Embed Size (px)
Citation preview
Magnetkraftmikroskopie an lateral
strukturierten magnetischen Dipolgittern:
Ummagnetisierungsprozesse, Ordnung und
Frustration in Honigwabenstrukturen
Dissertation
zur Erlangung des Grades “Doktor der Naturwissenschaften” an der Fakultät für
Physik und Astronomie der Ruhr-Universität Bochum
vorgelegt von
Alexandra Brennscheidt
aus
Castrop-Rauxel
Bochum 2011

Mit Genehmigung des Dekanats vom 11.04.2011 wurden Teile dieser Arbeit vorab veröffentlicht.
Eine Zusammenstellung befindet sich am Ende der Dissertation.
1. Gutachter: Prof. Dr. Dr. hc Zabel
2. Gutachter: Prof. Dr. Westerholt
Datum der Disputation: 11.07.2011

Ergebnisse? Mein Guter, ich habe viele Ergebnisse produziert. Ich kenne tausende von Dingen,
die nicht funktionieren.
(Thomas Alva Edison)

Inhaltsverzeichnis
I. Einleitung 7
1. Einleitung 9
1.1. Spin Ice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2. Literaturüberblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3. Ziel dieser Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2. Magnetismus der 3d Übergangsmetalle 17
2.1. Wechselwirkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2. Bandstrukutur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3. Anisotropiebeiträge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4. Domänenbildung und Magnetisierungsprozesse . . . . . . . . . . . . . . . . . . 24
3. Magnetische Nanostrukturen 29
II. Methoden 31
4. Rasterkraftmikroskopie 33
4.1. Relevante Wechselwirkungen zwischen Spitze und Probe . . . . . . . . . . . . . 34
4.2. Funktionsweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3. Messmodi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.4. Spitzenartefakte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.5. Magnetic Force Microscopy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.6. Experimenteller Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5. Rasterelektronenmikroskopie 61
5.1. Funktionsweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2. Wechselwirkung zwischen Elektronenstrahl und Probe . . . . . . . . . . . . . . 66
6. Probenpräparation 73
6.1. Schichtherstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.2. Lithographie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.3. Ionenstrahlätzen und Removing . . . . . . . . . . . . . . . . . . . . . . . . . . 78
III. Ergebnisse und Diskussion 81
7. Das Honigwabengitter 83
7.1. Probendetails . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
8. Phasendiagramm 87
9. Schaltverhalten einzelner und mehrerer Dipole 91
10. Schaltverhalten von Gittern 95
10.1. Entmagnetisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
10.2. Digitale Hysterese in [11]-Richtung . . . . . . . . . . . . . . . . . . . . . . . . 99
10.3. Digitale Hysterese in [10]-Richtung . . . . . . . . . . . . . . . . . . . . . . . . 104
10.4. Zusammenfassung der Ummagnetisierungsmessungen . . . . . . . . . . . . . . 106
11. Bereiche von Typ I Zuständen 111
12. Einfluss von Defekten 115
13. Rotationsmessungen 121
13.1. Probendetails . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
13.2. Einfluss der Randgeometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
13.3. Lokales Auftreten von Typ I Zuständen im statischen Fall . . . . . . . . . . . . . 123
13.4. Lokales Auftreten von Typ I Zuständen im Rotationsfall . . . . . . . . . . . . . 127
13.5. Zusammenfassung der Rotations- und randabhängigen Messungen . . . . . . . . 129
14. Zusammenfassung und Ausblick 131
A. Spezifikationen des Solver HV - MFM 143
B. Parameter zur Strukturherstellung 145
C. EDX-Untersuchungen 147
D. Mathematica-Code zur Auswertung der Knotenpunktkonfigurationen 151
Publikationen 169
Danksagung 171
Lebenslauf 173
Teil I.
Einleitung
1. Einleitung
In dieser Arbeit geht es um die magnetische Charakterisierung von künstlich hergestellten Honig-
wabenstrukturen mittels magnetischer Kraftmikroskopie. Es soll sowohl das Ummagnetisierungs-
verhalten des gesamten Gitters als auch das Auftreten von Ordnung untersucht werden. Zunächst
folgt in Teil I eine kurze Einleitung in das Themengebiet von lateral strukturierten, frustrierten
Dipolgittern vor allem im Hinblick auf sogenannte Spin Ice Systeme, welche im Abschnitt 1.1 nä-
her erläutert werden. Es folgt ein Überblick über den aktuellen Forschungsstand in diesem Gebiet
durch eine kurze Zusammenfassung der Literatur (siehe Abschnitt 1.2). Danach folgt ein Über-
blick über die Ziele dieser Arbeit (siehe Abschnitt 1.3). Abgeschlossen wird der erste Teil dieser
Dissertation mit Kapitel 2, welches als Überblick über die relevanten physikalischen Grundlagen
dient und sowohl den Magnetismus der 3d Übergangsmetalle (siehe Kapitel 2) als auch magne-
tische Nanostrukturen (siehe Kapitel 3) behandelt. Teil II widmet sich der verwendeten experi-
mentellen Methoden zur Herstellung und Untersuchung der Honigwabengitter. Begonnen wird
mit einem ausführlichen Kapitel zur Rasterkraftmikroskopie (Kapitel 4), in dem auch die Haupt-
untersuchungsmethode dieser Arbeit, die magnetische Kraftmikroskopie behandelt wird. Es folgt
jeweils ein Kapitel zum Rasterelektronenmikroskop (Kapitel 5) und zur Probenpräparation (Ka-
pitel 6). Das Rasterelektronenmikroskop wurde in erster Linie zur Probenherstellung, allerdings
auch zur optischen Qualtiätskontrolle der hergestellten Gitter verwendet und wird daher ebenfalls
ausführlich vorgestellt. In Teil III werden dann die Ergebnisse der Untersuchungen präsentiert.
In Kapitel 7 wird der gewählte Gittertyp, das Honigwabengitter, vorgestellt und motiviert. Es
folgen in Kapitel 8 die Resultate eines Phasendiagramms zu den gewählten Strukturgrößen. In
Kapitel 9 wird zunächst das Ummagnetisierungsverhalten einzelner Dipole untersucht um dann in
Kapitel 10 den Ummagnetisierungsprozess in den hergestellten Strukturen abhängig vom gewähl-
ten Dipolabstand und von der Ausrichtung der Strukturen in Bezug zum externen Magnetfeld zu
untersuchen. Es wird ein Verfahren zur Erstellung von digitalen Hysteresen sowie ein Auswerte-
schema für die vorliegenden Magnetisierungszustände vorgestellt und ein hochgeordneter Zustand
im Gitter erläutert. In Kapitel 11 werden zusammenhängende, geordnete Bereiche in den Gittern
besprochen. Kapitel 12 beschäftigt sich dann mit dem Einfluss von Defekten im Gitter auf die
Magnetisierungszustände. Abgeschlossen wird Teil III mit der Analyse von Rotationsmessungen
der Gitter in einem konstanten externen Magnetfeld (Kapitel 13). Es folgt eine Zusammenfassung,
in der auch ein Ausblick auf zukünftige Möglichkeiten in diesem Themengebiet gegeben wird.
1.1. Spin Ice
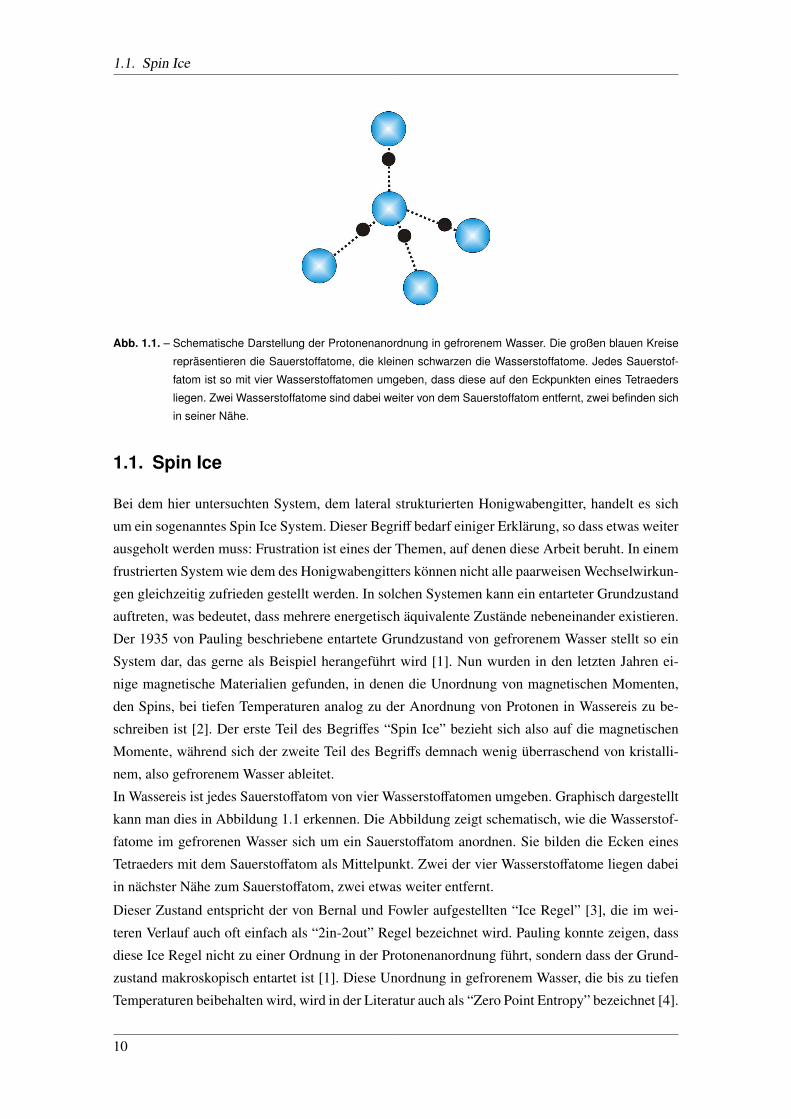
Abb. 1.1. – Schematische Darstellung der Protonenanordnung in gefrorenem Wasser. Die großen blauen Kreise
repräsentieren die Sauerstoffatome, die kleinen schwarzen die Wasserstoffatome. Jedes Sauerstof-
fatom ist so mit vier Wasserstoffatomen umgeben, dass diese auf den Eckpunkten eines Tetraeders
liegen. Zwei Wasserstoffatome sind dabei weiter von dem Sauerstoffatom entfernt, zwei befinden sich
in seiner Nähe.
1.1. Spin Ice
Bei dem hier untersuchten System, dem lateral strukturierten Honigwabengitter, handelt es sich
um ein sogenanntes Spin Ice System. Dieser Begriff bedarf einiger Erklärung, so dass etwas weiter
ausgeholt werden muss: Frustration ist eines der Themen, auf denen diese Arbeit beruht. In einem
frustrierten System wie dem des Honigwabengitters können nicht alle paarweisen Wechselwirkun-
gen gleichzeitig zufrieden gestellt werden. In solchen Systemen kann ein entarteter Grundzustand
auftreten, was bedeutet, dass mehrere energetisch äquivalente Zustände nebeneinander existieren.
Der 1935 von Pauling beschriebene entartete Grundzustand von gefrorenem Wasser stellt so ein
System dar, das gerne als Beispiel herangeführt wird [1]. Nun wurden in den letzten Jahren ei-
nige magnetische Materialien gefunden, in denen die Unordnung von magnetischen Momenten,
den Spins, bei tiefen Temperaturen analog zu der Anordnung von Protonen in Wassereis zu be-
schreiben ist [2]. Der erste Teil des Begriffes “Spin Ice” bezieht sich also auf die magnetischen
Momente, während sich der zweite Teil des Begriffs demnach wenig überraschend von kristalli-
nem, also gefrorenem Wasser ableitet.
In Wassereis ist jedes Sauerstoffatom von vier Wasserstoffatomen umgeben. Graphisch dargestellt
kann man dies in Abbildung 1.1 erkennen. Die Abbildung zeigt schematisch, wie die Wasserstof-
fatome im gefrorenen Wasser sich um ein Sauerstoffatom anordnen. Sie bilden die Ecken eines
Tetraeders mit dem Sauerstoffatom als Mittelpunkt. Zwei der vier Wasserstoffatome liegen dabei
in nächster Nähe zum Sauerstoffatom, zwei etwas weiter entfernt.
Dieser Zustand entspricht der von Bernal und Fowler aufgestellten “Ice Regel” [3], die im wei-
teren Verlauf auch oft einfach als “2in-2out” Regel bezeichnet wird. Pauling konnte zeigen, dass
diese Ice Regel nicht zu einer Ordnung in der Protonenanordnung führt, sondern dass der Grund-
zustand makroskopisch entartet ist [1]. Diese Unordnung in gefrorenem Wasser, die bis zu tiefen
Temperaturen beibehalten wird, wird in der Literatur auch als “Zero Point Entropy” bezeichnet [4].
10
Einleitung
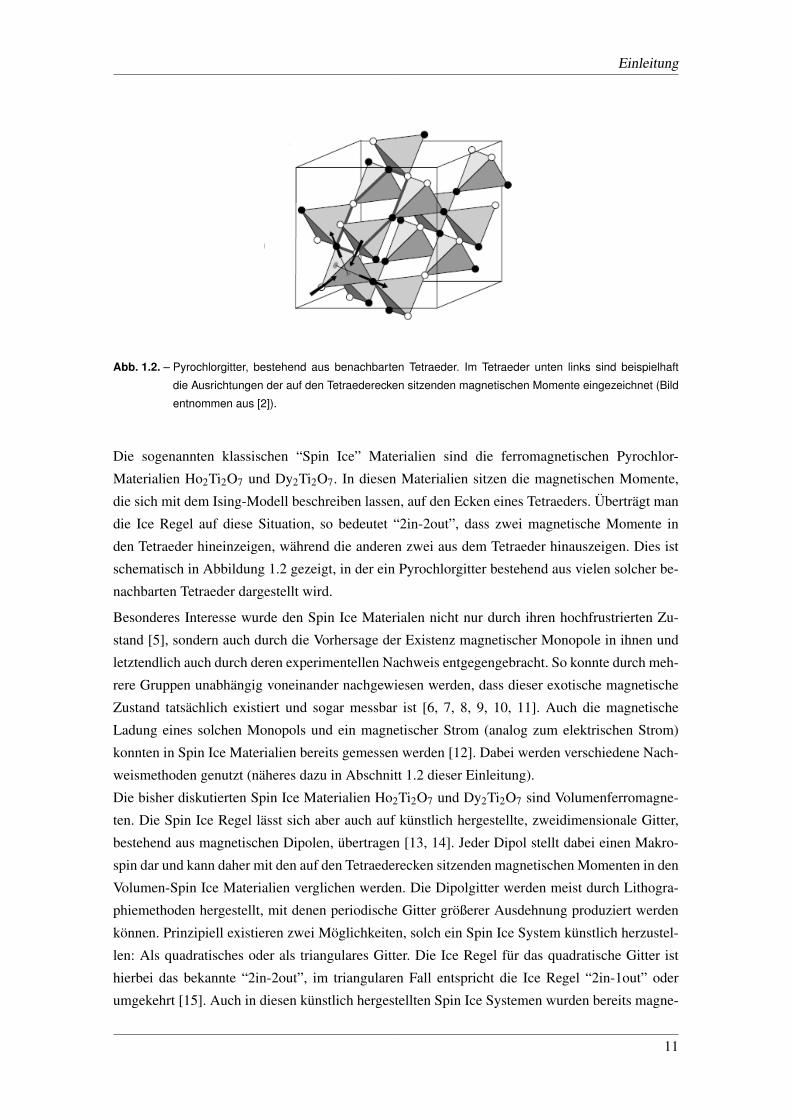
Abb. 1.2. – Pyrochlorgitter, bestehend aus benachbarten Tetraeder. Im Tetraeder unten links sind beispielhaft
die Ausrichtungen der auf den Tetraederecken sitzenden magnetischen Momente eingezeichnet (Bild
entnommen aus [2]).
Die sogenannten klassischen “Spin Ice” Materialien sind die ferromagnetischen Pyrochlor-
Materialien Ho2Ti2O7 und Dy2Ti2O7. In diesen Materialien sitzen die magnetischen Momente,
die sich mit dem Ising-Modell beschreiben lassen, auf den Ecken eines Tetraeders. Überträgt man
die Ice Regel auf diese Situation, so bedeutet “2in-2out”, dass zwei magnetische Momente in
den Tetraeder hineinzeigen, während die anderen zwei aus dem Tetraeder hinauszeigen. Dies ist
schematisch in Abbildung 1.2 gezeigt, in der ein Pyrochlorgitter bestehend aus vielen solcher be-
nachbarten Tetraeder dargestellt wird.
Besonderes Interesse wurde den Spin Ice Materialen nicht nur durch ihren hochfrustrierten Zu-
stand [5], sondern auch durch die Vorhersage der Existenz magnetischer Monopole in ihnen und
letztendlich auch durch deren experimentellen Nachweis entgegengebracht. So konnte durch meh-
rere Gruppen unabhängig voneinander nachgewiesen werden, dass dieser exotische magnetische
Zustand tatsächlich existiert und sogar messbar ist [6, 7, 8, 9, 10, 11]. Auch die magnetische
Ladung eines solchen Monopols und ein magnetischer Strom (analog zum elektrischen Strom)
konnten in Spin Ice Materialien bereits gemessen werden [12]. Dabei werden verschiedene Nach-
weismethoden genutzt (näheres dazu in Abschnitt 1.2 dieser Einleitung).
Die bisher diskutierten Spin Ice Materialien Ho2Ti2O7 und Dy2Ti2O7 sind Volumenferromagne-
ten. Die Spin Ice Regel lässt sich aber auch auf künstlich hergestellte, zweidimensionale Gitter,
bestehend aus magnetischen Dipolen, übertragen [13, 14]. Jeder Dipol stellt dabei einen Makro-
spin dar und kann daher mit den auf den Tetraederecken sitzenden magnetischen Momenten in den
Volumen-Spin Ice Materialien verglichen werden. Die Dipolgitter werden meist durch Lithogra-
phiemethoden hergestellt, mit denen periodische Gitter größerer Ausdehnung produziert werden
können. Prinzipiell existieren zwei Möglichkeiten, solch ein Spin Ice System künstlich herzustel-
len: Als quadratisches oder als triangulares Gitter. Die Ice Regel für das quadratische Gitter ist
hierbei das bekannte “2in-2out”, im triangularen Fall entspricht die Ice Regel “2in-1out” oder
umgekehrt [15]. Auch in diesen künstlich hergestellten Spin Ice Systemen wurden bereits magne-
11
1.2. Literaturüberblick
tische Monopole beobachtet und durch verschiedene Techniken abgebildet [16, 17, 18].
Man erkennt, dass Spin Ice Systeme, sowohl dreidimensionale als auch die künstlich hergestell-
ten zweidimensionalen, ein äußerst interessantes und noch relativ neues Gebiet im Magnetismus
darstellen. Umso wichtiger erscheint es da, sich ihnen systematisch zu nähern.
1.2. Literaturüberblick
In diesem Abschnitt soll ein kurzer Überblick über die Literatur gegeben werden. Bisherige Er-
gebnisse auf dem Gebiet der Spin Ice Systeme werden hier zusammengefasst und so ein Bild über
den aktuellen Forschungsstand geliefert.
1.2.1. 3D Spin Ice Systeme
Um die Entwicklung der künstlich hergestellten Spin Ice Systeme besser zu verstehen, soll hier
auch ein kurzer Überblick über die Volumen-Spin Ice Systeme gegeben werden.
• Isakov et al. [19] entwickelten ein theoretisches Konzept zur Erklärung des Auftretens der
Ice Regeln in Spin Ice Systemen. Sie zeigten damit eine zweistufige magnetische Ordnung
im Kagome-Spin Ice die durch die Ordnung der magnetischen Ladungen in der Tieftempe-
raturphase unterschieden werden können
• Higashinaka et al. [20] haben die spezifische Wärme und die Entropie von Dy2Ti2O7 in aus-
gezeichneten Kristallrichtungen bei 0,35 K untersucht. Sie beobachteten in [111]-Richtung
ein Frustrationsverhalten vergleichbar zu dem der zweidimensionalen Kagomestruktur in-
klusive der Erfüllung der dafür geltenden Spin-Ice Regel. Dies führt zu unterschiedlichen
Werten der Zero Point Entropy.
• Moessner und Sondhi [21] entwickelten ein Modell, in dem bei Anlegen eines Feldes in
[111]-Richtung bei Dy2Ti2O7 das dreidimensionale Verhalten auf eine Reihe lösbarer zwei-
dimensionaler Probleme reduziert werden kann.
• Tabata et al. [22] untersuchten das Spin Ice Material Dy2Ti2O7 in einem magnetischen Feld
entlang der [111]-Richtung mittels Neutronenstreuung und Monte Carlo Simulationen. Sie
beobachteten uneingeschränkt das Einhalten der Ice Regel.
• Ke et al. [23] haben systematische spezifische Wärmekapazität Messungen an Dy2−xYxTi2O7
durchgeführt. Sie haben einen Anteil der magnetischen Dy-Atome durch nichtmagnetische
Y-Atome ersetzt und so einen Zusammenhang zwischen der Zero Point Entropy und der
Verdünnung der magnetischen Atome gefunden, der in guter Übereinstimmung mit Pau-
lings Theorie für die Entropie von Wassereis ist.
• Castelnovo et al. [8] geben eine theoretische Erklärung für die Existenz magnetischer Mo-
nopole in Spin Ice Materialien. Sie benutzen dafür ein sogenanntes Hantel-Modell, bei dem
12
Einleitung
ein einzelner Spin als Hantel mit gegensätzlichen magnetischen Ladungen an den Enden
behandelt wird. Zunächst gehen sie von erfüllter Spin Ice Regel aus, bei der in jeden Kno-
tenpunkt zwei Spins hinein- und zwei hinauszeigen. Klappt ein Spin um, so entstehen an
den beiteiligten Knotenpunkten jeweils ein Monopol bzw. Antimonopol. Diese Paar kann
nun durch weitere Spin Flips, ohne weiteren Energieaufwand, durch das Gitter wandern. Da-
bei enteht als Verbindungslinie zwischen dem Monopol-Antimonopol Paar ein sogenannter
Dirac-String.
• Fennell et al. [7] führten an Ho2Ti2O7 polarisierte Neutronenstreuexperimente durch, bei
denen das Streusignal in zwei Komponenten aufgeteilt wird. Im Spin-Flip-Kanal konnten
eindeutig sogenannte Pinch-Points identifiziert werden, die die Existenz von Dirac Strings
und damit magnetischen Monopolen nahelegen. Eine Weiterführung dieser Arbeit findet
sich in [24], in der sie die Entropie des Systems kontinuierlich optimieren konnten.
• Morris et al. [6] konnten die Existenz der Dirac Strings in Dy2Ti2O7 direkt nachweisen. Sie
legten entlang der [100] - Richtung ein magnetisches Feld an, so dass Monopol-Antimonopol
Paare induziert wurden. Die resultierenden Dirac Strings richten sich dabei entgegengesetzt
zum angelegten Feld aus, was in konischen Features in den Neutronenstreumessergebnissen
resultiert.
• Bramwell et al. [12] ist es experimentell gelungen, analog zum elektrischen Strom, magne-
tische Ladungen und einen magnetischen Strom von magnetischen Monopolen in Dy2Ti2O7
zu messen.
• Jaubert et al. [10] interpretierten die magnetische Relaxationen in Dy2Ti2O7 als Bewegung
magnetischer Monopole, die sich in einem Netzwerk von Dirac-Strings befinden.
1.2.2. 2D Spin Ice Systeme
In dieser Arbeit wird mit dem Honigwabengitter ein lateral strukturiertes und damit künstlich her-
gestelltes frustriertes zweidimensionales Spin Ice System untersucht. Hier folgt nun ein Überblick
über den aktuellen Stand der Forschung in diesem Bereich.
Quadratische Spin Ice Systeme
• Wang et al. [25] untersuchten ein quadratisches Gitter bestehend aus Py-Dipolen. Sie stellten
Gitter mit verschiedenen Periodizitäten her und untersuchten diese Gitter in Remanenz hin-
sichtlich der auftretenden Knotenpunktkonfigurationen mittels magnetischer Kraftmikro-
skopie. Sie beobachteten ausschließlich kurzreichweitige Korrelationen in diesen Gittern,
analog zum Verhalten von Spin Ice Materialien. Die theoretisch vorhandenen langreichwei-
tigen Zustände geringer Energie werden durch die komplexe Energielandschaft aufgrund
von Frustrationen im Gitter unterdrückt. Es entsteht stattdessen ein ungeordneter Zustand,
13
1.2. Literaturüberblick
sobald thermische oder magnetische Anregungen verschwinden. Für steigende Gitterperi-
odizitäten wurde schnell ein unkorrelierter Zustand im Gitter erreicht.
• Nisoli et al. [26] untersuchten an einem quadratischen Py-Gitter die Entmagnetisierung un-
ter Rotation. Sie zeigen, dass das System in einen ungeordneten Zustand übergeht, dessen
Konfiguration ähnlich denen von Spin Ice Materialien ist. Sie demonstrieren außerdem einen
Formalismus, mit dem man die Population der Zustände vorhersagen kann.
• Libal et al. [27] haben numerische Simulationen an kolloidalen Partikeln gemacht, die in
zweidimensionalen, optischen Fallen gefangen sind und auf diese Weise ein quadratisches
Gitter formen. Diese Anordnung erfüllt die Spin-Ice Regel und zeigt einen Übergang zwi-
schen zufälliger Anordnung und langreichweitiger Ordnung abhängig von der Ladung der
Partikel und der Fallengröße.
• Mol et al. [18] fanden ein theoretisches Modell, dass auf der Dipolwechselwirkung zwischen
den magnetischen Inseln basiert. Mit diesem ist es möglich, den experimentell gefundenen
Grundzustand zu beschreiben.
• Möller und Moessner [28] haben sich mit künstlich hergestellten Spin Ice Strukturen theore-
tisch beschäftigt. Sie demonstrierten in einem quadratischen Gitter, dass das Spin Ice System
stabilisiert werden kann, in dem man kleine Änderungen in der Gittergeometrie durchführt,
die darin beruht, die Abstände und damit die Wechselwirkungen der einzelnen Dipole an
einem Knotenpunkt, durch Einführung einer Höhenänderung äquivalent werden zu lassen.
Triangulare Spin Ice Systeme
• Tanaka et al. [29] untersuchten ein Honigwabennetzwerk aus Py mittels magnetischer Kraft-
mikroskopie. Trotz nicht unterbrochener Strukturen wurde ein Ice-ähnliches Verhalten be-
obachtet, welches sich auch in den Magnetwiderstandmessungen niederschlägt. Die Ice Re-
geln dominieren in diesen Untersuchungen den Magnetisierungsprozess. Durch ein senk-
recht zur Struktur angelegtes Magnetfeld konnte dieser Effekt unterdrückt und eine drasti-
sche Änderung des Magnetisierungsprozesses erreicht werden.
• Qi et al. [30] beobachteten die Spin Ice Regel in einem Honigwabennetzwerk aus Py. Ihre
Resultate zeigen, dass das Honigwabengitter ein hochfrustriertes System ist, in dem die Ice
Regel erfüllt wird. Zusätzlich zeigen sie, dass die in ihrem System gefundenen Korrelationen
mit denen von Monte Carlo Rechnungen für Spin Ice Systeme übereinstimmt.
• Mengotti et al. [31] untersuchten die Grundbausteine des Honigwabengitters: einzelne Rin-
ge, sowie zwei und drei benachbarte Ringe. Die Strukturen bestehen aus Co oder Py und
wurden nach Entmagnetisierung mit PEEM (Photoemission Electron Microscopy) unter-
sucht. Sie konnten alle möglichen Energielevel für die untersuchten Strukturen ermitteln
(wie auch schon in einer ähnlichen Arbeit bei Nanoinseln mit senkrechter Anisotropie [32])
14
Einleitung
und dementsprechend die Zustände geringster Energie identifizieren. Für steigende Ringan-
zahl steigt die Frustration in dem System, was sie zu der Schlussfolgerung führt, dass es
praktisch unmöglich ist, in einem ausgedehnten, unendlichen Gitter den Grundzustand zu
erreichen.
• Ebenfalls Mengotti et al. [16] konnten erst kürzlich das Auftreten von magnetischen Mono-
polen und den damit verbundenen Dirac-Strings durch X-PEEM nachweisen. Der Umma-
gnetisierungsprozess in einem Honigwabengitter aus Py geschieht hier durch das Auseinan-
derwandern von Monopol-Antimonopolpaaren im magnetischen Feld. Die experimentellen
Ergebnisse wurden durch Monte-Carlo Simulationen gestützt.
• Tanaka et al. [33] untersuchten ein Honigwabennetzwerk mittels magnetischer Kraftmikro-
skopie und Magnetowiderstandsmessungen. Sie beobachteten Spin Ice ähnliches Verhalten
bei genügend magnetischer Energie an den Knotenpunkten des Netzwerkes.
• Ladak et al. [17] fanden magnetische Monopole in einem Honigwabennetzwerk aus Co
mittels Magnetkraftmikroskopie. Die Monopol-Antimonopolpaare bewegen sich dabei ent-
gegengesetzt zum angelegten Magnetfeld.
• Chern et al. [34] kombinierten analytische Methoden und Monte Carlo Simulationen und
zeigten so, dass das triangulare Spin Ice System zwei bestimmte Phasen besitzt. Diese Pha-
sen unterscheiden sich durch die Anordnung der magnetischen Ladungen bei tiefen Tempe-
raturen.
• Wills et al. [15] erstellten ein Modell für das Honigwabengitter. Mittels Monte Carlo Simu-
lationen ermittelten sie die Grundzustandsentropie sowie die Wechselwirkung zwischen be-
nachbarten Dipolen. Sie zeigten die Bedeutung von thermisch angeregten Spinfluktuationen
und ihre Fähigkeit, die unterschiedlichen magnetischen Konfigurationen zu stabilisieren. Sie
fanden sowohl geordnete als auch ungeordnete Untergitter.
• Möller und Moessner [35] fanden in ihrer theoretischen Arbeit zwei Ice-Regimes für das
Honigwabengitter, die sich mit einer Theorie die auf magnetischen Monopolen basiert, er-
klären lassen. Sie sagen eine von der Spinordnung unabhängige Ladungsordnung voraus.
1.3. Ziel dieser Arbeit
Magnetische Nanostrukturen haben mittlerweile Einzug in unser alltägliches Leben gehalten, vor
allem in Form von Speichermedien, aber auch als Sensoren in Automobilen. Daher ist die Her-
stellung dieser Strukturen genauso wie das Verständnis ihres Ummagnetisierungsverhaltens von
großer Bedeutung, sowohl aus wissenschaftlicher als auch aus technologischer Sicht. So müssen
die einzelnen magnetischen Elemente separat ansteuerbar sein, dürfen sich gegenseitig nicht be-
einflussen, sollen aber möglichst dicht beieinander liegen, um die Speicherdichte zu erhöhen. Um
solche Eigenschaften zu realisieren, muss das Verhalten der Elemente genau bekannt sein. Neben
15
1.3. Ziel dieser Arbeit
zahlreichen technologischen Anwendungen (so gab es z. B. bereits Untersuchungen zur Herstel-
lung von magnetischen Logikschaltungen [36, 37]), spielt aber auch ein fundamentales Interesse
eine große Rolle bei der Untersuchung magnetischer Strukturen. So traten in den letzten Jahren im
Bereich der künstlich hergestellten magnetischen Nanonstrukturen vor allem magnetisch frustrier-
te Systeme in den Vordergrund [38, 39, 40, 41, 42, 38, 43, 44]. Dies führte im Zusammenhang mit
den Spin Ice Materialien zu der Suche nach magnetischen Monopolen, die sowohl experimentell
[45, 46], als auch in theoretischen Beschreibung [47, 48, 49] schon lange von Interesse waren. Wie
bereits die Literaturübersicht gezeigt hat, ist dies ein sehr lebendiges Forschungsgebiet, auf dem
es noch viel zu entdecken gibt.
In dieser Arbeit soll das Ummagnetisierungsverhalten von lateral strukturierten Honigwabengit-
tern untersucht werden. Die Honigwabengitter bestehen dabei aus einzelnen magnetischen Dipo-
len, die periodisch angeordnet sind und so ein großflächiges Gitter bilden. Als magnetisches Ma-
terial wird polykristallines Eisen verwendet. Ziel ist es, das Ummagnetisierungsverhalten eines
solchen Gitters zu analysieren und zu verstehen, um so einen grundlegenden Einblick in das ma-
gnetische Verhalten dieses hochfrustrierten künstlichen Spin Ice System zu erhalten. Als Schwer-
punkt werden hierbei die Knotenpunktkonfigurationen des Gitter untersucht und ausgewertet. Des
Weiteren geht es darum, den Einfluss verschiedener Effekte, wie unterschiedliche Randgeometrien
oder Gitterdefekte abzuschätzen. Im Hinblick auf die im vorherigen Kapitel erwähnten Untersu-
chungen im Bereich lateral strukturierter Spin Ice Systeme erscheint es notwendig zu wissen,
unter welchen Umständen welche Konfiguration auftritt, um magnetische Monopole zu finden
und ihren Weg durch das Gitter verfolgen zu können. Dazu wird in der vorliegenden Arbeit eine
genaue Analyse vorgelegt, in der zwischen den zwei grundlegenden Knotenpunktkonfigurations-
typen unterschieden wird. Eben auch solche Aspekte wie Fehlstellen im Gitter und der Einfluss des
Strukturrandes stellen eine elementare Fragestellung dar, die es zu klären gilt, um die in den Gitter
auftretenden magnetischen Konfigurationen sicher zu interpretieren und zu verstehen. Dabei stellt
sich das Honigwabengitter als besonders interessantes Spin Ice System dar, da es hochfrustriert
ist. An jedem Knotenpunkt treffen drei Dipole aufeinander, so dass nie alle paarweisen Wech-
selwirkungen gleichzeitg zufrieden gestellt werden können. Ein weiterer Vorteil des triangularen
Honigwabengitters im Vergleich zu quadratischen Gittern ist, dass alle Wechselwirkungen an ei-
nem Knotenpunkt gleichberechtig sind, denn jeder Dipol des Knotenpunktes ist äquidistant zu den
beiden anderen. Als Untersuchungsmethode wurde die magnetische Kraftmikroskopie gewählt,
da hiermit magnetische Dipole durch die eindeutige hell- bzw. dunkel-Abbildung von Nord- und
Südpol, sehr gut und anschaulich abgebildet werden können. Es ist mit dieser Methode möglich
jedem Dipol, relativ zu den anderen abgebildeten Dipolen, eine Magnetisierungsrichtung zuzu-
ordnen und daher das Umschalten eines Dipols genau zu beobachten. Somit kann die magnetische
Konfiguration an einem Knotenpunkt sowie ihre Änderung leicht erkannt werden.
16
2. Magnetismus der 3d Übergangsmetalle
Die drei prinzipiellen Ursachen für das magnetische Moment eines Atoms sind der Spin der Elek-
tronen, der Bahndrehimpuls der Elektronen bezüglich ihrer Bewegung um den Kern und die Än-
derung des Bahndrehimpulses, die durch ein äußeres Magnetfeld induziert wird [50]. Werden die
durch die Bahnbewegung und den Spin der Elektronen bedingten magnetischen Momente in einem
äußeren Feld ausgerichtet, so spricht man von Paramagnetismus. Wenn hingegen für die Ausrich-
tung dieser magnetischen Momente eine Wechselwirkung mit anderen Gitteratomen des Festkör-
pers ausschlaggebend ist, so handelt es sich um Ferro-, Antiferro- oder Ferrimagnetismus. Man
spricht in diesem Fall auch von spontaner Magnetisierung, da kein externes Feld zum Ausrich-
ten der magnetischen Momente benötigt wird. Die durch ein äußeres Feld induzierten Momente
werden unter dem Begriff Diamagnetismus zusammengefasst [51]. Diese von einem äußeren Ma-
gnetfeld erzeugte Magnetisierung ist antiparallel zum Magnetfeld ausgerichtet, während in einem
paramagnetischen Stoff beide Felder parallel zueinander ausgerichtet sind. Dies hat seine Ursache
in den unterschiedlichen Eigenschaften der Spin- und Bahnmomente der Elektronen im Festkör-
per. Für die Spinmomente ist es energetisch am günstigsten, wenn sie sich parallel zum Magnetfeld
einstellen, die Bahnmomente werden dagegen bei Anlegen eines Magnetfeldes geschwächt. Dies
ist eine Konsequenz der Lenzschen Regel. Die auf ihren Orbitalen befindlichen Elektronen werden
durch das Magnetfeld, wie im Falle von Leiterschleifen, so beeinflusst, dass mikroskopische Strö-
me induziert werden, die das äußere Feld schwächen. Daher werden diamagnetische Stoffe aus
einem inhomogenen Feld herausgedrängt, während paramagnetische Stoffe in den inhomogenen
Feldbereich hineingezogen werden.
Da es in dieser Arbeit ausschließlich um das ferromagnetische Material Eisen geht, wird nur auf
diesen Teilaspekt des Magnetismus eingegangen. Dieses Kapitel stellt lediglich eine kurze Zusam-
menfassung der wichtigsten Aspekte des Ferromagnetismus in dünnen Schichten bzw. Nanostruk-
turen dar. Für eine detaillierte und ausschöpfende Beschäftigung mit diesem Thema sei auf die
zahlreichen Lehrbücher auf diesem Gebiet verwiesen (zum Beispiel [52, 53, 54, 55, 56, 57, 58]).
Es sei noch darauf hingewiesen, dass Magnetismus ein quantenmechanisches Phänomen ist und
eine rein klassische Interpretation (vgl. Bohr-van Leeuwen Theorem, [59]) nicht zu Magnetismus
führen kann.
2.1. Wechselwirkungen
Zur Entstehung von Ferromagnetismus ist eine große Kraft nötigt, die für die parallele Ausrichtung
benachbarter magnetischer Momente und deren Stabilität sorgt. In diesem Abschnitt werden ver-
2.1. Wechselwirkungen
schiedene atomare magnetische Wechselwirkungen und ihre Rolle für langreichweitige Ordnung
besprochen.
2.1.1. Dipol-Dipol Wechselwirkung
Die erste Wechselwirkung, die einem in den Sinn kommt, wenn man die parallele Ausrichtung der
magnetischen Momente in einem Festkörper betrachtet, ist wahrscheinlich die atomare magneti-
sche Dipolwechselwirkung. Zwei magnetische Dipole mit den magnetischen Momenten m1 = m2
= gµB und dem Abstand 1 Å voneinander haben eine Energie von
Edip−dip = kBT =µ0
4πm1m2
r3 ≈ 10−4eV (2.1)
Dabei ist µ0 die magnetische Permeabilität, µB das Bohrsche Magneton und g der Landéfaktor.
Dieser Energiebetrag entspricht etwa 1 K. Diese Wechselwirkung ist also nur für die Materialien
interessant, die erst im mK-Bereich ferromagnetische Ordnung zeigen [59]. Da die Messungen in
dieser Arbeit bei Raumtemperatur durchgeführt worden sind, können die atomaren Dipol-Dipol-
Wechselwirkungen vernachlässigt werden [60].
2.1.2. Austauschwechselwirkungen
Das Phänomen der langreichweitigen Ordnung wird hauptsächlich durch Austauschwechselwir-
kungen beschrieben. Austauschwechselwirkungen sind im klassischen Bild nichts anderes als
elektrostatische Wechselwirkungen. Hier soll jedoch die quantenmechanische Betrachtungsweise
erklärt werden, da eine rein klassische Betrachtung nicht ausreicht, um Magnetismus zu erklären.
In einem einfachen Modell werden zwei Elektronen betrachtet, die die jeweiligen Ortsvektoren
~r1 bzw. ~r2 besitzen. Um eine parallele Spinstellung zu realisieren muss eines der beiden Elektro-
nen nach dem Pauli-Prinzip einen angeregten Zustand besetzen. Die Energie kommt dabei aus der
Coulomb-Wechselwirkung zwischen den beiden Elektronen. Sie ist spinunabhängig und größer für
Elektronen, die sich in einem gemeinsamen Orbital befinden als für Elektronen in unterschiedli-
chen Orbitalen. Man kann also sagen, dass die Coulomb-Wechselwirkung den Fall parallel ausge-
richteter Spin favourisiert. Wäre diese Wechselwirkung jedoch die einzige, die man betrachtet, so
müsste jedes Metall Ferromagnetismus aufweisen. Dem Gewinn an Coulomb-Energie steht jedoch
eine steigende kinetische Energie gegenüber, da für eine parallele Spinstellung zweier Elektronen
eines der beiden ein höheres Orbital besetzen muss. Die Entstehung von Ferromagnetismus ist
also davon abhängig, welche der beiden Wechselwirkungen dominant ist [60]. Wir betrachten nun
die Wechselwirkungen etwas genauer: Das Pauli-Prinzip verlangt, dass die totale Wellenfunkti-
on von quantenmechanischen Spin- 12 -Teilchen antisymmetrisch ist. So sind nur Kombinationen
einer symmetrischen Ortsfunktion mit einer antiparallelen Spinfunktion und umgekehrt erlaubt.
Im Falle parallel ausgerichteter Elektronenspins, also einer symmetrischen Spinfunktion, muss
die Ortsfunktion antisymmetrisch sein (ΨS = 1√2[ψa(~r1)ψb(~r2) + ψa(~r2)ψb(~r1)]χS ) mit antisym-
metrischem Singlet-State χs). Andersherum muss bei einer antisymmetrischen Spinfunktion die
18

Magnetismus der 3d Übergangsmetalle
Ortsfunktion symmetrisch sein (ΨT = 1√2[ψa(~r1)ψb(~r2) − ψa(~r2)ψb(~r1)]χT ) mit symmetrischem
Triplet-State χT ). Die Energien der beiden möglichen Zustände lassen sich dann folgendermaßen
darstellen:
ES =
∫Ψ∗S HΨS d~r1d~r2 (2.2)
und
ET =
∫Ψ∗T HΨT d~r1d~r2 (2.3)
Bildet man nun die Differenz zwischen beiden Energien erhält man
ES − ET = 2∫
ψ∗a(~r1)ψ∗b(~r2)Hψa(~r1)ψb(~r2)d~r1d~r2 (2.4)
Wie in [59] ausführlich dargestellt, lautet der “effektive Hamiltonoperator” dann
H =14(ES + 3ET ) − (ES − ET )S 1S 2 (2.5)
wobei S 1 und S 2 die Spins der beiden betrachteten Elektronen darstellen. Dieser Term setzt sich
zusammen aus einer Konstanten und einem Term, der spinabhängig ist. Mit der Definition der
Austauschkonstanten J
J =ES − ET
2=
∫ψ∗a(~r1)ψ
∗b(~r2)Hψa(~r1)ψb(~r2)d~r1d~r2 (2.6)
kann man nun den spinabhängigen Teil des “effektiven Hamiltonoperators” schreiben als
Hspin = −2JS 1S 2 (2.7)
Diese Gleichung ist für zwei Elektronen noch recht einfach zu berechnen, auf ein Viel-Körper-
Problem bezogen jedoch ungleich schwieriger. Allerdings kann man Gleichung 2.7 auf alle be-
nachbarten Atome anwenden, was auch zum Heisenberg-Operator führt:
HHeis = −2∑i> j
Ji jS iS j (2.8)
Ist Ji j < 0, so werden sich die Spins antiparallel ausrichten, bei Ji j > 0 dagegen parallel [59].
2.1.3. Kristallfeld
Bei den meisten ferromagnetischen Stoffen sind hauptsächlich die Spinmomente der Elektronen
für die Magnetisierung verantwortlich. Das liegt an einer speziellen räumlichen Ausdehnung der
Atomorbitale. Das sogenannte Kristallfeld bewirkt, dass der Bahndrehimpuls eines Elektrons kei-
ne Konstante der Bewegung mehr ist und somit auch nicht mehr zur permanenten Magnetisierung
beiträgt. Der Betrag des Bahndrehimpulses bleibt zwar erhalten, der Erwartungswert in Bezug auf
19

2.2. Bandstrukutur
die Magnetfeldachse verschwindet jedoch. Dieser Effekt wird “Quenching” genannt. In klassi-
scher Betrachtung kann man auch anschaulich annehmen, dass die Bahn der Elektronen in einem
inhomogenen elektrischen Feld ständig ihre Orientierung ändert, so dass die Komponente des
Bahndrehimpulses im Bezug auf eine bestimmte Richtung ebenso oft positiv wie negativ und da-
her im Mittel Null ist [53]. Somit wird die Magnetisierung durch die permanenten magnetischen
Momente der Elektronenspins getragen.
2.2. Bandstrukutur
Die Kristallstruktur der 3d Übergangsmetalle ist zunächst einmal durch metallische Bindung zu
erklären. Die äußeren 4s Elektronen sind schwach gebunden und formen ein Elektronen-Gas,
in dem die positiven Atomrümpfe eingebettet sind. Diese freien Elektronen können sich mehr
oder weniger unabhängig durch das Kristallgitter bewegen, sind nicht lokalisiert und verantwort-
lich für die Bindung. Der Magnetismus dieser Elektronen basiert hauptsächlich auf dem Pauli-
Paramagnetismus [61]. Die Übergangsmetalle zeigen zum Teil auch kovalente Bindung. Die Wel-
lenfunktionen der nur teilweise gefüllten 3d Orbitale überschneiden sich mit denen benachbarter
Atome und tragen so auch zur chemischen Bindung bei. Durch den Überlapp der 3d Wellenfunk-
tionen und der Wechselwirkung zwischen Elektronen mit dem Kristallgitter kommt es zu einer
Verbreiterung der Energiezustände, also zu einer Ausbildung von Energiebändern. Dies führt zur
Bandstruktur. Der Energiebereich der 3d Bänder ist allerdings immer noch relativ schmal, so dass
weiterhin eine erhöhte Aufenthaltswahrscheinlichkeit der 3d Elektronen in Atomrumpfnähe ge-
geben ist. Die in Kapitel 2.1 gegebene Begründung für die Entstehung von Ferromagnetismus
lässt sich auf das Bandstrukturbild übertragen: Wie bereits geschildert, ist bei ferromagnetischen
Übergangsmetallen ein einfacher Ansatz für die Wellenfunktionen der 3d-Elektronen in Kristal-
len nicht möglich, was die Berechnung der Austauschenergie außerordentlich schwierig gestaltet.
Dies hängt damit zusammen, dass diese 3d-Elektronen sich weder als lokalisierte Elektronen noch
als freie Elektronen korrekt beschreiben lassen. Eine wichtige Größe bei der Untersuchung der
magnetischen Ordnungserscheinungen ist die Betrachtung der Bandstruktur. Die Energiebänder
sind bis zur Fermikante mit Elektronen aufgefüllt, wobei jedes Energieniveau zwei Elektronen
unterschiedlicher Spin-Ausrichtung aufnehmen kann. Die elektrostatische Energie kann nun da-
durch verringert werden, dass sich ein Elektron parallel ausrichtet. Dabei muss es aufgrund des
Pauli-Prinzips auf ein höheres Energieniveau angehoben werden. Durch diesen Prozess, der die
elektrostatische Energie verringert, wird jedoch die kinetische Energie des Elektrons erhöht. Die
Energiebilanz entscheidet nun, ob dieser Prozess stattfindet. Die ausschlaggebenden Parameter
dabei sind die Dichte der Energiezustände an der Fermikante n(EF), das Atomvolumen Ω0 und
die Austauschenergie J pro Elektron. Daraus resultiert das Stoner-Kriterium
Jn(EF)Ω0 ≥ 1 (2.9)
Erfüllt ein Metall dieses Kriterium, so tritt spontane Magnetisierung auf. Diese Bedingung ist für
die 3d-Metalle Eisen, Kobalt und Nickel und für einige der Selten-Erd-Metalle erfüllt. Die 4s- und
20
Magnetismus der 3d Übergangsmetalle
3d-Orbitale der Atome bilden das Leitungsband der 3d-Metalle, wobei das 4s-Band sehr breit ist
und dementsprechend nur eine kleine Zustandsdichte besitzt. Das 3d-Band ist stark lokalisiert und
hat eine große Zustandsdichte an der Fermikante. Durch diese Bänder wird demnach der Magne-
tismus verursacht [53]. Die Bandstruktur ist von der Gitterkonstante der Materialien abhängig. Ist
der Abstand der Atome gering, so verbreitern sich die Energiebänder und führen somit zu einer
geringeren Zustandsdichte am Ferminiveau, was zu einem antiferromagnetischen Zustand führen
würde.
2.3. Anisotropiebeiträge
Man spricht von magnetischer Anisotropie, wenn der Zusammenhang zwischen Magnetisierung
und magnetischer Feldstärke eine Abhängigkeit von der Probenorientierung aufweist. Dabei wird
zwischen leichten und schweren Richtungen unterschieden. Für die Orientierung, bei der die Um-
magnetisierungsarbeit
W = µ0
∫~Hd ~M (2.10)
(µ0 als Permeabilitätskonstante, ~H als angelegtes Feld und ~M als Probenmagnetisierung) minimal
ist, spricht man von einer leichten Richtung, im anderen Falle von einer schweren Richtung. Die
Differenz zwischen der Arbeit in leichter und in schwerer Richtung bezeichnet man als Anisotro-
pieenergie. W wird gegeben durch die Differenz der freien Energie im Anfangs- und Endzustand.
Die freie Energie setzt sich zum einen zusammen aus dem Zeeman-Term und zum anderen aus
Termen, die phänomenologisch verschiedene Beiträge zur Anisotropieenergie beschreiben. Der
Zeeman-Term stellt die magnetostatische Energiedichte der Magnetisierung ~M in einem äußeren
Magnetfeld dar. Die Zeeman-Energie hängt lediglich von der mittleren Magnetisierung ab und
nicht von der Domänenstruktur oder von der Form der Probe [62]:
FZeeman = −µ0 ~M · ~H (2.11)
Die verschiedenen Anisotropiebeiträge werden in den folgenden Abschnitten vorgestellt. Abbil-
dung 2.1 zeigt ein Koordinatensystem, auf das in den nun folgenden Abschnitten Bezug genom-
men wird.
2.3.1. Kristallanisotropie
Die Vorzugsrichtungen der Magnetisierung, die sich aus der Spin-Bahn-Kopplung ergeben, ori-
entieren sich in einem kugelförmigen Kristall entlang der Kristallachsen. Die leichten Achsen für
Eisen liegen beispielsweise entlang der Würfelkanten, für Nickel entlang der Würfeldiagonalen.
Es ist möglich, die freie Energiedichte der Kristallanisotropie FK nach Potenzen der Richtungsko-
sinus αi zu entwickeln. Aufgrund der Symmetrie in einem kubischen System, zu dem Nickel und
Eisen zählen, fallen Terme ungerader, sowie der Term zweiter Ordnung weg und man erhält
FK = K1(α21α
22 + α2
2α23 + α2
3α21) + K2(α
21α
22α
23) + ... (2.12)
21

2.3. Anisotropiebeiträge
Abb. 2.1. – Definition des Koordinatensystems bei der Berechnung von Anisotropien.
mit
α1 = sinθcosφ,α2 = sinθsinφ,α3 = cosθ. (2.13)
Dabei ist die Anisotropiekonstante K2 meist so klein, dass sie vernachlässigt werden kann.
Legt man die Koordinatenachsen entlang der [100]-Richtung und liegt die Magnetisierung in der
(001)-Ebene (θ = 90), so folgt
FK = K1cos2φsin2φ =K1
4sin2(2φ). (2.14)
Um die Vorzugsrichtung der Magnetisierung zu erhalten, muss Gleichung 2.12 minimiert werden.
Falls K1 größer als 0 ist, so liegt das Minimum von FK entlang einer [100]-Achse (z.B. bei Eisen),
für K1 kleiner als 0 liegt die Achse entlang einer [110]-Richtung (z.B. bei fcc-Nickel).
2.3.2. Formanisotropie
Als Konsequenz der magnetischen Dipol-Dipol Wechselwirkung werden sich einzelne Dipole so
einstellen, dass das äußere Streufeld minimiert wird. Vernachlässigt man Beiträge, die durch die
Kristallsymmetrie bestimmt werden, so würde bei einem ferromagnetischen Quader die Vorzugs-
richtung der Magnetisierung entlang der längsten Kante dieses Quaders liegen. Der Beitrag der
Formansiotropie FF ist gegeben durch
FF =12µ0M2cos2θ (2.15)
Daraus ergibt sich, dass die Abhängigkeit von φ entfällt und die leichte Achse bei dünnen Schich-
ten in der Schichtebene liegt, falls nur die Formansisotropie betrachtet wird.
22

Magnetismus der 3d Übergangsmetalle
2.3.3. Grenzflächenanisotropie
An der Oberfläche eines Festkörpers ist die Koordinationszahl reduziert. Die Auswirkung dieser
Tatsache auf einen Ferromagneten liegt in der Änderung des Kristallfeldes, was bedeutet, dass die
Bandstruktur modifiziert und der Bahndrehimpuls erhöht wird. Zusätzlich ist es möglich, dass an
Grenzflächen elektronische Zustände mit dem Nachbarmaterial “vermischt” werden. Daher muss
ein weiterer Term in die freie Energiedichte aufgenommen werden:
FG =1d(KS cos2θ+ KPcos2φ) (2.16)
Hierbei ist d die Dicke der magnetischen Schicht und KS bzw. KP beschreiben Anisotropiebei-
träge senkrecht bzw. parallel zur Schichtebene. Aufgrund des antiproportionalen Verhaltens der
Schichtdicke zum Energiebeitrag nimmt die Bedeutung der Grenzflächenanisotropie mit abneh-
mender Schichtdicke zu. Die parallelen Anisotropiebeiträge kann man in der Regel vernachlässi-
gen. In dünnen Schichten wird der Anteil der Grenzflächenanisotropie häufig so groß, dass er zum
bestimmenden Anteil der gesamten Energiebilanz wird.
2.3.4. Anisotropie an gestuften Grenzflächen
Bisher ist bei der Betrachtung der Grenzflächenanisotropie von idealen Grenzflächen ausgegangen
worden. Diese sind in realen Proben nicht unbedingt vorzufinden. Die Schichtdicken weisen Fluk-
tuationen auf, die sich z.B. in Stufen oder Terrassen zeigen. In der Ebene liegt die leichte Richtung
entlang der Stufen. Der Grund dafür ist die lokale Änderung des Kristallfeldes durch Reduktion
der Koordinationszahl an den Stufenkanten.
2.3.5. Magnetoelastische Anisotropie
Die bisher untersuchten Beiträge zur Anisotropie hängen nur von der Orientierung der Magneti-
sierung ab. Kommt es aber in dem magnetischen Material zu Verspannungen, so hängt die freie
Energie zusätzlich von einem Spannungstensor εi j ab. Für kleine Verspannungen kann man die
entsprechende Energie nach Potenzen von εi j und αi (siehe Gleichung 2.12) entwickeln. Für ku-
bische Systeme lautet die Entwicklung der Energiedichte in niedrigster Ordnung:
FM = B1(ε11α21 + ε22α
22 + ε33α
23) + 2B2(ε12α1α2 + ε23α2α3 + ε31α3α1) + ... (2.17)
.
Die magnetoelastischen Konstanten Bi sind oft größer als die Anisotropiekonstante K1. Deshalb
reicht schon eine geringe Verzerrung aus, um eine große Anisotropie entstehen zu lassen. Beim
epitaktischen Wachstum entstehen durch Gitterfehlanpassungen oft Verzerrungen, die zu magne-
toelastischen Effekten führen. Durch Wahl eines geeigneten Buffer-Materials kann dieser Effekt
gering gehalten werden.
23
2.4. Domänenbildung und Magnetisierungsprozesse
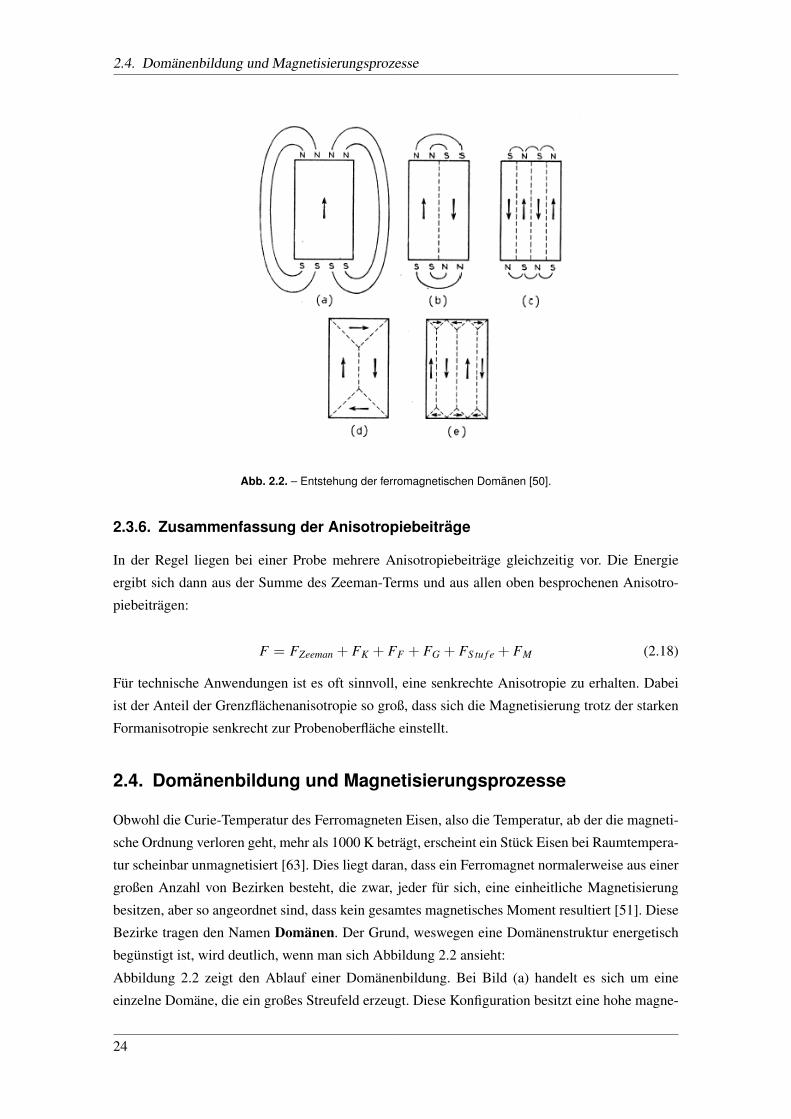
Abb. 2.2. – Entstehung der ferromagnetischen Domänen [50].
2.3.6. Zusammenfassung der Anisotropiebeiträge
In der Regel liegen bei einer Probe mehrere Anisotropiebeiträge gleichzeitig vor. Die Energie
ergibt sich dann aus der Summe des Zeeman-Terms und aus allen oben besprochenen Anisotro-
piebeiträgen:
F = FZeeman + FK + FF + FG + FS tu f e + FM (2.18)
Für technische Anwendungen ist es oft sinnvoll, eine senkrechte Anisotropie zu erhalten. Dabei
ist der Anteil der Grenzflächenanisotropie so groß, dass sich die Magnetisierung trotz der starken
Formanisotropie senkrecht zur Probenoberfläche einstellt.
2.4. Domänenbildung und Magnetisierungsprozesse
Obwohl die Curie-Temperatur des Ferromagneten Eisen, also die Temperatur, ab der die magneti-
sche Ordnung verloren geht, mehr als 1000 K beträgt, erscheint ein Stück Eisen bei Raumtempera-
tur scheinbar unmagnetisiert [63]. Dies liegt daran, dass ein Ferromagnet normalerweise aus einer
großen Anzahl von Bezirken besteht, die zwar, jeder für sich, eine einheitliche Magnetisierung
besitzen, aber so angeordnet sind, dass kein gesamtes magnetisches Moment resultiert [51]. Diese
Bezirke tragen den Namen Domänen. Der Grund, weswegen eine Domänenstruktur energetisch
begünstigt ist, wird deutlich, wenn man sich Abbildung 2.2 ansieht:
Abbildung 2.2 zeigt den Ablauf einer Domänenbildung. Bei Bild (a) handelt es sich um eine
einzelne Domäne, die ein großes Streufeld erzeugt. Diese Konfiguration besitzt eine hohe magne-
24
Magnetismus der 3d Übergangsmetalle
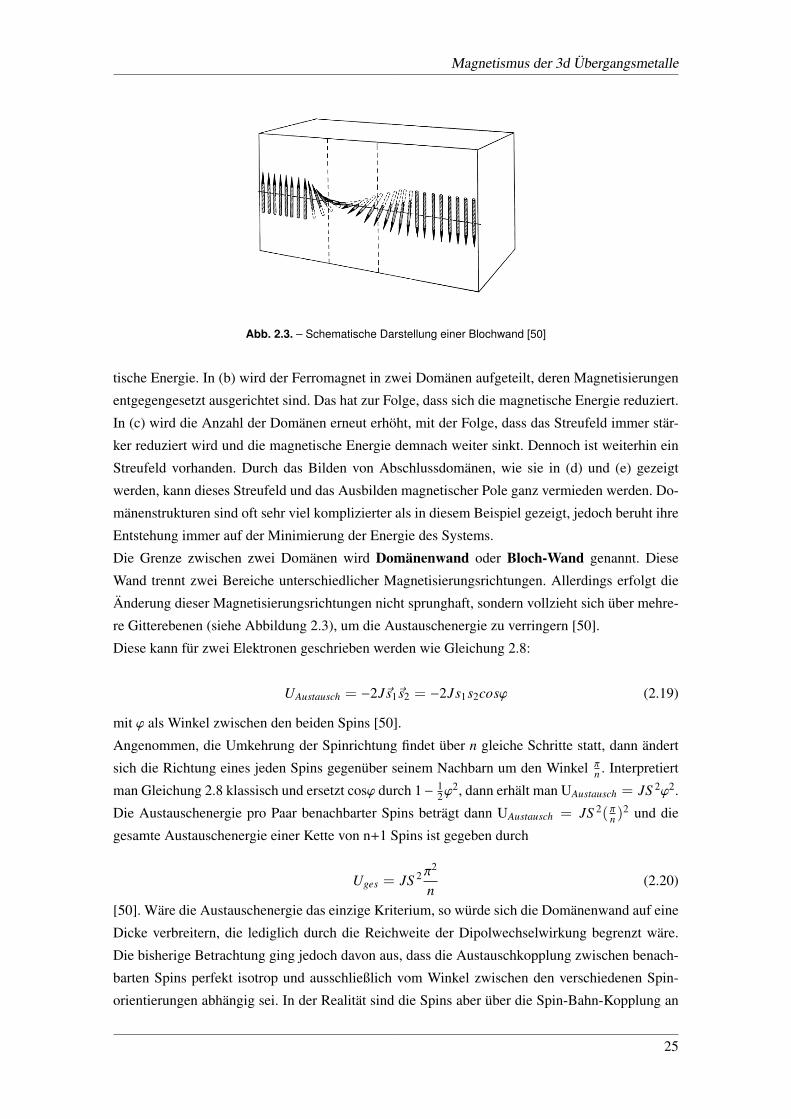
Abb. 2.3. – Schematische Darstellung einer Blochwand [50]
tische Energie. In (b) wird der Ferromagnet in zwei Domänen aufgeteilt, deren Magnetisierungen
entgegengesetzt ausgerichtet sind. Das hat zur Folge, dass sich die magnetische Energie reduziert.
In (c) wird die Anzahl der Domänen erneut erhöht, mit der Folge, dass das Streufeld immer stär-
ker reduziert wird und die magnetische Energie demnach weiter sinkt. Dennoch ist weiterhin ein
Streufeld vorhanden. Durch das Bilden von Abschlussdomänen, wie sie in (d) und (e) gezeigt
werden, kann dieses Streufeld und das Ausbilden magnetischer Pole ganz vermieden werden. Do-
mänenstrukturen sind oft sehr viel komplizierter als in diesem Beispiel gezeigt, jedoch beruht ihre
Entstehung immer auf der Minimierung der Energie des Systems.
Die Grenze zwischen zwei Domänen wird Domänenwand oder Bloch-Wand genannt. Diese
Wand trennt zwei Bereiche unterschiedlicher Magnetisierungsrichtungen. Allerdings erfolgt die
Änderung dieser Magnetisierungsrichtungen nicht sprunghaft, sondern vollzieht sich über mehre-
re Gitterebenen (siehe Abbildung 2.3), um die Austauschenergie zu verringern [50].
Diese kann für zwei Elektronen geschrieben werden wie Gleichung 2.8:
UAustausch = −2J~s1~s2 = −2Js1s2cosϕ (2.19)
mit ϕ als Winkel zwischen den beiden Spins [50].
Angenommen, die Umkehrung der Spinrichtung findet über n gleiche Schritte statt, dann ändert
sich die Richtung eines jeden Spins gegenüber seinem Nachbarn um den Winkel πn . Interpretiert
man Gleichung 2.8 klassisch und ersetzt cosϕ durch 1− 12ϕ
2, dann erhält man UAustausch = JS 2ϕ2.
Die Austauschenergie pro Paar benachbarter Spins beträgt dann UAustausch = JS 2( πn )2 und die
gesamte Austauschenergie einer Kette von n+1 Spins ist gegeben durch
Uges = JS 2π2
n(2.20)
[50]. Wäre die Austauschenergie das einzige Kriterium, so würde sich die Domänenwand auf eine
Dicke verbreitern, die lediglich durch die Reichweite der Dipolwechselwirkung begrenzt wäre.
Die bisherige Betrachtung ging jedoch davon aus, dass die Austauschkopplung zwischen benach-
barten Spins perfekt isotrop und ausschließlich vom Winkel zwischen den verschiedenen Spin-
orientierungen abhängig sei. In der Realität sind die Spins aber über die Spin-Bahn-Kopplung an
25
2.4. Domänenbildung und Magnetisierungsprozesse
die elektronische Ladungsdichte gekoppelt, so dass ihre Energie zusätzlich von ihrer Orientierung
in Bezug auf die Kristallachsen abhängig ist. Diese so genannte Anisotropieenergie (siehe auch
Kapitel 2.3) sorgt für eine Energiezunahme bei einer Reihe, in ihrer Orientierung voneinander ab-
weichenden Spins und wirkt somit der Austauschenergie entgegen. Damit ergibt sich die Dicke λ
einer Domänenwand aus dem Gleichgewicht zwischen Austausch- und Anisotropieenergie [59]
λ =
√JK
(2.21)
.
Die Dicke der Domänenwand kann von einigen Nanometern wie z. B. in Kobalt, über etwa 30 nm
in Eisen bis hin zu einigen Mikrometern in sehr weichem Permalloy variieren [53].
Die Bildung von Domänen führt zu einem Ansteigen der Austauschenergie. Die Reichweite der
Austauschenergie ist jedoch gering, so dass sie nur für Spins in der Nähe der Domänenwand er-
höht wird. Im Gegensatz dazu ist die Ersparnis der langreichweitigen magnetischen Dipolenergie
ein Volumeneffekt. Die Dipolenergie eines jeden Spins wird gesenkt, sobald die Domänenbildung
einsetzt. Daher ist die Ausbildung von Domänen trotz einer Erhöhung der Austauschenergie ener-
getisch bevorzugt [64].
Während des Prozesses der Magnetisierung werden die Domänen umgeordnet und umorientiert.
Ist das angelegte Magnetfeld schwach, können Domänen, die in Feldrichtung orientiert sind, durch
stetiges Verschieben der Domänenwände wachsen. Das geschieht auf Kosten der Domänen, die
nicht in Feldrichtung orientiert sind. Diese werden verkleinert. Dabei handelt es sich um einen
reversiblen Prozess. Das bedeutet, dass bei Zurückfahren des angelegten Feldes auf den Wert 0
wieder die ursprünglichen Domänen entstehen. Anders verhält es sich bei starken Magnetfeldern.
Hier kann sich die Domänenwand beispielsweise durch Kristallfehler hindurch ausdehnen, wenn
der Energiegewinn im externen Feld ausreichend groß ist. Diese Kristallfehler stellen dann, bei
Entfernen des angelegten Feldes, eine Behinderung dar, so dass die Domänenwände nicht wieder
zu ihrer Ausgangskonfiguration zurückgelangen können. Um dennoch wieder zur Ausgangskon-
figuration zurückzukehren, muss ein starkes, entgegengesetzt orientiertes, externes Feld angelegt
werden. Dieses Phänomen wird als Hysterese bezeichnet (siehe Abbildung 2.4) [63].
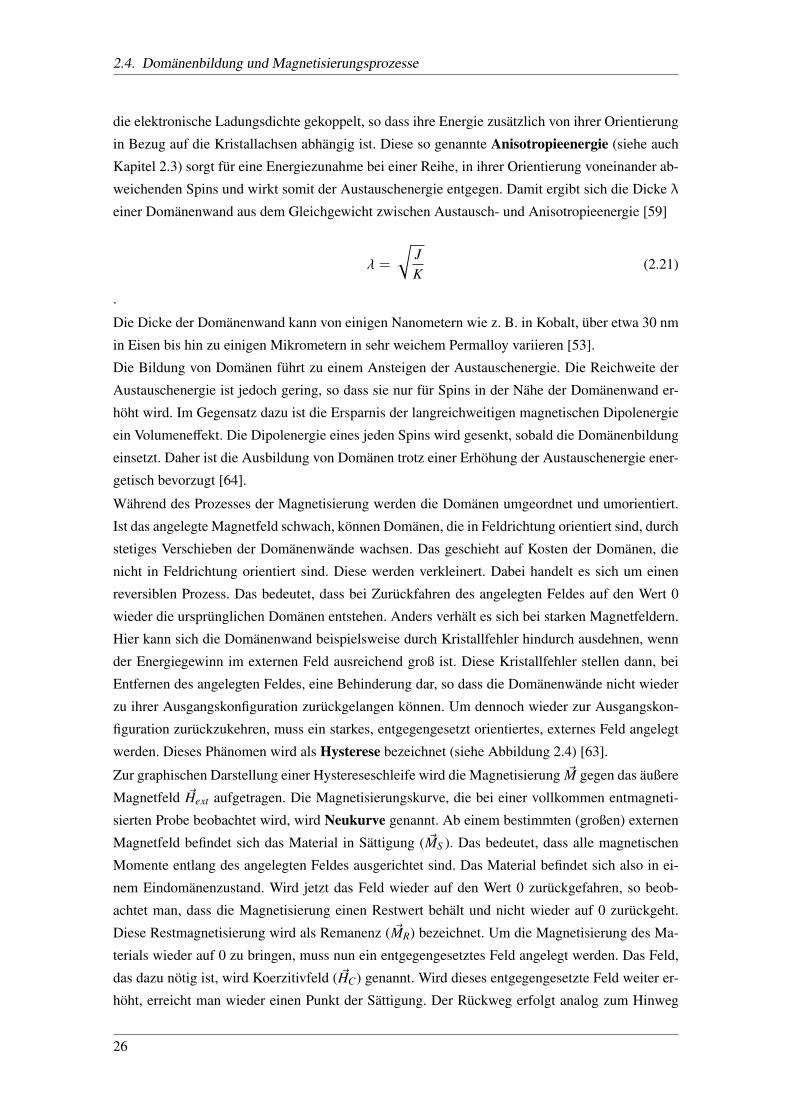
Zur graphischen Darstellung einer Hystereseschleife wird die Magnetisierung ~M gegen das äußere
Magnetfeld ~Hext aufgetragen. Die Magnetisierungskurve, die bei einer vollkommen entmagneti-
sierten Probe beobachtet wird, wird Neukurve genannt. Ab einem bestimmten (großen) externen
Magnetfeld befindet sich das Material in Sättigung ( ~MS ). Das bedeutet, dass alle magnetischen
Momente entlang des angelegten Feldes ausgerichtet sind. Das Material befindet sich also in ei-
nem Eindomänenzustand. Wird jetzt das Feld wieder auf den Wert 0 zurückgefahren, so beob-
achtet man, dass die Magnetisierung einen Restwert behält und nicht wieder auf 0 zurückgeht.
Diese Restmagnetisierung wird als Remanenz ( ~MR) bezeichnet. Um die Magnetisierung des Ma-
terials wieder auf 0 zu bringen, muss nun ein entgegengesetztes Feld angelegt werden. Das Feld,
das dazu nötig ist, wird Koerzitivfeld ( ~HC) genannt. Wird dieses entgegengesetzte Feld weiter er-
höht, erreicht man wieder einen Punkt der Sättigung. Der Rückweg erfolgt analog zum Hinweg
26
Magnetismus der 3d Übergangsmetalle
Abb. 2.4. – Hystereseschleife
[53]. Der steile Anstieg der Hysteresekurve bei kleinen Feldstärken beruht auf Wandverschiebun-
gen, der flachere Kurventeil ist durch Drehprozesse der magnetischen Momente bedingt [51]. Die
Richtung parallel zur Feldrichtung, bei der das höchste äußere Feld benötigt wird, um den Sät-
tigungszustand nach der Ummagnetisierung zu erreichen, wird als schwere Richtung bezeichnet.
Entsprechend heißt die Richtung parallel zur Feldrichtung, bei der das niedrigste äußere Feld be-
nötigt wird, leichte Richtung. Die Hysteresekurven in leichter Richtung sehen eckiger aus als die
in schwerer Richtung.
Solche Magnetisierungskurven sind zur Charakterisierung ferromagnetischer Materialien von Be-
deutung. Materialien mit hohen Koerzitivfeldern werden als magnetisch hart bezeichnet, solche
mit niedrigen Koerzitivfeldern nennt man magnetisch weich. Je nach Anwendungsgebiet sind ho-
he oder niedrige Koerzitivfelder von Vorteil. In der Datenspeichertechnik werden bevorzugt ma-
gnetisch harte Materialien benutzt, um Datenverluste durch unbeabsichtigte Entmagnetisierung zu
vermeiden, während bei Elektromagneten und -motoren eher magnetisch weiche Materialien ver-
wendet werden, um die Magnetisierung des Materials mit relativ kleinen Feldern kontrollieren zu
können [65].
27

