Embed Size (px)
Citation preview

s
SINAMICSPOLYGONLeitwertabhängige Kennlinienfunktionalität
Funktionshandbuch
10/2015Ausgabe

s
10/2015A5E33270639
SINAMICS
POLYGONLeitwertabhängige Kennlinienfunktionalität
Funktionshandbuch
Vorwort
Grundlegende Sicherheitshinweise 1
Anwendungsbereich, Merkmale 2
Installation und Aktivierung 3
Funktionsbeschreibung und Inbetriebnahme 4
Parameter 5
Funktionspläne 6
Störungen und Warnungen 7
Anhang A
Index
Gültig für
OA-Applikation Firmware-Version
POLYGON 1.1
zum Antrieb
SINAMICS S120/S150 ab 4.5
SINAMICS Integrated ab 4.5
Warnhinweiskonzept
Dieses Handbuch enthält Hinweise, die Sie zu Ihrer persönlichen Sicherheit sowie zur Vermeidung von Sachschäden beachten müssen. Die Hinweise zu Ihrer persönlichen Sicherheit sind durch ein Warndreieck hervorgehoben, Hinweise zu alleinigen Sachschäden stehen ohne Warndreieck. Je nach Gefährdungsstufe werden die Warnhinweise in abnehmender Reihenfolge wie folgt dargestellt.
Beim Auftreten mehrerer Gefährdungsstufen wird immer der Warnhinweis zur jeweils höchsten Stufe verwendet. Wenn in einem Warnhinweis mit dem Warndreieck vor Personenschäden gewarnt wird, dann kann im selben Warnhinweis zusätzlich eine Warnung vor Sachschäden angefügt sein.
Qualifiziertes Personal
Das zu dieser Dokumentation zugehörige Produkt/System darf nur von für die jeweilige Aufgabenstellung qualifiziertem Personal gehandhabt werden unter Beachtung der für die jeweilige Aufgabenstellung zugehörigen Dokumentation, insbesondere der darin enthaltenen Sicherheits- und Warnhinweise. Qualifiziertes Personal ist auf Grund seiner Ausbildung und Erfahrung befähigt, im Umgang mit diesen Produkten/Systemen Risiken zu erkennen und mögliche Gefährdungen zu vermeiden.
Bestimmungsgemäßer Gebrauch von Siemens-Produkten
Beachten Sie Folgendes:
Marken
Alle mit dem Schutzrechtsvermerk ® gekennzeichneten Bezeichnungen sind eingetragene Marken der Siemens AG. Die übrigen Bezeichnungen in dieser Schrift können Marken sein, deren Benutzung durch Dritte für deren Zwecke die Rechte der Inhaber verletzen kann.
Haftungsausschluss
Wir haben den Inhalt der Druckschrift auf Übereinstimmung mit der beschriebenen Hard- und Software geprüft. Dennoch können Abweichungen nicht ausgeschlossen werden, so dass wir für die vollständige Übereinstimmung keine Gewähr übernehmen. Die Angaben in dieser Druckschrift werden regelmäßig überprüft, notwendige Korrekturen sind in den nachfolgenden Auflagen enthalten.
GEFAHR
bedeutet, dass Tod oder schwere Körperverletzung eintreten wird, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
WARNUNG
bedeutet, dass Tod oder schwere Körperverletzung eintreten kann, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
VORSICHT
bedeutet, dass eine leichte Körperverletzung eintreten kann, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
ACHTUNG
bedeutet, dass Sachschaden eintreten kann, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
WARNUNG
Siemens-Produkte dürfen nur für die im Katalog und in der zugehörigen technischen Dokumentation vorgesehenen Einsatzfälle verwendet werden. Falls Fremdprodukte und -komponenten zum Einsatz kommen, müssen diese von Siemens empfohlen bzw. zugelassen sein. Der einwandfreie und sichere Betrieb der Produkte setzt sachgemäßen Transport, sachgemäße Lagerung, Aufstellung, Montage, Installation, Inbetriebnahme, Bedienung und Instandhaltung voraus. Die zulässigen Umgebungsbedingungen müssen eingehalten werden. Hinweise in den zugehörigen Dokumentationen müssen beachtet werden.
Siemens AGDivision Digital FactoryPostfach 48 4890026 NÜRNBERGDEUTSCHLAND
Dokumentbestellnummer: A5E3327063910/2015 Änderungen vorbehalten
Copyright © Siemens AG 2015.Alle Rechte vorbehalten
Rechtliche Hinweise
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 5
Vorwort
Informationen zur Dokumentation bei SINAMICS
Die SINAMICS-Dokumentation ist in 2 Ebenen gegliedert:
• Allgemeine Dokumentation/Kataloge
• Hersteller-/Service-Dokumentation
Die vorliegende Dokumentation ist Bestandteil der für SINAMICS entwickelten Technischen Kundendokumentation.
Diese Dokumentation enthält aus Gründen der Übersichtlichkeit nicht sämtliche Detailinformationen zu allen Typen des Produkts und kann auch nicht jeden denkbaren Fall der Aufstellung, des Betriebes oder der Instandhaltung berücksichtigen.
Der Inhalt dieser Dokumentation ist nicht Teil einer früheren oder bestehenden Vereinbarung, einer Zusage oder eines Rechtsverhältnisses oder ändert dies ab. Sämtliche Verpflichtungen von Siemens ergeben sich aus dem jeweiligen Kaufvertrag, der auch die vollständige und allein gültige Gewährleistungsregelung enthält. Diese vertraglichen Gewährleistungsbestimmungen werden durch die Ausführungen dieser Dokumentation weder erweitert noch beschränkt.
Adressat
Die vorliegende Dokumentation wendet sich an Inbetriebnehmer und Servicepersonal, die SINAMICS einsetzen.
Zielsetzung
Dieses Handbuch vermittelt die für Inbetriebnahme und Service benötigten Informationen zu allen Parametern, Funktionsplänen sowie den Störungen und Warnungen.
Dieses Handbuch ist zusätzlich zu den anderen beim Produkt vorhandenen Handbüchern und Tools zu verwenden.
Suchhilfen
Zur besseren Orientierung werden Ihnen folgende Hilfen angeboten:
1. Inhaltsverzeichnis für das gesamte Handbuch (Seite 7)
2. Abkürzungsverzeichnis (Seite 64)
3. Index (Seite 77)
Technical Support
Landesspezifische Telefonnummern für technische Beratung finden Sie im Internet:
http://www.siemens.com/automation/service&support

Vorwort
SINAMICS POLYGON
6 Funktionshandbuch (FH15), 10/2015, A5E33270639
SINAMICS
Informationen zu SINAMICS erhalten Sie im Internet unter folgender Adresse:
http://www.siemens.com/sinamics
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 7
Inhaltsverzeichnis
1 Grundlegende Sicherheitshinweise. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1 Allgemeine Sicherheitshinweise. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 Industrial Security. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Anwendungsbereich, Merkmale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Installation und Aktivierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.1 Installation einer OA-Applikation über STARTER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.1.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.2 OA Support Package im STARTER installieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.1.3 Technologiepaket-Download durchführen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1.4 OA-Applikation im Antriebsobjekt aktivieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.1.5 OA-Applikation in Betrieb nehmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Deinstallation einer OA-Applikation über STARTER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3 Installation einer OA-Applikation über SINUMERIK HMI . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.2 OA-Applikation auf dem Antriebsgerät installieren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3.3 OA-Applikation für Achse (Antriebsobjekt) aktivieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.3.4 OA-Applikation in Betrieb nehmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4 Deinstallation einer OA-Applikation über SINUMERIK HMI. . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Funktionsbeschreibung und Inbetriebnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1 Funktionsweise POLYGON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.1.1 Inbetriebnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.1.2 Aufbereiten des Leitwerts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.1.3 Parametrieren der Kennlinie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Beispiele zur Normierung des Leitwertes bei POLYGON . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.1 Beispiel 1 – Rundachse mit Inkrementalgeber ohne Getriebe. . . . . . . . . . . . . . . . . . . . . . . 364.2.2 Beispiel 2 – Rundachse mit Inkrementalgeber und Getriebe. . . . . . . . . . . . . . . . . . . . . . . . 374.2.3 Beispiel 3 – Referenzieren der OA-Applikation POLYGON . . . . . . . . . . . . . . . . . . . . . . . . . 374.2.4 Beispiel 4 – Referenzieren der OA-Applikation POLYGON bei der Verwendung
eines Absolutwertgebers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.3 Beispiele für Kennlinien bei POLYGON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.3.1 Beispiel 5 – Sinus mit Modulo 360 °. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.3.2 Beispiel 6 – Überlagerung mehrerer Kennlinien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.3.3 Beispiel 7 - Kompensation von Übertragungsverhalten und Totzeiten. . . . . . . . . . . . . . . . . 45
4.4 Funktionspläne. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.5 Abtastzeiten und Anzahl regelbarer Antriebe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.6 Lizenzierung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.7 SINAMICS Safety Integrated . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Inhaltsverzeichnis
SINAMICS POLYGON
8 Funktionshandbuch (FH15), 10/2015, A5E33270639
5 Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.1 Übersicht zu den Parametern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.2 Liste der Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6 Funktionspläne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
7 Störungen und Warnungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
A Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
A.1 Abkürzungsverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
A.2 Kennlinie (p31245, p31246[0…n]) mit Skript festlegen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73A.2.1 Skript anlegen und ausführen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73A.2.2 Beispiel für ein Skript . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
1
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 9
Grundlegende Sicherheitshinweise
Inhalt
1.1 Allgemeine Sicherheitshinweise 10
1.2 Industrial Security 11
1 Grundlegende Sicherheitshinweise
1.1 Allgemeine Sicherheitshinweise
SINAMICS POLYGON
10 Funktionshandbuch (FH15), 10/2015, A5E33270639
1.1 Allgemeine Sicherheitshinweise
WARNUNG
Lebensgefahr durch Nichtbeachtung von Sicherheitshinweisen und Restrisiken
Durch Nichtbeachtung der Sicherheitshinweise und Restrisiken in der zugehörigen Hardware-Dokumentation können Unfälle mit schweren Verletzungen oder Tod auftreten.
• Halten Sie die Sicherheitshinweise der Hardware-Dokumentation ein.
• Berücksichtigen Sie bei der Risikobeurteilung die Restrisiken.
WARNUNG
Lebensgefahr durch Fehlfunktionen der Maschine infolge fehlerhafter oder veränderter Parametrierung
Durch fehlerhafte oder veränderte Parametrierung können Fehlfunktionen an Maschinen auftreten, die zu Körperverletzungen oder Tod führen können.
• Schützen Sie die Parametrierungen vor unbefugtem Zugriff.
• Beherrschen Sie mögliche Fehlfunktionen durch geeignete Maßnahmen (z. B. NOT-HALT oder NOT-AUS).
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 11
1 Grundlegende Sicherheitshinweise
1.2 Industrial Security
1.2 Industrial Security
Hinweis
Industrial Security
Siemens bietet Produkte und Lösungen mit Industrial Security-Funktionen an, die den sicheren Betrieb von Anlagen, Lösungen, Maschinen, Geräten und/oder Netzwerken unterstützen. Sie sind wichtige Komponenten in einem ganzheitlichen Industrial Security-Konzept. Die Produkte und Lösungen von Siemens werden unter diesem Gesichtspunkt ständig weiterentwickelt. Siemens empfiehlt, sich unbedingt regelmäßig über Produkt-Updates zu informieren.
Für den sicheren Betrieb von Produkten und Lösungen von Siemens ist es erforderlich, geeignete Schutzmaßnahmen (z. B. Zellenschutzkonzept) zu ergreifen und jede Komponente in ein ganzheitliches Industrial Security-Konzept zu integrieren, das dem aktuellen Stand der Technik entspricht. Dabei sind auch eingesetzte Produkte von anderen Herstellern zu berücksichtigen. Weitergehende Informationen über Industrial Security finden Sie unter:
http://www.siemens.com/industrialsecurity
Um stets über Produkt-Updates informiert zu sein, melden Sie sich für unseren produktspezifischen Newsletter an. Weitere Informationen hierzu finden Sie unter:
http://support.automation.siemens.com
WARNUNG
Gefahr durch unsichere Betriebszustände wegen Manipulation der Software
Manipulationen der Software (z. B. Viren, Trojaner, Malware, Würmer) können unsichere Betriebszustände in Ihrer Anlage verursachen, die zu Tod, schwerer Körperverletzung und zu Sachschäden führen können.
• Halten Sie die Software aktuell.
Informationen und Newsletter hierzu finden Sie unter:
http://support.automation.siemens.com
• Integrieren Sie die Automatisierungs- und Antriebskomponenten in ein ganzheitliches Industrial Security-Konzept der Anlage oder Maschine nach dem aktuellen Stand der Technik.
Weitergehende Informationen finden Sie unter:
http://www.siemens.com/industrialsecurity
• Berücksichtigen Sie bei Ihrem ganzheitlichen Industrial Security-Konzept alle eingesetzten Produkte.

1 Grundlegende Sicherheitshinweise
1.2 Industrial Security
SINAMICS POLYGON
12 Funktionshandbuch (FH15), 10/2015, A5E33270639
2
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 13
Anwendungsbereich, Merkmale
Anwendungsbereich
Die OA-Applikation "Polygonzug" (POLYGON, Polygonal line) ist bei SINAMICS eine Erweiterung für die Antriebsobjekte SERVO, VECTOR und HLA.
Der Polygonzug ermöglicht es, in der Stromreglerabtastzeit (oder einem ganzzahligen Vielfachen der Stromreglerabtastzeit) ein leitwertabhängiges Ausgangssignal auf Grundlage einer parametrierbaren Kennlinie zu erzeugen. Die Kennlinie wird durch bis zu 10000 äquidistant verteilten Stützpunkten definiert, zwischen denen linear interpoliert wird. Die y-Werte der Stützpunkte können mittels Skripting aus einer Excel-Tabelle übernommen werden.
Durch Verschalten der Ausgangssignale auf unterschiedliche Konnektoreingänge können über die Kennlinienfunktionalität verschiedene Beziehungen geschaffen werden, z. B.:
• Lage-Lage-Bezug
• Lage-Drehzahl-Bezug
• Lage-Drehmoment-Bezug
Es gibt beispielsweise folgende Anwendungsfälle:
• Erzeugung von speziellen Signalformen zusammen mit der OA-Applikation SETPGEN als Leitwertvorgabe.
• Kompensation von Totzeiten und Übertragungsverhalten einer Drehzahlsollwert-Schwingung.
• Geberlageistwert als Leitwert für das Fahren eines anwenderdefinierten Drehmomentprofils.
• Antriebsintegrierte Kurvenscheibe.
2 Anwendungsbereich, Merkmale
SINAMICS POLYGON
14 Funktionshandbuch (FH15), 10/2015, A5E33270639
Merkmale
• Übernahme des Leitwerts und Berechnung des Ausgangssignals in der Stromreglerabtastzeit oder in diskreten ganzzahligen Vielfachen der Stromreglerabtastzeit.
• Vorgabe des Leitwerts als Ganzzahl über einen Konnektoreingang. Standardmäßig ist der Geberlageistwert Gn_XIST1 (r0479[0]) verschaltet.
• Umrechnung des Leitwerts in eine zur Anwendung passenden Längen- oder Winkeleinheit über einen rationalen Normierungsfaktor (ganzzahliger Zähler / ganzzahliger Nenner). In diesem Normierungsfaktor wird auch das Übersetzungsverhältnis eines eventuell vorhandenen Getriebes (Getriebefaktor) berücksichtigt.
• Festlegung eines Referenzpunktes möglich durch Übernahme eines Setzwerts.
• Periodische Wiederholung des Leitwerts bei Rundachsen durch Angabe einer Modulolänge.
• Dynamische Leitwertverschiebung über einen Konnektoreingang möglich.
• 3 Festwerte für die statische Verschaltung von Leitwert, Setzwert oder Leitwertverschiebung verfügbar.
• Generierung des Ausgangssignals über parametrierbare Kennlinie mit bis zu 10000 Stützpunkten, die äquidistant über die Modulolänge verteilt sind. Die Kennlinie wird durch die Anzahl der Stützpunkte und deren y-Werte definiert. Zwischen den Stützpunkten wird linear interpoliert.
Übernahme der y-Werte der Stützpunkte aus einer Excel-Tabelle mittels Skripting möglich.
• Dynamische Skalierung des Ausgangssignals über Konnektoreingänge:
– Durch Vorgabe eines Faktors (Amplitude)
– Durch Vorgabe eines Offsets
• Bereitstellung des skalierten Ausgangssignals über Konnektorausgänge zur weiteren Verschaltung als Prozentwert bzw. Ganzzahl. Diese Konnektorausgänge können beispielsweise mit regelungsinternen Konnektoreingängen oder Analogausgängen verschaltet werden.
Weitergehende Informationen zu POLYGON
Die OA-Applikation POLYGON ist ausführlich im Kapitel "Funktionsbeschreibung und Inbetriebnahme" (Seite 29) beschrieben.
3
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 15
Installation und Aktivierung
Inhalt
3.1 Installation einer OA-Applikation über STARTER 16
3.2 Deinstallation einer OA-Applikation über STARTER 22
3.3 Installation einer OA-Applikation über SINUMERIK HMI 23
3.4 Deinstallation einer OA-Applikation über SINUMERIK HMI 28
3 Installation und Aktivierung
3.1 Installation einer OA-Applikation über STARTER
SINAMICS POLYGON
16 Funktionshandbuch (FH15), 10/2015, A5E33270639
3.1 Installation einer OA-Applikation über STARTER
Diese Beschreibung zur Installation und Inbetriebnahme einer OA-Applikation gilt auch für Engineering Software mit integriertem STARTER (z. B. SIMOTION SCOUT).
Hinweis
Die nachfolgende Beschreibung in diesem Kapitel bezieht sich auf die fiktive OA-Applikation "ABC_OA".
Die in diesem Kapitel beschriebene Vorgehensweise kann sinngemäß auf jede reale OA-Applikation entsprechend angewendet werden.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 17
3 Installation und Aktivierung
3.1 Installation einer OA-Applikation über STARTER
3.1.1 Allgemeines
Begriffe
• OA-Applikation (OA, Open Architecture)
Software-Komponente (Technologiepaket), die zusätzliche Funktionalität für das Antriebssystem SINAMICS einbringt.
• OA Support Package (OASP)
Durch die Installation eines OA Support Package (OASP) wird das Inbetriebnahme-Tool STARTER um die entsprechende OA-Applikation erweitert.
Ein OA Support Package ist nur notwendig, wenn die dazugehörende OA-Applikation verwendet wird. Sie können in der Regel über die Siemens-Geschäftsstelle in Ihrer Region bezogen werden.
Geräte
Diese Beschreibung gilt für Geräte, die eine Speicherkarte benötigen (z. B. S120, Automatisierungssysteme mit SINAMICS Integrated).
Voraussetzungen
1. Das Inbetriebnahme-Tool STARTER ab Version V4.2 muss installiert sein.
2. Die Datei für das OA Support Package "oasp_abc_oa_v1_2_oaif04402300.zip" muss in einem bekannten Verzeichnis liegen.
Der Dateiname für das OA Support Package setzt sich wie folgt zusammen:
– oasp = OA Support Package
– abc_oa = Name der OA-Applikation
– v1_2 = Version der OA-Applikation
– oaif04402300 = OA-Interface-Version (OA-Schnittstellen-Version)
Version der SINAMICS-Firmware, ab der diese OA-Applikation eingesetzt werden kann (04402300 = V4.4).
Hinweis
Im Folgenden wird davon ausgegangen, dass die Inbetriebnahme von Steuerung und Antrieb abgeschlossen ist.
3 Installation und Aktivierung
3.1 Installation einer OA-Applikation über STARTER
SINAMICS POLYGON
18 Funktionshandbuch (FH15), 10/2015, A5E33270639
3.1.2 OA Support Package im STARTER installieren
Im Folgenden wird die OA-Applikation im STARTER als Technologiepaket installiert.
Voraussetzungen
1. Das Inbetriebnahme-Tool STARTER ist geöffnet.
2. Kein Projekt ist geöffnet.
Vorgehensweise
Gehen Sie wie folgt vor:
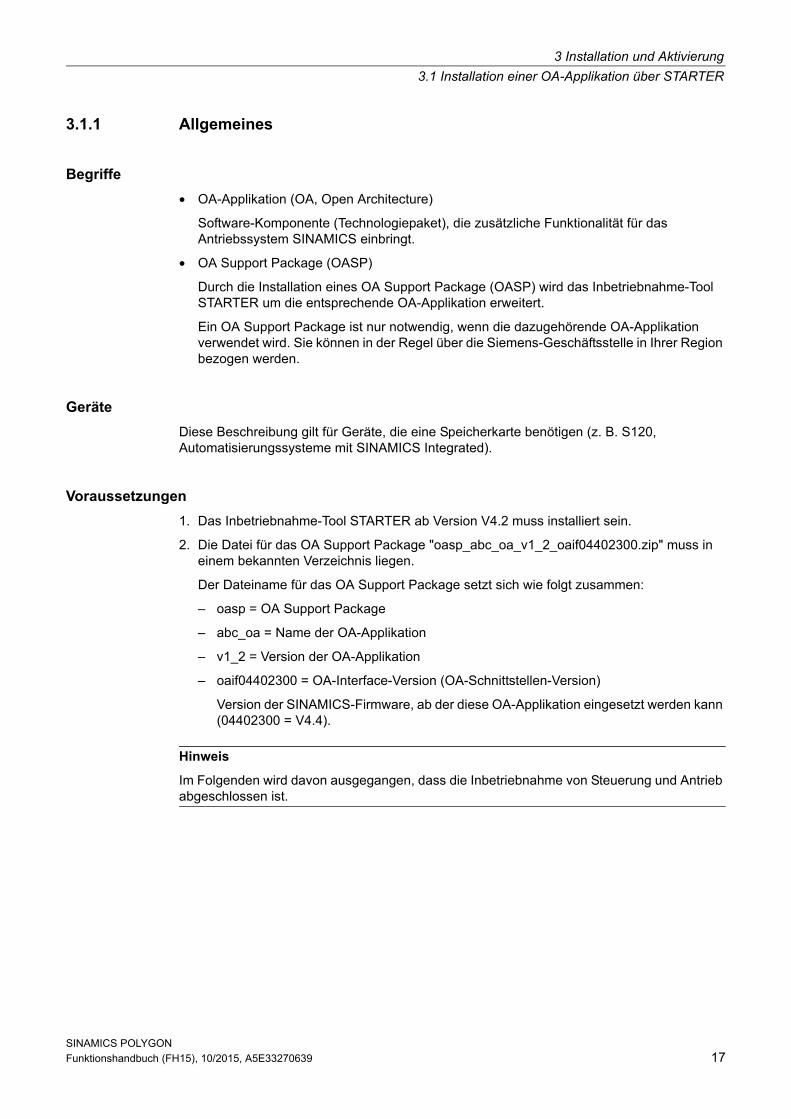
1. Menü Extras > Installation von Bibliotheken und Technologiepaketen … anwählen.
Bild 3-1 OA Support Package (Technologiepaket) auswählen und installieren
2. Schaltfläche Hinzufügen … betätigen.
3. Datei "oasp_abc_oa_v1_2_oaif04402300.zip" öffnen.
Das zur OA-Applikation ABC gehörende Technologiepaket wird ergänzt.
4. Schaltfläche Schließen betätigen.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 19
3 Installation und Aktivierung
3.1 Installation einer OA-Applikation über STARTER
3.1.3 Technologiepaket-Download durchführen
Im Folgenden wird die OA-Applikation ABC_OA über den STARTER in das Gerät geladen.
Voraussetzungen
1. Ein zum Gerät passendes Projekt ist geöffnet.
2. Das Inbetriebnahme-Tool STARTER ist im Modus ONLINE.
Vorgehensweise
Gehen Sie wie folgt vor:
1. Antriebsgerät im Projektnavigator markieren.
2. Im Kontextmenü (rechte Maustaste) Technologiepakete auswählen … aufrufen.
Das Fenster "Technologiepakete auswählen" wird geöffnet.
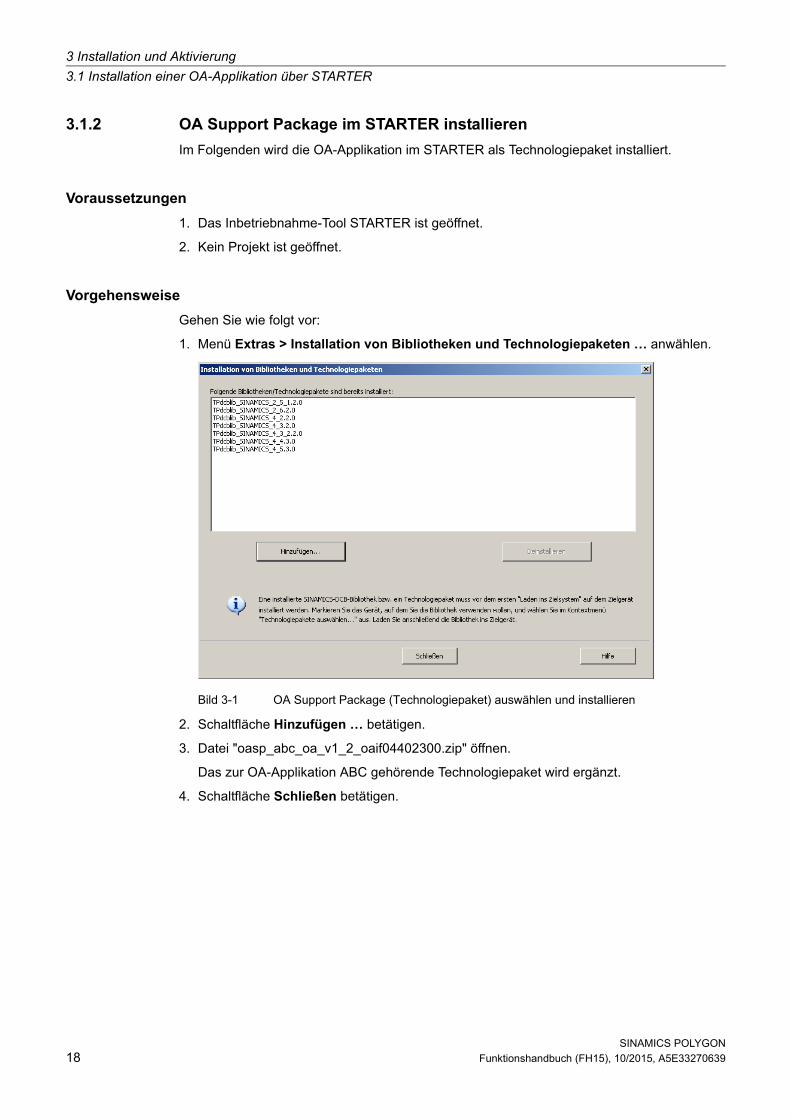
3. Beim Technologiepaket "ABC_OA“ die Aktion "Laden ins Zielgerät“ einstellen
Bild 3-2 Technologiepakete auswählen
4. Schaltfläche Aktionen ausführen betätigen.
Nach erfolgreichem Ausführen der Aktion wird beim entsprechenden Feld Ergebnis "OK" angezeigt.
5. Anschließend beim Zielgerät POWER ON durchführen (Aus-/Einschalten).
Weitere Informationen zum Dialog "Technologiepakete auswählen"
• Bei einem Technologiepaket ist die Spalte "Version (online)“ erst nach dem Ausführen des Vorgangs "Laden ins Zielgerät" befüllt.
• Die Versionsangabe zwischen der Spalte "Version (offline)“ und "Version (online)“ kann unterschiedlich sein. Beim Download des Technologiepakets wird immer die im Zielgerät vorhandene Version überschrieben.
3 Installation und Aktivierung
3.1 Installation einer OA-Applikation über STARTER
SINAMICS POLYGON
20 Funktionshandbuch (FH15), 10/2015, A5E33270639
3.1.4 OA-Applikation im Antriebsobjekt aktivieren
Im Folgenden wird die OA-Applikation einem Antriebsobjekt zugeordnet.
