Embed Size (px)
Citation preview
Numerische Methoden
● Algorithmen für nicht ganzzahlige Probleme– Probleme aus Bereich der numerischen Mathematik
● Lösungen meistens eine reelle Zahl● in Informatik eine Gleitpunktzahl
1) Nullstellen einer reellen Funktion2) Extremwerte einer reellen Funktion3) Werte analytischer Funktionen
sin(x), arcsin(x), ex
4) Fourier-Analyse5) Lösungen eines linearen Gleichungssystems
sehr viele UnbekannteLösung eines nichtlinearen Gleichungssystems
7) Erzeuge eine Folge von Zufallszahlen
Numerische Algorithmen
Numerische Algorithmen
● Algorithmen für nicht ganzzahlige Probleme
7) Transformation einer Wertefolge Fouriertransformation
8) möglichst glatte Kurve zwischen je zwei PunktenSpline-Approximation
9) numerische Differentiation oder Integration10) Optimum eines Systems linearer Ungleichungen11) Numerische Differenzen- / Differentialgleichungen
● Hier nur einige dieser Probleme behandelt
● Nullstellen einer Funktion– Polynom als spezielle Funktion
f(x) = a0 + a1·x + a2·x2 + ... + an·x
n.– Klassisches Problem des Mathematik
● Suche alle x, so dass f(x) = 0. ● Wurzeln ziehen: a ist Nullstelle der Funktion f(x) = x2-a
– algebraische Lösungsansätze● Nullstellen spezieller Polynome ● Polynome bis zum Grad vier ● Polynome höheren Grads im allgemeinen nicht mehr lösbar● Erkenntnis wenig hilfreich
Numerische Algorithmen
● Beispiel: Polynom zweiten Grades
– Algebraische Lösung
– Numerische Ergebnisse● P1(x) = x2-5x-6
x1=6, x2= – 1.
● P2(x) = x2 – 48·109·x - 49·109
x1=-1,0208320617675781, x2 = 48000000001,02083P2(-1,0208320617675781) = -61.034,11415190167,P2(48000000001,02083) = -262.144
● Ungenauigkeit der Differenzen im Wurzelausdruck ● Ungenauigkeit beim Wurzelziehen
Numerische Algorithmenf 2 x =a⋅x2b⋅xd
x1,2=−b2⋅a±b2−4⋅a⋅b
2⋅a
Numerische Algorithmen
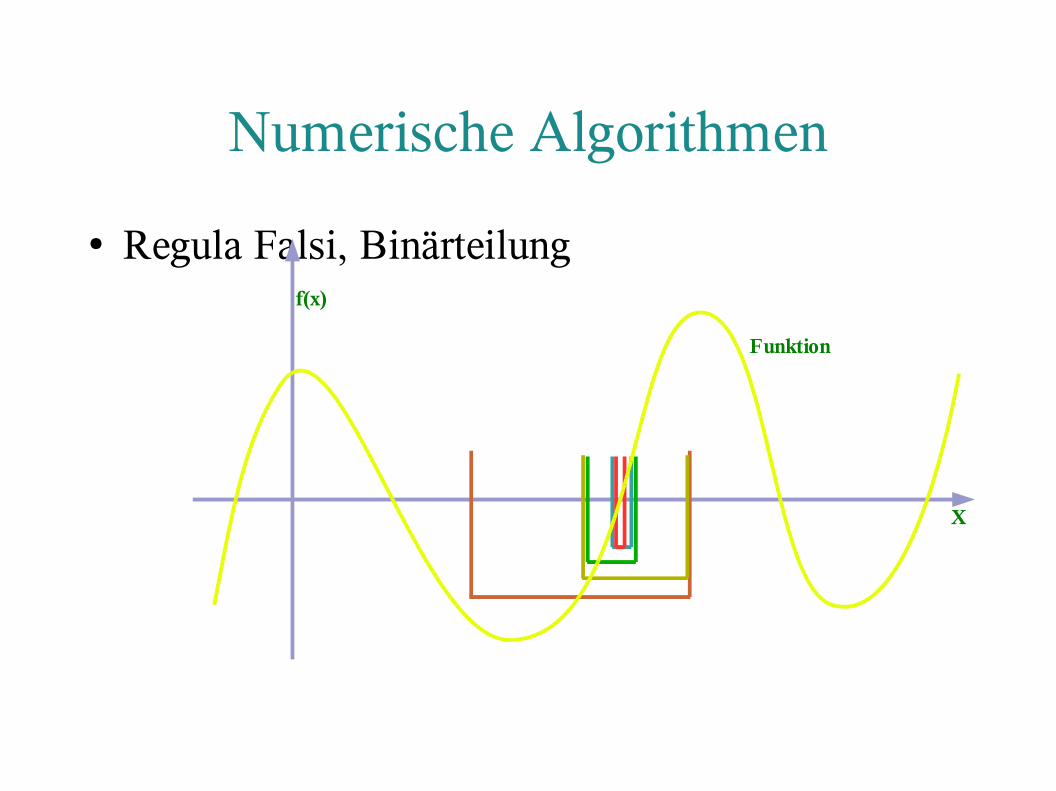
● Regula Falsi, Binärteilung
Funktion
f(x)
X
Numerische Algorithmen
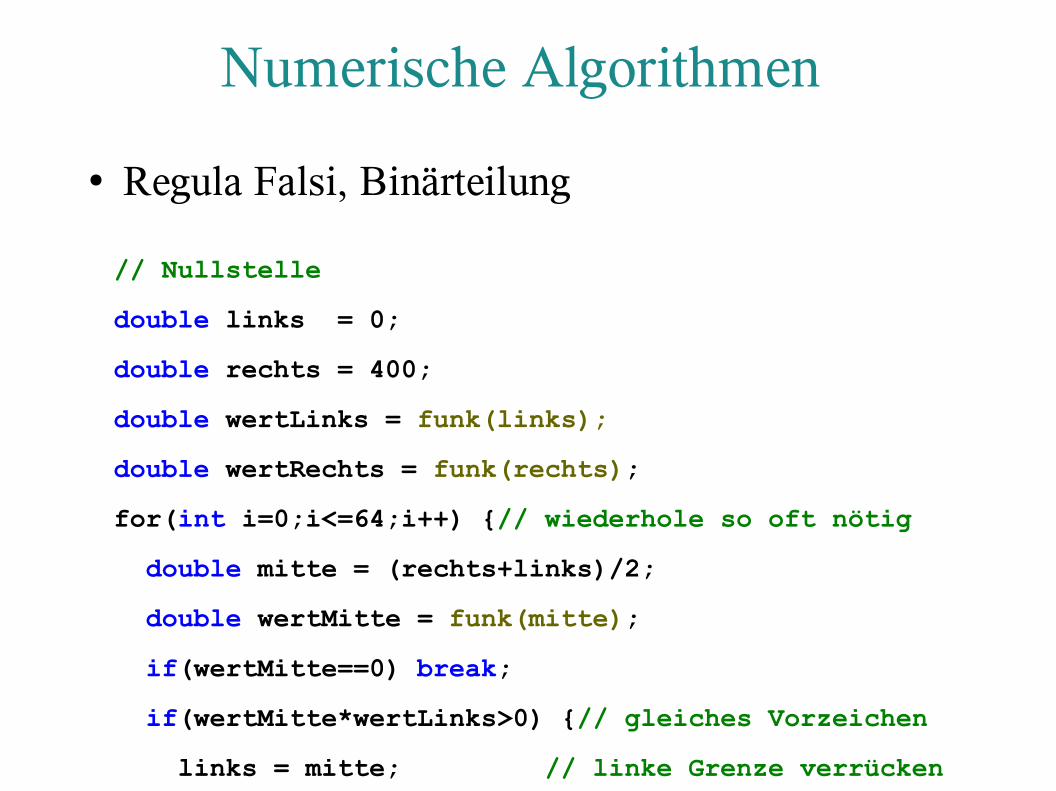
● Regula Falsi, Binärteilung
// Nullstelledouble links = 0;double rechts = 400;double wertLinks = funk(links);double wertRechts = funk(rechts);for(int i=0;i<=64;i++) {// wiederhole so oft nötig double mitte = (rechts+links)/2; double wertMitte = funk(mitte); if(wertMitte==0) break; if(wertMitte*wertLinks>0) {// gleiches Vorzeichen links = mitte; // linke Grenze verrücken
Numerische Algorithmen
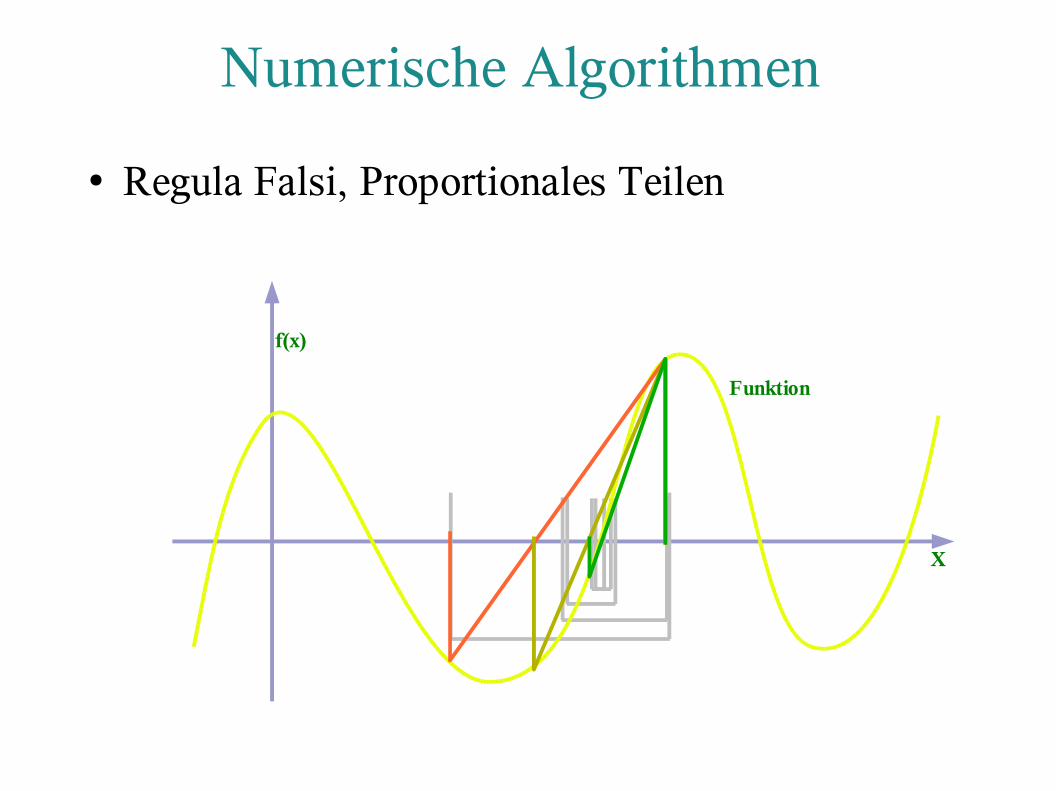
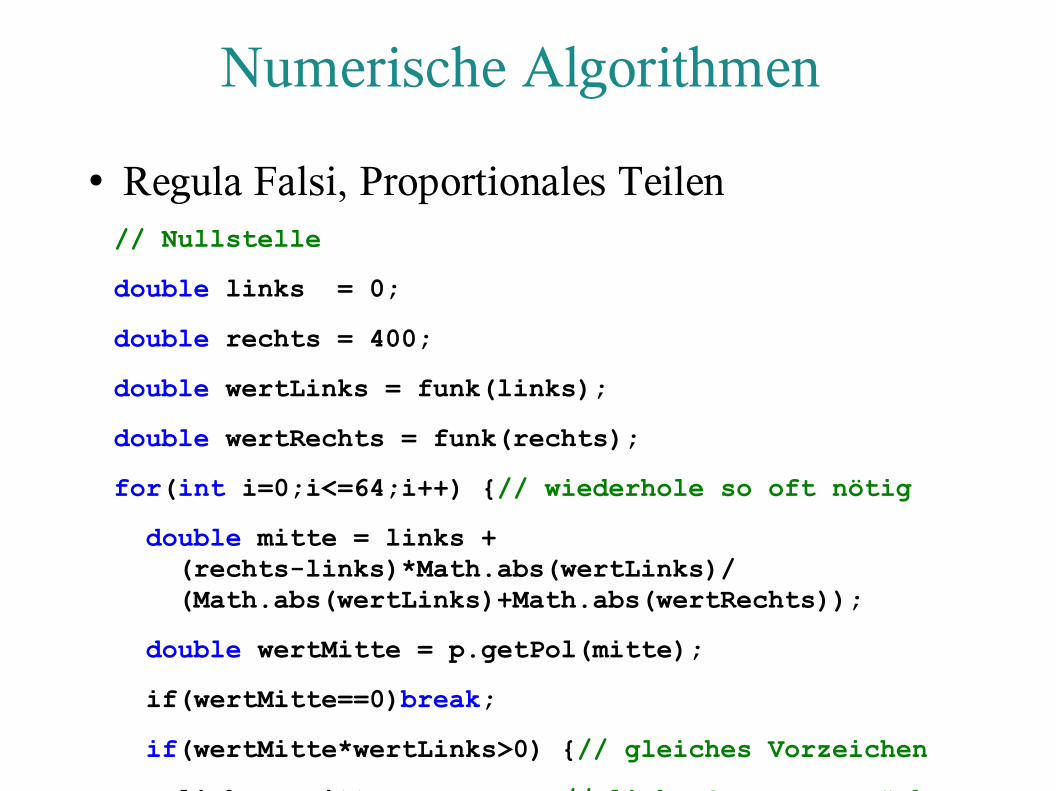
● Regula Falsi, Proportionales Teilen
Funktion
f(x)
X
Numerische Algorithmen
● Regula Falsi, Proportionales Teilen// Nullstelledouble links = 0;double rechts = 400;double wertLinks = funk(links);double wertRechts = funk(rechts);for(int i=0;i<=64;i++) {// wiederhole so oft nötig double mitte = links + (rechts-links)*Math.abs(wertLinks)/ (Math.abs(wertLinks)+Math.abs(wertRechts)); double wertMitte = p.getPol(mitte); if(wertMitte==0)break; if(wertMitte*wertLinks>0) {// gleiches Vorzeichen links = mitte; // linke Grenze verrücken
Funktionf(x)
X
Numerische Algorithmen
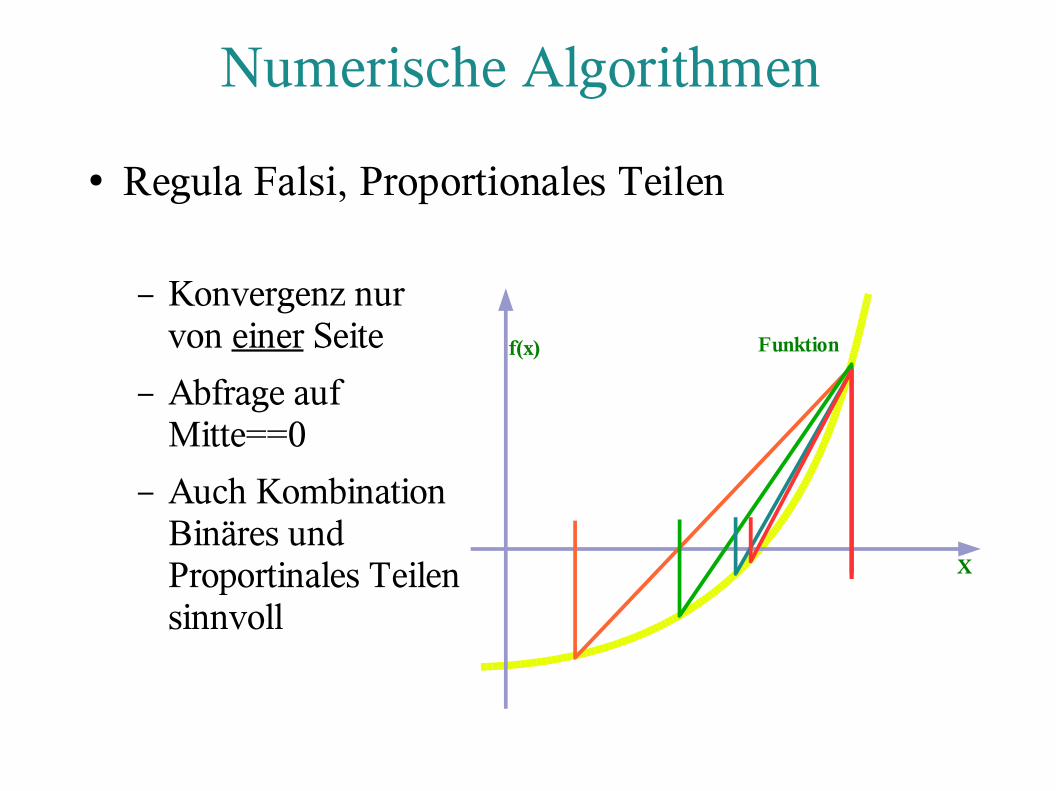
● Regula Falsi, Proportionales Teilen
– Konvergenz nur von einer Seite
– Abfrage aufMitte==0
– Auch KombinationBinäres und Proportinales Teilensinnvoll
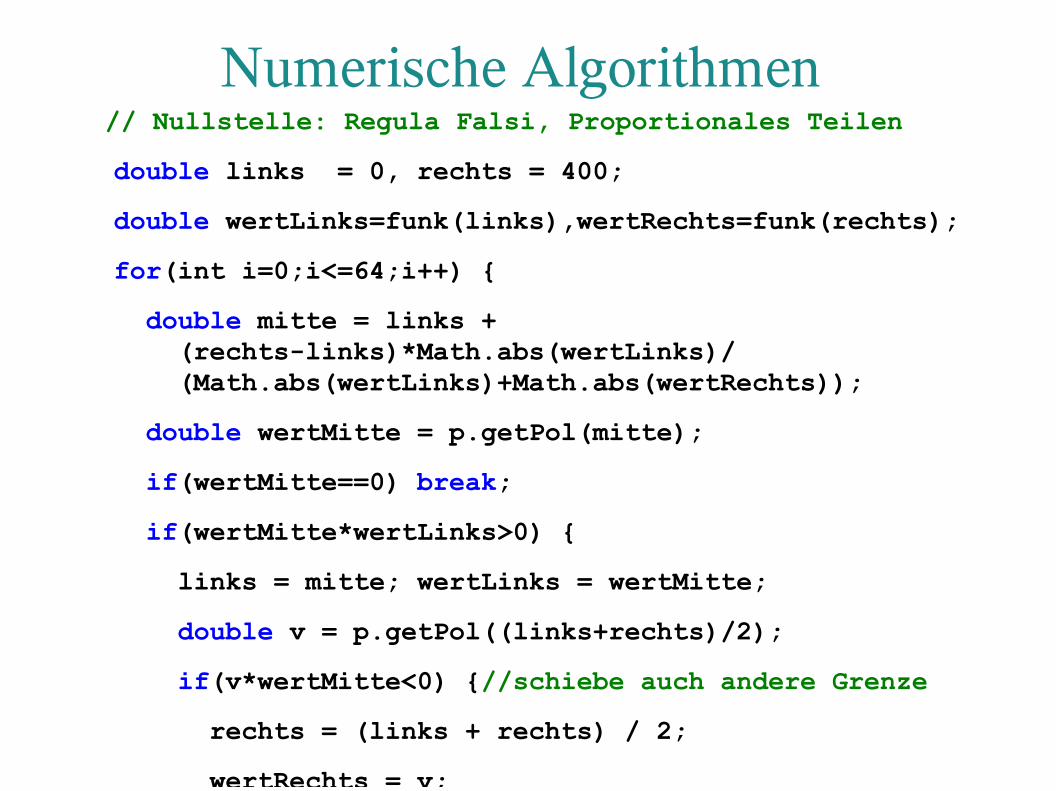
Numerische Algorithmen // Nullstelle: Regula Falsi, Proportionales Teilendouble links = 0, rechts = 400;double wertLinks=funk(links),wertRechts=funk(rechts);for(int i=0;i<=64;i++) { double mitte = links + (rechts-links)*Math.abs(wertLinks)/ (Math.abs(wertLinks)+Math.abs(wertRechts)); double wertMitte = p.getPol(mitte); if(wertMitte==0) break; if(wertMitte*wertLinks>0) { links = mitte; wertLinks = wertMitte; double v = p.getPol((links+rechts)/2); if(v*wertMitte<0) {//schiebe auch andere Grenze rechts = (links + rechts) / 2; wertRechts = v;
Funktionf(x)
x
f(x0 )
x0x1x2
f(x1 )
f(x2 )f ' x0=
f x0x0−x1
x1=x0−f x0f ' x0
Numerische Algorithmen
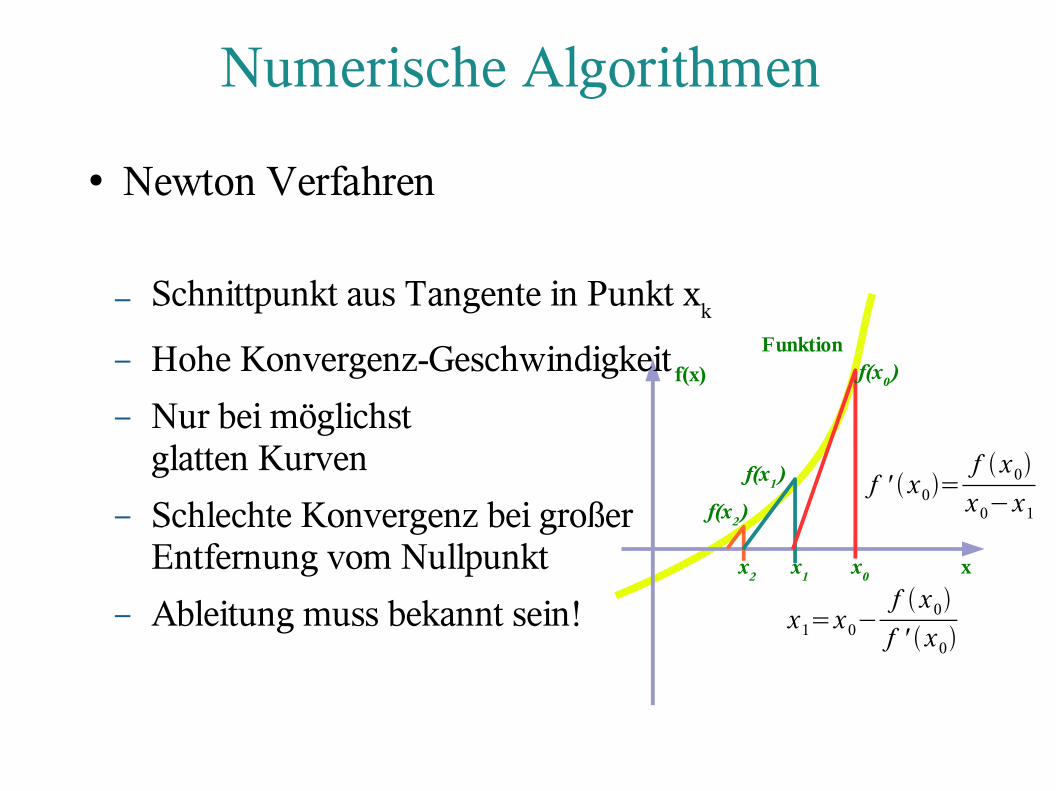
● Newton Verfahren
– Schnittpunkt aus Tangente in Punkt xk
– Hohe Konvergenz-Geschwindigkeit– Nur bei möglichst
glatten Kurven– Schlechte Konvergenz bei großer
Entfernung vom Nullpunkt– Ableitung muss bekannt sein!