3. Magnetische Nanostrukturen
Nanomagnetismus ist nicht nur ein Thema bei künstlich hergestellten Strukturen. Auch in der Na-
tur trifft man immer wieder auf dieses Phänomen. So gibt es z. B. magnetostatische Bakterien,
die in völliger Dunkelheit leben und Ketten magnetischer Partikel in sich tragen. Diese Ketten
sind etwa 40 bis 100 nm lang und werden von den Bakterien zur Orientierung benutzt. Ähnli-
che Partikel wurden auch in den Gehirnen andere Tiere entdeckt, z. B. bei Bienen und Tauben,
und es ist Gegenstand aktueller Forschung, ob diese magnetischen Partikel von den Tieren zur
Orientierungshilfe genutzt werden. Einige Nanostrukutren, zu denen auch Ferrofluide gehören,
tauchen so nicht in der Natur auf, sind aber relativ leicht herzustellen, während andere aufwendige
Herstellungsverfahren benötigen [60].
Wie in Kapitel 2.4 geschildert ist der energetisch günstigste Zustand für ein makroskopisches
Teilchen durch die Aufspaltung in Domänen gegeben. Bei kleineren Teilchen unterhalb eines
kritischen Durchmesser allerdings stellt sich der homogen magnetisierte Zustand als energetisch
günstiger dar. Solche eindomänigen Teilchen sind deshalb stabil, weil es energetisch weit ungüns-
tiger ist, eine Domänenwand zu realisieren, als man an Energie durch den Abbau des Streufelds
gewinnen würde [53]. Die Größe, ab der ein eindomäniger Zustand bevorzugt wird, ist von dem
Gleichgewicht zwischen der Kristallanisotropie, der Austauschenergie, der Zeeman Energie und
der magnetostatischen Energie abhängig. In Volumenferromagneten sind Domänenwände günstig
um das Streufeld zu minimieren. Die durchschnittliche Domänengröße hängt natürlich von Form
und Größe der Struktur ab, ist aber typischerweise größer als ein paar µm. Die Domänenwand-
breite λ ist viel kleiner als die Domänen, ungefähr in der Größenordnung von einigen hundert
Gitterkonstanten. Die hohe Austauschenergie erschwert eine nicht-uniforme Magnetisierungsro-
tation in einer Größenordnung kleiner als λ. Daher sollte eine Struktur mit einer Größe kleiner
als λ eindomänig sein. Dies wurde bereits experimentell bestätigt, u.a. von Majetich und Jin [66].
Das bedeutet aber nicht, dass Strukturen über dieser Größe automatisch in Domänen zerfallen,
da das Verhältnis zwischen der magnetostatischen Energie und der Anisotropieenergie ebenfalls
eine Rolle spielt. Daher muss für eine Größenabschätzung eines eindomänigen Teilchens die Di-
polenergie mitbetrachtet werden, die die Grundlage der magnetostatischen Energie darstellt. Der
kritische Durchmesser ist wie folgt definiert:
dcrit = λ(Eanisotropy
Edipole)
12 (3.1)
für Eanisotropy Edipole, also für eine schwache Kristallanisotropie und
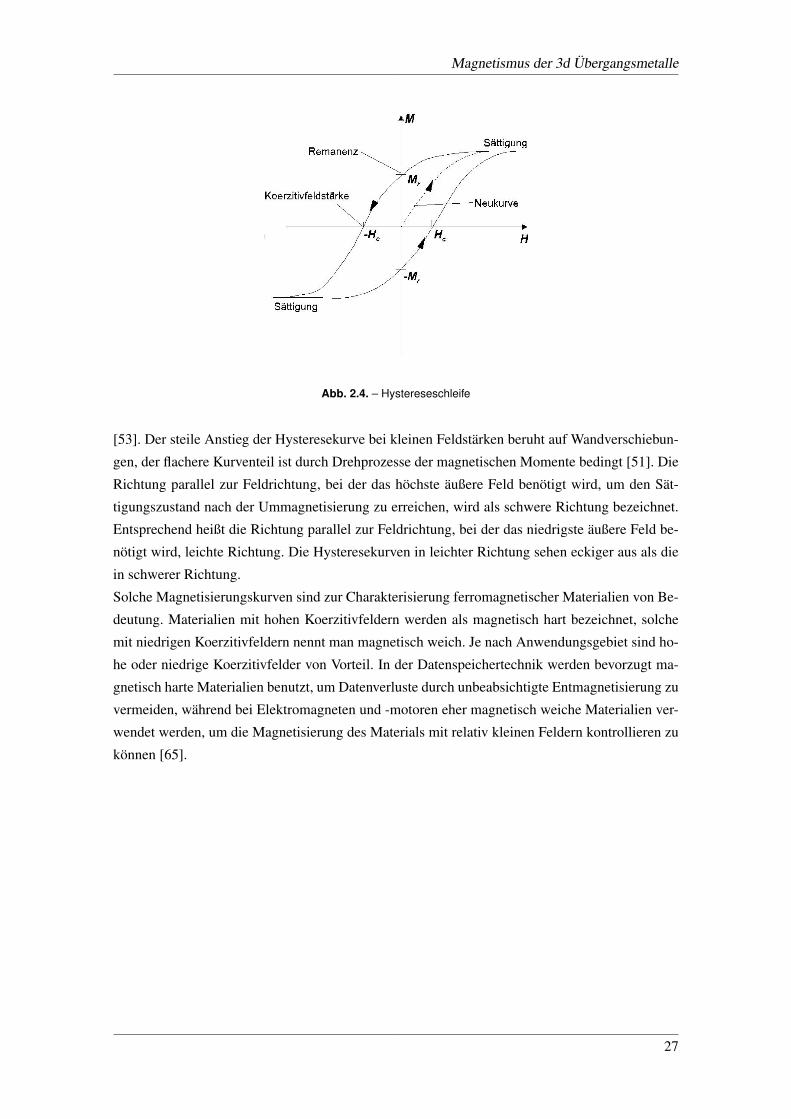
2.4. Domänenbildung und Magnetisierungsprozesse
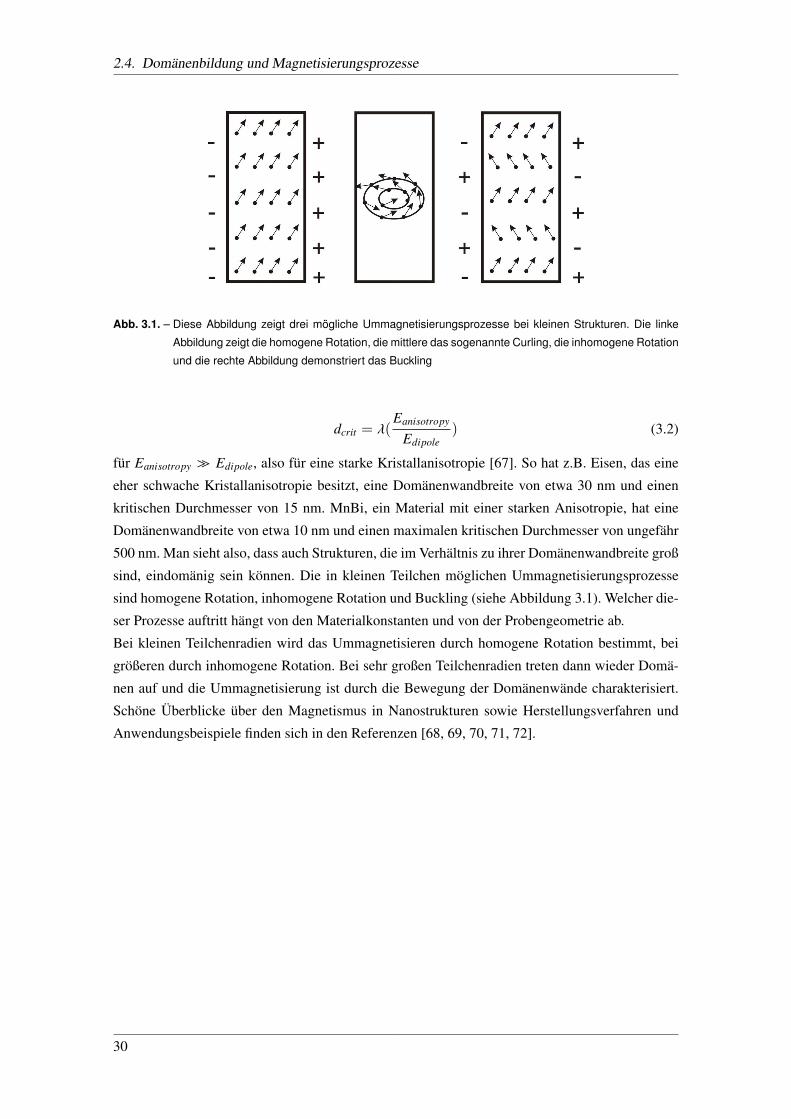
Abb. 3.1. – Diese Abbildung zeigt drei mögliche Ummagnetisierungsprozesse bei kleinen Strukturen. Die linke
Abbildung zeigt die homogene Rotation, die mittlere das sogenannte Curling, die inhomogene Rotation
und die rechte Abbildung demonstriert das Buckling
dcrit = λ(Eanisotropy
Edipole) (3.2)
für Eanisotropy Edipole, also für eine starke Kristallanisotropie [67]. So hat z.B. Eisen, das eine
eher schwache Kristallanisotropie besitzt, eine Domänenwandbreite von etwa 30 nm und einen
kritischen Durchmesser von 15 nm. MnBi, ein Material mit einer starken Anisotropie, hat eine
Domänenwandbreite von etwa 10 nm und einen maximalen kritischen Durchmesser von ungefähr
500 nm. Man sieht also, dass auch Strukturen, die im Verhältnis zu ihrer Domänenwandbreite groß
sind, eindomänig sein können. Die in kleinen Teilchen möglichen Ummagnetisierungsprozesse
sind homogene Rotation, inhomogene Rotation und Buckling (siehe Abbildung 3.1). Welcher die-
ser Prozesse auftritt hängt von den Materialkonstanten und von der Probengeometrie ab.
Bei kleinen Teilchenradien wird das Ummagnetisieren durch homogene Rotation bestimmt, bei
größeren durch inhomogene Rotation. Bei sehr großen Teilchenradien treten dann wieder Domä-
nen auf und die Ummagnetisierung ist durch die Bewegung der Domänenwände charakterisiert.
Schöne Überblicke über den Magnetismus in Nanostrukturen sowie Herstellungsverfahren und
Anwendungsbeispiele finden sich in den Referenzen [68, 69, 70, 71, 72].
30
Teil II.
Methoden

4. Rasterkraftmikroskopie
Die Rastersondenmikroskopie hat sich in den letzten Jahren zu einer wichtigen und kaum mehr
wegzudenkenden Untersuchungsmethode vor allem im Bereich der Oberflächenphysik und bei der
Charakterisierung von Oberflächenstrukturen entwickelt. Sowohl topographische als auch elektri-
sche, optische oder magnetische Oberflächeneigenschaften, periodisch oder nicht, lassen sich mit
den unterschiedlichsten Rastersondenmikroskopen untersuchen. Je nach Messmodus lassen sich
leitende sowie nicht-leitende Materialien charakterisieren. Im Gegensatz zu Streuexperimenten
liefert die Rastersondenmikroskopie Bilder aus dem realen Raum, so dass sie sich als ergänzen-
de, zusätzliche Informationen liefernde Untersuchungsmethode anbietet [65]. Das Verfahren der
Rastersondenmikroskopie beruht dabei immer auf einem relativ simplen Prinzip: Eine Messson-
de wird in sehr kurzem Abstand über die zu untersuchende Oberfläche geführt, wobei es eine
Wechselwirkung zwischen der Messsonde und der Oberfläche gibt. Diese Wechselwirkung kann
unterschiedlicher Natur sein, beispielsweise elektrisch, magnetisch oder mechanisch. Durch diese
Wechselwirkung erhält man ein entsprechendes Messsignal, welches je nach Qualität und Art der
Sonde atomare Auflösung liefern kann und das Linie für Linie zu einem Gesamtbild zusammen-
gesetzt wird, das dann der räumlichen Variation des gemessenen Parameters entspricht [73].
Die Entwicklung der Rastersondenmikroskopie begann 1982 mit der Erfindung des Rastertunnel-
mikroskops (STM, Scanning Tunneling Microscopy) durch Binnig und Rohrer [74]. Diese Me-
thode, die auch heute noch die höchste laterale Auflösung unter allen Rastersondenmikroskopen
liefert, wird hauptsächlich für Halbleiter, Metalle und Supraleiter verwendet, da hierfür elektrisch
leitende Oberflächen benötigt werden. Hierbei wird ein Tunnelstrom zwischen einer sehr feinen,
metallischen Spitze und der leitenden Probenoberfäche durch eine schmale Potentialbarriere in
einem externen elektrischen Feld als Messsignal ausgenutzt. Atomare Auflösung ist bei dieser
Messmethode Standard [75].
Eine weitere, häufig eingesetzte Methode ist die Rasterkraftmikroskopie (AFM, Atomic Force
Microscopy), eine oberflächenabbildenden Mikroskopiemethode, bei der die zu untersuchende
Oberfläche mit einer feinen Spitze, die auf einem Cantilever befestigt ist, zeilenweise abgetastet
wird. Die Auslenkung des Cantilevers bzw. die Änderung in seinen dynamischen Eigenschaften,
die durch Kräfte zwischen der Spitze und der Probenoberfläche verursacht werden, wird durch
ein Laser-Photodetektor System detektiert. Die wesentlichen Kräfte hierbei haben ihren Ursprung
in der van der Waals-, der elektrostatischen, der magnetischen oder der abstoßenden Wechselwir-
kung zwischen Atomen. Die Höhenänderung der Spitze relativ zur Oberfläche wird dabei über ein
piezoelektrisches Element reguliert [73], womit dann ein Oberflächenprofil erstellt werden kann.
Die untere Grenze der Kraftdetektion ist wesentlich geringer als die Kraft zwischen Atomen auf
4.1. Relevante Wechselwirkungen zwischen Spitze und Probe
Gitterabstand, woher der oft verwendete englische Ausdruck “Atomic Force Microscopy” herührt
[76]. Entwickelt wurde diese Technik im Jahre 1985, ebenso wie das Rastertunnelmikroskop von
Binnig [77]. Prinzipiell ist es auch mit einem Rasterkraftmikroskop möglich bei Verwendung von
tiefen Temperaturen und im Vakuum atomare Auflösung zu erlangen. Kommerzielle Geräte erzie-
len bei Raumtemperatur und an Luft eine laterale Auflösung von etwa 10 nm [78], die vertikale
Auflösung liegt bei etwa 1 Å [79]. 1986 von Y. Martin und H. K. Wickramasinghe weiterentwi-
ckelt, waren dann durch das Benutzen einer magnetischen Spitze auch magnetische Charakteri-
sierungen von Oberflächen möglich [80]. Dabei handelt es sich um die so genannte “magnetische
Kraftmikroskopie” (MFM, Magnetic Force Microscopy), die in Kapitel 4.5 detaillierter beschrie-
ben wird. Mit kommerziellen Geräten sind häufig auch viele weitere Messmodi durchführbar, wie
zum Beispiel EFM-Messungen (Electric Force Microscopy) oder LFM-Messungen (Lateral Force
Microscopy). Essenziell für diese Arbeit waren die MFM-Messungen, für die auch ein Verständnis
des AFM-Modus unabdingbar ist. Daher werden diese zwei Messmodi hier näher erläutert.
Zunächst soll ein Überblick über das Rasterkraftmikroskop und seine Funktionsweise gegeben
werden, um danach näher auf die Magnetkraftmikroskopie einzugehen. Abschließend folgt eine
kurze Vorstellung des experimentellen Aufbaus, wie er in dieser Arbeit verwendet worden ist.
4.1. Relevante Wechselwirkungen zwischen Spitze und Probe
In diesem Abschnitt wird ein Überblick über die Wechselwirkungen zwischen der Spitze und
der Probenoberfläche gegeben. Die Reichweite der verschiedenen Wechselwirkungsarten ist dabei
von großer Bedeutung für die Kraftmikroskopie, da unterschiedliche Teile der Spitze und des
Cantilevers auch unterschiedlich zur gemessenen Gesamtkraft beitragen. Van der Waals Kräfte
wirken zum Beispiel zwischen dem Spitzenende und der Oberfläche, während die Effekte der
elektrostatischen Kräfte vom gesamten Cantilever herrühren können [76].
4.1.1. Kurzreichweitige Wechselwirkung
Die kurzreichweitigen Kräfte resultieren aus dem Überlapp der Elektron-Wellen-Funktionen und
der Abstoßung der Ionenkerne. Daher ist die Reichweiter dieser Kräfte vergleichbar mit der Aus-
dehung von Elektron-Wellen-Funktionen, also kleiner als ein Nanometer. Die kurzreichweitige
Wechselwirkung kann sowohl anziehend als auch abstoßend wirken. Anziehend ist sie dann, wenn
der Überlapp der Wellenfunktionen die Gesamtenergie erniedrigt, vergleichbar mit der Energie-
erniedrigung bei molekularer Bindung [76]. Andererseits kann bei starkem Überlapp der Wellen-
funktionen auch eine abstoßende Wirkung die Folge sein. Nach dem Pauli-Prinzip dürfen zwei
Elektronen nicht in all ihren Quantenzahlen übereinstimmen. Daher müssen bei der Überlappung
der Ladungsverteilung einige Elektronen in höhere, bis dahin noch unbesetzte Zustände angeho-
ben werden, um dem Pauli-Prinzip zu genügen. Dadurch wird die Gesamtenergie des Systems
erhöht, was zu einem abstoßenden Beitrag zur Wechselwirkung führt [50]. Ist der Abstand zwi-
schen Probe und Spitze klein genug, so spürt die Spitze die abstoßende Wechselwirkung, die durch
34

Rasterkraftmikroskopie
den empirisch gefundenen Zusammenhang
Uel =B
z12 (4.1)
gegeben ist. Diese Gleichung beschreibt die Wechselwirkung zwischen zwei Atomen, stellt also
die vereinfachte Annahme dar, dass lediglich das unterste Spitzenatom mit einem Atom der Pro-
benoberfläche wechselwirkt. B ist dabei eine Konstante und z der Abstand zwischen den zwei
Atomen. Diese Kräfte sind direkt verbunden mit der Elektronendichte. Die Abstoßung durch die
Ionenkerne wirkt nur über kleine Abstände, nämlich dort, wo die Abschirmung der Ionenkerne
durch die Elektronen wegfällt.
4.1.2. Van der Waals Wechselwirkung
Zwischen zwei neutralen Atomen existiert eine langreichweitige Wechselwirkung. Obwohl die
elektronische Ladungsverteilung eines jeden neutralen Atoms im zeitlichen Mittel kugelsymme-
trisch ist, können durch Fluktuationen in der Ladungsverteilung dennoch effektive Dipolmomente
auftreten. Ein solches Dipolmoment erzeugt dann ein elektrisches Feld und induziert im zweiten
Atom ein zum ersten Dipolmoment proportionales Dipolmoment, womit eine Energieerniedrigung
des Systems verbunden ist [63]. Diese Wechselwirkung ist immer vorhanden und betrifft sogar
Edelgasatome. Das so entstehende Potential wirkt anziehend auf die beiden Atome und wird van
der Waals Potential genannt. Das Dipolpotential kann angegeben werden als
UD ∼1z3 . (4.2)
Da die Wechselwirkungsenergie zweier Dipole proportional zum Produkt ihrer Dipolpotentiale ist,
ist das van der Waals-Potential gegeben durch
UW = −Az6 (4.3)
mit A als einer Konstanten und z als Abstand der beiden Atome [50].
Bei größeren Entfernungen nimmt das van der Waals Potential stärker ab (z−7 statt z−6). Das liegt
an der Tatsache, dass die Wechselwirkung zwischen Dipolmomenten durch den Austausch vir-
tueller Photonen entsteht [73]. Ist der Abstand zwischen den betroffenen Molekülen größer als
die Distanz, die Licht in der typischen Fluktuationszeit der Dipole zurücklegen kann, so wird
die Wechselwirkung abgeschwächt [76]. Die Reichweite der van der Waals Wechselwirkung wird
deshalb retardiert genannt, im Gegensatz zu unretadiert bei kleineren Abständen [73].
Anfangs trennt ein großer Abstand die Oberfläche von der Spitze. Beim Annähern wird die Spitze
durch die van der Waals Kräfte angezogen. Dabei steigt die Wechselwirkung mit kleiner werden-
dem Probe-Spitze-Abstand solange an, bis sie durch die kurzreichweitige Abstoßung überlagert
wird. Für die wirkende Kraft gilt dabei
F = −gradUW ∼1z7 . (4.4)
35
4.1. Relevante Wechselwirkungen zwischen Spitze und Probe
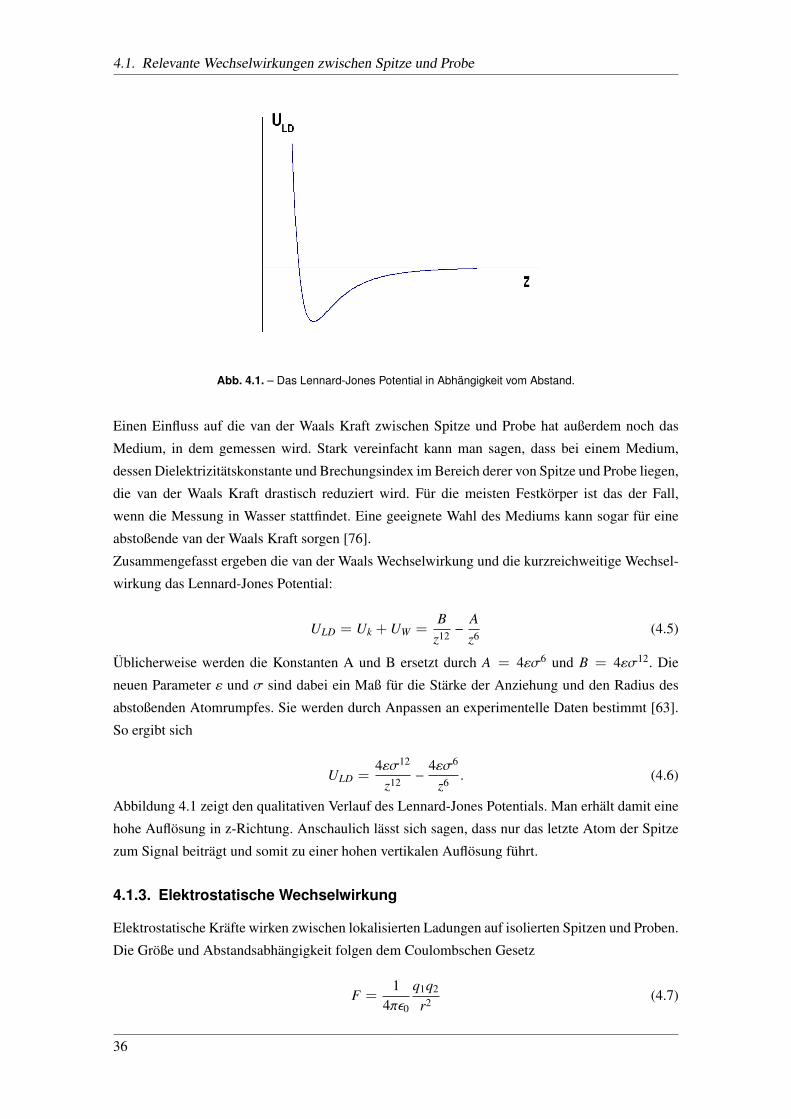
Abb. 4.1. – Das Lennard-Jones Potential in Abhängigkeit vom Abstand.
Einen Einfluss auf die van der Waals Kraft zwischen Spitze und Probe hat außerdem noch das
Medium, in dem gemessen wird. Stark vereinfacht kann man sagen, dass bei einem Medium,
dessen Dielektrizitätskonstante und Brechungsindex im Bereich derer von Spitze und Probe liegen,
die van der Waals Kraft drastisch reduziert wird. Für die meisten Festkörper ist das der Fall,
wenn die Messung in Wasser stattfindet. Eine geeignete Wahl des Mediums kann sogar für eine
abstoßende van der Waals Kraft sorgen [76].
Zusammengefasst ergeben die van der Waals Wechselwirkung und die kurzreichweitige Wechsel-
wirkung das Lennard-Jones Potential:
ULD = Uk + UW =B
z12 −Az6 (4.5)
Üblicherweise werden die Konstanten A und B ersetzt durch A = 4εσ6 und B = 4εσ12. Die
neuen Parameter ε und σ sind dabei ein Maß für die Stärke der Anziehung und den Radius des
abstoßenden Atomrumpfes. Sie werden durch Anpassen an experimentelle Daten bestimmt [63].
So ergibt sich
ULD =4εσ12
z12 −4εσ6
z6 . (4.6)
Abbildung 4.1 zeigt den qualitativen Verlauf des Lennard-Jones Potentials. Man erhält damit eine
hohe Auflösung in z-Richtung. Anschaulich lässt sich sagen, dass nur das letzte Atom der Spitze
zum Signal beiträgt und somit zu einer hohen vertikalen Auflösung führt.
4.1.3. Elektrostatische Wechselwirkung
Elektrostatische Kräfte wirken zwischen lokalisierten Ladungen auf isolierten Spitzen und Proben.
Die Größe und Abstandsabhängigkeit folgen dem Coulombschen Gesetz
F =1
4πε0
q1q2
r2 (4.7)
36
Rasterkraftmikroskopie
mit ε0 als elektrische Feldkonstante, den Ladungen q1 und q2 sowie dem Abstand r zwischen den
beiden Ladungen.
Ladungen können während der Probenpräparation leicht auf der Probenoberfläche eingefangen
werden, zum Beispiel beim Brechen der Probe oder bei der Verwendung von UHV-Techniken wie
dem Ionenstrahlsputtern. Um die Kraft zu bestimmen wird die Wechselwirkung der Ladung mit
ihrer Spiegelladung auf der Spizte berechnet. Da allerdings sogar neutrale Oberflächen mit leiten-
den Spitzen via Spiegelladungen interagieren können und Wechselwirkungen zwischen leitende-
nen Spitzen und Oberflächen festgestellt wurden, ist der Beitrag der elektrostatischen Kräfte zur
Gesamtkraft nur sehr schwer zu quantifizieren, zumal ebenfalls elektrostatische Kräfte zwischen
Probe und Cantilever berücksichtigt werden müssten [76].
4.1.4. Kapillare Wechselwirkung
Bei Messungen an Luft spielen dünne Wasserfilme auf der Probe eine wichtige Rolle. Es entstehen
kapillare Kräfte, die eine große Wechselwirkung zwischen Spitze und Probe verursachen. Die
Adhäsion, die der Kraft entspricht, die aufgewendet werden muss, um die Spitze von der Probe zu
trennen, ändert sich, sobald ein dünner Wasserfilm die Probe bedeckt. Die auftretenden Kräfte sind
dabei von der Spitzengeometrie und den Flüssigkeitseigenschaften abhängig und können je nach
Beschaffenheit der Grenzschicht zwischen Probe und Spitze weit stärker sein als die van der Waals
Kraft [81]. Durch das Einbringen von Probe und Spitze in Flüssigkeiten, Messen im Vakuum oder
bei tiefen Temperaturen kann die kapillare Wechselwirkung komplett vermieden werden [76]. Für
eine detaillierte Analyse der Kapillarkräfte bei der Rasterkraftmikroskopie und einen Vergleich
mit der van der Waals Kraft sei auf Referenz [81] verwiesen.
4.1.5. Magnetostatische Wechselwirkung
Die magnetostatische Wechselwirkung ist elementar für die Benutzung des MFM-Modus. Sie tritt
bei ferromagnetischen Proben und Spitzen auf. Eine detaillierte Erklärung dieser Wechselwirkung
folgt der Übersicht wegen in Kapitel 4.5.
4.2. Funktionsweise
Die bereits besprochenen Wechselwirkungen zwischen Spitze und Probe verlangen nach einem
Messaufbau, der hohen Ansprüchen genügen muss. Unter diesem Aspekt werden daher nun die
einzelnen Bauteile eines Rasterkraftmikroskops näher betrachtet.
Die wesentlichen Komponenten eines Rasterkraftmikroskops sind die Spitze, die über die Oberflä-
che gefahren wird, der Cantilever, dessen Auslenkung zum Messsignal führt, der Photodetektor,
der die Auslenkung des Cantilevers detektiert, das Rückkopplungssystem, das für eine stabile
Messung sorgt und der Scanner, der die Probe bewegt und so das Abrastern ermöglicht. Diese
Komponenten werden nun einzeln vorgestellt.
37
4.2. Funktionsweise
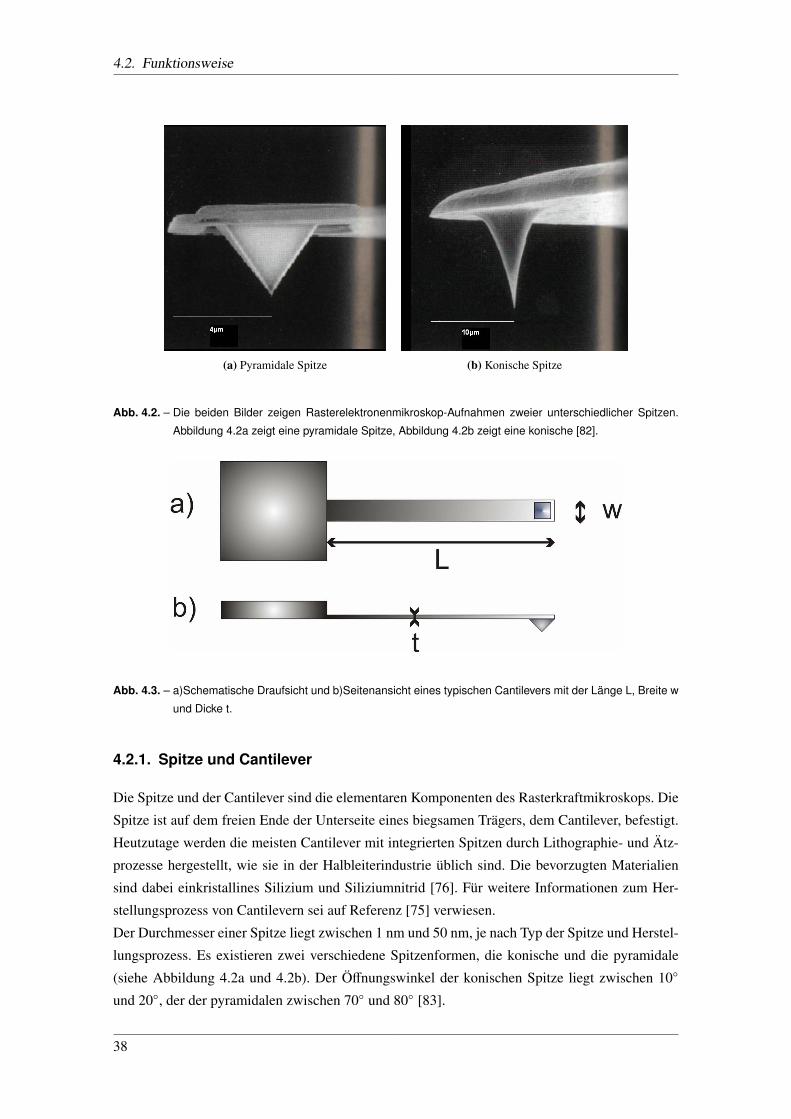
(a) Pyramidale Spitze (b) Konische Spitze
Abb. 4.2. – Die beiden Bilder zeigen Rasterelektronenmikroskop-Aufnahmen zweier unterschiedlicher Spitzen.
Abbildung 4.2a zeigt eine pyramidale Spitze, Abbildung 4.2b zeigt eine konische [82].
Abb. 4.3. – a)Schematische Draufsicht und b)Seitenansicht eines typischen Cantilevers mit der Länge L, Breite w
und Dicke t.
4.2.1. Spitze und Cantilever
Die Spitze und der Cantilever sind die elementaren Komponenten des Rasterkraftmikroskops. Die
Spitze ist auf dem freien Ende der Unterseite eines biegsamen Trägers, dem Cantilever, befestigt.
Heutzutage werden die meisten Cantilever mit integrierten Spitzen durch Lithographie- und Ätz-
prozesse hergestellt, wie sie in der Halbleiterindustrie üblich sind. Die bevorzugten Materialien
sind dabei einkristallines Silizium und Siliziumnitrid [76]. Für weitere Informationen zum Her-
stellungsprozess von Cantilevern sei auf Referenz [75] verwiesen.
Der Durchmesser einer Spitze liegt zwischen 1 nm und 50 nm, je nach Typ der Spitze und Herstel-
lungsprozess. Es existieren zwei verschiedene Spitzenformen, die konische und die pyramidale
(siehe Abbildung 4.2a und 4.2b). Der Öffnungswinkel der konischen Spitze liegt zwischen 10
und 20, der der pyramidalen zwischen 70 und 80 [83].
38

Rasterkraftmikroskopie
Die Geometrie von typischerweise verwendeten Cantilevern findet sich in Abbildung 4.3. Neben
der dargestellten balkenförmigen Bauweise gibt es auch dreieckige Cantilver, die bedingt durch
ihre Festigkeit weniger anfällig für lateral wirkende Kräfte sind. In dieser Arbeit wurden allerdings
ausschließlich balkenförmige Cantilever verwendet. Charakteristische Größen für den Cantilever
sind seine Federkonstante k, die Eigenfrequenzω0 und der Qualitätsfaktor Q. Die Federkonstante
für die hier vorgestellte Geometrie ist durch
k =Ewt3
4L3 (4.8)
gegeben, mit der Breite w, der Dicke t und der Länge L. E entspricht dem Elastizitätsmodul des
Materials. Die Eigenfrequenz ist darstellbar als
ω0 =0.162t2πL2
√Eρ
(4.9)
mit ρ als Dichte des Cantilevermaterials [73]. Der Qualitätsfaktor Q ist gegeben durch
Q =2πW(t)
∆WT(4.10)
wobei W(t) die im System gespeicherte Energie angibt und ∆WT = W(t) −W(t + T) den Ener-
gieverlust über eine bestimmte Zeitspanne. Geht man nun von einer kleinen Dämpfung aus (ω0
δ) vereinfacht sich der Term zu
Q ≈π
δT=
ω
2δ≈ω0
2δ(4.11)
Der Qualitätsfaktor Q entspricht also einer Energieübertragung in das System [84].
Gemessen wird die Auslenkung des Cantilevers. Deswegen benötigt man für eine gegebene Kraft-
einwirkung eine möglichst große Auslenkung, um eine hohe vertikale Auflösung zu erreichen. Da-
her sind möglichst weiche Cantilever von Vorteil. Gleichzeitig benötigt man aber auch einen Can-
tilever mit hoher Resonanzfrequenz, um den Einfluss von äußeren Schwingungen zu minimieren
[77], was wiederum für kurze Cantilever spricht. Allgemein gibt es einige einfache Kriterien, die
bei der Herstellung von Cantilevern zu beachten sind: Die Resonanzfrequenz sollte höher sein als
die Gebäudevibrationen, die zwischen 1 und 100 Hz liegen sowie weit entfernt von Schallwellen
(1-10 kHz). Für atomare Auflösung sollte die Federkonstante des Cantilevers in der Größenord-
nung der atomaren Federkonstante liegen, also zwischen 0.1 und 100 Nm .
Der Öffnungswinkel der Spitze und das Seitenverhältnis sind wichtige Parameter für die latera-
le Auflösung rauer Oberflächen. Um diese Werte zu verbessern, wurden zahlreiche aufwendige
und teure Verbesserungen im Herstellungsprozess entwickelt. Eine weitere Möglichkeit die Qua-
lität der Spitze zu verbessern ist die selektive Beschichtung selbiger mit Verunreinigungen. So
wurde z. B. bereits gezeigt, dass “carbon nanotubes” (Kohlenstoffröhrchen), die unter einem opti-
schen Mikroskop [85] oder durch direktes Wachstum [86] an einen Cantilever angebracht werden,
durchaus als Sonde für die Rasterkraftmikroskopie verwendet werden können und man damit hohe
Auflösungen erzielen kann.
39
4.2. Funktionsweise
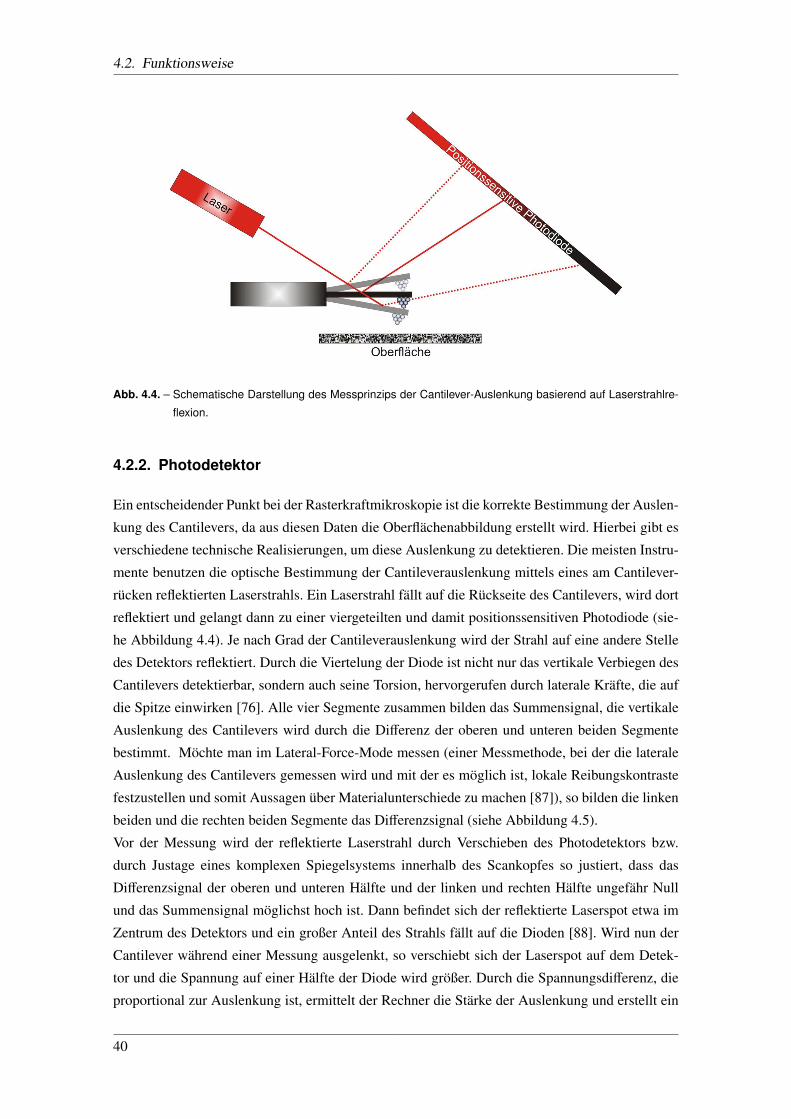
Abb. 4.4. – Schematische Darstellung des Messprinzips der Cantilever-Auslenkung basierend auf Laserstrahlre-
flexion.
4.2.2. Photodetektor
Ein entscheidender Punkt bei der Rasterkraftmikroskopie ist die korrekte Bestimmung der Auslen-
kung des Cantilevers, da aus diesen Daten die Oberflächenabbildung erstellt wird. Hierbei gibt es
verschiedene technische Realisierungen, um diese Auslenkung zu detektieren. Die meisten Instru-
mente benutzen die optische Bestimmung der Cantileverauslenkung mittels eines am Cantilever-
rücken reflektierten Laserstrahls. Ein Laserstrahl fällt auf die Rückseite des Cantilevers, wird dort
reflektiert und gelangt dann zu einer viergeteilten und damit positionssensitiven Photodiode (sie-
he Abbildung 4.4). Je nach Grad der Cantileverauslenkung wird der Strahl auf eine andere Stelle
des Detektors reflektiert. Durch die Viertelung der Diode ist nicht nur das vertikale Verbiegen des
Cantilevers detektierbar, sondern auch seine Torsion, hervorgerufen durch laterale Kräfte, die auf
die Spitze einwirken [76]. Alle vier Segmente zusammen bilden das Summensignal, die vertikale
Auslenkung des Cantilevers wird durch die Differenz der oberen und unteren beiden Segmente
bestimmt. Möchte man im Lateral-Force-Mode messen (einer Messmethode, bei der die laterale
Auslenkung des Cantilevers gemessen wird und mit der es möglich ist, lokale Reibungskontraste
festzustellen und somit Aussagen über Materialunterschiede zu machen [87]), so bilden die linken
beiden und die rechten beiden Segmente das Differenzsignal (siehe Abbildung 4.5).
Vor der Messung wird der reflektierte Laserstrahl durch Verschieben des Photodetektors bzw.
durch Justage eines komplexen Spiegelsystems innerhalb des Scankopfes so justiert, dass das
Differenzsignal der oberen und unteren Hälfte und der linken und rechten Hälfte ungefähr Null
und das Summensignal möglichst hoch ist. Dann befindet sich der reflektierte Laserspot etwa im
Zentrum des Detektors und ein großer Anteil des Strahls fällt auf die Dioden [88]. Wird nun der
Cantilever während einer Messung ausgelenkt, so verschiebt sich der Laserspot auf dem Detek-
tor und die Spannung auf einer Hälfte der Diode wird größer. Durch die Spannungsdifferenz, die
proportional zur Auslenkung ist, ermittelt der Rechner die Stärke der Auslenkung und erstellt ein
40
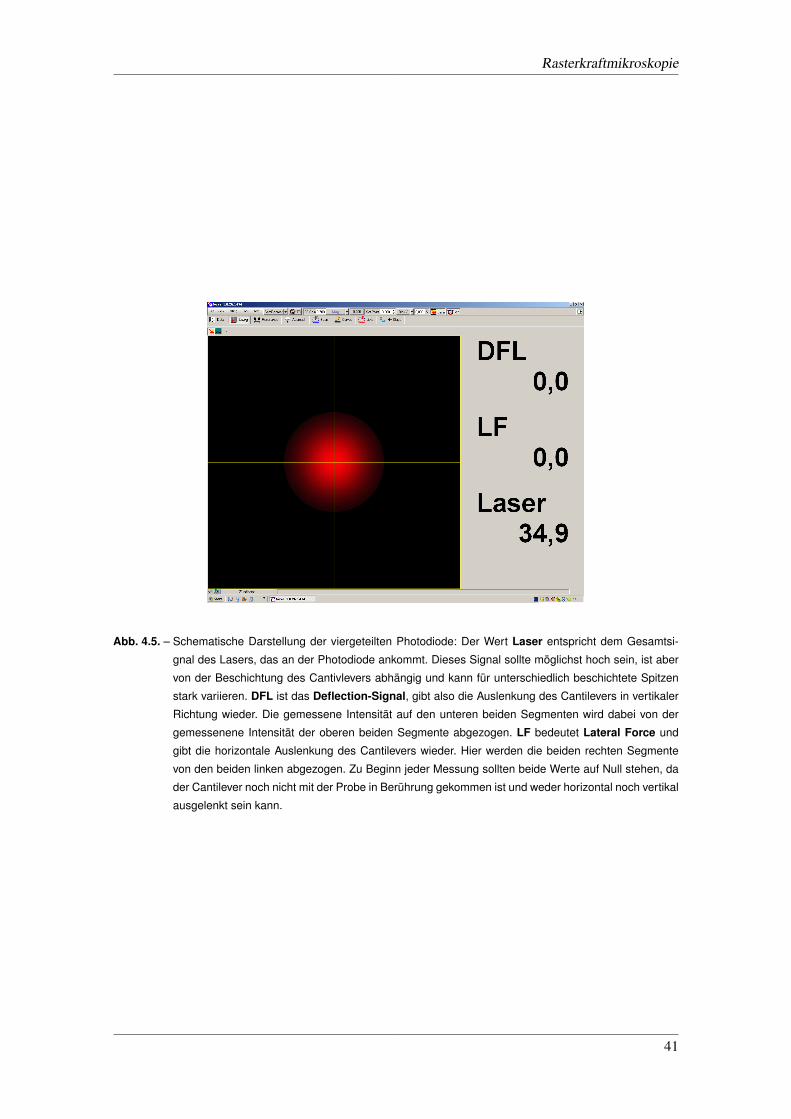
Rasterkraftmikroskopie
Abb. 4.5. – Schematische Darstellung der viergeteilten Photodiode: Der Wert Laser entspricht dem Gesamtsi-
gnal des Lasers, das an der Photodiode ankommt. Dieses Signal sollte möglichst hoch sein, ist aber
von der Beschichtung des Cantivlevers abhängig und kann für unterschiedlich beschichtete Spitzen
stark variieren. DFL ist das Deflection-Signal, gibt also die Auslenkung des Cantilevers in vertikaler
Richtung wieder. Die gemessene Intensität auf den unteren beiden Segmenten wird dabei von der
gemessenene Intensität der oberen beiden Segmente abgezogen. LF bedeutet Lateral Force und
gibt die horizontale Auslenkung des Cantilevers wieder. Hier werden die beiden rechten Segmente
von den beiden linken abgezogen. Zu Beginn jeder Messung sollten beide Werte auf Null stehen, da
der Cantilever noch nicht mit der Probe in Berührung gekommen ist und weder horizontal noch vertikal
ausgelenkt sein kann.
41
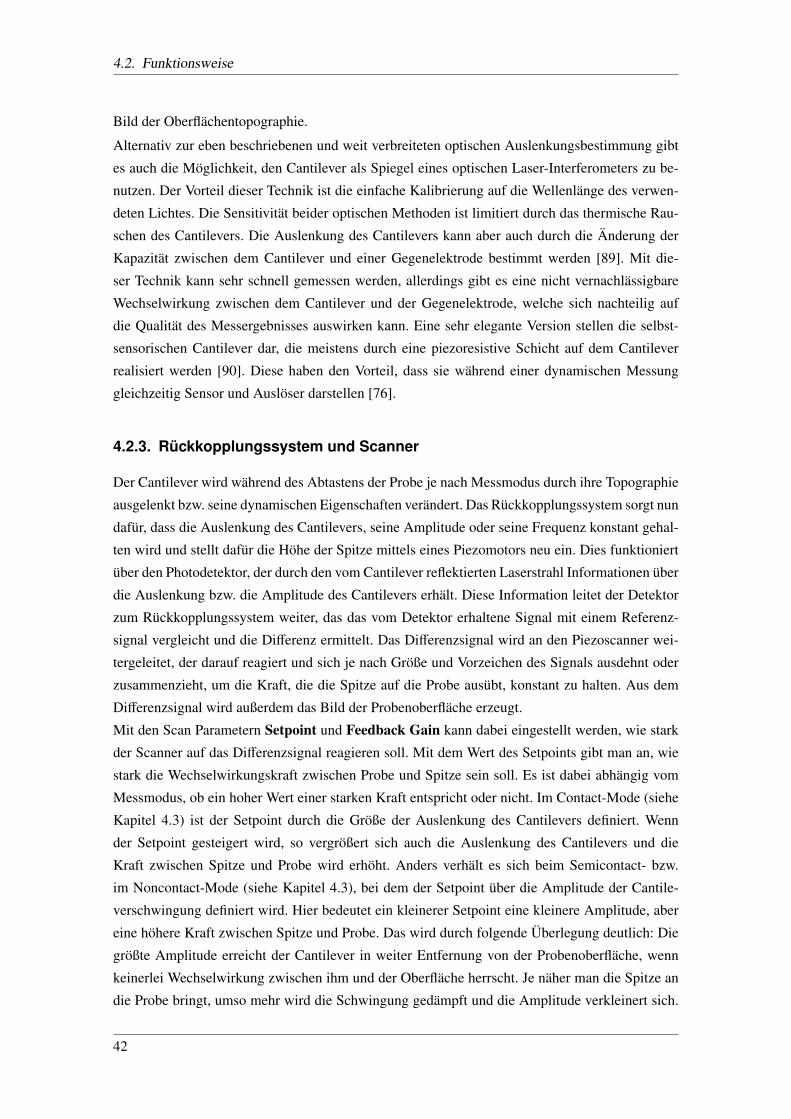
4.2. Funktionsweise
Bild der Oberflächentopographie.
Alternativ zur eben beschriebenen und weit verbreiteten optischen Auslenkungsbestimmung gibt
es auch die Möglichkeit, den Cantilever als Spiegel eines optischen Laser-Interferometers zu be-
nutzen. Der Vorteil dieser Technik ist die einfache Kalibrierung auf die Wellenlänge des verwen-
deten Lichtes. Die Sensitivität beider optischen Methoden ist limitiert durch das thermische Rau-
schen des Cantilevers. Die Auslenkung des Cantilevers kann aber auch durch die Änderung der
Kapazität zwischen dem Cantilever und einer Gegenelektrode bestimmt werden [89]. Mit die-
ser Technik kann sehr schnell gemessen werden, allerdings gibt es eine nicht vernachlässigbare
Wechselwirkung zwischen dem Cantilever und der Gegenelektrode, welche sich nachteilig auf
die Qualität des Messergebnisses auswirken kann. Eine sehr elegante Version stellen die selbst-
sensorischen Cantilever dar, die meistens durch eine piezoresistive Schicht auf dem Cantilever
realisiert werden [90]. Diese haben den Vorteil, dass sie während einer dynamischen Messung
gleichzeitig Sensor und Auslöser darstellen [76].
4.2.3. Rückkopplungssystem und Scanner
Der Cantilever wird während des Abtastens der Probe je nach Messmodus durch ihre Topographie
ausgelenkt bzw. seine dynamischen Eigenschaften verändert. Das Rückkopplungssystem sorgt nun
dafür, dass die Auslenkung des Cantilevers, seine Amplitude oder seine Frequenz konstant gehal-
ten wird und stellt dafür die Höhe der Spitze mittels eines Piezomotors neu ein. Dies funktioniert
über den Photodetektor, der durch den vom Cantilever reflektierten Laserstrahl Informationen über
die Auslenkung bzw. die Amplitude des Cantilevers erhält. Diese Information leitet der Detektor
zum Rückkopplungssystem weiter, das das vom Detektor erhaltene Signal mit einem Referenz-
signal vergleicht und die Differenz ermittelt. Das Differenzsignal wird an den Piezoscanner wei-
tergeleitet, der darauf reagiert und sich je nach Größe und Vorzeichen des Signals ausdehnt oder
zusammenzieht, um die Kraft, die die Spitze auf die Probe ausübt, konstant zu halten. Aus dem
Differenzsignal wird außerdem das Bild der Probenoberfläche erzeugt.
Mit den Scan Parametern Setpoint und Feedback Gain kann dabei eingestellt werden, wie stark
der Scanner auf das Differenzsignal reagieren soll. Mit dem Wert des Setpoints gibt man an, wie
stark die Wechselwirkungskraft zwischen Probe und Spitze sein soll. Es ist dabei abhängig vom
Messmodus, ob ein hoher Wert einer starken Kraft entspricht oder nicht. Im Contact-Mode (siehe
Kapitel 4.3) ist der Setpoint durch die Größe der Auslenkung des Cantilevers definiert. Wenn
der Setpoint gesteigert wird, so vergrößert sich auch die Auslenkung des Cantilevers und die
Kraft zwischen Spitze und Probe wird erhöht. Anders verhält es sich beim Semicontact- bzw.
im Noncontact-Mode (siehe Kapitel 4.3), bei dem der Setpoint über die Amplitude der Cantile-
verschwingung definiert wird. Hier bedeutet ein kleinerer Setpoint eine kleinere Amplitude, aber
eine höhere Kraft zwischen Spitze und Probe. Das wird durch folgende Überlegung deutlich: Die
größte Amplitude erreicht der Cantilever in weiter Entfernung von der Probenoberfläche, wenn
keinerlei Wechselwirkung zwischen ihm und der Oberfläche herrscht. Je näher man die Spitze an
die Probe bringt, umso mehr wird die Schwingung gedämpft und die Amplitude verkleinert sich.
42
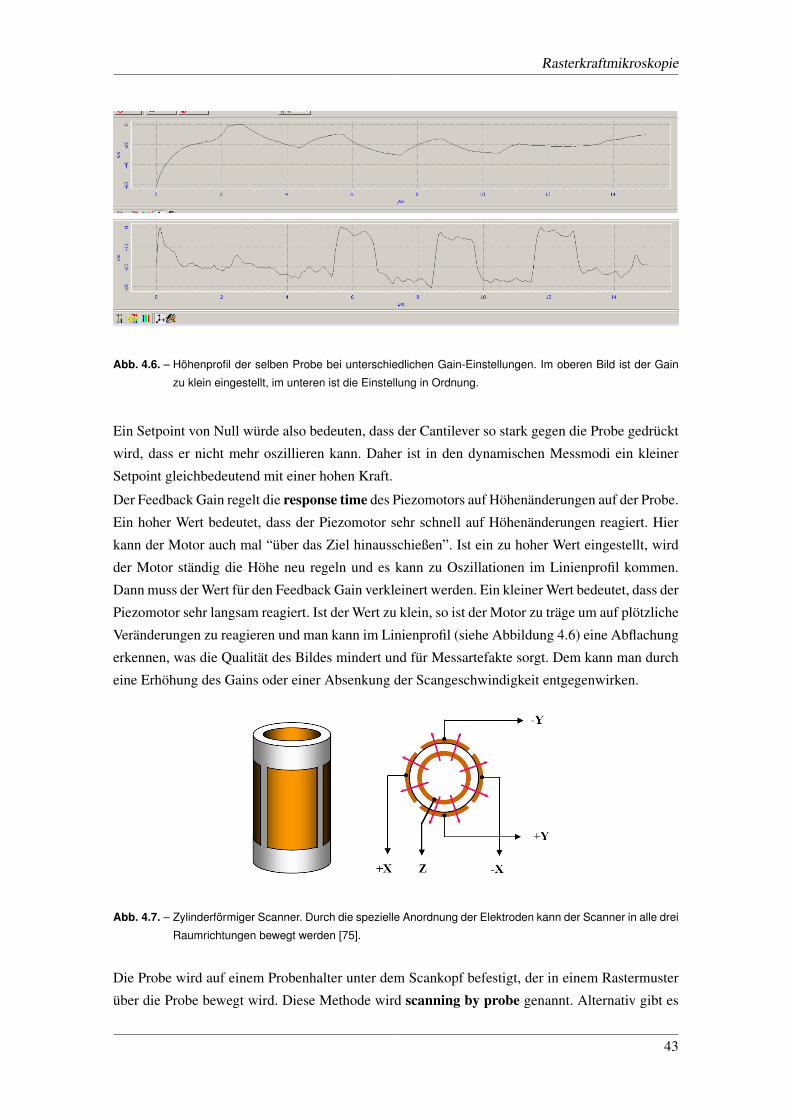
Rasterkraftmikroskopie
Abb. 4.6. – Höhenprofil der selben Probe bei unterschiedlichen Gain-Einstellungen. Im oberen Bild ist der Gain
zu klein eingestellt, im unteren ist die Einstellung in Ordnung.
Ein Setpoint von Null würde also bedeuten, dass der Cantilever so stark gegen die Probe gedrückt
wird, dass er nicht mehr oszillieren kann. Daher ist in den dynamischen Messmodi ein kleiner
Setpoint gleichbedeutend mit einer hohen Kraft.
Der Feedback Gain regelt die response time des Piezomotors auf Höhenänderungen auf der Probe.
Ein hoher Wert bedeutet, dass der Piezomotor sehr schnell auf Höhenänderungen reagiert. Hier
kann der Motor auch mal “über das Ziel hinausschießen”. Ist ein zu hoher Wert eingestellt, wird
der Motor ständig die Höhe neu regeln und es kann zu Oszillationen im Linienprofil kommen.
Dann muss der Wert für den Feedback Gain verkleinert werden. Ein kleiner Wert bedeutet, dass der
Piezomotor sehr langsam reagiert. Ist der Wert zu klein, so ist der Motor zu träge um auf plötzliche
Veränderungen zu reagieren und man kann im Linienprofil (siehe Abbildung 4.6) eine Abflachung
erkennen, was die Qualität des Bildes mindert und für Messartefakte sorgt. Dem kann man durch
eine Erhöhung des Gains oder einer Absenkung der Scangeschwindigkeit entgegenwirken.
Abb. 4.7. – Zylinderförmiger Scanner. Durch die spezielle Anordnung der Elektroden kann der Scanner in alle drei
Raumrichtungen bewegt werden [75].
Die Probe wird auf einem Probenhalter unter dem Scankopf befestigt, der in einem Rastermuster
über die Probe bewegt wird. Diese Methode wird scanning by probe genannt. Alternativ gibt es
43
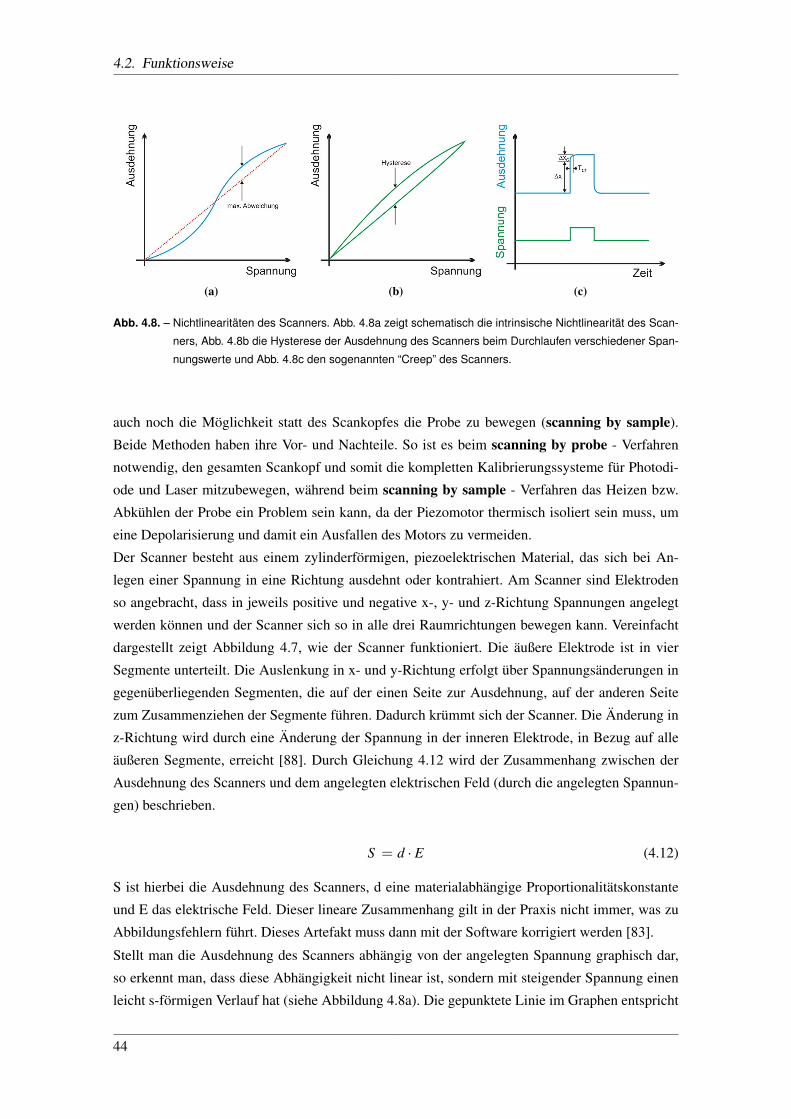
4.2. Funktionsweise
(a) (b) (c)
Abb. 4.8. – Nichtlinearitäten des Scanners. Abb. 4.8a zeigt schematisch die intrinsische Nichtlinearität des Scan-
ners, Abb. 4.8b die Hysterese der Ausdehnung des Scanners beim Durchlaufen verschiedener Span-
nungswerte und Abb. 4.8c den sogenannten “Creep” des Scanners.
auch noch die Möglichkeit statt des Scankopfes die Probe zu bewegen (scanning by sample).
Beide Methoden haben ihre Vor- und Nachteile. So ist es beim scanning by probe - Verfahren
notwendig, den gesamten Scankopf und somit die kompletten Kalibrierungssysteme für Photodi-
ode und Laser mitzubewegen, während beim scanning by sample - Verfahren das Heizen bzw.
Abkühlen der Probe ein Problem sein kann, da der Piezomotor thermisch isoliert sein muss, um
eine Depolarisierung und damit ein Ausfallen des Motors zu vermeiden.
Der Scanner besteht aus einem zylinderförmigen, piezoelektrischen Material, das sich bei An-
legen einer Spannung in eine Richtung ausdehnt oder kontrahiert. Am Scanner sind Elektroden
so angebracht, dass in jeweils positive und negative x-, y- und z-Richtung Spannungen angelegt
werden können und der Scanner sich so in alle drei Raumrichtungen bewegen kann. Vereinfacht
dargestellt zeigt Abbildung 4.7, wie der Scanner funktioniert. Die äußere Elektrode ist in vier
Segmente unterteilt. Die Auslenkung in x- und y-Richtung erfolgt über Spannungsänderungen in
gegenüberliegenden Segmenten, die auf der einen Seite zur Ausdehnung, auf der anderen Seite
zum Zusammenziehen der Segmente führen. Dadurch krümmt sich der Scanner. Die Änderung in
z-Richtung wird durch eine Änderung der Spannung in der inneren Elektrode, in Bezug auf alle
äußeren Segmente, erreicht [88]. Durch Gleichung 4.12 wird der Zusammenhang zwischen der
Ausdehnung des Scanners und dem angelegten elektrischen Feld (durch die angelegten Spannun-
gen) beschrieben.
S = d · E (4.12)
S ist hierbei die Ausdehnung des Scanners, d eine materialabhängige Proportionalitätskonstante
und E das elektrische Feld. Dieser lineare Zusammenhang gilt in der Praxis nicht immer, was zu
Abbildungsfehlern führt. Dieses Artefakt muss dann mit der Software korrigiert werden [83].
Stellt man die Ausdehnung des Scanners abhängig von der angelegten Spannung graphisch dar,
so erkennt man, dass diese Abhängigkeit nicht linear ist, sondern mit steigender Spannung einen
leicht s-förmigen Verlauf hat (siehe Abbildung 4.8a). Die gepunktete Linie im Graphen entspricht
44
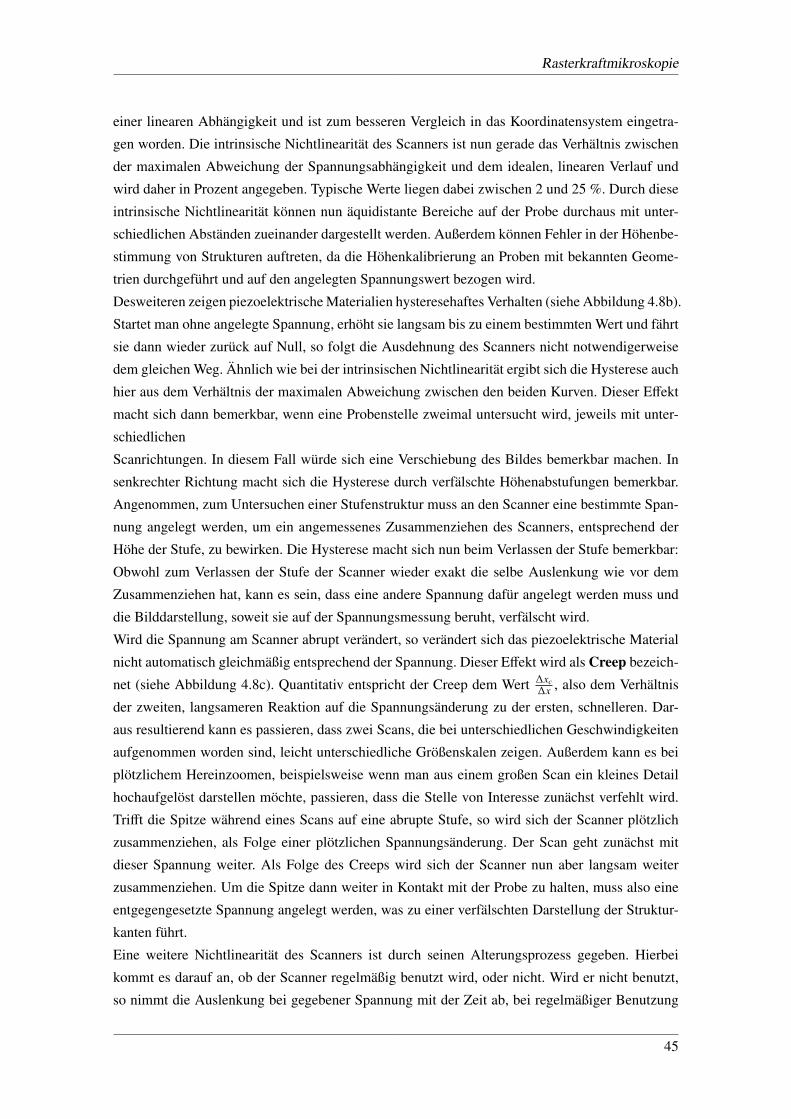
Rasterkraftmikroskopie
einer linearen Abhängigkeit und ist zum besseren Vergleich in das Koordinatensystem eingetra-
gen worden. Die intrinsische Nichtlinearität des Scanners ist nun gerade das Verhältnis zwischen
der maximalen Abweichung der Spannungsabhängigkeit und dem idealen, linearen Verlauf und
wird daher in Prozent angegeben. Typische Werte liegen dabei zwischen 2 und 25 %. Durch diese
intrinsische Nichtlinearität können nun äquidistante Bereiche auf der Probe durchaus mit unter-
schiedlichen Abständen zueinander dargestellt werden. Außerdem können Fehler in der Höhenbe-
stimmung von Strukturen auftreten, da die Höhenkalibrierung an Proben mit bekannten Geome-
trien durchgeführt und auf den angelegten Spannungswert bezogen wird.
Desweiteren zeigen piezoelektrische Materialien hysteresehaftes Verhalten (siehe Abbildung 4.8b).
Startet man ohne angelegte Spannung, erhöht sie langsam bis zu einem bestimmten Wert und fährt
sie dann wieder zurück auf Null, so folgt die Ausdehnung des Scanners nicht notwendigerweise
dem gleichen Weg. Ähnlich wie bei der intrinsischen Nichtlinearität ergibt sich die Hysterese auch
hier aus dem Verhältnis der maximalen Abweichung zwischen den beiden Kurven. Dieser Effekt
macht sich dann bemerkbar, wenn eine Probenstelle zweimal untersucht wird, jeweils mit unter-
schiedlichen
Scanrichtungen. In diesem Fall würde sich eine Verschiebung des Bildes bemerkbar machen. In
senkrechter Richtung macht sich die Hysterese durch verfälschte Höhenabstufungen bemerkbar.
Angenommen, zum Untersuchen einer Stufenstruktur muss an den Scanner eine bestimmte Span-
nung angelegt werden, um ein angemessenes Zusammenziehen des Scanners, entsprechend der
Höhe der Stufe, zu bewirken. Die Hysterese macht sich nun beim Verlassen der Stufe bemerkbar:
Obwohl zum Verlassen der Stufe der Scanner wieder exakt die selbe Auslenkung wie vor dem
Zusammenziehen hat, kann es sein, dass eine andere Spannung dafür angelegt werden muss und
die Bilddarstellung, soweit sie auf der Spannungsmessung beruht, verfälscht wird.
Wird die Spannung am Scanner abrupt verändert, so verändert sich das piezoelektrische Material
nicht automatisch gleichmäßig entsprechend der Spannung. Dieser Effekt wird als Creep bezeich-
net (siehe Abbildung 4.8c). Quantitativ entspricht der Creep dem Wert ∆xc∆x , also dem Verhältnis
der zweiten, langsameren Reaktion auf die Spannungsänderung zu der ersten, schnelleren. Dar-
aus resultierend kann es passieren, dass zwei Scans, die bei unterschiedlichen Geschwindigkeiten
aufgenommen worden sind, leicht unterschiedliche Größenskalen zeigen. Außerdem kann es bei
plötzlichem Hereinzoomen, beispielsweise wenn man aus einem großen Scan ein kleines Detail
hochaufgelöst darstellen möchte, passieren, dass die Stelle von Interesse zunächst verfehlt wird.
Trifft die Spitze während eines Scans auf eine abrupte Stufe, so wird sich der Scanner plötzlich
zusammenziehen, als Folge einer plötzlichen Spannungsänderung. Der Scan geht zunächst mit
dieser Spannung weiter. Als Folge des Creeps wird sich der Scanner nun aber langsam weiter
zusammenziehen. Um die Spitze dann weiter in Kontakt mit der Probe zu halten, muss also eine
entgegengesetzte Spannung angelegt werden, was zu einer verfälschten Darstellung der Struktur-
kanten führt.
Eine weitere Nichtlinearität des Scanners ist durch seinen Alterungsprozess gegeben. Hierbei
kommt es darauf an, ob der Scanner regelmäßig benutzt wird, oder nicht. Wird er nicht benutzt,
so nimmt die Auslenkung bei gegebener Spannung mit der Zeit ab, bei regelmäßiger Benutzung
45
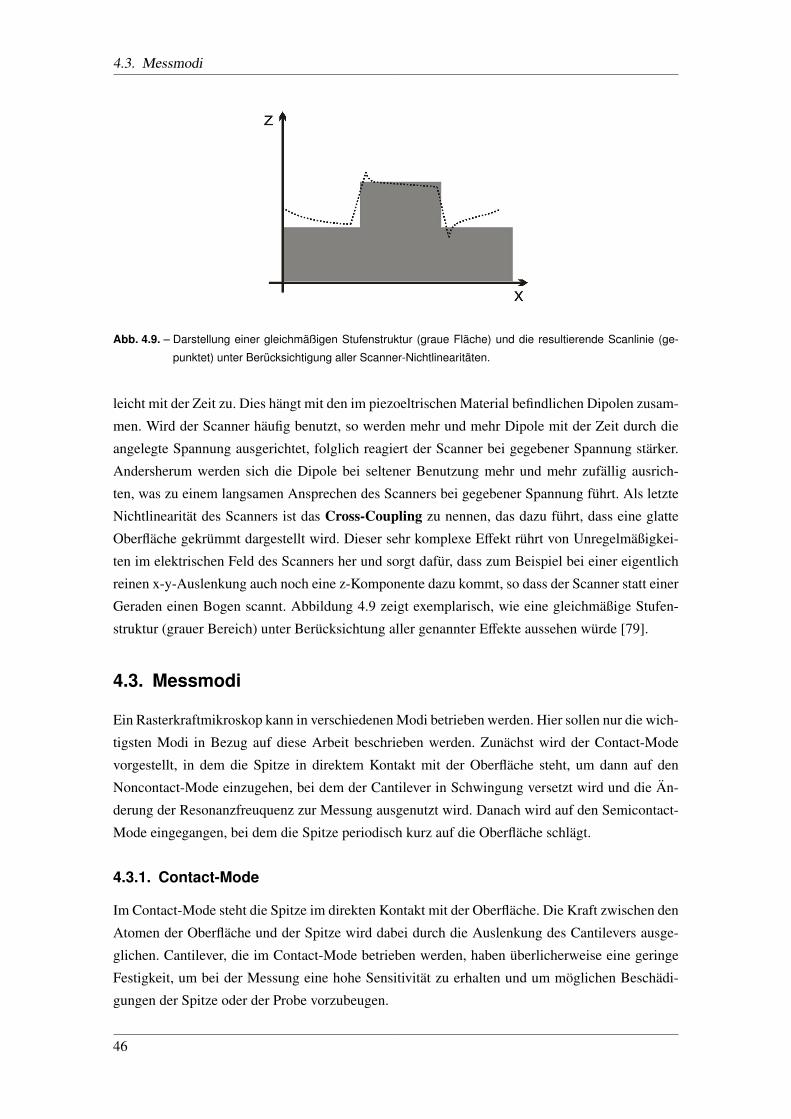
4.3. Messmodi
Abb. 4.9. – Darstellung einer gleichmäßigen Stufenstruktur (graue Fläche) und die resultierende Scanlinie (ge-
punktet) unter Berücksichtigung aller Scanner-Nichtlinearitäten.
leicht mit der Zeit zu. Dies hängt mit den im piezoeltrischen Material befindlichen Dipolen zusam-
men. Wird der Scanner häufig benutzt, so werden mehr und mehr Dipole mit der Zeit durch die
angelegte Spannung ausgerichtet, folglich reagiert der Scanner bei gegebener Spannung stärker.
Andersherum werden sich die Dipole bei seltener Benutzung mehr und mehr zufällig ausrich-
ten, was zu einem langsamen Ansprechen des Scanners bei gegebener Spannung führt. Als letzte
Nichtlinearität des Scanners ist das Cross-Coupling zu nennen, das dazu führt, dass eine glatte
Oberfläche gekrümmt dargestellt wird. Dieser sehr komplexe Effekt rührt von Unregelmäßigkei-
ten im elektrischen Feld des Scanners her und sorgt dafür, dass zum Beispiel bei einer eigentlich
reinen x-y-Auslenkung auch noch eine z-Komponente dazu kommt, so dass der Scanner statt einer
Geraden einen Bogen scannt. Abbildung 4.9 zeigt exemplarisch, wie eine gleichmäßige Stufen-
struktur (grauer Bereich) unter Berücksichtung aller genannter Effekte aussehen würde [79].
4.3. Messmodi
Ein Rasterkraftmikroskop kann in verschiedenen Modi betrieben werden. Hier sollen nur die wich-
tigsten Modi in Bezug auf diese Arbeit beschrieben werden. Zunächst wird der Contact-Mode
vorgestellt, in dem die Spitze in direktem Kontakt mit der Oberfläche steht, um dann auf den
Noncontact-Mode einzugehen, bei dem der Cantilever in Schwingung versetzt wird und die Än-
derung der Resonanzfreuquenz zur Messung ausgenutzt wird. Danach wird auf den Semicontact-
Mode eingegangen, bei dem die Spitze periodisch kurz auf die Oberfläche schlägt.
4.3.1. Contact-Mode
Im Contact-Mode steht die Spitze im direkten Kontakt mit der Oberfläche. Die Kraft zwischen den
Atomen der Oberfläche und der Spitze wird dabei durch die Auslenkung des Cantilevers ausge-
glichen. Cantilever, die im Contact-Mode betrieben werden, haben überlicherweise eine geringe
Festigkeit, um bei der Messung eine hohe Sensitivität zu erhalten und um möglichen Beschädi-
gungen der Spitze oder der Probe vorzubeugen.
46
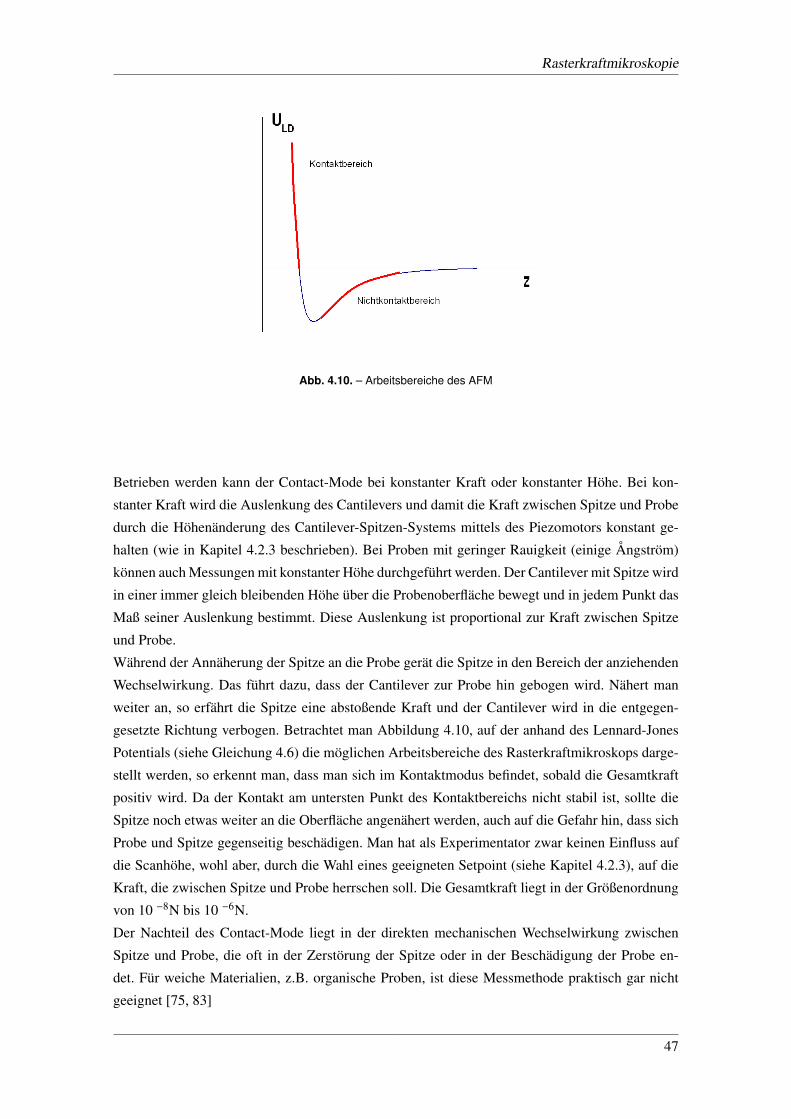
Rasterkraftmikroskopie
Abb. 4.10. – Arbeitsbereiche des AFM
Betrieben werden kann der Contact-Mode bei konstanter Kraft oder konstanter Höhe. Bei kon-
stanter Kraft wird die Auslenkung des Cantilevers und damit die Kraft zwischen Spitze und Probe
durch die Höhenänderung des Cantilever-Spitzen-Systems mittels des Piezomotors konstant ge-
halten (wie in Kapitel 4.2.3 beschrieben). Bei Proben mit geringer Rauigkeit (einige Ångström)
können auch Messungen mit konstanter Höhe durchgeführt werden. Der Cantilever mit Spitze wird
in einer immer gleich bleibenden Höhe über die Probenoberfläche bewegt und in jedem Punkt das
Maß seiner Auslenkung bestimmt. Diese Auslenkung ist proportional zur Kraft zwischen Spitze
und Probe.
Während der Annäherung der Spitze an die Probe gerät die Spitze in den Bereich der anziehenden
Wechselwirkung. Das führt dazu, dass der Cantilever zur Probe hin gebogen wird. Nähert man
weiter an, so erfährt die Spitze eine abstoßende Kraft und der Cantilever wird in die entgegen-
gesetzte Richtung verbogen. Betrachtet man Abbildung 4.10, auf der anhand des Lennard-Jones
Potentials (siehe Gleichung 4.6) die möglichen Arbeitsbereiche des Rasterkraftmikroskops darge-
stellt werden, so erkennt man, dass man sich im Kontaktmodus befindet, sobald die Gesamtkraft
positiv wird. Da der Kontakt am untersten Punkt des Kontaktbereichs nicht stabil ist, sollte die
Spitze noch etwas weiter an die Oberfläche angenähert werden, auch auf die Gefahr hin, dass sich
Probe und Spitze gegenseitig beschädigen. Man hat als Experimentator zwar keinen Einfluss auf
die Scanhöhe, wohl aber, durch die Wahl eines geeigneten Setpoint (siehe Kapitel 4.2.3), auf die
Kraft, die zwischen Spitze und Probe herrschen soll. Die Gesamtkraft liegt in der Größenordnung
von 10 −8N bis 10 −6N.
Der Nachteil des Contact-Mode liegt in der direkten mechanischen Wechselwirkung zwischen
Spitze und Probe, die oft in der Zerstörung der Spitze oder in der Beschädigung der Probe en-
det. Für weiche Materialien, z.B. organische Proben, ist diese Messmethode praktisch gar nicht
geeignet [75, 83]
47