Voraussetzungen
1. Das zum Gerät passende Projekt ist geöffnet.
2. Die entsprechenden Antriebsachsen sind im Projekt angelegt.
3. Das Inbetriebnahme-Tool STARTER ist im Modus OFFLINE.
Vorgehensweise
Gehen Sie wie folgt vor:
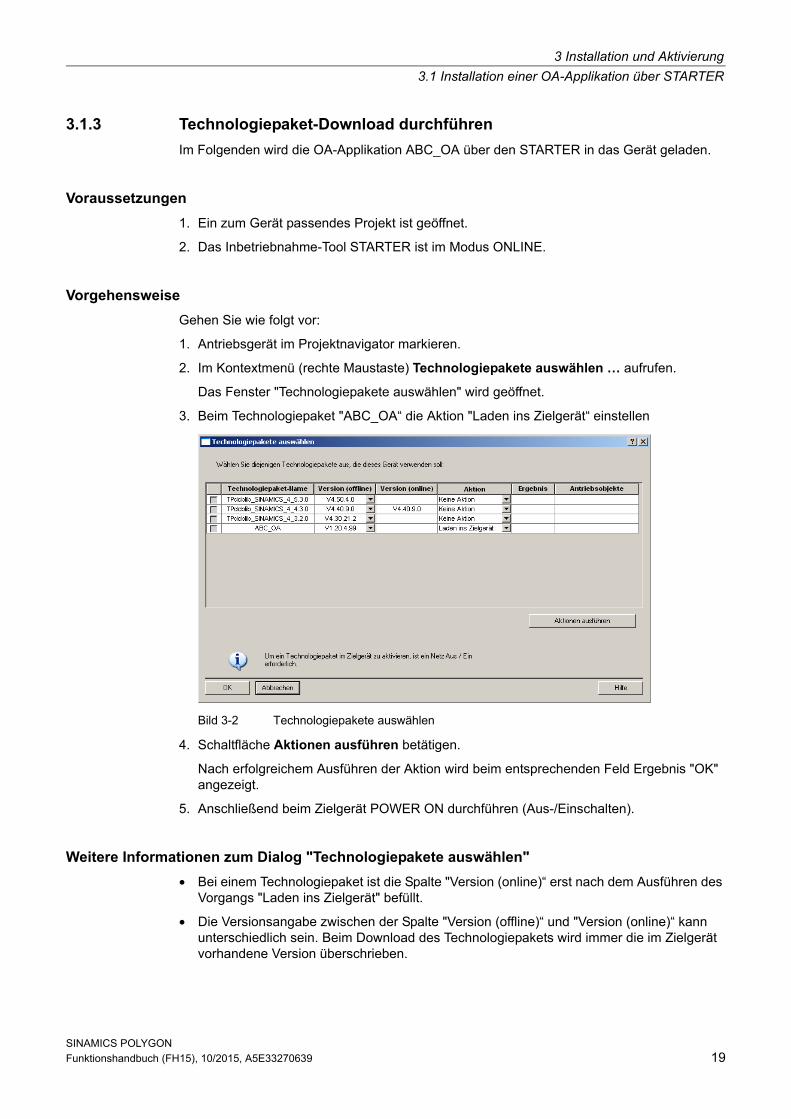
1. Im Projektnavigator das Antriebsobjekt markieren, für das die OA-Funktionalität benötigt wird (z. B. SERVO_03).
2. Kontextmenü Eigenschaften auswählen (rechte Maustaste).
3. Register Technologiepakete anwählen.
4. Checkbox für "ABC_OA“ aktivieren (Haken setzen).
Bild 3-3 Objekteigenschaften
5. Schaltfläche OK betätigen.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 21
3 Installation und Aktivierung
3.1 Installation einer OA-Applikation über STARTER
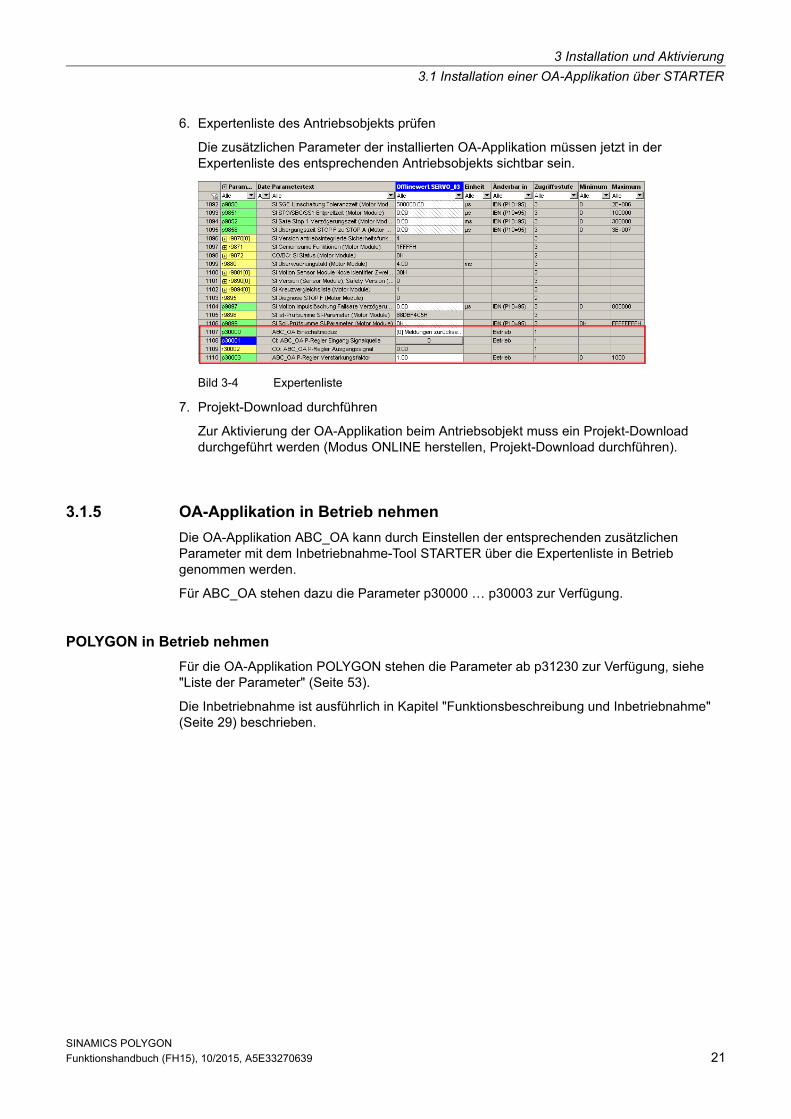
6. Expertenliste des Antriebsobjekts prüfen
Die zusätzlichen Parameter der installierten OA-Applikation müssen jetzt in der Expertenliste des entsprechenden Antriebsobjekts sichtbar sein.
Bild 3-4 Expertenliste
7. Projekt-Download durchführen
Zur Aktivierung der OA-Applikation beim Antriebsobjekt muss ein Projekt-Download durchgeführt werden (Modus ONLINE herstellen, Projekt-Download durchführen).
3.1.5 OA-Applikation in Betrieb nehmen
Die OA-Applikation ABC_OA kann durch Einstellen der entsprechenden zusätzlichen Parameter mit dem Inbetriebnahme-Tool STARTER über die Expertenliste in Betrieb genommen werden.
Für ABC_OA stehen dazu die Parameter p30000 … p30003 zur Verfügung.
POLYGON in Betrieb nehmen
Für die OA-Applikation POLYGON stehen die Parameter ab p31230 zur Verfügung, siehe "Liste der Parameter" (Seite 53).
Die Inbetriebnahme ist ausführlich in Kapitel "Funktionsbeschreibung und Inbetriebnahme" (Seite 29) beschrieben.
3 Installation und Aktivierung
3.2 Deinstallation einer OA-Applikation über STARTER
SINAMICS POLYGON
22 Funktionshandbuch (FH15), 10/2015, A5E33270639
3.2 Deinstallation einer OA-Applikation über STARTERZum Deinstallieren einer OA-Applikation über STARTER ist die umgekehrte Reihenfolge wie bei der Installation einzuhalten.
1. OA-Applikation im Antriebsobjekt deaktivieren, siehe "OA-Applikation im Antriebsobjekt aktivieren" (Seite 20)
2. Das zur OA-Applikation gehörende Technologiepaket im Antriebsgerät löschen, siehe "Technologiepaket-Download durchführen" (Seite 19).
– Das Technologiepaket im Modus OFFLINE deaktivieren.
– Beim Technologiepaket im Modus ONLINE die Aktion "Löschen“ auswählen und die Schaltfläche Aktionen ausführen betätigen.
3. OA-Applikation im STARTER deinstallieren, siehe "OA Support Package im STARTER installieren" (Seite 18).
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 23
3 Installation und Aktivierung
3.3 Installation einer OA-Applikation über SINUMERIK HMI
3.3 Installation einer OA-Applikation über SINUMERIK HMI
3.3.1 Allgemeines
Begriffe
• OA-Applikation (OA, Open Architecture)
Software-Komponente (Technologiepaket), die zusätzliche Funktionalität für das Antriebssystem SINAMICS einbringt.
• Portables Servicesystem für NCU
Emergency Boot System (EBS) auf einem USB-Speicher. Im Servicefall können Sie den Hochlauf der NCU vom Servicesystem starten, um verschiedene Service-Aufgaben auszuführen (z. B. Datensicherung oder Updates).
Geräte
Diese Beschreibung gilt für SINUMERIK Geräte mit SINAMICS Integrated (z. B. SINUMERIK 840D sl).
Hinweis
Die nachfolgende Beschreibung in diesem Kapitel bezieht sich auf die fiktive OA-Applikation "ABC_OA".
Die in diesem Kapitel beschriebene Vorgehensweise kann sinngemäß auf jede reale OA-Applikation entsprechend angewendet werden.
Hinweis
Das portable Servicesystem für NCU sowie die Vorgehensweise, es auf einem USB-Speicher zu erzeugen, ist ausführlich in folgender Literatur beschrieben:
Literatur: /IM7/ SINUMERIK Betriebssystem NCU InbetriebnahmehandbuchKapitel "Diagnose und Service"
3 Installation und Aktivierung
3.3 Installation einer OA-Applikation über SINUMERIK HMI
SINAMICS POLYGON
24 Funktionshandbuch (FH15), 10/2015, A5E33270639
Voraussetzungen
1. Das zur entsprechenden SINUMERIK Version passende HMI muss installiert sein (z. B. HMI-Operate, hier verwendet, oder HMI-Advanced).
2. Ein USB-Speicher, auf dem das portable Servicesystem für NCU installiert ist, liegt bereit.
3. Die Datei für die OA-Applikation ABC_OA "abc_oa_v1_2_oaif04402300.tgz" ist auf die FAT-Partition des USB-Speichers mit dem portablen Servicesystem kopiert.
Der Dateiname für die OA-Applikation ABC_OA setzt sich wie folgt zusammen:
– abc_oa = Name der OA-Applikation
– v1_2 = Version der OA-Applikation
– oaif04402300 = OA-Interface-Version (OA-Schnittstellen-Version)
Version der SINAMICS-Firmware, ab der diese OA-Applikation eingesetzt werden kann (04402300 = V4.4).
3.3.2 OA-Applikation auf dem Antriebsgerät installieren
Im Folgenden wird die OA-Applikation auf dem Antriebsgerät installiert.
Vorgehensweise
1. USB-Speicher mit portablem Servicesystem an die USB-Schnittstelle X125 oder X135 der SINUMERIK NCU anschließen.
2. SINUMERIK NCU neu starten:
– Ausschalten und anschließendes Einschalten des Geräts.
oder
– Taster "Reset" betätigen.
Die SINUMERIK NCU startet mit dem Servicesystem.
3. Im Servicesystem nacheinander folgende Aktionen ausführen:
– Im Hauptmenü den Menüpunkt "Update NCU Software and Data" wählen.
– Anschließend Menüpunkt "Update system software from USB memory stick" wählen.
– Datei "abc_oa_v1_2_oaif04402300.tgz" auswählen und mit "OK" bestätigen.
Die Datei "abc_oa.cfs" wird aus der Datei "abc_oa_v1_2_oaif04402300.tgz" extrahiert und im Verzeichnis "/card/oem/sinamics/oa" abgelegt.
4. SINUMERIK NCU neu starten, wie unter Schritt 2 beschrieben.
Beim Hochlauf des Systems wird die OA-Applikation ABC_OA im Verzeichnis "/card/oem/sinamics/oa" installiert. Dabei werden die entsprechenden Daten im Unterverzeichnis "abc_oa" bereitgestellt.
Hinweis
Im Folgenden wird davon ausgegangen, dass die Inbetriebnahme von Steuerung und Antrieb abgeschlossen ist.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 25
3 Installation und Aktivierung
3.3 Installation einer OA-Applikation über SINUMERIK HMI
3.3.3 OA-Applikation für Achse (Antriebsobjekt) aktivieren
Im Folgenden wird die OA-Applikation ABC_OA den gewünschten Achsen bzw. den entsprechenden Antriebsobjekten zugeordnet.
Konfigurationsbeispiel
Ein 3-Achs-System bei SINUMERIK besteht beispielsweise aus folgenden Antriebsobjekten:
• Control Unit (DO_1)
• Einspeisung (DO_2)
• X-Achse (DO_3, AX1)
• Y-Achse (DO_4, AX2)
• Z-Achse (DO_5, AX3)
Vorgehensweise
Zum Aktivieren der OA-Applikation auf den gewünschten Achsen gehen Sie wie folgt vor:
1. Bei SINAMICS die Impulsfreigabe abschalten (z. B. über EP-Klemme)
2. Control Unit: Konfiguration für OA-Applikation einstellen
– p0009 = 0 → 50
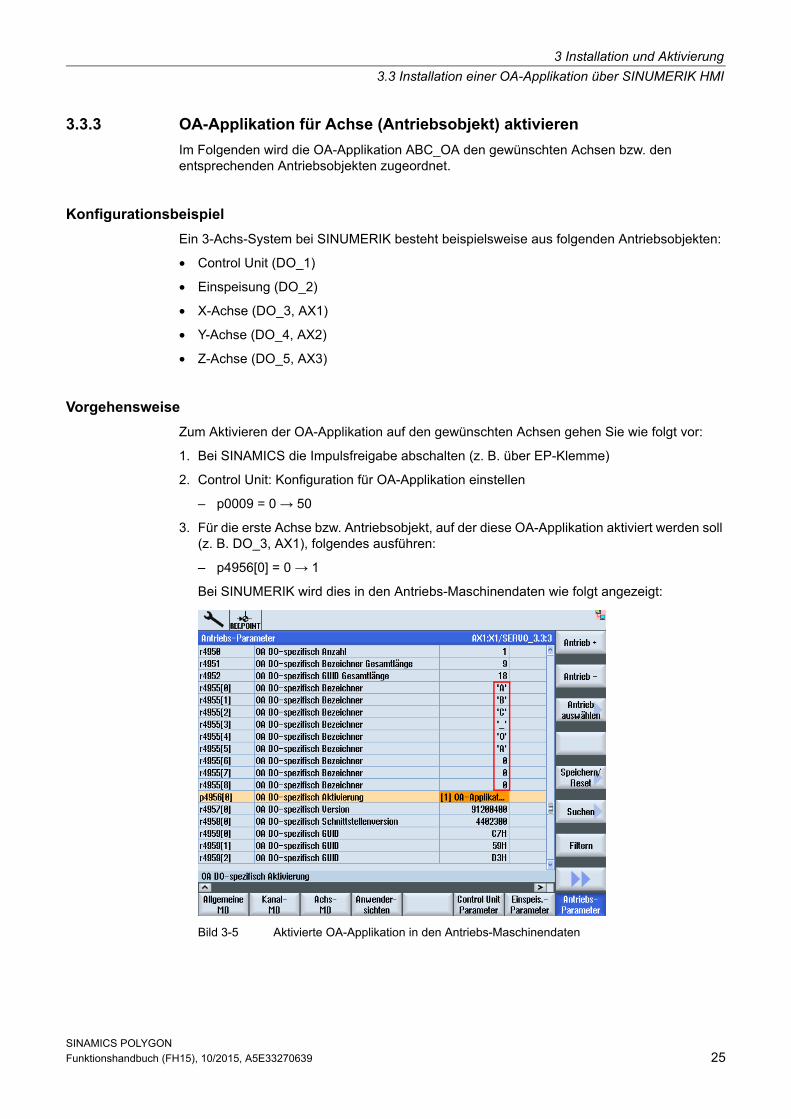
3. Für die erste Achse bzw. Antriebsobjekt, auf der diese OA-Applikation aktiviert werden soll (z. B. DO_3, AX1), folgendes ausführen:
– p4956[0] = 0 → 1
Bei SINUMERIK wird dies in den Antriebs-Maschinendaten wie folgt angezeigt:
Bild 3-5 Aktivierte OA-Applikation in den Antriebs-Maschinendaten
3 Installation und Aktivierung
3.3 Installation einer OA-Applikation über SINUMERIK HMI
SINAMICS POLYGON
26 Funktionshandbuch (FH15), 10/2015, A5E33270639
4. Für weitere Achsen, auf der diese OA-Applikation aktiviert werden soll (z. B. DO_4, AX2) ist Schritt 3 zu wiederholen.
5. Control Unit: Konfiguration für OA-Applikation beenden
– p0009 = 50 → 0
6. Parameter sichern durchführen
7. Bei SINAMICS die Impulsfreigabe wieder einschalten
8. Parameterliste für AX1 prüfen
Die zusätzlichen Parameter der installierten OA-Applikation müssen jetzt in der Parameterliste für die Achse AX1 (DO_3) sichtbar sein.
Hinweis
In r4950 wird die Anzahl der OA-Applikationen angezeigt.
In r4955[0…8] steht der Bezeichner für die OA-Applikation 1In r4955[9…17] steht der Bezeichner für die OA-Applikation 2, usw.
Bei r4950 = 1 gilt:
• Es ist nur eine OA-Applikation vorhanden.
• Für die Aktivierung dieser einen OA-Applikation ist p4956[0] zuständig.
Bei r4950 > 1 gilt:
• Es sind mehrere OA-Applikationen vorhanden.
• Der zuständige Index für die Aktivierung der OA-Applikation ABC_OA ist abhängig vom Bezeichner.
– Wenn "ABC_OA" in r4955[0…8] steht, dann gilt p4956[0]
– Wenn "ABC_OA" in r4955[9…17] steht, dann gilt p4956[1], usw.
Hinweis
Wenn Erweiterungs-Baugruppen (z. B. NX-Baugruppen) vorhanden sind, gilt für Achsen, die auf diesen Baugruppen gerechnet werden:
Es muss der Inbetriebnahmemodus (p0009 = 50) bei diesen Baugruppen eingestellt sein, bevor die OA-Applikation für diese Achsen aktiviert werden kann.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 27
3 Installation und Aktivierung
3.3 Installation einer OA-Applikation über SINUMERIK HMI
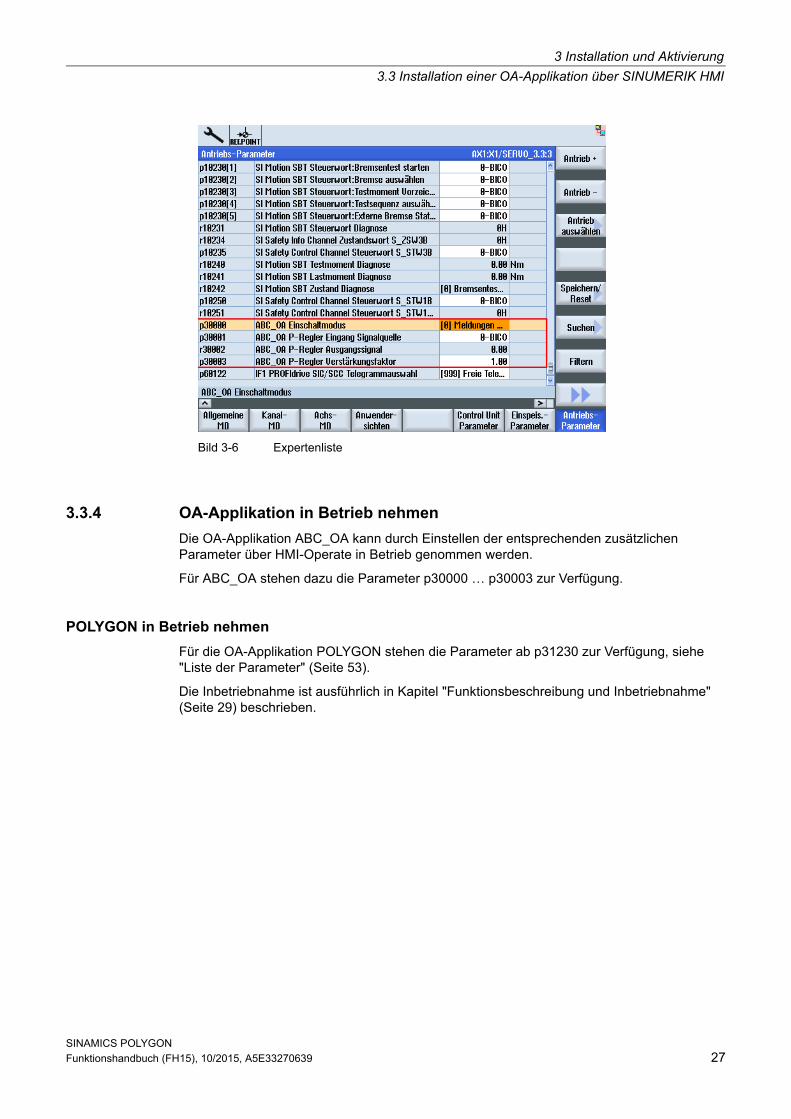
Bild 3-6 Expertenliste
3.3.4 OA-Applikation in Betrieb nehmen
Die OA-Applikation ABC_OA kann durch Einstellen der entsprechenden zusätzlichen Parameter über HMI-Operate in Betrieb genommen werden.
Für ABC_OA stehen dazu die Parameter p30000 … p30003 zur Verfügung.
POLYGON in Betrieb nehmen
Für die OA-Applikation POLYGON stehen die Parameter ab p31230 zur Verfügung, siehe "Liste der Parameter" (Seite 53).
Die Inbetriebnahme ist ausführlich in Kapitel "Funktionsbeschreibung und Inbetriebnahme" (Seite 29) beschrieben.
3 Installation und Aktivierung
3.4 Deinstallation einer OA-Applikation über SINUMERIK HMI
SINAMICS POLYGON
28 Funktionshandbuch (FH15), 10/2015, A5E33270639
3.4 Deinstallation einer OA-Applikation über SINUMERIK HMI
Vorgehensweise
Zum Deinstallieren einer OA-Applikation über SINUMERIK HMI ist wie folgt vorzugehen:
1. OA-Applikation im Antriebsobjekt deaktivieren, siehe "OA-Applikation für Achse (Antriebsobjekt) aktivieren" (Seite 25).
2. System anhalten:
– Verbinden über Secure Shell (SSH).
– Folgenden Befehl ausführen: sc stop all.
3. Unterverzeichnis und Dateien auf der Speicherkarte löschen:
– Systemdaten anwählen.
– Unter System CF-Card das Verzeichnis "/oem/sinamics/oa" anwählen.
– Unterverzeichnis "abc_oa" markieren und löschen.
– Datei "abc_oa.cfs" markieren und löschen.
4. POWER ON ausführen (Aus-/Einschalten).
Hinweis
Achten Sie auf die Reihenfolge beim Löschen:
Zuerst das Unterverzeichnis und dann die Datei.
4
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 29
Funktionsbeschreibung und Inbetriebnahme
Inhalt
4.1 Funktionsweise POLYGON 30
4.2 Beispiele zur Normierung des Leitwertes bei POLYGON 36
4.3 Beispiele für Kennlinien bei POLYGON 40
4.4 Funktionspläne 47
4.5 Abtastzeiten und Anzahl regelbarer Antriebe 48
4.6 Lizenzierung 49
4.7 SINAMICS Safety Integrated 50
In diesem Kapitel ist die Funktionsweise sowie die Inbetriebnahme der OA-Applikation POLYGON beschrieben. Es ergänzt folgende Kapitel:
• "Anwendungsbereich, Merkmale" (Seite 13)
• "Installation und Aktivierung" (Seite 15)
4 Funktionsbeschreibung und Inbetriebnahme
4.1 Funktionsweise POLYGON
SINAMICS POLYGON
30 Funktionshandbuch (FH15), 10/2015, A5E33270639
4.1 Funktionsweise POLYGONDie OA-Applikation POLYGON ermöglicht es, abhängig von einem Leitwert über eine Kennlinie ein Ausgangssignal zu erzeugen. Die Kennlinie wird über Stützpunkte vorgegeben.
Als Leitwert dient typischerweise der Geberlageistwert Gn_XIST1 (r0479[0]). Hier wird der Lageistwert abhängig von der Geberstrichzahl p0408 und der Feinauflösung p0418 dargestellt.
Mit den Parametern p31235 und p31236 wird der Geberlageistwert Gn_XIST1 in eine zur Anwendung passenden Längen- oder Winkeleinheit umgerechnet, z. B. Milligrad (° / 1000) bei Drehbewegungen. Falls zwischen Motor bzw. Geber und Last ein Getriebe vorhanden ist, wird der Getriebefaktor ebenfalls in diesen Parametern berücksichtigt. Durch Übernahme eines Setzwerts kann ein bestimmter Lageistwert an einem Referenzpunkt vorgegeben werden. Durch die Festlegung einer Modulolänge p31244 wird ein periodisches Signal erzeugt.
Über die Leitwertverschiebung kann zur Laufzeit gezielt ein Phasenversatz eingestellt werden, um beispielsweise die Übertragungsfunktion des mechanischen Aufbaus zu berücksichtigen.
Die Kennlinie wird durch maximal 10000 äquidistante Stützpunkte vorgegeben (p31245, POLYGON Kennlinie Stützpunkte Anzahl). Die y-Werte werden in p31246[0…n] (POLYGON Kennlinie y-Werte) hinterlegt. Zwischen den Stützpunkten wird linear interpoliert. Die y-Werte der Stützpunkte können mittels Skripting aus einer Excel-Tabelle übernommen werden. Es kann eine beliebige Signalform hinterlegt werden. Die Ausgangsamplitude kann frei skaliert werden.
Eine Überlagerung von mehreren Kennlinien ist möglich. Damit können einem Nutzsignal gezielt Zusatzsignale überlagert werden. Diese Zusatzsignale können beispielsweise erzeugt werden:
• Mit der OA-Applikation POLYGON als leitwertabhängige Zusatzsignale, d. h. abhängig z. B. vom aktuellen Drehwinkel.
• Mit der OA-Applikation SETPGEN als zeitabhängige Zusatzsignale, die unabhängig von einem Leitwert sind.
Das resultierende Signal kann z. B. als Drehmoment-, Drehzahl- oder Lagesollwert verschaltet werden.
4.1.1 Inbetriebnahme
Die folgende Beschreibung der Funktionalität gibt auch die übliche Reihenfolge der Inbetriebnahme von POLYGON an.
Die "Beispiele zur Normierung des Leitwertes bei POLYGON" (Seite 36) und die "Beispiele für Kennlinien bei POLYGON" (Seite 40) dienen ebenfalls als eine Anleitung für die Inbetriebnahme.
Die installierte OA-Applikation POLYGON wird bei der Funktion "Laden ins Dateisystem" mit übertragen. Dies kann bei einer Serien-Inbetriebnahme verwendet werden.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 31
4 Funktionsbeschreibung und Inbetriebnahme
4.1 Funktionsweise POLYGON
Voraussetzungen
Zur Inbetriebnahme der OA-Applikation POLYGON sind folgende Voraussetzungen erforderlich:
• Bei Installation über STARTER:
– Die OA-Applikation ist als Technologiepaket im STARTER installiert, siehe "OA Support Package im STARTER installieren" (Seite 18).
– Sie ist auf der Control Unit geladen, siehe "Technologiepaket-Download durchführen" (Seite 19).
– Sie ist den Antriebsobjekten SERVO, VECTOR oder HLA zugeordnet, siehe "OA-Applikation im Antriebsobjekt aktivieren" (Seite 20).
• Bei Installation über SINUMERIK HMI:
– Die OA-Applikation ist auf dem Antriebsgerät installiert, siehe "OA-Applikation auf dem Antriebsgerät installieren" (Seite 24)
– Sie ist für die Achse (Antriebsobjekt) aktiviert, siehe "OA-Applikation für Achse (Antriebsobjekt) aktivieren" (Seite 25)
Es ist eine Lizenzierung erforderlich, siehe "Lizenzierung" (Seite 49).
Konfiguration
Die Konfiguration von POLYGON ist aus folgendem Funktionsplänen ersichtlich:
• "7331 – POLYGON Struktur" (Seite 60).
Die notwendigen Einstellungen für die Konfiguration sind wie folgt:
1. Abtastzeit für POLYGON einstellen
Die Abtastzeit wird als Vielfaches der Stromreglerabtastzeit (p0115[0]) eingestellt. Die zulässigen Abtastzeiten sind ausführlich in der Beschreibung von p31230 aufgeführt, siehe "Liste der Parameter" (Seite 53).
2. Verschalten und Aufbereiten des Leitwerts
– Signalquelle des Leitwerts verschalten (CI: p31234)
– Leitwert normieren: p31235, p31236
– Setzwert und dessen Übernahme verschalten (CI: p31238, BI: p31239)
– Modulolänge festlegen: p31244
– Leitwertverschiebung verschalten (CI: p31240)
Siehe auch Abschnitt "Aufbereiten des Leitwerts" (Seite 32)
3. Parametrieren der Kennlinie
– Anzahl der Stützpunkte festlegen (p31245)
– y-Werte der Stützpunkte festlegen (p31246[0…n])
– Amplitude und Offset verschalten (CI: p31247, CI: p31248)
– Freigabe erteilen (BI: p31231)
Siehe auch Abschnitt "Parametrieren der Kennlinie" (Seite 34)
4 Funktionsbeschreibung und Inbetriebnahme
4.1 Funktionsweise POLYGON
SINAMICS POLYGON
32 Funktionshandbuch (FH15), 10/2015, A5E33270639
4.1.2 Aufbereiten des Leitwerts
Verschalten der Signalquelle für den Leitwert
Der Konnektoreingang p31234 wird auf die Signalquelle verschaltet, die den Leitwert liefert. Die Leitwertquelle muss den Leitwert als Ganzzahl (Datentyp Integer32) zur Verfügung stellen.
