Embed Size (px)
Citation preview
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 1
Mohieddine Jelali
Prozessautomatisierungstechnik
4. Echtzeitsysteme und Echtzeitprogrammierung
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 2
Inhaltsangaben zu Kapitel 4
Echtzeitsysteme und Echtzeitprogrammierung
4.1 Echtzeitsysteme
4.2 Aufgaben von Echtzeitsystemen
4.3 Echtzeitsysteme – Beispiele
4.4 Anforderungen an Echtzeitsysteme
4.5 Echtzeit-Programmierverfahren
4.6 Synchronisierung von Tasks
4.7 Synchronisierungsverfahren
4.8 Scheduling-Verfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 3
4.1 Echtzeitsysteme
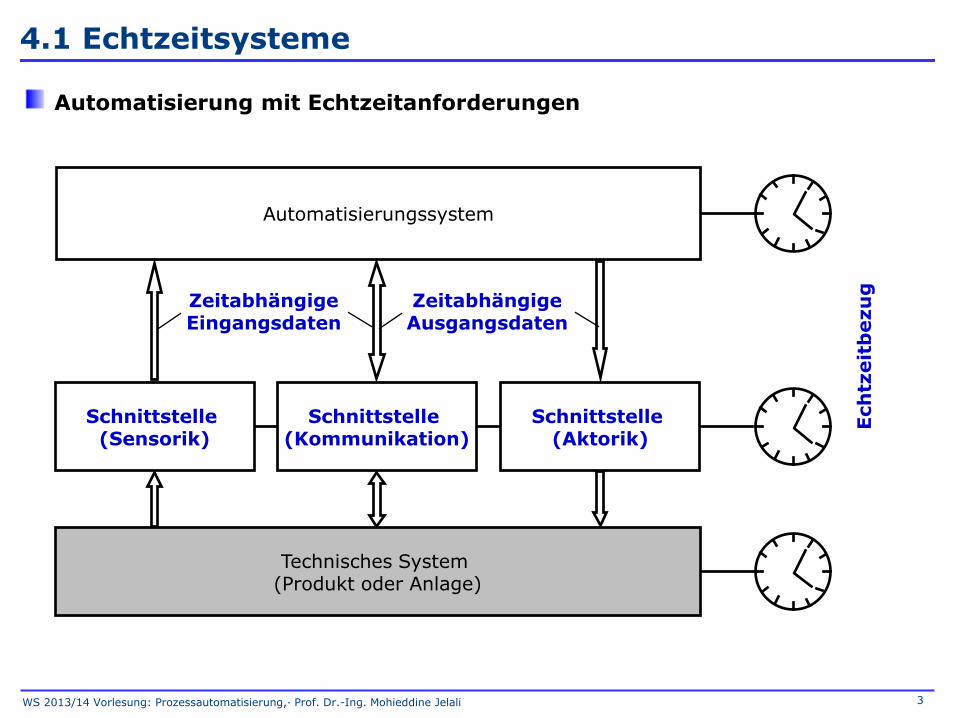
Automatisierung mit Echtzeitanforderungen
Automatisierungssystem
Technisches System (Produkt oder Anlage)
Schnittstelle (Kommunikation)
Schnittstelle (Aktorik)
Schnittstelle (Sensorik)
Zeitabhängige Ausgangsdaten
Zeitabhängige Eingangsdaten
Ech
tzeit
bezu
g
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 4
Echtzeitsteuerung (Real Time Control)
Bei der Datenverarbeitung in Echtzeitsystemen muss die Erfassung,
Verarbeitung und Ausgabe von (gültigen, fehlerfreien) Daten zu bestimmten,
durch das System und seinen Zustand vorgegebenen Zeitpunkten
(oder innerhalb bestimmter Zeitintervalle) erfolgen.
Das Ergebnis ist nur dann fehlerfrei, wenn es inhaltlich und zeitlich den
gestellten Anforderungen entspricht.
Echtzeitanforderungen
- Harte Anforderungen: verspätete Reaktion einer Komponente führt zum
Systemausfall, zu Schadensfällen oder zu Katastrophen.
- Weiche Anforderungen: Überschreitungen von Zeitlimits können
ausnahmsweise toleriert werden, ohne dass der technische Prozess in
gefährliche oder fatale Systemzustände übergeht.
Nichteinhaltung von vorgegebenen Reaktionszeiten führt zu ansteigenden Kosten
4.1 Echtzeitsysteme
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 5
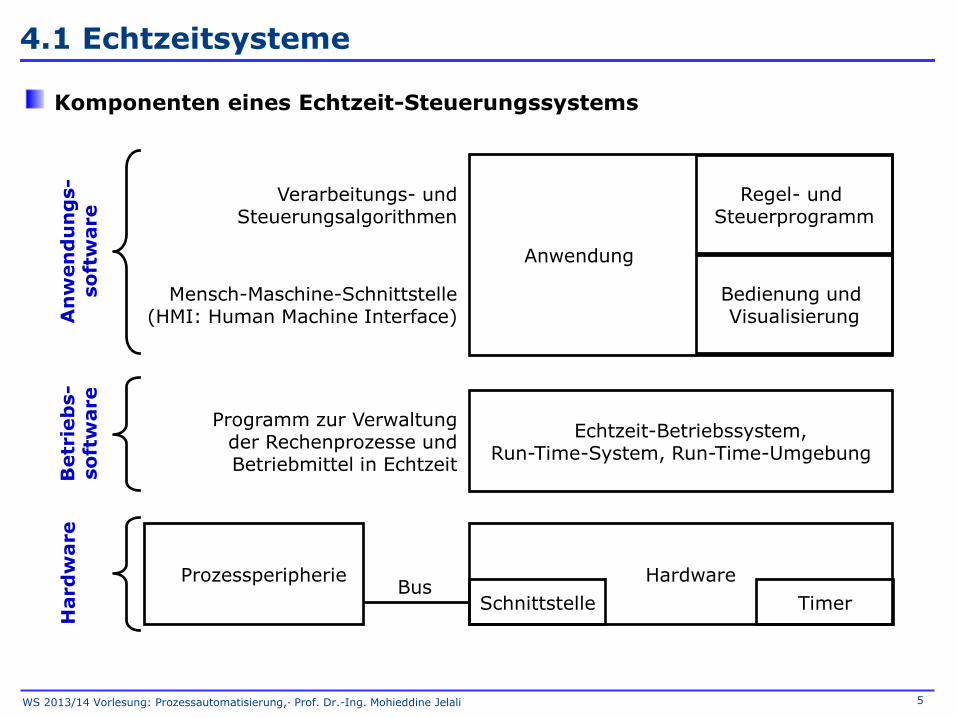
Komponenten eines Echtzeit-Steuerungssystems
Anwendung
Regel- und Steuerprogramm
Bedienung und Visualisierung
Echtzeit-Betriebssystem, Run-Time-System, Run-Time-Umgebung
Hardware
Schnittstelle Timer
Prozessperipherie Bus
Verarbeitungs- und Steuerungsalgorithmen
Mensch-Maschine-Schnittstelle (HMI: Human Machine Interface)
Programm zur Verwaltung der Rechenprozesse und Betriebmittel in Echtzeit
An
wen
du
ng
s-
so
ftw
are
Betr
ieb
s-
so
ftw
are
Hard
ware
4.1 Echtzeitsysteme
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 6
Aufgaben des Timer
- zyklische Interruptgenerierung zur Realisierung von zeitabhängigen
Systemdienste („Weckrufe“)
- Zeitmessung, z.B. zur Ermittlung von Geschwindigkeiten
- Watchdog-Funktionen, z.B. zur Zeitüberwachung in kritischen Prozessen
- Zeitsteuerung für periodische Dienste, z.B. Messwertübertragung
Anforderungen bei Echtzeitprogrammierung
- Rechtzeitigkeit: Reaktion zur richtigen Zeit
- Gleichzeitigkeit: gleichzeitige Reaktion auf mehrere Dinge
- Verlässlichkeit: Zuverlässigkeit, Sicherheit, Verfügbarkeit
- Vorhersehbarkeit: Planbarkeit und Determiniertheit aller Reaktionen
4.1 Echtzeitsysteme
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 7
4.2 Aufgaben von Echtzeitsystemen
Hauptfunktion
Steuerung und Überwachung von quasi-parallelen Teilprogrammen bei
vorgegebenen Zeitbedingungen unter Berücksichtigung von Nebenbedingungen,
wie z.B. der Prozesspriorität
Allgemeine Organisationsaufgaben
- Laden und Starten von Anwendungsprogrammen
- Organisation von Schnittstellen-Operationen (Ein- und Ausgabe,
Datentransport)
- Speichermanagement
- Klassifizierung von Fehlern und Handhabung von Ausnahmezuständen
(Neuanlauf nach Stromausfall, Alarmfunktionen usw.)
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 8
Koordinierungssaufgaben
- Entscheidung der Reihenfolge der Abarbeitung von Teilprogrammen
- Gegenseitiger Ausschluss zweier oder mehrerer Tasks, um zu verhindern,
dass mehrere Prozesse auf die gleichen Resourcen zugreifen.
- Zuordnung der Tasks zu den Prozessoren bei Multiprozessorsystemen
- Verwaltung der Systemprozesse
- Verwaltung von Interrupts
4.2 Aufgaben von Echtzeitsystemen
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 9
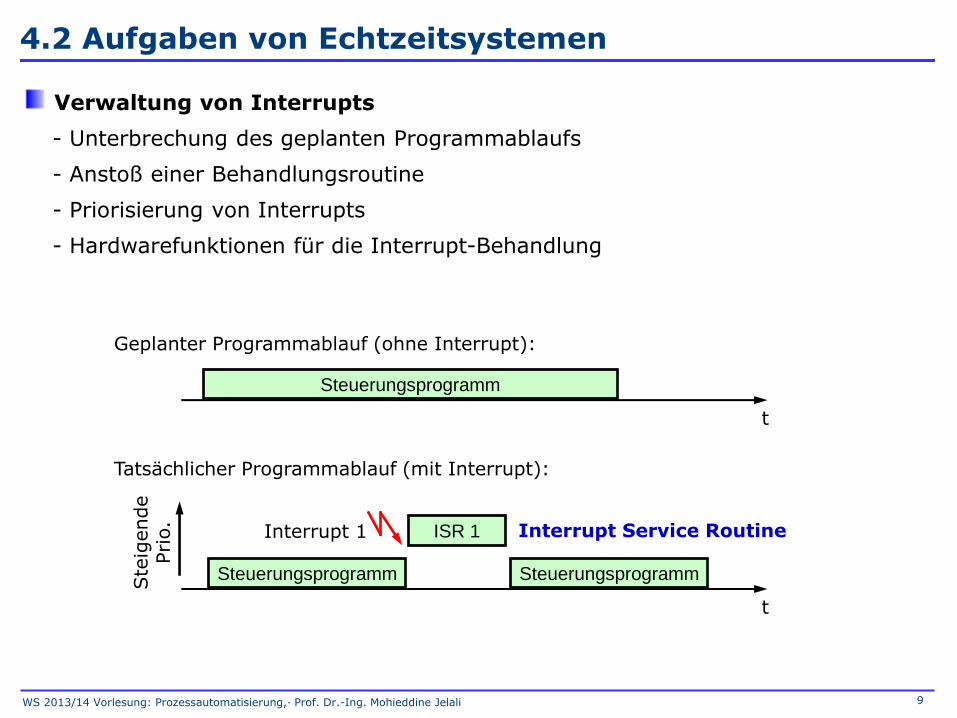
Verwaltung von Interrupts
- Unterbrechung des geplanten Programmablaufs
- Anstoß einer Behandlungsroutine
- Priorisierung von Interrupts
- Hardwarefunktionen für die Interrupt-Behandlung
Steuerungsprogramm
t
Steuerungsprogramm Steuerungsprogramm
ISR 1 Interrupt Service Routine
Ste
igende
Pri
o.
Interrupt 1
Geplanter Programmablauf (ohne Interrupt):
Tatsächlicher Programmablauf (mit Interrupt):
t
4.2 Aufgaben von Echtzeitsystemen
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 10
Speicherverwaltung
- Optimale Ausnutzung der “schnellen” Speicher
- Koordinierung des gemeinsamen Zugriffs auf einen Speicherbereich
- Schutz des Speicherbereichs verschiedener Rechenprozesse gegen
Fehlzugriffe
- Zuweisung von physikalischen Speicheradressen für die logischen Namen in
Anwenderprogrammen
Ein-/Ausgabesteuerung
- Hardwareunabhängige Ebene für die Datenverwaltung und den
Datentransport
- Hardwareabhängige Ebene, die alle gerätespezifischen Eigenschaften
berücksichtigt (Treiber-Programme).
