Embed Size (px)
DESCRIPTION
Learning a Multiagent Behavior. Pass Evaluation. Problemstellung. Ziel: Möchte ein Spieler den Ball zu einem Mitspieler passen, so soll er aus einer Reihe von Merkmalen, die seine Umgebung beschreiben, jenen bestimmen, zu dem ein Pass am wahrscheinlichsten erfolgreich ist. - PowerPoint PPT Presentation
Citation preview
Learning a Multiagent Behavior
Pass Evaluation
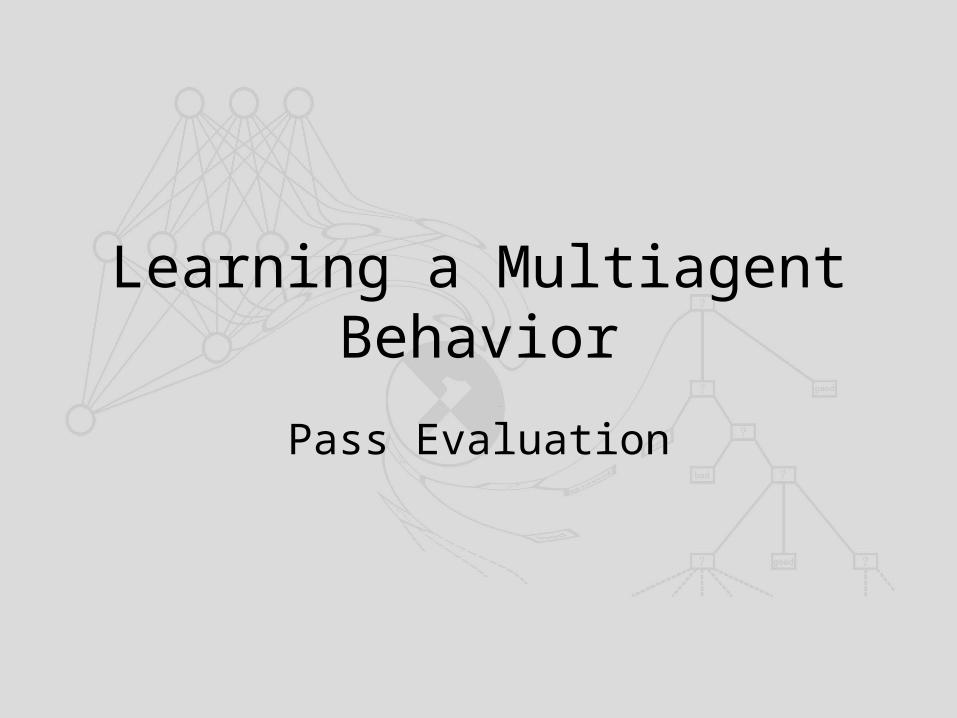
Problemstellung
Ziel:
Möchte ein Spieler den Ball zu
einem Mitspieler passen, so soll er
aus einer Reihe von Merkmalen,
die seine Umgebung beschreiben,
jenen bestimmen, zu dem ein Pass
am wahrscheinlichsten erfolgreich
ist.
