Embed Size (px)
Citation preview
“nlin˙fem” — 2007/4/7 — 11:52 — page 1 — #1
NichtlineareFinite Elemente
– Vorlesungsunterlagen WS 05/06 –
JP Dr.–Ing. habil. Ellen Kuhl
Kaiserslautern, Januar 2006

“nlin˙fem” — 2007/4/7 — 11:52 — page 2 — #2
“nlin˙fem” — 2007/4/7 — 11:52 — page i — #3
Inhaltsverzeichnis
1 Grundlagen der Kontinuumsmechanik 31.1 Kinematik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.1 Deformationsabbildung . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.2 Deformationsgradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.3 Verzerrungsmaße . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2 Spannungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.1 Spannungsmaße . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.2 Hyperelastizitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3 Bilanzgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3.1 Massenbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3.2 Impulsbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3.3 Drehimpulsbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.3.4 Energiebilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.4 Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.4.1 Prinzip der virtuellen Arbeit (materiell) . . . . . . . . . . . . . . . . . . 191.4.2 Prinzip der virtuellen Arbeit (raumlich) . . . . . . . . . . . . . . . . . . 22
1.5 Richtungsableitung – Linearisierung . . . . . . . . . . . . . . . . . . . . . . . . 241.5.1 Linearisierung kinematischer Großen . . . . . . . . . . . . . . . . . . . 251.5.2 Linearisierung des Prinzips der virtuellen Arbeit ( materiell ) . . . . . 261.5.3 Linearisierung des Prinzips der virtuellen Arbeit (raumlich) . . . . . . 28
1.6 Nichtlineare Analyse eines Dreigelenkrahmens . . . . . . . . . . . . . . . . . . 31
2 Finite Element Methode – Elastizitat 382.1 Raumliche Diskretisierung mit Finiten Elementen . . . . . . . . . . . . . . . . 38
2.1.1 Diskretisierung kinematischer Großen . . . . . . . . . . . . . . . . . . . 382.1.2 Beispiel: Diskretisierung kinematischer Großen . . . . . . . . . . . . . 40
2.2 Diskretisierung der schwachen Form (materiell) . . . . . . . . . . . . . . . . . 442.2.1 Diskretisierung des Residuums . . . . . . . . . . . . . . . . . . . . . . . 442.2.2 Linearisierung des Residuums . . . . . . . . . . . . . . . . . . . . . . . 45
2.3 Diskretisierung der schwachen Form (raumlich) . . . . . . . . . . . . . . . . . 482.3.1 Diskretisierung des Residuums . . . . . . . . . . . . . . . . . . . . . . . 482.3.2 Linearisierung des Residuums . . . . . . . . . . . . . . . . . . . . . . . 49
2.4 Diskretisierung in Matrix–Vektor–Notation . . . . . . . . . . . . . . . . . . . . 512.4.1 Diskretisierung des Elementresiduums . . . . . . . . . . . . . . . . . . 542.4.2 Linearisierung des Elementresiduums . . . . . . . . . . . . . . . . . . . 55
2.5 Stabelement im 2D Raum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
i
“nlin˙fem” — 2007/4/7 — 11:52 — page ii — #4
Inhaltsverzeichnis
2.6 Nichtlineare Analyse eines Dreigelenkrahmens . . . . . . . . . . . . . . . . . . 632.7 Algorithmische Umsetzung mit MATLAB . . . . . . . . . . . . . . . . . . . . . 66
2.7.1 Hauptprogramm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 672.7.2 Elementlastvektor und Elementsteifigkeitsmatrix . . . . . . . . . . . . 692.7.3 Gleichungsloser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 712.7.4 Zusammenbau Systemsteifigkeitsmatrix und Systemlastvektor . . . . 722.7.5 Plot der materiellen und raumlichen Konfiguration . . . . . . . . . . . 73
3 Losungsverfahren 743.1 Newton–Raphson Verfahren (Lastkontrolle) . . . . . . . . . . . . . . . . . . . . 74
3.1.1 Newton–Raphson Verfahren – Algorithmus . . . . . . . . . . . . . . . 753.1.2 Nichtlineare Analyse eines Dreigelenkrahmens . . . . . . . . . . . . . 76
3.2 Modifiziertes Newton Verfahren (Lastkontrolle) . . . . . . . . . . . . . . . . . 783.2.1 Modifiziertes Newton Verfahren – Algorithmus . . . . . . . . . . . . . 783.2.2 Nichtlineare Analyse eines Dreigelenkrahmens . . . . . . . . . . . . . 79
3.3 Gedampftes Newton Verfahren (’line search’) . . . . . . . . . . . . . . . . . . . 833.3.1 Gedampftes Newton Verfahren – Algorithmus . . . . . . . . . . . . . . 85
3.4 Newton–Raphson Verfahren (Verschiebungskontrolle) . . . . . . . . . . . . . . 863.5 Bogenlangenverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.5.1 Bogenlangenverfahren – Algorithmus . . . . . . . . . . . . . . . . . . . 913.5.2 Bogenlangenverfahren – mogliche Nebenbedingungen . . . . . . . . . 92
ii
“nlin˙fem” — 2007/4/7 — 11:52 — page 1 — #5
Literaturverzeichnis
[1] Bathe, K. J. [1995]. Finite Element Procedures. Prentice Hall, EnglewoodCliffs, New Jersey.
[2] Bathe, K. J. [2000]. Finite–Element–Methoden. Springer Verlag, Berlin.
[3] Belytschko, T., W. K. Liu & B. Moran [2000]. Nonlinear Finite ElementAnalysis for Continua and Structures. John Wiley & Sons.
[4] Bonet, J. & R. D. Wood [1997]. Nonlinear Continuum Mechanics for FiniteElement Analysis. Cambridge University Press.
[5] Crisfield, M. A. [1996]. Non–linear Finite Element Analysis of Solids andStructures. John Wiley & Sons.
[6] Holzapfel, G. A. [2000]. Nonlinear Solid Mechanics: A Continuum Approachfor Engineering. John Wiley & Sons.
[7] Hughes, T. J. R. [2000]. The Finite Element Method – Linear Static and Dyna-mic Finite Element Analysis. Prentice Hall, Englewood Cliffs, New Jersey.
[8] Wriggers, P. [2001]. Nichtlineare Finite–Element–Methoden. Springer Ver-lag, Berlin.
[9] Zienkiewicz, O. C. & R. L. Taylor [2000]. The Finite Element Method, Vo-lume I: The Basis. Butterworth Heinemann, fifth edition.
[10] Zienkiewicz, O. C. & R. L. Taylor [2000]. The Finite Element Method, Vo-lume II: Solid Mechanics. Butterworth Heinemann, fifth edition.
1

“nlin˙fem” — 2007/4/7 — 11:52 — page 2 — #6
Literaturverzeichnis
2
“nlin˙fem” — 2007/4/7 — 11:52 — page 3 — #7
1 Grundlagen der Kontinuumsmechanik
FEM I (bisher):lineare FEM, Gleichgewicht am unverformten System• Verzerrungen � als lineare Funktion der Verschiebungen u• Spannungen � als lineare Funktion der Verzerrungen �lineares Gleichungssystem der Form
f intI − f ext
I = 0 mit f intI =
nnd
∑J=1
KI J uJ
direkt losbar fur unbekannten Knotenvektor uJ = −nnd
∑I=1
K−1J I f ext
I
FEM II (jetzt):nichtlineare FEM, Gleichgewicht am deformierten System• Verzerrungen als nichtlineare Funktion der Deformation '
es gibt unterschiedliche Verzerrungsmaßeprimare Unbekannte ' J = X J + uJ
• Spannungen als nichtlineare Funktion der Verzerrungenes gibt unterschiedliche Spannungsmaße
nichtlineares Gleichungssystem der Form
f intI − f ext
I = 0 mit f intI = f int
I (' J)
nur iterativ losbar fur unbekannten Knotenvektor ' J
3
“nlin˙fem” — 2007/4/7 — 11:52 — page 4 — #8
1 Grundlagen der Kontinuumsmechanik
1.1 Kinematik
Lehre der Bewegung und Deformation ohne Bezug zur Ursache
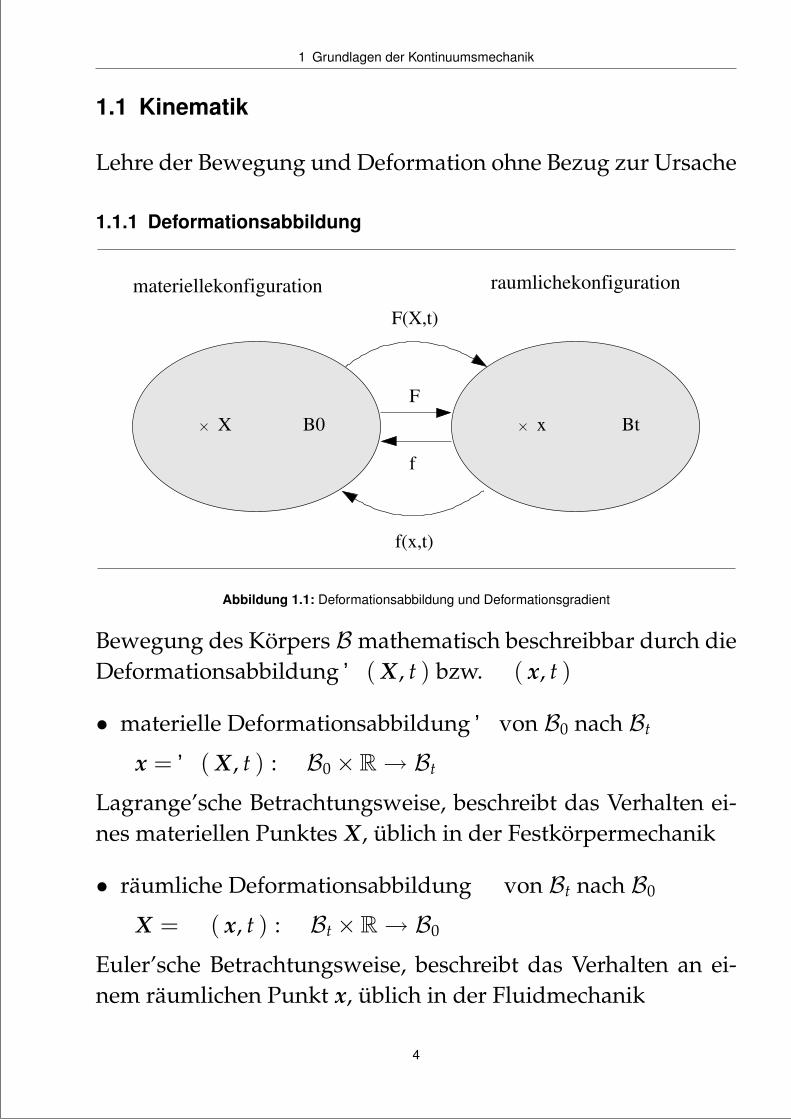
1.1.1 Deformationsabbildung
F(X,t)
f(x,t)
B0 BtF
f
materiellekonfiguration raumlichekonfiguration
X x
Abbildung 1.1: Deformationsabbildung und Deformationsgradient
Bewegung des Korpers B mathematisch beschreibbar durch dieDeformationsabbildung ' ( X , t ) bzw. � ( x, t )
• materielle Deformationsabbildung ' von B0 nach Bt
x = ' ( X , t ) : B0 ×R→ Bt
Lagrange’sche Betrachtungsweise, beschreibt das Verhalten ei-nes materiellen Punktes X, ublich in der Festkorpermechanik
• raumliche Deformationsabbildung � von Bt nach B0
X = � ( x, t ) : Bt ×R→ B0
Euler’sche Betrachtungsweise, beschreibt das Verhalten an ei-nem raumlichen Punkt x, ublich in der Fluidmechanik
4
“nlin˙fem” — 2007/4/7 — 11:52 — page 5 — #9
1 Grundlagen der Kontinuumsmechanik
im folgenden: Lagrange’sche Betrachtungsweise
• Verschiebungsvektor u
u = x− X = ' − X
1.1.2 Deformationsgradient
• materieller Deformationsgradient FTangentenabbildung von TB0 nach TBt
F =∂'∂X
=∇X '
FiJ =∂' i
∂XJ=∇XJ ' i
: TB0 → TBt
mit
FiJ =
∂' 1
∂X1
∂' 1
∂X2
∂' 1
∂X3∂' 2
∂X1
∂' 2
∂X2
∂' 2
∂X3∂' 3
∂X1
∂' 3
∂X2
∂' 3
∂X3
zentrale Große zur Beschreibung finiter Deformationen, be-schreibt die relative raumliche Position zweier benachbarterPartikel nach ihrer Deformation als Funktion ihrer relativen ma-teriellen Position vor der Deformation, Zweifeldtensor
F =∇X ' =∇X [ X + u ] = I +∇X u
FiJ =∇XJ ' i =∇XJ [ Xi + ui ] = � iJ +∇XJ ui
• Jacobi Determinante J
J = det(F)
5
“nlin˙fem” — 2007/4/7 — 11:52 — page 6 — #10
1 Grundlagen der Kontinuumsmechanik
• Transformation von Linienelementen
dx =∇X ' ·dX
dxi =∇X J ' i dXJ
dx = F ·dX
dxi = FiJ dXJ
F(X,t)
f(x,t)
F
f
materiellekonfiguration raumlichekonfiguration
B0 Bt dx
dA
dV
da
dv
dXxX
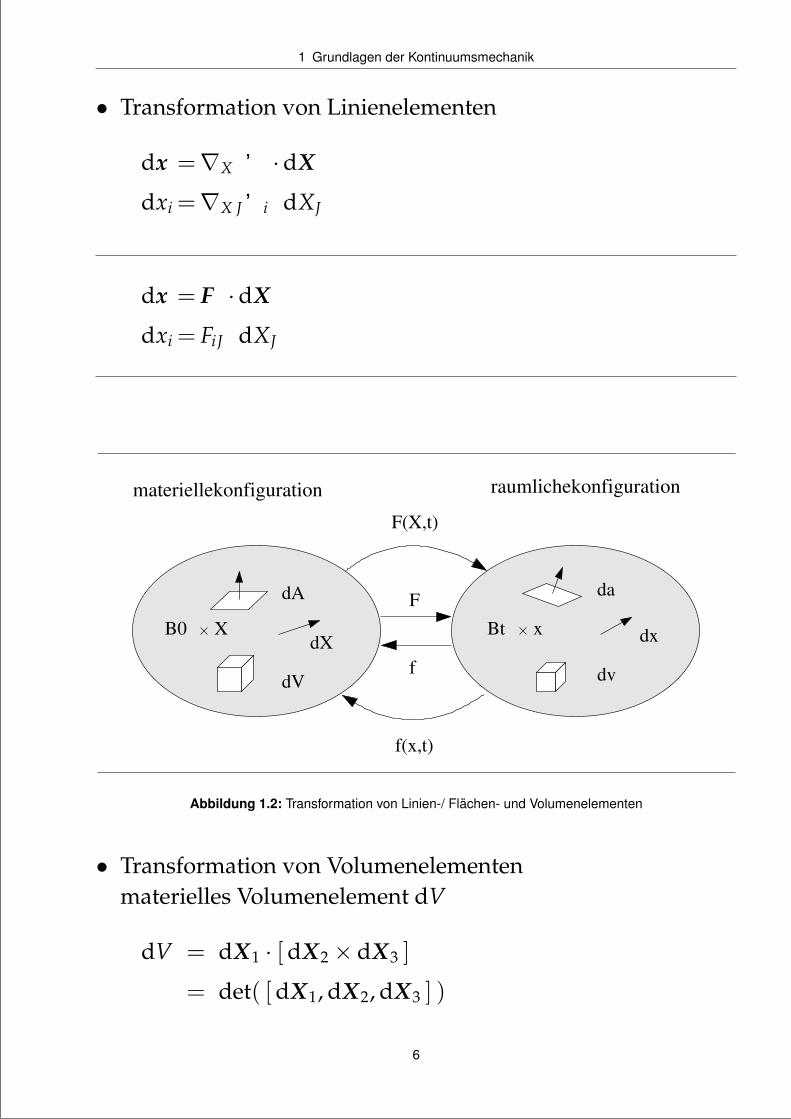
Abbildung 1.2: Transformation von Linien-/ Flachen- und Volumenelementen
• Transformation von Volumenelementenmaterielles Volumenelement dV
dV = dX1 · [ dX2 × dX3 ]
= det( [ dX1, dX2, dX3 ] )
6
“nlin˙fem” — 2007/4/7 — 11:52 — page 7 — #11
1 Grundlagen der Kontinuumsmechanik
raumliches Volumenelement dv
dv = dx1 · [ dx2 × dx3 ]
= det( [ dx1, dx2, dx3 ] )
= det( [ F [ dX1, dX2, dX3 ] ] )
= det(F) det( [dX1, dX2, dX3] )
dv = J dV
• Transformation von Flachenelementenmaterielles Flachen- und Volumenelement dA und dV
dA = N dA dV = dX · dA
N ... Einheitsnormale des materiellen Flachenelements dA
raumliches Flachen- und Volumenelement da und dv
da = n da dv = dx · da
n ... Einheitsnormalen des raumlichen Flachenelements da
mit dx = F · dX = dX · F t und dv = J dV
dv = dx · da
= dX · F t · da
= dX · J dA = J dV
Nanson’s formula
da = J F−t ·dA
dai = J F−tiJ dAJ
7
“nlin˙fem” — 2007/4/7 — 11:52 — page 8 — #12
1 Grundlagen der Kontinuumsmechanik
1.1.3 Verzerrungsmaße
Vergleich des Skalarproduktes des materiellen LinienelementesdX mit dem zugeorigen raumlichen Linienelement dx
dx ·dx −dX ·dX = F ·dX · F ·dX −dX ·dX
dxk dxk−dXI dXI = FkI dXI FkJ dXJ−dXI dXI
ausklammern ergibt
dx ·dx −dX ·dX = dX · [ F t · F − I ] ·dX
dxk dxk−dXI dXI = dXI [ FtIk FkJ− � I J ] dXJ
• Deformationstensorenrechter Cauchy–Green Deformationtensor C
C = F t · FCI J = Ft
Ik FkJ
rein materielle Große, es gilt:
dx · dx = dX · [ F t · F ] · dX = dX · C · dX
linker Cauchy–Green Deformationtensor (Fingertensor) b
b = F · F t
bi j = FiK FtK j
rein raumliche Große, es gilt:
dX · dX = dx · [ F−t · F−1 ] · dx = dx · b−1 · dx
• VerzerrungstensorenGreen–Lagrange Verzerrungstensor E
E =12
[ F t · F − I ] =12
[ C − I ]
EI J =12
[ FtIk FkJ− � I J ] =
12
[ CI J− � I J ]
8
“nlin˙fem” — 2007/4/7 — 11:52 — page 9 — #13
1 Grundlagen der Kontinuumsmechanik
rein materielle Großees gilt mit F = ∇Xx = ∇X[ X + u ] = I +∇Xu
E =12[ I +∇t
Xu ][ I +∇Xu ]− I ]
=12
[ I +∇Xu +∇tXu +∇t
Xu · ∇Xu− I ]
=12
[∇Xu +∇tXu +∇t
Xu · ∇Xu]
vergleiche mit geometrisch linearer Theorie (FEM I)
� =12[∇u +∇tu ]
Euler–Almansi Verzerrungstensor e
e =12
[ I − F−t · F−1 ] =12
[ I − b−1 ]
ei j =12
[ � i j− F−tiK F−1
K j ] =12
[ � i j− b−1i j ]
rein raumliche Großees gilt mit F−1 = ∇xX = ∇x[ x− u ] = I −∇xu
e =12
[ I − [ I −∇txu ][ I −∇xu ] ]
=12
[ I − I +∇xu +∇txu−∇t
xu · ∇xu ]
=12
[∇xu +∇txu−∇t
xu · ∇xu]
vergleiche mit geometrisch linearer Theorie (FEM I)
� =12[∇u +∇tu ]
es gilt
push forward e = F−t · E · F−1 pull back E = F t · e · Fei j = F−t
iK EKL F−1L j EI J = Ft
Ik ekl Fl J
9
“nlin˙fem” — 2007/4/7 — 11:52 — page 10 — #14
1 Grundlagen der Kontinuumsmechanik
1.2 Spannungen
1.2.1 Spannungsmaße
e1
e3
e2
t
n
dP dp
B0 Bt
dA
dN
da
dn
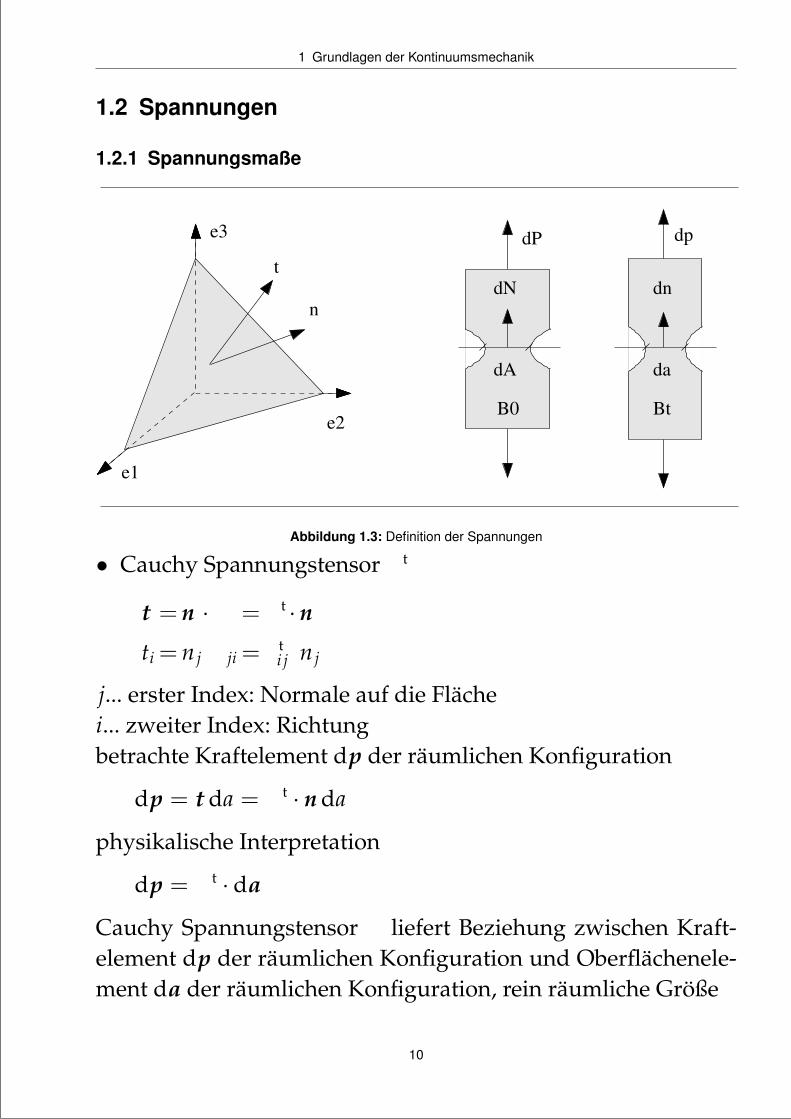
Abbildung 1.3: Definition der Spannungen
• Cauchy Spannungstensor � t
t = n · � = � t · nti = n j � ji = � t
i j n j
j... erster Index: Normale auf die Flachei... zweiter Index: Richtungbetrachte Kraftelement dp der raumlichen Konfiguration
dp = t da = � t · n da
physikalische Interpretation
dp = � t · da
