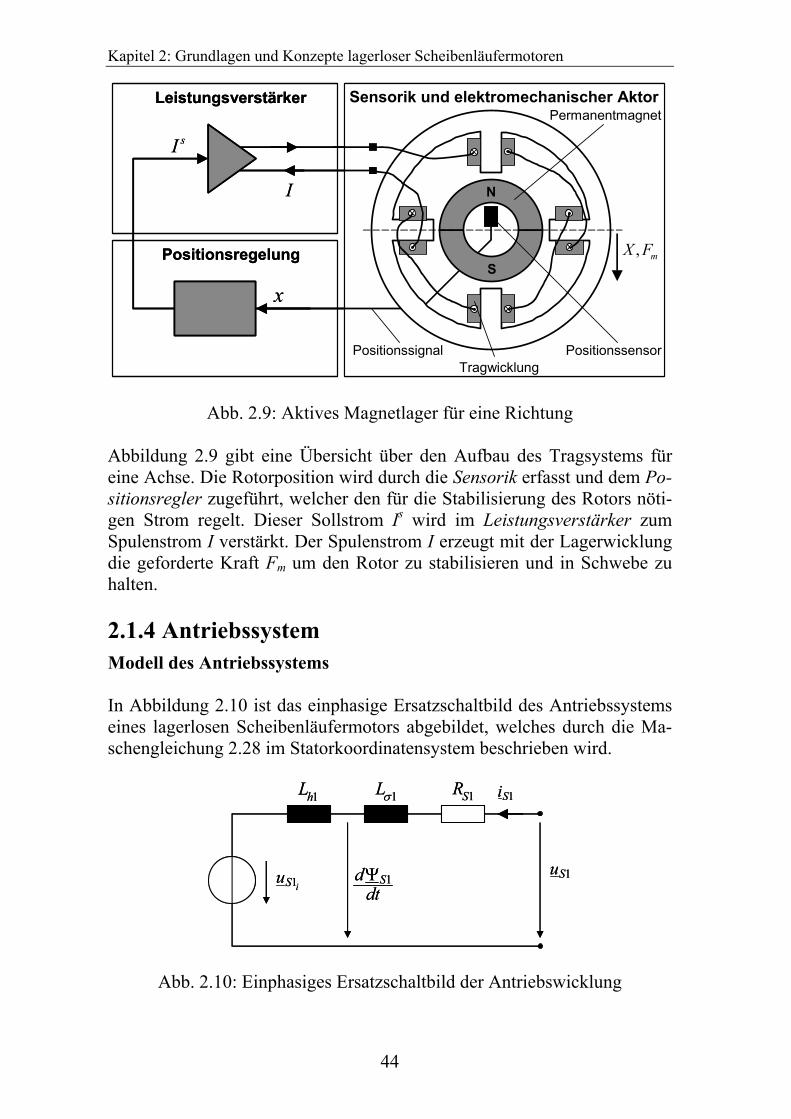
Abb. 2.9: Aktives Magnetlager für eine Richtung
Abbildung 2.9 gibt eine Übersicht über den Aufbau des Tragsystems für eine Achse. Die Rotorposition wird durch die Sensorik erfasst und dem Po-sitionsregler zugeführt, welcher den für die Stabilisierung des Rotors nöti-gen Strom regelt. Dieser Sollstrom Is wird im Leistungsverstärker zum Spulenstrom I verstärkt. Der Spulenstrom I erzeugt mit der Lagerwicklung die geforderte Kraft Fm um den Rotor zu stabilisieren und in Schwebe zu halten. 2.1.4 Antriebssystem Modell des Antriebssystems In Abbildung 2.10 ist das einphasige Ersatzschaltbild des Antriebssystems eines lagerlosen Scheibenläufermotors abgebildet, welches durch die Ma-schengleichung 2.28 im Statorkoordinatensystem beschrieben wird.
1iSu
1SR1Lσ 1Si1hL
1Su1Sd
dtΨ1iSu
1SR1Lσ 1Si1hL
1Su1Sd
dtΨ
Abb. 2.10: Einphasiges Ersatzschaltbild der Antriebswicklung

Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
45
( )( )
( ) ( ) 111 1 1
SSS S SS
S Sdi du i R L
dt dtσΨ= ⋅ + ⋅ + (2.28)
Die durch den verketteten Fluss erzeugte Spannung, lässt sich einfach im Rotorfeldkoordinatensystem darstellen. Der verkettete Fluss im Rotorfeld-koordinatensystem wird dabei vom Gesamtfluss des Permanentmagneten und von der Wicklungsdurchflutung gemeinsam aufgebaut (Gleichung 2.30). ( ) ( ) ( )( )
1 1 11( ) ( ) ( )S F FFS S PMSS S hD D L iγ γΨ = − ⋅Ψ = − ⋅ ⋅ + Ψ (2.29)
( ) ( )( )
1 11F FF
S PMShL iΨ = ⋅ + Ψ (2.30) Aus den Gleichungen 2.11 und 2.30 lässt sich die Gleichung 2.28 nach [Barl/98] in die Gleichung 2.31 überführen. Die in den einzelnen Phasen der Antriebswicklung erzeugten Spannungen bestehen aus einem indukti-ven, einem ohmschen und einem motorischen Anteil. Der motorische An-teil wird in der Fachliteratur als Polradspannung bezeichnet.
1 ( )
1
( )( )( ) ( ) 1
1 1 1 1 1( )
( )2
iS
S
SSS S S
PMS S S ShL
u
diu i R L L Ddtσ
π ω⎛ ⎞⎜ ⎟⎝ ⎠
= ⋅ + + ⋅ + ⋅ − ⋅ ⋅Ψ (2.31)
Bei den folgenden Gleichungen wird ein Rotor mit einer sinusförmigen Magnetisierung vorausgesetzt. Die Flussdichte BPM im Luftspalt kann in Abhängigkeit vom Rotorfeldwinkel γm vereinfacht angegeben werden. ( ) ( ) cos( )S
S SPMPMB Bγ γ= ⋅ 1 1m mS S t p t pγ ω ω γ= ⋅ = ⋅ ⋅ = ⋅ (2.32) Aus der sinusförmigen Feldverteilung im Luftspalt kann der Betrag des ge-samten Magnetisierungsflusses einfach berechnet werden. Dabei entspricht l der Länge und r dem Radius des Rotors. 2 PMPM B l rΦ = ⋅ ⋅ ⋅ (2.33) Der verkettete Fluss ψPM des Wicklungssystems kann mit der Gleichung 2.33, der Windungszahl w, der Polpaarzahl p und dem Wicklungsfaktor ξ berechnet werden. Mit dem Wicklungsfaktor wird der Anteil des Magneti-sierungsflusses von ψPM angegeben, welcher durch die Wicklung erfasst wird.
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
46
PM PMwp
ξΨ = ⋅ ⋅Φ (2.34)
Durch das rotierende Feld des Rotors wird in der Antriebswicklung eine sinusförmige Spannung induziert. Im feldorientierten Koordinatensystem verschwindet die d-Komponente des Vektors uS1
(F) und die q-Komponente entspricht dem Scheitelwert der induzierten Spannung im Statorkoordina-tensystem. Aus Gleichung 2.35 lässt sich die Spannungskonstante cu be-rechnen, welche in direktem Zusammenhang mit der Erzeugung des maxi-mal möglichen Drehmomentes steht.
1 1iS m m uPMU p cω ω= ⋅ ⋅Ψ = ⋅ ( )11
sin( )cos( )ii
S SSS
S
u Uγγ
−⎡ ⎤= ⋅ ⎢ ⎥
⎣ ⎦ (2.35)
Das Drehmoment lässt sich aus der q-Komponente des Stromes und aus dem Rotorfluss berechnen.
( )( ) ( ) ( ) ( )1 11 11 12
F F F FS q S qS d S d
m pM i i⋅= ⋅ ⋅Ψ − ⋅Ψ (2.36)
Aus den Gleichung 2.36 und 2.11 ergibt sich die vereinfachte Drehmo-mentgleichung 2.37.
( ) ( )1 11 12
F FmPMS q S q
m pM i i c⋅= ⋅ ⋅Ψ = ⋅ (2.37)
Der direkte Zusammenhang der Drehmomentkonstante cm zur Spannungs-konstante cu kann aus den Gleichungen 2.36 und 2.34 hergeleitet werden.
1 1 12 2m uPM
m p mc c⋅= ⋅Ψ = ⋅ (2.38)
Diese Beziehung könnte auch über die verlustfreie Leistungsübertragung im Motor hergeleitet werden, indem die mechanische Antriebsleistung Pm der vom Motor aufgenommenen, elektrischen Antriebsleistung Pe gleich-gesetzt wird. Drehzahlregelkreis des PM-Synchronmotors Die Drehzahlregelung des Antriebsystems wird wie bei der Positionsrege-lung mit einer direkt feldorientierten Regelstruktur realisiert. Der Regel-kreis des Antriebssystems besteht aus einem übergeordneten Drehzahlre-gelkreis und einem unterlagerten Stromregelkreis, welcher in erster Nähe-
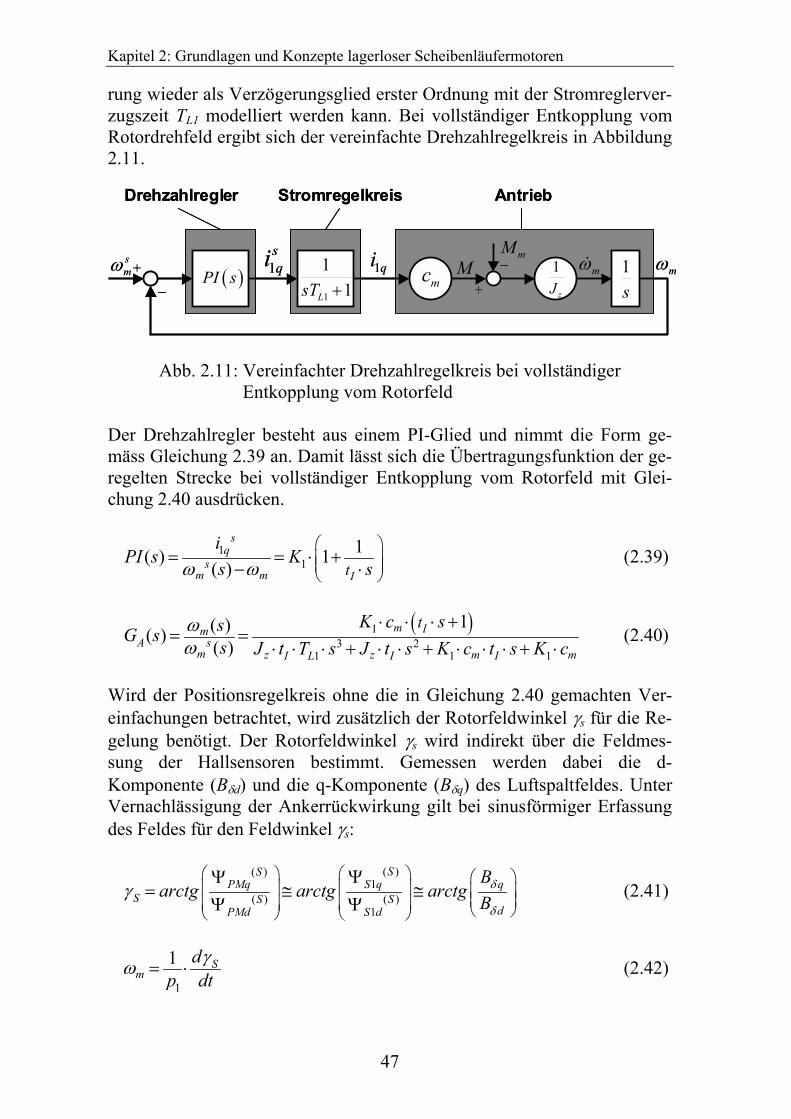
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
47
rung wieder als Verzögerungsglied erster Ordnung mit der Stromreglerver-zugszeit TL1 modelliert werden kann. Bei vollständiger Entkopplung vom Rotordrehfeld ergibt sich der vereinfachte Drehzahlregelkreis in Abbildung 2.11.
Drehzahlregler Stromregelkreis Antrieb
1s
1
zJ1
11LsT +
mωsmω
mc( )PI s M mω1qi1sqi mM
++
Drehzahlregler Stromregelkreis Antrieb
1s
1
zJ1
11LsT +
mωsmω
mc( )PI s M mω1qi1sqi mM
++
Abb. 2.11: Vereinfachter Drehzahlregelkreis bei vollständiger Entkopplung vom Rotorfeld Der Drehzahlregler besteht aus einem PI-Glied und nimmt die Form ge-mäss Gleichung 2.39 an. Damit lässt sich die Übertragungsfunktion der ge-regelten Strecke bei vollständiger Entkopplung vom Rotorfeld mit Glei-chung 2.40 ausdrücken.
11
1( ) 1( )
sq
sm m It
iPI s K
s sω ω⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
= = ⋅ +− ⋅
(2.39)
( )13 2
1 1 1
1( )( )( )
m ImA s
m z z m mI I IL
tK c ssG ss J t T s J t s K c t s K c
ωω
⋅ ⋅ ⋅ += =
⋅ ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ ⋅ + ⋅ (2.40)
Wird der Positionsregelkreis ohne die in Gleichung 2.40 gemachten Ver-einfachungen betrachtet, wird zusätzlich der Rotorfeldwinkel γs für die Re-gelung benötigt. Der Rotorfeldwinkel γs wird indirekt über die Feldmes-sung der Hallsensoren bestimmt. Gemessen werden dabei die d-Komponente (Bδd) und die q-Komponente (Bδq) des Luftspaltfeldes. Unter Vernachlässigung der Ankerrückwirkung gilt bei sinusförmiger Erfassung des Feldes für den Feldwinkel γs:
( )( )
1( ) ( )
1
SSPMq S q q
S S SdPMd S d
Barctg arctg arctg
Bδ
δγ
⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠ ⎝ ⎠
ΨΨ= ≅ ≅
Ψ Ψ (2.41)
1
1 Sm
dp dt
γω = ⋅ (2.42)

Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
48
Die Winkelgeschwindigkeit ωm des Rotors wird aus der zeitlichen Ablei-tung des Feldwinkels γs berechnet. 2.2 Motorkonfigurationen
2.2.1 Nut-, Polpaar- und Phasenzahl Die Gleichung p2=p1±1 beschreibt wie die beiden Wicklungssysteme (die p1-polpaarige Antriebswicklung und die p2-polpaarige Tragwicklung) ge-genseitig in Beziehung stehen müssen, damit mit dem gleichen Rotor so-wohl ein Drehmoment wie auch Lagerkräfte aufgebaut werden können. Dabei entspricht die Polpaarzahl des Rotors immer der Polpaarzahl der An-triebswicklung. Aufgrund des Aufbaus von lagerlosen Scheibenläufermoto-ren werden für den Aufbau der Wicklungen vorwiegend konzentrierte Spu-len verwendet. Eine konzentrierte Spule umfasst dabei pro Pol genau einen Nutzahn. Es werden aber auch Spulen verwendet, welche gleich aufgebaut sind wie konzentrierte Spulen, aber im Unterschied mehrere Nutzähne pro Pol umfassen. Dieser Spulentyp wird in dieser Arbeit als ausgeweitete, konzentrierte Spule bezeichnet. Ein wichtiges Merkmal ist die Spulenweite W, welche den Mittenabstand (längs des Statormantels) zwischen zwei Spulenseiten bezeichnet. Die Spulenweite hängt direkt mit der in der Spule und damit in der Wicklung induzierten Spannung zusammen. Wenn die Spulenweite so gewählt wird, dass die ganze Halbwelle des Drehfeldes er-fasst wird (Durchmesserwicklung), kann die grösste Spannungsamplitude gemessen werden. Mit konzentrierten Spulen (gesehnte Wicklung) wird die kleinste Spulenweite und damit die kleinste induzierte Spannung und die schlechteste Wicklungsausnützung erreicht. Um mit konzentrierten Spulen eine möglichst gute Wicklungsausnutzung erreichen zu können, muss die Nutzahl N möglichst klein gewählt werden. Eine bessere Wicklungsausnüt-zung kann auch durch die Umfassung von mehreren Nutzähnen mit ausge-weiteten konzentrierten Spulen erreicht werden. Für eine symmetrische Wicklungsverteilung (S) im Stator, muss die Nutzahl q pro Pol und Strang eine ganze Zahl sein. Eine symmetrische Wicklungsverteilung bedeutet, dass jeder Statorpol durch eine ihm zugeordnete Spule umschlossen wird. Wobei die einzelnen Spulen alle gleich aufgebaut sind.
2isi
Nqp m
=⋅ ⋅
(2.43)
Der Index i=1 bezeichnet das Antriebssystem, der Index 2i = das Tragsys-tem. Bei der Wahl einer asymmetrischen Wicklungsstruktur, muss die Nut-zahl q pro Pol und Strang ebenfalls eine ganze Zahl sein, wobei die Nut-zahl durch die Gleichung 2.44 beschrieben wird. Die asymmetrische Wick-lungsstruktur besitzt im Vergleich zur symmetrischen Wicklungsverteilung
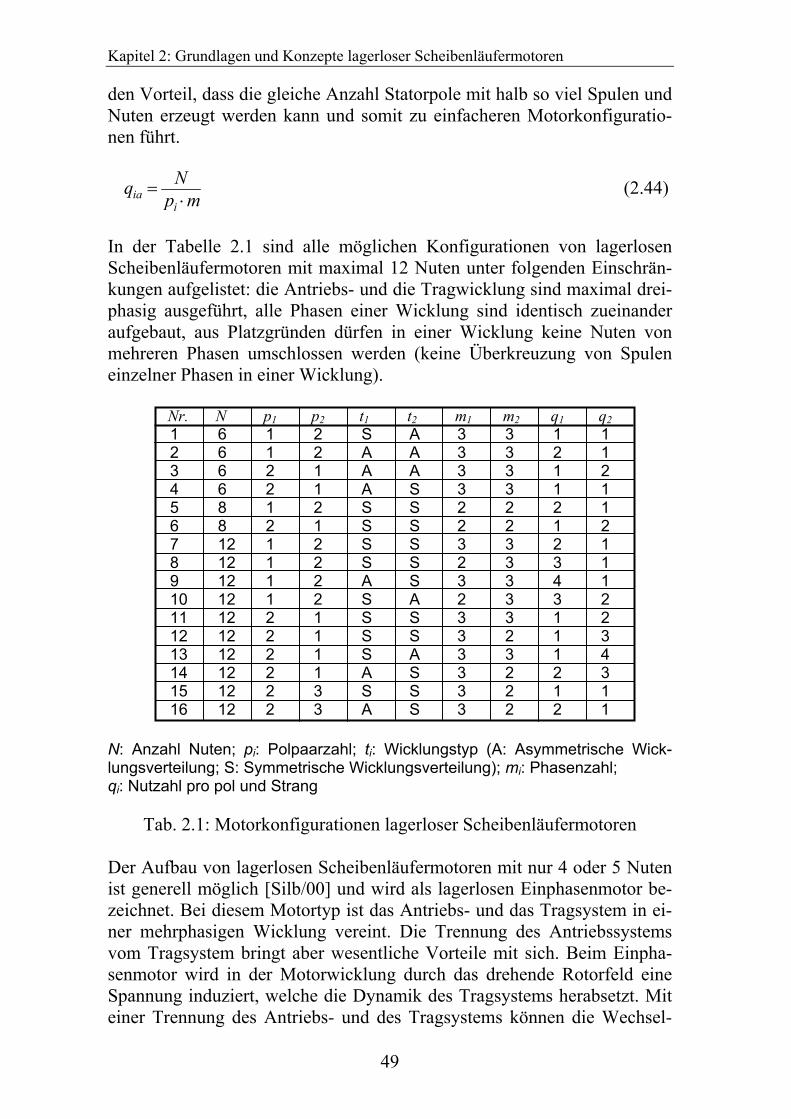
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
49
den Vorteil, dass die gleiche Anzahl Statorpole mit halb so viel Spulen und Nuten erzeugt werden kann und somit zu einfacheren Motorkonfiguratio-nen führt. ia
i
Nqp m
=⋅
(2.44)
In der Tabelle 2.1 sind alle möglichen Konfigurationen von lagerlosen Scheibenläufermotoren mit maximal 12 Nuten unter folgenden Einschrän-kungen aufgelistet: die Antriebs- und die Tragwicklung sind maximal drei-phasig ausgeführt, alle Phasen einer Wicklung sind identisch zueinander aufgebaut, aus Platzgründen dürfen in einer Wicklung keine Nuten von mehreren Phasen umschlossen werden (keine Überkreuzung von Spulen einzelner Phasen in einer Wicklung).
Nr. N p1 p2 t1 t2 m1 m2 q1 q2 1 6 1 2 S A 3 3 1 1 2 6 1 2 A A 3 3 2 1 3 6 2 1 A A 3 3 1 2 4 6 2 1 A S 3 3 1 1 5 8 1 2 S S 2 2 2 1 6 8 2 1 S S 2 2 1 2 7 12 1 2 S S 3 3 2 1 8 12 1 2 S S 2 3 3 1 9 12 1 2 A S 3 3 4 1 10 12 1 2 S A 2 3 3 2 11 12 2 1 S S 3 3 1 2 12 12 2 1 S S 3 2 1 3 13 12 2 1 S A 3 3 1 4 14 12 2 1 A S 3 2 2 3 15 12 2 3 S S 3 2 1 1 16 12 2 3 A S 3 2 2 1
N: Anzahl Nuten; pi: Polpaarzahl; ti: Wicklungstyp (A: Asymmetrische Wick-lungsverteilung; S: Symmetrische Wicklungsverteilung); mi: Phasenzahl; qi: Nutzahl pro pol und Strang
Tab. 2.1: Motorkonfigurationen lagerloser Scheibenläufermotoren Der Aufbau von lagerlosen Scheibenläufermotoren mit nur 4 oder 5 Nuten ist generell möglich [Silb/00] und wird als lagerlosen Einphasenmotor be-zeichnet. Bei diesem Motortyp ist das Antriebs- und das Tragsystem in ei-ner mehrphasigen Wicklung vereint. Die Trennung des Antriebssystems vom Tragsystem bringt aber wesentliche Vorteile mit sich. Beim Einpha-senmotor wird in der Motorwicklung durch das drehende Rotorfeld eine Spannung induziert, welche die Dynamik des Tragsystems herabsetzt. Mit einer Trennung des Antriebs- und des Tragsystems können die Wechsel-
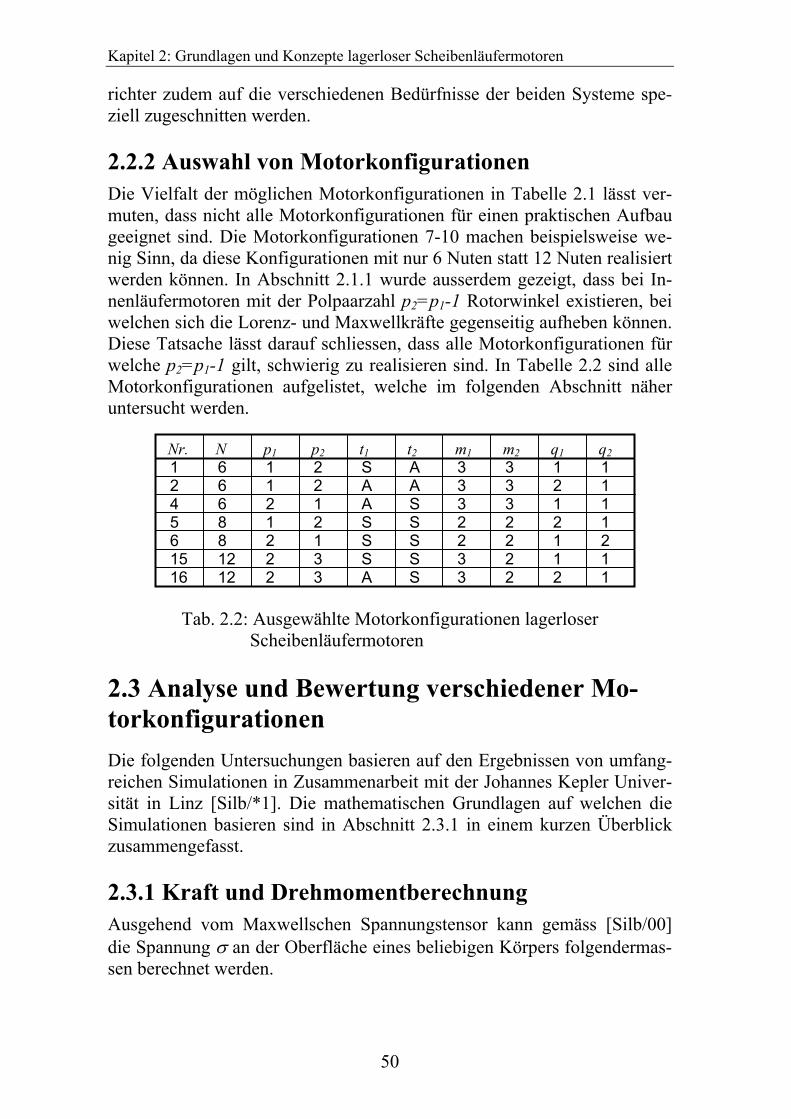
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
50
richter zudem auf die verschiedenen Bedürfnisse der beiden Systeme spe-ziell zugeschnitten werden. 2.2.2 Auswahl von Motorkonfigurationen Die Vielfalt der möglichen Motorkonfigurationen in Tabelle 2.1 lässt ver-muten, dass nicht alle Motorkonfigurationen für einen praktischen Aufbau geeignet sind. Die Motorkonfigurationen 7-10 machen beispielsweise we-nig Sinn, da diese Konfigurationen mit nur 6 Nuten statt 12 Nuten realisiert werden können. In Abschnitt 2.1.1 wurde ausserdem gezeigt, dass bei In-nenläufermotoren mit der Polpaarzahl p2=p1-1 Rotorwinkel existieren, bei welchen sich die Lorenz- und Maxwellkräfte gegenseitig aufheben können. Diese Tatsache lässt darauf schliessen, dass alle Motorkonfigurationen für welche p2=p1-1 gilt, schwierig zu realisieren sind. In Tabelle 2.2 sind alle Motorkonfigurationen aufgelistet, welche im folgenden Abschnitt näher untersucht werden.
Nr. N p1 p2 t1 t2 m1 m2 q1 q2 1 6 1 2 S A 3 3 1 1 2 6 1 2 A A 3 3 2 1 4 6 2 1 A S 3 3 1 1 5 8 1 2 S S 2 2 2 1 6 8 2 1 S S 2 2 1 2 15 12 2 3 S S 3 2 1 1 16 12 2 3 A S 3 2 2 1
Tab. 2.2: Ausgewählte Motorkonfigurationen lagerloser
Scheibenläufermotoren 2.3 Analyse und Bewertung verschiedener Mo-torkonfigurationen Die folgenden Untersuchungen basieren auf den Ergebnissen von umfang-reichen Simulationen in Zusammenarbeit mit der Johannes Kepler Univer-sität in Linz [Silb/*1]. Die mathematischen Grundlagen auf welchen die Simulationen basieren sind in Abschnitt 2.3.1 in einem kurzen Überblick zusammengefasst. 2.3.1 Kraft und Drehmomentberechnung Ausgehend vom Maxwellschen Spannungstensor kann gemäss [Silb/00] die Spannung σ an der Oberfläche eines beliebigen Körpers folgendermas-sen berechnet werden.
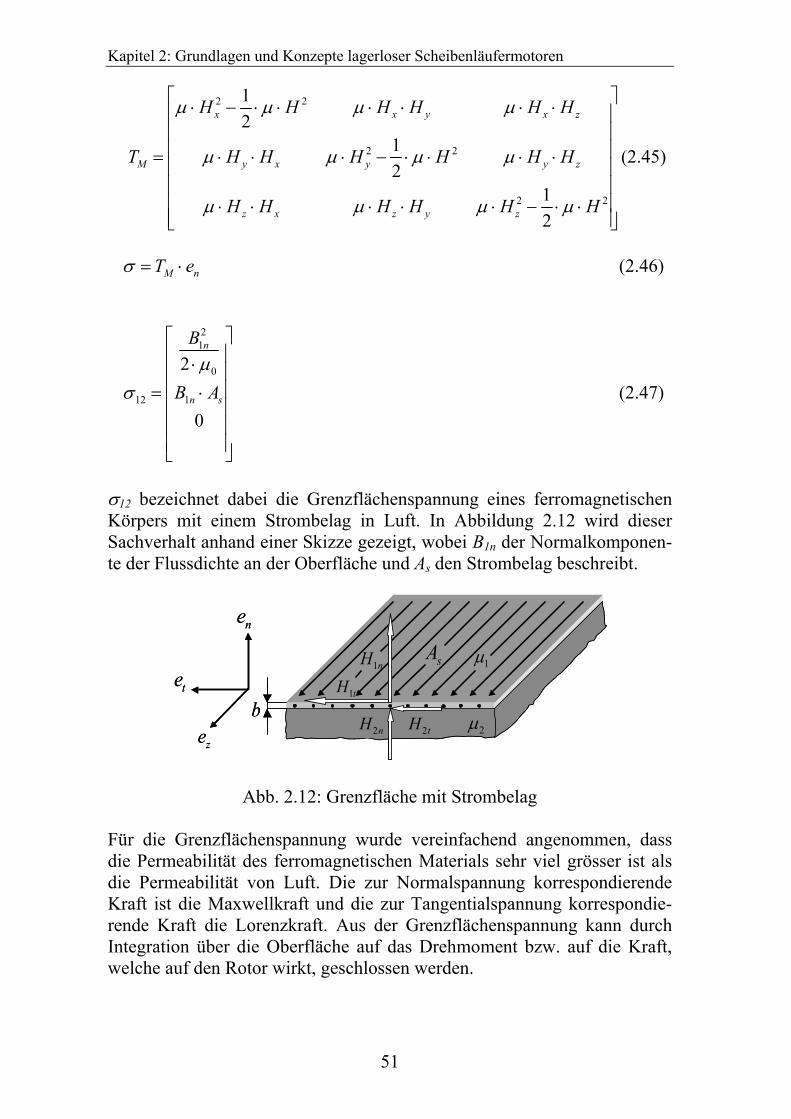
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
51
2 2
2 2
2 2
12
12
12
x x y x z
M y x y y z
z x z y z
H H H H H H
T H H H H H H
H H H H H H
µ µ µ µ
µ µ µ µ
µ µ µ µ
⎡ ⎤⋅ − ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⎢ ⎥⎢ ⎥⎢ ⎥= ⋅ ⋅ ⋅ − ⋅ ⋅ ⋅ ⋅⎢ ⎥⎢ ⎥⎢ ⎥⋅ ⋅ ⋅ ⋅ ⋅ − ⋅ ⋅⎢ ⎥⎣ ⎦
(2.45)
M nT eσ = ⋅ (2.46)
21
0
12 1
2
0
n
n s
B
B Aµ
σ
⎡ ⎤⎢ ⎥⋅⎢ ⎥⎢ ⎥= ⋅⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(2.47)
σ12 bezeichnet dabei die Grenzflächenspannung eines ferromagnetischen Körpers mit einem Strombelag in Luft. In Abbildung 2.12 wird dieser Sachverhalt anhand einer Skizze gezeigt, wobei B1n der Normalkomponen-te der Flussdichte an der Oberfläche und As den Strombelag beschreibt.
1µ
2µ2nH 2tH
1tH1nH
bte
ne
ze
sA1µ
2µ2nH 2tH
1tH1nH
bte
ne
ze
sA
Abb. 2.12: Grenzfläche mit Strombelag Für die Grenzflächenspannung wurde vereinfachend angenommen, dass die Permeabilität des ferromagnetischen Materials sehr viel grösser ist als die Permeabilität von Luft. Die zur Normalspannung korrespondierende Kraft ist die Maxwellkraft und die zur Tangentialspannung korrespondie-rende Kraft die Lorenzkraft. Aus der Grenzflächenspannung kann durch Integration über die Oberfläche auf das Drehmoment bzw. auf die Kraft, welche auf den Rotor wirkt, geschlossen werden.
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
52
21s s s n sM l r B A d
π
π
α−
= − ⋅ ⋅ ⋅ ⋅∫ (2.48)
21
0
1
2cos sin 0sin cos 0
0 0 1 0
n
s s s n s
B
F l r B A dπ
π
µα αα α α
−
⎡ ⎤⎢ ⎥⋅−⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥= − ⋅ ⋅ ⋅ ⋅ ⋅⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦
∫ (2.49)
Die Berechnung der Tragkräfte kann also näherungsweise mit Hilfe der Flussdichteverteilung im Luftspalt und der Statorstromverteilung vollzogen werden. Die Flussdichteverteilung im Luftspalt ergibt sich durch die Über-lagerung der Flussdichteverteilung im Permanentmagnetrotor und der Flussdichte, welche durch die Statorbestromung erzeugt wird. Die erzeug-baren Tragkräfte sind vom Rotorwinkel und der Bestromung der Stator-wicklung abhängig. Um die einzelnen Motorkonfigurationen vergleichen zu können, wird für jeden Rotorwinkel die maximal erzeugbare Tragkraft in x-Richtung berechnet, wenn weder Kräfte in y-Richtung noch ein Dreh-moment erzeugt wird und wenn die Statorströme auf ±500 A begrenzt wer-den. Dabei wird angenommen, dass die Spulen der Statorwicklung aus je-weils nur einer einzigen Windung bestehen, durch welche maximal ± 500 A fliessen kann. Der Verlauf der Kurven gibt an, wie stark die Kraftunter-schiede in den einzelnen Winkelstellungen sind. Die Darstellung der erzeugbaren Kraft erfolgt in einem Polarkoordinaten-system, wobei der Winkel des Kraftorbits mit dem elektrischen Rotorwin-kel übereinstimmt. Zusätzlich werden die jeweiligen Ströme angegeben, welche für die Erzeugung der Kräfte erforderlich sind. Analog zur erzeug-baren Lagerkraft in x-Richtung wird in den Simulationen das erzeugbare Drehmoment der Motorkonfigurationen bei einem maximalen Statorstrom von 500 A pro Spule in graphischer Form gezeigt. Als Bewertungskriterien für die einzelnen Motorkonfigurationen wird das erzeugbare Drehmoment, die erzeugbare Tragkraft und die Regelbarkeit des Tragsystems betrachtet. Ein wichtiges Mass für die Regelbarkeit des Tragsystems ist die erforderli-che maximale Stromänderung [A/N] bei änderndem Drehwinkel, wenn ei-ne konstante Kraft von 1 N jeweils in x- und y-Richtung erzeugt werden soll. Je kleiner die maximale Stromänderung ist, desto einfacher ist das Tragsystem für einen drehenden Rotor realisierbar. Die maximale Strom-änderung stellt zusammen mit der Induktivität die minimal erforderliche Stellspannung dar.
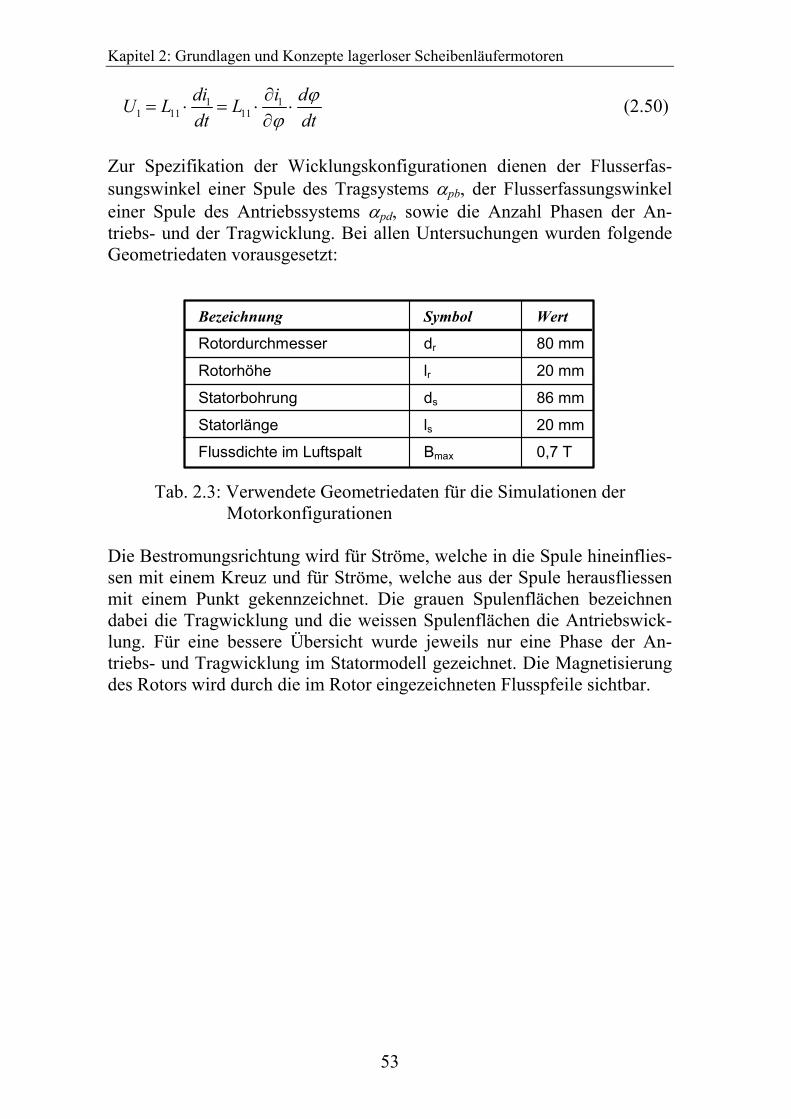
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
53
1 11 11 11
di i dU L Ldt dt
ϕϕ
∂= ⋅ = ⋅ ⋅
∂ (2.50)
Zur Spezifikation der Wicklungskonfigurationen dienen der Flusserfas-sungswinkel einer Spule des Tragsystems αpb, der Flusserfassungswinkel einer Spule des Antriebssystems αpd, sowie die Anzahl Phasen der An-triebs- und der Tragwicklung. Bei allen Untersuchungen wurden folgende Geometriedaten vorausgesetzt:
Bezeichnung Symbol Wert
Rotordurchmesser dr 80 mm
Rotorhöhe lr 20 mm
Statorbohrung ds 86 mm
Statorlänge ls 20 mm
Flussdichte im Luftspalt Bmax 0,7 T
Tab. 2.3: Verwendete Geometriedaten für die Simulationen der Motorkonfigurationen
Die Bestromungsrichtung wird für Ströme, welche in die Spule hineinflies-sen mit einem Kreuz und für Ströme, welche aus der Spule herausfliessen mit einem Punkt gekennzeichnet. Die grauen Spulenflächen bezeichnen dabei die Tragwicklung und die weissen Spulenflächen die Antriebswick-lung. Für eine bessere Übersicht wurde jeweils nur eine Phase der An-triebs- und Tragwicklung im Statormodell gezeichnet. Die Magnetisierung des Rotors wird durch die im Rotor eingezeichneten Flusspfeile sichtbar.
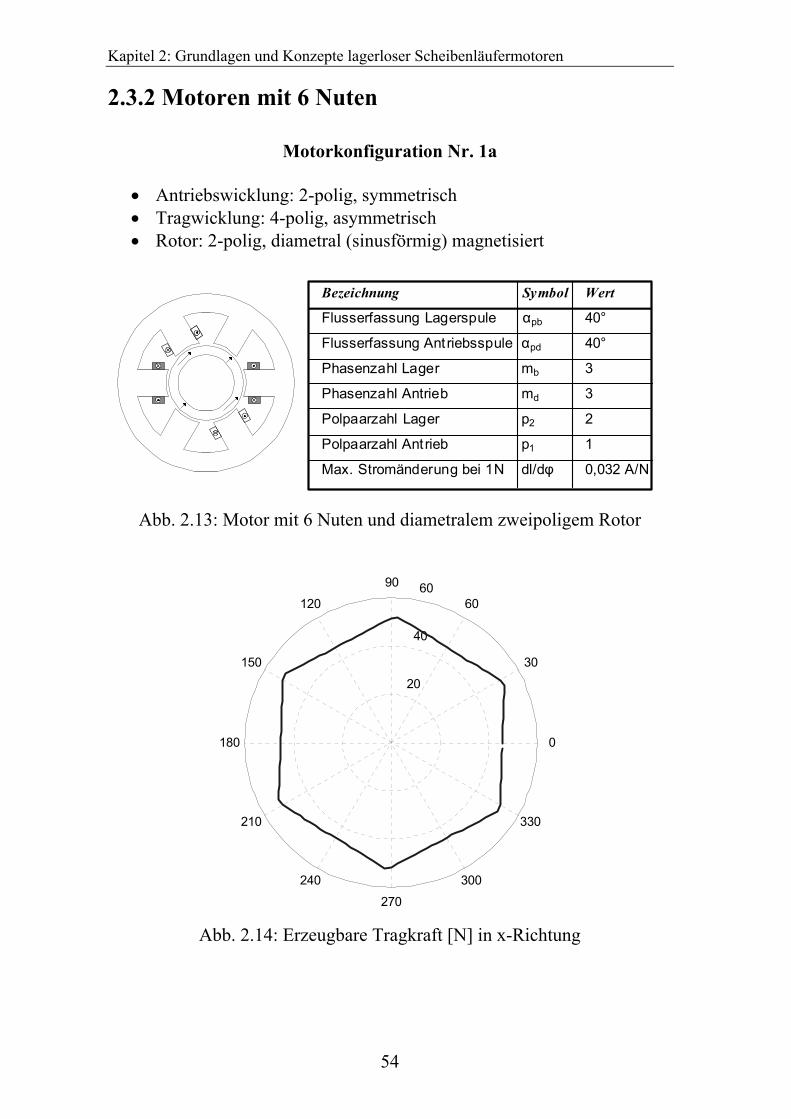
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
54
2.3.2 Motoren mit 6 Nuten
Motorkonfiguration Nr. 1a
• Antriebswicklung: 2-polig, symmetrisch • Tragwicklung: 4-polig, asymmetrisch • Rotor: 2-polig, diametral (sinusförmig) magnetisiert
Bezeichnung Symbol Wert
Flusserfassung Lagerspule αpb 40°
Flusserfassung Antriebsspule αpd 40°
Phasenzahl Lager mb 3
Phasenzahl Antrieb md 3
Polpaarzahl Lager p2 2
Polpaarzahl Antrieb p1 1
Max. Stromänderung bei 1N dl/dφ 0,032 A/N
Abb. 2.13: Motor mit 6 Nuten und diametralem zweipoligem Rotor
20
40
60
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.14: Erzeugbare Tragkraft [N] in x-Richtung
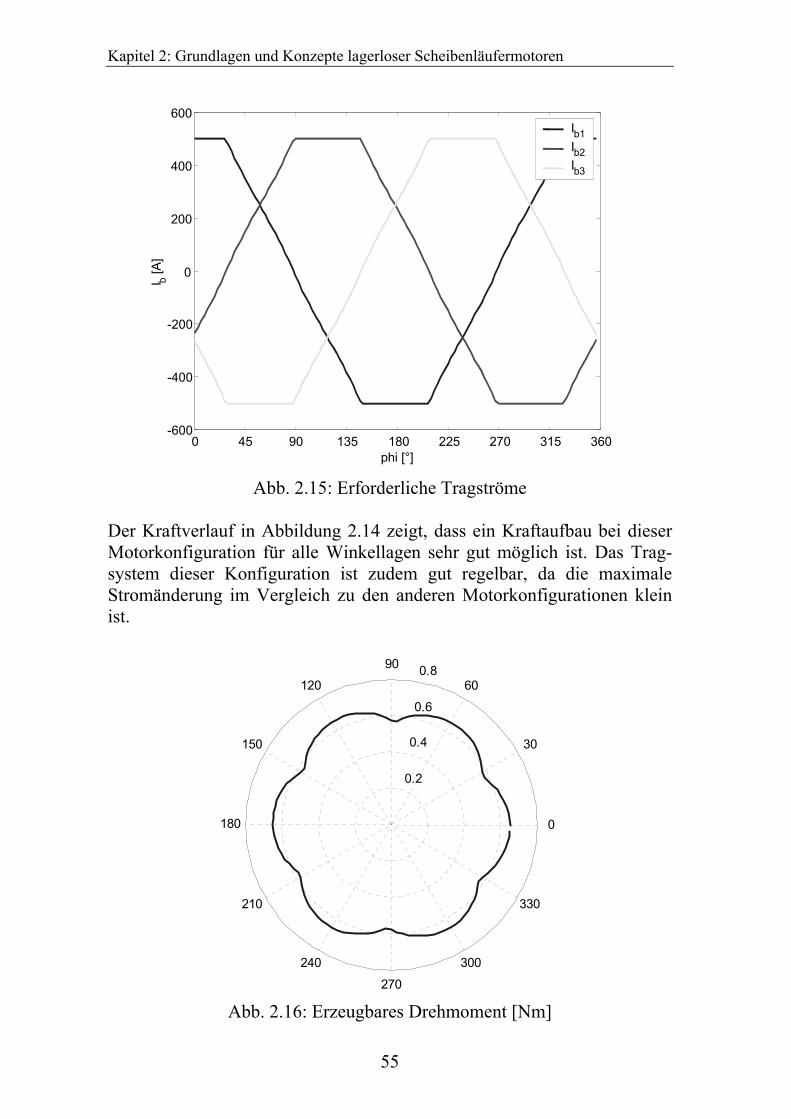
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
55
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2Ib3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2Ib3
Abb. 2.15: Erforderliche Tragströme
Der Kraftverlauf in Abbildung 2.14 zeigt, dass ein Kraftaufbau bei dieser Motorkonfiguration für alle Winkellagen sehr gut möglich ist. Das Trag-system dieser Konfiguration ist zudem gut regelbar, da die maximale Stromänderung im Vergleich zu den anderen Motorkonfigurationen klein ist.
0.2
0.4
0.6
0.8
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.16: Erzeugbares Drehmoment [Nm]
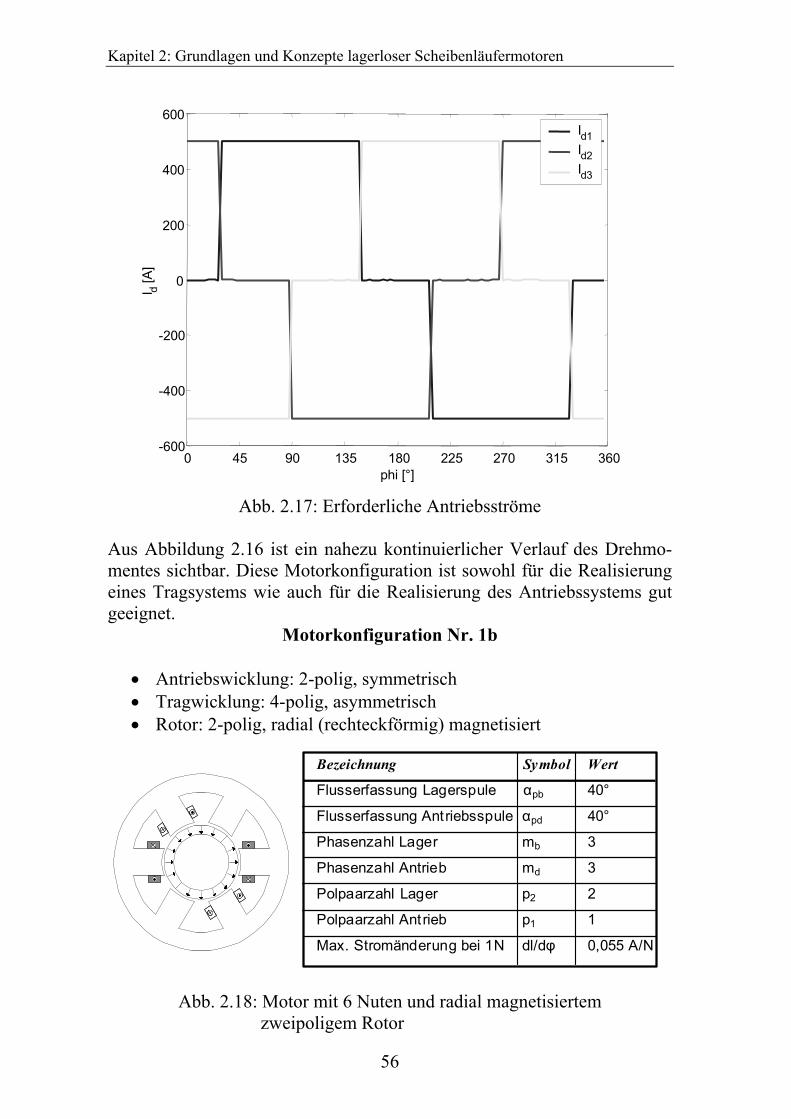
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
56
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]Id1Id2Id3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]Id1Id2Id3
Abb. 2.17: Erforderliche Antriebsströme
Aus Abbildung 2.16 ist ein nahezu kontinuierlicher Verlauf des Drehmo-mentes sichtbar. Diese Motorkonfiguration ist sowohl für die Realisierung eines Tragsystems wie auch für die Realisierung des Antriebssystems gut geeignet.
Motorkonfiguration Nr. 1b
• Antriebswicklung: 2-polig, symmetrisch • Tragwicklung: 4-polig, asymmetrisch • Rotor: 2-polig, radial (rechteckförmig) magnetisiert
Bezeichnung Symbol Wert
Flusserfassung Lagerspule αpb 40°
Flusserfassung Antriebsspule αpd 40°
Phasenzahl Lager mb 3
Phasenzahl Antrieb md 3
Polpaarzahl Lager p2 2
Polpaarzahl Antrieb p1 1
Max. Stromänderung bei 1N dl/dφ 0,055 A/N
Abb. 2.18: Motor mit 6 Nuten und radial magnetisiertem zweipoligem Rotor
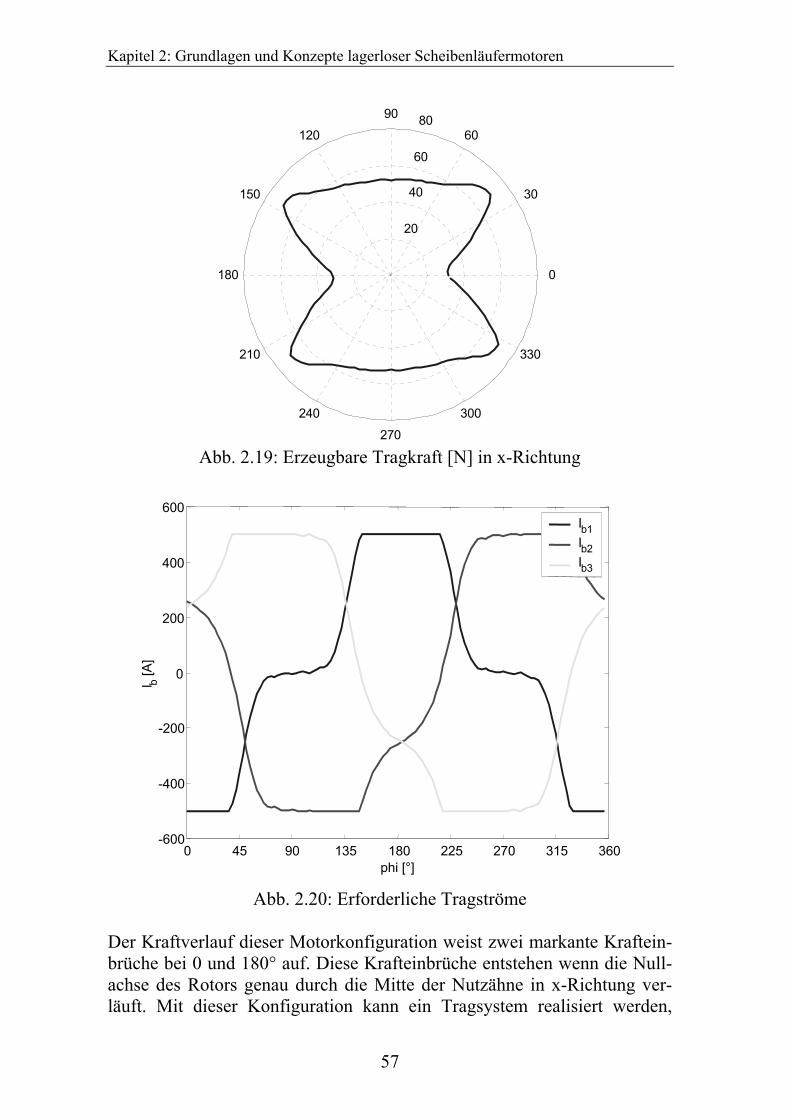
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
57
20
40
60
80
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.19: Erzeugbare Tragkraft [N] in x-Richtung
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2Ib3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2Ib3
Abb. 2.20: Erforderliche Tragströme
Der Kraftverlauf dieser Motorkonfiguration weist zwei markante Kraftein-brüche bei 0 und 180° auf. Diese Krafteinbrüche entstehen wenn die Null-achse des Rotors genau durch die Mitte der Nutzähne in x-Richtung ver-läuft. Mit dieser Konfiguration kann ein Tragsystem realisiert werden,
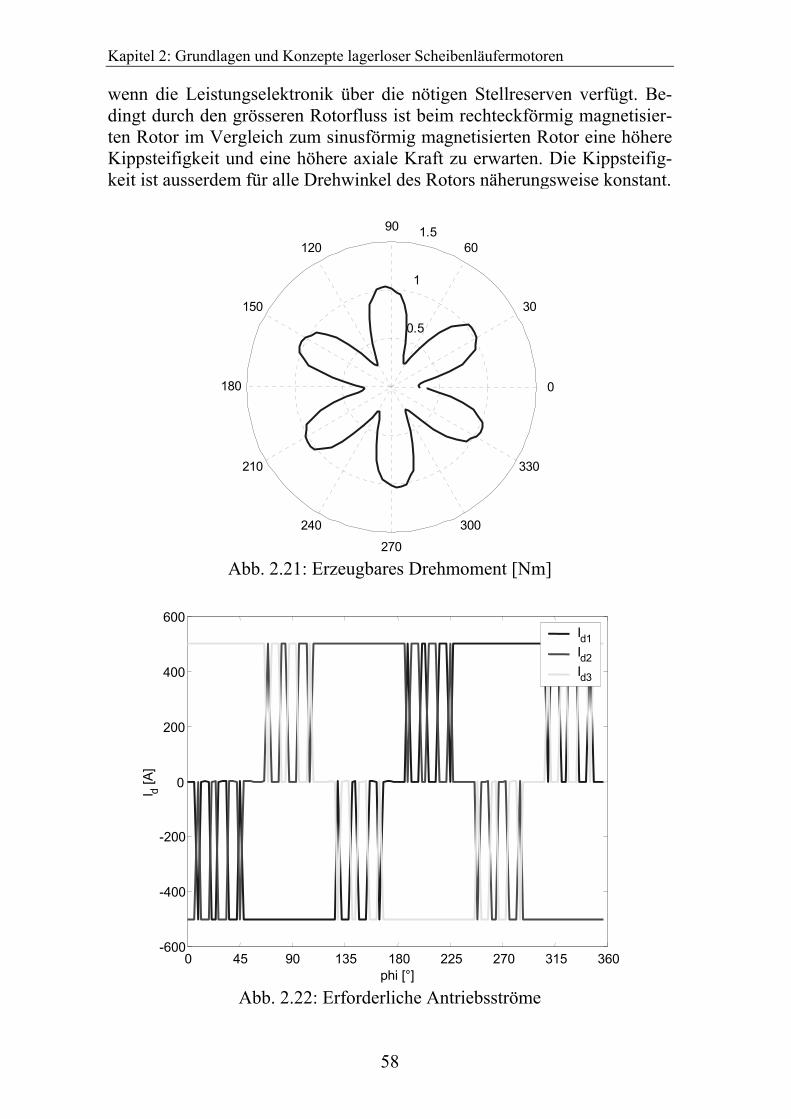
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
58
wenn die Leistungselektronik über die nötigen Stellreserven verfügt. Be-dingt durch den grösseren Rotorfluss ist beim rechteckförmig magnetisier-ten Rotor im Vergleich zum sinusförmig magnetisierten Rotor eine höhere Kippsteifigkeit und eine höhere axiale Kraft zu erwarten. Die Kippsteifig-keit ist ausserdem für alle Drehwinkel des Rotors näherungsweise konstant.
0.5
1
1.5
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.21: Erzeugbares Drehmoment [Nm]
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2Id3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2Id3
Abb. 2.22: Erforderliche Antriebsströme
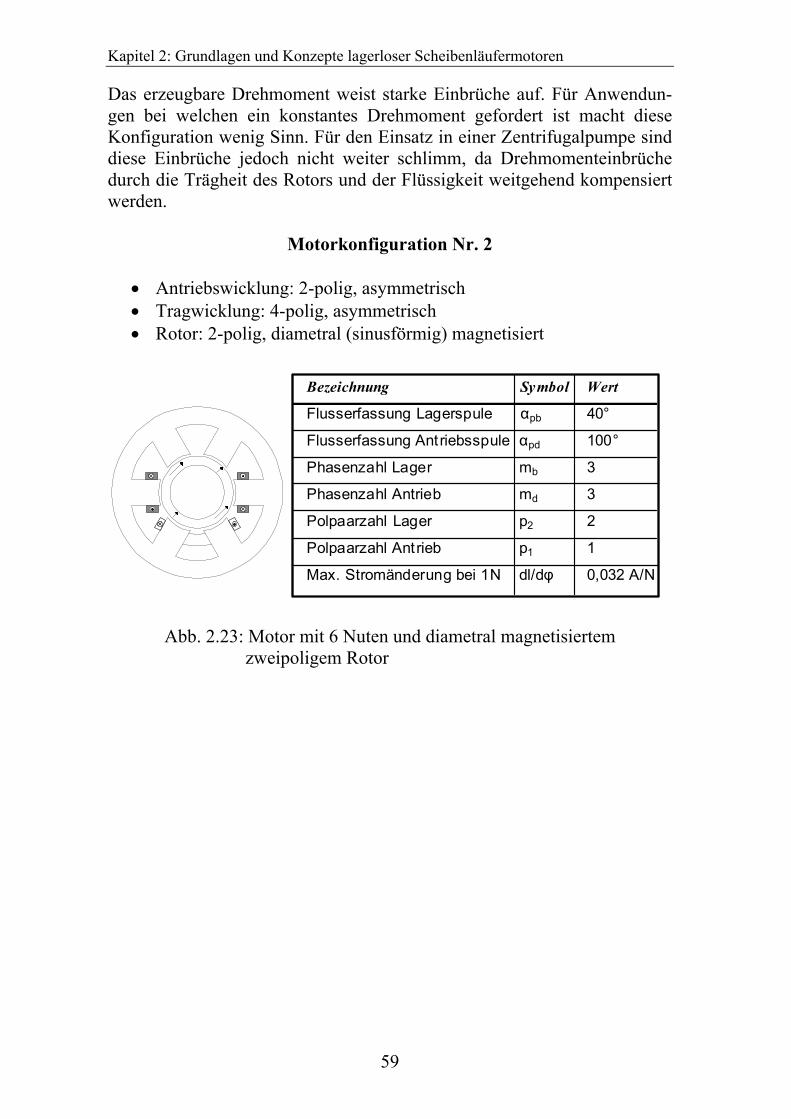
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
59
Das erzeugbare Drehmoment weist starke Einbrüche auf. Für Anwendun-gen bei welchen ein konstantes Drehmoment gefordert ist macht diese Konfiguration wenig Sinn. Für den Einsatz in einer Zentrifugalpumpe sind diese Einbrüche jedoch nicht weiter schlimm, da Drehmomenteinbrüche durch die Trägheit des Rotors und der Flüssigkeit weitgehend kompensiert werden.
Motorkonfiguration Nr. 2
• Antriebswicklung: 2-polig, asymmetrisch • Tragwicklung: 4-polig, asymmetrisch • Rotor: 2-polig, diametral (sinusförmig) magnetisiert
Bezeichnung Symbol Wert
Flusserfassung Lagerspule αpb 40°
Flusserfassung Antriebsspule αpd 100°
Phasenzahl Lager mb 3
Phasenzahl Antrieb md 3
Polpaarzahl Lager p2 2
Polpaarzahl Antrieb p1 1
Max. Stromänderung bei 1N dl/dφ 0,032 A/N
Abb. 2.23: Motor mit 6 Nuten und diametral magnetisiertem
zweipoligem Rotor
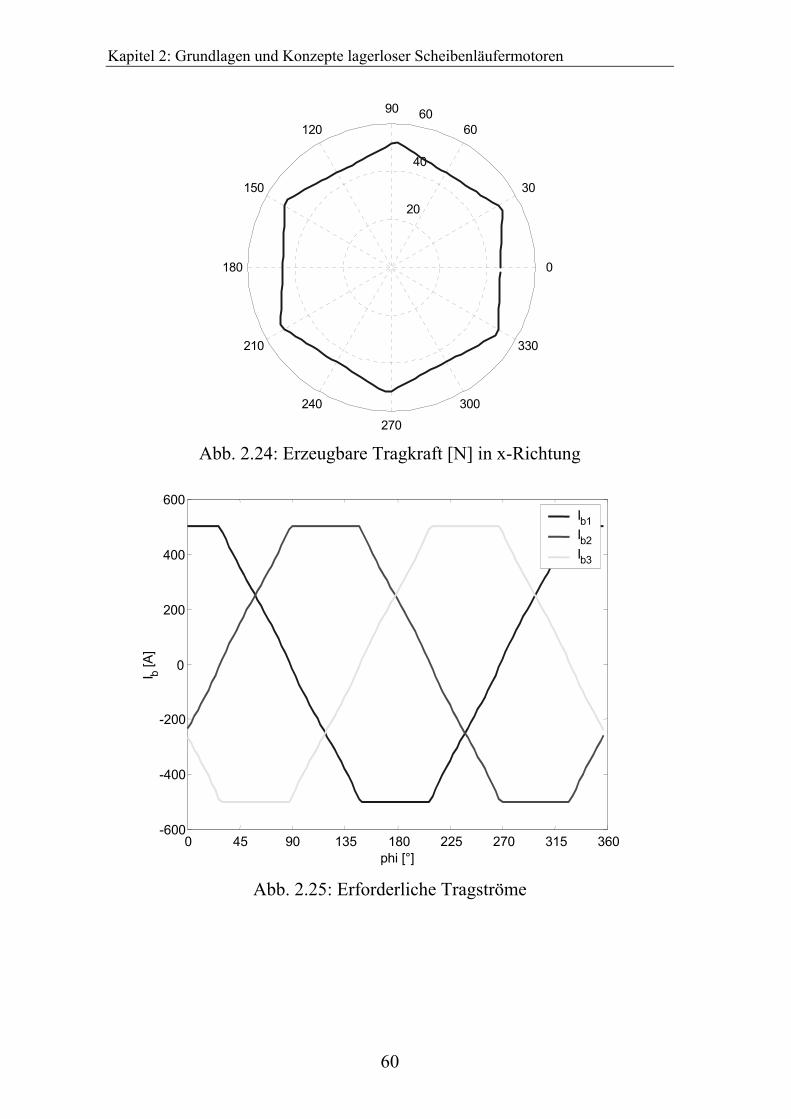
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
60
20
40
60
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.24: Erzeugbare Tragkraft [N] in x-Richtung
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2Ib3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2Ib3
Abb. 2.25: Erforderliche Tragströme
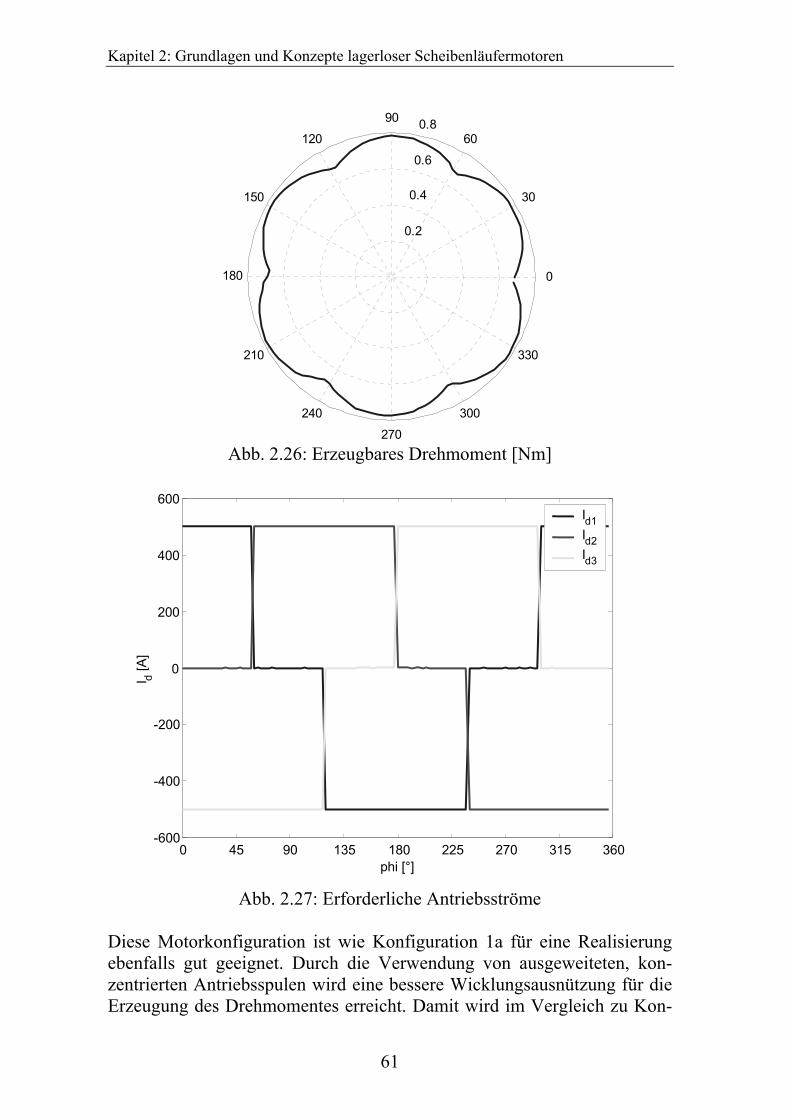
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
61
0.2
0.4
0.6
0.8
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.26: Erzeugbares Drehmoment [Nm]
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2Id3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2Id3
Abb. 2.27: Erforderliche Antriebsströme
Diese Motorkonfiguration ist wie Konfiguration 1a für eine Realisierung ebenfalls gut geeignet. Durch die Verwendung von ausgeweiteten, kon-zentrierten Antriebsspulen wird eine bessere Wicklungsausnützung für die Erzeugung des Drehmomentes erreicht. Damit wird im Vergleich zu Kon-
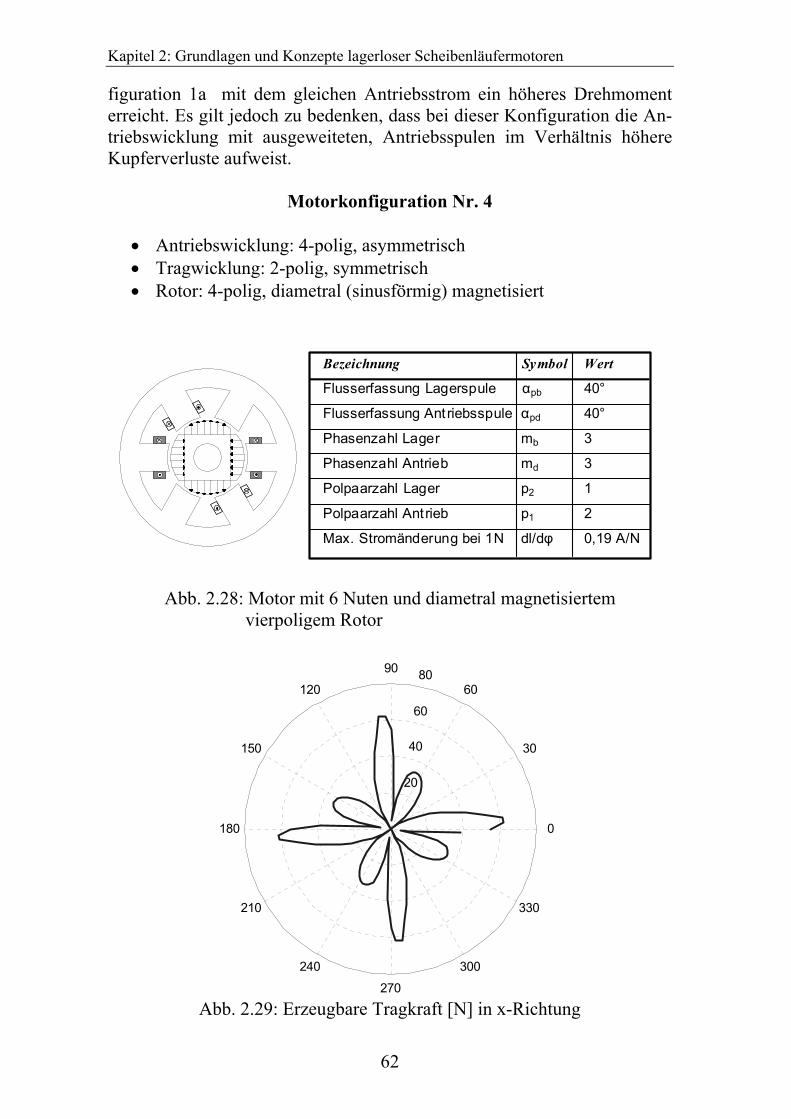
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
62
figuration 1a mit dem gleichen Antriebsstrom ein höheres Drehmoment erreicht. Es gilt jedoch zu bedenken, dass bei dieser Konfiguration die An-triebswicklung mit ausgeweiteten, Antriebsspulen im Verhältnis höhere Kupferverluste aufweist.
