Embed Size (px)
Citation preview
Fakultät Informatik Institut für Angewandte Informatik, Professur Technische Informationssysteme
MATERIALIEN ZUR VORLESUNG„SYSTEMORIENTIERTE INFORMATIK /HARDWARE SOFTWARE-CODESIGN“
Prof. Dr.-Ing. habil. Klaus Kabitzsch
2
Autor: Prof. Dr.-Ing. habil. Klaus Kabitzsch
Sitz: Nöthnitzer Straße 46 (INF), Zimmer 1074
Telefon: 0351 463-38289
E-Mail: <vorname>.<nachname>@ tu-dresden.de
WWW: http://www.iai.inf.tu-dresden.de/tis/
3
Gliederung
0. Motivation
0.1. Beschreibung der Lehrveranstaltung „Systemorientierte Informatik / Hardware Software-
Codesign“
0.2. Weitere Lehrveranstaltungen
1. Objekte und Systeme
2. Eigenschaften dynamischer Systeme 2.1. Allgemeine Systemeigenschaften
2.1.1. Signale
2.1.2. Systeme
2.1.3. Signalflussgraphen
2.2. Zeitkontinuierliche Systemtypen und ihre Software-Modelle
2.2.1. Gewinnung von Modellen
2.2.1.1. Theoretische Analyse
2.2.1.2. Grundtypen linearer Systeme
2.2.1.3. Modellbildung durch Messungen
2.3. Theorie linearer Systeme
2.3.1. Grundsätzliche Methode
2.3.2. Gültigkeitsvoraussetzungen
2.3.3. Faltungsintegral
2.3.4. Stabilität
2.3.5. Weitere Elementar- und Testsignale
2.3.6. Harmonische Elementarsignale
2.3.6.1. Signale
2.3.6.2. Systeme
2.3.6.3. Faltungssatz
3. Informationsverarbeitung in Objekten 3.1. Abtastung von Signalen an der Schnittstelle
3.2. Primärverarbeitung der Signale
3.3. Filteralgorithmen
3.4. Signalprozessoren
4. Objekte und Systeme in geschlossenen Signalzyklen
4.1. Steuerung
4.2. Regelung
4.2.1. Statische Betrachtung
4.2.2. Dynamische Betrachtung
4.2.3. Analyse durch Rechner-Simulation
4.2.4. Synthese durch Rechner-Optimierung
4
Literatur:
Kabitzsch, K.: Informations- und Steuerungssysteme Kapitel 11 in: Werner u.a.: Taschenbuch der Informatik Fachbuchverlag Leipzig 1995
ISBN 3-343-00892-3
Stein, G.: Automatisierungstechnik in der Maschinentechnik C. Hanser Verlag 1993
ISBN 3-446-15579-1
Wellenreuther, G.; Zastrow, D.: Steuerungstechnik mit SPS 3. Auflage, Vieweg Verlag Braunschweig / Wiesbaden 1995
ISBN 3-528-24580-8
Olsson, G.; Piani, G.: Steuern, regeln, automatisieren C. Hanser Verlag München Wien 1993
ISBN 3-446-17497-4
Färber, G.: Prozeßrechentechnik 2. Auflage, Springer-Verlag Berlin Heidelberg 1992
ISBN 3-540-55198-0
Ergänzungsliteratur:
Unger, J.: Einführung in die Regelungstechnik B.G. Teubner 1992
Bolch, G.; Seidel, M.: Prozeßautomatisierung 2. Auflage, B.G. Teubner Stuttgart 1993 (Reihe Leitfäden der angewandten Informatik)
ISBN 3-519-12499-8
Orlowski, P.F.: Praktische Regeltechnik 4. Auflage, Springer-Verlag Berlin Heidelberg 1994
ISBN 3-540-57425-5
Roth, G.: Regelungstechnik Hüthig Buch Verlag Heidelberg 1990
ISBN 3-7785-1832-1
Neumann, P.; Grötsch, E.; Lubkoll, C.; Simon, R.: SPS-Standard: IEC 1131 – Programmierung in verteilten Automatisierungssystemen R. Oldenbourg Verlag
München 1995
ISBN 3-486-23348-3
Kurbel, K.: Produktionsplanung und -steuerung R. Oldenbourg Verlag München Wien 1993 (Band 13.2 in der Reihe "Handbuch der
Informatik")
ISBN 3-486-21643-0
Schmid, D. (Hrsg.): CIM Lehrbuch zur Automatisierung der Fertigung Verlag Europa-Lehrmittel, Haan-Gruiten 1991
ISBN 3-8085-5111-9
Kabitzsch, K. (Hrsg.): Automatisierungskonzepte mit dezentraler Intelligenz (LonWorks)
Tagungsband, Workshop an der TU Dresden vom 13.10.1995
N.N.: LonWorks Technology Device Data
Motorola Inc. 1995
5
Erklärung zu verwendeten Symbolen:
Definition
Tabelle
Wichtige Formel
Beispiel
Regel
Hinweis
D
T
F
B
R
6
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 0 – Motivation
Prof. Dr.-Ing. habil. Klaus Kabitzsch
7
0. Motivation
0.1. Beschreibung der Lehrveranstaltung „Systemorientierte Informatik / Hardware
Software-Codesign“
Rechner müssen in der Praxis mit Prozessen, Anlagen und Komponenten verschiedenster
Branchen in Wirtschaft und Technik zusammenwirken. Um die dabei entstehende
Komplexität zu beherrschen, muss jede Software in Objekte und jeder Prozess in Systeme
zerlegt werden, um sie arbeitsteilig zu entwickeln und anschließend zusammenzufügen. Als
Mitwirkende an dieser Arbeitsteilung müssen Informatiker grundsätzliche Eigenschaften der
Schnittstellen (Signale) und Systeme verstehen, um die eigene Aufgabenstellung zu erkennen
und abzugrenzen.
Die Studenten sollen zur Zusammenarbeit mit den als Anwender auftretenden Betriebswirten
und Ingenieuren befähigt werden, die Grundprinzipien wichtiger Anwenderalgorithmen sowie
branchenübliche Lösungsansätze kennenlernen.
Ziele:
Vermittlung praktischer Kenntnisse, so dass eine Verständigung mit Spezialisten möglich
ist
Legen von Grundlagen für eine weiterführende Ausbildung
Der wachsende Nachwuchsmangel in allen Technikdisziplinen sichert gute Berufschancen.
Aktuelle Informationen zur Vorlesung und Übung, Übungsaufgaben sowie Literaturangaben
finden Sie unter:
http://www.inf.tu-dresden.de/index.php?node_id=1120&ln=de
Allgemeine Informationen zum Lehrstuhl finden Sie unter:
http://www.iai.inf.tu-dresden.de/tis/
Namen der Mitarbeiter, Raum- und Telefonnummern, E-Mail-Adressen
Informationen zu weiteren Lehrveranstaltungen (siehe auch Abschnitt 0.2)
Themen für Großer Beleg, Bachelor-, Bakkalaureats-, Diplom- und Masterarbeiten
(abhängig von Studiengang und –ordnung)
Überblick über Forschungsprojekte
Auflistung der Kooperationspartner
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 0 – Motivation
Prof. Dr.-Ing. habil. Klaus Kabitzsch
8
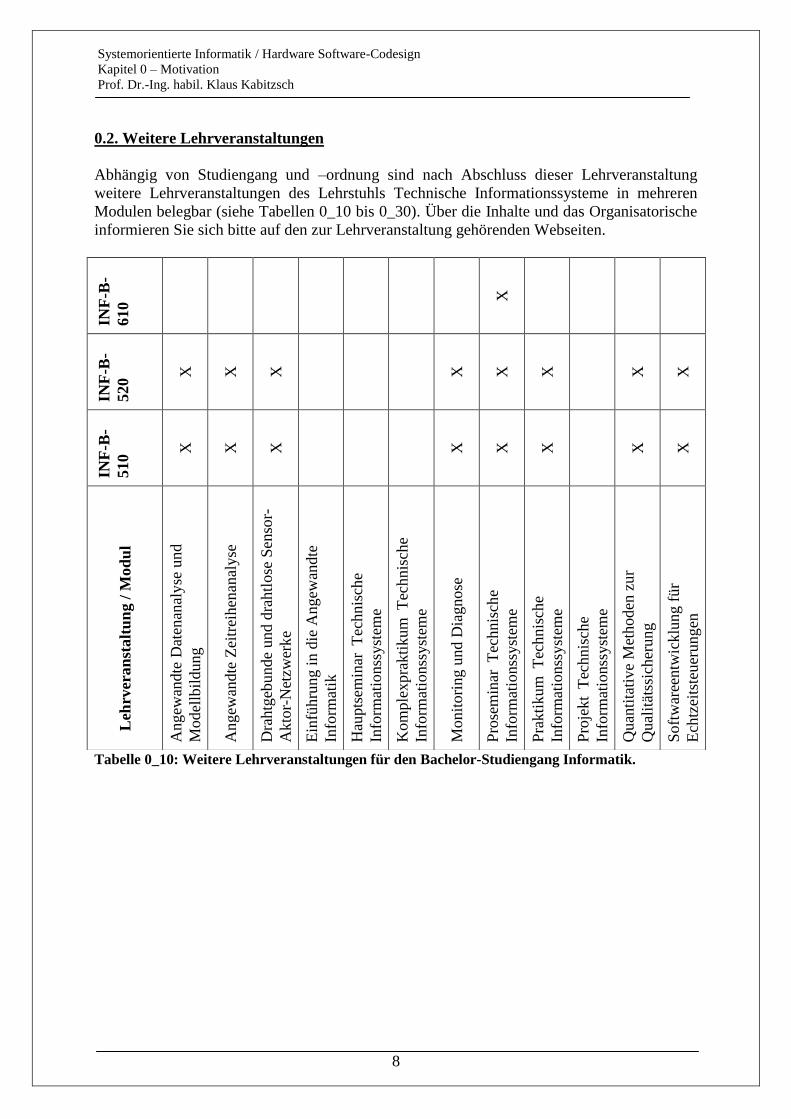
0.2. Weitere Lehrveranstaltungen
Abhängig von Studiengang und –ordnung sind nach Abschluss dieser Lehrveranstaltung
weitere Lehrveranstaltungen des Lehrstuhls Technische Informationssysteme in mehreren
Modulen belegbar (siehe Tabellen 0_10 bis 0_30). Über die Inhalte und das Organisatorische
informieren Sie sich bitte auf den zur Lehrveranstaltung gehörenden Webseiten.
Tabelle 0_10: Weitere Lehrveranstaltungen für den Bachelor-Studiengang Informatik.
INF
-B-
610 X
INF
-B-
520 X
X
X X
X
X X
X
INF
-B-
510 X
X
X X
X
X X
X
Leh
rver
an
stalt
un
g /
Mod
ul
Angew
andte
Dat
enan
aly
se u
nd
Model
lbil
dung
Angew
andte
Zei
trei
hen
anal
yse
Dra
htg
ebunde
und d
rahtl
ose
Sen
sor-
Akto
r-N
etzw
erk
e
Ein
führu
ng i
n d
ie A
ngew
andte
Info
rmat
ik
Hau
pts
emin
ar T
echnis
che
Info
rmat
ionss
yst
eme
Kom
ple
xpra
kti
kum
T
echnis
che
Info
rmat
ionss
yst
eme
Monit
ori
ng u
nd D
iagnose
Pro
sem
inar
T
echnis
che
Info
rmat
ionss
yst
eme
Pra
kti
kum
T
echnis
che
Info
rmat
ionss
yst
eme
Pro
jekt
Tec
hnis
che
Info
rmat
ionss
yst
eme
Quan
tita
tive
Met
hoden
zur
Qual
ität
ssic
her
ung
Soft
war
eentw
icklu
ng f
ür
Ech
tzei
tste
uer
ung
en
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 0 – Motivation
Prof. Dr.-Ing. habil. Klaus Kabitzsch
9
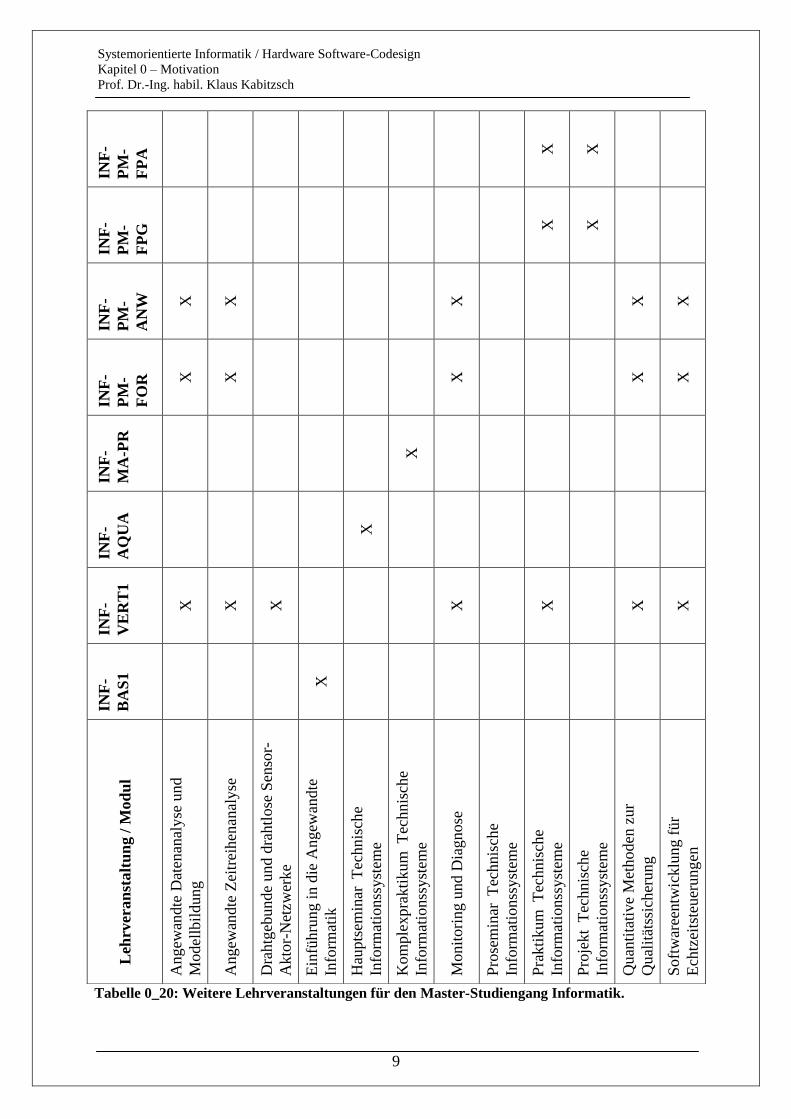
Tabelle 0_20: Weitere Lehrveranstaltungen für den Master-Studiengang Informatik.
INF
-
PM
-
FP
A X
X
INF
-
PM
-
FP
G X
X
INF
-
PM
-
AN
W
X
X X X
X
INF
-
PM
-
FO
R
X
X X X
X
INF
-
MA
-PR
X
INF
-
AQ
UA
X
INF
-
VE
RT
1
X
X
X X X X
X
INF
-
BA
S1
X
Leh
rver
an
stalt
un
g /
Mod
ul
Angew
andte
Dat
enan
aly
se u
nd
Mod
ellb
ildung
Angew
andte
Zei
trei
hen
anal
yse
Dra
htg
ebunde
und d
rahtl
ose
Sen
sor-
Akto
r-N
etzw
erk
e
Ein
führu
ng i
n d
ie A
ngew
andte
Info
rmat
ik
Hau
pts
emin
ar T
echnis
che
Info
rmat
ionss
yst
eme
Kom
ple
xpra
kti
kum
T
echnis
che
Info
rmat
ionss
yst
eme
Mon
itori
ng u
nd D
iagnose
Pro
sem
inar
T
echnis
che
Info
rmat
ionss
yst
eme
Pra
kti
kum
T
echnis
che
Info
rmat
ionss
yst
eme
Pro
jekt
Tec
hnis
che
Info
rmat
ionss
yst
eme
Quan
tita
tive
Met
hoden
zur
Qual
ität
ssic
her
ung
Soft
war
eentw
icklu
ng f
ür
Ech
tzei
tste
uer
ung
en
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 0 – Motivation
Prof. Dr.-Ing. habil. Klaus Kabitzsch
10
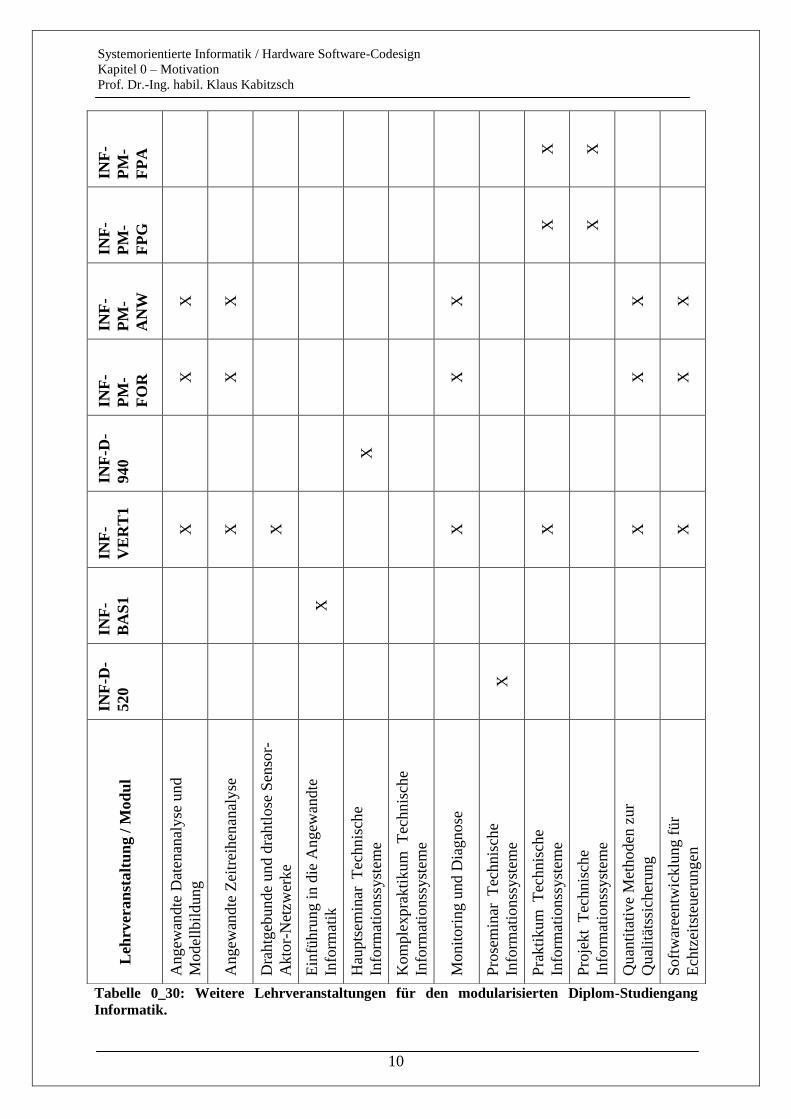
Tabelle 0_30: Weitere Lehrveranstaltungen für den modularisierten Diplom-Studiengang
Informatik.
INF
-
PM
-
FP
A X
X
INF
-
PM
-
FP
G X
X
INF
-
PM
-
AN
W
X
X X X
X
INF
-
PM
-
FO
R
X
X X X
X
INF
-D-
940 X
INF
-
VE
RT
1
X
X
X X X X
X
INF
-
BA
S1
X
INF
-D-
520 X
Leh
rver
an
stalt
un
g /
Mod
ul
Angew
andte
Dat
enan
aly
se u
nd
Mod
ellb
ildung
Angew
andte
Zei
trei
hen
anal
yse
Dra
htg
ebunde
und d
rahtl
ose
Sen
sor-
Akto
r-N
etzw
erk
e
Ein
führu
ng i
n d
ie A
ngew
andte
Info
rmat
ik
Hau
pts
emin
ar T
echnis
che
Info
rmat
ionss
yst
eme
Kom
ple
xpra
kti
kum
T
echnis
che
Info
rmat
ionss
yst
eme
Mon
itori
ng u
nd D
iagnose
Pro
sem
inar
T
echnis
che
Info
rmat
ionss
yst
eme
Pra
kti
kum
T
echnis
che
Info
rmat
ionss
yst
eme
Pro
jekt
Tec
hnis
che
Info
rmat
ionss
yst
eme
Quan
tita
tive
Met
hoden
zur
Qual
ität
ssic
her
ung
Soft
war
eentw
icklu
ng f
ür
Ech
tzei
tste
uer
ung
en
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 1 – Objekte und Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
11
1. Objekte und Systeme
Rechner müssen in der Praxis mit Prozessen, Anlagen und Komponenten verschiedenster
Branchen in Wirtschaft und Technik zusammenwirken. Um die dabei entstehende
Komplexität zu beherrschen, muss
jede Software in Objekte und
jeder Prozess in Systeme
zerlegt werden, um sie arbeitsteilig zu entwickeln und anschließend zusammenzufügen. Als
Mitwirkende an dieser Arbeitsteilung müssen Informatiker grundsätzliche Eigenschaften der
Schnittstellen (Signale) und Systeme verstehen, um die eigene Aufgabenstellung zu erkennen
und abzugrenzen.
Die Studenten sollen zur Zusammenarbeit mit den als Anwender auftretenden Betriebswirten
und Ingenieuren befähigt werden, die Grundprinzipien wichtiger Anwenderalgorithmen sowie
branchenübliche Lösungsansätze kennenlernen.
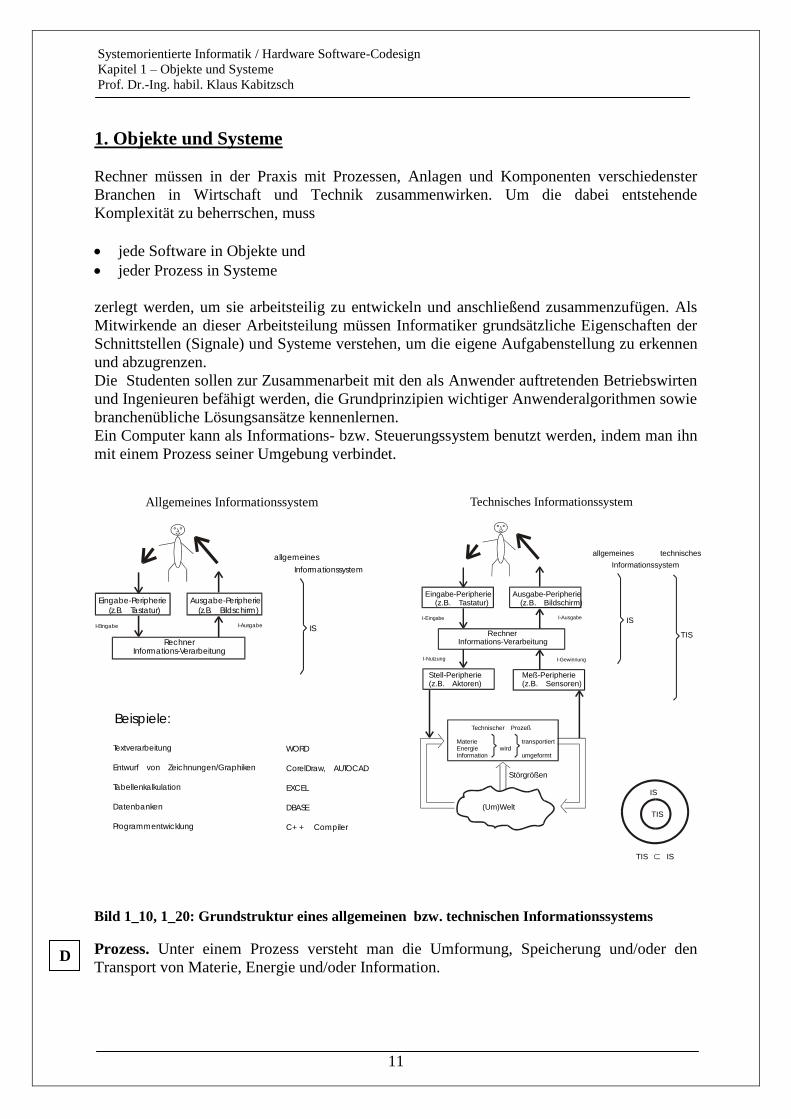
Ein Computer kann als Informations- bzw. Steuerungssystem benutzt werden, indem man ihn
mit einem Prozess seiner Umgebung verbindet.
Eingabe-Peripherie
(z.B. Tastatur)
Ausgabe-Peripherie
(z.B. Bildschirm)
RechnerInformations-Verarbeitung
I-Eingabe I-Ausgabe
Informationssystem
allgemeines
IS
Beispiele:
Textverarbeitung
Entwurf von Zeichnungen/Graphiken
Tabellenkalkulation
Datenbanken
Programmentwicklung
WORD
CorelDraw, AUTOCAD
EXCEL
DBASE
C+ + Compiler
Allgemeines Informationssystem
Eingabe-Peripherie (z.B. Tastatur)
Meß-Peripherie(z.B. Sensoren)
Stell-Peripherie(z.B. Aktoren)
Ausgabe-Peripherie (z.B. Bildschirm)
RechnerInformations-Verarbeitung
I-Eingabe I-Ausgabe
I-Nutzung I-Gewinnung
Informationssystem
allgemeines technisches
IS
TIS
Technischer Prozeß
Materie transportiertEnergie wirdInformation umgeformt
(Um)Welt
Störgrößen
IS
TIS
TIS IS
Technisches Informationssystem
Bild 1_10, 1_20: Grundstruktur eines allgemeinen bzw. technischen Informationssystems
Prozess. Unter einem Prozess versteht man die Umformung, Speicherung und/oder den
Transport von Materie, Energie und/oder Information.
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 1 – Objekte und Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
12
Neben allgemeinen, kommerziellen Prozessen aus Betriebswirtschaft, Finanzwesen,
Personalwesen, Verwaltung, welche über die übliche Ein-/Ausgabeperipherie mit dem
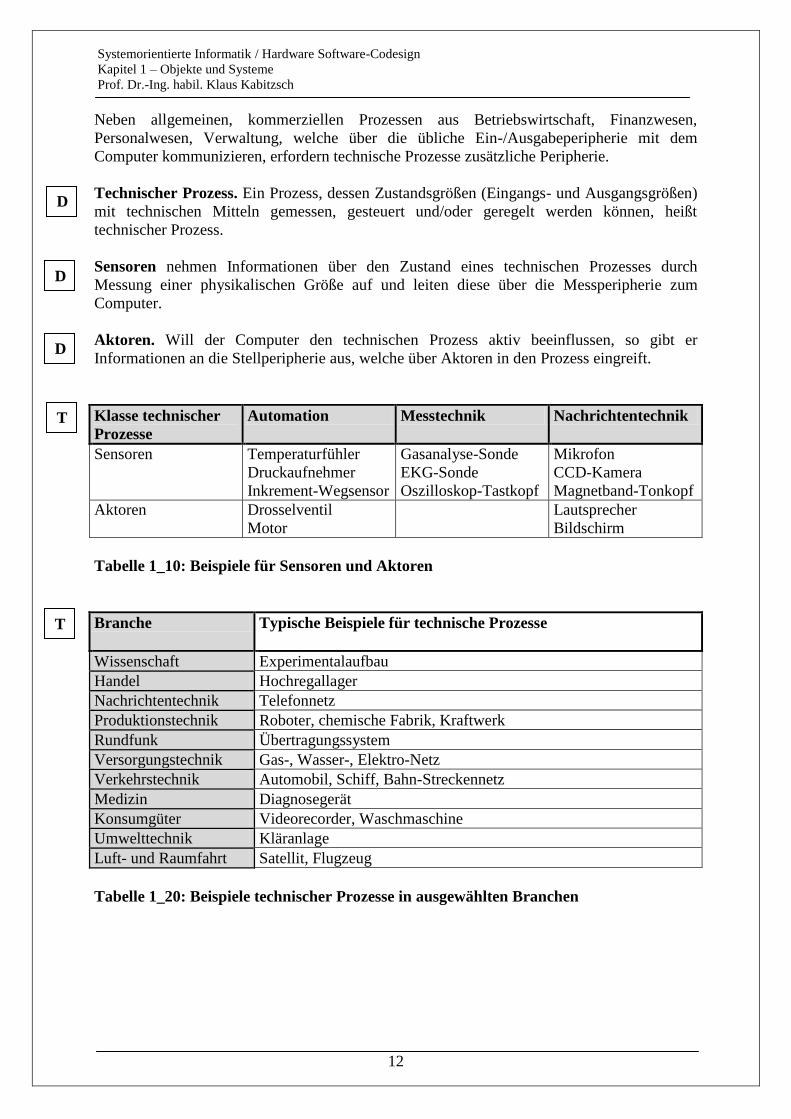
Computer kommunizieren, erfordern technische Prozesse zusätzliche Peripherie.
Technischer Prozess. Ein Prozess, dessen Zustandsgrößen (Eingangs- und Ausgangsgrößen)
mit technischen Mitteln gemessen, gesteuert und/oder geregelt werden können, heißt
technischer Prozess.
Sensoren nehmen Informationen über den Zustand eines technischen Prozesses durch
Messung einer physikalischen Größe auf und leiten diese über die Messperipherie zum
Computer.
Aktoren. Will der Computer den technischen Prozess aktiv beeinflussen, so gibt er
Informationen an die Stellperipherie aus, welche über Aktoren in den Prozess eingreift.
Klasse technischer
Prozesse
Automation Messtechnik Nachrichtentechnik
Sensoren Temperaturfühler
Druckaufnehmer
Inkrement-Wegsensor
Gasanalyse-Sonde
EKG-Sonde
Oszilloskop-Tastkopf
Mikrofon
CCD-Kamera
Magnetband-Tonkopf
Aktoren Drosselventil
Motor
Lautsprecher
Bildschirm
Tabelle 1_10: Beispiele für Sensoren und Aktoren
Branche Typische Beispiele für technische Prozesse
Wissenschaft Experimentalaufbau
Handel Hochregallager
Nachrichtentechnik Telefonnetz
Produktionstechnik Roboter, chemische Fabrik, Kraftwerk
Rundfunk Übertragungssystem
Versorgungstechnik Gas-, Wasser-, Elektro-Netz
Verkehrstechnik Automobil, Schiff, Bahn-Streckennetz
Medizin Diagnosegerät
Konsumgüter Videorecorder, Waschmaschine
Umwelttechnik Kläranlage
Luft- und Raumfahrt Satellit, Flugzeug
Tabelle 1_20: Beispiele technischer Prozesse in ausgewählten Branchen
D
D
D
T
T
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 1 – Objekte und Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
13
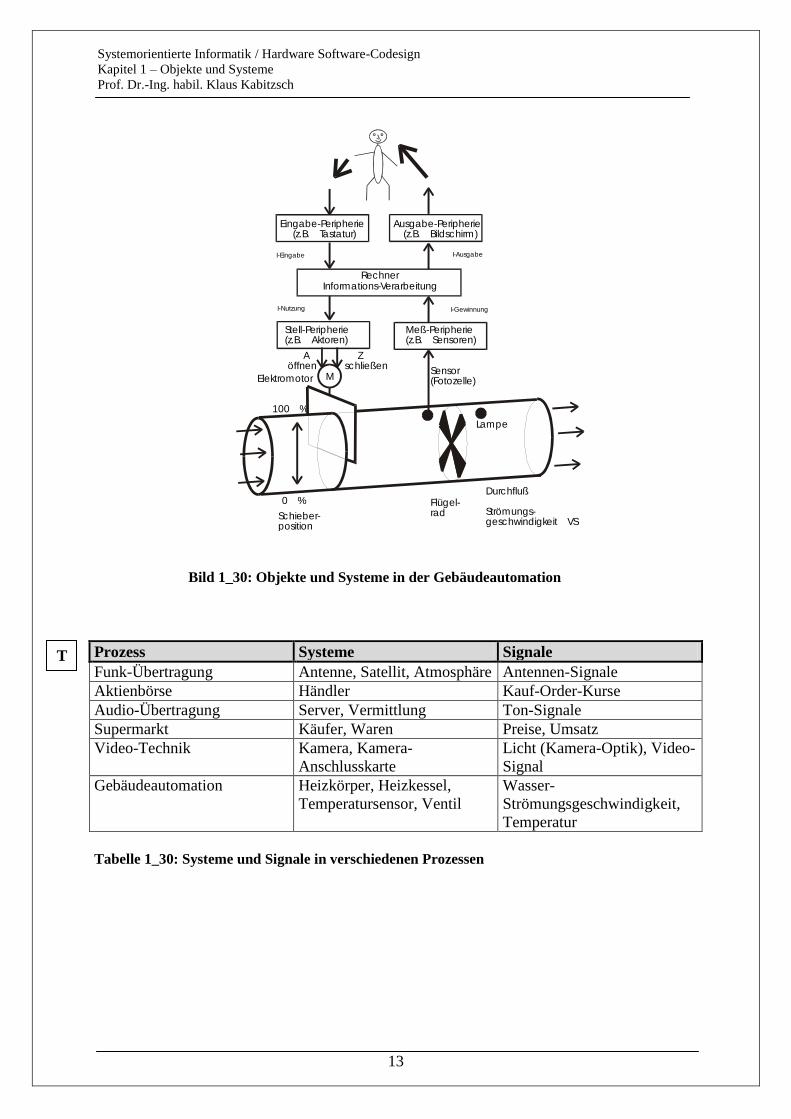
Eingabe-Peripherie (z.B. Tastatur)
Meß-Peripherie(z.B. Sensoren)
Stell-Peripherie(z.B. Aktoren)
Ausgabe-Peripherie (z.B. Bildschirm)
Rechner
Aöffnen
Zschließen
MElektromotor
100 %
0 %
Schieber-position
Durchfluß
Strömungs-geschwindigkeit VS
Sensor(Fotozelle)
Lampe
Flügel-rad
Informations-Verarbeitung
I-Eingabe I-Ausgabe
I-Nutzung I-Gewinnung
Bild 1_30: Objekte und Systeme in der Gebäudeautomation
Prozess Systeme Signale
Funk-Übertragung Antenne, Satellit, Atmosphäre Antennen-Signale
Aktienbörse Händler Kauf-Order-Kurse
Audio-Übertragung Server, Vermittlung Ton-Signale
Supermarkt Käufer, Waren Preise, Umsatz
Video-Technik Kamera, Kamera-
Anschlusskarte
Licht (Kamera-Optik), Video-
Signal
Gebäudeautomation Heizkörper, Heizkessel,
Temperatursensor, Ventil
Wasser-
Strömungsgeschwindigkeit,
Temperatur
Tabelle 1_30: Systeme und Signale in verschiedenen Prozessen
T
14
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
15
2. Eigenschaften dynamischer Systeme
2.1. Allgemeine Systemeigenschaften
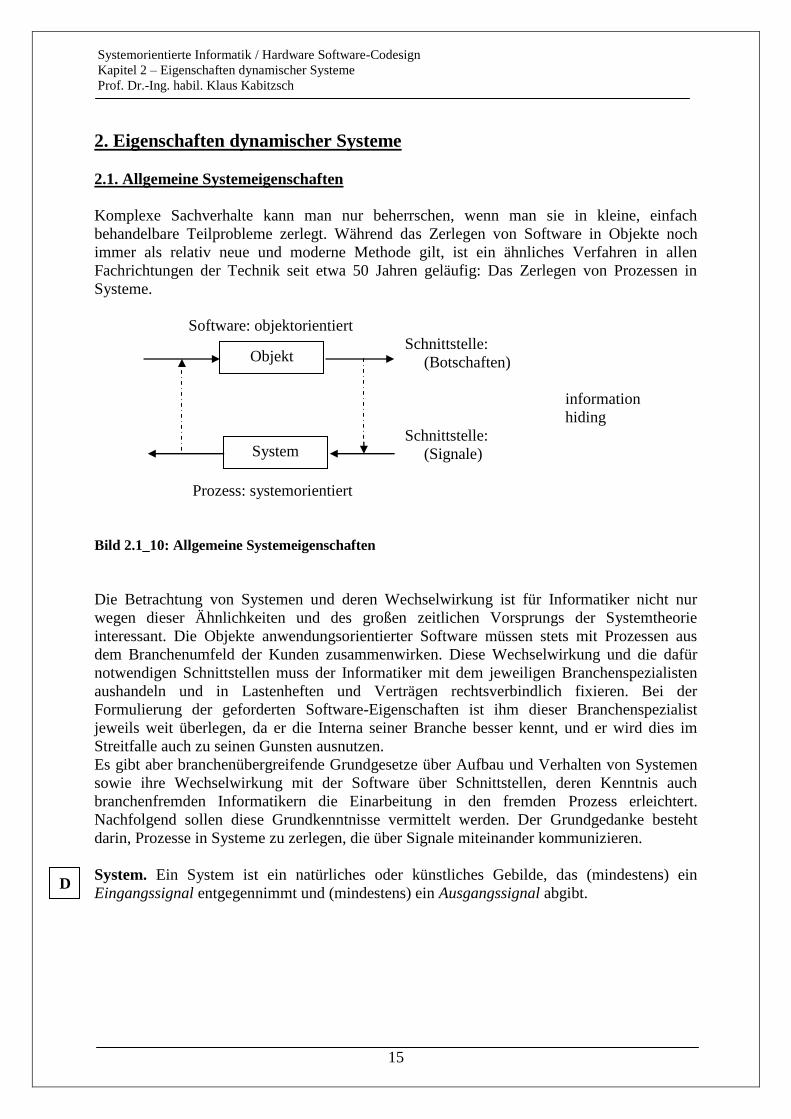
Komplexe Sachverhalte kann man nur beherrschen, wenn man sie in kleine, einfach
behandelbare Teilprobleme zerlegt. Während das Zerlegen von Software in Objekte noch
immer als relativ neue und moderne Methode gilt, ist ein ähnliches Verfahren in allen
Fachrichtungen der Technik seit etwa 50 Jahren geläufig: Das Zerlegen von Prozessen in
Systeme.
Software: objektorientiert
Schnittstelle:
(Botschaften)
information
hiding
Schnittstelle:
(Signale)
Prozess: systemorientiert
Bild 2.1_10: Allgemeine Systemeigenschaften
Die Betrachtung von Systemen und deren Wechselwirkung ist für Informatiker nicht nur
wegen dieser Ähnlichkeiten und des großen zeitlichen Vorsprungs der Systemtheorie
interessant. Die Objekte anwendungsorientierter Software müssen stets mit Prozessen aus
dem Branchenumfeld der Kunden zusammenwirken. Diese Wechselwirkung und die dafür
notwendigen Schnittstellen muss der Informatiker mit dem jeweiligen Branchenspezialisten
aushandeln und in Lastenheften und Verträgen rechtsverbindlich fixieren. Bei der
Formulierung der geforderten Software-Eigenschaften ist ihm dieser Branchenspezialist
jeweils weit überlegen, da er die Interna seiner Branche besser kennt, und er wird dies im
Streitfalle auch zu seinen Gunsten ausnutzen.
Es gibt aber branchenübergreifende Grundgesetze über Aufbau und Verhalten von Systemen
sowie ihre Wechselwirkung mit der Software über Schnittstellen, deren Kenntnis auch
branchenfremden Informatikern die Einarbeitung in den fremden Prozess erleichtert.
Nachfolgend sollen diese Grundkenntnisse vermittelt werden. Der Grundgedanke besteht
darin, Prozesse in Systeme zu zerlegen, die über Signale miteinander kommunizieren.
System. Ein System ist ein natürliches oder künstliches Gebilde, das (mindestens) ein
Eingangssignal entgegennimmt und (mindestens) ein Ausgangssignal abgibt.
Objekt
System
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
16
Gemeinsamkeiten von Objekten und Systemen:
a) Ihr Zusammenwirken ist nur über Schnittstellen möglich:
Botschaften zwischen Objekten
Signale zwischen Systemen
b) Es interessiert nur ihr Verhalten an den Schnittstellen, nicht ihr interner Aufbau
(information hiding):
Verbergen und Schützen der internen Implementierung
Es reicht aus, das Verhalten an den Schnittstellen zu kennen.
c) Es gibt bewährte Ordnungsprinzipien zur Beherrschung der Vielfalt:
Klassenbildung
Instanziierung
2.1.1. Signale
Signal. Unter einem Signal versteht man den zeitlichen Verlauf x(t) einer (physikalischen)
Größe, welcher Informationen in sich trägt.
Auf dem Wege ins Innere des Computers wird das Signal von seiner physikalischen
Trägergröße gelöst und als abstrakte Zahlenfolge dargestellt. Dazu führt die Messperipherie
zu diskreten Zeitpunkten Eingabebefehle des Computers aus (Abtastung). Alle zwischen
diesen Abtastzeitpunkten liegenden Signalwerte werden vom Computer nicht
wahrgenommen, so dass ein zeitdiskretes Signal entsteht. Die Umwandlung des Messwertes
in eine Festpunkt- oder Gleitpunktzahl wird durch einen Analog-Digital-Wandler (ADU)
ausgeführt. Da die Genauigkeit vom gewählten Zahlenformat mit seinem endlichen
Wertevorrat begrenzt wird, entsteht ein wertdiskretes Signal.
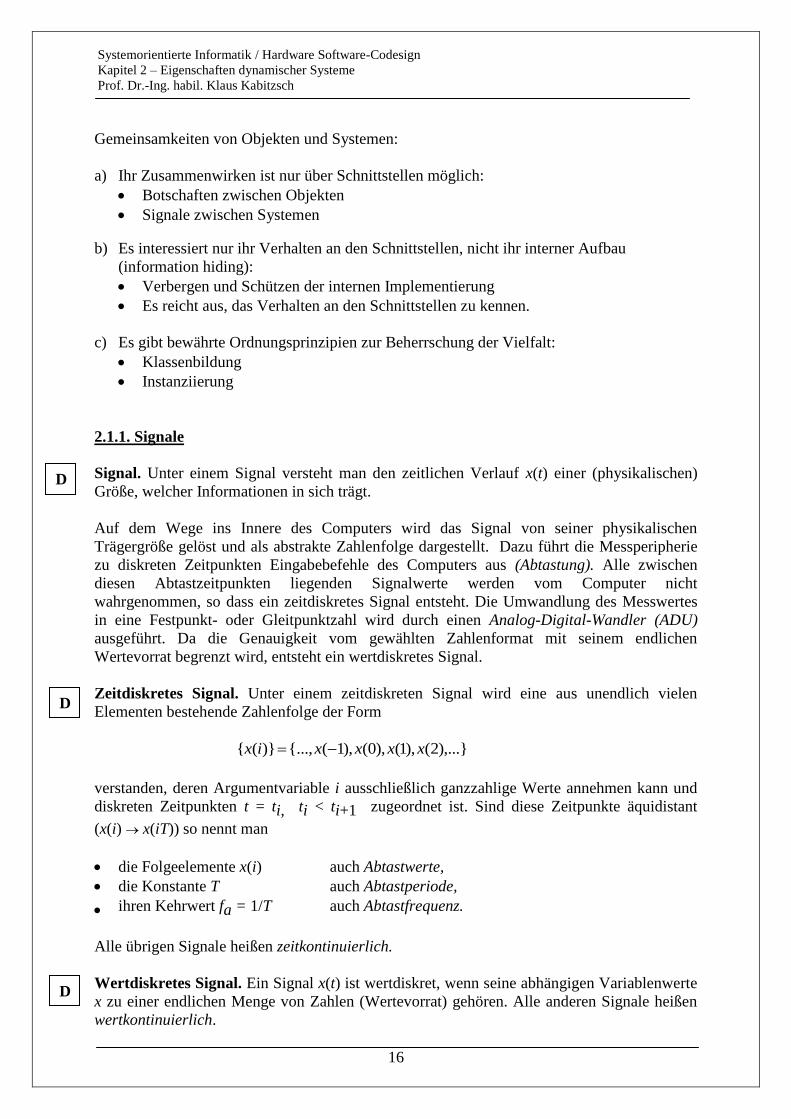
Zeitdiskretes Signal. Unter einem zeitdiskreten Signal wird eine aus unendlich vielen
Elementen bestehende Zahlenfolge der Form
),...}2(),1(),0(),1({...,)}({ xxxxix
verstanden, deren Argumentvariable i ausschließlich ganzzahlige Werte annehmen kann und
diskreten Zeitpunkten t = ti, ti < ti+1 zugeordnet ist. Sind diese Zeitpunkte äquidistant
(x(i) x(iT)) so nennt man
die Folgeelemente x(i) auch Abtastwerte,
die Konstante T auch Abtastperiode,
ihren Kehrwert fa = 1/T auch Abtastfrequenz.
Alle übrigen Signale heißen zeitkontinuierlich.
Wertdiskretes Signal. Ein Signal x(t) ist wertdiskret, wenn seine abhängigen Variablenwerte
x zu einer endlichen Menge von Zahlen (Wertevorrat) gehören. Alle anderen Signale heißen
wertkontinuierlich.
D
D
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
17
t
tt
t
zeitkontinuierlich
zeitdiskret
wertdiskret wertkontinuierlich
Bild 2.1.1_10: Signalklassen
2.1.2 Systeme
System. Ein System ist ein natürliches oder künstliches Gebilde, das (mindestens) ein
Eingangssignal x(t) entgegennimmt und (mindestens) ein Ausgangssignal y(t) abgibt.
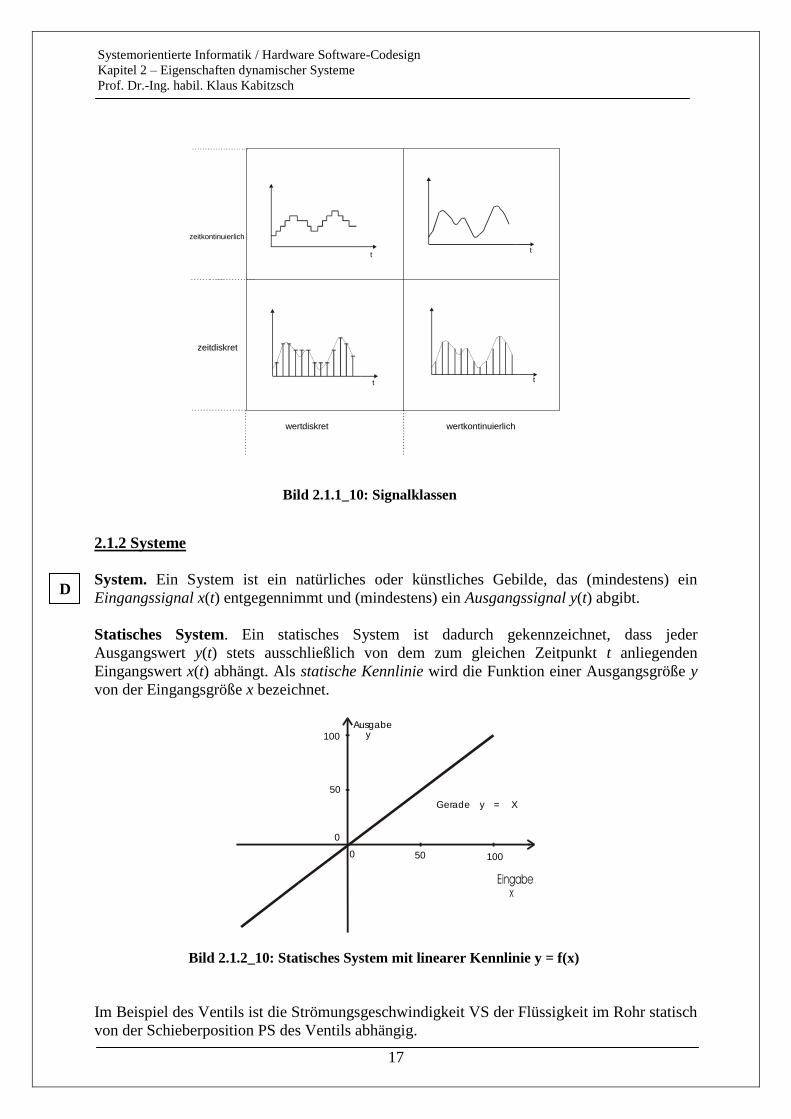
Statisches System. Ein statisches System ist dadurch gekennzeichnet, dass jeder
Ausgangswert y(t) stets ausschließlich von dem zum gleichen Zeitpunkt t anliegenden
Eingangswert x(t) abhängt. Als statische Kennlinie wird die Funktion einer Ausgangsgröße y
von der Eingangsgröße x bezeichnet.
100
100
50
50
0
0
Ausgabe y
Gerade y = X
Bild 2.1.2_10: Statisches System mit linearer Kennlinie y = f(x)
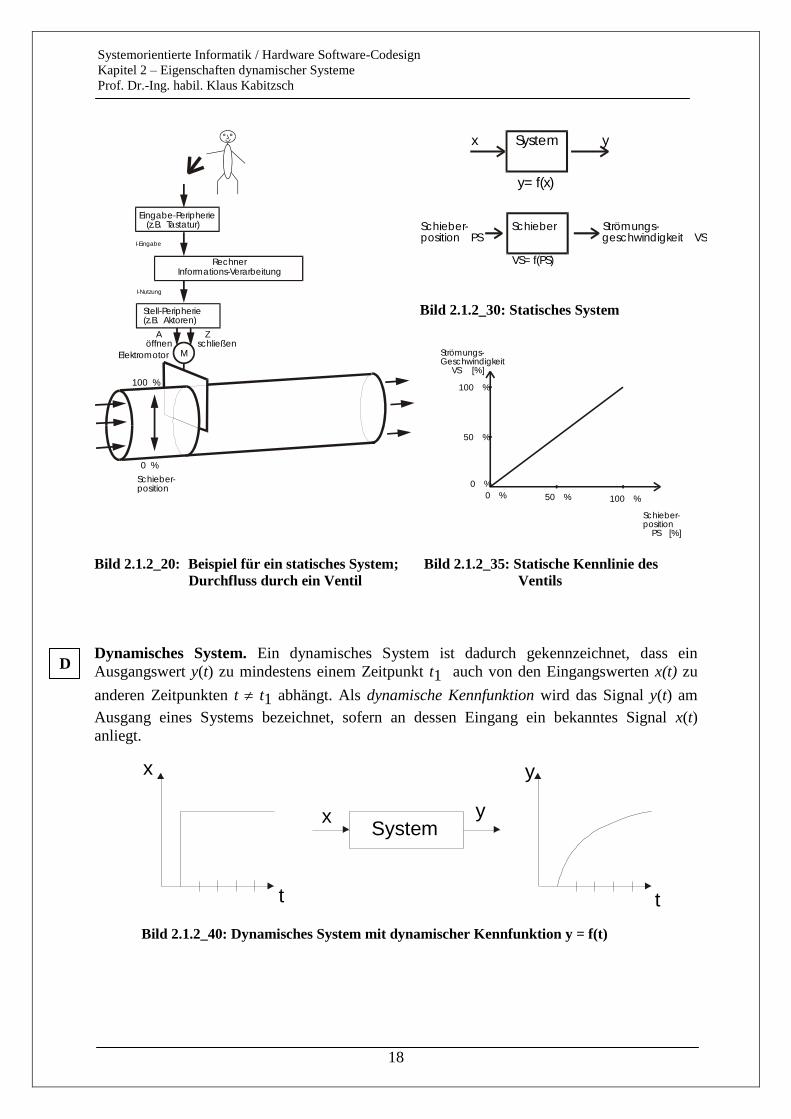
Im Beispiel des Ventils ist die Strömungsgeschwindigkeit VS der Flüssigkeit im Rohr statisch
von der Schieberposition PS des Ventils abhängig.
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
18
Eingabe-Peripherie (z.B. Tastatur)
Stell-Peripherie(z.B. Aktoren)
Rechner
Aöffnen
Zschließen
MElektromotor
100 %
0 %
Schieber-position
Informations-Verarbeitung
I-Eingabe
I-Nutzung
x System y
y= f(x)
Schieber- Schieber Strömungs-position PS geschwindigkeit VS
VS= f(PS)
Bild 2.1.2_30: Statisches System
100 %
100 %
50 %
50 %
0 %
0 %
Strömungs-Geschwindigkeit VS [%]
Schieber-position PS [%]
Bild 2.1.2_20: Beispiel für ein statisches System; Bild 2.1.2_35: Statische Kennlinie des
Durchfluss durch ein Ventil Ventils
Dynamisches System. Ein dynamisches System ist dadurch gekennzeichnet, dass ein
Ausgangswert y(t) zu mindestens einem Zeitpunkt t1 auch von den Eingangswerten x(t) zu
anderen Zeitpunkten t t1 abhängt. Als dynamische Kennfunktion wird das Signal y(t) am
Ausgang eines Systems bezeichnet, sofern an dessen Eingang ein bekanntes Signal x(t)
anliegt.
x
x
t t
System
y
y
Bild 2.1.2_40: Dynamisches System mit dynamischer Kennfunktion y = f(t)
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
19
Dynamische Systeme sind also stets mit irgendeiner Art von „Gedächtnis“ ausgestattet, das
den Einfluss der „Vorgeschichte“ speichert. Dagegen sind statische Systeme immer
gedächtnislos. Bei physikalischen Systemen hängen die dynamischen Eigenschaften (das
„Gedächtnis“) mit einem Energiespeicher zusammen, z. B.:
Elektrische Kapazität: Speicher für elektrische Ladung
Elektrische Induktivität: Speicher für magnetisches Feld
Feste Körper: Speicher für Bewegungsenergie oder Lageenergie
Körper, Flüssigkeiten, Gase: Speicher für Wärmeenergie.
