Embed Size (px)
Citation preview
Technische Universitat Hamburg-Harburg
Studienarbeit
Simulation der Manovriereigenschaften eines Kreuzfahrtschiffesmit Azipod Antrieben
Verfasser: Till SchadeMatr.Nr.: 132363. Mai 2005Angefertigt bei: Arbeitsbereich 3-14 der TU Hamburg-HarburgSchiffsentwurf und InformationstechnologieBetreuung: Prof. Dr. Ing. Kruger

Manovrieren mit Azipodantrieben Kapitel: 0
Inhaltsverzeichnis
1 Einleitung 3
2 Ziel der Arbeit 3
3 Vereinbarungen 4
3.1 Koordinatensystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
4 Schiffsbeschreibung 5
4.1 Beschreibung des untersuchten Schiffes . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4.2 Schiffsdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4.3 Beschreibung des Azipodantriebes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
5 Beschreibung der Vorgange an Schiff und Antrieb 7
5.1 Schiff mit konventionellen Antrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
5.2 Schiff mit drehbaren Antrieben mit Zugpropellern . . . . . . . . . . . . . . . . . . . . . 7
5.3 Berechnung der effektiven Anstromwinkel . . . . . . . . . . . . . . . . . . . . . . . . . . 7
6 Modellierung des Manovriermodells 10
6.1 Bestimmung des Schiffwiderstandes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6.2 Sogkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6.3 Nachstrom unter Schraganstromung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6.4 Windkrafte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6.5 Crossflow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6.6 Anlagensimulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
7 Berechnung der Azipodkrafte 12
7.1 Propellerkrafte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
7.2 Ruder- bzw. Podgeausekrafte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
7.3 Gemeinsame Azipodkrafte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
8 Ergebnisse Simulation Probefahrt 16
8.1 Drehkreis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
8.2 Williamsonturn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
8.3 Z-Manover 10/10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
8.4 Z-Manover 20/20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
9 Ergebnisse Simulation Modellversuch 19
9.1 Drehkreis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1/36
Manovrieren mit Azipodantrieben Kapitel: 0
9.2 Williamsonturn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
9.3 Z-Manover 10/10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
9.4 Z-Manover 20/20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
10 Vergleiche der Manoverergebnisse 21
10.1 Vergleich Probefahrtsmanovern und Simulation Schiff . . . . . . . . . . . . . . . . . . . 21
10.2 Vergleich Modellversuchsergebnissen und Modellsimulation . . . . . . . . . . . . . . . . 21
11 Vergleich der simulierten Manover 22
11.1 Vergleich Drehkreismanover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
11.2 Vergleich Williamsonturn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
11.3 Vergleich Z-Manover 10/10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
11.4 Vergleich Z-Manover 20/20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
12 Auswertung der Ergebnisse 34
12.1 Schiffsmanover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
12.2 Modellmanover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Literaturverzeichnis 35
Abbildungsverzeichnis 36
2/36

Manovrieren mit Azipodantrieben Kapitel: 2
1 Einleitung
Thema dieser Studienarbeit ist die Simulation des Manovrierverhalten eines Panmax-Passagierschiffesmit Azipod-Antrieben. Es werden sowohl die Probefahrtsmanover nachsimuliert, als auch die Modellver-suchsmanover. Die Daten der Probefahrt und der Modellversuche stammen aus einer Veroffentlichungder Bauwerft. Die Simulation erfolgt mit dem schiffbaulichen Entwurfsprogramm E4. Ebenso die Erzeu-gung der Schiffsformen und der Azipodgeometrie. Es werden folgende Manover, sowohl fur das Schiff,als auch fur das Modell im Maßstab 1:47 simuliert.
• Drehkreis
• Williamson Turn / Mann uber Bord Manover
• Z-Manover 10/10
• Z-Manover 20/20
Es wird kurz die Stromungssituation am manovrierenden Schiff beschrieben bzw. die Unterschiedebei konventionellen zu Pod-Antrieb. Anschließend wird die numerische Umsetzung in E4 beschrieben.Nicht behandelt werden Fragen zu der Widerstandoptimierung, des Vibrationsverhalten, der Wirtschaft-lichkeit oder des Einflusses der veranderten Raumeinteilung auf die Leckrechnung.
2 Ziel der Arbeit
Es soll uberpruft werden, ob es moglich ist, die fur konventionell angetriebene bzw. gesteuerte Schiffe er-probte Methode auf Schiffe mit Azipod-Antrieben anzuwenden. Die Simulation der Manover ermoglichtAussagen uber die Qualitat bzw. die Richtigkeit des physikalischen Modells fur drehbare Antriebe. Dieaus der Simulation gewonnenen Kennwerte fur die einzelnen Manover konnen mit den gemessenen Wer-ten verglichen werden. Hieruber kann die Bewertung der Gute dieser Simulation erfolgen.
Die Modellversuche der azipodangetriebenen Schiffe zeigen ein deutlich zu gutes Manovrierverhalten.Durch die Simulation der Manover von Schiff und Modell lassen sich die Ursachen fur das unterschiedlicheVerhalten herausfinden. Die Simulation liefert, anders als die Modellversuche, zusatzliche Daten wiedie Krafte und Anstromwinkel. Mit diesen weiteren Informationen kann man die Ursachen fur dasunterschiedliche Verhalten analysieren.
3/36
Manovrieren mit Azipodantrieben Kapitel: 3
3 Vereinbarungen
3.1 Koordinatensystem
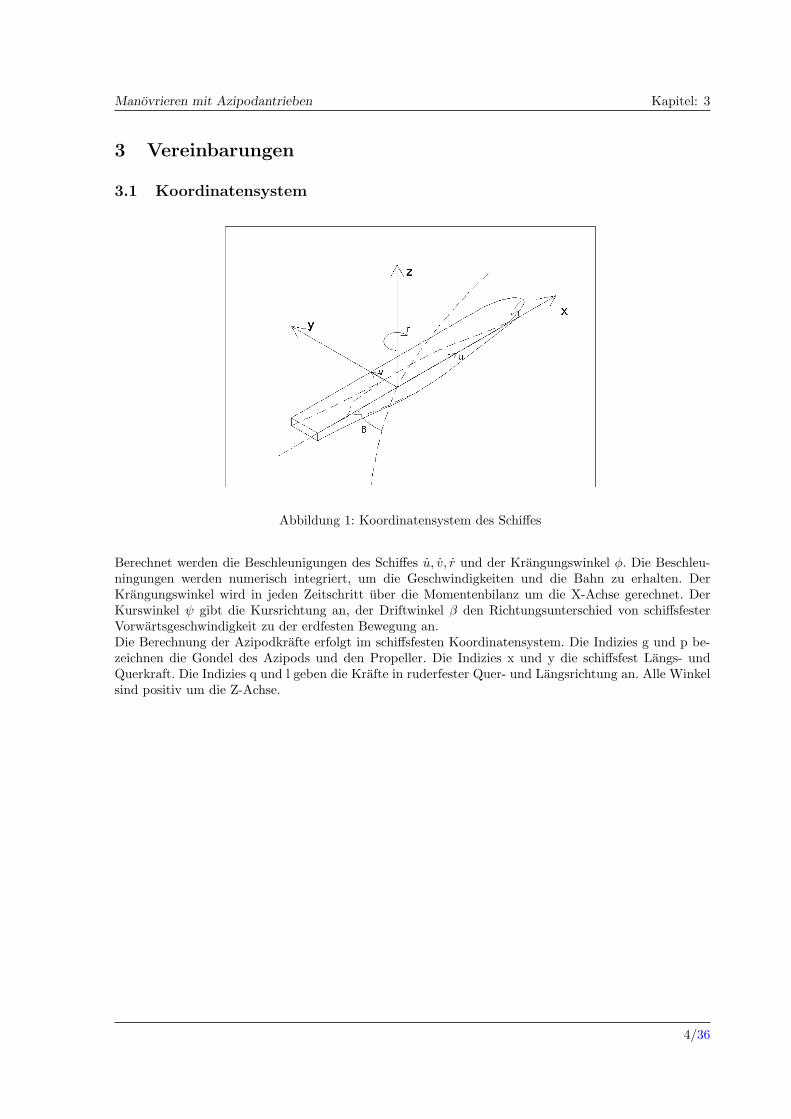
Abbildung 1: Koordinatensystem des Schiffes
Berechnet werden die Beschleunigungen des Schiffes u, v, r und der Krangungswinkel φ. Die Beschleu-ningungen werden numerisch integriert, um die Geschwindigkeiten und die Bahn zu erhalten. DerKrangungswinkel wird in jeden Zeitschritt uber die Momentenbilanz um die X-Achse gerechnet. DerKurswinkel ψ gibt die Kursrichtung an, der Driftwinkel β den Richtungsunterschied von schiffsfesterVorwartsgeschwindigkeit zu der erdfesten Bewegung an.Die Berechnung der Azipodkrafte erfolgt im schiffsfesten Koordinatensystem. Die Indizies g und p be-zeichnen die Gondel des Azipods und den Propeller. Die Indizies x und y die schiffsfest Langs- undQuerkraft. Die Indizies q und l geben die Krafte in ruderfester Quer- und Langsrichtung an. Alle Winkelsind positiv um die Z-Achse.
4/36
Manovrieren mit Azipodantrieben Kapitel: 4
4 Schiffsbeschreibung
4.1 Beschreibung des untersuchten Schiffes
Das Schiff hat einen dieselelektrischen Abtrieb. Die elektrische Versorgung ubernehmen sechs Diesel-generatoren. Die zur Verfugung gestellte Leistung, teilt sich auf in den Hotelbetrieb und den Bedarfder beiden elektrischen Antriebe. Diese sollen dem Schiff, sowohl bei Dienstgeschwindigkeit als auch imHafen, eine gutes Manovrierverhalten ermoglichen. Einsatzgebiet fur die Schiffe ist vor allem die Karibikund das Mittelmeer, aber auch Fahrten in geschutzten Fahrtgebieten mit besonderen Anforderungen andie Emissionen sind moglich. Fur die Berechnung liegen Daten des Schiffes, sowie der Probefahrt undder Modellversuche vor.