4.3. Messmodi
4.3.2. Noncontact- und Semicontact-Mode
Um auch weiche und elastische Materialien untersuchen zu können, wurden mit dem Noncontact-
und dem Semicontact-Mode dynamische Messmethoden entwickelt. Außerdem sind die dyna-
mischen Messmodi die einzigen, mit denen man echte atomare Auflösung erhalten kann. Diese
Verfahren heißen deshalb dynamisch, weil sie auf einem oszillierenden Cantilever beruhen, der in
seiner Resonanzfrequenz schwingt. Durch Variation der Cantileverlänge, -breite und -dicke kön-
nen unterschiedliche Resonanzfrequenzen realisiert werden. Im Noncontact-Mode stehen Spitze
und Probe in keinerlei direktem Kontakt, im Semicontact-Mode trifft die Spitze periodisch auf der
Probenoberfläche auf. Für eine sehr detaillierte Auseinandersetzung mit verschiedenen dynami-
schen Messmodi sei auf die Arbeit von R. Garcia und R. Perez [91] verwiesen.
Noncontact-Mode
Für den Noncontact-Mode kommt das Signal, das zur Bilddarstellung benutzt wird, von der direk-
ten Messung der Resonanzfrequenz des Cantilevers. Diese Frequenz ändert sich durch die Wech-
selwirkung zwischen Spitze und Probe. Der Cantilever wird über ein spezielles Piezoelement,
auf dem er aufgebracht ist, in Schwingung versetzt. Ebenso wie im Contact-Mode kann auch im
Noncontact-Mode über den Parameter Setpoint Einfluss auf die Kraft zwischen Probe und Spitze
genommen werden. Schwingt der Cantilever, so wird sich auch das Lasersignal am Photodetek-
tor periodisch auf- und abbewegen. Es verursacht ein sinusförmiges Signal, dessen quadratischer
Mittelwert gebildet wird. Wird die Spitze nun an die Probe angenähert, so wirkt auf sie lediglich
die van der Waals Kraft, die anziehend wirkt und in der Größenordnung von 10−22N liegt. Die
Kraft und der Gradient dieser Kraft ändern sich, je nachdem, wie weit die Spitze von der Probe
entfernt ist. Durch diese Änderung wird auch die Resonanzfrequenz des Cantilevers beeinflusst.
Die Resonanzfrequenz ohne jegliche Wechselwirkung mit der Probe ist gegeben durch
ω0 =√
k/m (4.13)
mit ω0 als Resonanzfrequenz, k als Federkonstante und m als Masse des Cantilevers. Wirkt nun
eine Kraft auf den Cantilever, so beeinflusst das sein Schwingungsverhalten und dadurch auch
seine Federkonstante. Man kann die Abhängigkeit der Federkonstante von der Kraftänderung fol-
gendermaßen beschreiben:
k′ = k −∂F∂z
(4.14)
k’ stellt dabei die geänderte Federkonstante dar, F die Kraft und z den Abstand zwischen Probe
und Spitze. ∂F∂z ist somit der Kraftgradient. Gleichung 4.14 zeigt, dass mit steigendem Kraftgradi-
enten die Federkonstante kleiner wird. Da die Resonanzfrequenz mit der Federkonstante zusam-
menhängt, wird auch sie kleiner, je näher man mit der Spitze an die Probe gelangt. Das Rück-
kopplungssystem hält die Schwingungsamplitude die ganze Zeit konstant, indem es den Spitzen-
Proben Abstand neu einstellt. Dies funktioniert durch eine Feedbackschleife, bei der das Signal,
das von dem schwingenden Cantilever kommt, verstärkt und wieder als Anregungssignal verwen-
48

Rasterkraftmikroskopie
det wird. Aus der Änderung der Frequenz wird dann das Signal für die Bilddarstellung gewonnen
[75, 83, 88, 91].
Semicontact-Mode
Im Semicontact-Mode wird der Cantilever mit einer Frequenz angeregt, die nah an seiner Reso-
nanzfrequenz liegt bzw. dieser entspricht. Anders als im Noncontact-Mode wird diese Frequenz
nun nicht moduliert, sondern die ganze Messung über konstant gehalten. Als Messsignal dient in
diesem Modus die Oszillationsamplitude. Neben der Oberflächenabbildung durch die Amplitu-
denmodulation können weitere Probeneigenschaften (z.B. magnetische Eigenschaften) durch die
Phasenverschiebung zwischen Anregungsfrequenz und Cantileveroszillation gemessen werden.
Unter der Annahme, dass sich der Cantilever entsprechend einer erzwungenen harmonischen
Schwingung in seiner Resonanzfrequenz bewegt, kann man für die Amplitude der Schwingung
A folgende Abhängigkeit annehmen [91]:
A(ω) =F0m
[(ω20 −ω
2)2 + (ωω0Q )2)]
12
(4.15)
mit Q als Qualitätsfaktor, F0 als antreibende Kraft undω0 undω als Resonanz- bzw. Anregungs-
frequenz. Durch Annähern der Spitze an die Probe wird die Resonanzfrequenz des Cantilevers
geändert und damit nach Gleichung 4.15 auch die Amplitude der Cantileverschwingung. Die Pha-
senverschiebungφ, also der Winkel zwischen der Anregungs- und der resultierenden Schwingung,
ist gegeben durch
tan(φ) =ωω0
Q
ω20 −ω
2. (4.16)
Diese Gleichung zeigt außerdem, dass im Resonanzfall die Phasenverschiebung gerade 90 be-
trägt. Anregungsfrequenzen weit unterhalb der Resonanzfrequenz des Cantilevers produzieren
keine Phasenverschiebung, Anregungsfrequenzen weit oberhalb dagegen resultieren in Phasen-
verschiebungen von 180. Sowohl die Amplitudenänderung für die Topographiedarstellung als
auch die Verschiebung der Phase zwischen Anregungs- und resultierender Cantileverfrequenz für
z. B. magnetische Charakterisierungen stellen die Messsignale dar [91].
4.4. Spitzenartefakte
Neben den bereits weiter oben in Kapitel 4.2.3 besprochenen Bildbeeinflussungen durch nichtli-
neares Scannerverhalten oder falsche Wahl des Feedback Gain, können noch weitere Aspekte zu
einer verfälschten Bilddarstellung führen. Die allermeisten Artefakte stammen von der Spitze. Das
resultierende Bild ist dabei eine Überlagerung von der Form der Spitze und der Form des abzubil-
denden Details. Solange die Spitze sehr viel schärfer als die abzubildende Oberflächenstruktur ist,
kann das echte Profil der Struktur wiedergegeben werden. Ist allerdings die Spitze stumpf, so wird
das resultierende Bild von der Form der Spitze dominiert [79]. Ist dann auch noch der Abstand
49
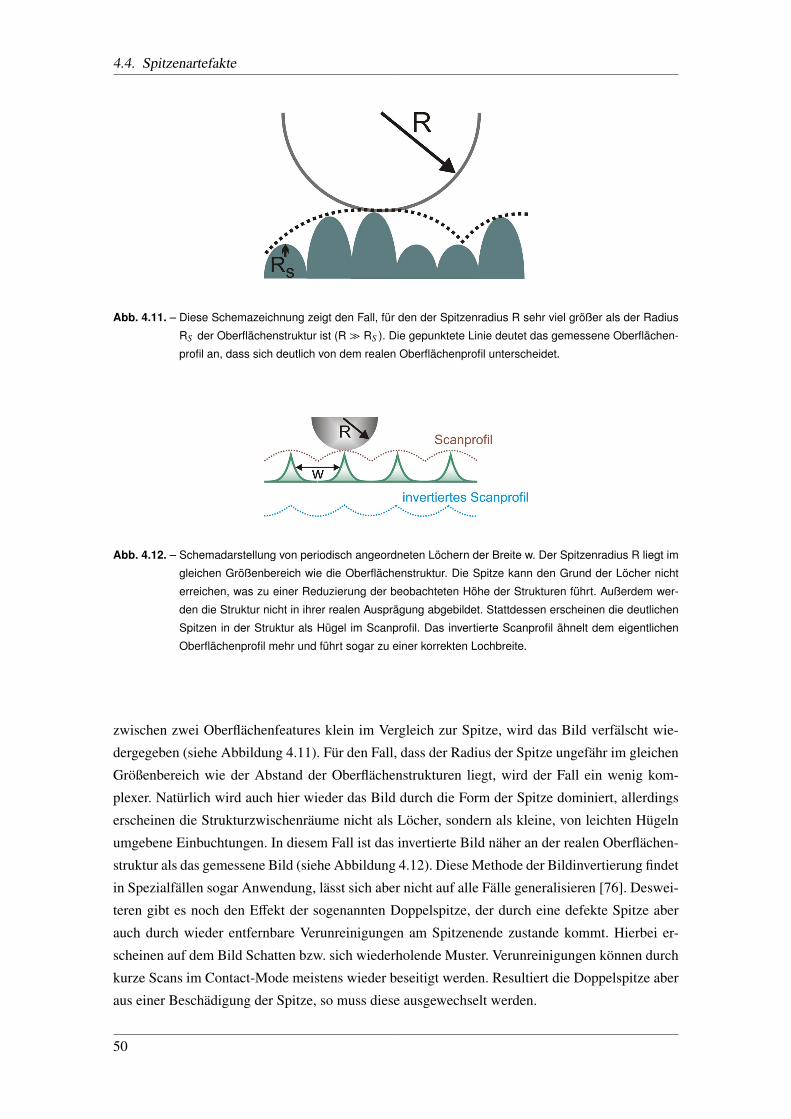
4.4. Spitzenartefakte
Abb. 4.11. – Diese Schemazeichnung zeigt den Fall, für den der Spitzenradius R sehr viel größer als der Radius
RS der Oberflächenstruktur ist (R RS ). Die gepunktete Linie deutet das gemessene Oberflächen-
profil an, dass sich deutlich von dem realen Oberflächenprofil unterscheidet.
Abb. 4.12. – Schemadarstellung von periodisch angeordneten Löchern der Breite w. Der Spitzenradius R liegt im
gleichen Größenbereich wie die Oberflächenstruktur. Die Spitze kann den Grund der Löcher nicht
erreichen, was zu einer Reduzierung der beobachteten Höhe der Strukturen führt. Außerdem wer-
den die Struktur nicht in ihrer realen Ausprägung abgebildet. Stattdessen erscheinen die deutlichen
Spitzen in der Struktur als Hügel im Scanprofil. Das invertierte Scanprofil ähnelt dem eigentlichen
Oberflächenprofil mehr und führt sogar zu einer korrekten Lochbreite.
zwischen zwei Oberflächenfeatures klein im Vergleich zur Spitze, wird das Bild verfälscht wie-
dergegeben (siehe Abbildung 4.11). Für den Fall, dass der Radius der Spitze ungefähr im gleichen
Größenbereich wie der Abstand der Oberflächenstrukturen liegt, wird der Fall ein wenig kom-
plexer. Natürlich wird auch hier wieder das Bild durch die Form der Spitze dominiert, allerdings
erscheinen die Strukturzwischenräume nicht als Löcher, sondern als kleine, von leichten Hügeln
umgebene Einbuchtungen. In diesem Fall ist das invertierte Bild näher an der realen Oberflächen-
struktur als das gemessene Bild (siehe Abbildung 4.12). Diese Methode der Bildinvertierung findet
in Spezialfällen sogar Anwendung, lässt sich aber nicht auf alle Fälle generalisieren [76]. Deswei-
teren gibt es noch den Effekt der sogenannten Doppelspitze, der durch eine defekte Spitze aber
auch durch wieder entfernbare Verunreinigungen am Spitzenende zustande kommt. Hierbei er-
scheinen auf dem Bild Schatten bzw. sich wiederholende Muster. Verunreinigungen können durch
kurze Scans im Contact-Mode meistens wieder beseitigt werden. Resultiert die Doppelspitze aber
aus einer Beschädigung der Spitze, so muss diese ausgewechselt werden.
50
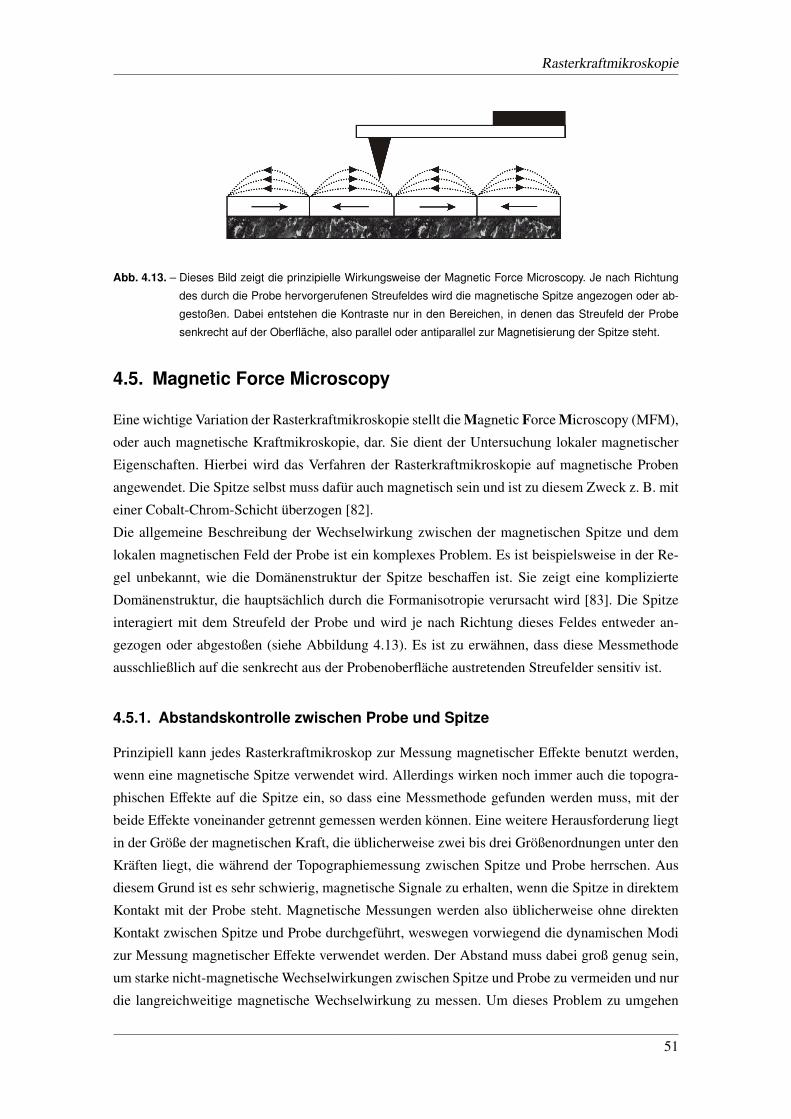
Rasterkraftmikroskopie
Abb. 4.13. – Dieses Bild zeigt die prinzipielle Wirkungsweise der Magnetic Force Microscopy. Je nach Richtung
des durch die Probe hervorgerufenen Streufeldes wird die magnetische Spitze angezogen oder ab-
gestoßen. Dabei entstehen die Kontraste nur in den Bereichen, in denen das Streufeld der Probe
senkrecht auf der Oberfläche, also parallel oder antiparallel zur Magnetisierung der Spitze steht.
4.5. Magnetic Force Microscopy
Eine wichtige Variation der Rasterkraftmikroskopie stellt die Magnetic Force Microscopy (MFM),
oder auch magnetische Kraftmikroskopie, dar. Sie dient der Untersuchung lokaler magnetischer
Eigenschaften. Hierbei wird das Verfahren der Rasterkraftmikroskopie auf magnetische Proben
angewendet. Die Spitze selbst muss dafür auch magnetisch sein und ist zu diesem Zweck z. B. mit
einer Cobalt-Chrom-Schicht überzogen [82].
Die allgemeine Beschreibung der Wechselwirkung zwischen der magnetischen Spitze und dem
lokalen magnetischen Feld der Probe ist ein komplexes Problem. Es ist beispielsweise in der Re-
gel unbekannt, wie die Domänenstruktur der Spitze beschaffen ist. Sie zeigt eine komplizierte
Domänenstruktur, die hauptsächlich durch die Formanisotropie verursacht wird [83]. Die Spitze
interagiert mit dem Streufeld der Probe und wird je nach Richtung dieses Feldes entweder an-
gezogen oder abgestoßen (siehe Abbildung 4.13). Es ist zu erwähnen, dass diese Messmethode
ausschließlich auf die senkrecht aus der Probenoberfläche austretenden Streufelder sensitiv ist.
4.5.1. Abstandskontrolle zwischen Probe und Spitze
Prinzipiell kann jedes Rasterkraftmikroskop zur Messung magnetischer Effekte benutzt werden,
wenn eine magnetische Spitze verwendet wird. Allerdings wirken noch immer auch die topogra-
phischen Effekte auf die Spitze ein, so dass eine Messmethode gefunden werden muss, mit der
beide Effekte voneinander getrennt gemessen werden können. Eine weitere Herausforderung liegt
in der Größe der magnetischen Kraft, die üblicherweise zwei bis drei Größenordnungen unter den
Kräften liegt, die während der Topographiemessung zwischen Spitze und Probe herrschen. Aus
diesem Grund ist es sehr schwierig, magnetische Signale zu erhalten, wenn die Spitze in direktem
Kontakt mit der Probe steht. Magnetische Messungen werden also üblicherweise ohne direkten
Kontakt zwischen Spitze und Probe durchgeführt, weswegen vorwiegend die dynamischen Modi
zur Messung magnetischer Effekte verwendet werden. Der Abstand muss dabei groß genug sein,
um starke nicht-magnetische Wechselwirkungen zwischen Spitze und Probe zu vermeiden und nur
die langreichweitige magnetische Wechselwirkung zu messen. Um dieses Problem zu umgehen
51
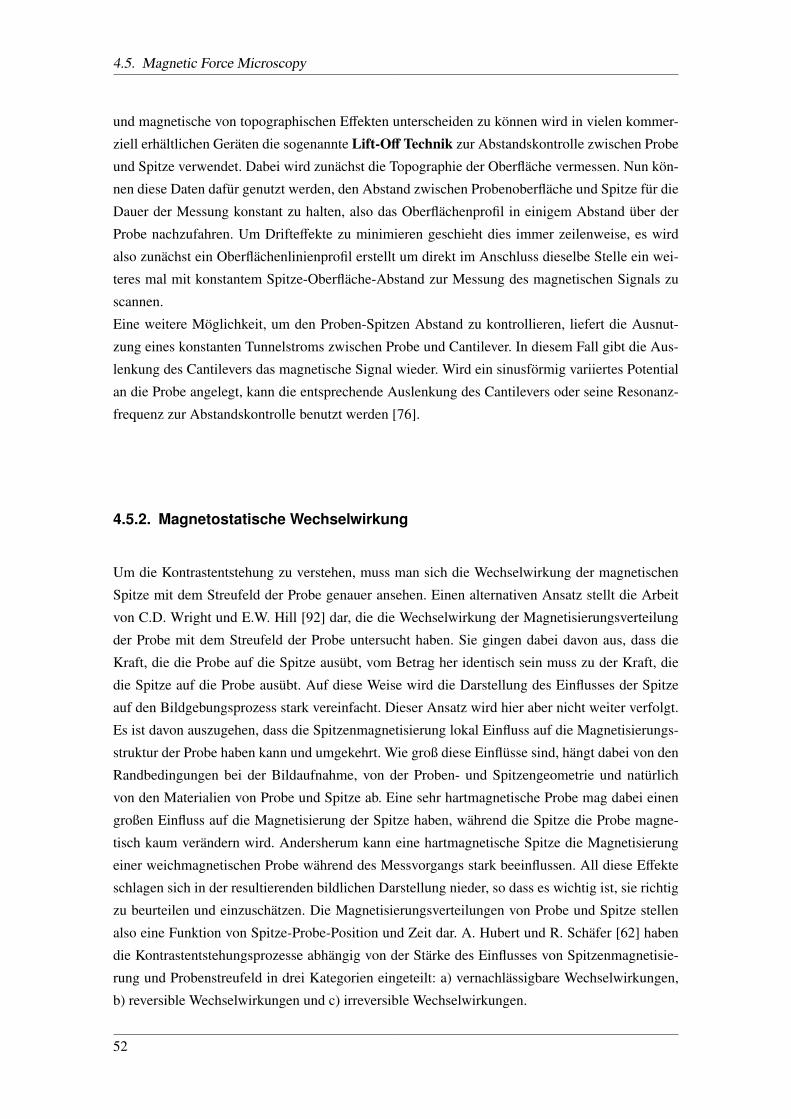
4.5. Magnetic Force Microscopy
und magnetische von topographischen Effekten unterscheiden zu können wird in vielen kommer-
ziell erhältlichen Geräten die sogenannte Lift-Off Technik zur Abstandskontrolle zwischen Probe
und Spitze verwendet. Dabei wird zunächst die Topographie der Oberfläche vermessen. Nun kön-
nen diese Daten dafür genutzt werden, den Abstand zwischen Probenoberfläche und Spitze für die
Dauer der Messung konstant zu halten, also das Oberflächenprofil in einigem Abstand über der
Probe nachzufahren. Um Drifteffekte zu minimieren geschieht dies immer zeilenweise, es wird
also zunächst ein Oberflächenlinienprofil erstellt um direkt im Anschluss dieselbe Stelle ein wei-
teres mal mit konstantem Spitze-Oberfläche-Abstand zur Messung des magnetischen Signals zu
scannen.
Eine weitere Möglichkeit, um den Proben-Spitzen Abstand zu kontrollieren, liefert die Ausnut-
zung eines konstanten Tunnelstroms zwischen Probe und Cantilever. In diesem Fall gibt die Aus-
lenkung des Cantilevers das magnetische Signal wieder. Wird ein sinusförmig variiertes Potential
an die Probe angelegt, kann die entsprechende Auslenkung des Cantilevers oder seine Resonanz-
frequenz zur Abstandskontrolle benutzt werden [76].
4.5.2. Magnetostatische Wechselwirkung
Um die Kontrastentstehung zu verstehen, muss man sich die Wechselwirkung der magnetischen
Spitze mit dem Streufeld der Probe genauer ansehen. Einen alternativen Ansatz stellt die Arbeit
von C.D. Wright und E.W. Hill [92] dar, die die Wechselwirkung der Magnetisierungsverteilung
der Probe mit dem Streufeld der Probe untersucht haben. Sie gingen dabei davon aus, dass die
Kraft, die die Probe auf die Spitze ausübt, vom Betrag her identisch sein muss zu der Kraft, die
die Spitze auf die Probe ausübt. Auf diese Weise wird die Darstellung des Einflusses der Spitze
auf den Bildgebungsprozess stark vereinfacht. Dieser Ansatz wird hier aber nicht weiter verfolgt.
Es ist davon auszugehen, dass die Spitzenmagnetisierung lokal Einfluss auf die Magnetisierungs-
struktur der Probe haben kann und umgekehrt. Wie groß diese Einflüsse sind, hängt dabei von den
Randbedingungen bei der Bildaufnahme, von der Proben- und Spitzengeometrie und natürlich
von den Materialien von Probe und Spitze ab. Eine sehr hartmagnetische Probe mag dabei einen
großen Einfluss auf die Magnetisierung der Spitze haben, während die Spitze die Probe magne-
tisch kaum verändern wird. Andersherum kann eine hartmagnetische Spitze die Magnetisierung
einer weichmagnetischen Probe während des Messvorgangs stark beeinflussen. All diese Effekte
schlagen sich in der resultierenden bildlichen Darstellung nieder, so dass es wichtig ist, sie richtig
zu beurteilen und einzuschätzen. Die Magnetisierungsverteilungen von Probe und Spitze stellen
also eine Funktion von Spitze-Probe-Position und Zeit dar. A. Hubert und R. Schäfer [62] haben
die Kontrastentstehungsprozesse abhängig von der Stärke des Einflusses von Spitzenmagnetisie-
rung und Probenstreufeld in drei Kategorien eingeteilt: a) vernachlässigbare Wechselwirkungen,
b) reversible Wechselwirkungen und c) irreversible Wechselwirkungen.
52
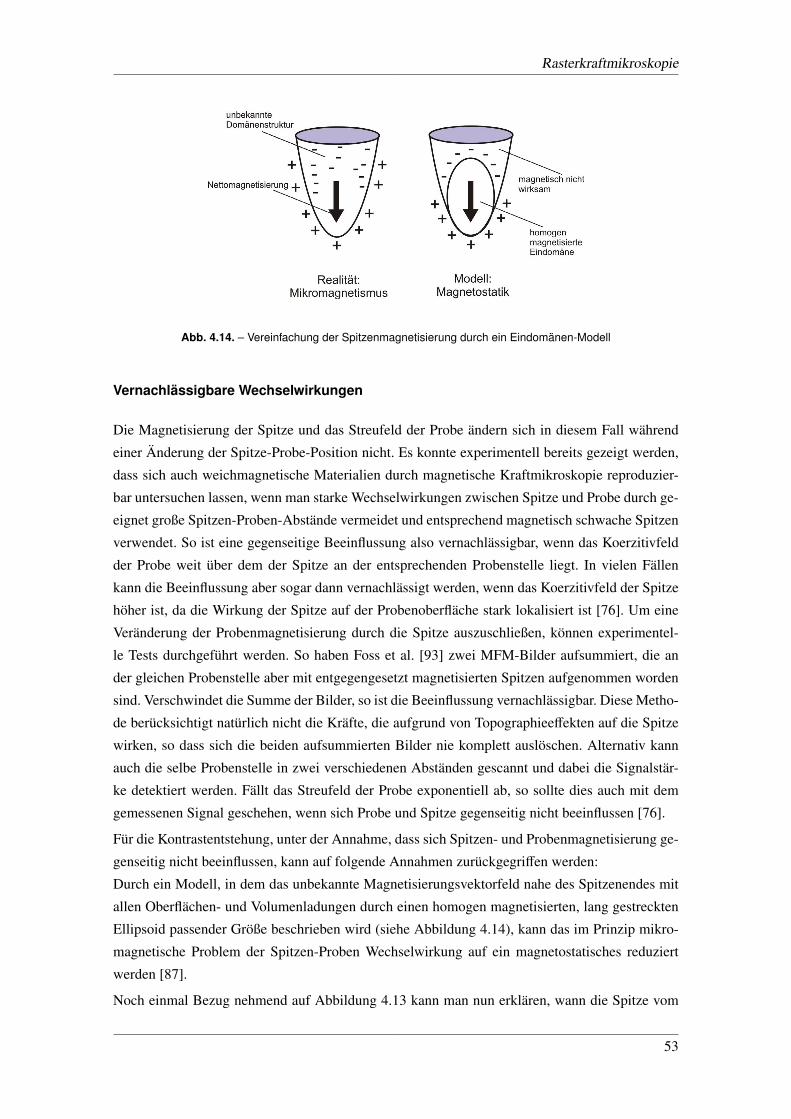
Rasterkraftmikroskopie
Abb. 4.14. – Vereinfachung der Spitzenmagnetisierung durch ein Eindomänen-Modell
Vernachlässigbare Wechselwirkungen
Die Magnetisierung der Spitze und das Streufeld der Probe ändern sich in diesem Fall während
einer Änderung der Spitze-Probe-Position nicht. Es konnte experimentell bereits gezeigt werden,
dass sich auch weichmagnetische Materialien durch magnetische Kraftmikroskopie reproduzier-
bar untersuchen lassen, wenn man starke Wechselwirkungen zwischen Spitze und Probe durch ge-
eignet große Spitzen-Proben-Abstände vermeidet und entsprechend magnetisch schwache Spitzen
verwendet. So ist eine gegenseitige Beeinflussung also vernachlässigbar, wenn das Koerzitivfeld
der Probe weit über dem der Spitze an der entsprechenden Probenstelle liegt. In vielen Fällen
kann die Beeinflussung aber sogar dann vernachlässigt werden, wenn das Koerzitivfeld der Spitze
höher ist, da die Wirkung der Spitze auf der Probenoberfläche stark lokalisiert ist [76]. Um eine
Veränderung der Probenmagnetisierung durch die Spitze auszuschließen, können experimentel-
le Tests durchgeführt werden. So haben Foss et al. [93] zwei MFM-Bilder aufsummiert, die an
der gleichen Probenstelle aber mit entgegengesetzt magnetisierten Spitzen aufgenommen worden
sind. Verschwindet die Summe der Bilder, so ist die Beeinflussung vernachlässigbar. Diese Metho-
de berücksichtigt natürlich nicht die Kräfte, die aufgrund von Topographieeffekten auf die Spitze
wirken, so dass sich die beiden aufsummierten Bilder nie komplett auslöschen. Alternativ kann
auch die selbe Probenstelle in zwei verschiedenen Abständen gescannt und dabei die Signalstär-
ke detektiert werden. Fällt das Streufeld der Probe exponentiell ab, so sollte dies auch mit dem
gemessenen Signal geschehen, wenn sich Probe und Spitze gegenseitig nicht beeinflussen [76].
Für die Kontrastentstehung, unter der Annahme, dass sich Spitzen- und Probenmagnetisierung ge-
genseitig nicht beeinflussen, kann auf folgende Annahmen zurückgegriffen werden:
Durch ein Modell, in dem das unbekannte Magnetisierungsvektorfeld nahe des Spitzenendes mit
allen Oberflächen- und Volumenladungen durch einen homogen magnetisierten, lang gestreckten
Ellipsoid passender Größe beschrieben wird (siehe Abbildung 4.14), kann das im Prinzip mikro-
magnetische Problem der Spitzen-Proben Wechselwirkung auf ein magnetostatisches reduziert
werden [87].
Noch einmal Bezug nehmend auf Abbildung 4.13 kann man nun erklären, wann die Spitze vom
53

4.5. Magnetic Force Microscopy
Streufeld angezogen bzw. abgestoßen wird. Tritt das Streufeld aus der Probe aus, so steht es senk-
recht auf der Probenoberfläche. In diesem Bereich hat die Spitze also eine zum Streufeld parallel
oder antiparallel stehende Magnetisierung. Im parallelen Fall wird die Spitze angezogen, im an-
tiparallelen abgestoßen. In der hinterher erhaltenen Abbildung werden diese beiden Fälle durch
schwarze bzw. weiße Bereiche unterschieden.
Der Kontrast bei der Magnetic Force Microscopy entsteht also aus einer magnetostatischen Wech-
selwirkung zwischen Spitze und Probe. Es ist nochmal zu betonen, dass in diesem betrachteten
Fall beide magnetisch starr sind, sich also gegenseitig in ihrer Magnetisierung nicht beeinflussen
[94]. Das magnetostatische Potential der Probe an einem Ort ~r ist durch Gleichung 4.17 gegeben.
ΦP(~r) =1
4π· [
∫d2~s′ ·MP(~r′)|~r −~r′|
−
∫d3~r′∇ ·MP(~r′)|~r −~r′|
] (4.17)
Hierbei ist MP(~r′) das Magnetisierungsvektorfeld der Probe und ~s′ der nach außen zeigende Nor-
malenvektor der Probenoberfläche. Der erste Term bezieht sich auf die magnetischen Oberflä-
chenladungen, die durch senkrecht zur Probenoberfläche stehende Magnetisierungskomponenten
hervorgerufen werden, der zweite beinhaltet den Beitrag von Divergenzen des Magnetisierungs-
vektorfeldes im Probeninnern. Das resultierende Streufeld der Probe ist dann gegeben durch
~Hs(~r) = −∇ΦP(~r). (4.18)
Die magnetostatische Energie der Spitze unter dem Einfluss des Streufeldes der Probe kann man
ausdrücken als
ψ(~r) = µ0(
∫d2~s′ ·Ms(~r′)ΦP(~r′) +
∫d3∇~r′ · [ΦP(~r′)Ms(~r′)]) (4.19)
mit ΦP(~r′) als Potential aus Gleichung 4.17 und Ms(~r′) als Spitzenmagnetisierung. Das Oberflä-
chenintegral beschreibt die Wechselwirkung der Oberflächenladungen der Spitze mit dem Proben-
streufeld, während das Volumenintegral den Beitrag von Divergenzen der Spitzenmagnetisierung
sowie Dipolwechselwirkungen enthält. Somit ergibt sich als resultierende Kraft
~F(~r) = −∇ψ(~r). (4.20)
Das zuvor eingeführte Modell einer ellipsoidalen Spitzendomäne führt nun dazu, dass die Spit-
zenmagnetisierung divergenzfrei ist und somit das Volumenintegral in Gleichung 4.19 auf die
Dipolwechselwirkung reduziert wird [87].
Auch weitere Vereinfachungen führen noch zu befriedigenden Resultaten. So besteht eine drasti-
sche Vereinfachung in der “Punktsonden-Approximation”, in der die Spitze als punktförmig an-
genommen wird. Dabei werden die unbekannten magnetischen Momente und der Proben-Spitzen
Abstand als freie Parameter durch Anpassen an experimentelle Daten ermittelt. Als resultierende
Kraft aus der magnetostatischen Wechselwirkung erhält man dann
~F(~r) = µ0(q + ~m · ∇) ~H (4.21)
54

Rasterkraftmikroskopie
mit q und ~m als effektive Monopol- und Dipolmomente der Sonde und ~H als das von der Probe
erzeugte Streufeld. Detektiert wird die Vertikalkomponente des Kraftvektors, die die gemessene
Auslenkung des Cantilevers verursacht. Daher erhält man als detektierte Kraftkomponente
Fd = ~n · ~F (4.22)
mit ~n als Normalenvektor des Cantileverrückens [87].
In Komponentenform lautet Gleichung 4.21
Fd(~r) = µ0
3∑j=1
n j(qH j +3∑
k=1
mk∂Hk
∂x j) (4.23)
Diese Gleichung würde im Falle eines statischen MFM-Modus als Basis für die Kontrastinter-
pretation dienen. Nun werden magnetische Messungen allerdings üblicherweise im dynamischen
Modus durchgeführt. Die in diesem Fall detektierte Größe entspricht dann
F′
d = (~n · ∇)(~n · ~F) (4.24)
mit der entsprechenden Kraft ~F aus Gleichung 4.21. Daraus ergibt sich dann folgende Komponen-
tenform:
F′
d(~r) = µ0
3∑i=1
3∑j=1
nin j[(∂q∂xi
+ q∂
∂xi)H j(~r) +
3∑k=1
(∂mk
∂xi
∂
∂x j+ mk
∂2
∂xi∂x j)Hk(~r)] (4.25)
In dieser Gleichung finden sich sogenannte “Pseudopotentiale” (φpj =
∂q∂x j
) und “Pseudoladungen”
(qpki =
∂mk∂x j
). Diese Beiträge resultieren aus der realen Spitzengeometrie. Die effektiven magne-
tischen Momente einer realen Spitze sind von der momentanen Spitzenposition während einer
Oszillationsperiode abhängig. Es wird deutlich, dass bei der dynamischen MFM-Methode nicht
einfach nur die zweite Ableitungen der Streufeldkomponenten, sondern auch Beiträge der ersten
Ableitung und Beiträge des Streufeldes selbst detektiert werden [87, 95]. Durch den Gradienten
der magnetischen Wechselwirkung wird also die Resonanzfrequenz geändert, was den Kontrast
für die dynamische MFM-Messung liefert.
Nun ist es entscheidend, ob man sich im Fern- oder im Nahfeldbereich der Probe befindet. Wo der
eine Bereich beginnt und der andere aufhört, ist dabei von der Wahl der Probe und nicht zuletzt
auch von der Spitze abhängig.
Im Fernfeldbereich (einige 100 nm Abstand zwischen Probe und Spitze) überwiegt die langreich-
weitige magnetostatische Wechselwirkung. Der Gradient der magnetischen Kraft ist hier um eini-
ges größer als der der van der Waals Kraft. In diesem Bereich ist es daher möglich, reine magne-
tische Informationen von der Probe zu erhalten und die topographischen Effekte auszuschalten.
Auch umgeht man bei diesen größeren Abständen ein mögliches Umschalten der Magnetisierung
der Probe durch das Streufeld der Spitze. Allerdings ist die geringe laterale Auflösung von Nach-
teil.
Im Gegensatz dazu steht der geringe Proben-Spitzen Abstand im Nahfeldbereich. Hier beträgt der
55
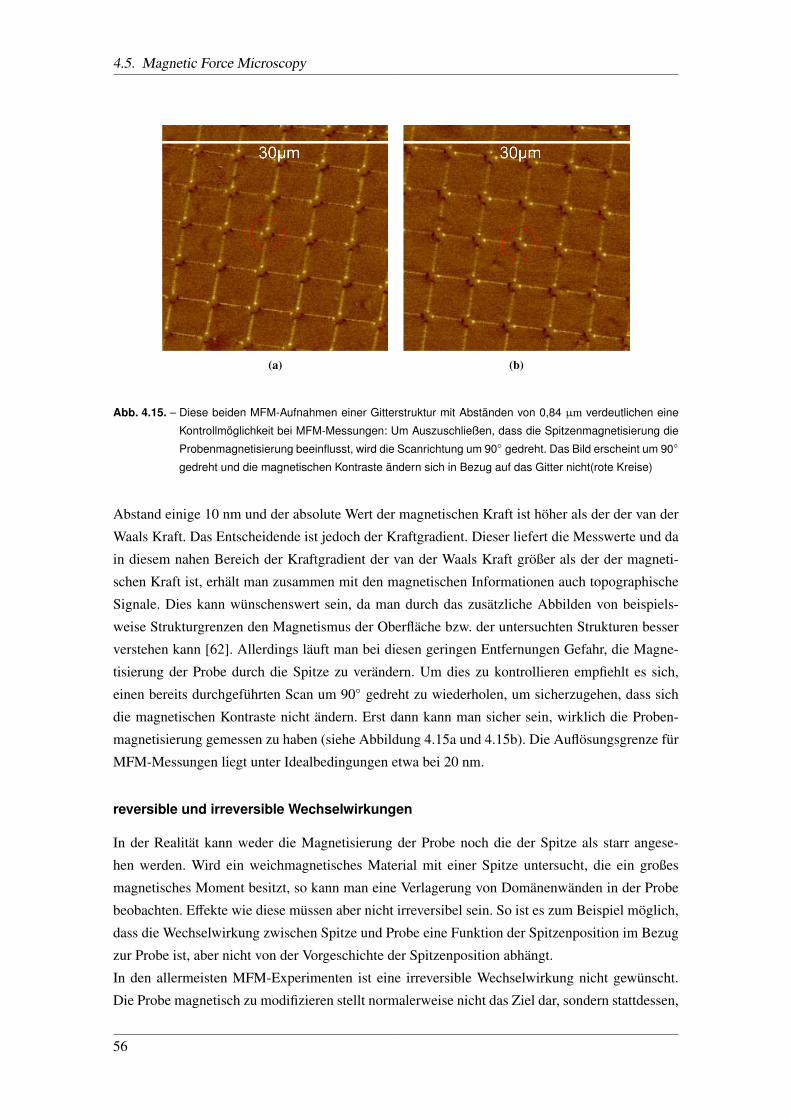
4.5. Magnetic Force Microscopy
(a) (b)
Abb. 4.15. – Diese beiden MFM-Aufnahmen einer Gitterstruktur mit Abständen von 0,84 µm verdeutlichen eine
Kontrollmöglichkeit bei MFM-Messungen: Um Auszuschließen, dass die Spitzenmagnetisierung die
Probenmagnetisierung beeinflusst, wird die Scanrichtung um 90 gedreht. Das Bild erscheint um 90
gedreht und die magnetischen Kontraste ändern sich in Bezug auf das Gitter nicht(rote Kreise)
Abstand einige 10 nm und der absolute Wert der magnetischen Kraft ist höher als der der van der
Waals Kraft. Das Entscheidende ist jedoch der Kraftgradient. Dieser liefert die Messwerte und da
in diesem nahen Bereich der Kraftgradient der van der Waals Kraft größer als der der magneti-
schen Kraft ist, erhält man zusammen mit den magnetischen Informationen auch topographische
Signale. Dies kann wünschenswert sein, da man durch das zusätzliche Abbilden von beispiels-
weise Strukturgrenzen den Magnetismus der Oberfläche bzw. der untersuchten Strukturen besser
verstehen kann [62]. Allerdings läuft man bei diesen geringen Entfernungen Gefahr, die Magne-
tisierung der Probe durch die Spitze zu verändern. Um dies zu kontrollieren empfiehlt es sich,
einen bereits durchgeführten Scan um 90 gedreht zu wiederholen, um sicherzugehen, dass sich
die magnetischen Kontraste nicht ändern. Erst dann kann man sicher sein, wirklich die Proben-
magnetisierung gemessen zu haben (siehe Abbildung 4.15a und 4.15b). Die Auflösungsgrenze für
MFM-Messungen liegt unter Idealbedingungen etwa bei 20 nm.
reversible und irreversible Wechselwirkungen
In der Realität kann weder die Magnetisierung der Probe noch die der Spitze als starr angese-
hen werden. Wird ein weichmagnetisches Material mit einer Spitze untersucht, die ein großes
magnetisches Moment besitzt, so kann man eine Verlagerung von Domänenwänden in der Probe
beobachten. Effekte wie diese müssen aber nicht irreversibel sein. So ist es zum Beispiel möglich,
dass die Wechselwirkung zwischen Spitze und Probe eine Funktion der Spitzenposition im Bezug
zur Probe ist, aber nicht von der Vorgeschichte der Spitzenposition abhängt.
In den allermeisten MFM-Experimenten ist eine irreversible Wechselwirkung nicht gewünscht.
Die Probe magnetisch zu modifizieren stellt normalerweise nicht das Ziel dar, sondern stattdessen,
56
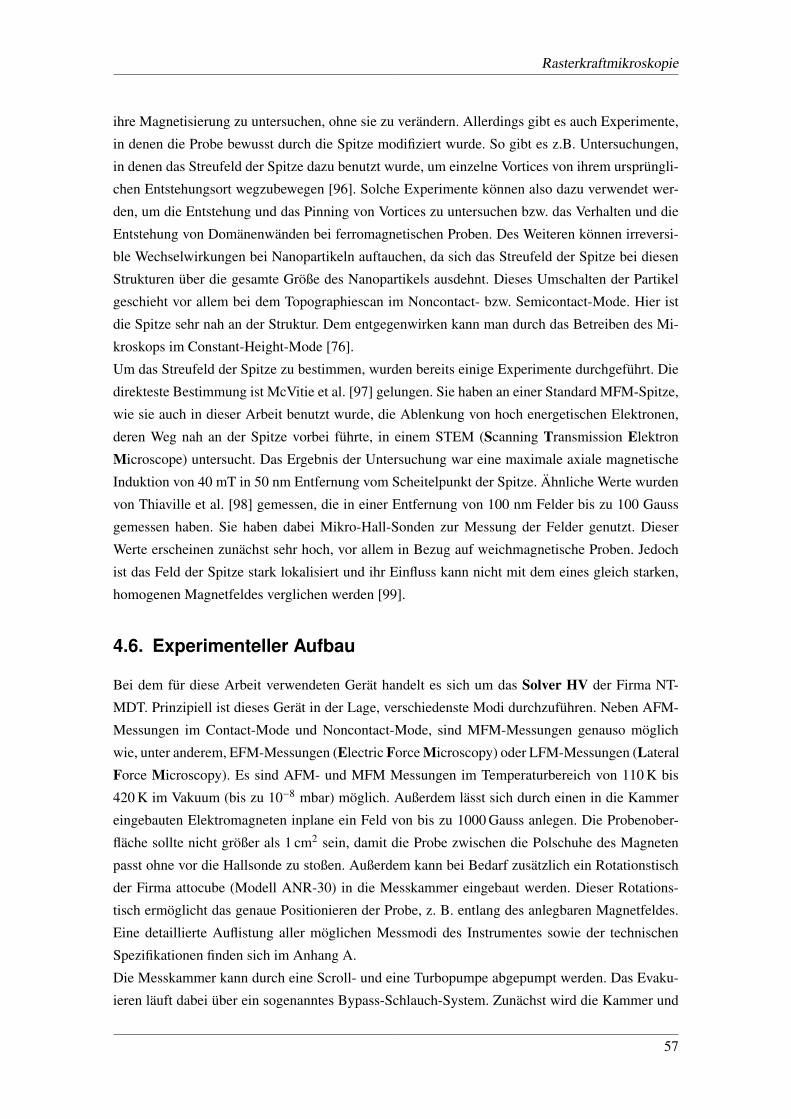
Rasterkraftmikroskopie
ihre Magnetisierung zu untersuchen, ohne sie zu verändern. Allerdings gibt es auch Experimente,
in denen die Probe bewusst durch die Spitze modifiziert wurde. So gibt es z.B. Untersuchungen,
in denen das Streufeld der Spitze dazu benutzt wurde, um einzelne Vortices von ihrem ursprüngli-
chen Entstehungsort wegzubewegen [96]. Solche Experimente können also dazu verwendet wer-
den, um die Entstehung und das Pinning von Vortices zu untersuchen bzw. das Verhalten und die
Entstehung von Domänenwänden bei ferromagnetischen Proben. Des Weiteren können irreversi-
ble Wechselwirkungen bei Nanopartikeln auftauchen, da sich das Streufeld der Spitze bei diesen
Strukturen über die gesamte Größe des Nanopartikels ausdehnt. Dieses Umschalten der Partikel
geschieht vor allem bei dem Topographiescan im Noncontact- bzw. Semicontact-Mode. Hier ist
die Spitze sehr nah an der Struktur. Dem entgegenwirken kann man durch das Betreiben des Mi-
kroskops im Constant-Height-Mode [76].
Um das Streufeld der Spitze zu bestimmen, wurden bereits einige Experimente durchgeführt. Die
direkteste Bestimmung ist McVitie et al. [97] gelungen. Sie haben an einer Standard MFM-Spitze,
wie sie auch in dieser Arbeit benutzt wurde, die Ablenkung von hoch energetischen Elektronen,
deren Weg nah an der Spitze vorbei führte, in einem STEM (Scanning Transmission Elektron
Microscope) untersucht. Das Ergebnis der Untersuchung war eine maximale axiale magnetische
Induktion von 40 mT in 50 nm Entfernung vom Scheitelpunkt der Spitze. Ähnliche Werte wurden
von Thiaville et al. [98] gemessen, die in einer Entfernung von 100 nm Felder bis zu 100 Gauss
gemessen haben. Sie haben dabei Mikro-Hall-Sonden zur Messung der Felder genutzt. Dieser
Werte erscheinen zunächst sehr hoch, vor allem in Bezug auf weichmagnetische Proben. Jedoch
ist das Feld der Spitze stark lokalisiert und ihr Einfluss kann nicht mit dem eines gleich starken,
homogenen Magnetfeldes verglichen werden [99].
4.6. Experimenteller Aufbau
Bei dem für diese Arbeit verwendeten Gerät handelt es sich um das Solver HV der Firma NT-
MDT. Prinzipiell ist dieses Gerät in der Lage, verschiedenste Modi durchzuführen. Neben AFM-
Messungen im Contact-Mode und Noncontact-Mode, sind MFM-Messungen genauso möglich
wie, unter anderem, EFM-Messungen (Electric Force Microscopy) oder LFM-Messungen (Lateral
Force Microscopy). Es sind AFM- und MFM Messungen im Temperaturbereich von 110 K bis
420 K im Vakuum (bis zu 10−8 mbar) möglich. Außerdem lässt sich durch einen in die Kammer
eingebauten Elektromagneten inplane ein Feld von bis zu 1000 Gauss anlegen. Die Probenober-
fläche sollte nicht größer als 1 cm2 sein, damit die Probe zwischen die Polschuhe des Magneten
passt ohne vor die Hallsonde zu stoßen. Außerdem kann bei Bedarf zusätzlich ein Rotationstisch
der Firma attocube (Modell ANR-30) in die Messkammer eingebaut werden. Dieser Rotations-
tisch ermöglicht das genaue Positionieren der Probe, z. B. entlang des anlegbaren Magnetfeldes.
Eine detaillierte Auflistung aller möglichen Messmodi des Instrumentes sowie der technischen
Spezifikationen finden sich im Anhang A.
Die Messkammer kann durch eine Scroll- und eine Turbopumpe abgepumpt werden. Das Evaku-
ieren läuft dabei über ein sogenanntes Bypass-Schlauch-System. Zunächst wird die Kammer und
57