Verhält sich ein Rechner wie ein dynamisches System, so benutzen seine Software-
Algorithmen Datenspeicher.
Wirkt ein Rechner mit einem technischen Prozess zusammen, so könnte er auch als System
im oben genannten Sinne aufgefasst werden, da er über seine Sensoren Eingangssignale
aufnimmt und über seine Aktoren Ausgangssignale abgibt. Da die Messperipherie durch den
Abtastvorgang alle Eingangssignale in zeitdiskrete Signale umformt und der Rechner sie in
dieser zeitdiskreten Form weiterverarbeitet und an seine Stellperipherie ausgibt, werden
Rechner auch als zeitdiskrete Systeme bezeichnet.
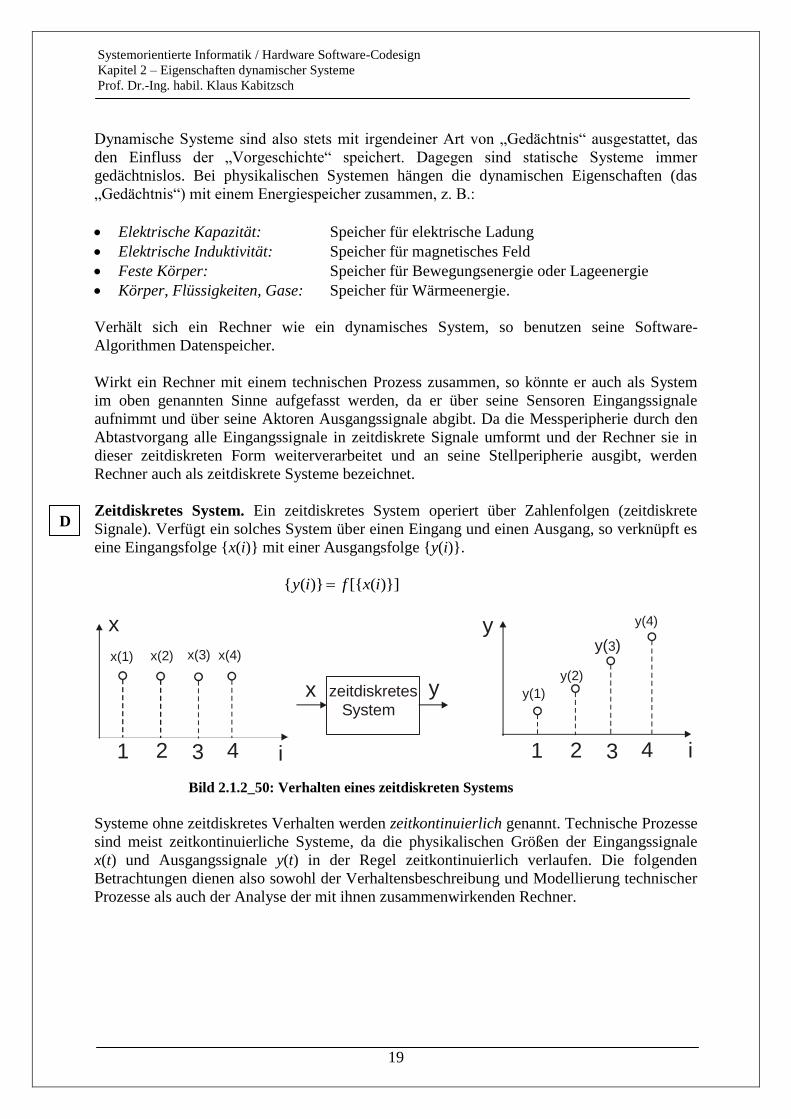
Zeitdiskretes System. Ein zeitdiskretes System operiert über Zahlenfolgen (zeitdiskrete
Signale). Verfügt ein solches System über einen Eingang und einen Ausgang, so verknüpft es
eine Eingangsfolge {x(i)} mit einer Ausgangsfolge {y(i)}.
)}]([{)}({ ixfiy
yx
x
ii
zeitdiskretes
System
y
1 2 3 4 1 2 3 4
x(1) x(2) x(3) x(4)
y(1)
y(2)
y( )3
y(4)
Bild 2.1.2_50: Verhalten eines zeitdiskreten Systems
Systeme ohne zeitdiskretes Verhalten werden zeitkontinuierlich genannt. Technische Prozesse
sind meist zeitkontinuierliche Systeme, da die physikalischen Größen der Eingangssignale
x(t) und Ausgangssignale y(t) in der Regel zeitkontinuierlich verlaufen. Die folgenden
Betrachtungen dienen also sowohl der Verhaltensbeschreibung und Modellierung technischer
Prozesse als auch der Analyse der mit ihnen zusammenwirkenden Rechner.
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
20
Schwach kausale Systeme reagieren auf gleiche Ursachen x auch stets mit gleichen
Wirkungen y.
In der Praxis ist ihr Verhalten meistens trotzdem unvorhersehbar, weil sich exakt gleiche
Ursachen niemals einstellen lassen, selbst kleinste Abweichungen davon aber bereits völlig
andere Wirkungen hervorrufen können. In einer Welt schwach kausaler Systeme kann sich
der Mensch nur schwer orientieren; diese Kausalität hat für ihn deshalb einen geringen Wert.
Stark kausale Systeme reagieren auf ähnliche Ursachen x auch stets mit ähnlichen
Wirkungen y.
Die meisten Systeme der Natur weisen zum Glück ein derart vorhersehbares Verhalten auf.
Sie erleichtern dem Menschen die Orientierung und ermöglichen ihm zielgerichtetes Handeln.
Stattdessen bauen viele Kulturleistungen des Menschen auf schwach kausalen Prinzipien auf,
z.B.
Sprache („Kopf“, „Zopf“, „Topf“)
Zahlensysteme („0001“, „1001“)
Rechner.
Auch wenige Naturfunktionen sind schwach kausal, z.B. die Gene der DNS.
Bei all diesen Beispielen wird auf die Vorteile der starken Kausalität nur aus
Effizienzgründen verzichtet: weil schwach kausale Systeme aufwandsarm und ohne
Redundanz Informationen speichern können.
Die strikteste und mathematisch exakteste Form des stark kausalen Verhaltens findet man bei
linearen Systemen.
Lineares statisches System. Ein statisches System ist linear, wenn für die aktuellen Werte
der Überlagerungssatz gilt (Additivität):
).()()( 2121 xfxfxxf
Die statische Kennlinie des Beispiels in Bild 2.1.2_10 ist linear. Statische Systeme, für die der
Überlagerungssatz nicht gilt, heißen nichtlinear.
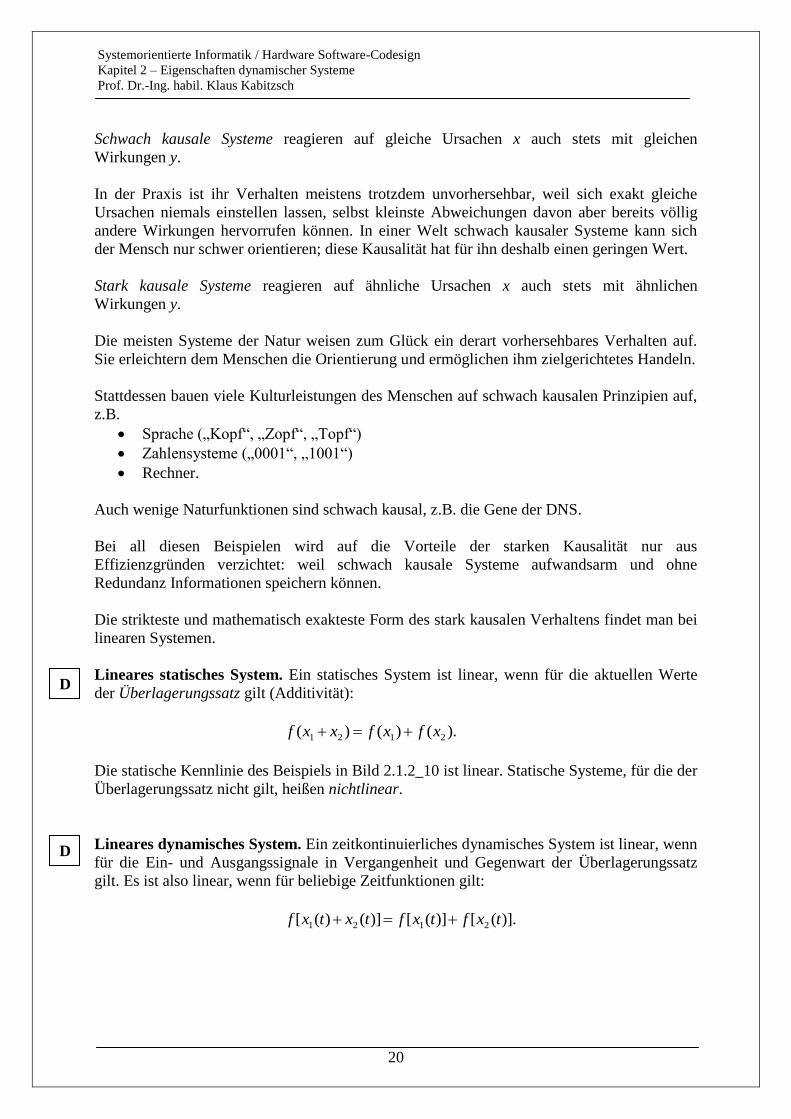
Lineares dynamisches System. Ein zeitkontinuierliches dynamisches System ist linear, wenn
für die Ein- und Ausgangssignale in Vergangenheit und Gegenwart der Überlagerungssatz
gilt. Es ist also linear, wenn für beliebige Zeitfunktionen gilt:
)].([)]([)]()([ 2121 txftxftxtxf
D
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
21
Bild 2.1.2_60: Verhalten eines linearen dynamischen Systems
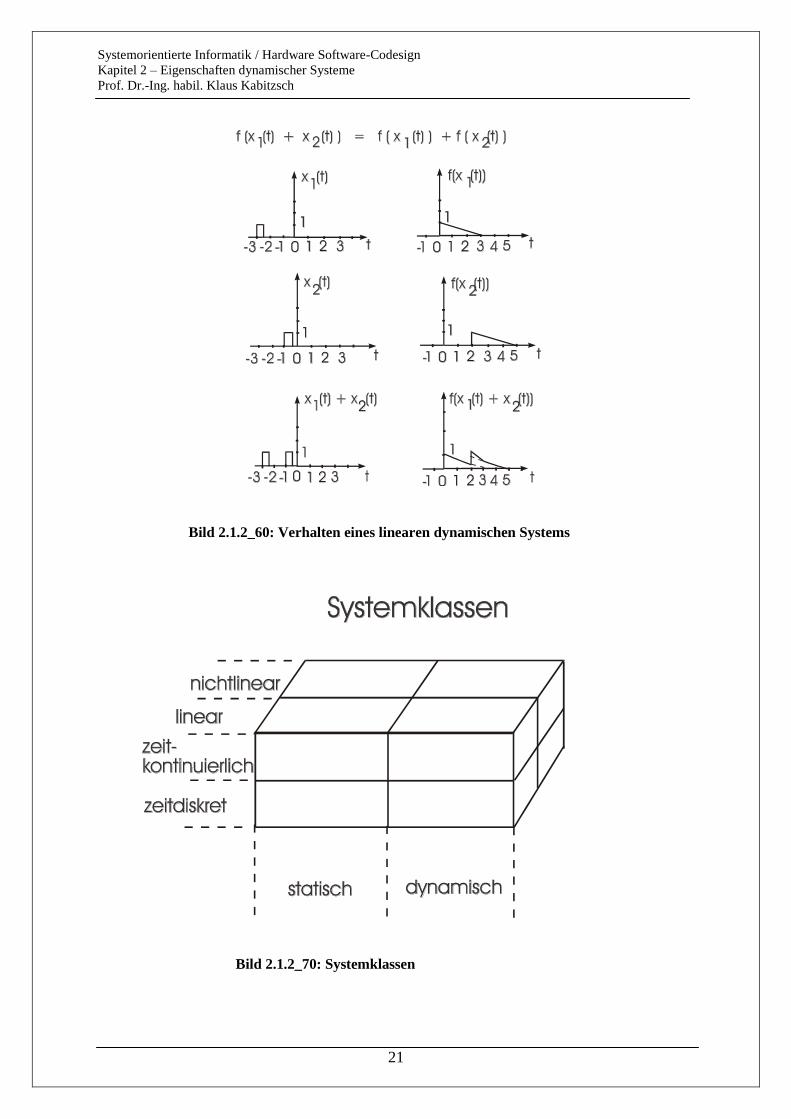
Bild 2.1.2_70: Systemklassen
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
22
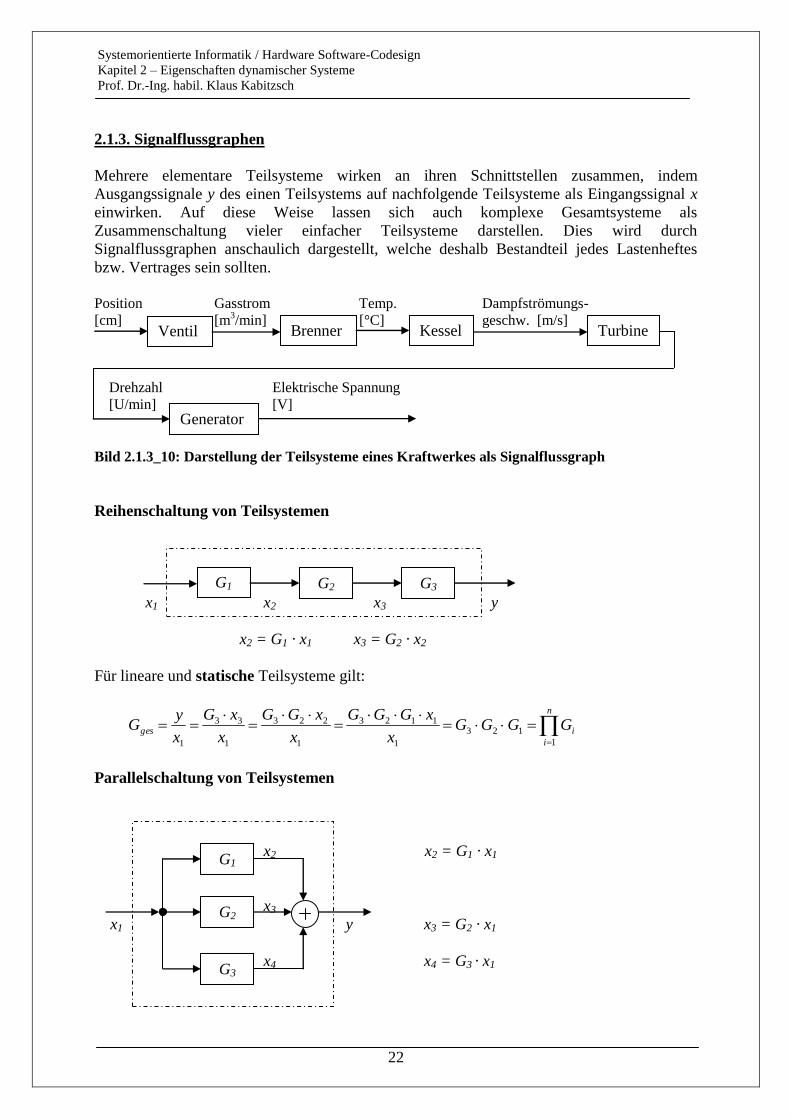
2.1.3. Signalflussgraphen
Mehrere elementare Teilsysteme wirken an ihren Schnittstellen zusammen, indem
Ausgangssignale y des einen Teilsystems auf nachfolgende Teilsysteme als Eingangssignal x
einwirken. Auf diese Weise lassen sich auch komplexe Gesamtsysteme als
Zusammenschaltung vieler einfacher Teilsysteme darstellen. Dies wird durch
Signalflussgraphen anschaulich dargestellt, welche deshalb Bestandteil jedes Lastenheftes
bzw. Vertrages sein sollten.
Position Gasstrom Temp. Dampfströmungs-
[cm] [m3/min] [°C] geschw. [m/s]
Drehzahl Elektrische Spannung
[U/min] [V]
Bild 2.1.3_10: Darstellung der Teilsysteme eines Kraftwerkes als Signalflussgraph
Reihenschaltung von Teilsystemen
x1 x2 x3 y
x2 = G1 · x1 x3 = G2 · x2
Für lineare und statische Teilsysteme gilt:
n
i
iges GGGGx
xGGG
x
xGG
x
xG
x
yG
1
123
1
1123
1
223
1
33
1
Parallelschaltung von Teilsystemen
x2 x2 = G1 · x1
x3
x1 y x3 = G2 · x1
x4 x4 = G3 · x1
Ventil Brenner Kessel Turbine
Generator
G1 G2 G3
G1
G2
G3
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
23
Für lineare und statische Teilsysteme gilt:
n
i
iges GGGGx
xGxGx
x
xxx
x
yG
1
321
1
131211
1
432
1
G
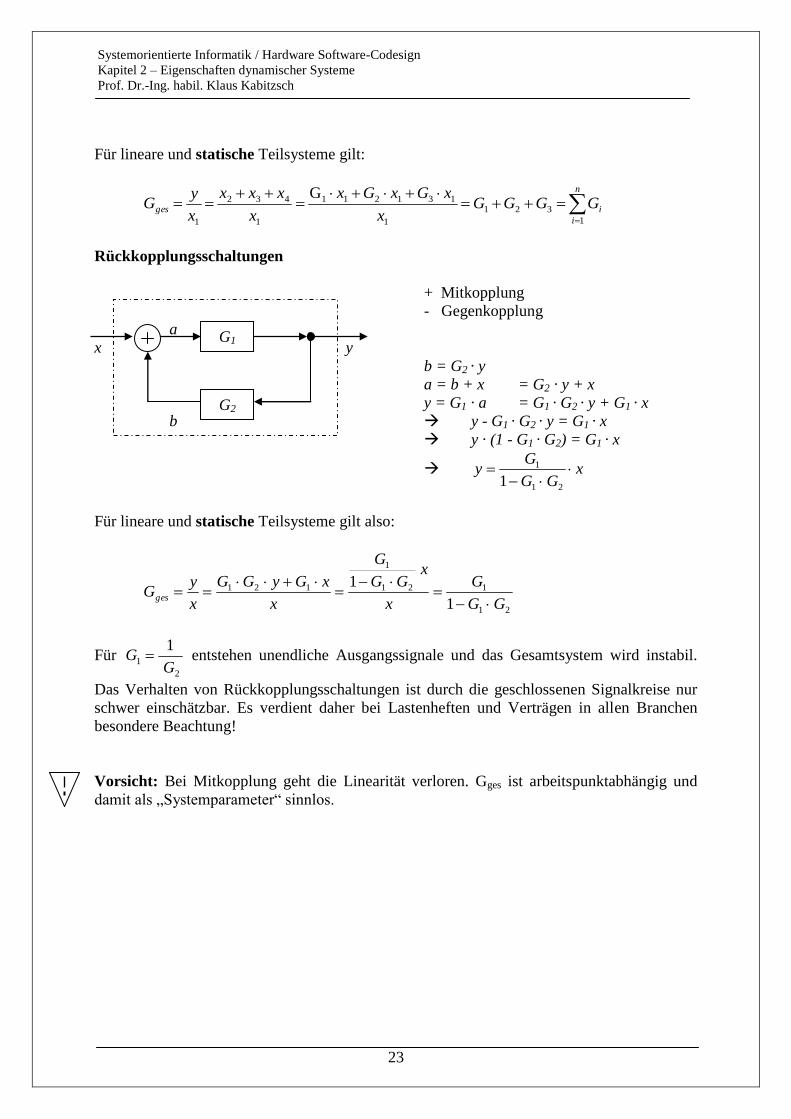
Rückkopplungsschaltungen
+ Mitkopplung
- Gegenkopplung
a
x y
b = G2 · y
a = b + x = G2 · y + x
y = G1 · a = G1 · G2 · y + G1 · x
b y - G1 · G2 · y = G1 · x
y · (1 - G1 · G2) = G1 · x
xGG
Gy
21
1
1
Für lineare und statische Teilsysteme gilt also:
21
121
1
121
1
1
GG
G
x
xGG
G
x
xGyGG
x
yGges
Für 2
1
1
GG entstehen unendliche Ausgangssignale und das Gesamtsystem wird instabil.
Das Verhalten von Rückkopplungsschaltungen ist durch die geschlossenen Signalkreise nur
schwer einschätzbar. Es verdient daher bei Lastenheften und Verträgen in allen Branchen
besondere Beachtung!
Vorsicht: Bei Mitkopplung geht die Linearität verloren. Gges ist arbeitspunktabhängig und
damit als „Systemparameter“ sinnlos.
G1
G2
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
24
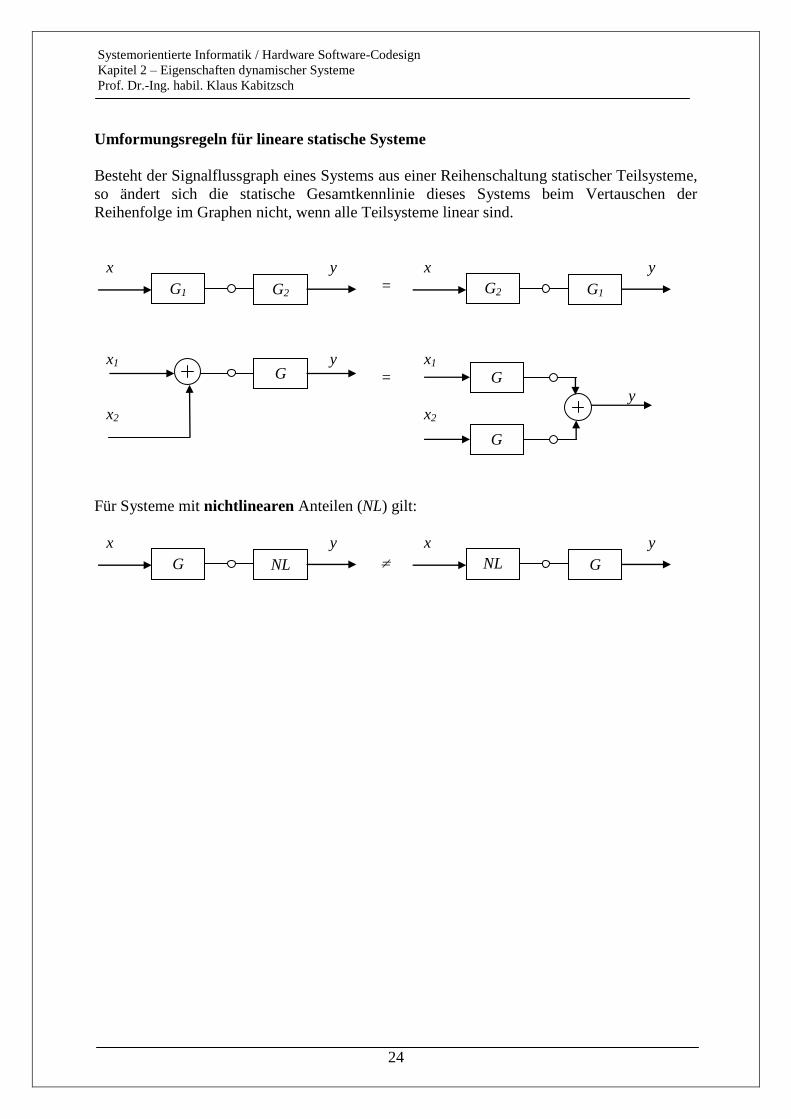
Umformungsregeln für lineare statische Systeme
Besteht der Signalflussgraph eines Systems aus einer Reihenschaltung statischer Teilsysteme,
so ändert sich die statische Gesamtkennlinie dieses Systems beim Vertauschen der
Reihenfolge im Graphen nicht, wenn alle Teilsysteme linear sind.
x y x y
=
x1 y x1
=
y
x2 x2
Für Systeme mit nichtlinearen Anteilen (NL) gilt:
x y x y
G1 G2 G2
G1
G G
G
G NL NL
G
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
25
2.2. Zeitkontinuierliche Systemtypen und ihre Software-Modelle
2.2.1. Gewinnung von Modellen
Sobald die Teilsysteme nicht mehr statisch, sondern dynamisch sind, lassen sich die
Signalflussgraphen mathematisch nicht mehr so einfach behandeln wie im letzten Kapitel.
Umso nötiger werden Methoden, mit denen man die inneren Eigenschaften dieser Systeme
klassifizieren und ihr äußeres Verhalten vorhersagen kann.
Die wichtigste Methode besteht darin, für diese Systeme mathematische Modelle zu
entwickeln, diese auf dem Rechner nachzubilden und ihr Zeitverhalten dort durch
Rechnersimulation zu studieren.
Modell. Die Gesamtheit der mathematischen Gleichungen, die den Zusammenhang zwischen
Eingangs- und Ausgangsgrößen eines Systems beschreibt, wird mathematisches Modell
genannt. Ihre Implementation auf einem Rechner heißt auch Rechnermodell.
Bei der Modellierung eines Systems soll die vom Signalflussgraphen bekannte Zerlegung in
Teilsysteme beibehalten werden. Da bei der Implementierung im Rechner der Signalfluss
durch einen Datenfluss nachgebildet wird, heißen die auf Implementierung gerichteten
Graphen auch Datenflussgraphen.
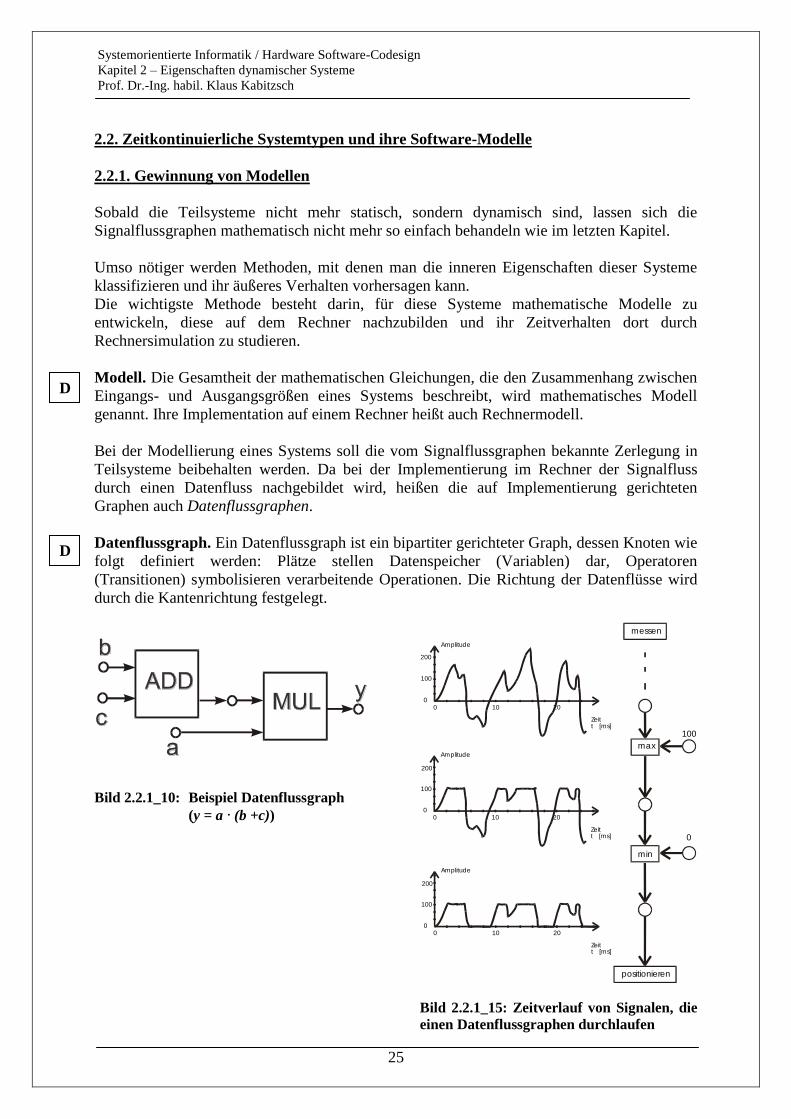
Datenflussgraph. Ein Datenflussgraph ist ein bipartiter gerichteter Graph, dessen Knoten wie
folgt definiert werden: Plätze stellen Datenspeicher (Variablen) dar, Operatoren
(Transitionen) symbolisieren verarbeitende Operationen. Die Richtung der Datenflüsse wird
durch die Kantenrichtung festgelegt.
Bild 2.2.1_10: Beispiel Datenflussgraph
(y = a · (b +c))
100
0
messen
max
min
positionieren
10 20
100
00
Amplitude
Zeitt [ms]
200
10 20
200
100
00
Amplitude
Zeitt [ms]
10 20
200
100
00
Amplitude
Zeitt [ms]
Bild 2.2.1_15: Zeitverlauf von Signalen, die
einen Datenflussgraphen durchlaufen
D
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
26
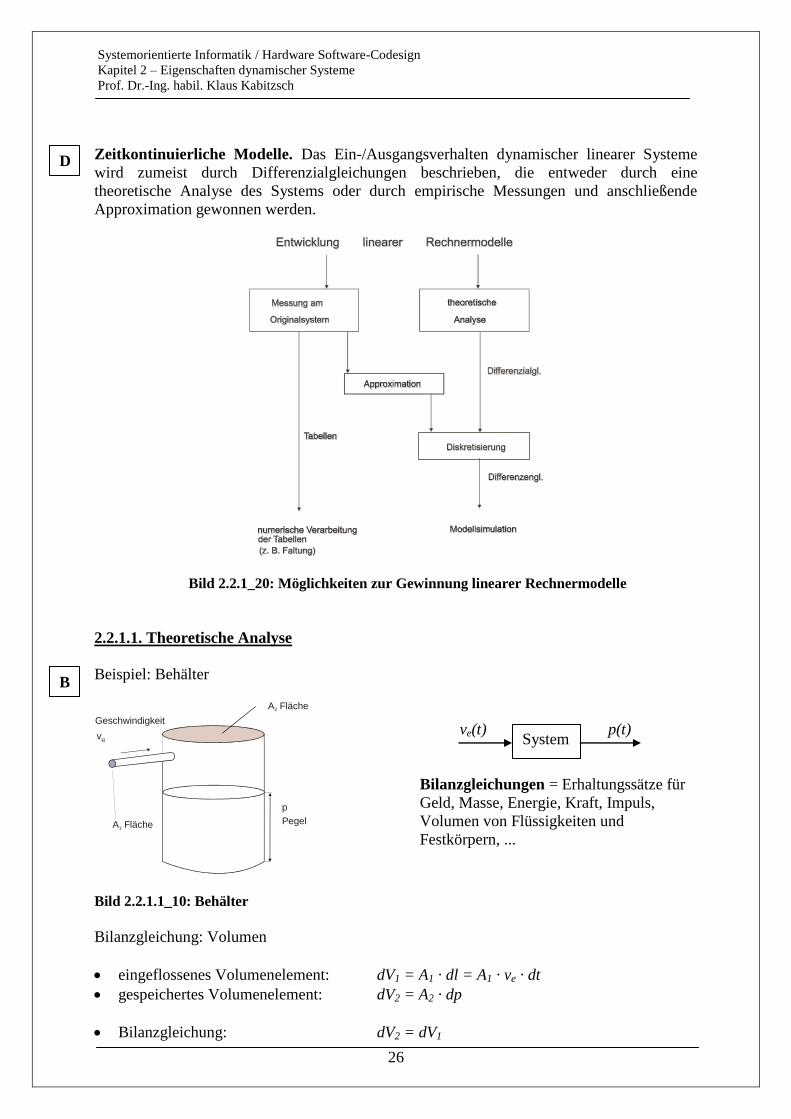
Zeitkontinuierliche Modelle. Das Ein-/Ausgangsverhalten dynamischer linearer Systeme
wird zumeist durch Differenzialgleichungen beschrieben, die entweder durch eine
theoretische Analyse des Systems oder durch empirische Messungen und anschließende
Approximation gewonnen werden.
Bild 2.2.1_20: Möglichkeiten zur Gewinnung linearer Rechnermodelle
2.2.1.1. Theoretische Analyse
Beispiel: Behälter
A Fläche2
A Fläche1
Geschwindigkeit
ve
p
Pegel
Bild 2.2.1.1_10: Behälter
ve(t) p(t)
Bilanzgleichungen = Erhaltungssätze für
Geld, Masse, Energie, Kraft, Impuls,
Volumen von Flüssigkeiten und
Festkörpern, ...
Bilanzgleichung: Volumen
eingeflossenes Volumenelement: dV1 = A1 · dl = A1 · ve · dt
gespeichertes Volumenelement: dV2 = A2 · dp
Bilanzgleichung: dV2 = dV1
D
System
B
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
27
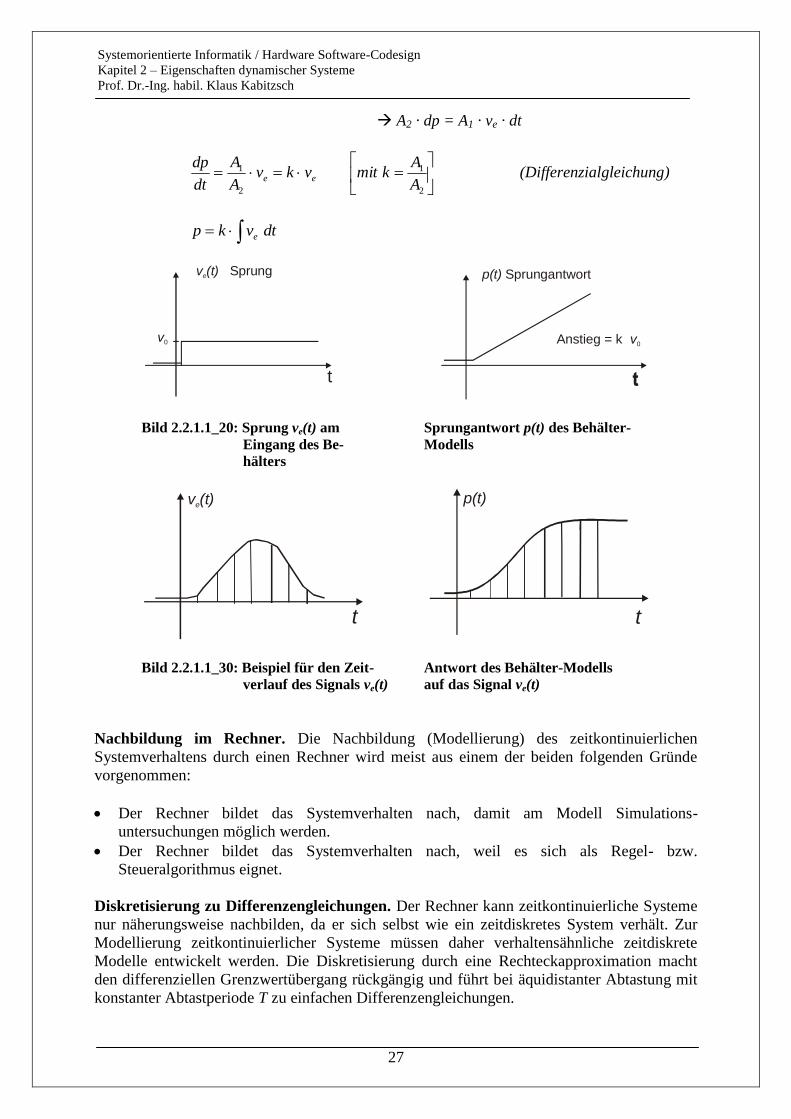
A2 · dp = A1 · ve · dt
2
1
2
1
A
Akmitvkv
A
A
dt
dpee (Differenzialgleichung)
dtvkp e
t
v (t)e Sprung p(t) Sprungantwort
Anstieg = k 0· vv0
Bild 2.2.1.1_20: Sprung ve(t) am Sprungantwort p(t) des Behälter-
Eingang des Be- Modells
hälters
tt
v (t)e p(t)
Bild 2.2.1.1_30: Beispiel für den Zeit- Antwort des Behälter-Modells
verlauf des Signals ve(t) auf das Signal ve(t)
Nachbildung im Rechner. Die Nachbildung (Modellierung) des zeitkontinuierlichen
Systemverhaltens durch einen Rechner wird meist aus einem der beiden folgenden Gründe
vorgenommen:
Der Rechner bildet das Systemverhalten nach, damit am Modell Simulations-
untersuchungen möglich werden.
Der Rechner bildet das Systemverhalten nach, weil es sich als Regel- bzw.
Steueralgorithmus eignet.
Diskretisierung zu Differenzengleichungen. Der Rechner kann zeitkontinuierliche Systeme
nur näherungsweise nachbilden, da er sich selbst wie ein zeitdiskretes System verhält. Zur
Modellierung zeitkontinuierlicher Systeme müssen daher verhaltensähnliche zeitdiskrete
Modelle entwickelt werden. Die Diskretisierung durch eine Rechteckapproximation macht
den differenziellen Grenzwertübergang rückgängig und führt bei äquidistanter Abtastung mit
konstanter Abtastperiode T zu einfachen Differenzengleichungen.
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
28
tT
y
y(i)
y
i
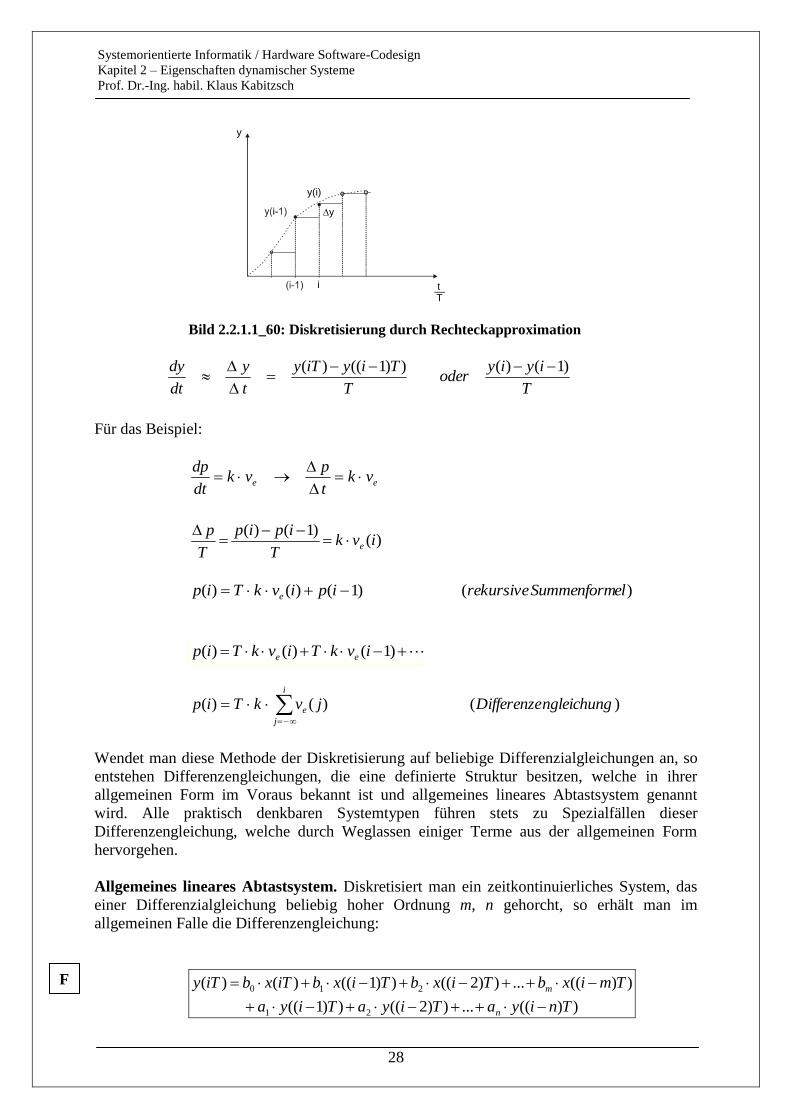
Bild 2.2.1.1_60: Diskretisierung durch Rechteckapproximation
T
iyiyoder
T
TiyiTy
t
y
dt
dy )1()())1(()(
Für das Beispiel:
ee vkt
pvk
dt
dp
)()1()(
ivkT
ipip
T
pe
)()1()()( elSummenformrekursiveipivkTip e
)1()()( ivkTivkTip ee
)()()( ngleichungDifferenzejvkTipi
j
e
Wendet man diese Methode der Diskretisierung auf beliebige Differenzialgleichungen an, so
entstehen Differenzengleichungen, die eine definierte Struktur besitzen, welche in ihrer
allgemeinen Form im Voraus bekannt ist und allgemeines lineares Abtastsystem genannt
wird. Alle praktisch denkbaren Systemtypen führen stets zu Spezialfällen dieser
Differenzengleichung, welche durch Weglassen einiger Terme aus der allgemeinen Form
hervorgehen.
Allgemeines lineares Abtastsystem. Diskretisiert man ein zeitkontinuierliches System, das
einer Differenzialgleichung beliebig hoher Ordnung m, n gehorcht, so erhält man im
allgemeinen Falle die Differenzengleichung:
))((...))2(())1((
))((...))2(())1(()()(
21
210
TniyaTiyaTiya
TmixbTixbTixbiTxbiTy
n
m
F
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
29
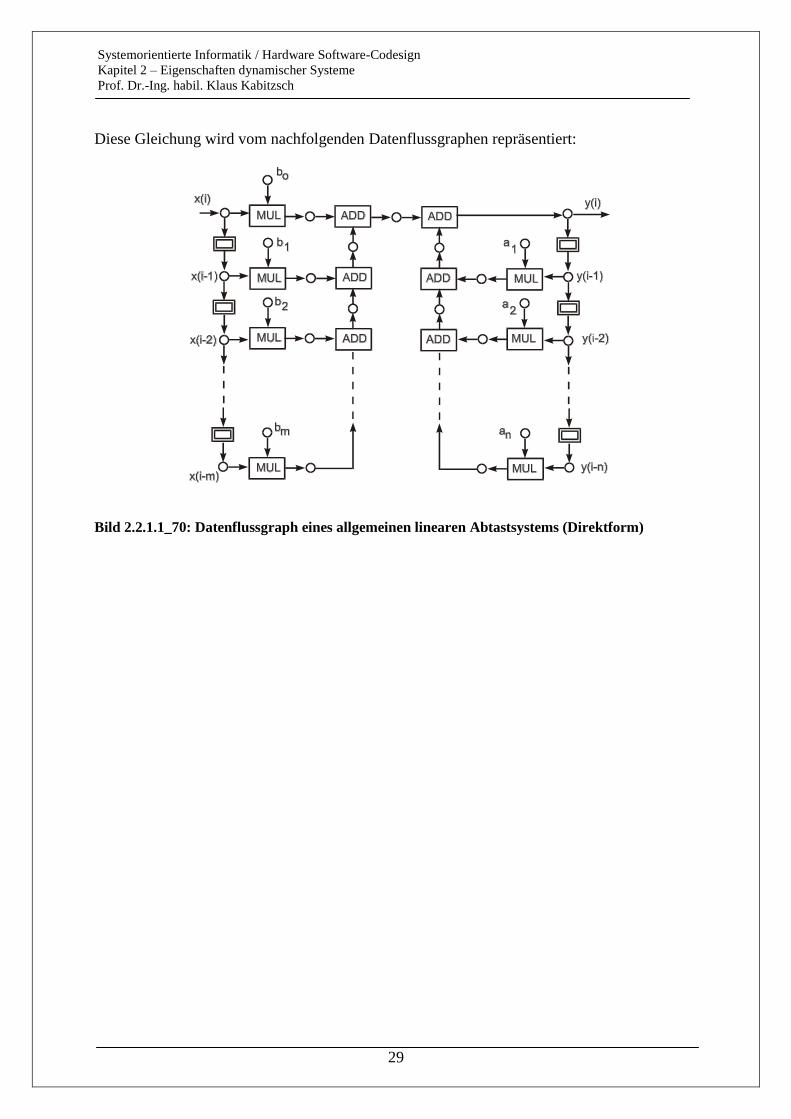
Diese Gleichung wird vom nachfolgenden Datenflussgraphen repräsentiert:
Bild 2.2.1.1_70: Datenflussgraph eines allgemeinen linearen Abtastsystems (Direktform)
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
30
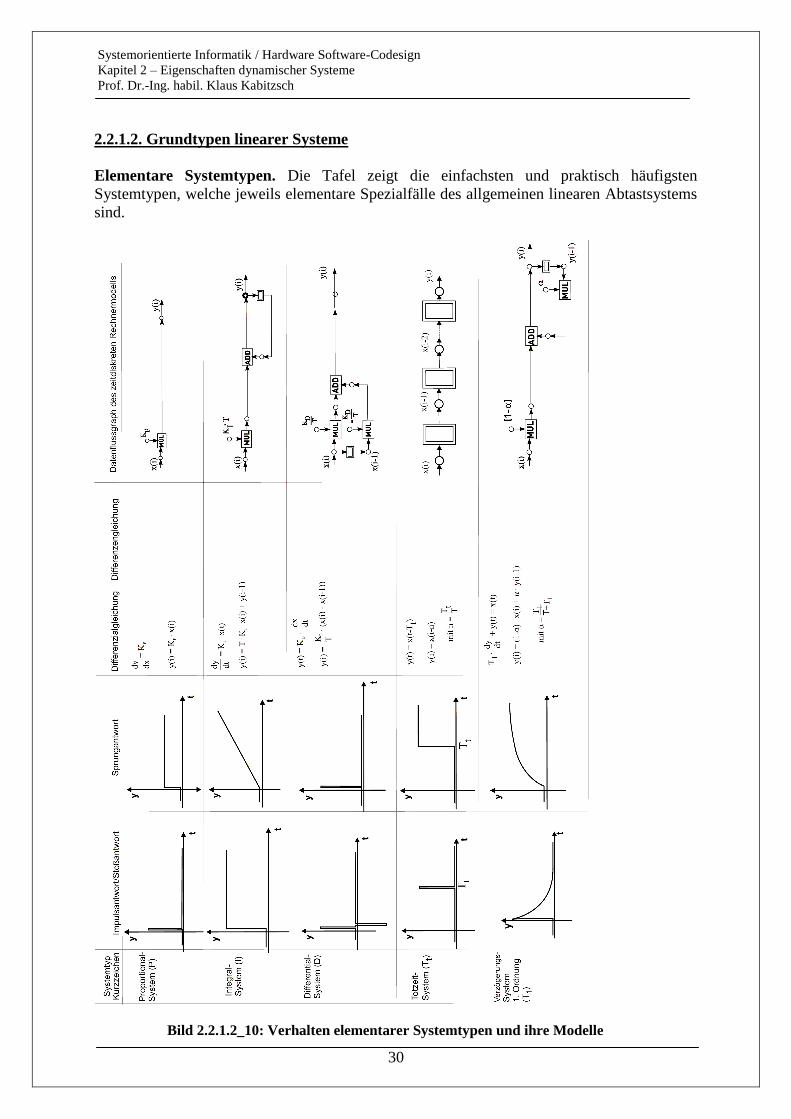
2.2.1.2. Grundtypen linearer Systeme
Elementare Systemtypen. Die Tafel zeigt die einfachsten und praktisch häufigsten
Systemtypen, welche jeweils elementare Spezialfälle des allgemeinen linearen Abtastsystems
sind.
Bild 2.2.1.2_10: Verhalten elementarer Systemtypen und ihre Modelle
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
31
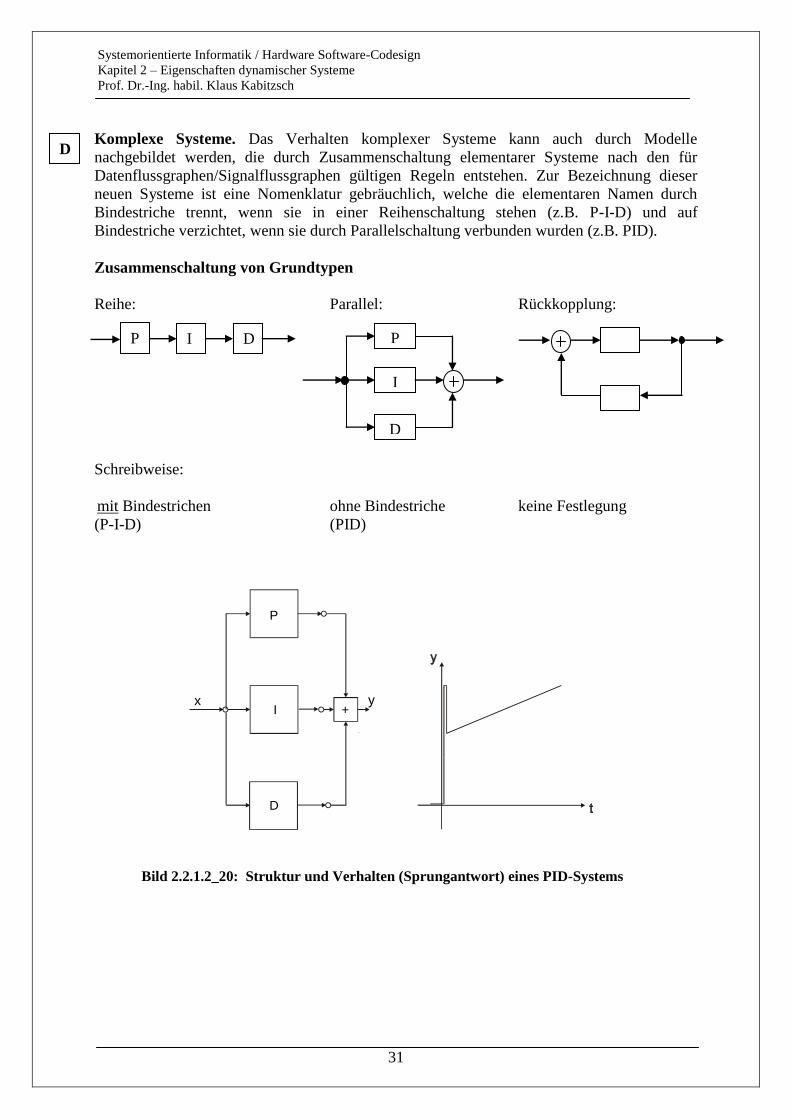
Komplexe Systeme. Das Verhalten komplexer Systeme kann auch durch Modelle
nachgebildet werden, die durch Zusammenschaltung elementarer Systeme nach den für
Datenflussgraphen/Signalflussgraphen gültigen Regeln entstehen. Zur Bezeichnung dieser
neuen Systeme ist eine Nomenklatur gebräuchlich, welche die elementaren Namen durch
Bindestriche trennt, wenn sie in einer Reihenschaltung stehen (z.B. P-I-D) und auf
Bindestriche verzichtet, wenn sie durch Parallelschaltung verbunden wurden (z.B. PID).
Zusammenschaltung von Grundtypen
Reihe: Parallel: Rückkopplung:
Schreibweise:
mit Bindestrichen ohne Bindestriche keine Festlegung
(P-I-D) (PID)
P
I
D
+x y
Bild 2.2.1.2_20: Struktur und Verhalten (Sprungantwort) eines PID-Systems
P I D P
I
D
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
32
2.2.1.3. Modellbildung durch Messungen
In der Praxis sind Systeme oft so komplex, dass eine theoretische Analyse scheitert. Dann ist
auch eine Modellbildung auf diesem Wege nicht möglich und man muss auf empirische
Methoden ausweichen.
Dort werden die Systeme mit definierten Testsignalen am Eingang stimuliert und
anschließend ihre entsprechenden Antworten am Ausgang beobachtet. Danach sucht man
nach Modellen, welche dieses äußere Verhalten näherungsweise nachbilden.
Ähnlichkeiten der inneren Funktionszusammenhänge zwischen Modell und Original sind
nicht unbedingt erforderlich.