Typische BICO-Verschaltungen sind:
• Leitwert einer realen Achse
CI: p31234 = r0479[0] (Diagnose Geberlageistwert Gn_XIST1, Geber 1)
• Virtueller Leitwert auf der Basis OA-Applikation SETPGEN
CI: p31234 = r31222 (SETPGEN Ausgang gesamt Ganzzahl)
• Virtueller Leitwert auf Basis des Funktionsmoduls EPOS (r0108.4 = 1)
CI: p31234 = r2665 (EPOS Lagesollwert)
Normieren des Leitwerts
Die Normierung dient dazu, den Leitwert in einer zur Anwendung passenden Längen- oder Winkeleinheit darzustellen.
Bei Drehbewegungen bietet es sich an, den Lageistwert in Winkeleinheiten darzustellen. Auf Grund der höheren Auflösung empfiehlt es sich, als Einheit Milligrad (° / 1000) zu wählen. Die Normierungsfaktoren p31235 und p31236 erhalten dann folgende Werte:
• p31235 (POLYGON Leitwert Normierung Zähler):
Diesem Parameter wird der Zahlenwert für 1 Umdrehung in der gewählten Winkeleinheit zugewiesen.
Bei der Einheit Milligrad entsprechen 360000 Milligrad einer Umdrehung, also p31235 = 360000.
• p31236 (Leitwert Normierung Nenner):
– Bei rotatorischen Gebern wird diesem Parameter der Zahlenwert für 1 Umdrehung in Geberinkrementen zugewiesen. Dieser Wert ist abhängig von der Auflösung des verwendeten Gebers, die in folgenden Parametern angegeben wird:
p0408[0] (Rotatorischer Geber Strichzahl)
p0418[0] (Feinauflösung Gx_XIST1 (in Bits))
Die Anzahl der Geberinkremente pro Umdrehung beträgt p0408[0] · 2p0418[0], also p31236 = p0408[0] · 2p0418[0].
– Bei einem virtuellen Leitwert auf Basis der OA-Applikation SETPGEN ist p31236 entsprechend der Parametrierung von SETPGEN zu wählen.
– Bei einem virtuellen Leitwert auf Basis des Funktionsmoduls EPOS kann der Wert von r2524 (LU/Umdrehung) dem Parameter p31236 zugewiesen werden.
Hinweis
Nach dem Hochlauf, nach einer Datensatzumschaltung oder nach Geber parken gilt: An Konnektoreingängen, die mit den Konnektorausgang r0479[0] verschaltet sind, steht der neue Wert unter Umständen erst nach einigen 100 ms zur Verfügung.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 33
4 Funktionsbeschreibung und Inbetriebnahme
4.1 Funktionsweise POLYGON
Referenzieren mittels Setzwert
Der Setzwert und die Übernahme ermöglicht das Festlegen eines Referenzpunktes.
• Der Setzwert wird in der vom Anwender gewählten Längen- oder Winkeleinheit vorgegeben; der entsprechende Zahlenwert wird z. B. im Festwert p31241[0…2] hinterlegt.
• Der Konnektoreingang p31238 (POLYGON Leitwert Setzwert) wird auf die Signalquelle des Setzwerts verschaltet (Werkseinstellung p31241[0]).
• Durch ein 0/1-Signal am Binektoreingang p31239 wird der Setzwert übernommen.
Der Setzwert wird nach dessen Übernahme als Basis für künftige Änderungen des normierten Leitwerts verwendet (Leitwert nach Setzwert = Normierter Leitwert + Setzwert – Normierter Leitwert bei Übernahme des Setzwerts).
Modulobildung
Die Modulobildung ermöglicht die periodische Wiederholung des Leitwerts bei Rundachsen. Die Modulolänge ist abhängig von den Periodenlängen des Leitwerts und des Ausgangssignals. Sie wird in der vom Anwender gewählten Längen- oder Winkeleinheit vorgegeben. Der entsprechende Zahlenwert wird in p31244 (POLYGON Modulolänge) eingetragen.
Standardmäßig ist p31244 = 360000, d. h. die Modulolänge entspricht einer Umdrehung in der Einheit Milligrad.
Wenn die Periodenlängen des Leitwerts und des Ausgangssignals verschieden sind, ist p31244 entsprechend zu ändern. Beispielsweise wiederholt sich der Drehmomentverlauf eines Zylinders eines 4-Takt-Verbrennungsmotors erst nach 2 Umdrehungen. Deshalb ist in diesem Fall die Modulolänge auf 2 Umdrehungen einzustellen, also p31244 = 720000.
Der effektive Leitwert nach der Modulobildung wird im Konnektorausgang r31242[0] (POLYGON Leitwert wirksam, Leitwert vor Lageverschiebung) angezeigt.
Leitwertverschiebung
Die Leitwertverschiebung über den Konnektoreingang p31240 (POLYGON Leitwert Verschiebung) ermöglicht eine dynamische Phasenverschiebung des Leitwerts bei Rundachsen. Die Leitwertverschiebung wird in der vom Anwender gewählten Längen- oder Winkeleinheit vorgegeben. Für eine statische Vorgabe der Leitwertverschiebung kann einer der Festwerte p31241[0…2] verwendet werden.
Der effektive Leitwert nach der Leitwertverschiebung wird im Konnektorausgang r31242[1] (POLYGON Leitwert wirksam, Leitwert nach Lageverschiebung) angezeigt.
Hinweis
Intern wird der normierte Leitwert im Datentyp FloatingPoint dargestellt, um Rundungsdifferenzen zu minimieren.
4 Funktionsbeschreibung und Inbetriebnahme
4.1 Funktionsweise POLYGON
SINAMICS POLYGON
34 Funktionshandbuch (FH15), 10/2015, A5E33270639
4.1.3 Parametrieren der Kennlinie
Stützpunkte festlegen
Die Kennlinie wird über Stützpunkte definiert.
• Anzahl der Stützpunkte:
Die Anzahl der Stützpunkte wird in p31245 (POLYGON Kennlinie Stützpunkte Anzahl) vorgegeben. Die Stützpunkte werden äquidistant über die Modulolänge verteilt.
Die Stützpunkte befinden sich deshalb bei folgenden effektiven Leitwerten:
• y-Werte der Stützpunkte
Die y-Werte der Stützpunkte werden in p31246[0…n] (POLYGON Kennlinie y-Werte) vorgegeben. Zwischen den Stützpunkten wird linear interpoliert.
Die obere Grenze n des dynamischen Index wird durch p31245 (POLYGON Kennlinie Stützpunkte Anzahl) bestimmt: .
Stützpunkte aus einer Excel-Tabelle einlesen
Bei einer großen Anzahl von Stützpunkten ist es mühsam und fehleranfällig, die Werte händisch in den Parameter p31245[1…n] einzutragen. Die Werte sind oft berechnete oder gemessene Werte, die bereits in Form einer Tabelle vorliegen.
Die Skripting-Funktionalität des Inbetriebnahme-Tools (z. B. STARTER) ermöglicht es, solche Tabellen zu verarbeiten, wenn sie im Format des Tabellenkalkulationsprogramms Excel vorliegen. Als Beispiel ist im Anhang "Kennlinie (p31245, p31246[0…n]) mit Skript festlegen" (Seite 73) ein Skript abgedruckt, das Werte aus einer Spalte einer Excel-Tabelle übernimmt und in die angegebenen Parameter schreibt.
Amplitude und Offset festlegen
Über die Konnektoreingänge p31247 (POLYGON Amplitude) und p31248 (POLYGON Offset) kann die Kennlinie dynamisch skaliert werden.
Wenn diese Konnektoreingänge nicht verschaltet sind, sind deren Werkseinstellungen wirksam (1 bei p31247 bzw. 0 bei p31248).
Modulolänge · , mit
i : Nummer des Stützpunkts,
Hinweis
Die Zahl 1.0 entspricht 100 %. Dies bedeutet, dass z. B. bei einer Verschaltung als Drehmomentsollwert ein Drehmoment von p2003 (Bezugsdrehmoment) vorgegeben wird.
i p31245⁄
i 0, p31245 1–( )[ ]∈
n p31245 1–=
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 35
4 Funktionsbeschreibung und Inbetriebnahme
4.1 Funktionsweise POLYGON
Ausgänge verschalten
Das skalierte Ausgangssignal steht in folgenden Konnektorausgängen zur weiteren Verschaltung zur Verfügung:
• in r31249 (POLYGON Ausgang) als Prozentwert.
Dieser Konnektorausgang kann beispielsweise wie folgt verschaltet werden:
– Mit regelungsinternen Konnektoreingängen, z. B.:
Zusatzsollwert (CI: p1075[C])
Zusatzdrehmoment (CI: p1511[C])
Drehzahlregler P-Verstärkung Adaptionssignal (CI: p1455[C])
Drehzahlregler P-Verstärkung Skalierung (CI: p1466[C]
– Mit Konnektoreingängen anderer OA-Appplikationen, z. B.
SETPGEN Signalform Amplitude (CI: p31212[0…2])
SETPGEN Signalform Offset (CI: p31214[0…2])
– Mit Konnektoreingängen der OA-Appplikation POLYGON auf einem anderen Antriebsobjekt, z. B.
POLYGON Amplitude (CI: p31247)
POLYGON Offset (CI: p31248)
– Mit Analogausgängen, z. B.:
TM31 Analogausgänge Signalquelle (CI: p4071[0…1])
• in r31251 (POLYGON Ausgang Ganzzahl) als Ganzzahl im Format Integer32.
Zur Verbesserung der Auflösung kann das Signal vorher mit p31250 (POLYGON Ausgang Ganzzahl Skalierung) skaliert werden.
Zur Freigabe der Ausgänge ist der Binektoreingang p31231 (POLYGON Freigabe) mit einem 1-Signal zu verschalten
4 Funktionsbeschreibung und Inbetriebnahme
4.2 Beispiele zur Normierung des Leitwertes bei POLYGON
SINAMICS POLYGON
36 Funktionshandbuch (FH15), 10/2015, A5E33270639
4.2 Beispiele zur Normierung des Leitwertes bei POLYGONBei realen Achsen wird als Leitwert in der Regel der Geberlageistwert Gn_XIST1 (r0479[0]) verwendet. Hierzu wird der Konnektoreingang p31234 (POLYGON Leitwert Rohwert) mit r0479[0] verschaltet.
Die Normierung dient dazu, den Leitwert in zur Anwendung passenenden Längen- oder Winkeleinheiten darzustellen.
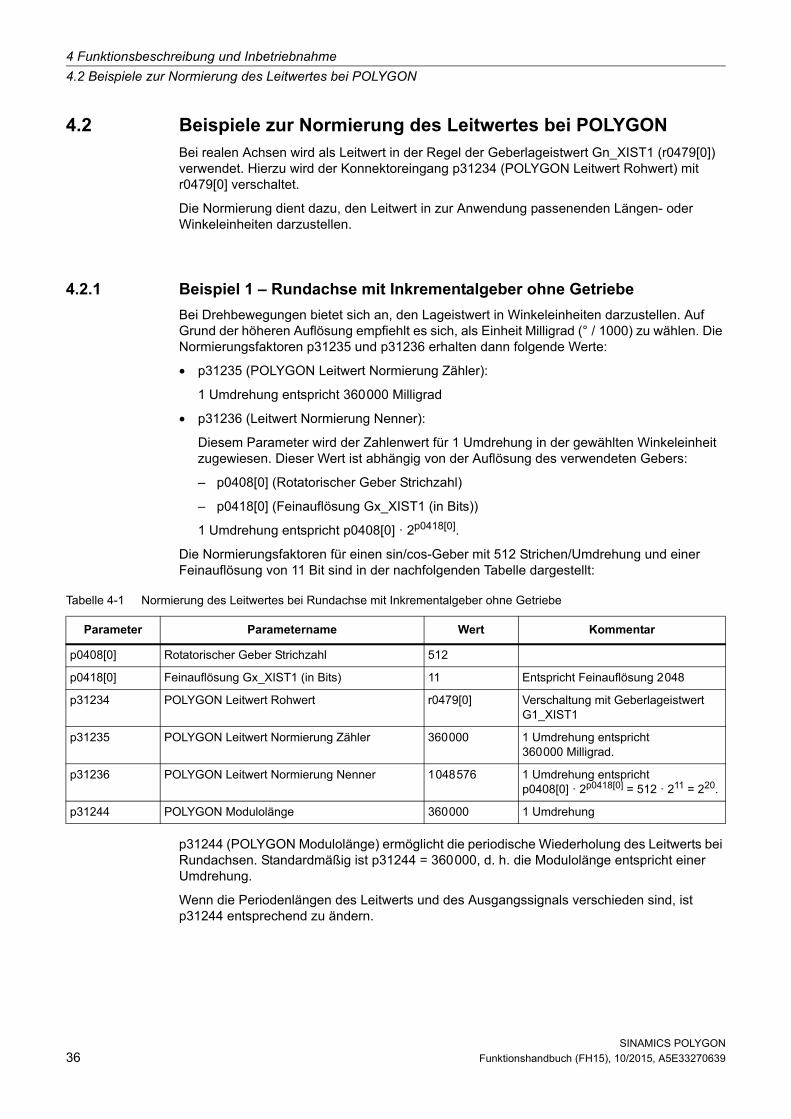
4.2.1 Beispiel 1 – Rundachse mit Inkrementalgeber ohne Getriebe
Bei Drehbewegungen bietet sich an, den Lageistwert in Winkeleinheiten darzustellen. Auf Grund der höheren Auflösung empfiehlt es sich, als Einheit Milligrad (° / 1000) zu wählen. Die Normierungsfaktoren p31235 und p31236 erhalten dann folgende Werte:
• p31235 (POLYGON Leitwert Normierung Zähler):
1 Umdrehung entspricht 360000 Milligrad
• p31236 (Leitwert Normierung Nenner):
Diesem Parameter wird der Zahlenwert für 1 Umdrehung in der gewählten Winkeleinheit zugewiesen. Dieser Wert ist abhängig von der Auflösung des verwendeten Gebers:
– p0408[0] (Rotatorischer Geber Strichzahl)
– p0418[0] (Feinauflösung Gx_XIST1 (in Bits))
1 Umdrehung entspricht p0408[0] · 2p0418[0].
Die Normierungsfaktoren für einen sin/cos-Geber mit 512 Strichen/Umdrehung und einer Feinauflösung von 11 Bit sind in der nachfolgenden Tabelle dargestellt:
p31244 (POLYGON Modulolänge) ermöglicht die periodische Wiederholung des Leitwerts bei Rundachsen. Standardmäßig ist p31244 = 360000, d. h. die Modulolänge entspricht einer Umdrehung.
Wenn die Periodenlängen des Leitwerts und des Ausgangssignals verschieden sind, ist p31244 entsprechend zu ändern.
Tabelle 4-1 Normierung des Leitwertes bei Rundachse mit Inkrementalgeber ohne Getriebe
Parameter Parametername Wert Kommentar
p0408[0] Rotatorischer Geber Strichzahl 512
p0418[0] Feinauflösung Gx_XIST1 (in Bits) 11 Entspricht Feinauflösung 2048
p31234 POLYGON Leitwert Rohwert r0479[0] Verschaltung mit Geberlageistwert G1_XIST1
p31235 POLYGON Leitwert Normierung Zähler 360000 1 Umdrehung entspricht 360000 Milligrad.
p31236 POLYGON Leitwert Normierung Nenner 1048576 1 Umdrehung entspricht p0408[0] · 2p0418[0] = 512 · 211 = 220.
p31244 POLYGON Modulolänge 360000 1 Umdrehung
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 37
4 Funktionsbeschreibung und Inbetriebnahme
4.2 Beispiele zur Normierung des Leitwertes bei POLYGON
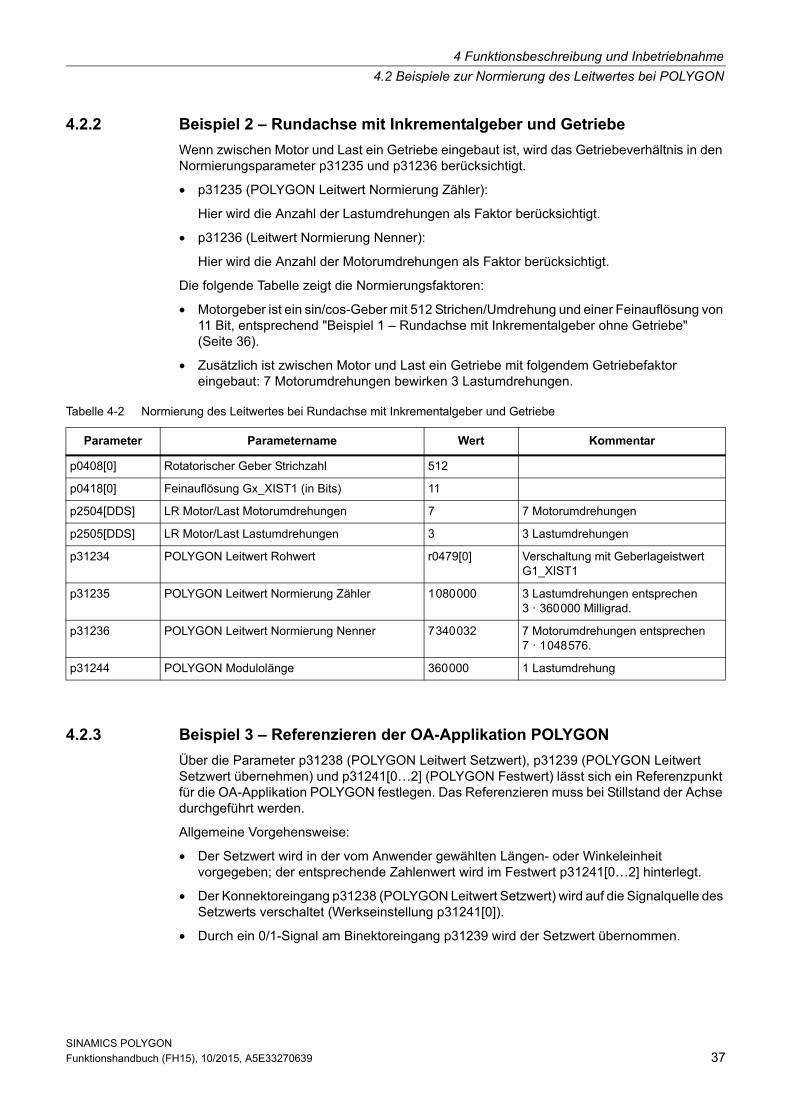
4.2.2 Beispiel 2 – Rundachse mit Inkrementalgeber und Getriebe
Wenn zwischen Motor und Last ein Getriebe eingebaut ist, wird das Getriebeverhältnis in den Normierungsparameter p31235 und p31236 berücksichtigt.
• p31235 (POLYGON Leitwert Normierung Zähler):
Hier wird die Anzahl der Lastumdrehungen als Faktor berücksichtigt.
• p31236 (Leitwert Normierung Nenner):
Hier wird die Anzahl der Motorumdrehungen als Faktor berücksichtigt.
Die folgende Tabelle zeigt die Normierungsfaktoren:
• Motorgeber ist ein sin/cos-Geber mit 512 Strichen/Umdrehung und einer Feinauflösung von 11 Bit, entsprechend "Beispiel 1 – Rundachse mit Inkrementalgeber ohne Getriebe" (Seite 36).
• Zusätzlich ist zwischen Motor und Last ein Getriebe mit folgendem Getriebefaktor eingebaut: 7 Motorumdrehungen bewirken 3 Lastumdrehungen.
4.2.3 Beispiel 3 – Referenzieren der OA-Applikation POLYGON
Über die Parameter p31238 (POLYGON Leitwert Setzwert), p31239 (POLYGON Leitwert Setzwert übernehmen) und p31241[0…2] (POLYGON Festwert) lässt sich ein Referenzpunkt für die OA-Applikation POLYGON festlegen. Das Referenzieren muss bei Stillstand der Achse durchgeführt werden.
Allgemeine Vorgehensweise:
• Der Setzwert wird in der vom Anwender gewählten Längen- oder Winkeleinheit vorgegeben; der entsprechende Zahlenwert wird im Festwert p31241[0…2] hinterlegt.
• Der Konnektoreingang p31238 (POLYGON Leitwert Setzwert) wird auf die Signalquelle des Setzwerts verschaltet (Werkseinstellung p31241[0]).
• Durch ein 0/1-Signal am Binektoreingang p31239 wird der Setzwert übernommen.
Tabelle 4-2 Normierung des Leitwertes bei Rundachse mit Inkrementalgeber und Getriebe
Parameter Parametername Wert Kommentar
p0408[0] Rotatorischer Geber Strichzahl 512
p0418[0] Feinauflösung Gx_XIST1 (in Bits) 11
p2504[DDS] LR Motor/Last Motorumdrehungen 7 7 Motorumdrehungen
p2505[DDS] LR Motor/Last Lastumdrehungen 3 3 Lastumdrehungen
p31234 POLYGON Leitwert Rohwert r0479[0] Verschaltung mit Geberlageistwert G1_XIST1
p31235 POLYGON Leitwert Normierung Zähler 1080000 3 Lastumdrehungen entsprechen 3 · 360000 Milligrad.
p31236 POLYGON Leitwert Normierung Nenner 7340032 7 Motorumdrehungen entsprechen 7 · 1048576.
p31244 POLYGON Modulolänge 360000 1 Lastumdrehung
4 Funktionsbeschreibung und Inbetriebnahme
4.2 Beispiele zur Normierung des Leitwertes bei POLYGON
SINAMICS POLYGON
38 Funktionshandbuch (FH15), 10/2015, A5E33270639
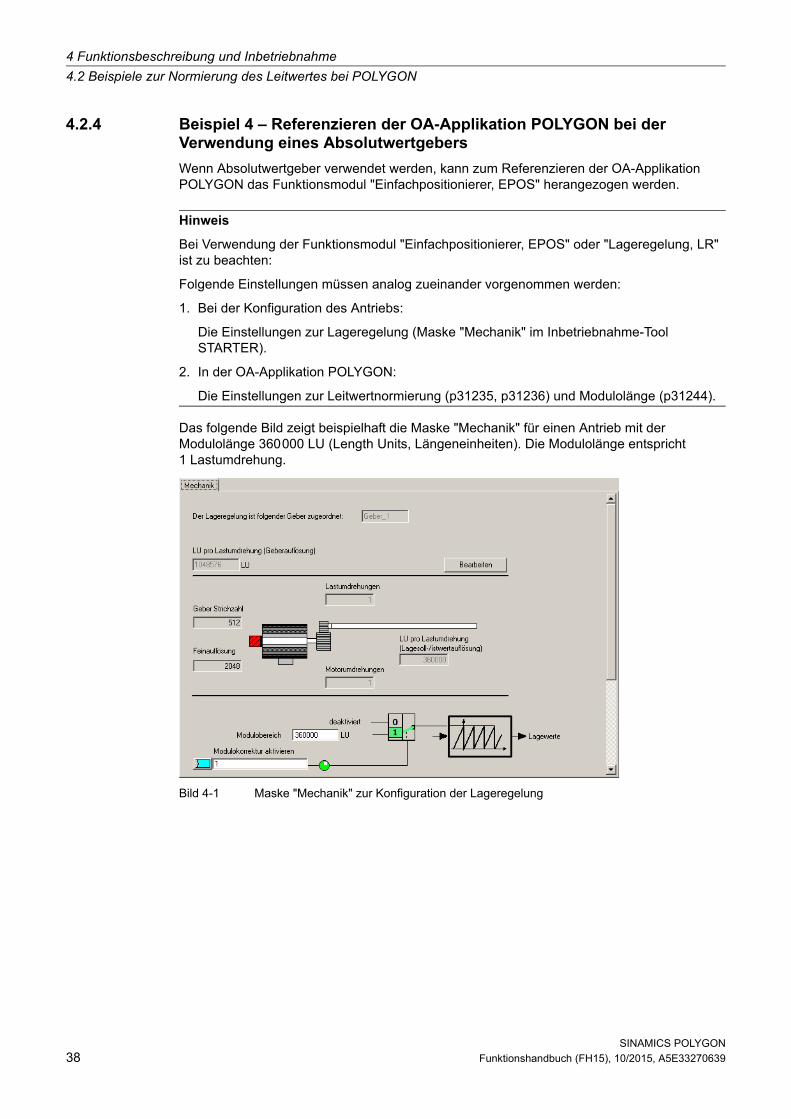
4.2.4 Beispiel 4 – Referenzieren der OA-Applikation POLYGON bei der Verwendung eines Absolutwertgebers
Wenn Absolutwertgeber verwendet werden, kann zum Referenzieren der OA-Applikation POLYGON das Funktionsmodul "Einfachpositionierer, EPOS" herangezogen werden.
Das folgende Bild zeigt beispielhaft die Maske "Mechanik" für einen Antrieb mit der Modulolänge 360000 LU (Length Units, Längeneinheiten). Die Modulolänge entspricht 1 Lastumdrehung.
Bild 4-1 Maske "Mechanik" zur Konfiguration der Lageregelung
Hinweis
Bei Verwendung der Funktionsmodul "Einfachpositionierer, EPOS" oder "Lageregelung, LR" ist zu beachten:
Folgende Einstellungen müssen analog zueinander vorgenommen werden:
1. Bei der Konfiguration des Antriebs:
Die Einstellungen zur Lageregelung (Maske "Mechanik" im Inbetriebnahme-Tool STARTER).
2. In der OA-Applikation POLYGON:
Die Einstellungen zur Leitwertnormierung (p31235, p31236) und Modulolänge (p31244).
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 39
4 Funktionsbeschreibung und Inbetriebnahme
4.2 Beispiele zur Normierung des Leitwertes bei POLYGON
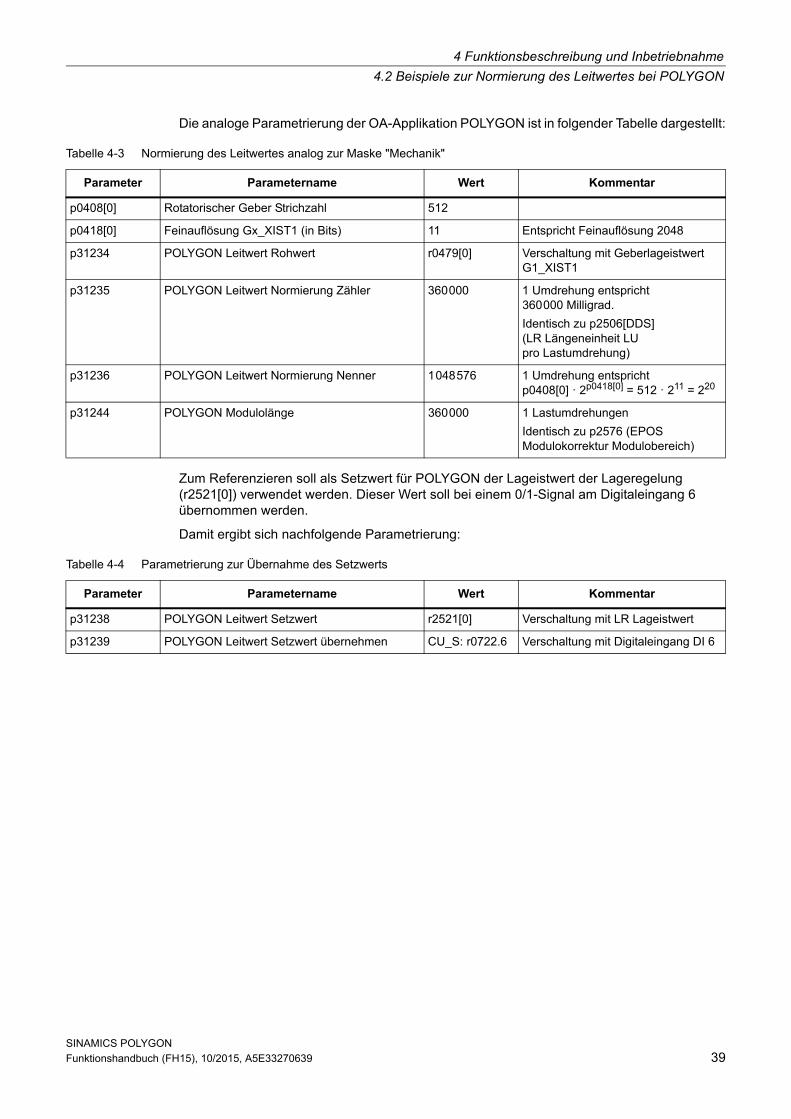
Die analoge Parametrierung der OA-Applikation POLYGON ist in folgender Tabelle dargestellt:
Zum Referenzieren soll als Setzwert für POLYGON der Lageistwert der Lageregelung (r2521[0]) verwendet werden. Dieser Wert soll bei einem 0/1-Signal am Digitaleingang 6 übernommen werden.