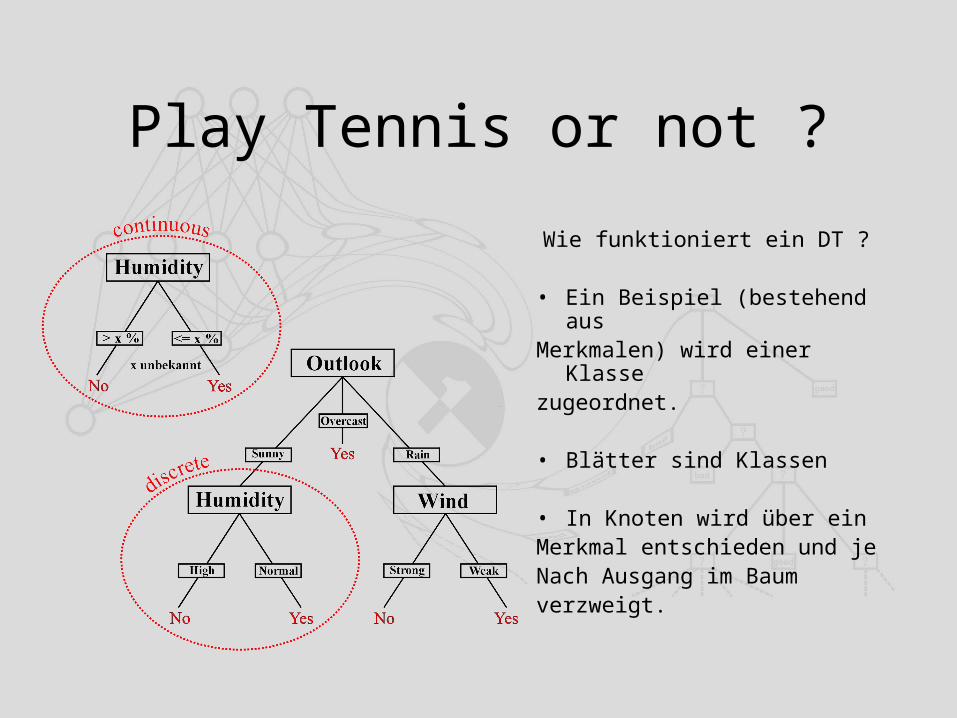
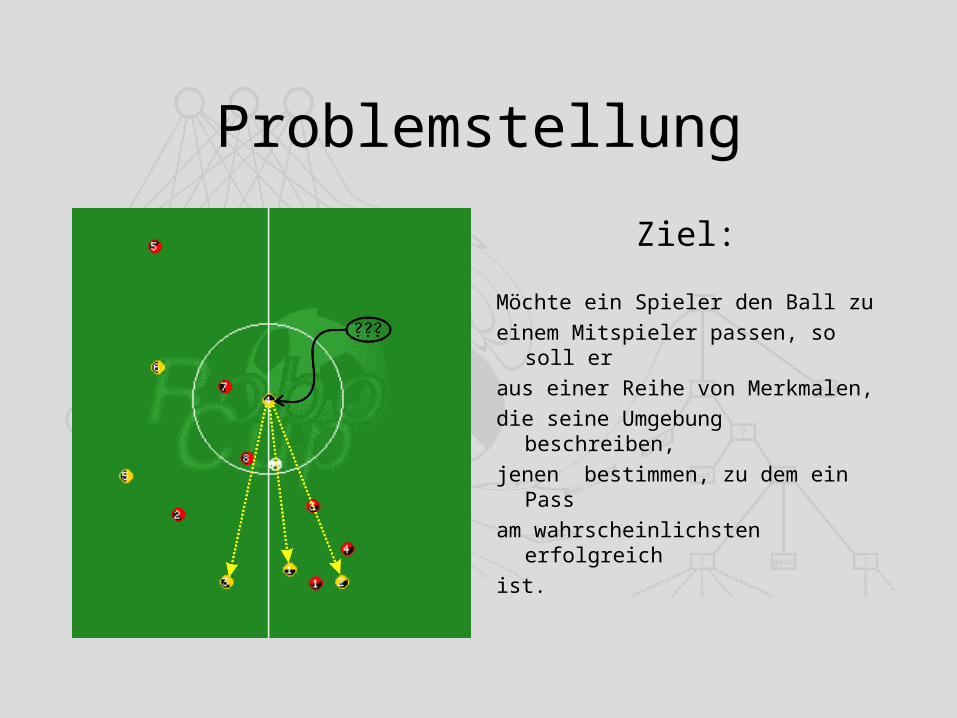
Play Tennis or not ?
Wie funktioniert ein DT ?
• Ein Beispiel (bestehend ausMerkmalen) wird einer Klassezugeordnet.
• Blätter sind Klassen
• In Knoten wird über einMerkmal entschieden und jeNach Ausgang im Baumverzweigt.
Voraussetzungen für DT learning
• Attribute - value descriptiondiskret oder numerisch, aber für alle Beispiele gleich
• Vordefinierte Klassensupervised learning, z.B. {good, bad}
• Diskrete Klassen1 Beispiel gehört genau 1 Klasse an
• Genügend TrainingsdatenUnter den Trainingsbeispielen muß sich ein Muster abzeichnen
• Logisches Modell
Decision Tree algorithmus C4.5
• Nachfolger des ID3
• Literatur
Quinlan, J. Ross (1993). C4.5: Programs for Machine LearningC4.5 / Beschreibung der Software (incl. Source) und dessen
Anwendung
Mitchell, Tom M. (1997). Machine Learningu.a. Decision Tree Learning (Grundlagen, ID3)
• WWWwww.cse.unsw.edu.ac/~quinlan (C4.5)
Merkmale des C4.5
• Algorithmus wählt die Merkmale, nach denen sich der Baum verzweigt.