4.2 Aufgaben von Echtzeitsystemen
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 11
Klassifikation und Behandlung von Fehlern und irregulärer
Betriebszustände
- fehlerhafte Benutzereingaben
- fehlerhafte Anwenderprogramme
- Hardwarefehler/-ausfälle
• Erkennung von Hardwarefehlern bzw. –ausfällen
• Rekonfigurierung ohne die fehlerhaften Teile
• Abschaltsequenzen bei Stromausfällen
- Deadlocks (Verklemmungen) aufgrund dynamischer Konstellationen
4.2 Aufgaben von Echtzeitsystemen
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 12
4.3 Echtzeitsysteme - Beispiele
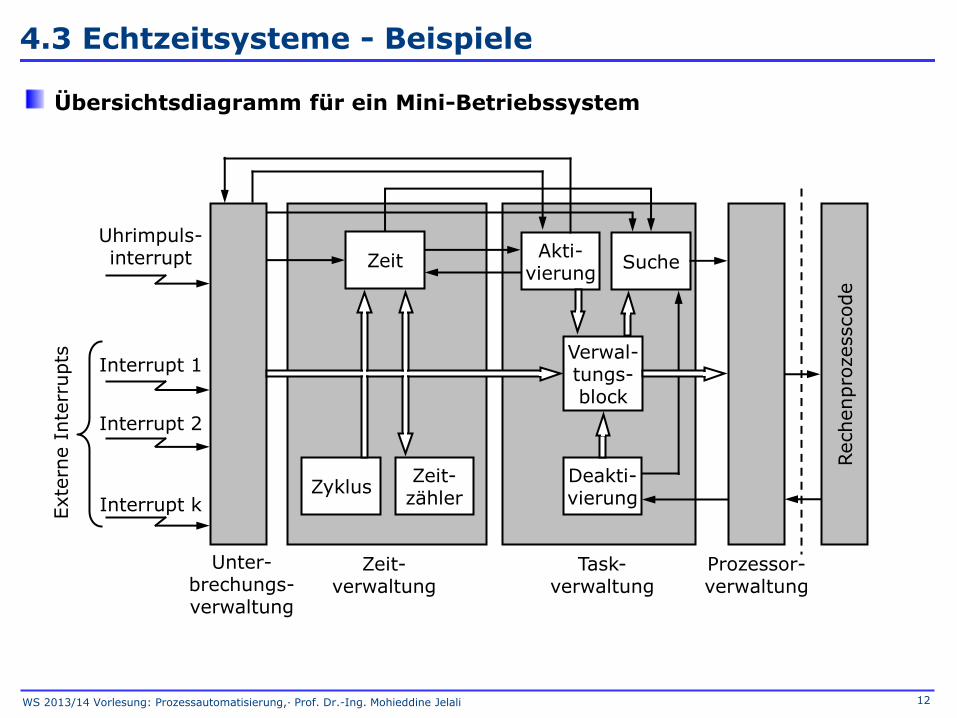
Übersichtsdiagramm für ein Mini-Betriebssystem
Zeit
Zyklus Zeit- zähler
Deakti- vierung
Akti- vierung
Suche
Rechenpro
zesscode
Interrupt 1
Interrupt 2
Interrupt k
Uhrimpuls-interrupt
Exte
rne I
nte
rrupts
Unter- brechungs- verwaltung
Zeit- verwaltung
Task- verwaltung
Prozessor- verwaltung
Verwal- tungs- block
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 13
Aktuelle Beispiele für Echtzeitbetriebssysteme
- QNX: kommerzielles Unix-ähnliches Betriebssystem speziell für eingebettete
Systeme (Embedded systems); POSIX-konform (Portable operating system
interface for Unix)
- OS9: relativ stark verbreitet in Steuerungssystemen, ursprünglich für den
8-Bit-Prozessor 6809 von Motorola entwickelt.
- VxWorks (wurde bei der Pathfinder-Mission zum Mars eingesetzt)
- RTLinux: Erweiterung von Linux für Echtzeitanforderungen
- Windows CE: sehr kleines Echtzeitbetriebssystem, das auf vielen
Pocket-PCs läuft.
4.3 Echtzeitsysteme - Beispiele
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 14
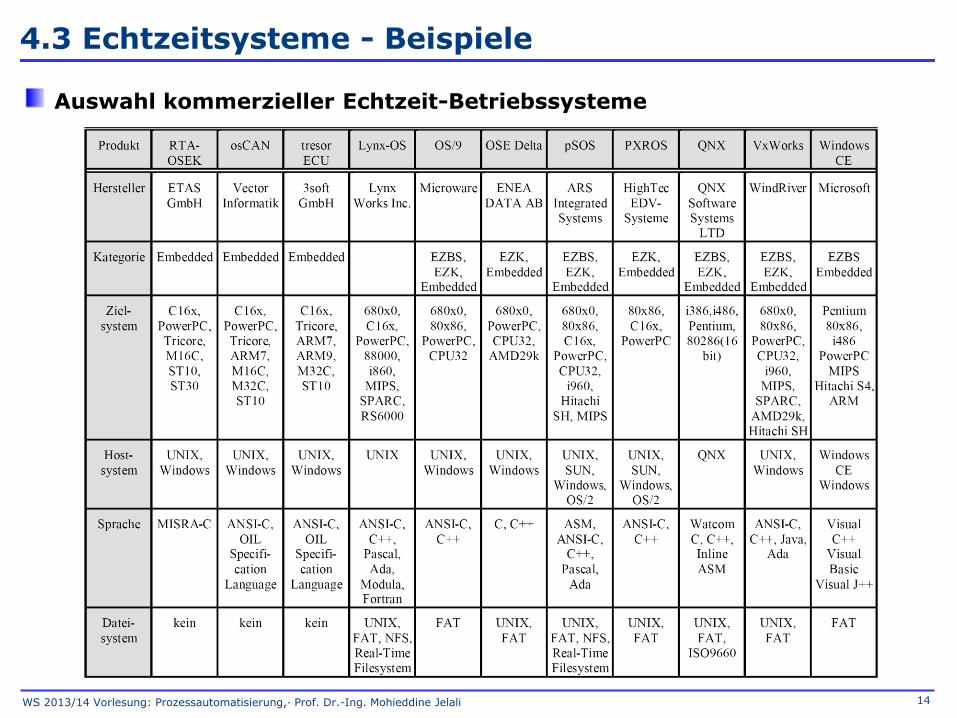
4.3 Echtzeitsysteme - Beispiele
Auswahl kommerzieller Echtzeit-Betriebssysteme
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 15
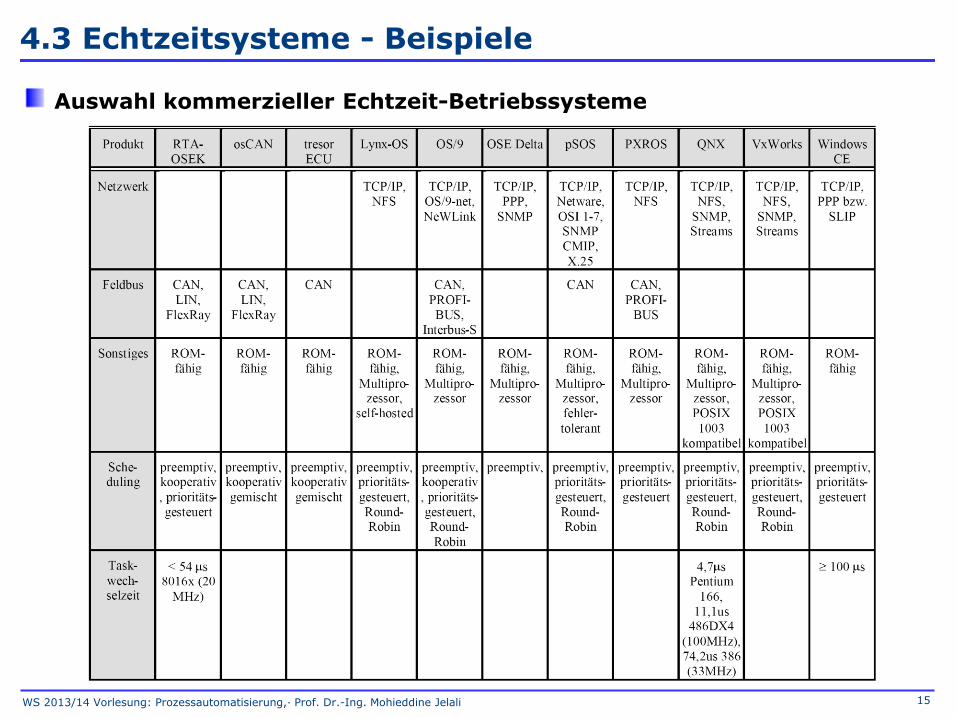
4.3 Echtzeitsysteme - Beispiele
Auswahl kommerzieller Echtzeit-Betriebssysteme
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 16
4.4 Anforderungen an Echtzeitsysteme
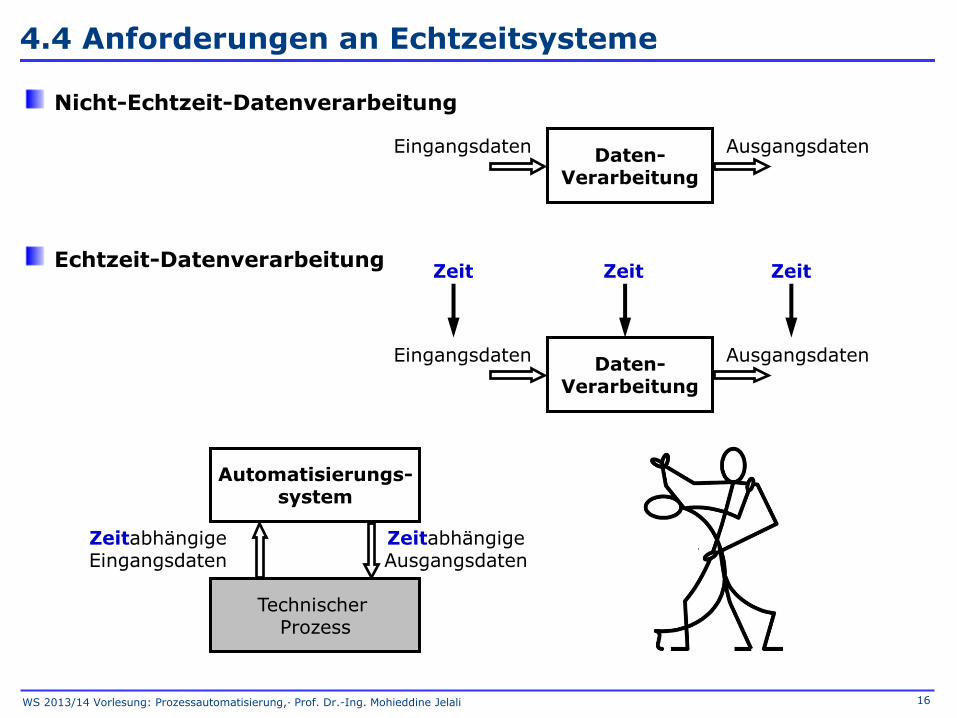
Nicht-Echtzeit-Datenverarbeitung
Echtzeit-Datenverarbeitung
Zeitabhängige Eingangsdaten
Automatisierungs- system
Technischer Prozess
Daten- Verarbeitung
Zeitabhängige Ausgangsdaten
Eingangsdaten Ausgangsdaten
Daten- Verarbeitung
Eingangsdaten Ausgangsdaten
Zeit Zeit Zeit
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 17
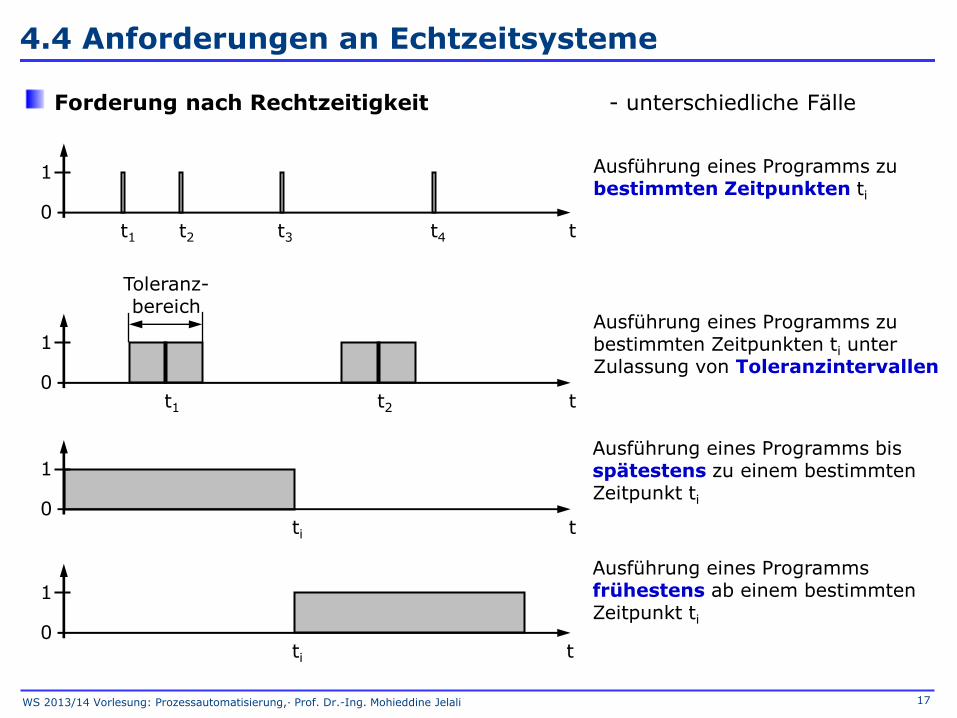
Forderung nach Rechtzeitigkeit - unterschiedliche Fälle
Ausführung eines Programms zu bestimmten Zeitpunkten ti
Ausführung eines Programms zu bestimmten Zeitpunkten ti unter Zulassung von Toleranzintervallen
Ausführung eines Programms bis spätestens zu einem bestimmten Zeitpunkt ti
Ausführung eines Programms frühestens ab einem bestimmten Zeitpunkt ti
4.4 Anforderungen an Echtzeitsysteme
t
1
0 t1 t2 t3 t4
t
1
0 t1 t2
Toleranz- bereich
t
1
0 ti
1
0 ti t
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 18
Forderung nach Gleichzeitigkeit
- Vorgänge in Umwelt laufen gleichzeitig ab
• “gleichzeitige” Reaktion der Echtzeit-Systeme erforderlich
• Gleichzeitige Durchführung von mehreren Datenverarbeitungsaufgaben
- Beispiele:
• Reaktion auf gleichzeitige Fahrt mehrerer Züge
• Verarbeitung mehrerer gleichzeitig anfallender Messwerte bei einer
Heizungsregelung
• Motorsteuerung und ABS-System gleichzeitig
- Realisierung der Gleichzeitigkeit:
• Ideal: Getrennter Rechner für jede Datenverarbeitungsaufgabe
echt parallel
• Praxis: Einen Rechner führt alle Datenverarbeitungsaufgaben durch.