Funktionf(x)
x
f(x0 )
x0x1x2
f(x1 )f(x2 )
f ' x0=f x0
x0−x1
x1=x0−f x0f ' x0
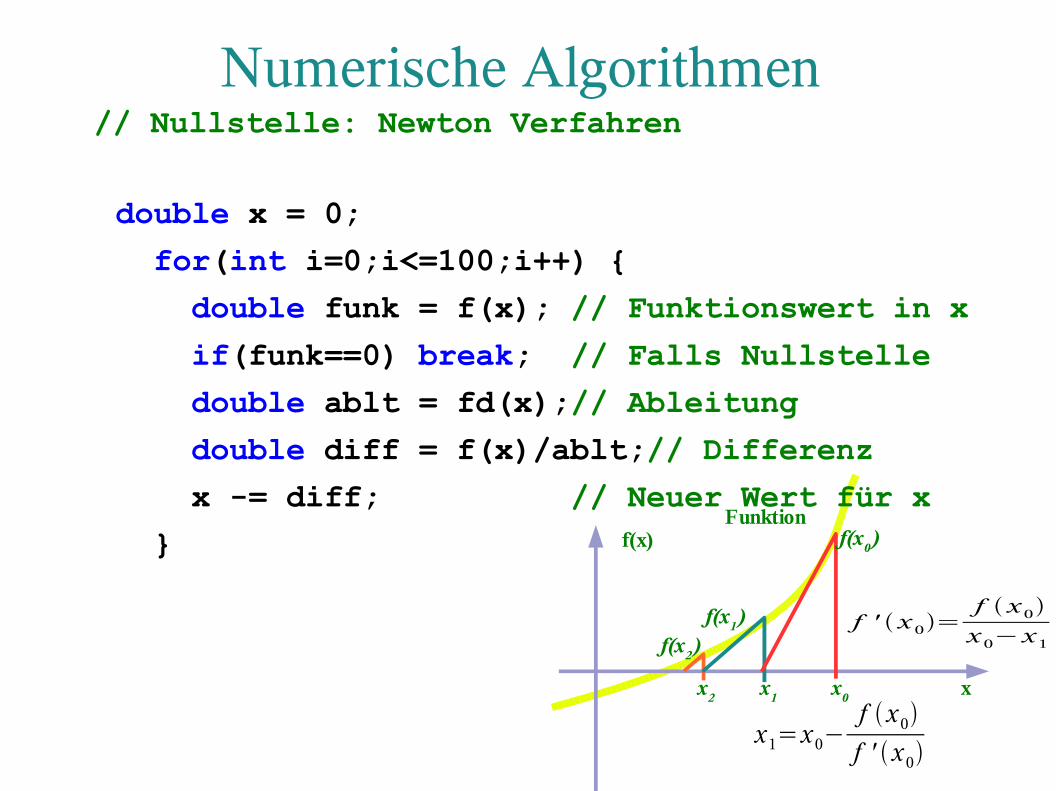
Numerische Algorithmen // Nullstelle: Newton Verfahren
double x = 0; for(int i=0;i<=100;i++) { double funk = f(x); // Funktionswert in x if(funk==0) break; // Falls Nullstelle double ablt = fd(x);// Ableitung double diff = f(x)/ablt;// Differenz x -= diff; // Neuer Wert für x }
● Lösung analytischer Gleichungen – Löse Gleichung: x/2 = sin x.
● Lösung: finde Nullstelle x0 zu: f(x) = sin x – x/2.● Wegen
sin x0 – x0/2 = 0ist x0/2 = sin x0.
– Finde Quadratwurzel aus 2● Lösung: finde Nullstelle x0 zu: f(x) = x2 – 2.● Wegen
x02 – 2 = 0
ist x02 = 2 oder x0 = 2.
Numerische Algorithmen
● Lösung analytischer Gleichungen – Anderer Lösungsansatz: Fixpunktgleichung
● Ziehe Quadratwurzel aus a.– Lösung:
● iteriere
solange, bis Ergebnis konstant● Gleichung entstand aus Newton-Verfahren
● Diese Methode löst viele Spezialfunktionen f(x):
wobei A ein geeignet Faktor ist (meist |A|<1)
Numerische Algorithmen
x= x2a2⋅x
x k1=x k−x k
2−a2⋅x k
=x k
2a2⋅x k
x k1=x kA× f x k
Funktionf(x)
X
f(x0 )
X0x1x2
f(x1 )f(x2 )
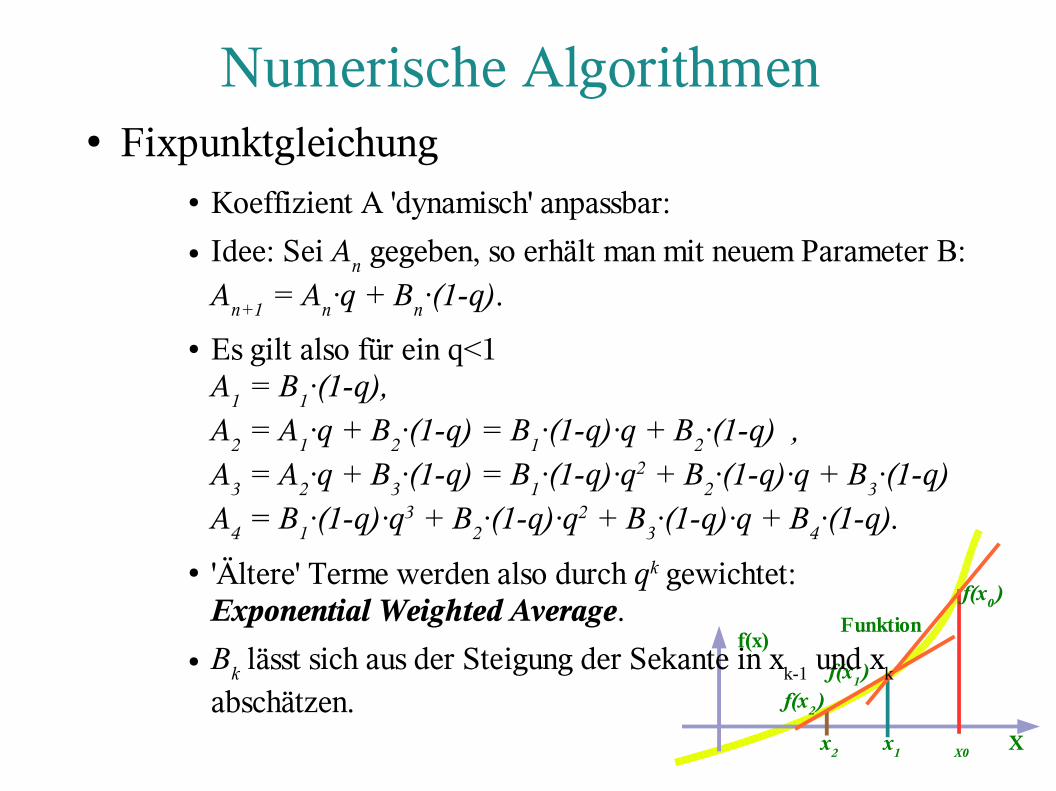
● Fixpunktgleichung● Koeffizient A 'dynamisch' anpassbar:● Idee: Sei An gegeben, so erhält man mit neuem Parameter B:
An+1 = An·q + Bn·(1-q).● Es gilt also für ein q<1
A1 = B1·(1-q),A2 = A1·q + B2·(1-q) = B1·(1-q)·q + B2·(1-q) ,A3 = A2·q + B3·(1-q) = B1·(1-q)·q2 + B2·(1-q)·q + B3·(1-q)A4 = B1·(1-q)·q3 + B2·(1-q)·q2 + B3·(1-q)·q + B4·(1-q).
● 'Ältere' Terme werden also durch qk gewichtet:Exponential Weighted Average.
● Bk lässt sich aus der Steigung der Sekante in xk-1 und xk abschätzen.
Numerische Algorithmen
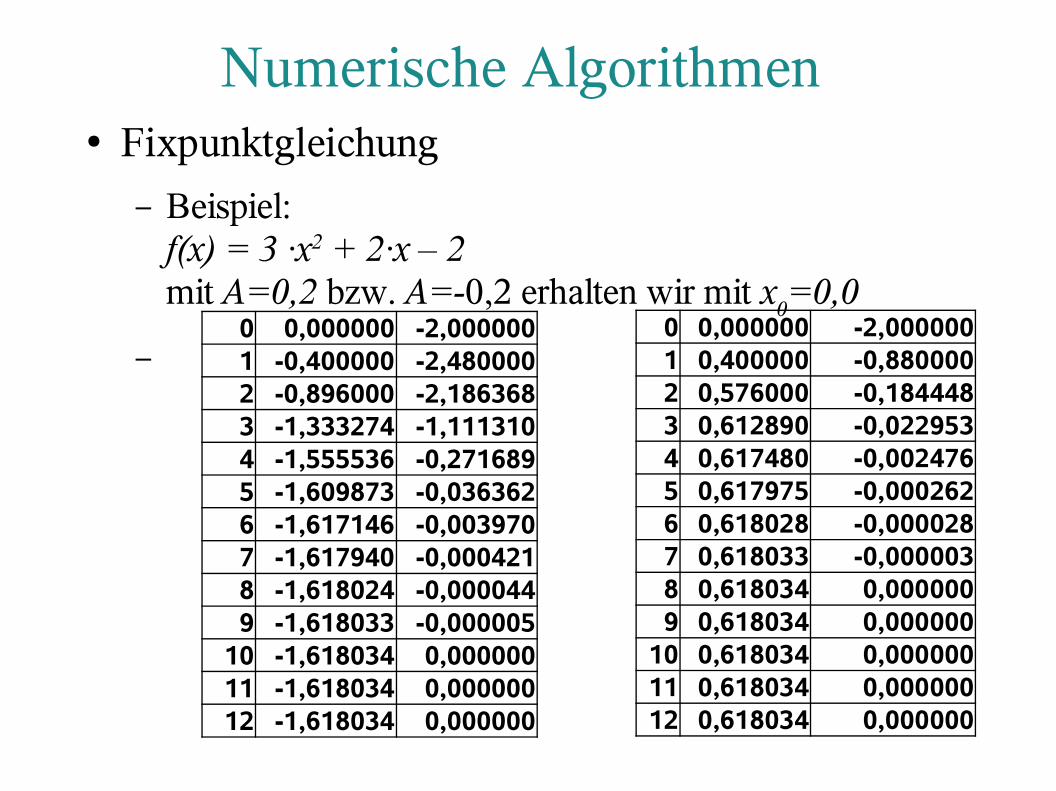
● Fixpunktgleichung – Beispiel:
f(x) = 3 ∙x2 + 2∙x – 2mit A=0,2 bzw. A=-0,2 erhalten wir mit x0=0,0
–
Numerische Algorithmen
0 0,000000 -2,0000001 -0,400000 -2,4800002 -0,896000 -2,1863683 -1,333274 -1,1113104 -1,555536 -0,2716895 -1,609873 -0,0363626 -1,617146 -0,0039707 -1,617940 -0,0004218 -1,618024 -0,0000449 -1,618033 -0,00000510 -1,618034 0,00000011 -1,618034 0,00000012 -1,618034 0,000000
0 0,000000 -2,0000001 0,400000 -0,8800002 0,576000 -0,1844483 0,612890 -0,0229534 0,617480 -0,0024765 0,617975 -0,0002626 0,618028 -0,0000287 0,618033 -0,0000038 0,618034 0,0000009 0,618034 0,00000010 0,618034 0,00000011 0,618034 0,00000012 0,618034 0,000000
Numerische Algorithmen
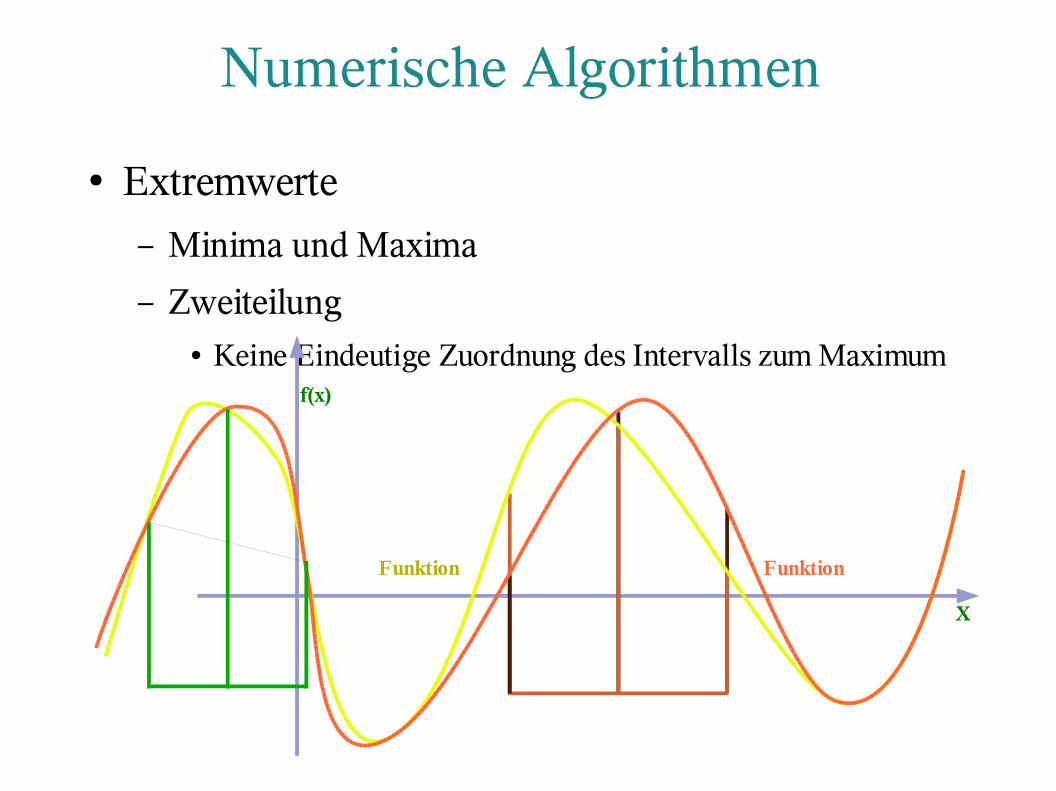