• Kontinuierliche Merkmale sind möglich, wobei der Algorithmus den optimalen Schwellwert auswählt.
• Neben der Klassifizierung kann zu jeder Klasse ein Erwartungswert für ungesehene Beispiele berechnet werden.

Trainingssituation CMU
1. Der Passer ist in Ballbesitz und steht in der Mitte des Spielfeldes.2. Darunter werden in einem vorgegebenen Bereich 3 Mitspieler und 4
Gegenspieler zufällig plaziert.3. Der Passer gibt bekannt, daß er abspielen möchte.4. Alle Mitspieler übermitteln dem Passer eine Reihe von Merkmalen,
der sie zusammen mit von ihm wahrgenommenen Merkmalen speichert.
5. Der Passer wählt einen Mitspieler aus und teilt ihm mit, daß er den Ball empfangen soll.
6. Der Ballabgabe wird durchgeführt, wobei die Gegner und der Empfänger versuchen den Ball abzufangen.
7. Der Passer klassifiziert das Ergebnis und legt die gesammelten Merkmale als gutes oder schlechtes Beispiel ab.

Trainingssituation CMU
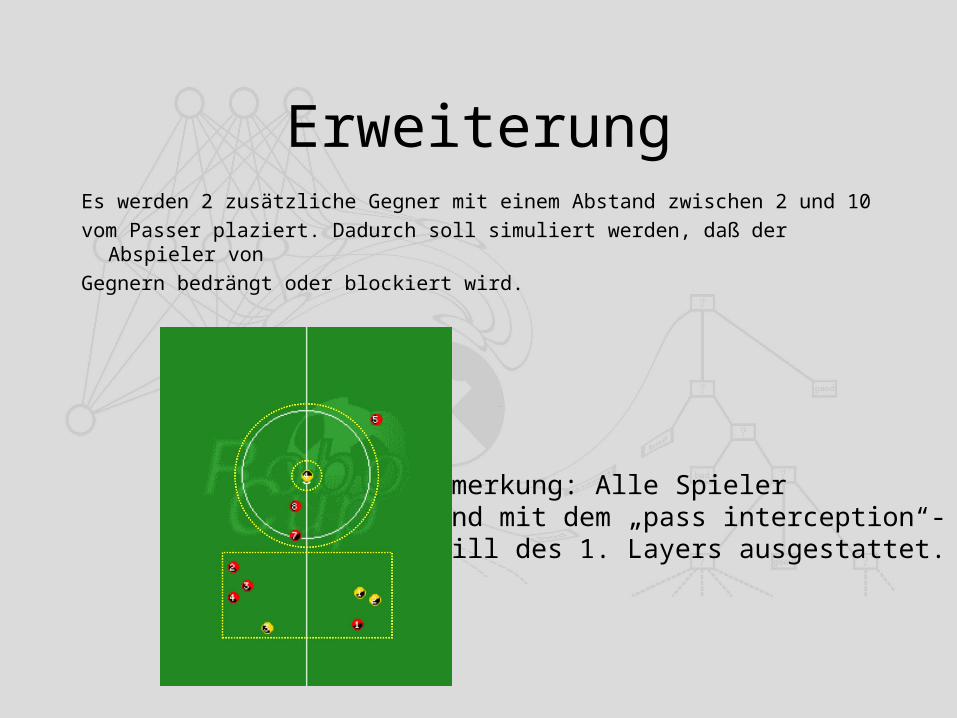
ErweiterungEs werden 2 zusätzliche Gegner mit einem Abstand zwischen 2 und 10
vom Passer plaziert. Dadurch soll simuliert werden, daß der Abspieler von
Gegnern bedrängt oder blockiert wird.
Anmerkung: Alle Spielersind mit dem „pass interception“-skill des 1. Layers ausgestattet.