Motorkonfiguration Nr. 4
• Antriebswicklung: 4-polig, asymmetrisch • Tragwicklung: 2-polig, symmetrisch • Rotor: 4-polig, diametral (sinusförmig) magnetisiert
Bezeichnung Symbol Wert
Flusserfassung Lagerspule αpb 40°
Flusserfassung Antriebsspule αpd 40°
Phasenzahl Lager mb 3
Phasenzahl Antrieb md 3
Polpaarzahl Lager p2 1
Polpaarzahl Antrieb p1 2
Max. Stromänderung bei 1N dl/dφ 0,19 A/N
Abb. 2.28: Motor mit 6 Nuten und diametral magnetisiertem
vierpoligem Rotor
20
40
60
80
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.29: Erzeugbare Tragkraft [N] in x-Richtung
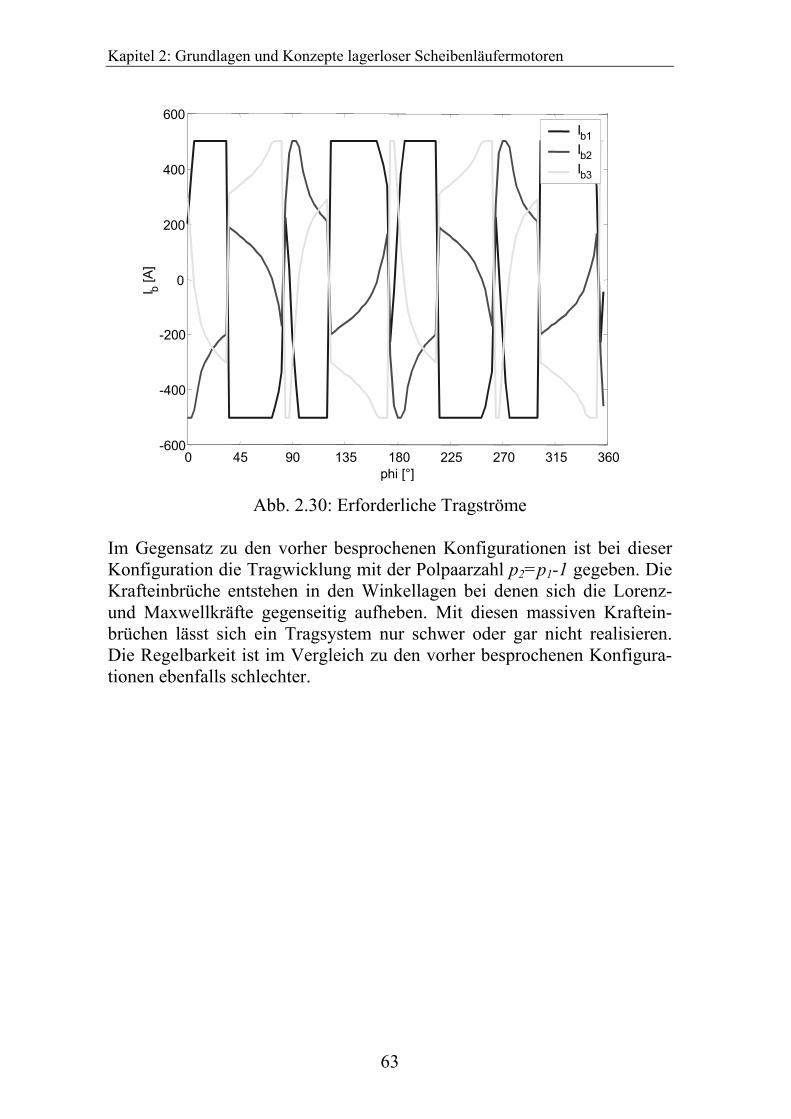
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
63
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]Ib1Ib2Ib3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]Ib1Ib2Ib3
Abb. 2.30: Erforderliche Tragströme
Im Gegensatz zu den vorher besprochenen Konfigurationen ist bei dieser Konfiguration die Tragwicklung mit der Polpaarzahl p2=p1-1 gegeben. Die Krafteinbrüche entstehen in den Winkellagen bei denen sich die Lorenz- und Maxwellkräfte gegenseitig aufheben. Mit diesen massiven Kraftein-brüchen lässt sich ein Tragsystem nur schwer oder gar nicht realisieren. Die Regelbarkeit ist im Vergleich zu den vorher besprochenen Konfigura-tionen ebenfalls schlechter.
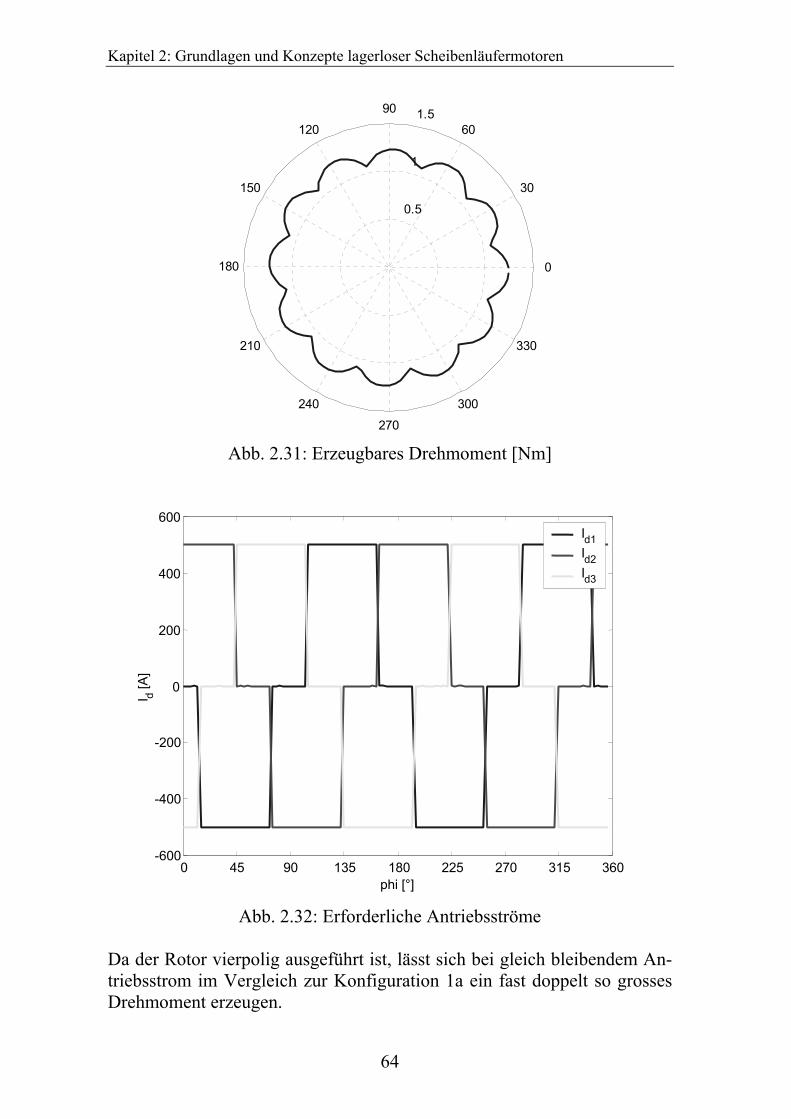
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
64
0.5
1
1.5
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.31: Erzeugbares Drehmoment [Nm]
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2Id3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2Id3
Abb. 2.32: Erforderliche Antriebsströme
Da der Rotor vierpolig ausgeführt ist, lässt sich bei gleich bleibendem An-triebsstrom im Vergleich zur Konfiguration 1a ein fast doppelt so grosses Drehmoment erzeugen.
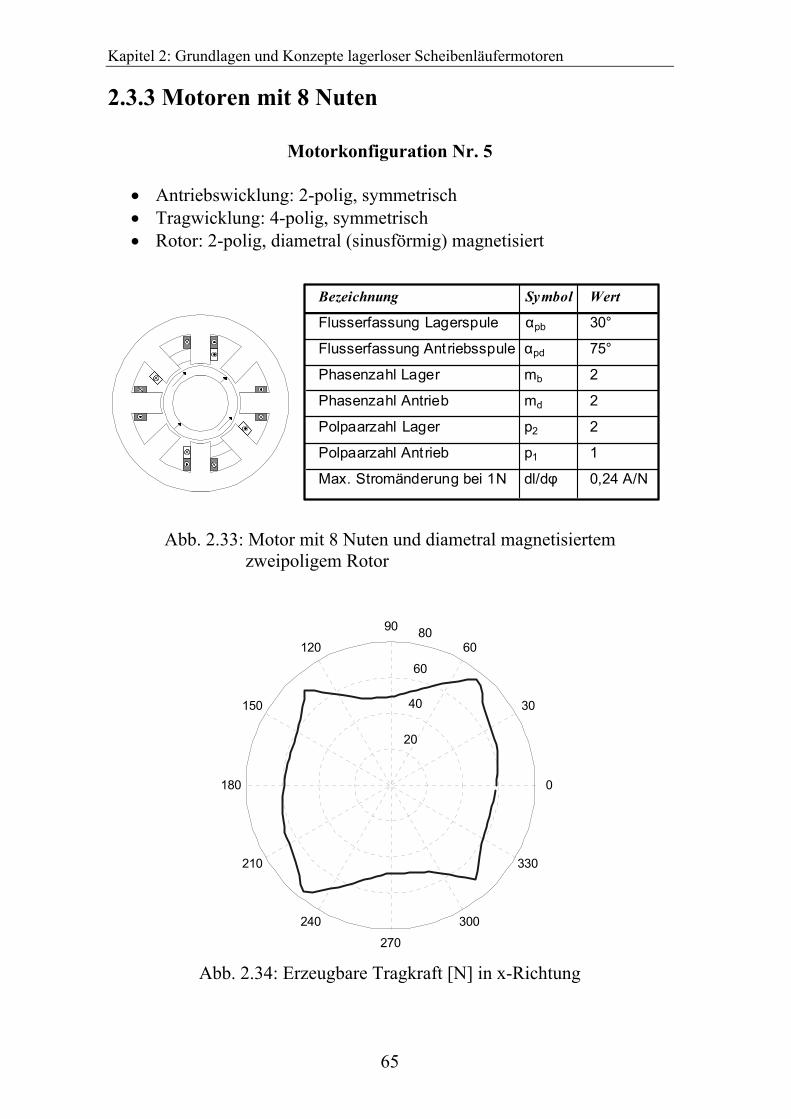
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
65
2.3.3 Motoren mit 8 Nuten
Motorkonfiguration Nr. 5
• Antriebswicklung: 2-polig, symmetrisch • Tragwicklung: 4-polig, symmetrisch • Rotor: 2-polig, diametral (sinusförmig) magnetisiert
Bezeichnung Symbol Wert
Flusserfassung Lagerspule αpb 30°
Flusserfassung Antriebsspule αpd 75°
Phasenzahl Lager mb 2
Phasenzahl Antrieb md 2
Polpaarzahl Lager p2 2
Polpaarzahl Antrieb p1 1
Max. Stromänderung bei 1N dl/dφ 0,24 A/N
Abb. 2.33: Motor mit 8 Nuten und diametral magnetisiertem
zweipoligem Rotor
20
40
60
80
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.34: Erzeugbare Tragkraft [N] in x-Richtung
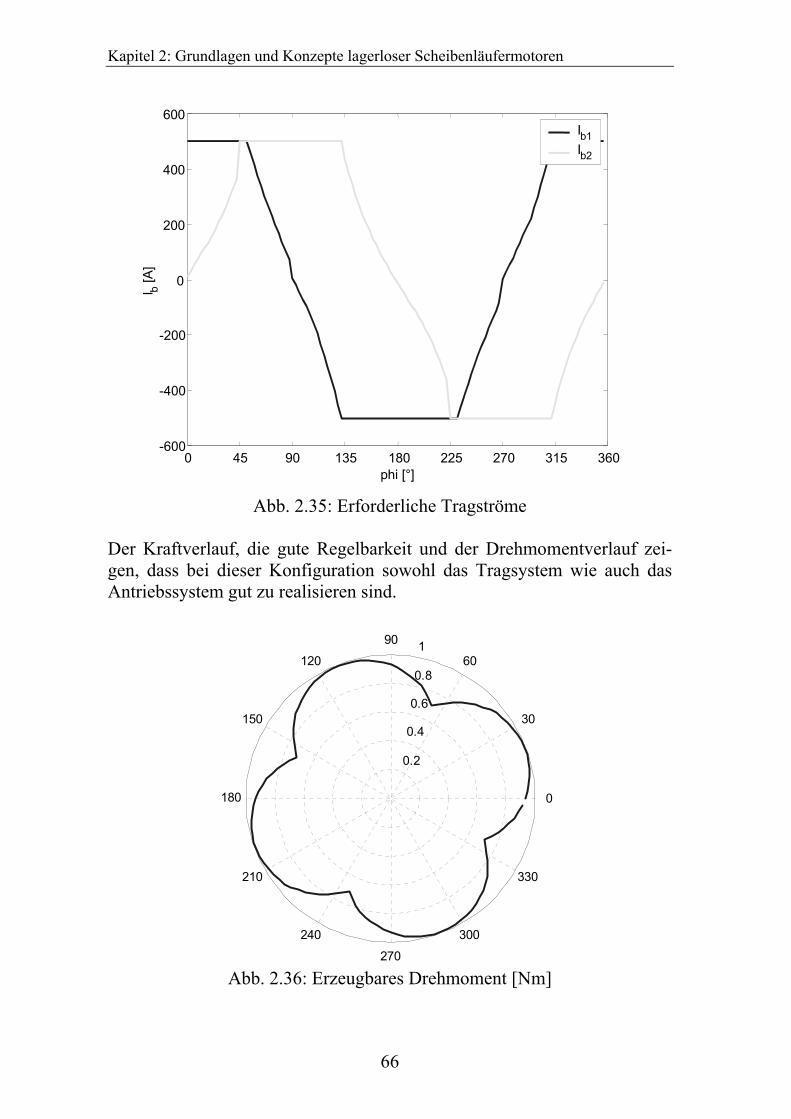
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
66
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]Ib1Ib2
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]Ib1Ib2
Abb. 2.35: Erforderliche Tragströme
Der Kraftverlauf, die gute Regelbarkeit und der Drehmomentverlauf zei-gen, dass bei dieser Konfiguration sowohl das Tragsystem wie auch das Antriebssystem gut zu realisieren sind.
0.2
0.4
0.6
0.8
1
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.36: Erzeugbares Drehmoment [Nm]
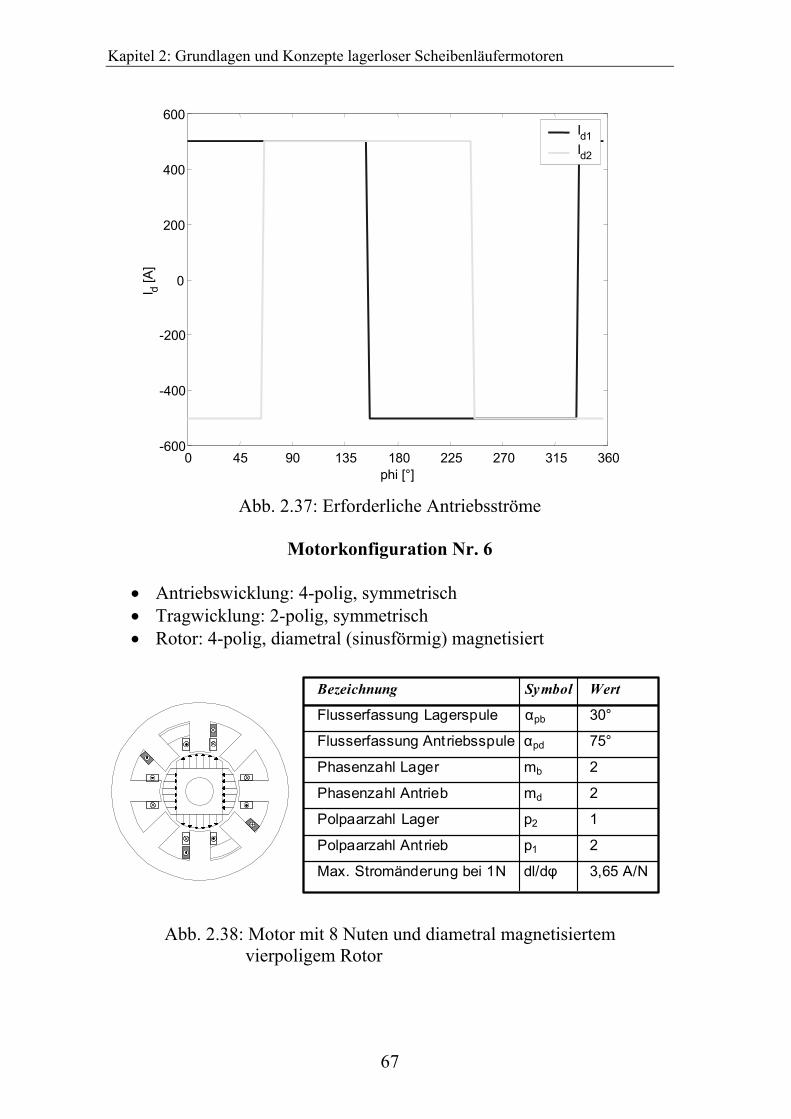
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
67
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]Id1Id2
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]Id1Id2
Abb. 2.37: Erforderliche Antriebsströme
Motorkonfiguration Nr. 6
• Antriebswicklung: 4-polig, symmetrisch • Tragwicklung: 2-polig, symmetrisch • Rotor: 4-polig, diametral (sinusförmig) magnetisiert
Bezeichnung Symbol Wert
Flusserfassung Lagerspule αpb 30°
Flusserfassung Antriebsspule αpd 75°
Phasenzahl Lager mb 2
Phasenzahl Antrieb md 2
Polpaarzahl Lager p2 1
Polpaarzahl Antrieb p1 2
Max. Stromänderung bei 1N dl/dφ 3,65 A/N
Abb. 2.38: Motor mit 8 Nuten und diametral magnetisiertem vierpoligem Rotor
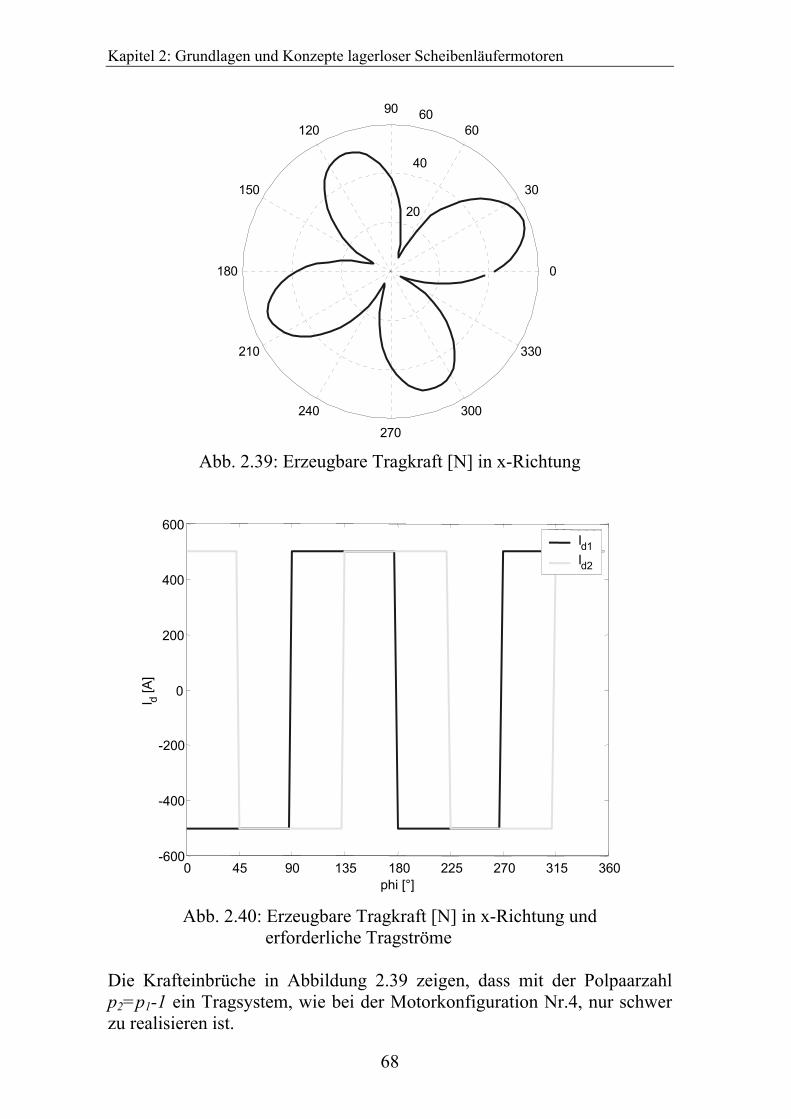
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
68
20
40
60
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.39: Erzeugbare Tragkraft [N] in x-Richtung
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2
Abb. 2.40: Erzeugbare Tragkraft [N] in x-Richtung und
erforderliche Tragströme Die Krafteinbrüche in Abbildung 2.39 zeigen, dass mit der Polpaarzahl p2=p1-1 ein Tragsystem, wie bei der Motorkonfiguration Nr.4, nur schwer zu realisieren ist.
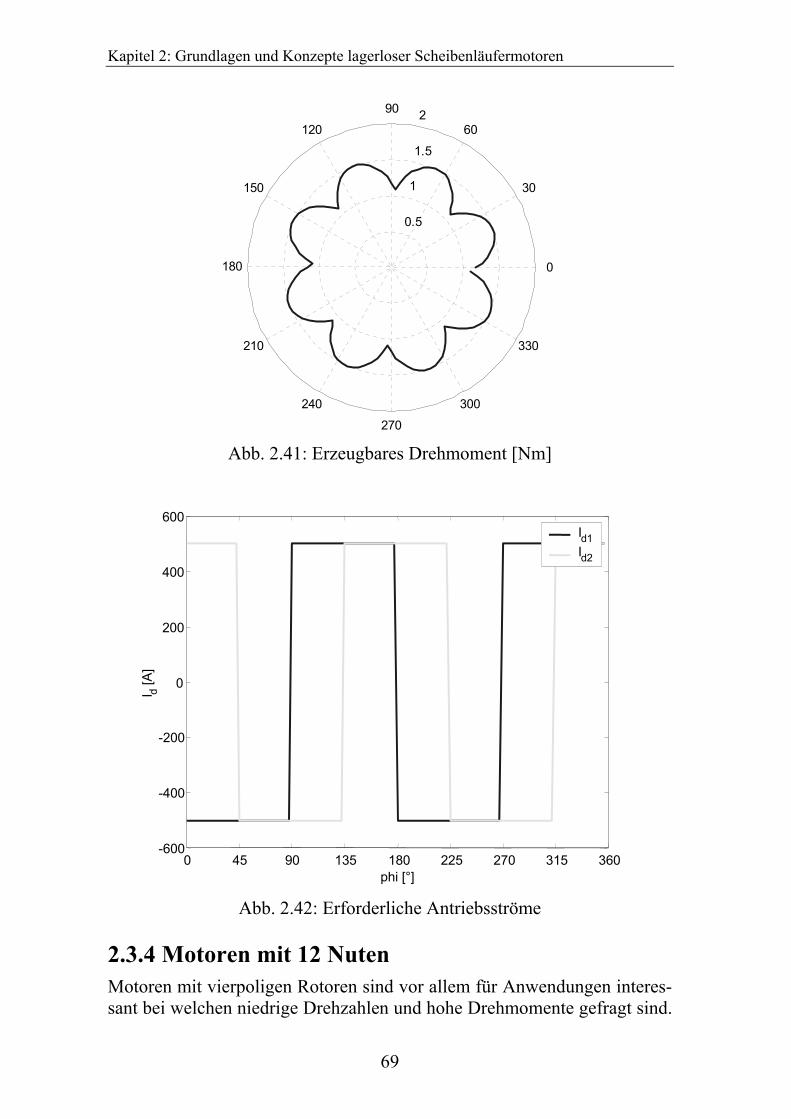
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
69
0.5
1
1.5
2
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.41: Erzeugbares Drehmoment [Nm]
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2
Abb. 2.42: Erforderliche Antriebsströme
2.3.4 Motoren mit 12 Nuten Motoren mit vierpoligen Rotoren sind vor allem für Anwendungen interes-sant bei welchen niedrige Drehzahlen und hohe Drehmomente gefragt sind.
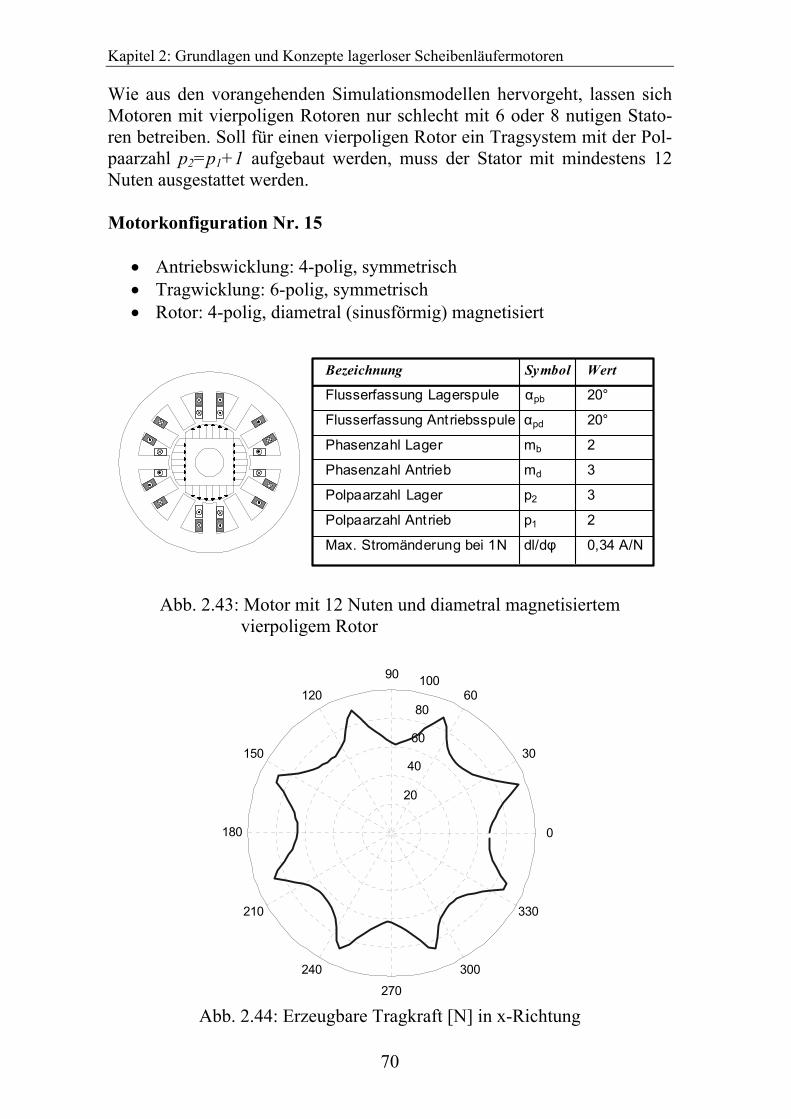
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
70
Wie aus den vorangehenden Simulationsmodellen hervorgeht, lassen sich Motoren mit vierpoligen Rotoren nur schlecht mit 6 oder 8 nutigen Stato-ren betreiben. Soll für einen vierpoligen Rotor ein Tragsystem mit der Pol-paarzahl p2=p1+1 aufgebaut werden, muss der Stator mit mindestens 12 Nuten ausgestattet werden. Motorkonfiguration Nr. 15
• Antriebswicklung: 4-polig, symmetrisch • Tragwicklung: 6-polig, symmetrisch • Rotor: 4-polig, diametral (sinusförmig) magnetisiert
Bezeichnung Symbol Wert
Flusserfassung Lagerspule αpb 20°
Flusserfassung Antriebsspule αpd 20°
Phasenzahl Lager mb 2
Phasenzahl Antrieb md 3
Polpaarzahl Lager p2 3
Polpaarzahl Antrieb p1 2
Max. Stromänderung bei 1N dl/dφ 0,34 A/N
Abb. 2.43: Motor mit 12 Nuten und diametral magnetisiertem
vierpoligem Rotor
20
40
60
80
100
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.44: Erzeugbare Tragkraft [N] in x-Richtung
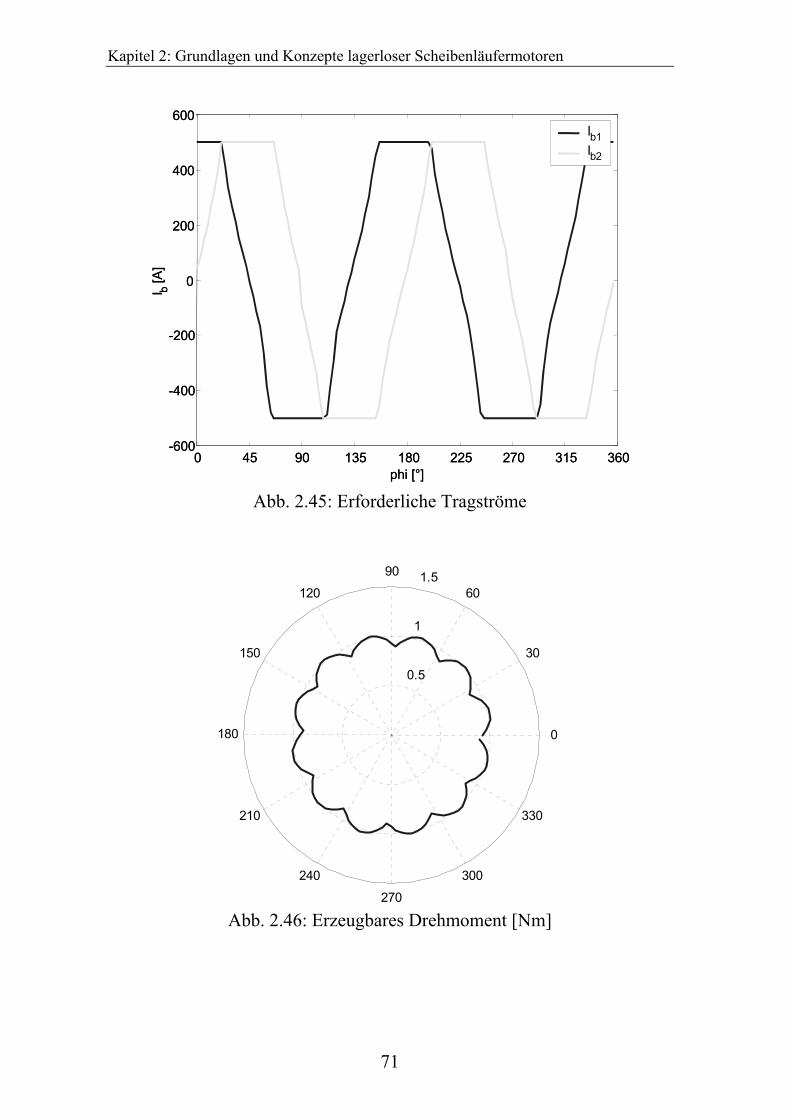
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
71
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2
Abb. 2.45: Erforderliche Tragströme
0.5
1
1.5
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.46: Erzeugbares Drehmoment [Nm]
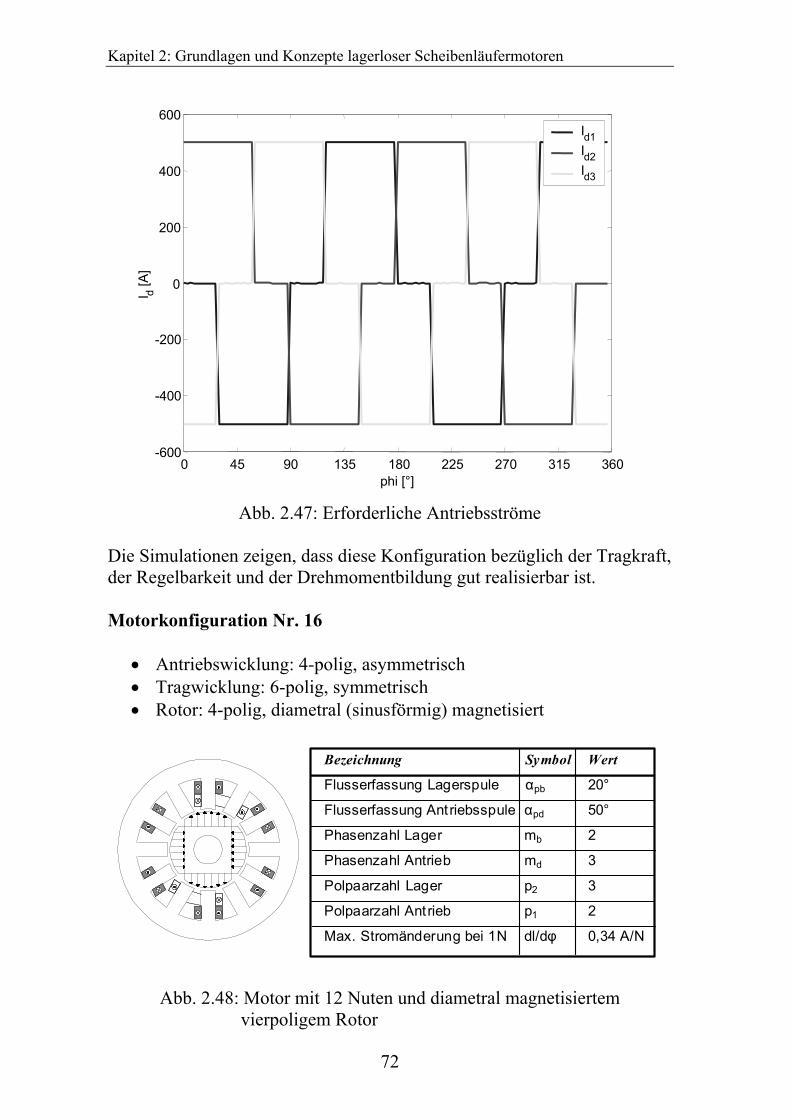
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
72
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]Id1Id2Id3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]Id1Id2Id3
Abb. 2.47: Erforderliche Antriebsströme
Die Simulationen zeigen, dass diese Konfiguration bezüglich der Tragkraft, der Regelbarkeit und der Drehmomentbildung gut realisierbar ist. Motorkonfiguration Nr. 16
• Antriebswicklung: 4-polig, asymmetrisch • Tragwicklung: 6-polig, symmetrisch • Rotor: 4-polig, diametral (sinusförmig) magnetisiert
Bezeichnung Symbol Wert
Flusserfassung Lagerspule αpb 20°
Flusserfassung Antriebsspule αpd 50°
Phasenzahl Lager mb 2
Phasenzahl Antrieb md 3
Polpaarzahl Lager p2 3
Polpaarzahl Antrieb p1 2
Max. Stromänderung bei 1N dl/dφ 0,34 A/N
Abb. 2.48: Motor mit 12 Nuten und diametral magnetisiertem vierpoligem Rotor
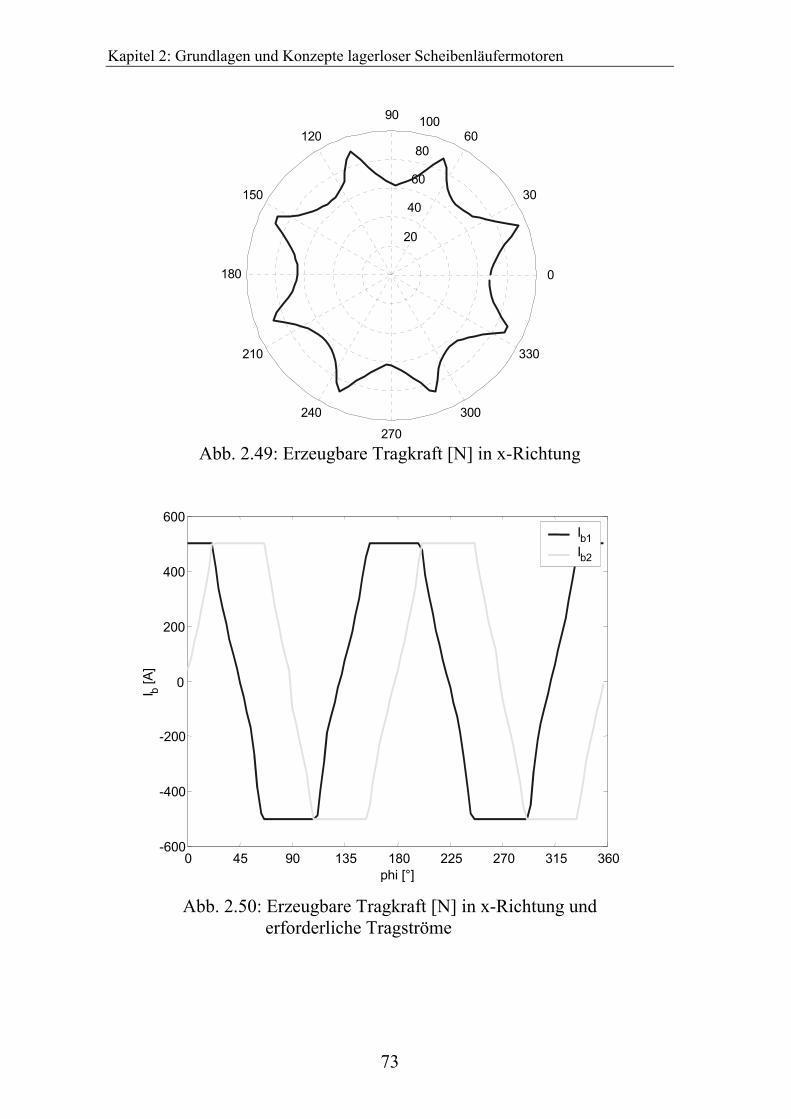
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
73
20
40
60
80
100
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.49: Erzeugbare Tragkraft [N] in x-Richtung
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600Ib1Ib2
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600Ib1Ib2
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I b[A
]
Ib1Ib2
Abb. 2.50: Erzeugbare Tragkraft [N] in x-Richtung und
erforderliche Tragströme
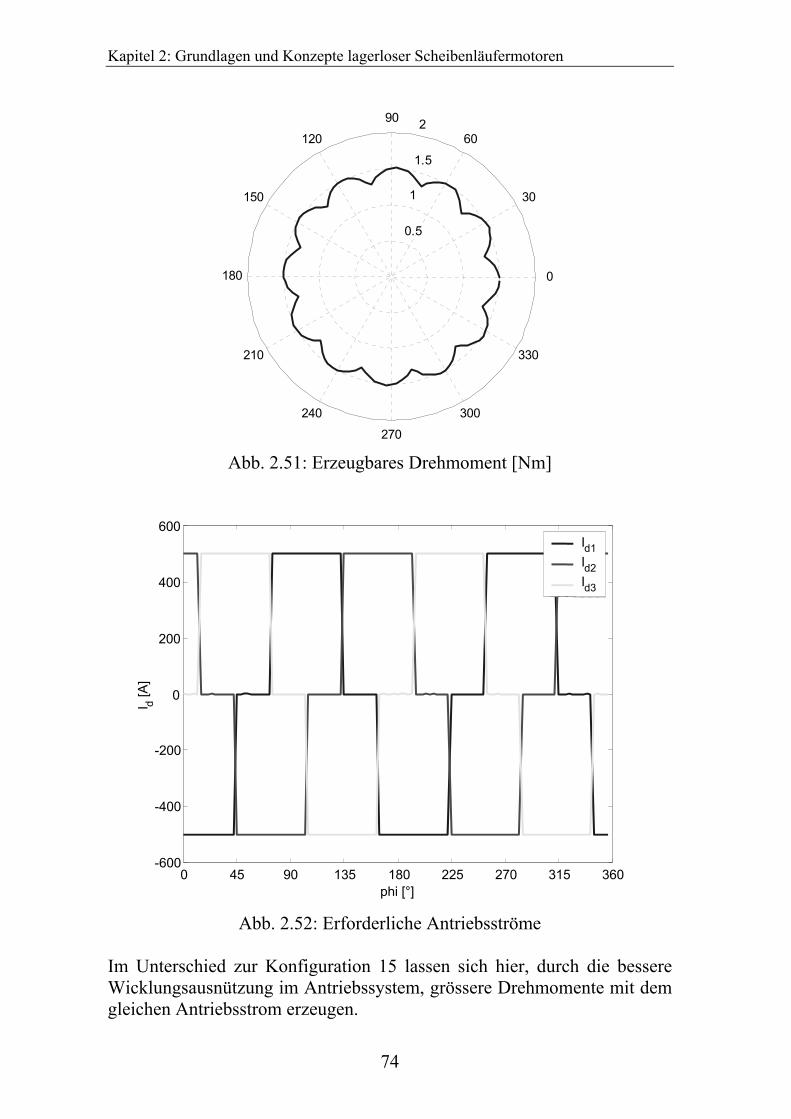
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
74
0.5
1
1.5
2
30
210
60
240
90
270
120
300
150
330
180 0
Abb. 2.51: Erzeugbares Drehmoment [Nm]
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2Id3
0 45 90 135 180 225 270 315 360-600
-400
-200
0
200
400
600
phi [°]
I d[A
]
Id1Id2Id3
Abb. 2.52: Erforderliche Antriebsströme
Im Unterschied zur Konfiguration 15 lassen sich hier, durch die bessere Wicklungsausnützung im Antriebssystem, grössere Drehmomente mit dem gleichen Antriebsstrom erzeugen.
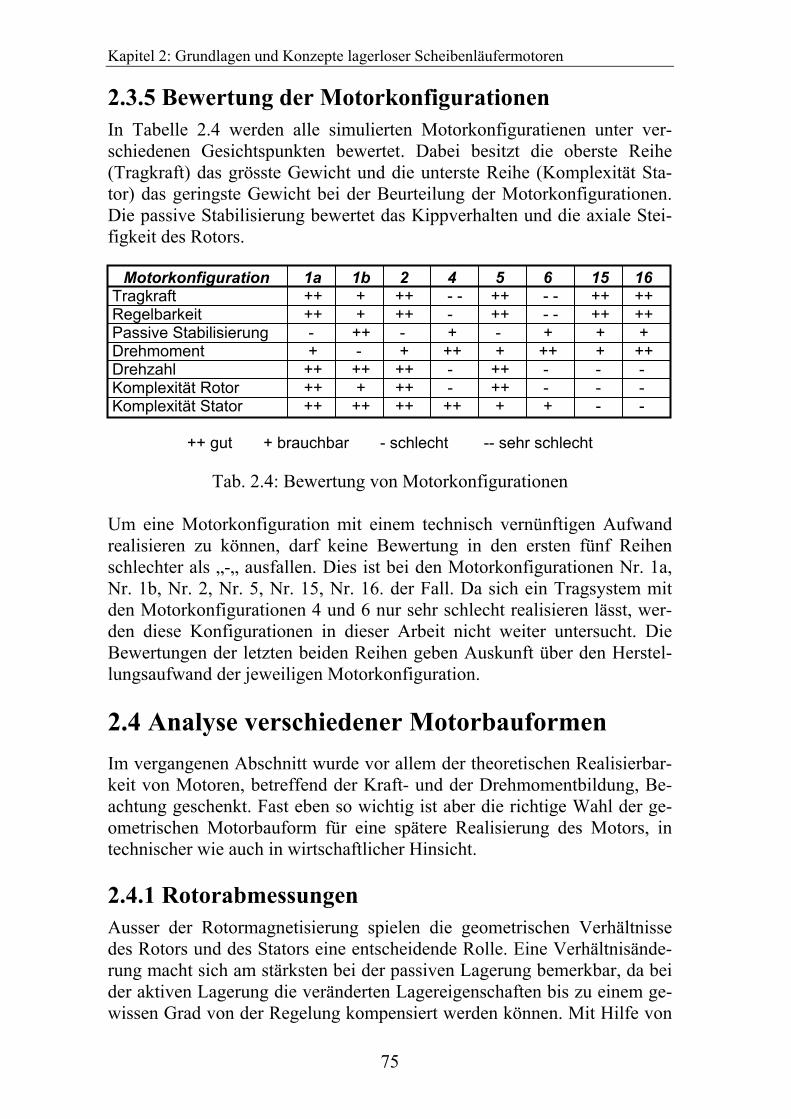
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
75
2.3.5 Bewertung der Motorkonfigurationen In Tabelle 2.4 werden alle simulierten Motorkonfiguratienen unter ver-schiedenen Gesichtspunkten bewertet. Dabei besitzt die oberste Reihe (Tragkraft) das grösste Gewicht und die unterste Reihe (Komplexität Sta-tor) das geringste Gewicht bei der Beurteilung der Motorkonfigurationen. Die passive Stabilisierung bewertet das Kippverhalten und die axiale Stei-figkeit des Rotors. Motorkonfiguration 1a 1b 2 4 5 6 15 16 Tragkraft ++ + ++ - - ++ - - ++ ++ Regelbarkeit ++ + ++ - ++ - - ++ ++ Passive Stabilisierung - ++ - + - + + + Drehmoment + - + ++ + ++ + ++ Drehzahl ++ ++ ++ - ++ - - - Komplexität Rotor ++ + ++ - ++ - - - Komplexität Stator ++ ++ ++ ++ + + - -
++ gut + brauchbar - schlecht -- sehr schlecht
Tab. 2.4: Bewertung von Motorkonfigurationen Um eine Motorkonfiguration mit einem technisch vernünftigen Aufwand realisieren zu können, darf keine Bewertung in den ersten fünf Reihen schlechter als „-„ ausfallen. Dies ist bei den Motorkonfigurationen Nr. 1a, Nr. 1b, Nr. 2, Nr. 5, Nr. 15, Nr. 16. der Fall. Da sich ein Tragsystem mit den Motorkonfigurationen 4 und 6 nur sehr schlecht realisieren lässt, wer-den diese Konfigurationen in dieser Arbeit nicht weiter untersucht. Die Bewertungen der letzten beiden Reihen geben Auskunft über den Herstel-lungsaufwand der jeweiligen Motorkonfiguration.
2.4 Analyse verschiedener Motorbauformen Im vergangenen Abschnitt wurde vor allem der theoretischen Realisierbar-keit von Motoren, betreffend der Kraft- und der Drehmomentbildung, Be-achtung geschenkt. Fast eben so wichtig ist aber die richtige Wahl der ge-ometrischen Motorbauform für eine spätere Realisierung des Motors, in technischer wie auch in wirtschaftlicher Hinsicht. 2.4.1 Rotorabmessungen Ausser der Rotormagnetisierung spielen die geometrischen Verhältnisse des Rotors und des Stators eine entscheidende Rolle. Eine Verhältnisände-rung macht sich am stärksten bei der passiven Lagerung bemerkbar, da bei der aktiven Lagerung die veränderten Lagereigenschaften bis zu einem ge-wissen Grad von der Regelung kompensiert werden können. Mit Hilfe von
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
76
Feldsimulationen konnten folgende Zusammenhänge zwischen einer geo-metrischen Verhältnisveränderung und der damit verbundenen Änderungen der Kräfte im passiven Lager festgestellt werden [Silb/*2],[Silb/*3]. Dabei beziehen sich die Untersuchungen auf den zweipoligen, diametral magneti-sierten Rotor: Wird der Luftspalt zwischen Rotor und Stator bei gleichbleibenden Ab-messungen und Magnetisierung des Rotors vergrössert, wird die passive axiale Lagerkraft in der Nähe der Ruhelage, näherungsweise umgekehrt proportional zum Luftspalt abgeschwächt. Eine ähnliche Auswirkung kann bei einer Vergrösserung des Luftspalts bezüglich des Rückstellmomentes für kleine Kippwinkel (< 10°) in Verkippungsrichtung beobachtet werden. Das Kippmoment vergrössert sich bei gleichbleibenden geometrischen Abmessungen in einem weiten Bereich annähernd linear zum Kippwinkel und kann grundsätzlich bis 10° beliebig gewählt werden. Wird nur das Verhältnis Rotordurchmesser zu Rotorhöhe betrachtet, lassen sich optimale Verhältnisse finden, bei welchen die axiale Lagerkraft oder die Kippmo-mente maximal werden. Das Optimum der axialen Lagerkraft und des Kippmomentes liegen aber sehr nahe beieinander [Silb/*2]. Gestützt auf Erfahrungswerte und Simulationsergebnisse, kann das optimale Verhältnis Rotordurchmesser zu Rotorhöhe, bei welchem sowohl grosse Kippmomen-te als auch grosse axiale Lagerkräfte erzeugt werden können, durch folgen-de Faustformel (Gleichung 2.51) ausgedrückt werden.
2.5...4r
r
dh = (2.51)
2.4.2 Radialbauformen Eine häufig verwendete Bauform bei Motoren ist die so genannte Radial-bauform. Es wird dabei zwischen Innenläufermotor und Aussenläufermotor unterschieden. Der Vorteil dieser Motorbauform liegt bei der einfachen ge-ometrischen Struktur. Um die Eisenverluste klein zu halten, wird der Ei-senkern mit gegeneinander isolierten Eisenblechen aufgebaut. Der Haupt-nachteil der Radialbauform sind die ausgebildeten Wickelköpfe um die Nutzähne, welche die konstruktiven Möglichkeiten bei der Gestaltung von lagerlosen Zentrifugalpumpen stark einschränken. Ein weiterer Nachteil ist, dass die Radialbauformen zu flachen aber dafür in der Breite weit ausge-dehnten, tellerförmigen Motoren führen, welche das Motorvolumen schlecht ausnützen und dadurch viel Platz benötigen.
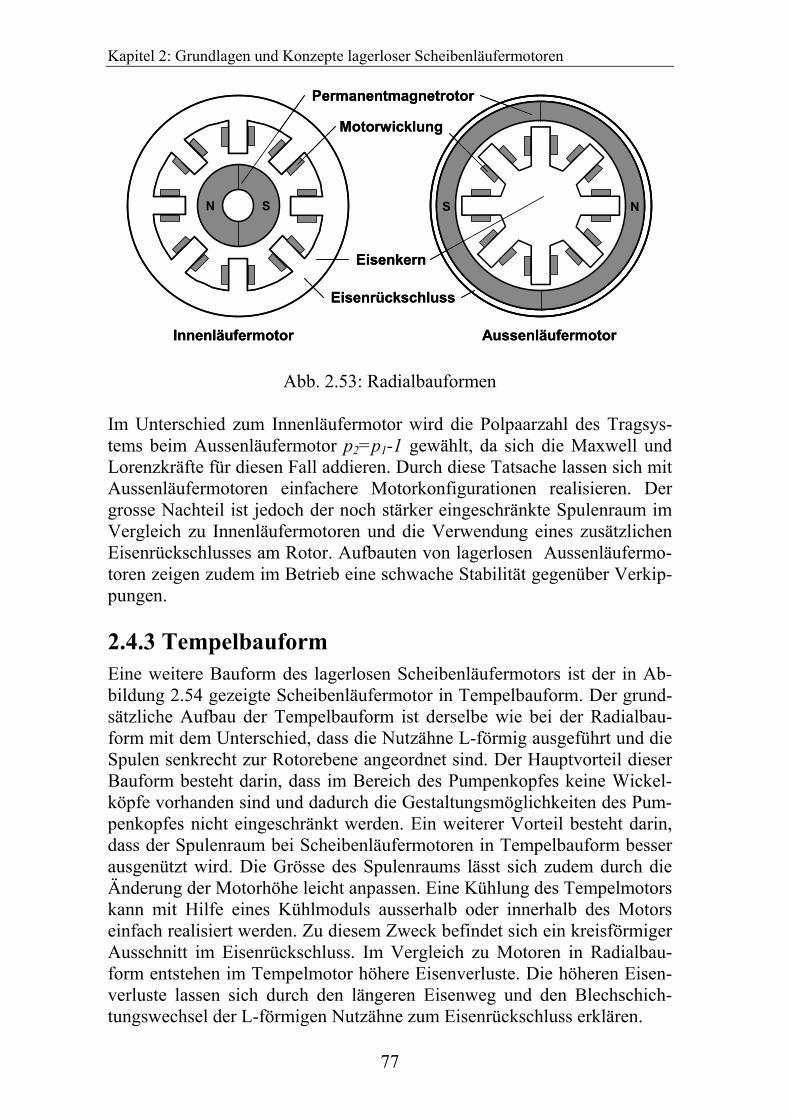
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
77
N S S N
Innenläufermotor Aussenläufermotor
Eisenrückschluss
Motorwicklung
Permanentmagnetrotor
Eisenkern
N S S NS N
Innenläufermotor Aussenläufermotor
Eisenrückschluss
Motorwicklung
Permanentmagnetrotor
Eisenkern
Abb. 2.53: Radialbauformen
Im Unterschied zum Innenläufermotor wird die Polpaarzahl des Tragsys-tems beim Aussenläufermotor p2=p1-1 gewählt, da sich die Maxwell und Lorenzkräfte für diesen Fall addieren. Durch diese Tatsache lassen sich mit Aussenläufermotoren einfachere Motorkonfigurationen realisieren. Der grosse Nachteil ist jedoch der noch stärker eingeschränkte Spulenraum im Vergleich zu Innenläufermotoren und die Verwendung eines zusätzlichen Eisenrückschlusses am Rotor. Aufbauten von lagerlosen Aussenläufermo-toren zeigen zudem im Betrieb eine schwache Stabilität gegenüber Verkip-pungen. 2.4.3 Tempelbauform Eine weitere Bauform des lagerlosen Scheibenläufermotors ist der in Ab-bildung 2.54 gezeigte Scheibenläufermotor in Tempelbauform. Der grund-sätzliche Aufbau der Tempelbauform ist derselbe wie bei der Radialbau-form mit dem Unterschied, dass die Nutzähne L-förmig ausgeführt und die Spulen senkrecht zur Rotorebene angeordnet sind. Der Hauptvorteil dieser Bauform besteht darin, dass im Bereich des Pumpenkopfes keine Wickel-köpfe vorhanden sind und dadurch die Gestaltungsmöglichkeiten des Pum-penkopfes nicht eingeschränkt werden. Ein weiterer Vorteil besteht darin, dass der Spulenraum bei Scheibenläufermotoren in Tempelbauform besser ausgenützt wird. Die Grösse des Spulenraums lässt sich zudem durch die Änderung der Motorhöhe leicht anpassen. Eine Kühlung des Tempelmotors kann mit Hilfe eines Kühlmoduls ausserhalb oder innerhalb des Motors einfach realisiert werden. Zu diesem Zweck befindet sich ein kreisförmiger Ausschnitt im Eisenrückschluss. Im Vergleich zu Motoren in Radialbau-form entstehen im Tempelmotor höhere Eisenverluste. Die höheren Eisen-verluste lassen sich durch den längeren Eisenweg und den Blechschich-tungswechsel der L-förmigen Nutzähne zum Eisenrückschluss erklären.
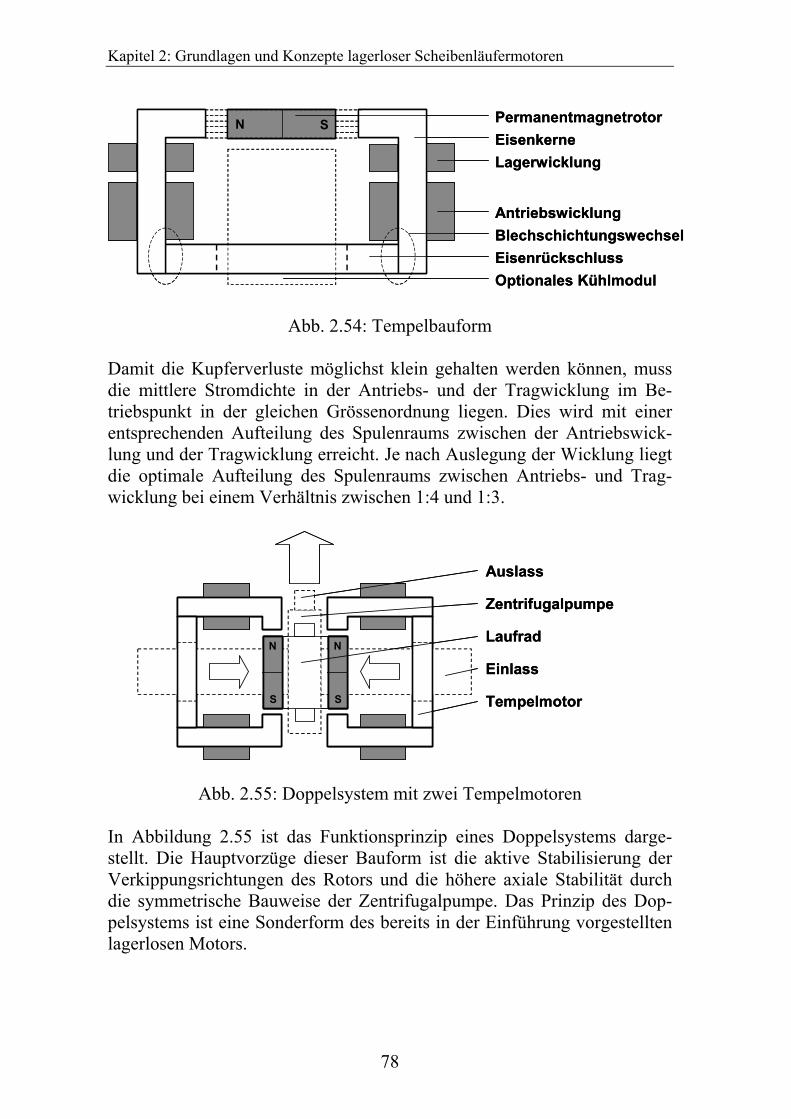
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
78
Eisenrückschluss
N SEisenkerne
Antriebswicklung
Optionales Kühlmodul
Blechschichtungswechsel
Permanentmagnetrotor
Lagerwicklung
Eisenrückschluss
N SEisenkerne
Antriebswicklung
Optionales Kühlmodul
Blechschichtungswechsel
Permanentmagnetrotor
Lagerwicklung
Abb. 2.54: Tempelbauform
Damit die Kupferverluste möglichst klein gehalten werden können, muss die mittlere Stromdichte in der Antriebs- und der Tragwicklung im Be-triebspunkt in der gleichen Grössenordnung liegen. Dies wird mit einer entsprechenden Aufteilung des Spulenraums zwischen der Antriebswick-lung und der Tragwicklung erreicht. Je nach Auslegung der Wicklung liegt die optimale Aufteilung des Spulenraums zwischen Antriebs- und Trag-wicklung bei einem Verhältnis zwischen 1:4 und 1:3.
N
S
N
S
Laufrad
Auslass
Einlass
Tempelmotor
Zentrifugalpumpe
N
S
N
S
N
S
N
S
Laufrad
Auslass
Einlass
Tempelmotor
Zentrifugalpumpe
Abb. 2.55: Doppelsystem mit zwei Tempelmotoren In Abbildung 2.55 ist das Funktionsprinzip eines Doppelsystems darge-stellt. Die Hauptvorzüge dieser Bauform ist die aktive Stabilisierung der Verkippungsrichtungen des Rotors und die höhere axiale Stabilität durch die symmetrische Bauweise der Zentrifugalpumpe. Das Prinzip des Dop-pelsystems ist eine Sonderform des bereits in der Einführung vorgestellten lagerlosen Motors.
