Embed Size (px)
Citation preview

Mathematische Methoden
TU Berlin, SS 2008
Prof. Dr. T. Brandes
7. Juli 2008
INHALTSVERZEICHNIS
1. Wiederholung Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Funktionen einer Variablen . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Umkehrfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2.1 Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2.2 Ableitung der inversen Funktion . . . . . . . . . . . . . . . . . . . 21.2.3 Hohere Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Taylorentwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3.1 Beispiel: Relativistische Energien . . . . . . . . . . . . . . . . . . . 3
1.4 Asymptotisches Verhalten von Funktionen . . . . . . . . . . . . . . . . . . 31.4.1 Grenzwerte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5 Komplexe Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.5.1 Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.5.2 Polardarstellung (Argand-Diagramm) . . . . . . . . . . . . . . . . 41.5.3 Euler-Formel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.5.4 Beispiel: Kreisbewegung in 2 Dimensionen . . . . . . . . . . . . . . 51.5.5 Wurzeln . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Gewohnliche Differentialgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . 62.1 Einfuhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.1 Motivierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1.2 Klassifizierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 DGLn erster Ordnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2.1 Richtungsfeld und Anfangswertproblem . . . . . . . . . . . . . . . 72.2.2 Einfache Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.3 Methoden: Trennung der Variablen . . . . . . . . . . . . . . . . . . 82.2.4 Lineare DGL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Lineare Systeme von DGL . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.1 Umwandlung einfacher DGLs hoherer Ordnung in ein System von
DGL erster Ordnung . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4 Lineare homogene Systeme mit konstanten Koeffizienten . . . . . . . . . . 11
2.4.1 Normalform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.4.2 Wiederholung Lineare Algebra (I): Vektoren und Matrizen . . . . 122.4.3 Exponentiallosung fur lineares DGL-System . . . . . . . . . . . . . 13

Inhaltsverzeichnis iii
2.4.4 Wiederholung Lineare Algebra (II): Eigenwerte und Eigenvektoren 142.4.5 Diagonalisierung der Exponentiallosung fur lineares DGL-System 152.4.6 Eigenlosungen und Anfangswertproblem . . . . . . . . . . . . . . . 152.4.7 Eigenlosungen fur nicht-diagonalisierbares A . . . . . . . . . . . . 162.4.8 ANWENDUNG MECHANIK: gedampfter harmonischer Oszillator 162.4.9 Wiederholung Lineare Algebra (III): Skalar- und Vektorprodukt . 17
2.5 ANWENDUNG MECHANIK: Eigenschwingungen und Eigenmoden (Nor-malmoden) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.5.1 Fall d = 1, N = 2 (zwei gekoppelte Oszillatoren) . . . . . . . . . . 182.5.2 Mehrere (N > 2) gekoppelte Oszillatoren . . . . . . . . . . . . . . 21
2.6 Lineare inhomogene Systeme . . . . . . . . . . . . . . . . . . . . . . . . . 21
3. Einfache partielle Differentialgleichungen und Fourier-Analyse . . . . . . . . . . . . 233.1 Die Gleichung der schwingenden Saite (Wellengleichung in einer Dimension) 23
3.1.1 Wellengleichung als Kontinuumslimes: gekoppelte Massenpunkten 243.1.2 Separationsansatz . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.1.3 Erfullung der Anfangsbedingungen . . . . . . . . . . . . . . . . . . 25
3.2 Fourier-Analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2.1 Definitionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2.2 Halbintervallige Fourier-Reihen (Sinus und Cosinus) . . . . . . . . 283.2.3 Vektorraum der Periodischen Funktionen . . . . . . . . . . . . . . 283.2.4 Konvergenz der Fourierreihe . . . . . . . . . . . . . . . . . . . . . . 29
3.3 Die Diffusionsgleichung in einer Dimension . . . . . . . . . . . . . . . . . . 293.3.1 Herleitung der Diffusionsgleichung in einer Dimension . . . . . . . 303.3.2 Losung der Diffusionsgleichung . . . . . . . . . . . . . . . . . . . . 30
3.4 Unendliches Intervall: von Fourier-Reihen zur Fourier-Transformation . . 313.4.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.4.2 Orts- und Impulsraum (k-Raum), Zeit-Domane und Frequenzraum 323.4.3 Fouriertransformation: Beispiel Gauß-Funktion . . . . . . . . . . . 333.4.4 Die Delta-Distribution . . . . . . . . . . . . . . . . . . . . . . . . . 343.4.5 Einige Eigenschaften der Fourier-Transformation . . . . . . . . . . 343.4.6 Losung von pDGL mit Fouriertransformation . . . . . . . . . . . . 353.4.7 ANWENDUNG QUANTENMECHANIK: Losung der Schrodinger-
gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4. Kurven und Krummlinige Koordinaten . . . . . . . . . . . . . . . . . . . . . . . . 374.1 Kurven und Kinematik eines Massenpunktes . . . . . . . . . . . . . . . . 37
4.1.1 Bahn eines Massenpunktes. Geschwindigkeit, Beschleunigung . . . 374.1.2 Die Bogenlange s . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.1.3 Begleitendes Dreibein . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2 Krummlinige Koordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.2.1 Kovariante und kontravariante Basis . . . . . . . . . . . . . . . . . 414.2.2 ANWENDUNG FESTKORPERPHYSIK: reziprokes Gitter . . . . 424.2.3 Polarkoordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43

Inhaltsverzeichnis iv
4.2.4 Beliebige Basis, Metrik-Tensor . . . . . . . . . . . . . . . . . . . . 444.2.5 Beschleunigung und Christoffel-Symbole . . . . . . . . . . . . . . . 45
5. Vektoranalysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.1 Vektorfelder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.2 Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.2.2 Der Gradient in krummlinigen Koordinaten . . . . . . . . . . . . . 48
5.3 ANWENDUNG MECHANIK: Kraft, Gradient und Potential . . . . . . . 505.3.1 Konservative Kraftfelder . . . . . . . . . . . . . . . . . . . . . . . . 505.3.2 Kurvenintegrale, Arbeit, Leistung . . . . . . . . . . . . . . . . . . 505.3.3 Konservative Krafte und vom Weg unabhangige Arbeit . . . . . . 51
5.4 Rotation und Integralsatz von Stokes . . . . . . . . . . . . . . . . . . . . . 515.4.1 Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.4.2 Integralsatz von Stokes . . . . . . . . . . . . . . . . . . . . . . . . 535.4.3 ANWENDUNG ELEKTRODYNAMIK: Induktionsgesetz . . . . . 535.4.4 ANWENDUNG MAGNETOSTATIK . . . . . . . . . . . . . . . . 54
5.5 Divergenz und Integralsatz von Gauß . . . . . . . . . . . . . . . . . . . . . 545.5.1 Divergenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.5.2 Integralsatz von Gauß . . . . . . . . . . . . . . . . . . . . . . . . . 555.5.3 ANWENDUNG ELEKTROSTATIK: Gauß’sches Gesetz . . . . . . 555.5.4 Zusammenfassung: Maxwell’sche Gleichungen . . . . . . . . . . . . 56
c©T. Brandes 2008
1. WIEDERHOLUNG ANALYSIS
Literatur: O. Forster, ‘Analysis 1’ (Vieweg). Bronstein, ‘Taschenbuch der Mathematik’.
1.1 Funktionen einer Variablen
Ublicherweise als y = f(x), Darstellung als Kurve in einem rechtwinkligen Koordina-tensystem. Beispiel: y = x2 Parabel, y = sin x, Sinus. Stetige Funktionen, unstetigeFunktionen (Beispiele).
1.1.1 Umkehrfunktion
Beispiel y = ex Exponentialfunktion, umkehren als x = ln y Logarithmus. Auf Definiti-onsbereich achten!
1.2 Differentiation
1.2.1 Ableitungen
Falls der Grenzwert existiert,
f ′(x) ≡ limh→0
f(x + h) − f(x)
h. (1.1)
Geometrische Bedeutung: Tangente!Differentiationsregeln: Ableitung von Summe, Produkt, zusammengesetzter Funkti-
on. Beispiel
f(x) = esin x2(1.2)
(mehr in den AUFGABEN).Weitere Beispiele (AUFGABEN)
f(x) = x1/2, f(x) = x sin
(
1
x
)
(1.3)
bei x = 0. Fall eines Knicks bei x0: links- und rechtsseitige Ableitungen f ′(x0 + 0),f ′(x0 − 0). AUFGABE: berechnen fur
f(x) =x
1 + e1x
. (1.4)
1. Wiederholung Analysis 2
1.2.2 Ableitung der inversen Funktion
(Merkregel, kein Beweis)
y = f(x) dy
dx= f ′(x)
dx
dy=
1
f ′(x). (1.5)
Beispiel (mehr in den AUFGABEN):
y = sin(x) x = arcsin(y) dx
dy=
1
cos(x)=
1√
1 − sin2 x=
1√
1 − y2. (1.6)
1.2.3 Hohere Ableitungen
Zweite Ableitung
y′′(x) ≡ d
dx
d
dxy(x) ≡ d2y
dx2≡ y(2)(x). (1.7)
Entsprechend hohere Ableitungen
f (n)(x) ≡ d(n)
dxnf(x). (1.8)
1.3 Taylorentwicklung
Falls konvergent,
f(x) =∞∑
n=0
f (n)(x0)
n!(x − x0)
n. (1.9)
Hierbei ist
n! ≡ n(n − 1)(n − 2)...1 (1.10)
(Fakultat). Wichtige Beispiele:
exp(x) = 1 + x +x2
2!+
x3
3!+ ... =
∞∑
n=0
xn
n!(1.11)
sin(x) = x − x3
3!+
x5
5!+ ... (1.12)
cos(x) = 1 − x2
2!+
x4
4!+ ... (1.13)
Geometrische Bedeutung: Approximation durch Polynom.Gegenbeispiel, wo es nicht funktioniert: f(x) = e−
1x (wesentliche Singularitat bei
x = 0).

1. Wiederholung Analysis 3
Abbrechen der Taylorreihe: In der Physik extrem wichtig fur Naherungsrechnungen.Beispiele
exp(x) = 1 + x +x2
2!+
x3
3!+ ... (1.14)
= 1 + x + O(x2) (1.15)
= 1 + x +x2
2!+ O(x3) (1.16)
etc.: Die Funktion wird nur bis zu Termen einer gewissen Ordnung (Potenz) entwickelt,alle hoheren Terme werden vernachlassigt. Im obigen Beispiel gut fur x ≪ 1 (‘sehr vielkleiner als 1’). Wie gut die Naherung funktioniert, hangt vom jeweiligen Problem ab.
AUFGABE: Taylorentwicklung der potentiellen Energie fur kleine Auslenkungenbeim Fadenpendel.
1.3.1 Beispiel: Relativistische Energien
Einstein Newton durch Taylorentwicklung von
E(v) ≡ mc2
√
1 − v2
c2
= mc2 +1
2mv2 + O
(
(v
c
)4)
. (1.17)
AUFGABE: Uberprufen und bis zu O(
(
vc
)4)
(nachster Term) entwickeln. (Physikalische
und mathematische) Diskussion der Konvergenz der Reihe.
1.4 Asymptotisches Verhalten von Funktionen
Wichtig, um sich einen Uberblick zu verschaffen. Beispiel (Skizze)
f(x) =1
1 + x2 f(x) ∼ 1
x2, x → ∞. (1.18)
Genauer durch Entwickeln nach Potenzen von 1/x2 fur x ≫ 1,
1
1 + x2=
1
x2
1
1 + x−2=
1
x2
(
1 − 1
x2+
1
x4± ...
)
(1.19)
=1
x2+ O
(
(
1
x
)4)
(1.20)
unter Benutzung der geometrischen Reihe
1
1 − x= 1 + x + x2 + x3 + ..., |x| < 1. (1.21)

1. Wiederholung Analysis 4
1.4.1 Grenzwerte
Beispiel
limx→0
sinx
x= lim
x→0
x − x3
3! + ...
x= lim
x→0
(
1 − x2
3!+ ...
)
= 1. (1.22)
1.5 Komplexe Zahlen
Literatur: W. Fischer, I. Lieb ‘Funktionentheorie’ (Vieweg) - hier nur die ersten Kapitel.
1.5.1 Eigenschaften
Komplexe Zahl
z ≡ x + iy (1.23)
mit x (Realteil) und y (Imaginarteil) reell und imaginarer Einheit i. Die imaginareEinheit i ist eine Losung der quadratischen Gleichung
z2 + 1 = 0. (1.24)
Die andere Losung ist −i: Konjugiert komplexe Zahl
z ≡ x + iy z∗ ≡ z ≡ x − iy. (1.25)
Darstellung einer komplexen Zahl als Punkt in zweidimensionaler Ebene (‘komplexeEbene’). AUFGABEN: Addition, Produkte, Quotienten komplexer Zahlen. Real- undImaginarteil mit z und z∗.
1.5.2 Polardarstellung (Argand-Diagramm)
Ebene Polarkoordinaten
z = x + iy, x = r cos θ, y = r sin θ (1.26)
r =√
x2 + y2 = |z| =√
zz∗ (1.27)
θ = arctan(y
x
)
. (1.28)
Damit de-Moivre’s Theorem (AUFGABE)
(cos θ + i sin θ)n = cos nθ + i sin nθ. (1.29)
AUFGABE: daraus trigonometrische Identitaten herleiten.

1. Wiederholung Analysis 5
1.5.3 Euler-Formel
Aus den Taylorreihen (Exp., Sinus, Cosinus) folgt
eiθ = cos θ + i sin θ (1.30)
und somit
z = x + iy = reiθ. (1.31)
1.5.4 Beispiel: Kreisbewegung in 2 Dimensionen
Beschreibung durch eine Kurve x(t) = r cos(ωt), y(t) = r sin(ωt) oder alternativ in derkomplexen Ebene
z(t) = reiωt (1.32)
Die Projektionen auf die Achsen beschreiben harmonische Schwingungen.
1.5.5 Wurzeln
Im Komplexen als Losungen z von
zn = z0. (1.33)
Beispiel z0 = 1 (Einheitswurzeln): Schreiben als
einθ = 1 z = e2kπi/n, k = 0, 1, 2, ..., n − 1. (1.34)
(AUFGABE, Darstellung als Argand-Diagramm)Weitere AUFGABEN: hyperbolische Funktionen sinh, cosh, ihr Zusammenhang mit
sin, cos, ihre Potenzreihen.
2. GEWOHNLICHE
DIFFERENTIALGLEICHUNGEN
Literatur: W. Walter, ‘Gewohnliche Differentialgleichungen’ (Springer). Bronstein, ‘Ta-schenbuch der Mathematik’.
2.1 Einfuhrung
2.1.1 Motivierung
Dynamische Grundgleichungen haben die Form von Differentialgleichungen. Beispiel:Newtonsche Bewegungsgleichung eines Massenpunktes (Masse m, Ort r(t),
md2
dt2r(t) ≡ mr(t) = F(r(t)) (2.1)
mit der ortsabhangigen Kraft F(r). Spezialfall eindimensionaler harmonischer Oszillatorder Masse m und Federkonstante (Young-Modul) k,
mx(t) = −kx(t), k > 0 (2.2)
x(t) + ω2x(t) = 0, ω2 ≡ k
m. (2.3)
Das ist eine lineare, gewohnliche Differentialgleichung zweiter Ordnung.
2.1.2 Klassifizierung
• Gewohnliche DGL fur Funktionen einer Variablen, z.B. Ort r(t) als Funktion derZeit (t ist die Variable).
• Partielle DGL fur Funktionen mehrerer Veranderlicher, z.B. quantenmechanischeWellenfunktion Ψ(r, t).
• Ordnung der DGL: hochste aufretende Ableitung.
• Implizit oder explizit gegeben.
• Linear oder nichtlinear in der gesuchten Funktion.
• Einzelne DGL oder Systeme von DGL.