4.2 Schiffsdaten
Das Schiff hat folgende Hauptabmessungen:
Lange u.a. : 292,5 mLange p.p. : 260,6 mBreite, kwl : 32,30 mBreite, max. : 38,8 mTiefgang, kwl : 10,0 mHauptmaschinen : 6× je 10395 kWAntrieb : 2 × 17,6MWABB AzipodDienstgeschwindigkeit : 22,0 knProbefahrtgeschwindigkeit : 23,8 knAblieferung : 2000
Abbildung 2: Seitenansicht des Schiffes
4.3 Beschreibung des Azipodantriebes
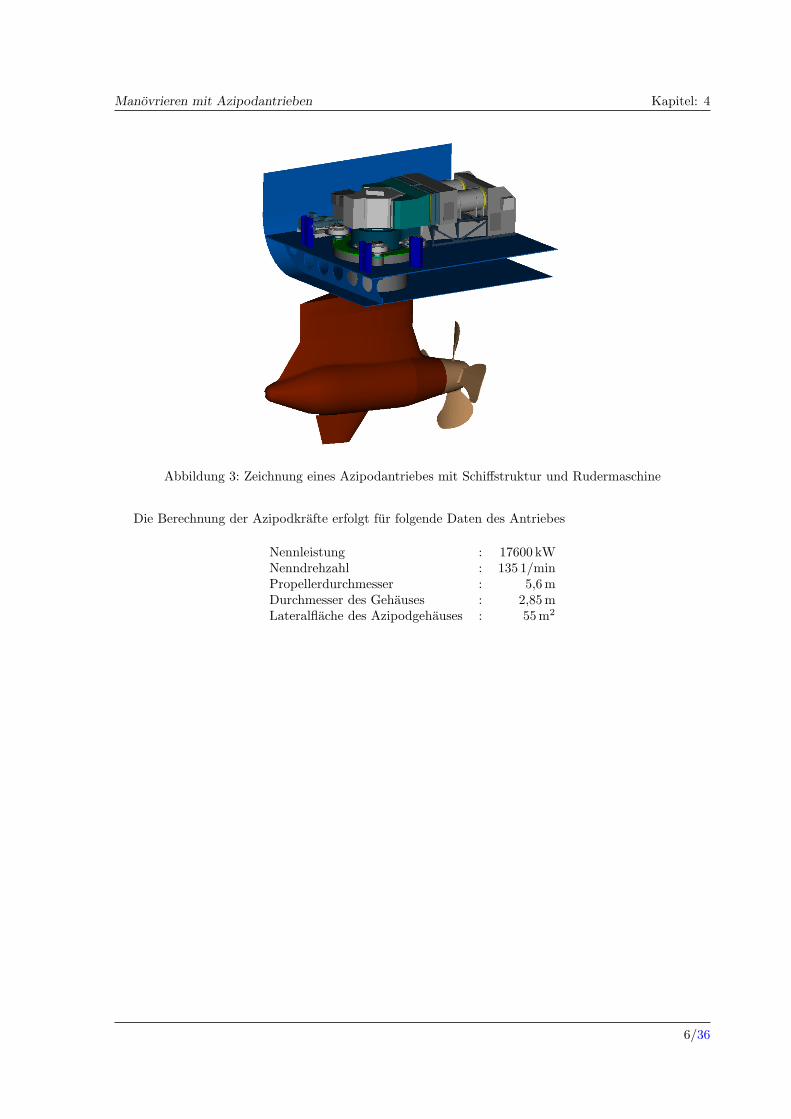
Der Antrieb des Schiffes erfolgt durch zwei Azipode des Herstellers ABB, jede Einheit hat eine Nennlei-stung von je 17600 kW. Die festen Vierblattpropeller drehen sich uber oben nach innen. Der elektrischeAntrieb erfolgt uber luftgekuhlte Drehstrom- Synchronmotoren. Die Drehzahlregelung mit Cyclonkon-verten ermoglicht jede Drehzahl bis zur Nenndrehzahl von 135 1/min bei Nennmoment stufenlos ein-zustellen. Aus hydrodynamischer Sicht haben diese Azipodantriebe eine Besonderheit, die Flosse (sieheAbb. 3)1 unter dem Gehause, die hinter der Drehachse angeordnet ist.
1(Abb.3 Quelle:[17])
5/36
Manovrieren mit Azipodantrieben Kapitel: 4
Abbildung 3: Zeichnung eines Azipodantriebes mit Schiffstruktur und Rudermaschine
Die Berechnung der Azipodkrafte erfolgt fur folgende Daten des Antriebes
Nennleistung : 17600 kWNenndrehzahl : 135 1/minPropellerdurchmesser : 5,6 mDurchmesser des Gehauses : 2,85mLateralflache des Azipodgehauses : 55 m2
6/36
Manovrieren mit Azipodantrieben Kapitel: 5
5 Beschreibung der Vorgange an Schiff und Antrieb
Beschrieben wird der physikalische Vorgang des stationaren Drehens bei einem vorwarts fahrendenSchiff. Der Vorgang der Umstromung des Rumpfes ist fur beide Antriebsarten ahnlich. Die fur dieseSimulation der Manover wichtigen Anderungen treten an den Steuer- bzw. Antriebsorganen auf.
5.1 Schiff mit konventionellen Antrieb
• Verzogerung des Wassers hinter dem Schiff infolge der Reibung am Rumpf(Nachstrom).
• Queranstomung des Hecks in Folge der Drift und Drehung des Schiffes(Crossflow).
• Beschleunigung des Wasser durch den Propeller in Richtung der schiffsfesten Langsachse. Es tretendie Propellerkrafte Fpx und Fpy auf. Das Wasser wird infolge der Axsialbeschleunigung umgelenkt,zusatzlich tritt noch der Drall im Strahl auf.
• Konvektion des Strahls in Folge der Strahlbeschleunigung.
• Entstehung der Ruderkrafte Frx und Fry.Abhangig von der Rudergeometrie kann bei δ = 0◦in Folge des Dralls des Propellerstrahls eineQuerkraft auftreten, der neutrale Ruderwinkel kann ungleich Null sein.
5.2 Schiff mit drehbaren Antrieben mit Zugpropellern
Es andert sich hierbei, dass der Propeller um den Ruderwinkel δ mitgedreht wird. Hiermit andert sichdie Richtung der induzierten Geschwindigkeiten.
• Verzogerung des Wassers hinter dem Schiff, wie bei einem Schiff mit konventionellen Antrieb.(Nachstrom)
• Querbewegung des Wassers infolge der Drift und Drehung des Schiffes(Crossflow).
• Beschleunigung des Wasser in Richtung der lokalen x-Achse des Propellers. Es treten die Propel-lerkrafte Fpx und Fpy auf. Wie bei dem nicht drehbaren Propeller sind die induzierten Geschwin-digkeiten vom Schubbelastungsgrad abhangig. Bei den Azipodpropeller kann sich der Schubbela-stungsgrad durch Schraganstromung zusatzlich stark andern.
• Entstehung der Gondelkrafte Fgx und Fgy durch die Schraganstromung des Gehauses. Infolge derstark unterschiedlichen Flachenverteilung oberhalb und unterhalb der Propellerachse ergibt sichdurch den Drall ein neutraler Anstellwinkel ungleich null.
Der fur die Steuerkraft entscheidende Unterschied ist die Verringerung des effektiven Anstellwinkels aufdas Podgehause durch den mitgedrehten Propeller.Bei einem konventionellen Antrieb erhoht der Propellerstrahl die axiale Geschwindigkeit, der effektiveAnstromwinkel steigt. Bei dem mitgedrehten Propeller ist die Richtung der induzierten Geschwindigkei-ten von den Ruderwinkel abhangig. Das Wasser wird in Richtung der Azipodlangsachse beschleunigt.Der effektive Anstellwinkel auf die Azipodgondel sinkt.
5.3 Berechnung der effektiven Anstromwinkel
Bei der Berechnung der effektiven Anstellwinkel ergeben sich Unterschiede bei Propeller und Ruder deskonventionellen Antriebs zu den Verhaltnissen bei einem Azipodantrieb.
7/36
Manovrieren mit Azipodantrieben Kapitel: 5
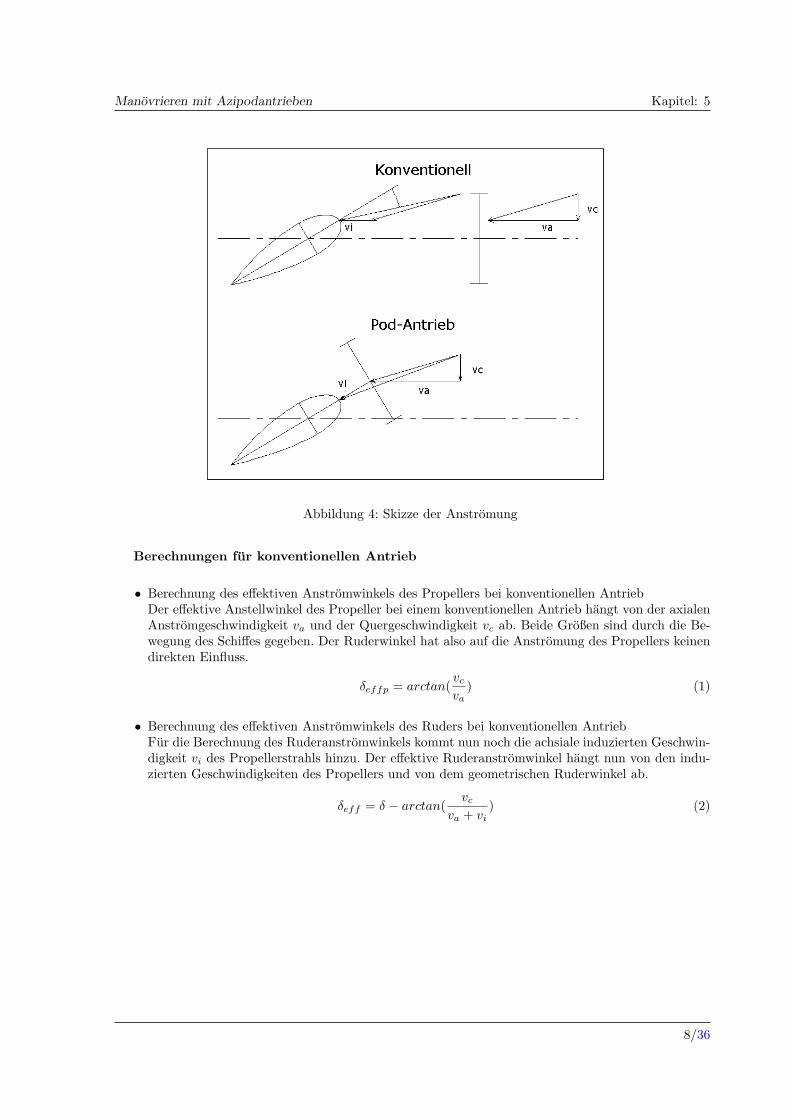
Abbildung 4: Skizze der Anstromung
Berechnungen fur konventionellen Antrieb
• Berechnung des effektiven Anstromwinkels des Propellers bei konventionellen AntriebDer effektive Anstellwinkel des Propeller bei einem konventionellen Antrieb hangt von der axialenAnstromgeschwindigkeit va und der Quergeschwindigkeit vc ab. Beide Großen sind durch die Be-wegung des Schiffes gegeben. Der Ruderwinkel hat also auf die Anstromung des Propellers keinendirekten Einfluss.
δeffp = arctan(vc
va) (1)
• Berechnung des effektiven Anstromwinkels des Ruders bei konventionellen AntriebFur die Berechnung des Ruderanstromwinkels kommt nun noch die achsiale induzierten Geschwin-digkeit vi des Propellerstrahls hinzu. Der effektive Ruderanstromwinkel hangt nun von den indu-zierten Geschwindigkeiten des Propellers und von dem geometrischen Ruderwinkel ab.
δeff = δ − arctan(vc
va + vi) (2)
8/36

Manovrieren mit Azipodantrieben Kapitel: 5
Berechnungen fur den Azipodantrieb
• Berechnung des effektiven Anstromwinkels des mitgedrehten PropellersAnders als bei den konventionellen Antrieb ist der effektive Propelleranstellwinkel nun nochabhangig vom geometrischen Ruderwinkel δ. Hierbei ist zu beachten, dass die Richtung der indu-zierten Geschwindigkeiten des Propellers nun ebenfalls von dem Ruderwinkel des Azipod abhangigist.
δeffp = δ − arctan(vc
va) (3)
• Berechnung des effektiven Anstromwinkels der gedrehten AzipodgondelEbenso wie bei dem konventionellen Antrieb, hat man die direkte aAbhangigkeit vom Ruderwinkelδ. Was sich verandert, ist die geanderte Richtung der induzierten Geschwindigkeiten durch denmitgedrehten Propeller.
δeffg = δ − arctan(vc + vi · sin(δ)va + vi · cos(δ)
) (4)
9/36

Manovrieren mit Azipodantrieben Kapitel: 6
6 Modellierung des Manovriermodells
6.1 Bestimmung des Schiffwiderstandes
Fur den Schiffswiderstand wurde die Widerstandsprognose eines Vergleichschiffes verwendet. Die Datenfur den Nachstrom und die Zusatzwiderstande stammen aus der selben Prognose.
6.2 Sogkraft
Die Sogkraft wird mit Hilfe eines CFD- Verfahrens bestimmt. Es wird ein Sog nach Potentialtheorie mitBerucksichtigung der induzierten Geschwindigkeiten der Propeller berechnet.
6.3 Nachstrom unter Schraganstromung
Die Berechnung des Nachstroms bei Schraganstromung beruht auf den Untersuchungen von Oltmann[9].
6.4 Windkrafte
Die Windkrafte werden nach Untersuchungen von Blendermann [1]angesetzt. Fur die Simulation wurdeein konstanter Wind mit v = 5kn von vorne bei Manoverbeginn angenommen.