Input Merkmale (1/2)jeweils von Passer und Empfänger
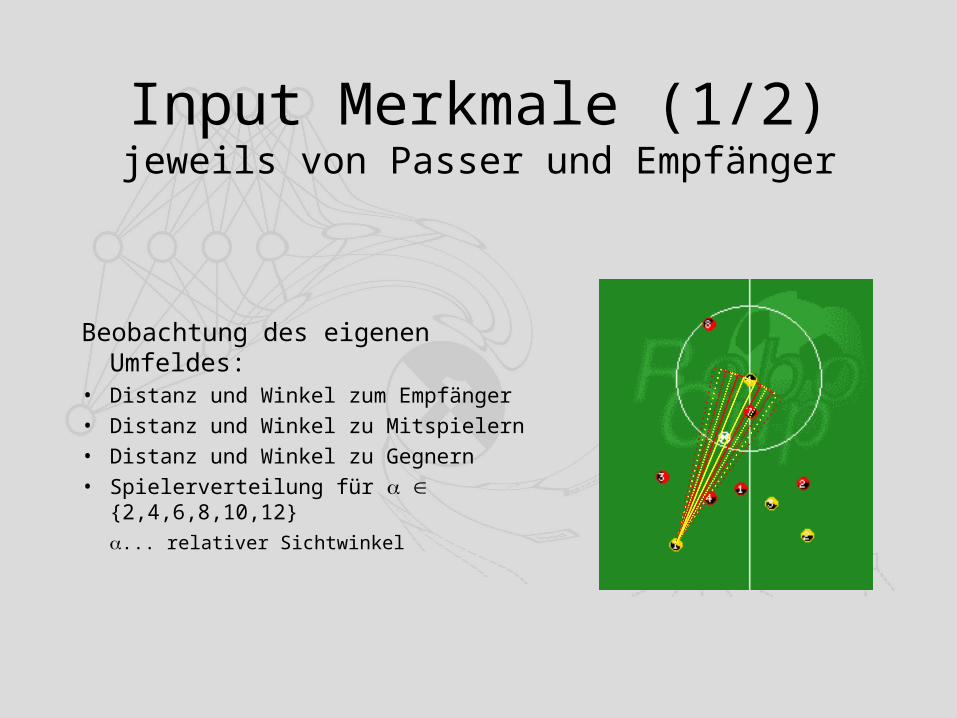
Beobachtung des eigenen Umfeldes:• Distanz und Winkel zum Empfänger
• Distanz und Winkel zu Mitspielern
• Distanz und Winkel zu Gegnern
• Spielerverteilung für {2,4,6,8,10,12}
... relativer Sichtwinkel
Input Merkmale (2/2)jeweils von Passer und Empfänger
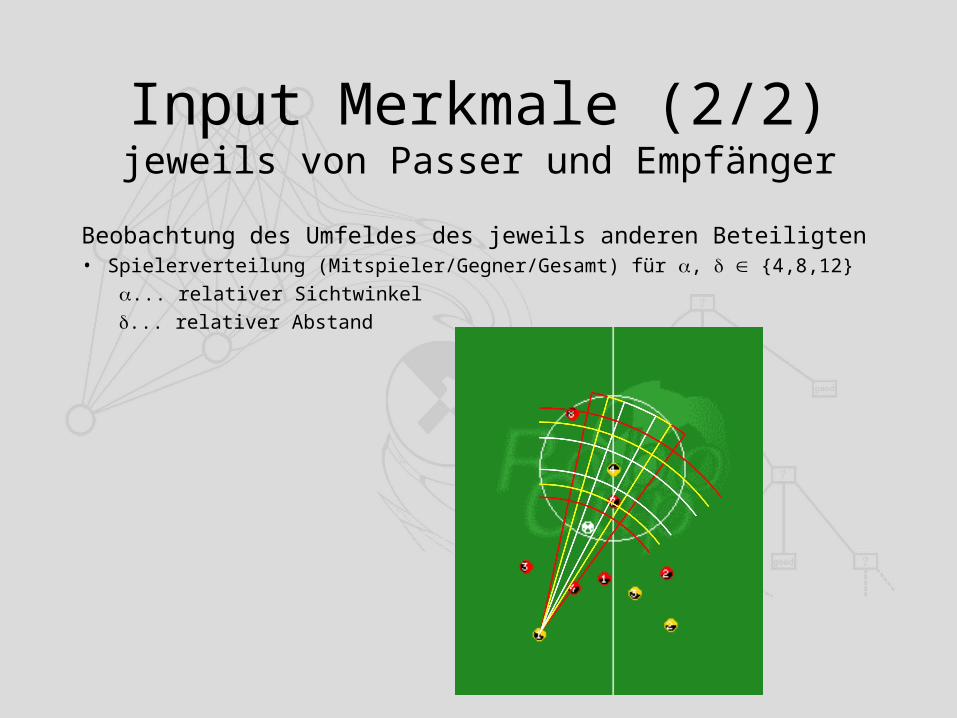
Beobachtung des Umfeldes des jeweils anderen Beteiligten• Spielerverteilung (Mitspieler/Gegner/Gesamt) für , {4,8,12}