2. Gewohnliche Differentialgleichungen 7
Abbildung 2.1: Richtungsfeld. c©Verlag Harri Deutsch (Bronstein, Taschenbuch der Mathema-tik 6. Auflage 2006.)
Beispiele
mr(t) = F(r(t)), r = (x, y, z), System von drei DGL 2. Ordnung(2.4)
x(t) + α cos x(t) = 0, nichtlineare DGL 2. Ordnung (2.5)
2.2 DGLn erster Ordnung
Explizite Form
y′(x) = f(x, y). (2.6)
Hierbei ist f(x, y) fest vorgegeben. Die Aufgabe besteht darin, eine Funktion y(x) zufinden, die y′(x) = f(x, y(x)) erfullt. Beispiel: y′(x) = x2 + 2 sin(xy).
2.2.1 Richtungsfeld und Anfangswertproblem
• Richtungsfeld: Steigung einer Losung y(x) im Punkt (x0, y0) in der x-y Ebeneist y′(x0) = f(x0, y0). Gesamtheit aller Tangenten in der x-y Ebene definieren einRichtungsfeld von y′(x) = f(x, y). Geometrische Interpretation von y′(x) = f(x, y):Losungskurve y(x) hat sich an Richtungsfeld ‘anzuschmiegen’.
• Anfangswertproblem: Losungskurve y(x) ausgehend von einem Anfangspunkt y0 =y(x0) bestimmen.

2. Gewohnliche Differentialgleichungen 8
2.2.2 Einfache Beispiele
Im Fall
y′(x) = f(x) (2.7)
erfolgt die Losung durch einfache Integration, z. B.
y′(x) = x3 + cos(x) y(x) =1
4x4 + sin(x) + c (2.8)
mit einer noch unbestimmten Konstanten c. Man erhalt also zunachst eine ganze Scharvon Losungen, die durch die Konstante c, d.h. die Integrationskonstante, parametrisiertwird. Wenn man jetzt eine Anfangsbedingung vorgibt, laßt sich aus dieser c bestimmen:
y(x0) = y0 c = y0 −1
4x4
0 − sin(x0). (2.9)
2.2.3 Methoden: Trennung der Variablen
Fur die Form
y′(x) = f(x)g(y) (2.10)
schreiben wir formal
dy
dx= f(x)g(y)
dy
g(y)= f(x)dx (2.11)
und integrieren beide Seiten. Wir konnen gleich vom Anfangspunkt (x0, y0) integrieren,um die richtige Anfangsbedingung zu erwischen,
∫ y
y0
dζ
g(ζ)=
∫ x
x0
f(ξ)dξ. (2.12)
Eindeutigkeit nicht immer gegeben, vgl. Walter, ‘Gewohnliche Differentialgleichun-gen’ (Springer Berlin Heidelberg, 1986).
Einfaches Beispiel
y′ = ey sinx
∫
e−ydy =
∫
sin xdx −e−y = − cos x − c (2.13)
y(x) = − log(cos x + c), (2.14)
vgl. Fig.(2.2): Man erhalt Losungskurven, die sich stark in ihrem Verhalten unterschei-den. Fangt man z.B. bei x0 = 0 an, so sitzt man je nach Anfangswert y0 auf einer Kurve,die beschrankt ist, die an bestimmten Stellen divergiert oder sogar in bestimmten Be-reichen (wegen des Logarithmus) nicht definiert ist. Nichtlineare Differentialgleichungenzeigen also eine starke Abhangigkeit von den Anfangsbedingungen!
AUFGABE: Lose y′(x) = αy/x fur reelles α und skizziere die Losungsscharen y(x)fur α = 1 und α = −1.
AUFGABE: Lose y′(x) = −2x/y und skizziere die Losungsscharen y(x).

2. Gewohnliche Differentialgleichungen 9
-2
0
2
4
6
8
10
-10 -5 0 5 10
y
x
c=-0.5c= 1.0c= 1.5
Abbildung 2.2: Losungen von y′ = ey sinx, vgl. Gl. (2.13).
2.2.4 Lineare DGL
Diese wichtige DGL hat die Form
L[x(t)] ≡ x(t) + g(t)x(t) = f(t) (2.15)
mit dem linearen Funktional (‘Funktion von Funktionen’) L. Hierbei sind g(t) undf(t) fest vorgegeben und x(t) ist gesucht. Die Gleichung mit f(t) ≡ 0 auf der rechtenSeite heißt homogene Differentialgleichung, die Gleichung mit f(t) 6= 0 auf der rechtenSeite heißt inhomogene Differentialgleichung.
Beispiel: Ein Teilchen der Masse m bewegt sich auf der z-Achse unter dem Einflußeiner Reibungskraft −γz(t) und einer außeren Kraft f(t) (beide in z-Richtung). Dieentsprechende Newtonsche Gleichung fur die z-Komponente lautet
mz(t) = −γz(t) + f(t) (2.16)
Wir benutzen die Geschwindigkeit v(t) = z(t) und erhalten
v(t) +γ
mv(t) =
1
mf(t) (2.17)
als lineare Differentialgleichung erster Ordnung.AUFGABE: Zerfallsprozesse: radioaktive Kerne, Abnahme einer Population von Tie-
ren durch Aussterben, ...
Die Inhomogenitat im mechanischen Beispiel oben ist also die aussere Kraft. Allge-mein lost man Gl. (2.15) in zwei Schritten: zunachst ohne Inhomogenitat, dann mit:
• Losung fur den homogenen Fall f ≡ 0.
x(t) + g(t)x(t) = 0 dx
x= −g(t)dt ln x + c = −
∫
g(t)dt
xh(t; t0) ≡ e−
R
t
t0dt′g(t′)
(2.18)

2. Gewohnliche Differentialgleichungen 10
(UBERPRUFEN!). Lost die DGL mit f ≡ 0 und Anfangsbedingung x(t0) = 1.Physikalische Interpretation: beschreibt exponentiellen Anderung x(t) einer anfanglichenPopulation 1 mit zeitabhangiger Rate g(t). Losung fur anfangliche Population cdurch Multiplikation mit c, d.h.
x(t) = ce−
R
t
t0dt′g(t′)
, x(t0) = c (2.19)
lost das homogene Problem.
• Losung fur den inhomogenen Fall: Eine spezielle Losung ist
xs(t; t0) =
∫ t
t0
dt′f(t′)xh(t; t′), (2.20)
denn
xs(t; t0) = f(t)xh(t; t) +
∫ t
t0
dt′f(t′)xh(t; t′) (2.21)
= f(t) −∫ t
t0
dt′f(t′)g(t)xh(t; t′) = f(t) − g(t)xs(t; t0). (2.22)
Physikalische Interpretation von xs(t; t0) =∫ tt0
dt′f(t′)xh(t; t′): alle Beitrage der ex-
ponentiellen Anderungen durch ausseren Einfluss f(t′) zur Anfangszeit t′ werden aufin-tegriert. Die homogene Losung xh(t; t′) propagiert diesen Einfluss uber den Zeitraum[t0, t] hinweg und heisst entsprechend Propagator oder Grundlosung der DGL. DerPropagator ist ein wichtiges Konzept in der Physik, insbesondere in der Quantenmecha-nik.
Gesamtlosung= Losung fur den inhomogenen Fall plus Losung fur den homogenenFall,
x(t) = cxh(t; t0) +
∫ t
t0
dt′f(t′)xh(t; t′). (2.23)
AUFGABE: konkretes Beispiel, siehe Ubungen.
2.3 Lineare Systeme von DGL
2.3.1 Umwandlung einfacher DGLs hoherer Ordnung in ein System vonDGL erster Ordnung
Physikalische Motivation: Newtonsche Gleichungen im Phasenraum und nicht im Orts-raum losen. Beispiel:
x(t) + ω2x(t) = 0, linearer harm. Oszillator in 1d (2.24)

2. Gewohnliche Differentialgleichungen 11
Einfuhrung von zwei Funktionen
x1(t) = x(t) (2.25)
x2(t) = x(t). (2.26)
Damit Umschreiben als
x1(t) = x2(t) (2.27)
x2(t) = −ω2x1(t). (2.28)
oder bei Umbenennung
x(t) =1
mp(t)
p(t) = −mω2x(t). (2.29)
mit dem Ort x und dem Impuls p. Wichtiges Vorgehen fur die analytische Mechanik(Hamiltonsche Gleichungen, x-p Phasenraum ) und in der Quantenmechanik, wo x undp zu nichtvertauschbaren linearen Operatoren werden.
Umgekehrt kann man ein System von DGL durch Differentiation und Einsetzen wie-der in eine einzelne DGL hoherer Ordnung verwandeln.
Sehr wichtig fur viele Anwendungen: Schwingungen in der Akustik, Elektronik, Me-chanik, Quantenmechanik etc. Das einfachste Beispiel ist bereits der 1d harmonischeOszillator im Impulsraum, Gl. (2.29)
2.4 Lineare homogene Systeme mit konstanten Koeffizienten
2.4.1 Normalform
Wir schreiben ein lineares System mit konstanten Koeffizienten in der Normalform
y′1 = a11y1 + a12y2 + ... + a1nyn
y′2 = a21y1 + a22y2 + ... + a2nyn
... = ...
y′n = an1y1 + an2y2 + ... + annyn
Wir fassen die Funktionen yi(t) als Komponenten eines Vektors y(t)auf und fassen diekonstanten Koeffizienten aij zu einer quadratischen Matrix zusammen,
y′(t) = Ay(t), (2.30)
was als homogenes System bezeichnet wird. Der Fall
y′(t) = Ay(t) + b(t) (2.31)
wird als inhomogenes System bezeichnet.
2. Gewohnliche Differentialgleichungen 12
2.4.2 Wiederholung Lineare Algebra (I): Vektoren und Matrizen
Literatur: Bitte im Skript von Mike Scherfner die entsprechenden Kapitel wiederholen.
2.4.2.1 Vektoren
Vektoren x, y etc. im n-dimensionalen Vektorraum (reell oder komplex) haben die Form
x =
x1
x2
..xn
=n∑
i=1
xiei (2.32)
mit reellen oder komplexen Komponenten xi und den Einheitsvektoren (kartesische Ba-sis) ei.
2.4.2.2 Basis, Lineare Unabhangigkeit
Bitte selbst wiederholen.
2.4.2.3 Lineare Abbildungen, Matrizen
Lineare Abbildungen werden durch quadratische n × n- Matrizen dargestellt,
x → y = Ax (2.33)
2.4.2.4 Matrix-Addition, Multiplikation
Matrixoperationen: Addition. Multiplikation von Matrizen ist i.A. nicht kommutativ,d.h.
[A,B] ≡ AB − BA 6= 0. (2.34)
Das ist wichtig fur die Quantenmechanik (Matrizenmechanik).AUFGABE: Pauli-Spinmatrizen.AUFGABE: Rotationsmatrix in 2d: Multiplikation, geometrische Interpretation. Spie-
gelungen.
2.4.2.5 Inverse einer Matrix; Determinante
Die Inverse einer quadratischen Matrix A stellt die entsprechende lineare Umkehrabbil-dung dar. Allerdings kann es sein, dass diese Umkehrabbildung nicht existiert. Beispiel(n =2): Projektion auf die x1-Achse (Skizze),
x → Ax, A =
(
1 00 0
)
(2.35)

2. Gewohnliche Differentialgleichungen 13
Die Umkehrabbildung existiert nicht: ein Punkt auf der x1-Achse ‘weiss nicht, wo erursprunglich herkam’.
Die Umkehrabbildung, d.h. die Inverse einer Matrix A existiert genau dann, wennihre Determinante von Null verschieden ist.
AUFGABE: Rechenregeln, Beispiele fur Determinanten. Inverse einer 2 mal 2 Matrix.
2.4.3 Exponentiallosung fur lineares DGL-System
Falls unser System
y′(t) = Ay(t) (2.36)
nur aus n = 1 einer Komponente besteht, haben wir die einfache DGL
y′(t) = ay(t), (2.37)
die wir durch Trennung der Variablen losen:
dy
y= adt ln y = at + c y(t) = y(0)eat, (2.38)
wir bekommen also eine Exponentialfunktion.Fur den n×n-Fall versuchen wir etwas entsprechendes: statt der Exponentialfunktion
von at die Exponentialfunktion von At, wobei t die Variable in y(t) ist und A die n×n-Matrix. Wir definieren fur eine Matrix M die Exponentialfunktion einer Matrix uber diePotenzreihe,
eM ≡∞∑
k=0
1
k!Mk, (2.39)
wobei Mk einfach das k-fache Matrizenprodukt ist. eM ist also wieder eine n×n-Matrix,und es gilt (AUFGABE)
d
dxeMt = MeMt. (2.40)
Damit finden wir die Losung
y′(t) = Ay(t) y(t) = eAty(t = 0), (2.41)
wie man durch direktes Differenzieren nachpruft. Die konkrete Berechnung der Expo-nentialfunktion geht am besten, wenn man die Eigenwerte und Eigenvektoren der Matrixkennt.