4.6. Experimenteller Aufbau
(a) Messkammer (b) Ansteuerungselektronik
Abb. 4.16. – Solver HV. Abb. 4.16a zeigt die Messkammer, Abb. 4.16b die Ansteuerungselektronik:1: Ansteuerung
des Elektromagneten, 2: Thermokontrolle, 3: XY-Stage Controller, zuständig für den motorisierten
Probentisch, 4x4 mm verfahrbar, 4: Controller für Druckanzeige, Turbopumpe und Stromleiste oben,
5: Stromleiste unten, 6: SPM-Controller, 7: Controller für den Acitve-Table (Schwingunsdämpfung).
das Schlauchsystem, das beide Pumpen und die Kammer verbindet, durch die Scrollpumpe vor-
gepumpt. Hier ist ein Druck von etwa 10−2 mbar erreichbar. Ist das Vorpumpen beendet, so wird
die Scrollpumpe durch das Schließen eines Ventils von der Kammer getrennt, pumpt aber das
Schlauchsystem weiter ab, und das Ventil zur Turbopumpe wird geöffnet. Die Turbopumpe pumpt
nun die Kammer weiter ab, bis ein Druck von etwa 10−7 mbar erreicht ist. Um den Druck bis auf
10−8 mbar zu reduzieren, muss zusätzlich zum Abpumpen eine sogennante Cold Trap verwen-
det werden. Dabei handelt es sich um einen an die hohle Messkammerwand angebrachten Dewar,
der mit flüssigem Stickstoff befüllt werden kann. Der flüssige Stickstoff kühlt auf diese Weise die
Wände der Messkammer aus, wodurch in der Kammer befindliche Moleküle an der Innenwand
“festgesetzt” werden. Etwa eine halbe Stunde nach Befüllen sollte der Druck in der Kammer auf
einige 10−8 mbar gefallen sein. Die Cold Trap muss ca. alle 10 Stunden neu befüllt werden.
Die Probe wird auf einem thermisch sehr gut leitfähigen Kupferzylinder befestigt und dann in die
Kammer eingeschraubt. Über diesen Kupferzylinder wird die Probe im Falle einer temperaturab-
hängigen Messung gekühlt bzw. geheizt. In der Kammer befinden sich neben dem Probenhalter
zusätzlich die Polschuhe des Elektromagneten mit der daran befestigten Hallsonde, ein Spiegel zur
Justage des optischen Mikroskops, vorgefertige Mulden als Standpunkte für den Scanhead sowie
diverse Anschlüsse (siehe Abbildung 4.18a). Die Scheibe, auf der der Scanhead steht, kann moto-
risiert um einen Bereich von 4 x 4 mm verfahren werden, um so definierte Probenbereiche anvi-
sieren zu können. Direkt über der motorisierten Scheibe liegt das sogenannte Cryopanel, das über
einen außen an der Kammer angebrachten Dewar auf Stickstofftemperatur heruntergekühlt werden
kann und so im Falle von Tieftemperaturmessungen immer unterhalb der Probentemperatur liegen
sollte. Damit können Kristallisationsprozesse auf der Probenoberfläche verhindert werden, die die
58
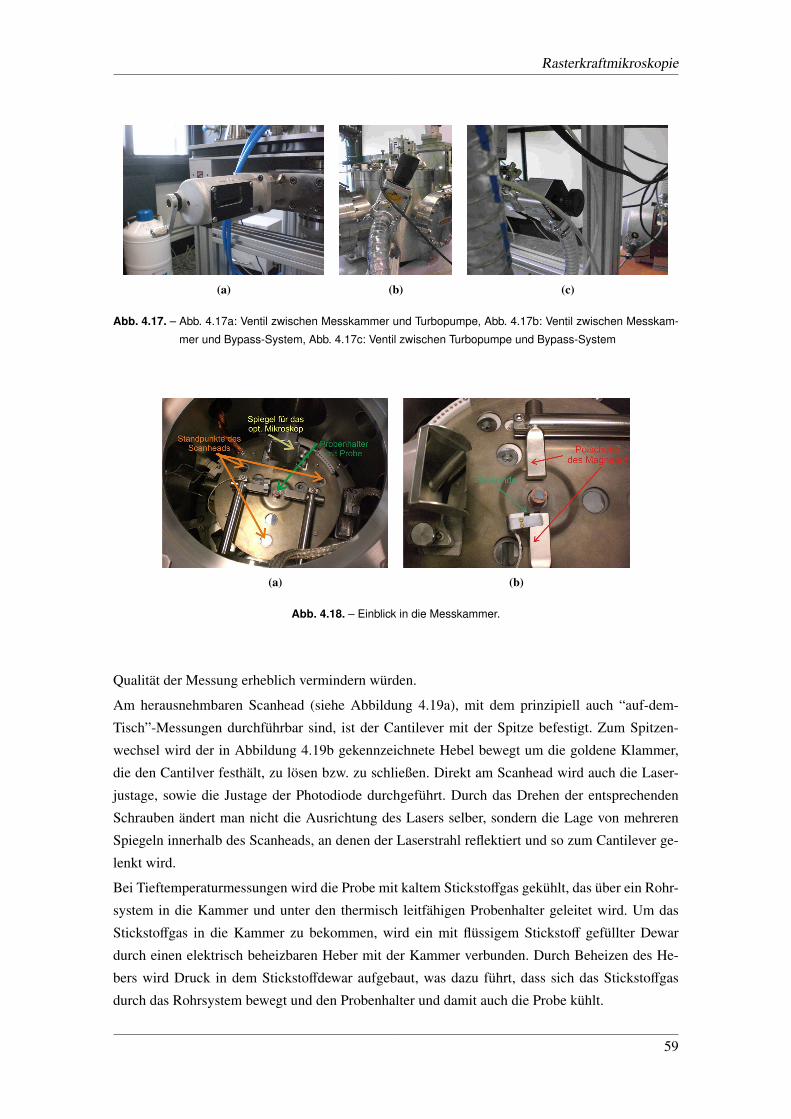
Rasterkraftmikroskopie
(a) (b) (c)
Abb. 4.17. – Abb. 4.17a: Ventil zwischen Messkammer und Turbopumpe, Abb. 4.17b: Ventil zwischen Messkam-
mer und Bypass-System, Abb. 4.17c: Ventil zwischen Turbopumpe und Bypass-System
(a) (b)
Abb. 4.18. – Einblick in die Messkammer.
Qualität der Messung erheblich vermindern würden.
Am herausnehmbaren Scanhead (siehe Abbildung 4.19a), mit dem prinzipiell auch “auf-dem-
Tisch”-Messungen durchführbar sind, ist der Cantilever mit der Spitze befestigt. Zum Spitzen-
wechsel wird der in Abbildung 4.19b gekennzeichnete Hebel bewegt um die goldene Klammer,
die den Cantilver festhält, zu lösen bzw. zu schließen. Direkt am Scanhead wird auch die Laser-
justage, sowie die Justage der Photodiode durchgeführt. Durch das Drehen der entsprechenden
Schrauben ändert man nicht die Ausrichtung des Lasers selber, sondern die Lage von mehreren
Spiegeln innerhalb des Scanheads, an denen der Laserstrahl reflektiert und so zum Cantilever ge-
lenkt wird.
Bei Tieftemperaturmessungen wird die Probe mit kaltem Stickstoffgas gekühlt, das über ein Rohr-
system in die Kammer und unter den thermisch leitfähigen Probenhalter geleitet wird. Um das
Stickstoffgas in die Kammer zu bekommen, wird ein mit flüssigem Stickstoff gefüllter Dewar
durch einen elektrisch beheizbaren Heber mit der Kammer verbunden. Durch Beheizen des He-
bers wird Druck in dem Stickstoffdewar aufgebaut, was dazu führt, dass sich das Stickstoffgas
durch das Rohrsystem bewegt und den Probenhalter und damit auch die Probe kühlt.
59
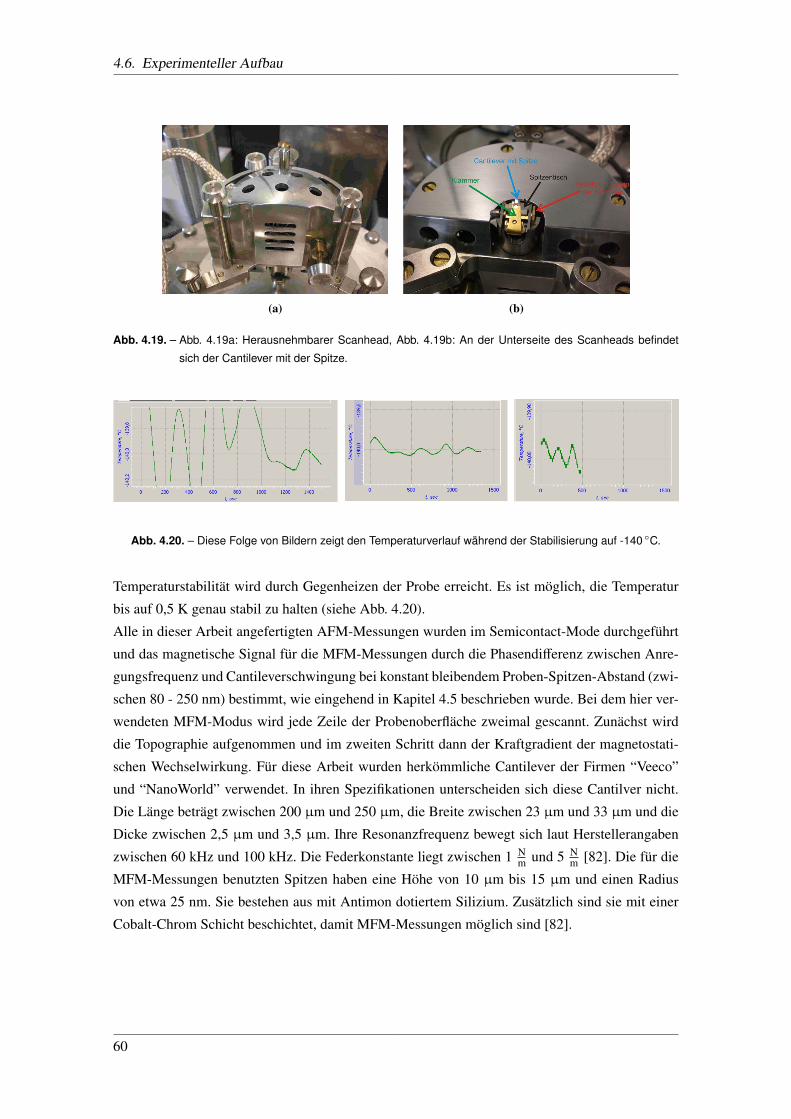
4.6. Experimenteller Aufbau
(a) (b)
Abb. 4.19. – Abb. 4.19a: Herausnehmbarer Scanhead, Abb. 4.19b: An der Unterseite des Scanheads befindet
sich der Cantilever mit der Spitze.
Abb. 4.20. – Diese Folge von Bildern zeigt den Temperaturverlauf während der Stabilisierung auf -140 C.
Temperaturstabilität wird durch Gegenheizen der Probe erreicht. Es ist möglich, die Temperatur
bis auf 0,5 K genau stabil zu halten (siehe Abb. 4.20).
Alle in dieser Arbeit angefertigten AFM-Messungen wurden im Semicontact-Mode durchgeführt
und das magnetische Signal für die MFM-Messungen durch die Phasendifferenz zwischen Anre-
gungsfrequenz und Cantileverschwingung bei konstant bleibendem Proben-Spitzen-Abstand (zwi-
schen 80 - 250 nm) bestimmt, wie eingehend in Kapitel 4.5 beschrieben wurde. Bei dem hier ver-
wendeten MFM-Modus wird jede Zeile der Probenoberfläche zweimal gescannt. Zunächst wird
die Topographie aufgenommen und im zweiten Schritt dann der Kraftgradient der magnetostati-
schen Wechselwirkung. Für diese Arbeit wurden herkömmliche Cantilever der Firmen “Veeco”
und “NanoWorld” verwendet. In ihren Spezifikationen unterscheiden sich diese Cantilver nicht.
Die Länge beträgt zwischen 200 µm und 250 µm, die Breite zwischen 23 µm und 33 µm und die
Dicke zwischen 2,5 µm und 3,5 µm. Ihre Resonanzfrequenz bewegt sich laut Herstellerangaben
zwischen 60 kHz und 100 kHz. Die Federkonstante liegt zwischen 1 Nm und 5 N
m [82]. Die für die
MFM-Messungen benutzten Spitzen haben eine Höhe von 10 µm bis 15 µm und einen Radius
von etwa 25 nm. Sie bestehen aus mit Antimon dotiertem Silizium. Zusätzlich sind sie mit einer
Cobalt-Chrom Schicht beschichtet, damit MFM-Messungen möglich sind [82].
60
5. Rasterelektronenmikroskopie
Wie das Rasterkraftmikroskop gehört das Rasterelektronenmikroskop (REM, engl. Scanning
Electron Microscope, SEM) zur Familie der Rastersondenmikroskope. Als Sonde dient hierbei
ein fein fokussierter Elektronenstrahl, der zeilenweise über die Probe geführt wird. Die Bilderzeu-
gung erfolgt über die Detektion der Strahl-Probe Wechselwirkungsprodukte, im Wesentlichen Se-
kundärelektronen, Rückstreuelektronen und charakteristische Röntgenstrahlung. Das REM wurde
1932 von M. Knoll und E. Ruska [100] in Berlin entwickelt. Kommerziell auf den Markt gebracht
wurde es 1964. Es hat sich schnell als ein extrem nützliches wissenschaftliches Gerät erwiesen,
das von der Nanotechnologie über die Halbleiterphysik bis hin zur Biologie seine Anwendung
findet [65].
Das Rasterelektronenmikroskop ist dem Lichtmikroskop in mehrfacher Hinsicht überlegen. Wäh-
rend das Auflösungsvermögen eines optischen Mikroskops durch die Wellenlänge des Lichts be-
grenzt ist (die maximale Auflösung liegt unter idealen Bedingungen bei etwa 0,3 µm), sind bei
einem Rasterelektronenmikroskop Auflösungen von wenigen Nanometern möglich. Durch die
geringe Informationstiefe der Sekundärelektronen (etwa 2 nm), die das hauptsächlich benutzte
Wechselwirkungsprodukt der Rasterelektronenmikroskopie darstellen, ist die Oberflächensensiti-
vität deutlich höher als bei einem Lichtmikroskop, bei dem die Lichteindringtiefe bei metallischen
Proben je nach Wellenlänge des verwendeten Lichts 50 bis 100 nm beträgt [101]. Zusätzlich ist
bedingt durch den kleinen Strahlquerschnitt und die hohe Kollimation die Tiefenschärfe deutlich
höher.
Weiterführende Informationen finden sich unter anderem in den Referenzen [102] und [103], so-
wie in [104]. Diese Quellen wurden auch zur Erstellung dieses Kapitels zu Rate gezogen. Dieses
Kapitel dient lediglich als kurzer Überblick über die Funktionsweise des REM und ist nicht als
komplette Beschreibung zu verstehen.
5.1. Funktionsweise
Das Rasterelektronenmikroskop besteht im Wesentlichen aus vier Komponenten: dem Strahler-
zeuger, dem Linsensystem, den Detektoren und dem Bildgebungssystem. Abbildung 5.1 zeigt den
schematischen Aufbau und Strahlenverlauf eines REM. Die Elektronenkanone emittiert die Elek-
tronen, die den Strahl bilden. Er wird durch mehrere Kondensorlinsen mehrstufig verkleinert und
durch die Objektivlinse auf die Probe fokussiert. Eine Ablenkeinheit führt den Elektronenstrahl
zeilenweise über die Probe. Die Wechselwirkungsprodukte von Elektronenstrahl und Probe wer-
den im Detektor detektiert und in elektrische Signale weiter verarbeitet, die zum Computer geleitet
5.1. Funktionsweise
und in ein Bild der abgerasterten Oberfläche umgewandelt werden.
5.1.1. Strahlerzeugung
Es existieren zwei gebräuchliche Möglichkeiten, den Elektronenstrahl zu erzeugen. Zunächst gibt
es den so genannten thermischen Emitter. In dieser Anordnung wird ein Wolframdraht durch
einen Stromfluss erhitzt, so dass Glühemission stattfindet. Der Wolframdraht, der hier die Kathode
bildet, emittiert also Elektronen, die aufgrund eines Wehneltzylinders, der die Kathode umgibt und
ebenfalls auf negativem Potential liegt, in einer Elektronenwolke gesammelt werden. Die emittier-
ten Elektronen werden zur Anode hin beschleunigt, die in Bezug zum Wolframdraht auf positivem
Potential liegt. Der Wehneltzylinder hält dabei den Emissionsstrom stabil. Da er konstant auf ei-
nem negativen Potential gehalten wird, wirkt er auf die emittierten Elektronen abstoßend und seine
Potentialverteilung sorgt für eine Bündelung der Elektronen im Crossover genau vor der Anode.
Der Wolframdraht als Elektronenquelle ist deshalb von Vorteil, weil er kostengünstig ersetzt wer-
den kann und kein Ultrahochvakuum benötigt. Nach einer Nutzungsdauer von 50 bis 150 Stunden
brennt der Faden durch, da im Betrieb das Wolfram langsam aus dem Faden ausdampft und der
Draht dadurch immer dünner wird. Zum Einsetzen eines neuen Drahtes ist es dann nötig, die ge-
samte Elektronenkanone auszubauen und den neuen Draht sorgfältig zu justieren.
Die zweite Möglichkeit zur Elektronenstrahlerzeugung bildet der Feldemitter (siehe Abbildung
5.1). Die Funktionsweise dieser Kathode beruht auf dem Prinzip der Feldemission. Hierbei wer-
den die Elektronen im Ultrahochvakuum durch ein elektrisches Feld aus einem angespitzten Wolf-
ramkristall “herausgezogen”. Hier wird der Tunneleffekt ausgenutzt, bei dem aus der sehr feinen
Spitze des Wolframkristalls Elektronen zur ersten Anode durchtunneln. Zum Aufbau des Emis-
sionsfeldes wird die erste Anode verwendet. Diese Spannung kann bis zu 2000 V betragen und
kontrolliert die Stärke der Elektronenemission. Die eigentliche Beschleunigungsspannung ist die
Spannung, die zwischen der Wolframspitze und der zweiten Anode anliegt. Ein großer Vorteil,
den der Feldemitter gegenüber den Glühkathoden hat, ist die Tatsache, dass die Elektronen aus
einem viel kleineren Gebiet emittiert werden und somit zwischen Elektronenkanone und Anode
ein Crossover mit viel kleinerem Durchmesser erzeugt wird. Das, und die größere Helligkeit, die
mit einem Feldemitter erreicht werden kann, führt zu einem höheren Auflösungsvermögen. Außer-
dem besitzt ein Feldemitter eine sehr lange Lebensdauer. Allerdings ist der technische Aufwand,
der betrieben werden muss, um eine Feldemissionskathode zu verwenden, nicht vernachlässigbar.
Zum einen kann sie nicht nachträglich in ein Mikroskop eingebaut werden und zum anderen muss
sie im Ultrahochvakuum betrieben werden, was den Wechsel sehr aufwendig gestaltet.
Bei dem hier verwendeten REM handelt es sich um ein Gerät der Firma FEI vom Typ Quanta200 FEG. Es enthält einen Feldemitter und kann die Beschleunigungsspannung zwischen 5 und
30 kV variieren. Es erreicht eine Auflösung von 2 nm. Das Quanta 200 FEG realisiert zudem im
so genannten Low-Vacuum-Mode das Arbeiten in einem Druckbereich von bis zu 20 mbar. Dies
ermöglicht die Untersuchung isolierender Proben, da das im Primärelektronenstrahl ionisierte Gas
die entstehende Oberflächenladungen neutralisiert. Außerdem ist es prinzipiell möglich, tempe-
62
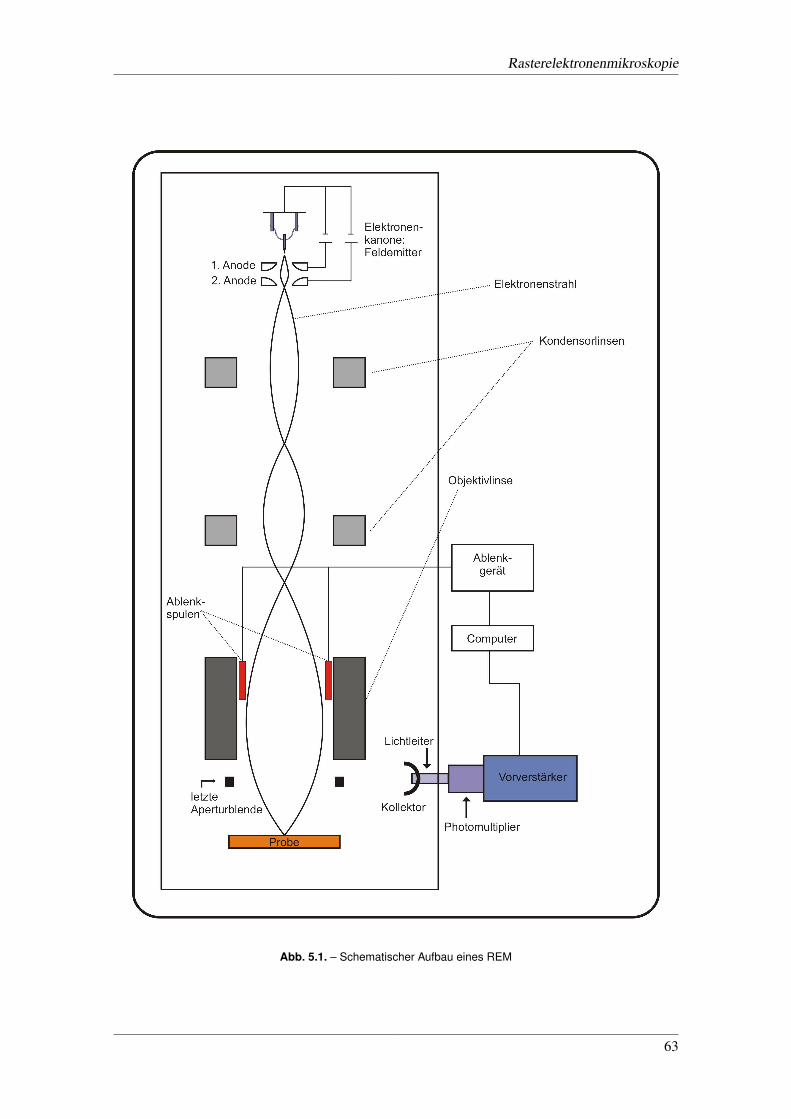
Rasterelektronenmikroskopie
Abb. 5.1. – Schematischer Aufbau eines REM
63
5.1. Funktionsweise
raturabhängige Messungen durchzuführen. Ein Lithographiezusatz der Firma RAITH erlaubt es,
das REM auch zur Elektronenstrahllithographie zu nutzen. Auf diesen Aspekt wird in Kapitel 6.2
ausführlicher eingegangen.
5.1.2. Linsensystem und Linsenfehler
Nach der Erzeugung des Elektronenstrahls in der Elektronenkanone und dem Beschleunigen der
Elektronen durch die Anode treten die meisten der Elektronen durch die Anodenöffnung hin-
durch. Sie gelangen ins Linsensystem, in dem der Strahl mehrstufig verkleinert wird, bevor er auf
die Probe trifft. Diese Verkleinerung wird durch magnetische Linsen hervorgerufen, die durch die
von ihnen ausgehenden magnetischen Feldern die Elektronen des Elektronenstrahls beeinflussen.
Solch eine magnetische Linse besteht aus einer stromdurchflossenen Spule, die von einem Ei-
senjoch umgeben ist. Durch dieses Eisenjoch wird der magnetische Fluss in einem ringförmigen
Spalt konzentriert. Der Elektronenstrahl verläuft nun durch die Spule, entlang ihrer Längsachse
und durch Variieren des Stromflusses kann die Brennweite der Linse verändert werden. Höhere
Ströme führen dabei zu einer kürzeren Brennweite.
Nach der anfänglichen Fokussierung des Elektronenstrahls wird er durch zusätzliche Objektivlin-
sen auf die Probenoberfläche fokussiert und durch spezielle Spulen abgelenkt, was so die Raste-
rung ermöglicht.
Wie auch bei optischen Linsen treten bei magnetischen Linsen Abbildungsfehler auf. Diese wer-
den im Folgenden aufgezählt und ihr Einfluss auf die Bilddarstellung abgeschätzt.
Sphärische Aberration Strahlen, die einen großen Abstand zur optischen Achse aufweisen,
werden stärker abgelenkt als die achsennahen Strahlen und haben damit eine kürzere Brennweite.
Dieser Fehler ist vernachlässigbar klein, da die Strahldivergenz des Elektronenstrahls sehr gering
ist.
Chromatische Aberration Ähnlich wie beim Lichtmikroskop, bei dem verschiedenfarbiges
Licht, also Licht unterschiedlicher Wellenlänge, unterschiedlich stark abgelenkt wird, tritt dieser
Effekt auch beim REM für Elektronen verschiedener Energien auf. Allerdings ist die Energieab-
weichung 4EE sehr gering, so dass die chromatische Aberration, wie auch zuvor schon die sphäri-
sche Aberration, vernachlässigt werden kann.
Beugungsfehler Aufgrund der Tatsache, dass die De-Broglie Wellenlänge der Elektronen λ =hp , mit h als dem Planck’schem Wirkungsquantum und p dem Impuls, klein gegenüber der Strahl-
größe ist (sie liegt bei einer kinetischen Energie der Elektronen von 30 keV im Bereich von 7
pm, während der Strahldurchmesser im Nanometerbereich liegt), können auch die Beugungsfeh-
ler vernachlässigt werden.
Astigmatismus Die Ursache für Astigmatismus liegt in nicht-rotationssymmetrischen Linsen.
Durch Inhomogenitäten im magnetischen Feld, mechanische Ungenauigkeiten in der Linsenboh-
64
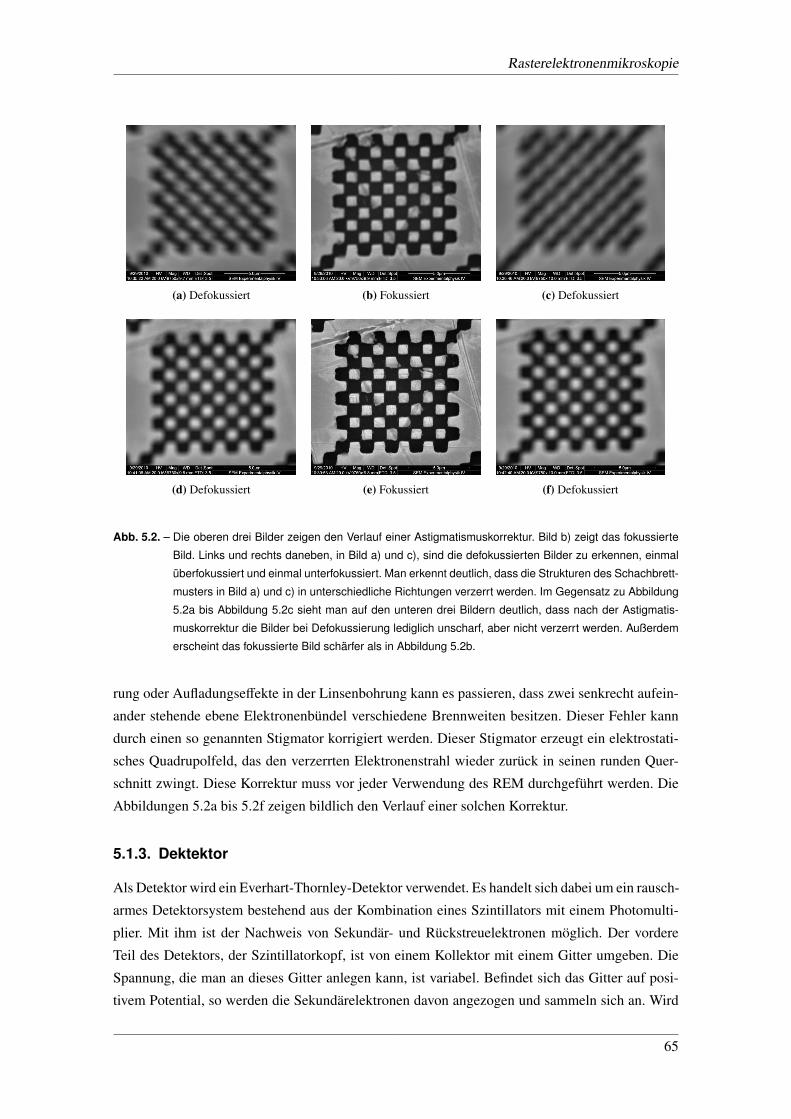
Rasterelektronenmikroskopie
(a) Defokussiert (b) Fokussiert (c) Defokussiert
(d) Defokussiert (e) Fokussiert (f) Defokussiert
Abb. 5.2. – Die oberen drei Bilder zeigen den Verlauf einer Astigmatismuskorrektur. Bild b) zeigt das fokussierte
Bild. Links und rechts daneben, in Bild a) und c), sind die defokussierten Bilder zu erkennen, einmal
überfokussiert und einmal unterfokussiert. Man erkennt deutlich, dass die Strukturen des Schachbrett-
musters in Bild a) und c) in unterschiedliche Richtungen verzerrt werden. Im Gegensatz zu Abbildung
5.2a bis Abbildung 5.2c sieht man auf den unteren drei Bildern deutlich, dass nach der Astigmatis-
muskorrektur die Bilder bei Defokussierung lediglich unscharf, aber nicht verzerrt werden. Außerdem
erscheint das fokussierte Bild schärfer als in Abbildung 5.2b.
rung oder Aufladungseffekte in der Linsenbohrung kann es passieren, dass zwei senkrecht aufein-
ander stehende ebene Elektronenbündel verschiedene Brennweiten besitzen. Dieser Fehler kann
durch einen so genannten Stigmator korrigiert werden. Dieser Stigmator erzeugt ein elektrostati-
sches Quadrupolfeld, das den verzerrten Elektronenstrahl wieder zurück in seinen runden Quer-
schnitt zwingt. Diese Korrektur muss vor jeder Verwendung des REM durchgeführt werden. Die
Abbildungen 5.2a bis 5.2f zeigen bildlich den Verlauf einer solchen Korrektur.
5.1.3. Dektektor
Als Detektor wird ein Everhart-Thornley-Detektor verwendet. Es handelt sich dabei um ein rausch-
armes Detektorsystem bestehend aus der Kombination eines Szintillators mit einem Photomulti-
plier. Mit ihm ist der Nachweis von Sekundär- und Rückstreuelektronen möglich. Der vordere
Teil des Detektors, der Szintillatorkopf, ist von einem Kollektor mit einem Gitter umgeben. Die
Spannung, die man an dieses Gitter anlegen kann, ist variabel. Befindet sich das Gitter auf posi-
tivem Potential, so werden die Sekundärelektronen davon angezogen und sammeln sich an. Wird
65
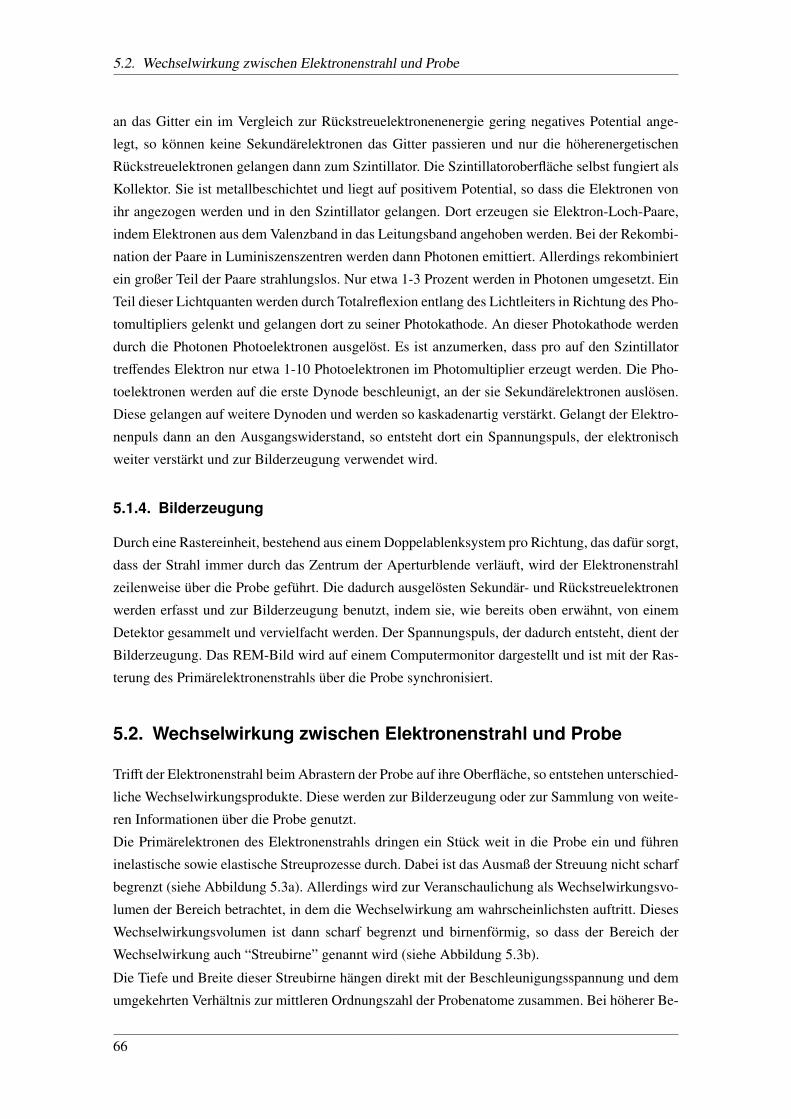
5.2. Wechselwirkung zwischen Elektronenstrahl und Probe
an das Gitter ein im Vergleich zur Rückstreuelektronenenergie gering negatives Potential ange-
legt, so können keine Sekundärelektronen das Gitter passieren und nur die höherenergetischen
Rückstreuelektronen gelangen dann zum Szintillator. Die Szintillatoroberfläche selbst fungiert als
Kollektor. Sie ist metallbeschichtet und liegt auf positivem Potential, so dass die Elektronen von
ihr angezogen werden und in den Szintillator gelangen. Dort erzeugen sie Elektron-Loch-Paare,
indem Elektronen aus dem Valenzband in das Leitungsband angehoben werden. Bei der Rekombi-
nation der Paare in Luminiszenszentren werden dann Photonen emittiert. Allerdings rekombiniert
ein großer Teil der Paare strahlungslos. Nur etwa 1-3 Prozent werden in Photonen umgesetzt. Ein
Teil dieser Lichtquanten werden durch Totalreflexion entlang des Lichtleiters in Richtung des Pho-
tomultipliers gelenkt und gelangen dort zu seiner Photokathode. An dieser Photokathode werden
durch die Photonen Photoelektronen ausgelöst. Es ist anzumerken, dass pro auf den Szintillator
treffendes Elektron nur etwa 1-10 Photoelektronen im Photomultiplier erzeugt werden. Die Pho-
toelektronen werden auf die erste Dynode beschleunigt, an der sie Sekundärelektronen auslösen.
Diese gelangen auf weitere Dynoden und werden so kaskadenartig verstärkt. Gelangt der Elektro-
nenpuls dann an den Ausgangswiderstand, so entsteht dort ein Spannungspuls, der elektronisch
weiter verstärkt und zur Bilderzeugung verwendet wird.
5.1.4. Bilderzeugung
Durch eine Rastereinheit, bestehend aus einem Doppelablenksystem pro Richtung, das dafür sorgt,
dass der Strahl immer durch das Zentrum der Aperturblende verläuft, wird der Elektronenstrahl
zeilenweise über die Probe geführt. Die dadurch ausgelösten Sekundär- und Rückstreuelektronen
werden erfasst und zur Bilderzeugung benutzt, indem sie, wie bereits oben erwähnt, von einem
Detektor gesammelt und vervielfacht werden. Der Spannungspuls, der dadurch entsteht, dient der
Bilderzeugung. Das REM-Bild wird auf einem Computermonitor dargestellt und ist mit der Ras-
terung des Primärelektronenstrahls über die Probe synchronisiert.
5.2. Wechselwirkung zwischen Elektronenstrahl und Probe
Trifft der Elektronenstrahl beim Abrastern der Probe auf ihre Oberfläche, so entstehen unterschied-
liche Wechselwirkungsprodukte. Diese werden zur Bilderzeugung oder zur Sammlung von weite-
ren Informationen über die Probe genutzt.
Die Primärelektronen des Elektronenstrahls dringen ein Stück weit in die Probe ein und führen
inelastische sowie elastische Streuprozesse durch. Dabei ist das Ausmaß der Streuung nicht scharf
begrenzt (siehe Abbildung 5.3a). Allerdings wird zur Veranschaulichung als Wechselwirkungsvo-
lumen der Bereich betrachtet, in dem die Wechselwirkung am wahrscheinlichsten auftritt. Dieses
Wechselwirkungsvolumen ist dann scharf begrenzt und birnenförmig, so dass der Bereich der
Wechselwirkung auch “Streubirne” genannt wird (siehe Abbildung 5.3b).
Die Tiefe und Breite dieser Streubirne hängen direkt mit der Beschleunigungsspannung und dem
umgekehrten Verhältnis zur mittleren Ordnungszahl der Probenatome zusammen. Bei höherer Be-
66

Rasterelektronenmikroskopie
(a) Realer Wechselwirkungsbereich (b) Veranschaulichung durch Streubirne
Abb. 5.3. – Diese beiden Bilder zeigen den Wechselwirkungsbereich der eindringenden Elektronen mit der Probe.
Bild 5.3a zeigt dabei den realen Wechselwirkungsbereich, während Bild 5.3b die Veranschaulichung
durch eine scharf begrenzte Streubirne darstellt [105].
schleunigungsspannung dringen die Primärelektronen tiefer in die Probe ein, da sie durch die
höhere Spannung auch eine höhere Energie besitzen (siehe Abbildung 5.4). Im Allgemeinen wird
mit höherer Ordnungszahl der Probenatome eine Wechselwirkung wahrscheinlicher, da die An-
zahl der möglichen Streuquellen zunimmt. Daher nimmt die Eindringtiefe der Primärelektronen
mit höherer Ordnungszahl ab. Als Wechselwirkungsprodukte entstehen prinzipiell Sekundärelek-
tronen, Rückstreuelektronen und charakteristische Röntgenstrahlung. Diese Wechselwirkungspro-
dukte werden im Folgenden näher vorgestellt.
5.2.1. Sekundärelektronen
Das Standardbild bei der Rasterelektronenmikroskopie wird auf der Basis von Sekundärelektronen
erstellt. Sie entstehen durch inelastische Wechselwirkung der Primärelektronen des Elektronen-
strahls mit den schwach gebundenen Leitungsbandelektronen in den Probenatomen. Die Primär-
elektronen ionisieren also die Atome des Probenmaterials. Die Energien der Sekundärelektronen
liegen zwischen 2 eV und 5 eV. Sie werden aufgrund dieser geringen Energien leicht vom Kollek-
tor des Dektektors angezogen. Auch Sekundärelektronen, deren Bewegungsrichtung ursprünglich
vom Detektor wegzeigte, werden vom Detektor angezogen, so dass ein hoher Anteil der emittierten
Sekundärelektronen nachgewiesen werden kann. Allerdings verlassen nicht alle erzeugten Sekun-
därelektronen die Probe. Ihre geringe Energie, und somit auch geringe Reichweite, sorgt dafür,
dass ein Großteil von der Probe absorbiert wird und nur die oberflächennahen Sekundärelektronen
die Probe verlassen können. So stammen die detektierten Sekundärelektronen aus einer dünnen
Oberflächenschicht der Dicke 0,2 - 2 nm (siehe Abbildung 5.5).
Aufgrund der Tatsache, dass die Sekundärelektronen nur aus einem kleinen Volumen des gesam-
ten Wechselwirkungsbereichs von Strahl und Probe stammen, liefern sie ein Bild mit höchster
Auflösung. Neben den Sekundärelektronen, die durch direkte Wechselwirkung der Primärelektro-
nen mit der Probe entstehen, werden vom Detektor weitere Sekundärelektronen eingefangen, die
67
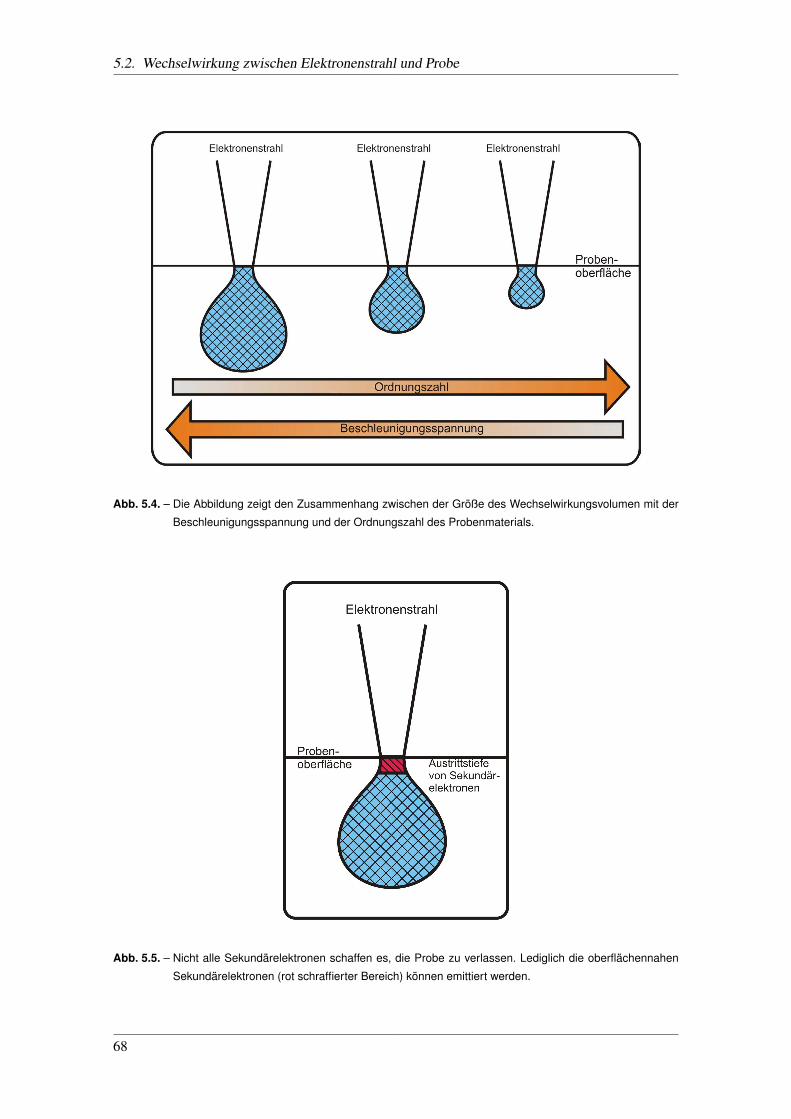
5.2. Wechselwirkung zwischen Elektronenstrahl und Probe
Abb. 5.4. – Die Abbildung zeigt den Zusammenhang zwischen der Größe des Wechselwirkungsvolumen mit der
Beschleunigungsspannung und der Ordnungszahl des Probenmaterials.
Abb. 5.5. – Nicht alle Sekundärelektronen schaffen es, die Probe zu verlassen. Lediglich die oberflächennahen
Sekundärelektronen (rot schraffierter Bereich) können emittiert werden.
68
Rasterelektronenmikroskopie
keine Information über die Probe enthalten und nur zum Hintergrundrauschen beitragen.
Die Sekundärelektronen werden in vier Gruppen aufgeteilt. Die Sekundärelektronen vom Typ
I sind dabei die Elektronen, die direkt aus dem Wechselwirkungsbereich von Strahl und Probe
stammen. Bei den Sekundärelektronen vom Typ II handelt es sich um die Elektronen, die von den
Rückstreuelektronen beim Verlassen der Probe erzeugt werden. Diese Sekundärelektronen sind
ebenfalls niederenergetisch, haben aber, da sie von den Rückstreuelektronen erzeugt werden, eine
geringere Auflösung, die etwa der der Rückstreuelektronen entspricht. Einige der Rückstreuelek-
tronen verlassen die Probe, wechselwirken dann mit den Kammerwänden und erzeugen dort Se-
kundärelektronen vom Typ III. Einige Primärelektronen im Strahl erzeugen darüber hinaus Sekun-
därelektronen, noch bevor sie mit der Probe wechselwirken. Sie passieren die letzte Aperturblende
und schlagen dabei Sekundärelektronen vom Typ IV heraus, die natürlich keinerlei Informationen
über die Probe liefern und zum allgemeinen Hintergrundrauschen beitragen.
Durch das Zusammenwirken dieser vier verschiedenen Sekundärelektronenarten wird das Auf-
lösungsvermögen begrenzt, da der Detektor nicht zwischen ihnen unterscheiden kann. So stellt
das Sekundärelektronenbild, dass vom Detektor erzeugt wird, eine Mischung von Elektronen ver-
schiedenen Ursprungs dar.
Die Ausbeute der Sekundärelektronen, also die Anzahl an ausgelösten Sekundärelektronen pro
einfallendem Primärelektron, steigt mit steigender Ordnungszahl des Probenmaterials und mit zu-
nehmendem Einfallswinkel der Primärelektronen gegenüber der Flächennormalen an. Letzteres
erklärt sich durch den vergrößerten Wechselwirkungsbereich bei schrägem Einfall.
5.2.2. Rückstreuelektronen
Unter Rückstreuelektronen versteht man die Elektronen aus dem Elektronenstrahl, die elastisch
von der Probe zurückgestreut werden. Sie besitzen ein breites Energiespektrum von 50 eV bis-
hin zur Energie der Primärelektronen. Dieses breite Spektrum kommt dadurch zustande, dass die
Primärelektronen beim Eindringen in die Probenoberfläche unterschiedlich viel Energie verlieren,
da sie unterschiedlich oft gestreut werden. Ihre Austrittsfläche aus der Probe ist groß und befindet
sich im µm-Bereich. Damit ist die Auflösung viel niedriger als die der Sekundärelektronen
Die Ausbeute der Rückstreuelektronen steigt stark mit der Ordnungszahl der Probenatome an, da
eine höhere Ordnungszahl eine höhere Ladungsträgeranzahl in der Probe bedeutet und somit die
Streuung wahrscheinlicher wird.
5.2.3. Charakteristische Röntgenstrahlung
Wird ein Elektron aus einer inneren Atomschale von einem Primärelektron herausgeschlagen und
nimmt ein weiter außen gelegenes Elektron den Platz des ersten Elektrons ein, so wird Ener-
gie in Form von Röntgenstrahlung frei. Die Energien dieser Strahlung sind elementspezifisch
und erlauben daher einen Rückschluss auf die Elementzusammensetzung der untersuchten Stel-
le. Außerdem erlaubt die Intensitätsverteilung der gemessenen Energien eine Quantisierung der
vorhandenen Elemente. Diese Analyse wird “energiedispersive Röntgenanalytik” (engl.: energy
69
5.2. Wechselwirkung zwischen Elektronenstrahl und Probe
dispersive X-ray analysis) genannt und EDX abgekürzt. Diese Methode zur Elementbestimmung
wird bei der Probenpräparation genutzt, um den Ätzerfolg zu kontrollieren (siehe Kapitel 6.3).
Der energiedispersive Röntgen-Detektor besteht im Wesentlichen aus einem Siliziumkristall, der
mit Lithium dotiert ist. Es handelt sich also um einen Halbleiter, in dem durch die auftreffenden
Röntgenquanten Elektron-Loch-Paare erzeugt werden. Durch eine angelegte Spannung wird ein
Elektron-Loch-Verarmungsbereich erzwungen, der die erzeugten Elektronen und Löcher anzieht.
Aus den einfallenden Röntgenquanten resultiert Ladung, die in Form eines kurzen Impulses zur
angelegten Spannung hinzuaddiert wird. Die Amplitude der Spannungsimpulse ist dabei propor-
tional zur Energie der einfallenden Strahlung. Der Halbleiterdetektor bedarf ständiger Kühlung
durch flüssigen Stickstoff um eine Neuverteilung des Lithiums zu verhindern und das elektroni-
sche Rauschen vom Kristall zu reduzieren.
Als Konkurrenzprozess zur charakteristischen Röntgenstrahlung sind die Auger-Elektronen zu
verstehen. Sie entstehen, wie auch die charakteristische Röntgenstrahlung, aufgrund von Ionisati-
on und Anregung einer inneren Schale. Die frei werdende Energie beim Übergang eines Elektrons
von einer äußeren auf eine innere Schale muss nun nicht in Form von Röntgenstrahlung emit-
tiert werden, sondern kann auch auf ein anderes Hüllenelektron übertragen werden. Durch diese
Energie angeregt, verlässt das Elektron das Atom mit einer elementspezifischen Energie und kann
damit auch zur Elementanalyse verwendet werden.
Weitere Wechselwirkungsprodukte
Neben den bereits beschriebenen Wechselwirkungsprodukten existieren noch weitere, die aller-
dings in Bezug auf die Bilderzeugung oder Elementanalyse eine untergeordnete Rolle spielen.
Daher werden sie hier nur kurz der Vollständigkeit halber erwähnt.
Nahezu elastisch gestreute Rückstreuelektronen werden auch Low-Loss-Elektronen genannt und
können dafür genutzt werden, auch mit Rückstreuelektronen eine hohe Auflösung zu erlangen. Sie
stammen, wie auch die Sekundärelektronen, aus einem oberflächennahen Bereich. Bei der Katho-dolumineszenz werden bei der Anregung und Relaxation von Probenatomen statt Röntgenquan-
ten Photonen im sichtbaren Bereich emittiert. Elektronen, die das Elektronenplasma zu Dichte-
schwingungen anregen, erleiden einen charakteristischen Energieverlust und werden Plasmon-Loss-Elektronen genannt. Der größte Teil der Primärelektronenenergie wird allerdings bei der
inelastischen Wechselwirkung in Form von Wärme bzw. Phononen freigesetzt.
5.2.4. Kontrastarten und Artefakte
Das REM liefert einen räumlichen Eindruck der Oberflächentopographie. Dieser entsteht durch
verschiedene Kontrastarten.
Es ist anschaulich klar, dass die Wechselwirkungsfläche zwischen Elektronenstrahl und Probeno-
berfläche am größten ist, wenn der Strahl unter einem möglichst kleinen Winkel auf die Probe fällt.
In diesem Fall werden auch mehr Sekundär- und Rückstreuelektronen emittiert, was wiederum zu
einem helleren Bild führt. Dieser Effekt wird der Flächenneigungskontrast genannt. Da Elektro-
70
Rasterelektronenmikroskopie
nen, die aus Oberflächen der vom Detektor abgewandten Seite der Probe emittiert werden, wesent-
lich schwerer vom Kollektor erfasst werden, erscheinen diese Bereich dunkler als die Bereiche,
die dem Detektor zugewandt sind. Dieser Effekt ist der so genannte Abschattungskontrast. Beim
Kanteneffekt erscheinen herausspringende Kanten deutlich heller, da dort von den sich treffenden
Flächen vermehrt Elektronen austreten. Auf Abbildung 5.6b kann man deutlich den Grund dafür
erkennen: Sekundärelektronen werden im gesamten Wechselwirkungsbereich zwischen Strahl und
Probe erzeugt. Wie allerdings bereits in Kapitel 5.2.1 erklärt, schaffen es aufgrund ihrer niedrigen
Energien nur die oberflächennahen Sekundärelektronen die Probe zu verlassen. Bei kleinen Er-
hebungen oder Kanten ist der oberflächennahe Bereich größer, als bei einer ebenen Fläche. So
gelangen also mehr Sekundärelektronen an die Oberfläche und werden detektiert. Als nächster
Effekt ist der Rauigkeitskontrast zu nennen, der auf den Kanteneffekt zurückgeht. Er führt dazu,
dass raue Oberflächen wesentlich heller erscheinen, als glatte.
Die bisher aufgezählten Kontraste waren auf die Topographie der Probe zurückzuführen. Es gibt
aber auch Kontraste, die mit den Materialeigenschaften der Probe zusammenhängen. Da wäre
zunächst der Materialkontrast, der auf die unterschiedliche Ordnungszahlen der verschiedenen
Materialien zurückgeht. Materialien mit höherer Ordnungszahl erscheinen heller, als solche mit
niedrigerer Ordnungszahl. Hier spielen besonders die Rückstreuelektronen eine Rolle, da ihre Ord-
nungszahlabhängigkeit größer ist als die der Sekundärelektronen. Des Weiteren gibt es noch den
Kristallorientierungskontrast. Die Emission von Rückstreuelektronen ist abhängig von der Nei-
gung einer Netzebenenschar zum einfallenden Elektronenstrahl. Daher erscheinen unterschiedlich
geneigte Kristallite auf einer glatten Oberfläche unterschiedlich hell. Der Potentialkontrast er-
scheint dann, wenn unterschiedliche elektrische Potentiale auf der Oberfläche anliegen. Der Kol-
lektor erfasst Elektronen aus negativ geladen Bereichen wesentlich leichter als solche aus positiv
geladenen Bereichen. Zum Schluss wäre noch der Magnetfeldkontrast zu nennen. Die Bahnen
der Sekundär- und Rückstreuelektronen werden dabei von Magnetfeldern beeinflusst und somit
auch ihr Nachweis durch den Kollektor.
Nicht nur die verschiedenen Kontrastarten formen ein REM-Bild. Es ist auch möglich, dass Ar-
tefakte auftreten, die die Interpretation eines Bildes erschweren können. Es können z.B. bei nicht
leitenden Materialien Aufladungseffekte auftreten. Die Probe wird mit Elektronen beschossen,
die nicht abgeleitet werden können. So lädt sich die Probe immer weiter auf und erscheint sehr
hell auf dem Bild. Außerdem können durch langes Betrachten eines Bildausschnitts Kontaminati-onseffekte auftreten. Es lagert sich Kohlenstoff auf der Probe ab, der von Verunreinigungen auf der
Probe stammen kann, und verringert so die Elektronenausbeute an dieser Stelle. Der entsprechen-
de Bereich erscheint dunkler. Auf Abbildung 5.7 erkennt man deutlich ein dunkler erscheinendes
Rechteck. Genau dieser Bereich wurde kurz vor Aufnahme des Bildes längere Zeit betrachtet. Bei
genauerem Hinschauen erkennt man zusätzlich in dem großen dunklen Rechteck ein kleineres,
noch dunkleres Rechteck, das aus einer vorhergegangenen Betrachtung stammt.
71
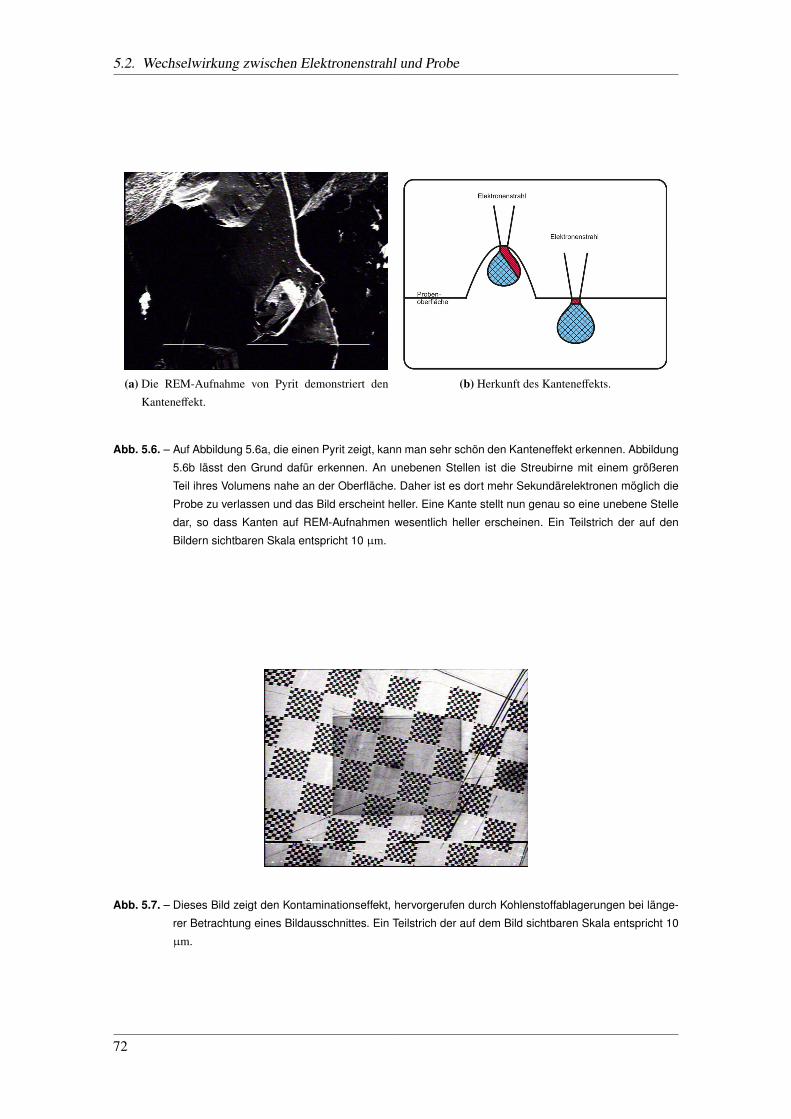
5.2. Wechselwirkung zwischen Elektronenstrahl und Probe
(a) Die REM-Aufnahme von Pyrit demonstriert den
Kanteneffekt.
(b) Herkunft des Kanteneffekts.
Abb. 5.6. – Auf Abbildung 5.6a, die einen Pyrit zeigt, kann man sehr schön den Kanteneffekt erkennen. Abbildung
5.6b lässt den Grund dafür erkennen. An unebenen Stellen ist die Streubirne mit einem größeren
Teil ihres Volumens nahe an der Oberfläche. Daher ist es dort mehr Sekundärelektronen möglich die
Probe zu verlassen und das Bild erscheint heller. Eine Kante stellt nun genau so eine unebene Stelle
dar, so dass Kanten auf REM-Aufnahmen wesentlich heller erscheinen. Ein Teilstrich der auf den
Bildern sichtbaren Skala entspricht 10 µm.
Abb. 5.7. – Dieses Bild zeigt den Kontaminationseffekt, hervorgerufen durch Kohlenstoffablagerungen bei länge-
rer Betrachtung eines Bildausschnittes. Ein Teilstrich der auf dem Bild sichtbaren Skala entspricht 10
µm.
72
6. Probenpräparation
In diesem Kapitel wird erläutert, mit welchen Verfahren die in dieser Arbeit untersuchten Proben
hergestellt worden sind. Zunächst wird auf die Schichtherstellung eingegangen (siehe Kapitel 6.1),
um dann den Prozess der Strukturierung näher zu erläutern (siehe Kapitel 6.2).
6.1. Schichtherstellung
Die Herstellung von dünnen Schichten ist ein wichtiger Schritt in vielen Bereichen der aktuellen
Technik (z.B. bei Hochtemperatur-Supraleitern und in der Mikro- und Nanoelektronik) und muss
vielen verschiedenen Anforderungen genügen. Es erscheint nur logisch, dass es nicht eine einzige,
für alle Bereiche geeignete Methode der Dünnschichtherstellung geben kann. Tatsächlich gibt es
ein großes Spektrum an hochentwickelten Methoden, was es manchmal schwierig macht, die für
die eigene Anwendung geeignete herauszusuchen.
Man kann zunächst zwischen physikalischen und chemischen Methoden unterscheiden. Physikali-
sche Methoden sind durch eine lokale Teilchenquelle charakterisiert. Die Partikel haben hier einen
nahezu wechselwirkungsfreien Weg durch Vakuum auf das Substrat. Bei chemischen Methoden
wird ein sogenanntes Precursor-Gas verwendet, dessen Moleküle an der heißen Substratoberflä-
che dissoziieren und die Atome von Interesse herauslösen [65]. Auf die chemischen Methoden soll
hier nicht weiter eingegangen werden, da diese für die vorliegende Arbeit nicht verwendet worden
sind. Stattdessen wird auf eine spezielle physikalische Methode zur Dünnschichtherstellung ein-
gegangen, die hier Verwendung gefunden hat: Das Ionenstrahlsputtern, das in Kapitel 6.1.1 näher
erläutert wird.
Einer der wichtigsten Parameter, der während der Schichtherstellung kontrolliert werden muss,
ist der Druck des Restgases in der Kammer. Diese Restgasatome können mit den aus den Targets
ausgelösten Atomen wechselwirken oder sogar in die zu wachsende Schicht mitaufgenommen
werden. Als Maß für die Interaktion der Atome miteinander dient die mittlere freie Weglänge λ.
Unter der einfachen Annahme, dass die Gasatome als nicht wechselwirkende Massen betrachtet
werden, die eine Maxwell-Geschwindigkeitsverteilung aufweisen, erhalten wir für die mittlere
freie Weglänge
λ =1
√2πNd2
(6.1)
mit d als Moleküldurchmesser und N als Gaskonzentration. Mit der idealen Gasgleichung N =p
kBT , wobei kB die Boltzmann Konstante ist, erhält man dann
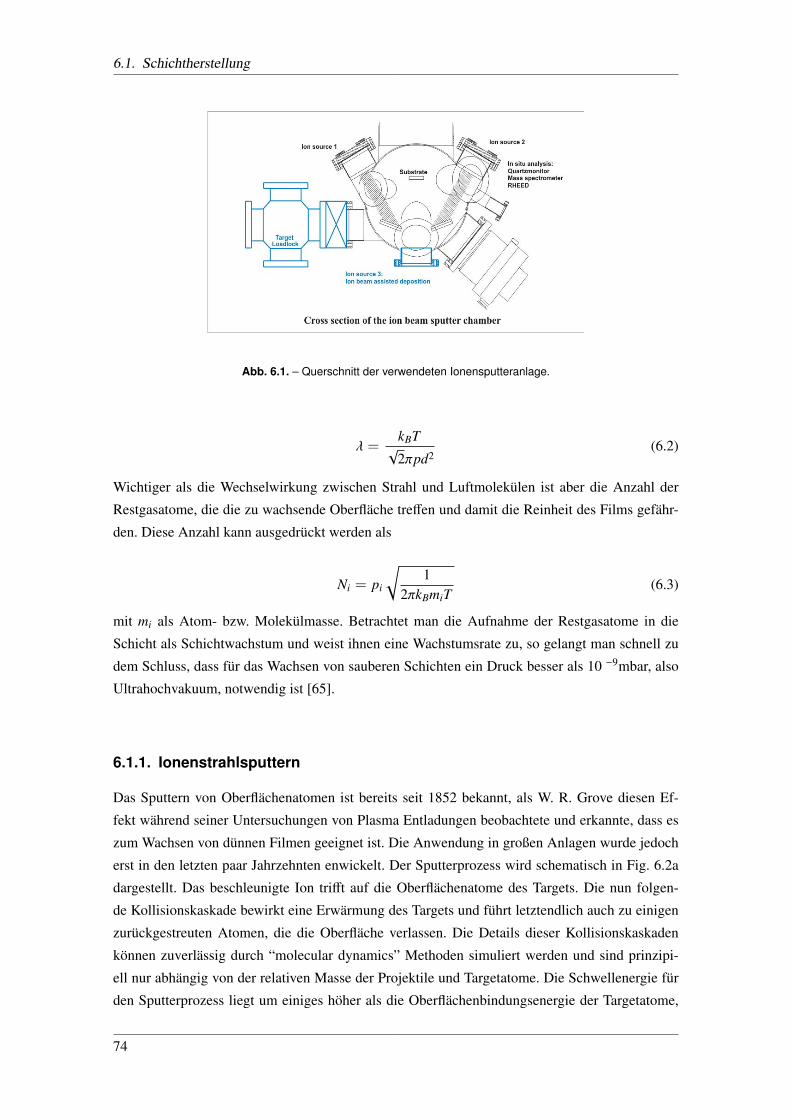
6.1. Schichtherstellung
Abb. 6.1. – Querschnitt der verwendeten Ionensputteranlage.
λ =kBT√
2πpd2(6.2)
Wichtiger als die Wechselwirkung zwischen Strahl und Luftmolekülen ist aber die Anzahl der
Restgasatome, die die zu wachsende Oberfläche treffen und damit die Reinheit des Films gefähr-
den. Diese Anzahl kann ausgedrückt werden als
Ni = pi
√1
2πkBmiT(6.3)
mit mi als Atom- bzw. Molekülmasse. Betrachtet man die Aufnahme der Restgasatome in die
Schicht als Schichtwachstum und weist ihnen eine Wachstumsrate zu, so gelangt man schnell zu
dem Schluss, dass für das Wachsen von sauberen Schichten ein Druck besser als 10 −9mbar, also
Ultrahochvakuum, notwendig ist [65].
6.1.1. Ionenstrahlsputtern
Das Sputtern von Oberflächenatomen ist bereits seit 1852 bekannt, als W. R. Grove diesen Ef-
fekt während seiner Untersuchungen von Plasma Entladungen beobachtete und erkannte, dass es
zum Wachsen von dünnen Filmen geeignet ist. Die Anwendung in großen Anlagen wurde jedoch
erst in den letzten paar Jahrzehnten enwickelt. Der Sputterprozess wird schematisch in Fig. 6.2a
dargestellt. Das beschleunigte Ion trifft auf die Oberflächenatome des Targets. Die nun folgen-
de Kollisionskaskade bewirkt eine Erwärmung des Targets und führt letztendlich auch zu einigen
zurückgestreuten Atomen, die die Oberfläche verlassen. Die Details dieser Kollisionskaskaden
können zuverlässig durch “molecular dynamics” Methoden simuliert werden und sind prinzipi-
ell nur abhängig von der relativen Masse der Projektile und Targetatome. Die Schwellenergie für
den Sputterprozess liegt um einiges höher als die Oberflächenbindungsenergie der Targetatome,
74
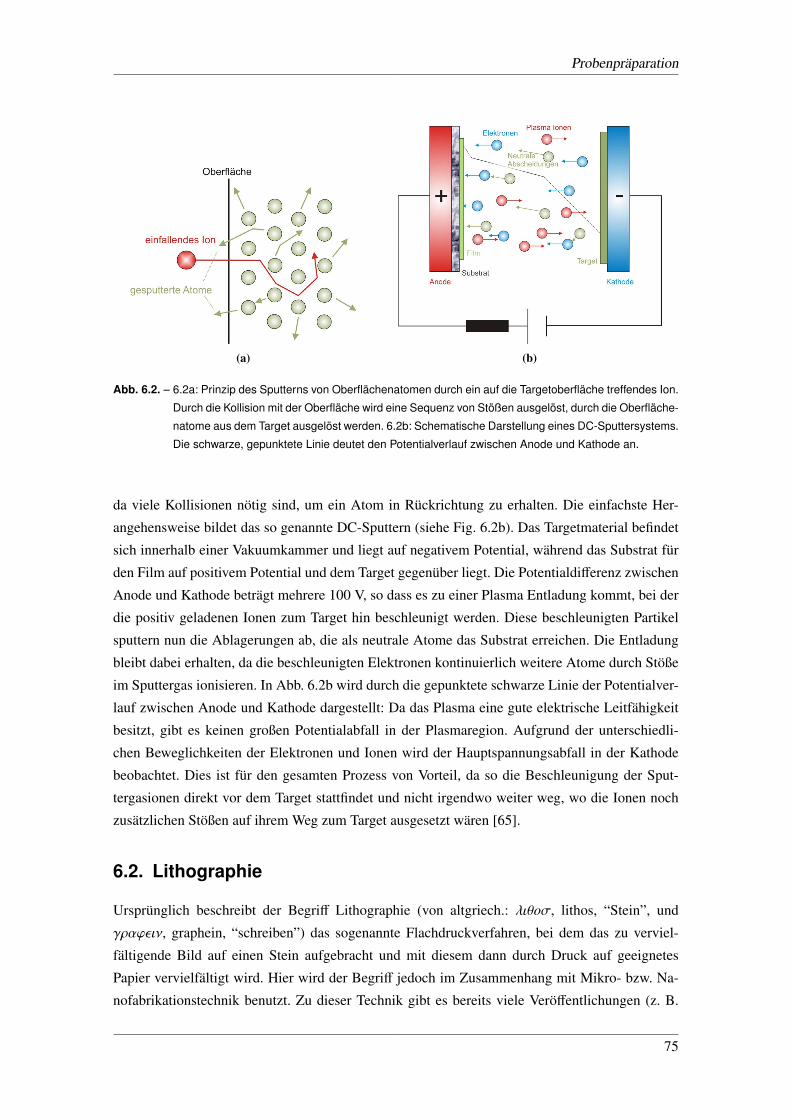
Probenpräparation
(a) (b)
Abb. 6.2. – 6.2a: Prinzip des Sputterns von Oberflächenatomen durch ein auf die Targetoberfläche treffendes Ion.
Durch die Kollision mit der Oberfläche wird eine Sequenz von Stößen ausgelöst, durch die Oberfläche-
natome aus dem Target ausgelöst werden. 6.2b: Schematische Darstellung eines DC-Sputtersystems.
Die schwarze, gepunktete Linie deutet den Potentialverlauf zwischen Anode und Kathode an.
da viele Kollisionen nötig sind, um ein Atom in Rückrichtung zu erhalten. Die einfachste Her-
angehensweise bildet das so genannte DC-Sputtern (siehe Fig. 6.2b). Das Targetmaterial befindet
sich innerhalb einer Vakuumkammer und liegt auf negativem Potential, während das Substrat für
den Film auf positivem Potential und dem Target gegenüber liegt. Die Potentialdifferenz zwischen
Anode und Kathode beträgt mehrere 100 V, so dass es zu einer Plasma Entladung kommt, bei der
die positiv geladenen Ionen zum Target hin beschleunigt werden. Diese beschleunigten Partikel
sputtern nun die Ablagerungen ab, die als neutrale Atome das Substrat erreichen. Die Entladung
bleibt dabei erhalten, da die beschleunigten Elektronen kontinuierlich weitere Atome durch Stöße
im Sputtergas ionisieren. In Abb. 6.2b wird durch die gepunktete schwarze Linie der Potentialver-
lauf zwischen Anode und Kathode dargestellt: Da das Plasma eine gute elektrische Leitfähigkeit
besitzt, gibt es keinen großen Potentialabfall in der Plasmaregion. Aufgrund der unterschiedli-
chen Beweglichkeiten der Elektronen und Ionen wird der Hauptspannungsabfall in der Kathode
beobachtet. Dies ist für den gesamten Prozess von Vorteil, da so die Beschleunigung der Sput-
tergasionen direkt vor dem Target stattfindet und nicht irgendwo weiter weg, wo die Ionen noch
zusätzlichen Stößen auf ihrem Weg zum Target ausgesetzt wären [65].
6.2. Lithographie
Ursprünglich beschreibt der Begriff Lithographie (von altgriech.: λιθoσ, lithos, “Stein”, und
γραϕειν, graphein, “schreiben”) das sogenannte Flachdruckverfahren, bei dem das zu verviel-
fältigende Bild auf einen Stein aufgebracht und mit diesem dann durch Druck auf geeignetes
Papier vervielfältigt wird. Hier wird der Begriff jedoch im Zusammenhang mit Mikro- bzw. Na-
nofabrikationstechnik benutzt. Zu dieser Technik gibt es bereits viele Veröffentlichungen (z. B.
75
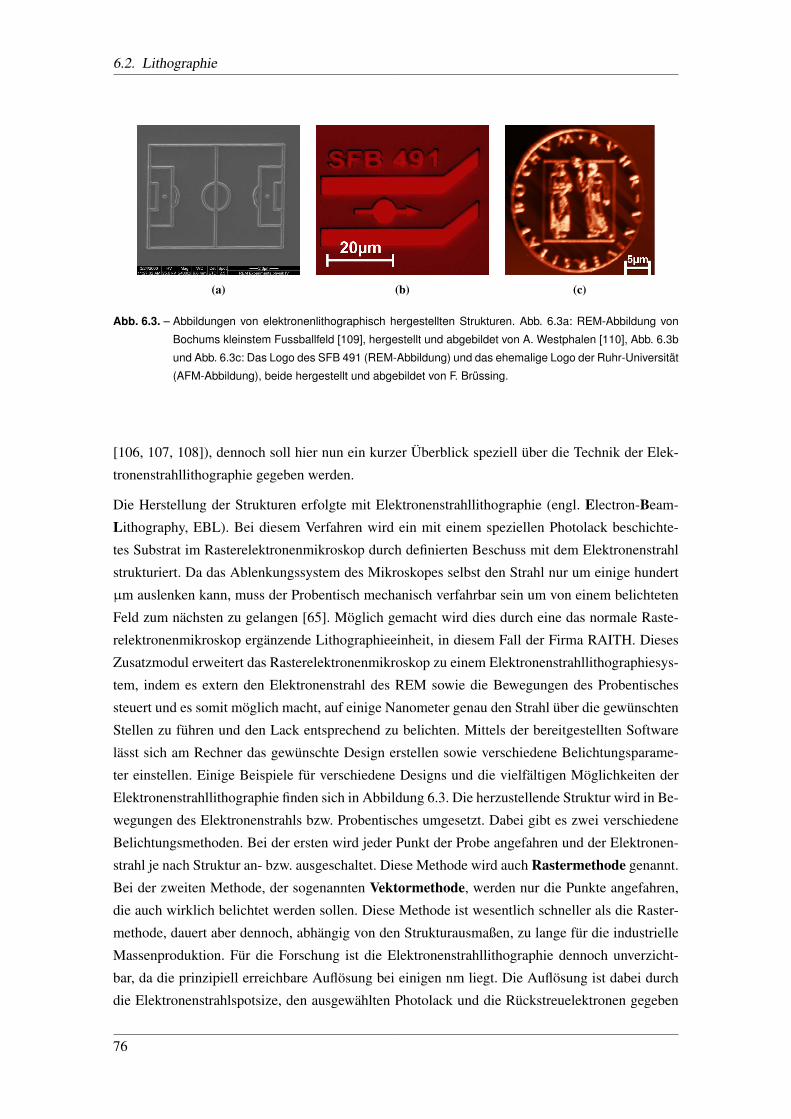
6.2. Lithographie
(a) (b) (c)
Abb. 6.3. – Abbildungen von elektronenlithographisch hergestellten Strukturen. Abb. 6.3a: REM-Abbildung von
Bochums kleinstem Fussballfeld [109], hergestellt und abgebildet von A. Westphalen [110], Abb. 6.3b
und Abb. 6.3c: Das Logo des SFB 491 (REM-Abbildung) und das ehemalige Logo der Ruhr-Universität
(AFM-Abbildung), beide hergestellt und abgebildet von F. Brüssing.
[106, 107, 108]), dennoch soll hier nun ein kurzer Überblick speziell über die Technik der Elek-
tronenstrahllithographie gegeben werden.
Die Herstellung der Strukturen erfolgte mit Elektronenstrahllithographie (engl. Electron-Beam-
Lithography, EBL). Bei diesem Verfahren wird ein mit einem speziellen Photolack beschichte-
tes Substrat im Rasterelektronenmikroskop durch definierten Beschuss mit dem Elektronenstrahl
strukturiert. Da das Ablenkungssystem des Mikroskopes selbst den Strahl nur um einige hundert
µm auslenken kann, muss der Probentisch mechanisch verfahrbar sein um von einem belichteten
Feld zum nächsten zu gelangen [65]. Möglich gemacht wird dies durch eine das normale Raste-
relektronenmikroskop ergänzende Lithographieeinheit, in diesem Fall der Firma RAITH. Dieses
Zusatzmodul erweitert das Rasterelektronenmikroskop zu einem Elektronenstrahllithographiesys-
tem, indem es extern den Elektronenstrahl des REM sowie die Bewegungen des Probentisches
steuert und es somit möglich macht, auf einige Nanometer genau den Strahl über die gewünschten
Stellen zu führen und den Lack entsprechend zu belichten. Mittels der bereitgestellten Software
lässt sich am Rechner das gewünschte Design erstellen sowie verschiedene Belichtungsparame-
ter einstellen. Einige Beispiele für verschiedene Designs und die vielfältigen Möglichkeiten der
Elektronenstrahllithographie finden sich in Abbildung 6.3. Die herzustellende Struktur wird in Be-
wegungen des Elektronenstrahls bzw. Probentisches umgesetzt. Dabei gibt es zwei verschiedene
Belichtungsmethoden. Bei der ersten wird jeder Punkt der Probe angefahren und der Elektronen-
strahl je nach Struktur an- bzw. ausgeschaltet. Diese Methode wird auch Rastermethode genannt.
Bei der zweiten Methode, der sogenannten Vektormethode, werden nur die Punkte angefahren,
die auch wirklich belichtet werden sollen. Diese Methode ist wesentlich schneller als die Raster-
methode, dauert aber dennoch, abhängig von den Strukturausmaßen, zu lange für die industrielle
Massenproduktion. Für die Forschung ist die Elektronenstrahllithographie dennoch unverzicht-
bar, da die prinzipiell erreichbare Auflösung bei einigen nm liegt. Die Auflösung ist dabei durch
die Elektronenstrahlspotsize, den ausgewählten Photolack und die Rückstreuelektronen gegeben
76
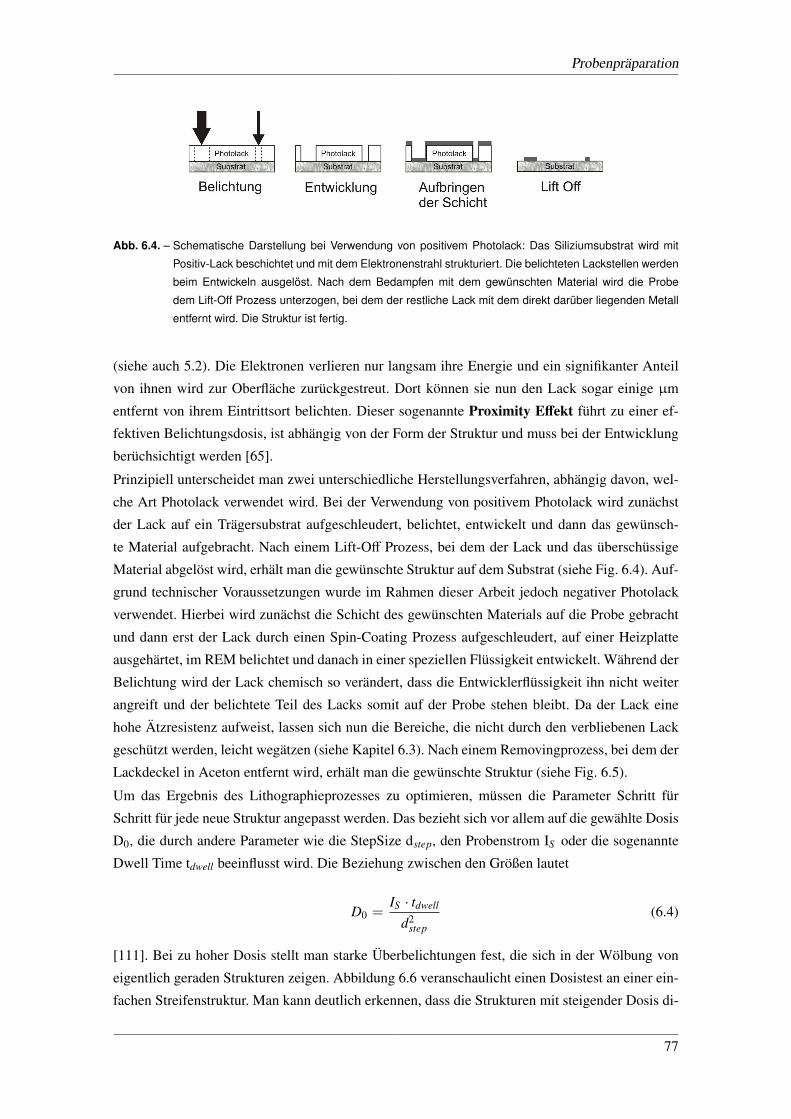
Probenpräparation
Abb. 6.4. – Schematische Darstellung bei Verwendung von positivem Photolack: Das Siliziumsubstrat wird mit
Positiv-Lack beschichtet und mit dem Elektronenstrahl strukturiert. Die belichteten Lackstellen werden
beim Entwickeln ausgelöst. Nach dem Bedampfen mit dem gewünschten Material wird die Probe
dem Lift-Off Prozess unterzogen, bei dem der restliche Lack mit dem direkt darüber liegenden Metall
entfernt wird. Die Struktur ist fertig.
(siehe auch 5.2). Die Elektronen verlieren nur langsam ihre Energie und ein signifikanter Anteil
von ihnen wird zur Oberfläche zurückgestreut. Dort können sie nun den Lack sogar einige µm
entfernt von ihrem Eintrittsort belichten. Dieser sogenannte Proximity Effekt führt zu einer ef-
fektiven Belichtungsdosis, ist abhängig von der Form der Struktur und muss bei der Entwicklung
berüchsichtigt werden [65].
Prinzipiell unterscheidet man zwei unterschiedliche Herstellungsverfahren, abhängig davon, wel-
che Art Photolack verwendet wird. Bei der Verwendung von positivem Photolack wird zunächst
der Lack auf ein Trägersubstrat aufgeschleudert, belichtet, entwickelt und dann das gewünsch-
te Material aufgebracht. Nach einem Lift-Off Prozess, bei dem der Lack und das überschüssige
Material abgelöst wird, erhält man die gewünschte Struktur auf dem Substrat (siehe Fig. 6.4). Auf-
grund technischer Voraussetzungen wurde im Rahmen dieser Arbeit jedoch negativer Photolack
verwendet. Hierbei wird zunächst die Schicht des gewünschten Materials auf die Probe gebracht
und dann erst der Lack durch einen Spin-Coating Prozess aufgeschleudert, auf einer Heizplatte
ausgehärtet, im REM belichtet und danach in einer speziellen Flüssigkeit entwickelt. Während der
Belichtung wird der Lack chemisch so verändert, dass die Entwicklerflüssigkeit ihn nicht weiter
angreift und der belichtete Teil des Lacks somit auf der Probe stehen bleibt. Da der Lack eine
hohe Ätzresistenz aufweist, lassen sich nun die Bereiche, die nicht durch den verbliebenen Lack
geschützt werden, leicht wegätzen (siehe Kapitel 6.3). Nach einem Removingprozess, bei dem der
Lackdeckel in Aceton entfernt wird, erhält man die gewünschte Struktur (siehe Fig. 6.5).
Um das Ergebnis des Lithographieprozesses zu optimieren, müssen die Parameter Schritt für
Schritt für jede neue Struktur angepasst werden. Das bezieht sich vor allem auf die gewählte Dosis
D0, die durch andere Parameter wie die StepSize dstep, den Probenstrom IS oder die sogenannte
Dwell Time tdwell beeinflusst wird. Die Beziehung zwischen den Größen lautet
D0 =IS · tdwell
d2step
(6.4)
[111]. Bei zu hoher Dosis stellt man starke Überbelichtungen fest, die sich in der Wölbung von
eigentlich geraden Strukturen zeigen. Abbildung 6.6 veranschaulicht einen Dosistest an einer ein-
fachen Streifenstruktur. Man kann deutlich erkennen, dass die Strukturen mit steigender Dosis di-
77