Bei der Anwendung dieser Methode geht man in folgenden Schritten vor:
a) Messung mit Testsignalen:
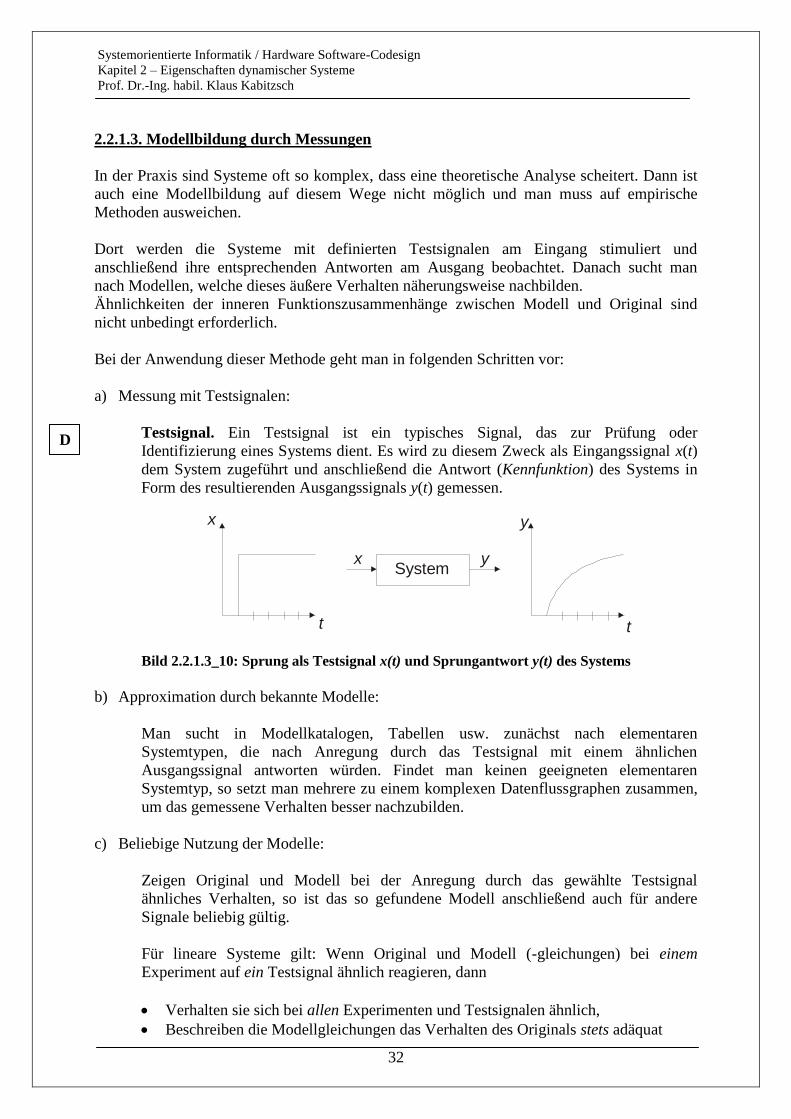
Testsignal. Ein Testsignal ist ein typisches Signal, das zur Prüfung oder
Identifizierung eines Systems dient. Es wird zu diesem Zweck als Eingangssignal x(t)
dem System zugeführt und anschließend die Antwort (Kennfunktion) des Systems in
Form des resultierenden Ausgangssignals y(t) gemessen.
x
x
t t
System
y
y
Bild 2.2.1.3_10: Sprung als Testsignal x(t) und Sprungantwort y(t) des Systems
b) Approximation durch bekannte Modelle:
Man sucht in Modellkatalogen, Tabellen usw. zunächst nach elementaren
Systemtypen, die nach Anregung durch das Testsignal mit einem ähnlichen
Ausgangssignal antworten würden. Findet man keinen geeigneten elementaren
Systemtyp, so setzt man mehrere zu einem komplexen Datenflussgraphen zusammen,
um das gemessene Verhalten besser nachzubilden.
c) Beliebige Nutzung der Modelle:
Zeigen Original und Modell bei der Anregung durch das gewählte Testsignal
ähnliches Verhalten, so ist das so gefundene Modell anschließend auch für andere
Signale beliebig gültig.
Für lineare Systeme gilt: Wenn Original und Modell (-gleichungen) bei einem
Experiment auf ein Testsignal ähnlich reagieren, dann
Verhalten sie sich bei allen Experimenten und Testsignalen ähnlich,
Beschreiben die Modellgleichungen das Verhalten des Originals stets adäquat
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
33
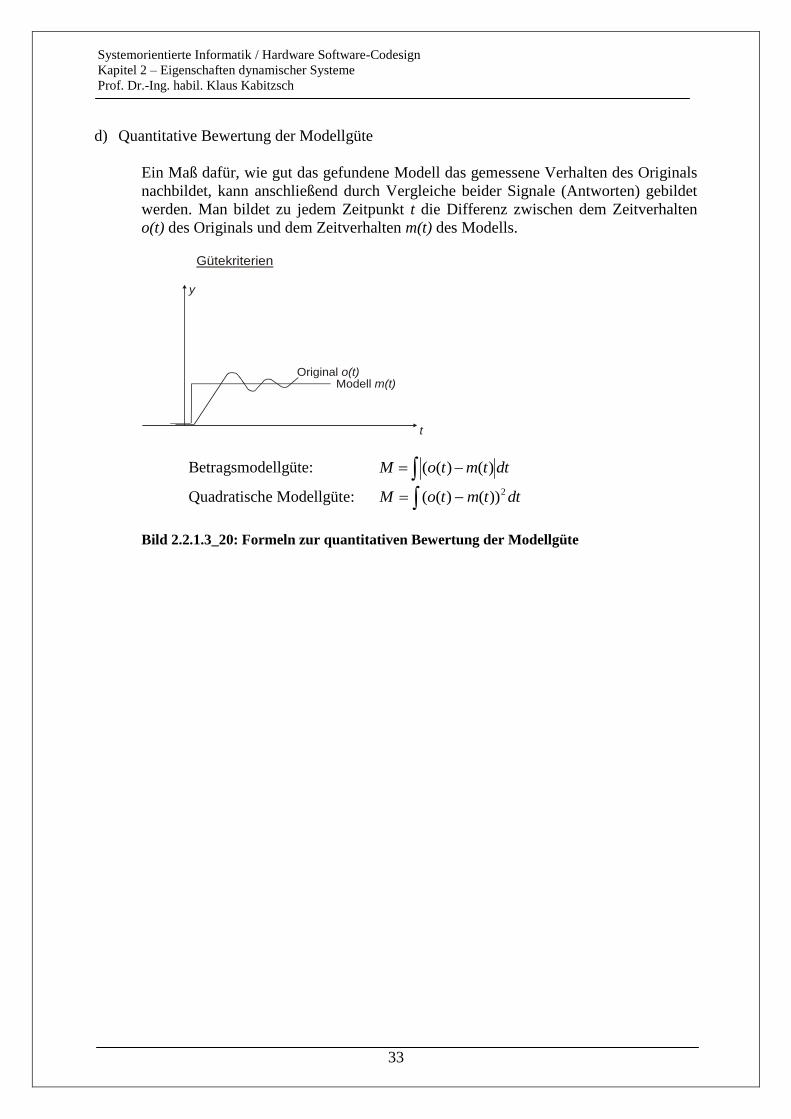
d) Quantitative Bewertung der Modellgüte
Ein Maß dafür, wie gut das gefundene Modell das gemessene Verhalten des Originals
nachbildet, kann anschließend durch Vergleiche beider Signale (Antworten) gebildet
werden. Man bildet zu jedem Zeitpunkt t die Differenz zwischen dem Zeitverhalten
o(t) des Originals und dem Zeitverhalten m(t) des Modells.
y
t
Original o(t)Modell m(t)
Gütekriterien
Betragsmodellgüte: dttmtoM )()((
Quadratische Modellgüte: dttmtoM 2))()((
Bild 2.2.1.3_20: Formeln zur quantitativen Bewertung der Modellgüte
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
34
2.3. Theorie linearer Systeme
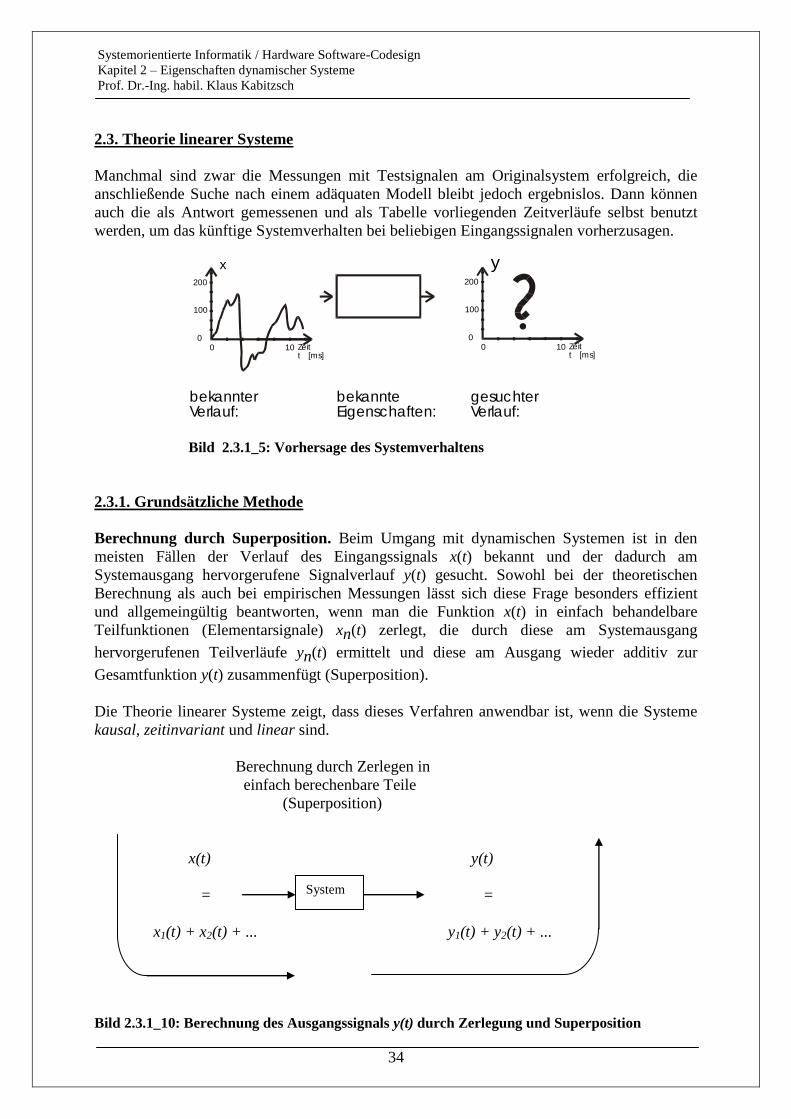
Manchmal sind zwar die Messungen mit Testsignalen am Originalsystem erfolgreich, die
anschließende Suche nach einem adäquaten Modell bleibt jedoch ergebnislos. Dann können
auch die als Antwort gemessenen und als Tabelle vorliegenden Zeitverläufe selbst benutzt
werden, um das künftige Systemverhalten bei beliebigen Eingangssignalen vorherzusagen.
10
100
00
y
Zeitt [ms]
200
10
100
00
x
Zeitt [ms]
200
bekannterVerlauf:
bekannteEigenschaften:
gesuchterVerlauf:
Bild 2.3.1_5: Vorhersage des Systemverhaltens
2.3.1. Grundsätzliche Methode
Berechnung durch Superposition. Beim Umgang mit dynamischen Systemen ist in den
meisten Fällen der Verlauf des Eingangssignals x(t) bekannt und der dadurch am
Systemausgang hervorgerufene Signalverlauf y(t) gesucht. Sowohl bei der theoretischen
Berechnung als auch bei empirischen Messungen lässt sich diese Frage besonders effizient
und allgemeingültig beantworten, wenn man die Funktion x(t) in einfach behandelbare
Teilfunktionen (Elementarsignale) xn(t) zerlegt, die durch diese am Systemausgang
hervorgerufenen Teilverläufe yn(t) ermittelt und diese am Ausgang wieder additiv zur
Gesamtfunktion y(t) zusammenfügt (Superposition).
Die Theorie linearer Systeme zeigt, dass dieses Verfahren anwendbar ist, wenn die Systeme
kausal, zeitinvariant und linear sind.
Berechnung durch Zerlegen in
einfach berechenbare Teile
(Superposition)
x(t) y(t)
= =
x1(t) + x2(t) + ... y1(t) + y2(t) + ...
Bild 2.3.1_10: Berechnung des Ausgangssignals y(t) durch Zerlegung und Superposition
System
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
35
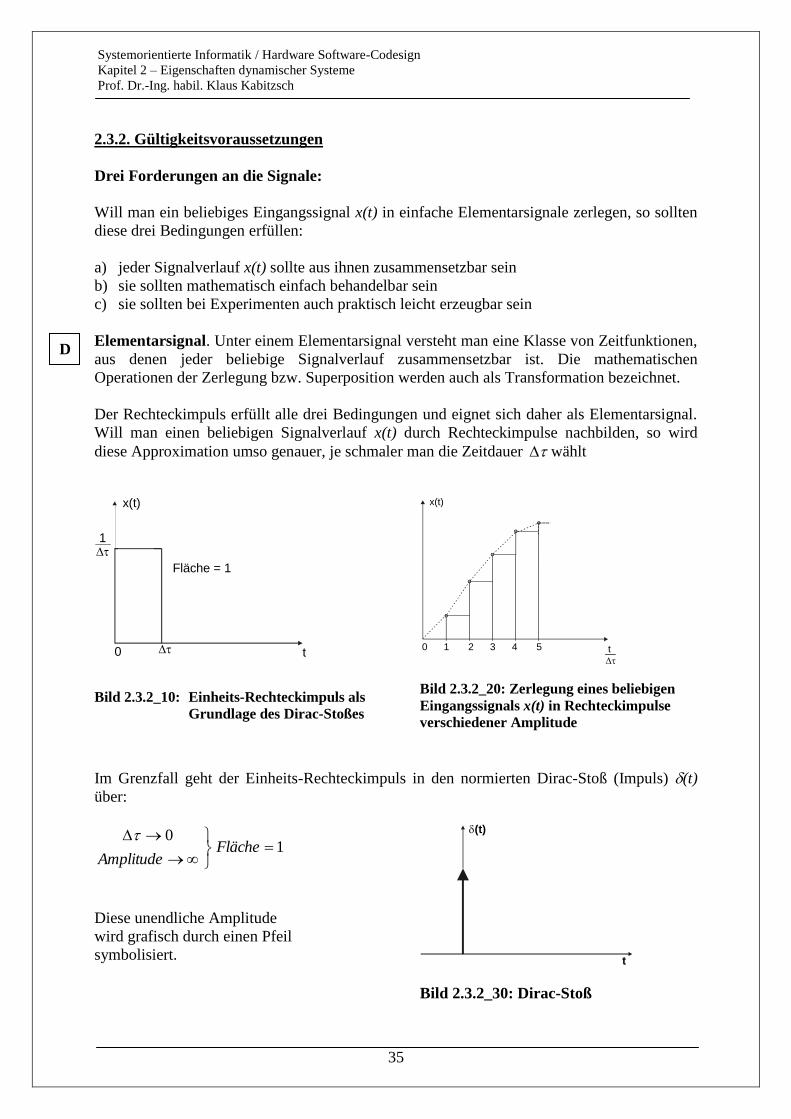
2.3.2. Gültigkeitsvoraussetzungen
Drei Forderungen an die Signale:
Will man ein beliebiges Eingangssignal x(t) in einfache Elementarsignale zerlegen, so sollten
diese drei Bedingungen erfüllen:
a) jeder Signalverlauf x(t) sollte aus ihnen zusammensetzbar sein
b) sie sollten mathematisch einfach behandelbar sein
c) sie sollten bei Experimenten auch praktisch leicht erzeugbar sein
Elementarsignal. Unter einem Elementarsignal versteht man eine Klasse von Zeitfunktionen,
aus denen jeder beliebige Signalverlauf zusammensetzbar ist. Die mathematischen
Operationen der Zerlegung bzw. Superposition werden auch als Transformation bezeichnet.
Der Rechteckimpuls erfüllt alle drei Bedingungen und eignet sich daher als Elementarsignal.
Will man einen beliebigen Signalverlauf x(t) durch Rechteckimpulse nachbilden, so wird
diese Approximation umso genauer, je schmaler man die Zeitdauer wählt
x(t)
t0
1
Fläche = 1
Bild 2.3.2_10: Einheits-Rechteckimpuls als
Grundlage des Dirac-Stoßes
t
x(t)
0 1 2 3 4 5
Bild 2.3.2_20: Zerlegung eines beliebigen
Eingangssignals x(t) in Rechteckimpulse
verschiedener Amplitude
Im Grenzfall geht der Einheits-Rechteckimpuls in den normierten Dirac-Stoß (Impuls) (t)
über:
10
Fläche
Amplitude
Diese unendliche Amplitude
wird grafisch durch einen Pfeil
symbolisiert.
t
(t)
Bild 2.3.2_30: Dirac-Stoß
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
36
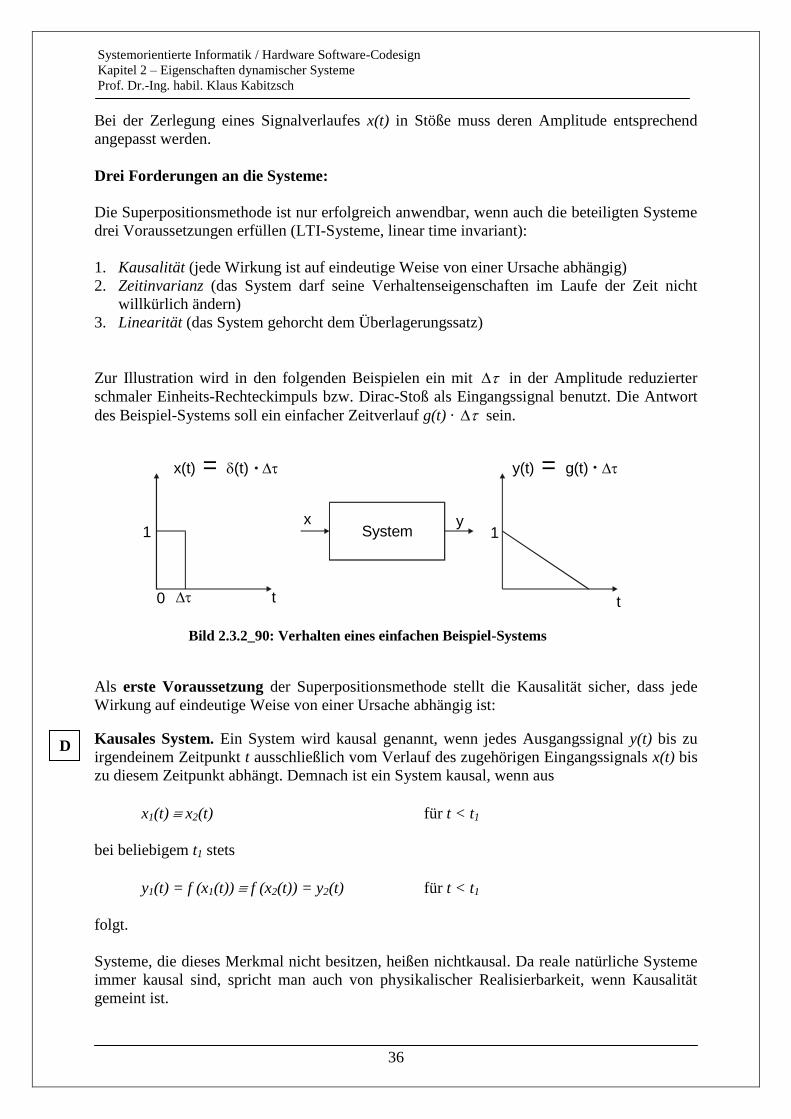
Bei der Zerlegung eines Signalverlaufes x(t) in Stöße muss deren Amplitude entsprechend
angepasst werden.
Drei Forderungen an die Systeme:
Die Superpositionsmethode ist nur erfolgreich anwendbar, wenn auch die beteiligten Systeme
drei Voraussetzungen erfüllen (LTI-Systeme, linear time invariant):
1. Kausalität (jede Wirkung ist auf eindeutige Weise von einer Ursache abhängig)
2. Zeitinvarianz (das System darf seine Verhaltenseigenschaften im Laufe der Zeit nicht
willkürlich ändern)
3. Linearität (das System gehorcht dem Überlagerungssatz)
Zur Illustration wird in den folgenden Beispielen ein mit in der Amplitude reduzierter
schmaler Einheits-Rechteckimpuls bzw. Dirac-Stoß als Eingangssignal benutzt. Die Antwort
des Beispiel-Systems soll ein einfacher Zeitverlauf g(t) · sein.
x y
t t
System1 1
0
x(t) (t) = y(t) g(t) =
Bild 2.3.2_90: Verhalten eines einfachen Beispiel-Systems
Als erste Voraussetzung der Superpositionsmethode stellt die Kausalität sicher, dass jede
Wirkung auf eindeutige Weise von einer Ursache abhängig ist:
Kausales System. Ein System wird kausal genannt, wenn jedes Ausgangssignal y(t) bis zu
irgendeinem Zeitpunkt t ausschließlich vom Verlauf des zugehörigen Eingangssignals x(t) bis
zu diesem Zeitpunkt abhängt. Demnach ist ein System kausal, wenn aus
x1(t) x2(t) für t < t1
bei beliebigem t1 stets
y1(t) = f (x1(t)) f (x2(t)) = y2(t) für t < t1
folgt.
Systeme, die dieses Merkmal nicht besitzen, heißen nichtkausal. Da reale natürliche Systeme
immer kausal sind, spricht man auch von physikalischer Realisierbarkeit, wenn Kausalität
gemeint ist.
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
37
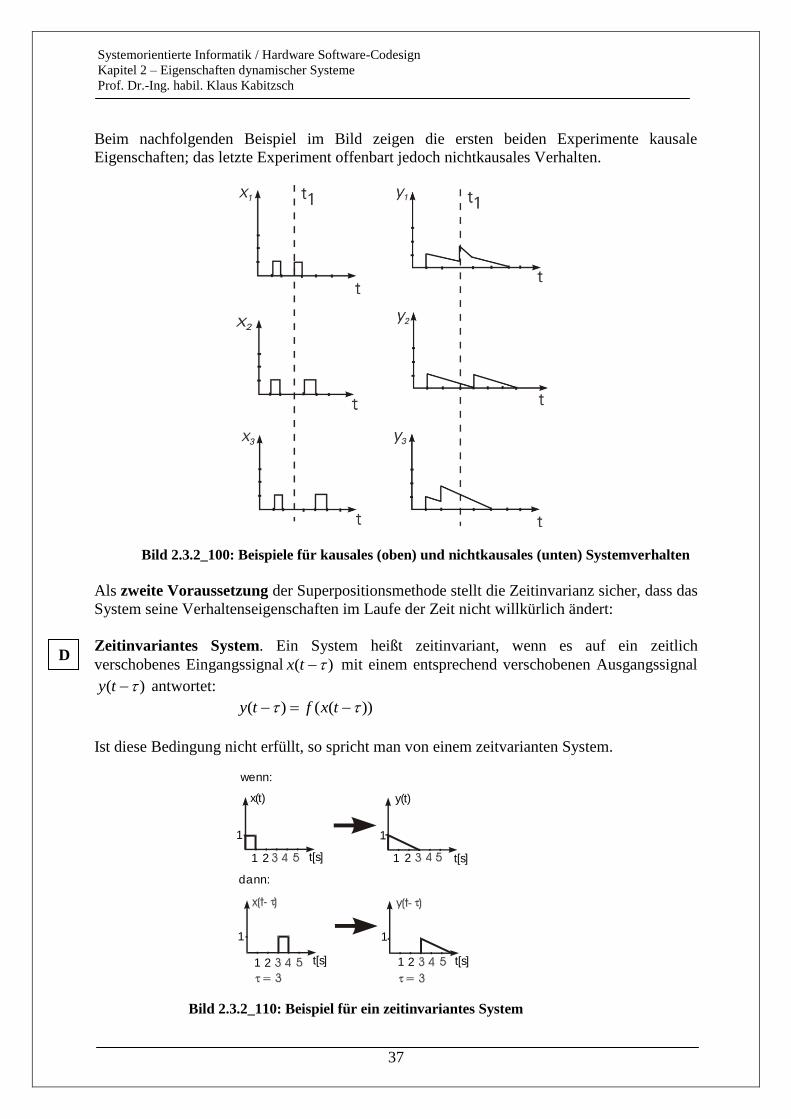
Beim nachfolgenden Beispiel im Bild zeigen die ersten beiden Experimente kausale
Eigenschaften; das letzte Experiment offenbart jedoch nichtkausales Verhalten.
Bild 2.3.2_100: Beispiele für kausales (oben) und nichtkausales (unten) Systemverhalten
Als zweite Voraussetzung der Superpositionsmethode stellt die Zeitinvarianz sicher, dass das
System seine Verhaltenseigenschaften im Laufe der Zeit nicht willkürlich ändert:
Zeitinvariantes System. Ein System heißt zeitinvariant, wenn es auf ein zeitlich
verschobenes Eingangssignal )( tx mit einem entsprechend verschobenen Ausgangssignal
)( ty antwortet:
))(()( txfty
Ist diese Bedingung nicht erfüllt, so spricht man von einem zeitvarianten System.
wenn:
1
x(t) y(t)
t[s]
11
dann:
1 2
t[s] t[s]1 2 1 2
1
1 2 t[s]
Bild 2.3.2_110: Beispiel für ein zeitinvariantes System
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
38
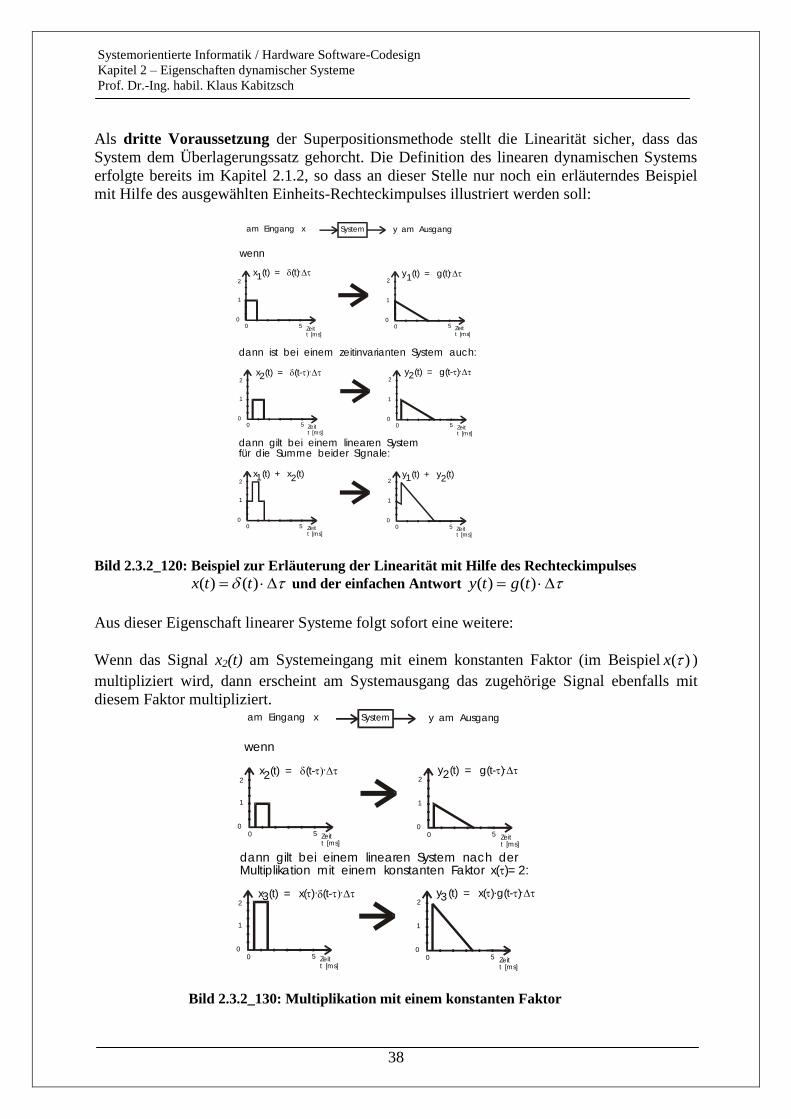
Als dritte Voraussetzung der Superpositionsmethode stellt die Linearität sicher, dass das
System dem Überlagerungssatz gehorcht. Die Definition des linearen dynamischen Systems
erfolgte bereits im Kapitel 2.1.2, so dass an dieser Stelle nur noch ein erläuterndes Beispiel
mit Hilfe des ausgewählten Einheits-Rechteckimpulses illustriert werden soll:
y am Ausgangam Eingang x System
wenn
5
1
00 Zeit
t [ms]
x1(t) = (t)
x2(t) = (t-
y1(t) = g(t)
y2(t) = g(t- )
2
5
1
00 Zeit
t [ms]
2
5
1
00 Zeit
t [ms]
2
5
1
00 Zeit
t [ms]
2
dann ist bei einem zeitinvarianten System auch:
x1(t) + x2(t) y1(t) + y2(t)
5
1
00 Zeit
t [ms]
2
5
1
00 Zeit
t [ms]
2
dann gilt bei einem linearen Systemfür die Summe beider Signale:
Bild 2.3.2_120: Beispiel zur Erläuterung der Linearität mit Hilfe des Rechteckimpulses
)()( ttx und der einfachen Antwort )()( tgty
Aus dieser Eigenschaft linearer Systeme folgt sofort eine weitere:
Wenn das Signal x2(t) am Systemeingang mit einem konstanten Faktor (im Beispiel )(x )
multipliziert wird, dann erscheint am Systemausgang das zugehörige Signal ebenfalls mit
diesem Faktor multipliziert. y am Ausgangam Eingang x System
wenn
x3(t) = x( ). (t- y3 (t) = x( ).g(t- )
5
1
00 Zeit
t [ms]
2
5
1
00 Zeit
t [ms]
2
x2(t) = (t- y2(t) = g(t- )
5
1
00 Zeit
t [ms]
2
5
1
00 Zeit
t [ms]
2
dann gilt bei einem linearen System nach derMultiplikation mit einem konstanten Faktor x( )= 2:
Bild 2.3.2_130: Multiplikation mit einem konstanten Faktor
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
39
2.3.3. Faltungsintegral
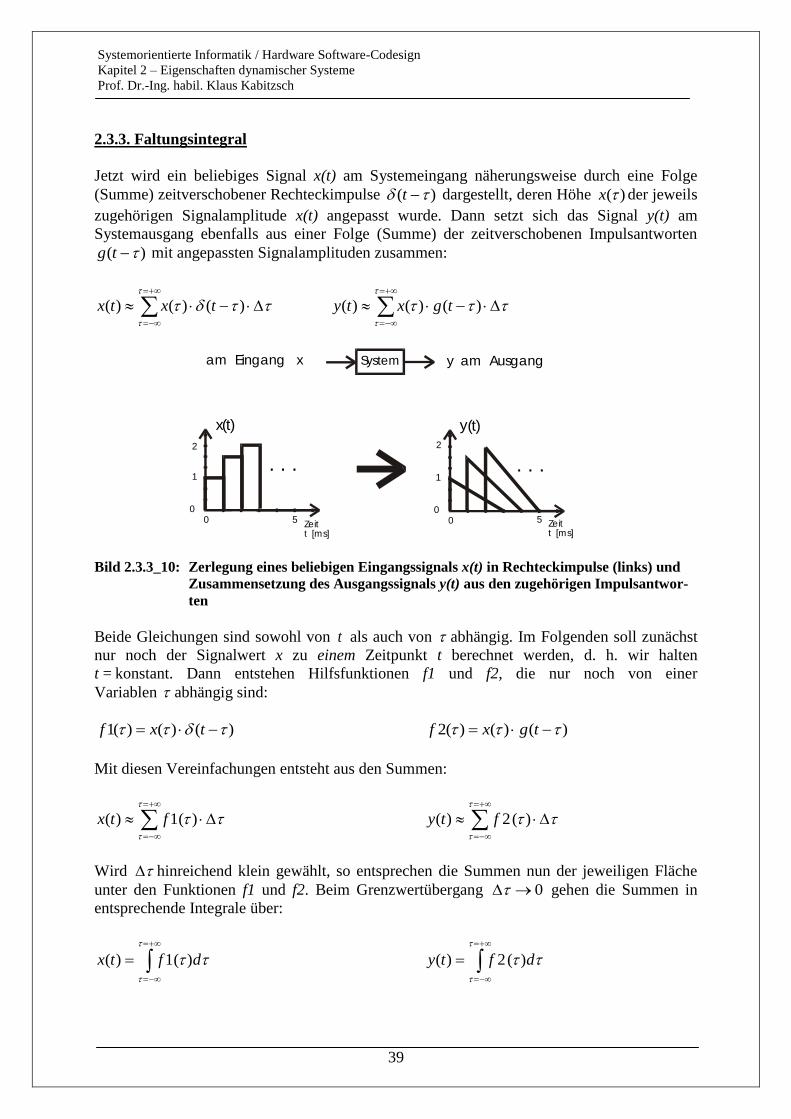
Jetzt wird ein beliebiges Signal x(t) am Systemeingang näherungsweise durch eine Folge
(Summe) zeitverschobener Rechteckimpulse )( t dargestellt, deren Höhe )(x der jeweils
zugehörigen Signalamplitude x(t) angepasst wurde. Dann setzt sich das Signal y(t) am
Systemausgang ebenfalls aus einer Folge (Summe) der zeitverschobenen Impulsantworten
)( tg mit angepassten Signalamplituden zusammen:
)()()( txtx
)()()( tgxty
y am Ausgangam Eingang x System
5
1
00
Zeitt [ms]
x(t) y(t)
2
5
1
00 Zeit
t [ms]
2
. . . . . .
Bild 2.3.3_10: Zerlegung eines beliebigen Eingangssignals x(t) in Rechteckimpulse (links) und
Zusammensetzung des Ausgangssignals y(t) aus den zugehörigen Impulsantwor-
ten
Beide Gleichungen sind sowohl von t als auch von abhängig. Im Folgenden soll zunächst
nur noch der Signalwert x zu einem Zeitpunkt t berechnet werden, d. h. wir halten
t = konstant. Dann entstehen Hilfsfunktionen f1 und f2, die nur noch von einer
Variablen abhängig sind:
)()()(1 txf )()()(2 tgxf
Mit diesen Vereinfachungen entsteht aus den Summen:
)(1)( ftx
)(2)( fty
Wird hinreichend klein gewählt, so entsprechen die Summen nun der jeweiligen Fläche
unter den Funktionen f1 und f2. Beim Grenzwertübergang 0 gehen die Summen in
entsprechende Integrale über:
dftx )(1)(
dfty )(2)(
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
40
Unter Beachtung der Tatsache, dass mit jedem Integral stets nur der Funktionswert x(t) oder
y(t) für einen Zeitpunkt t berechnet werden kann (t = konstant), können nun die
Hilfsfunktionen f1 oder f2 wieder eingesetzt werden:
dtxtx )()()(
dtgxty )()()(
Diese Integrale werden Faltungsintegrale genannt. Besonders nützlich ist das
Faltungsintegral zur Berechnung der einzelnen Signalwerte y(t) am Ausgang des Systems.
Indem nacheinander für die verschiedenen Zeitpunkte t die entsprechenden Faltungsintegrale
berechnet werden, lässt sich schrittweise der Verlauf des gesamten Ausgangssignals y(t)
ermitteln. Der numerische Aufwand dafür ist für moderne Rechner kein Problem mehr. Sie
brauchen dazu nur zwei Informationen:
a) den Zeitverlauf x(t) des Signals am Systemeingang
b) den Zeitverlauf g(t) der Antwort des Systems auf einen Stoß (t) am Eingang
Dieses als Stoßantwort, Impulsantwort oder Gewichtsfunktion bezeichnete Signal kann durch
eine einmalige Messung am System näherungsweise ermittelt werden. Nach der
Messvorschrift in Bild 2.3.2_90 stimuliert man dazu dessen Eingang durch einen hinreichend
schmalen Rechteckimpuls und zeichnet dabei den resultierenden Signalverlauf am
Systemausgang auf. Soll anschließend das System mit anderen Eingangssignalen beliebiger
Art angeregt werden, so reicht die zuvor gewonnene Gewichtsfunktion g(t) aus, um mit dem
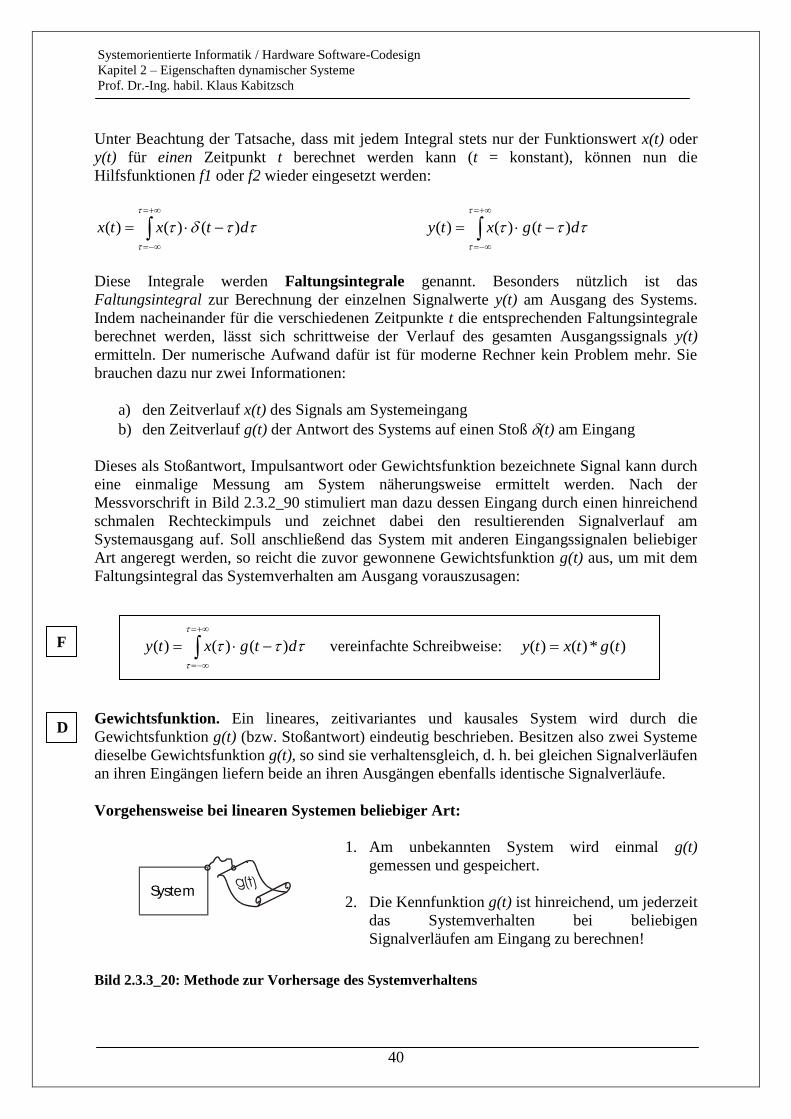
Faltungsintegral das Systemverhalten am Ausgang vorauszusagen:
dtgxty )()()( vereinfachte Schreibweise: )(*)()( tgtxty
Gewichtsfunktion. Ein lineares, zeitivariantes und kausales System wird durch die
Gewichtsfunktion g(t) (bzw. Stoßantwort) eindeutig beschrieben. Besitzen also zwei Systeme
dieselbe Gewichtsfunktion g(t), so sind sie verhaltensgleich, d. h. bei gleichen Signalverläufen
an ihren Eingängen liefern beide an ihren Ausgängen ebenfalls identische Signalverläufe.
Vorgehensweise bei linearen Systemen beliebiger Art:
System
1. Am unbekannten System wird einmal g(t)
gemessen und gespeichert.
2. Die Kennfunktion g(t) ist hinreichend, um jederzeit
das Systemverhalten bei beliebigen
Signalverläufen am Eingang zu berechnen!
Bild 2.3.3_20: Methode zur Vorhersage des Systemverhaltens
F
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
41
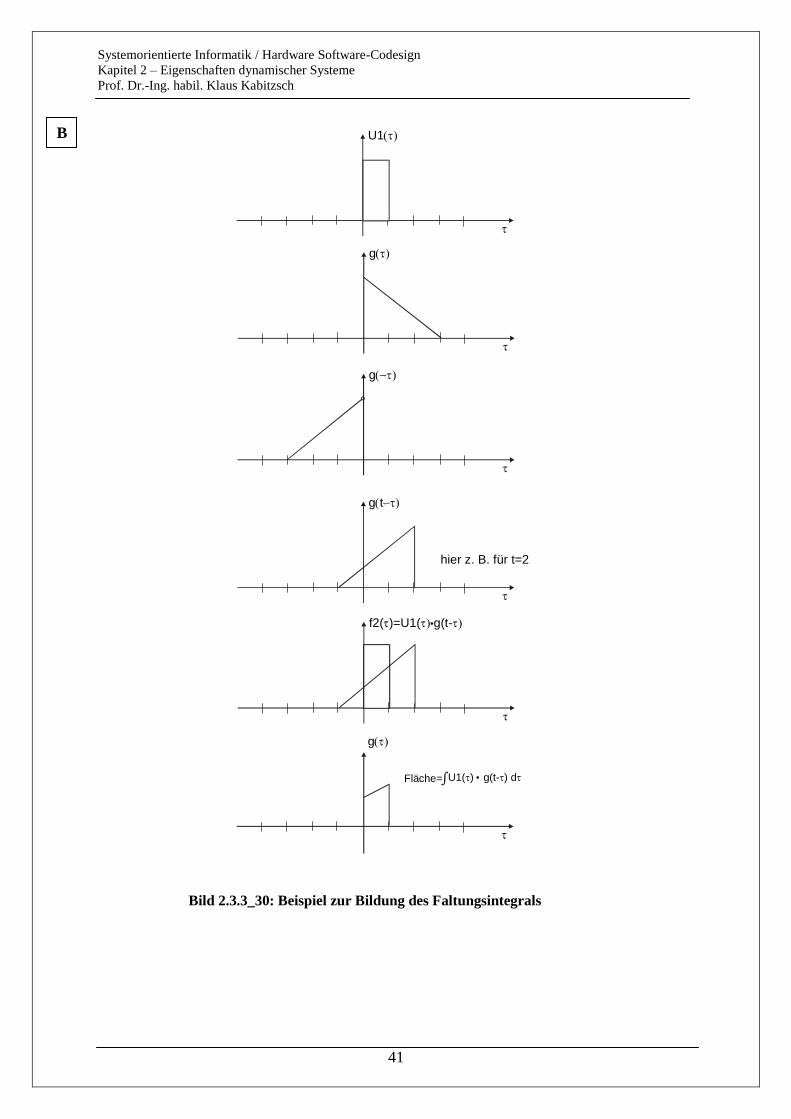
U1
g
g
g t
hier z. B. für t=2
f2( )=U1( g(t-
g
Fläche= U1( ) g(t- ) d
Bild 2.3.3_30: Beispiel zur Bildung des Faltungsintegrals
B
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
42
2.3.4. Stabilität
Sobald g(t) gemessen wurde, sind zumindest implizit alle Eigenschaften bekannt, um das
Verhalten eines Systems in beliebigen Situationen vorherzusagen. Besonders interessant ist
hierbei die Frage, ob ein System das latente Gefahrenpotential in sich trägt, unter bestimmten
Betriebsbedingungen außer Kontrolle zu geraten. Eine heimtückische und gefährliche
Eigenschaft ist es, wenn nach Anregung durch ein „harmloses“ Eingangssignal mit geringer,
endlicher Amplitude das Ausgangssignal plötzlich „explosionsartig“ über alle Maßen
anwächst. Besonders gefährdet sind Rückkopplungsschaltungen; z. B. konnte das System aus
Kapitel 2.1.3. unter bestimmten Bedingungen unendliche Amplituden am Ausgang erzeugen.
Solche Systeme nennt man instabil.
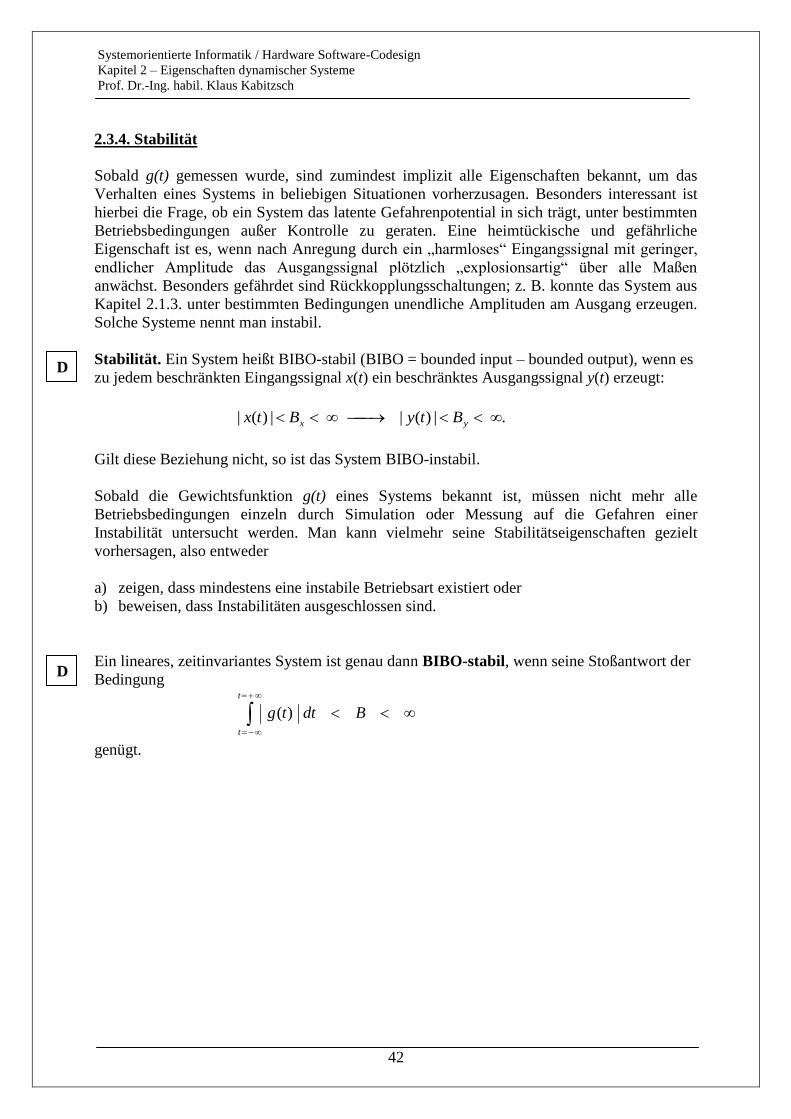
Stabilität. Ein System heißt BIBO-stabil (BIBO = bounded input – bounded output), wenn es
zu jedem beschränkten Eingangssignal x(t) ein beschränktes Ausgangssignal y(t) erzeugt:
.|)(||)(| yx BtyBtx
Gilt diese Beziehung nicht, so ist das System BIBO-instabil.
Sobald die Gewichtsfunktion g(t) eines Systems bekannt ist, müssen nicht mehr alle
Betriebsbedingungen einzeln durch Simulation oder Messung auf die Gefahren einer
Instabilität untersucht werden. Man kann vielmehr seine Stabilitätseigenschaften gezielt
vorhersagen, also entweder
a) zeigen, dass mindestens eine instabile Betriebsart existiert oder
b) beweisen, dass Instabilitäten ausgeschlossen sind.
Ein lineares, zeitinvariantes System ist genau dann BIBO-stabil, wenn seine Stoßantwort der
Bedingung
Bdttg
t
t
)(
genügt.
D
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
43
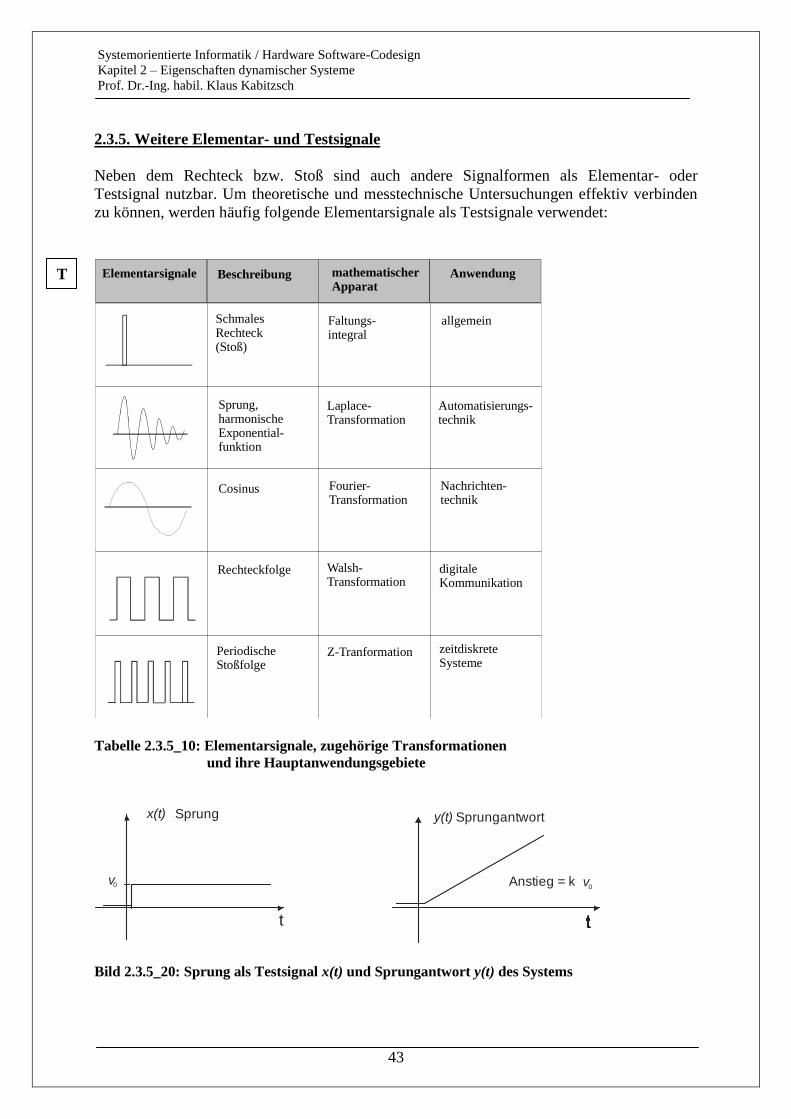
2.3.5. Weitere Elementar- und Testsignale
Neben dem Rechteck bzw. Stoß sind auch andere Signalformen als Elementar- oder
Testsignal nutzbar. Um theoretische und messtechnische Untersuchungen effektiv verbinden
zu können, werden häufig folgende Elementarsignale als Testsignale verwendet:
Elementarsignale Beschreibung mathematischer Apparat
Anwendung
Schmales Rechteck(Stoß)
Faltungs-integral
allgemein
Sprung, harmonischeExponential-funktion
Laplace-Transformation
Automatisierungs-technik
Cosinus Fourier-Transformation
Nachrichten-technik
Rechteckfolge Walsh-Transformation
digitaleKommunikation
Periodische Stoßfolge
Z-Tranformation zeitdiskreteSysteme
Tabelle 2.3.5_10: Elementarsignale, zugehörige Transformationen
und ihre Hauptanwendungsgebiete
t
x(t) Sprung y(t) Sprungantwort
Anstieg = k0· vv0
Bild 2.3.5_20: Sprung als Testsignal x(t) und Sprungantwort y(t) des Systems
T
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
44
2.3.6. Harmonische Elementarsignale
2.3.6.1. Signale
Man kann beliebige Signalverläufe auch aus Kosinus-förmigen (harmonischen) Signalen
verschiedener Frequenz zusammensetzen. Auch harmonische Signale erfüllen alle
Bedingungen, die an Elementarsignale gestellt werden.
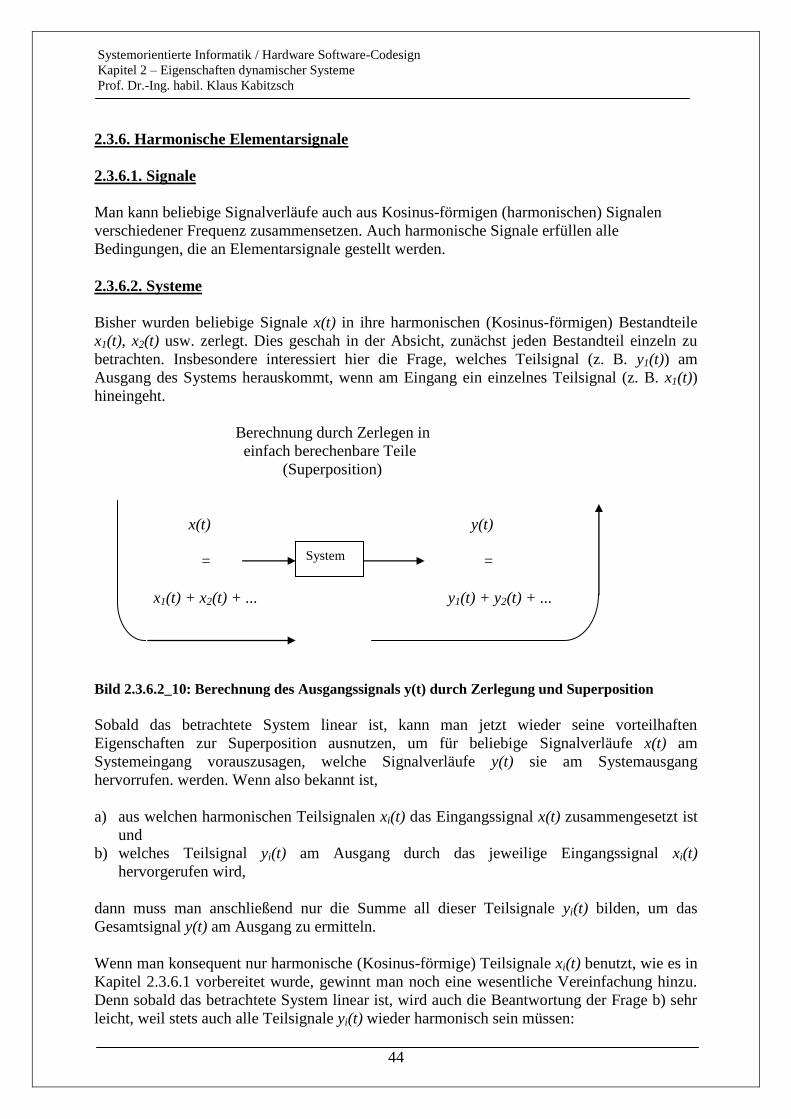
2.3.6.2. Systeme
Bisher wurden beliebige Signale x(t) in ihre harmonischen (Kosinus-förmigen) Bestandteile
x1(t), x2(t) usw. zerlegt. Dies geschah in der Absicht, zunächst jeden Bestandteil einzeln zu
betrachten. Insbesondere interessiert hier die Frage, welches Teilsignal (z. B. y1(t)) am
Ausgang des Systems herauskommt, wenn am Eingang ein einzelnes Teilsignal (z. B. x1(t))
hineingeht.