Damit ergibt sich nachfolgende Parametrierung:
Tabelle 4-3 Normierung des Leitwertes analog zur Maske "Mechanik"
Parameter Parametername Wert Kommentar
p0408[0] Rotatorischer Geber Strichzahl 512
p0418[0] Feinauflösung Gx_XIST1 (in Bits) 11 Entspricht Feinauflösung 2048
p31234 POLYGON Leitwert Rohwert r0479[0] Verschaltung mit Geberlageistwert G1_XIST1
p31235 POLYGON Leitwert Normierung Zähler 360000 1 Umdrehung entspricht 360000 Milligrad.
Identisch zu p2506[DDS] (LR Längeneinheit LU pro Lastumdrehung)
p31236 POLYGON Leitwert Normierung Nenner 1048576 1 Umdrehung entspricht p0408[0] · 2p0418[0] = 512 · 211 = 220
p31244 POLYGON Modulolänge 360000 1 Lastumdrehungen
Identisch zu p2576 (EPOS Modulokorrektur Modulobereich)
Tabelle 4-4 Parametrierung zur Übernahme des Setzwerts
Parameter Parametername Wert Kommentar
p31238 POLYGON Leitwert Setzwert r2521[0] Verschaltung mit LR Lageistwert
p31239 POLYGON Leitwert Setzwert übernehmen CU_S: r0722.6 Verschaltung mit Digitaleingang DI 6
4 Funktionsbeschreibung und Inbetriebnahme
4.3 Beispiele für Kennlinien bei POLYGON
SINAMICS POLYGON
40 Funktionshandbuch (FH15), 10/2015, A5E33270639
4.3 Beispiele für Kennlinien bei POLYGON
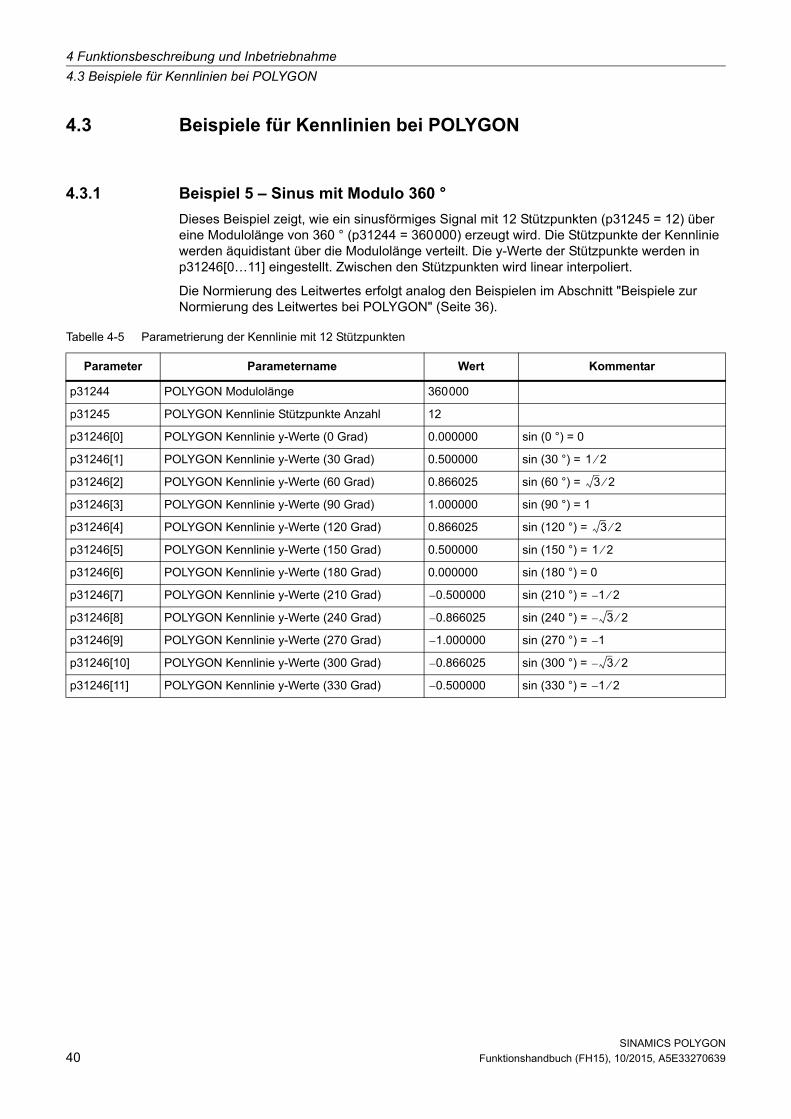
4.3.1 Beispiel 5 – Sinus mit Modulo 360 °
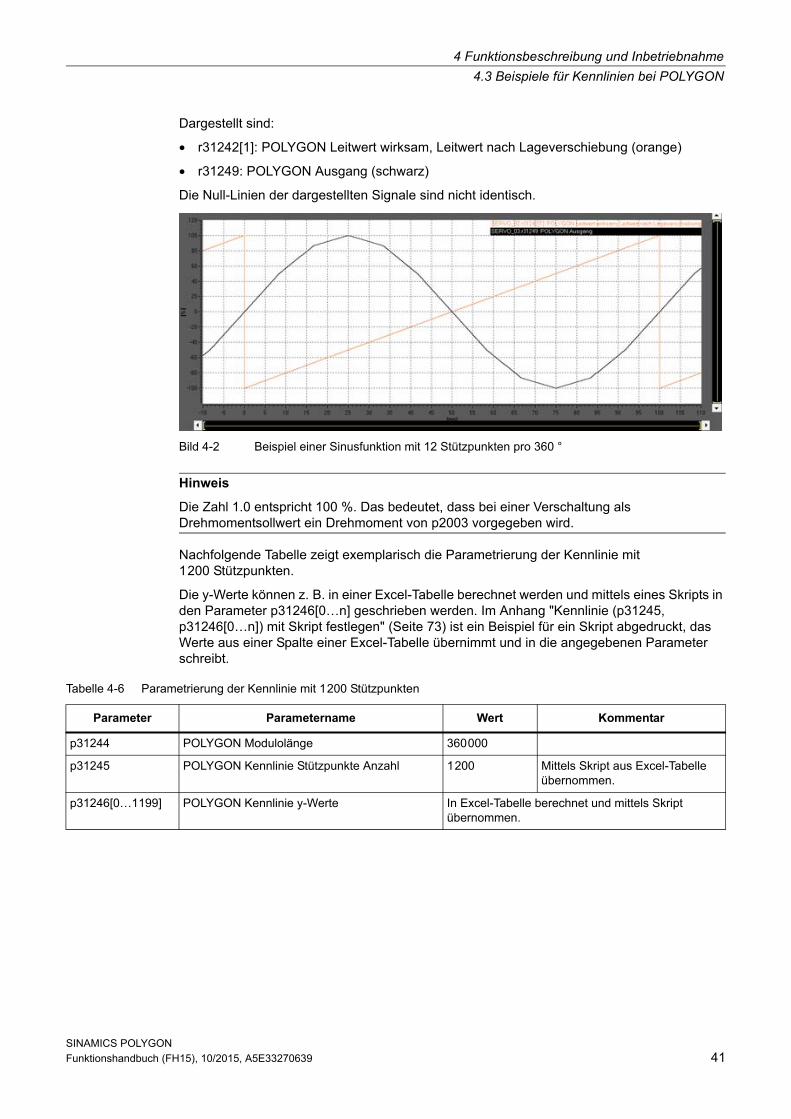
Dieses Beispiel zeigt, wie ein sinusförmiges Signal mit 12 Stützpunkten (p31245 = 12) über eine Modulolänge von 360 ° (p31244 = 360000) erzeugt wird. Die Stützpunkte der Kennlinie werden äquidistant über die Modulolänge verteilt. Die y-Werte der Stützpunkte werden in p31246[0…11] eingestellt. Zwischen den Stützpunkten wird linear interpoliert.
Die Normierung des Leitwertes erfolgt analog den Beispielen im Abschnitt "Beispiele zur Normierung des Leitwertes bei POLYGON" (Seite 36).
Tabelle 4-5 Parametrierung der Kennlinie mit 12 Stützpunkten
Parameter Parametername Wert Kommentar
p31244 POLYGON Modulolänge 360000
p31245 POLYGON Kennlinie Stützpunkte Anzahl 12
p31246[0] POLYGON Kennlinie y-Werte (0 Grad) 0.000000 sin (0 °) = 0
p31246[1] POLYGON Kennlinie y-Werte (30 Grad) 0.500000 sin (30 °) =
p31246[2] POLYGON Kennlinie y-Werte (60 Grad) 0.866025 sin (60 °) =
p31246[3] POLYGON Kennlinie y-Werte (90 Grad) 1.000000 sin (90 °) = 1
p31246[4] POLYGON Kennlinie y-Werte (120 Grad) 0.866025 sin (120 °) =
p31246[5] POLYGON Kennlinie y-Werte (150 Grad) 0.500000 sin (150 °) =
p31246[6] POLYGON Kennlinie y-Werte (180 Grad) 0.000000 sin (180 °) = 0
p31246[7] POLYGON Kennlinie y-Werte (210 Grad) sin (210 °) =
p31246[8] POLYGON Kennlinie y-Werte (240 Grad) sin (240 °) =
p31246[9] POLYGON Kennlinie y-Werte (270 Grad) sin (270 °) =
p31246[10] POLYGON Kennlinie y-Werte (300 Grad) sin (300 °) =
p31246[11] POLYGON Kennlinie y-Werte (330 Grad) sin (330 °) =
1 2⁄
3 2⁄
3 2⁄
1 2⁄
0.500000– 1– 2⁄
0.866025– 3– 2⁄
1.000000– 1–
0.866025– 3– 2⁄
0.500000– 1– 2⁄
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 41
4 Funktionsbeschreibung und Inbetriebnahme
4.3 Beispiele für Kennlinien bei POLYGON
Dargestellt sind:
• r31242[1]: POLYGON Leitwert wirksam, Leitwert nach Lageverschiebung (orange)
• r31249: POLYGON Ausgang (schwarz)
Die Null-Linien der dargestellten Signale sind nicht identisch.
Bild 4-2 Beispiel einer Sinusfunktion mit 12 Stützpunkten pro 360 °
Nachfolgende Tabelle zeigt exemplarisch die Parametrierung der Kennlinie mit 1200 Stützpunkten.
Die y-Werte können z. B. in einer Excel-Tabelle berechnet werden und mittels eines Skripts in den Parameter p31246[0…n] geschrieben werden. Im Anhang "Kennlinie (p31245, p31246[0…n]) mit Skript festlegen" (Seite 73) ist ein Beispiel für ein Skript abgedruckt, das Werte aus einer Spalte einer Excel-Tabelle übernimmt und in die angegebenen Parameter schreibt.
Hinweis
Die Zahl 1.0 entspricht 100 %. Das bedeutet, dass bei einer Verschaltung als Drehmomentsollwert ein Drehmoment von p2003 vorgegeben wird.
Tabelle 4-6 Parametrierung der Kennlinie mit 1200 Stützpunkten
Parameter Parametername Wert Kommentar
p31244 POLYGON Modulolänge 360000
p31245 POLYGON Kennlinie Stützpunkte Anzahl 1200 Mittels Skript aus Excel-Tabelle übernommen.
p31246[0…1199] POLYGON Kennlinie y-Werte In Excel-Tabelle berechnet und mittels Skript übernommen.
4 Funktionsbeschreibung und Inbetriebnahme
4.3 Beispiele für Kennlinien bei POLYGON
SINAMICS POLYGON
42 Funktionshandbuch (FH15), 10/2015, A5E33270639
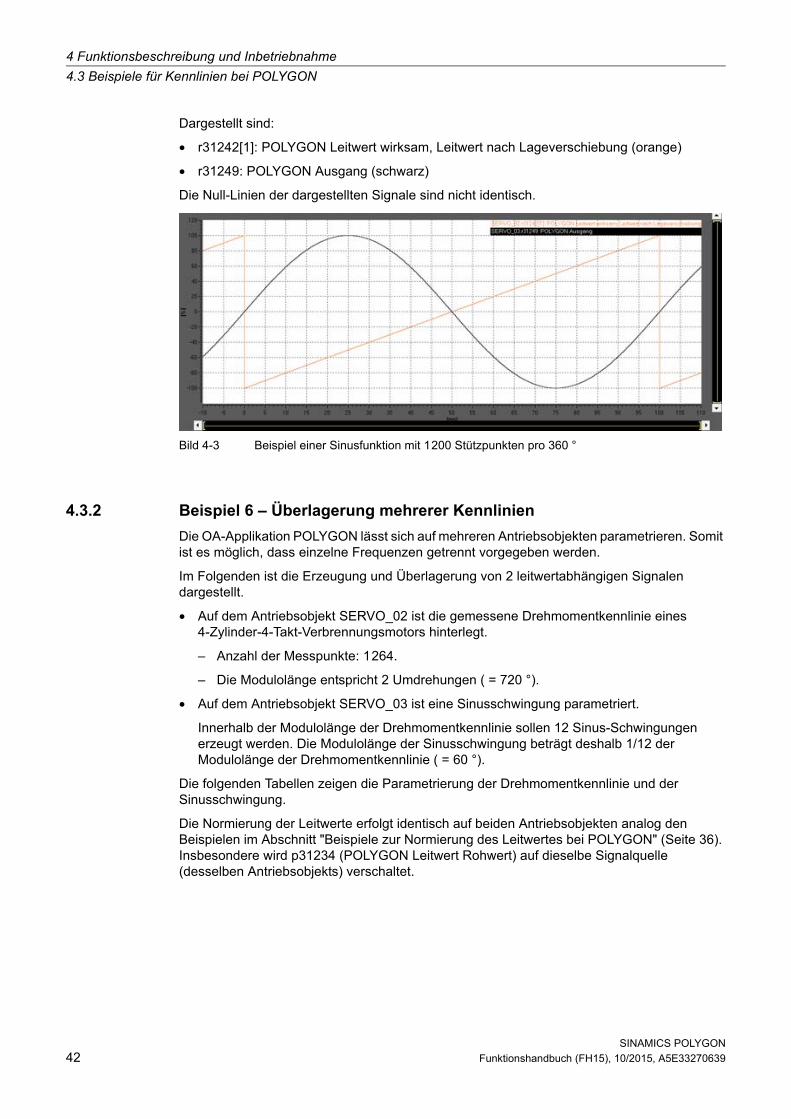
Dargestellt sind:
• r31242[1]: POLYGON Leitwert wirksam, Leitwert nach Lageverschiebung (orange)
• r31249: POLYGON Ausgang (schwarz)
Die Null-Linien der dargestellten Signale sind nicht identisch.
Bild 4-3 Beispiel einer Sinusfunktion mit 1200 Stützpunkten pro 360 °
4.3.2 Beispiel 6 – Überlagerung mehrerer Kennlinien
Die OA-Applikation POLYGON lässt sich auf mehreren Antriebsobjekten parametrieren. Somit ist es möglich, dass einzelne Frequenzen getrennt vorgegeben werden.
Im Folgenden ist die Erzeugung und Überlagerung von 2 leitwertabhängigen Signalen dargestellt.
• Auf dem Antriebsobjekt SERVO_02 ist die gemessene Drehmomentkennlinie eines 4-Zylinder-4-Takt-Verbrennungsmotors hinterlegt.
– Anzahl der Messpunkte: 1264.
– Die Modulolänge entspricht 2 Umdrehungen ( = 720 °).
• Auf dem Antriebsobjekt SERVO_03 ist eine Sinusschwingung parametriert.
Innerhalb der Modulolänge der Drehmomentkennlinie sollen 12 Sinus-Schwingungen erzeugt werden. Die Modulolänge der Sinusschwingung beträgt deshalb 1/12 der Modulolänge der Drehmomentkennlinie ( = 60 °).
Die folgenden Tabellen zeigen die Parametrierung der Drehmomentkennlinie und der Sinusschwingung.
Die Normierung der Leitwerte erfolgt identisch auf beiden Antriebsobjekten analog den Beispielen im Abschnitt "Beispiele zur Normierung des Leitwertes bei POLYGON" (Seite 36). Insbesondere wird p31234 (POLYGON Leitwert Rohwert) auf dieselbe Signalquelle (desselben Antriebsobjekts) verschaltet.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 43
4 Funktionsbeschreibung und Inbetriebnahme
4.3 Beispiele für Kennlinien bei POLYGON
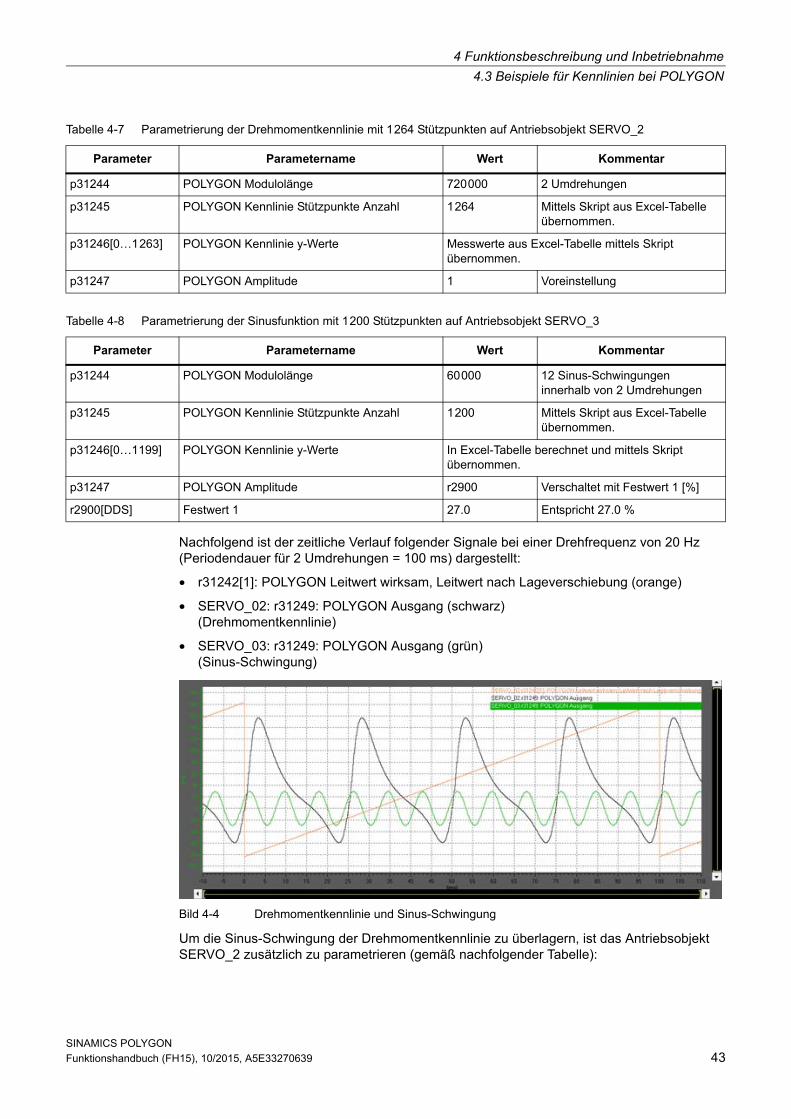
Nachfolgend ist der zeitliche Verlauf folgender Signale bei einer Drehfrequenz von 20 Hz (Periodendauer für 2 Umdrehungen = 100 ms) dargestellt:
• r31242[1]: POLYGON Leitwert wirksam, Leitwert nach Lageverschiebung (orange)
• SERVO_02: r31249: POLYGON Ausgang (schwarz)(Drehmomentkennlinie)
• SERVO_03: r31249: POLYGON Ausgang (grün)(Sinus-Schwingung)
Bild 4-4 Drehmomentkennlinie und Sinus-Schwingung
Um die Sinus-Schwingung der Drehmomentkennlinie zu überlagern, ist das Antriebsobjekt SERVO_2 zusätzlich zu parametrieren (gemäß nachfolgender Tabelle):
Tabelle 4-7 Parametrierung der Drehmomentkennlinie mit 1264 Stützpunkten auf Antriebsobjekt SERVO_2
Parameter Parametername Wert Kommentar
p31244 POLYGON Modulolänge 720000 2 Umdrehungen
p31245 POLYGON Kennlinie Stützpunkte Anzahl 1264 Mittels Skript aus Excel-Tabelle übernommen.
p31246[0…1263] POLYGON Kennlinie y-Werte Messwerte aus Excel-Tabelle mittels Skript übernommen.
p31247 POLYGON Amplitude 1 Voreinstellung
Tabelle 4-8 Parametrierung der Sinusfunktion mit 1200 Stützpunkten auf Antriebsobjekt SERVO_3
Parameter Parametername Wert Kommentar
p31244 POLYGON Modulolänge 60000 12 Sinus-Schwingungen innerhalb von 2 Umdrehungen
p31245 POLYGON Kennlinie Stützpunkte Anzahl 1200 Mittels Skript aus Excel-Tabelle übernommen.
p31246[0…1199] POLYGON Kennlinie y-Werte In Excel-Tabelle berechnet und mittels Skript übernommen.
p31247 POLYGON Amplitude r2900 Verschaltet mit Festwert 1 [%]
r2900[DDS] Festwert 1 27.0 Entspricht 27.0 %
4 Funktionsbeschreibung und Inbetriebnahme
4.3 Beispiele für Kennlinien bei POLYGON
SINAMICS POLYGON
44 Funktionshandbuch (FH15), 10/2015, A5E33270639
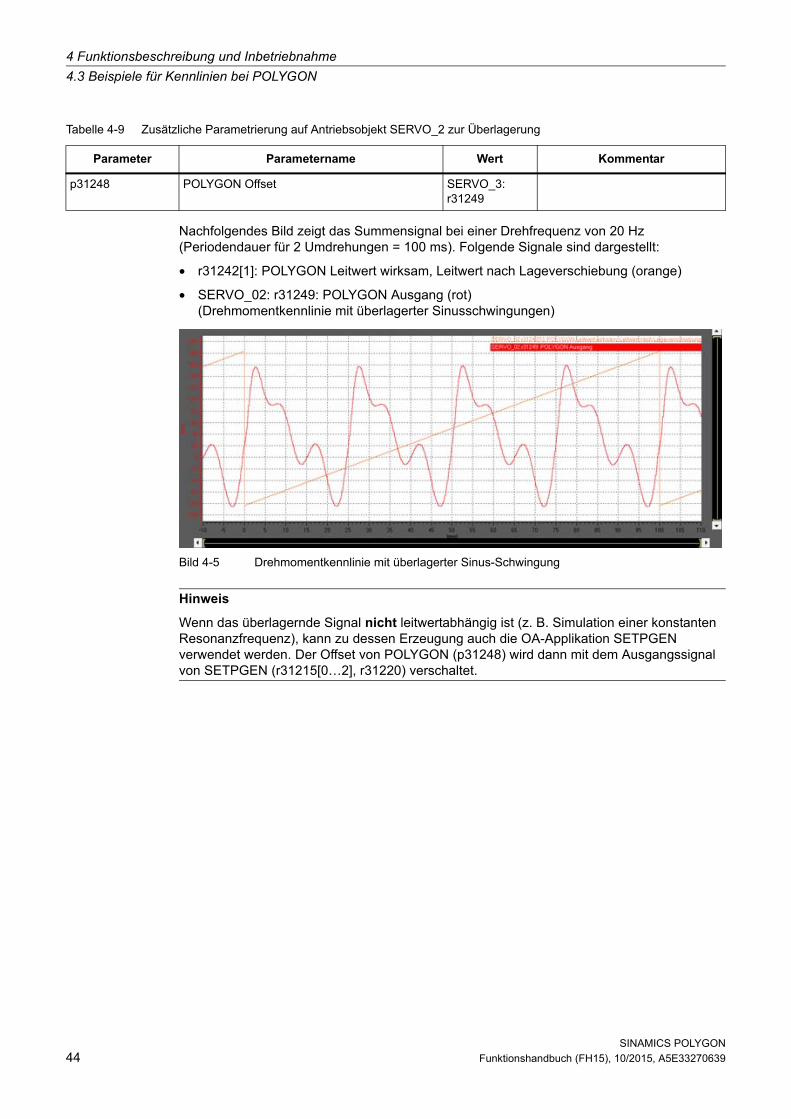
Nachfolgendes Bild zeigt das Summensignal bei einer Drehfrequenz von 20 Hz (Periodendauer für 2 Umdrehungen = 100 ms). Folgende Signale sind dargestellt:
• r31242[1]: POLYGON Leitwert wirksam, Leitwert nach Lageverschiebung (orange)
• SERVO_02: r31249: POLYGON Ausgang (rot)(Drehmomentkennlinie mit überlagerter Sinusschwingungen)
Bild 4-5 Drehmomentkennlinie mit überlagerter Sinus-Schwingung
Tabelle 4-9 Zusätzliche Parametrierung auf Antriebsobjekt SERVO_2 zur Überlagerung
Parameter Parametername Wert Kommentar
p31248 POLYGON Offset SERVO_3: r31249
Hinweis
Wenn das überlagernde Signal nicht leitwertabhängig ist (z. B. Simulation einer konstanten Resonanzfrequenz), kann zu dessen Erzeugung auch die OA-Applikation SETPGEN verwendet werden. Der Offset von POLYGON (p31248) wird dann mit dem Ausgangssignal von SETPGEN (r31215[0…2], r31220) verschaltet.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 45
4 Funktionsbeschreibung und Inbetriebnahme
4.3 Beispiele für Kennlinien bei POLYGON
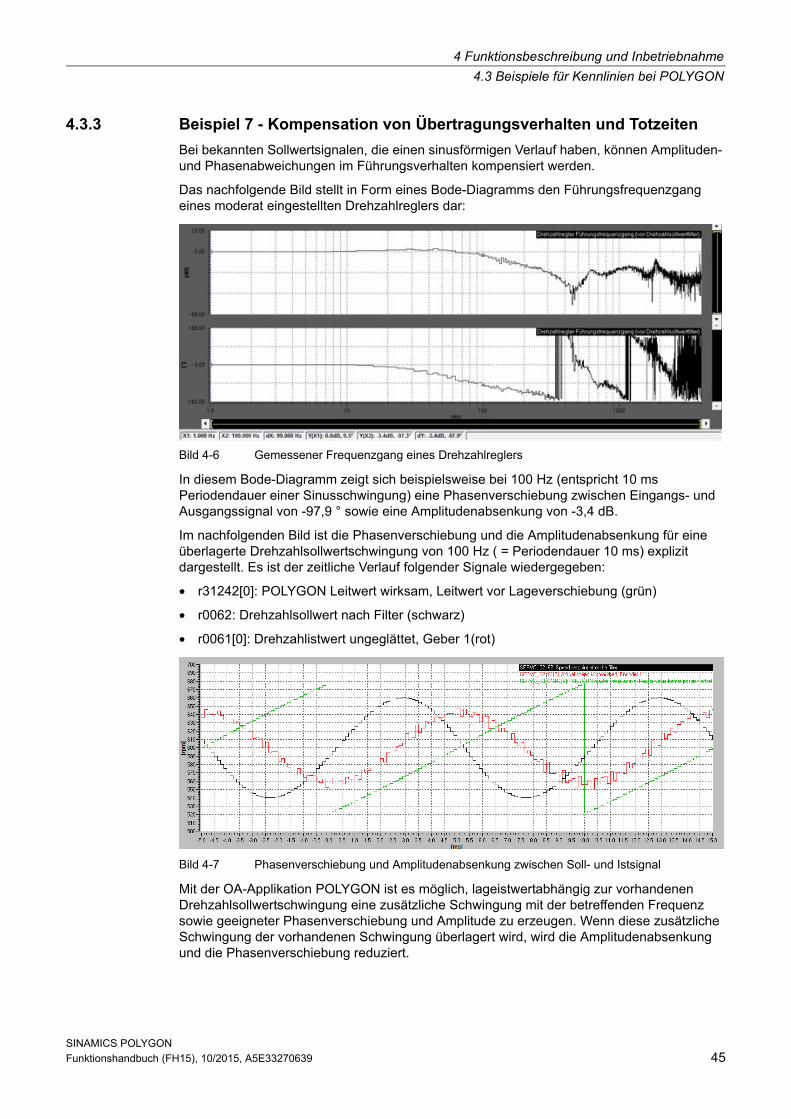
4.3.3 Beispiel 7 - Kompensation von Übertragungsverhalten und Totzeiten
Bei bekannten Sollwertsignalen, die einen sinusförmigen Verlauf haben, können Amplituden- und Phasenabweichungen im Führungsverhalten kompensiert werden.