Cauchy Spannungstensor � liefert Beziehung zwischen Kraft-element dp der raumlichen Konfiguration und Oberflachenele-ment da der raumlichen Konfiguration, rein raumliche Große
10
“nlin˙fem” — 2007/4/7 — 11:52 — page 11 — #15
1 Grundlagen der Kontinuumsmechanik
• 1. Piola–Kirchhoff Spannungstensor � t (vergl. Literatur: P)betrachte Kraftelement dp der raumlichen Konfiguration
dp = t da = � t · n da = � t · da = J � t · F−t · dA = � t · dA
Zusammenhang
� t = J � t · F−t � = J F−1 · �� t
iJ = J � tik F−t
kJ � Ji = J F−1Jk � ki
physikalische Interpretation
dp = � t · dA
erster PK liefert liefert Beziehung zwischen Kraftelement dpder raumlichen Konfiguration und Oberflachenelement dA dermateriellen Konfiguration, Zweifeldtensor
• 2. Piola–Kirchhoff Spannungstensor � t (vergl. Literatur: S)betrachte Kraftelement dP der materiellen Konfiguration
dP = F−1 ·dp = F−1 · � t ·dA = J F−1 · � t · F−t ·dA = � t ·dA
Zusammenhang
� t = F−1 · � t = J F−1 · � t · F−t
� tI J = F−1
Ik � tkJ = J F−1
Ik � tkl F−t
l J
physikalische Interpretation
dP = � t · dA
zweiter PK liefert liefert Beziehung zwischen Kraftelement dPder materiellen Konfiguration und Oberflachenelement dA dermateriellen Konfiguration, rein materielle Große
11
“nlin˙fem” — 2007/4/7 — 11:52 — page 12 — #16
1 Grundlagen der Kontinuumsmechanik
es gilt
push forward � t =1J
F · � t · F t pull back � t = J F−1· � t· F−t
� ti j =
1J
FiK � tKL Ft
L j � tI J = J F−1
Ik � tkl F−t
l J
1.2.2 Hyperelastizitat
• Elastizitat:Spannungszustand ist allein eine Funktion des aktuellen De-formationszustandes
• Hyperelastizitat:Spannungszustand ist pfadunabhangig und laßt sich als
Funk- tion der gespeicherten Verzerrungsenergie darstel-len
= ( F (X), X) ˙ =∂ ∂F
: F = � t : F � t :=∂ ∂F
= ( E (X), X) ˙ =∂ ∂E
: E = � t : E � t :=∂ ∂E
= 2∂ ∂C
Zusammenhang zwischen materiellem Spannungszuwachs∆� t und materiellem Verzerrungszuwachs ∆E
∆� t = IL : ∆E mit IL =∂� t
∂E=
∂2 ∂E2 = 4
∂2 ∂C2
IL ... vierstufiger Lagrange’scher ElastizitatstensorIE ... vierstufiger Euler’scher Elastizitatstensor
12
“nlin˙fem” — 2007/4/7 — 11:52 — page 13 — #17
1 Grundlagen der Kontinuumsmechanik
es gilt
push forward IE =1J[ F ⊗ F ] : IL : [ F t ⊗ F t]
Ei jkl =1J
FiI FjJ LI JKL FKk FLl
pull back IL = J [ F−1 ⊗ F−1 ] : IE : [ F−t ⊗ F−t ]
LI JKL = J FIi FJ j Ei jkl FkK FlL
Beispiel: St. Venant–Kirchhoff Material ( materiell)
Verzerrungsenergiefunktion des St. Venant–Kirchhoff Materials
kir (E) =12
� [ E : I ]2 + � E : E
� , � ... Lame Parameter
zugehorige Spannungen und Materialoperator
� kir t (E) =∂ ∂E
kir
= � [ E : I ] I +2 � E
ILkir (E) =∂� kir t
∂E= � I ⊗ I +2 � IIsym
I ... zweistufiger Einheitstensor [II J] = � I J
IIsym ... symmetrischer vierstufiger EinheitstensorIIsym = 1
2 [I⊗I + I⊗I] bzw. [IsymI JKL] = 1
2 [� IK � JL + � IL � JK]
vergleiche FEM I, Hooke’sches Gesetz, E← � und � ← �
13
“nlin˙fem” — 2007/4/7 — 11:52 — page 14 — #18
1 Grundlagen der Kontinuumsmechanik
Beispiel: Neo–Hooke Material (materiell)
dazu: Invarianten der Deformationstensoren
IC = C : I = b : I = Ib
I IC = 12 [ tr2(C)− tr(C2) ] = 1
2 [ tr2(b)− tr(b2) ] = I Ib
I I IC = det(C) = J2 = det(b) = I I Ib
partielle Ableitung der Invarianten∂IC
C= I
∂Ib
b= I
∂I IC
C= tr(C)I − Ct ∂I Ib
b= tr(b)I − bt
∂I I IC
C= det(C) C−1 = J2 C−t ∂I I Ib
b= det(b) b−1 = J2 b−t
Verzerrungsenergiefunktion des Neo–Hooke Materials
neo(C) =�2[ IC − 3 ]− � ln(J) +
�2[ ln(J) ]2
mit:∂ ln(J)
∂C=
∂ ln(√
I I IC)∂C
=1√I I IC
∂√
I I IC
∂C=
1√I I IC
12
I I IC√I I IC
C−1 =12
C−1
∂ ln2(J)∂C
= 2 ln(J)12
C−1 = ln(J) C−1
zugehorige Spannungen und Materialoperator
� neo t = 2∂ neo
∂C= � [ I − C−1 ] + � ln(J) C−1
ILneo = 2∂� neo t
∂C= [ 2 � − 2 � ln(J) ][−∂C
∂C
−1
] + � C−1 ⊗ C−1
∂C−1
∂C = −12
[C−1⊗C−1 + C−1⊗C−1
][∂CI J
∂C
−1
KL] = −1
2
[C−1
IK C−1JL + C−1
IL C−1JK
]
14
“nlin˙fem” — 2007/4/7 — 11:52 — page 15 — #19
1 Grundlagen der Kontinuumsmechanik
Beispiel: Neo–Hooke Material (raumlich)
push forward des Spannungstensors und des Materialtensors
� neo t =1J
F · � neo t · F t =�J
[ b− I ] +� ln(J)
JI
IEneo =1J[ F⊗F ] : ILneo : [ F t⊗F t ] = � ∗ I ⊗ I + 2 � ∗ iisym
Materialparameter
� ∗ =�J
� ∗ =� − � ln(J)
J
I ... zweistufiger Einheitstensor [Ii j] = � i j
iisym ... symmetrischer vierstufiger Einheitstensoriisym = 1
2 [I⊗I + I⊗I] bzw. [isymi jkl ] = 1
2
[� ik � jl + � il � jk
]vergleiche FEM I, Hooke’sches Gesetz, J ← 1, � ∗ ← � , � ∗ ← �
15
“nlin˙fem” — 2007/4/7 — 11:52 — page 16 — #20
1 Grundlagen der Kontinuumsmechanik
1.3 Bilanzgleichungen
zeitliche Anderung der Bilanzgroße {•}0, {•}t bilanziert mitOberflachenfluß {�}, {♦} und Volumenquelltermen {◦}0, {◦}t
• materiell, auf raumfestem materiellem Gebiet B0
Dt{•}0 = Div {�}+ {◦}0
• raumlich, auf zeitveranderlichem raumlichem Gebiet Bt
Dt{•}t = div ({♦})+ {◦}t dt{•}t = div ({♦}−{•}t⊗v)+ {◦}t
1.3.1 Massenbilanz
”Die zeitliche Anderung der Masse m, der materiellen Volumen-dichte � 0 im materiellen Gebiet B0, bzw. der raumlichen Volu-mendichte � t im raumlichen Gebiet Bt ist identisch zu Null.”
• materiell
Dt � 0 = 0
kein Fluß– & Quellterm, konstante Massendichte � 0 = const.
• raumlich
Dt � t = −� t div (v) dt � t = div (−� t v)
vergleiche Kontinuitatsgleichung der Stromungsmechanik
1.3.2 Impulsbilanz
”Die zeitliche Anderung des Impulses I, der mit der materi-ellen bzw. raumlichen Volumendichte � 0 bzw. � t gewichtetenGeschwindigkeit v = Dt' = ¨' im materiellen bzw. raumlichen
16
“nlin˙fem” — 2007/4/7 — 11:52 — page 17 — #21
1 Grundlagen der Kontinuumsmechanik
Gebiet B0 bzw. Bt entspricht der Summe aus Kraften aus demOberflachenfluß � t, � und den Volumenkraften � 0 b, � t b (z.B.Gravitation).”
• lokale Form, materiell
� 0 Dtv = Div (� t) + � 0 b
1. Cauchy’sche Bewegungsgleichung
• raumlich
� t Dtv = div (� t) + � t b � t dtv = div (� t− � tv⊗ v) + � t b
vergleiche Stromungsmechanik
1.3.3 Drehimpulsbilanz
”Die zeitliche Anderung des Drehimpulses L = r × I, ent-spricht der Summe aus dem Drehimpuls verursacht durchOberflachenkrafte r× t und dem Drehimpuls verursacht durchVolumenkrafte r× b.”
• materiell
F · � = � t · F t � = � t
1. Piola–Kirchhoff Spannungstensor nicht symmetrisch, aber2. Piola–Kirchhoff Spannungstensor ist symmetrisch
• raumlich
� = � t
Symmetrie des Cauchy Spannungstensors
17
“nlin˙fem” — 2007/4/7 — 11:52 — page 18 — #22
1 Grundlagen der Kontinuumsmechanik
1.3.4 Energiebilanz
”Die zeitliche Anderung der (inneren) Energie I0 Entropie S0
entspricht der Summe aus Warmeanderung durch den Ober-flachenfluß Q, q und den Volumenquellterm Q0, Qt plus derinneren mechanischen Leistung � t : DtF, � : ∇xv.”
• materiell, energie–basiert
DtI0 = Div (−Q) +Q0 + � t : DtF
• materiell, entropie–basiertmit I0 = 0 + � S0 und Dt 0 = � t : DtF − S0 Dt� folgt
� DtS0 = Div (−Q) +Q0
• raumlich, energie–basiert
DtIt = div (−q)+Qt + � t : ∇xv dtIt = div (−q− Itv)+Qt + � t : ∇xv
( wobei ∇xv = DtF · F−1 = l)• raumlich, entropie–basiert
mit It = t + � St und Dt t = � t : ∇xv− St Dt� folgt
� DtSt = −div (−q) +Qt � dtSt = div (−q− Stv) +Qt
18
“nlin˙fem” — 2007/4/7 — 11:52 — page 19 — #23
1 Grundlagen der Kontinuumsmechanik
1.4 Prinzip der virtuellen Arbeit
1.4.1 Prinzip der virtuellen Arbeit (materiell)
• Kinematik E =12
[ F t · F − I ] in B0
• Gleichgewicht � 0 ¨' = Div � t + � 0b in B0
• Konstitutives Gesetz � t =∂W∂F
in B0
• Dirichlet RB ' = ¯' auf ∂B0'
• Neumann RB T = � t · N = T auf ∂B0�
0. Ausgangspunkt: lokale materielle Form der Impulsbilanz
−� 0 ¨' + Div � t + � 0 b = 0
−� 0 ¨' i + � tiJ,J + � 0 bi = 0i
1. Skalarmultiplikation mit Testfunktion �
� · [ −� 0 ¨' + Div � t + � 0 b ] = 0
� i [ −� 0 ¨' i + � tiJ,J + � 0 bi ] = 0
2. Integration uber das materielle Gebiet B0
−∫B0
� · � 0 ¨' dV +∫B0
� ·Div � t dV +∫B0
� · � 0 b dV = 0
−∫B0
� i � 0 ¨' i dV +∫B0
� i � tiJ,J dV +
∫B0
� i � 0 bi dV = 0
3. partielle Integration des Divergenzterms∫B0
� ·Div � t dV =∫B0
Div [ � · � t ] dV−∫B0
∇X � : � t dV∫B0
� i � tiJ,J dV =
∫B0
[ � i � tiJ ],J dV−
∫B0
� i,J : � tiJ dV
19
“nlin˙fem” — 2007/4/7 — 11:52 — page 20 — #24
1 Grundlagen der Kontinuumsmechanik
4. Gauss’scher Integralsatz∫B0
Div [ � · � t ] dV =∫
∂B0
� · � t ·N dA∫B0
[ � i � tiJ ],J dV =
∫∂B0
� i � tiJ NJ dA
5. Randbedingungen
' = ¯' auf ∂B0' � = 0 auf ∂B0' T = � t ·N = T auf ∂B0�
' i = ¯' i auf ∂B0' � i = 0i auf ∂B0' Ti = � tiJ ·NJ = Ti auf ∂B0�∫
∂B0
� · � t ·N dA =∫
∂B0'
� · � t ·N dA +∫
∂B0�
� · T dA∫∂B0
� i � tiJ NJ dA =
∫∂B0'
� i � tiJ NJ dA +
∫∂B0�
� i Ti dA
• schwache Form
∫B0
� ·� 0 ¨' dV+∫B0
∇X� :� tdV−∫
∂B0
� ·T dA−∫B0
� ·� 0b dV=0∫B0
� i � 0 ¨' idV+∫B0
� i,J:� tiJdV−
∫∂B0
� i TidA−∫B0
� i � 0bidV=0
bzw. mit ∇X� : � t = ∇X� : F · � = [F t · ∇X� ]sym : �
∫B0
� ·� 0 ¨' dV+∫B0
[F t ·∇X� ]sym:� dV−∫
∂B0
� ·T dA−∫B0
� ·� 0b dV=0∫B0
� i � 0 ¨' idV+∫B0
[FtIi � i,J]sym:� t
I JdV−∫
∂B0
� i TidA−∫B0
� i � 0bidV=0
20
“nlin˙fem” — 2007/4/7 — 11:52 — page 21 — #25
1 Grundlagen der Kontinuumsmechanik
Interpretation als Prinzip der virtuellen Arbeit
mit � ← � ' ... virtuelle Verschiebung
�W0 = �Wdyn0 + �W int
0 − �W ext0 = 0
mit
�Wdyn0 =
∫B0
� ' · � 0 ¨' dV
�W int0 =
∫B0
∇X� ' : � t dV =∫B0
� E : � dV
�W ext0 =
∫∂B0
� ' · T dA +∫B0
� ' · � 0 b dV
wobei � E = [ � F t · F ]sym ... virtueller Verzerrungstensor
21
“nlin˙fem” — 2007/4/7 — 11:52 — page 22 — #26
1 Grundlagen der Kontinuumsmechanik
1.4.2 Prinzip der virtuellen Arbeit (raumlich)
• Kinematik b = F · F t in Bt
• Gleichgewicht � t ¨' = div � + � tb in Bt
• Konstitutives Gesetz � =2J
b · ∂W∂b
in Bt
• Dirichlet RB ' = ¯' auf ∂Bt'
• Neumann RB t = � t · n = t auf ∂Bt�
0. Ausgangspunkt: lokale raumliche Form der Impulsbilanz
−� t ¨' + div � + � t b = 0
−� t ¨' i + � i j, j + � t bi = 0i
1. Skalarmultiplikation mit Testfunktion �
� · [ −� t ¨' + div � + � t b ] = 0
� i [ −� t ¨' i + � i j, j + � t bi ] = 0
2. Integration uber das raumliche Gebiet Bt
−∫Bt
� · � t ¨' dv +∫Bt
� ·div � dv +∫Bt
� · � t b dv = 0
−∫Bt
� i � t ¨' i dv +∫Bt
� i � i j, j dv +∫Bt
� i � t bi dv = 0
3. partielle Integration des Divergenzterms∫Bt
� ·div � dv =∫Bt
div [ � · � ] dv−∫Bt
∇symx � : � dv∫
Bt
� i � i j, j dv =∫Bt
[ � i � i j ], j dv−∫Bt
� symi, j : � i j dv
22
“nlin˙fem” — 2007/4/7 — 11:52 — page 23 — #27
1 Grundlagen der Kontinuumsmechanik
4. Gauss’scher Integralsatz∫Bt
div [ � · � ] dv =∫
∂Bt
� · � · n da∫Bt
[ � i � i j ], j dv =∫
∂Bt
� i � i j n j da
5. Randbedingungen
' = ¯' auf ∂Bt' � = 0 auf ∂Bt' t = � · n = t auf ∂Bt�
' i = ¯' i auf ∂Bt' � i = 0i auf ∂Bt' ti = � i j · n j = ti auf ∂Bt�∫∂Bt
� · � · n da =∫
∂Bt'
� · � · n da +∫
∂Bt�
� · t da∫∂Bt
� i � i j n j da =∫
∂Bt'
� i � i j n j da +∫
∂Bt�
� i ti da
• schwache Form
∫Bt
� ·� t ¨' dv+∫Bt
∇symx � :� dv−
∫∂Bt
� ·t da−∫Bt
� ·� tb dv=0∫Bt
� i � t ¨' idv+∫Bt
� symi, j :� i jdv−
∫∂Bt
� i tida−∫Bt
� i � tbidv=0
Interpretation als Prinzip der virtuellen Leistung
mit � ← � v ... virtuelle Geschwindigkeit
�Wt = �Wdynt + �W int
t − �W extt = 0
mit
�Wdynt =
∫Bt
� v · � t ¨' dv
�W intt =
∫Bt
∇symx � v : � dv =
∫Bt
� d : � dv
�W extt =
∫∂Bt
� v · t da +∫Bt
� v · � t b dv
wobei � d = ∇symx � v ... virtueller Deformationsratentensor
23
“nlin˙fem” — 2007/4/7 — 11:52 — page 24 — #28
1 Grundlagen der Kontinuumsmechanik
1.5 Richtungsableitung – Linearisierung
Problem: nichtlineare Kontinuumsmechanik fuhrt auf nichtli-neares Gleichungssystem, i.a. gelost mit Newton–Raphson Ver-fahren, dazu Linearisierung des nichtlinearen Gleichungssy-stems erforderlich
allgemeine Definition der Richtungsableitung von F (x) an derStelle x0 in Richtung von ∆x
∆F (x0) = D∆xF (x0) · ∆x :=dd�
[F (x0 + � ∆x) ]∣∣∣∣� =0
Bemerkung: Die Richtungsableitung D∆xF (x0) · ∆x liefert dieAnderung der Funktion F aufgrund einer kleinen Anderung� ∆x ihres Argumentes x0. D∆xF (x0) ·∆x ist dabei immer linearin ∆x, so daß die Richtungsableitung auch als Linearisierung∆F (x0) von F bezuglich ∆x verstanden werden kann.
Bemerkung: Haufig findet man auch die folgende Darstellung.