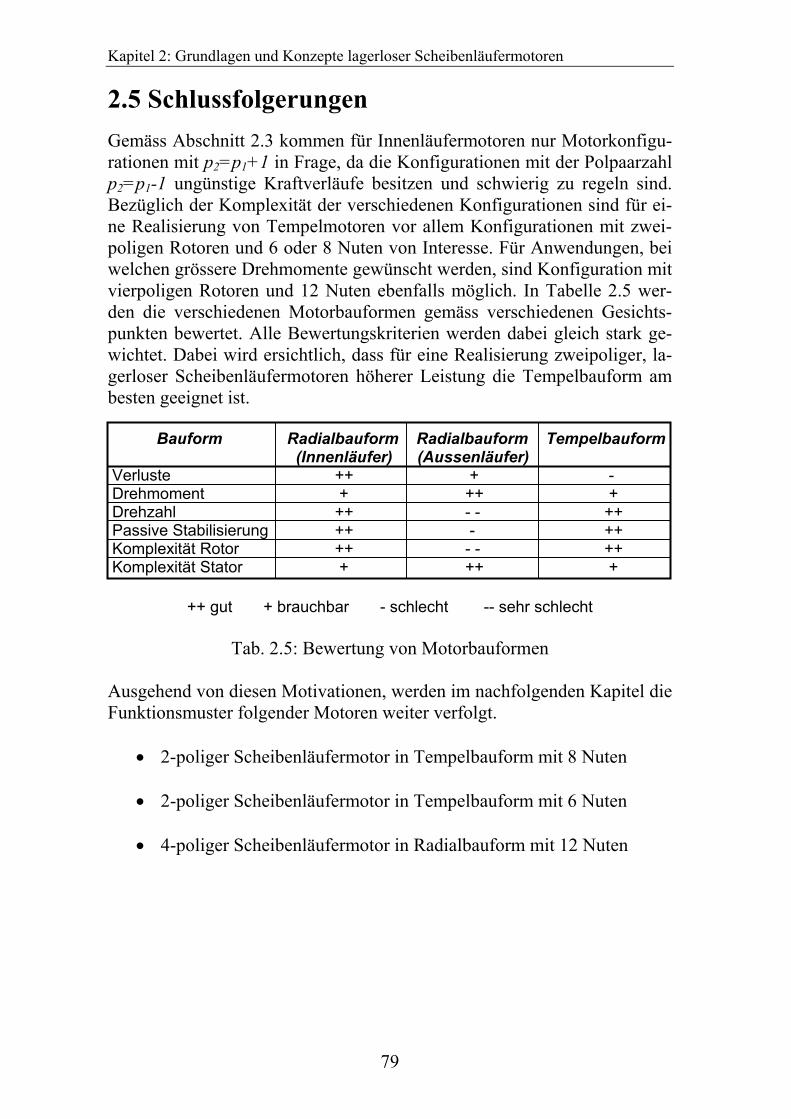
Kapitel 2: Grundlagen und Konzepte lagerloser Scheibenläufermotoren
79
2.5 Schlussfolgerungen Gemäss Abschnitt 2.3 kommen für Innenläufermotoren nur Motorkonfigu-rationen mit p2=p1+1 in Frage, da die Konfigurationen mit der Polpaarzahl p2=p1-1 ungünstige Kraftverläufe besitzen und schwierig zu regeln sind. Bezüglich der Komplexität der verschiedenen Konfigurationen sind für ei-ne Realisierung von Tempelmotoren vor allem Konfigurationen mit zwei-poligen Rotoren und 6 oder 8 Nuten von Interesse. Für Anwendungen, bei welchen grössere Drehmomente gewünscht werden, sind Konfiguration mit vierpoligen Rotoren und 12 Nuten ebenfalls möglich. In Tabelle 2.5 wer-den die verschiedenen Motorbauformen gemäss verschiedenen Gesichts-punkten bewertet. Alle Bewertungskriterien werden dabei gleich stark ge-wichtet. Dabei wird ersichtlich, dass für eine Realisierung zweipoliger, la-gerloser Scheibenläufermotoren höherer Leistung die Tempelbauform am besten geeignet ist. Bauform Radialbauform Radialbauform Tempelbauform (Innenläufer) (Aussenläufer) Verluste ++ + - Drehmoment + ++ + Drehzahl ++ - - ++ Passive Stabilisierung ++ - ++ Komplexität Rotor ++ - - ++ Komplexität Stator + ++ +
++ gut + brauchbar - schlecht -- sehr schlecht
Tab. 2.5: Bewertung von Motorbauformen
Ausgehend von diesen Motivationen, werden im nachfolgenden Kapitel die Funktionsmuster folgender Motoren weiter verfolgt.
• 2-poliger Scheibenläufermotor in Tempelbauform mit 8 Nuten • 2-poliger Scheibenläufermotor in Tempelbauform mit 6 Nuten
• 4-poliger Scheibenläufermotor in Radialbauform mit 12 Nuten

80

81
3. Der zweipolige lagerlose Scheibenläu-fermotor höherer Leistung Dieses Kapitel befasst sich mit dem Aufbau von zweipoligen Scheibenläu-fermotoren höherer Leistung. Dabei wird der Schwerpunkt auf die Reali-sierung der Motorkonfigurationen 1a und 5 gesetzt. In Abschnitt 3.1 wer-den die verschiedenen Rotortypen optimiert, verglichen und anschliessend bewertet. In den Abschnitten 3.2 und 3.3 werden die mechanischen Auf-bauten sowie die Regelstrukturen der verschiedenen zweipoligen Scheiben-läufermotoren besprochen. 3.1 Rotoraufbau Die wichtigsten Eigenschaften, welche einen guten Rotor kennzeichnen, sind die Erzeugung grosser Tragkräfte und Drehmomente, eine gute Regel-barkeit, hohe passive axiale Lagerkräfte und eine hohe Kippsteifigkeit. Die Erzeugung von Tragkräften und Drehmomenten wurden ausführlich im letzten Kapitel behandelt. Im Unterschied zum Aufbau von radialen Trag-kräften und Drehmomenten, kann die passive, axiale Lagerkraft und die Kippsteifigkeit nicht direkt durch eine entsprechende Bestromung der Trag- und der Antriebswicklung beeinflusst werden. Sie werden grössten-teils durch die Geometrie des Rotors und des Stators sowie der Rotormag-netisierung bestimmt. Das geometrische Verhältnis Rotoraussendurchmes-ser zu Rotorhöhe wurde gemäss Abschnitt 2.4.1 gewählt. Der Innendurch-messer des Magnetringes wurde gerade so gross gewählt, dass noch genü-gend Freiraum in der Mitte des Rotors für die spätere Realisierung von Druckausgleichskanälen in einem Laufrad übrig ist. Da gemäss [Silb/*2] ein bezüglich der axialen Lagerkraft optimierter Rotor auch nahe am Opti-mum für eine maximale Kippsteifigkeit liegt, beschränken sich die folgen-den Untersuchungen auf die Optimierung der axialen, passiven Lagerkraft. Die Kippsteifigkeit, sowie die passive, axiale Lagerkraft sind gleichermas-sen von der Höhe der magnetischen Induktion BPM, beziehungsweise von der Luftspaltflussdichte Bδ des Rotormagneten abhängig. Mit der Glei-chung 3.1, welche in [Barl/*1] hergeleitet wurde, kann die axiale Lager-kraft eines lagerlosen Scheibenläufermotors näherungsweise bestimmt werden.
2
0 0
kz PMz
z c l r BF πµ δ
⋅ ⋅ ⋅ ⋅≈
⋅ z l 03l δ⋅ (3.1)
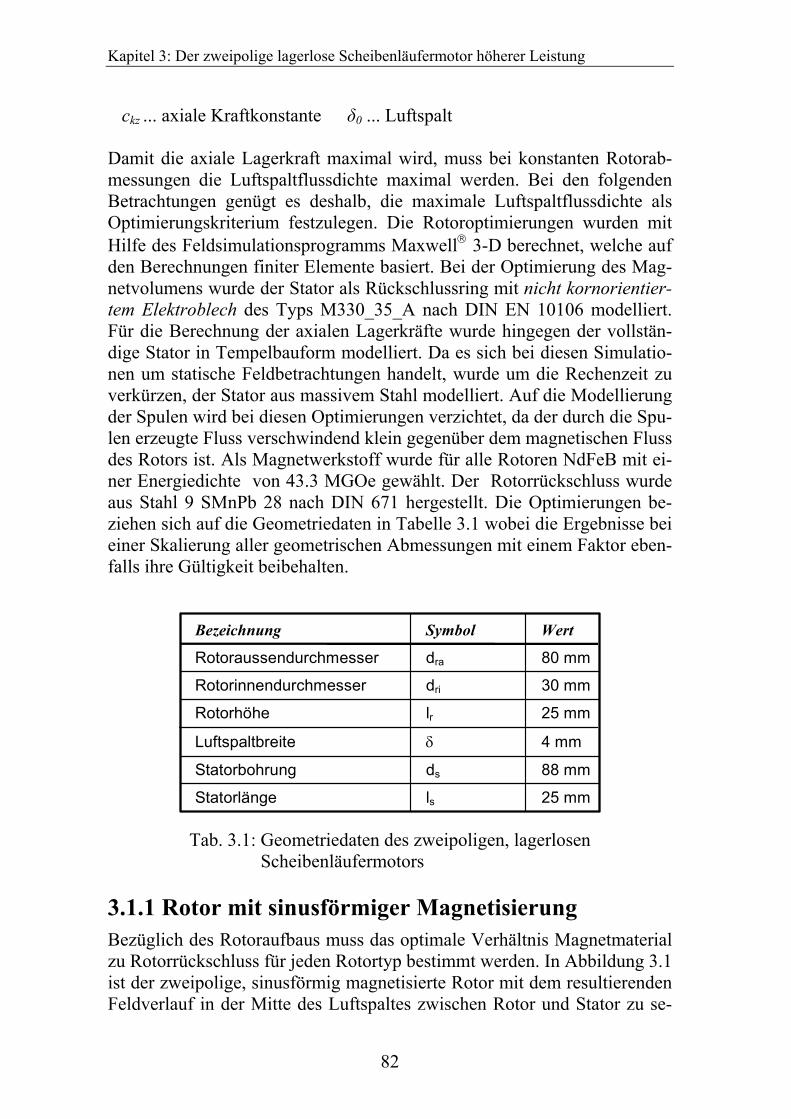
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
82
ckz ... axiale Kraftkonstante δ0 ... Luftspalt Damit die axiale Lagerkraft maximal wird, muss bei konstanten Rotorab-messungen die Luftspaltflussdichte maximal werden. Bei den folgenden Betrachtungen genügt es deshalb, die maximale Luftspaltflussdichte als Optimierungskriterium festzulegen. Die Rotoroptimierungen wurden mit Hilfe des Feldsimulationsprogramms Maxwell® 3-D berechnet, welche auf den Berechnungen finiter Elemente basiert. Bei der Optimierung des Mag-netvolumens wurde der Stator als Rückschlussring mit nicht kornorientier-tem Elektroblech des Typs M330_35_A nach DIN EN 10106 modelliert. Für die Berechnung der axialen Lagerkräfte wurde hingegen der vollstän-dige Stator in Tempelbauform modelliert. Da es sich bei diesen Simulatio-nen um statische Feldbetrachtungen handelt, wurde um die Rechenzeit zu verkürzen, der Stator aus massivem Stahl modelliert. Auf die Modellierung der Spulen wird bei diesen Optimierungen verzichtet, da der durch die Spu-len erzeugte Fluss verschwindend klein gegenüber dem magnetischen Fluss des Rotors ist. Als Magnetwerkstoff wurde für alle Rotoren NdFeB mit ei-ner Energiedichte von 43.3 MGOe gewählt. Der Rotorrückschluss wurde aus Stahl 9 SMnPb 28 nach DIN 671 hergestellt. Die Optimierungen be-ziehen sich auf die Geometriedaten in Tabelle 3.1 wobei die Ergebnisse bei einer Skalierung aller geometrischen Abmessungen mit einem Faktor eben-falls ihre Gültigkeit beibehalten.
Bezeichnung Symbol Wert
Rotoraussendurchmesser dra 80 mm
Rotorinnendurchmesser dri 30 mm
Rotorhöhe lr 25 mm
Luftspaltbreite δ 4 mm
Statorbohrung ds 88 mm
Statorlänge ls 25 mm
Tab. 3.1: Geometriedaten des zweipoligen, lagerlosen Scheibenläufermotors 3.1.1 Rotor mit sinusförmiger Magnetisierung Bezüglich des Rotoraufbaus muss das optimale Verhältnis Magnetmaterial zu Rotorrückschluss für jeden Rotortyp bestimmt werden. In Abbildung 3.1 ist der zweipolige, sinusförmig magnetisierte Rotor mit dem resultierenden Feldverlauf in der Mitte des Luftspaltes zwischen Rotor und Stator zu se-
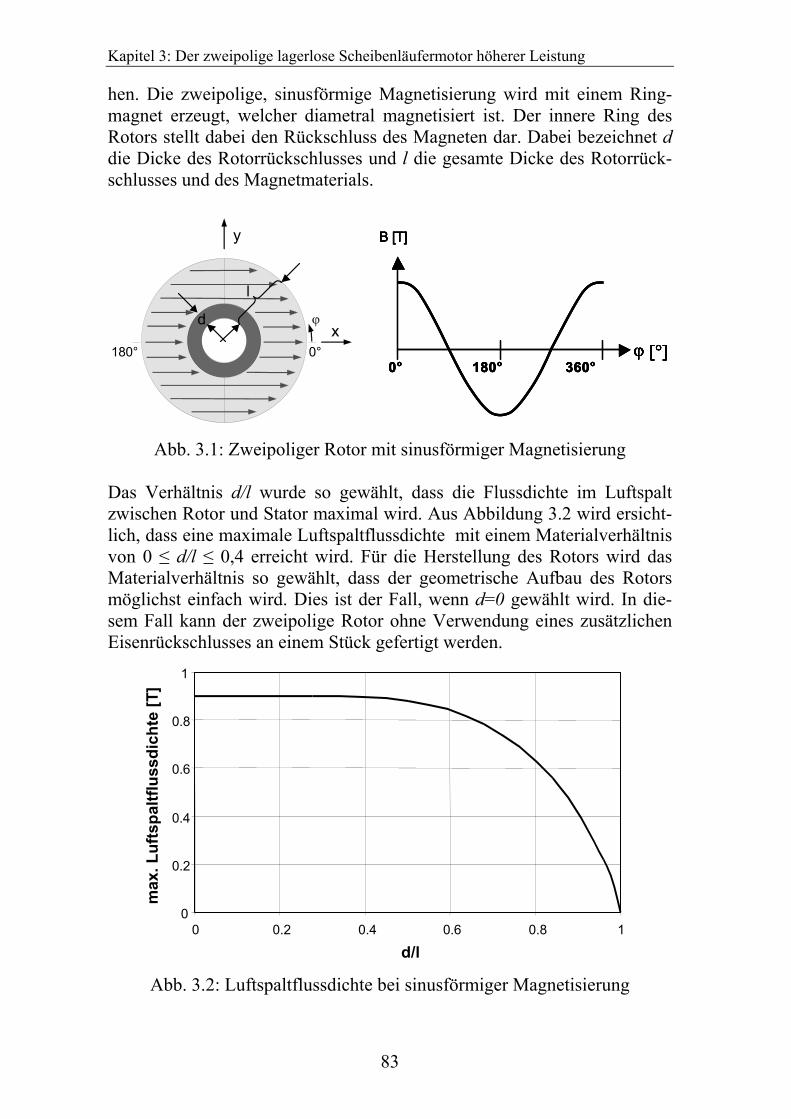
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
83
hen. Die zweipolige, sinusförmige Magnetisierung wird mit einem Ring-magnet erzeugt, welcher diametral magnetisiert ist. Der innere Ring des Rotors stellt dabei den Rückschluss des Magneten dar. Dabei bezeichnet d die Dicke des Rotorrückschlusses und l die gesamte Dicke des Rotorrück-schlusses und des Magnetmaterials.
x
y
ϕ
0°180°
d
l
ϕ [°]ϕ [°]
B [T]
0° 180° 360°
x
y
ϕ
0°180°
d
l
ϕ [°]ϕ [°]
B [T]
0° 180° 360°ϕ [°]ϕ [°]
B [T]
0° 180° 360°ϕ [°]ϕ [°]
B [T]
0° 180° 360°
Abb. 3.1: Zweipoliger Rotor mit sinusförmiger Magnetisierung
Das Verhältnis d/l wurde so gewählt, dass die Flussdichte im Luftspalt zwischen Rotor und Stator maximal wird. Aus Abbildung 3.2 wird ersicht-lich, dass eine maximale Luftspaltflussdichte mit einem Materialverhältnis von 0 ≤ d/l ≤ 0,4 erreicht wird. Für die Herstellung des Rotors wird das Materialverhältnis so gewählt, dass der geometrische Aufbau des Rotors möglichst einfach wird. Dies ist der Fall, wenn d=0 gewählt wird. In die-sem Fall kann der zweipolige Rotor ohne Verwendung eines zusätzlichen Eisenrückschlusses an einem Stück gefertigt werden.
d/l=0.5
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T]
d/l=0.5
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T]
Abb. 3.2: Luftspaltflussdichte bei sinusförmiger Magnetisierung
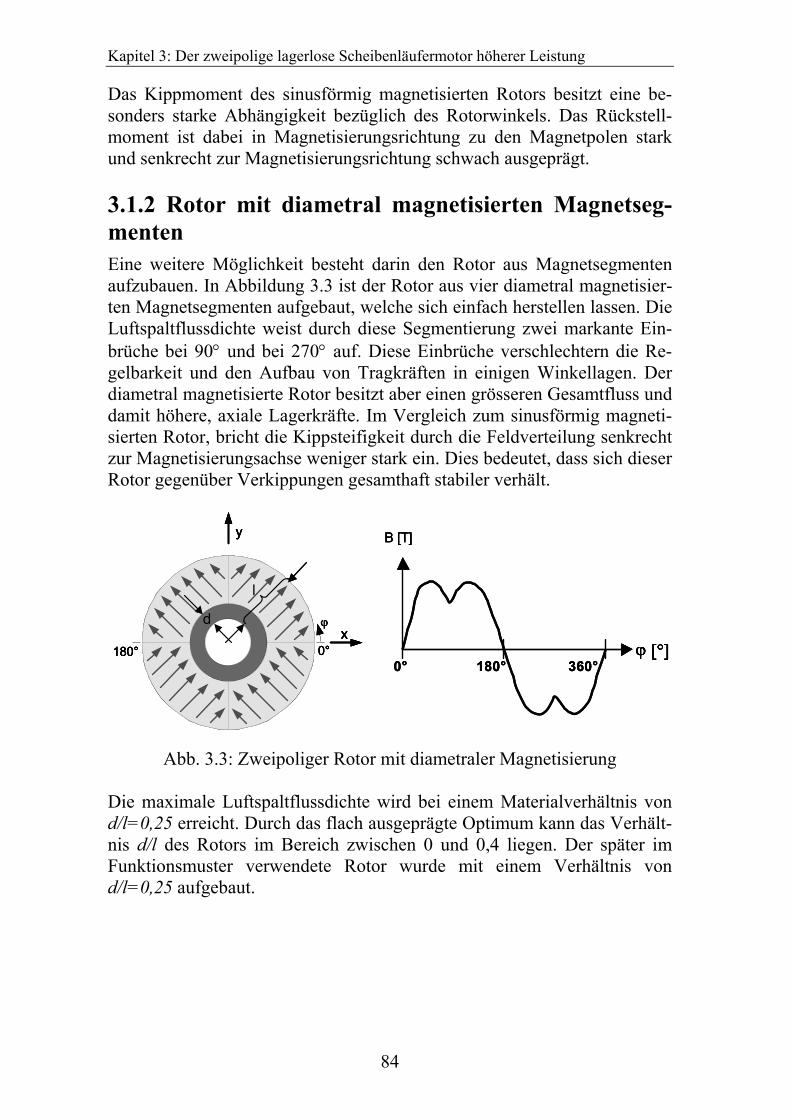
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
84
Das Kippmoment des sinusförmig magnetisierten Rotors besitzt eine be-sonders starke Abhängigkeit bezüglich des Rotorwinkels. Das Rückstell-moment ist dabei in Magnetisierungsrichtung zu den Magnetpolen stark und senkrecht zur Magnetisierungsrichtung schwach ausgeprägt. 3.1.2 Rotor mit diametral magnetisierten Magnetseg-menten Eine weitere Möglichkeit besteht darin den Rotor aus Magnetsegmenten aufzubauen. In Abbildung 3.3 ist der Rotor aus vier diametral magnetisier-ten Magnetsegmenten aufgebaut, welche sich einfach herstellen lassen. Die Luftspaltflussdichte weist durch diese Segmentierung zwei markante Ein-brüche bei 90° und bei 270° auf. Diese Einbrüche verschlechtern die Re-gelbarkeit und den Aufbau von Tragkräften in einigen Winkellagen. Der diametral magnetisierte Rotor besitzt aber einen grösseren Gesamtfluss und damit höhere, axiale Lagerkräfte. Im Vergleich zum sinusförmig magneti-sierten Rotor, bricht die Kippsteifigkeit durch die Feldverteilung senkrecht zur Magnetisierungsachse weniger stark ein. Dies bedeutet, dass sich dieser Rotor gegenüber Verkippungen gesamthaft stabiler verhält.
x
y
ϕ
0°180°x
y
ϕ
0°180°
d
l
ϕ [°]ϕ [°]
B [T]
0° 180° 360°
x
y
ϕ
0°180°x
y
ϕ
0°180°
d
l
ϕ [°]ϕ [°]
B [T]
0° 180° 360°ϕ [°]ϕ [°]
B [T]
0° 180° 360°
Abb. 3.3: Zweipoliger Rotor mit diametraler Magnetisierung
Die maximale Luftspaltflussdichte wird bei einem Materialverhältnis von d/l=0,25 erreicht. Durch das flach ausgeprägte Optimum kann das Verhält-nis d/l des Rotors im Bereich zwischen 0 und 0,4 liegen. Der später im Funktionsmuster verwendete Rotor wurde mit einem Verhältnis von d/l=0,25 aufgebaut.
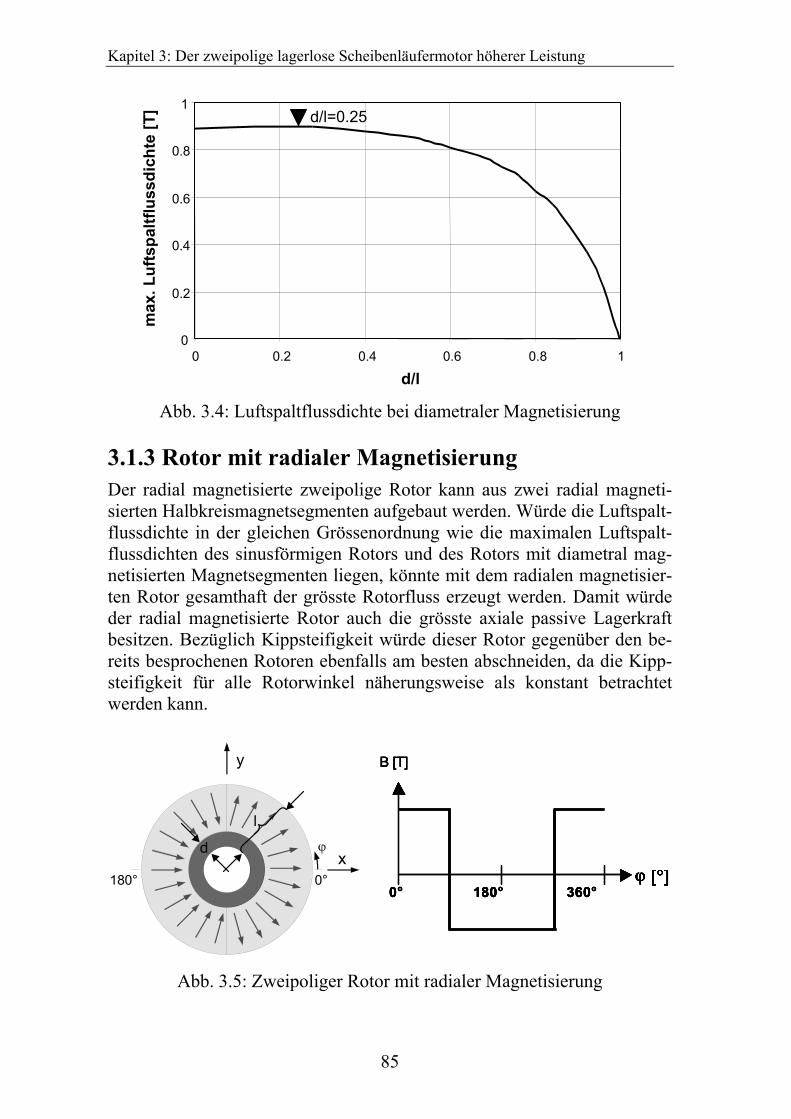
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
85
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T] d/l=0.25
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T] d/l=0.25
Abb. 3.4: Luftspaltflussdichte bei diametraler Magnetisierung
3.1.3 Rotor mit radialer Magnetisierung Der radial magnetisierte zweipolige Rotor kann aus zwei radial magneti-sierten Halbkreismagnetsegmenten aufgebaut werden. Würde die Luftspalt-flussdichte in der gleichen Grössenordnung wie die maximalen Luftspalt-flussdichten des sinusförmigen Rotors und des Rotors mit diametral mag-netisierten Magnetsegmenten liegen, könnte mit dem radialen magnetisier-ten Rotor gesamthaft der grösste Rotorfluss erzeugt werden. Damit würde der radial magnetisierte Rotor auch die grösste axiale passive Lagerkraft besitzen. Bezüglich Kippsteifigkeit würde dieser Rotor gegenüber den be-reits besprochenen Rotoren ebenfalls am besten abschneiden, da die Kipp-steifigkeit für alle Rotorwinkel näherungsweise als konstant betrachtet werden kann.
x
y
ϕ
0°180°
d
l
ϕ [°]ϕ [°]
B [T]
0° 180° 360°
x
y
ϕ
0°180°
d
l
ϕ [°]ϕ [°]
B [T]
0° 180° 360°ϕ [°]ϕ [°]
B [T]
0° 180° 360°ϕ [°]ϕ [°]
B [T]
0° 180° 360°
Abb. 3.5: Zweipoliger Rotor mit radialer Magnetisierung
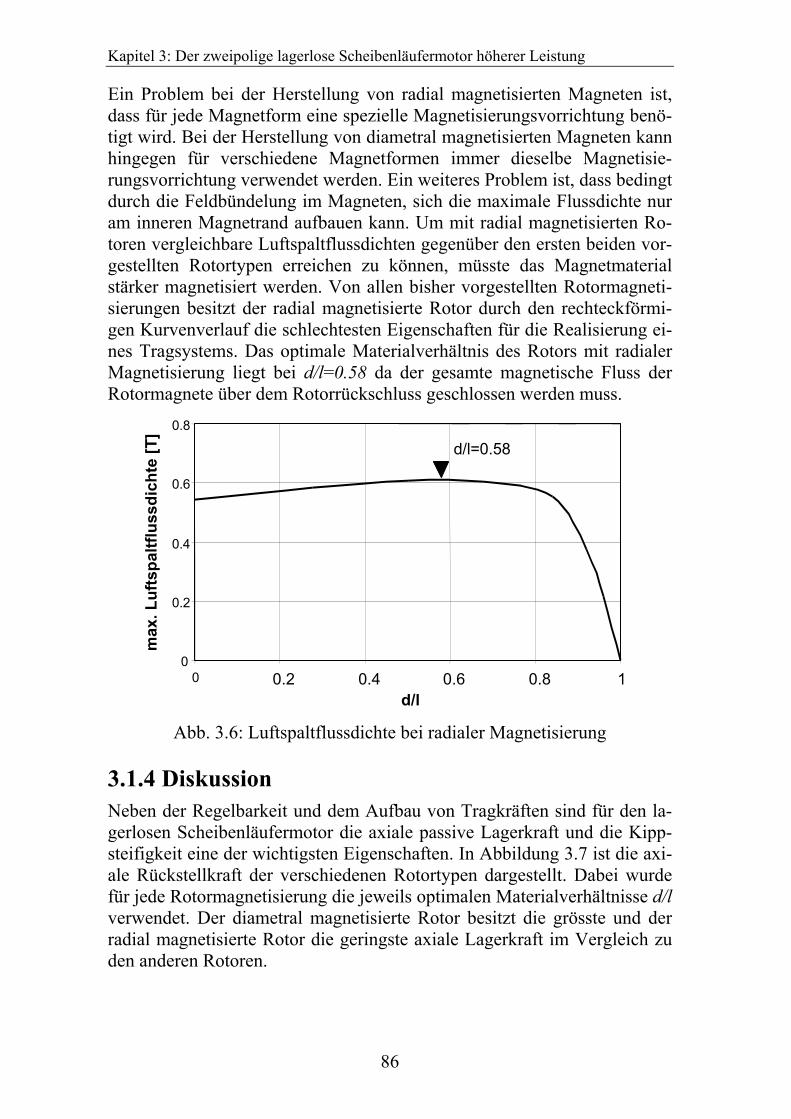
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
86
Ein Problem bei der Herstellung von radial magnetisierten Magneten ist, dass für jede Magnetform eine spezielle Magnetisierungsvorrichtung benö-tigt wird. Bei der Herstellung von diametral magnetisierten Magneten kann hingegen für verschiedene Magnetformen immer dieselbe Magnetisie-rungsvorrichtung verwendet werden. Ein weiteres Problem ist, dass bedingt durch die Feldbündelung im Magneten, sich die maximale Flussdichte nur am inneren Magnetrand aufbauen kann. Um mit radial magnetisierten Ro-toren vergleichbare Luftspaltflussdichten gegenüber den ersten beiden vor-gestellten Rotortypen erreichen zu können, müsste das Magnetmaterial stärker magnetisiert werden. Von allen bisher vorgestellten Rotormagneti-sierungen besitzt der radial magnetisierte Rotor durch den rechteckförmi-gen Kurvenverlauf die schlechtesten Eigenschaften für die Realisierung ei-nes Tragsystems. Das optimale Materialverhältnis des Rotors mit radialer Magnetisierung liegt bei d/l=0.58 da der gesamte magnetische Fluss der Rotormagnete über dem Rotorrückschluss geschlossen werden muss.
0
0.2
0.4
0.6
0.8
0 0.2 0.4 0.6 0.8 1d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T]
d/l=0.58
0
0.2
0.4
0.6
0.8
0 0.2 0.4 0.6 0.8 1d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T]
d/l=0.58
Abb. 3.6: Luftspaltflussdichte bei radialer Magnetisierung
3.1.4 Diskussion Neben der Regelbarkeit und dem Aufbau von Tragkräften sind für den la-gerlosen Scheibenläufermotor die axiale passive Lagerkraft und die Kipp-steifigkeit eine der wichtigsten Eigenschaften. In Abbildung 3.7 ist die axi-ale Rückstellkraft der verschiedenen Rotortypen dargestellt. Dabei wurde für jede Rotormagnetisierung die jeweils optimalen Materialverhältnisse d/l verwendet. Der diametral magnetisierte Rotor besitzt die grösste und der radial magnetisierte Rotor die geringste axiale Lagerkraft im Vergleich zu den anderen Rotoren.
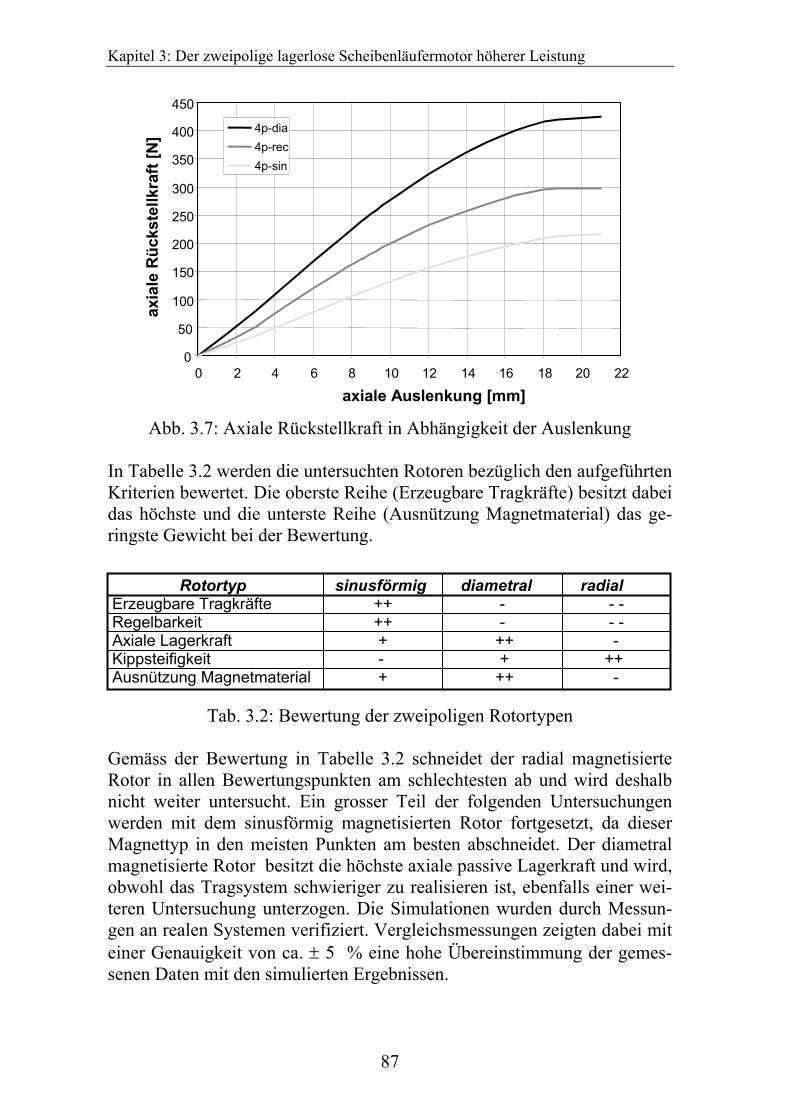
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
87
0
50
100
150
200
250
300
350
400
450
0 2 4 6 8 10 12 14 16 18 20 22
axiale Auslenkung [mm]
axia
le R
ücks
tellk
raft
[N] 4p-dia
4p-rec4p-sin
0
50
100
150
200
250
300
350
400
450
0 2 4 6 8 10 12 14 16 18 20 22
axiale Auslenkung [mm]
axia
le R
ücks
tellk
raft
[N] 4p-dia
4p-rec4p-sin
Abb. 3.7: Axiale Rückstellkraft in Abhängigkeit der Auslenkung
In Tabelle 3.2 werden die untersuchten Rotoren bezüglich den aufgeführten Kriterien bewertet. Die oberste Reihe (Erzeugbare Tragkräfte) besitzt dabei das höchste und die unterste Reihe (Ausnützung Magnetmaterial) das ge-ringste Gewicht bei der Bewertung. Rotortyp sinusförmig diametral radial Erzeugbare Tragkräfte ++ - - - Regelbarkeit ++ - - - Axiale Lagerkraft + ++ - Kippsteifigkeit - + ++ Ausnützung Magnetmaterial + ++ -
Tab. 3.2: Bewertung der zweipoligen Rotortypen Gemäss der Bewertung in Tabelle 3.2 schneidet der radial magnetisierte Rotor in allen Bewertungspunkten am schlechtesten ab und wird deshalb nicht weiter untersucht. Ein grosser Teil der folgenden Untersuchungen werden mit dem sinusförmig magnetisierten Rotor fortgesetzt, da dieser Magnettyp in den meisten Punkten am besten abschneidet. Der diametral magnetisierte Rotor besitzt die höchste axiale passive Lagerkraft und wird, obwohl das Tragsystem schwieriger zu realisieren ist, ebenfalls einer wei-teren Untersuchung unterzogen. Die Simulationen wurden durch Messun-gen an realen Systemen verifiziert. Vergleichsmessungen zeigten dabei mit einer Genauigkeit von ca. ± 5 % eine hohe Übereinstimmung der gemes-senen Daten mit den simulierten Ergebnissen.
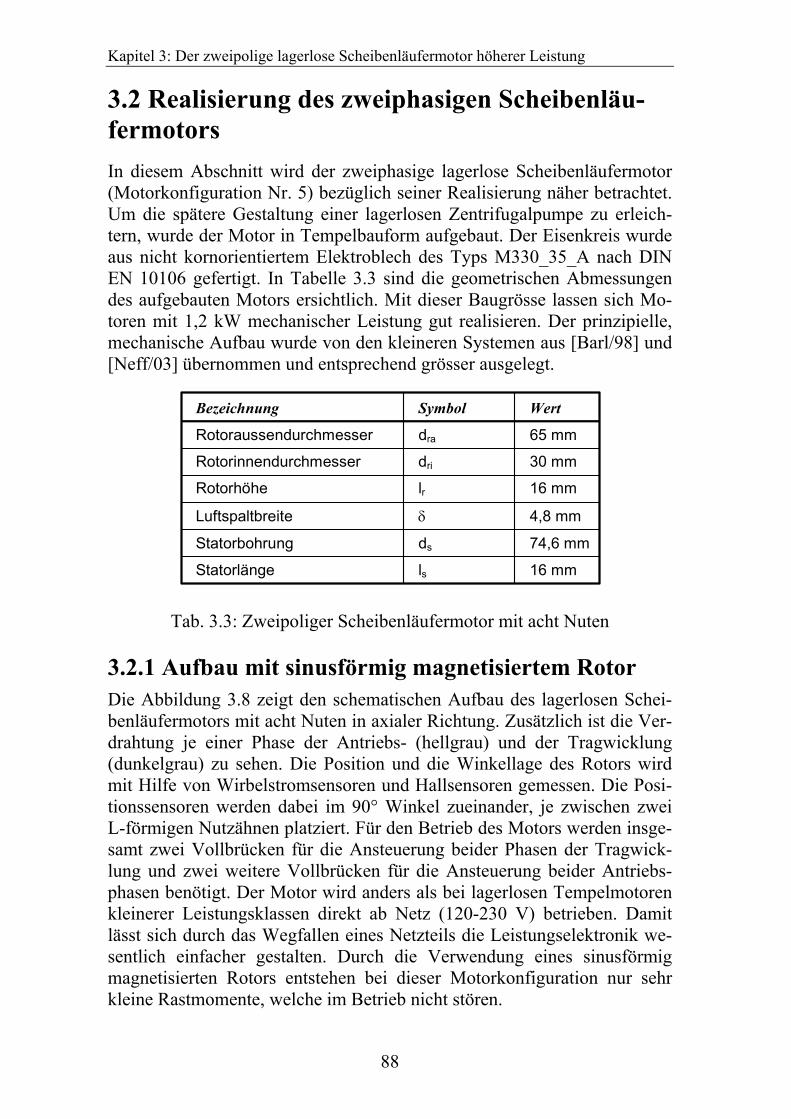
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
88
3.2 Realisierung des zweiphasigen Scheibenläu-fermotors In diesem Abschnitt wird der zweiphasige lagerlose Scheibenläufermotor (Motorkonfiguration Nr. 5) bezüglich seiner Realisierung näher betrachtet. Um die spätere Gestaltung einer lagerlosen Zentrifugalpumpe zu erleich-tern, wurde der Motor in Tempelbauform aufgebaut. Der Eisenkreis wurde aus nicht kornorientiertem Elektroblech des Typs M330_35_A nach DIN EN 10106 gefertigt. In Tabelle 3.3 sind die geometrischen Abmessungen des aufgebauten Motors ersichtlich. Mit dieser Baugrösse lassen sich Mo-toren mit 1,2 kW mechanischer Leistung gut realisieren. Der prinzipielle, mechanische Aufbau wurde von den kleineren Systemen aus [Barl/98] und [Neff/03] übernommen und entsprechend grösser ausgelegt.
Bezeichnung Symbol Wert
Rotoraussendurchmesser dra 65 mm
Rotorinnendurchmesser dri 30 mm
Rotorhöhe lr 16 mm
Luftspaltbreite δ 4,8 mm
Statorbohrung ds 74,6 mm
Statorlänge ls 16 mm
Tab. 3.3: Zweipoliger Scheibenläufermotor mit acht Nuten
3.2.1 Aufbau mit sinusförmig magnetisiertem Rotor Die Abbildung 3.8 zeigt den schematischen Aufbau des lagerlosen Schei-benläufermotors mit acht Nuten in axialer Richtung. Zusätzlich ist die Ver-drahtung je einer Phase der Antriebs- (hellgrau) und der Tragwicklung (dunkelgrau) zu sehen. Die Position und die Winkellage des Rotors wird mit Hilfe von Wirbelstromsensoren und Hallsensoren gemessen. Die Posi-tionssensoren werden dabei im 90° Winkel zueinander, je zwischen zwei L-förmigen Nutzähnen platziert. Für den Betrieb des Motors werden insge-samt zwei Vollbrücken für die Ansteuerung beider Phasen der Tragwick-lung und zwei weitere Vollbrücken für die Ansteuerung beider Antriebs-phasen benötigt. Der Motor wird anders als bei lagerlosen Tempelmotoren kleinerer Leistungsklassen direkt ab Netz (120-230 V) betrieben. Damit lässt sich durch das Wegfallen eines Netzteils die Leistungselektronik we-sentlich einfacher gestalten. Durch die Verwendung eines sinusförmig magnetisierten Rotors entstehen bei dieser Motorkonfiguration nur sehr kleine Rastmomente, welche im Betrieb nicht stören.
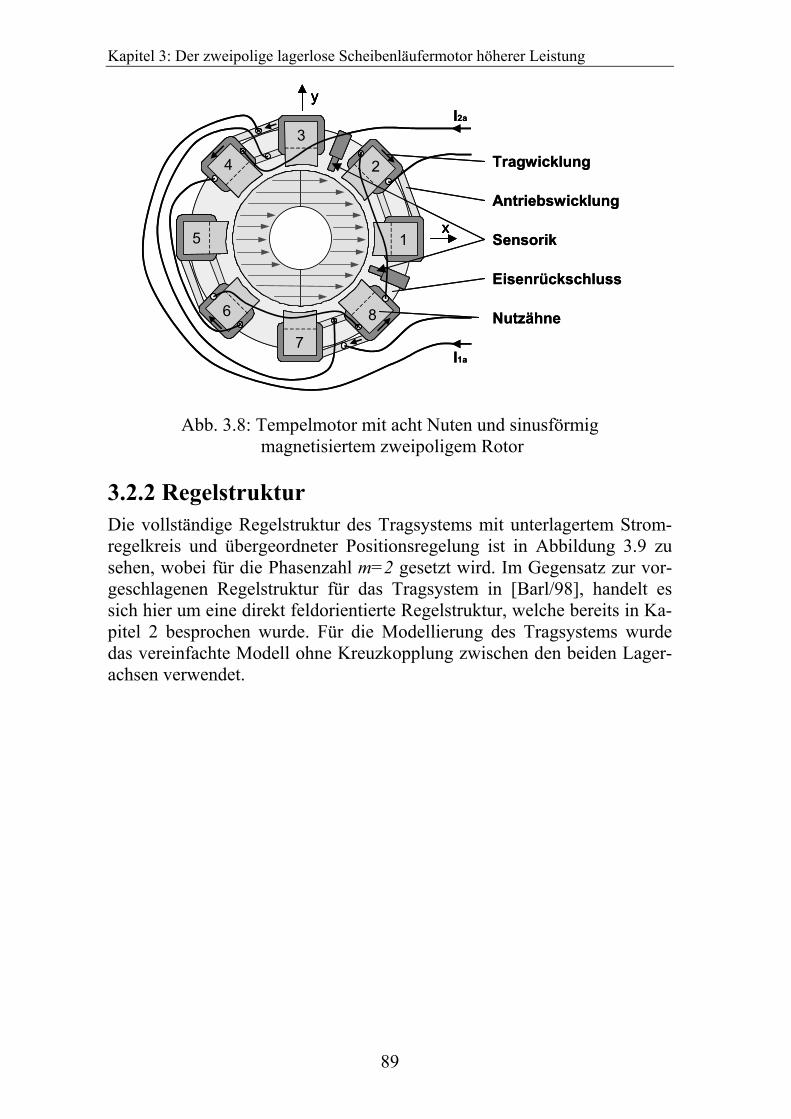
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
89
8
7
6
5
4
3
2
1x
y
Sensorik
I1a
I2a
Eisenrückschluss
Antriebswicklung
Tragwicklung
Nutzähne8
7
6
5
4
3
2
1x
y
8
7
6
5
4
3
2
1xx
yy
Sensorik
I1a
I2a
Eisenrückschluss
Antriebswicklung
Tragwicklung
Nutzähne
Abb. 3.8: Tempelmotor mit acht Nuten und sinusförmig magnetisiertem zweipoligem Rotor
3.2.2 Regelstruktur Die vollständige Regelstruktur des Tragsystems mit unterlagertem Strom-regelkreis und übergeordneter Positionsregelung ist in Abbildung 3.9 zu sehen, wobei für die Phasenzahl m=2 gesetzt wird. Im Gegensatz zur vor-geschlagenen Regelstruktur für das Tragsystem in [Barl/98], handelt es sich hier um eine direkt feldorientierte Regelstruktur, welche bereits in Ka-pitel 2 besprochen wurde. Für die Modellierung des Tragsystems wurde das vereinfachte Modell ohne Kreuzkopplung zwischen den beiden Lager-achsen verwendet.
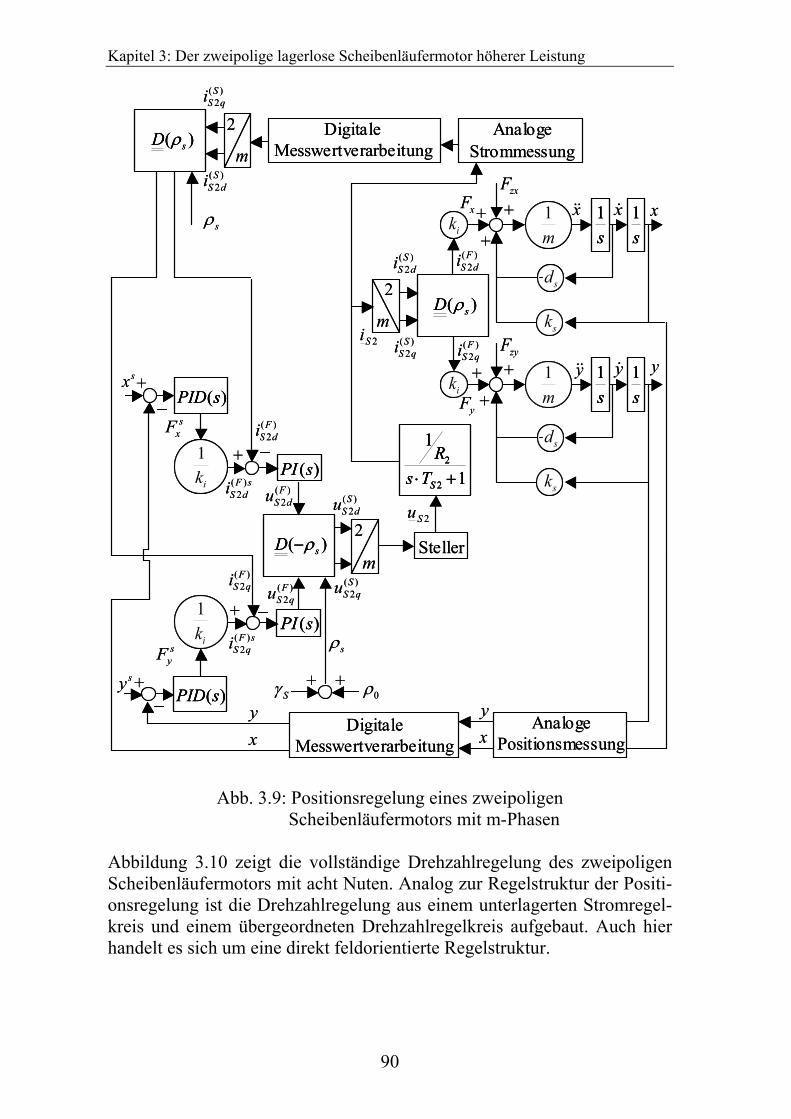
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
90
1mik
x
sd
sk
xxzxF
1s
1s
++
+
1mik
y
sd
sk
yyzyF
1s
1s
++
+
( )2S
S di
Digitale Messwertverarbeitung
Digitale Messwertverarbeitung
Analoge Strommessung
Analoge Positionsmessung
Steller
2
2
1
1S
Rs T⋅ +
( )PID s
( )PID s
( )PI s
( )PI s
( )sD ρ
( )sD ρ
0ρSγ
( )2F s
S di
xF
yF
++
sρ
sρ
xy
xy
+
+
+
+
( )2S
S qisx
( )2S
S qi
2Su
( )2F
S qi
( )2S
S di
( )2F
S di
( )2F
S qi
sy
( )2F s
S qi
( )2F
S qu
( )2F
S du
2
m
( )sD ρ−2
1
ik
1
iks
yF
sxF
( )2F
S di
2Si
( )2S
S du
( )2S
S qu
m
2
m
1m1mikik
x
sdsd
sksk
xxzxF
1s1s
1s1s
++
+
1m1mikik
y
sdsd
sksk
yyzyF
1s1s
1s1s
++
+
( )2S
S di
Digitale Messwertverarbeitung
Digitale Messwertverarbeitung
Analoge Strommessung
Analoge Positionsmessung
Steller
2
2
1
1S
Rs T⋅ +
2
2
1
1S
Rs T⋅ +
( )PID s( )PID s
( )PID s( )PID s
( )PI s( )PI s
( )PI s( )PI s
( )sD ρ( )sD ρ
( )sD ρ( )sD ρ
0ρSγ
( )2F s
S di
xF
yF
++
sρ
sρ
xy
xy
+
+
+
+
( )2S
S qisx
( )2S
S qi
2Su
( )2F
S qi
( )2S
S di
( )2F
S di
( )2F
S qi
sy
( )2F s
S qi
( )2F
S qu
( )2F
S du
2
m
( )sD ρ−( )sD ρ−2
1
ik1
ik
1
ik1
iks
yF
sxF
( )2F
S di
2Si
( )2S
S du
( )2S
S qu
m
2
m
Abb. 3.9: Positionsregelung eines zweipoligen Scheibenläufermotors mit m-Phasen
Abbildung 3.10 zeigt die vollständige Drehzahlregelung des zweipoligen Scheibenläufermotors mit acht Nuten. Analog zur Regelstruktur der Positi-onsregelung ist die Drehzahlregelung aus einem unterlagerten Stromregel-kreis und einem übergeordneten Drehzahlregelkreis aufgebaut. Auch hier handelt es sich um eine direkt feldorientierte Regelstruktur.
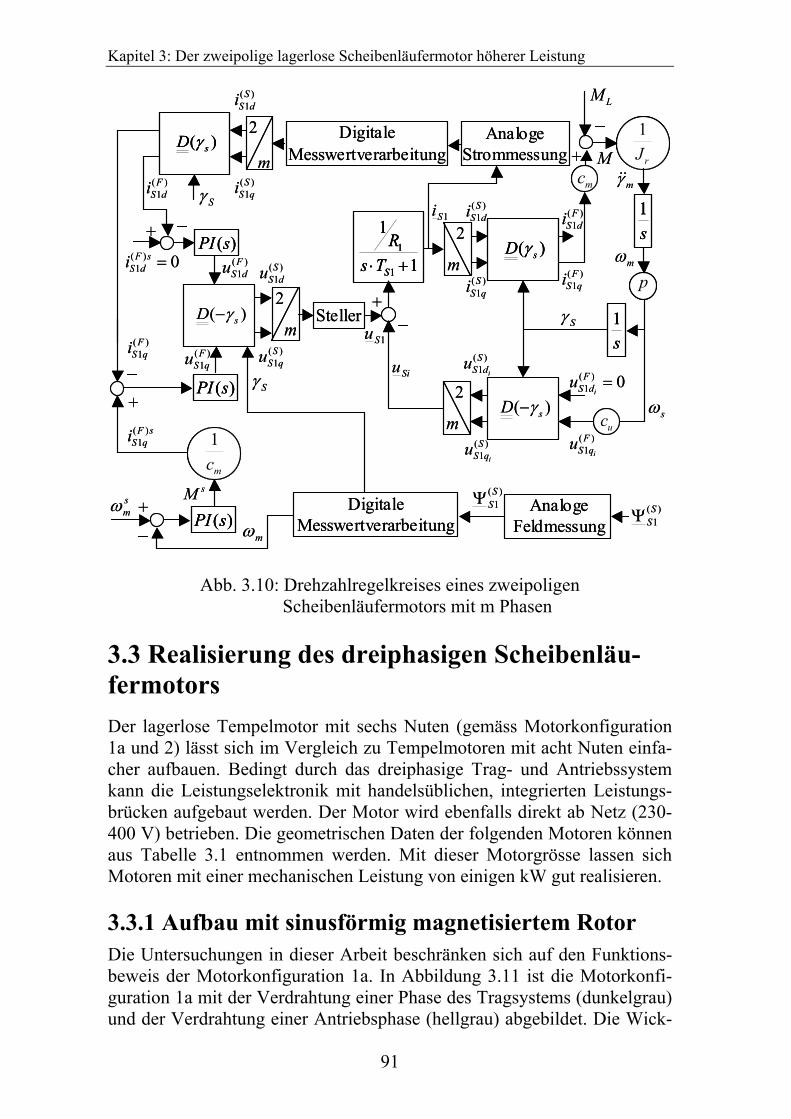
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
91
( )sD γ1
1
1
1S
Rs T⋅ +
2
m
1s( )PI s
Digitale Messwertverarbeitung
Analoge Strommessung
Steller
uc
1
rJmc
p
1s
( )sD γ−
2( )sD γ−
( )PI s
( )sD γ
1
mc
( )PI sDigitale
MesswertverarbeitungAnaloge
Feldmessung+
+
+
+
+
( )1S
SΨsmω ( )
1S
SΨmω
Sγ
Sγ
Sγ
sM
( )1 0F s
S di =
( )1F s
S qi
( )1F
S qi
( )1F
S di ( )1S
S qi
( )1S
S di
( )1F
S qu
( )1F
S du ( )1S
S du
( )1S
S qu1Su
Siu
1Si ( )1S
S di
( )1S
S qi
( )1F
S di
( )1F
S qi
M
LM
mγ
mω
sω
( )1 i
SS qu
( )1 i
SS du
( )1 i
FS qu
( )1 0
i
FS du =2
m
2
m
m
( )sD γ( )sD γ1
1
1
1S
Rs T⋅ +
1
1
1
1S
Rs T⋅ +
2
m
1s1s( )PI s( )PI s
Digitale Messwertverarbeitung
Analoge Strommessung
Steller
ucuc
1
rJ1
rJmcmc
pp
1s1s
( )sD γ−
2( )sD γ−
( )PI s( )PI s
( )sD γ( )sD γ
1
mc1
mc
( )PI s( )PI sDigitale
MesswertverarbeitungAnaloge
Feldmessung+
+
+
+
+
( )1S
SΨsmω ( )
1S
SΨmω
Sγ
Sγ
Sγ
sM
( )1 0F s
S di =
( )1F s
S qi
( )1F
S qi
( )1F
S di ( )1S
S qi
( )1S
S di
( )1F
S qu
( )1F
S du ( )1S
S du
( )1S
S qu1Su
Siu
1Si ( )1S
S di
( )1S
S qi
( )1F
S di
( )1F
S qi
M
LM
mγ
mω
sω
( )1 i
SS qu
( )1 i
SS du
( )1 i
FS qu
( )1 0
i
FS du =2
m
2
m
m
Abb. 3.10: Drehzahlregelkreises eines zweipoligen Scheibenläufermotors mit m Phasen
3.3 Realisierung des dreiphasigen Scheibenläu-fermotors Der lagerlose Tempelmotor mit sechs Nuten (gemäss Motorkonfiguration 1a und 2) lässt sich im Vergleich zu Tempelmotoren mit acht Nuten einfa-cher aufbauen. Bedingt durch das dreiphasige Trag- und Antriebssystem kann die Leistungselektronik mit handelsüblichen, integrierten Leistungs-brücken aufgebaut werden. Der Motor wird ebenfalls direkt ab Netz (230-400 V) betrieben. Die geometrischen Daten der folgenden Motoren können aus Tabelle 3.1 entnommen werden. Mit dieser Motorgrösse lassen sich Motoren mit einer mechanischen Leistung von einigen kW gut realisieren. 3.3.1 Aufbau mit sinusförmig magnetisiertem Rotor Die Untersuchungen in dieser Arbeit beschränken sich auf den Funktions-beweis der Motorkonfiguration 1a. In Abbildung 3.11 ist die Motorkonfi-guration 1a mit der Verdrahtung einer Phase des Tragsystems (dunkelgrau) und der Verdrahtung einer Antriebsphase (hellgrau) abgebildet. Die Wick-
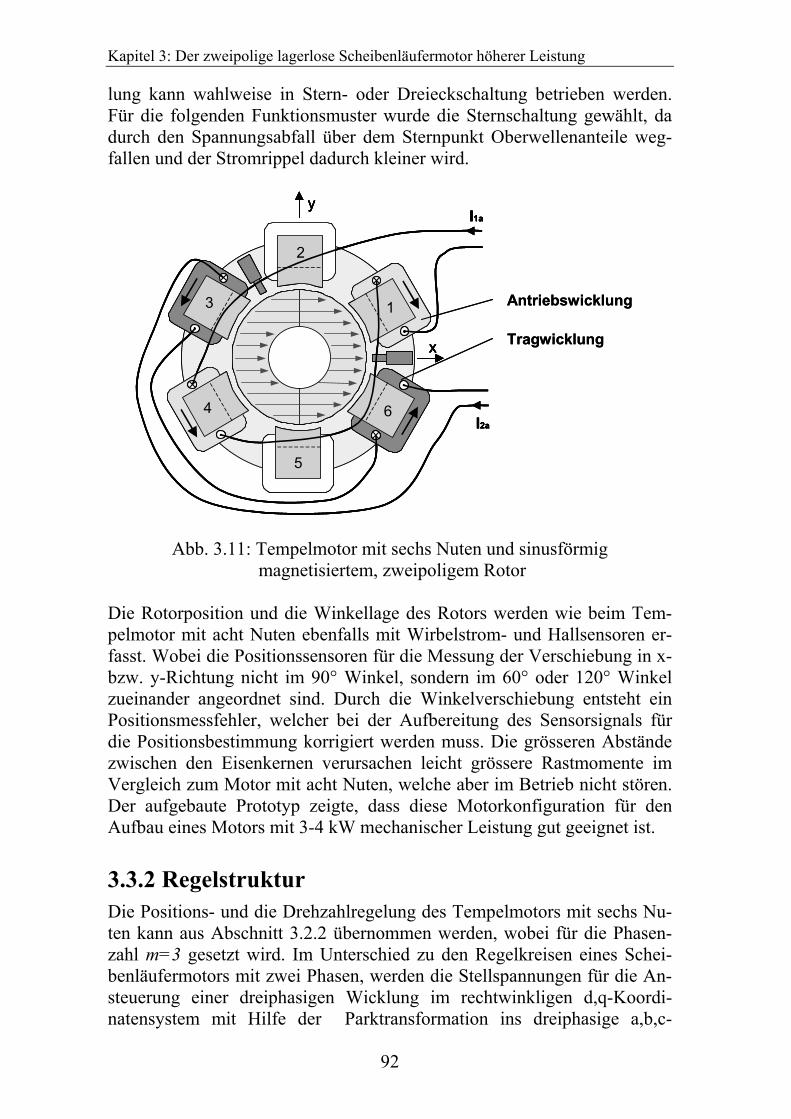
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
92
lung kann wahlweise in Stern- oder Dreieckschaltung betrieben werden. Für die folgenden Funktionsmuster wurde die Sternschaltung gewählt, da durch den Spannungsabfall über dem Sternpunkt Oberwellenanteile weg-fallen und der Stromrippel dadurch kleiner wird.
1
64
5
3
2
x
yI1a
I2a
Tragwicklung
Antriebswicklung1
64
5
3
2
x
yI1a
I2a
1
64
5
3
2
x
yI1a
I2a
1
64
5
3
2
xx
yyI1a
I2a
Tragwicklung
Antriebswicklung
Abb. 3.11: Tempelmotor mit sechs Nuten und sinusförmig magnetisiertem, zweipoligem Rotor
Die Rotorposition und die Winkellage des Rotors werden wie beim Tem-pelmotor mit acht Nuten ebenfalls mit Wirbelstrom- und Hallsensoren er-fasst. Wobei die Positionssensoren für die Messung der Verschiebung in x- bzw. y-Richtung nicht im 90° Winkel, sondern im 60° oder 120° Winkel zueinander angeordnet sind. Durch die Winkelverschiebung entsteht ein Positionsmessfehler, welcher bei der Aufbereitung des Sensorsignals für die Positionsbestimmung korrigiert werden muss. Die grösseren Abstände zwischen den Eisenkernen verursachen leicht grössere Rastmomente im Vergleich zum Motor mit acht Nuten, welche aber im Betrieb nicht stören. Der aufgebaute Prototyp zeigte, dass diese Motorkonfiguration für den Aufbau eines Motors mit 3-4 kW mechanischer Leistung gut geeignet ist. 3.3.2 Regelstruktur Die Positions- und die Drehzahlregelung des Tempelmotors mit sechs Nu-ten kann aus Abschnitt 3.2.2 übernommen werden, wobei für die Phasen-zahl m=3 gesetzt wird. Im Unterschied zu den Regelkreisen eines Schei-benläufermotors mit zwei Phasen, werden die Stellspannungen für die An-steuerung einer dreiphasigen Wicklung im rechtwinkligen d,q-Koordi-natensystem mit Hilfe der Parktransformation ins dreiphasige a,b,c-
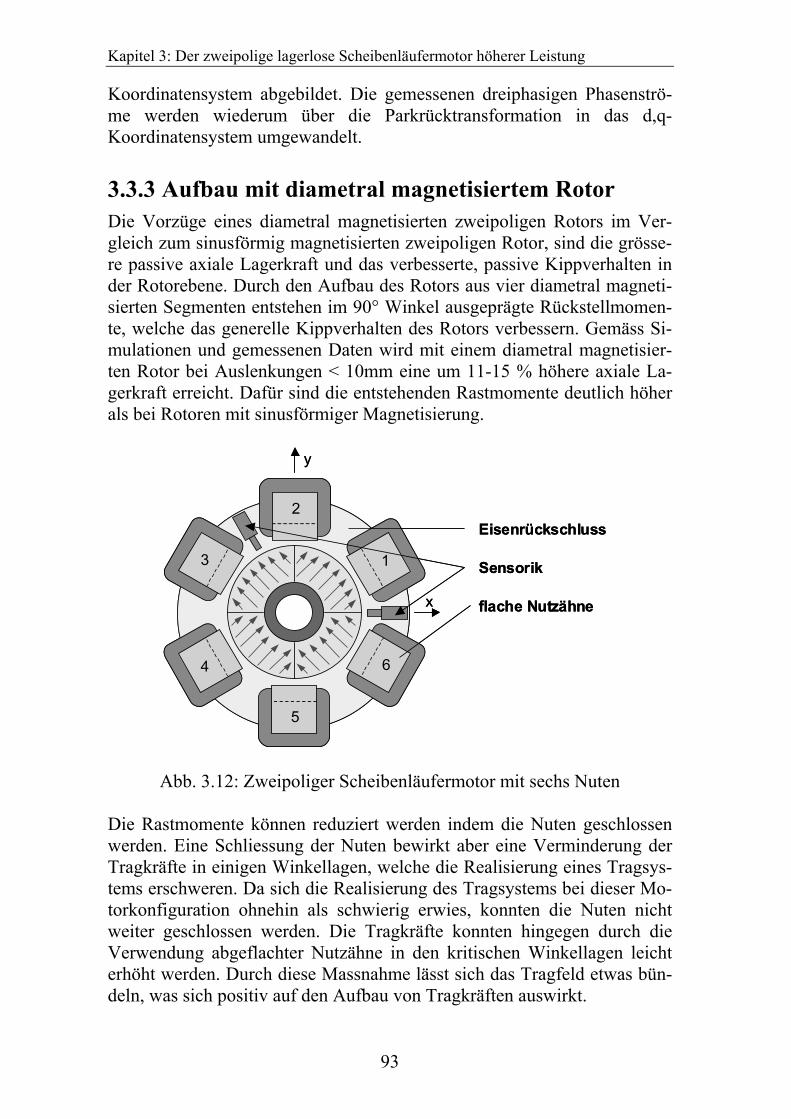
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
93
Koordinatensystem abgebildet. Die gemessenen dreiphasigen Phasenströ-me werden wiederum über die Parkrücktransformation in das d,q-Koordinatensystem umgewandelt. 3.3.3 Aufbau mit diametral magnetisiertem Rotor Die Vorzüge eines diametral magnetisierten zweipoligen Rotors im Ver-gleich zum sinusförmig magnetisierten zweipoligen Rotor, sind die grösse-re passive axiale Lagerkraft und das verbesserte, passive Kippverhalten in der Rotorebene. Durch den Aufbau des Rotors aus vier diametral magneti-sierten Segmenten entstehen im 90° Winkel ausgeprägte Rückstellmomen-te, welche das generelle Kippverhalten des Rotors verbessern. Gemäss Si-mulationen und gemessenen Daten wird mit einem diametral magnetisier-ten Rotor bei Auslenkungen < 10mm eine um 11-15 % höhere axiale La-gerkraft erreicht. Dafür sind die entstehenden Rastmomente deutlich höher als bei Rotoren mit sinusförmiger Magnetisierung.
1
2
3
4
5
6
x
y
Sensorik
Eisenrückschluss
flache Nutzähne
1
2
3
4
5
6
x
y
Sensorik
Eisenrückschluss
flache Nutzähne
Abb. 3.12: Zweipoliger Scheibenläufermotor mit sechs Nuten Die Rastmomente können reduziert werden indem die Nuten geschlossen werden. Eine Schliessung der Nuten bewirkt aber eine Verminderung der Tragkräfte in einigen Winkellagen, welche die Realisierung eines Tragsys-tems erschweren. Da sich die Realisierung des Tragsystems bei dieser Mo-torkonfiguration ohnehin als schwierig erwies, konnten die Nuten nicht weiter geschlossen werden. Die Tragkräfte konnten hingegen durch die Verwendung abgeflachter Nutzähne in den kritischen Winkellagen leicht erhöht werden. Durch diese Massnahme lässt sich das Tragfeld etwas bün-deln, was sich positiv auf den Aufbau von Tragkräften auswirkt.