6.3. Ionenstrahlätzen und Removing
Abb. 6.5. – Schematische Darstellung bei Verwendung von negativem Photolack: Zunächst wird die bedampfte
und belackte Probe mit dem Elektronenstrahl an definierten Stellen belichtet, diese Bereiche wer-
den dadurch dem Entwickler gegenüber unempfindlich gemacht und bleiben beim Entwickeln zurück.
Beim Ionenstrahlätzen wird das aufgedampfte Metall an den nicht durch den Lack geschützten Stellen
entfernt. Der Remover entfernt schließlich die schützenden Lackdeckel und die Probe ist fertig.
(a) Dosis 0.2 (b) Dosis 0,6 (c) Dosis 0,8 (d) Dosis 1,0
Abb. 6.6. – Dosistestreihe an einfachen Streifenstrukturen.
cker werden. Dies liegt daran, dass bei höheren Dosen der Lack stärker mit Elektronen beschossen
wird. Dabei entstehen mehr Wechselwirkungsprodukte, die auch in Bereiche des Lacks vordrin-
gen, die eigentlich nicht belichtet werden sollten. So entsteht eine Aufweitung der Struktur und die
Überbelichtung wird sichtbar. Neben den bereits genannten Größen spielt auch die gewählte Ver-
größerung, die Wahl der gesamten Schreibfeldgröße, die Blendengröße am Mikroskop sowie die
gewählte Beschleunigungsspannung für die Qualität des Endergebnis eine Rolle. Dabei muss auch
die Gesamtdauer der Lithographie beachtet werden. Tendenziell erzielen langsamere Schreibvor-
gänge sauberere Ergebnisse, jedoch können auch Drifteffekte auftreten und natürlich muss die
Dauer der Belichtung angemessen bleiben. Viele dieser Parameter beeinflussen sich gegenseitig
und so müssen sie für jede Struktur optimiert werden. In Anhang B sind typische Parameter für
die hier hergestellten Strukturen aufgelistet.
Nach dem Beenden der Lithographie folgt das Entwickeln. Dazu wird das Substrat in eine spezielle
Entwicklerflüssigkeit gelegt. Üblicherweise dauert der Entwicklungsprozess 30 - 40 Sekunden.
Mit einem optischen Mikroskop wird danach überprüft, ob der Lack zwischen den Strukturen
restlos entfernt werden konnte. Als Stopper für den Entwicklungsprozess wird destilliertes Wasser
verwendet. Nun ist die Probe bereit für den nächsten Prozessschritt, dem Ionenstrahlätzen.
6.3. Ionenstrahlätzen und Removing
Zum Transfer der lithographierten Strukturen ins Metall wird Ionenstrahlätzen verwendet.
78

Probenpräparation
Beim Abätzen werden Argonionen dazu benutzt, das nicht von Lack bedeckte Metall abzulösen.
Der Lack selbst besitzt eine hohe Ätzresistenz und wird daher von den Argonionen kaum angegrif-
fen. An den Stellen allerdings, an denen durch den Entwicklungsprozess der Lack entfernt wurde,
wird das anfangs aufgedampfte Metall durch den Aufprall der schweren Ionen abgetragen. Die be-
schleunigten Ionen dringen teilweise in das Metall ein und übertragen dabei ihre Energie und ihren
Impuls auf die Atome der Oberfläche. Dadurch werden diese abgeschieden. Um die Aufladung der
Oberfläche zu vermeiden, wird eine Elektronenwolke erzeugt, die die Ladungen an der Oberfläche
neutralisiert. Die verwendeten Ätzparameter finden sich in Anhang B. Nach dem Ätzen wird die
Probe zunächst mit EDX untersucht. Hiermit soll festgestellt werden, ob tatsächlich die komplette
Metallschicht vom Substrat entfernt worden ist. Als Referenzmessung wird eine durch Lack ge-
schützte Stelle untersucht, auf der das Metall noch vorhanden sein sollte (für Beispielmessungen
siehe Anhang C).
Ist die Probe erfolgreich geätzt worden, so kann der noch immer auf den Strukturen vorhandene
Lackdeckel entfernt werden. Dies geschieht durch ein kurzes Ultraschallbad in Aceton. Durch
diesen Prozess können die Strukturen unter Umständen zerstört werden, so dass die Probe auch
alternativ ohne das Verwenden des Ultraschallbades mehrere Tage in Aceton gelegt werden kann.
Die Entfernung des Lackdeckels kann große Probleme bereiten, jenachdem, wie lange die Probe
vorher geätzt worden ist. Durch das Ätzen wird der Lack weiter ausgehärtet und das Entfernen der
Lackschicht wird ungleich schwieriger, je länger die Probe geätzt worden ist.
79

Teil III.
Ergebnisse und Diskussion

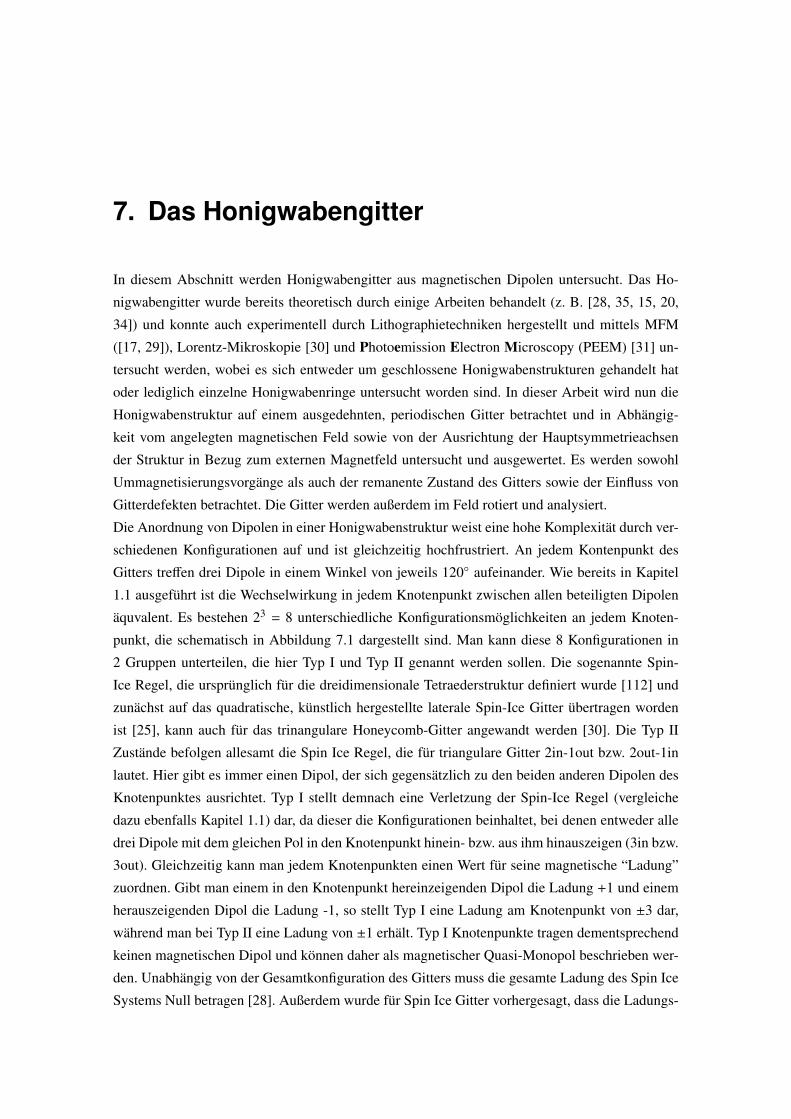
7. Das Honigwabengitter
In diesem Abschnitt werden Honigwabengitter aus magnetischen Dipolen untersucht. Das Ho-
nigwabengitter wurde bereits theoretisch durch einige Arbeiten behandelt (z. B. [28, 35, 15, 20,
34]) und konnte auch experimentell durch Lithographietechniken hergestellt und mittels MFM
([17, 29]), Lorentz-Mikroskopie [30] und Photoemission Electron Microscopy (PEEM) [31] un-
tersucht werden, wobei es sich entweder um geschlossene Honigwabenstrukturen gehandelt hat
oder lediglich einzelne Honigwabenringe untersucht worden sind. In dieser Arbeit wird nun die
Honigwabenstruktur auf einem ausgedehnten, periodischen Gitter betrachtet und in Abhängig-
keit vom angelegten magnetischen Feld sowie von der Ausrichtung der Hauptsymmetrieachsen
der Struktur in Bezug zum externen Magnetfeld untersucht und ausgewertet. Es werden sowohl
Ummagnetisierungsvorgänge als auch der remanente Zustand des Gitters sowie der Einfluss von
Gitterdefekten betrachtet. Die Gitter werden außerdem im Feld rotiert und analysiert.
Die Anordnung von Dipolen in einer Honigwabenstruktur weist eine hohe Komplexität durch ver-
schiedenen Konfigurationen auf und ist gleichzeitig hochfrustriert. An jedem Kontenpunkt des
Gitters treffen drei Dipole in einem Winkel von jeweils 120 aufeinander. Wie bereits in Kapitel
1.1 ausgeführt ist die Wechselwirkung in jedem Knotenpunkt zwischen allen beteiligten Dipolen
äquvalent. Es bestehen 23 = 8 unterschiedliche Konfigurationsmöglichkeiten an jedem Knoten-
punkt, die schematisch in Abbildung 7.1 dargestellt sind. Man kann diese 8 Konfigurationen in
2 Gruppen unterteilen, die hier Typ I und Typ II genannt werden sollen. Die sogenannte Spin-
Ice Regel, die ursprünglich für die dreidimensionale Tetraederstruktur definiert wurde [112] und
zunächst auf das quadratische, künstlich hergestellte laterale Spin-Ice Gitter übertragen worden
ist [25], kann auch für das trinangulare Honeycomb-Gitter angewandt werden [30]. Die Typ II
Zustände befolgen allesamt die Spin Ice Regel, die für triangulare Gitter 2in-1out bzw. 2out-1in
lautet. Hier gibt es immer einen Dipol, der sich gegensätzlich zu den beiden anderen Dipolen des
Knotenpunktes ausrichtet. Typ I stellt demnach eine Verletzung der Spin-Ice Regel (vergleiche
dazu ebenfalls Kapitel 1.1) dar, da dieser die Konfigurationen beinhaltet, bei denen entweder alle
drei Dipole mit dem gleichen Pol in den Knotenpunkt hinein- bzw. aus ihm hinauszeigen (3in bzw.
3out). Gleichzeitig kann man jedem Knotenpunkten einen Wert für seine magnetische “Ladung”
zuordnen. Gibt man einem in den Knotenpunkt hereinzeigenden Dipol die Ladung +1 und einem
herauszeigenden Dipol die Ladung -1, so stellt Typ I eine Ladung am Knotenpunkt von ±3 dar,
während man bei Typ II eine Ladung von ±1 erhält. Typ I Knotenpunkte tragen dementsprechend
keinen magnetischen Dipol und können daher als magnetischer Quasi-Monopol beschrieben wer-
den. Unabhängig von der Gesamtkonfiguration des Gitters muss die gesamte Ladung des Spin Ice
Systems Null betragen [28]. Außerdem wurde für Spin Ice Gitter vorhergesagt, dass die Ladungs-
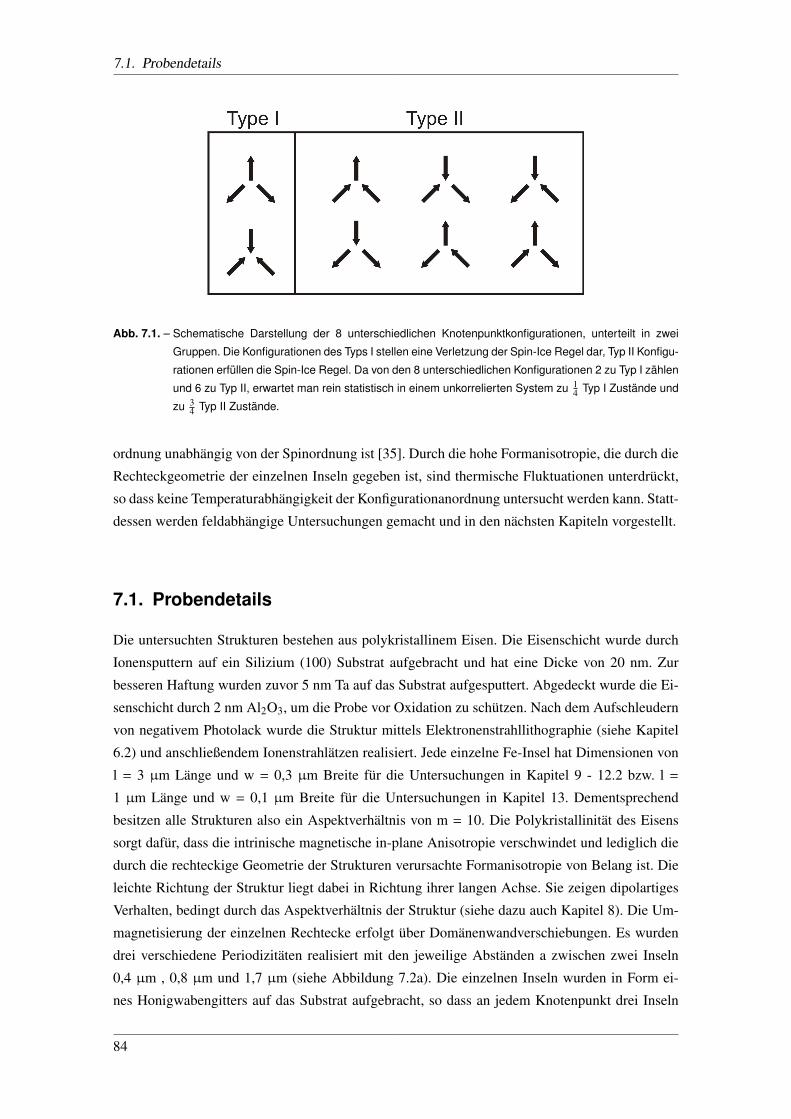
7.1. Probendetails
Abb. 7.1. – Schematische Darstellung der 8 unterschiedlichen Knotenpunktkonfigurationen, unterteilt in zwei
Gruppen. Die Konfigurationen des Typs I stellen eine Verletzung der Spin-Ice Regel dar, Typ II Konfigu-
rationen erfüllen die Spin-Ice Regel. Da von den 8 unterschiedlichen Konfigurationen 2 zu Typ I zählen
und 6 zu Typ II, erwartet man rein statistisch in einem unkorrelierten System zu 14 Typ I Zustände und
zu 34 Typ II Zustände.
ordnung unabhängig von der Spinordnung ist [35]. Durch die hohe Formanisotropie, die durch die
Rechteckgeometrie der einzelnen Inseln gegeben ist, sind thermische Fluktuationen unterdrückt,
so dass keine Temperaturabhängigkeit der Konfigurationanordnung untersucht werden kann. Statt-
dessen werden feldabhängige Untersuchungen gemacht und in den nächsten Kapiteln vorgestellt.
7.1. Probendetails
Die untersuchten Strukturen bestehen aus polykristallinem Eisen. Die Eisenschicht wurde durch
Ionensputtern auf ein Silizium (100) Substrat aufgebracht und hat eine Dicke von 20 nm. Zur
besseren Haftung wurden zuvor 5 nm Ta auf das Substrat aufgesputtert. Abgedeckt wurde die Ei-
senschicht durch 2 nm Al2O3, um die Probe vor Oxidation zu schützen. Nach dem Aufschleudern
von negativem Photolack wurde die Struktur mittels Elektronenstrahllithographie (siehe Kapitel
6.2) und anschließendem Ionenstrahlätzen realisiert. Jede einzelne Fe-Insel hat Dimensionen von
l = 3 µm Länge und w = 0,3 µm Breite für die Untersuchungen in Kapitel 9 - 12.2 bzw. l =
1 µm Länge und w = 0,1 µm Breite für die Untersuchungen in Kapitel 13. Dementsprechend
besitzen alle Strukturen also ein Aspektverhältnis von m = 10. Die Polykristallinität des Eisens
sorgt dafür, dass die intrinische magnetische in-plane Anisotropie verschwindet und lediglich die
durch die rechteckige Geometrie der Strukturen verursachte Formanisotropie von Belang ist. Die
leichte Richtung der Struktur liegt dabei in Richtung ihrer langen Achse. Sie zeigen dipolartiges
Verhalten, bedingt durch das Aspektverhältnis der Struktur (siehe dazu auch Kapitel 8). Die Um-
magnetisierung der einzelnen Rechtecke erfolgt über Domänenwandverschiebungen. Es wurden
drei verschiedene Periodizitäten realisiert mit den jeweilige Abständen a zwischen zwei Inseln
0,4 µm , 0,8 µm und 1,7 µm (siehe Abbildung 7.2a). Die einzelnen Inseln wurden in Form ei-
nes Honigwabengitters auf das Substrat aufgebracht, so dass an jedem Knotenpunkt drei Inseln
84
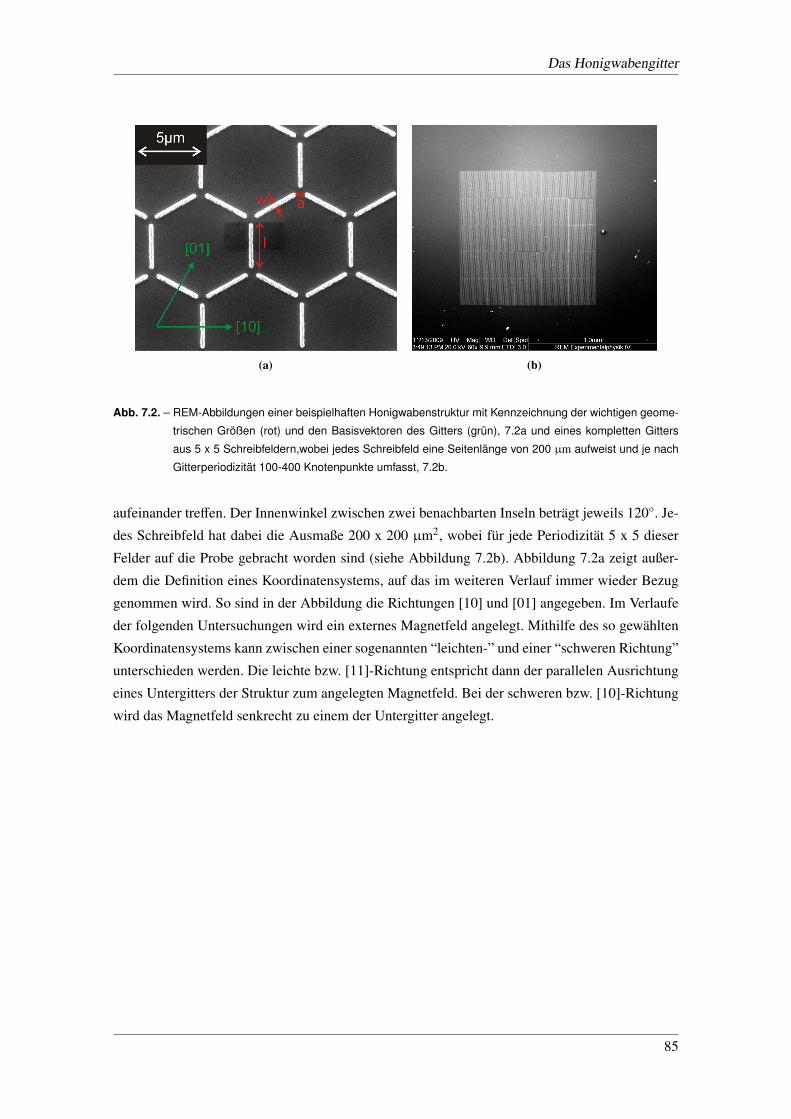
Das Honigwabengitter
(a) (b)
Abb. 7.2. – REM-Abbildungen einer beispielhaften Honigwabenstruktur mit Kennzeichnung der wichtigen geome-
trischen Größen (rot) und den Basisvektoren des Gitters (grün), 7.2a und eines kompletten Gitters
aus 5 x 5 Schreibfeldern,wobei jedes Schreibfeld eine Seitenlänge von 200 µm aufweist und je nach
Gitterperiodizität 100-400 Knotenpunkte umfasst, 7.2b.
aufeinander treffen. Der Innenwinkel zwischen zwei benachbarten Inseln beträgt jeweils 120. Je-
des Schreibfeld hat dabei die Ausmaße 200 x 200 µm2, wobei für jede Periodizität 5 x 5 dieser
Felder auf die Probe gebracht worden sind (siehe Abbildung 7.2b). Abbildung 7.2a zeigt außer-
dem die Definition eines Koordinatensystems, auf das im weiteren Verlauf immer wieder Bezug
genommen wird. So sind in der Abbildung die Richtungen [10] und [01] angegeben. Im Verlaufe
der folgenden Untersuchungen wird ein externes Magnetfeld angelegt. Mithilfe des so gewählten
Koordinatensystems kann zwischen einer sogenannten “leichten-” und einer “schweren Richtung”
unterschieden werden. Die leichte bzw. [11]-Richtung entspricht dann der parallelen Ausrichtung
eines Untergitters der Struktur zum angelegten Magnetfeld. Bei der schweren bzw. [10]-Richtung
wird das Magnetfeld senkrecht zu einem der Untergitter angelegt.
85
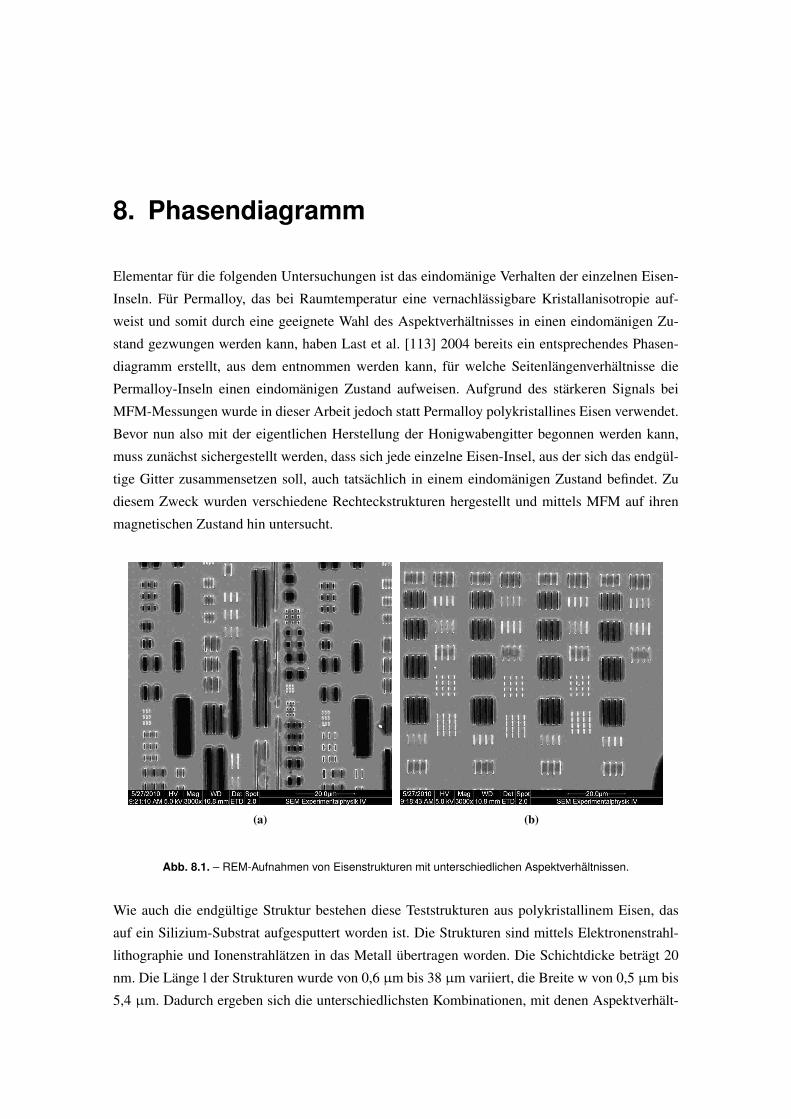
8. Phasendiagramm
Elementar für die folgenden Untersuchungen ist das eindomänige Verhalten der einzelnen Eisen-
Inseln. Für Permalloy, das bei Raumtemperatur eine vernachlässigbare Kristallanisotropie auf-
weist und somit durch eine geeignete Wahl des Aspektverhältnisses in einen eindomänigen Zu-
stand gezwungen werden kann, haben Last et al. [113] 2004 bereits ein entsprechendes Phasen-
diagramm erstellt, aus dem entnommen werden kann, für welche Seitenlängenverhältnisse die
Permalloy-Inseln einen eindomänigen Zustand aufweisen. Aufgrund des stärkeren Signals bei
MFM-Messungen wurde in dieser Arbeit jedoch statt Permalloy polykristallines Eisen verwendet.
Bevor nun also mit der eigentlichen Herstellung der Honigwabengitter begonnen werden kann,
muss zunächst sichergestellt werden, dass sich jede einzelne Eisen-Insel, aus der sich das endgül-
tige Gitter zusammensetzen soll, auch tatsächlich in einem eindomänigen Zustand befindet. Zu
diesem Zweck wurden verschiedene Rechteckstrukturen hergestellt und mittels MFM auf ihren
magnetischen Zustand hin untersucht.
(a) (b)
Abb. 8.1. – REM-Aufnahmen von Eisenstrukturen mit unterschiedlichen Aspektverhältnissen.
Wie auch die endgültige Struktur bestehen diese Teststrukturen aus polykristallinem Eisen, das
auf ein Silizium-Substrat aufgesputtert worden ist. Die Strukturen sind mittels Elektronenstrahl-
lithographie und Ionenstrahlätzen in das Metall übertragen worden. Die Schichtdicke beträgt 20
nm. Die Länge l der Strukturen wurde von 0,6 µm bis 38 µm variiert, die Breite w von 0,5 µm bis
5,4 µm. Dadurch ergeben sich die unterschiedlichsten Kombinationen, mit denen Aspektverhält-

7.1. Probendetails
nisse m = lw von 1 bis 77 bei verschiedenen Strukturgrößen realisiert werden konnten. Insgesamt
wurden über 100 Rechtecke unterschiedlicher Größen untersucht. In Abbildung 8.1 werden exem-
plarisch REM-Aufnahmen von einer Auswahl der untersuchten Strukturen präsentiert.
Je nach Seitenlänge l und Aspektverhältnis m ergeben sich für die Testrechtecke drei unterschied-
liche Zustände: ein Multidomänenzustand, ein nahezu dipolartiger, hochremanenter Zustand mit
Abschlussdomänen oder ein eindomäniger Zustand (siehe Abbildung 8.2a). Jedes einzelne Recht-
eck wurde mit dem MFM auf seine magnetische Struktur hin untersucht und entsprechend ein-
geordnet. Abbildung 8.2b zeigt das experimentell aus den MFM-Messungen erstellte Phasendia-
gramm, wobei die grünen Dreiecke für die Mulitdomänzustände stehen, die schwarzen Kreise die
Zustände mit hochremanenten Abschlussdomänen darstellen und die roten Quadrate die Eindo-
mänezustände repräsentieren. Man kann eine deutliche Trennung zwischen den Multidomänenzu-
ständen und den hochremanenten bzw. eindomänigen Zuständen erkennen (angedeutet durch die
gestrichelte Linie). Wie auch in dem von Last et al. bestimmten Phasendiagramm für Permalloy
zeigt Eisen ebenfalls einen Bereich von m=3 bis etwa m=10 für Seitenlängen bis 15 µm in dem so-
wohl hochremanenten und eindomänigen Zuständen vorkommen. Für Aspektverhältnisse m 10
liegen nur noch eindomänige Zustände vor, unabhängig von den sonstigen geometrischen Ausma-
ßen der Struktur. Allerdings sind für diese Fälle die Ummagnetisierungsfelder aller Wahrschein-
lichkeit nach viel zu hoch um noch experimentell annehmbar mit ihnen arbeiten zu können. Durch
den experimentellen Aufbau war ein maximal anlegbares Magnetfeld von 1000 Gauss gegeben,
außerdem muss auch bei der Herstellung berücksichtigt werden, dass mit der Elektronenstrahlli-
thographie bei einem angemessenen Aufwand nicht beliebig dünne Strukturen hergestellt werden
können. Auch sollten sich in einem Schreibfeld genügend Dipole für eine annehmbare statistische
Auswertung befinden, was zu lange Strukturen automatisch ausschließt.
Somit ist gezeigt, dass für Eisen ein Aspektverhältnis von mindestens 10 zu wählen ist, wenn
man Strukturen mit dipolartigem Verhalten erhalten möchte. Die in dieser Arbeit untersuchten
Eisen-Inseln weisen daher ein Aspektverhältnis von m=10 mit l=3 µm und w=0,3 µm (für die
großflächigen Arrays in den Kapiteln 10-12) bzw. l=1 µm und w=0,1 µm (für die Untersuchung
der Randeffekte im Kapitel 13) auf. Wie in Abbildung 8.2a zu sehen ist, handelt es sich bei den
gewählten Probenmaßen um einen eindomänigen Zustand.
88
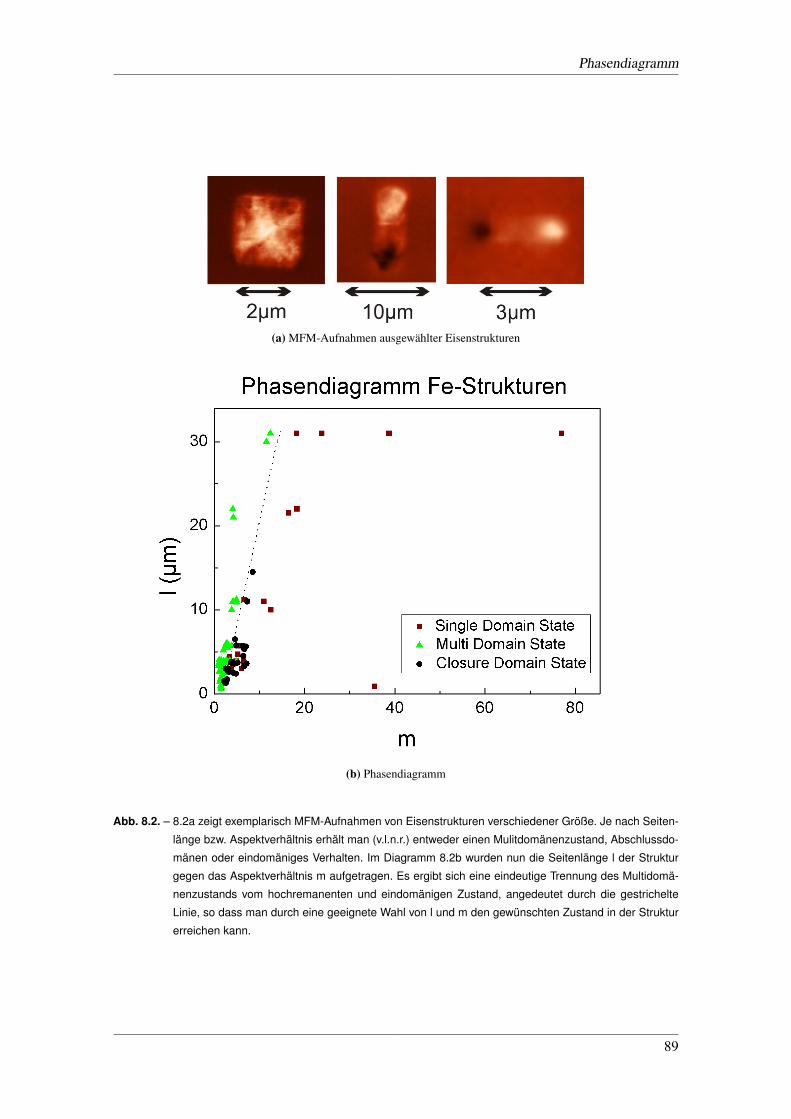
Phasendiagramm
(a) MFM-Aufnahmen ausgewählter Eisenstrukturen
(b) Phasendiagramm
Abb. 8.2. – 8.2a zeigt exemplarisch MFM-Aufnahmen von Eisenstrukturen verschiedener Größe. Je nach Seiten-
länge bzw. Aspektverhältnis erhält man (v.l.n.r.) entweder einen Mulitdomänenzustand, Abschlussdo-
mänen oder eindomäniges Verhalten. Im Diagramm 8.2b wurden nun die Seitenlänge l der Struktur
gegen das Aspektverhältnis m aufgetragen. Es ergibt sich eine eindeutige Trennung des Multidomä-
nenzustands vom hochremanenten und eindomänigen Zustand, angedeutet durch die gestrichelte
Linie, so dass man durch eine geeignete Wahl von l und m den gewünschten Zustand in der Struktur
erreichen kann.
89
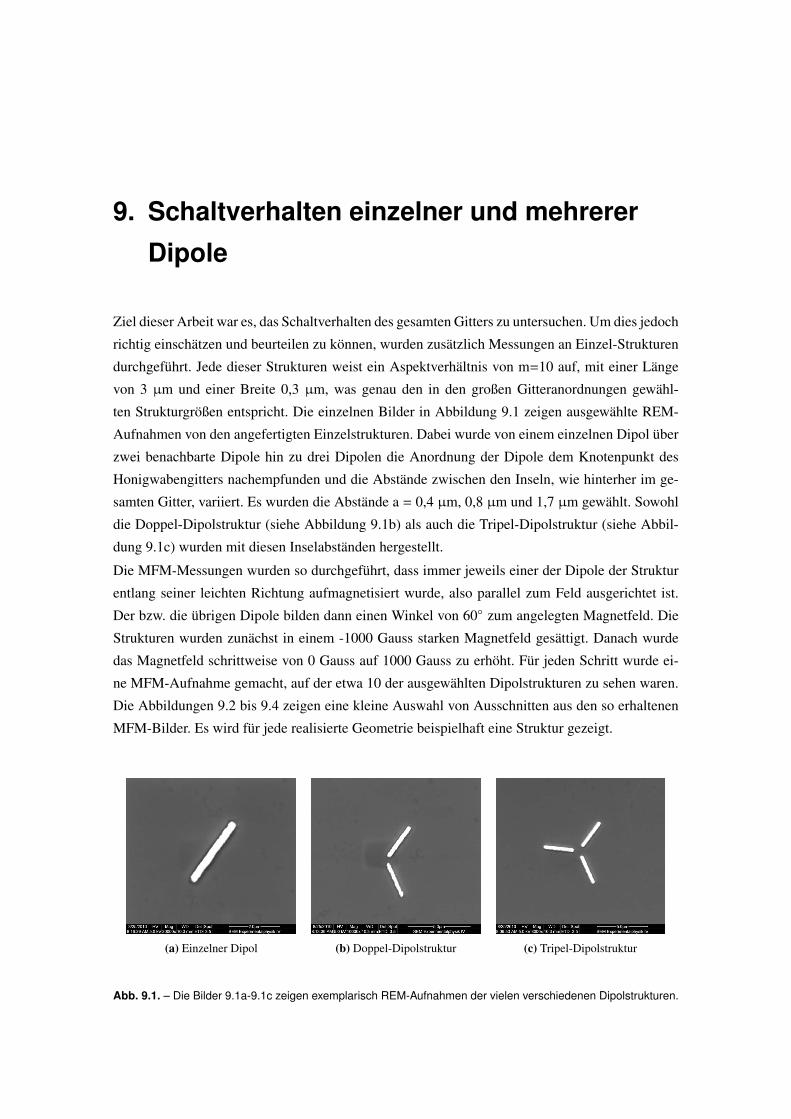
9. Schaltverhalten einzelner und mehrerer
Dipole
Ziel dieser Arbeit war es, das Schaltverhalten des gesamten Gitters zu untersuchen. Um dies jedoch
richtig einschätzen und beurteilen zu können, wurden zusätzlich Messungen an Einzel-Strukturen
durchgeführt. Jede dieser Strukturen weist ein Aspektverhältnis von m=10 auf, mit einer Länge
von 3 µm und einer Breite 0,3 µm, was genau den in den großen Gitteranordnungen gewähl-
ten Strukturgrößen entspricht. Die einzelnen Bilder in Abbildung 9.1 zeigen ausgewählte REM-
Aufnahmen von den angefertigten Einzelstrukturen. Dabei wurde von einem einzelnen Dipol über
zwei benachbarte Dipole hin zu drei Dipolen die Anordnung der Dipole dem Knotenpunkt des
Honigwabengitters nachempfunden und die Abstände zwischen den Inseln, wie hinterher im ge-
samten Gitter, variiert. Es wurden die Abstände a = 0,4 µm, 0,8 µm und 1,7 µm gewählt. Sowohl
die Doppel-Dipolstruktur (siehe Abbildung 9.1b) als auch die Tripel-Dipolstruktur (siehe Abbil-
dung 9.1c) wurden mit diesen Inselabständen hergestellt.
Die MFM-Messungen wurden so durchgeführt, dass immer jeweils einer der Dipole der Struktur
entlang seiner leichten Richtung aufmagnetisiert wurde, also parallel zum Feld ausgerichtet ist.
Der bzw. die übrigen Dipole bilden dann einen Winkel von 60 zum angelegten Magnetfeld. Die
Strukturen wurden zunächst in einem -1000 Gauss starken Magnetfeld gesättigt. Danach wurde
das Magnetfeld schrittweise von 0 Gauss auf 1000 Gauss zu erhöht. Für jeden Schritt wurde ei-
ne MFM-Aufnahme gemacht, auf der etwa 10 der ausgewählten Dipolstrukturen zu sehen waren.
Die Abbildungen 9.2 bis 9.4 zeigen eine kleine Auswahl von Ausschnitten aus den so erhaltenen
MFM-Bilder. Es wird für jede realisierte Geometrie beispielhaft eine Struktur gezeigt.
(a) Einzelner Dipol (b) Doppel-Dipolstruktur (c) Tripel-Dipolstruktur
Abb. 9.1. – Die Bilder 9.1a-9.1c zeigen exemplarisch REM-Aufnahmen der vielen verschiedenen Dipolstrukturen.

7.1. Probendetails
(a) 0 Gauss (b) 400 Gauss (c) 600 Gauss
Abb. 9.2. – MFM-Aufnahmen an einem einzelnen Dipol. Bei den einzelnen Dipolen wurde ein Umschaltfeld zwi-
schen 400 und 600 Gauss gefunden.
Für die Einzel-Dipole wurde das Umschalten der Strukturen bei Feldwerten um 400 Gauss beob-
achtet. Die Dipole schalten nicht alle gleichzeitig. Es gibt eine Verteilung der Schaltfelder, die aber
alle in der Nähe des genannten Bereiches liegen und maximal 100 Gauss davon abweichen. Bei
den Doppel-Dipolstrukturen lässt sich ein ähnliches Verhalten beobachten. So schaltet der parallel
ausgerichtete Dipol für die beiden engen Inselabstände von 0,4 µm und 0,8 µm zwischen 400 und
500 Gauss, für den größeren Abstand von 1,7 µm um 300 Gauss. Bei den Tripel-Dipolstrukturen
schaltet der parallel ausgerichtete Dipol ebenfalls in ähnlichen Bereichen, bei etwa 400 Gauss, wo-
bei tendenziell beobachtet wurde, dass die enger beieinander liegenden Dipole etwas später schal-
ten als die mit dem größten Abstand von 1,7 µm. Dies gilt sowohl für die Doppel-Dipolstrukturen
als auch für die Tripel-Dipolstrukturen und zeigt, dass zwischen den enger zusammenliegenden
Strukturen eine höhere Wechselwirkung herrscht als in den Strukturen mit größeren Abständen.
Betrachtet man demnach die Mehrfachanordnungen, so erkennt man einen Trend hin zu kleineren
Umschaltfeldern für größere Inselabstände. Dies ist zu erwarten, da bei engeren Abständen eine
höhere Wechselwirkung zwischen den Dipolen wirken sollte, die die Dipole länger in eine Rich-
tung zwingt. Nach dieser Argumentation sollten jedoch die Einzel-Dipole ein ähnlich geringes
Schaltfeld wie die 1,7 µm Strukturen aufweisen. Dies konnte nicht beobachtet werden. Stattdessen
schalten die Einzel-Dipole, vergleichbar mit den enger zusammenliegenden Mehrfachstrukturen,
bei einem externen Magnetfeld ab etwa 400 Gauss. Dies spricht für eine sehr große Verteilung
der Schaltfelder zwischen den Dipolen. So stellen beispielsweise ausgefranste Ränder Pinning-
Zentren dar, die das Umschalten erschweren können.
92
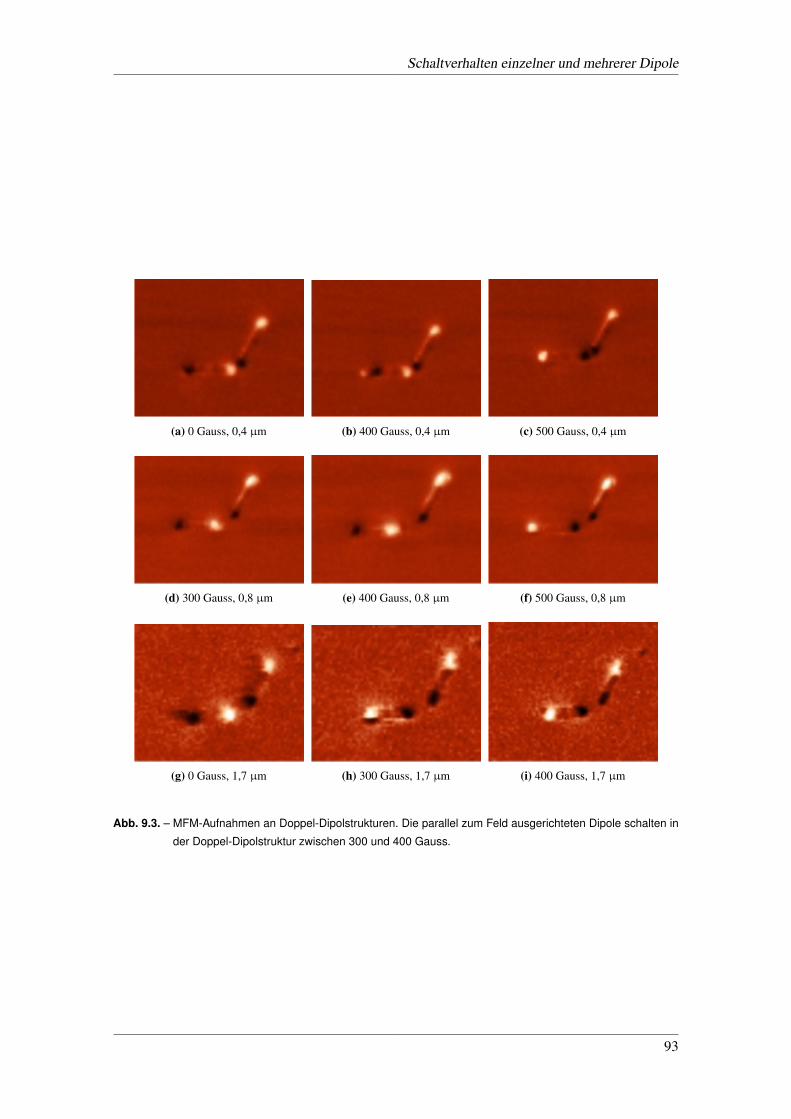
Schaltverhalten einzelner und mehrerer Dipole
(a) 0 Gauss, 0,4 µm (b) 400 Gauss, 0,4 µm (c) 500 Gauss, 0,4 µm
(d) 300 Gauss, 0,8 µm (e) 400 Gauss, 0,8 µm (f) 500 Gauss, 0,8 µm
(g) 0 Gauss, 1,7 µm (h) 300 Gauss, 1,7 µm (i) 400 Gauss, 1,7 µm
Abb. 9.3. – MFM-Aufnahmen an Doppel-Dipolstrukturen. Die parallel zum Feld ausgerichteten Dipole schalten in
der Doppel-Dipolstruktur zwischen 300 und 400 Gauss.
93

7.1. Probendetails
(a) 300 Gauss, 0,4 µm (b) 400 Gauss, 0,4 µm (c) 500 Gauss, 0,4 µm
(d) 200 Gauss, 0,8 µm (e) 300 Gauss, 0,8 µm (f) 400 Gauss, 0,8 µm
(g) 300 Gauss, 1,7 µm (h) 400 Gauss, 1,7 µm (i) 500 Gauss, 1,7 µm
Abb. 9.4. – MFM-Aufnahmen an Tripel-Dipolstrukturen. Die parallel zum Feld ausgerichteten Dipole schalten in
der Tripel-Dipolstruktur zwischen 300 und 400 Gauss.
94
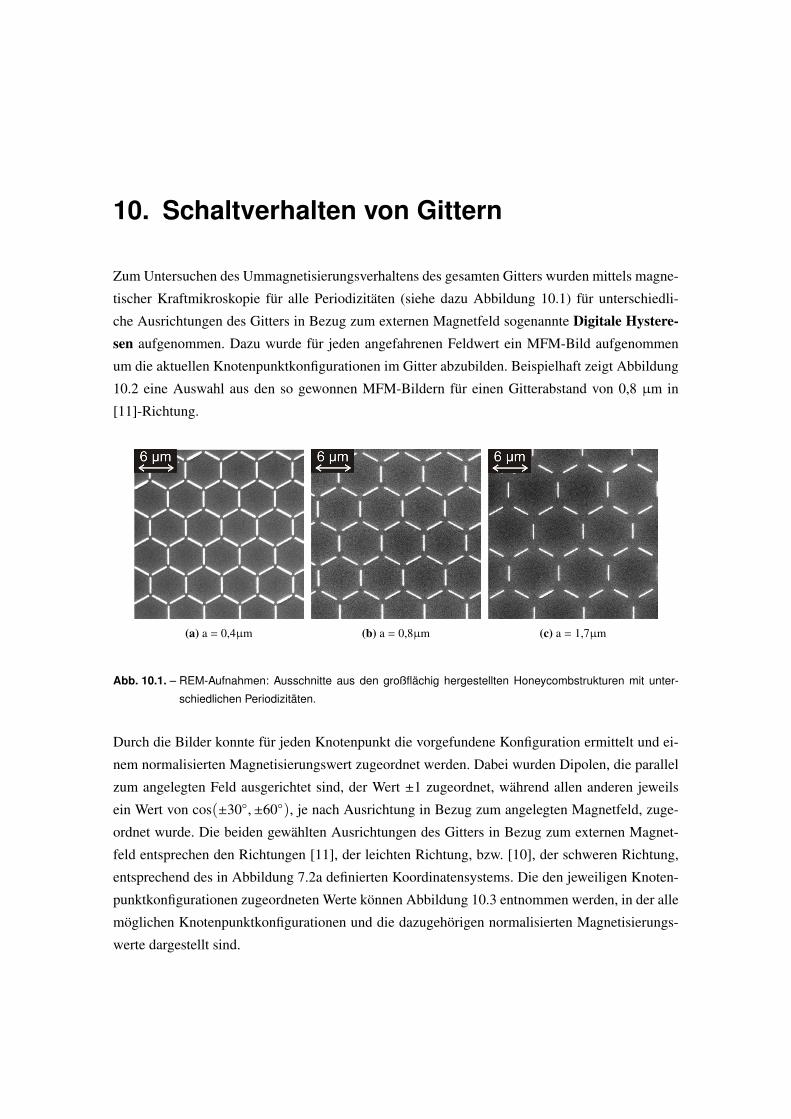
10. Schaltverhalten von Gittern
Zum Untersuchen des Ummagnetisierungsverhaltens des gesamten Gitters wurden mittels magne-
tischer Kraftmikroskopie für alle Periodizitäten (siehe dazu Abbildung 10.1) für unterschiedli-
che Ausrichtungen des Gitters in Bezug zum externen Magnetfeld sogenannte Digitale Hystere-sen aufgenommen. Dazu wurde für jeden angefahrenen Feldwert ein MFM-Bild aufgenommen
um die aktuellen Knotenpunktkonfigurationen im Gitter abzubilden. Beispielhaft zeigt Abbildung
10.2 eine Auswahl aus den so gewonnen MFM-Bildern für einen Gitterabstand von 0,8 µm in
[11]-Richtung.
(a) a = 0,4µm (b) a = 0,8µm (c) a = 1,7µm
Abb. 10.1. – REM-Aufnahmen: Ausschnitte aus den großflächig hergestellten Honeycombstrukturen mit unter-
schiedlichen Periodizitäten.
Durch die Bilder konnte für jeden Knotenpunkt die vorgefundene Konfiguration ermittelt und ei-
nem normalisierten Magnetisierungswert zugeordnet werden. Dabei wurden Dipolen, die parallel
zum angelegten Feld ausgerichtet sind, der Wert ±1 zugeordnet, während allen anderen jeweils
ein Wert von cos(±30,±60), je nach Ausrichtung in Bezug zum angelegten Magnetfeld, zuge-
ordnet wurde. Die beiden gewählten Ausrichtungen des Gitters in Bezug zum externen Magnet-
feld entsprechen den Richtungen [11], der leichten Richtung, bzw. [10], der schweren Richtung,
entsprechend des in Abbildung 7.2a definierten Koordinatensystems. Die den jeweiligen Knoten-
punktkonfigurationen zugeordneten Werte können Abbildung 10.3 entnommen werden, in der alle
möglichen Knotenpunktkonfigurationen und die dazugehörigen normalisierten Magnetisierungs-
werte dargestellt sind.
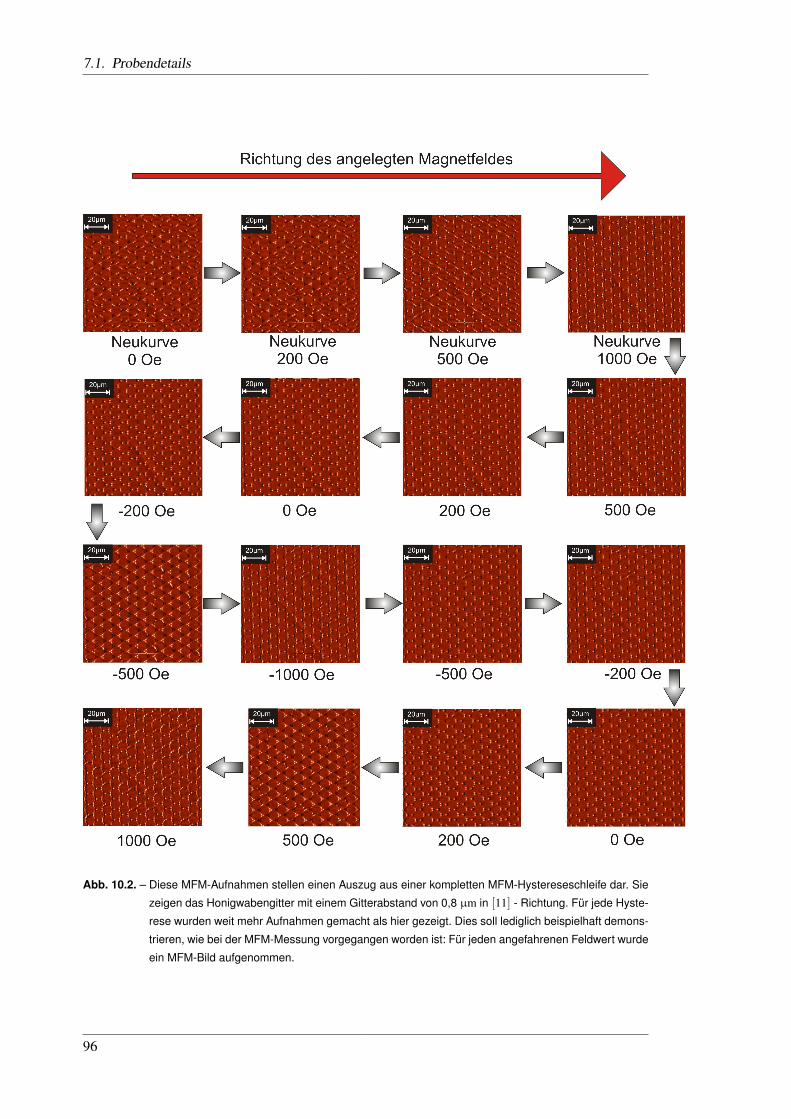
7.1. Probendetails
Abb. 10.2. – Diese MFM-Aufnahmen stellen einen Auszug aus einer kompletten MFM-Hystereseschleife dar. Sie
zeigen das Honigwabengitter mit einem Gitterabstand von 0,8 µm in [11] - Richtung. Für jede Hyste-
rese wurden weit mehr Aufnahmen gemacht als hier gezeigt. Dies soll lediglich beispielhaft demons-
trieren, wie bei der MFM-Messung vorgegangen worden ist: Für jeden angefahrenen Feldwert wurde
ein MFM-Bild aufgenommen.
96
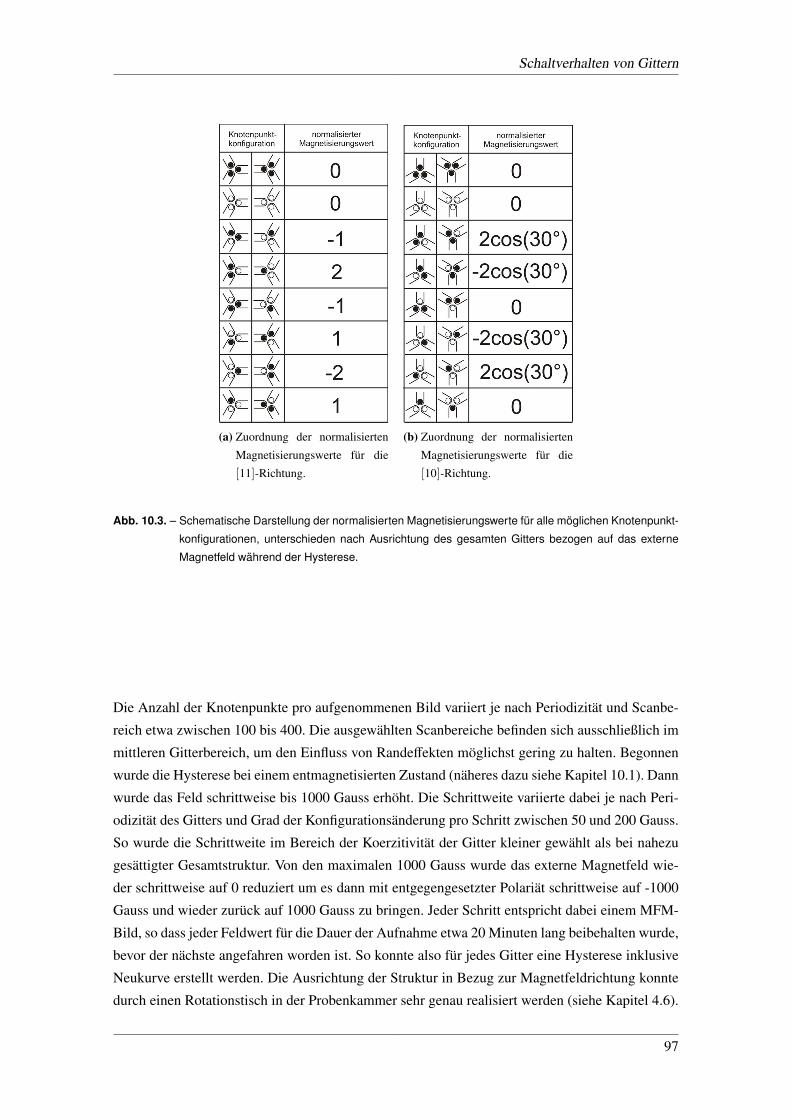
Schaltverhalten von Gittern
(a) Zuordnung der normalisierten
Magnetisierungswerte für die
[11]-Richtung.
(b) Zuordnung der normalisierten
Magnetisierungswerte für die
[10]-Richtung.
Abb. 10.3. – Schematische Darstellung der normalisierten Magnetisierungswerte für alle möglichen Knotenpunkt-
konfigurationen, unterschieden nach Ausrichtung des gesamten Gitters bezogen auf das externe
Magnetfeld während der Hysterese.
Die Anzahl der Knotenpunkte pro aufgenommenen Bild variiert je nach Periodizität und Scanbe-
reich etwa zwischen 100 bis 400. Die ausgewählten Scanbereiche befinden sich ausschließlich im
mittleren Gitterbereich, um den Einfluss von Randeffekten möglichst gering zu halten. Begonnen
wurde die Hysterese bei einem entmagnetisierten Zustand (näheres dazu siehe Kapitel 10.1). Dann
wurde das Feld schrittweise bis 1000 Gauss erhöht. Die Schrittweite variierte dabei je nach Peri-
odizität des Gitters und Grad der Konfigurationsänderung pro Schritt zwischen 50 und 200 Gauss.
So wurde die Schrittweite im Bereich der Koerzitivität der Gitter kleiner gewählt als bei nahezu
gesättigter Gesamtstruktur. Von den maximalen 1000 Gauss wurde das externe Magnetfeld wie-
der schrittweise auf 0 reduziert um es dann mit entgegengesetzter Polariät schrittweise auf -1000
Gauss und wieder zurück auf 1000 Gauss zu bringen. Jeder Schritt entspricht dabei einem MFM-
Bild, so dass jeder Feldwert für die Dauer der Aufnahme etwa 20 Minuten lang beibehalten wurde,
bevor der nächste angefahren worden ist. So konnte also für jedes Gitter eine Hysterese inklusive
Neukurve erstellt werden. Die Ausrichtung der Struktur in Bezug zur Magnetfeldrichtung konnte
durch einen Rotationstisch in der Probenkammer sehr genau realisiert werden (siehe Kapitel 4.6).
97

10.1. Entmagnetisierung
(a) Inselabstand 0,4 µm
8% Typ I
85% Typ II
7% nicht definierbar
(b) Inselabstand 0,8 µm
13% Typ I
80% Typ II
7% nicht definierbar
(c) Inselabstand 1,7 µm
21% Typ I
73% Typ II
6% nicht definierbar
Abb. 10.4. – MFM-Aufnahmen der entmagnetisierten Gitter in [11]-Richtung. Für jedes Bild wurde die Häufigkeit
von Typ I und Typ II Knotenpunkten ermittelt.
10.1. Entmagnetisierung
Um für jede Probe eine vergleichbare Ausgangssituation zu schaffen, wurde ein Entmagnetisie-
rungsprotokoll entwickelt, das vor jeder Hysteresemessung durchgeführt worden ist. Dazu wurde
die Probe einem magnetischen Feld wechselnder Polarität ausgesetzt, dass in Schritten von 10
Gauss aus der Sättigung hinunter auf 0 Gauss gebracht wurde. Begonnen wurde bei einem Feld-
wert von 1000 Gauss. Bei jedem Schritt wurde die Polarität des Feldes geändert, so dass nachein-
ander die Werte 1000 Gauss, -1000 Gauss, 990 Gauss, -990 Gauss, ... , 0 Gauss angefahren worden
sind. Dieses Protokoll wurde so ähnlich bereits von Wang et al. [114, 115] erfolgreich durchge-
führt und musste für diese Arbeit lediglich den experimentellen Gegebenheiten angepasst werden.
Nach der Entmagnetisierungsprozedur wurde zunächst ohne externes Magnetfeld ein MFM-Bild
aufgenommen und im Hinblick auf die Häufigkeit der zwei unterschiedlichen Konfigurationsty-
pen I und II analysiert. Man erhält dabei für alle 3 Gitterperiodizitäten, unter Berücksichtigung
der limitierten Statistik, ähnliche Werte für das Auftreten von Typ I und Typ II Zuständen. Für
ein komplett unkorreliertes System ist zu erwarten, dass sich das Gitter zu 25% in Typ I Zustände
und zu 75% in Typ II Zustände aufteilt, wie man einfach aus Abbildung 7.1 erkennen kann. Die
Abbildungen 10.4 und 10.5 zeigen die relativen Häufigkeiten von Typ I und Typ II Zuständen
unterschieden nach Gitterperiodizität und Gitterausrichtung. Nicht allen Knotenpunkten kann ein
eindeutiger Zustand zugeordnet werden, da einzelne Dipole bei der Probenherstellung (Lithogra-
phie und/oder Entwickeln) zerstört wurden, es durch Abbildungsartefakte nicht möglich ist, die
Dipolausrichtung zu bestimmen oder weil die Auswertungssoftware einzelne Dipolzustände nicht
richtig zuordnet. Diese Knotenpunkte werden als “nicht definierbar” zusammengefasst.
Für die [11]-Richtung lässt sich ein Trend hin zu einem höheren Auftreten von Typ I Konfiguratio-
nen bei steigenden Gitterabständen erkennen, was dazu führt, dass sich das System bei steigendem
98
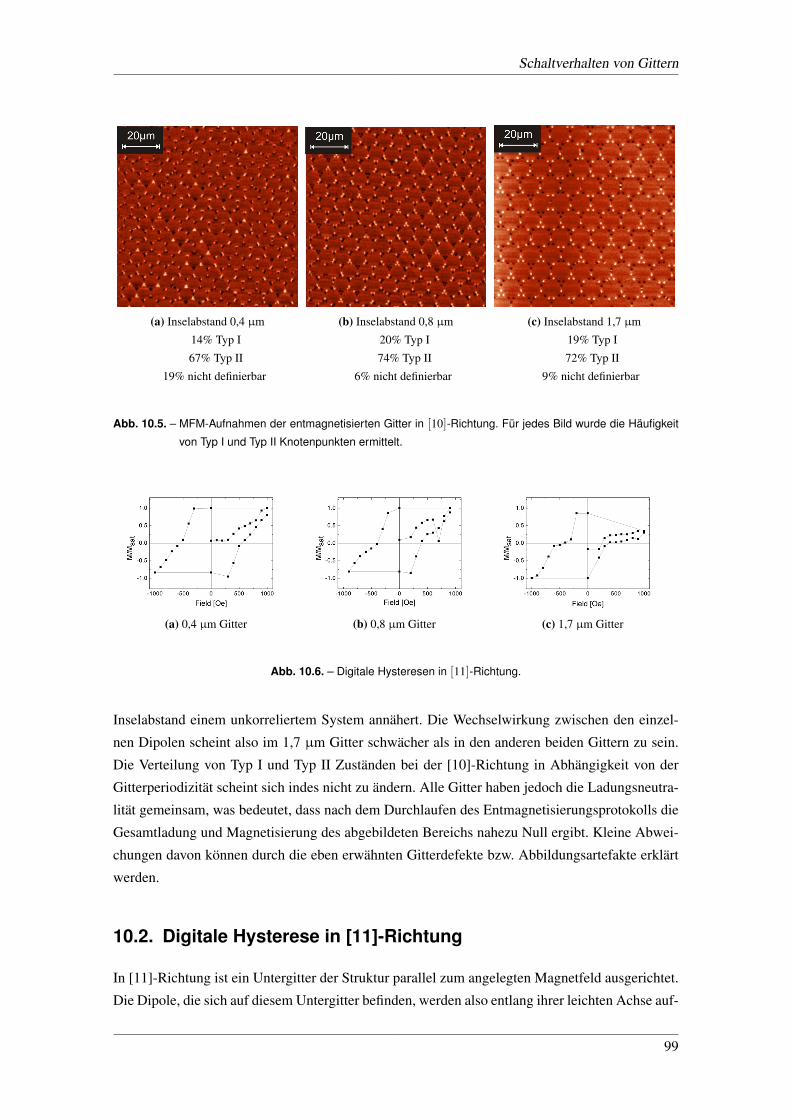
Schaltverhalten von Gittern
(a) Inselabstand 0,4 µm
14% Typ I
67% Typ II
19% nicht definierbar
(b) Inselabstand 0,8 µm
20% Typ I
74% Typ II
6% nicht definierbar
(c) Inselabstand 1,7 µm
19% Typ I
72% Typ II
9% nicht definierbar
Abb. 10.5. – MFM-Aufnahmen der entmagnetisierten Gitter in [10]-Richtung. Für jedes Bild wurde die Häufigkeit
von Typ I und Typ II Knotenpunkten ermittelt.
(a) 0,4 µm Gitter (b) 0,8 µm Gitter (c) 1,7 µm Gitter
Abb. 10.6. – Digitale Hysteresen in [11]-Richtung.
Inselabstand einem unkorreliertem System annähert. Die Wechselwirkung zwischen den einzel-
nen Dipolen scheint also im 1,7 µm Gitter schwächer als in den anderen beiden Gittern zu sein.
Die Verteilung von Typ I und Typ II Zuständen bei der [10]-Richtung in Abhängigkeit von der
Gitterperiodizität scheint sich indes nicht zu ändern. Alle Gitter haben jedoch die Ladungsneutra-
lität gemeinsam, was bedeutet, dass nach dem Durchlaufen des Entmagnetisierungsprotokolls die
Gesamtladung und Magnetisierung des abgebildeten Bereichs nahezu Null ergibt. Kleine Abwei-
chungen davon können durch die eben erwähnten Gitterdefekte bzw. Abbildungsartefakte erklärt
werden.
10.2. Digitale Hysterese in [11]-Richtung
In [11]-Richtung ist ein Untergitter der Struktur parallel zum angelegten Magnetfeld ausgerichtet.
Die Dipole, die sich auf diesem Untergitter befinden, werden also entlang ihrer leichten Achse auf-
99