quasi-gleichzeitig / quasi-parallel
4.4 Anforderungen an Echtzeitsysteme
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 19
Forderung nach Vorhersagbarkeit/Determiniertheit
- Determiniertheit:
• Eindeutige Bestimmbarkeit der Menge von Ausgangsinformationen und
des nächsten Zustandes für jeden möglichen Zustand und für jede Menge
an Eingangsinformationen
• Voraussetzung: endliche Menge von Systemzuständen; bei digitalen
Rechnersystemen immer gegeben.
- Zeitliche Determiniertheit:
Antwortzeit für jede Menge von Ausgangsinformationen bekannt!
- Determiniertheit als elementar wichtige Eigenschaft für harte Echtzeitsysteme:
• Voraussetzung für Garantie der Sicherheit bei sicherheitskritischen
Systemen
• Geringste zeitliche Verschiebungen können zu vollkommen
unterschiedlichen Abläufen führen.
4.4 Anforderungen an Echtzeitsysteme
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 20
4.5 Echtzeit-Programmierverfahren
Synchrone Programmierung
- Prinzip:
Planung des zeitlichen Ablaufs vor der Ausführung der Programme
- Vorgehensweise:
• Teilprogramme werden zyklisch abgearbeitet.
• Zyklischer Ablauf wird mit Hilfe einer Echtzeituhr über ein vorgegebenes
Zeitraster synchronisiert. (Zeittriggerung)
• Reihenfolge der Teilprogramme wird vorher festgelegt.
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 21
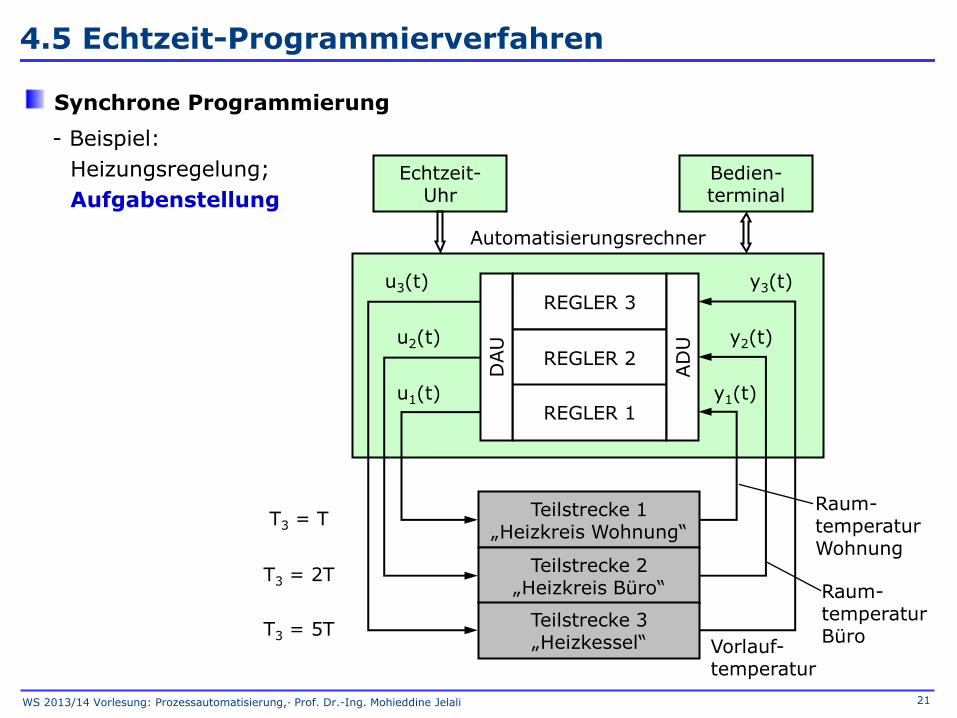
Synchrone Programmierung
- Beispiel:
Heizungsregelung;
Aufgabenstellung
4.5 Echtzeit-Programmierverfahren
T3 = 5T
Teilstrecke 1 „Heizkreis Wohnung“
Teilstrecke 2 „Heizkreis Büro“
Teilstrecke 3 „Heizkessel“
REGLER 3
REGLER 2
REGLER 1
AD
U
y1(t)
y2(t)
y3(t)
u1(t)
u2(t)
u3(t)
DAU
Bedien- terminal
Echtzeit- Uhr
Vorlauf-temperatur
Raum-temperatur Büro
Raum-temperatur Wohnung
T3 = 2T
T3 = T
Automatisierungsrechner
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 22
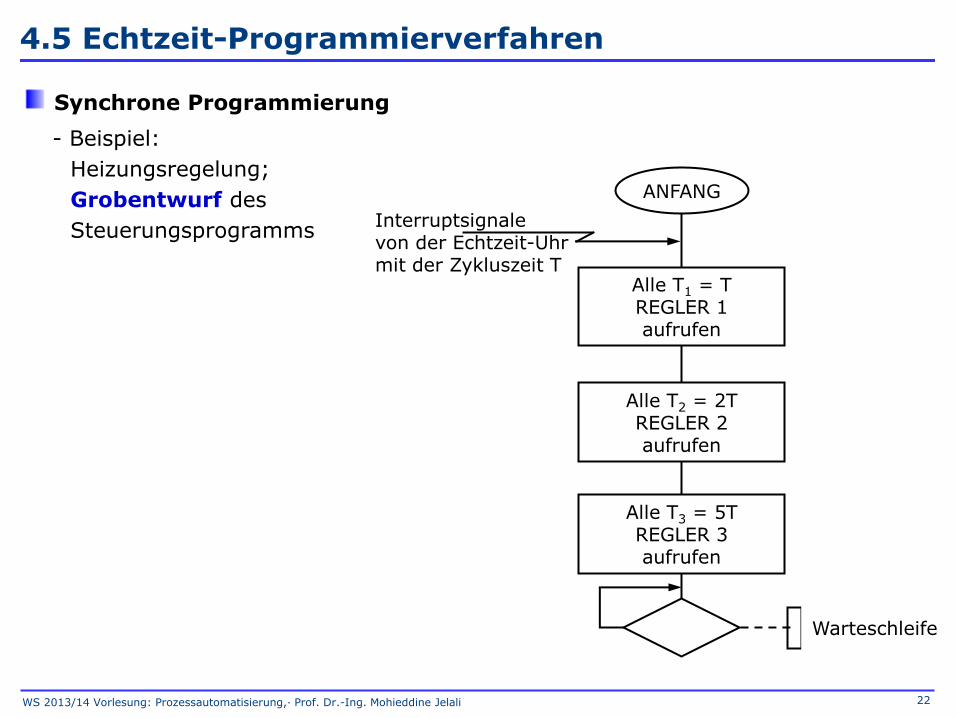
Synchrone Programmierung
- Beispiel:
Heizungsregelung;
Grobentwurf des
Steuerungsprogramms
4.5 Echtzeit-Programmierverfahren
ANFANG
Interruptsignale von der Echtzeit-Uhr mit der Zykluszeit T
Alle T1 = T REGLER 1 aufrufen
Alle T2 = 2T REGLER 2 aufrufen
Alle T3 = 5T REGLER 3 aufrufen
Warteschleife
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 23
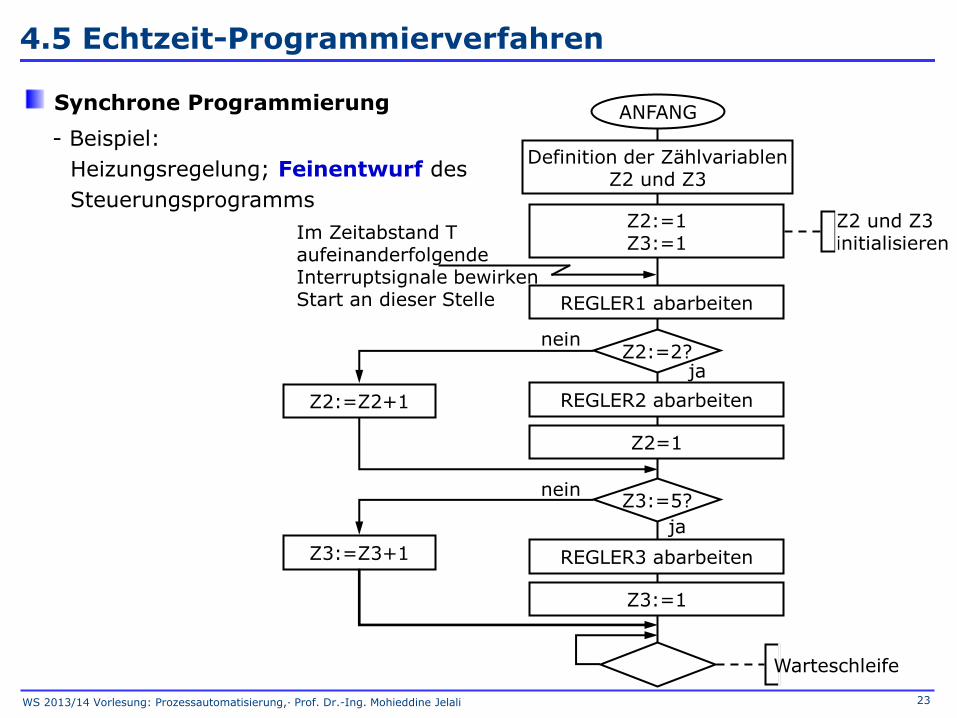
Synchrone Programmierung
- Beispiel:
Heizungsregelung; Feinentwurf des
Steuerungsprogramms
4.5 Echtzeit-Programmierverfahren
ANFANG
Definition der Zählvariablen Z2 und Z3
Warteschleife
Z2:=1 Z3:=1
REGLER1 abarbeiten
REGLER2 abarbeiten
REGLER3 abarbeiten
Z3:=5?
Z3:=1
Z2:=2?
