Embed Size (px)
Citation preview

NICHTLINEARE DYNAMIK
Einfuhrung in die theoretischen Grundlagen der nichtlinearen Dy-namik und des deterministischen Chaos in konservativen Hamilton-schen Systemen.
Vorlesung von Prof. Dr. M. Brack
gehalten im WS 2001/2
im Rahmen des Graduiertenkollegs 638
der Universitat Regensburg:
Nichtlinearitat und Nichtgleichgewicht
in kondensierter Materie
Wiederverwendet in den WS 2004/5 und 2006/7 im Rahmen der Vorlesung:
Nichtlinearitat in klassischer und Quantenphysik (1 Modul)
Skript: Ch. Amann und M. Brack (2002), M. Brack (seit 2004)
Regensburg, 25. August 2008
1

2

Inhaltsverzeichnis
1 Variationsprinzip und Lagrange-Gleichung 5
2 Hamilton-Gleichungen 6
3 Kanonische Transformationen 73.1 Poissonklammern . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2 Erzeugende Funktionen von kanonischen Transformationen . . . 83.3 Der 1-dimensionale harmonische Oszillator: . . . . . . . . . . . . 10
4 Der Phasenraum 104.1 Phasenraumportraits . . . . . . . . . . . . . . . . . . . . . . . . . 124.2 Das Theorem von Liouville . . . . . . . . . . . . . . . . . . . . . 144.3 Das mathematische Pendel . . . . . . . . . . . . . . . . . . . . . 15
4.3.1 E < mgl . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.3.2 E > mgl . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.3.3 Grenzfalle . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.3.4 Phasenraumportrait . . . . . . . . . . . . . . . . . . . . . 18
5 Hamilton-Jacobi-Theorie 195.1 Die Hamilton-Jacobi-Gleichung . . . . . . . . . . . . . . . . . . . 195.2 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5.2.1 Eindimensionale Systeme . . . . . . . . . . . . . . . . . . 205.2.2 Separable Systeme . . . . . . . . . . . . . . . . . . . . . . 215.2.3 Separation in krummlinigen Koordinaten . . . . . . . . . 215.2.4 Das Keplerproblem . . . . . . . . . . . . . . . . . . . . . . 23
6 Integrable Systeme: regulare Bewegung 246.1 Definition der Integrabilitat . . . . . . . . . . . . . . . . . . . . . 246.2 Beispiele fur integrable Systeme . . . . . . . . . . . . . . . . . . . 24
6.2.1 Spharisches Potential in N = 3 Dimensionen . . . . . . . 246.2.2 Integrable Billards . . . . . . . . . . . . . . . . . . . . . . 256.2.3 Weitere Beispiele . . . . . . . . . . . . . . . . . . . . . . . 25
6.3 Torusvariablen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256.3.1 Einfuhrung der Torusvariablen . . . . . . . . . . . . . . . 256.3.2 Beispiel: Der zweidimensionale harmonische Oszillator . . 27
6.4 Periodische Bahnen auf dem N -Torus . . . . . . . . . . . . . . . 286.5 EBK-Quantisierung . . . . . . . . . . . . . . . . . . . . . . . . . 29
6.5.1 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306.6 Semiklassische Spurformeln . . . . . . . . . . . . . . . . . . . . . 31
6.6.1 Integrable Systeme: die Berry-Tabor-Spurformel . . . . . 316.6.2 Chaotische Systeme: die Gutzwiller-Spurformel . . . . . . 32
7 Nicht-integrable Hamiltonsche Systeme 337.1 Poincare-Schnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.1.1 Spezialfall N = 2 . . . . . . . . . . . . . . . . . . . . . . . 357.2 Familien von entarteten periodischen Bahnen . . . . . . . . . . . 377.3 Beispiele von Poincare-Schnitten (N = 2) . . . . . . . . . . . . . 37
7.3.1 Inkommensurabler harmonischer Oszillator (integrabel!) . 377.3.2 Isotroper harmonischer Oszillator (integrabel!) . . . . . . 38
3

7.3.3 Das Toda-Gitter (integrabel!) . . . . . . . . . . . . . . . . 397.3.4 Das Henon-Heiles Potential (nicht-integrabel!) . . . . . . 42
7.4 Der Lyapunov-Exponent . . . . . . . . . . . . . . . . . . . . . . . 457.4.1 Lineare Stabilitatsanalyse einer Trajektorie . . . . . . . . 457.4.2 Definition des Lyapunov-Exponenten . . . . . . . . . . . . 467.4.3 Praktisches Verfahren zur Berechnung von σ1 . . . . . . . 46
7.5 Stabilitat von periodischen Bahnen . . . . . . . . . . . . . . . . . 477.5.1 Monodromie-Matrix und Stabilitatsmatrix . . . . . . . . . 477.5.2 Stabilitat von periodischen Bahnen fur N = 2 . . . . . . . 487.5.3 Beispiel: zweidimensionaler harmonischer Oszillator . . . 497.5.4 Beispiel: zweidimensionale harmonische Sattelflache . . . 517.5.5 Umgebung von Fixpunkten auf Poincare-Schnitten . . . . 517.5.6 Wie findet man periodische Bahnen? . . . . . . . . . . . . 54
8 Zweidimensionale Billards 568.1 Wahl der Poincare-Variablen . . . . . . . . . . . . . . . . . . . . 568.2 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
8.2.1 Das Kreisbillard . . . . . . . . . . . . . . . . . . . . . . . 578.2.2 Das elliptische Billard . . . . . . . . . . . . . . . . . . . . 588.2.3 Ein asymmetrisch deformiertes Billard . . . . . . . . . . . 58
9 Logistische Abbildungen 629.1 Eindimensionale Abbildungen . . . . . . . . . . . . . . . . . . . . 62
9.1.1 Lineare Abbildung . . . . . . . . . . . . . . . . . . . . . . 639.1.2 Stuckweise lineare Abbildungen . . . . . . . . . . . . . . . 639.1.3 Quadratische Abbildung . . . . . . . . . . . . . . . . . . . 65
9.2 Zweidimensionale Abbildungen . . . . . . . . . . . . . . . . . . . 70
10 Bifurkationen 7210.1 Parametrische Resonanz . . . . . . . . . . . . . . . . . . . . . . . 72
10.1.1 Das gleichformig rotierende mathematische Pendel . . . . 7210.2 Bifurkationen in Hamiltonschen Systemen . . . . . . . . . . . . . 74
10.2.1 Beispiel der Hill-Gleichung fur eine gradlinige Libration . 7410.2.2 Klassifizierung der generischen Bifurkationen fur N = 2 . 7710.2.3 Die transkritische Bifurkation . . . . . . . . . . . . . . . . 7910.2.4 Bifurkationskaskaden . . . . . . . . . . . . . . . . . . . . . 80
11 Storungstheorie 8111.1 Elementare Storungstheorie . . . . . . . . . . . . . . . . . . . . . 8111.2 Kanonische Storungstheorie . . . . . . . . . . . . . . . . . . . . . 83
11.2.1 Eindimensionaler Fall . . . . . . . . . . . . . . . . . . . . 8311.2.2 Beispiel: Harmonischer Oszillator mit kubischer Storung . 8511.2.3 Mehrdimensionaler Fall . . . . . . . . . . . . . . . . . . . 85
12 Das Poincare-Birkhoff-Theorem und dasKAM-Theorem 8712.1 Das Theorem von Poincare und Birkhoff . . . . . . . . . . . . . . 8712.2 Kettenbruche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8912.3 Das KAM-Theorem . . . . . . . . . . . . . . . . . . . . . . . . . 90
12.3.1 Beispiel: Lucken im Asteroidengurtel . . . . . . . . . . . . 92
4

1 Variationsprinzip und Lagrange-Gleichung
Ein System besitze nach Abzug der holonomen Zwangsbedingungen N un-abhangige Freiheitsgrade. Zur Festlegung der Lagrange-Funktion werden N ver-allgemeinerte Koordinaten qi(t) und die dazugehorigen verallgemeinerten Ge-schwindigkeiten qi = d
dtqi(t) definiert. Wir schreiben in Kurznotation:
q(t) = qi(t) , q(t) = qi(t) . (i = 1, 2, 3, . . . N) (1)
Die Lagrange-Funktion selbst ist definiert durch
L [q(t), q(t), t] = T − V . (2)
Hierbei bezeichnet T die kinetische Energie, die bei Energieerhaltung bilinearin den Geschwindigkeiten ist
T =N∑
i,j=1
1
2mij qiqj , (3)
sowie V das außere Potential
V = V (q, t) . (4)
Der Massentensor kann selber ortsabhangig sein; z.B. im Falle von Polarkoordi-naten: T = 1
2m(r2 + r2φ2). In den meisten Fallen vereinfacht er sich allerdingszu mij = miδij .
In konservativen Systemen gilt ∂L
∂t = 0. Die Energie ist in diesem Fallerhalten: E = T + V = const.
Zur Herleitung der Lagrange-Bewegungsgleichungen wird zunachst die Ha-miltonsche Prinzipalfunktion (oft kurz: das Wirkungsintegral) definiert:
R :=
∫ t2
t1
L [q(t), q(t), t] dt . (5)
Die Bewegungsgleichungen folgen nun, wenn man fordert, dass bei infinitesima-ler Variation von q(t) unter Festhalten der Anfangs- und Endpunkte
q(t) → q(t) + δq(t) , δq(t1) = δq(t2) = 0 , (6)
das Wirkungsintegral bis zur ersten Ordnung in δqi stationar bleibt:
δR
δqi(t)= 0 + O[(δqi)
2] . (7)
Damit erhalt man die Lagrange-Gleichungen 2. Art:
∂L
∂qi− d
dt
(∂L
∂qi
)= 0 . (i = 1, 2, 3 . . . N) (8)
Bemerkungen:
• Bei den Lagrange-Gleichungen handelt es sich um N Differentialgleichun-gen 2. Ordnung. Zur eindeutigen Losung werden pro Freiheitsgrad zweiRandbedingungen benotigt. Dies konnen z.B. die 2N Anfangswerte qi(0),qi(0) sein, oder die N Koordinaten zu verschiedenen Zeiten: qi(t1), qi(t2).
5

• q(t) heißt Trajektorie bzw. Bahn (im Ortsraum).
• Eine wichtige Rolle beim Losen von Bewegungsgleichungen nehmen Er-haltungsgroßen ein. Dies sind Funktionen f [q(t), q(t)], die nicht explizitzeitabhangig und entlang der Bahn konstant sind:
f [q(t), q(t)] = const. ⇔ d
dtf = 0 . (9)
2 Hamilton-Gleichungen
Fur den Ubergang vom Lagrange- zum Hamilton-Formalismus werden die ver-allgemeinerten Impulse pi definiert (auch als die zu qi kanonisch konjugiertenImpulse bezeichnet):
pi :=∂L
∂qi, p(t) = pi(t) . (i = 1, 2, 3, . . . N) (10)
Die Hamilton-Funktion erhalt man nun durch eine Legendre-Transformation:
H(q,p, t) :=N∑
i=1
piqi − L (q, q, t) . (11)
Dabei sind jetzt die Variablen pi, qi als voneinander unabhangig zu betrachten.Aus (8) - (11) folgen die Hamilton-Gleichungen:
∂H
∂pi= qi ,
∂H
∂qi= −pi . (12)
Bemerkungen:
• Bei den Hamilton-Gleichungen handelt es sich um 2N gekoppelte Diffe-rentialgleichungen 1. Ordnung, ideal fur die Beschreibung des Systems imPhasenraum (s. Kap. 4).
• pi und qi sind zueinander konjugierte Variablen. Ihr Produkt piqi hatimmer die Dimension einer Wirkung.
• Falls ∂L
∂t = 0, folgt ∂H∂t = 0, so dass H = E = const. die erhaltene Energie
des Systems ist.
• Die Gleichungen (12) konnen auch aus dem Variationsprinzip hergeleitetwerden. Einerseits gilt:
dH(q,p, t) = d
(∑
i
piqi − L (q, q, t)
)
=∑
i
(dpiqi + pidqi −
∂L
∂qidqi −
∂L
∂qidqi
)− ∂L
∂tdt
=∑
i
(dpiqi + pidqi −
d
dt
∂L
∂qidqi −
∂L
∂qidqi
)− ∂L
∂tdt
=∑
i
(dpiqi + pidqi − pidqi − pidqi) −∂L
∂tdt
=∑
i
(dpiqi − pidqi) −∂L
∂tdt .
6

Vergleicht man dies andererseits mit
dH(q,p, t) =∑
i
(∂H
∂pidpi +
∂H
∂qidqi
)+∂H
∂tdt , (13)
so folgt daraus (12). Dieses Variationsprinzip kann in Kurznotation auchso geschrieben werden:
δ
∫ ➁
➀
(∑
i
pidqi −Hdt
)= 0 . (14)
Dabei stehen ➀ und ➁ fur die Randwerte q1, t1 bzw. q2, t2.
3 Kanonische Transformationen
3.1 Poissonklammern
Sei f(q,p, t) eine beliebige differenzierbare Funktion. Dann gilt fur die totaleZeitableitung:
df
dt=∂f
∂t+∑
i
(∂f
∂qiqi +
∂f
∂pipi
)=∂f
∂t+ [H, f ]p,q . (15)
Hierbei wurden bei der letzten Umformung die Bewegungsgleichungen (12) ein-gesetzt. Das Symbol [H, f ]p,q auf der rechten Seite ist dabei definiert als Poisson-Klammer: (Achtung Reihenfolge! Ist in einigen Buchern umgekehrt!)
[g, f ]p,q :=∑
i
(∂g
∂pi
∂f
∂qi− ∂g
∂qi
∂f
∂pi
). (16)
Bemerkungen:
• Statt [g, f ]p,q verwenden wir im Folgenden die kurze Bezeichnung [g, f ].Um Verwechslung mit dem quantenmechanischen Kommutator zu vermei-den, wird oft auch das Symbol g, f verwendet.
• Aus Obigem folgt: Falls H = E, ∂f∂t = 0 und [H, f ] = 0 folgt f = const.,
und damit ist auch f eine Erhaltungsgroße.
• Allgemeiner gilt das Theorem von Poisson: Falls f und g erhalten sind, soist auch [g, f ] erhalten.
• Beispiele von Poissonklammer-Relationen:
[qi, qj ] = [pi, pj ] = 0 ,
[pi, qj ] = δij . (17)
• Fur den Drehimpuls L = r × p gilt komponentenweise:
[Li, Lj ] = −ǫijkLk . (i, j, k = 1, 2, 3) (18)
7

3.2 Erzeugende Funktionen von kanonischen Transforma-tionen
Folgende drei Aussagen sind aquivalent:
1. (qi, pi) sind kanonische Variablen, d.h., sie erfullen die Poissonklammer-Relationen (17).
2. Es gelten die Hamilton-Gleichungen (12).
3. Es gilt das Variationsprinzip (14).
Wir suchen nun eine kanonische Transformation
qi −→ Qi(q,p, t)
pi −→ Pi(q,p, t)
H(q,p, t) −→ H(Q,P, t) (19)
so, dass fur die transformierte Hamilton-Funktion H in den neuen kanonischenVariablen (Qi, Pi) ebenfalls die Gleichungen (12) und (14) erfullt sind. Dazuschreiben wir nochmals das Variationsprinzip in den alten und neuen Variablenhin:
δ
∫ ➁
➀
(∑
i
pi dqi −Hdt
)
︸ ︷︷ ︸dA
= δ
∫ ➁
➀
(∑
i
Pi dQi − Hdt
)
︸ ︷︷ ︸dB
= 0 . (20)
Es muss daher gelten
δ
∫ ➁
➀
dA = δ
∫ ➁
➀
dB . (21)
Es durfen sich also dA und dB hochstens um ein totales Differential dF unter-scheiden, so dass gilt
δ
∫ ➁
➀
(dA− dB) =: δ
∫ ➁
➀
dF = δ[F (t2) − F (t1)] = 0 . (22)
(Denn die Variationen an den Endpunkten sind immer gleich null!) Wir folgerndaraus weiter:
dF = dA− dB =
(∑
i
pidqi −Hdt
)−(∑
i
PidQi − Hdt
). (23)
Diese Gleichung genugt, damit die Hamilton-Gleichungen in beiden Paaren vonVariablen gultig sind. (Der Beweis der Notwendigkeit existiert, ist aber schwie-rig.)
Eine Funktion F , die Gl. (23) erfullt, heißt die erzeugende Funktion derkanonischen Transformation (19). Sie ist im Allgemeinen eine Funktion vonallen 4N Variablen pi, qi, Pi, Qi. Es reicht aber, die Diskussion auf 4 Typen vonerzeugenden Funktionen zu beschranken,1 welche jeweils von N alten und Nneuen Variablen abhangen. Diese werden meist mit Fn (n = 1, 2, 3, 4) bezeichnet.
1siehe eine ausfuhrliche Diskussion in Kuypers [2]
8

1. Typ: F = F1(q,Q, t). Aus (23) folgt sofort:
∂F1
∂qi= pi ,
∂F1
∂Qi= −Pi , H = H +
∂F1
∂t. (24)
Durch die Legendre-Transformation F2(q,P, t) := F1(q,Q, t) +∑
iQiPi folgtder2. Typ: F = F2(q,P, t) mit
∂F2
∂qi= pi ,
∂F2
∂Pi= Qi , H = H +
∂F2
∂t. (25)
Analog findet man Erzeugende vom 3. und 4. Typ: F3(p,Q, t) und F4(p,P, t).
In allen vier Fallen gilt H = H + ∂Fn/∂t. Falls ∂Fn/∂t = 0 gilt, so ist nur ein
Ersetzen der Koordinaten in H notwendig: H(Q,P, t) = H[q(Q,P),p(Q,P), t].
Beispiele:
(A) Identische Transformation:
F2 =∑
i
qiPi = q · P ⇒ pi = Pi , Qi = qi . (26)
(B) Punkttransformation (d.h. reine Koordinatentransformation):
F2 =∑
i
Pifi(q, t) ⇒ Qi = fi(q, t) , pi =∑
j
Pj∂fj
∂qi. (27)
Die neuen Koordinaten Qi hangen hier nur von den alten qi ab. Eine Bei-spiel ist der Ubergang von kartesischen auf spharische Polarkoordinaten:q = (x, y, z) → Q = (r, θ, φ). Die neuen Impulse P = (pr, pθ, pφ) konnendabei aus (27) bestimmt werden!
(C) Vertauschung der Orts- und Impulskoordinaten:
F1 =∑
i
qiQi = q · Q ⇒ pi = Qi , Pi = −qi . (28)
Bemerkungen:
• Durch Wahl einer geeigneten kanonischen Transformation kann ein Pro-blem vereinfacht werden. Insbesondere konnen durch eine “ideale” Trans-formation alle neuen Koordinaten Qi zyklisch werden. Dies geht per De-finition in integrablen Systemen (s. Beispiel 3.3 und Kap. 6.1)!
• Allgemein gilt der Satz: Die Poisson-Klammer [f, g]p,q ist invariant unterkanonischen Transformationen:
[f, g]p,q = [f , g]P,Q . (29)
• Insbesondere gilt
[Pi, Pj ]p,q = [Qi, Qj ]p,q = 0 ,
[Pi, Qk]p,q = δik , (30)
genau dann, wenn die zugeorige Transformation kanonisch ist. (Beweissiehe Goldstein [1].)
9

3.3 Der 1-dimensionale harmonische Oszillator:
H(q, p) =p2
2m+m
2ω2q2 . (31)
Sei die erzeugende Funktion 1. Art gegeben durch
F1(q,Q) =m
2ω q2 cotQ . (32)
Dann findet man leicht
p = mω q cotQ , P =m
2ω q2
1
sin2Q(33)
und darausq =
√2P/mω sinQ , p =
√2mωP cosQ . (34)
Merke: Die neue Hamiltonfunktion hangt nach der Transformation nur mehrvom Impuls P ab; Q ist somit eine zyklische Variable:
H(Q,P ) = ωP cos2Q+ ωP sin2Q = ωP = H(P ) = E . (35)
Dies ist also eine “ideale” kanonische Transformation, denn die Integration derHamilton-Gleichungen wird nun trivial:
∂H
∂Q= −P = 0 ⇒ P = const. =
E
ω,
∂H
∂P= Q = ω = const. ⇒ Q(t) = ωt+ α . (36)
Zuruckeingesetzt in die ursprunglichen Koordinaten ergibt sich die bekannteLosung:
q(t) =√
2E/mω2 sin(ωt+ α) , (37)
p(t) =√
2Em cos(ωt+ α) . (38)
4 Der Phasenraum
Unter dem Phasenraum Γ versteht man das direkte Produkt aus Ortsraum RN
und Impulsraum PN :
Γ = RN ⊗ PN , q ∈ RN p ∈ PN . (39)
Die Elemente von Γ sind Phasenraumvektoren ξ der Gestalt
ξ = ξi =
(qp
)=
q1...qNp1
...pN
, ξ ∈ Γ . (40)
10

Ferner soll der folgende 2N -dimensionale Nabla-Vektor definiert werden
∇ :=∂
∂ξ=
(∂
∂q1, . . . ,
∂
∂qN,∂
∂p1, . . . ,
∂
∂pN
)T
. (41)
Mit seiner Hilfe konnen die Hamilton-Gleichungen kompakt geschrieben werden:
ξ =
(∂
∂pH
− ∂∂qH
)= J ∇H(ξ, t) . (42)
Die Matrix J sorgt hierbei fur Vertauschen der Orts- und Impulskomponentenund Richtigstellen der Vorzeichen und hat die Gestalt:
J :=
(0 1−1 0
), (43)
wobei 1 = 1N die Einheitsmatrix bzw. 0 = 0N die Nullmatrix inN Dimensionenist. J ist die symplektische Einheitsmatrix mit den Eigenschaften J2 = −12N ,J−1 = JT = −J, JT J = 12N . Ferner spricht man bei ∇H(ξ, t) vom Hamilton-schen Fluss(-vektor) und bei ξ(t) von der Phasenraumtrajektorie oder Bahn desTeilchens im Phasenraum.
Bemerkungen:
• Fur N > 1 ist die Darstellung des Phasenraums auf einer Zeichenebenenicht moglich. Es kann nur ein Unterraum visualisiert werden.
• Fur konservative Systeme (E=const.) liegt die Trajektorie ξ(t) auf einer(2N − 1)-dimensionalen Hyperflache (“Energieschale”). Bei N = 1 gibtdies eine 1-dimensionale Phasenraumkurve (siehe die Beispiele unten).
• Eine Kurve ξ(t) kann sich nie in einem Punkt ξ0 kreuzen (außer mit Win-kel null, s.u.). Dies folgt aus der Eindeutigkeit der Losungen der Hamilton-Gleichungen bei gegebenem Anfangspunkt ξ0.
• Falls ξ(t + T ) = ξ(t) mit 0 < T < ∞, dann heißt die Bahn periodisch.In 1-dimensionalen Systemen ist jede Bahn eines gebundenen Teilchensperiodisch.
• Das Wirkungsintegral S einer periodischen Bahn definiert sich zu
S =
∮p · dq =
∮ N∑
i=1
pi dqi =
N∑
i=1
∫ T
0
piqidt . (44)
S ist invariant unter kanonischen Transformationen:
(q,p) −→ (Q,P) : S =
∮p · dq =
∮P · dQ .
Das Wirkungsintegral, oder kurz: die Wirkung S ist eine Funktion derEnergie des Teilchens: S(E). Aus der Funktion S(E) erhalten wir die Pe-riode T (E) durch die Beziehung
T (E) =dS(E)
dE.
11
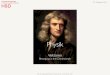
4.1 Phasenraumportraits
Es ist oft aufschlussreich, die Phasenraumkurven oder Phasenraumportraits zubetrachten, die durch Elimination der Zeitvariablen t aus q(t) und p(t) (furverschiedene festgehaltene Werte der Energie E) entstehen. Im Folgenden zeigenwir einige Beispiele von Phasenraumportraits von eindimensionalen Systemen.Dabei sind besonders die sogenannten Fixpunkte (q0, p0) zu beachten, an denengilt q(q0, p0) = p(q0, p0) = 0. Diese konnen stabil oder instabil sein; was diesbedeutet, ist in den folgenden Beispielen offensichtlich. Allgemein werden wiruns mit der sog. linearen Stabilitatsanalyse periodischer Bahnen im Abschn. 7.4befassen.
Beispiele:
(A) 1-dim. harmonischer Oszillator:
V (q) =m
2ω2q2 (45)
Es ergeben sich Ellipsen. Die Umlauf-zeit (Periode) ist unabhangig von derEnergie T = 2π/ω.
Fixpunkt: (0, 0) (stabil).
1
V(q)
E0
q00 q
21
q
p
(B) Quartischer Oszillator:
V (q) = q4 (46)
Die Kurven sind nicht mehr Ellipsen,haben aber dieselbe Topologie.
Fixpunkt: (0, 0) (stabil). V(q)
E0
q00 q
q
p
-1
12
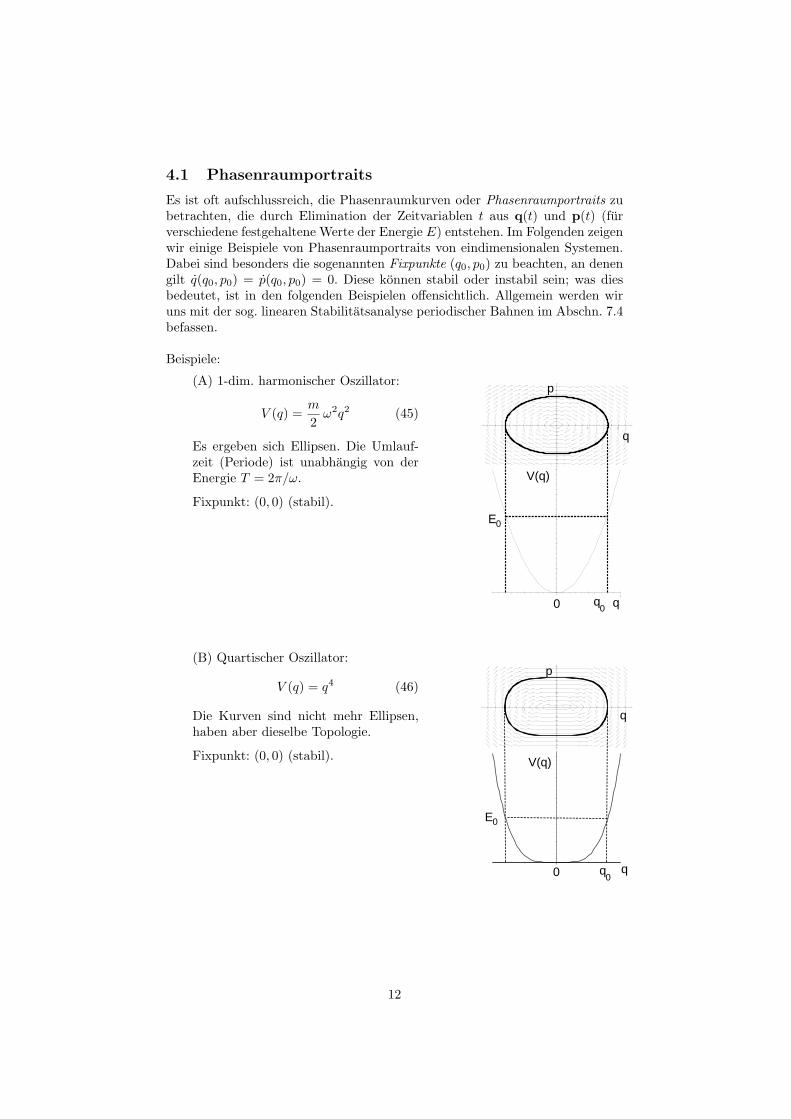
(C) Quartischer Oszillator mit Sattel-punkt:
V (q) =1
4q4 − 1
2q2 (47)
Merke: Fur E = E∗ (E∗ = Energiedes Maximums bei q = 0) ergibt sicheine Figur-8-Bahn mit Kreuzpunkt beip = q = 0. (Diese entspricht einer unei-gentlichen Losung mit unendlicher Pe-riode, genannt Separatrix.) Fur E < E∗
ergeben sich zwei getrennte geschlosse-ne Kurven.Fixpunkte: (0, 0) (instabil),
(±1, 0) (stabil).
V(q)
E0
q00 q
q
p
(D) Kubischer Oszillator:
V (q) =1
2q2 − 1
3q3 (48)
In diesem Fall ist der Phasenraum offenbzw. nicht kompakt. Teilchen mit einerEnergie E > E∗ (E∗ = Energie des Ma-ximums) sind nicht gebunden.Fixpunkte: (0, 0) (stabil),
(1, 0) (instabil).
V(q)
E0
q0
0 q
q
p
3
(E) Beispiel eines nicht-konservativenSystems: gedampfter harmonischer Os-zillator:
q + λq + ω2 q = 0 . (49)
Die bekannte Losung ist (fur ω > λ/2)
q(t) = q0e−λt/2 sin(ν t+ α) (50)
mit ν =√ω2 − λ2/4.
Fixpunkt: (0,0) (stabil).
q
p
13

(F) Die Riccati-Gleichungen
p = p− q − p (q2 + p2)
q = p+ q − q (q2 + p2)
beschreiben ein weiteres nicht-konservatives System und sind also keine Hamil-ton-Gleichungen! Man kann sie aber losen mit dem Ansatz R(t) = q2(t)+ p2(t),der auf die eindimensionale Gleichung R = 2R (1 − R) fuhrt, und findet dieLosung
R(t) =C1e
2t
C1e2t + C2
mit beliebigen Konstanten C1, C2. Da R(t) −→ 1 fur t→ ∞ gilt, sind die Pha-senraumkurven also Spiralen, die – je nach Wahl der Konstanten C1, C2 voninnen oder außen kommend – sich dem Einheitskreis R = q2 +p2 = 1 annahern.(0,0) ist instabiler Fixpunkt; der Kreis R = 1 ist eine stabile “Fixkurve” (zweidi-mensionaler Fixpunkt), hier Attraktor oder Grenzzyklus genannt. Dieses Systemist auch unter dem Namen Rossler-Oszillator bekannt.
4.2 Das Theorem von Liouville
Das Theorem von Liouville lautet in folgenden aquivalenten Formulierungen:
• Der Hamiltonsche Fluss ist divergenzfrei:
∇ · ξ =∑
i
(∂qi∂qi
+∂pi
∂pi
)= 0 (51)
bzw. der Phasenraum ist inkompressibel.
• Das Volumenelement dΓ des Phasenraums ist invariant unter kanonischenTransformationen:
dΓ :=
(N∏
i=1
dqi
)(N∏
i=1
dpi
)!=
(N∏
i=1
dQi
)(N∏
i=1
dPi
). (52)
• Die Jacobi-Determinante einer kanonischen Transformation ist eins:∣∣∣∣∂(Q1, . . . , QN , P1, . . . , PN )
∂(q1, . . . , qN , p1, . . . , pN )
∣∣∣∣
=
∣∣∣∣∣∣∣
∂Q1
∂q1. . . ∂Q1
∂qN
∂Q1
∂p1. . . ∂Q1
∂pN
......
∂PN
∂q1. . . ∂PN
∂qN
∂PN
∂p1. . . ∂PN
∂pN
∣∣∣∣∣∣∣= 1 . (53)
14
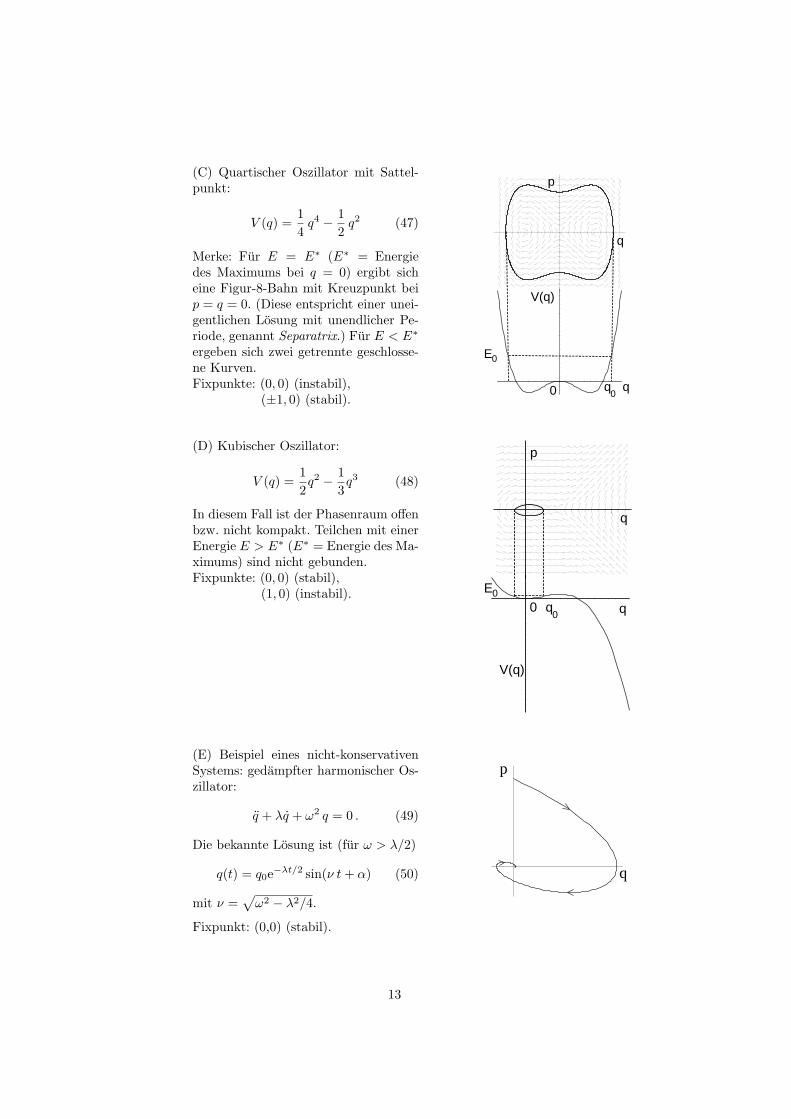
4.3 Das mathematische Pendel
Das mathematische Pendel ist der Prototyp eines 1-dimensionalen nichtlinearenSystems. Wir besprechen es deshalb ausfuhrlich und fuhren bei der Gelegenheitdie elliptischen Integrale und die Jacobischen elliptischen Funktionen ein.
πϕ l
x
y
−π
V(φ)
Aus l = const. folgt N = 1; die verallgemeinerte Koordinate sei φ.
L (φ, φ) =m
2l2φ2 +mgl cosφ , (54)
pφ = ml2φ , (55)
H(φ, pφ) =p2
φ
2ml2−mgl cosφ . (56)
Die Bewegungsgleichungen lauten nach Lagrange (bzw. Newton):
lφ+ g sinφ = 0 (57)
und nach Hamilton:
φ =pφ
ml2,
pφ = −mgl sinφ . (58)
Zur Bestimmung der allgemeinen Losung benutzt man die Energieerhaltung:
E =m
2l2φ2 −mgl cosφ , (59)
woraus folgt
t(φ) = l
√m
2
∫ φ
0
dφ′√E +mgl cosφ′
. (60)
Im letzten Schritt wurde o.B.d.A. φ(t = 0) = 0 gewahlt. Die folgenden Schrittedienen zur Transformation des Integrals auf die Standardform eines elliptischenIntegrals (nach Landau & Lifshits [3]).
4.3.1 E < mgl
Man fuhre eine Konstante φ0 so ein, dass
E = −mgl cosφ0 . (61)
15