Berechnung durch Zerlegen in
einfach berechenbare Teile
(Superposition)
x(t) y(t)
= =
x1(t) + x2(t) + ... y1(t) + y2(t) + ...
Bild 2.3.6.2_10: Berechnung des Ausgangssignals y(t) durch Zerlegung und Superposition
Sobald das betrachtete System linear ist, kann man jetzt wieder seine vorteilhaften
Eigenschaften zur Superposition ausnutzen, um für beliebige Signalverläufe x(t) am
Systemeingang vorauszusagen, welche Signalverläufe y(t) sie am Systemausgang
hervorrufen. werden. Wenn also bekannt ist,
a) aus welchen harmonischen Teilsignalen xi(t) das Eingangssignal x(t) zusammengesetzt ist
und
b) welches Teilsignal yi(t) am Ausgang durch das jeweilige Eingangssignal xi(t)
hervorgerufen wird,
dann muss man anschließend nur die Summe all dieser Teilsignale yi(t) bilden, um das
Gesamtsignal y(t) am Ausgang zu ermitteln.
Wenn man konsequent nur harmonische (Kosinus-förmige) Teilsignale xi(t) benutzt, wie es in
Kapitel 2.3.6.1 vorbereitet wurde, gewinnt man noch eine wesentliche Vereinfachung hinzu.
Denn sobald das betrachtete System linear ist, wird auch die Beantwortung der Frage b) sehr
leicht, weil stets auch alle Teilsignale yi(t) wieder harmonisch sein müssen:
System
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
45
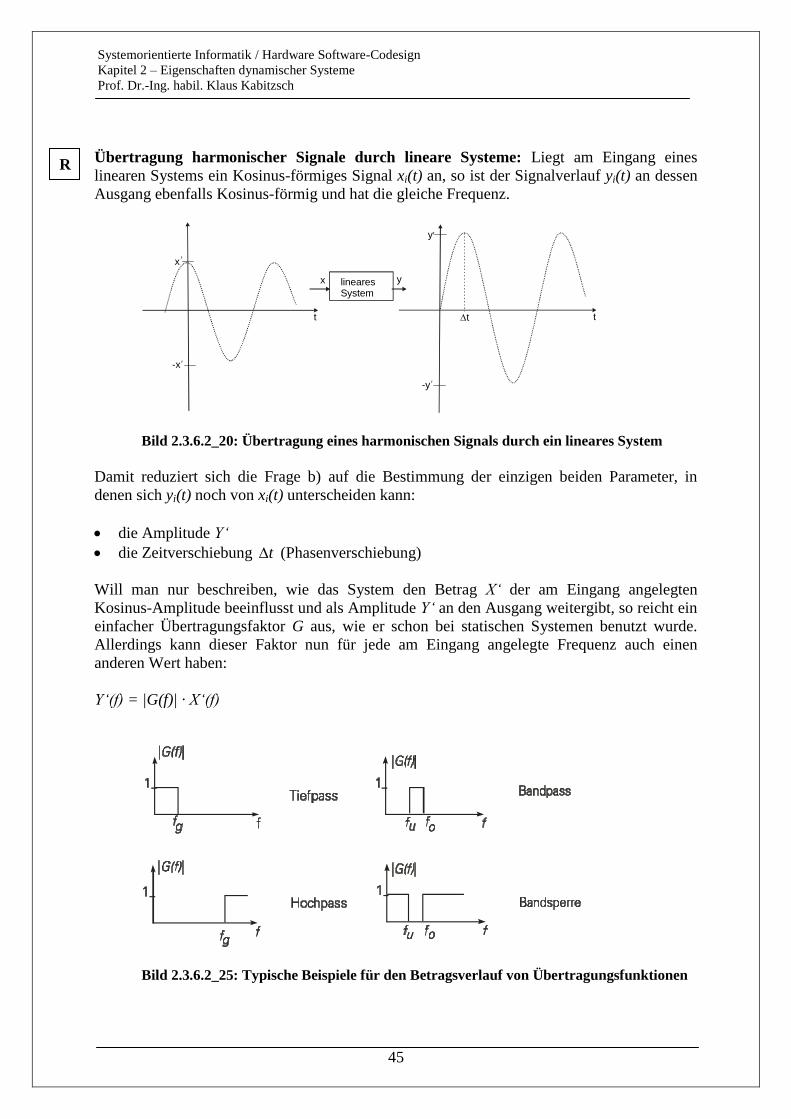
Übertragung harmonischer Signale durch lineare Systeme: Liegt am Eingang eines
linearen Systems ein Kosinus-förmiges Signal xi(t) an, so ist der Signalverlauf yi(t) an dessen
Ausgang ebenfalls Kosinus-förmig und hat die gleiche Frequenz.
lineares System
x
x
-x
tt
y
y
-y
t
Bild 2.3.6.2_20: Übertragung eines harmonischen Signals durch ein lineares System
Damit reduziert sich die Frage b) auf die Bestimmung der einzigen beiden Parameter, in
denen sich yi(t) noch von xi(t) unterscheiden kann:
die Amplitude Y‘
die Zeitverschiebung t (Phasenverschiebung)
Will man nur beschreiben, wie das System den Betrag X‘ der am Eingang angelegten
Kosinus-Amplitude beeinflusst und als Amplitude Y‘ an den Ausgang weitergibt, so reicht ein
einfacher Übertragungsfaktor G aus, wie er schon bei statischen Systemen benutzt wurde.
Allerdings kann dieser Faktor nun für jede am Eingang angelegte Frequenz auch einen
anderen Wert haben:
Y‘(f) = |G(f)| · X‘(f)
Bild 2.3.6.2_25: Typische Beispiele für den Betragsverlauf von Übertragungsfunktionen
R
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
46
Auch die vom System verursachte Zeitverschiebung (Phasenverschiebung) kann bei jeder am
Eingang angelegten Frequenz einen anderen Wert t aufweisen. Will man die Abhängigkeit
dieser Systemeigenschaft von der Frequenz beschreiben, so kann man die Zeigerdarstellung
(Vektordarstellung) der Kosinus-Signale verwenden:
)()()(
)( )( fGefGfX
fY fj mit )(2)( ftff
Diese gemeinsame Darstellung der Übertragungseigenschaften des Systems bezüglich
Amplitude (Betrag) und Zeitverschiebung (Phase) nennt man nunmehr Übertragungsfunktion
G(f). Sobald die Übertragungsfunktion eines linearen Systems einmal durch Berechnung oder
Messung ermittelt werden konnte, kann man sie immer wieder zur Vorhersage der
Systemreaktionen benutzen. Solange das System seine inneren Eigenschaften nicht
willkürlich ändert (zeitinvariantes System), ist G(f) zur eineindeutigen Beschreibung seines
kompletten Schnittstellenverhaltens (Input / Output) völlig hinreichend. Deshalb wird in der
Praxis die Übertragungsfunktion ebenso häufig zur Charakterisierung eines vorhandenen
Systems benutzt wie die Gewichtsfunktion g(t).
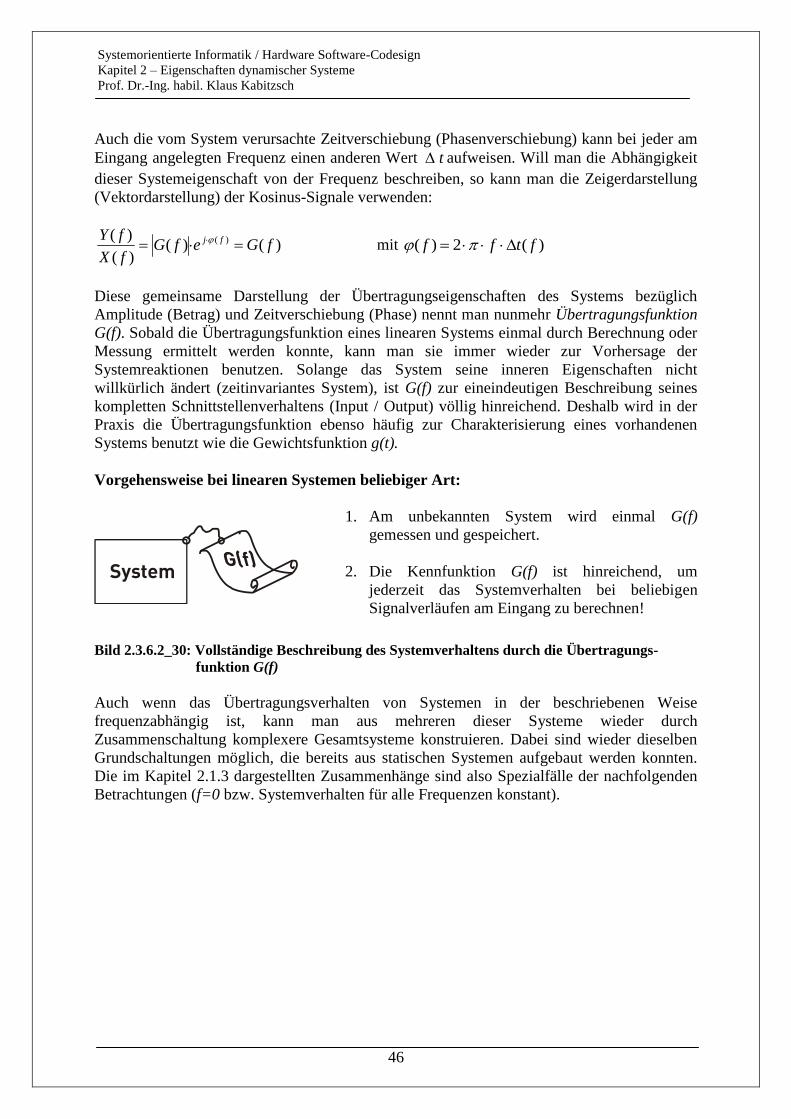
Vorgehensweise bei linearen Systemen beliebiger Art:
1. Am unbekannten System wird einmal G(f)
gemessen und gespeichert.
2. Die Kennfunktion G(f) ist hinreichend, um
jederzeit das Systemverhalten bei beliebigen
Signalverläufen am Eingang zu berechnen!
Bild 2.3.6.2_30: Vollständige Beschreibung des Systemverhaltens durch die Übertragungs-
funktion G(f)
Auch wenn das Übertragungsverhalten von Systemen in der beschriebenen Weise
frequenzabhängig ist, kann man aus mehreren dieser Systeme wieder durch
Zusammenschaltung komplexere Gesamtsysteme konstruieren. Dabei sind wieder dieselben
Grundschaltungen möglich, die bereits aus statischen Systemen aufgebaut werden konnten.
Die im Kapitel 2.1.3 dargestellten Zusammenhänge sind also Spezialfälle der nachfolgenden
Betrachtungen (f=0 bzw. Systemverhalten für alle Frequenzen konstant).
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
47
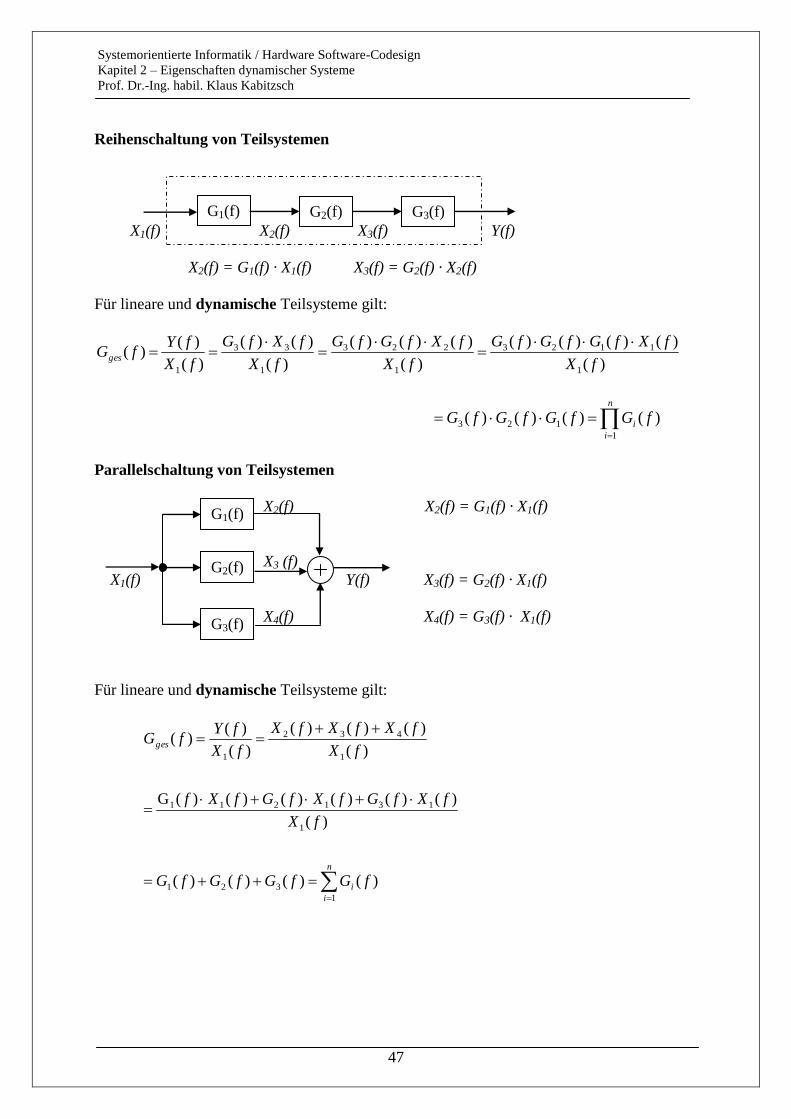
Reihenschaltung von Teilsystemen
X1(f) X2(f) X3(f) Y(f)
X2(f) = G1(f) · X1(f) X3(f) = G2(f) · X2(f)
Für lineare und dynamische Teilsysteme gilt:
)(
)()()()(
)(
)()()(
)(
)()(
)(
)()(
1
1123
1
223
1
33
1 fX
fXfGfGfG
fX
fXfGfG
fX
fXfG
fX
fYfGges
n
i
i fGfGfGfG1
123 )()()()(
Parallelschaltung von Teilsystemen
X2(f) X2(f) = G1(f) · X1(f)
X3 (f)
X1(f) Y(f) X3(f) = G2(f) · X1(f)
X4(f) X4(f) = G3(f) · X1(f)
Für lineare und dynamische Teilsysteme gilt:
)()()()(
)(
)()()()()()(G
)(
)()()(
)(
)()(
1
321
1
131211
1
432
1
fGfGfGfG
fX
fXfGfXfGfXf
fX
fXfXfX
fX
fYfG
n
i
i
ges
G1(f) G2(f) G3(f)
G1(f)
G2(f)
G3(f)
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 2 – Eigenschaften dynamischer Systeme
Prof. Dr.-Ing. habil. Klaus Kabitzsch
48
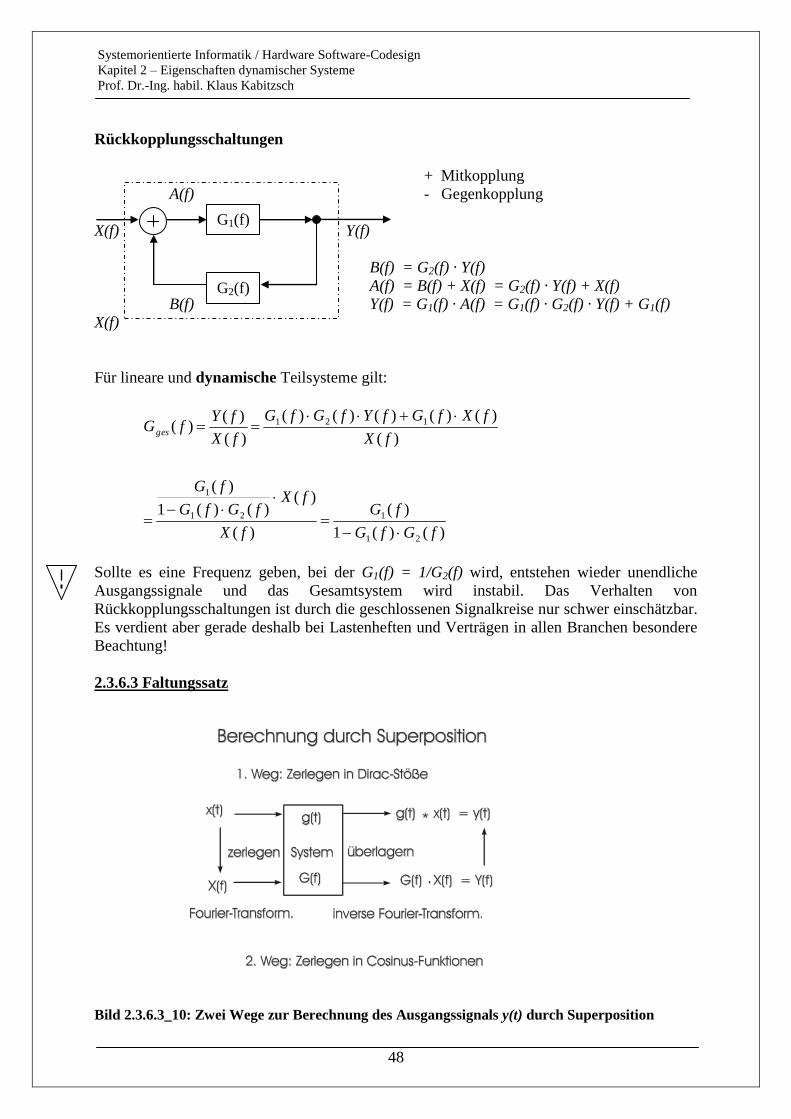
Rückkopplungsschaltungen
+ Mitkopplung
A(f) - Gegenkopplung
X(f) Y(f)
B(f) = G2(f) · Y(f)
A(f) = B(f) + X(f) = G2(f) · Y(f) + X(f)
B(f) Y(f) = G1(f) · A(f) = G1(f) · G2(f) · Y(f) + G1(f)
X(f)
Für lineare und dynamische Teilsysteme gilt:
)()(1
)(
)(
)()()(1
)(
)(
)()()()()(
)(
)()(
21
121
1
121
fGfG
fG
fX
fXfGfG
fG
fX
fXfGfYfGfG
fX
fYfGges
Sollte es eine Frequenz geben, bei der G1(f) = 1/G2(f) wird, entstehen wieder unendliche
Ausgangssignale und das Gesamtsystem wird instabil. Das Verhalten von
Rückkopplungsschaltungen ist durch die geschlossenen Signalkreise nur schwer einschätzbar.
Es verdient aber gerade deshalb bei Lastenheften und Verträgen in allen Branchen besondere
Beachtung!
2.3.6.3 Faltungssatz
Bild 2.3.6.3_10: Zwei Wege zur Berechnung des Ausgangssignals y(t) durch Superposition
G1(f)
G2(f)
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
49
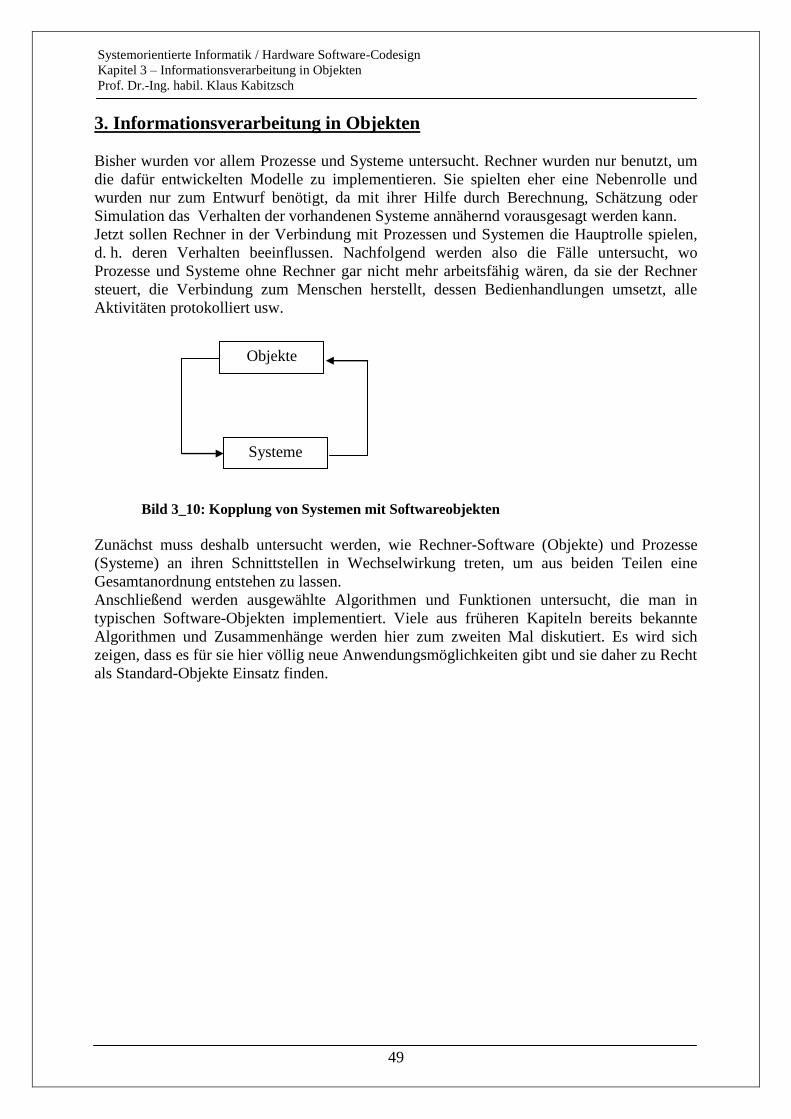
3. Informationsverarbeitung in Objekten
Bisher wurden vor allem Prozesse und Systeme untersucht. Rechner wurden nur benutzt, um
die dafür entwickelten Modelle zu implementieren. Sie spielten eher eine Nebenrolle und
wurden nur zum Entwurf benötigt, da mit ihrer Hilfe durch Berechnung, Schätzung oder
Simulation das Verhalten der vorhandenen Systeme annähernd vorausgesagt werden kann.
Jetzt sollen Rechner in der Verbindung mit Prozessen und Systemen die Hauptrolle spielen,
d. h. deren Verhalten beeinflussen. Nachfolgend werden also die Fälle untersucht, wo
Prozesse und Systeme ohne Rechner gar nicht mehr arbeitsfähig wären, da sie der Rechner
steuert, die Verbindung zum Menschen herstellt, dessen Bedienhandlungen umsetzt, alle
Aktivitäten protokolliert usw.
Bild 3_10: Kopplung von Systemen mit Softwareobjekten
Zunächst muss deshalb untersucht werden, wie Rechner-Software (Objekte) und Prozesse
(Systeme) an ihren Schnittstellen in Wechselwirkung treten, um aus beiden Teilen eine
Gesamtanordnung entstehen zu lassen.
Anschließend werden ausgewählte Algorithmen und Funktionen untersucht, die man in
typischen Software-Objekten implementiert. Viele aus früheren Kapiteln bereits bekannte
Algorithmen und Zusammenhänge werden hier zum zweiten Mal diskutiert. Es wird sich
zeigen, dass es für sie hier völlig neue Anwendungsmöglichkeiten gibt und sie daher zu Recht
als Standard-Objekte Einsatz finden.
Objekte
Systeme
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
50
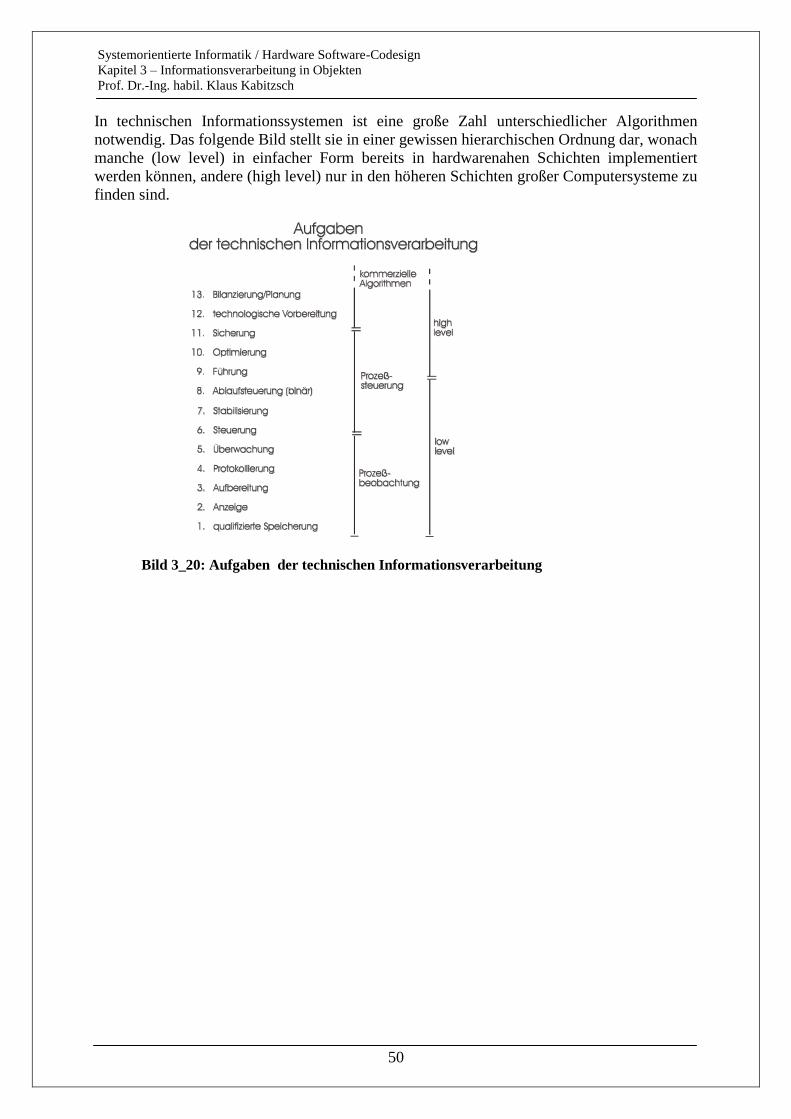
In technischen Informationssystemen ist eine große Zahl unterschiedlicher Algorithmen
notwendig. Das folgende Bild stellt sie in einer gewissen hierarchischen Ordnung dar, wonach
manche (low level) in einfacher Form bereits in hardwarenahen Schichten implementiert
werden können, andere (high level) nur in den höheren Schichten großer Computersysteme zu
finden sind.
Bild 3_20: Aufgaben der technischen Informationsverarbeitung
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
51
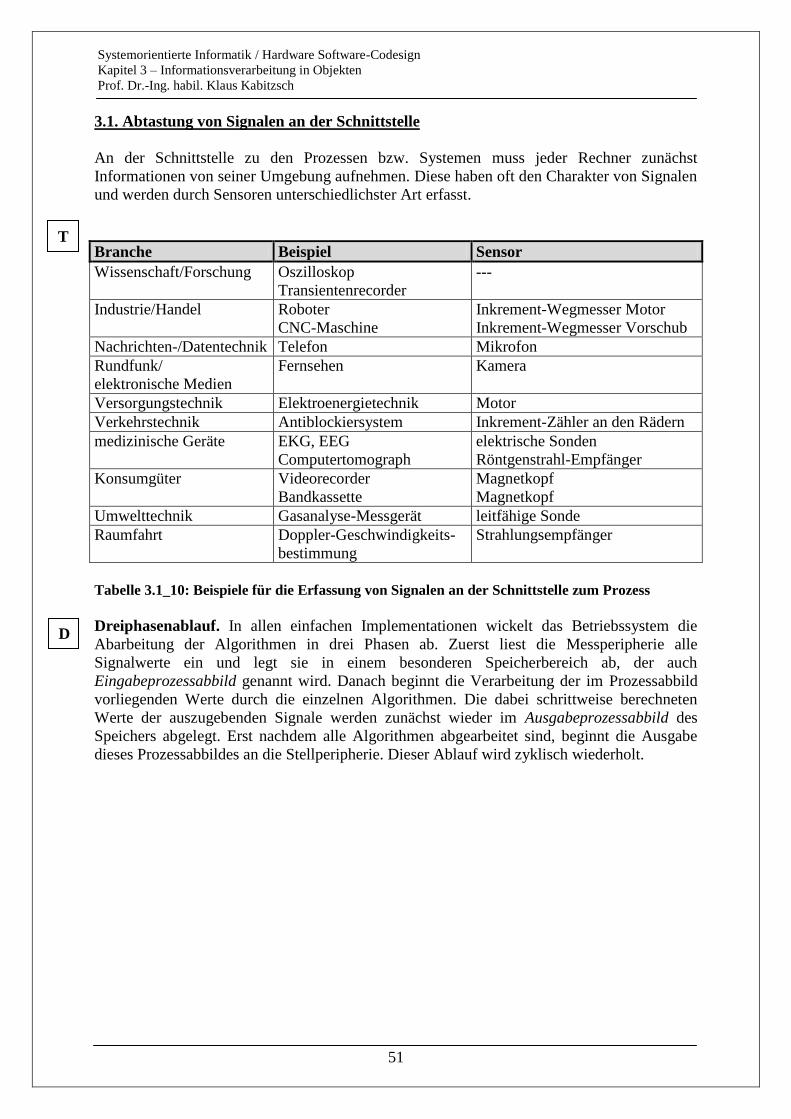
3.1. Abtastung von Signalen an der Schnittstelle
An der Schnittstelle zu den Prozessen bzw. Systemen muss jeder Rechner zunächst
Informationen von seiner Umgebung aufnehmen. Diese haben oft den Charakter von Signalen
und werden durch Sensoren unterschiedlichster Art erfasst.
Branche Beispiel Sensor
Wissenschaft/Forschung Oszilloskop
Transientenrecorder
---
Industrie/Handel Roboter
CNC-Maschine
Inkrement-Wegmesser Motor
Inkrement-Wegmesser Vorschub
Nachrichten-/Datentechnik Telefon Mikrofon
Rundfunk/
elektronische Medien
Fernsehen Kamera
Versorgungstechnik Elektroenergietechnik Motor
Verkehrstechnik Antiblockiersystem Inkrement-Zähler an den Rädern
medizinische Geräte EKG, EEG
Computertomograph
elektrische Sonden
Röntgenstrahl-Empfänger
Konsumgüter Videorecorder
Bandkassette
Magnetkopf
Magnetkopf
Umwelttechnik Gasanalyse-Messgerät leitfähige Sonde
Raumfahrt Doppler-Geschwindigkeits-
bestimmung
Strahlungsempfänger
Tabelle 3.1_10: Beispiele für die Erfassung von Signalen an der Schnittstelle zum Prozess
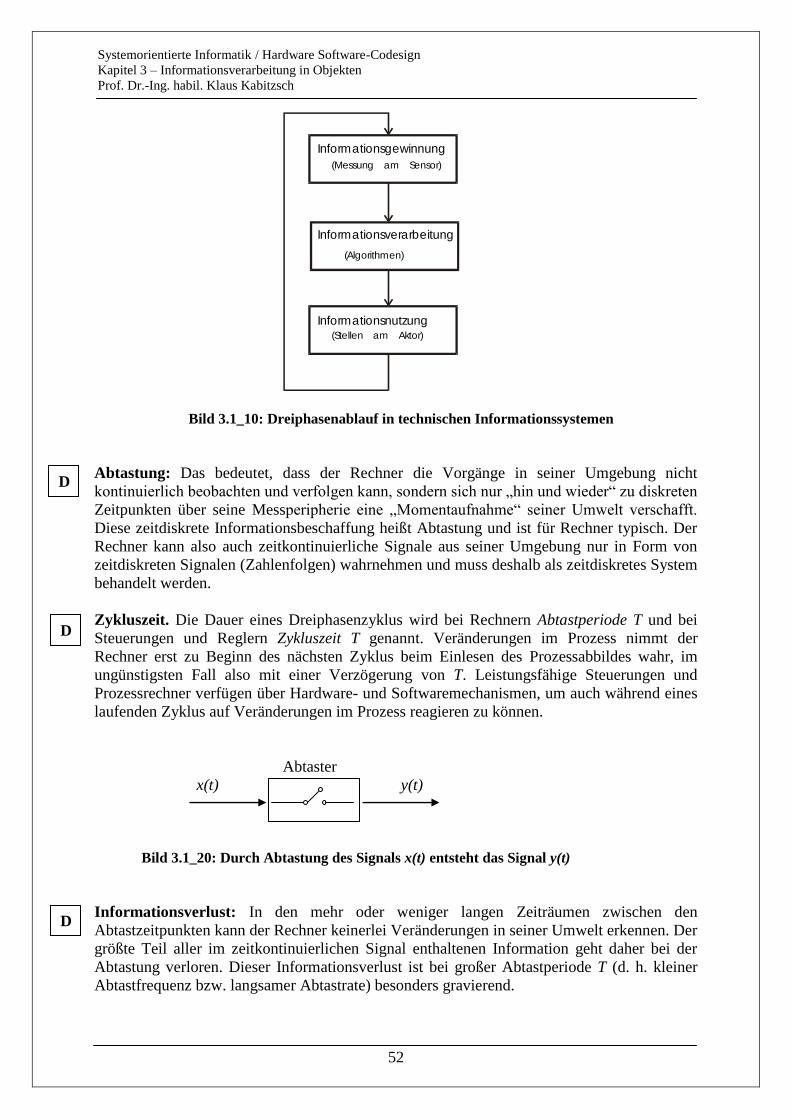
Dreiphasenablauf. In allen einfachen Implementationen wickelt das Betriebssystem die
Abarbeitung der Algorithmen in drei Phasen ab. Zuerst liest die Messperipherie alle
Signalwerte ein und legt sie in einem besonderen Speicherbereich ab, der auch
Eingabeprozessabbild genannt wird. Danach beginnt die Verarbeitung der im Prozessabbild
vorliegenden Werte durch die einzelnen Algorithmen. Die dabei schrittweise berechneten
Werte der auszugebenden Signale werden zunächst wieder im Ausgabeprozessabbild des
Speichers abgelegt. Erst nachdem alle Algorithmen abgearbeitet sind, beginnt die Ausgabe
dieses Prozessabbildes an die Stellperipherie. Dieser Ablauf wird zyklisch wiederholt.
T
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
52
Informationsgewinnung
Informationsverarbeitung
Informationsnutzung
(Messung am Sensor)
(Algorithmen)
(Stellen am Aktor)
Bild 3.1_10: Dreiphasenablauf in technischen Informationssystemen
Abtastung: Das bedeutet, dass der Rechner die Vorgänge in seiner Umgebung nicht
kontinuierlich beobachten und verfolgen kann, sondern sich nur „hin und wieder“ zu diskreten
Zeitpunkten über seine Messperipherie eine „Momentaufnahme“ seiner Umwelt verschafft.
Diese zeitdiskrete Informationsbeschaffung heißt Abtastung und ist für Rechner typisch. Der
Rechner kann also auch zeitkontinuierliche Signale aus seiner Umgebung nur in Form von
zeitdiskreten Signalen (Zahlenfolgen) wahrnehmen und muss deshalb als zeitdiskretes System
behandelt werden.
Zykluszeit. Die Dauer eines Dreiphasenzyklus wird bei Rechnern Abtastperiode T und bei
Steuerungen und Reglern Zykluszeit T genannt. Veränderungen im Prozess nimmt der
Rechner erst zu Beginn des nächsten Zyklus beim Einlesen des Prozessabbildes wahr, im
ungünstigsten Fall also mit einer Verzögerung von T. Leistungsfähige Steuerungen und
Prozessrechner verfügen über Hardware- und Softwaremechanismen, um auch während eines
laufenden Zyklus auf Veränderungen im Prozess reagieren zu können.
Abtaster
x(t) y(t)
Bild 3.1_20: Durch Abtastung des Signals x(t) entsteht das Signal y(t)
Informationsverlust: In den mehr oder weniger langen Zeiträumen zwischen den
Abtastzeitpunkten kann der Rechner keinerlei Veränderungen in seiner Umwelt erkennen. Der
größte Teil aller im zeitkontinuierlichen Signal enthaltenen Information geht daher bei der
Abtastung verloren. Dieser Informationsverlust ist bei großer Abtastperiode T (d. h. kleiner
Abtastfrequenz bzw. langsamer Abtastrate) besonders gravierend.
D
D
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
53
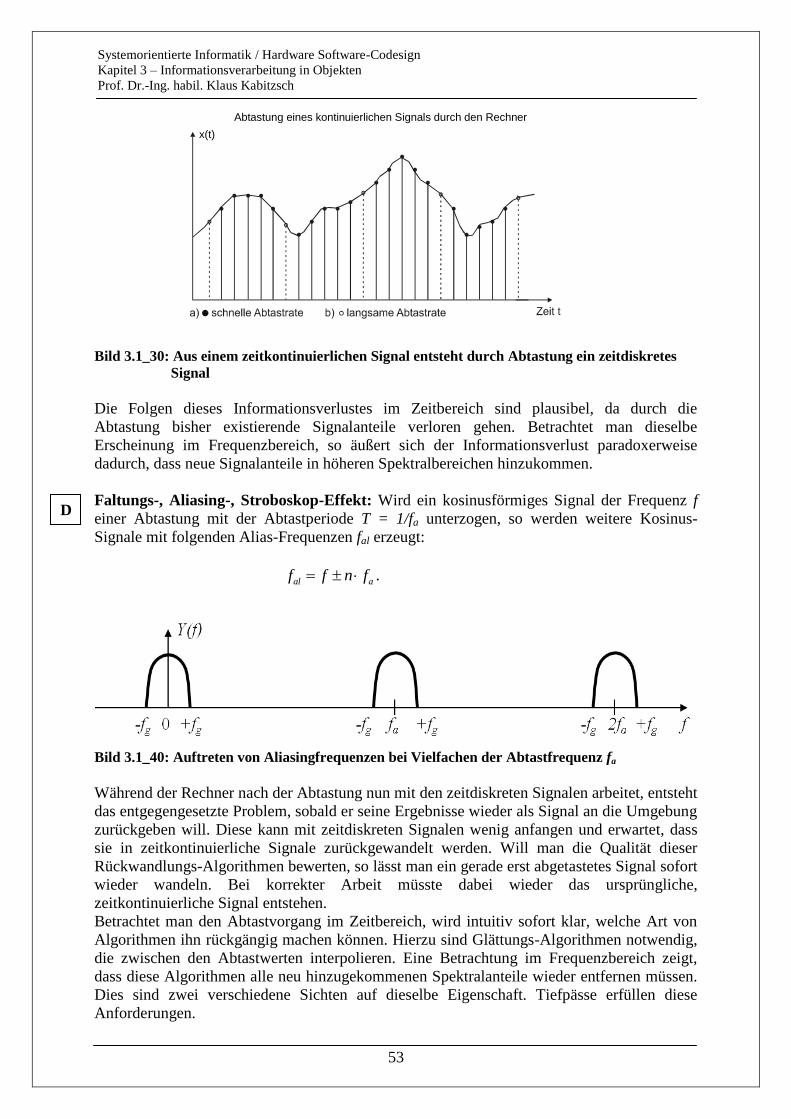
Abtastung eines kontinuierlichen Signals durch den Rechner
x(t)
Bild 3.1_30: Aus einem zeitkontinuierlichen Signal entsteht durch Abtastung ein zeitdiskretes
Signal
Die Folgen dieses Informationsverlustes im Zeitbereich sind plausibel, da durch die
Abtastung bisher existierende Signalanteile verloren gehen. Betrachtet man dieselbe
Erscheinung im Frequenzbereich, so äußert sich der Informationsverlust paradoxerweise
dadurch, dass neue Signalanteile in höheren Spektralbereichen hinzukommen.
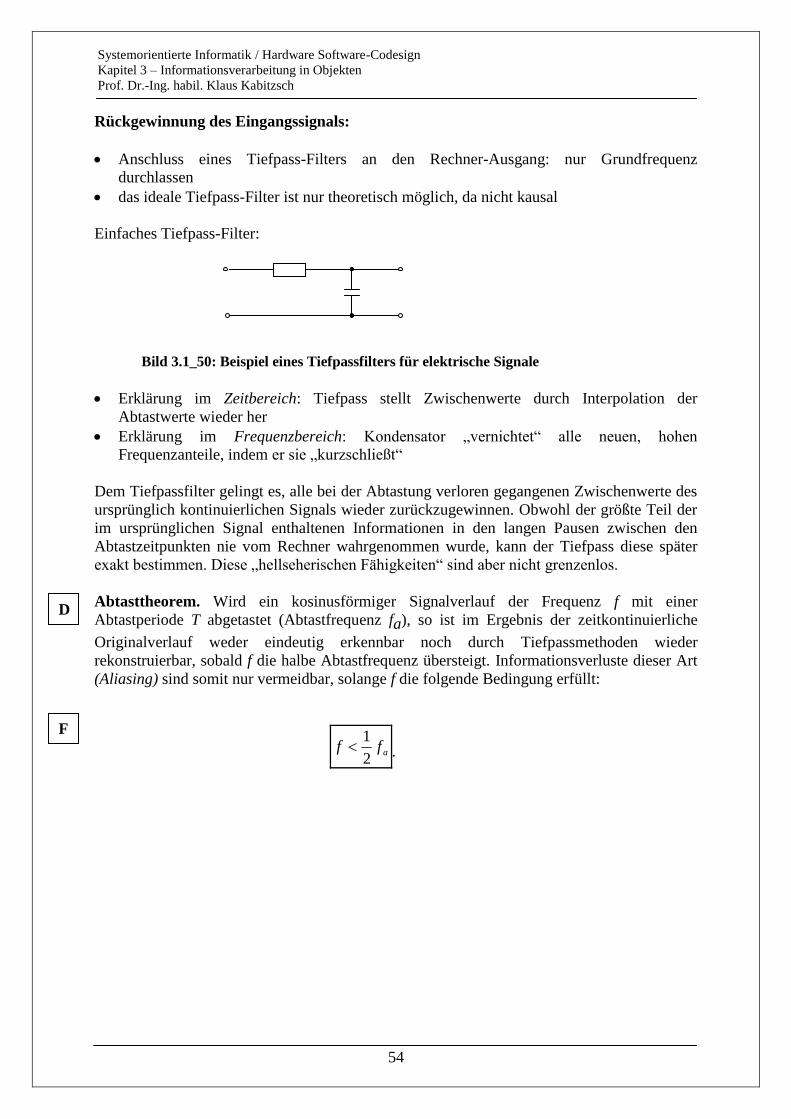
Faltungs-, Aliasing-, Stroboskop-Effekt: Wird ein kosinusförmiges Signal der Frequenz f
einer Abtastung mit der Abtastperiode T = 1/fa unterzogen, so werden weitere Kosinus-
Signale mit folgenden Alias-Frequenzen fal erzeugt:
al af f n f .
Bild 3.1_40: Auftreten von Aliasingfrequenzen bei Vielfachen der Abtastfrequenz fa
Während der Rechner nach der Abtastung nun mit den zeitdiskreten Signalen arbeitet, entsteht
das entgegengesetzte Problem, sobald er seine Ergebnisse wieder als Signal an die Umgebung
zurückgeben will. Diese kann mit zeitdiskreten Signalen wenig anfangen und erwartet, dass
sie in zeitkontinuierliche Signale zurückgewandelt werden. Will man die Qualität dieser
Rückwandlungs-Algorithmen bewerten, so lässt man ein gerade erst abgetastetes Signal sofort
wieder wandeln. Bei korrekter Arbeit müsste dabei wieder das ursprüngliche,
zeitkontinuierliche Signal entstehen.
Betrachtet man den Abtastvorgang im Zeitbereich, wird intuitiv sofort klar, welche Art von
Algorithmen ihn rückgängig machen können. Hierzu sind Glättungs-Algorithmen notwendig,
die zwischen den Abtastwerten interpolieren. Eine Betrachtung im Frequenzbereich zeigt,
dass diese Algorithmen alle neu hinzugekommenen Spektralanteile wieder entfernen müssen.
Dies sind zwei verschiedene Sichten auf dieselbe Eigenschaft. Tiefpässe erfüllen diese
Anforderungen.
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
54
Rückgewinnung des Eingangssignals:
Anschluss eines Tiefpass-Filters an den Rechner-Ausgang: nur Grundfrequenz
durchlassen
das ideale Tiefpass-Filter ist nur theoretisch möglich, da nicht kausal
Einfaches Tiefpass-Filter:
Bild 3.1_50: Beispiel eines Tiefpassfilters für elektrische Signale
Erklärung im Zeitbereich: Tiefpass stellt Zwischenwerte durch Interpolation der
Abtastwerte wieder her
Erklärung im Frequenzbereich: Kondensator „vernichtet“ alle neuen, hohen
Frequenzanteile, indem er sie „kurzschließt“
Dem Tiefpassfilter gelingt es, alle bei der Abtastung verloren gegangenen Zwischenwerte des
ursprünglich kontinuierlichen Signals wieder zurückzugewinnen. Obwohl der größte Teil der
im ursprünglichen Signal enthaltenen Informationen in den langen Pausen zwischen den
Abtastzeitpunkten nie vom Rechner wahrgenommen wurde, kann der Tiefpass diese später
exakt bestimmen. Diese „hellseherischen Fähigkeiten“ sind aber nicht grenzenlos.
Abtasttheorem. Wird ein kosinusförmiger Signalverlauf der Frequenz f mit einer
Abtastperiode T abgetastet (Abtastfrequenz fa), so ist im Ergebnis der zeitkontinuierliche
Originalverlauf weder eindeutig erkennbar noch durch Tiefpassmethoden wieder
rekonstruierbar, sobald f die halbe Abtastfrequenz übersteigt. Informationsverluste dieser Art
(Aliasing) sind somit nur vermeidbar, solange f die folgende Bedingung erfüllt:
aff2
1 .
D
F
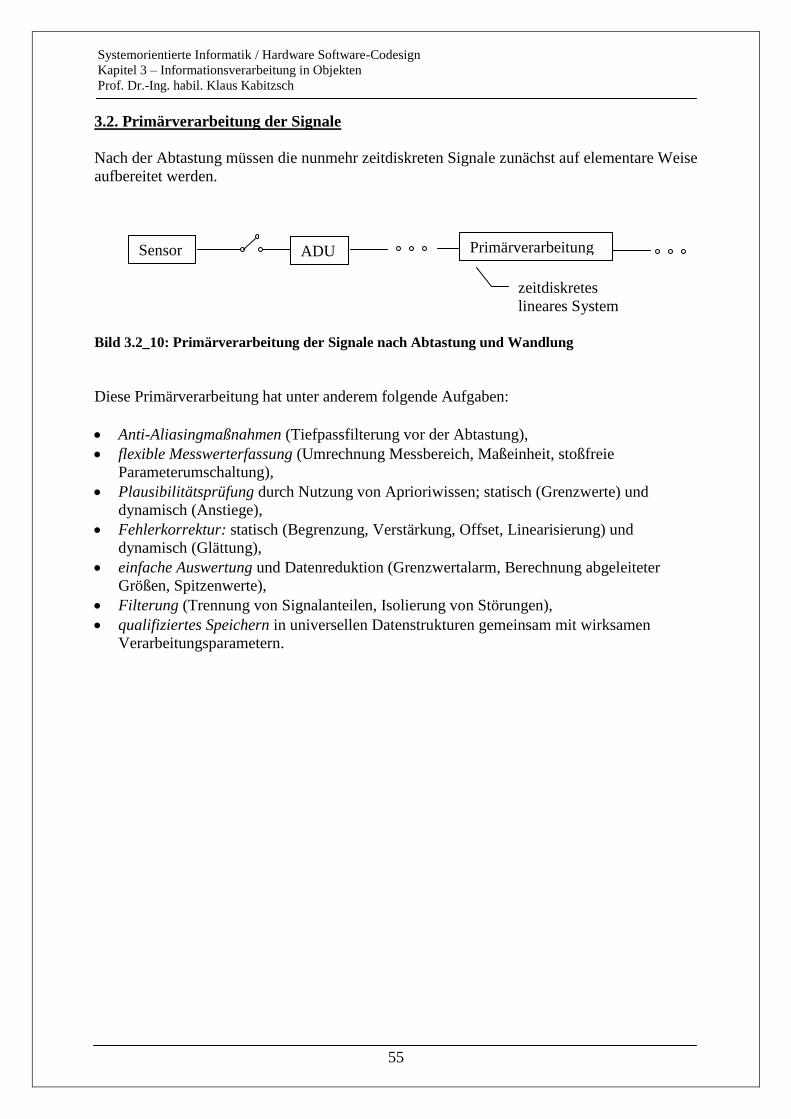
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
55
3.2. Primärverarbeitung der Signale
Nach der Abtastung müssen die nunmehr zeitdiskreten Signale zunächst auf elementare Weise
aufbereitet werden.
zeitdiskretes
lineares System
Bild 3.2_10: Primärverarbeitung der Signale nach Abtastung und Wandlung
Diese Primärverarbeitung hat unter anderem folgende Aufgaben:
Anti-Aliasingmaßnahmen (Tiefpassfilterung vor der Abtastung),
flexible Messwerterfassung (Umrechnung Messbereich, Maßeinheit, stoßfreie
Parameterumschaltung),
Plausibilitätsprüfung durch Nutzung von Aprioriwissen; statisch (Grenzwerte) und
dynamisch (Anstiege),
Fehlerkorrektur: statisch (Begrenzung, Verstärkung, Offset, Linearisierung) und
dynamisch (Glättung),
einfache Auswertung und Datenreduktion (Grenzwertalarm, Berechnung abgeleiteter
Größen, Spitzenwerte),
Filterung (Trennung von Signalanteilen, Isolierung von Störungen),
qualifiziertes Speichern in universellen Datenstrukturen gemeinsam mit wirksamen
Verarbeitungsparametern.
ADU Primärverarbeitung Sensor
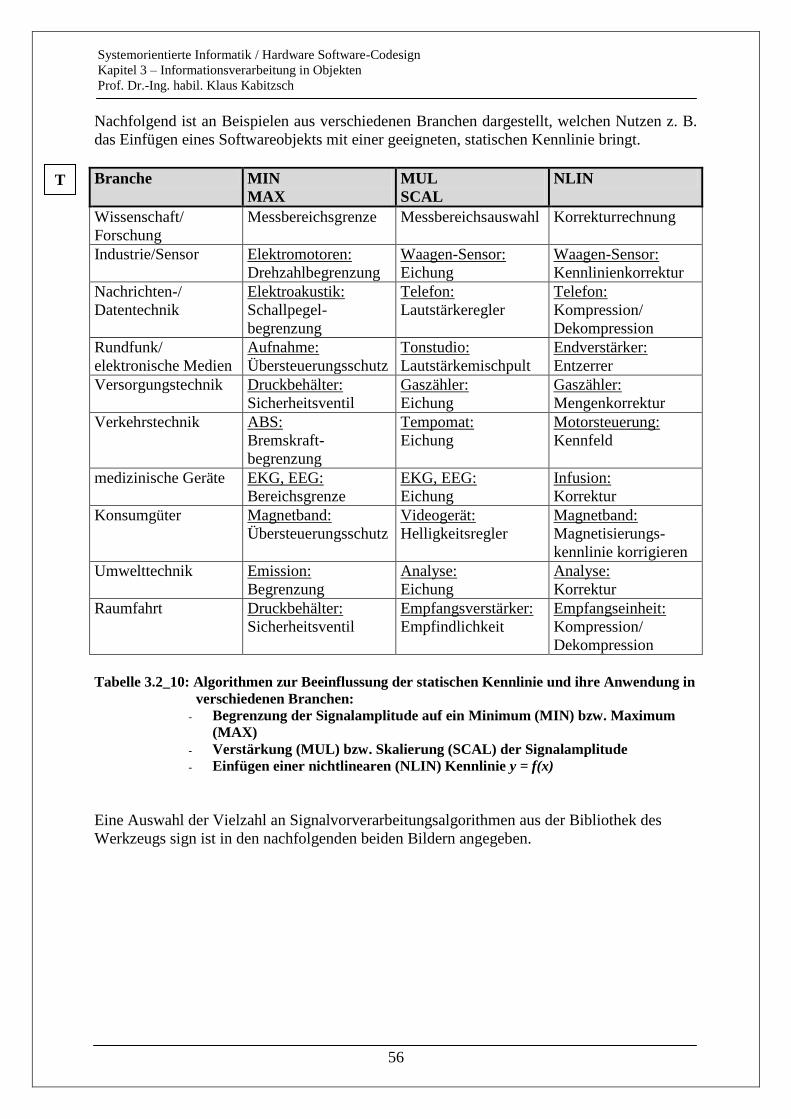
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
56
Nachfolgend ist an Beispielen aus verschiedenen Branchen dargestellt, welchen Nutzen z. B.
das Einfügen eines Softwareobjekts mit einer geeigneten, statischen Kennlinie bringt.