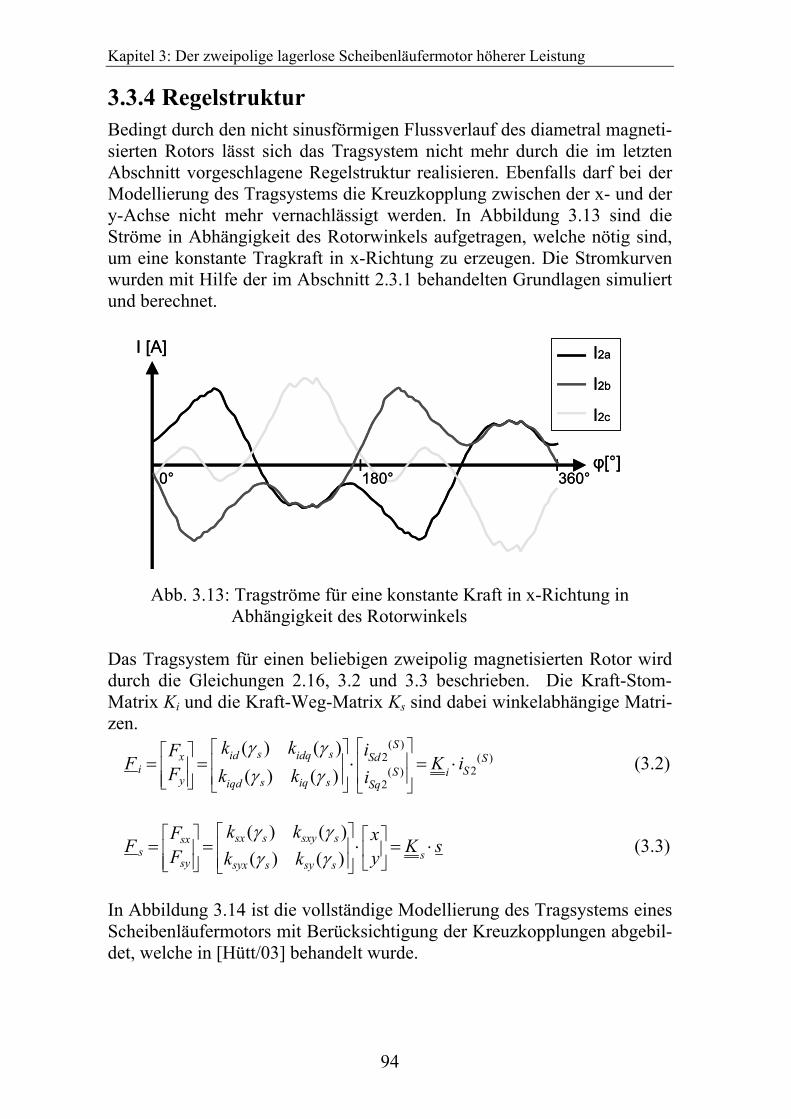
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
94
3.3.4 Regelstruktur Bedingt durch den nicht sinusförmigen Flussverlauf des diametral magneti-sierten Rotors lässt sich das Tragsystem nicht mehr durch die im letzten Abschnitt vorgeschlagene Regelstruktur realisieren. Ebenfalls darf bei der Modellierung des Tragsystems die Kreuzkopplung zwischen der x- und der y-Achse nicht mehr vernachlässigt werden. In Abbildung 3.13 sind die Ströme in Abhängigkeit des Rotorwinkels aufgetragen, welche nötig sind, um eine konstante Tragkraft in x-Richtung zu erzeugen. Die Stromkurven wurden mit Hilfe der im Abschnitt 2.3.1 behandelten Grundlagen simuliert und berechnet.
I [A]
φ[°]180° 360°0°
I2a
I2b
I2c
I [A]
φ[°]180° 360°0°
I2a
I2b
I2c
Abb. 3.13: Tragströme für eine konstante Kraft in x-Richtung in
Abhängigkeit des Rotorwinkels Das Tragsystem für einen beliebigen zweipolig magnetisierten Rotor wird durch die Gleichungen 2.16, 3.2 und 3.3 beschrieben. Die Kraft-Stom-Matrix Ki und die Kraft-Weg-Matrix Ks sind dabei winkelabhängige Matri-zen.
( )
2 ( )2( )
2
( ) ( )( ) ( )
Ss sid idqx Sd S
i SS iy s siqiqd Sq
k k iFF K iF k k i
γ γγ γ
⎡ ⎤⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
= = ⋅ = ⋅ (3.2)
( ) ( )( ) ( )
sx s sxy ssxs s
sy syx s sy s
k kF xF K sF yk kγ γγ γ
⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎦
= = ⋅ = ⋅ (3.3)
In Abbildung 3.14 ist die vollständige Modellierung des Tragsystems eines Scheibenläufermotors mit Berücksichtigung der Kreuzkopplungen abgebil-det, welche in [Hütt/03] behandelt wurde.
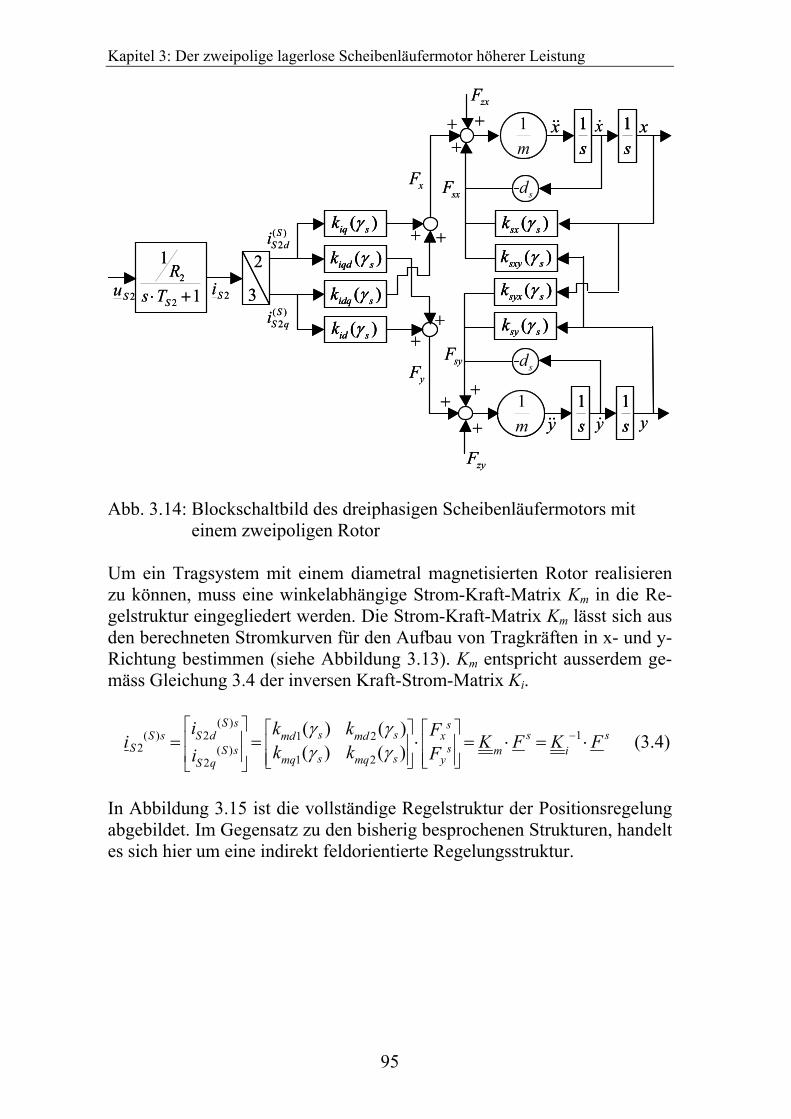
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
95
1m
x
sd
xxzxF
1s
1s
++
+
1m y
sd
yy
zyF
1s
1s
++
+
( )2S
S di
xF
yF
( )2S
S qi
2
32Si
( )sx sk γ
( )sxy sk γ
( )syx sk γ
( )sy sk γ
( )iq sk γ
( )iqd sk γ
( )id sk γ
( )idq sk γ+
+
+
+
sxF
syF
2
2
1
1S
Rs T⋅ +2Su
1m1m
x
sdsd
xxzxF
1s1s
1s1s
++
+
1m1m y
sdsd
yy
zyF
1s1s
1s1s
++
+
( )2S
S di
xF
yF
( )2S
S qi
2
32Si
( )sx sk γ( )sx sk γ
( )sxy sk γ( )sxy sk γ
( )syx sk γ( )syx sk γ
( )sy sk γ( )sy sk γ
( )iq sk γ( )iq sk γ
( )iqd sk γ( )iqd sk γ
( )id sk γ( )id sk γ
( )idq sk γ( )idq sk γ+
+
+
+
sxF
syF
2
2
1
1S
Rs T⋅ +2Su
Abb. 3.14: Blockschaltbild des dreiphasigen Scheibenläufermotors mit einem zweipoligen Rotor Um ein Tragsystem mit einem diametral magnetisierten Rotor realisieren zu können, muss eine winkelabhängige Strom-Kraft-Matrix Km in die Re-gelstruktur eingegliedert werden. Die Strom-Kraft-Matrix Km lässt sich aus den berechneten Stromkurven für den Aufbau von Tragkräften in x- und y-Richtung bestimmen (siehe Abbildung 3.13). Km entspricht ausserdem ge-mäss Gleichung 3.4 der inversen Kraft-Strom-Matrix Ki.
( )
1( ) 2 1 22 ( )
1 22
( ) ( )( ) ( )
S s ss s s sS s S d xmd md
S sS s m is s ymq mqS q
i k k Fi K F K Fk k Fiγ γγ γ
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦⎣ ⎦
= = ⋅ = ⋅ = ⋅ (3.4)
In Abbildung 3.15 ist die vollständige Regelstruktur der Positionsregelung abgebildet. Im Gegensatz zu den bisherig besprochenen Strukturen, handelt es sich hier um eine indirekt feldorientierte Regelungsstruktur.
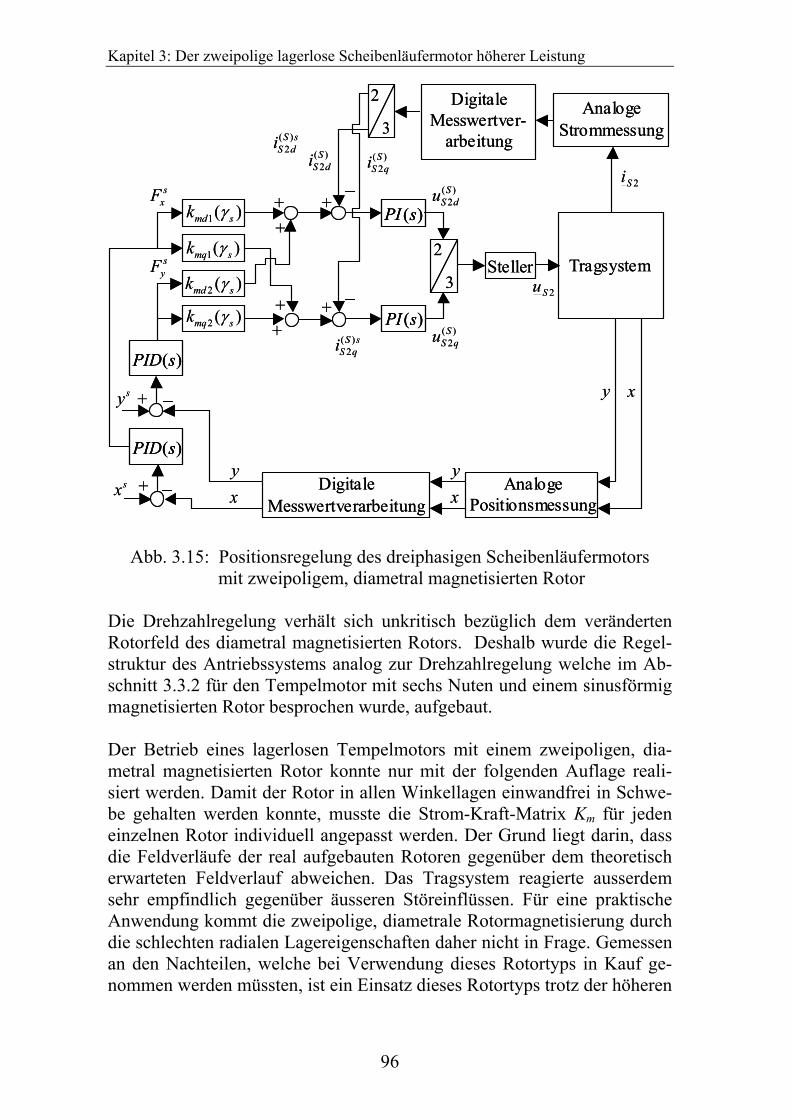
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
96
Digitale Messwertverarbeitung
Digitale Messwertver-
arbeitung
Analoge Strommessung
Analoge Positionsmessung
Steller
( )PID s
( )PID s
( )PI s
( )PI s
xy
xy
+
+
+
+
sx
( )2S
S qi
2Su
( )2S
S di
sy
3
2s
yF
sxF ( )
2S
S du
( )2S
S qu
3
2
1( )md sk γ
1( )mq sk γ
2 ( )mq sk γ
2 ( )md sk γ
+
+
+
+
( )2S s
S di
( )2S s
S qi
y x
2Si
Tragsystem
Digitale Messwertverarbeitung
Digitale Messwertver-
arbeitung
Analoge Strommessung
Analoge Positionsmessung
Steller
( )PID s( )PID s
( )PID s( )PID s
( )PI s( )PI s
( )PI s( )PI s
xy
xy
+
+
+
+
sx
( )2S
S qi
2Su
( )2S
S di
sy
3
2s
yF
sxF ( )
2S
S du
( )2S
S qu
3
2
1( )md sk γ
1( )mq sk γ
2 ( )mq sk γ
2 ( )md sk γ
+
+
+
+
( )2S s
S di
( )2S s
S qi
y x
2Si
Tragsystem
Abb. 3.15: Positionsregelung des dreiphasigen Scheibenläufermotors mit zweipoligem, diametral magnetisierten Rotor
Die Drehzahlregelung verhält sich unkritisch bezüglich dem veränderten Rotorfeld des diametral magnetisierten Rotors. Deshalb wurde die Regel-struktur des Antriebssystems analog zur Drehzahlregelung welche im Ab-schnitt 3.3.2 für den Tempelmotor mit sechs Nuten und einem sinusförmig magnetisierten Rotor besprochen wurde, aufgebaut. Der Betrieb eines lagerlosen Tempelmotors mit einem zweipoligen, dia-metral magnetisierten Rotor konnte nur mit der folgenden Auflage reali-siert werden. Damit der Rotor in allen Winkellagen einwandfrei in Schwe-be gehalten werden konnte, musste die Strom-Kraft-Matrix Km für jeden einzelnen Rotor individuell angepasst werden. Der Grund liegt darin, dass die Feldverläufe der real aufgebauten Rotoren gegenüber dem theoretisch erwarteten Feldverlauf abweichen. Das Tragsystem reagierte ausserdem sehr empfindlich gegenüber äusseren Störeinflüssen. Für eine praktische Anwendung kommt die zweipolige, diametrale Rotormagnetisierung durch die schlechten radialen Lagereigenschaften daher nicht in Frage. Gemessen an den Nachteilen, welche bei Verwendung dieses Rotortyps in Kauf ge-nommen werden müssten, ist ein Einsatz dieses Rotortyps trotz der höheren
Kapitel 3: Der zweipolige lagerlose Scheibenläufermotor höherer Leistung
97
passiven, axialen Lagerkraft und der besseren Kippsteifigkeit nicht sinn-voll. 3.4 Schlussfolgerung Für die Realisierung eines lagerlosen Scheibenläufermotors mit einer me-chanischen Leistung bis 1,2 kW ist der Scheibenläufermotor mit acht Nu-ten und einem sinusförmig magnetisierten Rotor gut geeignet. Der mecha-nische Aufbau ist einfach und es kann auf die bestehende Regelstruktur und auf Erfahrungen der Systeme kleinerer Leistungsklasse (> 350 W) auf-gebaut werden (siehe dazu [Barl/98] und [Neff/03]). Für grössere Leis-tungsklassen von 3-4 kW eignet sich der lagerlose Scheibenläufermotor mit sechs Nuten und einem sinusförmig magnetisierten Rotor. Die Reduzierung der Komplexität beim Aufbau des Motors mit sechs Nuten und der Leis-tungselektronik, wirkt sich vor allem bei den Herstellungskosten solcher lagerlosen Systeme positiv aus. Die Verwendung eines diametral magneti-sierten Rotors ist für die praktische Realisierung des lagerlosen Motors nicht geeignet. Abgesehen von der etwas höheren axialen passiven Lager-kraft und einer höheren Kippsteifigkeit im Vergleich zum sinusförmigen Rotor, besitzt der Rotor mit diametraler Magnetisierung keine Vorteile. Die Realisierung des Tragsystems gestaltet sich wesentlich schwieriger im Vergleich zum sinusförmig magnetisierten Rotor.

98
99
4. Der vierpolige, lagerlose Scheibenläu-fermotor höherer Leistung In diesem Kapitel wird die Realisierung der Motorkonfiguration Nr.16, aus Kapitel 2 bezüglich dem mechanischen Aufbau und der Regelstruktur be-sprochen. Analog zum vergangenen Kapitel werden in Abschnitt 4.1 ver-schiedene Rotoren untersucht und nach den gleichen Optimierungskriterien beurteilt. In Abschnitt 4.2 wird der Aufbau und die Regelstruktur des vier-poligen Scheibenläufermotors behandelt. Im letzten Abschnitt werden in einer Gegenüberstellung der zweipolige und der vierpolige Scheibenläu-fermotor verglichen und bewertet. Alle Optimierungsbetrachtungen wurden wie im Kapitel 3 mit Hilfe des Feldsimulationsprogramms Maxwell® 3-D untersucht. In Tabelle 4.1 sind die geometrischen Daten des vierpoligen, lagerlosen Scheibenläufermotors aufgeführt.
Bezeichnung Symbol Wert
Rotoraussendurchmesser dra 80 mm
Rotorinnendurchmesser dri 30 mm
Rotorhöhe lr 25 mm
Luftspaltbreite δ 4 mm
Statorbohrung ds 88 mm
Statorlänge ls 20 mm
Tab. 4.1: Geometrie des vierpoligen lagerlosen Scheibenläufermotors
4.1 Rotoraufbau Im Unterschied zu den im Kapitel 3 besprochenen, zweipoligen Rotoren, sind ausnahmslos alle vierpoligen Rotoren aus Magnetsegmenten mit einer Energiedichte von 43.3 MGOe aufgebaut, da es nicht möglich war, Rotoren mit den geforderten Abmessungen an einem Stück zu fertigen. Die indus-trielle Herstellung solcher Rotoren an einem Stück wird aber künftig mög-lich sein. Die folgenden Optimierungen beziehen sich auf einen Stator mit geschlossenen Nuten, welcher aus nicht kornorientiertem Elektroblech M330_35_A nach DIN EN 10106 modelliert wurde. Wobei die Geomet-riedaten aus Tabelle 4.1 entnommen wurden. Die Ergebnisse behalten bei
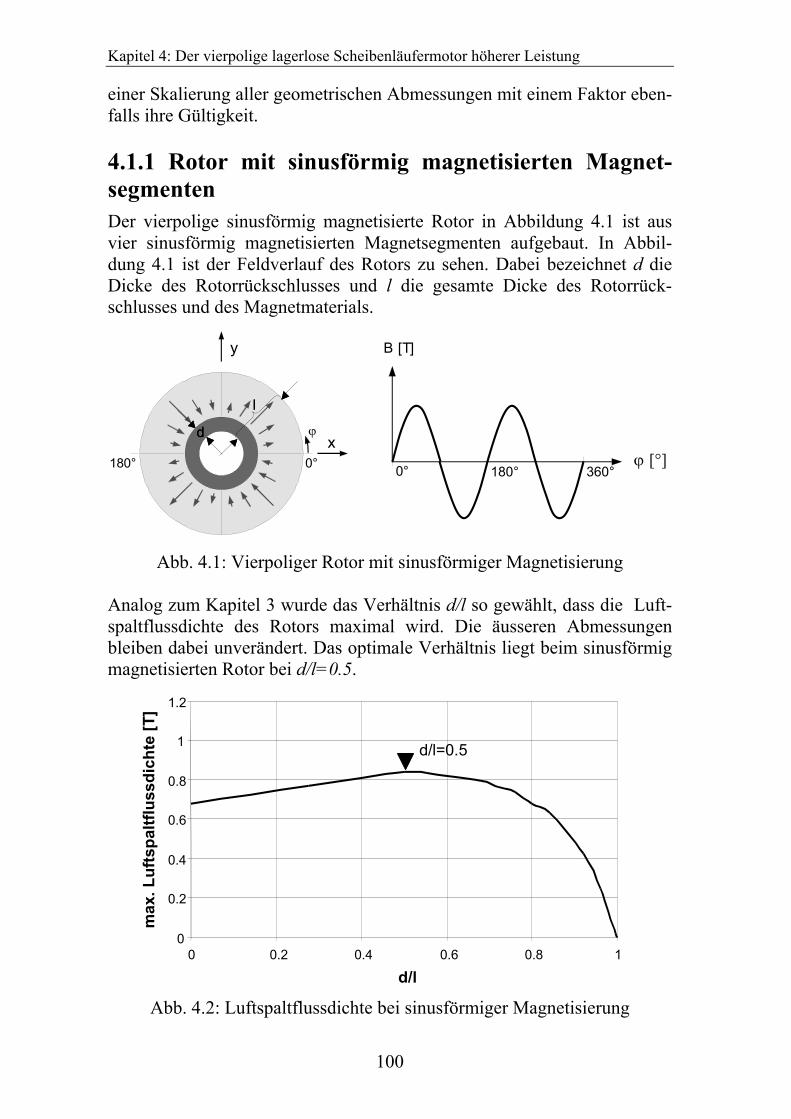
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
100
einer Skalierung aller geometrischen Abmessungen mit einem Faktor eben-falls ihre Gültigkeit. 4.1.1 Rotor mit sinusförmig magnetisierten Magnet-segmenten Der vierpolige sinusförmig magnetisierte Rotor in Abbildung 4.1 ist aus vier sinusförmig magnetisierten Magnetsegmenten aufgebaut. In Abbil-dung 4.1 ist der Feldverlauf des Rotors zu sehen. Dabei bezeichnet d die Dicke des Rotorrückschlusses und l die gesamte Dicke des Rotorrück-schlusses und des Magnetmaterials.
B [T]
ϕ [°]0° 180° 360°
x
y
ϕ
0°180°
d
l
x
y
ϕ
0°180°
d
l
d
l
B [T]B [T]
ϕ [°]0° 180° 360°
x
y
ϕ
0°180°
d
l
x
y
ϕ
0°180°
d
l
d
l
B [T]
Abb. 4.1: Vierpoliger Rotor mit sinusförmiger Magnetisierung
Analog zum Kapitel 3 wurde das Verhältnis d/l so gewählt, dass die Luft-spaltflussdichte des Rotors maximal wird. Die äusseren Abmessungen bleiben dabei unverändert. Das optimale Verhältnis liegt beim sinusförmig magnetisierten Rotor bei d/l=0.5.
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T]
d/l=0.5
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T]
d/l=0.5
Abb. 4.2: Luftspaltflussdichte bei sinusförmiger Magnetisierung
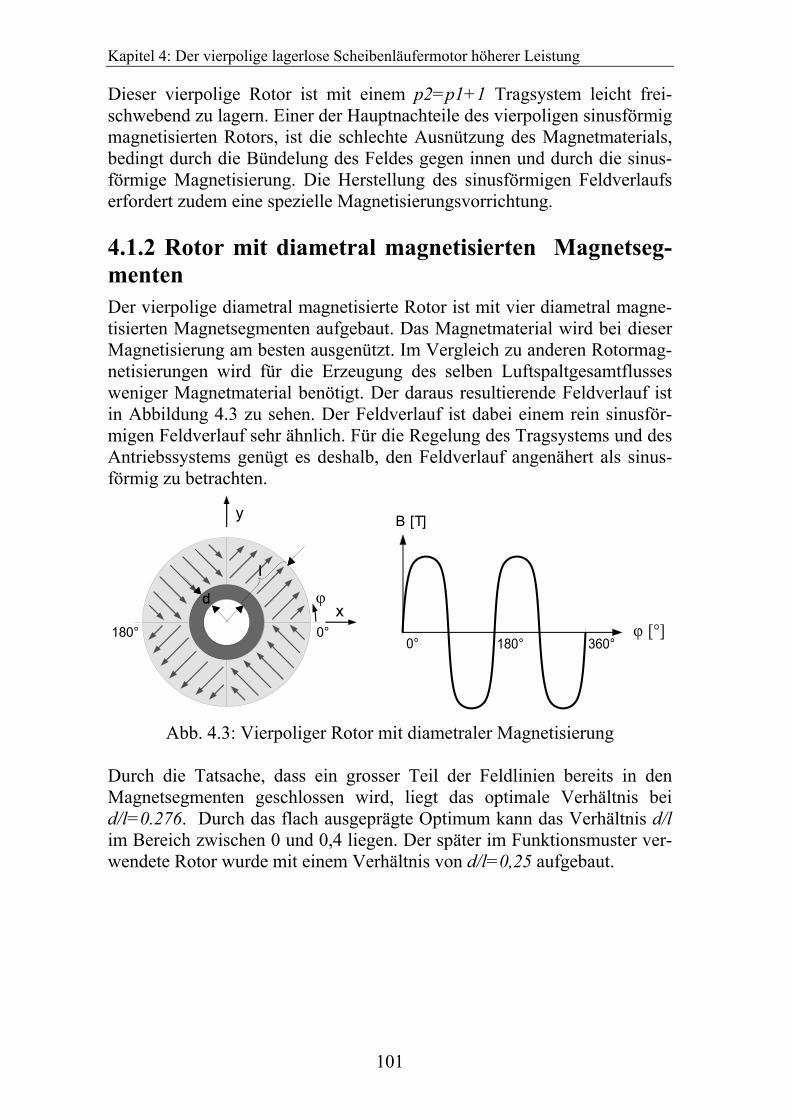
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
101
Dieser vierpolige Rotor ist mit einem p2=p1+1 Tragsystem leicht frei-schwebend zu lagern. Einer der Hauptnachteile des vierpoligen sinusförmig magnetisierten Rotors, ist die schlechte Ausnützung des Magnetmaterials, bedingt durch die Bündelung des Feldes gegen innen und durch die sinus-förmige Magnetisierung. Die Herstellung des sinusförmigen Feldverlaufs erfordert zudem eine spezielle Magnetisierungsvorrichtung. 4.1.2 Rotor mit diametral magnetisierten Magnetseg-menten Der vierpolige diametral magnetisierte Rotor ist mit vier diametral magne-tisierten Magnetsegmenten aufgebaut. Das Magnetmaterial wird bei dieser Magnetisierung am besten ausgenützt. Im Vergleich zu anderen Rotormag-netisierungen wird für die Erzeugung des selben Luftspaltgesamtflusses weniger Magnetmaterial benötigt. Der daraus resultierende Feldverlauf ist in Abbildung 4.3 zu sehen. Der Feldverlauf ist dabei einem rein sinusför-migen Feldverlauf sehr ähnlich. Für die Regelung des Tragsystems und des Antriebssystems genügt es deshalb, den Feldverlauf angenähert als sinus-förmig zu betrachten.
B [T]
ϕ [°]360°180°0°
x
y
ϕ
0°180°
d
l
x
y
ϕ
0°180°
d
l
d
l
B [T]B [T]
ϕ [°]360°180°0°
x
y
ϕ
0°180°
d
l
x
y
ϕ
0°180°
d
l
d
l
B [T]
Abb. 4.3: Vierpoliger Rotor mit diametraler Magnetisierung
Durch die Tatsache, dass ein grosser Teil der Feldlinien bereits in den Magnetsegmenten geschlossen wird, liegt das optimale Verhältnis bei d/l=0.276. Durch das flach ausgeprägte Optimum kann das Verhältnis d/l im Bereich zwischen 0 und 0,4 liegen. Der später im Funktionsmuster ver-wendete Rotor wurde mit einem Verhältnis von d/l=0,25 aufgebaut.
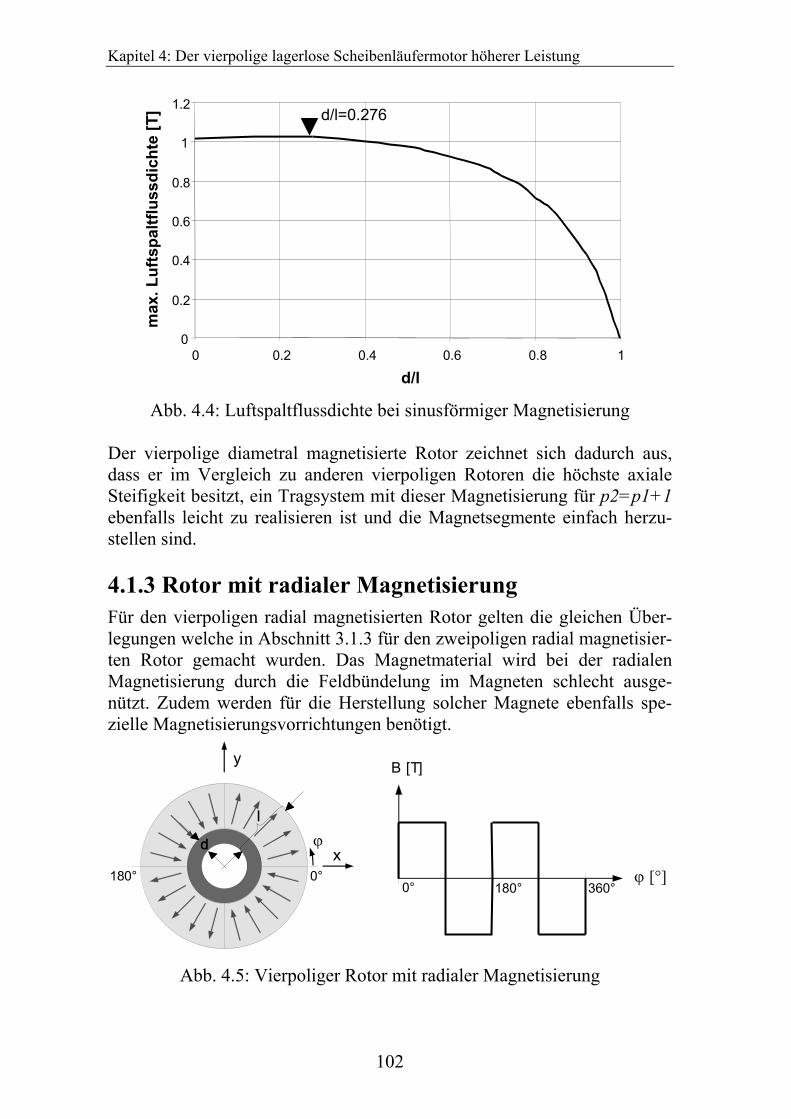
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
102
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T] d/l=0.276
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T] d/l=0.276
Abb. 4.4: Luftspaltflussdichte bei sinusförmiger Magnetisierung
Der vierpolige diametral magnetisierte Rotor zeichnet sich dadurch aus, dass er im Vergleich zu anderen vierpoligen Rotoren die höchste axiale Steifigkeit besitzt, ein Tragsystem mit dieser Magnetisierung für p2=p1+1 ebenfalls leicht zu realisieren ist und die Magnetsegmente einfach herzu-stellen sind. 4.1.3 Rotor mit radialer Magnetisierung Für den vierpoligen radial magnetisierten Rotor gelten die gleichen Über-legungen welche in Abschnitt 3.1.3 für den zweipoligen radial magnetisier-ten Rotor gemacht wurden. Das Magnetmaterial wird bei der radialen Magnetisierung durch die Feldbündelung im Magneten schlecht ausge-nützt. Zudem werden für die Herstellung solcher Magnete ebenfalls spe-zielle Magnetisierungsvorrichtungen benötigt.
B [T]
ϕ [°]360°180°0°
180°x
y
ϕ
0°
d
l
180°x
y
ϕ
0°
d
l
d
l
B [T]B [T]
ϕ [°]360°180°0°
180°x
y
ϕ
0°
d
l
180°x
y
ϕ
0°
d
l
d
l
B [T]
Abb. 4.5: Vierpoliger Rotor mit radialer Magnetisierung
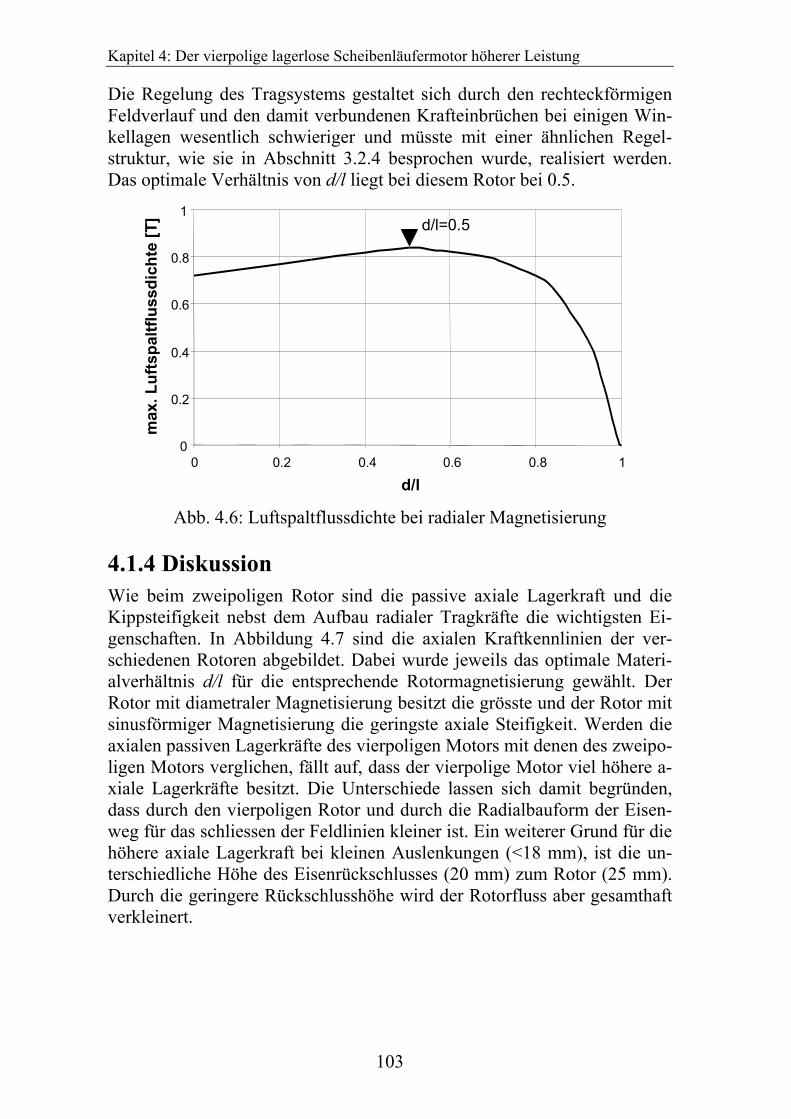
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
103
Die Regelung des Tragsystems gestaltet sich durch den rechteckförmigen Feldverlauf und den damit verbundenen Krafteinbrüchen bei einigen Win-kellagen wesentlich schwieriger und müsste mit einer ähnlichen Regel-struktur, wie sie in Abschnitt 3.2.4 besprochen wurde, realisiert werden. Das optimale Verhältnis von d/l liegt bei diesem Rotor bei 0.5.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T] d/l=0.5
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
d/l
max
.Luf
tspa
ltflu
ssdi
chte
[T] d/l=0.5
Abb. 4.6: Luftspaltflussdichte bei radialer Magnetisierung
4.1.4 Diskussion Wie beim zweipoligen Rotor sind die passive axiale Lagerkraft und die Kippsteifigkeit nebst dem Aufbau radialer Tragkräfte die wichtigsten Ei-genschaften. In Abbildung 4.7 sind die axialen Kraftkennlinien der ver-schiedenen Rotoren abgebildet. Dabei wurde jeweils das optimale Materi-alverhältnis d/l für die entsprechende Rotormagnetisierung gewählt. Der Rotor mit diametraler Magnetisierung besitzt die grösste und der Rotor mit sinusförmiger Magnetisierung die geringste axiale Steifigkeit. Werden die axialen passiven Lagerkräfte des vierpoligen Motors mit denen des zweipo-ligen Motors verglichen, fällt auf, dass der vierpolige Motor viel höhere a-xiale Lagerkräfte besitzt. Die Unterschiede lassen sich damit begründen, dass durch den vierpoligen Rotor und durch die Radialbauform der Eisen-weg für das schliessen der Feldlinien kleiner ist. Ein weiterer Grund für die höhere axiale Lagerkraft bei kleinen Auslenkungen (<18 mm), ist die un-terschiedliche Höhe des Eisenrückschlusses (20 mm) zum Rotor (25 mm). Durch die geringere Rückschlusshöhe wird der Rotorfluss aber gesamthaft verkleinert.
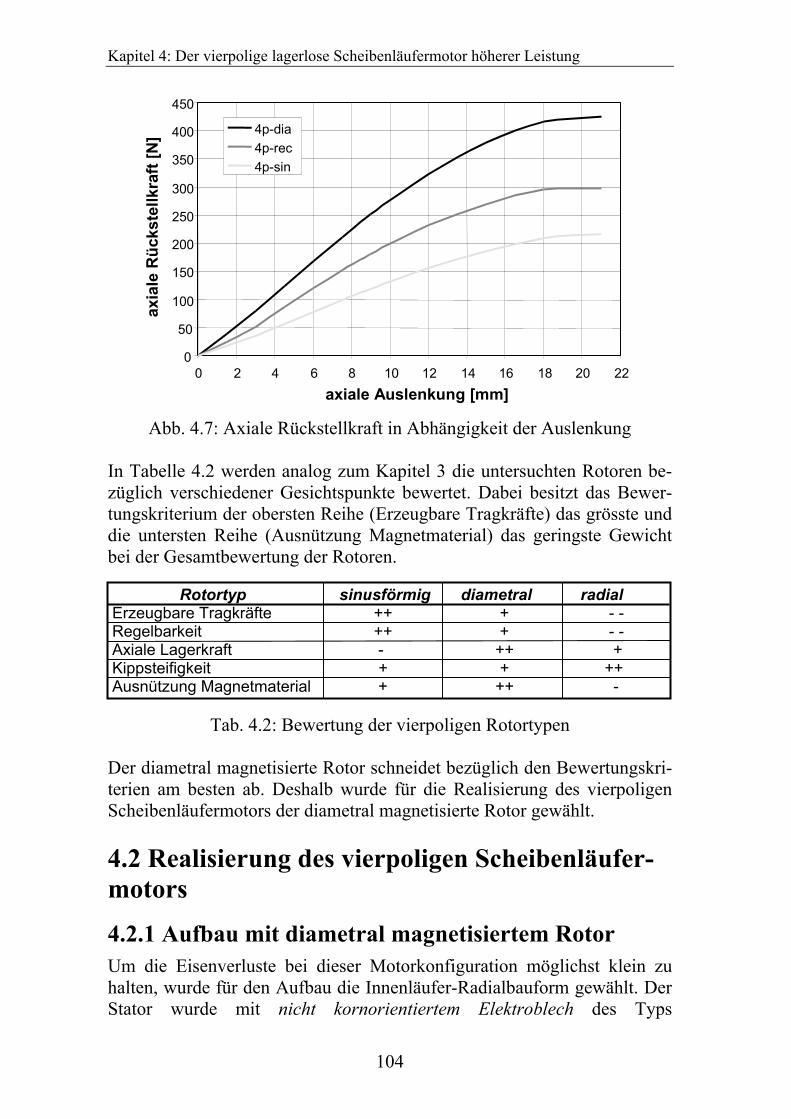
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
104
0
50
100
150
200
250
300
350
400
450
0 2 4 6 8 10 12 14 16 18 20 22axiale Auslenkung [mm]
axia
le R
ücks
tellk
raft
[N] 4p-dia
4p-rec4p-sin
0
50
100
150
200
250
300
350
400
450
0 2 4 6 8 10 12 14 16 18 20 22axiale Auslenkung [mm]
axia
le R
ücks
tellk
raft
[N] 4p-dia
4p-rec4p-sin
Abb. 4.7: Axiale Rückstellkraft in Abhängigkeit der Auslenkung
In Tabelle 4.2 werden analog zum Kapitel 3 die untersuchten Rotoren be-züglich verschiedener Gesichtspunkte bewertet. Dabei besitzt das Bewer-tungskriterium der obersten Reihe (Erzeugbare Tragkräfte) das grösste und die untersten Reihe (Ausnützung Magnetmaterial) das geringste Gewicht bei der Gesamtbewertung der Rotoren. Rotortyp sinusförmig diametral radial Erzeugbare Tragkräfte ++ + - - Regelbarkeit ++ + - - Axiale Lagerkraft - ++ + Kippsteifigkeit + + ++ Ausnützung Magnetmaterial + ++ -
Tab. 4.2: Bewertung der vierpoligen Rotortypen
Der diametral magnetisierte Rotor schneidet bezüglich den Bewertungskri-terien am besten ab. Deshalb wurde für die Realisierung des vierpoligen Scheibenläufermotors der diametral magnetisierte Rotor gewählt. 4.2 Realisierung des vierpoligen Scheibenläufer-motors
4.2.1 Aufbau mit diametral magnetisiertem Rotor Um die Eisenverluste bei dieser Motorkonfiguration möglichst klein zu halten, wurde für den Aufbau die Innenläufer-Radialbauform gewählt. Der Stator wurde mit nicht kornorientiertem Elektroblech des Typs
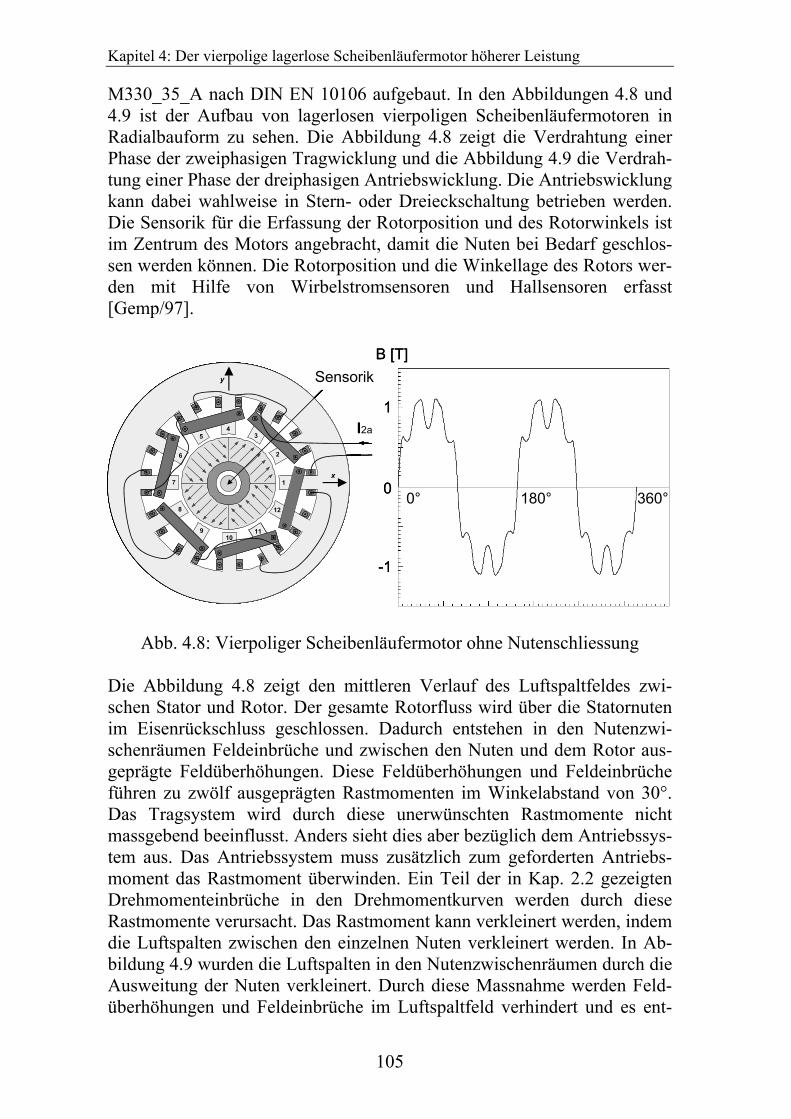
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
105
M330_35_A nach DIN EN 10106 aufgebaut. In den Abbildungen 4.8 und 4.9 ist der Aufbau von lagerlosen vierpoligen Scheibenläufermotoren in Radialbauform zu sehen. Die Abbildung 4.8 zeigt die Verdrahtung einer Phase der zweiphasigen Tragwicklung und die Abbildung 4.9 die Verdrah-tung einer Phase der dreiphasigen Antriebswicklung. Die Antriebswicklung kann dabei wahlweise in Stern- oder Dreieckschaltung betrieben werden. Die Sensorik für die Erfassung der Rotorposition und des Rotorwinkels ist im Zentrum des Motors angebracht, damit die Nuten bei Bedarf geschlos-sen werden können. Die Rotorposition und die Winkellage des Rotors wer-den mit Hilfe von Wirbelstromsensoren und Hallsensoren erfasst [Gemp/97].
x
y
1
2
34
5
6
7
8
910
11
12
++
+
+
+
+
+
+
+
+
+
+
++
++
+
+
Sensorik
I2a
x
y
1
2
34
5
6
7
8
910
11
12
++
+
+
+
+
+
+
+
+
+
+
++
++
+
+
Sensorik
x
y
1
2
34
5
6
7
8
910
11
12
+++++
+++
+++
+
++
++++
+++
++
+++
+++
++++
+++++++
+++++
++
++
Sensorik
I2a
x
y
1
2
34
5
6
7
8
910
11
12
++
+
+
+
+
+
+
+
+
+
+
++
++
+
+
Sensorik
I2a
x
y
1
2
34
5
6
7
8
910
11
12
++
+
+
+
+
+
+
+
+
+
+
++
++
+
+
Sensorik
x
y
1
2
34
5
6
7
8
910
11
12
+++++
+++
+++
+
++
++++
+++
++
+++
+++
++++
+++++++
+++++
++
++
Sensorik
I2a
Sensorik
I2a
0
1
-1
360°180°0°
B [T]
x
y
1
2
34
5
6
7
8
910
11
12
++
+
+
+
+
+
+
+
+
+
+
++
++
+
+
Sensorik
I2a
x
y
1
2
34
5
6
7
8
910
11
12
++
+
+
+
+
+
+
+
+
+
+
++
++
+
+
Sensorik
x
y
1
2
34
5
6
7
8
910
11
12
+++++
+++
+++
+
++
++++
+++
++
+++
+++
++++
+++++++
+++++
++
++
Sensorik
I2a
x
y
1
2
34
5
6
7
8
910
11
12
++
+
+
+
+
+
+
+
+
+
+
++
++
+
+
Sensorik
I2a
x
y
1
2
34
5
6
7
8
910
11
12
++
+
+
+
+
+
+
+
+
+
+
++
++
+
+
Sensorik
x
y
1
2
34
5
6
7
8
910
11
12
+++++
+++
+++
+
++
++++
+++
++
+++
+++
++++
+++++++
+++++
++
++
Sensorik
I2a
Sensorik
I2a
0
1
-1
360°180°0°
B [T]
Abb. 4.8: Vierpoliger Scheibenläufermotor ohne Nutenschliessung Die Abbildung 4.8 zeigt den mittleren Verlauf des Luftspaltfeldes zwi-schen Stator und Rotor. Der gesamte Rotorfluss wird über die Statornuten im Eisenrückschluss geschlossen. Dadurch entstehen in den Nutenzwi-schenräumen Feldeinbrüche und zwischen den Nuten und dem Rotor aus-geprägte Feldüberhöhungen. Diese Feldüberhöhungen und Feldeinbrüche führen zu zwölf ausgeprägten Rastmomenten im Winkelabstand von 30°. Das Tragsystem wird durch diese unerwünschten Rastmomente nicht massgebend beeinflusst. Anders sieht dies aber bezüglich dem Antriebssys-tem aus. Das Antriebssystem muss zusätzlich zum geforderten Antriebs-moment das Rastmoment überwinden. Ein Teil der in Kap. 2.2 gezeigten Drehmomenteinbrüche in den Drehmomentkurven werden durch diese Rastmomente verursacht. Das Rastmoment kann verkleinert werden, indem die Luftspalten zwischen den einzelnen Nuten verkleinert werden. In Ab-bildung 4.9 wurden die Luftspalten in den Nutenzwischenräumen durch die Ausweitung der Nuten verkleinert. Durch diese Massnahme werden Feld-überhöhungen und Feldeinbrüche im Luftspaltfeld verhindert und es ent-
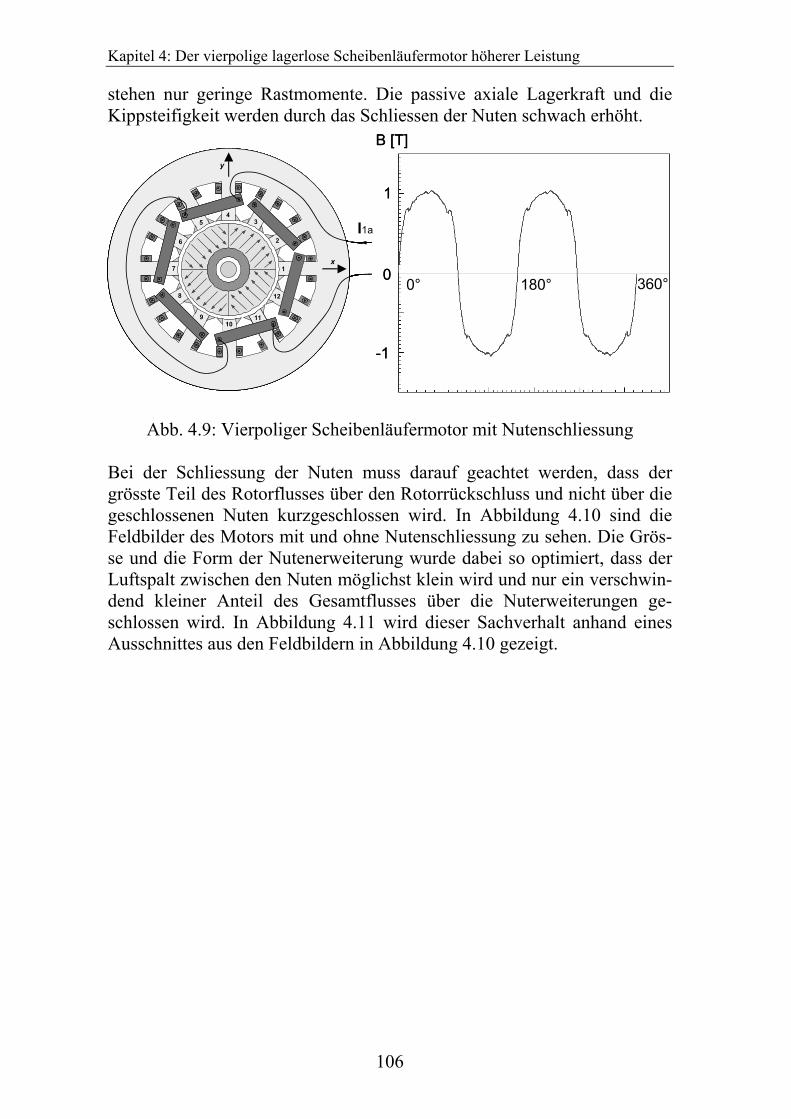
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
106
stehen nur geringe Rastmomente. Die passive axiale Lagerkraft und die Kippsteifigkeit werden durch das Schliessen der Nuten schwach erhöht.
x
y
1
2
34
5
6
7
8
910
11
12
+
+
+
+
+
+
+
+
+
+
+
++
+
++
+
+
I1a
x
y
1
2
34
5
6
7
8
910
11
12
++
+++
+++
+++
+
++
++++
+++
++
+++
+++
++++++++
+++
+++++
++
++
I1a
x
y
1
2
34
5
6
7
8
910
11
12
+
+
+
+
+
+
+
+
+
+
+
++
+
++
+
+
I1a
x
y
1
2
34
5
6
7
8
910
11
12
++
+++
+++
+++
+
++
++++
+++
++
+++
+++
++++++++
+++
+++++
++
++
I1aI1a
0 0°
1
-1
180° 360°
B [T]
x
y
1
2
34
5
6
7
8
910
11
12
+
+
+
+
+
+
+
+
+
+
+
++
+
++
+
+
I1a
x
y
1
2
34
5
6
7
8
910
11
12
++
+++
+++
+++
+
++
++++
+++
++
+++
+++
++++++++
+++
+++++
++
++
I1a
x
y
1
2
34
5
6
7
8
910
11
12
+
+
+
+
+
+
+
+
+
+
+
++
+
++
+
+
I1a
x
y
1
2
34
5
6
7
8
910
11
12
++
+++
+++
+++
+
++
++++
+++
++
+++
+++
++++++++
+++
+++++
++
++
I1aI1a
0 0°
1
-1
180° 360°
B [T]
Abb. 4.9: Vierpoliger Scheibenläufermotor mit Nutenschliessung Bei der Schliessung der Nuten muss darauf geachtet werden, dass der grösste Teil des Rotorflusses über den Rotorrückschluss und nicht über die geschlossenen Nuten kurzgeschlossen wird. In Abbildung 4.10 sind die Feldbilder des Motors mit und ohne Nutenschliessung zu sehen. Die Grös-se und die Form der Nutenerweiterung wurde dabei so optimiert, dass der Luftspalt zwischen den Nuten möglichst klein wird und nur ein verschwin-dend kleiner Anteil des Gesamtflusses über die Nuterweiterungen ge-schlossen wird. In Abbildung 4.11 wird dieser Sachverhalt anhand eines Ausschnittes aus den Feldbildern in Abbildung 4.10 gezeigt.
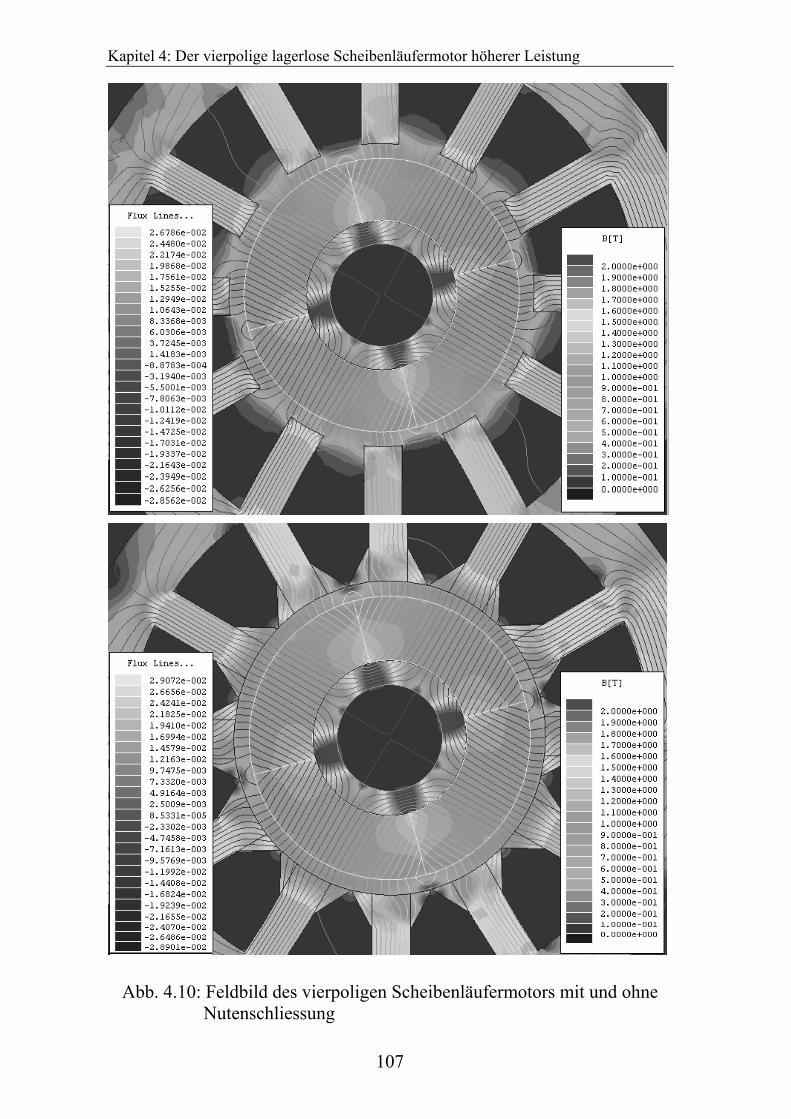
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
107
Abb. 4.10: Feldbild des vierpoligen Scheibenläufermotors mit und ohne Nutenschliessung
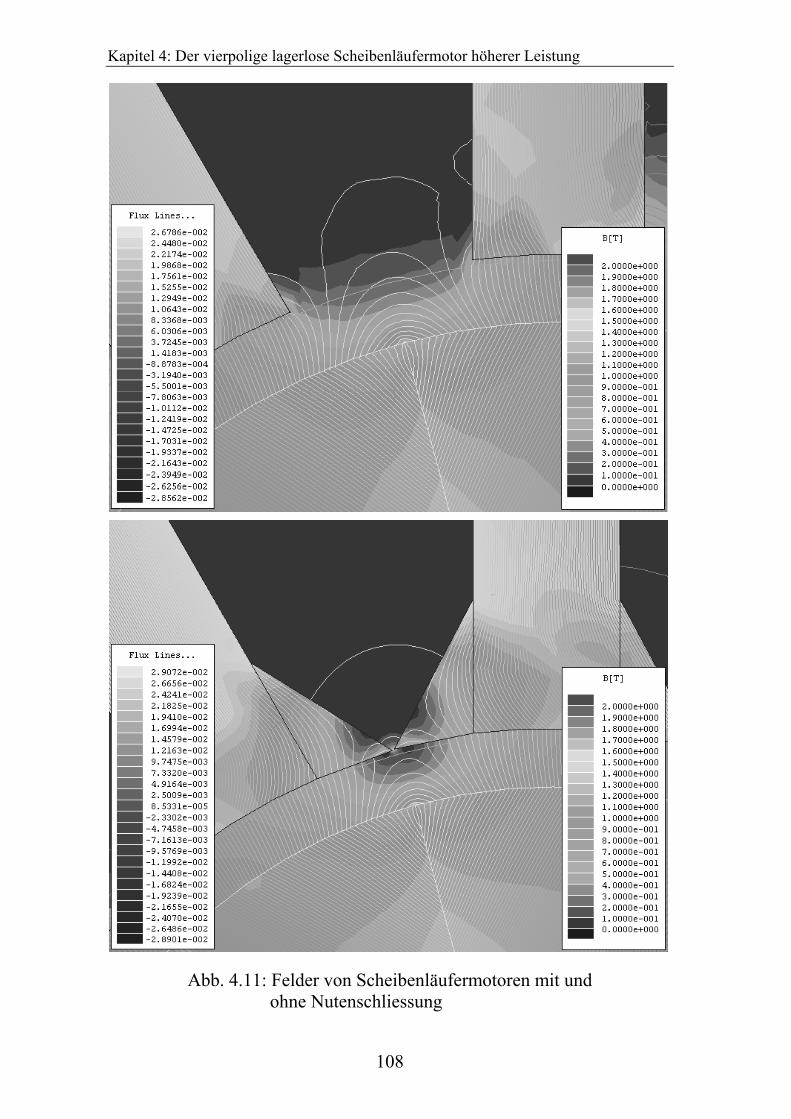
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
108
Abb. 4.11: Felder von Scheibenläufermotoren mit und ohne Nutenschliessung
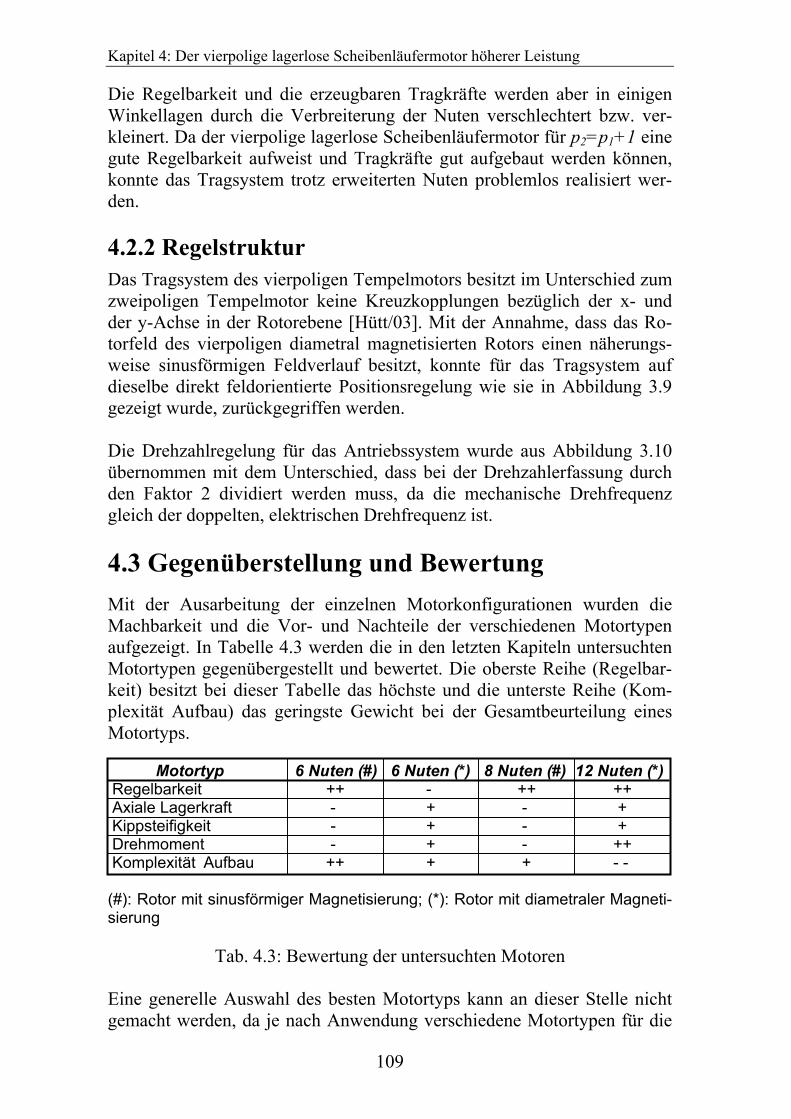
Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
109
Die Regelbarkeit und die erzeugbaren Tragkräfte werden aber in einigen Winkellagen durch die Verbreiterung der Nuten verschlechtert bzw. ver-kleinert. Da der vierpolige lagerlose Scheibenläufermotor für p2=p1+1 eine gute Regelbarkeit aufweist und Tragkräfte gut aufgebaut werden können, konnte das Tragsystem trotz erweiterten Nuten problemlos realisiert wer-den. 4.2.2 Regelstruktur Das Tragsystem des vierpoligen Tempelmotors besitzt im Unterschied zum zweipoligen Tempelmotor keine Kreuzkopplungen bezüglich der x- und der y-Achse in der Rotorebene [Hütt/03]. Mit der Annahme, dass das Ro-torfeld des vierpoligen diametral magnetisierten Rotors einen näherungs-weise sinusförmigen Feldverlauf besitzt, konnte für das Tragsystem auf dieselbe direkt feldorientierte Positionsregelung wie sie in Abbildung 3.9 gezeigt wurde, zurückgegriffen werden. Die Drehzahlregelung für das Antriebssystem wurde aus Abbildung 3.10 übernommen mit dem Unterschied, dass bei der Drehzahlerfassung durch den Faktor 2 dividiert werden muss, da die mechanische Drehfrequenz gleich der doppelten, elektrischen Drehfrequenz ist. 4.3 Gegenüberstellung und Bewertung Mit der Ausarbeitung der einzelnen Motorkonfigurationen wurden die Machbarkeit und die Vor- und Nachteile der verschiedenen Motortypen aufgezeigt. In Tabelle 4.3 werden die in den letzten Kapiteln untersuchten Motortypen gegenübergestellt und bewertet. Die oberste Reihe (Regelbar-keit) besitzt bei dieser Tabelle das höchste und die unterste Reihe (Kom-plexität Aufbau) das geringste Gewicht bei der Gesamtbeurteilung eines Motortyps. Motortyp 6 Nuten (#) 6 Nuten (*) 8 Nuten (#) 12 Nuten (*) Regelbarkeit ++ - ++ ++ Axiale Lagerkraft - + - + Kippsteifigkeit - + - + Drehmoment - + - ++ Komplexität Aufbau ++ + + - - (#): Rotor mit sinusförmiger Magnetisierung; (*): Rotor mit diametraler Magneti-sierung
Tab. 4.3: Bewertung der untersuchten Motoren Eine generelle Auswahl des besten Motortyps kann an dieser Stelle nicht gemacht werden, da je nach Anwendung verschiedene Motortypen für die

Kapitel 4: Der vierpolige lagerlose Scheibenläufermotor höherer Leistung
110
Erfüllung gestellter Anforderungen in Frage kommen. Für das konkrete Anwendungsfeld von lagerlosen Zentrifugalpumpen sind Antriebe mit ho-hen Drehzahlen von bis zu 9000 U/min gefordert. Für eine solche Anwen-dung sind vor allem zweipolige lagerlose Scheibenläufermotoren prädesti-niert. Auf dem Gebiet der zweipoligen lagerlosen Scheibenläufermotoren mit acht Nuten wurden in früheren Arbeiten [Barl/98] , [Neff/03] viele Er-fahrungen gesammelt, so dass eine Leistungserhöhung bis 1,2kW mechani-sche Leistung mit dieser Motorkonfiguration gut realisiert werden kann. Für den Betrieb dieses 2x2-Phasen-Motors werden insgesamt vier Leis-tungsvollbrücken benötigt. Die Herstellungskosten einer 4-Phasen-Umrichterelektronik höherer Leistung sind jedoch hoch, gemessen an den Herstellungskosten eines handelsüblichen 2x3-Phasen-Umrichters der glei-chen Leistungsklasse. Der Vorteil des lagerlosen Scheibenläufermotors mit sechs Nuten liegt nebst dem vereinfachten Aufbau auch darin, dass der Motor mit zwei handelsüblichen, kostengünstigen 3-Phasen-IGBT-Umrichtermodulen betrieben werden kann. Ausgehend von diesen Motiva-tionen werden sich die Schwerpunkte weiterer Untersuchungen auf dem lagerlosen Scheibenläufermotor mit sechs Nuten und sinusförmig magneti-siertem, zweipoligem Rotor beziehen.