Dann folgt
t(φ) =
√l
2g
∫ φ
0
dφ′√cosφ′ − cosφ0
. (62)
Mit cosφ′ − cosφ0 = 2[cos2(φ′/2) − cos2(φ0/2)
]= 2
[sin2(φ0/2) − sin2(φ′/2)
]
und der Substitution
sin ξ =sin(φ′/2)
sin(φ0/2)(63)
folgt
t(φ) =
√l
g
1
2 sin(φ0/2)
∫ φ
0
dφ′√1 − sin2 ξ(φ′)
=
√l
g
∫ γ
0
dξ√1 − k2 sin2 ξ
=
√l
gF (γ, k) , (64)
wobei wir definiert haben
γ = arcsin
[sin(φ/2)
sin(φ0/2)
], (65)
k2 = sin2 (φ0/2) . (k2 < 1) (66)
Die rechte Seite von (64) enthalt das unvollstandige elliptische Integral ersterArt F (γ, k) als Funktion einer Variablen γ und eines Parameters k:
F (γ, k) :=
∫ γ
0
dξ√1 − k2 sin2 ξ
. (67)
Fur einen vollen Ausschlag des Pendels ist der Endwinkel gleich dem Umkehr-winkel, φ = φ0, und damit sin γ = 1 ⇒ γ = π/2. In diesem Falle erhalt man dasvollstandige elliptische Integral erster Art K(k):
K(k) := F(π
2, k). (68)
Die volle Periode ist vier mal der Zeit aus der Nullpunktslage bis zum Umkehr-punkt und betragt damit
T = 4
√l
gK(k) . (69)
Fur den Grenzfall E → mgl folgt k → 1. Dabei divergiert K(k) und somitT → ∞. Im Falle kleiner Energien E → −mgl ergibt sich dagegen, wegen φ0 → 0
k → 0 und K(0) = π2 , die Periode des harmonischen Pendels: T = 2π
√lg (vgl.
die Diskussion der Grenzfalle in 4.3.3).Das elliptische Integral 1. Art kann auch invertiert werden. Die Umkehr-
funktion heißt Jacobische elliptische Funktion und wird mit sn(u, k) bezeichnet.Sie ist definiert durch
sn(u, k) := sin γ , u = F (γ, k) . (70)
16

sn(u, k) ist eine periodische Funktion mit der reellen Periode 4K(k). Mit
sn
(√g
lt, k
)= sin γ =
sin(φ/2)
sin(φ0/2)(71)
erhalten wir daraus die exakte analytische Losung der Pendelgleichung:
φ(t) = 2 arcsin
[sin(φ0/2) sn
(√g
lt, k
)]. (E < mgl) (72)
Im Grenzfall E ↑ mgl und damit k → 1 wird die Jacobi-elliptische Funktion zu
sn(u, k) −→ tanh(u) , (k → 1) (73)
d.h. sie wird aperiodisch mit Periode T = ∞ und stellt die sog. Separatrix dar(s. Abschn. 4.3.4). Im anderen Grenzfall φ0 ≪ 1, E → −mgl und damit k → 0wird sie zur Sinusfunktion:
sn(u, k) −→ sin(u) , (k → 0) (74)
und die allgemeine Losung (72) geht in die bekannte harmonische Losung kleinerAuslenkungen uber (s. Abschn. 4.3.3).
4.3.2 E > mgl
Hier definieren wir eine neue Konstante µ durch
µ = mgl/E < 1 . (75)
Das Integral (60) kann dann direkt aus Integraltabellen gefunden werden:
∫ φ
0
dξ√1 + µ cos ξ
= F
(φ
2,
√2µ
1 + µ
). (µ < 1) (76)
Mit
q2 =2µ
1 + µ=
2mlg
E +mlg< 1 (77)
wird also
t(φ) =
√2ml2
E +mlgF
(φ
2, q
). (78)
Die Periode ist jetzt
T = t(π) − t(−π) = 2
√2ml2
E +mlgK(q) (79)
und divergiert fur E ↓ mgl, q → 1. Die exakte Losung fur φ(t) wird somit
φ(t) = 2 arcsin
[sn
(√E +mlg
2ml2t, q
)]. (E > mgl) (80)
Fur E → ∞ wird q → 0 und die Losung geht in die gleichformige Kreisbewegunguber (s. nachster Abschnitt).
17
4.3.3 Grenzfalle
Fur kleine und große Energien konnen folgende Naherungen gemacht werden:
• −mgl ≤ E ≪ mgl: kleine harmonische Schwingungen:φ ≪ 1 ⇒ sinφ ≃ φ ⇒ die DG (57) wird linear: φ + g
l φ = 0. Die Losung
ist φ(t) = φ0 sin(ωt) mit ω =√g/l und Periode T = 2π/ω = 2π
√l/g.
• E ≫ mgl; gleichformige Kreisbewegung:Ekin ≫ V ⇒ V (φ) kann vernachlassigt werden.⇒ E = Ekin = ml2φ2/2 ⇒ φ = ω =
√2E/ml2. Die Losung wird also
φ(t) = ωt mit Periode T = 2π/ω = 2π√ml2/2E.
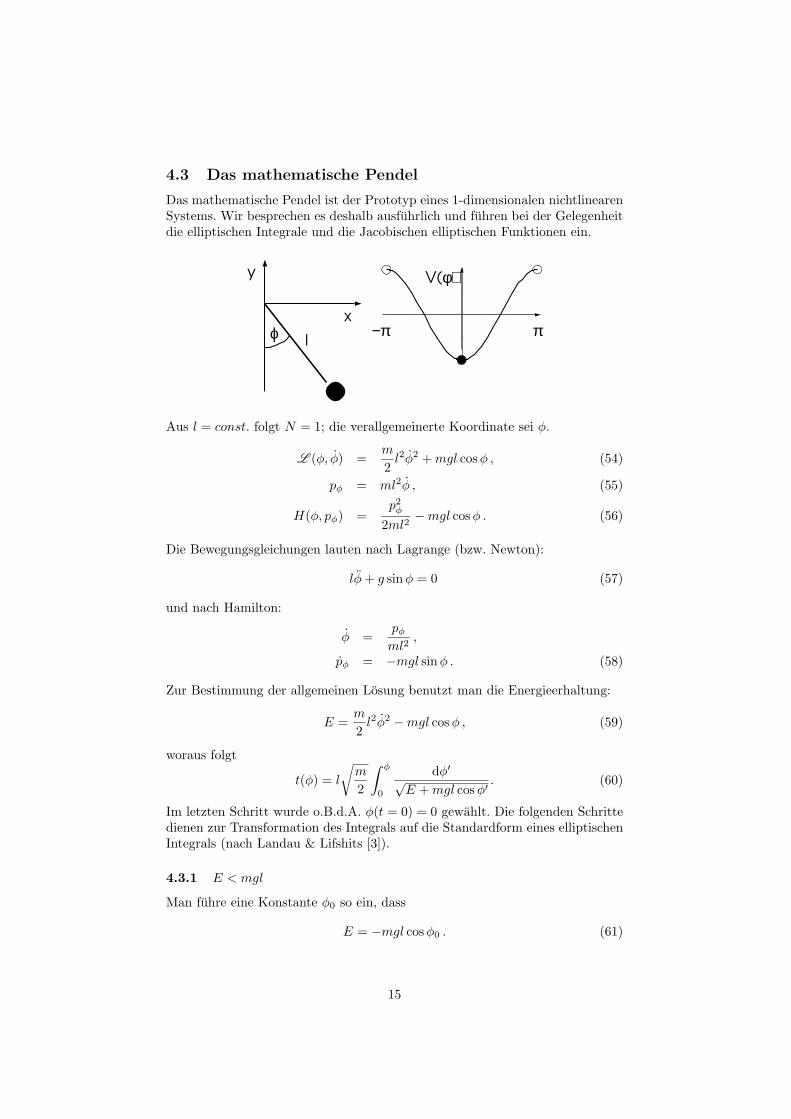
4.3.4 Phasenraumportrait
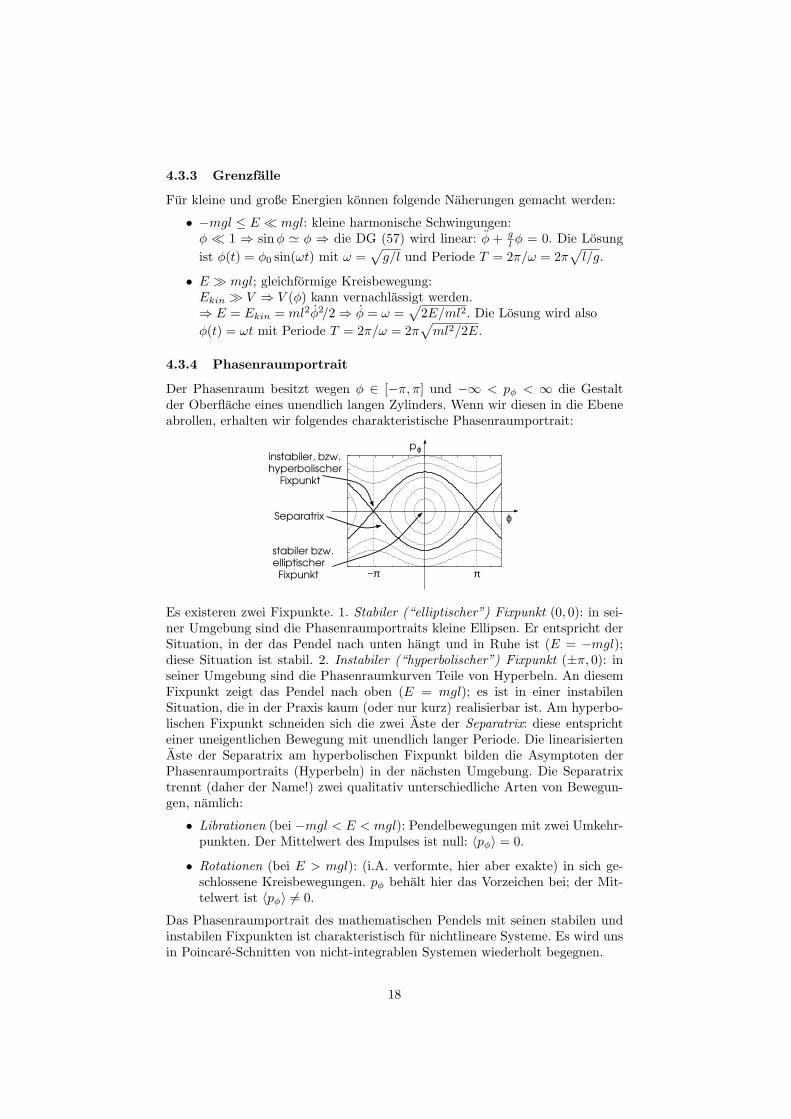
Der Phasenraum besitzt wegen φ ∈ [−π, π] und −∞ < pφ < ∞ die Gestaltder Oberflache eines unendlich langen Zylinders. Wenn wir diesen in die Ebeneabrollen, erhalten wir folgendes charakteristische Phasenraumportrait:
π−π
pϕ
ϕSeparatrix
instabiler, bzw.hyperbolischer Fixpunkt
stabiler bzw.elliptischer Fixpunkt
Es existeren zwei Fixpunkte. 1. Stabiler (“elliptischer”) Fixpunkt (0, 0): in sei-ner Umgebung sind die Phasenraumportraits kleine Ellipsen. Er entspricht derSituation, in der das Pendel nach unten hangt und in Ruhe ist (E = −mgl);diese Situation ist stabil. 2. Instabiler (“hyperbolischer”) Fixpunkt (±π, 0): inseiner Umgebung sind die Phasenraumkurven Teile von Hyperbeln. An diesemFixpunkt zeigt das Pendel nach oben (E = mgl); es ist in einer instabilenSituation, die in der Praxis kaum (oder nur kurz) realisierbar ist. Am hyperbo-lischen Fixpunkt schneiden sich die zwei Aste der Separatrix: diese entsprichteiner uneigentlichen Bewegung mit unendlich langer Periode. Die linearisiertenAste der Separatrix am hyperbolischen Fixpunkt bilden die Asymptoten derPhasenraumportraits (Hyperbeln) in der nachsten Umgebung. Die Separatrixtrennt (daher der Name!) zwei qualitativ unterschiedliche Arten von Bewegun-gen, namlich:
• Librationen (bei −mgl < E < mgl): Pendelbewegungen mit zwei Umkehr-punkten. Der Mittelwert des Impulses ist null: 〈pφ〉 = 0.
• Rotationen (bei E > mgl): (i.A. verformte, hier aber exakte) in sich ge-schlossene Kreisbewegungen. pφ behalt hier das Vorzeichen bei; der Mit-telwert ist 〈pφ〉 6= 0.
Das Phasenraumportrait des mathematischen Pendels mit seinen stabilen undinstabilen Fixpunkten ist charakteristisch fur nichtlineare Systeme. Es wird unsin Poincare-Schnitten von nicht-integrablen Systemen wiederholt begegnen.
18

5 Hamilton-Jacobi-Theorie
5.1 Die Hamilton-Jacobi-Gleichung
Fur ein konservatives System mit N Freiheitsgraden suchen wir nun die ’opti-male’ zeitunabhangige kanonische Transformation
H(q,p) −→ H(Q,P)!= H(P) , (81)
bei der die neue Hamiltonfunktion nur noch von den Impulsen Pi abhangig ist,d.h. bei der alle Qi zyklisch sind. Die Erzeugende dieser Transformation ist vom2. Typ und soll im folgenden S genannt werden (wir sehen gleich, dass es eineWirkung ist):
S(q,P) := F2(q,P) . (82)
Falls diese Erzeugende existiert, muss gelten (in Vektorschreibweise)
p =∂S
∂q, Q =
∂S
∂P,
∂S
∂t= 0 . (83)
Wenn wir den ersten Ausdruck in (81) einsetzen, erhalten wir die zeitunabhangi-ge Hamilton-Jacobi-Gleichung:
H
(q,∂S
∂q
)= E . (84)
Bemerkungen:
• Gl. (84) ist eine partielle DG fur S(q1, . . . , qN , P1, . . . , PN ) in den N Koor-dinaten qi, wobei die Pi Integrationskonstanten sind. Diese mussen linearunabhangig sein, damit eine Losung existiert.
• Falls eine Losung von (84) existiert, konnen die Bewegungsgleichungentrivial integriert werden (vgl. den 1-dim. harmonischen Oszillator in 3.3):
∂H
∂Qi= −Pi = 0 ⇒ Pi = const., (85)
∂H
∂Pi= Qi = ωi = const. ⇒ Qi(t) = ωit+ αi . (86)
• Fur einen festen Satz von Pi berechnet sich S als offenes Wirkungsinte-gral (auch “Hamiltonsche charakteristische Funktion” genannt) entlangdes Weges q(t) von t = 0 bis t und lautet (bis auf eine Konstante):
S(q) =
N∑
i=1
∫ qi(t)
qi(0)
pidqi =
∫ q
q0
p(q′) · dq′ . (87)
• Im Allgemeinen kann fur N > 1 kein S(q) gefunden werden (N = 1: siehedas Beispiel in Abschn. 5.2.1). Die Ausnahme bilden integrable Systeme(siehe Kap. 6.1); davon sind die einfachsten die separablen Systeme (siehedas Beispiel in Abschn. 5.2.2).
19

Liegt ein nicht-konservatives System vor, so kann die Hamiltonsche Prinzi-palfunktion (5) als Erzeugende gewahlt werden:
F2(q,P, t) = R(q, t) =
∫ t
t0
L [q(t′), q(t′), t′] dt′
=
∫ t
t0
(∑
i
piqi −H(q,p, t′)
)dt′ , (88)
wobei die Pi wieder die Rolle von (i.A. noch zu bestimmenden) Integrationskon-stanten spielen. Uber (25) fuhrt dies dann zur zeitabhangigen Hamilton-Jacobi-Gleichung:
H
(q,∂R
∂q, t
)= −∂R
∂t. (89)
Den stationaren Fall (84) erhalt man daraus mit H = E = const. mit demSeparationsansatz
R(q, t) = S(q) − Et . (90)
Bemerkung:Die Prinzipalfunktion (88) als zeitabhangige Erzeugende vermittelt eine zeitab-hangige ideale kanonische Transformation, bei der fur konservative Systeme dieneue Hamiltonfunktion H identisch gleich null wird, so dass samtliche neu-en Impulse und Koordinaten konstant sind (vgl. [2, 3])! Dies bringt uns abernichts Neues gegenuber dem vorhin Gesagten; die neuen konstanten Koordina-ten entsprechen denen, die man erhalt, wenn man mit den Losungen (86) zeitlich“mitfahrt” und dann im bewegten Bezugssystem als konstante Koordinaten ab-liest.
5.2 Beispiele
5.2.1 Eindimensionale Systeme
Sei ein beliebiges eindimensionales Potential V (q) gegeben. Wir wahlen als neueImpulsvariable die Energie: P = E = const. Dann ergibt sich mit S = S(q, E)die HJ-Gleichung
H(P ) = H
(∂S
∂q, q
)= E (91)
mit
p =∂S(q, E)
∂q; Q =
∂S(q, E)
∂E. (92)
Daraus erhalten wir die Hamilton-Gleichungen
∂H
∂Q= −P = 0 ,
∂H
∂P= Q =
∂E
∂E= 1 ⇒ Q(t) = t− t0 . (93)
Man hat somit das Paar neuer konjugierter Variablen (Q,P ) = (t − t0.E). DieWirkungsfunktion bestimmt sich aus
H(q, p) =p2
2m+ V (q) =
1
2m
(∂S
∂q
)2
+ V (q) = E , (94)
20

woraus folgt
∂S
∂q=√
2m[E − V (q)] ⇒ S(q, E) =
∫ q
q0
√2m[E − V (q′)] dq′. (95)
Fur Q = t− t0 findet man daraus die bekannte Losung
Q = t− t0 =∂S
∂E=
∂
∂E
∫ q
q0
√2m[E − V (q′)] dq′
=
√m
2
∫ q
q0
dq′√E − V (q′)
= t(q) − t0 . (96)
und daraus durch Inversion die gesuchte Funktion q(t).
5.2.2 Separable Systeme
Sei die Hamiltonfunktion von der Form
H(q,p) =
N∑
i=1
h(qi, pi) , (97)
die man “separabel” nennt, da h nur von einem Freiheitsgrad abhangt: h(q, p) =p2/2m+ V (q). In der Vielteilchenphysik tritt (97) auf, wenn man die Zweiteil-chenwechselwirkung vernachlassigt oder in ein mittleres selbstkonsistentes Po-tential steckt (Hartree-Fock-Theorie, Dichtefunktionaltheorie); man spricht hierauch vom “Einteilchenmodell”. Mit (97) hat auch S(q,P) eine separable Form:
S(q,P) =
N∑
i=1
s(qi, Pi) (98)
mit einer einzigen Funktion s(q, P ). Die HJ-Gleichung (84) zerfallt dann in Nunabhangige Gleichungen
h
(qi,
∂s
∂qi
)= Ei = const., (i = 1, . . . , N) (99)
die, bis auf die unterschiedlichen Energien Ei, identisch sind. Praktisch heisstdas, dass man fur N unabhangige Systeme die eindimensionale HJ-Gleichungmit h(q, p) und s(q, P ) lost; die Gesamtenergie ist dann
E =∑
i
Ei . (100)
5.2.3 Separation in krummlinigen Koordinaten
Auch wenn H nicht von der separablen Form (97) ist, kann manchmal fur S eineseparable Form gefunden werden. Dies geht oft in krummlinigen Koordinaten.Wir illustrieren dies fur das folgende Potential
V (q) = V (r, θ) = a(r) +b(θ)
r2, (101)
21

wobei q = (r, θ, φ) die ublichen Polarkoordinaten sind
x = r sin θ cosφ ,
y = r sin θ sinφ ,
z = r cos θ (102)
und p = (pr, pθ, pφ) deren konjugierte Impulse. Schreibt man nun die kinetischeEnergie um, so ergibt sich (siehe Vorlesung klassische Mechanik!)
H(r, θ, φ, pr, pθ, pφ) = E =1
2m
(p2
r +p2
θ
r2+
p2φ
r2 sin2 θ
)+ V (r, θ) . (103)
Da φ zyklisch ist, ist pφ = Lz eine Erhaltungsgroße, die wir als einen der neuenImpulse wahlen konnen: P2 = Lz. Mit dem separablen Ansatz
S(r, θ, φ) = Sr(r,P) + Sθ(θ,P) + Sφ(φ, P2) , Sφ(φ, P2) = φP2 (104)
wird nun die HJ-Gleichung zu
1
2m
(∂Sr
∂r
)2
+ a(r)
︸ ︷︷ ︸g(r)
+1
r2
[1
2m
(∂Sθ
∂θ
)2
+ b(θ) +L2
z
2m sin2 θ
]
︸ ︷︷ ︸f(θ)
= E . (105)
Da (105) identisch fur alle r(t), θ(t), φ(t) erfullt sein muss und g(r) und f(θ)jeweils nur von einer Variablen abhangen, muss f(θ) konstant sein. Setzen wir
f(θ) =β
2m, β = const. (106)
so folgen daraus zwei unabhangige Gleichungen fur Sr und Sθ:(∂Sr
∂r
)2
+ 2ma(r) +β
r2= 2mE , (107)
(∂Sθ
∂θ
)2
+ 2mb(θ) +L2
z
sin2 θ= β . (108)
Wir haben also drei unabhangige Erhaltungsgroßen E,Lz, β, welche als die neu-en verallgemeinerten Impulse P = (P1, P2, P3) gewahlt werden konnen: p1 = E,P2 = Lz und P3 = β. Die Integration von (107) und (108) liefert dann:
S(r, θ, φ,E, β, Lz) = φLz +
∫ θ
θ0
√β − 2mb(θ′) − L2
z/ sin2 θ′ dθ′
+
∫ r
r0
√2mE − 2ma(r′) − β/r′2 dr′ (109)
Die Integrale lassen sich i.A. nicht durch elementare Funktionen darstellen. Oftfuhren sie aber zu elliptischen Integralen. Die Losungen fur r(t), φ(t) und θ(t)erhalt man schließlich aus:
Q1 =∂H
∂P1=∂E
∂E= 1 ⇒ Q1 =
∂S
∂E= t− t0 , (110)
Q2 =∂H
∂P2=∂E
∂β= 0 ⇒ Q2 =
∂S
∂β= const., (111)
Q3 =∂H
∂P3=
∂E
∂Lz= 0 ⇒ Q3 =
∂S
∂Lz= const.′ (112)
22

Auch diese Gleichungen lassen sich i.A. nicht leicht losen.
5.2.4 Das Keplerproblem
Im folgenden spezialisieren wir das Potential (101) auf das Gravitationspotential
V (r) =α
r, α = const. < 0 . (113)
Es folgt daher im obigen Beispiel a(r) = α/r und b(θ) = 0. Aus der Tatsache,dass es sich hier um ein Zentralpotential handelt, ergibt sich Drehimpulserhal-tung L = const., und o.B.d.A. kann man L = Lzez festlegen. Die Bewegungfindet dann in der xy-Ebene statt, so dass θ = π
2 = const., woraus pθ = 0 folgt.Es ergibt sich
∂Sθ
∂θ= pθ = 0 , (114)
und mit (108) (da sinπ/2 = 1)
β = L2z = L2 . (115)
Es ergibt sich weiter
S = φL+
∫ r
r0
√2mE − 2mα/r′ − L2/r′2 dr′ , (116)
und mit (110), (112) schließlich
t(r) = t0 +√m
∫ r
r0
1√2E − 2α/r′ − L2/mr′2
dr′ , (117)
φ(r) = φ0 +
∫ r
r0
L/r′2
√2mE − 2mα/r′ − L2/r′2
dr′ . (118)
Die Losungen dieser Integrale fuhren zu den bekannten Keplerbahnen, d.h. denKegelschnitten (s. z.B. [1, 3]).
Hausaufgabe:
Zeige, dass die Bahnen des Keplerproblems im Impulsraum, d.h. die Kurven p(t),Kreise sind! Welche Rolle spielen deren Radien? (Die Losung ist in Gutzwiller[4], Abschn. 12.4, gegeben.)
23

6 Integrable Systeme: regulare Bewegung
Die Kriterien, die erfullt sein mussen, damit die “optimale” kanonische Trans-formation (81) durchgefuhrt und die HJ-Gleichung (84) eindeutig gelost werdenkann, werden kurz als Integrabilitats-Kriterien bezeichnet.
6.1 Definition der Integrabilitat
Ein System mit N unabhangigen Freiheitsgraden heißt integrabel, falls minde-stens N linear unabhangige Erhaltungsgroßen
An(q,p) = An = const., (n = 1, . . . , N) (119)
existieren, welche miteinander Poisson-kommutieren resp. “in Involution sind”,d.h. wenn im gesamten Phasenraum gilt
[An, Am]p,q = 0 . ∀n,m ∈ 1, . . . , N (120)
Bemerkungen:
• In konservativen Systemen liegt mit A1 = E = H(q,p) immer eine Erhal-tungsgroße vor.
• Jedes 1-dimensionale konservative System ist damit integrabel.
• Jedes separable System ist integrabel:
E =
N∑
i=1
Ei =
N∑
i=1
H(qi, pi) ⇒ An = En . (121)
• Es zeigt sich, dass fur jedes integrable System die Erzeugende S(q,P)existiert, welche die “ideale” kanonische Transformation (81) vermittelt.Diese wird am elegantesten in den sogenannten Torus-Variablen ausge-druckt (s. Kap. 6.3).
• Ein System mit N Freiheitsgraden kann auch mehr als N Poisson-kommu-tierende Erhaltungsgroßen besitzen. Dann nennt man es “superintegra-bel”. Ein solches System zeichnet sich durch eine sog. dynamische Symme-trie aus. Beispiele sind das Kepler- (oder Coulomb-)Potential (zusatzlicheErhaltungsgroße ist der Runge-Lenz-Vektor) mit O(4)-Symmetrie und iso-trope harmonische Oszillatoren in D Dimensionen mit SU(D)-Symmetrie.
6.2 Beispiele fur integrable Systeme
6.2.1 Spharisches Potential in N = 3 Dimensionen
Gegeben sei ein 3-dimensionales System mit einem Zentralpotential V (r) =V (r), r ∈ R3, r = |r|:
H(r,p) =p2
2m+ V (r) . (122)
Erhaltungsgroßen sind hierbei E, Lx, Ly und Lz. Wegen [Li, Lj ] = −ǫijkLk sindaber nicht alle von ihnen paarweise Poisson-kommutierbar. Die Großen A1 = E,A2 = L2 = L2
x +L2y +L2
z und eine der drei Komponenten Li kommutieren aber;ublicherweise wahlt man A3 = Lz.
24

6.2.2 Integrable Billards
Billards sind zusammenhangende Teilmengen G ∈ RN mit dem Potential
V (q) =
0 falls q ∈ G ,∞ falls q 6∈ G .
(123)
Die Dynamik eines Teilchens ist in Billards besonders einfach:
• geradlinige, gleichformige Bewegung im Inneren des Billards (|p| = const.);
• spiegelnde Reflexion am Rand (Einfallswinkel = Ausfallswinkel).
Meist werden zweidimensionale Billards untersucht. Wir werden sie im Kapitel 8ausfuhrlicher diskutieren. Integrable zweidimensionale Billards, bei denen nebender Energie noch eine weitere Große erhalten ist, sind unter anderen:
• Rechtecksbilliard: Erhalten sind die Betrage der Impulse parallel zu denRandern.
• Dreiecksbilliards: falls die Innenwinkel 30, 45, 60 oder 90 sind. DieErhaltungsgroßen sind nicht immer einfach zu intepretieren!
• Kreisbillard: Erhaltungsgroße ist der Drehimpuls Lz.
• Elliptisches Billard: Hier ist das Produkt A2 = L1L2 erhalten, wobei L1
und L2 die Drehimpulse bezuglich der Brennpunkte c1 und c2 sind.
R
Mc1 c2
a
b
6.2.3 Weitere Beispiele
Diese finden Sie im Abschn. 7.3, wo auch ihre Poincare-Schnitte diskutiert wer-den.
6.3 Torusvariablen
6.3.1 Einfuhrung der Torusvariablen
Einstein machte 1917 auf folgenden Satz aufmerksam:
Die Phasenraumkurven ξ(t) eines integrablen Systems mit N unabhangigenFreiheitsgraden liegen auf einer Mannigfaltigkeit, welche die Struktur eines N -Torus besitzt.
Bemerkungen:
• Ein N -Torus ist eine zusammenhangende N -dimensionale Mannigfaltig-keit MN mit einem Loch. Fur N = 1 ist dies eine zu einem Kreis defor-mierbare Kurve. Fur N = 2 ist dies ein Torus schlechthin, auf englisch eindoughnut (siehe Figur auf der nachsten Seite).
25

• Aus den Erhaltungsgroßen An (119), die (120) erfullen, konnen Vektorfel-der vn definiert werden:
vn = J · ∇An , (124)
die linear unabhangig und alle tangential zu MN sind. Eine der Erhal-tungsgroßen ist die Energie, und damit ist
v1 = J · ∇H = ξ (125)
in Ubereinstimmung mit den Hamilton-Gleichungen (42). Mit dem Poin-care-Hopf-Theorem aus der Topologie folgt nun, dass MN ein N -Torusist. Dies ist eine N -dimensionale kompakte Mannigfaltigkeit, welche “ge-kammt” werden kann, ohne dass dabei Wirbel entstehen (math.: welche“parallelisierbar” ist). (Dies geht z.B. nicht bei der Kugeloberflache S2!)
• Es kann gezeigt werden, dass auf einem N -Torus immer N unabhangigeelementare Schleifen Cn existieren, die weder zu einem Punkt zusammen-gezogen noch ineinander ubergefuhrt werden konnen.
• Diese elementaren Schleifen Cn beschreiben wir jetzt durch die Winkelva-riablen Φn ∈ [0, 2π) (mit n = 1, . . . , N).
C1
Φ1 1I
2IC2
2Φ
Die Schleifen konnen immer auf Kreise abgebildet werden, deren RadienIn die zu Φn kanonisch konjugierten Impulse sind. Man erhalt dadurch dieWirkungsvariablen In > 0. Diese sind definiert entlang den elementarenSchleifen Cn:
In =1
2π
∮
Cn
p · dq . (n = 1, . . . , N) (126)
Beachte, dass die Großen In > 0 eindeutig sind. [Die pi(q) sind i.A. zwei-deutig; bei dem Integral (126) mussen beide Aste verwendet werden.]
• Die “optimale” kanonische Transformation ist also
(qi, pi) −→ (Φi, Ii) ,
H(q,p) −→ H(I) . (127)
Die neuen Winkel/Wirkungs-Variablen (Φi, Ii) (englisch: action-angle va-riables) werden oft auch Torusvariablen genannt. Die Hamilton-Gleichun-gen und ihre trivialen Losungen in den Torusvariablen lauten:
Ii = − ∂H
∂Φi= 0 ⇒ Ii = const.,
Φi =∂H
∂Ii= Ωi = const. ⇒ Φi(t) = Ωit+ βi . (128)
Die Phasen βi bilden dabei neben den Ii weitereN Integrationskonstanten.
26

• Fur N = 1 kann das Integral I1 = I (126) folgendermaßen interpretiertwerden: Betrachtet man die Variablen (q, p), so ist 2πI = S =
∮pdq genau
die Flache, die von der Phasenraumkurve eingeschlossen wird (a). In denVariablen (Φ, I) dagegen ist 2πI der Umfang eines Kreises mit Radius I(b) oder die Flache eines Rechtecks mit den Seiten I, 2π (c) – je nachdem,ob man Φ und I als polare oder kartesische Koordinaten auffasst.
Sq
p
Φ I
a) b)
Φ
I
2π
S
0
c)
Die Wahl der (Φi, Ii) als polare Variablen (im Phasenraum) ist die naturli-che im Hinblick auf ihre Definition auf dem N -Torus. Man beachte auch,dass die Ωi = Φi echt physikalische Kreisfrequenzen darstellen.
6.3.2 Beispiel: Der zweidimensionale harmonische Oszillator
Gegeben sei die Hamiltonfunktion
H =1
2m(p2
1 + p22) +
m
2(ω2
1q21 + ω2
2q22) = E = E1 + E2 , (129)
wobei Ei = p2i /2m+ (m/2)ω2
i q2i . Auflosen nach pi ergibt
pi(qi) = ±√
2mEi − ω2im
2q2i . (i = 1, 2) (130)
Da H in (129) separabel ist, konnen wir als elementare Schleifen Ci gerade diePhasenraumbahnen in den einzelnen Ebenen (pi, qi) wahlen, die jeweils Ellipsensind (siehe 4.1). Damit folgt fur die Wirkungen Ii
Ii =1
2π
∮
Ci
pi(qi) dqi =1
π
∫ +q(0)i
−q(0)i
pi(qi) dqi (i = 1, 2) (131)
mit den Grenzen ±q(0)i = ±√
2Ei/mω2i . Das obige Integral ergibt:
Ii = Ei/ωi ⇒ H(I) = ω1I1 + ω2I2 . (132)
Fur die Erzeugende der Transformation findet man
S = S1(q1, I1) + S2(q2, I2) (133)
mit
Si(qi, Ii) =
∫ qi
0
√2mIiωi −m2ω2
i q′2 dq′
= Ii arcsin
(√mωi
2Iiqi
)+
1
2
√2mIiωi −m2ω2
i q2i qi . (134)
27

Damit sind die Winkelvariablen
Φi =∂Si
∂Ii= arcsin
(√mωi
2Iiqi
). (i = 1, 2) (135)
Geht man zuruck auf die ursprunglichen Koordinaten, so findet man mit (135)und (128) die bekannten Oszillatorlosungen:
qi(t) = q(0)i sin(ωit+ αi) . (136)
Fur diese Losungen gilt Folgendes:
• Die Bahnen qi(t) sind i.A. aperiodisch oder quasiperiodisch, d.h. sieschließen sich uberhaupt nie (resp. erst bei t = ∞).
• Es existieren immer periodische Losungen in Form von Librationen entlangden beiden Achsen qi.
• Im Sonderfall, wo ω1 : ω2 rational ist, gibt es ausschließlich periodischeBahnen, die bekannten Lissajous-Figuren (s.a. Abschn. 7.5.3).
Weitere Beispiele, wie man Torusvariablen auffindet, werden im Abschn. 6.5.1gezeigt bzw. erwahnt.
6.4 Periodische Bahnen auf dem N-Torus
Im Phasenraum bewegen sich im Falle von N = 2 die Trajektorien auf einen 2-Torus. Falls das Frequenzverhaltnis Ω1 : Ω2 6∈ Q, also irrational ist, windet sichdie Bahn um den Torus und schließt sich nicht in endlicher Zeit. Der Phasen-raum wird komplett durchlaufen, die Torusoberflache wird dabei gleichmaßiguberdeckt. Man spricht auch von einem ergodischen System. Nur die beidenBahnen entlang den elementaren Schleifen sind hier periodisch. Ist das Fre-quenzverhaltnis dagegen rational:
Ω1
Ω2=
n
m, n,m ∈ N (137)
so spricht man oft von “rationalen Tori”. Periodische Bahnen sind isolierte,in sich geschlossene Kurven, die nicht die ganze Torusoberflache uberdecken.Durch Variation der Anfangsbedingungen konnen sie aber entlang des Toruskontinuierlich verschoben werden.
Im N -dimensionalen Fall gilt Ahnliches. Die Bedingung fur die Periodizitateiner Bahn lautet, dass alle Verhaltnisse Ωi : Ωj = n : m rational sein mussen:
Ωi : Ωj = n : m ∀ (i, j) , n,m ∈ N . (138)
Dies kann auch so ausgedruckt werden:
Ωi =∂H
∂Ii=
2π
Tni , ni ∈ N . (i = 1, . . . , N) (139)
Jede periodische Bahn kann also durch einen Satz n = ni von N ganzenZahlen charakterisiert werden. (Achtung: die Umkehrung gilt nicht!)
28
Merke: Die Frequenzen Ωi (139) sind zwar konstant, hangen aber im All-gemeinen von den Ij ab:
∂H(I)
∂Ii= Ωi(I) , (140)
d.h., H(I) ist i.A. nicht linear in den Ii. Der harmonische Oszillator bildet mit(132) eine Ausnahme!
6.5 EBK-Quantisierung
Die EBK-Quantisierung, so genannt nach Einstein, Brillouin und Keller, stelltdie mehrdimensionale Verallgemeinerung der WKB-Quantisierung dar. In einerDimension lautet diese bekanntlich (s. [10], Abschn. 2.2)
S =
∮pdq = h (n+ α) , n ∈ N (141)
wobei h = 2π~ das Plancksche Wirkungsquantum ist. Die Konstante α fehlte beider ursprunglichen Bohr-Sommerfeld-Quantisierung. Im Normalfall ist α ≥ 0 .Liegt ein “weiches Potential” V (q) vor, dessen Ableitungen an den klassischen
Umkehrpunkten q(0)i – definiert durch E = V (q
(0)i ) – endlich sind, so ergibt
sich durch lokales Anpassen der WKB-Wellenfunktion an die exakte Losungmit linearisiertem Potential an beiden Umkehrpunkten je eine Phase von π/4,also insgesamt α = 1/2. Eine ahnliche Uberlegung fuhrt bei unendlich steilenWanden (Billard, “hartes Potential”) zu einer Phase π/2 pro Reflexion unddamit zu α = 1. Falls an einem Umkehrpunkt eine “harte” und am anderen eine“weiche” Reflexion stattfindet (z.B. im “halben” harmonischen Oszillator miteiner refektierenden Wand bei x = 0 oder fur einen Massepunkt im Schwerefeldder Erde, der am Boden reflektiert wird), dann wird α = 3/4.
Fur ein N -dimensionales integrables System kann nun in den Torusvaria-blen einzeln genauso verfahren werden: die Quantisierung (141) kann einzeln furjedes der Ii durchgefuhrt werden. Dies liefert die EBK-Quantisierung:
Ii =1
2π
∮
Ci
p · dq = ~ (ni + αi) . ni = 0, 1, 2, . . . (142)
Die αi heißen Maslov-Indizes und sind wie oben definiert, d.h. fur jede SchleifeCi durch
αi =1
4× (Zahl der ”weichen” Umkehrpunkte)
+1
2× (Zahl der ”harten” Umkehrpunkte) . (143)
Bemerkungen:
• Die EBK-Gleichungen (142) ergeben eine implizite Quantisierungsbeding-ung fur die Energie:
E = H(I) = H[~(n + α)] ⇒ E = E(n1, . . . , nN ) = EEBKn . (144)
Dabei sind n = (n1, . . . , nN ) die Quantenzahlen, welche die diskretenEnergien EEBK
n (und die entsprechenden Zustande) charakterisieren, undα = (α1, . . . , αN ) ist der Vektor der N Malov-Indices.
29

• Oft kann H(I) nicht explizit angegeben werden. In diesem Fall mussen dieEn anhand der Gleichung (144) numerisch iteriert werden.
• Achtung: im Allgemeinen hangen die Ωi = ∂H/∂Ii von den I und damitauch von der Energie und den anderen Erhaltungsgroßen ab: Ωi(I) =Ωi(E, . . . ). Der harmonische Oszillator bildet hier eine Ausnahme.
• In den meisten Fallen gilt EEBKn 6= Eqm
n , d.h., die EBK-Quantisierunggibt nicht das exakte quantenmechanische Spektrum. Die EBK-Naherungwird jedoch besser fur großere Werte der ni; dies entspricht dem Bohr-schen Korrespondenzprinzip. Harmonische Oszillatoren (s. das BeispielA unten), integrable polygonale Billards (Beispiele B und C) und dasCoulomb-Potential (Beispiel D) bilden Ausnahmen: fur sie wird die EBK-Quantisierung exakt.
• Die Zahl der Umkehrpunkte ist null, und damit αi = 0, wenn die verall-gemeinerte Koordinate qi = ϕ ein zyklischer Winkel ist, der den ganzenBereich [0, 2π) uberstreicht. Weil dann ϕ = 0 identisch mit ϕ = n 2π(n ∈ N) ist, gibt es hier keinen Umkehrpunkt.
6.5.1 Beispiele
(A) Harmonischer Oszillator:
H =
N∑
i=1
ωiIi , ωi = const. (145)
Hier sind die Maslov-Indices αi = 1/2. Die Integrale in (142) sind analy-tisch durchfuhrbar und liefern das bekannte quantenmechanische Resultat:
E(n) =
N∑
i=1
~ωi(ni + 1/2) . (146)
Die EBK-Quantisierung ist in diesem Falle exakt. Die Maslov-Indizes sor-gen fur die richtigen Nullpunktsenergien.
(B) Das Rechtecksbillard mit Seitenlangen a und b:
Der Impuls pi wechselt bei jeder Reflexion an einer Wand in Richtung i(qi = x, y) sein Vorzeichen: pi → −pi. Sein Betrag bleibt jedoch erhalten:|pi| = const. Ferner gilt pi dqi > 0. Wahlt man nun2
I1 =1
2π
∮
Cx
px dx =a
π|px| , (147)
I2 =1
2π
∮
Cy
py dy =b
π|py| , (148)
dann transformiert sich die Hamiltonfunktion zu
H =1
2m(p2
x + p2y) =
π2
2m
(I21
a2+I22
b2
). (149)
2Ein Rechteck, bei dem die gegenuberliegenden Seiten periodisch aufeinander zuruckgefal-tet werden, ist aquivalent zu einem 2-Torus!
30