6.5 Crossflow
Fur die Berechnung des effektiven Anstellwinkels des Propellers, sowie der Azipodgondel ist die Bestim-mung der Quergeschwindigkeit von großer Bedeutung. Das Schiff fuhrt beim Manovrieren sowohl Quer-als auch Drehbewegungen aus, die eine Quergeschwindigkeit vq an Heck ergeben.
vq = v + xprop · r (5)
Von dieser Starrkorperbewegung wird ein Teil durch den Rumpfeinfluss abgeschwacht.Der Crossflow vcberechnet sich nach Quelle [6]wie folgt:
vc = c1 · v + c2 ·xprop · r (6)
vc : Crossflowc1 : Korrekturwert fur Quergeschwindigkeitv : Quergeschwindigkeitc2 : Korrekturwert fur Drehgeschwindigkeitxprop : Abstand Propeller zum Langenschwerpunkt des Schiffesr : Drehrate
Die empfohlenen empirischen Korrekturwerte fur Einschrauber sind
c1 = 0,36c2 = 0,66
Bei der Simulation ist mit folgenden Faktoren gerechnet worden:
c1 = 0,20c2 = 0,50
10/36

Manovrieren mit Azipodantrieben Kapitel: 6
Dieses Wertepaar ist bei der Simulation variiert worden. Das verwendete Paar hat zu guten Ergeb-nissen in der Simulation Probefahrt gefuhrt. Dieses Werte wurden dann auch fur die Simulation derModellversuche beibehalten.
6.6 Anlagensimulation
Die aus den Propellerberechnungen bestimmten Propellerdrehmomente gehen in die Anlagensimulati-on ein. Angenommen wird, dass die Fahranlage fahig ist, ein konstantes Moment uber dem gesamtenDrehzahlbereich zu liefern. Die Drehzahl des Propellers stellt sich uber ein Momentengleichgewicht vonaufgenommenen zu abgegebenen Drehmoment ein.Eine konstant gehaltene Drehzahl wurde einem beliebig großen zur Verfugung stehenden Drehmomententsprechen und somit das Ergebniss der Simulation verfalschen.
Bei der Simulation des Modellversuchs wurde dem Modell eine großere Leistung zur Verfugunggestellt. Diese ergibt sich in Folge der geanderten Reibung, bei Einhaltung der Froudschen Ahnlichkeitbei dem Modellversuch. Die Berechnung des aquivalenten Modellwiderstand ist in Kapitel 9 beschrieben.
11/36

Manovrieren mit Azipodantrieben Kapitel: 7
7 Berechnung der Azipodkrafte
7.1 Propellerkrafte
Verwendet werden verschiedene Potentialmethoden fur die Berechnung des Arbeitszustandes des Pro-pellers und der Propellerkrafte. Vor der eigentlichen Manoversimulation werden die Kraftverhaltnissevon Propellerschub zu Propellerquerkraft bei verschieden Schubbelastungsgraden und Anstellwinkelndes Propellers berechnet. Zwischen diesen Betriebspunkten wird in der Simulation der Schiffsbewegunginterpoliert.
Der Betriebspunkt des arbeitenden Propellers wird in der Simulation mit einem Traglinienverfahrenberechnet. Mit dem benotigten Propellerschub und dem moglichen Drehmoment der Maschinenanlagelasst sich die Drehzahl bzw. die Drehzahlanderung berechnen. Mit den Schub und den Anstromgeschwin-digkeiten va und vc lasst sich die Propellerquerkraft ermitteln.Aus dieser Methode erhalt man auch die Informationen uber die Geschwindigkeiten hinter dem Propel-ler, diese werden fur die richtige Berechnung der Gondelkrafte benotigt.
Neben den axialen Kraften des Propellers sind fur die Simulation die Propellerquerkrafte von Bedeu-tung, da der Propeller als aktives Steuerorgan benutzt wird. Bei der Berechnung der Querkrafte ergibtsich eine Abanigkeit von der aktuellen Fortschrittsziffer J bzw. J
P/D . Abb.(5).
Die Vereinfachungen der Fluideigenschaften hat zur Folge, dass nicht alle, moglicherweise auftre-tenden Effekt berechnet werden konnen. Ablosungen sowie Reibungseinflusse konnen nicht berechnetwerden. Die viskosen Effekte werden zum Teil durch Korrekturen mit in die Rechnung eingebunden.
Abbildung 5: Verhaltniss Querkraft zu Schub (Quelle [13])
12/36

Manovrieren mit Azipodantrieben Kapitel: 7
7.2 Ruder- bzw. Podgeausekrafte
Abbildung 6: Krafte am Pod
Fur die Berechnung der Gondelkrafte wird eine direkte Potentialmethode verwendet. Das Ruder wirddiskretisiert und in Paneele eingeteilt. Die Abflussbedingung(Kutta-Bedingung) wird durch Nachlaufpa-neele an der Ruderhinterkante numerisch dargestellt. Diese Nachlaufpaneele laufen in Richtung des halb-en Anstromwinkels ein Vielfaches der Profilange nach hinten. Die Anstromgeschwindigkeiten werden ausder Propellerberechnung entnommen und dienen als Eingangsgroße fur die Auftriebs- bzw. Widerstands-berechnung der Podgondel. Hiermit kann in jedem Zeitschritt der Einfluss des arbeitenden Propellersauf die Azipodgondel berucksichtigt werden. Im ursprunglichen Programm ist der Propellerstrahl nurempirisch bzw. nach Strahltheorie berucksichtig.(Ruderkraftberechnung mit einen Paneelverfahren[12])
Berechnet wird der schiffsfeste Auftrieb und Widerstand der Podgondel, sowie das Schaftmomentum die Z-Achse. Das ausgegebene Schaftmoment wird berechnet auf Grund der Druckverteilung auf denPaneelen. Das Schaftmoment, das durch die Propellerquerkraft erzeugt wird, muss gesondert berechnetwerden. Benotigt wird dafur der Abstand zwischen Propeller und Drehachse des Azipod xp(Abb.6)
13/36
Manovrieren mit Azipodantrieben Kapitel: 7
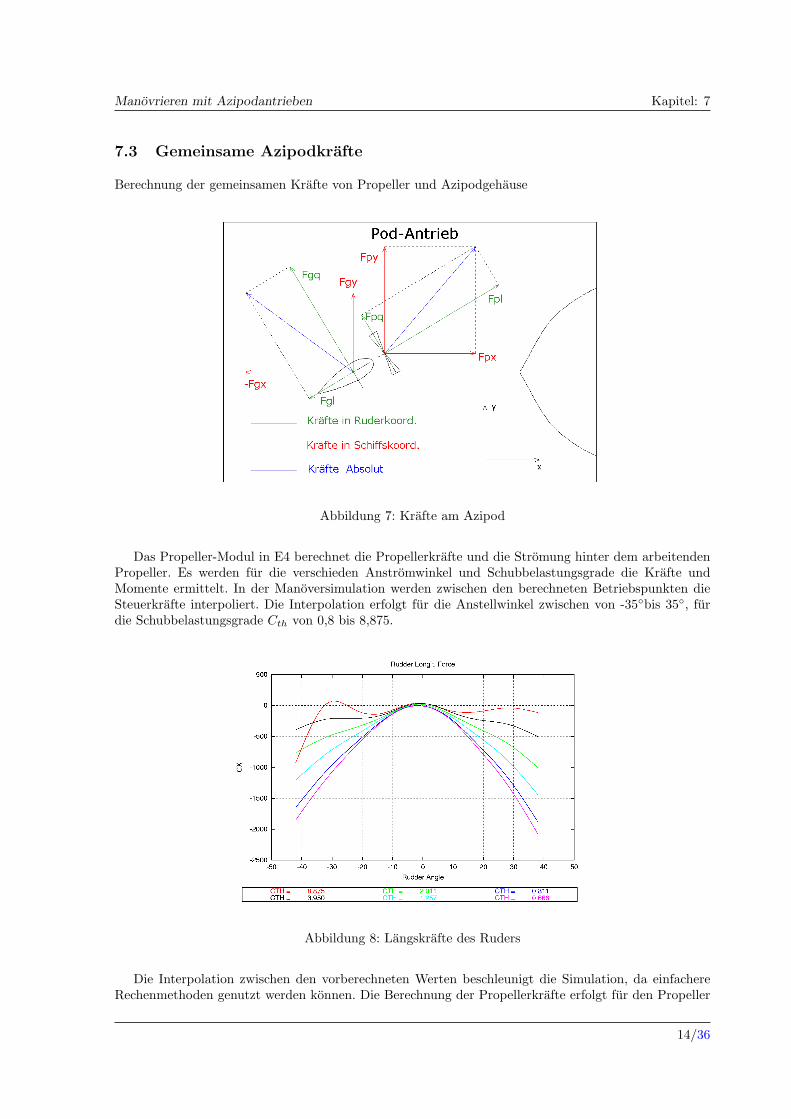
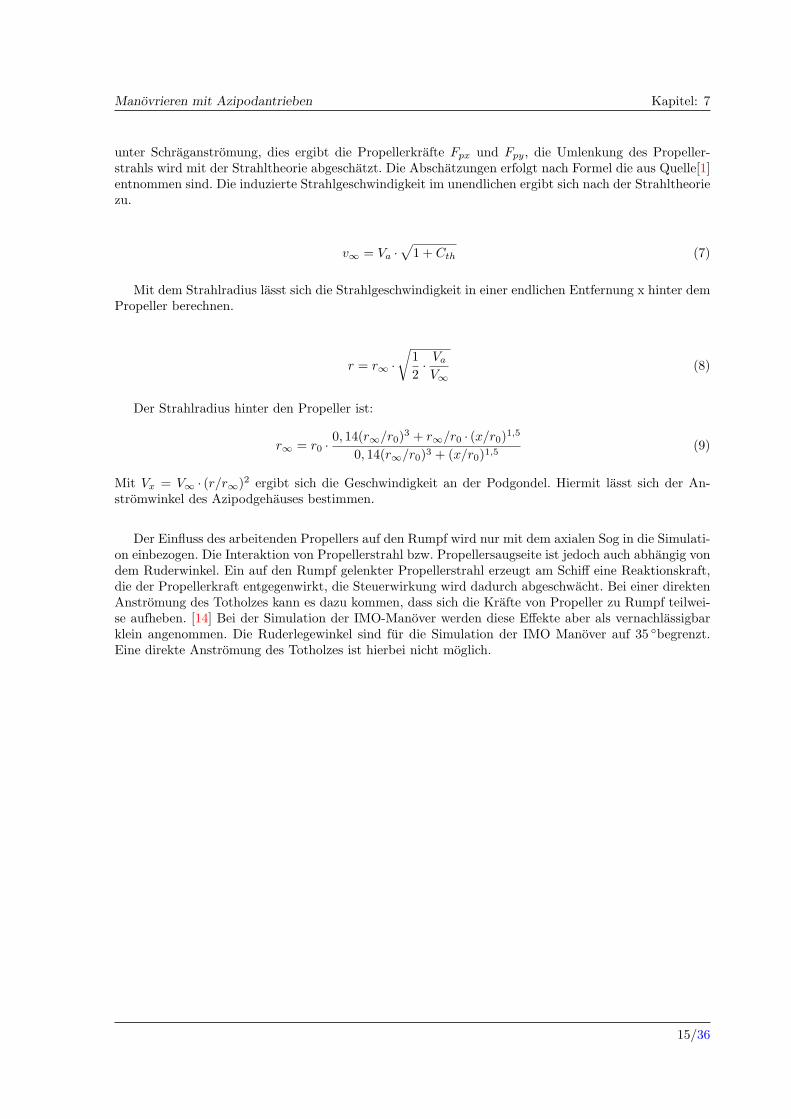
7.3 Gemeinsame Azipodkrafte
Berechnung der gemeinsamen Krafte von Propeller und Azipodgehause
Abbildung 7: Krafte am Azipod
Das Propeller-Modul in E4 berechnet die Propellerkrafte und die Stromung hinter dem arbeitendenPropeller. Es werden fur die verschieden Anstromwinkel und Schubbelastungsgrade die Krafte undMomente ermittelt. In der Manoversimulation werden zwischen den berechneten Betriebspunkten dieSteuerkrafte interpoliert. Die Interpolation erfolgt fur die Anstellwinkel zwischen von -35◦bis 35◦, furdie Schubbelastungsgrade Cth von 0,8 bis 8,875.