2. Gewohnliche Differentialgleichungen 14
2.4.4 Wiederholung Lineare Algebra (II): Eigenwerte und Eigenvektoren
Eigenwerte λ und Eigenvektoren x einer n × n-Matrix sind definiert uber
Ax = λx. (2.42)
Diese Gleichung ist ein lineares homogenes Gleichungssystem, das genau dann eine nicht-triviale Losung hat, wenn
det(A − λE) = 0, (2.43)
wobei E die n × n-Einheitsmatrix ist. Die Eigenwerte von A sind die Nullstellen descharakteristischen Polynoms der Matrix A.
Zu jedem Eigenwert λ bestimmt man jetzt die zugehorigen Eigenvektoren x durchLosen des linearen Gleichungssystems
(A − λE)x = 0. (2.44)
Hat man hierbei soviel linear unabhangige Losungsvektoren x wie die Vielfachheit derentsprechenden Nullstelle des charakteristischen Polynoms der Matrix A, so nennt manA diagonalisierbar.
BEISPIEL (VORLESUNG): 2 × 2-Matrix.GEGENBEISPIEL (nicht diagonalisierbar): die 2 × 2-Matrix
A =
(
0 10 0
)
. (2.45)
2.4.4.1 Diagonalform
Ausgangspunkt: n × n-Matrix A mit n linear unabhangigen Eigenvektoren x1,...,xn zuden Eigenwerten λ1,...,λn. Wir bilden die Matrix der (Spalten)Eigenvektoren von A,
C ≡ (x1, ...,xn)
AC = (Ax1, ..., Axn) = (λ1x1, ..., λnxn) (2.46)
= (x1, ...,xn)D, D ≡
λ1 0 .. 00 λ2 .. 0.. .. .. ..0 ... 0 λn
A = CDC−1 ↔ D = C−1AC. (2.47)
Damit ist die Transformation der Matrix A auf Diagonalform gefunden. KONKRETESBEISPIEL (VORLESUNG): 2×2-Matrix. AUFGABE: Hauptachsentransformation einerquadratischen Form.
Warum ist das uberhaupt nutzlich:

2. Gewohnliche Differentialgleichungen 15
2.4.5 Diagonalisierung der Exponentiallosung fur lineares DGL-System
Wir konnen die Losung y(t) = eAty(t = 0) des linearen DGL-Systems y′(t) = Ay(t)jetzt durch Diagonalisieren berechnen: wiederum Annahmen, dass die Matrix A n linearunabhangigen Eigenvektoren hat. Dann folgt
exp(At) = exp(CDC−1t) = C exp(Dt)C−1 = C
eλ1t 0 .. 00 eλ2t .. 0.. .. .. ..0 ... 0 eλnt
C−1, (2.48)
wobei der zweite Schritt durch Benutzung der Potenzreihe erfolgt. Damit folgt
y′(t) = Ay(t)
y(t) = C exp(Dt)C−1 = C
eλ1t 0 .. 00 eλ2t .. 0.. .. .. ..0 ... 0 eλnt
C−1y(t = 0). (2.49)
Damit ist die Losung direkt geschlossen ausgedruckt mittels der Eigenwerte λ von A ,der Matrix C der Eigenvektoren von A und der Anfangsbedingung y(t = 0) zur Zeitt = 0.
2.4.6 Eigenlosungen und Anfangswertproblem
Wir konnen Losungen zu
y′(t) = Ay(t) (2.50)
auch direkt durch einen Exponential-Ansatz finden, d.h. wir setzen y(t) = xeλt in dieDGL ein und erhalten
Ax = λx, (2.51)
d.h. genau wieder die Eigenwertgleichung fur die Eigenwerte λi und Eigenvektoren xi
der Matrix A. Wenn A n linear unabhangige Eigenvektoren hat, haben wir somit auch nlinear unabhangige Losungen yi(t) = xie
λit. Wie vertragt sich das mit unserer eindeuti-gen, geschlossenen Losung Gl. (2.49)? Zunachst gilt: Linearkombinationen von yi(t) zuverschiedenen λ sind wiederum eine Losung von y′(t) = Ay(t). Wir wahlen die Koeffizi-enten der Linearkomination
y(t) = c1y1(t) + c2y2(t) + ... + cnyn(t) (2.52)
so, dass die Anfangsbedingung (AB) erfullt ist:
y(t = 0) = c1y1(0) + c2y2(0) + ... + cnyn(0) = c1x1 + c2x2 + ... + cnxn (2.53)

2. Gewohnliche Differentialgleichungen 16
Das ist ein lineares Gleichungssystem fur den Koeffizientenvektor c,
y(t = 0) = Cc, c ≡
c1
c2
..cn
, C ≡ (x1, ...,xn). (2.54)
Die Losung ist eindeutig, weil C invertierbar ist.
2.4.7 Eigenlosungen fur nicht-diagonalisierbares A
Der Fall
y′(t) = Ay(t) (2.55)
mit nichtdiagonaliserbarem A ist etwas komplizierter. Man muss A auf Jordansche Nor-malform bringen bzw. den Exponentialansatz etwas verallgemeinern (vgl. WALTER,‘Gewohnliche Differentialgleichungen’).
2.4.8 ANWENDUNG MECHANIK: gedampfter harmonischer Oszillator
Dieser erfullt die Newtonschen Bewegungsgleichungen
x(t) + 2γx(t) + ω2x(t) = f(t), γ > 0. (2.56)
Umschreiben in ein System erster Ordung fuhrt auf (setze die Masse m = 1)
x(t) = p(t)
p(t) = −ω2x(t) − 2γp(t) + f(t) (2.57)
Wir schreiben das in unserer Standard-Form als
y′(t) = Ay(t) + b(t) (2.58)
mit
b(t) =
(
0f(t)
)
, A =
(
0 1−ω2 −2γ
)
. (2.59)
Hier betrachten wir zunachst den homogenen Fall ohne außere Kraft, d.h. f(t) = 0.Die Eigenwerte λ von A sind durch
− λ(−2γ − λ) + ω2 = 0 λ2 + 2γλ + ω2 = 0 (2.60)
λ1/2 = −γ ±√
γ2 − ω2 (2.61)
gegeben. Fur γ = 0 (ungedampfter Fall) gibt es die zwei Losungen, d.h. Eigenwerte λ1/2
und Eigenvektoren x1/2,
λ1/2 = ±iω, x1 =
(
1iω
)
, x2 =
(
1−iω
)
. (2.62)

2. Gewohnliche Differentialgleichungen 17
Die allgemeine Losung des homogenen Systems ist deshalb von der Form
y(t) = c+
(
1iω
)
eiωt + c−
(
1−iω
)
e−iωt (2.63)
mit Koeffizienten, die aus der Anfangsbedingung bestimmt werden mussen.AUFGABE: Betrachte den gedampften harmonischen Oszillator ohne außere Kraft,
x(t) + 2γx(t) + ω2x(t) = 0.1. Berechne analog zu oben die Eigenfrequenzen und die allgemeinen Losung des homoge-nen Systems fur γ 6= 0. Hierbei soll angenommen werden, dass die zwei Eigenfrequenzenverschieden voneinander sind.2. Bestimmte x(t) explizit (ausgedruckt durch reelle Funktionen) fur die Anfangsbedin-gung x(t = 0) = x0, x(t = 0) = v0. Skizziere die Losung.
2.4.9 Wiederholung Lineare Algebra (III): Skalar- und Vektorprodukt
Wir schliessen unsere Wiederholung der Lineare Algebra hier der Vollstandigkeit halbervorlaufig mit einem Einschub uber Skalar- und Vektorprodukte ab.
2.4.9.1 Skalarprodukt (inneres Produkt) zweier Vektoren
In kartesischen Koordinaten gilt
xy ≡ (x,y) ≡n∑
i=1
x∗i yi. (2.64)
Die Lange (Norm) eines Vektors ist
‖x‖ ≡√
xx. (2.65)
Zwei Vektoren x, y heissen orthogonal, falls xy = 0.
2.4.9.2 Kreuzprodukt zweier reeller Vektoren im R3
Das Kreuzprodukt von x =∑3
i=1 xiei und y =∑3
i=1 yiei mit reellen Koeffizienten istselbst wieder ein dreidimensionaler Vektor senkrecht zu x, y und uber die Determinantedefiniert als
x× y =
∣
∣
∣
∣
∣
∣
e1 e2 e3
x1 x2 x3
y1 y2 y3
∣
∣
∣
∣
∣
∣
, (2.66)
wobei die Determinante einfach formal ausgerechnet wird und die ei die kartesischenBasisvektoren sind. Man kann das auch formal mit Hilfe des ε-Tensors (Levi-Civita-

2. Gewohnliche Differentialgleichungen 18
Symbol) schreiben:
x× y =
3∑
i=1
3∑
j=1
3∑
k=1
εijkxiyjek ≡ εijkxiyjek (2.67)
1 = ε123 = ε231 = ε312, zyklische Vertauschung von 123 (2.68)
−1 = ε213 = ε132 = ε321, zyklische Vertauschung von 213 (2.69)
εijk = 0, sonst . (2.70)
vgl. WIKIPEDIA-Artikel o.a. Hierbei wurde die Einsteinsche Summationskonventi-on eingefuhrt: uber gemeinsam auftretende Indizes wird summiert, das Summen-Symbolwird dabei weggelassen.
Es gelten Rechenregeln fur das Kreuzprodukt (AUFGABE)
x × y = −y × x (2.71)
a × (b× c) = b(ac) − c(ab), bac-cab-Regel . (2.72)
2.5 ANWENDUNG MECHANIK: Eigenschwingungen und Eigenmoden(Normalmoden)
Wir betrachten die Newtonschen Gleichungen fur N Massenpunkte mit Masse mi, diedurch lineare Federn miteinander verbunden sind. Der Vektor ri (d-dimensionaler Vektor,z.B. d = 2 fur Bewegung in einer Ebene) bezeichne die Auslenkung der Masse mi ausihrer Ruhelage. Die Kraft auf die Masse mi ist proportional zur Auslenkung aller Massenaus ihrer Ruhelage,
miri =
N∑
j=1
Aijri. (2.73)
Hierbei ist jedes Aij eine d × d-Matrix. Das ist ein lineares System mit konstantenKoeffizienten, allerdings von zweiter Ordnung. Man kann es in ein System erster Ordnungumwandeln, einfacher ist aber eine direkte Losung uber einen Exponentialansatz:
2.5.1 Fall d = 1, N = 2 (zwei gekoppelte Oszillatoren)
Zwei uber Federn gekoppelte Massen m1 und m2 auf einer Geraden, Auslenkung aus derRuhelage x1 und x2. Die Newtonschen Gleichungen lauten
m1x1 = A11x1 + A12x2
m2x2 = A21x1 + A22x2, (2.74)
die Aij sind hier skalar.

2. Gewohnliche Differentialgleichungen 19
2.5.1.1 Losung durch Exponentialansatz
Wir setzen
x1(t) = c1e−iωt, x2(t) = c2e
−iωt (2.75)
in die DGL ein und erhalten
− m1ω2c1 = A11c1 + A12c2
−m2ω2c2 = A21c1 + A22c2, (2.76)
was wir als
(A + Mω2)c = 0, A =
(
A11 A12
A21 A22
)
, M =
(
m1 00 m2
)
(2.77)
mit dem Koeffizientenvektor c schreiben. Nichttriviale Losungen gibt es fur
det(A + Mω2) = 0. (2.78)
Aus dieser Gleichung werden die moglichen Werte fur die Winkelfrequenzen ω bestimmt.Es gibt wegen des Quadrats jeweils zwei Wurzeln - diejenigen mit positivem Realteilwerden als Eigenfrequenzen des Systems bezeichnet. Die zugehorigen Losungen furden Koeffizientenvektor c heissen Eigenmoden (Normalmoden) des Systems.
2.5.1.2 Ungekoppelte Massenpunkte
In diesem Fall hat man
A =
(
−k1 00 −k2
)
(2.79)
mit zwei Federkonstanten k1 > 0, k2 > 0. Aus Gl. (2.78) folgt naturlich
∣
∣
∣
∣
−k1 + m1ω2 0
0 −k2 + m2ω2
∣
∣
∣
∣
= 0 0 = (−k1 + m1ω2)(−k2 + m2ω
2), (2.80)
also Winkelfrequenzen ±ω1 = ±√
k1/m1 und ±ω2 = ±√
k2/m2, d.h. die zwei Eigenfre-quenzen, die wie erwartet den Frequenzen der beiden Oszillatoren (die ja unabhangigvoneinander sind) entsprechen. Die Koeffizientenvektoren sind
c1 =
(
10
)
, zu ω1 (2.81)
c2 =
(
01
)
, zu ω2 . (2.82)

2. Gewohnliche Differentialgleichungen 20
Abbildung 2.3: Normalmoden c©WIKIPEDIA http://en.wikipedia.org/wiki/Normal mode
2.5.1.3 Gekoppelte Massenpunkte
Jetzt betrachten wir ein spezielles Beispiel zweier gleicher Massen m, die sich auf einerGeraden bewegen (raumliche Dimension d = 1) und durch Federn mit gleicher Feder-konstante k aneinander und jeweils an eine Wand links und rechts gekoppelt sind (Bild).
Koordinaten x1 und x2 von den jeweiligen Ruhelagen der Massen. Kraft auf die ersteMasse (Bild)
mx1 = −kx1 + k(x2 − x1), (2.83)
entsprechend Kraft auf die zweite Masse (Bild)
mx2 = −kx2 + k(x1 − x2). (2.84)
Das einzig Wichtige ist hier, dass man sich die Vorzeichen genau uberlegt (NACH-PRUFEN!). Wir haben also
mx1 = −2kx1 + kx2
mx2 = kx1 − 2kx2. (2.85)
Der Exponentialansatz fuhrt also auf
(A + Mω2)c = 0, A = k
(
−2 11 −2
)
, M = m
(
1 00 1
)
. (2.86)
Die zwei Eigenfrequenzen folgen aus
0 = det(A + Mω2) (−2k + mω2)2 − k2 = 0 −2k + mω2 = ±k
ω21 =
k
m, ω2
2 = 3k
m. (2.87)
Die zwei Normalmoden c finden wir mit den Eigenvektoren von A + Mω2 als (NACH-RECHNEN!)
c1 =
(
11
)
, zu ω21 , c2 =
(
1−1
)
, zu ω22 . (2.88)
Die allgemeine Losung hat also die Form(
x1(t)x2(t)
)
=
(
11
)
[
α+eiω1t + α−e−iω1t]
+
(
1−1
)
[
β+eiω2t + β−e−iω2t]
(2.89)
2. Gewohnliche Differentialgleichungen 21
mit vier Koeffizienten α±, β±, die aus den Anfangsbedingungen bestimmt werden. Furβ± = 0 schwingen die Massen miteinander in der Normalmode c1 mit der Frequenz ω1.Fur α± = 0 schwingen die Massen gegeneinander in der Normalmode c2 mit der um
√3
hoheren Frequenz ω2.Vgl. auch den Artikel ‘normal modes’ in WIKIPEDIA (April 2008).http://en.wikipedia.org/wiki/Normal mode
AUFGABE: Betrachte zwei Massen m1, m2, die sich auf einer Geraden bewegen (raumlicheDimension d = 1) und durch eine Feder mit Federkonstante k aneinander gekoppeltsind. Die linke Masse sei weiterhin durch eine Feder mit gleicher Federkonstante k aneine Wand links gekoppelt, die rechte Masse sei frei. Bestimme die Eigenfrequenzen undEigenmoden dieses Systems.
2.5.2 Mehrere (N > 2) gekoppelte Oszillatoren
Das funktioniert genauso wie im obigen Fall N = 2, nur mit dem Unterschied, dass jetztdie Matrizen A und M großer werden.AUFGABE: Bestimme die Eigenfrequenzen eines linearen dreiatomigen Molekul-Modellsmit zwei Massen m außen, einer Masse mc innen, und den zwei Federn mit Federkon-stanten k. Bestimme die zugehorigen Normalmoden (∗-Aufgabe).
2.6 Lineare inhomogene Systeme
Inhomogene lineare Systeme (Dimension n)
y′(t) = Ay(t) + b(t) (2.90)
mit der n × n-Matrix A konnen wir jetzt auch leicht losen. Der homogene Fall b(t) ≡ 0hatte die Losung
y(t) = eAty(t = 0) (2.91)
mit der Exponentialfunktion der Matrix A, vgl. oben. Wir definieren analog zur DGL 1.Ordnung, Gl. (2.18), eine Losung des homogenen Falls
yh(t, t′) = eA(t−t′)y1, eA(t−t′) : Propagator, (2.92)
die die homogene DGL mit der AB y1 = (1, 1, ..., 1)T zur Zeit t = t′ erfullt. Wenn wir dasuber die Inhomogenitat (‘außere Kraft’) b(t′) integrieren (Anfangszeit t = t0), erhaltenwir wie bei der DGL 1. Ordnung eine spezielle Losung fur den inhomogenen Fall,
ys(t, t0) =
∫ t
t0
dt′eA(t−t′)b(t′), (2.93)
denn
d
dtys(t, t0) = eA(t−t)b(t′ = t) +
∫ t
t0
dt′AeA(t−t′)b(t′) = b(t) + Ays(t, t0). (2.94)

2. Gewohnliche Differentialgleichungen 22
Die Gesamtlosung ist wieder eine Linearkombination aus spezieller Losung ys(t, t0) undder Losung fur den homogenen Fall, d.h.
y(t) = eA(t−t0)y(t = t0) +
∫ t
t0
dt′eA(t−t′)b(t′). (2.95)
INTERPRETATION: y(t) = (y1(t), ..., yn(t))T als mehrkomponentige ‘Auslenkung’, diesich als Summe zweier Anteile ergibt: 1. die homogenen Auslenkung eA(t−t0)y(t = t0)ohne außere Kraft b(t′), bei der einfach die AB y(t = t0) frei propagiert wird, und2. die inhomogene Auslenkung
∫ tt0
dt′eA(t−t′)b(t′), bei der der Einfluß der außeren Kraftb(t′) zu jedem Zeitpunkt t′ zusatzliche Auslenkungen ergeben, die jeweils von t′ bis tpropagiert werden.
AUFGABE: Losen Sie mit dieser Methode das Anfangswertproblem fur den un-gedampften harmonischen Oszillator mit außerer Kraft, x(t)+ω2x(t) = f(t), x(0) = x0,x(0) = v0. Bestimmen Sie hierfur zunachst die Matrix eAt und bestimmen Sie dann einenallgemeinen Ausdruck fur x(t) fur beliebiges f(t).