Branche MIN
MAX
MUL
SCAL
NLIN
Wissenschaft/
Forschung
Messbereichsgrenze Messbereichsauswahl Korrekturrechnung
Industrie/Sensor Elektromotoren:
Drehzahlbegrenzung
Waagen-Sensor:
Eichung
Waagen-Sensor:
Kennlinienkorrektur
Nachrichten-/
Datentechnik
Elektroakustik:
Schallpegel-
begrenzung
Telefon:
Lautstärkeregler
Telefon:
Kompression/
Dekompression
Rundfunk/
elektronische Medien
Aufnahme:
Übersteuerungsschutz
Tonstudio:
Lautstärkemischpult
Endverstärker:
Entzerrer
Versorgungstechnik Druckbehälter:
Sicherheitsventil
Gaszähler:
Eichung
Gaszähler:
Mengenkorrektur
Verkehrstechnik ABS:
Bremskraft-
begrenzung
Tempomat:
Eichung
Motorsteuerung:
Kennfeld
medizinische Geräte EKG, EEG:
Bereichsgrenze
EKG, EEG:
Eichung
Infusion:
Korrektur
Konsumgüter Magnetband:
Übersteuerungsschutz
Videogerät:
Helligkeitsregler
Magnetband:
Magnetisierungs-
kennlinie korrigieren
Umwelttechnik Emission:
Begrenzung
Analyse:
Eichung
Analyse:
Korrektur
Raumfahrt Druckbehälter:
Sicherheitsventil
Empfangsverstärker:
Empfindlichkeit
Empfangseinheit:
Kompression/
Dekompression
Tabelle 3.2_10: Algorithmen zur Beeinflussung der statischen Kennlinie und ihre Anwendung in
verschiedenen Branchen:
- Begrenzung der Signalamplitude auf ein Minimum (MIN) bzw. Maximum
(MAX)
- Verstärkung (MUL) bzw. Skalierung (SCAL) der Signalamplitude
- Einfügen einer nichtlinearen (NLIN) Kennlinie y = f(x)
Eine Auswahl der Vielzahl an Signalvorverarbeitungsalgorithmen aus der Bibliothek des
Werkzeugs sign ist in den nachfolgenden beiden Bildern angegeben.
T
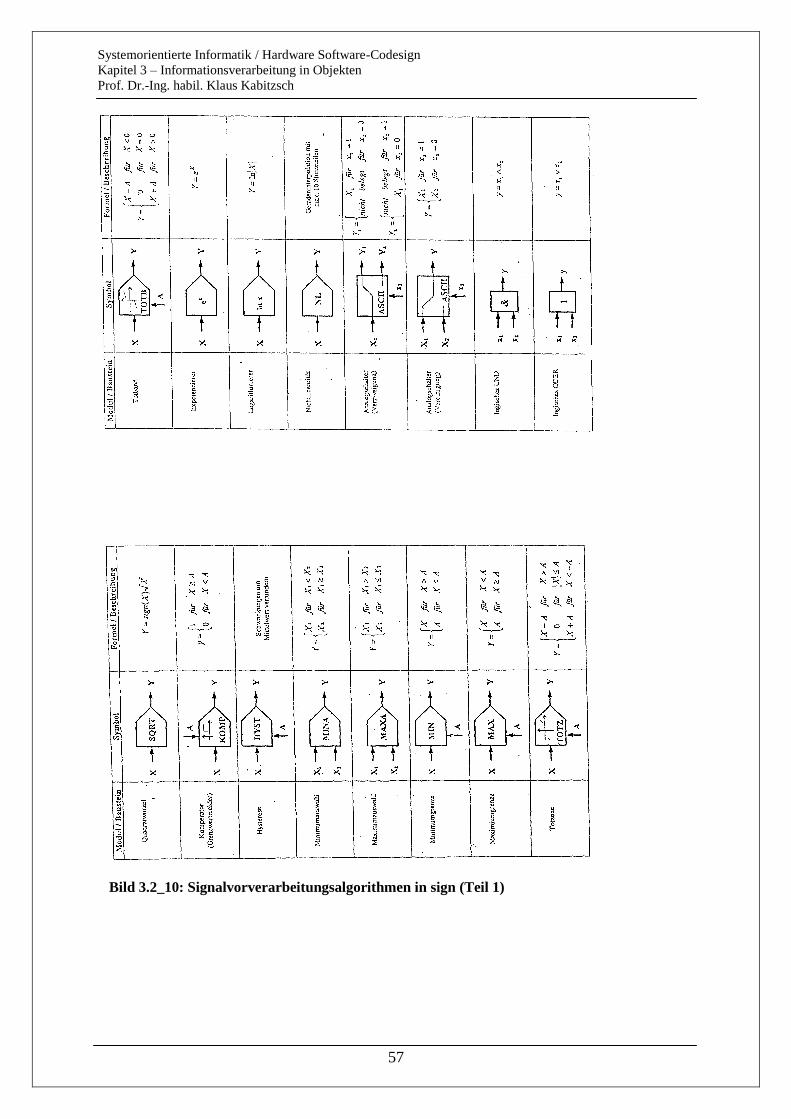
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
57
Bild 3.2_10: Signalvorverarbeitungsalgorithmen in sign (Teil 1)
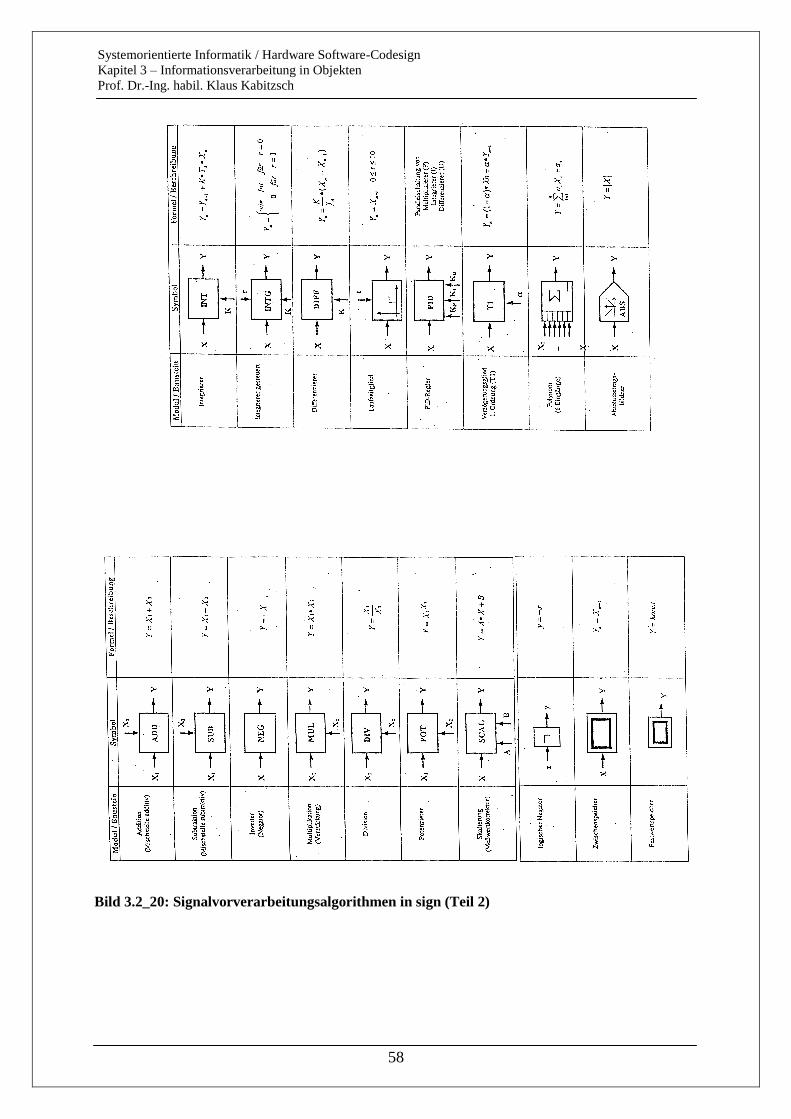
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
58
Bild 3.2_20: Signalvorverarbeitungsalgorithmen in sign (Teil 2)
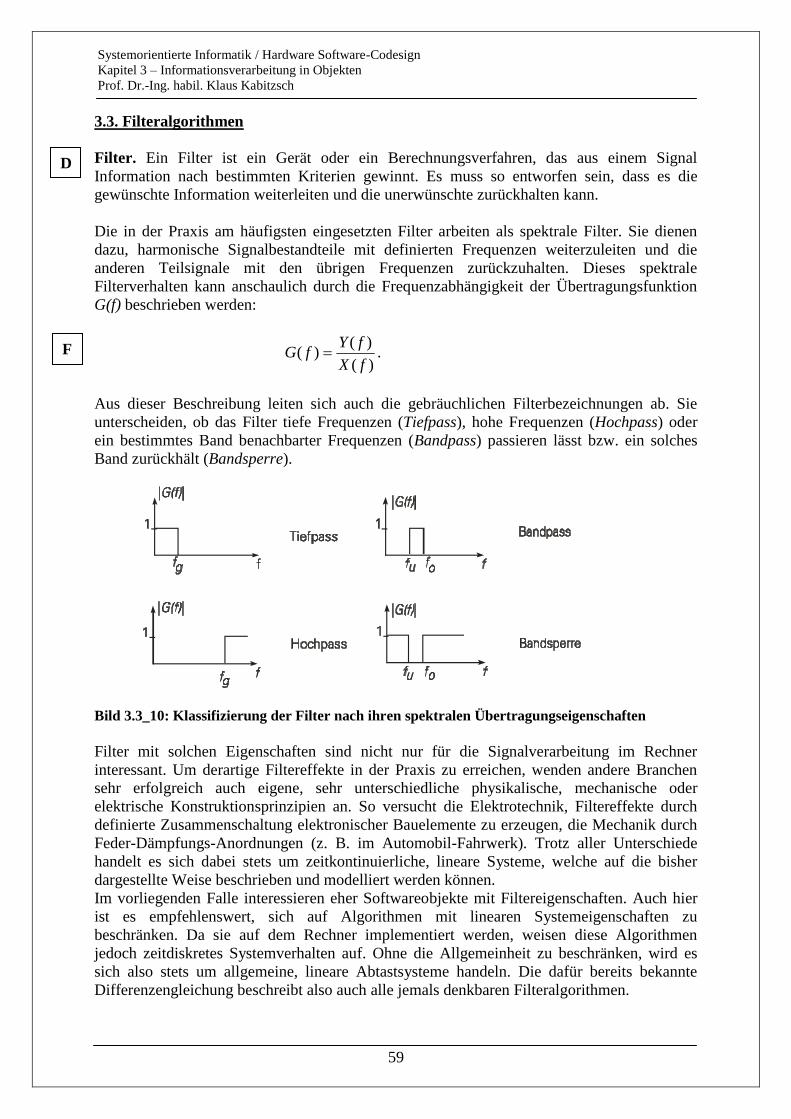
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
59
3.3. Filteralgorithmen
Filter. Ein Filter ist ein Gerät oder ein Berechnungsverfahren, das aus einem Signal
Information nach bestimmten Kriterien gewinnt. Es muss so entworfen sein, dass es die
gewünschte Information weiterleiten und die unerwünschte zurückhalten kann.
Die in der Praxis am häufigsten eingesetzten Filter arbeiten als spektrale Filter. Sie dienen
dazu, harmonische Signalbestandteile mit definierten Frequenzen weiterzuleiten und die
anderen Teilsignale mit den übrigen Frequenzen zurückzuhalten. Dieses spektrale
Filterverhalten kann anschaulich durch die Frequenzabhängigkeit der Übertragungsfunktion
G(f) beschrieben werden:
)(
)()(
fX
fYfG .
Aus dieser Beschreibung leiten sich auch die gebräuchlichen Filterbezeichnungen ab. Sie
unterscheiden, ob das Filter tiefe Frequenzen (Tiefpass), hohe Frequenzen (Hochpass) oder
ein bestimmtes Band benachbarter Frequenzen (Bandpass) passieren lässt bzw. ein solches
Band zurückhält (Bandsperre).
Bild 3.3_10: Klassifizierung der Filter nach ihren spektralen Übertragungseigenschaften
Filter mit solchen Eigenschaften sind nicht nur für die Signalverarbeitung im Rechner
interessant. Um derartige Filtereffekte in der Praxis zu erreichen, wenden andere Branchen
sehr erfolgreich auch eigene, sehr unterschiedliche physikalische, mechanische oder
elektrische Konstruktionsprinzipien an. So versucht die Elektrotechnik, Filtereffekte durch
definierte Zusammenschaltung elektronischer Bauelemente zu erzeugen, die Mechanik durch
Feder-Dämpfungs-Anordnungen (z. B. im Automobil-Fahrwerk). Trotz aller Unterschiede
handelt es sich dabei stets um zeitkontinuierliche, lineare Systeme, welche auf die bisher
dargestellte Weise beschrieben und modelliert werden können.
Im vorliegenden Falle interessieren eher Softwareobjekte mit Filtereigenschaften. Auch hier
ist es empfehlenswert, sich auf Algorithmen mit linearen Systemeigenschaften zu
beschränken. Da sie auf dem Rechner implementiert werden, weisen diese Algorithmen
jedoch zeitdiskretes Systemverhalten auf. Ohne die Allgemeinheit zu beschränken, wird es
sich also stets um allgemeine, lineare Abtastsysteme handeln. Die dafür bereits bekannte
Differenzengleichung beschreibt also auch alle jemals denkbaren Filteralgorithmen.
D
F
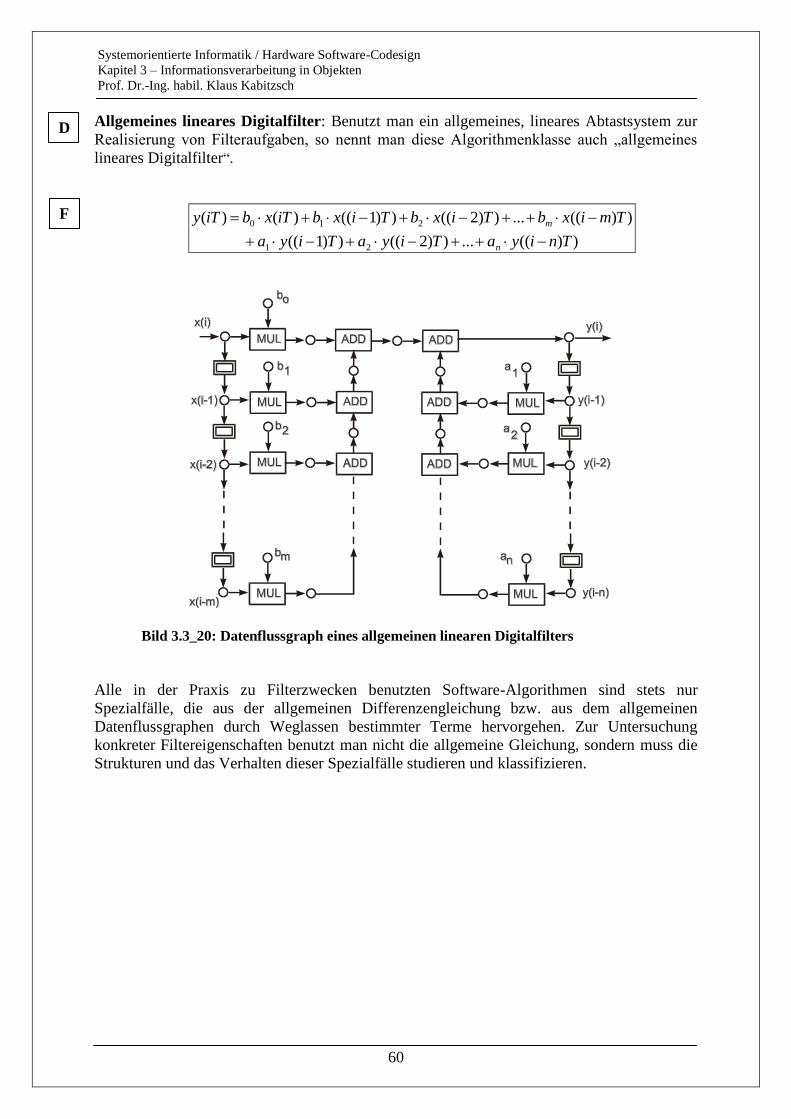
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
60
Allgemeines lineares Digitalfilter: Benutzt man ein allgemeines, lineares Abtastsystem zur
Realisierung von Filteraufgaben, so nennt man diese Algorithmenklasse auch „allgemeines
lineares Digitalfilter“.
))((...))2(())1((
))((...))2(())1(()()(
21
210
TniyaTiyaTiya
TmixbTixbTixbiTxbiTy
n
m
Bild 3.3_20: Datenflussgraph eines allgemeinen linearen Digitalfilters
Alle in der Praxis zu Filterzwecken benutzten Software-Algorithmen sind stets nur
Spezialfälle, die aus der allgemeinen Differenzengleichung bzw. aus dem allgemeinen
Datenflussgraphen durch Weglassen bestimmter Terme hervorgehen. Zur Untersuchung
konkreter Filtereigenschaften benutzt man nicht die allgemeine Gleichung, sondern muss die
Strukturen und das Verhalten dieser Spezialfälle studieren und klassifizieren.
D
F
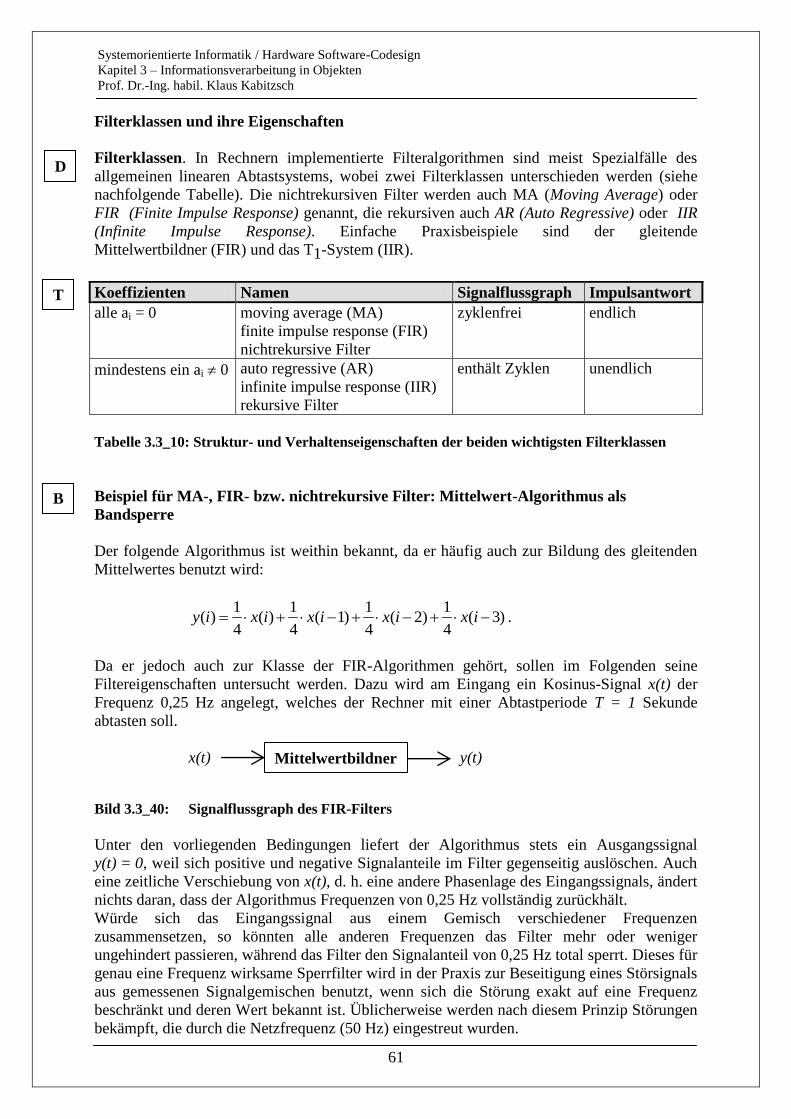
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
61
Filterklassen und ihre Eigenschaften
Filterklassen. In Rechnern implementierte Filteralgorithmen sind meist Spezialfälle des
allgemeinen linearen Abtastsystems, wobei zwei Filterklassen unterschieden werden (siehe
nachfolgende Tabelle). Die nichtrekursiven Filter werden auch MA (Moving Average) oder
FIR (Finite Impulse Response) genannt, die rekursiven auch AR (Auto Regressive) oder IIR
(Infinite Impulse Response). Einfache Praxisbeispiele sind der gleitende
Mittelwertbildner (FIR) und das T1-System (IIR).
Koeffizienten Namen Signalflussgraph Impulsantwort
alle ai = 0 moving average (MA)
finite impulse response (FIR)
nichtrekursive Filter
zyklenfrei endlich
mindestens ein ai 0 auto regressive (AR)
infinite impulse response (IIR)
rekursive Filter
enthält Zyklen unendlich
Tabelle 3.3_10: Struktur- und Verhaltenseigenschaften der beiden wichtigsten Filterklassen
Beispiel für MA-, FIR- bzw. nichtrekursive Filter: Mittelwert-Algorithmus als
Bandsperre
Der folgende Algorithmus ist weithin bekannt, da er häufig auch zur Bildung des gleitenden
Mittelwertes benutzt wird:
1 1 1 1
( ) ( ) ( 1) ( 2) ( 3)4 4 4 4
y i x i x i x i x i .
Da er jedoch auch zur Klasse der FIR-Algorithmen gehört, sollen im Folgenden seine
Filtereigenschaften untersucht werden. Dazu wird am Eingang ein Kosinus-Signal x(t) der
Frequenz 0,25 Hz angelegt, welches der Rechner mit einer Abtastperiode T = 1 Sekunde
abtasten soll.
x(t) y(t)
Bild 3.3_40: Signalflussgraph des FIR-Filters
Unter den vorliegenden Bedingungen liefert der Algorithmus stets ein Ausgangssignal
y(t) = 0, weil sich positive und negative Signalanteile im Filter gegenseitig auslöschen. Auch
eine zeitliche Verschiebung von x(t), d. h. eine andere Phasenlage des Eingangssignals, ändert
nichts daran, dass der Algorithmus Frequenzen von 0,25 Hz vollständig zurückhält.
Würde sich das Eingangssignal aus einem Gemisch verschiedener Frequenzen
zusammensetzen, so könnten alle anderen Frequenzen das Filter mehr oder weniger
ungehindert passieren, während das Filter den Signalanteil von 0,25 Hz total sperrt. Dieses für
genau eine Frequenz wirksame Sperrfilter wird in der Praxis zur Beseitigung eines Störsignals
aus gemessenen Signalgemischen benutzt, wenn sich die Störung exakt auf eine Frequenz
beschränkt und deren Wert bekannt ist. Üblicherweise werden nach diesem Prinzip Störungen
bekämpft, die durch die Netzfrequenz (50 Hz) eingestreut wurden.
Mittelwertbildner
T
D
B
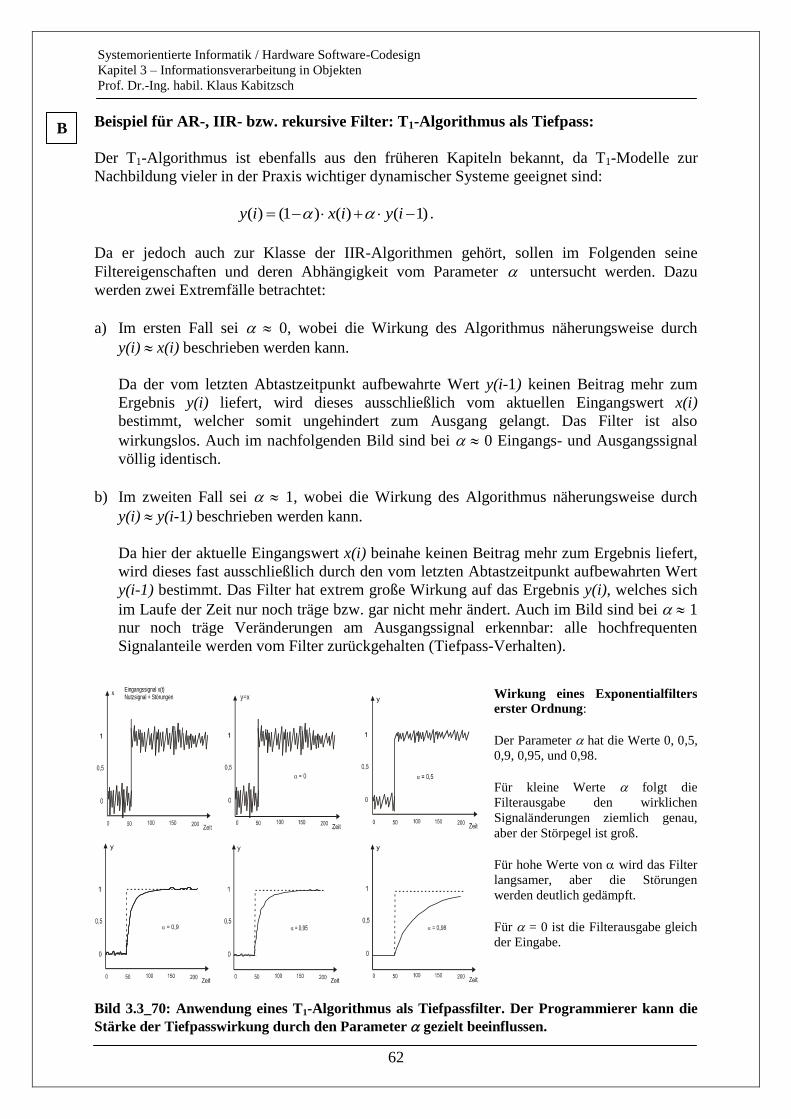
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
62
Beispiel für AR-, IIR- bzw. rekursive Filter: T1-Algorithmus als Tiefpass:
Der T1-Algorithmus ist ebenfalls aus den früheren Kapiteln bekannt, da T1-Modelle zur
Nachbildung vieler in der Praxis wichtiger dynamischer Systeme geeignet sind:
( ) (1 ) ( ) ( 1)y i x i y i .
Da er jedoch auch zur Klasse der IIR-Algorithmen gehört, sollen im Folgenden seine
Filtereigenschaften und deren Abhängigkeit vom Parameter untersucht werden. Dazu
werden zwei Extremfälle betrachtet:
a) Im ersten Fall sei 0, wobei die Wirkung des Algorithmus näherungsweise durch
y(i) x(i) beschrieben werden kann.
Da der vom letzten Abtastzeitpunkt aufbewahrte Wert y(i-1) keinen Beitrag mehr zum
Ergebnis y(i) liefert, wird dieses ausschließlich vom aktuellen Eingangswert x(i)
bestimmt, welcher somit ungehindert zum Ausgang gelangt. Das Filter ist also
wirkungslos. Auch im nachfolgenden Bild sind bei 0 Eingangs- und Ausgangssignal
völlig identisch.
b) Im zweiten Fall sei 1, wobei die Wirkung des Algorithmus näherungsweise durch
y(i) y(i-1) beschrieben werden kann.
Da hier der aktuelle Eingangswert x(i) beinahe keinen Beitrag mehr zum Ergebnis liefert,
wird dieses fast ausschließlich durch den vom letzten Abtastzeitpunkt aufbewahrten Wert
y(i-1) bestimmt. Das Filter hat extrem große Wirkung auf das Ergebnis y(i), welches sich
im Laufe der Zeit nur noch träge bzw. gar nicht mehr ändert. Auch im Bild sind bei 1
nur noch träge Veränderungen am Ausgangssignal erkennbar: alle hochfrequenten
Signalanteile werden vom Filter zurückgehalten (Tiefpass-Verhalten).
Eingangssignal x(t)Nutzsignal + Störungen
Wirkung eines Exponentialfilters
erster Ordnung:
Der Parameter hat die Werte 0, 0,5,
0,9, 0,95, und 0,98.
Für kleine Werte folgt die
Filterausgabe den wirklichen
Signaländerungen ziemlich genau,
aber der Störpegel ist groß.
Für hohe Werte von wird das Filter
langsamer, aber die Störungen
werden deutlich gedämpft.
Für = 0 ist die Filterausgabe gleich
der Eingabe.
Bild 3.3_70: Anwendung eines T1-Algorithmus als Tiefpassfilter. Der Programmierer kann die
Stärke der Tiefpasswirkung durch den Parameter gezielt beeinflussen.
B
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
63
Beispiel für AR-, IIR- bzw. rekursive Filter: Modifizierter D-Algorithmus als Hochpass:
Auch der D-Algorithmus ist aus den früheren Kapiteln bekannt, wo er in ähnlicher Form zur
Modellierung dynamischer Systeme genutzt wurde. Hier wird eine Modifikation desselben
betrachtet, die zusätzlich y(i-1) berücksichtigt:
( ) ( 1) ( ) ( 1)y i y i x i x i .
Der Algorithmus fügt also zum jeweils „alten“ Ausgangswert y(i-1) die Differenz x der
letzten Eingangswerte hinzu:
( ) alty i y x .
Da er jedoch auch zur Klasse der IIR-Algorithmen gehört, sollen im Folgenden seine
Filtereigenschaften und deren Abhängigkeit vom Parameter untersucht werden. Dazu
werden zwei Extremfälle betrachtet:
a) Im ersten Fall sei 0, wobei die Wirkung des Algorithmus näherungsweise durch
y(i) x beschrieben werden kann.
Da der vom letzten Abtastzeitpunkt aufbewahrte Wert y(i-1) keinen Beitrag mehr zum
Ergebnis y(i) liefert, wird dieses ausschließlich vom Differenzialquotienten (Anstieg) des
aktuellen Eingangssignals x(i) bestimmt, welcher somit ungehindert zum Ausgang
gelangt. Das Filter wirkt als reines Differenzierglied und lässt nur hohe Frequenzen
passieren. Im Bild wird vor allem der starke Anstieg in der Flanke des Sprungs als Impuls
an den Ausgang weitergegeben. Für niedrige Frequenzen (x(t) bleibt annähernd konstant,
x = 0) wirkt es als Sperre (y = 0).
b) Im zweiten Fall sei 1, wobei die Wirkung des Algorithmus näherungsweise durch
( ) alty i y x , mit anderen Worten y(i) = x(i), beschrieben werden kann.
Da das Ergebnis y(i) ausschließlich vom aktuellen Eingangswert x(i) bestimmt wird,
gelangt dieser somit ungehindert zum Ausgang. Das Filter ist also wirkungslos. Auch im
Bild werden bei 1 Eingangs- und Ausgangssignal zunehmend identisch.
B
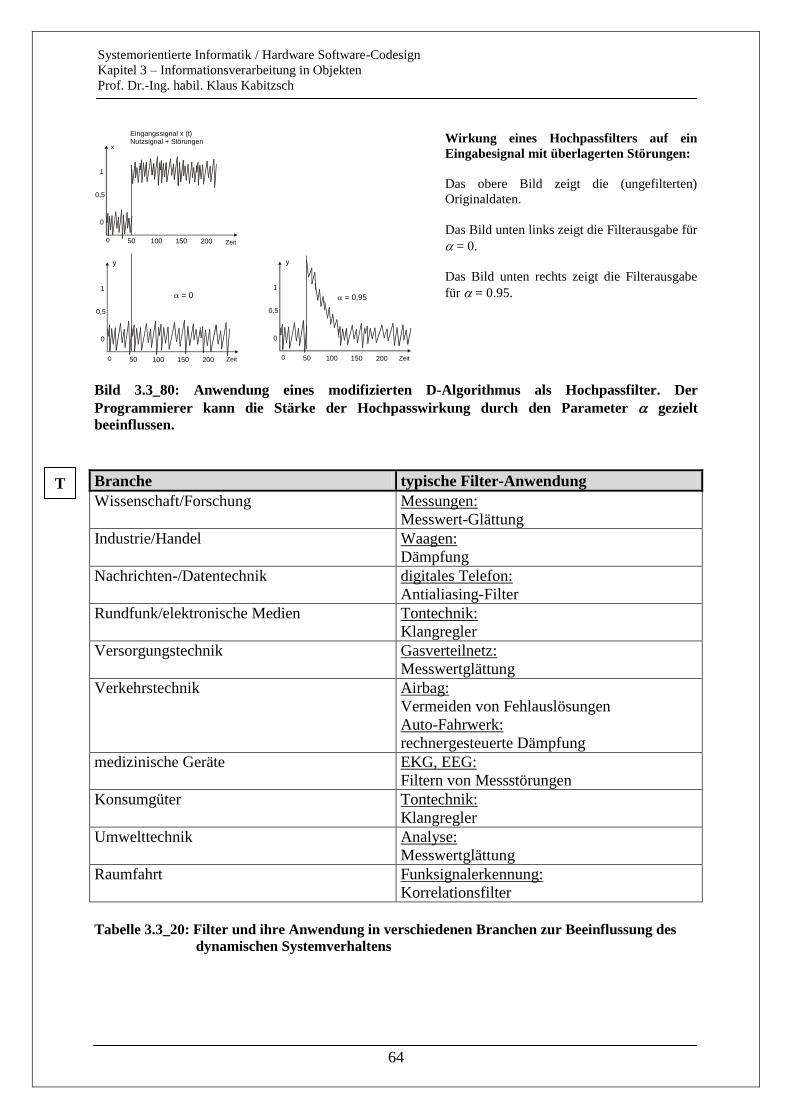
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
64
y
= 0
x
0
0,5
1
Zeit
y
= 0,95
Eingangssignal x (t) Nutzsignal + Störungen
0 50 100 150 200
0
0,5
1
Zeit
0
0,5
1
Zeit0 50 100 150 200 0 50 100 150 200
Wirkung eines Hochpassfilters auf ein
Eingabesignal mit überlagerten Störungen:
Das obere Bild zeigt die (ungefilterten)
Originaldaten.
Das Bild unten links zeigt die Filterausgabe für
= 0.
Das Bild unten rechts zeigt die Filterausgabe
für = 0.95.
Bild 3.3_80: Anwendung eines modifizierten D-Algorithmus als Hochpassfilter. Der
Programmierer kann die Stärke der Hochpasswirkung durch den Parameter gezielt
beeinflussen.
Branche typische Filter-Anwendung
Wissenschaft/Forschung Messungen:
Messwert-Glättung
Industrie/Handel Waagen:
Dämpfung
Nachrichten-/Datentechnik digitales Telefon:
Antialiasing-Filter
Rundfunk/elektronische Medien Tontechnik:
Klangregler
Versorgungstechnik Gasverteilnetz:
Messwertglättung
Verkehrstechnik Airbag:
Vermeiden von Fehlauslösungen
Auto-Fahrwerk:
rechnergesteuerte Dämpfung
medizinische Geräte EKG, EEG:
Filtern von Messstörungen
Konsumgüter Tontechnik:
Klangregler
Umwelttechnik Analyse:
Messwertglättung
Raumfahrt Funksignalerkennung:
Korrelationsfilter
Tabelle 3.3_20: Filter und ihre Anwendung in verschiedenen Branchen zur Beeinflussung des
dynamischen Systemverhaltens
T
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
65
3.4. Signalprozessoren
Signalprozessoren. Durch ihre besondere RISC-Architektur sind Signalprozessoren auf die
schnelle Berechnung des für allgemeine lineare Abtastsysteme üblichen Gleichungstyps
zugeschnitten: Ein spezielles Rechenwerk kann die ständig rekursiv wiederkehrende
Grundoperation (eine Multiplikation und eine Addition) in einem Zyklus ausführen. Eine
erweiterte Harvard-Architektur enthält drei Bussysteme (für Programm, Daten x(i), y(i) sowie
Koeffizienten an, bm). Für Daten und Koeffizienten ist ein großer On-Chip-RAM vorgesehen,
der geringe Zugriffszeiten ermöglicht. Damit ist eine Signalverarbeitung bei hohen
Abtastfrequenzen (zeitdiskretes Signal) realisierbar (Sprach- und Bildverarbeitung,
Mobilfunk).
Wenn der Signalprozessor die bekannten Differenzengleichungen für allgemeine lineare
Abtastsysteme berechnen soll, also z. B. für folgendes FIR-Filter:
0 1 2( ) ( ) ( 1) ( 2) ... ( )my i b x i b x i b x i b x i m ,
so addiert er schrittweise einen Term nach dem anderen, indem er jeweils rekursiv folgenden
Ausdruck berechnet:
[ ] [ ]neu alty b m x i m y .
Müsste dieser Ausdruck in einer Hochsprache notiert werden, dann würde seine Abarbeitung
zu viel Zeit beanspruchen. Um die Berechnung dieses Terms zu beschleunigen, ist er in den
Signalprozessoren als schneller Maschinenbefehl direkt auf dem Chip implementiert. Das
Skalarprodukt des FIR-Filters kann jetzt durch eine Folge dieser Maschinenbefehle ausgeführt
werden, also z. B.:
0
[ ] [ ]
[2] [ 2]
[1] [ 1]
[0] [ 0]
alt
neu alt
neu alt
neu alt
neu alt
y
y b m x i m y
y b x i y
y b x i y
y b x i y
Da die Speicherzugriffe im von-Neumann-Rechner sequenziell ausgeführt werden müssen,
würde die Abarbeitung jedes Maschinenbefehls nacheinander folgende Einzelschritte
erfordern:
1. Befehl aus dem Speicher holen
2. b[m] aus dem Speicher holen
3. x[i-m] aus dem Speicher holen
4. multiplizieren
5. yalt aus dem Speicher holen
6. addieren
7. yneu im Speicher ablegen.
D
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 3 – Informationsverarbeitung in Objekten
Prof. Dr.-Ing. habil. Klaus Kabitzsch
66
Um noch mehr Zeit zu sparen, führt der Signalprozessor mehrere dieser Aktivitäten parallel
aus. Das ist nur möglich, wenn die betreffenden Daten in getrennten Speichern liegen und
diese durch getrennte Bussysteme mit dem Prozessor verbunden sind. Die erweiterte Harvard-
Architektur der Signalprozessoren hat deshalb getrennte Speicher und Busse für das
Programm (Befehle), die Koeffizienten (b[m]) und die Signaldaten (Abtastwerte x[i-m]).
Während das Programm in einem üblichen Speicherbaustein (extern) neben dem Prozessor
abgelegt ist, sind die Speicher und Busse für Koeffizienten und Signaldaten direkt auf dem
Chip des Prozessors abgelegt. Dadurch benötigen diese Zugriffe besonders geringe
Zugriffszeiten, so dass die besonders häufig auszuführenden Aktivitäten (2. und 3.) nochmals
beschleunigt werden.
Insgesamt ist damit ein Geschwindigkeitsgewinn von etwa zwei Zehnerpotenzen erreichbar,
so dass auch extrem schnelle Signalverarbeitung möglich wird, z. B. für:
Messtechnik (Filter, Radar, Sonar)
Automobiltechnik (Sicherheitssysteme)
Medizintechnik (Sprachverarbeitung)
Bildverarbeitung (schnelle Antriebsregler)
Telekommunikation (Modem, Sender/Empfänger, Entzerrer, Mobiltelefone)
Regelungstechnik
Audiotechnik (Filter, adaptive Geräuschunterdrückung, Ton-/Musikerzeugung).
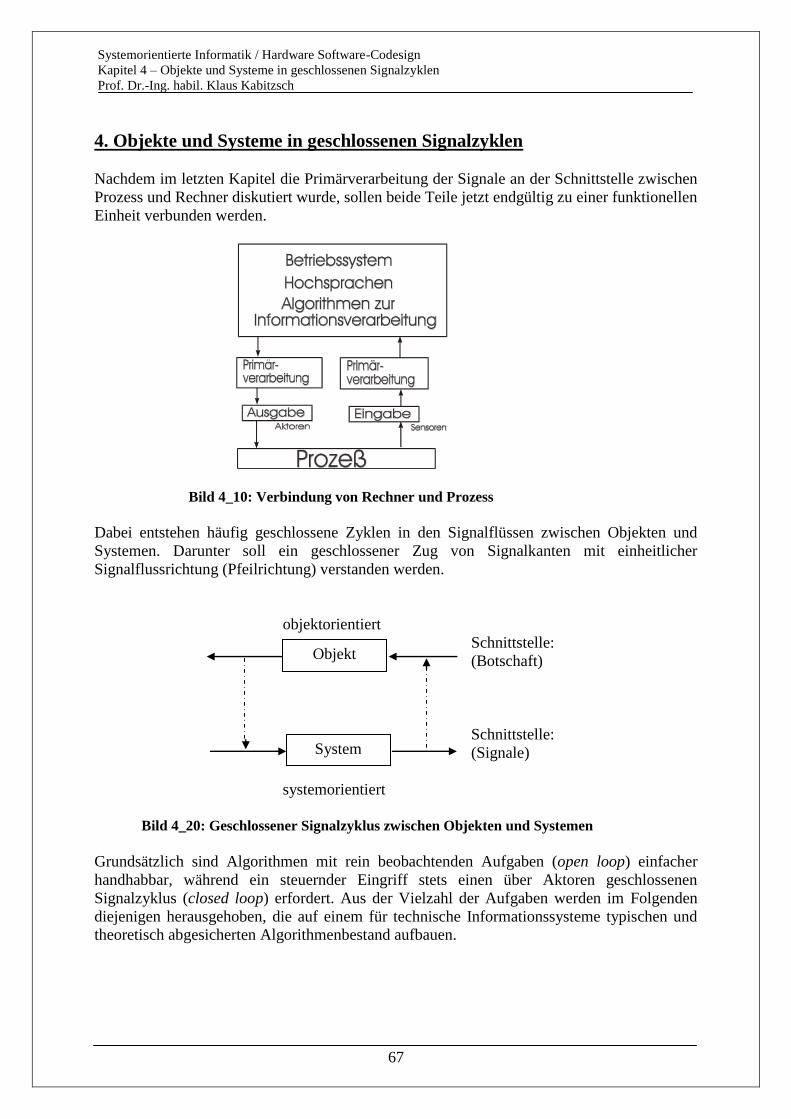
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
67
4. Objekte und Systeme in geschlossenen Signalzyklen
Nachdem im letzten Kapitel die Primärverarbeitung der Signale an der Schnittstelle zwischen
Prozess und Rechner diskutiert wurde, sollen beide Teile jetzt endgültig zu einer funktionellen
Einheit verbunden werden.
Bild 4_10: Verbindung von Rechner und Prozess
Dabei entstehen häufig geschlossene Zyklen in den Signalflüssen zwischen Objekten und
Systemen. Darunter soll ein geschlossener Zug von Signalkanten mit einheitlicher
Signalflussrichtung (Pfeilrichtung) verstanden werden.
objektorientiert
Schnittstelle:
(Botschaft)
Schnittstelle:
(Signale)
systemorientiert
Bild 4_20: Geschlossener Signalzyklus zwischen Objekten und Systemen
Grundsätzlich sind Algorithmen mit rein beobachtenden Aufgaben (open loop) einfacher
handhabbar, während ein steuernder Eingriff stets einen über Aktoren geschlossenen
Signalzyklus (closed loop) erfordert. Aus der Vielzahl der Aufgaben werden im Folgenden
diejenigen herausgehoben, die auf einem für technische Informationssysteme typischen und
theoretisch abgesicherten Algorithmenbestand aufbauen.
Objekt
System
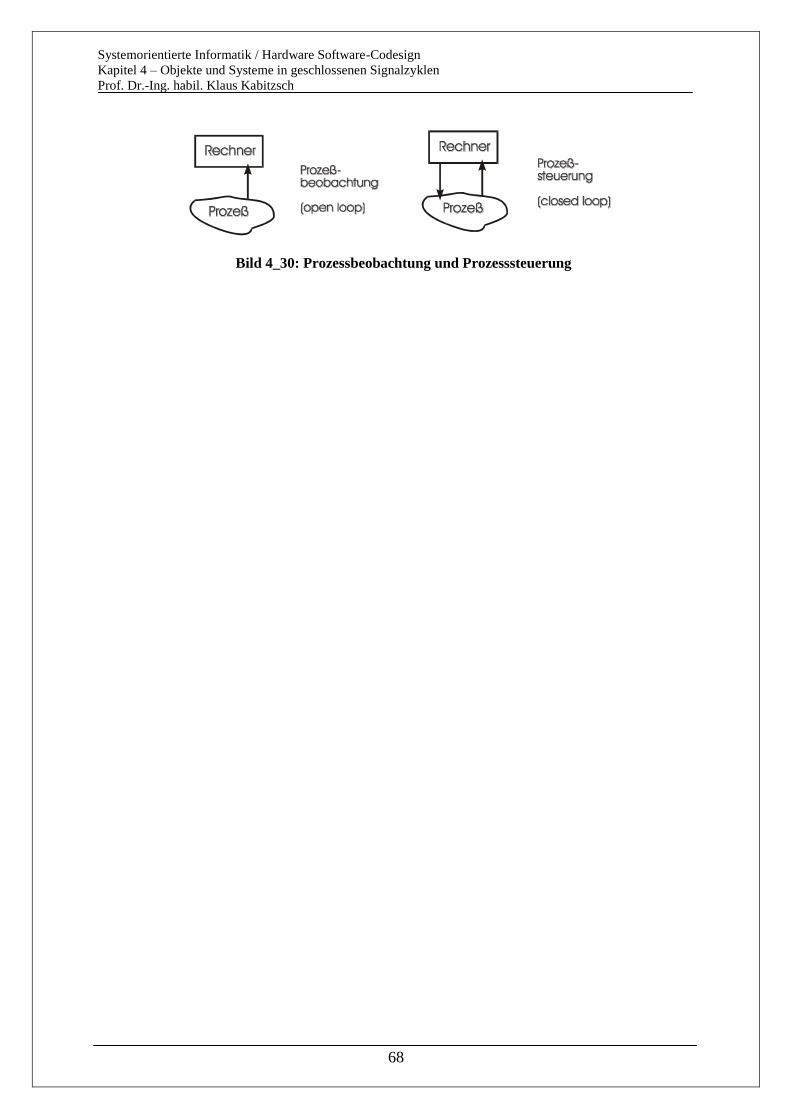
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
68
Bild 4_30: Prozessbeobachtung und Prozesssteuerung
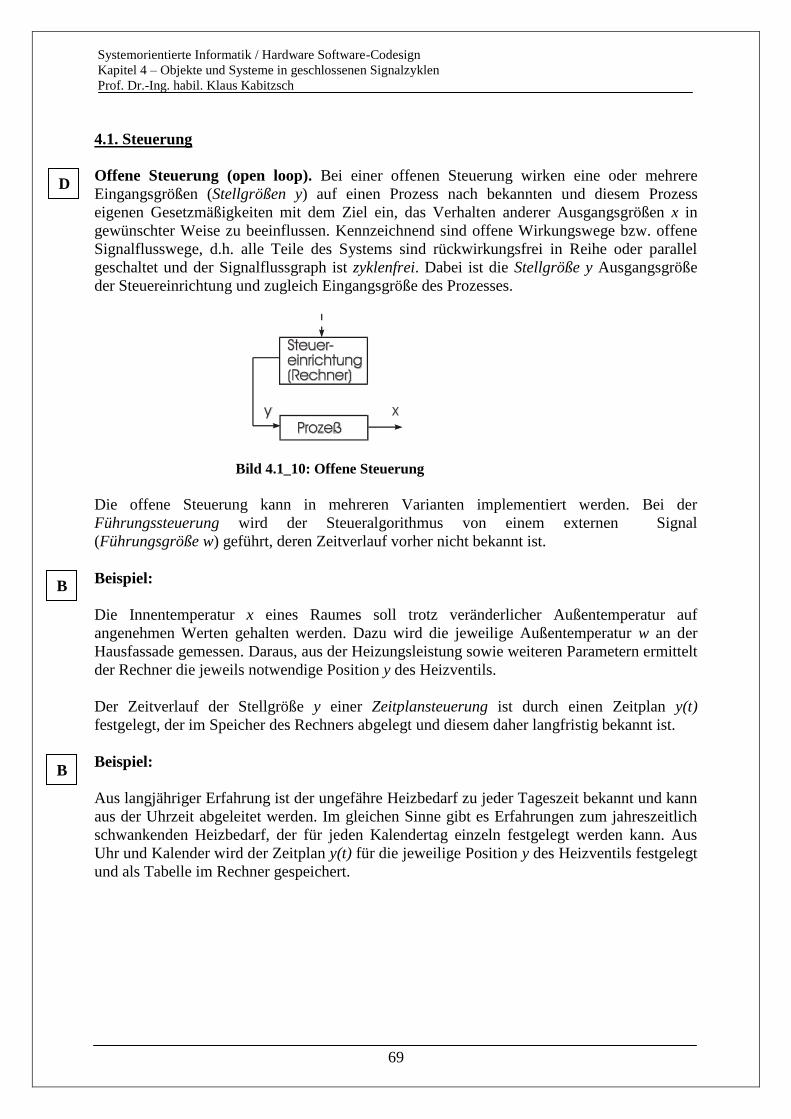
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
69
4.1. Steuerung
Offene Steuerung (open loop). Bei einer offenen Steuerung wirken eine oder mehrere
Eingangsgrößen (Stellgrößen y) auf einen Prozess nach bekannten und diesem Prozess
eigenen Gesetzmäßigkeiten mit dem Ziel ein, das Verhalten anderer Ausgangsgrößen x in
gewünschter Weise zu beeinflussen. Kennzeichnend sind offene Wirkungswege bzw. offene
Signalflusswege, d.h. alle Teile des Systems sind rückwirkungsfrei in Reihe oder parallel
geschaltet und der Signalflussgraph ist zyklenfrei. Dabei ist die Stellgröße y Ausgangsgröße
der Steuereinrichtung und zugleich Eingangsgröße des Prozesses.
Bild 4.1_10: Offene Steuerung
Die offene Steuerung kann in mehreren Varianten implementiert werden. Bei der
Führungssteuerung wird der Steueralgorithmus von einem externen Signal
(Führungsgröße w) geführt, deren Zeitverlauf vorher nicht bekannt ist.
Beispiel:
Die Innentemperatur x eines Raumes soll trotz veränderlicher Außentemperatur auf
angenehmen Werten gehalten werden. Dazu wird die jeweilige Außentemperatur w an der
Hausfassade gemessen. Daraus, aus der Heizungsleistung sowie weiteren Parametern ermittelt
der Rechner die jeweils notwendige Position y des Heizventils.
Der Zeitverlauf der Stellgröße y einer Zeitplansteuerung ist durch einen Zeitplan y(t)
festgelegt, der im Speicher des Rechners abgelegt und diesem daher langfristig bekannt ist.
Beispiel:
Aus langjähriger Erfahrung ist der ungefähre Heizbedarf zu jeder Tageszeit bekannt und kann
aus der Uhrzeit abgeleitet werden. Im gleichen Sinne gibt es Erfahrungen zum jahreszeitlich
schwankenden Heizbedarf, der für jeden Kalendertag einzeln festgelegt werden kann. Aus
Uhr und Kalender wird der Zeitplan y(t) für die jeweilige Position y des Heizventils festgelegt
und als Tabelle im Rechner gespeichert.