Abbildung 8: Langskrafte des Ruders
Die Interpolation zwischen den vorberechneten Werten beschleunigt die Simulation, da einfachereRechenmethoden genutzt werden konnen. Die Berechnung der Propellerkrafte erfolgt fur den Propeller
14/36
Manovrieren mit Azipodantrieben Kapitel: 7
unter Schraganstromung, dies ergibt die Propellerkrafte Fpx und Fpy, die Umlenkung des Propeller-strahls wird mit der Strahltheorie abgeschatzt. Die Abschatzungen erfolgt nach Formel die aus Quelle[1]entnommen sind. Die induzierte Strahlgeschwindigkeit im unendlichen ergibt sich nach der Strahltheoriezu.
v∞ = Va ·√
1 + Cth (7)
Mit dem Strahlradius lasst sich die Strahlgeschwindigkeit in einer endlichen Entfernung x hinter demPropeller berechnen.
r = r∞ ·√
12· Va
V∞(8)
Der Strahlradius hinter den Propeller ist:
r∞ = r0 ·0, 14(r∞/r0)3 + r∞/r0 · (x/r0)1,5
0, 14(r∞/r0)3 + (x/r0)1,5(9)
Mit Vx = V∞ · (r/r∞)2 ergibt sich die Geschwindigkeit an der Podgondel. Hiermit lasst sich der An-stromwinkel des Azipodgehauses bestimmen.
Der Einfluss des arbeitenden Propellers auf den Rumpf wird nur mit dem axialen Sog in die Simulati-on einbezogen. Die Interaktion von Propellerstrahl bzw. Propellersaugseite ist jedoch auch abhangig vondem Ruderwinkel. Ein auf den Rumpf gelenkter Propellerstrahl erzeugt am Schiff eine Reaktionskraft,die der Propellerkraft entgegenwirkt, die Steuerwirkung wird dadurch abgeschwacht. Bei einer direktenAnstromung des Totholzes kann es dazu kommen, dass sich die Krafte von Propeller zu Rumpf teilwei-se aufheben. [14] Bei der Simulation der IMO-Manover werden diese Effekte aber als vernachlassigbarklein angenommen. Die Ruderlegewinkel sind fur die Simulation der IMO Manover auf 35 ◦begrenzt.Eine direkte Anstromung des Totholzes ist hierbei nicht moglich.
15/36
Manovrieren mit Azipodantrieben Kapitel: 8
8 Ergebnisse Simulation Probefahrt
Die Ergebnisse liegen zum Teil im Form dimensionsloser Verhaltnisse, bezogen auf Lpp vor. Dies ver-einfacht den Vergleich mit dem IMO Kriterien. In den Tabellen sind die Originalwerte, die simuliertenWerte und, wenn vorhanden, die Grenzwerte angegeben. Bei Langen ist die Angabe mit Lpp dimensi-onslos gemacht worden.
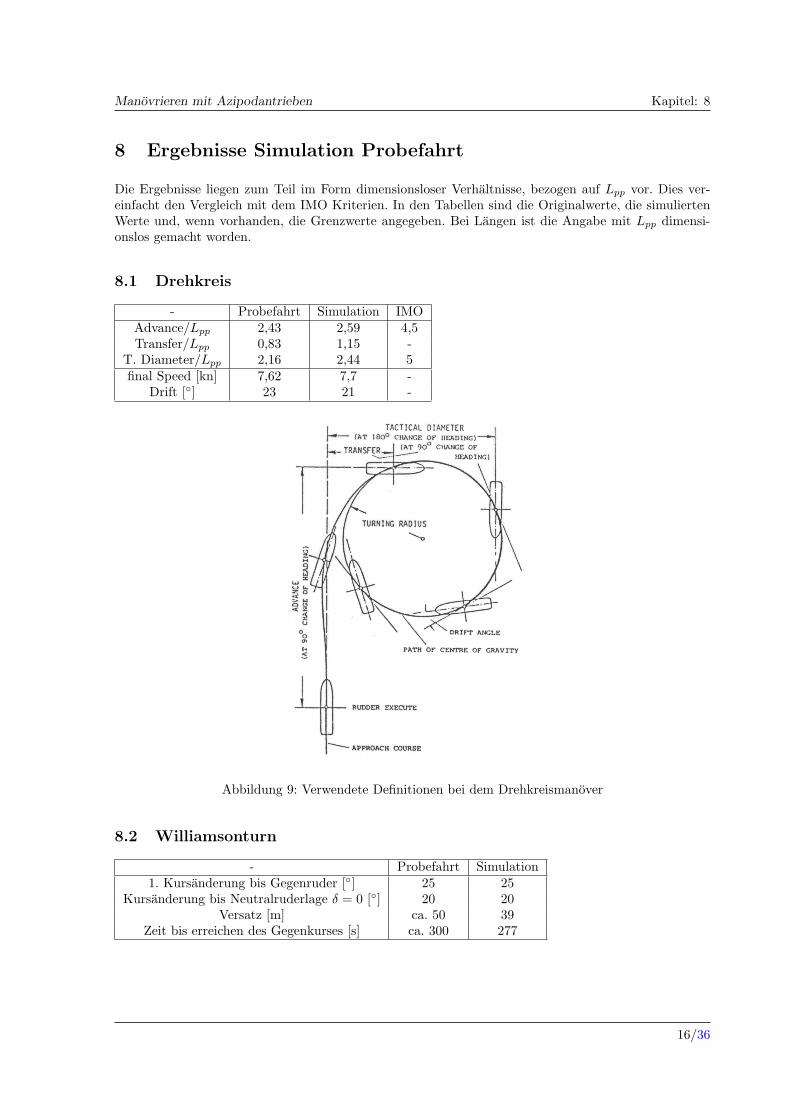
8.1 Drehkreis
- Probefahrt Simulation IMOAdvance/Lpp 2,43 2,59 4,5Transfer/Lpp 0,83 1,15 -
T. Diameter/Lpp 2,16 2,44 5final Speed [kn] 7,62 7,7 -
Drift [◦] 23 21 -
Abbildung 9: Verwendete Definitionen bei dem Drehkreismanover
8.2 Williamsonturn
- Probefahrt Simulation1. Kursanderung bis Gegenruder [◦] 25 25
Kursanderung bis Neutralruderlage δ = 0 [◦] 20 20Versatz [m] ca. 50 39
Zeit bis erreichen des Gegenkurses [s] ca. 300 277
16/36
Manovrieren mit Azipodantrieben Kapitel: 8
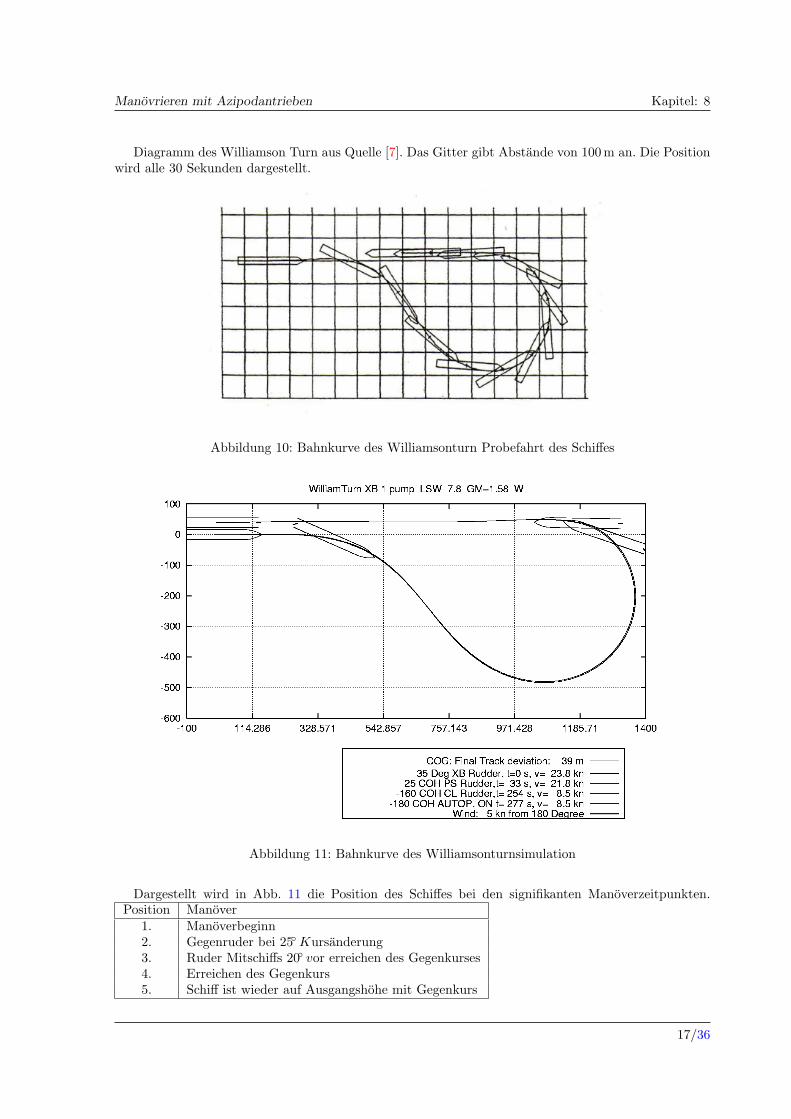
Diagramm des Williamson Turn aus Quelle [7]. Das Gitter gibt Abstande von 100m an. Die Positionwird alle 30 Sekunden dargestellt.