Das nachfolgende Bild stellt in Form eines Bode-Diagramms den Führungsfrequenzgang eines moderat eingestellten Drehzahlreglers dar:
Bild 4-6 Gemessener Frequenzgang eines Drehzahlreglers
In diesem Bode-Diagramm zeigt sich beispielsweise bei 100 Hz (entspricht 10 ms Periodendauer einer Sinusschwingung) eine Phasenverschiebung zwischen Eingangs- und Ausgangssignal von -97,9 ° sowie eine Amplitudenabsenkung von -3,4 dB.
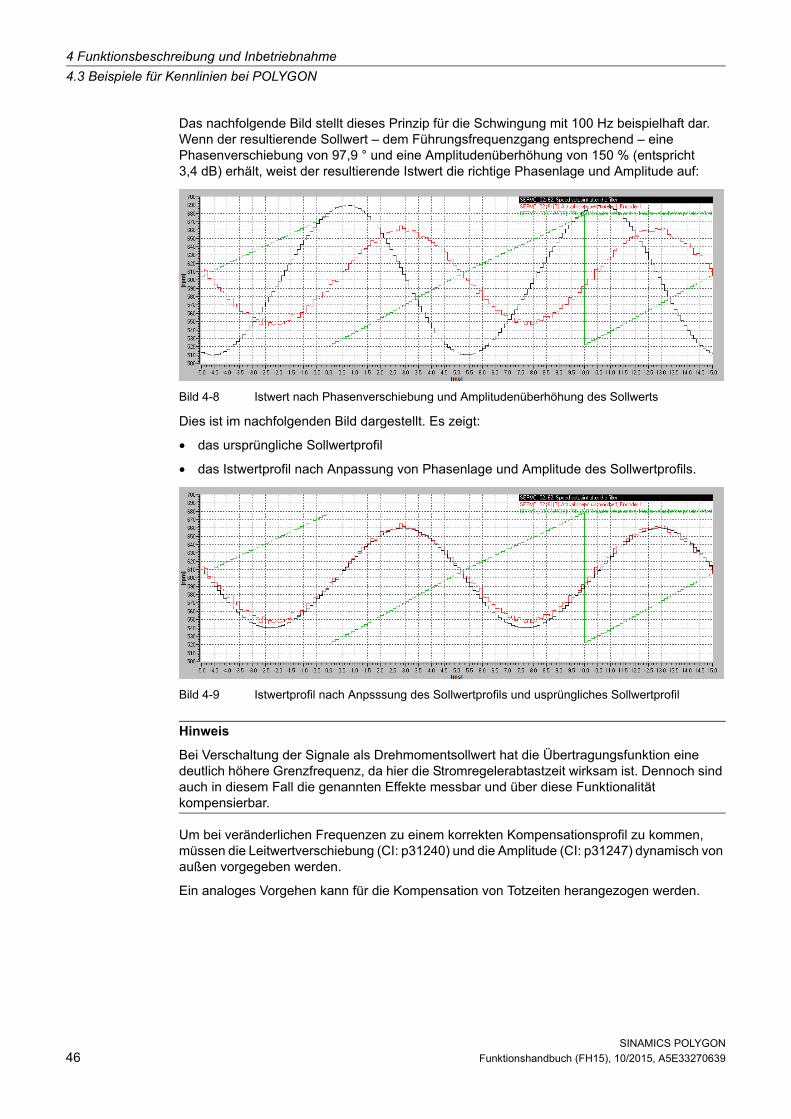
Im nachfolgenden Bild ist die Phasenverschiebung und die Amplitudenabsenkung für eine überlagerte Drehzahlsollwertschwingung von 100 Hz ( = Periodendauer 10 ms) explizit dargestellt. Es ist der zeitliche Verlauf folgender Signale wiedergegeben:
• r31242[0]: POLYGON Leitwert wirksam, Leitwert vor Lageverschiebung (grün)
• r0062: Drehzahlsollwert nach Filter (schwarz)
• r0061[0]: Drehzahlistwert ungeglättet, Geber 1(rot)
Bild 4-7 Phasenverschiebung und Amplitudenabsenkung zwischen Soll- und Istsignal
Mit der OA-Applikation POLYGON ist es möglich, lageistwertabhängig zur vorhandenen Drehzahlsollwertschwingung eine zusätzliche Schwingung mit der betreffenden Frequenz sowie geeigneter Phasenverschiebung und Amplitude zu erzeugen. Wenn diese zusätzliche Schwingung der vorhandenen Schwingung überlagert wird, wird die Amplitudenabsenkung und die Phasenverschiebung reduziert.
4 Funktionsbeschreibung und Inbetriebnahme
4.3 Beispiele für Kennlinien bei POLYGON
SINAMICS POLYGON
46 Funktionshandbuch (FH15), 10/2015, A5E33270639
Das nachfolgende Bild stellt dieses Prinzip für die Schwingung mit 100 Hz beispielhaft dar. Wenn der resultierende Sollwert – dem Führungsfrequenzgang entsprechend – eine Phasenverschiebung von 97,9 ° und eine Amplitudenüberhöhung von 150 % (entspricht 3,4 dB) erhält, weist der resultierende Istwert die richtige Phasenlage und Amplitude auf:
Bild 4-8 Istwert nach Phasenverschiebung und Amplitudenüberhöhung des Sollwerts
Dies ist im nachfolgenden Bild dargestellt. Es zeigt:
• das ursprüngliche Sollwertprofil
• das Istwertprofil nach Anpassung von Phasenlage und Amplitude des Sollwertprofils.
Bild 4-9 Istwertprofil nach Anpsssung des Sollwertprofils und usprüngliches Sollwertprofil
Um bei veränderlichen Frequenzen zu einem korrekten Kompensationsprofil zu kommen, müssen die Leitwertverschiebung (CI: p31240) und die Amplitude (CI: p31247) dynamisch von außen vorgegeben werden.
Ein analoges Vorgehen kann für die Kompensation von Totzeiten herangezogen werden.
Hinweis
Bei Verschaltung der Signale als Drehmomentsollwert hat die Übertragungsfunktion eine deutlich höhere Grenzfrequenz, da hier die Stromregelerabtastzeit wirksam ist. Dennoch sind auch in diesem Fall die genannten Effekte messbar und über diese Funktionalität kompensierbar.
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 47
4 Funktionsbeschreibung und Inbetriebnahme
4.4 Funktionspläne
4.4 Funktionspläne
Hinweis
In diesem Handbuch ist ausschließlich der Funktionsplan für die OA-Applikation POLYGON enthalten, siehe Kapitel "Funktionspläne" (Seite 59).
Die bei SINAMICS zur Verfügung stehenden Funktionspläne sind in den jeweiligen produktspezifischen Listenhandbüchern enthalten, beispielsweise:
Literatur: /LH1/ SINAMICS S120/S150 ListenhandbuchKapitel "Funktionspläne"
4 Funktionsbeschreibung und Inbetriebnahme
4.5 Abtastzeiten und Anzahl regelbarer Antriebe
SINAMICS POLYGON
48 Funktionshandbuch (FH15), 10/2015, A5E33270639
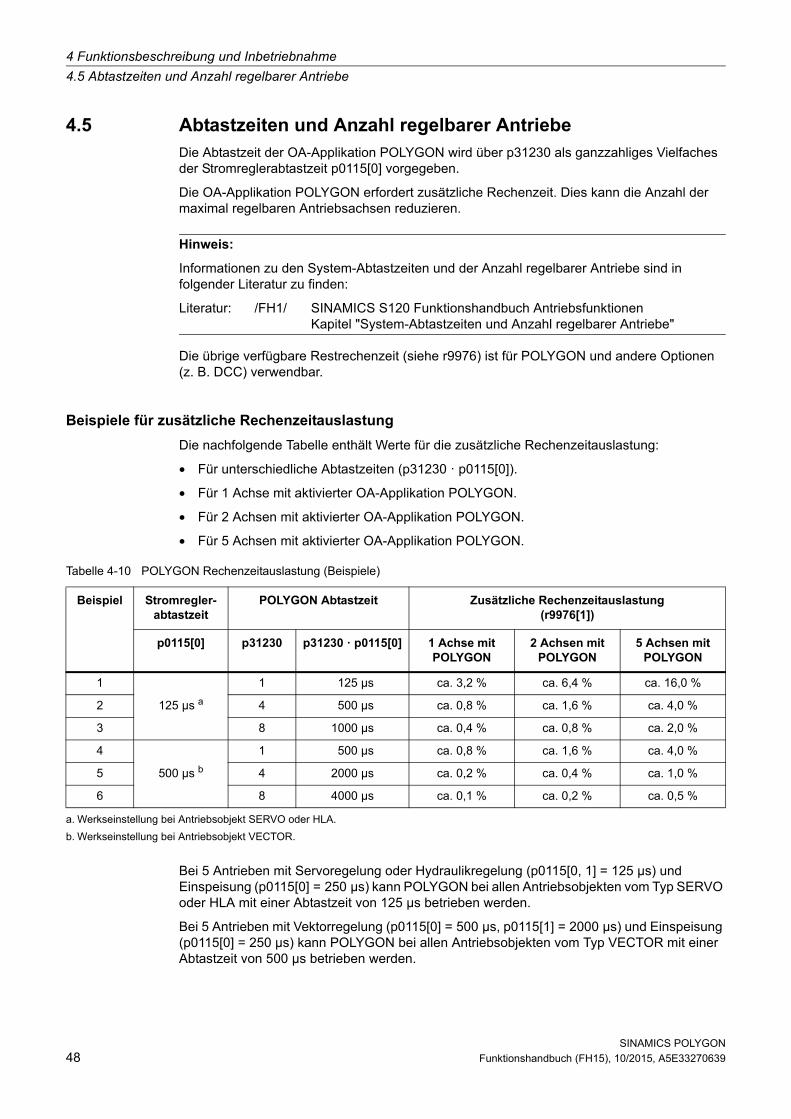
4.5 Abtastzeiten und Anzahl regelbarer AntriebeDie Abtastzeit der OA-Applikation POLYGON wird über p31230 als ganzzahliges Vielfaches der Stromreglerabtastzeit p0115[0] vorgegeben.
Die OA-Applikation POLYGON erfordert zusätzliche Rechenzeit. Dies kann die Anzahl der maximal regelbaren Antriebsachsen reduzieren.
Die übrige verfügbare Restrechenzeit (siehe r9976) ist für POLYGON und andere Optionen (z. B. DCC) verwendbar.
Beispiele für zusätzliche Rechenzeitauslastung
Die nachfolgende Tabelle enthält Werte für die zusätzliche Rechenzeitauslastung:
• Für unterschiedliche Abtastzeiten (p31230 · p0115[0]).
• Für 1 Achse mit aktivierter OA-Applikation POLYGON.
• Für 2 Achsen mit aktivierter OA-Applikation POLYGON.
• Für 5 Achsen mit aktivierter OA-Applikation POLYGON.
Bei 5 Antrieben mit Servoregelung oder Hydraulikregelung (p0115[0, 1] = 125 µs) und Einspeisung (p0115[0] = 250 µs) kann POLYGON bei allen Antriebsobjekten vom Typ SERVO oder HLA mit einer Abtastzeit von 125 µs betrieben werden.
Bei 5 Antrieben mit Vektorregelung (p0115[0] = 500 µs, p0115[1] = 2000 µs) und Einspeisung (p0115[0] = 250 µs) kann POLYGON bei allen Antriebsobjekten vom Typ VECTOR mit einer Abtastzeit von 500 µs betrieben werden.
Hinweis:
Informationen zu den System-Abtastzeiten und der Anzahl regelbarer Antriebe sind in folgender Literatur zu finden:
Literatur: /FH1/ SINAMICS S120 Funktionshandbuch AntriebsfunktionenKapitel "System-Abtastzeiten und Anzahl regelbarer Antriebe"
Tabelle 4-10 POLYGON Rechenzeitauslastung (Beispiele)
Beispiel Stromregler-abtastzeit
POLYGON Abtastzeit Zusätzliche Rechenzeitauslastung(r9976[1])
p0115[0] p31230 p31230 · p0115[0] 1 Achse mit POLYGON
2 Achsen mit POLYGON
5 Achsen mit POLYGON
1
125 µs a
a. Werkseinstellung bei Antriebsobjekt SERVO oder HLA.
1 125 µs ca. 3,2 % ca. 6,4 % ca. 16,0 %
2 4 500 µs ca. 0,8 % ca. 1,6 % ca. 4,0 %
3 8 1000 µs ca. 0,4 % ca. 0,8 % ca. 2,0 %
4
500 µs b
b. Werkseinstellung bei Antriebsobjekt VECTOR.
1 500 µs ca. 0,8 % ca. 1,6 % ca. 4,0 %
5 4 2000 µs ca. 0,2 % ca. 0,4 % ca. 1,0 %
6 8 4000 µs ca. 0,1 % ca. 0,2 % ca. 0,5 %

SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 49
4 Funktionsbeschreibung und Inbetriebnahme
4.6 Lizenzierung
4.6 LizenzierungFür die OA-Applikation "POLYGON" ist ein License Key erforderlich:
Einen entsprechenden License Key können Sie mit Hilfe des WEB License Managers erzeugen. Dazu benötigen Sie das Certificate of License (CoL).
Die Bestellnummer (MLFB) für das Certificate of License (CoL) lautet wie folgt:
6SL3077-0AA00-7AB0
Hinweis
Informationen und Vorgehensweise zur Lizenzierung sind in folgender Literatur zu finden:
Literatur: /FH1/ SINAMICS S120 Funktionshandbuch AntriebsfunktionenKapitel "Lizenzierung"

4 Funktionsbeschreibung und Inbetriebnahme
4.7 SINAMICS Safety Integrated
SINAMICS POLYGON
50 Funktionshandbuch (FH15), 10/2015, A5E33270639
4.7 SINAMICS Safety IntegratedDie mit dieser OA-Applikation realisierten Funktionen sind nicht Bestandteil der SINAMICS Safety Integrated Functions und beeinflussen die SINAMICS Safety Integrated Functions nicht.
Hinweis
Informationen zu SINAMICS Safety Integrated sind in folgender Literatur zu finden:
Literatur: /FHS/ SINAMICS S120 Safety Integrated Funktionshandbuch
5
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 51
Parameter
Inhalt
5.1 Übersicht zu den Parametern 52
5.2 Liste der Parameter 53
5 Parameter
5.1 Übersicht zu den Parametern
SINAMICS POLYGON
52 Funktionshandbuch (FH15), 10/2015, A5E33270639
5.1 Übersicht zu den Parametern
Alle Objekte
Die Angabe "Alle Objekte" in der folgenden Liste bezieht sich auf alle Antriebsobjekte, für welche die OA-Applikation POLYGON freigegeben ist.
Dies sind folgende Antriebsobjekte:
• HLA
• SERVO
• VECTOR
Hinweis
Eine Übersicht zu den Parametern, insbesondere die Erklärung zur Liste der Parameter, ist in den produktspezifischen Listenhandbüchern enthalten, beispielsweise:
Literatur: /LH1/ SINAMICS S120/S150 ListenhandbuchKapitel "Übersicht zu den Parametern"
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 53
5 Parameter
5.2 Liste der Parameter
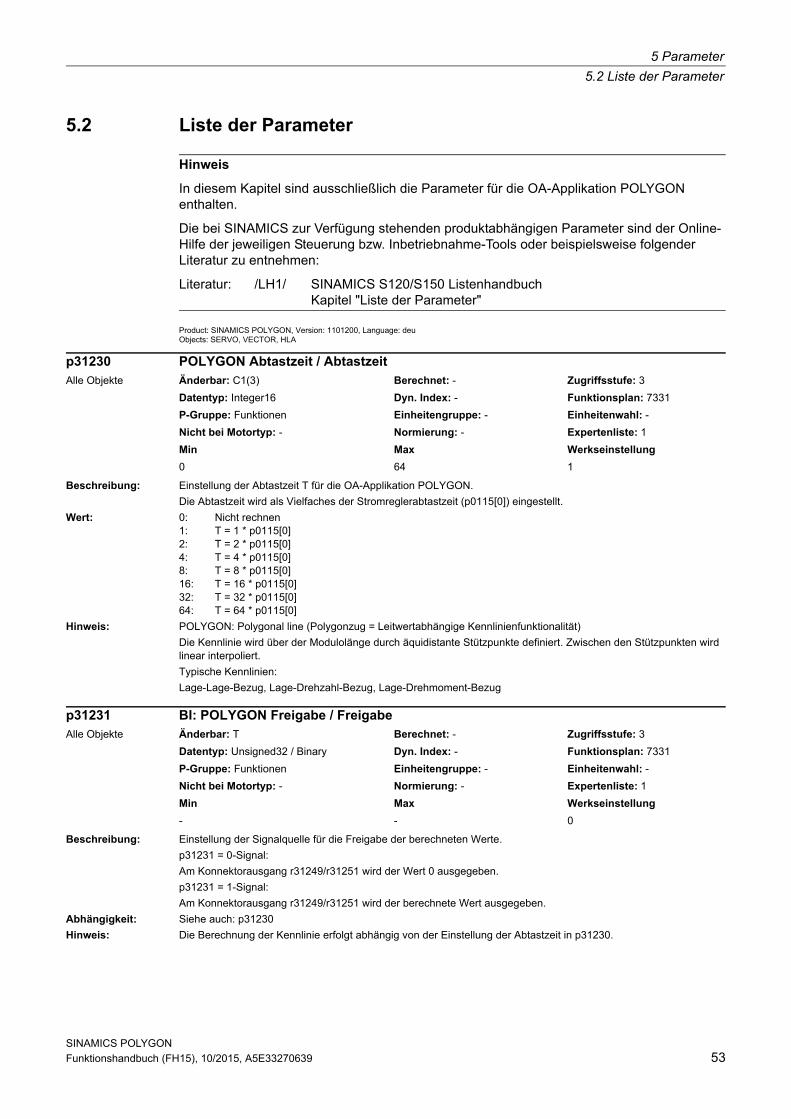
5.2 Liste der Parameter
Product: SINAMICS POLYGON, Version: 1101200, Language: deuObjects: SERVO, VECTOR, HLA
Beschreibung: Einstellung der Abtastzeit T für die OA-Applikation POLYGON.
Die Abtastzeit wird als Vielfaches der Stromreglerabtastzeit (p0115[0]) eingestellt.
Wert: 0: Nicht rechnen1: T = 1 * p0115[0]2: T = 2 * p0115[0]4: T = 4 * p0115[0]8: T = 8 * p0115[0]16: T = 16 * p0115[0]32: T = 32 * p0115[0]64: T = 64 * p0115[0]
Hinweis: POLYGON: Polygonal line (Polygonzug = Leitwertabhängige Kennlinienfunktionalität)
Die Kennlinie wird über der Modulolänge durch äquidistante Stützpunkte definiert. Zwischen den Stützpunkten wird linear interpoliert.
Typische Kennlinien:
Lage-Lage-Bezug, Lage-Drehzahl-Bezug, Lage-Drehmoment-Bezug
Beschreibung: Einstellung der Signalquelle für die Freigabe der berechneten Werte.
p31231 = 0-Signal:
Am Konnektorausgang r31249/r31251 wird der Wert 0 ausgegeben.
p31231 = 1-Signal:
Am Konnektorausgang r31249/r31251 wird der berechnete Wert ausgegeben.
Abhängigkeit: Siehe auch: p31230
Hinweis: Die Berechnung der Kennlinie erfolgt abhängig von der Einstellung der Abtastzeit in p31230.
Hinweis
In diesem Kapitel sind ausschließlich die Parameter für die OA-Applikation POLYGON enthalten.
Die bei SINAMICS zur Verfügung stehenden produktabhängigen Parameter sind der Online-Hilfe der jeweiligen Steuerung bzw. Inbetriebnahme-Tools oder beispielsweise folgender Literatur zu entnehmen:
Literatur: /LH1/ SINAMICS S120/S150 ListenhandbuchKapitel "Liste der Parameter"
p31230 POLYGON Abtastzeit / AbtastzeitAlle Objekte Änderbar: C1(3) Berechnet: - Zugriffsstufe: 3
Datentyp: Integer16 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
0 64 1
p31231 BI: POLYGON Freigabe / FreigabeAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned32 / Binary Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
- - 0
5 Parameter
5.2 Liste der Parameter
SINAMICS POLYGON
54 Funktionshandbuch (FH15), 10/2015, A5E33270639
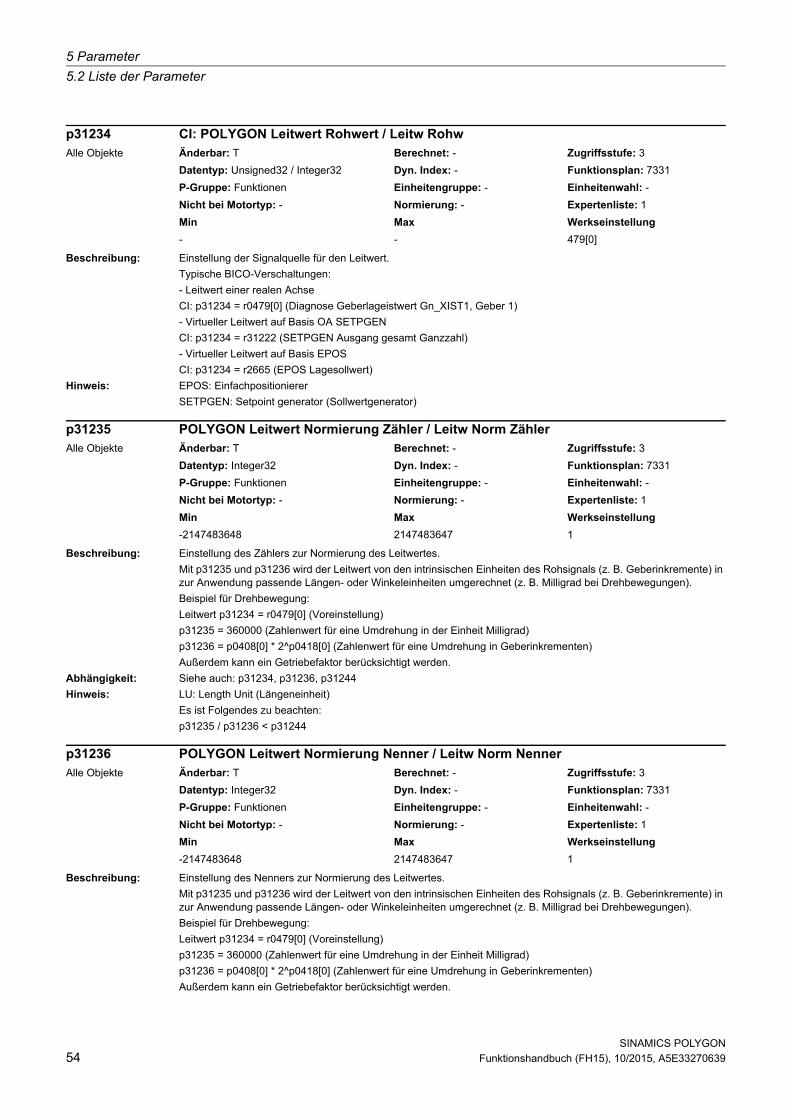
Beschreibung: Einstellung der Signalquelle für den Leitwert.
Typische BICO-Verschaltungen:
- Leitwert einer realen Achse
CI: p31234 = r0479[0] (Diagnose Geberlageistwert Gn_XIST1, Geber 1)
- Virtueller Leitwert auf Basis OA SETPGEN
CI: p31234 = r31222 (SETPGEN Ausgang gesamt Ganzzahl)
- Virtueller Leitwert auf Basis EPOS
CI: p31234 = r2665 (EPOS Lagesollwert)
Hinweis: EPOS: Einfachpositionierer
SETPGEN: Setpoint generator (Sollwertgenerator)
Beschreibung: Einstellung des Zählers zur Normierung des Leitwertes.
Mit p31235 und p31236 wird der Leitwert von den intrinsischen Einheiten des Rohsignals (z. B. Geberinkremente) in zur Anwendung passende Längen- oder Winkeleinheiten umgerechnet (z. B. Milligrad bei Drehbewegungen).
Beispiel für Drehbewegung:
Leitwert p31234 = r0479[0] (Voreinstellung)
p31235 = 360000 (Zahlenwert für eine Umdrehung in der Einheit Milligrad)
p31236 = p0408[0] * 2^p0418[0] (Zahlenwert für eine Umdrehung in Geberinkrementen)
Außerdem kann ein Getriebefaktor berücksichtigt werden.
Abhängigkeit: Siehe auch: p31234, p31236, p31244
Hinweis: LU: Length Unit (Längeneinheit)
Es ist Folgendes zu beachten:
p31235 / p31236 < p31244
Beschreibung: Einstellung des Nenners zur Normierung des Leitwertes.
Mit p31235 und p31236 wird der Leitwert von den intrinsischen Einheiten des Rohsignals (z. B. Geberinkremente) in zur Anwendung passende Längen- oder Winkeleinheiten umgerechnet (z. B. Milligrad bei Drehbewegungen).
Beispiel für Drehbewegung:
Leitwert p31234 = r0479[0] (Voreinstellung)
p31235 = 360000 (Zahlenwert für eine Umdrehung in der Einheit Milligrad)
p31236 = p0408[0] * 2^p0418[0] (Zahlenwert für eine Umdrehung in Geberinkrementen)
Außerdem kann ein Getriebefaktor berücksichtigt werden.
p31234 CI: POLYGON Leitwert Rohwert / Leitw RohwAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned32 / Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
- - 479[0]
p31235 POLYGON Leitwert Normierung Zähler / Leitw Norm ZählerAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
-2147483648 2147483647 1
p31236 POLYGON Leitwert Normierung Nenner / Leitw Norm NennerAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
-2147483648 2147483647 1
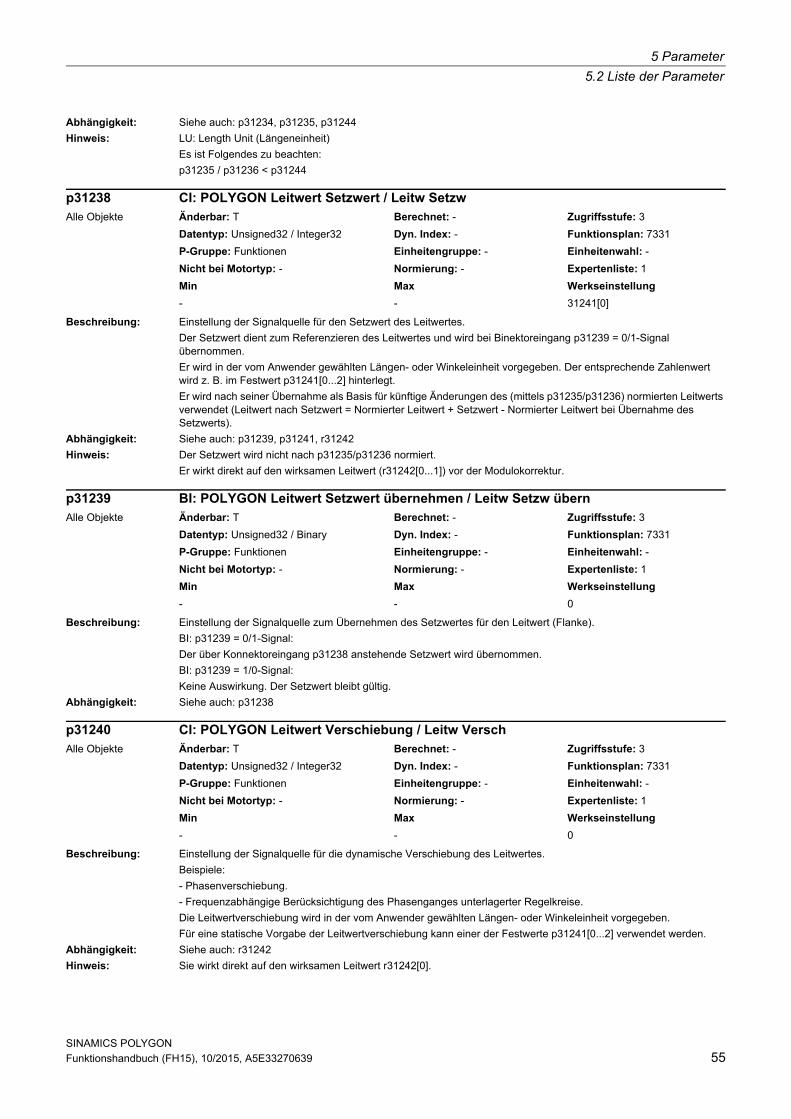
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 55
5 Parameter
5.2 Liste der Parameter
Abhängigkeit: Siehe auch: p31234, p31235, p31244
Hinweis: LU: Length Unit (Längeneinheit)
Es ist Folgendes zu beachten:
p31235 / p31236 < p31244
Beschreibung: Einstellung der Signalquelle für den Setzwert des Leitwertes.