Hier sind die Maslov-Indices aufgrund der “harten” Reflexionen αi = 1.Es folgt Ii = ~ (ni + 1) mit ni = 0, 1, . . . und damit das EBK-Spektrum
En1,n2=π2~2
2m
(n2
1
a2+n2
2
b2
), n1, n2 = 1, 2, 3, . . . (150)
Wieder werden die quantenmechanischen Eigenwerte (bei Dirichlet-Rand-bedingung!) exakt wiedergegeben.
(C) Das gleichseitige Dreiecksbillard: siehe [9], Abschn. 3.2.7.
(D) Das Coulomb-Potential: man erhalt das exakte Rydberg-Spektrum fur dasH-Atom! (Siehe [10], Abschn. 2.3.3.)
6.6 Semiklassische Spurformeln
Semiklassische Spurformeln bilden eine Brucke zwischen Quantenmechanik undklassischer Mechanik. Sie erlauben es, die quantenmechanische Zustandsdichte(oder Niveaudichte) durch eine Summe uber die periodischen klassischen Bahneneines gegebenen Systems auszudrucken. Meist klappt dies nur naherungsweise,liefert aber oft recht gute Naherungen. In einigen integrablen Systemen gibt esexakte Spurformeln, d.h., die Summe uber alle klassischen periodischen Bahnenliefert die exakte quantenmechanische Zustandsdichte (s. [9], Abschn. 3.2 und[10], Abschn. 3.1 fur Beispiele).
6.6.1 Integrable Systeme: die Berry-Tabor-Spurformel
In einem integrablen System kann man mit Hilfe der EBK-Quantisierung eingenahertes Energiespektrum und damit eine genaherte Niveaudichte berechnen:
gEBK(E) =∑
n
δ(E −EEBKn ) ≈ gqm(E) =
∑
n
δ(E − Eqmn ) . (151)
Die ganzen Zahlen-N -tupel n = ni (i = 1, . . . , N) bedeuten hierbei die NQuantenzahlen, die das Energiespektrum vollstandig charakterisieren. Es kannnun gezeigt werden (Berry und Tabor, 1976, 1977; Creagh und Littlejohn, 1992),dass folgende semiklassische Spurformel fur die Niveaudichte gilt:
g (E) ≈∑
m
Am(E) cos
[1
~Sm(E) − βm
]. (152)
Die ganzen Zahlen-N -tupel m = mi (i = 1, . . . , N) charakterisieren hierbeidie periodischen Bahnen des Systems entsprechend Gl. (139). Die Phasen βm
hangen mit den Maslov-Indices zusammen, und die Wirkungen Sm sind gegebendurch
Sm = 2πm · I . (153)
Bemerkung:
• Die Spurformel (152) enthalt auch eine “Bahn der Lange Null”, definiertdurch das “leere” N -tupel m = (0, 0, . . . , 0). Dieses ergibt genau den mitt-leren Anteil g (E) der Niveaudichte, der auch im (erweiterten) Thomas-Fermi-Modell berechnet werden kann (s. [9], Kap. 4).
31

Die Spurformel (152) kann im Wesentlichen dadurch hergeleitet werden,dass man von der linken Seite von Gl. (151) ausgeht und dann die Summatio-nen uber die Quantenzahlen ni mittels der Poisson-Summenformel (siehe [10],Abschn. 3.1.1) naherungsweise auswertet, indem man die darin auftretendenIntegrale (teilweise) in Sattelpunkts-Naherung lost (siehe [9] Abschn. 2.7 und6.1.4, sowie [10] Abschn. 3.1.8).
6.6.2 Chaotische Systeme: die Gutzwiller-Spurformel
Fur nicht-integrable Systeme gibt es keine globalen Tori und keine allgemeineQuantisierungsvorschrift. Eine Spurformel fur den oszillierenden Anteil δg (E) =g (E)− g (E) der Niveaudichte wurde dennoch von Gutzwiller (1971) hergeleitet(s. dae Buch [4] und die darin zitierten Originalartikel von Gutzwiller) und hatdie Form:
δg(E) ≈∑
po
Apo(E) cos
(1
~Spo(E) − π
2σpo
). (154)
Sie gilt streng genommen nur fur chaotische Systeme, in denen alle periodischenBahnen (“po”) isoliert und hyperbolisch instabil sind. Inzwischen gibt es auchVerallgemeinerungen fur Systeme mit entarteten Bahnen (d.h. Systeme mit kon-tinuierlichen Symmetrien) und spezielle uniforme Naherungen fur Bifurkationenund symmetriebrechende Ubergange, wo (154) divergiert. Fur weitere Detailszur Gutzwiller-Theorie und zur Definition der in (154) auftretenden Großenverweisen wir auf das Lehrbuch [9], Kap. 5 und 6, sowie das Vorlesungsskript[10].
32

7 Nicht-integrable Hamiltonsche Systeme
Im Folgenden soll ein konservatives Hamiltonsches System mit N ≥ 2 Freiheits-graden untersucht werden:
H(q,p) =p2
2m+ V (q) = E , q,p ∈ RN . (155)
Die Dynamik des Systems wird durch die Hamilton-Gleichungen beschrieben:
qi =∂H
∂pi, pi = −∂H
∂qi, ⇒ ξ(t) =
(q(t)p(t)
). (156)
Der gesamte Phasenraum ist ein 2N -dimensionaler Vektorraum R2N . Durch(155) wird er auf die “Energieschale” RE :=
ξ ∈ R2N
∣∣ H(ξ) = E
mit (2N−1)Dimensionen eingeschrankt. Im Allgemeinen sind die Phasenraumkurven ξ(t) ∈RE ab N = 2 nur schwierig zu visualisieren. Daher beschrankt man sich aufgewisse Unterflachen, wie sie von Poincare eingefuhrt wurden.
7.1 Poincare-Schnitte
Henri Poincare gewann 1890 mit einer 270-seitigen Abhandlung uber das Drei-korperproblem einen am schwedischen Hof ausgeschriebenen Preis fur Losungs-vorschlage zu den damals aktuellsten mathematischen Problemstellungen. Inseiner Arbeit erkannte Poincare, dass das Dreikorperproblem keine geschlosse-nen Losungen zulasst (wir sagen heute: dass es nicht integrabel ist) und ana-lysierte in bahnbrechender Weise die Dynamik von nicht-integrablen Systemen.Er legte damit die Grundlagen zur Chaos-Theorie, obwohl diese erst sehr vielspater (unter Zuhilfenahme von Computern) entwickelt wurde.
Poincare fuhrte u.a. Schnitte der Kurven ξ(t) mit einer (2N − 1)-dimensio-nalen Hyperflache Σqi
ein, die wie folgt definiert ist:
Σqi:=
ξ ∈ R2N∣∣ qi = q
(0)i
, (157)
d.h. man legt eine (beliebige) Variable qi auf einen bestimmten Wert q(0)i fest.
Auf Σqiregistriert man nun die Durchstoßpunkte der Trajektorie ξ(t) zu genau
den Zeiten tn, an denen sie Σqiin einer (z.B. positiver) Richtung (also z.B.
mit pi > 0) durchkreuzt. Dies ergibt eine diskrete Folge von Punkten ξ(tn)mit n = 0, 1, . . . , wobei ξ(t0) als Anfangspunkt gewahlt wird. Die Punkte ξ(tn)vermitteln nun ein stroboskopisches Abbild der Trajektorie.Merke: Σqi
ist verschieden von der Energieschale RE ! Der Durchschnitt von Σqi
mit RE ergibt eine (2N − 2)-dimensionale Hyperflache ΣEqi:
ΣEqi:= Σqi
∩ RE =
ξ ∈ R2N∣∣ qi = q
(0)i ,H(ξ) = E
. (158)
Aus der Energie-Erhaltung
H(q1, . . . , q(0)i , . . . , qN , p1, . . . , pN ) = E (159)
kann nun der zu qi gehorige Impuls pi > 0 eindeutig aus E, qi und den ubri-gen 2N − 2 Variablen (außer qi, pi) berechnet werden. (Die Wahl von pi >
33

0 entspricht positiver Durchstoßrichtung von ξ durch Σqi.) Damit konnen qi
und pi als bekannt vorausgesetzt werden. Die Menge aller ubrigen Variablenspannt dann eine (2N − 2)-dimensionale Hyperflache auf, die wir die Poincare-Schnittflache (engl.: Poincare surface of section, PSS) nennen und kurz mit Σbezeichnen:
Σ :=
ξ ∈ R2N∣∣ qi = q
(0)i , pi = 0
. (160)
Die Punkte in Σ bezeichnen wir im Folgenden mit ξΣ. Die diskrete Folge vonPunkten ξΣ(tn) heißt kurz der Poincare-Schnitt. [Achtung: In der Mathematikbezeichnet man mit “Poincare-Schnitt” meist die (2N −1)-dimensionale Hyper-flache Σqi
resp. die darin liegenden Durchstoßpunkte.]Merke: Das in (160) definierte Σ ist die Projektion von ΣEqi
auf pi = 0und liegt damit selber nicht in der Energieschale RE ! Aber jeder Punkt ξΣ ∈ Σ
legt mittels der Kenntnis von E, qi = q(0)i und der aus (159) bekannten Funk-
tion pi(ξΣ, E, q(0)i ) die Trajektorie ξ(t) eindeutig fest. Die Folge der Punkte
ξΣ(tn) ∈ Σ ergibt also ein vollstandiges (2N − 2)-dimensionales stroboskopi-sches Abbild der Trajektorie ξ(t).
Bemerkungen:
• Fur ein gebundenes System liegen alle Punkte ξΣ in einem kompaktenTeilgebiet von Σ. Dessen Rand ∂ΣE entspricht dem Durchschnitt von Σmit der Energieschale:
∂ΣE = Σ ∩ RE (161)
und enthalt genau die Punkte mit pi(tn) = 0, also bloß Beruhrungspunktevon ξ(t) mit Σqi
oder Trajektorien, die ganz in Σqiliegen (und fur die
streng genommen gar keine Durchstoßpunkte definiert werden konnen!).
• Periodische Bahnen mit ξ(t + T ) = ξ(t) erzeugen eine endliche Mengevon Schnittpunkten, die zyklisch durchlaufen werden. Diese Punkte hei-ßen Fixpunkte der (iterierten) Poincare-Abbildung ξΣ(tn) → ξΣ(tn+1) →ξΣ(tn+2) . . . . Wenn ξΣ(tn) = ξΣ(tn+m) mit kleinstmoglichem m gilt, dannist tn+m − tn = T die “primitive” Periode der Bahn. Man spricht dann oftvon einer “Bahn der Periode m”.
• Nicht-periodische Bahnen fuhren hingegen zu unendlich vielen Schnitt-punkten. Diese werden i.A. endliche Teilgebiete der Schnittflache Σ uber-decken. In einem voll chaotischen System wird das ganze energetisch er-laubte Teilgebiet von Σ gleichmaßig uberdeckt (fur t→ ∞; Ergodenhypo-these!).
• Fur ein integrables System liegen die Poincare-Schnittpunkte auf demDurchschnitt von Σ mit dem zugehorigen N -Torus. Fur N = 2 ist dieseine eindimensionale Schleife:
34

periodische Bahn,endliche Menge vonPunkten’rationale Tori’
aperiodische Bahndichte Menge’irrationale Tori’
p
q
• Charakteristisch fur chaotische Bahnen ist, dass eine kleine Anderungδq(t0), δp(t0) der Anfangsbedingungen nach kurzer Zeit zu großen Abwei-chungen von der ursprunglichen Bahn fuhrt. Bei regularen Bahnen bleibendagegen die Abweichungen klein (vgl. Abschn. 7.4):
t
t
t(q ,p )0 0
ξ (t)
ξ(t)+δξ (t)1
ξ(t)+δξ (t)2chaotische Bahn
ξ(t)+δξ (t)2
ξ(t)+δξ (t)1
ξ (t)
t
tt
(q ,p )0 0
regulaere Bahn
7.1.1 Spezialfall N = 2
In einem zweidimensionalen System (N = 2) ergibt sich fur den Poincare-SchnittFolgendes. Aufgrund der Energieerhaltung
H =1
2m(p2
x + p2y) + V (x, y) = E (162)
liegen die Bahnen ξ(t) auf einer dreidimensionalen Energieschale R3E . Einer der
Impulse, z.B. px, wird dadurch festgelegt:
px = px(E, py, x, y) = ±√
2mE − p2y − 2mV (x, y) (163)
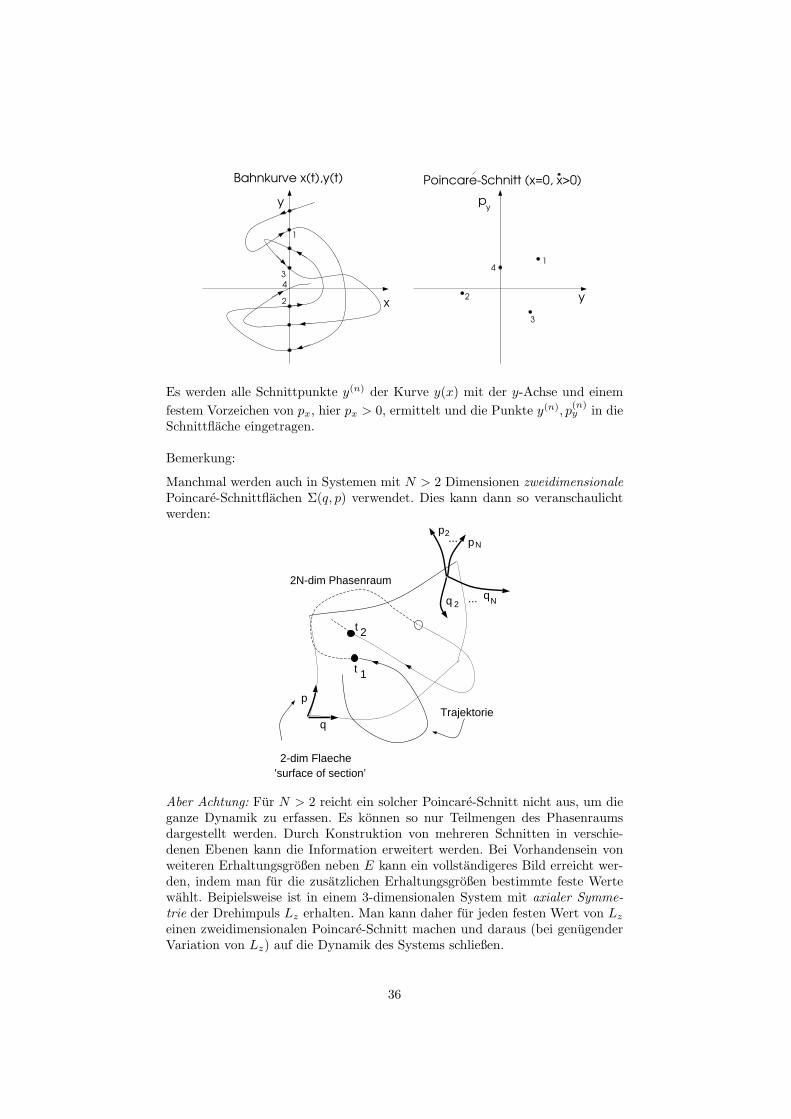
und kann eliminiert werden. Eine weitere Variable wird durch Wahl der Poin-care-Schnittflache festgelegt (oder umgekehrt!): z.B. x = 0. Damit verbleibennoch zwei freie Variablen, welche die Punkte (y, py) ∈ Σ bilden. Ein Punkt(y, py)(t0) legt demnach eine Bahn ξ(t) eindeutig fest (bei vorgegebener EnergieE). Der Poincare-Schnitt ergibt also ein vollstandiges Portrait der Bahn. Wirdeine genugend große Zahl von Anfangspunkten (und damit von verschiedenenBahnen) gewahlt, so erhalt man ein mehr oder weniger komplettes Portrait vonder Dynamik des untersuchten Systems. Praktisch sieht das bei der Wahl derSchnittflache (y, py) (mit x = 0) so aus:
35
1
2
3
x
y py
y
Bahnkurve x(t),y(t) Poincare-Schnitt (x=0, x>0)
4
1
2
3
4
Es werden alle Schnittpunkte y(n) der Kurve y(x) mit der y-Achse und einem
festem Vorzeichen von px, hier px > 0, ermittelt und die Punkte y(n), p(n)y in die
Schnittflache eingetragen.
Bemerkung:
Manchmal werden auch in Systemen mit N > 2 Dimensionen zweidimensionalePoincare-Schnittflachen Σ(q, p) verwendet. Dies kann dann so veranschaulichtwerden:
t 1
2t
2N-dim Phasenraum
2-dim Flaeche’surface of section’
Trajektoriep
q
pp
N2
2 N...
...
Aber Achtung: Fur N > 2 reicht ein solcher Poincare-Schnitt nicht aus, um dieganze Dynamik zu erfassen. Es konnen so nur Teilmengen des Phasenraumsdargestellt werden. Durch Konstruktion von mehreren Schnitten in verschie-denen Ebenen kann die Information erweitert werden. Bei Vorhandensein vonweiteren Erhaltungsgroßen neben E kann ein vollstandigeres Bild erreicht wer-den, indem man fur die zusatzlichen Erhaltungsgroßen bestimmte feste Wertewahlt. Beipielsweise ist in einem 3-dimensionalen System mit axialer Symme-trie der Drehimpuls Lz erhalten. Man kann daher fur jeden festen Wert von Lz
einen zweidimensionalen Poincare-Schnitt machen und daraus (bei genugenderVariation von Lz) auf die Dynamik des Systems schließen.
36

7.2 Familien von entarteten periodischen Bahnen
Wenn in einem System mit N ≥ 2 außer der Energie zusatzliche Erhaltungs-großen existieren, dann treten die periodischen Bahnen i.A. in sogenannten “Fa-milien” auf. Diese enthalten nicht-abzahlbar unendlich viele Bahnen mit dem-selben Wirkungsintegral S(E) =
∮p · dq, deren Phasenraumkurven sich aber
voneinander durch Gestalt oder Orientierung unterscheiden. Die Zahl der Para-meter, welche einzelne Bahnen der Familien beschreiben, nennt man den Entar-tungsgrad f . Meist entsprechen diese Parameter kontinuierlichen geometrischenSymmetrien, welche den zusatzlichen Erhaltungsgroßen zugrundeliegen.
Die Fixpunkte von Familien mit f > 0 in einer Poincare-Schnittflache Σliegen also dicht auf f -dimensionalen Hyperflachen von Σ (im integrablen Fall:Torus-Schnitten). Nicht entartete Bahnen haben f = 0; ihre Fixpunkte liegenisoliert in Σ (resp. im gesamten Phasenraum).
Beispiel: Die periodischen Bahnen im Kreisbillard. Dies sind endliche ge-schlossene Polygonzuge, welche um den Mittelpunkt gedreht werden konnen(Parameter φ, entspricht dem erhaltenen Drehimpuls Lz), ohne dass sich ihreWirkungsintegrale S(E) andern. Also ist f = 1. (Andere Beispiele s.u.)
7.3 Beispiele von Poincare-Schnitten (N = 2)
In nicht-integrablen Systemen konnen Poincare-Schnitte i.A. nur numerisch un-tersucht werden. Um zu lernen, wie wir solche Schnitte zu “lesen” haben, folgenzunachst Poincare-Schnitte von drei integrablen zweidimensionalen Systemen.Die ersten zwei sind wieder einmal harmonische Oszillatoren, deren Integrabi-litat direkt aus der Separabilitat folgt. Das dritte Beispiel (das Toda-Gitter)ist nichtlinear und nicht offensichtlich separabel, aber integrabel. Das vierteBeispiel schließlich (das Henon-Heiles-System) ist nicht-integrabel und hat beihohen Energien eine chaotische Dynamik.
7.3.1 Inkommensurabler harmonischer Oszillator (integrabel!)
V (x, y) =m
2(ω2
xx2 + ω2
yy2) , ωx : ωy irrational. (164)
Das System besitzt die Erhaltungsgroßen Ex und Ey und ist damit integra-bel. Die beiden einzigen periodischen Bahnen sind Oszillationen (Librationen)entlang den beiden Achsen:
Bahn Ax : x(t) =√
2Ex/mω2x cos(ωxt+ φx) , (165)
Bahn Ay : y(t) =√
2Ey/mω2y cos(ωyt+ φy) . (166)
Sie sind isoliert (f = 0). Die Wirkungsintegrale langs dieser Bahnen berechnensich zu
Si =
∮
Ai
pi dqi =2πEi
ωi. (167)
Alle anderen Bahnen sind aperiodisch. Die Poincare-Schnittpunkte (yn, pny ) bei
fester Energie E = Ex + Ey liegen auf Ellipsen. Fur Ex, Ey > 0 werden diesedurch die Punkte (yn, pn
y ) fur tn → ∞ gleichmaßig uberdeckt. (Man muss alsounendlich lange warten, bis die gestrichelten Ellipsen in der folgenden Abbildunggleichmaßig aufgefullt werden!) Die Bahn Ax (mit Ey = 0) entspricht dem
37

einzigen Fixpunkt (0,0), der isoliert und stabil ist. Die Bahn Ay (mit Ex = 0)liegt auf der Schnittflache (x = 0) und erscheint deshalb als die volle Randkurve∂ΣE (hier eine Ellipse) des energetisch zuganglichen Phasenraums in der (y, py)-Ebene.
y
py
Randkurve des zugaenglichenPhasenraums ( A ) E =0y
isolierter Fixpunkt,stabil ( A )E =0
x
aperiodische Bahnenmit E >0, E >0x y
y
x
7.3.2 Isotroper harmonischer Oszillator (integrabel!)
V (x, y) =m
2ω2(x2 + y2) = V (r) =
m
2ω2r2 . (168)
Hier sind drei Erhaltungsgroßen vorhanden: Ei = p2i /2m +mω2q2i /2 (i = x, y,
qx = x, qy = y) und Lz = L = xpy − ypx. Die allgemeine Losung der Bewe-gungsgleichungen lautet:
x(t) = x0 cos(ωt) , x0 =√
2Ex/mω2 , (169)
y(t) = y0 cos(ωt+ φ) , y0 =√
2Ey/mω2 . (170)
Die Periode betragt T = 2π/ω und der Drehimpuls berechnet sich zu L =(2/ω)
√ExEy sinφ. Bei der Bahnbewegung gibt es verschiedene Falle:
• Librationen: (φ = 0 bzw. L = 0). Dies sind Oszillationen entlang ei-ner Geraden in der (x, y)-Ebene mit Neigungswinkel α, fur welchen gilt:tanα = y0/x0 = ±
√Ey/Ex .
• Kreise: (φ = ±π/2 bzw. L = ±Lmax = ±E/ω, Ex = Ey). In Polarkoordi-naten ist das effektive Potential Veff (r) = V (r)+L2/2mr2; das Minimum
gibt den Kreisradius r0: V′eff (r0) = 0; dieser ergibt sich zu r0 =
√E/mω2.
• Ellipsen: (0 < |φ| < π/2 , L 6= 0). Diese Bahnen haben alle einen endlichenDrehimpuls L 6= 0; die langere Achse soll den Neigungswinkel α zur x-Achse haben. Wir konnen somit diese Bahnen durch die zwei Parameter−Lmax < L < Lmax und 0 ≤ α < π eindeutig charakterisieren.
• Auch hier ist der Rand ∂ΣE des Poincare-Schnitts eine Ellipse. Da alleBahnen periodisch sind mit Wirkung S = 2πE/ω und Periode T = 2π/ωpro Umlauf, ist jeder Punkt innerhalb von ∂ΣE ein Fixpunkt! Die Ellip-senbahnen bilden eine zweifach entartete Familie (f = 2), deren einzelneMitglieder anhand der zwei Parameter L (6= 0) und α (resp. α und φ)charakterisiert und stetig ineinander ubergefuhrt werden konnen. Diese
38
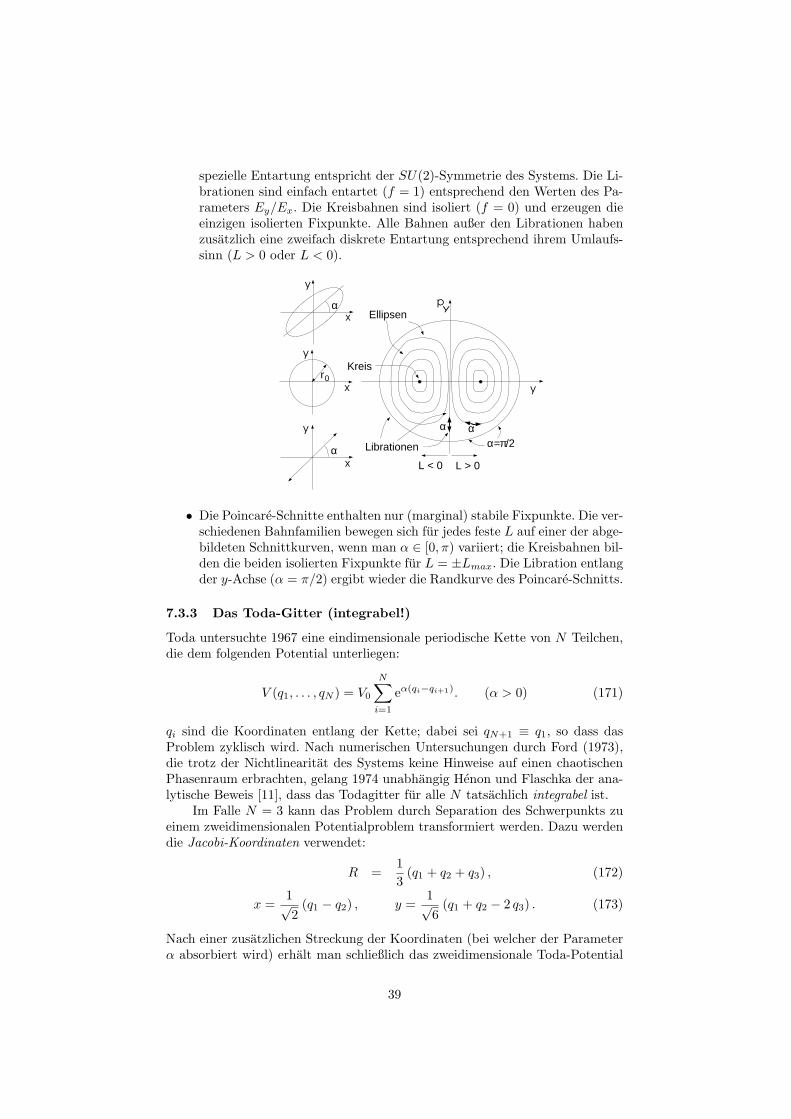
spezielle Entartung entspricht der SU(2)-Symmetrie des Systems. Die Li-brationen sind einfach entartet (f = 1) entsprechend den Werten des Pa-rameters Ey/Ex. Die Kreisbahnen sind isoliert (f = 0) und erzeugen dieeinzigen isolierten Fixpunkte. Alle Bahnen außer den Librationen habenzusatzlich eine zweifach diskrete Entartung entsprechend ihrem Umlaufs-sinn (L > 0 oder L < 0).
α αα=π/2
y
py
x
y
αx
y
x
y
α
Ellipsen
Kreis
Librationen
L > 0L < 0
r0
• Die Poincare-Schnitte enthalten nur (marginal) stabile Fixpunkte. Die ver-schiedenen Bahnfamilien bewegen sich fur jedes feste L auf einer der abge-bildeten Schnittkurven, wenn man α ∈ [0, π) variiert; die Kreisbahnen bil-den die beiden isolierten Fixpunkte fur L = ±Lmax. Die Libration entlangder y-Achse (α = π/2) ergibt wieder die Randkurve des Poincare-Schnitts.
7.3.3 Das Toda-Gitter (integrabel!)
Toda untersuchte 1967 eine eindimensionale periodische Kette von N Teilchen,die dem folgenden Potential unterliegen:
V (q1, . . . , qN ) = V0
N∑
i=1
eα(qi−qi+1). (α > 0) (171)
qi sind die Koordinaten entlang der Kette; dabei sei qN+1 ≡ q1, so dass dasProblem zyklisch wird. Nach numerischen Untersuchungen durch Ford (1973),die trotz der Nichtlinearitat des Systems keine Hinweise auf einen chaotischenPhasenraum erbrachten, gelang 1974 unabhangig Henon und Flaschka der ana-lytische Beweis [11], dass das Todagitter fur alle N tatsachlich integrabel ist.
Im Falle N = 3 kann das Problem durch Separation des Schwerpunkts zueinem zweidimensionalen Potentialproblem transformiert werden. Dazu werdendie Jacobi-Koordinaten verwendet:
R =1
3(q1 + q2 + q3) , (172)
x =1√2
(q1 − q2) , y =1√6
(q1 + q2 − 2 q3) . (173)
Nach einer zusatzlichen Streckung der Koordinaten (bei welcher der Parameterα absorbiert wird) erhalt man schließlich das zweidimensionale Toda-Potential
39

(die Koordinate R fallt heraus):
V (x, y) =1
24
(e2y+2
√3x + e2y−2
√3x + e−4y
)− 1
8. (174)
Es ist hier so normiert, dass es sein Minimum bei (x, y) = (0, 0) mit dem WertVmin = V (0, 0) = 0 hat. Die zweite Erhaltungsgroße, die von Henon fur das3-Teilchen-Todagitter gefunden wurde, lautet
F = 8px(p2x−3p2
y)+(px+√
3py) e2y−2√
3x+(px−√
3py) e2y+2√
3x−2pxe−4y. (175)
Bei kleinen Energien, wo die kubischen Terme in F vernachlaßigt werden konnen,geht F (nach Taylor-Entwicklung der Exponentialterme) in den Drehimpulsuber: F −→ −12 (xpy − ypx) = −12Lz. Die Bahnkurven von Losungen derBewegungsgleichungen mit F 6= 0) sind also Rotationen, wobei das Vorzeichenvon F den Drehsinn festlegt. Fur F = 0 erhalt man Librationen. Beispiele vonsolchen Bahnkurven sind in der Figur auf der nachsten Seite abgebildet (al-le bei der Energie E = 1/6 berechnet). Zunachst aber betrachten wir einenPoincare-Schnitt fur x = 0:
-0.4 -0.2 0.0 0.2 0.4 0.6y
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
.
.
.
.
..
.
.
.
.
.
..
.
.
.
.
.
.
.. .
.
.
.
.
.
.. .
.
.
.
.
.
...
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.. .
.
.
.
.
.
..
... .. .
... .. ...
... .. .
..
... .. .
..
... .. .
... .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .......................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.. ..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
... .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
B
B
B
A
A
CC
F=0
F >F > 0F < 0F < 0
py
Mit einiger Ubung erkennt man sofort, dass dieses System regular ist. Alle Punk-te (außer C und C) liegen auf kontinuierlichen Torus-Schnitten entsprechendeinfach entarteten Familien (f = 1). Dass diese nicht kontinuierlich erscheinen,liegt daran, dass einige in der Figur erfassten Bahnen periodisch sind (“rationaleTori” mit endlich vielen Punkten), und andere nur fur eine endliche Zeit ver-folgt wurden. Wir sehen zwei isolierte stabile Fixpunkte (rot: C und C), welcheisolierten (f = 0) Rotationen in entgegengesetzten Orientierungen entsprechen.Ihre Bahnkurven haben die Form von deformierten Kreisen; ein Beispiel ist inder Figur auf der nachsten Seite oben links abgebildet (rot). Um diese Fixpunkteherum liegen Torusschnitte mit F > 0 und F < 0, getrennt durch die SeparatrixF = 0 (grun), auf der eine Familie von Librationen liegt. Einzelne Punkte aufder Separatrix sind mit A und B gekennzeichnet; sie entsprechen den BahnenA und B im Henon-Heiles Potential, welche dort isoliert sind (s. 7.3.4).
Einige Bahnen mit F = 0 sind in der nachsten Figur unten links abgebildet(grun). (Die Bahn, welche entlang der y-Achse libriert, liegt auf dem Poin-care-Schnitt; sie erscheint in der obigen Figur als Berandung ∂ΣE (grun) der
40