Z2=1
Im Zeitabstand T aufeinanderfolgende Interruptsignale bewirken Start an dieser Stelle
Z3:=Z3+1
Z2:=Z2+1
ja
ja
nein
nein
Z2 und Z3 initialisieren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 24
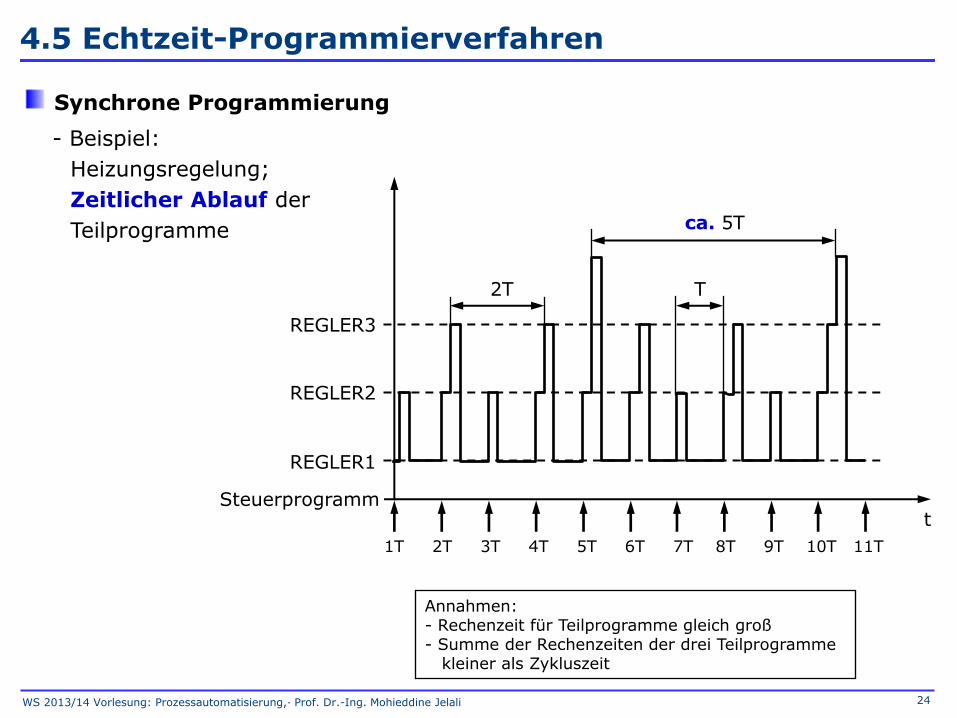
ca. 5T
T 2T
1T 2T 3T 4T 5T 6T 7T 8T 9T 10T 11T
Synchrone Programmierung
- Beispiel:
Heizungsregelung;
Zeitlicher Ablauf der
Teilprogramme
Annahmen: - Rechenzeit für Teilprogramme gleich groß - Summe der Rechenzeiten der drei Teilprogramme kleiner als Zykluszeit
4.5 Echtzeit-Programmierverfahren
t
REGLER3
REGLER2
REGLER1
Steuerprogramm
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 25
Synchrone Programmierung
- Eigenschaften:
• Forderung nach Rechtzeitigkeit wird nur näherungsweise erfüllt.
• Forderung nach Gleichzeitigkeit wird erfüllt, wenn Zykluszeiten der
Regelstrecken groß sind gegenüber den Rechenzeiten der Teilprogramme.
• Synchrone Programmierung ist gut für Echtzeit-Systeme mit
zyklischen Programmabläufen.
• Synchrone Programmierung ist ungeeignet für die Reaktion auf zeitlich
nicht vorhersehbare (asynchrone) Ereignisse, z.B. Alarmsignal
„Brennerstörung“ im Bespiel der Heizungsregelung.
Erhöhung der Rechenzeit durch ständiges Abfragen,
Verzögerung der Reaktion
• Gesamte Programmstruktur muss geändert werden, wenn die
Aufgabenstellung geändert wird.
Steuerprogramm ist unflexibel.
4.5 Echtzeit-Programmierverfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 26
Asynchrone Programmierung/Parallelprogrammierung
- Prinzip:
Organisation des zeitlichen Ablaufs während der Ausführung der Programme
- Vorgehensweise:
• Aufruf der Teilprogramme erfolgt nach Zeitbedingungen und Anforderungen
aus dem Prozess.
• Konfliktsituation wird durch bestimmte Strategie (Scheduling-Strategie)
gelöst.
- Typische Scheduling-Strategie:
• Vergabe von Prioritäten
• Priorität umso höher, je niedriger die Prioritätsnummer
4.5 Echtzeit-Programmierverfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 27
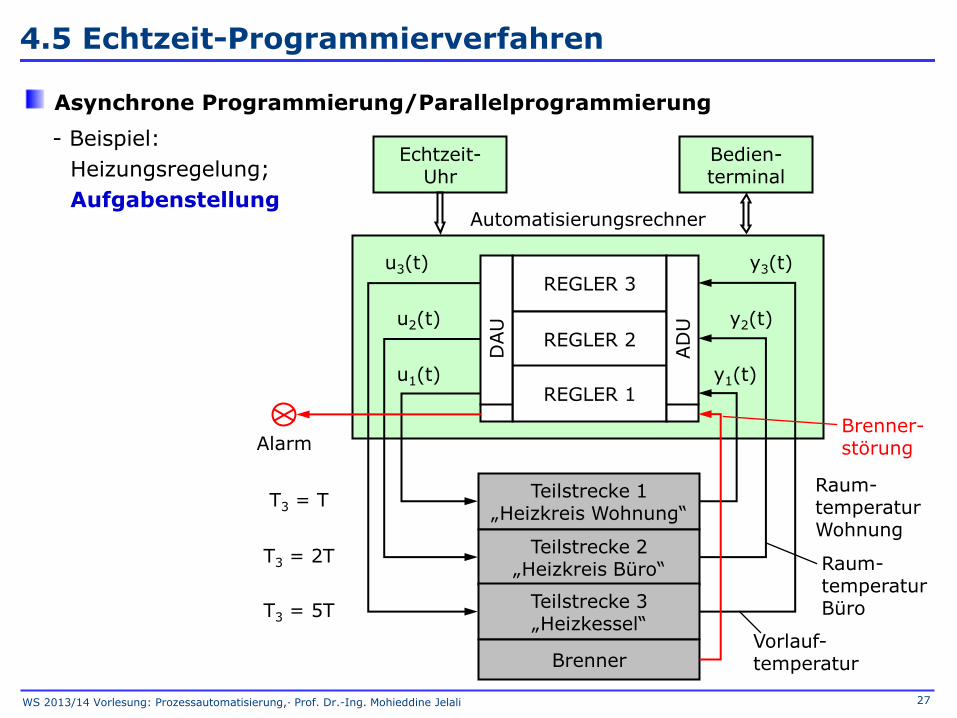
Asynchrone Programmierung/Parallelprogrammierung
- Beispiel:
Heizungsregelung;
Aufgabenstellung
4.5 Echtzeit-Programmierverfahren
T3 = 5T
Teilstrecke 1 „Heizkreis Wohnung“
Teilstrecke 2 „Heizkreis Büro“
Teilstrecke 3 „Heizkessel“
REGLER 3
REGLER 2
REGLER 1
AD
U
y1(t)
y2(t)
y3(t)
u1(t)
u2(t)
u3(t)
DAU
Bedien- terminal
Echtzeit- Uhr
Vorlauf-temperatur
Raum-temperatur Büro
Raum-temperatur Wohnung
T3 = 2T
T3 = T
Automatisierungsrechner
Brenner
Alarm Brenner-störung
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 28
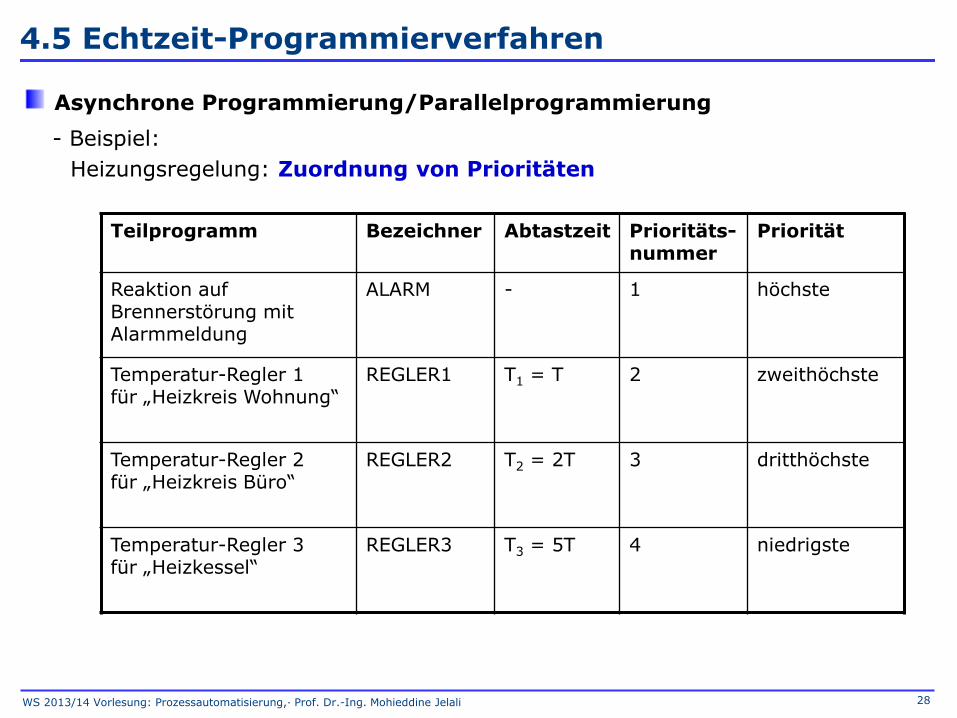
Asynchrone Programmierung/Parallelprogrammierung
- Beispiel:
Heizungsregelung: Zuordnung von Prioritäten
4.5 Echtzeit-Programmierverfahren
Teilprogramm Bezeichner Abtastzeit Prioritäts-nummer
Priorität
Reaktion auf Brennerstörung mit Alarmmeldung
ALARM - 1 höchste
Temperatur-Regler 1 für „Heizkreis Wohnung“
REGLER1 T1 = T 2 zweithöchste
Temperatur-Regler 2 für „Heizkreis Büro“
REGLER2 T2 = 2T 3 dritthöchste
Temperatur-Regler 3 für „Heizkessel“
REGLER3 T3 = 5T 4 niedrigste
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 29
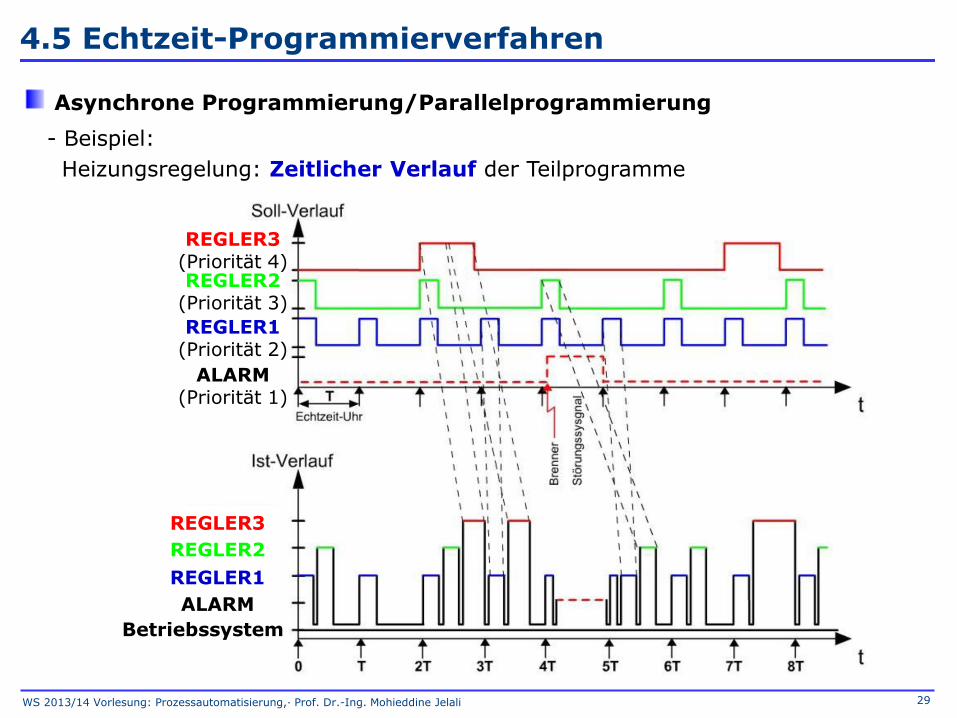
Asynchrone Programmierung/Parallelprogrammierung
- Beispiel:
Heizungsregelung: Zeitlicher Verlauf der Teilprogramme
4.5 Echtzeit-Programmierverfahren
REGLER3 (Priorität 4) REGLER2
(Priorität 3)
REGLER1 (Priorität 2)
ALARM (Priorität 1)
REGLER3
REGLER2
REGLER1
ALARM
Betriebssystem
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 30
Asynchrone Programmierung/Parallelprogrammierung
- Eigenschaften:
• Forderung nach Rechtzeitigkeit wird nur näherungsweise erfüllt;
Je höher die Priorität ist, desto besser wird die Anforderung erfüllt.