10.2. Digitale Hysterese in [11]-Richtung
magnetisiert. Die restlichen Inseln bilden einen Winkel von 60 zum externen Feld. Es wird, wie
bereits weiter oben beschrieben, für jeden Feldwert eine MFM-Aufnahme gemacht und bezüglich
der Knotenpunktkonfigurationen ausgewertet. Die Auszählung und Zuordnung der verschiedenen
Knotenpunktkonfigurationen erfolgt mittels eines Mathematica-Programms, dass die Färbung der
Dipolenden ausliest, ihnen einen Wert zuordnet (-1 für weiß, 1 für schwarz) und zu einem Zah-
lentripel je Knotenpunkt zusammenfasst. So kann für jeden Knotenpunkt nicht nur entschieden
werden, wie viele positive und negative “Ladungen” pro Knotenpunkt vorliegen, sondern auch, in
welcher Reihenfolge sie auftreten. Dementsprechend kann ihnen einer der acht möglichen Kon-
figurationstypen und ein Magnetisierungswert zugewiesen werden. Ein Beispiel-Code für solch
eine Auswertung findet sich in Anhang D. Zunächst sei darauf hingewiesen, dass die untersuch-
ten Abschnitte durch die Einschränkungen des maximalen Scanbereichs von 100 x 100 µm2 eine
limitierte Statistik aufweisen. Auch können durch Gitterfehler nicht unbedingt allen Knotenpunk-
ten eine eindeutige Konfiguration zugeordnet werden. Durch diese Effekte kann erklärt werden,
dass die Neukurve nicht exakt bei einer verschwindenen Magnetisierung beginnt, wie es nach dem
Durchlaufen eines Entmagnetisierungsprotokolls eigentlich erwartet würde, sondern leichte Ab-
weichungen von Null zu sehen sind. Wie in Abbildung 10.6 zu sehen ist, beginnt die Neukurve
für alle Hysteresen nahezu bei Null. Alle drei Inselabstände haben ein Koerzitivfeld von ungefähr
400-500 Gauss. Aufgrund von hohen Unsicherheiten bei der Auswertung der MFM-Bilder für das
Gitter mit 1,7 µm Inselabstand konnte die digitale Hysterese nicht einwandfrei entwickelt werden.
Interessant ist bei der Betrachtung des Ummagnetisierungverhaltens der Gitter vor allem die Häu-
figkeit und Verteilung der verschiedenen Knotenpunktkonfigurationen. Besonders ins Auge fällt
dabei das Auftreten von Typ I Zuständen. Abbildung 10.7 zeigt die prozentuale Häufigkeit von Typ
I und Typ II Zuständen in Abhängigkeit vom angelegten Magnetfeld für die Neukurve (schwarzer
Graph), den absteigenden Hystereseast (blauer Graph) und den ansteigenden Hystereseast (roter
Graph). Am Koerzitivfeld steigt der Anteil an Typ I Zuständen dramatisch an, teilweise bis auf
über 60%. Dies geschieht sowohl im ansteigenden als auch im absteigenden Hystereseast und für
alle Gitterperiodizitäten, wobei eine leichte Abnahme der Typ I Zustände hin zu größeren Gitter-
abständen zu beobachten ist. Das häufige Auftreten gerade dieser Knotenpunktkonfiguration ist
zunächst überraschend, da dieser Zustand die Spin Ice Regel verletzt und energetisch äußerst un-
günstig ist. Dieser Effekt wird genauer im folgenden Kapitel 10.2.1 beschrieben.
Da jeder Knotenpunkt entweder eine Typ I oder eine Typ II Konfiguration aufweisen kann, sollten
sich die relativen Angaben beider Typen je Wert auf 1 addieren. Da jedoch auch Gitterdefekte und
Bildartefakte auftreten, ist dies nicht immer der Fall. Besonders auffällig ist dies in Abbildung
10.7c, da hier eine relativ hohe Unsicherheit bei der Auswertung aufgrund von nicht so hoher
Bildqualität vorlag.
10.2.1. Ladungsordnung in [11]-Richtung
Die Ergebnisse dieser Auswertung sind in [116] bereits veröffentlicht worden.
Bei der Auswertung der Hysteresekurven in [11]-Richtung fällt sofort die Anhäufung von Typ I
100
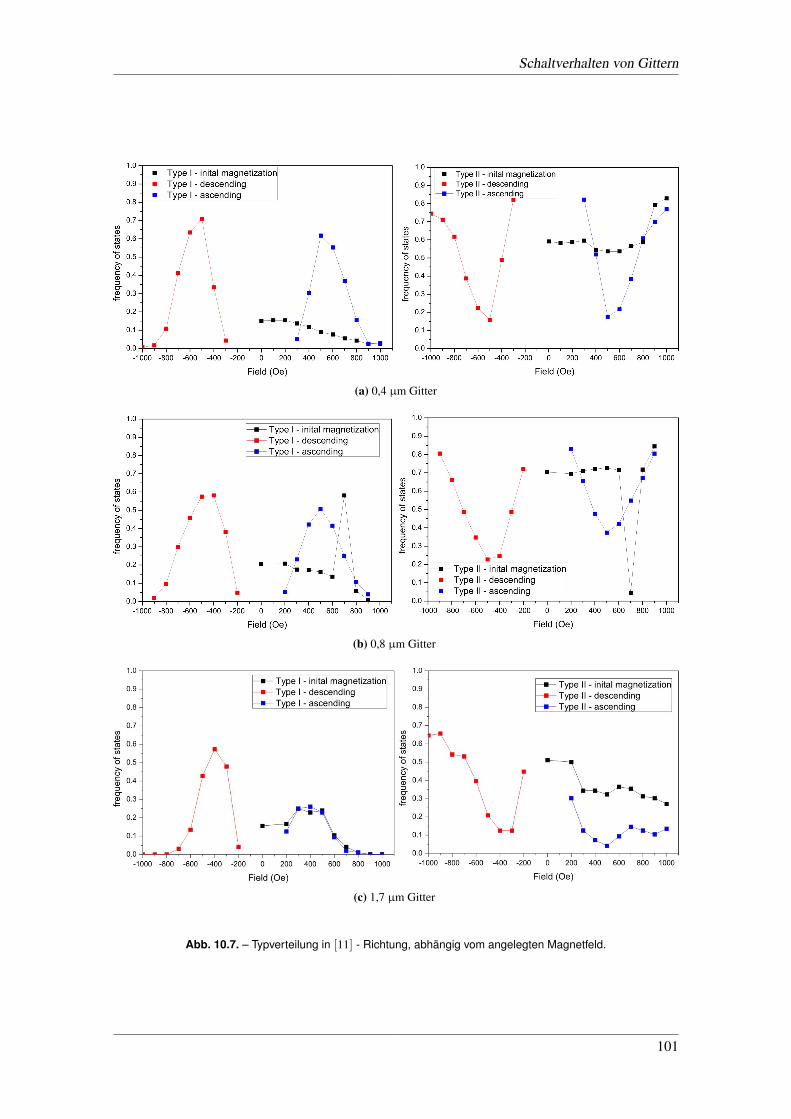
Schaltverhalten von Gittern
(a) 0,4 µm Gitter
(b) 0,8 µm Gitter
(c) 1,7 µm Gitter
Abb. 10.7. – Typverteilung in [11] - Richtung, abhängig vom angelegten Magnetfeld.
101
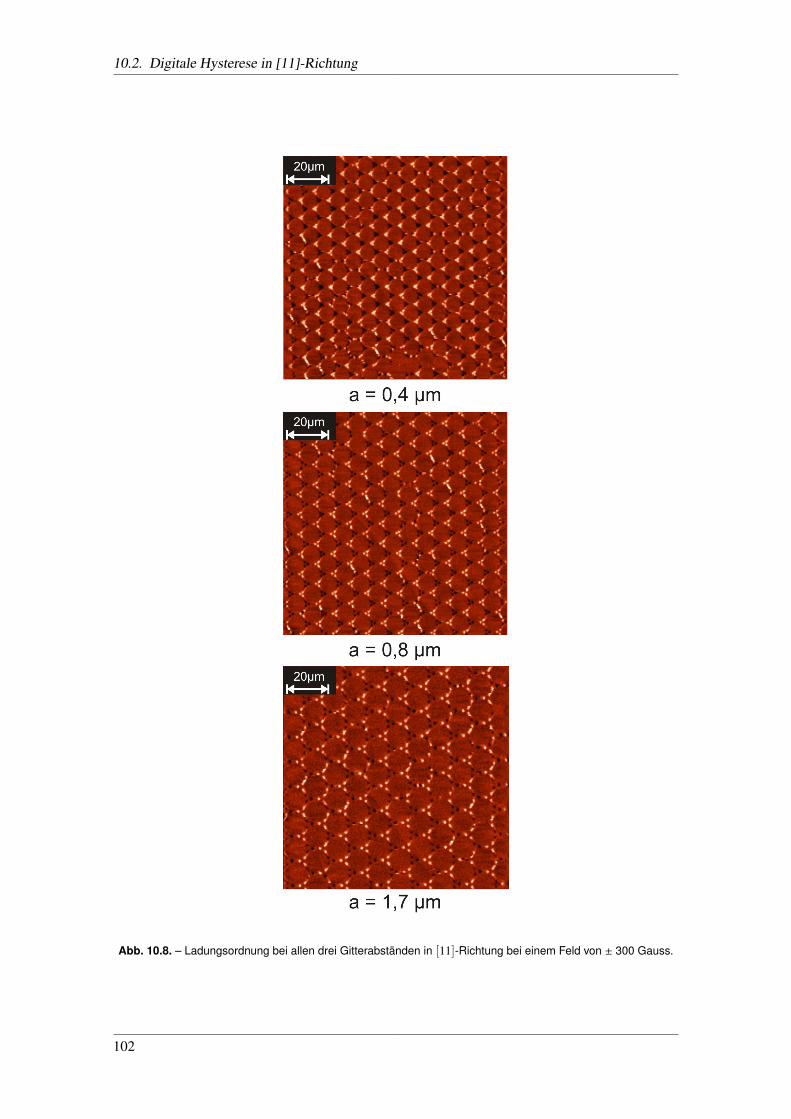
10.2. Digitale Hysterese in [11]-Richtung
Abb. 10.8. – Ladungsordnung bei allen drei Gitterabständen in [11]-Richtung bei einem Feld von ± 300 Gauss.
102
Schaltverhalten von Gittern
Zuständen am Koerzitivfeld auf. Betrachtet man die MFM-Aufnahmen an diesen Stellen genauer,
so zeigt sich, dass sich dort ein hochsymmetrischer Zustand ausbildet mit abwechseln auftreten-
den Typ I Zuständen der Ladung ±3. Abbildung 10.8 zeigt jeweils das 0,4 µm, 0,8 µm und 1,7
µm Gitter aus der Sättigung kommend am Koerzitivfeld, was in allen drei Fällen etwa 500 Gauss
beträgt. Dieses Verhalten kann verstanden werden, wenn man die Honigwabenstruktur in ihre drei
Untergitter zerlegt. In [11]-Richtung ist eines dieser drei Untergitter genau parallel zum angeleg-
ten Magnetfeld ausgerichtet, die anderen beiden bilden einen Winkel von 60 dazu. Die parallel
ausgerichteten Dipole schalten in einem externen Feld eher, gefolgt von den zum externen Feld
geneigten Dipolen. Das Umschalten erfolgt über eine Domänenwandverschiebung, daher ist das
effektive Umschaltfeld, das auf die schräg stehenden Dipole wirkt, nur halb so groß wie das, das
auf die horizontalen Dipole wirkt. Deswegen schalten die Dipole auf dem horizontalen Untergitter
früher, gefolgt von den zum Feld geneigten Untergittern. Die Ladungsordnung resultiert demnach
aus der Ausrichtung der Gitter und tritt nur zwischen dem Koerzitivfeld des parallel ausgerichte-
ten und dem der geneigten Untergitter auf. Wie man an den Graphen in Abbildung 10.7 ablesen
kann, ist diese Ladungsordnung nicht perfekt. Das liegt zum einen an den bereits erwähnten Git-
terdefekten aber auch an einer Verteilung der Umschaltfelder für die einzelnen Dipole. Eine hun-
dertprozentige Ladungsordnung könnte also für ein perfekt hergestelltes Gitter realisiert werden,
trotz der hohen magnetostatischen Energie, die dafür aufgebracht werden müsste. Daraus kann
man schließen, dass die Koerzitivität des Honigwabengitters nicht nur durch die verschwinden-
de Magnetisierung definiert ist, sondern auch durch die höchstmögliche magnetostatische Energie
mit einer fast perfekten Ladungsordnung. Nun ist dieses durch die Koerzitivfelder der Strukturen
bestimmte Schaltverhalten ein Indiz dafür, dass die Kopplung zwischen den einzelnen Dipolen
nicht allzu stark ist.
10.2.2. Stabilität des geordneten Zustandes
Der hochsymmetrische Zustand der Ladungsordnung, der am Koerzitivfeld auftritt, soll nun hin-
sichtlich seiner Stabilität näher betrachtet werden. Zu diesem Zweck wurden die Gitter ein wei-
teres Mal von der Sättigung aus in diesen geordnete Zustand gebracht. Anschließend wurde das
externe Feld komplett ausgeschaltet und die Gitter durch MFM-Aufnahmen abgebildet. Erwartet
wurde, dass sich die Ladungsordnung ohne angelegtes Magnetfeld nicht würde aufrechterhalten
können, das Gegenteil ist jedoch der Fall. Die Bilder aller Strukturen zeigen, dass die Ladungs-
ordnung auch ohne angelegtes Magnetfeld erhalten bleibt (siehe Abbildung 10.9).
Der nächste Schritt bestand darin, langsam ein immer größer werdendes Gegenfeld anzulegen.
Dazu wurde eine Schrittweite von 10 Gauss gewählt. Es zeigt sich, dass für die Gitterabstände
von 0,4 µm und 0,8 µm der geordnete Zustand erst ab einem Gegenfeld von 200 Gauss verloren
geht, bei einem Gitterabstand von 1,7 µm bereits bei 80 Gauss. Abbildung 10.10 zeigt als Beispiel
die Stabilität des 0,8 µm Gitters. Als kleine Hilfestellung zur Beobachtung des Umschaltverhal-
tens dienen die blauen Kreise, die eine Auswahl an Knotenpunkten zeigen, die von einem Typ I
Zustand erst bei 200 Gauss in einen Typ II Zustand wechseln. Das Schalten findet demnach un-
103
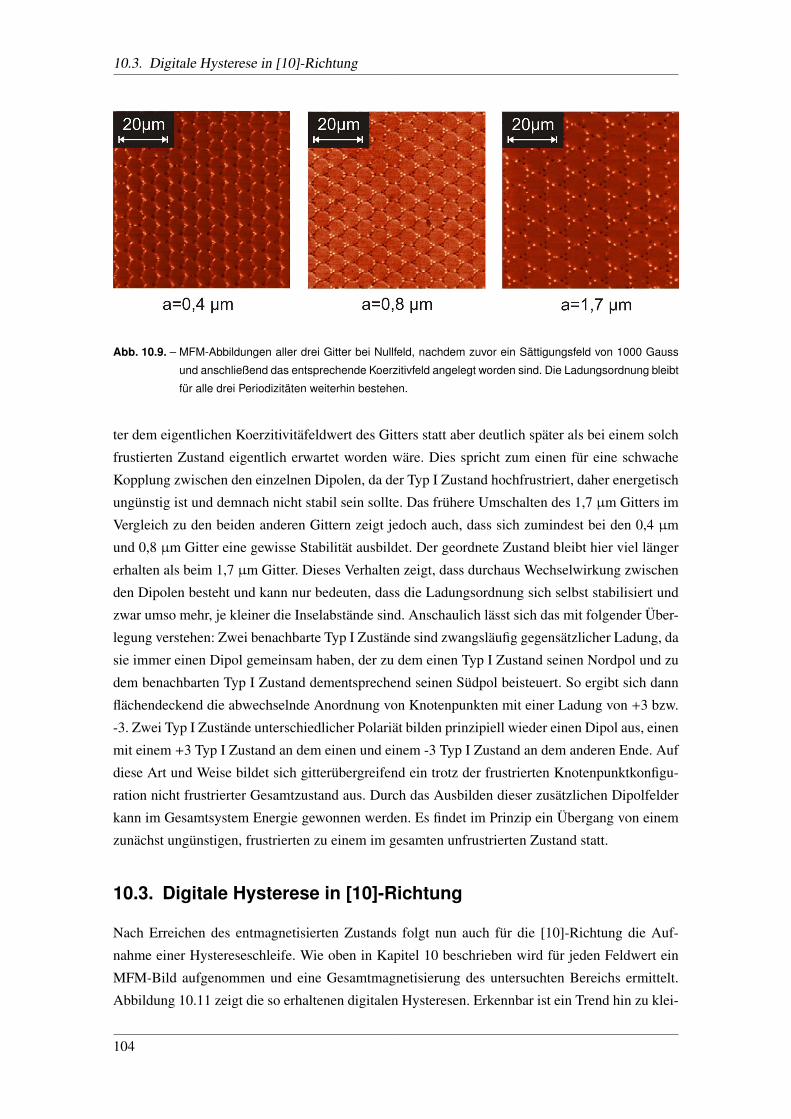
10.3. Digitale Hysterese in [10]-Richtung
Abb. 10.9. – MFM-Abbildungen aller drei Gitter bei Nullfeld, nachdem zuvor ein Sättigungsfeld von 1000 Gauss
und anschließend das entsprechende Koerzitivfeld angelegt worden sind. Die Ladungsordnung bleibt
für alle drei Periodizitäten weiterhin bestehen.
ter dem eigentlichen Koerzitivitäfeldwert des Gitters statt aber deutlich später als bei einem solch
frustierten Zustand eigentlich erwartet worden wäre. Dies spricht zum einen für eine schwache
Kopplung zwischen den einzelnen Dipolen, da der Typ I Zustand hochfrustriert, daher energetisch
ungünstig ist und demnach nicht stabil sein sollte. Das frühere Umschalten des 1,7 µm Gitters im
Vergleich zu den beiden anderen Gittern zeigt jedoch auch, dass sich zumindest bei den 0,4 µm
und 0,8 µm Gitter eine gewisse Stabilität ausbildet. Der geordnete Zustand bleibt hier viel länger
erhalten als beim 1,7 µm Gitter. Dieses Verhalten zeigt, dass durchaus Wechselwirkung zwischen
den Dipolen besteht und kann nur bedeuten, dass die Ladungsordnung sich selbst stabilisiert und
zwar umso mehr, je kleiner die Inselabstände sind. Anschaulich lässt sich das mit folgender Über-
legung verstehen: Zwei benachbarte Typ I Zustände sind zwangsläufig gegensätzlicher Ladung, da
sie immer einen Dipol gemeinsam haben, der zu dem einen Typ I Zustand seinen Nordpol und zu
dem benachbarten Typ I Zustand dementsprechend seinen Südpol beisteuert. So ergibt sich dann
flächendeckend die abwechselnde Anordnung von Knotenpunkten mit einer Ladung von +3 bzw.
-3. Zwei Typ I Zustände unterschiedlicher Polariät bilden prinzipiell wieder einen Dipol aus, einen
mit einem +3 Typ I Zustand an dem einen und einem -3 Typ I Zustand an dem anderen Ende. Auf
diese Art und Weise bildet sich gitterübergreifend ein trotz der frustrierten Knotenpunktkonfigu-
ration nicht frustrierter Gesamtzustand aus. Durch das Ausbilden dieser zusätzlichen Dipolfelder
kann im Gesamtsystem Energie gewonnen werden. Es findet im Prinzip ein Übergang von einem
zunächst ungünstigen, frustrierten zu einem im gesamten unfrustrierten Zustand statt.
10.3. Digitale Hysterese in [10]-Richtung
Nach Erreichen des entmagnetisierten Zustands folgt nun auch für die [10]-Richtung die Auf-
nahme einer Hystereseschleife. Wie oben in Kapitel 10 beschrieben wird für jeden Feldwert ein
MFM-Bild aufgenommen und eine Gesamtmagnetisierung des untersuchten Bereichs ermittelt.
Abbildung 10.11 zeigt die so erhaltenen digitalen Hysteresen. Erkennbar ist ein Trend hin zu klei-
104

Schaltverhalten von Gittern
Abb. 10.10. – Demonstration der Stabilität der Ladungsordnung am Beispiel des Gitters mit einem Inselabstand
von 0,8 µm. Die blauen Kreise dienen als Hilfestellung, um den Umschaltprozess besser verfolgen
zu können.
neren Koerzitivfeldern für steigenden Inselabstand im Gitter. So liegt das Koerzitivfeld für den
kleinsten Gitterabstand von 0,4 µm noch bei knapp 500 Gauss, für den 0,8 µm Gitterabstand bei
etwa 400 Gauss und bei dem höchsten Gitterabstand von 1,7 µm bei nur noch 200 Gauss. Die-
se Tendenz lässt sich durch die schwächer werdende Wechselwirkung zwischen den Dipolen bei
steigendem Inselabstand erklären. Da sich im Vergleich zur Hysterese in [11]-Richtung zusätzlich
kaum Typ I Zustände ausbilden, kann auch deren stabilisierende Wirkung nicht zum Ausbilden
höherer Koerzitivfelder beitragen. Um ein besseres Bild davon zu bekommen, wie sich die Kno-
tenpunktkonfiguration während des Ummagnetisierungsprozesses ändert, wird im Folgenden die
Häufigkeit der Typ I bzw. Typ II Zustände betrachtet, dargestellt in Abbildung 10.12. Anders als
im Falle der [11]-Ausrichtung ist hier das Auftreten von Typ I Zuständen wesentlich seltener.
Das Ummagnetisierungsverhalten verläuft für die [10]-Ausrichtung anders, da das senkrecht zum
externen Magnetfeld ausgerichtete Untergitter während der Hysterese gar nicht schaltet. Der ex-
perimentell maximal erreichbare Feldwert von 1000 Gauss reicht dafür nicht aus. Sie verbleiben
also in der zufälligen Anordnung, die durch das Entmagnetisieren erhalten worden ist, während
nur die zum magnetischen Feld geneigten Dipole schalten. Ihr Winkel zum Magnetfeld beträgt
30 und sie schalten mehr oder weniger simultan.
Um den Einfluss des zufälligen Ausgangszustandes nach der Entmagnetisierung zu vermeiden,
wurden die Messungen in [11]-Richtung wiederholt, ohne die Strukturen vorher zu entmagneti-
sieren. Stattdessen wurden sie zunächst in einen genau definierten, gesättigten Ausgangszustand
105
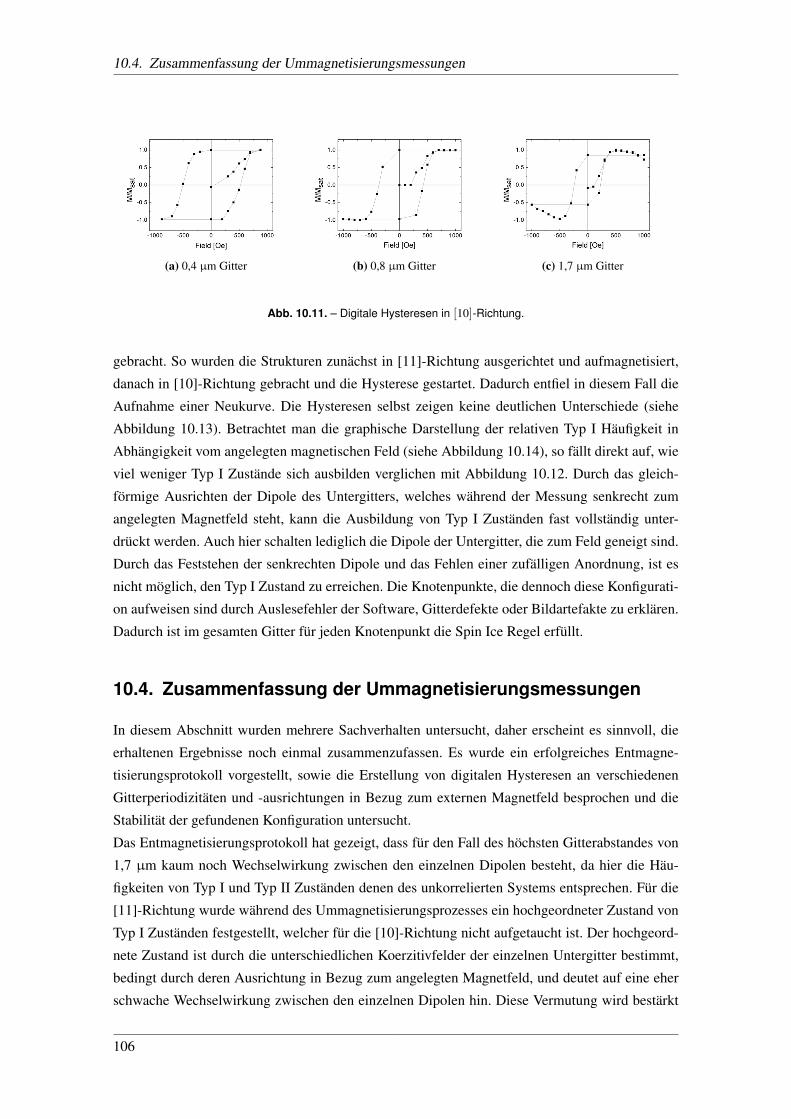
10.4. Zusammenfassung der Ummagnetisierungsmessungen
(a) 0,4 µm Gitter (b) 0,8 µm Gitter (c) 1,7 µm Gitter
Abb. 10.11. – Digitale Hysteresen in [10]-Richtung.
gebracht. So wurden die Strukturen zunächst in [11]-Richtung ausgerichtet und aufmagnetisiert,
danach in [10]-Richtung gebracht und die Hysterese gestartet. Dadurch entfiel in diesem Fall die
Aufnahme einer Neukurve. Die Hysteresen selbst zeigen keine deutlichen Unterschiede (siehe
Abbildung 10.13). Betrachtet man die graphische Darstellung der relativen Typ I Häufigkeit in
Abhängigkeit vom angelegten magnetischen Feld (siehe Abbildung 10.14), so fällt direkt auf, wie
viel weniger Typ I Zustände sich ausbilden verglichen mit Abbildung 10.12. Durch das gleich-
förmige Ausrichten der Dipole des Untergitters, welches während der Messung senkrecht zum
angelegten Magnetfeld steht, kann die Ausbildung von Typ I Zuständen fast vollständig unter-
drückt werden. Auch hier schalten lediglich die Dipole der Untergitter, die zum Feld geneigt sind.
Durch das Feststehen der senkrechten Dipole und das Fehlen einer zufälligen Anordnung, ist es
nicht möglich, den Typ I Zustand zu erreichen. Die Knotenpunkte, die dennoch diese Konfigurati-
on aufweisen sind durch Auslesefehler der Software, Gitterdefekte oder Bildartefakte zu erklären.
Dadurch ist im gesamten Gitter für jeden Knotenpunkt die Spin Ice Regel erfüllt.
10.4. Zusammenfassung der Ummagnetisierungsmessungen
In diesem Abschnitt wurden mehrere Sachverhalten untersucht, daher erscheint es sinnvoll, die
erhaltenen Ergebnisse noch einmal zusammenzufassen. Es wurde ein erfolgreiches Entmagne-
tisierungsprotokoll vorgestellt, sowie die Erstellung von digitalen Hysteresen an verschiedenen
Gitterperiodizitäten und -ausrichtungen in Bezug zum externen Magnetfeld besprochen und die
Stabilität der gefundenen Konfiguration untersucht.
Das Entmagnetisierungsprotokoll hat gezeigt, dass für den Fall des höchsten Gitterabstandes von
1,7 µm kaum noch Wechselwirkung zwischen den einzelnen Dipolen besteht, da hier die Häu-
figkeiten von Typ I und Typ II Zuständen denen des unkorrelierten Systems entsprechen. Für die
[11]-Richtung wurde während des Ummagnetisierungsprozesses ein hochgeordneter Zustand von
Typ I Zuständen festgestellt, welcher für die [10]-Richtung nicht aufgetaucht ist. Der hochgeord-
nete Zustand ist durch die unterschiedlichen Koerzitivfelder der einzelnen Untergitter bestimmt,
bedingt durch deren Ausrichtung in Bezug zum angelegten Magnetfeld, und deutet auf eine eher
schwache Wechselwirkung zwischen den einzelnen Dipolen hin. Diese Vermutung wird bestärkt
106
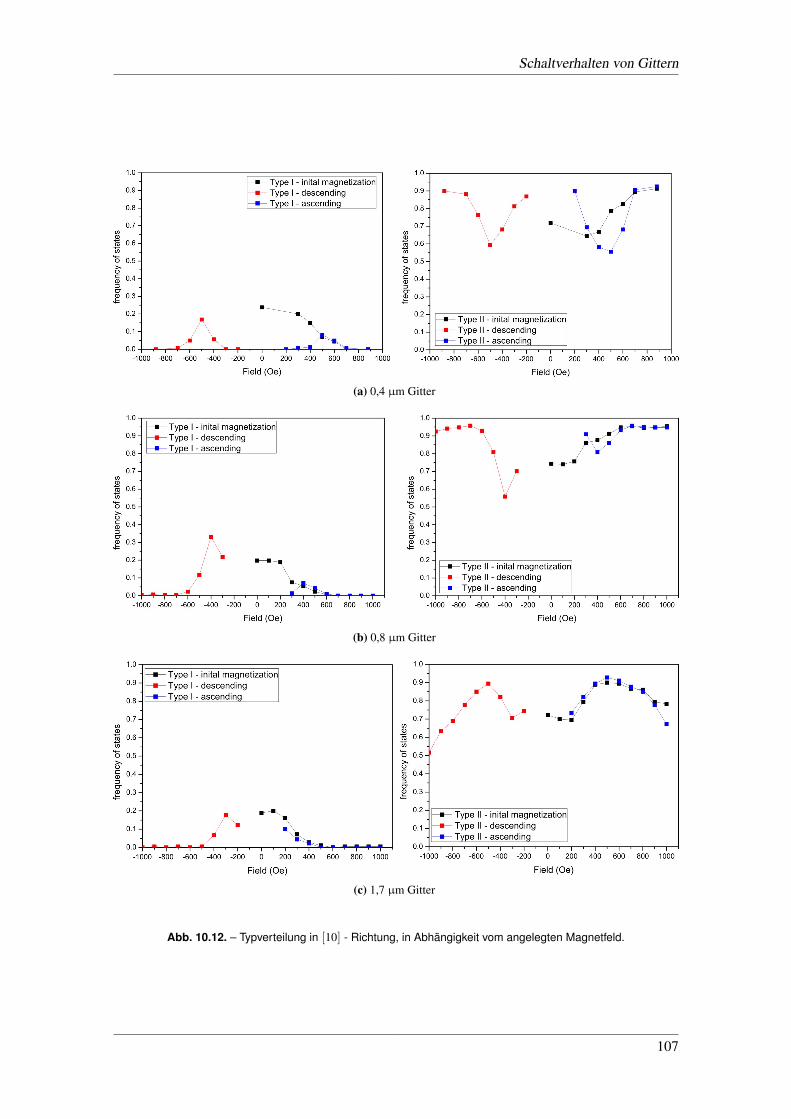
Schaltverhalten von Gittern
(a) 0,4 µm Gitter
(b) 0,8 µm Gitter
(c) 1,7 µm Gitter
Abb. 10.12. – Typverteilung in [10] - Richtung, in Abhängigkeit vom angelegten Magnetfeld.
107
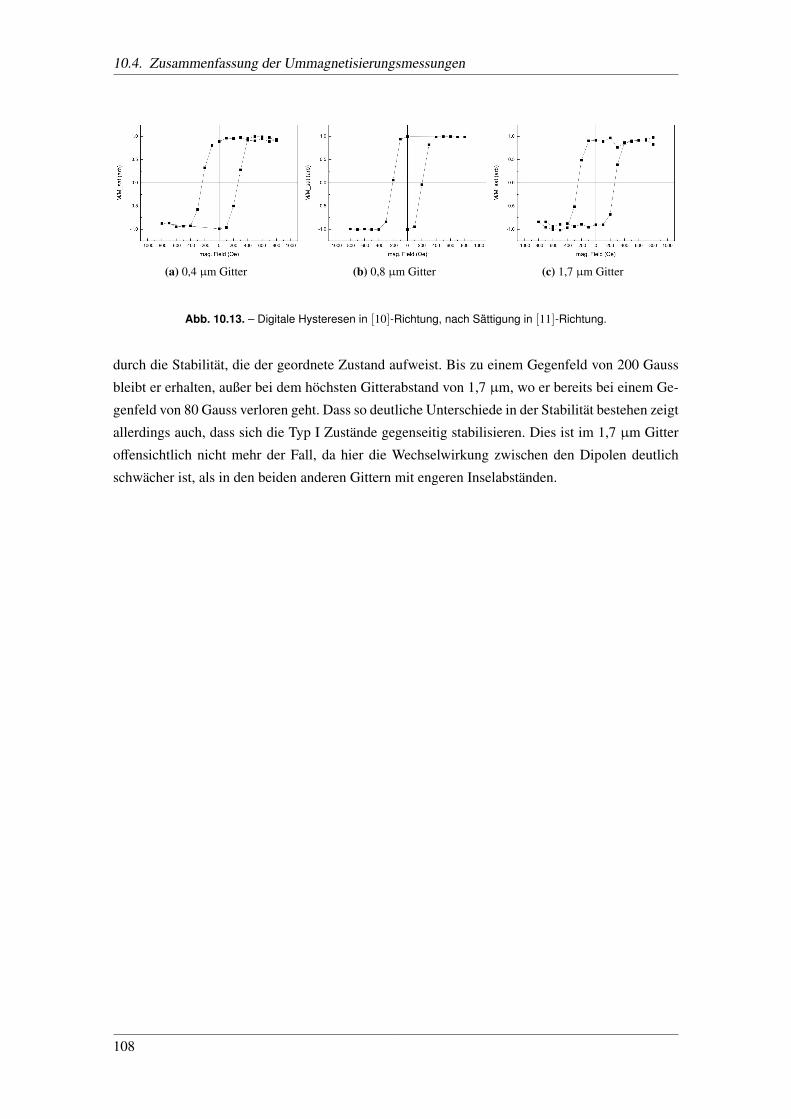
10.4. Zusammenfassung der Ummagnetisierungsmessungen
(a) 0,4 µm Gitter (b) 0,8 µm Gitter (c) 1,7 µm Gitter
Abb. 10.13. – Digitale Hysteresen in [10]-Richtung, nach Sättigung in [11]-Richtung.
durch die Stabilität, die der geordnete Zustand aufweist. Bis zu einem Gegenfeld von 200 Gauss
bleibt er erhalten, außer bei dem höchsten Gitterabstand von 1,7 µm, wo er bereits bei einem Ge-
genfeld von 80 Gauss verloren geht. Dass so deutliche Unterschiede in der Stabilität bestehen zeigt
allerdings auch, dass sich die Typ I Zustände gegenseitig stabilisieren. Dies ist im 1,7 µm Gitter
offensichtlich nicht mehr der Fall, da hier die Wechselwirkung zwischen den Dipolen deutlich
schwächer ist, als in den beiden anderen Gittern mit engeren Inselabständen.
108
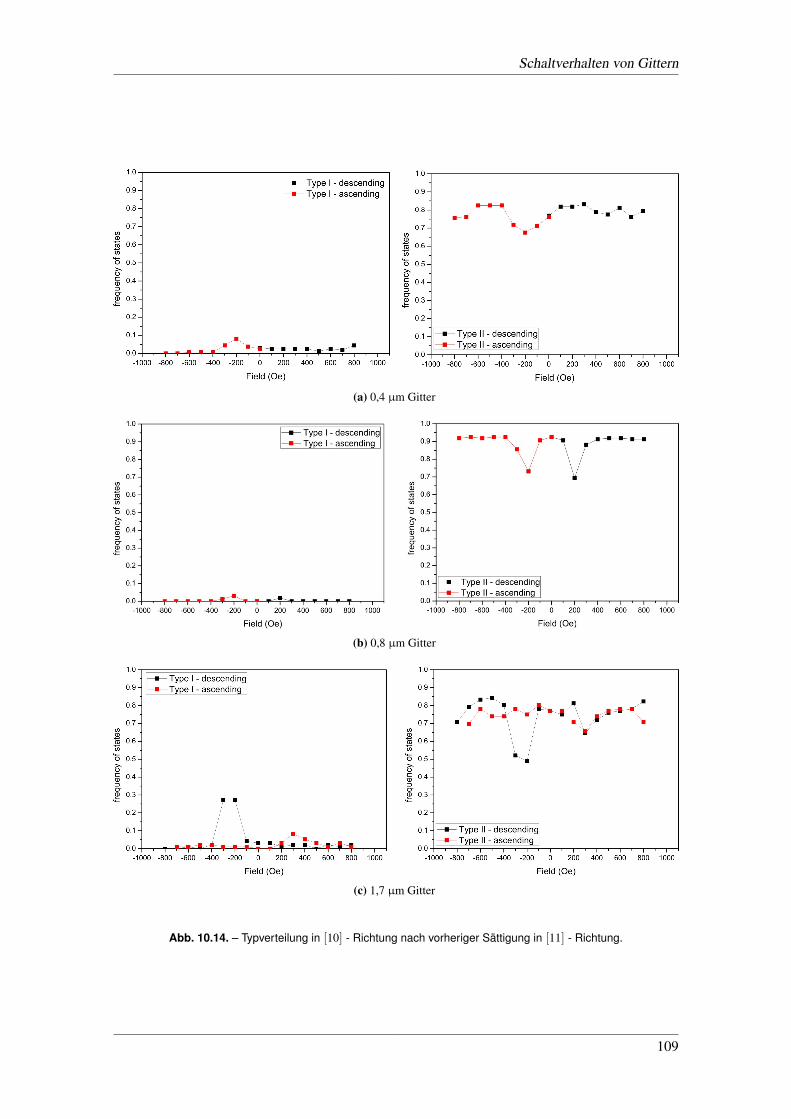
Schaltverhalten von Gittern
(a) 0,4 µm Gitter
(b) 0,8 µm Gitter
(c) 1,7 µm Gitter
Abb. 10.14. – Typverteilung in [10] - Richtung nach vorheriger Sättigung in [11] - Richtung.
109
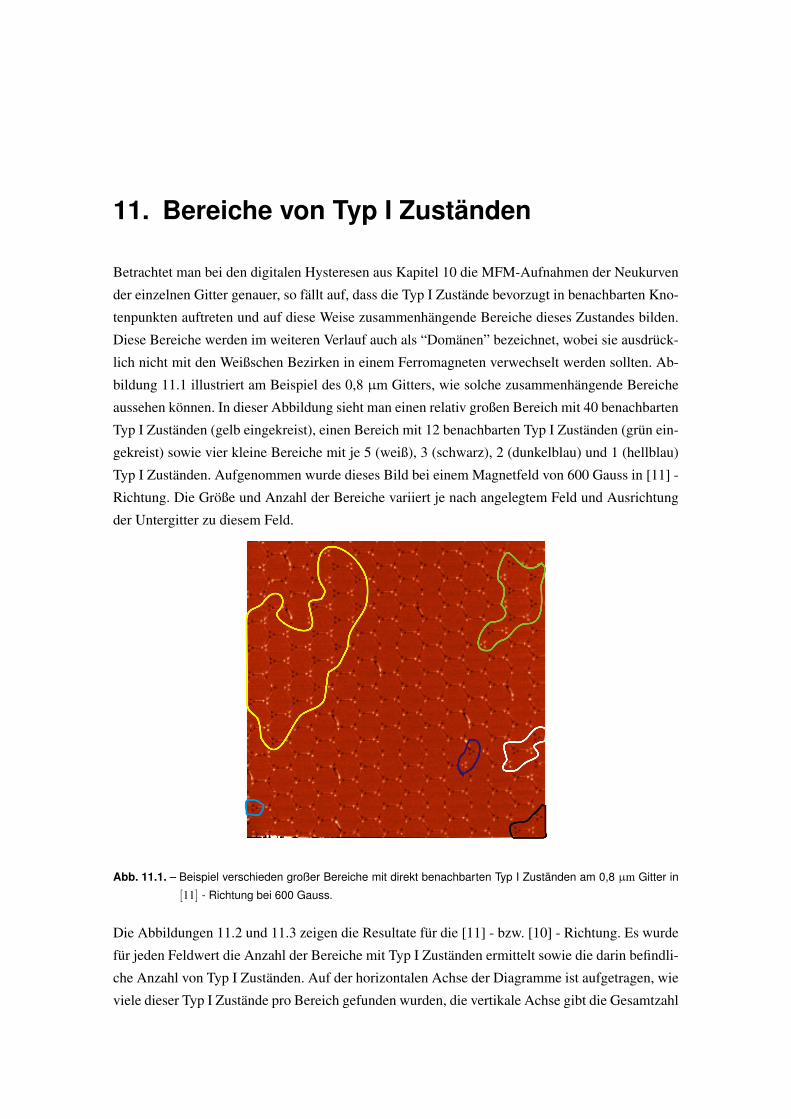
11. Bereiche von Typ I Zuständen
Betrachtet man bei den digitalen Hysteresen aus Kapitel 10 die MFM-Aufnahmen der Neukurven
der einzelnen Gitter genauer, so fällt auf, dass die Typ I Zustände bevorzugt in benachbarten Kno-
tenpunkten auftreten und auf diese Weise zusammenhängende Bereiche dieses Zustandes bilden.
Diese Bereiche werden im weiteren Verlauf auch als “Domänen” bezeichnet, wobei sie ausdrück-
lich nicht mit den Weißschen Bezirken in einem Ferromagneten verwechselt werden sollten. Ab-
bildung 11.1 illustriert am Beispiel des 0,8 µm Gitters, wie solche zusammenhängende Bereiche
aussehen können. In dieser Abbildung sieht man einen relativ großen Bereich mit 40 benachbarten
Typ I Zuständen (gelb eingekreist), einen Bereich mit 12 benachbarten Typ I Zuständen (grün ein-
gekreist) sowie vier kleine Bereiche mit je 5 (weiß), 3 (schwarz), 2 (dunkelblau) und 1 (hellblau)
Typ I Zuständen. Aufgenommen wurde dieses Bild bei einem Magnetfeld von 600 Gauss in [11] -
Richtung. Die Größe und Anzahl der Bereiche variiert je nach angelegtem Feld und Ausrichtung
der Untergitter zu diesem Feld.
Abb. 11.1. – Beispiel verschieden großer Bereiche mit direkt benachbarten Typ I Zuständen am 0,8 µm Gitter in
[11] - Richtung bei 600 Gauss.
Die Abbildungen 11.2 und 11.3 zeigen die Resultate für die [11] - bzw. [10] - Richtung. Es wurde
für jeden Feldwert die Anzahl der Bereiche mit Typ I Zuständen ermittelt sowie die darin befindli-
che Anzahl von Typ I Zuständen. Auf der horizontalen Achse der Diagramme ist aufgetragen, wie
viele dieser Typ I Zustände pro Bereich gefunden wurden, die vertikale Achse gibt die Gesamtzahl

10.4. Zusammenfassung der Ummagnetisierungsmessungen
der Bereiche pro Magnetfeld an. Auf der Tiefenachse ist das angelegte Feld aufgetragen. So kann
man anhand der Diagramme die Entwicklung der Größe sowie der Anzahl der Domänen ablesen.
Alle Gitter zeigen, unabhängig von Ausrichtung und Gitterperiodizität, ein von der Tendenz her
ähnliches Verhalten. Interessanterweise scheint es zwar so zu sein, dass insgesamt die Anzahl der
Domänen mit steigendem Magnetfeld abnimmt, dafür aber die Bildung von langen Ketten bzw.
großen Bereichen mit Typ I Zuständen zunimmt. So gibt es zu Beginn relativ viele kleinere Be-
reiche mit Typ I Zuständen. Dies ändert sich auch bis zu einem Feldwert von 300 Gauss zunächst
nicht. Die Anzahl der allein stehenden Typ I Zustände nimmt von da an bei Erhöhen des Feldes
immer stärker ab, jedoch treten ab einem Feld von 400 Gauss vermehrt größere Bereiche auf, bis
hin zu flächendeckenden Typ I Domänen mit teilweise über 200 benachbarten Typ I Knotenpunk-
ten im 0,4 µm Gitter bei [11]-Ausrichtung. Hier wird eine Abhängigkeit von der Gitterperiodizität
deutlich: Die Größe der Domänen nimmt für steigenden Inselabstand ab. Für die [10]-Ausrichtung
unabhängig von den Inselabständen werden Domänen dieser Größenordnung nicht erreicht. Hier
liegen die maximalen Domänengrößen bei etwa 20 zusammenhängenden Typ I Zuständen. Dies
ist dennoch bemerkenswert, denn in Kapitel 10 wurde bereits festgestellt, dass das Ausbilden von
Typ I Zuständen bei dieser Ausrichtung extrem unwahrscheinlich ist. Dass die Typ I Zustände, die
sich dennoch ausbilden dann die Tendenz zeigen, sich zusammenzuschließen ist also ein sehr in-
teressanter Effekt. Dies unterstützt die Vermutung, dass die Typ I Zustände Dipolgitter mit interner
Wechselwirkung bilden und sich gegenseitig stabilisieren.
112
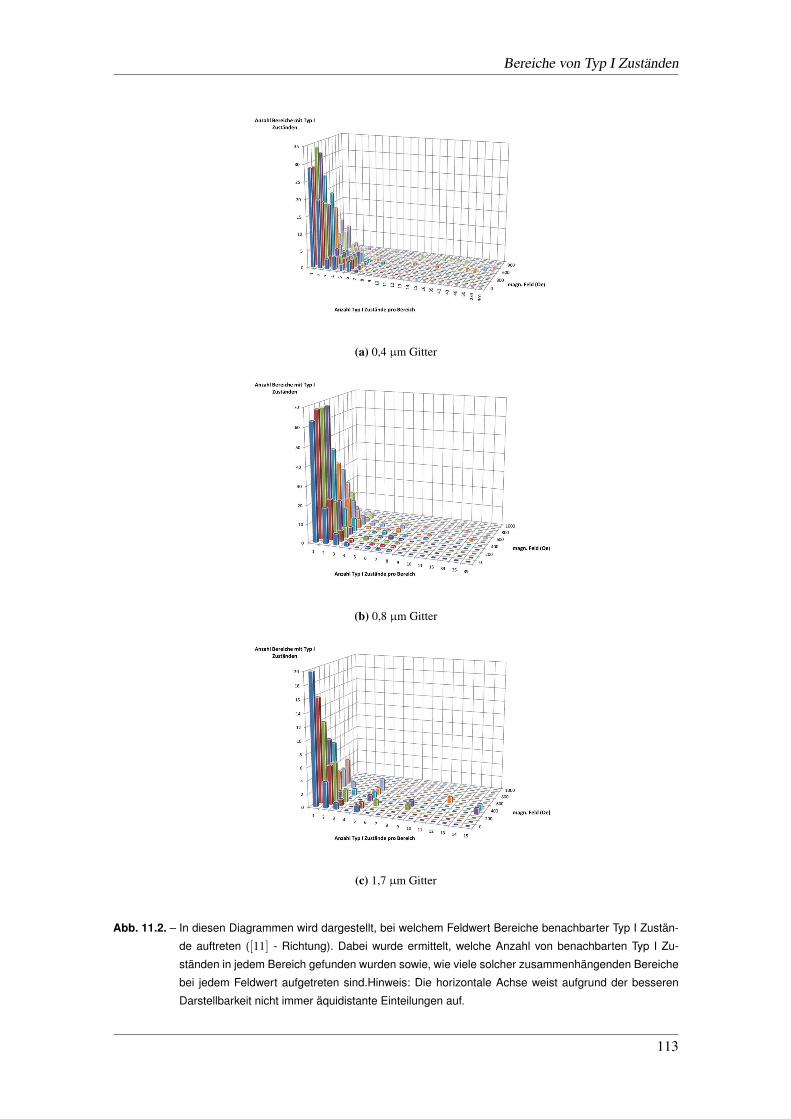
Bereiche von Typ I Zuständen
(a) 0,4 µm Gitter
(b) 0,8 µm Gitter
(c) 1,7 µm Gitter
Abb. 11.2. – In diesen Diagrammen wird dargestellt, bei welchem Feldwert Bereiche benachbarter Typ I Zustän-
de auftreten ([11] - Richtung). Dabei wurde ermittelt, welche Anzahl von benachbarten Typ I Zu-
ständen in jedem Bereich gefunden wurden sowie, wie viele solcher zusammenhängenden Bereiche
bei jedem Feldwert aufgetreten sind.Hinweis: Die horizontale Achse weist aufgrund der besseren
Darstellbarkeit nicht immer äquidistante Einteilungen auf.
113
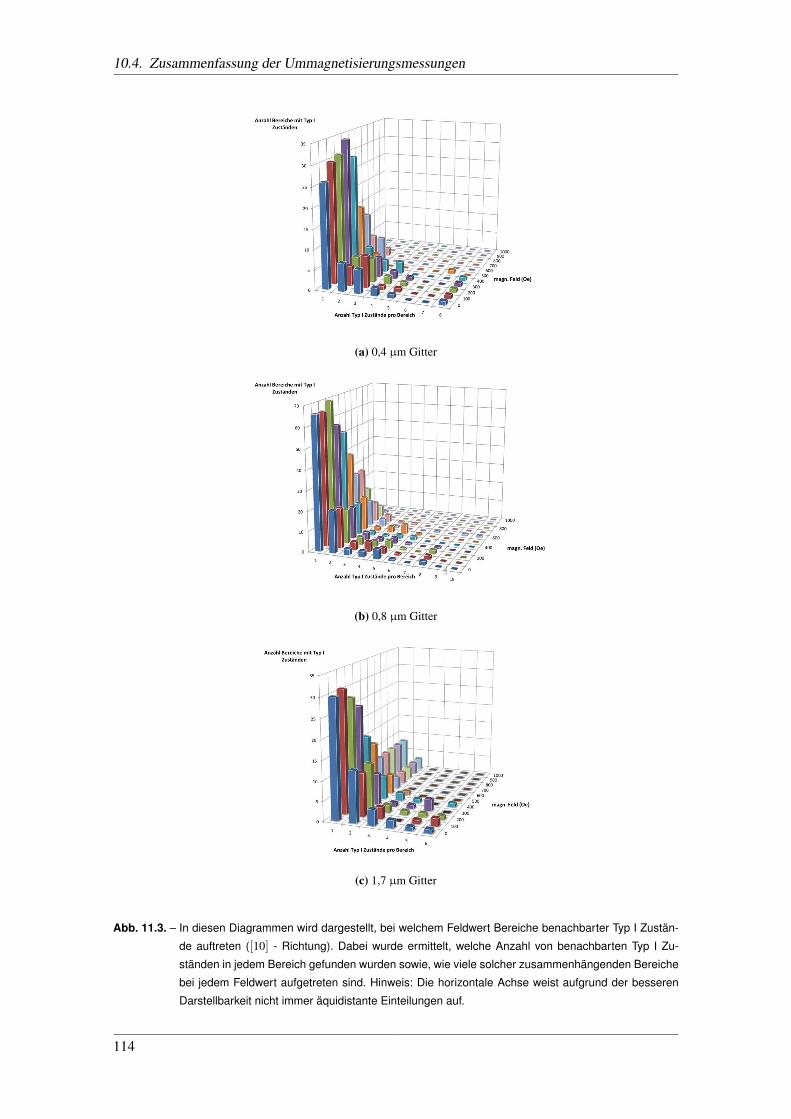
10.4. Zusammenfassung der Ummagnetisierungsmessungen
(a) 0,4 µm Gitter
(b) 0,8 µm Gitter
(c) 1,7 µm Gitter
Abb. 11.3. – In diesen Diagrammen wird dargestellt, bei welchem Feldwert Bereiche benachbarter Typ I Zustän-
de auftreten ([10] - Richtung). Dabei wurde ermittelt, welche Anzahl von benachbarten Typ I Zu-
ständen in jedem Bereich gefunden wurden sowie, wie viele solcher zusammenhängenden Bereiche
bei jedem Feldwert aufgetreten sind. Hinweis: Die horizontale Achse weist aufgrund der besseren
Darstellbarkeit nicht immer äquidistante Einteilungen auf.
114
12. Einfluss von Defekten
Aufgrund von Fehlern in der Lithographie oder in den darauffolgenden Prozesschritten kommt es
hin und wieder vor, dass im Gitter ein Dipol fehlt (siehe Abbildung 12.1). Dieses Fehlen kann
dazu führen, dass sich die benachbarten Dipole während des Ummagnetisierungsprozesses anders
verhalten als es in einem idealen Gitter der Fall wäre. Um den Einfluss dieser Defekte einschätzen
zu können, wurden gezielt Bereiche der hergestellten Strukturen herausgesucht, die einen solchen
Defekt aufweisen und ihre Nachbarknotenpunkte hinsichtlich ihrer Knotenpunktkonfigurationen
untersucht. Als Referenz wurden auch intakte Probenbereiche untersucht, wobei darauf geach-
tet worden ist, dass diese Bereiche möglichst weit entfernt von Defekten bzw. dem Strukturrand
liegen, um einen möglicherweise verfälschenden Einfluss solcher Störstellen auszuschließen. In
Abbildung 12.2 werden die im weiteren Verlauf verwendeten Bezeichnungen zum besseren Ver-
ständnis dargestellt. Der in Abbildung 12.2a rot hervorgehobene Dipol ist dabei der, auf den sich
die gewählten Bezeichnungen beziehen. So werden mit A1 und A2 genau die Knotenpunkte be-
zeichnet, an deren Bildung der besagte Dipol selbst beteiligt ist. Die Knotenpunkte, die in nächster
Nachbarschaft des Dipols liegen, werden mit den Buchstaben B1 - B4 versehen, während die Kno-
tenpunkte, die die übernächsten Nachbarn darstellen, die Bezeichnungen C1 - C8 erhalten. Analog
dazu werden ebenfalls die in der Umgebung eines Defektes liegenden Knotenpunkte bezeichnet
(siehe Abbildung 12.2b). Die Nummerierungen A1 und A2 fallen dabei natürlich weg, da diese
Knotenpunkte eben durch das Fehlen eines Dipols nicht mehr eindeutig einer bestimmten Konfi-
guration zuzuordnen sind. Mit dieser Nomuklatur ist es nun möglich, die Typenverteilung in der
Umgebung eines Defektes zu analysieren und mit intakten Bereichen des Gitters zu vergleichen.
Vergleicht man zunächst die Unterschiede für Bereiche mit und ohne Defekte bei dem kleinsten
Gitterabstand von 0,4 µm (Abbildungen 12.3a - 12.3c und Abbildungen 12.4a und 12.4b), so fällt
auf, dass die Häufigkeit von Typ I Zuständen am Koerzitivfeld in Bereichen ohne Defekte für die
nächsten Nachbarn, also die Knotenpunkte B1 - B4, deutlich höher ist als in Bereichen, in denen
Defekte auftreten. Dies gilt insbesondere für die Neukurve, während der in defekten Gittern für
die betrachteten Knotenpunkte nicht ein einziger Typ I Zustand auftritt. Für die Knotenpunkte C1
- C8, also die übernächsten Nachbarn, lässt sich allerdings in Bereichen mit und ohne Defekte kein
nennenswerter Unterschied feststellen. Für die Gitter mit den Inselabständen von 0,8 µm (Abbil-
dungen 12.3d - 12.3f und Abbildungen 12.4c und 12.4d) findet man bei den Knotenpunkten B1 -
B4 für den Bereich der Neukurve, wie auch schon bei dem 0,4 µm Gitter, im Bereich mit Defekten
keine Typ I Zustände, die allerdings in intakten Gitterbereichen dort noch auftreten. Vergleicht
man für die 1,7 µm Gitter die intakten und defekten Gitterbereiche miteinander (Abbildungen
12.3g - 12.3i und Abbildungen 12.4e und 12.4f), so stellt man fest, dass sie kaum Unterschiede
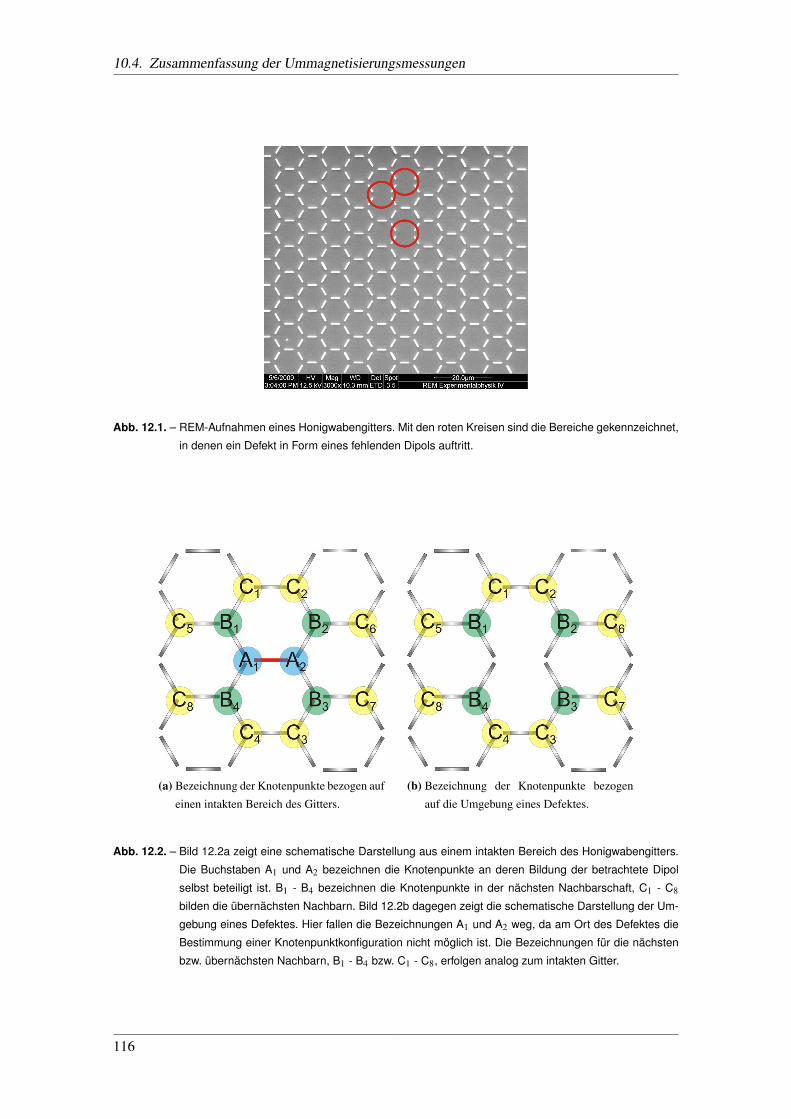
10.4. Zusammenfassung der Ummagnetisierungsmessungen
Abb. 12.1. – REM-Aufnahmen eines Honigwabengitters. Mit den roten Kreisen sind die Bereiche gekennzeichnet,
in denen ein Defekt in Form eines fehlenden Dipols auftritt.
(a) Bezeichnung der Knotenpunkte bezogen auf
einen intakten Bereich des Gitters.
(b) Bezeichnung der Knotenpunkte bezogen
auf die Umgebung eines Defektes.
Abb. 12.2. – Bild 12.2a zeigt eine schematische Darstellung aus einem intakten Bereich des Honigwabengitters.
Die Buchstaben A1 und A2 bezeichnen die Knotenpunkte an deren Bildung der betrachtete Dipol
selbst beteiligt ist. B1 - B4 bezeichnen die Knotenpunkte in der nächsten Nachbarschaft, C1 - C8
bilden die übernächsten Nachbarn. Bild 12.2b dagegen zeigt die schematische Darstellung der Um-
gebung eines Defektes. Hier fallen die Bezeichnungen A1 und A2 weg, da am Ort des Defektes die
Bestimmung einer Knotenpunktkonfiguration nicht möglich ist. Die Bezeichnungen für die nächsten
bzw. übernächsten Nachbarn, B1 - B4 bzw. C1 - C8, erfolgen analog zum intakten Gitter.
116
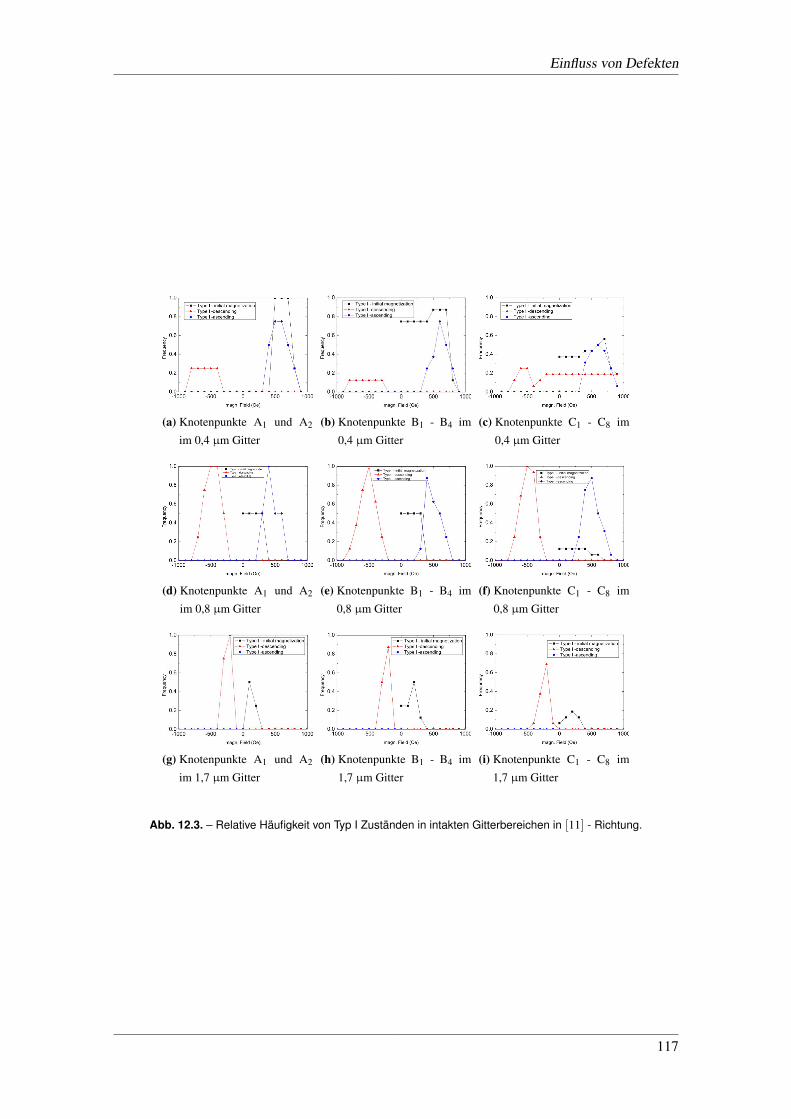
Einfluss von Defekten
(a) Knotenpunkte A1 und A2
im 0,4 µm Gitter
(b) Knotenpunkte B1 - B4 im
0,4 µm Gitter
(c) Knotenpunkte C1 - C8 im
0,4 µm Gitter
(d) Knotenpunkte A1 und A2
im 0,8 µm Gitter
(e) Knotenpunkte B1 - B4 im
0,8 µm Gitter
(f) Knotenpunkte C1 - C8 im
0,8 µm Gitter
(g) Knotenpunkte A1 und A2
im 1,7 µm Gitter
(h) Knotenpunkte B1 - B4 im
1,7 µm Gitter
(i) Knotenpunkte C1 - C8 im
1,7 µm Gitter
Abb. 12.3. – Relative Häufigkeit von Typ I Zuständen in intakten Gitterbereichen in [11] - Richtung.
117

10.4. Zusammenfassung der Ummagnetisierungsmessungen
aufweisen.
Das spricht zusammendfassen dafür, dass Defekte offensichtlich nur die direkten Nachbarkno-
tenpunkte beeinflussen und auch das nur für die beiden kleineren Gitterabstände 0,4 µm und 0,8
µm. Im Falle eines Gitterabstandes von 1,7 µm erkennt man überhaupt keinen Einfluss, was die
bereits in Kapitel 10 getroffene Vermutung stützt, dass in diesem Gitter kaum Wechselwirkung
zwischen den Dipolen herrscht. Gleichzeitig bedeutet dies, dass bei der Betrachtung eines großen
Gitterbereiches, wie in Kapitel 10 geschehen, die Auswirkung der Gitterdefekte auf die Verteilung
der Knotenpunktkonfigurationen im gesamten Gitter relativ gering sein sollte und die gefundenen
Ergebnisse somit glaubhaft sind.
118
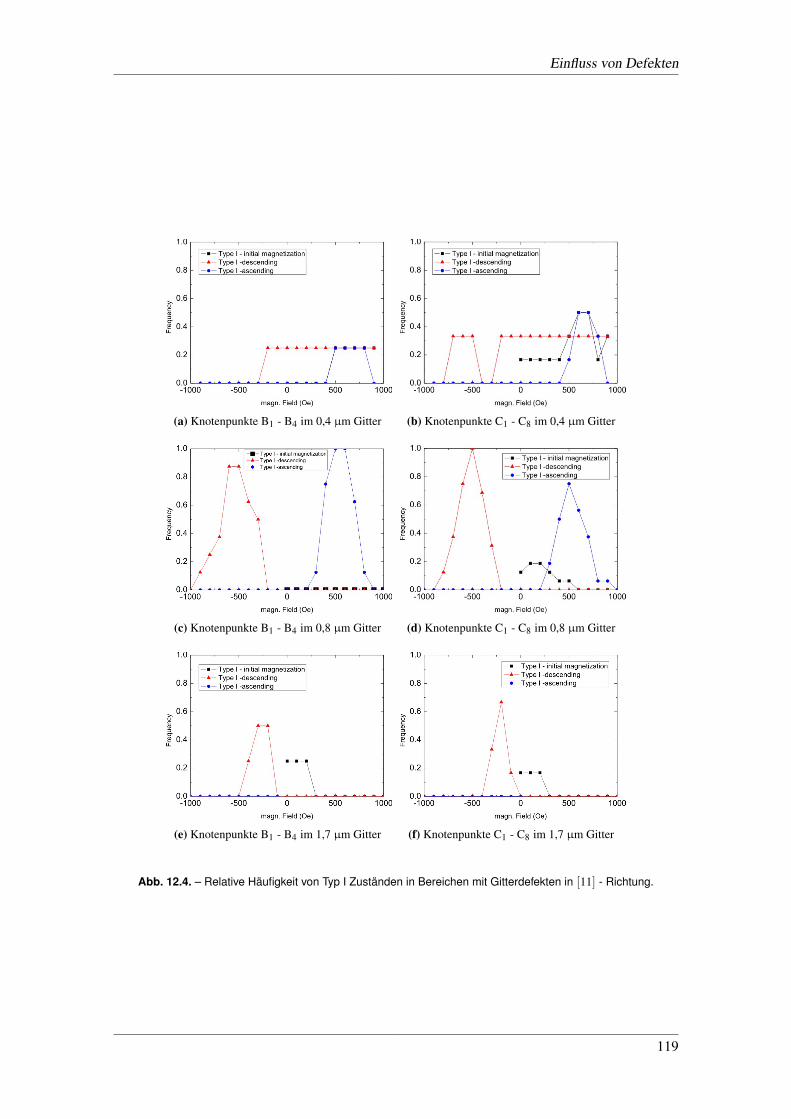
Einfluss von Defekten
(a) Knotenpunkte B1 - B4 im 0,4 µm Gitter (b) Knotenpunkte C1 - C8 im 0,4 µm Gitter
(c) Knotenpunkte B1 - B4 im 0,8 µm Gitter (d) Knotenpunkte C1 - C8 im 0,8 µm Gitter
(e) Knotenpunkte B1 - B4 im 1,7 µm Gitter (f) Knotenpunkte C1 - C8 im 1,7 µm Gitter
Abb. 12.4. – Relative Häufigkeit von Typ I Zuständen in Bereichen mit Gitterdefekten in [11] - Richtung.
119