● Extremwerte– Minima und Maxima– Zweiteilung
● Keine Eindeutige Zuordnung des Intervalls zum Maximum
Funktion
f(x)
X
Funktion
Numerische Algorithmen
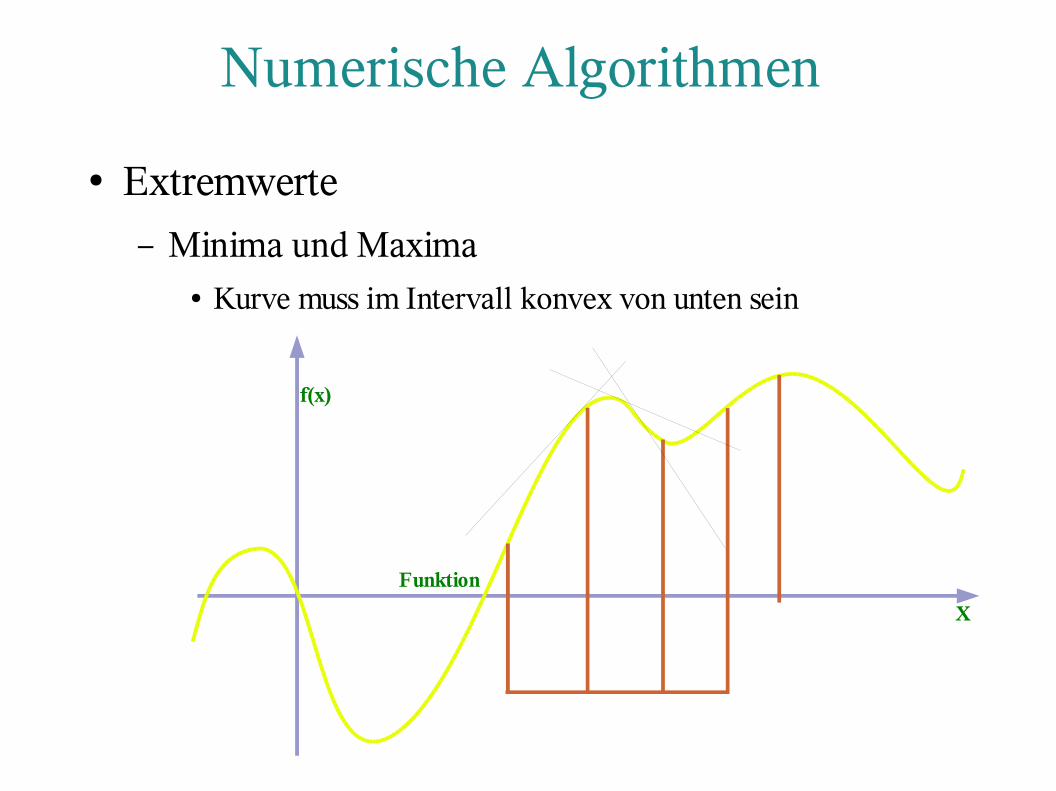
● Extremwerte– Minima und Maxima
● Kurve muss im Intervall konvex von unten sein
Funktion
f(x)
X
Numerische Algorithmen
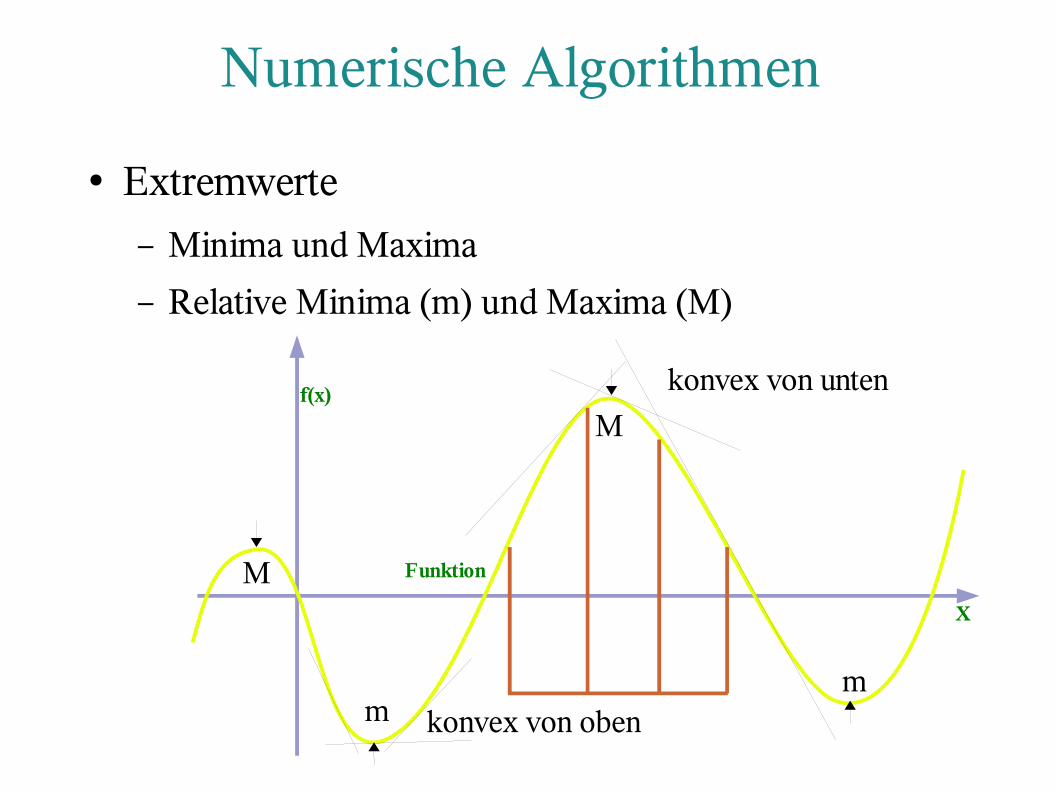
● Extremwerte– Minima und Maxima– Relative Minima (m) und Maxima (M)
Funktion
f(x)
X
mm
M
M
konvex von oben
konvex von unten
Numerische Algorithmen
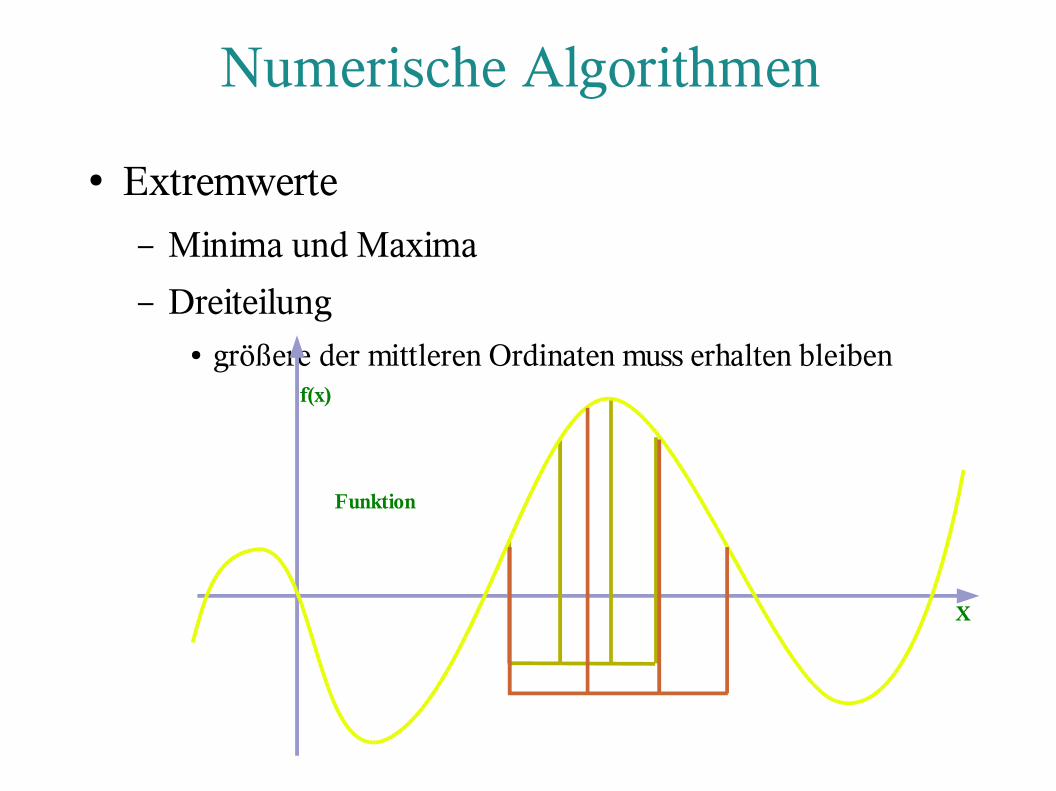
● Extremwerte– Minima und Maxima– Dreiteilung
● größere der mittleren Ordinaten muss erhalten bleiben
Funktion
f(x)
X
Numerische Algorithmen
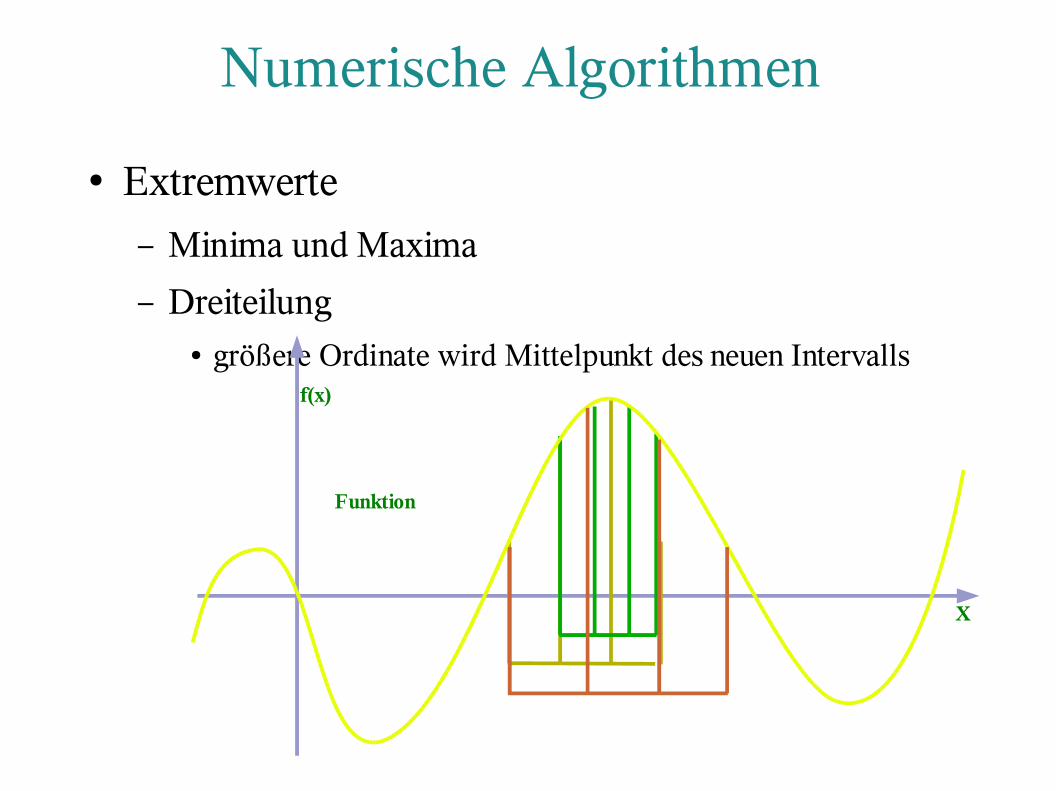
● Extremwerte– Minima und Maxima– Dreiteilung
● größere Ordinate wird Mittelpunkt des neuen Intervalls
Funktion
f(x)
X
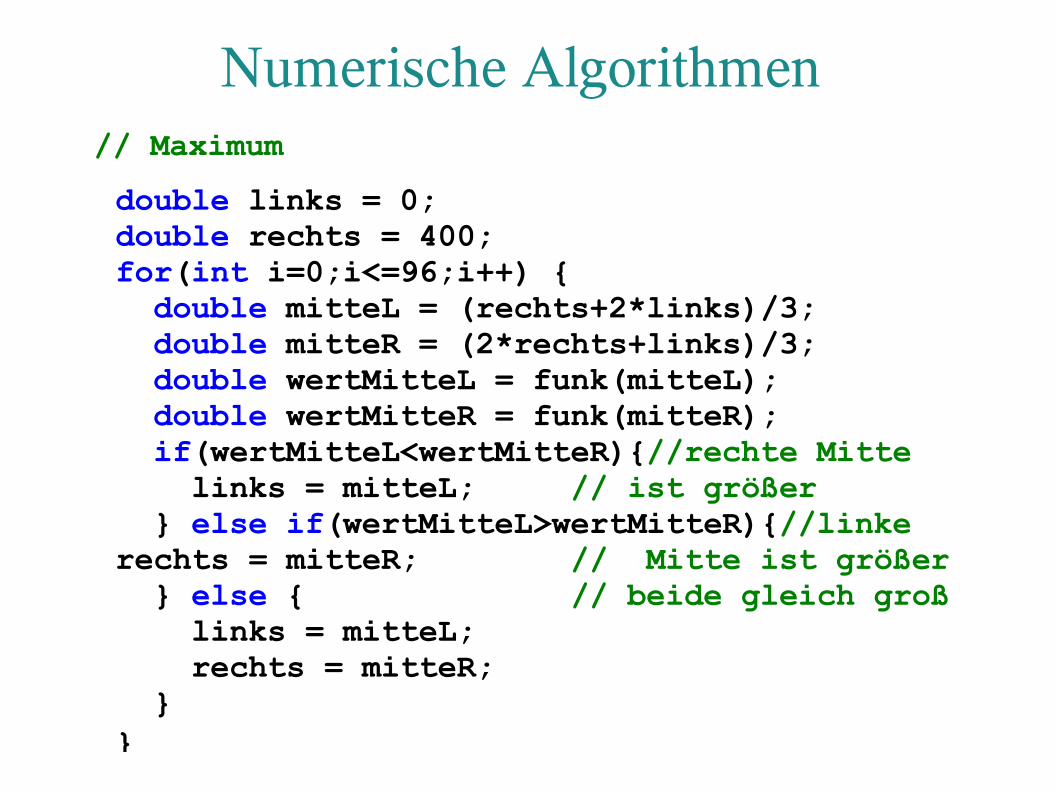
Numerische Algorithmen // Maximum double links = 0; double rechts = 400; for(int i=0;i<=96;i++) { double mitteL = (rechts+2*links)/3; double mitteR = (2*rechts+links)/3; double wertMitteL = funk(mitteL); double wertMitteR = funk(mitteR); if(wertMitteL<wertMitteR){//rechte Mitte links = mitteL; // ist größer } else if(wertMitteL>wertMitteR){//linke rechts = mitteR; // Mitte ist größer } else { // beide gleich groß links = mitteL; rechts = mitteR; } }
Numerische Algorithmen● Werte für analytische Funktionen– Beispiele
● sin(x), cos(x), tan(x)● 10x, log10 x● usw.
– Annahme: Reelle Funktion durch Polynom approximierbar
– Koeffizienten
f x =a0a1⋅ x−x0a2⋅x−x02ak⋅ x−x0
kRk x
f k x0=ak⋅k !⇒ak=f x0k !
f x = f x0 f ' x0⋅ x−x0f " x0
2⋅ x−x0
2f k x0
k !⋅ x−x0
k
Numerische Algorithmen
● Werte für analytische Funktionen– Taylor-Reihe
– Beispiel: sin(x)sin'(x) = cos(x), cos'(x) = - sin(x); x0 = 0.
– Beispiel: cos(x)cos'(x) = - sin(x), sin'(x) = cos(x); x0 = 0.
– Beispiel: ex
f x = f x0 f ' x0⋅ x−x0f " x0
2⋅ x−x0
2f k x0
k !⋅x−x0
k
sin x =x− x3
3 ! x5
5!− x7
7! x9
9 !− x11
11!
cos x =1− x2
2! x 4
4 !− x6
6 ! x8
8 !− x10
10 !
e x x =1 x1! x2
2! x3
3 ! x 4
4 ! x5
5 !
Numerische Algorithmen
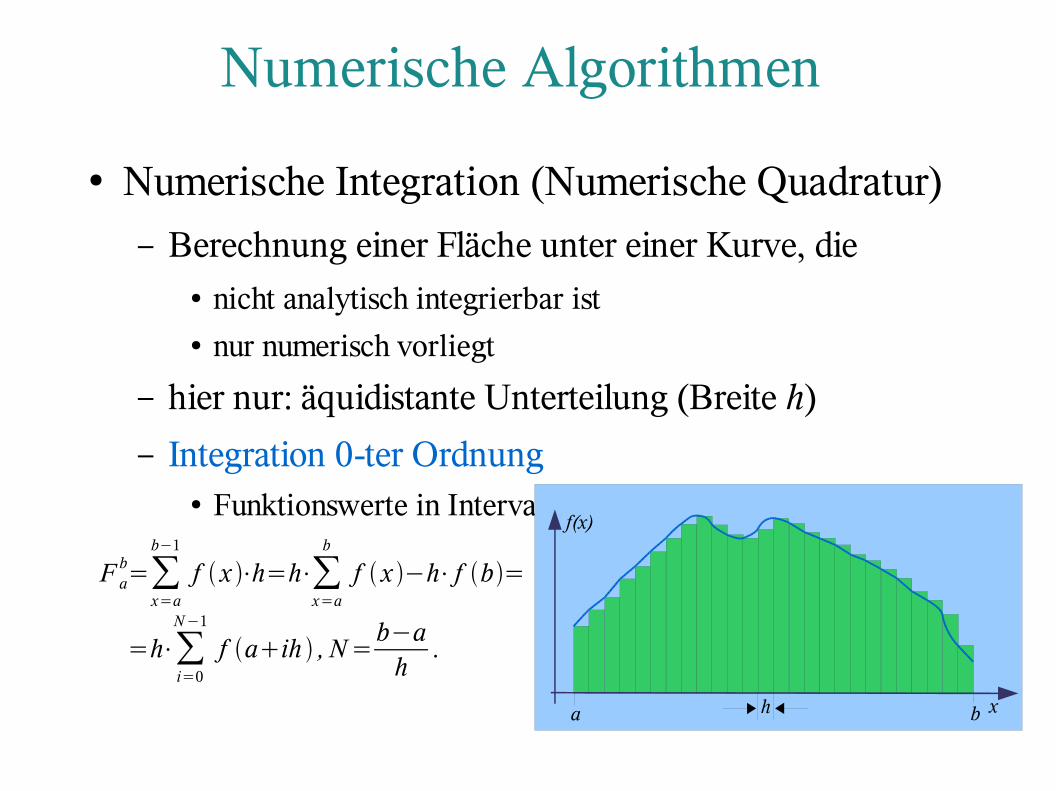
● Numerische Integration (Numerische Quadratur)– Berechnung einer Fläche unter einer Kurve, die
● nicht analytisch integrierbar ist● nur numerisch vorliegt
– hier nur: äquidistante Unterteilung (Breite h)– Integration 0-ter Ordnung
● Funktionswerte in Intervall h als konstant angenommenf(x)
xh ba
F ab=∑
x=a
b−1
f x ⋅h=h⋅∑x=a
b
f x −h⋅ f b=
=h⋅∑i=0
N−1
f aih , N=b−ah
.