∆F (x0) =∂F (x0)
∂x0· ∆x mit D∆xF (x0) =
∂F (x0)∂x0
hier: primare Unbekannte Deformationsabbildung ' , Lineari-sierung des Residuums r an der Stelle ' in Richtung von ∆'
∆r (' ) = D∆' r (' ) · ∆' :=dd�
[ r (' + � ∆' ) ]∣∣∣∣� =0
24
“nlin˙fem” — 2007/4/7 — 11:52 — page 25 — #29
1 Grundlagen der Kontinuumsmechanik
1.5.1 Linearisierung kinematischer Großen
• Linearisierung von F an der Stelle ' in Richtung von ∆'
∆F = D∆' F(' ) · ∆' =dd�
[ F (' + � ∆' ) ]|� =0
=dd�
[∇X' +∇X[� ∆' ]]|� =0
=dd�
[∇X' + � ∇X[∆' ]]|� =0
= ∇X∆' |� =0 = ∇X∆'
• Linearisierung von E an der Stelle ' in Richtung von ∆'
∆E= D∆' E(' ) · ∆'
=dd�
[E (' + � ∆' )]|� =0
=dd�
12
[[∇tX' +∇t
X[� ∆' ]] · [∇X' +∇X[� ∆' ]]− I]|� =0
=dd�
12
[∇tX' · ∇X' + � ∇t
X' · ∇X∆'
+� ∇tX∆' · ∇X' + � 2∇t
X∆' · ∇X∆' − I]|� =0
=12
[∇tX' · ∇X∆' +∇t
X∆' · ∇X' ] = [∆F t · F]sym
alternative Herleitung
∆E = D∆' E(' ) · ∆' =dd�
12[F t (' + � ∆' ) · F (' + � ∆' )− I]|� =0
=12[ ∆F t · F + F t · ∆F ]
= [ ∆F t · F ]sym
25
“nlin˙fem” — 2007/4/7 — 11:52 — page 26 — #30
1 Grundlagen der Kontinuumsmechanik
1.5.2 Linearisierung des Prinzips der virtuellen Arbeit ( materiell )
Bemerkung: hier Linearisierung der kontinuierlichen Gleichun-gen, dann Diskretisierung mit Finiten Elementen, alternativ:Diskretisierung, dann Linearisierung (insbesondere bei Struk-turelementen)
Problem: nichtlineares Gleichungssystem der Form
∫B0
� · � 0 ¨' dV +∫B0
[∇tX� · F]sym : � dV
−∫
∂B0
� · TdA−∫B0
� · � 0 bdV = 0
allgemeine Form
�W0(' + ∆' ) = 0
iterative Losung mit Hilfe des Newton–Raphson VerfahrensTaylor Reihenentwicklung mit Abbruch nach dem linearenTerm
�W0(' + ∆' ) = �W0(' ) + ∆�W0(' ) = 0
mit
�W0 = �Wdyn0 + �W int
0 − �W ext0
∆�W0 = ∆�Wdyn0 + ∆�W int
0 − ∆�W ext0
26
“nlin˙fem” — 2007/4/7 — 11:52 — page 27 — #31
1 Grundlagen der Kontinuumsmechanik
und
�Wdyn0 =
∫B0
� · � 0 ¨' dV
∆�Wdyn0 =
∫B0
� · � 0∂ ¨'∂'· ∆' dV
�W int0 =
∫B0
[∇tX� · F]sym : � dV
∆�W int0 =
∫B0
[∇tX� · ∇X∆' ]sym: � dV geom. Anteil
+∫B0
[∇tX� · F]sym: IL : [F t · ∇X∆' ]symdV mat. Anteil
�W ext0 =
∫∂B0
� · TdA +∫B0
� · � 0 b dV
∆�W ext0 =
∫∂B0
0 dA +∫
∂B0
0 dV
Interpretation als Prinzip der virtuellen Arbeit
mit � ← � ' ... virtuelle Verschiebung
�W int0 =
∫B0
� E : IL : E dV
∆�W int0 =
∫B0
� ∆E : IL : E dV geometrischer Anteil
+∫B0
� E : IL : ∆E dV materieller Anteil
wobei
� ... Variation
∆ ... Linearisierung (formal gleiche Herleitung)
mit
� F = ∇X� ' � E = [ � F t· F]sym
∆ F = ∇X∆' ∆ E = [ ∆F t· F]sym
� ∆ E = [ � F t· ∆F]sym
27
“nlin˙fem” — 2007/4/7 — 11:52 — page 28 — #32
1 Grundlagen der Kontinuumsmechanik
1.5.3 Linearisierung des Prinzips der virtuellen Arbeit (raumlich)
Problem: nichtlineares Gleichungssystem der Form
∫Bt
� · � t ¨' dv +∫Bt
∇symx � : � dv−
∫∂Bt
� · tda−∫Bt
� · � t bdv
allgemeine Form
�Wt(' + ∆' ) = 0
iterative Losung mit Hilfe des Newton–Raphson VerfahrensTaylor Reihenentwicklung mit Abbruch nach dem linearenTerm
�Wt(' + ∆' ) = �Wt(' ) + ∆�Wt(' ) = 0
mit
�Wt = �Wdynt + �W int
t − �W extt
∆�Wt = ∆�Wdynt + ∆�W int
t − ∆�W extt
Bemerkung: Linearisierung auf bewegtem Gebiet Bt nicht ohneweiteres durchfuhrbar, deshalb: push forward der materiellenForm aus 1.5.2 dazu
dA =1J
F t · da und dV =1J
dv
28
“nlin˙fem” — 2007/4/7 — 11:52 — page 29 — #33
1 Grundlagen der Kontinuumsmechanik
also
�Wdynt =
∫Bt
� · � t ¨' dv
∆�Wdynt =
∫Bt
� · � t∂ ¨'∂'· ∆' dv
�W intt =
∫Bt
∇symx � : � dv
∆�W intt =
∫Bt
[∇tx� · ∇x∆' ]sym : � dv geometrischer Anteil
+∫Bt
∇symx � : IE : ∇sym
x ∆' dv materieller Anteil
�W extt =
∫∂Bt
� · tda +∫Bt
� · � t b dv
∆�W extt =
∫∂Bt
0 da +∫
∂Bt
0 dv
Interpretation als Prinzip der virtuellen Leistung
mit � ← � v ... virtuelle Geschwindigkeit
�W intt =
∫Bt
� d : � dv
∆�W intt =
∫Bt
[∇tx� v · ∇x∆' ]sym : � dv geometrischer Anteil
+∫Bt
� d : IE : � dv materieller Anteil
vergleiche mit geometrisch linearer Theorie (FEM I)
� d = ∇symx � v und � = ∇sym
x u
29
“nlin˙fem” — 2007/4/7 — 11:52 — page 30 — #34
1 Grundlagen der Kontinuumsmechanik
Bemerkungen:
• Generell liefern materielle und raumliche Formulierungidentische Ergebnisse, es konnen also auch einzelne Inte-gralausdrucke materiell und andere raumlich ausgewertetwerden.
• Die Beziehung zwischen d = ∇symx v und v hat formal die
gleiche Struktur wie die Beziehung zwischen � = ∇symx u
und u der linearen FEM.
• Der materielle Anteil aus der Linearisierung der raumlichenFormulierung nimmt eine analoge Struktur an, wie der ent-sprechende Term der linearen FEM, deswegen wird haufigdie raumliche Form bevorzugt.
• Materielle formulierte Stoffgesetze (St. Venant Kirchhoff)motivieren eine materielle Formulierung, raumliche Stoff-gesetze (Neo–Hooke) eine raumliche.
• Bei richtungsabhangigen Lasten, z.B. aus Wasserdruck, derimmer senkrecht zur Oberflache wirkt, ist die Linearisie-rung der externen Lasten nicht Null, ∆�W ext 6= 0.
30
“nlin˙fem” — 2007/4/7 — 11:52 — page 31 — #35
1 Grundlagen der Kontinuumsmechanik
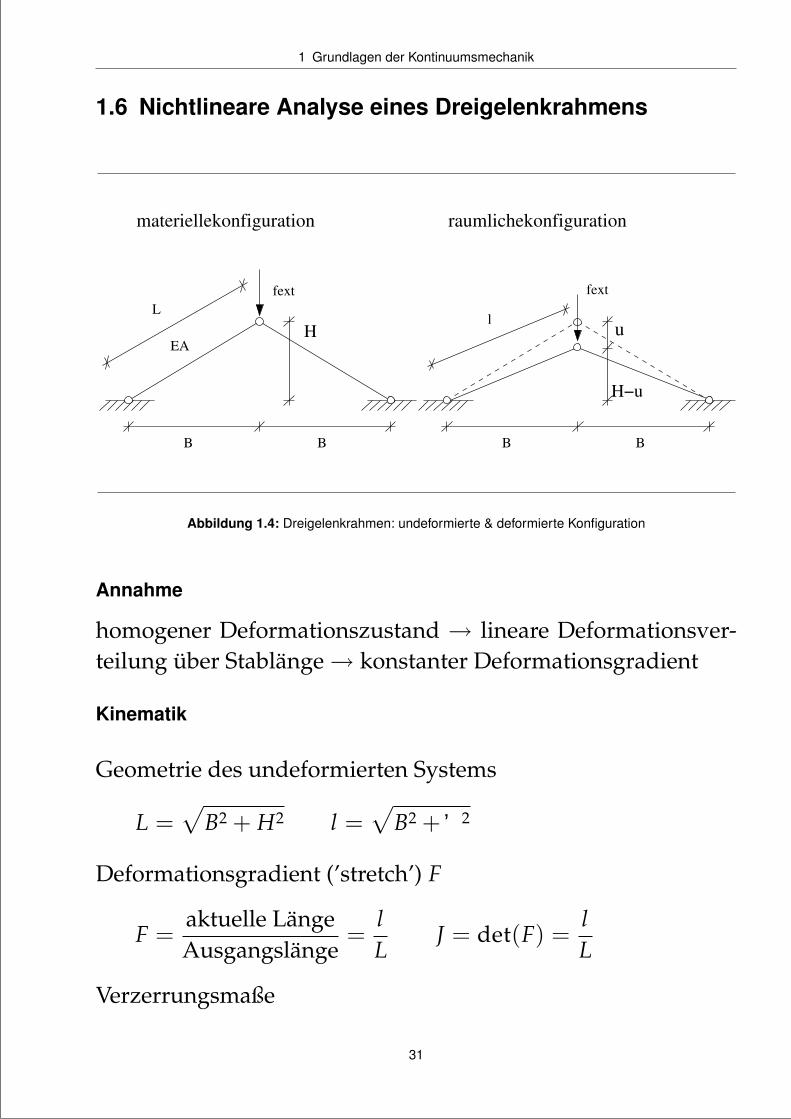
1.6 Nichtlineare Analyse eines Dreigelenkrahmens
EA
Lfext
B B
H
materiellekonfiguration raumlichekonfiguration
B B
l
fext
H−u
u
Abbildung 1.4: Dreigelenkrahmen: undeformierte & deformierte Konfiguration
Annahme
homogener Deformationszustand → lineare Deformationsver-teilung uber Stablange→ konstanter Deformationsgradient
Kinematik
Geometrie des undeformierten Systems
L =√
B2 + H2 l =√
B2 + ' 2
Deformationsgradient (’stretch’) F
F =aktuelle LangeAusgangslange
=lL
J = det(F) =lL
Verzerrungsmaße
31
“nlin˙fem” — 2007/4/7 — 11:52 — page 32 — #36
1 Grundlagen der Kontinuumsmechanik
Green–Lagrange Verzerrungstensor E
E =12
[ Ft F− 1 ] =12
l2 − L2
L2 =1
2L2 [ ' 2 − H2 ]
linearer Verzerrungstensor
� =∆lL
mit ∆l = u sin � ; sin � =HL→ � =
H uL2
Linearisierung / Variation kinematischer Großen
Langenanderung
∆l = D∆' l(' ) =dd�
[ l (' + � ∆' ) ] |� =0
=dd�
[B2 + [ ' + � ∆' ]2]1/2
∣∣∣� =0
=12 l
[2' ∆' + 2� ∆" 2] ∣∣
� =0
=1l
' ∆'
Deformationsgradient
∆F = D∆' F (' ) =dd�
[1L[ l (' + � ∆' ) ]
]∣∣∣∣� =0
=1
L l' ∆'
� F = D�' F (' ) =dd�
[1L[ l (' + ��' ) ]
]∣∣∣∣� =0
=1
L l' �'
∆� F = D∆' � F (' ) =dd�
[1
Ll (' + � ∆' )[' + � ∆' ]�'
]∣∣∣∣� =0
=1
L l�'
[1− ' 2
l2
]∆'
Green–Lagrange Verzerrungstensor
∆E = D∆' E (' ) =dd�
[1
2 L2 [ l2 (' + � ∆' )− 1 ]]∣∣∣∣
� =0=
1L2' ∆'
32
“nlin˙fem” — 2007/4/7 — 11:52 — page 33 — #37
1 Grundlagen der Kontinuumsmechanik
� E = D�' E (' ) =dd�
[1
2 L2 [ l2 (' + � �' )− 1 ]]∣∣∣∣
� =0=
1L2' �'
Bemerkung: Linearisierung der Green–Lagrange Verzerrungenliefert ∆ E ' →X=H,∆' →u→ �
∆� E = D∆' � E (' ) =dd�
[1L2 [ ' + � ∆' ] �'
]∣∣∣∣� =0
=1L2∆'�'
lineare Verzerrungen
�� = D� u � (u) =dd�
[H [ u + � � u ]
L2
]∣∣∣∣� =0
=HL2 � u
Hyperelastisches Stoffgesetz vom St. Venant Kirchhoff Typ
� kir = Emod E
Prinzip der virtuellen Arbeit am halben System
Beschrankung auf symmetrischen Versagenszustand
� W(' ) = � W int(' )− � Wext(' ) = 0 ∀ �'
� W(' ) =∫ L
0� E Emod EA dX− �' f ext
=∫ L
0
[�'
1L2 '
]Emod
[1
2L2 [' 2 − H2]]
A dX− �' f ext
=∫ L
0�'
EmodA2L4
[' 3 − ' H2]dX− �' f ext
= �'[
EmodA2L3
[' 3 − ' H2]− f ext
]= 0 ∀ �'
Newton–Raphson Verfahren
(a) direkte Losung der nichtlinearen Gleichung
� W (' + ∆' ) = 0
33

“nlin˙fem” — 2007/4/7 — 11:52 — page 34 — #38
1 Grundlagen der Kontinuumsmechanik
Taylor Reihenentwicklung
� W (' + ∆' ) = � W (' ) + ∆� W (' ) + ... = 0
mit
� W(' ) = �'[
EmodA2L3
[' 3 − ' H2]− f ext
]∆� W(' ) =
dd�
[� W(' + � ∆' )]|� =0
= �'[
EmodA2L3
[3 ' 2 − H2] ∆'
]
Iterationsvorschrift fur Newton–Raphson Verfahren
∆' =2L3
EmodA [3' 2 − H2]
[f ext− EmodA
2L3
[' 3 − ' H2]]
(b) allgemeine Linearisierung des Prinzips der virtuellen Arbeit
Losung der nichtlinearen Gleichung
� W (' + ∆' ) = 0
Taylor Reihenentwicklung
� W (' + ∆' ) = � W (' ) + ∆� W (' ) + ... = 0
34

“nlin˙fem” — 2007/4/7 — 11:52 — page 35 — #39
1 Grundlagen der Kontinuumsmechanik
mit
� W(' ) =∫ L
0� E Emod E A dX− �' f ext
= �' [EmodA
2L3
[' 3 − ' H2]︸ ︷︷ ︸
:= f int
− f ext ]
∆� W(' ) =∫ L
0� E Emod ∆E A dX +
∫ L
0∆� E Emod E A dX
=∫ L
0
[�'
1L2'
]Emod
[1L2' ∆'
]A dX
+∫ L
0
[�'
1L2∆'
]Emod
[1
2 L2 [ '2 − H2 ]
]AdX
= �' [EmodA
2L3 2 ' 2︸ ︷︷ ︸:=Kmat
+EmodA
2L3 [' 2 − H2]︸ ︷︷ ︸:=Kgeo
] ∆'
Iterationsvorschrift fur Newton–Raphson Verfahren
∆' = [Kmat + Kgeo]−1 [ f ext− f int]
interne Krafte und Steifigkeit fur St. Venant–Kirchhof Material
f int =EmatA
2L3
[' 3 − H2'
]Kmat =
EmatA2L3 2' 2
Kgeo =EmatA
2L3
[' 2 − H2]
35
“nlin˙fem” — 2007/4/7 — 11:52 — page 36 — #40
1 Grundlagen der Kontinuumsmechanik
Vergleich mit linearer Theorie (FEM I)
� W(u) =∫ L
0�� Emod � A dX− � u f ext
=∫ L
0
[� u
HL2
]Emod
[HL2 u
]A dX− � u f ext
= � u [EmodA
L3 H2︸ ︷︷ ︸:=K
u− f ext ] = 0 ∀ � u
direkte Losung der linearen Gleichung
u = K−1 f ext
Gleichung linear in u→ keine Iteration erforderlich
36
“nlin˙fem” — 2007/4/7 — 11:52 — page 37 — #41
1 Grundlagen der Kontinuumsmechanik
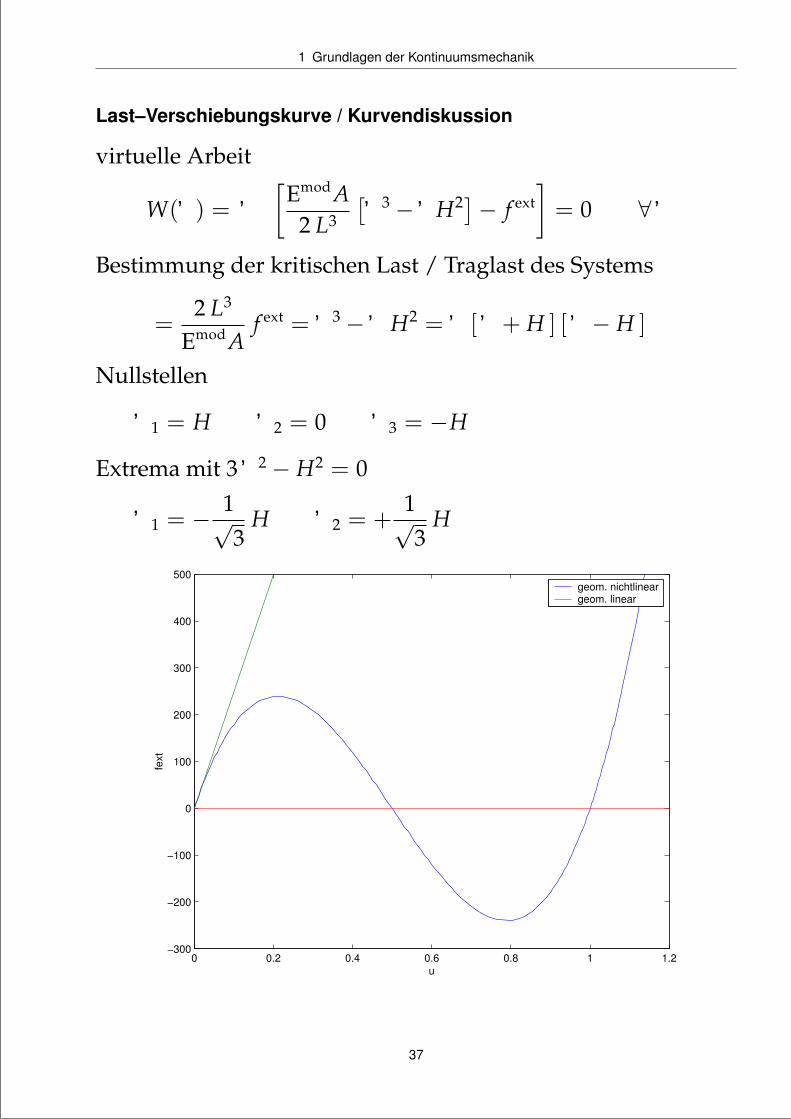
Last–Verschiebungskurve / Kurvendiskussion
virtuelle Arbeit
� W(' ) = � '[
EmodA2 L3
[' 3 − ' H2]− f ext
]= 0 ∀� '
Bestimmung der kritischen Last / Traglast des Systems
� =2 L3
EmodAf ext = ' 3 − ' H2 = ' [ ' + H ] [ ' − H ]
Nullstellen
' 1 = H ' 2 = 0 ' 3 = −H
Extrema mit 3 ' 2 − H2 = 0
' 1 = − 1√3
H ' 2 = +1√3
H
0 0.2 0.4 0.6 0.8 1 1.2−300
−200
−100
0
100
200
300
400
500
u
fext
geom. nichtlineargeom. linear
37
“nlin˙fem” — 2007/4/7 — 11:52 — page 38 — #42
2 Finite Element Methode – Elastizitat
2.1 Raumliche Diskretisierung mit Finiten Elementen
• ’isoparametrisches Konzept’: gleiche Ansatze fur GeometrieX und unbekannte Deformationsabbildung '
• ’Bubnov–Galerkin Technik’: gleiche Ansatze fur Unbekannte' und Testfunktionen � ( alternativ: � ' oder � v )
• Zerlegung des Gebietes B0 in nel Elemente Be0
B0 =nel⋃e=1
Be0
2.1.1 Diskretisierung kinematischer Großen
• (elementweise) Approximation der Geometrie X
X =nen
∑i=1
Ni X i
nen ... Anzahl Knoten pro ElementN ... hier: Lagrange’sche Formfunktionen, vergl. FEM I
• (elementweise) Approximation der Deformationsabbildung
38
“nlin˙fem” — 2007/4/7 — 11:52 — page 39 — #43
2 Finite Element Methode – Elastizitat
' , der Beschleunigung ¨' und der Testfunktion � (bzw. � ' )
' =nen
∑i=1
Ni ' i ¨' =nen
∑i=1
Ni ¨' i
� =nen
∑i=1
Ni � i bzw. � ' =nen
∑i=1
Ni � ' i
• Gradient der Testfunktionen und der Deformation
∇X� =nen
∑i=1
� i ⊗ ∇XNi
∇X' =nen
∑i=1
' i ⊗ ∇XNi
• Deformationsgradient
F =nen
∑i=1
' i ⊗∇XNi bzw. FjJ =nen
∑i=1
' j i ⊗∇XJ Ni
mit Ni = Ni(� ) → Kettenregel
∇XNi =∂Ni
∂X=
∂Ni
∂�· ∂�
∂X=[
∂X∂�
]−t
· ∂Ni
∂�
• Deformationstensoren
C = F t · F =nen
∑i=1
nen
∑j=1
[' i · ' j] ∇XNi ⊗ ∇XN j
b = F · F t =nen
∑i=1
nen
∑j=1
[∇XNi · ∇XN j] ' i ⊗ ' j
• Deformationsratentensor
d =12
nen
∑i=1
˙' i ⊗∇xNi +∇xNi ⊗ ˙' i
mit Ni = Ni(� ) → Kettenregel
∇xNi =∂Ni
∂x=
∂Ni
∂�· ∂�
∂x=[
∂x∂�
]−t
· ∂Ni
∂�
39
“nlin˙fem” — 2007/4/7 — 11:52 — page 40 — #44
2 Finite Element Methode – Elastizitat
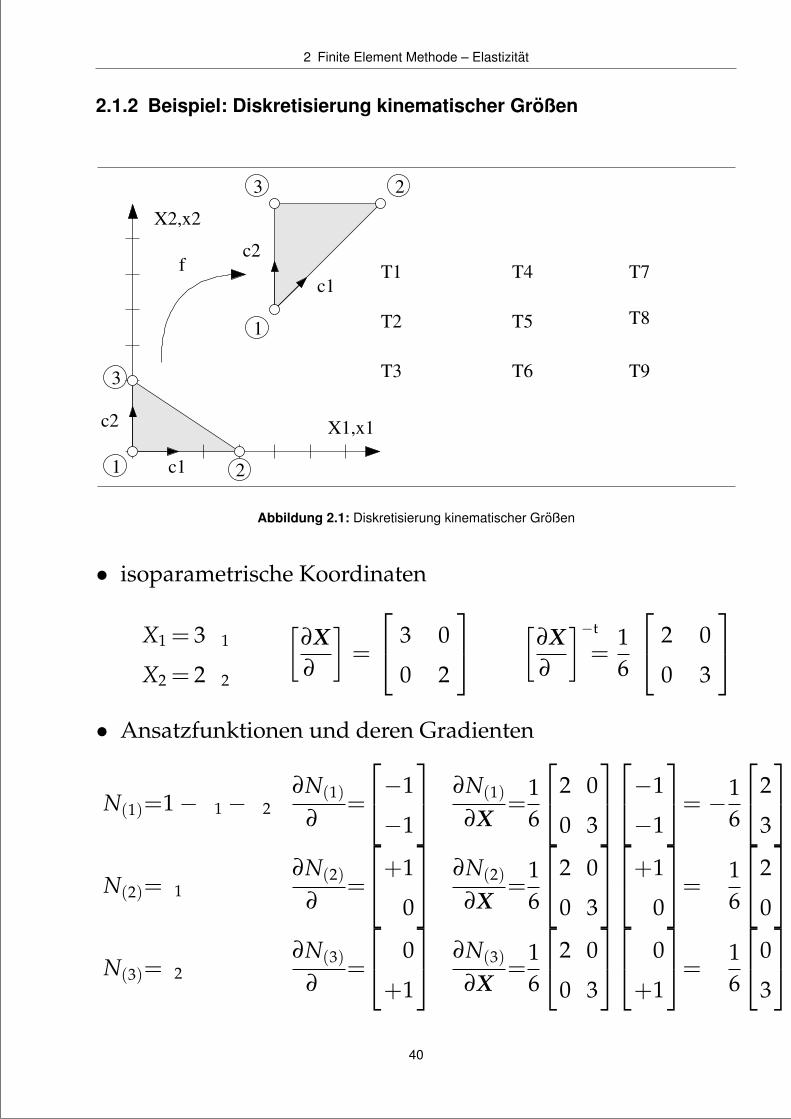
2.1.2 Beispiel: Diskretisierung kinematischer Großen
X2,x2
X1,x1
3
21
1
23
c1
c2
c2
c1f
T9
T2
T3 T6
T5
T1 T4 T7
T8
Abbildung 2.1: Diskretisierung kinematischer Großen
• isoparametrische Koordinaten
X1 = 3 � 1
X2 = 2 � 2
[∂X∂�
]=
3 0
0 2
[∂X∂�
]−t
=16
2 0
0 3
• Ansatzfunktionen und deren Gradienten
N(1)=1− � 1 − � 2∂N(1)
∂�=
−1
−1
∂N(1)
∂X=
16
2 0
0 3
−1
−1
= −16
2
3
N(2)=� 1
∂N(2)
∂�=
+1
0
∂N(2)
∂X=
16
2 0
0 3
+1
0
=16
2
0
N(3)=� 2
∂N(3)
∂�=
0
+1
∂N(3)
∂X=
16
2 0
0 3
0
+1
=16
0
3
40
“nlin˙fem” — 2007/4/7 — 11:52 — page 41 — #45
2 Finite Element Methode – Elastizitat
• Deformationsgradient
F =3
∑i=1
' i ⊗∇XNi bzw. FjJ =3
∑i=1
' j i ⊗∇XJ Ni
F11=' 1(1)∇1N(1)+' 1(2)∇1N(2)+' 1(3)∇1N(3) = −43+
73+0=1
F12=' 1(1)∇2N(1)+' 1(2)∇2N(2)+' 1(3)∇2N(3) = −42+0+
42=0
F21=' 2(1)∇1N(1)+' 2(2)∇1N(2)+' 2(3)∇1N(3) = −43+
73+0=1
F22=' 2(1)∇2N(1)+' 2(2)∇2N(2)+' 2(3)∇2N(3) = −42+0+
72=
32
Annahme: Ebener Verzerrungszustand
F =
1 0 0
1 32 0
0 0 1
• rechter Cauchy–Green Deformationstensor
1 0 0
1 32 0
0 0 1
C = F t · F =
1 1 0
0 32 0
0 0 1
2 32 0
32
94 0
0 0 1
= Ct
41
“nlin˙fem” — 2007/4/7 — 11:52 — page 42 — #46
2 Finite Element Methode – Elastizitat
• linker Cauchy–Green Deformationstensor / Fingertensor1 1 0
0 32 0
0 0 1
b = F · F t =
1 0 0
1 32 0
0 0 1
1 1 0
1 19 0
0 0 1
= bt
• Green–Lagrange Verzerrungstensor
E =12
[ F t · F − I ] =
12
34 0
34
58 0
0 0 1
= Et
• Jacobi Determinante
J = det F = det
1 0 0
1 32 0
0 0 1
=32
• Kontrolle: Flacheninhalte der Dreieckselemente
dV =12
2 · 3 = 3 dv =12
3 · 3 = 4.5
es gilt
dv = J dV =32
3 = 4.5√
42
“nlin˙fem” — 2007/4/7 — 11:52 — page 43 — #47
2 Finite Element Methode – Elastizitat
• Kontrolle: Transformation von Linienelementen
dX(1−2) =
3
0
dx(1−2) =
1 0
1 32
3
0
=
3
3
√
dX(1−3) =
0
2
dx(1−3) =
1 0
1 32
0
2
=
0
3
√
43
“nlin˙fem” — 2007/4/7 — 11:52 — page 44 — #48
2 Finite Element Methode – Elastizitat
2.2 Diskretisierung der schwachen Form (materiell)
2.2.1 Diskretisierung des Residuums
kontinuierliche schwache Form skalare Gleichung
�W0 =∫B0
� · � 0 ¨' dV +∫B0
[∇tX� · F]sym: � dV
−∫
∂B0
� · TdA−∫B0
� · � 0 bdV = 0
diskretisierte schwache Form skalare Gleichung
�W0 =nelAAAAAAAAA
e=1� i · [
∫Be
0
Ni � 0 ¨' dV +∫Be
0
∇XNi · [F · � ] dV
−∫
∂Be0
Ni T dA −∫Be
0
Ni � 0 b dV ] = 0
bzw.