3. EINFACHE PARTIELLE
DIFFERENTIALGLEICHUNGEN UND
FOURIER-ANALYSE
3.1 Die Gleichung der schwingenden Saite (Wellengleichung in einerDimension)
Dieses ist eine partielle Differentialgleichung (pDGL) fur die Auslenkung u(x, t) der Saiteals Funktion des Ortes x und der Zeit t,
∂2
∂t2u(x, t) = c2 ∂2
∂x2u(x, t) (3.1)
mit der Schallgeschwindigkeit c. Die Saite habe die Lange L und sei fest eingespannt -die pDGL muss deshalb die Randbedingung
u(x = 0, t) = u(x = L, t) = 0 (3.2)
zu allen Zeiten t erfullen. Zur Zeit t = 0 ist die Saite anfanglich ausgelenkt gemass einemvorgegebenen Profil u0(x) (z.B. dreieckig, da mit dem Finger in der Mitte hochgezogen),ausserdem hat die Saitenauslenkung an jeder Stelle x eine Anfangsgeschwindigkeit v0(x),
u(x, t = 0) = u0(x), 1. Anfangsbedingung (3.3)
∂
∂tu(x, t)
∣
∣
∣
∣
t=0
= v0(x), 2. Anfangsbedingung. (3.4)
Die Anfangswertaufgabe besteht dann in der Losung der pDGL zu Zeiten t > 0, d.h.ausgehend von dem Auslenkungs und Geschwindigkeitsprofil zur Zeit t = 0 soll das Profil(die Auslenkung) u(x, t) zu allen Zeiten bestimmt werden. Das Anfangsprofil wird alsozu grosseren Zeiten hin ‘propagiert’.
Bemerkungen
• Wie bei der Dynamik von Massenpunkten (Newton) mussen fur eine eindeutigeLosung Anfangsauslenkung u und Anfangsgeschwindigkeit u uberall (fur alle x)bekannt sein: ‘Laplacescher Damon’.
• Es konnen auch allgemeinere Randbedingung als Gl. (3.2) vorkommen.

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 24
3.1.1 Wellengleichung als Kontinuumslimes: gekoppelte Massenpunkten
Wir betrachten die Bewegung von Massen m im gleichen Abstand a auf der x-Achse, diedurch masselose Federn mit Federkonstante k gekoppelt sind. Die Bewegungsgleichungfur die Auslenkung ui der i-ten Masse lautet (AUFGABE)
mui = k(ui+1 − ui) − k(ui − ui−1). (3.5)
Wenn wir die Auslenkung u jetzt als (stetige und differenzierbare) Funktion von x mitkontinuierlichem x anstelle des diskreten i auffassen, haben wir
ui → u(x), ui+1 → u(x + a), ui−1 → u(x − a)
ui+1 − 2ui + ui−1 → u(x + a) − 2u(x) + u(x − a) = a2u′′(x) + O(a3), (3.6)
d.h.
lima→0
u(x + a) − 2u(x) + u(x − a)
a2= u′′(x). (3.7)
Aus den gekoppelten Bewegungsgleichungen der unendlich vielen Oszillatoren wird eineeinzige partielle Differentialgleichung,
ui =ka2
m
ui+1 − 2ui + ui−1
a2
∂2
∂t2u(x, t) = c2 ∂2
∂x2u(x, t), c2 = lim
a→0
ka2
m, (3.8)
wobei sich k und m so verhalten mussen, dass der Limes c2 = lima→0ka2
m existiert.LITERATUR: H. Goldstein, ’Klassische Mechanik’. Ein wichtiges Mechanik-Lehrbuch
(Klassiker), wird auch nachstes Semester nutzlich sein.
3.1.2 Separationsansatz
Wir losen die pDGL mit einem Separationsansatz
u(x, t) = y(x)z(t) y(x)z′′(t) = z(t)c2y′′(x)
1
c2z(t)z′′(t) =
1
y(x)y′′(x) ≡ −k2, (3.9)
denn beide Seiten hangen von jeweils unabhangigen Variablen x und t ab, mussen al-so konstant sein. Die Konstante nennen wir −k2. Beide Gleichungen sind gewohnlichelineare DGL zweiter Ordnung mit allgemeiner Losung
y(x) = α cos kx + β sin kx (3.10)
z(t) = γ1 cos kct + γ2 sin kct. (3.11)
mit Koeffizienten α, β, γ1, γ2. Die Konstante k heisst Wellenvektor (hier einkomponentig,da wir in einer Dimension sind).

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 25
3.1.2.1 Erfullung der Randbedingung (RB)
Aus u(x = 0, t) = u(x = L, t) = 0 folgt y(0) = y(L) = 0. Damit
y(0) = 0 α = 0 (3.12)
y(L) = 0 sin kL = 0 k = kn ≡ nπ
L, n = 1, 2, 3..., ‘Quantisierung’ (3.13)
Die zweite RB fuhrt also auf ausschliesslich diskrete Werte kn fur den Wellenvektor k: eshandelt sich schliesslich um stehende Wellen. Eine Losung der pDGL hat jetzt die Form
un(x, t) = β sin(nπ
Lx)
[γ1 cos knct + γ2 sin knct] (3.14)
3.1.2.2 Superposition von Losungen
Die Losung un(x, t) hangt von der ganzen Zahl n ab. Wir fassen die Konstanten zusam-men (βγ1 → an, βγ2 → bn ) und schreiben
un(x, t) = sin(nπ
Lx)
[an cos kct + bn sin kct] . (3.15)
Wegen der Linearitat der pDGL ist eine Linearkombination von Losungen wieder eineLosung. Allgemein konnen wir eine solche Superposition also als
u(x, t) =∞∑
n=1
sin(nπ
Lx)
[an cos kct + bn sin kct] (3.16)
schreiben. Die Koeffizienten an und bn werden jetzt aus den Anfangsbedingungen be-stimmt.
3.1.3 Erfullung der Anfangsbedingungen
Aus u(x, t = 0) = u0(x) und ∂∂tu(x, t)
∣
∣
t=0= v0(x) folgt
∞∑
n=1
an sin(nπ
Lx)
= u0(x) (3.17)
∞∑
n=1
kcbn sin(nπ
Lx)
= v0(x). (3.18)
Hierbei sind die Funktionen u0(x) und v0(x) vorgegeben und die Koeffizienten an undbn noch zu bestimmen.
BEISPIEL:
v0(x) ≡ 0 bn = 0
u0(x) = γ sin
(
2π
Lx
)
a1 = 0, a2 = γ, a3 = 0, a4 = 0, ... (3.19)

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 26
Fur ein allgemeine Anfangsbedingung benutzt man Fourier-Reihen. Die Darstellung
f(x) =∞∑
n=1
an sin(nπ
Lx)
(3.20)
einer Funktion f(x) auf dem Intervall [0, L] heisst Fourier-Sinus-Reihe. Ist f(x) gege-ben, so lassen sich die an folgendermassen bestimmen: wir multiplizieren und integrierendie Gleichung,
∫ L
0dxf(x) sin
(
n′π
Lx
)
=
∞∑
n=1
an
∫ L
0dx sin
(nπ
Lx)
sin
(
n′π
Lx
)
(3.21)
und benutzen∫ L
0dx sin
(nπ
Lx)
sin
(
n′π
Lx
)
=L
2δn,n′ (3.22)
(AUFGABE), wobei
δn,n′ =
{
1, n = n′
0, n 6= n′ , Kronecker-Symbol. (3.23)
Damit hat man einen expliziten Ausdruck fur an,
an =2
L
∫ L
0dxf(x) sin
(nπ
Lx)
(3.24)
(entsprechend fur bn) und damit die vollstandige Losung der pDGL, die korrekt die RBund AB erfullt.
AUFGABE: Lose die Wellengleichung ∂2
∂t2u(x, t) = c2 ∂2
∂x2 u(x, t) auf dem Intervall[0, L] mit Randbedingung (RB) u(x = 0, t) = u(x = L, t) = 0 und Anfangsbedingung(AB) ∂
∂tu(x, t)∣
∣
t=0= 0 und u(x, t = 0) = u0(x), wobei u0(x) eine ‘Dreiecks’-Gestalt mit
Maximum u0(L/2) = um habe.Zusatzaufgabe: Plot der Losung u(x, t) fur verschiedene, feste Zeiten t. Animation in
MATHEMATICA.
3.2 Fourier-Analyse
Jetzt diskutieren wir Fourier-Reihen etwas allgemeiner. LITERATUR: Forster, AnalysisI. Als Visualisierung weiterhin web-animationen:
z.B. wikipedia ‘Fourier series’; http://www.falstad.com/fourier/ (05/2008).
3.2.1 Definitionen
Definition Fourier-Reihen einer Funktion f(x) auf dem Intervall [−L,L] sind definiertals unendliche Reihe der Form
f(x) =a0
2+
∞∑
n=1
(
an cos(nπ
Lx)
+ bn sin(nπ
Lx))
. (3.25)

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 27
mit reellen Koeffizienten an, bn. Man bezeichnet diese Darstellung von f(x) auch alsEntwicklung nach stehenden Wellen. Die so definierte Funktion ist periodisch, f(x) =f(x + 2L).
Allgemeiner definiert man die komplexe Fourier-Reihen einer periodischen Funktionf(x) = f(x + 2L) auf dem Intervall [−L,L] als
f(x) =
∞∑
n=−∞cnei nπ
Lx. (3.26)
mit komplexen Koeffizienten cn.
Man bezeichnet diese Darstellung von f(x) dann als Entwicklung nach ebenen (laufen-den) Wellen.
Die Fourier- Koeffizienten dieser Entwicklung bestimmt man durch Integration,
an =1
L
∫ L
−Ldxf(x) cos
(nπ
Lx)
, bn =1
L
∫ L
−Ldxf(x) sin
(nπ
Lx)
(3.27)
cn =1
2L
∫ L
−Ldxf(x)e−i nπ
Lx. (3.28)
Das folgt, indem man die Reihen jeweils mit cos(
nπL x)
, sin(
nπL x)
bzw. e−i nπ
Lx multipli-
ziert und integriert unter Benutzung von (NACHRECHNEN!)
1
L
∫ L
−Ldx cos
(nπ
Lx)
cos(mπ
Lx)
= δnm (3.29)
1
L
∫ L
−Ldx sin
(nπ
Lx)
sin(mπ
Lx)
= δnm (3.30)
1
L
∫ L
−Ldx cos
(nπ
Lx)
sin(mπ
Lx)
= 0 (3.31)
1
2L
∫ L
−Ldxei
(n−m)πL
x = δnm. (3.32)
AUFGABE:1. Entwicklung der periodischen Sprungfunktion f(−L < x < 0) = −1, f(0 < x <
L) = 1 in a) eine komplexe Fourierreihe, b) eine sin-cos-Fourier-Reihe2. Entwicklung der periodischen Funktion f(0 < x < 2π) = x2 mit Periode 2π in
eine Fourierreihe. Berechnung von∑∞
n=11n2 hiermit.

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 28
3.2.2 Halbintervallige Fourier-Reihen (Sinus und Cosinus)
Die Funktion f(x) ist hier auf dem Intervall (0, L) definiert (im Gegensatz zu (−L,L)),und zwar mittels
f(x) =
∞∑
n=1
bn sin(nπ
Lx)
, halbintervallige Sinus-Reihe (3.33)
bn =2
L
∫ L
0dxf(x) sin
(nπ
Lx)
(3.34)
f(x) =
∞∑
n=0
an cos(nπ
Lx)
, halbintervallige Cosinus-Reihe (3.35)
an =2
L
∫ L
0dxf(x) cos
(nπ
Lx)
. (3.36)
Den Fall f(x) =∑∞
n=1 bn sin(
nπL x)
hatten wir z.B. bei der Losung der Wellengleichungoben benutzt (die Koeffizienten hießen dort an).
3.2.3 Vektorraum der Periodischen Funktionen
Periodische, komplexwertige Funktion f mit f(x) = f(x+2L) auf dem Intervall [−L,L]bilden einen Vektorraum H (Hilbertraum, wird spater in der Quantenmechanik sehrwichtig)). Eine Basis dieses Vektorraum sind die Funktionen
en : R → C, en(x) ≡ ei nπ
Lx, n = 0,±1,±2, ... (3.37)
Da es unendlich viele n gibt, ist diese Basis und damit der Vektorraum unendlichdimen-sional. Analogie zu gewohnlichen Vektoren y im Cd:
• Vektoren y im Cd
y =
d∑
n=1
cnen, Basisdarstellung (3.38)
cn = (en,y) ≡d∑
i=1
(en)∗i yi, Skalarprodukt (3.39)
(en, em) =
d∑
i=1
δinδim = δnm, Orthonormalbasis . (3.40)
• Vektoren (Funktionen) f in H: Funktionen f (nicht ihre Funktionswerte) werdenals abstrakte Objekte, d.h. Vektoren ausgefasst. Die Fourier-Koeffizienten cn ent-

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 29
sprechen den Komponenten des Vektors in einer Orthonormalbasis.
f =
∞∑
n=−∞cnen, Basisdarstellung (3.41)
cn = (en, f) ≡ 1
2L
∫ L
−Ldxe∗n(x)f(x), Skalarprodukt (3.42)
(en, em) = δnm, Orthonormalbasis . (3.43)
3.2.4 Konvergenz der Fourierreihe
Endliche Fourierreihen
fN : R → C, fN (x) ≡N∑
n=−N
cnei nπ
Lx, cn =
1
2L
∫ L
−Ldxf(x)e−i nπ
Lx (3.44)
konvergieren im Allgemeinen nicht punktweise (fur jedes x) gegen die Funktion f(x),sondern nur im quadratischen Mittel:
limN→∞
‖f − fN‖ = 0, (3.45)
wobei der Abstand (Norm) zwischen f und fN durch das Skalarprodukt gegeben ist,
‖f − fN‖2 ≡ (f − fN , f − fN) ≡ 1
2L
∫ L
−Ldx|f(x) − fN(x)|2. (3.46)
Beispiel: Gibbsches Phanomen (web-animation) an Sprungstellen.AUFGABE: Man beweise die Parsevalsche Gleichung (Vollstandigkeisrelation)
fur die komplexen Fourier-Reihen periodischer, integrierbarer Funktionen f auf [−L,L],
∞∑
n=−∞|cn|2 =
1
2L
∫ L
−Ldx|f(x)|2 (3.47)
3.3 Die Diffusionsgleichung in einer Dimension
Dieses ist eine partielle Differentialgleichung (pDGL) fur die Konzentration n(x, t) einerSubstanz als Funktion des Ortes x und der Zeit t,
∂
∂tn(x, t) = D
∂2
∂x2n(x, t) (3.48)
mit der Diffusionskonstanten D.Die Diffusionsgleichung muss haufig Randbedingungen erfullen, z.B.
n(x = 0, t) = n(x = L, t) = 0. (3.49)