Numerische Algorithmen
● Numerische Integration (Numerische Quadratur)– Sei die Ordinatensumme mal der Intervallbreite, so
lässt sich ein Korrekturterm bestimmen:
– Im folgenden werden die Ergebnisse verglichen gegen
– Ergebnis
– Korrekturterm
f(x)
xh ba
F ab=h⋅∑
x=a
b
f x −h⋅ f b=K ab−h⋅ f b.
K ab=h⋅∑
x=a
b
f x
K ab
E F ab=−h⋅ f b.
F ab=K a
b−h⋅ f b
f(x)
xh ba
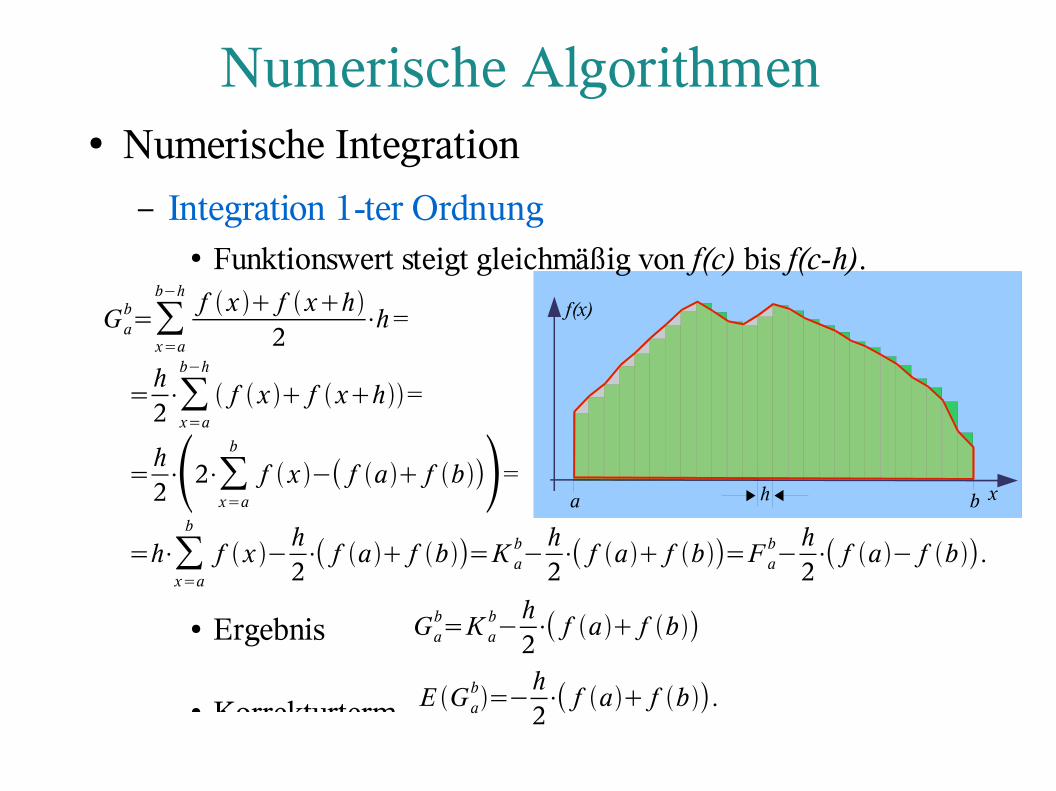
Numerische Algorithmen● Numerische Integration– Integration 1-ter Ordnung
● Funktionswert steigt gleichmäßig von f(c) bis f(c-h).
● Ergebnis
● Korrekturterm
Gab=∑
x=a
b−h f x f xh2
⋅h =
=h2⋅∑
x=a
b−h
f x f xh=
=h2⋅2⋅∑x=a
b
f x − f a f b= =h⋅∑
x=a
b
f x −h2⋅ f a f b=K a
b−h2⋅ f a f b=F a
b−h2⋅ f a− f b.
E Gab=−h
2⋅ f a f b.
Gab=K a
b−h2⋅ f a f b
Numerische Algorithmen
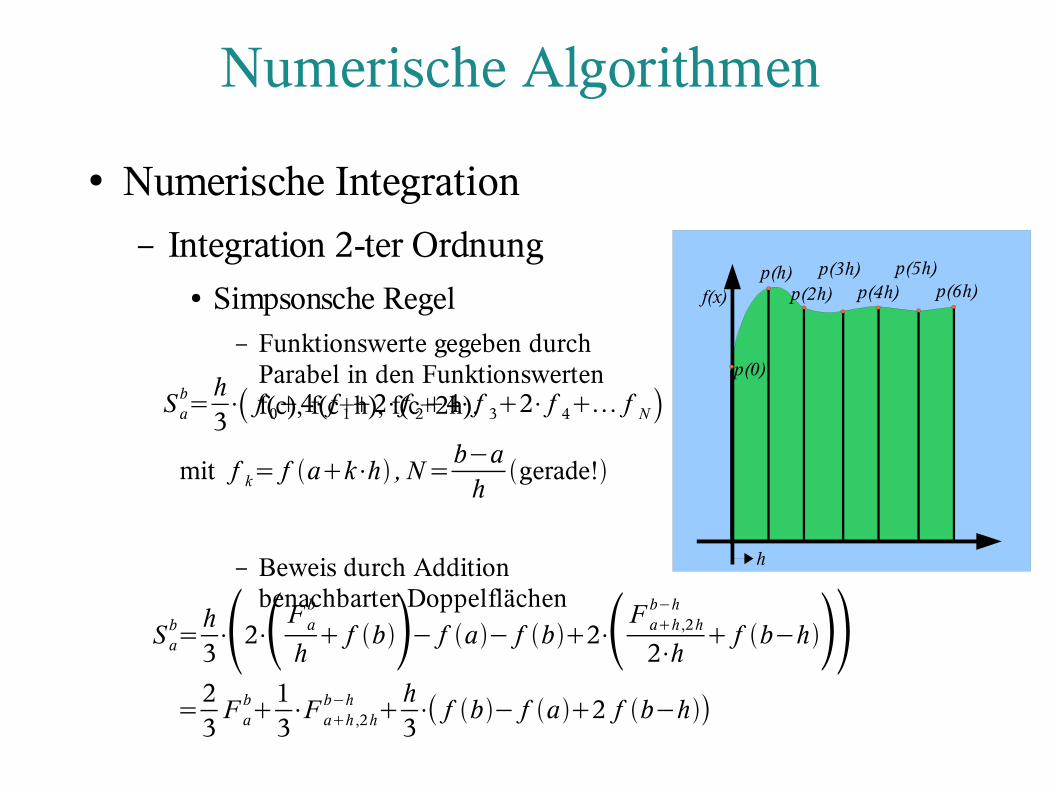
● Numerische Integration– Integration 2-ter Ordnung
● Simpsonsche Regel– Funktionswerte gegeben durch
Parabel in den Funktionswerten f(c), f(c+h), f(c+2h).
– Beweis durch Addition benachbarter Doppelflächen
f(x)p(h)
p(4h)
p(0)
h
p(2h)p(3h)
p(6h)p(5h)
S ab=h
3⋅ f 04⋅ f 12⋅ f 24⋅ f 32⋅ f 4 f N
mit f k= f ak⋅h , N=b−ahgerade!
S ab=h
3⋅2⋅F a
b
h f b− f a− f b2⋅F ah ,2h
b−h
2⋅h f b−h
=23
F ab1
3⋅F ah ,2h
b−h h3⋅ f b− f a2 f b−h
Numerische Algorithmen
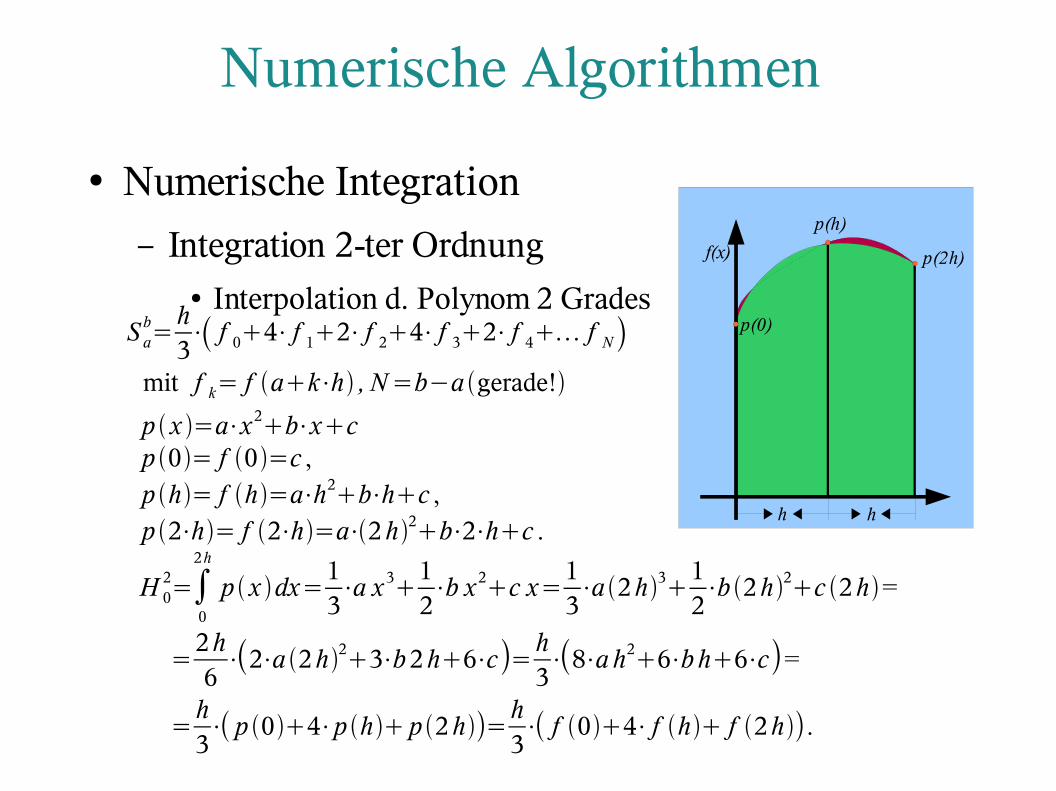
● Numerische Integration– Integration 2-ter Ordnung
● Interpolation d. Polynom 2 Grades
p x =a⋅x2b⋅xcp 0= f 0=c ,p h= f h=a⋅h2b⋅hc ,p 2⋅h= f 2⋅h=a⋅2 h2b⋅2⋅hc .
H 02=∫
0
2h
p x dx=13⋅a x 31
2⋅b x2c x=1
3⋅a 2 h31
2⋅b 2 h2c 2 h=
=2 h6⋅2⋅a 2 h23⋅b 2 h6⋅c=h
3⋅8⋅a h26⋅b h6⋅c=
=h3⋅ p 04⋅p h p 2 h=h
3⋅ f 04⋅ f h f 2 h.
f(x)p(h)
p(2h)
p(0)
hh
S ab=h
3⋅ f 04⋅ f 12⋅ f 24⋅ f 32⋅ f 4 f N
mit f k= f ak⋅h , N=b−a gerade!
1
2
a b
Numerische Algorithmen
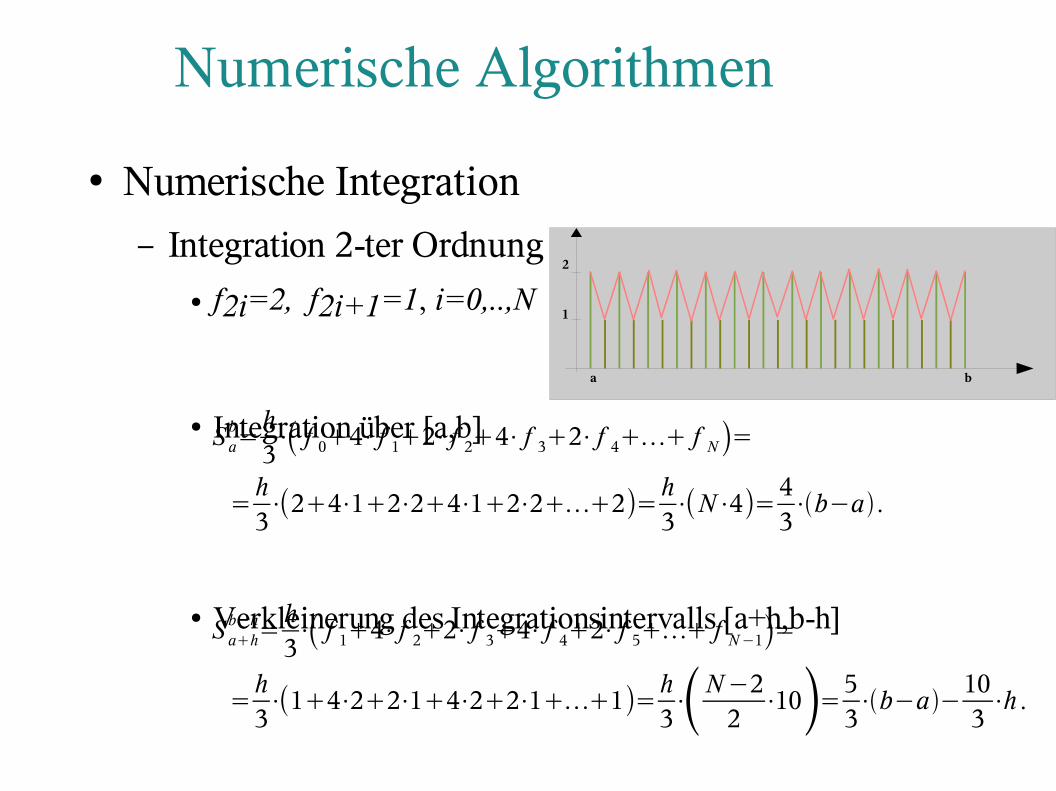
● Numerische Integration– Integration 2-ter Ordnung
● f2i=2, f2i+1=1, i=0,..,N
● Integration über [a,b]
● Verkleinerung des Integrationsintervalls [a+h,b-h]
S ab=h
3⋅ f 04⋅ f 12⋅ f 24⋅ f 32⋅ f 4 f N=
=h3⋅24⋅12⋅24⋅12⋅22=h
3⋅N⋅4= 4
3⋅b−a .
S ahb−h=h
3⋅ f 14⋅ f 22⋅ f 34⋅ f 42⋅ f 5 f N−1=
=h3⋅14⋅22⋅14⋅22⋅11=h
3⋅N−2
2⋅10=5
3⋅b−a−10
3⋅h .
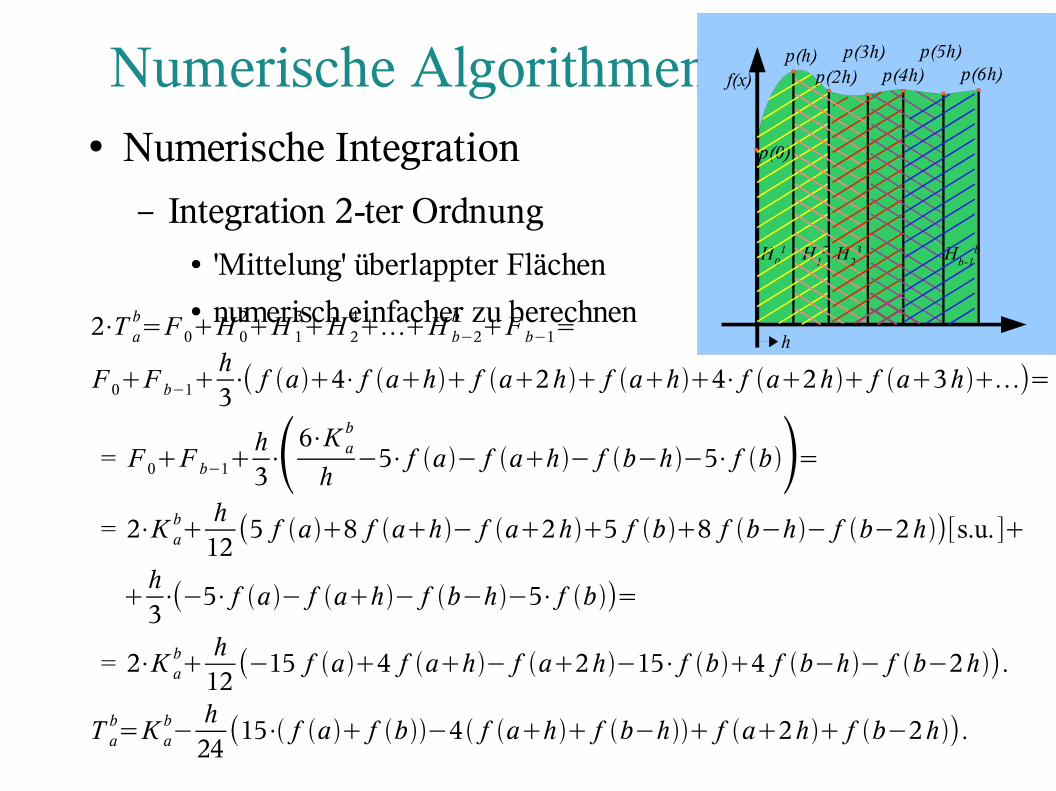
Numerische Algorithmen● Numerische Integration– Integration 2-ter Ordnung
● 'Mittelung' überlappter Flächen● numerisch einfacher zu berechnen2⋅T a
b=F 0H 02H 1
3H 24H b−2
b F b−1=
F 0F b−1h3⋅ f a4⋅ f ah f a2 h f ah4⋅ f a2 h f a3 h=
= F 0F b−1h3⋅6⋅K a
b
h−5⋅ f a− f ah− f b−h−5⋅ f b=
= 2⋅K ab h
125 f a8 f ah− f a2 h5 f b8 f b−h− f b−2 h[s.u. ]
h3⋅−5⋅ f a− f ah− f b−h−5⋅ f b=
= 2⋅K ab h
12−15 f a4 f ah− f a2 h−15⋅ f b4 f b−h− f b−2 h.