D
B
B
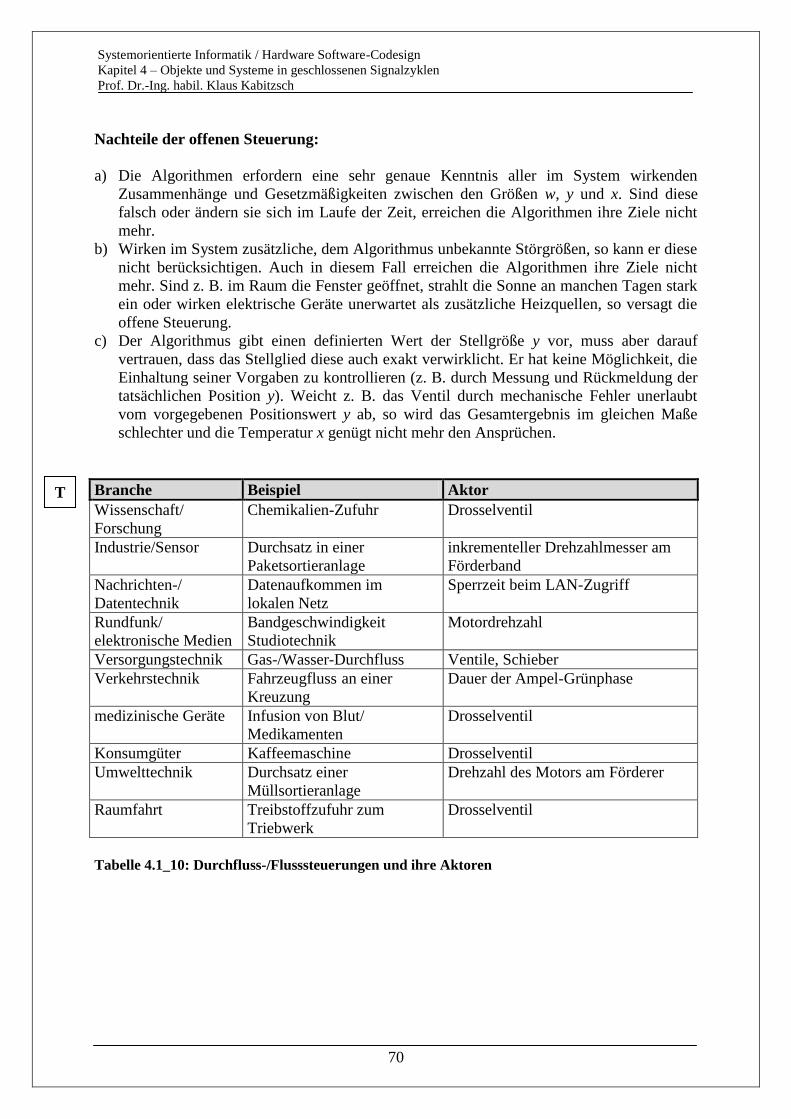
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
70
Nachteile der offenen Steuerung:
a) Die Algorithmen erfordern eine sehr genaue Kenntnis aller im System wirkenden
Zusammenhänge und Gesetzmäßigkeiten zwischen den Größen w, y und x. Sind diese
falsch oder ändern sie sich im Laufe der Zeit, erreichen die Algorithmen ihre Ziele nicht
mehr.
b) Wirken im System zusätzliche, dem Algorithmus unbekannte Störgrößen, so kann er diese
nicht berücksichtigen. Auch in diesem Fall erreichen die Algorithmen ihre Ziele nicht
mehr. Sind z. B. im Raum die Fenster geöffnet, strahlt die Sonne an manchen Tagen stark
ein oder wirken elektrische Geräte unerwartet als zusätzliche Heizquellen, so versagt die
offene Steuerung.
c) Der Algorithmus gibt einen definierten Wert der Stellgröße y vor, muss aber darauf
vertrauen, dass das Stellglied diese auch exakt verwirklicht. Er hat keine Möglichkeit, die
Einhaltung seiner Vorgaben zu kontrollieren (z. B. durch Messung und Rückmeldung der
tatsächlichen Position y). Weicht z. B. das Ventil durch mechanische Fehler unerlaubt
vom vorgegebenen Positionswert y ab, so wird das Gesamtergebnis im gleichen Maße
schlechter und die Temperatur x genügt nicht mehr den Ansprüchen.
Branche Beispiel Aktor
Wissenschaft/
Forschung
Chemikalien-Zufuhr Drosselventil
Industrie/Sensor Durchsatz in einer
Paketsortieranlage
inkrementeller Drehzahlmesser am
Förderband
Nachrichten-/
Datentechnik
Datenaufkommen im
lokalen Netz
Sperrzeit beim LAN-Zugriff
Rundfunk/
elektronische Medien
Bandgeschwindigkeit
Studiotechnik
Motordrehzahl
Versorgungstechnik Gas-/Wasser-Durchfluss Ventile, Schieber
Verkehrstechnik Fahrzeugfluss an einer
Kreuzung
Dauer der Ampel-Grünphase
medizinische Geräte Infusion von Blut/
Medikamenten
Drosselventil
Konsumgüter Kaffeemaschine Drosselventil
Umwelttechnik Durchsatz einer
Müllsortieranlage
Drehzahl des Motors am Förderer
Raumfahrt Treibstoffzufuhr zum
Triebwerk
Drosselventil
Tabelle 4.1_10: Durchfluss-/Flusssteuerungen und ihre Aktoren
T
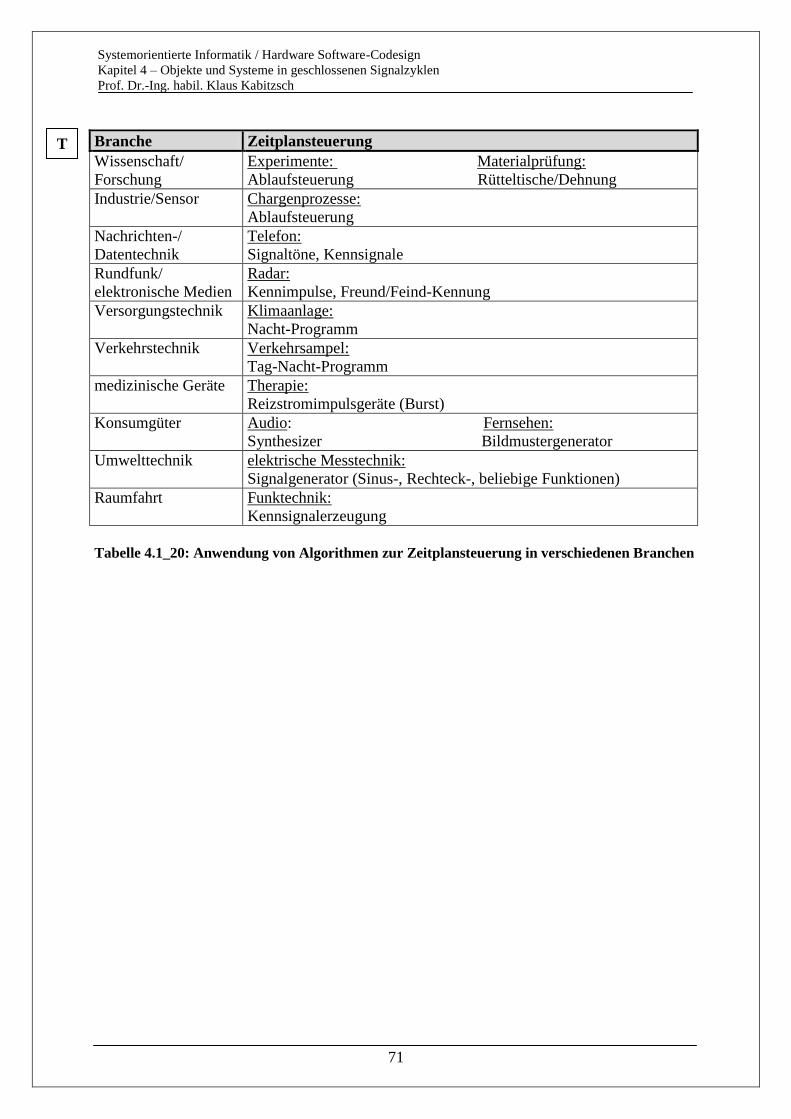
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
71
Branche Zeitplansteuerung
Wissenschaft/
Forschung
Experimente: Materialprüfung:
Ablaufsteuerung Rütteltische/Dehnung
Industrie/Sensor Chargenprozesse:
Ablaufsteuerung
Nachrichten-/
Datentechnik
Telefon:
Signaltöne, Kennsignale
Rundfunk/
elektronische Medien
Radar:
Kennimpulse, Freund/Feind-Kennung
Versorgungstechnik Klimaanlage:
Nacht-Programm
Verkehrstechnik Verkehrsampel:
Tag-Nacht-Programm
medizinische Geräte Therapie:
Reizstromimpulsgeräte (Burst)
Konsumgüter Audio: Fernsehen:
Synthesizer Bildmustergenerator
Umwelttechnik elektrische Messtechnik:
Signalgenerator (Sinus-, Rechteck-, beliebige Funktionen)
Raumfahrt Funktechnik:
Kennsignalerzeugung
Tabelle 4.1_20: Anwendung von Algorithmen zur Zeitplansteuerung in verschiedenen Branchen
T
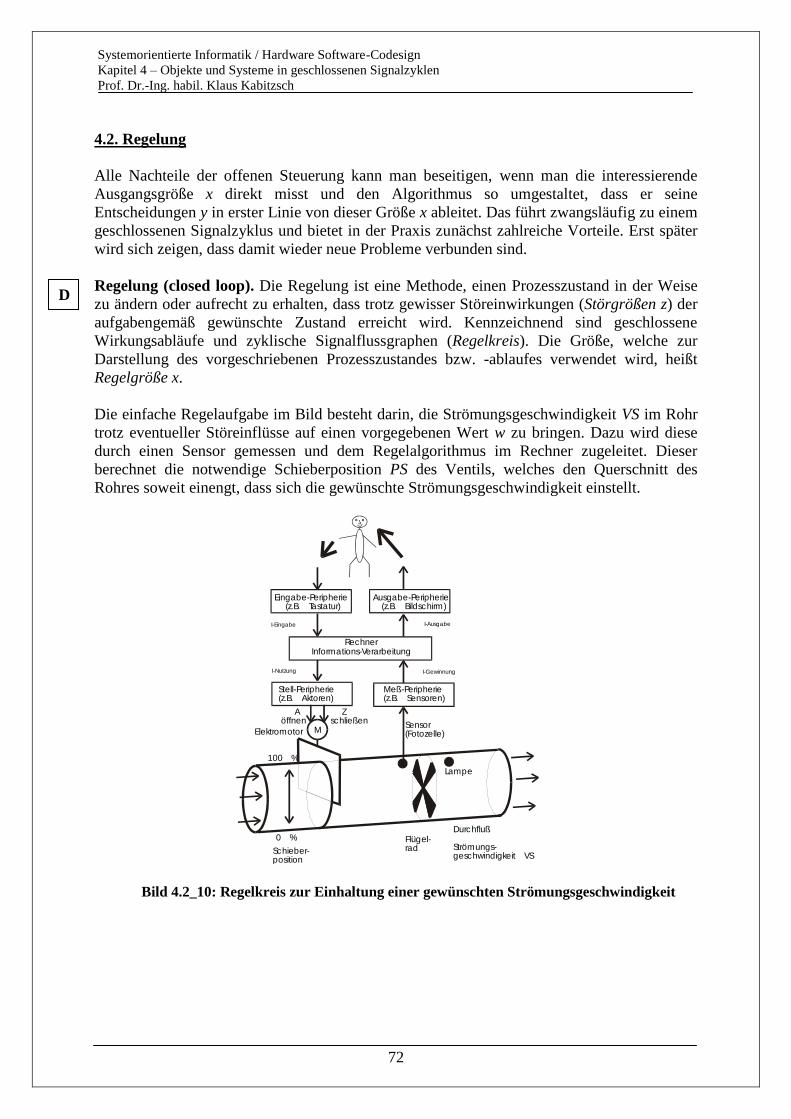
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
72
4.2. Regelung
Alle Nachteile der offenen Steuerung kann man beseitigen, wenn man die interessierende
Ausgangsgröße x direkt misst und den Algorithmus so umgestaltet, dass er seine
Entscheidungen y in erster Linie von dieser Größe x ableitet. Das führt zwangsläufig zu einem
geschlossenen Signalzyklus und bietet in der Praxis zunächst zahlreiche Vorteile. Erst später
wird sich zeigen, dass damit wieder neue Probleme verbunden sind.
Regelung (closed loop). Die Regelung ist eine Methode, einen Prozesszustand in der Weise
zu ändern oder aufrecht zu erhalten, dass trotz gewisser Störeinwirkungen (Störgrößen z) der
aufgabengemäß gewünschte Zustand erreicht wird. Kennzeichnend sind geschlossene
Wirkungsabläufe und zyklische Signalflussgraphen (Regelkreis). Die Größe, welche zur
Darstellung des vorgeschriebenen Prozesszustandes bzw. -ablaufes verwendet wird, heißt
Regelgröße x.
Die einfache Regelaufgabe im Bild besteht darin, die Strömungsgeschwindigkeit VS im Rohr
trotz eventueller Störeinflüsse auf einen vorgegebenen Wert w zu bringen. Dazu wird diese
durch einen Sensor gemessen und dem Regelalgorithmus im Rechner zugeleitet. Dieser
berechnet die notwendige Schieberposition PS des Ventils, welches den Querschnitt des
Rohres soweit einengt, dass sich die gewünschte Strömungsgeschwindigkeit einstellt.
Eingabe-Peripherie (z.B. Tastatur)
Meß-Peripherie(z.B. Sensoren)
Stell-Peripherie(z.B. Aktoren)
Ausgabe-Peripherie (z.B. Bildschirm)
Rechner
Aöffnen
Zschließen
MElektromotor
100 %
0 %
Schieber-position
Durchfluß
Strömungs-geschwindigkeit VS
Sensor(Fotozelle)
Lampe
Flügel-rad
Informations-Verarbeitung
I-Eingabe I-Ausgabe
I-Nutzung I-Gewinnung
Bild 4.2_10: Regelkreis zur Einhaltung einer gewünschten Strömungsgeschwindigkeit
D
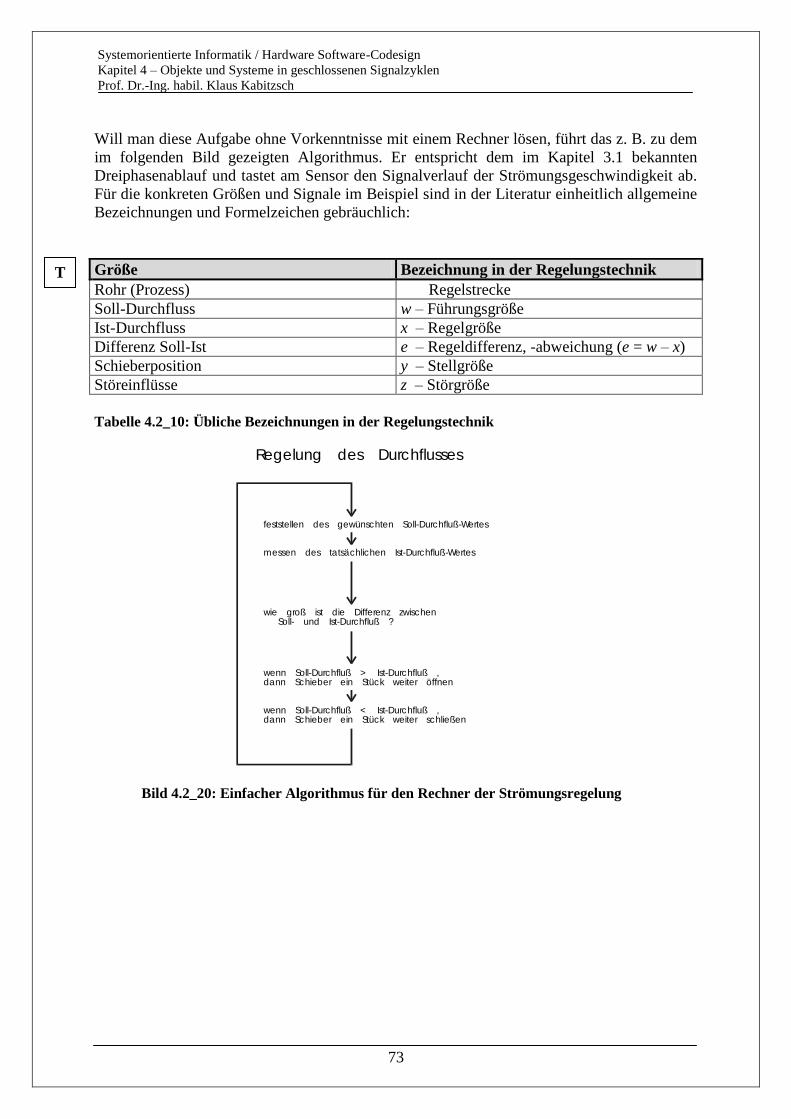
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
73
Will man diese Aufgabe ohne Vorkenntnisse mit einem Rechner lösen, führt das z. B. zu dem
im folgenden Bild gezeigten Algorithmus. Er entspricht dem im Kapitel 3.1 bekannten
Dreiphasenablauf und tastet am Sensor den Signalverlauf der Strömungsgeschwindigkeit ab.
Für die konkreten Größen und Signale im Beispiel sind in der Literatur einheitlich allgemeine
Bezeichnungen und Formelzeichen gebräuchlich:
Größe Bezeichnung in der Regelungstechnik
Rohr (Prozess) Regelstrecke
Soll-Durchfluss w – Führungsgröße
Ist-Durchfluss x – Regelgröße
Differenz Soll-Ist e – Regeldifferenz, -abweichung (e = w – x)
Schieberposition y – Stellgröße
Störeinflüsse z – Störgröße
Tabelle 4.2_10: Übliche Bezeichnungen in der Regelungstechnik
feststellen des gewünschten Soll-Durchfluß-Wertes
messen des tatsächlichen Ist-Durchfluß-Wertes
wie groß ist die Differenz zwischen Soll- und Ist-Durchfluß ?
wenn Soll-Durchfluß > Ist-Durchfluß ,dann Schieber ein Stück weiter öffnen
wenn Soll-Durchfluß < Ist-Durchfluß ,dann Schieber ein Stück weiter schließen
Regelung des Durchflusses
Bild 4.2_20: Einfacher Algorithmus für den Rechner der Strömungsregelung
T
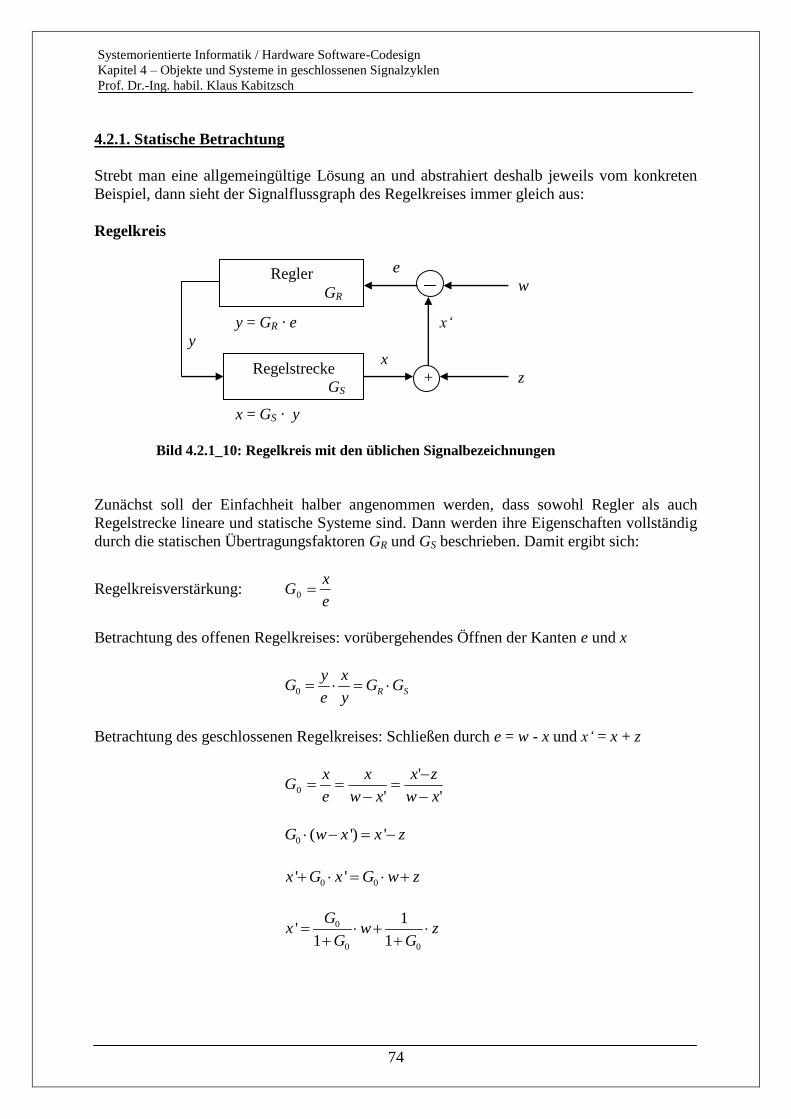
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
74
4.2.1. Statische Betrachtung
Strebt man eine allgemeingültige Lösung an und abstrahiert deshalb jeweils vom konkreten
Beispiel, dann sieht der Signalflussgraph des Regelkreises immer gleich aus:
Regelkreis
e
w
y = GR · e x‘
y
x
+ z
x = GS · y
Bild 4.2.1_10: Regelkreis mit den üblichen Signalbezeichnungen
Zunächst soll der Einfachheit halber angenommen werden, dass sowohl Regler als auch
Regelstrecke lineare und statische Systeme sind. Dann werden ihre Eigenschaften vollständig
durch die statischen Übertragungsfaktoren GR und GS beschrieben. Damit ergibt sich:
Regelkreisverstärkung: e
xG 0
Betrachtung des offenen Regelkreises: vorübergehendes Öffnen der Kanten e und x
0 R S
y xG G G
e y
Betrachtung des geschlossenen Regelkreises: Schließen durch e = w - x und x‘ = x + z
'
'
'0
xw
zx
xw
x
e
xG
0 ( ') 'G w x x z
0 0' 'x G x G w z
0
0 0
1'
1 1
Gx w z
G G
Regler
GR
Regelstrecke
GS
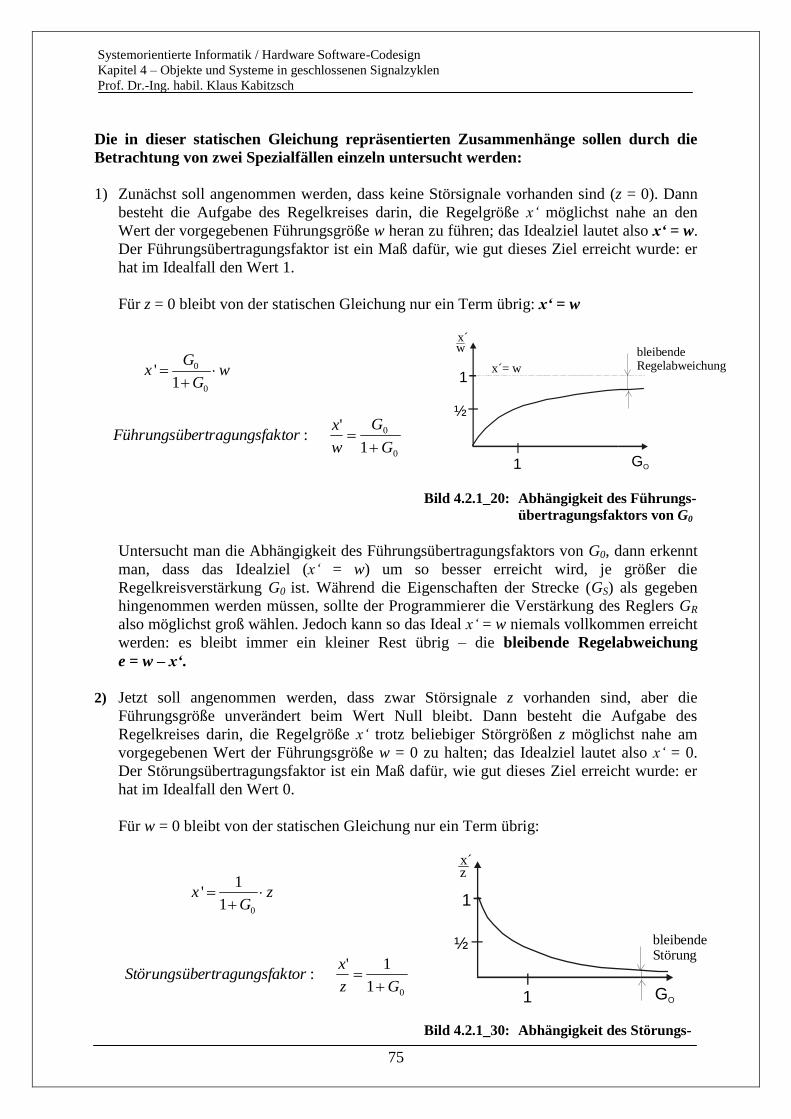
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
75
Die in dieser statischen Gleichung repräsentierten Zusammenhänge sollen durch die
Betrachtung von zwei Spezialfällen einzeln untersucht werden:
1) Zunächst soll angenommen werden, dass keine Störsignale vorhanden sind (z = 0). Dann
besteht die Aufgabe des Regelkreises darin, die Regelgröße x‘ möglichst nahe an den
Wert der vorgegebenen Führungsgröße w heran zu führen; das Idealziel lautet also x‘ = w.
Der Führungsübertragungsfaktor ist ein Maß dafür, wie gut dieses Ziel erreicht wurde: er
hat im Idealfall den Wert 1.
Für z = 0 bleibt von der statischen Gleichung nur ein Term übrig: x‘ = w
0
0
'1
Gx w
G
0
0
1
':
G
G
w
xfaktorertragungsFührungsüb
1
1
GO
½
x´= w
bleibendeRegelabweichung
x´w
Bild 4.2.1_20: Abhängigkeit des Führungs-
übertragungsfaktors von G0
Untersucht man die Abhängigkeit des Führungsübertragungsfaktors von G0, dann erkennt
man, dass das Idealziel (x‘ = w) um so besser erreicht wird, je größer die
Regelkreisverstärkung G0 ist. Während die Eigenschaften der Strecke (GS) als gegeben
hingenommen werden müssen, sollte der Programmierer die Verstärkung des Reglers GR
also möglichst groß wählen. Jedoch kann so das Ideal x‘ = w niemals vollkommen erreicht
werden: es bleibt immer ein kleiner Rest übrig – die bleibende Regelabweichung
e = w – x‘.
2) Jetzt soll angenommen werden, dass zwar Störsignale z vorhanden sind, aber die
Führungsgröße unverändert beim Wert Null bleibt. Dann besteht die Aufgabe des
Regelkreises darin, die Regelgröße x‘ trotz beliebiger Störgrößen z möglichst nahe am
vorgegebenen Wert der Führungsgröße w = 0 zu halten; das Idealziel lautet also x‘ = 0.
Der Störungsübertragungsfaktor ist ein Maß dafür, wie gut dieses Ziel erreicht wurde: er
hat im Idealfall den Wert 0.
Für w = 0 bleibt von der statischen Gleichung nur ein Term übrig:
0
1'
1x z
G
01
1':
Gz
xfaktorertragungsStörungsüb
x´z
1
1
GO
½ bleibendeStörung
Bild 4.2.1_30: Abhängigkeit des Störungs-
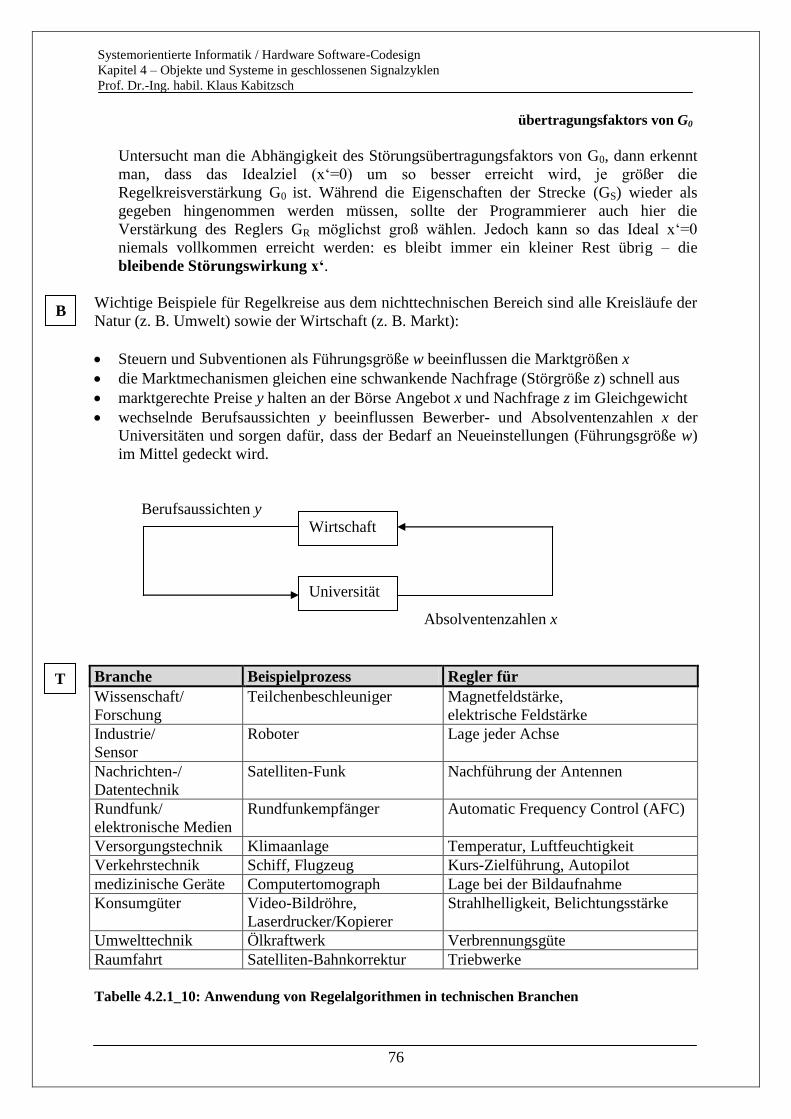
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
76
übertragungsfaktors von G0
Untersucht man die Abhängigkeit des Störungsübertragungsfaktors von G0, dann erkennt
man, dass das Idealziel (x‘=0) um so besser erreicht wird, je größer die
Regelkreisverstärkung G0 ist. Während die Eigenschaften der Strecke (GS) wieder als
gegeben hingenommen werden müssen, sollte der Programmierer auch hier die
Verstärkung des Reglers GR möglichst groß wählen. Jedoch kann so das Ideal x‘=0
niemals vollkommen erreicht werden: es bleibt immer ein kleiner Rest übrig – die
bleibende Störungswirkung x‘.
Wichtige Beispiele für Regelkreise aus dem nichttechnischen Bereich sind alle Kreisläufe der
Natur (z. B. Umwelt) sowie der Wirtschaft (z. B. Markt):
Steuern und Subventionen als Führungsgröße w beeinflussen die Marktgrößen x
die Marktmechanismen gleichen eine schwankende Nachfrage (Störgröße z) schnell aus
marktgerechte Preise y halten an der Börse Angebot x und Nachfrage z im Gleichgewicht
wechselnde Berufsaussichten y beeinflussen Bewerber- und Absolventenzahlen x der
Universitäten und sorgen dafür, dass der Bedarf an Neueinstellungen (Führungsgröße w)
im Mittel gedeckt wird.
Berufsaussichten y
Absolventenzahlen x
Branche Beispielprozess Regler für
Wissenschaft/
Forschung
Teilchenbeschleuniger Magnetfeldstärke,
elektrische Feldstärke
Industrie/
Sensor
Roboter Lage jeder Achse
Nachrichten-/
Datentechnik
Satelliten-Funk Nachführung der Antennen
Rundfunk/
elektronische Medien
Rundfunkempfänger Automatic Frequency Control (AFC)
Versorgungstechnik Klimaanlage Temperatur, Luftfeuchtigkeit
Verkehrstechnik Schiff, Flugzeug Kurs-Zielführung, Autopilot
medizinische Geräte Computertomograph Lage bei der Bildaufnahme
Konsumgüter Video-Bildröhre,
Laserdrucker/Kopierer
Strahlhelligkeit, Belichtungsstärke
Umwelttechnik Ölkraftwerk Verbrennungsgüte
Raumfahrt Satelliten-Bahnkorrektur Triebwerke
Tabelle 4.2.1_10: Anwendung von Regelalgorithmen in technischen Branchen
B
Wirtschaft
Universität
T
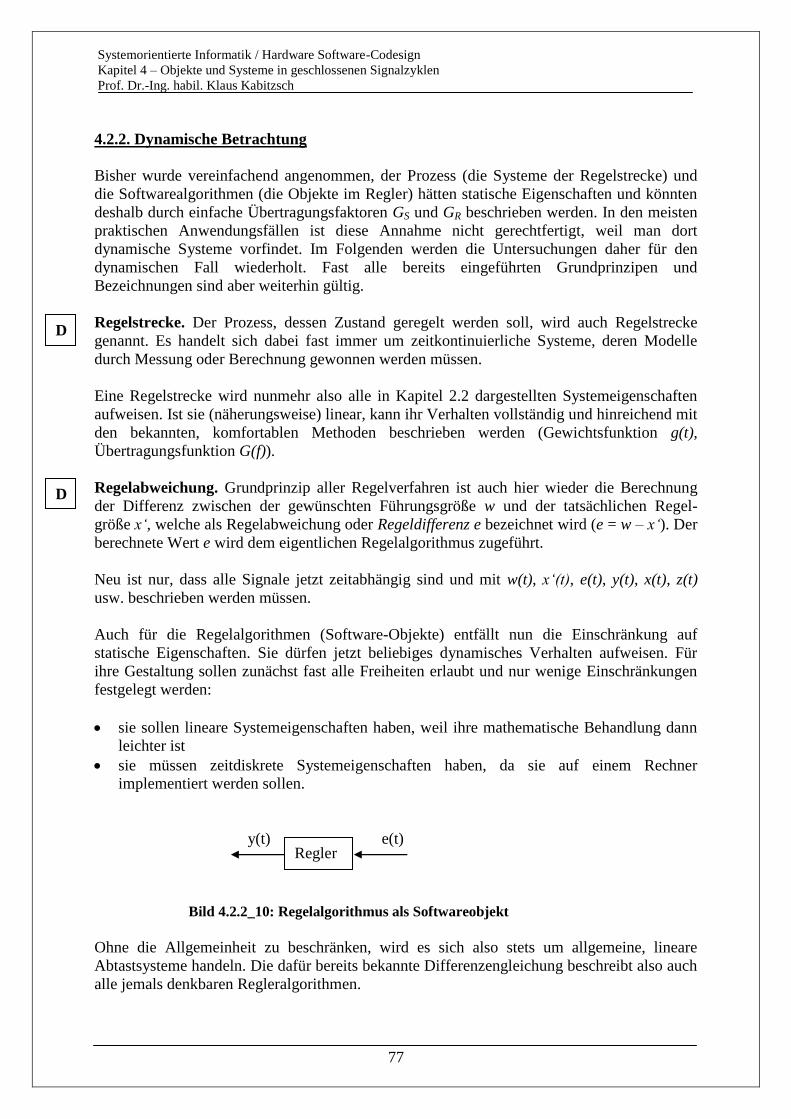
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
77
4.2.2. Dynamische Betrachtung
Bisher wurde vereinfachend angenommen, der Prozess (die Systeme der Regelstrecke) und
die Softwarealgorithmen (die Objekte im Regler) hätten statische Eigenschaften und könnten
deshalb durch einfache Übertragungsfaktoren GS und GR beschrieben werden. In den meisten
praktischen Anwendungsfällen ist diese Annahme nicht gerechtfertigt, weil man dort
dynamische Systeme vorfindet. Im Folgenden werden die Untersuchungen daher für den
dynamischen Fall wiederholt. Fast alle bereits eingeführten Grundprinzipen und
Bezeichnungen sind aber weiterhin gültig.
Regelstrecke. Der Prozess, dessen Zustand geregelt werden soll, wird auch Regelstrecke
genannt. Es handelt sich dabei fast immer um zeitkontinuierliche Systeme, deren Modelle
durch Messung oder Berechnung gewonnen werden müssen.
Eine Regelstrecke wird nunmehr also alle in Kapitel 2.2 dargestellten Systemeigenschaften
aufweisen. Ist sie (näherungsweise) linear, kann ihr Verhalten vollständig und hinreichend mit
den bekannten, komfortablen Methoden beschrieben werden (Gewichtsfunktion g(t),
Übertragungsfunktion G(f)).
Regelabweichung. Grundprinzip aller Regelverfahren ist auch hier wieder die Berechnung
der Differenz zwischen der gewünschten Führungsgröße w und der tatsächlichen Regel-
größe x‘, welche als Regelabweichung oder Regeldifferenz e bezeichnet wird (e = w – x‘). Der
berechnete Wert e wird dem eigentlichen Regelalgorithmus zugeführt.
Neu ist nur, dass alle Signale jetzt zeitabhängig sind und mit w(t), x‘(t), e(t), y(t), x(t), z(t)
usw. beschrieben werden müssen.
Auch für die Regelalgorithmen (Software-Objekte) entfällt nun die Einschränkung auf
statische Eigenschaften. Sie dürfen jetzt beliebiges dynamisches Verhalten aufweisen. Für
ihre Gestaltung sollen zunächst fast alle Freiheiten erlaubt und nur wenige Einschränkungen
festgelegt werden:
sie sollen lineare Systemeigenschaften haben, weil ihre mathematische Behandlung dann
leichter ist
sie müssen zeitdiskrete Systemeigenschaften haben, da sie auf einem Rechner
implementiert werden sollen.
y(t) e(t)
Bild 4.2.2_10: Regelalgorithmus als Softwareobjekt
Ohne die Allgemeinheit zu beschränken, wird es sich also stets um allgemeine, lineare
Abtastsysteme handeln. Die dafür bereits bekannte Differenzengleichung beschreibt also auch
alle jemals denkbaren Regleralgorithmen.
D
D
Regler
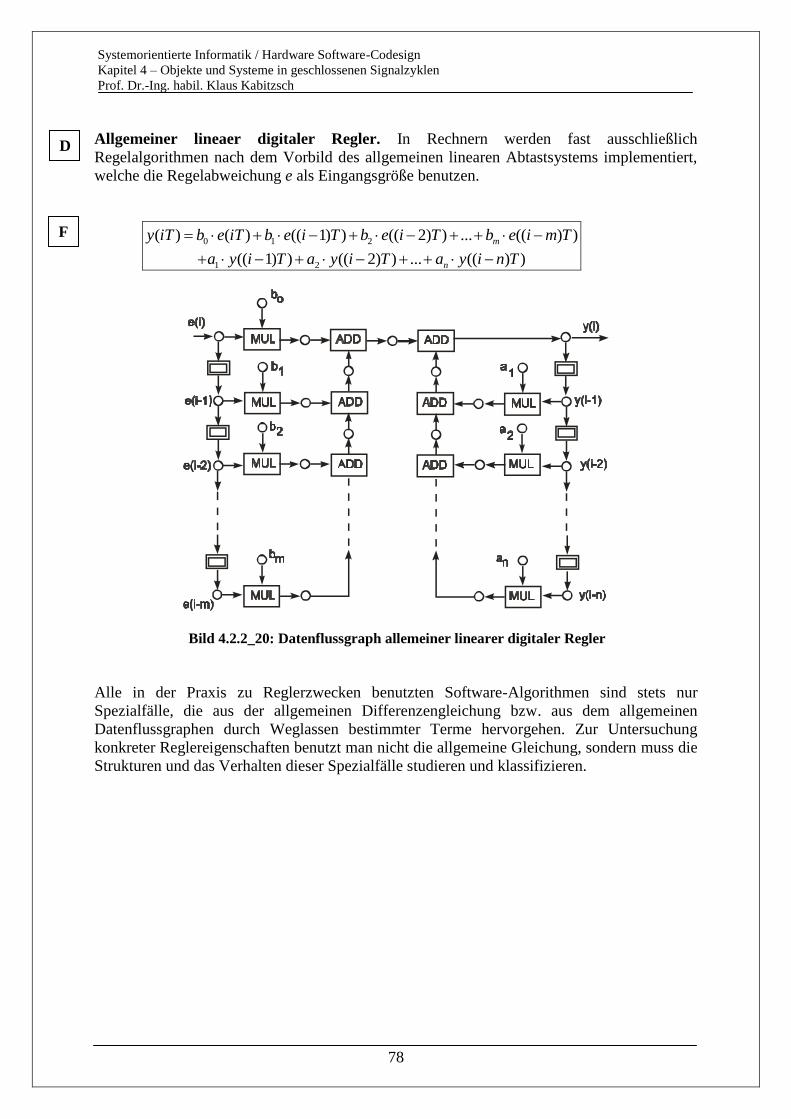
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
78
Allgemeiner lineaer digitaler Regler. In Rechnern werden fast ausschließlich
Regelalgorithmen nach dem Vorbild des allgemeinen linearen Abtastsystems implementiert,
welche die Regelabweichung e als Eingangsgröße benutzen.
0 1 2
1 2
( ) ( ) (( 1) ) (( 2) ) ... (( ) )
(( 1) ) (( 2) ) ... (( ) )
m
n
y iT b e iT b e i T b e i T b e i m T
a y i T a y i T a y i n T
Bild 4.2.2_20: Datenflussgraph allemeiner linearer digitaler Regler
Alle in der Praxis zu Reglerzwecken benutzten Software-Algorithmen sind stets nur
Spezialfälle, die aus der allgemeinen Differenzengleichung bzw. aus dem allgemeinen
Datenflussgraphen durch Weglassen bestimmter Terme hervorgehen. Zur Untersuchung
konkreter Reglereigenschaften benutzt man nicht die allgemeine Gleichung, sondern muss die
Strukturen und das Verhalten dieser Spezialfälle studieren und klassifizieren.
D
F
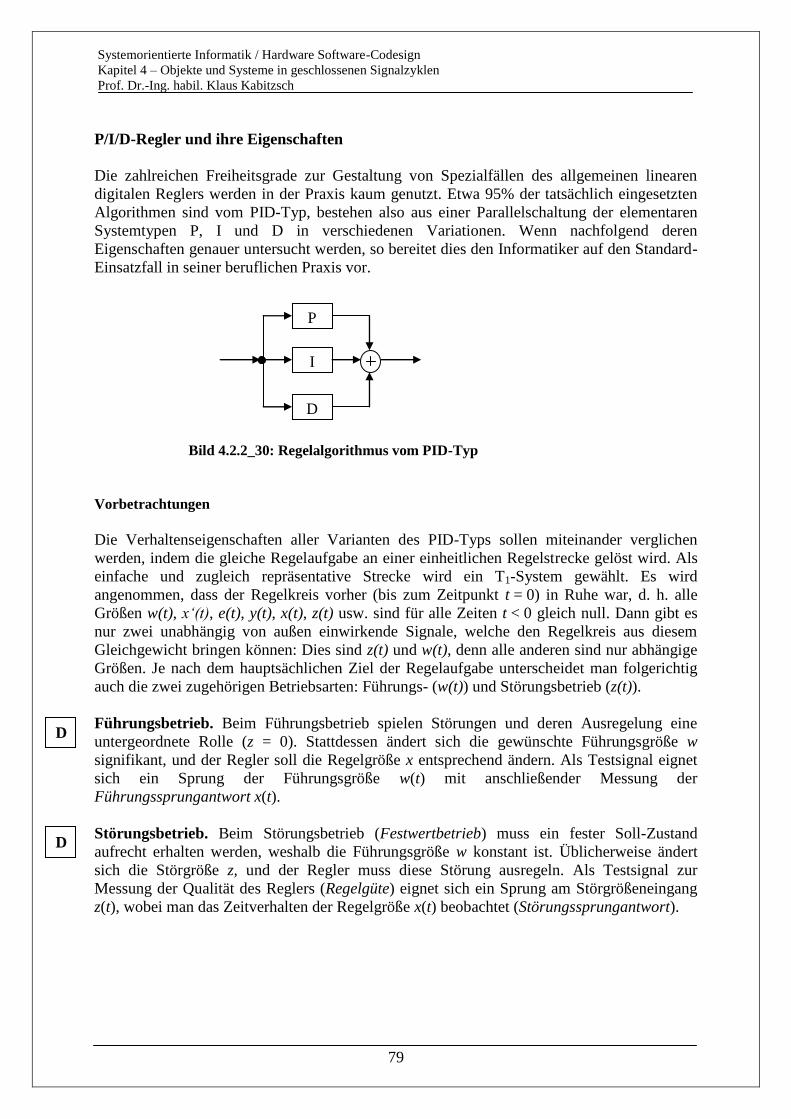
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
79
P/I/D-Regler und ihre Eigenschaften
Die zahlreichen Freiheitsgrade zur Gestaltung von Spezialfällen des allgemeinen linearen
digitalen Reglers werden in der Praxis kaum genutzt. Etwa 95% der tatsächlich eingesetzten
Algorithmen sind vom PID-Typ, bestehen also aus einer Parallelschaltung der elementaren
Systemtypen P, I und D in verschiedenen Variationen. Wenn nachfolgend deren
Eigenschaften genauer untersucht werden, so bereitet dies den Informatiker auf den Standard-
Einsatzfall in seiner beruflichen Praxis vor.
Bild 4.2.2_30: Regelalgorithmus vom PID-Typ
Vorbetrachtungen
Die Verhaltenseigenschaften aller Varianten des PID-Typs sollen miteinander verglichen
werden, indem die gleiche Regelaufgabe an einer einheitlichen Regelstrecke gelöst wird. Als
einfache und zugleich repräsentative Strecke wird ein T1-System gewählt. Es wird
angenommen, dass der Regelkreis vorher (bis zum Zeitpunkt t = 0) in Ruhe war, d. h. alle
Größen w(t), x‘(t), e(t), y(t), x(t), z(t) usw. sind für alle Zeiten t < 0 gleich null. Dann gibt es
nur zwei unabhängig von außen einwirkende Signale, welche den Regelkreis aus diesem
Gleichgewicht bringen können: Dies sind z(t) und w(t), denn alle anderen sind nur abhängige
Größen. Je nach dem hauptsächlichen Ziel der Regelaufgabe unterscheidet man folgerichtig
auch die zwei zugehörigen Betriebsarten: Führungs- (w(t)) und Störungsbetrieb (z(t)).
Führungsbetrieb. Beim Führungsbetrieb spielen Störungen und deren Ausregelung eine
untergeordnete Rolle (z = 0). Stattdessen ändert sich die gewünschte Führungsgröße w
signifikant, und der Regler soll die Regelgröße x entsprechend ändern. Als Testsignal eignet
sich ein Sprung der Führungsgröße w(t) mit anschließender Messung der
Führungssprungantwort x(t).
Störungsbetrieb. Beim Störungsbetrieb (Festwertbetrieb) muss ein fester Soll-Zustand
aufrecht erhalten werden, weshalb die Führungsgröße w konstant ist. Üblicherweise ändert
sich die Störgröße z, und der Regler muss diese Störung ausregeln. Als Testsignal zur
Messung der Qualität des Reglers (Regelgüte) eignet sich ein Sprung am Störgrößeneingang
z(t), wobei man das Zeitverhalten der Regelgröße x(t) beobachtet (Störungssprungantwort).
P
I
D
D
D
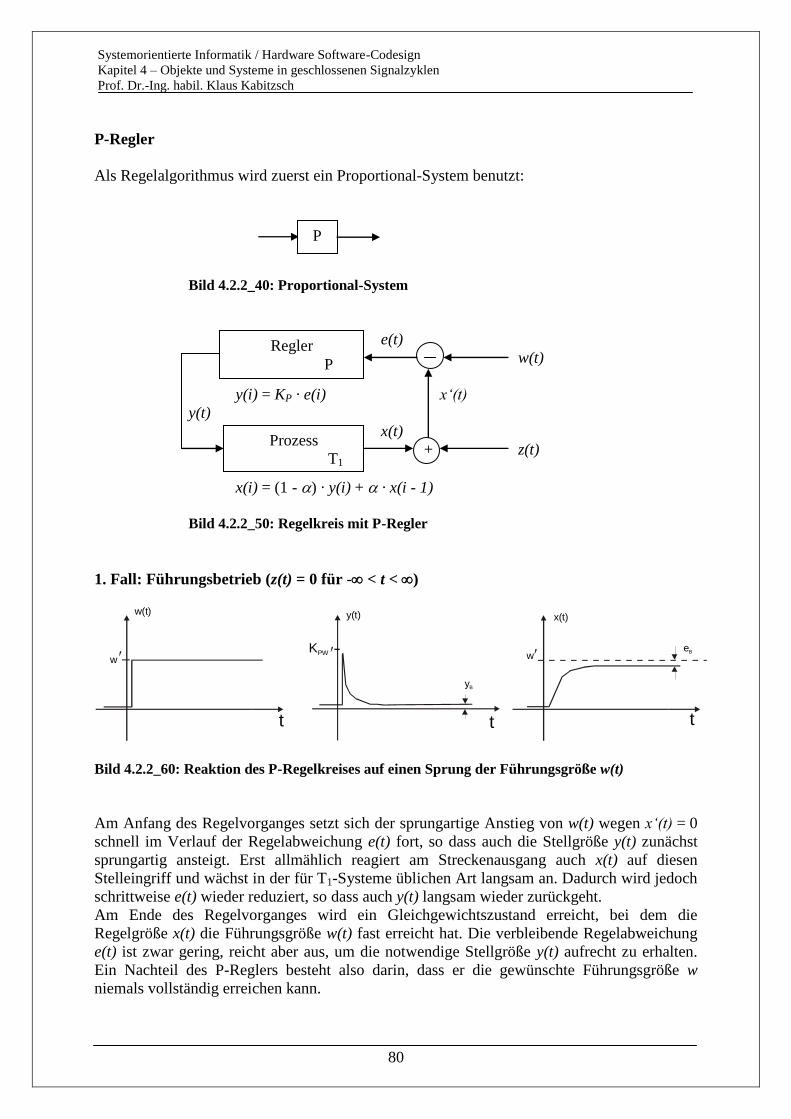
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
80
P-Regler
Als Regelalgorithmus wird zuerst ein Proportional-System benutzt:
Bild 4.2.2_40: Proportional-System
e(t)
w(t)
y(i) = KP · e(i) x‘(t)
y(t)
x(t)
+ z(t)
x(i) = (1 - ) · y(i) + · x(i - 1)
Bild 4.2.2_50: Regelkreis mit P-Regler
1. Fall: Führungsbetrieb (z(t) = 0 für - < t < )
t t t
w(t)
w
x(t)y(t)
yB
eBw
KPW
Bild 4.2.2_60: Reaktion des P-Regelkreises auf einen Sprung der Führungsgröße w(t)
Am Anfang des Regelvorganges setzt sich der sprungartige Anstieg von w(t) wegen x‘(t) = 0
schnell im Verlauf der Regelabweichung e(t) fort, so dass auch die Stellgröße y(t) zunächst
sprungartig ansteigt. Erst allmählich reagiert am Streckenausgang auch x(t) auf diesen
Stelleingriff und wächst in der für T1-Systeme üblichen Art langsam an. Dadurch wird jedoch
schrittweise e(t) wieder reduziert, so dass auch y(t) langsam wieder zurückgeht.
Am Ende des Regelvorganges wird ein Gleichgewichtszustand erreicht, bei dem die
Regelgröße x(t) die Führungsgröße w(t) fast erreicht hat. Die verbleibende Regelabweichung
e(t) ist zwar gering, reicht aber aus, um die notwendige Stellgröße y(t) aufrecht zu erhalten.
Ein Nachteil des P-Reglers besteht also darin, dass er die gewünschte Führungsgröße w
niemals vollständig erreichen kann.
Regler
P
Prozess
T1
P
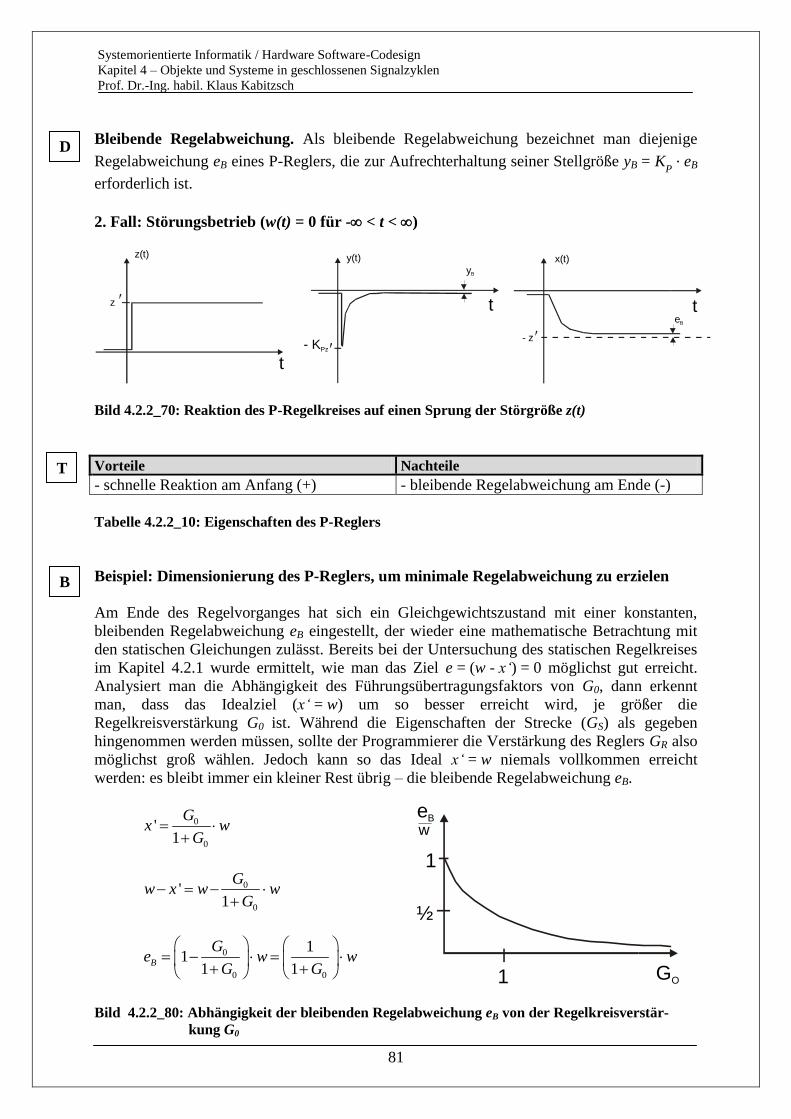
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
81
Bleibende Regelabweichung. Als bleibende Regelabweichung bezeichnet man diejenige
Regelabweichung eB eines P-Reglers, die zur Aufrechterhaltung seiner Stellgröße yB = KP . eB
erforderlich ist.