energetisch zuganglichen Flache.) Oben rechts (blau) ist eine Bahn der ’Periode8’ mit F 6= 0 abgebildet; sie entspricht den 8 Fixpunkten, die auf einem ellip-senahnlichen Torusschnitt um den Fixpunkt C herum liegen (blau). Die ubrigenPunkte auf demselben Torusschnitt entsprechen anderen Bahnen mit Periode 8,welche mit der abgebildeten entartet sind: sie haben etwas verschiedene Formen,aber alle dieselbe Wirkung und gehoren zur selben Familie. Unten rechts schließ-lich ist eine quasiperiodische Bahn (lila) mit F 6= 0 abgebildet; sie entsprichtden vielen Punkten auf Toruschnitten, welche in der Nahe der Separatrix liegen(lila). (Von allen Bahnen mit F 6= 0 gibt es zwei zeitliche Orientierungen, ent-sprechend F > 0 oder F < 0, und entsprechend auch zwei Reihen von Punktenauf Torusschnitten, die beiderseits der Separatrix liegen.) Die schwarze Kurvein allen vier Teilbildern ist die Aquipotentiallinie, entlang der V (x, y) = E gilt(= Menge der klassischen Umkehrpunkte).
-0.4 0.0 0.4x
-0.4
0.0
0.4
y
isolated orbit C (period 1)
-0.4 0.0 0.4x
-0.4
0.0
0.4
yperiod 8 orbit (degenerate)
-0.4 0.0 0.4x
-0.4
0.0
0.4
y
orbit family F=0 (period 1)
-0.4 0.0 0.4x
-0.4
0.0
0.4
y
quasiperiodic orbit
Zwischen dem Toda-Potential und dem im folgenden Abschnitt beschriebenennicht-integrablen Henon-Heiles Potential gibt es folgenden Zusammenhang. Ent-wickelt man das Potential (174) in eine Taylorreihe um xi = (x, y) = 0:
V (x, y) =1
2(x2 + y2) +
(x2y − 1
3y3
)+
1
2(x2 + y2)2 + O(x5
i ) , (176)
so ergeben die Terme einschließlich dritter Ordnung genau das Henon-HeilesPotential (177) (mit ε = 1). Bis zur zweiten Ordnung erhalt man naturlich denharmonischen Oszillator, was der ublichen harmonischen Naherung im Minimumentspricht. Wenn man nun die Anharmonizitat des vollen Potentials (174) nurbis zur dritten (oder hoherer endlicher) Ordnung entwickelt, findet man einnicht-integrables System mit teilweise chaotischer Dynamik, obwohl das vollePotential integrabel mit regularer Dynamik ist!
41
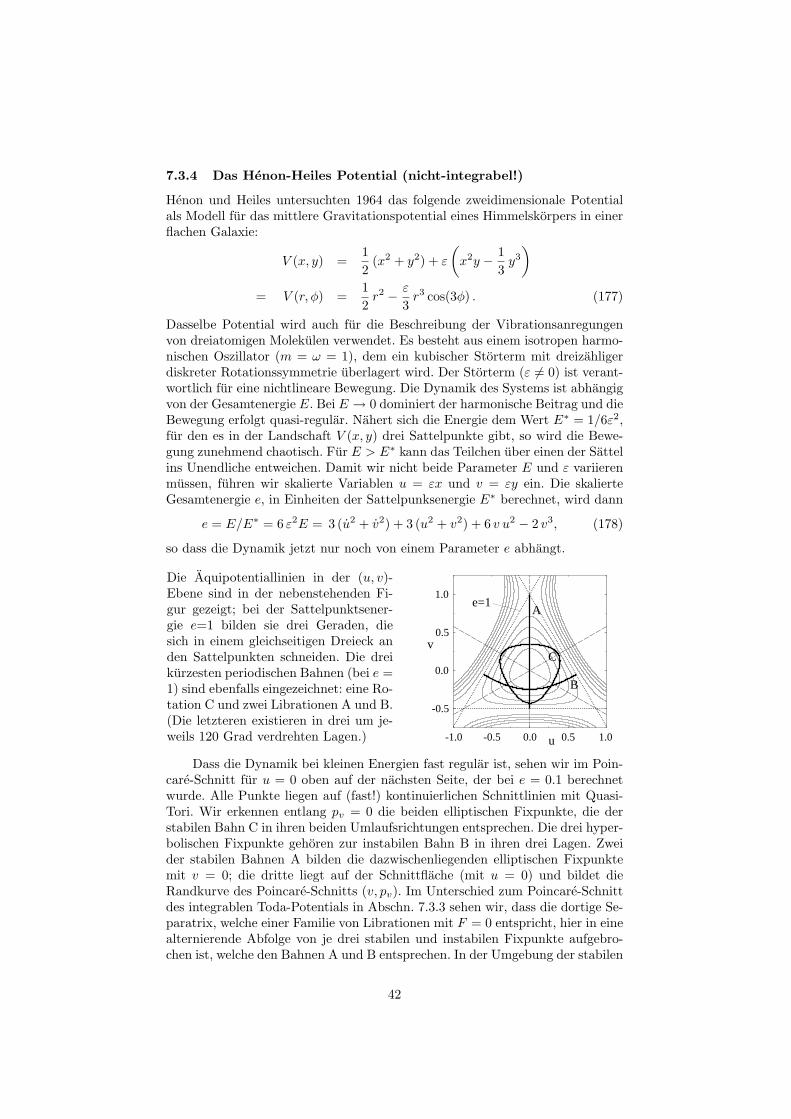
7.3.4 Das Henon-Heiles Potential (nicht-integrabel!)
Henon und Heiles untersuchten 1964 das folgende zweidimensionale Potentialals Modell fur das mittlere Gravitationspotential eines Himmelskorpers in einerflachen Galaxie:
V (x, y) =1
2(x2 + y2) + ε
(x2y − 1
3y3
)
= V (r, φ) =1
2r2 − ε
3r3 cos(3φ) . (177)
Dasselbe Potential wird auch fur die Beschreibung der Vibrationsanregungenvon dreiatomigen Molekulen verwendet. Es besteht aus einem isotropen harmo-nischen Oszillator (m = ω = 1), dem ein kubischer Storterm mit dreizahligerdiskreter Rotationssymmetrie uberlagert wird. Der Storterm (ε 6= 0) ist verant-wortlich fur eine nichtlineare Bewegung. Die Dynamik des Systems ist abhangigvon der Gesamtenergie E. Bei E → 0 dominiert der harmonische Beitrag und dieBewegung erfolgt quasi-regular. Nahert sich die Energie dem Wert E∗ = 1/6ε2,fur den es in der Landschaft V (x, y) drei Sattelpunkte gibt, so wird die Bewe-gung zunehmend chaotisch. Fur E > E∗ kann das Teilchen uber einen der Sattelins Unendliche entweichen. Damit wir nicht beide Parameter E und ε variierenmussen, fuhren wir skalierte Variablen u = εx und v = εy ein. Die skalierteGesamtenergie e, in Einheiten der Sattelpunksenergie E∗ berechnet, wird dann
e = E/E∗ = 6 ε2E = 3 (u2 + v2) + 3 (u2 + v2) + 6 v u2 − 2 v3, (178)
so dass die Dynamik jetzt nur noch von einem Parameter e abhangt.
Die Aquipotentiallinien in der (u, v)-Ebene sind in der nebenstehenden Fi-gur gezeigt; bei der Sattelpunktsener-gie e=1 bilden sie drei Geraden, diesich in einem gleichseitigen Dreieck anden Sattelpunkten schneiden. Die dreikurzesten periodischen Bahnen (bei e =1) sind ebenfalls eingezeichnet: eine Ro-tation C und zwei Librationen A und B.(Die letzteren existieren in drei um je-weils 120 Grad verdrehten Lagen.) -1.0 -0.5 0.0 0.5 1.0
-0.5
0.0
0.5
1.0
u
v
e=1A
B
C
Dass die Dynamik bei kleinen Energien fast regular ist, sehen wir im Poin-care-Schnitt fur u = 0 oben auf der nachsten Seite, der bei e = 0.1 berechnetwurde. Alle Punkte liegen auf (fast!) kontinuierlichen Schnittlinien mit Quasi-Tori. Wir erkennen entlang pv = 0 die beiden elliptischen Fixpunkte, die derstabilen Bahn C in ihren beiden Umlaufsrichtungen entsprechen. Die drei hyper-bolischen Fixpunkte gehoren zur instabilen Bahn B in ihren drei Lagen. Zweider stabilen Bahnen A bilden die dazwischenliegenden elliptischen Fixpunktemit v = 0; die dritte liegt auf der Schnittflache (mit u = 0) und bildet dieRandkurve des Poincare-Schnitts (v, pv). Im Unterschied zum Poincare-Schnittdes integrablen Toda-Potentials in Abschn. 7.3.3 sehen wir, dass die dortige Se-paratrix, welche einer Familie von Librationen mit F = 0 entspricht, hier in einealternierende Abfolge von je drei stabilen und instabilen Fixpunkte aufgebro-chen ist, welche den Bahnen A und B entsprechen. In der Umgebung der stabilen
42
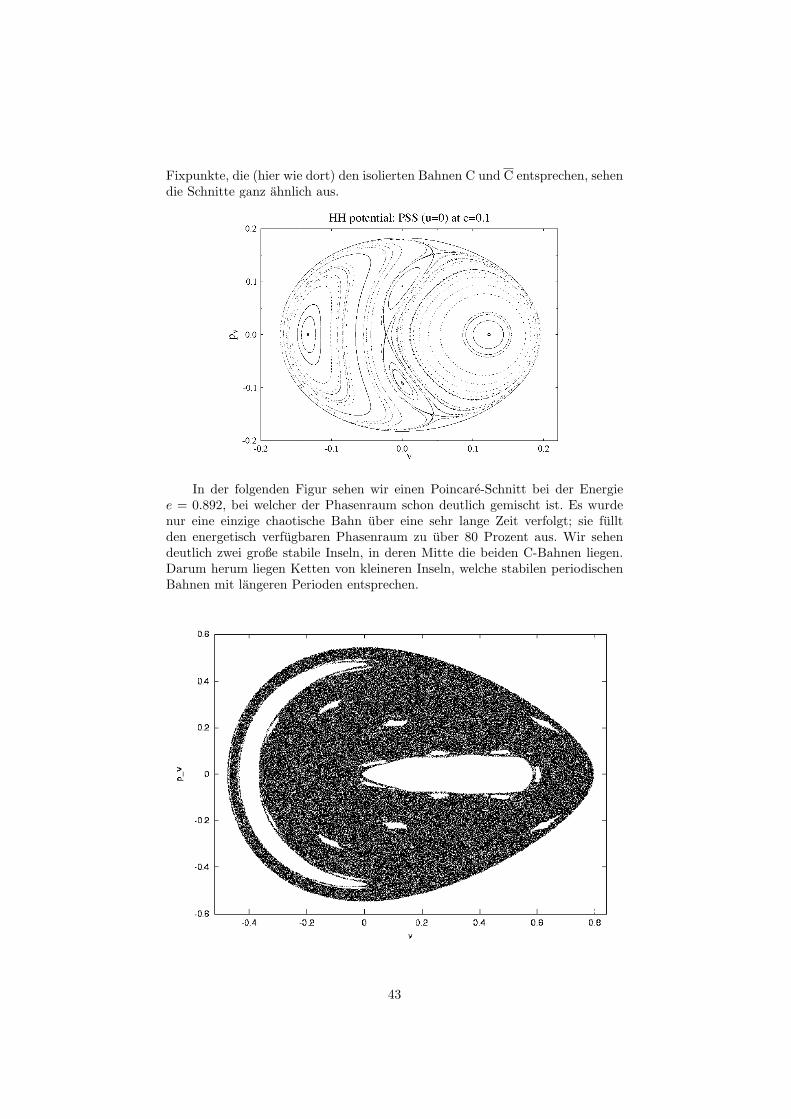
Fixpunkte, die (hier wie dort) den isolierten Bahnen C und C entsprechen, sehendie Schnitte ganz ahnlich aus.
In der folgenden Figur sehen wir einen Poincare-Schnitt bei der Energiee = 0.892, bei welcher der Phasenraum schon deutlich gemischt ist. Es wurdenur eine einzige chaotische Bahn uber eine sehr lange Zeit verfolgt; sie fulltden energetisch verfugbaren Phasenraum zu uber 80 Prozent aus. Wir sehendeutlich zwei große stabile Inseln, in deren Mitte die beiden C-Bahnen liegen.Darum herum liegen Ketten von kleineren Inseln, welche stabilen periodischenBahnen mit langeren Perioden entsprechen.
43
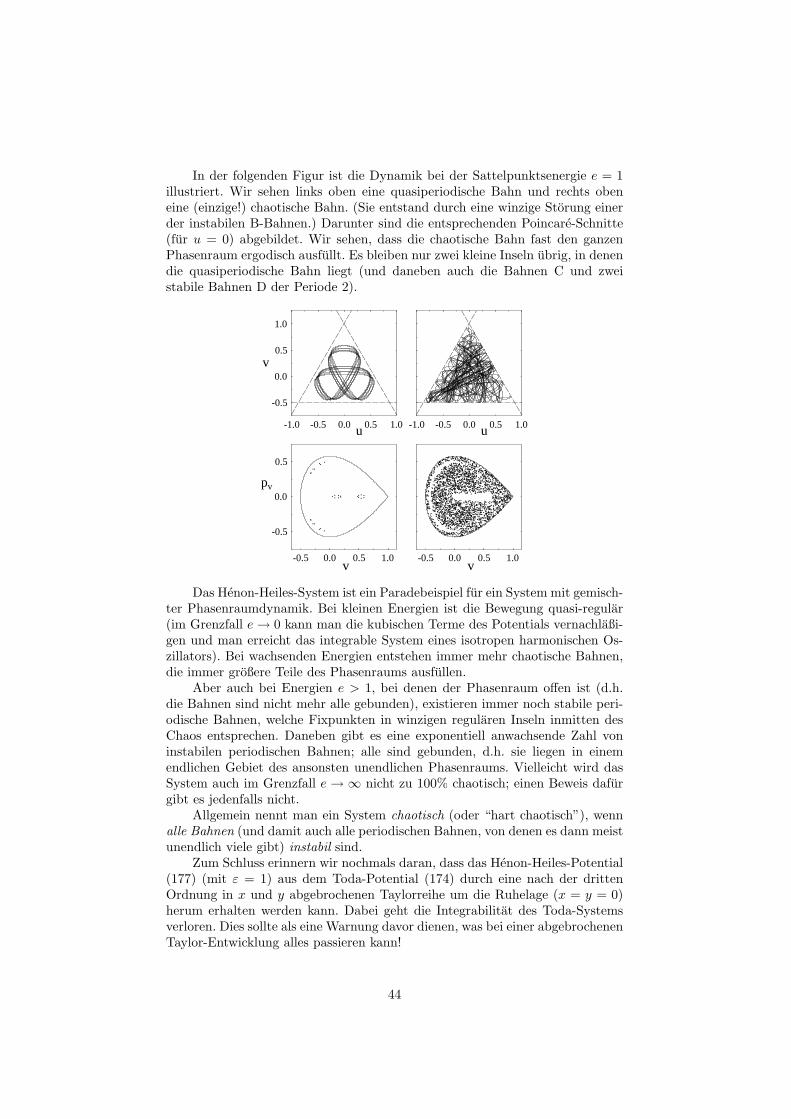
In der folgenden Figur ist die Dynamik bei der Sattelpunktsenergie e = 1illustriert. Wir sehen links oben eine quasiperiodische Bahn und rechts obeneine (einzige!) chaotische Bahn. (Sie entstand durch eine winzige Storung einerder instabilen B-Bahnen.) Darunter sind die entsprechenden Poincare-Schnitte(fur u = 0) abgebildet. Wir sehen, dass die chaotische Bahn fast den ganzenPhasenraum ergodisch ausfullt. Es bleiben nur zwei kleine Inseln ubrig, in denendie quasiperiodische Bahn liegt (und daneben auch die Bahnen C und zweistabile Bahnen D der Periode 2).
-1.0 -0.5 0.0 0.5 1.0
-0.5
0.0
0.5
1.0
-0.5 0.0 0.5 1.0
-0.5
0.0
0.5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
-1.0 -0.5 0.0 0.5 1.0
-0.5 0.0 0.5 1.0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.... .
.
.
.
.
..
.
.
.
..
.
.
.
..
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
. .
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
..
.
.
.
..
.
.
.
..
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
......
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
. .
.
.
.
..
.
.
.
.
..
.
.
.
.
.
.. .
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
..
.
..
.
.
.
.
.
.
.
.
.. .
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
..
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
. .
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.. .
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.. .
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
..
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
..
.
..
.
.
.
.
...
.
.
.
...
.
.
.
...
.
.
.
.. .
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.. ..
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
..
..
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.. .
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
..
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
..
.
.
..
.
..
.
.
.
.
.
.
.
..
..
.
.
..
.
.
.
...
.
.
...
.
.
.
..
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.. .
.
.
.
.
.
.
.
.
..
.
.
...
.
..
.
.
..
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
. .
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
..
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.. .
.
.
.
.. .
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
..
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
..
.
..
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.. .
.
.
..
.
..
.
.
.
.
.
..
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
..
.
..
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
..
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
..
.
..
.
.
.
.. .
.
.
.
..
.
.
.
.
...
.
.
.
...
.
.
.
...
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
. .
.
.
. .
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
. .
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
. .
.
.
. .
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
..
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
..
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
v v
pv
u u
v
Das Henon-Heiles-System ist ein Paradebeispiel fur ein System mit gemisch-ter Phasenraumdynamik. Bei kleinen Energien ist die Bewegung quasi-regular(im Grenzfall e→ 0 kann man die kubischen Terme des Potentials vernachlaßi-gen und man erreicht das integrable System eines isotropen harmonischen Os-zillators). Bei wachsenden Energien entstehen immer mehr chaotische Bahnen,die immer großere Teile des Phasenraums ausfullen.
Aber auch bei Energien e > 1, bei denen der Phasenraum offen ist (d.h.die Bahnen sind nicht mehr alle gebunden), existieren immer noch stabile peri-odische Bahnen, welche Fixpunkten in winzigen regularen Inseln inmitten desChaos entsprechen. Daneben gibt es eine exponentiell anwachsende Zahl voninstabilen periodischen Bahnen; alle sind gebunden, d.h. sie liegen in einemendlichen Gebiet des ansonsten unendlichen Phasenraums. Vielleicht wird dasSystem auch im Grenzfall e → ∞ nicht zu 100% chaotisch; einen Beweis dafurgibt es jedenfalls nicht.
Allgemein nennt man ein System chaotisch (oder “hart chaotisch”), wennalle Bahnen (und damit auch alle periodischen Bahnen, von denen es dann meistunendlich viele gibt) instabil sind.
Zum Schluss erinnern wir nochmals daran, dass das Henon-Heiles-Potential(177) (mit ε = 1) aus dem Toda-Potential (174) durch eine nach der drittenOrdnung in x und y abgebrochenen Taylorreihe um die Ruhelage (x = y = 0)herum erhalten werden kann. Dabei geht die Integrabilitat des Toda-Systemsverloren. Dies sollte als eine Warnung davor dienen, was bei einer abgebrochenenTaylor-Entwicklung alles passieren kann!
44
7.4 Der Lyapunov-Exponent
7.4.1 Lineare Stabilitatsanalyse einer Trajektorie
Die Hamilton-Gleichung (42) fur den Phasenraumvektor ξ(t) kann komponen-tenweise so geschrieben werden:
ξi(t) = Fi[ξ1(t), . . . , ξ2N (t)] . i = 1, . . . , 2N (179)
Wir gehen von einer bestimmten Losung ξ(0)(t) aus, die eindeutig durch den
Anfangspunkt ξ(0)(0) gegeben ist. Wir machen nun eine kleine Storung δξ(0)
bei t = 0 und untersuchen den Verlauf der gestorten Bahn ξ(t) = ξ(0)(t)+δξ(t):
ξ (t=0)(0)
ξ (t)(0)
ξ (t)+δξ(t)(0)
Statt die exakte Losung zu bestimmen, linearisieren wir nun die Bewegungsglei-chungen um die ungestorte Bahn ξ(0)(t) herum. Dies ergibt in erster Ordnungvon δξ(t)
d
dtδξi(t) = δξi(t) =
2N∑
j=1
(∂Fi
∂ξj
)
ξ=ξ (0)(t)︸ ︷︷ ︸
Yij(t)
δξj(t) =
2N∑
j=1
Yij(t) δξj(t) , (180)
oder in Matrix-Vektor-Schreibweise:
δξ(t) = Y(t) δξ(t) . (181)
Oder, von einer Hamiltonfunktion der Form H(q,p) = p2
2m + V (q) ausgehend:
d
dt
(δqδp
)=
(0N
1mIN
−V 0N
)(δqδp
). (182)
Dabei sind IN und 0N die N -dimensionalen Einheits- und Nullmatrizen und
Vij =∂2V
∂qi∂qj
∣∣∣∣ξ (0)
(t)
i, j = 1, . . . , N (183)
ist die sogenannte Hesse-Matrix.Die Gleichung (181) beschreibt die Propagation kleiner Storungen um ξ(0)(t)
herum. Sie stellt ein System linearer DGL 1. Ordnung dar. Wir konstruierennun 2N linear unabhangige Losungen δξ(j)(t) mit den Anfangsbedingungen
δξ(j)i (0) = δij (i, j = 1, . . . , 2N) und bilden daraus den sogenannten Matri-
zanten X (t) [12]:
Xij(t) = δξ(j)i (t) oder X (t) =
(δξ(1), . . . , δξ(2N)
). (184)
Dieser erfullt dieselbe Gleichung (181) wie δξ(t):
X (t) = Y(t)X (t) mit X (0) = I2N . (185)
45

Außerdem beschreibt er die zeitliche Propagation einer Anfangsstorung δξ(0)
δξ(t) = X (t) δξ(0) (186)
und hat die Eigenschaft
X (t+ T ) = X (t)X (T ) . (187)
Als weiteres soll eine Norm eingefuhrt werden:
d(t) := |δξ(t)| =√
[δξ(t)]2. (188)
Diese misst den Abstand der gestorten Bahn zur ursprunglichen, aber nur imLimes fur |δξ(0)| → 0, da andernfalls obige Linearisierung nicht mehr gerecht-fertigt ist. Wachst nun der Abstand exponentiell mit der Zeit
d(t) ∼ d(0) eσt, (σ > 0) (189)
so heißt die Bahn ξ0(t) instabil. Wachst der Abstand fur alle moglichen Storun-gen δξ(0) hochstens mit einer endlichen Potenz von t: d(t) ∼ d(0) ta (mit a ∈ R,a <∞), so heißt die Bahn stabil.
7.4.2 Definition des Lyapunov-Exponenten
Ein Maß fur die Instabilitat einer Bahn ist der Lyapunov-Exponent σ, der strengwie folgt definiert wird:
σ := limt→∞
1
tlim
d(0)→0ln
[d(t)
d(0)
]. (190)
Die beiden Grenzwerte sind notwendig: d(0) → 0 wegen der Linearisierung undt → ∞ wegen moglicher Einschwingungsvorgange. Es lasst sich zeigen, dass es2N charakteristische Lyapunov-Exponenten σi gibt, abhangig von der Richtungder Storung δξ(0) im Phasenraum, die man so anordnen kann:
σ1 ≥ σ2 ≥ · · · ≥ σ2N . (191)
Der großte Lyapunov-Exponent σ1 ist ein Maß fur die Chaotizitat des Systems.Einer oder mehrere der σi konnen null sein; fur eine stabile Bahn sind alle σi
gleich null. Zur numerischen Bestimmung von σ ist (190) nicht geeignet. Mankann dafur die folgende praktische Methode heranziehen.
7.4.3 Praktisches Verfahren zur Berechnung von σ1
d(0)=1
d =d(τ)1
1τ
2τ
ξ (t)(0)
(1)δξ (t)
δξ (t)(2)
1d 2
(a) Normiere d(0) auf 1: d(0) = 1.
(b) Lose (185,186) auf dem Computer uber ein kleines Zeitintervall τ = ∆t
entlang der ursprunglichen Bahn ξ(0)(t).
46

(c) Bei t = τ : Normiere d(τ) wieder auf 1 und verfahre wie in (b), aber vont = τ nach t = 2τ . Wiederhole dies M mal, jeweils mit der Startbedingung
δξ(n+1)(nτ) =1
dnδξ(n)(nτ) , dn = |δξ(n)|(nτ) . n = 1, 2, . . . ,M (192)
(d) Berechne σM = 1Mτ
∑Mn=1 ln dn.
(e) Der Lyapunov-Exponent ergibt sich nun als σ1 = limM→∞ σM . Falls τklein genug ist, hangt σ1 nicht von τ ab.
7.5 Stabilitat von periodischen Bahnen
7.5.1 Monodromie-Matrix und Stabilitatsmatrix
Sei eine Bahn periodisch, d.h. ξ(0)(t + T ) = ξ(0)(t). Dann ist die Matrix Yij(t)in (180), (181) ebenfalls periodisch:
Y(t) = Y(t+ T ) . (193)
Der Matrizant mit Argument T heißt die Monodromie-Matrix
M := X (T ) (194)
und beschreibt die zeitliche Entwicklung einer kleinen Storung uber eine Periode:
δξ(T ) = M δξ(0) . (195)
Die Eigenwerte λi der Matrix M enthalten Informationen uber die Stabilitatder periodischen Bahn ξ(0)(t). Fur Hamiltonsche Systeme gelten folgende Be-ziehungen:
• det M = 1.
• M ist reell und symplektisch:
M†JM = J , (196)
wobei J =
(0N IN−IN 0N
)die symplektische Einheitsmatrix ist.
• Ist λ ein Eigenwert von M, dann sind auch 1/λ und λ∗ Eigenwerte von M.Das heißt: alle Eigenwerte liegen symmetrisch zum Einheitskreis und zurreellen Achse.
1Reλ
Imλ
47

• In konservativen Systemen gibt es immer ein Paar von Eigenwerten λ1 =λ2 = 1. Sie entsprechen Storungen entlang der Bahn und orthogonal zurEnergieschale.
Diese zwei “trivialen” Eigenwerte λ = 1 interessieren meist nicht und mantransformiert deshalb die Monodromiematrix auf folgende Gestalt:
M =
(M AB C
), (197)
wobei
A =
a1,1 a1,2
......
a2N−2,1 a2N−2,2
, B =
(0 . . . 00 . . . 0
)
︸ ︷︷ ︸2N−2
, C =
(1 α0 1
)(198)
Matrizen mit beliebigen Zahlen ai,j und α sind. Die (2N −2)× (2N −2) Matrix
M heißt Stabilitatsmatrix oder reduzierte Monodromiematrix. Sie beschreibt dieEntwicklung einer Storung δξ⊥, die im Phasenraum orthogonal zur ursprungli-
chen Bahn ξ(0) ist, aber auf der Energieschale liegt:
δξ⊥(T ) = M δξ⊥(0) . (199)
Liegen die Eigenwerte von M alle auf dem komplexen Einheitskreis, dann istdie Bahn ξ(0)(t) stabil. Ist dies nicht der Fall, so definiert der großte reelle undpositive Eigenwert den Lyapunov-Exponenten σ1. Fur die n−te Wiederholungeiner primitiven periodischen Bahn (das ist eine Bahn mit nur einem Umlauf),kann die Monodromiematrix folgendermaßen bestimmt werden.
Mn = X (nT ) = Mn . (200)
Dieselbe Beziehung gilt auch fur die Stabilitatsmatrix: Mn = Mn.
7.5.2 Stabilitat von periodischen Bahnen fur N = 2
Fur N = 2 Dimensionen gelten folgende Besonderheiten fur die Stabilitatsma-trix: M ist eine 2 × 2-Matrix und besitzt die Eigenwerte λ und 1/λ. Da dieseauch noch zueinander konjugiert sind, liegen sie entweder auf dem komplexenEinheitskreis oder auf der rellen Achse.
• |λ| = 1 → λ = exp(±iν), ν 6= 2πn (n ∈ Z): Die Bahn ist dann stabil unddie reelle Zahl ν nennt man Stabilitatswinkel.
• λ ∈ R → λ = ± exp(±χ), χ > 0: Hier ist die Bahn instabil mit demLyapunov-Exponenten σ1 = χ/T .
In beiden Fallen gilt fur die n-te Wiederholung einer Bahn:
Tn = nT , χn = nχ1 , νn = nν1 . (201)
Meist wird zur Charakterisierung der Stabilitat die Spur von M benutzt:
tr M = λ+ 1/λ (202)
Fur N = 2 legt die Spur tr M also eindeutig die Eigenwerte fest. Es werden dreiFalle unterschieden:
48

• |tr M| < 2 → λ = exp(±iν), ν 6= 2πn (n ∈ Z):→ stabile oder elliptische Bahn.
• |tr M| > 2 → λ = exp(±χ), χ > 0 :→ instabile oder hyperbolische Bahn. Man unterscheidet weiter zwischendirekt hyperbolisch (tr M > 2) und invers hyperbolisch (tr M < 2).
• |tr M| = 2 → λ = ±1 :→ neutrale (marginal stabile) Bahn. Es wird zwischen direkt parabolisch
(tr M = 2) und indirekt parabolisch (tr M = −2) unterschieden. SolcheBahnen sind charakteristisch fur integrable Systeme.Fur eine isolierte Bahn ist λ = +1 immer mit einer Bifurkation verbunden(vgl. Abschn. 10.2).
Bei mehr als zwei Dimensionen kann auch der Fall λ = exp(±χ±iν) mit χ, ν 6= 0auftreten. Dieser wird dann als loxodromischer Fall bezeichnet.
7.5.3 Beispiel: zweidimensionaler harmonischer Oszillator
Gegeben sei der zweidimensionale harmonische Oszillator mit zunachst irratio-nalem Frequenzverhaltnis
H =1
2(p2
x + p2y) +
1
2(ω2
xx2 + ω2
yy2) , ωx : ωy = irrational . (203)
Die einzigen periodischen Bahnen verlaufen, wie schon fruher erwahnt, entlangden beiden Achsen.
Ax : x(t) = x0 cos(ωxt+ αx) ; y(t) = py(t) = 0 , (204)
Ay : x(t) = px(t) = 0 ; y(t) = y0 cos(ωyt+ αy) . (205)
Die Gleichung (185) ist hier gleichbedeutend mit der vollen Hamiltongleichung(179), da dieses System bereits linear ist, und hat eine konstante Koeffizienten-matrix Y:
X (t) =
0 0 1 00 0 0 1
−ω2x 0 0 0
0 −ω2y 0 0
X (t) . (206)
Die Losung des Systems mit Xij(0) = δij ist gegeben durch:
X (t) =
cos(ωxt) 0 sin(ωxt)/ωx 00 cos(ωyt) 0 sin(ωyt)/ωy
−ωx sin(ωxt) 0 cos(ωxt) 00 −ωy sin(ωyt) 0 cos(ωyt)
. (207)
Fur die Bahn Ax ist die Periode Tx = 2π/ωx und damit ist die Monodromiema-trix
Mx = X (Tx) =
1 0 0 00 cos(2πωy/ωx) 0 sin(2πωy/ωx)/ωy
0 0 1 00 −ωy sin(2πωy/ωx) 0 cos(2πωy/ωx)
. (208)
49
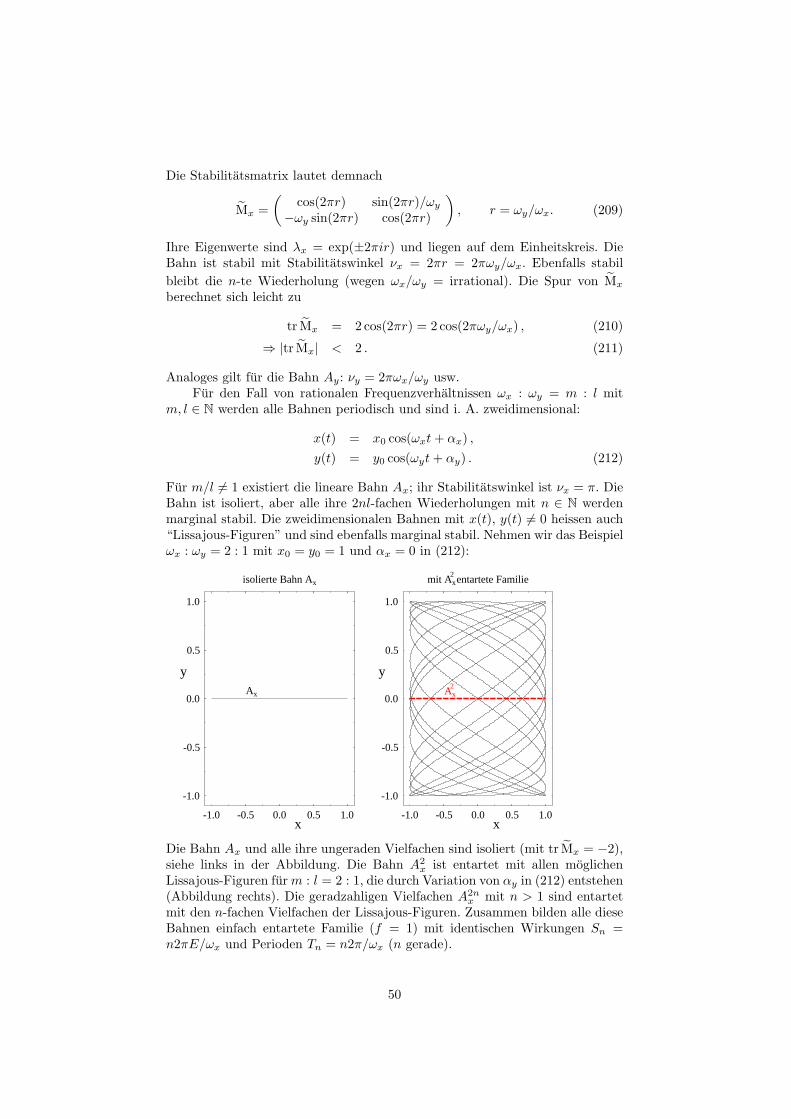
Die Stabilitatsmatrix lautet demnach
Mx =
(cos(2πr) sin(2πr)/ωy
−ωy sin(2πr) cos(2πr)
), r = ωy/ωx. (209)
Ihre Eigenwerte sind λx = exp(±2πir) und liegen auf dem Einheitskreis. DieBahn ist stabil mit Stabilitatswinkel νx = 2πr = 2πωy/ωx. Ebenfalls stabil
bleibt die n-te Wiederholung (wegen ωx/ωy = irrational). Die Spur von Mx
berechnet sich leicht zu
tr Mx = 2 cos(2πr) = 2 cos(2πωy/ωx) , (210)
⇒ |tr Mx| < 2 . (211)
Analoges gilt fur die Bahn Ay: νy = 2πωx/ωy usw.Fur den Fall von rationalen Frequenzverhaltnissen ωx : ωy = m : l mit
m, l ∈ N werden alle Bahnen periodisch und sind i. A. zweidimensional:
x(t) = x0 cos(ωxt+ αx) ,
y(t) = y0 cos(ωyt+ αy) . (212)
Fur m/l 6= 1 existiert die lineare Bahn Ax; ihr Stabilitatswinkel ist νx = π. DieBahn ist isoliert, aber alle ihre 2nl-fachen Wiederholungen mit n ∈ N werdenmarginal stabil. Die zweidimensionalen Bahnen mit x(t), y(t) 6= 0 heissen auch“Lissajous-Figuren” und sind ebenfalls marginal stabil. Nehmen wir das Beispielωx : ωy = 2 : 1 mit x0 = y0 = 1 und αx = 0 in (212):
-1.0 -0.5 0.0 0.5 1.0
-1.0
-0.5
0.0
0.5
1.0
mit Ax2
entartete Familie
-1.0 -0.5 0.0 0.5 1.0
-1.0
-0.5
0.0
0.5
1.0
isolierte Bahn Ax
x x
y yAx
2Ax
Die Bahn Ax und alle ihre ungeraden Vielfachen sind isoliert (mit tr Mx = −2),siehe links in der Abbildung. Die Bahn A2
x ist entartet mit allen moglichenLissajous-Figuren furm : l = 2 : 1, die durch Variation von αy in (212) entstehen(Abbildung rechts). Die geradzahligen Vielfachen A2n
x mit n > 1 sind entartetmit den n-fachen Vielfachen der Lissajous-Figuren. Zusammen bilden alle dieseBahnen einfach entartete Familie (f = 1) mit identischen Wirkungen Sn =n2πE/ωx und Perioden Tn = n2π/ωx (n gerade).
50