�W0 =nelAAAAAAAAA
e=1� i ·
[f dyn
i + f inti − f ext
i
]= 0 ∀ � i
nelAAAAAAAAAe=1
... Zusammenbau aller i = 1, .., nen Elementknotenbeitrage
zu globalen Knotenbeitragen I = 1, .., nnp
diskretes Gleichgewicht vektorwertige Gleichung
r I := f dynI + f int
I − f extI = 0 ∀ I = 1, .., nnp
44

“nlin˙fem” — 2007/4/7 — 11:52 — page 45 — #49
2 Finite Element Methode – Elastizitat
mit Residuum r I und diskreten Knotenkraften f dynI , f int
I , f extI
f dynI =
nelAAAAAAAAAe=1
∫Be
0
Ni � 0 ¨' dV dynamische Krafte
f intI =
nelAAAAAAAAAe=1
∫Be
0
∇XNi · [F · � ] dV interne Krafte
f extI =
nelAAAAAAAAAe=1
∫∂Be
0
Ni T dA externe Oberflachenkrafte
+nelAAAAAAAAA
e=1
∫Be
0
Ni � 0 b dV externe Volumenkrafte
2.2.2 Linearisierung des Residuums
konsistente Linearisierung des Residuums r I an der Stelle n + 1
Taylor Reihenentwicklung
r Ik+1n+1 = r I
kn+1 + ∆r I
.= 0 ∀ I = 1, .., nnp
mit Linearisierung des Residuums ∆r I
∆r I(' J) =nnp
∑J=1
D∆' Jr I(' J) · ∆' J =nnp
∑J=1
∂r I(' J)∂' J
· ∆' J
mit inkrementellem Update des Losungsvektors ∆' J
∆r I =nnp
∑J=1
KI J · ∆' J KI J =∂r I(' J)
∂' J∀ I = 1, .., nnp
Steifigkeitsmatrix KI J aus Linearisierung des Residuums r I
KI J = KdynI J + Kgeo
I J + KmatI J ∀ I, J = 1, .., nnp
45
“nlin˙fem” — 2007/4/7 — 11:52 — page 46 — #50
2 Finite Element Methode – Elastizitat
mit Anteilen der Steifigkeitsmatrix KI J
KdynI J =
nelAAAAAAAAAe=1
∫Be
0
Ni � 0∂ ¨'∂'
N j I dV dyn. Anteil
KgeoI J =
nelAAAAAAAAAe=1
∫Be
0
∇tXNi · � · ∇XN j I dV geom. Anteil
KmatI J =
nelAAAAAAAAAe=1
∫Be
0
[∇tXNi · F]sym· IL · [F t · ∇XN j]symdV mat. Anteil
zu losendes Gleichungssystem
∆' J =nnp
∑I=1
K−1J I · ∆r I ∀ I, J = 1, .., nnp
Bemerkungen:
• Alternativ kann auch zunachst kontinuierliche schwacheForm �W0(' ) bezuglich der kontinuierlichen Verschiebun-gen ' linearisiert und die linearisierte schwache Form
�W0(' + ∆' ) = �W0(' ) + ∆�W0(' ) .= 0
dann diskretisiert werden. Fur Kontinuumselemente erhaltman formal gleiche Ausdrucke wie bei der hier vorge-stellten Vorgehensweise. Insbesondere fur Strukturelemen-te konnen sich beide Verfahren jedoch erheblich unterschei-den, nur das hier vorgestellte liefert dann die richtigen Tan-gentenoperatoren.
• Die Summe aus dynamischen, internen und externenKraften wird als Elementresiduum ri ∀i = 1, .., nen bzw. alsglobales Residuum r I ∀I = 1, .., nnp bezeichnet. Das Residu-um ist eine nichtlineare Funktion der unbekannten Defor-mation ' J. Mit Hilfe des Newton–Raphson Verfahrens wirddas globale Residuum an der Stelle n + 1 iterativ zu Nullberechnet, so daß r I n+1
.= 0 ∀I = 1, .., nnp.
46
“nlin˙fem” — 2007/4/7 — 11:52 — page 47 — #51
2 Finite Element Methode – Elastizitat
• Die Integralausdrucke uber das materielle bzw. raumlicheElementgebiet
∫Be
0...dV bzw.
∫Be
t...dv werden ublicherweise
im Rahmen der FEM mittels numerischer Integration ermit-telt.∫Be
0
(•)dV ≈nip
∑I=1
(•)(� I) wI bzw.∫Be
t
(•)dv ≈nip
∑I=1
(•)(� I) wI
Dazu erfolgt eine Auswertung an I = 1, .., nip Integrations-punkten und eine anschließende Gewichtung mit den je-weiligen Gewichten wI, vergleiche FEM I (Gauss–Legendreoder Newton–Cotes Quadratur).
• Aufgrund der komplizierten Darstellung der materiellenForm wird i.a. haufig die raumliche Form bevorzugt, die imfolgenden naher betrachtet wird.
47
“nlin˙fem” — 2007/4/7 — 11:52 — page 48 — #52
2 Finite Element Methode – Elastizitat
2.3 Diskretisierung der schwachen Form (raumlich)
2.3.1 Diskretisierung des Residuums
kontinuierliche schwache Form skalare Gleichung
�Wt =∫Bt
� · � t ¨' dv +∫Bt
∇tx� : � dv−
∫∂Bt
� · tda−∫Bt
� · � t b dv = 0
diskretisierte schwache Form skalare Gleichung
�Wt =nelAAAAAAAAA
e=1� i · [
∫Be
t
Ni � t ¨' dV +∫Be
t
∇txNi � dv
−∫
∂Bet
Ni · t da −∫Be
t
Ni � t b dv ] = 0
bzw.
�Wt =nelAAAAAAAAA
e=1� i ·
[f dyn
i + f inti − f ext
i
]= 0 ∀ � i
nelAAAAAAAAAe=1
... Zusammenbau aller i = 1, .., nen Elementknotenbeitrage
zu globalen Knotenbeitragen I = 1, .., nnp
diskretes Gleichgewicht vektorwertige Gleichung
r I := f dynI + f int
I − f extI = 0 ∀ I = 1, .., nnp
48
“nlin˙fem” — 2007/4/7 — 11:52 — page 49 — #53
2 Finite Element Methode – Elastizitat
mit Residuum r I und diskreten Knotenkraften f dynI , f int
I und f extI
f dynI =
nelAAAAAAAAAe=1
∫Be
t
Ni � t ¨' dv dynamische Krafte
f intI =
nelAAAAAAAAAe=1
∫Be
t
∇xNi · � dv interne Krafte
f extI =
nelAAAAAAAAAe=1
∫∂Be
t
Ni t da externe Oberflachenkrafte
+nelAAAAAAAAA
e=1
∫Be
t
Ni � t b dv externe Volumenkrafte
2.3.2 Linearisierung des Residuums
konsistente Linearisierung des Residuums r I an der Stelle n + 1
Taylor Reihenentwicklung
r Ik+1n+1 = r I
kn+1 + ∆r I
.= 0 ∀ I = 1, .., nnp
mit Linearisierung des Residuums ∆r I
∆r I(' J) =nnp
∑J=1
D∆' Jr I(' J) · ∆' J =nnp
∑J=1
∂r I(' J)∂' J
· ∆' J
mit inkrementellem Update des Losungsvektors ∆' J
∆r I =nnp
∑J=1
KI J · ∆' J KI J =∂r I(' J)
∂' J∀ I = 1, .., nnp
Steifigkeitsmatrix KI J aus Linearisierung des Residuums r I
KI J = KdynI J + Kgeo
I J + KmatI J ∀ I, J = 1, .., nnp
49
“nlin˙fem” — 2007/4/7 — 11:52 — page 50 — #54
2 Finite Element Methode – Elastizitat
mit Anteilen der Steifigkeitsmatrix KI J
KdynI J =
nelAAAAAAAAAe=1
∫Be
t
Ni � t∂ ¨'∂'
N j I dv dynamischer Anteil
KgeoI J =
nelAAAAAAAAAe=1
∫Be
t
∇txNi · � · ∇xN j I dv geometrischer Anteil
KmatI J =
nelAAAAAAAAAe=1
∫Be
t
∇txNi · IE · ∇xN j dv materieller Anteil
• zu losendes Gleichungssystem
∆' J =nnp
∑I=1
K−1J I · ∆r I ∀ I, J = 1, .., nnp
Bemerkung: einzelne Anteile von Residuum und Steifigkeits-matrix konnen je nach Problemstellung materiell oder raumlichausgewertet werden
50
“nlin˙fem” — 2007/4/7 — 11:52 — page 51 — #55
2 Finite Element Methode – Elastizitat
2.4 Diskretisierung in Matrix–Vektor–Notation
Bemerkung: Bei der Implementierung wird haufig dieVoigt’sche Darstellung / Matrixnotation verwendet, fur diesich die Darstellung der Tensoren und Vektoren erheblich ver-einfacht, vergleiche FEM I
hier: Matrixnotation am Beispiel der raumlichen Formulierung,vergleiche 2.3
• Unbekanntenvektor - Inkrement der Verschiebungen
∆'[3×1]
= [ ∆' 1, ∆' 2, ∆' 3 ]t mit ∆'[3×1]
=nen
∑i=1
Ni ∆' i
• Testfunktion
�[3×1]
= [ � 1, � 2, � 3 ]t mit �[3×1]
=nen
∑i=1
Ni � i
Ni ... isoparametrische Formfunktionen
• raumlicher Gradient des Unbekanntenvektors
∇x∆'[6×1]
= [ ∆' 1,1, ∆' 2,2, ∆' 3,3, ∆' 1,2, ∆' 2,3, ∆' 3,1 ]t
mit
∇x∆'[3×1]
=nen
∑i=1
Bti
[6×3]· ∆' i
[3×1]
• raumlicher Gradient der Testfunktionen
∇x�[6×1]
= [ � 1,1, � 2,2, � 3,3, � 1,2, � 2,3, � 3,1 ]t
mit
∇x�[6×1]
=nen
∑i=1
Bti
[6×3]· � i
[3×1]
51
“nlin˙fem” — 2007/4/7 — 11:52 — page 52 — #56
2 Finite Element Methode – Elastizitat
Bi ... B-Matritzen, vergleiche FEM I
Bi[6×3]
=
∂Ni
∂x10 0
∂Ni
∂x20
∂Ni
∂x3
0∂Ni
∂x20
∂Ni
∂x1
∂Ni
∂x30
0 0∂Ni
∂x30
∂Ni
∂x2
∂Ni
∂x1
t
• Beschleunigungsvektor
¨'[3×1]
= [ ¨' 1, ¨' 2, ¨' 3 ]t
• Spannungstensor in Voigt’scher Notation
�[6×1]
= [ � 11, � 22, � 33, � 12, � 23, � 31 ]t
• Spannungssvektor
t[3×1]
= [ t1, t2, t3 ]t
• Volumenlastvektor
b[3×1]
= [ b1, b2, b3 ]t
52
“nlin˙fem” — 2007/4/7 — 11:52 — page 53 — #57
2 Finite Element Methode – Elastizitat
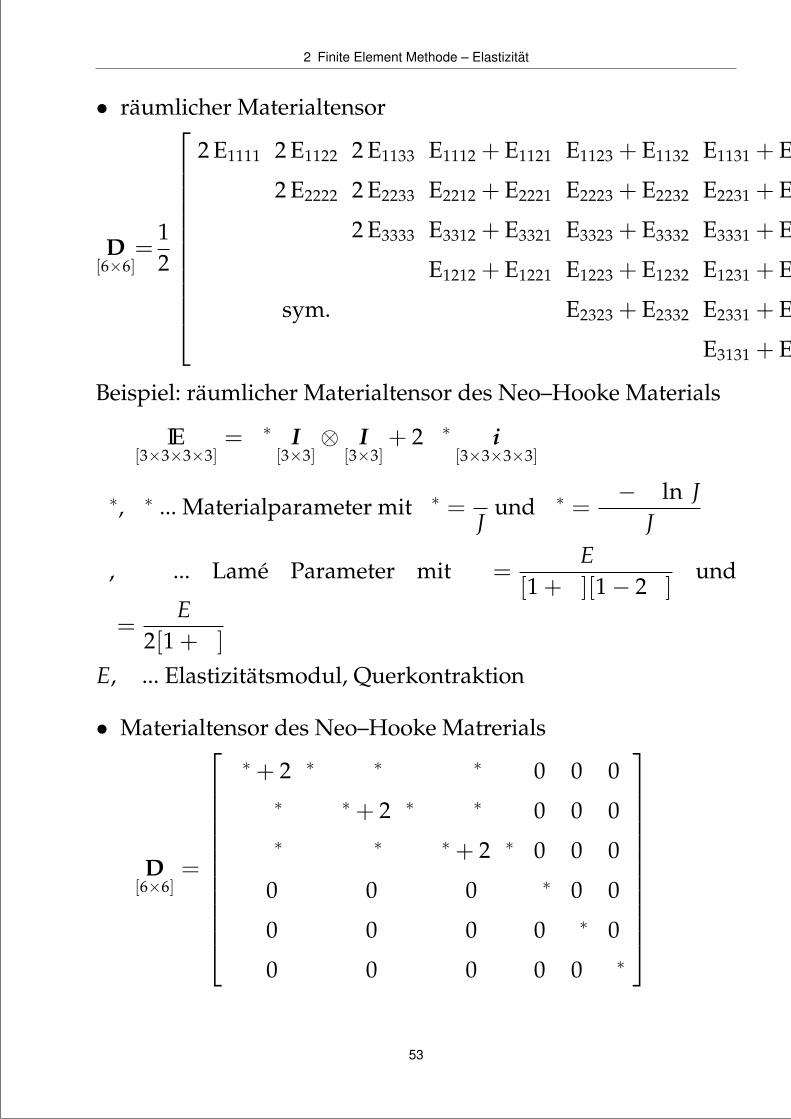
• raumlicher Materialtensor
D[6×6]
=12
2 E1111 2 E1122 2 E1133 E1112 + E1121 E1123 + E1132 E1131 + E1113
2 E2222 2 E2233 E2212 + E2221 E2223 + E2232 E2231 + E2213
2 E3333 E3312 + E3321 E3323 + E3332 E3331 + E3313
E1212 + E1221 E1223 + E1232 E1231 + E1213
sym. E2323 + E2332 E2331 + E2313
E3131 + E3113
Beispiel: raumlicher Materialtensor des Neo–Hooke Materials
IE[3×3×3×3]
= � ∗ I[3×3]⊗ I
[3×3]+ 2 � ∗ i
[3×3×3×3]
� ∗, � ∗ ... Materialparameter mit � ∗ =�J
und � ∗ =� − � ln J
J
� , � ... Lame Parameter mit � =E �
[1 + � ][1− 2 � ]und
� =E
2[1 + � ]E, � ... Elastizitatsmodul, Querkontraktion
• Materialtensor des Neo–Hooke Matrerials
D[6×6]
=
� ∗ + 2� ∗ � ∗ � ∗ 0 0 0
� ∗ � ∗ + 2� ∗ � ∗ 0 0 0
� ∗ � ∗ � ∗ + 2� ∗ 0 0 0
0 0 0 � ∗ 0 0
0 0 0 0 � ∗ 0
0 0 0 0 0 � ∗
53
“nlin˙fem” — 2007/4/7 — 11:52 — page 54 — #58
2 Finite Element Methode – Elastizitat
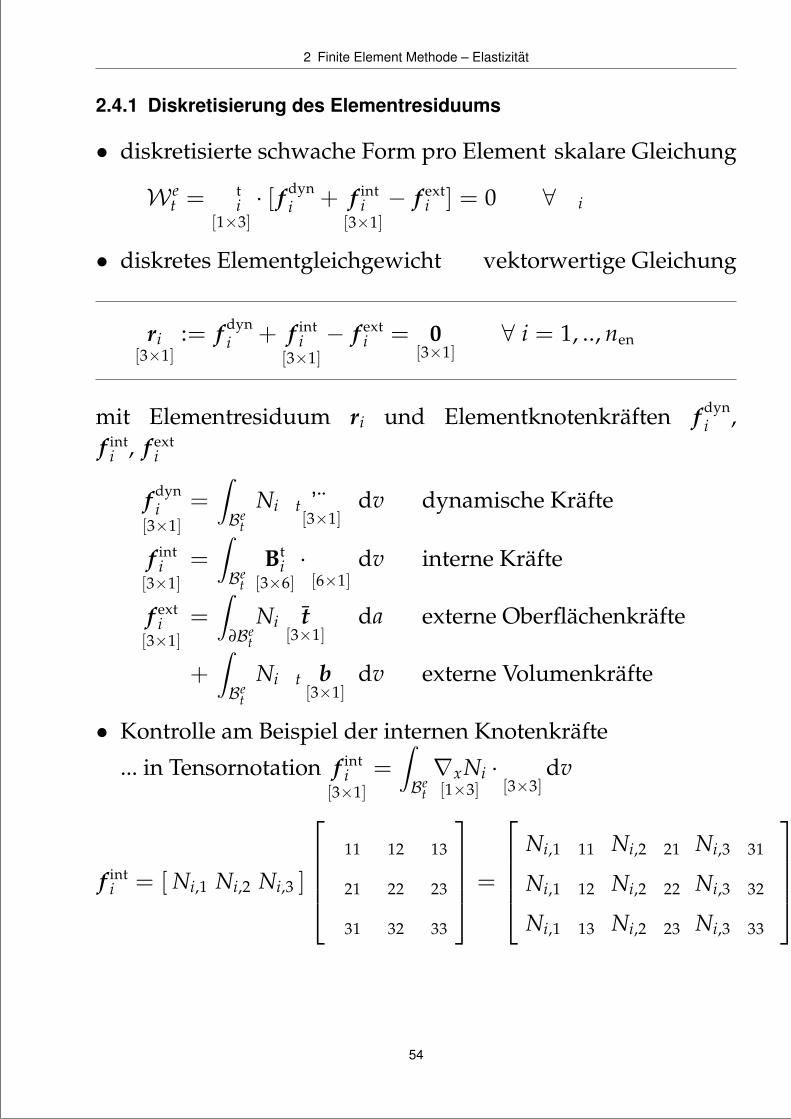
2.4.1 Diskretisierung des Elementresiduums
• diskretisierte schwache Form pro Element skalare Gleichung
�W et = � t
i[1×3]· [ f dyn
i + f inti
[3×1]− f ext
i ] = 0 ∀ � i
• diskretes Elementgleichgewicht vektorwertige Gleichung
ri[3×1]
:= f dyni + f int
i[3×1]− f ext
i = 0[3×1]
∀ i = 1, .., nen
mit Elementresiduum ri und Elementknotenkraften f dyni ,
f inti , f ext
i
f dyni
[3×1]=∫Be
t
Ni � t ¨'[3×1]
dv dynamische Krafte
f inti
[3×1]=∫Be
t
Bti
[3×6]· �
[6×1]dv interne Krafte
f exti
[3×1]=∫
∂Bet
Ni t[3×1]
da externe Oberflachenkrafte
+∫Be
t
Ni � t b[3×1]
dv externe Volumenkrafte
• Kontrolle am Beispiel der internen Knotenkrafte
... in Tensornotation f inti
[3×1]=∫Be
t
∇xNi[1×3]
· �[3×3]
dv
f inti = [ Ni,1 Ni,2 Ni,3 ]
� 11 � 12 � 13
� 21 � 22 � 23
� 31 � 32 � 33
=
Ni,1 � 11 Ni,2 � 21 Ni,3 � 31
Ni,1 � 12 Ni,2 � 22 Ni,3 � 32
Ni,1 � 13 Ni,2 � 23 Ni,3 � 33
54
“nlin˙fem” — 2007/4/7 — 11:52 — page 55 — #59
2 Finite Element Methode – Elastizitat
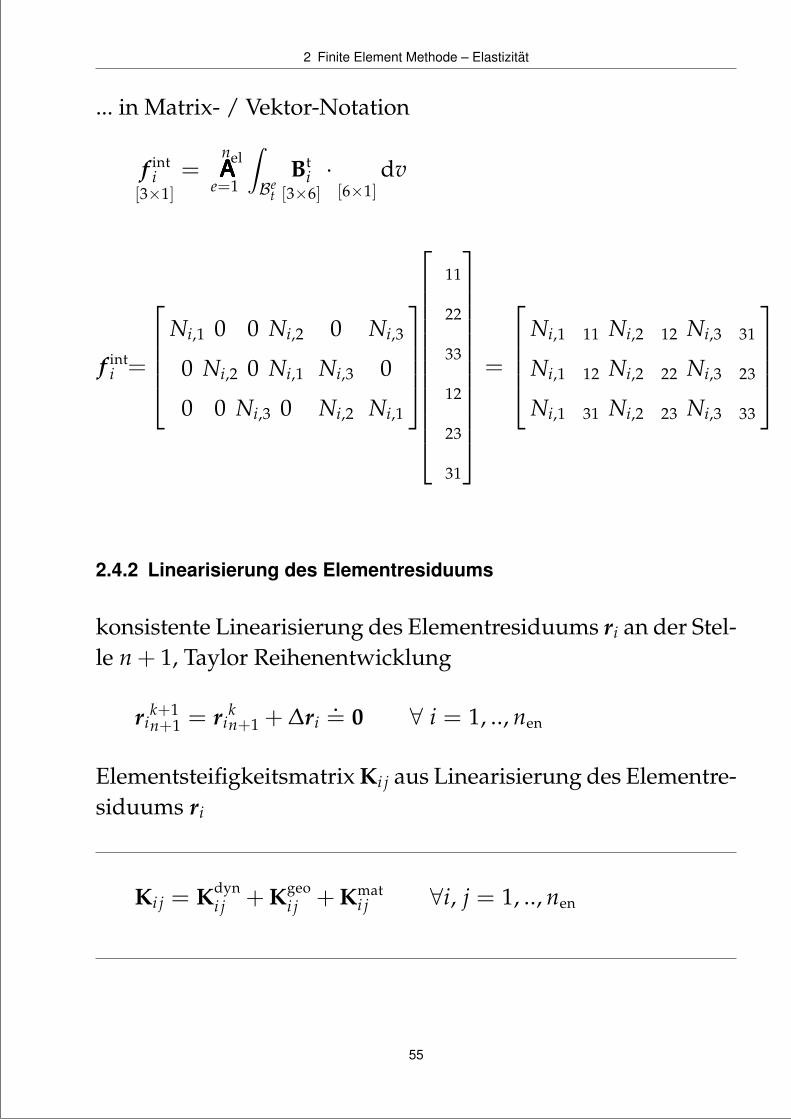
... in Matrix- / Vektor-Notation
f inti
[3×1]=
nelAAAAAAAAAe=1
∫Be
t
Bti
[3×6]· �
[6×1]dv
f inti =
Ni,1 0 0 Ni,2 0 Ni,3
0 Ni,2 0 Ni,1 Ni,3 0
0 0 Ni,3 0 Ni,2 Ni,1
� 11
� 22
� 33
� 12
� 23
� 31
=
Ni,1 � 11 Ni,2 � 12 Ni,3 � 31