• Ist-Zeitablauf kann sich gegenüber Soll-Zeitablauf stark verschieben,
dass sich Teilprogramme gegenseitig überholen können.
• Aufeinanderfolge der Teilprogramme ist nicht determiniert; Sie kann durch
sporadisch auftretende Ereignisse dynamisch beeinflusst werden.
• Bei Programmerstellung lässt sich nicht im Voraus angeben, welches
Teilprogramm zu welchem Zeitpunkt ablaufen wird.
einfache Entwicklung,
Komplexität im Verwaltungsprogramm,
Programmablauf schwer durchschaubar
4.5 Echtzeit-Programmierverfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 31
Rechenprozess = Task
ein von einem Echtzeit-Betriebssystem gesteuerter Vorgang der Abarbeitung
eines sequenziellen Programms
4.6 Synchronisierung von Tasks
Grundzustände von Tasks
- „ablaufend (running)“:
• Teilprogramm ist in Bearbeitung.
- „bereit/ablaufwillig (runnable)“:
• alle Zeitbedingungen für den Ablauf sind erfüllt.
• Es fehlt der Start durch das Betriebssystem.
- „blockiert (suspended)“:
• Rechenprozess wartet auf den Eintritt eines Ereignisses
• Wenn das Ereignis eingetreten ist, Übergang aus dem Zustand “blockiert”
in den Zustand “bereit”.
- „ruhend (dormant)“:
• Rechenprozess ist nicht ablaufbereit, weil Zeitbedingungen oder sonstige
Voraussetzungen nicht erfüllt sind.
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 32
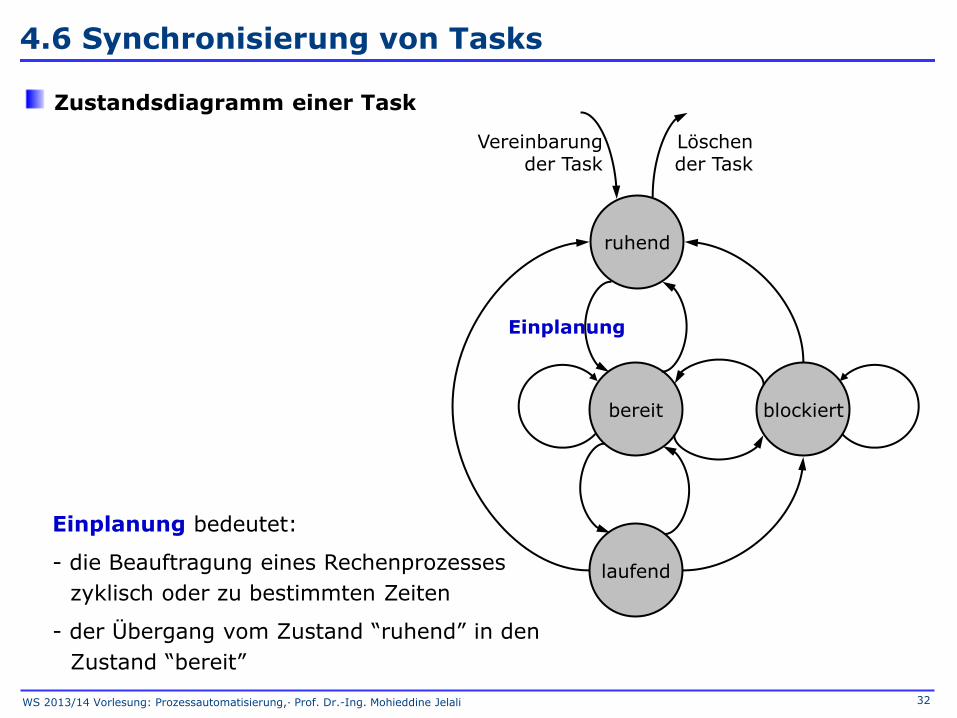
Zustandsdiagramm einer Task
Einplanung bedeutet:
- die Beauftragung eines Rechenprozesses
zyklisch oder zu bestimmten Zeiten
- der Übergang vom Zustand “ruhend” in den
Zustand “bereit”
4.6 Synchronisierung von Tasks
ruhend
blockiert bereit
laufend
Vereinbarung der Task
Löschen der Task
Einplanung
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 33
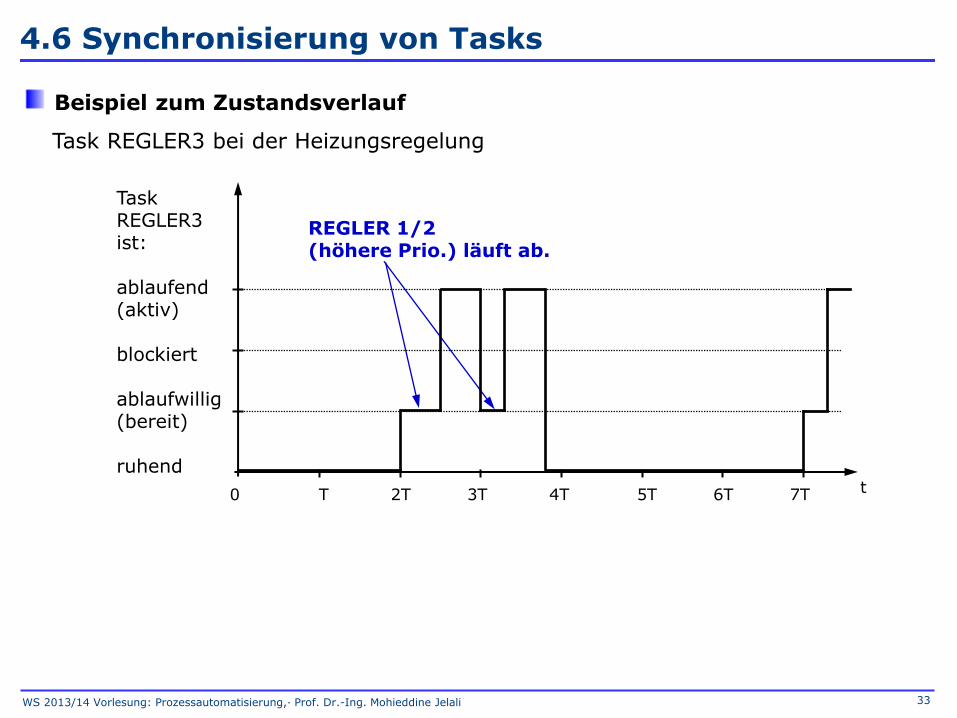
t
Beispiel zum Zustandsverlauf
Task REGLER3 bei der Heizungsregelung
REGLER 1/2 (höhere Prio.) läuft ab.
4.6 Synchronisierung von Tasks
Task REGLER3 ist:
ablaufend (aktiv)
blockiert ablaufwillig (bereit) ruhend
0 T 2T 3T 4T 5T 6T 7T
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 34
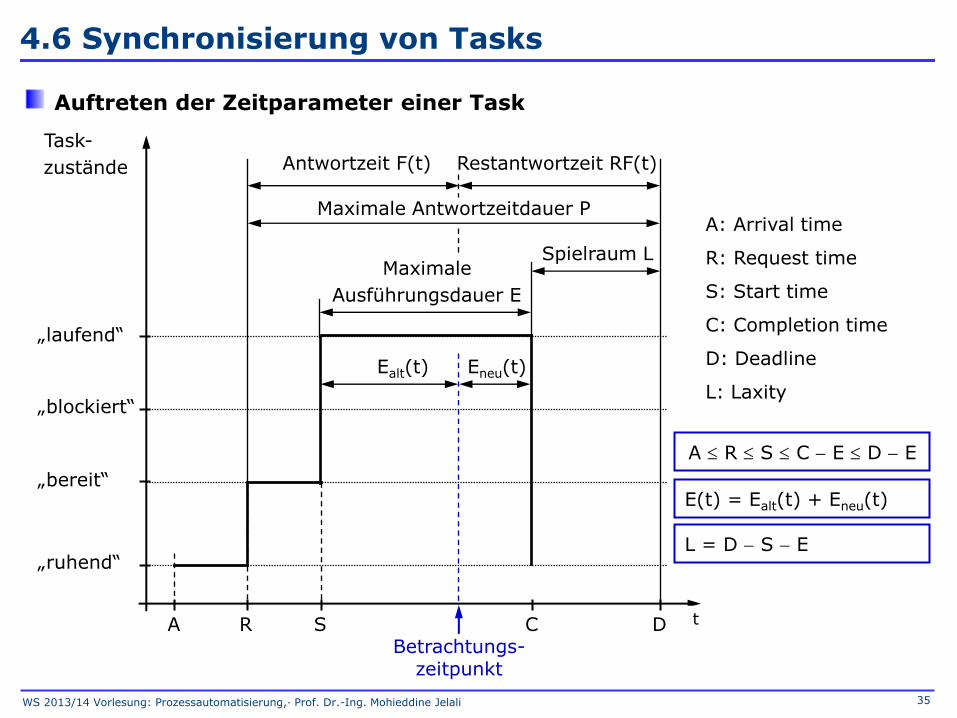
Prioritätsvergabe für Tasks
- statische Prioritätsvergabe
- dynamische Prioritätsvergabe (z.B. durch Verwendung von Deadlines)
Zeitparameter einer Task
A: Arrival time (Ankunftszeitpunkt)
R: Request time (Einplanungszeitpunkt)
S: Start time (Startzeit, Zuteilung eines Betriebsmittels)
C: Completion time (Beendigungszeitpunkt)
D: Deadline (Maximalzeit)
E: Execution time (maximale Ausführungsdauer)
P: Period time (maximale Antwortzeit)
L: Laxity (Spielraum)
F(t): Flow time (Antwortzeit)
RF(t): Remaining flow time (Restantwortzeit)
4.6 Synchronisierung von Tasks
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 35
Auftreten der Zeitparameter einer Task
A R S C E D E
E(t) = Ealt(t) + Eneu(t)
L = D S E
A: Arrival time
R: Request time
S: Start time
C: Completion time
D: Deadline
L: Laxity
4.6 Synchronisierung von Tasks
t
Antwortzeit F(t) Restantwortzeit RF(t)
Maximale Antwortzeitdauer P
Spielraum L Maximale
Ausführungsdauer E
Ealt(t) Eneu(t)
Task-
zustände
„laufend“
„blockiert“
„bereit“
„ruhend“
A R S C D Betrachtungs-
zeitpunkt
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 36
4.6 Synchronisierung von Tasks
Begriffe
- Synchronisierung: zeitliche Koordinierung
- Zwei Aktionen (Threads) in Tasks heißen parallel, wenn sie gleichzeitig
ablaufen können.
- Zwei Aktionen heißen sequenziell, wenn sie in einer bestimmten Reihenfolge
angeordnet sind.
- Zwei Aktionen aus zwei verschiedenen Tasks heißen nebenläufig, wenn sie
gleichzeitig ablaufen können (äußere Parallelität).
- Zwei Aktionen einer Task heißen simultan, wenn sie gleichzeitig ausgeführt
werden können (innere Parallelität).
Abhängigkeiten zwischen Tasks
- Logische Abhängigkeiten aufgrund der Vorgänge im technischen Prozess
- Abhängigkeiten durch die gemeinsame Benutzung von Betriebsmitteln (d.h.