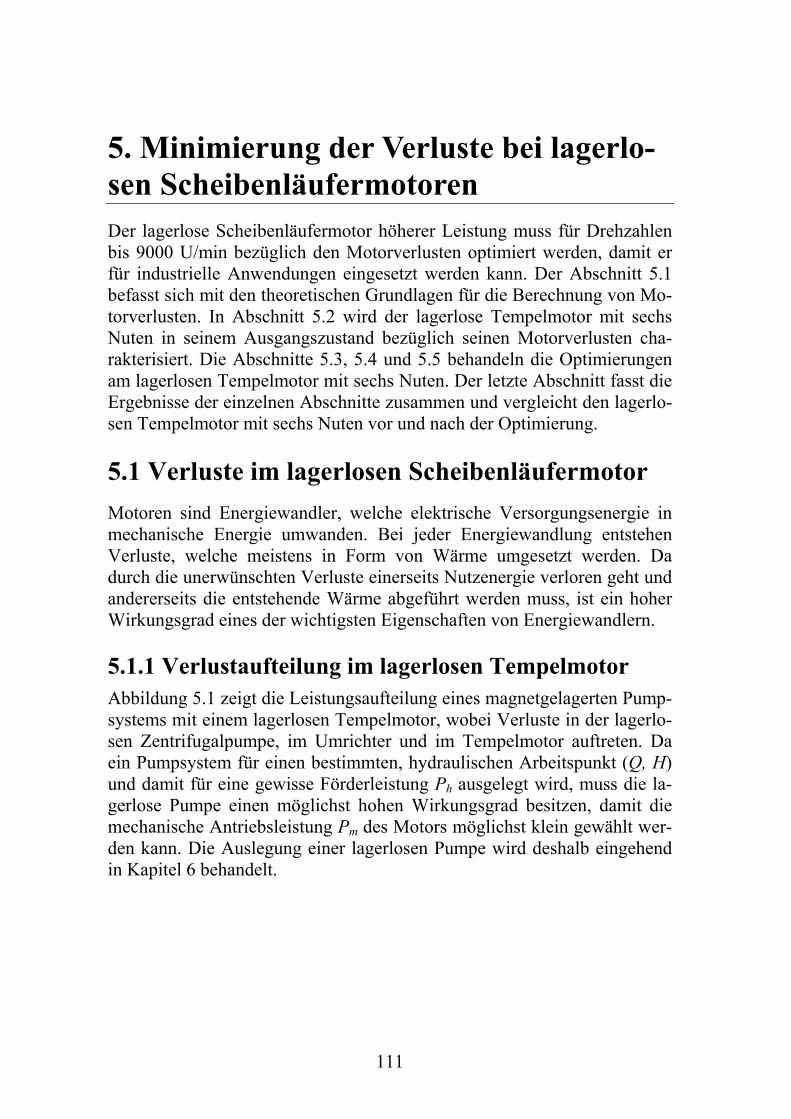
111
5. Minimierung der Verluste bei lagerlo-sen Scheibenläufermotoren Der lagerlose Scheibenläufermotor höherer Leistung muss für Drehzahlen bis 9000 U/min bezüglich den Motorverlusten optimiert werden, damit er für industrielle Anwendungen eingesetzt werden kann. Der Abschnitt 5.1 befasst sich mit den theoretischen Grundlagen für die Berechnung von Mo-torverlusten. In Abschnitt 5.2 wird der lagerlose Tempelmotor mit sechs Nuten in seinem Ausgangszustand bezüglich seinen Motorverlusten cha-rakterisiert. Die Abschnitte 5.3, 5.4 und 5.5 behandeln die Optimierungen am lagerlosen Tempelmotor mit sechs Nuten. Der letzte Abschnitt fasst die Ergebnisse der einzelnen Abschnitte zusammen und vergleicht den lagerlo-sen Tempelmotor mit sechs Nuten vor und nach der Optimierung. 5.1 Verluste im lagerlosen Scheibenläufermotor Motoren sind Energiewandler, welche elektrische Versorgungsenergie in mechanische Energie umwanden. Bei jeder Energiewandlung entstehen Verluste, welche meistens in Form von Wärme umgesetzt werden. Da durch die unerwünschten Verluste einerseits Nutzenergie verloren geht und andererseits die entstehende Wärme abgeführt werden muss, ist ein hoher Wirkungsgrad eines der wichtigsten Eigenschaften von Energiewandlern. 5.1.1 Verlustaufteilung im lagerlosen Tempelmotor Abbildung 5.1 zeigt die Leistungsaufteilung eines magnetgelagerten Pump-systems mit einem lagerlosen Tempelmotor, wobei Verluste in der lagerlo-sen Zentrifugalpumpe, im Umrichter und im Tempelmotor auftreten. Da ein Pumpsystem für einen bestimmten, hydraulischen Arbeitspunkt (Q, H) und damit für eine gewisse Förderleistung Ph ausgelegt wird, muss die la-gerlose Pumpe einen möglichst hohen Wirkungsgrad besitzen, damit die mechanische Antriebsleistung Pm des Motors möglichst klein gewählt wer-den kann. Die Auslegung einer lagerlosen Pumpe wird deshalb eingehend in Kapitel 6 behandelt.
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
112
hydraulische Verluste
hydraulische Förderleistung
elek
tris
che
Netz
leis
tung
UmrichterVerluste
Kupferverluste im Antriebssystem
Kupferverluste im Tragsystem
Eisenverluste im Antriebssystem
elek
tris
che
Mot
orle
istu
ng
elek
tris
che
Antr
iebs
leis
tung
m1/
2•ui
1q•i1
q= M
•ωm
mec
hani
sche
An
trie
bsle
istu
ng
Pm
1CuP
2CuP
Fe Ws HyP P P= +
hP
hydraulische Verluste
hydraulische Förderleistung
elek
tris
che
Netz
leis
tung
UmrichterVerluste
Kupferverluste im Antriebssystem
Kupferverluste im Tragsystem
Eisenverluste im Antriebssystem
elek
tris
che
Mot
orle
istu
ng
elek
tris
che
Antr
iebs
leis
tung
m1/
2•ui
1q•i1
q= M
•ωm
mec
hani
sche
An
trie
bsle
istu
ng
Pm
1CuP
2CuP
Fe Ws HyP P P= +
hP
Abb. 5.1: Qualitative Leistungsaufteilung eines lagerlosen Pumpsystems Die Motorverluste PML werden in Leerlauf- und Lastverluste unterteilt. Die Leerlaufverluste sind nur von der Drehzahl n abhängig und erzeugen ein von der Last unabhängiges Bremsmoment welches bei steigender Drehzahl zunimmt. Die Lastverluste sind nur vom erzeugten Drehmoment abhängig und nehmen bei Erhöhung des Drehmomentes zu. Beim lagerlosen Schei-benläufermotor ist hauptsächlich die Drehung des Rotors für Magnetfeld-änderungen im Eisenkreis und damit für die Leerlaufverluste verantwort-lich [Hend/94]. Die induzierten Feldänderungen durch die Antriebsspulen sind im Vergleich zum Permanentmagnetfeld des Rotors sehr klein und können deshalb in den folgenden Betrachtungen vernachlässigt werden. Feldänderungen, welche durch den Stromrippel des Wechselrichters her-vorgerufen werden, können durch eine geeignete Ansteuerungen des Um-richters (Drei-Punkt-Pulsweiten-Modulation) gemäss [Zang/95] stark redu-ziert und somit auch vernachlässigt werden. Durch diese Vereinfachungen sind die Eisenverluste nur von der Drehzahl abhängig und entsprechen da-her den Leerlaufverlusten. Die Eisenverluste setzen sich wiederum aus Hysterese- und Wirbelstromverlusten zusammen. Bei den Lastverlusten handelt es sich um Kupferverluste, welche in den Spulen der Trag- und An-triebswicklung entstehen. Die Gesamtverluste im lagerlosen Scheibenläu-fermotor setzen sich aus den folgenden Verlusten zusammen:
• Kupferverluste PCu: Entstehen aufgrund des Wicklungswiderstan-des in den Wicklungen. Die Kupferverluste werden auch als Strom-wärmeverluste bezeichnet.
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
113
• Wirbelstromverluste PWs: Werden in elektrisch leitfähigen Werk-stoffen durch ein zeitlich änderndes Magnetfeld erzeugt. Durch das ändernde Magnetfeld werden Wirbelströme induziert, welche durch die beschränkte Leitfähigkeit des Werkstoffes in Wärmeverluste umgewandelt werden.
• Hystereseverluste PHy: Sind Ummagnetisierungsverluste in ferro-
magnetischen Werkstoffen welche durch zeitlich ändernde Magnet-felder erzeugt werden.
Die Kupferverluste verursachen eine Erwärmung der Trag- und Antriebs-wicklung. Das magnetische Drehfeld des Rotors erzeugt Hysterese- und Wirbelstromverluste, welche den Eisenkreis des Motors erwärmen. Magne-tische Streufelder des Rotors verursachen zudem im Metallgehäuse des Motors zusätzliche Wirbelstromverluste. Aufgrund der offenen Nuten im Motor entstehen im Rotor auch so genannte Pulsationsverluste. Dabei wer-den durch das mit der Nutzahl pulsierende Feld Wirbelströme im Rotor in-duziert, welche den Rotor erwärmen. Durch die berührungslose Lagerung des Rotors entstehen keine mechanischen Reibungsverluste im Motor. In der lagerlosen Zentrifugalpumpe ist jedoch mit erheblichen Laufradrei-bungsverlusten in der zu pumpenden Flüssigkeit zu rechnen. Da die Eisen-verluste im Eisenkreis und die Kupferverluste in den Wicklungen den grössten Anteil der gesamten Motorverluste ausmachen, werden die übri-gen Verluste bei den folgenden Verlustbetrachtungen vernachlässigt. 5.1.2 Modellierung der Verluste Eisenverluste Der diametral magnetisierte, zweipolige Rotor erzeugt bei einer Drehung eine nahezu sinusförmige Flussdichteänderung im Eisenkreis. Für die Be-rechnung der Eisenverluste muss deshalb nur die Grundschwingungsfre-quenz fe des Synchronmotors berücksichtigt werden.
12m
epf ω
π⋅=⋅
(5.1)
Gemäss [Stei/91] lassen sich Hystereseverluste von Eisen in einem magne-tischen Wechselfeld mit einer Amplitude im Bereich von 0.2-1.5 T ange-nähert durch Gleichung 5.2 berechnen. Die Hystereseverluste hängen dabei linear von der Materialkonstante cHy und der Frequenz fe ab.
1.6eHy Hy FeP c f B m= ⋅ ⋅ ⋅ (5.2)
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
114
Für eine sinusförmige Flussdichteänderung lassen sich Wirbelstromverlus-te von Eisen angenähert gemäss Gleichung 5.3 bestimmen [Heck/75]. Um die Bildung von Wirbelströmen möglichst unterbinden zu können, wird der Eisenkreis aus aufeinander geschichteten, isolierten Motorblechen aufge-baut. Die Wirbelstromverluste sind quadratisch von der Frequenz fe und von der Amplitude B des Magnetfeldes abhängig. Dabei beeinflusst die Materialkonstante cWs zu einem grossen Teil die Leitfähigkeit des Eisen-werkstoffes. Die Wirbelstromverluste können gesenkt werden, indem die Blechdicke dFe verkleinert wird. Die Verwendung von speziell legierten Ei-senblechen (Siliziumlegierungen), welche einen höheren spezifischen Wi-derstand aufweisen, können ebenfalls eine Reduktion der Wirbelstromver-luste bewirken.
22 2eWs Ws Fe FeP c f B d m= ⋅ ⋅ ⋅ ⋅ (5.3)
Damit die Eisenverluste im lagerlosen Tempelmotor bestimmt werden können, müssen die Verluste über die gesamte Masse des Eisenkreises in-tegriert werden. Der Eisenkreis wird zu diesem Zweck in i Teile zerlegt. Dabei werden die einzelnen Teile so gewählt, dass für jedes einzelne Teil ein homogener Feldverlauf angenommen werden kann. Aus der Integration der Teilverluste lassen sich die gesamten Eisenverluste eines Motors bestimmen.
1.6
iieHy Hy Fe
iP c f B m= ⋅ ⋅ ⋅∑ (5.4)
22 2i
ieWs Ws Fe Fei
P c f d B m= ⋅ ⋅ ⋅ ⋅∑ (5.5)
Durch die Eisenverluste entsteht ein drehzahlabhängiges Bremsmoment MFe welches vom Antriebssystem überwunden werden muss.
Hy WsFe
m
P PM
ω+
= (5.6)
Abbildung 5.2 zeigt den qualitativen Verlauf der Eisenverluste in Abhän-gigkeit der Drehzahl. Dabei wird ersichtlich, dass bei kleinen Drehzahlen die Hystereseverluste und bei grossen Drehzahlen die Wirbelstromverluste überwiegen.
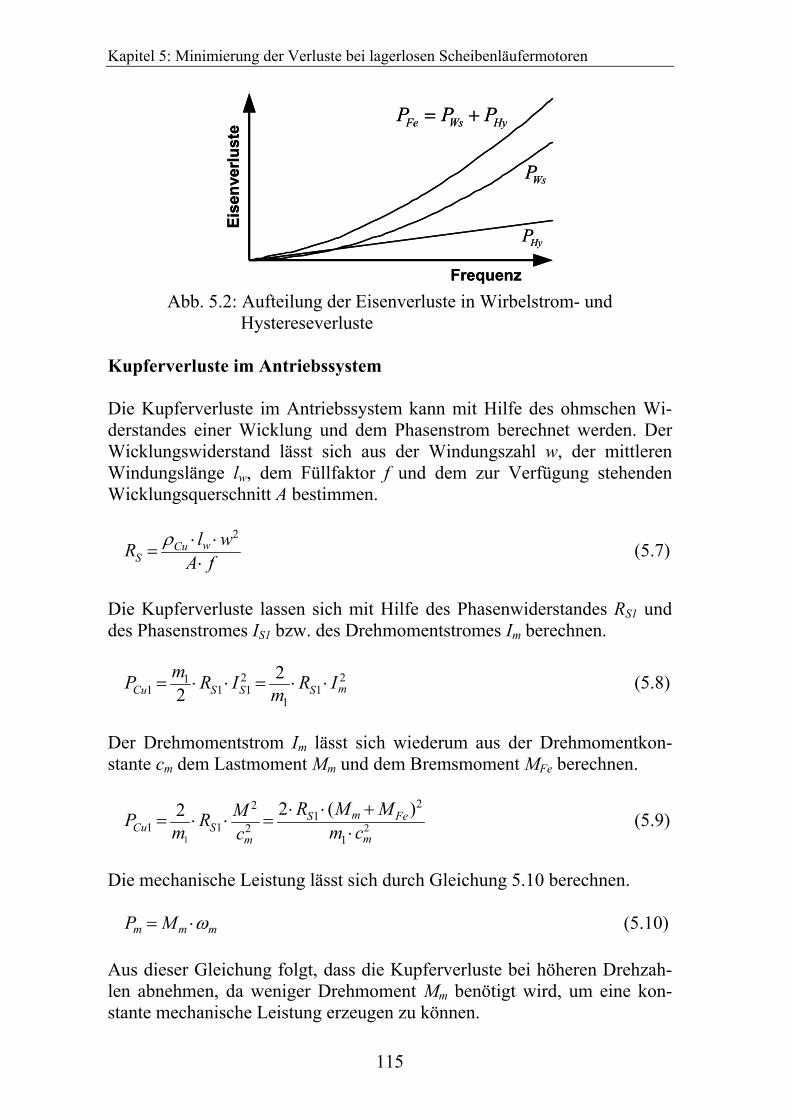
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
115
Eise
nver
lust
e
Frequenz
WsP
HyP
Fe Ws HyP P P= +
Eise
nver
lust
e
Frequenz
WsP
HyP
Fe Ws HyP P P= +
Abb. 5.2: Aufteilung der Eisenverluste in Wirbelstrom- und
Hystereseverluste Kupferverluste im Antriebssystem Die Kupferverluste im Antriebssystem kann mit Hilfe des ohmschen Wi-derstandes einer Wicklung und dem Phasenstrom berechnet werden. Der Wicklungswiderstand lässt sich aus der Windungszahl w, der mittleren Windungslänge lw, dem Füllfaktor f und dem zur Verfügung stehenden Wicklungsquerschnitt A bestimmen.
2
wCuS
l wRA f
ρ ⋅ ⋅=⋅
(5.7)
Die Kupferverluste lassen sich mit Hilfe des Phasenwiderstandes RS1 und des Phasenstromes IS1 bzw. des Drehmomentstromes Im berechnen.
2 211 1 1 1
1
22 mCu S S SmP R I R I
m= ⋅ ⋅ = ⋅ ⋅ (5.8)
Der Drehmomentstrom Im lässt sich wiederum aus der Drehmomentkon-stante cm dem Lastmoment Mm und dem Bremsmoment MFe berechnen.
1
2
221
1 1 21
2 ( )2 m FeSCu S
mm
R M MMP Rm m cc
⋅ ⋅ += ⋅ ⋅ =⋅
(5.9)
Die mechanische Leistung lässt sich durch Gleichung 5.10 berechnen. m m mP M ω= ⋅ (5.10) Aus dieser Gleichung folgt, dass die Kupferverluste bei höheren Drehzah-len abnehmen, da weniger Drehmoment Mm benötigt wird, um eine kon-stante mechanische Leistung erzeugen zu können.
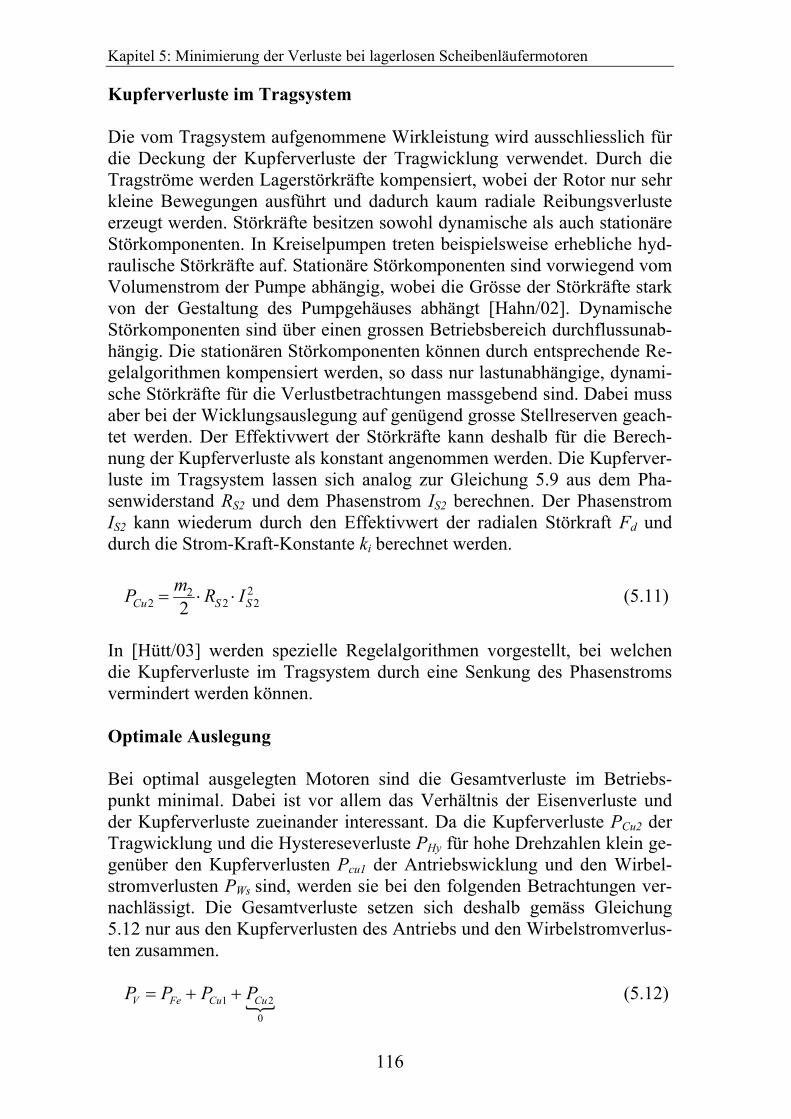
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
116
Kupferverluste im Tragsystem Die vom Tragsystem aufgenommene Wirkleistung wird ausschliesslich für die Deckung der Kupferverluste der Tragwicklung verwendet. Durch die Tragströme werden Lagerstörkräfte kompensiert, wobei der Rotor nur sehr kleine Bewegungen ausführt und dadurch kaum radiale Reibungsverluste erzeugt werden. Störkräfte besitzen sowohl dynamische als auch stationäre Störkomponenten. In Kreiselpumpen treten beispielsweise erhebliche hyd-raulische Störkräfte auf. Stationäre Störkomponenten sind vorwiegend vom Volumenstrom der Pumpe abhängig, wobei die Grösse der Störkräfte stark von der Gestaltung des Pumpgehäuses abhängt [Hahn/02]. Dynamische Störkomponenten sind über einen grossen Betriebsbereich durchflussunab-hängig. Die stationären Störkomponenten können durch entsprechende Re-gelalgorithmen kompensiert werden, so dass nur lastunabhängige, dynami-sche Störkräfte für die Verlustbetrachtungen massgebend sind. Dabei muss aber bei der Wicklungsauslegung auf genügend grosse Stellreserven geach-tet werden. Der Effektivwert der Störkräfte kann deshalb für die Berech-nung der Kupferverluste als konstant angenommen werden. Die Kupferver-luste im Tragsystem lassen sich analog zur Gleichung 5.9 aus dem Pha-senwiderstand RS2 und dem Phasenstrom IS2 berechnen. Der Phasenstrom IS2 kann wiederum durch den Effektivwert der radialen Störkraft Fd und durch die Strom-Kraft-Konstante ki berechnet werden.
222 2 22Cu S S
mP R I= ⋅ ⋅ (5.11)
In [Hütt/03] werden spezielle Regelalgorithmen vorgestellt, bei welchen die Kupferverluste im Tragsystem durch eine Senkung des Phasenstroms vermindert werden können. Optimale Auslegung Bei optimal ausgelegten Motoren sind die Gesamtverluste im Betriebs-punkt minimal. Dabei ist vor allem das Verhältnis der Eisenverluste und der Kupferverluste zueinander interessant. Da die Kupferverluste PCu2 der Tragwicklung und die Hystereseverluste PHy für hohe Drehzahlen klein ge-genüber den Kupferverlusten Pcu1 der Antriebswicklung und den Wirbel-stromverlusten PWs sind, werden sie bei den folgenden Betrachtungen ver-nachlässigt. Die Gesamtverluste setzen sich deshalb gemäss Gleichung 5.12 nur aus den Kupferverlusten des Antriebs und den Wirbelstromverlus-ten zusammen. 1 2
0
V Fe Cu CuP P P P= + + (5.12)
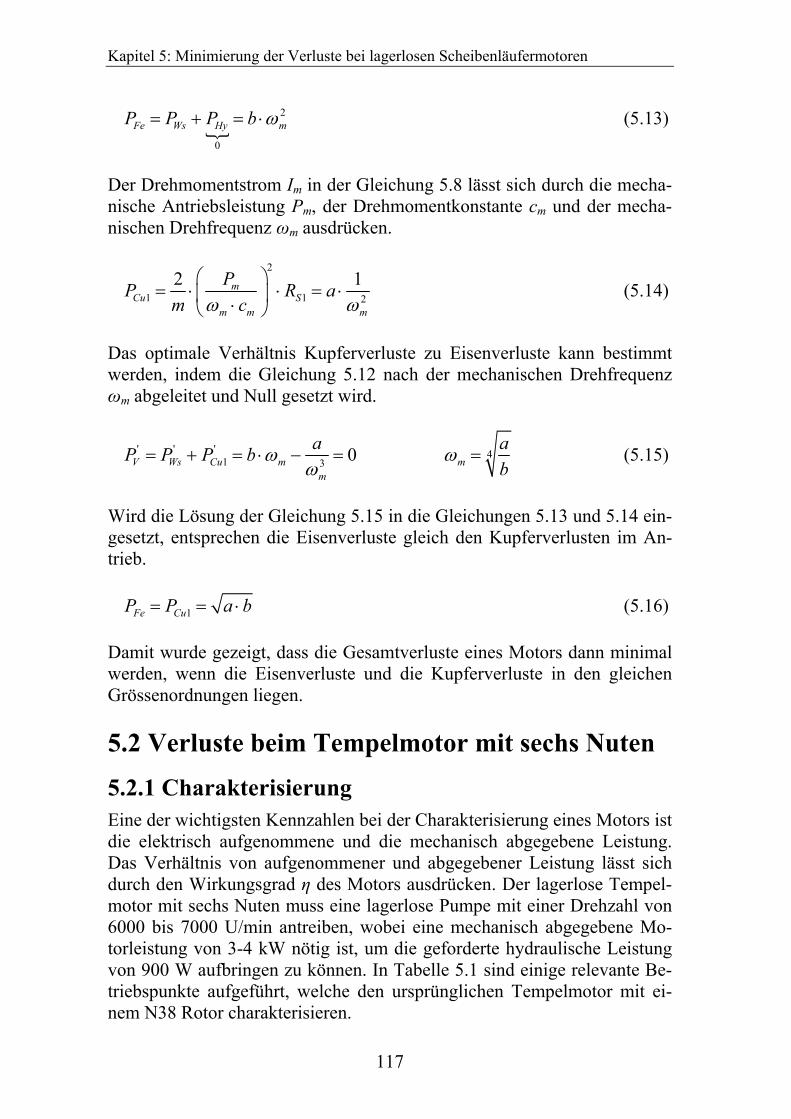
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
117
2
0
Fe Ws Hy mP P P b ω= + = ⋅ (5.13)
Der Drehmomentstrom Im in der Gleichung 5.8 lässt sich durch die mecha-nische Antriebsleistung Pm, der Drehmomentkonstante cm und der mecha-nischen Drehfrequenz ωm ausdrücken.
2
1 1 2
2 1mCu S
m m m
PP R am cω ω
⎛ ⎞= ⋅ ⋅ = ⋅⎜ ⎟⋅⎝ ⎠
(5.14)
Das optimale Verhältnis Kupferverluste zu Eisenverluste kann bestimmt werden, indem die Gleichung 5.12 nach der mechanischen Drehfrequenz ωm abgeleitet und Null gesetzt wird.
' ' '1 3 0V Ws Cu m
m
aP P P b ωω
= + = ⋅ − = 4m
ab
ω = (5.15)
Wird die Lösung der Gleichung 5.15 in die Gleichungen 5.13 und 5.14 ein-gesetzt, entsprechen die Eisenverluste gleich den Kupferverlusten im An-trieb. 1Fe CuP P a b= = ⋅ (5.16) Damit wurde gezeigt, dass die Gesamtverluste eines Motors dann minimal werden, wenn die Eisenverluste und die Kupferverluste in den gleichen Grössenordnungen liegen. 5.2 Verluste beim Tempelmotor mit sechs Nuten
5.2.1 Charakterisierung Eine der wichtigsten Kennzahlen bei der Charakterisierung eines Motors ist die elektrisch aufgenommene und die mechanisch abgegebene Leistung. Das Verhältnis von aufgenommener und abgegebener Leistung lässt sich durch den Wirkungsgrad η des Motors ausdrücken. Der lagerlose Tempel-motor mit sechs Nuten muss eine lagerlose Pumpe mit einer Drehzahl von 6000 bis 7000 U/min antreiben, wobei eine mechanisch abgegebene Mo-torleistung von 3-4 kW nötig ist, um die geforderte hydraulische Leistung von 900 W aufbringen zu können. In Tabelle 5.1 sind einige relevante Be-triebspunkte aufgeführt, welche den ursprünglichen Tempelmotor mit ei-nem N38 Rotor charakterisieren.
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
118
Drehzahl [U/min] Pe [W] PCu [W] PFe [W] η [%]
6500 3500 78.0 162 93.1
7000 3000 48.1 184 92.3
7000 3500 60.8 184 93.0
7000 4000 75.4 184 93.5
Tab. 5.1: Wirkungsgrad des Tempelmotors im Ausgangszustand bei
verschiedenen Betriebspunkten Aus Tabelle 5.1 wird ersichtlich, dass bei diesem Tempelmotor die Eisen-verluste zwei- bis dreimal so gross sind wie die Kupferverluste und etwa drei- bis viermal so gross wie gemäss Datenblätter der Blechhersteller zu erwarten wäre. Für den Betrieb bedeutet dies, dass eine Motorverlustleis-tung von insgesamt fast 260 W abgeführt werden muss. Da die Verlust-wärme des Motors über den Pumpenkopf aus Kunststoff schlecht abgeleitet werden kann, muss der grösste Teil der Motorverluste über das Motorge-häuse abgeführt werden. Dies erfordert wiederum entsprechende Kühl-massnahmen. Aus diesem Grund muss der Tempelmotor mit sechs Nuten, was die Höhe der Eisenverluste betrifft, optimiert werden. Der Eisenkreis wurde aus nicht kornorientiertem 0.5 mm Motorblech des Typs M330_50A nach DIN EN 10106 aufgebaut. In Tabelle 5.2 wurden die Materialkon-stanten cWs und cHy anhand von Messungen für den bestehenden Tempel-motor identifiziert.
Blechsorte [ ]Fed mm 1.6HymWc
T Hz kg⎡ ⎤⎢ ⎥⋅ ⋅⎣ ⎦
2
Wsmc
kg⎡ ⎤⎢ ⎥Ω ⋅⎣ ⎦
M330_50A 0.5 22.89 5923
Tab. 5.2: Identifizierte Materialkonstanten des Tempelmotors mit sechs
Nuten im Ausgangszustand 5.2.2 Ursachen In Abbildung 5.3 ist ein Schnittbild des Tempelmotors abgebildet. Die Problemzonen, in welchen erhöhte Eisenverluste auftreten, sind im Schnitt-bild eingekreist.
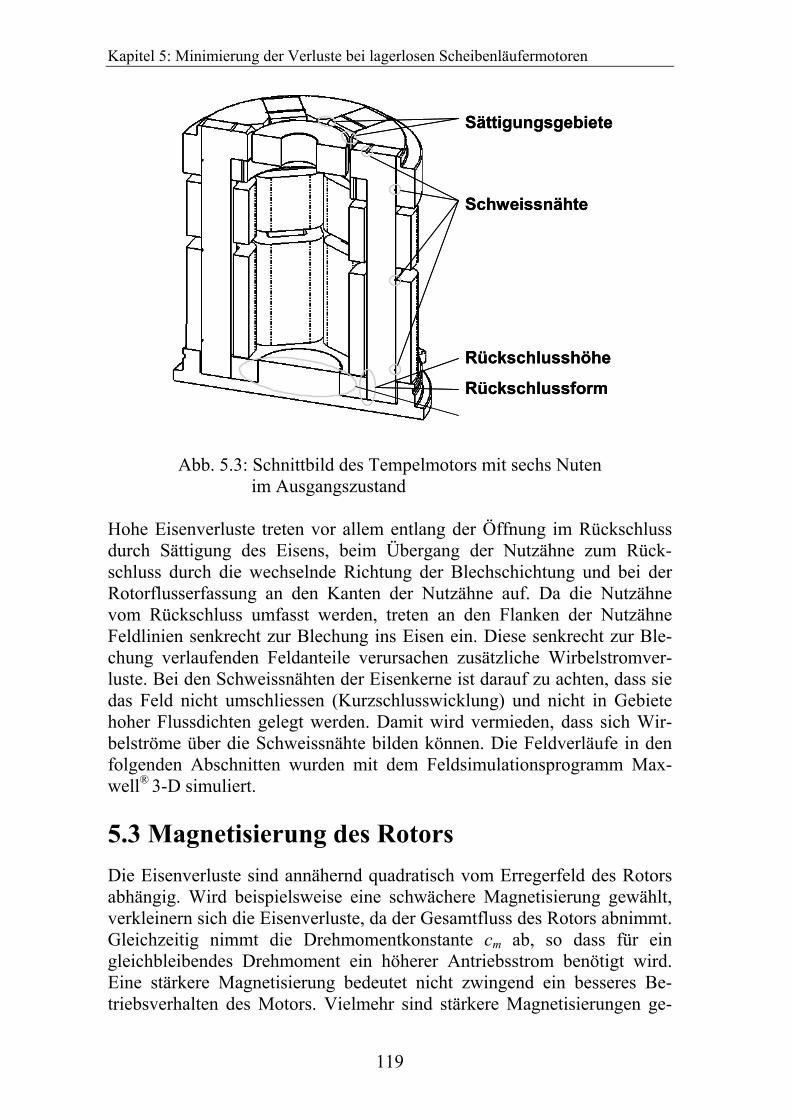
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
119
Schweissnähte
Rückschlussform
Sättigungsgebiete
Rückschlusshöhe
Schweissnähte
Rückschlussform
Sättigungsgebiete
Rückschlusshöhe
Abb. 5.3: Schnittbild des Tempelmotors mit sechs Nuten im Ausgangszustand
Hohe Eisenverluste treten vor allem entlang der Öffnung im Rückschluss durch Sättigung des Eisens, beim Übergang der Nutzähne zum Rück-schluss durch die wechselnde Richtung der Blechschichtung und bei der Rotorflusserfassung an den Kanten der Nutzähne auf. Da die Nutzähne vom Rückschluss umfasst werden, treten an den Flanken der Nutzähne Feldlinien senkrecht zur Blechung ins Eisen ein. Diese senkrecht zur Ble-chung verlaufenden Feldanteile verursachen zusätzliche Wirbelstromver-luste. Bei den Schweissnähten der Eisenkerne ist darauf zu achten, dass sie das Feld nicht umschliessen (Kurzschlusswicklung) und nicht in Gebiete hoher Flussdichten gelegt werden. Damit wird vermieden, dass sich Wir-belströme über die Schweissnähte bilden können. Die Feldverläufe in den folgenden Abschnitten wurden mit dem Feldsimulationsprogramm Max-well® 3-D simuliert. 5.3 Magnetisierung des Rotors Die Eisenverluste sind annähernd quadratisch vom Erregerfeld des Rotors abhängig. Wird beispielsweise eine schwächere Magnetisierung gewählt, verkleinern sich die Eisenverluste, da der Gesamtfluss des Rotors abnimmt. Gleichzeitig nimmt die Drehmomentkonstante cm ab, so dass für ein gleichbleibendes Drehmoment ein höherer Antriebsstrom benötigt wird. Eine stärkere Magnetisierung bedeutet nicht zwingend ein besseres Be-triebsverhalten des Motors. Vielmehr sind stärkere Magnetisierungen ge-
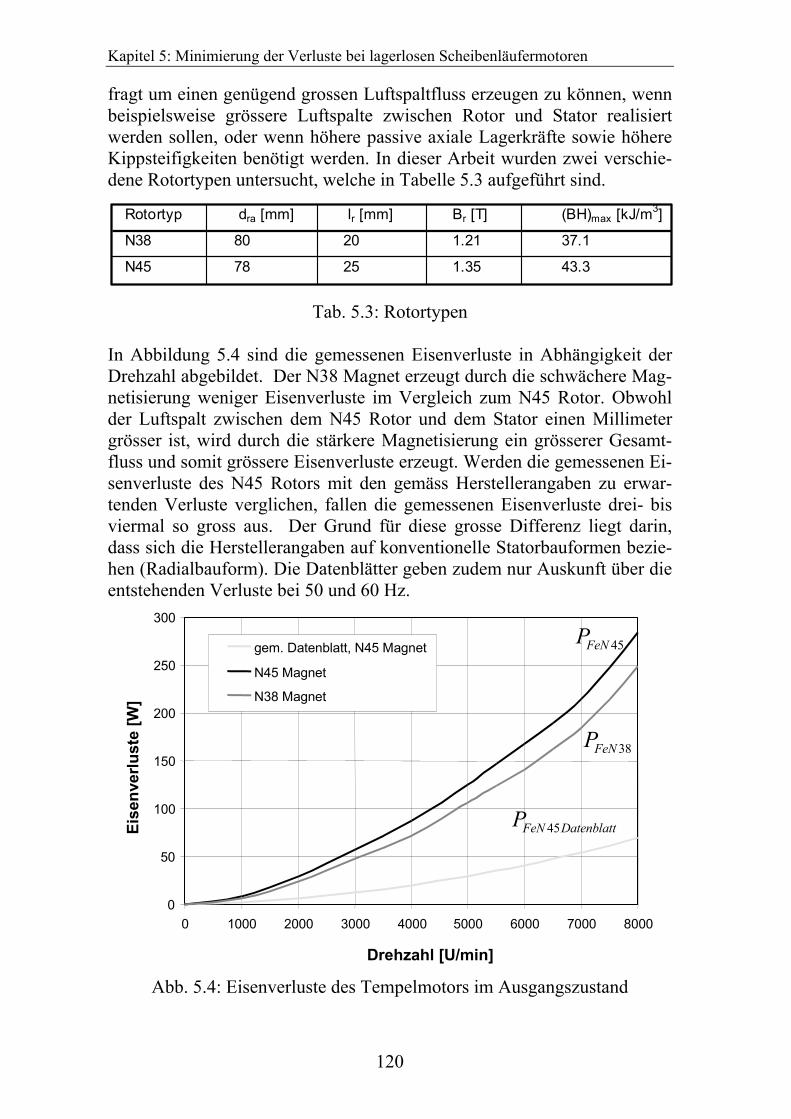
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
120
fragt um einen genügend grossen Luftspaltfluss erzeugen zu können, wenn beispielsweise grössere Luftspalte zwischen Rotor und Stator realisiert werden sollen, oder wenn höhere passive axiale Lagerkräfte sowie höhere Kippsteifigkeiten benötigt werden. In dieser Arbeit wurden zwei verschie-dene Rotortypen untersucht, welche in Tabelle 5.3 aufgeführt sind.
Rotortyp dra [mm] lr [mm] Br [T] (BH)max [kJ/m3]
N38 80 20 1.21 37.1
N45 78 25 1.35 43.3
Tab. 5.3: Rotortypen
In Abbildung 5.4 sind die gemessenen Eisenverluste in Abhängigkeit der Drehzahl abgebildet. Der N38 Magnet erzeugt durch die schwächere Mag-netisierung weniger Eisenverluste im Vergleich zum N45 Rotor. Obwohl der Luftspalt zwischen dem N45 Rotor und dem Stator einen Millimeter grösser ist, wird durch die stärkere Magnetisierung ein grösserer Gesamt-fluss und somit grössere Eisenverluste erzeugt. Werden die gemessenen Ei-senverluste des N45 Rotors mit den gemäss Herstellerangaben zu erwar-tenden Verluste verglichen, fallen die gemessenen Eisenverluste drei- bis viermal so gross aus. Der Grund für diese grosse Differenz liegt darin, dass sich die Herstellerangaben auf konventionelle Statorbauformen bezie-hen (Radialbauform). Die Datenblätter geben zudem nur Auskunft über die entstehenden Verluste bei 50 und 60 Hz.
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000 6000 7000 8000Drehzahl [rpm]
Eise
nver
lust
e[W
]
gem. Datenblatt, N45 Magnet
N45 Magnet
N38 Magnet
Drehzahl [U/min]
Eise
nver
lust
e [W
]
45FeN DatenblattP
38FeNP
45FeNP
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000 6000 7000 8000Drehzahl [rpm]
Eise
nver
lust
e[W
]
gem. Datenblatt, N45 Magnet
N45 Magnet
N38 Magnet
Drehzahl [U/min]
Eise
nver
lust
e [W
]
45FeN DatenblattP
38FeNP
45FeNP
Abb. 5.4: Eisenverluste des Tempelmotors im Ausgangszustand
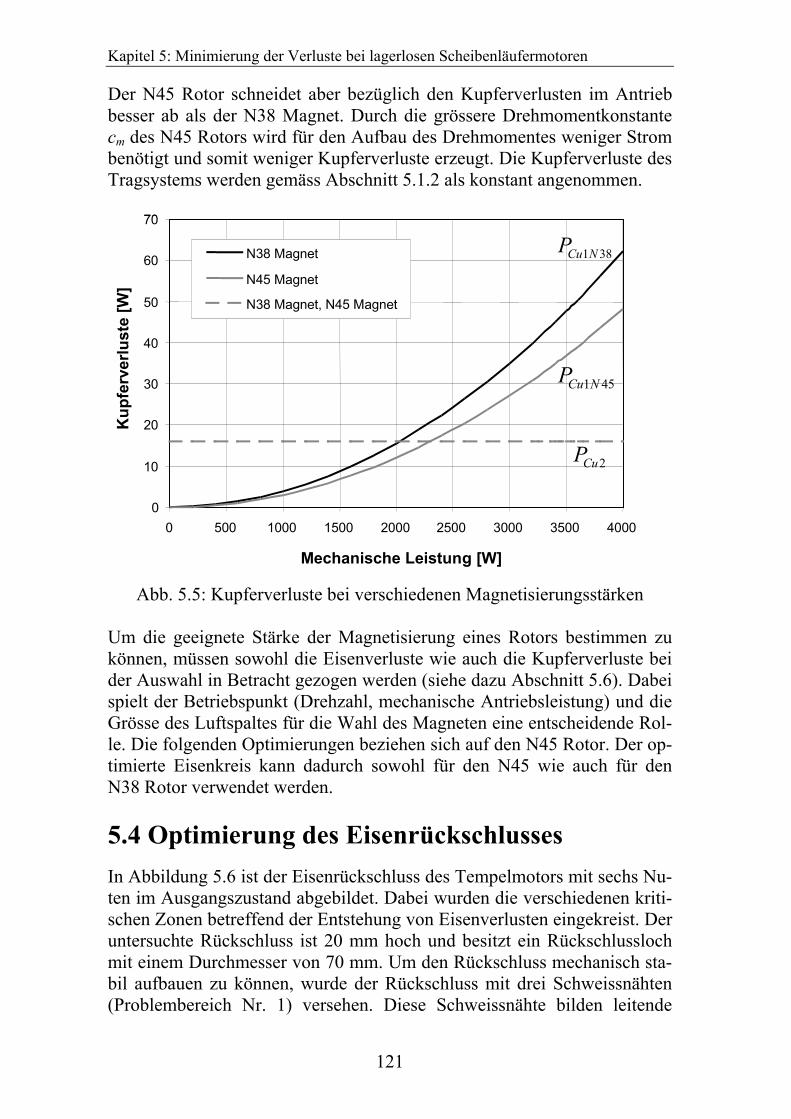
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
121
Der N45 Rotor schneidet aber bezüglich den Kupferverlusten im Antrieb besser ab als der N38 Magnet. Durch die grössere Drehmomentkonstante cm des N45 Rotors wird für den Aufbau des Drehmomentes weniger Strom benötigt und somit weniger Kupferverluste erzeugt. Die Kupferverluste des Tragsystems werden gemäss Abschnitt 5.1.2 als konstant angenommen.
0
10
20
30
40
50
60
70
0 500 1000 1500 2000 2500 3000 3500 4000
mechanische Leistung [W]
Kup
ferv
erlu
ste
[W]
N38 Magnet
N45 Magnet
N38 Magnet, N45 Magnet
Mechanische Leistung [W]
Kup
ferv
erlu
ste
[W]
1 38Cu NP
1 45Cu NP
2CuP
0
10
20
30
40
50
60
70
0 500 1000 1500 2000 2500 3000 3500 4000
mechanische Leistung [W]
Kup
ferv
erlu
ste
[W]
N38 Magnet
N45 Magnet
N38 Magnet, N45 Magnet
Mechanische Leistung [W]
Kup
ferv
erlu
ste
[W]
1 38Cu NP
1 45Cu NP
2CuP
Abb. 5.5: Kupferverluste bei verschiedenen Magnetisierungsstärken
Um die geeignete Stärke der Magnetisierung eines Rotors bestimmen zu können, müssen sowohl die Eisenverluste wie auch die Kupferverluste bei der Auswahl in Betracht gezogen werden (siehe dazu Abschnitt 5.6). Dabei spielt der Betriebspunkt (Drehzahl, mechanische Antriebsleistung) und die Grösse des Luftspaltes für die Wahl des Magneten eine entscheidende Rol-le. Die folgenden Optimierungen beziehen sich auf den N45 Rotor. Der op-timierte Eisenkreis kann dadurch sowohl für den N45 wie auch für den N38 Rotor verwendet werden. 5.4 Optimierung des Eisenrückschlusses In Abbildung 5.6 ist der Eisenrückschluss des Tempelmotors mit sechs Nu-ten im Ausgangszustand abgebildet. Dabei wurden die verschiedenen kriti-schen Zonen betreffend der Entstehung von Eisenverlusten eingekreist. Der untersuchte Rückschluss ist 20 mm hoch und besitzt ein Rückschlussloch mit einem Durchmesser von 70 mm. Um den Rückschluss mechanisch sta-bil aufbauen zu können, wurde der Rückschluss mit drei Schweissnähten (Problembereich Nr. 1) versehen. Diese Schweissnähte bilden leitende
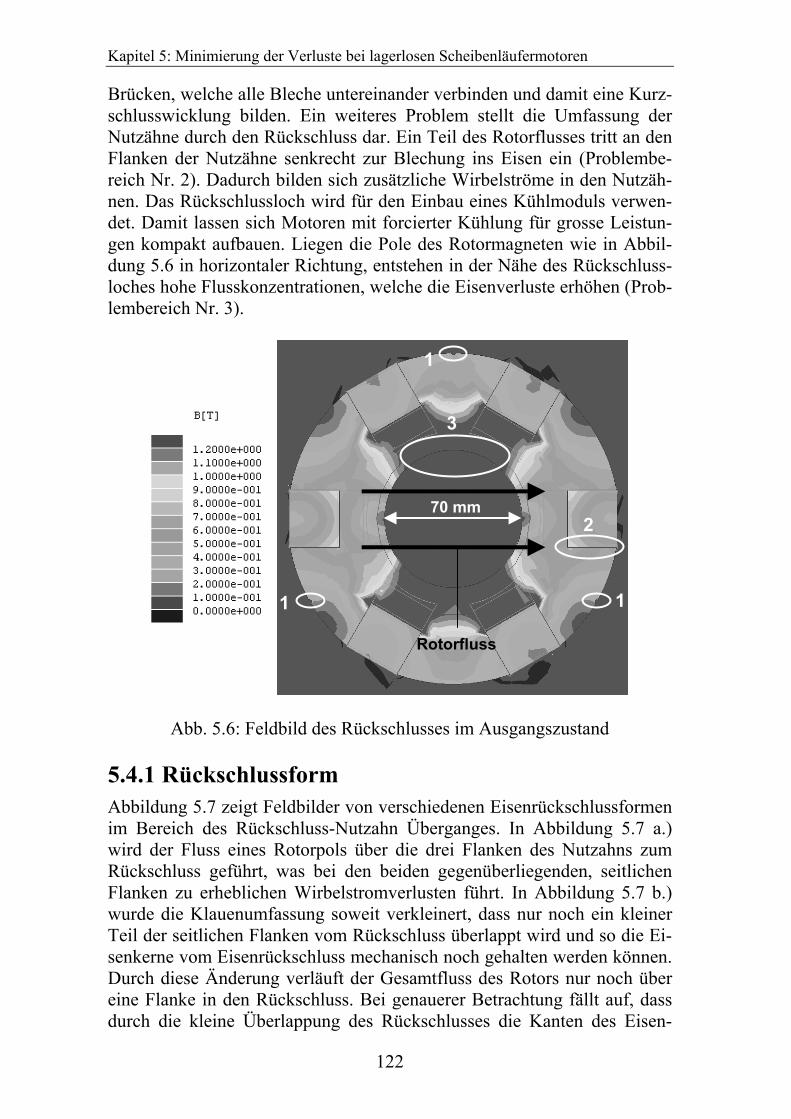
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
122
Brücken, welche alle Bleche untereinander verbinden und damit eine Kurz-schlusswicklung bilden. Ein weiteres Problem stellt die Umfassung der Nutzähne durch den Rückschluss dar. Ein Teil des Rotorflusses tritt an den Flanken der Nutzähne senkrecht zur Blechung ins Eisen ein (Problembe-reich Nr. 2). Dadurch bilden sich zusätzliche Wirbelströme in den Nutzäh-nen. Das Rückschlussloch wird für den Einbau eines Kühlmoduls verwen-det. Damit lassen sich Motoren mit forcierter Kühlung für grosse Leistun-gen kompakt aufbauen. Liegen die Pole des Rotormagneten wie in Abbil-dung 5.6 in horizontaler Richtung, entstehen in der Nähe des Rückschluss-loches hohe Flusskonzentrationen, welche die Eisenverluste erhöhen (Prob-lembereich Nr. 3).
11
1
2
3
11
1
2
3
70 mm
Rotorfluss
11
1
2
3
11
1
2
3
70 mm
Rotorfluss
Abb. 5.6: Feldbild des Rückschlusses im Ausgangszustand
5.4.1 Rückschlussform Abbildung 5.7 zeigt Feldbilder von verschiedenen Eisenrückschlussformen im Bereich des Rückschluss-Nutzahn Überganges. In Abbildung 5.7 a.) wird der Fluss eines Rotorpols über die drei Flanken des Nutzahns zum Rückschluss geführt, was bei den beiden gegenüberliegenden, seitlichen Flanken zu erheblichen Wirbelstromverlusten führt. In Abbildung 5.7 b.) wurde die Klauenumfassung soweit verkleinert, dass nur noch ein kleiner Teil der seitlichen Flanken vom Rückschluss überlappt wird und so die Ei-senkerne vom Eisenrückschluss mechanisch noch gehalten werden können. Durch diese Änderung verläuft der Gesamtfluss des Rotors nur noch über eine Flanke in den Rückschluss. Bei genauerer Betrachtung fällt auf, dass durch die kleine Überlappung des Rückschlusses die Kanten des Eisen-
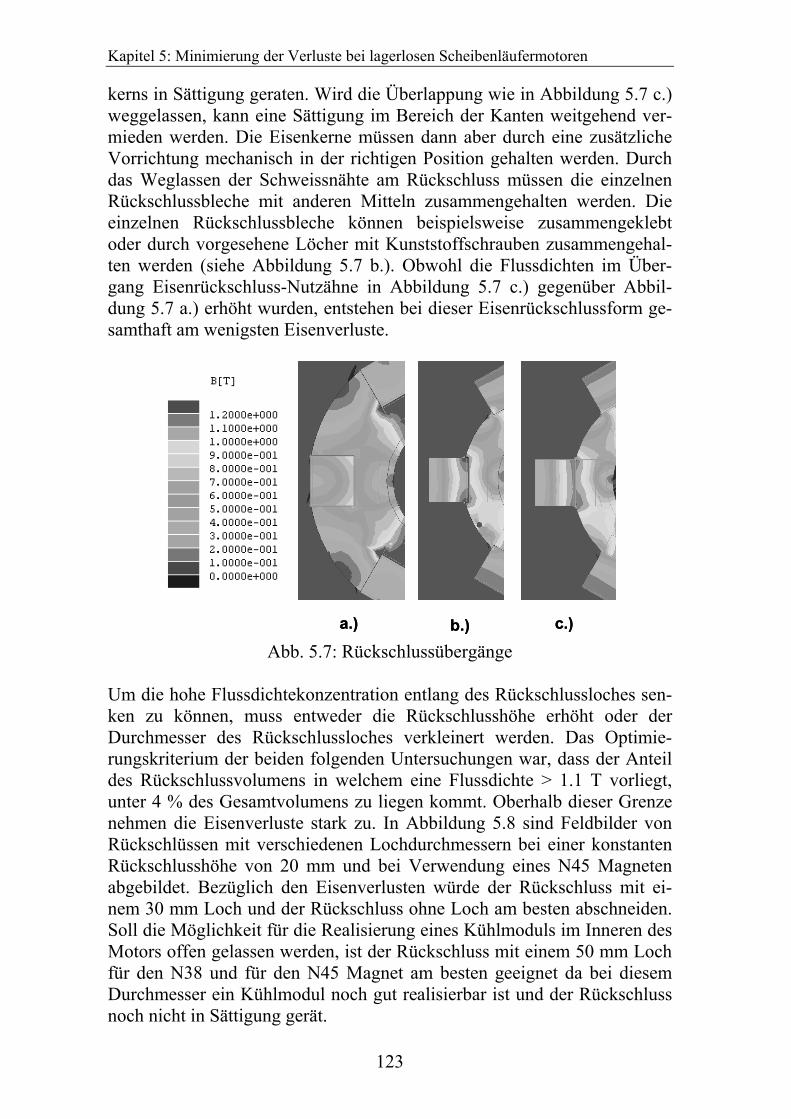
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
123
kerns in Sättigung geraten. Wird die Überlappung wie in Abbildung 5.7 c.) weggelassen, kann eine Sättigung im Bereich der Kanten weitgehend ver-mieden werden. Die Eisenkerne müssen dann aber durch eine zusätzliche Vorrichtung mechanisch in der richtigen Position gehalten werden. Durch das Weglassen der Schweissnähte am Rückschluss müssen die einzelnen Rückschlussbleche mit anderen Mitteln zusammengehalten werden. Die einzelnen Rückschlussbleche können beispielsweise zusammengeklebt oder durch vorgesehene Löcher mit Kunststoffschrauben zusammengehal-ten werden (siehe Abbildung 5.7 b.). Obwohl die Flussdichten im Über-gang Eisenrückschluss-Nutzähne in Abbildung 5.7 c.) gegenüber Abbil-dung 5.7 a.) erhöht wurden, entstehen bei dieser Eisenrückschlussform ge-samthaft am wenigsten Eisenverluste.
c.)b.)a.) c.)b.)a.) Abb. 5.7: Rückschlussübergänge
Um die hohe Flussdichtekonzentration entlang des Rückschlussloches sen-ken zu können, muss entweder die Rückschlusshöhe erhöht oder der Durchmesser des Rückschlussloches verkleinert werden. Das Optimie-rungskriterium der beiden folgenden Untersuchungen war, dass der Anteil des Rückschlussvolumens in welchem eine Flussdichte > 1.1 T vorliegt, unter 4 % des Gesamtvolumens zu liegen kommt. Oberhalb dieser Grenze nehmen die Eisenverluste stark zu. In Abbildung 5.8 sind Feldbilder von Rückschlüssen mit verschiedenen Lochdurchmessern bei einer konstanten Rückschlusshöhe von 20 mm und bei Verwendung eines N45 Magneten abgebildet. Bezüglich den Eisenverlusten würde der Rückschluss mit ei-nem 30 mm Loch und der Rückschluss ohne Loch am besten abschneiden. Soll die Möglichkeit für die Realisierung eines Kühlmoduls im Inneren des Motors offen gelassen werden, ist der Rückschluss mit einem 50 mm Loch für den N38 und für den N45 Magnet am besten geeignet da bei diesem Durchmesser ein Kühlmodul noch gut realisierbar ist und der Rückschluss noch nicht in Sättigung gerät.
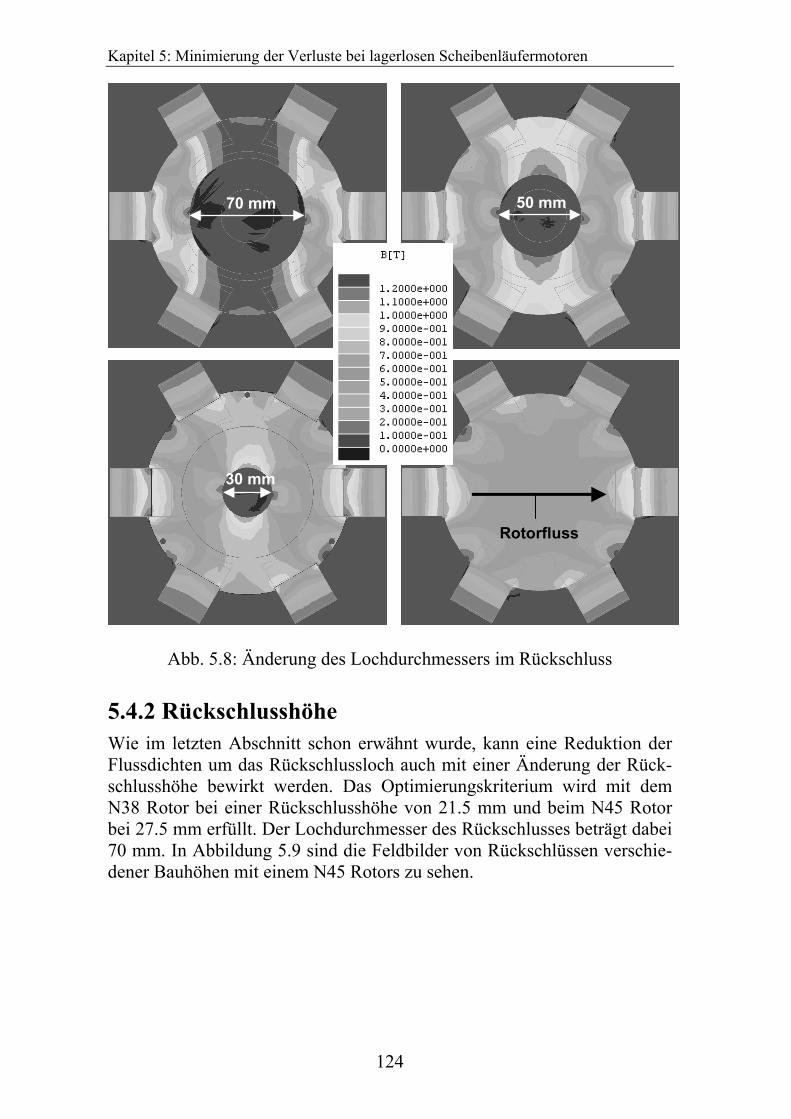
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
124
70 mm 50 mm
30 mm
Rotorfluss
70 mm 50 mm
30 mm
Rotorfluss
Abb. 5.8: Änderung des Lochdurchmessers im Rückschluss 5.4.2 Rückschlusshöhe Wie im letzten Abschnitt schon erwähnt wurde, kann eine Reduktion der Flussdichten um das Rückschlussloch auch mit einer Änderung der Rück-schlusshöhe bewirkt werden. Das Optimierungskriterium wird mit dem N38 Rotor bei einer Rückschlusshöhe von 21.5 mm und beim N45 Rotor bei 27.5 mm erfüllt. Der Lochdurchmesser des Rückschlusses beträgt dabei 70 mm. In Abbildung 5.9 sind die Feldbilder von Rückschlüssen verschie-dener Bauhöhen mit einem N45 Rotors zu sehen.
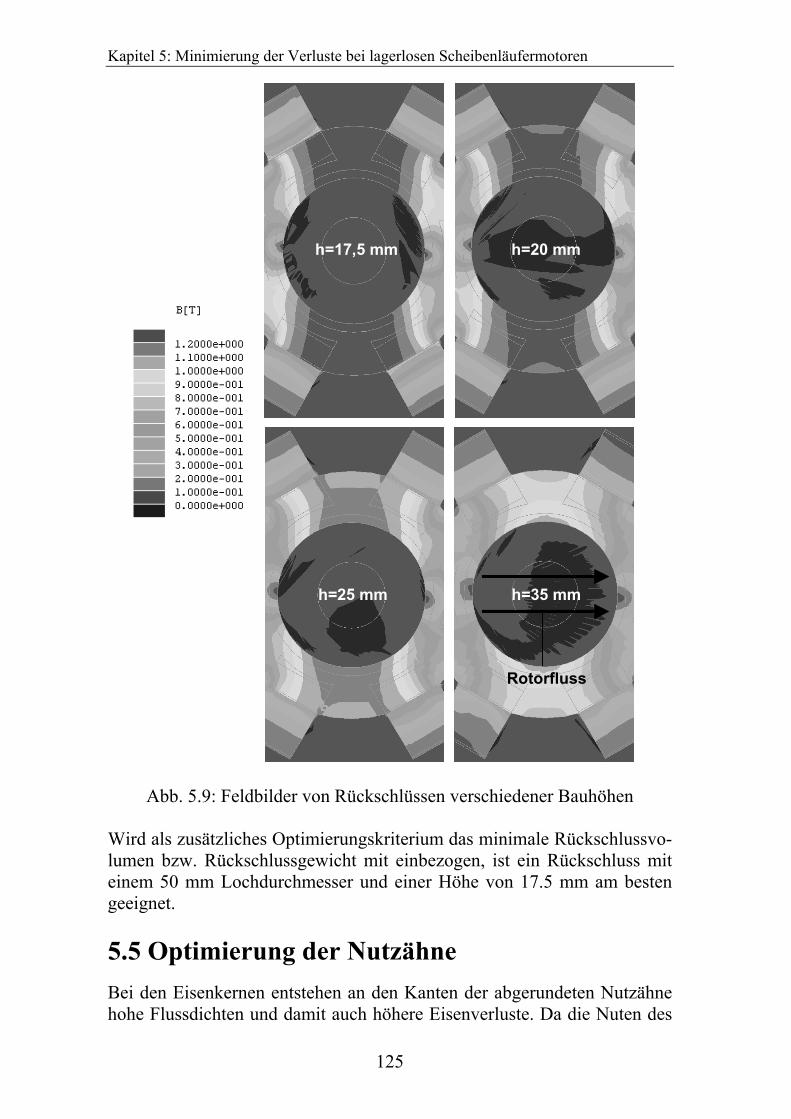
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
125
h=17,5 mm
h=35 mmh=25 mm
h=20 mm
Rotorfluss
h=17,5 mm
h=35 mmh=25 mm
h=20 mm
Rotorfluss
Abb. 5.9: Feldbilder von Rückschlüssen verschiedener Bauhöhen
Wird als zusätzliches Optimierungskriterium das minimale Rückschlussvo-lumen bzw. Rückschlussgewicht mit einbezogen, ist ein Rückschluss mit einem 50 mm Lochdurchmesser und einer Höhe von 17.5 mm am besten geeignet. 5.5 Optimierung der Nutzähne Bei den Eisenkernen entstehen an den Kanten der abgerundeten Nutzähne hohe Flussdichten und damit auch höhere Eisenverluste. Da die Nuten des
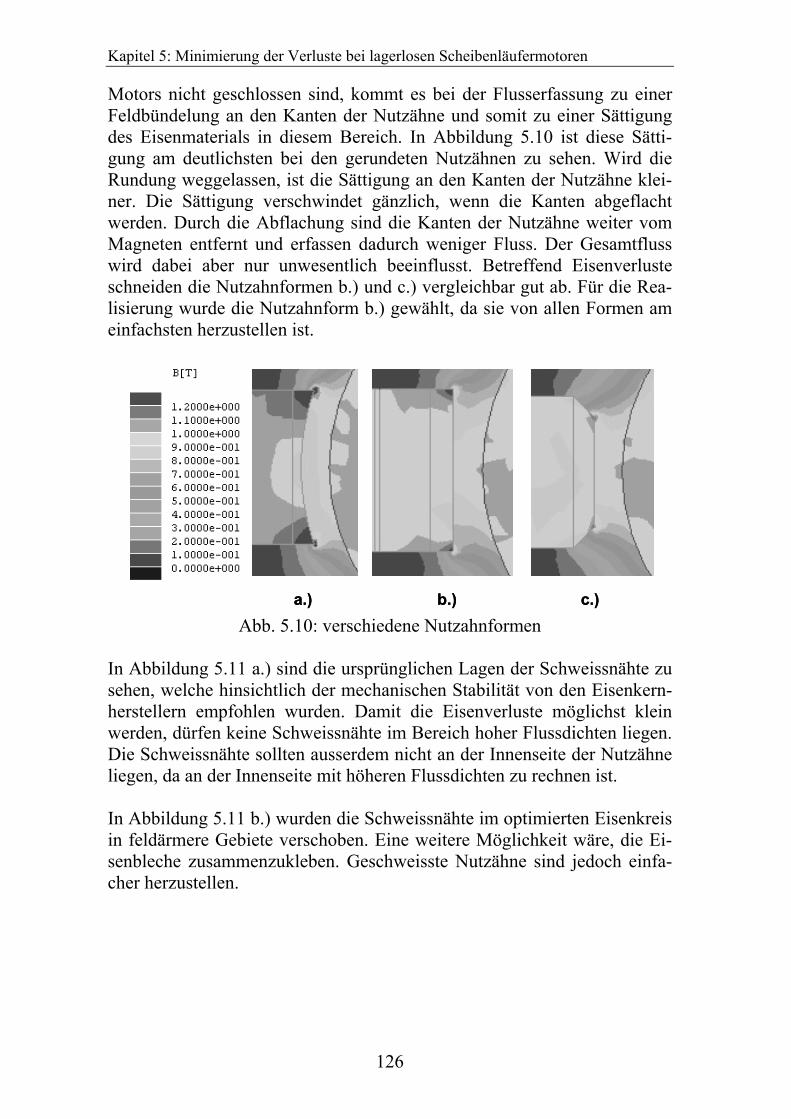
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
126
Motors nicht geschlossen sind, kommt es bei der Flusserfassung zu einer Feldbündelung an den Kanten der Nutzähne und somit zu einer Sättigung des Eisenmaterials in diesem Bereich. In Abbildung 5.10 ist diese Sätti-gung am deutlichsten bei den gerundeten Nutzähnen zu sehen. Wird die Rundung weggelassen, ist die Sättigung an den Kanten der Nutzähne klei-ner. Die Sättigung verschwindet gänzlich, wenn die Kanten abgeflacht werden. Durch die Abflachung sind die Kanten der Nutzähne weiter vom Magneten entfernt und erfassen dadurch weniger Fluss. Der Gesamtfluss wird dabei aber nur unwesentlich beeinflusst. Betreffend Eisenverluste schneiden die Nutzahnformen b.) und c.) vergleichbar gut ab. Für die Rea-lisierung wurde die Nutzahnform b.) gewählt, da sie von allen Formen am einfachsten herzustellen ist.
a.) b.) c.)a.) b.) c.) Abb. 5.10: verschiedene Nutzahnformen
In Abbildung 5.11 a.) sind die ursprünglichen Lagen der Schweissnähte zu sehen, welche hinsichtlich der mechanischen Stabilität von den Eisenkern-herstellern empfohlen wurden. Damit die Eisenverluste möglichst klein werden, dürfen keine Schweissnähte im Bereich hoher Flussdichten liegen. Die Schweissnähte sollten ausserdem nicht an der Innenseite der Nutzähne liegen, da an der Innenseite mit höheren Flussdichten zu rechnen ist. In Abbildung 5.11 b.) wurden die Schweissnähte im optimierten Eisenkreis in feldärmere Gebiete verschoben. Eine weitere Möglichkeit wäre, die Ei-senbleche zusammenzukleben. Geschweisste Nutzähne sind jedoch einfa-cher herzustellen.