13. Rotationsmessungen
Inspiriert durch die theoretische Arbeit von Budrikis et al. [117], die das Verhalten und die Be-
wegung von unterschiedlichen Knotenpunktkonfigurationen im quadratischen Spin Ice Gitter bei
rotierendem, externen Magnetfeld untersucht haben, werden nun in diesem Kapitel die Typ I Zu-
stände im Honigwabengitter während der Rotation untersucht. Statt das Magnetfeld rotieren zu
lassen wurde aus experimentellen Gründen die Probe in einem kontanten Magnetfeld rotiert und
dabei die Abhängigkeit des Auftretens von Typ I Zuständen von der Randgeometrie des Gitters
untersucht. Dabei wurde die Probe immer ein Stück weit im Feld gedreht um dann ein MFM-Bild
aufzunehmen. So konnte Schritt für Schritt die Probe um 2π gedeht werden. Während einer kom-
pletten Rotation wurden 15-20 Bilder aufgenommen. Budrikis et al. haben die lokale magnetische
Ordnung in einem quadratischen Spin Ice System mittels einen Teilchen Bildes basierend auf den
Knotenpunktkonfigurationen untersucht. Dabei stand die Interpretation der zeitlichen Entwicklung
dieser Konfigurationen im Mittelpunkt. Sie fanden eine hohe Bedeutung für Korrelationen und
langreichweitige Wechselwirkungen, bezogen in ihre Untersuchungen allerdings zusätzlich noch
die Größe der untersuchten Gitter mit ein. So fanden sie heraus, dass die absolute Anzahl von Zu-
ständen, die die Spin Ice Regel befolgen, mit steigender Gittergröße nur sehr langsam abnimmt.
Des Weiteren beobachteten sie eine Nukleation von Konfigurationstypen 3in-1out (Verletzung der
Spin Ice Regel) am Rand der Gitter, die in ihrer Ausprägung von der gewählten Randgeometrie
abhängt. In den Gittern mit geschlossenen Rändern sind dafür größere Felder nötig.
13.1. Probendetails
Die hier untersuchten Gitter unterscheiden sich in der gewählten Geometrie von den bisher un-
tersuchten Gittern. Die Nanostrukturen wurden ebenfalls mit Elektronenstrahllithographie und Io-
nenstrahlätzen hergestellt (siehe dazu auch Kapitel 6). Die Gitter bestehen aus Eiseninseln mit l =
1 µm Länge und w = 0,1 µm Breite, die Schichtdicke beträgt 20 nm. Die Eisenschicht wurde als
Oxidationsschutz mit einer 2 nm dicken Schicht Al2O3 abgedeckt. Die gewählte Schreibfeldgröße
beträgt 50 µm . Diese relativ kleinen Strukturen und Schreibfelder gewährleisten, dass sie kom-
plett durch das MFM abbildbar sind und dennoch genug Dipole für eine angemessene Statistik
vorhanden sind. Das komplette Abbilden eines gesamten Schreibfeldes ist notwendig, um Verän-
derungen in der Knotenpunktkonfiguration während der Rotation eindeutig zuordnen zu können.
Untersucht wurden zwei unterschiedliche Gitterperiodizitäten: 0.4 µm und 0,8 µm. Für beide Git-
tertypen wurde jeweils eine Struktur mit offenen und eine mit geschlossenen Rändern hergestellt.
Abbildung 13.1 zeigt REM-Aufnahmen aller Strukturen.
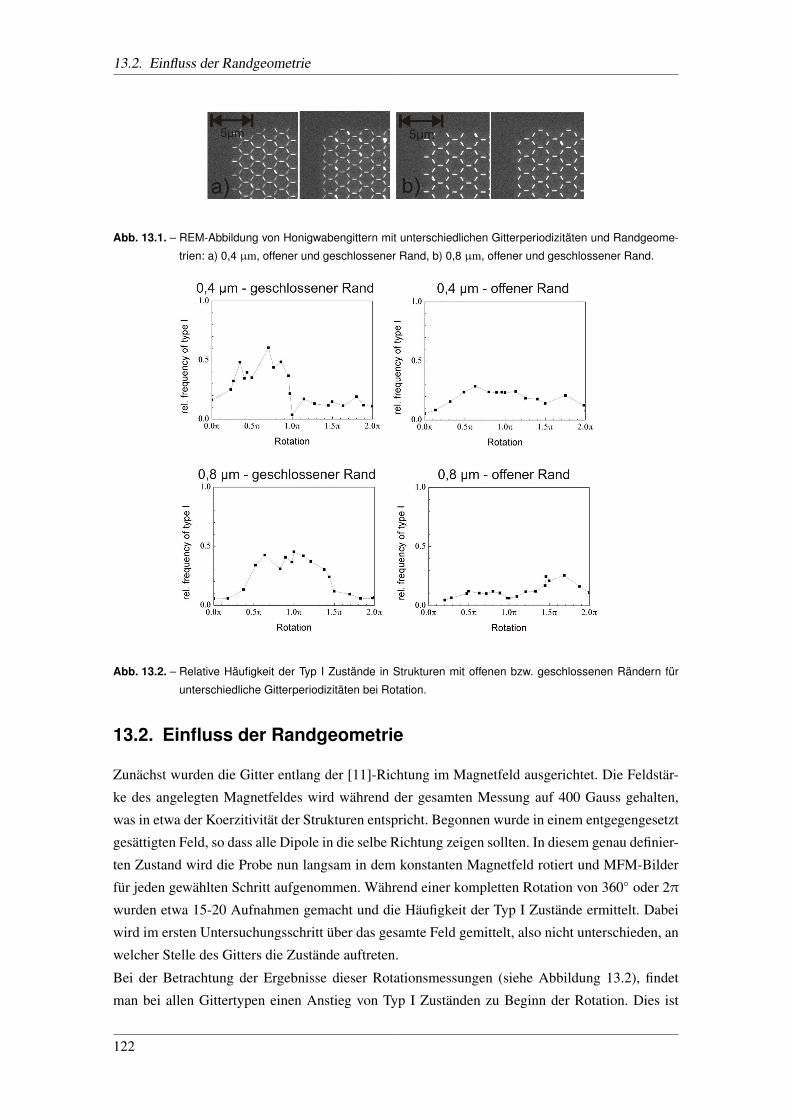
13.2. Einfluss der Randgeometrie
Abb. 13.1. – REM-Abbildung von Honigwabengittern mit unterschiedlichen Gitterperiodizitäten und Randgeome-
trien: a) 0,4 µm, offener und geschlossener Rand, b) 0,8 µm, offener und geschlossener Rand.
Abb. 13.2. – Relative Häufigkeit der Typ I Zustände in Strukturen mit offenen bzw. geschlossenen Rändern für
unterschiedliche Gitterperiodizitäten bei Rotation.
13.2. Einfluss der Randgeometrie
Zunächst wurden die Gitter entlang der [11]-Richtung im Magnetfeld ausgerichtet. Die Feldstär-
ke des angelegten Magnetfeldes wird während der gesamten Messung auf 400 Gauss gehalten,
was in etwa der Koerzitivität der Strukturen entspricht. Begonnen wurde in einem entgegengesetzt
gesättigten Feld, so dass alle Dipole in die selbe Richtung zeigen sollten. In diesem genau definier-
ten Zustand wird die Probe nun langsam in dem konstanten Magnetfeld rotiert und MFM-Bilder
für jeden gewählten Schritt aufgenommen. Während einer kompletten Rotation von 360 oder 2π
wurden etwa 15-20 Aufnahmen gemacht und die Häufigkeit der Typ I Zustände ermittelt. Dabei
wird im ersten Untersuchungsschritt über das gesamte Feld gemittelt, also nicht unterschieden, an
welcher Stelle des Gitters die Zustände auftreten.
Bei der Betrachtung der Ergebnisse dieser Rotationsmessungen (siehe Abbildung 13.2), findet
man bei allen Gittertypen einen Anstieg von Typ I Zuständen zu Beginn der Rotation. Dies ist
122
Rotationsmessungen
verständlich, da zunächst durch die Sättigung kein Typ I Zustand vorhanden sein sollte und nun
durch die Rotation einige Dipole beginnen zu schalten und sich dementsprechen Typ I Zustände
an den Knotenpunkten ausbilden können. Für das 0,8 µm Gitter mit geschlossenen Rändern steigt
die Häufigkeit der Typ I Zustände bis zu einer Rotationsposition von 180 bzw. π an und fällt
dann wieder ab. Bei dem Gitter mit kleinerem Inselabstand von 0,4 µm ist das Maximum der Typ
I Zustände bei einer Position von 0.7π zu finden. Bei den Gittern mit offenen Rändern ist dagegen
keine bevorzugte Rotationsposition für das Ausbilden von Typ I Zuständen zu beobachten. Statt-
dessen kann man zu Beginn der Rotation einen leichten Anstieg dieser Zustände auf einen Wert
von etwa 30% beobachten, mit einer sinkenden Tendenz für den weiteren Verlauf der Rotation.
Beim 0,8 µm Gitter mit offenen Rändern bleibt die Anzahl der Typ I Zustände bis zu einer Positi-
on von 1.5π konstant und erreicht dann ein kleines Maximum bei 1.7π.
Zusammegefasst ergibt sich bei der Untersuchung der Häufigkeit von Typ I Zustände bei Rotation
in einem konstanten magnetischen Feld ein bevorzugtes Auftreten von Typ I Zuständen in Gittern
mit geschlossenen Rändern.
13.3. Lokales Auftreten von Typ I Zuständen im statischen Fall
Um die Rotationsmessungen mit einem “statischen” Fall zu vergleichen, wurden an den Strukturen
ebenfalls digitale Hysteresen aufgenommen (siehe dazu Kapitel 10). Durch die Wahl eines klei-
neren Schreibfeldes konnte hier die gesamte Struktur mit dem MFM abgebildet werden und nicht
nur, wie in Kapitel 10, ein kleiner Ausschnitt. Abbildung 13.4 zeigt die relative Häufigkeit von Typ
I Zuständen in Abhängigkeit vom magnetischen Feld, gemittelt über den gesamten Gitterbereich.
Um nun das lokale Auftreten von Typ I Zuständen zu untersuchen, wurde das Gitter zusätzlich in
insgesamt 5 Bereiche unterteilt, die A1, A2, B1, B2 und C genannt worden sind (siehe Abbilung
13.3). Dabei können die Bereiche A1 und A2, sowie B1 und B2 aus Symmetriegründen jeweils
gleichberechtigt als A und B zusammengefasst werden. Für jeden Gittertyp umfassen die einzel-
nen Bereiche jeweils die gleiche Anzahl an Knotenpunkten, zwischen den verschiedenen Gittern
kann sich die Knotenpunktanzahl je Bereich jedoch unterscheiden. Insgesamt liegt die Anzahl der
untersuchten Knotenpunkte pro Bereich bei etwa 50-100. Die Hysterese wurde in [11]-Richtung
aufgenommen.
Betrachtet man die über das gesamte Gitter gemittelte Verteilung von Typ I Zuständen in Abbil-
dung 13.4, so erkennt man, wie auch schon bei den Rotationsmessungen, eine klare Präferenz der
Typ I Zustände in den Gittern mit geschlossenem Rand. Besonders ausgeprägt ist dieses Verhal-
ten bei den Gittern mit 0,4 µm Inselabstand. Wenn man sich das Auftreten der Typ I Zustände in
Abhängigkeit vom Gitterbereich anschaut, ergibt sich ein detailliertes Bild (siehe dazu Abbildung
13.5). Die Graphen zeigen die relative Häufigkeit des Typ I Zustandes abhängig vom externen Ma-
gnetfeld für die unterschiedlichen, in Abbildung 13.3 definierten Bereiche. Dabei wird zwischen
den Gitterperiodizitäten 0,4 µm und 0,8 µm sowie zwischen den zwei Randgeometrien (offene
und geschlossene Ränder) unterschieden. Das bevorzugte Auftreten von Typ I Zuständen in Git-
tern mit geschlossenen Rändern ist auch hier beobachtbar. Bei genauerer Betrachtung zeigt sich,
123
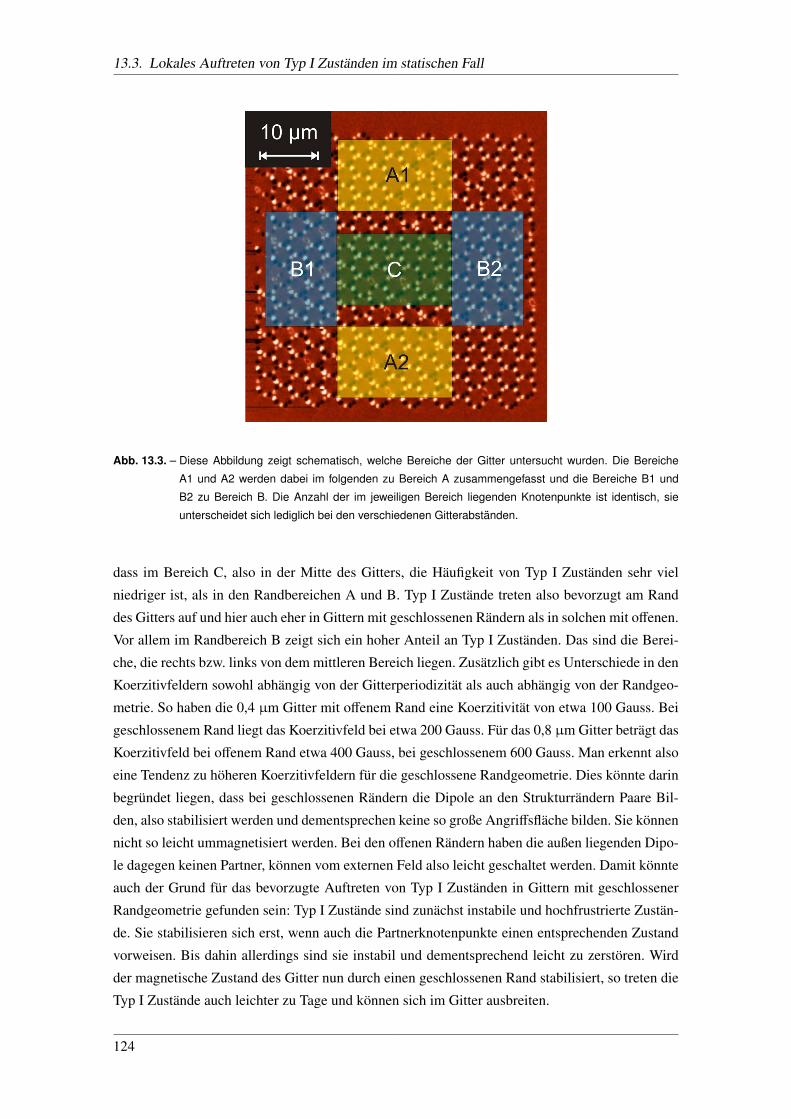
13.3. Lokales Auftreten von Typ I Zuständen im statischen Fall
Abb. 13.3. – Diese Abbildung zeigt schematisch, welche Bereiche der Gitter untersucht wurden. Die Bereiche
A1 und A2 werden dabei im folgenden zu Bereich A zusammengefasst und die Bereiche B1 und
B2 zu Bereich B. Die Anzahl der im jeweiligen Bereich liegenden Knotenpunkte ist identisch, sie
unterscheidet sich lediglich bei den verschiedenen Gitterabständen.
dass im Bereich C, also in der Mitte des Gitters, die Häufigkeit von Typ I Zuständen sehr viel
niedriger ist, als in den Randbereichen A und B. Typ I Zustände treten also bevorzugt am Rand
des Gitters auf und hier auch eher in Gittern mit geschlossenen Rändern als in solchen mit offenen.
Vor allem im Randbereich B zeigt sich ein hoher Anteil an Typ I Zuständen. Das sind die Berei-
che, die rechts bzw. links von dem mittleren Bereich liegen. Zusätzlich gibt es Unterschiede in den
Koerzitivfeldern sowohl abhängig von der Gitterperiodizität als auch abhängig von der Randgeo-
metrie. So haben die 0,4 µm Gitter mit offenem Rand eine Koerzitivität von etwa 100 Gauss. Bei
geschlossenem Rand liegt das Koerzitivfeld bei etwa 200 Gauss. Für das 0,8 µm Gitter beträgt das
Koerzitivfeld bei offenem Rand etwa 400 Gauss, bei geschlossenem 600 Gauss. Man erkennt also
eine Tendenz zu höheren Koerzitivfeldern für die geschlossene Randgeometrie. Dies könnte darin
begründet liegen, dass bei geschlossenen Rändern die Dipole an den Strukturrändern Paare Bil-
den, also stabilisiert werden und dementsprechen keine so große Angriffsfläche bilden. Sie können
nicht so leicht ummagnetisiert werden. Bei den offenen Rändern haben die außen liegenden Dipo-
le dagegen keinen Partner, können vom externen Feld also leicht geschaltet werden. Damit könnte
auch der Grund für das bevorzugte Auftreten von Typ I Zuständen in Gittern mit geschlossener
Randgeometrie gefunden sein: Typ I Zustände sind zunächst instabile und hochfrustrierte Zustän-
de. Sie stabilisieren sich erst, wenn auch die Partnerknotenpunkte einen entsprechenden Zustand
vorweisen. Bis dahin allerdings sind sie instabil und dementsprechend leicht zu zerstören. Wird
der magnetische Zustand des Gitter nun durch einen geschlossenen Rand stabilisiert, so treten die
Typ I Zustände auch leichter zu Tage und können sich im Gitter ausbreiten.
124
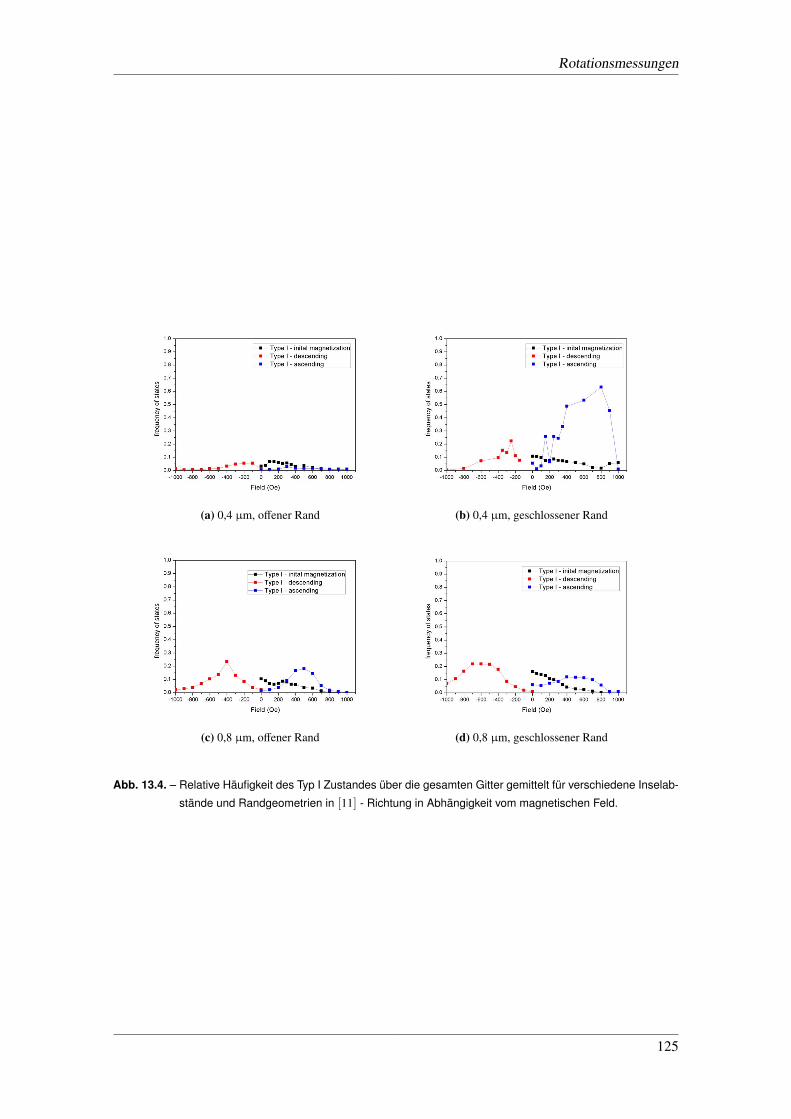
Rotationsmessungen
(a) 0,4 µm, offener Rand (b) 0,4 µm, geschlossener Rand
(c) 0,8 µm, offener Rand (d) 0,8 µm, geschlossener Rand
Abb. 13.4. – Relative Häufigkeit des Typ I Zustandes über die gesamten Gitter gemittelt für verschiedene Inselab-
stände und Randgeometrien in [11] - Richtung in Abhängigkeit vom magnetischen Feld.
125
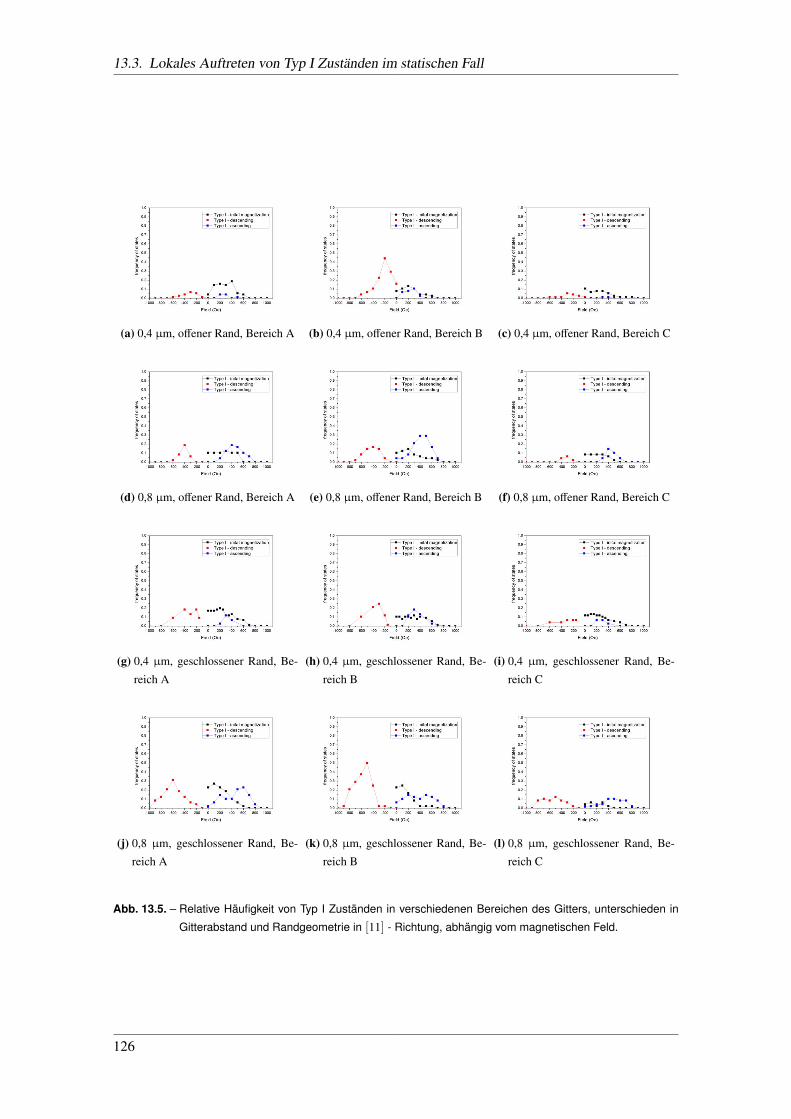
13.3. Lokales Auftreten von Typ I Zuständen im statischen Fall
(a) 0,4 µm, offener Rand, Bereich A (b) 0,4 µm, offener Rand, Bereich B (c) 0,4 µm, offener Rand, Bereich C
(d) 0,8 µm, offener Rand, Bereich A (e) 0,8 µm, offener Rand, Bereich B (f) 0,8 µm, offener Rand, Bereich C
(g) 0,4 µm, geschlossener Rand, Be-
reich A
(h) 0,4 µm, geschlossener Rand, Be-
reich B
(i) 0,4 µm, geschlossener Rand, Be-
reich C
(j) 0,8 µm, geschlossener Rand, Be-
reich A
(k) 0,8 µm, geschlossener Rand, Be-
reich B
(l) 0,8 µm, geschlossener Rand, Be-
reich C
Abb. 13.5. – Relative Häufigkeit von Typ I Zuständen in verschiedenen Bereichen des Gitters, unterschieden in
Gitterabstand und Randgeometrie in [11] - Richtung, abhängig vom magnetischen Feld.
126
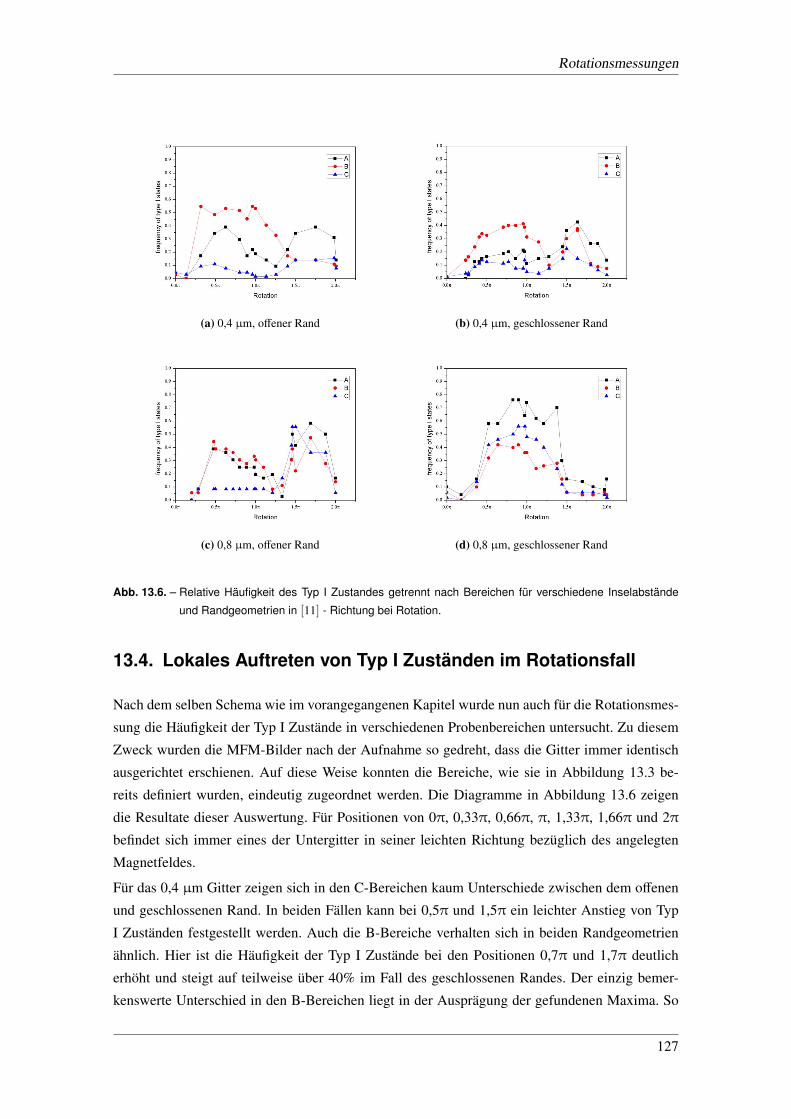
Rotationsmessungen
(a) 0,4 µm, offener Rand (b) 0,4 µm, geschlossener Rand
(c) 0,8 µm, offener Rand (d) 0,8 µm, geschlossener Rand
Abb. 13.6. – Relative Häufigkeit des Typ I Zustandes getrennt nach Bereichen für verschiedene Inselabstände
und Randgeometrien in [11] - Richtung bei Rotation.
13.4. Lokales Auftreten von Typ I Zuständen im Rotationsfall
Nach dem selben Schema wie im vorangegangenen Kapitel wurde nun auch für die Rotationsmes-
sung die Häufigkeit der Typ I Zustände in verschiedenen Probenbereichen untersucht. Zu diesem
Zweck wurden die MFM-Bilder nach der Aufnahme so gedreht, dass die Gitter immer identisch
ausgerichtet erschienen. Auf diese Weise konnten die Bereiche, wie sie in Abbildung 13.3 be-
reits definiert wurden, eindeutig zugeordnet werden. Die Diagramme in Abbildung 13.6 zeigen
die Resultate dieser Auswertung. Für Positionen von 0π, 0,33π, 0,66π, π, 1,33π, 1,66π und 2π
befindet sich immer eines der Untergitter in seiner leichten Richtung bezüglich des angelegten
Magnetfeldes.
Für das 0,4 µm Gitter zeigen sich in den C-Bereichen kaum Unterschiede zwischen dem offenen
und geschlossenen Rand. In beiden Fällen kann bei 0,5π und 1,5π ein leichter Anstieg von Typ
I Zuständen festgestellt werden. Auch die B-Bereiche verhalten sich in beiden Randgeometrien
ähnlich. Hier ist die Häufigkeit der Typ I Zustände bei den Positionen 0,7π und 1,7π deutlich
erhöht und steigt auf teilweise über 40% im Fall des geschlossenen Randes. Der einzig bemer-
kenswerte Unterschied in den B-Bereichen liegt in der Ausprägung der gefundenen Maxima. So
127
13.4. Lokales Auftreten von Typ I Zuständen im Rotationsfall
wird im ersten Maxima für das offene Gitter ein Wert von etwa 40% für die Häufigkeit der Typ I
Zustände erreicht, im geschlossenen Gitter wird an dieser Stelle lediglich ein Wert von etwa 20%
erreicht. Die Erhöhung an den beschriebenen Positionen lassen sich darauf zurückführen, dass
hier jeweils eines der Strukturuntergitter in seine leichte Richtung, bezogen auf das angelegte Ma-
gnetfeld, gededreht wird. In den A-Bereichen zeigen sich deutlichere Unterschiede. So taucht im
Fall des Gitters mit offenem Rand ein stark erhöhtes Auftreten von Typ I Zuständen zwischen den
Positionen 0,4π und 1,0π auf. Danach nimmt die Häufigkeit dieses Zustandes langsam wieder ab.
Für das Gitter mit geschlossenem Rand ist ebenfalls zwischen den Positionen 0,4π und 1,0π die
Häufigkeit der Typ I Zustände erhöht, aber es findet sich noch ein zweites, zusätzliches Maximum
bei 1,7π, bei dem die Häufigkeit der Typ I Zustände immerhin noch auf knapp 40% ansteigt. Hier
wird wieder eines der Untergitter in seine leichte Richtung gedreht.
Das Gitter mit 0,8 µm Inselabstand zeigt ein anderes Verhalten. Hier unterscheiden sich die C-
Bereiche des offenen und geschlossenen Gitters z. B. stark voneinander. Während im offenem
Gitter erst bei Rotationspositionen von 1,5π und 2,0π Typ I Zustände gehäuft auftreten (leichte
Richtung der Untergitter), findet man diese im Gitter mit geschlossenem Rand bereits bei Positio-
nen zwischen 0,5π und 1,5π. In beiden Fällen steigt die Häufigkeit auf bis zu 60%. Im offenen
Gitter verhalten sich die A- und B-Bereiche ähnlich. Einem starken Ansteigen der Häufigkeit der
Typ I Zustände bei 0,5π folgt ein langsamer Abfall bis zu einem Minimum bei etwa 1,8π. Für das
geschlossene Gitter sieht das Auftreten von Typ I Zuständen in den A- und B-Bereichen ähnlich
aus, wie im C-Bereich. Lediglich die Häufigkeiten unterscheiden sich. So werden im A-Bereich
Häufigkeiten von bis zu 80% bei 1π erreicht, während im B-Bereich lediglich 40% erreicht wer-
den. Die Häufigkeit von Typ I Zuständen im C-Bereich liegt mit knapp 60% genau dazwischen.
Insgesamt unterscheidet sich demnach das Auftreten von Typ I Zuständen im 0,8 µm Gitter mit
offenem Rand deutlich von dem mit geschlossenem Rand.
Ein so deutlicher Unterschied konnte für das 0,4 µm Gitter nicht festgestellt werden. Auffällig
ist aber, dass sich in beiden Gitterabständen das Auftreten der Typ I Zustände für geschlossene
Ränder in den drei Bereichen ähnlich verhält. So zeigen in dem 0,4 µm Gitter alle drei Bereiche
an ähnlichen Stellen zwei Maxima (bei etwa 0,7 und etwa 1,7π, also wieder an Stellen, an denen
sich eines der Untergitter in seiner leichter Richtung befindet), mit unterschiedlicher Ausprägung.
Im 0,8 µm Gitter bildet sich in allen drei Bereichen nur jeweils ein Maxima unterschiedlicher
Ausprägung bei etwa 1π aus.
Wie auch bei den statischen Hystereseaufnahmen treten im mittleren Probenbereich C bei Be-
ginn der Rotation weniger Typ I Zustände auf als in den Randbereichen. Für das 0,4 µm Gitter
bleibt dieses Verhalten über die Dauer der gesamten Rotation erhalten. Lediglich für das 0,8 µm
Gitter mit geschlossenen Rändern gilt dies nicht. Eine weitere Regelmäßigkeit zeigen die A- und
B-Bereiche im 0,4 µm Gitter. Bis zu einer Probenposition von etwa 1,5π finden sich in den B-
Bereichen deutlich mehr Typ I Zustände als im A-Bereich. Dies kehrt sich dann aber um und ab
1,5π bis zur vollendeten Rotation von 2π finden sich im A-Bereich mehr Typ I Zustände als im
B-Bereich. Dass diese Bereiche ineinander übergehen würden, war zu erwarten, da im Laufe der
Rotation ein Bereich den anderen in seiner geometrischen Ausrichtung im Bezug zum Magnetfeld
128
Rotationsmessungen
ersetzt. Das Ausbilden der durch die Rotation verursachten Konfigurationen setzt erst mit der Ro-
tation der Probe ein. Wäre die Struktur um einige Vielfache von π gedreht worden, müsste man
eine periodische Wiederholung dieser abwechselnd auftretenden Maxima feststellen können und
auch ein Abwechseln der A- und B-Bereiche als Bereiche mit maximaler Typ I Häufigkeit. Dass
die B-Bereiche für das Ausbilden von Typ I Zuständen, unabhängig von der Randgeometrie, offen-
sichtlich präferiert sind, deckt sich mit den Ergebnissen aus den statischen Untersuchungen. Für
dieses Verhalten bildet allerdings das 0,8 µm Gitter mit geschlossenen Rändern eine Ausnahme.
Hier ändert sich während der gesamten Rotation so gut wie nichts an der Häufigkeitsverteilung.
Hier treten im Bereich A am häufigsten Typ I Zustände auf, gefolgt vom mittleren Bereich C.
Bereich B bildet das Schlusslicht.
13.5. Zusammenfassung der Rotations- und randabhängigen
Messungen
Es wurden Honigwabengitter mit verschiedenen Gitterperiodizitäten und Randgeometrien in ei-
nem statischen Magnetfeld rotiert. Es wurde sowohl über das gesamte Gitter gemittelt als auch
nach Gitterbereichen sortiert die Häufigkeit der Typ I Zustände im Verlaufe der Rotation ermittelt.
Diese Messungen wurden mit denen der gleichen Gitter im statischen Fall bei Veränderung des
magnetischen Feldes verglichen.
Mittelt man im Verlauf einer Rotation über den ganzen Gitterbereich, so erhält man das Ergebnis,
dass das Auftreten von Typ I Zuständen in Gittern mit geschlossenen Rändern gegenüber denen
mit offenen Rändern bevorzugt ist, unabhängig von der Gitterperiodizität. Dies wurde ebenfalls
durch die Untersuchungen im statischen Fall beobachtet. Der Grund dafür kann in den sich gegen-
seitig stabilisierenden Dipolpaaren am Rand der Gitter mit geschlossener Randgeometrie liegen,
die im Falle der offenen Randgeometrie nicht vorhanden sind. Dies spiegelt sich auch in einer
erhöhten Koerzitivität für geschlossene Gitter wieder. Schaut man sich die Ergebnisse nach Git-
terbereichen getrennt an, so zeigt sich ein vermehrtes Auftreten von Typ I Zuständen in den Be-
reichen, die links und rechts von der Gittermitte liegen. Durch die Rotation konnte nachgewiesen
werden, dass das Verhalten von Bereich A in das von Bereich B übergeht und umgekehrt, was
diese Vermutung stützt. Im statischen Fall wurde dieses Verhalten ebenfalls beobachtet, mit dem
Unterschied, dass hier das Umschalten der Dipole durch ein aktives Ändern des Magnetfeldwertes
verursacht wurde und nicht durch eine Neuausrichtung der Dipole durch Rotation.
Verglichen mit der Eingangs erwähnten Arbeit von Budrikis et al. [117], ergibt sich ein ähnli-
cher Zusammenhang zwischen geschlossenen und offenen Rändern. So ist auch in diesem Fall bei
geschlossenen Rändern ein höheres Feld zum Umschalten der Dipole notwendig. Ebenfalls ver-
gleichbar ist die Präferenz für Bildung der Konfigurationstypen, die die Spin Ice Regel verletzen,
am Rand der Gitter. Natürlich lässt sich die zitierte Arbeit nicht 1:1 auf die vorliegende Arbeit
übertragen, da unterschiedliche Geometrien verwendet wurden und die theoretische Arbeit in ei-
nigen Details von der experimentellen Durchführung hier abweicht, tendenziell scheinen sie sich
129

13.5. Zusammenfassung der Rotations- und randabhängigen Messungen
aber zu ergänzen.
130
14. Zusammenfassung und Ausblick
In dieser Arbeit wurden zahlreiche Untersuchungen an lithographisch hergestellten Honigwaben-
gitterstrukturen aus polykristallinem Eisen vorgestellt. Neben dem Ummagnetisierungsverhalten
einzelner Dipole und Dipolanordnungen wurden ebenfalls Gitteranordnungen mit unterschied-
lichen Inselabständen hinsichtlich ihres Schaltverhaltens untersucht. Es wurde der Einfluss von
Gitterdefekten analysiert sowie das Verhalten der Gitter bei Rotation und der Einfluss der Rand-
geometrie besprochen.
Zunächst konnte durch ein selbst erstelltes Phasendiagramm gezeigt werden, dass bei einer Struk-
turgröße von l=3 µm und w=0,3 µm bzw. l=1 µm und w=0,1 µm und einem Aspektverhältnis von
m=10 die einzelnen Inseln eindomäniges Verhalten zeigen. Mit diesen Ergebnissen konnten dann
die zu untersuchenden Gitter mittels Elektronenstrahllithographie hergestellt werden, mit Inselab-
ständen von 0,4 µm, 0,8 µm und 1,7 µm.
Im ersten Schritt wurden einzelne Dipole bzw. Anordnungen von Doppel- und Tripeldipolstruk-
turen parallel zum magnetischen Feld ausgerichtet und ihr Umschaltfeld bestimmt. Hier wurde
der erste Hinweis darauf gefunden, dass bei einem Inselabstand von 1,7 µm nur eine sehr geringe
Wechselwirkung zwischen den Dipolen besteht, sowie eine leicht stabilisierende Wirkung der Di-
pole aufeinander bei kleinen Inselabständen.
Die Untersuchungen am ausgedehnten Gitter konnten diese Vermutung bestätigen, da hier bei dem
1,7 µm Gitter die Häufigkeiten von Typ I und Typ II Zuständen denen des unkorrelierten Systems
entsprechen. Für die [11]-Richtung wurde während des Ummagnetisierungsprozesses ein hoch-
geordneter Zustand von Typ I Zuständen festgestellt, der in die [10]-Richtung nicht beobachtbar
war. Der hochgeordnete Zustand ist durch die unterschiedlichen Koerzitivfelder der einzelnen Un-
tergitter bestimmt, bedingt durch deren Ausrichtung in Bezug zum angelegten Magnetfeld. Dieser
eigentlich in sich hochfrustrierte Zustand bildet sich deshalb aus, weil er durch das Vorhandensein
im gesamten Gitter einen übergeordneten nicht frustrierten Zustand ausbildet. Benachbarte Kno-
tenpunkte bilden Quasi-Dipole, deren Streufeld über das gesamte Gitter eben in nicht frustrierter
Anordnung realisiert werden kann. So stabilisieren sich die Typ I Zustände gegenseitig. Diese
Vermutung wird bestärkt durch die Stabilität, die der geordnete Zustand aufweist. Bis zu einem
Gegenfeld von 200 Gauss bleibt er erhalten, außer bei dem höchsten Gitterabstand von 1,7 µm,
wo er bereits bei einem Gegenfeld von 80 Gauss verloren geht. Die Stabilisierung ist im 1,7 µm
Gitter offensichtlich nicht mehr der so stark, da hier die Wechselwirkung zwischen den Dipolen
deutlich schwächer ist, als in den beiden anderen Gittern mit engeren Inselabständen. Bestätigt
wurde diese Vermutung durch die Betrachtung von Typ I Domänen. Das bevorzugte Auftreten des
eigentlich hochfrustierten Zustandes in direkter Nachbarschaft wurde sowohl in den Gittern mit
0,4 µm Inselabstand als auch noch im Gitter mit 1,7 µm Inselabstand beobachtet. Bei letzterem
konnten die Domänen allerdings bei weitem nicht mehr die Größe erreichen, wie im Gitter mit
kleinem oder mittlerem Gitterabstand. Dies zeigt erneut die geringere Wechselwirkung zwischen
den einzelnen Dipolen im 1,7 µm Gitter und gibt ebenfalls einen Hinweis auf die stabilisierende
Wirkung, die sich in dieser Knotenpunktkonfiguration ausbildet.
Defekte in Form von einzelnen fehlenden Dipolen haben kaum Auswirkung auf die Gesamtkon-
figuration im Gitter und verfälschen demnach die Ergebnisse der bisherigen Auswertung kaum.
Es konnte gezeigt werden, dass lediglich die direkten Nachbarknotenpunkte von solch einem Git-
terdefekt beeinflusst werden. Schon die übernächsten Nachbarn im defekten Gitter zeigen keinen
Unterschied zu ihrem intakten Pendant. Auch dies spricht insgesamt für eine eher schwache Wech-
selwirkung zwischen den einzelnen Dipolen.
Beim Betrachten unterschiedlicher Randgeometrien konnte ein bevorzugtes Auftreten von Typ I
Zuständen in Gittern mit geschlossenen Rändern beobachtet werden. Dies liegt in den sich gegen-
seitig stabilisierenden Dipolen am Rand der geschlossenen Gitter begründet. Das Feld schaltet erst
später, so dass sich die Typ I Zustände leichter halten können, bis sie sich gegenseitig stabilisieren.
Dies wurde sowohl durch die Rotationsmessungen als auch durch Hystereseaufnahmen ohne Ro-
tation bestätigt. Unterscheidet man bei der Auswertung das Auftreten von Typ I Zuständen nach
Gitterbereich, so macht sich sowohl im statischen als auch im Rotationsfall ein Häufigkeitsanstieg
dieses Konfigurationstyps in Bereichen links und rechts von der Gittermitte bemerkbar. So schei-
nen die Typ I Zustände vorzugsweise an den Rändern der Gitter zu nukleieren, während sie im
Zentrum des Gitters kaum auftreten.
Insgesamt konnte eine detaillierte Analyse des Honigwabengitters hinsichtlich seines Schaltver-
haltens und seiner Knotenpunktkonfigurationen erstellt werden. Diese kann dabei helfen, das Ver-
halten dieses Gitters in einem externen Feld und bei Rotation zu verstehen und weitergehende
Analysen vor allem im Hinblick auf die Bewegung von Typ I Zuständen durch das Gitter zu er-
stellen. Vor allem die Stabilität der Typ I Zustände hat hier einen hohen Stellenwert, da dieser
Zustand ursprünglich nicht in dieser Häufigkeit erwartet worden ist. Weiterführend könnte z.B.
das Entmagnetisierungsprotokoll, welches hier entwickelt wurde, durch einen temperaturbeding-
ten Phasenübergang ersetzt werden. Mit einer Legierung wie FeCr lässt sich beispielsweise die
Curie-Temperatur des Materials einstellen, so dass man die Gitterstruktur bei Raumtemperatur in
paramagnetischer Phase vorliegen hat. Durch Herunterkühlen könnte die Struktur in den ferroma-
gnetischen Bereich gebracht und analog untersucht werden. Desweiteren könnten durch Ändern
der Randbedingungen weitere geometrische Einflüsse auf die Typ I Konfiguration analysiert wer-
den. So bietet sich statt der quadratische Schreibfeldform eine rechteckige an, die man abhängig
davon ob die Längs- oder Querseite parallel zum Magnetfeld ausgerichtet ist, auswerten kann.
Auch hier sind selbstverständlich Rotationsmessungen denkbar. Weiterhin könnte man die Struk-
turen um mehrere Vielfache von π im Feld rotieren lassen und so das periodische Auftreten und
Verschwinden von Typ I Zuständen nachweisen. Neben diesen experimentellen Möglichkeiten,
sich noch weiter mit dem Honigwabengitter zu beschäftigen, ist es auch denkbar, die Analyse
vom Auftreten der verschiedenen Konfigurationstypen hin zu ihrer Bewegung durch das Gitter zu

verschieben.
Wie man sieht, gibt es noch zahlreiche weitere Aspekte, die es zu erforschen und analysieren gilt,
um ein komplettes Verständnis des magnetischen Verhaltens des Honigwabengitters und damit
eines hochinteressanten Spin Ice Systems zu erreichen.

Literaturverzeichnis
[1] L. Pauling. The Structure and Entropy of Ice and of Other Crystals with Some Randomness
of Atomic Arrangement. J. Am. Chem. Soc., 57(12), 1935.
[2] S. T. Bramwell and M. J. P. Gingras. Spin ice state in frustrated magnetic pyrochlore
materials. Science, 294(1495), 2001.
[3] J. D. Bernal and R. H. Fowler. A theory of water and ionic solution with particular reference
to hydrogen and hydroxyl ions. Journal of chemical physics, 1(8), 1933.
[4] A. P. Ramirez, A. Hayashi, R. J. Cava, R. Siddharthan, and B. S. Shastry. Zero-point entropy
in spin ice. Nature, 399:333–335, 1999.
[5] R. Siddarthan, B.S. Shastry, A.P. Ramirez, A. Hayashi, R.J.Cava, and S. Rosenkranz. Ising
Pyrochlore Magnets: Low-Temperature Properties, Ice Rules and Beyond. Phys. Rev. Lett.,
83(9), 1999.
[6] D. J. P. Morris, D. A. Tennant, S. A. Grigera, B. Klemke, C. Castelnovo, R. Moessner,
C. Czternasty, M. Meissner, K. C. Rule, J.-U. Hoffmann, K. Kiefer, S. Gerischer, D. Slo-
binsky, and R. S. Perry. Dirac Strings and magnetic monopoles in the spin ice Dy2Ti2O7.
Science, 326:411–414, 2009.
[7] T. Fennell, P. P. Deen, A. R. Wildes, K. Schmalzl, D. Prabhakaran, A. T. Boothroyd, R. J.
Aldus, D. F. McMorrow, and S. T. Bramwell. Magnetic coulomb phase in the spin ice
Ho2Ti2O7. Science, 326:415–417, 2009.
[8] C. Castelnovo, R. Moessner, and S. L. Sondhi. Magnetic Monopoles in spin ice. Nature,
451:42–45, 2008.
[9] M. J. P. Gingras. Observing monopoles in a magnetic analog of ice. Science, 326:375–376,
2009.
[10] L. D. C. Jaubert and P. C. W. Holdsworth. Signature of magnetic monopole and Dirac string
dynamics in spin ice. Nature Physics, 5:258–261, 2009.
[11] H. Kadowaki, N. Doi, Y. Aoki, Y. Tabata, T. Sato, J. Lynn, K. Matsuhira, and Z. Hiroi.
Observation of magnetic monopoles in spin ice. J. Phys. Soc. Jpn., 78(10), 2009.
Literaturverzeichnis
[12] S. T. Bramwell, S. R. Giblin, S. Calder, R. Aldus, D. Prabhakaran, and T. Fennell. Measu-
rement of the charge and current of magnetic monopoles in spin ice. Nature, 461:956–960,
2009.
[13] S. T. Bramwell. Great moments in disorder. Nature, 439:273–274, 2006.
[14] O. Tchernyshyov. Freedom for the poles. Nature, 451, 2008.
[15] A. S. Wills, R. Ballou, and C. Lacroix. Model of localized highly frustrated ferromagnetism:
The kagomé spin ice. Phys. Rev. B, 66(144407), 2002.
[16] E. Mengotti, L.J. Heyderman, A. Fraile Rodriguez, F. Nolting, R.V. Hügli, and H.B. Braun.
Real-space observations of emergent magnetic monopoles and associated Dirac strings in
artificial kagome spin ice. Nature Physics, 7, 2011.
[17] S. Ladak, D. E. Read, G. K. Perkins, L. F. Cohen, and W. R. Branford. Direct observation
of magnetic monopole defects in an artificial spin-ice system. Nature Physics, April 2010.
[18] L. A. Mól, R. L. Silva, R. C. Silva, A. R. Pereira, W. A. Moura-Melo, and B. V. Costa.
Magnetic monopole and string excitations in two-dimensional spin ice. J. Appl. Phys., 106
(063913), 2009.
[19] S. V. Isakov, R. Moessner, and S. L. Sondhi. Why spin ice obeys the ice rules. Phys. Rev.
Lett., 95(217201), 2005.
[20] R. Higashinaka, H. Fukazawa, and Y. Maeno. Anisotropic release of the residual zero-
point entropy in the spin-ice compound Dy2Ti2O7: Kagome ice behavior. Phys. Rev. B, 68
(014415), 2003.
[21] R. Moessner and S. L. Sondhi. Theory of the [111] magnetization plateau in spin ice. Phys.
Rev. B, 68(06441), 2003.
[22] Y. Tabata, H. Kadowski, K. Matsuhira, Z. Hiroi, N. Aso, E. Ressouche, and B. Fak. Kagomé
ice state in the dipolar spin ice Dy2Ti2O7. Phys. Rev. Lett., 97(257205), 2006.
[23] X. Ke, R. S. Freitas, B. G. Ueland, G. C. Lau, M. L. Dahlberg, R. J. Cava, R. Moessner,
and P. Schiffer. Nonmonotonic zero-point entropy in diluted spin-ice. Phys. Rev. Lett., 99
(137203), 2007.
[24] T. Fennell, S.T. Bramwell, D.F. McMorrow, P. Manuel, and A.R. Wildes. Pinch points and
Kasteleyn transitions in kagome ice. Nature Physics, 3, 2007.
[25] R. F. Wang, C. Nisoli, R. S. Freitas, J. Li, W. McConville, B. J. Cooley, M. S. Lund, N. Sa-
marth, C. Leighton, V. H. Crespi, and P. Schiffer. Artificial spin ice in a geometrically
frustrated lattice of nanoscale ferromagnetic islands. Nature, 439:303–306, 2006.
136
Literaturverzeichnis
[26] C. Nisoli, R. Wang, J. Li, W. McConville, P. Lammert, P. Schiffer, and V. Crespi. Ground
state lost but degeneracy found: The effective thermodynamics of artificial spin ice. Phys.
Rev. Lett., 98(217203), 2007.
[27] A. Libal, C. Reichhardt, and C. J. O. Reichhardt. Realizing colloidal artificial ice on arrays
of optical traps. Phys. Rev. Lett., 97(228302), 2006.
[28] G. Möller and R. Moessner. Artificial square ice and related dipolar nanoarrays. Phys. Rev.
Lett., 96(237202), 2006.
[29] M. Tanaka, W. Saitoh, H. Miyaijma, T. Yamaoka, and Y. Iye. Magnetic interactions in a
ferromagnetic honeycomb nanoscale network. Phys. Rev. B, 73(052411), 2006.
[30] Y. Qi, T. Brintlinger, and J. Cummings. Direct observation of the ice rule in artificial kagome
spin ice. Phys. Rev. B, 77(094418), 2008.
[31] E. Mengotti, L. J. Heyderman, A. Rodríguez, A. Bisig, L. Le Guyader, F. Nolting, and H. B.
Braun. Building blocks of an artificial kagome spin ice: Photoemission electron microscopy
of arrays of ferromagnetic islands. Phys. Rev. B, 78(144402), 2008.
[32] E. Mengotti, L.J. Heyderman, A. Bisig, A. Fraile Rodriguez, L. LeGuyader, F. Nolting, and
H.B. Braun. Dipolar energy states in clusters of perpendicular magnetic nanoislands. J.
Appl. Phys., 105(113113), 2009.
[33] M. Tanaka, E. Saitoh, and H. Miyaijma. Domain structures and magnetic ice-order in NiFe
nano-network with honeycomb structure. J. Appl. Phys., 97(10J710), 2005.
[34] G.W. Chern, P. Mellado, and O. Tchernyshyov. Two-stage ordering of spins in dipolar spin
ice on kagome. arXiv:0906.4781v1, 2009.
[35] G. Möller and R. Moessner. Magnetic multipole analysis of kagome and artificial spin-ice
dipolar arrays. Phys. Rev. B, 80(140409(R)), 2009.
[36] R.P. Cowburn and M.E. Welland. Room Temperature Magnetic Quantum Cellular Auto-
mata. Science, 287, 2000.
[37] D.B. Carlton, N.C. Emley, E. Tuchfeld, and J. Bokor. Simulation Studies of Nanomagnet-
Based Logic Architecture. Nano Letters, 8(12), 2008.
[38] A. P. Ramirez. Handbook of Magnetic Materials, Chapter 4: Geometrical Frustration,
volume 13. Elsevier Science B. V., 2001.
[39] S. T. Bramwell and M. J. Harris. Frustration in ising-type spin models on the pyrochlore
lattice. J. Phys. Condens. Matter, 10:L215–L220, 1998.
[40] R. Moessner and S. L. Sondhi. Ising models of quantum frustration. Phys. Rev. B, 63
(224401), 2001.
137
Literaturverzeichnis
[41] L. Balents. Spin liquids in frustrated magnets. Nature, 464, 2010.
[42] J. Li, X. Ke, S. Zhang, D. Garand, C. Nisoli, P. Lammert, V.H. Crespi, and P. Schiffer. Pinch
points and Kasteleyn transitions in kagome ice. Phys. Rev. B, 81(092406), 2010.
[43] R. Moessner. Magnets with strong geometric frustration. arXiv:cond-mat/0010301v1, 2000.
[44] Y. Han. Phase-space networks of geometrically frustrated systems. Phys. Rev. E, 80
(051102), 2009.
[45] B. Cabrera. First results from a superconducting detector for moving magnetic monopoles.
Phys. Rev. Lett., 48(20), 1982.
[46] OPAL Collaboration. Search for Dirac Magnetic Monopoles in e+e-Collisions with the
OPAL Detector at LEP2. Physics Letters B, 663, 2007.
[47] P.A.M. Dirac. Quantisied Singularities in the Electromagnetic Field. Proc. Royal. Soc., 133
(60), 1933.
[48] G. t’Hooft. Pinch points and Kasteleyn transitions in kagome ice. Nuclear Physics B, 79,
1974.
[49] F.S. Crawford. The Structure and Entropy of Ice and of Other Crystals with Some Random-
ness of Atomic Arrangement. Am. J. Phys., 60(2), 1992.
[50] Ch. Kittel. Einführung in die Festkörperphysik. Oldenbourg Verlag München Wien, 13
edition, 2002.
[51] K. Kopitzki and P. Herzog. Einführung in die Festkörperphysik. Teubner Stuttgart Leipzig
Wiesbaden, 5 edition, 2004.
[52] A. Aharoni. Introduction to the theory of ferromagnetism. Oxford Science Publications,
2000.
[53] L. Bergmann and C. Schaefer. Lehrbuch der Experimentalphysik 6. De Gruyter Berlin,
1992.
[54] G.T. Rado and H. Suhl. Magnetism. Academic Press New-York, 1963.
[55] S.V. Vonsovskii. Magnetism. John Whiley Sons LTD Chichester, 1974.
[56] E.P. Wohlfarth. Ferromagnetic Materials. North-Holland Amsterdam, 1980.
[57] E.T. de Lacheisserie, D. Gignoux, and M. Schlenker, editors. Magnetism - Fundamentals.
Springer Science and Business, 2005.
[58] K.H.J. Buschow and F.R. de Boer. Physics of magnetism and magnetic materials. Kluwer
Academic Publishers New York, Boston, Dordrecht, London, Moscow, 2004.
138
Literaturverzeichnis
[59] S. Blundell. Magnetism in condensed matter. Oxford University Press, New York, 2004.
[60] R. Skomski. Simple models of magnetism. Oxford University Press, New York, 2008.
[61] G. Czycholl. Theoretische Festkörperphysik. Springer Berlin Heidelberg, 2 edition, 2004.
[62] A. Hubert and R. Schäfer. Magnetic Domains. Springer-Verlag Berlin Heidelberg New
York, 2000.
[63] Ashcroft and Mermin. Festkörperphysik. Oldenbourg Verlag München Wien, 2 edition,
2005.
[64] C. Kittel. Physical Theory of Ferromagnetic Domains. Reviews of modern physics, 21(4),
1949.
[65] R. Waser. Nanoelectronics and information technology. Wiley-VCH Verlag GmbH Co.
KGaA, Weinheim, 2nd, corrected edition, 2005.
[66] S.A. Majetich and Y. Jin. Magnetization Directions of Individual Nanoparticles. Science,
284(470), 1999.
[67] C.L. Dennis, R.P. Borges, L.D. Buda, U. Ebels, J.F. Gregg, M. Hehn, E. Jouguelet, K. Oun-
dadjela, I. Petej, I.L. Prejbeanu, and M.J. Thornton. The defining length scales of mesoma-
gnetism: a review. J. Phys. Condens. Matter, 14(R1175–R1262), 2002.
[68] F.J. Himpsel, J.E. Ortega, G.J. Mankey, and R.F. Willis. Magnetic nanostructures. Advances
in physics, 47(4), 1998.
[69] S.D. Bader. Opportunities in nanomagnetism. Reviews of modern physics, 78, 2006.
[70] R. Schäfer. Magnetische Mikrostrukturen. In Magnetische Schichtsysteme, chapter B6.
Research Center Jülich, 1999.
[71] D.L. Mills and J.A.C. Bland, editors. Nanomagnetism. Elsevier B.V., 2006.
[72] A.O. Adeyeye and N. Singh. Large area patterned magnetic nanostructures. J. Phys. D, 41
(153001), 2008.
[73] Ph. Ebert. Scanning Probe Microscopy: Overview. In Probing the Nanoworld, chapter B4.
Research Center Jülich, 2007.
[74] G. Binnig and H. Rohrer. Scanning tunneling microscopy. Helv. Phys. Acta, 55:726–735,
1982.
[75] V.L. Mironov. Fundamentals of scanning probe microscopy. Russian Acadamy of Sciences,
Institute for physics of microstructures, Nizhniy Novgorod, 2004.
139
Literaturverzeichnis
[76] E.Meyer, H.J. Hug, and R. Bennewitz. Scanning Probe Microscopy - The Lab on a Tip.
Springer Verlag Berlin Heidelberg New York, 2004.
[77] G. Binnig, C.F. Quate, and Ch. Gerber. Atomic force microscopy. Phys. Rev. Lett., 56(9),
1986.
[78] M. Weitze. Das Rasterkraftmikroskop. Deutsches Museum Berlin München Diepholz, 2003.
[79] Veeco Instruments. A practical guide to scanning probe microscopy. Veeco Instruments,
2005.
[80] Y. Martin and H.K. Wickramasinghe. Magnetic imaging by force microscopy with 1000 A
resolution. Appl. Phys. Lett., 50(20), 1987.
[81] T. Stifter, O. Marti, and B. Bhushan. Theoretical investigation of the distance dependence
of capillary and van der Waals forces in scanning force microscopy. Phys. Rev. B, 62(20),
2000.
[82] Veeco Instruments. Probes and Accessories. Veeco Instruments Katalog, 2006.
[83] S. Goek. Abbildung magnetischer Domänen. Diplomarbeit, Ruhr-Universiät Bochum,
2001.
[84] Application Note. Magnetic Force Microscopy. www.ntmdt.com, 2006.
[85] H. Dai, J.H. Hafner, A.G. Rinzler, D.T. Colbert, and R.E. Smalley. Nanotubes as nanoprobes
in scanning probe microscopy. Nature, 384(147), 1996.
[86] J.H. Hafner, C.L. Cheung, and C.M. Lieber. Direct growth of single-walled nanotube scan-
ning probe microscopy tips. J. Am. Chem. Soc., 121(9750), 1999.
[87] U. Hartmann. Magnetisch abbildende Rastersondenverfahren. In Magnetische Schichtsys-
teme, chapter B7. Research Center Jülich, 1999.
[88] Digital Instruments. MultiMode SPM Instruction Manual. Version 4.31ce, 1997.
[89] G.M. McClelland and J.N. Glosli. Friction at the atomic scale. In Fundamentals of Friction:
Macroscopic and Microscopic Processes. Kluwer Academic, Dortrecht, The Netherlands,
1992.
[90] R.C. Barrett, M. Tortonese, and C.F. Quate. Atomic resolution with an atomic force mi-
croscope using piezoresistive detection. Appl. Phys. Lett., 62(834), 1993.
[91] R. Garcia and R. Perez. Dynamic atomic force microscopy methods. Surface Science
Reports, 47(197), 2002.
[92] C.D. Wright and E.W. Hill. Reciprocity based tranfer function analysis in magnetic force
microscopy. Appl. Phys. Lett., 68(12), 1996.
140
Literaturverzeichnis
[93] S.Foss, R. Proksch, E.D. Dahlberg, B. Moskowitz, and B. Walsh. Localized micromagnetic
perturbation of domain walls in magnetite using a magnetic force microscope. Appl. Phys.
Lett., 69(22), 1996.
[94] U. Hartmann. Magnetokraft- und Magnetotunnelmikroskopie. In Magnetismus von Fest-
körpern und Grenzflächen, chapter 35. Research Center Jülich, 1993.
[95] D. Rugar, H.J. Mamin, P. Guethner, S.E. Lambert, J.E. Stern, I. McFadyen, and T. Yogi.
Magnetic Force Microscopy: general principles and application to longitudinal recording
media. J. Appl. Phys., 68(1169), 1990.
[96] A. Moser, H.J. Hug, B. Stiefel, and H.J. Güntherodt. Low temperature magnetic force
microscopy on YBa2Cu3O7 thin films. J. Mag. Magn. Mat., 190(114), 1998.
[97] S. McVitie, R.P. Ferrier, J. Scott, G.S. White, and A. Gallagher. Quantitative field measure-
ments from magnetic force microscope tips and comparison with point and extended charge
models. J. Appl. Phys., 89(3656), 2001.
[98] A. Thiaville, L. Belliard, D. Majer, E. Zeldov, and J. Miltat. Magnetic domain structure in
ultrathin Cu/Ni/Cu/Si(001) films. J. Appl. Phys., 82(7), 1997.
[99] A. Thiaville, J. Miltat, and J.M. Garcia. Magnetic Force Microscopy: Images of Nanostruc-
tures and Contrast Modeling. In H. Hopster and H.P. Oepen, editors, Magnetic Microscopy
of Nanostructures. Springer-Verlag Berlin Heidelberg, 2005.
[100] E. Ruska. The development of the electron microscope and of electron microscopy. Reviews
of modern physics, 59(3), 1987.
[101] J. D. Jackson. Klassische Elektrodynamik. de Gruyter, Berlin, 1983.
[102] L. Reimer and G. Pfefferkorn. Raster-Elektronenmikroskopie. Springer-Verlag Berlin Hei-
delberg New York, 1993.
[103] S. Fleger, J. Heckmann, and K. Klomparens. Elektronenmikroskopie. Spektrum Akademi-
scher Verlag Heidelberg Berlin Oxford, 1995.
[104] A. Remhof. Charakterisierungsmethoden nanostrukturierter Materialien. Vorlesung Ruhr-
Universität Bochum, 2005.
[105] Oxford. EDX-System. Hilfesystem der INCA-Software.
[106] L.F. Thompson, D.G. Wilson, and M. Bowden, editors. Introduction to Microlithography.
American Chemical Society, Washington D.C., 2 edition, 1994.
[107] D. Elliott. Microlithography: Process Technology for IC Fabrication. McGraw-Hill, New
York, 1986.
141
[108] J. R. Sheats and B.W. Smith, editors. Microlithography Science and Technology. Marcel
Dekker, New York, 1998.
[109] Das kleinste Fußballfeld der Welt. Presseinformationen der Ruhr-Universität Bochum, Nr.
164, 10.05.2006.
[110] A. Westphalen. Advanced MOKE Investigations: Remagnetisation Process of Microsized
Structures. Dissertation, Ruhr-Universiät Bochum, 2007.
[111] RAITH. Lithographie-System. Hilfesystem der Elphy Quantum-Software.
[112] M. J. Harris, S. T. Bramwell, D. F. McMorrow, T. Zeiske, and K. W. Godfrey. Geometrical
frustration in the ferromagnetic pyrochlore Ho2T2O7. Phys. Rev. Lett., 79(13), 1997.
[113] T. Last, S. Hacia, M. Wahle, S.F. Fischer, and U. Kunze. Optimization of nanopatterned
permalloy electrodes for a lateral hybrid spin-valve structure. J. Appl. Phys., 96(11), 2004.
[114] R. F. Wang, J. Li, W. McConville, C. Nisoli, X. Ke, J. W. Freeland, V. Rose, M. Grims-
ditch, P. Lammert, V. H. Crespi, and P. Schiffer. Demagnetization protocoll for frustrated
interacting nanomagnet arrays. J. Appl. Phys., 101(09J104), 2007.
[115] X. Ke, J. Li, C. Nisoli, P. Lammert, W. McConville, R. F. Wang, V. H. Crespi, and P. Schiffer.
Energy minimization and ac demagnetization in a nanomagnet array. Phys. Rev. Lett., 101
(037205), 2008.
[116] A. Schumann, B. Sothmann, P. Szary, and H. Zabel. Charge Ordering of magnetich dipoles
in artificial honeycomb patterns. Appl.Phys. Lett., 97(022509), 2010.
[117] Z. Budrikis, P. Politi, and R.L. Stamps. Vertex Dynamics in Finite Two-Dimensional Square
Spin Ices. Phys. Rev. Lett., 105(017201), 2010.
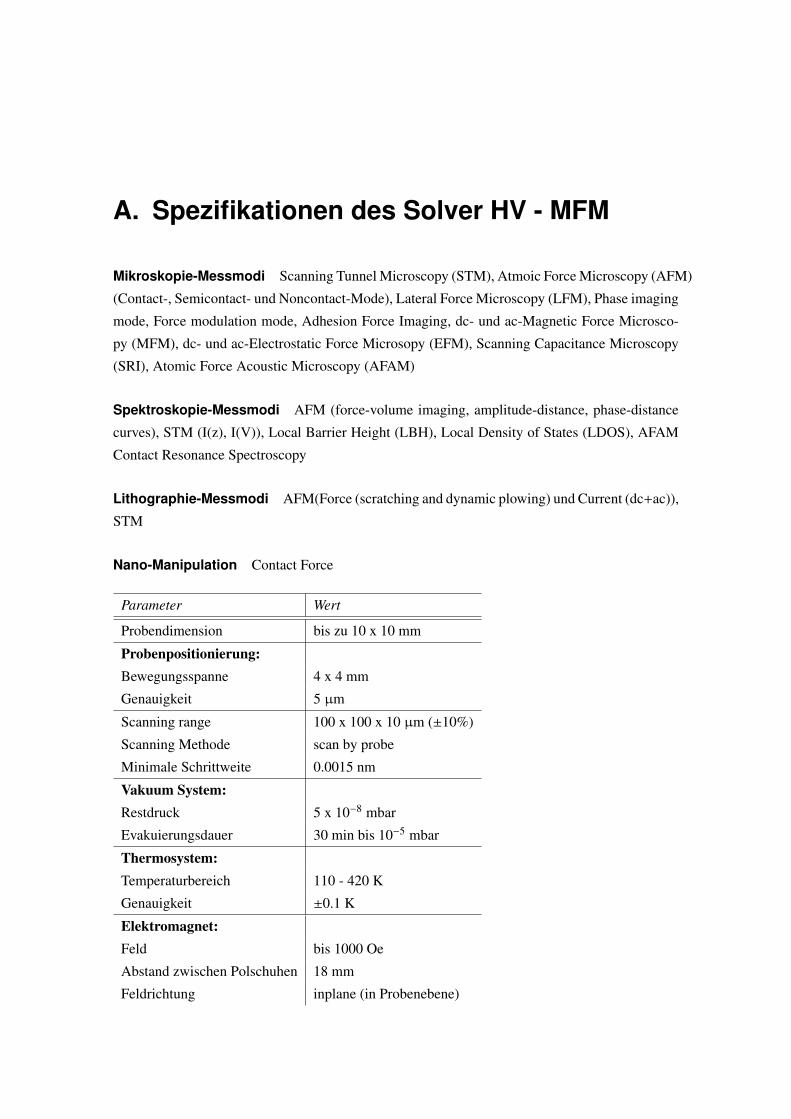
A. Spezifikationen des Solver HV - MFM
Mikroskopie-Messmodi Scanning Tunnel Microscopy (STM), Atmoic Force Microscopy (AFM)
(Contact-, Semicontact- und Noncontact-Mode), Lateral Force Microscopy (LFM), Phase imaging
mode, Force modulation mode, Adhesion Force Imaging, dc- und ac-Magnetic Force Microsco-
py (MFM), dc- und ac-Electrostatic Force Microsopy (EFM), Scanning Capacitance Microscopy
(SRI), Atomic Force Acoustic Microscopy (AFAM)
Spektroskopie-Messmodi AFM (force-volume imaging, amplitude-distance, phase-distance
curves), STM (I(z), I(V)), Local Barrier Height (LBH), Local Density of States (LDOS), AFAM
Contact Resonance Spectroscopy
Lithographie-Messmodi AFM(Force (scratching and dynamic plowing) und Current (dc+ac)),
STM
Nano-Manipulation Contact Force
Parameter Wert
Probendimension bis zu 10 x 10 mm
Probenpositionierung:Bewegungsspanne 4 x 4 mm
Genauigkeit 5 µm
Scanning range 100 x 100 x 10 µm (±10%)
Scanning Methode scan by probe
Minimale Schrittweite 0.0015 nm
Vakuum System:Restdruck 5 x 10−8 mbar
Evakuierungsdauer 30 min bis 10−5 mbar
Thermosystem:Temperaturbereich 110 - 420 K
Genauigkeit ±0.1 K
Elektromagnet:Feld bis 1000 Oe
Abstand zwischen Polschuhen 18 mm
Feldrichtung inplane (in Probenebene)