Ni,1 � 12 Ni,2 � 22 Ni,3 � 23
Ni,1 � 31 Ni,2 � 23 Ni,3 � 33
2.4.2 Linearisierung des Elementresiduums
konsistente Linearisierung des Elementresiduums ri an der Stel-le n + 1, Taylor Reihenentwicklung
rik+1n+1 = ri
kn+1 + ∆ri
.= 0 ∀ i = 1, .., nen
Elementsteifigkeitsmatrix Ki j aus Linearisierung des Elementre-siduums ri
Ki j = Kdyni j + Kgeo
i j + Kmati j ∀i, j = 1, .., nen
55
“nlin˙fem” — 2007/4/7 — 11:52 — page 56 — #60
2 Finite Element Methode – Elastizitat
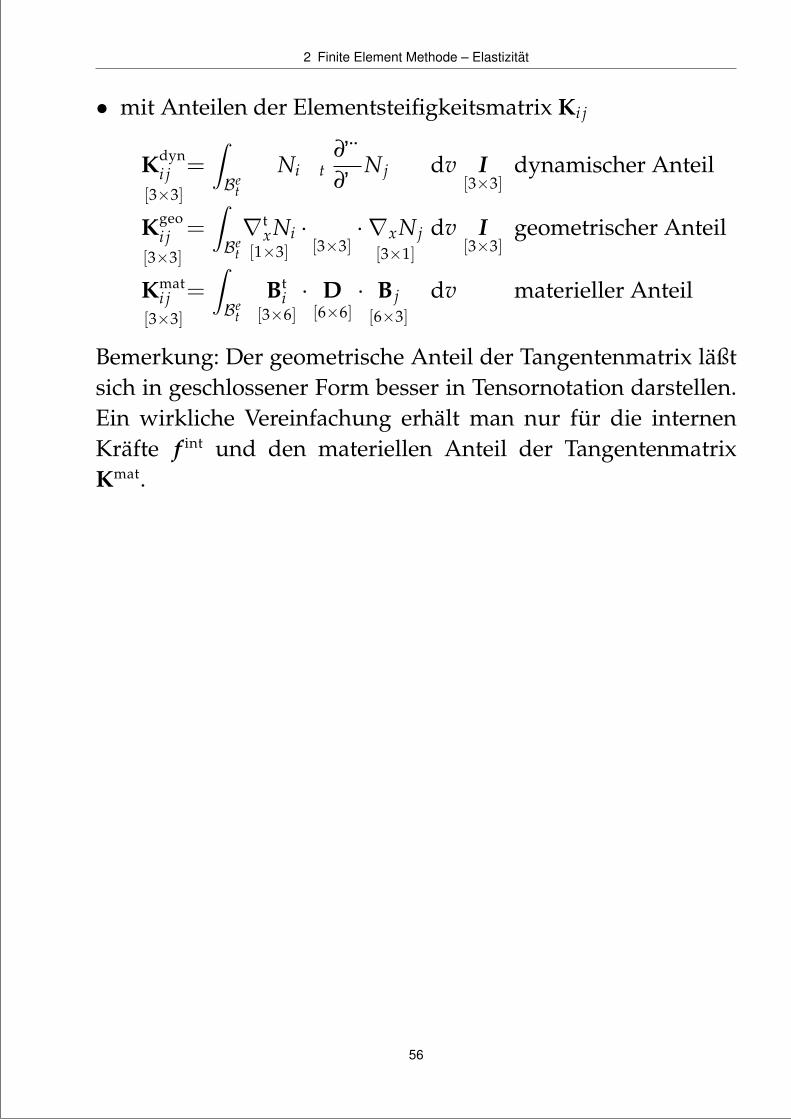
• mit Anteilen der Elementsteifigkeitsmatrix Ki j
Kdyni j
[3×3]
=∫Be
t
Ni � t∂ ¨'∂'
N j dv I[3×3]
dynamischer Anteil
Kgeoi j
[3×3]
=∫Be
t
∇txNi
[1×3]· �
[3×3]· ∇xN j
[3×1]dv I
[3×3]geometrischer Anteil
Kmati j
[3×3]
=∫Be
t
Bti
[3×6]· D
[6×6]· B j
[6×3]dv materieller Anteil
Bemerkung: Der geometrische Anteil der Tangentenmatrix laßtsich in geschlossener Form besser in Tensornotation darstellen.Ein wirkliche Vereinfachung erhalt man nur fur die internenKrafte f int und den materiellen Anteil der TangentenmatrixKmat.
56
“nlin˙fem” — 2007/4/7 — 11:52 — page 57 — #61
2 Finite Element Methode – Elastizitat
2.5 Stabelement im 2D Raum
1
2
2
1
21
B0
L l
BtN n
x
y
X
Y
F
phi
Xxi
Ll
xxi
xixim1 xip1
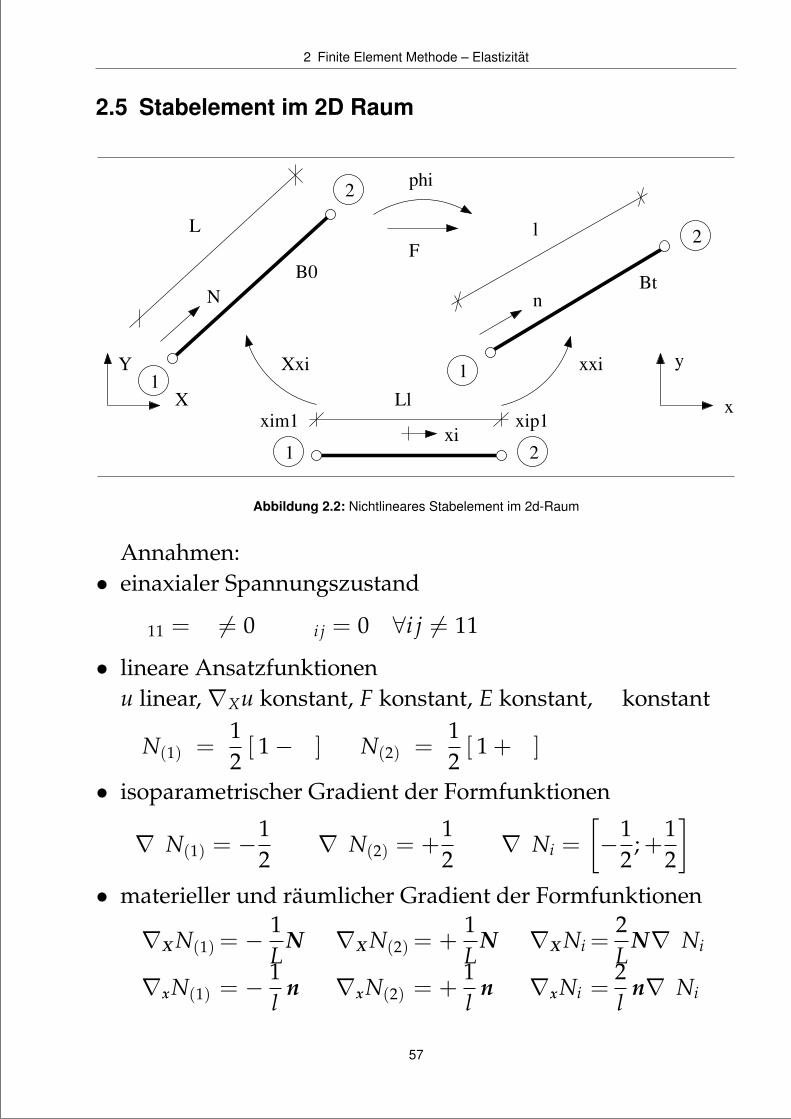
Abbildung 2.2: Nichtlineares Stabelement im 2d-Raum
Annahmen:• einaxialer Spannungszustand
� 11 = � 6= 0 � i j = 0 ∀i j 6= 11
• lineare Ansatzfunktionenu linear, ∇Xu konstant, F konstant, E konstant, � konstant
N(1) =12
[ 1− � ] N(2) =12
[ 1 + � ]
• isoparametrischer Gradient der Formfunktionen
∇� N(1) = −12
∇� N(2) = +12
∇� Ni =[−1
2; +
12
]• materieller und raumlicher Gradient der Formfunktionen
∇X N(1) = − 1L
N ∇X N(2) = +1L
N ∇X Ni =2L
N∇� Ni
∇xN(1) = − 1l
n ∇xN(2) = +1l
n ∇xNi =2l
n∇� Ni
57

“nlin˙fem” — 2007/4/7 — 11:52 — page 58 — #62
2 Finite Element Methode – Elastizitat
• Diskretisierung der Geometrie und Deformation
X =2
∑i=1
Ni(� ) X i ' =2
∑i=1
Ni(� ) ' i
also gilt
X =12
[ 1− � ] X(1) + [ 1 + � ] X(2)
[ 1− � ] Y(1) + [ 1 + � ] Y(2)
und damit
X(1) =
X(1)
Y(1)
X(2) =
X(2)
Y(2)
• materielle und raumliche Lange
L = ||X(2)− X(1) ||= ||2
∑i=1
2 X i∇� Ni ||
l = || ' (2)− ' (1) ||= ||2
∑i=1
2 ' i∇� Ni ||
• materielle und raumliche Normale
N =X(2)− X(1)
L= ∑
2i=1 2 X i∇� Ni
L
2
∑i=1
X i∇� Ni =L N
2
n =' (2)− ' (1)
l= ∑
2i=1 2 ' i∇� Ni
l
2
∑i=1
' i∇� Ni =l n2
• materieller und raumlicher Jacobi-”Vector”
∇X{•} =2L
N∇� {•} ∇x{•} =2ln∇� {•}
∇X� =2L
N ∇x� =2ln
58
“nlin˙fem” — 2007/4/7 — 11:52 — page 59 — #63
2 Finite Element Methode – Elastizitat
• Deformationsgradient
F =2
∑i=1
' i ⊗∇X Ni =2
∑i=1
' i∇� Ni2L⊗ N =
lL
n⊗ N
alternative Darstellung
F =lL
F = F n⊗ N
Interpretation als Tangentenabbildung von TB0 nach TBt
dx = F · dX bzw. n = F · N
Stretch F = l / L und Rotation der materiellen Normalen N
n =lL
n⊗ N · N =lL
n
• Green–Lagrange Verzerrungstensor
E =12[ F F− 1 ] =
12
l2 − L2
L2 E = E N ⊗ N
vergleiche Dreigelenkrahmen
• (eindimensionales) konstitutives Gesetz:Neo-Hooke Material
Wneo0 =
14
Emod [ F2 − 1− 2 ln(F) ]
� neo =dWneo
0
dF=
12
Emod
[F− 1
F
]� t = � n⊗ N
� neo =1F
� neoF =12
Emod
[F− 1
F
]� = � n⊗ n
d2Wneo0
dF2 =d� neo
dF=
12
Emod
[1 +
1F2
]• (eindimensionales) konstitutives Gesetz: St.–Venant Kirch-hoff Material
Wkir0 =
12
E Emod E
59
“nlin˙fem” — 2007/4/7 — 11:52 — page 60 — #64
2 Finite Element Methode – Elastizitat
� kir = Emod E =12
Emod[F2 − 1] � t = � N ⊗ N
� t = F · � t = � F · N ⊗ N � t = � F n⊗ N
� kir = F� kir =12
Emod[F3 − F] � t = � n⊗ N
d2Wkir0
dE=
d�dE
kir
= Emod d�dF
kir
=12
Emod[3 F2 − 1
]• Vergleich Neo–Hooke und St. Venant–Kirchhoff Spannungen
� neo =1F2 � kir � kir = F2 � neo
• innere Krafte
f intI =
nelAAAAAAAAAe=1
∫Be
0
∇X Ni· F · � dV ...materiell
=nelAAAAAAAAA
e=1
∫Be
0
∇X Ni· � dV ...materiell
=nelAAAAAAAAA
e=1
∫Be
t
∇xNi· � dv ...raumlich
mit
∇X Ni =2L
N∇� Ni ∇xNi =2ln∇� Ni
und
dV =12
A L d� dv =12
A l d�
f intI =
nelAAAAAAAAAe=1∇� Ni 2 � A ne =
nelAAAAAAAAAe=1∇� Ni 2 � A ne
60
“nlin˙fem” — 2007/4/7 — 11:52 — page 61 — #65
2 Finite Element Methode – Elastizitat
• Linearisierung
KI J =d f int
Id' J
=nelAAAAAAAAA
e=1
d[∇� Ni 2 � A ne]d' j
=nelAAAAAAAAA
e=1∇� Ni 2 A ne ⊗
d�dF
dFd' J︸ ︷︷ ︸
materiellerAnteil
+nelAAAAAAAAA
e=1∇� Ni 2 � A
dne
d' j︸ ︷︷ ︸geometrischerAnteil
Linearisierung des Stretches F = l / L
dFd' j
=1L
d ld' j
=1L
d||∑2i=1 2 ' i∇� Ni||
d' j
=1L
12
1||∑2
i=1 2 ' i∇� Ni||2
[2
∑i=1
2 ' i∇� Ni
]2∇� N j
dFd' j
=2L
ne∇� N j
Linearisierung der raumlichen (Einheits-)normale ne
dne
d' j=
1L
d[∑2i=1 2 ' i∇� Ni]/F
d' j
=1L
1F
d[∑2i=1 2 ' i∇� Ni]
d' j+
1L[
2
∑i=1
2 ' i∇� Ni]dF−1
d' j
=2
F LI∇� N j −
2F L
ne ⊗ ne∇� N j
=2l[I − ne ⊗ ne]∇� N j
61
“nlin˙fem” — 2007/4/7 — 11:52 — page 62 — #66
2 Finite Element Methode – Elastizitat
• materielle Steifigkeitsmatrix
KmatI J =
nelAAAAAAAAAe=1
∫Be
0
[∇X Ni · F]d�dF
[F t · ∇X N j] dV ...materiell
=nelAAAAAAAAA
e=1
∫Be
t
∇xNid�dF∇xN j dv ...raumlich
KmatI J =
nelAAAAAAAAAe=1
4AL
d�dF∇� Ni ne ⊗ ne∇� N j
• geometrische Steifigkeitsmatrix
KgeoI J =
nelAAAAAAAAAe=1
∫Be
0
∇X Ni � ∇X N j dVI ...materiell
=nelAAAAAAAAA
e=1
∫Be
t
∇xNi � ∇xN j dvI ...raumlich
KgeoI J =
nelAAAAAAAAAe=1
4Al
� ∇� Ni [I − ne ⊗ ne]∇� N j
62
“nlin˙fem” — 2007/4/7 — 11:52 — page 63 — #67
2 Finite Element Methode – Elastizitat
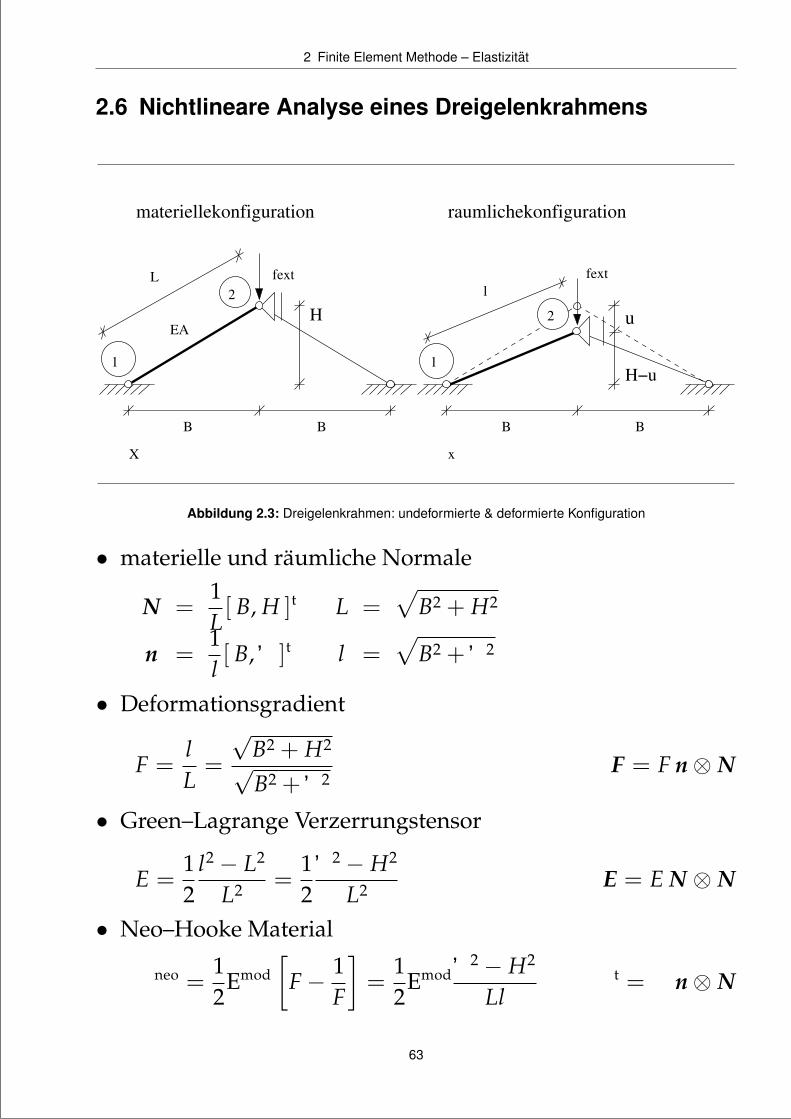
2.6 Nichtlineare Analyse eines Dreigelenkrahmens
B B
fext
EA
fext
B B
1
2
1
H u
H−u
lL
xX
materiellekonfiguration raumlichekonfiguration
2
Abbildung 2.3: Dreigelenkrahmen: undeformierte & deformierte Konfiguration
• materielle und raumliche Normale
N =1L[ B, H ]t L =
√B2 + H2
n =1l[ B, ' ]t l =
√B2 + ' 2
• Deformationsgradient
F =lL
=√
B2 + H2√
B2 + ' 2F = F n⊗ N
• Green–Lagrange Verzerrungstensor
E =12
l2 − L2
L2 =12
' 2 − H2
L2 E = E N ⊗ N
• Neo–Hooke Material
� neo =12
Emod
[F− 1
F
]=
12
Emod' 2 − H2
Ll� t = � n⊗ N
63
“nlin˙fem” — 2007/4/7 — 11:52 — page 64 — #68
2 Finite Element Methode – Elastizitat
d�dF
neo
=12
Emod
[1 +
1F2
]• St. Venant–Kirchhoff Material
� kir = Emod E =12
Emod' 2 − H2
L2 � t = � N ⊗ N
� t = F · � t = � F · N ⊗ N � t = �lL
n⊗ N
� kir =lL
� kir =12
Emod l[' 2 − H2]L3 � t = � n⊗ N
d�dF
kir
=12
Emod[3 F2 − 1
] d�dE
kir
= Emod
• Vergleich Neo–Hooke und St. Venant–Kirchhoff Spannungen
� neo =L2
l2 � kir =1F2 � kir � kir =
l2
L2 � neo = F2 � neo
• innere Krafte
f intI =∇� Ni 2 � A ne
f int neo(2)y = +
12
212
Emod' 2 − H2
LlA
1l
' =EmodA2Ll2 [' 3 − H' ]
f int kir(2)y = +
12
212
Emod l[' 2 − H2]L3 A
1l
' =EmodA
2L3 [' 3 − H' ]
• materielle Steifigkeit
KmodI J = 4
AL
d�dF
∇� Ni ne ⊗ ne ∇� N j
Kmat neo(2)y(2)y = 4
AL
d�dF
12
1l'
1l'
12
Kmat neo(2)y(2)y =
EmodA2l2L
[1 +
1F2
]' 2
Kmat kir(2)y(2)y =
EmodA2l2L
[3F2 − 1
]' 2
64
“nlin˙fem” — 2007/4/7 — 11:52 — page 65 — #69
2 Finite Element Methode – Elastizitat
• geometrische Steifigkeit
KgeoI J = 4
Al
� ∇� Ni [I − ne ⊗ ne]∇� N j
Kgeo(2)y(2)y = 4
Al
�12
[1− 1l'
1l' ]
12
Kgeo neo(2)y(2)y =
EmodA2l
[F− 1
F
] [1− ' 2
l2
]Kgeo kir
(2)y(2)y =EmodA
2l[F3 − F
] [1− ' 2
l2
]• Iterationsvorschrift fur Newton–Raphson Verfahren
∆ ' =1
Kmod + Kgeo
[f ext− f int
]interne Krafte und Steifigkeit fur St. Venant–Kirchhof Material
f int =EmodA
2L3
[' 3 − H2'
]Kmod + Kgeo =
EmodA2L3
[3' 2 − L2
l2 ' 2]
+EmodA
2L3
[l2 − L2] [1− ' 2
l2
]=
EmodA2L3
[3' 2 − H2]
vergleiche kontinuierliche Formulierung Dreigelenkrahmen 1.6
65
“nlin˙fem” — 2007/4/7 — 11:52 — page 66 — #70
2 Finite Element Methode – Elastizitat
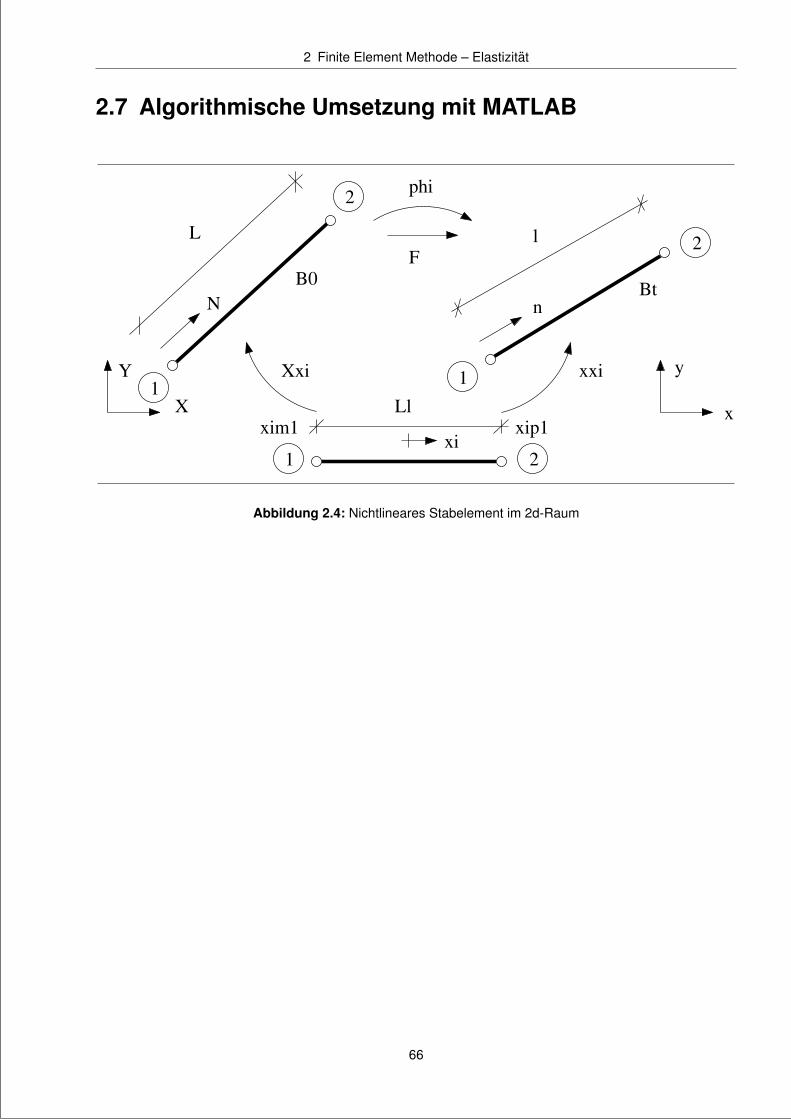
2.7 Algorithmische Umsetzung mit MATLAB
1
2
2
1
21
B0
L l
BtN n
x
y
X
Y
F
phi
Xxi
Ll
xxi
xixim1 xip1
Abbildung 2.4: Nichtlineares Stabelement im 2d-Raum
66

“nlin˙fem” — 2007/4/7 — 11:52 — page 67 — #71
2 Finite Element Methode – Elastizitat
2.7.1 Hauptprogramm
%-----------------------------------------------------------------% nonlinear elastostatics%-----------------------------------------------------------------%-----------------------------------------------------------------clear all initialization[ q0,edof,bc,F ext,emod,area,nel,node,ndof ] = frame 2;
% input of discretization, geometry, material dataj = 1; % init time indextime(1)= 0; % init timetol = 1e-8; % tolerance of newton iteratione mat = extr dis(edof,q0); % init material coordinatesq2 = q0; % init spatial coordinatesn gp = 2; % number of integration pointsdt = 1; % init load increment%-----------------------------------------------------------------%-----------------------------------------------------------------for im=1:1000 % loop over keyboard inputsmacro = input(’macro:’,’s’);[ir,ic] = size(macro);if ic<4disp(’@ least 4 letters needed’) % wrong keyboard inputelse
%-----------------------------------------------------------------if (strcmp(macro(1:4),’step’) == 1); % apply load in n increments[ir,ic] = size(macro);if ic==4nsteps = 1;
elsensteps = str2num(macro(7:ic));
endfor is = 1:nsteps; % loop over all load incrementsj = j+1;time(j) = time(j-1) + dt;iter=0; residuum=1;while residuum > tol % global newton-raphson iterationiter=iter+1;if iter>20 % no convergencedisp(’no convergence after 20 iterations’)return
elseR = zeros(ndof,1); % initialization of global residuumKt = zeros(ndof,ndof); % initialization of global stema
67