Der Setzwert dient zum Referenzieren des Leitwertes und wird bei Binektoreingang p31239 = 0/1-Signal übernommen.
Er wird in der vom Anwender gewählten Längen- oder Winkeleinheit vorgegeben. Der entsprechende Zahlenwert wird z. B. im Festwert p31241[0...2] hinterlegt.
Er wird nach seiner Übernahme als Basis für künftige Änderungen des (mittels p31235/p31236) normierten Leitwerts verwendet (Leitwert nach Setzwert = Normierter Leitwert + Setzwert - Normierter Leitwert bei Übernahme des Setzwerts).
Abhängigkeit: Siehe auch: p31239, p31241, r31242
Hinweis: Der Setzwert wird nicht nach p31235/p31236 normiert.
Er wirkt direkt auf den wirksamen Leitwert (r31242[0...1]) vor der Modulokorrektur.
Beschreibung: Einstellung der Signalquelle zum Übernehmen des Setzwertes für den Leitwert (Flanke).
BI: p31239 = 0/1-Signal:
Der über Konnektoreingang p31238 anstehende Setzwert wird übernommen.
BI: p31239 = 1/0-Signal:
Keine Auswirkung. Der Setzwert bleibt gültig.
Abhängigkeit: Siehe auch: p31238
Beschreibung: Einstellung der Signalquelle für die dynamische Verschiebung des Leitwertes.
Beispiele:
- Phasenverschiebung.
- Frequenzabhängige Berücksichtigung des Phasenganges unterlagerter Regelkreise.
Die Leitwertverschiebung wird in der vom Anwender gewählten Längen- oder Winkeleinheit vorgegeben.
Für eine statische Vorgabe der Leitwertverschiebung kann einer der Festwerte p31241[0...2] verwendet werden.
Abhängigkeit: Siehe auch: r31242
Hinweis: Sie wirkt direkt auf den wirksamen Leitwert r31242[0].
p31238 CI: POLYGON Leitwert Setzwert / Leitw SetzwAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned32 / Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
- - 31241[0]
p31239 BI: POLYGON Leitwert Setzwert übernehmen / Leitw Setzw übernAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned32 / Binary Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
- - 0
p31240 CI: POLYGON Leitwert Verschiebung / Leitw VerschAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned32 / Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
- - 0
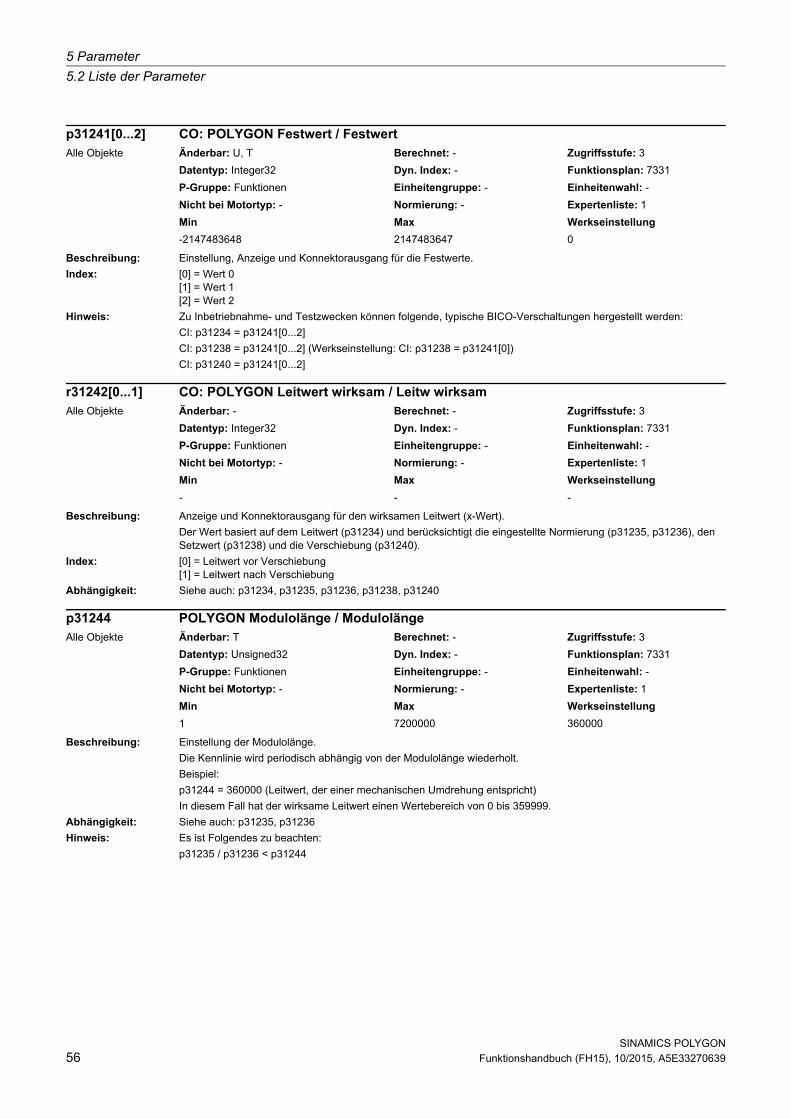
5 Parameter
5.2 Liste der Parameter
SINAMICS POLYGON
56 Funktionshandbuch (FH15), 10/2015, A5E33270639
Beschreibung: Einstellung, Anzeige und Konnektorausgang für die Festwerte.
Index: [0] = Wert 0[1] = Wert 1[2] = Wert 2
Hinweis: Zu Inbetriebnahme- und Testzwecken können folgende, typische BICO-Verschaltungen hergestellt werden:
CI: p31234 = p31241[0...2]
CI: p31238 = p31241[0...2] (Werkseinstellung: CI: p31238 = p31241[0])
CI: p31240 = p31241[0...2]
Beschreibung: Anzeige und Konnektorausgang für den wirksamen Leitwert (x-Wert).
Der Wert basiert auf dem Leitwert (p31234) und berücksichtigt die eingestellte Normierung (p31235, p31236), den Setzwert (p31238) und die Verschiebung (p31240).
Index: [0] = Leitwert vor Verschiebung[1] = Leitwert nach Verschiebung
Abhängigkeit: Siehe auch: p31234, p31235, p31236, p31238, p31240
Beschreibung: Einstellung der Modulolänge.
Die Kennlinie wird periodisch abhängig von der Modulolänge wiederholt.
Beispiel:
p31244 = 360000 (Leitwert, der einer mechanischen Umdrehung entspricht)
In diesem Fall hat der wirksame Leitwert einen Wertebereich von 0 bis 359999.
Abhängigkeit: Siehe auch: p31235, p31236
Hinweis: Es ist Folgendes zu beachten:
p31235 / p31236 < p31244
p31241[0...2] CO: POLYGON Festwert / FestwertAlle Objekte Änderbar: U, T Berechnet: - Zugriffsstufe: 3
Datentyp: Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
-2147483648 2147483647 0
r31242[0...1] CO: POLYGON Leitwert wirksam / Leitw wirksamAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 3
Datentyp: Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
- - -
p31244 POLYGON Modulolänge / ModulolängeAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
1 7200000 360000
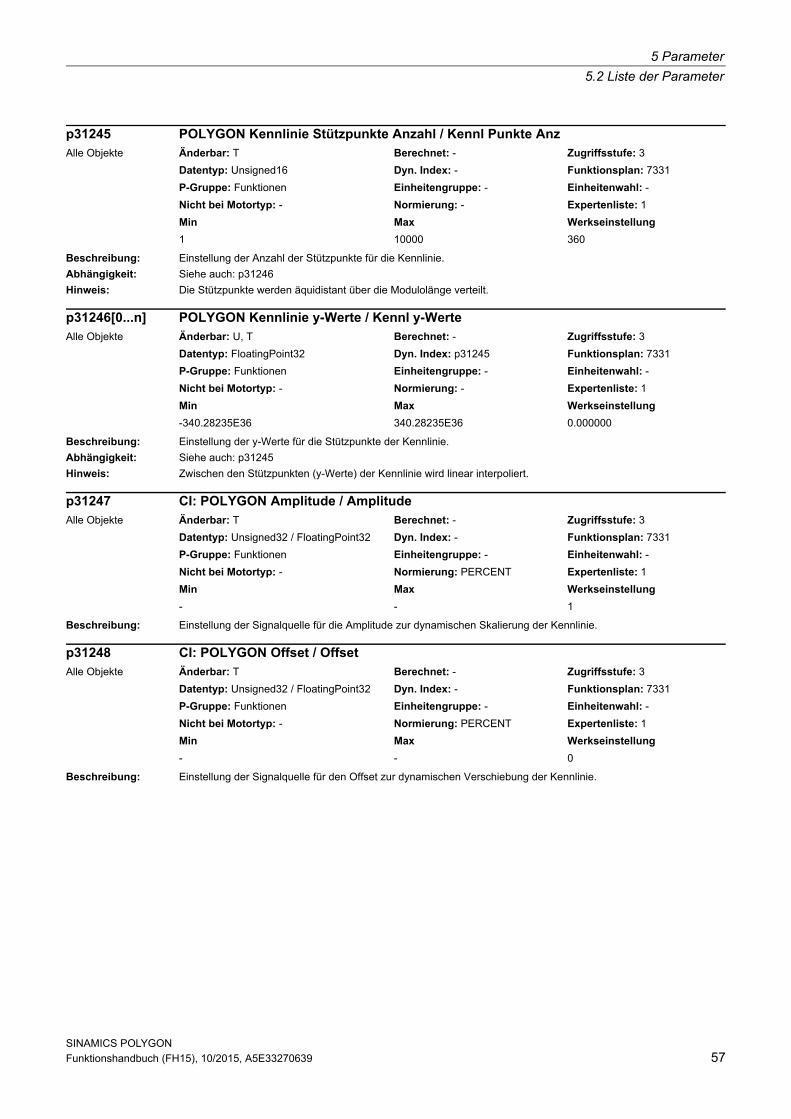
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 57
5 Parameter
5.2 Liste der Parameter
Beschreibung: Einstellung der Anzahl der Stützpunkte für die Kennlinie.
Abhängigkeit: Siehe auch: p31246
Hinweis: Die Stützpunkte werden äquidistant über die Modulolänge verteilt.
Beschreibung: Einstellung der y-Werte für die Stützpunkte der Kennlinie.
Abhängigkeit: Siehe auch: p31245
Hinweis: Zwischen den Stützpunkten (y-Werte) der Kennlinie wird linear interpoliert.
Beschreibung: Einstellung der Signalquelle für die Amplitude zur dynamischen Skalierung der Kennlinie.
Beschreibung: Einstellung der Signalquelle für den Offset zur dynamischen Verschiebung der Kennlinie.
p31245 POLYGON Kennlinie Stützpunkte Anzahl / Kennl Punkte AnzAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned16 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
1 10000 360
p31246[0...n] POLYGON Kennlinie y-Werte / Kennl y-WerteAlle Objekte Änderbar: U, T Berechnet: - Zugriffsstufe: 3
Datentyp: FloatingPoint32 Dyn. Index: p31245 Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
-340.28235E36 340.28235E36 0.000000
p31247 CI: POLYGON Amplitude / AmplitudeAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned32 / FloatingPoint32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: PERCENT Expertenliste: 1
Min Max Werkseinstellung
- - 1
p31248 CI: POLYGON Offset / OffsetAlle Objekte Änderbar: T Berechnet: - Zugriffsstufe: 3
Datentyp: Unsigned32 / FloatingPoint32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: PERCENT Expertenliste: 1
Min Max Werkseinstellung
- - 0
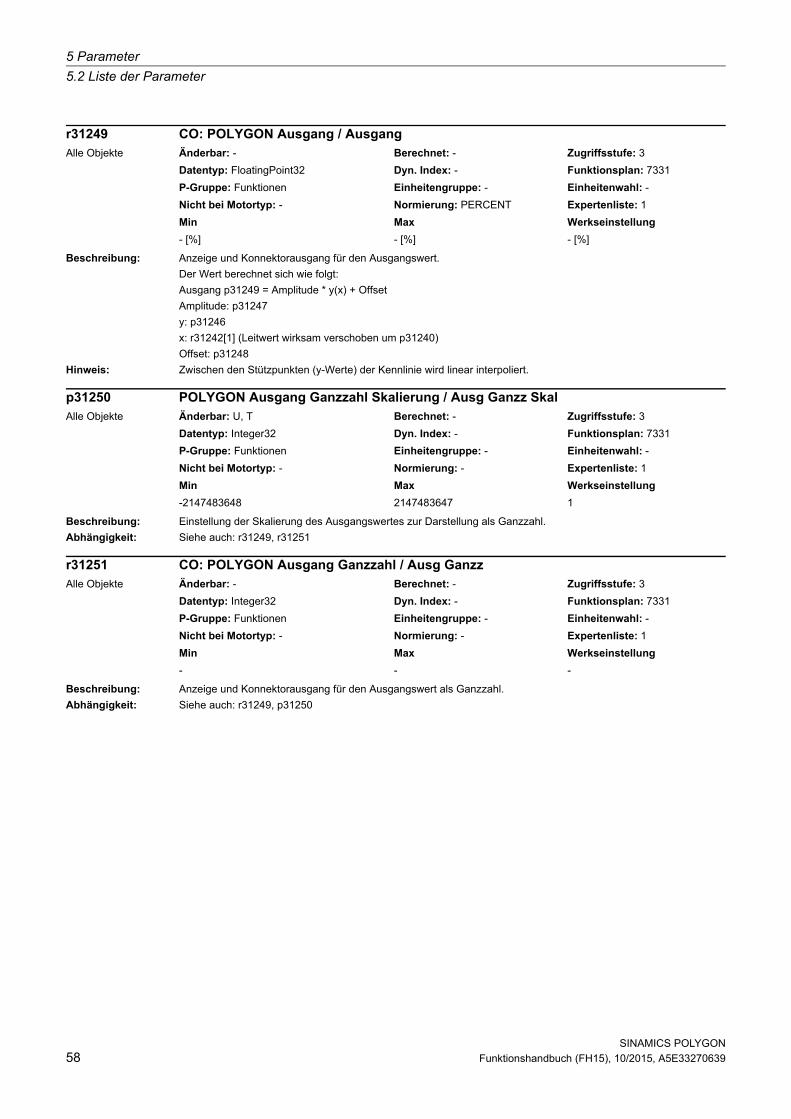
5 Parameter
5.2 Liste der Parameter
SINAMICS POLYGON
58 Funktionshandbuch (FH15), 10/2015, A5E33270639
Beschreibung: Anzeige und Konnektorausgang für den Ausgangswert.
Der Wert berechnet sich wie folgt:
Ausgang p31249 = Amplitude * y(x) + Offset
Amplitude: p31247
y: p31246
x: r31242[1] (Leitwert wirksam verschoben um p31240)
Offset: p31248
Hinweis: Zwischen den Stützpunkten (y-Werte) der Kennlinie wird linear interpoliert.
Beschreibung: Einstellung der Skalierung des Ausgangswertes zur Darstellung als Ganzzahl.
Abhängigkeit: Siehe auch: r31249, r31251
Beschreibung: Anzeige und Konnektorausgang für den Ausgangswert als Ganzzahl.
Abhängigkeit: Siehe auch: r31249, p31250
r31249 CO: POLYGON Ausgang / AusgangAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 3
Datentyp: FloatingPoint32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: PERCENT Expertenliste: 1
Min Max Werkseinstellung
- [%] - [%] - [%]
p31250 POLYGON Ausgang Ganzzahl Skalierung / Ausg Ganzz SkalAlle Objekte Änderbar: U, T Berechnet: - Zugriffsstufe: 3
Datentyp: Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
-2147483648 2147483647 1
r31251 CO: POLYGON Ausgang Ganzzahl / Ausg GanzzAlle Objekte Änderbar: - Berechnet: - Zugriffsstufe: 3
Datentyp: Integer32 Dyn. Index: - Funktionsplan: 7331
P-Gruppe: Funktionen Einheitengruppe: - Einheitenwahl: -
Nicht bei Motortyp: - Normierung: - Expertenliste: 1
Min Max Werkseinstellung
- - -
6
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 59
Funktionspläne
Inhalt
7331 – POLYGON Struktur 60
Hinweis
In diesem Kapitel ist ausschließlich der Funktionsplan für die OA-Applikation POLYGON enthalten.
Die bei SINAMICS zur Verfügung stehenden produktabhängigen Funktionspläne (z. B. Funktionsplan 5020) sind in folgender Literatur aufgeführt:
Literatur: /LH1/ SINAMICS S120/S150 ListenhandbuchKapitel "Funktionspläne"
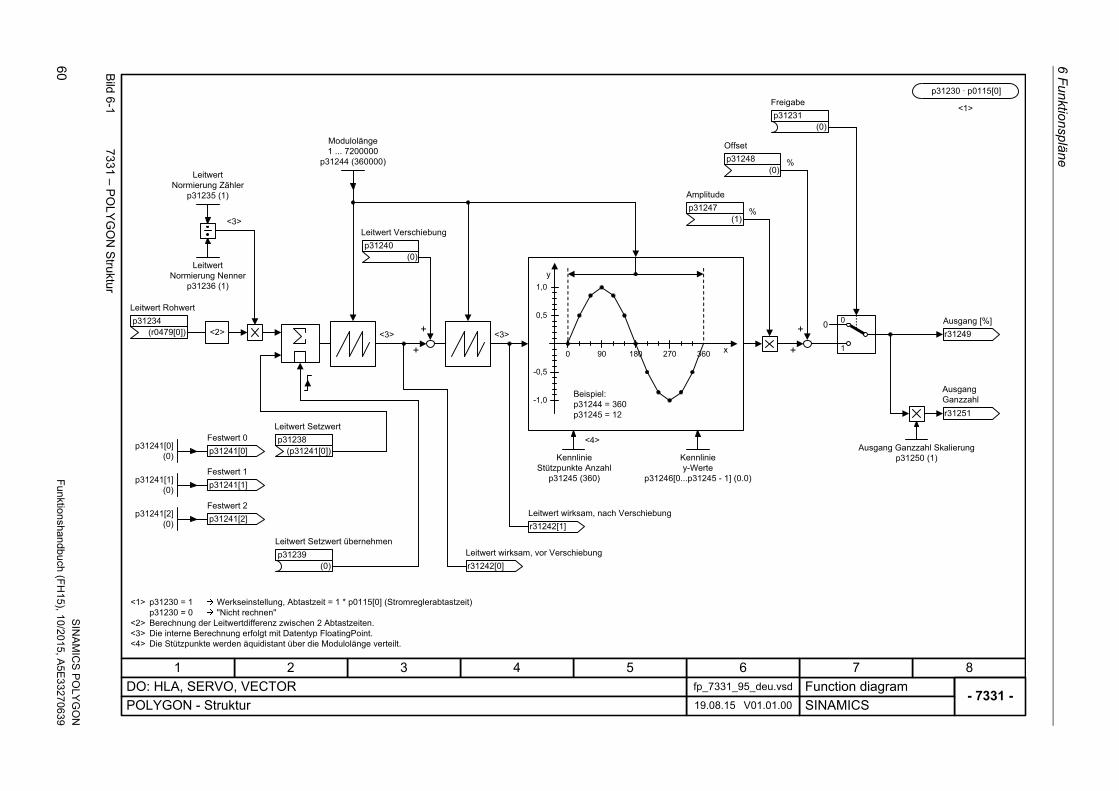
6F
un
ktionsplä
ne
SIN
AM
ICS
PO
LY
GO
N
60
Funktion
shandbuch
(FH
15), 10/2015, A
5E3327063
9
Bild
6-1
7331 – P
OLY
GO
N S
truktur
- 7331 -Function diagram
87654321fp_7331_95_deu.vsdDO: HLA, SERVO, VECTOR
SINAMICS19.08.15 V01.01.00POLYGON - Struktur
p31230 · p0115[0]
<1> p31230 = 1 Werkseinstellung, Abtastzeit = 1 * p0115[0] (Stromreglerabtastzeit)p31230 = 0 "Nicht rechnen"
<2> Berechnung der Leitwertdifferenz zwischen 2 Abtastzeiten.<3> Die interne Berechnung erfolgt mit Datentyp FloatingPoint.<4> Die Stützpunkte werden äquidistant über die Modulolänge verteilt.
(0)
Freigabep31231
0r31249Ausgang [%]
r31251
Ausgang Ganzzahl
Ausgang Ganzzahl Skalierungp31250 (1)
1
0
<1>
y
x
Leitwert Rohwert
(r0479[0])p31234
Modulolänge1 ... 7200000
p31244 (360000)
Leitwert Normierung Nenner
p31236 (1)
Leitwert Normierung Zähler
p31235 (1) Amplitude
(1)p31247
Offset
(0)p31248
Kennlinie Stützpunkte Anzahl
p31245 (360)
Kennlinie y-Werte
p31246[0...p31245 - 1] (0.0)
<4>
+ +
++ 180900 270 360
1,0
0,5
Leitwert Verschiebung
(0)p31240
r31242[0]Leitwert wirksam, vor Verschiebung
r31242[1]Leitwert wirksam, nach Verschiebung
Leitwert Setzwert
(p31241[0])p31238
(0)
Leitwert Setzwert übernehmenp31239
Beispiel:p31244 = 360p31245 = 12
-0,5
-1,0
<3>
<3> <3>
p31241[0]Festwert 0
p31241[0](0)
p31241[1]Festwert 1
p31241[1](0)
p31241[2]Festwert 2
p31241[2](0)
%
%
<2>
7
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 61
Störungen und Warnungen
Die OA-Applikation POLYGON hat keine eigenen Störungen und Warnungen (Meldungen).
Hinweis
Informationen zu aufgetretenen Meldungen (Störungen, Warnungen) sind der Online-Hilfe der jeweiligen Steuerung bzw. Inbetriebnahme-Tools oder beispielsweise folgender Literatur zu entnehmen:
Literatur: /LH1/ SINAMICS S120/S150 ListenhandbuchKapitel "Liste der Störungen und Warnungen"

7 Störungen und Warnungen
SINAMICS POLYGON
62 Funktionshandbuch (FH15), 10/2015, A5E33270639
A
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 63
Anhang
Inhalt
A.1 Abkürzungsverzeichnis 64
A.2 Kennlinie (p31245, p31246[0…n]) mit Skript festlegen 73
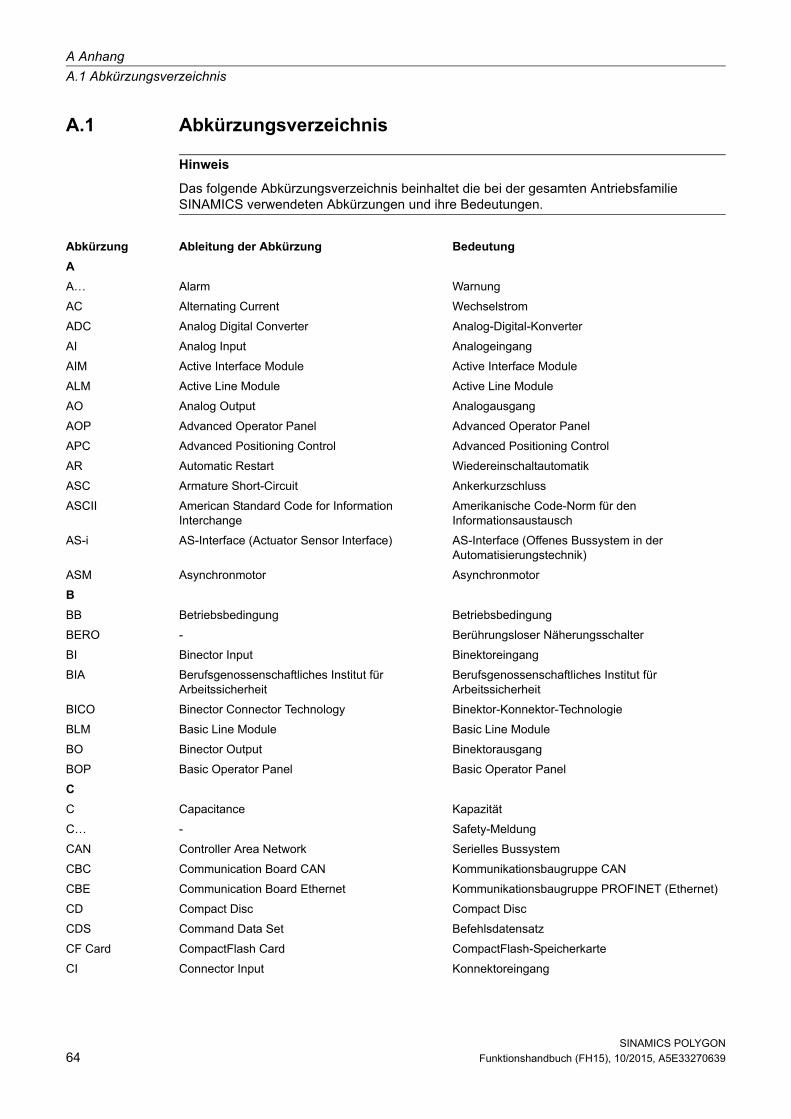
A Anhang
A.1 Abkürzungsverzeichnis
SINAMICS POLYGON
64 Funktionshandbuch (FH15), 10/2015, A5E33270639
A.1 Abkürzungsverzeichnis
Hinweis
Das folgende Abkürzungsverzeichnis beinhaltet die bei der gesamten Antriebsfamilie SINAMICS verwendeten Abkürzungen und ihre Bedeutungen.