Abbildung 10: Bahnkurve des Williamsonturn Probefahrt des Schiffes
Abbildung 11: Bahnkurve des Williamsonturnsimulation
Dargestellt wird in Abb. 11 die Position des Schiffes bei den signifikanten Manoverzeitpunkten.Position Manover
1. Manoverbeginn2. Gegenruder bei 25◦Kursanderung3. Ruder Mitschiffs 20◦ vor erreichen des Gegenkurses4. Erreichen des Gegenkurs5. Schiff ist wieder auf Ausgangshohe mit Gegenkurs
17/36
Manovrieren mit Azipodantrieben Kapitel: 8
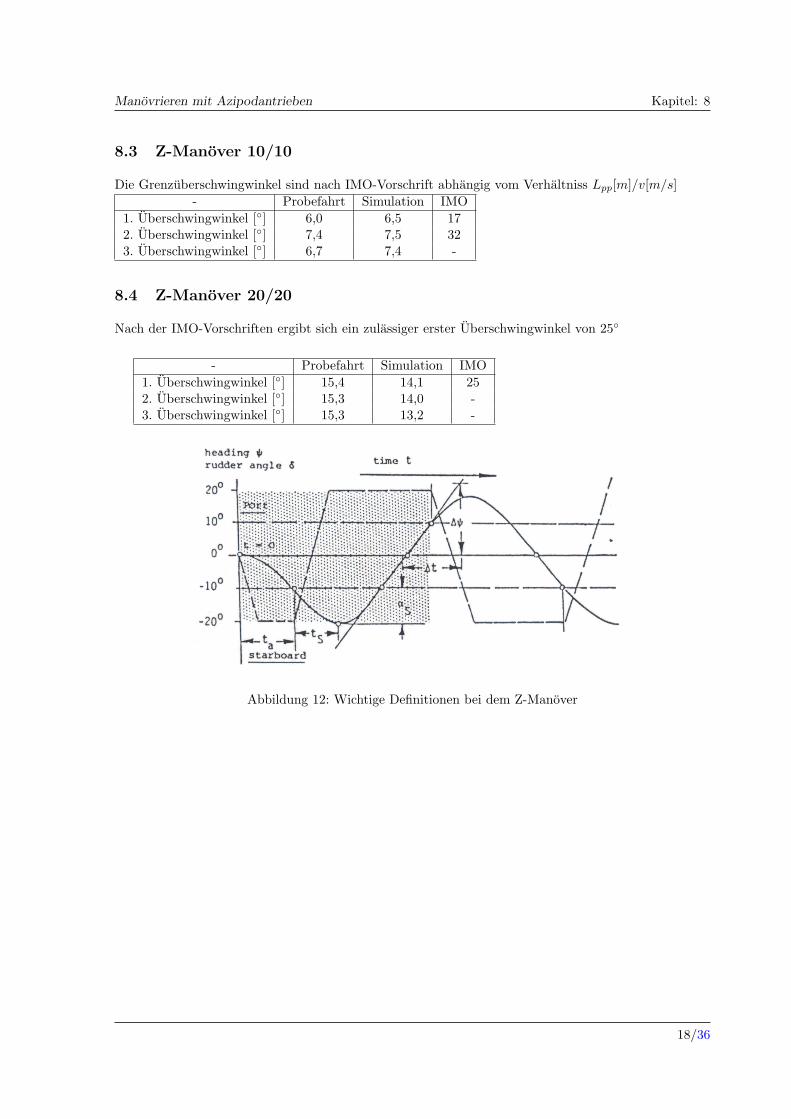
8.3 Z-Manover 10/10
Die Grenzuberschwingwinkel sind nach IMO-Vorschrift abhangig vom Verhaltniss Lpp[m]/v[m/s]- Probefahrt Simulation IMO
1. Uberschwingwinkel [◦] 6,0 6,5 172. Uberschwingwinkel [◦] 7,4 7,5 323. Uberschwingwinkel [◦] 6,7 7,4 -
8.4 Z-Manover 20/20
Nach der IMO-Vorschriften ergibt sich ein zulassiger erster Uberschwingwinkel von 25◦
- Probefahrt Simulation IMO1. Uberschwingwinkel [◦] 15,4 14,1 252. Uberschwingwinkel [◦] 15,3 14,0 -3. Uberschwingwinkel [◦] 15,3 13,2 -
Abbildung 12: Wichtige Definitionen bei dem Z-Manover
18/36

Manovrieren mit Azipodantrieben Kapitel: 9
9 Ergebnisse Simulation Modellversuch
Neben der Simulation der Probefahrten werden auch die Modellversuchsfahrten simuliert. Das Schiffwird im Maßstab 1:1 beibehalten und die Einflussgroßen auf den Modellmaßstab von 1:47 umgerechnetFur die Simulation der Modellversuche werden der Widerstand, der Nachstrom und die Leistung andie Modellbedingungen angepasst. Die Berechnung des equivalenten Modellwiderstandes erfolgt mit derWiderstandshypothese von Froude, unter Verwendung der ITTC 57 Korrelationskennline. Es wird ange-nommen, dass sich der Gesamtwiderstand des Schiffes aus dem Reibwiderstand und dem Restwiderstandzusammensetzt.
Ct = Cr + Cf (10)
Der Reibwiderstandsbeiwert des Modell lasst sich mit der ITTC 57 Formel abschatzen. Der Wellen-widerstandsbeiwert bleibt konstant bei gleicher Froudezahl.
Cf =0, 075
(log10(Rn)− 2)2(11)
Umrechnung des Nachstroms von Schiff zu Modell.
1−Ws
1−Wm= 1, 020 (12)
Die Nachstromziffer von 0,16 der Großausfuhrung wird mit 0,176 fur das Modell abgeschatzt. Umdie Geschwindigkeit nach Froudescher Ahnlichkeit zu fahren, ist jedoch erheblich mehr Leistung notig.Zu beachten ist, dass sich das Verhaltnis von Rest- zu Reibwiderstand sich von ca. Rr/Rf = 0, 7 furdas Schiff stark andert. Bei dem Modell ergibt sich das Verhaltniss zu ca. Rr/Rf = 0, 35. In demGeschwindigkeitbereich, bei den die Manover gefahren wurden, hat der Restwiderstand ein noch kleine-ren Anteil am Gesamtwiderstand. Die benotigte Leistung wird daher bei dem Modell stark durch denReibwiderstand beeinflusst. Das Modell benotigt umgerechnet auf dem Maßstab 1:1 eine Leistung vonca. 60.000 kW.
Fur das Modell treten durch die Maßstabseffekte verschiedene Anderungen auf.
• Großerer Reibwiderstand, damit eine Erhohung des Gesamtwiderstandes.
• Durch die Anderung der Grenzschichtverhaltnisse tritt eine Veranderung des Nachstroms auf. DerNachstrom wird großer.
• Infolge der Verlangsamung der Anstromung und des großeren benotigten Schubes steigt der Schub-belastungsgrad des Propellers an.
Cth =T
ρ
2· v2
a ·πD2
4
(13)
• Nach der Strahltheorie steigt mit den Schubbelastungsgrad die Große er induzierten Geschwindig-keit des Propellers.
v∞ = va ·√
1 + Cth (14)
19/36

Manovrieren mit Azipodantrieben Kapitel: 9
• Durch den mitgedrehten und der starkeren belasteten Propeller steigt die Geschwindigkeit, mitder das Ruder bzw. Gehause angestromt wird, der effektive Anstellwinkel sinkt.
Die Propellerkraft steigt an, die Auswirkung der Maßtabseffekte auf die Ruderkraft schwachen sichgegenseitig ab. Welcher Effekt fur das Ruder uberwiegt, kann erst die Simulation ergeben.
9.1 Drehkreis
- Modellversuch Simulation IMOAdvance/Lpp 2,00 2,45 4,5Transfer/Lpp 0,66 0,96 -
T. Diameter/Lpp 1,66 2,21 5
9.2 Williamsonturn
- Modellversuch Simulation1. Kursanderung bis Gegenruder [◦] 25 25
Kursandeung bis Neutralruderlage δ = 0 [◦] 20 20Versatz [m] - 36
Zeit bis Erreichen des Gegenkurses [s] - 239
9.3 Z-Manover 10/10
- Modellversuch Simulation IMO1. Uberschwingwinkel [◦] 5,6 6,4 172. Uberschwingwinkel[◦] 7,3 7,7 323. Uberschwingwinkel [◦] 7,5 7,6 -
9.4 Z-Manover 20/20
- Modellversuch Simulation IMO1. Uberschwingwinkel [◦] 12,4 14,7 252. Uberschwingwinkel [◦] 13,7 14,8 -3. Uberschwingwinkel [◦] 13,3 14,4 -
20/36
Manovrieren mit Azipodantrieben Kapitel: 11
10 Vergleiche der Manoverergebnisse
Die Ergebnisse der Berechnungen werden nun mit der Probefahrt und den Modellversuchen verglichen. Jenachdem welche Kombination verglichen wird, konnen verschiedene Zusammenhange festgestellt werden.Folgende Kombinationen sind verglichen worden:
• Vergleich zwischen den Probefahrtsergebnissen und den E-4 Simulationen fur das Schiff.Hiermit kann die Gute der Simulation fur das Schiff festgestellt werden, bzw. es konnen Parameterfur die Simulation gewonnen werden. Da man die Ergebnisse der verschieden Manover kennt, wer-den die variablen Eingangsgroßen der Rechnung angepasst, um das Manovrierverhalten moglichstgenau zu simulieren. Diese Großen werden dann auch fur die Simulation des Modellversuchs ver-wendet.
• Vergleich der Ergebnisse von Modellversuch zu simulierten Modellversuch.Hierbei konnen die Annahmen bezuglich der Maßstabseffekte uberpruft werden. Wenn beide Ver-gleiche befriedigende Ergebnisse liefern, kann man davon ausgehen, dass die Krafte und Momentein der Simulation in physikalisch richtigen Bereich liegen.
• Unterschiede zwischen der simulierten Probefahrten und den simulierten Modellversuchen.In den beiden ersten Vergleichen konnen immer nur die Bahnkurven, Zeiten oder Winkel vergli-chen werden. Die Ursachen hierzu sind aber unbekannt. Nur bei der Simulation kennt man dieauftretenden Krafte und Momente. Erst hiermit kann man die Ursachen des unterschiedlichenVerhaltens von Schiff und Modell analysieren.
10.1 Vergleich Probefahrtsmanovern und Simulation Schiff
• DrehkreismanoverDie Ergebnisse lassen den Schluss zu, dass sowohl die Drehfreudigkeit als auch die Andrehfahigkeitin der Simulation unterschatzt werden.
• WilliamsonturnBei der Simulation des Williamson Turn zeigt sich ein sehr ahnlicher Bahnverlauf. Die Schleife,die das Schiff fahrt ist aber langgezogener. Es zeigt sich wieder eine zu geringe Andrehfahigkeit zuBeginn des Manovers. Der Anteil des stationaren Drehens wird relativ gut wiedergeben, ebensodas Einsteuern des Schiffes auf den Gegenkurs.
• Z-ManoverDie Simulationsergebnisse geben das Verhalten des Schiffes sehr genau wieder. Aufgrund der un-terschiedlichen Umweltbedingungen bei den gefahrenen Z-Manovern schwanken die Ergebnisse vonMessung zu Messung. Die simulierten Winkel sind zum Teil im Bereich der verschieden gemessenenWinkel.
10.2 Vergleich Modellversuchsergebnissen und Modellsimulation
Die Ergebnisse der simulierten Modellversuche zeigen, wie die Modellversuche selbst, eine Uberschatzungder Drehfahigkeit. Diese zeigt sich bei der Drehkreisfahrt am deutlichsten. Das Modell manovriert hier-bei sehr viel besser als das Schiff und auch besser als bei der Simulation des Modellversuchs vorhergesagt.Bei den Z-Manovern ist dieses Verhalten nicht so eindeutig. Das Modell hat etwas kleinere Uberschwing-winkel, die Simulation der Modellmanover sagt aber etwas großere voraus.
21/36
Manovrieren mit Azipodantrieben Kapitel: 11
11 Vergleich der simulierten Manover
Die ersten beiden Vergleiche haben ergeben, dass die Simulationen das Manovrierverhalten relativ gutwiedergegeben haben. Die Unterschiede sind klein und in sich schlussig. Da die Bewegungen bzw. die Be-schleunigungen von den errechneten Kraften abhangen, ist daraus zu schließen, dass die Krafte ebenfallsrichtig berechnet worden sind. Es werden die aus der Simulation gewonnenen Krafte und Anstromwinkelvon Azipodgondel und Propeller verglichen.Im Folgenden werden die Unterschiede bei den einzelnen Manovern dargestellt.
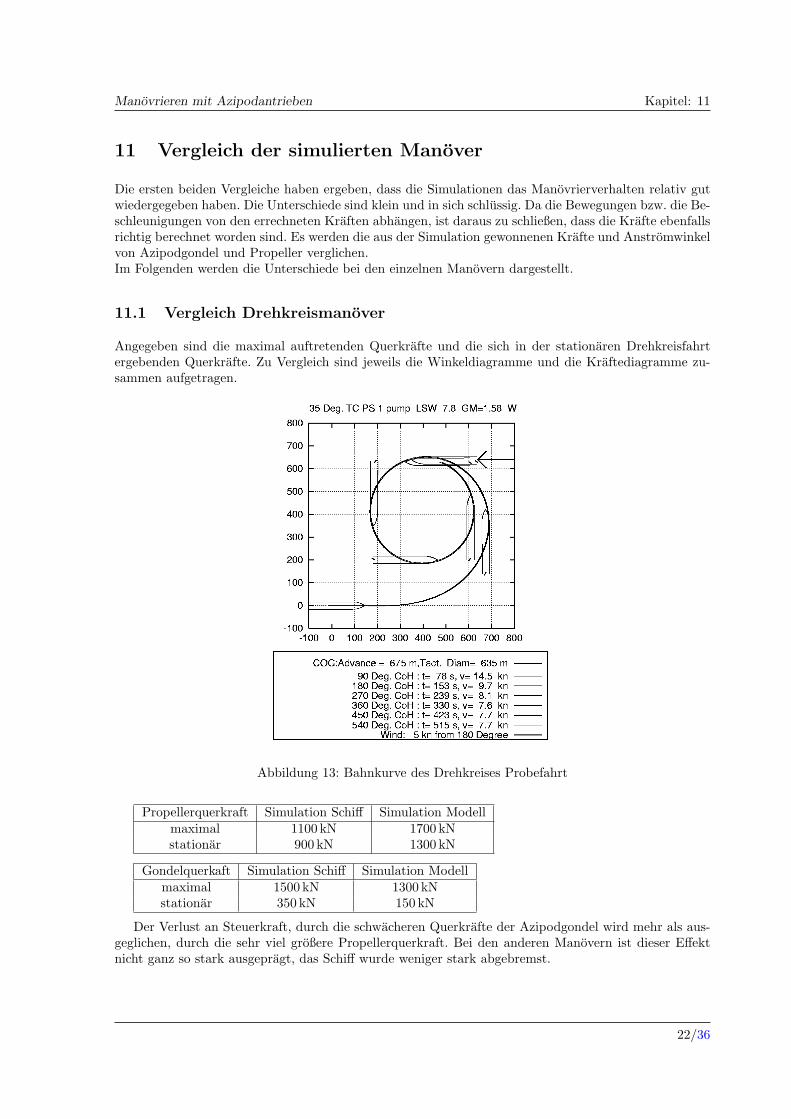
11.1 Vergleich Drehkreismanover
Angegeben sind die maximal auftretenden Querkrafte und die sich in der stationaren Drehkreisfahrtergebenden Querkrafte. Zu Vergleich sind jeweils die Winkeldiagramme und die Kraftediagramme zu-sammen aufgetragen.