... relativer Sichtwinkel
... relativer Abstand
Klassifikation
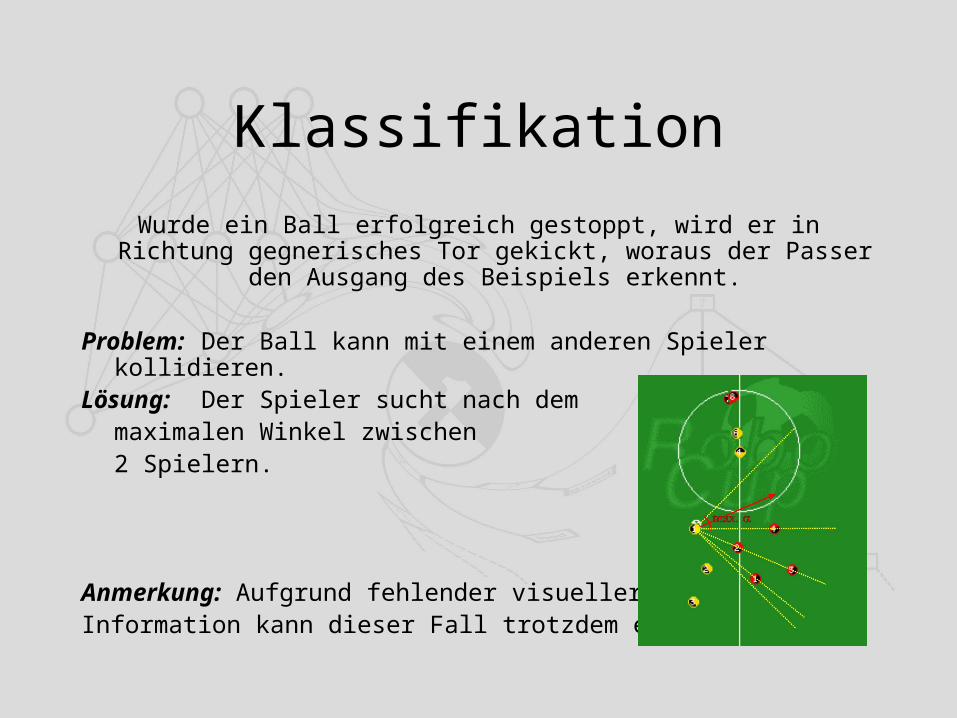
Wurde ein Ball erfolgreich gestoppt, wird er in Richtung gegnerisches Tor gekickt, woraus der Passer den Ausgang des Beispiels erkennt.
Problem: Der Ball kann mit einem anderen Spieler kollidieren.Lösung: Der Spieler sucht nach dem
maximalen Winkel zwischen 2 Spielern.
Anmerkung: Aufgrund fehlender visueller Information kann dieser Fall trotzdem eintreten.