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 30
Es kann auch die Stromdichte an den Randern vorgegeben sein, z.B.
j(x = 0, t) = j0, j(x = L, t) = jL. (3.50)
Im Gegensatz zur Wellengleichung ist die Diffusionsgleichung von erster Ordnung inder zeitlichen Ableitung. Deshalb gibt es nur eine Anfangsbedingung (AB) der Form
n(x, t = 0) = n0(x), Anfangsbedingung. (3.51)
3.3.1 Herleitung der Diffusionsgleichung in einer Dimension
Diffusionsstrom mit Stromdichte j(x, t) fließt in Richtung de starksten Konzentrations-gefalles,
j(x, t) = −D∂
∂xn(x, t), 1. Fick’sches Gesetz . (3.52)
Ausserdem hat man
∂
∂tn(x, t) = − ∂
∂xj(x, t), Kontinuitatsgleichung (1 Dimension) , (3.53)
die aus der Erhaltung der Masse folgt.AUFGABE: Kontinuitatsgleichung (1 Dimension) durch Betrachten des Teilchen-
Flusses durch einen Querschnitts der Flache A senkrecht zum Fluß.Differenzieren des 1. Fick’sches Gesetzes nach x gibt die Diffusionsgleichung.
3.3.2 Losung der Diffusionsgleichung
Wie bei der Wellengleichung erfolgt zunachst eine Trennung der Variablen (Separations-ansatz),
n(x, t) = y(x)z(t) y(x)z′(t) = z(t)Dy′′(x)
1
Dz(t)z′(t) =
1
y(x)y′′(x) ≡ −k2, (3.54)
denn beide Seiten hangen von jeweils unabhangigen Variablen x und t ab, mussen al-so konstant sein. Die Konstante nennen wir −k2. Beide Gleichungen sind gewohnlichelineare DGL mit allgemeiner Losung
y(x) = α cos kx + β sin kx (3.55)
z(t) = e−Dk2t (3.56)
Die Konstante k heisst Wellenvektor (hier einkomponentig, da wir in einer Dimensionsind). Die Randbedingungen z.B. fur Stromdichte Null (es stromt nichts hinein oderhinaus) lauten
j(x = 0, t) = j(x = L, t) = 0 β = 0, k = kn = nπ/L. (3.57)
Wir uberlagern diese Losungen als Fourier-Reihe, um die Anfangsbedingung zu erfullen,AUFGABE: Formuliere die allgemeine Losung der Diffusionsgleichung ∂
∂tn(x, t) =
D ∂2
∂x2 n(x, t) mit RB j(x = 0, t) = j(x = L, t) = 0 und AB n(x, t = 0) = n0(x).

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 31
3.4 Unendliches Intervall: von Fourier-Reihen zur Fourier-Transformation
3.4.1 Motivation
In Fourier-Reihen fur Losungen der Diffusionsgleichung auf [0, L],
n(x, t) =
∞∑
n=0
e−Dk2nt [an cos knx + bn sin knx] , kn = nπ/L, (3.58)
fragen wir, was fur L → ∞ passiert. Wir schreiben zunachst alles als komplexe Fourier-Reihe,
n(x, t) =
∞∑
n=−∞cne−Dk2
nteiknx (3.59)
mit komplexen Koeffizienten cn.Allgemein kann man in der Fourier-Entwicklung einer periodischen Funktion n(x) =
n(x + 2L) auf dem Intervall [−L,L],
n(x) =
∞∑
n=−∞cnei nπ
Lx, (3.60)
fragen, was fur L → ∞ passiert. Heuristisch gilt folgendes: wir betrachten das Integral
∫ ∞
−∞f(k)dk = lim
L,N→∞
N∑
n=−N
2π
2Lf(kn), kn = nπ/L, Riemann-Summe .(3.61)
Hierbei ist 2π2L ≡ ∆k die Feinheit der Unterteilung der Riemann-Summe, die das Integral
fur L,N → ∞ immer besser approximiert. Wir haben also den Ubergang von derdiskreten Summe im k-Raum zum Integral,
limL,N→∞
1
2L
N∑
n=−N
f(nπ/L) =1
2π
∫ ∞
−∞f(k)dk, (3.62)
eine wichtige und in verschiedenen Gebieten (Quantenphysik, Festkorpertheorie, Strah-lungstheorie,...) oft benutzte Formel. Beachte: Die Lange 2L des Intervalls geht im Vor-faktor im Limes L → ∞ in den Faktor 2π uber. In den Fourierreihen haben wir nunentsprechend den Ubergang fur L → ∞,
f(x) =∞∑
n=−∞cnei nπ
Lx =
1
2L
∞∑
n=−∞
(∫ L
−Ldx′f(x′)e−i nπ
Lx′
)
ei nπ
Lx (3.63)
→ 1
2π
∫ ∞
−∞dk
(∫ ∞
−∞dx′f(x′)e−ikx′
)
eikx
≡ 1
2π
∫ ∞
−∞dkf(k)eikx. (3.64)

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 32
Hierbei ist also der Koeffizient cn mit diskretem Index n in den Koeffizienten f(k) mitkontinuierlichem Index k ubergegangen. Beachte, dass wir im Integral, welches f(k)definiert, x′ als Integrationsvariable benutzten, da x bereits als Buchstabe vergeben ist.
Definition
f(k) ≡∫ ∞
−∞dxf(x)e−ikx, Fourier-Transformierte von f(x) (3.65)
f(x) =1
2π
∫ ∞
−∞dkf(k)eikx, Fourier-Darstellung (3.66)
• Man bezeichnet die Fourier-Transformierte f(k) von f(x) manchmal auch alsFourier-Hintransformation und die Darstellung von f(x) mittels f(k) als Fourier-Rucktransformation.
• Beachte die Aufteilung des Faktors 1/2π: in der Physik wird das meist so wie oben(unsymmetrisch) definiert. In der Mathematik definiert man das meist symmetrischmit zwei Faktoren 1/
√2π.
• Ebenfalls beachte (und memoriere) man die Vorzeichen ∓ikx bei Hin- und Ruck-transformation.
• Selbstverstandlich haben wir hier uberhaupt nicht uber Konvergenz- und Existenz-fragen gesprochen (LITERATUR: Forster, Analysis III).
3.4.2 Orts- und Impulsraum (k-Raum), Zeit-Domane und Frequenzraum
Ein in der Physik haufige Bezeichnung: Eine Funktion f(x) sei im Ortsraum definiert,d.h. x sei eine Ortsvariable. Dann bezeichnet man
f(x) , Darstellung von f im Ortsraum (3.67)
f(k) , Darstellung von f im Impulsraum (k-Raum) (3.68)
Beide Darstellungen sind aquivalent, da sie ja Fouriertransformierte (FT) voneinandersind. Die Bezeichnung Impulsraum kommt aus der de-Broglie-Beziehung p = ~k derQuantenmechanik mit ~ ≡ h/2π und dem Planck’schen Wirkungsquantum h. Wenn esnicht um Quantenmechanik geht, spricht man besser vom k-Raum oder dem Raum derWellenvektoren.
Analog definiert man die FT einer Funktion f(t) der Zeit,
f(ω) ≡∫ ∞
−∞dtf(t)eiωt, Fourier-Transformierte von f(t) (3.69)
f(t) =1
2π
∫ ∞
−∞dωf(ω)e−iωt, Fourier-Darstellung . (3.70)

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 33
Hierbei sind die Vorzeichen im Exponenten der FT im Vergleich zur FT vom Orts inden Impulsraum genau anders herum (Konvention). Man bezeichnet
f(t) , Darstellung von f in der Zeit-Domane (3.71)
f(ω) , Darstellung von f im Frequenzraum. (3.72)
Wiederum sind beide Darstellungen aquivalent. Manchmal spricht man auch von Origi-nalbereich (z.B. f(t)) und Bildbereich (z.B. f(ω)).
Haufig hat man auch Fouriertransformationen in zwei Variablen, z.B. Ort und Zeit:
u(k, ω) ≡∫ ∞
−∞
∫ ∞
−∞dxdtu(x, t)ei(ωt−kx), Fourier-Transformierte von u(x, t)(3.73)
u(x, t) =1
(2π)2
∫ ∞
−∞
∫ ∞
−∞dkdωu(k, ω)e−i(ωt−kx), Fourier-Darstellung . (3.74)
Jetz sehen wir auch den Sinn der Vorzeichen-Konvention: in der Fourier-Darstellunghaben wir zeitabhangige ebene Wellen e−i(ωt−kx)!
3.4.3 Fouriertransformation: Beispiel Gauß-Funktion
Die Gauß-Funktion ist definiert als eine Wahrscheinlichkeitsdichte p(x),
p(x) ≡ 1√2πσ2
e−(x−x0)2
2σ2 , σ > 0, (3.75)
z.B. fur das Auffinden eines Teilchens am Ort x. Hierbei ist
p(x)dx (3.76)
die Wahrscheinlichkeit, das Teilchens im Intervall [x, x + dx] zu finden. Es gilt∫ ∞
−∞dxp(x) = 1, Normierung (3.77)
was mit∫ ∞
−∞dxe−ax2+bx =
√
π
ae
b2
4a , a > 0 (3.78)
gezeigt werden kann.AUFGABE: Beweise diese Formel unter Ausnutzung von
∫∞−∞ dxe−x2
=√
π.Wir berechnen fur x0 = 0 (Mittelwert Null) die Fouriertransformierte von p(x) (AUF-
GABE)
p(x) =1√
2πσ2e−
x2
2σ2 p(k) ≡
∫ ∞
−∞dxp(x)e−ikx = e−
12σ2k2
. (3.79)
Die Fouriertransformierte einer Gauß-Funktion ist also bis auf den Vorfaktor wieder eineGauß-Funktion.

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 34
• Breite Gauß-Funktion p(x) im Ortsraum, d.h. große σ schmale Fouriertransfor-mierte p(k) im k-Raum.
• Schmale Gauß-Funktion p(x) im Ortsraum, d.h. kleine σ breite Fouriertransfor-mierte p(k) im k-Raum.
Je scharfer die Verteilung p(x) im Ortsraum, desto unscharfer (breiter) wird sie im k-Raum. Umgekehrt: je unscharfer die Verteilung p(x) im Ortsraum, desto scharfer (schma-ler) wird sie im k-Raum.
AUFGABE: Berechne die Fouriertransformierte der Kastenfunktion f(−a ≤ x ≤a) = 1, f(|x| > a) = 0, a > 0, und diskutiere das Ergebnis.
3.4.4 Die Delta-Distribution
LITERATUR: Forster, Analysis III. Im Grenzfall verschwindender Breite σ der Gauß-Funktion definiert man zunachst heuristisch
δ(x − x0) ≡ limσ→0
1√2πσ2
e−(x−x0)2
2σ2 , (Dirac) Delta-Distribution (3.80)
in dem Sinne, dass bei Integration uber ‘gutartige’ Funktionen f(x)∫ ∞
−∞dxδ(x − x0)f(x) = lim
σ→0
∫ ∞
−∞dx
1√2πσ2
e−(x−x0)2
2σ2 f(x) = f(x0) (3.81)
gilt. Diese Operation ist ein Funktional (einer Funktion f wird ein Wert f(x0) zugeord-net), aus historischen Grunden spricht man in der Physik aber von der (Dirac’schen)Delta-Funktion. Die Darstellung Gl. (3.80) ist nicht die einzige: es gilt z.B. auch
δ(x − x0) =1
2π
∫ ∞
−∞dke−ik(x−x0). (3.82)
AUFGABE: Beweis von Gl. (3.82) mittels der Definition der Fouriertransformation einerFunktion f(x).
3.4.5 Einige Eigenschaften der Fourier-Transformation
LITERATUR: BRONSTEIN. FORSTER Analysis III.Wir betrachten eine Funktion f(t) und bezeichnen ihre FT mit Hilfe des Operators
(Abbildung) F : f → f ,
F [f ](ω) ≡ f(ω) ≡∫ ∞
−∞dtf(t)eiωt. (3.83)
Es gilt (AUFGABE)
F [αf + βg] = αF [f ] + βF [g], Linearitat. (3.84)
F [f ′](ω) = −iωF [f ](ω), Differentiation im Originalbereich. (3.85)
F [f(t − t0)](ω) = eiωt0F [f(t)](ω), Verschiebungssatz. (3.86)