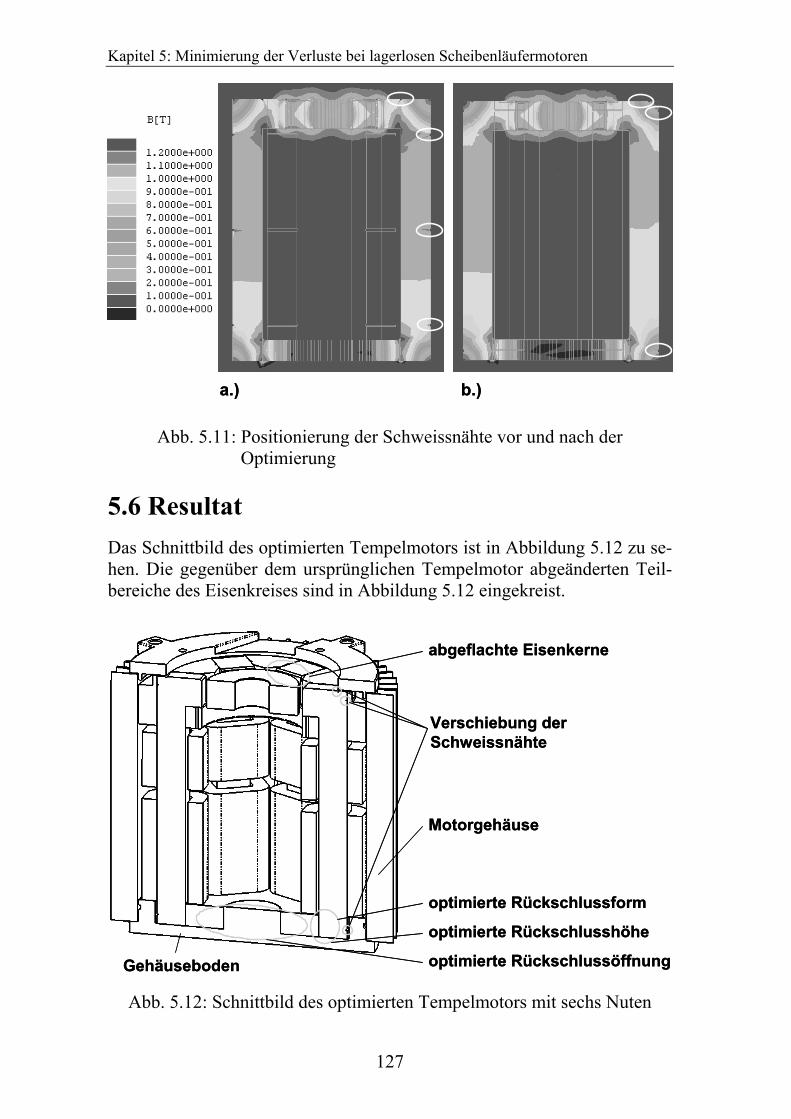
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
127
a.) b.)a.) b.)
Abb. 5.11: Positionierung der Schweissnähte vor und nach der Optimierung 5.6 Resultat Das Schnittbild des optimierten Tempelmotors ist in Abbildung 5.12 zu se-hen. Die gegenüber dem ursprünglichen Tempelmotor abgeänderten Teil-bereiche des Eisenkreises sind in Abbildung 5.12 eingekreist.
optimierte Rückschlussöffnung
Verschiebung der Schweissnähte
optimierte Rückschlussform
abgeflachte Eisenkerne
optimierte Rückschlusshöhe
Motorgehäuse
Gehäuseboden optimierte Rückschlussöffnung
Verschiebung der Schweissnähte
optimierte Rückschlussform
abgeflachte Eisenkerne
optimierte Rückschlusshöhe
Motorgehäuse
Gehäuseboden
Abb. 5.12: Schnittbild des optimierten Tempelmotors mit sechs Nuten
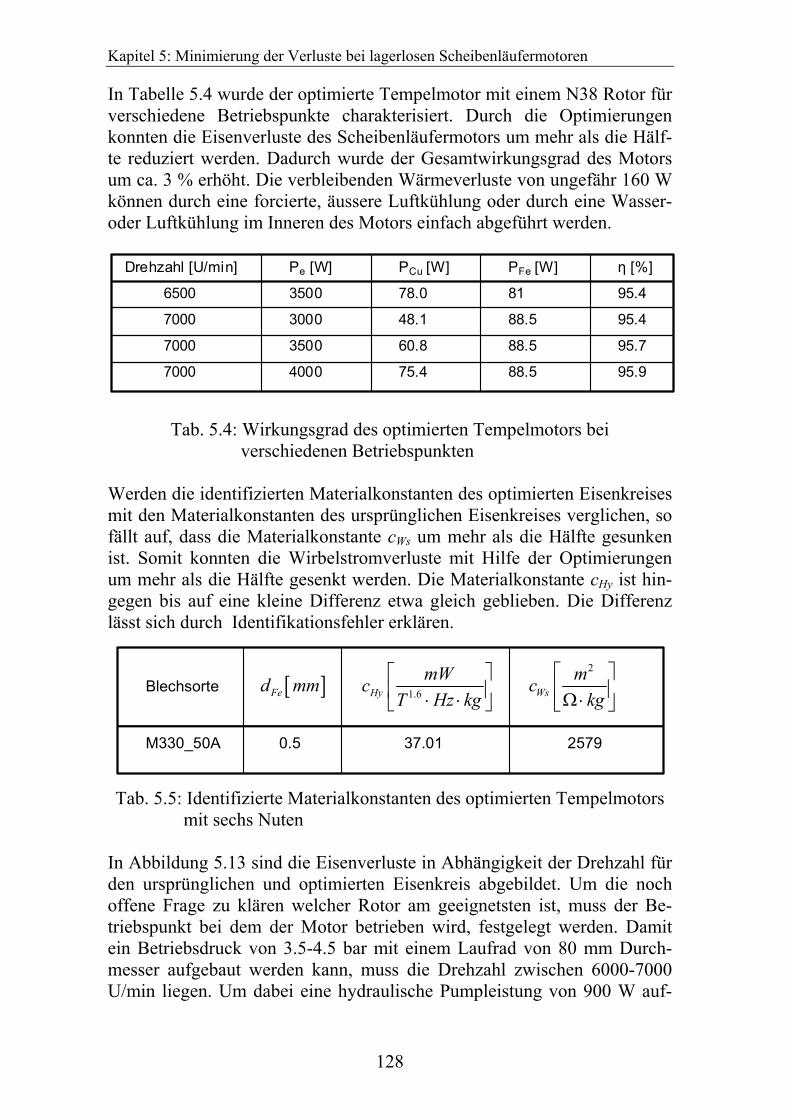
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
128
In Tabelle 5.4 wurde der optimierte Tempelmotor mit einem N38 Rotor für verschiedene Betriebspunkte charakterisiert. Durch die Optimierungen konnten die Eisenverluste des Scheibenläufermotors um mehr als die Hälf-te reduziert werden. Dadurch wurde der Gesamtwirkungsgrad des Motors um ca. 3 % erhöht. Die verbleibenden Wärmeverluste von ungefähr 160 W können durch eine forcierte, äussere Luftkühlung oder durch eine Wasser- oder Luftkühlung im Inneren des Motors einfach abgeführt werden.
Drehzahl [U/min] Pe [W] PCu [W] PFe [W] η [%]
6500 3500 78.0 81 95.4
7000 3000 48.1 88.5 95.4
7000 3500 60.8 88.5 95.7
7000 4000 75.4 88.5 95.9
Tab. 5.4: Wirkungsgrad des optimierten Tempelmotors bei
verschiedenen Betriebspunkten
Werden die identifizierten Materialkonstanten des optimierten Eisenkreises mit den Materialkonstanten des ursprünglichen Eisenkreises verglichen, so fällt auf, dass die Materialkonstante cWs um mehr als die Hälfte gesunken ist. Somit konnten die Wirbelstromverluste mit Hilfe der Optimierungen um mehr als die Hälfte gesenkt werden. Die Materialkonstante cHy ist hin-gegen bis auf eine kleine Differenz etwa gleich geblieben. Die Differenz lässt sich durch Identifikationsfehler erklären.
Blechsorte [ ]Fed mm 1.6HymWc
T Hz kg⎡ ⎤⎢ ⎥⋅ ⋅⎣ ⎦
2
Wsmc
kg⎡ ⎤⎢ ⎥Ω ⋅⎣ ⎦
M330_50A 0.5 37.01 2579
Tab. 5.5: Identifizierte Materialkonstanten des optimierten Tempelmotors
mit sechs Nuten
In Abbildung 5.13 sind die Eisenverluste in Abhängigkeit der Drehzahl für den ursprünglichen und optimierten Eisenkreis abgebildet. Um die noch offene Frage zu klären welcher Rotor am geeignetsten ist, muss der Be-triebspunkt bei dem der Motor betrieben wird, festgelegt werden. Damit ein Betriebsdruck von 3.5-4.5 bar mit einem Laufrad von 80 mm Durch-messer aufgebaut werden kann, muss die Drehzahl zwischen 6000-7000 U/min liegen. Um dabei eine hydraulische Pumpleistung von 900 W auf-
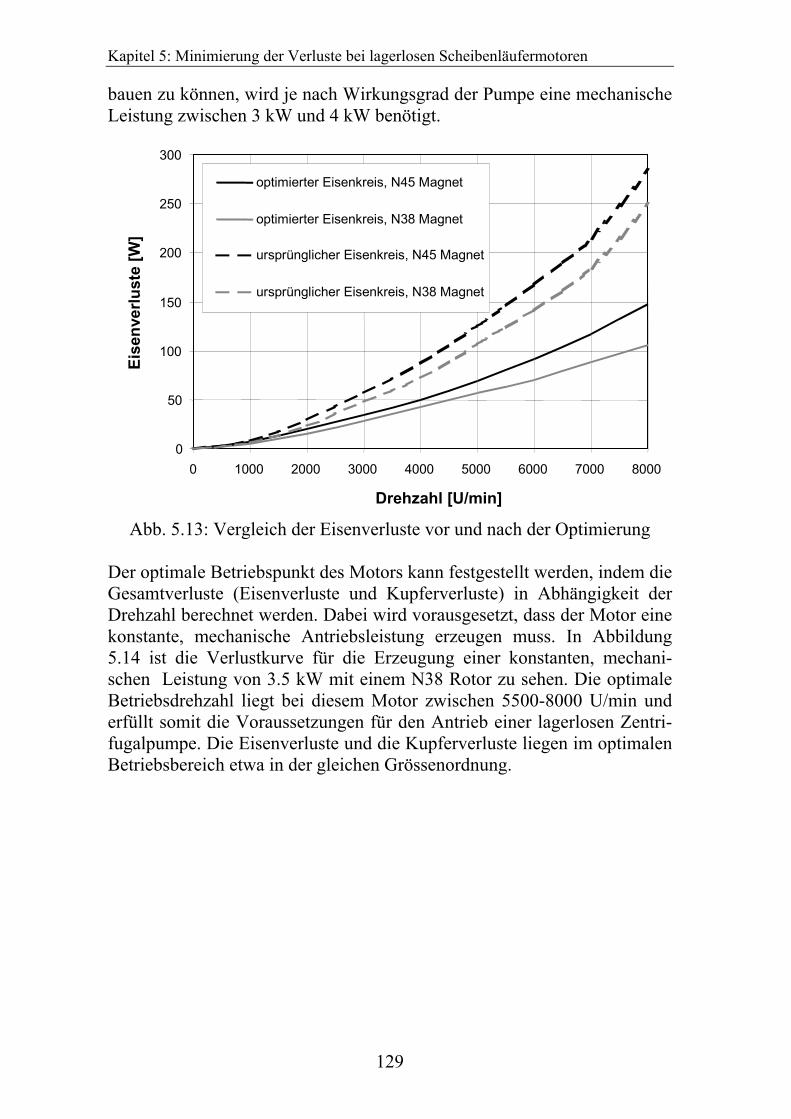
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
129
bauen zu können, wird je nach Wirkungsgrad der Pumpe eine mechanische Leistung zwischen 3 kW und 4 kW benötigt.
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000 6000 7000 8000
Drehzahl [rpm]
Eise
nver
lust
e[W
]
optimierter Eisenkreis, N45 Magnet
optimierter Eisenkreis, N38 Magnet
ursprünglicher Eisenkreis, N45 Magnet
ursprünglicher Eisenkreis, N38 Magnet
Drehzahl [U/min]
Eise
nver
lust
e [W
]
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000 6000 7000 8000
Drehzahl [rpm]
Eise
nver
lust
e[W
]
optimierter Eisenkreis, N45 Magnet
optimierter Eisenkreis, N38 Magnet
ursprünglicher Eisenkreis, N45 Magnet
ursprünglicher Eisenkreis, N38 Magnet
Drehzahl [U/min]
Eise
nver
lust
e [W
]
Abb. 5.13: Vergleich der Eisenverluste vor und nach der Optimierung
Der optimale Betriebspunkt des Motors kann festgestellt werden, indem die Gesamtverluste (Eisenverluste und Kupferverluste) in Abhängigkeit der Drehzahl berechnet werden. Dabei wird vorausgesetzt, dass der Motor eine konstante, mechanische Antriebsleistung erzeugen muss. In Abbildung 5.14 ist die Verlustkurve für die Erzeugung einer konstanten, mechani-schen Leistung von 3.5 kW mit einem N38 Rotor zu sehen. Die optimale Betriebsdrehzahl liegt bei diesem Motor zwischen 5500-8000 U/min und erfüllt somit die Voraussetzungen für den Antrieb einer lagerlosen Zentri-fugalpumpe. Die Eisenverluste und die Kupferverluste liegen im optimalen Betriebsbereich etwa in der gleichen Grössenordnung.
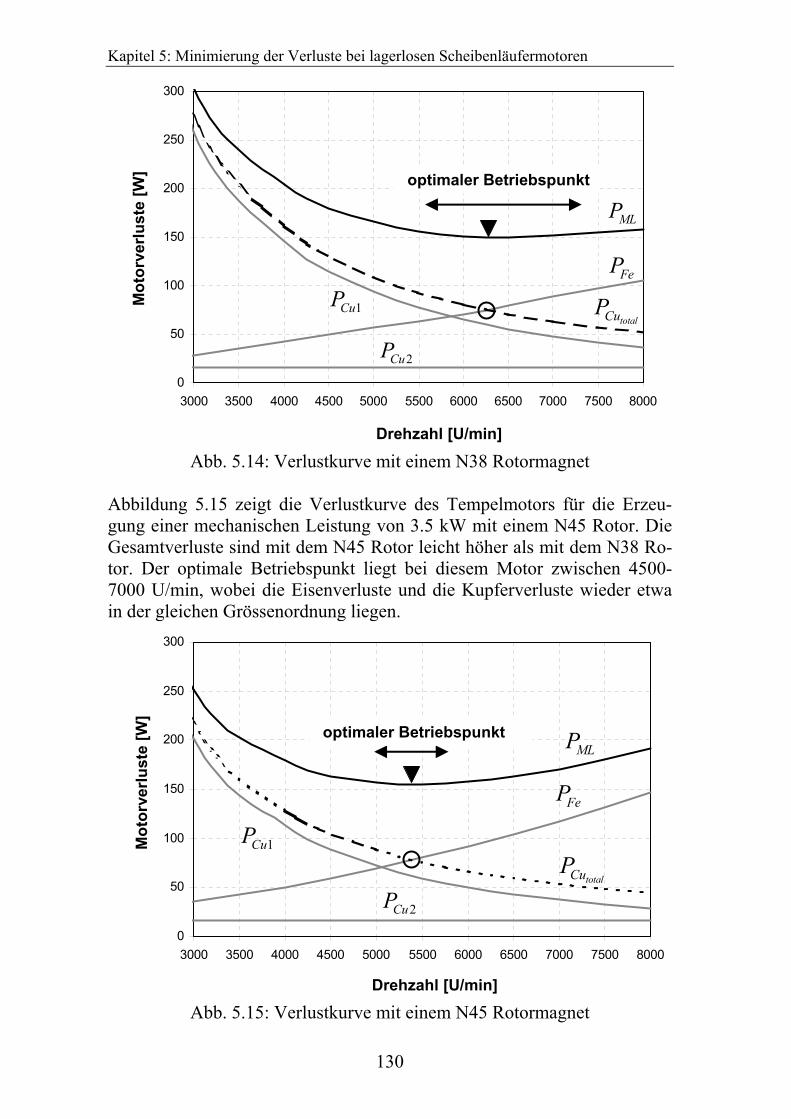
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
130
0
50
100
150
200
250
300
3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000
Drehzahl [rpm]
N 3
8 M
otor
ve
Drehzahl [U/min]
Mot
orve
rlust
e [W
]
MLP
FeP
1CuP
2CuP
optimaler Betriebspunkt
totalCuP
0
50
100
150
200
250
300
3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000
Drehzahl [rpm]
N 3
8 M
otor
ve
Drehzahl [U/min]
Mot
orve
rlust
e [W
]
MLP
FeP
1CuP
2CuP
optimaler Betriebspunkt
totalCuP
Abb. 5.14: Verlustkurve mit einem N38 Rotormagnet
Abbildung 5.15 zeigt die Verlustkurve des Tempelmotors für die Erzeu-gung einer mechanischen Leistung von 3.5 kW mit einem N45 Rotor. Die Gesamtverluste sind mit dem N45 Rotor leicht höher als mit dem N38 Ro-tor. Der optimale Betriebspunkt liegt bei diesem Motor zwischen 4500-7000 U/min, wobei die Eisenverluste und die Kupferverluste wieder etwa in der gleichen Grössenordnung liegen.
0
50
100
150
200
250
300
3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000
Drehzahl [rpm]
N 4
5 Ve
Drehzahl [U/min]
Mot
orve
rlust
e [W
]
optimaler BetriebspunktMLP
FeP
1CuP
2CuPtotalCuP
0
50
100
150
200
250
300
3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 8000
Drehzahl [rpm]
N 4
5 Ve
Drehzahl [U/min]
Mot
orve
rlust
e [W
]
optimaler BetriebspunktMLP
FeP
1CuP
2CuPtotalCuP
Abb. 5.15: Verlustkurve mit einem N45 Rotormagnet
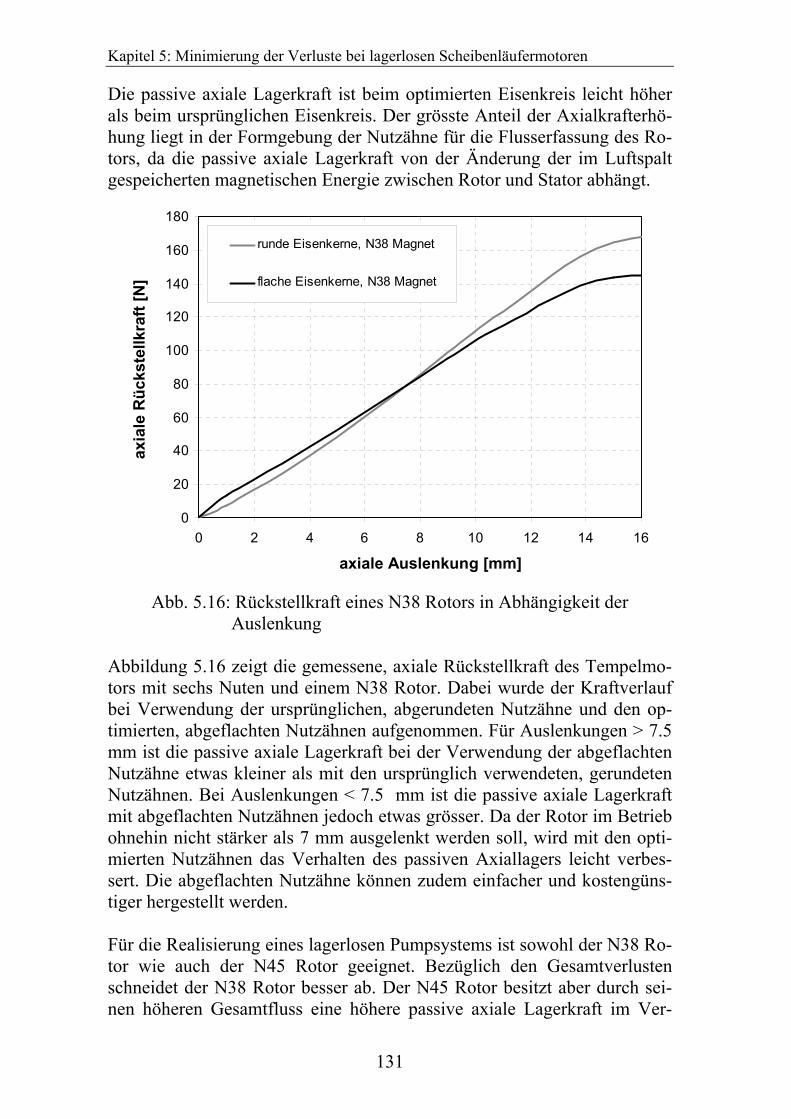
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
131
Die passive axiale Lagerkraft ist beim optimierten Eisenkreis leicht höher als beim ursprünglichen Eisenkreis. Der grösste Anteil der Axialkrafterhö-hung liegt in der Formgebung der Nutzähne für die Flusserfassung des Ro-tors, da die passive axiale Lagerkraft von der Änderung der im Luftspalt gespeicherten magnetischen Energie zwischen Rotor und Stator abhängt.
0
20
40
60
80
100
120
140
160
180
0 2 4 6 8 10 12 14 16
axiale Auslenkung [mm]
axia
le R
ücks
runde Eisenkerne, N38 Magnet
flache Eisenkerne, N38 Magnet
axiale Auslenkung [mm]axiale Auslenkung [mm]
axia
le R
ücks
tellk
raft
[N]
0
20
40
60
80
100
120
140
160
180
0 2 4 6 8 10 12 14 16
axiale Auslenkung [mm]
axia
le R
ücks
runde Eisenkerne, N38 Magnet
flache Eisenkerne, N38 Magnet
axiale Auslenkung [mm]axiale Auslenkung [mm]
axia
le R
ücks
tellk
raft
[N]
Abb. 5.16: Rückstellkraft eines N38 Rotors in Abhängigkeit der
Auslenkung
Abbildung 5.16 zeigt die gemessene, axiale Rückstellkraft des Tempelmo-tors mit sechs Nuten und einem N38 Rotor. Dabei wurde der Kraftverlauf bei Verwendung der ursprünglichen, abgerundeten Nutzähne und den op-timierten, abgeflachten Nutzähnen aufgenommen. Für Auslenkungen > 7.5 mm ist die passive axiale Lagerkraft bei der Verwendung der abgeflachten Nutzähne etwas kleiner als mit den ursprünglich verwendeten, gerundeten Nutzähnen. Bei Auslenkungen < 7.5 mm ist die passive axiale Lagerkraft mit abgeflachten Nutzähnen jedoch etwas grösser. Da der Rotor im Betrieb ohnehin nicht stärker als 7 mm ausgelenkt werden soll, wird mit den opti-mierten Nutzähnen das Verhalten des passiven Axiallagers leicht verbes-sert. Die abgeflachten Nutzähne können zudem einfacher und kostengüns-tiger hergestellt werden. Für die Realisierung eines lagerlosen Pumpsystems ist sowohl der N38 Ro-tor wie auch der N45 Rotor geeignet. Bezüglich den Gesamtverlusten schneidet der N38 Rotor besser ab. Der N45 Rotor besitzt aber durch sei-nen höheren Gesamtfluss eine höhere passive axiale Lagerkraft im Ver-
Kapitel 5: Minimierung der Verluste bei lagerlosen Scheibenläufermotoren
132
gleich zum N38 Rotor, was wiederum die axiale Ausbalancierung des Laufrades wesentlich einfacher macht (siehe Kapitel 3, Abbildung 3.7). Aus diesem Grund wurde im realisierten Funktionsmuster der N45 Rotor verwendet.
133
6. Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen Bisher wurden die Ursachen von hydrodynamischen Störeffekten in einer lagerlosen Zentrifugalpumpe, welche den Betrieb des lagerlosen Scheiben-läufermotors stark beeinträchtigen können, ausser Acht gelassen. Dieser Problematik widmet sich dieses Kapitel. Abschnitt 6.1 fasst die Grundlagen zusammen, welche bei der Gestaltung von lagerlosen Zentrifugalpumpen von Bedeutung sind. Im nachfolgenden Abschnitt 6.2 wird die Auslegung des Laufrades sowie die Wahl der Gehäuseform der Pumpe behandelt. Eine der schwierigsten Aufgaben bei der Gestaltung von lagerlosen Zentrifugal-pumpen höherer Leistung ist die Reduzierung von axialen Schubkräften. Mit verschiedenen Lösungsansätzen werden in Abschnitt 6.3 Möglichkei-ten für die Reduktion von axialen Schubkräften in einer lagerlosen Zentri-fugalpumpe besprochen. Im letzten Abschnitt 6.4 werden zwei realisierte, lagerlose Zentrifugalpumpen höherer Leistung vorgestellt. 6.1 Grundlagen und Probleme lagerloser Zentri-fugalpumpen höherer Leistung Zentrifugalpumpen sind vor allem für das Fördern von niederviskosen Flüssigkeiten bei niedriger Förderhöhe und hohem Durchfluss geeignet. In Produktionsprozessen der chemischen und der Halbleiterindustrie sind für Zentrifugalpumpen relativ grosse Förderhöhen bei geringem bis hohem Fördervolumen gefordert. Dabei müssen die Pumpen für hohe Durchflüsse möglichst kavitationsfrei ausgelegt werden damit das Pumpmedium durch möglichst wenig Kavitationserosionspartikel verunreinigt wird. Bei hoch-viskosen Fördermedien steigt der Leistungsbedarf von Zentrifugalpumpen stark an, da der Wirkungsgrad der Pumpe stark verkleinert wird. Motor und Pumpe sind dabei so auszulegen, dass der hydraulische Anwendungsbe-reich mit einem optimalen Wirkungsgrad abgedeckt wird. Eine der wich-tigsten Entwurfsparameter sind dabei die Wahl des Laufraddurchmessers, der Laufradform, der Betriebsdrehzahl und der Gehäuseform. 6.1.1 Grundlagen lagerloser Zentrifugalpumpen In Abbildung 6.1 ist das Schnittbild einer lagerlosen Zentrifugalpumpe ab-gebildet. Die lagerlose Zentrifugalpumpe unterscheidet sich insofern von einer herkömmlichen Zentrifugalpumpe, weil das Laufrad in axialer und
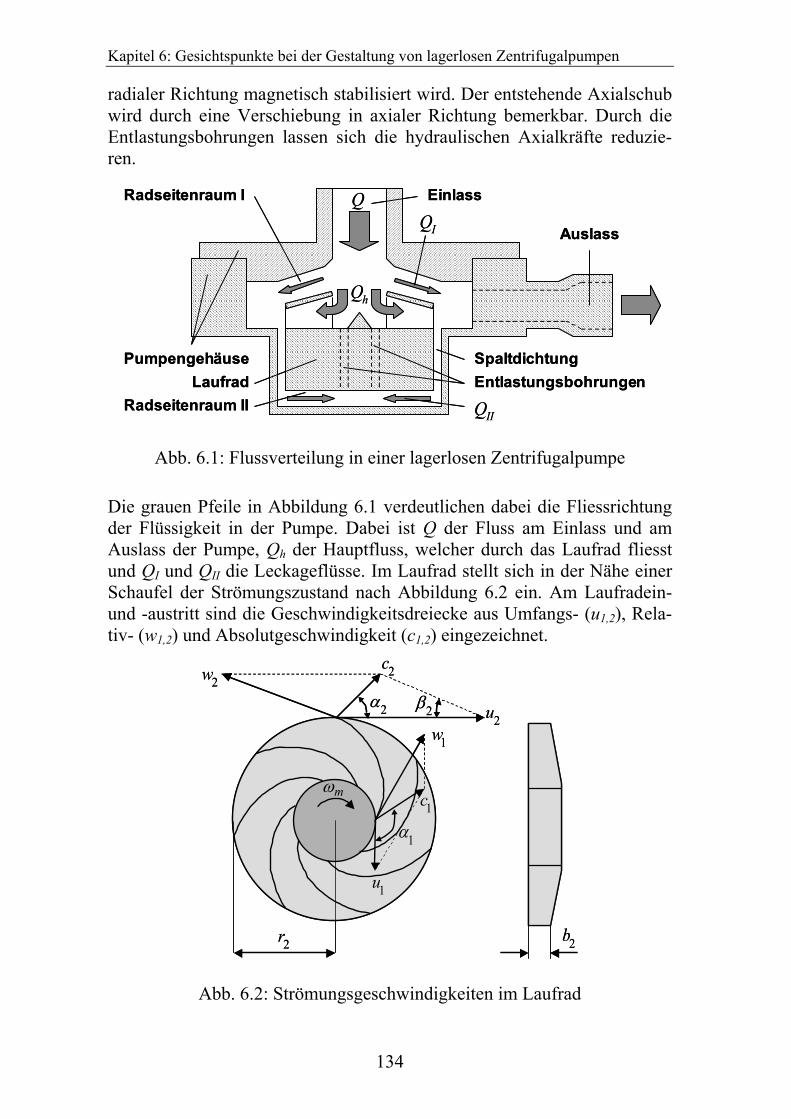
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
134
radialer Richtung magnetisch stabilisiert wird. Der entstehende Axialschub wird durch eine Verschiebung in axialer Richtung bemerkbar. Durch die Entlastungsbohrungen lassen sich die hydraulischen Axialkräfte reduzie-ren.
PumpengehäuseLaufrad
Einlass
Auslass
Spaltdichtung
Radseitenraum I
Radseitenraum II
hQ
QIQ
IIQEntlastungsbohrungen
PumpengehäuseLaufrad
Einlass
Auslass
Spaltdichtung
Radseitenraum I
Radseitenraum II
hQ
QIQ
IIQEntlastungsbohrungen
Abb. 6.1: Flussverteilung in einer lagerlosen Zentrifugalpumpe Die grauen Pfeile in Abbildung 6.1 verdeutlichen dabei die Fliessrichtung der Flüssigkeit in der Pumpe. Dabei ist Q der Fluss am Einlass und am Auslass der Pumpe, Qh der Hauptfluss, welcher durch das Laufrad fliesst und QI und QII die Leckageflüsse. Im Laufrad stellt sich in der Nähe einer Schaufel der Strömungszustand nach Abbildung 6.2 ein. Am Laufradein- und -austritt sind die Geschwindigkeitsdreiecke aus Umfangs- (u1,2), Rela-tiv- (w1,2) und Absolutgeschwindigkeit (c1,2) eingezeichnet.
2r
2β
1u
1w
2b
1cmω
2u
2w 2c
1α
2α
2r
2β
1u
1w
2b
1cmω
2u
2w 2c
1α
2α
Abb. 6.2: Strömungsgeschwindigkeiten im Laufrad
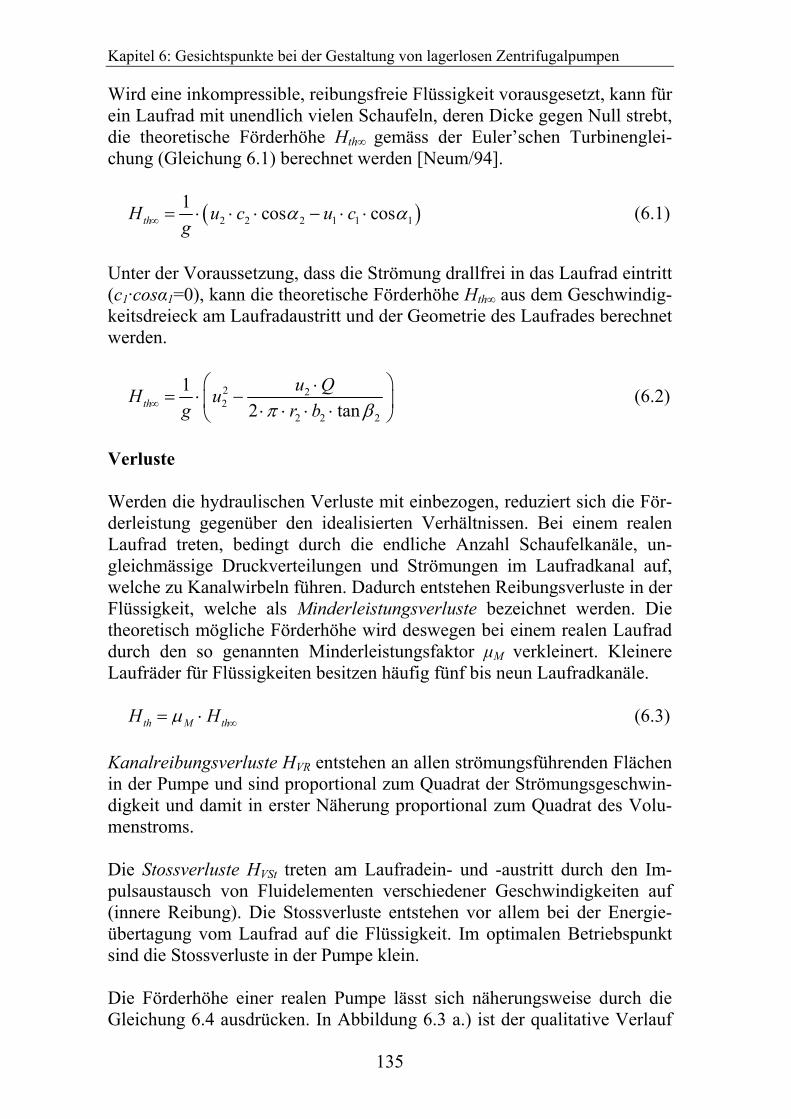
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
135
Wird eine inkompressible, reibungsfreie Flüssigkeit vorausgesetzt, kann für ein Laufrad mit unendlich vielen Schaufeln, deren Dicke gegen Null strebt, die theoretische Förderhöhe Hth∞ gemäss der Euler’schen Turbinenglei-chung (Gleichung 6.1) berechnet werden [Neum/94].
( )2 2 2 1 1 11 cos costhH u c u cg
α α∞ = ⋅ ⋅ ⋅ − ⋅ ⋅ (6.1)
Unter der Voraussetzung, dass die Strömung drallfrei in das Laufrad eintritt (c1·cosα1=0), kann die theoretische Förderhöhe Hth∞ aus dem Geschwindig-keitsdreieck am Laufradaustritt und der Geometrie des Laufrades berechnet werden.
2 22
2 2 2
12 tanth
u QH ug r bπ β∞
⎛ ⎞⋅= ⋅ −⎜ ⎟⋅ ⋅ ⋅ ⋅⎝ ⎠
(6.2)
Verluste Werden die hydraulischen Verluste mit einbezogen, reduziert sich die För-derleistung gegenüber den idealisierten Verhältnissen. Bei einem realen Laufrad treten, bedingt durch die endliche Anzahl Schaufelkanäle, un-gleichmässige Druckverteilungen und Strömungen im Laufradkanal auf, welche zu Kanalwirbeln führen. Dadurch entstehen Reibungsverluste in der Flüssigkeit, welche als Minderleistungsverluste bezeichnet werden. Die theoretisch mögliche Förderhöhe wird deswegen bei einem realen Laufrad durch den so genannten Minderleistungsfaktor µM verkleinert. Kleinere Laufräder für Flüssigkeiten besitzen häufig fünf bis neun Laufradkanäle. th M thH Hµ ∞= ⋅ (6.3) Kanalreibungsverluste HVR entstehen an allen strömungsführenden Flächen in der Pumpe und sind proportional zum Quadrat der Strömungsgeschwin-digkeit und damit in erster Näherung proportional zum Quadrat des Volu-menstroms. Die Stossverluste HVSt treten am Laufradein- und -austritt durch den Im-pulsaustausch von Fluidelementen verschiedener Geschwindigkeiten auf (innere Reibung). Die Stossverluste entstehen vor allem bei der Energie-übertagung vom Laufrad auf die Flüssigkeit. Im optimalen Betriebspunkt sind die Stossverluste in der Pumpe klein. Die Förderhöhe einer realen Pumpe lässt sich näherungsweise durch die Gleichung 6.4 ausdrücken. In Abbildung 6.3 a.) ist der qualitative Verlauf
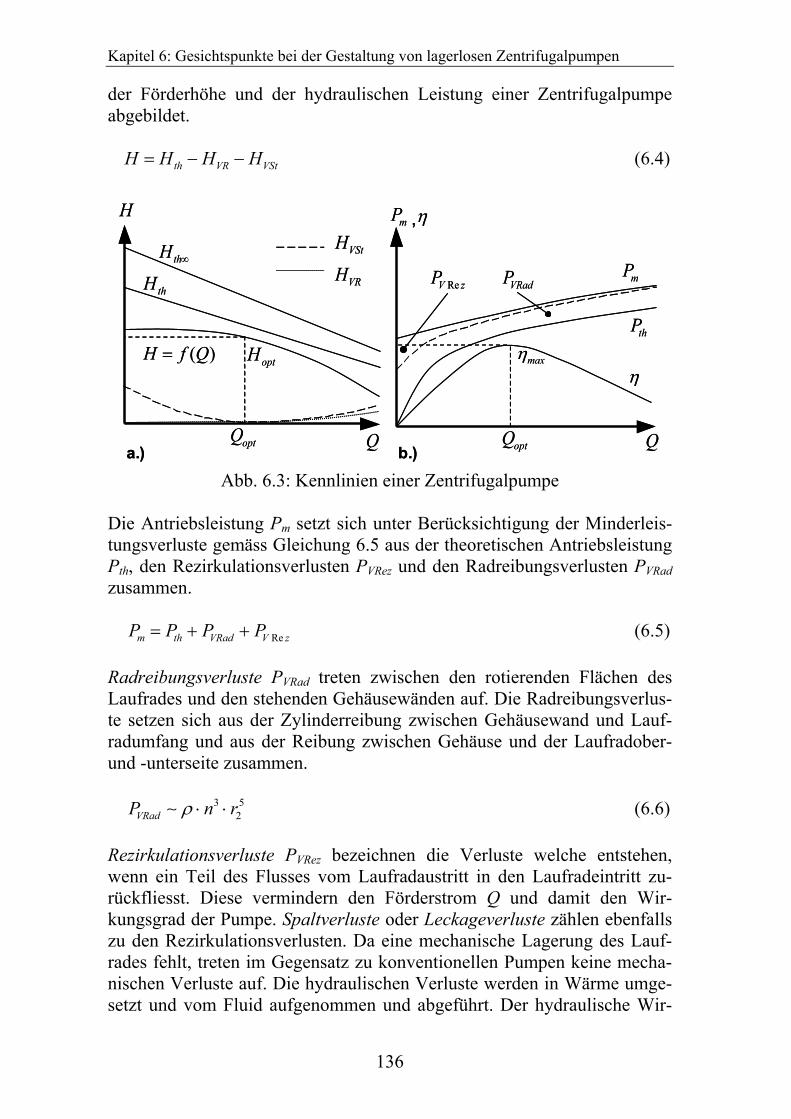
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
136
der Förderhöhe und der hydraulischen Leistung einer Zentrifugalpumpe abgebildet. th VR VStH H H H= − − (6.4)
Q Q
HmP η
optQ
η
mP
maxη
thHthH ∞
( )H f Q= optH
optQ
,
VRHVStH
thP
VRadPReV zP
a.) b.)Q Q
HmP η
optQ
η
mP
maxη
thHthH ∞
( )H f Q= optH
optQ
,
VRHVStH
thP
VRadPReV zP
a.) b.) Abb. 6.3: Kennlinien einer Zentrifugalpumpe
Die Antriebsleistung Pm setzt sich unter Berücksichtigung der Minderleis-tungsverluste gemäss Gleichung 6.5 aus der theoretischen Antriebsleistung Pth, den Rezirkulationsverlusten PVRez und den Radreibungsverlusten PVRad zusammen. Rem th VRad V zP P P P= + + (6.5) Radreibungsverluste PVRad treten zwischen den rotierenden Flächen des Laufrades und den stehenden Gehäusewänden auf. Die Radreibungsverlus-te setzen sich aus der Zylinderreibung zwischen Gehäusewand und Lauf-radumfang und aus der Reibung zwischen Gehäuse und der Laufradober- und -unterseite zusammen. 3 5
2VRadP n rρ ⋅ ⋅∼ (6.6) Rezirkulationsverluste PVRez bezeichnen die Verluste welche entstehen, wenn ein Teil des Flusses vom Laufradaustritt in den Laufradeintritt zu-rückfliesst. Diese vermindern den Förderstrom Q und damit den Wir-kungsgrad der Pumpe. Spaltverluste oder Leckageverluste zählen ebenfalls zu den Rezirkulationsverlusten. Da eine mechanische Lagerung des Lauf-rades fehlt, treten im Gegensatz zu konventionellen Pumpen keine mecha-nischen Verluste auf. Die hydraulischen Verluste werden in Wärme umge-setzt und vom Fluid aufgenommen und abgeführt. Der hydraulische Wir-

Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
137
kungsgrad einer Pumpe lässt sich durch den Quotienten zwischen mechani-scher und hydraulischer Leistung berechnen.
h m hP g H Q Pρ η= ⋅ ⋅ ⋅ = ⋅ hh
m
PP
η = (6.7)
Der maximale, hydraulische Wirkungsgrad gemäss Abbildung 6.3 b.) wird erreicht, wenn die Pumpe im optimalen Betriebspunkt Oopt, Hopt betrieben wird. Um die Auswahl eines geeigneten Pumpentyps für eine bestimmte Anwendung vereinfachen zu können, wird eine Pumpe durch die spezifi-sche Drehzahl nq charakterisiert, welche sich auf den optimalen Betriebs-punkt bezieht. Die spezifische Drehzahl ist eine dimensionslose Grösse und liegt bei lagerlosen Zentrifugalpumpen im Bereich 10 < nq < 100.
0.75opt
qopt
Qn n
H= ⋅ (6.8)
Einfluss der Viskosität Die Viskosität einer Flüssigkeit beschreibt die Schubspannung, welche bei einer parallelen Verschiebung von Flüssigkeitsteilchen gegeneinander ent-gegenwirken. Dabei wird zwischen der dynamischen Viskosität η und der auf die Dichte bezogenen kinematischen Viskosität ν unterschieden.
ηνρ
= (6.9)
Die Flüssigkeitsviskosität beeinflusst die Leistungsfähigkeit einer Zentri-fugalpumpe. Die Radreibungsverluste nehmen mit höherer Viskosität stark zu. Eine grössere Reibung führt dazu, dass bei gleichbleibender, mechani-scher Antriebsleistung und Drehzahl die Förderhöhe mit dem Volumen-strom stärker zurückgeht als bei Wasser. Bei erhöhter Viskosität gehen die Leckageverluste ebenfalls zurück, wobei diese Änderung die Kennlinie nur wenig beeinflusst und deshalb meistens vernachlässigt werden kann. Die Kennlinien von Flüssigkeiten höherer Viskosität werden häufig mit Kor-rekturfaktoren aus den Kennlinien von Wasser berechnet [Holz/89], [Gü-li/99]. 2V Q H O
Q f Q= ⋅ 2V H H OH f H= ⋅ (6.10)
Hinsichtlich des Wirkungsgrades sind für hochviskose Flüssigkeiten Pum-pen mit einer spezifischen Drehzahl von nq= 20...35 am besten geeignet.
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
138
Kavitation Kavitation in einer Pumpe entsteht immer dann, wenn der statische Druck der Flüssigkeit infolge hoher Strömungsgeschwindigkeiten örtlich auf den Verdampfungsdruck der Flüssigkeit absinkt, so dass die Flüssigkeit zu ver-dampfen beginnt. Dieser Dampf kondensiert schlagartig (Implosion) sobald der örtliche Druck wieder den Verdampfungsdruck übersteigt. Der NPSH-Wert (Net Positive Suction Head) ist eine Kenngrösse zur Quantifizierung der Kavitationsempfindlichkeit einer Zentrifugalpumpe und ist definiert als Gesamtdruckhöhe der Strömung in der Laufradmitte, vermindert um die Verdampfungsdruckhöhe der Flüssigkeit [Wind/98]. Bei Zentrifugalpum-pen ist häufig der mindestens erforderliche NPSH-Wert angegeben, bei welchem die Pumpe ohne Kavitationsfolgen (Kavitationserosion) dauernd betrieben werden kann. Der NPSH-Wert wird meistens für ein bestimmtes Kavitationskriterium experimentell bestimmt und steigt mit zunehmendem Durchfluss an [Güli/99].
tot Dp pNPSHgρ
−=
⋅ (6.11)
ptot ... Gesamtdruck der Strömung in der Laufradmitte, pD ... Dampfdruck der Förderflüssigkeit, ρ ... Dichte der Förderflüssigkeit, g ... Erdbeschleunigung Mit zunehmender Kavitation werden die Förderhöhe und der Wirkungs-grad der Pumpe beeinträchtig. Durch Kavitationserosion in der Pumpe können sich zudem Partikel ablösen und das Pumpmedium verunreinigen. Modellgesetze Strömungen in Zentrifugalpumpen lassen sich nur mit grossem, rechneri-schen Aufwand mit einer beschränkten Genauigkeit analytisch bestimmen. Modellversuche, und die Umrechnung der Ergebnisse auf andere Drehzah-len und Pumpengrössen, bilden deshalb im Pumpenbau eine wichtige Grundlage. Für geometrisch ähnliche Pumpen gelten bezüglich einer Ände-rung der Drehzahl und des Laufradradius folgende Beziehungen:
3
1 1 1
2 2 2
Q n rQ n r
⎛ ⎞= ⋅ ⎜ ⎟
⎝ ⎠
2 2
1 1 1
2 2 2
H n rH n r
⎛ ⎞ ⎛ ⎞= ⋅⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
3 5
1 1 1
2 2 2
P n rP n r
⎛ ⎞ ⎛ ⎞= ⋅⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ (6.12)

Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
139
6.1.2 Axialschub in einer lagerlosen Zentrifugalpumpe Axiale Reluktanzkraft Die Erzeugung der passiven Reluktanzkraft in axialer Richtung wurde be-reits in den vergangenen Kapiteln behandelt und soll deshalb an dieser Stelle nur kurz zusammengefasst werden. Gleichung 6.13 beschreibt den für kleine Auslenkungen näherungsweise linearen Zusammenhang zwi-schen einer axialen Auslenkung z und der daraus resultierenden axialen Lagerkraft. Dabei wird vorausgesetzt, dass sich der Rotor im Zentrum be-findet und keine Verkippung aufweist. Die Steifigkeit kz hängt vom magne-tischen Fluss im Luftspalt zwischen Rotor und Stator und damit vom ver-wendeten Magnetmaterial ab. Daneben wird die Steifigkeit des Axiallagers durch die geometrischen Verhältnisse beeinflusst. z zF k z= − ⋅ (6.13) Bei einer massstäblichen Vergrösserung des gesamten Motors steigt die passive axiale Lagerkraft gemäss Kapitel 1 mit der zweiten Potenz. Hydraulischer Axialschub Aufgrund von Druckdifferenzen wirken hydraulische Kräfte auf das Lauf-rad, welche vom passiven Axiallager aufgenommen werden müssen. Eine stabile axiale Lage entsteht, wenn die axiale Reluktanzkraft Fz und der hyd-raulische Axialschub Fzhydr sich gegenseitig aufheben. 0z zhydrF F+ = (6.14) Das Problem bezüglich des Gleichgewichtes dieser beiden Kräfte ist, dass der hydraulische Axialschub bei einer Vergrösserung der Pumpe im Ge-gensatz zur passiven axialen Lagerkraft mit der vierten Potenz und bei ei-ner Drehzahlerhöhung mit der zweiten Potenz steigt. Die Realisierung ei-nes Gleichgewichts unter den beiden Kräften wird bei einer Vergrösserung der Pumpe deshalb immer schwieriger. In Abbildung 6.4 wird die Entste-hung des hydraulischen Axialschubes gezeigt.
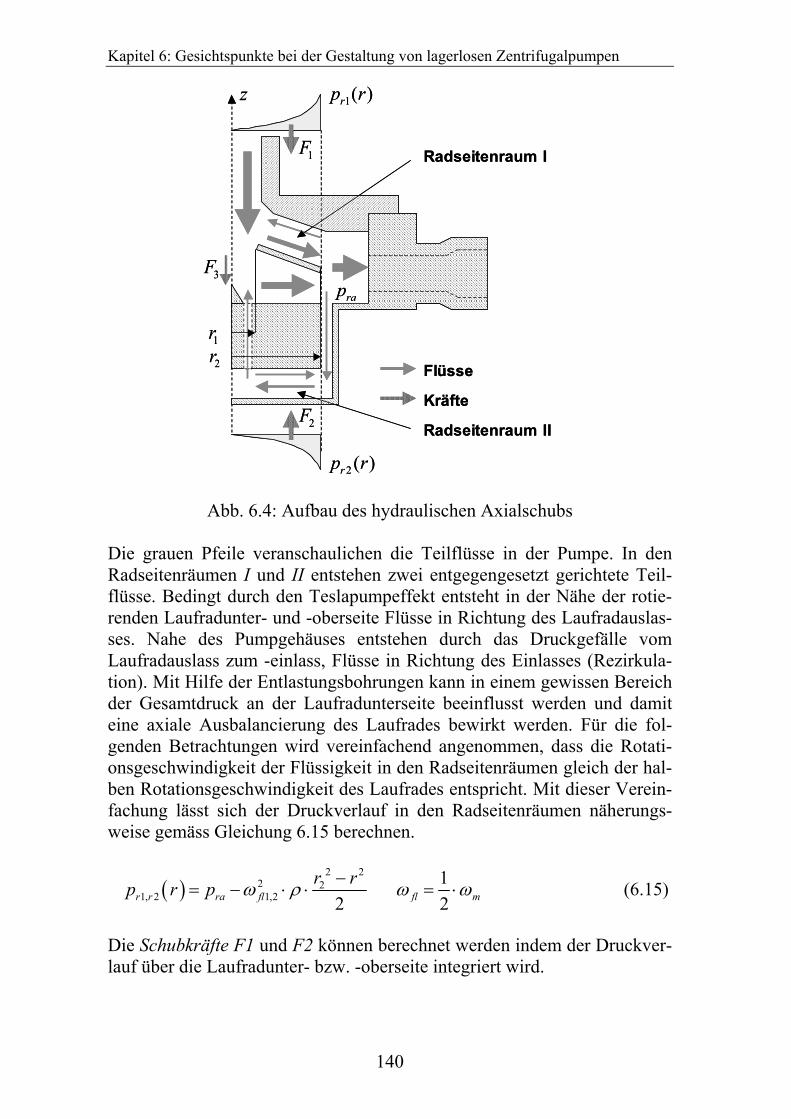
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
140
2r1r
3F
2F
1F
z
Flüsse
Kräfte
Radseitenraum I
Radseitenraum II
rap
2 ( )rp r
1( )rp r
2r1r
3F
2F
1F
z
Flüsse
Kräfte
Radseitenraum I
Radseitenraum II
rap
2 ( )rp r
1( )rp r
Abb. 6.4: Aufbau des hydraulischen Axialschubs Die grauen Pfeile veranschaulichen die Teilflüsse in der Pumpe. In den Radseitenräumen I und II entstehen zwei entgegengesetzt gerichtete Teil-flüsse. Bedingt durch den Teslapumpeffekt entsteht in der Nähe der rotie-renden Laufradunter- und -oberseite Flüsse in Richtung des Laufradauslas-ses. Nahe des Pumpgehäuses entstehen durch das Druckgefälle vom Laufradauslass zum -einlass, Flüsse in Richtung des Einlasses (Rezirkula-tion). Mit Hilfe der Entlastungsbohrungen kann in einem gewissen Bereich der Gesamtdruck an der Laufradunterseite beeinflusst werden und damit eine axiale Ausbalancierung des Laufrades bewirkt werden. Für die fol-genden Betrachtungen wird vereinfachend angenommen, dass die Rotati-onsgeschwindigkeit der Flüssigkeit in den Radseitenräumen gleich der hal-ben Rotationsgeschwindigkeit des Laufrades entspricht. Mit dieser Verein-fachung lässt sich der Druckverlauf in den Radseitenräumen näherungs-weise gemäss Gleichung 6.15 berechnen.
( )2 2
2 21, 2 1,2 2r r ra fl
r rp r p ω ρ −= − ⋅ ⋅ 1
2fl mω ω= ⋅ (6.15)
Die Schubkräfte F1 und F2 können berechnet werden indem der Druckver-lauf über die Laufradunter- bzw. -oberseite integriert wird.
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
141
( )2
1
2
1,2 1, 20
r
r rr
F r p r drdπ
ϕ= ⋅∫ ∫ (6.16)
Die Impulskraft F3 entsteht durch die Umlenkung der Strömung von der axialen in die radiale Richtung. Sie wird bestimmt durch den Volumen-strom und aus Differenz der Axialkomponenten der Absolutgeschwindig-keit am Laufradein- und -austritt. 3 aF Q Vρ≈ ⋅ ⋅ ∆ (6.17) Aus der Summe der einzelnen Kräfte lässt sich der gesamte Axialschub bestimmen. Unter anderem ist der Axialschub von der Viskosität und der Dichte der Flüssigkeit sowie von der Geometrie des Laufrades und des Ge-häuses abhängig. 2 1 3zhydF F F F= − − (6.18) Der Wirkungsgrad einer lagerlosen Pumpe wird massgebend von der axia-len Position des Laufrades beeinflusst. Dies bezüglich kann aber keine ge-nerelle Aussage über die Abhängigkeit des Wirkungsgrades von der axia-len Position des Laufrades im Betriebspunkt gemacht werden. Ein axial ausbalanciertes Laufrad besitzt deshalb nicht zwingend einen guten Wir-kungsgrad. 6.2 Auslegung einer Zentrifugalpumpe Der Wirkungsgrad einer Zentrifugalpumpe wird von der hydraulisch abge-gebenen Leistung und den hydraulischen Verlusten bestimmt. Mit opti-mierten Laufradkanälen können hydraulische Verluste reduziert und damit der Wirkungsgrad der Pumpe erhöht werden. Durch die geeignete Wahl des Pumpengehäuses lassen sich zudem hydraulische Störkräfte in radialer Richtung verkleinern. Die radiale Magnetlagerung wird damit entlastet. 6.2.1 Grundlagen für die Auslegung des Laufradkanals Die Grundlagen für die Auslegung der Laufradkanäle wurden aus der klas-sischen Pumpentheorie übernommen [Reul/88], [Bohl/78], [Güli/99], [Neum/94]. In Abbildung 6.5 sind alle für die Auslegung der Laufradkanä-le wichtigen Grössen eingezeichnet. Der Laufradradius r1 entspricht dabei dem Radius des Einlasses. Für die Auslegung des Laufrades können fol-gende Angaben als bekannt vorausgesetzt werden: Betriebsdrehzahl n, Laufradradien r2 und r1, gewünschte Förderhöhe H und gewünschter Be-triebsfluss Q. Bei den folgenden Berechnungen wird wieder eine in-
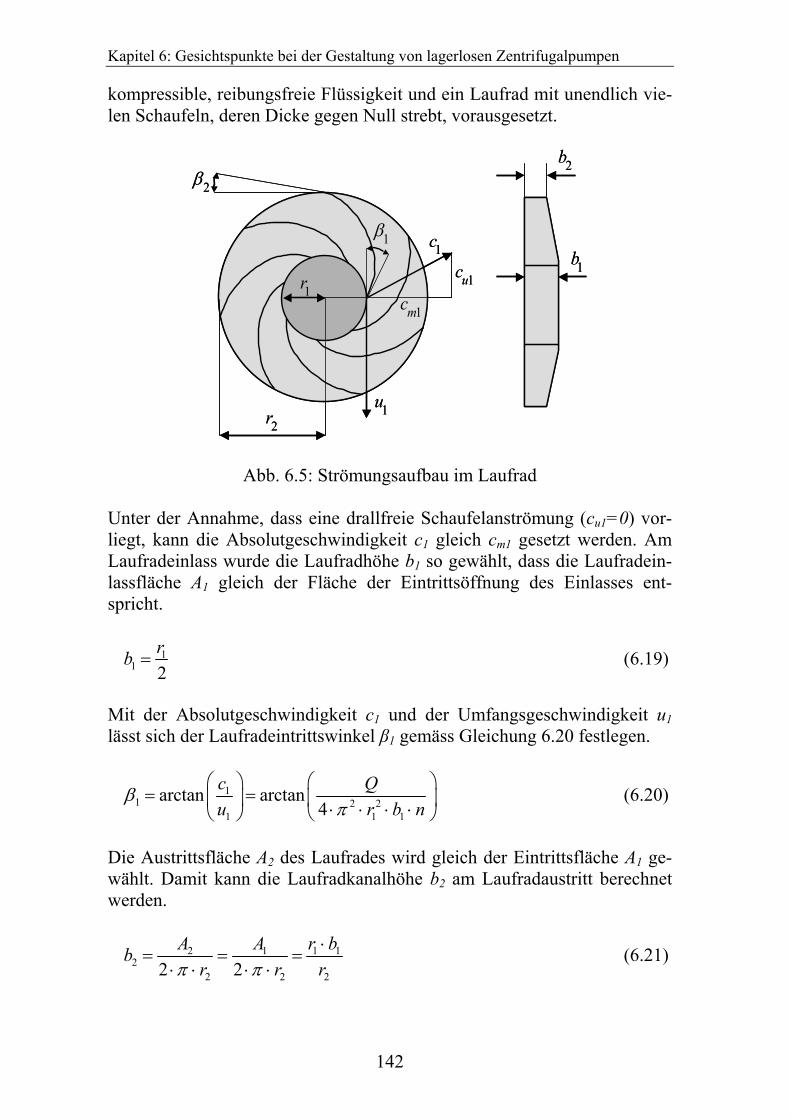
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
142
kompressible, reibungsfreie Flüssigkeit und ein Laufrad mit unendlich vie-len Schaufeln, deren Dicke gegen Null strebt, vorausgesetzt.
2r
2β
1u
1r
1β
1b
2b
1c
1mc1uc
2r
2β
1u
1r
1β
1b
2b
1c
1mc1uc
Abb. 6.5: Strömungsaufbau im Laufrad Unter der Annahme, dass eine drallfreie Schaufelanströmung (cu1=0) vor-liegt, kann die Absolutgeschwindigkeit c1 gleich cm1 gesetzt werden. Am Laufradeinlass wurde die Laufradhöhe b1 so gewählt, dass die Laufradein-lassfläche A1 gleich der Fläche der Eintrittsöffnung des Einlasses ent-spricht.
11 2
rb = (6.19)
Mit der Absolutgeschwindigkeit c1 und der Umfangsgeschwindigkeit u1 lässt sich der Laufradeintrittswinkel β1 gemäss Gleichung 6.20 festlegen.
11 2 2
1 1 1
arctan arctan4
c Qu r b n
βπ
⎛ ⎞ ⎛ ⎞= =⎜ ⎟ ⎜ ⎟⋅ ⋅ ⋅ ⋅⎝ ⎠ ⎝ ⎠
(6.20)
Die Austrittsfläche A2 des Laufrades wird gleich der Eintrittsfläche A1 ge-wählt. Damit kann die Laufradkanalhöhe b2 am Laufradaustritt berechnet werden.
2 1 1 12
2 2 22 2A A r bb
r r rπ π⋅
= = =⋅ ⋅ ⋅ ⋅
(6.21)
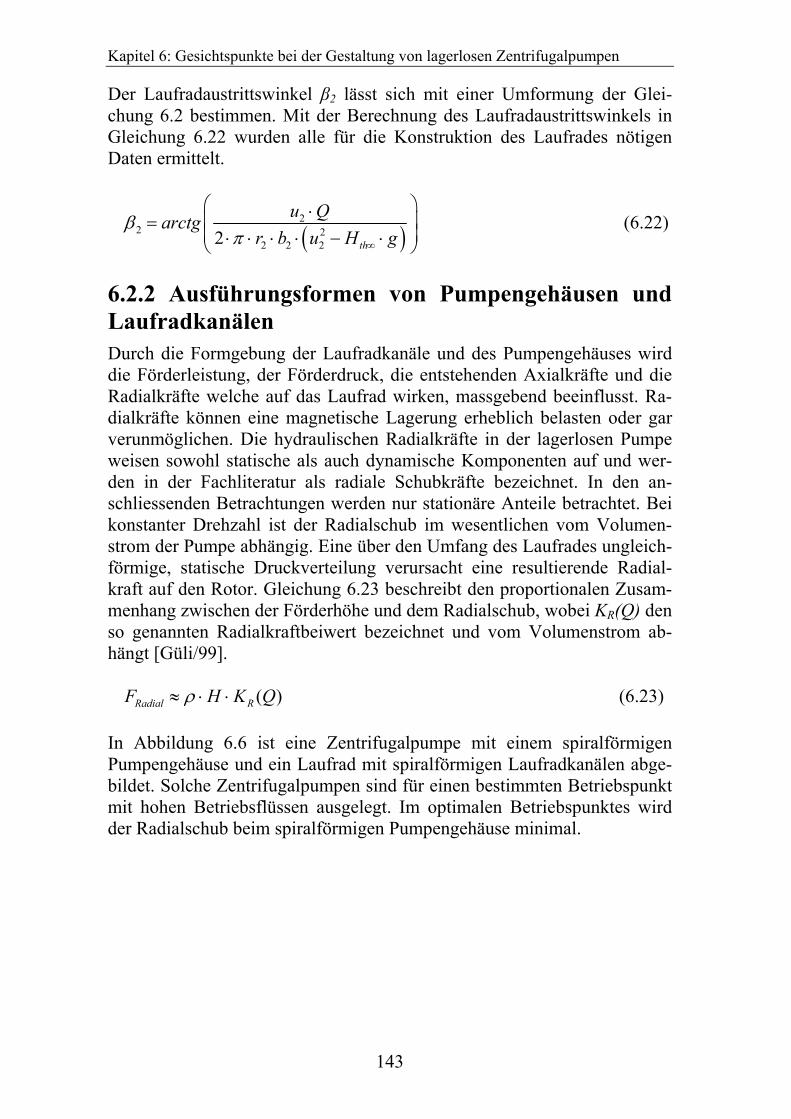
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
143
Der Laufradaustrittswinkel β2 lässt sich mit einer Umformung der Glei-chung 6.2 bestimmen. Mit der Berechnung des Laufradaustrittswinkels in Gleichung 6.22 wurden alle für die Konstruktion des Laufrades nötigen Daten ermittelt.