2. Fall: Störungsbetrieb (w(t) = 0 für - < t < )
t
t t
z(t)
z
x(t)y(t)
yB
eB
- z- KPz
Bild 4.2.2_70: Reaktion des P-Regelkreises auf einen Sprung der Störgröße z(t)
Vorteile Nachteile
- schnelle Reaktion am Anfang (+) - bleibende Regelabweichung am Ende (-)
Tabelle 4.2.2_10: Eigenschaften des P-Reglers
Beispiel: Dimensionierung des P-Reglers, um minimale Regelabweichung zu erzielen
Am Ende des Regelvorganges hat sich ein Gleichgewichtszustand mit einer konstanten,
bleibenden Regelabweichung eB eingestellt, der wieder eine mathematische Betrachtung mit
den statischen Gleichungen zulässt. Bereits bei der Untersuchung des statischen Regelkreises
im Kapitel 4.2.1 wurde ermittelt, wie man das Ziel e = (w - x‘) = 0 möglichst gut erreicht.
Analysiert man die Abhängigkeit des Führungsübertragungsfaktors von G0, dann erkennt
man, dass das Idealziel (x‘ = w) um so besser erreicht wird, je größer die
Regelkreisverstärkung G0 ist. Während die Eigenschaften der Strecke (GS) als gegeben
hingenommen werden müssen, sollte der Programmierer die Verstärkung des Reglers GR also
möglichst groß wählen. Jedoch kann so das Ideal x‘ = w niemals vollkommen erreicht
werden: es bleibt immer ein kleiner Rest übrig – die bleibende Regelabweichung eB.
0
0
'1
Gx w
G
0
0
'1
Gw x w w
G
0
0 0
11
1 1B
Ge w w
G G
1
1
GO
½
weB
Bild 4.2.2_80: Abhängigkeit der bleibenden Regelabweichung eB von der Regelkreisverstär-
kung G0
D
B
T
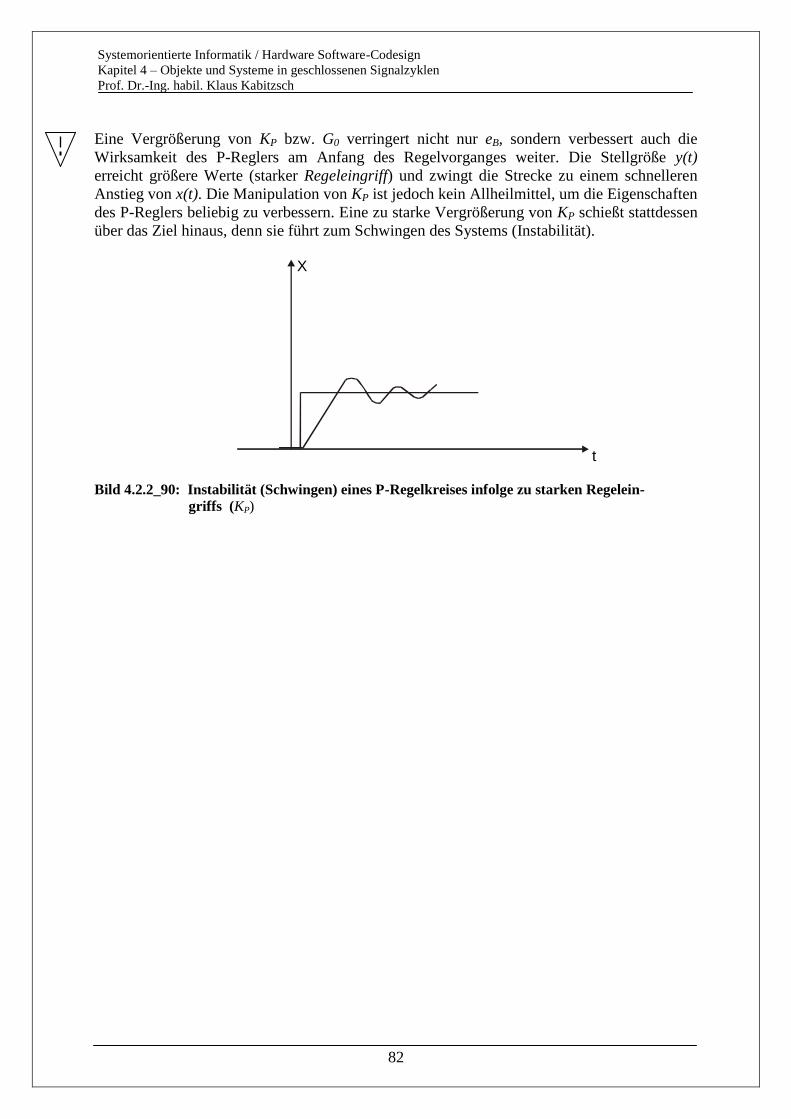
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
82
Eine Vergrößerung von KP bzw. G0 verringert nicht nur eB, sondern verbessert auch die
Wirksamkeit des P-Reglers am Anfang des Regelvorganges weiter. Die Stellgröße y(t)
erreicht größere Werte (starker Regeleingriff) und zwingt die Strecke zu einem schnelleren
Anstieg von x(t). Die Manipulation von KP ist jedoch kein Allheilmittel, um die Eigenschaften
des P-Reglers beliebig zu verbessern. Eine zu starke Vergrößerung von KP schießt stattdessen
über das Ziel hinaus, denn sie führt zum Schwingen des Systems (Instabilität).
X
t Bild 4.2.2_90: Instabilität (Schwingen) eines P-Regelkreises infolge zu starken Regelein-
griffs (KP)
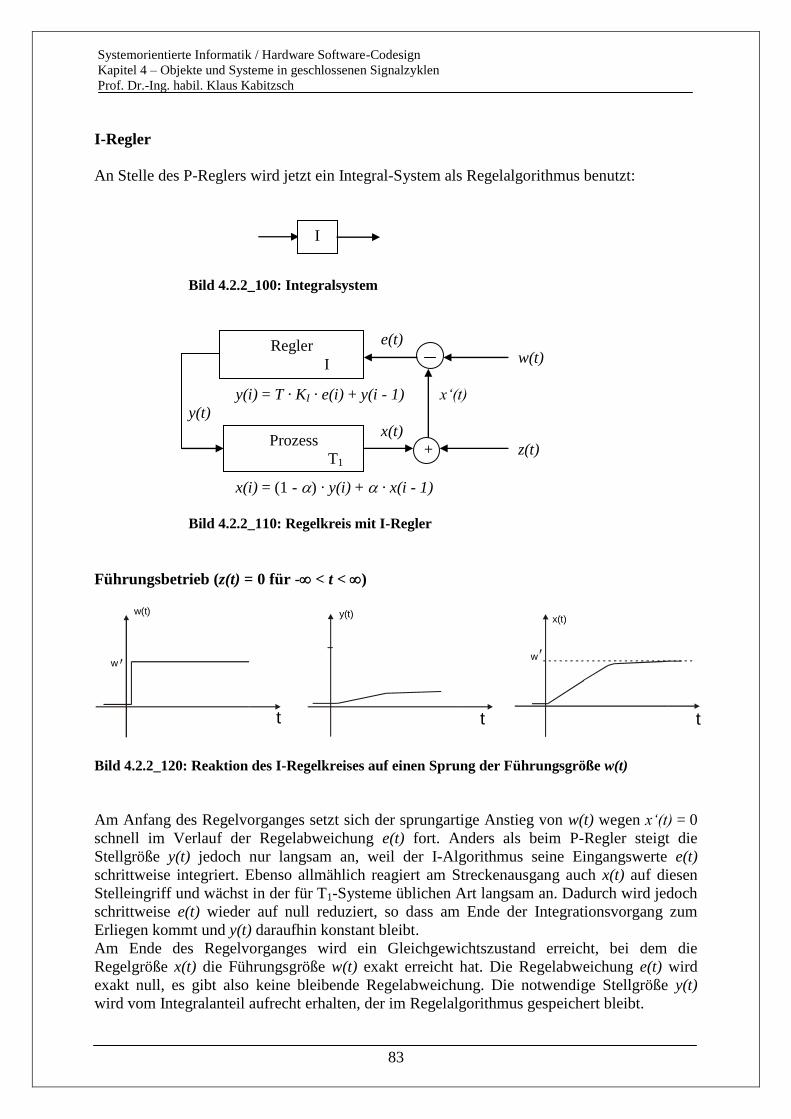
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
83
I-Regler
An Stelle des P-Reglers wird jetzt ein Integral-System als Regelalgorithmus benutzt:
Bild 4.2.2_100: Integralsystem
e(t)
w(t)
y(i) = T · KI · e(i) + y(i - 1) x‘(t)
y(t)
x(t)
+ z(t)
x(i) = (1 - ) · y(i) + · x(i - 1)
Bild 4.2.2_110: Regelkreis mit I-Regler
Führungsbetrieb (z(t) = 0 für - < t < )
t t t
w(t)
w
x(t)y(t)
w
Bild 4.2.2_120: Reaktion des I-Regelkreises auf einen Sprung der Führungsgröße w(t)
Am Anfang des Regelvorganges setzt sich der sprungartige Anstieg von w(t) wegen x‘(t) = 0
schnell im Verlauf der Regelabweichung e(t) fort. Anders als beim P-Regler steigt die
Stellgröße y(t) jedoch nur langsam an, weil der I-Algorithmus seine Eingangswerte e(t)
schrittweise integriert. Ebenso allmählich reagiert am Streckenausgang auch x(t) auf diesen
Stelleingriff und wächst in der für T1-Systeme üblichen Art langsam an. Dadurch wird jedoch
schrittweise e(t) wieder auf null reduziert, so dass am Ende der Integrationsvorgang zum
Erliegen kommt und y(t) daraufhin konstant bleibt.
Am Ende des Regelvorganges wird ein Gleichgewichtszustand erreicht, bei dem die
Regelgröße x(t) die Führungsgröße w(t) exakt erreicht hat. Die Regelabweichung e(t) wird
exakt null, es gibt also keine bleibende Regelabweichung. Die notwendige Stellgröße y(t)
wird vom Integralanteil aufrecht erhalten, der im Regelalgorithmus gespeichert bleibt.
Regler
I
Prozess
T1
I
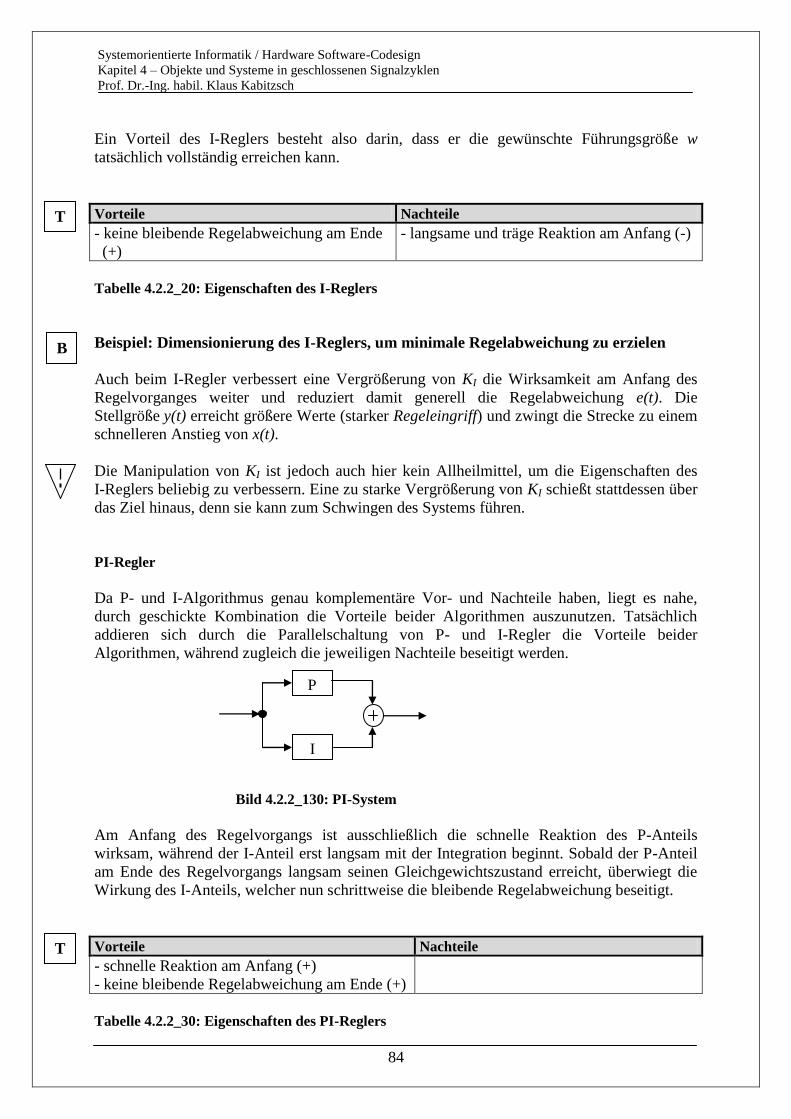
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
84
Ein Vorteil des I-Reglers besteht also darin, dass er die gewünschte Führungsgröße w
tatsächlich vollständig erreichen kann.
Vorteile Nachteile
- keine bleibende Regelabweichung am Ende
(+)
- langsame und träge Reaktion am Anfang (-)
Tabelle 4.2.2_20: Eigenschaften des I-Reglers
Beispiel: Dimensionierung des I-Reglers, um minimale Regelabweichung zu erzielen
Auch beim I-Regler verbessert eine Vergrößerung von KI die Wirksamkeit am Anfang des
Regelvorganges weiter und reduziert damit generell die Regelabweichung e(t). Die
Stellgröße y(t) erreicht größere Werte (starker Regeleingriff) und zwingt die Strecke zu einem
schnelleren Anstieg von x(t).
Die Manipulation von KI ist jedoch auch hier kein Allheilmittel, um die Eigenschaften des
I-Reglers beliebig zu verbessern. Eine zu starke Vergrößerung von KI schießt stattdessen über
das Ziel hinaus, denn sie kann zum Schwingen des Systems führen.
PI-Regler
Da P- und I-Algorithmus genau komplementäre Vor- und Nachteile haben, liegt es nahe,
durch geschickte Kombination die Vorteile beider Algorithmen auszunutzen. Tatsächlich
addieren sich durch die Parallelschaltung von P- und I-Regler die Vorteile beider
Algorithmen, während zugleich die jeweiligen Nachteile beseitigt werden.
Bild 4.2.2_130: PI-System
Am Anfang des Regelvorgangs ist ausschließlich die schnelle Reaktion des P-Anteils
wirksam, während der I-Anteil erst langsam mit der Integration beginnt. Sobald der P-Anteil
am Ende des Regelvorgangs langsam seinen Gleichgewichtszustand erreicht, überwiegt die
Wirkung des I-Anteils, welcher nun schrittweise die bleibende Regelabweichung beseitigt.
Vorteile Nachteile
- schnelle Reaktion am Anfang (+)
- keine bleibende Regelabweichung am Ende (+)
Tabelle 4.2.2_30: Eigenschaften des PI-Reglers
B
T
P
I
T
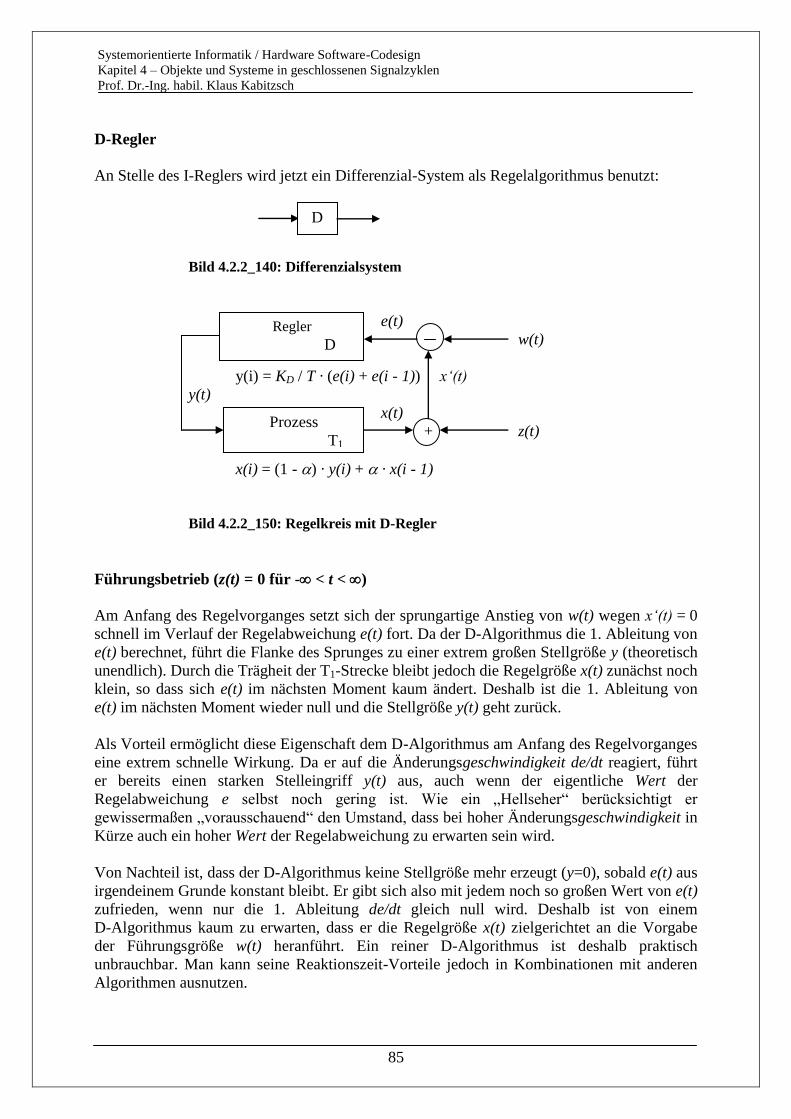
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
85
D-Regler
An Stelle des I-Reglers wird jetzt ein Differenzial-System als Regelalgorithmus benutzt:
Bild 4.2.2_140: Differenzialsystem
e(t)
w(t)
y(i) = KD / T · (e(i) + e(i - 1)) x‘(t)
y(t)
x(t)
+ z(t)
x(i) = (1 - ) · y(i) + · x(i - 1)
Bild 4.2.2_150: Regelkreis mit D-Regler
Führungsbetrieb (z(t) = 0 für - < t < )
Am Anfang des Regelvorganges setzt sich der sprungartige Anstieg von w(t) wegen x‘(t) = 0
schnell im Verlauf der Regelabweichung e(t) fort. Da der D-Algorithmus die 1. Ableitung von
e(t) berechnet, führt die Flanke des Sprunges zu einer extrem großen Stellgröße y (theoretisch
unendlich). Durch die Trägheit der T1-Strecke bleibt jedoch die Regelgröße x(t) zunächst noch
klein, so dass sich e(t) im nächsten Moment kaum ändert. Deshalb ist die 1. Ableitung von
e(t) im nächsten Moment wieder null und die Stellgröße y(t) geht zurück.
Als Vorteil ermöglicht diese Eigenschaft dem D-Algorithmus am Anfang des Regelvorganges
eine extrem schnelle Wirkung. Da er auf die Änderungsgeschwindigkeit de/dt reagiert, führt
er bereits einen starken Stelleingriff y(t) aus, auch wenn der eigentliche Wert der
Regelabweichung e selbst noch gering ist. Wie ein „Hellseher“ berücksichtigt er
gewissermaßen „vorausschauend“ den Umstand, dass bei hoher Änderungsgeschwindigkeit in
Kürze auch ein hoher Wert der Regelabweichung zu erwarten sein wird.
Von Nachteil ist, dass der D-Algorithmus keine Stellgröße mehr erzeugt (y=0), sobald e(t) aus
irgendeinem Grunde konstant bleibt. Er gibt sich also mit jedem noch so großen Wert von e(t)
zufrieden, wenn nur die 1. Ableitung de/dt gleich null wird. Deshalb ist von einem
D-Algorithmus kaum zu erwarten, dass er die Regelgröße x(t) zielgerichtet an die Vorgabe
der Führungsgröße w(t) heranführt. Ein reiner D-Algorithmus ist deshalb praktisch
unbrauchbar. Man kann seine Reaktionszeit-Vorteile jedoch in Kombinationen mit anderen
Algorithmen ausnutzen.
Regler
D
Prozess
T1
D
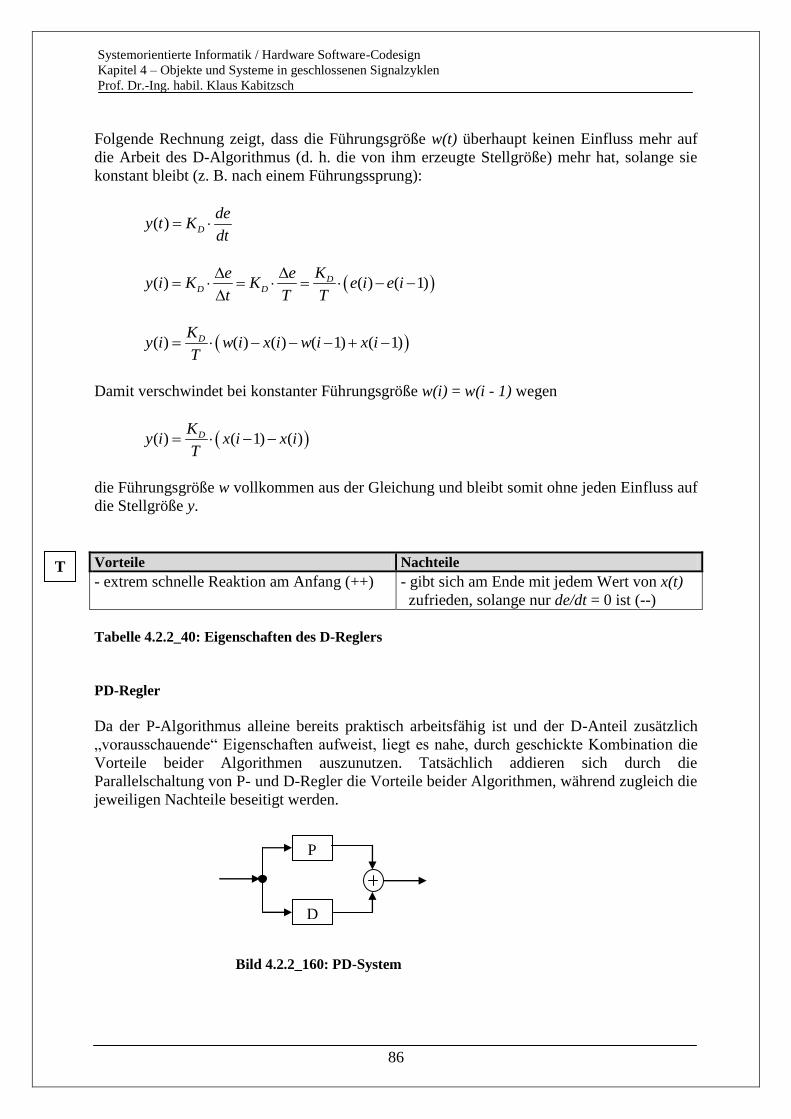
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
86
Folgende Rechnung zeigt, dass die Führungsgröße w(t) überhaupt keinen Einfluss mehr auf
die Arbeit des D-Algorithmus (d. h. die von ihm erzeugte Stellgröße) mehr hat, solange sie
konstant bleibt (z. B. nach einem Führungssprung):
( ) D
dey t K
dt
( ) ( ) ( 1)DD D
Ke ey i K K e i e i
t T T
( ) ( ) ( ) ( 1) ( 1)DKy i w i x i w i x i
T
Damit verschwindet bei konstanter Führungsgröße w(i) = w(i - 1) wegen
( ) ( 1) ( )DKy i x i x i
T
die Führungsgröße w vollkommen aus der Gleichung und bleibt somit ohne jeden Einfluss auf
die Stellgröße y.
Vorteile Nachteile
- extrem schnelle Reaktion am Anfang (++) - gibt sich am Ende mit jedem Wert von x(t)
zufrieden, solange nur de/dt = 0 ist (--)
Tabelle 4.2.2_40: Eigenschaften des D-Reglers
PD-Regler
Da der P-Algorithmus alleine bereits praktisch arbeitsfähig ist und der D-Anteil zusätzlich
„vorausschauende“ Eigenschaften aufweist, liegt es nahe, durch geschickte Kombination die
Vorteile beider Algorithmen auszunutzen. Tatsächlich addieren sich durch die
Parallelschaltung von P- und D-Regler die Vorteile beider Algorithmen, während zugleich die
jeweiligen Nachteile beseitigt werden.
Bild 4.2.2_160: PD-System
T
P
D
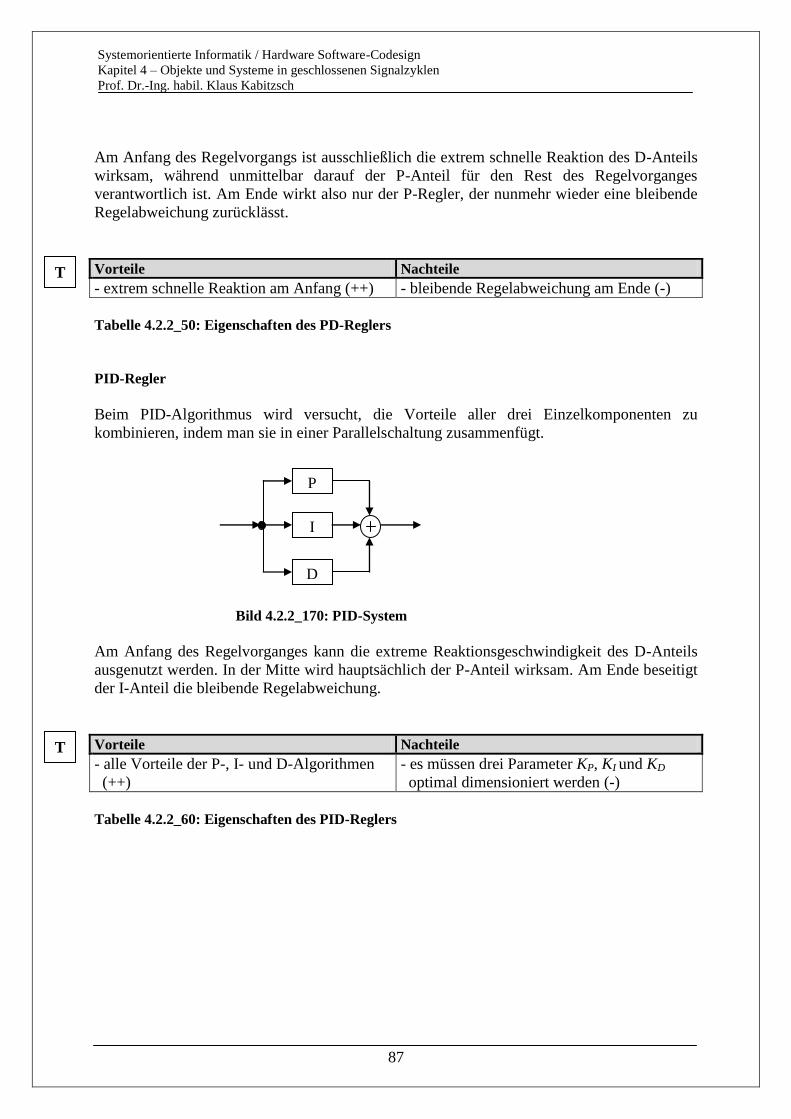
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
87
Am Anfang des Regelvorgangs ist ausschließlich die extrem schnelle Reaktion des D-Anteils
wirksam, während unmittelbar darauf der P-Anteil für den Rest des Regelvorganges
verantwortlich ist. Am Ende wirkt also nur der P-Regler, der nunmehr wieder eine bleibende
Regelabweichung zurücklässt.
Vorteile Nachteile
- extrem schnelle Reaktion am Anfang (++) - bleibende Regelabweichung am Ende (-)
Tabelle 4.2.2_50: Eigenschaften des PD-Reglers
PID-Regler
Beim PID-Algorithmus wird versucht, die Vorteile aller drei Einzelkomponenten zu
kombinieren, indem man sie in einer Parallelschaltung zusammenfügt.
Bild 4.2.2_170: PID-System
Am Anfang des Regelvorganges kann die extreme Reaktionsgeschwindigkeit des D-Anteils
ausgenutzt werden. In der Mitte wird hauptsächlich der P-Anteil wirksam. Am Ende beseitigt
der I-Anteil die bleibende Regelabweichung.
Vorteile Nachteile
- alle Vorteile der P-, I- und D-Algorithmen
(++)
- es müssen drei Parameter KP, KI und KD
optimal dimensioniert werden (-)
Tabelle 4.2.2_60: Eigenschaften des PID-Reglers
T
P
I
D
T
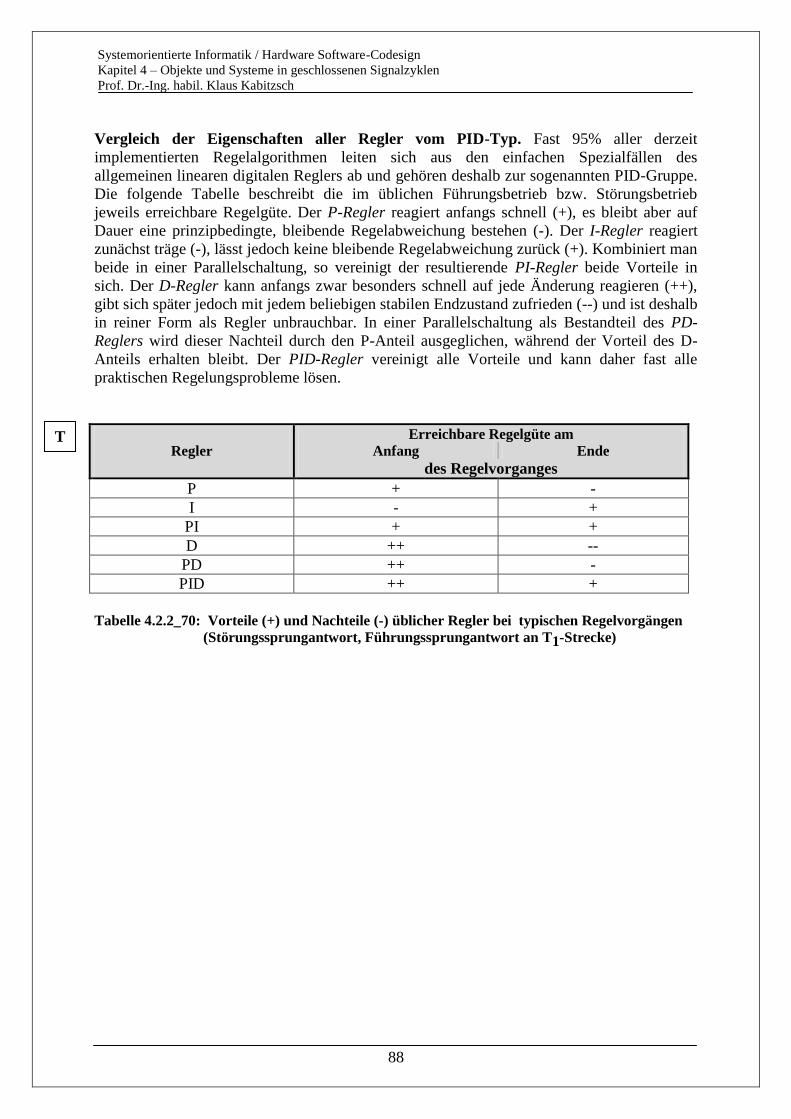
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
88
Vergleich der Eigenschaften aller Regler vom PID-Typ. Fast 95% aller derzeit
implementierten Regelalgorithmen leiten sich aus den einfachen Spezialfällen des
allgemeinen linearen digitalen Reglers ab und gehören deshalb zur sogenannten PID-Gruppe.
Die folgende Tabelle beschreibt die im üblichen Führungsbetrieb bzw. Störungsbetrieb
jeweils erreichbare Regelgüte. Der P-Regler reagiert anfangs schnell (+), es bleibt aber auf
Dauer eine prinzipbedingte, bleibende Regelabweichung bestehen (-). Der I-Regler reagiert
zunächst träge (-), lässt jedoch keine bleibende Regelabweichung zurück (+). Kombiniert man
beide in einer Parallelschaltung, so vereinigt der resultierende PI-Regler beide Vorteile in
sich. Der D-Regler kann anfangs zwar besonders schnell auf jede Änderung reagieren (++),
gibt sich später jedoch mit jedem beliebigen stabilen Endzustand zufrieden (--) und ist deshalb
in reiner Form als Regler unbrauchbar. In einer Parallelschaltung als Bestandteil des PD-
Reglers wird dieser Nachteil durch den P-Anteil ausgeglichen, während der Vorteil des D-
Anteils erhalten bleibt. Der PID-Regler vereinigt alle Vorteile und kann daher fast alle
praktischen Regelungsprobleme lösen.
Erreichbare Regelgüte am
Regler Anfang Ende
des Regelvorganges
P + -
I - +
PI + +
D ++ --
PD ++ -
PID ++ +
Tabelle 4.2.2_70: Vorteile (+) und Nachteile (-) üblicher Regler bei typischen Regelvorgängen
(Störungssprungantwort, Führungssprungantwort an T1-Strecke)
T
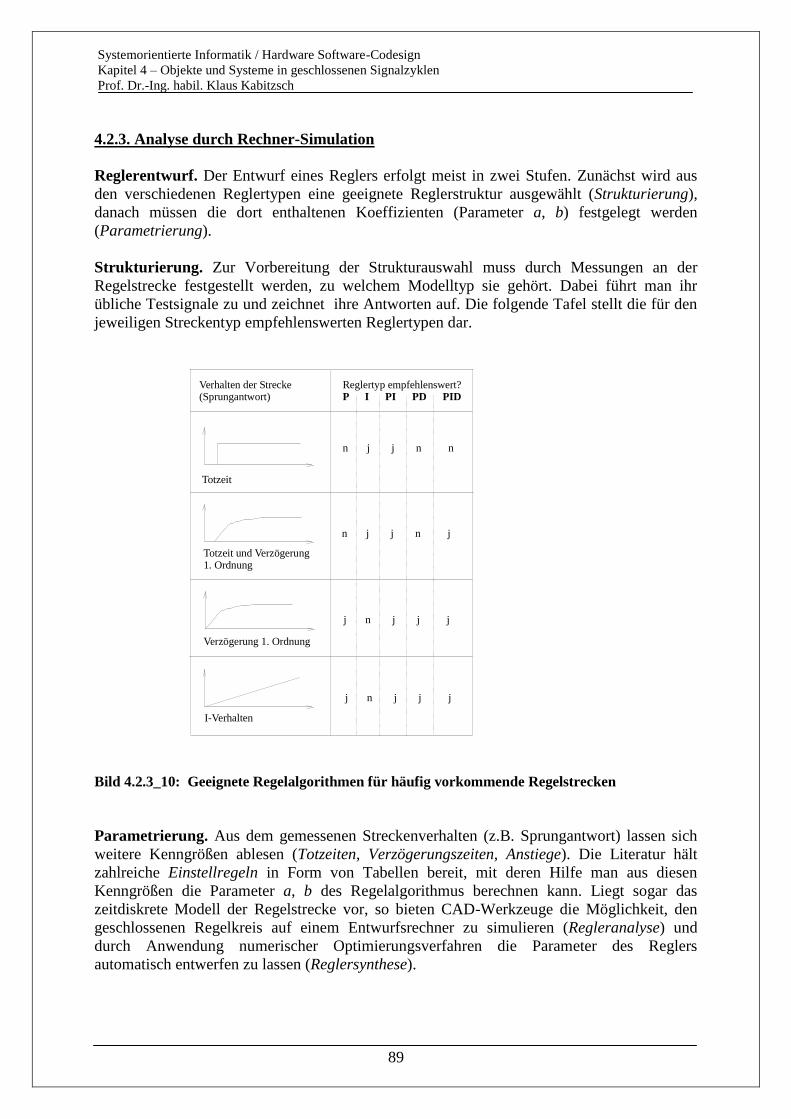
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
89
4.2.3. Analyse durch Rechner-Simulation
Reglerentwurf. Der Entwurf eines Reglers erfolgt meist in zwei Stufen. Zunächst wird aus
den verschiedenen Reglertypen eine geeignete Reglerstruktur ausgewählt (Strukturierung),
danach müssen die dort enthaltenen Koeffizienten (Parameter a, b) festgelegt werden
(Parametrierung).
Strukturierung. Zur Vorbereitung der Strukturauswahl muss durch Messungen an der
Regelstrecke festgestellt werden, zu welchem Modelltyp sie gehört. Dabei führt man ihr
übliche Testsignale zu und zeichnet ihre Antworten auf. Die folgende Tafel stellt die für den
jeweiligen Streckentyp empfehlenswerten Reglertypen dar.
Verhalten der Strecke(Sprungantwort)
Reglertyp empfehlenswert?P I PI PD PID
Totzeit
Totzeit und Verzögerung1. Ordnung
Verzögerung 1. Ordnung
I-Verhalten
n j j n n
n j j n j
j n j j j
j n j j j
Bild 4.2.3_10: Geeignete Regelalgorithmen für häufig vorkommende Regelstrecken
Parametrierung. Aus dem gemessenen Streckenverhalten (z.B. Sprungantwort) lassen sich
weitere Kenngrößen ablesen (Totzeiten, Verzögerungszeiten, Anstiege). Die Literatur hält
zahlreiche Einstellregeln in Form von Tabellen bereit, mit deren Hilfe man aus diesen
Kenngrößen die Parameter a, b des Regelalgorithmus berechnen kann. Liegt sogar das
zeitdiskrete Modell der Regelstrecke vor, so bieten CAD-Werkzeuge die Möglichkeit, den
geschlossenen Regelkreis auf einem Entwurfsrechner zu simulieren (Regleranalyse) und
durch Anwendung numerischer Optimierungsverfahren die Parameter des Reglers
automatisch entwerfen zu lassen (Reglersynthese).
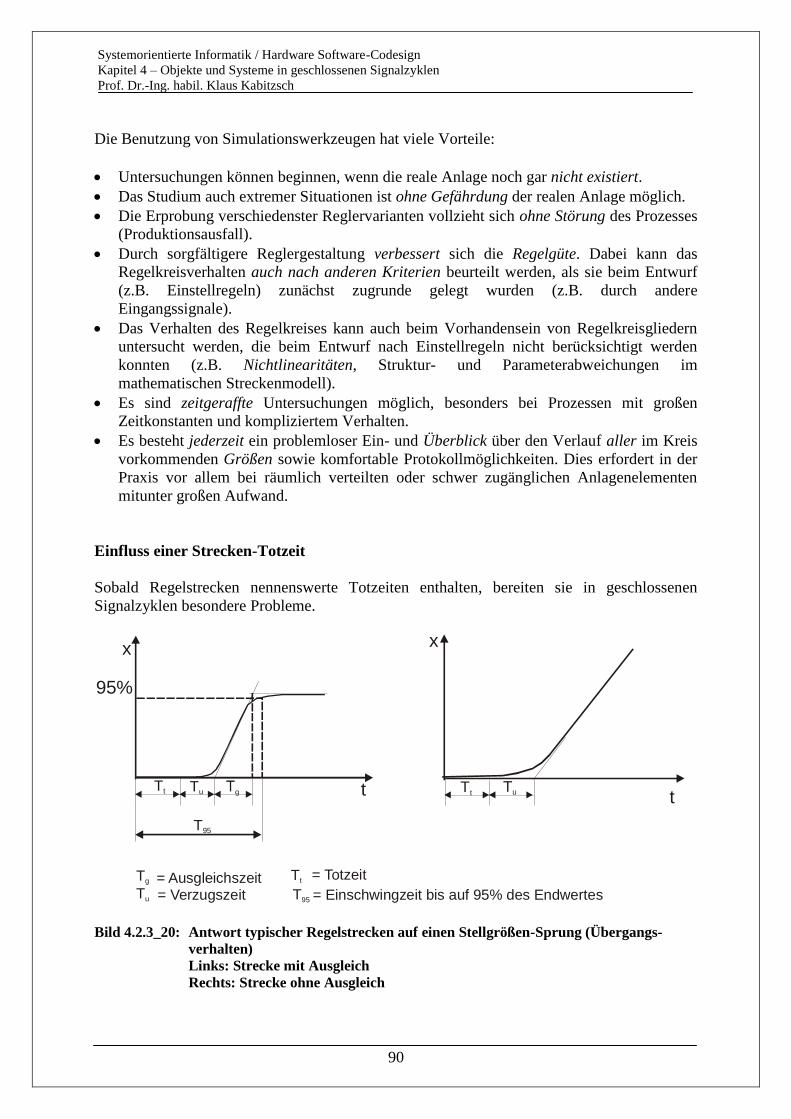
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
90
Die Benutzung von Simulationswerkzeugen hat viele Vorteile:
Untersuchungen können beginnen, wenn die reale Anlage noch gar nicht existiert.
Das Studium auch extremer Situationen ist ohne Gefährdung der realen Anlage möglich.
Die Erprobung verschiedenster Reglervarianten vollzieht sich ohne Störung des Prozesses
(Produktionsausfall).
Durch sorgfältigere Reglergestaltung verbessert sich die Regelgüte. Dabei kann das
Regelkreisverhalten auch nach anderen Kriterien beurteilt werden, als sie beim Entwurf
(z.B. Einstellregeln) zunächst zugrunde gelegt wurden (z.B. durch andere
Eingangssignale).
Das Verhalten des Regelkreises kann auch beim Vorhandensein von Regelkreisgliedern
untersucht werden, die beim Entwurf nach Einstellregeln nicht berücksichtigt werden
konnten (z.B. Nichtlinearitäten, Struktur- und Parameterabweichungen im
mathematischen Streckenmodell).
Es sind zeitgeraffte Untersuchungen möglich, besonders bei Prozessen mit großen
Zeitkonstanten und kompliziertem Verhalten.
Es besteht jederzeit ein problemloser Ein- und Überblick über den Verlauf aller im Kreis
vorkommenden Größen sowie komfortable Protokollmöglichkeiten. Dies erfordert in der
Praxis vor allem bei räumlich verteilten oder schwer zugänglichen Anlagenelementen
mitunter großen Aufwand.
Einfluss einer Strecken-Totzeit
Sobald Regelstrecken nennenswerte Totzeiten enthalten, bereiten sie in geschlossenen
Signalzyklen besondere Probleme.
t t
x x
95%
Tt
Tt
TtTu
Tu
Tu
Tg
T95
T95
= Ausgleichszeit= Verzugszeit
= Totzeit
= Einschwingzeit bis auf 95% des Endwertes Bild 4.2.3_20: Antwort typischer Regelstrecken auf einen Stellgrößen-Sprung (Übergangs-
verhalten)
Links: Strecke mit Ausgleich
Rechts: Strecke ohne Ausgleich
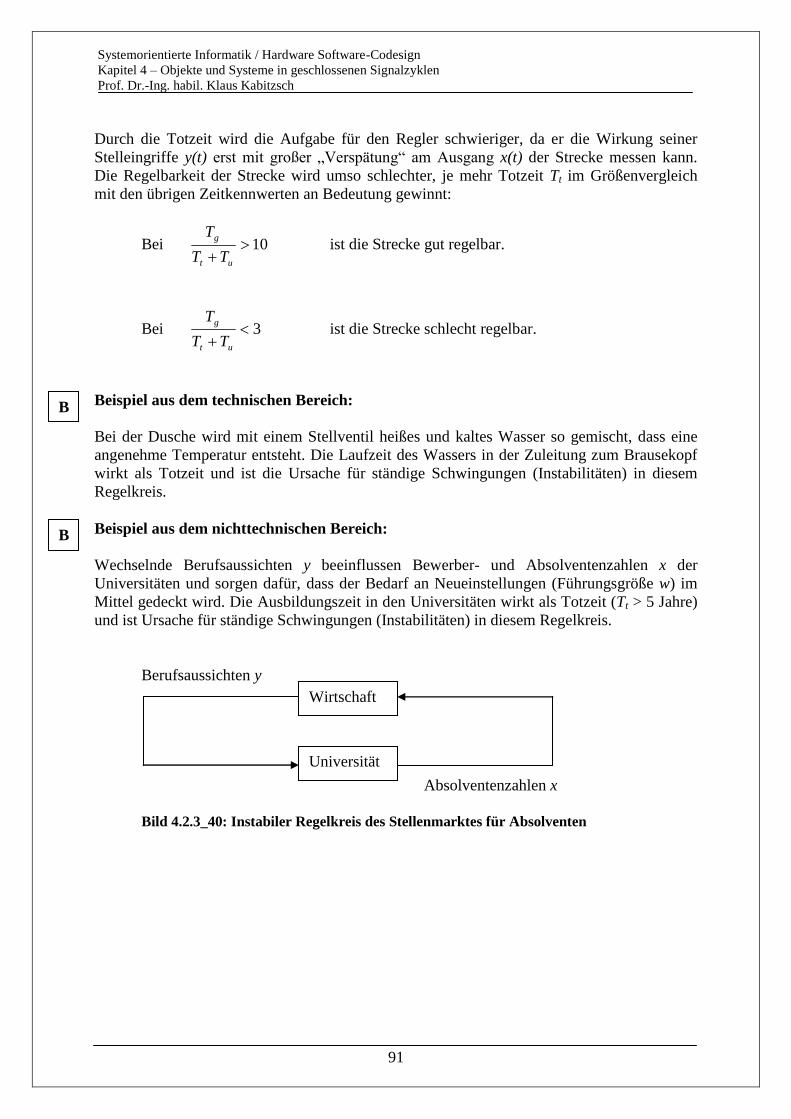
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
91
Durch die Totzeit wird die Aufgabe für den Regler schwieriger, da er die Wirkung seiner
Stelleingriffe y(t) erst mit großer „Verspätung“ am Ausgang x(t) der Strecke messen kann.
Die Regelbarkeit der Strecke wird umso schlechter, je mehr Totzeit Tt im Größenvergleich
mit den übrigen Zeitkennwerten an Bedeutung gewinnt:
Bei 10 ut
g
TT
T ist die Strecke gut regelbar.
Bei 3 ut
g
TT
T ist die Strecke schlecht regelbar.
Beispiel aus dem technischen Bereich:
Bei der Dusche wird mit einem Stellventil heißes und kaltes Wasser so gemischt, dass eine
angenehme Temperatur entsteht. Die Laufzeit des Wassers in der Zuleitung zum Brausekopf
wirkt als Totzeit und ist die Ursache für ständige Schwingungen (Instabilitäten) in diesem
Regelkreis.
Beispiel aus dem nichttechnischen Bereich:
Wechselnde Berufsaussichten y beeinflussen Bewerber- und Absolventenzahlen x der
Universitäten und sorgen dafür, dass der Bedarf an Neueinstellungen (Führungsgröße w) im
Mittel gedeckt wird. Die Ausbildungszeit in den Universitäten wirkt als Totzeit (Tt > 5 Jahre)
und ist Ursache für ständige Schwingungen (Instabilitäten) in diesem Regelkreis.
Berufsaussichten y
Absolventenzahlen x
Bild 4.2.3_40: Instabiler Regelkreis des Stellenmarktes für Absolventen
B
B
Wirtschaft
Universität
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
92
4.2.4. Synthese durch Rechner-Optimierung
In den vorangegangenen Kapiteln wurden Möglichkeiten gezeigt, gefundene Hard- und
Softwarelösungen durch Simulation, Test usw. zu analysieren und damit zu prüfen, inwieweit
sie sich zur Erfüllung der ursprünglich gestellten Automatisierungsaufgabe eignen. Will man
möglichst gute Ergebnisse erreichen, so wird sich an eine solche Analyse meist eine
Überarbeitung der entwickelten Algorithmen, Programme usw. anschließen. Dieses mehr oder
weniger zielgerichtete Einarbeiten von Änderungen wird sehr stark von der Intuition des
Ingenieurs geprägt, welcher dabei oft um gewisse Formen des "systematischen Probierens"
nicht umhinkommt. Viele ingenieurmäßige Entwurfsmethoden nutzen dabei das Prinzip der
Synthese durch iterative Analyse aus (siehe Bild 4.2.4_10). Dabei wird jede Lösung durch
den Ingenieur entsprechend der konkreten Aufgabe analysiert, Änderungen am Entwurf
vorgenommen und deren Ergebnisse durch eine erneute Analyse überprüft. Dieser Prozess
wird gegebenenfalls mehrfach wiederholt, wobei manche Änderungen auch rückgängig
gemacht werden müssen, wenn sich die in sie gesetzten Erwartungen nicht erfüllen.
Die bereits dargestellten rechnergestützten Analyseverfahren erleichtern diese
Vorgehensweise, indem durch Simulation, Emulation oder Test der Einfluss von Änderungen
auf das Gesamtergebnis sehr schnell überprüft werden kann. So können Untersuchungen des
geschlossenen Regelkreises nicht nur an der konkreten Anlage, sondern auch durch
Simulation am Rechnermodell stattfinden.
Über diese Analyse hinaus werden bei der rechnergestützten Optimierung nunmehr auch die
Entwurfsänderungen von einer mathematischen Optimierungsstrategie gesteuert, welche die
im Analyseteil ermittelte Güte des Entwurfs auswertet. Am weitesten entwickelt ist diese
Vorgehensweise beim Entwurf von Mikrorechnerreglern, weshalb im Folgenden
vorzugsweise auf diese Anwendung Bezug genommen wird. Ausgehend vom mathematischen
Regelkreismodell und einem durch den Nutzer eingebrachten Anfangsentwurf kann der
Entwurfsrechner jetzt also die Reglerkennwerte selbstständig derart abändern, dass die
geforderte Regelaufgabe von Optimierungsschritt zu Optimierungsschritt zunehmend besser
erfüllt wird. Über die Analyse hinaus ist damit auch eine rechnergestützte, iterative
Dimensionierungssynthese des Reglers möglich. Ein ähnliches Vorgehen ist auch in anderen
Bereichen der Elektronik üblich, z. B. beim Entwurf von Schaltungen oder Bauelementen.