3. Einfache partielle Differentialgleichungen und Fourier-Analyse 35
Haufig hat man es z.B. in der Signalverarbeitung mit sogenannten Faltungsintegralenzu tun,
(f1 ∗ f2)(t) ≡∫ ∞
−∞dτf1(τ)f2(t − τ), Faltungsintegral . (3.87)
So kann f1(t) z.B. das Originalsignal darstellen, das aber durch eine Apparatur noch zeit-verzogert und verandert wird, was durch die Integration uber f2 zum Ausdruck kommt.Weitere physikalische Anwendungen solcher Faltungsintegrale sind Systeme, die mit ei-ner Umgebung zeitverzogert wechselwirken, z.B. dissipative Systeme (mikroskopischeModelle fur Reibung).
Fur die FT von Faltungsintegralen gilt der wichtige Faltungssatz (Beweis als AUF-GABE)
F [f1 ∗ f2] = F [f1]F [f2] (3.88)
Die Faltung im Originalbereich wird also zu einem gewohnlichen Produkt im Bildbereich.
3.4.6 Losung von pDGL mit Fouriertransformation
Wir losen die Diffusionsgleichung in einer Dimension als Anfangswertproblem
∂
∂tn(x, t) = D
∂2
∂x2n(x, t), n(x, 0) = n0(x) (3.89)
durch Fouriertransformation,
∂
∂t
1
2π
∫ ∞
−∞dkn(k, t)eikx = D
∂2
∂x2
1
2π
∫ ∞
−∞dkn(k, t)eikx (3.90)
Vertauschen von Differentiation und Integration fuhrt einfach auf
0 =1
2π
∫ ∞
−∞dk
[
∂
∂tn(k, t) + Dk2n(k, t)
]
eikx. (3.91)
Das diese Gleichung fur alle x gelten muß, folgt
∂
∂tn(k, t) + Dk2n(k, t) = 0 (3.92)
n(k, t) = n(k, t = 0)e−Dk2t = n0(k)e−Dk2t. (3.93)
Fur gegebenes Anfangsprofil n0(x) wird n0(k) durch FT berechnet und dann mittelsFourier-Rucktransformation n(x, t).
AUFGABE: Lose die Diffusionsgleichung in einer Dimension auf (−∞,∞), Gl. (3.89),
fur n0(x) = n√2πσ2
e−(x−x0)2
2σ2 mit reellem x0 und n. Interpretiere das Ergebnis physikalisch.
3. Einfache partielle Differentialgleichungen und Fourier-Analyse 36
3.4.7 ANWENDUNG QUANTENMECHANIK: Losung derSchrodingergleichung
Die Schrodingergleichung eines freien Teilchens der Masse m, das sich in einer Dimensionbewegt, lautet
i~∂
∂tΨ(x, t) = − ~
2
2m
∂2
∂x2Ψ(x, t), Ψ(x, 0) = Ψ0(x). (3.94)
Hierbei ist Ψ(x, t) die Wellenfunktion des Teilchens, und
|Ψ(x, t)|2dx ≡ p(x, t)dx (3.95)
ist die Wahrscheinlichkeit, das Teilchen im Intervall [x, x + dx] zu finden.Wie bei der Diffusionsgleichung konnen wir diese Gleichung wieder durch Separa-
tionsansatz und mittels Fourier-Reihen auf einem endlichen Intervall losen. Auf demunendlichen Intervall (−∞,∞) geht das am einfachsten durch Fouriertransformation.
AUFGABE: Lose die Schrodingergleichung in einer Dimension auf (−∞,∞) fur eingegebenes Ψ0(x). Interpretiere das Ergebnis physikalisch.
4. KURVEN UND KRUMMLINIGE
KOORDINATEN
Wiederum ausgehend von der Newtonschen Mechanik von Massenpunkten, kann maneinen grossen Teil der Differentialgeometrie (Kurven, Fachen, Ableitungen etc.) physi-kalisch anschaulich erklaren.
4.1 Kurven und Kinematik eines Massenpunktes
Eine Kurve im Rd ist eine stetige Abbildung t → r(t), also eine einparametrige Scharvon Vektoren, wobei t in der Physik meistens ein Zeitparameter ist. Meist fordert manauch Differenzierbarkeit.
Zwei Gesichtspunkte:1. Kurven als rein geometrische Objekte (Beispiel: Modell fur DNA-Doppelhelix).2. Kurven als Trajektorien von Massepunkten (Testmassen), die sich in Kraftfeldern
bewegen.
4.1.1 Bahn eines Massenpunktes. Geschwindigkeit, Beschleunigung
r(t) sei der Ort eines Massenpunktes zur Zeit t. Beispiele:
r(t) =
(
a cos ωtb sin ωt
)
, Ellipse in d = 2 . (4.1)
Kurven konnen sich schneiden, z.B.
r(t) =
(
t2 − 1t3 − t
)
, (4.2)
oder Spitzen haben, z.B.
r(t) =
(
t2
t3
)
, Neilsche Parabel, (4.3)
(Skizzen), vgl. FORSTER, Analysis II.Geschwindigkeit und Beschleunigung sind einfach die Ableitungen
v(t) ≡ r(t), Geschwindigkeit (4.4)
a(t) ≡ r(t), Beschleunigung . (4.5)
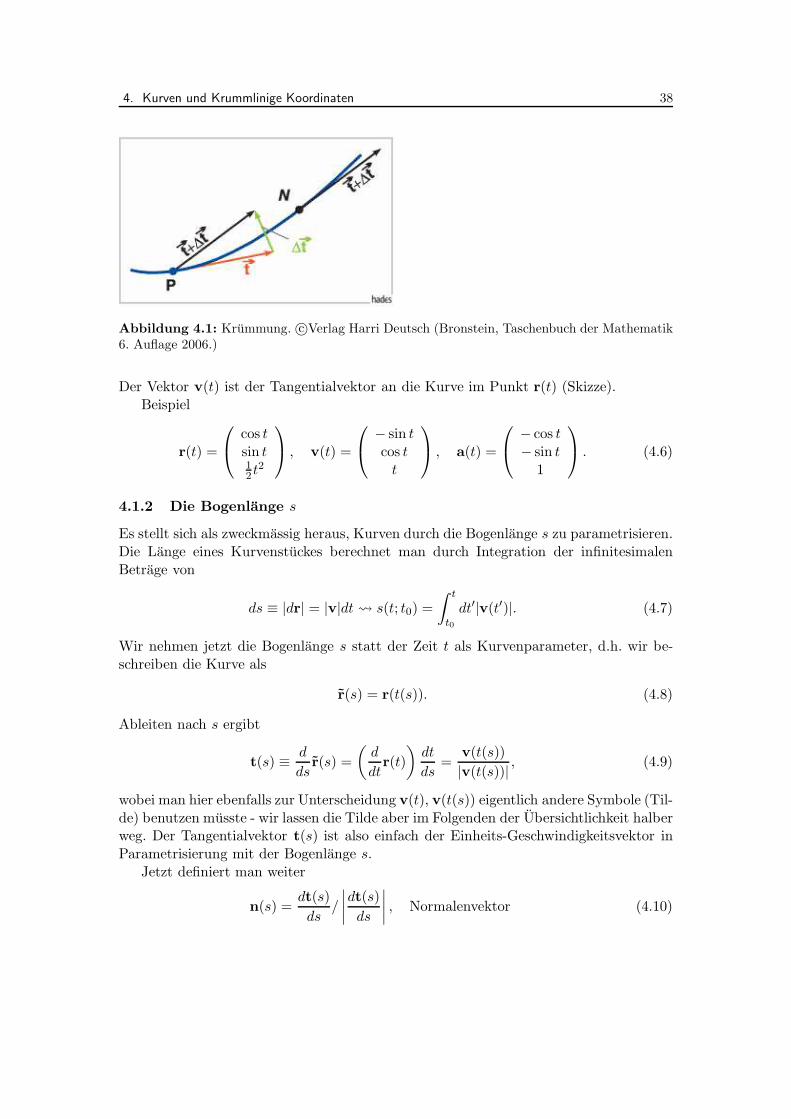
4. Kurven und Krummlinige Koordinaten 38
Abbildung 4.1: Krummung. c©Verlag Harri Deutsch (Bronstein, Taschenbuch der Mathematik6. Auflage 2006.)
Der Vektor v(t) ist der Tangentialvektor an die Kurve im Punkt r(t) (Skizze).Beispiel
r(t) =
cos tsin t12t2
, v(t) =
− sin tcos t
t
, a(t) =
− cos t− sin t
1
. (4.6)
4.1.2 Die Bogenlange s
Es stellt sich als zweckmassig heraus, Kurven durch die Bogenlange s zu parametrisieren.Die Lange eines Kurvenstuckes berechnet man durch Integration der infinitesimalenBetrage von
ds ≡ |dr| = |v|dt s(t; t0) =
∫ t
t0
dt′|v(t′)|. (4.7)
Wir nehmen jetzt die Bogenlange s statt der Zeit t als Kurvenparameter, d.h. wir be-schreiben die Kurve als
r(s) = r(t(s)). (4.8)
Ableiten nach s ergibt
t(s) ≡ d
dsr(s) =
(
d
dtr(t)
)
dt
ds=
v(t(s))
|v(t(s))| , (4.9)
wobei man hier ebenfalls zur Unterscheidung v(t), v(t(s)) eigentlich andere Symbole (Til-de) benutzen musste - wir lassen die Tilde aber im Folgenden der Ubersichtlichkeit halberweg. Der Tangentialvektor t(s) ist also einfach der Einheits-Geschwindigkeitsvektor inParametrisierung mit der Bogenlange s.
Jetzt definiert man weiter
n(s) =dt(s)
ds/
∣
∣
∣
∣
dt(s)
ds
∣
∣
∣
∣
, Normalenvektor (4.10)

4. Kurven und Krummlinige Koordinaten 39
Dieser steht senkrecht auf dem Tangentialvektor t(s), denn
1 = t(s) · t(s) 0 =dt(s)
ds· t(s). (4.11)
Der Betrag K ≡∣
∣
∣
dt(s)ds
∣
∣
∣ gibt die Abweichung von einer Geraden an und wird als Krummung
der Kurve im Punkt r(s),
K ≡ limPN→0
∣
∣
∣
∣
∆t
PN
∣
∣
∣
∣
=
∣
∣
∣
∣
dt(s)
ds
∣
∣
∣
∣
=
∣
∣
∣
∣
d2r(s)
ds2
∣
∣
∣
∣
, Krummung , (4.12)
definiert, vgl. die Skizze. Beachte: das ist der Betrag der zweiten Ableitung von r in derBogenlangen-Parametrisierung, nicht a(t) = r(t). Man definiert weiterhin
R ≡ 1
K, Krummungsradius. (4.13)
Beachte: K ist i.A. an jedem Punkt der Kurve verschieden, also eine Funktion von tbzw. s. Die Krummung erhalten wir direkt aus (AUFGABE)
K =
∣
∣
∣
∣
dt(s)
ds
∣
∣
∣
∣
=v2a2 − (va)2
v6. (4.14)
Die Geschwindigkeit und Beschleunigung lassen sich mittels der lokalen Einheitsvek-toren t und n an der Kurve ausdrucken:
v(t) =dr(t)
dt=
dr(s)
ds
ds
dt= v(t)t(s(t)) (4.15)
a(t) =dv(t)
dt=
d
dt[v(t)t(s(t))] = v(t)t(s(t)) + v(t)
dt(s)
ds
ds
dt
= v(t)t(s(t)) +v2(t)
Rn(s(t)). (4.16)
Die Geschwindigkeit ist also einfach der Tangentialvektor t multipliziert mit demBetrag v(t). Die Beschleunigung hat eine tangentiale Komponente mit Betrag v(t)(Tangentialbeschleunigung) und eine Komponente in Normalenrichtung senkrecht
dazu mit Betrag v2(t)R (Zentripetalbeschleunigung).
4.1.3 Begleitendes Dreibein
Wir konnen den normierten Tangentialvektor und Normalenvektor an einem Punkt derKurve direkt in der Zeitparametrisierung berechnen,
t(t) =v(t)
|v(t)| ≡v(t)
v(t), n(t) =
ddtt(t)
| ddtt(t)|
. (4.17)

4. Kurven und Krummlinige Koordinaten 40
Alles ist konsistent mit der obigen Herleitung in der Parametrisierung durch die Bo-genlange s:
v(t) = v(t)t(t) (4.18)
a(t) =d
dt[v(t)t(t)] = v(t)t(t) + v(t)
dt(t)
dt= v(t)t(t) + v(t)
∣
∣
∣
∣
d
dtt(t)
∣
∣
∣
∣
n(t)
= v(t)t(t) +v2(t)
Rn(t), (4.19)
denn
d
dtt(t) =
d
dst(s)
ds
dt
∣
∣
∣
∣
d
dtt(t)
∣
∣
∣
∣
= Kv(t) =v(t)
R, (4.20)
und wir erhalten die gleichen Ausdrucke wie in Gl. (4.16).Wir definieren fur d = 3 ein lokales Dreibein
t, n, b ≡ t × n (4.21)
an jedem Punkt der Kurve. Dabei heisst der Vektor b Binormalenvektor, wobei dasVektorprodukt zweier Vektoren nur im R3 definiert wird. Wir berechnen die Ableitungvon b(s) in Bogenlangen-Parametrisierung,
db(s)
ds= t(s) × n(s) + t(s) × n(s) = t(s) × n(s), (4.22)
denn t(s) ∝ n. Es gilt also
b(s) ⊥ b(s), t(s) b(s) = −τn(s), (4.23)
d.h. b(s) zeigt in Richtung des Normalenvektors, und der zugehorige Vorfaktor τ wir alsTorsion bezeichnet. Die Torsion ist ein Maß fur die Schraubung der Raumkurve aus dervon t und n aufgespannten Ebene.
AUFGABE: Wiederholung Vektorprodukt. Determinanten-Formel.AUFGABE: Zeigen Sie fur drei Vektoren (Bronstein 3.5.1.4. S. 190) die ‘bac-cab’-
Formel
a × (b × c) = b(ac) − c(ab). (4.24)
AUFGABE: Zeigen Sie fur den Binormalenvektor b und den Normalenvektor n denZusammenhang mit Geschwindigkeit v und Beschleunigung a,
b =v × a
|v × a| (4.25)
n =(v × a) × v
|(v × a) × v| . (4.26)

4. Kurven und Krummlinige Koordinaten 41
AUFGABE: Leiten Sie in den Frenetschen Formeln
t(s) = Kn(s) (4.27)
n(s) = −Kt(s) + τb(s) (4.28)
b(s) = −τn(s) (4.29)
die Gleichung fur n(s) her. Krummung K und Torsion τ bestimmen also die Rich-tungsanderung der Einheitsvektoren des begleitenden Dreibeins beim ‘Entlangfahren’auf der Kurve.
Web-Animationen und Info (Stand Marz 2008)http://www.iag.uni-hannover.de/ greite/ingSS07/dateien/maple/MI 7 4.htmlhttp://www.ottmarlabonde.de/L1/Schmiegeebene.htmlhttp://de.wikipedia.org/wiki/Frenetsche Formeln
4.2 Krummlinige Koordinaten
Wie fuhren zunachst die Begriffe ’kovariante und kontravariante Basis und Koordinaten’ein, um auch fur spater Differentialoperationen in krummlinigen Koordinaten vorzube-reiten.
4.2.1 Kovariante und kontravariante Basis
LITERATUR: E. Klingbeil, ’Tensorrechnung fur Ingenieure’.Sei gi, i = 1, ..., n eine Basis des Rn. Wir konstruieren eine zweite Basis mit Indizes
oben, gi, i = 1, ..., n so dass die Skalarprodukte
gigj = δj
i (4.30)
erfullen, wobei wir auch im Kronecker-Delta einen der Indizes oben schreiben. Wir fuhrenBezeichnungen ein,
gi , kovariante Basis (4.31)
gi , kontravariante Basis. (4.32)
Weiterhin definieren wir die Matrix der Skalarprodukte
gij ≡ gigj, kovariante Metrikkoeffizienten (4.33)
gij ≡ gigj , kontravariante Metrikkoeffizienten. (4.34)
Wir konnen die gi durch eine Linearkombination der gj , gi =∑
j Aijgj ausdrucken underhalten (AUFGABE)
gi =
n∑
j=1
gijgj ≡ gijgj (4.35)
gi =n∑
j=1
gijgj ≡ gijg
j . (4.36)