T ab=K a
b− h2415⋅ f a f b−4 f ah f b−h f a2 h f b−2 h.
f(x)p(h)
p(4h)
p(0)
h
p(2h)p(3h)
p(6h)p(5h)
Hb-1bH0
1 H12 H2
3
f(x)p(h)
p(4h)
p(0)
h
p(2h)p(3h)
p(6h)p(5h)
Hb-1bH0
1 H12 H2
3
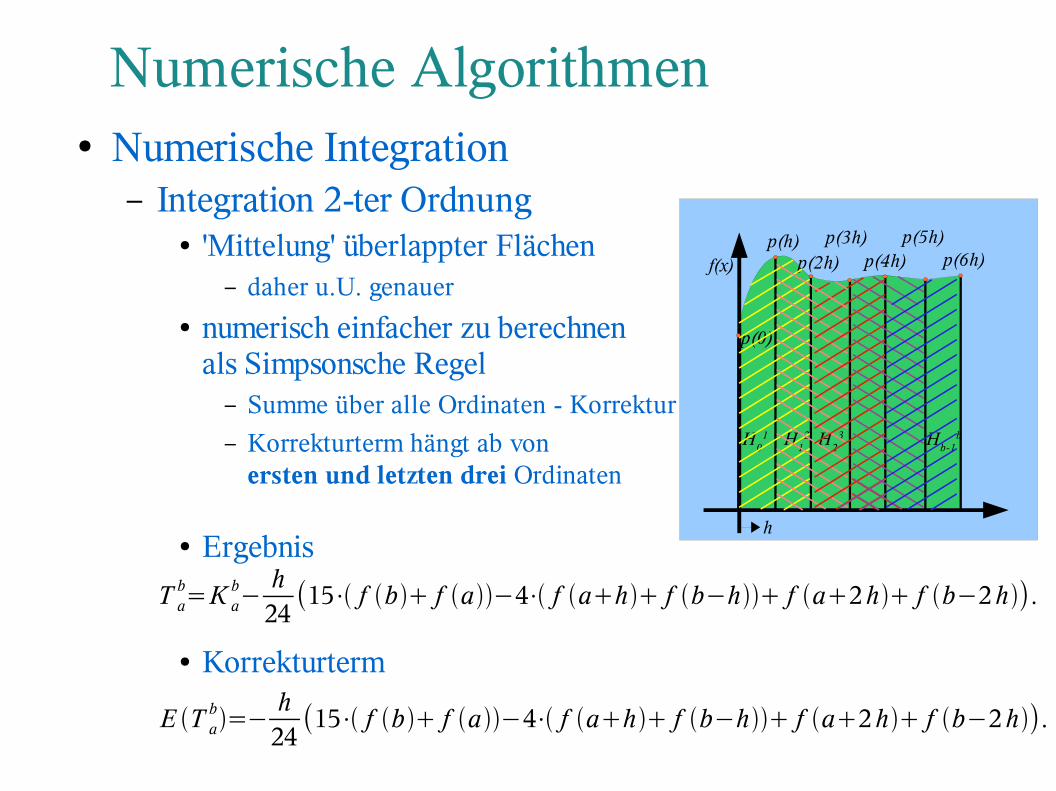
Numerische Algorithmen● Numerische Integration– Integration 2-ter Ordnung
● 'Mittelung' überlappter Flächen– daher u.U. genauer
● numerisch einfacher zu berechnen als Simpsonsche Regel– Summe über alle Ordinaten - Korrektur– Korrekturterm hängt ab von
ersten und letzten drei Ordinaten
● Ergebnis
● Korrekturterm
T ab=K a
b− h2415⋅ f b f a−4⋅ f ah f b−h f a2 h f b−2 h.
E T ab=− h
24 15⋅ f b f a−4⋅ f ah f b−h f a2 h f b−2 h.
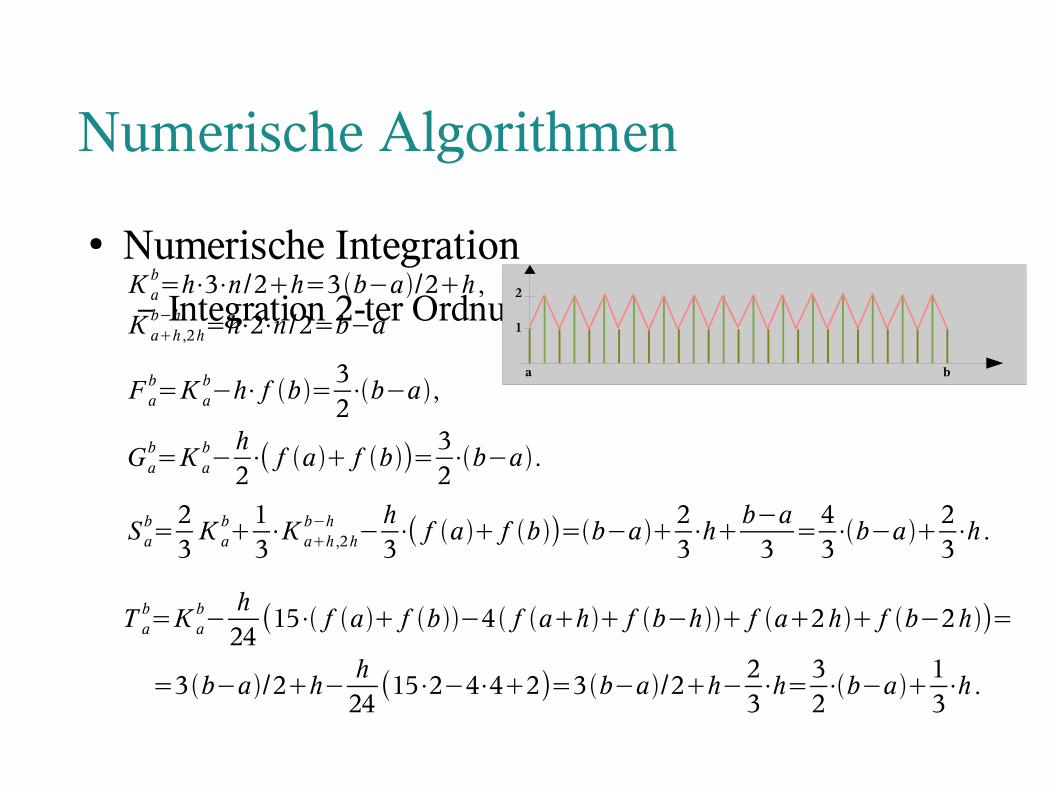
Numerische Algorithmen
● Numerische Integration– Integration 2-ter Ordnung
1
2
a b
F ab=K a
b−h⋅ f b=32⋅b−a,
Gab=K a
b−h2⋅ f a f b= 3
2⋅b−a.
K ab=h⋅3⋅n /2h=3 b−a/2h ,
K ah ,2hb−h =h⋅2⋅n /2=b−a
S ab=2
3K a
b13⋅K ah ,2h
b−h −h3⋅ f a f b=b−a2
3⋅hb−a
3= 4
3⋅b−a2
3⋅h .
T ab=K a
b− h2415⋅ f a f b−4 f ah f b−h f a2 h f b−2 h=
=3 b−a/2h− h2415⋅2−4⋅42=3 b−a/2h−2
3⋅h= 3
2⋅b−a1
3⋅h .
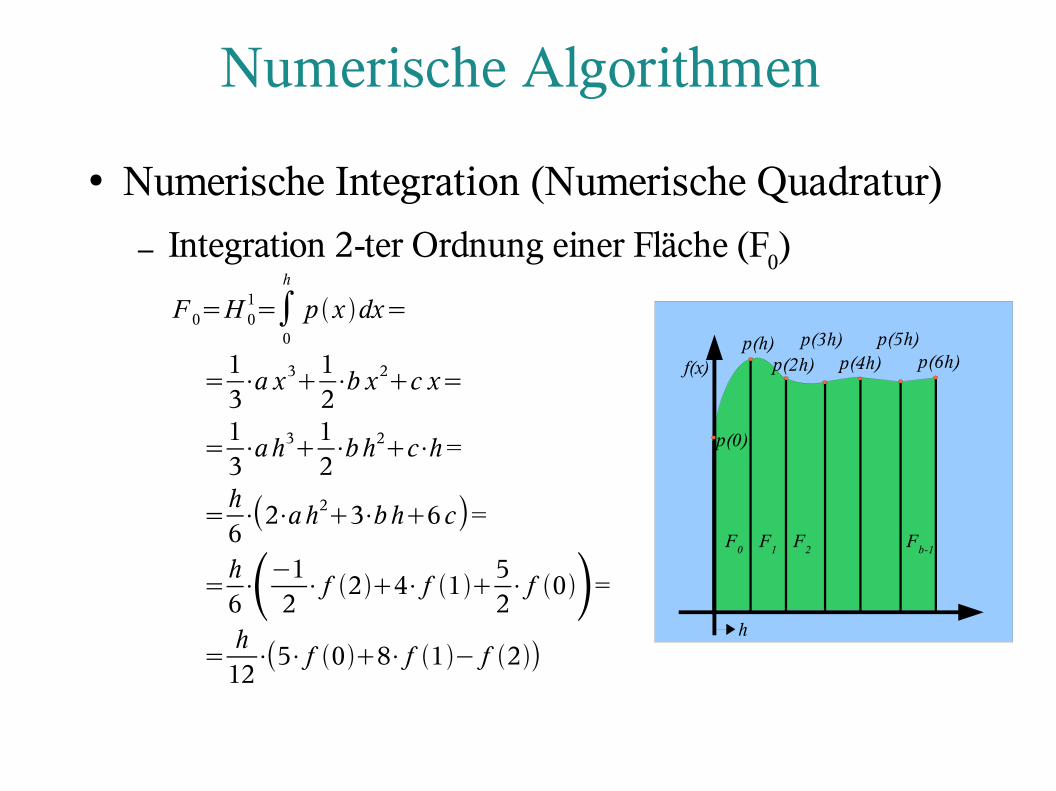
Numerische Algorithmen
● Numerische Integration (Numerische Quadratur)– Integration 2-ter Ordnung einer Fläche (F0)
F 0=H 01=∫
0
h
p x dx=
=13⋅a x31
2⋅b x2c x=
=13⋅a h31
2⋅b h2c⋅h =
=h6⋅2⋅a h23⋅b h6 c=
=h6⋅−1
2⋅ f 24⋅ f 15
2⋅ f 0=
= h12⋅5⋅ f 08⋅ f 1− f 2
f(x)p(h)
p(4h)
p(0)
h
p(2h)p(3h)
p(6h)p(5h)
F0 F1 F2 Fb-1
Numerische Algorithmen
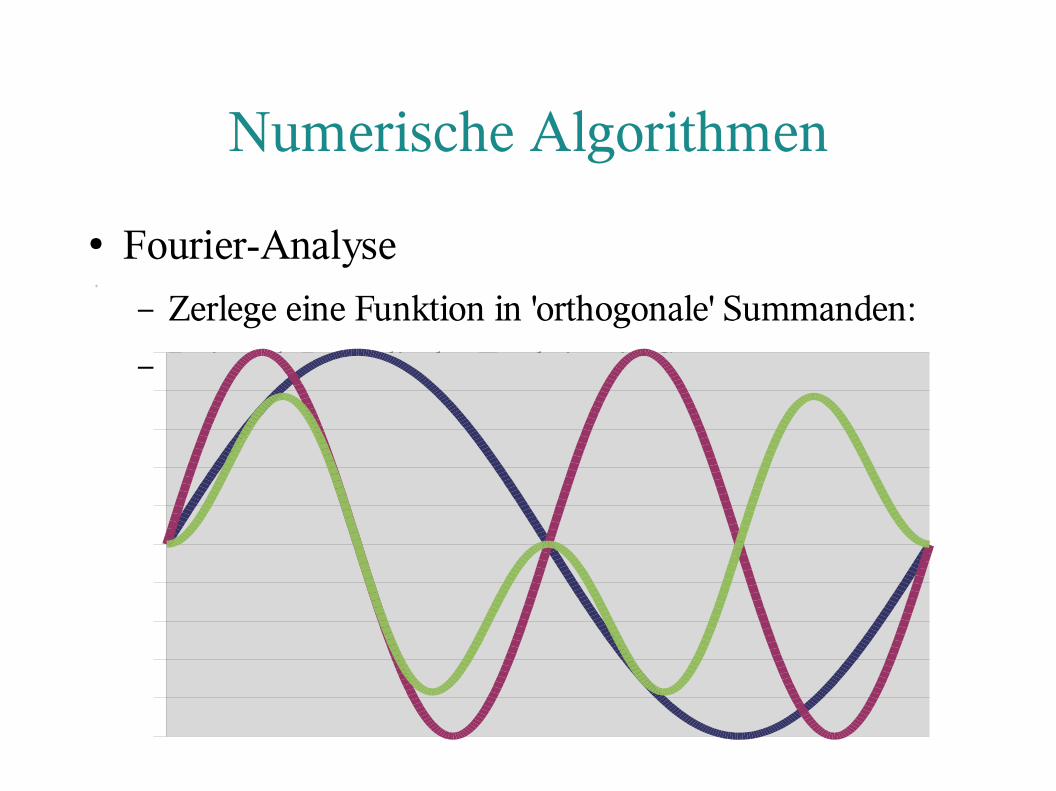
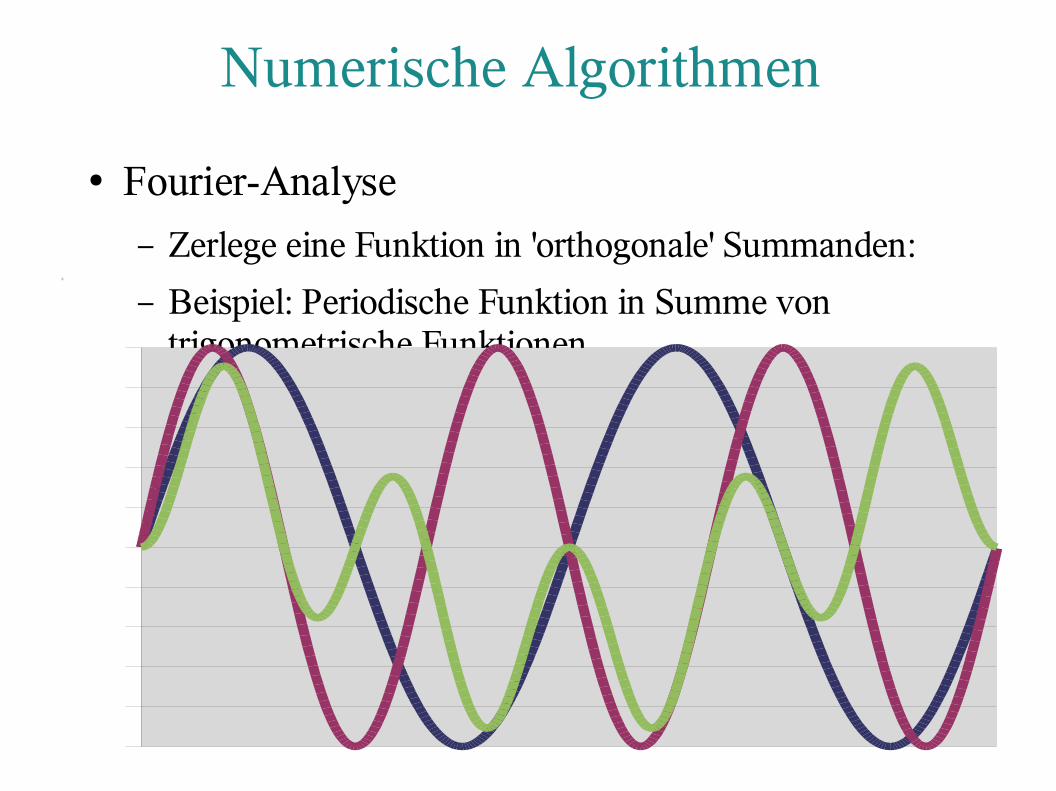
● Fourier-Analyse– Zerlege eine Funktion in 'orthogonale' Summanden:– Beispiel: Periodische Funktion in Summe von
trigonometrische Funktionen
Numerische Algorithmen
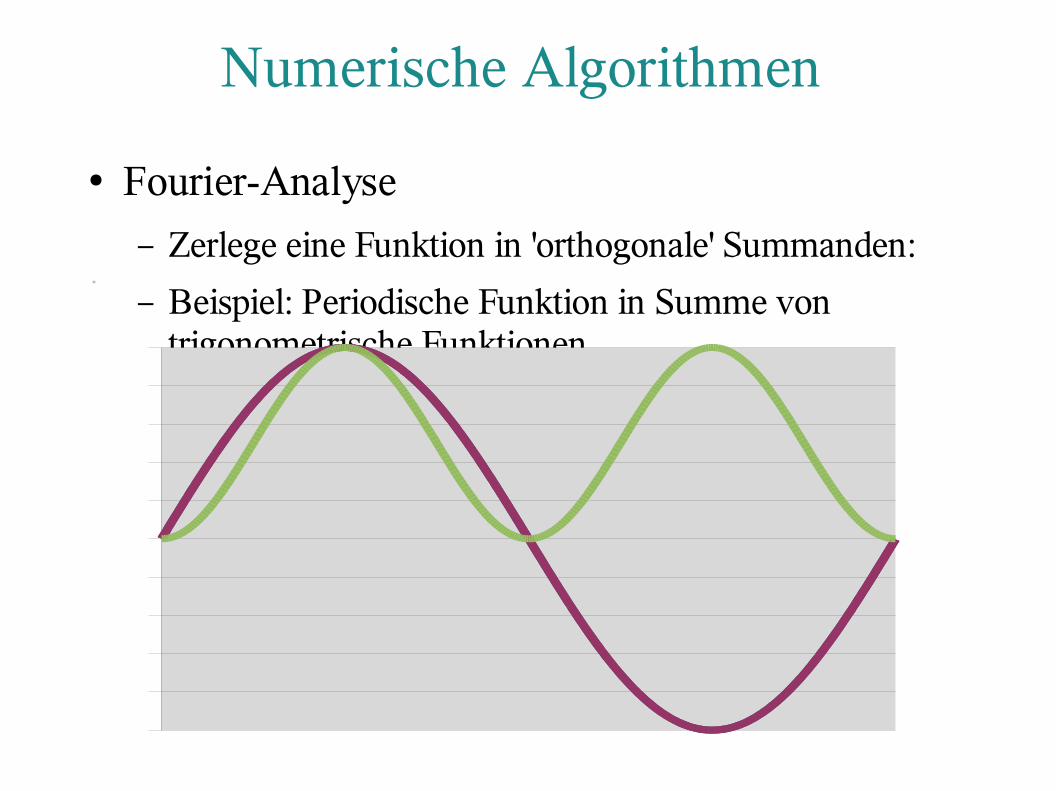
● Fourier-Analyse– Zerlege eine Funktion in 'orthogonale' Summanden:– Beispiel: Periodische Funktion in Summe von
trigonometrische Funktionen
Numerische Algorithmen
● Fourier-Analyse– Zerlege eine Funktion in 'orthogonale' Summanden:– Beispiel: Periodische Funktion in Summe von
trigonometrische Funktionen
Numerische Algorithmen
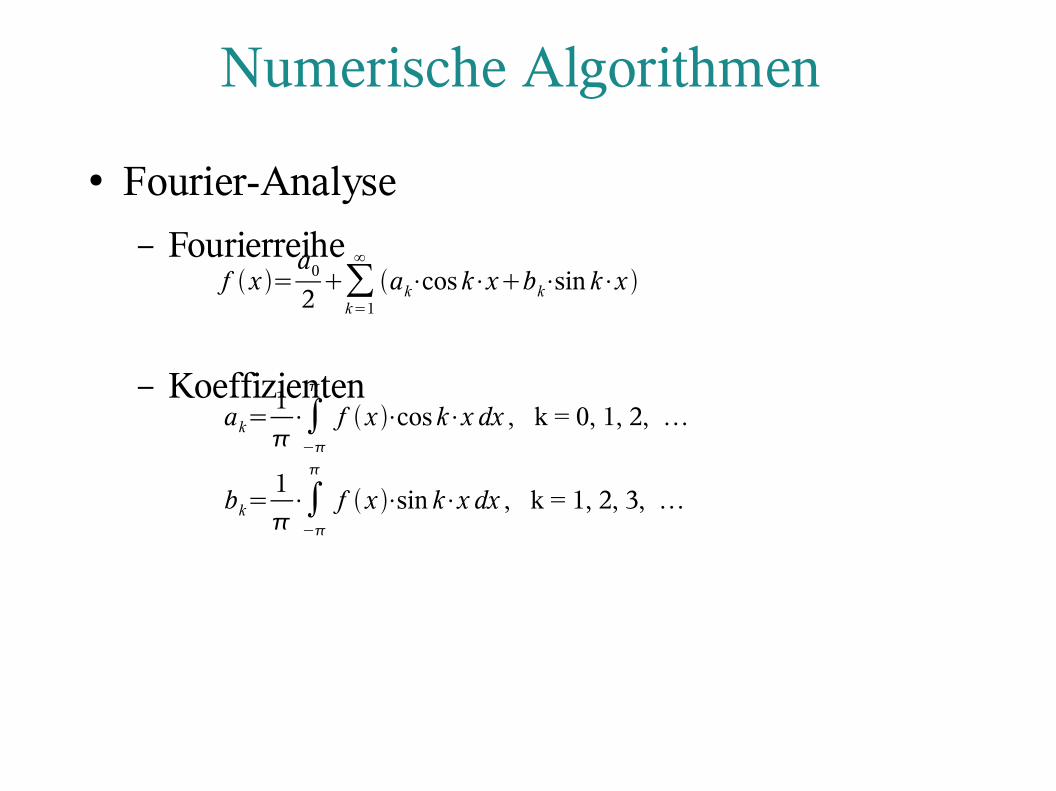
● Fourier-Analyse– Fourierreihe
– Koeffizienten
f x =a0
2∑
k=1
∞
ak⋅cos k⋅xbk⋅sin k⋅x
ak=1⋅∫−
f x ⋅cos k⋅x dx , k = 0, 1, 2,
bk=1⋅∫−
f x ⋅sin k⋅x dx , k = 1, 2, 3,
Numerische Algorithmen
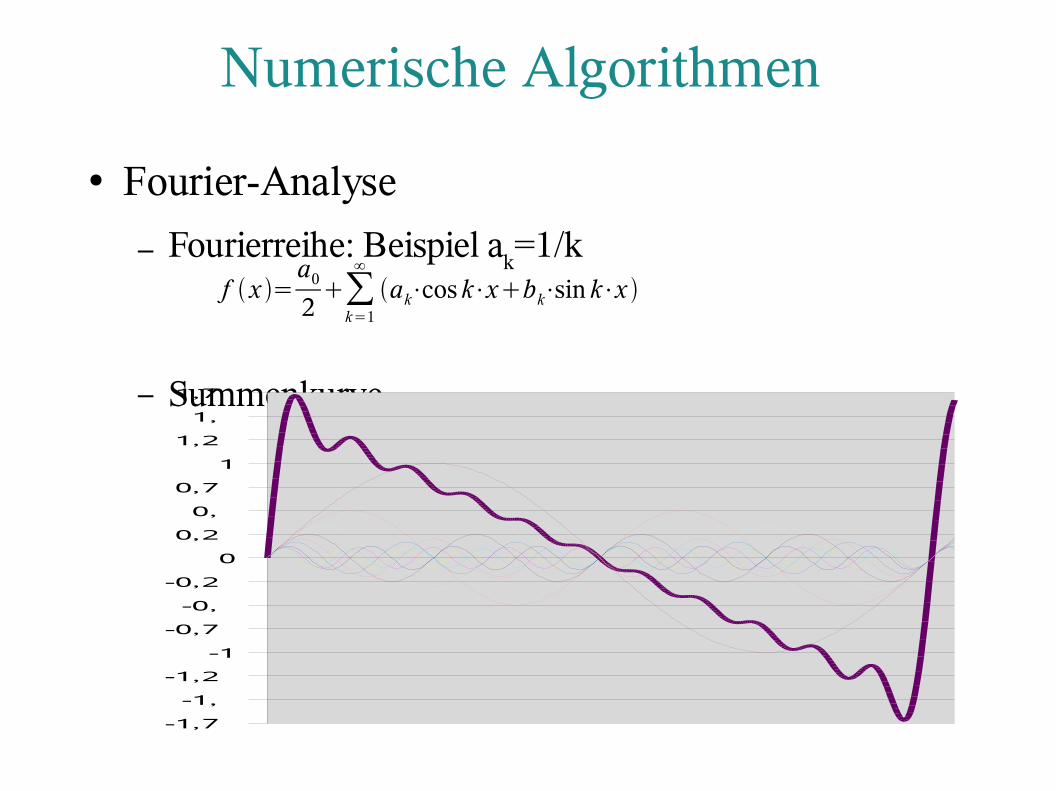
● Fourier-Analyse– Fourierreihe: Beispiel ak=1/k
– Summenkurve
f x =a0
2∑
k=1
∞
ak⋅cos k⋅xbk⋅sin k⋅x
-1,7
-1,
-1,2
-1
-0,7
-0,
-0,2
0
0,2
0,
0,7
1
1,2
1,
1,7
Numerische Algorithmen
● Fouriertransformation– Verallgemeinerung der Fourier-Analyse auf nicht
periodische Funktionen
– mit den Koeffizienten
– Abbildung der Zeitdarstellung in Frequenzdarstellung– Fouriertransformation in komplexer Darstellung
f x =∫0
∞
a y ⋅cos x⋅yb y ⋅sin x⋅y dy
a y =1⋅∫