Abbildung 13: Bahnkurve des Drehkreises Probefahrt
Propellerquerkraft Simulation Schiff Simulation Modellmaximal 1100 kN 1700 kNstationar 900 kN 1300 kN
Gondelquerkaft Simulation Schiff Simulation Modellmaximal 1500 kN 1300 kNstationar 350 kN 150 kN
Der Verlust an Steuerkraft, durch die schwacheren Querkrafte der Azipodgondel wird mehr als aus-geglichen, durch die sehr viel großere Propellerquerkraft. Bei den anderen Manovern ist dieser Effektnicht ganz so stark ausgepragt, das Schiff wurde weniger stark abgebremst.
22/36
Manovrieren mit Azipodantrieben Kapitel: 11
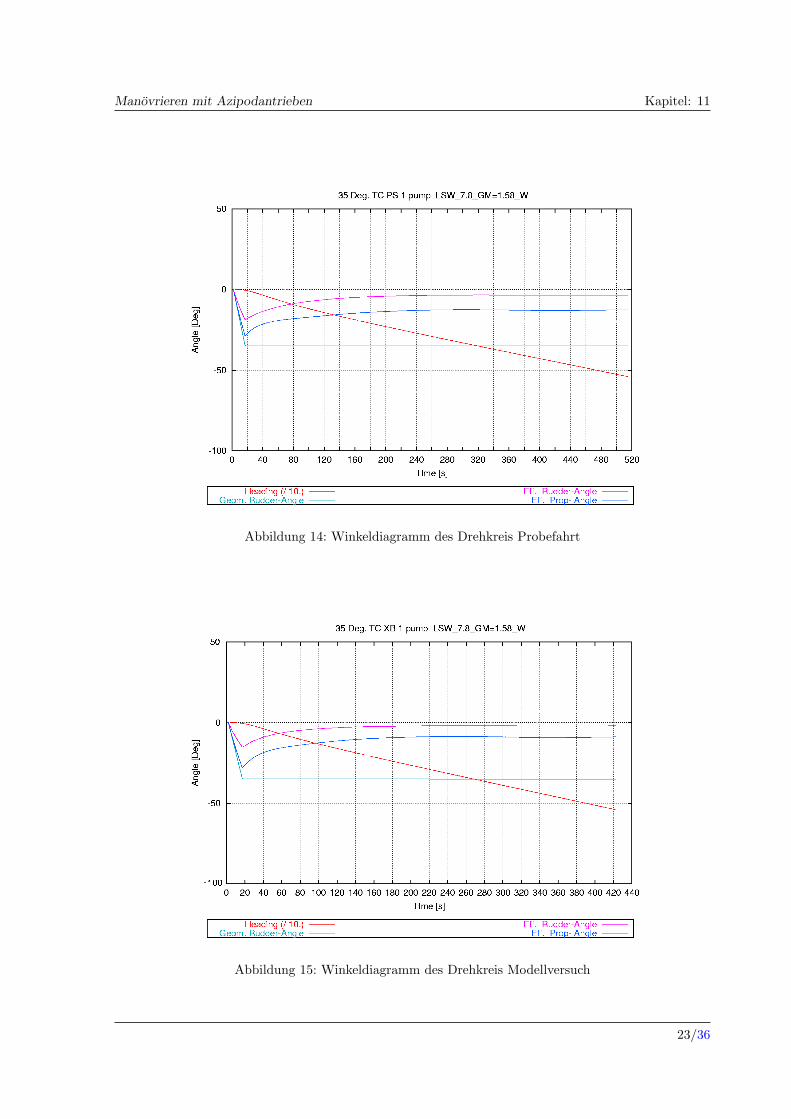
Abbildung 14: Winkeldiagramm des Drehkreis Probefahrt
Abbildung 15: Winkeldiagramm des Drehkreis Modellversuch
23/36

Manovrieren mit Azipodantrieben Kapitel: 11
Abbildung 16: Kraftdiagramm des Drehkreis Probefahrt
Abbildung 17: Kraftdiagramm des Drehkreis Modellversuch
24/36
Manovrieren mit Azipodantrieben Kapitel: 11
11.2 Vergleich Williamsonturn
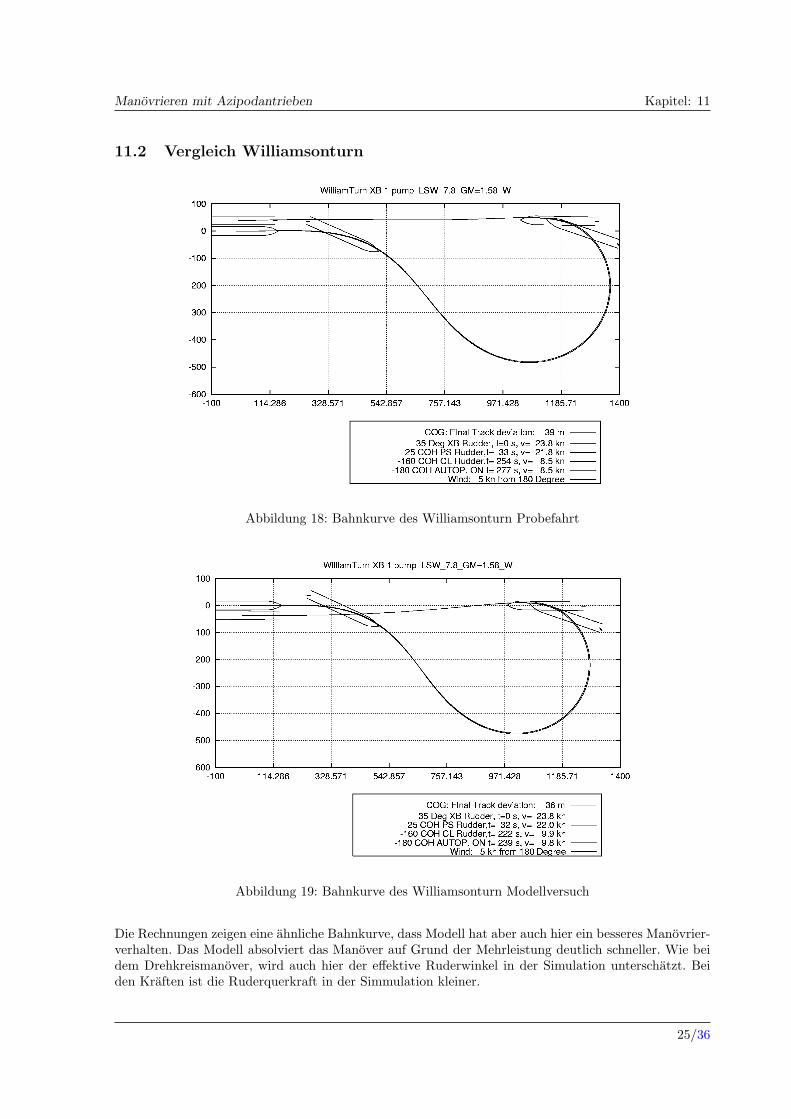
Abbildung 18: Bahnkurve des Williamsonturn Probefahrt
Abbildung 19: Bahnkurve des Williamsonturn Modellversuch
Die Rechnungen zeigen eine ahnliche Bahnkurve, dass Modell hat aber auch hier ein besseres Manovrier-verhalten. Das Modell absolviert das Manover auf Grund der Mehrleistung deutlich schneller. Wie beidem Drehkreismanover, wird auch hier der effektive Ruderwinkel in der Simulation unterschatzt. Beiden Kraften ist die Ruderquerkraft in der Simmulation kleiner.