“nlin˙fem” — 2007/4/7 — 11:52 — page 68 — #72
2 Finite Element Methode – Elastizitat
e spa = extr dis(edof,q2); % extract global displacementsfor ie = 1:nel % loop over all elements[Ke,Fe] = truss(e mat(ie,:),e spa(ie,:),emod,area);[Kt,R] = assm sys(edof(ie,:),Kt,Ke,R,Fe);
endR = R - time(j)*F ext; % add external load to righthand sideresiduum=res norm(R,bc) % norm of residual including bc’sq2 = solve nr(Kt,R,q2,bc); % solution and update
endend % end of global newton iteration
end % end of load incrementation loop%-----------------------------------------------------------------%-----------------------------------------------------------------elseif (strcmp(macro(1:4),’pmat’) == 1); % plot mat configfigure(1)elnum = edof(:,1);plot mat(e mat,elnum)
%-----------------------------------------------------------------%-----------------------------------------------------------------elseif (strcmp(macro(1:4),’pspa’) == 1); % plot spat configfigure(1)e spa = extr dis(edof,q2);plot spa(e spa)
%-----------------------------------------------------------------%-----------------------------------------------------------------elseif (strcmp(macro(1:4),’quit’) == 1); % quitreturn
%-----------------------------------------------------------------%-----------------------------------------------------------------else % displace possible keyboard inputsdisp(’step ... apply one load step’)disp(’step,,n ... apply n load steps’)disp(’pmat ... plot material configuration’)disp(’pspa ... plot spatial configuration’)disp(’quit ... quit fe analyses’)
%-----------------------------------------------------------------endend % end of keyboard input loopend % end of main programme%-----------------------------------------------------------------
68

“nlin˙fem” — 2007/4/7 — 11:52 — page 69 — #73
2 Finite Element Methode – Elastizitat
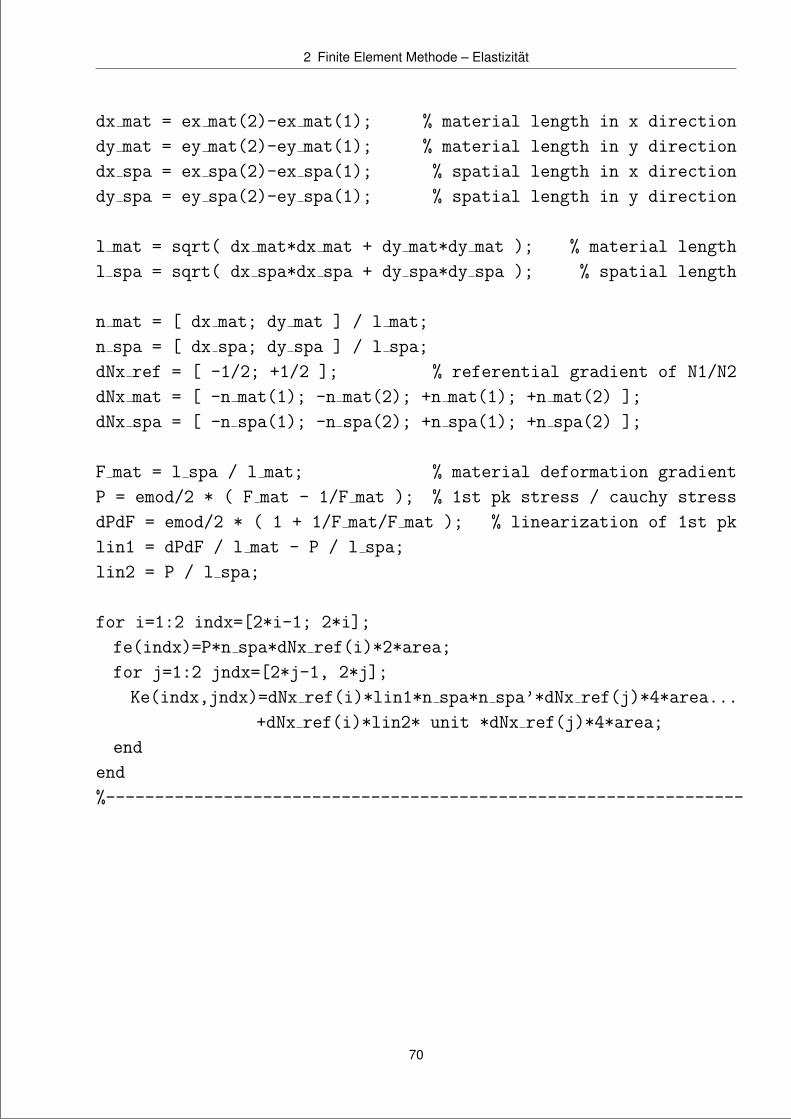
2.7.2 Elementlastvektor und Elementsteifigkeitsmatrix
%-----------------------------------------------------------------function [ed] = extr dis(edof,a)%-----------------------------------------------------------------% extract displacements from global vecto%-----------------------------------------------------------------[nie,n] = size(edof);t = edof(:,2:n);for i = 1:nieed(i,1:(n-1)) = a(t(i,:))’;
end%-----------------------------------------------------------------
%-----------------------------------------------------------------
function [Ke,fe] = truss(e mat,e spa,emod,area,e b)
%-----------------------------------------------------------------
% geometrically nonlinear isoparametric truss element
% two noded element, analytical integration, material formulation
%-----------------------------------------------------------------
% input: e mat = [ X 1 Y 1 X 2 Y 2 ] ... material coord
% e spa = [ x 1 y 1 x 2 y 2 ] ... spatial coord
% emod = 2 * mue ... young’s modulus
% area ... cross section area
% e b = [ bx; by ] ... volume force vector
%-----------------------------------------------------------------
% output: Ke = [ 4 x 4 ] ... element stiffness matrix
% fe = [ fx 1 fy 1 fx 2 fy 2] ... element load vector
%-----------------------------------------------------------------
fe = [ 0; 0; 0; 0]; % init load vector
unit = eye(2); % init identity
if nargin==4 b=zeros(2,1); else b=e b; end % init volume forces
indx =[1;3]; % indices of x coordinates
indy =[2;4]; % indices of y coordinates
ex mat=e mat(indx); % material x coordinates of 1/2
ey mat=e mat(indy); % material y coordinates of 1/2
ex spa=e spa(indx); % spatial x coordinates of 1/2
ey spa=e spa(indy); % spatial y coordinates of 1/2
69
“nlin˙fem” — 2007/4/7 — 11:52 — page 70 — #74
2 Finite Element Methode – Elastizitat
dx mat = ex mat(2)-ex mat(1); % material length in x direction
dy mat = ey mat(2)-ey mat(1); % material length in y direction
dx spa = ex spa(2)-ex spa(1); % spatial length in x direction
dy spa = ey spa(2)-ey spa(1); % spatial length in y direction
l mat = sqrt( dx mat*dx mat + dy mat*dy mat ); % material length
l spa = sqrt( dx spa*dx spa + dy spa*dy spa ); % spatial length
n mat = [ dx mat; dy mat ] / l mat;
n spa = [ dx spa; dy spa ] / l spa;
dNx ref = [ -1/2; +1/2 ]; % referential gradient of N1/N2
dNx mat = [ -n mat(1); -n mat(2); +n mat(1); +n mat(2) ];
dNx spa = [ -n spa(1); -n spa(2); +n spa(1); +n spa(2) ];
F mat = l spa / l mat; % material deformation gradient
P = emod/2 * ( F mat - 1/F mat ); % 1st pk stress / cauchy stress
dPdF = emod/2 * ( 1 + 1/F mat/F mat ); % linearization of 1st pk
lin1 = dPdF / l mat - P / l spa;
lin2 = P / l spa;
for i=1:2 indx=[2*i-1; 2*i];
fe(indx)=P*n spa*dNx ref(i)*2*area;
for j=1:2 jndx=[2*j-1, 2*j];
Ke(indx,jndx)=dNx ref(i)*lin1*n spa*n spa’*dNx ref(j)*4*area...
+dNx ref(i)*lin2* unit *dNx ref(j)*4*area;
end
end
%-----------------------------------------------------------------
70

“nlin˙fem” — 2007/4/7 — 11:52 — page 71 — #75
2 Finite Element Methode – Elastizitat
2.7.3 Gleichungsloser
%-----------------------------------------------------------------function ug = solve nr(K,f,ug,bc)%-----------------------------------------------------------------%-----------------------------------------------------------------if nargin==3 ; % no dirichlet boundary condsug = ug - K \ f ; % solve and update vector of unknowns
elseif nargin==4; % dirichlet boundary conds to be included[nd,nd] = size(K);fdof = [1:nd]’;pdof = bc(:,1);dp = bc(:,2);fdof(pdof) = []; % extract load vector of non-dirichlet nodess =- K(fdof,fdof) \ f(fdof); % solve reduced systemug(fdof) = ug(fdof) + s; % update vector of unknowns
end%-----------------------------------------------------------------
%-----------------------------------------------------------------function residuum = res norm(f,bc)%-----------------------------------------------------------------% norm of residual%-----------------------------------------------------------------if nargin==1 % no dirichlet bc’sresiduum = norm(f);
elseif nargin==2 % dirichlet bc’s[nr,nc] = size(f);fdof = [1:nr]’;pdof = bc(:,1);fdof(pdof) = [];residuum = norm(f(fdof)); % residual without reaction forces
end%-----------------------------------------------------------------
71
“nlin˙fem” — 2007/4/7 — 11:52 — page 72 — #76
2 Finite Element Methode – Elastizitat
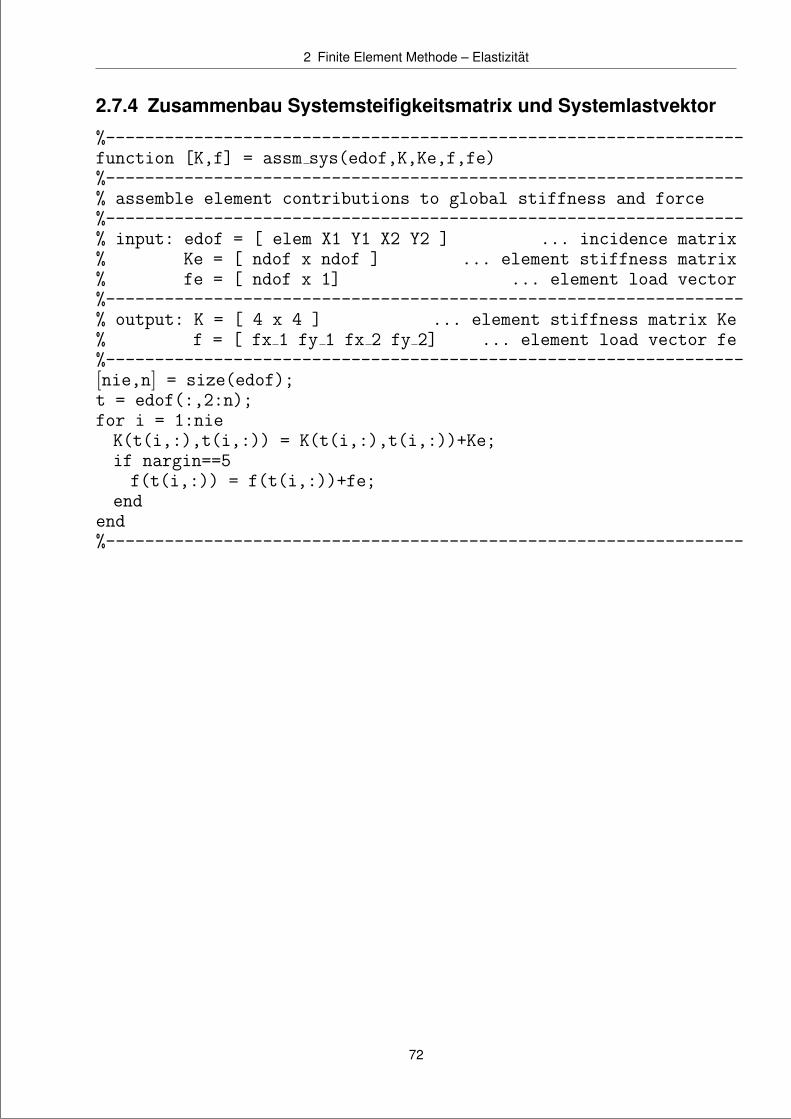
2.7.4 Zusammenbau Systemsteifigkeitsmatrix und Systemlastvektor
%-----------------------------------------------------------------function [K,f] = assm sys(edof,K,Ke,f,fe)%-----------------------------------------------------------------% assemble element contributions to global stiffness and force%-----------------------------------------------------------------% input: edof = [ elem X1 Y1 X2 Y2 ] ... incidence matrix% Ke = [ ndof x ndof ] ... element stiffness matrix% fe = [ ndof x 1] ... element load vector%-----------------------------------------------------------------% output: K = [ 4 x 4 ] ... element stiffness matrix Ke% f = [ fx 1 fy 1 fx 2 fy 2] ... element load vector fe%-----------------------------------------------------------------[nie,n] = size(edof);t = edof(:,2:n);for i = 1:nieK(t(i,:),t(i,:)) = K(t(i,:),t(i,:))+Ke;if nargin==5f(t(i,:)) = f(t(i,:))+fe;
endend%-----------------------------------------------------------------
72
“nlin˙fem” — 2007/4/7 — 11:52 — page 73 — #77
2 Finite Element Methode – Elastizitat
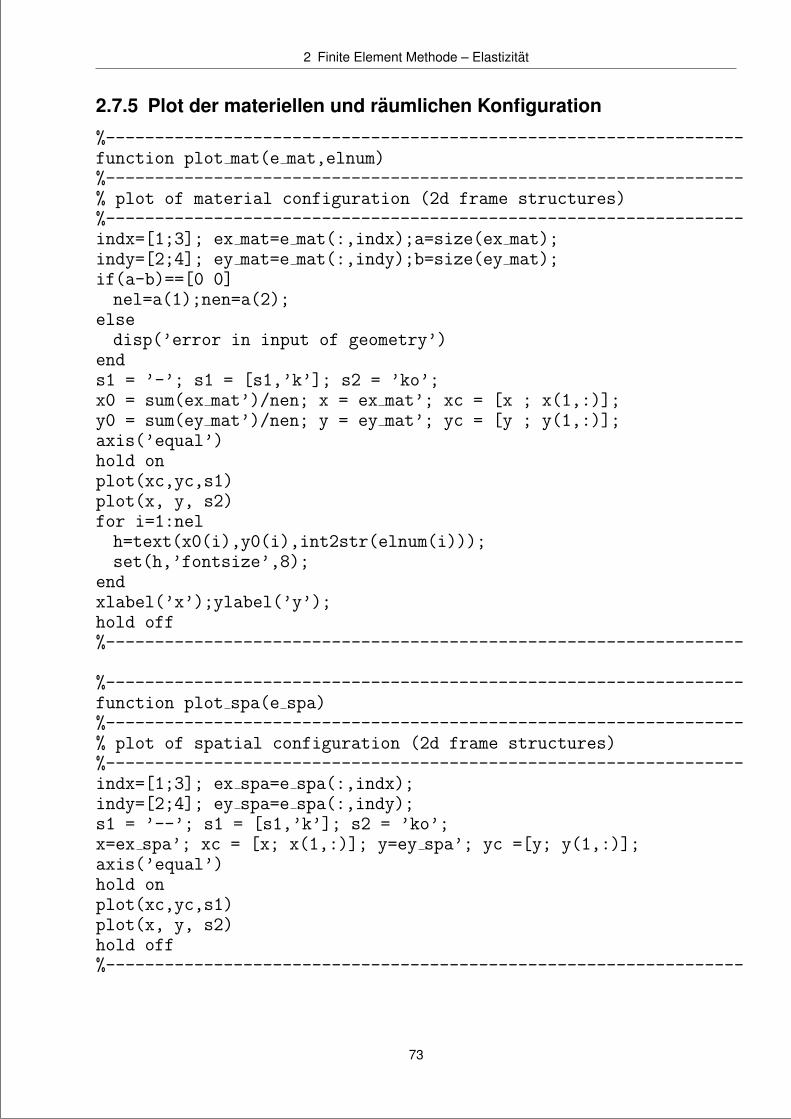
2.7.5 Plot der materiellen und raumlichen Konfiguration
%-----------------------------------------------------------------function plot mat(e mat,elnum)%-----------------------------------------------------------------% plot of material configuration (2d frame structures)%-----------------------------------------------------------------indx=[1;3]; ex mat=e mat(:,indx);a=size(ex mat);indy=[2;4]; ey mat=e mat(:,indy);b=size(ey mat);if(a-b)==[0 0]nel=a(1);nen=a(2);
elsedisp(’error in input of geometry’)
ends1 = ’-’; s1 = [s1,’k’]; s2 = ’ko’;x0 = sum(ex mat’)/nen; x = ex mat’; xc = [x ; x(1,:)];y0 = sum(ey mat’)/nen; y = ey mat’; yc = [y ; y(1,:)];axis(’equal’)hold onplot(xc,yc,s1)plot(x, y, s2)for i=1:nelh=text(x0(i),y0(i),int2str(elnum(i)));set(h,’fontsize’,8);
endxlabel(’x’);ylabel(’y’);hold off%-----------------------------------------------------------------
%-----------------------------------------------------------------function plot spa(e spa)%-----------------------------------------------------------------% plot of spatial configuration (2d frame structures)%-----------------------------------------------------------------indx=[1;3]; ex spa=e spa(:,indx);indy=[2;4]; ey spa=e spa(:,indy);s1 = ’--’; s1 = [s1,’k’]; s2 = ’ko’;x=ex spa’; xc = [x; x(1,:)]; y=ey spa’; yc =[y; y(1,:)];axis(’equal’)hold onplot(xc,yc,s1)plot(x, y, s2)hold off%-----------------------------------------------------------------
73
“nlin˙fem” — 2007/4/7 — 11:52 — page 74 — #78
3 Losungsverfahren
3.1 Newton–Raphson Verfahren (Lastkontrolle)
Bemerkung: Das Newton–Raphson Verfahren ist ein iterativesVerfahren, das das Residuum r I = f dyn
I + f intI − f ext
I , den “Fehlerim Kaftegleichgewicht”, zu Null iteriert.