0
∞
f u⋅cos y⋅udu ,
b y =1⋅∫
0
∞
f u⋅sin y⋅udu. }F y = 1
2⋅∫−∞
∞
f x ⋅ei⋅xydx
Numerische Algorithmen
● Schnelle Fourier-Transformation– Aufwand quadratisch in Anzahl der Punkte
● u.U. zu groß– Schnelle Fourier-Transformation
FFT Fast Fourier Transformation● Schnelle Hartley-Transformation– Äquivalent wie Fourier-Transformation– keine komplexen Zahlen!– weniger Rechenoperationen (im 'Normalfall').– kann in Fourier-Transformierte umgerechnet werden
(trotz vieler Vorteile eher selten benutzt)
Numerische Algorithmen
● Lineares Gleichungssystem– Lineare Gleichung ersten Grades
● a1·x1 + a2·x2 + … + ak·xk + … + aN·xN = a0
– Lineares Gleichungssystem● Mehrere Gleichungen mit gleichen Variablen x1, x2, …, xN
– Finde x1, x2, …, xN, die alle Gleichungen erfüllen
– Systematische Lösung durch Gaußsches Eliminationsverfahren
Numerische Algorithmen
● Lineares Gleichungssystem– Gaußsches Eliminationsverfahren● Beispiel
● Erweitere Gleichung 1 mit 2 und 3 und subtrahiere von Gleichung 2 und 3
● Erweitere Gleichung 2 mit -1 und subtrahiere von Gleichung 3
x + 2⋅y + 3⋅z = 142⋅x + 2⋅y + 1⋅z = 93⋅x + 4⋅y + 2⋅z = 17
x + 2⋅y + 3⋅z = 14−2⋅y + −5⋅z = −19−2⋅y + −7⋅z = −25
x + 2⋅y + 3⋅z = 14−2⋅y + −5⋅z = −19
−2⋅z = −6
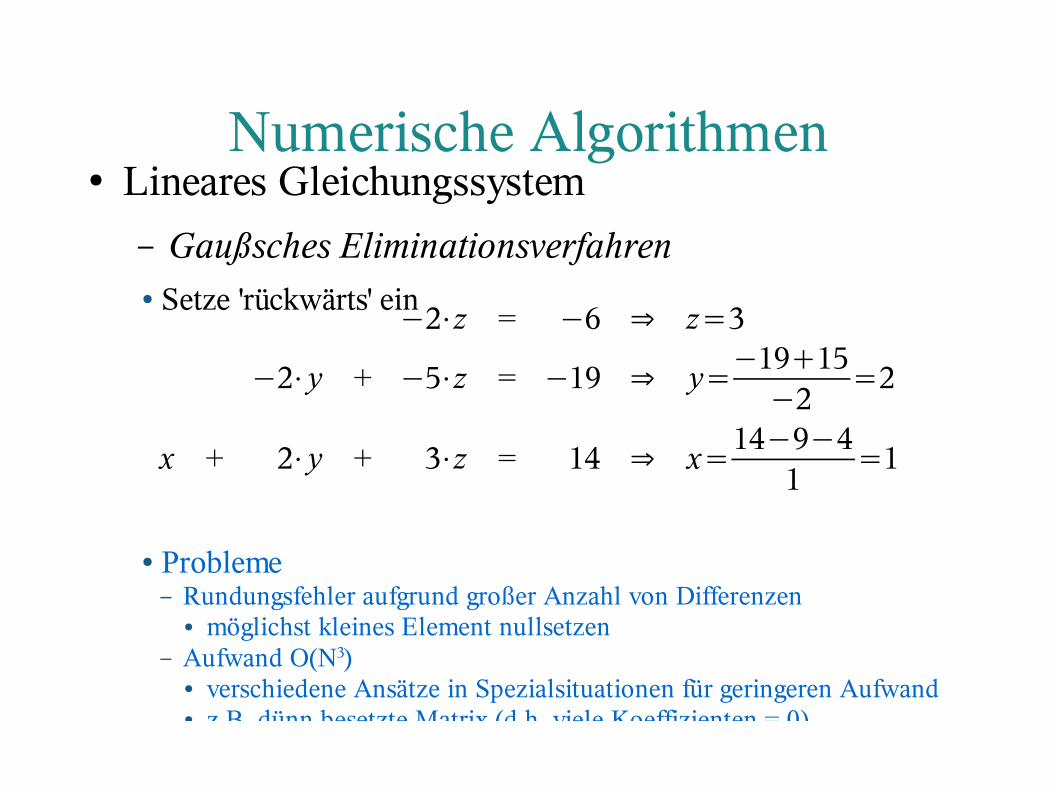
Numerische Algorithmen● Lineares Gleichungssystem– Gaußsches Eliminationsverfahren● Setze 'rückwärts' ein
● Probleme– Rundungsfehler aufgrund großer Anzahl von Differenzen● möglichst kleines Element nullsetzen
– Aufwand O(N3)● verschiedene Ansätze in Spezialsituationen für geringeren Aufwand● z.B. dünn besetzte Matrix (d.h. viele Koeffizienten = 0)
−2⋅z = −6 ⇒ z=3
−2⋅y + −5⋅z = −19 ⇒ y=−1915−2
=2
x + 2⋅y + 3⋅z = 14 ⇒ x=14−9−41
=1
Numerische Algorithmen
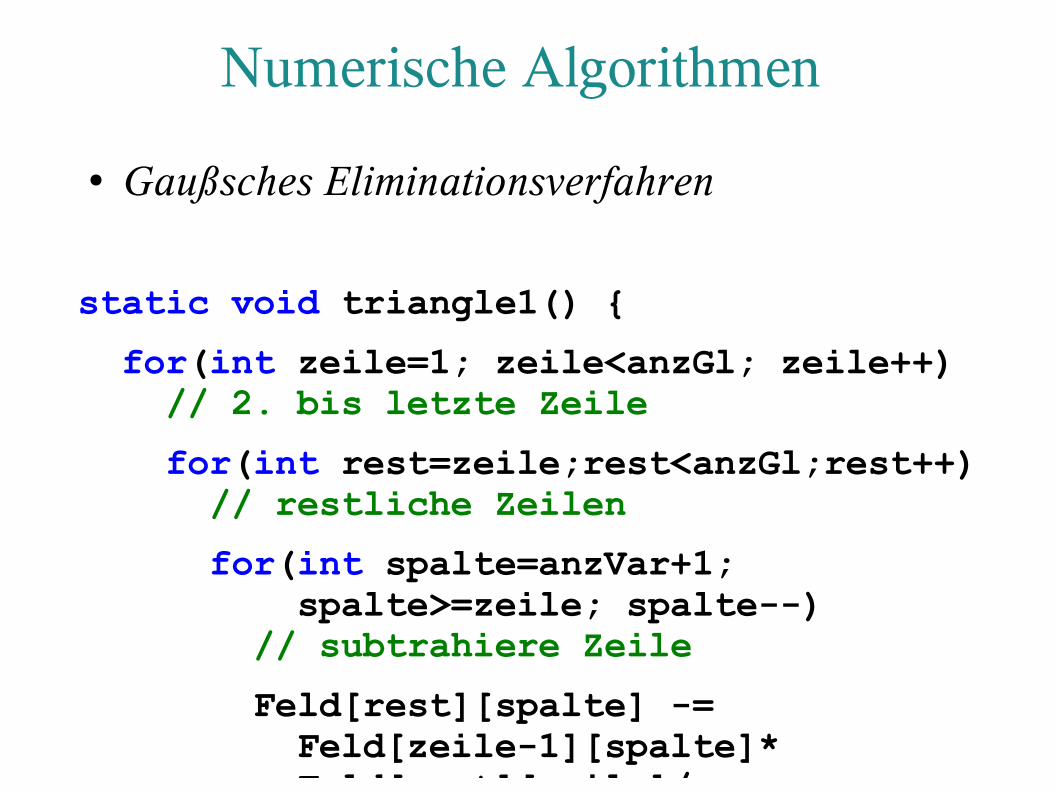
● Gaußsches Eliminationsverfahren
static void triangle1() { for(int zeile=1; zeile<anzGl; zeile++) // 2. bis letzte Zeile for(int rest=zeile;rest<anzGl;rest++) // restliche Zeilen for(int spalte=anzVar+1; spalte>=zeile; spalte--) // subtrahiere Zeile Feld[rest][spalte] -= Feld[zeile-1][spalte]* Feld[rest][zeile]/
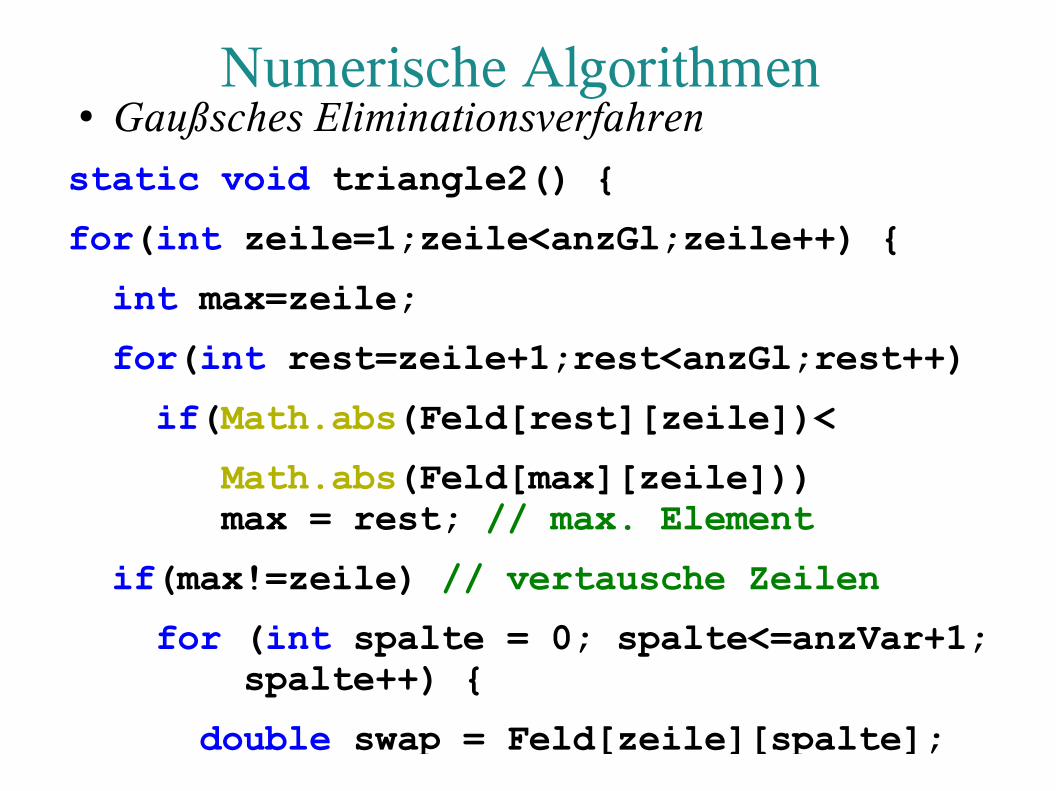
Numerische Algorithmen● Gaußsches Eliminationsverfahrenstatic void triangle2() { for(int zeile=1;zeile<anzGl;zeile++) { int max=zeile; for(int rest=zeile+1;rest<anzGl;rest++) if(Math.abs(Feld[rest][zeile])< Math.abs(Feld[max][zeile])) max = rest; // max. Element if(max!=zeile) // vertausche Zeilen for (int spalte = 0; spalte<=anzVar+1; spalte++) { double swap = Feld[zeile][spalte];
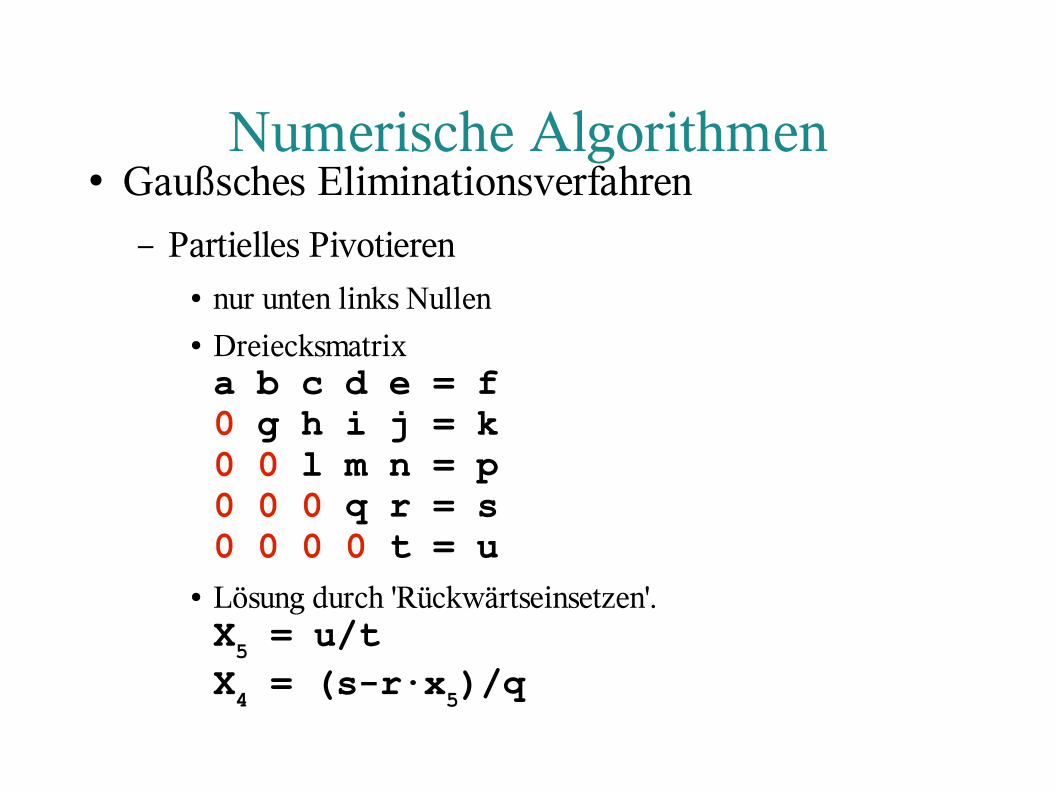
Numerische Algorithmen● Gaußsches Eliminationsverfahren– Partielles Pivotieren
● nur unten links Nullen● Dreiecksmatrixa b c d e = f0 g h i j = k0 0 l m n = p0 0 0 q r = s0 0 0 0 t = u
● Lösung durch 'Rückwärtseinsetzen'.X5 = u/tX4 = (s-r∙x5)/qusw.