25/36
Manovrieren mit Azipodantrieben Kapitel: 11
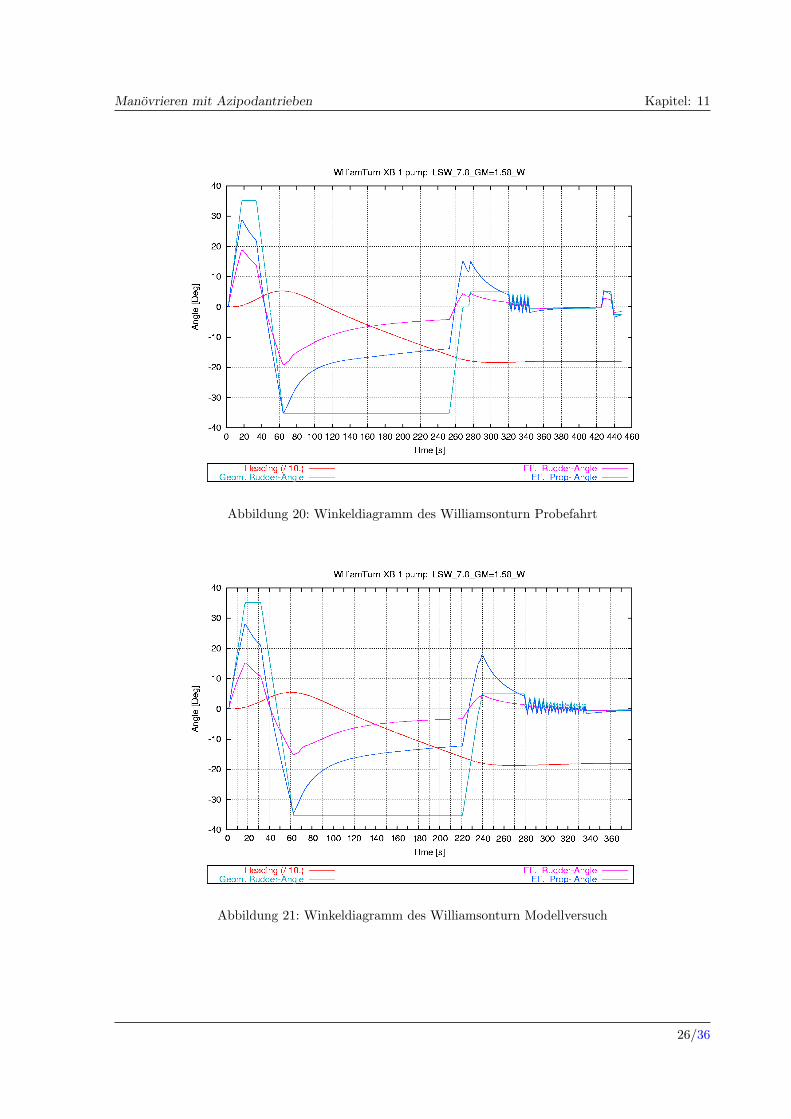
Abbildung 20: Winkeldiagramm des Williamsonturn Probefahrt
Abbildung 21: Winkeldiagramm des Williamsonturn Modellversuch
26/36

Manovrieren mit Azipodantrieben Kapitel: 11
Abbildung 22: Kraftdiagramm des Williamsonturn Probefahrt
Abbildung 23: Kraftdiagramm des Williamsonturn Modellversuch
27/36
Manovrieren mit Azipodantrieben Kapitel: 11
11.3 Vergleich Z-Manover 10/10
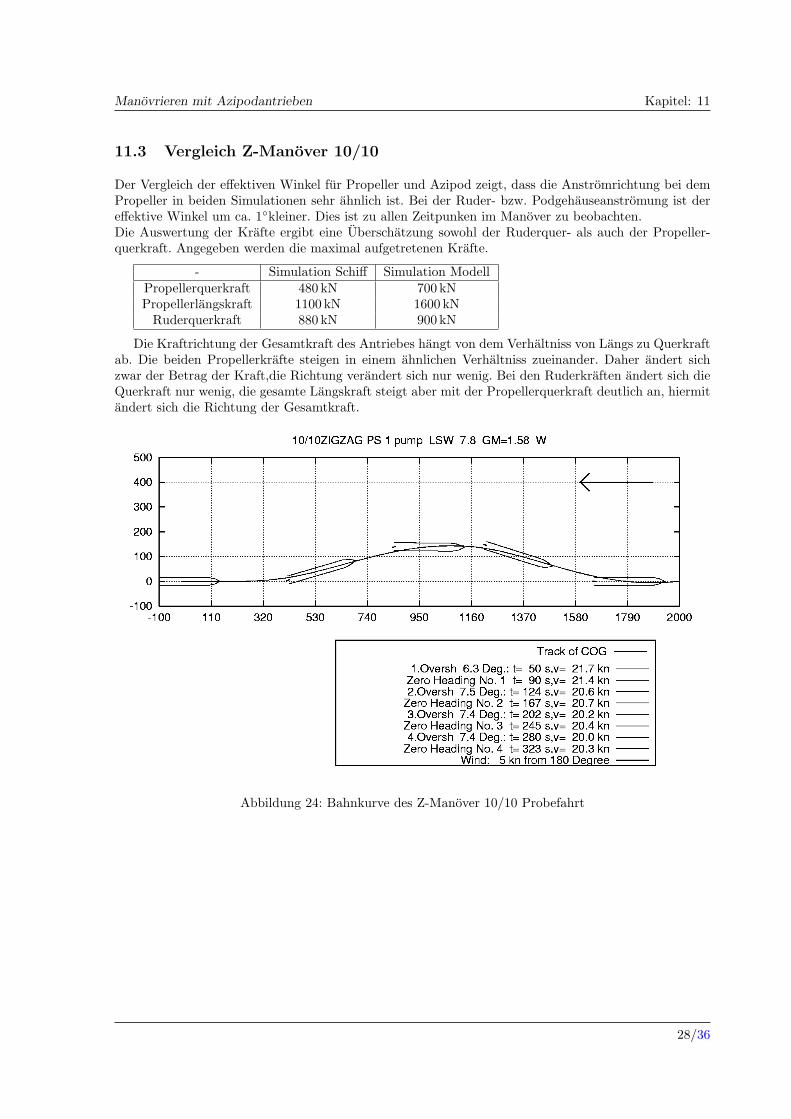
Der Vergleich der effektiven Winkel fur Propeller und Azipod zeigt, dass die Anstromrichtung bei demPropeller in beiden Simulationen sehr ahnlich ist. Bei der Ruder- bzw. Podgehauseanstromung ist dereffektive Winkel um ca. 1◦kleiner. Dies ist zu allen Zeitpunken im Manover zu beobachten.Die Auswertung der Krafte ergibt eine Uberschatzung sowohl der Ruderquer- als auch der Propeller-querkraft. Angegeben werden die maximal aufgetretenen Krafte.
- Simulation Schiff Simulation ModellPropellerquerkraft 480 kN 700 kNPropellerlangskraft 1100 kN 1600 kN
Ruderquerkraft 880 kN 900 kN
Die Kraftrichtung der Gesamtkraft des Antriebes hangt von dem Verhaltniss von Langs zu Querkraftab. Die beiden Propellerkrafte steigen in einem ahnlichen Verhaltniss zueinander. Daher andert sichzwar der Betrag der Kraft,die Richtung verandert sich nur wenig. Bei den Ruderkraften andert sich dieQuerkraft nur wenig, die gesamte Langskraft steigt aber mit der Propellerquerkraft deutlich an, hiermitandert sich die Richtung der Gesamtkraft.
Abbildung 24: Bahnkurve des Z-Manover 10/10 Probefahrt
28/36
Manovrieren mit Azipodantrieben Kapitel: 11
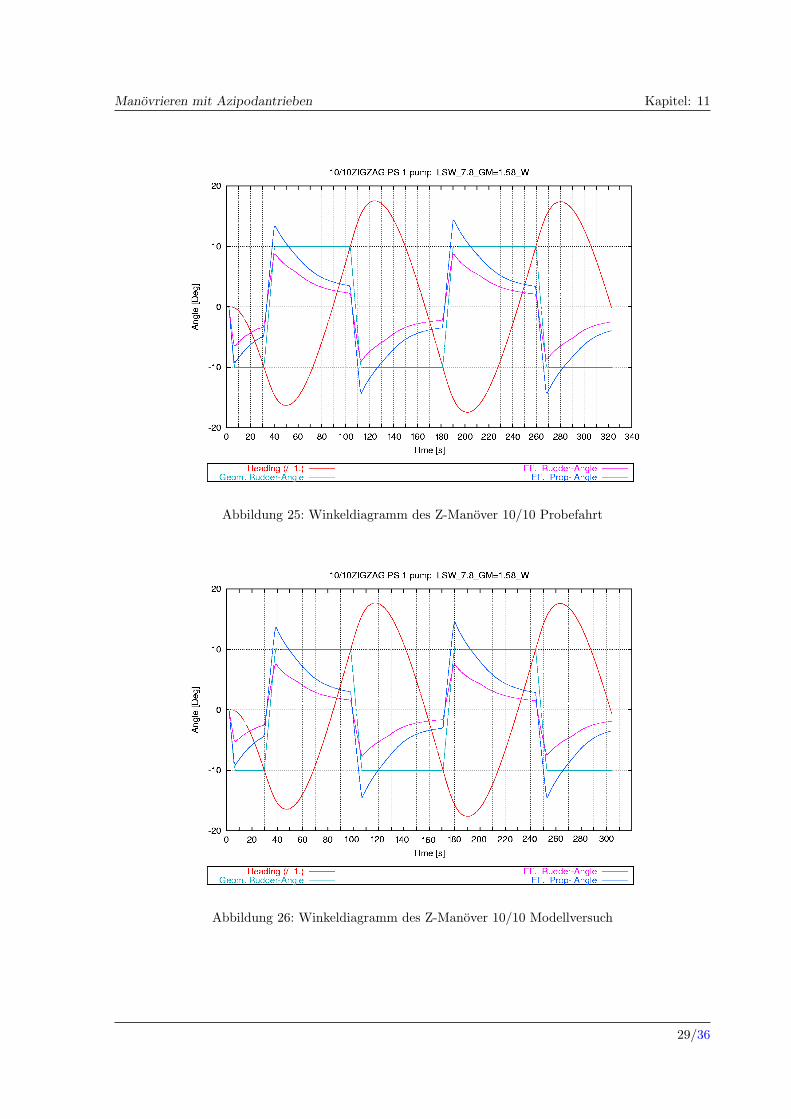
Abbildung 25: Winkeldiagramm des Z-Manover 10/10 Probefahrt
Abbildung 26: Winkeldiagramm des Z-Manover 10/10 Modellversuch
29/36

Manovrieren mit Azipodantrieben Kapitel: 11
Abbildung 27: Kraftdiagramm des Z-Manover 10/10 Probefahrt
Abbildung 28: Kraftdiagramm des Z-Manover 10/10 Modellversuch
30/36
Manovrieren mit Azipodantrieben Kapitel: 11
11.4 Vergleich Z-Manover 20/20
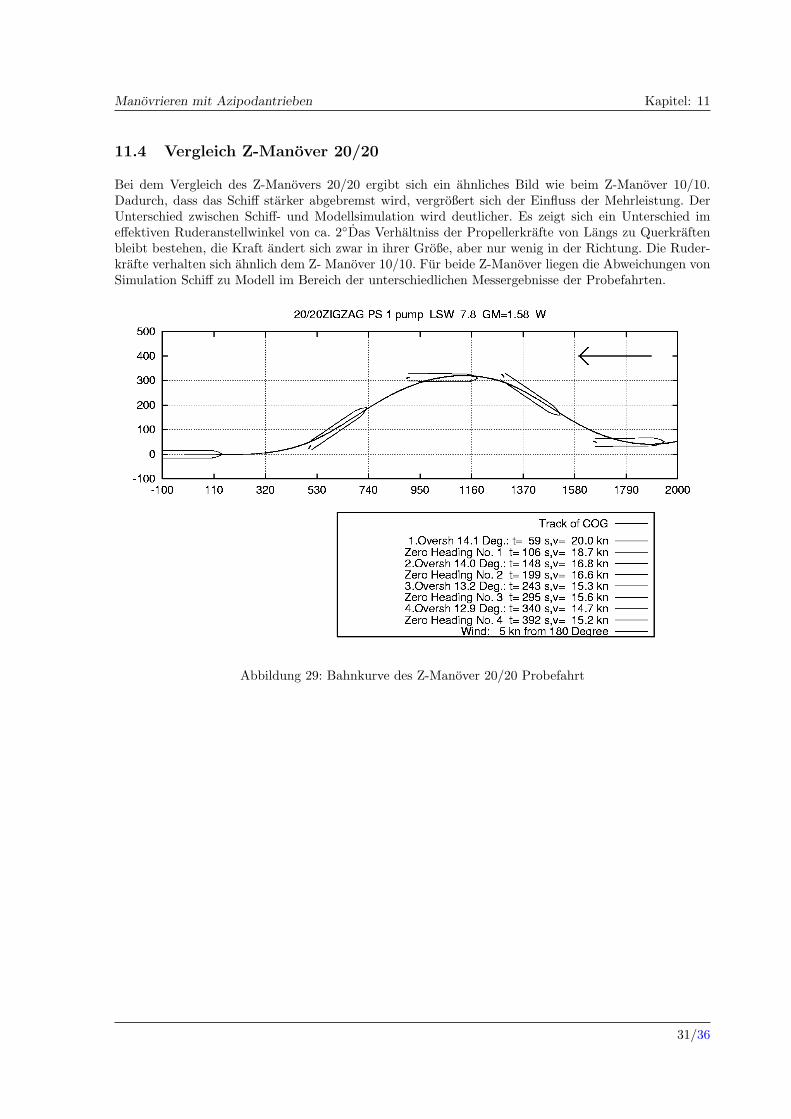
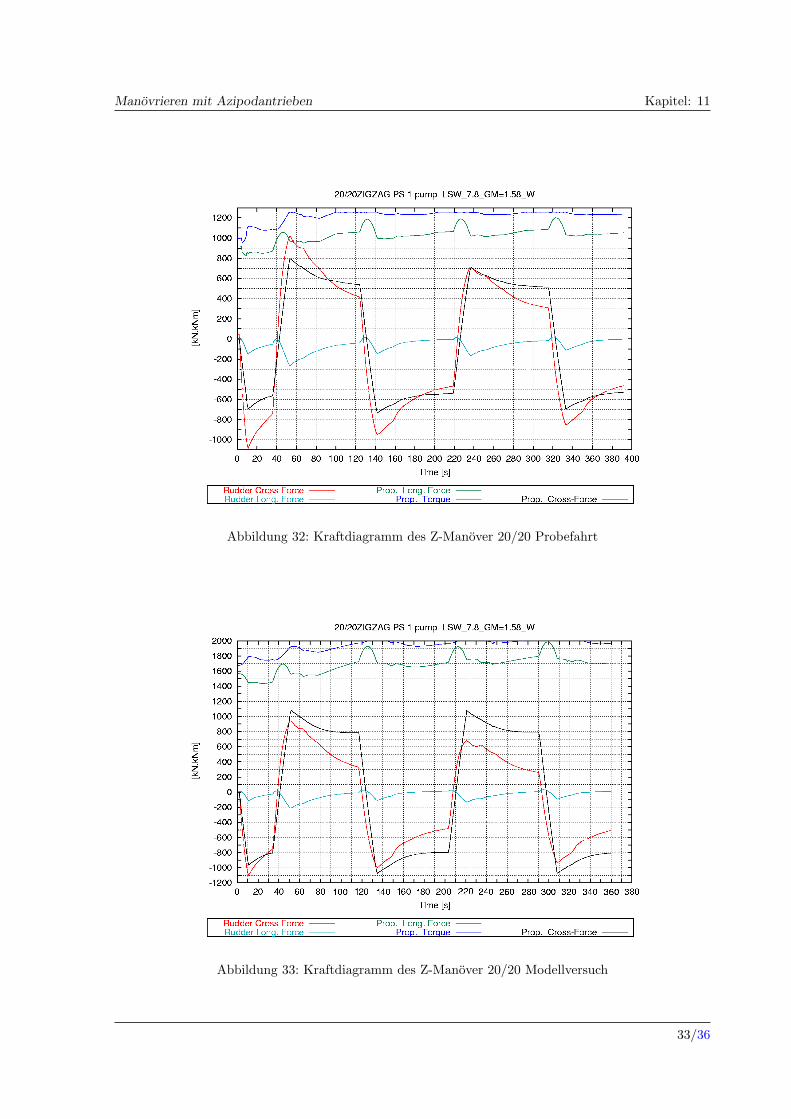
Bei dem Vergleich des Z-Manovers 20/20 ergibt sich ein ahnliches Bild wie beim Z-Manover 10/10.Dadurch, dass das Schiff starker abgebremst wird, vergroßert sich der Einfluss der Mehrleistung. DerUnterschied zwischen Schiff- und Modellsimulation wird deutlicher. Es zeigt sich ein Unterschied imeffektiven Ruderanstellwinkel von ca. 2◦Das Verhaltniss der Propellerkrafte von Langs zu Querkraftenbleibt bestehen, die Kraft andert sich zwar in ihrer Große, aber nur wenig in der Richtung. Die Ruder-krafte verhalten sich ahnlich dem Z- Manover 10/10. Fur beide Z-Manover liegen die Abweichungen vonSimulation Schiff zu Modell im Bereich der unterschiedlichen Messergebnisse der Probefahrten.