4. Kurven und Krummlinige Koordinaten 42
Fur eine gegebene Basis gi berechnet man die kovariante Metrikkoeffizienten einfachdurch die Skalarprodukte gigj. Die kontravariante Metrikkoeffizienten und damit diekontravariante Basis erhalt man durch Invertieren der Matrix gij , denn
gi = gikgk δj
i = gikgkgj = gikg
kj . (4.37)
AUFGABE:1. Berechne die kontravariante Basis und die Metrikkoeffizienten zur kovarianten
Basis g1 = e1, g2 = e1 + e2 des R2.2. Berechne die kontravariante Basis und die Metrikkoeffizienten zur kovarianten
Basis g1 = e1, g2 = e1 + e2, g3 = e1 + e2 + e3 des R3.Vektoren x des Rn kann man jetzt sowohl in der kovarianten als auch in der kontra-
varianten Basis ausdrucken:
x = xigi, xi: kontravariante Komponenten von x (4.38)
x = xigi, xi: kovariante Komponenten von x. (4.39)
AUFGABE: Zeigen Sie die Regel fur das Herauf- und Herunterziehen von Indizesmit den Metrikkoeffizienten,
xi = gijxj xi = gijxj. (4.40)
4.2.2 ANWENDUNG FESTKORPERPHYSIK: reziprokes Gitter
LITERATUR: N. W. Ashcroft, N. D. Mermin, ’Solid State Physics’. E. Klingbeil, ’Ten-sorrechnung fur Ingenieure’.
Im R3 sei gi die (kovariante) Basis eines Gitters B aus Punkten x = nigi mit ganzenZahlen ni. Solch ein Gitter wird auch als Bravais-Gitter bezeichnet. Es ist ein Gitterim Ortsraum.
Bei der Analyse von Bravais-Gittern benutzt man haufig Streuexperimente (z.B. mitPhotonen, Neutronen, Elektronen etc.), die einer Fourieranalyse mit ebenen Wellen
Ψk(r) = eikr (4.41)
entsprechen. Man definiert das reziproke Gitter R als die Menge aller k mit
Ψk(r) = Ψk(r + x), x ∈ B, (4.42)
denn fur solche k-(Differenz)vektoren man bekommt konstruktive Interferenz (von-Laue-Bedingung).
Das reziproke Gitter ist ein Gitter im k-Raum. Seine k-Vektoren mussen also
eikx = 1, x ∈ B kx = 2πm (4.43)
mit einer ganzen Zahl m erfullen. Wir definieren die kontravariante Basis gi des rezipro-ken Gitters mit gig
j = δji und schreiben die k-Vektoren als
k = 2πkigi kx = 2πkig
injgj = 2πkini, (4.44)

4. Kurven und Krummlinige Koordinaten 43
wobei der Faktor 2π herausgezogen wurde, so dass die kovarianten Koeffizienten von kalso 2π mal eine ganze Zahl ki sein mussen, damit m eine ganze Zahl ist.
Die kontravariante Basis erhalt man mittels Kreuzprodukt (AUFGABE),
g1 =g2 × g3
g1(g2 × g3), g2 =
g3 × g1
g1(g2 × g3), g3 =
g1 × g2
g1(g2 × g3). (4.45)
Oft definiert man den Faktor 2π auch in die Basis gi hinein und die kovarianten Koeffi-zienten von k ohne den Faktor 2π. Wir haben also zusammenfassend
x = nigi ∈ B, Gitter im Ortsraum (4.46)
k = 2πkigi ∈ R, reziprokes Gitter (4.47)
Die Vektoren des reziproken Gitters konnen als Linearformen aufgefasst werden: siewirken auf Vektoren des Gitters im Ortsraum gemaß Gl. (4.43) als spezielle Linearformen,x → kx = 2πm.
Die kontravariante Basis gi ist also eine Basis des Raums (Dualraum), der dual zudem von der kovarianten Basis gi aufgespannten Raum ist.
4.2.3 Polarkoordinaten
Wir betrachten diese als erstes konkretes Beispiel fur eine Beschreibung in krummlinigenKoordinaten. Solche Koordinaten vereinfachen haufig die Losung physikalischer Proble-me stark, wenn sie z.B. der Symmetrie des Problems angepasst sind. Fur kugelsymme-trische Probleme im R3 verwendet man Kugelkordinaten (spharische Polarkoordinaten,eng. spherical polar coordinates (polars).
Wir schreiben den Ortsvektor als (SKIZZE)
r =
r cos φ sin θr sin φ sin θ
r cos θ
, spharische Polarkoordinaten. (4.48)
Wir definieren ein lokales Dreibein im Punkt r durch die drei Tangentialvektoren an diedrei Kurven
θ, φ = const tr =d
dt
r(t) cos φ sin θr(t) sin φ sin θ
r(t) cos θ
er ≡
cos φ sin θsin φ sin θ
cos θ
(4.49)
θ, r = const tφ =d
dt
r cos φ(t) sin θr sin φ(t) sin θ
r cos θ
eφ ≡
− sinφcos φ
0
(4.50)
φ, r = const tθ =d
dt
r cos φ sin θ(t)r sin φ sin θ(t)
r cos θ(t)
eθ ≡
cos φ cos θsinφ cos θ− sin θ
(4.51)
Wir erhalten drei orthogonale, lokale Basisvektoren er, eθ, eφ also durch einfache Diffe-rentiation nach jeweils einem der Parameter r, θ, φ und Normieren.

4. Kurven und Krummlinige Koordinaten 44
Es folgt fur die Geschwindigkeit in Polarkoordinaten
v = r(t) =d
dt[r(t)er(t)] = rer + rer (4.52)
= rer + rφ sin θeφ + rθeθ. (4.53)
Daraus folgt z.B. die kinetische Energie eines freien Teilchens der Masse m (hier gleichder Lagrange-Funktion L),
L =1
2mv2 =
m
2
(
r2 + r2θ2 + r2 sin2 θφ2)
. (4.54)
Die Bogenlange fur eine Kurve in Polarkoordinaten folgt dann als
ds = |dr|dt = |v|dt =(
r2 + r2θ2 + r2 sin2 θφ2)1/2
dt, (4.55)
was man haufig als
ds2 =(
r2 + r2θ2 + r2 sin2 θφ2)
dt2 = dr2 + r2dθ2 + r2 sin2 θdφ2 (4.56)
schreibt. Allgemein definiert man fur beliebige andere Koordinatentripel (x1, x2, x3) dasQuadrat des Bogenlangenelements (metrische Fundamentalform)
ds2 =
3∑
α,β=1
gαβ(xν)dxαdxβ, ν = 1, 2, 3. (4.57)
mit dem metrischen Tensor gαβ(xν) .AUFGABE: Berechne die Beschleunigung in Polarkoordinaten.
4.2.4 Beliebige Basis, Metrik-Tensor
Es seien jetzt krummlinige Koordinaten in d Dimensionen gegeben, die kontravariantenKomponenten xk des Ortsvektors r also Funktionen
r =∑
k
xk(u1, u2, ..., ud)ek (4.58)
mit der ublichen festen kovarianten Einheitsbasis {ek}.Eine lokale kovariante Basis {gi} im Punkt r erhalt man durch Differentiation,
gi ≡∂r
∂ui=∑
k
∂xk
∂uiek. (4.59)
Tatsachlich ist das eine Basis im Punkt r, falls
det(g1, ...,gd) 6= 0. (4.60)

4. Kurven und Krummlinige Koordinaten 45
Entsprechend gilt dann die Umkehrung
ek =∑
j
∂uj
∂xkgj . (4.61)
AUFGABE: Beweis dieser Umkehrung.Fur die Geschwindigkeit eines Teilchen auf einer Kurve durch r hat man (Ketten-
regel)
v = r =∑
ki
∂xk
∂uiuiek =
∑
i
uigi (4.62)
Fur die Bogenlange ds folgt damit
ds = |v|dt =
∑
ij
gi · gj uiuj
1/2
dt ≡
∑
ij
gij uiuj
1/2
dt, (4.63)
wobei
gij ≡ gi · gj =∂r
∂ui· ∂r
∂uj, metrischer Tensor (4.64)
durch das gewohnliche Skalarprodukt der zwei Vektoren gi, gj berechnet wird. Es folgtalso sofort die Symmetrie des metrischen Tensors,
gij = gji. (4.65)
Der Abkurzung halber schreibt man meistens
ds2 =∑
ij
gijduiduj . (4.66)
AUFGABE:1. Berechne den metrischen Tensor gij fur Polarkoordinaten in d = 3.2. Berechne den metrischen Tensor und die Geschwindigkeit in Zylinderkoordinaten
in d = 3,
r =
r cos φr sinφ
z
, Zylinderkoordinaten. (4.67)
4.2.5 Beschleunigung und Christoffel-Symbole
Fur die Beschleunigung eines Teilchen auf einer Kurve durch r hat man (Kettenregel)
a = v =∑
i
(
uigi + uigi
)
, (4.68)

4. Kurven und Krummlinige Koordinaten 46
wir benotigen also die Ableitung der lokalen Basisvektoren gi und wollen naturlich alleswieder in der lokalen Basis am Punkt r ausdrucken,
gi =∑
j
∂gi
∂ujuj ≡
∑
lj
Γlijglu
j . (4.69)
Die Christoffel-Symbole Γlij folgen schlicht aus der Definition,
∂gi
∂uj=
∑
k
∂2xk
∂uj∂uiek =
∑
kl
∂2xk
∂uj∂ui
∂ul
∂xkgl (4.70)
Γlij =
∑
k
∂2xk
∂uj∂ui
∂ul
∂xk, Christoffel-Symbol . (4.71)
Damit haben wir fur die Beschleunigung
r =∑
i
(
uigi + uigi
)
=∑
i
uigi + ui∑
lj
Γlijglu
j
(4.72)
r =∑
l
ul +∑
ij
uiujΓlij
gl. (4.73)
Wenn wir Newton’s Gesetz F = mr in der lokalen Basis (F =∑
l flgl) ausdrucken,
erhalten wir also
f l = m(
ul + uiujΓlij
)
(4.74)
in Einsteinscher Summationskonvention: uber gemeinsame Indizes wird summiert.LITERATUR: H. STEPHANI, ‘Allgemeine Relativitatstheorie’; J. G. SIMMONS,
‘A Brief on Tensor Analysis’; E. KLINGBEIL, ‘Tensorrechnung fur Ingenieure’.
5. VEKTORANALYSIS
5.1 Vektorfelder
Definition Eine Abbildung
Rn → Rm, x ≡ (x1, ..., xn)T → f(x) ≡ (f1(x1, ..., xn), ..., fm(x1, ..., xn))T (5.1)
heißt m-dimensionales Vektorfeld.
Jedem Vektor x wird ein Vektor f(x) zugeordnet. Fur m > 1 hat man tatsachlich einenVektor f (und keinen Skalar).
Definition Der Spezialfall m = 1,
Rn → R, x ≡ (x1, ..., xn)T → f(x) ≡ f(x1, ..., xn) (5.2)
heißt skalares Feld (Skalarfeld).
Im Druckbild schreibt man das f in Skalarfeldern f(x) nicht fett, in Vektorfeldern f(x)schreibt man es fett.
AUFGABE: Skizziere die Skalarfelder n = 2
f(x, y) = x2 + y2 − 1, g(x, y) = x2 − y2. (5.3)
AUFGABE: Skizziere das Vektorfeld
f(x, y) = (y,−x). (5.4)
5.2 Gradient
5.2.1 Definition
Sei f : Rn → R eine skalare, reelle Funktion von n Variablen,
x → f(x), x = (x1, ..., xn)T , skalares Feld f (5.5)
Fur differenzierbare Funktionen definieren wir die Richtungsableitung in Richtungeines Einheitsvektors v,
Dvf(x) ≡ ∂
∂vf(x) ≡ lim
t→0
f(x + tv) − f(x)
t. (5.6)

5. Vektoranalysis 48
Die Richtungsableitung ist also einfach die Ableitung der Funktion f entlang der Raum-kurve t → x + tv.
BEISPIEL und INTERPRETATION: f : R2 → R Skalarfeld, die Werte von f bildeneinen ‘Teppich’ uber der x-y-Ebene. Vom Punkt x fahren wir eine Strecke tv in v-Richtung (Geschwindigkeit v). Die Richtungsableitung beschreibt, wie stark sich derWert von f dabei andert.
Wir berechnen die Richtungsableitung mit Hilfe der Kettenregel:
∂
∂vf(x) =
d
dtf(x + tv)
∣
∣
∣
∣
t=0
=d
dtf(x1 + tv1, ..., xn + tvn)
∣
∣
∣
∣
t=0
=
n∑
i=1
∂
∂xif(x)
d
dt(xi + tvi)
∣
∣
∣
∣
t=0
=n∑
i=1
vi∂
∂xif(x) = v∇f(x), (5.7)
wobei wir den Gradienten
∇f(x) ≡(
∂
∂x1f(x), ...,
∂
∂xnf(x)
)
(5.8)
definiert haben. Die Richtungsableitung ist also durch das Skalarprodukt gegeben,
∂
∂vf(x) = (∇f(x),v), Richtungsableitung und Gradient. (5.9)
Bemerkungen:
• Der Gradient im Punkt x ist selbst ein n-dimensionaler ’Vektor’ (siehe aber auchunten). Die Abbildung x → ∇f(x) ordnet jedem Vektor x einen Vektor ∇f(x) zu,ist also ein Vektorfeld.
• Die Richtungsableitung ist wegen des Skalarprodukts maximal, wenn v und ∇f(x)die gleiche Richtung haben. Der Gradient gibt deshalb die Richtung des starkstenAnstiegs von f an.
• In einem festen Punkt x ordnet der Gradient ∇f(x) jedem Vektor v die reelle Zahl(∇f(x),v) zu, namlich die Richtungsableitung von f in Richtung v: so gesehen ist∇f(x) also eine Linearform.
5.2.2 Der Gradient in krummlinigen Koordinaten
Wir betrachten die Ableitung einer Funktion f : Rn → R entlang einer Kurve x(t). Inkartesischen Koordinaten gilt nach der Kettenregel
d
dtf(x(t)) =
n∑
i=1
∂
∂xif(x)
dxi
dt= (∇f(x),v), v ≡ x. (5.10)

5. Vektoranalysis 49
Jetzt beschreiben wir diese Kurve in krummlinigen Koordinaten uj , so dass xi = xi(uj)(wir unterscheiden wieder zwischen ko- und kontravarianten Koordinaten). Wir bildendie Ableitung der Funktion in krummlinigen Koordinaten
d
dtf(u1(t), ..., un(t)) =
n∑
i=1
∂
∂uif
dui
dt≡ (∇f,v), (5.11)
was wegen v = ujgj auf
∇f =∂f
∂uigi, Gradient in krummlinigen Koordinaten (5.12)
fuhrt, denn wegen gigj = δij gilt
(∇f,v) =∂f
∂uigiujgj =
∂f
∂uiui. (5.13)
An der Darstellung Gl. (5.12) erkennt man, dass der Gradient im Punkt x = x(u1, ..., un)eine Linearform ist, die auf Vektoren v wirkt. Deshalb schreibt sich ∇f als Linearkom-binationen der kontravarianten Basisvektoren gi. Man kann ∇f aber auch wieder alsVektor auffassen, wenn man die gi durch die gj ausdruckt. Haufig mochte man ∇f ineiner normierten Basis gj mit |gj | = 1 ausdrucken, d.h. man definiert
g∗j ≡ gj
|gj |(5.14)
und schreibt
∇f =∂f
∂uigi =
∂f
∂uigijgj =
∂f
∂uigij |gj |g∗
j . (5.15)
Fur orthogonale Koordinaten ist der Metriktensor diagonal,
gij = δij |gi|2 gij = δij 1
|gi|2, (5.16)
und der Gradient wird
∇f =∂f
∂ui
g∗i
|gi|, orthogonale Koordinaten, normierte Basis. (5.17)
In der kartesischen Basis ist naturlich wegen gi = gi = ei alles einfacher und manbraucht die Unterscheidung ko- und kontravariant nicht wirklich.
AUFGABE:1. Berechne den Gradienten in Polarkoordinaten im R3, ausgedruckt in der normier-
ten kovarianten Basis.2. Berechne den Gradienten in Zylinderkoordinaten im R3, ausgedruckt in der nor-
mierten kovarianten Basis.