Abkürzung Ableitung der Abkürzung Bedeutung
A
A… Alarm Warnung
AC Alternating Current Wechselstrom
ADC Analog Digital Converter Analog-Digital-Konverter
AI Analog Input Analogeingang
AIM Active Interface Module Active Interface Module
ALM Active Line Module Active Line Module
AO Analog Output Analogausgang
AOP Advanced Operator Panel Advanced Operator Panel
APC Advanced Positioning Control Advanced Positioning Control
AR Automatic Restart Wiedereinschaltautomatik
ASC Armature Short-Circuit Ankerkurzschluss
ASCII American Standard Code for Information Interchange
Amerikanische Code-Norm für den Informationsaustausch
AS-i AS-Interface (Actuator Sensor Interface) AS-Interface (Offenes Bussystem in der Automatisierungstechnik)
ASM Asynchronmotor Asynchronmotor
B
BB Betriebsbedingung Betriebsbedingung
BERO - Berührungsloser Näherungsschalter
BI Binector Input Binektoreingang
BIA Berufsgenossenschaftliches Institut für Arbeitssicherheit
Berufsgenossenschaftliches Institut für Arbeitssicherheit
BICO Binector Connector Technology Binektor-Konnektor-Technologie
BLM Basic Line Module Basic Line Module
BO Binector Output Binektorausgang
BOP Basic Operator Panel Basic Operator Panel
C
C Capacitance Kapazität
C… - Safety-Meldung
CAN Controller Area Network Serielles Bussystem
CBC Communication Board CAN Kommunikationsbaugruppe CAN
CBE Communication Board Ethernet Kommunikationsbaugruppe PROFINET (Ethernet)
CD Compact Disc Compact Disc
CDS Command Data Set Befehlsdatensatz
CF Card CompactFlash Card CompactFlash-Speicherkarte
CI Connector Input Konnektoreingang
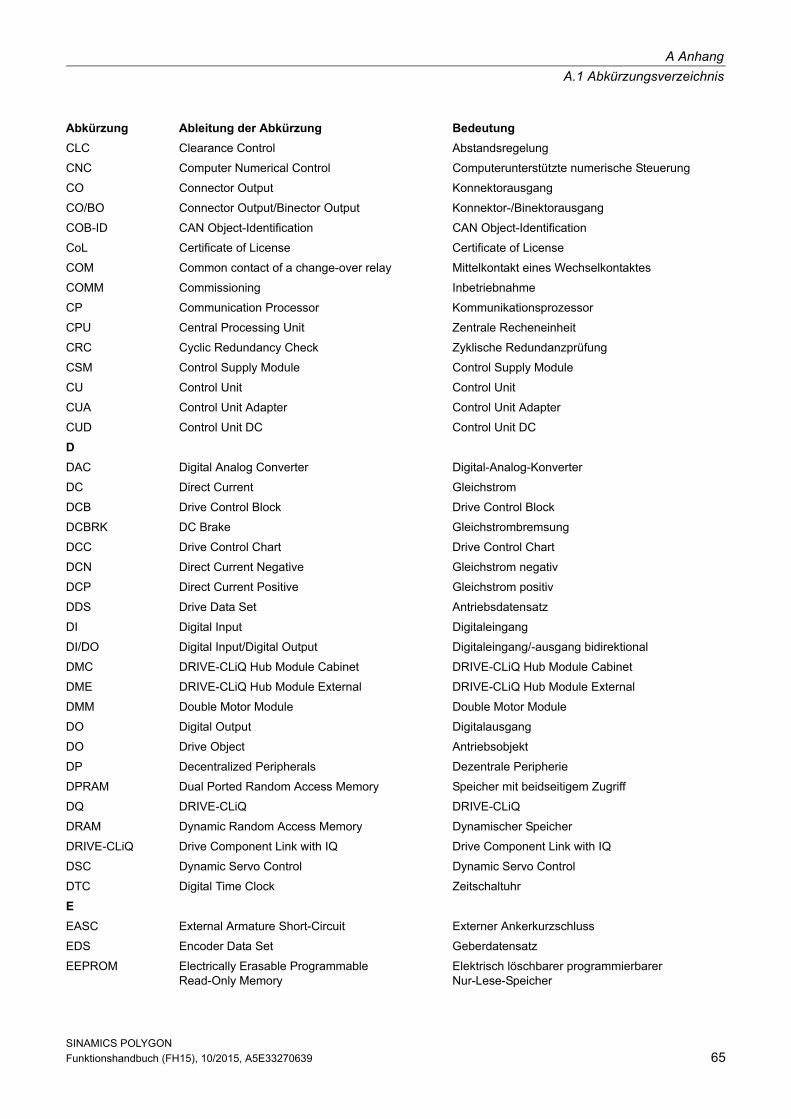
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 65
A Anhang
A.1 Abkürzungsverzeichnis
CLC Clearance Control Abstandsregelung
CNC Computer Numerical Control Computerunterstützte numerische Steuerung
CO Connector Output Konnektorausgang
CO/BO Connector Output/Binector Output Konnektor-/Binektorausgang
COB-ID CAN Object-Identification CAN Object-Identification
CoL Certificate of License Certificate of License
COM Common contact of a change-over relay Mittelkontakt eines Wechselkontaktes
COMM Commissioning Inbetriebnahme
CP Communication Processor Kommunikationsprozessor
CPU Central Processing Unit Zentrale Recheneinheit
CRC Cyclic Redundancy Check Zyklische Redundanzprüfung
CSM Control Supply Module Control Supply Module
CU Control Unit Control Unit
CUA Control Unit Adapter Control Unit Adapter
CUD Control Unit DC Control Unit DC
D
DAC Digital Analog Converter Digital-Analog-Konverter
DC Direct Current Gleichstrom
DCB Drive Control Block Drive Control Block
DCBRK DC Brake Gleichstrombremsung
DCC Drive Control Chart Drive Control Chart
DCN Direct Current Negative Gleichstrom negativ
DCP Direct Current Positive Gleichstrom positiv
DDS Drive Data Set Antriebsdatensatz
DI Digital Input Digitaleingang
DI/DO Digital Input/Digital Output Digitaleingang/-ausgang bidirektional
DMC DRIVE-CLiQ Hub Module Cabinet DRIVE-CLiQ Hub Module Cabinet
DME DRIVE-CLiQ Hub Module External DRIVE-CLiQ Hub Module External
DMM Double Motor Module Double Motor Module
DO Digital Output Digitalausgang
DO Drive Object Antriebsobjekt
DP Decentralized Peripherals Dezentrale Peripherie
DPRAM Dual Ported Random Access Memory Speicher mit beidseitigem Zugriff
DQ DRIVE-CLiQ DRIVE-CLiQ
DRAM Dynamic Random Access Memory Dynamischer Speicher
DRIVE-CLiQ Drive Component Link with IQ Drive Component Link with IQ
DSC Dynamic Servo Control Dynamic Servo Control
DTC Digital Time Clock Zeitschaltuhr
E
EASC External Armature Short-Circuit Externer Ankerkurzschluss
EDS Encoder Data Set Geberdatensatz
EEPROM Electrically Erasable Programmable Read-Only Memory
Elektrisch löschbarer programmierbarer Nur-Lese-Speicher
Abkürzung Ableitung der Abkürzung Bedeutung
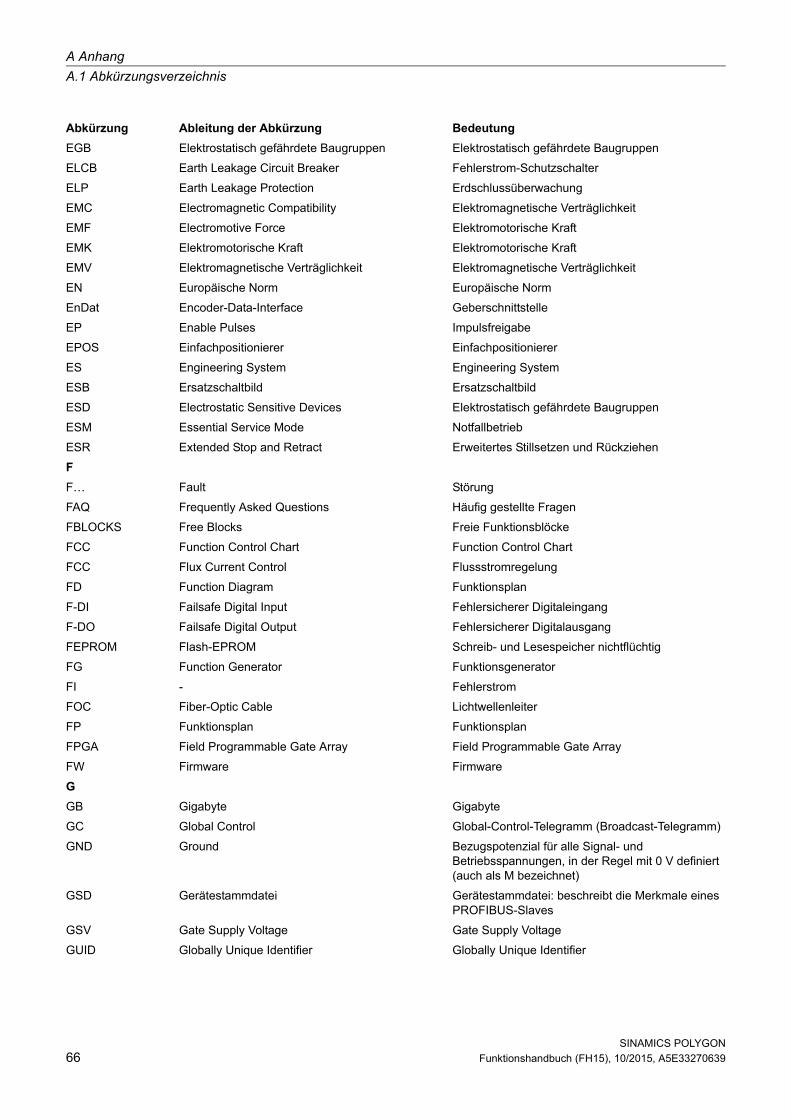
A Anhang
A.1 Abkürzungsverzeichnis
SINAMICS POLYGON
66 Funktionshandbuch (FH15), 10/2015, A5E33270639
EGB Elektrostatisch gefährdete Baugruppen Elektrostatisch gefährdete Baugruppen
ELCB Earth Leakage Circuit Breaker Fehlerstrom-Schutzschalter
ELP Earth Leakage Protection Erdschlussüberwachung
EMC Electromagnetic Compatibility Elektromagnetische Verträglichkeit
EMF Electromotive Force Elektromotorische Kraft
EMK Elektromotorische Kraft Elektromotorische Kraft
EMV Elektromagnetische Verträglichkeit Elektromagnetische Verträglichkeit
EN Europäische Norm Europäische Norm
EnDat Encoder-Data-Interface Geberschnittstelle
EP Enable Pulses Impulsfreigabe
EPOS Einfachpositionierer Einfachpositionierer
ES Engineering System Engineering System
ESB Ersatzschaltbild Ersatzschaltbild
ESD Electrostatic Sensitive Devices Elektrostatisch gefährdete Baugruppen
ESM Essential Service Mode Notfallbetrieb
ESR Extended Stop and Retract Erweitertes Stillsetzen und Rückziehen
F
F… Fault Störung
FAQ Frequently Asked Questions Häufig gestellte Fragen
FBLOCKS Free Blocks Freie Funktionsblöcke
FCC Function Control Chart Function Control Chart
FCC Flux Current Control Flussstromregelung
FD Function Diagram Funktionsplan
F-DI Failsafe Digital Input Fehlersicherer Digitaleingang
F-DO Failsafe Digital Output Fehlersicherer Digitalausgang
FEPROM Flash-EPROM Schreib- und Lesespeicher nichtflüchtig
FG Function Generator Funktionsgenerator
FI - Fehlerstrom
FOC Fiber-Optic Cable Lichtwellenleiter
FP Funktionsplan Funktionsplan
FPGA Field Programmable Gate Array Field Programmable Gate Array
FW Firmware Firmware
G
GB Gigabyte Gigabyte
GC Global Control Global-Control-Telegramm (Broadcast-Telegramm)
GND Ground Bezugspotenzial für alle Signal- und Betriebsspannungen, in der Regel mit 0 V definiert (auch als M bezeichnet)
GSD Gerätestammdatei Gerätestammdatei: beschreibt die Merkmale eines PROFIBUS-Slaves
GSV Gate Supply Voltage Gate Supply Voltage
GUID Globally Unique Identifier Globally Unique Identifier
Abkürzung Ableitung der Abkürzung Bedeutung
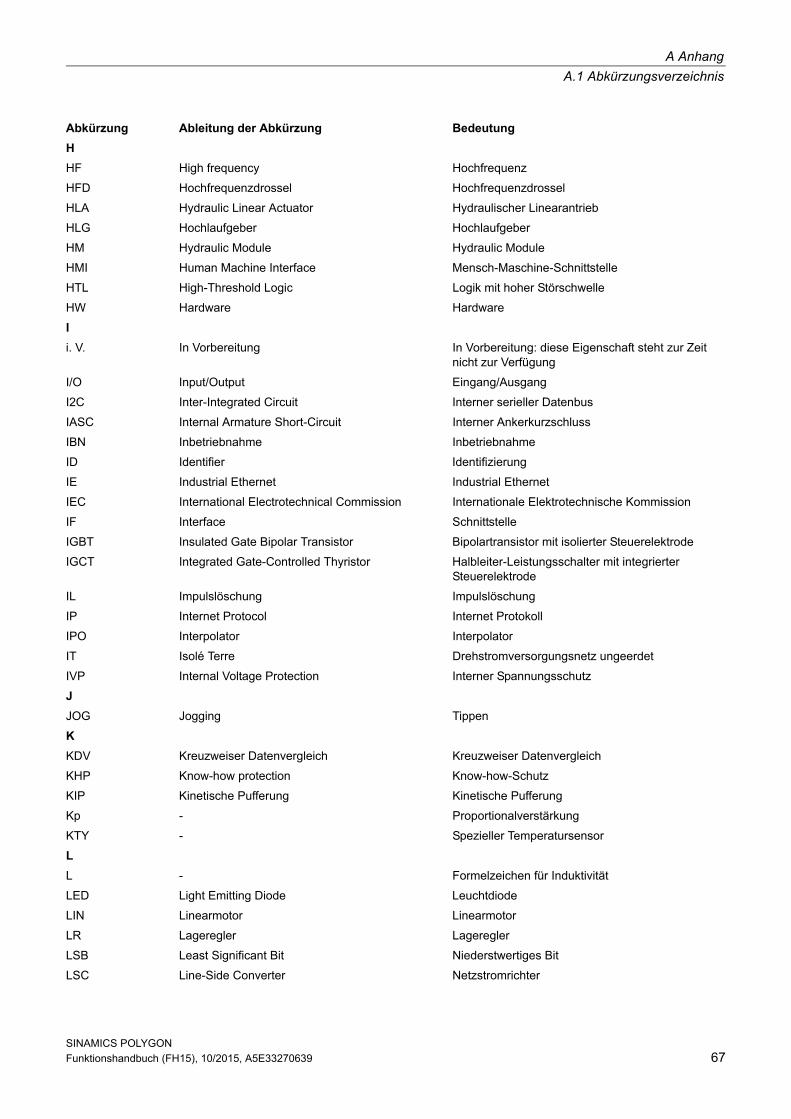
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 67
A Anhang
A.1 Abkürzungsverzeichnis
H
HF High frequency Hochfrequenz
HFD Hochfrequenzdrossel Hochfrequenzdrossel
HLA Hydraulic Linear Actuator Hydraulischer Linearantrieb
HLG Hochlaufgeber Hochlaufgeber
HM Hydraulic Module Hydraulic Module
HMI Human Machine Interface Mensch-Maschine-Schnittstelle
HTL High-Threshold Logic Logik mit hoher Störschwelle
HW Hardware Hardware
I
i. V. In Vorbereitung In Vorbereitung: diese Eigenschaft steht zur Zeit nicht zur Verfügung
I/O Input/Output Eingang/Ausgang
I2C Inter-Integrated Circuit Interner serieller Datenbus
IASC Internal Armature Short-Circuit Interner Ankerkurzschluss
IBN Inbetriebnahme Inbetriebnahme
ID Identifier Identifizierung
IE Industrial Ethernet Industrial Ethernet
IEC International Electrotechnical Commission Internationale Elektrotechnische Kommission
IF Interface Schnittstelle
IGBT Insulated Gate Bipolar Transistor Bipolartransistor mit isolierter Steuerelektrode
IGCT Integrated Gate-Controlled Thyristor Halbleiter-Leistungsschalter mit integrierter Steuerelektrode
IL Impulslöschung Impulslöschung
IP Internet Protocol Internet Protokoll
IPO Interpolator Interpolator
IT Isolé Terre Drehstromversorgungsnetz ungeerdet
IVP Internal Voltage Protection Interner Spannungsschutz
J
JOG Jogging Tippen
K
KDV Kreuzweiser Datenvergleich Kreuzweiser Datenvergleich
KHP Know-how protection Know-how-Schutz
KIP Kinetische Pufferung Kinetische Pufferung
Kp - Proportionalverstärkung
KTY - Spezieller Temperatursensor
L
L - Formelzeichen für Induktivität
LED Light Emitting Diode Leuchtdiode
LIN Linearmotor Linearmotor
LR Lageregler Lageregler
LSB Least Significant Bit Niederstwertiges Bit
LSC Line-Side Converter Netzstromrichter
Abkürzung Ableitung der Abkürzung Bedeutung
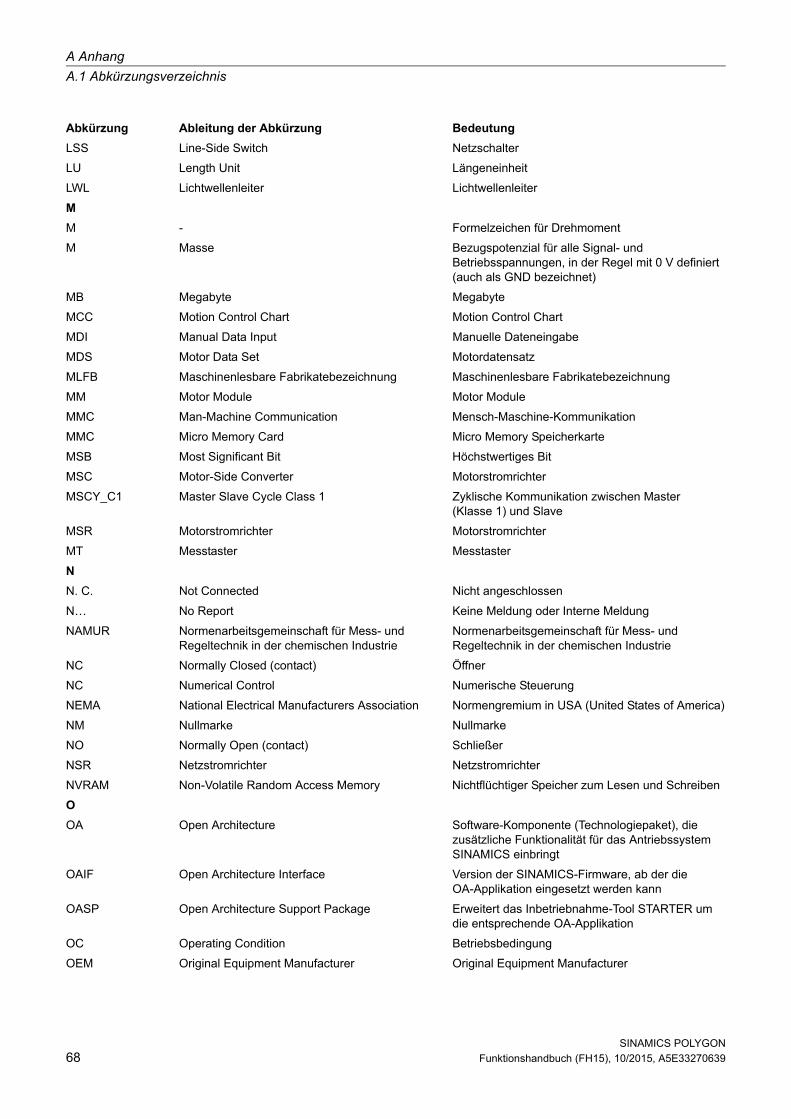
A Anhang
A.1 Abkürzungsverzeichnis
SINAMICS POLYGON
68 Funktionshandbuch (FH15), 10/2015, A5E33270639
LSS Line-Side Switch Netzschalter
LU Length Unit Längeneinheit
LWL Lichtwellenleiter Lichtwellenleiter
M
M - Formelzeichen für Drehmoment
M Masse Bezugspotenzial für alle Signal- und Betriebsspannungen, in der Regel mit 0 V definiert (auch als GND bezeichnet)
MB Megabyte Megabyte
MCC Motion Control Chart Motion Control Chart
MDI Manual Data Input Manuelle Dateneingabe
MDS Motor Data Set Motordatensatz
MLFB Maschinenlesbare Fabrikatebezeichnung Maschinenlesbare Fabrikatebezeichnung
MM Motor Module Motor Module
MMC Man-Machine Communication Mensch-Maschine-Kommunikation
MMC Micro Memory Card Micro Memory Speicherkarte
MSB Most Significant Bit Höchstwertiges Bit
MSC Motor-Side Converter Motorstromrichter
MSCY_C1 Master Slave Cycle Class 1 Zyklische Kommunikation zwischen Master (Klasse 1) und Slave
MSR Motorstromrichter Motorstromrichter
MT Messtaster Messtaster
N
N. C. Not Connected Nicht angeschlossen
N… No Report Keine Meldung oder Interne Meldung
NAMUR Normenarbeitsgemeinschaft für Mess- und Regeltechnik in der chemischen Industrie
Normenarbeitsgemeinschaft für Mess- und Regeltechnik in der chemischen Industrie
NC Normally Closed (contact) Öffner
NC Numerical Control Numerische Steuerung
NEMA National Electrical Manufacturers Association Normengremium in USA (United States of America)
NM Nullmarke Nullmarke
NO Normally Open (contact) Schließer
NSR Netzstromrichter Netzstromrichter
NVRAM Non-Volatile Random Access Memory Nichtflüchtiger Speicher zum Lesen und Schreiben
O
OA Open Architecture Software-Komponente (Technologiepaket), die zusätzliche Funktionalität für das Antriebssystem SINAMICS einbringt
OAIF Open Architecture Interface Version der SINAMICS-Firmware, ab der die OA-Applikation eingesetzt werden kann
OASP Open Architecture Support Package Erweitert das Inbetriebnahme-Tool STARTER um die entsprechende OA-Applikation
OC Operating Condition Betriebsbedingung
OEM Original Equipment Manufacturer Original Equipment Manufacturer
Abkürzung Ableitung der Abkürzung Bedeutung
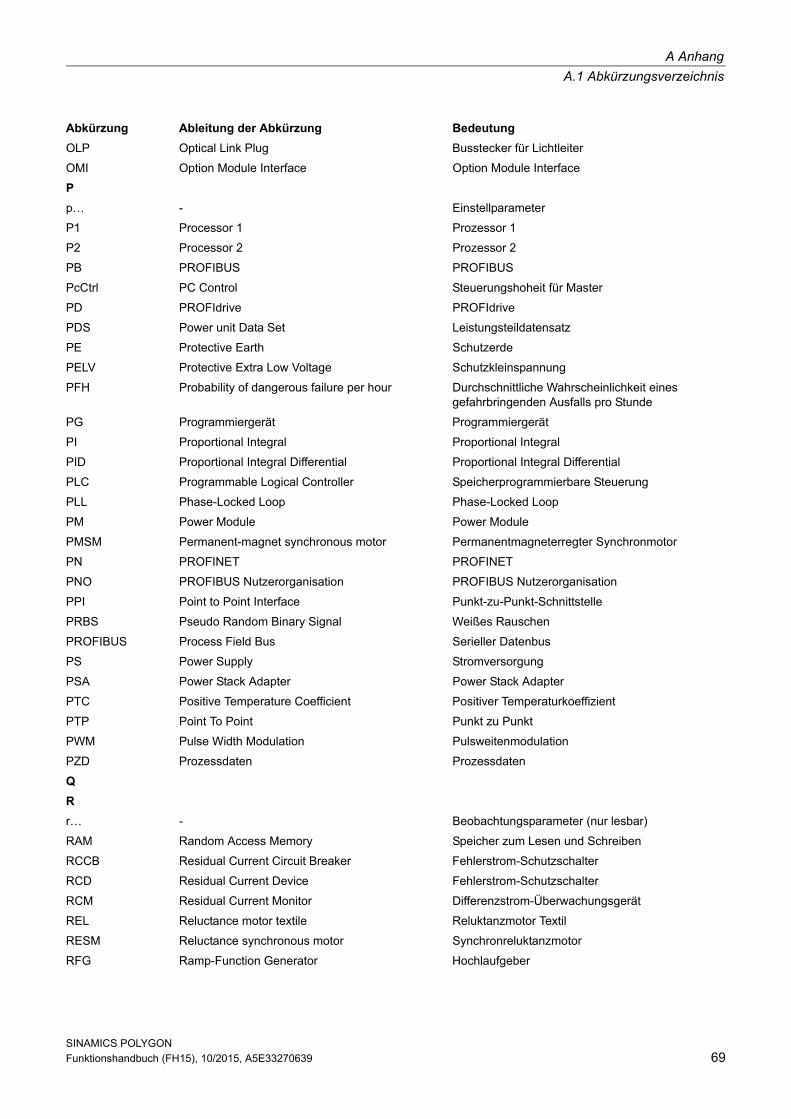
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 69
A Anhang
A.1 Abkürzungsverzeichnis
OLP Optical Link Plug Busstecker für Lichtleiter
OMI Option Module Interface Option Module Interface
P
p… - Einstellparameter
P1 Processor 1 Prozessor 1
P2 Processor 2 Prozessor 2
PB PROFIBUS PROFIBUS
PcCtrl PC Control Steuerungshoheit für Master
PD PROFIdrive PROFIdrive
PDS Power unit Data Set Leistungsteildatensatz
PE Protective Earth Schutzerde
PELV Protective Extra Low Voltage Schutzkleinspannung
PFH Probability of dangerous failure per hour Durchschnittliche Wahrscheinlichkeit eines gefahrbringenden Ausfalls pro Stunde
PG Programmiergerät Programmiergerät
PI Proportional Integral Proportional Integral
PID Proportional Integral Differential Proportional Integral Differential
PLC Programmable Logical Controller Speicherprogrammierbare Steuerung
PLL Phase-Locked Loop Phase-Locked Loop
PM Power Module Power Module
PMSM Permanent-magnet synchronous motor Permanentmagneterregter Synchronmotor
PN PROFINET PROFINET
PNO PROFIBUS Nutzerorganisation PROFIBUS Nutzerorganisation
PPI Point to Point Interface Punkt-zu-Punkt-Schnittstelle
PRBS Pseudo Random Binary Signal Weißes Rauschen
PROFIBUS Process Field Bus Serieller Datenbus
PS Power Supply Stromversorgung
PSA Power Stack Adapter Power Stack Adapter
PTC Positive Temperature Coefficient Positiver Temperaturkoeffizient
PTP Point To Point Punkt zu Punkt
PWM Pulse Width Modulation Pulsweitenmodulation
PZD Prozessdaten Prozessdaten
Q
R
r… - Beobachtungsparameter (nur lesbar)
RAM Random Access Memory Speicher zum Lesen und Schreiben
RCCB Residual Current Circuit Breaker Fehlerstrom-Schutzschalter
RCD Residual Current Device Fehlerstrom-Schutzschalter
RCM Residual Current Monitor Differenzstrom-Überwachungsgerät
REL Reluctance motor textile Reluktanzmotor Textil
RESM Reluctance synchronous motor Synchronreluktanzmotor
RFG Ramp-Function Generator Hochlaufgeber
Abkürzung Ableitung der Abkürzung Bedeutung
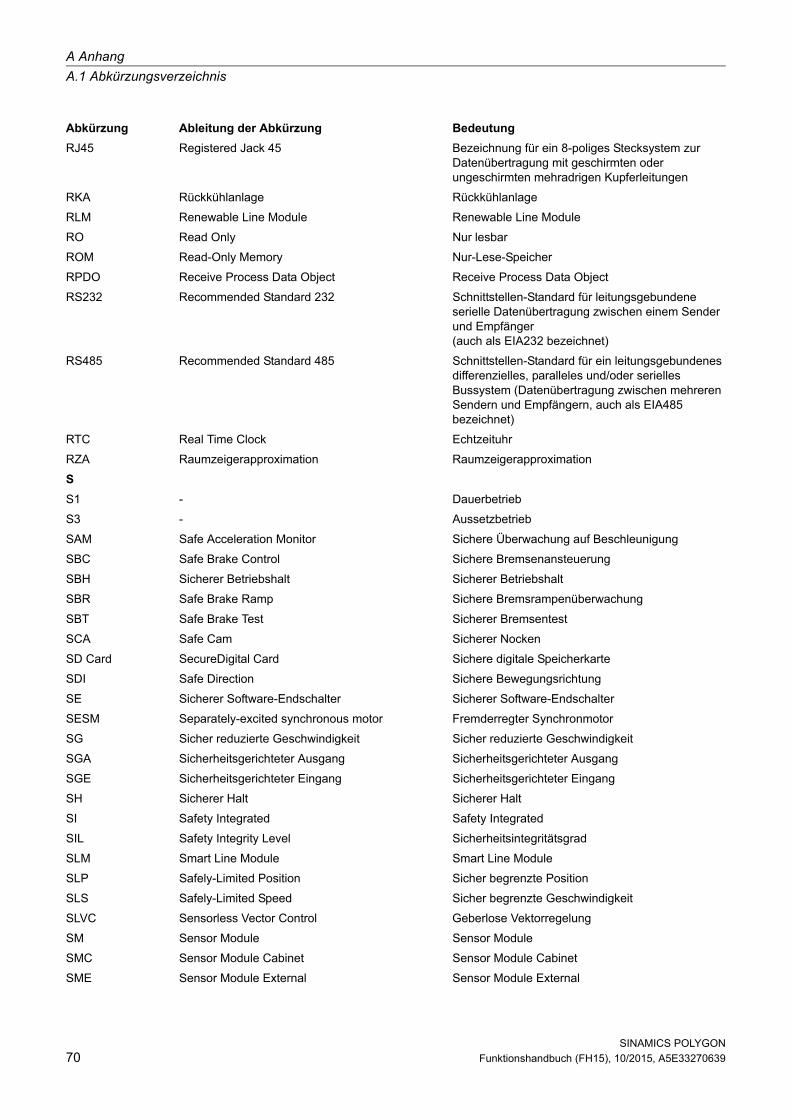
A Anhang
A.1 Abkürzungsverzeichnis
SINAMICS POLYGON
70 Funktionshandbuch (FH15), 10/2015, A5E33270639
RJ45 Registered Jack 45 Bezeichnung für ein 8-poliges Stecksystem zur Datenübertragung mit geschirmten oder ungeschirmten mehradrigen Kupferleitungen
RKA Rückkühlanlage Rückkühlanlage
RLM Renewable Line Module Renewable Line Module
RO Read Only Nur lesbar
ROM Read-Only Memory Nur-Lese-Speicher
RPDO Receive Process Data Object Receive Process Data Object
RS232 Recommended Standard 232 Schnittstellen-Standard für leitungsgebundene serielle Datenübertragung zwischen einem Sender und Empfänger (auch als EIA232 bezeichnet)
RS485 Recommended Standard 485 Schnittstellen-Standard für ein leitungsgebundenes differenzielles, paralleles und/oder serielles Bussystem (Datenübertragung zwischen mehreren Sendern und Empfängern, auch als EIA485 bezeichnet)
RTC Real Time Clock Echtzeituhr
RZA Raumzeigerapproximation Raumzeigerapproximation
S
S1 - Dauerbetrieb
S3 - Aussetzbetrieb
SAM Safe Acceleration Monitor Sichere Überwachung auf Beschleunigung
SBC Safe Brake Control Sichere Bremsenansteuerung
SBH Sicherer Betriebshalt Sicherer Betriebshalt
SBR Safe Brake Ramp Sichere Bremsrampenüberwachung
SBT Safe Brake Test Sicherer Bremsentest
SCA Safe Cam Sicherer Nocken
SD Card SecureDigital Card Sichere digitale Speicherkarte
SDI Safe Direction Sichere Bewegungsrichtung
SE Sicherer Software-Endschalter Sicherer Software-Endschalter
SESM Separately-excited synchronous motor Fremderregter Synchronmotor
SG Sicher reduzierte Geschwindigkeit Sicher reduzierte Geschwindigkeit
SGA Sicherheitsgerichteter Ausgang Sicherheitsgerichteter Ausgang
SGE Sicherheitsgerichteter Eingang Sicherheitsgerichteter Eingang
SH Sicherer Halt Sicherer Halt
SI Safety Integrated Safety Integrated
SIL Safety Integrity Level Sicherheitsintegritätsgrad
SLM Smart Line Module Smart Line Module
SLP Safely-Limited Position Sicher begrenzte Position
SLS Safely-Limited Speed Sicher begrenzte Geschwindigkeit
SLVC Sensorless Vector Control Geberlose Vektorregelung
SM Sensor Module Sensor Module
SMC Sensor Module Cabinet Sensor Module Cabinet
SME Sensor Module External Sensor Module External
Abkürzung Ableitung der Abkürzung Bedeutung
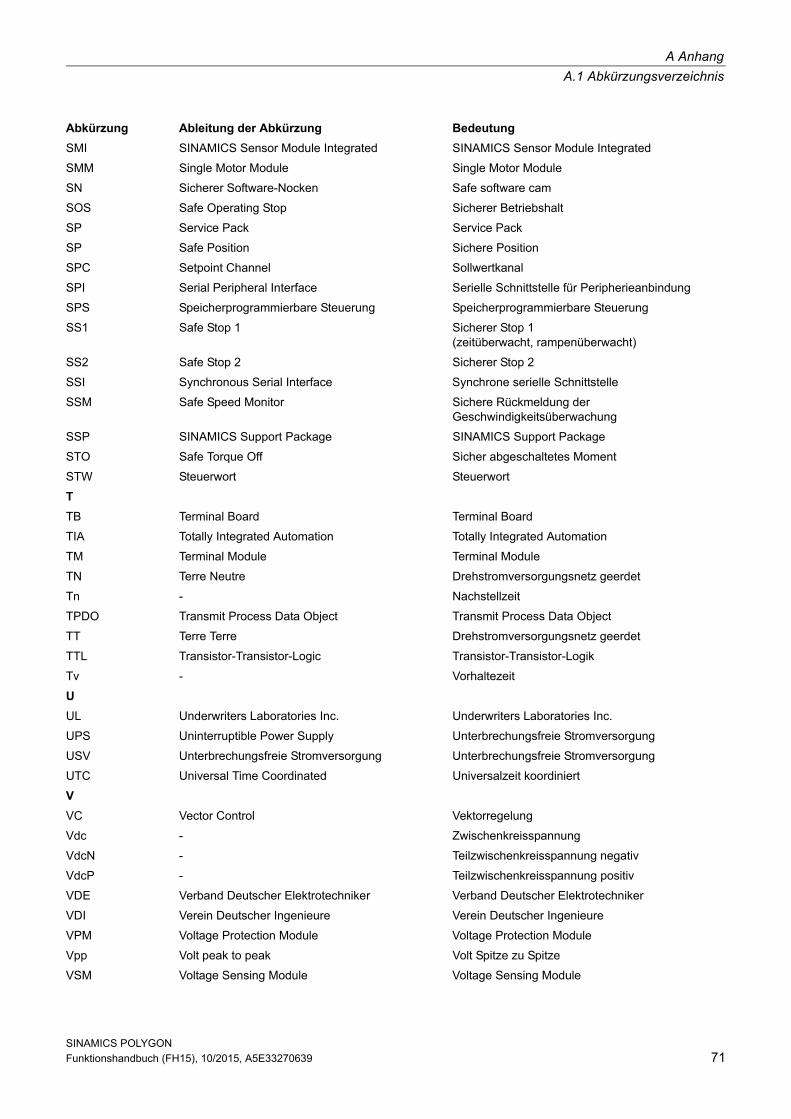
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 71
A Anhang
A.1 Abkürzungsverzeichnis
SMI SINAMICS Sensor Module Integrated SINAMICS Sensor Module Integrated
SMM Single Motor Module Single Motor Module
SN Sicherer Software-Nocken Safe software cam
SOS Safe Operating Stop Sicherer Betriebshalt
SP Service Pack Service Pack
SP Safe Position Sichere Position
SPC Setpoint Channel Sollwertkanal
SPI Serial Peripheral Interface Serielle Schnittstelle für Peripherieanbindung
SPS Speicherprogrammierbare Steuerung Speicherprogrammierbare Steuerung
SS1 Safe Stop 1 Sicherer Stop 1 (zeitüberwacht, rampenüberwacht)
SS2 Safe Stop 2 Sicherer Stop 2
SSI Synchronous Serial Interface Synchrone serielle Schnittstelle
SSM Safe Speed Monitor Sichere Rückmeldung der Geschwindigkeitsüberwachung
SSP SINAMICS Support Package SINAMICS Support Package
STO Safe Torque Off Sicher abgeschaltetes Moment
STW Steuerwort Steuerwort
T
TB Terminal Board Terminal Board
TIA Totally Integrated Automation Totally Integrated Automation
TM Terminal Module Terminal Module
TN Terre Neutre Drehstromversorgungsnetz geerdet
Tn - Nachstellzeit
TPDO Transmit Process Data Object Transmit Process Data Object
TT Terre Terre Drehstromversorgungsnetz geerdet
TTL Transistor-Transistor-Logic Transistor-Transistor-Logik
Tv - Vorhaltezeit
U
UL Underwriters Laboratories Inc. Underwriters Laboratories Inc.