Im isotropen Fall ωx = ωy = ω wird fur jede periodische Bahn die Mon-odromiematrix identisch mit der Einheitsmatrix: M = I4 und damit wird dieStabilitatsmatrix M = I2. Der Stabilitatswinkel ist also 2π und tr M = 2. AlleBahnen bilden marginal stabile Familien und haben die Form von Ellipsen oderKreisen (f = 2) oder gradlinigen Librationen (f = 1) (vgl. Abschn. 7.3.2).
Es gilt allgemein tr M = 2 fur alle periodischen Bahnen, die in entartetenFamilien auftreten, wie sie fur Systeme mit kontinuierlichen Symmetrien charak-teristisch und fur integrable Systeme sogar die Regel sind. Diese Bahnen liegenja auf Tori, welche auf der Poincare-Schnittflache zu kontinuierlichen Kurvenfuhren, welche die darauf dicht liegenden Schnittpunkte der Familien enthalten.
7.5.4 Beispiel: zweidimensionale harmonische Sattelflache
Wir betrachten jetzt eine harmonische Sattelflache mit positiver Krummung inx- und negativer Krummung in y-Richtung:
H =1
2(p2
x + p2y) +
1
2(ω2
xx2 − ω2
yy2) . (213)
Die einzige periodische Bahn, die man hier finden kann, ist die Libration entlangder x-Achse:
x(t) = x0 cos(ωxt) ,
y(t) = 0 . (214)
Jede Bahn mit y 6= 0 ist nicht-kompakt, d.h. sie entweicht ins Unendliche. Dieallgemeine Losung der Bewegungsgleichung in y-Richtung lautet:
y(t) = a eωyt + b e−ωyt . (215)
Die Stablitatsmatrix fur die x-Bahn (214) erhalt man aus (209), indem man ωy
durch iωy ersetzt, somit wird sie hier
Mx =
(cosh(2πr) sinh(2πr)/ωy
ωysinh(2πr) cosh(2πr)
), r = ωy/ωx. (216)
Damit wird tr Mx = 2 cosh(2πr) > 2 fur ωy 6= 0; die Bahn ist also instabil. Die
Eigenwerte von Mx sind λx = e±2πr und der maximale Lyapunov-Exponent istχ = 2πr resp. σ1 = 2πr/Tx = ωy, wie auch direkt aus (215) ersichtlich ist!
7.5.5 Umgebung von Fixpunkten auf Poincare-Schnitten
Auf dem Poincare-Schnitt lassen sich obi-ge drei Falle leicht unterscheiden. Bei ei-ner stabilen periodischen Bahn liegen umden elliptischen Fixpunkt herum konzen-trische Ellipsen. Diese ruhren von einerleicht gestorten Bahn her und sind dieSchnittpunkte mit einem (lokalen) Torus.Die gestorte Bahn bleibt auch immer in derNahe des Fixpunkts.
δq
δp
elliptischer Fixpunkt
gestoerte Bahn
T
51
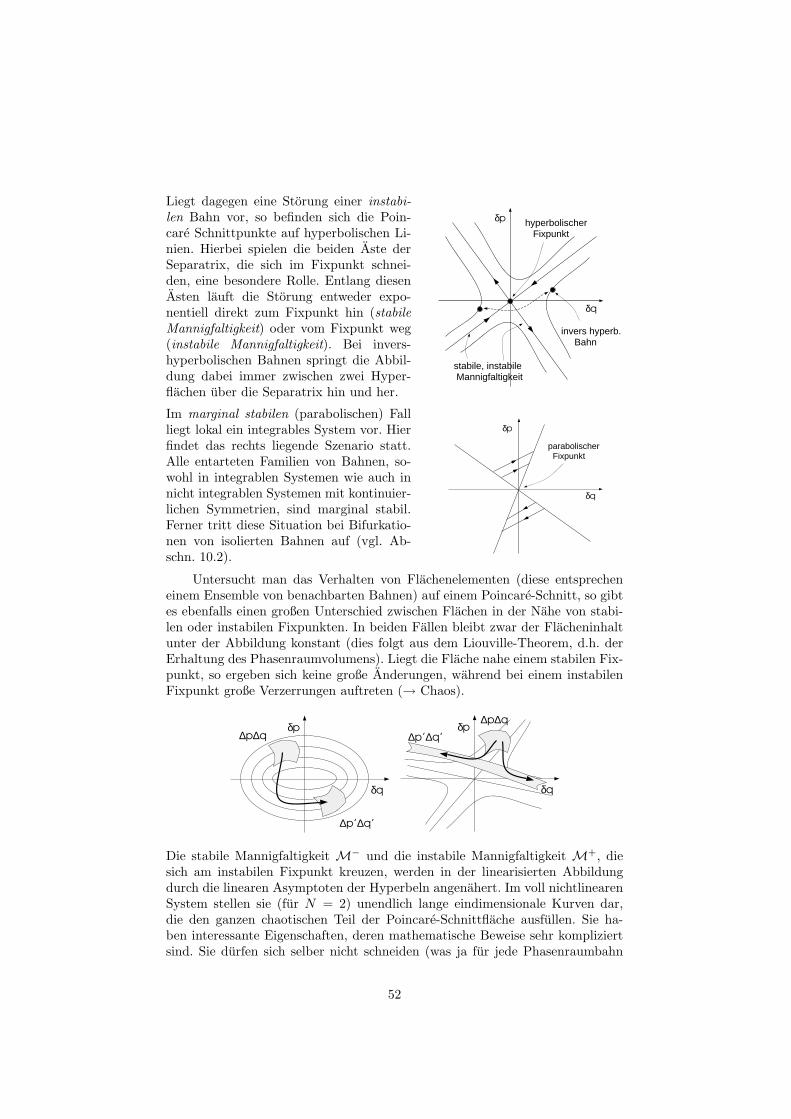
Liegt dagegen eine Storung einer instabi-len Bahn vor, so befinden sich die Poin-care Schnittpunkte auf hyperbolischen Li-nien. Hierbei spielen die beiden Aste derSeparatrix, die sich im Fixpunkt schnei-den, eine besondere Rolle. Entlang diesenAsten lauft die Storung entweder expo-nentiell direkt zum Fixpunkt hin (stabileMannigfaltigkeit) oder vom Fixpunkt weg(instabile Mannigfaltigkeit). Bei invers-hyperbolischen Bahnen springt die Abbil-dung dabei immer zwischen zwei Hyper-flachen uber die Separatrix hin und her.
stabile, instabile Mannigfaltigkeit
δq
δp hyperbolischer Fixpunkt
invers hyperb. Bahn
Im marginal stabilen (parabolischen) Fallliegt lokal ein integrables System vor. Hierfindet das rechts liegende Szenario statt.Alle entarteten Familien von Bahnen, so-wohl in integrablen Systemen wie auch innicht integrablen Systemen mit kontinuier-lichen Symmetrien, sind marginal stabil.Ferner tritt diese Situation bei Bifurkatio-nen von isolierten Bahnen auf (vgl. Ab-schn. 10.2).
δq
δp
parabolischer Fixpunkt
Untersucht man das Verhalten von Flachenelementen (diese entsprecheneinem Ensemble von benachbarten Bahnen) auf einem Poincare-Schnitt, so gibtes ebenfalls einen großen Unterschied zwischen Flachen in der Nahe von stabi-len oder instabilen Fixpunkten. In beiden Fallen bleibt zwar der Flacheninhaltunter der Abbildung konstant (dies folgt aus dem Liouville-Theorem, d.h. derErhaltung des Phasenraumvolumens). Liegt die Flache nahe einem stabilen Fix-punkt, so ergeben sich keine große Anderungen, wahrend bei einem instabilenFixpunkt große Verzerrungen auftreten (→ Chaos).
δq
δp
δq
δp∆p∆q
∆p’∆q’
∆p∆q
∆p’∆q’
Die stabile Mannigfaltigkeit M− und die instabile Mannigfaltigkeit M+, diesich am instabilen Fixpunkt kreuzen, werden in der linearisierten Abbildungdurch die linearen Asymptoten der Hyperbeln angenahert. Im voll nichtlinearenSystem stellen sie (fur N = 2) unendlich lange eindimensionale Kurven dar,die den ganzen chaotischen Teil der Poincare-Schnittflache ausfullen. Sie ha-ben interessante Eigenschaften, deren mathematische Beweise sehr kompliziertsind. Sie durfen sich selber nicht schneiden (was ja fur jede Phasenraumbahn
52
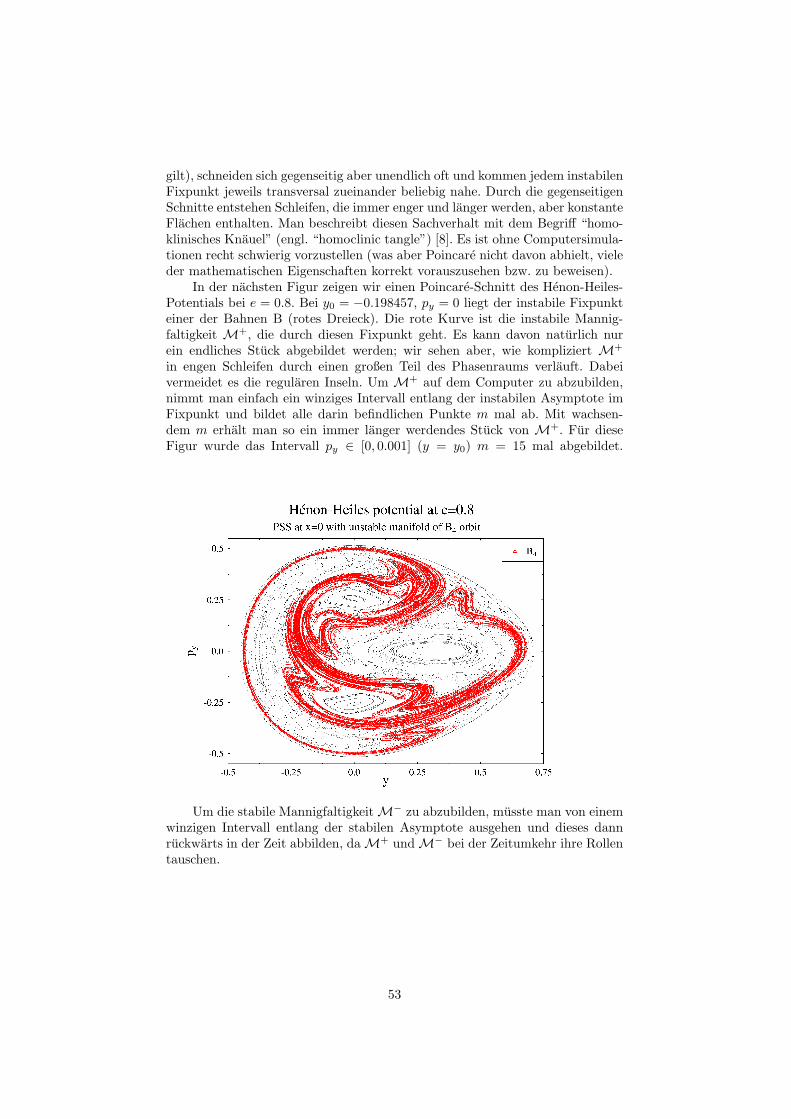
gilt), schneiden sich gegenseitig aber unendlich oft und kommen jedem instabilenFixpunkt jeweils transversal zueinander beliebig nahe. Durch die gegenseitigenSchnitte entstehen Schleifen, die immer enger und langer werden, aber konstanteFlachen enthalten. Man beschreibt diesen Sachverhalt mit dem Begriff “homo-klinisches Knauel” (engl. “homoclinic tangle”) [8]. Es ist ohne Computersimula-tionen recht schwierig vorzustellen (was aber Poincare nicht davon abhielt, vieleder mathematischen Eigenschaften korrekt vorauszusehen bzw. zu beweisen).
In der nachsten Figur zeigen wir einen Poincare-Schnitt des Henon-Heiles-Potentials bei e = 0.8. Bei y0 = −0.198457, py = 0 liegt der instabile Fixpunkteiner der Bahnen B (rotes Dreieck). Die rote Kurve ist die instabile Mannig-faltigkeit M+, die durch diesen Fixpunkt geht. Es kann davon naturlich nurein endliches Stuck abgebildet werden; wir sehen aber, wie kompliziert M+
in engen Schleifen durch einen großen Teil des Phasenraums verlauft. Dabeivermeidet es die regularen Inseln. Um M+ auf dem Computer zu abzubilden,nimmt man einfach ein winziges Intervall entlang der instabilen Asymptote imFixpunkt und bildet alle darin befindlichen Punkte m mal ab. Mit wachsen-dem m erhalt man so ein immer langer werdendes Stuck von M+. Fur dieseFigur wurde das Intervall py ∈ [0, 0.001] (y = y0) m = 15 mal abgebildet.
Um die stabile Mannigfaltigkeit M− zu abzubilden, musste man von einemwinzigen Intervall entlang der stabilen Asymptote ausgehen und dieses dannruckwarts in der Zeit abbilden, da M+ und M− bei der Zeitumkehr ihre Rollentauschen.
53
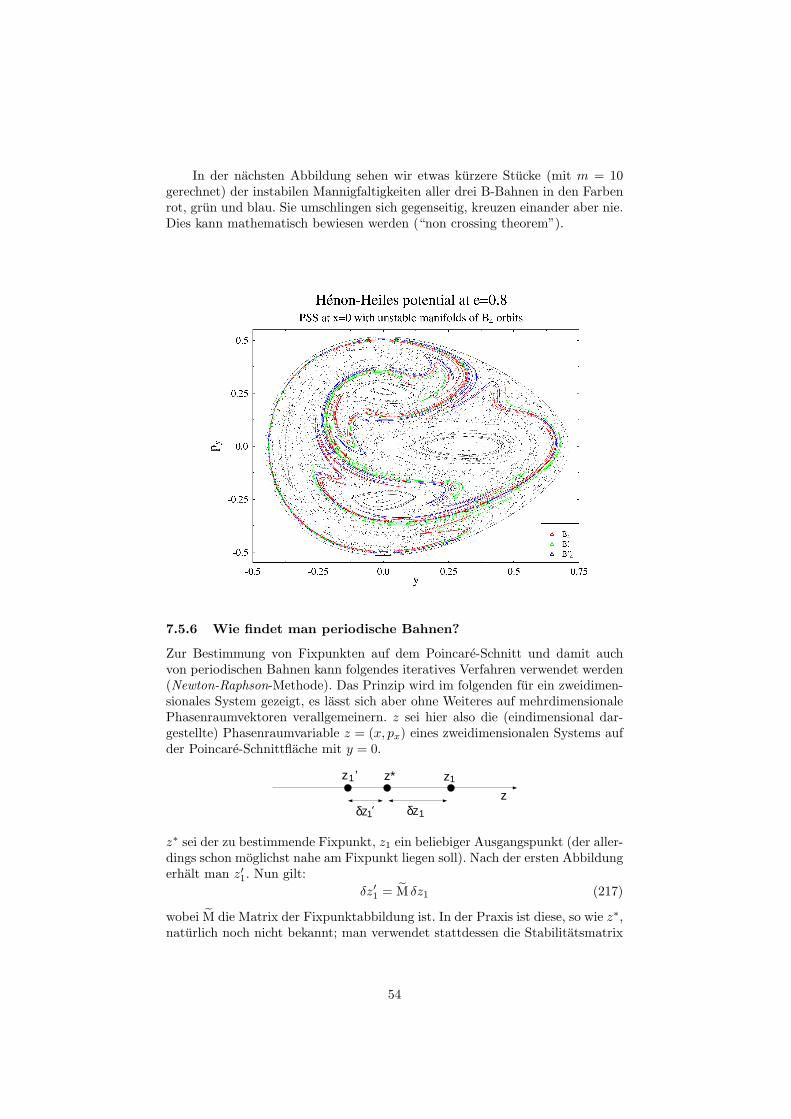
In der nachsten Abbildung sehen wir etwas kurzere Stucke (mit m = 10gerechnet) der instabilen Mannigfaltigkeiten aller drei B-Bahnen in den Farbenrot, grun und blau. Sie umschlingen sich gegenseitig, kreuzen einander aber nie.Dies kann mathematisch bewiesen werden (“non crossing theorem”).
7.5.6 Wie findet man periodische Bahnen?
Zur Bestimmung von Fixpunkten auf dem Poincare-Schnitt und damit auchvon periodischen Bahnen kann folgendes iteratives Verfahren verwendet werden(Newton-Raphson-Methode). Das Prinzip wird im folgenden fur ein zweidimen-sionales System gezeigt, es lasst sich aber ohne Weiteres auf mehrdimensionalePhasenraumvektoren verallgemeinern. z sei hier also die (eindimensional dar-gestellte) Phasenraumvariable z = (x, px) eines zweidimensionalen Systems aufder Poincare-Schnittflache mit y = 0.
z* zz ’
δz δz ’
z
1
1
1
1
z∗ sei der zu bestimmende Fixpunkt, z1 ein beliebiger Ausgangspunkt (der aller-dings schon moglichst nahe am Fixpunkt liegen soll). Nach der ersten Abbildungerhalt man z′1. Nun gilt:
δz′1 = M δz1 (217)
wobei M die Matrix der Fixpunktabbildung ist. In der Praxis ist diese, so wie z∗,naturlich noch nicht bekannt; man verwendet stattdessen die Stabilitatsmatrix
54

der Abbildung z1 → z′1. Nun gilt weiter:
δz1 = z1 − z∗ (218)
δz′1 = z′1 − z∗ (219)
Bekannt ist auch noch dz = z′1 − z1 und daher:
dz = z′1 − z1 = δz′1 − δz1 = (M − I2) δz1 (220)
→ δz1 = (M − I2)−1dz (221)
→ z2 = z1 − (M − I2)−1dz (222)
Aufgrund der nicht exakt bekannten Stabilitatsmatrix ist der neue Punkt nichtexakt der Fixpunkt; bei iterativem Anwenden erfolgt aber sehr schnelle Kon-vergenz. Ein Problem entsteht, wenn fur eine isolierte Bahn tr M = 2 wird. Diestritt auf, wenn entweder (i) die Bahn nicht isoliert ist, sondern aus einer entar-teten Familie stammt (was in integrablen Systemen meist der Fall ist), oder (ii)eine Bifurkation stattfindet (siehe Abschn. 10.2). Die Matrixinversion in (221)
divergiert in diesem Falle, da dann det (M− I2) = 2− tr M = 0 wird. Praktischkommt man aber mit der Newton-Raphson-Iteration sehr nahe an entarteteBahnen oder an Bifurkationspunkte heran, so dass diese Divergenz in der Regelkeine Rolle spielt.
Wir schließen dieses Kapitel mit einem Zitat von Henri Poincare:
“Periodische Bahnen sind der Schlussel zu unse-rem Verstandnis der nichtlinearen Dynamik.”
Hat Poincare damit schon die Spurformel (154) vorausgeahnt, welche Gutzwiller80 Jahre spater herleitete? Wohl deshalb nicht, weil es ja damals noch keineQuantenmechanik gab. Aber trotzdem hat er die wichtige Rolle der periodischenBahnen in der nichtlinearen Dynamik erkannt.
55

8 Zweidimensionale Billards
Wir haben uns bereits im Abschnitt 6.1 kurz mit zweidimensionalen Billardsbeschaftigt. Sie sollen im Folgenden noch etwas ausfuhrlicher besprochen wer-den.
8.1 Wahl der Poincare-Variablen
Zur Untersuchung der Dynamik von zweidimensionalen Billards erweist sichein Koordinatensystem [13] als besonders gunstig, bei dem als kanonische Va-riablen der Poincare-Abbildung der Reflexionspunkt und der Reflexionswinkelder Trajektorie gewahlt werden. Die Ortsvariable ist hierbei genauer die Beran-dungslange s von einem beliebigen Punkt s0 bis zum Reflexionspunkt P :
s =
∫ P
s0
ds . (223)
Die Impulsvariable ist p = cosα, wobei α der Winkel der Trajektorie zur Tan-gente am Reflexionspunkt P ist. Es zeigt sich, dass das Paar (s, p) kanonischkonjugiert ist. Eine Bahn definiert also durch aufeinanderfolgende Reflexionendie Poincare-Abbildung
(sn, pn) → (sn+1, pn+1) . (224)
Diese Abbildung ist i.A. nichtlinear und kann oftmals auch nicht analytischangegeben werden. Eine wichtige Eigenschaft der Abbildung ist die Flachener-haltung: ∣∣∣∣
∂(sn+1, pn+1)
∂(sn, pn)
∣∣∣∣ = 1 . (225)
Es ist klar, dass die Form (und auch die Stabiltat) einer Bahn nicht von derEnergie, sondern ausschließlich von der Form der Berandung abhangt. Mansagt, dass das System “skaliert”: bei Variation der Energie andert sich die Formder Trajektorien nicht; da diese zwischen den Reflexionen eine freie geradlinigeBewegung darstellen, ist die Wirkung entlang einer Bahn einfach durch S = pLgegeben, wobei L deren Lange und p =
√2mE der Betrag des Impulses ist. Man
kann sich also auf den Fall√
2mE = p = 1 beschranken und die Wirkung beibeliebiger Energie durch eine einfache Skalierung rekonstruieren.
Pro Teilstuck gibt die linearisierte Abbildung mn+1,n mit
(δsn+1
δpn+1
)= mn+1,n
(δsn
δpn
); det (mn+1,n) = 1 (226)
Auskunft uber die Stabilitat. Aus der Kenntnis der lokalen KrummungsradienRn, Rn+1 bei den Reflexionspunkten, der Lange ρ der Trajektorie von n nachn + 1, sowie der Winkel αn und αn+1 kann man mn+1,n wie folgt berechnen(s.a. [9], App. C.5):
mn+1,n =
(ρ
Rn sin αn+1− sin αn
sin αn+1− ρ
sin αn sin αn+1
− ρRnRn+1
+ sin αn+1
Rn+ sin αn
R1
ρRn+1 sin αn
− sin αn+1
sin αn
). (227)
56

Fur eine periodische Bahn mit N Reflexionspunkten gilt
(sN , pN ) = (s0, p0) . (228)
Ihre Stabilitatsmatrix ist damit einfach das Produkt der einzelnen mn+1,n:
MN =N−1∏
n=0
mn+1,n . (229)
Besonders einfach wird die Situation, wenn eine periodische Bahn mit N = 2Reflexionspunkten beiderseits rechtwinklig reflekiert wird (α0 = α1 = π
2 , R0 =R1 = R). Dann ist
M2 = m21 =
(ρR − 1 −ρ2R − ρ
R2ρR − 1
)2
. (230)
Je nach dem Wert von |tr M2| ergeben sich die folgenden Falle fur die Stabilitatdieser Bahn:
• ρ > 2R instabil,
• ρ = 2R marginal stabil,
• ρ < 2R stabil.
8.2 Beispiele
Allgemein konnen die periodischen Bahnen in einem zweidimensionalen Billarddurch die Zahl N der Ecken (Reflexionspunkte) und eine Windungszahl w cha-rakterisiert werden; dabei uberstreicht der Polarwinkel der Reflexionspunkte ineiner Periode den Wert 2π w. Die Zuordnung ist allerdings nicht eindeutig: zueinem Paar (N,w) konnen mehrere verschiedene Bahnen existieren.
Im den folgenden zwei Beispielen sollen zwei integrable Billards nochmalskurz besprochen werden, und im dritten Beispiel gehen wir etwas ausfuhrlicherauf ein nicht-integrables Billard ein.
8.2.1 Das Kreisbillard
Hier gibt es neben der Energie noch den Drehimpuls Lz = xpy − ypx als Er-haltungsgroße. Das System ist dadurch integrabel. Fur die Reflexionswinkel vonperiodischen Bahnen gilt αn = const. = αNw = πw/N . Im Poincare-Schnitt(s, p) erscheinen nur waagrechte Linien mit den Werten p = cos(αn). Fur peri-odische Bahnen sind die sog. “rationalen Tori” mit jeweils N Fixpunkten dis-kret besetzt, die sich kontinuierlich entlang der Linien verschieben, wenn mandie Bahn entlang der kreisformigen Berandung rotiert. (Diese Rotation, welchedie Kreissymmetrie des Billards ausnutzt, erzeugt also eine Familie unendlichvieler entarteter periodischer Bahnen mit f = 1.) Fur aperiodische Bahnen(αn 6= πw/N) werden die “irrationalen Tori” fur t→ ∞ dicht aufgefullt.
Hausaufgabe: Zeige, dass fur alle periodischen Bahnen (w,N) im Kreisbil-
lard gilt: tr MN = +2.
57

8.2.2 Das elliptische Billard
Die elliptische Randkurve kann definiert werden durch
x = A cosϕ , y = B cosϕ . (231)
(Achtung: ϕ ist nicht der Polarwinkel des Punkts x, y!) Die Exzentritat ǫ istgegeben durch
ǫ =C
A=C
B
√1 − ǫ2; A2 −B2 = C2 ; (232)
dabei sind ±C die Brennpunkte auf der x-Achse. Ferner gilt fur den Krummungs-radius
R(ϕ) =1
AB(B2 cos2 ϕ+A2 sin2 ϕ)3/2 (233)
Auch das elliptische Billard besitzt eine zweite Erhaltungsgroße, namlich dasProdukt der Drehimpulse L1, L2 um die beiden Brennpunkte:
F = L1L2 =p2 − ǫ4 cos2 ψ
1 − ǫ4 cos2 ψ, tanψ = −B
Acotϕ . (234)
Alle periodischen Bahnen mit mehr als zwei Reflexionspunkten (N > 2) treten
in entarteten Familien (f = 1) mit tr M = 2 auf. Charakteristisch ist dabei,dass gewisse Bereiche des Billards nicht erreichbar sind und durch eine soge-nannte Kaustik abgegrenzt werden. Die Kaustik kann eine konfokale Ellipseoder eine Hyperbel sein. Außerdem gibt es zwei isolierte Bahnen (f = 0) mitN = 2, namlich die Librationen entlang den Hauptachsen. Weiter treten indiesem System auch Bifurkationen auf, und zwar von den 2m-ten Wiederho-lungen (m > 0) der kurzeren der beiden Librationen, die immer stabil bleibt.(Siehe Kap. 10 uber Bifurkationen.) Siehe auch [9] fur weitere Einzelheiten deselliptischen Billards.
8.2.3 Ein asymmetrisch deformiertes Billard
Die Randkurve habe folgende Gestalt:
y2 = (R2 − x2)(1 + αx) . (235)
Fur α 6= 0 wird das System asymmetrisch bezuglich der y-Achse und ist nichtmehr integrabel. Alle periodischen Bahnen mit N > 2 werden isoliert; auchdie Pendelbahnen mit N = 2 sind isoliert, mit Ausnahme der horizontalenBahn entlang der x-Achse, die fur alle α marginal stabil bleibt (tr M = 2).[Aufgabe: Man zeige dies unter Verwendung von Gleichung (230)!]
In den folgenden drei Bildern werden fur wachsende Werte von α = 0.01,0.1 und 0.61 Poincare-Schnitte (pα, φ) gezeigt, wobei φ hier die Polarwinkel derReflexionspunkte sind und pα = cosα wie oben definiert ist. (Die Abbildung inden Variablen pα und φ ist nicht flachenerhaltend, was aber fur die qualitativeDiskussion keine Bedeutung hat.) Wir sehen, dass mit zunehmendem α dieDynamik chaotischer wird. Jeweils oben im Bild ist das Billard gezeigt mitden kurzesten periodischen Bahnen, deren Fixpunkte im jeweiligen Poincare-Schnitt deutlich erkennbar sind. Stabile Bahnen sind durch ausgezogene (grune),instabile durch gepunktete (rote) und marginal stabile Bahnen durch strich-punktierte (blaue) Linien dargestellt.
58
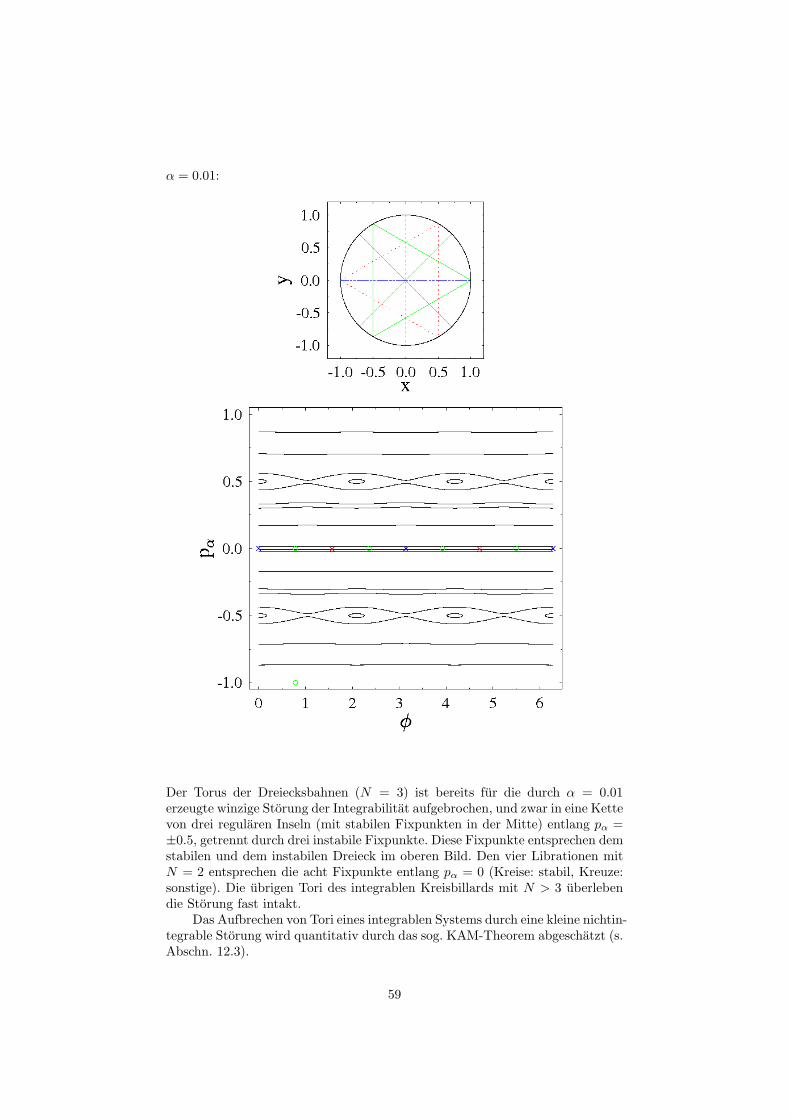
α = 0.01:
Der Torus der Dreiecksbahnen (N = 3) ist bereits fur die durch α = 0.01erzeugte winzige Storung der Integrabilitat aufgebrochen, und zwar in eine Kettevon drei regularen Inseln (mit stabilen Fixpunkten in der Mitte) entlang pα =±0.5, getrennt durch drei instabile Fixpunkte. Diese Fixpunkte entsprechen demstabilen und dem instabilen Dreieck im oberen Bild. Den vier Librationen mitN = 2 entsprechen die acht Fixpunkte entlang pα = 0 (Kreise: stabil, Kreuze:sonstige). Die ubrigen Tori des integrablen Kreisbillards mit N > 3 uberlebendie Storung fast intakt.
Das Aufbrechen von Tori eines integrablen Systems durch eine kleine nichtin-tegrable Storung wird quantitativ durch das sog. KAM-Theorem abgeschatzt (s.Abschn. 12.3).
59
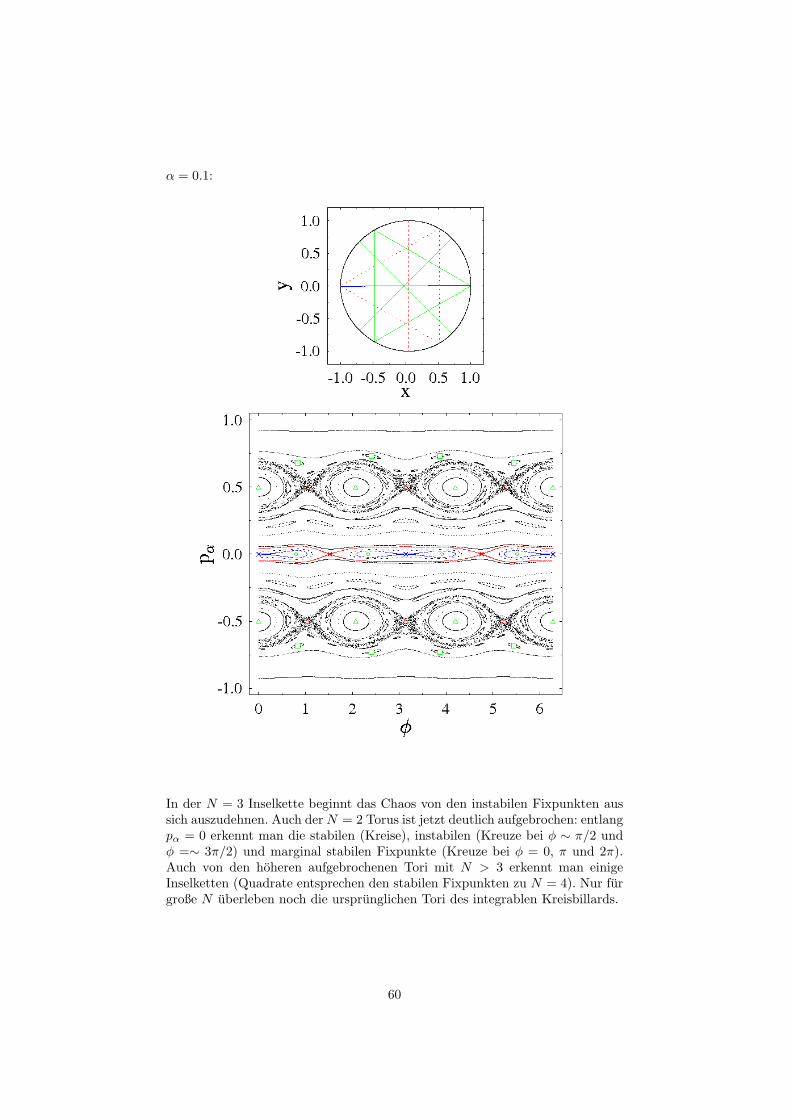
α = 0.1:
In der N = 3 Inselkette beginnt das Chaos von den instabilen Fixpunkten aussich auszudehnen. Auch derN = 2 Torus ist jetzt deutlich aufgebrochen: entlangpα = 0 erkennt man die stabilen (Kreise), instabilen (Kreuze bei φ ∼ π/2 undφ =∼ 3π/2) und marginal stabilen Fixpunkte (Kreuze bei φ = 0, π und 2π).Auch von den hoheren aufgebrochenen Tori mit N > 3 erkennt man einigeInselketten (Quadrate entsprechen den stabilen Fixpunkten zu N = 4). Nur furgroße N uberleben noch die ursprunglichen Tori des integrablen Kreisbillards.
60
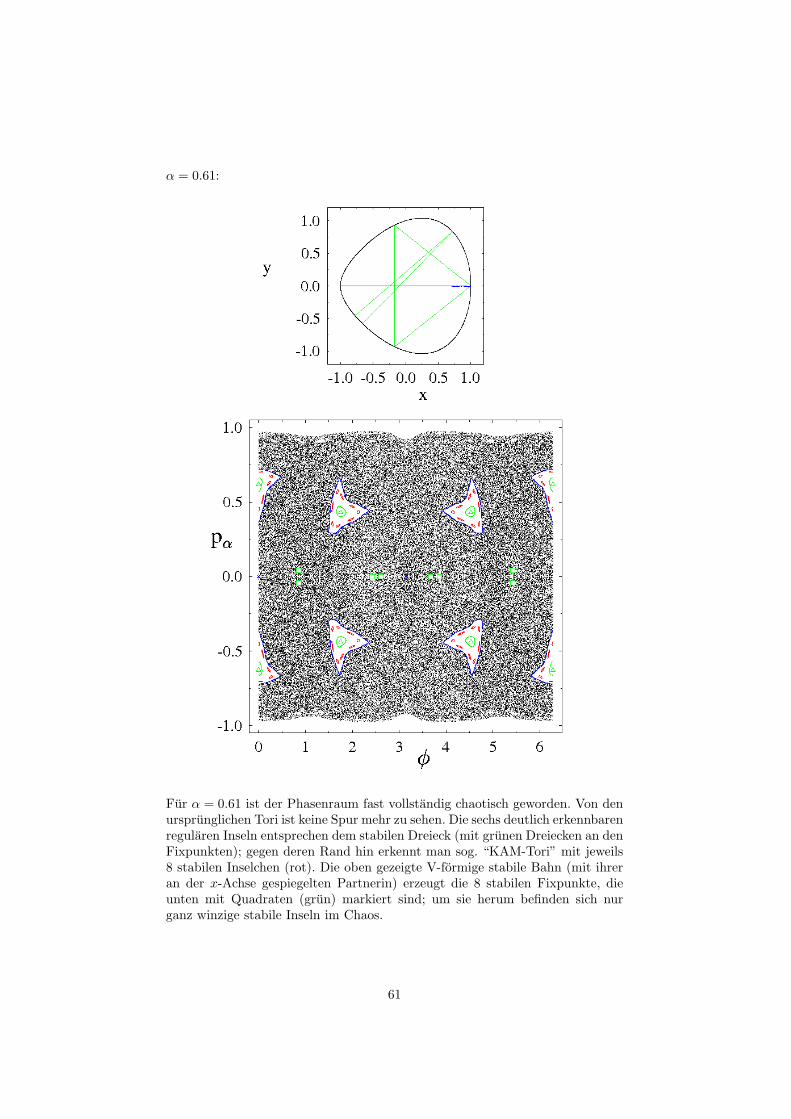
α = 0.61:
Fur α = 0.61 ist der Phasenraum fast vollstandig chaotisch geworden. Von denursprunglichen Tori ist keine Spur mehr zu sehen. Die sechs deutlich erkennbarenregularen Inseln entsprechen dem stabilen Dreieck (mit grunen Dreiecken an denFixpunkten); gegen deren Rand hin erkennt man sog. “KAM-Tori” mit jeweils8 stabilen Inselchen (rot). Die oben gezeigte V-formige stabile Bahn (mit ihreran der x-Achse gespiegelten Partnerin) erzeugt die 8 stabilen Fixpunkte, dieunten mit Quadraten (grun) markiert sind; um sie herum befinden sich nurganz winzige stabile Inseln im Chaos.
61

9 Logistische Abbildungen
Viele Untersuchungen auf dem Gebiet der nichtlinearen Dynamik werden an-hand von logistischen Abbildungen durchgefuhrt. Diese zeichnen sich in der Regelweniger durch eine physikalische Relevanz als vielmehr durch ihre mathemati-sche Einfachheit aus. Im Gegensatz zur Poincare-Abbildung eines Hamilton-schen Systems, die meist nur durch numerische Integration der Bewegungsglei-chungen bestimmt werden kann, gibt man bei logistischen Abbildungen eineanalytische Vorschrift fur die Abbildung vor. Solche Abbildungen stellen also ingewissem Sinne ein einfaches Abbild (oder eine Karrikatur) dessen dar, was sichauf dem Poincare-Schnitt eines Hamiltonschen Systems abspielt.
Wir beginnen mit eindimensionalen logistischen Abbildungen, wo bereitswesentliche Elemente wie der Ubergang von regularem zu chaotischen Verhaltensowie Bifurkationsketten mit universalem Skalenverhalten auftreten, obwohl die-se nicht einem energieerhaltenden Hamiltonschen System entsprechen konnen.Anschliessend wird darum auch noch kurz auf zweidimensionale flachenerhal-tende Abbildungen eingegangen.
9.1 Eindimensionale Abbildungen
Gegeben sei eine eindimensionale Abbildung
fr : R → R , (236)
x 7→ fr(x) .
Durch diese wird folgende Rekursion vermittelt:
xn+1 = fr(xn) . n ∈ N (237)
Zusatzlich zur Variablen x tritt mit r ein reeller Kontrollparameter auf. Aus-serdem werde die k−fache iterierte Abbildung von f eingefuhrt und mit fk
bezeichnet:fk(xn) := f(f(. . . f(xn) . . . )︸ ︷︷ ︸
k mal
= xn+k . (238)
Fixpunkte der logistischen Abbildung sollen mit x∗ (oder expliziter: x∗r)bezeichnet werden, d.h. fur diese gilt
x∗r = fr(x∗r) . (239)
Auch hier lassen sich stabile und instabile Fixpunkte unterscheiden. Ein stabilerFixpunkt liegt vor, wenn in einer Umgebung U von x∗ alle Punkte sich demFixpunkt nahern:
limn→∞
xn = limn→∞
fn(x1) = x∗ fur alle x1 ∈ U(x∗) . (240)
Dies trifft zu, wenn |f ′(x∗)| < 1. Im umgekehrten Fall, also wenn |f ′(x∗)| > 1,so ist der Fixpunkt x∗ instabil. Die Stabilitat von Fixpunkten hangt in derRegel vom Kontrollparameter r ab; damit verbunden ist die Frage, ob das Sys-tem regulares oder chaotisches Verhalten aufweist. Dies wird in den folgendenAbschnitten anhand prominenter Beispiele untersucht werden.
62