Abbildung 29: Bahnkurve des Z-Manover 20/20 Probefahrt
31/36

Manovrieren mit Azipodantrieben Kapitel: 11
Abbildung 30: Winkeldiagramm des Z-Manover 20/20 Probefahrt
Abbildung 31: Winkeldiagramm des Z-Manover 20/20 Modellversuch
32/36
Manovrieren mit Azipodantrieben Kapitel: 11
Abbildung 32: Kraftdiagramm des Z-Manover 20/20 Probefahrt
Abbildung 33: Kraftdiagramm des Z-Manover 20/20 Modellversuch
33/36

Manovrieren mit Azipodantrieben Kapitel: 12
12 Auswertung der Ergebnisse
12.1 Schiffsmanover
Es hat sich gezeigt dass, man das Manovrierverhalten mit der E-4 Simulation mit guten Ergebnissenbestimmen kann. Wenn es um die Einhaltung der IMO-Grenzen bei Drehkreis und Z-Manover gehtliefert die Simulation brauchbare Werte. Im Vergleich von Modellversuch zu Simulation liefert die Simu-lation deutlich bessere Ergebnisse. Da die Manoverergebnisse bekannt waren, konnte bei der Simulationfur verschieden Einflussgroßen Werte gewonnen werden, durch die Variation dieser Parameter. DasManovrierverhalten konnte bzw. brauchte nur im geringen Maß ’angepasst‘ werden. Schon mit den Gr-undeinstellungen wurde das Verhalten des Schiffes gut wiedergegeben. Mit den Parametern wurde dieSimulation dann ’feinjustiert‘.
12.2 Modellmanover
Die vom Modellversuch bekannten Maßstabseffekte sind bei der Simulation nicht im vollen Umfang auf-getreten. Die Annahme, dass sich nur der Widerstand und der Nachstrom andert zwischen Modell undGroßausfuhrung beschreibt die Stromungssituation bei dem Manover nicht vollstandig. Der Modellver-such ergibt ein noch geringeren Drehkreis als in der Simulation des Manovers vorhergesagt. Bei dem Z-Manovern stimmen die Ergebnisse fur Versuch und Simulation relativ gut uberein.
Die Probleme ergeben sich hauptsachlich aus den auftretenden Propellersteuerkraften. Anders, alsbei einem Propulsionsversuch mit konventionellen Antrieb, bei dem axial mehr Widerstand durchmehr Schub ausgeglichen werden kann, ist bei den Manovrierversuchen das Krafteverhaltniss zwischenPropeller- und Rumpfkraften verandert. Mit der verwendeten ITTC 57 Korrelationskennlinie wird derReibungseinfluss am drift- und gierfreien Schiff beschrieben. Die beim Manovrieren auftretenden Kraftesind zum Teil durch Ablosung verursacht. Diese viskosen Effekte lassen sich aber nicht einfach mit einerReibungskennlinie umrechnen.Um aber auf die maßstabsgerechte Geschwindigkeit zu kommen, benotig man diese zusatzliche Leistungfur die Azipodpropeller. Entscheidend fur den Unterschied im Manovrierverhalten ist die vergroßerteLeistung der Azipode. Je starker sie zum Steuern, als fur den Vortrieb genutzt werden, um so deutlicherzeigt sich der Leistungsunterschied im Manovrierverhalten.Bei den untersuchten Pod-Antrieben wird jedoch ein erheblicher Teil der Steuerkraft durch die Gondelverursacht. Dieser Anteil schwacht sich im Modellversuch ab. Wenn die Pod-Gondel aber nur Gehause furein Elektromotor ist und nicht als Ruder angesehen bzw. verwendet wird, tritt nur noch der uberschatzeAnteil der Propellerquerkraft auf.
34/36
Manovrieren mit Azipodantrieben Kapitel: 12
Literatur
[1] J. Brix(Hrsg.): Manouvering Technical Manual Seehafen Verlag Hamburg, Hamburg, 1993
[2] F. Gutsche: Untersuchung von Schiffsschrauben in schrager Anstronung Schiffbauforschung 3, Ro-stock, 1964
[3] S. Kruger: Manovrieren und Manovrierorgane. Vorlesungsmanuskrips Hamburg, TUHH AB 3-14,1999
[4] S. Kruger, A. Urban: E4 Anleitung: Manovrieren / Azimuth Hamburg, TUHH AB 3-14, 2000
[5] S. Kruger: E4 Anleitung: Manoeuvring simulations / full scale trials, Hamburg, TUHH AB 3-14,2001
[6] S. Kruger, H. Soding: E4 Anleitung: Manoevering Theoretical Background, Hamburg, TUHH AB3-14, 2002
[7] R. Kurino, L. Bystrom: Manouvering with Pods: Modell tests and Sea Trials of M/S Costa Atlantica,Proceedings of the 8th International Marine Conference, Athens, Greec, 2003
[8] K. Meyne , A. Nollte : Experimentelle Untersuchung der hydrodynamischen Krafte und Momentean einem Flugel eines Schiffspropellers bei schrager Anstromung, Schiff und Hafen, Heft 5/1969 S.359 ff, Hamburg, 1969
[9] P. Oltmann: Nachstrommessungen mit einem Schiffsmodell der Serie 60, Hamburg, Instituit furschiffbau der Universitat Hamburg, 1976
[10] H. Soding: Manovrierfahigkeit von Schiffen, Vorlesungsmanuskript, IfS, Hamburg, 1995
[11] H. Soding: Program Paneel, TUHH AB 3-13, Hamburg, 2002
[12] H. Soding: Ruderkraftberechnung mit einem Paneelverfahren, IfS, Hamburg, 1997
[13] A. Urban: Manovrieren von Schiffen mit Azipod-Antrieben Diplomarbeit Univ. Duisburg, 1999
[14] E. Wolters: Erfahrungen mit Podantrieben aus der Sicht eines Betreibers STG-Vortrag, Weener,2002
[15] Costa Atlantica: a Panamax-Max cruise ship, Significant Ships S. 28 ff, 2000
[16] Hansa: Newbuildings: Costa Atlantica, Hamburg, 2000
[17] ABB, Frontrunner 1/2000, Helsinki, 2000
[18] Kvaerner Masa-Yard Inc.:PANAMAX, Helsinki, 2001
35/36
Manovrieren mit Azipodantrieben Kapitel: 12
Abbildungsverzeichnis
1 Koordinatensystem des Schiffes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Seitenansicht des Schiffes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Zeichnung eines Azipodantriebes mit Schiffstruktur und Rudermaschine . . . . . . . . . 6
4 Skizze der Anstromung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
5 Verhaltniss Querkraft zu Schub (Quelle [13]) . . . . . . . . . . . . . . . . . . . . . . . . . 12
6 Krafte am Pod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
7 Krafte am Azipod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
8 Langskrafte des Ruders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
9 Verwendete Definitionen bei dem Drehkreismanover . . . . . . . . . . . . . . . . . . . . 16
10 Bahnkurve des Williamsonturn Probefahrt des Schiffes . . . . . . . . . . . . . . . . . . . 17
11 Bahnkurve des Williamsonturnsimulation . . . . . . . . . . . . . . . . . . . . . . . . . . 17
12 Wichtige Definitionen bei dem Z-Manover . . . . . . . . . . . . . . . . . . . . . . . . . . 18
13 Bahnkurve des Drehkreises Probefahrt . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
14 Winkeldiagramm des Drehkreis Probefahrt . . . . . . . . . . . . . . . . . . . . . . . . . 23
15 Winkeldiagramm des Drehkreis Modellversuch . . . . . . . . . . . . . . . . . . . . . . . 23
16 Kraftdiagramm des Drehkreis Probefahrt . . . . . . . . . . . . . . . . . . . . . . . . . . 24
17 Kraftdiagramm des Drehkreis Modellversuch . . . . . . . . . . . . . . . . . . . . . . . . 24
18 Bahnkurve des Williamsonturn Probefahrt . . . . . . . . . . . . . . . . . . . . . . . . . . 25
19 Bahnkurve des Williamsonturn Modellversuch . . . . . . . . . . . . . . . . . . . . . . . . 25
20 Winkeldiagramm des Williamsonturn Probefahrt . . . . . . . . . . . . . . . . . . . . . . 26
21 Winkeldiagramm des Williamsonturn Modellversuch . . . . . . . . . . . . . . . . . . . . 26
22 Kraftdiagramm des Williamsonturn Probefahrt . . . . . . . . . . . . . . . . . . . . . . . 27
23 Kraftdiagramm des Williamsonturn Modellversuch . . . . . . . . . . . . . . . . . . . . . 27
24 Bahnkurve des Z-Manover 10/10 Probefahrt . . . . . . . . . . . . . . . . . . . . . . . . . 28
25 Winkeldiagramm des Z-Manover 10/10 Probefahrt . . . . . . . . . . . . . . . . . . . . . 29
26 Winkeldiagramm des Z-Manover 10/10 Modellversuch . . . . . . . . . . . . . . . . . . . 29
27 Kraftdiagramm des Z-Manover 10/10 Probefahrt . . . . . . . . . . . . . . . . . . . . . . 30
28 Kraftdiagramm des Z-Manover 10/10 Modellversuch . . . . . . . . . . . . . . . . . . . . 30
29 Bahnkurve des Z-Manover 20/20 Probefahrt . . . . . . . . . . . . . . . . . . . . . . . . . 31
30 Winkeldiagramm des Z-Manover 20/20 Probefahrt . . . . . . . . . . . . . . . . . . . . . 32
31 Winkeldiagramm des Z-Manover 20/20 Modellversuch . . . . . . . . . . . . . . . . . . . 32
32 Kraftdiagramm des Z-Manover 20/20 Probefahrt . . . . . . . . . . . . . . . . . . . . . . 33
33 Kraftdiagramm des Z-Manover 20/20 Modellversuch . . . . . . . . . . . . . . . . . . . . 33
36/36