• Problem: nichtlineare Gleichung der Form
r I(' J + ∆' J).= 0 ∀ I = 1, .., nnp
• Taylor Reihenentwicklung
r Ik+1n+1 = r I
kn+1 + ∆r I
.= 0 ∀ I = 1, .., nnp
mit Linearisierung des Residuums ∆r I
∆r I =nnp
∑J=1
∂r I
∂' J· ∆' J KI J =
∂r I
∂' J∀ I = 1, .., nnp
folgt
r Ik+1n+1 = r I
kn+1 +
nnp
∑J=1
KI J · ∆' J.= 0 ∀ I = 1, .., nnp
• Iterationsvorschrift fur das Newton–Raphson Verfahren
∆' J = −nnp
∑I=1
K−1J I · r I
kn+1 ∀ J = 1, .., nnp
74
“nlin˙fem” — 2007/4/7 — 11:52 — page 75 — #79
3 Losungsverfahren
Bemerkung: Obwohl es theoretisch moglich ware, die außereLast f ext
I in einem einzigen Schritt aufzubringen, ist es im all-gemeinen ublich, die Last inkrementell zu steigern, so daß injedem Lastschritt n eine Teillast ∆ f ext
In mit
f extI =
nstep
∑n=1
∆ f extIn
aufgebracht wird. Man spricht von einem inkrementelliterativen, lastkontrollierten Verfahren.
3.1.1 Newton–Raphson Verfahren – Algorithmus
1. Schleife uber alle Lastschritte n = 1..nstep
f extIn+1 = f ext
In + ∆ f extI
2. Schleife uber alle Iterationsschritte i = 1..imax
a) Berechne Residuumr I(' i
n+1) = f dynI (' i
n+1) + f intI (' i
n+1)− f extIn+1
b) Berechne TangentenmatrixKI J(' i
n+1) = KdynI J (' i
n+1) + KgeoI J (' i
n+1) + KmatI J (' i
n+1)c) Berechne Inkrement der Verschiebungen
∆' J = −∑nnpI=1 KJ I(' i
n+1)−1 · r I(' i
n+1)d) Update
' Ji+1n+1 = ' J
in+1 + ∆' J
e) Konvergenztest
||r I(' i+1n+1)||
≤ TOL goto 1.
> TOL goto 2.
75
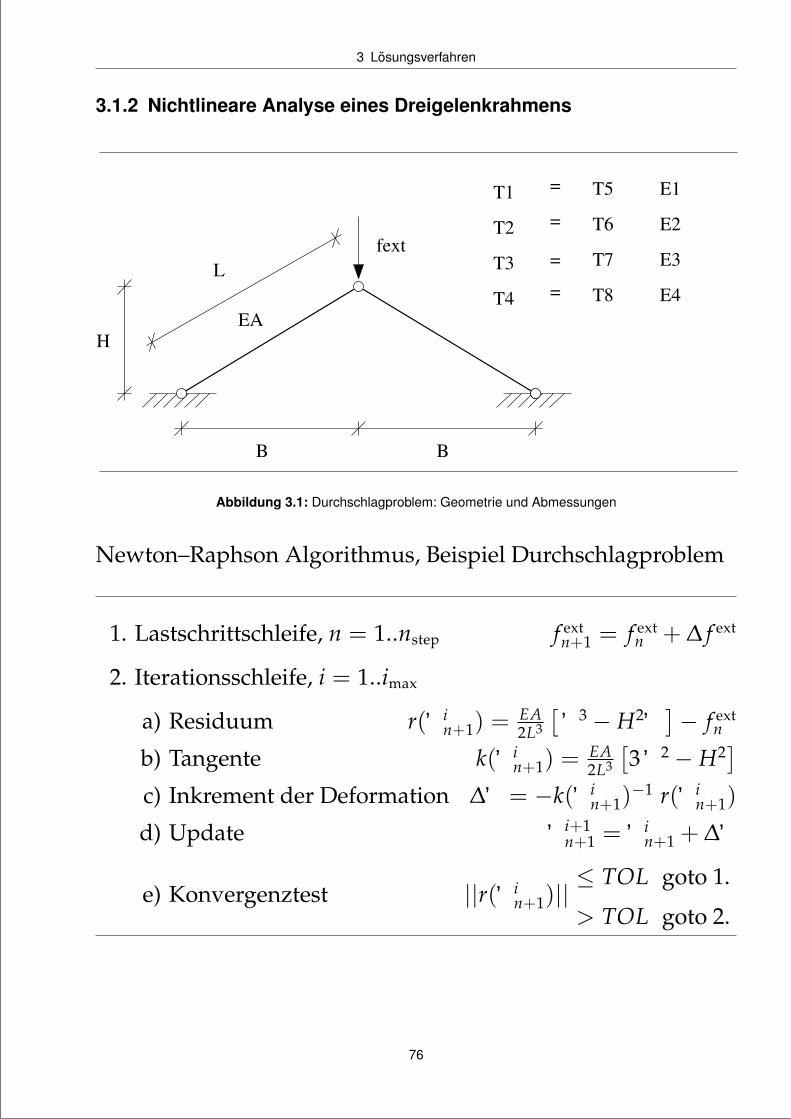
“nlin˙fem” — 2007/4/7 — 11:52 — page 76 — #80
3 Losungsverfahren
3.1.2 Nichtlineare Analyse eines Dreigelenkrahmens
T5
T6
T7
T8
T3
T4
T2
T1 E1
E2
E3
E4
=
=
=
=EA
Lfext
B B
H
Abbildung 3.1: Durchschlagproblem: Geometrie und Abmessungen
Newton–Raphson Algorithmus, Beispiel Durchschlagproblem
1. Lastschrittschleife, n = 1..nstep f extn+1 = f ext
n + ∆ f ext
2. Iterationsschleife, i = 1..imax
a) Residuum r(' in+1) = EA
2L3
[' 3 − H2'
]− f ext
n
b) Tangente k(' in+1) = EA
2L3
[3 ' 2 − H2
]c) Inkrement der Deformation ∆' = −k(' i
n+1)−1 r(' i
n+1)
d) Update ' i+1n+1 = ' i
n+1 + ∆'
e) Konvergenztest ||r(' in+1)||
≤ TOL goto 1.
> TOL goto 2.
76
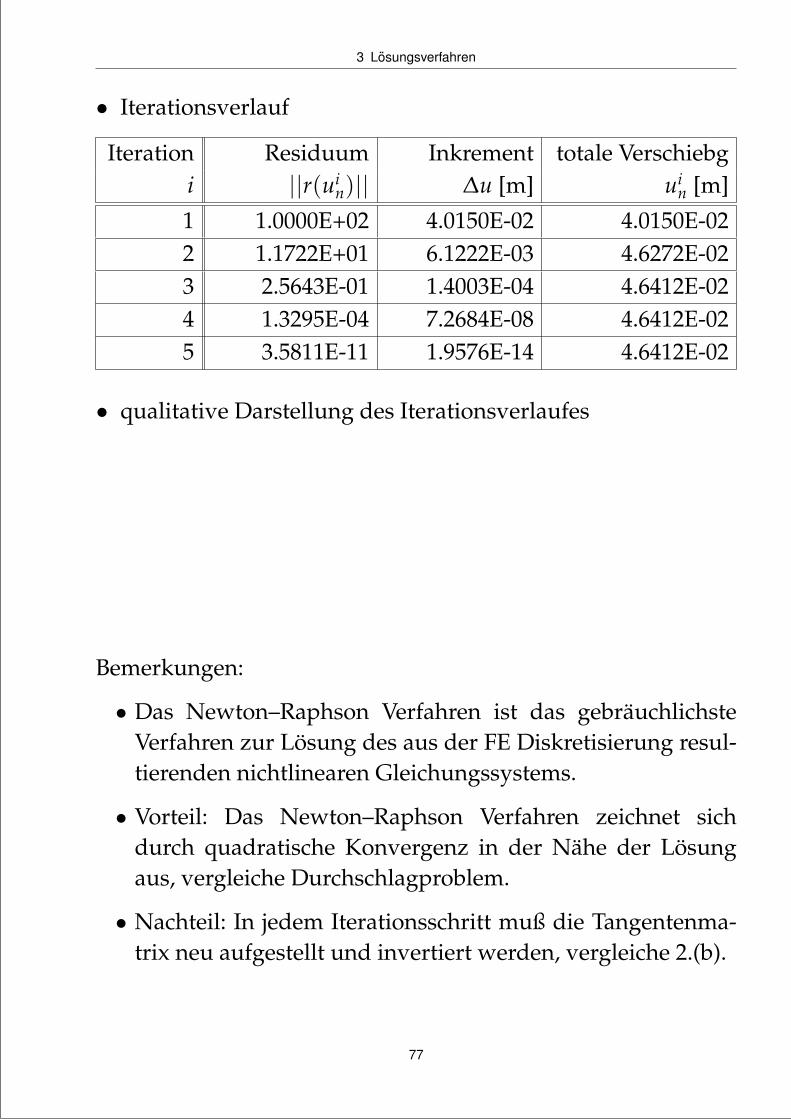
“nlin˙fem” — 2007/4/7 — 11:52 — page 77 — #81
3 Losungsverfahren
• Iterationsverlauf
Iteration Residuum Inkrement totale Verschiebgi ||r(ui
n)|| ∆u [m] uin [m]
1 1.0000E+02 4.0150E-02 4.0150E-022 1.1722E+01 6.1222E-03 4.6272E-023 2.5643E-01 1.4003E-04 4.6412E-024 1.3295E-04 7.2684E-08 4.6412E-025 3.5811E-11 1.9576E-14 4.6412E-02
• qualitative Darstellung des Iterationsverlaufes
Bemerkungen:
• Das Newton–Raphson Verfahren ist das gebrauchlichsteVerfahren zur Losung des aus der FE Diskretisierung resul-tierenden nichtlinearen Gleichungssystems.
• Vorteil: Das Newton–Raphson Verfahren zeichnet sichdurch quadratische Konvergenz in der Nahe der Losungaus, vergleiche Durchschlagproblem.
• Nachteil: In jedem Iterationsschritt muß die Tangentenma-trix neu aufgestellt und invertiert werden, vergleiche 2.(b).
77
“nlin˙fem” — 2007/4/7 — 11:52 — page 78 — #82
3 Losungsverfahren
3.2 Modifiziertes Newton Verfahren (Lastkontrolle)
Bemerkung: Das modifizierte Newton Verfahren stellt eine Ver-einfachung des Newton–Raphson Verfahrens dar, bei der dieTangentenmatrix pro Lastschritt nur einmalig aufgestellt undinvertiert wird.
3.2.1 Modifiziertes Newton Verfahren – Algorithmus
1. Schleife uber alle Lastschritte n = 1..nstep
f extIn+1 = f ext
In + ∆ f extI
Berechne (und invertiere) TangentenmatrixKI J(' n+1) = Kdyn
I J (' n+1) + KgeoI J (' n+1) + Kmat
I J (' n+1)
2. Schleife uber alle Iterationsschritte i = 1..imax
a) Berechne Residuumr I(' i
n+1) = f dynI (' i
n+1) + f intI (' i
n+1)− f extIn+1
b) Berechne Tangentenmatrix (entfallt)Tangentenmatrix wird einmalig vor Beginn der Schleifeinitialisiert
c) Berechne Inkrement der Verschiebungen∆' J = −∑
nnpI=1 KJ I(' n+1)−1 · r I(' i
n+1)d) Update
' Ji+1n+1 = ' J
in+1 + ∆' J
e) Konvergenztest
||r I(' i+1n+1)||
≤ TOL goto 1.
> TOL goto 2.
78
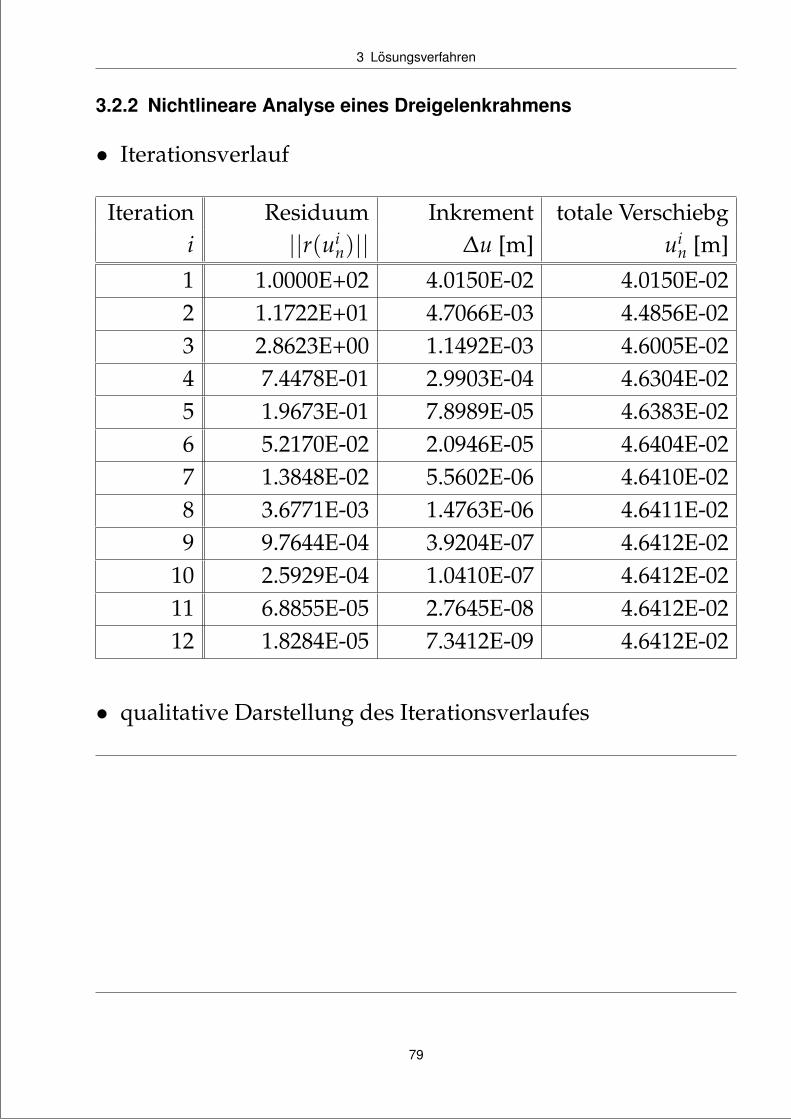
“nlin˙fem” — 2007/4/7 — 11:52 — page 79 — #83
3 Losungsverfahren
3.2.2 Nichtlineare Analyse eines Dreigelenkrahmens
• Iterationsverlauf
Iteration Residuum Inkrement totale Verschiebgi ||r(ui
n)|| ∆u [m] uin [m]
1 1.0000E+02 4.0150E-02 4.0150E-022 1.1722E+01 4.7066E-03 4.4856E-023 2.8623E+00 1.1492E-03 4.6005E-024 7.4478E-01 2.9903E-04 4.6304E-025 1.9673E-01 7.8989E-05 4.6383E-026 5.2170E-02 2.0946E-05 4.6404E-027 1.3848E-02 5.5602E-06 4.6410E-028 3.6771E-03 1.4763E-06 4.6411E-029 9.7644E-04 3.9204E-07 4.6412E-02
10 2.5929E-04 1.0410E-07 4.6412E-0211 6.8855E-05 2.7645E-08 4.6412E-0212 1.8284E-05 7.3412E-09 4.6412E-02
• qualitative Darstellung des Iterationsverlaufes
79
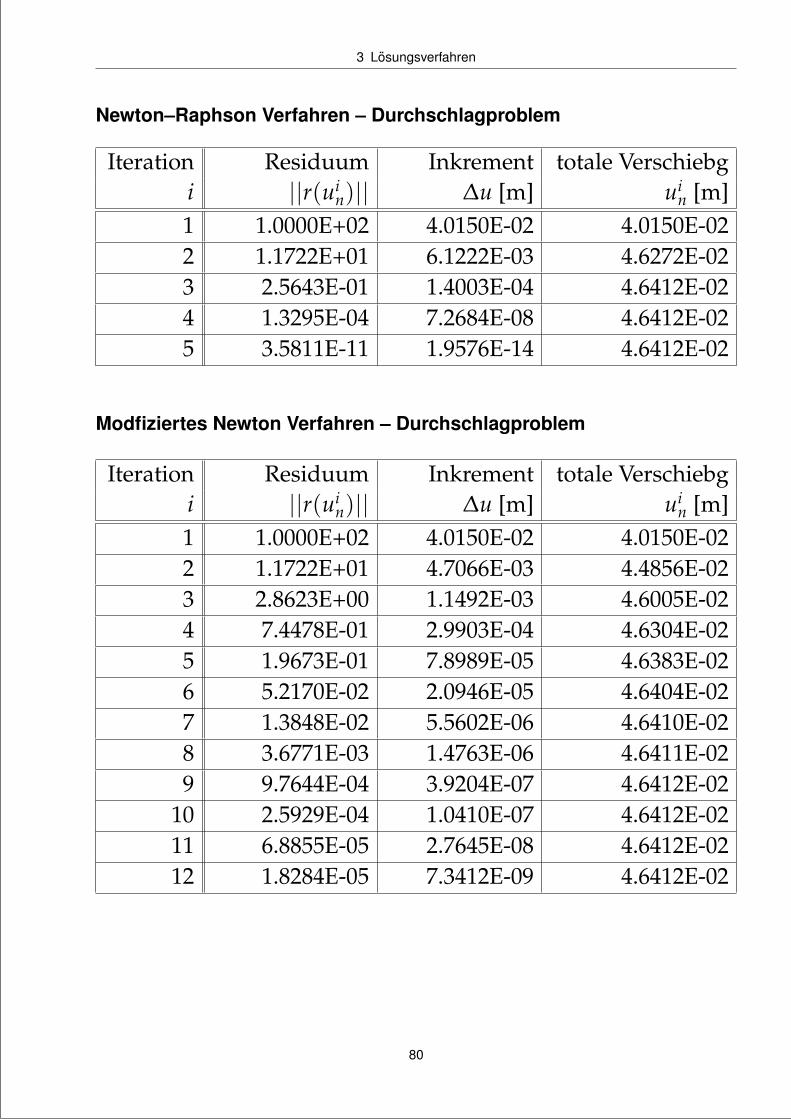
“nlin˙fem” — 2007/4/7 — 11:52 — page 80 — #84
3 Losungsverfahren
Newton–Raphson Verfahren – Durchschlagproblem
Iteration Residuum Inkrement totale Verschiebgi ||r(ui
n)|| ∆u [m] uin [m]
1 1.0000E+02 4.0150E-02 4.0150E-022 1.1722E+01 6.1222E-03 4.6272E-023 2.5643E-01 1.4003E-04 4.6412E-024 1.3295E-04 7.2684E-08 4.6412E-025 3.5811E-11 1.9576E-14 4.6412E-02
Modfiziertes Newton Verfahren – Durchschlagproblem
Iteration Residuum Inkrement totale Verschiebgi ||r(ui
n)|| ∆u [m] uin [m]
1 1.0000E+02 4.0150E-02 4.0150E-022 1.1722E+01 4.7066E-03 4.4856E-023 2.8623E+00 1.1492E-03 4.6005E-024 7.4478E-01 2.9903E-04 4.6304E-025 1.9673E-01 7.8989E-05 4.6383E-026 5.2170E-02 2.0946E-05 4.6404E-027 1.3848E-02 5.5602E-06 4.6410E-028 3.6771E-03 1.4763E-06 4.6411E-029 9.7644E-04 3.9204E-07 4.6412E-02
10 2.5929E-04 1.0410E-07 4.6412E-0211 6.8855E-05 2.7645E-08 4.6412E-0212 1.8284E-05 7.3412E-09 4.6412E-02
80
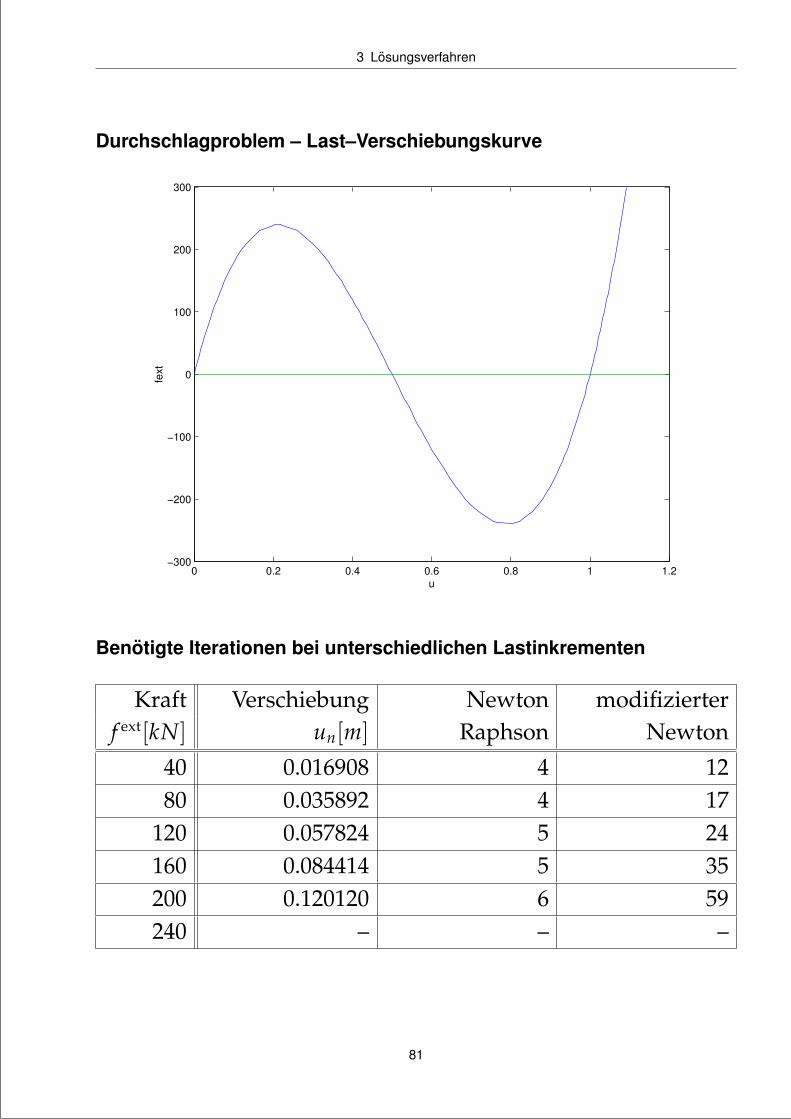
“nlin˙fem” — 2007/4/7 — 11:52 — page 81 — #85
3 Losungsverfahren
Durchschlagproblem – Last–Verschiebungskurve
0 0.2 0.4 0.6 0.8 1 1.2−300
−200
−100
0
100
200
300
u
fext
Benotigte Iterationen bei unterschiedlichen Lastinkrementen
Kraft Verschiebung Newton modifizierterf ext[kN] un[m] Raphson Newton
40 0.016908 4 1280 0.035892 4 17
120 0.057824 5 24160 0.084414 5 35200 0.120120 6 59240 – – –
81
“nlin˙fem” — 2007/4/7 — 11:52 — page 82 — #86
3 Losungsverfahren
Die Traglast des gewahlten Systems bei den angenommenenMaterial– und Geometriedaten liegt bei f ext
max = 239.6 kN, so daßbeide Verfahren fur f ext
max = 240 kN versagen.