Der Lyapunov-Exponent in einem beliebigen Punkt x0 wird anhand derk-fachen Abbildung fk(x0) folgendermaßen definiert:
σ(x0) = limk→∞
[1
klimǫ→0
ln
∣∣∣∣fk(x0 + ǫ) − fk(x0)
ǫ
∣∣∣∣]
= limk→∞
[1
kln
∣∣∣∣dfk(x)
dx
∣∣∣∣x=x0
](241)
Das heißt also, dass ein kleines Intervall ǫ um x0 herum bei der k-fachen Ab-bildung wie ekσ anwachst. Wenn σ > 0, ist der Punkt x0 (und die darausentstehende Folge x1, x2, . . . ) instabil.
9.1.1 Lineare Abbildung
Die einfachste lineare Abbildung ist von der Form
fr : R → R (242)
x 7→ rx .
Fur r 6= 1 ist x∗ = 0 der einzige Fixpunkt. Aus
fkr (x∗) = rkx∗ (243)
lasst sich ablesen, dass im Falle |r| < 1 jedes x0 ∈ R zu x∗ konvergiert, derFixpunkt ist daher stabil. Fur |r| > 1 dagegen liegt ein instabiler Fixpunkt vor.Das Gleiche gilt fur den Abstand ∆xn = |xn+1 − xn|. Der Lyapunov-Exponentwird σ(x0) = ln |r| und ist damit unabangig vom Punkte x0. Zusammengefasstergibt sich daher:
|r| < 1 limn→∞ xn → 0 x∗ = 0 stabiler FP σ < 0|r| > 1 limn→∞ xn → ±∞ x∗ = 0 instabiler FP σ > 0
9.1.2 Stuckweise lineare Abbildungen
Wir betrachten die auf dem Einheitsintervall definierte Dreiecksabbildung
fr : [0, 1] → [0, 1]
x 7→ fr(x) = r
(1 − 2
∣∣∣∣1
2− x
∣∣∣∣). (244)
Fur r < 1/2 ist x∗ = 0 der einzige FP. Die Ermittlung des Stabilitatsverhal-tens wird in den nachsten zwei Abbildungen illustriert. Ausgehend von einembeliebigen Startwert x0 lasst sich dessen Grenzwert graphisch ermitteln. Dazuwird der Funktionswert horizontal auf die Winkelhalbierende projiziert. Die an-schließende senkrechte Projektion ergibt den neuen Funktionswert, u.s.w. Manerkennt, dass fur r < 1/2 jedes x0 gegen Null konvergiert. Dieser FP ist daherstabil. Fur Werte r > 1/2 wird der Fixpunkt x∗ = 0 instabil und ein neuerFP bei x∗r = 2r/(1 + 2r) kommt hinzu. Dieser liegt beispielsweise fur r = 1 beix∗1 = 2
3 und ist ebenfalls instabil. Fur fast alle Punkte x0 gilt: σ(x0) = ln(2r).Lediglich die Punkte x0 = 1, 1
2 ,13 , . . . bilden Ausnahmen. Sie werden schließlich
auf einen der Fixpunkte abgebildet.
63
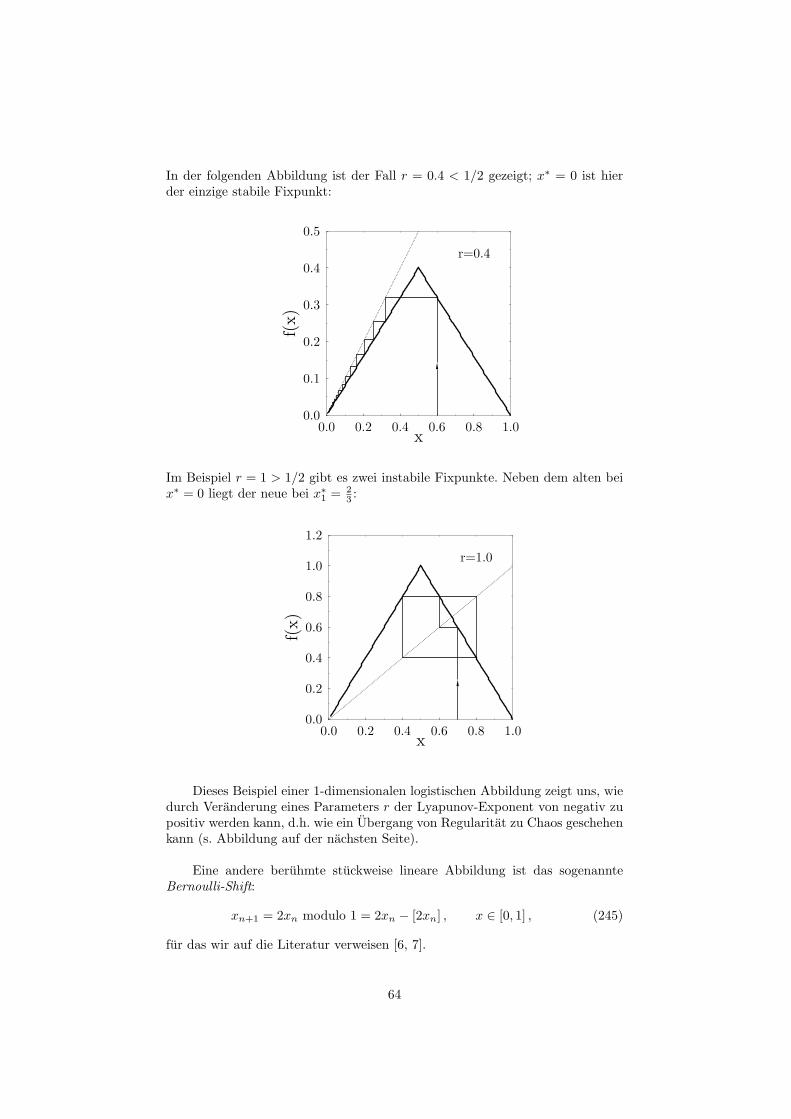
In der folgenden Abbildung ist der Fall r = 0.4 < 1/2 gezeigt; x∗ = 0 ist hierder einzige stabile Fixpunkt:
Im Beispiel r = 1 > 1/2 gibt es zwei instabile Fixpunkte. Neben dem alten beix∗ = 0 liegt der neue bei x∗1 = 2
3 :
Dieses Beispiel einer 1-dimensionalen logistischen Abbildung zeigt uns, wiedurch Veranderung eines Parameters r der Lyapunov-Exponent von negativ zupositiv werden kann, d.h. wie ein Ubergang von Regularitat zu Chaos geschehenkann (s. Abbildung auf der nachsten Seite).
Eine andere beruhmte stuckweise lineare Abbildung ist das sogenannteBernoulli-Shift:
xn+1 = 2xn modulo 1 = 2xn − [2xn] , x ∈ [0, 1] , (245)
fur das wir auf die Literatur verweisen [6, 7].
64
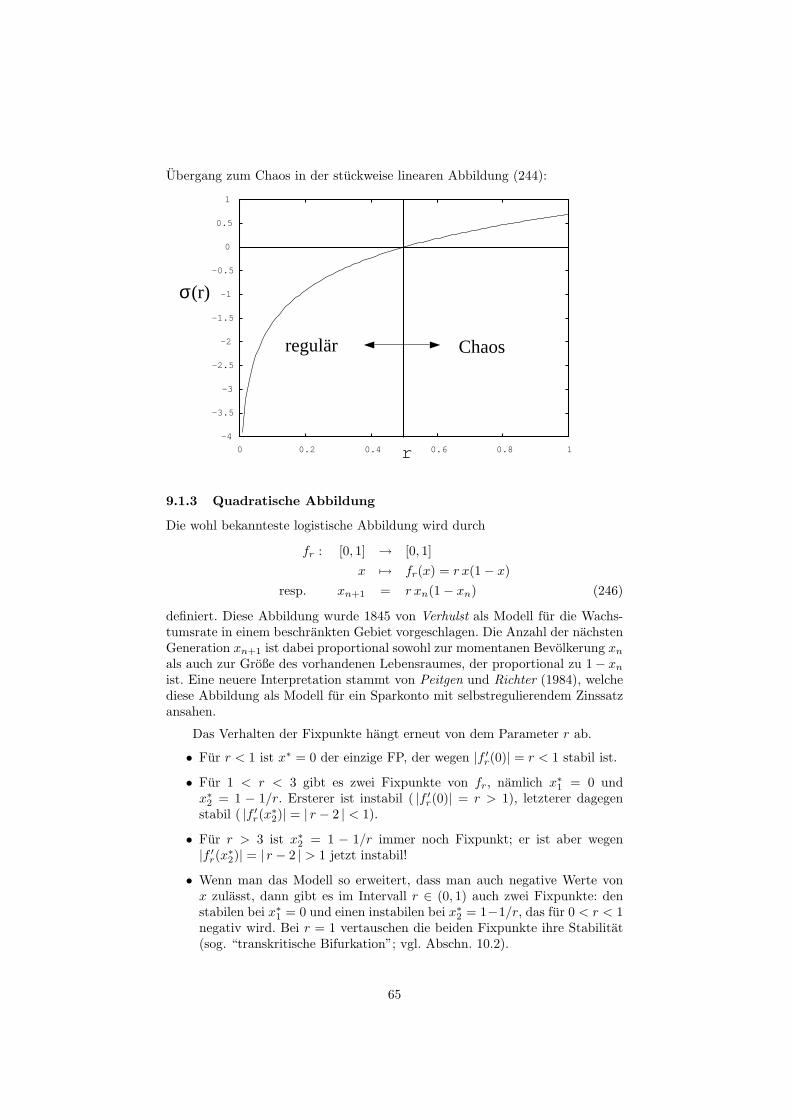
Ubergang zum Chaos in der stuckweise linearen Abbildung (244):
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
0 0.2 0.4 r 0.6 0.8 1
Chaosregulär
(r)σ
9.1.3 Quadratische Abbildung
Die wohl bekannteste logistische Abbildung wird durch
fr : [0, 1] → [0, 1]
x 7→ fr(x) = r x(1 − x)
resp. xn+1 = r xn(1 − xn) (246)
definiert. Diese Abbildung wurde 1845 von Verhulst als Modell fur die Wachs-tumsrate in einem beschrankten Gebiet vorgeschlagen. Die Anzahl der nachstenGeneration xn+1 ist dabei proportional sowohl zur momentanen Bevolkerung xn
als auch zur Große des vorhandenen Lebensraumes, der proportional zu 1− xn
ist. Eine neuere Interpretation stammt von Peitgen und Richter (1984), welchediese Abbildung als Modell fur ein Sparkonto mit selbstregulierendem Zinssatzansahen.
Das Verhalten der Fixpunkte hangt erneut von dem Parameter r ab.
• Fur r < 1 ist x∗ = 0 der einzige FP, der wegen |f ′r(0)| = r < 1 stabil ist.
• Fur 1 < r < 3 gibt es zwei Fixpunkte von fr, namlich x∗1 = 0 undx∗2 = 1 − 1/r. Ersterer ist instabil ( |f ′r(0)| = r > 1), letzterer dagegenstabil ( |f ′r(x∗2)| = | r − 2 | < 1).
• Fur r > 3 ist x∗2 = 1 − 1/r immer noch Fixpunkt; er ist aber wegen|f ′r(x∗2)| = | r − 2 | > 1 jetzt instabil!
• Wenn man das Modell so erweitert, dass man auch negative Werte vonx zulasst, dann gibt es im Intervall r ∈ (0, 1) auch zwei Fixpunkte: denstabilen bei x∗1 = 0 und einen instabilen bei x∗2 = 1−1/r, das fur 0 < r < 1negativ wird. Bei r = 1 vertauschen die beiden Fixpunkte ihre Stabilitat(sog. “transkritische Bifurkation”; vgl. Abschn. 10.2).
65
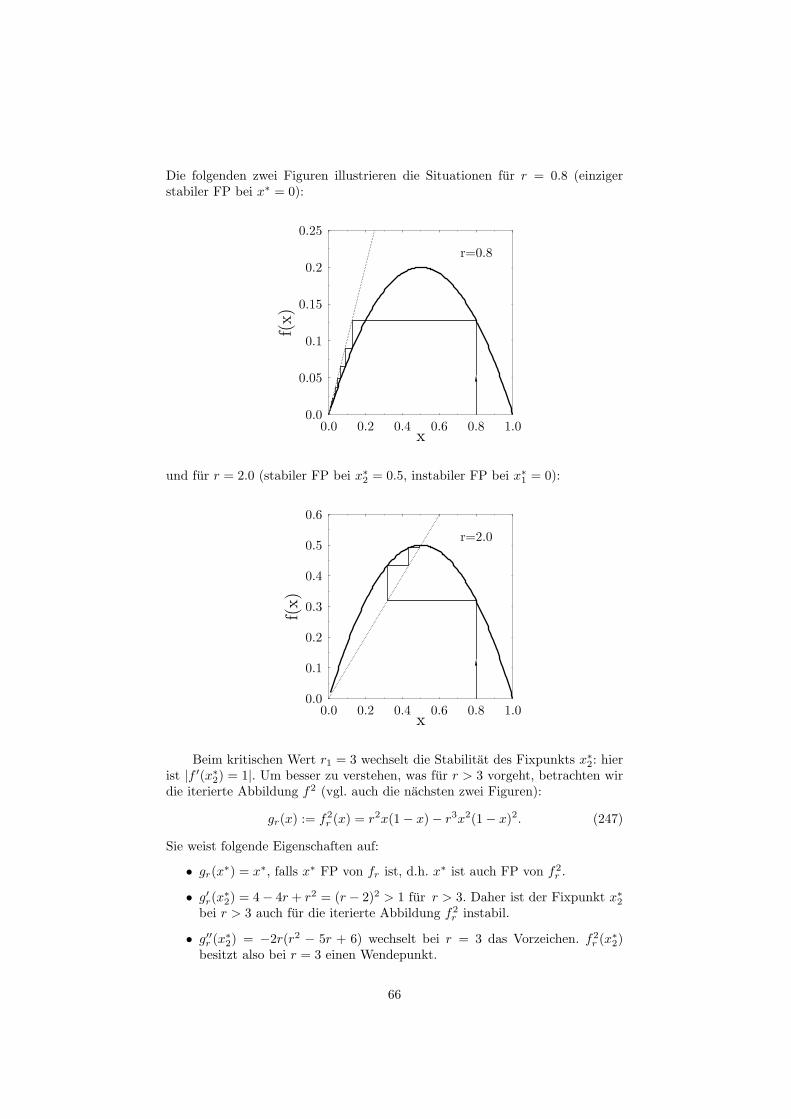
Die folgenden zwei Figuren illustrieren die Situationen fur r = 0.8 (einzigerstabiler FP bei x∗ = 0):
und fur r = 2.0 (stabiler FP bei x∗2 = 0.5, instabiler FP bei x∗1 = 0):
Beim kritischen Wert r1 = 3 wechselt die Stabilitat des Fixpunkts x∗2: hierist |f ′(x∗2) = 1|. Um besser zu verstehen, was fur r > 3 vorgeht, betrachten wirdie iterierte Abbildung f2 (vgl. auch die nachsten zwei Figuren):
gr(x) := f2r (x) = r2x(1 − x) − r3x2(1 − x)2. (247)
Sie weist folgende Eigenschaften auf:
• gr(x∗) = x∗, falls x∗ FP von fr ist, d.h. x∗ ist auch FP von f2
r .
• g′r(x∗2) = 4 − 4r + r2 = (r − 2)2 > 1 fur r > 3. Daher ist der Fixpunkt x∗2
bei r > 3 auch fur die iterierte Abbildung f2r instabil.
• g′′r (x∗2) = −2r(r2 − 5r + 6) wechselt bei r = 3 das Vorzeichen. f2r (x∗2)
besitzt also bei r = 3 einen Wendepunkt.
66
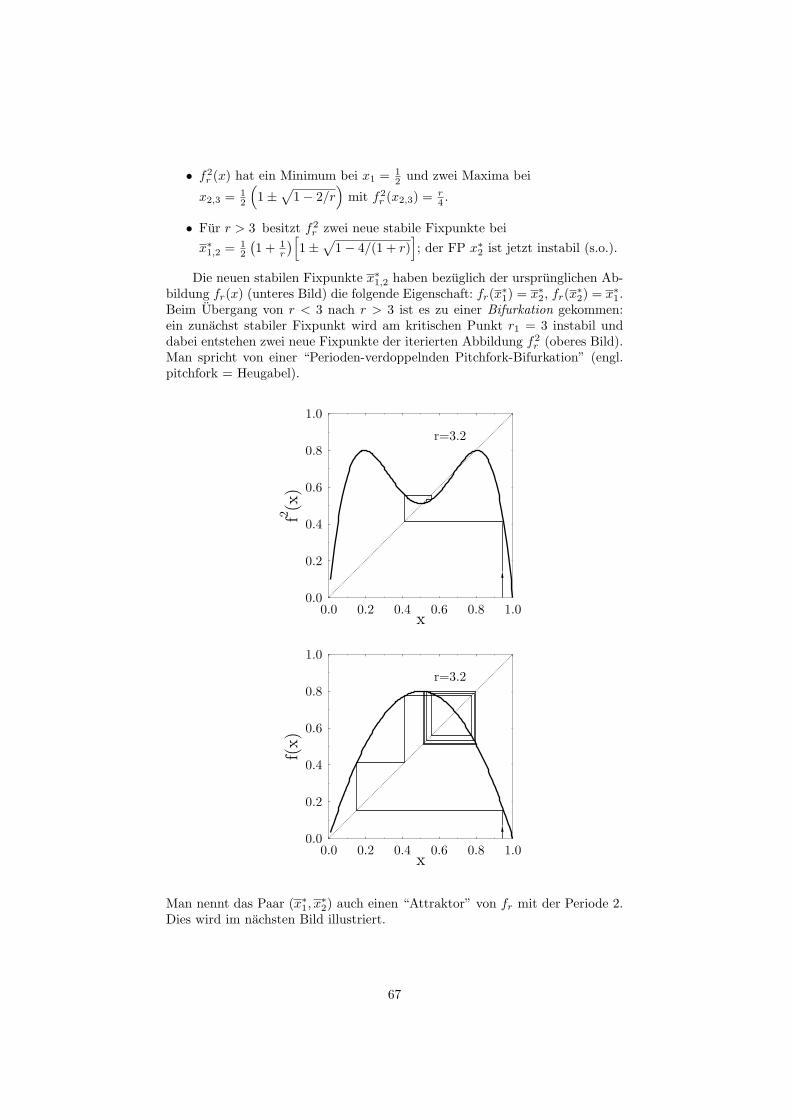
• f2r (x) hat ein Minimum bei x1 = 1
2 und zwei Maxima bei
x2,3 = 12
(1 ±
√1 − 2/r
)mit f2
r (x2,3) = r4 .
• Fur r > 3 besitzt f2r zwei neue stabile Fixpunkte bei
x∗1,2 = 12
(1 + 1
r
)[1 ±
√1 − 4/(1 + r)
]; der FP x∗2 ist jetzt instabil (s.o.).
Die neuen stabilen Fixpunkte x∗1,2 haben bezuglich der ursprunglichen Ab-bildung fr(x) (unteres Bild) die folgende Eigenschaft: fr(x
∗1) = x∗2, fr(x
∗2) = x∗1.
Beim Ubergang von r < 3 nach r > 3 ist es zu einer Bifurkation gekommen:ein zunachst stabiler Fixpunkt wird am kritischen Punkt r1 = 3 instabil unddabei entstehen zwei neue Fixpunkte der iterierten Abbildung f2
r (oberes Bild).Man spricht von einer “Perioden-verdoppelnden Pitchfork-Bifurkation” (engl.pitchfork = Heugabel).
Man nennt das Paar (x∗1, x∗2) auch einen “Attraktor” von fr mit der Periode 2.
Dies wird im nachsten Bild illustriert.
67
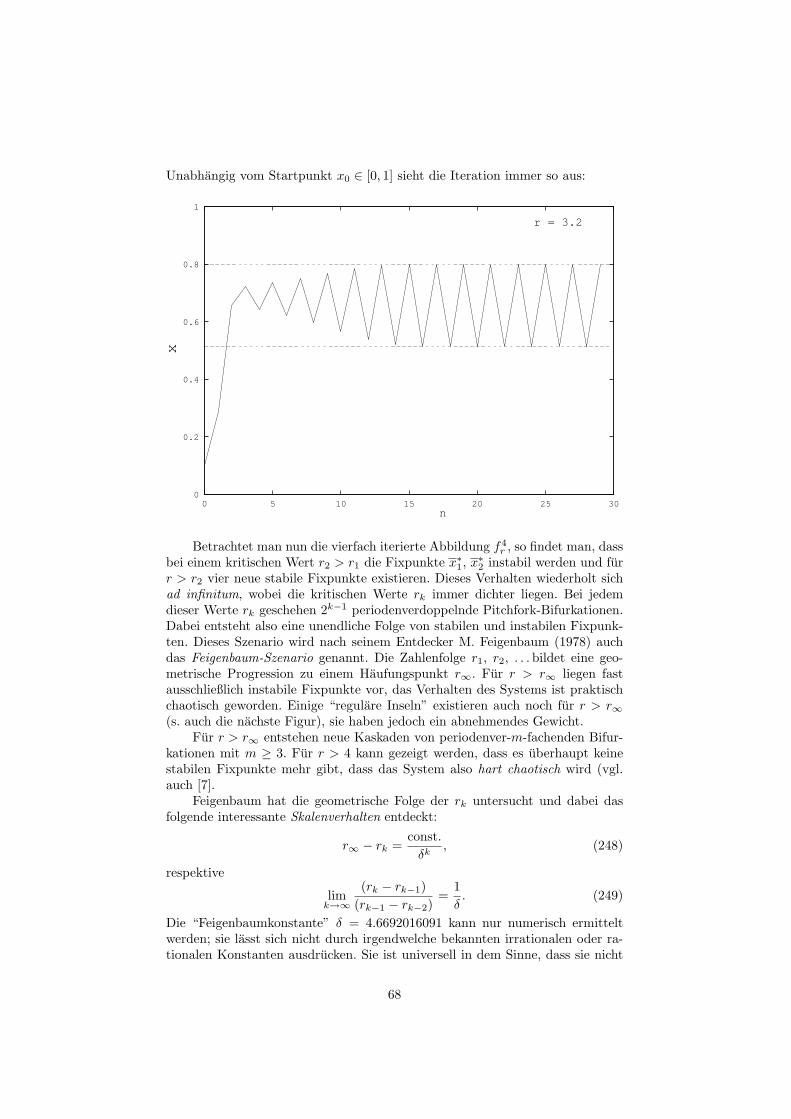
Unabhangig vom Startpunkt x0 ∈ [0, 1] sieht die Iteration immer so aus:
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20 25 30
x
n
r = 3.2
Betrachtet man nun die vierfach iterierte Abbildung f4r , so findet man, dass
bei einem kritischen Wert r2 > r1 die Fixpunkte x∗1, x∗2 instabil werden und fur
r > r2 vier neue stabile Fixpunkte existieren. Dieses Verhalten wiederholt sichad infinitum, wobei die kritischen Werte rk immer dichter liegen. Bei jedemdieser Werte rk geschehen 2k−1 periodenverdoppelnde Pitchfork-Bifurkationen.Dabei entsteht also eine unendliche Folge von stabilen und instabilen Fixpunk-ten. Dieses Szenario wird nach seinem Entdecker M. Feigenbaum (1978) auchdas Feigenbaum-Szenario genannt. Die Zahlenfolge r1, r2, . . . bildet eine geo-metrische Progression zu einem Haufungspunkt r∞. Fur r > r∞ liegen fastausschließlich instabile Fixpunkte vor, das Verhalten des Systems ist praktischchaotisch geworden. Einige “regulare Inseln” existieren auch noch fur r > r∞(s. auch die nachste Figur), sie haben jedoch ein abnehmendes Gewicht.
Fur r > r∞ entstehen neue Kaskaden von periodenver-m-fachenden Bifur-kationen mit m ≥ 3. Fur r > 4 kann gezeigt werden, dass es uberhaupt keinestabilen Fixpunkte mehr gibt, dass das System also hart chaotisch wird (vgl.auch [7].
Feigenbaum hat die geometrische Folge der rk untersucht und dabei dasfolgende interessante Skalenverhalten entdeckt:
r∞ − rk =const.
δk, (248)
respektive
limk→∞
(rk − rk−1)
(rk−1 − rk−2)=
1
δ. (249)
Die “Feigenbaumkonstante” δ = 4.6692016091 kann nur numerisch ermitteltwerden; sie lasst sich nicht durch irgendwelche bekannten irrationalen oder ra-tionalen Konstanten ausdrucken. Sie ist universell in dem Sinne, dass sie nicht
68
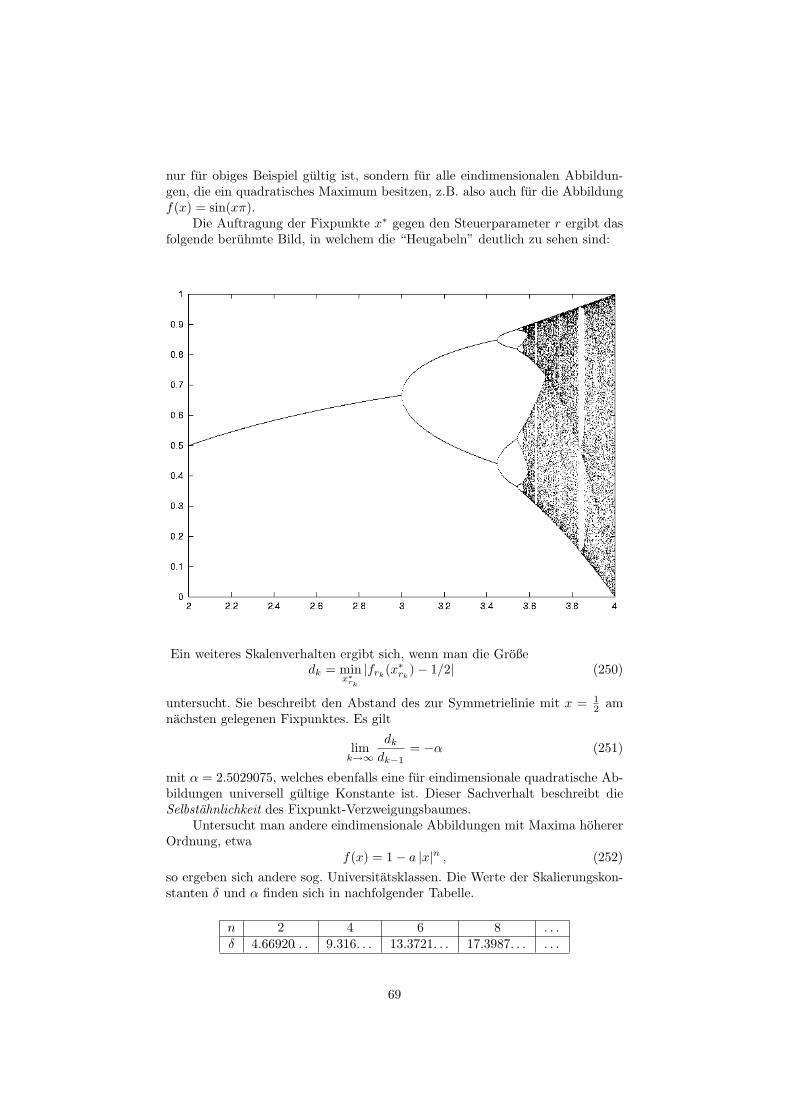
nur fur obiges Beispiel gultig ist, sondern fur alle eindimensionalen Abbildun-gen, die ein quadratisches Maximum besitzen, z.B. also auch fur die Abbildungf(x) = sin(xπ).
Die Auftragung der Fixpunkte x∗ gegen den Steuerparameter r ergibt dasfolgende beruhmte Bild, in welchem die “Heugabeln” deutlich zu sehen sind:
Ein weiteres Skalenverhalten ergibt sich, wenn man die Großedk = min
x∗
rk
|frk(x∗rk
) − 1/2| (250)
untersucht. Sie beschreibt den Abstand des zur Symmetrielinie mit x = 12 am
nachsten gelegenen Fixpunktes. Es gilt
limk→∞
dk
dk−1= −α (251)
mit α = 2.5029075, welches ebenfalls eine fur eindimensionale quadratische Ab-bildungen universell gultige Konstante ist. Dieser Sachverhalt beschreibt dieSelbstahnlichkeit des Fixpunkt-Verzweigungsbaumes.
Untersucht man andere eindimensionale Abbildungen mit Maxima hohererOrdnung, etwa
f(x) = 1 − a |x|n , (252)
so ergeben sich andere sog. Universitatsklassen. Die Werte der Skalierungskon-stanten δ und α finden sich in nachfolgender Tabelle.
n 2 4 6 8 . . .δ 4.66920. . . 9.316. . . 13.3721. . . 17.3987. . . . . .
69

9.2 Zweidimensionale Abbildungen
Bislang wurden eindimensionale Abbildungen untersucht. Liegt jedoch ein kon-servatives Hamiltonsches System vor, so besitzt der zugehorige Poincare-Schnitteine geradzahlige Dimension und die Abbildung darauf ist flachenerhaltend. Diesgibt die Motivation fur das Studium von zweidimensionalen flachenerhaltendenAbbildungen, die allerdings immer noch eine recht modellhafte Vereinfachungder physikalischen Realitat sind.
Bekannt ist hierbei das sogenannte Henon-Map:
f : R2 → R2 (253)
(x, y) 7→ (by − 1 − ax2, x)
und damit die Iteration
xn+1 = byn − 1 − ax2n, (254)
yn+1 = xn.
Wegen det( ∂f∂x,∂y ) = det
(−2ax b
1 0
)= −b ist diese flachenerhaltend genau
dann, wenn |b| = 1 ist. Die Monodromiematrix eines Fixpunkts lautet in diesemFalle
Mx∗ =
(−2ax∗ b
1 0
)(255)
und hat damit Spur trMx∗ = −2ax∗.Fur b = −1 kann das System (254) auch auf eine Gleichung reduziert
werden:xn+1 = −xn−1 + 1 − ax2
n . (256)
Die Fixpunkte x∗ ergeben sich als Losungen der quadratischen Gleichunga(x∗)2 + 2x∗ − 1 = 0 und besitzen die Werte x∗1,2 = 1
a (−1±√
1 + a). Sie habendas folgende Stabilitatsverhalten
• x1 = 1a (−1 +
√1 + a) .
Es gilt |trMx∗
1| = |2 − 2
√1 + a| < 2 genau dann wenn −1 < a < 3 und
der Fixpunkt ist in diesem Bereich stabil Fur a > 3 wird er instabil undes kommt zu einer Bifurkation der 2-ten Iterierten bei a=3.
• x2 = 1a (−1 −
√1 + a) .
Dieser Fixpunkt ist wegen trMx∗
2= 2 + 2
√1 + a > 2 fur alle a > −1
instabil.
Es kommt erneut zu einer Periodenver-2k+1-fachung bei dem Wert ak. Auchbei dieser zweidimensionalen Abbildung streben die ak einen Grenzwert an undbesitzen ein charakteristisches Skalenverhalten (nach Bountis 1981):
k 1 2 3 4 . . .ak 3 4 4.12045 . . . 4.13436 . . . . . .
limk→∞
ak = a∞ = 4.1361667 . . . (257)
limk→∞
(ak−2 − ak−1
ak−1 − ak
)= δ = 8.72109720 . . . (258)
70

Beim Skalenverhalten der Fixpunktabstande von einer Symmetrielinie muss zwi-schen den beiden Koordinaten x und y unterschieden werden; die Selbstahn-lichkeit der Verzweigungsdiagramme in den entsprechenden Poincare-Schnitten(y = 0 resp. x = 0) kann durch zwei Skalierungskonstanten α und β erfasstwerden:
• Progression der Abstande von x∗k von der Symmetrieline x = 0:
α = −4.0180767 ,
• Progression der Abstande von y∗k von der Symmetrinie y = 0:
β = 16.3638 .
Diese Konstanten sind wiederum universell fur eine ganze Reihe von quadrati-schen Abbildungen von der Form (de Vogelaere map)
xn+1 = −yn + f(xn) ,
yn+1 = xn − f(xn + 1) ,
f(x) = px− (1 − p)x2. (259)
Diese flachenerhaltende Abbildung wurde von Greene et al. (1981) studiert undergab dieselben Konstanten α, β und δ wie das flachenerhaltende Henon-Map.
Diese Beispiele von flachenerhaltenden zweidimensionalen logistischen Ab-bildungen illustrieren den wichtigsten Weg zum Chaos, der auch in Hamilton-schen Systemen aufzufinden ist. Bei Variation eines Systemparameters (beliebi-ger Parameter des Potentials, auch die Energie oder die Starke eines außeren an-gelegten Feldes) geschieht eine Kaskade von aufeinanderfolgenden Bifurkationen,wobei eine unendliche Zahl von neuen periodischen Bahnen (mit entsprechen-den Fixpunkten) ensteht. Einige davon sind unmittelbar nach der Bifurkationstabil, werden dann aber spater auch wieder instabil in Verbindung mit neu-en Bifurkationen. Dieser Prozess kann sich ad libitum wiederholen, wobei mehrund mehr instabile Bahnen entstehen und damit mehr und mehr Irregularitatin die Dynamik gelangt. Im sog. “generischen” Fall (ohne diskrete Symmetrieder Hamilton-Funktion) sind die Pitchfork-Bifurkationen periodenverdoppelnd.Bei Vorliegen von diskreten Symmetrien (wozu auch die Zeitumkehr-Symmetriezahlt) konnen sie aber auch “isochron” sein, d.h. die neuen Bahnen haben un-gefahr (am Bifurkationspunkt genau) dieselbe Periode wie die ursprunglicheBahn. Auch treten dann andere Formen von Bifurkationen auf. Diese werdenim folgenden Kapitel ausfuhrlicher besprochen und klassifiziert.
71

10 Bifurkationen
Wir haben im obigen Kapitel bereits zwei Typen von Bifurkationen kennen-gelernt. Hier wollen wir uns noch ausfuhrlicher mit Bifurkationen beschaftigen.Wir besprechen zunachst ein typisches Beispiel fur die sogenannte parametrischeResonanz, die zu Bifurkationen fuhrt. Danach gehen wir naher auf Bifurkationenin Hamiltonschen Systemen ein.
10.1 Parametrische Resonanz
Eine weit verbreitete Klasse von Phanomenen, bei denen Bifurkationen auf-treten, werden unter dem Begriff der parametrischen Resonanz zusammenge-fasst. Im Allgemeinen handelt es sich dabei um Systeme, die durch eine peri-odisch zeitabhangige außere Storung angetrieben werden. Wenn die Periode derStorung mit einer der Perioden des ungestorten Systems zusammenfallt, trittResonanz auf (siehe die Storungstheorie in Kap. 11) und dabei kann es zu ei-ner Bifurkation der entsprechenden periodischen Bahn kommen. Im Folgendenbesprechen wir ausfuhrlich das Beispiel des gleichformig rotierenden mathema-tischen Pendels. Andere Beispiele fur parametrische Resonanz sind:
• Pendel mit oszillierendem Aufhangepunkt. Dabei kann der instabile Fix-punkt bei φ = ±π (vgl. Abschn. 4.3) stabil werden!
• Pendel mit oszillierender Lange. Eine praktische Realisierung davon istdas Schaukeln: jedes Kind lernt intuitiv, durch periodisches Strecken undAnziehen der Beine Resonanz zu erzeugen.
• Der periodisch getriebene Oszillator:
x(t) = −ω2(t)x(t) , (260)
wobei ω(t) eine periodische Funktion ist und wiederum von einem außerenAntrieb kommen kann.
• Die Gleichung (260) erscheint aber auch in einem autonomen Hamilton-schen System, wenn man die Bewegungsgleichungen entlang einer periodi-schen Bahn linearisiert (vgl. Abschn. 7.5.2) und kleine Storungen senkrechtdazu (hier: in x-Richtung) studiert. In diesem Zusammenhang heißt (260)auch die Hill-Gleichung, benannt nach G. W. Hill, der sie bei seinem Stu-dium der Mondbahn um die Erde unter dem Einfluss der Storung durchdie Sonne herleitete [14] (s.a. [4], Abschn. 5.6). In Abschn. 10.2.1 werdenwir uns ausfuhrlicher mit der Hill-Gleichung beschaftigen.
10.1.1 Das gleichformig rotierende mathematische Pendel
Dieses kann z.B. so realisiert werden, dass eine punktformige Perle der Masse mreibungslos entlang einer vertikal montierten kreisformigen Drahtschleife (mas-selos, Radius l) gleiten kann und dabei dem Gravitationsfeld der Erde ausgesetztist. Zusatzlich laßt man nun aber die Drahtschleife um die Vertikale (z-Achse)mit einer konstanten Kreisfrequenz ω rotieren. Die Koordinaten des Massepunk-tes wollen wir in dreidimensionalen Polarkoordinaten (r, θ, φ) ausdrucken. Dabeihat die Variable r den konstanten Wert r = l des Schleifenradius, und der Azi-muthwinkel φ ist linear in der Zeit: φ = ωt mit der konstanten Winkelgeschwin-
72

digkeit φ = ω. Die Koordinaten der Perle lauten also:
x = l sin θ cos(ωt) , y = l sin θ sin(ωt) , z = l cos θ . (261)
In der rotierenden (!) (x, y)-Ebene haben wir also ein normales zweidimensiona-les mathematisches Pendel vorliegen, das wir in Abschn. 4.3 behandelt haben.(Der dortige Winkel φ entspricht hier θ.)
Die Lagrange-Funktion berechnet sich nun leicht zu
L(θ, θ) = T − V =m
2l2(θ2 + ω2 sin2 θ
)+mgl cos θ , (262)
woraus wir die Bewegungsgleichung finden:
θ = −gl
sin θ + ω2 sin θ cos θ . (263)
Man beachte, dass die zeitabhangige Zwangsbedingung φ = ωt das System nicht-Hamiltonsch macht (trotz ∂L/∂t = 0!). Wurde man das Pendel frei um die z-Achse rotieren lassen, dann erhielte man das integrable Hamiltonsche Systemdes mathematischen Kugelpendels. Dabei sind aber θ(t) und φ(t) gekoppelt undφ ist i.A. nicht konstant!
Fur ω = 0 ist (263) naturlich die alte Pendelgleichung (57); der neue Termauf der rechten Seite kommt vom außeren Antrieb her (Rotation der Draht-schleife). Wir konnen die Gleichung (263) auch als Newtongleichung mit einemeffektiven Potential schreiben:
θ = − 1
ml2d
dθVeff (θ) = −g
lsin θ
(1 − ω2l
gcos θ
)(264)
mit
Veff (θ) = −mgl cos θ − m
2l2ω2 sin2 θ . (265)
Wenn man sich das Potential Veff (θ) aufzeichnet, sieht man leicht, dass es fur0 < ω2l < g nur ein Minimum bei θ = θ0 = 0 hat, was dem ublichen stabilenFixpunkt des Pendels entspricht. Fur ω2l > g hingegen entstehen zwei Minimabei θ = ±θ1 mit cos θ1 = g/ω2l, getrennt durch ein Maximum bei θ0 = 0. Bei derkritischen Frequenz ωcrit =
√g/l der Rotation geschieht also eine Bifurkation,
bei welcher der zunachst stabile Fixpunkt bei θ0 instabil wird und zwei neueStabile Fixpunkte bei ±θ1 entstehen:
0 1 2 3/ crit
-2
0
2
0
1
- 1
0
Dies ist genau das Diagramm einer Pitchfork-Bifurkation, wobei der instabil ge-wordene Fixpunkt gestrichelt gezeichnet ist. Im Unterschied zu den Pitchfork-Bifurkationen beim Feigenbaum-Szenario geschieht hier keine Periodenverdop-pelung; dies hangt an der Spiegelungssymmetrie des Potentials Veff (θ) umθ = 0.
73