Geräten oder Programmen)
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 37
4.6 Synchronisierung von Tasks
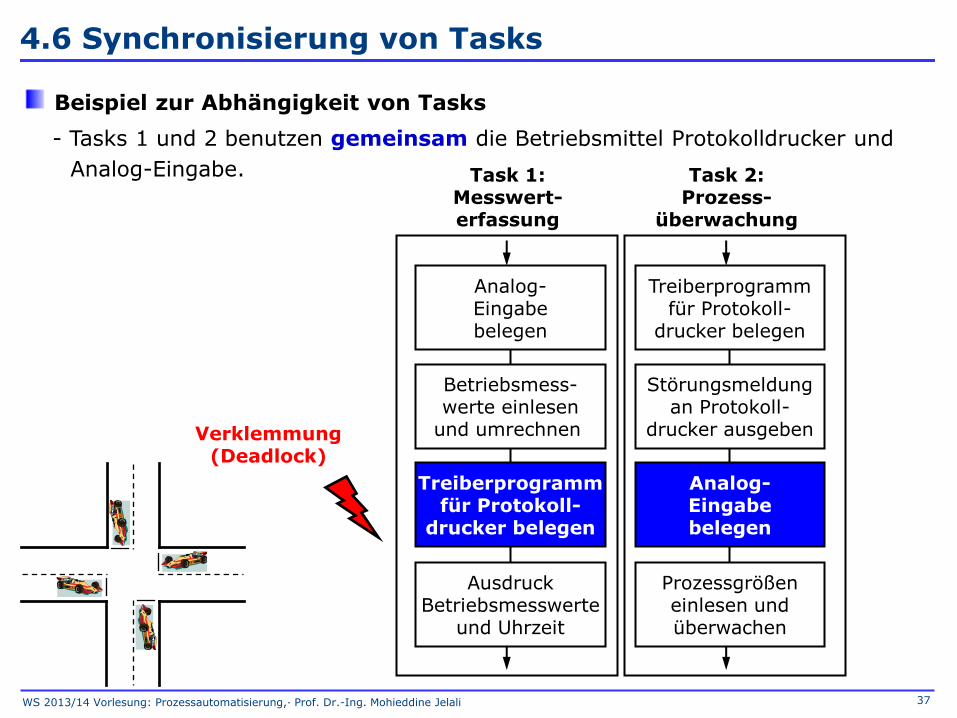
Beispiel zur Abhängigkeit von Tasks
- Tasks 1 und 2 benutzen gemeinsam die Betriebsmittel Protokolldrucker und
Analog-Eingabe. Task 1: Messwert- erfassung
Task 2: Prozess-
überwachung
Treiberprogramm für Protokoll-
drucker belegen
Störungsmeldung an Protokoll-
drucker ausgeben
Prozessgrößen einlesen und überwachen
Analog- Eingabe belegen
Analog- Eingabe belegen
Betriebsmess- werte einlesen
und umrechnen
Ausdruck Betriebsmesswerte
und Uhrzeit
Treiberprogramm für Protokoll-
drucker belegen
Verklemmung (Deadlock)
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 38
Logische (aufgaben-/oder prozessorientierte) Synchronisierung
- Anpassung des Ablaufs der Rechenprozesse an den Ablauf der Vorgänge im
technischen Prozess
- Synchronisierung bedeutet:
Erfüllung von Anforderungen bezüglich der Reihenfolge von Aktionen
Berücksichtigung vorgegebener Zeitpunkte bzw. Zeitabstände
Reaktionen auf Unterbrechungsmeldungen aus dem technischen Prozess
Betriebsmittelorientierte Synchronisierung
Einhaltung von Bedingungen bezüglich der Verwendung gemeinsam benutzter
Betriebsmittel (Ressourcen)
4.6 Synchronisierung von Tasks
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 39
4.7 Synchronisierungsverfahren
Grundgedanke der Synchronisierung
- Rechenprozess muss warten, bis ein bestimmtes Signal bzw. Ereignis eintrifft.
- Einfügen von Wartebedingungen an den kritischen Stellen
Verfahren
- Semaphorkonzept
- kritische Regionen
- Rendez-Vous-Konzept
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 40
Semaphorkonzept
- Synchronisierung von Rechenprozessen durch Signale (nach Dijkstra)
- Einführung von zwei Semaphor-Variablen:
V(S) und P(S) (positive, ganzzahlige Werte)
V(Si): Verlassen-Operation:
Si Si + 1; Task wird fortgesetzt.
P(Si): Passieren-Operation:
Si wird abgefragt:
Si > 0: Si Si 1; Task wird fortgesetzt.
Si = 0: Si bleibt unverändert; Task geht in den Zustand „blockiert“ über.
Ein Verlassen dieses Zustandes ist nur möglich, wenn diese
Semaphor-Variable Si in einer anderen Task inkrementiert wird.
4.7 Synchronisierungsverfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 41
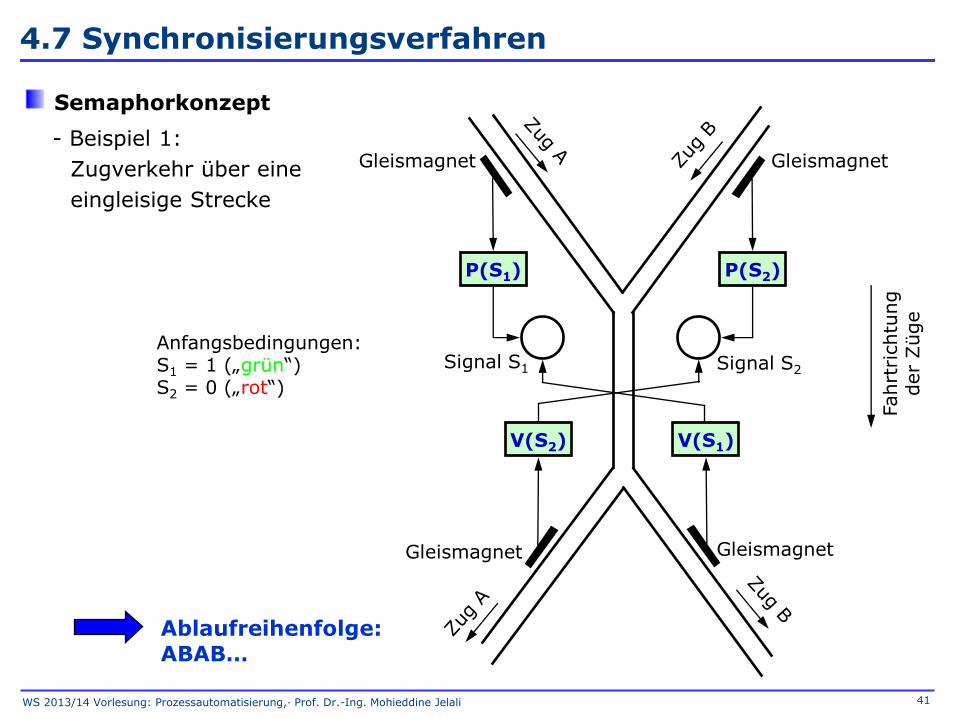
Semaphorkonzept
- Beispiel 1:
Zugverkehr über eine
eingleisige Strecke
P(S1) P(S2)
V(S2) V(S1)
Gleismagnet Gleismagnet
Gleismagnet Gleismagnet
Signal S2 Signal S1
Fahrt
richtu
ng
der
Züge
Anfangsbedingungen: S1 = 1 („grün“) S2 = 0 („rot“)
Ablaufreihenfolge: ABAB…
4.7 Synchronisierungsverfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 42
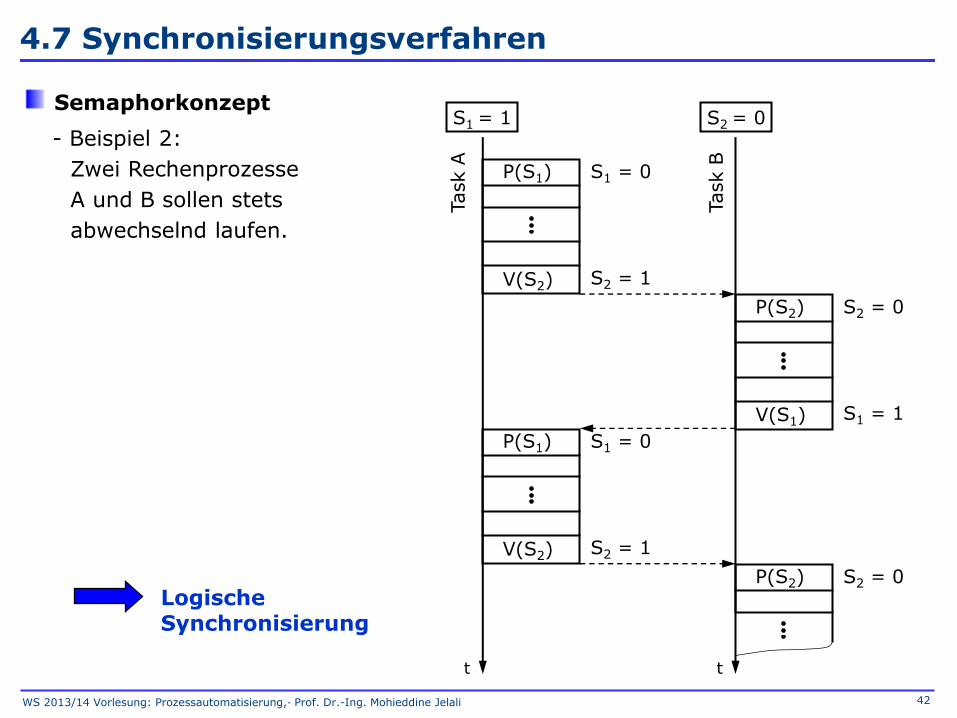
Semaphorkonzept
- Beispiel 2:
Zwei Rechenprozesse
A und B sollen stets
abwechselnd laufen.
Logische Synchronisierung
4.7 Synchronisierungsverfahren
t t
S1 = 1 S2 = 0
S1 = 0
S2 = 1
P(S1)
V(S2)
S2 = 0
S1 = 1
P(S2)
V(S1)
S1 = 0
S2 = 1
P(S1)
V(S2)
S2 = 0 P(S2)
Task A
Task B
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 43
Kommunikation zwischen Tasks
Kommunikation: Austausch von Daten zwischen parallel ablaufenden Tasks
Möglichkeiten der Datenkommunikation
- Direkter Datenaustausch (Rendez-vous)
- Gemeinsam benutzter Speicher (Shared memory)
gemeinsame Variable
gemeinsame komplexe Datenstruktur
- Versenden von Nachrichten (Messages)
Übertragung von Nachrichten von einem Rechenprozessor zu einem anderen
(Message passing)
vor allem bei verteilten Systemen
Arten der Kommunikation
- Synchron: sendende und empfangende Task kommunizieren an einer
definierten Stelle im Programmablauf.
- Asynchron: Daten werden gepuffert.
4.7 Synchronisierungsverfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 44
Begriffe
- Scheduling (Planung): Vergabe des Prozessors an ablaufbereite
Rechenprozesse nach einem festgelegten Algorithmus (Scheduling-Verfahren)
- Scheduler (Planer): Teil eines Echtzeit-Betriebssystems zur Zuteilung des
Prozessors
- Schedule (Plan): vom Scheduler erzeugte Ablauf- und Zuteilungsplan
Notwendigkeit des Scheduling von Tasks
- Tasks benötigen Ressourcen (Prozessor, Ein-/Ausgabegeräte usw.)
- Ressourcen sind knapp
- Tasks konkurrieren um Ressourcen
- Zuteilung der Ressourcen muss verwaltet werden.
4.8 Scheduling-Verfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 45
4.8 Scheduling-Verfahren
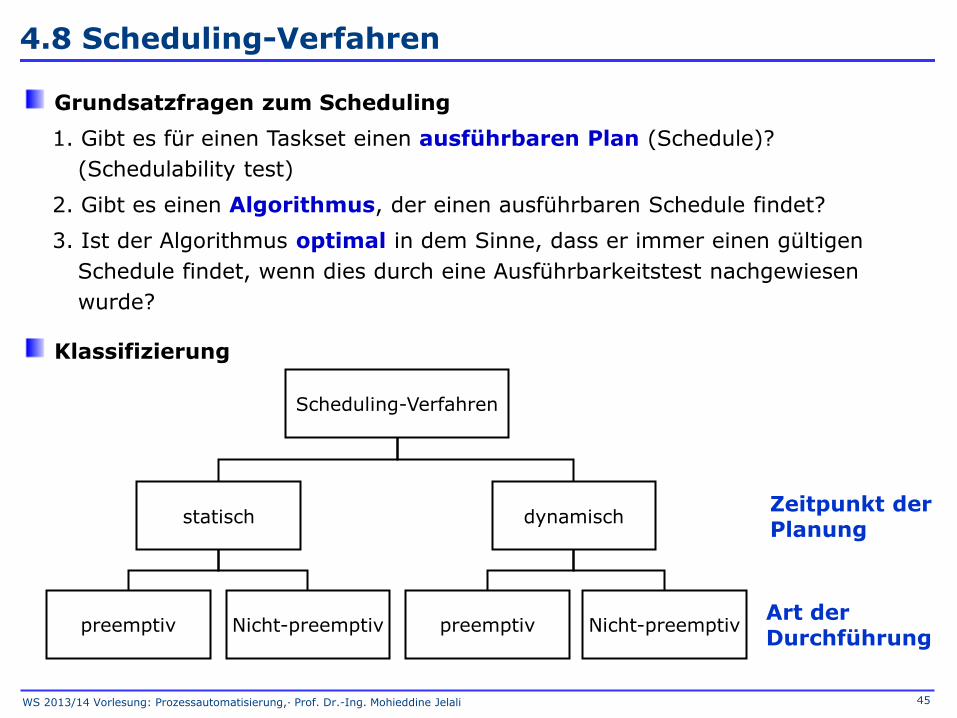
Grundsatzfragen zum Scheduling
1. Gibt es für einen Taskset einen ausführbaren Plan (Schedule)?
(Schedulability test)
2. Gibt es einen Algorithmus, der einen ausführbaren Schedule findet?
3. Ist der Algorithmus optimal in dem Sinne, dass er immer einen gültigen
Schedule findet, wenn dies durch eine Ausführbarkeitstest nachgewiesen
wurde?