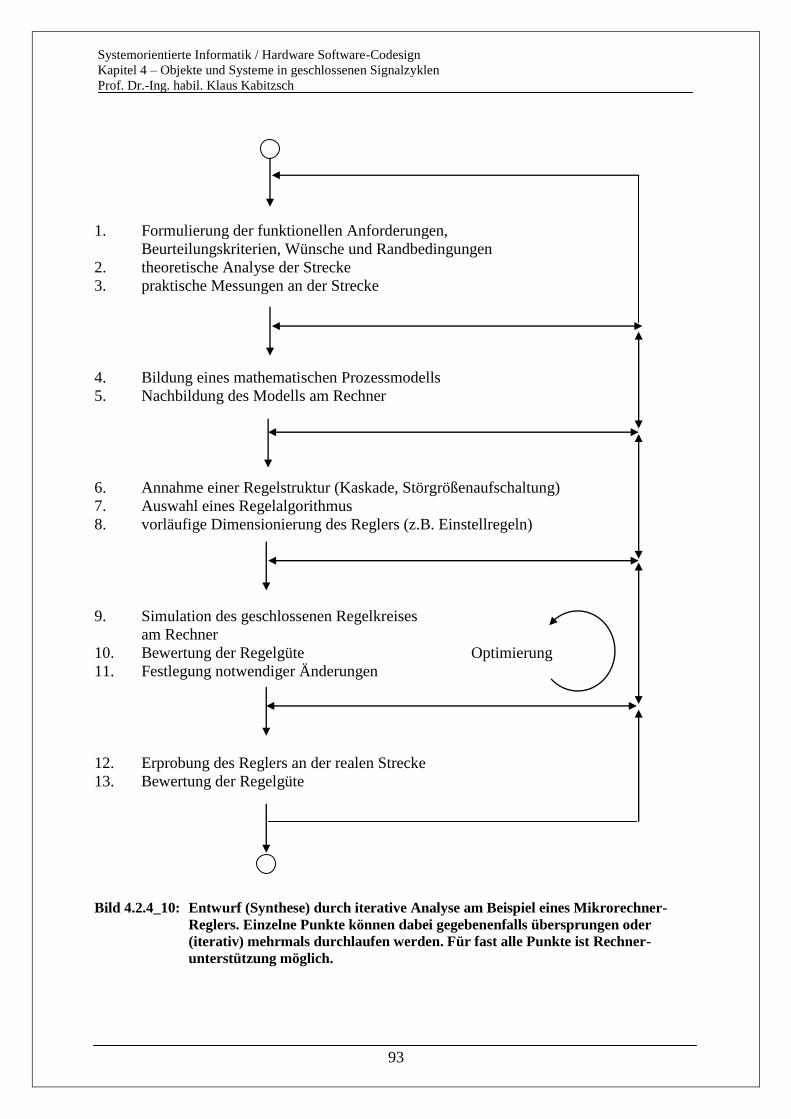
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
93
1. Formulierung der funktionellen Anforderungen,
Beurteilungskriterien, Wünsche und Randbedingungen
2. theoretische Analyse der Strecke
3. praktische Messungen an der Strecke
4. Bildung eines mathematischen Prozessmodells
5. Nachbildung des Modells am Rechner
6. Annahme einer Regelstruktur (Kaskade, Störgrößenaufschaltung)
7. Auswahl eines Regelalgorithmus
8. vorläufige Dimensionierung des Reglers (z.B. Einstellregeln)
9. Simulation des geschlossenen Regelkreises
am Rechner
10. Bewertung der Regelgüte Optimierung
11. Festlegung notwendiger Änderungen
12. Erprobung des Reglers an der realen Strecke
13. Bewertung der Regelgüte
Bild 4.2.4_10: Entwurf (Synthese) durch iterative Analyse am Beispiel eines Mikrorechner-
Reglers. Einzelne Punkte können dabei gegebenenfalls übersprungen oder
(iterativ) mehrmals durchlaufen werden. Für fast alle Punkte ist Rechner-
unterstützung möglich.
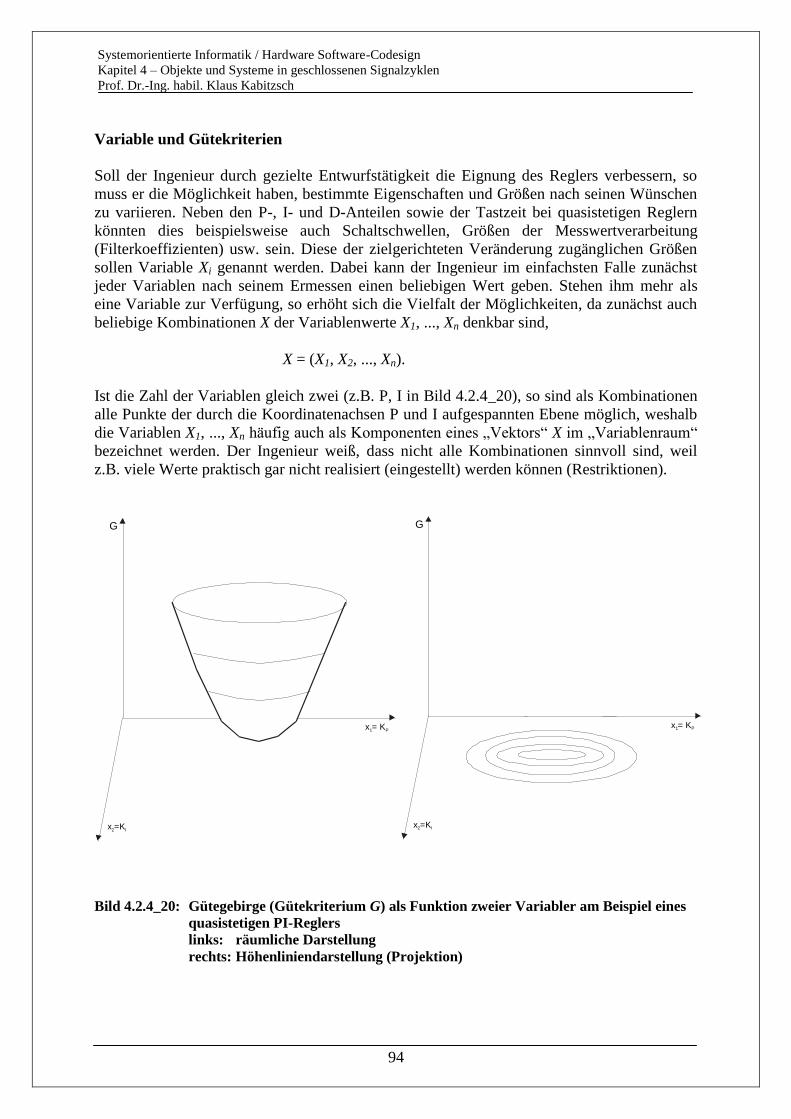
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
94
Variable und Gütekriterien
Soll der Ingenieur durch gezielte Entwurfstätigkeit die Eignung des Reglers verbessern, so
muss er die Möglichkeit haben, bestimmte Eigenschaften und Größen nach seinen Wünschen
zu variieren. Neben den P-, I- und D-Anteilen sowie der Tastzeit bei quasistetigen Reglern
könnten dies beispielsweise auch Schaltschwellen, Größen der Messwertverarbeitung
(Filterkoeffizienten) usw. sein. Diese der zielgerichteten Veränderung zugänglichen Größen
sollen Variable Xi genannt werden. Dabei kann der Ingenieur im einfachsten Falle zunächst
jeder Variablen nach seinem Ermessen einen beliebigen Wert geben. Stehen ihm mehr als
eine Variable zur Verfügung, so erhöht sich die Vielfalt der Möglichkeiten, da zunächst auch
beliebige Kombinationen X der Variablenwerte X1, ..., Xn denkbar sind,
X = (X1, X2, ..., Xn).
Ist die Zahl der Variablen gleich zwei (z.B. P, I in Bild 4.2.4_20), so sind als Kombinationen
alle Punkte der durch die Koordinatenachsen P und I aufgespannten Ebene möglich, weshalb
die Variablen X1, ..., Xn häufig auch als Komponenten eines „Vektors“ X im „Variablenraum“
bezeichnet werden. Der Ingenieur weiß, dass nicht alle Kombinationen sinnvoll sind, weil
z.B. viele Werte praktisch gar nicht realisiert (eingestellt) werden können (Restriktionen).
G
x = K1 P
x =K2 I
G
x = K1 P
x =K2 I
Bild 4.2.4_20: Gütegebirge (Gütekriterium G) als Funktion zweier Variabler am Beispiel eines
quasistetigen PI-Reglers
links: räumliche Darstellung
rechts: Höhenliniendarstellung (Projektion)
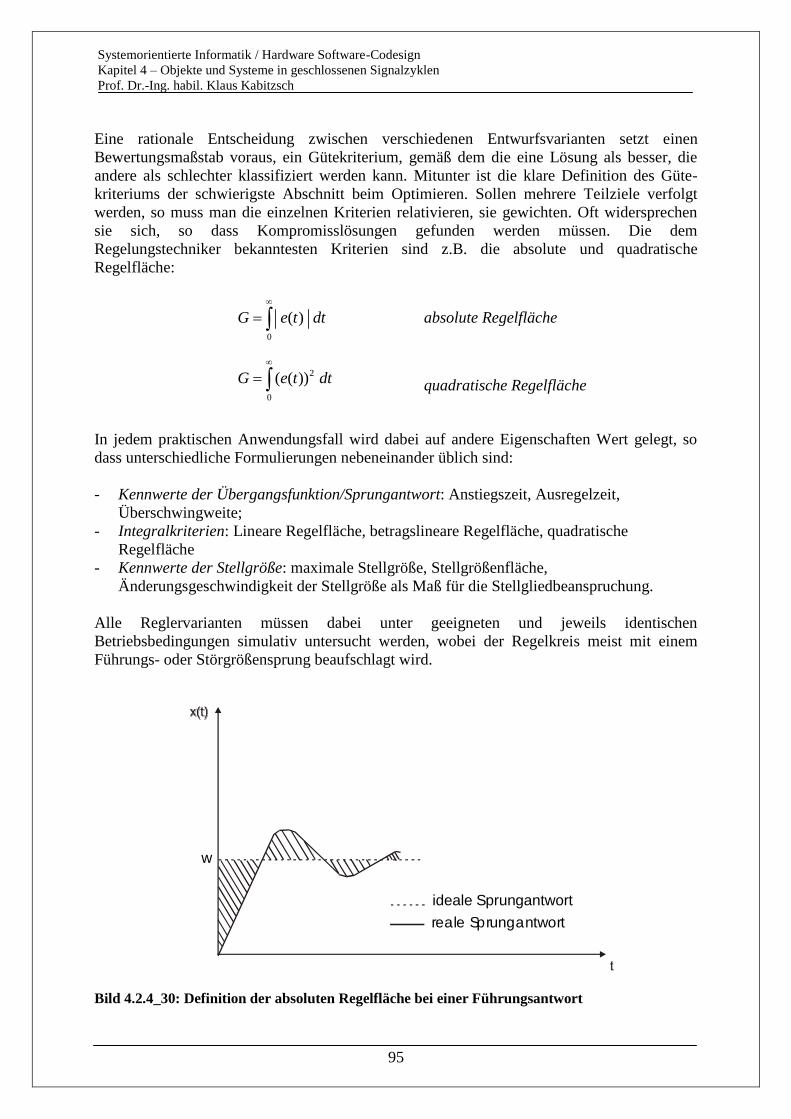
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
95
Eine rationale Entscheidung zwischen verschiedenen Entwurfsvarianten setzt einen
Bewertungsmaßstab voraus, ein Gütekriterium, gemäß dem die eine Lösung als besser, die
andere als schlechter klassifiziert werden kann. Mitunter ist die klare Definition des Güte-
kriteriums der schwierigste Abschnitt beim Optimieren. Sollen mehrere Teilziele verfolgt
werden, so muss man die einzelnen Kriterien relativieren, sie gewichten. Oft widersprechen
sie sich, so dass Kompromisslösungen gefunden werden müssen. Die dem
Regelungstechniker bekanntesten Kriterien sind z.B. die absolute und quadratische
Regelfläche:
0
( )G e t dt
absolute Regelfläche
2
0
( ( ))G e t dt
quadratische Regelfläche
In jedem praktischen Anwendungsfall wird dabei auf andere Eigenschaften Wert gelegt, so
dass unterschiedliche Formulierungen nebeneinander üblich sind:
- Kennwerte der Übergangsfunktion/Sprungantwort: Anstiegszeit, Ausregelzeit,
Überschwingweite;
- Integralkriterien: Lineare Regelfläche, betragslineare Regelfläche, quadratische
Regelfläche
- Kennwerte der Stellgröße: maximale Stellgröße, Stellgrößenfläche,
Änderungsgeschwindigkeit der Stellgröße als Maß für die Stellgliedbeanspruchung.
Alle Reglervarianten müssen dabei unter geeigneten und jeweils identischen
Betriebsbedingungen simulativ untersucht werden, wobei der Regelkreis meist mit einem
Führungs- oder Störgrößensprung beaufschlagt wird.
w
ideale Sprungantwort
reale Sprungantwort
Bild 4.2.4_30: Definition der absoluten Regelfläche bei einer Führungsantwort
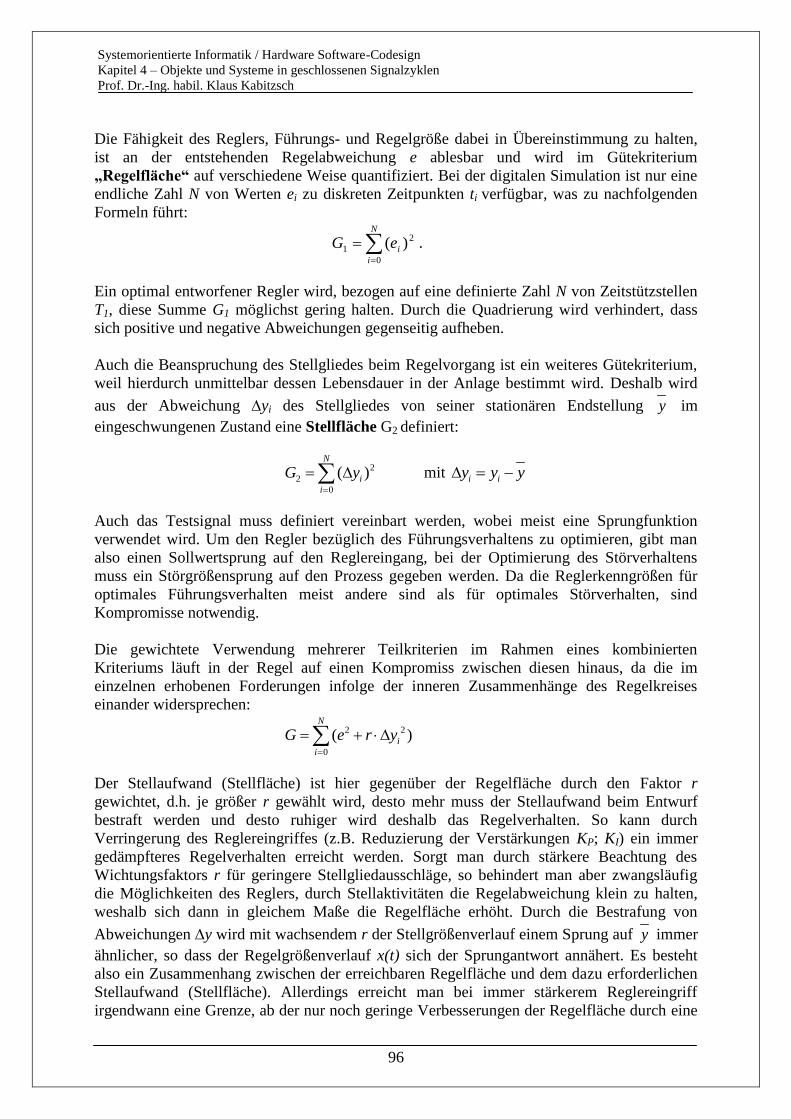
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
96
Die Fähigkeit des Reglers, Führungs- und Regelgröße dabei in Übereinstimmung zu halten,
ist an der entstehenden Regelabweichung e ablesbar und wird im Gütekriterium
„Regelfläche“ auf verschiedene Weise quantifiziert. Bei der digitalen Simulation ist nur eine
endliche Zahl N von Werten ei zu diskreten Zeitpunkten ti verfügbar, was zu nachfolgenden
Formeln führt:
N
i
ieG0
2
1 )( .
Ein optimal entworfener Regler wird, bezogen auf eine definierte Zahl N von Zeitstützstellen
T1, diese Summe G1 möglichst gering halten. Durch die Quadrierung wird verhindert, dass
sich positive und negative Abweichungen gegenseitig aufheben.
Auch die Beanspruchung des Stellgliedes beim Regelvorgang ist ein weiteres Gütekriterium,
weil hierdurch unmittelbar dessen Lebensdauer in der Anlage bestimmt wird. Deshalb wird
aus der Abweichung yi des Stellgliedes von seiner stationären Endstellung y im
eingeschwungenen Zustand eine Stellfläche G2 definiert:
2
2
0
( )N
i
i
G y
mit i iy y y
Auch das Testsignal muss definiert vereinbart werden, wobei meist eine Sprungfunktion
verwendet wird. Um den Regler bezüglich des Führungsverhaltens zu optimieren, gibt man
also einen Sollwertsprung auf den Reglereingang, bei der Optimierung des Störverhaltens
muss ein Störgrößensprung auf den Prozess gegeben werden. Da die Reglerkenngrößen für
optimales Führungsverhalten meist andere sind als für optimales Störverhalten, sind
Kompromisse notwendig.
Die gewichtete Verwendung mehrerer Teilkriterien im Rahmen eines kombinierten
Kriteriums läuft in der Regel auf einen Kompromiss zwischen diesen hinaus, da die im
einzelnen erhobenen Forderungen infolge der inneren Zusammenhänge des Regelkreises
einander widersprechen:
2 2
0
( )N
i
i
G e r y
Der Stellaufwand (Stellfläche) ist hier gegenüber der Regelfläche durch den Faktor r
gewichtet, d.h. je größer r gewählt wird, desto mehr muss der Stellaufwand beim Entwurf
bestraft werden und desto ruhiger wird deshalb das Regelverhalten. So kann durch
Verringerung des Reglereingriffes (z.B. Reduzierung der Verstärkungen KP; KI) ein immer
gedämpfteres Regelverhalten erreicht werden. Sorgt man durch stärkere Beachtung des
Wichtungsfaktors r für geringere Stellgliedausschläge, so behindert man aber zwangsläufig
die Möglichkeiten des Reglers, durch Stellaktivitäten die Regelabweichung klein zu halten,
weshalb sich dann in gleichem Maße die Regelfläche erhöht. Durch die Bestrafung von
Abweichungen y wird mit wachsendem r der Stellgrößenverlauf einem Sprung auf y immer
ähnlicher, so dass der Regelgrößenverlauf x(t) sich der Sprungantwort annähert. Es besteht
also ein Zusammenhang zwischen der erreichbaren Regelfläche und dem dazu erforderlichen
Stellaufwand (Stellfläche). Allerdings erreicht man bei immer stärkerem Reglereingriff
irgendwann eine Grenze, ab der nur noch geringe Verbesserungen der Regelfläche durch eine
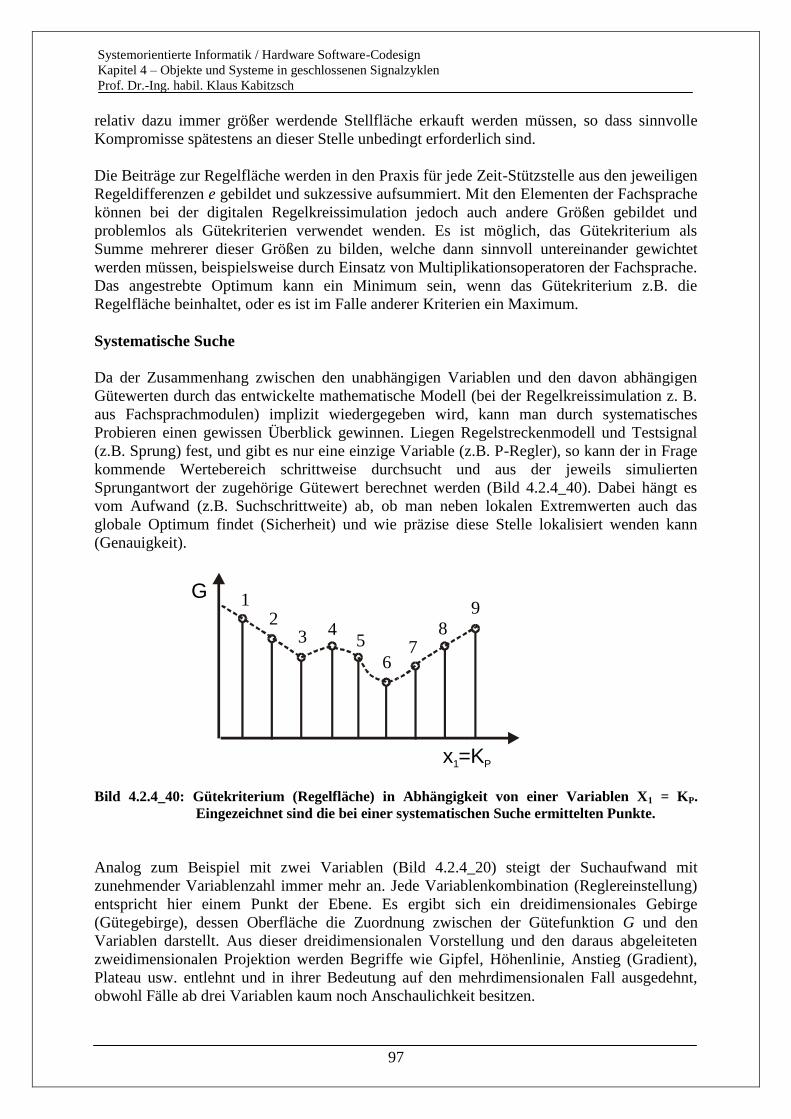
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
97
relativ dazu immer größer werdende Stellfläche erkauft werden müssen, so dass sinnvolle
Kompromisse spätestens an dieser Stelle unbedingt erforderlich sind.
Die Beiträge zur Regelfläche werden in den Praxis für jede Zeit-Stützstelle aus den jeweiligen
Regeldifferenzen e gebildet und sukzessive aufsummiert. Mit den Elementen der Fachsprache
können bei der digitalen Regelkreissimulation jedoch auch andere Größen gebildet und
problemlos als Gütekriterien verwendet wenden. Es ist möglich, das Gütekriterium als
Summe mehrerer dieser Größen zu bilden, welche dann sinnvoll untereinander gewichtet
werden müssen, beispielsweise durch Einsatz von Multiplikationsoperatoren der Fachsprache.
Das angestrebte Optimum kann ein Minimum sein, wenn das Gütekriterium z.B. die
Regelfläche beinhaltet, oder es ist im Falle anderer Kriterien ein Maximum.
Systematische Suche
Da der Zusammenhang zwischen den unabhängigen Variablen und den davon abhängigen
Gütewerten durch das entwickelte mathematische Modell (bei der Regelkreissimulation z. B.
aus Fachsprachmodulen) implizit wiedergegeben wird, kann man durch systematisches
Probieren einen gewissen Überblick gewinnen. Liegen Regelstreckenmodell und Testsignal
(z.B. Sprung) fest, und gibt es nur eine einzige Variable (z.B. P-Regler), so kann der in Frage
kommende Wertebereich schrittweise durchsucht und aus der jeweils simulierten
Sprungantwort der zugehörige Gütewert berechnet werden (Bild 4.2.4_40). Dabei hängt es
vom Aufwand (z.B. Suchschrittweite) ab, ob man neben lokalen Extremwerten auch das
globale Optimum findet (Sicherheit) und wie präzise diese Stelle lokalisiert wenden kann
(Genauigkeit).
G
x =K1 P
23 4
5
67
8
91
Bild 4.2.4_40: Gütekriterium (Regelfläche) in Abhängigkeit von einer Variablen X1 = KP.
Eingezeichnet sind die bei einer systematischen Suche ermittelten Punkte.
Analog zum Beispiel mit zwei Variablen (Bild 4.2.4_20) steigt der Suchaufwand mit
zunehmender Variablenzahl immer mehr an. Jede Variablenkombination (Reglereinstellung)
entspricht hier einem Punkt der Ebene. Es ergibt sich ein dreidimensionales Gebirge
(Gütegebirge), dessen Oberfläche die Zuordnung zwischen der Gütefunktion G und den
Variablen darstellt. Aus dieser dreidimensionalen Vorstellung und den daraus abgeleiteten
zweidimensionalen Projektion werden Begriffe wie Gipfel, Höhenlinie, Anstieg (Gradient),
Plateau usw. entlehnt und in ihrer Bedeutung auf den mehrdimensionalen Fall ausgedehnt,
obwohl Fälle ab drei Variablen kaum noch Anschaulichkeit besitzen.
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
98
Deterministische Verfahren
Die im vorigen Kapitel erkennbaren Parallelen zur Extremwertproblematik der
Differenzialrechnung legen zunächst nahe, die dort entwickelten Methoden direkt zu
übernehmen. Leider lassen sich nun wenige Probleme analytisch fassen, wobei meist
Gleichungssysteme entstehen, die ihrerseits schwer lösbar sind. Gewisse Denkweisen werden
jedoch beim Einsatz sogenannter deterministischer Verfahren übernommen. In der
englischsprachigen Literatur gibt es dafür den treffenden Begriff „Hill-Climbing-Strategien“
(engl. hill climbing = einen Hügel erklimmen), da ihre Herangehensweise bei der Suche nach
einem Optimum (Maximum) der intuitiven Art eines (blinden) Bergsteigers entspricht, der
sich von einem Startpunkt aus schrittweise bis zum höchsten Gipfel eines Gebirges
emportastet. Im Falle der Minimumsuche kehrt sich lediglich der Richtungssinn der
Bewegungen um. Ausgehend von einer Anfangs-Variablenkombination werden die Variablen
also in kleinen Schritten zielgerichtet derart verändert, so dass Schritt für Schritt ein immer
besserer Gütewert erreicht wird.
Die zahlreichen bekannten Verfahren unterscheiden sich meist vor allem dadurch, wie sie die
Schrittweite sowie die Schrittrichtung der Variablenänderung in Richtung einer
Güteverbesserung festlegen. Einfache Verfahren verändern „probehalber“ jeweils nur eine
Variable (Suchschritt in Koordinatenrichtung) und prüfen in einem Simulationslauf, ob die
neue Variablenkombination den Gütewert verbessert. Ist dies nicht der Fall, wird die
Änderung rückgängig gemacht und der nächste Suchschritt in Richtung der nächsten
Koordinate (Variablen) vollzogen.
Gradientenverfahren ermitteln (z.B. durch Suchschritte) die partiellen Ableitungen der
Gütefunktion G nach den Variablen Xi, also die Werte G/ Xi. Daraus kann der Gradient,
also die Schrittrichtung hin zur bestmöglichen Verbesserung der Gütefunktion, bestimmt
werden. Wählt man die Schrittweite zu klein, so sind auf Grund der größeren Schrittanzahl
sehr viele Simulationsläufe notwendig, wodurch sich die Rechenzeit erhöht. Bei großer
Schrittweite besteht andererseits die Gefahr, das Optimum zu verfehlen. Allgemeingültige
Aussagen zur günstigsten Wahl der Schrittweite lassen sich kaum treffen.
Die Anfangslösung (Startpunkt), von der ausgehend der Rechner dann allein das Optimum
findet, muss wiederum intuitiv vom Ingenieur festgelegt werden, z.B. nach Erfahrungswerten
oder Einstellregeln. Das Optimum wird dann als erreicht angesehen, wenn die vom Ingenieur
festgelegte Abbruchbedingungen erfüllt sind. Mögliche Abbruchgründe können sein, dass der
Gütewert durch viele aufeinanderfolgende Iterationen kaum noch verbessert wird, dass sich
die Werte der Variablen kaum noch ändern oder dass Rechenzeitgrenzen überschritten
werden.
Nach Erreichen des Optimums kann sich ein erneuter Optimierungslauf anschließen, um
gegebenenfalls ein anderes lokales Optimum zu finden, wobei man sinnvollerweise von
anderen Startpunkten ausgeht und eventuell auch die Anzahl und Art der Variablen, die
Gewichtung der Teil-Gütekriterien usw. ändern kann.
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
99
Zufallsverfahren
Das einfachste Zufallsverfahren sucht blind und rein zufällig Variablenkombinationen heraus
und berechnet durch einen Simulationslauf den jeweiligen Gütewert. Aus diesen
gleichverteilten Stichproben wird die beste als Optimum ausgewählt. Zur Realisierung dieser,
auf Grund ihrer Ähnlichkeit mit dem Roulettespiel auch als „Monte-Carlo-Verfahren“
bezeichneten, Optimierungsstrategie wird im Rechner ein sogenannter Zufallsgenerator
implementiert. Diese Strategie ist durch den hohen Anteil erfolgloser Stichproben meist
wenig effektiv, da sie weder aus Erfolgen noch aus Misserfolgen zu lernen in der Lage ist.
Deshalb sind zahlreiche Strategien zur Verbesserung des Kompromisses zwischen
Zufälligkeit und Determiniertheit vorgeschlagen worden, wofür nachfolgend ein besonders
einfaches Beispiel ausgewählt wurde.
Die Entstehung von Optimalstrukturen ist auch eine Eigenschaft der biologischen Evolution.
Die folgenden Betrachtungen werden zeigen, dass Evolutionsprinzipien eine sehr effektive,
auch unter schwierigen Bedingungen zuverlässige sowie hinsichtlich der Zahl der
notwendigen Mutationsschritte vorteilhafte Optimierungsstrategie liefern.
Allerdings umfasst ein solches Minimalkonzept nur die zur Merkmalverbesserung unbedingt
erforderlichen Komponenten des biologischen Prinzips, spiegelt also nur in sehr
unvollkommener Weise die Vorgänge der natürlichen Evolution wider. Vom Standpunkt des
Biologen geht es unter anderem von folgenden einschränkenden Annahmen aus:
Die Populationsstärke bleibt stets konstant und besteht lediglich aus zwei Individuen.
Selektion wird auf den Überlebenskampf dieser beiden Individuen gegeneinander
reduziert.
Ein Individuum unterliegt keiner Alterung und kann im Falle seiner selektiven
Überlegenheit unendlich viele Nachkomnen auf ungeschlechtliche Weise erzeugen.
Zwischen Genotyp und Phänotyp gibt es keinen Unterschied.
Die Umwelt und die durch sie bestimmten Kriterien der Lebensfähigkeit bleiben konstant.
Mutationen sind zwar auch in der Natur als zufällige, ungerichtete Ereignisse anzusehen,
treten dort aber in anderer Weise auf als am Rechner.
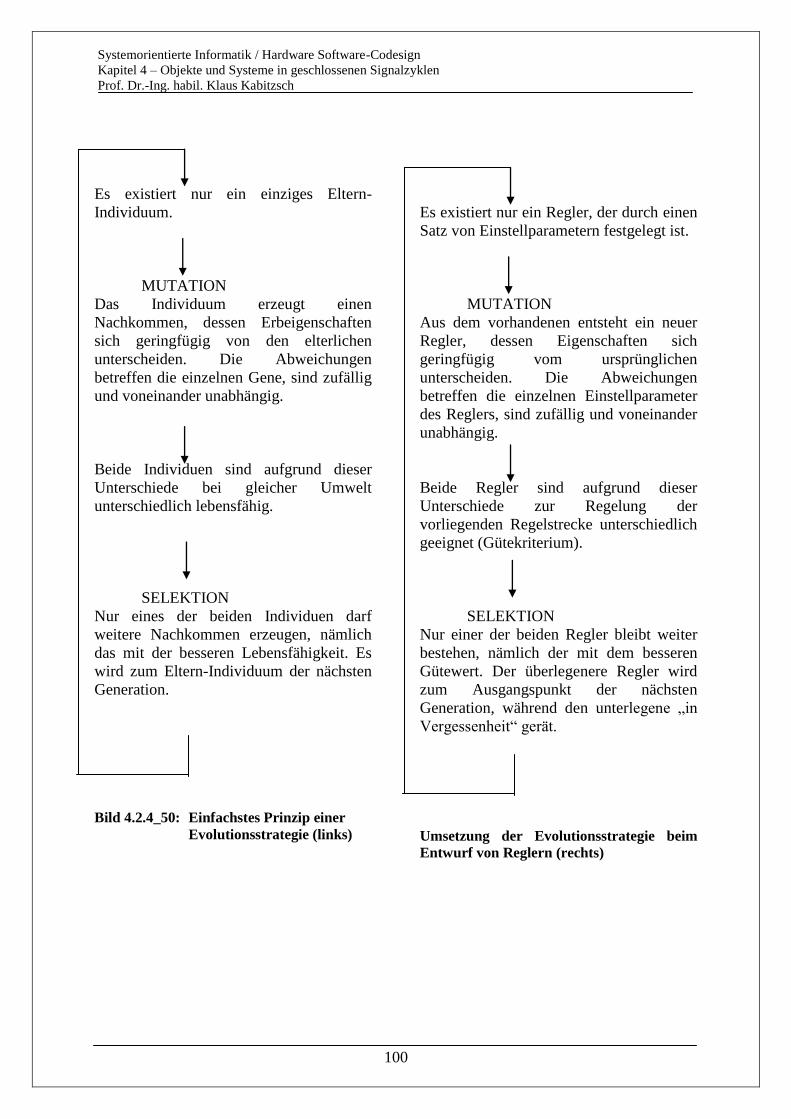
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
100
Es existiert nur ein einziges Eltern-
Individuum.
MUTATION
Das Individuum erzeugt einen
Nachkommen, dessen Erbeigenschaften
sich geringfügig von den elterlichen
unterscheiden. Die Abweichungen
betreffen die einzelnen Gene, sind zufällig
und voneinander unabhängig.
Beide Individuen sind aufgrund dieser
Unterschiede bei gleicher Umwelt
unterschiedlich lebensfähig.
SELEKTION
Nur eines der beiden Individuen darf
weitere Nachkommen erzeugen, nämlich
das mit der besseren Lebensfähigkeit. Es
wird zum Eltern-Individuum der nächsten
Generation.
Bild 4.2.4_50: Einfachstes Prinzip einer
Evolutionsstrategie (links)
Es existiert nur ein Regler, der durch einen
Satz von Einstellparametern festgelegt ist.
MUTATION
Aus dem vorhandenen entsteht ein neuer
Regler, dessen Eigenschaften sich
geringfügig vom ursprünglichen
unterscheiden. Die Abweichungen
betreffen die einzelnen Einstellparameter
des Reglers, sind zufällig und voneinander
unabhängig.
Beide Regler sind aufgrund dieser
Unterschiede zur Regelung der
vorliegenden Regelstrecke unterschiedlich
geeignet (Gütekriterium).
SELEKTION
Nur einer der beiden Regler bleibt weiter
bestehen, nämlich der mit dem besseren
Gütewert. Der überlegenere Regler wird
zum Ausgangspunkt der nächsten
Generation, während den unterlegene „in
Vergessenheit“ gerät.
Umsetzung der Evolutionsstrategie beim
Entwurf von Reglern (rechts)
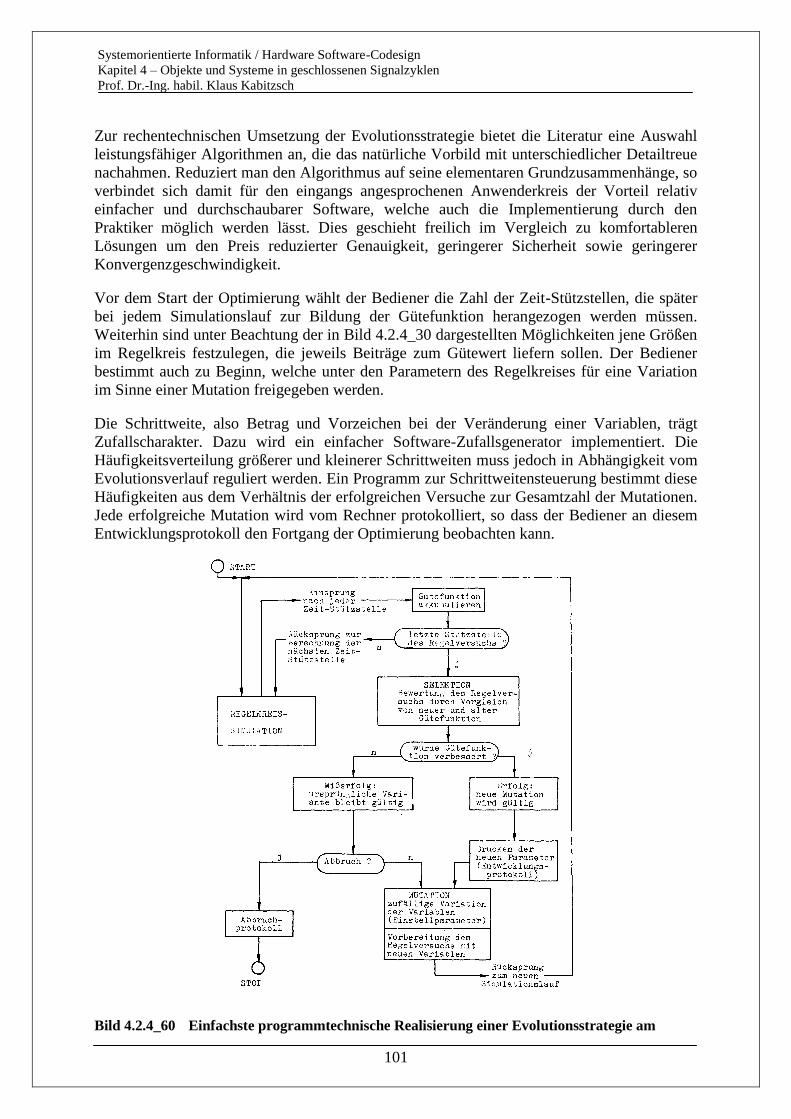
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
101
Zur rechentechnischen Umsetzung der Evolutionsstrategie bietet die Literatur eine Auswahl
leistungsfähiger Algorithmen an, die das natürliche Vorbild mit unterschiedlicher Detailtreue
nachahmen. Reduziert man den Algorithmus auf seine elementaren Grundzusammenhänge, so
verbindet sich damit für den eingangs angesprochenen Anwenderkreis der Vorteil relativ
einfacher und durchschaubarer Software, welche auch die Implementierung durch den
Praktiker möglich werden lässt. Dies geschieht freilich im Vergleich zu komfortableren
Lösungen um den Preis reduzierter Genauigkeit, geringerer Sicherheit sowie geringerer
Konvergenzgeschwindigkeit.
Vor dem Start der Optimierung wählt der Bediener die Zahl der Zeit-Stützstellen, die später
bei jedem Simulationslauf zur Bildung der Gütefunktion herangezogen werden müssen.
Weiterhin sind unter Beachtung der in Bild 4.2.4_30 dargestellten Möglichkeiten jene Größen
im Regelkreis festzulegen, die jeweils Beiträge zum Gütewert liefern sollen. Der Bediener
bestimmt auch zu Beginn, welche unter den Parametern des Regelkreises für eine Variation
im Sinne einer Mutation freigegeben werden.
Die Schrittweite, also Betrag und Vorzeichen bei der Veränderung einer Variablen, trägt
Zufallscharakter. Dazu wird ein einfacher Software-Zufallsgenerator implementiert. Die
Häufigkeitsverteilung größerer und kleinerer Schrittweiten muss jedoch in Abhängigkeit vom
Evolutionsverlauf reguliert werden. Ein Programm zur Schrittweitensteuerung bestimmt diese
Häufigkeiten aus dem Verhältnis der erfolgreichen Versuche zur Gesamtzahl der Mutationen.
Jede erfolgreiche Mutation wird vom Rechner protokolliert, so dass der Bediener an diesem
Entwicklungsprotokoll den Fortgang der Optimierung beobachten kann.
Bild 4.2.4_60 Einfachste programmtechnische Realisierung einer Evolutionsstrategie am
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
102
Beispiel des Reglerentwurfs
Eine Entscheidung zum Abbruch der Optimierung erscheint dann sinnvoll, wenn die
Ergebnisse darauf hindeuten, dass sich keine oder keine wesentliche Verbesserung mehr
erzielen lässt. Überlässt man, wie im vorliegenden Falle, die Entscheidung einem Mikro-
rechner, so muss im Voraus, vom Programm her, festgelegt werden, wann die Iterationenfolge
abzubrechen ist. Das benutzte Konvergenzkriterium besteht darin, die Suche zu beenden,
wenn keine Verbesserung des Gütekriteriums mehr erfolgt. Praktisch ist ein Abbruch nach
einer bestimmten Anzahl ohne Unterbrechung stattfindender Misserfolge angezeigt. Da die
Fortschrittsgeschwindigkeit im Mittel um so langsamer ist, je mehr Variable am Problem
beteiligt, d.h. zur Veränderung freigegeben sind, muss auch die Festlegung der
Abbruchgrenze problemangepasst erfolgen. Bild 4.2.4_80 zeigt die Veränderungen dreier
Parameter im Laufe einer Optimierung sowie den sich dabei ständig verringernden Gütewert.
Die Rechenzeiten T0 bis zum Erreichen des Optimums bzw. bis zum Abbruchprotokoll liegen
im Minutenbereich und sind von drei Faktoren abhängig:
VSS NNTT 0
Die Zeit TS zur Berechnung einer Zeit-Stützstelle hängt von Anzahl und Charakter der
Befehle ab, die z.B. als Fachsprachtext, das Regelkreismodell beschreiben und anlässlich
jeder Stützstelle genau einmal abgearbeitet werden.
Die Stützstellenzahl NS bestimmt das Zeitintervall des Regelvorganges, welches der
Rechner für seine Optimierungsentscheidungen zugrunde legt.
Die Zahl der Versuche NV bis zum Abbruch hängt wesentlich von der Zahl der zur
Variation freigegebenen Variablen ab.
Der Rechner findet auch von unterschiedlichen Startwerten in den meisten Fällen zum selben
Optimum. Das vorzeitige Steckenbleiben bei günstigen Zwischenwerten (lokalen Optima)
kann durch Modifikation der Schrittweitensteuerung umgangen werden. Allerdings geht
größere Sicherheit bei jedem Optimierungsverfahren grundsätzlich zu Lasten der Konvergenz
(Rechenzeit), so dass praktische Kompromisse notwendig sind.
Die Eigenschaften verbesserter Zufallsverfahren kommen im Allgemeinen durch einen
Verzicht auf gleichverteilten Zufall zustande, das heißt also durch Wiedereinführung eines
höheren Grades von Determiniertheit bei der Suche.
Man geht also beispielsweise davon aus, dass die Suchrichtung, die im letzten Schritt
erfolgreich war, mit großer Wahrscheinlichkeit auch für den darauffolgenden Suchschritt
erfolgreich sein wird. Selbstverständlich dürfen zu diesem Zweck bei Zufallsverfahren nur die
statistischen Eigenschaften des Zufallsgenerators modifiziert werden. Dies können für jede
Variablenrichtung z.B. Mittelwert und Varianz der zufälligen Suchschritte sein. Dazu sind die
zurückliegenden Erfahrungen über die Erfolgsrichtung auszuwerten, welche von Schritt zu
Schritt erneuert werden müssen:
positive Erfahrungen aus zurückliegenden Erfolgen (positives Lernen),
negative Erfahrungen aus zurückliegenden Misserfolgen (negatives Lernen),
schrittweise Reduzierung des Einflusses älterer Erfahrungen (Vergessen).
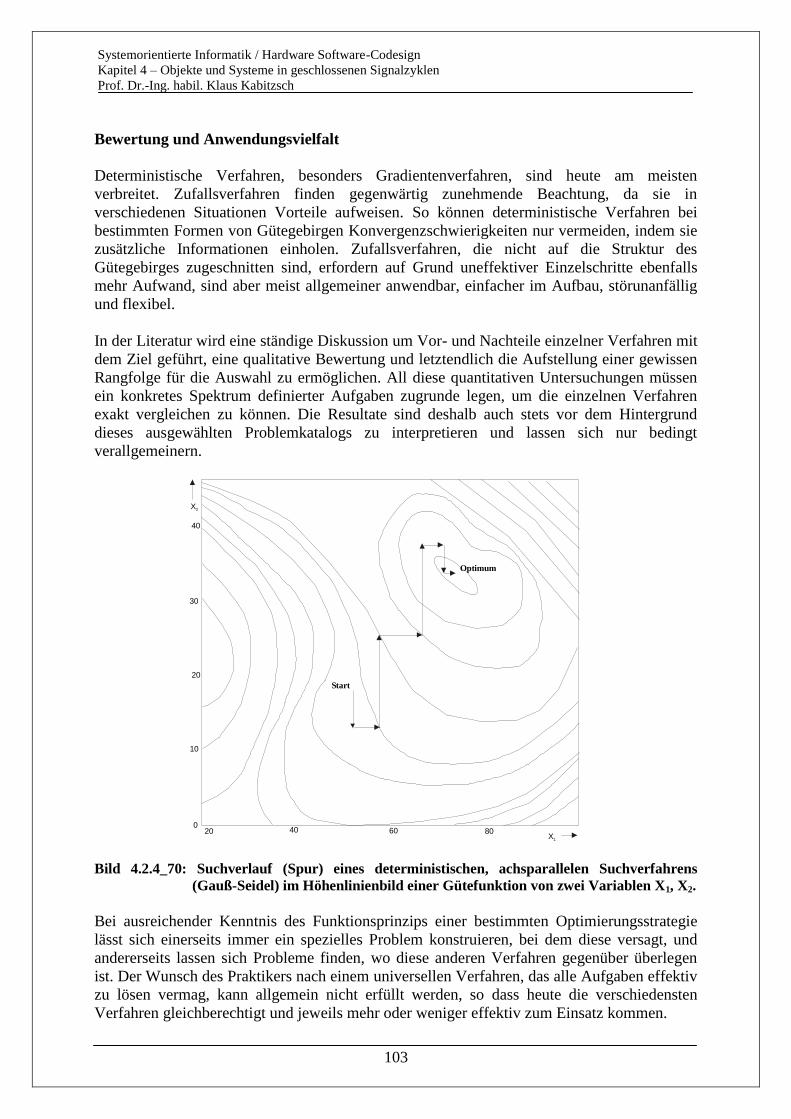
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
103
Bewertung und Anwendungsvielfalt
Deterministische Verfahren, besonders Gradientenverfahren, sind heute am meisten
verbreitet. Zufallsverfahren finden gegenwärtig zunehmende Beachtung, da sie in
verschiedenen Situationen Vorteile aufweisen. So können deterministische Verfahren bei
bestimmten Formen von Gütegebirgen Konvergenzschwierigkeiten nur vermeiden, indem sie
zusätzliche Informationen einholen. Zufallsverfahren, die nicht auf die Struktur des
Gütegebirges zugeschnitten sind, erfordern auf Grund uneffektiver Einzelschritte ebenfalls
mehr Aufwand, sind aber meist allgemeiner anwendbar, einfacher im Aufbau, störunanfällig
und flexibel.
In der Literatur wird eine ständige Diskussion um Vor- und Nachteile einzelner Verfahren mit
dem Ziel geführt, eine qualitative Bewertung und letztendlich die Aufstellung einer gewissen
Rangfolge für die Auswahl zu ermöglichen. All diese quantitativen Untersuchungen müssen
ein konkretes Spektrum definierter Aufgaben zugrunde legen, um die einzelnen Verfahren
exakt vergleichen zu können. Die Resultate sind deshalb auch stets vor dem Hintergrund
dieses ausgewählten Problemkatalogs zu interpretieren und lassen sich nur bedingt
verallgemeinern.
0
10
20
20
30
40
40 60 80
Start
Optimum
X1
X2
Bild 4.2.4_70: Suchverlauf (Spur) eines deterministischen, achsparallelen Suchverfahrens
(Gauß-Seidel) im Höhenlinienbild einer Gütefunktion von zwei Variablen X1, X2.
Bei ausreichender Kenntnis des Funktionsprinzips einer bestimmten Optimierungsstrategie
lässt sich einerseits immer ein spezielles Problem konstruieren, bei dem diese versagt, und
andererseits lassen sich Probleme finden, wo diese anderen Verfahren gegenüber überlegen
ist. Der Wunsch des Praktikers nach einem universellen Verfahren, das alle Aufgaben effektiv
zu lösen vermag, kann allgemein nicht erfüllt werden, so dass heute die verschiedensten
Verfahren gleichberechtigt und jeweils mehr oder weniger effektiv zum Einsatz kommen.
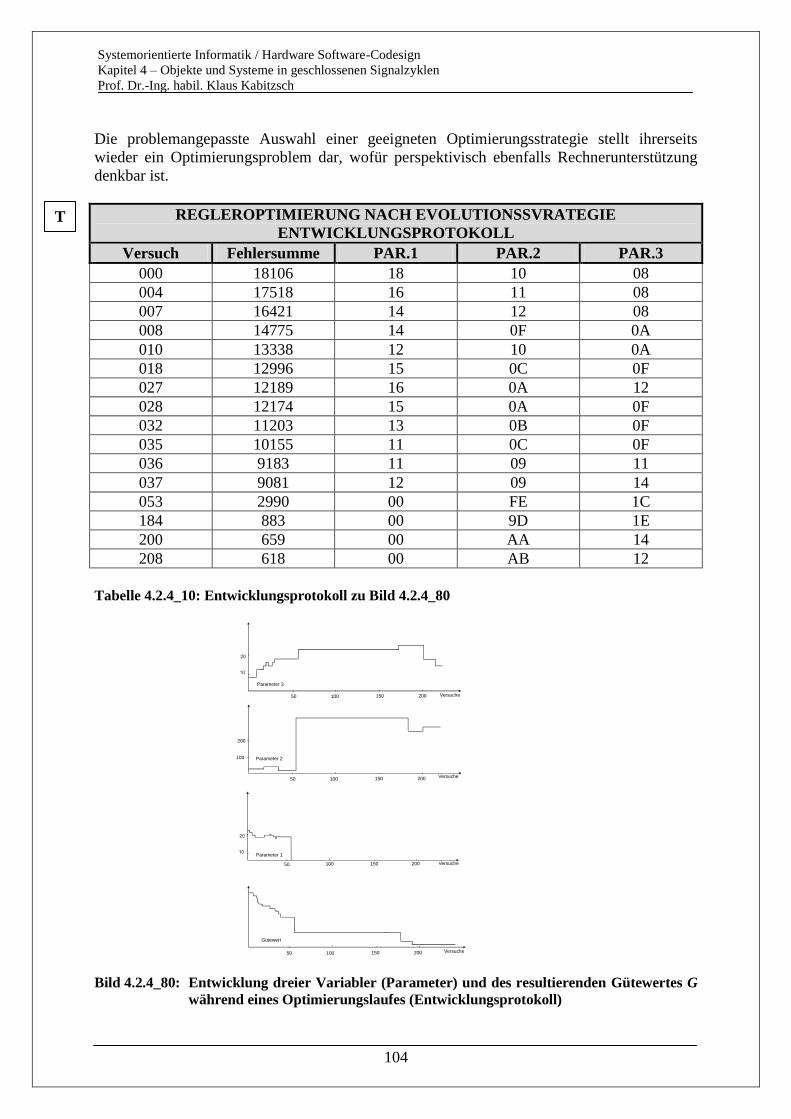
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
104
Die problemangepasste Auswahl einer geeigneten Optimierungsstrategie stellt ihrerseits
wieder ein Optimierungsproblem dar, wofür perspektivisch ebenfalls Rechnerunterstützung
denkbar ist.
REGLEROPTIMIERUNG NACH EVOLUTIONSSVRATEGIE
ENTWICKLUNGSPROTOKOLL
Versuch Fehlersumme PAR.1 PAR.2 PAR.3
000 18106 18 10 08
004 17518 16 11 08
007 16421 14 12 08
008 14775 14 0F 0A
010 13338 12 10 0A
018 12996 15 0C 0F
027 12189 16 0A 12
028 12174 15 0A 0F
032 11203 13 0B 0F
035 10155 11 0C 0F
036 9183 11 09 11
037 9081 12 09 14
053 2990 00 FE 1C
184 883 00 9D 1E
200 659 00 AA 14
208 618 00 AB 12
Tabelle 4.2.4_10: Entwicklungsprotokoll zu Bild 4.2.4_80
50 100 150 200
100
200
50 100 150 200
Versuche
Versuche
Versuche
Versuche
Parameter 3
Parameter 2
Parameter 1
Gütewert
50 100 150 200
50 100 150 200 Bild 4.2.4_80: Entwicklung dreier Variabler (Parameter) und des resultierenden Gütewertes G
während eines Optimierungslaufes (Entwicklungsprotokoll)
T
Systemorientierte Informatik / Hardware Software-Codesign
Kapitel 4 – Objekte und Systeme in geschlossenen Signalzyklen
Prof. Dr.-Ing. habil. Klaus Kabitzsch
105
Optimierungsverfahren stellen eine große Hilfe beim Entwurf dar, führen aber nicht in jedem
Falle automatisch zu Ergebnissen, die den Entwerfer sofort zufriedenstellen. Das liegt an der
bereits erwähnten Schwierigkeit, die Gesamtheit des Entwurfsziels in Form von Gütekriterien
zu fassen. Zwar lässt sich eine einzelne Eigenschaft (geringe Regelfläche, geringe
Stellbewegungen) in gewissem Maße erzwingen, geht aber auf Grund der inneren Zusam-
menhänge des Regelkreises stets zu Lasten anderer Eigenschaften, so dass nach einer
günstigen Kompromisslösung gesucht werden muss.
Das Problem besteht also darin, die verschiedenen Entwurfsziele untereinander zu wichten
und ein sinnvolles Gesamt-Gütekriterium zu formulieren. Das gelingt nicht immer und
erfordert wieder eine gewisse Bereitschaft zum Probieren, wenngleich auf höherer Ebene.
Neben dem Reglerentwurf wird die Optimierung beispielsweise auch zur Entwicklung von
Streckenmodellen aus empirischen Messreihen benutzt. Dabei werden die Messwerte
tabellarisch durch einen Funktionsgenerator vorgegeben, und der Rechner entwickelt die Pa-
rameter des Streckenmodells, bis die Modellresultate von den Messwerten nur noch minimal
abweichen. Auch die Kopplung mit Netzwerkanalyseprogrammen zur Entwicklung
elektronischer Schaltungen wird seit langem praktiziert.