5. Vektoranalysis 50
5.3 ANWENDUNG MECHANIK: Kraft, Gradient und Potential
5.3.1 Konservative Kraftfelder
Die Kraft F(x) auf ein Punktteilchen der Masse m am Ort x ist ein Vektorfeld, z.B. indrei Dimensionen. Die Newtonschen Bewegungsgleichungen lauten dann
mx(t) = F(x(t)). (5.18)
Definition Eine Kraft (Kraftfeld F(x)) heißt konservativ, falls sie sich als Gradienteines skalaren Potentials Φ(x) in der Form
F(x) = −∇Φ(x) (5.19)
schreiben laßt.
Beispiel: die durch eine schwere, sich bei x = 0 befindende Masse M erzeugte Gravita-tionskraft auf Punktmasse m bei x,
F(x) = −GmMx
‖x‖3, Gravitationskraft. (5.20)
Φ(x) = −GmM1
‖x‖ , Gravitations-Potential. (5.21)
G = 6.67 × 10−11m3kg−1s−2, Gravitationskonstante. (5.22)
5.3.2 Kurvenintegrale, Arbeit, Leistung
Sei F(x) ein Vektorfeld Rn → Rn, z.B. die Kraft auf ein Punktteilchen der Masse m.Bewegt sich die Masse entlang der (differenzierbaren) Kurve x(t), so verrichtet die Kraftentlang eines Kurvenstucks, z.B. von x → x + xdt, die Arbeit
δW = F(x)dx = F(x)xdt. (5.23)
Hierbei ist F(x(t))x(t) die momentane Leistung der Kraft.Mit der Zeit t als Kurvenparameter in x(t) ergibt sich die verrichtete Arbeit entlang
der Kurve, die wir allgemein als C bezeichnen und durch x(t) parametrisieren, als
W [C] ≡∫
CF(x)dx ≡
∫ t1
t0
F(x)xdt. (5.24)
Es wird also die momentane Leistung F(x)x entlang der durchfahrenen Kurve C aufin-tegriert. Integrale dieser Form nennt man Kurvenintegrale. Wenn uber geschlosseneKurven integriert wird, schreibt man haufig
∮
CF(x)dx, (5.25)
die konkrete Berechnung erfolgt aber stets durch Parametrisieren der Kurve C als x(t)und einfaches Integrieren, Gl. (5.24).
AUFGABE: Berechnung von Kurvenintegralen entlang verschiedener Kurven C furgegebene Kraftfelder.

5. Vektoranalysis 51
5.3.3 Konservative Krafte und vom Weg unabhangige Arbeit
Satz 1. Ein Kraftfeld F(x) ist genau dann konservativ, wenn jedes Wegintegral derArbeit uber eine Kurve C nur vom Anfangs- und Endpunkt und nicht von der Form derKurve abhangt.
Das ist recht einfach zu sehen: ist F(x) konservativ, so gilt F(x) = −∇Φ(x) unddeshalb
W [C] ≡∫
CF(x)dx = −
∫ t1
t0
∇Φ(x(t))xdt
= −∫ t1
t0
dtd
dtΦ(x(t)) = −Φ(x(t1)) + Φ(x(t0)) = −Φ(x1) + Φ(x0) (5.26)
unabhangig von der Form von C. Umgekehrt definiert
Φ(x1) ≡ −∫
x1
x0
F(x)dx (5.27)
eindeutig eine Funktion Φ(x1) (das Integral ist ja wegunabhangig), bis auf eine Kon-stante, die vom Anfangspunkt x0 abhangt. Die Komponente i des Gradienten ist dieRichtungsableitung in Richtung des i-ten Basisvektors ei,
− ∂
∂xiΦ(x) = − lim
h→0
1
h[Φ(x + hei) − Φ(x)] = lim
h→0
1
h
∫
x+hei
x
F(s)ds
= limh→0
1
h
∫ t1+h
t1
dtF(s(t))s(t) = F(x)ei, (5.28)
wobei die Kurve C so gewahlt wurde, dass am Endpunkt x = s(t1) gerade x = ei gilt(SKIZZE!). Damit hat man insgesamt
−∇Φ(x) = F(x). (5.29)
AUFGABE: Warum ist f(x, y) = (y,−x) kein konservatives Kraftfeld?
5.4 Rotation und Integralsatz von Stokes
LITERATUR: Berkeley Physik Kurs 2 (E. M. Purcell). BRONSTEIN. Im Folgendenbetrachten wir dreidimensionale Vektorfelder.
5.4.1 Rotation
Wir betrachten ein dreidimensionales Vektorfeld R3 → R3, z.B. ein Kraftfeld F(x) in3 Dimensionen. Fur konservative Kraftfelder hatten wir gesehen, dass das Integral derArbeit uber eine geschlossene Kurve C gleich Null ist,
W [C] ≡∮
CF(x)dx = 0, konservatives Kraftfeld (5.30)
6= , nicht-konservatives Kraftfeld. (5.31)

5. Vektoranalysis 52
Im letzteren Fall nennt man W [C] manchmal Wirbelstarke . Ein typisches Wirbelfeldist f(x, y, z) = (y,−x, 0), vgl. die AUFGABE oben. Wir mochten nun ein lokales Massfur die Wirbelstarke eines Kraftfelds finden, das nicht mehr von der speziellen Wahl derKurve C abhangt. Wir erweitern hierzu die Integration in W [C], indem wir zahlreichekleine Flachen zur von C umschlossenen Flache zusammensetzen (SKIZZE) - an denRandern innen heben sich die Beitrage der Integrale jeweils weg. Der Beitrag einesinfinitesimalen Flachenelements A mit Normalenvektor n wird dann zur Definition derRotation verwendet,
(rotF)n ≡ (∇× F)n ≡ limA→0
∮
Cx
F(s)ds
A, (5.32)
wobei Cx eine kleine geschlossene Kurve um den Punkt x bezeichnet. Hierdurch ist dieKomponente der Rotation in n-Richtung definiert - man bekommt alle drei Komponentendurch die Wahl n = e1 etc. Wir wahlen z.B. n = e3, dann ist fur eine infinitesimal kleinequadratische Flache mit Mittelpunkt x
∮
Cx
F(s)ds =
∫ 1
−1Fy(x +
∆x
2, y + t
∆y
2, z)
∆y
2dt (5.33)
−∫ 1
−1Fy(x − ∆x
2, y + t
∆y
2, z)
∆y
2dt
+
∫ 1
−1Fx(x +
∆x
2t, y − ∆y
2, z)
∆x
2dt
−∫ 1
−1Fx(x +
∆x
2t, y +
∆y
2, z)
∆x
2dt
= ∂xFy(x, y, z)∆x
2∆y − ∂xFy(x, y, z)
−∆x
2∆y
+ ∂yFx(x, y, z)−∆y
2∆x − ∂yFx(x, y, z)
∆y
2∆x + O(∆x2∆y) + O(∆y2∆x)
und damit
(rotF)e3 = limA→0
1
∆x∆y(∂xFy(x, y, z)∆x∆y − ∂yFx(x, y, z)∆x∆y)
= ∂xFy(x, y, z) − ∂yFx(x, y, z). (5.34)
Entsprechend macht man es fur die zwei anderen Komponenten. Die Rotation von F(x)ergibt sich also in kartesischen Komponenten als
rotF ≡ ∇×F ≡(
∂Fz
∂y− ∂Fy
∂z,∂Fx
∂z− ∂Fz
∂x,∂Fy
∂x− ∂Fx
∂y
)T
(5.35)
=
∣
∣
∣
∣
∣
∣
ex ey ez
∂x ∂y ∂z
Fx Fy Fz
∣
∣
∣
∣
∣
∣
, (5.36)

5. Vektoranalysis 53
wobei in der letzten Zeile die Determinante als Merkregel benutzt wurde und ∂x ≡ ∂∂x
etc. abkurzt. Die Rotation ist also selbst wieder ein dreidimensionales Vektorfeld.BEISPIEL:
f(x, y, z) = (y,−x, 0) ∇× f = (0, 0,−2). (5.37)
5.4.2 Integralsatz von Stokes
Wir betrachten nochmals die Zerlegung des Wirbelstarken-Integrals
W [C] ≡∮
CF(x)dx =
∑
i
AiWi
Ai(5.38)
in zahlreiche kleine Flachen Ai, die von C umschlossenen werden. Im Grenzfall Ai → 0folgt jetzt mit der Definition der Rotation heuristisch
W [C] ≡∮
CF(x)dx =
∫
ArotFdA, Stokes’scher Integralsatz , (5.39)
was die Aquivalenz des Kurvenintegrals F(x)dx uber die geschlossene Kurve C mit demFlachenintegral uber die eingeschlossene Flache A beschreibt.
5.4.3 ANWENDUNG ELEKTRODYNAMIK: Induktionsgesetz
Ein zeitlich veranderliches Magnetfeld B(x, t) erzeugt ein elektrisches Wirbelfeld E(x, t)gemaß
∮
CEds = − ∂
∂t
∫
ABdA, Induktionsgesetz (5.40)
rotE = − ∂
∂tB, 1. Maxwell’schen Gleichung. (5.41)
Die zweite Zeile ist eine der Maxwell’schen Gleichungen und folgt aus dem Stokes’-schen Integralsatz.
BEISPIEL: Eine rechteckige Leiterschleife (SKIZZE) der Flache A rotiert gleichmaßigmit der Winkelgeschwindigkeit ω im konstanten Magnetfeld B. Es gilt
U(t) ≡∮
CEds = − ∂
∂t
∫
ABdA = −BA
∂
∂tcos(ωt) = BAω sin(ωt) (5.42)
wobei U(t) die in der Schleife induzierte Spannung ist. AUFGABE: wie kann man dieseSpannung experimentell messen?

5. Vektoranalysis 54
5.4.4 ANWENDUNG MAGNETOSTATIK
Ein Leiter fuhre eine stationare (zeitunabhangige) Stromdichte J(x). Diese erzeugt einMagnetfeld B, fur das gilt
∮
CBds = µ0
∫
AJdA (5.43)
rotB = µ0J +1
c2
∂
∂tE, 3. Maxwell’sche Gleichung. (5.44)
Die zweite Zeile ist eine weitere der Maxwell’schen Gleichungen (der Verschiebungs-strom ∂
∂tE = 0 ist hier Null. ) Hierbei ist
µ0 = 4π × 10−7 V s
Am, magnetische Feldkonstante. (5.45)
BEISPIEL (AUFGABE): Ein gerader, unendlich langer Draht mit Querschnitt Afuhre den Strom I. Berechne das Magnetfeld B innerhalb und außerhalb des Drahtes.
5.5 Divergenz und Integralsatz von Gauß
Jetzt konnte man hier zum Schluß die Divergenz einfach als weitere vektoranalytischeOperation einfuhren. Bisher waren wir allerdings stets physikalisch motiviert vorgegan-gen: Der Gradient kommt letztendlich aus dem Konzept des Potentials Φ (d.h. der po-tentiellen Energie) in der Mechanik uber die Kraft F = −∇Φ in den Newton’schenGleichungen. Die Rotation kommt dann aus der Bedingung der Wirbelfreiheit rotF = 0fur konservative, d.h. Energie-erhaltende Kraftfelder. Felder (elektrische und magneti-sche) treten auch in der Elektrodynamik auf, und wir sahen den Stokes’schen Integral-satz im Zentrum zweier Maxwellscher Gleichungen, die das Induktionsgesetzes und dasMagnetfeld eines Leiters lokal formalulieren.
Was noch fehlt, sind die Quellen der Felder (z.B. elektrische Felder, Gravitationsfel-der), und das fuhrt auf die Divergenz.
5.5.1 Divergenz
LITERATUR: Berkeley Physik Kurs 2 (E. M. Purcell). BRONSTEIN. Wir betrachtenein Vektorfeld F(x), z.B. ein durch eine Masse erzeugtes Gravitations-Kraftfeld oderein durch eine Ladung erzeugtes elektrostatisches Feld. Wir betrachten außerdem einVolumen V , das durch eine Oberflache A eingeschlossen wird, und definieren
Ψ ≡∫
AFdA, Fluß des Vektorfelds F(x) durch Oberflache A. (5.46)
Jetzt teilen wir V in viele kleine Volumina Vi mit Oberflachen Ai (SKIZZE), die An-teile der Integration benachbarter Volumina heben sich gerade weg (dA bezeichnet das

5. Vektoranalysis 55
Flachenelement mit nach außem gerichtetem Normalen-Vektor ). Im Grenzfall definiertman fur ein infinitesimal kleines Volumen Vi um den Punkt x
divF ≡ limVi→0
1
Vi
∫
AFdA (5.47)
als Divergenz des Vektorfeldes F(x) im Punkt x. Wahlt man einen infinitesimal kleinenQuader, so erhalt man in kartesischen Koordinaten (AUFGABE)
F(x) = (F1(x), F2(x), ..., Fn(x))T , x = (x1, ..., xn)T
divF(x) =∂
∂x1F1(x) + ... +
∂
∂xFn(x). (5.48)
Hier haben wir in der Definition der Divergenz bereits ein n-dimensionales Vektorfeldzugelassen, also nicht notwendigerweise n = 3.
5.5.2 Integralsatz von Gauß
Analog zum Integralsatz von Stokes folgt dieser nun quasi automatisch zumindest heu-ristisch aus der obigen Herleitung der Divergenz, d.h. wir betrachten die Zerlegung desFlußintegrals
Ψ ≡∫
AFdA =
∑
i
Vi1
Vi
∫
Ai
FdAi (5.49)
mit Vi → 0,∫
AFdA =
∫
divFdV, Gauß’scher Integralsatz. (5.50)
5.5.3 ANWENDUNG ELEKTROSTATIK: Gauß’sches Gesetz
Eine Ladungsverteilung mit raumlicher Ladungsdichte ρ(x) erzeugt ein elektrisches FeldE, dessen Fluß durch eine beliebige geschlossene Oberflache durch die von der Oberflacheeingeschlossene Gesamtladung gegeben ist,
∫
AEdA =
1
ε0
∫
ρdV, Gauß’sches Gesetz der Elektrostatik (5.51)
divE =1
ε0ρ, 2. Maxwell’sche Gleichung. (5.52)
Die zweite Zeile ist eine weitere der Maxwell’schen Gleichungen (die Numerierungist in der Tat willkurlich). Hierbei ist
ε0 = 8.85 × 10−12C2N−1m−2, elektrische Feldkonstante. (5.53)
AUFGABEN:1. Berechnen Sie das durch eine homogen geladene Kugel mit Radius r und Gesamt-
ladung Q erzeugte elektrische Feld.2. Berechnen Sie das durch eine unendliche dunne und unendlich ausgedehnte Platte
der homogenen Flachenladungsdichte σ erzeugte elektrische Feld ausserhalb der Platte.

5. Vektoranalysis 56
5.5.4 Zusammenfassung: Maxwell’sche Gleichungen
Die Maxwell’schen Gleichungen lauten
rotE = − ∂
∂tB (5.54)
divE =1
ε0ρ (5.55)
rotB = µ0J +1
c2
∂
∂tE (5.56)
divB = 0. (5.57)
Die letzte der Maxwell’schen Gleichungen besagt, dass es keine magnetischen Monopolegibt, die als Quellen von Magnetfeldern auftreten wurden.





