Scheduling-Verfahren
statisch dynamisch
Nicht-preemptiv preemptiv Nicht-preemptiv preemptiv
Klassifizierung
Zeitpunkt der Planung
Art der Durchführung
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 46
Statisches Scheduling Synchrone Programmierung
- Planung des zeitlichen Ablaufs der Tasks erfolgt vor der Ausführung
(Dispatching table) vorhersehbar, aber unfexibel
- Berücksichtigung von Informationen über Taskset, Deadlines,
Ausführungszeiten, Reihenfolgebeziehungen, Ressourcen
- Dispatcher macht Zuteilung gemäß Dispatching Table
- minimaler Laufzeit-Overhead
- determiniertes Verhalten
Dynamisches Scheduling Asynchrone Programmierung
- Organisation des zeitlichen Ablaufs während der Ausführung der Tasks
- erheblicher Laufzeit-Overhead durch die „Online-Suche“ nach einem
ausführbaren Schedule
4.8 Scheduling-Verfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 47
Preemptives Scheduling
- Laufende Task kann unterbrochen werden.
- Höherpriore Task verdrängt niederpriore Task.
Nicht-preemptives Scheduling
- Laufende Task kann nicht unterbrochen werden.
- Prozessorfreigabe erfolgt durch die Task selbst.
Wichtigste Scheduling-Verfahren
- FIFO-Scheduling (First-in-first-out)
- Zeitscheibenverfahren
- Scheduling mit festen Prioritäten
- Ratenmonotones Scheduling
- Verfahren der kleinsten Restantwortzeit
- Verfahren des kleinsten Spielraums
4.8 Scheduling-Verfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 48
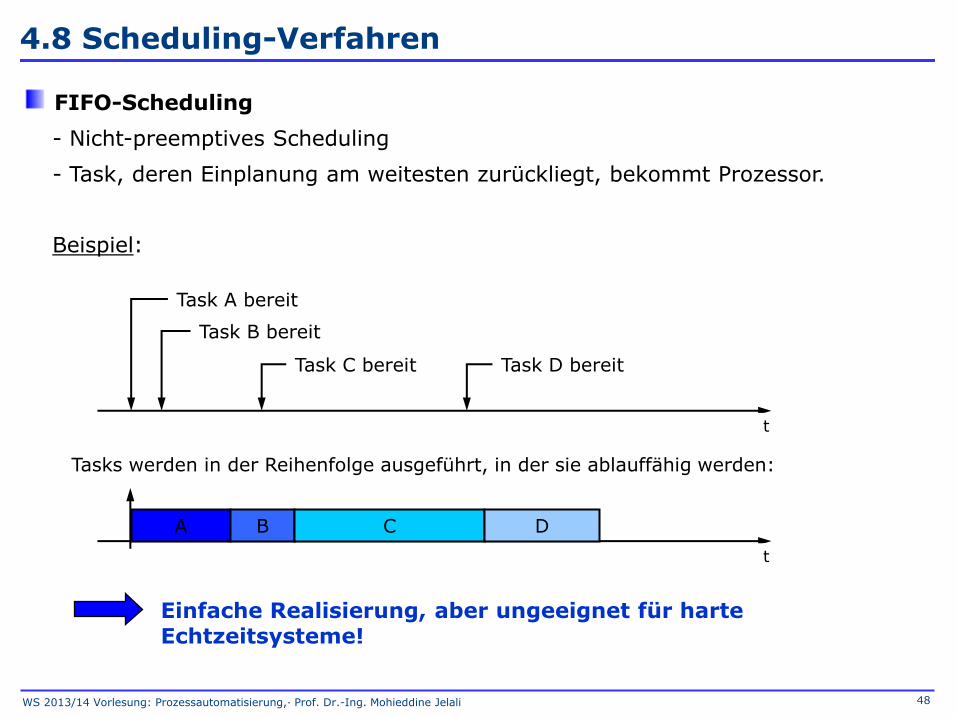
FIFO-Scheduling
- Nicht-preemptives Scheduling
- Task, deren Einplanung am weitesten zurückliegt, bekommt Prozessor.
Beispiel:
Einfache Realisierung, aber ungeeignet für harte Echtzeitsysteme!
Tasks werden in der Reihenfolge ausgeführt, in der sie ablauffähig werden:
4.8 Scheduling-Verfahren
t
Task A bereit
Task B bereit
Task C bereit Task D bereit
t
A B C D
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 49
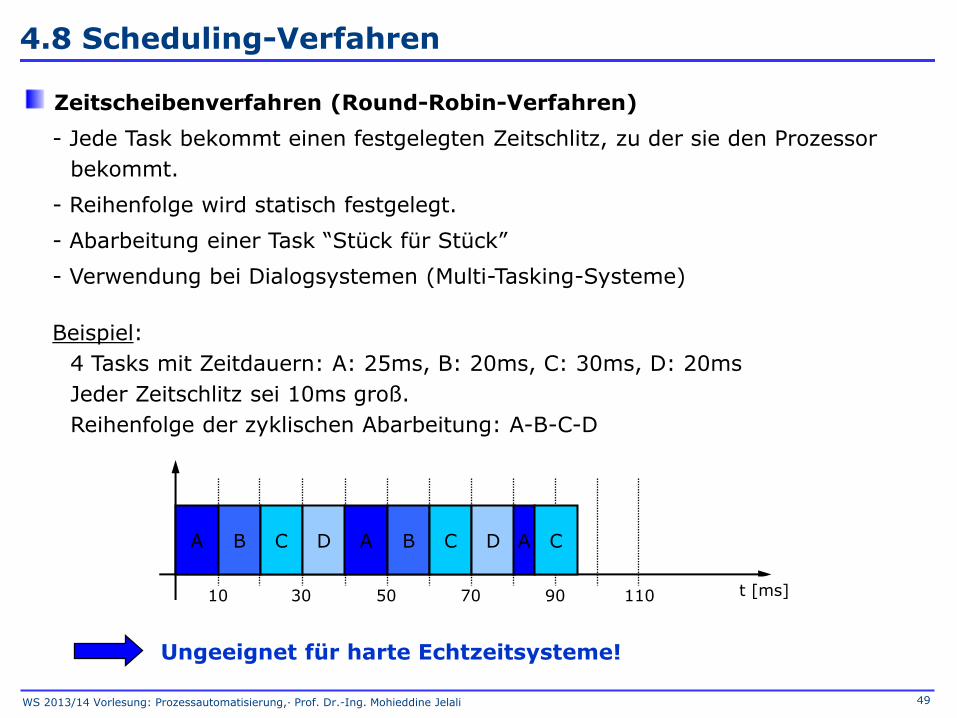
Zeitscheibenverfahren (Round-Robin-Verfahren)
- Jede Task bekommt einen festgelegten Zeitschlitz, zu der sie den Prozessor
bekommt.
- Reihenfolge wird statisch festgelegt.
- Abarbeitung einer Task “Stück für Stück”
- Verwendung bei Dialogsystemen (Multi-Tasking-Systeme)
Ungeeignet für harte Echtzeitsysteme!
Beispiel:
4 Tasks mit Zeitdauern: A: 25ms, B: 20ms, C: 30ms, D: 20ms
Jeder Zeitschlitz sei 10ms groß.
Reihenfolge der zyklischen Abarbeitung: A-B-C-D
4.8 Scheduling-Verfahren
t [ms]
A B C D A B C D A C
10 30 50 70 90 110
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 50
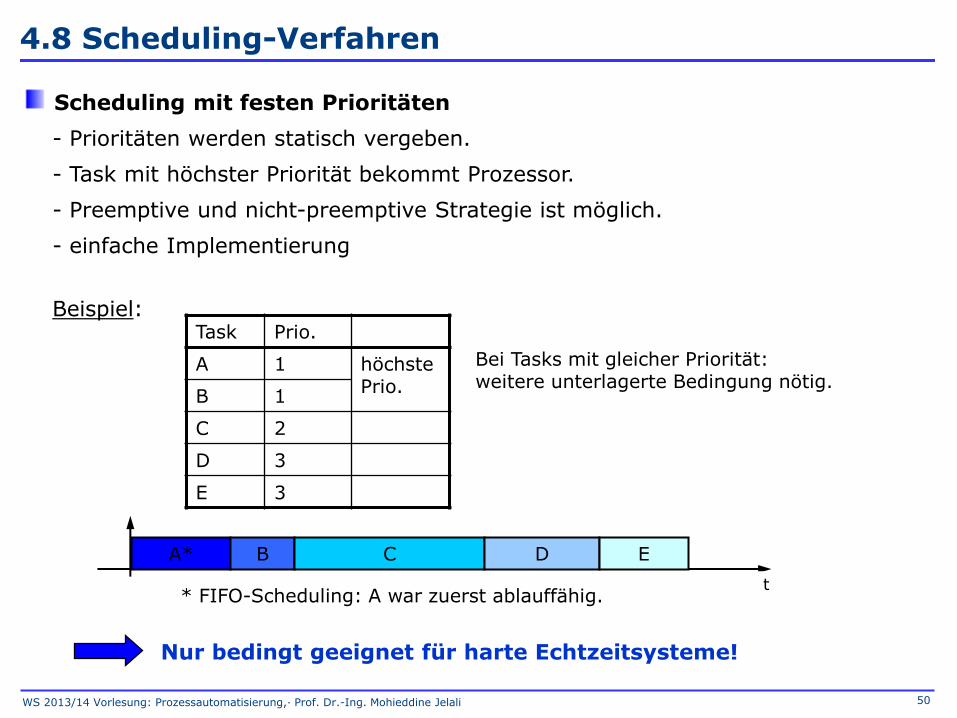
Scheduling mit festen Prioritäten
- Prioritäten werden statisch vergeben.
- Task mit höchster Priorität bekommt Prozessor.
- Preemptive und nicht-preemptive Strategie ist möglich.
- einfache Implementierung
Nur bedingt geeignet für harte Echtzeitsysteme!
Beispiel:
Bei Tasks mit gleicher Priorität: weitere unterlagerte Bedingung nötig.
* FIFO-Scheduling: A war zuerst ablauffähig.
4.8 Scheduling-Verfahren
Task Prio.
A 1 höchste Prio.
B 1
C 2
D 3
E 3
t
A* B C D E
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 51
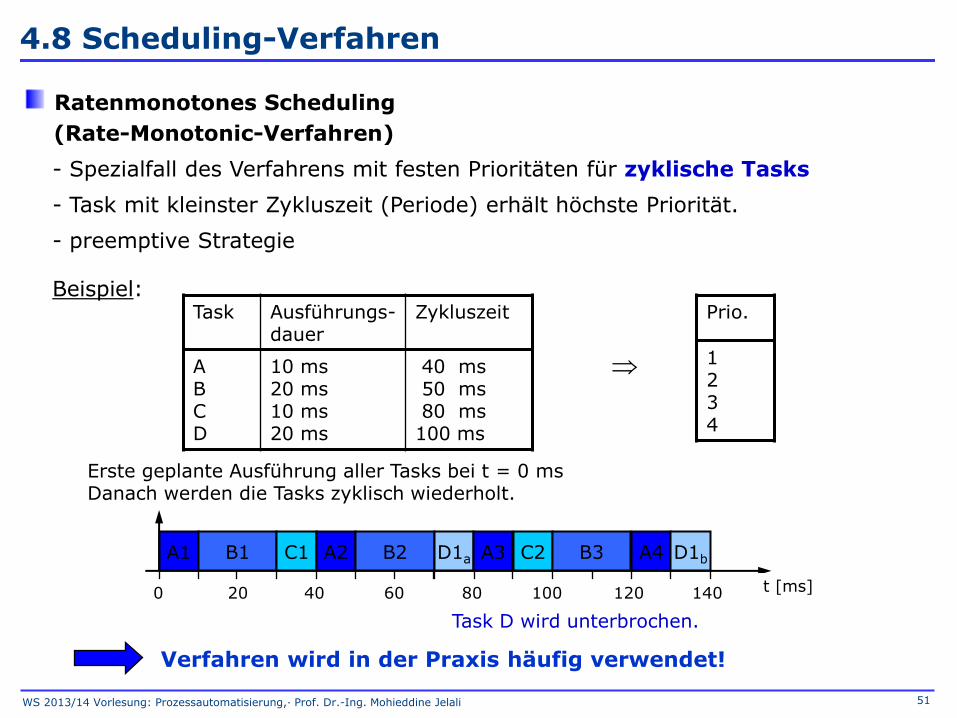
Ratenmonotones Scheduling
(Rate-Monotonic-Verfahren)
- Spezialfall des Verfahrens mit festen Prioritäten für zyklische Tasks
- Task mit kleinster Zykluszeit (Periode) erhält höchste Priorität.