Numerische Algorithmen● Gaußsches Eliminationsverfahren– Vollständiges Pivotieren
● unten und oben Nullen● Diagonalmatrixa 0 0 0 0 = b; x1 = b/a0 c 0 0 0 = d; x2 = d/c0 0 e 0 0 = f; x3 = f/e0 0 0 g 0 = h; x4 = h/g0 0 0 0 i = j; x5 = j/i
for(int rest = 0; rest<zeile-1; rest++) for(int spalte = anzVar + 1; spalte >= zeile; spalte--) Feld[rest][spalte] -= Feld[zeile - 1][spalte] *
Numerische Algorithmen● Lineare Optimierung– Reale Systeme modellieren durch
● System linearer Ungleichungen● Beipiel
– Herstellung verschiedener Waren Wn auf Maschinen Mm
– Lmn: Laufzeiten je produzierter Einheit
– Zm: Gesamtlaufzeiten der Maschinen je Woche
– Gn: Gewinne je Produkteinheit
– Welche Mengen xn auf welchen Maschinen produzieren – Gewinn soll maximiert werden!
● Mathematisches Modell (n = 1…4, m = 1…3) – x1 ≥ 0; x2 ≥ 0; x3 ≥ 0; x4 ≥ 0;
– L11·x1 + L12·x2 + L13·x3 + L14·x4 ≤ Z1,
Numerische Algorithmen
● Lineare Optimierung– effiziente Verfahren zur Lösung solcher Probleme – Simplexverfahren nach Dantzig– Problem in Normalform als System von Ungleichungen
x1≥0 ; x2≥0 ; x v≥0 ;a11⋅x1 + a12⋅x2 + + a1 v⋅x v ≤b1 ,
ak1⋅x1 + ak2⋅x2 + + akv⋅x v ≤b1
ag1⋅x1 + ag2⋅x2 + + agv⋅x v ≤b1
e1⋅x1 + e2⋅x2 + + ev⋅x v =Zielfunktion (zu maximieren)
Numerische Algorithmen
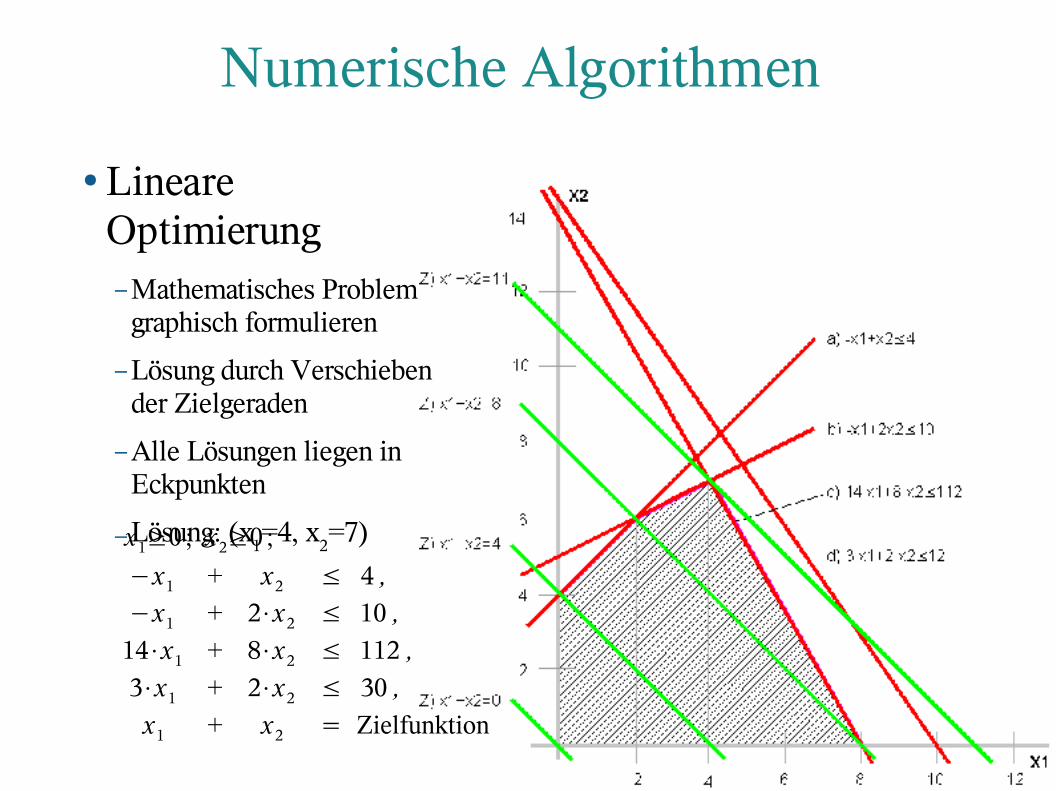
● LineareOptimierung–Mathematisches Problem
graphisch formulieren–Lösung durch Verschieben
der Zielgeraden–Alle Lösungen liegen in
Eckpunkten
–Lösung: (x1=4, x2=7)x1≥0 ; x2≥0 ; −x1 + x2 ≤ 4 ,−x1 + 2⋅x2 ≤ 10 ,
14⋅x1 + 8⋅x2 ≤ 112 ,3⋅x1 + 2⋅x2 ≤ 30 ,x1 + x2 = Zielfunktion
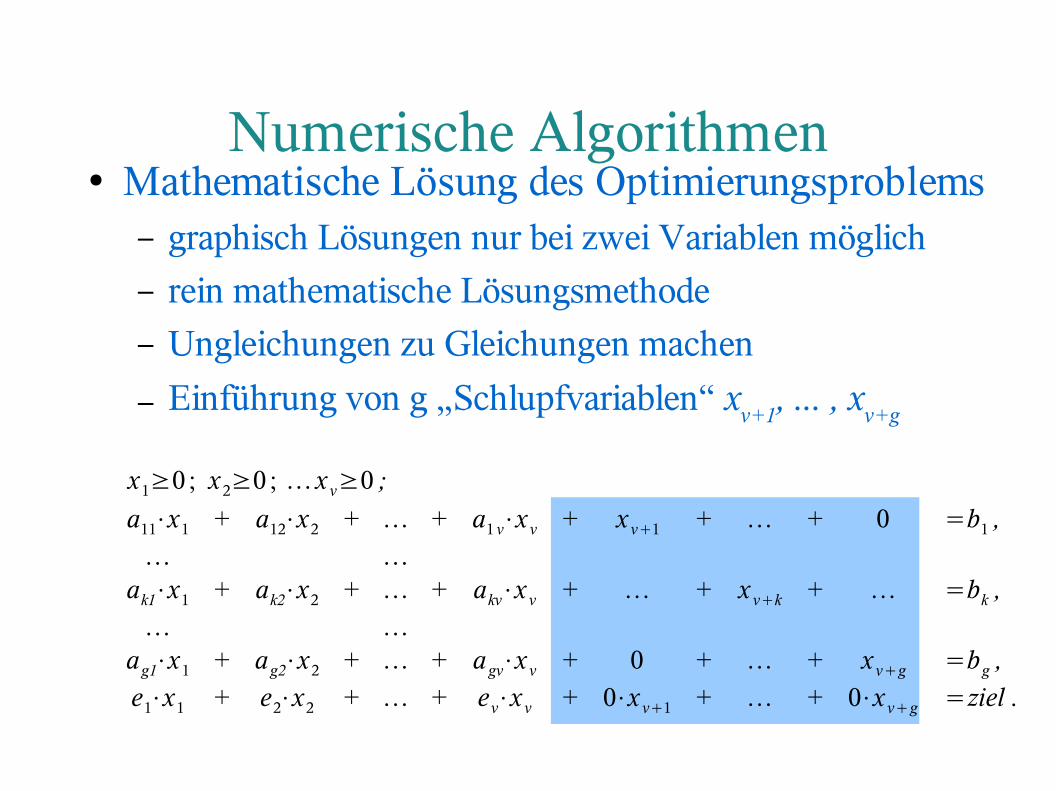
● Mathematische Lösung des Optimierungsproblems– graphisch Lösungen nur bei zwei Variablen möglich– rein mathematische Lösungsmethode – Ungleichungen zu Gleichungen machen– Einführung von g „Schlupfvariablen“ xv+1, ... , xv+g
Numerische Algorithmen
x1≥0 ; x2≥0 ; x v≥0 ;a11⋅x1 + a12⋅x2 + + a1 v⋅x v + x v1 + + 0 =b1 ,
ak1⋅x1 + ak2⋅x2 + + akv⋅x v + + x vk + =bk ,
ag1⋅x1 + ag2⋅x2 + + agv⋅x v + 0 + + x vg =bg ,e1⋅x1 + e2⋅x2 + + ev⋅x v + 0⋅x v1 + + 0⋅x vg =ziel .
Numerische Algorithmen
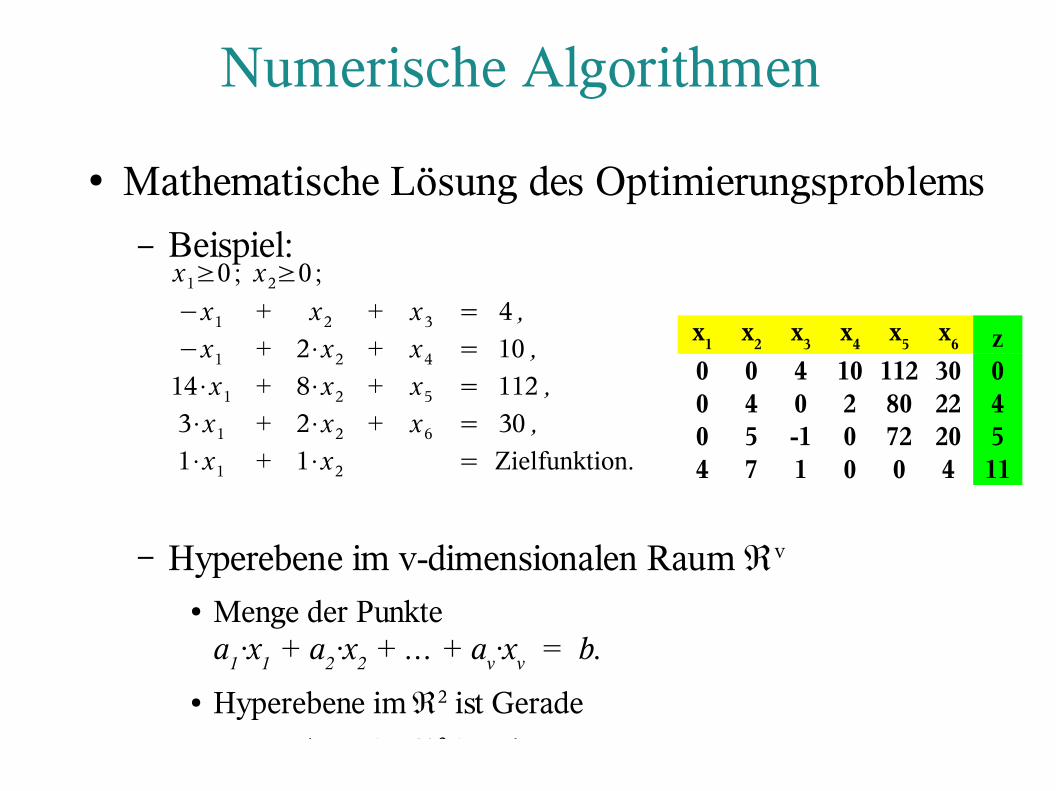
● Mathematische Lösung des Optimierungsproblems– Beispiel:
– Hyperebene im v-dimensionalen Raum v ● Menge der Punkte
a1·x1 + a2·x2 + … + av·xv = b.● Hyperebene im 2 ist Gerade ● Hyperebene im 3 ist Ebene usw.
x1≥0 ; x2≥0 ; −x1 + x2 + x 3 = 4 ,−x1 + 2⋅x2 + x 4 = 10 ,
14⋅x1 + 8⋅x2 + x5 = 112 ,3⋅x1 + 2⋅x2 + x6 = 30 ,1⋅x1 + 1⋅x2 = Zielfunktion.
z0 0 4 10 112 30 00 4 0 2 80 22 40 5 -1 0 72 20 54 7 1 0 0 4 11
x1 x2 x3 x4 x5 x6
Numerische Algorithmen
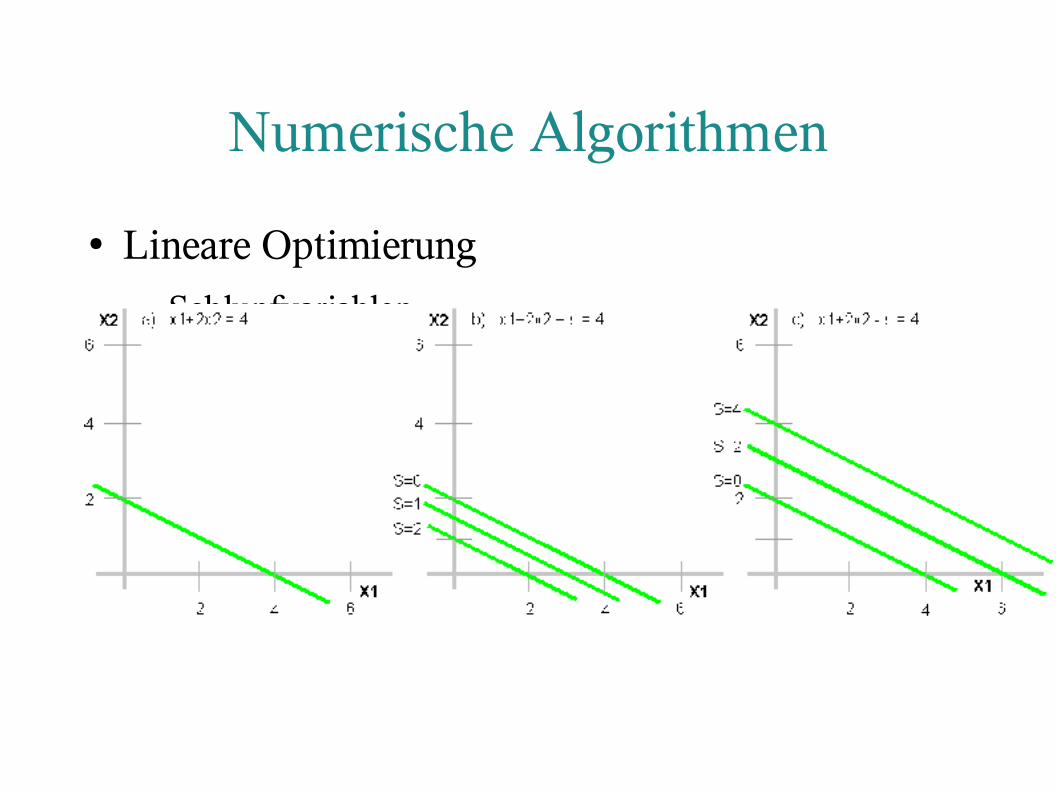
● Lineare Optimierung– Schlupfvariablen
● Gewichteter Abstand zu einer Hyperebene
Numerische Algorithmen
● Lineare Optimierung– 1. Lösungsansatz
● Setze von den v+g Variablen jeweils v auf null● Löse das Gleichungssystem aus g Gleichungen mit g Variablen● Berechne jeweils Zielfunktionswert● Bestimme maximalen Wert und daraus Optimum
● Es gibt verschiedene Gleichungssysteme
● Für großes v und g zu viel!
vgv =vg
g 2v
Numerische Algorithmen● Lineare Optimierung– Ecke im v-dimensionalen Raum v
● Schnittpunkt von v Hyperebenen.