Synchronisation (Passer)
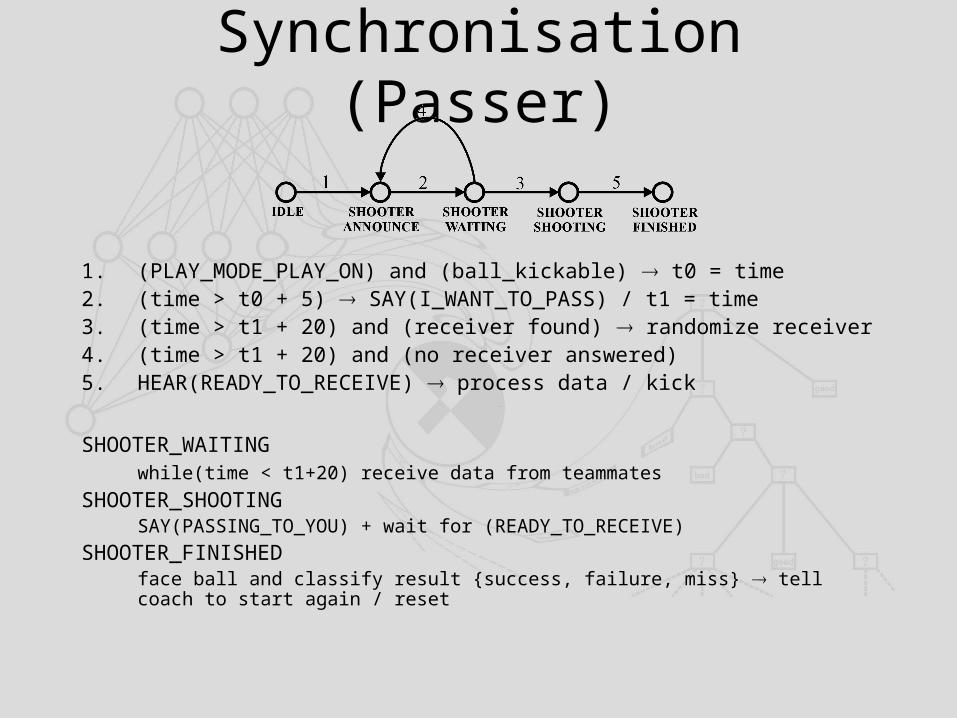
1. (PLAY_MODE_PLAY_ON) and (ball_kickable) t0 = time2. (time > t0 + 5) SAY(I_WANT_TO_PASS) / t1 = time3. (time > t1 + 20) and (receiver found) randomize receiver4. (time > t1 + 20) and (no receiver answered)5. HEAR(READY_TO_RECEIVE) process data / kick
SHOOTER_WAITING while(time < t1+20) receive data from teammates
SHOOTER_SHOOTINGSAY(PASSING_TO_YOU) + wait for (READY_TO_RECEIVE)
SHOOTER_FINISHEDface ball and classify result {success, failure, miss} tell coach to start again / reset
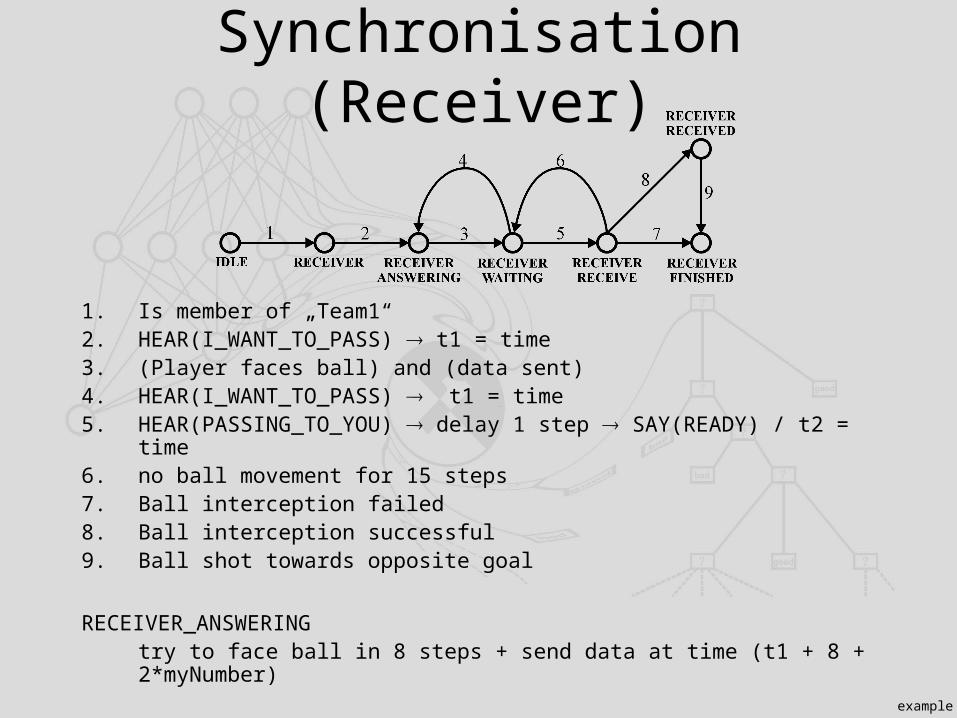
Synchronisation (Receiver)
1. Is member of „Team1“2. HEAR(I_WANT_TO_PASS) t1 = time3. (Player faces ball) and (data sent)4. HEAR(I_WANT_TO_PASS) t1 = time5. HEAR(PASSING_TO_YOU) delay 1 step SAY(READY) / t2 = time6. no ball movement for 15 steps7. Ball interception failed8. Ball interception successful9. Ball shot towards opposite goal