Bemerkungen:
• Man beachte, dass die kritische Frequenz ωcrit =√g/l genau der Schwing-
ungsfrequenz des ungestorten (d.h. nicht rotierenden) Pendels bei kleinenAuslenkungen entspricht.
• Dass dieses System nicht Hamiltonsch ist, erkennt man auch daran, dass
H(θ, pθ) = pθ θ − L(θ, θ) 6= T + V
gilt. Die Energie des außeren Antriebs, d.h. die Rotationsenergie des Mas-senpunkts um die z-Achse, ist zeitlich nicht konstant, da sein Tragheits-moment mit sin2 θ(t) variiert!
• Das System kann aber auf ein Hamiltonsches System abgebildet werden,wenn man schreibt:
H = pθ θ − L = Heff (θ, pθ) =p2
θ
2ml2+ Veff (θ, ω) (266)
(Dabei ist p2θ/2ml
2 aber nicht die gesamte kinetische Energie des Massen-punktes im rotierenden Pendel!)Das System Heff in (266) beschreibt einen Massepunkt auf einer (ru-henden!) Kreisbahn mit festem Radius l im Potential (265), das von demzusatzlichen Parameter ω abhangt. Bei Variation dieses Parameters kommtes zur Bifurkation am kritischen Wert ωcrit. Damit ist ein Beispiel fur einHamiltonsches System gegeben, bei dem die Variation eines Parameterszu einer Bifurkation fuhrt.
10.2 Bifurkationen in Hamiltonschen Systemen
Wir betrachten nun periodische Bahnen in einem Hamiltonschen System beiVariation eines kontinuierlichen Parameters α. Dieser kann z.B. die Energie,eine Deformation des Potentials oder auch ein außeres Magnetfeld B sein. Beieiner Anderung des Parameters α kann sich im Allgemeinen die Stabilitat einerperiodischen Bahn andern. Es gilt der folgende
Satz: Wenn fur eine isolierte Bahn ein Paar oder mehrere Paare von Eigen-werten der Stabilitatsmatrix M an der Stelle α = αb den Wert +1 annehmen,dann geschieht bei αb eine Bifurkation. Dabei entstehen oder verschwinden eineoder mehrere (neue) periodische Bahnen. In einem zweidimensionalen System
ist dann tr M(αb) = +2.
Anstelle eines generellen Beweises wollen wir diese Situation am Beispiel dergradliningen A-Bahn im Henon-Heiles-System diskutieren.
10.2.1 Beispiel der Hill-Gleichung fur eine gradlinige Libration
Wir betrachten die in Abschnitt 7.3.4 besprochene Bahn A im Henon-Heiles(HH)-Potential, die entlang der y-Achse oszilliert. Fur m = ε = 1 lauten dieBewegungsgleichungen fur das Potential (177) in der Newtonschen Form:
x+ (1 + 2y)x = 0 , y + y − y2 + x2 = 0 . (267)
74
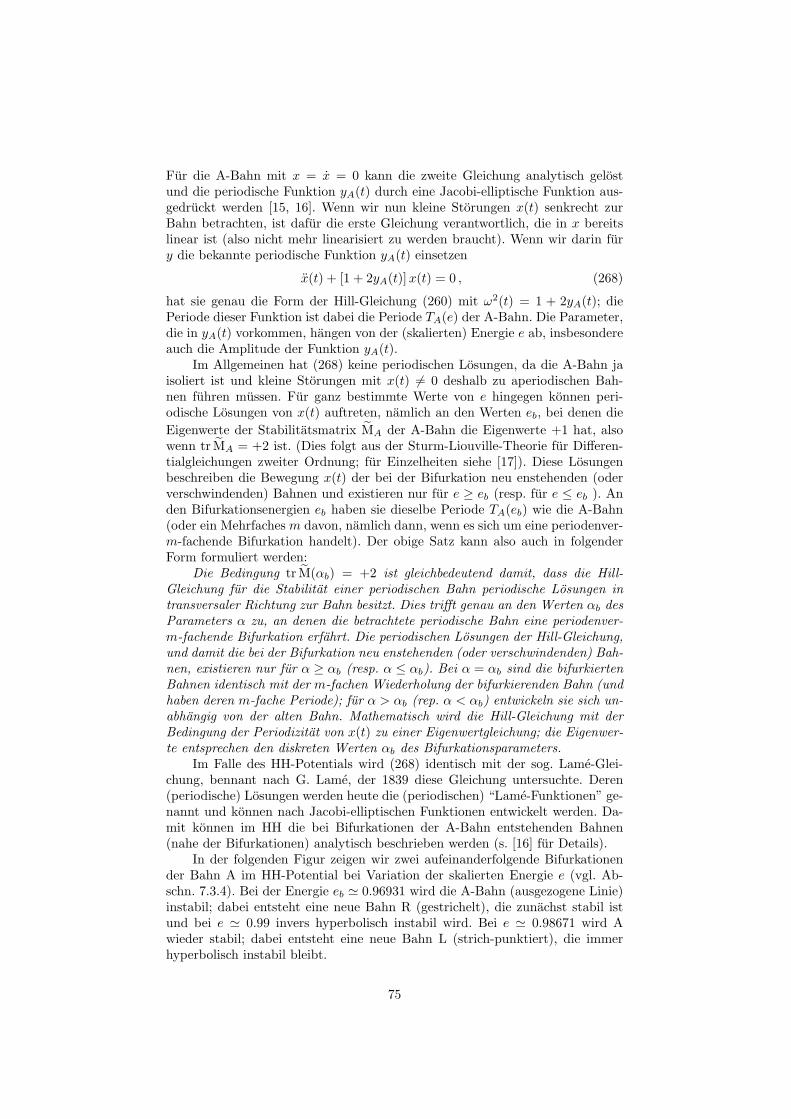
Fur die A-Bahn mit x = x = 0 kann die zweite Gleichung analytisch gelostund die periodische Funktion yA(t) durch eine Jacobi-elliptische Funktion aus-gedruckt werden [15, 16]. Wenn wir nun kleine Storungen x(t) senkrecht zurBahn betrachten, ist dafur die erste Gleichung verantwortlich, die in x bereitslinear ist (also nicht mehr linearisiert zu werden braucht). Wenn wir darin fury die bekannte periodische Funktion yA(t) einsetzen
x(t) + [1 + 2yA(t)]x(t) = 0 , (268)
hat sie genau die Form der Hill-Gleichung (260) mit ω2(t) = 1 + 2yA(t); diePeriode dieser Funktion ist dabei die Periode TA(e) der A-Bahn. Die Parameter,die in yA(t) vorkommen, hangen von der (skalierten) Energie e ab, insbesondereauch die Amplitude der Funktion yA(t).
Im Allgemeinen hat (268) keine periodischen Losungen, da die A-Bahn jaisoliert ist und kleine Storungen mit x(t) 6= 0 deshalb zu aperiodischen Bah-nen fuhren mussen. Fur ganz bestimmte Werte von e hingegen konnen peri-odische Losungen von x(t) auftreten, namlich an den Werten eb, bei denen die
Eigenwerte der Stabilitatsmatrix MA der A-Bahn die Eigenwerte +1 hat, alsowenn tr MA = +2 ist. (Dies folgt aus der Sturm-Liouville-Theorie fur Differen-tialgleichungen zweiter Ordnung; fur Einzelheiten siehe [17]). Diese Losungenbeschreiben die Bewegung x(t) der bei der Bifurkation neu enstehenden (oderverschwindenden) Bahnen und existieren nur fur e ≥ eb (resp. fur e ≤ eb ). Anden Bifurkationsenergien eb haben sie dieselbe Periode TA(eb) wie die A-Bahn(oder ein Mehrfaches m davon, namlich dann, wenn es sich um eine periodenver-m-fachende Bifurkation handelt). Der obige Satz kann also auch in folgenderForm formuliert werden:
Die Bedingung tr M(αb) = +2 ist gleichbedeutend damit, dass die Hill-Gleichung fur die Stabilitat einer periodischen Bahn periodische Losungen intransversaler Richtung zur Bahn besitzt. Dies trifft genau an den Werten αb desParameters α zu, an denen die betrachtete periodische Bahn eine periodenver-m-fachende Bifurkation erfahrt. Die periodischen Losungen der Hill-Gleichung,und damit die bei der Bifurkation neu enstehenden (oder verschwindenden) Bah-nen, existieren nur fur α ≥ αb (resp. α ≤ αb). Bei α = αb sind die bifurkiertenBahnen identisch mit der m-fachen Wiederholung der bifurkierenden Bahn (undhaben deren m-fache Periode); fur α > αb (rep. α < αb) entwickeln sie sich un-abhangig von der alten Bahn. Mathematisch wird die Hill-Gleichung mit derBedingung der Periodizitat von x(t) zu einer Eigenwertgleichung; die Eigenwer-te entsprechen den diskreten Werten αb des Bifurkationsparameters.
Im Falle des HH-Potentials wird (268) identisch mit der sog. Lame-Glei-chung, bennant nach G. Lame, der 1839 diese Gleichung untersuchte. Deren(periodische) Losungen werden heute die (periodischen) “Lame-Funktionen” ge-nannt und konnen nach Jacobi-elliptischen Funktionen entwickelt werden. Da-mit konnen im HH die bei Bifurkationen der A-Bahn entstehenden Bahnen(nahe der Bifurkationen) analytisch beschrieben werden (s. [16] fur Details).
In der folgenden Figur zeigen wir zwei aufeinanderfolgende Bifurkationender Bahn A im HH-Potential bei Variation der skalierten Energie e (vgl. Ab-schn. 7.3.4). Bei der Energie eb ≃ 0.96931 wird die A-Bahn (ausgezogene Linie)instabil; dabei entsteht eine neue Bahn R (gestrichelt), die zunachst stabil istund bei e ≃ 0.99 invers hyperbolisch instabil wird. Bei e ≃ 0.98671 wird Awieder stabil; dabei entsteht eine neue Bahn L (strich-punktiert), die immerhyperbolisch instabil bleibt.
75
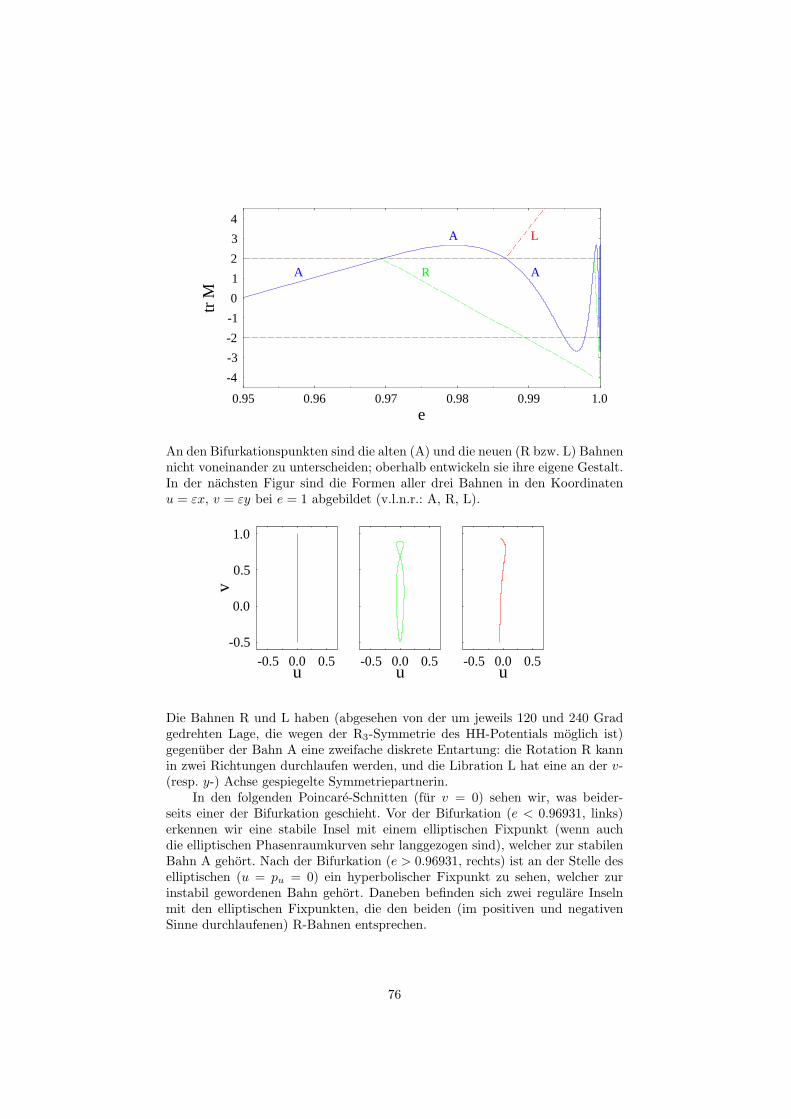
0.95 0.96 0.97 0.98 0.99 1.0e
-4
-3
-2
-1
0
1
2
3
4tr
M
A A
A
R
L
An den Bifurkationspunkten sind die alten (A) und die neuen (R bzw. L) Bahnennicht voneinander zu unterscheiden; oberhalb entwickeln sie ihre eigene Gestalt.In der nachsten Figur sind die Formen aller drei Bahnen in den Koordinatenu = εx, v = εy bei e = 1 abgebildet (v.l.n.r.: A, R, L).
-0.5 0.0 0.5u
-0.5
0.0
0.5
1.0
v
-0.5 0.0 0.5u
-0.5 0.0 0.5u
Die Bahnen R und L haben (abgesehen von der um jeweils 120 und 240 Gradgedrehten Lage, die wegen der R3-Symmetrie des HH-Potentials moglich ist)gegenuber der Bahn A eine zweifache diskrete Entartung: die Rotation R kannin zwei Richtungen durchlaufen werden, und die Libration L hat eine an der v-(resp. y-) Achse gespiegelte Symmetriepartnerin.
In den folgenden Poincare-Schnitten (fur v = 0) sehen wir, was beider-seits einer der Bifurkation geschieht. Vor der Bifurkation (e < 0.96931, links)erkennen wir eine stabile Insel mit einem elliptischen Fixpunkt (wenn auchdie elliptischen Phasenraumkurven sehr langgezogen sind), welcher zur stabilenBahn A gehort. Nach der Bifurkation (e > 0.96931, rechts) ist an der Stelle deselliptischen (u = pu = 0) ein hyperbolischer Fixpunkt zu sehen, welcher zurinstabil gewordenen Bahn gehort. Daneben befinden sich zwei regulare Inselnmit den elliptischen Fixpunkten, die den beiden (im positiven und negativenSinne durchlaufenen) R-Bahnen entsprechen.
76
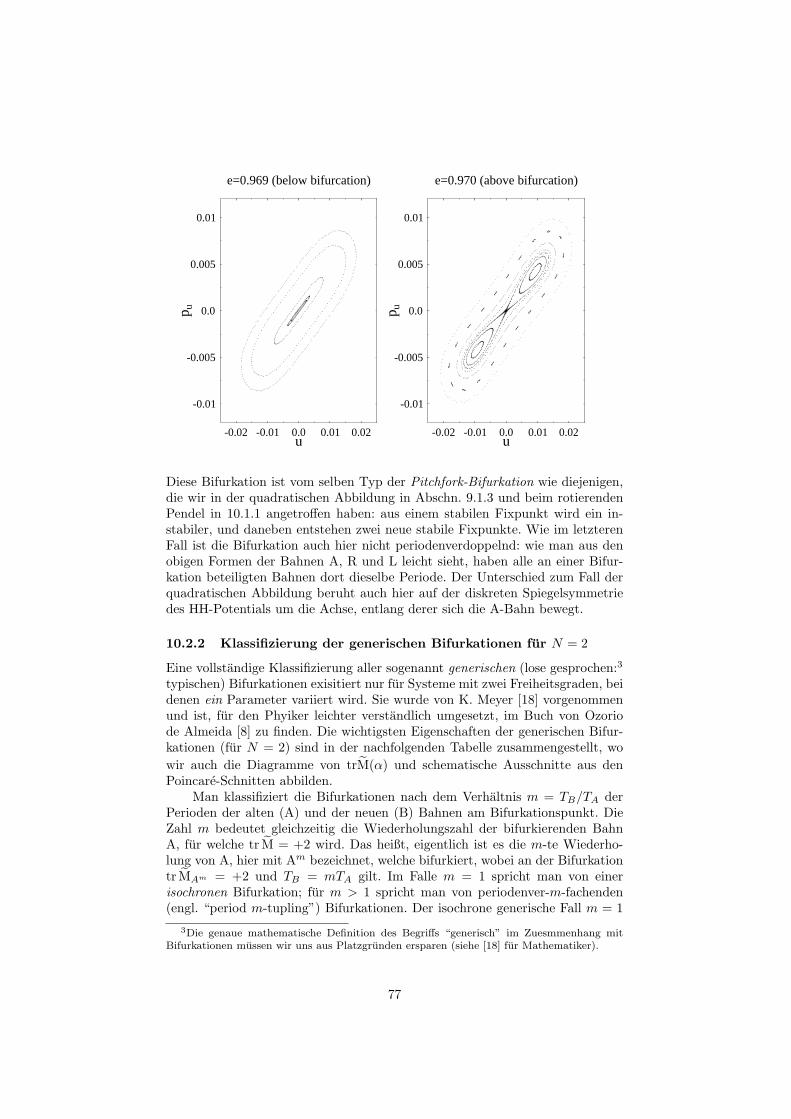
-0.02 -0.01 0.0 0.01 0.02u
-0.01
-0.005
0.0
0.005
0.01
p u
e=0.970 (above bifurcation)
............
..
.
.
.
.
.. .
.
.
.
.
.................
.... . .
..
.
.
.
.
.
...
.
.
.
.
..
..
....................
..
.
.
.
.
.. .
.
.
.
.
.
..................
. .. .
..
..
.
.
.
...
.
.
.
.
.
..
.....................
..
.
.
.
.
.. .
.
.
.
.
.
..........................
..
..
.
.
.
.. .
.
.
.
.
.
...........
.... . .
..
.
.
.
.
.
...
.
.
.
.
..
..
.............
..
..
.
.
.
.
.. .
.
.
.
.
...........
.... . .
..
..
.
.
.
...
.
.
.
.
.
..
..
..............
..
.
.
.
.
.. .
.
.
.
.
.
...........
... . .
..
..
.
.
.
.
...
.
.
.
.
..
..
..............
..
.
.
.
.
.
. ..
.
.
.
.
...........
.... . .
..
.
.
.
.
.
...
.
.
.
.
.
..
..
.............
..
.
.
.
.
.
.. .
.
.
.
.
.....................
..
.
.
.
.
.. .
.
.
.
.
.................................
..... .
. ..
..
.
.
.
.
...
.
.
.
.
..
..
.....................................
..
.
.
.
.
.
.. .
.
.
.
.
.................................
..... .
. ..
..
.
.
.
.
...
.
.
.
.
..
..
.....................................
..
.
.
.
.
.
.. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
......
..
...... . . .
.......
..
...... . .
........
..
..... . . .
........
....... . .
.....
...
..
..... . .........
..
...... .
........
..
...... .
.........
..
...... .. .
......
..
...... .
. .....
.... . .
...........
..... . .
..........
..
... . . ...........
..... . . .
.........
..
... . .
..........
..
.... . .
.........
..
..... .
..........
..
.... . .
.........
...
... . ...........
..... . .
..
.
..
...
..
.
..
..... . .
..
.
.
.
...
..
.
..
..... . . .
..
.
.
.
...
.
.
.
..
.... . .
..
..
.
.
...
.
.
.
.
...... . .
..
.
.
.
...
..
.
.
..
.... . . .
..
.
.
.
...
.
.
.
..
.... . . .
..
.
.
..
...
.
.
..
..... . .
..
.
.
.
....
.
.
.
..
.... . .
..
.
.
.
.
...
.
.
.
.
...... . .
..
.
.
..
...
.
.
..
..... . .
..
.
.......
..
.
..
.. .
..
.
.........
..
.
.
.
.. .
..
.
......
.....
.
.
.
.
.. .
.
.
.
........
..
..
.
.
.. .
.
.
.
.
........
..
.
.
.
.. .
..
.
.
.....
.....
.
.
.
.
.. .
.
.
.
.........
..
.
.
... .
..
.
.........
..
.
.
.
.. . .
.
.
.
........
..
.
.
.
.
.. .
.
.
.
.
........
..
.
.
... .
..
.
.........
..
.
.
.
..
..
.
.
.
.
.
.. .
.
.
.
.
.
..
..
..
.
.
.
.
.
..
.
.
.
.
.
.
..
..
..
.
.
.
.
.
..
.
.
.
.
.
.
..
..
..
.
.
.
.
.
...
.
.
.
.
.
..
..
..
.
.
.
.
.
. ..
.
.
.
.
.
..
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
..
.
.
.
.
.
.
.. .
.
.
.
.
.
.
..
..
.
.
.
.
.
.
...
.
.
.
.
.
..
..
..
.
.
.
.
.
. ..
.
.
.
.
.
..
..
..
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
..
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
-0.02 -0.01 0.0 0.01 0.02u
-0.01
-0.005
0.0
0.005
0.01
p ue=0.969 (below bifurcation)
.......................................................................................................................
..
..
..
.... . .
..
..
..
..
..
.......
..
..
..
..
..
..
.... . .
..
..
..
..
..
.......
..
..
..
..
..
..
... . .
..
..
..
..
..
.......
..
..
..
..
..
..
.... . .
..
..
..
..
..
.......
..
..
..
..
..
..
... . .
.
.................................
......
......
...........................................................
.........
......
.....................................
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
..
Diese Bifurkation ist vom selben Typ der Pitchfork-Bifurkation wie diejenigen,die wir in der quadratischen Abbildung in Abschn. 9.1.3 und beim rotierendenPendel in 10.1.1 angetroffen haben: aus einem stabilen Fixpunkt wird ein in-stabiler, und daneben entstehen zwei neue stabile Fixpunkte. Wie im letzterenFall ist die Bifurkation auch hier nicht periodenverdoppelnd: wie man aus denobigen Formen der Bahnen A, R und L leicht sieht, haben alle an einer Bifur-kation beteiligten Bahnen dort dieselbe Periode. Der Unterschied zum Fall derquadratischen Abbildung beruht auch hier auf der diskreten Spiegelsymmetriedes HH-Potentials um die Achse, entlang derer sich die A-Bahn bewegt.
10.2.2 Klassifizierung der generischen Bifurkationen fur N = 2
Eine vollstandige Klassifizierung aller sogenannt generischen (lose gesprochen:3
typischen) Bifurkationen exisitiert nur fur Systeme mit zwei Freiheitsgraden, beidenen ein Parameter variiert wird. Sie wurde von K. Meyer [18] vorgenommenund ist, fur den Phyiker leichter verstandlich umgesetzt, im Buch von Ozoriode Almeida [8] zu finden. Die wichtigsten Eigenschaften der generischen Bifur-kationen (fur N = 2) sind in der nachfolgenden Tabelle zusammengestellt, wo
wir auch die Diagramme von trM(α) und schematische Ausschnitte aus denPoincare-Schnitten abbilden.
Man klassifiziert die Bifurkationen nach dem Verhaltnis m = TB/TA derPerioden der alten (A) und der neuen (B) Bahnen am Bifurkationspunkt. DieZahl m bedeutet gleichzeitig die Wiederholungszahl der bifurkierenden BahnA, fur welche tr M = +2 wird. Das heißt, eigentlich ist es die m-te Wiederho-lung von A, hier mit Am bezeichnet, welche bifurkiert, wobei an der Bifurkationtr MAm = +2 und TB = mTA gilt. Im Falle m = 1 spricht man von einerisochronen Bifurkation; fur m > 1 spricht man von periodenver-m-fachenden(engl. “period m-tupling”) Bifurkationen. Der isochrone generische Fall m = 1
3Die genaue mathematische Definition des Begriffs “generisch” im Zuesmmenhang mitBifurkationen mussen wir uns aus Platzgrunden ersparen (siehe [18] fur Mathematiker).
77
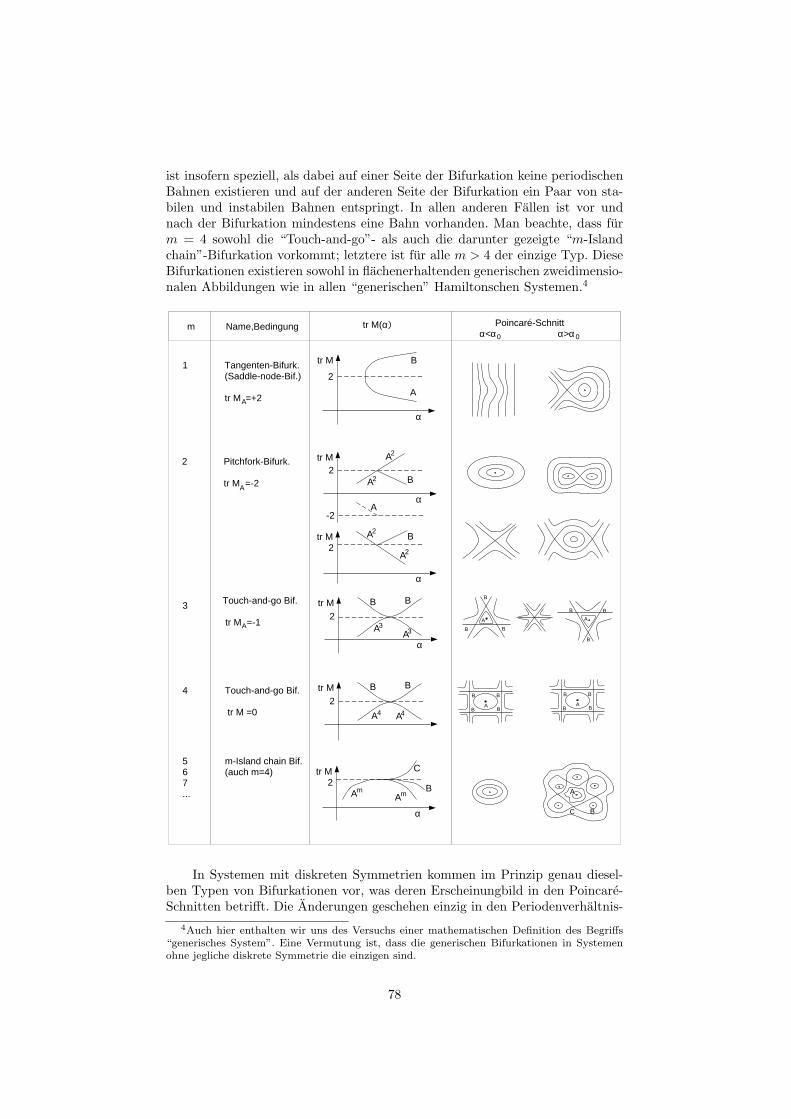
ist insofern speziell, als dabei auf einer Seite der Bifurkation keine periodischenBahnen existieren und auf der anderen Seite der Bifurkation ein Paar von sta-bilen und instabilen Bahnen entspringt. In allen anderen Fallen ist vor undnach der Bifurkation mindestens eine Bahn vorhanden. Man beachte, dass furm = 4 sowohl die “Touch-and-go”- als auch die darunter gezeigte “m-Islandchain”-Bifurkation vorkommt; letztere ist fur alle m > 4 der einzige Typ. DieseBifurkationen existieren sowohl in flachenerhaltenden generischen zweidimensio-nalen Abbildungen wie in allen “generischen” Hamiltonschen Systemen.4
m Name,Bedingung tr M(α)0 0
1 Tangenten-Bifurk. (Saddle-node-Bif.)
tr M =+2 A
tr M
α
2
tr M
α
2
A
B
Poincare-Schnittα<α α>α
2 Pitchfork-Bifurk.
tr M =-2A
tr M
α
2
-2A
A2
A2
B
tr M
α
2B
A2
A2
3 Touch-and-go Bif.
tr M =-1 A
α
tr M2
B B
A
B
BB
B
B
B
A
4 Touch-and-go Bif.
tr M =0
tr M2
B B
A3A3
A A4 4
B
B
B
BA
B
B
B
BA
567...
m-Island chain Bif.(auch m=4)
AmAm
B
C
A
BC
In Systemen mit diskreten Symmetrien kommen im Prinzip genau diesel-ben Typen von Bifurkationen vor, was deren Erscheinungbild in den Poincare-Schnitten betrifft. Die Anderungen geschehen einzig in den Periodenverhaltnis-
4Auch hier enthalten wir uns des Versuchs einer mathematischen Definition des Begriffs“generisches System”. Eine Vermutung ist, dass die generischen Bifurkationen in Systemenohne jegliche diskrete Symmetrie die einzigen sind.
78
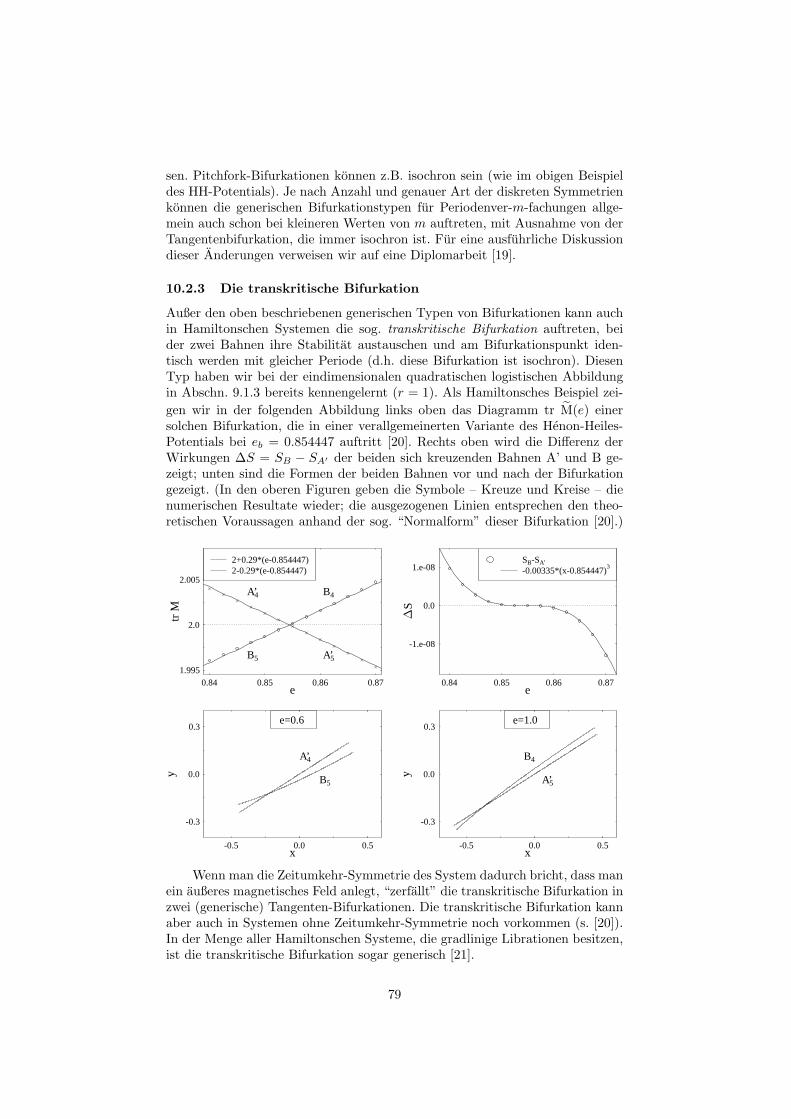
sen. Pitchfork-Bifurkationen konnen z.B. isochron sein (wie im obigen Beispieldes HH-Potentials). Je nach Anzahl und genauer Art der diskreten Symmetrienkonnen die generischen Bifurkationstypen fur Periodenver-m-fachungen allge-mein auch schon bei kleineren Werten von m auftreten, mit Ausnahme von derTangentenbifurkation, die immer isochron ist. Fur eine ausfuhrliche Diskussiondieser Anderungen verweisen wir auf eine Diplomarbeit [19].
10.2.3 Die transkritische Bifurkation
Außer den oben beschriebenen generischen Typen von Bifurkationen kann auchin Hamiltonschen Systemen die sog. transkritische Bifurkation auftreten, beider zwei Bahnen ihre Stabilitat austauschen und am Bifurkationspunkt iden-tisch werden mit gleicher Periode (d.h. diese Bifurkation ist isochron). DiesenTyp haben wir bei der eindimensionalen quadratischen logistischen Abbildungin Abschn. 9.1.3 bereits kennengelernt (r = 1). Als Hamiltonsches Beispiel zei-
gen wir in der folgenden Abbildung links oben das Diagramm tr M(e) einersolchen Bifurkation, die in einer verallgemeinerten Variante des Henon-Heiles-Potentials bei eb = 0.854447 auftritt [20]. Rechts oben wird die Differenz derWirkungen ∆S = SB − SA′ der beiden sich kreuzenden Bahnen A’ und B ge-zeigt; unten sind die Formen der beiden Bahnen vor und nach der Bifurkationgezeigt. (In den oberen Figuren geben die Symbole – Kreuze und Kreise – dienumerischen Resultate wieder; die ausgezogenen Linien entsprechen den theo-retischen Voraussagen anhand der sog. “Normalform” dieser Bifurkation [20].)
0.84 0.85 0.86 0.87e
1.995
2.0
2.005
trM
2-0.29*(e-0.854447)2+0.29*(e-0.854447)
0.84 0.85 0.86 0.87e
-1.e-08
0.0
1.e-08
S
-0.00335*(x-0.854447)3
SB-SA’
-0.5 0.0 0.5x
-0.3
0.0
0.3
y
-0.5 0.0 0.5x
-0.3
0.0
0.3
y
A’4
B5
B4
A’5
e=0.6 e=1.0
A’4
B5 A’5
B4
Wenn man die Zeitumkehr-Symmetrie des System dadurch bricht, dass manein außeres magnetisches Feld anlegt, “zerfallt” die transkritische Bifurkation inzwei (generische) Tangenten-Bifurkationen. Die transkritische Bifurkation kannaber auch in Systemen ohne Zeitumkehr-Symmetrie noch vorkommen (s. [20]).In der Menge aller Hamiltonschen Systeme, die gradlinige Librationen besitzen,ist die transkritische Bifurkation sogar generisch [21].
79
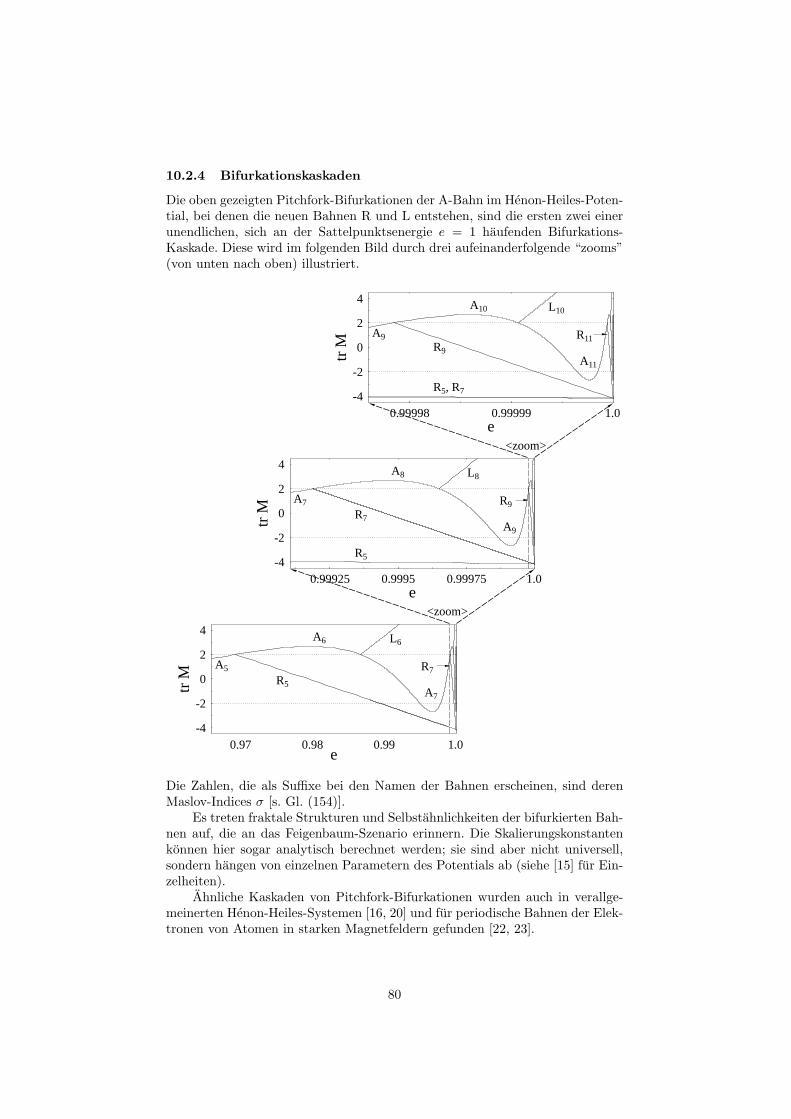
10.2.4 Bifurkationskaskaden
Die oben gezeigten Pitchfork-Bifurkationen der A-Bahn im Henon-Heiles-Poten-tial, bei denen die neuen Bahnen R und L entstehen, sind die ersten zwei einerunendlichen, sich an der Sattelpunktsenergie e = 1 haufenden Bifurkations-Kaskade. Diese wird im folgenden Bild durch drei aufeinanderfolgende “zooms”(von unten nach oben) illustriert.
0.99998 0.99999 1.0e
-4
-2
0
2
4
trM
0.99925 0.9995 0.99975 1.0e
-4
-2
0
2
4
trM
0.97 0.98 0.99 1.0e
-4
-2
0
2
4
trM
A6
A8
A10
R5
R7
R9
R5
R5, R7
L6
L8
L10
R7
R9
R11
A7
A9
A11
A5
A7
A9
<zoom>
<zoom>
Die Zahlen, die als Suffixe bei den Namen der Bahnen erscheinen, sind derenMaslov-Indices σ [s. Gl. (154)].
Es treten fraktale Strukturen und Selbstahnlichkeiten der bifurkierten Bah-nen auf, die an das Feigenbaum-Szenario erinnern. Die Skalierungskonstantenkonnen hier sogar analytisch berechnet werden; sie sind aber nicht universell,sondern hangen von einzelnen Parametern des Potentials ab (siehe [15] fur Ein-zelheiten).
Ahnliche Kaskaden von Pitchfork-Bifurkationen wurden auch in verallge-meinerten Henon-Heiles-Systemen [16, 20] und fur periodische Bahnen der Elek-tronen von Atomen in starken Magnetfeldern gefunden [22, 23].
80

11 Storungstheorie
Im Folgenden betrachten wir das System
H(q,p) = H0(q,p) + ǫH1(q,p) , (269)
wobei H0 integrabel und ǫ ≪ 1 eine dimensionslose Zahl sein soll. Die Losungq(t) von H0 sei als bekannt vorausgesetzt, gesucht wird eine genaherte Losungdes gestorten Systems in der Form einer Potenzreihe in ǫ:
q(t) = q0(t) + ǫq1(t) + ǫ2q2(t) + . . . (270)
Wir werden im Folgenden zuerst die elementare Form und dann die kanonischeForm der Storungstheorie behandeln.
11.1 Elementare Storungstheorie
Obiger Ansatz (270) wird in die Hamilton-Gleichungen eigesetzt und anschlies-send Ordnung fur Ordnung fur wachsende Potenzen von ǫ sukzessive gelost.Wir illustrieren zuerst die elementare Storungsreihe anhand des Beispiels dereindimensionalen Differentialgleichung
x(t) = x+ ǫ x2 (271)
mit der Anfangsbedingung x(0) = A. Wir erhalten
O(ǫ0) : x0 = x0 → x0(t) = Aet
O(ǫ1) : x1 = x1 + x20 =
= x1 +A2e2t → x1(t) = A2et(et − 1)
etc. (272)
so dass wir schließlich bis zur Ordnung ǫ2 zum folgenden Resultat kommen:
x(t) = Aet[1 + ǫA(et − 1) + ǫ2A2(et − 1)2 + . . .
]. (273)
Diese Losung kann nun verglichen werden mit der exakten Losung, die durch die“linearisierende Substitution” x = 1/y, x = −y/y2 explizit gewonnen werdenkann.5 Die damit erhaltene Differentialgleichung fur y(t) ist namlich linear: y =−y+ ǫ und kann elementar gelost werden. Zuruckubersetzt auf das alte Systemergibt sich dabei
x(t) =Aet
1 − ǫA(et − 1)(274)
mit konvergenten Losungen fur t < tC = ln[(1 + ǫA)/ǫA]. Entwickelt man dieexakte Losung (274), ergibt sich obige Entwicklung (273).
Ein Problem, das bei der Storungstheorie auftritt, ist aber das der Reso-nanznenner. Dies soll im folgenden Beispiel veranschaulicht werden. Wir losenfolgende Gleichung:
x+ ω20x = ǫ x3. (275)
5Mit diesem Verfahren kann allgemein die Bernoullische Differentialgleichung x = x+ ǫxα
gelost werden!
81