( )2
2 22 2 22 th
u Qarctgr b u H g
βπ ∞
⎛ ⎞⋅⎜ ⎟=⎜ ⎟⋅ ⋅ ⋅ ⋅ − ⋅⎝ ⎠
(6.22)
6.2.2 Ausführungsformen von Pumpengehäusen und Laufradkanälen Durch die Formgebung der Laufradkanäle und des Pumpengehäuses wird die Förderleistung, der Förderdruck, die entstehenden Axialkräfte und die Radialkräfte welche auf das Laufrad wirken, massgebend beeinflusst. Ra-dialkräfte können eine magnetische Lagerung erheblich belasten oder gar verunmöglichen. Die hydraulischen Radialkräfte in der lagerlosen Pumpe weisen sowohl statische als auch dynamische Komponenten auf und wer-den in der Fachliteratur als radiale Schubkräfte bezeichnet. In den an-schliessenden Betrachtungen werden nur stationäre Anteile betrachtet. Bei konstanter Drehzahl ist der Radialschub im wesentlichen vom Volumen-strom der Pumpe abhängig. Eine über den Umfang des Laufrades ungleich-förmige, statische Druckverteilung verursacht eine resultierende Radial-kraft auf den Rotor. Gleichung 6.23 beschreibt den proportionalen Zusam-menhang zwischen der Förderhöhe und dem Radialschub, wobei KR(Q) den so genannten Radialkraftbeiwert bezeichnet und vom Volumenstrom ab-hängt [Güli/99]. ( )Radial RF H K Qρ≈ ⋅ ⋅ (6.23) In Abbildung 6.6 ist eine Zentrifugalpumpe mit einem spiralförmigen Pumpengehäuse und ein Laufrad mit spiralförmigen Laufradkanälen abge-bildet. Solche Zentrifugalpumpen sind für einen bestimmten Betriebspunkt mit hohen Betriebsflüssen ausgelegt. Im optimalen Betriebspunktes wird der Radialschub beim spiralförmigen Pumpengehäuse minimal.
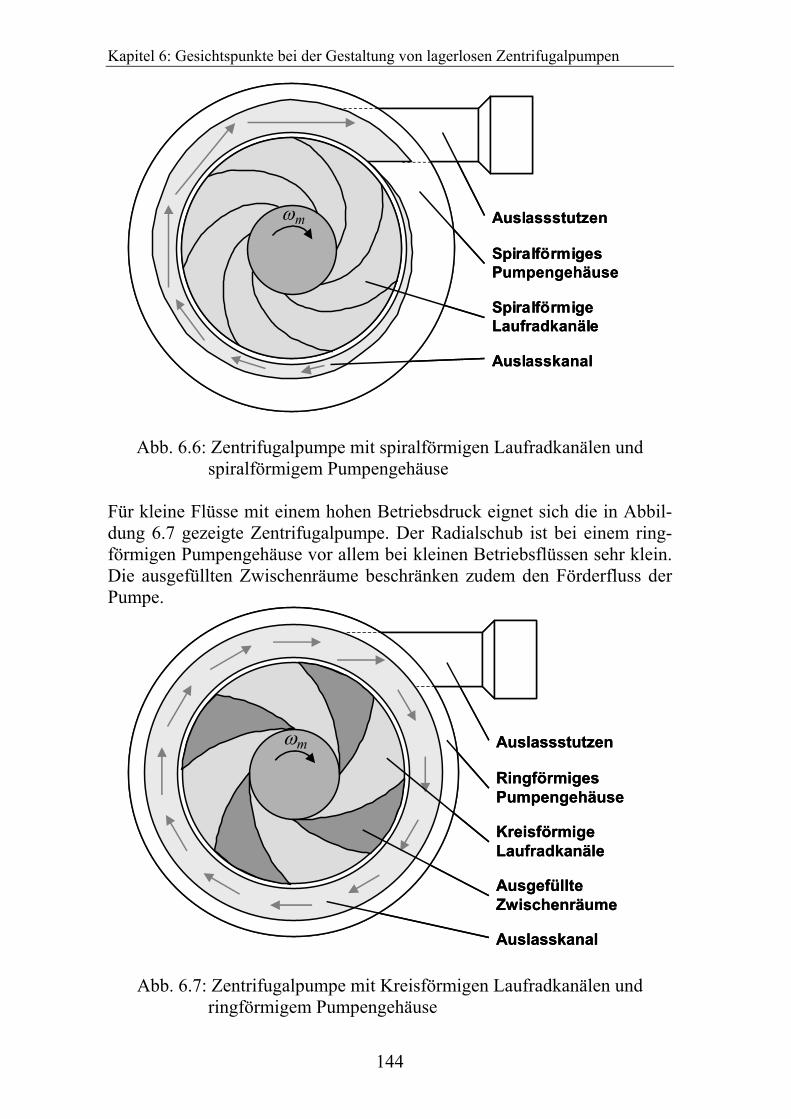
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
144
mω Auslassstutzen
Spiralförmiges Pumpengehäuse
Spiralförmige Laufradkanäle
Auslasskanal
mω Auslassstutzen
Spiralförmiges Pumpengehäuse
Spiralförmige Laufradkanäle
Auslasskanal
Abb. 6.6: Zentrifugalpumpe mit spiralförmigen Laufradkanälen und spiralförmigem Pumpengehäuse Für kleine Flüsse mit einem hohen Betriebsdruck eignet sich die in Abbil-dung 6.7 gezeigte Zentrifugalpumpe. Der Radialschub ist bei einem ring-förmigen Pumpengehäuse vor allem bei kleinen Betriebsflüssen sehr klein. Die ausgefüllten Zwischenräume beschränken zudem den Förderfluss der Pumpe.
mω
Auslasskanal
Auslassstutzen
Ringförmiges Pumpengehäuse
Kreisförmige Laufradkanäle
Ausgefüllte Zwischenräume
mω
Auslasskanal
Auslassstutzen
Ringförmiges Pumpengehäuse
Kreisförmige Laufradkanäle
Ausgefüllte Zwischenräume
Abb. 6.7: Zentrifugalpumpe mit Kreisförmigen Laufradkanälen und ringförmigem Pumpengehäuse
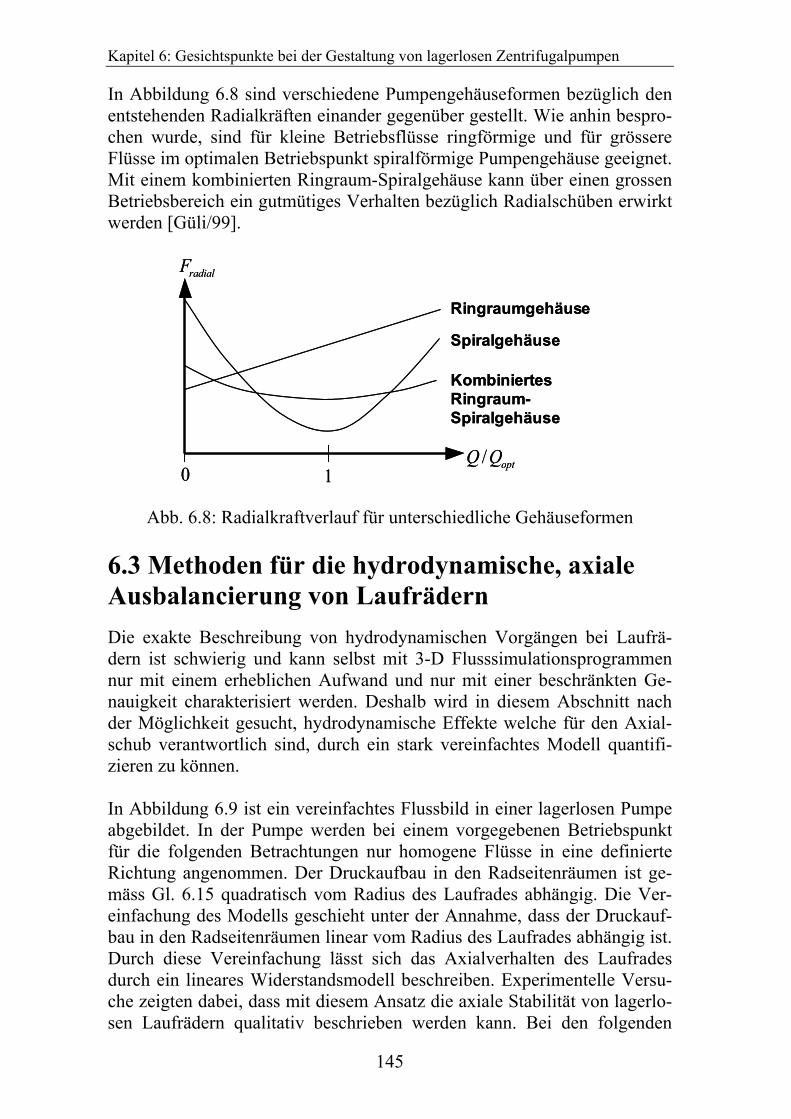
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
145
In Abbildung 6.8 sind verschiedene Pumpengehäuseformen bezüglich den entstehenden Radialkräften einander gegenüber gestellt. Wie anhin bespro-chen wurde, sind für kleine Betriebsflüsse ringförmige und für grössere Flüsse im optimalen Betriebspunkt spiralförmige Pumpengehäuse geeignet. Mit einem kombinierten Ringraum-Spiralgehäuse kann über einen grossen Betriebsbereich ein gutmütiges Verhalten bezüglich Radialschüben erwirkt werden [Güli/99].
/ optQ Q10
radialF
Spiralgehäuse
Ringraumgehäuse
Kombiniertes Ringraum-Spiralgehäuse
/ optQ Q10
radialF
Spiralgehäuse
Ringraumgehäuse
Kombiniertes Ringraum-Spiralgehäuse
Abb. 6.8: Radialkraftverlauf für unterschiedliche Gehäuseformen
6.3 Methoden für die hydrodynamische, axiale Ausbalancierung von Laufrädern Die exakte Beschreibung von hydrodynamischen Vorgängen bei Laufrä-dern ist schwierig und kann selbst mit 3-D Flusssimulationsprogrammen nur mit einem erheblichen Aufwand und nur mit einer beschränkten Ge-nauigkeit charakterisiert werden. Deshalb wird in diesem Abschnitt nach der Möglichkeit gesucht, hydrodynamische Effekte welche für den Axial-schub verantwortlich sind, durch ein stark vereinfachtes Modell quantifi-zieren zu können. In Abbildung 6.9 ist ein vereinfachtes Flussbild in einer lagerlosen Pumpe abgebildet. In der Pumpe werden bei einem vorgegebenen Betriebspunkt für die folgenden Betrachtungen nur homogene Flüsse in eine definierte Richtung angenommen. Der Druckaufbau in den Radseitenräumen ist ge-mäss Gl. 6.15 quadratisch vom Radius des Laufrades abhängig. Die Ver-einfachung des Modells geschieht unter der Annahme, dass der Druckauf-bau in den Radseitenräumen linear vom Radius des Laufrades abhängig ist. Durch diese Vereinfachung lässt sich das Axialverhalten des Laufrades durch ein lineares Widerstandsmodell beschreiben. Experimentelle Versu-che zeigten dabei, dass mit diesem Ansatz die axiale Stabilität von lagerlo-sen Laufrädern qualitativ beschrieben werden kann. Bei den folgenden
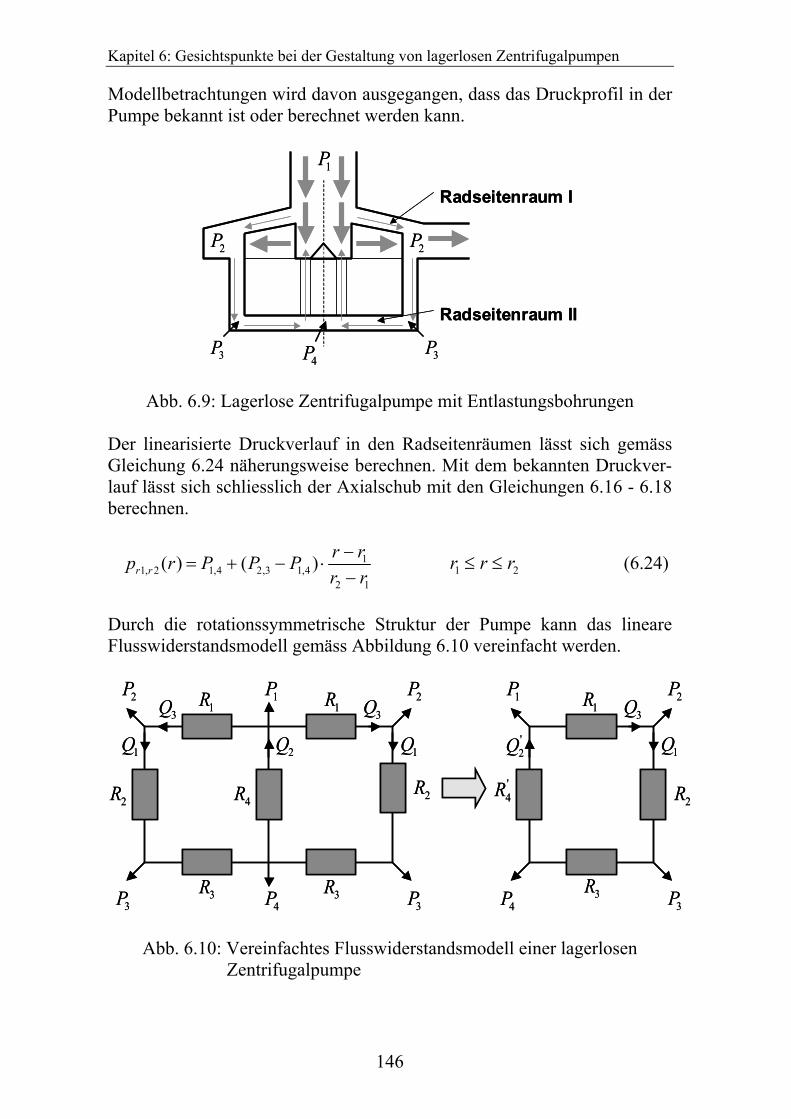
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
146
Modellbetrachtungen wird davon ausgegangen, dass das Druckprofil in der Pumpe bekannt ist oder berechnet werden kann.
Radseitenraum I
Radseitenraum II
2P
1P
3P4P 3P
2P
Radseitenraum I
Radseitenraum II
2P
1P
3P4P 3P
2P
Abb. 6.9: Lagerlose Zentrifugalpumpe mit Entlastungsbohrungen Der linearisierte Druckverlauf in den Radseitenräumen lässt sich gemäss Gleichung 6.24 näherungsweise berechnen. Mit dem bekannten Druckver-lauf lässt sich schliesslich der Axialschub mit den Gleichungen 6.16 - 6.18 berechnen.
11, 2 1,4 2,3 1,4
2 1
( ) ( )r rr rp r P P Pr r
−= + − ⋅
− 1 2r r r≤ ≤ (6.24)
Durch die rotationssymmetrische Struktur der Pumpe kann das lineare Flusswiderstandsmodell gemäss Abbildung 6.10 vereinfacht werden.
1P2P 2P
3P 3P4P 3P
1Q
4P
2P1P
1Q 2Q
1R1R 1R
3R 3R 3R
2R 2R2R4R '
4R
1Q'2Q
3Q3Q 3Q1P2P 2P
3P 3P4P 3P
1Q
4P
2P1P
1Q 2Q
1R1R 1R
3R 3R 3R
2R 2R2R4R '
4R
1Q'2Q
3Q3Q 3Q
Abb. 6.10: Vereinfachtes Flusswiderstandsmodell einer lagerlosen Zentrifugalpumpe

Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
147
Ist nur der Druck am Einlass der Pumpe P1 und der Druck am Auslass der Pumpe P2 bekannt, können die statischen Drücke P3 und P4 mit Hilfe der Flusswiderstände ausgedrückt werden.
4 33 1 2 1
4 3 2
2( )2
R RP P P PR R R
⋅ += + − ⋅
⋅ + + ,
4 42R R= ⋅ (6.25)
44 1 2 1
4 3 2
2( )2
RP P P PR R R
⋅= + − ⋅
⋅ + + (6.26)
Es gilt aber zu beachten, dass die Flusswiderstände nur in erster Näherung konstant sind, wenn sich das Laufrad in einer stabilen Lage befindet. Die Flusswiderstände sind unter anderem stark von der axialen Position des Laufrades und von der Viskosität der Flüssigkeit abhängig. Die einfachste und gängigste Methode für die Ausbalancierung einer lager-losen Zentrifugalpumpe ist das Anbringen von Entlastungsbohrungen im Zentrum des Laufrades. Die generelle Funktionsweise ist aus Abbildung 6.9 ersichtlich. Werden die Entlastungsbohrungen verkleinert, wird der Le-ckagefluss verkleinert. Damit baut sich ein höherer Druck im Radseiten-raum II auf und das Laufrad steigt auf eine höhere, axiale Position. Eine Vergrösserung der Entlastungsbohrungen bewirkt ein gegenteiliges axiales Verhalten des Laufrades. Mit Entastungsbohrungen lassen sich Laufräder von lagerlosen Zentrifugalpumpen aber nur in einem eingeschränkten Be-triebsbereich stabilisieren. Deshalb werden in den folgenden Abschnitten Lösungsansätze vorgestellt wie der Axialschub durch weitere Massnahmen beeinflusst werden kann. 6.3.1 Staudruckplatte Durch die 90° Abwinklung des Pumpeneinlasses zum Laufrad, muss der Fluss im Laufrad radial umgelenkt werden. Bei grossen Flüssen entsteht dadurch ein nicht vernachlässigbarer Staudruck im Zentrum des Laufrades (Vgl. Abschnitt 6.1.2). Der Staudruck übt eine Kraft in Flussrichtung aus und behindert zugleich den Leckagefluss aus dem Radseitenraum II. Die Änderung des Leckageflusses wirkt sich aber stärker auf das Axialverhal-ten des Laufrades aus als der unmittelbare Einfluss des Staudruckes auf das Laufrad. Das Laufrad nimmt dadurch eine höhere axiale Position an. Die-ses Verhalten kann eingedämmt werden, wenn wie in Abbildung 6.11 eine Staudruckplatte oberhalb der Entlastungsbohrungen angebracht wird. Der Staudruck wird damit von den Entlastungsbohrungen weitgehend fern-gehalten und der Flusswiderstand R4 wird weniger durchflussabhängig. Durch die Staudruckplatte wird der Gesamtfluss des Laufrades verkleinert.
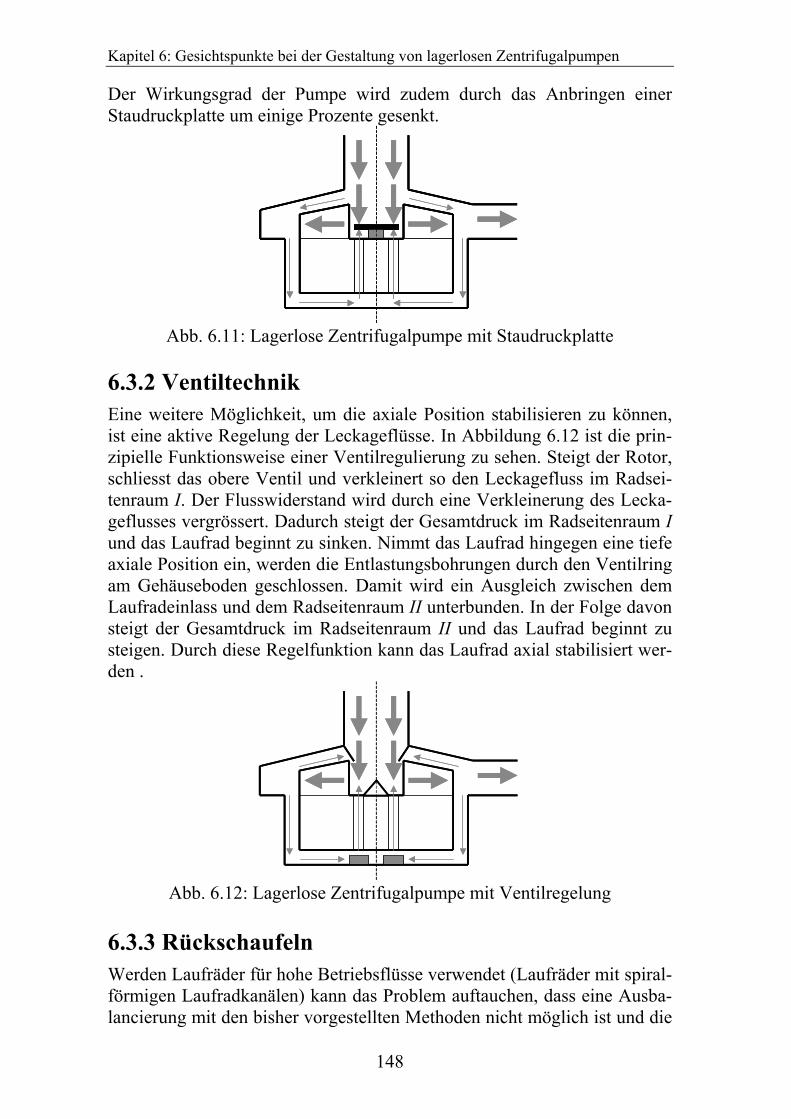
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
148
Der Wirkungsgrad der Pumpe wird zudem durch das Anbringen einer Staudruckplatte um einige Prozente gesenkt.
Abb. 6.11: Lagerlose Zentrifugalpumpe mit Staudruckplatte
6.3.2 Ventiltechnik Eine weitere Möglichkeit, um die axiale Position stabilisieren zu können, ist eine aktive Regelung der Leckageflüsse. In Abbildung 6.12 ist die prin-zipielle Funktionsweise einer Ventilregulierung zu sehen. Steigt der Rotor, schliesst das obere Ventil und verkleinert so den Leckagefluss im Radsei-tenraum I. Der Flusswiderstand wird durch eine Verkleinerung des Lecka-geflusses vergrössert. Dadurch steigt der Gesamtdruck im Radseitenraum I und das Laufrad beginnt zu sinken. Nimmt das Laufrad hingegen eine tiefe axiale Position ein, werden die Entlastungsbohrungen durch den Ventilring am Gehäuseboden geschlossen. Damit wird ein Ausgleich zwischen dem Laufradeinlass und dem Radseitenraum II unterbunden. In der Folge davon steigt der Gesamtdruck im Radseitenraum II und das Laufrad beginnt zu steigen. Durch diese Regelfunktion kann das Laufrad axial stabilisiert wer-den .
Abb. 6.12: Lagerlose Zentrifugalpumpe mit Ventilregelung
6.3.3 Rückschaufeln Werden Laufräder für hohe Betriebsflüsse verwendet (Laufräder mit spiral-förmigen Laufradkanälen) kann das Problem auftauchen, dass eine Ausba-lancierung mit den bisher vorgestellten Methoden nicht möglich ist und die
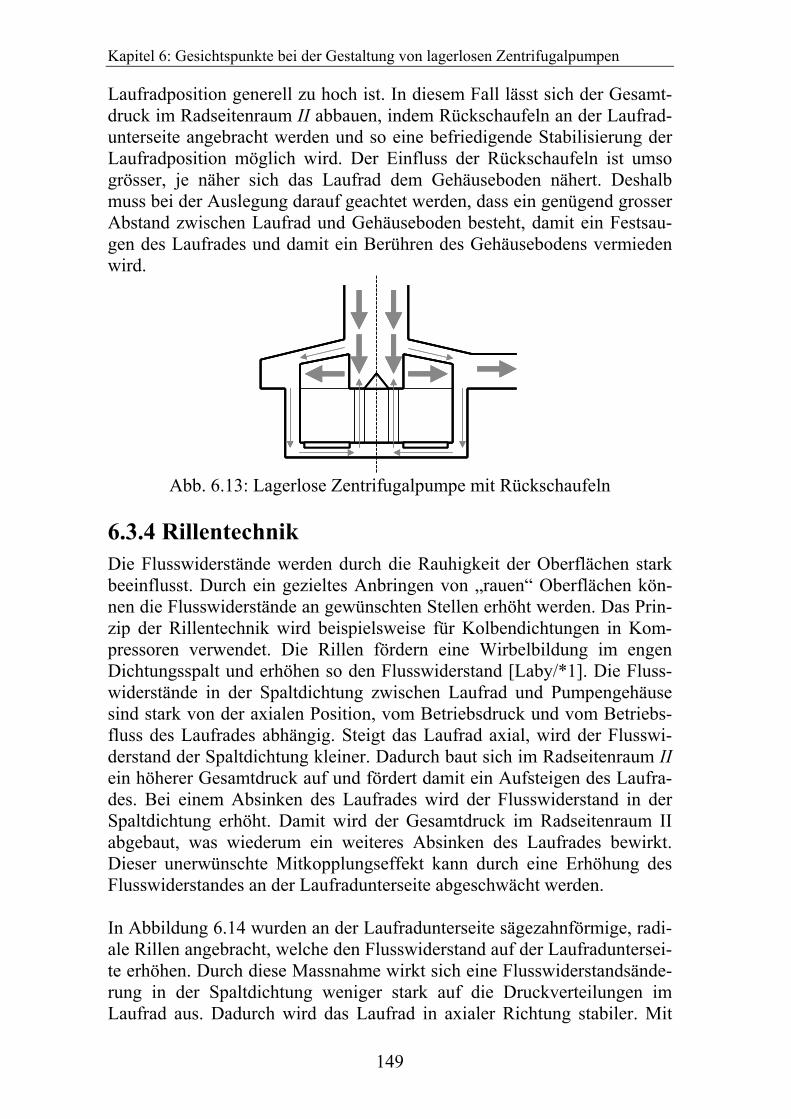
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
149
Laufradposition generell zu hoch ist. In diesem Fall lässt sich der Gesamt-druck im Radseitenraum II abbauen, indem Rückschaufeln an der Laufrad-unterseite angebracht werden und so eine befriedigende Stabilisierung der Laufradposition möglich wird. Der Einfluss der Rückschaufeln ist umso grösser, je näher sich das Laufrad dem Gehäuseboden nähert. Deshalb muss bei der Auslegung darauf geachtet werden, dass ein genügend grosser Abstand zwischen Laufrad und Gehäuseboden besteht, damit ein Festsau-gen des Laufrades und damit ein Berühren des Gehäusebodens vermieden wird.
Abb. 6.13: Lagerlose Zentrifugalpumpe mit Rückschaufeln
6.3.4 Rillentechnik Die Flusswiderstände werden durch die Rauhigkeit der Oberflächen stark beeinflusst. Durch ein gezieltes Anbringen von „rauen“ Oberflächen kön-nen die Flusswiderstände an gewünschten Stellen erhöht werden. Das Prin-zip der Rillentechnik wird beispielsweise für Kolbendichtungen in Kom-pressoren verwendet. Die Rillen fördern eine Wirbelbildung im engen Dichtungsspalt und erhöhen so den Flusswiderstand [Laby/*1]. Die Fluss-widerstände in der Spaltdichtung zwischen Laufrad und Pumpengehäuse sind stark von der axialen Position, vom Betriebsdruck und vom Betriebs-fluss des Laufrades abhängig. Steigt das Laufrad axial, wird der Flusswi-derstand der Spaltdichtung kleiner. Dadurch baut sich im Radseitenraum II ein höherer Gesamtdruck auf und fördert damit ein Aufsteigen des Laufra-des. Bei einem Absinken des Laufrades wird der Flusswiderstand in der Spaltdichtung erhöht. Damit wird der Gesamtdruck im Radseitenraum II abgebaut, was wiederum ein weiteres Absinken des Laufrades bewirkt. Dieser unerwünschte Mitkopplungseffekt kann durch eine Erhöhung des Flusswiderstandes an der Laufradunterseite abgeschwächt werden. In Abbildung 6.14 wurden an der Laufradunterseite sägezahnförmige, radi-ale Rillen angebracht, welche den Flusswiderstand auf der Laufraduntersei-te erhöhen. Durch diese Massnahme wirkt sich eine Flusswiderstandsände-rung in der Spaltdichtung weniger stark auf die Druckverteilungen im Laufrad aus. Dadurch wird das Laufrad in axialer Richtung stabiler. Mit
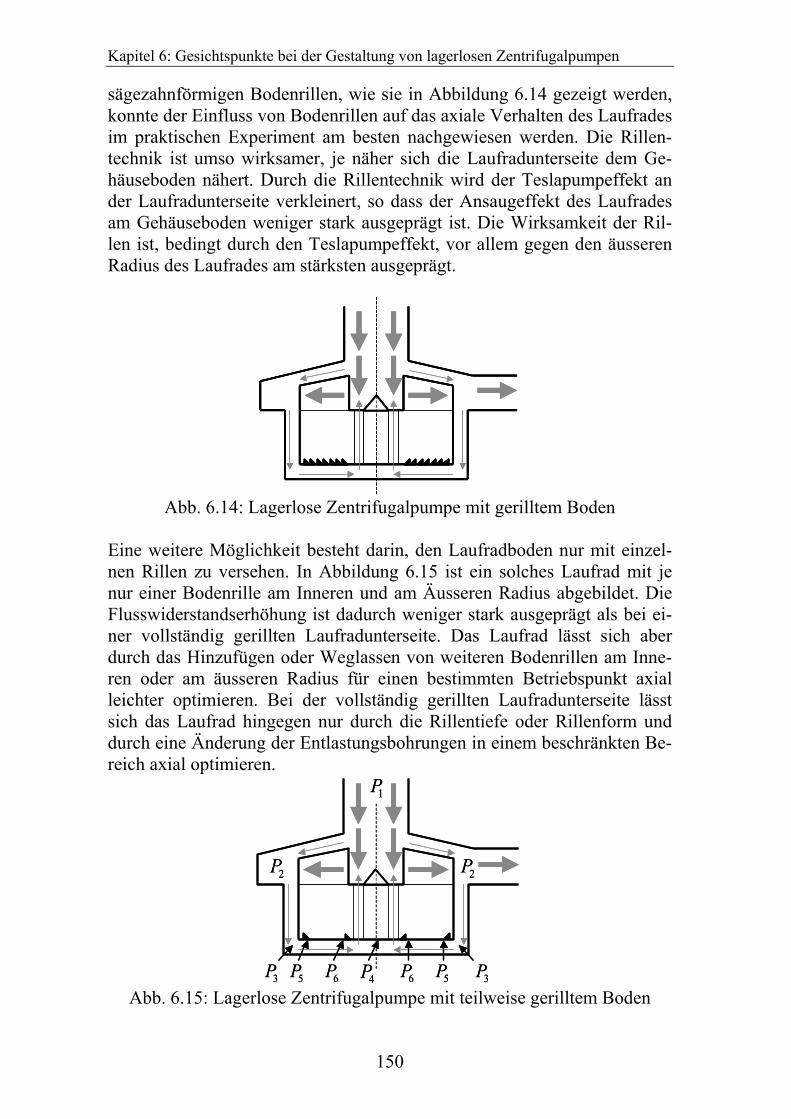
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
150
sägezahnförmigen Bodenrillen, wie sie in Abbildung 6.14 gezeigt werden, konnte der Einfluss von Bodenrillen auf das axiale Verhalten des Laufrades im praktischen Experiment am besten nachgewiesen werden. Die Rillen-technik ist umso wirksamer, je näher sich die Laufradunterseite dem Ge-häuseboden nähert. Durch die Rillentechnik wird der Teslapumpeffekt an der Laufradunterseite verkleinert, so dass der Ansaugeffekt des Laufrades am Gehäuseboden weniger stark ausgeprägt ist. Die Wirksamkeit der Ril-len ist, bedingt durch den Teslapumpeffekt, vor allem gegen den äusseren Radius des Laufrades am stärksten ausgeprägt.
Abb. 6.14: Lagerlose Zentrifugalpumpe mit gerilltem Boden
Eine weitere Möglichkeit besteht darin, den Laufradboden nur mit einzel-nen Rillen zu versehen. In Abbildung 6.15 ist ein solches Laufrad mit je nur einer Bodenrille am Inneren und am Äusseren Radius abgebildet. Die Flusswiderstandserhöhung ist dadurch weniger stark ausgeprägt als bei ei-ner vollständig gerillten Laufradunterseite. Das Laufrad lässt sich aber durch das Hinzufügen oder Weglassen von weiteren Bodenrillen am Inne-ren oder am äusseren Radius für einen bestimmten Betriebspunkt axial leichter optimieren. Bei der vollständig gerillten Laufradunterseite lässt sich das Laufrad hingegen nur durch die Rillentiefe oder Rillenform und durch eine Änderung der Entlastungsbohrungen in einem beschränkten Be-reich axial optimieren.
1P
2P
3P 4P6P5P
2P
6P 5P 3P
1P
2P
3P 4P6P5P
2P
6P 5P 3P Abb. 6.15: Lagerlose Zentrifugalpumpe mit teilweise gerilltem Boden
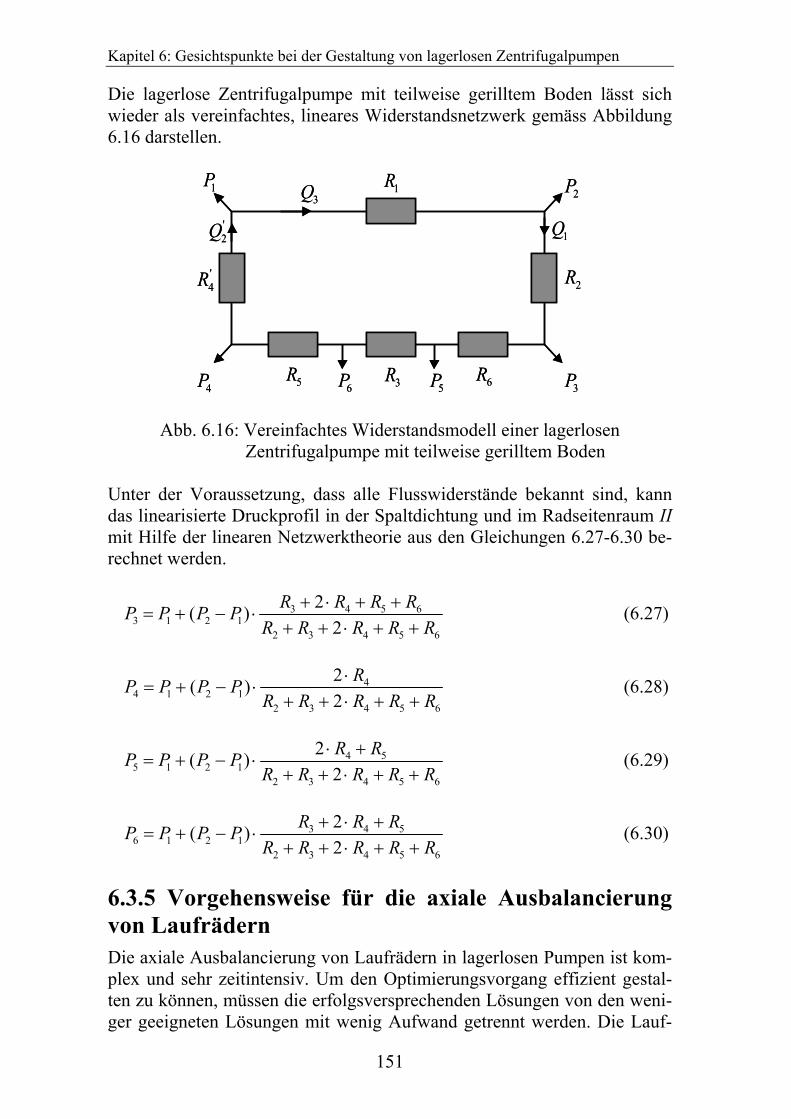
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
151
Die lagerlose Zentrifugalpumpe mit teilweise gerilltem Boden lässt sich wieder als vereinfachtes, lineares Widerstandsnetzwerk gemäss Abbildung 6.16 darstellen.
2R
1R
5R 3R 6R
'4R
1Q'2Q
3Q1P2P
3P4P 5P6P
2R
1R
5R 3R 6R
'4R
1Q'2Q
3Q1P2P
3P4P 5P6P
Abb. 6.16: Vereinfachtes Widerstandsmodell einer lagerlosen Zentrifugalpumpe mit teilweise gerilltem Boden Unter der Voraussetzung, dass alle Flusswiderstände bekannt sind, kann das linearisierte Druckprofil in der Spaltdichtung und im Radseitenraum II mit Hilfe der linearen Netzwerktheorie aus den Gleichungen 6.27-6.30 be-rechnet werden.
3 4 5 63 1 2 1
2 3 4 5 6
2( )2
R R R RP P P PR R R R R
+ ⋅ + += + − ⋅
+ + ⋅ + + (6.27)
44 1 2 1
2 3 4 5 6
2( )2
RP P P PR R R R R
⋅= + − ⋅
+ + ⋅ + + (6.28)
4 55 1 2 1
2 3 4 5 6
2( )2R RP P P P
R R R R R⋅ +
= + − ⋅+ + ⋅ + +
(6.29)
3 4 56 1 2 1
2 3 4 5 6
2( )2
R R RP P P PR R R R R
+ ⋅ += + − ⋅
+ + ⋅ + + (6.30)
6.3.5 Vorgehensweise für die axiale Ausbalancierung von Laufrädern Die axiale Ausbalancierung von Laufrädern in lagerlosen Pumpen ist kom-plex und sehr zeitintensiv. Um den Optimierungsvorgang effizient gestal-ten zu können, müssen die erfolgsversprechenden Lösungen von den weni-ger geeigneten Lösungen mit wenig Aufwand getrennt werden. Die Lauf-

Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
152
räder wurden in dieser Arbeit gemäss Ablaufdiagramm in Abbildung 6.17 axial optimiert. Der Optimierungsablauf ist dabei in zwei Teilschritte ge-gliedert. Im ersten Teilschritt - dem screening - wird eine Ausbalancie-rungsmethode (beispielsweise die Verwendung einer Staudruckplatte) oder eine Kombination verschiedener Ausbalancierungsmethoden ausgewählt. Davon ausgehend wird das Laufrad grob optimiert, um die Tauglichkeit der jeweiligen Ausbalancierungsmethode oder deren Kombination abzuklären. Dieser Teilschritt ist nötig, um eine rasche Übersicht über die aussichts-reichsten Lösungen gewinnen zu können. Ist kein einwandfreier Betrieb für Drehzahlen zwischen 0 und 9000 U/min möglich, wird die Ausbalancie-rungsmethode oder deren Kombination verworfen und eine neue Ausba-lancierungsmethode oder Kombination gesucht. Ist hingegen ein einge-schränkter Betriebsbereich möglich, in welchem die Pumpe einwandfrei arbeitet, wird im zweiten Teilschritt zum fine-tuning gewechselt. Im fine-tuning wird das Laufrad hinsichtlich einer Vergrösserung des Betriebsbe-reiches optimiert. Im letzten Optimierungsschritt des fine-tunings kann das Laufrad durch die Änderung der Entlastungsbohrungen noch feinoptimiert werden. Das Endziel des fine-tunings ist, das Laufrad axial so zu optimie-ren, dass ein einwandfreier Betrieb im gewünschten Flussbereich für alle Drehzahlen zwischen 0 und 9000 U/min möglich wird. Wird dieser Zu-stand nicht erreicht, durchläuft das Laufrad eine erneute Feinoptimierung. Ist nach mehrmaligen Feinoptimierungsschritten kein Erfolg zu verzeich-nen, wird die jeweilige Ausbalancierungsmethode oder deren Kombination verworfen und die Suche einer geeigneten Ausbalancierungsmethode oder Kombination beginnt von neuem.
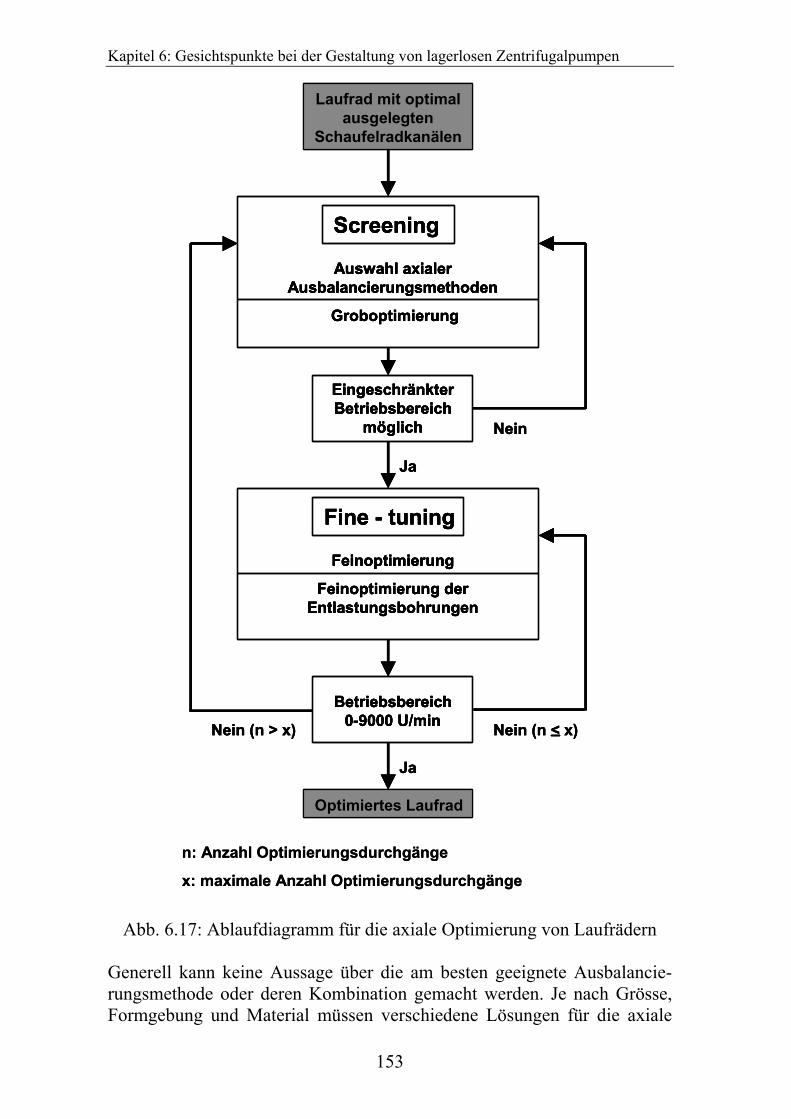
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
153
Betriebsbereich 0-9000 U/min
EingeschränkterBetriebsbereich
möglich
Screening
Auswahl axialer Ausbalancierungsmethoden
Groboptimierung
Fine - tuning
Feinoptimierung
Feinoptimierung der Entlastungsbohrungen
Ja
Ja
Nein
Nein (n < x)
Optimiertes Laufrad
Laufrad mit optimal ausgelegten
Schaufelradkanälen
Nein (n > x)
n: Anzahl Optimierungsdurchgänge
x: maximale Anzahl Optimierungsdurchgänge
Betriebsbereich 0-9000 U/min
EingeschränkterBetriebsbereich
möglich
Screening
Auswahl axialer Ausbalancierungsmethoden
Groboptimierung
Fine - tuning
Feinoptimierung
Feinoptimierung der Entlastungsbohrungen
Ja
Ja
Nein
Nein (n < x)
Optimiertes Laufrad
Laufrad mit optimal ausgelegten
Schaufelradkanälen
Nein (n > x)
Betriebsbereich 0-9000 U/min
Betriebsbereich 0-9000 U/min
EingeschränkterBetriebsbereich
möglich
EingeschränkterBetriebsbereich
möglich
Screening
Auswahl axialer Ausbalancierungsmethoden
Groboptimierung
Screening
Auswahl axialer Ausbalancierungsmethoden
Groboptimierung
Fine - tuning
Feinoptimierung
Feinoptimierung der Entlastungsbohrungen
Fine - tuning
Feinoptimierung
Feinoptimierung der Entlastungsbohrungen
Ja
Ja
Nein
Nein (n < x)
Optimiertes Laufrad
Laufrad mit optimal ausgelegten
Schaufelradkanälen
Nein (n > x)
n: Anzahl Optimierungsdurchgänge
x: maximale Anzahl Optimierungsdurchgänge
Abb. 6.17: Ablaufdiagramm für die axiale Optimierung von Laufrädern Generell kann keine Aussage über die am besten geeignete Ausbalancie-rungsmethode oder deren Kombination gemacht werden. Je nach Grösse, Formgebung und Material müssen verschiedene Lösungen für die axiale
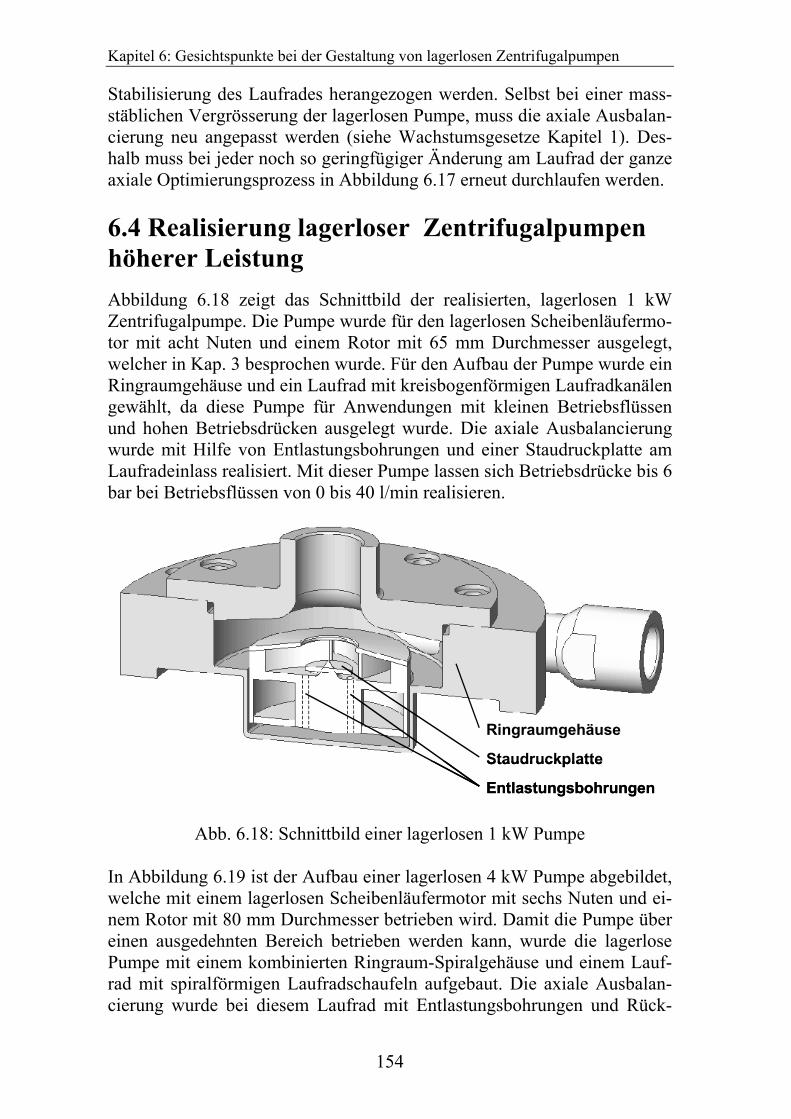
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
154
Stabilisierung des Laufrades herangezogen werden. Selbst bei einer mass-stäblichen Vergrösserung der lagerlosen Pumpe, muss die axiale Ausbalan-cierung neu angepasst werden (siehe Wachstumsgesetze Kapitel 1). Des-halb muss bei jeder noch so geringfügiger Änderung am Laufrad der ganze axiale Optimierungsprozess in Abbildung 6.17 erneut durchlaufen werden. 6.4 Realisierung lagerloser Zentrifugalpumpen höherer Leistung Abbildung 6.18 zeigt das Schnittbild der realisierten, lagerlosen 1 kW Zentrifugalpumpe. Die Pumpe wurde für den lagerlosen Scheibenläufermo-tor mit acht Nuten und einem Rotor mit 65 mm Durchmesser ausgelegt, welcher in Kap. 3 besprochen wurde. Für den Aufbau der Pumpe wurde ein Ringraumgehäuse und ein Laufrad mit kreisbogenförmigen Laufradkanälen gewählt, da diese Pumpe für Anwendungen mit kleinen Betriebsflüssen und hohen Betriebsdrücken ausgelegt wurde. Die axiale Ausbalancierung wurde mit Hilfe von Entlastungsbohrungen und einer Staudruckplatte am Laufradeinlass realisiert. Mit dieser Pumpe lassen sich Betriebsdrücke bis 6 bar bei Betriebsflüssen von 0 bis 40 l/min realisieren.
Entlastungsbohrungen
Staudruckplatte
Ringraumgehäuse
Entlastungsbohrungen
Staudruckplatte
Ringraumgehäuse
Abb. 6.18: Schnittbild einer lagerlosen 1 kW Pumpe
In Abbildung 6.19 ist der Aufbau einer lagerlosen 4 kW Pumpe abgebildet, welche mit einem lagerlosen Scheibenläufermotor mit sechs Nuten und ei-nem Rotor mit 80 mm Durchmesser betrieben wird. Damit die Pumpe über einen ausgedehnten Bereich betrieben werden kann, wurde die lagerlose Pumpe mit einem kombinierten Ringraum-Spiralgehäuse und einem Lauf-rad mit spiralförmigen Laufradschaufeln aufgebaut. Die axiale Ausbalan-cierung wurde bei diesem Laufrad mit Entlastungsbohrungen und Rück-
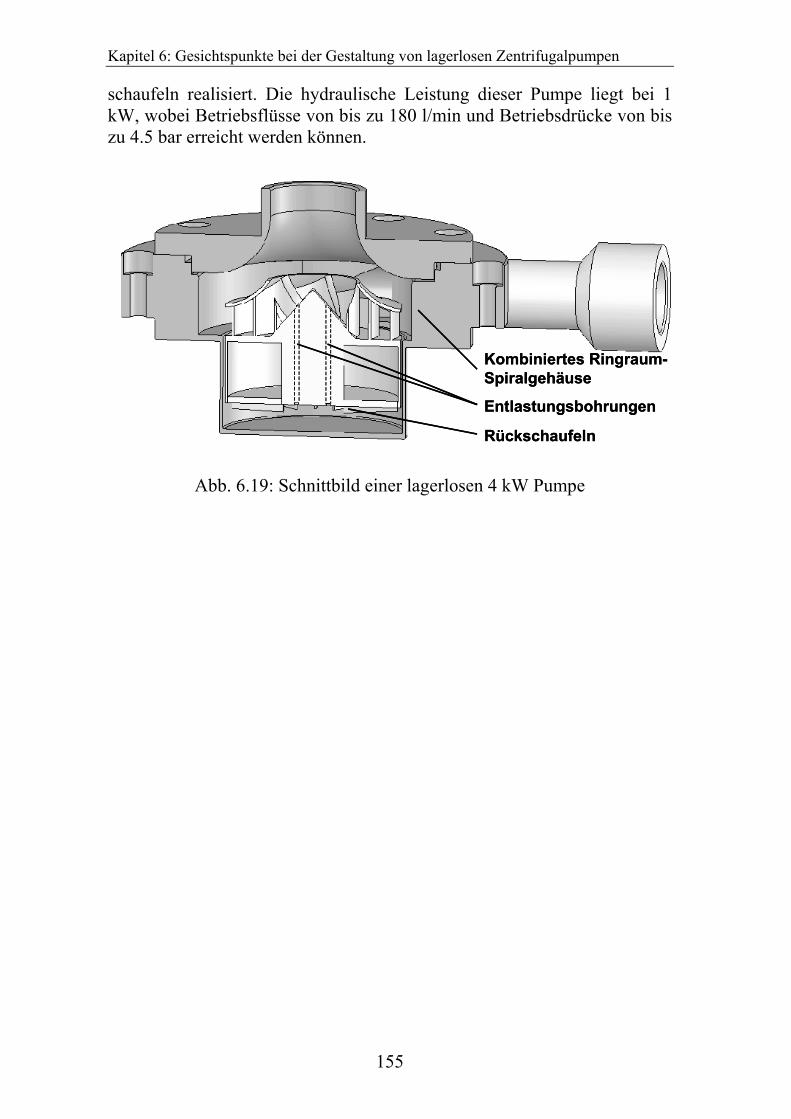
Kapitel 6: Gesichtspunkte bei der Gestaltung von lagerlosen Zentrifugalpumpen
155
schaufeln realisiert. Die hydraulische Leistung dieser Pumpe liegt bei 1 kW, wobei Betriebsflüsse von bis zu 180 l/min und Betriebsdrücke von bis zu 4.5 bar erreicht werden können.
Entlastungsbohrungen
Kombiniertes Ringraum-Spiralgehäuse
Rückschaufeln
Entlastungsbohrungen
Kombiniertes Ringraum-Spiralgehäuse
Rückschaufeln
Entlastungsbohrungen
Kombiniertes Ringraum-Spiralgehäuse
Rückschaufeln
Abb. 6.19: Schnittbild einer lagerlosen 4 kW Pumpe

156
157
7. Realisierung Lagerlose Antriebe sind typische mechatronische Systeme, welche erst dank der fortgeschrittenen Signalprozessortechnik für praktische Anwen-dungen in Frage kommen. Die Leistungserhöhung bei lagerlosen Scheiben-läufermotoren erfordert eine interdisziplinäre Betrachtungsweise aus den Bereichen des Maschinenbaus, der Elektrotechnik, der Informatik, der Ma-terialwissenschaften und aus dem Gebiet der Hydrodynamik. Die Realisie-rung lagerloser Pumpsysteme umfasste dabei folgende Gebiete:
• Auslegung des Scheibenläufermotors (Konzeptstudie, Berechnung, Konstruktion)
• Aufbau des Umrichters (Signalverarbeitungs- und Leistungselektro-
nik, Konstruktion)
• Software (Benutzer- und Regelsoftware)
• Auslegung der Zentrifugalpumpe (Hydrodynamik, Konstruktion) Die Ziele der aufgeführten Punkte bei der schrittweisen Forschung und Entwicklung sind:
• Das Aufzeigen der Realisierbarkeit der ausgewählten Motorkonfigu-rationen
• Das Aufzeigen der Funktionsfähigkeit lagerloser Scheibenläufermo-
toren höherer Leistung in hermetischen Pumpsystemen
• Die Realisierung von Prototypen lagerloser Pumpsysteme höherer Leistung (> 1 kW)
In Abschnitt 7.1 wird die Struktur von lagerlosen Pumpsystemen anhand einer Systemübersicht behandelt. Abschnitt 7.2 erläutert den prinzipiellen Aufbau von Umrichtern für die Ansteuerung der zwei- und dreiphasigen Wicklungssysteme lagerloser Motoren. In den nachfolgenden Abschnitten werden die in der Arbeit realisierten Prototypen von lagerlosen Pumpsys-temen vorgestellt.
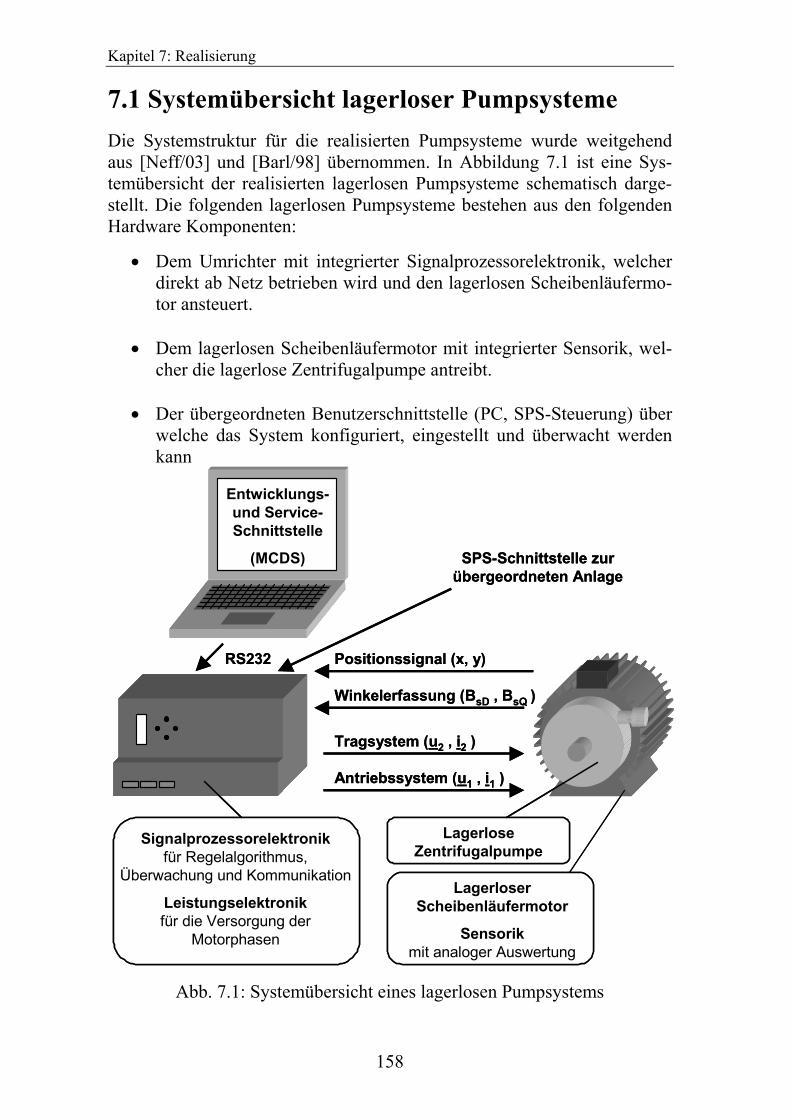
Kapitel 7: Realisierung
158
7.1 Systemübersicht lagerloser Pumpsysteme Die Systemstruktur für die realisierten Pumpsysteme wurde weitgehend aus [Neff/03] und [Barl/98] übernommen. In Abbildung 7.1 ist eine Sys-temübersicht der realisierten lagerlosen Pumpsysteme schematisch darge-stellt. Die folgenden lagerlosen Pumpsysteme bestehen aus den folgenden Hardware Komponenten:
• Dem Umrichter mit integrierter Signalprozessorelektronik, welcher direkt ab Netz betrieben wird und den lagerlosen Scheibenläufermo-tor ansteuert.
• Dem lagerlosen Scheibenläufermotor mit integrierter Sensorik, wel-
cher die lagerlose Zentrifugalpumpe antreibt.
• Der übergeordneten Benutzerschnittstelle (PC, SPS-Steuerung) über welche das System konfiguriert, eingestellt und überwacht werden kann
RS232
SPS-Schnittstelle zur übergeordneten Anlage
Entwicklungs-und Service-Schnittstelle
(MCDS)
Winkelerfassung (BsD , BsQ )
Positionssignal (x, y)
Signalprozessorelektronik für Regelalgorithmus,
Überwachung und Kommunikation
Leistungselektronik für die Versorgung der
Motorphasen
Lagerlose Zentrifugalpumpe
Antriebssystem (u1 , i1 )
Tragsystem (u2 , i2 )
Lagerloser Scheibenläufermotor
Sensorik mit analoger Auswertung
RS232
SPS-Schnittstelle zur übergeordneten Anlage
Entwicklungs-und Service-Schnittstelle
(MCDS)
Winkelerfassung (BsD , BsQ )
Positionssignal (x, y)
Signalprozessorelektronik für Regelalgorithmus,
Überwachung und Kommunikation
Leistungselektronik für die Versorgung der
Motorphasen
Lagerlose Zentrifugalpumpe
Antriebssystem (u1 , i1 )
Tragsystem (u2 , i2 )
Lagerloser Scheibenläufermotor
Sensorik mit analoger Auswertung
Abb. 7.1: Systemübersicht eines lagerlosen Pumpsystems
Kapitel 7: Realisierung
159
Die Kommunikation zum System geschieht über dem Umrichter in wel-chem sich sowohl die Leistungselektronik für die Ansteuerung der Motor-phasen wie auch der Signalprozessor für die Regelung des Pumpsystems befindet. Die digital implementierten Regelungs- und Überwachungsrouti-nen, welche vom Signalprozessor des Typs TMS320F40 von Texas In-struments® verarbeitet werden, wurden in Assembler programmiert. Die assemblierten Regelalgorithmen werden mit einem PC über die RS232 Schnittstelle in den Signalprozessor geladen. Mit Hilfe der von der Firma Levitronix® entwickelten Benutzeroberfläche MCDS (Magnetic Control Development Studio) kann über die RS232 Schnittstelle Online auf sämtli-che Speicheradressen des Signalprozessors und damit auf alle Programm-variablen, wie Regelparameter, Skalierungsfaktoren und Messgrössen zu-gegriffen werden. In Produktionsprozessanlagen wird das Pumpsystem über die standardisierte SPS-Schnittstelle (Speicher Programmierbare Steuerung) gesteuert. Die Leistungskanäle für die Ansteuerung der Motor-phasen wurden mit IGBT-Leistungstransistoren aufgebaut. Um die Position und die Drehzahl des Rotors regeln zu können, wird der Rotorwinkel und die Rotorposition durch eine im Motor integrierte Sensorik erfasst und ana-log aufbereitet. Die analogen Sensorsignale werden im Umrichter mittels A/D-Wandler digitalisiert und dem Signalprozessor zugeführt. Daraus werden im Umrichter die erforderlichen Ausgangsströme für das Antriebs- und das Tragsystem berechnet. 7.2 Umrichter Die Wicklungen des Antriebs- und des Tragsystems sind je nach Motor-konfiguration zwei- oder dreiphasig ausgeführt. Um die Wicklungen an-steuern zu können müssen bei der Realisierung der Umrichter verschiedene Konzepte in Betracht gezogen werden. Eine digitale Stromregelung lässt sich mit einem digitalen Signalprozessor und geschalteten Leistungskanä-len einfach realisieren. In Abbildung 7.2 ist der prinzipielle Aufbau einer geschalteten, digitalen Stromregelung für die Ansteuerung eines zweipha-sigen Systems abgebildet. Jede Phase wird dabei unabhängig voneinander über eine 3-Punkt-PWM Pulsmodulation im Unterschwingungsverfahren geregelt [Stem/96]. Im Leistungspfad jeder einzelnen Phase wird der Pha-senstrom über einen potentialgetrennten analogen Stromsensor gemessen, A/D gewandelt und dem digitalen Stromregelkreis zugeführt. Für die An-steuerung von zwei Phasen werden insgesamt vier voneinander unabhängi-ge Halbbrücken benötigt.
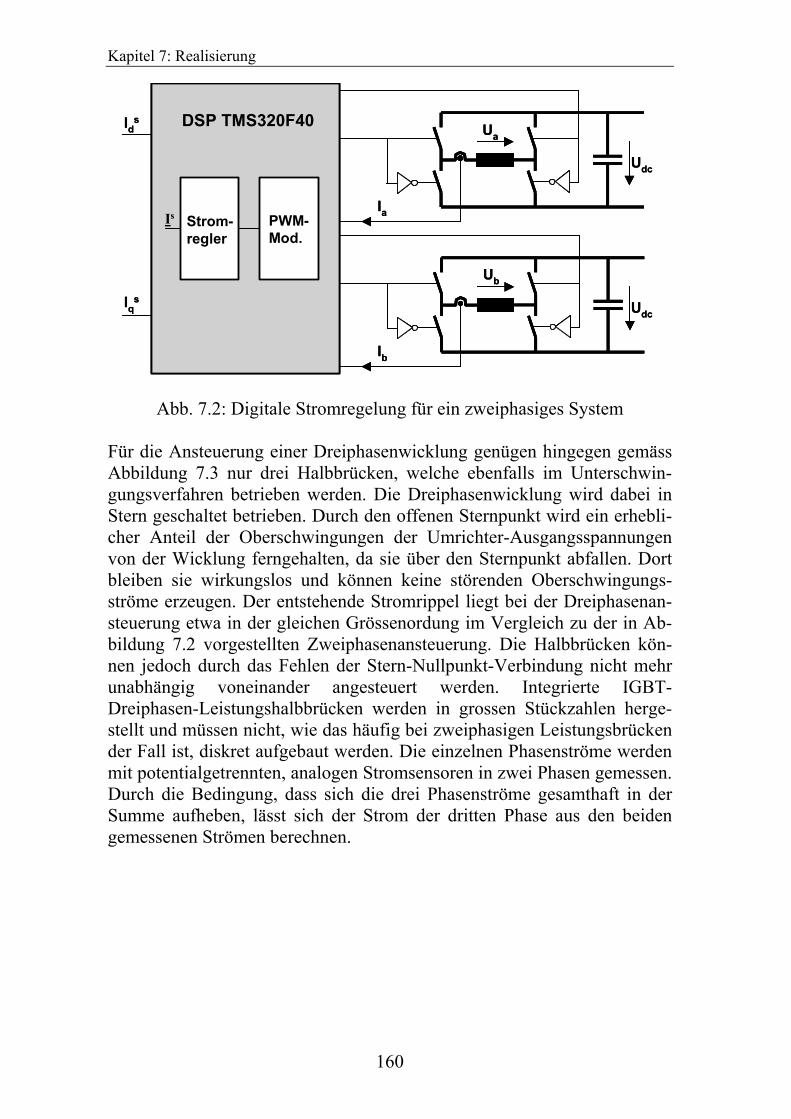
Kapitel 7: Realisierung
160
DSP TMS320F40
Strom-regler
PWM-Mod.
Udc
Udc
Ua
Ub
Ia
Ib
Is
Ids
Iqs
DSP TMS320F40
Strom-regler
PWM-Mod.