UPS Uninterruptible Power Supply Unterbrechungsfreie Stromversorgung
USV Unterbrechungsfreie Stromversorgung Unterbrechungsfreie Stromversorgung
UTC Universal Time Coordinated Universalzeit koordiniert
V
VC Vector Control Vektorregelung
Vdc - Zwischenkreisspannung
VdcN - Teilzwischenkreisspannung negativ
VdcP - Teilzwischenkreisspannung positiv
VDE Verband Deutscher Elektrotechniker Verband Deutscher Elektrotechniker
VDI Verein Deutscher Ingenieure Verein Deutscher Ingenieure
VPM Voltage Protection Module Voltage Protection Module
Vpp Volt peak to peak Volt Spitze zu Spitze
VSM Voltage Sensing Module Voltage Sensing Module
Abkürzung Ableitung der Abkürzung Bedeutung
A Anhang
A.1 Abkürzungsverzeichnis
SINAMICS POLYGON
72 Funktionshandbuch (FH15), 10/2015, A5E33270639
W
WEA Wiedereinschaltautomatik Wiedereinschaltautomatik
WZM Werkzeugmaschine Werkzeugmaschine
X
XML Extensible Markup Language Erweiterbare Auszeichnungssprache (Standardsprache für Web-Publishing und Dokumentenmanagement)
Y
Z
ZK Zwischenkreis Zwischenkreis
ZM Zero Mark Nullmarke
ZSW Zustandswort Zustandswort
Abkürzung Ableitung der Abkürzung Bedeutung
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 73
A Anhang
A.2 Kennlinie (p31245, p31246[0…n]) mit Skript festlegen
A.2 Kennlinie (p31245, p31246[0…n]) mit Skript festlegen
A.2.1 Skript anlegen und ausführen
Skript-Ordner erzeugen
Zuerst müssen Sie im Inbetriebnahme-Tool STARTER bzw. SIMOTION SCOUT den Ordner anlegen, in dem Skripte gespeichert werden.
Gehen Sie wie folgt vor:
1. Im Projektnavigator das Antriebsgerät markieren.
2. Kontextmenü Experte > Skript Ordner einfügen wählen.
Unterhalb des Antriebsgeräts wird der Ordner SKRIPTE erzeugt. In diesem Ordner wird das nachfolgend beschriebene Skript abgelegt.
Skript erzeugen und ausführen
So gehen Sie vor, um in diesem Ordner ein Skript zu erzeugen:
1. Im Projektnavigator den Ordner SKRIPTE markieren und Kontextmenü Neues Objekt einfügen > Skript wählen.
2. Namen des Skripts festlegen (z. B. Get_Excel_Data) und mit OK bestätigen.
Namen für Skripte müssen folgenden Regeln für Bezeichner entsprechen:
– Sie werden aus Buchstaben (A … Z, a … z), Ziffern (0 … 9) und Unterstrich ( _ ) zusammengesetzt.
– Das erste Zeichen muss ein Buchstabe oder ein Unterstrich sein.
– Danach können Sie beliebig oft und in beliebiger Reihenfolge Buchstaben, Ziffern oder den Unterstrich verwenden.
– Ausnahme: Mehrere Unterstriche dürfen nicht aufeinander folgen.
– Sowohl Groß- wie Kleinbuchstaben sind erlaubt. Eine Unterscheidung zwischen Groß- und Kleinschreibung findet nicht statt.
3. Skript markieren und Kontextmenü Öffnen wählen.
4. Inhalt des Skripts bearbeiten.
Beispielsweise kann das im Abschnitt "Beispiel für ein Skript" (Seite 74) abgedruckte Skript kopiert und entsprechend den Erfordernissen geändert werden.
5. Im Projektnavigator das Skript markieren und Kontextmenü Übernehmen und Ausführen wählen.
Hinweis
Nähere Informationen zum Skripting sind der Online-Hilfe des Inbetriebnahme-Tools zu entnehmen.
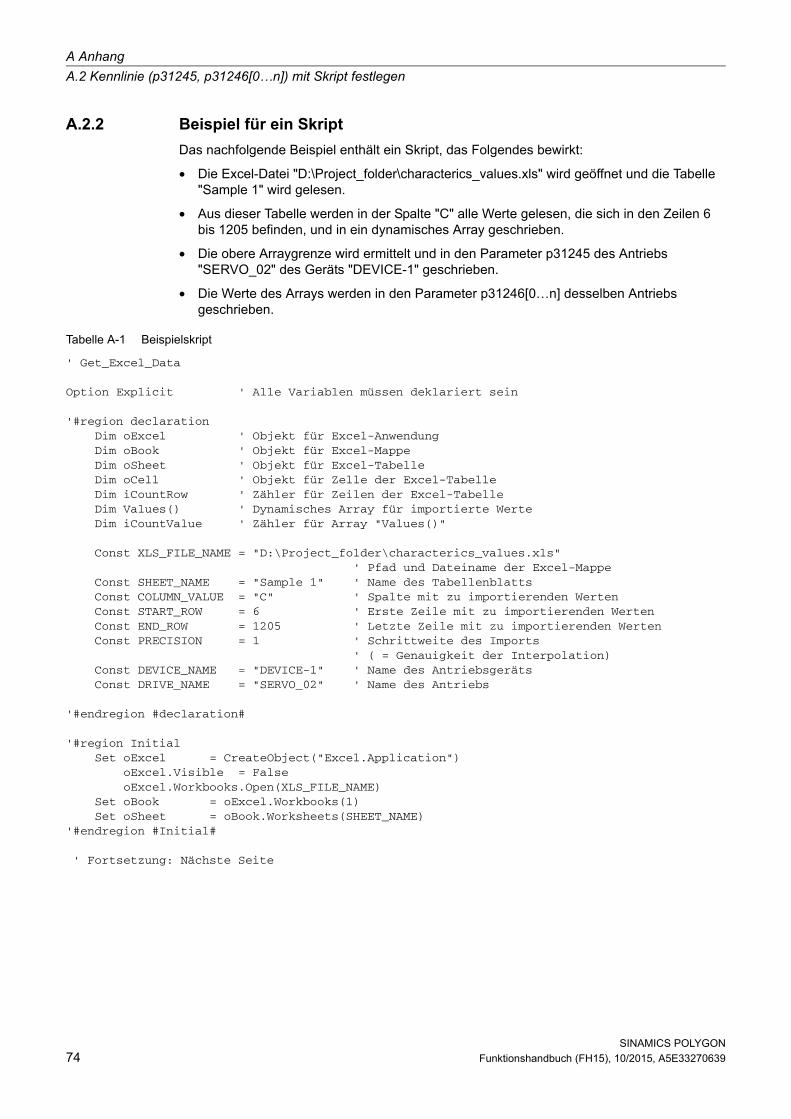
A Anhang
A.2 Kennlinie (p31245, p31246[0…n]) mit Skript festlegen
SINAMICS POLYGON
74 Funktionshandbuch (FH15), 10/2015, A5E33270639
A.2.2 Beispiel für ein Skript
Das nachfolgende Beispiel enthält ein Skript, das Folgendes bewirkt:
• Die Excel-Datei "D:\Project_folder\characterics_values.xls" wird geöffnet und die Tabelle "Sample 1" wird gelesen.
• Aus dieser Tabelle werden in der Spalte "C" alle Werte gelesen, die sich in den Zeilen 6 bis 1205 befinden, und in ein dynamisches Array geschrieben.
• Die obere Arraygrenze wird ermittelt und in den Parameter p31245 des Antriebs "SERVO_02" des Geräts "DEVICE-1" geschrieben.
• Die Werte des Arrays werden in den Parameter p31246[0…n] desselben Antriebs geschrieben.
Tabelle A-1 Beispielskript
' Get_Excel_Data Option Explicit ' Alle Variablen müssen deklariert sein '#region declaration
Dim oExcel ' Objekt für Excel-AnwendungDim oBook ' Objekt für Excel-MappeDim oSheet ' Objekt für Excel-TabelleDim oCell ' Objekt für Zelle der Excel-TabelleDim iCountRow ' Zähler für Zeilen der Excel-TabelleDim Values() ' Dynamisches Array für importierte WerteDim iCountValue ' Zähler für Array "Values()"
Const XLS_FILE_NAME = "D:\Project_folder\characterics_values.xls"
' Pfad und Dateiname der Excel-MappeConst SHEET_NAME = "Sample 1" ' Name des TabellenblattsConst COLUMN_VALUE = "C" ' Spalte mit zu importierenden WertenConst START_ROW = 6 ' Erste Zeile mit zu importierenden WertenConst END_ROW = 1205 ' Letzte Zeile mit zu importierenden WertenConst PRECISION = 1 ' Schrittweite des Imports
' ( = Genauigkeit der Interpolation)Const DEVICE_NAME = "DEVICE-1" ' Name des AntriebsgerätsConst DRIVE_NAME = "SERVO_02" ' Name des Antriebs
'#endregion #declaration# '#region Initial
Set oExcel = CreateObject("Excel.Application") oExcel.Visible = False oExcel.Workbooks.Open(XLS_FILE_NAME)
Set oBook = oExcel.Workbooks(1) Set oSheet = oBook.Worksheets(SHEET_NAME)
'#endregion #Initial# ' Fortsetzung: Nächste Seite
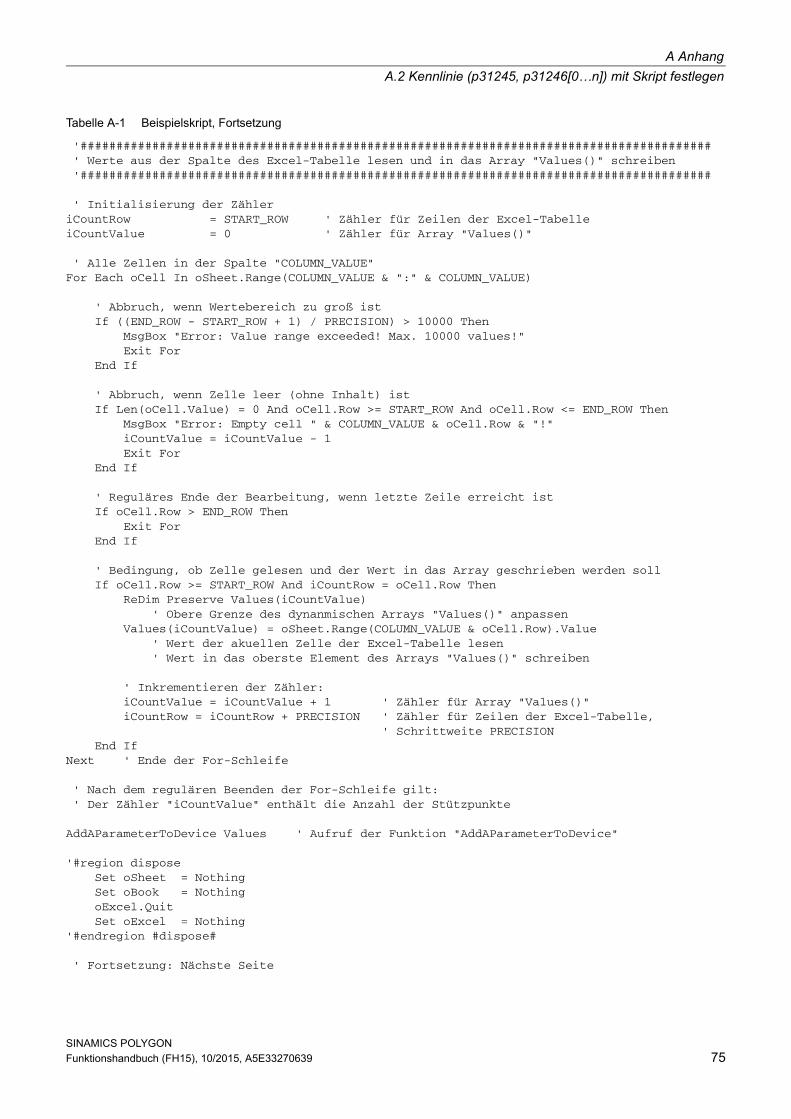
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 75
A Anhang
A.2 Kennlinie (p31245, p31246[0…n]) mit Skript festlegen
'######################################################################################## ' Werte aus der Spalte des Excel-Tabelle lesen und in das Array "Values()" schreiben '######################################################################################## ' Initialisierung der ZähleriCountRow = START_ROW ' Zähler für Zeilen der Excel-TabelleiCountValue = 0 ' Zähler für Array "Values()" ' Alle Zellen in der Spalte "COLUMN_VALUE"For Each oCell In oSheet.Range(COLUMN_VALUE & ":" & COLUMN_VALUE) ' Abbruch, wenn Wertebereich zu groß ist
If ((END_ROW - START_ROW + 1) / PRECISION) > 10000 Then MsgBox "Error: Value range exceeded! Max. 10000 values!" Exit For
End If ' Abbruch, wenn Zelle leer (ohne Inhalt) ist
If Len(oCell.Value) = 0 And oCell.Row >= START_ROW And oCell.Row <= END_ROW Then MsgBox "Error: Empty cell " & COLUMN_VALUE & oCell.Row & "!" iCountValue = iCountValue - 1 Exit For
End If ' Reguläres Ende der Bearbeitung, wenn letzte Zeile erreicht ist
If oCell.Row > END_ROW Then Exit For
End If ' Bedingung, ob Zelle gelesen und der Wert in das Array geschrieben werden soll
If oCell.Row >= START_ROW And iCountRow = oCell.Row Then ReDim Preserve Values(iCountValue)
' Obere Grenze des dynanmischen Arrays "Values()" anpassenValues(iCountValue) = oSheet.Range(COLUMN_VALUE & oCell.Row).Value
' Wert der akuellen Zelle der Excel-Tabelle lesen' Wert in das oberste Element des Arrays "Values()" schreiben
' Inkrementieren der Zähler:
iCountValue = iCountValue + 1 ' Zähler für Array "Values()"iCountRow = iCountRow + PRECISION ' Zähler für Zeilen der Excel-Tabelle,
' Schrittweite PRECISIONEnd If
Next ' Ende der For-Schleife ' Nach dem regulären Beenden der For-Schleife gilt: ' Der Zähler "iCountValue" enthält die Anzahl der Stützpunkte AddAParameterToDevice Values ' Aufruf der Funktion "AddAParameterToDevice" '#region dispose
Set oSheet = Nothing Set oBook = Nothing oExcel.Quit Set oExcel = Nothing
'#endregion #dispose# ' Fortsetzung: Nächste Seite
Tabelle A-1 Beispielskript, Fortsetzung
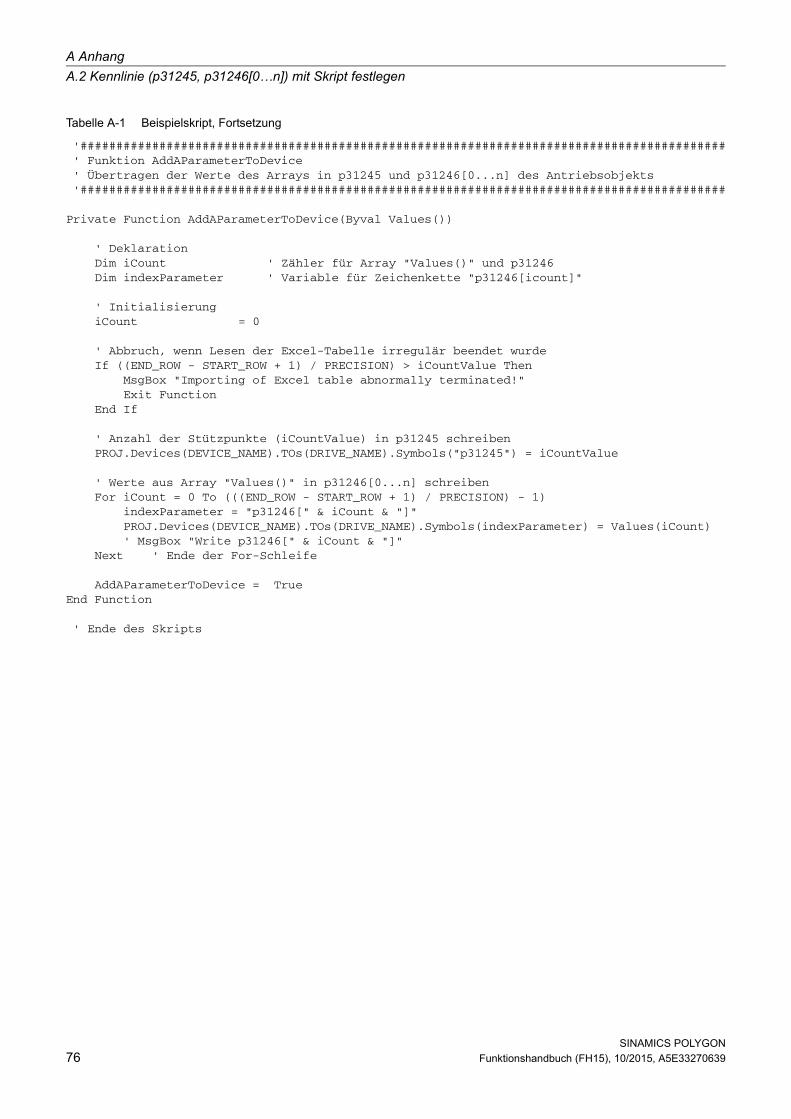
A Anhang
A.2 Kennlinie (p31245, p31246[0…n]) mit Skript festlegen
SINAMICS POLYGON
76 Funktionshandbuch (FH15), 10/2015, A5E33270639
'########################################################################################## ' Funktion AddAParameterToDevice ' Übertragen der Werte des Arrays in p31245 und p31246[0...n] des Antriebsobjekts '########################################################################################## Private Function AddAParameterToDevice(Byval Values()) ' Deklaration
Dim iCount ' Zähler für Array "Values()" und p31246Dim indexParameter ' Variable für Zeichenkette "p31246[icount]"
' Initialisierung
iCount = 0 ' Abbruch, wenn Lesen der Excel-Tabelle irregulär beendet wurde
If ((END_ROW - START_ROW + 1) / PRECISION) > iCountValue Then MsgBox "Importing of Excel table abnormally terminated!" Exit Function
End If ' Anzahl der Stützpunkte (iCountValue) in p31245 schreiben
PROJ.Devices(DEVICE_NAME).TOs(DRIVE_NAME).Symbols("p31245") = iCountValue ' Werte aus Array "Values()" in p31246[0...n] schreiben
For iCount = 0 To (((END_ROW - START_ROW + 1) / PRECISION) - 1) indexParameter = "p31246[" & iCount & "]" PROJ.Devices(DEVICE_NAME).TOs(DRIVE_NAME).Symbols(indexParameter) = Values(iCount) ' MsgBox "Write p31246[" & iCount & "]"
Next ' Ende der For-Schleife
AddAParameterToDevice = True End Function ' Ende des Skripts
Tabelle A-1 Beispielskript, Fortsetzung
SINAMICS POLYGON
Funktionshandbuch (FH15), 10/2015, A5E33270639 77
Index
Zahlen7331
POLYGON Struktur, 60
AABC_OA, 16, 23
Aktivierung über HMI-Operate, 25Aktivierung über STARTER, 20Deinstallation über HMI, 28Deinstallation über STARTER, 22
Abkürzungsverzeichnis, 64Abtastzeiten, 48Adressat Handbuch, 5Adresse
Technical Support, 5Allgemeines
zu Parametern, 52Anwendungsbereich POLYGON, 13
BBegriff
OA Support Package, 17OA-Applikation, 17, 23OA-Interface, 17, 24POLYGON, 13Portables Servicesystem für NCU, 23Servicesystem, 23
BeispieleKennlinie parametrieren, 40Leitwert normieren, 36Rechenzeitauslastung, 48Referenzieren, 37, 38
Bestellnummer, 49
CCertificate of License, 49
DDeinstallation OA-Applikation
über HMI, 28über STARTER, 22
EEmergency Boot System (ESB), 23Engineering Software
SCOUT, 16STARTER, 16
FFunktionsplan
POLYGON Struktur, 60SINAMICS produktspezifisch, 59
GGeräte
OA-Applikation über SINUMERIK HMI, 23OA-Applikation über STARTER, 17
HHinweise
Hotline, 5Produktinformationen, 6Technical Support, 5
HMI-Advanced, 24HMI-Operate, 24Hotline, 5
IImpulsfreigabe, 25Inbetriebnahme
ABC_OA über HMI, 27ABC_OA über STARTER, 21POLYGON, 21, 27, 30
Industrial Security, 11Installation OA-Applikation
über HMI, 23über STARTER, 16
KKennlinie parametrieren
Beispiele, 40Beschreibung, 34
LLeitwert aufbereiten
Beispiele, 36Beschreibung, 32
License Key, 49Liste
Abkürzungen, 64Parameter, 53
Lizenzierung, 49
Index
SINAMICS POLYGON
78 Funktionshandbuch (FH15), 10/2015, A5E33270639
MMerkmale POLYGON, 14
NNormierung des Leitwerts
Beispiele, 36Beschreibung, 32
OOA Support Package
Begriffsdefinition, 17OA-Applikation
Begriffsdefinition, 17, 23OA-Applikation ABC_OA
Aktivierung über HMI-Operate, 25Aktivierung über STARTER, 20Inbetriebnahme, 16, 21, 23, 27Installation über HMI, 23Installation über STARTER, 16OA Support Package Installation, 18Technologiepaket-Download, 19
OA-Applikation POLYGONFunktionsplan, 60Liste der Parameter, 53Rechenzeit, 48
OA-InterfaceBegriffsdefinition, 17, 24Beispiel, 17, 24
PParameter, 53POLYGON
Anwendungsbereich, 13Begriffsdefinition, 13Funktionsplan, 47, 60Inbetriebnahme, 21, 27, 30Konfiguration, 31Liste der Parameter, 53Lizenzierung, 49Merkmale, 14Rechenzeit, 48Struktur, 60Voraussetzungen zur Inbetriebnahme, 31
Produktinformationen, 6
RRechenzeitauslastung (SERVO, VECTOR, HLA), 48Regelbare Antriebe (Anzahl), 48
SSCOUT, 16Servicesystem
Begriffsdefinition, 23Sicherheitshinweise
allgemein, 10grundlegend, 9Industrial Security, 11
SINAMICS Safety Integrated, 50STARTER, 16Suchhilfen Handbuch, 5Support, 5Support Request, 5Systemauslastung, 48
TTechnical Support, 5
VVersion
HMI, 24Liste der Parameter, 53OA-Interface, 17, 24SINUMERIK, 24
VerzeichnisAbkürzungsverzeichnis, 64Index, 77Inhaltsverzeichnis gesamt, 7
VoraussetzungenInbetriebnahme POLYGON, 31Installation einer OA-Applikation über
SINUMERIK HMI, 24Installation einer OA-Applikation über STARTER, 17
WWEB License Manager, 49
ZZielsetzung Handbuch, 5Zusätzliche Rechenzeitbelastung, 48


Siemens AGDigital FactoryMotion ControlPostfach 318091050 ERLANGENDEUTSCHLAND
Änderungen vorbehalten© Siemens AG 2015
www.siemens.com/motioncontrol





























![Python - DESY · Python-Grundlagen moderne Hochsprache unterstützt Skripting (Prozeduren u. ... SciPy I - Statistik Modul In [1]: from scipy import * In [2]: f = stats.poisson](https://img.pdfslide.org/doc/110x75/5ae89aba7f8b9acc26905b38/python-desy-moderne-hochsprache-untersttzt-skripting-prozeduren-u-scipy.jpg)