- preemptive Strategie
Verfahren wird in der Praxis häufig verwendet!
Beispiel:
Erste geplante Ausführung aller Tasks bei t = 0 ms Danach werden die Tasks zyklisch wiederholt.
Task D wird unterbrochen.
4.8 Scheduling-Verfahren
Task Ausführungs- dauer
Zykluszeit
A B C D
10 ms 20 ms 10 ms 20 ms
40 ms 50 ms 80 ms 100 ms
t [ms]
A1 B1 C1 A2 B2 D1a A3 C2 B3 A4 D1b
20 40 60 80 100 120 0 140
Prio.
1 2 3 4
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 52
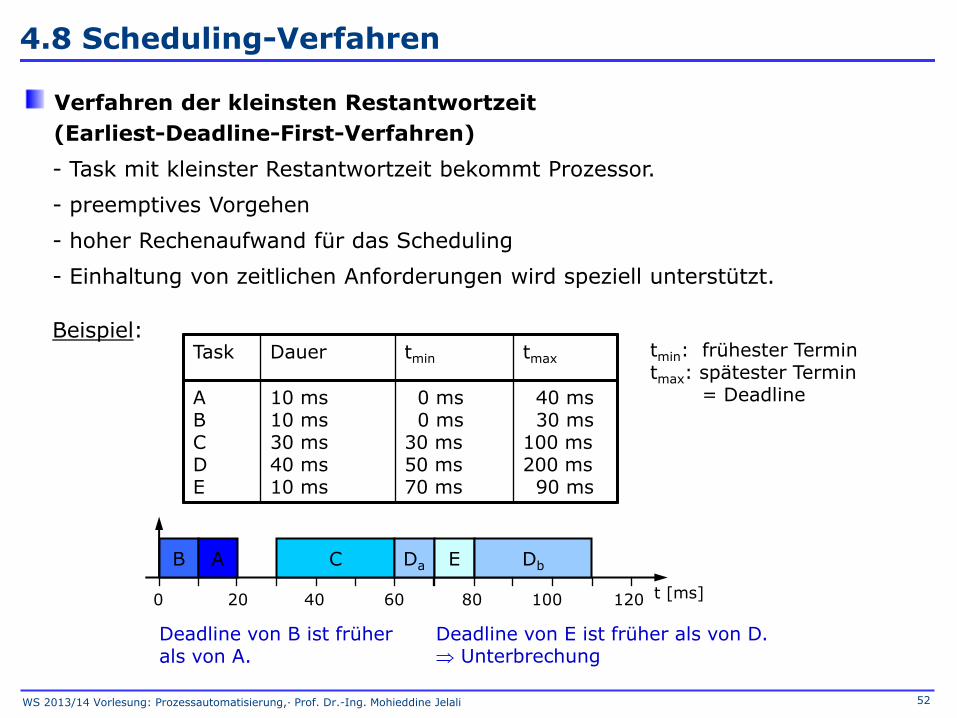
Verfahren der kleinsten Restantwortzeit
(Earliest-Deadline-First-Verfahren)
- Task mit kleinster Restantwortzeit bekommt Prozessor.
- preemptives Vorgehen
- hoher Rechenaufwand für das Scheduling
- Einhaltung von zeitlichen Anforderungen wird speziell unterstützt.
Beispiel:
Deadline von B ist früher als von A.
Deadline von E ist früher als von D. Unterbrechung
4.8 Scheduling-Verfahren
Task Dauer tmin tmax
A B C D E
10 ms 10 ms 30 ms 40 ms 10 ms
0 ms 0 ms 30 ms 50 ms 70 ms
40 ms 30 ms 100 ms 200 ms 90 ms
tmin: frühester Termin tmax: spätester Termin = Deadline
t [ms]
B A C Da E Db
20 40 60 80 100 120 0
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 53
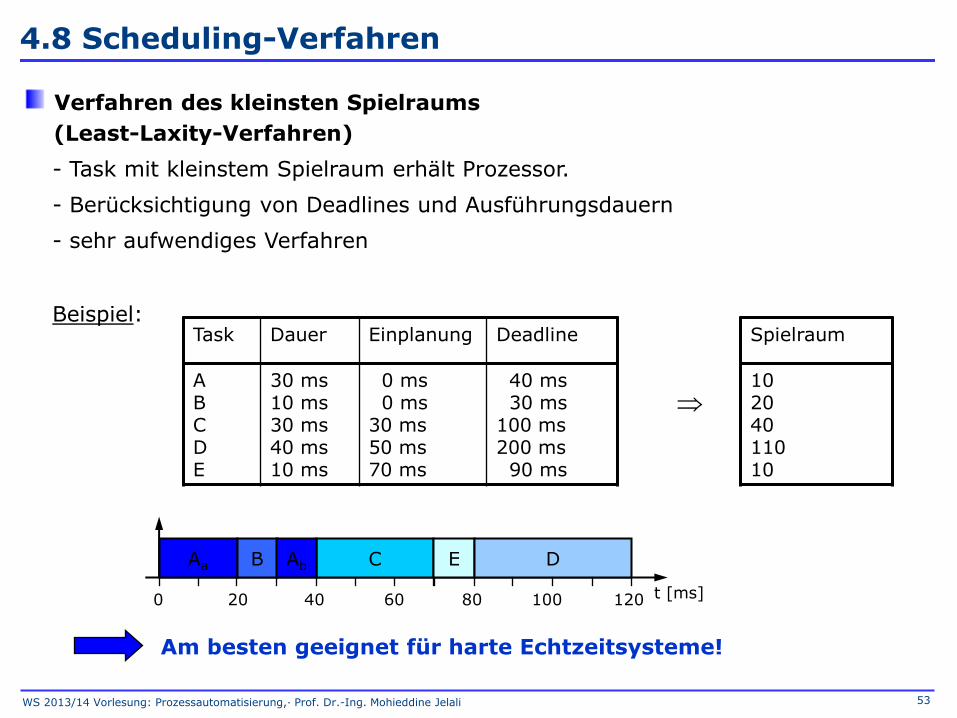
Verfahren des kleinsten Spielraums
(Least-Laxity-Verfahren)
- Task mit kleinstem Spielraum erhält Prozessor.
- Berücksichtigung von Deadlines und Ausführungsdauern
- sehr aufwendiges Verfahren
Beispiel:
Am besten geeignet für harte Echtzeitsysteme!
4.8 Scheduling-Verfahren
Task Dauer Einplanung Deadline
A B C D E
30 ms 10 ms 30 ms 40 ms 10 ms
0 ms 0 ms 30 ms 50 ms 70 ms
40 ms 30 ms 100 ms 200 ms 90 ms
t [ms]
Aa C E D
20 40 60 80 100 120 0
B Ab
Spielraum
10 20 40 110 10
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 54
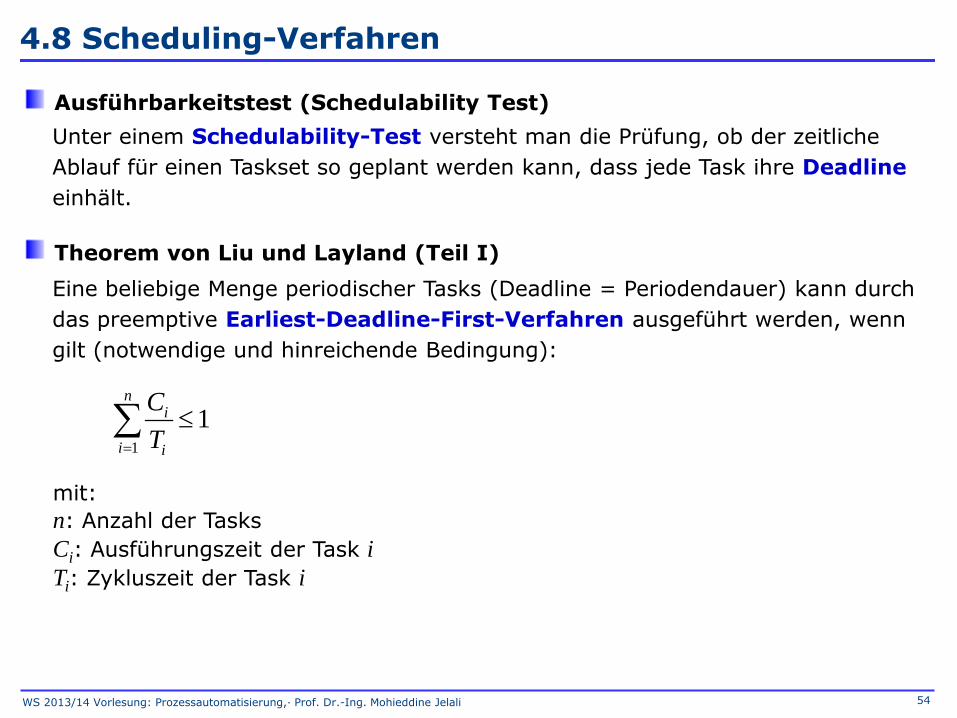
Ausführbarkeitstest (Schedulability Test)
Unter einem Schedulability-Test versteht man die Prüfung, ob der zeitliche
Ablauf für einen Taskset so geplant werden kann, dass jede Task ihre Deadline
einhält.
Theorem von Liu und Layland (Teil I)
Eine beliebige Menge periodischer Tasks (Deadline = Periodendauer) kann durch
das preemptive Earliest-Deadline-First-Verfahren ausgeführt werden, wenn
gilt (notwendige und hinreichende Bedingung):
1
1n
i
i i
C
T
mit:
n: Anzahl der Tasks
Ci: Ausführungszeit der Task i
Ti: Zykluszeit der Task i
4.8 Scheduling-Verfahren
WS 2013/14 Vorlesung: Prozessautomatisierung,· Prof. Dr.-Ing. Mohieddine Jelali 55
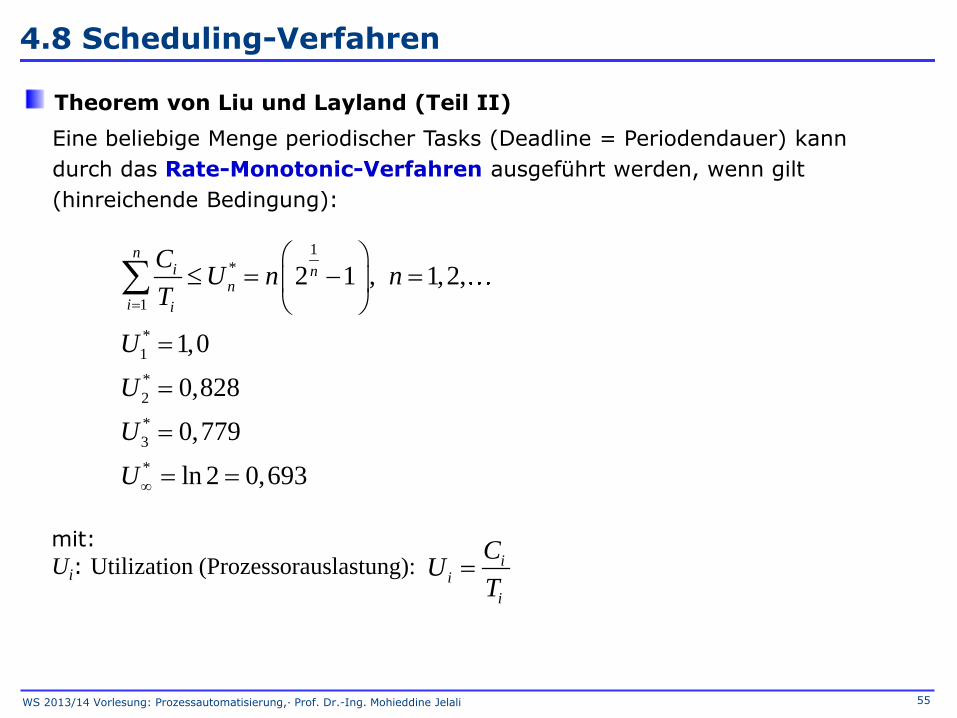
Theorem von Liu und Layland (Teil II)
Eine beliebige Menge periodischer Tasks (Deadline = Periodendauer) kann
durch das Rate-Monotonic-Verfahren ausgeführt werden, wenn gilt
(hinreichende Bedingung):
1
*
1
*
1
*
2
*
3
*
2 1 , 1,2,
1,0
0,828
0,779
ln 2 0,693
ni n
n
i i
CU n n
T
U
U
U
U
mit:
Ui: Utilization (Prozessorauslastung): ii
i
CU
T
4.8 Scheduling-Verfahren