Entwicklung nach Potenzen von ǫ ergibt in diesem Fall:
O(ǫ0) : x+ ω20x = 0
→ x0(t) = A cos(ω0t) ,
O(ǫ1) : x1 + ω20x1 = A3 cos3(ω0t) =
A3
4[cos(3ω0t) + 3 cos(ω0t)]
→ x1(t) = A1 cos(ω0t) +B1 sin(ω0t)
− A3
32ω20
cos(3ω0t) +3A3
8t sin(ω0t) . (276)
Der letzte Term ist nicht beschrankt und divergiert fur t → ∞. Die Ursachedafur liegt an der Tatsache, dass der treibende inhomogene Term fur die DGder Ordnung O(ǫ1) in Resonanz mit der Eigenfrequenz ω0 liegt. Eine Losungdieses Problems wurde u.a. von Poincare (1892) vorgeschlagen. Die Idee bestehtdarin, sowohl die Losung x(t) als auch die Frequenz ω in eine Potenzreihe zuentwickeln:
x(t) = x0(t) + ǫ x1(t) + ǫ2x2(t) + . . .
ω = ω0 + ǫ ω1 + ǫ2ω2 + . . . (277)
Damit ergibt sich
d2
dt2x = ω2 d2
d(ωt)2x =: ω2x′′(ωt) = (ω0 + ǫ ω1 + . . . )2[x′′0(ωt) + ǫ x′′1(ωt) + . . . ] .
(278)Bei der Entwicklung nach ǫ
O(ǫ0) : x0 = A cos(ω0t) , ω = ω0
O(ǫ1) : ω20(x′′1 + x1) =
1
4A3 cos(3ω0t)
+2Aω0ω1 cos(ω0t) +3
4A3 cos(ω0t) (279)
wahlt man nun ω1 so, dass die beiden Resonanzterme in (279) verschwinden,d.h. man setzt ω1 = −(3A2)/(8ω0). Die bis zur 1. Ordnung genaherte Losunghat dann die Form
x(t) = A cos(ω0t) + ǫ
[A1 cos(ω0t) +B1 sin(ω0t) −
A3
32ω20
cos(3ω0t)
](280)
und bleibt fur alle Zeiten t beschrankt.Dieses Verfahren kann in allen Ordnungen von ǫ fortgesetzt werden und
damit ist das Problem der Resonanzen beseitigt. Dies funktioniert aber bloß ineindimensionalen Systemen. Eine elegantere Form der Storungstheorie, bei derdie resonanten Nenner soweit wie moglich entfernt werden, wird im folgendenAbschnitt besprochen.
82

11.2 Kanonische Storungstheorie
11.2.1 Eindimensionaler Fall
Das Verfahren soll zunachst fur ein 1-dimensionales Problem erklart werden.Hier liegt immer ein integrables System vor und die Hamiltonfunktion kann inden Wirkungs-Winkel-Variablen (θ, I) so geschrieben werden, dass der Winkel θin H nicht auftaucht. Das ungestorte System besitzt die Bewegungsgleichungen
I = − ∂
∂θH0(I) = 0 ⇒ I = const. ,
θ =∂
∂IH0(I) = ω0(I) . (281)
Mit dem Reihenansatz
H(θ, I) = H0(I) + ǫH1(θ, I) + ǫ2H2(θ, I) + . . . (282)
erhalten wir fur das gestorte System die Gleichungen
I = − ∂
∂θH(θ, I) = − ǫ
∂H1
∂θ− ǫ2
∂H2
∂θ+ O(ǫ3) ,
θ =∂
∂IH(θ, I) = ω0(I) + ǫ
∂H1
∂I+ ǫ2
∂H2
∂I+ O(ǫ3) . (283)
Ziel ist es nun, eine kanonische Transformation vom Typ 2 fur den Ubergang vonden alten Variablen (θ, I) zu neuen Variablen (Φ, J) zu finden: F2(θ, J) = S(θ, J)mit I = ∂S(θ, J)/∂θ, Φ = ∂S(θ, J)/∂J , so dass die neue Hamiltonfunktion Knur noch eine Funktion der neuen Wirkung J wird. Da fur ein konservativesSystem die alte Funktion H und die neue Funktion K beide konstant und gleichder Energie E sind, folgt aus (282) die Jacobi-Gleichung
H(θ, I) = H0
(∂S
∂θ
)+ ǫH1
(θ,∂S
∂θ
)+ ǫ2H2
(θ,∂S
∂θ
)+ · · · = K(J) . (284)
Um sie zu losen, werden nun sowohl S als auch K(J) nach Potenzen von ǫentwickelt, wobei S0(θ, J) = J θ die Erzeugende der identischen TransformationJ = I, Φ = θ ist:
S(θ, J) = S0(θ, J) + ǫ S1(θ, J) + ǫ2S2(θ, J) + . . . ,
K(J) = K0(J) + ǫK1(J) + ǫ2K2(J) + . . . (285)
Setzt man dies in (284) ein, dann folgt:
H0
(∂
∂θ(S0 + ǫ S1 + . . . )
)+ ǫH1
(∂
∂θ(S0 + ǫ S1 + . . . )
)+ . . .
= H0(J) + ǫ
(∂S1
∂θ
∂H0
∂J+H1
)
+ǫ2
[1
2
(∂S1
∂θ
)2∂ 2H0
∂J2+∂S2
∂θ
∂H0
∂J+∂S1
∂θ
∂H1
∂J+H2
]+ . . .
= K0(J) + ǫK1(J) + ǫ2K2(J) + . . . (286)
83

In 0. Ordnung erhalten wir einfach J0 = I, Φ0 = θ, K0(J) = H0(I). In 1.Ordnung gilt es folgende Gleichung zu losen:
K1(J) = ω0(J)∂
∂θS1(θ, J) +H1(θ, J) . (287)
K1(J) darf aber nicht von θ abhangen! Wir konnen daher die rechte Seite derobigen Gleichung durch ihren Mittelwert uber θ uber eine Periode ersetzen. Daauch I = ∂S(θ, J)/∂θ = J +
∑∞n=1 ǫ
n∂Sn/∂θ konstant sein muss, ist der Mit-telwert von ∂Sn/∂θ gleich null, d.h. alle Sn sind periodisch in θ. Die Mittelungergibt daher auf der rechten Seite von (287) nur einen Beitrag von H1:
K1(J) = H1(J) =1
2π
∫ 2π
0
H1(θ, J) dθ (288)
und wir erhalten somit
K(J) = H0(J) + ǫH1(J) + O(ǫ2) . (289)
Wir mussen jetzt noch S1(θ, J) bestimmen. Dazu losen wir die Gleichung (287)(ohne Mittelung!), wobei darin nur noch der periodische Anteil δH1(θ, J) =H1(θ, J) −H1(J) von H1 beitragt:
∂
∂θS1(θ, J) = − 1
ω0(J)δH1(θ, J) . (290)
Gelost werden kann diese Gleichung durch Entwicklung in Fourier-Reihen:
δH1(θ, J) =
∞∑
k=1
Ak(J) eikθ ,
S1(θ, J) =
∞∑
k=1
Bk(J) eikθ , (291)
wodurch sich folgende Beziehung zwischen den Ak und Bk ergibt
Bk(J) =i
k ω0(J)Ak(J) . (292)
Da die Funktion H1(θ, I) vorgegeben ist, konnen wir die Ak als bekannt voraus-setzen. Damit ist die Transformation bis zur 1. Ordung vollzogen worden, unddie neuen Variablen (Φ, J) sind bis zu dieser Ordnung durch folgende Gleichun-gen bestimmt:
Φ1 = θ + ǫ∂S1(θ, J)
∂J,
J1 = I − ǫ∂S1(θ, J)
∂θ. (293)
Dies kann zu allen Ordnungen in ǫ fortgesetzt und summiert werden. Die Reihemuss konvergieren, da wir ja wissen, dass fur ein eindimensionales System auchdas komplette H(θ, I) = K(J) existieren muss, obwohl es vielleicht nicht leichtexplizit zu finden ist.
84

11.2.2 Beispiel: Harmonischer Oszillator mit kubischer Storung
Wir illustrieren die kanonische Storungstheorie anhand der Hamiltonfunktion
H =1
2p2 +
1
2ω2
0 q2 + ǫ q3. (294)
In den Wirkungs-Winkel-Variablen gelten folgende bekannte Beziehungen:
H0 =1
2p2 +
1
2ω2
0 q2 = Iω0 ,
q =
√2I
ω0sin θ , θ = ω0t+ φ0 ,
⇒ H1(θ, I) =
(2I
ω0
)32
sin3 θ = A sin3 θ . (295)
Obiges Verfahren darauf angewandt ergibt einen verschwindenden Mittelwert:
H1 = 0 → K1(J) = 0 , (296)
und damit wird
ω0∂S1
∂θ= −A sin3 θ (297)
mit der Losung
S1(θ, J) =1
ω0
(2J
ω0
)32[1
3sin2 θ cos θ +
2
3cos θ
]. (298)
11.2.3 Mehrdimensionaler Fall
Es wird sich herausstellen, dass eine Verallgemeinerung des obigen Verfahrensab der Dimension N = 2 zu Problemen fuhrt. Es ist dennoch lehrreich, den Wegzu beschreiben, da dadurch ein Einblick in die tiefere Problematik der Storungs-theorie gegeben wird. Zunachst sollen folgende Großen eingefuhrt werden:
θ = θ1, . . . , θN und I = I1, . . . , IN . (299)
Die Bewegungsgleichungen des gestorten Systems
H(θ, I) = H0(I) + ǫH1(θ, I) + . . . (300)
lauten damit
I = −∂H∂θ
, (301)
θ =∂H
∂I= ω0(I) . (302)
Erneut soll eine Transformation (θ, I) → (Φ,J) gesucht werden, mit der manerreicht, dass die neue Hamiltonfunktion K nur noch von von J abhangt:H(θ, I) → K(J). Erreicht wird dies mit der erzeugenden Funktion
S(θ,J) = θ · J + ǫ S1 + ǫ2S2 + . . . (303)
85

Die nachsten Schritte geschehen genau gleich wie oben, aber in vektorieller Form,und es ergibt sich schließlich in 1. Ordnung die zu (287) entsprechende Gleichung
∂S1
∂θ· ∂H0
∂I+H1(θ,J) = K1(J) . (304)
Die Mittelung zur Bestimmung der Losung von K1(J) muss in diesem Fall aufmehrere Dimensionen erweitert werden:
K1(J) = H1(J) =1
2π
∫ 2π
0
dθ11
2π
∫ 2π
0
dθ2 . . .1
2π
∫ 2π
0
dθNH1(θ,J) . (305)
Bis hierher konnten alle Schritte von oben reibungslos durchgefuhrt werden.Das Problem entsteht nun beim Versuch, Gleichung (304) zu losen. Der Fourier-Reihen-Ansatz,
H1(J) =∑
k6=0
Ak eik·θ ,
S1(θ,J) =∑
k 6=0
Bk eik·θ , (306)
fuhrt zur Bestimmungsgleichung
Bk =iAk
k · ω0(J). (307)
Diese unterscheidet sich jedoch grundlegend von (292), indem hier der Nen-ner null werden kann, wenn auch alle Frequenzen ω0 ungleich null sind. Diesgeschieht namlich genau dann, wenn die Gleichung
k · ω0(J) = 0 , k = (k1, . . . , kN ) , kn ∈ N (308)
erfullt ist. Dies ist aber genau die Bestimmungsgleichung fur periodische Bah-nen, die sogenannten “rationalen” oder “resonanten Tori” (vgl. Abschn. 6.4)!Es sind also die periodischen Bahnen des ungestorten Systems, welche zu Di-vergenzen der kanonischen Storungstheorie fur N ≥ 2 fuhren. Aber auch bei“irrationalen Tori” kann der Nenner, wenn zwar nicht exakt null, so doch belie-big klein werden.
Das Problem der kleinen Nenner fuhrte gegen Ende des 19. Jahrhundertszum Scheitern der Versuche, konvergente Losungen des Mehrkorperproblemsauf Basis von storungstheoretischen Methoden zu finden und gab Anlass zuPoincares bahnbrechenden Arbeiten.
Es gibt keinen Ausweg aus dieser Situation. Die Divergenz der Storungsrei-he ist eine tiefliegende Eigenschaft nicht-integrabler Systeme und ist mit derenTendenz verknupft, Chaos zu entwickeln. Ein mathematischer Ansatz, die Situa-tion wenigstens bei kleinen Storungen in den Griff zu kriegen, wird im letztenKapitel kurz angesprochen.
86

12 Das Poincare-Birkhoff-Theorem und dasKAM-Theorem
Wir haben gesehen, dass bei der Storungsrechnung das Problem der kleinenNenner auftritt. Speziell die Tori, deren Umlauffrequenzen zueinander rationalsind, d.h. m ·ω = 0, erzeugen Divergenzen und konnen mit der Storungstheorienicht erfasst werden. Die Frage, ob ein integrables System unter dem Einflusseiner nicht-integrablen Storung stabil bleibt, muss daher auf eine andere Weisebeantwortet werden.
Fur das Verhalten von rationalen Tori gibt allgemein ein Theorem von Poin-care und Birkhoff Auskunft: diese brechen in Insel-Ketten mit alternierendenstabilen und instabilen Fixpunkten auf, wie wir dies am Beispiel des asymme-trisch deformierten Billards (Abschn. 8.2.3) gesehen haben. Eine wichtige Rollespielt hierbei die Irrationalitat von reellen Zahlen. Daher folgt nach der Diskus-sion des Poincare-Birkhoff-Theorems ein kurzer Abschnitt uber Kettenbruche.
Eine Antwort auf die Frage, welche Tori in welchem Masse in Insel-Kettenaufbrechen, und bei welchen Storungen, gaben Kolmogorov (1954), Moser (1962)und Arnold (1963). In verschieden Etappen entwickelten sie das beruhmt gewor-dene KAM-Theorem, welches in einfachen Worten besagt: “Genugend irrationa-le Tori bleiben bei genugend kleinen Storungen erhalten”. Dies soll im letztenAbschnitt kurz erlautert werden.
12.1 Das Theorem von Poincare und Birkhoff
Das sogenannte “Fixpunkt-Theorem” von Poincare und Birkhoff besagt, dass einrationaler Torus mit Frequenzverhaltnis ω1/ω2 = q/s ∈ Q bei einer (genugendkleinen) Storung der Integrabilitat in eine “Inselkette” von 2ks Fixpunkten auf-bricht (k = 1, 2, . . . ), von denen alternativ ks stabil und ks instabil sind.
Dies lasst sich qualitativ wie folgt verstehen. Wir gehen von einem zwei-dimensionalen integrablen System aus mit E = H0(I1, I2), wobei I1, I2 dieWirkungs- und θ1, θ2 die Winkelvariablen auf dem 2-Torus sind. Eine Poin-care-Schnittflache kann z.B. durch das Paar (I1, θ1) := (r, θ) definiert werden,da die Angabe von I1 ja uber E = H0(I1, I2) auch I2 festlegt. Im integrablenFall hat eine Poincare-Abbildung also die Form:
ri+1 = ri ,
θi+1 = θi + 2πω1
ω2. (309)
Der Radius r (= I1) ist eine Erhaltungsgroße, wahrend der Winkel θ sich umeinen bestimmten Betrag andert. Es lasst sich zeigen, dass dieser nur vom Radiusr abhangig ist, was die sogenannte Twist-Abbildung motiviert:
(r′
θ′
)=
(r
θ + 2πa(r)
)= T
(rθ
). (310)
Legt man nun eine Storung an: E = H0 + ǫH1(θ1, θ2, I1, I2), aber so, dass dieGesamtabbildung flachenerhaltend bleibt, dann ergibt sich:
(ri+1
θi+1
)=
(ri + ǫf(ri, θi)
θi + 2πa(ri) + ǫg(ri, θi)
). (311)
87
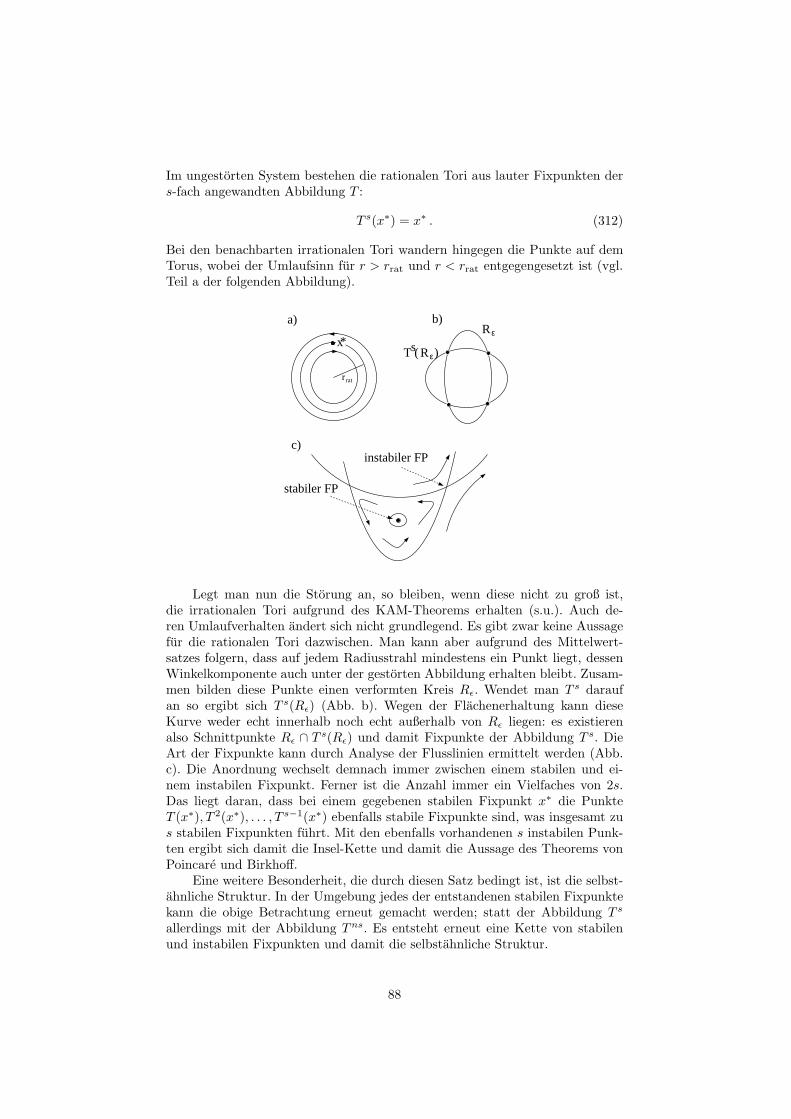
Im ungestorten System bestehen die rationalen Tori aus lauter Fixpunkten ders-fach angewandten Abbildung T :
T s(x∗) = x∗ . (312)
Bei den benachbarten irrationalen Tori wandern hingegen die Punkte auf demTorus, wobei der Umlaufsinn fur r > rrat und r < rrat entgegengesetzt ist (vgl.Teil a der folgenden Abbildung).
rrat
Rεx*
stabiler FP
instabiler FP
T ( )Rεs
a) b)
c)
Legt man nun die Storung an, so bleiben, wenn diese nicht zu groß ist,die irrationalen Tori aufgrund des KAM-Theorems erhalten (s.u.). Auch de-ren Umlaufverhalten andert sich nicht grundlegend. Es gibt zwar keine Aussagefur die rationalen Tori dazwischen. Man kann aber aufgrund des Mittelwert-satzes folgern, dass auf jedem Radiusstrahl mindestens ein Punkt liegt, dessenWinkelkomponente auch unter der gestorten Abbildung erhalten bleibt. Zusam-men bilden diese Punkte einen verformten Kreis Rǫ. Wendet man T s daraufan so ergibt sich T s(Rǫ) (Abb. b). Wegen der Flachenerhaltung kann dieseKurve weder echt innerhalb noch echt außerhalb von Rǫ liegen: es existierenalso Schnittpunkte Rǫ ∩ T s(Rǫ) und damit Fixpunkte der Abbildung T s. DieArt der Fixpunkte kann durch Analyse der Flusslinien ermittelt werden (Abb.c). Die Anordnung wechselt demnach immer zwischen einem stabilen und ei-nem instabilen Fixpunkt. Ferner ist die Anzahl immer ein Vielfaches von 2s.Das liegt daran, dass bei einem gegebenen stabilen Fixpunkt x∗ die PunkteT (x∗), T 2(x∗), . . . , T s−1(x∗) ebenfalls stabile Fixpunkte sind, was insgesamt zus stabilen Fixpunkten fuhrt. Mit den ebenfalls vorhandenen s instabilen Punk-ten ergibt sich damit die Insel-Kette und damit die Aussage des Theorems vonPoincare und Birkhoff.
Eine weitere Besonderheit, die durch diesen Satz bedingt ist, ist die selbst-ahnliche Struktur. In der Umgebung jedes der entstandenen stabilen Fixpunktekann die obige Betrachtung erneut gemacht werden; statt der Abbildung T s
allerdings mit der Abbildung Tns. Es entsteht erneut eine Kette von stabilenund instabilen Fixpunkten und damit die selbstahnliche Struktur.
88

12.2 Kettenbruche
Kettenbruche tauchen bei der Beantwortung der Frage nach der bestmoglichenApproximation einer irrationalen Zahl α durch eine rationale Zahl r/s auf: manwunscht bei einem vorgegebenen maximalen s einen moglichst kleinen Fehler|α−r/s|. Ein mogliches, uns allen wohlvertrautes und taglich benutztes Verfah-ren ist die Dezimalbruchentwicklung:
α = a0 +a1
10+
a2
100+ · · · =
∞∑
k=0
10−kak . (313)
Der maximale Fehler, der bei Abbruch nach der n-ten Stelle auftritt, betragt10−n und damit ergibt sich fur den Fehler: |α− r/s| ≤ 1/s.
Eine wesentlich bessere – und tatsachlich die beste – Naherung ergibt sichaber mit Hilfe von Kettenbruchen:
α = a0 +1
a1 +1
a2 +1
. . .
=: a0, a1, a2, . . . , (314)
wobei a0 ∈ N0, ak ∈ N und k ≥ 2 gilt. Die Naherung bis zur n−ten Stelle sollmit
αn = a0, . . . , an (315)
bezeichnet werden. Die Bestimmung der ak kann rekursiv erfolgen:
a0 = [α] (ganzzahliger Anteil von α) ,
α1 = α− a0 ,
a1 =
[1
α1
],
. . . ,
αn+1 = αn − an ,
an+1 =
[1
αn+1
]. (316)
Beispiel: π = 3.14159 . . .
π = 3 +1
7 +1
15 +1
1 +1
292 + . . .
= 3, 7, 15, 1, 292, . . . (317)
mit den Naherungen:
π1 =22
7= 3.1428571 . . . , (318)
π2 =333
106= 3.1415094 . . . , (319)
π3 =355
113= 3.1415929 . . . (320)
89

Vor allem die Naherung π3 liegt sehr nahe bei dem wahren Wert. Die Ursachehierfur ist die Zahl 292 im Kettenbruch, die groß im Vergleich zu den ver-nachlassigten Termen ist.
Der maximale Fehler bei Abbruch eines Kettenbruchs nach der n-ten Stelleist im Vergleich zur Dezimalbruchentwicklung deutlich besser:
|α− rnsn
| ≤ 1
snsn+1,
|α− r
s| ≤ 1
s2. (321)
Besonders schnell konvergieren hierbei transzendente Zahlen wie π oder e. Bei-spielsweise gilt fur die Eulersche Zahl e:
e = 1, 1, 2, 1, 1, 4, 1, 1, 6, 1, . . . = 1, 1, 2n, 1∞n=1 (322)
mit standig wachsenden Eintragen in der Entwicklung, wahrend fur die Qua-dratwurzel
√3 = 1, 2, 1, 2, . . . = 1, 2 die an alle sehr klein sind. Besonders
langsam konvergieren die Zahlen
0, 1 =1
1 +1
1 + . . .
(323)
und
1 = 1 +1
1 +1
1 + . . .
, (324)
und allgemein Zahlen, die ab einem gewissen an nur noch Einsen in der Entwick-lung besitzen, die sogenannten “noble numbers”. Bekannt ist vor allem der obenangegebene goldene Schnitt: 0, 1 = 1
2 (√
5 − 2) = 0.118033988 . . . Wir werdensehen, dass die “noble numbers” im Zusammenhang mit dem KAM-Theoremeine besondere Rolle spielen.
12.3 Das KAM-Theorem
Im Folgenden soll das KAM-Theorem furN = 2 Dimensionen diskutiert werden.In hoheren Dimensionen gelten ganz analoge Aussagen; gewisse Abschatzun-gen lassen sich jedoch nicht so prazise formulieren. Gegeben sei ein integrablesSystem H0 und eine Storung ǫH1. H0 + ǫH1 soll in einem Bereich des kom-plexen Phasenraums C2n analytisch sein. Ferner darf das System nicht ent-artet sein, d.h. |∂ωi/∂Ii| 6= 0. Dann folgt, dass unter einer hinreichend klei-nen Storung (ǫ≪ 1) diejenigen Tori erhalten bleiben, deren Frequenzverhaltnisω1/ω2 genugend irrational ist. Die genaue Bedingung hierfur lautet:
∣∣∣∣ω1
ω2− r
s
∣∣∣∣ >k(ǫ)
s2.5, (325)
wobei die Große k(ǫ) von der Storung abhangig ist und limǫ→0 k(ǫ) = 0 gilt.
90
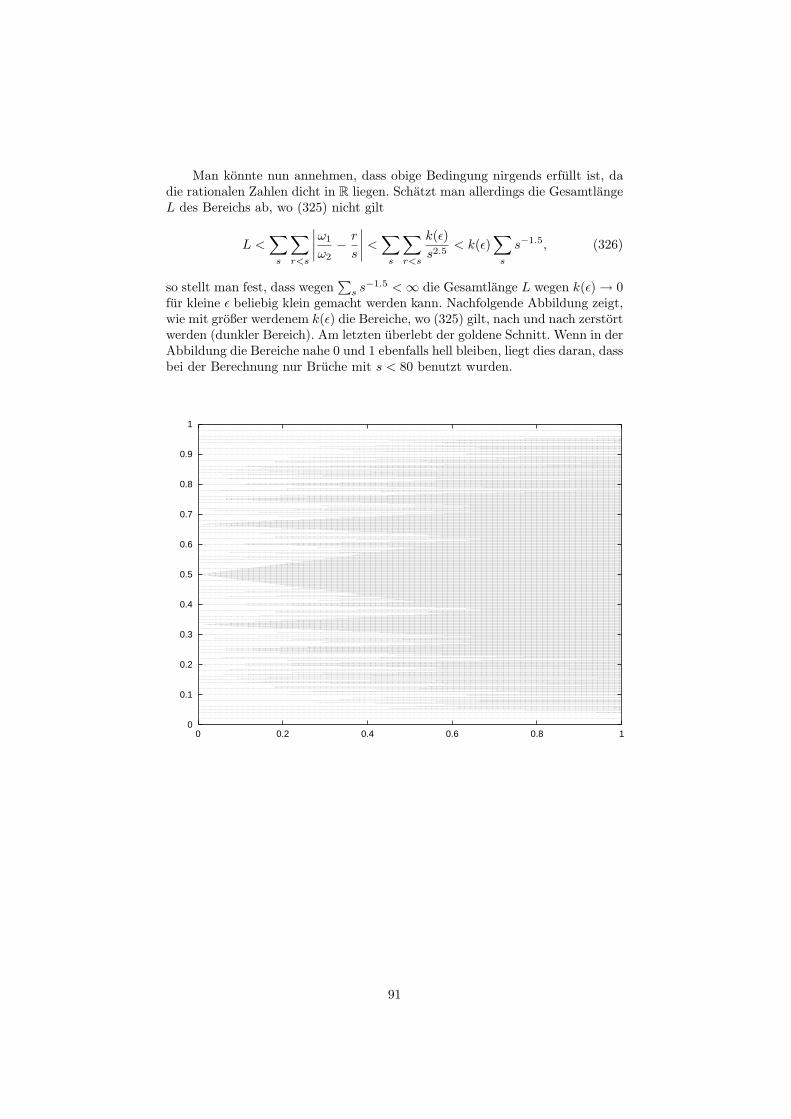
Man konnte nun annehmen, dass obige Bedingung nirgends erfullt ist, dadie rationalen Zahlen dicht in R liegen. Schatzt man allerdings die GesamtlangeL des Bereichs ab, wo (325) nicht gilt
L <∑
s
∑
r<s
∣∣∣∣ω1
ω2− r
s
∣∣∣∣ <∑
s
∑
r<s
k(ǫ)
s2.5< k(ǫ)
∑
s
s−1.5, (326)
so stellt man fest, dass wegen∑
s s−1.5 <∞ die Gesamtlange L wegen k(ǫ) → 0
fur kleine ǫ beliebig klein gemacht werden kann. Nachfolgende Abbildung zeigt,wie mit großer werdenem k(ǫ) die Bereiche, wo (325) gilt, nach und nach zerstortwerden (dunkler Bereich). Am letzten uberlebt der goldene Schnitt. Wenn in derAbbildung die Bereiche nahe 0 und 1 ebenfalls hell bleiben, liegt dies daran, dassbei der Berechnung nur Bruche mit s < 80 benutzt wurden.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
91
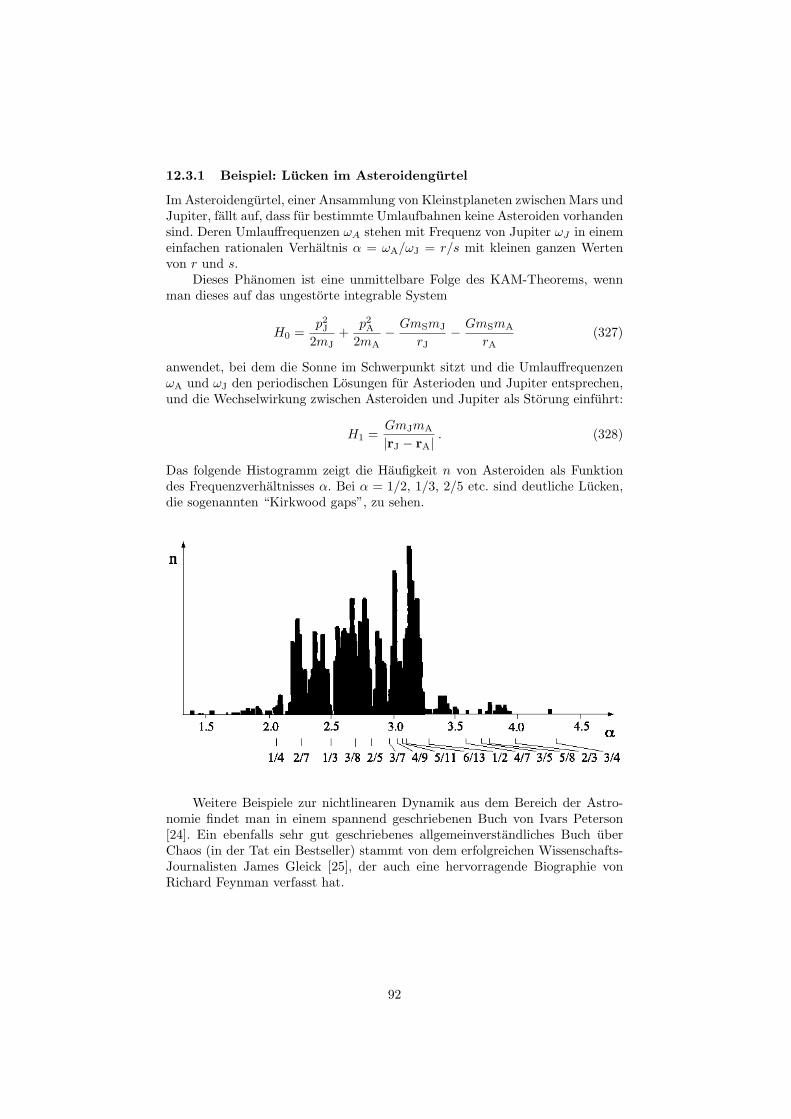
12.3.1 Beispiel: Lucken im Asteroidengurtel
Im Asteroidengurtel, einer Ansammlung von Kleinstplaneten zwischen Mars undJupiter, fallt auf, dass fur bestimmte Umlaufbahnen keine Asteroiden vorhandensind. Deren Umlauffrequenzen ωA stehen mit Frequenz von Jupiter ωJ in einemeinfachen rationalen Verhaltnis α = ωA/ωJ = r/s mit kleinen ganzen Wertenvon r und s.
Dieses Phanomen ist eine unmittelbare Folge des KAM-Theorems, wennman dieses auf das ungestorte integrable System
H0 =p2J
2mJ+
p2A
2mA− GmSmJ
rJ− GmSmA
rA(327)
anwendet, bei dem die Sonne im Schwerpunkt sitzt und die UmlauffrequenzenωA und ωJ den periodischen Losungen fur Asterioden und Jupiter entsprechen,und die Wechselwirkung zwischen Asteroiden und Jupiter als Storung einfuhrt:
H1 =GmJmA
|rJ − rA|. (328)
Das folgende Histogramm zeigt die Haufigkeit n von Asteroiden als Funktiondes Frequenzverhaltnisses α. Bei α = 1/2, 1/3, 2/5 etc. sind deutliche Lucken,die sogenannten “Kirkwood gaps”, zu sehen.
Weitere Beispiele zur nichtlinearen Dynamik aus dem Bereich der Astro-nomie findet man in einem spannend geschriebenen Buch von Ivars Peterson[24]. Ein ebenfalls sehr gut geschriebenes allgemeinverstandliches Buch uberChaos (in der Tat ein Bestseller) stammt von dem erfolgreichen Wissenschafts-Journalisten James Gleick [25], der auch eine hervorragende Biographie vonRichard Feynman verfasst hat.
92
Literatur
[1] H. Goldstein: Klassische Mechanik (Akad. Verlagsgesellschaft Wiesbaden,1976).
[2] F. Kuypers: Klassische Mechanik (Wiley-VCH, Weinheim, 5. uberarb. Auf-lage: 1997).
[3] L. D. Landau und E. M. Lifshits: Mechanik (Akademie-Verlag Berlin, 1964).
[4] M. C. Gutzwiller: Chaos in Classical and Quantum Mechanics (SpringerVerlag, New York, 1990).
[5] I. Percival and D. Richards: Introduction to Dynamics (Cambridge Univer-sity Press, Cambridge, 1982).UBR: 84 UF 1000 P429
[6] A. Lichtenberg and M. Liebermann: Regular and Stochastic Motion(Springer-Verlag, New York, 1983).UBR: 84 SK 820 L699
[7] M. Tabor: Chaos and integrability in nonlinear dynamics (John Wiley &Sons, New York, 1989).UBR: 84 UG 3900 T114
[8] A. M. Ozorio de Almeida: Hamiltonian Systems (Cambridge UniversityPress, Cambridge, 1988).UBR: 84 UG 3900 O99
[9] M. Brack und R. K. Bhaduri: Semiclassical Physics, Frontiers in Physics,Vol. 96 (Addison-Wesley, Reading, 1997); revidierte Paperback-Ausgabe(Westview Press, Bolder, 2003).UBR: 84(7) UK 4000 B797
[10] M. Brack: Vorlesungs-Skript: Einfuhrung in semklassische Methoden derPhysik, abrufbar auf:〈http://homepages.uni-regensburg.de/˜brm04014/notes/semicl.html〉.
[11] M. Henon, Phys. Rev. B 9, 1921 (1974);H. Flaschka, Phys. Rev. B 9, 1924 (1974) (nur 1 1/2 Seiten!).
[12] V. A. Yakubovich and V. M. Starzhinskii: Linear differential equationswith periodic coefficients, Vols. 1 and 2 (J. Wiley & Sons, New York, 1975),speziell: Kap. II § 1 - 3.UBR: 80 SK 520 J25
[13] M. V. Berry, Eur. J. Phys. 2, 91 (1981).
[14] G. W. Hill, Acta Mathematica 8, 1 (1886).
[15] M. Brack: “Bifurcation cascades and self-similarity of periodic orbits withanalytical scaling constants in Henon-Heiles type potentials”, in: Festschriftin honour of the 75th birthday of Martin Gutzwiller, eds. A. Inomata et al.;Foundations of Physics 31, 209 - 232 (2001) [nlin.CD/0006034].
93

[16] M. Brack, M. Mehta, and K. Tanaka: “Occurrence of periodic Lame func-tions at bifurcations in chaotic Hamiltonian systems”, J. Phys. A 34, 8199(2001).
[17] W. Magnus and S. Winkler: Hill’s Equation (Interscience, New York, 1966).
[18] K. R. Meyer, Trans. Am. Math. Soc. 149, 95 (1970).
[19] H. Then: “Bifurkationen periodischer Bahnen in Hamiltonschen Systemenmit Symmetrien”, Diplomarbeit, Universitat Ulm (1999); H. Then and M.Sieber, to be published.
[20] K. Tanaka and M. Brack, to be published (2007).
[21] K. Janich, unveroffentlichte Seminaraufzeichnungen (2006).
[22] J. Main, G. Wiebusch, A. Holle and K. Welge, Phys. Rev. Lett. 57, 2789(1986); Z. Phys. D 6, 295 (1987).
[23] D. Wintgen and F. Friedrich, Phys. Rev. A 36, 131 (1987);F. Friedrich and D. Wintgen, Phys. Rep. 183, 39 (1989);H. Hasegawa, M. Robnik and G. Wunner, Prog. Th. Phys. (Japan) Suppl.98 198 (1989).
[24] Ivars Peterson: Newton’s Clock – Chaos in the Universe (W. H. Freeman& Co., New York, 1993).
[25] James Gleick: Chaos (Penguin Books, 1988).
UBR = Universitatsbibliothek Regensburg
94