RECEIVER_ANSWERINGtry to face ball in 8 steps + send data at time (t1 + 8 + 2*myNumber)
example
DT training
Das Trainingsset, bestehend aus 5128 Beispielen
(2973 good, 2155 bad), setzt sich wie folgt zusammen:
3248 Beispiele: 3 Mitspieler, 4 Gegner, 2 Gegner im Umkreis des Passers
900 Beispiele: 3 Mitspieler, 4 Gegner
980 Beispiele: 3 Mitspieler, 4 Gegner, Merkmale des Empfängers fehlen
Offene Frage: Wie wirkt sich eine Veränderung der Zusammensetzung
der Trainingsdaten auf den Entscheidungsbaum aus?
example
Ergebnis (1/2)
• Original Tree1281 nodes
Error on training set 10,2 %
• Pruned Tree77 nodes
Error on training set: 15,3 %
• Pruned Tree CMU:87 nodes
Error on training set: 26 %
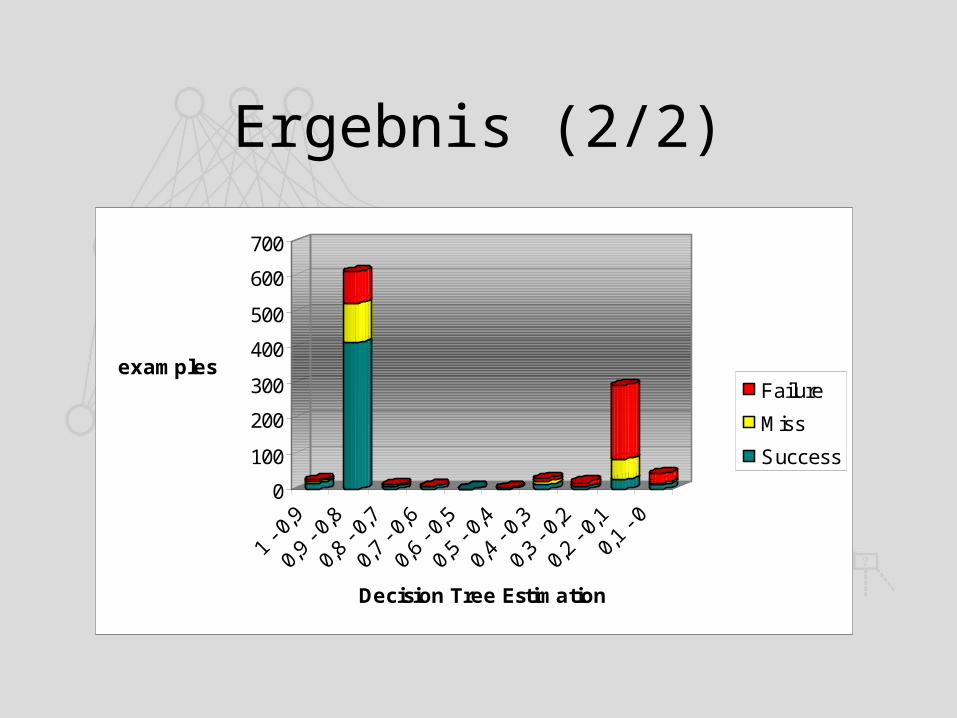
Ergebnis (2/2)
0
100
200
300
400
500
600
700
examples
Decision Tree Estimation
Failure
Miss
Success
Fehlerquellen
• Kommunikationsfehler
• Ballverlust nach erfolgreicher Annahme
• Schlechte Passannahme (NN)
• Falsche Entscheidung des DT
example