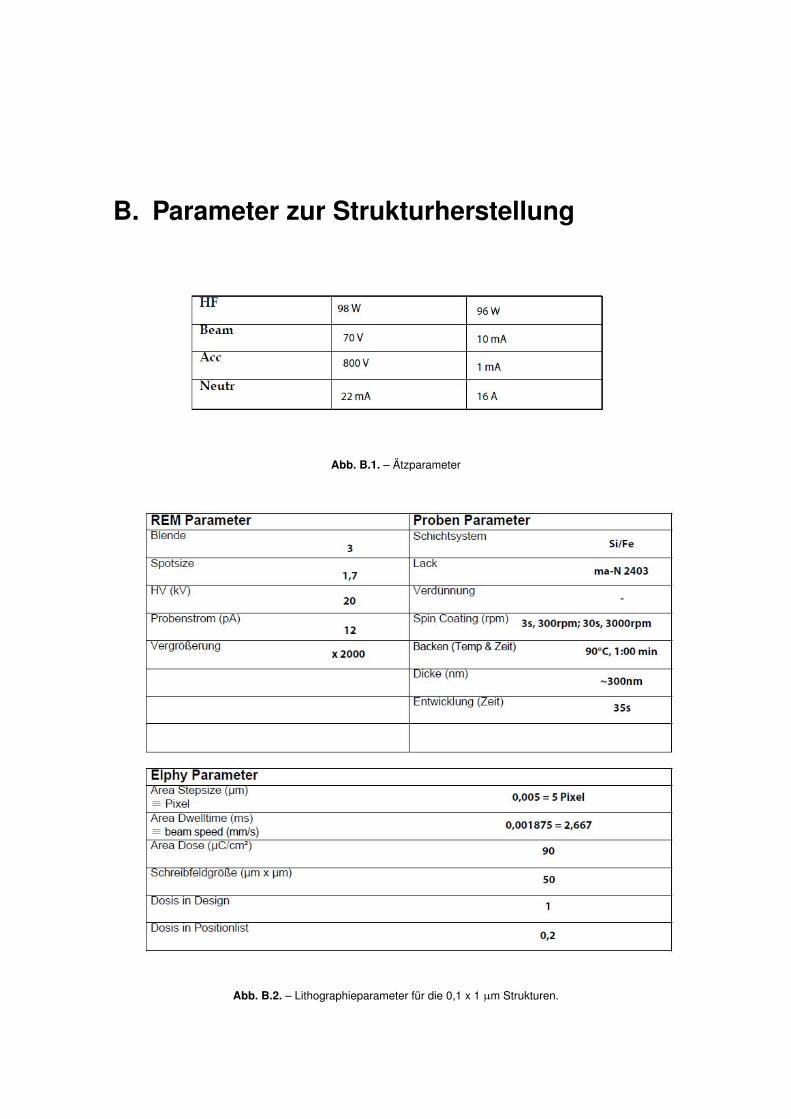
B. Parameter zur Strukturherstellung
Abb. B.1. – Ätzparameter
Abb. B.2. – Lithographieparameter für die 0,1 x 1 µm Strukturen.
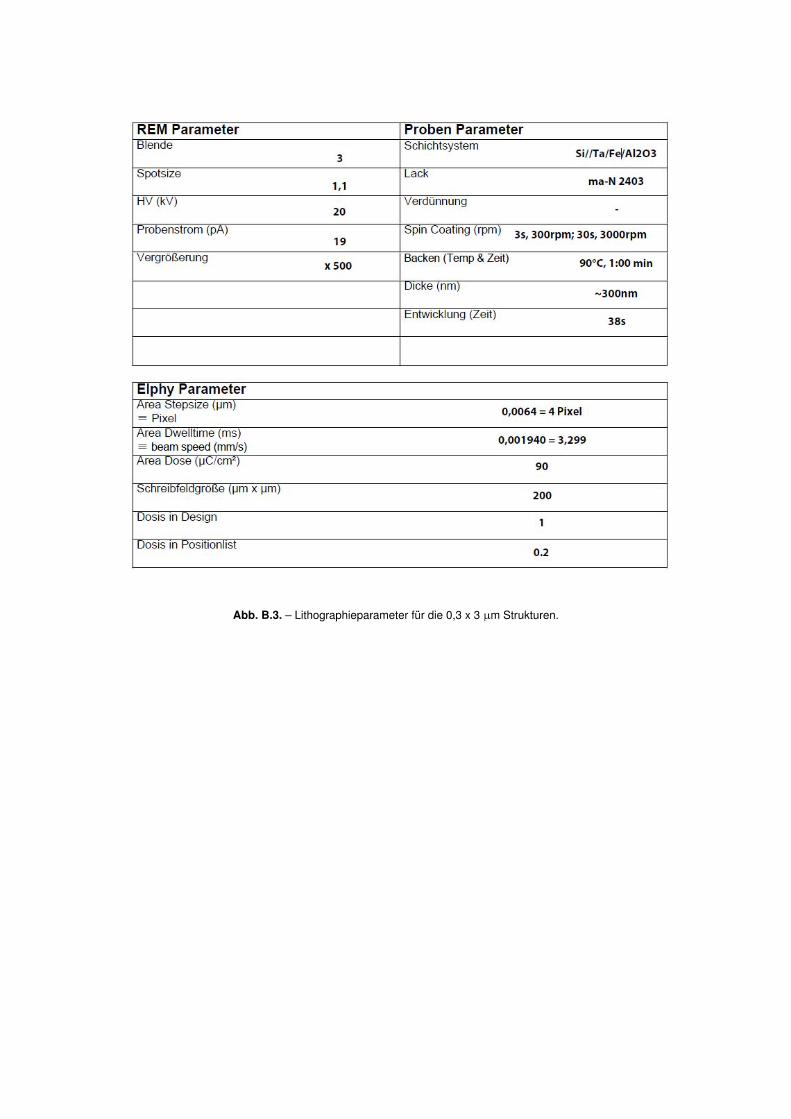
Abb. B.3. – Lithographieparameter für die 0,3 x 3 µm Strukturen.
C. EDX-Untersuchungen
Zur Ätzkontrolle wurde jede Probe zwei Mal mittels EDX untersucht. Als Beispiel dienen fol-
gende zwei Untersuchungsergebnisse: Die ersten beiden Bilder zeigen einen Probenausschnitt mit
Markierung der abgeätzten Fläche, welche untersucht worden ist sowie das erhaltene Spektrum.
Das Element Eisen wurde nicht gefunden, was für einen erfolgreichen Ätzvorgang spricht. Die
letzten zwei Bilder zeigen die Referenzmessung direkt auf der Struktur, bei der das Element Ei-
sen gefunden worden ist. Das Auftauchen von Kohlenstoff erklärt sich durch den auf der Struktur
befindlichen Lack, welcher aus einer Kohlenstoffverbindung besteht.
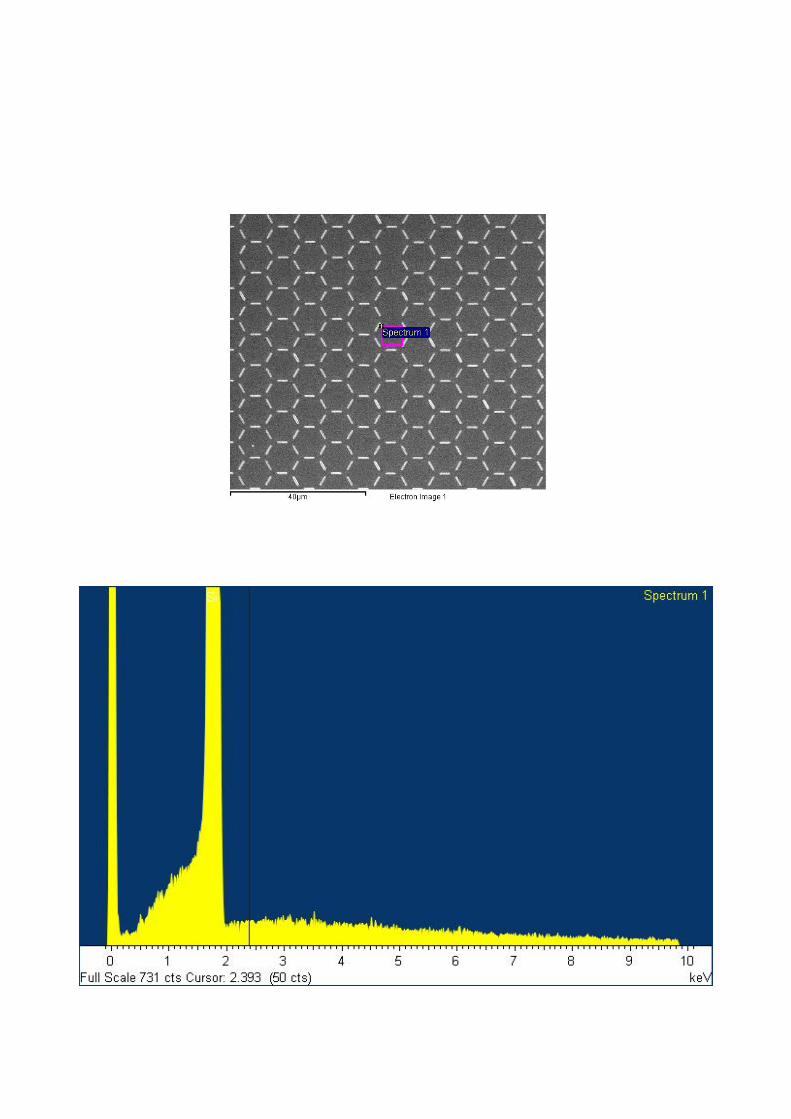
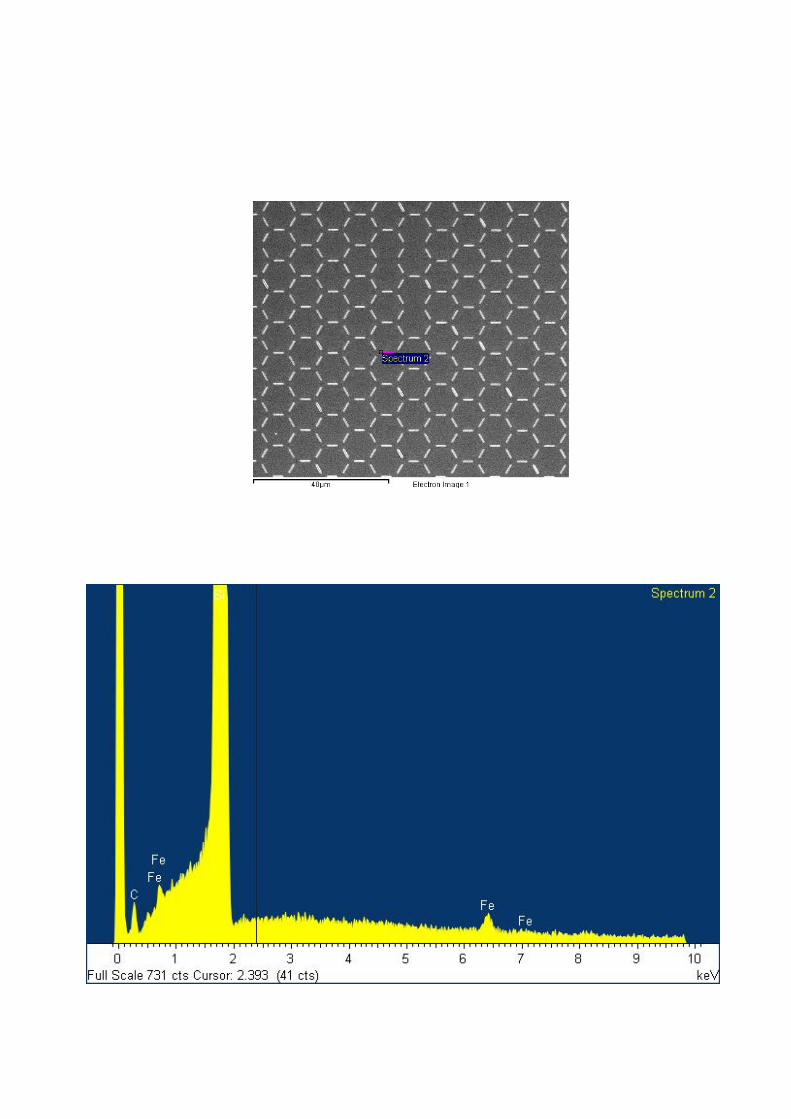

D. Mathematica-Code zur Auswertung der
Knotenpunktkonfigurationen
Auf den folgenden Seiten wird ein Beispiel-Code zur Auszählung und Zuordnung der verschie-
denen Knotenpunktkonfigurationen dargestellt. Der ursprüngliche Code wurde von B. Sothmann
geschrieben, danach aber auf die gegebenen Strukturgeometrien angepasst und erweitert. Zunächst
wird in Abbildung D.1 erläutert, wie die Bezeichnungen im Code in Bezug auf die reale Proben-
geometrie zu verstehen ist. Die Einteilung in Untergitter wird erklärt, sowie die Ablesereihenfolge
der einzelnen Ladungszuordnungen. In Abbildung D.2 wird dann gezeigt, welchem Typ (numme-
riert von 1 für bis 8)1 welche Knotenpunktkonfiguration entspricht, so dass die durch den Code
ermittelte Anzahl von Knotenpunkten je Typ nach Ausgabe in eine Textdatei entsprechend ih-
rer Wertigkeit zusammengefasst werden können. Im Anschluss an diese graphischen Übersichten
erfolgt dann das kommentierte Beispielprogramm.
1Im Code finden sich außerdem die Typen -1 und 0. Typ -1 bezeichnet dabei einfach die Anzahl an nicht definierbaren
Knotenpunkten, Typ 0 ist nicht weiter definiert und kann ignoriert werden.
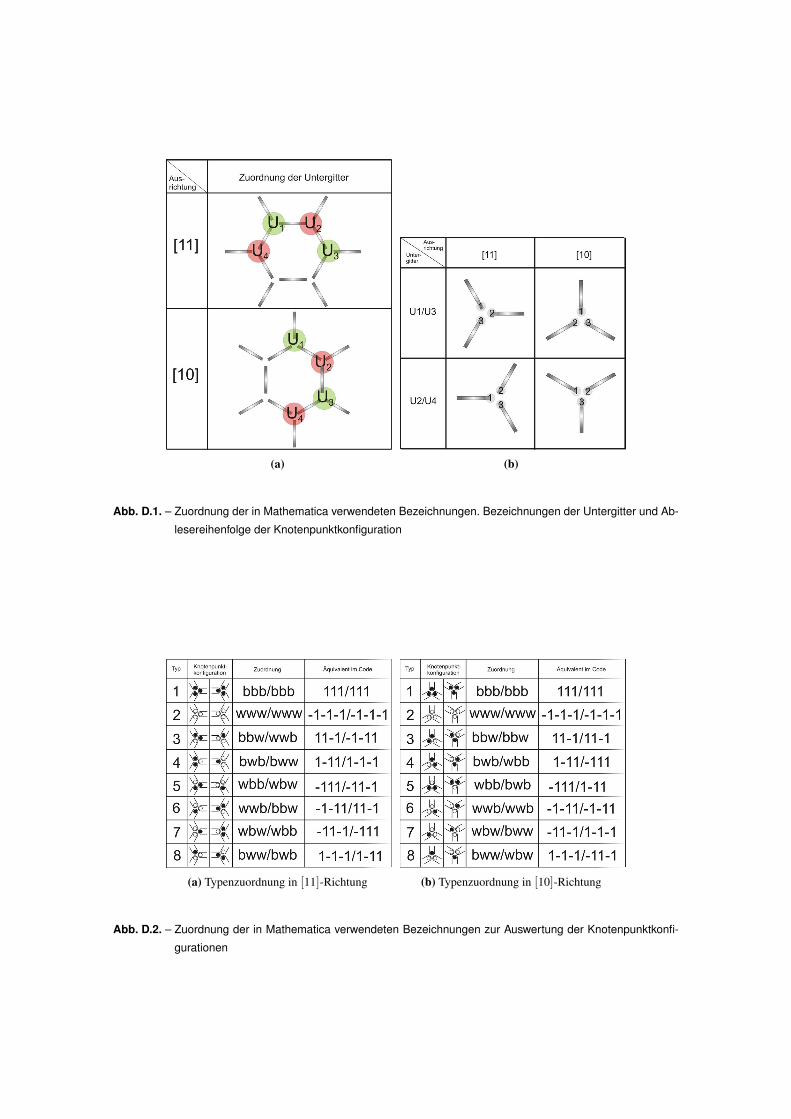
(a) (b)
Abb. D.1. – Zuordnung der in Mathematica verwendeten Bezeichnungen. Bezeichnungen der Untergitter und Ab-
lesereihenfolge der Knotenpunktkonfiguration
(a) Typenzuordnung in [11]-Richtung (b) Typenzuordnung in [10]-Richtung
Abb. D.2. – Zuordnung der in Mathematica verwendeten Bezeichnungen zur Auswertung der Knotenpunktkonfi-
gurationen
Automatisches Zählen von Dipolen
Einlesen der Bilder und Auszählen der Dipole auf den 4 Untergittern
Nötige Eingaben: Zahl der Knotenpunkte in x- und y-RichtungKoordinaten der Knotenpunkte oben links, unten links und unten rechts, alle auf dem gleichen Untergitter! (Erhält man durchmanuelles Auslesen der Pixel mit geeigneter Bildbearbeitungssoftware.)Positionen der drei "Ladungen" im ersten Knotenpunkt oben links auf Untergitter 1Positionen der drei "Ladungen" im ersten Knotenpunkt oben links auf Untergitter 2Positionen der drei "Ladungen" im ersten Knotenpunkt oben links auf Untergitter 3Positionen der drei "Ladungen" im ersten Knotenpunkt oben links auf Untergitter 4 (siehe Abbildung D.1 für Zuordnung)
Einlesen der Bilddatei, Koordinaten der Vertices, Konsistenzcheck
In[230]:= Clear@"Global`*"D
In[231]:= dataJPG = Import@"D:\\Uni\\Proben\\2010\\101014\\AFM_MFM\\08er_geschlossen_leicht_Hys\\01_Neukurve_0
Oe.jpg"D;
In[232]:= data = dataJPG;
Anzahl der Kontenpunkte in horizontaler Richtung (Nx)Anzahl der Kontenpunkte in vertikaler Richtung (Ny)
In[233]:= Nx = 8;
Ny = 13;
Koordinaten der Vertices links oben, links unten und rechts unten im Bild (auf das richtige Untergitter achten!)Daraus berechnet werden:Dxx=Abstand in x-Richtung von zwei Vertices in der selben ZeileDxy=Abstand in y-Richtung von zwei Vertices in der selben ZeileDyy=Abstand in y-Richtung von zwei Vertices in der selben SpalteDyx=Abstand in x-Richtung von zwei Vertices in der selben Spalte
In[235]:= xobenlinks = 233;
yobenlinks = 122;
xuntenlinks = 237;
yuntenlinks = 596;
xuntenrechts = 683;
yuntenrechts = 601;
Dxx = -Hxuntenlinks - xuntenrechtsL HNx - 1L N
Dxy = -Hyuntenlinks - yuntenrechtsL HNx - 1L N
Dyx = -Hxobenlinks - xuntenlinksL HNy - 1L N
Dyy = -Hyobenlinks - yuntenlinksL HNy - 1L N
Out[241]= 63.7143
Out[242]= 0.714286
Out[243]= 0.333333
Out[244]= 39.5
Positionen der ersten drei "Ladungen", Reihenfolge siehe Abb. D.1
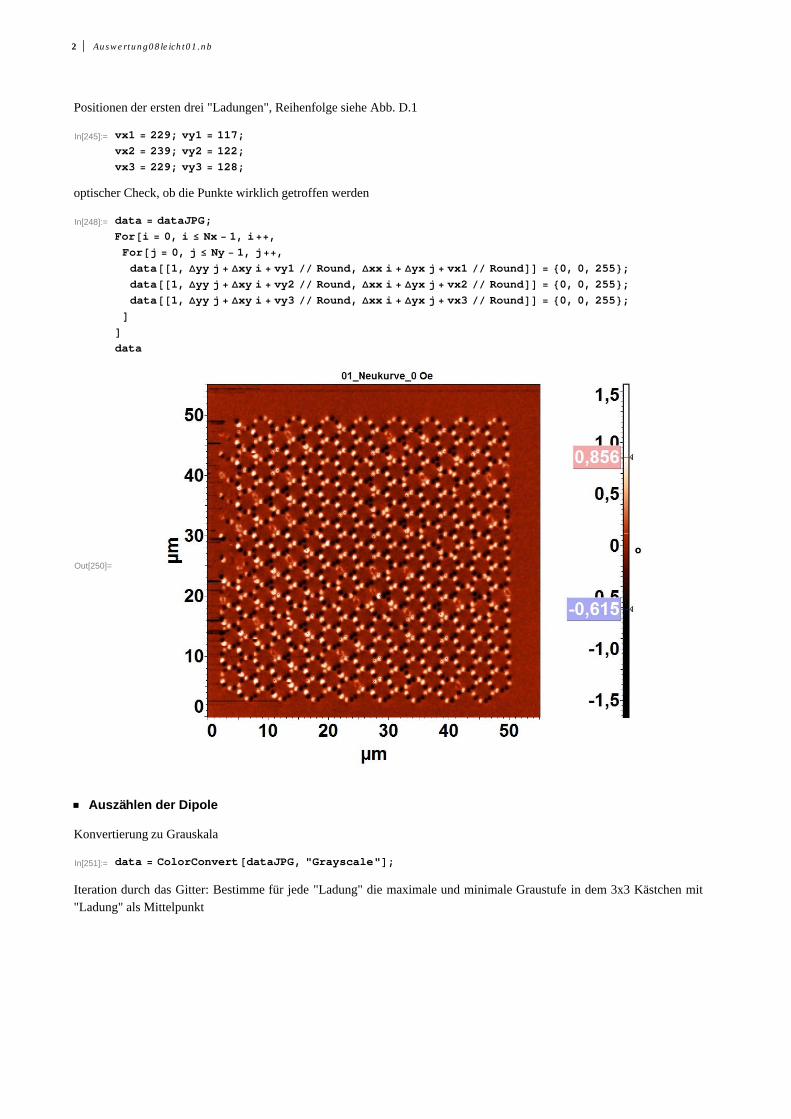
Positionen der ersten drei "Ladungen", Reihenfolge siehe Abb. D.1
In[245]:= vx1 = 229; vy1 = 117;
vx2 = 239; vy2 = 122;
vx3 = 229; vy3 = 128;
optischer Check, ob die Punkte wirklich getroffen werden
In[248]:= data = dataJPG;
For@i = 0, i £ Nx - 1, i++,
For@j = 0, j £ Ny - 1, j++,
data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 RoundDD = 80, 0, 255<;data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 RoundDD = 80, 0, 255<;data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 RoundDD = 80, 0, 255<;
DDdata
Out[250]=
Auszählen der Dipole
Konvertierung zu Grauskala
In[251]:= data = ColorConvert@dataJPG, "Grayscale"D;
Iteration durch das Gitter: Bestimme für jede "Ladung" die maximale und minimale Graustufe in dem 3x3 Kästchen mit"Ladung" als Mittelpunkt
In[252]:=
2 Auswertung08leicht01.nb
In[252]:= For@i = 0, i £ Nx - 1, i++,
For@j = 0, j £ Ny - 1, j++,
dummyMin = Min@data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 + 1 RoundDDD;
vertex1@i, jD = 8dummyMin, dummyMax<;dummyMin = Min@data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,
data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 + 1 RoundDDD;
vertex2@i, jD = 8dummyMin, dummyMax<;dummyMin = Min@data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,
data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 + 1 RoundDD,
,
Auswertung08leicht01.nb 3
In[252]:=
data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 + 1 RoundDDD;
vertex3@i, jD = 8dummyMin, dummyMax<;D
D
In[253]:= Table@8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D N
4 Auswertung08leicht01.nb
Out[253]= 8888223., 253.<, 895., 133.<, 8133., 162.<<,880., 6.<, 8166., 216.<, 8143., 190.<<, 880., 2.<, 8198., 219.<, 817., 28.<<,88238., 254.<, 81., 6.<, 8117., 143.<<, 880., 9.<, 87., 25.<, 8143., 178.<<,88102., 156.<, 8195., 230.<, 8137., 172.<<, 880., 11.<, 85., 15.<, 869., 71.<<,8863., 92.<, 889., 181.<, 86., 32.<<, 882., 29.<, 8159., 225.<, 8169., 211.<<,880., 18.<, 8140., 236.<, 811., 35.<<, 88178., 254.<, 8127., 224.<, 882., 156.<<,884., 42.<, 8140., 224.<, 815., 35.<<, 88169., 241.<, 8137., 240.<, 811., 32.<<<,
8882., 14.<, 8140., 213.<, 811., 29.<<, 881., 3.<, 8156., 233.<, 8127., 176.<<,884., 9.<, 8201., 234.<, 8156., 213.<<, 884., 10.<, 8188., 238.<, 8172., 212.<<,88188., 214.<, 8204., 237.<, 83., 19.<<, 8866., 89.<, 8210., 243.<, 8138., 188.<<,881., 5.<, 8201., 248.<, 8185., 215.<<, 88209., 243.<, 8181., 243.<, 8130., 185.<<,88207., 238.<, 8205., 241.<, 8111., 181.<<, 885., 27.<, 8181., 227.<, 812., 35.<<,88198., 237.<, 8150., 207.<, 82., 22.<<, 8858., 67.<, 8156., 224.<, 898., 188.<<,882., 31.<, 8159., 232.<, 8162., 203.<<<, 8889., 18.<, 8188., 221.<, 8162., 211.<<,88229., 247.<, 8162., 232.<, 8156., 195.<<, 880., 6.<, 8178., 241.<, 88., 21.<<,880., 5.<, 8198., 242.<, 8159., 211.<<, 883., 10.<, 8176., 228.<, 8169., 217.<<,8850., 95.<, 81., 7.<, 8150., 206.<<, 88208., 251.<, 8198., 225.<, 8114., 193.<<,88211., 234.<, 8181., 221.<, 8133., 176.<<, 88165., 233.<, 8156., 212.<, 810., 36.<<,880., 16.<, 8205., 246.<, 8133., 206.<<, 88199., 247.<, 8159., 227.<, 8117., 191.<<,880., 21.<, 8172., 225.<, 8147., 223.<<, 881., 29.<, 8151., 235.<, 8130., 210.<<<,
888201., 221.<, 8178., 215.<, 8147., 210.<<, 8811., 24.<, 8191., 248.<, 8140., 216.<<,884., 16.<, 8176., 229.<, 8158., 227.<<, 881., 8.<, 8178., 228.<, 8133., 215.<<,883., 15.<, 8204., 225.<, 8148., 214.<<, 882., 8.<, 8185., 248.<, 8169., 215.<<,887., 18.<, 8206., 244.<, 8178., 221.<<, 8868., 79.<, 8195., 225.<, 84., 27.<<,881., 8.<, 81., 10.<, 8172., 224.<<, 881., 18.<, 8216., 243.<, 8143., 211.<<,883., 29.<, 8194., 235.<, 8141., 212.<<, 8866., 85.<, 8191., 231.<, 8152., 207.<<,88156., 232.<, 8175., 220.<, 83., 28.<<<, 88810., 22.<, 8168., 239.<, 8130., 209.<<,884., 15.<, 8210., 241.<, 8172., 222.<<, 886., 21.<, 8156., 237.<, 8166., 207.<<,88206., 221.<, 8185., 218.<, 8150., 195.<<, 88208., 240.<, 80., 5.<, 8124., 191.<<,881., 10.<, 8181., 247.<, 8181., 209.<<, 882., 18.<, 8195., 244.<, 8176., 212.<<,8862., 84.<, 8201., 239.<, 8166., 211.<<, 8866., 73.<, 8204., 254.<, 83., 18.<<,881., 21.<, 81., 15.<, 8147., 222.<<, 885., 22.<, 8178., 227.<, 8130., 214.<<,881., 25.<, 8176., 242.<, 8176., 220.<<, 884., 16.<, 8214., 251.<, 8191., 241.<<<,
88810., 32.<, 8156., 223.<, 8114., 202.<<, 88169., 207.<, 8172., 231.<, 88., 24.<<,881., 11.<, 8181., 223.<, 88., 37.<<, 883., 7.<, 8166., 231.<, 8147., 212.<<,883., 12.<, 8181., 245.<, 8133., 217.<<, 88213., 227.<, 8191., 222.<, 8133., 204.<<,883., 9.<, 8181., 225.<, 8139., 215.<<, 8863., 73.<, 8214., 247.<, 8166., 210.<<,882., 16.<, 8195., 225.<, 8166., 223.<<, 8859., 70.<, 8191., 233.<, 8178., 214.<<,88188., 231.<, 8203., 235.<, 8133., 181.<<,8810., 30.<, 8176., 225.<, 8124., 209.<<, 88191., 228.<, 80., 4.<, 81., 18.<<<,
88810., 28.<, 8198., 222.<, 8127., 209.<<, 8810., 26.<, 8166., 222.<, 8137., 213.<<,88186., 226.<, 81., 10.<, 8136., 197.<<, 886., 18.<, 8198., 226.<, 8133., 213.<<,887., 14.<, 8169., 230.<, 8147., 212.<<, 884., 13.<, 8204., 234.<, 86., 32.<<,88176., 213.<, 80., 5.<, 8121., 192.<<, 884., 16.<, 8188., 215.<, 8147., 218.<<,889., 16.<, 8217., 244.<, 8147., 207.<<, 88197., 228.<, 8208., 239.<, 8117., 198.<<,885., 26.<, 8201., 228.<, 8140., 209.<<, 8810., 20.<, 8212., 242.<, 8150., 207.<<,887., 39.<, 85., 28.<, 8117., 213.<<<, 88813., 26.<, 8185., 214.<, 8140., 201.<<,8812., 28.<, 8191., 238.<, 8130., 207.<<, 887., 19.<, 8176., 216.<, 8156., 212.<<,889., 32.<, 8210., 228.<, 8143., 212.<<, 889., 27.<, 8195., 214.<, 8140., 221.<<,881., 14.<, 8178., 224.<, 812., 36.<<, 8811., 22.<, 8213., 228.<, 8143., 210.<<,883., 17.<, 84., 17.<, 8130., 200.<<, 881., 10.<, 81., 9.<, 810., 42.<<,884., 23.<, 8206., 228.<, 8137., 225.<<, 888., 29.<, 8181., 239.<, 8107., 216.<<,885., 20.<, 8185., 227.<, 8127., 203.<<, 887., 27.<, 8198., 244.<, 8114., 206.<<<<
Bestimmung, ab wann ein Pixel als schwarz oder weiß erkannt werden soll
Auswertung08leicht01.nb 5
In[254]:= ThresholdBlack = 48;H*Threshold below which a pixel is considered black*LThresholdWhite = 72;H*Threshold above which a pixel is considered white*LThresholdBorder = 255;
f@8a_, b_, c_<D :=
8Which@a@@1DD < ThresholdBlack && a@@2DD < ThresholdWhite, 1, a@@1DD > ThresholdBlack &&
a@@2DD > ThresholdWhite && a@@2DD < ThresholdBorder, -1, True, 0D,Which@b@@1DD < ThresholdBlack && b@@2DD < ThresholdWhite, 1, b@@1DD > ThresholdBlack &&
b@@2DD > ThresholdWhite && b@@2DD < ThresholdBorder, -1, True, 0D,Which@c@@1DD < ThresholdBlack && c@@2DD < ThresholdWhite, 1, c@@1DD > ThresholdBlack &&
c@@2DD > ThresholdWhite && c@@2DD < ThresholdBorder, -1, True, 0D<;
In[258]:= Table@f8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D
Out[258]= 888-1, -1, -1<, 81, -1, -1<, 81, -1, 1<, 8-1, 1, -1<, 81, 1, -1<, 8-1, -1, -1<, 81, 1, 0<,8-1, -1, 1<, 81, -1, -1<, 81, -1, 1<, 8-1, -1, -1<, 81, -1, 1<, 8-1, -1, 1<<,
881, -1, 1<, 81, -1, -1<, 81, -1, -1<, 81, -1, -1<, 8-1, -1, 1<, 8-1, -1, -1<, 81, -1, -1<,8-1, -1, -1<, 8-1, -1, -1<, 81, -1, 1<, 8-1, -1, 1<, 80, -1, -1<, 81, -1, -1<<,
881, -1, -1<, 8-1, -1, -1<, 81, -1, 1<, 81, -1, -1<, 81, -1, -1<, 8-1, 1, -1<,8-1, -1, -1<, 8-1, -1, -1<, 8-1, -1, 1<, 81, -1, -1<, 8-1, -1, -1<,81, -1, -1<, 81, -1, -1<<, 88-1, -1, -1<, 81, -1, -1<, 81, -1, -1<,81, -1, -1<, 81, -1, -1<, 81, -1, -1<, 81, -1, -1<, 8-1, -1, 1<, 81, 1, -1<,81, -1, -1<, 81, -1, -1<, 8-1, -1, -1<, 8-1, -1, 1<<, 881, -1, -1<,81, -1, -1<, 81, -1, -1<, 8-1, -1, -1<, 8-1, 1, -1<, 81, -1, -1<, 81, -1, -1<,8-1, -1, -1<, 8-1, -1, 1<, 81, 1, -1<, 81, -1, -1<, 81, -1, -1<, 81, -1, -1<<,
881, -1, -1<, 8-1, -1, 1<, 81, -1, 1<, 81, -1, -1<, 81, -1, -1<, 8-1, -1, -1<, 81, -1, -1<,8-1, -1, -1<, 81, -1, -1<, 80, -1, -1<, 8-1, -1, -1<, 81, -1, -1<, 8-1, 1, 1<<,
881, -1, -1<, 81, -1, -1<, 8-1, 1, -1<, 81, -1, -1<, 81, -1, -1<, 81, -1, 1<, 8-1, 1, -1<,81, -1, -1<, 81, -1, -1<, 8-1, -1, -1<, 81, -1, -1<, 81, -1, -1<, 81, 1, -1<<,
881, -1, -1<, 81, -1, -1<, 81, -1, -1<, 81, -1, -1<, 81, -1, -1<, 81, -1, 1<,81, -1, -1<, 81, 1, -1<, 81, 1, 1<, 81, -1, -1<, 81, -1, -1<, 81, -1, -1<, 81, -1, -1<<<
Funktion, die die erkannten Farben in Knotenpunkttypen umwandelt
Type 1=b,b,b für Untergitter 1, 2, 3 und 4Type 2=w,w,w für Untergitter 1, 2, 3 und 4Type 3=b,b,w für Untergitter 1, 2, 3, und 4Type 4=b,w,b für Untergitter 1 und 3 bzw. wbb für Untergitter 2 und 4Type 5=w,b,b für Untergitter 1 und 3 bzw. bwb für Untergitter 2 und 4Type 6=w,w,b für Untergitter 1, 2, 3 und 4Type 7=w,b,w für Untergitter 1 und 3 bzw. bww für Untergitter 2 und 4Type 8=b,w,w für Untergitter 1 und 3 bzw. wbw für Untergitter 2 und 4
(siehe Abb. D.2 für Zuordnung)
In[259]:= g@8a_, b_, c_<D =
Which@8a, b, c< == 81, 1, 1<, 1, 8a, b, c< == 8-1, -1, -1<, 2, 8a, b, c< == 81, 1, -1<,3, 8a, b, c< == 81, -1, 1<, 4, 8a, b, c< == 8-1, 1, 1<, 5, 8a, b, c< == 8-1, -1, 1<,6, 8a, b, c< == 8-1, 1, -1<, 7, 8a, b, c< == 81, -1, -1<, 8, True, -1D;
In[260]:= Untergitter1 =
Table@gf8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D
Out[260]= 882, 8, 4, 7, 3, 2, -1, 6, 8, 4, 2, 4, 6<, 84, 8, 8, 8, 6, 2, 8, 2, 2, 4, 6, -1, 8<,88, 2, 4, 8, 8, 7, 2, 2, 6, 8, 2, 8, 8<, 82, 8, 8, 8, 8, 8, 8, 6, 3, 8, 8, 2, 6<,88, 8, 8, 2, 7, 8, 8, 2, 6, 3, 8, 8, 8<, 88, 6, 4, 8, 8, 2, 8, 2, 8, -1, 2, 8, 5<,88, 8, 7, 8, 8, 4, 7, 8, 8, 2, 8, 8, 3<, 88, 8, 8, 8, 8, 4, 8, 3, 1, 8, 8, 8, 8<<
graphische Darstellung der Typverteilung für das erste Untergitter
6 Auswertung08leicht01.nb
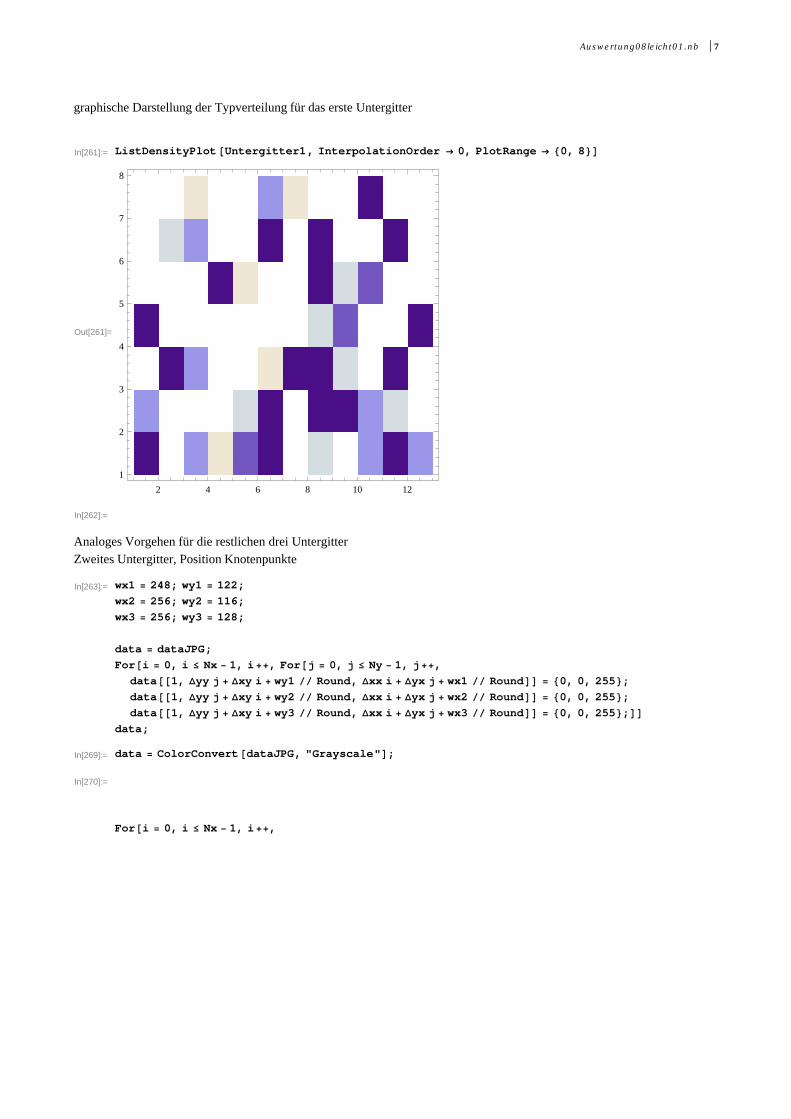
graphische Darstellung der Typverteilung für das erste Untergitter
In[261]:= ListDensityPlot@Untergitter1, InterpolationOrder ® 0, PlotRange ® 80, 8<D
Out[261]=
2 4 6 8 10 12
1
2
3
4
5
6
7
8
In[262]:=
Analoges Vorgehen für die restlichen drei UntergitterZweites Untergitter, Position Knotenpunkte
In[263]:= wx1 = 248; wy1 = 122;
wx2 = 256; wy2 = 116;
wx3 = 256; wy3 = 128;
data = dataJPG;
For@i = 0, i £ Nx - 1, i++, For@j = 0, j £ Ny - 1, j++,
data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 RoundDD = 80, 0, 255<;data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 RoundDD = 80, 0, 255<;data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 RoundDD = 80, 0, 255<;DD
data;
In[269]:= data = ColorConvert@dataJPG, "Grayscale"D;
In[270]:=
For@i = 0, i £ Nx - 1, i++,
Auswertung08leicht01.nb 7
In[270]:=
For@j = 0, j £ Ny - 1, j++,
dummyMin = Min@data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 + 1 RoundDDD;
vertex1@i, jD = 8dummyMin, dummyMax<;dummyMin = Min@data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,
data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 + 1 RoundDDD;
vertex2@i, jD = 8dummyMin, dummyMax<;dummyMin = Min@data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,
data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,
,
8 Auswertung08leicht01.nb
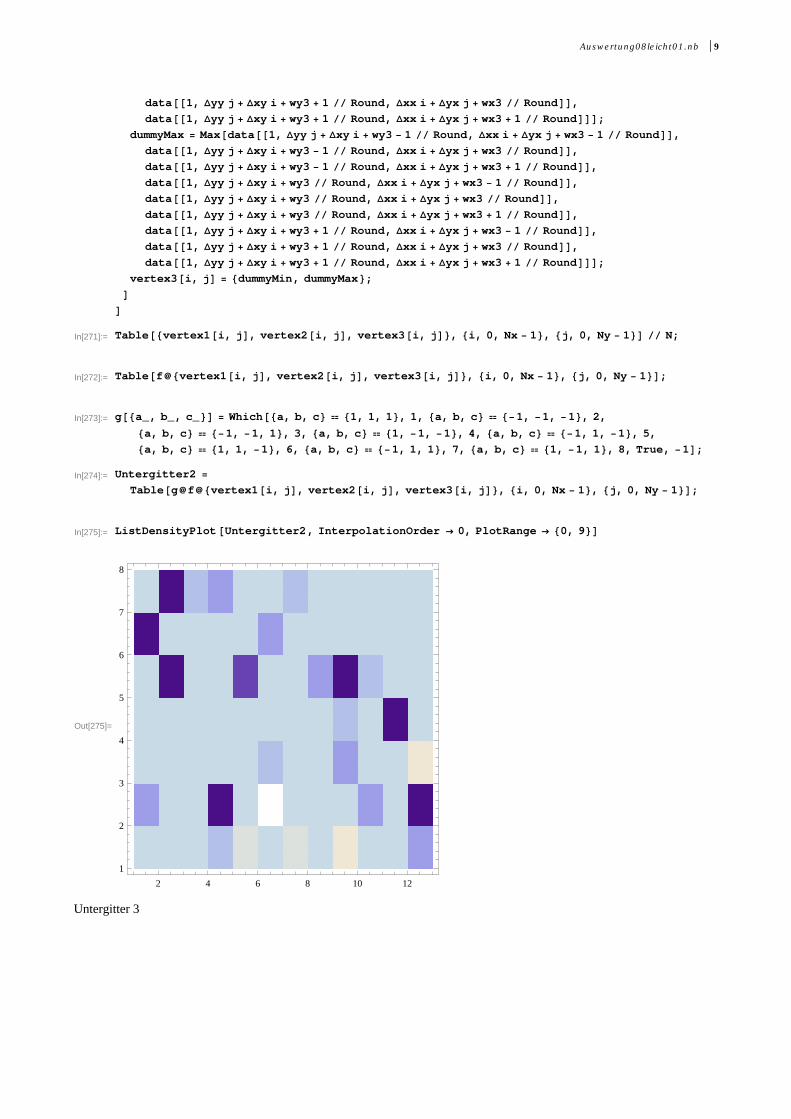
In[270]:=
data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 + 1 RoundDDD;
vertex3@i, jD = 8dummyMin, dummyMax<;D
D
In[271]:= Table@8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D N;
In[272]:= Table@f8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D;
In[273]:= g@8a_, b_, c_<D = Which@8a, b, c< 81, 1, 1<, 1, 8a, b, c< 8-1, -1, -1<, 2,
8a, b, c< 8-1, -1, 1<, 3, 8a, b, c< 81, -1, -1<, 4, 8a, b, c< 8-1, 1, -1<, 5,
8a, b, c< 81, 1, -1<, 6, 8a, b, c< 8-1, 1, 1<, 7, 8a, b, c< 81, -1, 1<, 8, True, -1D;
In[274]:= Untergitter2 =
Table@gf8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D;
In[275]:= ListDensityPlot@Untergitter2, InterpolationOrder ® 0, PlotRange ® 80, 9<D
Out[275]=
2 4 6 8 10 12
1
2
3
4
5
6
7
8
Untergitter 3
Auswertung08leicht01.nb 9
In[276]:= vx1 = 261; vy1 = 136;
vx2 = 270; vy2 = 142;
vx3 = 261; vy3 = 147;
data = dataJPG;
For@i = 0, i £ Nx - 1, i++, For@j = 0, j £ Ny - 1, j++,
data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 RoundDD = 80, 0, 255<;data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 RoundDD = 80, 0, 255<;data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 RoundDD = 80, 0, 255<;DD
data;
In[282]:= data = ColorConvert@dataJPG, "Grayscale"D;
In[283]:= For@i = 0, i £ Nx - 1, i++,
For@j = 0, j £ Ny - 1, j++,
dummyMin = Min@data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 - 1 Round, Dxx i + Dyx j + vx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 Round, Dxx i + Dyx j + vx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 RoundDD,data@@1, Dyy j + Dxy i + vy1 + 1 Round, Dxx i + Dyx j + vx1 + 1 RoundDDD;
vertex1@i, jD = 8dummyMin, dummyMax<;dummyMin = Min@data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,
data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 - 1 Round, Dxx i + Dyx j + vx2 + 1 RoundDD,
,
10 Auswertung08leicht01.nb
In[283]:=
data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 Round, Dxx i + Dyx j + vx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 RoundDD,data@@1, Dyy j + Dxy i + vy2 + 1 Round, Dxx i + Dyx j + vx2 + 1 RoundDDD;
vertex2@i, jD = 8dummyMin, dummyMax<;dummyMin = Min@data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,
data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 - 1 Round, Dxx i + Dyx j + vx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 Round, Dxx i + Dyx j + vx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 RoundDD,data@@1, Dyy j + Dxy i + vy3 + 1 Round, Dxx i + Dyx j + vx3 + 1 RoundDDD;
vertex3@i, jD = 8dummyMin, dummyMax<;D
D
In[284]:= Table@8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D N;
In[285]:= Table@f8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D;
In[286]:= g@8a_, b_, c_<D =
Which@8a, b, c< 81, 1, 1<, 1, 8a, b, c< 8-1, -1, -1<, 2, 8a, b, c< 81, 1, -1<,3, 8a, b, c< 81, -1, 1<, 4, 8a, b, c< 8-1, 1, 1<, 5, 8a, b, c< 8-1, -1, 1<,6, 8a, b, c< 8-1, 1, -1<, 7, 8a, b, c< 81, -1, -1<, 8, True, -1D;
In[287]:= Untergitter3 =
Table@gf8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D;
Auswertung08leicht01.nb 11
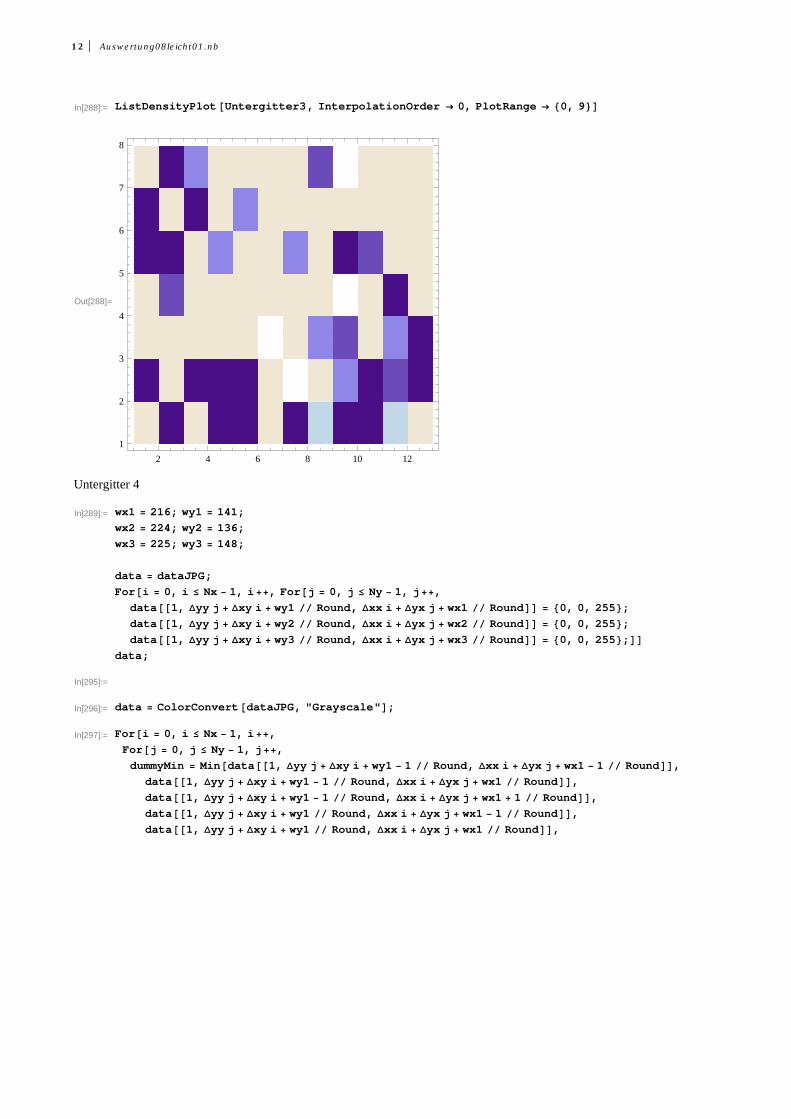
In[288]:= ListDensityPlot@Untergitter3, InterpolationOrder ® 0, PlotRange ® 80, 9<D
Out[288]=
2 4 6 8 10 12
1
2
3
4
5
6
7
8
Untergitter 4
In[289]:= wx1 = 216; wy1 = 141;
wx2 = 224; wy2 = 136;
wx3 = 225; wy3 = 148;
data = dataJPG;
For@i = 0, i £ Nx - 1, i++, For@j = 0, j £ Ny - 1, j++,
data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 RoundDD = 80, 0, 255<;data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 RoundDD = 80, 0, 255<;data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 RoundDD = 80, 0, 255<;DD
data;
In[295]:=
In[296]:= data = ColorConvert@dataJPG, "Grayscale"D;
In[297]:= For@i = 0, i £ Nx - 1, i++,
For@j = 0, j £ Ny - 1, j++,
dummyMin = Min@data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 RoundDD,
,
12 Auswertung08leicht01.nb
In[297]:=
data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 - 1 Round, Dxx i + Dyx j + wx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 Round, Dxx i + Dyx j + wx1 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 RoundDD,data@@1, Dyy j + Dxy i + wy1 + 1 Round, Dxx i + Dyx j + wx1 + 1 RoundDDD;
vertex1@i, jD = 8dummyMin, dummyMax<;dummyMin = Min@data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,
data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 - 1 Round, Dxx i + Dyx j + wx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 Round, Dxx i + Dyx j + wx2 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 RoundDD,data@@1, Dyy j + Dxy i + wy2 + 1 Round, Dxx i + Dyx j + wx2 + 1 RoundDDD;
vertex2@i, jD = 8dummyMin, dummyMax<;dummyMin = Min@data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,
data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 + 1 RoundDDD;
dummyMax = Max@data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 - 1 Round, Dxx i + Dyx j + wx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,
,
Auswertung08leicht01.nb 13
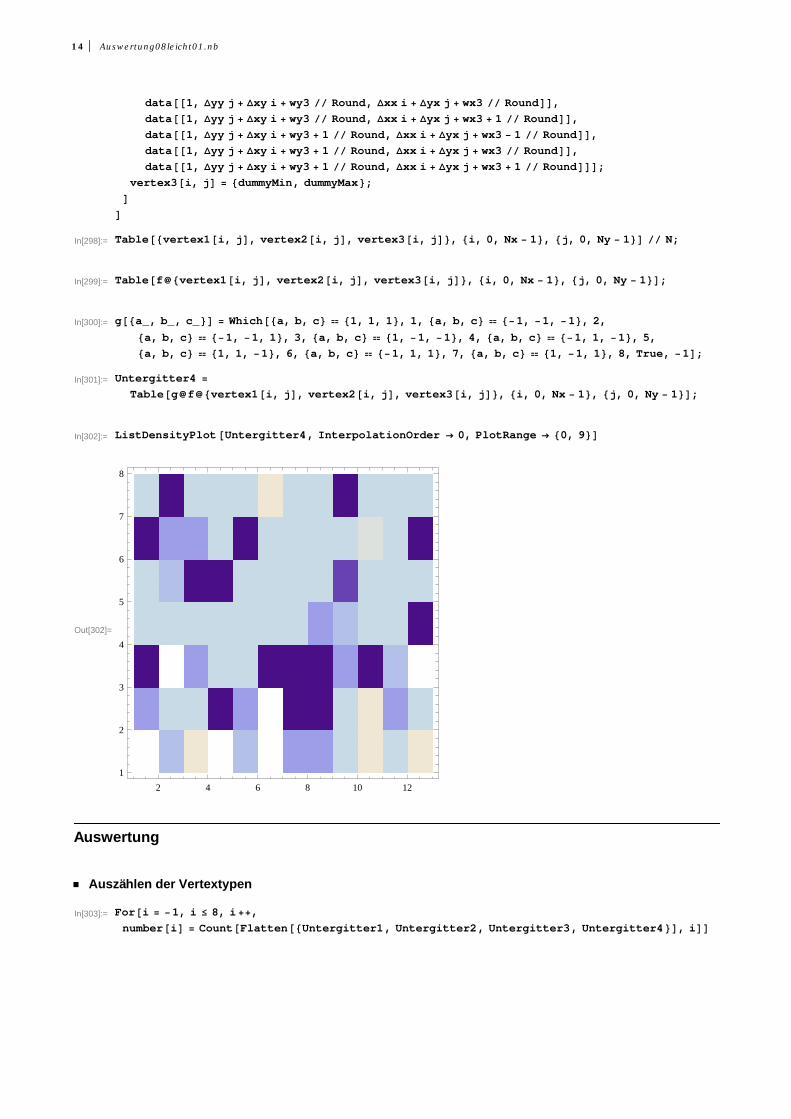
In[297]:=
data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 Round, Dxx i + Dyx j + wx3 + 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 - 1 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 RoundDD,data@@1, Dyy j + Dxy i + wy3 + 1 Round, Dxx i + Dyx j + wx3 + 1 RoundDDD;
vertex3@i, jD = 8dummyMin, dummyMax<;D
D
In[298]:= Table@8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D N;
In[299]:= Table@f8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D;
In[300]:= g@8a_, b_, c_<D = Which@8a, b, c< 81, 1, 1<, 1, 8a, b, c< 8-1, -1, -1<, 2,
8a, b, c< 8-1, -1, 1<, 3, 8a, b, c< 81, -1, -1<, 4, 8a, b, c< 8-1, 1, -1<, 5,
8a, b, c< 81, 1, -1<, 6, 8a, b, c< 8-1, 1, 1<, 7, 8a, b, c< 81, -1, 1<, 8, True, -1D;
In[301]:= Untergitter4 =
Table@gf8vertex1@i, jD, vertex2@i, jD, vertex3@i, jD<, 8i, 0, Nx - 1<, 8j, 0, Ny - 1<D;
In[302]:= ListDensityPlot@Untergitter4, InterpolationOrder ® 0, PlotRange ® 80, 9<D
Out[302]=
2 4 6 8 10 12
1
2
3
4
5
6
7
8
Auswertung
Auszählen der Vertextypen
In[303]:= For@i = -1, i £ 8, i++,
number@iD = Count@Flatten@8Untergitter1, Untergitter2, Untergitter3, Untergitter4<D, iDD
14 Auswertung08leicht01.nb
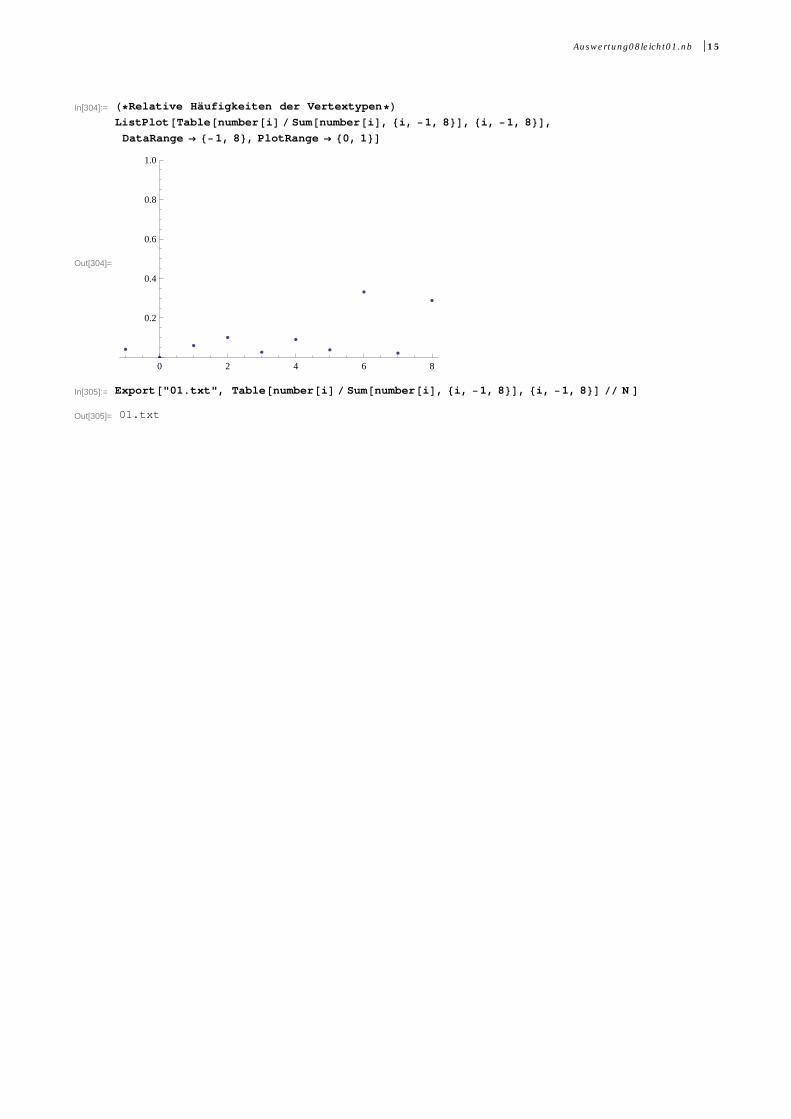
In[304]:= H*Relative Häufigkeiten der Vertextypen*LListPlot@Table@number@iD Sum@number@iD, 8i, -1, 8<D, 8i, -1, 8<D,DataRange ® 8-1, 8<, PlotRange ® 80, 1<D
Out[304]=
0 2 4 6 8
0.2
0.4
0.6
0.8
1.0
In[305]:= Export@"01.txt", Table@number@iD Sum@number@iD, 8i, -1, 8<D, 8i, -1, 8<D N D
Out[305]= 01.txt
Auswertung08leicht01.nb 15

Publikationen
Aus dieser Arbeit entstandene Publikationen
• A. Schumann, B. Sothmann, P. Szary and H. Zabel, Charge odering of magnetic dipoles in
artificial honeycomb patterns, Applied Physics Letters 97, 022509 (2010)
Publikationen mit eigener Beteiligung
• A. Westphalen, A. Schumann, A. Remhof, T. Last, U. Kunze and H. Zabel, Magnetization
reversal of equilateral Fe triangles, Physical Review B 74, 104417 (2006)
• A. Westphalen, A. Schumann, A. Remhof, T. Last, U. Kunze and H. Zabel, Magnetization
reversal of thin Fe triangular rings, Superlattices and Microstructures 41 (2007) 98103
• A. Remhof, A. Schumann, A. Westphalen, T. Last, U. Kunze and H. Zabel, Dipolar inter-
actions in periodic arrays of rectangular ferromagnetic islands, Journal of Magnetism and
Magnetic Materials 310 (2007) e794e796
• M.S. Lee, A. Westphalen, A. Remhof, A. Schumann, and H. Zabel, Extended longitudinal
vector and Bragg magneto-optic Kerr effect for the determination of the chirality distributi-
on in magnetic vortices, Journal of Applied Physics 103, 093913 (2008)
• A. Remhof, A. Schumann, A. Westphalen and H. Zabel, N. Mikuszeit and E. Y. Vedmeden-
ko, T. Last and U. Kunze, Magnetostatic interactions on a square lattice, Physical Review
B 77, 134409 (2008)
• H. Zabel, A. Schumann, A. Westphalen and A. Remhof, Order and frustration in arti¯cial
magnetic patterns, Acta Physica Polonica A 97 2000 (2008)
• F. Brüssing, G. Nowak, A. Schumann, S. Buschhorn, H. Zabel and K. Theis-Bröhl, Ma-
gnetization reversal and magnetic interactions in patterned spin valve structures, Journal of
Physics D: Applied Physics 42, (2009) 165001
Vorträge und Posterpräsentationen
• A. Schumann, A. Remhof, A. Westphalen, T. Last, U. Kunze and H. Zabel, Collective beha-
viour of artificial magnetic dipoles, DPG Spring Meeting and 21st EPS General Conference
of the EPS Condensed Matter Division, March 2006, Dresden, Germany.
• A. Schumann, A. Remhof, E. Vedmedenko, N. Mikuszeit, M. Wahle, T. Last, U. Kunze and
H. Zabel, Ground state of magnetic dipole arrays, INTAS-Meeting, April 2007, Bochum,
Germany.
• A. Schumann, A. Remhof, M. Wahle, U. Kunze and H. Zabel, Ground states of artifcial
magnetic dipol arrays, SFB 491 International Summer School: Magnetic Heterostructures
and Nanomagnetism, September 2007, Schwerte, Germany
• A. Schumann, A. Remhof, M. Wahle, U. Kunze and H. Zabel, Magnetische Grundzustän-
de nanostrukturierter Dipolanordnungen, 1. NRW Nano-Konferenz, February 2008, Dort-
mund, Germany.
• A. Schumann, A. Remhof, U. Kunze, M. Wahle, E. Vedmedenko, N. Mikuszeit and H.
Zabel, Dipolar interactions on lateral structured square lattices, DPG Spring Meeting, Fe-
bruary 2008, Berlin, Germany
• A. Schumann, M. Ewerlin, F. Brüssing, O. Petracic and H. Zabel, Characterization of na-
nostructured PdFe-alloy dots, SFB 491 International Summer School: Frontiers in modern
magnetism, September 2008, Nässlingen, Sweden.
• A. Schumann, P. Szary and H. Zabel, Digital hysteresis of a dipolar array, DPG Spring
Meeting, March 2009, Dresden, Germany.
• A. Schumann, P. Szary and H. Zabel, Digital hysteresis of a dipolar array, International
SFB 491 Workshop: Nanomagnetism probed by X-rays and neutrons, June 2009, Bochum,
Germany.
• A. Schumann, P. Szary and H. Zabel, Demagnetization states of lateral structured dipolar
arrays, 20th International Colloquium on Magnetic Films and Surfaces, July 2009, Berlin,
Germany.
• A. Schumann, P. Szary and H. Zabel, Demagnetization states of lateral structured dipolar
arrays, SFB 491 Inernational Summer School: Nanomagnetism, October 2009, Mülheim
a.d.R, Germany.
• A. Schumann, B. Sothmann, P. Szary and H. Zabel, Ground state and magnetization reversal
of spin ice patterns, 11th Joint MMM/Intermag Conference, January 2010, Washington D.C.,
USA.
• A. Schumann, B. Sothmann, P. Szary and H. Zabel, Charge order of magnetic monopoles in
triangular spin ice, DPG Spring Meeting, March 2010, Regensburg, Germany
Danksagung
Zunächst möchte ich Herrn Prof. Dr. Dr. h c Zabel für die interessante Themenstellung, die stän-
dige Diskussionsbereitschaft und Motivation und nicht zuletzt für den kreativen Input bei der
Betreuung dieser Arbeit danken.
Mein ganz besonderer Dank geht an mein Büro:
Melanie Ewerlin dafür, dass sie immer ein offenes Ohr für interessante und nicht ganz so inter-
essante Geschichten hatte. Mit einer gehörigen Portion Galgenhumor haben wir’s dann immer
noch geschafft, das Leben ist halt kein Ponyhof.
Philipp Szary dafür, dass er so eifrig Gegenstände in Manteltaschen versteckt und meinen Scho-
koladenkonsum unterstützt hat. Philipp, ich schulde dir mindestens 3 Vorratspackungen M&Ms.
Katherine Gross für das Kontrastprogramm zur Schokoladensucht: Vielen Dank für die vielen le-
ckeren Mangos, Melonen, Kokosnüsse, Bananen, Äpfel und Erdbeeren und für die Gelassenheit,
die du mitgebracht hast. Muchas gracias para las lecciones espanol. Espero que no haga muy fal-
tas. Oder so ähnlich. Frank Brüssing, der zwar nicht zum Büro gehörte, trotzdem aber ständig dort
war und bei jedem Problem hilfsbereit zur Stelle war.
Nicht aus meinem Büro aber immer hilfsbereit war Stefan Buschhorn, der trotz eigener forschungs-
bedingter Rückschläge auch noch meinen gelauscht hat und dem ich auch die ein oder andere
Schokoladenration zu verdanken habe.
Min-Sang Lee möchte ich danken für das viele tolle Sushi und für die Telefonnummer für den
besten China-Imbiss Bochums, wenn nicht gar Nordrhein-Westfalens. Und natürlich auch für die
vielen netten Gespräche und nicht zuletzt für das Einrichten der Simulationsrechner.
Und nochmals danke an Philipp, der mich darauf aufmerksam gemacht hat, dass ich mich bisher
ausschließlich für’s Essen bedankt habe. Immer an Dick und Doof denken, gell?
Außerdem möchte ich mich beim Sekretariat bedanken. Durch die organisatorische Unterstützung
von Petra Hahn, Bahar Özdamur und Claudia Wulf und das ein oder andere Schwätzchen wurde
das Arbeiten immens erleichtert!
Ich bedanke mich bei Herrn Peter Stauche, ohne dessen Unterstützung die Probenherstellung
wahrscheinlich unmöglich gewesen wäre. Vielen Dank auch für die vielen neuen (und alten) Mu-
siktipps, die Witze, Comics, Cartoons und sonstige Internetkuriositäten, die mir sonst wohl ent-
gangen wären.
Ein ganz großes Dankeschön geht an Horst Glowatzki und sein Organisationsteam Elizabeth Bart-
ling, Cornelia Leschke und Sabine Erdt-Böhm für viele gelungene Weihnachtsfeiern, Geburtstags-
karten, Doktorhüte und was immer es zu organisieren gab.
Danke an Jürgen Podschwadek und Jörg Meermann für die vielen technischen Ratschläge nicht
nur für das MFM, sondern womit auch immer man gerade Probleme hatte.
Ebenfalls bedanken möchte ich mich bei Dennis Schöpper und Evgenij Termer für das funktio-
nierende Netzwerk und Internet, für betriebsbereite Drucker, für Festplattenrettungen, Lösung bei
Softwareproblemen, Dateikomprimierungstipps und für alles sonst, was mit Nullen und Einsen zu
tun hat.
Neben den bereits erwähnten Personen möchte ich natürlich dem gesamten Lehrstuhl EP4/AG4
für die angenehme und entspannte Arbeitsatmosphäre danken. Nicht zuletzt durch die große Hilfs-
bereitschaft und den durch Humor geprägten Umgang miteinander wurde das Arbeiten sehr viel
angenehmer.
Ohne Geld geht nichts und daher bedanke ich mich bei der Deutschen Forschungsgemeinschaft für
die finanzielle Unterstützung innerhalb des SFB 491 sowie die Finanzierung des für diese Arbeit
genutzten Rasterkraftmikroskops durch das HBFG.
Nicht unerwähnt lassen möchte ich Leo Maxwell und Merry Newton, die das Schreiben dieser
Arbeit durch ständiges vor-dem-Monitor- und auf-der-Tastatur-Sitzen wesentlich interassenter ge-
staltet haben, als es sonst wohl gewesen wäre. Zum Glück gibt es den “Undo”-Knopf. Dem möchte
ich an dieser Stelle auch danken.
Und zu guter Letzt möchte ich mich bei meinen Eltern und bei Martin Brennscheidt für die mora-
lische Unterstützung während des gesamten Studiums und vor allem während des Schreibens der
Dissertation bedanken.
Lebenslauf
Name Alexandra Brennscheidt, geb. SchumannGeburtsdatum 06. August 1981Geburtsort Castrop-RauxelFamilienstand verheiratet
Schulausbildung08/1988 - 07/1992 Gemeinschaftsgrundschule Castroper-Hellweg, Bochum08/1992 - 06/2001 Heinrich-von-Kleist Gymnasium, Bochum06/2001 Allgemeine Hochschulreife
Studium10/2001 - 09/2006 Studium der Physik an der Ruhr-Universität Bochum08/2003 Vordiplom08/2005 - 08/2006 Diplomarbeit am Lehrstuhl für Experimentalphysik
IV/Festkörperphysik, Ruhr-Universität Bochum, The-ma: Magnetische Grundzustände mikrostrukturierterDipolanordnungen
09/2006 Diplom
Beruflicher Werdegang10/2006 - 04/2007 wissenschaftliche Hilfskraft am Lehrstuhl für Experimen-
talphysik IV/Festkörperphysik, Ruhr-Universität Bochum05/2007 - 03/2011 wissenschaftlicher Mitarbeiter am Lehrstuhl für Experi-
mentalphysik IV/Festkörperphysik, Ruhr-Universität Bo-chum
seit 04/2011 Technologieberaterin beim VDI-Technologiezentrum,Düsseldorf
Fortbildungen11/2005 Fortbildungskurs zur energiedispersiven Röntgenanaly-
se am Rasterelektronenmikroskop, Oxford Instruments,Wiesbaden
10/2008 Trainingskurs am Rasterkraftmikroskop “Solver HV”09/2010 Strahlenschutzkurs nach Fachkundegruppe S4.1 (ein-
schließlich S1.1, S1.2, S1.3, S2.1, S2.2, S5 und S6.1), RU-BION Bochum






