Udc
Udc
Ua
Ub
Ia
Ib
Is
Ids
Iqs
Abb. 7.2: Digitale Stromregelung für ein zweiphasiges System
Für die Ansteuerung einer Dreiphasenwicklung genügen hingegen gemäss Abbildung 7.3 nur drei Halbbrücken, welche ebenfalls im Unterschwin-gungsverfahren betrieben werden. Die Dreiphasenwicklung wird dabei in Stern geschaltet betrieben. Durch den offenen Sternpunkt wird ein erhebli-cher Anteil der Oberschwingungen der Umrichter-Ausgangsspannungen von der Wicklung ferngehalten, da sie über den Sternpunkt abfallen. Dort bleiben sie wirkungslos und können keine störenden Oberschwingungs-ströme erzeugen. Der entstehende Stromrippel liegt bei der Dreiphasenan-steuerung etwa in der gleichen Grössenordung im Vergleich zu der in Ab-bildung 7.2 vorgestellten Zweiphasenansteuerung. Die Halbbrücken kön-nen jedoch durch das Fehlen der Stern-Nullpunkt-Verbindung nicht mehr unabhängig voneinander angesteuert werden. Integrierte IGBT-Dreiphasen-Leistungshalbbrücken werden in grossen Stückzahlen herge-stellt und müssen nicht, wie das häufig bei zweiphasigen Leistungsbrücken der Fall ist, diskret aufgebaut werden. Die einzelnen Phasenströme werden mit potentialgetrennten, analogen Stromsensoren in zwei Phasen gemessen. Durch die Bedingung, dass sich die drei Phasenströme gesamthaft in der Summe aufheben, lässt sich der Strom der dritten Phase aus den beiden gemessenen Strömen berechnen.
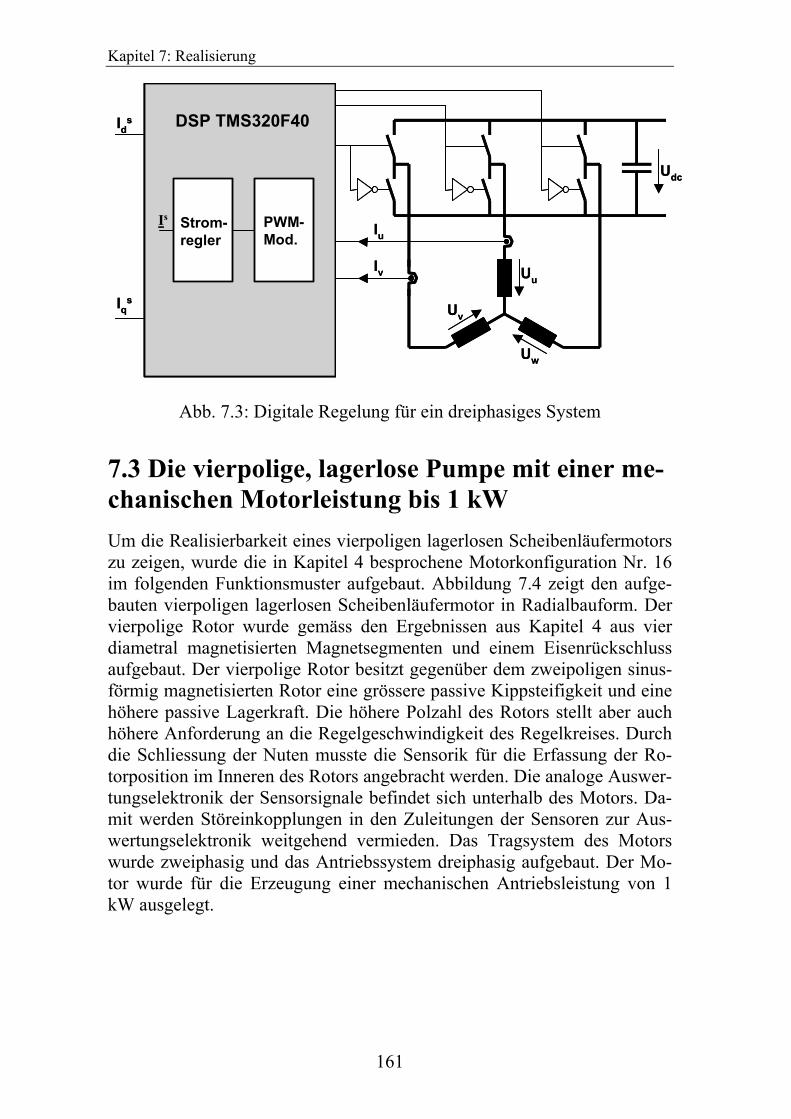
Kapitel 7: Realisierung
161
Strom-regler
PWM-Mod.
Is
Ids
Iqs
Iu
Iv
Uv
Uu
Uw
Udc
DSP TMS320F40
Strom-regler
PWM-Mod.
Is
Ids
Iqs
Iu
Iv
Uv
Uu
Uw
Udc
DSP TMS320F40
Abb. 7.3: Digitale Regelung für ein dreiphasiges System 7.3 Die vierpolige, lagerlose Pumpe mit einer me-chanischen Motorleistung bis 1 kW Um die Realisierbarkeit eines vierpoligen lagerlosen Scheibenläufermotors zu zeigen, wurde die in Kapitel 4 besprochene Motorkonfiguration Nr. 16 im folgenden Funktionsmuster aufgebaut. Abbildung 7.4 zeigt den aufge-bauten vierpoligen lagerlosen Scheibenläufermotor in Radialbauform. Der vierpolige Rotor wurde gemäss den Ergebnissen aus Kapitel 4 aus vier diametral magnetisierten Magnetsegmenten und einem Eisenrückschluss aufgebaut. Der vierpolige Rotor besitzt gegenüber dem zweipoligen sinus-förmig magnetisierten Rotor eine grössere passive Kippsteifigkeit und eine höhere passive Lagerkraft. Die höhere Polzahl des Rotors stellt aber auch höhere Anforderung an die Regelgeschwindigkeit des Regelkreises. Durch die Schliessung der Nuten musste die Sensorik für die Erfassung der Ro-torposition im Inneren des Rotors angebracht werden. Die analoge Auswer-tungselektronik der Sensorsignale befindet sich unterhalb des Motors. Da-mit werden Störeinkopplungen in den Zuleitungen der Sensoren zur Aus-wertungselektronik weitgehend vermieden. Das Tragsystem des Motors wurde zweiphasig und das Antriebssystem dreiphasig aufgebaut. Der Mo-tor wurde für die Erzeugung einer mechanischen Antriebsleistung von 1 kW ausgelegt.
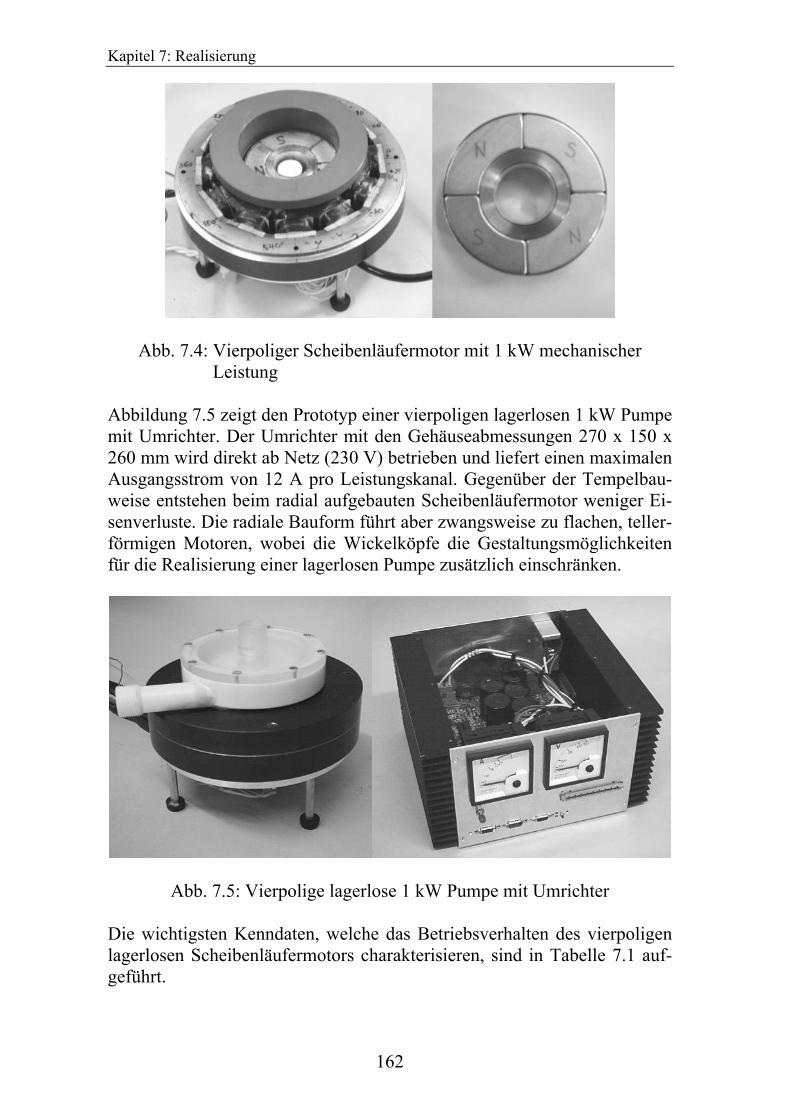
Kapitel 7: Realisierung
162
Abb. 7.4: Vierpoliger Scheibenläufermotor mit 1 kW mechanischer Leistung Abbildung 7.5 zeigt den Prototyp einer vierpoligen lagerlosen 1 kW Pumpe mit Umrichter. Der Umrichter mit den Gehäuseabmessungen 270 x 150 x 260 mm wird direkt ab Netz (230 V) betrieben und liefert einen maximalen Ausgangsstrom von 12 A pro Leistungskanal. Gegenüber der Tempelbau-weise entstehen beim radial aufgebauten Scheibenläufermotor weniger Ei-senverluste. Die radiale Bauform führt aber zwangsweise zu flachen, teller-förmigen Motoren, wobei die Wickelköpfe die Gestaltungsmöglichkeiten für die Realisierung einer lagerlosen Pumpe zusätzlich einschränken.
Abb. 7.5: Vierpolige lagerlose 1 kW Pumpe mit Umrichter Die wichtigsten Kenndaten, welche das Betriebsverhalten des vierpoligen lagerlosen Scheibenläufermotors charakterisieren, sind in Tabelle 7.1 auf-geführt.
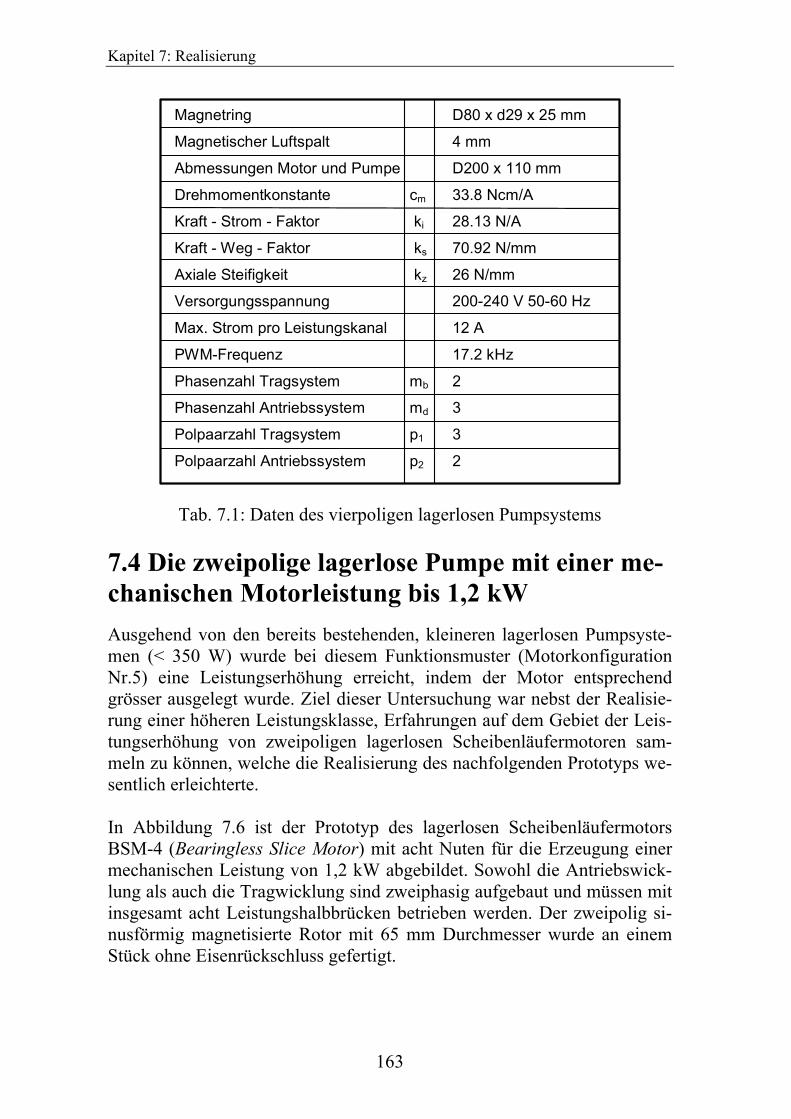
Kapitel 7: Realisierung
163
Magnetring D80 x d29 x 25 mm
Magnetischer Luftspalt 4 mm
Abmessungen Motor und Pumpe D200 x 110 mm
Drehmomentkonstante cm 33.8 Ncm/A
Kraft - Strom - Faktor ki 28.13 N/A
Kraft - Weg - Faktor ks 70.92 N/mm
Axiale Steifigkeit kz 26 N/mm
Versorgungsspannung 200-240 V 50-60 Hz
Max. Strom pro Leistungskanal 12 A
PWM-Frequenz 17.2 kHz
Phasenzahl Tragsystem mb 2
Phasenzahl Antriebssystem md 3
Polpaarzahl Tragsystem p1 3
Polpaarzahl Antriebssystem p2 2
Tab. 7.1: Daten des vierpoligen lagerlosen Pumpsystems
7.4 Die zweipolige lagerlose Pumpe mit einer me-chanischen Motorleistung bis 1,2 kW Ausgehend von den bereits bestehenden, kleineren lagerlosen Pumpsyste-men (< 350 W) wurde bei diesem Funktionsmuster (Motorkonfiguration Nr.5) eine Leistungserhöhung erreicht, indem der Motor entsprechend grösser ausgelegt wurde. Ziel dieser Untersuchung war nebst der Realisie-rung einer höheren Leistungsklasse, Erfahrungen auf dem Gebiet der Leis-tungserhöhung von zweipoligen lagerlosen Scheibenläufermotoren sam-meln zu können, welche die Realisierung des nachfolgenden Prototyps we-sentlich erleichterte. In Abbildung 7.6 ist der Prototyp des lagerlosen Scheibenläufermotors BSM-4 (Bearingless Slice Motor) mit acht Nuten für die Erzeugung einer mechanischen Leistung von 1,2 kW abgebildet. Sowohl die Antriebswick-lung als auch die Tragwicklung sind zweiphasig aufgebaut und müssen mit insgesamt acht Leistungshalbbrücken betrieben werden. Der zweipolig si-nusförmig magnetisierte Rotor mit 65 mm Durchmesser wurde an einem Stück ohne Eisenrückschluss gefertigt.
Kapitel 7: Realisierung
164
Abb. 7.6: Zweipoliger Scheibenläufermotor mit 1,2 kW mechanischer Leistung Ein mögliches Anwendungsfeld lagerloser Pumpsysteme dieser Leistungs-klasse ist in der Halbleiterindustrie zu finden. Abbildung 7.7 zeigt den Pro-totyp einer realisierten Produktionsprozesspumpe welche bereits für An-wendungen in der Halbleiterindustrie eingesetzt wurde. Um die Verlust-wärme des Motors von der Sensorelektronik weitgehend fern zu halten, wurde sie ausserhalb des Motors im Motorklemmkasten integriert. Das Motorgehäuse aus Aluminium ist mit einer chemikalienresistenten Kunst-stoffschicht überzogen. Damit neben dem Gehäuse auch der Motor selbst vor Korrosion geschützt ist, wurden zwei Schutzmassnahmen getroffen. Einerseits ist der Antrieb so abgedichtet, dass keine Chemikalien in das In-nere des Motors gelangen können, und andererseits ist der Motor vergos-sen. Die Vergussmasse besitzt ausserdem die Eigenschaft, dass sie die Ver-lustwärme besser an das Motorgehäuse ableitet. Die Pumpe selbst besteht aus einem Pumpengehäuse und einem Laufrad aus PTFE oder PFA in wel-chem der Permanentmagnetring hermetisch dicht eingeschweisst ist. Die Pumpe lässt sich über vier Schrauben vom Motor lösen und kann dadurch schnell und einfach ausgewechselt werden. Der Umrichter (LC325) wird direkt ab Netz (230 V) betrieben und ist mit dem Signalprozessor in einem kompakten Aluminiumgehäuse mit den Abmessungen 210 x 80 x 240 mm untergebracht. Die acht Leistungshalbbrücken sind diskret aufgebaut und werden durch zwei eingebaute Ventilatoren entlang der Kühlrippenprofile aktiv gekühlt. Die Netzleistungsaufnahme des Umrichters liegt bei etwa 1,5 kW.
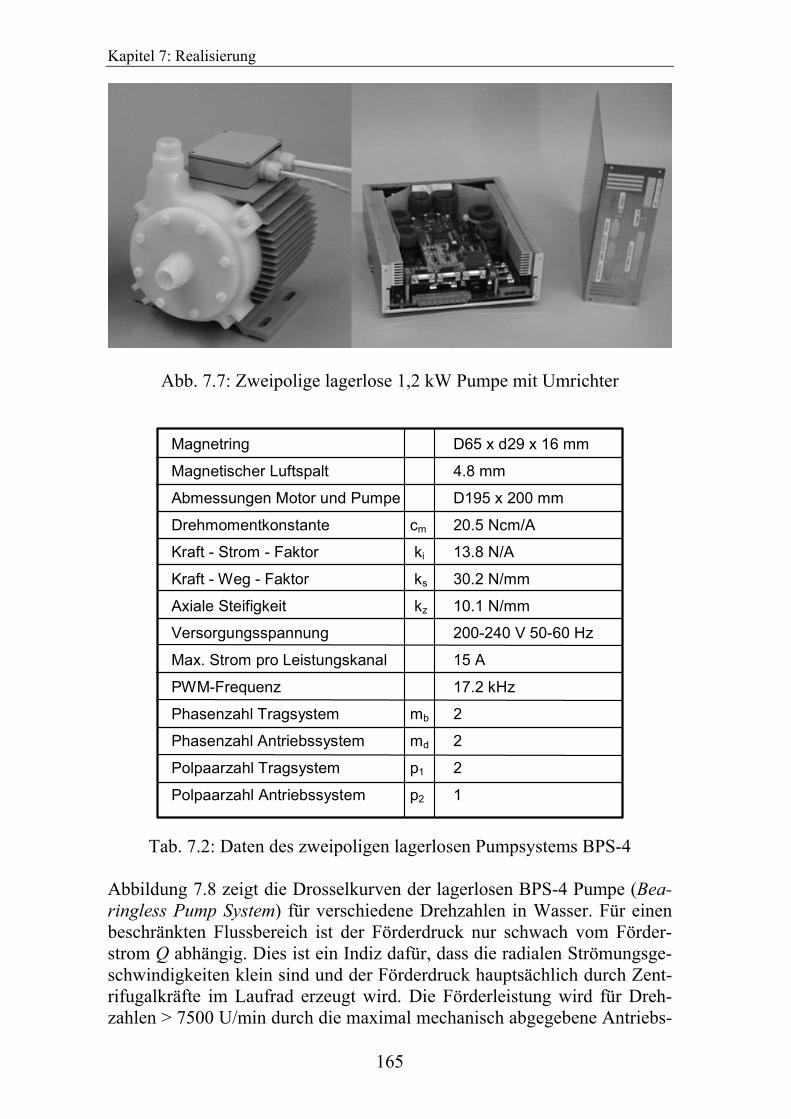
Kapitel 7: Realisierung
165
Abb. 7.7: Zweipolige lagerlose 1,2 kW Pumpe mit Umrichter
Magnetring D65 x d29 x 16 mm
Magnetischer Luftspalt 4.8 mm
Abmessungen Motor und Pumpe D195 x 200 mm
Drehmomentkonstante cm 20.5 Ncm/A
Kraft - Strom - Faktor ki 13.8 N/A
Kraft - Weg - Faktor ks 30.2 N/mm
Axiale Steifigkeit kz 10.1 N/mm
Versorgungsspannung 200-240 V 50-60 Hz
Max. Strom pro Leistungskanal 15 A
PWM-Frequenz 17.2 kHz
Phasenzahl Tragsystem mb 2
Phasenzahl Antriebssystem md 2
Polpaarzahl Tragsystem p1 2
Polpaarzahl Antriebssystem p2 1
Tab. 7.2: Daten des zweipoligen lagerlosen Pumpsystems BPS-4
Abbildung 7.8 zeigt die Drosselkurven der lagerlosen BPS-4 Pumpe (Bea-ringless Pump System) für verschiedene Drehzahlen in Wasser. Für einen beschränkten Flussbereich ist der Förderdruck nur schwach vom Förder-strom Q abhängig. Dies ist ein Indiz dafür, dass die radialen Strömungsge-schwindigkeiten klein sind und der Förderdruck hauptsächlich durch Zent-rifugalkräfte im Laufrad erzeugt wird. Die Förderleistung wird für Dreh-zahlen > 7500 U/min durch die maximal mechanisch abgegebene Antriebs-
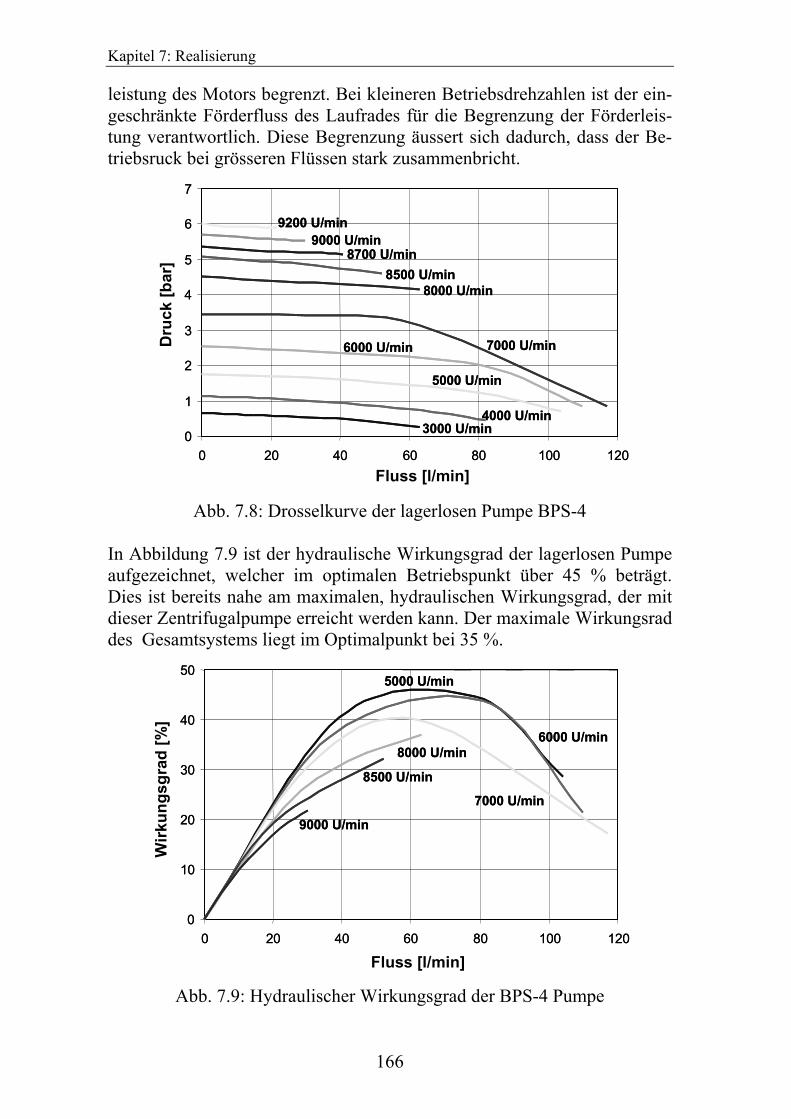
Kapitel 7: Realisierung
166
leistung des Motors begrenzt. Bei kleineren Betriebsdrehzahlen ist der ein-geschränkte Förderfluss des Laufrades für die Begrenzung der Förderleis-tung verantwortlich. Diese Begrenzung äussert sich dadurch, dass der Be-triebsruck bei grösseren Flüssen stark zusammenbricht.
0
1
2
3
4
5
6
7
0 20 40 60 80 100 120Fluss [l/min]
Dru
ck
Dru
ck [b
ar]
Fluss [l/min]
9200 U/min9000 U/min
7000 U/min6000 U/min
5000 U/min
4000 U/min3000 U/min
8700 U/min8500 U/min
8000 U/min
0
1
2
3
4
5
6
7
0 20 40 60 80 100 120Fluss [l/min]
Dru
ck
Dru
ck [b
ar]
Fluss [l/min]
9200 U/min9000 U/min
7000 U/min6000 U/min
5000 U/min
4000 U/min3000 U/min
8700 U/min8500 U/min
8000 U/min
Abb. 7.8: Drosselkurve der lagerlosen Pumpe BPS-4
In Abbildung 7.9 ist der hydraulische Wirkungsgrad der lagerlosen Pumpe aufgezeichnet, welcher im optimalen Betriebspunkt über 45 % beträgt. Dies ist bereits nahe am maximalen, hydraulischen Wirkungsgrad, der mit dieser Zentrifugalpumpe erreicht werden kann. Der maximale Wirkungsrad des Gesamtsystems liegt im Optimalpunkt bei 35 %.
0
10
20
30
40
50
0 20 40 60 80 100 120Fluss
Wirk
ungs
gra
Wirk
ungs
grad
[%]
Fluss [l/min]
5000 U/min
8500 U/min
9000 U/min
8000 U/min
7000 U/min
6000 U/min
0
10
20
30
40
50
0 20 40 60 80 100 120Fluss
Wirk
ungs
gra
Wirk
ungs
grad
[%]
Fluss [l/min]
5000 U/min
8500 U/min
9000 U/min
8000 U/min
7000 U/min
6000 U/min
Abb. 7.9: Hydraulischer Wirkungsgrad der BPS-4 Pumpe
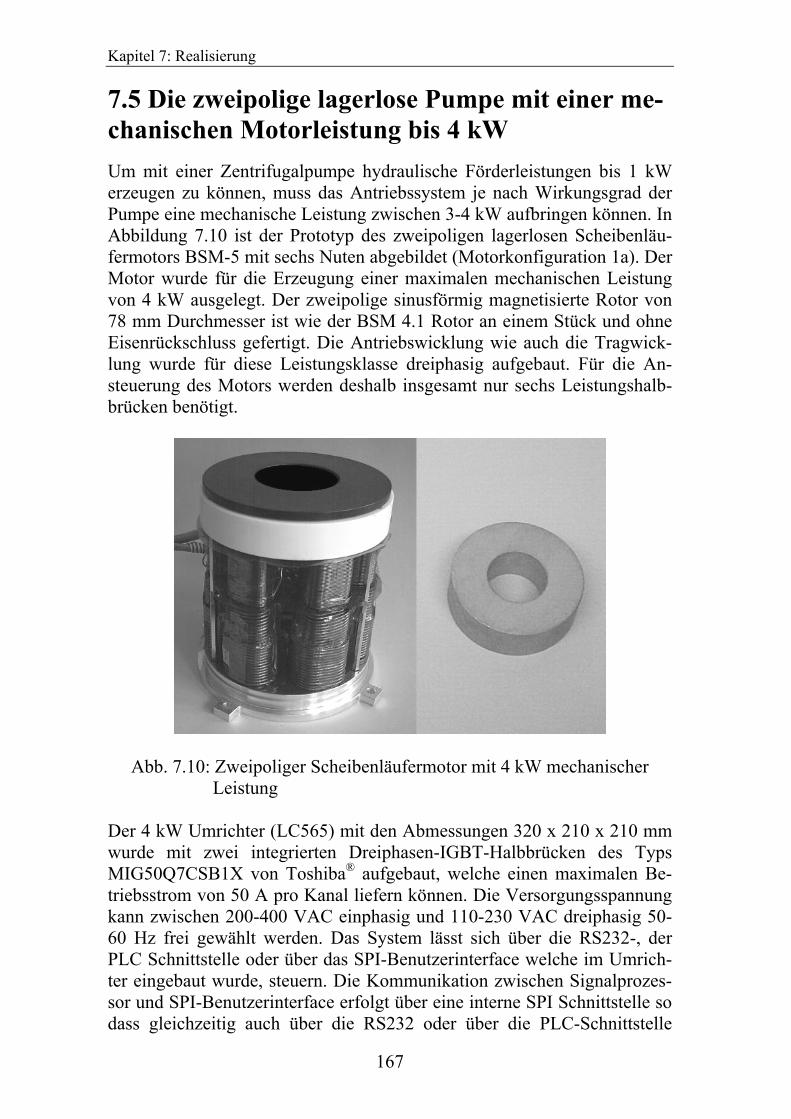
Kapitel 7: Realisierung
167
7.5 Die zweipolige lagerlose Pumpe mit einer me-chanischen Motorleistung bis 4 kW Um mit einer Zentrifugalpumpe hydraulische Förderleistungen bis 1 kW erzeugen zu können, muss das Antriebssystem je nach Wirkungsgrad der Pumpe eine mechanische Leistung zwischen 3-4 kW aufbringen können. In Abbildung 7.10 ist der Prototyp des zweipoligen lagerlosen Scheibenläu-fermotors BSM-5 mit sechs Nuten abgebildet (Motorkonfiguration 1a). Der Motor wurde für die Erzeugung einer maximalen mechanischen Leistung von 4 kW ausgelegt. Der zweipolige sinusförmig magnetisierte Rotor von 78 mm Durchmesser ist wie der BSM 4.1 Rotor an einem Stück und ohne Eisenrückschluss gefertigt. Die Antriebswicklung wie auch die Tragwick-lung wurde für diese Leistungsklasse dreiphasig aufgebaut. Für die An-steuerung des Motors werden deshalb insgesamt nur sechs Leistungshalb-brücken benötigt.
Abb. 7.10: Zweipoliger Scheibenläufermotor mit 4 kW mechanischer Leistung
Der 4 kW Umrichter (LC565) mit den Abmessungen 320 x 210 x 210 mm wurde mit zwei integrierten Dreiphasen-IGBT-Halbbrücken des Typs MIG50Q7CSB1X von Toshiba® aufgebaut, welche einen maximalen Be-triebsstrom von 50 A pro Kanal liefern können. Die Versorgungsspannung kann zwischen 200-400 VAC einphasig und 110-230 VAC dreiphasig 50-60 Hz frei gewählt werden. Das System lässt sich über die RS232-, der PLC Schnittstelle oder über das SPI-Benutzerinterface welche im Umrich-ter eingebaut wurde, steuern. Die Kommunikation zwischen Signalprozes-sor und SPI-Benutzerinterface erfolgt über eine interne SPI Schnittstelle so dass gleichzeitig auch über die RS232 oder über die PLC-Schnittstelle
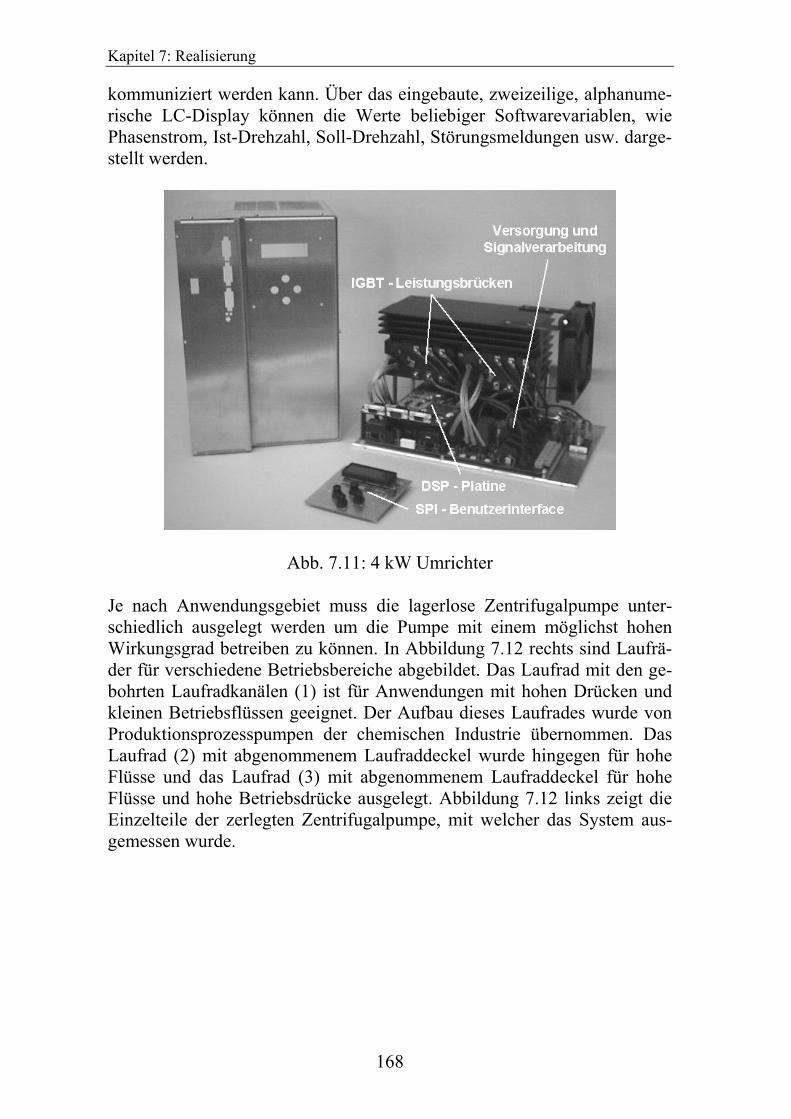
Kapitel 7: Realisierung
168
kommuniziert werden kann. Über das eingebaute, zweizeilige, alphanume-rische LC-Display können die Werte beliebiger Softwarevariablen, wie Phasenstrom, Ist-Drehzahl, Soll-Drehzahl, Störungsmeldungen usw. darge-stellt werden.
Abb. 7.11: 4 kW Umrichter
Je nach Anwendungsgebiet muss die lagerlose Zentrifugalpumpe unter-schiedlich ausgelegt werden um die Pumpe mit einem möglichst hohen Wirkungsgrad betreiben zu können. In Abbildung 7.12 rechts sind Laufrä-der für verschiedene Betriebsbereiche abgebildet. Das Laufrad mit den ge-bohrten Laufradkanälen (1) ist für Anwendungen mit hohen Drücken und kleinen Betriebsflüssen geeignet. Der Aufbau dieses Laufrades wurde von Produktionsprozesspumpen der chemischen Industrie übernommen. Das Laufrad (2) mit abgenommenem Laufraddeckel wurde hingegen für hohe Flüsse und das Laufrad (3) mit abgenommenem Laufraddeckel für hohe Flüsse und hohe Betriebsdrücke ausgelegt. Abbildung 7.12 links zeigt die Einzelteile der zerlegten Zentrifugalpumpe, mit welcher das System aus-gemessen wurde.
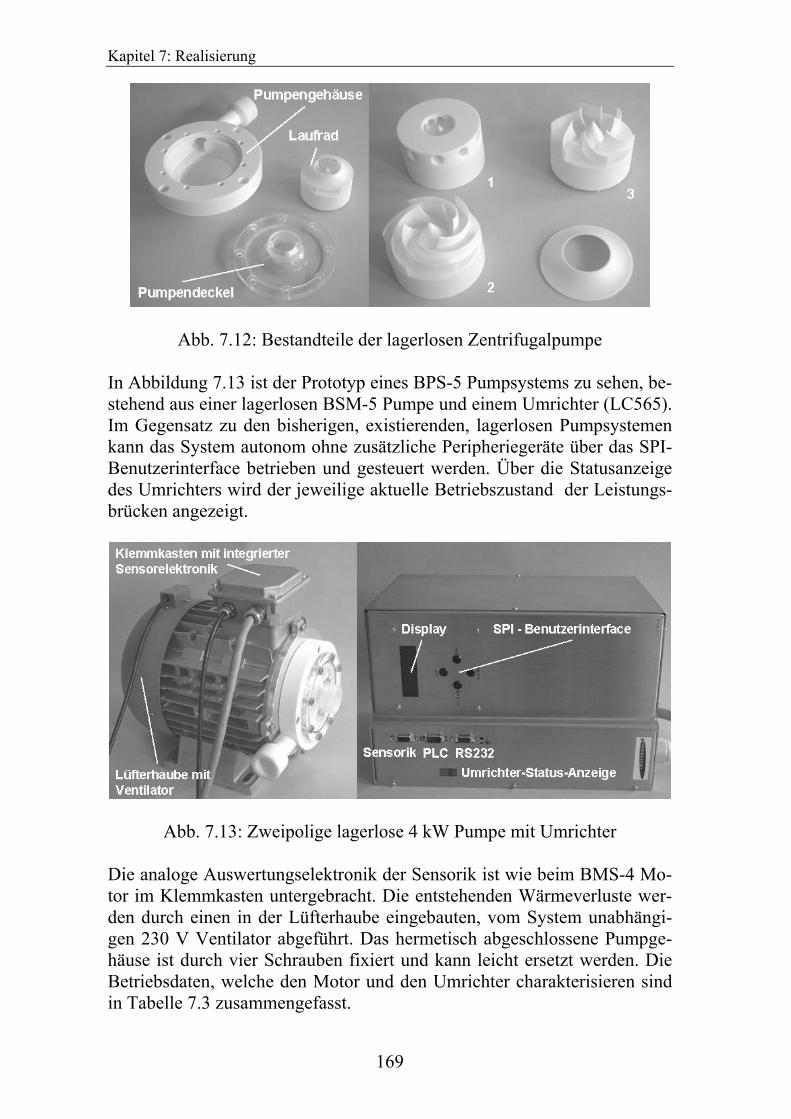
Kapitel 7: Realisierung
169
Abb. 7.12: Bestandteile der lagerlosen Zentrifugalpumpe
In Abbildung 7.13 ist der Prototyp eines BPS-5 Pumpsystems zu sehen, be-stehend aus einer lagerlosen BSM-5 Pumpe und einem Umrichter (LC565). Im Gegensatz zu den bisherigen, existierenden, lagerlosen Pumpsystemen kann das System autonom ohne zusätzliche Peripheriegeräte über das SPI-Benutzerinterface betrieben und gesteuert werden. Über die Statusanzeige des Umrichters wird der jeweilige aktuelle Betriebszustand der Leistungs-brücken angezeigt.
Abb. 7.13: Zweipolige lagerlose 4 kW Pumpe mit Umrichter
Die analoge Auswertungselektronik der Sensorik ist wie beim BMS-4 Mo-tor im Klemmkasten untergebracht. Die entstehenden Wärmeverluste wer-den durch einen in der Lüfterhaube eingebauten, vom System unabhängi-gen 230 V Ventilator abgeführt. Das hermetisch abgeschlossene Pumpge-häuse ist durch vier Schrauben fixiert und kann leicht ersetzt werden. Die Betriebsdaten, welche den Motor und den Umrichter charakterisieren sind in Tabelle 7.3 zusammengefasst.
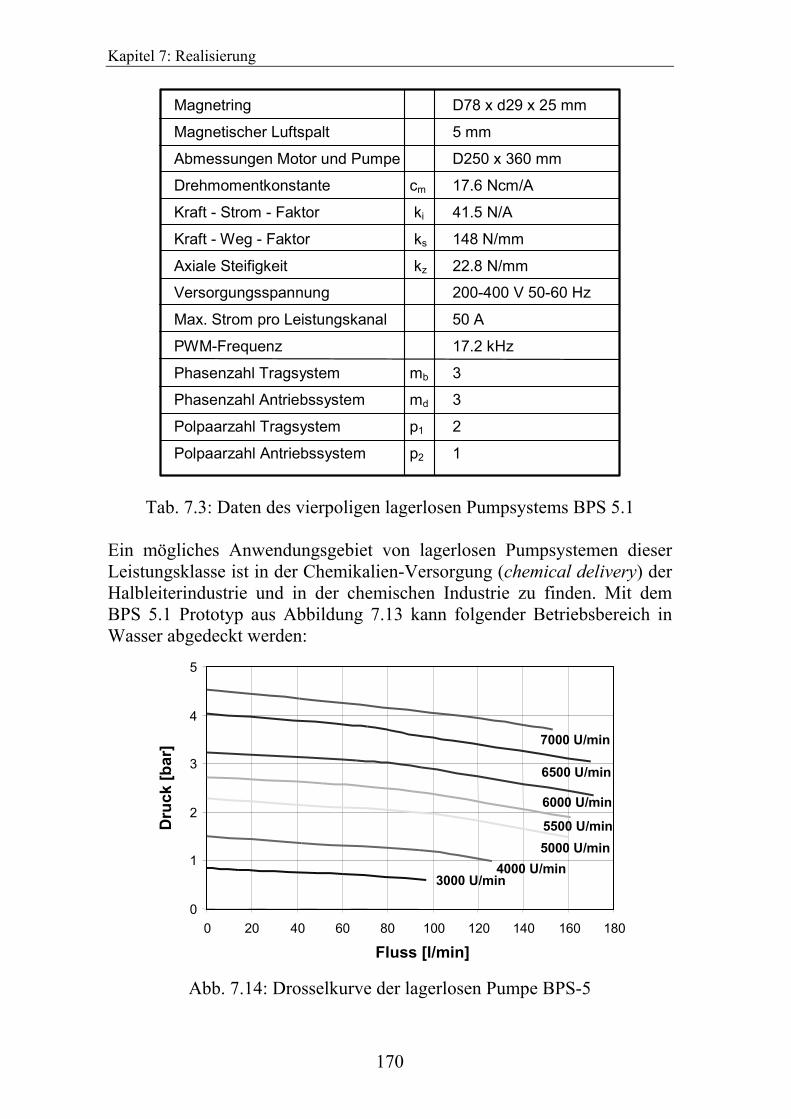
Kapitel 7: Realisierung
170
Magnetring D78 x d29 x 25 mm
Magnetischer Luftspalt 5 mm
Abmessungen Motor und Pumpe D250 x 360 mm
Drehmomentkonstante cm 17.6 Ncm/A
Kraft - Strom - Faktor ki 41.5 N/A
Kraft - Weg - Faktor ks 148 N/mm
Axiale Steifigkeit kz 22.8 N/mm
Versorgungsspannung 200-400 V 50-60 Hz
Max. Strom pro Leistungskanal 50 A
PWM-Frequenz 17.2 kHz
Phasenzahl Tragsystem mb 3
Phasenzahl Antriebssystem md 3
Polpaarzahl Tragsystem p1 2
Polpaarzahl Antriebssystem p2 1
Tab. 7.3: Daten des vierpoligen lagerlosen Pumpsystems BPS 5.1
Ein mögliches Anwendungsgebiet von lagerlosen Pumpsystemen dieser Leistungsklasse ist in der Chemikalien-Versorgung (chemical delivery) der Halbleiterindustrie und in der chemischen Industrie zu finden. Mit dem BPS 5.1 Prototyp aus Abbildung 7.13 kann folgender Betriebsbereich in Wasser abgedeckt werden:
0
1
2
3
4
5
0 20 40 60 80 100 120 140 160 180
Fluss
Dru
ck
Fluss [l/min]
Dru
ck [b
ar]
3000 U/min4000 U/min
5000 U/min5500 U/min
6500 U/min
6000 U/min
7000 U/min
0
1
2
3
4
5
0 20 40 60 80 100 120 140 160 180
Fluss
Dru
ck
Fluss [l/min]
Dru
ck [b
ar]
3000 U/min4000 U/min
5000 U/min5500 U/min
6500 U/min
6000 U/min
7000 U/min
Abb. 7.14: Drosselkurve der lagerlosen Pumpe BPS-5
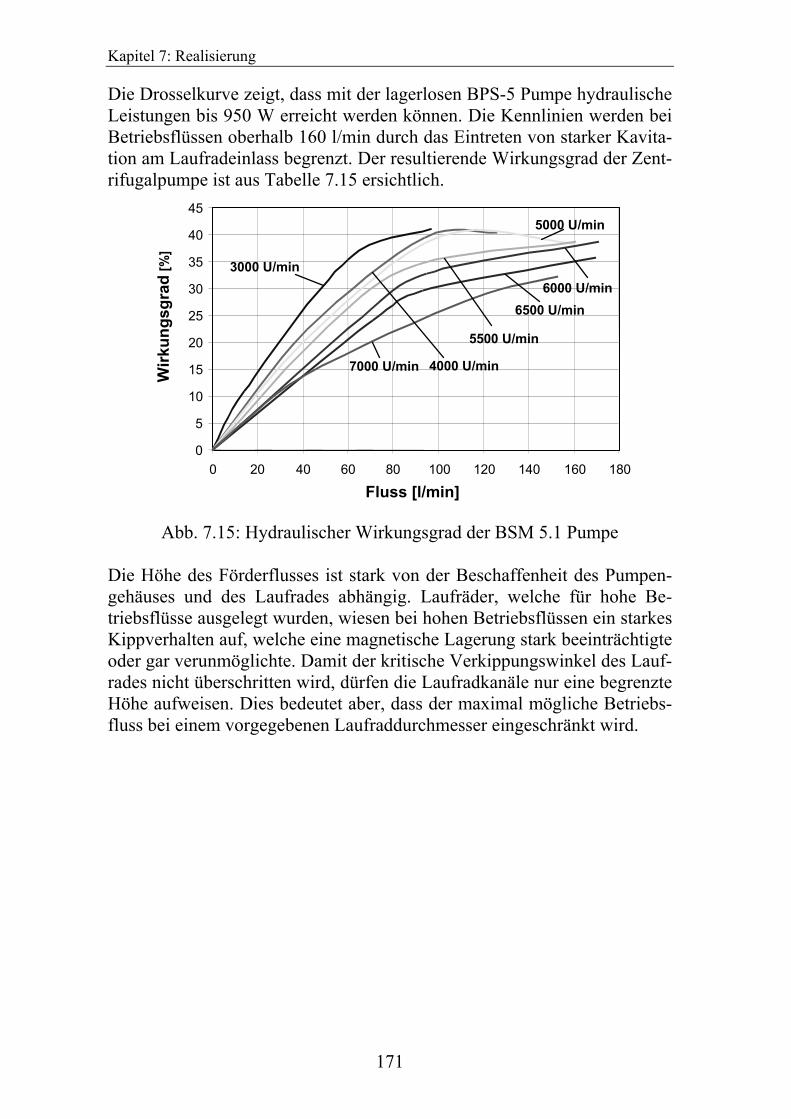
Kapitel 7: Realisierung
171
Die Drosselkurve zeigt, dass mit der lagerlosen BPS-5 Pumpe hydraulische Leistungen bis 950 W erreicht werden können. Die Kennlinien werden bei Betriebsflüssen oberhalb 160 l/min durch das Eintreten von starker Kavita-tion am Laufradeinlass begrenzt. Der resultierende Wirkungsgrad der Zent-rifugalpumpe ist aus Tabelle 7.15 ersichtlich.
0
5
10
15
20
25
30
35
40
45
0 20 40 60 80 100 120 140 160 180
Fluss
Wirk
ungs
grad
Wirk
ungs
grad
[%]
Fluss [l/min]
3000 U/min
7000 U/min
6500 U/min6000 U/min
5500 U/min
5000 U/min
4000 U/min
0
5
10
15
20
25
30
35
40
45
0 20 40 60 80 100 120 140 160 180
Fluss
Wirk
ungs
grad
Wirk
ungs
grad
[%]
Fluss [l/min]
3000 U/min
7000 U/min
6500 U/min6000 U/min
5500 U/min
5000 U/min
4000 U/min
Abb. 7.15: Hydraulischer Wirkungsgrad der BSM 5.1 Pumpe
Die Höhe des Förderflusses ist stark von der Beschaffenheit des Pumpen-gehäuses und des Laufrades abhängig. Laufräder, welche für hohe Be-triebsflüsse ausgelegt wurden, wiesen bei hohen Betriebsflüssen ein starkes Kippverhalten auf, welche eine magnetische Lagerung stark beeinträchtigte oder gar verunmöglichte. Damit der kritische Verkippungswinkel des Lauf-rades nicht überschritten wird, dürfen die Laufradkanäle nur eine begrenzte Höhe aufweisen. Dies bedeutet aber, dass der maximal mögliche Betriebs-fluss bei einem vorgegebenen Laufraddurchmesser eingeschränkt wird.
Kapitel 7: Realisierung
172
Abb. 7.16: Lagerlose Zentrifugalpumpe BSM 5.1 Mit den vorgestellten Prototypen wurde gezeigt, dass lagerlose Pumpsys-teme höherer Leistung mit Scheibenläufermotoren gut realisierbar sind. Dabei wurde die Funktionsfähigkeit sowohl für zweipolige als auch für vierpolige Scheibenläufermotoren höherer Leistung gezeigt. Mit der Erhö-hung der hydraulischen Pumpleistung auf 1 kW eröffnen sich neue An-wendungsmöglichkeiten in der Halbleiter- wie auch erstmals in der Phar-ma-, und der chemischen Industrie.
173
8. Zusammenfassung und Ausblick 8.1 Zusammenfassung und Ergebnisse der Arbeit Das Ziel dieser Arbeit war die Erarbeitung neuer Konzepte für die Realisie-rung lagerloser Scheibenläufermotoren höherer Leistung > 350 W. Ein mögliches Hauptanwendungsgebiet von lagerlosen Scheibenläufermotoren höherer Leistung ist der Antrieb hermetischer Fördersysteme, welche hoch-reine Flüssigkeiten in der Prozessumgebung der Halbleiter-, der Pharma- und der chemischen Industrie fördern. In einem ersten Schritt wurde in einer Übersicht das Anwendungsfeld be-stehender, lagerloser Scheibenläufermotoren mit acht Nuten und einer me-chanischen Leistung < 350 W charakterisiert. Eines der derzeit wichtigsten Anwendungsgebiete bestehender, lagerloser Scheibenläufermotoren bilden die lagerlosen Zentrifugalpumpen. In diesem Zusammenhang wurden Probleme, die es bei einer Leistungserhöhung von lagerlosen Scheibenläu-fermotoren und lagerlosen Zentrifugalpumpen zu lösen gilt, behandelt. Mit der Erarbeitung der Grundlagen lagerloser Scheibenläufermotoren hö-herer Leistung wurden alle möglichen Motorkonfigurationen mit der Nut-zahl ≤ 12 und der Phasenzahl ≤ 3 untersucht. Mit Hilfe von 3-D Feldsimu-lationen wurden die aussagekräftigsten Motorkonfigurationen bezüglich Verlauf der Tragkräfte und des zu erwartenden Drehmomentes simuliert und bewertet. Von den Simulationsergebnissen ausgehend, wurden hinsichtlich einer spä-teren Realisierung, folgende Motorkonfigurationen bezüglich Aufbau, ver-schiedener Rotormagnetisierungen und der Regelstruktur genauer unter-sucht:
• 2-poliger Scheibenläufermotor in Tempelbauform mit 6 Nuten • 2-poliger Scheibenläufermotor in Tempelbauform mit 8 Nuten
• 4-poliger Scheibenläufermotor in Radialbauform mit 12 Nuten
In einer Gegenüberstellung wurden die untersuchten Konfigurationen betreffend der technischen Realisierbarkeit verglichen und bewertet, wobei sich der Schwerpunkt der nachfolgenden Untersuchungen auf den lagerlo-sen Scheibenläufermotor mit sechs Nuten bezog.
Kapitel 8: Zusammenfassung und Ausblick
174
Gestützt durch theoretische Verlustbetrachtungen und Feldsimulationen wurden verschiedene Eisenkreiskonfigurationen des zweipoligen lagerlo-sen Scheibenläufermotors mit sechs Nuten untersucht und optimiert. Ein Schwerpunkt bildete dabei die Minimierung von Eisenverlusten. Durch die Optimierungsbetrachtungen konnten die Eisenverluste des ursprünglich ausgelegten lagerlosen Scheibenläufermotors auf den halben Wert gesenkt werden. Bei der Gestaltung lagerloser Zentrifugalpumpen höherer Leistung ist die axiale Ausbalancierung des Laufrades eine der schwierigsten Aufgaben welche es zu lösen gilt. Mit verschiedenen Lösungsansätzen wurden Mög-lichkeiten für die axiale Stabilisierung von Laufrädern höherer Leistung, unter Berücksichtigung der Betriebseigenschaften von lagerlosen Schei-benläufermotoren, erarbeitet und vorgeschlagen. Mit den aufgebauten und experimentell optimierten lagerlosen Zentrifugalpumpen konnten Betriebs-drücke bis 6 bar und Betriebsflüsse bis 170 l/min erreicht werden. Anhand von aufgebauten Prototypen wurde die praktische Realisierbarkeit eines vierpoligen lagerlosen 1 kW Pumpsystems, eines zweipoligen lager-losen 1,2 kW Pumpsystems für die Halbleiterfertigung und eines zweipoli-gen lagerlosen 4 kW Pumpsystems für die Chemikalienversorgung gezeigt. Mit dem Eintritt in eine höhere Leistungsklasse oberhalb 350 W wird der Zugang für Anwendungen in der Pharma-, Lebensmittel- und der chemi-schen Industrie erstmals für lagerlose Scheibenläufermotoren möglich ge-macht. 8.2 Ausblick Mit der Realisierung lagerloser Pumpsysteme höherer Leistung wurde ge-zeigt, dass mit den erarbeiteten Konzepten eine Leistungserhöhung bei la-gerlosen Scheibenläufermotoren gut möglich ist. Es bleiben aber noch ei-nige Aspekte übrig, welche bei den bestehenden lagerlosen Pumpsystemen oder bei einer weiteren Leistungserhöhung von lagerlosen Scheibenläufer-motoren noch untersucht werden müssten. Die schwierigste Aufgabe bei der Gestaltung einer lagerlosen Pumpe höhe-rer Leistung ist die Reduzierung des Axialschubes. Mit den im Kapitel 6 vorgeschlagenen Ausbalancierungsmethoden ist die axiale Stabilität des Laufrades aber nur in einem eingeschränkten Viskositätsbereich der zu pumpenden Flüssigkeit gegeben. Ausserhalb dieses Bereiches muss das Laufrad erneut axial ausbalanciert werden. Damit Flüssigkeiten verschie-dener Viskositäten zukünftig mit dem selben Laufrad gefördert werden können, müssen viskositätsunabhängige Ausbalancierungsmethoden ge-funden werden. Ein weiteres Problem stellt die Verkippung des Laufrades
Kapitel 8: Zusammenfassung und Ausblick
175
bei grossen Flüssen dar. Die Verkippung hängt dabei stark von der Höhe der Laufradkanäle und von der Beschaffenheit des Pumpengehäuses ab. Die Laufradkanäle dürfen nur eine begrenzte Höhe aufweisen, was wieder-um den maximal möglichen Förderfluss begrenzt. Damit der Förderfluss bei gegebenem Laufraddurchmesser trotzdem weiter erhöht werden kann, muss die Gestaltung des Pumpengehäuses genauer untersucht werden. Mit kombinierten Doppelringraum-Spiralgehäusen könnten die Radial- und Verkippungskräfte beispielsweise weiter reduziert werden. Zentrifugal-pumpen, welche vollständig aus Metall (beispielsweise aus Titan) gefertigt wären, könnten neue Anwendungsgebiete für die Anwendung von lagerlo-sen Scheibenläufermotoren eröffnen. Nebst experimentellen Optimie-rungsmethoden sind Fluidsimulationen ein weiteres, hilfreiches Instrument um das Betriebsverhalten von lagerlosen Zentrifugalpumpen höherer Leis-tung besser verstehen zu können. Damit könnten sowohl der Wirkungsgrad wie auch die axiale Stabilität bestehender und zukünftiger, lagerloser Zent-rifugalpumpen weiter verbessert werden. Zweipolige sinusförmig magnetisierte Rotoren können mit dem heutigen Stand der Technik nur bis zu einem begrenzten Durchmesser an einem Stück gefertigt werden. Rotoren mit grösseren Durchmessern müssen des-halb aus einzelnen Magnetsegmenten aufgebaut werden. Gemäss Kapitel 3 ist das Betriebsverhalten von segmentierten Rotoren schlechter als von Ro-toren welche an einem Stück gefertigt werden. Der Grund liegt darin, dass der Feldverlauf jedes einzelnen Rotors, welcher mit Magnetsegmenten auf-gebaut wurde, stark vom gewünschten Feldverlauf abweichen kann. Die Regelparameter müssen deshalb mit Hilfe einer, auf jeden einzelnen Rotor individuell zugeschnittene Korrekturmatrix angepasst werden. Für die Rea-lisierung von Scheibenläufermotoren höherer Leistung > 10 kW muss des-halb nach Möglichkeiten gesucht werden, wie der Feldverlauf von segmen-tierten Rotoren verbessert werden kann oder wie die Korrekturmatrizen der einzelnen Rotoren in einem automatisierten Verfahren einfach bestimmt werden können.

176
177
Literaturverzeichnis [Ausd/04] Daniel Ausderau Polysolenoid-Linearantrieb mit genutetem Stator, Dissertation, ETH, Zürich, 2004, Nr. 15498 [Barl/98] Natale Barletta
Der lagerlose Scheibenmotor, Dissertation, ETH, Zürich, 1998, Nr. 12870
[Bart/82] Wilfried J. Barz Luftlagerungen, Expert Verlag Ehningen, 1982 [Bich/90] Peter Bichsel Beiträge zum lagerlosen Elektromotor,Dissertation, ETH, Zürich, 1990, Nr. 9303 [Bilk/99] Urs Bilke Die Auslegung lagerloser Induktionsmaschinen, Dissertation,
ETH, Zürich, 1999, Nr. 13180 [Bohl/78] Willi Bohl, Walter Wagner Technische Strömungslehre, Vogel Verlag, 1978 [Brau/39] Werner Braunbek
Freischwebende Körper im elektrischen und magnetischen Feld, Zeitschrift für Physik, Bd. 112:753-763, 1939
[Figu/86] Louis Figuier Ouvrage couronne par l’académie française, Frankreich Les nouvelles conquêtes de la science – l’électricité, 1886 [Fisc/95] Rolf Fischer
Elektrische Maschinen, Carl Hanser Verlag München Wien, 1995
[Gemp/97] Thomas Gemp Mechatronik einer lagerlosen Spaltrohrpumpe, Dissertation, ETH, Zürich, 1997, Nr. 12325
Literaturverzeichnis
178
[Güli/99] Johann F.Gülich Kreiselpumpen, Handbuch für Entwicklung, Anlageplanung und Betrieb, Springer Verlag Berlin Heidelberg, 1999
[Hahn/02] Jürgen Hahn Sensorlose Bestimmung der Prozessgrössen magnetisch gelagerter Blutpumpen, Dissertation, ETH, Zürich, 2002, Nr. 14563 [Heck/75] Carl Heck Magnetische Werkstoffe und ihre technische Anwendung, Dr. Alfred Hüthig, Heidelberg, 2. Auflage, 1975 [Hend/94] J. R. Hendershot Jr., T. J. E. Miller Design of Brushless Permanent-Magnet Motors. Magna Physics, Oxford, 1994 [Herm/74] P. Hermann Deutsche Patent-Offenlegungsschrift P 24 57 0841-32, 1974 [Herm/75] P. Hermann Deutsche Patent-Offenlegungsschrift P 24 06 790.1-32, 1975 [Hilg/92] Philip Hilge Die Geschichte der Pumpen, Philip Hilge GmbH, Bodenheim/Rhein 1992 [Holz/89] Kurt Holzenberger Hrsg. KDB-Kreiselpumpen-Lexikon. KSB AG, Frankenthal, 3. Auflage, 1989 [Huwy/03] Simon Huwyler Baringless In-Line Viscometer for the Semiconductor Industry, IEEE Sensors, Toronto, 2003 [Hütt/03] Christian Hüttner Regelungskonzepte magnetisch gelagerter Scheibenmotoren, Dissertation, ETH, Zürich, 2003, Nr. 15092 [Neff/03] Martin Neff Magnetgelagertes Pumpsystem für die Halbleiterfertigung, Dissertation, ETH, Zürich, 2003, Nr. 15217
Literaturverzeichnis
179
[Küpf/59] Karl Küpfmüller Theoretische Elektrotechnik, Springer Verlag Berlin, 1959 [Neum/94] Robert Neumaier Hermetische Pumpen – die ökologische Lösung bei
Kreiselpumpen und rotierenden Verdrängerpumpen, W. H. Faragallah Verlag, Sulzbach (D), 1994 [Pfle/91] Carl Pfleiderer, Hartwig Petermann Strömungsmaschinen, Springer Verlag Berlin, 1991 [Rede/00] Christian Redemann Auslegung, Simulation und Aufbau einer lagerlosen Spaltrohrpumpe, Dissertation, ETH, Zürich, 2000, Nr. 13736 [Reul/88] H. Reul Hydrodynamics of Rotary Pumps, International Workshop on Rotary Blood Pumps, 1988, Obertauern, Austria [Schö/93] Reto Schöb Beiträge zur lagerlosen Asynchronmaschine, Dissertation, ETH, Zürich, 1993, Nr. 10417 [Schu/96] Jens Oliver Schulze Dynamisches Modell der Querkraft Asynchronmaschine, Dissertation, ETH, Zürich, 1996, Nr. 11607 [Schw/93] G. Schweitzer, A. Traxler, H. Bleuler Magnetlager, Springer Verlag Berlin, 1993 [Silb/00] Siegfried Silber Beiträge zum lagerlosen Einphasenmotor, Dissertation, Johannes Kepler Universität Linz, Linz, 2000 [Stei/91] C. Steinmetz Note on the law of hysteresis, Electrician, 26:261 – 262, 1891 [Stem/96] H. Stemmler Leistungselektronische Systeme II, ETH, Zürich, 1996 [Stem/97] H. Stemmler Leistungselektronische Systeme I, ETH, Zürich, 1997
Literaturverzeichnis
180
[Vogt/88] K. Vogt Elektrische Maschinen, VEB Verlag Technik Berlin, 1988 [Wied/67] Eugen Wiedemann, Walter Kellenberger Konstruktion elektrischer Maschinen, Springer Verlag Berlin, 1967 [Wilk/99] Arthur Wilke Die Elektrizität, ihre Erzeugung und ihre Anwendung in Industrie und Gewerbe, Otto Spamer Verlag, Leipzig, 1899 [Wind/98] E. Windhab Pumpen – Arten, Arbeitsweise und Verwendung, ETH, Zürich, 1998 [Zhan 95] Jing Zhang Power Amplifier for Active Magnetic Bearings, Dissertation, ETH, Zürich, 1995, Nr. 11406 [Barl/*1] Natale Barletta Bearing Forces and Parameters in the Bearingless Slice Motor BSM 3.2, Zürich, 2000 [Laby/*1] Prospekt Laby®, Labyrinthkolben-Kompressoren, Sulzer Burckhardt [Levi/*1] Bericht aus der Zeitschrift Process, 12.2002, Levitronix GmbH, Zürich [Levi/*2] Prospekt PL-0023 Rev00, Levitronix GmbH, Zürich [Levi/*3] Prospekt PL-2004 Rev00, Levitronix GmbH, Zürich [Silb/*1] Siegfried Silber Evaluation von Motorkonzepten, Linz Center of Competence in Mechatronics, Linz, 2002 [Silb/*2] Siegfried Silber Untersuchung Kippsteifigkeit BSM 4.1, Linz Center of Competence in Mechatronics, Linz, 2002 [Silb/*3] Siegfried Silber, Michael Huber Untersuchung Motor BSM 4.1, Linz Center of Competence in Mechatronics, Linz, 2002
181
Publikationen P. Bösch, N. Barletta „HIGH POWER BEARINGLESS SLICE MOTOR (3-4kW) FOR BEARINGLESS CANNED PUMPS”, Ninth International Symposium on Magnetic Bearings (ISMB9), 6.Aug 04, Lexington, Kentucky, USA H. Zhu, P. Bösch „THE MEASUREMENTS AND ANALYSIS OF CORE LOSSES FOR A 4kW BEARINGLESS PERMANENT MAGNET SLICE MOTOR”, Ninth International Symposium on Magnetic Bearings (ISMB9), 6.Aug 04, Lexington, Kentucky, USA S. Silber, W. Amrhein, P. Bösch, R. Schöb, N. Barletta „DESIGN ASPECTS OF BEARINGLESS SLICE MOTORS”, Ninth International Symposium on Magnetic Bearings (ISMB9), 6.Aug 04, Lexington, Kentucky, USA

182
183
Lebenslauf Personalien: Name: Bösch Vorname: Pascal Nang Geburtsdatum: 22. Mai 1975 Heimatort: Nesslau SG Vater: Willi Ernst Bösch Mutter: Cécile Nga Hoang Bösch (Nguyen) Schulbildung: 1982 – 1988 Primarschule in Adliswil (ZH) 1988 – 1990 Sekundarschule in Adliswil (ZH) 1990 – 1995 Mathematisch Naturwissenschaftliches
Gymnasium in Zürich (Matura Typus C) Studium an der ETH Zürich: 1995 – 2001 Studium der Elektrotechnik Abschluss Richtung Leistungselektronik, Hochspannungstechnik/Energie- übertragung und Antriebstechnik Berufstätigkeit:
2001 – 2004 Wissenschaftlicher Mitarbeiter an der Professur für Elektrotechnische Entwicklungen und Konstruktionen (EEK) der ETH Zürich