Bemerkungen:
• Vorteil: Die Tangentenmatrix KI J(' n) wird zu Beginn derIteration aufgestellt und muß nur einmalig invertiert wer-den.
• Nachteil: Die quadratische Konvergenz des Newton–Raphson Verfahrens geht verloren, die Konvergenz des mo-difizierten Newton Verfahrens is lediglich linear.
• Wird die Tangentenmatrix nur ein einziges Mal vor Beginnder Berechnung aufgestellt und invertiert, so spricht manvom elastischen Anfangssteifigkeits-Verfahren. Die Konver-genz dieses Verfahrens ist jedoch extrem schlecht.
• Das modifizierte Newton Verfahren wird i.a. nur beischwach linearen Nichtlinearitaten verwendet.
82
“nlin˙fem” — 2007/4/7 — 11:52 — page 83 — #87
3 Losungsverfahren
3.3 Gedampftes Newton Verfahren (’line search’)
Bemerkung: Ein Nachteil des Newton–Raphson Verfahrens istsein eingeschrankter Konvergenzradius. Es liefert nur ”in derNahe der Losung” quadratische Konvergenz, erfordert alsoeinen guten Startwert ' 0
n. Alternativ kann die Last inkremen-tell in mehreren Schritten ∆ f ext
I aufgebracht werden oder eingedampftes Newton–Raphson Verfahren (”line search”) ver-wendet werden. Dabei erfolgt der Update aus 2(d) mit
' i+1n+1 = ' i
n+1 + � i∆' = ' in+1 + � iK−1(' i
n+1) · r I(' in+1)
mit 0 ≤ � ≤ 1 ... line search Parameter
Bedingung fur � i:Reduktion des Residuums in jedem Iterationsschritt
||r I(' i+1n+1)|| ≤ ||r I(' i
n+1 + � i∆' )|| ≤ ||r I(' in+1)||
dazu Minimierung der Energie Π(� i) des Systems
Π(� i)→ min
daraus folgt
r(� i) :=∂Π
∂� i =∂Π
∂' in+1· ∆' = r I(' i
n+1 + � i∆' ) · ∆' = 0
nichtlineare Gleichung in � i→ iterative Bestimmung von � i mit”regula falsi” Verfahren (Newton Verfahren auch moglich, aberzu aufwendig)
83
“nlin˙fem” — 2007/4/7 — 11:52 — page 84 — #88
3 Losungsverfahren
2.(d) Schleife uber alle Iterationsschritte k = 1..kmax
i. Berechne Inkrement des line search Parameters
∆� = −� i
k − � ik−1
r(� ik)− r(� i
k−1)r(� i
k)
ii. Update� i
k+1 = � ik + ∆�
iii. Konvergenztest
||r(� ik+1)||
≤ 0.8 ||r(0)|| goto 2.(e)
> 0.8 ||r(0)|| goto 2.(d)
84
“nlin˙fem” — 2007/4/7 — 11:52 — page 85 — #89
3 Losungsverfahren
3.3.1 Gedampftes Newton Verfahren – Algorithmus
1. Schleife uber alle Lastschritte n = 1..nstep
f extIn+1 = f ext
In + ∆ f extI
2. Schleife uber alle Iterationsschritte i = 1..imax
a) Berechne Residuumr I(' i
n+1) = f dynI (' i
n+1) + f intI (' i
n+1)− f extIn+1
b) Berechne TangentenmatrixKI J(' i
n+1) = KdynI J (' i
n+1) + KgeoI J (' i
n+1) + KmatI J (' i
n+1)c) Berechne Inkrement der Verschiebungen
∆' J = −∑nnpI KJ I(' i
n+1)−1 · r I(' i
n+1)d) Schleife uber alle Iterationsschritte k = 1..kmax
i. Berechne Inkrement des line search Parameters
∆� = −� i
k − � ik−1
r(� ik)− r(� i
k−1)r(� i
k)
ii. Update� i
k+1 = � ik + ∆�
iii. Konvergenztest
||r(� ik+1)||
≤ 0.8 ||r(0)|| goto 2.(e)
> 0.8 ||r(0)|| goto 2.(d)
e) Update' J
i+1n+1 = ' J
in+1 + � i∆' J
f) Konvergenztest
||r I(' i+1n+1)||
≤ TOL goto 1.
> TOL goto 2.
85
“nlin˙fem” — 2007/4/7 — 11:52 — page 86 — #90
3 Losungsverfahren
3.4 Newton–Raphson Verfahren (Verschiebungskontrolle)
Bemerkung: Obwohl die line search Technik den Konvergenz-radius des Newton–Raphson Verfahrens verbessert, konnenmit dem lastgesteuerten Verfahren sogenannte ”limit points”des Gleichgewichtspfads nicht uberschritten werden. Abhilfeschafft ein verschiebungsggesteuertes Verfahren, das durchvorgegebene Verschiebungen an einem ausgewahlten Kno-ten einen Spannungszustand in der Probe erzeugt, aus demKnotenkrafte an dem verschiebungskontrollierten Knoten re-sultieren.
Vorgehen:Partitionierung (Umsortieren) des Losungsvektors ∆' in tat-sachliche Freiheitsgrade ∆' f und vorgeschriebene Werte ∆' p
∆' = [ ∆' f, ∆' p ]
zu losendes Gleichungssystem Kff Kfp
Kpf Kpp
∆' f
∆' p
=
0
0
− f int
fI
f intpI
mit ∆' i=0
p gegeben und ∆' i>0p = 0
1. Iterationsschritt
∆' 1f = −Kff−1 · [ Kfp · ∆' 0
P + f intf
0I ]
i. Iterationsschritt
∆' i+1f = −Kff−1 · [ f int
fiI ]
Bemerkung: Bei verschiebungskontrollierten Verfahren wirdein reduziertes Gleichungssystem mit veranderter rechter Seite
86
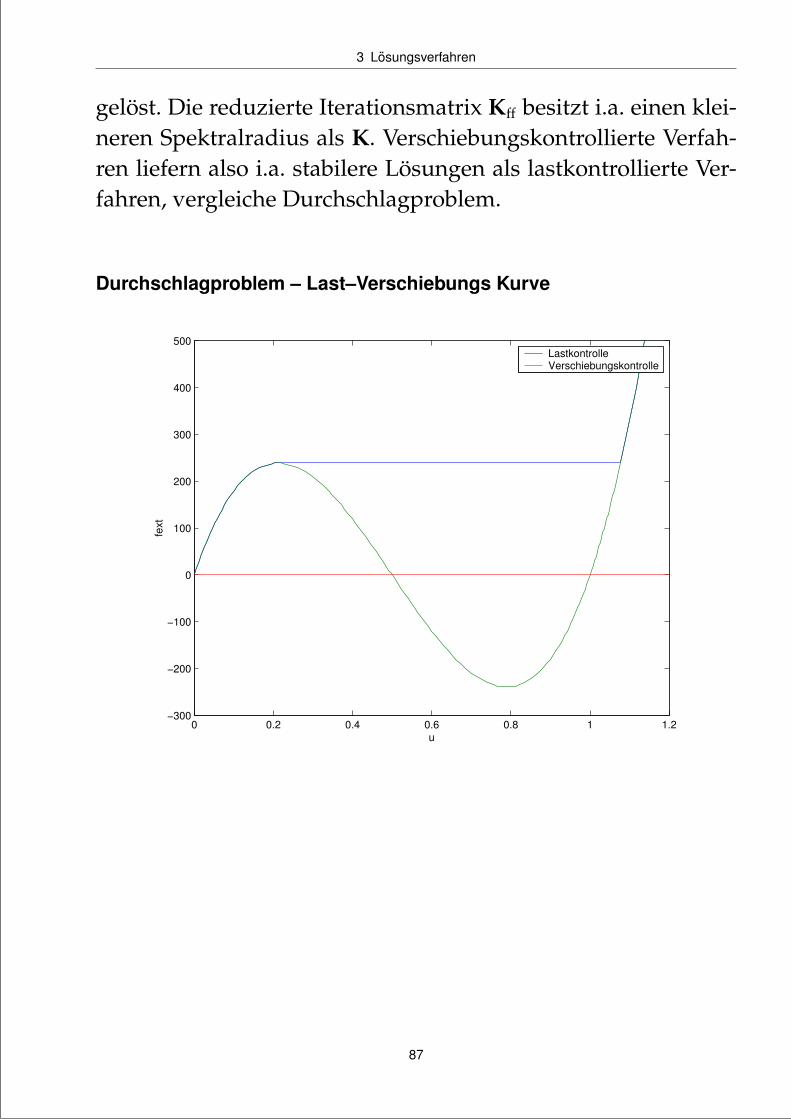
“nlin˙fem” — 2007/4/7 — 11:52 — page 87 — #91
3 Losungsverfahren
gelost. Die reduzierte Iterationsmatrix Kff besitzt i.a. einen klei-neren Spektralradius als K. Verschiebungskontrollierte Verfah-ren liefern also i.a. stabilere Losungen als lastkontrollierte Ver-fahren, vergleiche Durchschlagproblem.
Durchschlagproblem – Last–Verschiebungs Kurve
0 0.2 0.4 0.6 0.8 1 1.2−300
−200
−100
0
100
200
300
400
500
u
fext
LastkontrolleVerschiebungskontrolle
87
“nlin˙fem” — 2007/4/7 — 11:52 — page 88 — #92
3 Losungsverfahren
3.5 Bogenlangenverfahren
Bemerkung: Ist man am Verhalten einer Struktur im uber-kritischen Bereich interessiert, so benotigt man ein stabilesVerfahren zur vollstandigen Verfolgung des nichtlinearenGleichgewichtspfades. Sowohl mit dem lastkontrollierten, alsauch mit dem verschiebungskontrollierten Verfahren konnenbestimmte ”limit points” LL bzw. LV nicht uberschritten wer-den. Abhilfe schafft das Bogenlangenverfahren (”arc lengthcontrol”), das die inkrementelle Last mittels eines Lastparame-ters � uber eine zusatzliche Nebenbedingung bestimmt.
außere Last zum Zeitpunkt tin
f extin = � i
n f ext
� ... Lastparameter, bisher � = 1/nstep = const., jetzt � variabel,bestimmt aus Nebenbedingung f (' , � ) = 0
erweitertes Gleichungssystem
r( ¯' ) = 0
mit r (' , � )
f (' , � )
=
0
0
mit ¯' =
'
�
Newton–Raphson Verfahren zur Losung des erweiterten Glei-chungssystems, dazu Linearisierung, Newton–Raphson Iterati-onsvorschrift
K( ¯' ) · ∆ ¯' = −r
88
“nlin˙fem” — 2007/4/7 — 11:52 — page 89 — #93
3 Losungsverfahren
mit ∂r∂'
∂r∂�
∂ f∂'
∂ f∂�
· ∆'
∆�
= −
r
f
Linearisierung der Gleichgewichtsgleichung
∂r∂'
= K'' ...standard Tangentenmatrix∂r∂�
= K'� = − f ext ...externe Last
Linearisierung der Nebenbedingung
∂ f∂'
= K�' ...abhangig von der Wahl der NB f (' , � ) = 0∂ f∂�
= K�� ...abhangig von der Wahl der NB f (' , � ) = 0
linearisiertes Gleichungssystem K'' − f extI
K�' K��
· ∆'
∆�
= −
r I
f
Bemerkung: Da die Iterationsmatrix des erweiterten Systemsunsymmetrisch ist, K 6= Kt, wird das Gleichungssystemublicherweise mittels Partitionierungstechniken gelost, um dieSymmetrie der Tangentenmatrix, K = Kt, auszunutzen.
erste Gleichung
K · ∆' − f ext · ∆� = −r
∆' = −K−1 · r + K−1 · ∆� f ext
89
“nlin˙fem” — 2007/4/7 — 11:52 — page 90 — #94
3 Losungsverfahren
mit
∆' ' := −K−1 · r und ∆' � := K−1 · f ext
∆' = ∆' ' + ∆� ∆' �
• zweite Gleichung
K�' · ∆' + K�� ∆� = − f
K�' · ∆' ' + [ K�' · ∆' � + K�� ] ∆� = − f
∆� = − f + K�' · ∆' '
K�' · ∆' � + K��
Wagner [1991], Wriggers [2001]
90
“nlin˙fem” — 2007/4/7 — 11:52 — page 91 — #95
3 Losungsverfahren
3.5.1 Bogenlangenverfahren – Algorithmus
1. Schleife uber alle Lastschritte n = 1..nstep
a) Pradiktorschritt∆' � = K−1(' n) · f ext
I
∆� =±∆s||∆' � ||
entsprechend Nebenbedigung f (Dn, � n)
� 0n+1 = � n + ∆�
2. Schleife uber alle Iterationsschritte i = 1..imax
a) Berechne Residuumr I(' i
n+1, � in+1) = f dyn
I (' in+1) + f int
I (' in+1)− � i
n+1 f extI
b) Berechne TangentenmatrixK(' i
n+1) = Kdyn(' in+1) + Kgeo(' i
n+1) + Kmat(' in+1)
c) Berechne ∆' ' und ∆' �
∆' ' = −K−1(' in+1) · r I(' i
n+1, � in+1)
∆' � = K−1(' in+1) · f ext
I
d) Berechne inkrementellen Lastparameter & Deformation
∆� = − f in + K�' · ∆' '
K�' · ∆' � + K��∆' = ∆' ' + ∆� ∆' �
e) Update� i+1
n+1 = � in+1 + ∆� ' i+1
n+1 = ' in+1 + ∆'
f) Konvergenztest
||r I(' i+1n+1, � i+1
n+1)||≤ TOL goto 1.
> TOL goto 2.
91
“nlin˙fem” — 2007/4/7 — 11:52 — page 92 — #96
3 Losungsverfahren
3.5.2 Bogenlangenverfahren – mogliche Nebenbedingungen
Lastkontrolle Standard Newton–Raphson Verfahren
f (' , � ) = � − � p
daraus folgt K�' = ∂' f = 0 und K�� = ∂� f = 1
bzw. ∆� ≡ 0 und ∆' = −K−1 · r = ∆' ' vergleiche 3.1
Verschiebungskontrolle Batoz & Dhatt [1979]
f (' , � ) = ' A − ' pA
mit A... kontrollierter Freiheitsgrad, daraus folgt
K�' = ∂' f = [ 0, 0, .., 1︸︷︷︸A-te Komponente
, .., 0, 0 ] und K�� = ∂� f = 0
bzw. ∆� = −' A − ' pA + K�' · ∆' '
K�' · ∆' � + 0= −' A − ' p
A + ∆' A
∆' Avergleiche 3.4
Iteration auf fixer Normalenebene Riks [1972]
f (' , � ) = [' 1n−' n]·[' i+1
n −' 1n] + 2[� 1
n−� n][� i+1n −� 1
n] f extI · f ext
I − ∆s2
92
“nlin˙fem” — 2007/4/7 — 11:52 — page 93 — #97
3 Losungsverfahren
daraus folgt K�' = ∂' f = ' 1n − ' n und K�� = ∂� f = � 1
n − � n
• altestes Pfadverfolgungsverfahren• ... Wichtungsfaktor• ∆s ... Bogenlange• f linear in ' i+1
n und � i+1n
• f beschreibt Normalenebene zum ersten Tangentenvektor andie Kurve
Iteration auf Normalenebene Ramm [1981]
f (' , � ) = [' in−' n]·[' i+1
n −' in] + 2[� i
n−� n][� i+1n −� i
n] f extI · f ext
I − ∆s2
daraus folgt K�' = ∂' f = ' in − ' n und K�� = ∂� f = � i
n − � n
• f linear in ' i+1n und � i+1
n
• f beschreibt Normalenebene zum aktuellen Tangentenvektoran die Kurve
Iteration auf Kugelflache Crisfield [1981]
f (' , � ) = [' i+1n −' i
n]·[' i+1n −' i
n] + 2[� i+1n −� i
n][� i+1n −� i
n] f extI · f ext
I − ∆s2
• f quadratisch in ' i+1n und � i+1
n
• f beschreibt Kugelflache um letzten Gleichgewichtspunkt• ∆s ... Radius• zwei Schnittpunkte mit dem Gleichgewichtspfad
93
“nlin˙fem” — 2007/4/7 — 11:52 — page 94 — #98
3 Losungsverfahren
Bemerkung: Bogenlangenverfahren sind i.a. robuster als dasStandard Newton–Raphson Verfahren, jedoch sind sie nicht glo-bal stabil, so daß sie moglichst nur in Kombination mit linesearch Techniken eingesetzt werden sollten.
94