– Nichtbasisvariable● v Variablen xi mit Wert null
● Wir sagen auch Nullvariable
– Basisvariable● g Variable mit Wert größer als null (in der Regel)
Numerische Algorithmen
● Lineare Optimierung– Effiziente Lösung des Optimierungsproblems
● Ecken heißen 'benachbart' wenn sie sich nur in einer Hyperebene unterscheiden
● Austauschverfahren:Ersetze eine Basisvariable durch Nullvariable und umgekehrt
● Wähle neue Basisvariable aus bisherigen Nullvariablen– maximaler Anstieg der Zielfunktion
● Wähle Nullvariable aus bisherigen Basisvariable– Zulässigkeit bei Umformung
● Lineare Optimierung– Effiziente Lösung des Optimierungsproblems
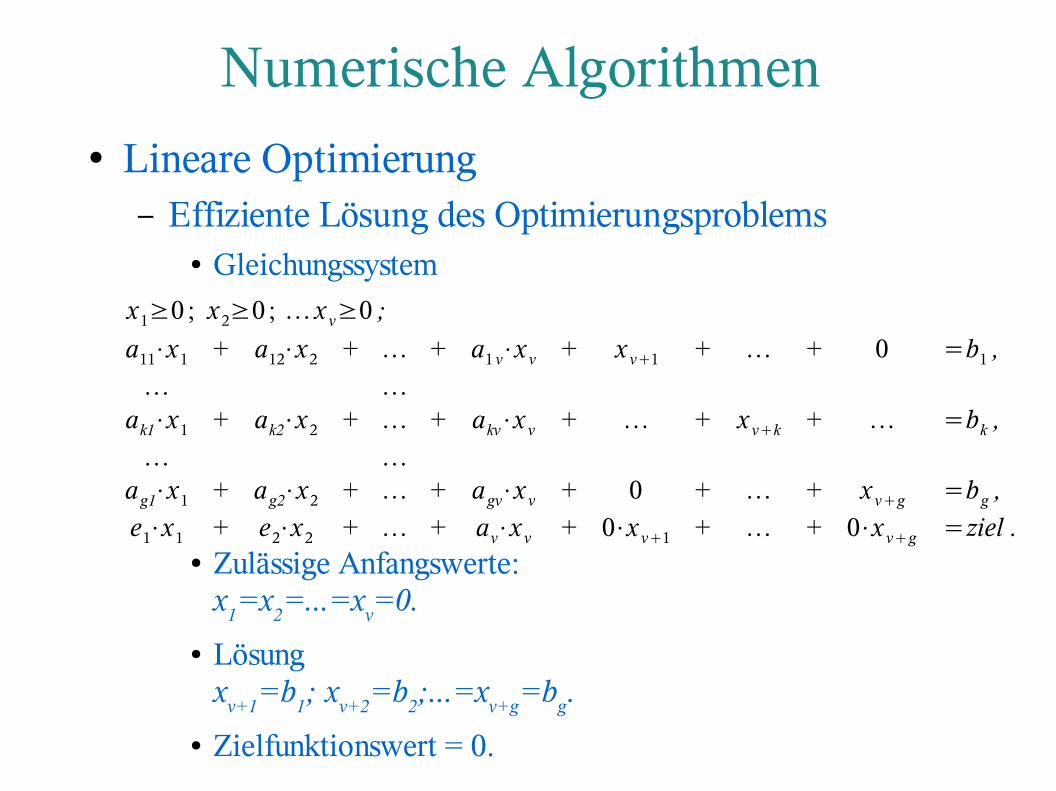
● Gleichungssystem
● Zulässige Anfangswerte: x1=x2=...=xv=0.
● Lösungxv+1=b1; xv+2=b2;...=xv+g=bg.
● Zielfunktionswert = 0.
Numerische Algorithmen
x1≥0 ; x2≥0 ; x v≥0 ;a11⋅x1 + a12⋅x2 + + a1 v⋅x v + x v1 + + 0 =b1 ,
ak1⋅x1 + ak2⋅x2 + + akv⋅x v + + x vk + =bk ,
ag1⋅x1 + ag2⋅x2 + + agv⋅x v + 0 + + x vg =bg ,e1⋅x1 + e2⋅x2 + + av⋅x v + 0⋅x v1 + + 0⋅x vg =ziel .
● Lineare Optimierung– Effiziente Lösung des Optimierungsproblems
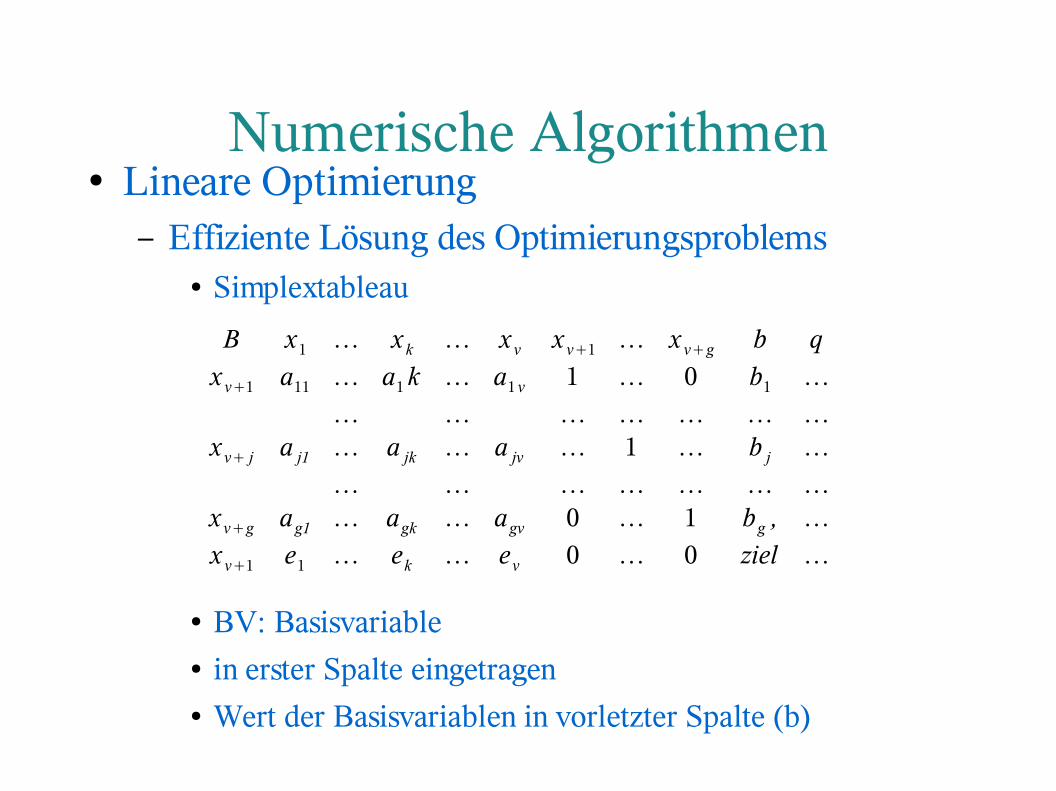
● Simplextableau
● BV: Basisvariable● in erster Spalte eingetragen● Wert der Basisvariablen in vorletzter Spalte (b)
Numerische Algorithmen
B x1 x k x v x v1 x vg b qx v1 a11 a1 k a1 v 1 0 b1
x v j a j1 a jk a jv 1 b j
x vg ag1 agk agv 0 1 bg , x v1 e1 ek ev 0 0 ziel
● Lineare Optimierung– Effiziente Lösung des Optimierungsproblems
● Wert aller Nichtbasisvariablen null– Nullvariablen
● Koeffizienten von Nichtbasisvariablen i.d.R. nicht null● Für jede Basisvariablen gilt
– genau eine Gleichung mit Koeffizient 1– alle anderen Gleichungen haben Koeffizienten null – Werte der Basisvariablen aktuelle Lösung des Gleichungssystems
● Koeffizienten der Zielfunktion – nur bei Nullvariablen Wert ungleich null – Wert der Zielfunktion ist -be, zu Anfang null
Numerische Algorithmen
● Lineare Optimierung● Austauschalgorithmus
● Suche Spalte k mit maximalem Wert ek
– Maximaler Zuwachs der Zielfunktion (nicht garantiert)
● Wähle Minimum aller nicht negativen bn/bk.– In nachfolgender Operation bleiben rechte Seiten nicht negativ
● Kürze Zeile k durch akn
● Subtrahiere ajk∙Zeile k von allen Zeilen j=1..k-1, k+1...g.
● xk wird neue Basisvariable
● Neue Nullvariable wird xn, (In Spalte n ist ajn=1)
Numerische Algorithmen
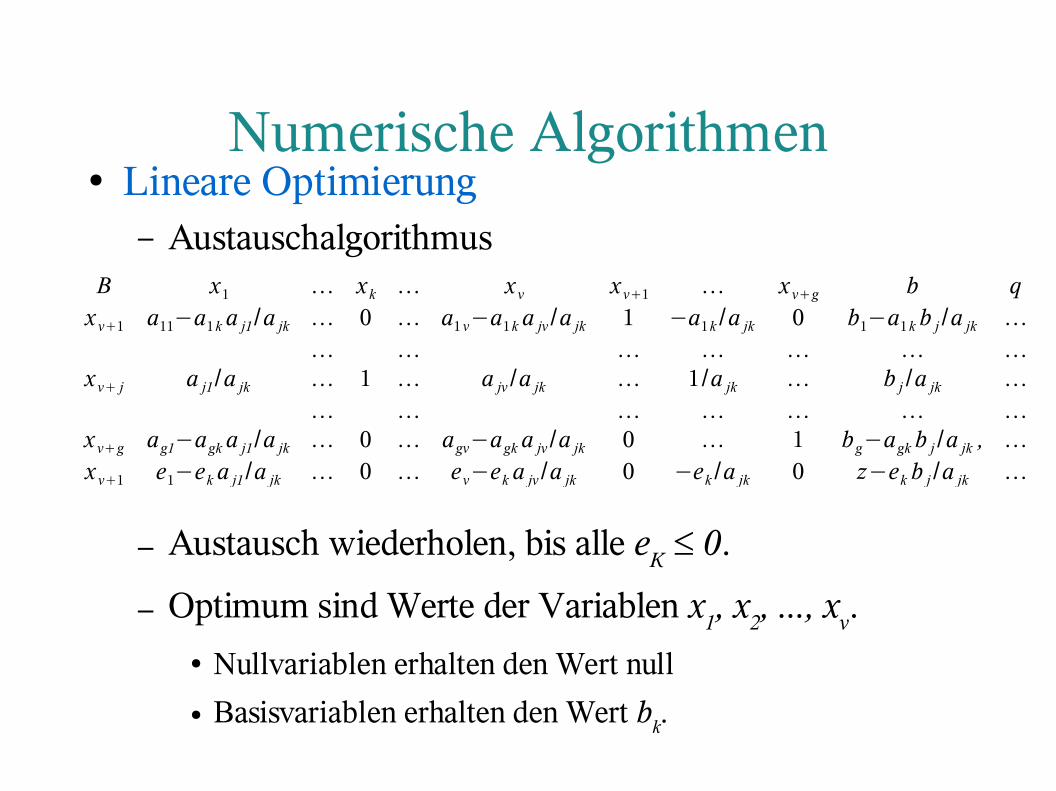
● Lineare Optimierung– Austauschalgorithmus
– Austausch wiederholen, bis alle eK ≤ 0.
– Optimum sind Werte der Variablen x1, x2, ..., xv.● Nullvariablen erhalten den Wert null● Basisvariablen erhalten den Wert bk.
Numerische Algorithmen
B x1 xk x v x v1 x vg b qx v1 a11−a1k a j1/a jk 0 a1 v−a1k a jv /a jk 1 −a1k /a jk 0 b1−a1k b j /a jk
x v j a j1/a jk 1 a jv /a jk 1/a jk b j /a jk
x vg ag1−agk a j1/a jk 0 agv−agk a jv /a jk 0 1 bg−agk b j /a jk , x v1 e1−ek a j1/a jk 0 ev−ek a jv /a jk 0 −ek /a jk 0 z−ek b j /a jk
● Lineare Optimierung– Erweiterungen
● nehme auch >-Bedingungen auf– setze Koeffizienten auf -1 (statt + 1)– Basisvariable (stets ≥ 0), also rechte Seite unter Schranke
● nehme auch =-Bedingungen auf– füge Gleichung ohne Schlupfvariable ein – daher ist 'Schlupfvariable' stets null– es muss eine andere Basisvariable gesucht werden
● ändere Anfangsbedingungen: – x1≥c1>0, x2≥c2>0, ..., xv≥cv>0.
– durch Anfangstransformation
– Algorithmus sollte Konsistenz der Daten überprüfen!
Numerische Algorithmen
Numerische Algorithmen
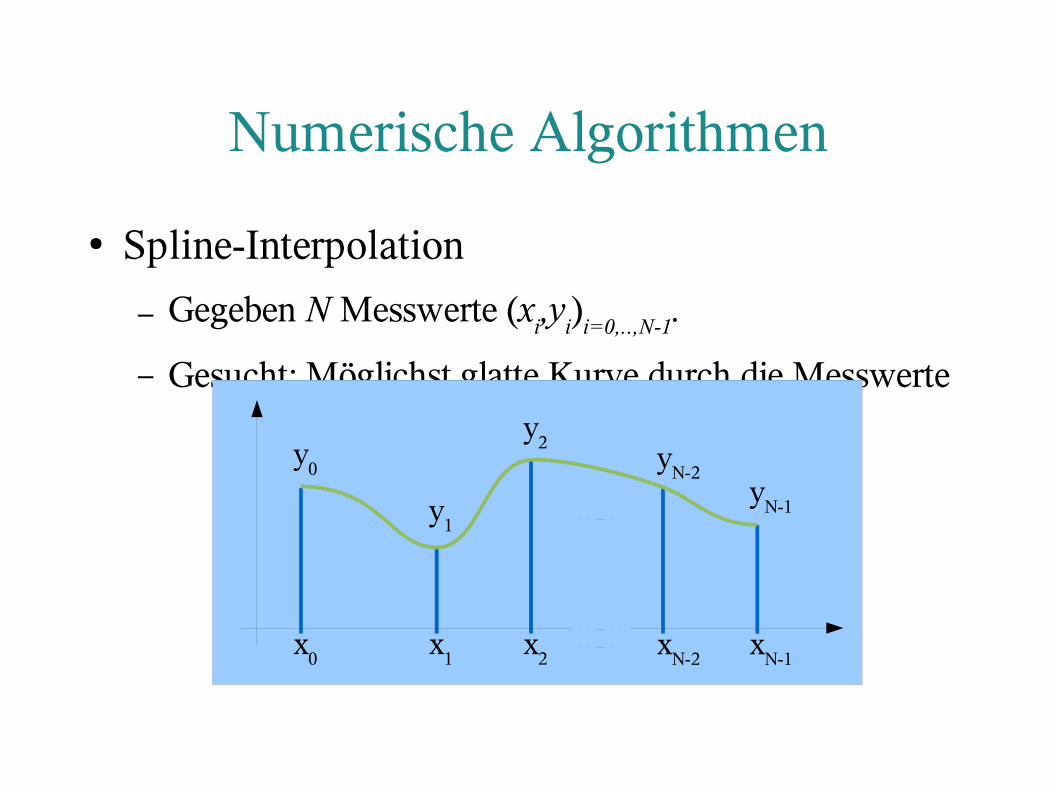
● Spline-Interpolation– Gegeben N Messwerte (xi,yi)i=0,..,N-1.
– Gesucht: Möglichst glatte Kurve durch die Messwerte
x0 x1 x2 xN-2 xN-1
y0
y1
y2 yN-2yN-1
Numerische Algorithmen
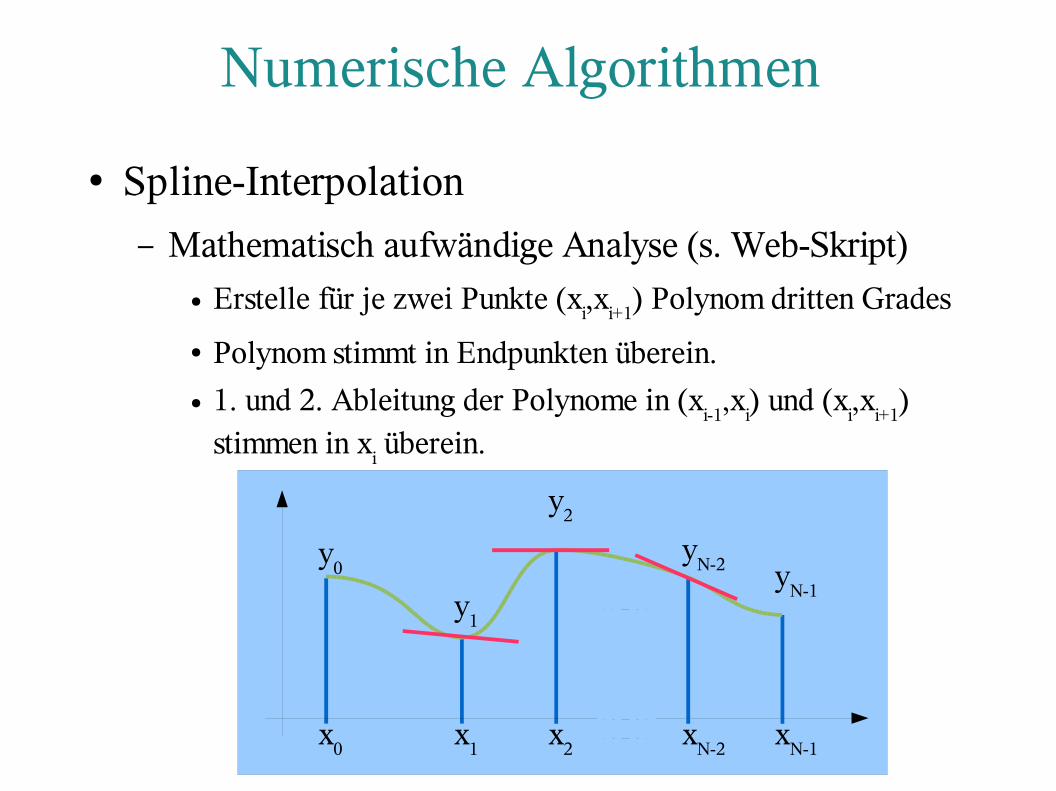
● Spline-Interpolation– Mathematisch aufwändige Analyse (s. Web-Skript)
● Erstelle für je zwei Punkte (xi,xi+1) Polynom dritten Grades● Polynom stimmt in Endpunkten überein.● 1. und 2. Ableitung der Polynome in (xi-1,xi) und (xi,xi+1)
stimmen in xi überein.
x0 x1 x2 xN-2 xN-1
y0
y1
y2
yN-2 yN-1